
撮影ショット制御装置、協調撮影システム及びそのプログラム
【課題】本発明は、ロボットカメラとマンカメラとが協調してテレビ番組の撮影を行うことを可能とする撮影ショット制御装置を提供する。
【解決手段】ロボットカメラ・スイッチャ制御装置1は、マンカメラMCの撮影ショットタイプとロボットカメラC1〜C3の撮影ショットタイプとを予め設定する撮影ショットタイプ設定手段11と、撮影規則を生成するための撮影規則生成情報を記憶する撮影規則生成情報記憶手段12と、イベントとマンカメラMCの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成する撮影規則生成手段13と、撮影規則を修正する撮影規則設定手段14と、ロボットカメラが撮影する撮影ショットC1〜C3を決定する撮影ショット制御手段15と、スイッチャの切替を制御するスイッチャ制御手段16とを備える。
【解決手段】ロボットカメラ・スイッチャ制御装置1は、マンカメラMCの撮影ショットタイプとロボットカメラC1〜C3の撮影ショットタイプとを予め設定する撮影ショットタイプ設定手段11と、撮影規則を生成するための撮影規則生成情報を記憶する撮影規則生成情報記憶手段12と、イベントとマンカメラMCの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成する撮影規則生成手段13と、撮影規則を修正する撮影規則設定手段14と、ロボットカメラが撮影する撮影ショットC1〜C3を決定する撮影ショット制御手段15と、スイッチャの切替を制御するスイッチャ制御手段16とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、テレビ局のテレビ番組、遠隔テレビ会議、講義等の映像を自動撮影するロボットカメラの撮影ショットを、マンカメラに協調させて制御する撮影ショット制御装置、協調撮影システム及びそのプログラムに関する。
【背景技術】
【0002】
従来から、テレビ番組等をロボットカメラで自動撮影する技術が知られている(例えば、特許文献1参照)。特許文献1に記載の発明では、ロボットカメラの撮影ショットタイプと、被写体の変化を示すイベントと、切替後の撮影ショットとを対応させる撮影規則を生成しておく。そして、特許文献1に記載の発明では、被写体の変化を示すイベントが入力された際、このイベントに応じてロボットカメラの撮影ショットを制御する。
【特許文献1】特開2008−72702号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、被写体の自動検出が困難である、又は、自動撮影によるロボットカメラの映像では視聴者にテレビ番組の臨場感等が伝わらない等の理由で、ロボットカメラだけでテレビ番組を自動撮影できない問題がある。そこで、ロボットカメラが撮影できない撮影ショットをカメラマンが操作するマンカメラで撮影する技術、つまり、ロボットカメラとマンカメラとが協調してテレビ番組の撮影を可能にしたいとの強い要望がある。
【0004】
そこで、本発明は、前記した課題を解決し、ロボットカメラとマンカメラとが協調してテレビ番組の撮影を行うことを可能とする撮影ショット制御装置、協調撮影システム及びそのプログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
前記した課題を解決するため、請求項1に係る撮影ショット制御装置は、マンカメラの撮影ショットの種類を判定するマンカメラ撮影ショット判定装置に接続され、1以上のロボットカメラが番組を撮影する映像とマンカメラが番組を撮影する映像とを切り替えるスイッチャを制御すると共に、ロボットカメラの撮影ショットを制御する撮影ショット制御装置であって、撮影ショットタイプ設定手段と、記憶手段と、撮影規則生成手段と、スイッチャ制御手段と、撮影ショット決定手段と、を備える構成とした。
【0006】
かかる構成によれば、撮影ショット制御装置は、撮影ショットタイプ設定手段によって、外部から入力されるマンカメラの撮影ショットの種類とロボットカメラの撮影ショットの種類とを設定する指令に基づいて、マンカメラが番組で撮影する撮影ショットの種類であるマンカメラの撮影ショットタイプと、ロボットカメラが番組で撮影する撮影ショットの種類であるロボットカメラの撮影ショットタイプとを予め設定する。また、撮影ショット制御装置は、記憶手段に、番組の状況変化を示すイベントと、マンカメラの撮影ショットタイプと、ロボットカメラの撮影ショットタイプと、イベント後のロボットカメラの撮影ショットである切替ショットとを対応させる撮影規則生成情報を予め記憶する。
【0007】
また、撮影ショット制御装置は、撮影規則生成手段によって、記憶手段が記憶する撮影規則生成情報を参照し、撮影ショットタイプ設定手段が設定したマンカメラの撮影ショットタイプとロボットカメラの撮影ショットタイプとに基づいて、イベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成する。このとき、撮影規則生成手段は、各々の撮影規則生成情報によって示される撮影ショットタイプが、撮影ショットタイプ設定手段で設定された撮影ショットタイプに含まれる場合に、このロボットカメラに対して、当該撮影規則生成情報によって示されるイベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成することができる。
【0008】
また、撮影ショット制御装置は、スイッチャ制御手段によって、外部から入力されるロボットカメラ又はマンカメラの何れかの映像に出力を切り替える指令に基づいて、スイッチャの出力をロボットカメラが撮影する映像又はマンカメラが撮影する映像の何れかに切り替える。さらに、撮影ショット制御装置は、撮影ショット決定手段によって、撮影規則生成手段が生成した撮影規則を参照し、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置から入力されるマンカメラの撮影ショットタイプとに基づいて、ロボットカメラが撮影する撮影ショットを決定する。
【0009】
また、請求項2に係る撮影ショット制御装置は、記憶手段が、カメラマンを含めたマンカメラの形状と大きさと、ロボットカメラの形状と大きさとを含むカメラ形状・大きさ情報を予め記憶し、撮影ショット決定手段が、マンカメラからマンカメラの現在位置が入力され、外部から入力されるロボットカメラの撮影ショットとロボットカメラの位置とを対応させる指令に基づいて、決定したロボットカメラの撮影ショットに応じたロボットカメラの移動後位置を設定するロボットカメラ位置設定部と、カメラ形状・大きさ情報を参照し、マンカメラの現在位置でのマンカメラが占有する領域を示す占有領域と、ロボットカメラの移動後位置でのロボットカメラが占有する領域を示す占有領域とを算出するカメラ占有領域算出部と、カメラ占有範囲算出部が算出したロボットカメラの占有領域とマンカメラの占有領域とを比較して、ロボットカメラと当該マンカメラとが衝突するか否かと、ロボットカメラが撮影する映像にマンカメラが映り込むか否かと、マンカメラが撮影する映像にロボットカメラが映り込むか否かとを判定するカメラ衝突判定部と、ロボットカメラとマンカメラとが衝突すると判定された場合、ロボットカメラが撮影する映像にマンカメラが含まれると判定された場合、又は、マンカメラが撮影する映像にロボットカメラが映り込むと判定された場合、マンカメラへ移動指示を通知する移動指示通知部と、を備えることを特徴とする。
【0010】
かかる構成によれば、撮影ショット制御装置は、カメラ占有領域算出部によって、マンカメラの現在位置での占有領域と、ロボットカメラの移動後位置での占有領域とを算出する。また、撮影ショット制御装置は、カメラ衝突判定部によって、ロボットカメラとマンカメラとが衝突するか否かと、ロボットカメラが撮影する映像にマンカメラが映り込むか否かと、マンカメラが撮影する映像にロボットカメラが映り込むか否かとを判定する。さらに、撮影ショット制御装置は、移動指示通知部によって、ロボットカメラとマンカメラとが衝突すると判定された場合、ロボットカメラが撮影する映像にマンカメラが含まれると判定された場合、又は、マンカメラが撮影する映像にロボットカメラが映り込むと判定された場合、マンカメラへ移動指示を通知する。この移動指示を通知されたマンカメラを操作するカメラマンは、事前にマンカメラを移動させて、ロボットカメラとマンカメラとが衝突する事態やロボットカメラが撮影する映像にマンカメラが映り込んでしまう事態を防止できる。
【0011】
また、請求項3に係る撮影ショット制御装置は、ロボットカメラが複数の場合、カメラ占有領域算出部は、ロボットカメラ毎に占有領域を算出し、カメラ衝突判定部は、ロボットカメラ同士の占有領域を比較してロボットカメラ同士が衝突するか否かを判定すると共に、ロボットカメラが撮影する映像に他のロボットカメラが映り込むか否かを判定し、撮影ショット決定手段は、ロボットカメラ同士が衝突すると判定された場合、又は、ロボットカメラが撮影する映像に他のロボットカメラが含まれると判定された場合、スイッチャが映像を出力していないロボットカメラの撮影ショットを再決定することを特徴とする。
【0012】
かかる構成によれば、撮影ショット制御装置は、カメラ衝突判定部によって、ロボットカメラ同士が衝突するか否かを判定すると共に、ロボットカメラが撮影する映像に他のロボットカメラが映り込むか否かを判定する。さらに、撮影ショット制御装置は、撮影ショット決定手段によって、ロボットカメラ同士が衝突すると判定された場合、又は、ロボットカメラが撮影する映像に他のロボットカメラが含まれると判定された場合、スイッチャが切り替えていないロボットカメラの撮影ショットを再決定する。これによって、撮影ショット制御装置は、スイッチャが出力している映像、つまり、放送中の映像を撮影しているロボットカメラの撮影ショットを再決定してしまう事態を防止できる。
【0013】
また、前記した課題を解決するため、請求項4に係る協調撮影システムは、請求項1から請求項3の何れか一項に記載の撮影ショット制御装置と、マンカメラの撮影ショットの種類を判定するマンカメラ撮影ショット判定装置と、を含む協調撮影システムであって、マンカメラ撮影ショット判定装置が、マンカメラ撮影情報入力手段と、撮影情報−撮影ショット対応情報記憶手段と、マンカメラ撮影ショットタイプ判定手段と、を備える構成とした。
【0014】
かかる構成によれば、協調撮影システムは、マンカメラ撮影ショット判定装置のマンカメラ撮影情報入力手段によって、マンカメラから、当該マンカメラの撮影アングルと当該マンカメラの現在位置とを含むマンカメラ撮影情報が入力される。また、協調撮影システムは、マンカメラ撮影ショット判定装置の撮影情報−撮影ショット対応情報記憶手段によって、マンカメラ撮影情報とマンカメラの撮影ショットの種類とを対応させた撮影情報−撮影ショット対応情報を予め記憶する。また、協調撮影システムは、マンカメラ撮影ショット判定装置のマンカメラ撮影ショットタイプ判定手段によって、撮影情報−撮影ショット対応情報を参照し、マンカメラ撮影情報入力手段に入力されるマンカメラ撮影情報に応じて、マンカメラの撮影ショットの種類であるマンカメラの撮影ショットタイプを判定する。さらに、協調撮影システムは、マンカメラ撮影ショット判定装置が、マンカメラの撮影ショットタイプを撮影ショット制御装置に出力する。これによって、協調撮影システムは、撮影ショット制御装置が、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置から入力されるマンカメラの撮影ショットタイプとに基づいて、ロボットカメラが撮影する撮影ショットを決定する。
【0015】
また、前記した課題を解決するため、請求項5に係る協調撮影プログラムは、マンカメラが撮影の撮影ショットの種類を判定するマンカメラ撮影ショット判定装置に接続され、番組の状況変化を示すイベントと、マンカメラの撮影ショットタイプと、ロボットカメラの撮影ショットタイプと、イベント後のロボットカメラの撮影ショットである切替ショットとを対応させる撮影規則生成情報を予め記憶する記憶手段を備え、1以上のロボットカメラが番組を撮影する映像とマンカメラが番組を撮影する映像とを切り替えるスイッチャを制御すると共に、ロボットカメラの撮影ショットを制御するために、コンピュータを、撮影ショットタイプ設定手段、撮影規則生成手段、スイッチャ制御手段、撮影ショット決定手段、として機能させる構成とした。
【0016】
かかる構成によれば、撮影ショット制御プログラムは、撮影ショットタイプ設定手段によって、外部から入力されるマンカメラの撮影ショットの種類とロボットカメラの撮影ショットの種類とを設定する指令に基づいて、マンカメラが番組で撮影する撮影ショットの種類であるマンカメラの撮影ショットタイプと、ロボットカメラが番組で撮影する撮影ショットの種類であるロボットカメラの撮影ショットタイプとを予め設定する。
【0017】
また、撮影ショット制御プログラムは、撮影規則生成手段によって、記憶手段が記憶する撮影規則生成情報を参照し、撮影ショットタイプ設定手段が設定したマンカメラの撮影ショットタイプとロボットカメラの撮影ショットタイプとに基づいて、イベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成する。このとき、撮影規則生成手段は、各々の撮影規則生成情報によって示される撮影ショットタイプが、撮影ショットタイプ設定手段で設定された撮影ショットタイプに含まれる場合に、このロボットカメラに対して、当該撮影規則生成情報によって示されるイベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成することができる。
【0018】
また、撮影ショット制御プログラムは、スイッチャ制御手段によって、外部から入力されるロボットカメラ又はマンカメラの何れかの映像に出力を切り替える指令に基づいて、スイッチャの出力をロボットカメラが撮影する映像又はマンカメラが撮影する映像の何れかに切り替える。さらに、撮影ショット制御プログラムは、撮影ショット決定手段によって、撮影規則生成手段が生成した撮影規則を参照し、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置から入力されるマンカメラの撮影ショットタイプとに基づいて、ロボットカメラが撮影する撮影ショットを決定する。
【発明の効果】
【0019】
本発明によれば、以下のような優れた効果を奏する。
請求項1,4,5に係る発明によれば、イベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を参照してロボットカメラが撮影する撮影ショットを決定するため、ロボットカメラとマンカメラとが協調してテレビ番組の撮影を行うことができる。
【0020】
請求項2に係る発明によれば、ロボットカメラとマンカメラとが衝突する事態やロボットカメラが撮影する映像にマンカメラが映り込む事態を防止するため、様々なテレビ番組の自動撮影に適用することができる。
請求項3に係る発明によれば、放送中の映像を撮影しているロボットカメラの撮影ショットを再決定してしまう事態を防止するため、番組制作者が意図しない撮影ショットでロボットカメラが映像を撮影することを防止し、様々なテレビ番組の自動撮影に適用することができる。
【発明を実施するための最良の形態】
【0021】
以下、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。なお、各実施形態において、同一の機能を有する手段及び同一の部材には同一の符号を付し、説明を省略した。
【0022】
まず、図1を参照して、本発明におけるロボットカメラ・スイッチャ制御装置1を備える自動撮影システムSの構成について説明する。図1は、本発明におけるロボットカメラ・スイッチャ制御装置を備える自動撮影システムの構成を模式的に示した模式図である。
【0023】
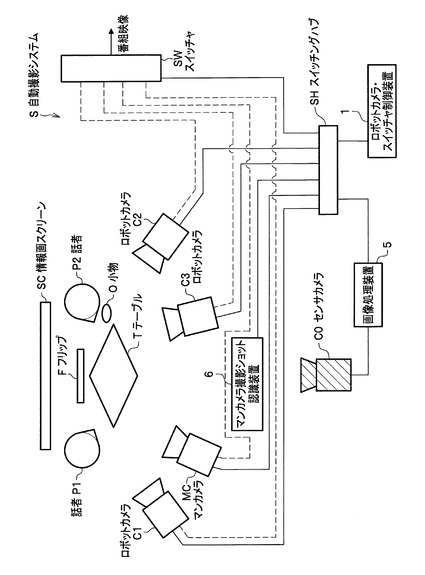
自動撮影システム(協調撮影システム)Sは、被写体[テーブルT、話者(出演者)P1、P2、フリップF、小物O、情報画スクリーンSC]を撮影し、番組映像を生成するものである。図1に示すように、自動撮影システムSは、ロボットカメラ・スイッチャ制御装置1と、マンカメラMCと、ロボットカメラC1〜C3と、センサカメラC0と、画像処理装置5と、マンカメラ撮影ショット認識装置6と、スイッチングハブSHと、スイッチャSWとを備える。
【0024】
ロボットカメラ・スイッチャ制御装置(撮影ショット制御装置)1は、ロボットカメラC1〜C3が被写体を撮影する映像とマンカメラMCが被写体を撮影する映像とを切り替えるスイッチャSWを制御するものである。また、ロボットカメラ・スイッチャ制御装置1は、ロボットカメラC1〜C3の撮影ショットを制御するものである。
【0025】
ここで、ロボットカメラ・スイッチャ制御装置1によって生成されたロボットカメラC1〜C3の撮影ショットを制御する指令となる撮影ショット制御信号は、スイッチングハブSHを介してロボットカメラC1〜C3に出力される。また、ロボットカメラ・スイッチャ制御装置1によって生成されたスイッチャSWの切替を制御する指令となる切替制御信号は、スイッチングハブSHを介してスイッチャSWに出力される。
【0026】
なお、ここでは、被写体の変化を示すイベントとして、フリップFと小物Oとの提示及び除去と、情報画スクリーンSCへの情報画の提示及び除去と、話者P1、P2の喋りの開始及び終了を想定し、イベント情報として、後記する画像処理装置5からのフリップFと小物Oとの提示と除去との情報、及び、情報画スクリーンSCへの情報画の提示と除去との情報と、図示しないマイクによって取得された話者P1、P2の音声信号の音声レベルに基づいて、図示しない音声処理装置によって解析した各々の話者P1、P2の喋りの開始と終了との情報とが、ロボットカメラ・スイッチャ制御装置1に入力されることとした。
【0027】
ロボットカメラC1〜C3は、ロボットカメラ・スイッチャ制御装置1から入力された撮影ショット制御信号と、後記する画像処理装置5から入力されるスタジオ内における被写体の位置の情報とに基づいて、当該撮影ショット制御信号によって指示される撮影ショットの映像を撮影し、番組映像の素材となる映像信号を生成するものである。ここで、生成された映像信号は、スイッチャSWに出力される。ここで、このフレーミングを自動で行えるロボットカメラC1〜C3としては、例えば、T.Tsuda,et al,"Intelligent Mobile Robot Camera",SMPTE Australia 2005-Conference and Exhibition,Session 4.4,July 2005に記載されたものを用いることができる。なお、図1では、ロボットカメラC1〜C3及びマンカメラMCからの映像信号の流れを破線で示した。
【0028】
マンカメラMCは、図示しないカメラマンによって被写体を撮影し、備え付けられた移動機構で撮影フロア内を自在に移動し、番組映像の素材となる映像信号を生成するものである。ここで、マンカメラMCは、マンカメラMCの各軸を測定するエンコーダを備えており、撮影アングルを後記するマンカメラ撮影ショット認識装置6に出力する。また、マンカメラMCは、移動機構が測定する移動量及び移動方向から、撮影フロア内でのマンカメラMCの現在位置を算出してロボットカメラ・スイッチャ制御装置1に出力する。また、マンカメラMCは、図示しない屋内GPS(Galileo positioning system)測位手段を備え、測位したGPS座標をマンカメラMCの現在位置としても良い。つまり、マンカメラMCは、スイッチングハブSHを介して、撮影アングルと現在位置とを含むマンカメラ撮影情報をマンカメラ撮影ショット認識装置6に出力すると共に、現在位置をロボットカメラ・スイッチャ制御装置1に出力する。
【0029】
また、マンカメラMCは、後記する移動指示が通知されたときに、カメラマンに移動指示の通知を伝える移動指示出力手段を備える。この移動指示出力手段としては、例えば、移動指示が通知されたときに点灯するLED(Light Emitting Diode)がある。
【0030】
ここでは、被写体として、テーブルTと、このテーブルTを挟んで向かい合う2人の話者P1、P2と、この話者P1、P2の間のフリップFと、話者P2の手元の小物Oと、話者P1、P2の背後の情報画スクリーンSCとが設置されることとした。そして、話者P1、P2が、フリップFと、小物Oと、情報画スクリーンSCとを用いて対談する番組をマンカメラMC及びロボットカメラC1〜C3によって撮影して番組制作する場合について説明する。しかしながら、フリップFと小物Oと情報画スクリーンSCの個数及び有無や、これらの被写体の配置、話者P1、P2の人数はこれに限定されることなく、任意の被写体を設定することができる。また、マンカメラMC及びロボットカメラC1〜C3の個数もこれに限定されることなく、任意の個数とすることができる。さらに、本発明は番組制作に限定されず、テレビ会議や、大学の講義の撮影や、TVML(TV program Making Language;"http://www.nhk.or.jp/strl/tvml/"参照)等のCGを使ったテレビ番組の制作にも応用が可能である。
【0031】
センサカメラC0は、被写体を撮影し、後記する画像処理装置5によって被写体の位置を算出するのに必要となる映像信号を生成するものである。ここで生成された映像信号は、画像処理装置5に出力される。なお、センサカメラC0は、被写体が撮影できる位置に設置されていればよく、例えば、被写体の上方や背後に設置されることとしてもよい。また、センサカメラC0の個数はこれに限定されることなく、任意の個数とすることができる。さらに、マンカメラMC及びロボットカメラC1〜C3によって撮影した映像から画像処理装置5によって被写体の位置を算出する場合には、自動撮影システムSがセンサカメラC0を備えないこととしてもよい。
【0032】
画像処理装置5は、センサカメラC0によって撮影された映像を構成するフレーム画像ごとに被写体を検出し、スタジオ内における被写体の位置を算出するものである。また、画像処理装置5は、フリップFと小物Oを検出することで、スタジオ内においてフリップFや小物Oが提示もしくは除去されたかを解析するものでもある。ここで算出された被写体の位置の情報は、スイッチングハブSHを介してロボットカメラC1〜C3に出力される。また、ここで解析されたフリップFと小物Oとの提示及び除去の情報が、イベント情報として、スイッチングハブSHを介してロボットカメラ・スイッチャ制御装置1に出力される。なお、画像処理装置5は、例えば、被写体の形状や色や、予め被写体に取り付けたセンサからの不可視光等に基づいて、フレーム画像から検出することとしてもよい。
【0033】
マンカメラ撮影ショット認識装置(マンカメラ撮影ショット判定装置)6は、マンカメラMCから入力されたマンカメラ撮影情報に基づいて、マンカメラMCが撮影する被写体の撮影ショットの種類を判定するものである。そして、マンカメラ撮影ショット認識装置6は、判定したマンカメラMCの撮影ショットの種類を、マンカメラMCの撮影ショットタイプとして、ロボットカメラ・スイッチャ制御装置1に出力する。なお、マンカメラ撮影ショット認識装置6の詳細については、後記する。
【0034】
スイッチングハブSHは、ロボットカメラ・スイッチャ制御装置1から入力された撮影ショット制御信号及び切替制御信号をそれぞれマンカメラMC、ロボットカメラC1〜C3及びスイッチャSWに出力するとともに、画像処理装置5、音声処理装置(図示せず)及び情報画スクリーンSCへの情報画の出力装置(図示せず)から入力されたイベント情報をロボットカメラ・スイッチャ制御装置1に出力する中継器である。また、スイッチングハブSHは、マンカメラ撮影ショット認識装置6が出力するマンカメラMCの撮影ショットタイプを、ロボットカメラ・スイッチャ制御装置1に中継する。また、スイッチングハブSHは、マンカメラMCから入力されたマンカメラ撮影情報をマンカメラ撮影ショット認識装置6に出力する。
【0035】
スイッチャSWは、ロボットカメラ・スイッチャ制御装置1から入力された切替制御信号に基づいて、スイッチャSWの出力をロボットカメラC1〜C3が撮影する映像又はマンカメラMCが撮影する映像の何れかに切り替えて、番組映像(出力映像)として出力するものである。
【0036】
[マンカメラ撮影ショット認識装置の構成]
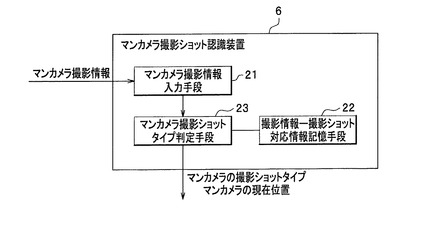
以下、図2を参照して、本発明におけるマンカメラ撮影ショット認識装置6の構成について詳細に説明する(適宜図1参照)。図2は、図1のマンカメラ撮影ショット認識装置6の構成を示すブロック図である。図2に示すように、マンカメラ撮影ショット認識装置6は、マンカメラ撮影情報入力手段21と、撮影情報−撮影ショット対応情報記憶手段22と、マンカメラ撮影ショットタイプ判定手段23とを備える。
【0037】
マンカメラ撮影情報入力手段21は、マンカメラMCから、マンカメラMCの撮影アングルとマンカメラMCの現在位置とを含むマンカメラ撮影情報が入力されるものである。ここで、マンカメラMCの撮影アングルは、例えば、パン角、チルト角、フォーカス位置及びズーム位置を含む。また、マンカメラMCの現在位置は、例えば、撮影フロアの任意位置を基準としたマンカメラMCの横方向の位置、縦方向の位置及び高さ方向の位置を示す3次元位置である。また、マンカメラMCの現在位置は、GPS座標(経度、緯度、高度を示す3次元位置)としても良い。
【0038】
撮影情報−撮影ショット対応情報記憶手段22は、マンカメラ撮影情報入力手段21に入力されたマンカメラ撮影情報とマンカメラMCの撮影ショットの種類とを予め対応させた撮影情報−撮影ショット対応情報を予め記憶するものである。なお、撮影情報−撮影ショット対応情報の詳細は、後記する。
【0039】
マンカメラ撮影ショットタイプ判定手段23は、撮影情報−撮影ショット対応情報記憶手段22が記憶する撮影情報−撮影ショット対応情報を参照し、マンカメラ撮影情報入力手段21に入力されたマンカメラ撮影情報に応じたマンカメラMCの撮影ショットの種類であるマンカメラMCの撮影ショットタイプを判定するものである。
【0040】
<撮影情報−撮影ショット対応情報の詳細及び撮影ショットタイプの判定>
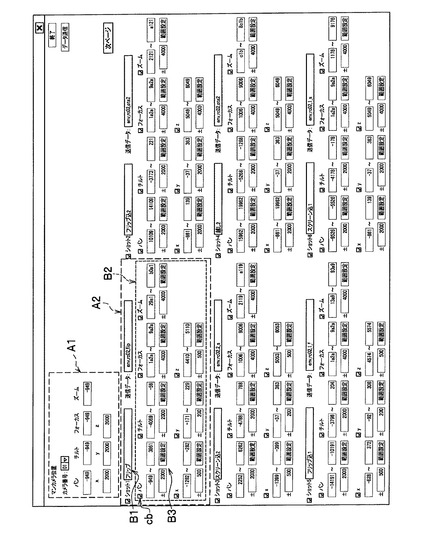
ここで、図3を参照して、撮影情報−撮影ショット対応情報の詳細及び撮影ショットタイプの判定について、具体例を用いて説明する(適宜図1及び図2参照)。図3は、撮影情報−撮影ショット対応情報の詳細及び撮影ショットタイプの判定において、番組制作者に提示される表示画面の例を示す図である。
【0041】
ここでは、番組制作者は、図示しない表示装置に表示された図3に示すようなGUI(Graphical User Interface)によって、マンカメラ撮影情報とマンカメラMCの撮影ショットの種類とを予め対応付けることとした。図3では、マンカメラの現在位置表示領域A1に、マンカメラ撮影情報入力手段21に入力されたマンカメラMCの撮影アングル(パン、チルト、フォーカス、ズーム)と、マンカメラMCの現在位置(横方向の位置:x、縦方向の位置:y、高さ方向の位置:z)とがそれぞれ表示されている。
【0042】
図3の撮影情報−撮影ショット対応情報表示領域A2には、撮影情報−撮影ショット対応情報記憶手段22が記憶する撮影情報−撮影ショット対応情報が表示されている。具体的には、撮影情報−撮影ショット対応情報表示領域A2には、パン、チルト、フォーカス、ズーム、横方向の位置、縦方向の位置、高さ方向の位置等のマンカメラ撮影情報の各要素の範囲が表示される撮影情報表示領域B2が含まれる。また、撮影情報−撮影ショット対応情報表示領域A2には、マンカメラ撮影情報入力手段21に入力されたマンカメラ撮影情報が、前記した各要素の範囲内であるときのマンカメラMCの撮影ショットの種類(例えば、「フリップ」)が表示される撮影ショット表示領域B1が含まれる。ここで、番組制作者は、マウス、キーボード等の入力手段によって、撮影情報表示領域B2におけるマンカメラ撮影情報の各要素の範囲と、撮影ショット表示領域B1におけるマンカメラの撮影ショットの種類とを入力できる。また、番組制作者は、範囲設定ボタンB3を押下すると、マンカメラの現在位置表示領域A1に表示されたマンカメラMCの撮影アングル又はマンカメラMCの現在位置の値に対する、撮影情報−撮影ショット対応情報表示領域A2に表示されたマンカメラ撮影情報の各要素の値の差が計算され、この差が各要素の値に反映される。つまり、図3の表示画面によって、番組制作者は、マンカメラMCの撮影ショットの種類毎に、マンカメラ撮影情報の各要素の範囲を設定し、マンカメラ撮影情報とマンカメラMCの撮影ショットの種類とを対応させることができる。
【0043】
マンカメラ撮影ショットタイプ判定手段23は、撮影情報−撮影ショット対応情報表示領域A2に表示されたマンカメラ撮影情報の各要素の範囲内に、マンカメラの現在位置表示領域A1に表示されたマンカメラMCの撮影アングルとカメラMCの現在位置とが収まる場合、撮影情報−撮影ショット対応情報表示領域A2に表示されたマンカメラの撮影ショットの種類であると判定する。ここで、撮影情報−撮影ショット対応情報表示領域A2において、番組制作者は、チェックボックスcbを外すことで、そのチェックボックスcbに対応するマンカメラ撮影情報の要素が、マンカメラMCの撮影ショットの種類の判定基準から除外させることができる。なお、マンカメラ撮影ショット認識装置6は、前記した方法とは別に、マンカメラMCが撮影している映像を画像処理して、マンカメラMCの撮影ショットタイプを判定しても良い。
【0044】
[ロボットカメラ・スイッチャ制御装置の構成]
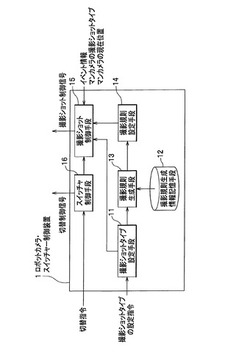
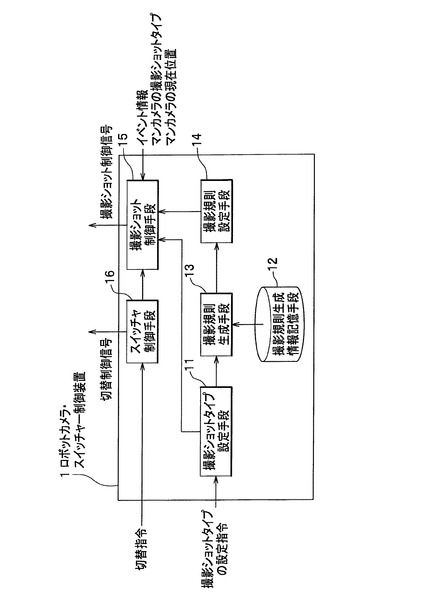
以下、図4を参照して、図1のロボットカメラ・スイッチャ制御装置1の構成について詳細に説明する(適宜図1参照)。図4は、図1のロボットカメラ・スイッチャ制御装置の構成を示すブロック図である。図4に示すように、ロボットカメラ・スイッチャ制御装置1は、撮影ショットタイプ設定手段11と、撮影規則生成情報記憶手段12と、撮影規則生成手段13と、撮影規則設定手段14と、撮影ショット制御手段15と、スイッチャ制御手段16とを備える。
【0045】
撮影ショットタイプ設定手段11は、番組制作者によって、外部から入力されるマンカメラMCの撮影ショットの種類とロボットカメラの撮影ショットC1〜C3の種類とを設定する指令(設定指令)に基づいて、マンカメラMCが番組で撮影する撮影ショットの種類であるマンカメラMCの撮影ショットタイプと、ロボットカメラC1〜C3が番組で撮影する撮影ショットの種類であるロボットカメラC1〜C3の撮影ショットタイプとを予め設定するものである。また、撮影ショットタイプ設定手段11は、設定した撮影ショットタイプの情報を、撮影規則生成手段13及び撮影ショット制御手段15に出力する。
【0046】
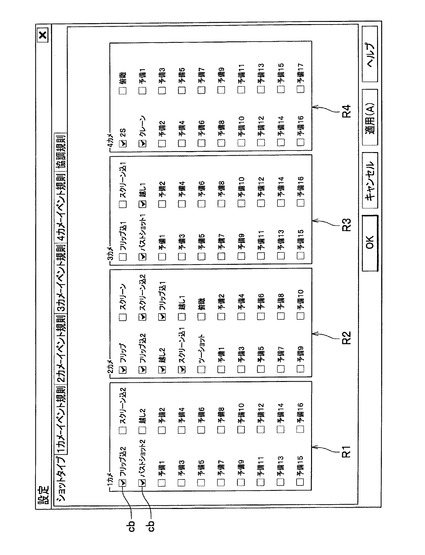
ここで、図5を参照(適宜図4参照)して、撮影ショットタイプ設定手段11による撮影ショットタイプの設定について、具体例を用いて説明する。図5は、撮影ショットタイプの設定時において、番組制作者に提示される表示画面の例を模式的に示す模式図である。
【0047】
ここでは、番組制作者は、図示しない表示装置に表示された図5に示すようなGUIによって、撮影ショットタイプを設定する指令を入力することとした。なお、図5において、「1カメ」、「2カメ」、「3カメ」及び「4カメ」は、それぞれマンカメラMC、ロボットカメラC1、C2、C3を示す。これらのロボットカメラC1〜C3には予め設定可能な複数の種類の撮影ショットが割り当てられ、さらに、優先順位が設定されている。図5では、撮影ショットタイプ表示領域R1〜R4に、各々のマンカメラMC及びロボットカメラC1〜C3において設定可能な撮影ショットが表示されている。例えば、ロボットカメラC1(1カメ)には、「フリップ込2」(フリップFと話者P2の映像)、「スクリーン込2」(情報画スクリーンSCと話者P2の映像)、「バストショット2」(話者P2の胸から上の映像)及び「越し2」(話者P1の背後から撮影した話者P2の映像)の4種類の撮影ショットが割り当てられ、これらの撮影ショットが撮影ショットタイプ表示領域R1に優先順位の高い順に表示されている。
【0048】
そして、番組制作者は、スタジオ内の配置に合う撮影ショットタイプを選択する。このとき、番組制作者は、図5に示す撮影ショットタイプ表示領域R1〜R4に表示された撮影ショットのチェックボックスcbを図示しないマウス等によってクリックしてチェックを付加することで、選択した撮影ショットタイプを設定する指令を入力することができる。図5は、例えば、マンカメラMCに、「フリップ込2」及び「バストショット2」の2種類の撮影ショットを設定した場合を示している。このようにして、番組制作者は、すべてのマンカメラMC及びロボットカメラC1〜C3について、番組で撮影する撮影ショットタイプを設定する。そして、番組制作者によって入力された指令に基づいて、撮影ショットタイプ設定手段11は、選択された撮影ショットタイプをマンカメラMC及びロボットカメラC1〜C3毎に設定する。
【0049】
図4に戻って説明を続ける。撮影規則生成情報記憶手段(記憶装置)12は、後記する撮影規則生成手段13において撮影規則を生成するための撮影規則生成情報を記憶するもので、ハードディスク等の一般的な記憶手段によって構成される。ここで、撮影規則生成情報記憶手段12は、撮影規則生成情報としてイベント撮影規則生成情報、スイッチング撮影規則生成情報及び協調撮影規則生成情報を記憶することとした。
【0050】
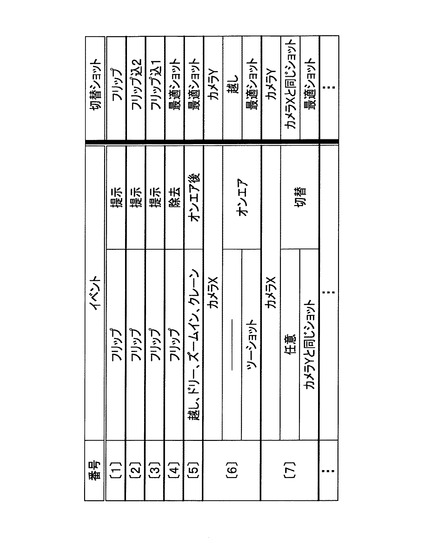
ここで、図6を参照して、撮影規則生成情報について具体例を用いて説明する(適宜図4参照)。図6は、撮影規則生成情報を説明するための説明図である。ここでは、撮影規則生成情報記憶手段12には、図6に示す情報が記憶されていることとする。図6に示す表の各行には、行の番号とイベントと、イベント後の撮影ショット(切替ショット)とを対応させた情報が示されている。
【0051】
イベント撮影規則生成情報は、イベントと、ロボットカメラC1〜C3の撮影ショットタイプと、切替ショットとを対応させる情報である。ここで、図6の表の番号[1]〜[4]の行に示す情報は、イベント撮影規則生成情報の一部であり、イベントと、切替ショットとを対応させる情報である。例えば、図6の番号[1]の行では、フリップFが提示されたことを示すイベントに、切替ショットとして「フリップ」(フリップFのみを撮影した映像)の撮影ショットが対応付けられている。図6の表の番号[1]〜[4]の行に示す情報以外にも、例えば、情報画スクリーンSCの提示及び除去や、小物Oの提示及び除去、話者P1、P2の喋りの開始及び終了等のイベントにそれぞれ切替ショットを対応させる情報を撮影規則生成情報記憶手段12に記憶することとしてもよい。
【0052】
なお、図6に示す表の番号[4]の行における切替ショットの「最適ショット」は、撮影ショットタイプ設定手段11において設定された撮影ショットタイプのうち、選択可能なもので最も優先順位の高い撮影ショットを示す。このとき、例えば、他のマンカメラMC及びロボットカメラC1〜C3が撮影している撮影ショットと同じ撮影ショットや、フリップFが提示されていないときのフリップショットは選択不可能である。
【0053】
さらに、撮影規則生成情報記憶手段12には、以下の[a]〜[d]の情報が記憶されていることとする。この情報は、図6の表の番号[1]〜[4]の行に示す情報のそれぞれと撮影ショットタイプとを対応させるものであり、この情報と図6の表の番号[1]〜[4]の行に示す情報とを、イベント撮影規則生成情報とした。
【0054】
[a]:撮影ショットタイプに「フリップ」が設定されているロボットカメラC1〜C3には、図6の表の番号[1]及び[4]の行を撮影規則として生成する。
[b]:[a]に該当しないロボットカメラC1〜C3で、撮影ショットタイプに「フリップ込2」が設定されているロボットカメラC1〜C3には、図6の表の番号[2]及び[4]の行を撮影規則として生成する。
[c]:[a]及び[b]に該当しないロボットカメラC1〜C3で、撮影ショットタイプに「フリップ込1」が設定されているロボットカメラC1〜C3には、図6の表の番号[3]及び[4]の行を撮影規則として生成する。
[d]:情報画スクリーンSC、小物Oについても[a]〜[c]と同様の処理を行う。ただし、複数のロボットカメラC1〜C3に同じ撮影規則を生成せず、ロボットカメラC2、ロボットカメラC3、ロボットカメラC1の順に優先的に生成する。
【0055】
スイッチング撮影規則生成情報は、マンカメラMC及びロボットカメラC1〜C3の撮影ショットと、この撮影ショットの切替の条件となるイベントと、切替ショット(他の撮影ショット)と、ロボットカメラC1〜C3の撮影ショットタイプとを対応させる情報である。ここで、図6の表の番号[5]の行に示す情報は、スイッチング撮影規則生成情報の一部であり、ある撮影ショットのオンエアが解除されるイベントの情報と、オンエア解除後の切替ショットとを対応させる情報である。図6の番号[5]の行では、あるマンカメラMC及びロボットカメラC1〜C3の「越し」(「越し1」及び「越し2」)、「ドリー」、「ズームイン」および「クレーン」の何れかの撮影ショットの映像がオンエアされている状態からオンエアが解除されるイベントに、切替ショットとして「最適ショット」の撮影ショットが対応付けられている。ここで、オンエアは、スイッチャSWから映像が出力されることを示す。
【0056】
さらに、撮影規則生成情報記憶手段12には、以下の[e]の情報が記憶されていることとする。この情報は、図6の表の番号[5]の行に示す情報と撮影ショットタイプとを対応させるものであり、この情報と図6の表の番号[5]の行に示す情報とを、スイッチング撮影規則生成情報とした。
【0057】
[e]:撮影ショットタイプに「越し」、「ドリー」、「ズームイン」および「クレーン」の何れかが設定されているロボットカメラC1〜C3には、図6の表の番号[5]の行を撮影規則として生成する。
【0058】
協調撮影規則生成情報は、あるマンカメラMC及びロボットカメラC1〜C3の撮影ショットと、撮影ショットタイプと、他のロボットカメラC1〜C3と、撮影ショットタイプとを対応させる情報である。ここで、図6の表の番号[6]及び[7]の行に示す情報は、協調撮影規則生成情報の一部であり、マンカメラMC及びロボットカメラC1〜C3の種類、切り替わり前後の撮影ショットもしくはオンエアされた撮影ショット、及び、撮影ショットの切替もしくはオンエアのイベントの情報と、このイベント後に撮影ショットが切り替えられる他のロボットカメラC1〜C3の種類、及び、切り替わり前後の撮影ショットの情報とを対応させる情報である。例えば、図6の番号[6]の行では、あるマンカメラMC及びロボットカメラC1〜C3の「ツーショット」の撮影ショットがオンエアされるイベントに、他のロボットカメラC1〜C3の撮影ショットを「越し」(「越し1」及び「越し2」)から「最適ショット」に切り替わることが対応付けられている。ここで、「カメラX」は任意のマンカメラMC及びロボットカメラC1〜C3、「カメラY」は「カメラX」以外のロボットカメラC1〜C3を示す。
【0059】
さらに、撮影規則生成情報記憶手段12には、以下の[f]、[g]の情報が記憶されていることとする。この情報は、図6の表の番号[6]及び[7]の行に示す情報のそれぞれと撮影ショットタイプとを対応させるものであり、この情報と図6の表の番号[6]及び[7]の行に示す情報とを、協調撮影規則生成情報とした。
【0060】
[f]:あるマンカメラMC及びロボットカメラC1〜C3の撮影ショットタイプに「ツーショット」が、他のロボットカメラC1〜C3の撮影ショットタイプに「越し」が設定されている場合には、図6の表の番号[6]の行を撮影規則として生成する。
[g]:異なるマンカメラMC及びロボットカメラC1〜C3に同じ撮影ショットタイプが設定されている場合には、図6の表の番号[7]の行を撮影規則として生成する。
【0061】
撮影規則生成情報記憶手段12に記憶された撮影規則生成情報は、後記する撮影規則生成手段13によって撮影規則を生成する際に参照されて用いられる。ここでは、撮影規則生成情報は、図6の表の番号[1]〜[7]の行に示す情報と、当該情報のそれぞれと撮影ショットタイプとを対応させる[a]〜[g]の情報とからなることとし、撮影規則生成手段13によって、この[a]〜[g]に示される撮影ショットタイプが、撮影ショットタイプ設定手段11によって設定された撮影ショットタイプに含まれる場合に、このロボットカメラC1〜C3に対して、図6の表の番号[1]〜[7]のうちの適合する行に示す情報を撮影規則として生成することとした。
【0062】
なお、ここでは、図6の表と[a]〜[g]の情報とからなる撮影規則生成情報について説明したが、例えば、図6の表の番号[1]〜[7]の行の情報のそれぞれに含まれる撮影ショット(切り替えショットを含む)が撮影ショットタイプを示すこととし、後記する撮影規則生成手段13によって、この撮影ショットを撮影ショットタイプに含むロボットカメラC1〜C3に対して、図6の表の適合する行を撮影規則として生成することとしてもよい。
【0063】
また、ここでは、マンカメラMC及びロボットカメラC1〜C3の切替もしくはオンエア前後の撮影ショットと、他のロボットカメラC1〜C3の切替前後の撮影ショットとを対応させるイベント撮影規則生成情報について説明したが、例えば、あるマンカメラMC及びロボットカメラC1〜C3がある撮影ショットに切り替わった際に、他のロボットカメラC1〜C3を、指定した撮影ショットに切り替える場合に特定して、ロボットカメラC1〜C3の種類及び切り替わり後の撮影ショットと、ロボットカメラC1〜C3の種類及び切り替わり後の撮影ショットのみを対応させるものとしてもよい。この撮影規則生成情報は、例えば、過去のカメラマンによる撮影におけるカメラの撮影ショットの選択を参考にして生成することができる。
【0064】
図4に戻り説明を続ける。また、撮影規則生成情報記憶手段12は、カメラマンを含めたマンカメラMCの形状と大きさと、ロボットカメラC1〜C3の形状と大きさとを含むカメラ形状・大きさ情報を予め記憶する。例えば、カメラ形状・大きさ情報は、カメラマンを含めたマンカメラMCの形状及びロボットカメラC1〜C3の形状を、微小な三角形に分割して表現し(ポリゴン処理)、各三角形の頂点をこれらの形状としても良い。この場合、カメラ形状・大きさ情報は、前記した各三角形の角頂点間の距離(長さ)を、カメラマンを含めたマンカメラMCの大きさ及びロボットカメラC1〜C3の大きさとしても良い。また、後記する占有領域の演算を簡易にするため、カメラ形状・大きさ情報は、カメラマンを含めたマンカメラMCの形状及びロボットカメラC1〜C3の形状を、四角形、円筒形等の簡易な形状として扱っても良い。
【0065】
撮影規則生成手段13は、撮影規則生成情報記憶手段12が記憶する撮影規則生成情報を参照し、撮影ショットタイプ設定手段11が設定したマンカメラMCの撮影ショットタイプとロボットカメラC1〜C3の撮影ショットタイプとに基づいて、イベントとマンカメラMCの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成するものである。ここで生成された撮影規則は、撮影規則設定手段14に出力される。
【0066】
ここで、撮影規則生成情報は、マンカメラMC及びロボットカメラC1〜C3の撮影ショットタイプの情報を含む。撮影規則生成手段13は、撮影規則生成情報によって示されるロボットカメラC1〜C3の撮影ショットタイプが、撮影ショットタイプ設定手段11によって設定されたロボットカメラC1〜C3の撮影ショットタイプに含まれる場合に、このロボットカメラC1〜C3に対して当該撮影規則生成情報によって示される撮影規則を生成する。そして、撮影ショットタイプ設定手段11によって設定されたロボットカメラC1〜C3の撮影ショットタイプが、マンカメラMCの撮影ショットタイプ、スタジオの配置や話者の人数等に合うように番組制作者によって選択されているため、撮影規則生成手段13によって生成される撮影規則は、マンカメラMCの撮影ショットタイプ、スタジオの配置や話者の人数等の撮影条件に合うものとなる。これによって、撮影規則生成手段13は、番組ごとに撮影条件が変化してもそれに応じた撮影規則を自動で生成でき、撮影条件が変更されても番組制作者は撮影ショットタイプの設定のみを行えばよく、その都度撮影条件にあうイベントと切替ショットとを対応させる必要がなくなる。
【0067】
撮影規則設定手段14は、撮影規則生成手段13によって生成された撮影規則を、外部から入力された番組制作者からの指令に基づいて修正するものである。なお、番組制作者からの修正の指令が入力されない場合には、撮影規則設定手段14は、撮影規則生成手段13によって生成された撮影規則をそのまま設定する。ここで設定された撮影規則は、撮影ショット制御手段15に出力される。
【0068】
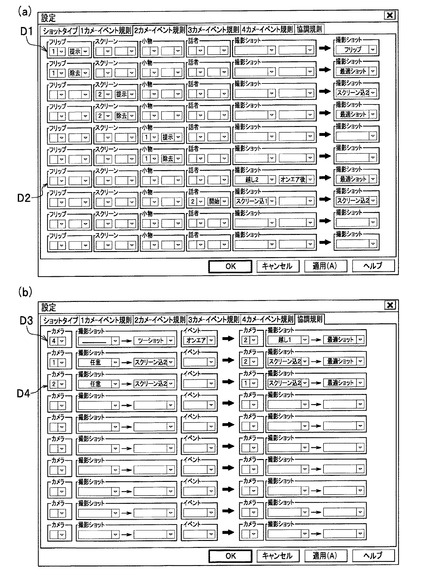
ここで、図7を参照して、撮影規則生成手段13によって生成された撮影規則と、撮影規則設定手段14による撮影規則の修正について、具体例を用いて説明する(適宜図4参照)。図7は、撮影規則の修正時において、番組制作者に提示される表示画面の例を示す図、(a)は、あるロボットカメラのイベント撮影規則を提示した表示画面の例を示す図、(b)は、協調撮影規則を提示した表示画面の例を示す図である。
【0069】
ここでは、撮影規則設定手段14は、図7に示すようなGUIによって、番組制作者からの撮影規則の修正指令を入力することとした。例えば、撮影規則生成手段13によって、イベント撮影規則生成情報に基づいてロボットカメラC1について、図7(a)の行D1に示すような撮影規則(イベント撮影規則)が生成されたとする。ここで、図7(a)のイベント撮影規則の一番上の行D1は、フリップFが提示されたというイベント情報が入力されたときに、後記する撮影ショット制御手段15がロボットカメラC1に「フリップ」の撮影ショットを撮影する指令を出力する撮影規則を示している。
【0070】
また、例えば、撮影規則生成手段13によって、スイッチング撮影規則生成情報に基づいて、図7(a)の行D2に示すような撮影規則(スイッチング撮影規則)が生成されたとする。ここで、このスイッチング撮影規則は、ロボットカメラC1で撮影された「越し2」の映像がスイッチャSWから出力されている状態において、スイッチャSWから他のロボットカメラの映像を出力する指令が、後記するスイッチャ制御手段16によってスイッチャSWに出力されると、撮影ショット制御手段15が、ロボットカメラC1に「最適ショット」の撮影ショットを撮影する指令を出力する撮影規則を示している。
【0071】
また、例えば、撮影規則生成手段13によって、協調撮影規則生成情報に基づいて、図7(b)に示すような撮影規則(協調撮影規則)が生成されたとする。ここで、図7(b)の協調撮影規則の一番上の行D3は、ロボットカメラC1が「越し1」を撮影しているときに、ロボットカメラC3で撮影された「ツーショット」の映像をスイッチャSWにおいて出力する指令が、後記するスイッチャ制御手段16によって出力されると、撮影ショット制御手段15がロボットカメラC1に「最適ショット」の撮影ショットを撮影する指令を出力する撮影規則を示している。
【0072】
さらに、例えば、図7(b)の協調撮影規則の一番下の行D4は、マンカメラMCが「スクリーン込2」を撮影しているときに、カメラマンがマンカメラMCで別の撮影ショットから「スクリーン込2」を撮影すると、ロボットカメラC1が「スクリーン込2」から「最適ショット」に撮影ショットを撮影する指令を出力する撮影規則を示している。
【0073】
そして、番組制作者は図示しないマウス等によって、図7(a)及び(b)の表示画面のプルダウンメニューを操作することで、撮影規則を修正する指令を撮影規則設定手段14に入力することができる。そして、撮影規則設定手段14は、番組制作者によって入力された指令に基づいて撮影規則を修正する。
【0074】
図4に戻って説明を続ける。撮影ショット制御手段(撮影ショット決定手段)15は、撮影規則生成手段14が生成した撮影規則を参照し、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置6から入力されるマンカメラMCの撮影ショットタイプと、マンカメラMCから入力される現在位置とに基づいて、ロボットカメラが撮影する撮影ショットC1〜C3を決定するものである。ここで決定された撮影ショットの映像を撮影する指令(撮影ショット制御信号)は、スイッチングハブSHを介してロボットカメラC1〜C3に出力される。
【0075】
また、撮影ショット制御手段15は、撮影規則設定手段14において撮影規則が設定されるごとに、ロボットカメラC1〜C3に対して「最適ショット」の撮影の指令を出力して、撮影ショットを初期化することとした。さらに、撮影ショット制御手段15は、例えば、ズームインのような動きを伴う撮影ショットを決定した場合には、このロボットカメラC1〜C3を待機させ、番組制作者によって当該撮影ショットをスイッチャSWから出力させる指令が後記するスイッチャ制御手段16に入力されたときに、この撮影ショットを撮影する指令を出力することとした。これによって、撮影ショット制御手段15は、ロボットカメラC1〜C3に、スイッチャSWからの映像の出力開始とともに撮影を開始させることができる。そのため、ズームイン等の動きの途中で映像がスイッチャSWから出力開始されることなく、スイッチャSWからの出力開始と撮影開始とを一致させた映像がスイッチャSWから出力される。
【0076】
なお、あるロボットカメラC1〜C3が決定した撮影ショット位置に移動したときに、他のロボットカメラC1〜C3と衝突し、又は、他のロボットカメラC1〜C3が撮影する映像に映り込む可能性がある。このため、撮影ショット決定手段15は、後記する切替情報に基づいて、スイッチャSWが映像を出力しているロボットカメラC1〜C3を判定する。そして、撮影ショット決定手段15は、撮影ショットを決定したあるロボットカメラC1〜C3の映像をスイッチャSWが出力していない場合、このロボットカメラC1〜C3の撮影ショットを、例えば、「最適ショット」に再決定する。一方、撮影ショット決定手段15は、撮影ショットを決定したあるロボットカメラC1〜C3の映像をスイッチャSWが出力している場合、このロボットカメラC1〜C3と衝突し又はこのロボットカメラC1〜C3が撮影する映像に映り込む他のロボットカメラC1〜C3の撮影ショットを、例えば、「最適ショット」に再決定する。
【0077】
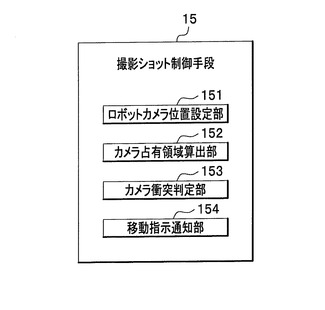
ここで、図8を参照して、撮影ショット制御手段15の詳細について説明する(適宜図4参照)。図8は、図4の撮影ショット制御手段の構成を示すブロック図である。図8に示すように、撮影ショット制御手段15は、ロボットカメラ位置設定部151と、カメラ占有領域算出部152と、カメラ衝突判定部153と、移動指示通知部154とを備える。
【0078】
ロボットカメラ位置設定部151は、番組制作者が入力するロボットカメラC1〜C3の撮影ショットとロボットカメラC1〜C3の位置とを対応させる指令に基づいて、撮影ショット制御手段15が決定したロボットカメラC1〜C3の撮影ショットに応じたロボットカメラC1〜C3の移動後位置を設定するものである。
【0079】
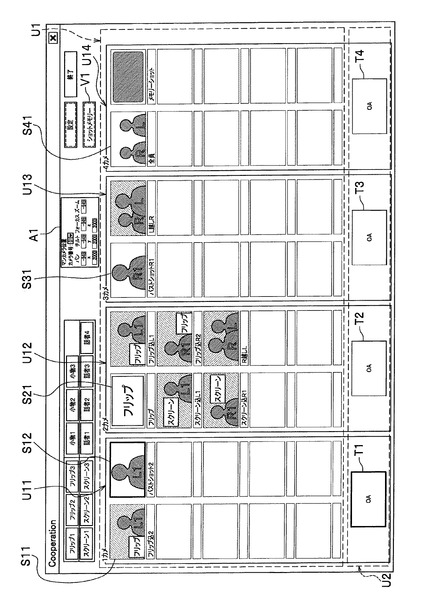
ここでは、ロボットカメラ位置設定部151は、図9に示すようなGUIによって、撮影ショットを対応させる指令を入力することとした。図9に示す表示画面の例において、マンカメラの現在位置表示領域A1に、マンカメラ撮影情報入力手段21に入力されたマンカメラMCの撮影アングル(パン、チルト、フォーカス、ズーム)と、マンカメラMCの現在位置(横方向の位置:x、縦方向の位置:y、高さ方向の位置:z)とがそれぞれ表示されている。また、撮影ショット表示領域U1内の撮影ショットタイプ表示領域U11〜U14に、それぞれ撮影ショットタイプ設定手段11において設定されたマンカメラMC及びロボットカメラC1〜C3の撮影ショットタイプを示すサムネールS11、S12、S21・・・が表示される。
【0080】
そして、番組制作者は、図示しない入力手段によって、ロボットカメラC1〜C3の位置を設定する。また、番組制作者は、ショットメモリボタンV1を押下し、サムネールS11、S12、S21・・・の中から割り当てたいサムネールを選択(クリック等)する。これによって、ロボットカメラ位置設定部151は、ショットメモリ作業、及び、ロボットカメラC1〜C3の撮影ショットとロボットカメラC1〜C3の位置とを対応付けを終了する。
【0081】
図8に戻り説明を続ける。カメラ占有領域算出部152は、撮影規則生成情報記憶手段12が記憶するカメラ形状・大きさ情報を参照し、マンカメラMCの現在位置でのマンカメラMCが占有する領域を示す占有領域と、ロボットカメラC1〜C3の移動後位置でのロボットカメラC1〜C3が占有する領域を示す占有領域とを算出するものである。カメラ占有領域算出部152は、例えば、マンカメラMCの現在位置(3次元位置)を基準に、カメラ形状・大きさ情報に設定されたマンカメラMCの大きさで、マンカメラMCの形状をポリゴンで表現し、マンカメラMCの占有領域を算出する。また、カメラ占有領域算出部152は、例えば、ロボットカメラC1〜C3の移動後位置を基準に、カメラ形状・大きさ情報に設定されたロボットカメラC1〜C3の大きさで、ロボットカメラC1〜C3の形状をポリゴンで表現し、ロボットカメラC1〜C3の占有領域を算出する。
【0082】
カメラ衝突判定部153は、カメラ占有範囲算出部152が算出したロボットカメラC1〜C3の占有領域とマンカメラMCの占有領域とを比較してロボットカメラC1〜C3とマンカメラMCとが衝突するか否かを判定するものである。また、カメラ衝突判定部153は、ロボットカメラC1〜C3同士の占有領域を比較してロボットカメラC1〜C3同士が衝突するか否かを判定する。カメラ衝突判定部153は、例えば、ポリゴンで表現したマンカメラMCの占有領域及びロボットカメラC1〜C3が重なる場合に、ロボットカメラC1〜C3同士又はロボットカメラC1〜C3とマンカメラMCとが衝突すると判定する。なお、カメラ衝突判定部153は、これらの判定結果に応じて、後記する衝突メッセージ又は映り込みメッセージを生成して出力する。
【0083】
また、カメラ衝突判定部153は、ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込むか否かと、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむか否かとを判定する。ここで、カメラ衝突判定部153は、例えば、マンカメラMC及びロボットカメラC1〜C3の撮影ショットと形状と大きさとが分かるので、下記の式(1)によって、ロボットカメラC1〜C3及びマンカメラMCの画界を算出し、この画界に他のロボットカメラC1〜C3又はマンカメラMCが映り込むか否かを判定する。
【0084】
y=y’×l/f・・・式(1)
なお、式(1)において、yはマンカメラMC及びロボットカメラC1〜C3の画界、y’はマンカメラMC及びロボットカメラC1〜C3の撮影ショットのイメージサイズ、lはマンカメラMC及びロボットカメラC1〜C3のレンズ主点と被写体との距離、及び、fはマンカメラMC及びロボットカメラC1〜C3の焦点距離である。
【0085】
移動指示通知部154は、カメラ衝突判定部153によって、ロボットカメラC1〜C3とマンカメラMCとが衝突すると判定された場合、ロボットカメラC1〜C3が撮影する映像にマンカメラMCが含まれると判定された場合、又は、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむと判定された場合、マンカメラMCへ移動指示を通知するものである。この移動指示は、スイッチングハブSHを介して、マンカメラMCに出力される。例えば、移動指示通知部154は、入力された切替実施情報に基づいて、スイッチャSWがマンカメラMCの映像を出力しているか否かを判定する。そして、スイッチャSWがマンカメラMCの映像を出力していないと判定された場合、移動指示通知部154は、カメラ衝突判定部153からの衝突メッセージ又は映り込みメッセージに応じて、マンカメラMCへ移動指示を通知する。
【0086】
なお、スイッチャSWがマンカメラMCの映像を出力していると判定された場合、移動指示通知部154がマンカメラMCへ移動指示を通知しても、カメラマンがマンカメラMCを移動させることができない。このため、撮影ショット決定手段15は、スイッチャSWがマンカメラMCの映像を出力していると判定され、かつ、マンカメラMCとロボットカメラC1〜C3が衝突すると判定された場合、又は、スイッチャSWがマンカメラMCの映像を出力していると判定され、かつ、ロボットカメラC1〜C3が撮影する映像にマンカメラMCが含まれると判定された場合、マンカメラMCに衝突又は映り込むロボットカメラC1〜C3の撮影ショットを、例えば、「最適ショット」に再決定する。
【0087】
図4に戻って説明を続ける。スイッチャ制御手段16は、番組制作者によって外部から入力された、スイッチャSWから出力する映像の切替指令に基づいて、スイッチャSWの切替を制御するものである。ここで生成されたスイッチャSWの切替を制御する指令(切替制御信号)は、スイッチングハブSHを介してスイッチャSWに出力される。また、スイッチャSWが出力するマンカメラMC及びロボットカメラC1〜C3の撮影ショットについての切替実施情報が、撮影ショット制御手段15に入力される。
【0088】
ここで、図9を参照して、番組制作者によるスイッチャSWから出力する映像の切替について、具体例を用いて説明する(適宜図4参照)。図9に示すように、マンカメラMC及びロボットカメラC1〜C3のそれぞれは、サムネールS11、S21、S31、S41の撮影ショットを撮影している。そして、番組制作者は、話者(P1、P2)の行うフリップFや小物Oの提示及び除去、情報画スクリーンSCの情報画の切り替わり、話者(P1、P2)の切り替わり、スイッチャSWから出力される映像の切り替わり、マンカメラMC及びロボットカメラC1〜C3の撮影ショットの切り替わり等のスタジオの状況変化に合わせて、スイッチャSWの切替を制御するための指令をスイッチャ制御手段16に入力する。
【0089】
このとき、番組制作者は、図示しないマウス等でクリックしたり図示しないタッチパネルをタッチしたりして、図9におけるスイッチングパネル表示領域U2内に表示されたスイッチングパネルT1〜T4を指定することで、対応するマンカメラMC及びロボットカメラC1〜C3の映像にスイッチャSWの出力を切り替えさせる指令をスイッチャ制御手段16に入力することができる。ここで、スイッチングパネルT1〜T4のそれぞれは、マンカメラMC及びロボットカメラC1〜C3に対応する。そして、スイッチャ制御手段16は、番組制作者によって入力された指令に基づいて、選択されたマンカメラMC及びロボットカメラC1〜C3の映像に出力を切り替える切替制御信号をスイッチャSWに出力する。なお、スイッチャSWの制御は、前記したタッチパネルに限られず、例えば、スイッチャSWからタリー信号を取得することで、スイッチャ専用操作器(不図示)を用いて行なうこともできる。
【0090】
以上のように、ロボットカメラ・スイッチャ制御装置1は、スタジオの状況変化やマンカメラMCの撮影ショットに応じて、各々のロボットカメラC1〜C3の撮影ショットを制御することができる。これによって、ロボットカメラとマンカメラとが協調してテレビ番組の撮影を行うことができる。また、ロボットカメラ・スイッチャ制御装置1は、移動指示をマンカメラMCに通知することで、ロボットカメラC1〜C3とマンカメラMCとが衝突する事態、ロボットカメラC1〜C3が撮影する映像にマンカメラMCが映り込む事態を防止できるため、様々なテレビ番組の自動撮影に適用することができる。さらに、ロボットカメラ・スイッチャ制御装置1は、放送中の映像を撮影しているロボットカメラC1〜C3の撮影ショットを再決定してしまう事態を防止できるため、番組制作者が意図しない撮影ショットでロボットカメラC1〜C3が映像を撮影することを防止し、様々なテレビ番組の自動撮影に適用することができる。
【0091】
なお、ロボットカメラ・スイッチャ制御装置1は、コンピュータにおいて各手段を各機能プログラムとして実現することも可能であり、各機能プログラムを結合して、ロボットカメラ・スイッチャ制御プログラム(撮影ショット制御プログラム)として動作させることも可能である。
【0092】
なお、ロボットカメラ・スイッチャ制御装置1は、撮影ショット決定手段15によって、ロボットカメラC1〜C3同士の衝突や撮影する映像の映り込みを防止することとしたが、撮影規則生成手段13がロボットカメラC1〜C3同士の衝突や撮影する映像の映り込みを防止する撮影規則情報を生成することとしても良い。また、ロボットカメラC1〜C3の自動ポジショニング及び自動フレーミングの手法として、前記した文献(T.Tsuda,et al,"Intelligent Mobile Robot Camera",SMPTE Australia 2005-Conference and Exhibition,Session 4.4,July 2005)に記載の手法又はメモリーショット以外の手法を用いても良い。
【0093】
[ロボットカメラ・スイッチャ制御装置の動作]
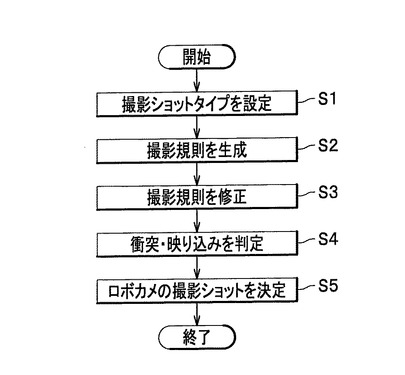
以下、図10を参照して、図4のロボットカメラ・スイッチャ制御装置1の動作について詳細に説明する(適宜図4参照)。図10は、図4のロボットカメラ・スイッチャ制御装置の動作を示すフローチャートである。なお、図10、図11では、ロボットカメラをロボカメと略記し、マンカメラをマンカメと略記する。
【0094】
まず、ロボットカメラ・スイッチャ制御装置1は、撮影ショットタイプ設定手段11によって、外部から入力されるマンカメラMCの撮影ショットの種類とロボットカメラの撮影ショットC1〜C3の種類とを設定する指令に基づいて、マンカメラMCが番組で撮影する撮影ショットの種類であるマンカメラMCの撮影ショットタイプと、ロボットカメラC1〜C3が番組で撮影する撮影ショットの種類であるロボットカメラC1〜C3の撮影ショットタイプとを予め設定する(ステップS1)。
【0095】
ステップS1の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、撮影規則生成手段13によって、撮影規則生成情報記憶手段12が記憶する撮影規則生成情報を参照し、撮影ショットタイプ設定手段11が設定したマンカメラMCの撮影ショットタイプとロボットカメラC1〜C3の撮影ショットタイプとに基づいて、イベントとマンカメラMCの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成する(ステップS2)。
【0096】
ステップS2の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、撮影規則設定手段14によって、撮影規則生成手段13によって生成された撮影規則を、外部から入力された番組制作者からの指令に基づいて修正する(ステップS3)。また、ロボットカメラ・スイッチャ制御装置1は、撮影ショット制御手段15によって、ロボットカメラC1〜C3とマンカメラMCとが衝突するか否かと、ロボットカメラC1〜C3同士が衝突するか否かと、ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込みむか否かと、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむか否かとを判定する(ステップS4)。なお、ステップS4における衝突及び映り込みの判定の動作の詳細は、後記する。
【0097】
ステップS4の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、撮影ショット制御手段15によって、撮影規則生成手段14が生成した撮影規則を参照し、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置6から入力されるマンカメラMCの撮影ショットタイプとに基づいて、ロボットカメラが撮影する撮影ショットC1〜C3を決定する(ステップS5)。ここで、ロボットカメラ・スイッチャ制御装置1は、スイッチャ制御手段16によって、切替制御信号を出力してスイッチャSWの切替を制御し、撮影ショット制御手段15によって、撮影ショット制御信号をロボットカメラC1〜C3に出力する。
【0098】
<衝突及び映り込みの判定>
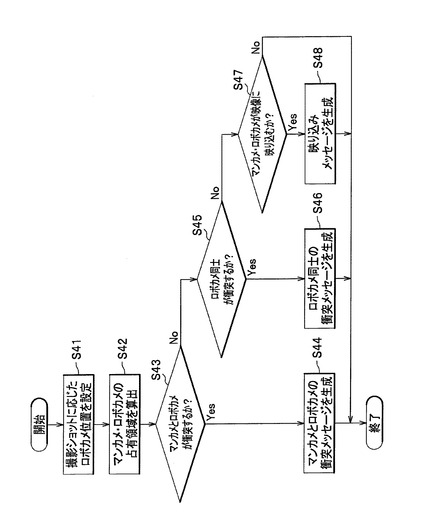
以下、図11を参照(適宜図4参照)して、衝突の判定及び映り込みの判定の動作について詳細に説明する。図11は、図10のステップS4における衝突及び映り込みの判定の動作を示すフローチャートである。
【0099】
まず、ロボットカメラ・スイッチャ制御装置1は、ロボットカメラ位置設定部151によって、番組制作者が入力するロボットカメラC1〜C3の撮影ショットとロボットカメラC1〜C3の位置とを対応させる指令に基づいて、撮影ショット制御手段15が決定したロボットカメラC1〜C3の撮影ショットに応じたロボットカメラC1〜C3の移動後位置を設定する(ステップS41)。
【0100】
ステップS41の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、カメラ占有領域算出部152によって、撮影規則生成情報記憶手段12が記憶するカメラ形状・大きさ情報を参照し、マンカメラMCの現在位置でのマンカメラMCが占有する領域を示す占有領域と、ロボットカメラC1〜C3の移動後位置でのロボットカメラC1〜C3が占有する領域を示す占有領域とを算出する(ステップS42)。
【0101】
ステップS42の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、ロボットカメラC1〜C3とマンカメラMCとが衝突するか否かを判定する(ステップS43)。ロボットカメラC1〜C3とマンカメラMCとが衝突すると判定された場合(ステップS43でYes)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、衝突するロボットカメラC1〜C3とマンカメラMCとを一意に識別する識別子を含む衝突メッセージ(例えば、1カメ・2カメが衝突)を生成して出力し、衝突及び映り込みの判定の動作を終了する(ステップS44)。
【0102】
ロボットカメラC1〜C3とマンカメラMCとが衝突しないと判定された場合(ステップS43でNo)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、ロボットカメラC1〜C3同士が衝突するか否かを判定する(ステップS45)。ロボットカメラC1〜C3同士が衝突すると判定された場合(ステップS45でYes)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、衝突するロボットカメラC1〜C3同士の識別子を含む衝突メッセージ(例えば、2カメ・3カメが衝突)を生成して出力し、衝突及び映り込みの判定の動作を終了する(ステップS46)。
【0103】
ロボットカメラC1〜C3同士が衝突しないと判定された場合(ステップS45でNo)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込むか否かと、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむか否かとを判定する(ステップS47)。ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込むと判定された場合、又は、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむと判定された場合(ステップS47でYes)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、映り込むマンカメラMC又はロボットカメラC1〜C3の識別子を含む映り込みメッセージ(例えば、2カメが3カメに映り込み)を生成して出力し、衝突及び映り込みの判定の動作を終了する(ステップS48)。
【0104】
一方、ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込まないと判定された場合、及び、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込まないと判定された場合(ステップS47でNo)、ロボットカメラ・スイッチャ制御装置1は、衝突メッセージ及び映り込みメッセージを生成せずに、衝突及び映り込みの判定の動作を終了する。
【図面の簡単な説明】
【0105】
【図1】本発明におけるロボットカメラ・スイッチャ制御装置を備える自動撮影システムの構成を模式的に示した模式図である。
【図2】図1のマンカメラ撮影ショット認識装置6の構成を示すブロック図である。
【図3】撮影情報−撮影ショット対応情報の詳細及び撮影ショットタイプの判定において、番組制作者に提示される表示画面の例を示す図である。
【図4】図1のロボットカメラ・スイッチャ制御装置の構成を示すブロック図である。
【図5】撮影ショットタイプの設定時において、番組制作者に提示される表示画面の例を模式的に示す模式図である。
【図6】撮影規則生成情報を説明するための説明図である。
【図7】撮影規則の修正時において、番組制作者に提示される表示画面の例を示す図、(a)は、あるロボットカメラのイベント撮影規則を提示した表示画面の例を示す図、(b)は、協調撮影規則を提示した表示画面の例を示す図である。
【図8】図4の撮影ショット制御手段の構成を示すブロック図である。
【図9】ロボットカメラの位置設定時において、番組制作者に提示される表示画面の例を示す図である。
【図10】図4のロボットカメラ・スイッチャ制御装置の動作を示すフローチャートである。
【図11】図10のステップS4における衝突及び映り込みの判定の動作を示すフローチャートである。
【符号の説明】
【0106】
1 ロボットカメラ・スイッチャ制御装置(撮影ショット制御装置)
11 撮影ショットタイプ設定手段
12 撮影規則生成情報記憶手段
13 撮影規則生成手段
14 撮影規則設定手段
15 撮影ショット制御手段
16 スイッチャ制御手段
21 マンカメラ撮影情報入力手段
22 撮影情報−撮影ショット対応情報記憶手段
23 マンカメラ撮影ショットタイプ判定手段
6 マンカメラ撮影ショット認識装置
C1〜C3 ロボットカメラ
MC マンカメラ
S 自動撮影システム(協調撮影システム)
【技術分野】
【0001】
本発明は、テレビ局のテレビ番組、遠隔テレビ会議、講義等の映像を自動撮影するロボットカメラの撮影ショットを、マンカメラに協調させて制御する撮影ショット制御装置、協調撮影システム及びそのプログラムに関する。
【背景技術】
【0002】
従来から、テレビ番組等をロボットカメラで自動撮影する技術が知られている(例えば、特許文献1参照)。特許文献1に記載の発明では、ロボットカメラの撮影ショットタイプと、被写体の変化を示すイベントと、切替後の撮影ショットとを対応させる撮影規則を生成しておく。そして、特許文献1に記載の発明では、被写体の変化を示すイベントが入力された際、このイベントに応じてロボットカメラの撮影ショットを制御する。
【特許文献1】特開2008−72702号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、被写体の自動検出が困難である、又は、自動撮影によるロボットカメラの映像では視聴者にテレビ番組の臨場感等が伝わらない等の理由で、ロボットカメラだけでテレビ番組を自動撮影できない問題がある。そこで、ロボットカメラが撮影できない撮影ショットをカメラマンが操作するマンカメラで撮影する技術、つまり、ロボットカメラとマンカメラとが協調してテレビ番組の撮影を可能にしたいとの強い要望がある。
【0004】
そこで、本発明は、前記した課題を解決し、ロボットカメラとマンカメラとが協調してテレビ番組の撮影を行うことを可能とする撮影ショット制御装置、協調撮影システム及びそのプログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
前記した課題を解決するため、請求項1に係る撮影ショット制御装置は、マンカメラの撮影ショットの種類を判定するマンカメラ撮影ショット判定装置に接続され、1以上のロボットカメラが番組を撮影する映像とマンカメラが番組を撮影する映像とを切り替えるスイッチャを制御すると共に、ロボットカメラの撮影ショットを制御する撮影ショット制御装置であって、撮影ショットタイプ設定手段と、記憶手段と、撮影規則生成手段と、スイッチャ制御手段と、撮影ショット決定手段と、を備える構成とした。
【0006】
かかる構成によれば、撮影ショット制御装置は、撮影ショットタイプ設定手段によって、外部から入力されるマンカメラの撮影ショットの種類とロボットカメラの撮影ショットの種類とを設定する指令に基づいて、マンカメラが番組で撮影する撮影ショットの種類であるマンカメラの撮影ショットタイプと、ロボットカメラが番組で撮影する撮影ショットの種類であるロボットカメラの撮影ショットタイプとを予め設定する。また、撮影ショット制御装置は、記憶手段に、番組の状況変化を示すイベントと、マンカメラの撮影ショットタイプと、ロボットカメラの撮影ショットタイプと、イベント後のロボットカメラの撮影ショットである切替ショットとを対応させる撮影規則生成情報を予め記憶する。
【0007】
また、撮影ショット制御装置は、撮影規則生成手段によって、記憶手段が記憶する撮影規則生成情報を参照し、撮影ショットタイプ設定手段が設定したマンカメラの撮影ショットタイプとロボットカメラの撮影ショットタイプとに基づいて、イベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成する。このとき、撮影規則生成手段は、各々の撮影規則生成情報によって示される撮影ショットタイプが、撮影ショットタイプ設定手段で設定された撮影ショットタイプに含まれる場合に、このロボットカメラに対して、当該撮影規則生成情報によって示されるイベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成することができる。
【0008】
また、撮影ショット制御装置は、スイッチャ制御手段によって、外部から入力されるロボットカメラ又はマンカメラの何れかの映像に出力を切り替える指令に基づいて、スイッチャの出力をロボットカメラが撮影する映像又はマンカメラが撮影する映像の何れかに切り替える。さらに、撮影ショット制御装置は、撮影ショット決定手段によって、撮影規則生成手段が生成した撮影規則を参照し、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置から入力されるマンカメラの撮影ショットタイプとに基づいて、ロボットカメラが撮影する撮影ショットを決定する。
【0009】
また、請求項2に係る撮影ショット制御装置は、記憶手段が、カメラマンを含めたマンカメラの形状と大きさと、ロボットカメラの形状と大きさとを含むカメラ形状・大きさ情報を予め記憶し、撮影ショット決定手段が、マンカメラからマンカメラの現在位置が入力され、外部から入力されるロボットカメラの撮影ショットとロボットカメラの位置とを対応させる指令に基づいて、決定したロボットカメラの撮影ショットに応じたロボットカメラの移動後位置を設定するロボットカメラ位置設定部と、カメラ形状・大きさ情報を参照し、マンカメラの現在位置でのマンカメラが占有する領域を示す占有領域と、ロボットカメラの移動後位置でのロボットカメラが占有する領域を示す占有領域とを算出するカメラ占有領域算出部と、カメラ占有範囲算出部が算出したロボットカメラの占有領域とマンカメラの占有領域とを比較して、ロボットカメラと当該マンカメラとが衝突するか否かと、ロボットカメラが撮影する映像にマンカメラが映り込むか否かと、マンカメラが撮影する映像にロボットカメラが映り込むか否かとを判定するカメラ衝突判定部と、ロボットカメラとマンカメラとが衝突すると判定された場合、ロボットカメラが撮影する映像にマンカメラが含まれると判定された場合、又は、マンカメラが撮影する映像にロボットカメラが映り込むと判定された場合、マンカメラへ移動指示を通知する移動指示通知部と、を備えることを特徴とする。
【0010】
かかる構成によれば、撮影ショット制御装置は、カメラ占有領域算出部によって、マンカメラの現在位置での占有領域と、ロボットカメラの移動後位置での占有領域とを算出する。また、撮影ショット制御装置は、カメラ衝突判定部によって、ロボットカメラとマンカメラとが衝突するか否かと、ロボットカメラが撮影する映像にマンカメラが映り込むか否かと、マンカメラが撮影する映像にロボットカメラが映り込むか否かとを判定する。さらに、撮影ショット制御装置は、移動指示通知部によって、ロボットカメラとマンカメラとが衝突すると判定された場合、ロボットカメラが撮影する映像にマンカメラが含まれると判定された場合、又は、マンカメラが撮影する映像にロボットカメラが映り込むと判定された場合、マンカメラへ移動指示を通知する。この移動指示を通知されたマンカメラを操作するカメラマンは、事前にマンカメラを移動させて、ロボットカメラとマンカメラとが衝突する事態やロボットカメラが撮影する映像にマンカメラが映り込んでしまう事態を防止できる。
【0011】
また、請求項3に係る撮影ショット制御装置は、ロボットカメラが複数の場合、カメラ占有領域算出部は、ロボットカメラ毎に占有領域を算出し、カメラ衝突判定部は、ロボットカメラ同士の占有領域を比較してロボットカメラ同士が衝突するか否かを判定すると共に、ロボットカメラが撮影する映像に他のロボットカメラが映り込むか否かを判定し、撮影ショット決定手段は、ロボットカメラ同士が衝突すると判定された場合、又は、ロボットカメラが撮影する映像に他のロボットカメラが含まれると判定された場合、スイッチャが映像を出力していないロボットカメラの撮影ショットを再決定することを特徴とする。
【0012】
かかる構成によれば、撮影ショット制御装置は、カメラ衝突判定部によって、ロボットカメラ同士が衝突するか否かを判定すると共に、ロボットカメラが撮影する映像に他のロボットカメラが映り込むか否かを判定する。さらに、撮影ショット制御装置は、撮影ショット決定手段によって、ロボットカメラ同士が衝突すると判定された場合、又は、ロボットカメラが撮影する映像に他のロボットカメラが含まれると判定された場合、スイッチャが切り替えていないロボットカメラの撮影ショットを再決定する。これによって、撮影ショット制御装置は、スイッチャが出力している映像、つまり、放送中の映像を撮影しているロボットカメラの撮影ショットを再決定してしまう事態を防止できる。
【0013】
また、前記した課題を解決するため、請求項4に係る協調撮影システムは、請求項1から請求項3の何れか一項に記載の撮影ショット制御装置と、マンカメラの撮影ショットの種類を判定するマンカメラ撮影ショット判定装置と、を含む協調撮影システムであって、マンカメラ撮影ショット判定装置が、マンカメラ撮影情報入力手段と、撮影情報−撮影ショット対応情報記憶手段と、マンカメラ撮影ショットタイプ判定手段と、を備える構成とした。
【0014】
かかる構成によれば、協調撮影システムは、マンカメラ撮影ショット判定装置のマンカメラ撮影情報入力手段によって、マンカメラから、当該マンカメラの撮影アングルと当該マンカメラの現在位置とを含むマンカメラ撮影情報が入力される。また、協調撮影システムは、マンカメラ撮影ショット判定装置の撮影情報−撮影ショット対応情報記憶手段によって、マンカメラ撮影情報とマンカメラの撮影ショットの種類とを対応させた撮影情報−撮影ショット対応情報を予め記憶する。また、協調撮影システムは、マンカメラ撮影ショット判定装置のマンカメラ撮影ショットタイプ判定手段によって、撮影情報−撮影ショット対応情報を参照し、マンカメラ撮影情報入力手段に入力されるマンカメラ撮影情報に応じて、マンカメラの撮影ショットの種類であるマンカメラの撮影ショットタイプを判定する。さらに、協調撮影システムは、マンカメラ撮影ショット判定装置が、マンカメラの撮影ショットタイプを撮影ショット制御装置に出力する。これによって、協調撮影システムは、撮影ショット制御装置が、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置から入力されるマンカメラの撮影ショットタイプとに基づいて、ロボットカメラが撮影する撮影ショットを決定する。
【0015】
また、前記した課題を解決するため、請求項5に係る協調撮影プログラムは、マンカメラが撮影の撮影ショットの種類を判定するマンカメラ撮影ショット判定装置に接続され、番組の状況変化を示すイベントと、マンカメラの撮影ショットタイプと、ロボットカメラの撮影ショットタイプと、イベント後のロボットカメラの撮影ショットである切替ショットとを対応させる撮影規則生成情報を予め記憶する記憶手段を備え、1以上のロボットカメラが番組を撮影する映像とマンカメラが番組を撮影する映像とを切り替えるスイッチャを制御すると共に、ロボットカメラの撮影ショットを制御するために、コンピュータを、撮影ショットタイプ設定手段、撮影規則生成手段、スイッチャ制御手段、撮影ショット決定手段、として機能させる構成とした。
【0016】
かかる構成によれば、撮影ショット制御プログラムは、撮影ショットタイプ設定手段によって、外部から入力されるマンカメラの撮影ショットの種類とロボットカメラの撮影ショットの種類とを設定する指令に基づいて、マンカメラが番組で撮影する撮影ショットの種類であるマンカメラの撮影ショットタイプと、ロボットカメラが番組で撮影する撮影ショットの種類であるロボットカメラの撮影ショットタイプとを予め設定する。
【0017】
また、撮影ショット制御プログラムは、撮影規則生成手段によって、記憶手段が記憶する撮影規則生成情報を参照し、撮影ショットタイプ設定手段が設定したマンカメラの撮影ショットタイプとロボットカメラの撮影ショットタイプとに基づいて、イベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成する。このとき、撮影規則生成手段は、各々の撮影規則生成情報によって示される撮影ショットタイプが、撮影ショットタイプ設定手段で設定された撮影ショットタイプに含まれる場合に、このロボットカメラに対して、当該撮影規則生成情報によって示されるイベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成することができる。
【0018】
また、撮影ショット制御プログラムは、スイッチャ制御手段によって、外部から入力されるロボットカメラ又はマンカメラの何れかの映像に出力を切り替える指令に基づいて、スイッチャの出力をロボットカメラが撮影する映像又はマンカメラが撮影する映像の何れかに切り替える。さらに、撮影ショット制御プログラムは、撮影ショット決定手段によって、撮影規則生成手段が生成した撮影規則を参照し、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置から入力されるマンカメラの撮影ショットタイプとに基づいて、ロボットカメラが撮影する撮影ショットを決定する。
【発明の効果】
【0019】
本発明によれば、以下のような優れた効果を奏する。
請求項1,4,5に係る発明によれば、イベントとマンカメラの撮影ショットタイプと切替ショットとを対応させる撮影規則を参照してロボットカメラが撮影する撮影ショットを決定するため、ロボットカメラとマンカメラとが協調してテレビ番組の撮影を行うことができる。
【0020】
請求項2に係る発明によれば、ロボットカメラとマンカメラとが衝突する事態やロボットカメラが撮影する映像にマンカメラが映り込む事態を防止するため、様々なテレビ番組の自動撮影に適用することができる。
請求項3に係る発明によれば、放送中の映像を撮影しているロボットカメラの撮影ショットを再決定してしまう事態を防止するため、番組制作者が意図しない撮影ショットでロボットカメラが映像を撮影することを防止し、様々なテレビ番組の自動撮影に適用することができる。
【発明を実施するための最良の形態】
【0021】
以下、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。なお、各実施形態において、同一の機能を有する手段及び同一の部材には同一の符号を付し、説明を省略した。
【0022】
まず、図1を参照して、本発明におけるロボットカメラ・スイッチャ制御装置1を備える自動撮影システムSの構成について説明する。図1は、本発明におけるロボットカメラ・スイッチャ制御装置を備える自動撮影システムの構成を模式的に示した模式図である。
【0023】
自動撮影システム(協調撮影システム)Sは、被写体[テーブルT、話者(出演者)P1、P2、フリップF、小物O、情報画スクリーンSC]を撮影し、番組映像を生成するものである。図1に示すように、自動撮影システムSは、ロボットカメラ・スイッチャ制御装置1と、マンカメラMCと、ロボットカメラC1〜C3と、センサカメラC0と、画像処理装置5と、マンカメラ撮影ショット認識装置6と、スイッチングハブSHと、スイッチャSWとを備える。
【0024】
ロボットカメラ・スイッチャ制御装置(撮影ショット制御装置)1は、ロボットカメラC1〜C3が被写体を撮影する映像とマンカメラMCが被写体を撮影する映像とを切り替えるスイッチャSWを制御するものである。また、ロボットカメラ・スイッチャ制御装置1は、ロボットカメラC1〜C3の撮影ショットを制御するものである。
【0025】
ここで、ロボットカメラ・スイッチャ制御装置1によって生成されたロボットカメラC1〜C3の撮影ショットを制御する指令となる撮影ショット制御信号は、スイッチングハブSHを介してロボットカメラC1〜C3に出力される。また、ロボットカメラ・スイッチャ制御装置1によって生成されたスイッチャSWの切替を制御する指令となる切替制御信号は、スイッチングハブSHを介してスイッチャSWに出力される。
【0026】
なお、ここでは、被写体の変化を示すイベントとして、フリップFと小物Oとの提示及び除去と、情報画スクリーンSCへの情報画の提示及び除去と、話者P1、P2の喋りの開始及び終了を想定し、イベント情報として、後記する画像処理装置5からのフリップFと小物Oとの提示と除去との情報、及び、情報画スクリーンSCへの情報画の提示と除去との情報と、図示しないマイクによって取得された話者P1、P2の音声信号の音声レベルに基づいて、図示しない音声処理装置によって解析した各々の話者P1、P2の喋りの開始と終了との情報とが、ロボットカメラ・スイッチャ制御装置1に入力されることとした。
【0027】
ロボットカメラC1〜C3は、ロボットカメラ・スイッチャ制御装置1から入力された撮影ショット制御信号と、後記する画像処理装置5から入力されるスタジオ内における被写体の位置の情報とに基づいて、当該撮影ショット制御信号によって指示される撮影ショットの映像を撮影し、番組映像の素材となる映像信号を生成するものである。ここで、生成された映像信号は、スイッチャSWに出力される。ここで、このフレーミングを自動で行えるロボットカメラC1〜C3としては、例えば、T.Tsuda,et al,"Intelligent Mobile Robot Camera",SMPTE Australia 2005-Conference and Exhibition,Session 4.4,July 2005に記載されたものを用いることができる。なお、図1では、ロボットカメラC1〜C3及びマンカメラMCからの映像信号の流れを破線で示した。
【0028】
マンカメラMCは、図示しないカメラマンによって被写体を撮影し、備え付けられた移動機構で撮影フロア内を自在に移動し、番組映像の素材となる映像信号を生成するものである。ここで、マンカメラMCは、マンカメラMCの各軸を測定するエンコーダを備えており、撮影アングルを後記するマンカメラ撮影ショット認識装置6に出力する。また、マンカメラMCは、移動機構が測定する移動量及び移動方向から、撮影フロア内でのマンカメラMCの現在位置を算出してロボットカメラ・スイッチャ制御装置1に出力する。また、マンカメラMCは、図示しない屋内GPS(Galileo positioning system)測位手段を備え、測位したGPS座標をマンカメラMCの現在位置としても良い。つまり、マンカメラMCは、スイッチングハブSHを介して、撮影アングルと現在位置とを含むマンカメラ撮影情報をマンカメラ撮影ショット認識装置6に出力すると共に、現在位置をロボットカメラ・スイッチャ制御装置1に出力する。
【0029】
また、マンカメラMCは、後記する移動指示が通知されたときに、カメラマンに移動指示の通知を伝える移動指示出力手段を備える。この移動指示出力手段としては、例えば、移動指示が通知されたときに点灯するLED(Light Emitting Diode)がある。
【0030】
ここでは、被写体として、テーブルTと、このテーブルTを挟んで向かい合う2人の話者P1、P2と、この話者P1、P2の間のフリップFと、話者P2の手元の小物Oと、話者P1、P2の背後の情報画スクリーンSCとが設置されることとした。そして、話者P1、P2が、フリップFと、小物Oと、情報画スクリーンSCとを用いて対談する番組をマンカメラMC及びロボットカメラC1〜C3によって撮影して番組制作する場合について説明する。しかしながら、フリップFと小物Oと情報画スクリーンSCの個数及び有無や、これらの被写体の配置、話者P1、P2の人数はこれに限定されることなく、任意の被写体を設定することができる。また、マンカメラMC及びロボットカメラC1〜C3の個数もこれに限定されることなく、任意の個数とすることができる。さらに、本発明は番組制作に限定されず、テレビ会議や、大学の講義の撮影や、TVML(TV program Making Language;"http://www.nhk.or.jp/strl/tvml/"参照)等のCGを使ったテレビ番組の制作にも応用が可能である。
【0031】
センサカメラC0は、被写体を撮影し、後記する画像処理装置5によって被写体の位置を算出するのに必要となる映像信号を生成するものである。ここで生成された映像信号は、画像処理装置5に出力される。なお、センサカメラC0は、被写体が撮影できる位置に設置されていればよく、例えば、被写体の上方や背後に設置されることとしてもよい。また、センサカメラC0の個数はこれに限定されることなく、任意の個数とすることができる。さらに、マンカメラMC及びロボットカメラC1〜C3によって撮影した映像から画像処理装置5によって被写体の位置を算出する場合には、自動撮影システムSがセンサカメラC0を備えないこととしてもよい。
【0032】
画像処理装置5は、センサカメラC0によって撮影された映像を構成するフレーム画像ごとに被写体を検出し、スタジオ内における被写体の位置を算出するものである。また、画像処理装置5は、フリップFと小物Oを検出することで、スタジオ内においてフリップFや小物Oが提示もしくは除去されたかを解析するものでもある。ここで算出された被写体の位置の情報は、スイッチングハブSHを介してロボットカメラC1〜C3に出力される。また、ここで解析されたフリップFと小物Oとの提示及び除去の情報が、イベント情報として、スイッチングハブSHを介してロボットカメラ・スイッチャ制御装置1に出力される。なお、画像処理装置5は、例えば、被写体の形状や色や、予め被写体に取り付けたセンサからの不可視光等に基づいて、フレーム画像から検出することとしてもよい。
【0033】
マンカメラ撮影ショット認識装置(マンカメラ撮影ショット判定装置)6は、マンカメラMCから入力されたマンカメラ撮影情報に基づいて、マンカメラMCが撮影する被写体の撮影ショットの種類を判定するものである。そして、マンカメラ撮影ショット認識装置6は、判定したマンカメラMCの撮影ショットの種類を、マンカメラMCの撮影ショットタイプとして、ロボットカメラ・スイッチャ制御装置1に出力する。なお、マンカメラ撮影ショット認識装置6の詳細については、後記する。
【0034】
スイッチングハブSHは、ロボットカメラ・スイッチャ制御装置1から入力された撮影ショット制御信号及び切替制御信号をそれぞれマンカメラMC、ロボットカメラC1〜C3及びスイッチャSWに出力するとともに、画像処理装置5、音声処理装置(図示せず)及び情報画スクリーンSCへの情報画の出力装置(図示せず)から入力されたイベント情報をロボットカメラ・スイッチャ制御装置1に出力する中継器である。また、スイッチングハブSHは、マンカメラ撮影ショット認識装置6が出力するマンカメラMCの撮影ショットタイプを、ロボットカメラ・スイッチャ制御装置1に中継する。また、スイッチングハブSHは、マンカメラMCから入力されたマンカメラ撮影情報をマンカメラ撮影ショット認識装置6に出力する。
【0035】
スイッチャSWは、ロボットカメラ・スイッチャ制御装置1から入力された切替制御信号に基づいて、スイッチャSWの出力をロボットカメラC1〜C3が撮影する映像又はマンカメラMCが撮影する映像の何れかに切り替えて、番組映像(出力映像)として出力するものである。
【0036】
[マンカメラ撮影ショット認識装置の構成]
以下、図2を参照して、本発明におけるマンカメラ撮影ショット認識装置6の構成について詳細に説明する(適宜図1参照)。図2は、図1のマンカメラ撮影ショット認識装置6の構成を示すブロック図である。図2に示すように、マンカメラ撮影ショット認識装置6は、マンカメラ撮影情報入力手段21と、撮影情報−撮影ショット対応情報記憶手段22と、マンカメラ撮影ショットタイプ判定手段23とを備える。
【0037】
マンカメラ撮影情報入力手段21は、マンカメラMCから、マンカメラMCの撮影アングルとマンカメラMCの現在位置とを含むマンカメラ撮影情報が入力されるものである。ここで、マンカメラMCの撮影アングルは、例えば、パン角、チルト角、フォーカス位置及びズーム位置を含む。また、マンカメラMCの現在位置は、例えば、撮影フロアの任意位置を基準としたマンカメラMCの横方向の位置、縦方向の位置及び高さ方向の位置を示す3次元位置である。また、マンカメラMCの現在位置は、GPS座標(経度、緯度、高度を示す3次元位置)としても良い。
【0038】
撮影情報−撮影ショット対応情報記憶手段22は、マンカメラ撮影情報入力手段21に入力されたマンカメラ撮影情報とマンカメラMCの撮影ショットの種類とを予め対応させた撮影情報−撮影ショット対応情報を予め記憶するものである。なお、撮影情報−撮影ショット対応情報の詳細は、後記する。
【0039】
マンカメラ撮影ショットタイプ判定手段23は、撮影情報−撮影ショット対応情報記憶手段22が記憶する撮影情報−撮影ショット対応情報を参照し、マンカメラ撮影情報入力手段21に入力されたマンカメラ撮影情報に応じたマンカメラMCの撮影ショットの種類であるマンカメラMCの撮影ショットタイプを判定するものである。
【0040】
<撮影情報−撮影ショット対応情報の詳細及び撮影ショットタイプの判定>
ここで、図3を参照して、撮影情報−撮影ショット対応情報の詳細及び撮影ショットタイプの判定について、具体例を用いて説明する(適宜図1及び図2参照)。図3は、撮影情報−撮影ショット対応情報の詳細及び撮影ショットタイプの判定において、番組制作者に提示される表示画面の例を示す図である。
【0041】
ここでは、番組制作者は、図示しない表示装置に表示された図3に示すようなGUI(Graphical User Interface)によって、マンカメラ撮影情報とマンカメラMCの撮影ショットの種類とを予め対応付けることとした。図3では、マンカメラの現在位置表示領域A1に、マンカメラ撮影情報入力手段21に入力されたマンカメラMCの撮影アングル(パン、チルト、フォーカス、ズーム)と、マンカメラMCの現在位置(横方向の位置:x、縦方向の位置:y、高さ方向の位置:z)とがそれぞれ表示されている。
【0042】
図3の撮影情報−撮影ショット対応情報表示領域A2には、撮影情報−撮影ショット対応情報記憶手段22が記憶する撮影情報−撮影ショット対応情報が表示されている。具体的には、撮影情報−撮影ショット対応情報表示領域A2には、パン、チルト、フォーカス、ズーム、横方向の位置、縦方向の位置、高さ方向の位置等のマンカメラ撮影情報の各要素の範囲が表示される撮影情報表示領域B2が含まれる。また、撮影情報−撮影ショット対応情報表示領域A2には、マンカメラ撮影情報入力手段21に入力されたマンカメラ撮影情報が、前記した各要素の範囲内であるときのマンカメラMCの撮影ショットの種類(例えば、「フリップ」)が表示される撮影ショット表示領域B1が含まれる。ここで、番組制作者は、マウス、キーボード等の入力手段によって、撮影情報表示領域B2におけるマンカメラ撮影情報の各要素の範囲と、撮影ショット表示領域B1におけるマンカメラの撮影ショットの種類とを入力できる。また、番組制作者は、範囲設定ボタンB3を押下すると、マンカメラの現在位置表示領域A1に表示されたマンカメラMCの撮影アングル又はマンカメラMCの現在位置の値に対する、撮影情報−撮影ショット対応情報表示領域A2に表示されたマンカメラ撮影情報の各要素の値の差が計算され、この差が各要素の値に反映される。つまり、図3の表示画面によって、番組制作者は、マンカメラMCの撮影ショットの種類毎に、マンカメラ撮影情報の各要素の範囲を設定し、マンカメラ撮影情報とマンカメラMCの撮影ショットの種類とを対応させることができる。
【0043】
マンカメラ撮影ショットタイプ判定手段23は、撮影情報−撮影ショット対応情報表示領域A2に表示されたマンカメラ撮影情報の各要素の範囲内に、マンカメラの現在位置表示領域A1に表示されたマンカメラMCの撮影アングルとカメラMCの現在位置とが収まる場合、撮影情報−撮影ショット対応情報表示領域A2に表示されたマンカメラの撮影ショットの種類であると判定する。ここで、撮影情報−撮影ショット対応情報表示領域A2において、番組制作者は、チェックボックスcbを外すことで、そのチェックボックスcbに対応するマンカメラ撮影情報の要素が、マンカメラMCの撮影ショットの種類の判定基準から除外させることができる。なお、マンカメラ撮影ショット認識装置6は、前記した方法とは別に、マンカメラMCが撮影している映像を画像処理して、マンカメラMCの撮影ショットタイプを判定しても良い。
【0044】
[ロボットカメラ・スイッチャ制御装置の構成]
以下、図4を参照して、図1のロボットカメラ・スイッチャ制御装置1の構成について詳細に説明する(適宜図1参照)。図4は、図1のロボットカメラ・スイッチャ制御装置の構成を示すブロック図である。図4に示すように、ロボットカメラ・スイッチャ制御装置1は、撮影ショットタイプ設定手段11と、撮影規則生成情報記憶手段12と、撮影規則生成手段13と、撮影規則設定手段14と、撮影ショット制御手段15と、スイッチャ制御手段16とを備える。
【0045】
撮影ショットタイプ設定手段11は、番組制作者によって、外部から入力されるマンカメラMCの撮影ショットの種類とロボットカメラの撮影ショットC1〜C3の種類とを設定する指令(設定指令)に基づいて、マンカメラMCが番組で撮影する撮影ショットの種類であるマンカメラMCの撮影ショットタイプと、ロボットカメラC1〜C3が番組で撮影する撮影ショットの種類であるロボットカメラC1〜C3の撮影ショットタイプとを予め設定するものである。また、撮影ショットタイプ設定手段11は、設定した撮影ショットタイプの情報を、撮影規則生成手段13及び撮影ショット制御手段15に出力する。
【0046】
ここで、図5を参照(適宜図4参照)して、撮影ショットタイプ設定手段11による撮影ショットタイプの設定について、具体例を用いて説明する。図5は、撮影ショットタイプの設定時において、番組制作者に提示される表示画面の例を模式的に示す模式図である。
【0047】
ここでは、番組制作者は、図示しない表示装置に表示された図5に示すようなGUIによって、撮影ショットタイプを設定する指令を入力することとした。なお、図5において、「1カメ」、「2カメ」、「3カメ」及び「4カメ」は、それぞれマンカメラMC、ロボットカメラC1、C2、C3を示す。これらのロボットカメラC1〜C3には予め設定可能な複数の種類の撮影ショットが割り当てられ、さらに、優先順位が設定されている。図5では、撮影ショットタイプ表示領域R1〜R4に、各々のマンカメラMC及びロボットカメラC1〜C3において設定可能な撮影ショットが表示されている。例えば、ロボットカメラC1(1カメ)には、「フリップ込2」(フリップFと話者P2の映像)、「スクリーン込2」(情報画スクリーンSCと話者P2の映像)、「バストショット2」(話者P2の胸から上の映像)及び「越し2」(話者P1の背後から撮影した話者P2の映像)の4種類の撮影ショットが割り当てられ、これらの撮影ショットが撮影ショットタイプ表示領域R1に優先順位の高い順に表示されている。
【0048】
そして、番組制作者は、スタジオ内の配置に合う撮影ショットタイプを選択する。このとき、番組制作者は、図5に示す撮影ショットタイプ表示領域R1〜R4に表示された撮影ショットのチェックボックスcbを図示しないマウス等によってクリックしてチェックを付加することで、選択した撮影ショットタイプを設定する指令を入力することができる。図5は、例えば、マンカメラMCに、「フリップ込2」及び「バストショット2」の2種類の撮影ショットを設定した場合を示している。このようにして、番組制作者は、すべてのマンカメラMC及びロボットカメラC1〜C3について、番組で撮影する撮影ショットタイプを設定する。そして、番組制作者によって入力された指令に基づいて、撮影ショットタイプ設定手段11は、選択された撮影ショットタイプをマンカメラMC及びロボットカメラC1〜C3毎に設定する。
【0049】
図4に戻って説明を続ける。撮影規則生成情報記憶手段(記憶装置)12は、後記する撮影規則生成手段13において撮影規則を生成するための撮影規則生成情報を記憶するもので、ハードディスク等の一般的な記憶手段によって構成される。ここで、撮影規則生成情報記憶手段12は、撮影規則生成情報としてイベント撮影規則生成情報、スイッチング撮影規則生成情報及び協調撮影規則生成情報を記憶することとした。
【0050】
ここで、図6を参照して、撮影規則生成情報について具体例を用いて説明する(適宜図4参照)。図6は、撮影規則生成情報を説明するための説明図である。ここでは、撮影規則生成情報記憶手段12には、図6に示す情報が記憶されていることとする。図6に示す表の各行には、行の番号とイベントと、イベント後の撮影ショット(切替ショット)とを対応させた情報が示されている。
【0051】
イベント撮影規則生成情報は、イベントと、ロボットカメラC1〜C3の撮影ショットタイプと、切替ショットとを対応させる情報である。ここで、図6の表の番号[1]〜[4]の行に示す情報は、イベント撮影規則生成情報の一部であり、イベントと、切替ショットとを対応させる情報である。例えば、図6の番号[1]の行では、フリップFが提示されたことを示すイベントに、切替ショットとして「フリップ」(フリップFのみを撮影した映像)の撮影ショットが対応付けられている。図6の表の番号[1]〜[4]の行に示す情報以外にも、例えば、情報画スクリーンSCの提示及び除去や、小物Oの提示及び除去、話者P1、P2の喋りの開始及び終了等のイベントにそれぞれ切替ショットを対応させる情報を撮影規則生成情報記憶手段12に記憶することとしてもよい。
【0052】
なお、図6に示す表の番号[4]の行における切替ショットの「最適ショット」は、撮影ショットタイプ設定手段11において設定された撮影ショットタイプのうち、選択可能なもので最も優先順位の高い撮影ショットを示す。このとき、例えば、他のマンカメラMC及びロボットカメラC1〜C3が撮影している撮影ショットと同じ撮影ショットや、フリップFが提示されていないときのフリップショットは選択不可能である。
【0053】
さらに、撮影規則生成情報記憶手段12には、以下の[a]〜[d]の情報が記憶されていることとする。この情報は、図6の表の番号[1]〜[4]の行に示す情報のそれぞれと撮影ショットタイプとを対応させるものであり、この情報と図6の表の番号[1]〜[4]の行に示す情報とを、イベント撮影規則生成情報とした。
【0054】
[a]:撮影ショットタイプに「フリップ」が設定されているロボットカメラC1〜C3には、図6の表の番号[1]及び[4]の行を撮影規則として生成する。
[b]:[a]に該当しないロボットカメラC1〜C3で、撮影ショットタイプに「フリップ込2」が設定されているロボットカメラC1〜C3には、図6の表の番号[2]及び[4]の行を撮影規則として生成する。
[c]:[a]及び[b]に該当しないロボットカメラC1〜C3で、撮影ショットタイプに「フリップ込1」が設定されているロボットカメラC1〜C3には、図6の表の番号[3]及び[4]の行を撮影規則として生成する。
[d]:情報画スクリーンSC、小物Oについても[a]〜[c]と同様の処理を行う。ただし、複数のロボットカメラC1〜C3に同じ撮影規則を生成せず、ロボットカメラC2、ロボットカメラC3、ロボットカメラC1の順に優先的に生成する。
【0055】
スイッチング撮影規則生成情報は、マンカメラMC及びロボットカメラC1〜C3の撮影ショットと、この撮影ショットの切替の条件となるイベントと、切替ショット(他の撮影ショット)と、ロボットカメラC1〜C3の撮影ショットタイプとを対応させる情報である。ここで、図6の表の番号[5]の行に示す情報は、スイッチング撮影規則生成情報の一部であり、ある撮影ショットのオンエアが解除されるイベントの情報と、オンエア解除後の切替ショットとを対応させる情報である。図6の番号[5]の行では、あるマンカメラMC及びロボットカメラC1〜C3の「越し」(「越し1」及び「越し2」)、「ドリー」、「ズームイン」および「クレーン」の何れかの撮影ショットの映像がオンエアされている状態からオンエアが解除されるイベントに、切替ショットとして「最適ショット」の撮影ショットが対応付けられている。ここで、オンエアは、スイッチャSWから映像が出力されることを示す。
【0056】
さらに、撮影規則生成情報記憶手段12には、以下の[e]の情報が記憶されていることとする。この情報は、図6の表の番号[5]の行に示す情報と撮影ショットタイプとを対応させるものであり、この情報と図6の表の番号[5]の行に示す情報とを、スイッチング撮影規則生成情報とした。
【0057】
[e]:撮影ショットタイプに「越し」、「ドリー」、「ズームイン」および「クレーン」の何れかが設定されているロボットカメラC1〜C3には、図6の表の番号[5]の行を撮影規則として生成する。
【0058】
協調撮影規則生成情報は、あるマンカメラMC及びロボットカメラC1〜C3の撮影ショットと、撮影ショットタイプと、他のロボットカメラC1〜C3と、撮影ショットタイプとを対応させる情報である。ここで、図6の表の番号[6]及び[7]の行に示す情報は、協調撮影規則生成情報の一部であり、マンカメラMC及びロボットカメラC1〜C3の種類、切り替わり前後の撮影ショットもしくはオンエアされた撮影ショット、及び、撮影ショットの切替もしくはオンエアのイベントの情報と、このイベント後に撮影ショットが切り替えられる他のロボットカメラC1〜C3の種類、及び、切り替わり前後の撮影ショットの情報とを対応させる情報である。例えば、図6の番号[6]の行では、あるマンカメラMC及びロボットカメラC1〜C3の「ツーショット」の撮影ショットがオンエアされるイベントに、他のロボットカメラC1〜C3の撮影ショットを「越し」(「越し1」及び「越し2」)から「最適ショット」に切り替わることが対応付けられている。ここで、「カメラX」は任意のマンカメラMC及びロボットカメラC1〜C3、「カメラY」は「カメラX」以外のロボットカメラC1〜C3を示す。
【0059】
さらに、撮影規則生成情報記憶手段12には、以下の[f]、[g]の情報が記憶されていることとする。この情報は、図6の表の番号[6]及び[7]の行に示す情報のそれぞれと撮影ショットタイプとを対応させるものであり、この情報と図6の表の番号[6]及び[7]の行に示す情報とを、協調撮影規則生成情報とした。
【0060】
[f]:あるマンカメラMC及びロボットカメラC1〜C3の撮影ショットタイプに「ツーショット」が、他のロボットカメラC1〜C3の撮影ショットタイプに「越し」が設定されている場合には、図6の表の番号[6]の行を撮影規則として生成する。
[g]:異なるマンカメラMC及びロボットカメラC1〜C3に同じ撮影ショットタイプが設定されている場合には、図6の表の番号[7]の行を撮影規則として生成する。
【0061】
撮影規則生成情報記憶手段12に記憶された撮影規則生成情報は、後記する撮影規則生成手段13によって撮影規則を生成する際に参照されて用いられる。ここでは、撮影規則生成情報は、図6の表の番号[1]〜[7]の行に示す情報と、当該情報のそれぞれと撮影ショットタイプとを対応させる[a]〜[g]の情報とからなることとし、撮影規則生成手段13によって、この[a]〜[g]に示される撮影ショットタイプが、撮影ショットタイプ設定手段11によって設定された撮影ショットタイプに含まれる場合に、このロボットカメラC1〜C3に対して、図6の表の番号[1]〜[7]のうちの適合する行に示す情報を撮影規則として生成することとした。
【0062】
なお、ここでは、図6の表と[a]〜[g]の情報とからなる撮影規則生成情報について説明したが、例えば、図6の表の番号[1]〜[7]の行の情報のそれぞれに含まれる撮影ショット(切り替えショットを含む)が撮影ショットタイプを示すこととし、後記する撮影規則生成手段13によって、この撮影ショットを撮影ショットタイプに含むロボットカメラC1〜C3に対して、図6の表の適合する行を撮影規則として生成することとしてもよい。
【0063】
また、ここでは、マンカメラMC及びロボットカメラC1〜C3の切替もしくはオンエア前後の撮影ショットと、他のロボットカメラC1〜C3の切替前後の撮影ショットとを対応させるイベント撮影規則生成情報について説明したが、例えば、あるマンカメラMC及びロボットカメラC1〜C3がある撮影ショットに切り替わった際に、他のロボットカメラC1〜C3を、指定した撮影ショットに切り替える場合に特定して、ロボットカメラC1〜C3の種類及び切り替わり後の撮影ショットと、ロボットカメラC1〜C3の種類及び切り替わり後の撮影ショットのみを対応させるものとしてもよい。この撮影規則生成情報は、例えば、過去のカメラマンによる撮影におけるカメラの撮影ショットの選択を参考にして生成することができる。
【0064】
図4に戻り説明を続ける。また、撮影規則生成情報記憶手段12は、カメラマンを含めたマンカメラMCの形状と大きさと、ロボットカメラC1〜C3の形状と大きさとを含むカメラ形状・大きさ情報を予め記憶する。例えば、カメラ形状・大きさ情報は、カメラマンを含めたマンカメラMCの形状及びロボットカメラC1〜C3の形状を、微小な三角形に分割して表現し(ポリゴン処理)、各三角形の頂点をこれらの形状としても良い。この場合、カメラ形状・大きさ情報は、前記した各三角形の角頂点間の距離(長さ)を、カメラマンを含めたマンカメラMCの大きさ及びロボットカメラC1〜C3の大きさとしても良い。また、後記する占有領域の演算を簡易にするため、カメラ形状・大きさ情報は、カメラマンを含めたマンカメラMCの形状及びロボットカメラC1〜C3の形状を、四角形、円筒形等の簡易な形状として扱っても良い。
【0065】
撮影規則生成手段13は、撮影規則生成情報記憶手段12が記憶する撮影規則生成情報を参照し、撮影ショットタイプ設定手段11が設定したマンカメラMCの撮影ショットタイプとロボットカメラC1〜C3の撮影ショットタイプとに基づいて、イベントとマンカメラMCの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成するものである。ここで生成された撮影規則は、撮影規則設定手段14に出力される。
【0066】
ここで、撮影規則生成情報は、マンカメラMC及びロボットカメラC1〜C3の撮影ショットタイプの情報を含む。撮影規則生成手段13は、撮影規則生成情報によって示されるロボットカメラC1〜C3の撮影ショットタイプが、撮影ショットタイプ設定手段11によって設定されたロボットカメラC1〜C3の撮影ショットタイプに含まれる場合に、このロボットカメラC1〜C3に対して当該撮影規則生成情報によって示される撮影規則を生成する。そして、撮影ショットタイプ設定手段11によって設定されたロボットカメラC1〜C3の撮影ショットタイプが、マンカメラMCの撮影ショットタイプ、スタジオの配置や話者の人数等に合うように番組制作者によって選択されているため、撮影規則生成手段13によって生成される撮影規則は、マンカメラMCの撮影ショットタイプ、スタジオの配置や話者の人数等の撮影条件に合うものとなる。これによって、撮影規則生成手段13は、番組ごとに撮影条件が変化してもそれに応じた撮影規則を自動で生成でき、撮影条件が変更されても番組制作者は撮影ショットタイプの設定のみを行えばよく、その都度撮影条件にあうイベントと切替ショットとを対応させる必要がなくなる。
【0067】
撮影規則設定手段14は、撮影規則生成手段13によって生成された撮影規則を、外部から入力された番組制作者からの指令に基づいて修正するものである。なお、番組制作者からの修正の指令が入力されない場合には、撮影規則設定手段14は、撮影規則生成手段13によって生成された撮影規則をそのまま設定する。ここで設定された撮影規則は、撮影ショット制御手段15に出力される。
【0068】
ここで、図7を参照して、撮影規則生成手段13によって生成された撮影規則と、撮影規則設定手段14による撮影規則の修正について、具体例を用いて説明する(適宜図4参照)。図7は、撮影規則の修正時において、番組制作者に提示される表示画面の例を示す図、(a)は、あるロボットカメラのイベント撮影規則を提示した表示画面の例を示す図、(b)は、協調撮影規則を提示した表示画面の例を示す図である。
【0069】
ここでは、撮影規則設定手段14は、図7に示すようなGUIによって、番組制作者からの撮影規則の修正指令を入力することとした。例えば、撮影規則生成手段13によって、イベント撮影規則生成情報に基づいてロボットカメラC1について、図7(a)の行D1に示すような撮影規則(イベント撮影規則)が生成されたとする。ここで、図7(a)のイベント撮影規則の一番上の行D1は、フリップFが提示されたというイベント情報が入力されたときに、後記する撮影ショット制御手段15がロボットカメラC1に「フリップ」の撮影ショットを撮影する指令を出力する撮影規則を示している。
【0070】
また、例えば、撮影規則生成手段13によって、スイッチング撮影規則生成情報に基づいて、図7(a)の行D2に示すような撮影規則(スイッチング撮影規則)が生成されたとする。ここで、このスイッチング撮影規則は、ロボットカメラC1で撮影された「越し2」の映像がスイッチャSWから出力されている状態において、スイッチャSWから他のロボットカメラの映像を出力する指令が、後記するスイッチャ制御手段16によってスイッチャSWに出力されると、撮影ショット制御手段15が、ロボットカメラC1に「最適ショット」の撮影ショットを撮影する指令を出力する撮影規則を示している。
【0071】
また、例えば、撮影規則生成手段13によって、協調撮影規則生成情報に基づいて、図7(b)に示すような撮影規則(協調撮影規則)が生成されたとする。ここで、図7(b)の協調撮影規則の一番上の行D3は、ロボットカメラC1が「越し1」を撮影しているときに、ロボットカメラC3で撮影された「ツーショット」の映像をスイッチャSWにおいて出力する指令が、後記するスイッチャ制御手段16によって出力されると、撮影ショット制御手段15がロボットカメラC1に「最適ショット」の撮影ショットを撮影する指令を出力する撮影規則を示している。
【0072】
さらに、例えば、図7(b)の協調撮影規則の一番下の行D4は、マンカメラMCが「スクリーン込2」を撮影しているときに、カメラマンがマンカメラMCで別の撮影ショットから「スクリーン込2」を撮影すると、ロボットカメラC1が「スクリーン込2」から「最適ショット」に撮影ショットを撮影する指令を出力する撮影規則を示している。
【0073】
そして、番組制作者は図示しないマウス等によって、図7(a)及び(b)の表示画面のプルダウンメニューを操作することで、撮影規則を修正する指令を撮影規則設定手段14に入力することができる。そして、撮影規則設定手段14は、番組制作者によって入力された指令に基づいて撮影規則を修正する。
【0074】
図4に戻って説明を続ける。撮影ショット制御手段(撮影ショット決定手段)15は、撮影規則生成手段14が生成した撮影規則を参照し、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置6から入力されるマンカメラMCの撮影ショットタイプと、マンカメラMCから入力される現在位置とに基づいて、ロボットカメラが撮影する撮影ショットC1〜C3を決定するものである。ここで決定された撮影ショットの映像を撮影する指令(撮影ショット制御信号)は、スイッチングハブSHを介してロボットカメラC1〜C3に出力される。
【0075】
また、撮影ショット制御手段15は、撮影規則設定手段14において撮影規則が設定されるごとに、ロボットカメラC1〜C3に対して「最適ショット」の撮影の指令を出力して、撮影ショットを初期化することとした。さらに、撮影ショット制御手段15は、例えば、ズームインのような動きを伴う撮影ショットを決定した場合には、このロボットカメラC1〜C3を待機させ、番組制作者によって当該撮影ショットをスイッチャSWから出力させる指令が後記するスイッチャ制御手段16に入力されたときに、この撮影ショットを撮影する指令を出力することとした。これによって、撮影ショット制御手段15は、ロボットカメラC1〜C3に、スイッチャSWからの映像の出力開始とともに撮影を開始させることができる。そのため、ズームイン等の動きの途中で映像がスイッチャSWから出力開始されることなく、スイッチャSWからの出力開始と撮影開始とを一致させた映像がスイッチャSWから出力される。
【0076】
なお、あるロボットカメラC1〜C3が決定した撮影ショット位置に移動したときに、他のロボットカメラC1〜C3と衝突し、又は、他のロボットカメラC1〜C3が撮影する映像に映り込む可能性がある。このため、撮影ショット決定手段15は、後記する切替情報に基づいて、スイッチャSWが映像を出力しているロボットカメラC1〜C3を判定する。そして、撮影ショット決定手段15は、撮影ショットを決定したあるロボットカメラC1〜C3の映像をスイッチャSWが出力していない場合、このロボットカメラC1〜C3の撮影ショットを、例えば、「最適ショット」に再決定する。一方、撮影ショット決定手段15は、撮影ショットを決定したあるロボットカメラC1〜C3の映像をスイッチャSWが出力している場合、このロボットカメラC1〜C3と衝突し又はこのロボットカメラC1〜C3が撮影する映像に映り込む他のロボットカメラC1〜C3の撮影ショットを、例えば、「最適ショット」に再決定する。
【0077】
ここで、図8を参照して、撮影ショット制御手段15の詳細について説明する(適宜図4参照)。図8は、図4の撮影ショット制御手段の構成を示すブロック図である。図8に示すように、撮影ショット制御手段15は、ロボットカメラ位置設定部151と、カメラ占有領域算出部152と、カメラ衝突判定部153と、移動指示通知部154とを備える。
【0078】
ロボットカメラ位置設定部151は、番組制作者が入力するロボットカメラC1〜C3の撮影ショットとロボットカメラC1〜C3の位置とを対応させる指令に基づいて、撮影ショット制御手段15が決定したロボットカメラC1〜C3の撮影ショットに応じたロボットカメラC1〜C3の移動後位置を設定するものである。
【0079】
ここでは、ロボットカメラ位置設定部151は、図9に示すようなGUIによって、撮影ショットを対応させる指令を入力することとした。図9に示す表示画面の例において、マンカメラの現在位置表示領域A1に、マンカメラ撮影情報入力手段21に入力されたマンカメラMCの撮影アングル(パン、チルト、フォーカス、ズーム)と、マンカメラMCの現在位置(横方向の位置:x、縦方向の位置:y、高さ方向の位置:z)とがそれぞれ表示されている。また、撮影ショット表示領域U1内の撮影ショットタイプ表示領域U11〜U14に、それぞれ撮影ショットタイプ設定手段11において設定されたマンカメラMC及びロボットカメラC1〜C3の撮影ショットタイプを示すサムネールS11、S12、S21・・・が表示される。
【0080】
そして、番組制作者は、図示しない入力手段によって、ロボットカメラC1〜C3の位置を設定する。また、番組制作者は、ショットメモリボタンV1を押下し、サムネールS11、S12、S21・・・の中から割り当てたいサムネールを選択(クリック等)する。これによって、ロボットカメラ位置設定部151は、ショットメモリ作業、及び、ロボットカメラC1〜C3の撮影ショットとロボットカメラC1〜C3の位置とを対応付けを終了する。
【0081】
図8に戻り説明を続ける。カメラ占有領域算出部152は、撮影規則生成情報記憶手段12が記憶するカメラ形状・大きさ情報を参照し、マンカメラMCの現在位置でのマンカメラMCが占有する領域を示す占有領域と、ロボットカメラC1〜C3の移動後位置でのロボットカメラC1〜C3が占有する領域を示す占有領域とを算出するものである。カメラ占有領域算出部152は、例えば、マンカメラMCの現在位置(3次元位置)を基準に、カメラ形状・大きさ情報に設定されたマンカメラMCの大きさで、マンカメラMCの形状をポリゴンで表現し、マンカメラMCの占有領域を算出する。また、カメラ占有領域算出部152は、例えば、ロボットカメラC1〜C3の移動後位置を基準に、カメラ形状・大きさ情報に設定されたロボットカメラC1〜C3の大きさで、ロボットカメラC1〜C3の形状をポリゴンで表現し、ロボットカメラC1〜C3の占有領域を算出する。
【0082】
カメラ衝突判定部153は、カメラ占有範囲算出部152が算出したロボットカメラC1〜C3の占有領域とマンカメラMCの占有領域とを比較してロボットカメラC1〜C3とマンカメラMCとが衝突するか否かを判定するものである。また、カメラ衝突判定部153は、ロボットカメラC1〜C3同士の占有領域を比較してロボットカメラC1〜C3同士が衝突するか否かを判定する。カメラ衝突判定部153は、例えば、ポリゴンで表現したマンカメラMCの占有領域及びロボットカメラC1〜C3が重なる場合に、ロボットカメラC1〜C3同士又はロボットカメラC1〜C3とマンカメラMCとが衝突すると判定する。なお、カメラ衝突判定部153は、これらの判定結果に応じて、後記する衝突メッセージ又は映り込みメッセージを生成して出力する。
【0083】
また、カメラ衝突判定部153は、ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込むか否かと、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむか否かとを判定する。ここで、カメラ衝突判定部153は、例えば、マンカメラMC及びロボットカメラC1〜C3の撮影ショットと形状と大きさとが分かるので、下記の式(1)によって、ロボットカメラC1〜C3及びマンカメラMCの画界を算出し、この画界に他のロボットカメラC1〜C3又はマンカメラMCが映り込むか否かを判定する。
【0084】
y=y’×l/f・・・式(1)
なお、式(1)において、yはマンカメラMC及びロボットカメラC1〜C3の画界、y’はマンカメラMC及びロボットカメラC1〜C3の撮影ショットのイメージサイズ、lはマンカメラMC及びロボットカメラC1〜C3のレンズ主点と被写体との距離、及び、fはマンカメラMC及びロボットカメラC1〜C3の焦点距離である。
【0085】
移動指示通知部154は、カメラ衝突判定部153によって、ロボットカメラC1〜C3とマンカメラMCとが衝突すると判定された場合、ロボットカメラC1〜C3が撮影する映像にマンカメラMCが含まれると判定された場合、又は、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむと判定された場合、マンカメラMCへ移動指示を通知するものである。この移動指示は、スイッチングハブSHを介して、マンカメラMCに出力される。例えば、移動指示通知部154は、入力された切替実施情報に基づいて、スイッチャSWがマンカメラMCの映像を出力しているか否かを判定する。そして、スイッチャSWがマンカメラMCの映像を出力していないと判定された場合、移動指示通知部154は、カメラ衝突判定部153からの衝突メッセージ又は映り込みメッセージに応じて、マンカメラMCへ移動指示を通知する。
【0086】
なお、スイッチャSWがマンカメラMCの映像を出力していると判定された場合、移動指示通知部154がマンカメラMCへ移動指示を通知しても、カメラマンがマンカメラMCを移動させることができない。このため、撮影ショット決定手段15は、スイッチャSWがマンカメラMCの映像を出力していると判定され、かつ、マンカメラMCとロボットカメラC1〜C3が衝突すると判定された場合、又は、スイッチャSWがマンカメラMCの映像を出力していると判定され、かつ、ロボットカメラC1〜C3が撮影する映像にマンカメラMCが含まれると判定された場合、マンカメラMCに衝突又は映り込むロボットカメラC1〜C3の撮影ショットを、例えば、「最適ショット」に再決定する。
【0087】
図4に戻って説明を続ける。スイッチャ制御手段16は、番組制作者によって外部から入力された、スイッチャSWから出力する映像の切替指令に基づいて、スイッチャSWの切替を制御するものである。ここで生成されたスイッチャSWの切替を制御する指令(切替制御信号)は、スイッチングハブSHを介してスイッチャSWに出力される。また、スイッチャSWが出力するマンカメラMC及びロボットカメラC1〜C3の撮影ショットについての切替実施情報が、撮影ショット制御手段15に入力される。
【0088】
ここで、図9を参照して、番組制作者によるスイッチャSWから出力する映像の切替について、具体例を用いて説明する(適宜図4参照)。図9に示すように、マンカメラMC及びロボットカメラC1〜C3のそれぞれは、サムネールS11、S21、S31、S41の撮影ショットを撮影している。そして、番組制作者は、話者(P1、P2)の行うフリップFや小物Oの提示及び除去、情報画スクリーンSCの情報画の切り替わり、話者(P1、P2)の切り替わり、スイッチャSWから出力される映像の切り替わり、マンカメラMC及びロボットカメラC1〜C3の撮影ショットの切り替わり等のスタジオの状況変化に合わせて、スイッチャSWの切替を制御するための指令をスイッチャ制御手段16に入力する。
【0089】
このとき、番組制作者は、図示しないマウス等でクリックしたり図示しないタッチパネルをタッチしたりして、図9におけるスイッチングパネル表示領域U2内に表示されたスイッチングパネルT1〜T4を指定することで、対応するマンカメラMC及びロボットカメラC1〜C3の映像にスイッチャSWの出力を切り替えさせる指令をスイッチャ制御手段16に入力することができる。ここで、スイッチングパネルT1〜T4のそれぞれは、マンカメラMC及びロボットカメラC1〜C3に対応する。そして、スイッチャ制御手段16は、番組制作者によって入力された指令に基づいて、選択されたマンカメラMC及びロボットカメラC1〜C3の映像に出力を切り替える切替制御信号をスイッチャSWに出力する。なお、スイッチャSWの制御は、前記したタッチパネルに限られず、例えば、スイッチャSWからタリー信号を取得することで、スイッチャ専用操作器(不図示)を用いて行なうこともできる。
【0090】
以上のように、ロボットカメラ・スイッチャ制御装置1は、スタジオの状況変化やマンカメラMCの撮影ショットに応じて、各々のロボットカメラC1〜C3の撮影ショットを制御することができる。これによって、ロボットカメラとマンカメラとが協調してテレビ番組の撮影を行うことができる。また、ロボットカメラ・スイッチャ制御装置1は、移動指示をマンカメラMCに通知することで、ロボットカメラC1〜C3とマンカメラMCとが衝突する事態、ロボットカメラC1〜C3が撮影する映像にマンカメラMCが映り込む事態を防止できるため、様々なテレビ番組の自動撮影に適用することができる。さらに、ロボットカメラ・スイッチャ制御装置1は、放送中の映像を撮影しているロボットカメラC1〜C3の撮影ショットを再決定してしまう事態を防止できるため、番組制作者が意図しない撮影ショットでロボットカメラC1〜C3が映像を撮影することを防止し、様々なテレビ番組の自動撮影に適用することができる。
【0091】
なお、ロボットカメラ・スイッチャ制御装置1は、コンピュータにおいて各手段を各機能プログラムとして実現することも可能であり、各機能プログラムを結合して、ロボットカメラ・スイッチャ制御プログラム(撮影ショット制御プログラム)として動作させることも可能である。
【0092】
なお、ロボットカメラ・スイッチャ制御装置1は、撮影ショット決定手段15によって、ロボットカメラC1〜C3同士の衝突や撮影する映像の映り込みを防止することとしたが、撮影規則生成手段13がロボットカメラC1〜C3同士の衝突や撮影する映像の映り込みを防止する撮影規則情報を生成することとしても良い。また、ロボットカメラC1〜C3の自動ポジショニング及び自動フレーミングの手法として、前記した文献(T.Tsuda,et al,"Intelligent Mobile Robot Camera",SMPTE Australia 2005-Conference and Exhibition,Session 4.4,July 2005)に記載の手法又はメモリーショット以外の手法を用いても良い。
【0093】
[ロボットカメラ・スイッチャ制御装置の動作]
以下、図10を参照して、図4のロボットカメラ・スイッチャ制御装置1の動作について詳細に説明する(適宜図4参照)。図10は、図4のロボットカメラ・スイッチャ制御装置の動作を示すフローチャートである。なお、図10、図11では、ロボットカメラをロボカメと略記し、マンカメラをマンカメと略記する。
【0094】
まず、ロボットカメラ・スイッチャ制御装置1は、撮影ショットタイプ設定手段11によって、外部から入力されるマンカメラMCの撮影ショットの種類とロボットカメラの撮影ショットC1〜C3の種類とを設定する指令に基づいて、マンカメラMCが番組で撮影する撮影ショットの種類であるマンカメラMCの撮影ショットタイプと、ロボットカメラC1〜C3が番組で撮影する撮影ショットの種類であるロボットカメラC1〜C3の撮影ショットタイプとを予め設定する(ステップS1)。
【0095】
ステップS1の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、撮影規則生成手段13によって、撮影規則生成情報記憶手段12が記憶する撮影規則生成情報を参照し、撮影ショットタイプ設定手段11が設定したマンカメラMCの撮影ショットタイプとロボットカメラC1〜C3の撮影ショットタイプとに基づいて、イベントとマンカメラMCの撮影ショットタイプと切替ショットとを対応させる撮影規則を生成する(ステップS2)。
【0096】
ステップS2の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、撮影規則設定手段14によって、撮影規則生成手段13によって生成された撮影規則を、外部から入力された番組制作者からの指令に基づいて修正する(ステップS3)。また、ロボットカメラ・スイッチャ制御装置1は、撮影ショット制御手段15によって、ロボットカメラC1〜C3とマンカメラMCとが衝突するか否かと、ロボットカメラC1〜C3同士が衝突するか否かと、ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込みむか否かと、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむか否かとを判定する(ステップS4)。なお、ステップS4における衝突及び映り込みの判定の動作の詳細は、後記する。
【0097】
ステップS4の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、撮影ショット制御手段15によって、撮影規則生成手段14が生成した撮影規則を参照し、外部から入力されるイベントの情報と、マンカメラ撮影ショット判定装置6から入力されるマンカメラMCの撮影ショットタイプとに基づいて、ロボットカメラが撮影する撮影ショットC1〜C3を決定する(ステップS5)。ここで、ロボットカメラ・スイッチャ制御装置1は、スイッチャ制御手段16によって、切替制御信号を出力してスイッチャSWの切替を制御し、撮影ショット制御手段15によって、撮影ショット制御信号をロボットカメラC1〜C3に出力する。
【0098】
<衝突及び映り込みの判定>
以下、図11を参照(適宜図4参照)して、衝突の判定及び映り込みの判定の動作について詳細に説明する。図11は、図10のステップS4における衝突及び映り込みの判定の動作を示すフローチャートである。
【0099】
まず、ロボットカメラ・スイッチャ制御装置1は、ロボットカメラ位置設定部151によって、番組制作者が入力するロボットカメラC1〜C3の撮影ショットとロボットカメラC1〜C3の位置とを対応させる指令に基づいて、撮影ショット制御手段15が決定したロボットカメラC1〜C3の撮影ショットに応じたロボットカメラC1〜C3の移動後位置を設定する(ステップS41)。
【0100】
ステップS41の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、カメラ占有領域算出部152によって、撮影規則生成情報記憶手段12が記憶するカメラ形状・大きさ情報を参照し、マンカメラMCの現在位置でのマンカメラMCが占有する領域を示す占有領域と、ロボットカメラC1〜C3の移動後位置でのロボットカメラC1〜C3が占有する領域を示す占有領域とを算出する(ステップS42)。
【0101】
ステップS42の処理に続いて、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、ロボットカメラC1〜C3とマンカメラMCとが衝突するか否かを判定する(ステップS43)。ロボットカメラC1〜C3とマンカメラMCとが衝突すると判定された場合(ステップS43でYes)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、衝突するロボットカメラC1〜C3とマンカメラMCとを一意に識別する識別子を含む衝突メッセージ(例えば、1カメ・2カメが衝突)を生成して出力し、衝突及び映り込みの判定の動作を終了する(ステップS44)。
【0102】
ロボットカメラC1〜C3とマンカメラMCとが衝突しないと判定された場合(ステップS43でNo)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、ロボットカメラC1〜C3同士が衝突するか否かを判定する(ステップS45)。ロボットカメラC1〜C3同士が衝突すると判定された場合(ステップS45でYes)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、衝突するロボットカメラC1〜C3同士の識別子を含む衝突メッセージ(例えば、2カメ・3カメが衝突)を生成して出力し、衝突及び映り込みの判定の動作を終了する(ステップS46)。
【0103】
ロボットカメラC1〜C3同士が衝突しないと判定された場合(ステップS45でNo)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込むか否かと、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむか否かとを判定する(ステップS47)。ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込むと判定された場合、又は、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込みむと判定された場合(ステップS47でYes)、ロボットカメラ・スイッチャ制御装置1は、カメラ衝突判定部153によって、映り込むマンカメラMC又はロボットカメラC1〜C3の識別子を含む映り込みメッセージ(例えば、2カメが3カメに映り込み)を生成して出力し、衝突及び映り込みの判定の動作を終了する(ステップS48)。
【0104】
一方、ロボットカメラC1〜C3が撮影する映像に他のロボットカメラC1〜C3又はマンカメラMCが映り込まないと判定された場合、及び、マンカメラMCが撮影する映像にロボットカメラC1〜C3が映り込まないと判定された場合(ステップS47でNo)、ロボットカメラ・スイッチャ制御装置1は、衝突メッセージ及び映り込みメッセージを生成せずに、衝突及び映り込みの判定の動作を終了する。
【図面の簡単な説明】
【0105】
【図1】本発明におけるロボットカメラ・スイッチャ制御装置を備える自動撮影システムの構成を模式的に示した模式図である。
【図2】図1のマンカメラ撮影ショット認識装置6の構成を示すブロック図である。
【図3】撮影情報−撮影ショット対応情報の詳細及び撮影ショットタイプの判定において、番組制作者に提示される表示画面の例を示す図である。
【図4】図1のロボットカメラ・スイッチャ制御装置の構成を示すブロック図である。
【図5】撮影ショットタイプの設定時において、番組制作者に提示される表示画面の例を模式的に示す模式図である。
【図6】撮影規則生成情報を説明するための説明図である。
【図7】撮影規則の修正時において、番組制作者に提示される表示画面の例を示す図、(a)は、あるロボットカメラのイベント撮影規則を提示した表示画面の例を示す図、(b)は、協調撮影規則を提示した表示画面の例を示す図である。
【図8】図4の撮影ショット制御手段の構成を示すブロック図である。
【図9】ロボットカメラの位置設定時において、番組制作者に提示される表示画面の例を示す図である。
【図10】図4のロボットカメラ・スイッチャ制御装置の動作を示すフローチャートである。
【図11】図10のステップS4における衝突及び映り込みの判定の動作を示すフローチャートである。
【符号の説明】
【0106】
1 ロボットカメラ・スイッチャ制御装置(撮影ショット制御装置)
11 撮影ショットタイプ設定手段
12 撮影規則生成情報記憶手段
13 撮影規則生成手段
14 撮影規則設定手段
15 撮影ショット制御手段
16 スイッチャ制御手段
21 マンカメラ撮影情報入力手段
22 撮影情報−撮影ショット対応情報記憶手段
23 マンカメラ撮影ショットタイプ判定手段
6 マンカメラ撮影ショット認識装置
C1〜C3 ロボットカメラ
MC マンカメラ
S 自動撮影システム(協調撮影システム)
【特許請求の範囲】
【請求項1】
マンカメラの撮影ショットの種類を判定するマンカメラ撮影ショット判定装置に接続され、1以上のロボットカメラが番組を撮影する映像と前記マンカメラが前記番組を撮影する映像とを切り替えるスイッチャを制御すると共に、前記ロボットカメラの撮影ショットを制御する撮影ショット制御装置であって、
外部から入力される前記マンカメラの撮影ショットの種類と前記ロボットカメラの撮影ショットの種類とを設定する指令に基づいて、前記マンカメラが前記番組で撮影する前記撮影ショットの種類である前記マンカメラの撮影ショットタイプと、前記ロボットカメラが前記番組で撮影する前記撮影ショットの種類である前記ロボットカメラの撮影ショットタイプとを予め設定する撮影ショットタイプ設定手段と、
前記番組の状況変化を示すイベントと、前記マンカメラの撮影ショットタイプと、前記ロボットカメラの撮影ショットタイプと、前記イベント後の前記ロボットカメラの撮影ショットである切替ショットとを対応させる撮影規則生成情報を予め記憶する記憶手段と、
前記撮影規則生成情報を参照し、前記撮影ショットタイプ設定手段が設定した前記マンカメラの撮影ショットタイプと前記ロボットカメラの撮影ショットタイプとに基づいて、前記イベントと前記マンカメラの撮影ショットタイプと前記切替ショットとを対応させる撮影規則を生成する撮影規則生成手段と、
外部から入力される前記ロボットカメラ又は前記マンカメラの何れかの映像に出力を切り替える指令に基づいて、前記スイッチャの出力を前記ロボットカメラが撮影する映像又は前記マンカメラが撮影する映像の何れかに切り替えるスイッチャ制御手段と、
前記撮影規則生成手段が生成した撮影規則を参照し、外部から入力される前記イベントの情報と、前記マンカメラ撮影ショット判定装置から入力される前記マンカメラの撮影ショットタイプとに基づいて、前記ロボットカメラが撮影する撮影ショットを決定する撮影ショット決定手段と、
を備えることを特徴とする撮影ショット制御装置。
【請求項2】
前記記憶手段は、カメラマンを含めた前記マンカメラの形状と大きさと、前記ロボットカメラの形状と大きさとを含むカメラ形状・大きさ情報を予め記憶し、
前記撮影ショット決定手段は、前記マンカメラから前記マンカメラの現在位置が入力され、
外部から入力される前記ロボットカメラの撮影ショットと前記ロボットカメラの位置とを対応させる指令に基づいて、決定した前記ロボットカメラの撮影ショットに応じた前記ロボットカメラの移動後位置を設定するロボットカメラ位置設定部と、
前記カメラ形状・大きさ情報を参照し、前記マンカメラの現在位置での前記マンカメラが占有する領域を示す占有領域と、前記ロボットカメラの移動後位置での前記ロボットカメラが占有する領域を示す占有領域とを算出するカメラ占有領域算出部と、
前記カメラ占有範囲算出部が算出した前記ロボットカメラの占有領域と前記マンカメラの占有領域とを比較して、当該ロボットカメラと当該マンカメラとが衝突するか否かと、当該ロボットカメラが撮影する映像に当該マンカメラが映り込むか否かと、当該マンカメラが撮影する映像に当該ロボットカメラが映り込むか否かとを判定するカメラ衝突判定部と、
前記ロボットカメラと前記マンカメラとが衝突すると判定された場合、前記ロボットカメラが撮影する映像に前記マンカメラが含まれると判定された場合、又は、前記マンカメラが撮影する映像に前記ロボットカメラが映り込むと判定された場合、前記マンカメラへ移動指示を通知する移動指示通知部と、
を備えることを特徴とする請求項1に記載の撮影ショット制御装置。
【請求項3】
前記ロボットカメラが複数の場合、
前記カメラ占有領域算出部は、前記ロボットカメラ毎に占有領域を算出し、
前記カメラ衝突判定部は、前記ロボットカメラ同士の占有領域を比較して前記ロボットカメラ同士が衝突するか否かを判定すると共に、前記ロボットカメラが撮影する映像に他の前記ロボットカメラが映り込むか否かを判定し、
前記撮影ショット決定手段は、前記ロボットカメラ同士が衝突すると判定された場合、又は、前記ロボットカメラが撮影する映像に他の前記ロボットカメラが含まれると判定された場合、前記スイッチャが映像を出力していない前記ロボットカメラの撮影ショットを再決定することを特徴とする請求項2に記載の撮影ショット制御装置。
【請求項4】
請求項1から請求項3の何れか一項に記載の撮影ショット制御装置と、マンカメラの撮影ショットの種類を判定するマンカメラ撮影ショット判定装置と、を含む協調撮影システムであって、
前記マンカメラ撮影ショット判定装置が、
前記マンカメラから、当該マンカメラの撮影アングルと当該マンカメラの現在位置とを含むマンカメラ撮影情報が入力されるマンカメラ撮影情報入力手段と、
前記マンカメラ撮影情報と前記マンカメラの撮影ショットの種類とを対応させた撮影情報−撮影ショット対応情報を予め記憶する撮影情報−撮影ショット対応情報記憶手段と、
前記撮影情報−撮影ショット対応情報を参照し、前記マンカメラ撮影情報入力手段に入力される前記マンカメラ撮影情報に応じて、前記マンカメラの撮影ショットの種類である前記マンカメラの撮影ショットタイプを判定するマンカメラ撮影ショットタイプ判定手段と、
を備えることを特徴とする協調撮影システム。
【請求項5】
マンカメラが撮影の撮影ショットの種類を判定するマンカメラ撮影ショット判定装置に接続され、番組の状況変化を示すイベントと、前記マンカメラの撮影ショットタイプと、ロボットカメラの撮影ショットタイプと、前記イベント後の前記ロボットカメラの撮影ショットである切替ショットとを対応させる撮影規則生成情報を予め記憶する記憶手段を備え、1以上の前記ロボットカメラが前記番組を撮影する映像と前記マンカメラが前記番組を撮影する映像とを切り替えるスイッチャを制御すると共に、前記ロボットカメラの撮影ショットを制御するために、コンピュータを、
外部から入力される前記マンカメラの撮影ショットの種類と前記ロボットカメラの撮影ショットの種類とを設定する指令に基づいて、前記マンカメラが前記番組で撮影する前記撮影ショットの種類である前記マンカメラの撮影ショットタイプと、前記ロボットカメラが前記番組で撮影する前記撮影ショットの種類である前記ロボットカメラの撮影ショットタイプとを予め設定する撮影ショットタイプ設定手段、
前記撮影規則生成情報を参照し、前記撮影ショットタイプ設定手段が設定した前記マンカメラの撮影ショットタイプと前記ロボットカメラの撮影ショットタイプとに基づいて、前記イベントと前記マンカメラの撮影ショットタイプと前記切替ショットとを対応させる撮影規則を生成する撮影規則生成手段、
外部から入力される前記ロボットカメラ又は前記マンカメラの何れかの映像に出力を切り替える指令に基づいて、前記スイッチャの出力を前記ロボットカメラが撮影する映像又は前記マンカメラが撮影する映像の何れかに切り替えるスイッチャ制御手段、
前記撮影規則生成手段が生成した撮影規則を参照し、外部から入力される前記イベントの情報と、前記マンカメラ撮影ショット判定装置から入力される前記マンカメラの撮影ショットタイプとに基づいて、前記ロボットカメラが撮影する撮影ショットを決定する撮影ショット決定手段、
として機能させることを特徴とする撮影ショット制御プログラム。
【請求項1】
マンカメラの撮影ショットの種類を判定するマンカメラ撮影ショット判定装置に接続され、1以上のロボットカメラが番組を撮影する映像と前記マンカメラが前記番組を撮影する映像とを切り替えるスイッチャを制御すると共に、前記ロボットカメラの撮影ショットを制御する撮影ショット制御装置であって、
外部から入力される前記マンカメラの撮影ショットの種類と前記ロボットカメラの撮影ショットの種類とを設定する指令に基づいて、前記マンカメラが前記番組で撮影する前記撮影ショットの種類である前記マンカメラの撮影ショットタイプと、前記ロボットカメラが前記番組で撮影する前記撮影ショットの種類である前記ロボットカメラの撮影ショットタイプとを予め設定する撮影ショットタイプ設定手段と、
前記番組の状況変化を示すイベントと、前記マンカメラの撮影ショットタイプと、前記ロボットカメラの撮影ショットタイプと、前記イベント後の前記ロボットカメラの撮影ショットである切替ショットとを対応させる撮影規則生成情報を予め記憶する記憶手段と、
前記撮影規則生成情報を参照し、前記撮影ショットタイプ設定手段が設定した前記マンカメラの撮影ショットタイプと前記ロボットカメラの撮影ショットタイプとに基づいて、前記イベントと前記マンカメラの撮影ショットタイプと前記切替ショットとを対応させる撮影規則を生成する撮影規則生成手段と、
外部から入力される前記ロボットカメラ又は前記マンカメラの何れかの映像に出力を切り替える指令に基づいて、前記スイッチャの出力を前記ロボットカメラが撮影する映像又は前記マンカメラが撮影する映像の何れかに切り替えるスイッチャ制御手段と、
前記撮影規則生成手段が生成した撮影規則を参照し、外部から入力される前記イベントの情報と、前記マンカメラ撮影ショット判定装置から入力される前記マンカメラの撮影ショットタイプとに基づいて、前記ロボットカメラが撮影する撮影ショットを決定する撮影ショット決定手段と、
を備えることを特徴とする撮影ショット制御装置。
【請求項2】
前記記憶手段は、カメラマンを含めた前記マンカメラの形状と大きさと、前記ロボットカメラの形状と大きさとを含むカメラ形状・大きさ情報を予め記憶し、
前記撮影ショット決定手段は、前記マンカメラから前記マンカメラの現在位置が入力され、
外部から入力される前記ロボットカメラの撮影ショットと前記ロボットカメラの位置とを対応させる指令に基づいて、決定した前記ロボットカメラの撮影ショットに応じた前記ロボットカメラの移動後位置を設定するロボットカメラ位置設定部と、
前記カメラ形状・大きさ情報を参照し、前記マンカメラの現在位置での前記マンカメラが占有する領域を示す占有領域と、前記ロボットカメラの移動後位置での前記ロボットカメラが占有する領域を示す占有領域とを算出するカメラ占有領域算出部と、
前記カメラ占有範囲算出部が算出した前記ロボットカメラの占有領域と前記マンカメラの占有領域とを比較して、当該ロボットカメラと当該マンカメラとが衝突するか否かと、当該ロボットカメラが撮影する映像に当該マンカメラが映り込むか否かと、当該マンカメラが撮影する映像に当該ロボットカメラが映り込むか否かとを判定するカメラ衝突判定部と、
前記ロボットカメラと前記マンカメラとが衝突すると判定された場合、前記ロボットカメラが撮影する映像に前記マンカメラが含まれると判定された場合、又は、前記マンカメラが撮影する映像に前記ロボットカメラが映り込むと判定された場合、前記マンカメラへ移動指示を通知する移動指示通知部と、
を備えることを特徴とする請求項1に記載の撮影ショット制御装置。
【請求項3】
前記ロボットカメラが複数の場合、
前記カメラ占有領域算出部は、前記ロボットカメラ毎に占有領域を算出し、
前記カメラ衝突判定部は、前記ロボットカメラ同士の占有領域を比較して前記ロボットカメラ同士が衝突するか否かを判定すると共に、前記ロボットカメラが撮影する映像に他の前記ロボットカメラが映り込むか否かを判定し、
前記撮影ショット決定手段は、前記ロボットカメラ同士が衝突すると判定された場合、又は、前記ロボットカメラが撮影する映像に他の前記ロボットカメラが含まれると判定された場合、前記スイッチャが映像を出力していない前記ロボットカメラの撮影ショットを再決定することを特徴とする請求項2に記載の撮影ショット制御装置。
【請求項4】
請求項1から請求項3の何れか一項に記載の撮影ショット制御装置と、マンカメラの撮影ショットの種類を判定するマンカメラ撮影ショット判定装置と、を含む協調撮影システムであって、
前記マンカメラ撮影ショット判定装置が、
前記マンカメラから、当該マンカメラの撮影アングルと当該マンカメラの現在位置とを含むマンカメラ撮影情報が入力されるマンカメラ撮影情報入力手段と、
前記マンカメラ撮影情報と前記マンカメラの撮影ショットの種類とを対応させた撮影情報−撮影ショット対応情報を予め記憶する撮影情報−撮影ショット対応情報記憶手段と、
前記撮影情報−撮影ショット対応情報を参照し、前記マンカメラ撮影情報入力手段に入力される前記マンカメラ撮影情報に応じて、前記マンカメラの撮影ショットの種類である前記マンカメラの撮影ショットタイプを判定するマンカメラ撮影ショットタイプ判定手段と、
を備えることを特徴とする協調撮影システム。
【請求項5】
マンカメラが撮影の撮影ショットの種類を判定するマンカメラ撮影ショット判定装置に接続され、番組の状況変化を示すイベントと、前記マンカメラの撮影ショットタイプと、ロボットカメラの撮影ショットタイプと、前記イベント後の前記ロボットカメラの撮影ショットである切替ショットとを対応させる撮影規則生成情報を予め記憶する記憶手段を備え、1以上の前記ロボットカメラが前記番組を撮影する映像と前記マンカメラが前記番組を撮影する映像とを切り替えるスイッチャを制御すると共に、前記ロボットカメラの撮影ショットを制御するために、コンピュータを、
外部から入力される前記マンカメラの撮影ショットの種類と前記ロボットカメラの撮影ショットの種類とを設定する指令に基づいて、前記マンカメラが前記番組で撮影する前記撮影ショットの種類である前記マンカメラの撮影ショットタイプと、前記ロボットカメラが前記番組で撮影する前記撮影ショットの種類である前記ロボットカメラの撮影ショットタイプとを予め設定する撮影ショットタイプ設定手段、
前記撮影規則生成情報を参照し、前記撮影ショットタイプ設定手段が設定した前記マンカメラの撮影ショットタイプと前記ロボットカメラの撮影ショットタイプとに基づいて、前記イベントと前記マンカメラの撮影ショットタイプと前記切替ショットとを対応させる撮影規則を生成する撮影規則生成手段、
外部から入力される前記ロボットカメラ又は前記マンカメラの何れかの映像に出力を切り替える指令に基づいて、前記スイッチャの出力を前記ロボットカメラが撮影する映像又は前記マンカメラが撮影する映像の何れかに切り替えるスイッチャ制御手段、
前記撮影規則生成手段が生成した撮影規則を参照し、外部から入力される前記イベントの情報と、前記マンカメラ撮影ショット判定装置から入力される前記マンカメラの撮影ショットタイプとに基づいて、前記ロボットカメラが撮影する撮影ショットを決定する撮影ショット決定手段、
として機能させることを特徴とする撮影ショット制御プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−74327(P2010−74327A)
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願番号】特願2008−237334(P2008−237334)
【出願日】平成20年9月17日(2008.9.17)
【出願人】(000004352)日本放送協会 (2,206)
【Fターム(参考)】
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願日】平成20年9月17日(2008.9.17)
【出願人】(000004352)日本放送協会 (2,206)
【Fターム(参考)】
[ Back to top ]