
撮像装置
【課題】CMOS型イメージセンサを用いた撮像装置において、高輝度光が入射したときの横筋状又は横帯状のノイズの発生を抑制する。
【解決手段】複数の画素が二次元に配列され、光を受光する開口画素領域と、基準となる遮光されたオプティカルブラック領域とを含むCMOS型の撮像素子と、撮像素子の開口画素領域の特定の領域が高輝度被写体からの光を受光している場合の撮像素子の出力から得られる情報を予め記憶する記憶部と、開口画素領域の特定の領域が高輝度被写体からの光を受光しているか否かを判定する判定部と、判定部により特定の領域が高輝度被写体からの光を受光していると判定された場合に、記憶部に記憶された情報に基づいて、撮像素子からの出力を補正する補正部とを備える。
【解決手段】複数の画素が二次元に配列され、光を受光する開口画素領域と、基準となる遮光されたオプティカルブラック領域とを含むCMOS型の撮像素子と、撮像素子の開口画素領域の特定の領域が高輝度被写体からの光を受光している場合の撮像素子の出力から得られる情報を予め記憶する記憶部と、開口画素領域の特定の領域が高輝度被写体からの光を受光しているか否かを判定する判定部と、判定部により特定の領域が高輝度被写体からの光を受光していると判定された場合に、記憶部に記憶された情報に基づいて、撮像素子からの出力を補正する補正部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は特にビデオカメラ、デジタルスチルカメラ等の撮像装置に用いられる固体撮像素子における映像信号の画質の改善技術に関するものである。
【背景技術】
【0002】
デジタルカメラやビデオカメラ等においては、固体撮像素子としてCCD、CMOSイメージセンサ等が使用されている。ところで、CCDおよびCMOSイメージセンサ上に高輝度被写体があるとき、その列または行全体の信号レベルが変動することで、縦筋・縦帯や横筋・横帯状の画像になることが知られている。このことはCCDではスミア現象として広く知られているが、CMOS型イメージセンサにおいても同様の現象が発生する。
【0003】
CMOS型イメージセンサにおいては、電源やグラウンドの配線レイアウトに起因しているところが大きい。通常電源やグラウンドは水平方向に配線される。例えば画面内の高輝度被写体部に相当する部分に多く電流が流れた結果、その左右画素の電源も変動することで同一行全体の信号レベルが変動する。また、レベル変動の応答遅れなどにより同一行以降の行の信号レベルも変動することにより横筋や横帯状のノイズ画像を引き起こす。このような現象は、特に高輝度被写体によってイメージセンサ内部回路が飽和してしまった場合に顕著に起こる。これは、回路飽和によって信号出力を十分に制御できなくなるからであり、回路的な対策は難しい。
【0004】
また後述するが、撮像素子の水平方向(X方向)の特定位置に高輝度被写体がある場合にのみ横筋や横帯状のノイズ画像を引き起こす場合もある。これは、回路設計上の自由度の制約で電源やグラウンドの配線長や配線方法の違いにより、特定位置の配線インピーダンスが高くなってしまうことなどが原因となる。このような場合、高輝度被写体部の信号出力が飽和していなくても、横筋や横帯状のノイズ画像になる場合があることも実験的にわかっている。
【0005】
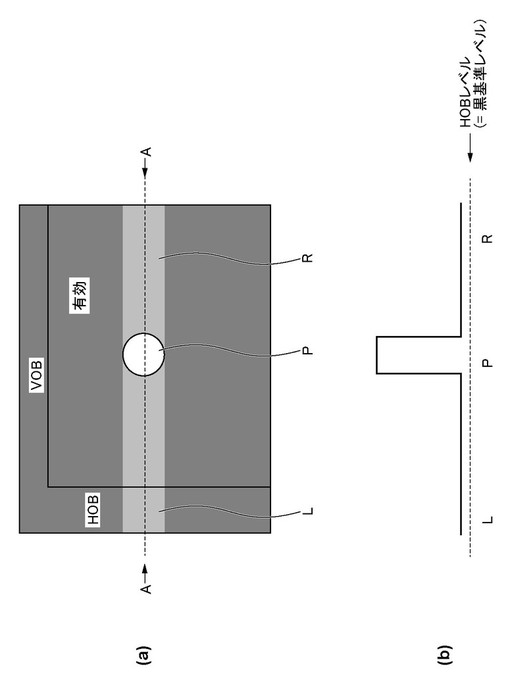
図14(a)、(b)は上記の横帯状のノイズが発生している様子を示したもので、CMOS型イメージセンサからの画像信号を画素部レイアウトと対応させて表示している。通常、固体撮像素子には信号レベルの基準信号となる信号(黒基準信号)を得るために光に反応しないように遮光されたオプティカルブラック領域が備えられており、有効画素信号はそのオプティカルブラック領域で得たレベルを基準として演算処理される。このような画素を“OB画素(オプティカルブラック画素)”と呼ぶ。
【0006】
図14(a)中のHOB、VOBと記されている領域は、上記のオプティカルブラック画素からの信号を示している。また、有効画素と記されている部分が実際に光を受光できる画素領域からの信号である。図14(a)は、周辺輝度が低い状態で高輝度光「P」を受光している状態を示しており、その水平方向の左右画素出力「L」と「R」はレベル変動を起こし、横帯状の画像になっていることがわかる。周辺輝度が低いので、高輝度光「P」を受光している部分以外はHOB、VOBと同レベルの出力になるのが理想である。
【0007】
図14(a)のA−Aで示す線上の画像出力レベルを示したのが、図14(b)である。HOBレベルと示したレベルは、HOB領域の中でもレベル変動していない領域の平均レベルであり、通常はこのレベルが黒基準信号になる。それに対して高輝度光「P」を受光している部分のレベルは非常に高く、その出力は回路飽和している。また左右の画素出力「L」、「R」はHOBレベルよりも高くレベル変動を起こしている。
【0008】
ここで、上記のレベル変動による横帯画像を補正することを考えてみる。CCDなどのスミアについては、オプティカルブラック画素にも同様のスミアが発生している。そのため、同一列のオプティカルブラック画素の信号の平均値を基に有効部の出力を補正する方法が、特許文献1、特許文献2等により開示されている。
【0009】
特に特許文献2では、有効画像信号のレベルに応じてスミア補正手段における補正処理内容を変更している。具体的には、有効画像信号のレベルが所定の信号飽和レベルに達していた場合にスミア補正を無補正にすることでスミア補正により飽和部が過補正になり、黒沈みすることの対策としている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平7−67038号
【特許文献2】特開2001−24943号
【発明の概要】
【発明が解決しようとする課題】
【0011】
CMOS型イメージセンサにおいても、図14のように高輝度光「P」の左右が均等にレベル変動しているような場合は特許文献1、特許文献2に記載された補正方法を横方向に適用することで、同様に補正することが可能である。
【0012】
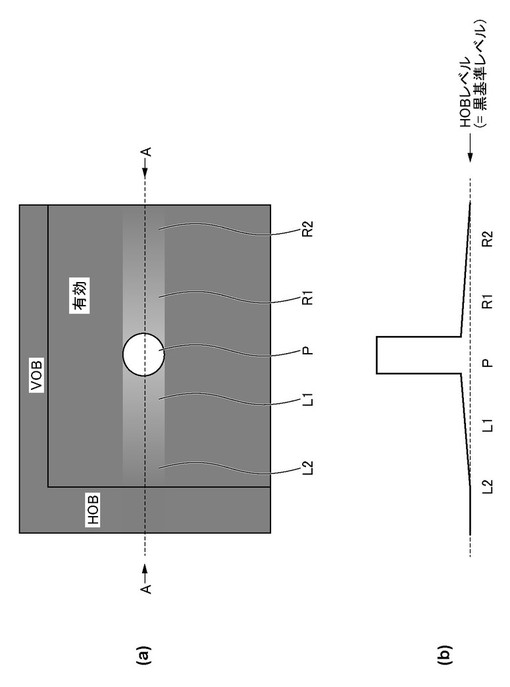
しかしながら、図15(a)、(b)のように高輝度光「P」に近接した画素出力「L1」、「R1」はHOBレベルよりも高く、高輝度光「P」から若干遠ざかった画素出力「L2」、「R2」、「HOB」はHOBと同レベルとなるようなレベル変動を起こしている場合を考える。この場合、同一行のHOB画素はレベル変動を起こしていないので有効部の出力を補正しようとしても、補正不可能である。
【0013】
撮影画像の補正方法としては、撮影レンズの収差や絞り値の違いによって発生するシェーディングを補正するものなどがあるが、図15のような局所的に発生するレベル変動による筋(帯)状のノイズを補正することは不可能である。
【0014】
本発明は上述した課題に鑑みてなされたものであり、その目的は、CMOS型イメージセンサを用いた撮像装置において、高輝度光が入射したときの横筋状又は横帯状のノイズの発生を抑制することである。
【課題を解決するための手段】
【0015】
本発明に係わる撮像装置は、複数の画素が二次元に配列され、光を受光する開口画素領域と、基準となる遮光されたオプティカルブラック領域とを含むCMOS型の撮像素子と、前記撮像素子の前記開口画素領域の特定の領域が高輝度被写体からの光を受光している場合の前記撮像素子の出力から得られる情報を予め記憶する記憶手段と、前記開口画素領域の前記特定の領域が高輝度被写体からの光を受光しているか否かを判定する判定手段と、前記判定手段により前記特定の領域が高輝度被写体からの光を受光していると判定された場合に、前記記憶手段に記憶された情報に基づいて、前記撮像素子からの出力を補正する補正手段と、を備えることを特徴とする。
【発明の効果】
【0016】
本発明によれば、CMOS型イメージセンサを用いた撮像装置において、高輝度光が入射したときの横筋状又は横帯状のノイズの発生を抑制することが可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態における固体撮像素子の平面図。
【図2】固体撮像素子の構成図。
【図3】固体撮像素子の構成図。
【図4】固体撮像素子の構成図。
【図5】第1の実施形態における理想的な画素出力図。
【図6】第1の実施形態における横筋現象を示した図。
【図7】横筋現象が起こらない状態を示した図。
【図8】第1の実施形態における横筋現象を示した図。
【図9】横筋現象の補正方法を説明する図。
【図10】横筋現象の詳細を示した図。
【図11】横筋現象の詳細を示した図。
【図12】横筋現象の補正方法を説明するフローチャート図。
【図13】横筋現象の補正方法を説明するフローチャート図。
【図14】従来例における横筋現象を示した図。
【図15】従来例で補正できない横筋現象を示した図。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について、添付図面を参照して詳細に説明する。
【0019】
(第1の実施形態)
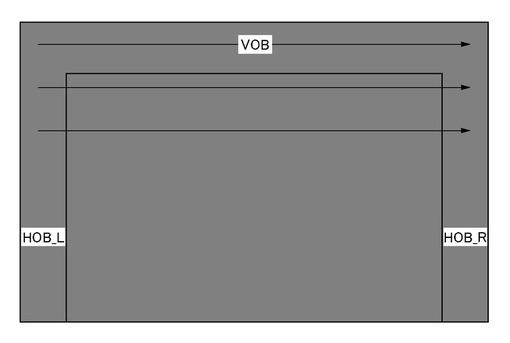
図1は、本発明の第1の実施形態に係わるCMOS型固体撮像素子の画面全体の二次元に配列された画素レイアウトを示した図である。この画素領域には、光を受光する開口画素領域と、遮光されたオプティカルブラック領域(OB画素)とがあり、オプティカルブラック領域は画面上部のVOB部と画面左右のHOB部がある。画素からの信号は図1の左上から矢印で示すように読み出される。
【0020】
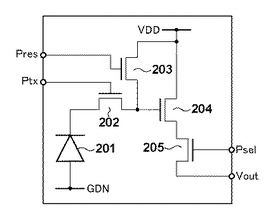
図2は、CMOS型固体撮像素子の画素セルPixelの構成例を示すブロック図である。光信号電荷を発生するフォトダイオード201は、この例ではアノード側が接地されている。フォトダイオード201のカソード側は、転送MOSトランジスタ202を介して増幅MOSトランジスタ204のゲートに接続されている。また、増幅MOSトランジスタ204のゲートには、これをリセットするためのリセットMOSトランジスタ203のソースが接続されている。リセットMOSトランジスタ203のドレインは電源電圧VDDに接続されている。さらに、増幅MOSトランジスタ204は、ドレインが電源電圧VDDに接続され、ソースが選択MOSトランジスタ205のドレインに接続されている。
【0021】
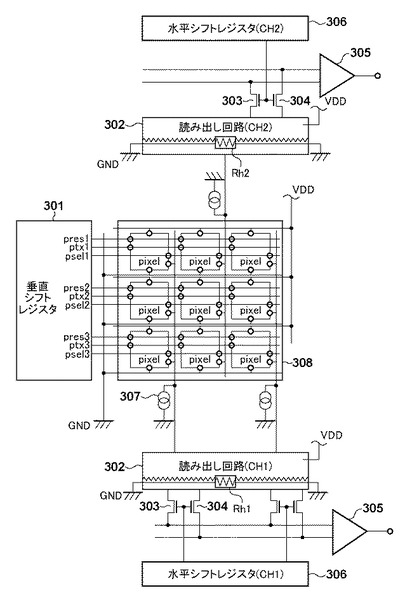
図3は、CMOS型固体撮像素子の構成例を示すブロック図である。説明を分かりやすくするために3x3画素の構成となっているが、通常はさらに多画素である。垂直シフトレジスタ301は、行選択線Pres1,Ptx1,Psel1等の信号を画素領域308に出力する。画素領域308は、図1の構成を有し、複数の画素セルPixelを有する。各画素セルPixelは、偶数列と奇数列で各々CH1、CH2の垂直信号線に画素信号を出力する。電流源307は、各垂直信号線に接続される。読み出し回路302は、垂直信号線上の画素信号を入力し、画素信号をnチャネルMOSトランジスタ303を介して差動増幅器305に出力し、ノイズ信号をnチャネルMOSトランジスタ304を介して差動増幅器305に出力する。ここで読み出し回路302は列毎の読み出し回路を含み、作動増幅器305は最終段読み出し回路に相当する。なお、読み出し回路302、MOSトランジスタ303、MOSトランジスタ304、差動増幅器305については、後に詳述する。水平シフトレジスタ306は、トランジスタ303及び304のオン/オフを制御する。差動増幅器305は、画素信号とノイズ信号との差分を出力する。
【0022】
図2の転送MOSトランジスタ202のゲートは、横方向に延長して配置される第1の行選択線(垂直走査線)Ptx1(図3)に接続される。同じ行に配置された他の画素セルPixelの同様な転送MOSトランジスタ202のゲートも上記第1の行選択線Ptx1に共通に接続される。リセットMOSトランジスタ203のゲートは、横方向に延長して配置される第2の行選択線(垂直走査線)Pres1(図3)に接続される。同じ行に配置された他の画素セルPixelの同様なリセットMOSトランジスタ203のゲートも第2の行選択線Pres1に共通に接続される。選択MOSトランジスタ205のゲートは、横方向に延長して配置される第3の行選択線(垂直走査線)Psel1に接続される。同じ行に配置された他の画素セルPixelの同様な選択MOSトランジスタ205のゲートも第3の行選択線Psel1に共通に接続される。これら第1〜第3の行選択線Ptx1, Pres1, Psel1は、垂直シフトレジスタ301に接続され信号電圧が供給される。
【0023】
図3に示されている残りの行においても同様な構成の画素セルPixelと、行選択線が設けられる。これらの行選択線には、垂直シフトレジスタ301により形成された行選択線Ptx2〜Ptx3、Pres2〜Pres3、Psel2〜Psel3の信号が供給される。
【0024】
図2の選択MOSトランジスタ205のソースは、縦方向に延長して配置される垂直信号線の端子Voutに接続される。同じ列に配置される画素セルPixelの同様な選択MOSトランジスタ205のソースも垂直信号線の端子Voutに接続される。図3において、垂直信号線の端子Voutは負荷手段である定電流源307に接続される。また、図3において、読み出し回路302に含まれる回路のグラウンド配線は、半導体レイアウト設計の制約で、一部のインピーダンスが高くなっており、その様子をRh1,Rh2で表している。
【0025】
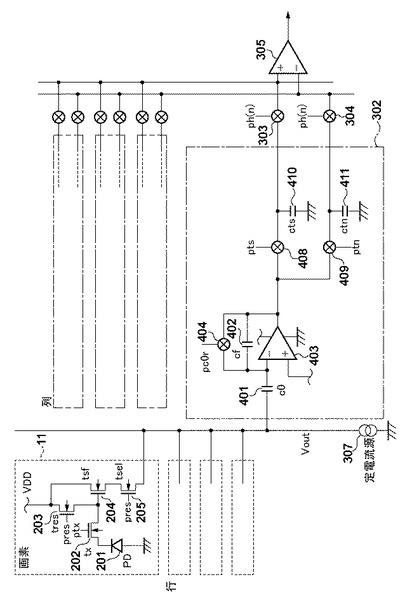
図4は、本実施形態に係わるCMOS型固体撮像素子の構成を示す図面であり、読み出し回路302、MOSトランジスタ303,304、差動増幅器305を含んでいる。図4において、201〜205は画素部であり図2と同一であるので説明を省略する。
【0026】
各画素のソースフォロワ出力は共通の垂直出力線を介して一点鎖線で囲まれた部分の読み出し回路302内の容量(c0)401に入力される。403はオペアンプで、帰還容量(cf)402と容量(c0)401により反転増幅アンプを構成している。アナログスイッチ404はpc0rパルス(不図示)により駆動され、オンすることでc0、cf容量のリセットおよび後段の容量cts、ctnのリセットを行う。オペアンプ403の出力はpts,ptnパルスで駆動されるアナログスイッチ408、409を介して夫々保持容量(cts)410、(ctn)411に保持される。
【0027】
1行分の画素信号が列毎に(cts)410、(ctn)411に保持されると、図3における水平シフトレジスタ306によりph(n)パルスが順次駆動されることで、アナログスイッチ303,304が開閉され後段の差動型読み出しアンプ305に入力され外部に出力される。
【0028】
なお、図3で説明したように、読み出し回路302に含まれるオペアンプ403、保持容量(cts)410、(ctn)411にはグラウンド配線が共通接続されている。そして、このグラウンド配線は半導体レイアウト設計の制約で、一部のインピーダンスが高くなっている。
【0029】
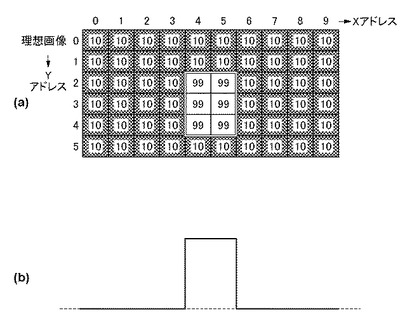
図5は配線レイアウトの制約がなく、理想的な配線を実現できているイメージセンサの出力を具体的に示している。図5(a)ではより具体的にするために、水平方向(X)は0〜9の10画素、垂直方向(Y)は0〜5の6画素の10×6画素とし、各アドレスの画素出力も示している。以下、各画素のアドレスは(X,Y)で示すものとする。また、イメージセンサには周辺輝度が低い状態で中央部(4,2)〜(5,4)に高輝度光が入射している様子を示していて、その高輝度部の画素出力値は画像としての飽和レベル「99」としている。また、高輝度部以外の画素及びオプティカルブラック画素の出力値は「10」としている。また、HOBはX=0の画素が相当する。
【0030】
図5(a)ではイメージセンサの出力を示しており、高輝度光を受光していても出力のレベル変動を起こしていない。図5(b)はY=3の画像出力レベルを示しており、破線部はHOB領域の中でもレベル変動していない領域の平均レベルであり、高輝度部以外の部分は破線と一致した出力になっている。
【0031】
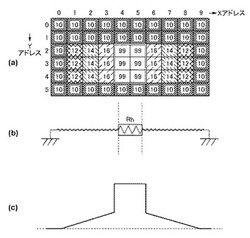
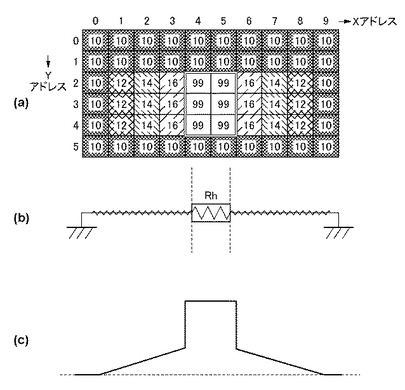
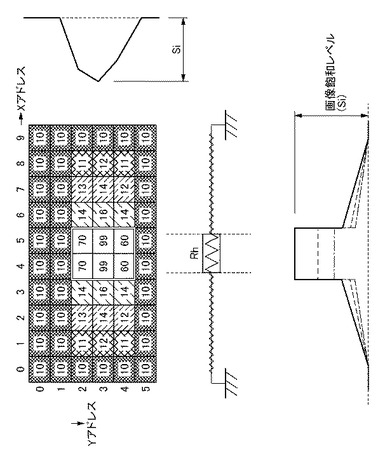
図6は配線レイアウトの制約があり、グラウンド配線に局部的にインピーダンスの高い部分があるイメージセンサの例を示している。ここでは中央部(4,2)〜(5,4)の高輝度光に近接した左画素部(1,2)〜(3,4)、右画素部(6,2)〜(8,4)はHOBレベルよりも高くなる方向にレベル変動して且つ、その変動量は高輝度光から遠ざかるほどに少なくなっている。左画素部(0,2)〜(0,4)や右画素部(9,2)〜(9,4)においては、HOBレベルと同じでレベル変動はない。
【0032】
図6(c)はY=3の画像出力レベルを示しており、破線部はHOB領域の中でもレベル変動していない領域の平均レベルである。前述の通り高輝度部に近接した左右のレベルが高く、高輝度部から遠ざかるに従ってレベルが低くなっている。
【0033】
図6(b)は、図3で示した読み出し回路302のグラウンド配線のインピーダンスを、X方向座標と合わせて示している。すなわち読み出し回路302のX=4,5の領域のグラウンド配線インピーダンスをRhとして示しこの部分の配線インピーダンスが局部的に高くなっていることを示している。他の部分はRhに比べて極めてインピーダンスが低いので、公知の抵抗記号で示している。
【0034】
この状態でX=4,5の領域が高輝度被写体を受光し、その信号を読み出すと図6(c)のように、高輝度部に近接した左右のレベルが高く、高輝度部から遠ざかるに従ってレベルが低くなるようなレベル変動を起こしてしまう。なお、画像としてはY=2〜4の領域で横帯状のノイズとして見える。
【0035】
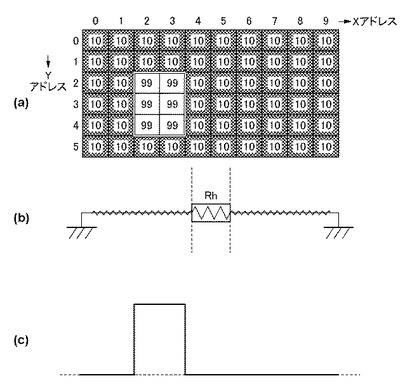
図7は図6と同じイメージセンサの例を示しており、図6と同じようにイメージセンサの出力を示しているが、図6との違いは高輝度光は画面中央部(4,2)〜(5,4)ではなく画面左部(2,2)〜(3,4)の領域で受光されている点である。このため、読み出し回路302のX=4,5の領域は高輝度光によりグラウンドレベルが変動させられてもインピーダンスの低い左側配線を通して瞬時にレベルが回復するため、図7(c)のように高輝度光の左右画素のレベル変動はない。
【0036】
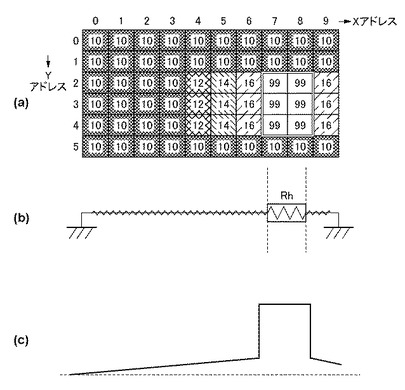
図8は配線レイアウトの制約が異なる別のイメージセンサの例を示しており、図6と同じようにイメージセンサの出力を示している。図6との違いは高輝度光は画面中央部(4,2)〜(5,4)ではなく画面右部(7,2)〜(8,4)の領域で受光されている点である。また、図8(b)に示すように読み出し回路302のX=7,8の領域のグラウンド配線インピーダンスをRhとして示しこの部分の配線インピーダンスが局部的に高くなっていることを示している。
【0037】
この場合、X=7,8の領域に高輝度被写体を受光し、その信号を読み出すと図8(c)のように、高輝度部に近接した左右のレベルが高く、高輝度部から遠ざかるに従ってレベルが低くなるようなレベル変動を起こしてしまう。なお、画像としてはY=2〜4の領域で横帯状のノイズとして見える。
【0038】
ここで、図6、7に示すようなイメージセンサにおいて発生する横帯状のノイズの補正方法を考える。注目するべきは、X=4,5列の領域に高輝度被写体が存在するときにだけ横帯状のノイズが発生することである。
【0039】
従ってこのイメージセンサの工場出荷時などに、あらかじめX=4,5列の領域にイメージセンサ出力が十分飽和するような高輝度被写体を受光させる。この状態で、高輝度被写体を受光している行の画素出力およびHOB領域の中でもレベル変動していない領域の平均レベル(黒基準レベル)を読み出す。
【0040】
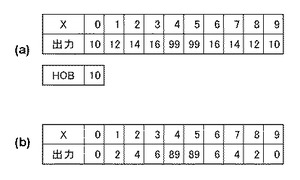
図6の例では、Y=2〜4行の信号で図9(a)に示すような表になる。更に、高輝度被写体を受光している行の画素出力から黒基準レベルを減算すると図9(b)のようになり、高輝度部に近接した左右のレベルが高く、高輝度部から遠ざかるに従ってレベルが低くなっている。図9(b)のX=0〜3及び6〜9(X方向の位置)の値が横帯状のノイズの補正値になる。
【0041】
すなわち、図9(b)の情報を記憶しておき、実際に撮影された画像データのうち、X=4,5列に高輝度被写体を受光しているかどうかを判定する。高輝度被写体が受光されていたら、高輝度被写体を受光している行のX=0〜3及び6〜9列目の画像データから、図9(b)のX=0〜3及び6〜9の補正データを減算することで、図5のような横帯状のノイズのない画像を得ることができる。
【0042】
このように、高輝度部に近接した左右ほど補正量を多くし、高輝度部から遠ざかるに従って補正量を減らすことで、最適な画像補正を実現している。図8の例においても上記説明のX=4,5の部分をX=7,8と置き換えれば同様の補正が可能である。
【0043】
(第2の実施形態)
背景技術の欄でも説明したが、高輝度被写体部の信号出力が飽和していなくても、横筋や横帯状のノイズ画像になる場合があることも実験的にわかっている。図10はこのことを示すとともに、本発明の第2の実施形態を説明する図である。
【0044】
図10において、Y=3行目、X=4,5列目の信号は図6と同様に『99』になっており画像飽和しているが、Y=2行目、X=4,5列目の信号は『70』、Y=4行目、X=4,5列目の信号は『60』であり、どちらも画像飽和していない。Y=2行目、4行目の画像にはレベル変動による横筋状のノイズが発生しているが、その程度はY=3行目よりも少ない。実験的には高輝度部の出力に比例したレベル変動になり、その出力値の様子を数字で表している。
【0045】
このレベル変動はほぼ下記の(1)式で表される。
【0046】
tbl(n)=tblx{Xrhmax(n)/99)} …(1)
ここで、
tbl :X=4,5列目画像飽和時の他の列の出力
(図9(b)のX=0〜3及び6〜9の補正データ…基準テーブル)
Xrhmax(n) :n行目、X=4,5列の最大値
99 :画像飽和レベル
tbl(n) :n行目、X=0〜3及び6〜9のレベル変動
つまり、各行の横帯状ノイズ補正値は『tbl(n)』となり、その値は基準テーブル『tbl』に、高輝度部の出力と画像飽和レベルの比を乗算したものとなる。従って、高輝度被写体を受光しているn行目の信号から、補正値『tbl(n)』を減算することで横筋(横帯)状のノイズを補正することができる。
【0047】
図10の右側には4,5列の出力、下側には2,3,4行の出力をプロットしたグラフを示していて、画像飽和レベルは『99』であり、Siの記号で示している。
【0048】
(第3の実施形態)
図10までの説明で、高輝度部のレベルを『99』で示しているが、これは画像信号としてA/D変換された出力の飽和レベル(Si)である。イメージセンサ内部のアナログ回路信号の飽和レベルは更に高いレベルにあるが、画像信号として出力される飽和レベルは『99』である。横筋状ノイズのレベル変動は高輝度部の出力に比例するので、画像信号として『99』のレベルであっても更に、アナログ回路信号の飽和レベル(Sc)までの間で横筋状のノイズ強度が変化する。従って画像飽和レベル(Si)を超えたレベルの実際の出力レベルを予測する。
【0049】
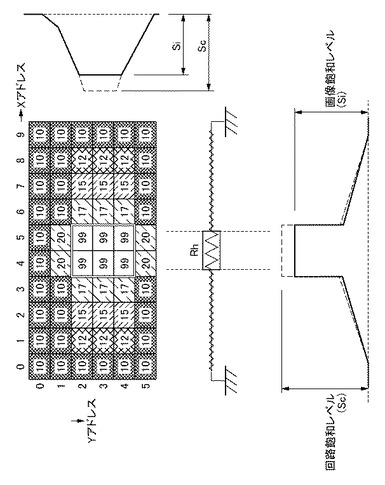
図11は、出力が十分回路飽和する程度の高輝度被写体を受光させたときのイメージセンサの様子を示していて、Y=2〜4行目、X=4,5列目の信号はともに画像飽和レベル『99』になっているが、実際は回路飽和(Sc)レベルになっている。
【0050】
また、Y=1及び5行目、X=4,5列目の信号はその左右画素及び上または下画素の出力『10』よりも高く『20』になっている。これは、高輝度光の強度が強いため光学的な反射等により上下方向に隣接した画素出力が高くなっているためである。このことを利用して、高輝度部の実際の出力を予想する。
【0051】
すなわち、このイメージセンサの工場出荷時などに、画像飽和する程度及び回路飽和する程度の高輝度被写体を受光させ、夫々の画像を得る。この状態で、高輝度被写体を受光している行の画素出力およびHOB領域の中でもレベル変動していない領域の平均レベル(黒基準レベル)、更には高輝度被写体を受光している画素の周囲画素の情報を評価する。
【0052】
回路飽和時の画像が図11の状態で、画像飽和時の画像が図6の状態である。横筋状ノイズのレベル変動は高輝度部の出力に比例するので、Y=2〜4行目、X=3または6列目の信号に注目する。ここで画像飽和時は『16』で黒基準レベル『10』を減算すると『6』、回路飽和時は『17』で黒基準レベル『10』を減算すると『7』となり、7/6倍になっている。従って高輝度部の実際の出力(この場合は回路飽和レベル(Sc)と等価)は、
『99』×7/6=116 …(2)
となることがわかる。
【0053】
次に、飽和画素と上下方向に隣接しているY=1または5行目、X=4,5列目の信号に注目する。ここで画像飽和時は『10』で黒基準レベル『10』を減算すると『0』、回路飽和時は『20』で黒基準レベル『10』を減算すると『10』となる。つまり画像飽和している画素の上下方向に隣接した画素は、画像飽和『99』したときは『0』、回路飽和『116』したときは『10』なので、線形補間して
飽和画素出力={(116−99)/10}×上下隣接画素+99 …(3)
但し、飽和画素出力≦116
と近似することができる。
【0054】
つまり、画像飽和レベル(Si)を超える高輝度被写体を受光した状態であっても、高輝度部の上下隣接画素情報を用いて(3)式から飽和画素出力を予測して、更に(1)式を用いることで横筋(横帯)状ノイズを補正することが可能である。
【0055】
ここで飽和画素出力≦116としているのは、横筋状ノイズのレベル変動は高輝度部の出力に比例するので、これ以上の高輝度光を受光してもレベル変動は変わらないためである。このことにより、回路飽和時には(3)式で表される固定の値で画像補正されることになる。
(第4の実施形態)
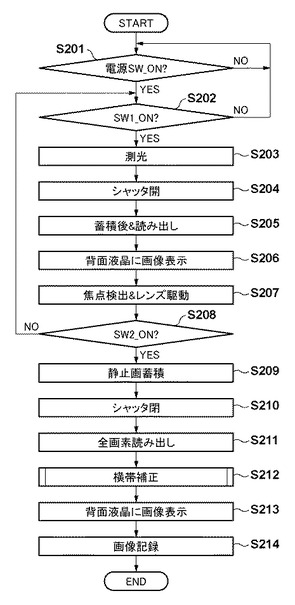
図12、13は第1〜第3の実施形態の撮像素子のいずれかを用いたデジタルカメラにおける動作を説明するフローチャートである。
【0056】
図12ではカメラの全体の流れを説明していて、ステップS201で不図示の電源スイッチがONされたかどうかを判定する、OFFであればONされるまでステップS201を繰り返す。
【0057】
ステップS201で電源スイッチがONされていれば、ステップS202で撮影準備動作を行わせるための不図示のスイッチSW1がONされたかどうかを判定する。ステップS202でSW1がOFFであれば、ステップS201に戻り、ステップS201〜ステップS202を繰り返す。ステップS202でSW1がONであれば、撮影準備動作を行うためにステップS203以降に進む。
【0058】
ステップS203では、不図示の測光手段により被写体輝度を測定し、イメージセンサへの露光量が最適になるよう撮影レンズの絞り値やシャッタースピード(イメージセンサの蓄積時間)を決定する。続くステップS204で不図示のメカシャッタを開き、イメージセンサへの露光を開始する。
【0059】
ステップS205ではイメージセンサの蓄積制御及び画像情報の読み出し制御を行い、ステップS206で不図示の背面液晶に読み出した画像情報を表示する。その後ステップS207では、ステップS205で得られた画像情報をもとに焦点検出を行うとともに、その結果から撮影レンズを駆動して被写体にピントを合わせる。
【0060】
ステップS208では静止画撮影を行わせるためのスイッチSW2がONされたかどうかを判定する。ステップS208でSW2がOFFであればステップS202に戻り、ステップS202〜ステップS208を繰り返す。ステップS202〜ステップS208までの動作を繰り返すことで所謂EVF機能を実現している。
【0061】
ステップS208でSW2がONであれば、静止画撮影を行うためにステップS209に移行する。ステップS209ではイメージセンサの静止画蓄積制御を行い、ステップS210で不図示のメカシャッタを閉じることでイメージセンサへの露光を終了させる。
【0062】
その後ステップS211でイメージセンサからの画像信号を読み出し、ステップS212で第1〜第3の実施形態のいずれかの横帯補正を行う。横帯補正の詳細は後述する。その後ステップS213で不図示の背面液晶に画像を表示させ、ステップS214で不図示の記録媒体に画像を記録し、一連の動作を終了する。
【0063】
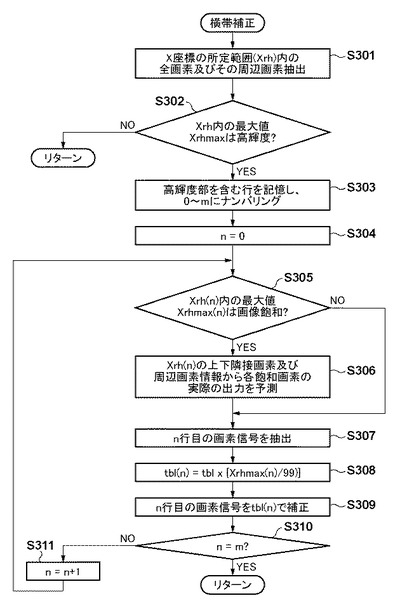
図13を参照して、図12のステップS212の横帯補正の詳細を説明する。まずステップS301でステップS211で得られた画像信号のうちイメージセンサ出力のX座標の所定の範囲、つまりグラウンド配線インピーダンスが局部的に高くなっているX座標『Xrh』内の全画素及びその周辺の画素信号を抽出する。
【0064】
ステップS302ではX座標『Xrh』内の画像信号の最大値Xrhmaxを算出し、Xrhmaxが所定のレベルより大きいかどうかを判定することで、X座標『Xrh』内に高輝度被写体が含まれるかどうかを判定する。ここで所定のレベルは『50』などあらかじめ横筋状のノイズが目立たないレベルを設定しておく。ステップS302で、X座標『Xrh』内に高輝度被写体が含まれないと判定されたら、高輝度被写体がないため横帯補正をする必要がないものとして終了する。
【0065】
ステップS302でX座標『Xrh』内に高輝度被写体が含まれると判定されたら、ステップS303で高輝度被写体が含まれる行を記憶するとともに、0〜m行にナンバリングする。続くステップS304以降では高輝度部を含む行について横帯補正作業を行う。ステップS304では、横帯補正を行う行番号をnとするために、n=0として初期化する。
【0066】
続くステップS305で、n行目のX座標『Xrh(n)』内の画像信号の最大値Xrhmax(n)が画像飽和しているかどうかを判定する。ここでの判定レベルは、図6〜11で説明した『99』であるかどうかである。ここで最大値Xrhmax(n)が画像飽和していなければステップS307に移行する。
【0067】
ステップS305で最大値Xrhmax(n)が画像飽和していると判定されたら、ステップS306に移行して高輝度部の実際の信号を予測する。予測の方法は第3の実施形態で説明したように、上下隣接画素情報から(3)式を用いて各飽和画素の実際の出力を予測する。
【0068】
そうして高輝度部の出力値が確定したらステップS307に移行し、横帯補正をするためにn行目の画素信号を抽出し、ステップS308で(1)式を用いてn行目の補正テーブルtbl(n)を算出する。そして、ステップS309で補正テーブルtbl(n)を用いてn行目の画素信号を補正する。
【0069】
ステップS310では、高輝度被写体を含む行の全てが補正されたかどうかを判定するため、n=mになったかどうかを判定する。ここでn=mでなかったら、ステップS311でn=n+1として、n=mになるまでステップS305〜S311を繰り返す。ステップS310でn=mになったら、高輝度被写体を含む行の全てが補正されたものとして、終了する。
【0070】
以上説明した複数の実施形態のように、イメージセンサの出荷時にあらかじめ高輝度被写体を受光した画像を取得して、代表的な補正テーブル(ここではtbl)を作成しておく。それとともに、画像飽和時と回路飽和時の隣接画素の関係についても取得しておく(ここでは(3)式)。それで、実際の画像の所定の領域に高輝度被写体があることを判定して、あらかじめ取得した情報から実際に撮影した画像の横筋(横帯)状ノイズを補正するようにしている。
【0071】
上記の補正が可能なのは、特定の領域に高輝度被写体が存在するときにだけ横筋(横帯)状のノイズが発生することに注目したからである。また、高輝度部に近接した左右ほど補正量を多くし、高輝度部から遠ざかるに従って補正量を減らすことで、最適な画像補正を実現している。
【0072】
ここで、上記例で説明している補正テーブルは近似式などに変えて記憶するようにしても良い。また、上記の実施形態をパーソナルコンピュータ上のアプリケーションによって行うようにしても良い。
【技術分野】
【0001】
本発明は特にビデオカメラ、デジタルスチルカメラ等の撮像装置に用いられる固体撮像素子における映像信号の画質の改善技術に関するものである。
【背景技術】
【0002】
デジタルカメラやビデオカメラ等においては、固体撮像素子としてCCD、CMOSイメージセンサ等が使用されている。ところで、CCDおよびCMOSイメージセンサ上に高輝度被写体があるとき、その列または行全体の信号レベルが変動することで、縦筋・縦帯や横筋・横帯状の画像になることが知られている。このことはCCDではスミア現象として広く知られているが、CMOS型イメージセンサにおいても同様の現象が発生する。
【0003】
CMOS型イメージセンサにおいては、電源やグラウンドの配線レイアウトに起因しているところが大きい。通常電源やグラウンドは水平方向に配線される。例えば画面内の高輝度被写体部に相当する部分に多く電流が流れた結果、その左右画素の電源も変動することで同一行全体の信号レベルが変動する。また、レベル変動の応答遅れなどにより同一行以降の行の信号レベルも変動することにより横筋や横帯状のノイズ画像を引き起こす。このような現象は、特に高輝度被写体によってイメージセンサ内部回路が飽和してしまった場合に顕著に起こる。これは、回路飽和によって信号出力を十分に制御できなくなるからであり、回路的な対策は難しい。
【0004】
また後述するが、撮像素子の水平方向(X方向)の特定位置に高輝度被写体がある場合にのみ横筋や横帯状のノイズ画像を引き起こす場合もある。これは、回路設計上の自由度の制約で電源やグラウンドの配線長や配線方法の違いにより、特定位置の配線インピーダンスが高くなってしまうことなどが原因となる。このような場合、高輝度被写体部の信号出力が飽和していなくても、横筋や横帯状のノイズ画像になる場合があることも実験的にわかっている。
【0005】
図14(a)、(b)は上記の横帯状のノイズが発生している様子を示したもので、CMOS型イメージセンサからの画像信号を画素部レイアウトと対応させて表示している。通常、固体撮像素子には信号レベルの基準信号となる信号(黒基準信号)を得るために光に反応しないように遮光されたオプティカルブラック領域が備えられており、有効画素信号はそのオプティカルブラック領域で得たレベルを基準として演算処理される。このような画素を“OB画素(オプティカルブラック画素)”と呼ぶ。
【0006】
図14(a)中のHOB、VOBと記されている領域は、上記のオプティカルブラック画素からの信号を示している。また、有効画素と記されている部分が実際に光を受光できる画素領域からの信号である。図14(a)は、周辺輝度が低い状態で高輝度光「P」を受光している状態を示しており、その水平方向の左右画素出力「L」と「R」はレベル変動を起こし、横帯状の画像になっていることがわかる。周辺輝度が低いので、高輝度光「P」を受光している部分以外はHOB、VOBと同レベルの出力になるのが理想である。
【0007】
図14(a)のA−Aで示す線上の画像出力レベルを示したのが、図14(b)である。HOBレベルと示したレベルは、HOB領域の中でもレベル変動していない領域の平均レベルであり、通常はこのレベルが黒基準信号になる。それに対して高輝度光「P」を受光している部分のレベルは非常に高く、その出力は回路飽和している。また左右の画素出力「L」、「R」はHOBレベルよりも高くレベル変動を起こしている。
【0008】
ここで、上記のレベル変動による横帯画像を補正することを考えてみる。CCDなどのスミアについては、オプティカルブラック画素にも同様のスミアが発生している。そのため、同一列のオプティカルブラック画素の信号の平均値を基に有効部の出力を補正する方法が、特許文献1、特許文献2等により開示されている。
【0009】
特に特許文献2では、有効画像信号のレベルに応じてスミア補正手段における補正処理内容を変更している。具体的には、有効画像信号のレベルが所定の信号飽和レベルに達していた場合にスミア補正を無補正にすることでスミア補正により飽和部が過補正になり、黒沈みすることの対策としている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平7−67038号
【特許文献2】特開2001−24943号
【発明の概要】
【発明が解決しようとする課題】
【0011】
CMOS型イメージセンサにおいても、図14のように高輝度光「P」の左右が均等にレベル変動しているような場合は特許文献1、特許文献2に記載された補正方法を横方向に適用することで、同様に補正することが可能である。
【0012】
しかしながら、図15(a)、(b)のように高輝度光「P」に近接した画素出力「L1」、「R1」はHOBレベルよりも高く、高輝度光「P」から若干遠ざかった画素出力「L2」、「R2」、「HOB」はHOBと同レベルとなるようなレベル変動を起こしている場合を考える。この場合、同一行のHOB画素はレベル変動を起こしていないので有効部の出力を補正しようとしても、補正不可能である。
【0013】
撮影画像の補正方法としては、撮影レンズの収差や絞り値の違いによって発生するシェーディングを補正するものなどがあるが、図15のような局所的に発生するレベル変動による筋(帯)状のノイズを補正することは不可能である。
【0014】
本発明は上述した課題に鑑みてなされたものであり、その目的は、CMOS型イメージセンサを用いた撮像装置において、高輝度光が入射したときの横筋状又は横帯状のノイズの発生を抑制することである。
【課題を解決するための手段】
【0015】
本発明に係わる撮像装置は、複数の画素が二次元に配列され、光を受光する開口画素領域と、基準となる遮光されたオプティカルブラック領域とを含むCMOS型の撮像素子と、前記撮像素子の前記開口画素領域の特定の領域が高輝度被写体からの光を受光している場合の前記撮像素子の出力から得られる情報を予め記憶する記憶手段と、前記開口画素領域の前記特定の領域が高輝度被写体からの光を受光しているか否かを判定する判定手段と、前記判定手段により前記特定の領域が高輝度被写体からの光を受光していると判定された場合に、前記記憶手段に記憶された情報に基づいて、前記撮像素子からの出力を補正する補正手段と、を備えることを特徴とする。
【発明の効果】
【0016】
本発明によれば、CMOS型イメージセンサを用いた撮像装置において、高輝度光が入射したときの横筋状又は横帯状のノイズの発生を抑制することが可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態における固体撮像素子の平面図。
【図2】固体撮像素子の構成図。
【図3】固体撮像素子の構成図。
【図4】固体撮像素子の構成図。
【図5】第1の実施形態における理想的な画素出力図。
【図6】第1の実施形態における横筋現象を示した図。
【図7】横筋現象が起こらない状態を示した図。
【図8】第1の実施形態における横筋現象を示した図。
【図9】横筋現象の補正方法を説明する図。
【図10】横筋現象の詳細を示した図。
【図11】横筋現象の詳細を示した図。
【図12】横筋現象の補正方法を説明するフローチャート図。
【図13】横筋現象の補正方法を説明するフローチャート図。
【図14】従来例における横筋現象を示した図。
【図15】従来例で補正できない横筋現象を示した図。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について、添付図面を参照して詳細に説明する。
【0019】
(第1の実施形態)
図1は、本発明の第1の実施形態に係わるCMOS型固体撮像素子の画面全体の二次元に配列された画素レイアウトを示した図である。この画素領域には、光を受光する開口画素領域と、遮光されたオプティカルブラック領域(OB画素)とがあり、オプティカルブラック領域は画面上部のVOB部と画面左右のHOB部がある。画素からの信号は図1の左上から矢印で示すように読み出される。
【0020】
図2は、CMOS型固体撮像素子の画素セルPixelの構成例を示すブロック図である。光信号電荷を発生するフォトダイオード201は、この例ではアノード側が接地されている。フォトダイオード201のカソード側は、転送MOSトランジスタ202を介して増幅MOSトランジスタ204のゲートに接続されている。また、増幅MOSトランジスタ204のゲートには、これをリセットするためのリセットMOSトランジスタ203のソースが接続されている。リセットMOSトランジスタ203のドレインは電源電圧VDDに接続されている。さらに、増幅MOSトランジスタ204は、ドレインが電源電圧VDDに接続され、ソースが選択MOSトランジスタ205のドレインに接続されている。
【0021】
図3は、CMOS型固体撮像素子の構成例を示すブロック図である。説明を分かりやすくするために3x3画素の構成となっているが、通常はさらに多画素である。垂直シフトレジスタ301は、行選択線Pres1,Ptx1,Psel1等の信号を画素領域308に出力する。画素領域308は、図1の構成を有し、複数の画素セルPixelを有する。各画素セルPixelは、偶数列と奇数列で各々CH1、CH2の垂直信号線に画素信号を出力する。電流源307は、各垂直信号線に接続される。読み出し回路302は、垂直信号線上の画素信号を入力し、画素信号をnチャネルMOSトランジスタ303を介して差動増幅器305に出力し、ノイズ信号をnチャネルMOSトランジスタ304を介して差動増幅器305に出力する。ここで読み出し回路302は列毎の読み出し回路を含み、作動増幅器305は最終段読み出し回路に相当する。なお、読み出し回路302、MOSトランジスタ303、MOSトランジスタ304、差動増幅器305については、後に詳述する。水平シフトレジスタ306は、トランジスタ303及び304のオン/オフを制御する。差動増幅器305は、画素信号とノイズ信号との差分を出力する。
【0022】
図2の転送MOSトランジスタ202のゲートは、横方向に延長して配置される第1の行選択線(垂直走査線)Ptx1(図3)に接続される。同じ行に配置された他の画素セルPixelの同様な転送MOSトランジスタ202のゲートも上記第1の行選択線Ptx1に共通に接続される。リセットMOSトランジスタ203のゲートは、横方向に延長して配置される第2の行選択線(垂直走査線)Pres1(図3)に接続される。同じ行に配置された他の画素セルPixelの同様なリセットMOSトランジスタ203のゲートも第2の行選択線Pres1に共通に接続される。選択MOSトランジスタ205のゲートは、横方向に延長して配置される第3の行選択線(垂直走査線)Psel1に接続される。同じ行に配置された他の画素セルPixelの同様な選択MOSトランジスタ205のゲートも第3の行選択線Psel1に共通に接続される。これら第1〜第3の行選択線Ptx1, Pres1, Psel1は、垂直シフトレジスタ301に接続され信号電圧が供給される。
【0023】
図3に示されている残りの行においても同様な構成の画素セルPixelと、行選択線が設けられる。これらの行選択線には、垂直シフトレジスタ301により形成された行選択線Ptx2〜Ptx3、Pres2〜Pres3、Psel2〜Psel3の信号が供給される。
【0024】
図2の選択MOSトランジスタ205のソースは、縦方向に延長して配置される垂直信号線の端子Voutに接続される。同じ列に配置される画素セルPixelの同様な選択MOSトランジスタ205のソースも垂直信号線の端子Voutに接続される。図3において、垂直信号線の端子Voutは負荷手段である定電流源307に接続される。また、図3において、読み出し回路302に含まれる回路のグラウンド配線は、半導体レイアウト設計の制約で、一部のインピーダンスが高くなっており、その様子をRh1,Rh2で表している。
【0025】
図4は、本実施形態に係わるCMOS型固体撮像素子の構成を示す図面であり、読み出し回路302、MOSトランジスタ303,304、差動増幅器305を含んでいる。図4において、201〜205は画素部であり図2と同一であるので説明を省略する。
【0026】
各画素のソースフォロワ出力は共通の垂直出力線を介して一点鎖線で囲まれた部分の読み出し回路302内の容量(c0)401に入力される。403はオペアンプで、帰還容量(cf)402と容量(c0)401により反転増幅アンプを構成している。アナログスイッチ404はpc0rパルス(不図示)により駆動され、オンすることでc0、cf容量のリセットおよび後段の容量cts、ctnのリセットを行う。オペアンプ403の出力はpts,ptnパルスで駆動されるアナログスイッチ408、409を介して夫々保持容量(cts)410、(ctn)411に保持される。
【0027】
1行分の画素信号が列毎に(cts)410、(ctn)411に保持されると、図3における水平シフトレジスタ306によりph(n)パルスが順次駆動されることで、アナログスイッチ303,304が開閉され後段の差動型読み出しアンプ305に入力され外部に出力される。
【0028】
なお、図3で説明したように、読み出し回路302に含まれるオペアンプ403、保持容量(cts)410、(ctn)411にはグラウンド配線が共通接続されている。そして、このグラウンド配線は半導体レイアウト設計の制約で、一部のインピーダンスが高くなっている。
【0029】
図5は配線レイアウトの制約がなく、理想的な配線を実現できているイメージセンサの出力を具体的に示している。図5(a)ではより具体的にするために、水平方向(X)は0〜9の10画素、垂直方向(Y)は0〜5の6画素の10×6画素とし、各アドレスの画素出力も示している。以下、各画素のアドレスは(X,Y)で示すものとする。また、イメージセンサには周辺輝度が低い状態で中央部(4,2)〜(5,4)に高輝度光が入射している様子を示していて、その高輝度部の画素出力値は画像としての飽和レベル「99」としている。また、高輝度部以外の画素及びオプティカルブラック画素の出力値は「10」としている。また、HOBはX=0の画素が相当する。
【0030】
図5(a)ではイメージセンサの出力を示しており、高輝度光を受光していても出力のレベル変動を起こしていない。図5(b)はY=3の画像出力レベルを示しており、破線部はHOB領域の中でもレベル変動していない領域の平均レベルであり、高輝度部以外の部分は破線と一致した出力になっている。
【0031】
図6は配線レイアウトの制約があり、グラウンド配線に局部的にインピーダンスの高い部分があるイメージセンサの例を示している。ここでは中央部(4,2)〜(5,4)の高輝度光に近接した左画素部(1,2)〜(3,4)、右画素部(6,2)〜(8,4)はHOBレベルよりも高くなる方向にレベル変動して且つ、その変動量は高輝度光から遠ざかるほどに少なくなっている。左画素部(0,2)〜(0,4)や右画素部(9,2)〜(9,4)においては、HOBレベルと同じでレベル変動はない。
【0032】
図6(c)はY=3の画像出力レベルを示しており、破線部はHOB領域の中でもレベル変動していない領域の平均レベルである。前述の通り高輝度部に近接した左右のレベルが高く、高輝度部から遠ざかるに従ってレベルが低くなっている。
【0033】
図6(b)は、図3で示した読み出し回路302のグラウンド配線のインピーダンスを、X方向座標と合わせて示している。すなわち読み出し回路302のX=4,5の領域のグラウンド配線インピーダンスをRhとして示しこの部分の配線インピーダンスが局部的に高くなっていることを示している。他の部分はRhに比べて極めてインピーダンスが低いので、公知の抵抗記号で示している。
【0034】
この状態でX=4,5の領域が高輝度被写体を受光し、その信号を読み出すと図6(c)のように、高輝度部に近接した左右のレベルが高く、高輝度部から遠ざかるに従ってレベルが低くなるようなレベル変動を起こしてしまう。なお、画像としてはY=2〜4の領域で横帯状のノイズとして見える。
【0035】
図7は図6と同じイメージセンサの例を示しており、図6と同じようにイメージセンサの出力を示しているが、図6との違いは高輝度光は画面中央部(4,2)〜(5,4)ではなく画面左部(2,2)〜(3,4)の領域で受光されている点である。このため、読み出し回路302のX=4,5の領域は高輝度光によりグラウンドレベルが変動させられてもインピーダンスの低い左側配線を通して瞬時にレベルが回復するため、図7(c)のように高輝度光の左右画素のレベル変動はない。
【0036】
図8は配線レイアウトの制約が異なる別のイメージセンサの例を示しており、図6と同じようにイメージセンサの出力を示している。図6との違いは高輝度光は画面中央部(4,2)〜(5,4)ではなく画面右部(7,2)〜(8,4)の領域で受光されている点である。また、図8(b)に示すように読み出し回路302のX=7,8の領域のグラウンド配線インピーダンスをRhとして示しこの部分の配線インピーダンスが局部的に高くなっていることを示している。
【0037】
この場合、X=7,8の領域に高輝度被写体を受光し、その信号を読み出すと図8(c)のように、高輝度部に近接した左右のレベルが高く、高輝度部から遠ざかるに従ってレベルが低くなるようなレベル変動を起こしてしまう。なお、画像としてはY=2〜4の領域で横帯状のノイズとして見える。
【0038】
ここで、図6、7に示すようなイメージセンサにおいて発生する横帯状のノイズの補正方法を考える。注目するべきは、X=4,5列の領域に高輝度被写体が存在するときにだけ横帯状のノイズが発生することである。
【0039】
従ってこのイメージセンサの工場出荷時などに、あらかじめX=4,5列の領域にイメージセンサ出力が十分飽和するような高輝度被写体を受光させる。この状態で、高輝度被写体を受光している行の画素出力およびHOB領域の中でもレベル変動していない領域の平均レベル(黒基準レベル)を読み出す。
【0040】
図6の例では、Y=2〜4行の信号で図9(a)に示すような表になる。更に、高輝度被写体を受光している行の画素出力から黒基準レベルを減算すると図9(b)のようになり、高輝度部に近接した左右のレベルが高く、高輝度部から遠ざかるに従ってレベルが低くなっている。図9(b)のX=0〜3及び6〜9(X方向の位置)の値が横帯状のノイズの補正値になる。
【0041】
すなわち、図9(b)の情報を記憶しておき、実際に撮影された画像データのうち、X=4,5列に高輝度被写体を受光しているかどうかを判定する。高輝度被写体が受光されていたら、高輝度被写体を受光している行のX=0〜3及び6〜9列目の画像データから、図9(b)のX=0〜3及び6〜9の補正データを減算することで、図5のような横帯状のノイズのない画像を得ることができる。
【0042】
このように、高輝度部に近接した左右ほど補正量を多くし、高輝度部から遠ざかるに従って補正量を減らすことで、最適な画像補正を実現している。図8の例においても上記説明のX=4,5の部分をX=7,8と置き換えれば同様の補正が可能である。
【0043】
(第2の実施形態)
背景技術の欄でも説明したが、高輝度被写体部の信号出力が飽和していなくても、横筋や横帯状のノイズ画像になる場合があることも実験的にわかっている。図10はこのことを示すとともに、本発明の第2の実施形態を説明する図である。
【0044】
図10において、Y=3行目、X=4,5列目の信号は図6と同様に『99』になっており画像飽和しているが、Y=2行目、X=4,5列目の信号は『70』、Y=4行目、X=4,5列目の信号は『60』であり、どちらも画像飽和していない。Y=2行目、4行目の画像にはレベル変動による横筋状のノイズが発生しているが、その程度はY=3行目よりも少ない。実験的には高輝度部の出力に比例したレベル変動になり、その出力値の様子を数字で表している。
【0045】
このレベル変動はほぼ下記の(1)式で表される。
【0046】
tbl(n)=tblx{Xrhmax(n)/99)} …(1)
ここで、
tbl :X=4,5列目画像飽和時の他の列の出力
(図9(b)のX=0〜3及び6〜9の補正データ…基準テーブル)
Xrhmax(n) :n行目、X=4,5列の最大値
99 :画像飽和レベル
tbl(n) :n行目、X=0〜3及び6〜9のレベル変動
つまり、各行の横帯状ノイズ補正値は『tbl(n)』となり、その値は基準テーブル『tbl』に、高輝度部の出力と画像飽和レベルの比を乗算したものとなる。従って、高輝度被写体を受光しているn行目の信号から、補正値『tbl(n)』を減算することで横筋(横帯)状のノイズを補正することができる。
【0047】
図10の右側には4,5列の出力、下側には2,3,4行の出力をプロットしたグラフを示していて、画像飽和レベルは『99』であり、Siの記号で示している。
【0048】
(第3の実施形態)
図10までの説明で、高輝度部のレベルを『99』で示しているが、これは画像信号としてA/D変換された出力の飽和レベル(Si)である。イメージセンサ内部のアナログ回路信号の飽和レベルは更に高いレベルにあるが、画像信号として出力される飽和レベルは『99』である。横筋状ノイズのレベル変動は高輝度部の出力に比例するので、画像信号として『99』のレベルであっても更に、アナログ回路信号の飽和レベル(Sc)までの間で横筋状のノイズ強度が変化する。従って画像飽和レベル(Si)を超えたレベルの実際の出力レベルを予測する。
【0049】
図11は、出力が十分回路飽和する程度の高輝度被写体を受光させたときのイメージセンサの様子を示していて、Y=2〜4行目、X=4,5列目の信号はともに画像飽和レベル『99』になっているが、実際は回路飽和(Sc)レベルになっている。
【0050】
また、Y=1及び5行目、X=4,5列目の信号はその左右画素及び上または下画素の出力『10』よりも高く『20』になっている。これは、高輝度光の強度が強いため光学的な反射等により上下方向に隣接した画素出力が高くなっているためである。このことを利用して、高輝度部の実際の出力を予想する。
【0051】
すなわち、このイメージセンサの工場出荷時などに、画像飽和する程度及び回路飽和する程度の高輝度被写体を受光させ、夫々の画像を得る。この状態で、高輝度被写体を受光している行の画素出力およびHOB領域の中でもレベル変動していない領域の平均レベル(黒基準レベル)、更には高輝度被写体を受光している画素の周囲画素の情報を評価する。
【0052】
回路飽和時の画像が図11の状態で、画像飽和時の画像が図6の状態である。横筋状ノイズのレベル変動は高輝度部の出力に比例するので、Y=2〜4行目、X=3または6列目の信号に注目する。ここで画像飽和時は『16』で黒基準レベル『10』を減算すると『6』、回路飽和時は『17』で黒基準レベル『10』を減算すると『7』となり、7/6倍になっている。従って高輝度部の実際の出力(この場合は回路飽和レベル(Sc)と等価)は、
『99』×7/6=116 …(2)
となることがわかる。
【0053】
次に、飽和画素と上下方向に隣接しているY=1または5行目、X=4,5列目の信号に注目する。ここで画像飽和時は『10』で黒基準レベル『10』を減算すると『0』、回路飽和時は『20』で黒基準レベル『10』を減算すると『10』となる。つまり画像飽和している画素の上下方向に隣接した画素は、画像飽和『99』したときは『0』、回路飽和『116』したときは『10』なので、線形補間して
飽和画素出力={(116−99)/10}×上下隣接画素+99 …(3)
但し、飽和画素出力≦116
と近似することができる。
【0054】
つまり、画像飽和レベル(Si)を超える高輝度被写体を受光した状態であっても、高輝度部の上下隣接画素情報を用いて(3)式から飽和画素出力を予測して、更に(1)式を用いることで横筋(横帯)状ノイズを補正することが可能である。
【0055】
ここで飽和画素出力≦116としているのは、横筋状ノイズのレベル変動は高輝度部の出力に比例するので、これ以上の高輝度光を受光してもレベル変動は変わらないためである。このことにより、回路飽和時には(3)式で表される固定の値で画像補正されることになる。
(第4の実施形態)
図12、13は第1〜第3の実施形態の撮像素子のいずれかを用いたデジタルカメラにおける動作を説明するフローチャートである。
【0056】
図12ではカメラの全体の流れを説明していて、ステップS201で不図示の電源スイッチがONされたかどうかを判定する、OFFであればONされるまでステップS201を繰り返す。
【0057】
ステップS201で電源スイッチがONされていれば、ステップS202で撮影準備動作を行わせるための不図示のスイッチSW1がONされたかどうかを判定する。ステップS202でSW1がOFFであれば、ステップS201に戻り、ステップS201〜ステップS202を繰り返す。ステップS202でSW1がONであれば、撮影準備動作を行うためにステップS203以降に進む。
【0058】
ステップS203では、不図示の測光手段により被写体輝度を測定し、イメージセンサへの露光量が最適になるよう撮影レンズの絞り値やシャッタースピード(イメージセンサの蓄積時間)を決定する。続くステップS204で不図示のメカシャッタを開き、イメージセンサへの露光を開始する。
【0059】
ステップS205ではイメージセンサの蓄積制御及び画像情報の読み出し制御を行い、ステップS206で不図示の背面液晶に読み出した画像情報を表示する。その後ステップS207では、ステップS205で得られた画像情報をもとに焦点検出を行うとともに、その結果から撮影レンズを駆動して被写体にピントを合わせる。
【0060】
ステップS208では静止画撮影を行わせるためのスイッチSW2がONされたかどうかを判定する。ステップS208でSW2がOFFであればステップS202に戻り、ステップS202〜ステップS208を繰り返す。ステップS202〜ステップS208までの動作を繰り返すことで所謂EVF機能を実現している。
【0061】
ステップS208でSW2がONであれば、静止画撮影を行うためにステップS209に移行する。ステップS209ではイメージセンサの静止画蓄積制御を行い、ステップS210で不図示のメカシャッタを閉じることでイメージセンサへの露光を終了させる。
【0062】
その後ステップS211でイメージセンサからの画像信号を読み出し、ステップS212で第1〜第3の実施形態のいずれかの横帯補正を行う。横帯補正の詳細は後述する。その後ステップS213で不図示の背面液晶に画像を表示させ、ステップS214で不図示の記録媒体に画像を記録し、一連の動作を終了する。
【0063】
図13を参照して、図12のステップS212の横帯補正の詳細を説明する。まずステップS301でステップS211で得られた画像信号のうちイメージセンサ出力のX座標の所定の範囲、つまりグラウンド配線インピーダンスが局部的に高くなっているX座標『Xrh』内の全画素及びその周辺の画素信号を抽出する。
【0064】
ステップS302ではX座標『Xrh』内の画像信号の最大値Xrhmaxを算出し、Xrhmaxが所定のレベルより大きいかどうかを判定することで、X座標『Xrh』内に高輝度被写体が含まれるかどうかを判定する。ここで所定のレベルは『50』などあらかじめ横筋状のノイズが目立たないレベルを設定しておく。ステップS302で、X座標『Xrh』内に高輝度被写体が含まれないと判定されたら、高輝度被写体がないため横帯補正をする必要がないものとして終了する。
【0065】
ステップS302でX座標『Xrh』内に高輝度被写体が含まれると判定されたら、ステップS303で高輝度被写体が含まれる行を記憶するとともに、0〜m行にナンバリングする。続くステップS304以降では高輝度部を含む行について横帯補正作業を行う。ステップS304では、横帯補正を行う行番号をnとするために、n=0として初期化する。
【0066】
続くステップS305で、n行目のX座標『Xrh(n)』内の画像信号の最大値Xrhmax(n)が画像飽和しているかどうかを判定する。ここでの判定レベルは、図6〜11で説明した『99』であるかどうかである。ここで最大値Xrhmax(n)が画像飽和していなければステップS307に移行する。
【0067】
ステップS305で最大値Xrhmax(n)が画像飽和していると判定されたら、ステップS306に移行して高輝度部の実際の信号を予測する。予測の方法は第3の実施形態で説明したように、上下隣接画素情報から(3)式を用いて各飽和画素の実際の出力を予測する。
【0068】
そうして高輝度部の出力値が確定したらステップS307に移行し、横帯補正をするためにn行目の画素信号を抽出し、ステップS308で(1)式を用いてn行目の補正テーブルtbl(n)を算出する。そして、ステップS309で補正テーブルtbl(n)を用いてn行目の画素信号を補正する。
【0069】
ステップS310では、高輝度被写体を含む行の全てが補正されたかどうかを判定するため、n=mになったかどうかを判定する。ここでn=mでなかったら、ステップS311でn=n+1として、n=mになるまでステップS305〜S311を繰り返す。ステップS310でn=mになったら、高輝度被写体を含む行の全てが補正されたものとして、終了する。
【0070】
以上説明した複数の実施形態のように、イメージセンサの出荷時にあらかじめ高輝度被写体を受光した画像を取得して、代表的な補正テーブル(ここではtbl)を作成しておく。それとともに、画像飽和時と回路飽和時の隣接画素の関係についても取得しておく(ここでは(3)式)。それで、実際の画像の所定の領域に高輝度被写体があることを判定して、あらかじめ取得した情報から実際に撮影した画像の横筋(横帯)状ノイズを補正するようにしている。
【0071】
上記の補正が可能なのは、特定の領域に高輝度被写体が存在するときにだけ横筋(横帯)状のノイズが発生することに注目したからである。また、高輝度部に近接した左右ほど補正量を多くし、高輝度部から遠ざかるに従って補正量を減らすことで、最適な画像補正を実現している。
【0072】
ここで、上記例で説明している補正テーブルは近似式などに変えて記憶するようにしても良い。また、上記の実施形態をパーソナルコンピュータ上のアプリケーションによって行うようにしても良い。
【特許請求の範囲】
【請求項1】
複数の画素が二次元に配列され、光を受光する開口画素領域と、基準となる遮光されたオプティカルブラック領域とを含むCMOS型の撮像素子と、
前記撮像素子の前記開口画素領域の特定の領域が高輝度被写体からの光を受光している場合の前記撮像素子の出力から得られる情報を予め記憶する記憶手段と、
前記開口画素領域の前記特定の領域が高輝度被写体からの光を受光しているか否かを判定する判定手段と、
前記判定手段により前記特定の領域が高輝度被写体からの光を受光していると判定された場合に、前記記憶手段に記憶された情報に基づいて、前記撮像素子からの出力を補正する補正手段と、
を備えることを特徴とする撮像装置。
【請求項2】
前記判定手段は、前記撮像素子の前記特定の領域からの出力が所定のレベルを超えたか否かを判定することによって、前記特定の領域が高輝度被写体からの光を受光していると判定することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記判定手段は、前記撮像素子の前記特定の領域に画像飽和レベルの画素があるか否かを判定し、
前記判定手段により画像飽和レベルの画素があると判定された場合に前記画像飽和レベルの画素の周囲の画素の情報に基づいて前記画像飽和レベルの画素の出力を予測する予測手段をさらに備えることを特徴とする請求項2に記載の撮像装置。
【請求項4】
前記特定の領域は、前記撮像素子の水平方向の所定の領域であることを特徴とする請求項1に記載の撮像装置。
【請求項5】
前記補正手段は、高輝度被写体からの光を受光している領域からの水平方向の位置に応じて前記撮像素子からの出力を補正する補正量を変えることを特徴とする請求項4に記載の撮像装置。
【請求項6】
前記補正手段は、高輝度被写体からの光を受光している領域に近接した領域ほど補正量を多くし、遠ざかるに従って補正量を減らすことを特徴とする請求項5に記載の撮像装置。
【請求項1】
複数の画素が二次元に配列され、光を受光する開口画素領域と、基準となる遮光されたオプティカルブラック領域とを含むCMOS型の撮像素子と、
前記撮像素子の前記開口画素領域の特定の領域が高輝度被写体からの光を受光している場合の前記撮像素子の出力から得られる情報を予め記憶する記憶手段と、
前記開口画素領域の前記特定の領域が高輝度被写体からの光を受光しているか否かを判定する判定手段と、
前記判定手段により前記特定の領域が高輝度被写体からの光を受光していると判定された場合に、前記記憶手段に記憶された情報に基づいて、前記撮像素子からの出力を補正する補正手段と、
を備えることを特徴とする撮像装置。
【請求項2】
前記判定手段は、前記撮像素子の前記特定の領域からの出力が所定のレベルを超えたか否かを判定することによって、前記特定の領域が高輝度被写体からの光を受光していると判定することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記判定手段は、前記撮像素子の前記特定の領域に画像飽和レベルの画素があるか否かを判定し、
前記判定手段により画像飽和レベルの画素があると判定された場合に前記画像飽和レベルの画素の周囲の画素の情報に基づいて前記画像飽和レベルの画素の出力を予測する予測手段をさらに備えることを特徴とする請求項2に記載の撮像装置。
【請求項4】
前記特定の領域は、前記撮像素子の水平方向の所定の領域であることを特徴とする請求項1に記載の撮像装置。
【請求項5】
前記補正手段は、高輝度被写体からの光を受光している領域からの水平方向の位置に応じて前記撮像素子からの出力を補正する補正量を変えることを特徴とする請求項4に記載の撮像装置。
【請求項6】
前記補正手段は、高輝度被写体からの光を受光している領域に近接した領域ほど補正量を多くし、遠ざかるに従って補正量を減らすことを特徴とする請求項5に記載の撮像装置。
【図2】


【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図1】
【図14】
【図15】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図1】
【図14】
【図15】
【公開番号】特開2013−106098(P2013−106098A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246853(P2011−246853)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]