
撮像装置
【目的】 ビューファインダ内における注視点の位置と主被写体の位置が一致しなくなった場合にも、自動焦点制御(AF)等の各種制御を的確に実行し得るよう構成した撮像装置を提供する。
【構成】 視線検出装置EDの出力に基づいて設定された被写体追尾領域内で上記の各種制御を行うための制御信号が不十分な場合、被写体追尾領域の大きさを上記の各種制御が可能となるように設定し、それに基づいてAF等の制御を行う。
【効果】 撮影者の注視点近傍で高周波成分値を監視しながら制御対象領域をできるだけ小さくすることにより、撮影者の意図しない被写体に合焦してしまう、いわゆる遠近競合を未然に防止することができる。撮影者の注視点位置で高周波成分値がAF制御不可能な場合にそれが可能となるレベルに到達するまで、制御対象領域を拡大し、合焦の可能性を高めることができる。
【構成】 視線検出装置EDの出力に基づいて設定された被写体追尾領域内で上記の各種制御を行うための制御信号が不十分な場合、被写体追尾領域の大きさを上記の各種制御が可能となるように設定し、それに基づいてAF等の制御を行う。
【効果】 撮影者の注視点近傍で高周波成分値を監視しながら制御対象領域をできるだけ小さくすることにより、撮影者の意図しない被写体に合焦してしまう、いわゆる遠近競合を未然に防止することができる。撮影者の注視点位置で高周波成分値がAF制御不可能な場合にそれが可能となるレベルに到達するまで、制御対象領域を拡大し、合焦の可能性を高めることができる。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、ビューファインダを備えた撮像装置に関するものである。
【0002】更に詳述すれば本発明は、例えばビデオカメラと、ビデオレコーダと、モニタ用のビューファインダを有するカメラ一体型VTRに適用可能な、撮像装置に関するものである。
【0003】
【従来の技術】従来より、観察者が観察面上のどの位置を観察しているかを検出する装置、いわゆる視線(視軸)を検出する装置が種々提案されている。
【0004】例えば特開昭61−172552号公報においては、光源からの平行光束を観察者の眼球の前眼部へ投射し、角膜からの反射光による角膜反射像と瞳孔の結像位置を利用して視軸を求めている。
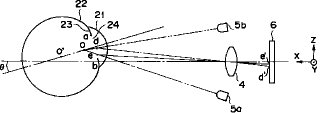
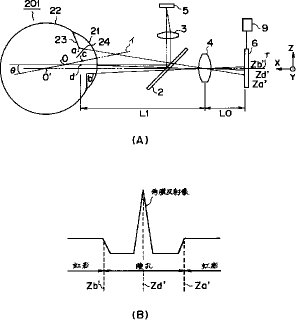
【0005】図19は視線検出方法の原理説明図である。ここで、同図(A)は視線検出光学系の概略図、同図(B)は光電素子列6からの出力信号の強度図である。また同図において、5は観察者に対して不感の赤外光を放射する発光ダイオードなどの光源であり、投光レンズ3の焦点面に配置されている。光源5より発光した赤外光は、投光レンズ3により平行光となりハーフミラー2で反射し、眼球201の角膜21を照明する。このとき、角膜21の表面で反射した赤外光の一部による角膜反射像dはハーフミラー2を透過し、受光レンズ4により集光され、光電素子列6上の位置Zd′に再結像する。
【0006】また虹彩23の端部a,bからの光束は、ハーフミラー2および受光レンズ4を介して、光電素子列6上の位置Za′,Zb′に該端部a,bの像を結像する。受光レンズ4の光軸(光軸ア)に対する眼球の光軸イの回転角θが小さい場合には、虹彩23の端部a,bのZ座標をZa,Zbとしたとき、虹彩23の中心位置cの座標Zcは
【0007】
【数1】
Zc=(Za+Zb)/2 …(1)
と表わされる。
【0008】また、角膜反射像の発生位置DのZ座標をZd、角膜21の曲率中心Oと虹彩23の中心Cまでの距離をOCとすると、眼球光軸イの回転角θは、
【0009】
【数2】
OC*sinθ=Zc−Zd …(2)
の関係式を略満足する。
【0010】ここで、角膜反射像の位置dのZ座標Zdと角膜21の曲率中心OのZ座標Zoとは一致している。このため演算手段9において、同図(B)のごとく光電素子列6面上に投影された各特異点(角膜反射像d及び虹彩の端部a,b)の位置を検出することにより、眼球光軸イの回転角θを求めることができる。このとき(2)式は、
【0011】
【数3】
β*OC*sinθ=(Za′+Zb′)/2−Zd′ …(3)
と書き換えられる。ただし、βは角膜反射像の発生位置dと受光レンズ4との距離L1と、受光レンズ4と光電素子列6との距離L0とで決まる倍率であり、通常ほぼ一定の値となっている。
【0012】一方、カメラ一体型VTRにおいては、撮影者が、撮影中に各種機能の入力を行おうとする際には、ビューファインダをのぞきながらその操作を行わなければならなかった。また、各種機能のスイッチを確認しながら操作するためには、一度ビューファインダから目を離さなければならず、その結果として、撮影画面が乱れたり、被写体を見失ったりする可能性がある。さらに近年に至り、ユーザ用途の多様化などでカメラ一体型VTRに付随する各種機能は増加する傾向にある。
【0013】このような背景を鑑みるとき、例えば上述の視線検出装置を利用してビューファインダ内の視線を検出し、メニュー画面などを用いて各種機能の入力を行うようにすれば、ビューファインダから目を離すことなく、容易に機能入力を行うことが可能となる。
【0014】また、例えばカメラ一体型VTRのオートフォーカス(以下、AFという)、オートアイリスコントロール(以下、AEという)、オートホワイトバランス(以下、AWBという)、自動手ブレ補正(以下、ASという)など撮影動作を補うための各種制御を実行するに際して、時事刻々と変化する主被写体の位置と、撮影者が注視している位置とが一致しているものと想定し、視線検出装置により正確に主被写体を追尾させることができれば、撮影者の意図に反することの無い、より正確なAF,AE,AWB,ASを実現させることができることになる。
【0015】
【発明が解決しようとする課題】しかしながら、注視点位置に常に撮影者の意図する被写体があるとは限らないので、その様な場合はAF,AE,AWB,AS等の制御が著しく困難になるという欠点が生じる。
【0016】よって本発明の目的は上述の点に鑑み、ビューファインダ内における注視点の位置と主被写体の位置が一致しなくなった場合にも、上記AF,AE,AWB,ASといった各種制御を的確に実行し得るよう構成した撮像装置を提供することにある。
【0017】
【課題を解決するための手段】かかる目的を達成するために、本発明はビューファインダを備えた撮像装置において、前記ビューファインダ内における注視点を検出する注視点検出手段と、検出された前記注視点を含む所定領域を制御対象領域として設定する制御枠設定手段と、前記制御対象領域内における表示画像に予め定めた処理を施し、特定信号を抽出する信号処理手段と、抽出された前記特定信号に基づいて、前記制御対象領域の大きさ、および/または、位置を変化させる領域制御手段とを具備したものである。すなわち、本発明のひとつの形態として、抽出された前記特定信号に基づき、前記注視点を中心とした前記制御対象領域の大きさのみを変化させることが可能である。あるいは、その他の形態として、抽出された前記特定信号に基づき、前記制御対象領域の大きさを変化させることなく、該制御対象の位置のみを前記注視点の近傍で移動させることが可能である。
【0018】更に加えて、前記特定信号を入力することにより自動焦点制御,自動アイリス制御,自動ホワイトバランス制御,自動手振れ補正制御のいずれかを行う手段を具備するのが好適である。
【0019】
【作用】本発明の上記構成によれば、AF,AE,AWB,ASなど撮影動作を補うための各種制御を実行させるために、時事刻々と変化する被写体の位置を撮影者が注視している位置として検出し、追尾させることにより上記制御を行う場合、注視点検出手段により検出された注視点位置を囲む被写体追尾領域(すなわち、制御対象領域)の大きさを変化させ、あるいは、被写体追尾領域の大きさを変えることなく最初の注視点位置の近傍を検索し、その領域から得られた各種の制御信号に基づいてAF,AE,AWB,ASなどを的確に実行させることが可能となる。かくして本発明によれば、注視点位置に被写体がまったく存在しない場合、あるいは撮影者の意図しない別の被写体が存在する場合でも的確なAF,AE,AWB,ASが可能となり、快適な撮影を実現させることができる。
【0020】
【実施例】以下、本発明の実施例を詳細に説明する。
【0021】実施例1以下に詳述する各実施例は、ビデオカメラ、ビデオレンズ、及びモニタ用のビューファインダを具備しているカメラ一体型のVTRであって、ビューファインダの回りに視線検出装置を設けることにより、AF,AE,AWB,ASなど撮影者の撮影動作を補うための各種制御の中で、時事刻々と変化する被写体の位置を、撮影者が注視している位置として検出し、追尾させることにより、上記の各種制御を最適に行うことのできる装置において、視線検出装置の出力に基づいて設定された被写体追尾領域内で上記の各種制御を行うための制御信号が不十分な場合、被写体追尾領域の大きさを上記の各種制御が可能となるように設定し、それに基づいてAF,AE,AWB,ASなどの制御を行うものである。
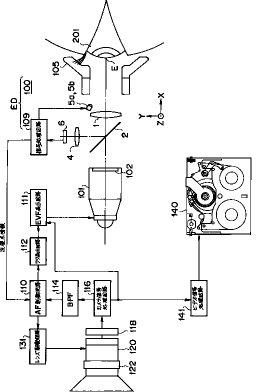
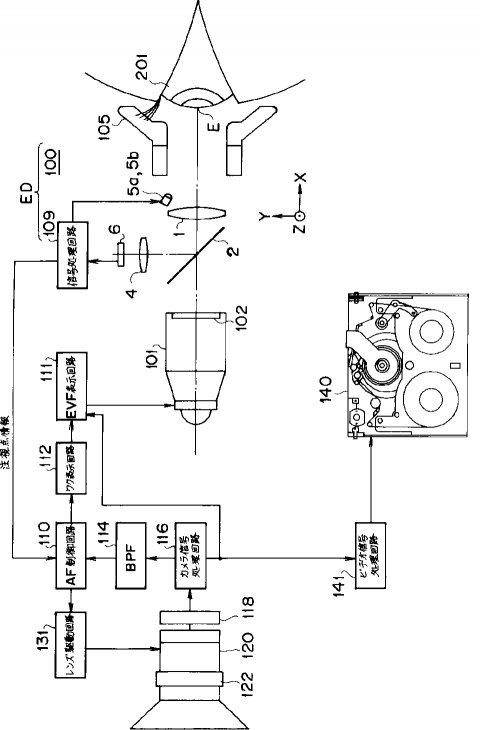
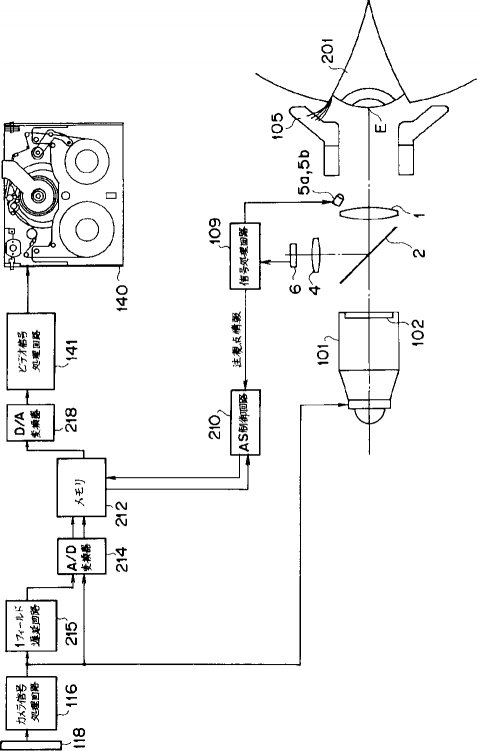
【0022】図1は、本発明の第1の実施例によるカメラ一体型VTRを示す。
【0023】図1において、101は電子ビューファインダ(以下、EVFと略す)、102はファインダ画面である。
【0024】EDは視線検出装置であり、受光手段としての光電素子列6と、照明手段としての赤外発光ダイオード5a,5bと、ファインダ光学系100と、信号処理回路109とにより構成されている。
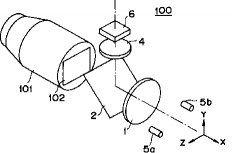
【0025】ファインダ光学系100は、図2に拡大描画するとおり、光路分割用のハーフミラー2と、接眼レンズ1と、受光レンズ4とにより構成されている。ファインダ画面102からの光(映像)は可視光透過・赤外光反射のハーフミラー2を通過するとともに接眼レンズ1を通過してアイピース105内のアイポイントEに導かれる。ここで、ファインダ画面102からアイポイントEに入射される光の軸をX軸とする。
【0026】赤外発光ダイオード5a,5bは接眼レンズ1の眼球201側上端部の近傍において、X軸に対して対象に配置され、赤外光がアイポイントEの近傍に位置する眼球201の中心に入射されるようになっている。眼球201からの反射した赤外光は、接眼レンズ1を通り、可視光透過・赤外光反射のハーフミラー2により受光レンズ4に導かれ、光電素子列6に入射するようになっている。
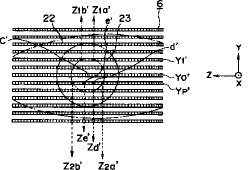
【0027】図6は、光電素子列6面上の眼球反射像の一例を示したものである。
【0028】また図2に示すように、X軸に直交すると共に、ハーフミラー2により受光レンズ4に導かれ、光電素子列6に入射される光の軸に平行な軸をY軸とし、X軸とY軸を含む平面に直交する軸をZ軸とする。そして、光電素子列6においては、複数の光電素子列がZ軸に平行な直線上に並べられている(図6参照)。
【0029】図1に示した信号処理回路109は、眼球光軸検出回路,眼球判別回路,視線補正回路,注視点検出回路等(いずれも図示せず)により構成されている。ここで、眼球光軸検出回路は眼球光軸の回転角を求めるものである。また眼球判別回路は、ファインダ画面102を注視している眼球が左右のいずれであるかを判別するものである。視軸補正回路は、眼球光軸の回転角と眼球判別情報に基づき、視軸の補正を行うものである。さらに、注視点検出回路は、光学定数に基づき注視点を算出するものである。この信号処理回路109は例えばマイクロコンピュータのソフトウェアに従って実行される。
【0030】図4に示すように、赤外発光ダイオード5a,5bからの光束についてみると、角膜反射像eと角膜反射像dがZ軸と平行な方向にそれぞれ形成される。また、角膜反射像eと角膜反射像dの中点のZ座標は、角膜21の曲率中心oのZ座標と一致している。
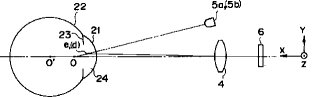
【0031】図5に示すように、観察者の眼球光軸がY軸を中心に回動していない場合、すなわち、眼球光軸とX軸が一致している場合(角膜の曲率中心oと瞳孔の中心C′がX軸上にある)の角膜反射像e(d)は、X軸から+Y方向にずれて形成される。
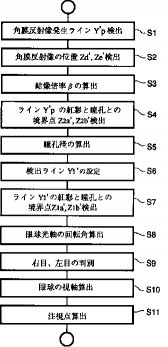
【0032】図3は、信号処理回路109による視線検出手順を示すフローチャートである。以下、本図に示す各ステップS1〜S11を説明する。
【0033】まず、信号処理回路109に内蔵されている眼球光軸検出回路により眼球光軸の回転角を検出し、光電素子列6から像信号を読み出す際に、図6において−Y方向から順次読み出し、角膜反射像e′,d′が形成された光電素子列6の行Yp′を検出する(S1)。次に、角膜反射像e′,d′が形成された光電素子列6の列方向の発生位置Zd′,Ze′を検出する(S2)。
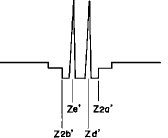
【0034】光電素子列6の行Yp′から得られる出力信号の一例を図7に示す。
【0035】次に、角膜反射像の間隔|Zd′−Ze′|から光学系の結像倍率βを求める(S3)。眼球からの反射像の結像倍率βは、角膜反射像e,dの間隔が赤外発光ダイオード5a,5bと観察者の眼球との距離に比例して変化するため、光電素子列6上に再結像した角膜反射像の位置e′,d′を検出することにより求めることができる。
【0036】そして、角膜反射像e,dが再結像された光電素子列6の行Yp′上の虹彩23と瞳孔24の境界点Z2b′,A2a′を検出し(S4)、行Yp′上の瞳孔径|Z2d′−Z2a′|を算出する(S5)。
【0037】通常、角膜反射像が形成される光電素子列6の行Yp′は、瞳孔中心C′が存在する光電素子列6の行Y0′より図6において−Y方向にずれている。像信号を読み出すべきもう1つの光電素子列の行Y1′を結像倍率βと瞳孔径により算出する(S6)。行Y1′は行Yp′から充分離れている。
【0038】次に、光電素子列の行Y1′上の虹彩23と瞳孔24の境界Z1b′,Z1a′を検出し(S7)、境界点(Z1a′,Y1′),境界点(Z1b′,Y1′),境界点(Z2a′,Yp′),境界点(Z2b′,Yp′)のうち少なくとも3点を用いて瞳孔の中心位置C′(Zc′,Yc′)を求める。
【0039】次に、角膜反射像の位置(Zd′,Yp′),(Ze′,Yp′)と、次式(4),(5)から眼球光軸の回転角θz,θyを求める(S8)。
【0040】
【数4】
β*OC*sinθz≒Zc′−(Zd′+Ze′)/2 …(4)
【0041】
【数5】
β*OC*sinθy≒Zc′−Yp′+δY′ …(5)
ただし、δY′は赤外発光ダイオード5a,5bが受光レンズ4に対して光電素子列6の列方向の直交する方向に配置されていることにより、角膜反射像の再結像位置e′,d′が光電素子列6の上で角膜21の曲率中心のY座標に対してY軸方向のズレを補正する補正値である。
【0042】ついで、信号処理回路109に内蔵されている眼球判別回路により、例えば、算出される眼球光軸の回転角の分布からEVF101を覗いている観察者の眼が左右いずれかを判別し(S9)、眼球判別情報と眼球光軸の回転角に基づき視軸補正回路により視軸を補正し(S10)、ファインダ光学系100の光学定数に基づき、信号処理回路109に内蔵されている注視点検出回路により注視点を算出する(S11)。
【0043】図1に示したビデオカメラ部のCCDイメージセンサ118から出力される電気信号は、カメラ信号処理回路116を経て映像信号となり、バンドパスフィルタ(BPF)114とビデオ信号処理回路141とに供給される。ビデオ信号処理回路141からの出力信号は、記録信号としてVTR(ビデオテープレコーダ)140に送られ、磁気テープに記録される。
【0044】一方、信号処理回路109内の上記注視点検出回路において検出された注視点情報は、AF制御回路110に送られる。AF制御回路110では、バンドパスフィルタ114により検出された撮像画面内の高周波成分信号の時系列変化により、その信号振幅が最大になるようにフォーカシングレンズ120をレンズ駆動回路131を介し駆動モータ(不図示)により駆動させ、ピントを合わせを行っている。
【0045】さらに、AF制御回路110は撮像画面内の高周波成分信号のピーク位置も検出し、そのピーク位置を中心に所定の範囲で高周波成分の検出を行う被写体追尾も同時に行っている。AF制御回路110において設定された上記検出範囲は、測距枠表示回路112及びEVF表示回路111を介して実際にEVF101内のファインダ上に表示される(図11参照)。
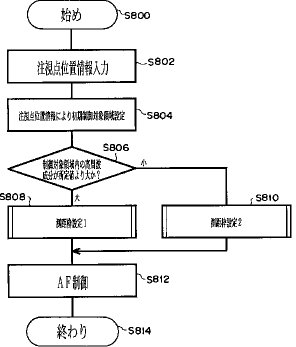
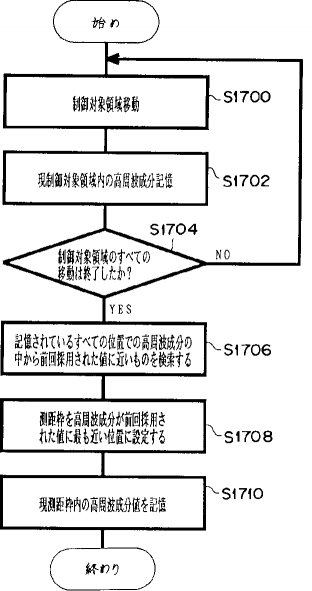
【0046】図8は、AF制御回路110によるAF制御手順を示す動作フローチャートである。以下、図示した各ステップS802〜S812について説明する。
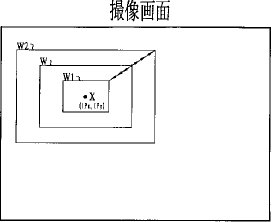
【0047】S802は、信号処理回路109に含まれている注視点処理回路より得られる注視点情報、すなわち、現在撮影者がファインダ画面内のどの位置を注視しているかという信号をファインダ内座標値X(IPX ,IPY )で受け取るルーチンである(図11参照)。
【0048】S804は、S802で受け取った注視点位置座標X(IPX ,IPY )を中心にして、所定の大きさの初期制御対象領域W(図11参照)を設定するルーチンである。
【0049】S806は、S804で設定した領域内の高周波成分が所定の大きさより大きいか否かを判断し、大きい時はS808の測距枠設定1ルーチンへ、小さいときはS810の測距枠設定2ルーチンへ制御を移行させるルーチンである。このS808,S810は測距枠設定ルーチンとして本実施例の主眼を成すところであり、後に詳細に説明する。
【0050】S812は、S808,S810により設定された測距エリア内において、高周波成分の検出を行い、AF制御を行うルーチンである。
【0051】次に、上述したS808,S810の測距枠設定ルーチンについて、図9,図10および図11を参照して説明する。
【0052】図11において、W,W1,W2はそれぞれ制御対象領域であり、Xは注視点座標である。以下、この記号を使って説明する。
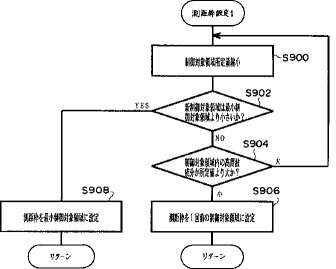
【0053】図9は、S806のルーチンで、初期制御対象領域W内の高周波成分が所定値より大きいと判断された場合の、測距枠設定1の処理手順を示す。
【0054】図9において、S900は、初期制御対象領域Wを所定量だけ縮小させるルーチンである。
【0055】S902は、S900で設定した新制御対象領域が最小制御対象領域W1より小さいか否かを判断し、小さい場合には、以降の制御を中止してS908のルーチンに制御を移行させるルーチンである。
【0056】S904は、新制御対象領域内の高周波成分値が所定値より大きいか否かを判断し、大きい場合は、更に制御対象領域を小さくさせるため、再びS900のルーチンへ制御を移行し、小さい場合は、次の測距枠最終設定ルーチンS906へ移行させるルーチンである。
【0057】S906は、高周波成分の値が最後に所定値より小さくなった時に、制御対象領域を測距枠として設定するルーチンである。
【0058】S908は、測距枠として最小制御対象領域W1に設定するルーチンである。
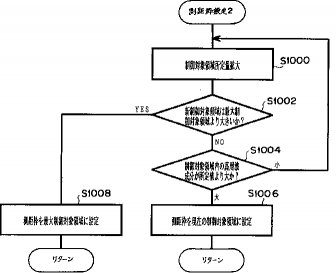
【0059】図10は、図8に示したS806ルーチンで、初期制御対象領域W内の高周波成分が所定値より小さいと判断された場合の、測距枠設定2の処理手順を示す。図10において、S1000は、制御対象領域Wを所定量だけ拡大させるルーチンである。
【0060】S1002は、S1000で設定した制御対象領域が最大制御対象領域W2より大きいか否かを判断し、大きい場合には、移行の制御を中止してS1008のルーチンに制御を移行させるルーチンである。
【0061】S1004は、新制御対象領域内の高周波成分値が所定値より大きいか否かを判断し、小さい場合は、更に制御対象領域を大きくさせるため、再びS1000のルーチンへ制御を移行し、大きい場合は、次の測距枠最終設定ルーチン(S1006)へ移行させるルーチンである。
【0062】S1006は、高周波成分の値が最後に所定値より大きくなった時の制御対象領域を測距枠として設定するルーチンである。
【0063】S1008は、測距枠として最大制御対象領域W2に設定するルーチンである。
【0064】以上の如く、図9すなわち図8の測距枠設定1(S808)によれば、撮影者の注視点近傍で高周波成分値を監視しながら制御対象領域をできるだけ小さくすることにより、撮影者の意図しない被写体に合焦してしまう、いわゆる遠近競合を未然に防止することができる。また図10すなわち図8の測距枠設定2(S810)によれば、撮影者の注視点位置で高周波成分値がAF制御不可能な場合にそれが可能となるレベルに到達するまで、制御対象領域を拡大し、合焦の可能性を高めることができる。
【0065】以上述べてきたように、本実施例においては、注視点追尾型AF機構が搭載されたビデオカメラにおいて、撮影者の注視点位置に意図する被写体がない場合でも、測距枠の大きさを最適に設定することにより、遠近競合、合焦不可能状態を未然に防ぎ、快適なAF撮影を行うことが可能となる。
【0066】実施例2第1の実施例では、1制御当たりの制御対象領域の拡大、縮小量は一定であったが、何もこれに限ることはなく、例えば制御対象領域内の高周波成分値により可変にしても良い。
【0067】実施例3第1の実施例では、制御対象領域内の高周波成分の大小により測距枠設定を変えていたが、何もこれに限ることはなく、例えば被写体エッジ成分、あるいは、高周波成分の変化量に応じて測距枠設定を変えても良い。
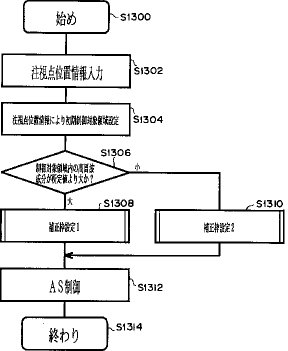
【0068】実施例4第1の実施例では、被写体追尾をAF制御に応用した場合について述べたが、何もこれに限ることは無く、例えばAS制御を行うために、視線による被写体追尾を手ブレ補正領域の検出に応用しても同等の効果が得られる。この場合においても、補正領域設定には制御対象領域内の高周波成分の大小を検出すれば良い。すなわちピントの合うところが補正対象となる。
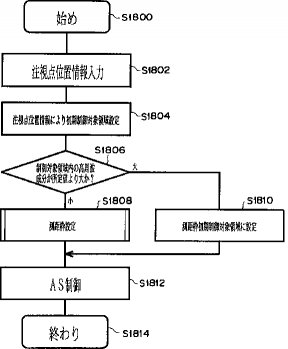
【0069】図12は上記AS制御を行うための回路例であり、図1に示した回路と異なるところは、カメラ信号処理回路116の後段にA/D変換器214,1フィールド遅延回路215,メモリ212およびAS制御回路210を設け、注視点情報に基づいて、補正枠の大きさを設定する(図13のS1308,1310参照)ところにある。その他の動作は、第1の実施例と同等であるので、説明は省略する。
【0070】実施例5以下に詳述する各実施例は、ビデオカメラ、ビデオレンズ、及びモニタ用のビューファインダを具備しているカメラ一体型のVTRであって、前記ビューファインダの回りに視線検出装置を設けることにより、AF,AE,AWB,ASなど撮影者の撮影動作を補うための各種制御の中で、時事刻々と変化する被写体の位置を、撮影者が注視している位置として検出し、追尾させることにより、上記の各種制御を最適に行うことのできる装置において、視線検出装置の出力に基づいて設定された被写体追尾領域内で上記各種の制御を行うための制御信号が不十分な場合、被写体追尾領域自体の大きさは変えることなく、最初の注視点位置の近傍を検索し、上記の各種制御が可能となるよう再設定し、それに基づいてAF,AE,AWB,ASなどの制御を行うものである。
【0071】ここで説明する第5の実施例では、図1に示したブロック構成によりAF制御を行うものである。
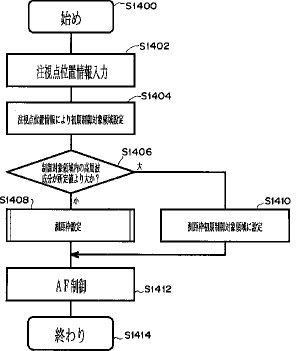
【0072】図14は、AF制御回路110によるAF制御手順を示す動作フローチャートである。S1402は、信号処理回路109に内蔵されている注視点処理回路109より得られる注視点情報、すなわち、現在撮影者がファインダ画面のどの位置を注視しているかという信号をファインダ内座標値(IPX ,IPY )で受け取るルーチンである。
【0073】S1404は、S1402で受け取った注視点位置座標X(IPX ,IPY )を中心にして、所定の大きさの初期制御対象領域W(図16参照)を設定するルーチンである。
【0074】S1406は、S1404で設定した領域内の高周波成分が所定の大きさより大きいか否かを判断し、大きい時はS1401へ、小さいときはS1408の測距枠設定ルーチンへ制御を移行させるルーチンである。
【0075】S1408は、S1406で初期制御対象領域W内の高周波成分が所定値より小さいと判断された場合の測距枠設定ルーチンとして本実施例の主眼を成すところであり、後に詳細に説明する。
【0076】S1410は、S1406で初期制御対象領域W内の高周波成分が所定値より大きいと判断された場合に、測距枠としてそれを設定するルーチンである。
【0077】S1412は、S1408およびS1410により設定された測距エリア内において、高周波成分の検出を行い、AF制御を行うルーチンである。
【0078】次に、本実施例の主眼を成すS1408の測距枠設定ルーチンについて、図15および図16を使用して説明する。
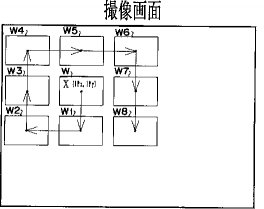
【0079】図16において、WおよびW1〜W8はそれぞれ制御対象領域であり、Xは注視点座標である。ここで、制御対象領域はすべて同じ大きさである。以下、この記号を使って説明する。
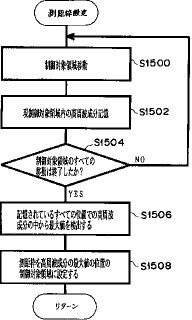
【0080】図15において、S1500は初期制御対象領域WをW1へ移動させるルーチンである。
【0081】S1502は、移動した位置での制御対象領域内の高周波成分値を記憶するルーチンである。
【0082】S1504は、移動した位置が検索範囲の最終位置(W8)か否かを確認するルーチンであり、最終位置の場合、次の最大値検出ルーチンへ、そうでない場合は、再び制御対象領域を次の領域へ移動させる。
【0083】S1506は、これまで記憶されているW1からW8での制御対象領域内の高周波成分最大値を検出し、その位置を明らかにするルーチンである。
【0084】S1508は、S1506で明らかにされた高周波成分最大値の位置における制御対象領域を測距枠として設定するルーチンである。
【0085】以上の如く、図15すなわち図14の測距枠設定アルゴリズム(S1408)によれば、撮影者の注視点位置で高周波成分値がAF制御不可能な場合に、それが可能となるレベルを注視点近傍で制御対象領域を移動させて検索し、測距枠を高周波成分値が最大値の位置に設定し、合焦の可能性を高めることができる。
【0086】以上述べてきたように、本実施例においては、注視点追尾型AFが搭載されたビデオカメラにおいて、撮影者の注視点位置に意図する被写体がない場合でも、測距枠の位置を最適に設定することにより、合焦不可能状態を未然に防ぎ、快適なAF撮影を行うことが可能となる。
【0087】実施例6第5の実施例では、移動させる制御対象領域の大きさと初期制御対象領域の大きさは同じであったが、何もこれに限ることはなく、例えば重ならない程度に、移動させる制御対象領域の大きさを初期制御対象領域のそれより大きくしても良い。
【0088】実施例7第5の実施例では、制御対象領域を移動させて高周波成分を検索していたが、何もこれに限ることはなく、例えば予め注視点近傍の大きなエリアをサンプリングし、その中で所定の領域内の高周波成分値同士を比較し、最大となる位置を検索しても良い。
【0089】実施例8第5の実施例では、制御対象領域内の高周波成分値により測距枠設定を行っていたが、何もこれに限ることはなく、例えば被写体エッジ成分、あるいは、高周波成分の変化量に応じて測距枠設定を行っても良い。
【0090】実施例9第5の実施例では、高周波成分が最大値を示す位置に測距枠を設定していたが、何もこれに限ることはなく、例えば、図17のフローチャートに示すように、前回合焦制御を行った時に採用した高周波成分値に最も近い値を示す位置に測距枠を設定しても良い。
【0091】実施例10第5の実施例では、被写体追尾をAFに応用した場合について述べたが、何もこれに限ることは無く、例えばAS制御を行うために図12に示した回路を用い、視線による被写体追尾を手ブレ補正領域の検出に応用しても同等の効果が得られる。この場合においても、補正領域設定には図18のフローチャートに示すように、制御対象領域内の高周波成分の大小を検出すれば良い。すなわちピントの合うところが補正対象となる。
【0092】
【発明の効果】以上述べてきたとおり本発明によれば、注視点追尾機能を有する撮像装置において、注視点位置に意図する被写体が無い場合にも、制御対象領域の大きさあるいは位置を最適に設定することにより、より忠実に撮影者の意図を反映した各種の制御を実行させることが可能となる。
【図面の簡単な説明】
【図1】本発明の第1実施例であるカメラ一体型VTRの回路構成を示すブロック図である。
【図2】図1に示したファインダ光学系100の配置例を示す斜視図である。
【図3】図1の信号処理回路109による視線検出手段の一例を示すフローチャートである。
【図4】X軸およびZ軸を含む平面上の角膜反射像の位置の一例を示す光路図である。
【図5】X軸およびY軸を含む平面上の角膜反射像の位置の一例を示す光路図である。
【図6】眼球からの反射像の一例を示す平面図である。
【図7】図6に示した光電素子列の行Yp′から得られる出力信号の一例を示す波形図である。
【図8】図1に示したAF制御回路110の動作手順を示すフローチャートである。
【図9】図8に示した測距枠設定1(S808)の詳細なフローチャートである。
【図10】図8に示した測距枠設定2(S810)の詳細なフローチャートである。
【図11】本実施例の測距枠設定を説明する図である。
【図12】第4の実施例を示すブロック図である。
【図13】第4の実施例におけるAS制御手順を示すフローチャートである。
【図14】第5の実施例におけるAF制御を示すフローチャートである。
【図15】図14に示した測距枠設定(S1408)の詳細なフローチャートである。
【図16】第5の実施例における測距枠設定を説明する図である。
【図17】第9の実施例における測距枠設定処理を示すフローチャートである。
【図18】第10の実施例におけるAS制御手順を示すフローチャートである。
【図19】従来技術の説明図である。
【符号の説明】
ED 視線検出装置
5a,5b 赤外発光ダイオード
6 光電素子列
100 ファインダ光学系
101 電子ビューファインダ(EVF)
102 ファインダ画面
109 信号処理回路
110 AF(自動焦点)制御回路
111 EVF表示回路
112 測距枠表示回路
114 バンドパスフィルタ(BPF)
116 カメラ信号処理回路
118 CCDイメージセンサ
120 フォーカシングレンズ
131 レンズ駆動回路
140 VTR
141 ビデオ信号処理回路
【0001】
【産業上の利用分野】本発明は、ビューファインダを備えた撮像装置に関するものである。
【0002】更に詳述すれば本発明は、例えばビデオカメラと、ビデオレコーダと、モニタ用のビューファインダを有するカメラ一体型VTRに適用可能な、撮像装置に関するものである。
【0003】
【従来の技術】従来より、観察者が観察面上のどの位置を観察しているかを検出する装置、いわゆる視線(視軸)を検出する装置が種々提案されている。
【0004】例えば特開昭61−172552号公報においては、光源からの平行光束を観察者の眼球の前眼部へ投射し、角膜からの反射光による角膜反射像と瞳孔の結像位置を利用して視軸を求めている。
【0005】図19は視線検出方法の原理説明図である。ここで、同図(A)は視線検出光学系の概略図、同図(B)は光電素子列6からの出力信号の強度図である。また同図において、5は観察者に対して不感の赤外光を放射する発光ダイオードなどの光源であり、投光レンズ3の焦点面に配置されている。光源5より発光した赤外光は、投光レンズ3により平行光となりハーフミラー2で反射し、眼球201の角膜21を照明する。このとき、角膜21の表面で反射した赤外光の一部による角膜反射像dはハーフミラー2を透過し、受光レンズ4により集光され、光電素子列6上の位置Zd′に再結像する。
【0006】また虹彩23の端部a,bからの光束は、ハーフミラー2および受光レンズ4を介して、光電素子列6上の位置Za′,Zb′に該端部a,bの像を結像する。受光レンズ4の光軸(光軸ア)に対する眼球の光軸イの回転角θが小さい場合には、虹彩23の端部a,bのZ座標をZa,Zbとしたとき、虹彩23の中心位置cの座標Zcは
【0007】
【数1】
Zc=(Za+Zb)/2 …(1)
と表わされる。
【0008】また、角膜反射像の発生位置DのZ座標をZd、角膜21の曲率中心Oと虹彩23の中心Cまでの距離をOCとすると、眼球光軸イの回転角θは、
【0009】
【数2】
OC*sinθ=Zc−Zd …(2)
の関係式を略満足する。
【0010】ここで、角膜反射像の位置dのZ座標Zdと角膜21の曲率中心OのZ座標Zoとは一致している。このため演算手段9において、同図(B)のごとく光電素子列6面上に投影された各特異点(角膜反射像d及び虹彩の端部a,b)の位置を検出することにより、眼球光軸イの回転角θを求めることができる。このとき(2)式は、
【0011】
【数3】
β*OC*sinθ=(Za′+Zb′)/2−Zd′ …(3)
と書き換えられる。ただし、βは角膜反射像の発生位置dと受光レンズ4との距離L1と、受光レンズ4と光電素子列6との距離L0とで決まる倍率であり、通常ほぼ一定の値となっている。
【0012】一方、カメラ一体型VTRにおいては、撮影者が、撮影中に各種機能の入力を行おうとする際には、ビューファインダをのぞきながらその操作を行わなければならなかった。また、各種機能のスイッチを確認しながら操作するためには、一度ビューファインダから目を離さなければならず、その結果として、撮影画面が乱れたり、被写体を見失ったりする可能性がある。さらに近年に至り、ユーザ用途の多様化などでカメラ一体型VTRに付随する各種機能は増加する傾向にある。
【0013】このような背景を鑑みるとき、例えば上述の視線検出装置を利用してビューファインダ内の視線を検出し、メニュー画面などを用いて各種機能の入力を行うようにすれば、ビューファインダから目を離すことなく、容易に機能入力を行うことが可能となる。
【0014】また、例えばカメラ一体型VTRのオートフォーカス(以下、AFという)、オートアイリスコントロール(以下、AEという)、オートホワイトバランス(以下、AWBという)、自動手ブレ補正(以下、ASという)など撮影動作を補うための各種制御を実行するに際して、時事刻々と変化する主被写体の位置と、撮影者が注視している位置とが一致しているものと想定し、視線検出装置により正確に主被写体を追尾させることができれば、撮影者の意図に反することの無い、より正確なAF,AE,AWB,ASを実現させることができることになる。
【0015】
【発明が解決しようとする課題】しかしながら、注視点位置に常に撮影者の意図する被写体があるとは限らないので、その様な場合はAF,AE,AWB,AS等の制御が著しく困難になるという欠点が生じる。
【0016】よって本発明の目的は上述の点に鑑み、ビューファインダ内における注視点の位置と主被写体の位置が一致しなくなった場合にも、上記AF,AE,AWB,ASといった各種制御を的確に実行し得るよう構成した撮像装置を提供することにある。
【0017】
【課題を解決するための手段】かかる目的を達成するために、本発明はビューファインダを備えた撮像装置において、前記ビューファインダ内における注視点を検出する注視点検出手段と、検出された前記注視点を含む所定領域を制御対象領域として設定する制御枠設定手段と、前記制御対象領域内における表示画像に予め定めた処理を施し、特定信号を抽出する信号処理手段と、抽出された前記特定信号に基づいて、前記制御対象領域の大きさ、および/または、位置を変化させる領域制御手段とを具備したものである。すなわち、本発明のひとつの形態として、抽出された前記特定信号に基づき、前記注視点を中心とした前記制御対象領域の大きさのみを変化させることが可能である。あるいは、その他の形態として、抽出された前記特定信号に基づき、前記制御対象領域の大きさを変化させることなく、該制御対象の位置のみを前記注視点の近傍で移動させることが可能である。
【0018】更に加えて、前記特定信号を入力することにより自動焦点制御,自動アイリス制御,自動ホワイトバランス制御,自動手振れ補正制御のいずれかを行う手段を具備するのが好適である。
【0019】
【作用】本発明の上記構成によれば、AF,AE,AWB,ASなど撮影動作を補うための各種制御を実行させるために、時事刻々と変化する被写体の位置を撮影者が注視している位置として検出し、追尾させることにより上記制御を行う場合、注視点検出手段により検出された注視点位置を囲む被写体追尾領域(すなわち、制御対象領域)の大きさを変化させ、あるいは、被写体追尾領域の大きさを変えることなく最初の注視点位置の近傍を検索し、その領域から得られた各種の制御信号に基づいてAF,AE,AWB,ASなどを的確に実行させることが可能となる。かくして本発明によれば、注視点位置に被写体がまったく存在しない場合、あるいは撮影者の意図しない別の被写体が存在する場合でも的確なAF,AE,AWB,ASが可能となり、快適な撮影を実現させることができる。
【0020】
【実施例】以下、本発明の実施例を詳細に説明する。
【0021】実施例1以下に詳述する各実施例は、ビデオカメラ、ビデオレンズ、及びモニタ用のビューファインダを具備しているカメラ一体型のVTRであって、ビューファインダの回りに視線検出装置を設けることにより、AF,AE,AWB,ASなど撮影者の撮影動作を補うための各種制御の中で、時事刻々と変化する被写体の位置を、撮影者が注視している位置として検出し、追尾させることにより、上記の各種制御を最適に行うことのできる装置において、視線検出装置の出力に基づいて設定された被写体追尾領域内で上記の各種制御を行うための制御信号が不十分な場合、被写体追尾領域の大きさを上記の各種制御が可能となるように設定し、それに基づいてAF,AE,AWB,ASなどの制御を行うものである。
【0022】図1は、本発明の第1の実施例によるカメラ一体型VTRを示す。
【0023】図1において、101は電子ビューファインダ(以下、EVFと略す)、102はファインダ画面である。
【0024】EDは視線検出装置であり、受光手段としての光電素子列6と、照明手段としての赤外発光ダイオード5a,5bと、ファインダ光学系100と、信号処理回路109とにより構成されている。
【0025】ファインダ光学系100は、図2に拡大描画するとおり、光路分割用のハーフミラー2と、接眼レンズ1と、受光レンズ4とにより構成されている。ファインダ画面102からの光(映像)は可視光透過・赤外光反射のハーフミラー2を通過するとともに接眼レンズ1を通過してアイピース105内のアイポイントEに導かれる。ここで、ファインダ画面102からアイポイントEに入射される光の軸をX軸とする。
【0026】赤外発光ダイオード5a,5bは接眼レンズ1の眼球201側上端部の近傍において、X軸に対して対象に配置され、赤外光がアイポイントEの近傍に位置する眼球201の中心に入射されるようになっている。眼球201からの反射した赤外光は、接眼レンズ1を通り、可視光透過・赤外光反射のハーフミラー2により受光レンズ4に導かれ、光電素子列6に入射するようになっている。
【0027】図6は、光電素子列6面上の眼球反射像の一例を示したものである。
【0028】また図2に示すように、X軸に直交すると共に、ハーフミラー2により受光レンズ4に導かれ、光電素子列6に入射される光の軸に平行な軸をY軸とし、X軸とY軸を含む平面に直交する軸をZ軸とする。そして、光電素子列6においては、複数の光電素子列がZ軸に平行な直線上に並べられている(図6参照)。
【0029】図1に示した信号処理回路109は、眼球光軸検出回路,眼球判別回路,視線補正回路,注視点検出回路等(いずれも図示せず)により構成されている。ここで、眼球光軸検出回路は眼球光軸の回転角を求めるものである。また眼球判別回路は、ファインダ画面102を注視している眼球が左右のいずれであるかを判別するものである。視軸補正回路は、眼球光軸の回転角と眼球判別情報に基づき、視軸の補正を行うものである。さらに、注視点検出回路は、光学定数に基づき注視点を算出するものである。この信号処理回路109は例えばマイクロコンピュータのソフトウェアに従って実行される。
【0030】図4に示すように、赤外発光ダイオード5a,5bからの光束についてみると、角膜反射像eと角膜反射像dがZ軸と平行な方向にそれぞれ形成される。また、角膜反射像eと角膜反射像dの中点のZ座標は、角膜21の曲率中心oのZ座標と一致している。
【0031】図5に示すように、観察者の眼球光軸がY軸を中心に回動していない場合、すなわち、眼球光軸とX軸が一致している場合(角膜の曲率中心oと瞳孔の中心C′がX軸上にある)の角膜反射像e(d)は、X軸から+Y方向にずれて形成される。
【0032】図3は、信号処理回路109による視線検出手順を示すフローチャートである。以下、本図に示す各ステップS1〜S11を説明する。
【0033】まず、信号処理回路109に内蔵されている眼球光軸検出回路により眼球光軸の回転角を検出し、光電素子列6から像信号を読み出す際に、図6において−Y方向から順次読み出し、角膜反射像e′,d′が形成された光電素子列6の行Yp′を検出する(S1)。次に、角膜反射像e′,d′が形成された光電素子列6の列方向の発生位置Zd′,Ze′を検出する(S2)。
【0034】光電素子列6の行Yp′から得られる出力信号の一例を図7に示す。
【0035】次に、角膜反射像の間隔|Zd′−Ze′|から光学系の結像倍率βを求める(S3)。眼球からの反射像の結像倍率βは、角膜反射像e,dの間隔が赤外発光ダイオード5a,5bと観察者の眼球との距離に比例して変化するため、光電素子列6上に再結像した角膜反射像の位置e′,d′を検出することにより求めることができる。
【0036】そして、角膜反射像e,dが再結像された光電素子列6の行Yp′上の虹彩23と瞳孔24の境界点Z2b′,A2a′を検出し(S4)、行Yp′上の瞳孔径|Z2d′−Z2a′|を算出する(S5)。
【0037】通常、角膜反射像が形成される光電素子列6の行Yp′は、瞳孔中心C′が存在する光電素子列6の行Y0′より図6において−Y方向にずれている。像信号を読み出すべきもう1つの光電素子列の行Y1′を結像倍率βと瞳孔径により算出する(S6)。行Y1′は行Yp′から充分離れている。
【0038】次に、光電素子列の行Y1′上の虹彩23と瞳孔24の境界Z1b′,Z1a′を検出し(S7)、境界点(Z1a′,Y1′),境界点(Z1b′,Y1′),境界点(Z2a′,Yp′),境界点(Z2b′,Yp′)のうち少なくとも3点を用いて瞳孔の中心位置C′(Zc′,Yc′)を求める。
【0039】次に、角膜反射像の位置(Zd′,Yp′),(Ze′,Yp′)と、次式(4),(5)から眼球光軸の回転角θz,θyを求める(S8)。
【0040】
【数4】
β*OC*sinθz≒Zc′−(Zd′+Ze′)/2 …(4)
【0041】
【数5】
β*OC*sinθy≒Zc′−Yp′+δY′ …(5)
ただし、δY′は赤外発光ダイオード5a,5bが受光レンズ4に対して光電素子列6の列方向の直交する方向に配置されていることにより、角膜反射像の再結像位置e′,d′が光電素子列6の上で角膜21の曲率中心のY座標に対してY軸方向のズレを補正する補正値である。
【0042】ついで、信号処理回路109に内蔵されている眼球判別回路により、例えば、算出される眼球光軸の回転角の分布からEVF101を覗いている観察者の眼が左右いずれかを判別し(S9)、眼球判別情報と眼球光軸の回転角に基づき視軸補正回路により視軸を補正し(S10)、ファインダ光学系100の光学定数に基づき、信号処理回路109に内蔵されている注視点検出回路により注視点を算出する(S11)。
【0043】図1に示したビデオカメラ部のCCDイメージセンサ118から出力される電気信号は、カメラ信号処理回路116を経て映像信号となり、バンドパスフィルタ(BPF)114とビデオ信号処理回路141とに供給される。ビデオ信号処理回路141からの出力信号は、記録信号としてVTR(ビデオテープレコーダ)140に送られ、磁気テープに記録される。
【0044】一方、信号処理回路109内の上記注視点検出回路において検出された注視点情報は、AF制御回路110に送られる。AF制御回路110では、バンドパスフィルタ114により検出された撮像画面内の高周波成分信号の時系列変化により、その信号振幅が最大になるようにフォーカシングレンズ120をレンズ駆動回路131を介し駆動モータ(不図示)により駆動させ、ピントを合わせを行っている。
【0045】さらに、AF制御回路110は撮像画面内の高周波成分信号のピーク位置も検出し、そのピーク位置を中心に所定の範囲で高周波成分の検出を行う被写体追尾も同時に行っている。AF制御回路110において設定された上記検出範囲は、測距枠表示回路112及びEVF表示回路111を介して実際にEVF101内のファインダ上に表示される(図11参照)。
【0046】図8は、AF制御回路110によるAF制御手順を示す動作フローチャートである。以下、図示した各ステップS802〜S812について説明する。
【0047】S802は、信号処理回路109に含まれている注視点処理回路より得られる注視点情報、すなわち、現在撮影者がファインダ画面内のどの位置を注視しているかという信号をファインダ内座標値X(IPX ,IPY )で受け取るルーチンである(図11参照)。
【0048】S804は、S802で受け取った注視点位置座標X(IPX ,IPY )を中心にして、所定の大きさの初期制御対象領域W(図11参照)を設定するルーチンである。
【0049】S806は、S804で設定した領域内の高周波成分が所定の大きさより大きいか否かを判断し、大きい時はS808の測距枠設定1ルーチンへ、小さいときはS810の測距枠設定2ルーチンへ制御を移行させるルーチンである。このS808,S810は測距枠設定ルーチンとして本実施例の主眼を成すところであり、後に詳細に説明する。
【0050】S812は、S808,S810により設定された測距エリア内において、高周波成分の検出を行い、AF制御を行うルーチンである。
【0051】次に、上述したS808,S810の測距枠設定ルーチンについて、図9,図10および図11を参照して説明する。
【0052】図11において、W,W1,W2はそれぞれ制御対象領域であり、Xは注視点座標である。以下、この記号を使って説明する。
【0053】図9は、S806のルーチンで、初期制御対象領域W内の高周波成分が所定値より大きいと判断された場合の、測距枠設定1の処理手順を示す。
【0054】図9において、S900は、初期制御対象領域Wを所定量だけ縮小させるルーチンである。
【0055】S902は、S900で設定した新制御対象領域が最小制御対象領域W1より小さいか否かを判断し、小さい場合には、以降の制御を中止してS908のルーチンに制御を移行させるルーチンである。
【0056】S904は、新制御対象領域内の高周波成分値が所定値より大きいか否かを判断し、大きい場合は、更に制御対象領域を小さくさせるため、再びS900のルーチンへ制御を移行し、小さい場合は、次の測距枠最終設定ルーチンS906へ移行させるルーチンである。
【0057】S906は、高周波成分の値が最後に所定値より小さくなった時に、制御対象領域を測距枠として設定するルーチンである。
【0058】S908は、測距枠として最小制御対象領域W1に設定するルーチンである。
【0059】図10は、図8に示したS806ルーチンで、初期制御対象領域W内の高周波成分が所定値より小さいと判断された場合の、測距枠設定2の処理手順を示す。図10において、S1000は、制御対象領域Wを所定量だけ拡大させるルーチンである。
【0060】S1002は、S1000で設定した制御対象領域が最大制御対象領域W2より大きいか否かを判断し、大きい場合には、移行の制御を中止してS1008のルーチンに制御を移行させるルーチンである。
【0061】S1004は、新制御対象領域内の高周波成分値が所定値より大きいか否かを判断し、小さい場合は、更に制御対象領域を大きくさせるため、再びS1000のルーチンへ制御を移行し、大きい場合は、次の測距枠最終設定ルーチン(S1006)へ移行させるルーチンである。
【0062】S1006は、高周波成分の値が最後に所定値より大きくなった時の制御対象領域を測距枠として設定するルーチンである。
【0063】S1008は、測距枠として最大制御対象領域W2に設定するルーチンである。
【0064】以上の如く、図9すなわち図8の測距枠設定1(S808)によれば、撮影者の注視点近傍で高周波成分値を監視しながら制御対象領域をできるだけ小さくすることにより、撮影者の意図しない被写体に合焦してしまう、いわゆる遠近競合を未然に防止することができる。また図10すなわち図8の測距枠設定2(S810)によれば、撮影者の注視点位置で高周波成分値がAF制御不可能な場合にそれが可能となるレベルに到達するまで、制御対象領域を拡大し、合焦の可能性を高めることができる。
【0065】以上述べてきたように、本実施例においては、注視点追尾型AF機構が搭載されたビデオカメラにおいて、撮影者の注視点位置に意図する被写体がない場合でも、測距枠の大きさを最適に設定することにより、遠近競合、合焦不可能状態を未然に防ぎ、快適なAF撮影を行うことが可能となる。
【0066】実施例2第1の実施例では、1制御当たりの制御対象領域の拡大、縮小量は一定であったが、何もこれに限ることはなく、例えば制御対象領域内の高周波成分値により可変にしても良い。
【0067】実施例3第1の実施例では、制御対象領域内の高周波成分の大小により測距枠設定を変えていたが、何もこれに限ることはなく、例えば被写体エッジ成分、あるいは、高周波成分の変化量に応じて測距枠設定を変えても良い。
【0068】実施例4第1の実施例では、被写体追尾をAF制御に応用した場合について述べたが、何もこれに限ることは無く、例えばAS制御を行うために、視線による被写体追尾を手ブレ補正領域の検出に応用しても同等の効果が得られる。この場合においても、補正領域設定には制御対象領域内の高周波成分の大小を検出すれば良い。すなわちピントの合うところが補正対象となる。
【0069】図12は上記AS制御を行うための回路例であり、図1に示した回路と異なるところは、カメラ信号処理回路116の後段にA/D変換器214,1フィールド遅延回路215,メモリ212およびAS制御回路210を設け、注視点情報に基づいて、補正枠の大きさを設定する(図13のS1308,1310参照)ところにある。その他の動作は、第1の実施例と同等であるので、説明は省略する。
【0070】実施例5以下に詳述する各実施例は、ビデオカメラ、ビデオレンズ、及びモニタ用のビューファインダを具備しているカメラ一体型のVTRであって、前記ビューファインダの回りに視線検出装置を設けることにより、AF,AE,AWB,ASなど撮影者の撮影動作を補うための各種制御の中で、時事刻々と変化する被写体の位置を、撮影者が注視している位置として検出し、追尾させることにより、上記の各種制御を最適に行うことのできる装置において、視線検出装置の出力に基づいて設定された被写体追尾領域内で上記各種の制御を行うための制御信号が不十分な場合、被写体追尾領域自体の大きさは変えることなく、最初の注視点位置の近傍を検索し、上記の各種制御が可能となるよう再設定し、それに基づいてAF,AE,AWB,ASなどの制御を行うものである。
【0071】ここで説明する第5の実施例では、図1に示したブロック構成によりAF制御を行うものである。
【0072】図14は、AF制御回路110によるAF制御手順を示す動作フローチャートである。S1402は、信号処理回路109に内蔵されている注視点処理回路109より得られる注視点情報、すなわち、現在撮影者がファインダ画面のどの位置を注視しているかという信号をファインダ内座標値(IPX ,IPY )で受け取るルーチンである。
【0073】S1404は、S1402で受け取った注視点位置座標X(IPX ,IPY )を中心にして、所定の大きさの初期制御対象領域W(図16参照)を設定するルーチンである。
【0074】S1406は、S1404で設定した領域内の高周波成分が所定の大きさより大きいか否かを判断し、大きい時はS1401へ、小さいときはS1408の測距枠設定ルーチンへ制御を移行させるルーチンである。
【0075】S1408は、S1406で初期制御対象領域W内の高周波成分が所定値より小さいと判断された場合の測距枠設定ルーチンとして本実施例の主眼を成すところであり、後に詳細に説明する。
【0076】S1410は、S1406で初期制御対象領域W内の高周波成分が所定値より大きいと判断された場合に、測距枠としてそれを設定するルーチンである。
【0077】S1412は、S1408およびS1410により設定された測距エリア内において、高周波成分の検出を行い、AF制御を行うルーチンである。
【0078】次に、本実施例の主眼を成すS1408の測距枠設定ルーチンについて、図15および図16を使用して説明する。
【0079】図16において、WおよびW1〜W8はそれぞれ制御対象領域であり、Xは注視点座標である。ここで、制御対象領域はすべて同じ大きさである。以下、この記号を使って説明する。
【0080】図15において、S1500は初期制御対象領域WをW1へ移動させるルーチンである。
【0081】S1502は、移動した位置での制御対象領域内の高周波成分値を記憶するルーチンである。
【0082】S1504は、移動した位置が検索範囲の最終位置(W8)か否かを確認するルーチンであり、最終位置の場合、次の最大値検出ルーチンへ、そうでない場合は、再び制御対象領域を次の領域へ移動させる。
【0083】S1506は、これまで記憶されているW1からW8での制御対象領域内の高周波成分最大値を検出し、その位置を明らかにするルーチンである。
【0084】S1508は、S1506で明らかにされた高周波成分最大値の位置における制御対象領域を測距枠として設定するルーチンである。
【0085】以上の如く、図15すなわち図14の測距枠設定アルゴリズム(S1408)によれば、撮影者の注視点位置で高周波成分値がAF制御不可能な場合に、それが可能となるレベルを注視点近傍で制御対象領域を移動させて検索し、測距枠を高周波成分値が最大値の位置に設定し、合焦の可能性を高めることができる。
【0086】以上述べてきたように、本実施例においては、注視点追尾型AFが搭載されたビデオカメラにおいて、撮影者の注視点位置に意図する被写体がない場合でも、測距枠の位置を最適に設定することにより、合焦不可能状態を未然に防ぎ、快適なAF撮影を行うことが可能となる。
【0087】実施例6第5の実施例では、移動させる制御対象領域の大きさと初期制御対象領域の大きさは同じであったが、何もこれに限ることはなく、例えば重ならない程度に、移動させる制御対象領域の大きさを初期制御対象領域のそれより大きくしても良い。
【0088】実施例7第5の実施例では、制御対象領域を移動させて高周波成分を検索していたが、何もこれに限ることはなく、例えば予め注視点近傍の大きなエリアをサンプリングし、その中で所定の領域内の高周波成分値同士を比較し、最大となる位置を検索しても良い。
【0089】実施例8第5の実施例では、制御対象領域内の高周波成分値により測距枠設定を行っていたが、何もこれに限ることはなく、例えば被写体エッジ成分、あるいは、高周波成分の変化量に応じて測距枠設定を行っても良い。
【0090】実施例9第5の実施例では、高周波成分が最大値を示す位置に測距枠を設定していたが、何もこれに限ることはなく、例えば、図17のフローチャートに示すように、前回合焦制御を行った時に採用した高周波成分値に最も近い値を示す位置に測距枠を設定しても良い。
【0091】実施例10第5の実施例では、被写体追尾をAFに応用した場合について述べたが、何もこれに限ることは無く、例えばAS制御を行うために図12に示した回路を用い、視線による被写体追尾を手ブレ補正領域の検出に応用しても同等の効果が得られる。この場合においても、補正領域設定には図18のフローチャートに示すように、制御対象領域内の高周波成分の大小を検出すれば良い。すなわちピントの合うところが補正対象となる。
【0092】
【発明の効果】以上述べてきたとおり本発明によれば、注視点追尾機能を有する撮像装置において、注視点位置に意図する被写体が無い場合にも、制御対象領域の大きさあるいは位置を最適に設定することにより、より忠実に撮影者の意図を反映した各種の制御を実行させることが可能となる。
【図面の簡単な説明】
【図1】本発明の第1実施例であるカメラ一体型VTRの回路構成を示すブロック図である。
【図2】図1に示したファインダ光学系100の配置例を示す斜視図である。
【図3】図1の信号処理回路109による視線検出手段の一例を示すフローチャートである。
【図4】X軸およびZ軸を含む平面上の角膜反射像の位置の一例を示す光路図である。
【図5】X軸およびY軸を含む平面上の角膜反射像の位置の一例を示す光路図である。
【図6】眼球からの反射像の一例を示す平面図である。
【図7】図6に示した光電素子列の行Yp′から得られる出力信号の一例を示す波形図である。
【図8】図1に示したAF制御回路110の動作手順を示すフローチャートである。
【図9】図8に示した測距枠設定1(S808)の詳細なフローチャートである。
【図10】図8に示した測距枠設定2(S810)の詳細なフローチャートである。
【図11】本実施例の測距枠設定を説明する図である。
【図12】第4の実施例を示すブロック図である。
【図13】第4の実施例におけるAS制御手順を示すフローチャートである。
【図14】第5の実施例におけるAF制御を示すフローチャートである。
【図15】図14に示した測距枠設定(S1408)の詳細なフローチャートである。
【図16】第5の実施例における測距枠設定を説明する図である。
【図17】第9の実施例における測距枠設定処理を示すフローチャートである。
【図18】第10の実施例におけるAS制御手順を示すフローチャートである。
【図19】従来技術の説明図である。
【符号の説明】
ED 視線検出装置
5a,5b 赤外発光ダイオード
6 光電素子列
100 ファインダ光学系
101 電子ビューファインダ(EVF)
102 ファインダ画面
109 信号処理回路
110 AF(自動焦点)制御回路
111 EVF表示回路
112 測距枠表示回路
114 バンドパスフィルタ(BPF)
116 カメラ信号処理回路
118 CCDイメージセンサ
120 フォーカシングレンズ
131 レンズ駆動回路
140 VTR
141 ビデオ信号処理回路
【特許請求の範囲】
【請求項1】 ビューファインダを備えた撮像装置において、前記ビューファインダ内における注視点を検出する注視点検出手段と、検出された前記注視点を含む所定領域を制御対象領域として設定する制御枠設定手段と、前記制御対象領域内における表示画像に予め定めた処理を施し、特定信号を抽出する信号処理手段と、抽出された前記特定信号に基づいて、前記制御対象領域の大きさ、および/または、位置を変化させる領域制御手段とを具備したことを特徴とする撮像装置。
【請求項2】 請求項1において、抽出された前記特定信号に基づき、前記注視点を中心とした前記制御対象領域の大きさのみを変化させることを特徴とする撮像装置。
【請求項3】 請求項1において、抽出された前記特定信号に基づき、前記制御対象領域の大きさを変化させることなく、該制御対象の位置のみを前記注視点の近傍で移動させることを特徴とする撮像装置。
【請求項4】 請求項1において、更に加えて、前記特定信号を入力することにより自動焦点制御,自動アイリス制御,自動ホワイトバランス制御,自動手振れ補正制御のいずれかを行う手段を具備したことを特徴とする撮像装置。
【請求項1】 ビューファインダを備えた撮像装置において、前記ビューファインダ内における注視点を検出する注視点検出手段と、検出された前記注視点を含む所定領域を制御対象領域として設定する制御枠設定手段と、前記制御対象領域内における表示画像に予め定めた処理を施し、特定信号を抽出する信号処理手段と、抽出された前記特定信号に基づいて、前記制御対象領域の大きさ、および/または、位置を変化させる領域制御手段とを具備したことを特徴とする撮像装置。
【請求項2】 請求項1において、抽出された前記特定信号に基づき、前記注視点を中心とした前記制御対象領域の大きさのみを変化させることを特徴とする撮像装置。
【請求項3】 請求項1において、抽出された前記特定信号に基づき、前記制御対象領域の大きさを変化させることなく、該制御対象の位置のみを前記注視点の近傍で移動させることを特徴とする撮像装置。
【請求項4】 請求項1において、更に加えて、前記特定信号を入力することにより自動焦点制御,自動アイリス制御,自動ホワイトバランス制御,自動手振れ補正制御のいずれかを行う手段を具備したことを特徴とする撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図16】
【図12】
【図14】
【図15】
【図18】
【図19】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図16】
【図12】
【図14】
【図15】
【図18】
【図19】
【図17】
【公開番号】特開平7−191256
【公開日】平成7年(1995)7月28日
【国際特許分類】
【出願番号】特願平5−331779
【出願日】平成5年(1993)12月27日
【出願人】(000001007)キヤノン株式会社 (59,756)
【公開日】平成7年(1995)7月28日
【国際特許分類】
【出願日】平成5年(1993)12月27日
【出願人】(000001007)キヤノン株式会社 (59,756)
[ Back to top ]