
撮影装置
【課題】大型被写体を撮影するための門型の撮影装置において、撮影を行う撮影者等の作業者の負担を軽減し、また、大型被写体の撮影装置の輸送を簡便にし、かつ大型被写体の画像処理が煩雑となる事態を防止することができる技術の提供を目的とする。
【解決手段】撮影装置10は、幅が伸縮自在に形成された門型架台を備え、門型架台の横型フレーム120に沿って、カメラ160を保持する保持部150を移動可能とする。また、保持部150の水平方向の移動量を検出するX軸センサ140を備える。
【解決手段】撮影装置10は、幅が伸縮自在に形成された門型架台を備え、門型架台の横型フレーム120に沿って、カメラ160を保持する保持部150を移動可能とする。また、保持部150の水平方向の移動量を検出するX軸センサ140を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、大型の絵画、地図や文書等の大型被写体を撮影するための撮影装置についての技術に関する。
【背景技術】
【0002】
従来、大型の絵画、地図や文書等の大型被写体を撮影するときは、撮影者は床面に大型被写体を配置し、撮影者が台の上からカメラ等で撮影するということがなされていた。この場合、大型被写体の大きさと、カメラ等の1回分の撮影範囲との関係で、撮影者は台の上からでも1回で全体を撮影することは困難であった。
【0003】
また、カメラのレンズを被写体に向けたとき、当該レンズにおける撮影範囲の中心位置は、当該被写体とカメラのレンズとの距離が最も近い部分となる。その反面、中心位置から離れれば離れるほど当該カメラのレンズとの距離は遠くなる。つまり、当該撮影範囲における端縁の部分と中心位置とでは、カメラのレンズからの距離が大きく異なる。結果として撮影範囲における端縁部分の焦点と、中心位置の焦点とには、ずれが生じる。
【0004】
カメラで被写体を撮影する場合、通常撮影範囲の中心位置に焦点を合わせるので、撮影された画像の端縁部分は焦点が最もずれた状態で表される。すなわち、一回の撮影にかかる撮影範囲が広くなればなるほど、撮影範囲における端縁の位置が中心位置から離れることになり、焦点がずれた画像が取得されることになる。
【0005】
また、撮影者が台の高さを高くして、大型被写体とカメラ等の距離を離し、1回の撮影範囲を広げようとすると、その分、鮮明度が不十分となる。
【0006】
したがって、大型被写体を撮影する際には1回の撮影範囲を、焦点のずれや鮮明度の低下が許容範囲内となるように設定する必要がある。そうするためには、撮影者が大型被写体の全体を複数回に分けて撮影することが必要となる。
【0007】
従来、大型被写体の撮影では、固定された撮影台の上で撮影者が複数回に分けて大型被写体を撮影するので、大型被写体自体を折りたたんだり、丸めたりして大型被写体を移動しなければならなかった。しかし、大型被写体の移動は非常に煩雑である。この点、特許文献1に記載の撮影装置では、門型の架台を備えている。撮影者はこの門型の架台上で被写体を撮影する。さらに、特許文献1の撮影装置では撮影台にキャスタ等の移動部材が設けられている。つまり、大型被写体を移動させなくても、大型被写体を分割して撮影することが可能である。
【0008】
【特許文献1】実用新案登録第3068091号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
特許文献1のような門型の撮影装置は、大型被写体の上をまたぐように支柱間に形成された架台上から、撮影者が大型被写体を撮影可能とするものである。したがって特許文献1に記載の門型の撮影装置は、撮影者が架台上に乗って撮影をすることを考慮して、撮影の精度、効率および安全性を確保しなければならない。この観点からは、大型被写体を撮影する撮影者が撮影装置の支柱や架台に安全に乗ることができ、さらに撮影装置上の撮影者が大型被写体の撮影を十分に行いうる程度の大きさに形成しなければならない。
【0010】
また、大型被写体はそれぞれサイズや形状が異なるものであり、撮影装置下に載置されたときの幅もそれぞれ異なるものである。したがって、特許文献1の門型の撮影装置は大型被写体の中でも幅の大きなものを撮影できるように、被写体の設置台に載置する大型被写体の幅より、架台の幅を長く形成しなければならない。
【0011】
これらの要請から従来の門型の撮影装置は大型化する。しかし、この撮影装置を利用した撮影をするには、撮影者が乗ったまま大型の撮影装置を複数回移動させなければならない。したがって、撮影作業は効率が悪く、かつ作業者に大きな負担がかかる。また、撮影作業者の負担という観点では、門型の撮影装置の架台に乗った撮影者は、複数回にわたり、少なくとも架台上でカメラを移動し、ファインダーから撮影範囲を定め、カメラの位置を微調整して撮影するという煩雑かつ負担の大きな作業を行わなければならなかった。
【0012】
また大型被写体は、その大きさから輸送が煩雑な場合がある。また、撮影者は歴史的な絵画・図面など、劣化した大型被写体を毀損しないように状態を保持しなければならない。毀損のおそれがある被写体については輸送自体を困難とする場合がある。したがって、このような大型被写体を撮影するには、大型被写体を輸送するのではなく、撮影者が大型被写体のある場所まで行き、撮影を行う必要がある。
【0013】
つまり、大型被写体の輸送を行わず、かつ撮影装置を利用して大型被写体の撮影を行う場合、大型被写体が配置されている場所まで撮影装置を輸送しなければならない。しかし、前述のように特許文献1に記載されているような撮影装置は大型で幅も大きいものである。したがってこの撮影装置の輸送は容易に行うことができず、非常に煩雑であった。
【0014】
また、大型被写体を載置している先の保管場所等も、それぞれ面積が異なるものであり、撮影装置のサイズによっては、大型の門型撮影装置を設置できない場合がある。したがって特許文献1の撮影装置においては、撮影者は大型被写体の保管先の面積に合わせて、複数のサイズの撮影装置を用意しなければならないおそれがある。
【0015】
本発明は、以上の問題点に鑑みてなされたものであって、その目的は、大型被写体を撮影するための門型の撮影装置において、撮影を行う撮影者等の作業者の負担を軽減することができる技術の提供を目的とする。また、大型被写体の撮影装置の輸送を簡便にする技術の提供を目的とする。また、大型被写体の画像処理が煩雑となる事態を防止することができる技術の提供を目的とする。
【課題を解決するための手段】
【0016】
上記の課題を解決するために、本発明は、間隔を置いてそれぞれ立設する一対の縦型フレームと、該縦型フレーム間に架設され、水平方向に延伸し、かつ該延伸方向に伸縮自在に形成された横型フレームとによって構成される門型架台と、設置される被写体を前記縦型フレーム間において撮影する撮影手段を設置可能な保持部と、前記横型フレームに設けられ、前記保持部を前記横型フレームに沿って移動可能とする第1移動機構と、前記第1移動機構の移動量を検出する第1検出手段と、前記第1検出手段が検出する前記第1移動機構の移動量が、あらかじめ設定された設定移動量とほぼ等しくなったときに該第1移動機構の移動を停止させる第1制御部と、を備えたこと、を特徴とする撮影装置である。
【発明の効果】
【0017】
この発明による撮影装置は、撮影手段を有する保持部を移動可能とする第1移動機構と、第1移動機構の移動量を検出する第1検出手段と、第1検出手段が検出する第1移動機構の移動量が、あらかじめ設定された設定移動量とほぼ等しくなったときに第1移動機構の移動を停止させる第1制御部を有して構成されている。したがって、大型の被写体の撮影時において、門型の撮影装置における撮影手段の位置調整が容易となり、撮影者等の作業負担が軽減される。
【0018】
また、この発明による撮影装置は、門型架台の橋桁部が伸縮自在に形成され、撮影装置自体の幅を縮小することができる。したがって、撮影装置の幅を縮小することにより輸送の煩雑さを軽減することができ、かつ撮影装置の幅を撮影場所に合わせた大きさに調整することが可能となる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施形態の一例について図1〜図7を参照して説明する。
【0020】
[第1実施形態]
(全体構成)
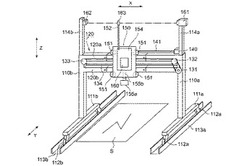
この発明の第1実施形態にかかる撮影装置10の全体構成の概要について、図1を参照して説明する。図1は、この発明の実施形態にかかる撮影装置10を示す概略正面図である。
【0021】
この実施形態にかかる撮影装置10は門型架台を有し、門型架台は、図1に示すように縦型フレーム110a・110bとこれらに架設される横型フレーム120とを備える。また、撮影装置10は、横型フレーム120に沿って移動可能にされカメラを取り付け可能な保持部150と、保持部150を水平移動(図1のX方向)させるための駆動プーリ131、中継プーリ132・133、ワイヤー134を有して構成されるX軸移動機構(本発明の「第1移動機構」の一例に該当する。)と、保持部150の水平方向の移動量を検出するX軸センサ140(本発明の「第1検出手段」の一例に該当する。)とを備え、撮影装置10自体がカメラを移動させることが可能である。
【0022】
この撮影装置10においては、例えば図1に示すように門型架台の縦型フレーム110a・110bの間であって横型フレーム120の下方に大型の被写体S(大型図面等)を設置し、当該大型の被写体Sを、保持部150に取り付けられたカメラ160で複数領域に分けて撮影することが可能である。
【0023】
また、図1に示すように撮影装置10は、縦型フレーム110a・110bの上面から立設するセンサポスト114a・114bと、保持部150に設けられたZ軸移動機構と、高さ検出部とを備えている。Z軸移動機構は、カメラ保持部154とZ軸モータ155aおよび伝達部155bを備えている。
【0024】
また、高さ検出部は、センサポスト114aに設けられたLD(Laser Diode)161およびセンサポスト114bに設けられた第1フォトセンサ162を有して構成される基準高度供給手段と、カメラ保持部154に設けられたアンテナ152の先端に形成された第2フォトセンサ163(本発明の「検出部」の一例に該当する。)とを備える。この高さ検出部とZ軸移動機構により、撮影装置10における被写体Sの設置面からカメラのレンズまでの距離を所定範囲内に維持することができる。なお、これらの基準高度供給手段と第2フォトセンサ163とは、本発明における「第2検出手段」の一例に該当する。
以下、撮影装置10の各部の構成について説明する。
【0025】
(門型架台の構成)
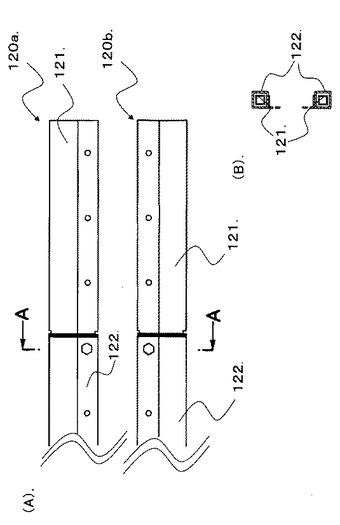
次に撮影装置10の外形をなす門型架台の構成について図1および図2を参照して説明する。図2(A)は、この発明の実施形態にかかる撮影装置10の横型フレーム120を図1と同じ方向から見た部分拡大図である。図2(B)は、この発明の実施形態にかかる横型フレーム120の接合部分の概略を示す図2(A)のA−A断面図である。
【0026】
門型架台は、縦型フレーム110a・110b、レール113a・113b、センサポスト114a・114b、横型フレーム120によって構成される。縦型フレーム110aは、図1に示すように脚部111a・111bの長手方向の両端にキャスタ112aが設けられ、略水平に延伸する脚部111aと、かつ当該脚部111aの延伸方向における略中央部分から略垂直に立設する柱部によって構成される。同様に図1に示す縦型フレーム110bは、縦型フレーム110aと左右対称に形成され、一対のキャスタ112bが設けられた脚部111bおよび柱部を備えて構成され、この脚部111bも略水平に、かつ縦型フレーム110aの脚部111aと平行な方向に延伸する。また、これら縦型フレーム110a・110bは全体の高さや幅などにおいて同じ大きさに形成される。
【0027】
また図1に示すように、撮影装置10における門型架台は、縦型フレーム110a・110bの上端それぞれから立設するセンサポスト114a・114bを備えている。このセンサポスト114aには後述するLD161が設けられ、センサポスト114bにはLD161と同じ高さに第1フォトセンサ162が設けられる。
【0028】
横型フレーム120は、縦型フレーム110aの上端部と縦型フレーム110bの上端部にわたって水平に架設される上フレーム120aと、縦型フレーム110a・110b間において当該上フレーム120aより所定間隔分だけ下方に、かつ水平に架設される下フレーム120bとを有して構成される。また横型フレーム120には、後述する第1の中継プーリ132、第2の中継プーリ133が配置される。
【0029】
また横型フレーム120は、後述する保持部150の上下ローラ151を案内する不図示のレール溝を備えている。このレール溝は、横型フレーム120の上フレーム120aの上面と下フレーム120bの下面において、横型フレーム120の延伸方向(図1のX方向)に伸長するように設けられている。
【0030】
図2(B)に示すように、この横型フレーム120は、内部が空洞となる、複数の直線状のパーツを繋ぎ合せて構成されている。すなわち図2(A)に示すように横型フレーム120は、複数のフレームパーツ121・122・・・を繋ぎ合わせて構成されている。各フレームパーツは両端が開口されており、かつ一端が他の部分より細くなるように構成されている。この各フレームパーツの細くなっている部分を他のフレームパーツの開口部分から嵌挿し、嵌挿された各フレームパーツの重複している部分を固定することによって繋ぎ合わせられる。
【0031】
例えば図2(A)に示すように、フレームパーツ121の左端がフレームパーツ122の右端の開口部分から挿し込まれて図2(B)のように重複部分が生じるので、その部分を固定することによりフレームパーツ121・122を繋ぎ合わせる。このようにして繋ぎ合わせるフレームパーツの数を増減することにより、横型フレーム120の全長を延長または短縮することができる。
【0032】
また、図1に示すように、撮影装置10における門型架台は、縦型フレーム110a・110bの脚部111a・111bにおけるキャスタ112a・112bそれぞれを、横型フレーム120と直交する方向に案内するレール113a・113bを備えている。このレール113aは、図1に示すように縦型フレーム110aの脚部111a・111bの延伸方向に伸長しており、キャスタ112aを通過可能に形成され、縦型フレーム110a全体の移動を案内する。また図1に示すように、レール113bはレール113aに対して横型フレーム120の長さ分だけ離れた位置においてレール113aと平行にかつ脚部111a・111bの延伸方向に伸長する。また、レール113bはキャスタ112bを通過可能に形成され、縦型フレーム110b全体の移動を案内する。
【0033】
したがって、互いに平行に伸長するレール113a・113bによって、門型架台全体が横型フレーム120と直交する方向に案内される。すなわち、門型架台が直線状に往復移動するので、横型フレーム120の下方に配置される被写体Sと門型架台の位置関係を対応させたまま、門型架台が被写体Sに対して移動する。したがって、門型架台の移動に伴って、カメラ160のレンズの焦点位置が被写体Sに対して揺動する事態を防止することが可能となる。
【0034】
(X軸移動機構の構成)
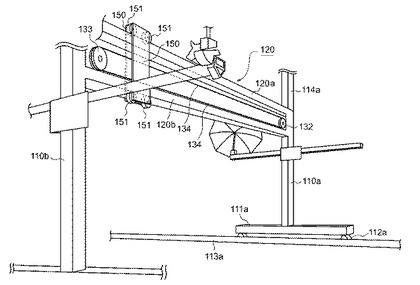
次に、撮影装置10のカメラ160を水平方向(図1のX方向)に移動させるX軸移動機構について図1および図3を参照して説明する。図3は、この発明の実施形態にかかる撮影装置10のX軸移動機構を示す概略斜視図である。なお図3においては、キャスタ112b、センサポスト114b、駆動プーリ131、中継プーリ132・133の支持部、カメラ160、Z軸移動機構等は図示を省略している。
【0035】
この実施形態の撮影装置10にかかるカメラ160は、保持部150のカメラ保持部154に保持され、保持部150の移動にともない横型フレーム120に沿って水平方向(図1のX方向)に移動可能に構成されている。また撮影装置10には横型フレーム120の両端に中継プーリ132・133、駆動プーリ131が設けられており、これらにはワイヤー134が張架される。ワイヤー134は、駆動プーリ131の回転駆動により、駆動プーリ131と中継プーリ132・133の間で回転する。またこのワイヤー134は保持部150に固定される。したがって撮影装置10においては、駆動プーリ131を駆動させてワイヤー134を回転させ、それにともなって保持部150とカメラ160とが水平方向に移動される。つまり、当該撮影装置10によれば門型架台におけるカメラ160を装置自体が移動させるので、人手による作業を介することなくカメラが移動される。以下、これらのX軸移動機構の各部について説明する。
【0036】
図1に示すように中継プーリ133は、横型フレーム120の上下フレーム120a・120bの間であって、横型フレーム120における縦型フレーム110b側の端部の近傍に設けられる。また、この中継プーリ133は、門型架台に設けられたた不図示の支持部によって軸支され、縦型フレーム110aへ向かう方向およびその逆方向に回転自在に形成される。
【0037】
図1に示すように中継プーリ132は横型フレーム120において、中継プーリ133の位置と略対称となる位置であって中継プーリ133と略平行に設けられる。すなわち、横型フレーム120の上下フレーム120a・120bの間であって、当該横型フレーム120における縦型フレーム110a側の端部の近傍に設けられ、かつ門型架台に形成された不図示の支持部によって軸支され、中継プーリ133の回転方向と同様の方向に回転自在にされている。
【0038】
駆動プーリ131は、図1に示すように中継プーリ132の位置から下方かつ外側(縦型フレーム110a側)に設けられる。また駆動プーリ131は、不図示の駆動部に軸支され、中継プーリ132・133の回転方向と同様の方向に回転自在にされている。また、駆動プーリ131は、当該駆動部が回転駆動することにより、自ら回転する。この駆動プーリ131における駆動部としては、例えばステッピングモータ等が用いられ、後述する主制御部200に制御されて、所定距離分だけ保持部150を移動させるように駆動される。
【0039】
ワイヤー134は図1に示すように環状に形成される。また図1に示すように、ワイヤー134は横型フレーム120の一端に配置された中継プーリ132から横型フレーム120の延伸方向に沿って伸長し、中継プーリ133を経由して、当該中継プーリ133の下方かつ装置の外側に配置された駆動プーリ131まで到達する。
【0040】
また、このワイヤー134は、保持部150の内部を貫通し、かつ当該保持部150に取り付けられる。またこのワイヤー134は、各プーリに張架され、駆動プーリ131が回転駆動することにより回転される。
【0041】
また保持部150は、内部が空洞となっており、横型フレーム120を内部に貫通させて横型フレーム120に対し摺動可能に形成される。この保持部150は所定間隔を置いて組み合わされた一対の方形状の保持板によって構成される。この一対の保持板は長手方向が横型フレーム120の上フレーム120aの上面から下フレーム120bの下面までの距離より長くなるように形成される。またこの保持板それぞれの間には、当該保持板の四隅において2枚の保持板それぞれに固定された軸が形成され、当該4つの軸にそれぞれ軸支されたローラ151・151・151・151が設けられる。この各ローラ151は、横型フレーム120のレール溝方向に回転可能となるように軸支される。
【0042】
また、保持板の長手方向の一端に形成されたローラ151と他端に設けられたローラ151との間隔は、上フレーム120aの上面から下フレーム120bの下面までの距離よりやや長くなるように形成される。これは図3に示すように、横型フレーム120の上フレーム120a上面に形成されたレール溝に一端のローラ151・151を載せ、下フレーム120bの下面のレール溝に他端のローラ151・151を接触させて転動可能とするためである。つまり、保持部150は、保持板に軸支された四隅のローラ151によって横型フレーム120を挟み込み、かつ各ローラが上下フレーム120a・120bそれぞれのレール溝に転動可能に接触するように形成される。
【0043】
なお、保持部150には、Z軸移動機構および、当該Z軸移動機構のカメラ保持部154において第2フォトセンサ163を有したアンテナ152が設けられているが、これについては後述する。
【0044】
以上からX軸移動機構は、駆動プーリ131を回転駆動させ、ワイヤー134を介して保持部150を水平移動させることにより、人手による作業を介することなくカメラ160を水平方向に移動させることができ、門型の撮影装置において撮影作業を大幅に簡略化することが可能である。さらに作業効率を向上させることが可能である。
【0045】
なお、本実施形態にかかる撮影装置10では保持部150の移動にワイヤー134を用いているが、これは横型フレーム120の伸縮に合わせてワイヤー134の長さを調節することが便宜であるためである。したがって、横型フレーム120の伸縮に合わせて長さを可変できるものであれば他の部材を用いることが可能である。例えば保持部150の移動にはワイヤーに換えてタイミングベルト等を用いることが可能である。また、プーリも使用せず、横型フレーム120にラックアンドピニオンを取り付けて保持部150の移動に用いることも可能である。
【0046】
(X軸センサの構成)
次に、撮影装置10のカメラ160の水平方向(図1のX方向)の移動量を検出するX軸センサについて図1を参照して説明する。
【0047】
X軸センサ140は、図1に示すようにセンサポスト114aの内側(センサポスト114b方向)に設けられ、保持部150とX軸センサ140との距離を検出するセンサである。X軸センサ140としては、例えばワイヤー式リニアエンコーダを用いることが可能である。つまりX軸センサ140は計測用ワイヤーを巻きつけて備えており、そのワイヤーが水平に繰り出されるように、その計測用ワイヤーの先端を保持部150におけるX軸センサ140と同じ高さに取り付ける。そして保持部150がX軸センサ140から離隔することによって計測用ワイヤーが繰り出され、その繰り出し量から、保持部150とX軸センサ140との距離を検出することが可能である。
【0048】
したがって、保持部150とX軸センサ140の距離とを検出することにより、保持部150が横型フレーム120におけるどの位置に位置しているかを検出することが可能となる。これによって、X軸センサ140で保持部150の位置を検出しつつ、検出結果に応じて主制御部200が駆動プーリ131の回転駆動量を制御することにより、主制御部200の指示に応じてカメラ160を水平移動させることができる。つまり撮影作業者は、主制御部200によって駆動プーリ131を制御して任意にカメラを水平移動させることが可能である。また、X軸センサ140としてはリニアエンコーダの他、アブソリュートエンコーダを用いることも可能である。
【0049】
なお、駆動プーリ131においてステッピングモータ等を用いることで駆動プーリ131においてワイヤー134の移動量を検出し、カメラ160の移動量を検出することも可能である。ただし、カメラ160の水平移動の移動量を精密に検出する必要がある場合は、各プーリに対してのワイヤー134の滑りを考慮しなければならず、X軸センサ140を必要とする。
【0050】
(Z軸移動機構の構成)
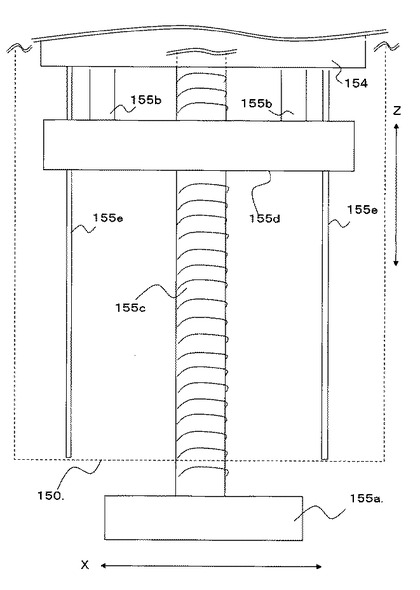
次に、撮影装置10のカメラ160を垂直方向(図1のZ方向)に移動させるZ軸移動機構について図1および図4を参照して説明する。図4は、この発明の実施形態にかかる撮影装置10の保持部150の内部に設置されたZ軸移動機構の概略を示す正面図である。
【0051】
Z軸移動機構は、図1に示すように保持部150に取付けられる。また、このZ軸移動機構としては例えばクロスローラステージなどを用いることが可能である。すなわち、図4に示すようにZ軸移動機構はZ軸モータ155aを備えており、Z軸モータ155aには送りネジ155cが回転可能にかつ垂直に取付けられている。また送りネジ155cは、両端において垂直方向に伸長するガイド155eに案内されたナット155dに螺合している。
【0052】
当該ナット155dには垂直方向に延伸する伝達部155bがガイド155eそれぞれに並行して取り付けられている。伝達部155bは上端においてカメラ保持部154に取付られ、ナット155dが上下動することにともない、上下動してカメラ保持部154を上下動させる。また、カメラ保持部154は図1に示すようにカメラ160が取付可能に形成される。
【0053】
したがって、Z軸モータ155aが駆動されると送りネジ155cが回転し、送りネジ155cに螺合しているナット155dが上下動する。ナット155dが上下動することにより伝達部155bが上下動し、伝達部155bの上端に取り付けられたカメラ保持部154とカメラ160が垂直方向(図1におけるZ方向)に移動される。
【0054】
(高さ検出部の構成)
次に、撮影装置10のカメラ160の高さ調整に供する高さ検出部について図1を参照して説明する。
【0055】
高さ検出部は、縦型フレーム110aから立設するセンサポスト114aに設けられたLD161とセンサポスト114bに設けられた第1フォトセンサ162を有して構成される基準高度供給手段と、カメラ保持部154の上端部におけるアンテナ152の先端に形成された第2フォトセンサ163とを備えている。
【0056】
基準高度供給手段は、保持部150が維持すべき高さ(門型架台下の被写体設置面とカメラ160までの距離)の基準となるレーザをLD161から第1フォトセンサ162へ水平に出力し、当該レーザを検出する。カメラ保持部154に取り付けられたアンテナ152における第2フォトセンサ163がこの高さの基準となるレーザを受光している間は、カメラ160の高さが所定範囲内に維持されていることになる。これに対し、第2フォトセンサ163がレーザを受光せず、第1フォトセンサ162が受光している場合は、第2フォトセンサ163の高さが所定範囲外にあることになる。
【0057】
このようにして高さ検出部では、LD161の出力するレーザを、第1フォトセンサ162と第2フォトセンサ163のいずれが受光しているかによって、第2フォトセンサ163の高さが所定範囲内であるかを検出することができる。結果として、保持部150に保持されたカメラ160の高さが所定範囲内に維持されているかについて検出することができる。以下、高さ検出部の各部について説明する。
【0058】
LD161は図1に示すように、センサポスト114aの上端に形成された駆動部と、当該駆動部におけるセンサポスト114b方向かつ水平に発光するように設置された発光素子を備えている。
【0059】
LD161における駆動部はモータを備え、発光素子を固定したまま水平に、所定角度範囲内で発光素子面を左右(センサポスト114aからセンサポスト114bを見たときの左方または右方)に回動させる。
【0060】
第1フォトセンサ162は図1に示すようにセンサポスト114bの上端かつセンサポスト114bにおけるセンサポスト114a側に設置される。また、第2フォトセンサ163は図1に示すように、カメラ保持部154の上端から立設するアンテナ152の上端かつ、センサポスト114a側に向けて設置される。この第1フォトセンサ162および第2フォトセンサ163はLD161の発光素子からのレーザを受光する受光素子を備えている。この第1フォトセンサ162としては、例えば浜松ホトニクス(登録商標)株式会社製の1次元PSD(Position Sensing Detector)センサを用いる。これは当該センサが帯状の受光面をもち、長手方向について位置検出が可能であるため、LD161が回動しながら出力した光線(光信号)をより強度が高い状態で検出するためである。
【0061】
撮影装置10における門型架台はレール113a・113bに案内されて移動されるものであるが、横型フレーム120が長くなればなるほど、両端の縦型フレーム110aと110bとを同期させて同じ量だけ移動させることが困難になる。つまり、縦型フレーム110aと110bとは必ずしも同じ距離だけ移動されるわけではない。その結果、門型架台にねじれが生じる可能性があり、その場合LD161の発光素子と第1フォトセンサ162および第2フォトセンサ163における受光素子が対向しない可能性がある。
【0062】
一方レーザは、受光素子の中心位置で受光することによって、より強度の高い光信号を受光することができる。すなわち、門型架台のねじれによる発光素子と受光素子との位置関係にずれが生じても第1フォトセンサ162および第2フォトセンサ163における受光素子の中心位置でレーザを受光することが好ましい。
【0063】
これらのことから、一方のLD161においては駆動部が発光素子を回動させ、受光素子側に受光しやすくし、他方の受け側の第1フォトセンサ162および第2フォトセンサ163には1次元PSDセンサを用いてより幅広くレーザを受光することができる構成を採用する。この1次元PSDセンサは、帯状の受光面をもち、長手方向について位置検出が可能であることから門型架台のねじれによる素子間のずれが生じてもレーザの受光に支障をきたすおそれが低いという利点がある。
【0064】
(高さ調整)
次にZ軸移動機構と高さ検出部によるカメラ160の高さ調整について図1および図4を参照して説明する。
【0065】
カメラ160を保持する保持部150は、水平方向に延伸する横型フレーム120に案内されて移動するのでカメラ160の高さは一定に保持されるものである。ただし、横型フレーム120の長さが長くなるにつれ横型フレーム120に撓みが生じるおそれがある。また撮影装置10における横型フレーム120は、図1に示すようにフレームパーツを繋ぎ合わせて構成されていることにより横型フレーム120に撓みが生じるおそれがある。
【0066】
このため実施形態における撮影装置10は、Z軸移動機構と高さ検出部によって、この撓みによるカメラ160の高さのひずみを調整し、カメラ160の高さを所定範囲内に調整する。
【0067】
具体的には、カメラ保持部154におけるアンテナ152の先端の第2フォトセンサ163がLD161からのレーザを受光しつづける状態では、第2フォトセンサの検出により主制御部200は、カメラ160の高さが所定範囲内であると判断する。しかし、保持部150が水平移動するにつれ保持部150の高さが上下してしまい、カメラ160の高さもそれにつれて上下動することがある。このとき、カメラ保持部154に設けられたアンテナ152も保持部150にともなって上下動(図1・図4におけるZ方向への移動)する。アンテナ152が上下動するとアンテナ152の先端に位置する第2フォトセンサ163の高さも上下動する。
【0068】
このように第2フォトセンサ163が上下動してしまうことによって、LD161から出力されるレーザを第1フォトセンサ162が受光している場合は、主制御部200は第2フォトセンサ163の高さが所定範囲外にあると判断してZ軸移動機構を駆動させる。すなわち主制御部200は、図4に示すZ軸モータ155aを駆動させ、Z軸モータ155aに回転可能に取り付けられた送りネジ155cを正回転、または逆回転させる。送りネジ155cが回転すると、送りネジ155cに螺合したナット155dが上下動し、これによってナット155dに取り付けられた伝達部155bが上下動する。伝達部155bが上下動すると当該伝達部155bの上端に取り付けられたカメラ保持部154およびアンテナ152が上下動し、第2フォトセンサ163がLD161からのレーザを受光する位置まで上下動する。これによってカメラ160が垂直方向へ移動し、横型フレーム120の下方における被写体設置面とカメラ160のレンズとの距離(高さ)が所定範囲内に維持される。
【0069】
これに対し、当該レーザを第2フォトセンサ163が受光している間は、主制御部200は第2フォトセンサ163の高さが所定範囲内であると判断してZ軸移動機構のZ軸モータ155aを駆動させない。
【0070】
横型フレーム120の撓み等により端部側で撮影したときと中央側で撮影したときで、カメラ160のレンズと被写体Sまでの距離が変化すると、複数回に分けて撮影した大型被写体Sを1枚の画像となるように画像処理する際、個々の画像片のサイズを全体で統一する作業が必要になり、その後の画像処理が非常に煩雑となってしまう。この点、本実施形態にかかる撮影装置10は、横型フレーム120の撓みなどにより生じうるカメラ160のレンズ高さのずれに対し、主制御部200により高さ検出部とZ軸移動機構を介してカメラ160の高さを調整することが可能である。これによって、複数回に分けて撮影した大型被写体の画像処理を簡便にすることが可能となる。
【0071】
(制御)
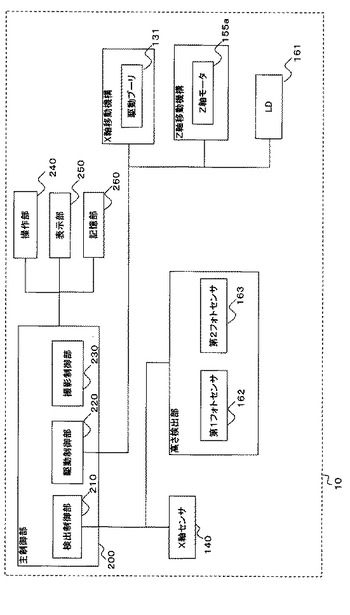
次に、図5を用いて、撮影装置10の制御構成について説明する。図5は、この発明の実施形態にかかる撮影装置10の構成を示すブロック図である。
【0072】
図5に示すように撮影装置10は、制御系として主制御部200を備える。この主制御部200は、検出制御を行う検出制御部210、駆動制御を行う駆動制御部220、カメラ160の制御を行う撮影制御部230を備える。また、主制御部200は撮影装置10の操作部240、表示部250およびその他の各部を制御する。
【0073】
主制御部200は例えばCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。記憶部260には、あらかじめ制御プログラムが記憶され、CPUが当該制御プログラムを適宜RAM上に展開することにより、主制御部200として機能する。
【0074】
〈検出制御〉
検出制御部210は図5に示すように、X軸センサ140、高さ検出部に接続され、これらから検出信号を受信する。すなわちX軸センサ140からの検出信号を受け、当該信号から保持部150がX軸センサ140から離隔した距離を求める。また検出制御部210は、あらかじめ設定された横型フレーム120の長手方向の長さを記憶部260等から読み出し、求めた当該距離と読み出した横型フレームの長さを比較して、保持部150が横型フレーム120におけるどの位置にあるかを判断する。この検出制御部210は保持部150が水平移動している間中、随時X軸方向(横型フレーム120の延伸方向)における位置検出を行う。
【0075】
なお、記憶部260等から読み出す横型フレーム120長手方向の長さの値は、あらかじめ記憶部260に設定されている値、もしくは操作部240を介して撮影作業者等が入力した値となる。
【0076】
また検出制御部210は、LD161から出力されたレーザを受光する第1フォトセンサ162または第2フォトセンサ163からの検出信号を処理する。すなわち、第1フォトセンサ162から検出信号を受信した場合は、カメラ160の高さが所定範囲外であると判断する。また、第2フォトセンサ163からの検出信号を受信した場合は、カメラ160の高さが所定範囲内であると判断する。
【0077】
〈駆動制御〉
駆動制御部220は図5に示すように、X軸移動機構の駆動プーリ131、Z軸移動機構のZ軸モータ155aに接続され、主制御部200の制御に基づいてこれらを駆動させる。すなわち駆動制御部220は、主制御部200から図1のX方向における保持部150の移動回数と1回分の水平移動距離を定めた信号を受ける。駆動制御部220はこれに基づき駆動プーリ131を主制御部200が定めた距離分だけ駆動させる。
【0078】
また、本実施形態における撮影装置10は、各プーリとワイヤー134との滑りを考慮してX軸センサ140による位置検出を行いながら駆動プーリ131を駆動させる。つまり、保持部150が一端停止した位置から、前述の距離分移動した時点で駆動プーリ131の駆動を停止させ保持部150の水平移動を停止させる。この停止させるタイミングの判断は、検出制御部210が求めた保持部150の水平移動距離の検出結果に基づいて、主制御部200が行う。駆動制御部220は、主制御部200から水平移動の停止指示を受けたことにより保持部150の水平移動を停止させる。
【0079】
また、駆動制御部220は、主制御部200が検出制御部210からカメラ160の高さが所定の範囲外となった旨の信号を受けたことにより、Z軸移動機構のZ軸モータ155aを駆動させる。つまり、駆動制御部220は主制御部200から当該信号を受けたことにより、Z軸モータ155aを駆動させ、送りネジ155c、ナット155d、伝達部155b、カメラ保持部154を介し、第2フォトセンサ163がLD161からのレーザを受光するまで、アンテナ152を上下動させる。これによって、横型フレーム120の下方の被写体設置面からのカメラ160のレンズの高さは、所定の範囲内に維持されることになる。なお、横型フレーム120が撓む場合、下方に撓むことが多いものと考えられるため、まず駆動制御部220は、カメラ保持部154を上昇させるようにZ軸モータ155aを駆動させる。
【0080】
〈撮影制御〉
撮影制御部230は、撮影装置10のカメラ160の制御を行う。すなわち、主制御部200が保持部150の水平移動の停止信号を受けると、撮影制御部230はカメラ160を制御して撮影を実行する。より詳しくは、以下のように制御される。
【0081】
撮影装置10においては、撮影作業者が操作部240から被写体Sのサイズ(幅、長さ等)や、撮影画像に要求する精細度を入力することが可能である。また、記憶部260はあらかじめ、被写体Sのサイズと要求される精細度とから求められる焦点距離のテーブルを記憶している。主制御部200は、撮影作業者によって操作部240から被写体Sのサイズおよび要求される精細度の入力を受けると、記憶部260から当該テーブルを読み出し、当該入力された情報に該当する焦点距離の値を検索し、または該当するものが無い場合、テーブルから入力された情報に近似する焦点距離の値を検索する。
【0082】
次に、主制御部200は検索して決定された焦点距離とカメラ160の高さから1回の撮影領域の範囲を求める。また、主制御部200は求めた撮影範囲と入力された被写体Sのサイズから被写体Sを何回に分けて撮影するかを求める。
【0083】
次に、主制御部200は保持部150およびカメラ160がどの位置にあるかについて検出制御部210を介して判断する。本実施形態においては、保持部150の初期位置をX軸センサ140に最も近接した位置とする。主制御部200は撮影作業の開始にともない、X軸センサ140の検出結果に基づいて、駆動制御部220によって駆動プーリ131を回転させ、保持部150を当該初期位置に移動させる。
【0084】
次に、主制御部200が撮影作業者によって操作部240から撮影開始の操作をうけると、主制御部200は、初期位置から最初の撮影領域を撮影しうる位置まで、カメラ160が水平移動する距離を求める。主制御部200は駆動制御部220に、この求めた距離のデータを送信し、駆動制御部220は当該距離分だけワイヤー134を回転させ保持部150を水平移動させる。
【0085】
このとき検出制御部210はX軸センサ140によって保持部150が初期位置から離隔した距離を検出しており、主制御部200は、検出制御部210から随時、移動距離のデータを受ける。主制御部200は、保持部150の水平移動距離のデータを受け、保持部150が停止すべき距離分移動する前に、駆動制御部220によって駆動プーリの回転を停止させる制御を行う。つまり主制御部200は保持部150が当該停止すべき位置で停止するように、保持部150の移動速度とX軸センサ140からの検出距離のデータに基づいて駆動制御部220を制御する。より詳しくは、次のように制御する。
【0086】
主制御部200はX軸センサ140が検出したX軸センサ140から保持部150までの距離の値と移動開始前に求められたX軸センサ140から停止位置までの距離の値との差と、保持部150の移動速度から、当該停止位置に到達する時間を求める。この時間に基づき主制御部200は駆動プーリ131の回転の停止をすべきタイミングを求め、当該タイミングで駆動制御部220に駆動プーリ131を停止させるように制御を行う。
【0087】
駆動制御部220は、主制御部200から駆動プーリ131の回転を停止させる信号を受け、駆動プーリ131の回転を停止させる。
【0088】
次に主制御部200は、保持部150が水平移動を停止し、カメラ160が撮影位置まで到達すると、高さ検出部の検出結果に基づき、検出制御部210からカメラ160の高さが所定範囲内であるか否かの検出信号を受信する。この高さ検出部の高さの検出に当たっては、駆動制御部220がLD161に発光素子面の回動駆動をさせる制御を行う。つまり主制御部200は保持部150が停止すると、LD161の発光素子面を回動させるように駆動制御部220を制御する。
【0089】
主制御部200は、検出制御部210からカメラ160の高さが所定範囲外である旨の信号を受けると、撮影を直ちには行わせず、駆動制御部220によってZ軸モータ155aを駆動制御し、上記説明した高さ調整の制御を行う。
【0090】
検出制御部210からカメラ160の高さが所定範囲内である旨の信号を受けた場合や、上記高さ調節の結果、カメラ160の高さが所定範囲内である旨の信号を受けた場合には、撮影を実行する。すなわち、あらかじめ求めてあった被写体Sとの焦点距離となるようにカメラ160を制御し、撮影を実行する。撮影が実行されると1撮影領域分の画像データがカメラ160に記憶されるか、または当該画像データが撮影装置10の記憶部260に送信され、記憶部260に記憶される。
【0091】
撮影が実行されると、主制御部200は停止している保持部150の位置から次の撮影範囲を撮影しうる位置まで保持部150を移動させるように駆動制御部220を制御する。このようにして、主制御部200は被写体Sのサイズと一撮影範囲から求まる保持部150の水平移動の回数分、保持部150を移動させるように駆動制御部220を制御する。なお、撮影制御部230は、撮影作業者等による操作部240からの撮影操作を受け、撮影を実行する構成であってもよい。
【0092】
〈その他の制御〉
上記説明した他、主制御部200は撮影装置10の各部を制御する。例えば主制御部200は、撮影された一撮影領域の画像を表示部250に表示させる制御を行い、または、各種データの入力に供するデータ入力画面にかかるデータを操作に応じて記憶部260から読み出し、表示部250に表示させる制御を行う。
【0093】
(作用・効果)
以上説明した本実施形態にかかる撮影装置10の作用および効果について説明する。
【0094】
本実施形態にかかる撮影装置10は、門型架台の横型フレーム120に沿って回転するワイヤー134と当該ワイヤー134を張架する各プーリが設けられ、そのうち駆動プーリ131はワイヤー134を正逆方向に回転駆動させるように構成されている。また、当該ワイヤー134には、カメラ160が取り付けられ、横型フレーム120上面および下面に案内されて水平方向に移動可能な保持部150が取り付けられている。
【0095】
すなわち、駆動プーリ131を回転駆動させるだけで保持部150に取り付けられたカメラ160を水平移動させることができる。したがって門型架台に撮影作業者が乗ってカメラを移動させるといったような煩雑かつ作業者に対する危険をともなう作業を回避することができる。さらに大型被写体の撮影を簡易化し、作業効率を大幅に向上させることが可能である。
【0096】
また本実施形態にかかる撮影装置10は、保持部150の水平移動量を検出するX軸センサ140が設けられている。また主制御部200は、X軸センサ140の検出結果に基づき検出制御部210を介して保持部150の移動量を検出し、その検出結果に基づき、駆動制御部220を介して駆動プーリ131を制御しているので、駆動プーリ131の回転および停止を正確に制御することができる。
【0097】
したがって撮影作業者は、データを入力して1回分の撮影領域を定めれば、カメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0098】
さらに、駆動プーリ131の回転量によるのではなく、X軸センサ140によって保持部150の水平方向における移動量を検出しているので、より正確な保持部150の位置検出を行うことができる。つまり、各プーリに対してワイヤー134の滑りが生じても、保持部150の位置検出を正確に行っているので、撮影範囲のずれを生じる事態を防止することができる。結果として、撮影範囲のずれによる後の画像処理の煩雑さを解消することができる。
【0099】
また、本実施形態の門型架台における横型フレーム120は、複数のフレームパーツ(図2(A)の121・122参照)それぞれを嵌挿させ、繋ぎ合わせて構成されている。したがって、フレームパーツ同士の重複部分をずらすことにより、また、フレームパーツの数を増減することにより、横型フレーム120の長手方向における長さを容易に、延長または短縮することが可能である。
【0100】
したがって、撮影装置10の門型架台の幅を縮小することにより輸送の煩雑さを軽減することができ、かつ撮影装置10の幅を撮影場所に合わせた大きさに調整することが可能となる。さらに当該幅を容易に延長または短縮させることができる。
【0101】
また、本実施形態にかかる撮影装置10は、横型フレーム120の撓みなどにより生じうるカメラ160のレンズ高さのずれに対し、主制御部200により高さ検出部とZ軸移動機構を介してカメラ160の高さを調整することが可能である。これによって、複数回に分けて撮影した大型被写体の画像処理を簡便にすることが可能となる。
【0102】
さらに、本実施形態における撮影装置10は高さの基準となるセンサを、縦型フレーム110a・110bから立設した、センサポスト114a・114bに設置するように構成されている。この構成によれば、カメラの高さの基準をカメラの位置と被写体との距離によって調整する構成と比較して、高さの基準がより正確となる。つまり、カメラのレンズと被写体とによってカメラの焦点距離を調整する構成では、被写体の撮影面の凹凸がある場合、高さの基準がずれてしまう。これに対して、本実施形態の撮影装置10においては門型架台のフレームを基準としてカメラの高さの調整を行うので、被写体の撮影面が土どのような状態であっても、正確な高さの基準に基づき調整を行うことができる。
【0103】
(変形例)
次に、第1実施形態にかかる撮影装置の変形例について、以下に説明する。
【0104】
上記実施形態にかかる撮影装置10においては、縦型フレームと横型フレームによる1つの門型架台を用いているが、撮影装置としては他の構成を採用することも可能である。例えば、本実施形態にかかる門型架台2台を、横型フレームが平行になるように並列に配置する。さらに横型フレームそれぞれの間において、各横型フレームと直交するようにフレームを架設する。さらにこのフレームを横型フレームそれぞれに対し平行な方向かつ被写体設置面に対し水平に移動するように構成する。当該水平移動するフレームには、当該フレームに対し水平移動可能なカメラ保持部を形成し、カメラを保持したまま移動可能に構成する。
【0105】
このような構成においても、上記実施形態にかかる撮影装置10と同様にカメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0106】
また、上記実施形態にかかる撮影装置10においては、保持部150の位置検出においてX軸センサ140として、ワイヤー式のエンコーダ等を用いるが、撮影装置としては他の構成を採用することも可能である。例えば、横型フレーム120の延伸方向に沿って複数のループコイルを並設し、保持部150に当該ループコイルと共振する共振回路による位置指示手段を設ける。この位置指示手段と当該ループコイルとの間の電磁結合によって、横型フレーム120における位置指示手段の位置を検出するように構成する。主制御部200はこの位置検出に基づいて、駆動制御部220を介して駆動プーリ131を制御する。
【0107】
このような構成においても、上記実施形態にかかる撮影装置10と同様にカメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0108】
また上記実施形態にかかる撮影装置10においては、横型フレーム120の両端に中継プーリ132・133を水平に配置し、さらに駆動プーリ131を備える構成であるが、撮影装置としては他の構成を採用することも可能である。例えば中継プーリ132・133のいずれか一方を駆動プーリとして構成し、本実施形態の駆動プーリ131を備えない構成であってもよい。
【0109】
このような構成においても、上記実施形態にかかる撮影装置10と同様にカメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0110】
[第2実施形態]
次にこの発明の第2実施形態にかかる撮影装置10について説明する。
【0111】
(全体構成)
第2実施形態にかかる撮影装置においては、前述の第1実施形態にかかる撮影装置10に、さらにY軸移動機構(不図示)およびY軸センサ171a・171bを備えた構成となる。したがって、門型架台、X軸移動機構、X軸センサ140、Z軸移動機構および高さ検出部について第1実施形態の撮影装置と同様であるため説明を割愛する。また、第2実施形態における撮影装置の各部の制御も第1実施形態にかかる撮影装置の制御と同様であるため、説明を割愛する。
【0112】
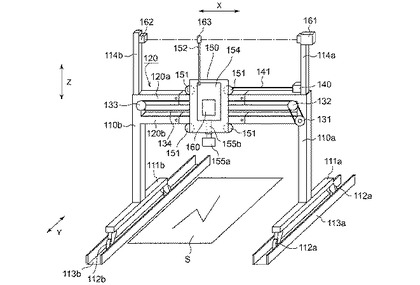
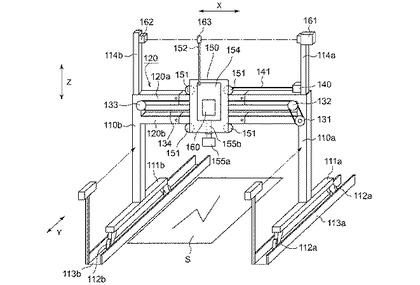
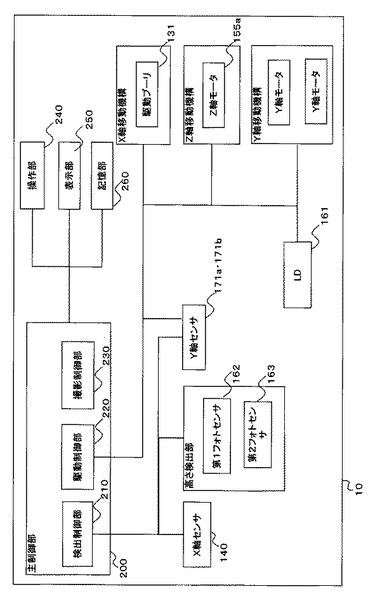
以下、Y軸移動機構およびY軸センサ171a・171bおよび、これらの制御について図6および図7を用いて説明する。図6はこの発明の第2実施形態にかかる撮影装置を示す概略正面図である。また図7は、この発明の第2実施形態にかかる撮影装置の制御構成を示すブロック図である。
【0113】
(Y軸移動機構)
第2実施形態にかかる門型架台においては、キャスタ112a・112bを駆動するY軸移動機構を備えている。すなわち縦型フレーム110aの脚部111aには、脚部111aの両端に設けられたキャスタ112aの双方または一方を駆動するモータ(不図示)を設ける。このモータは、主制御部200および駆動制御部220に駆動制御されキャスタ112aを駆動する。また縦型フレーム110bの脚部111bには、縦型フレーム110aの脚部111aと同様に、キャスタ112bの双方または一方を駆動するモータが設けられる。
【0114】
(Y軸センサ)
第2実施形態にかかる門型架台においては、縦型フレーム110a・110bの移動量を検出するY軸センサ171a・171bを備えている。すなわち図6に示すように縦型フレーム110aのキャスタ112aを案内するレール113aの一端においてY軸センサ171aが設けられる。このY軸センサ171aは当該レール113aの一端から略垂直に立設する支柱と、当該支柱の先端に取り付けられたセンサによって構成される。また図6に示すように、レール113aと並列して配置されるレール113bにおける一端にもY軸センサ171bが設けられる。このY軸センサ171bはY軸センサ171aと同様に、レール113bの一端から略垂直に立設する支柱と、当該支柱の先端に取り付けられたセンサによって構成される。この支柱はY軸センサ171aにおける支柱に対応する位置に設けられる。
【0115】
またY軸センサ171aのセンサは、縦型フレーム110aの方向に、かつ水平にレーザを出力する発光部を備え、縦型フレーム110aへ向けてレーザを出力する。また、縦型フレーム110aには、Y軸センサ171aのセンサの発光部と略同じ高さにレーザを反射する反射板(不図示)を設ける。同様に、Y軸センサ171bのセンサも縦型フレーム110bの方向かつ水平にレーザを出力する。また縦型フレーム110bにもY軸センサ171bから出力されたレーザを反射する反射板が設けられている。またこれらのセンサは、反射板から反射したレーザを受光する。
【0116】
(制御)
第2実施形態にかかる主制御部200、検出制御部210および駆動制御部220は、Y軸センサ171a・171bが受光した検出信号から、縦型フレーム110aとY軸センサ171aまでの距離、縦型フレーム110bとY軸センサ171bまでの距離を計測し、計測結果に基づきY軸移動機構を駆動し、横型フレーム120と直交する方向に、門型架台を移動させる。
【0117】
すなわち主制御部200は、被写体Sにおける1回分の撮影範囲と全体の撮影が完了するまでの撮影回数が決定すると、区分された保持部150の水平移動量および門型架台の移動のための縦型フレーム110a・110bの移動量を量定したデータを駆動制御部220に送信する。
【0118】
検出制御部210、駆動制御部220および撮影制御部230を介し、撮影装置10が複数の撮影領域に区分された被写体Sの1列目の撮影を完了すると、主制御部200は、駆動制御部220を介し、門型架台の移動制御を行う。つまり、駆動制御部220は、受信した縦型フレーム110a・110bの移動量のデータに基づきY軸移動機構を駆動して縦型フレーム110a・110bを所定方向に所定量移動させる。
【0119】
この縦型フレーム110a・110bの移動量については、主制御部200が、検出制御部210から、Y軸センサ171a・171bが検出した縦型フレーム110bとY軸センサ171bまでの距離についての情報を受け、駆動制御部220を介してY軸移動機構のモータ駆動を制御する。
【0120】
つまり、検出制御部210は、Y軸センサ171a・171bが出力したレーザの周波数と、Y軸センサ171a・171bが受光した反射レーザの周波数とを検出して比較し、位相差を計測する。この位相差から、縦型フレーム110bとY軸センサ171bまでの距離を求める。このようにして、検出制御部210は門型架台の停止時から当該距離を随時計測する。主制御部200はこの計測された距離の情報と、門型架台の移動速度および量定された門型架台の1回の移動量から門型架台の移動を停止させるタイミングを判断する。
【0121】
駆動制御部220は主制御部200から門型架台の移動停止の指示を受け、Y軸移動機構の駆動を停止し、キャスタ112a・112bの移動を停止させる。
【0122】
(作用・効果)
以上説明した第2実施形態にかかる撮影装置10の作用および効果について説明する。
【0123】
第2実施形態にかかる撮影装置においても、第1実施形態にかかる撮影装置10と同様にカメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0124】
さらに第2実施形態にかかる撮影装置10は、主制御部200、検出制御部210および駆動制御部220が、Y軸センサ171a・171bが受光した検出信号から、縦型フレーム110aとY軸センサ171aまでの距離、縦型フレーム110bとY軸センサ171bまでの距離を計測し、計測結果に基づきY軸移動機構を駆動し、横型フレーム120と直交する方向に、門型架台を移動させることが可能である。
【0125】
すなわち、第2実施形態にかかる撮影装置10は、撮影装置10の操作部240等により、被写体のサイズおよび撮影画像に要求する精細度を入力するのみで、主制御部200が被写体を複数の撮影領域に区分し、1回分の撮影範囲を定める。その撮影範囲のデータおよび検出制御部210のX軸センサ140の検出結果に応じ、駆動制御部220が駆動プーリ131を駆動・停止して保持部150の移動を制御する。また、その撮影範囲のデータおよび検出制御部210のY軸センサ171a・171bの検出結果に応じ、駆動制御部220がY軸移動機構を駆動・停止して門型架台の移動を制御する。また、撮影制御部230があらかじめ定められた焦点距離で被写体を撮影する。
【0126】
したがって、大型被写体であっても、本実施形態にかかる撮影装置10を用いることにより、撮影作業者等は必要なデータの入力のみで、撮影を実行することが可能である。結果として、門型架台に撮影作業者が乗ってカメラを移動させるといったような煩雑かつ作業者に対する危険をともなう作業を回避することができる。さらに大型被写体の撮影を簡易化し、作業効率を大幅に向上させることが可能である。
【図面の簡単な説明】
【0127】
【図1】この発明の第1実施形態にかかる撮影装置を示す概略正面図である。
【図2】(A)この発明の実施形態にかかる撮影装置の横型フレームを図1と同じ方向から見た部分拡大図である。 (B)この発明の実施形態にかかる横型フレームの接合部分の概略を示す図2(A)のA−A断面図である。
【図3】この発明の実施形態にかかる撮影装置のX軸移動機構を示す概略斜視図である。
【図4】この発明の実施形態にかかる撮影装置の保持部の内部に設置されたZ軸移動機構の概略を示す正面図である。
【図5】この発明の第1実施形態にかかる撮影装置の制御構成を示すブロック図である。
【図6】この発明の第2実施形態にかかる撮影装置を示す概略正面図である。
【図7】この発明の第2実施形態にかかる撮影装置の制御構成を示すブロック図である。
【符号の説明】
【0128】
10 撮影装置
110a・110b 縦型フレーム
111a・111b 脚部
112a・112b キャスタ
113a・113b レール
120 横型フレーム
131 駆動プーリ
132・133 中継プーリ
134 ワイヤー
140 X軸センサ
150 保持部
151 ローラ
152 アンテナ
154 カメラ保持部
155a Z軸モータ
155b 伝達部
160 カメラ
161 LD
162 第1フォトセンサ
163 第2フォトセンサ
200 主制御部
210 検出制御部
220 駆動制御部
230 撮影制御部
240 操作部
250 表示部
260 記憶部
S 被写体
【技術分野】
【0001】
本発明は、大型の絵画、地図や文書等の大型被写体を撮影するための撮影装置についての技術に関する。
【背景技術】
【0002】
従来、大型の絵画、地図や文書等の大型被写体を撮影するときは、撮影者は床面に大型被写体を配置し、撮影者が台の上からカメラ等で撮影するということがなされていた。この場合、大型被写体の大きさと、カメラ等の1回分の撮影範囲との関係で、撮影者は台の上からでも1回で全体を撮影することは困難であった。
【0003】
また、カメラのレンズを被写体に向けたとき、当該レンズにおける撮影範囲の中心位置は、当該被写体とカメラのレンズとの距離が最も近い部分となる。その反面、中心位置から離れれば離れるほど当該カメラのレンズとの距離は遠くなる。つまり、当該撮影範囲における端縁の部分と中心位置とでは、カメラのレンズからの距離が大きく異なる。結果として撮影範囲における端縁部分の焦点と、中心位置の焦点とには、ずれが生じる。
【0004】
カメラで被写体を撮影する場合、通常撮影範囲の中心位置に焦点を合わせるので、撮影された画像の端縁部分は焦点が最もずれた状態で表される。すなわち、一回の撮影にかかる撮影範囲が広くなればなるほど、撮影範囲における端縁の位置が中心位置から離れることになり、焦点がずれた画像が取得されることになる。
【0005】
また、撮影者が台の高さを高くして、大型被写体とカメラ等の距離を離し、1回の撮影範囲を広げようとすると、その分、鮮明度が不十分となる。
【0006】
したがって、大型被写体を撮影する際には1回の撮影範囲を、焦点のずれや鮮明度の低下が許容範囲内となるように設定する必要がある。そうするためには、撮影者が大型被写体の全体を複数回に分けて撮影することが必要となる。
【0007】
従来、大型被写体の撮影では、固定された撮影台の上で撮影者が複数回に分けて大型被写体を撮影するので、大型被写体自体を折りたたんだり、丸めたりして大型被写体を移動しなければならなかった。しかし、大型被写体の移動は非常に煩雑である。この点、特許文献1に記載の撮影装置では、門型の架台を備えている。撮影者はこの門型の架台上で被写体を撮影する。さらに、特許文献1の撮影装置では撮影台にキャスタ等の移動部材が設けられている。つまり、大型被写体を移動させなくても、大型被写体を分割して撮影することが可能である。
【0008】
【特許文献1】実用新案登録第3068091号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
特許文献1のような門型の撮影装置は、大型被写体の上をまたぐように支柱間に形成された架台上から、撮影者が大型被写体を撮影可能とするものである。したがって特許文献1に記載の門型の撮影装置は、撮影者が架台上に乗って撮影をすることを考慮して、撮影の精度、効率および安全性を確保しなければならない。この観点からは、大型被写体を撮影する撮影者が撮影装置の支柱や架台に安全に乗ることができ、さらに撮影装置上の撮影者が大型被写体の撮影を十分に行いうる程度の大きさに形成しなければならない。
【0010】
また、大型被写体はそれぞれサイズや形状が異なるものであり、撮影装置下に載置されたときの幅もそれぞれ異なるものである。したがって、特許文献1の門型の撮影装置は大型被写体の中でも幅の大きなものを撮影できるように、被写体の設置台に載置する大型被写体の幅より、架台の幅を長く形成しなければならない。
【0011】
これらの要請から従来の門型の撮影装置は大型化する。しかし、この撮影装置を利用した撮影をするには、撮影者が乗ったまま大型の撮影装置を複数回移動させなければならない。したがって、撮影作業は効率が悪く、かつ作業者に大きな負担がかかる。また、撮影作業者の負担という観点では、門型の撮影装置の架台に乗った撮影者は、複数回にわたり、少なくとも架台上でカメラを移動し、ファインダーから撮影範囲を定め、カメラの位置を微調整して撮影するという煩雑かつ負担の大きな作業を行わなければならなかった。
【0012】
また大型被写体は、その大きさから輸送が煩雑な場合がある。また、撮影者は歴史的な絵画・図面など、劣化した大型被写体を毀損しないように状態を保持しなければならない。毀損のおそれがある被写体については輸送自体を困難とする場合がある。したがって、このような大型被写体を撮影するには、大型被写体を輸送するのではなく、撮影者が大型被写体のある場所まで行き、撮影を行う必要がある。
【0013】
つまり、大型被写体の輸送を行わず、かつ撮影装置を利用して大型被写体の撮影を行う場合、大型被写体が配置されている場所まで撮影装置を輸送しなければならない。しかし、前述のように特許文献1に記載されているような撮影装置は大型で幅も大きいものである。したがってこの撮影装置の輸送は容易に行うことができず、非常に煩雑であった。
【0014】
また、大型被写体を載置している先の保管場所等も、それぞれ面積が異なるものであり、撮影装置のサイズによっては、大型の門型撮影装置を設置できない場合がある。したがって特許文献1の撮影装置においては、撮影者は大型被写体の保管先の面積に合わせて、複数のサイズの撮影装置を用意しなければならないおそれがある。
【0015】
本発明は、以上の問題点に鑑みてなされたものであって、その目的は、大型被写体を撮影するための門型の撮影装置において、撮影を行う撮影者等の作業者の負担を軽減することができる技術の提供を目的とする。また、大型被写体の撮影装置の輸送を簡便にする技術の提供を目的とする。また、大型被写体の画像処理が煩雑となる事態を防止することができる技術の提供を目的とする。
【課題を解決するための手段】
【0016】
上記の課題を解決するために、本発明は、間隔を置いてそれぞれ立設する一対の縦型フレームと、該縦型フレーム間に架設され、水平方向に延伸し、かつ該延伸方向に伸縮自在に形成された横型フレームとによって構成される門型架台と、設置される被写体を前記縦型フレーム間において撮影する撮影手段を設置可能な保持部と、前記横型フレームに設けられ、前記保持部を前記横型フレームに沿って移動可能とする第1移動機構と、前記第1移動機構の移動量を検出する第1検出手段と、前記第1検出手段が検出する前記第1移動機構の移動量が、あらかじめ設定された設定移動量とほぼ等しくなったときに該第1移動機構の移動を停止させる第1制御部と、を備えたこと、を特徴とする撮影装置である。
【発明の効果】
【0017】
この発明による撮影装置は、撮影手段を有する保持部を移動可能とする第1移動機構と、第1移動機構の移動量を検出する第1検出手段と、第1検出手段が検出する第1移動機構の移動量が、あらかじめ設定された設定移動量とほぼ等しくなったときに第1移動機構の移動を停止させる第1制御部を有して構成されている。したがって、大型の被写体の撮影時において、門型の撮影装置における撮影手段の位置調整が容易となり、撮影者等の作業負担が軽減される。
【0018】
また、この発明による撮影装置は、門型架台の橋桁部が伸縮自在に形成され、撮影装置自体の幅を縮小することができる。したがって、撮影装置の幅を縮小することにより輸送の煩雑さを軽減することができ、かつ撮影装置の幅を撮影場所に合わせた大きさに調整することが可能となる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施形態の一例について図1〜図7を参照して説明する。
【0020】
[第1実施形態]
(全体構成)
この発明の第1実施形態にかかる撮影装置10の全体構成の概要について、図1を参照して説明する。図1は、この発明の実施形態にかかる撮影装置10を示す概略正面図である。
【0021】
この実施形態にかかる撮影装置10は門型架台を有し、門型架台は、図1に示すように縦型フレーム110a・110bとこれらに架設される横型フレーム120とを備える。また、撮影装置10は、横型フレーム120に沿って移動可能にされカメラを取り付け可能な保持部150と、保持部150を水平移動(図1のX方向)させるための駆動プーリ131、中継プーリ132・133、ワイヤー134を有して構成されるX軸移動機構(本発明の「第1移動機構」の一例に該当する。)と、保持部150の水平方向の移動量を検出するX軸センサ140(本発明の「第1検出手段」の一例に該当する。)とを備え、撮影装置10自体がカメラを移動させることが可能である。
【0022】
この撮影装置10においては、例えば図1に示すように門型架台の縦型フレーム110a・110bの間であって横型フレーム120の下方に大型の被写体S(大型図面等)を設置し、当該大型の被写体Sを、保持部150に取り付けられたカメラ160で複数領域に分けて撮影することが可能である。
【0023】
また、図1に示すように撮影装置10は、縦型フレーム110a・110bの上面から立設するセンサポスト114a・114bと、保持部150に設けられたZ軸移動機構と、高さ検出部とを備えている。Z軸移動機構は、カメラ保持部154とZ軸モータ155aおよび伝達部155bを備えている。
【0024】
また、高さ検出部は、センサポスト114aに設けられたLD(Laser Diode)161およびセンサポスト114bに設けられた第1フォトセンサ162を有して構成される基準高度供給手段と、カメラ保持部154に設けられたアンテナ152の先端に形成された第2フォトセンサ163(本発明の「検出部」の一例に該当する。)とを備える。この高さ検出部とZ軸移動機構により、撮影装置10における被写体Sの設置面からカメラのレンズまでの距離を所定範囲内に維持することができる。なお、これらの基準高度供給手段と第2フォトセンサ163とは、本発明における「第2検出手段」の一例に該当する。
以下、撮影装置10の各部の構成について説明する。
【0025】
(門型架台の構成)
次に撮影装置10の外形をなす門型架台の構成について図1および図2を参照して説明する。図2(A)は、この発明の実施形態にかかる撮影装置10の横型フレーム120を図1と同じ方向から見た部分拡大図である。図2(B)は、この発明の実施形態にかかる横型フレーム120の接合部分の概略を示す図2(A)のA−A断面図である。
【0026】
門型架台は、縦型フレーム110a・110b、レール113a・113b、センサポスト114a・114b、横型フレーム120によって構成される。縦型フレーム110aは、図1に示すように脚部111a・111bの長手方向の両端にキャスタ112aが設けられ、略水平に延伸する脚部111aと、かつ当該脚部111aの延伸方向における略中央部分から略垂直に立設する柱部によって構成される。同様に図1に示す縦型フレーム110bは、縦型フレーム110aと左右対称に形成され、一対のキャスタ112bが設けられた脚部111bおよび柱部を備えて構成され、この脚部111bも略水平に、かつ縦型フレーム110aの脚部111aと平行な方向に延伸する。また、これら縦型フレーム110a・110bは全体の高さや幅などにおいて同じ大きさに形成される。
【0027】
また図1に示すように、撮影装置10における門型架台は、縦型フレーム110a・110bの上端それぞれから立設するセンサポスト114a・114bを備えている。このセンサポスト114aには後述するLD161が設けられ、センサポスト114bにはLD161と同じ高さに第1フォトセンサ162が設けられる。
【0028】
横型フレーム120は、縦型フレーム110aの上端部と縦型フレーム110bの上端部にわたって水平に架設される上フレーム120aと、縦型フレーム110a・110b間において当該上フレーム120aより所定間隔分だけ下方に、かつ水平に架設される下フレーム120bとを有して構成される。また横型フレーム120には、後述する第1の中継プーリ132、第2の中継プーリ133が配置される。
【0029】
また横型フレーム120は、後述する保持部150の上下ローラ151を案内する不図示のレール溝を備えている。このレール溝は、横型フレーム120の上フレーム120aの上面と下フレーム120bの下面において、横型フレーム120の延伸方向(図1のX方向)に伸長するように設けられている。
【0030】
図2(B)に示すように、この横型フレーム120は、内部が空洞となる、複数の直線状のパーツを繋ぎ合せて構成されている。すなわち図2(A)に示すように横型フレーム120は、複数のフレームパーツ121・122・・・を繋ぎ合わせて構成されている。各フレームパーツは両端が開口されており、かつ一端が他の部分より細くなるように構成されている。この各フレームパーツの細くなっている部分を他のフレームパーツの開口部分から嵌挿し、嵌挿された各フレームパーツの重複している部分を固定することによって繋ぎ合わせられる。
【0031】
例えば図2(A)に示すように、フレームパーツ121の左端がフレームパーツ122の右端の開口部分から挿し込まれて図2(B)のように重複部分が生じるので、その部分を固定することによりフレームパーツ121・122を繋ぎ合わせる。このようにして繋ぎ合わせるフレームパーツの数を増減することにより、横型フレーム120の全長を延長または短縮することができる。
【0032】
また、図1に示すように、撮影装置10における門型架台は、縦型フレーム110a・110bの脚部111a・111bにおけるキャスタ112a・112bそれぞれを、横型フレーム120と直交する方向に案内するレール113a・113bを備えている。このレール113aは、図1に示すように縦型フレーム110aの脚部111a・111bの延伸方向に伸長しており、キャスタ112aを通過可能に形成され、縦型フレーム110a全体の移動を案内する。また図1に示すように、レール113bはレール113aに対して横型フレーム120の長さ分だけ離れた位置においてレール113aと平行にかつ脚部111a・111bの延伸方向に伸長する。また、レール113bはキャスタ112bを通過可能に形成され、縦型フレーム110b全体の移動を案内する。
【0033】
したがって、互いに平行に伸長するレール113a・113bによって、門型架台全体が横型フレーム120と直交する方向に案内される。すなわち、門型架台が直線状に往復移動するので、横型フレーム120の下方に配置される被写体Sと門型架台の位置関係を対応させたまま、門型架台が被写体Sに対して移動する。したがって、門型架台の移動に伴って、カメラ160のレンズの焦点位置が被写体Sに対して揺動する事態を防止することが可能となる。
【0034】
(X軸移動機構の構成)
次に、撮影装置10のカメラ160を水平方向(図1のX方向)に移動させるX軸移動機構について図1および図3を参照して説明する。図3は、この発明の実施形態にかかる撮影装置10のX軸移動機構を示す概略斜視図である。なお図3においては、キャスタ112b、センサポスト114b、駆動プーリ131、中継プーリ132・133の支持部、カメラ160、Z軸移動機構等は図示を省略している。
【0035】
この実施形態の撮影装置10にかかるカメラ160は、保持部150のカメラ保持部154に保持され、保持部150の移動にともない横型フレーム120に沿って水平方向(図1のX方向)に移動可能に構成されている。また撮影装置10には横型フレーム120の両端に中継プーリ132・133、駆動プーリ131が設けられており、これらにはワイヤー134が張架される。ワイヤー134は、駆動プーリ131の回転駆動により、駆動プーリ131と中継プーリ132・133の間で回転する。またこのワイヤー134は保持部150に固定される。したがって撮影装置10においては、駆動プーリ131を駆動させてワイヤー134を回転させ、それにともなって保持部150とカメラ160とが水平方向に移動される。つまり、当該撮影装置10によれば門型架台におけるカメラ160を装置自体が移動させるので、人手による作業を介することなくカメラが移動される。以下、これらのX軸移動機構の各部について説明する。
【0036】
図1に示すように中継プーリ133は、横型フレーム120の上下フレーム120a・120bの間であって、横型フレーム120における縦型フレーム110b側の端部の近傍に設けられる。また、この中継プーリ133は、門型架台に設けられたた不図示の支持部によって軸支され、縦型フレーム110aへ向かう方向およびその逆方向に回転自在に形成される。
【0037】
図1に示すように中継プーリ132は横型フレーム120において、中継プーリ133の位置と略対称となる位置であって中継プーリ133と略平行に設けられる。すなわち、横型フレーム120の上下フレーム120a・120bの間であって、当該横型フレーム120における縦型フレーム110a側の端部の近傍に設けられ、かつ門型架台に形成された不図示の支持部によって軸支され、中継プーリ133の回転方向と同様の方向に回転自在にされている。
【0038】
駆動プーリ131は、図1に示すように中継プーリ132の位置から下方かつ外側(縦型フレーム110a側)に設けられる。また駆動プーリ131は、不図示の駆動部に軸支され、中継プーリ132・133の回転方向と同様の方向に回転自在にされている。また、駆動プーリ131は、当該駆動部が回転駆動することにより、自ら回転する。この駆動プーリ131における駆動部としては、例えばステッピングモータ等が用いられ、後述する主制御部200に制御されて、所定距離分だけ保持部150を移動させるように駆動される。
【0039】
ワイヤー134は図1に示すように環状に形成される。また図1に示すように、ワイヤー134は横型フレーム120の一端に配置された中継プーリ132から横型フレーム120の延伸方向に沿って伸長し、中継プーリ133を経由して、当該中継プーリ133の下方かつ装置の外側に配置された駆動プーリ131まで到達する。
【0040】
また、このワイヤー134は、保持部150の内部を貫通し、かつ当該保持部150に取り付けられる。またこのワイヤー134は、各プーリに張架され、駆動プーリ131が回転駆動することにより回転される。
【0041】
また保持部150は、内部が空洞となっており、横型フレーム120を内部に貫通させて横型フレーム120に対し摺動可能に形成される。この保持部150は所定間隔を置いて組み合わされた一対の方形状の保持板によって構成される。この一対の保持板は長手方向が横型フレーム120の上フレーム120aの上面から下フレーム120bの下面までの距離より長くなるように形成される。またこの保持板それぞれの間には、当該保持板の四隅において2枚の保持板それぞれに固定された軸が形成され、当該4つの軸にそれぞれ軸支されたローラ151・151・151・151が設けられる。この各ローラ151は、横型フレーム120のレール溝方向に回転可能となるように軸支される。
【0042】
また、保持板の長手方向の一端に形成されたローラ151と他端に設けられたローラ151との間隔は、上フレーム120aの上面から下フレーム120bの下面までの距離よりやや長くなるように形成される。これは図3に示すように、横型フレーム120の上フレーム120a上面に形成されたレール溝に一端のローラ151・151を載せ、下フレーム120bの下面のレール溝に他端のローラ151・151を接触させて転動可能とするためである。つまり、保持部150は、保持板に軸支された四隅のローラ151によって横型フレーム120を挟み込み、かつ各ローラが上下フレーム120a・120bそれぞれのレール溝に転動可能に接触するように形成される。
【0043】
なお、保持部150には、Z軸移動機構および、当該Z軸移動機構のカメラ保持部154において第2フォトセンサ163を有したアンテナ152が設けられているが、これについては後述する。
【0044】
以上からX軸移動機構は、駆動プーリ131を回転駆動させ、ワイヤー134を介して保持部150を水平移動させることにより、人手による作業を介することなくカメラ160を水平方向に移動させることができ、門型の撮影装置において撮影作業を大幅に簡略化することが可能である。さらに作業効率を向上させることが可能である。
【0045】
なお、本実施形態にかかる撮影装置10では保持部150の移動にワイヤー134を用いているが、これは横型フレーム120の伸縮に合わせてワイヤー134の長さを調節することが便宜であるためである。したがって、横型フレーム120の伸縮に合わせて長さを可変できるものであれば他の部材を用いることが可能である。例えば保持部150の移動にはワイヤーに換えてタイミングベルト等を用いることが可能である。また、プーリも使用せず、横型フレーム120にラックアンドピニオンを取り付けて保持部150の移動に用いることも可能である。
【0046】
(X軸センサの構成)
次に、撮影装置10のカメラ160の水平方向(図1のX方向)の移動量を検出するX軸センサについて図1を参照して説明する。
【0047】
X軸センサ140は、図1に示すようにセンサポスト114aの内側(センサポスト114b方向)に設けられ、保持部150とX軸センサ140との距離を検出するセンサである。X軸センサ140としては、例えばワイヤー式リニアエンコーダを用いることが可能である。つまりX軸センサ140は計測用ワイヤーを巻きつけて備えており、そのワイヤーが水平に繰り出されるように、その計測用ワイヤーの先端を保持部150におけるX軸センサ140と同じ高さに取り付ける。そして保持部150がX軸センサ140から離隔することによって計測用ワイヤーが繰り出され、その繰り出し量から、保持部150とX軸センサ140との距離を検出することが可能である。
【0048】
したがって、保持部150とX軸センサ140の距離とを検出することにより、保持部150が横型フレーム120におけるどの位置に位置しているかを検出することが可能となる。これによって、X軸センサ140で保持部150の位置を検出しつつ、検出結果に応じて主制御部200が駆動プーリ131の回転駆動量を制御することにより、主制御部200の指示に応じてカメラ160を水平移動させることができる。つまり撮影作業者は、主制御部200によって駆動プーリ131を制御して任意にカメラを水平移動させることが可能である。また、X軸センサ140としてはリニアエンコーダの他、アブソリュートエンコーダを用いることも可能である。
【0049】
なお、駆動プーリ131においてステッピングモータ等を用いることで駆動プーリ131においてワイヤー134の移動量を検出し、カメラ160の移動量を検出することも可能である。ただし、カメラ160の水平移動の移動量を精密に検出する必要がある場合は、各プーリに対してのワイヤー134の滑りを考慮しなければならず、X軸センサ140を必要とする。
【0050】
(Z軸移動機構の構成)
次に、撮影装置10のカメラ160を垂直方向(図1のZ方向)に移動させるZ軸移動機構について図1および図4を参照して説明する。図4は、この発明の実施形態にかかる撮影装置10の保持部150の内部に設置されたZ軸移動機構の概略を示す正面図である。
【0051】
Z軸移動機構は、図1に示すように保持部150に取付けられる。また、このZ軸移動機構としては例えばクロスローラステージなどを用いることが可能である。すなわち、図4に示すようにZ軸移動機構はZ軸モータ155aを備えており、Z軸モータ155aには送りネジ155cが回転可能にかつ垂直に取付けられている。また送りネジ155cは、両端において垂直方向に伸長するガイド155eに案内されたナット155dに螺合している。
【0052】
当該ナット155dには垂直方向に延伸する伝達部155bがガイド155eそれぞれに並行して取り付けられている。伝達部155bは上端においてカメラ保持部154に取付られ、ナット155dが上下動することにともない、上下動してカメラ保持部154を上下動させる。また、カメラ保持部154は図1に示すようにカメラ160が取付可能に形成される。
【0053】
したがって、Z軸モータ155aが駆動されると送りネジ155cが回転し、送りネジ155cに螺合しているナット155dが上下動する。ナット155dが上下動することにより伝達部155bが上下動し、伝達部155bの上端に取り付けられたカメラ保持部154とカメラ160が垂直方向(図1におけるZ方向)に移動される。
【0054】
(高さ検出部の構成)
次に、撮影装置10のカメラ160の高さ調整に供する高さ検出部について図1を参照して説明する。
【0055】
高さ検出部は、縦型フレーム110aから立設するセンサポスト114aに設けられたLD161とセンサポスト114bに設けられた第1フォトセンサ162を有して構成される基準高度供給手段と、カメラ保持部154の上端部におけるアンテナ152の先端に形成された第2フォトセンサ163とを備えている。
【0056】
基準高度供給手段は、保持部150が維持すべき高さ(門型架台下の被写体設置面とカメラ160までの距離)の基準となるレーザをLD161から第1フォトセンサ162へ水平に出力し、当該レーザを検出する。カメラ保持部154に取り付けられたアンテナ152における第2フォトセンサ163がこの高さの基準となるレーザを受光している間は、カメラ160の高さが所定範囲内に維持されていることになる。これに対し、第2フォトセンサ163がレーザを受光せず、第1フォトセンサ162が受光している場合は、第2フォトセンサ163の高さが所定範囲外にあることになる。
【0057】
このようにして高さ検出部では、LD161の出力するレーザを、第1フォトセンサ162と第2フォトセンサ163のいずれが受光しているかによって、第2フォトセンサ163の高さが所定範囲内であるかを検出することができる。結果として、保持部150に保持されたカメラ160の高さが所定範囲内に維持されているかについて検出することができる。以下、高さ検出部の各部について説明する。
【0058】
LD161は図1に示すように、センサポスト114aの上端に形成された駆動部と、当該駆動部におけるセンサポスト114b方向かつ水平に発光するように設置された発光素子を備えている。
【0059】
LD161における駆動部はモータを備え、発光素子を固定したまま水平に、所定角度範囲内で発光素子面を左右(センサポスト114aからセンサポスト114bを見たときの左方または右方)に回動させる。
【0060】
第1フォトセンサ162は図1に示すようにセンサポスト114bの上端かつセンサポスト114bにおけるセンサポスト114a側に設置される。また、第2フォトセンサ163は図1に示すように、カメラ保持部154の上端から立設するアンテナ152の上端かつ、センサポスト114a側に向けて設置される。この第1フォトセンサ162および第2フォトセンサ163はLD161の発光素子からのレーザを受光する受光素子を備えている。この第1フォトセンサ162としては、例えば浜松ホトニクス(登録商標)株式会社製の1次元PSD(Position Sensing Detector)センサを用いる。これは当該センサが帯状の受光面をもち、長手方向について位置検出が可能であるため、LD161が回動しながら出力した光線(光信号)をより強度が高い状態で検出するためである。
【0061】
撮影装置10における門型架台はレール113a・113bに案内されて移動されるものであるが、横型フレーム120が長くなればなるほど、両端の縦型フレーム110aと110bとを同期させて同じ量だけ移動させることが困難になる。つまり、縦型フレーム110aと110bとは必ずしも同じ距離だけ移動されるわけではない。その結果、門型架台にねじれが生じる可能性があり、その場合LD161の発光素子と第1フォトセンサ162および第2フォトセンサ163における受光素子が対向しない可能性がある。
【0062】
一方レーザは、受光素子の中心位置で受光することによって、より強度の高い光信号を受光することができる。すなわち、門型架台のねじれによる発光素子と受光素子との位置関係にずれが生じても第1フォトセンサ162および第2フォトセンサ163における受光素子の中心位置でレーザを受光することが好ましい。
【0063】
これらのことから、一方のLD161においては駆動部が発光素子を回動させ、受光素子側に受光しやすくし、他方の受け側の第1フォトセンサ162および第2フォトセンサ163には1次元PSDセンサを用いてより幅広くレーザを受光することができる構成を採用する。この1次元PSDセンサは、帯状の受光面をもち、長手方向について位置検出が可能であることから門型架台のねじれによる素子間のずれが生じてもレーザの受光に支障をきたすおそれが低いという利点がある。
【0064】
(高さ調整)
次にZ軸移動機構と高さ検出部によるカメラ160の高さ調整について図1および図4を参照して説明する。
【0065】
カメラ160を保持する保持部150は、水平方向に延伸する横型フレーム120に案内されて移動するのでカメラ160の高さは一定に保持されるものである。ただし、横型フレーム120の長さが長くなるにつれ横型フレーム120に撓みが生じるおそれがある。また撮影装置10における横型フレーム120は、図1に示すようにフレームパーツを繋ぎ合わせて構成されていることにより横型フレーム120に撓みが生じるおそれがある。
【0066】
このため実施形態における撮影装置10は、Z軸移動機構と高さ検出部によって、この撓みによるカメラ160の高さのひずみを調整し、カメラ160の高さを所定範囲内に調整する。
【0067】
具体的には、カメラ保持部154におけるアンテナ152の先端の第2フォトセンサ163がLD161からのレーザを受光しつづける状態では、第2フォトセンサの検出により主制御部200は、カメラ160の高さが所定範囲内であると判断する。しかし、保持部150が水平移動するにつれ保持部150の高さが上下してしまい、カメラ160の高さもそれにつれて上下動することがある。このとき、カメラ保持部154に設けられたアンテナ152も保持部150にともなって上下動(図1・図4におけるZ方向への移動)する。アンテナ152が上下動するとアンテナ152の先端に位置する第2フォトセンサ163の高さも上下動する。
【0068】
このように第2フォトセンサ163が上下動してしまうことによって、LD161から出力されるレーザを第1フォトセンサ162が受光している場合は、主制御部200は第2フォトセンサ163の高さが所定範囲外にあると判断してZ軸移動機構を駆動させる。すなわち主制御部200は、図4に示すZ軸モータ155aを駆動させ、Z軸モータ155aに回転可能に取り付けられた送りネジ155cを正回転、または逆回転させる。送りネジ155cが回転すると、送りネジ155cに螺合したナット155dが上下動し、これによってナット155dに取り付けられた伝達部155bが上下動する。伝達部155bが上下動すると当該伝達部155bの上端に取り付けられたカメラ保持部154およびアンテナ152が上下動し、第2フォトセンサ163がLD161からのレーザを受光する位置まで上下動する。これによってカメラ160が垂直方向へ移動し、横型フレーム120の下方における被写体設置面とカメラ160のレンズとの距離(高さ)が所定範囲内に維持される。
【0069】
これに対し、当該レーザを第2フォトセンサ163が受光している間は、主制御部200は第2フォトセンサ163の高さが所定範囲内であると判断してZ軸移動機構のZ軸モータ155aを駆動させない。
【0070】
横型フレーム120の撓み等により端部側で撮影したときと中央側で撮影したときで、カメラ160のレンズと被写体Sまでの距離が変化すると、複数回に分けて撮影した大型被写体Sを1枚の画像となるように画像処理する際、個々の画像片のサイズを全体で統一する作業が必要になり、その後の画像処理が非常に煩雑となってしまう。この点、本実施形態にかかる撮影装置10は、横型フレーム120の撓みなどにより生じうるカメラ160のレンズ高さのずれに対し、主制御部200により高さ検出部とZ軸移動機構を介してカメラ160の高さを調整することが可能である。これによって、複数回に分けて撮影した大型被写体の画像処理を簡便にすることが可能となる。
【0071】
(制御)
次に、図5を用いて、撮影装置10の制御構成について説明する。図5は、この発明の実施形態にかかる撮影装置10の構成を示すブロック図である。
【0072】
図5に示すように撮影装置10は、制御系として主制御部200を備える。この主制御部200は、検出制御を行う検出制御部210、駆動制御を行う駆動制御部220、カメラ160の制御を行う撮影制御部230を備える。また、主制御部200は撮影装置10の操作部240、表示部250およびその他の各部を制御する。
【0073】
主制御部200は例えばCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。記憶部260には、あらかじめ制御プログラムが記憶され、CPUが当該制御プログラムを適宜RAM上に展開することにより、主制御部200として機能する。
【0074】
〈検出制御〉
検出制御部210は図5に示すように、X軸センサ140、高さ検出部に接続され、これらから検出信号を受信する。すなわちX軸センサ140からの検出信号を受け、当該信号から保持部150がX軸センサ140から離隔した距離を求める。また検出制御部210は、あらかじめ設定された横型フレーム120の長手方向の長さを記憶部260等から読み出し、求めた当該距離と読み出した横型フレームの長さを比較して、保持部150が横型フレーム120におけるどの位置にあるかを判断する。この検出制御部210は保持部150が水平移動している間中、随時X軸方向(横型フレーム120の延伸方向)における位置検出を行う。
【0075】
なお、記憶部260等から読み出す横型フレーム120長手方向の長さの値は、あらかじめ記憶部260に設定されている値、もしくは操作部240を介して撮影作業者等が入力した値となる。
【0076】
また検出制御部210は、LD161から出力されたレーザを受光する第1フォトセンサ162または第2フォトセンサ163からの検出信号を処理する。すなわち、第1フォトセンサ162から検出信号を受信した場合は、カメラ160の高さが所定範囲外であると判断する。また、第2フォトセンサ163からの検出信号を受信した場合は、カメラ160の高さが所定範囲内であると判断する。
【0077】
〈駆動制御〉
駆動制御部220は図5に示すように、X軸移動機構の駆動プーリ131、Z軸移動機構のZ軸モータ155aに接続され、主制御部200の制御に基づいてこれらを駆動させる。すなわち駆動制御部220は、主制御部200から図1のX方向における保持部150の移動回数と1回分の水平移動距離を定めた信号を受ける。駆動制御部220はこれに基づき駆動プーリ131を主制御部200が定めた距離分だけ駆動させる。
【0078】
また、本実施形態における撮影装置10は、各プーリとワイヤー134との滑りを考慮してX軸センサ140による位置検出を行いながら駆動プーリ131を駆動させる。つまり、保持部150が一端停止した位置から、前述の距離分移動した時点で駆動プーリ131の駆動を停止させ保持部150の水平移動を停止させる。この停止させるタイミングの判断は、検出制御部210が求めた保持部150の水平移動距離の検出結果に基づいて、主制御部200が行う。駆動制御部220は、主制御部200から水平移動の停止指示を受けたことにより保持部150の水平移動を停止させる。
【0079】
また、駆動制御部220は、主制御部200が検出制御部210からカメラ160の高さが所定の範囲外となった旨の信号を受けたことにより、Z軸移動機構のZ軸モータ155aを駆動させる。つまり、駆動制御部220は主制御部200から当該信号を受けたことにより、Z軸モータ155aを駆動させ、送りネジ155c、ナット155d、伝達部155b、カメラ保持部154を介し、第2フォトセンサ163がLD161からのレーザを受光するまで、アンテナ152を上下動させる。これによって、横型フレーム120の下方の被写体設置面からのカメラ160のレンズの高さは、所定の範囲内に維持されることになる。なお、横型フレーム120が撓む場合、下方に撓むことが多いものと考えられるため、まず駆動制御部220は、カメラ保持部154を上昇させるようにZ軸モータ155aを駆動させる。
【0080】
〈撮影制御〉
撮影制御部230は、撮影装置10のカメラ160の制御を行う。すなわち、主制御部200が保持部150の水平移動の停止信号を受けると、撮影制御部230はカメラ160を制御して撮影を実行する。より詳しくは、以下のように制御される。
【0081】
撮影装置10においては、撮影作業者が操作部240から被写体Sのサイズ(幅、長さ等)や、撮影画像に要求する精細度を入力することが可能である。また、記憶部260はあらかじめ、被写体Sのサイズと要求される精細度とから求められる焦点距離のテーブルを記憶している。主制御部200は、撮影作業者によって操作部240から被写体Sのサイズおよび要求される精細度の入力を受けると、記憶部260から当該テーブルを読み出し、当該入力された情報に該当する焦点距離の値を検索し、または該当するものが無い場合、テーブルから入力された情報に近似する焦点距離の値を検索する。
【0082】
次に、主制御部200は検索して決定された焦点距離とカメラ160の高さから1回の撮影領域の範囲を求める。また、主制御部200は求めた撮影範囲と入力された被写体Sのサイズから被写体Sを何回に分けて撮影するかを求める。
【0083】
次に、主制御部200は保持部150およびカメラ160がどの位置にあるかについて検出制御部210を介して判断する。本実施形態においては、保持部150の初期位置をX軸センサ140に最も近接した位置とする。主制御部200は撮影作業の開始にともない、X軸センサ140の検出結果に基づいて、駆動制御部220によって駆動プーリ131を回転させ、保持部150を当該初期位置に移動させる。
【0084】
次に、主制御部200が撮影作業者によって操作部240から撮影開始の操作をうけると、主制御部200は、初期位置から最初の撮影領域を撮影しうる位置まで、カメラ160が水平移動する距離を求める。主制御部200は駆動制御部220に、この求めた距離のデータを送信し、駆動制御部220は当該距離分だけワイヤー134を回転させ保持部150を水平移動させる。
【0085】
このとき検出制御部210はX軸センサ140によって保持部150が初期位置から離隔した距離を検出しており、主制御部200は、検出制御部210から随時、移動距離のデータを受ける。主制御部200は、保持部150の水平移動距離のデータを受け、保持部150が停止すべき距離分移動する前に、駆動制御部220によって駆動プーリの回転を停止させる制御を行う。つまり主制御部200は保持部150が当該停止すべき位置で停止するように、保持部150の移動速度とX軸センサ140からの検出距離のデータに基づいて駆動制御部220を制御する。より詳しくは、次のように制御する。
【0086】
主制御部200はX軸センサ140が検出したX軸センサ140から保持部150までの距離の値と移動開始前に求められたX軸センサ140から停止位置までの距離の値との差と、保持部150の移動速度から、当該停止位置に到達する時間を求める。この時間に基づき主制御部200は駆動プーリ131の回転の停止をすべきタイミングを求め、当該タイミングで駆動制御部220に駆動プーリ131を停止させるように制御を行う。
【0087】
駆動制御部220は、主制御部200から駆動プーリ131の回転を停止させる信号を受け、駆動プーリ131の回転を停止させる。
【0088】
次に主制御部200は、保持部150が水平移動を停止し、カメラ160が撮影位置まで到達すると、高さ検出部の検出結果に基づき、検出制御部210からカメラ160の高さが所定範囲内であるか否かの検出信号を受信する。この高さ検出部の高さの検出に当たっては、駆動制御部220がLD161に発光素子面の回動駆動をさせる制御を行う。つまり主制御部200は保持部150が停止すると、LD161の発光素子面を回動させるように駆動制御部220を制御する。
【0089】
主制御部200は、検出制御部210からカメラ160の高さが所定範囲外である旨の信号を受けると、撮影を直ちには行わせず、駆動制御部220によってZ軸モータ155aを駆動制御し、上記説明した高さ調整の制御を行う。
【0090】
検出制御部210からカメラ160の高さが所定範囲内である旨の信号を受けた場合や、上記高さ調節の結果、カメラ160の高さが所定範囲内である旨の信号を受けた場合には、撮影を実行する。すなわち、あらかじめ求めてあった被写体Sとの焦点距離となるようにカメラ160を制御し、撮影を実行する。撮影が実行されると1撮影領域分の画像データがカメラ160に記憶されるか、または当該画像データが撮影装置10の記憶部260に送信され、記憶部260に記憶される。
【0091】
撮影が実行されると、主制御部200は停止している保持部150の位置から次の撮影範囲を撮影しうる位置まで保持部150を移動させるように駆動制御部220を制御する。このようにして、主制御部200は被写体Sのサイズと一撮影範囲から求まる保持部150の水平移動の回数分、保持部150を移動させるように駆動制御部220を制御する。なお、撮影制御部230は、撮影作業者等による操作部240からの撮影操作を受け、撮影を実行する構成であってもよい。
【0092】
〈その他の制御〉
上記説明した他、主制御部200は撮影装置10の各部を制御する。例えば主制御部200は、撮影された一撮影領域の画像を表示部250に表示させる制御を行い、または、各種データの入力に供するデータ入力画面にかかるデータを操作に応じて記憶部260から読み出し、表示部250に表示させる制御を行う。
【0093】
(作用・効果)
以上説明した本実施形態にかかる撮影装置10の作用および効果について説明する。
【0094】
本実施形態にかかる撮影装置10は、門型架台の横型フレーム120に沿って回転するワイヤー134と当該ワイヤー134を張架する各プーリが設けられ、そのうち駆動プーリ131はワイヤー134を正逆方向に回転駆動させるように構成されている。また、当該ワイヤー134には、カメラ160が取り付けられ、横型フレーム120上面および下面に案内されて水平方向に移動可能な保持部150が取り付けられている。
【0095】
すなわち、駆動プーリ131を回転駆動させるだけで保持部150に取り付けられたカメラ160を水平移動させることができる。したがって門型架台に撮影作業者が乗ってカメラを移動させるといったような煩雑かつ作業者に対する危険をともなう作業を回避することができる。さらに大型被写体の撮影を簡易化し、作業効率を大幅に向上させることが可能である。
【0096】
また本実施形態にかかる撮影装置10は、保持部150の水平移動量を検出するX軸センサ140が設けられている。また主制御部200は、X軸センサ140の検出結果に基づき検出制御部210を介して保持部150の移動量を検出し、その検出結果に基づき、駆動制御部220を介して駆動プーリ131を制御しているので、駆動プーリ131の回転および停止を正確に制御することができる。
【0097】
したがって撮影作業者は、データを入力して1回分の撮影領域を定めれば、カメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0098】
さらに、駆動プーリ131の回転量によるのではなく、X軸センサ140によって保持部150の水平方向における移動量を検出しているので、より正確な保持部150の位置検出を行うことができる。つまり、各プーリに対してワイヤー134の滑りが生じても、保持部150の位置検出を正確に行っているので、撮影範囲のずれを生じる事態を防止することができる。結果として、撮影範囲のずれによる後の画像処理の煩雑さを解消することができる。
【0099】
また、本実施形態の門型架台における横型フレーム120は、複数のフレームパーツ(図2(A)の121・122参照)それぞれを嵌挿させ、繋ぎ合わせて構成されている。したがって、フレームパーツ同士の重複部分をずらすことにより、また、フレームパーツの数を増減することにより、横型フレーム120の長手方向における長さを容易に、延長または短縮することが可能である。
【0100】
したがって、撮影装置10の門型架台の幅を縮小することにより輸送の煩雑さを軽減することができ、かつ撮影装置10の幅を撮影場所に合わせた大きさに調整することが可能となる。さらに当該幅を容易に延長または短縮させることができる。
【0101】
また、本実施形態にかかる撮影装置10は、横型フレーム120の撓みなどにより生じうるカメラ160のレンズ高さのずれに対し、主制御部200により高さ検出部とZ軸移動機構を介してカメラ160の高さを調整することが可能である。これによって、複数回に分けて撮影した大型被写体の画像処理を簡便にすることが可能となる。
【0102】
さらに、本実施形態における撮影装置10は高さの基準となるセンサを、縦型フレーム110a・110bから立設した、センサポスト114a・114bに設置するように構成されている。この構成によれば、カメラの高さの基準をカメラの位置と被写体との距離によって調整する構成と比較して、高さの基準がより正確となる。つまり、カメラのレンズと被写体とによってカメラの焦点距離を調整する構成では、被写体の撮影面の凹凸がある場合、高さの基準がずれてしまう。これに対して、本実施形態の撮影装置10においては門型架台のフレームを基準としてカメラの高さの調整を行うので、被写体の撮影面が土どのような状態であっても、正確な高さの基準に基づき調整を行うことができる。
【0103】
(変形例)
次に、第1実施形態にかかる撮影装置の変形例について、以下に説明する。
【0104】
上記実施形態にかかる撮影装置10においては、縦型フレームと横型フレームによる1つの門型架台を用いているが、撮影装置としては他の構成を採用することも可能である。例えば、本実施形態にかかる門型架台2台を、横型フレームが平行になるように並列に配置する。さらに横型フレームそれぞれの間において、各横型フレームと直交するようにフレームを架設する。さらにこのフレームを横型フレームそれぞれに対し平行な方向かつ被写体設置面に対し水平に移動するように構成する。当該水平移動するフレームには、当該フレームに対し水平移動可能なカメラ保持部を形成し、カメラを保持したまま移動可能に構成する。
【0105】
このような構成においても、上記実施形態にかかる撮影装置10と同様にカメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0106】
また、上記実施形態にかかる撮影装置10においては、保持部150の位置検出においてX軸センサ140として、ワイヤー式のエンコーダ等を用いるが、撮影装置としては他の構成を採用することも可能である。例えば、横型フレーム120の延伸方向に沿って複数のループコイルを並設し、保持部150に当該ループコイルと共振する共振回路による位置指示手段を設ける。この位置指示手段と当該ループコイルとの間の電磁結合によって、横型フレーム120における位置指示手段の位置を検出するように構成する。主制御部200はこの位置検出に基づいて、駆動制御部220を介して駆動プーリ131を制御する。
【0107】
このような構成においても、上記実施形態にかかる撮影装置10と同様にカメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0108】
また上記実施形態にかかる撮影装置10においては、横型フレーム120の両端に中継プーリ132・133を水平に配置し、さらに駆動プーリ131を備える構成であるが、撮影装置としては他の構成を採用することも可能である。例えば中継プーリ132・133のいずれか一方を駆動プーリとして構成し、本実施形態の駆動プーリ131を備えない構成であってもよい。
【0109】
このような構成においても、上記実施形態にかかる撮影装置10と同様にカメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0110】
[第2実施形態]
次にこの発明の第2実施形態にかかる撮影装置10について説明する。
【0111】
(全体構成)
第2実施形態にかかる撮影装置においては、前述の第1実施形態にかかる撮影装置10に、さらにY軸移動機構(不図示)およびY軸センサ171a・171bを備えた構成となる。したがって、門型架台、X軸移動機構、X軸センサ140、Z軸移動機構および高さ検出部について第1実施形態の撮影装置と同様であるため説明を割愛する。また、第2実施形態における撮影装置の各部の制御も第1実施形態にかかる撮影装置の制御と同様であるため、説明を割愛する。
【0112】
以下、Y軸移動機構およびY軸センサ171a・171bおよび、これらの制御について図6および図7を用いて説明する。図6はこの発明の第2実施形態にかかる撮影装置を示す概略正面図である。また図7は、この発明の第2実施形態にかかる撮影装置の制御構成を示すブロック図である。
【0113】
(Y軸移動機構)
第2実施形態にかかる門型架台においては、キャスタ112a・112bを駆動するY軸移動機構を備えている。すなわち縦型フレーム110aの脚部111aには、脚部111aの両端に設けられたキャスタ112aの双方または一方を駆動するモータ(不図示)を設ける。このモータは、主制御部200および駆動制御部220に駆動制御されキャスタ112aを駆動する。また縦型フレーム110bの脚部111bには、縦型フレーム110aの脚部111aと同様に、キャスタ112bの双方または一方を駆動するモータが設けられる。
【0114】
(Y軸センサ)
第2実施形態にかかる門型架台においては、縦型フレーム110a・110bの移動量を検出するY軸センサ171a・171bを備えている。すなわち図6に示すように縦型フレーム110aのキャスタ112aを案内するレール113aの一端においてY軸センサ171aが設けられる。このY軸センサ171aは当該レール113aの一端から略垂直に立設する支柱と、当該支柱の先端に取り付けられたセンサによって構成される。また図6に示すように、レール113aと並列して配置されるレール113bにおける一端にもY軸センサ171bが設けられる。このY軸センサ171bはY軸センサ171aと同様に、レール113bの一端から略垂直に立設する支柱と、当該支柱の先端に取り付けられたセンサによって構成される。この支柱はY軸センサ171aにおける支柱に対応する位置に設けられる。
【0115】
またY軸センサ171aのセンサは、縦型フレーム110aの方向に、かつ水平にレーザを出力する発光部を備え、縦型フレーム110aへ向けてレーザを出力する。また、縦型フレーム110aには、Y軸センサ171aのセンサの発光部と略同じ高さにレーザを反射する反射板(不図示)を設ける。同様に、Y軸センサ171bのセンサも縦型フレーム110bの方向かつ水平にレーザを出力する。また縦型フレーム110bにもY軸センサ171bから出力されたレーザを反射する反射板が設けられている。またこれらのセンサは、反射板から反射したレーザを受光する。
【0116】
(制御)
第2実施形態にかかる主制御部200、検出制御部210および駆動制御部220は、Y軸センサ171a・171bが受光した検出信号から、縦型フレーム110aとY軸センサ171aまでの距離、縦型フレーム110bとY軸センサ171bまでの距離を計測し、計測結果に基づきY軸移動機構を駆動し、横型フレーム120と直交する方向に、門型架台を移動させる。
【0117】
すなわち主制御部200は、被写体Sにおける1回分の撮影範囲と全体の撮影が完了するまでの撮影回数が決定すると、区分された保持部150の水平移動量および門型架台の移動のための縦型フレーム110a・110bの移動量を量定したデータを駆動制御部220に送信する。
【0118】
検出制御部210、駆動制御部220および撮影制御部230を介し、撮影装置10が複数の撮影領域に区分された被写体Sの1列目の撮影を完了すると、主制御部200は、駆動制御部220を介し、門型架台の移動制御を行う。つまり、駆動制御部220は、受信した縦型フレーム110a・110bの移動量のデータに基づきY軸移動機構を駆動して縦型フレーム110a・110bを所定方向に所定量移動させる。
【0119】
この縦型フレーム110a・110bの移動量については、主制御部200が、検出制御部210から、Y軸センサ171a・171bが検出した縦型フレーム110bとY軸センサ171bまでの距離についての情報を受け、駆動制御部220を介してY軸移動機構のモータ駆動を制御する。
【0120】
つまり、検出制御部210は、Y軸センサ171a・171bが出力したレーザの周波数と、Y軸センサ171a・171bが受光した反射レーザの周波数とを検出して比較し、位相差を計測する。この位相差から、縦型フレーム110bとY軸センサ171bまでの距離を求める。このようにして、検出制御部210は門型架台の停止時から当該距離を随時計測する。主制御部200はこの計測された距離の情報と、門型架台の移動速度および量定された門型架台の1回の移動量から門型架台の移動を停止させるタイミングを判断する。
【0121】
駆動制御部220は主制御部200から門型架台の移動停止の指示を受け、Y軸移動機構の駆動を停止し、キャスタ112a・112bの移動を停止させる。
【0122】
(作用・効果)
以上説明した第2実施形態にかかる撮影装置10の作用および効果について説明する。
【0123】
第2実施形態にかかる撮影装置においても、第1実施形態にかかる撮影装置10と同様にカメラ160の位置合わせを撮影装置10によって自動的に行わせることが可能となる。結果として、大型被写体の撮影を簡易化し、作業効率を大幅に向上させるとともに作業の安全性を確保することが可能である。
【0124】
さらに第2実施形態にかかる撮影装置10は、主制御部200、検出制御部210および駆動制御部220が、Y軸センサ171a・171bが受光した検出信号から、縦型フレーム110aとY軸センサ171aまでの距離、縦型フレーム110bとY軸センサ171bまでの距離を計測し、計測結果に基づきY軸移動機構を駆動し、横型フレーム120と直交する方向に、門型架台を移動させることが可能である。
【0125】
すなわち、第2実施形態にかかる撮影装置10は、撮影装置10の操作部240等により、被写体のサイズおよび撮影画像に要求する精細度を入力するのみで、主制御部200が被写体を複数の撮影領域に区分し、1回分の撮影範囲を定める。その撮影範囲のデータおよび検出制御部210のX軸センサ140の検出結果に応じ、駆動制御部220が駆動プーリ131を駆動・停止して保持部150の移動を制御する。また、その撮影範囲のデータおよび検出制御部210のY軸センサ171a・171bの検出結果に応じ、駆動制御部220がY軸移動機構を駆動・停止して門型架台の移動を制御する。また、撮影制御部230があらかじめ定められた焦点距離で被写体を撮影する。
【0126】
したがって、大型被写体であっても、本実施形態にかかる撮影装置10を用いることにより、撮影作業者等は必要なデータの入力のみで、撮影を実行することが可能である。結果として、門型架台に撮影作業者が乗ってカメラを移動させるといったような煩雑かつ作業者に対する危険をともなう作業を回避することができる。さらに大型被写体の撮影を簡易化し、作業効率を大幅に向上させることが可能である。
【図面の簡単な説明】
【0127】
【図1】この発明の第1実施形態にかかる撮影装置を示す概略正面図である。
【図2】(A)この発明の実施形態にかかる撮影装置の横型フレームを図1と同じ方向から見た部分拡大図である。 (B)この発明の実施形態にかかる横型フレームの接合部分の概略を示す図2(A)のA−A断面図である。
【図3】この発明の実施形態にかかる撮影装置のX軸移動機構を示す概略斜視図である。
【図4】この発明の実施形態にかかる撮影装置の保持部の内部に設置されたZ軸移動機構の概略を示す正面図である。
【図5】この発明の第1実施形態にかかる撮影装置の制御構成を示すブロック図である。
【図6】この発明の第2実施形態にかかる撮影装置を示す概略正面図である。
【図7】この発明の第2実施形態にかかる撮影装置の制御構成を示すブロック図である。
【符号の説明】
【0128】
10 撮影装置
110a・110b 縦型フレーム
111a・111b 脚部
112a・112b キャスタ
113a・113b レール
120 横型フレーム
131 駆動プーリ
132・133 中継プーリ
134 ワイヤー
140 X軸センサ
150 保持部
151 ローラ
152 アンテナ
154 カメラ保持部
155a Z軸モータ
155b 伝達部
160 カメラ
161 LD
162 第1フォトセンサ
163 第2フォトセンサ
200 主制御部
210 検出制御部
220 駆動制御部
230 撮影制御部
240 操作部
250 表示部
260 記憶部
S 被写体
【特許請求の範囲】
【請求項1】
間隔を置いてそれぞれ立設する一対の縦型フレームと、該縦型フレーム間に架設され、水平方向に延伸し、かつ該延伸方向に伸縮自在に形成された横型フレームとによって構成される門型架台と、
設置される被写体を前記縦型フレーム間において撮影する撮影手段を設置可能な保持部と、
前記横型フレームに設けられ、前記保持部を前記横型フレームに沿って移動可能とする第1移動機構と、
前記第1移動機構の移動量を検出する第1検出手段と、
前記第1検出手段が検出する前記第1移動機構の移動量が、あらかじめ設定された設定移動量とほぼ等しくなったときに該第1移動機構の移動を停止させる第1制御部と、
を備えたこと、
を特徴とする撮影装置。
【請求項2】
前記一方の縦型フレームから他方の縦型フレームへ向かって、略水平方向に光線を照射する基準高度供給手段と、前記保持部に設けられ該光線を検出する検出部とを有する第2検出手段と、
前記保持部に設けられ、略垂直方向に前記撮影手段と前記検出部とを移動可能とする第2移動機構と、
前記検出部が前記光線を検出しないときに、前記第2移動機構を駆動させて前記検出部が該光線を検出するまで前記保持部を上下動させることにより、該撮影手段と前記光線との距離があらかじめ定められた範囲内となるように調整する第2制御部と、を有すること、
を特徴とする請求項1に記載の撮影装置。
【請求項3】
前記第1移動機構は、
前記保持部を移動可能とするように該保持部に連結され、かつ前記横型フレームに沿って形成された環状のワイヤーと、
前記横型フレームにおける延伸方向の各端部または、前記縦型フレームのいずれかに設けられ、かつ前記ワイヤーが張架される一対のプーリと、を有し、
前記プーリの少なくなくとも一方を回転駆動させることにより、ワイヤーを回転させ、該撮影手段を移動させること、
を特徴とする請求項1に記載の撮影装置。
【請求項4】
前記第1検出手段は、一端が前記縦型フレームの一方に、他端が前記保持部に取り付けられ、該保持部が該一端から離隔するにつれて該離隔する方向に繰り出されるワイヤー部材と、前記縦型フレームの一方に設けられ、前記ワイヤー部材の繰出量を測定する測定手段と、を有して構成されること、を特徴とする請求項2記載の撮影装置。
【請求項5】
前記撮影手段により被写体を複数領域に分割して撮影する場合における1領域分の撮影範囲を決定する撮影範囲情報を、精細度と被写体のサイズおよび文字のサイズごとにあらかじめ記憶する記憶手段を備え、
被写体のサイズおよび文字のサイズが設定されると、前記第1制御部は、前記記憶手段から該当する前記撮影範囲情報を読み出し、該被写体のサイズと該読み出した撮影範囲情報に基づき、前記第1移動機構が移動させる前記保持部の前記移動量を調整すること、
を特徴とする請求項1に記載の撮影装置。
【請求項6】
前記横型フレームは、管状であって延伸方向の一端がやや細く形成された複数のフレーム片を有して構成されるとともに、該フレーム片が相互に嵌挿されて連結されることにより略直線状にされ、かつ該フレーム片相互の嵌挿される長さを変更することにより、該横型フレームの前記延伸方向の長さを延長または短縮可能に形成されていること、
を特徴とする請求項1に記載の撮影装置。
【請求項7】
前記第2検出手段は、
前記縦型フレーム部に設けられ、該縦型フレーム部のそれぞれ上端からさらに上方へ突出する突出部と、
前記突出部のいずれか一方において前記第保持部より上方に位置する部分に形成され、他方の突出部側の方向へ、前記撮影手段の高さの基準となる水平な光線を発する発光部と、
前記保持部から前記突出部の突出方向と略同じ距離分だけ上方へ突出して設けられ、該突出方向の先端近傍に形成された第1受光部を有するアンテナ部と、を有して構成されること、
を特徴とする請求項2に記載の撮影装置。
【請求項8】
前記第2検出手段は、前記発光部を有する一方の突出部に対する他方の突出部において、該発光部と略同じ高さに形成され、前記光線を前記第1受光部が受光しないときに受光する第2受光部を有し、
前記制御部は、前記第2検出手段において前記第2受光部が受光しているときは前記第1受光部が受光するまで前記第2移動機構を駆動させて、前記保持部および前記前記撮影手段を上下動させること、
を特徴とする請求項8に記載の撮影装置。
【請求項1】
間隔を置いてそれぞれ立設する一対の縦型フレームと、該縦型フレーム間に架設され、水平方向に延伸し、かつ該延伸方向に伸縮自在に形成された横型フレームとによって構成される門型架台と、
設置される被写体を前記縦型フレーム間において撮影する撮影手段を設置可能な保持部と、
前記横型フレームに設けられ、前記保持部を前記横型フレームに沿って移動可能とする第1移動機構と、
前記第1移動機構の移動量を検出する第1検出手段と、
前記第1検出手段が検出する前記第1移動機構の移動量が、あらかじめ設定された設定移動量とほぼ等しくなったときに該第1移動機構の移動を停止させる第1制御部と、
を備えたこと、
を特徴とする撮影装置。
【請求項2】
前記一方の縦型フレームから他方の縦型フレームへ向かって、略水平方向に光線を照射する基準高度供給手段と、前記保持部に設けられ該光線を検出する検出部とを有する第2検出手段と、
前記保持部に設けられ、略垂直方向に前記撮影手段と前記検出部とを移動可能とする第2移動機構と、
前記検出部が前記光線を検出しないときに、前記第2移動機構を駆動させて前記検出部が該光線を検出するまで前記保持部を上下動させることにより、該撮影手段と前記光線との距離があらかじめ定められた範囲内となるように調整する第2制御部と、を有すること、
を特徴とする請求項1に記載の撮影装置。
【請求項3】
前記第1移動機構は、
前記保持部を移動可能とするように該保持部に連結され、かつ前記横型フレームに沿って形成された環状のワイヤーと、
前記横型フレームにおける延伸方向の各端部または、前記縦型フレームのいずれかに設けられ、かつ前記ワイヤーが張架される一対のプーリと、を有し、
前記プーリの少なくなくとも一方を回転駆動させることにより、ワイヤーを回転させ、該撮影手段を移動させること、
を特徴とする請求項1に記載の撮影装置。
【請求項4】
前記第1検出手段は、一端が前記縦型フレームの一方に、他端が前記保持部に取り付けられ、該保持部が該一端から離隔するにつれて該離隔する方向に繰り出されるワイヤー部材と、前記縦型フレームの一方に設けられ、前記ワイヤー部材の繰出量を測定する測定手段と、を有して構成されること、を特徴とする請求項2記載の撮影装置。
【請求項5】
前記撮影手段により被写体を複数領域に分割して撮影する場合における1領域分の撮影範囲を決定する撮影範囲情報を、精細度と被写体のサイズおよび文字のサイズごとにあらかじめ記憶する記憶手段を備え、
被写体のサイズおよび文字のサイズが設定されると、前記第1制御部は、前記記憶手段から該当する前記撮影範囲情報を読み出し、該被写体のサイズと該読み出した撮影範囲情報に基づき、前記第1移動機構が移動させる前記保持部の前記移動量を調整すること、
を特徴とする請求項1に記載の撮影装置。
【請求項6】
前記横型フレームは、管状であって延伸方向の一端がやや細く形成された複数のフレーム片を有して構成されるとともに、該フレーム片が相互に嵌挿されて連結されることにより略直線状にされ、かつ該フレーム片相互の嵌挿される長さを変更することにより、該横型フレームの前記延伸方向の長さを延長または短縮可能に形成されていること、
を特徴とする請求項1に記載の撮影装置。
【請求項7】
前記第2検出手段は、
前記縦型フレーム部に設けられ、該縦型フレーム部のそれぞれ上端からさらに上方へ突出する突出部と、
前記突出部のいずれか一方において前記第保持部より上方に位置する部分に形成され、他方の突出部側の方向へ、前記撮影手段の高さの基準となる水平な光線を発する発光部と、
前記保持部から前記突出部の突出方向と略同じ距離分だけ上方へ突出して設けられ、該突出方向の先端近傍に形成された第1受光部を有するアンテナ部と、を有して構成されること、
を特徴とする請求項2に記載の撮影装置。
【請求項8】
前記第2検出手段は、前記発光部を有する一方の突出部に対する他方の突出部において、該発光部と略同じ高さに形成され、前記光線を前記第1受光部が受光しないときに受光する第2受光部を有し、
前記制御部は、前記第2検出手段において前記第2受光部が受光しているときは前記第1受光部が受光するまで前記第2移動機構を駆動させて、前記保持部および前記前記撮影手段を上下動させること、
を特徴とする請求項8に記載の撮影装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−111517(P2009−111517A)
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願番号】特願2007−279407(P2007−279407)
【出願日】平成19年10月26日(2007.10.26)
【出願人】(591173084)株式会社国際マイクロ写真工業社 (2)
【Fターム(参考)】
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願日】平成19年10月26日(2007.10.26)
【出願人】(591173084)株式会社国際マイクロ写真工業社 (2)
【Fターム(参考)】
[ Back to top ]