
操作器システム
【課題】 行動者が操作器の操作を行う操作器システムで、行動者の体に装着する通信制御服に設けられる通信機と、操作器に設けられる制御器との間の通信を効率化する。
【解決手段】 行動者により持たれる操作器1と、行動者の体に装着される通信制御服2を設けた。操作器は通信制御服との間で無線通信する手段11を備え、通信制御服は操作器との間で無線通信する手段31を備えた。送信側では同期コードと送信対象となるデータとその誤り検出用データとの組を同一の送信対象となるデータについて各回毎に同期コードを異ならせて複数回送信し、受信側では受信した同期コードとデータとその誤り検出用データとの組について誤り検出用データに基づく誤りが非検出であった場合に受信データとして取得する。
【解決手段】 行動者により持たれる操作器1と、行動者の体に装着される通信制御服2を設けた。操作器は通信制御服との間で無線通信する手段11を備え、通信制御服は操作器との間で無線通信する手段31を備えた。送信側では同期コードと送信対象となるデータとその誤り検出用データとの組を同一の送信対象となるデータについて各回毎に同期コードを異ならせて複数回送信し、受信側では受信した同期コードとデータとその誤り検出用データとの組について誤り検出用データに基づく誤りが非検出であった場合に受信データとして取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、行動者(人)が操作器の操作を行う操作器システムに関し、特に、行動者の体に装着する服(通信制御服)に設けられる通信機と、操作器に設けられる制御器との間の通信を効率化した操作器システムに関する。
【背景技術】
【0002】
例えば、操作器システムでは、行動者となる人が、その体に通信機を設けた服(通信制御服)を装着して、操作器を持って、作業などの行動を行う。このような操作器システムでは、通信制御服に設けられた通信機と、操作器に設けられた制御器との間で、データを通信することが行われる。
図13には、通信制御服に設けられた通信機と、操作器に設けられた制御器との間で通信されるデータの伝送フォーマットの一例を示してある。
図13に示されるように、通信機から制御器へ、同期コードに続けて、同一のデータを3回送信する。
【0003】
具体的には、通信機が有する送信機では、同期コードを送信してデータスタートを認識させた後に、データ1回目、データ2回目、データ3回目といったように、同一のデータを3回送信する。制御器では、通信機から送信された同期コードを受信するとデータスタートを認識し、その後、3回のデータのうちの2回のデータが正しい場合にはデータが確定したと判断する。
つまり、データ成立条件としては、データ1回目とデータ2回目とが等しい場合、或いは、データ1回目とデータ3回目とが等しい場合、或いは、データ2回目とデータ3回目とが等しい場合、或いは、データ1回目とデータ2回目とデータ3回目が等しい場合のいずれかの場合に、データが確定したと判断する。
この方法では、制御器では、少なくとも同期コードを認識してから2回目のデータ終了までのデータを取得しなければ、データとして成立しない。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、操作器システムでは、上記のような通信機と制御器との通信方法によると、通信の効率がよくないといった不具合があった。
例えば、通信制御服(通信機)と操作器(制御器)との間の通信では、物理的な位置関係が特定されないことから、送受信しにくい場合があるといったことがあった。つまり、通信制御服を装着した行動者が操作器を所持している(手に持っている)ため、距離や角度には限度があり手の動作範囲内となるが、送受信中に手を動作させる可能性がある。
このため、通信制御服(通信機)と操作器(制御器)とが固定された固定位置関係の静止状態で通信を行うような場合における通信と比較して、データの内容を正しく取り易い構成や方法の開発が必要であった。
【0005】
本発明は、このような従来の事情に鑑み為されたもので、行動者(人)が操作器を持って歩いて移動したり動いたりするに際して、行動者の体に装着する服(通信制御服)に設けられる通信機と、操作器に設けられる制御器との間の通信を効率化することができる操作器システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明に係る操作器システムでは、次のような構成により、処理を行う。
すなわち、操作器が、行動者により持たれる。通信制御服が、前記行動者の体に装着される。
前記操作器は、前記通信制御服との間で無線により通信を行う操作器無線通信手段を備える。前記通信制御服は、前記操作器との間で無線により通信を行う通信制御服無線通信手段を備える。
そして、前記操作器の前記操作器無線通信手段と前記通信制御服の前記通信制御服無線通信手段は、送信側では同期コードと送信対象となるデータとその誤り検出用データとの組を同一の送信対象となるデータについて各回毎に同期コードを異ならせて複数回送信する処理を実行し、受信側では受信した同期コードとデータとその誤り検出用データとの組について誤り検出用データに基づく誤りが非検出であった(つまり、誤りが検出されなかった)場合に受信データとして取得する処理を実行する。
従って、例えば、行動者(人)が操作器を持って行動するに際して、行動者の体に装着する服(通信制御服)に設けられる通信機と、操作器に設けられる制御器との間の通信を効率化することができる。
【0007】
ここで、行動者としては、種々な人であってもよく、例えば、1人であってもよく、複数人であってもよい。
また、操作器としては、種々なものが用いられてもよい。
また、通信制御服としては、種々なものが用いられてもよく、例えば、操作器などとの間で通信する機能などを設けた服が用いられる。
また、操作器と通信制御服との間で行われる無線通信としては、種々なものが用いられてもよく、例えば、赤外線を用いた無線通信や、マイクロ波を用いた無線通信などを用いることができる。
【0008】
また、操作器と通信制御服との間で行われる無線通信では、いずれが送信側となっていずれが受信側となってもよく、また、双方向の通信が行われてもよい。
また、同期コードとしては、種々なものが用いられてもよい。
また、送信対象となるデータとしては、種々なデータが用いられてもよく、例えば、初期設定や設定変更に関するデータや、位置情報の要求や通知に関するデータなどを用いることができる。
また、誤り検出用データとしては、種々なデータが用いられてもよく、例えば、補数を用いたサム値のデータなどを用いることができる。
【0009】
また、送信側では、同一のデータについて同期コードとデータとその誤り検出用データとの組を複数回送信する場合における送信回数としては、種々な回数が用いられてもよい。
また、受信側では、送信側から複数回送信される同期コードとデータとその誤り検出用データとの組を受信する場合には、例えば、早い回数から優先して、誤り検出用データに基づいて誤りが検出されなかった時点で受信したデータを正しい受信データとして取得することとし、同一のデータについてはそれ以降の受信処理を停止することで、受信処理を効率化することができる。
【発明の効果】
【0010】
以上説明したように、本発明に係る操作器システムによると、操作器が行動者により持たれ、通信制御服が行動者の体に装着されて、行動者が行動を行うに際して、操作器と通信制御服との間では、送信側が同期コードと送信対象となるデータとその誤り検出用データとの組を同一の送信対象となるデータについて各回毎に同期コードを異ならせて複数回送信し、受信側が受信した同期コードとデータとその誤り検出用データとの組について誤り検出用データに基づく誤りが非検出であった時点で受信したデータを取得するようにしたため、例えば、行動者(人)が操作器を持って行動を行うに際して、行動者の体に装着する服(通信制御服)に設けられる通信機と、操作器に設けられる制御器との間の通信を効率化することができる。
【発明を実施するための最良の形態】
【0011】
本発明に係る一実施例を図面を参照して説明する。
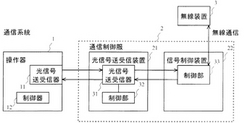
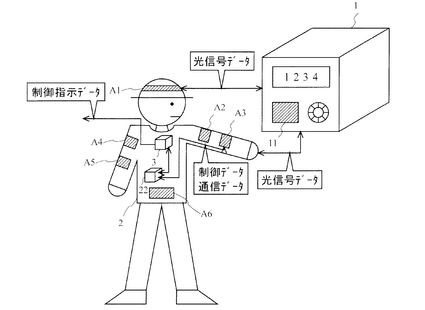
図1には、本発明の一実施例に係る操作器システムの構成例を示してある。
本例の操作器システムは、光信号送受信器11及び制御器12を有した操作器1と、行動者となる人員(人)の体に装着される服(通信制御服)2に設けられる装置を備えている。
通信制御服2に設けられる装置として、光信号送受信装置21(本例では、複数の光信号送受信装置A1〜A6がある)と、信号制御装置22と、無線装置3を備えている。
光信号送受信装置21は、光信号送受信器31と、制御部32を有している。
信号制御装置22は、制御部33を有している。
【0012】
ここで、通信制御服2に、マイコンや無線機などの各種の部品が付加されている。
また、上記のように、操作器1には制御器12が設けられている。この制御器12は、無線や光信号による通信などの各種の制御を行う。
光信号送受信装置21は、例えばレーザや赤外線などの信号経路のある通信制御服2に設けられ、その他の光信号送受信装置や信号制御装置22と通信可能に接続され、光信号送受信器11、31を介して操作器1と通信可能である。
また、信号制御装置22は、例えば光信号送受信装置21を介して操作器1の光信号送受信器11と通信可能に接続され、無線装置3と無線により通信可能に接続され、データの送受や判定や各種の制御などを行う。
また、操作器1に設けられた制御器12は、操作器1が人員により持たれることから、基本的な位置はある特定の位置になるが、作業中には例えば立っていたり寝ていたり左側に向けたり右側に向けたりと様々であるため、通信制御服2との位置関係は固定にはならず変動し得る。
【0013】
複数の行動者の操作器1に対して、時刻設定や初期設定などのために一斉にデータを送信する場合には、例えば、無線装置3に対して無線によりデータを送信し、当該データを無線装置3から信号制御装置22へ送信してデータ処理して、光信号送受信装置21を介して操作器1の光信号送受信器11へ送信する。
また、ある特定の行動者の操作器1のみに対して、制御などのためにデータを送信する場合には、例えば、通信制御服2の光信号送受信装置21へ光信号でデータを送信し、信号制御装置22によりデータ処理し、光信号送受信装置21を介して操作器1の光信号送受信器11へ送信する。
【0014】
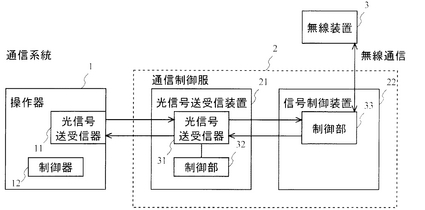
図2には、信号制御装置22の構成例を示してある。
本例の信号制御装置22は、ブザー41を有した制御部33を備えている。
また、信号制御装置22は、光信号送受信装置21との間で制御信号を送受信し、無線装置3との間で制御信号を送受信する。
【0015】
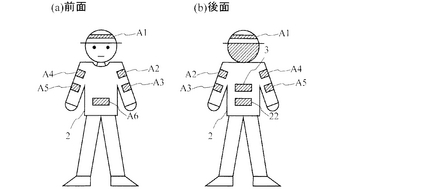
図3(a)、(b)には、通信制御服2の一例を示してある。
図3(a)には、通信制御服2を着用した人を前面から見た様子の一例を示してあり、図3(b)には、通信制御服2を着用した人を背面から見た様子の一例を示してある。
本例の通信制御服2は、チョッキタイプの形状を有しており、例えば、頭部用の光信号通信器の機能として使用され得る頭部の光信号送受信装置A1や、腕部用の光信号通信器の機能として使用され得る腕部の光信号送受信装置A2〜A5や、胴部用の光信号通信器の機能として使用され得る胴部の光信号送受信装置A6や、背中部の信号制御装置22や、背中部の無線装置3を設けてある。
【0016】
図4には、信号データ通信の系統の一例を示してある。
図4には、通信制御服2を着用した人員が操作器1を手に持っている様子の一例を示してある。
通信制御服2には、光信号送受信装置A1〜A6や、信号制御装置22や、無線装置3が設けられている。
図4に示されるように、外部の操作器1の光信号送受信器11からレーザ光線として発射されたデータ(光信号データ)が頭部や腕部や胴部などの受光装置(例えば、光信号送受信装置A1〜A6に設けられた機能)に当たると、当該受光装置がその旨を示す信号を例えば赤外線により光信号送受信装置A1〜A6へ送信する。これにより、光信号送受信装置A1〜A6は、外部の操作器1からのレーザ光線が人員に当たったことを把握する。
【0017】
また、光信号送受信装置A1〜A6から信号制御装置22へ例えば受光データや部位接続情報や電圧低下情報などの通信データや制御データが送信され、また、信号制御装置22から光信号送受信装置A1〜A6へ光信号送信データや現示表示情報などの通信データや制御データが送信される。
信号制御装置22では、光信号送受信装置A1〜A6が受光したレーザ光線を内部で電気的に変換した信号を、信号処理し、光信号データや、現示表示情報などを送信する。
【0018】
以下で、更に、本例の操作器システムについて詳しく説明する。
本例の操作器システムでは、通信制御服2の装置は、随時変更される様々な情報を別の系統(例えば、別の操作器システム)から受信しており、必要時に保有制御器(制御器12)により要求されるので、その時点での最新のデータを提供する。
保有制御器(制御器12)と通信制御服2との角度などの物理的な関係は固定ではなく、通信制御服2を装着した人員の移動などの行動に伴って様々である。
また、通信制御服2の数と制御器12の数との関係は、1対1である場合もあり、或いは、1対n(nは複数)である場合もある。更に、通信制御服2を装着して作業を行う人員の数としては、1人である場合もあり、複数人である場合もあり、また、多人数で密集するような場合もある。このため、このような様々な状態において、任意の時点で、人員の通信制御服2と制御器12との間で通信を行うことが必要となる。
【0019】
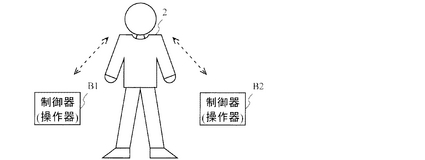
図5には、人員に装着された通信制御服2と、当該人員により持たれる2個の操作器1の制御器12(制御器B1、B2)との間で無線により通信する様子の一例を示してある。
本例では、通信制御服2の通信機(本例では、光信号送受信装置A1〜A6)と制御器B1、B2との間の通信に赤外線を用いることから、携帯電話などのような無線と違い、壁などで遮蔽されているエリアにいる通信制御服2の通信機と制御器B1、B2との間ではデータの送受は行われない。
また、通信制御服2と制御器B1、B2との数の関係が1対nであるときには、通信可能な範囲で制御器B1、B2同士が接近した場合に、それぞれの制御器B1、B2を識別することが必要となる。
このような場合には、それぞれの制御器B1、B2毎に異なる識別番号(ナンバー)を設定し、そして、通信制御服2を介して信号制御装置22が、予め、自己が所持する制御器B1、B2に付せられたナンバーの情報を保有登録する。そして、自己の保有しない制御器B1、B2からのデータは受け付けない。なお、このようなナンバーの情報を登録する装置としては、種々な装置が用いられてもよく、例えば、操作器1の制御器12(制御器B1、B2)や、光信号送受信装置21などを用いることもできる。
【0020】
通信制御服2の通信機などは、送信するときには送信するデータ内に送信相手となる制御器B1、B2のナンバーを含ませて載せ、制御器B1、B2から受信したデータについては当該データに含まれる制御器B1、B2のナンバーが自己に保有登録された制御器のナンバーであれば当該データを取得する。
また、例えば、通信制御服2の通信機などでは、制御器B1、B2から受信したデータ内に含まれる制御器のナンバーを確認して、自己に保有登録された制御器のナンバーである場合には自己の情報を送信する。
同様に、それぞれの制御器B1、B2は、自己に設定されたナンバーの情報を記憶しており、送信するときには送信するデータ内に自己のナンバーを含ませて載せ、通信制御服2の通信機から受信したデータについては当該データに含まれる制御器のナンバーが自己のナンバーと一致すれば当該データを取得する。
このように、制御器B1、B2の登録を複数行えば、通信制御服2と制御器B1、B2との数の関係を1対nとして個別に通信することが可能である。
【0021】
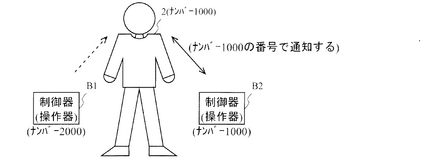
図6には、通信制御服2の通信機と複数の制御器B1、B2とが個別に通信する様子の一例を示してある。
ここで、制御器B1にはナンバー“2000”が設定されており、制御器B2にはナンバー“1000”が設定されており、通信制御服2の通信機などには無線通信相手とする制御器のナンバーとして制御器B2のナンバー“1000”が設定されている。
この場合、通信制御服2の通信機などでは、自己に設定されている制御器のナンバー“1000”を有する制御器B2との間では当該ナンバー“1000”を含むデータを送信や受信して無線通信を行うが、自己に設定されていない制御器のナンバー“2000”を有する制御器B1との間では無線通信を行わない。
例えば、通信制御服2の通信機などでは、ナンバー“1000”の制御器B2からの信号に応答して返答の信号を送信するが、ナンバー“2000”の制御器B1からの信号に対しては受信しても返答しない。
【0022】
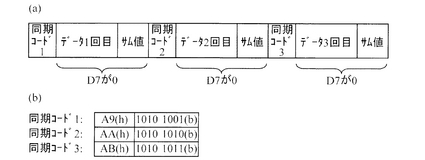
図7(a)、(b)には、通信制御服2に設けられた通信機(本例では、光信号送受信装置A1〜A6)と、操作器1に設けられた制御器12との間で通信される赤外線データの伝送フォーマットの一例を示してある。
図7(a)には、赤外線データのフレームの構成例を示してあり、図7(b)には、同期コードの一例を示してある。
図7(a)に示されるように、本例では、通信制御服2の通信機が有する送信機は、制御器12に対して、1回目の同期コード(同期コード1)、1回目のデータ(データ1回目)、1回目のサム値、2回目の同期コード(同期コード2)、2回目のデータ(データ2回目)、2回目のサム値、3回目の同期コード(同期コード3)、3回目のデータ(データ3回目)、3回目のサム値、の順に送信する。
図7(b)に示されるように、本例では、同期コード1と同期コード2と同期コード3はそれぞれ異なっている。
【0023】
このように、本例では、通信制御服2の側から操作器1(制御器12)の側へ同一のデータを3回(データ1回目、データ2回目、データ3回目)送信するに際して、各回のデータに何回目のデータであるかを識別することが可能な同期コードを付け、その後にデータをつなげて、最後にそのデータのサム値を付けるフォーマットとした。また、各回の同期コードを回数毎に変更する。
各回のデータは、バイト(byte)毎のD7を必ず0とし、サム値としてはデータの開始から終了までの総和について2の補数をとり、その1バイトのデータのD7を0とする。データは1回目から3回目まで同一であるため、サム値も同様となり、つまり、3回の送信データはそれぞれ同期コードのみが異なっている。
【0024】
そして、データ成立条件としては、同期コード1からサム値まで(同期コード1、データ1回目、そのサム値)を取得することができて当該サム値が正しい場合、或いは、同期コード2からサム値まで(同期コード2、データ2回目、そのサム値)を取得することができて当該サム値が正しい場合、或いは、同期コード3からサム値まで(同期コード3、データ3回目、そのサム値)を取得することができて当該サム値が正しい場合のいずれかの場合に、データが確定したと判断する。
【0025】
本例のフォーマットでは、サム値からそのデータで整合性がとれるため、少なくともいずれかの同期コードからそのサム値までの情報を取得することができれば受信したデータが成立する。つまり、本例では、1回目のデータが成立すれば2回目以降のデータは不要となり、1回目のデータが成立しなくとも2回目のデータが成立すれば3回目のデータは不要となる。このため、例えば図13に示されるようなフォーマットを用いた場合と比べて、データの取得時間を短くすることが可能であり、例えば、人員が腕を動作するような場合においても、送受信データの成立確率を大きくすることが可能である。
なお、本例では、同期コードはD7が1であり、それ以外はD7が0であるため、例えば、データの途中から取得するような場合においても、必ず同期コードの開始位置を認識することが可能である。
【0026】
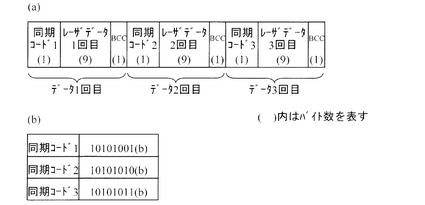
図8(a)、(b)には、通信制御服2の通信機が有する送信機から操作器1の制御器12へ赤外線データを送信する場合における伝送フォーマットの具体的な一例を示してある。
図8(a)には、赤外線データのフレームの構成例を示してあり、図8(b)には、同期コードの一例を示してある。
図8(a)に示されるように、本例では、通信制御服2の通信機が有する送信機は、制御器12に対して、1回目の同期コード(同期コード1)、1回目のデータ(レーザデータ1回目)、1回目のBCC、2回目の同期コード(同期コード2)、2回目のデータ(レーザデータ2回目)、2回目のBCC、3回目の同期コード(同期コード3)、3回目のデータ(レーザデータ3回目)、3回目のBCC、の順に送信する。
図8(b)に示されるように、本例では、同期コード1と同期コード2と同期コード3はそれぞれ異なっている。
【0027】
ここで、本例では、同期コードは1バイトであり、レーザデータは9バイトであり、BCCは1バイトである。レーザデータとしては、72ビットのレーザデータを8ビットずつ9個分に分けて、9バイトのデータとして、赤外線データの1回分としている。
また、BCCとしては、例えばブロック誤りを検出することが可能なデータが用いられ、本例では、レーザデータの1バイト目のデータから9バイト目のデータまでの総和について2の補数の下位7ビットを用いている。
本例では、データ1回目からデータ3回目のうちで、同期コードからBCCまでを正しく取得することができた1回分のデータを、受信データとして確定する。
【0028】
次に、本例の操作器システムで行われる動作の一例を示す。
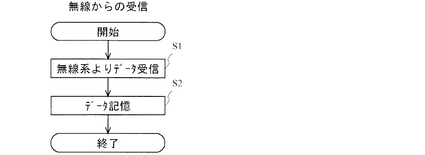
図9には、通信制御服2の通信機が有する受信機による無線受信の処理手順の一例を示してある。
通信制御服2では、情報発信元から無線により送信されたデータを受信機により受信すると(ステップS1)、受信したデータを例えばメモリに記憶する処理を行う(ステップS2)。
【0029】
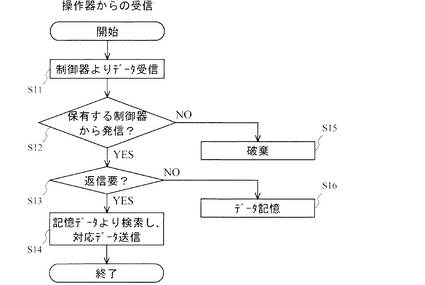
図10には、通信制御服2の通信機が有する受信機による、操作器1の制御器12からの受信の処理手順の一例を示してある。
通信制御服2では、操作器1の制御器12からデータ要求を行うためなどのデータを受信機により受信すると(ステップS11)、受信データが自己にナンバーが保有登録された制御器12からの発信であるか否かを判定し(ステップS12)、自己にナンバーが保有登録されていない制御器12からの発信であると判定した場合には受信データを破棄する(ステップS15)。
一方、通信制御服2では、受信データが自己にナンバーが保有登録された制御器12からの発信であると判定した場合には、受信データの内容に基づいて返信が必要であるか否かを判定し(ステップS13)、返信が必要でなければ受信データをメモリに記憶し(ステップS16)、返信が必要であればメモリに記憶されたデータから検索して対応するデータを返信のために送信機により送信する(ステップS14)。
【0030】
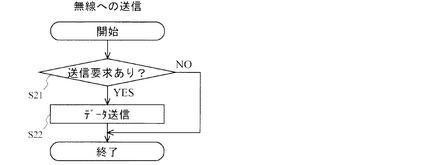
図11には、通信制御服2の通信機が有する送信機からの無線送信の処理手順の一例を示してある。
通信制御服2では、情報発信元からデータの送信要求があったか否かを判定し(ステップS21)、データの送信要求があった場合には、情報発信元に対して対応するデータを送信機により無線により送信する(ステップS22)。
【0031】
図12には、通信制御服2の通信機が有する送信機から操作器1の制御器12への送信の処理手順の一例を示してある。
通信制御服2では、自己にナンバーが保有登録された制御器12からの発信を受信機により受信したか否かを判定し(ステップS31)、受信した場合には、当該制御器12に対してデータを送信機により送信する(ステップS32)。
【0032】
以上のように、本例の操作器システムでは、行動者である人員の体に装着する通信制御服(データ送信機など)2と当該人員が持つ操作器1(制御器12)との間で行われるデータ通信において、データの正誤の判定にチェックサム(本例では、サム値或いはBCC)を用いることにより、通信制御服2から制御器12へ短時間でデータ送信を行うことを可能とした。
【0033】
本例の操作器システムでは、システムの運用において、通信制御服2とその通信制御服2が保有する制御器12との間で通信を行って、情報を交換する必要がある。通信制御服2や制御器12は静止しているわけではなく人員の行動に伴って移動するため、通信制御服2と制御器12との間の状態は必ずしも最良な通信状態ではない。そこで、本例では、通信制御服2と制御器12とが互いに移動しているような状態においても良好な通信を行うために、その通信が少しでも確率よくデータを取得することができるように、図7や図8に示されるような通信フォーマットや通信方式を用いた。
また、本例では、通信制御服2は無線機能(例えば、携帯電話などのような無線機能)を搭載して新規情報を随時得ることができるが、制御器12は小型であること等の制約があるために無線機能(例えば、携帯電話などのような無線機能)を搭載することができない場合に対応して、制御器12は常に通信制御服2を装着した人員が持つという運用を利用して、赤外線を用いて通信制御服2より任意に情報を送受信することとした。
【0034】
従って、本例の操作器システムでは、送受信のデータフォーマットを短時間でデータを取得することが可能なものとすることにより、行動者となる人員の動作中においても、当該人員により装着された通信制御服2と当該人員により持たれた操作器1の制御器12との間での通信可能な確率が上昇する。また、本例の通信制御服2では、各制御器12のナンバーを用いることにより、自己が保有する制御器12のみと通信することができる。
ここで、本例では、送受信のデータフォーマットを短時間でデータを取得することが可能なものとしたが、更に、通信速度を上げると、効果的である。
【0035】
なお、本例の操作器システムでは、操作器1が有する制御器12が光信号送受信器11により通信制御服2が有する通信機(本例では、光信号送受信装置21の光信号送受信器31)との間で図7や図8に示されるフォーマットを用いて光信号により無線通信(本例では、赤外線通信)を行う機能により操作器無線通信手段が構成されており、通信制御服2が有する通信機(本例では、光信号送受信装置21の光信号送受信器31)が操作器1が有する光信号送受信器11を介して制御器12との間で図7や図8に示されるフォーマットを用いて光信号により無線通信(本例では、赤外線通信)を行う機能により通信制御服無線通信手段が構成されている。
【0036】
一例として、本例のような操作器システムを、射撃訓練システムに適用することが可能である。
例えば、レーザ光線などによるデータを操作器1が送信するようにして、通信制御服2を体に装着した人員(行動者)が操作器1を持ってレーザ光線などを発し、また、通信制御服2の光信号送受信装置21は他の人員の操作器1から発せられたレーザ光線などを受信したことを検出する。
【0037】
ここで、本発明に係る操作器システムや各装置などの構成としては、必ずしも以上に示したものに限られず、種々な構成が用いられてもよい。また、本発明は、例えば、本発明に係る処理を実行する方法或いは方式や、このような方法や方式を実現するためのプログラムや当該プログラムを記録する記録媒体などとして提供することも可能であり、また、種々な装置やシステムとして提供することも可能である。
また、本発明の適用分野としては、必ずしも以上に示したものに限られず、本発明は、種々な分野に適用することが可能なものである。
また、本発明に係る操作器システムや各装置などにおいて行われる各種の処理としては、例えばプロセッサやメモリ等を備えたハードウエア資源においてプロセッサがROM(Read Only Memory)に格納された制御プログラムを実行することにより制御される構成が用いられてもよく、また、例えば当該処理を実行するための各機能手段が独立したハードウエア回路として構成されてもよい。
また、本発明は上記の制御プログラムを格納したフロッピー(登録商標)ディスクやCD(Compact Disc)−ROM等のコンピュータにより読み取り可能な記録媒体や当該プログラム(自体)として把握することもでき、当該制御プログラムを当該記録媒体からコンピュータに入力してプロセッサに実行させることにより、本発明に係る処理を遂行させることができる。
【図面の簡単な説明】
【0038】
【図1】本発明の一実施例に係る操作器システムの構成例を示す図である。
【図2】信号制御装置の構成例を示す図である。
【図3】通信制御服の一例を示す図である。
【図4】信号データ通信系統の一例を示す図である。
【図5】通信制御服と制御器との通信の一例を示す図である。
【図6】通信制御服と複数の制御器との通信の一例を示す図である。
【図7】光信号データの伝送フォーマットの一例を示す図である。
【図8】光信号データの伝送フォーマットの具体的な一例を示す図である。
【図9】通信制御服による無線受信の処理手順の一例を示す図である。
【図10】通信制御服による操作器からの受信の処理手順の一例を示す図である。
【図11】通信制御服からの無線送信の処理手順の一例を示す図である。
【図12】通信制御服から保有操作器への送信の処理手順の一例を示す図である。
【図13】光信号データの伝送フォーマットの一例を示す図である。
【符号の説明】
【0039】
1・・操作器、 2・・通信制御服、 3・・無線装置、 11・・光信号送受信器、 12、B1、B2・・制御器、 21、31、A1〜A6・・光信号送受信装置、 22・・信号制御装置、 32、33・・制御部、 41・・ブザー、
【技術分野】
【0001】
本発明は、行動者(人)が操作器の操作を行う操作器システムに関し、特に、行動者の体に装着する服(通信制御服)に設けられる通信機と、操作器に設けられる制御器との間の通信を効率化した操作器システムに関する。
【背景技術】
【0002】
例えば、操作器システムでは、行動者となる人が、その体に通信機を設けた服(通信制御服)を装着して、操作器を持って、作業などの行動を行う。このような操作器システムでは、通信制御服に設けられた通信機と、操作器に設けられた制御器との間で、データを通信することが行われる。
図13には、通信制御服に設けられた通信機と、操作器に設けられた制御器との間で通信されるデータの伝送フォーマットの一例を示してある。
図13に示されるように、通信機から制御器へ、同期コードに続けて、同一のデータを3回送信する。
【0003】
具体的には、通信機が有する送信機では、同期コードを送信してデータスタートを認識させた後に、データ1回目、データ2回目、データ3回目といったように、同一のデータを3回送信する。制御器では、通信機から送信された同期コードを受信するとデータスタートを認識し、その後、3回のデータのうちの2回のデータが正しい場合にはデータが確定したと判断する。
つまり、データ成立条件としては、データ1回目とデータ2回目とが等しい場合、或いは、データ1回目とデータ3回目とが等しい場合、或いは、データ2回目とデータ3回目とが等しい場合、或いは、データ1回目とデータ2回目とデータ3回目が等しい場合のいずれかの場合に、データが確定したと判断する。
この方法では、制御器では、少なくとも同期コードを認識してから2回目のデータ終了までのデータを取得しなければ、データとして成立しない。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、操作器システムでは、上記のような通信機と制御器との通信方法によると、通信の効率がよくないといった不具合があった。
例えば、通信制御服(通信機)と操作器(制御器)との間の通信では、物理的な位置関係が特定されないことから、送受信しにくい場合があるといったことがあった。つまり、通信制御服を装着した行動者が操作器を所持している(手に持っている)ため、距離や角度には限度があり手の動作範囲内となるが、送受信中に手を動作させる可能性がある。
このため、通信制御服(通信機)と操作器(制御器)とが固定された固定位置関係の静止状態で通信を行うような場合における通信と比較して、データの内容を正しく取り易い構成や方法の開発が必要であった。
【0005】
本発明は、このような従来の事情に鑑み為されたもので、行動者(人)が操作器を持って歩いて移動したり動いたりするに際して、行動者の体に装着する服(通信制御服)に設けられる通信機と、操作器に設けられる制御器との間の通信を効率化することができる操作器システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明に係る操作器システムでは、次のような構成により、処理を行う。
すなわち、操作器が、行動者により持たれる。通信制御服が、前記行動者の体に装着される。
前記操作器は、前記通信制御服との間で無線により通信を行う操作器無線通信手段を備える。前記通信制御服は、前記操作器との間で無線により通信を行う通信制御服無線通信手段を備える。
そして、前記操作器の前記操作器無線通信手段と前記通信制御服の前記通信制御服無線通信手段は、送信側では同期コードと送信対象となるデータとその誤り検出用データとの組を同一の送信対象となるデータについて各回毎に同期コードを異ならせて複数回送信する処理を実行し、受信側では受信した同期コードとデータとその誤り検出用データとの組について誤り検出用データに基づく誤りが非検出であった(つまり、誤りが検出されなかった)場合に受信データとして取得する処理を実行する。
従って、例えば、行動者(人)が操作器を持って行動するに際して、行動者の体に装着する服(通信制御服)に設けられる通信機と、操作器に設けられる制御器との間の通信を効率化することができる。
【0007】
ここで、行動者としては、種々な人であってもよく、例えば、1人であってもよく、複数人であってもよい。
また、操作器としては、種々なものが用いられてもよい。
また、通信制御服としては、種々なものが用いられてもよく、例えば、操作器などとの間で通信する機能などを設けた服が用いられる。
また、操作器と通信制御服との間で行われる無線通信としては、種々なものが用いられてもよく、例えば、赤外線を用いた無線通信や、マイクロ波を用いた無線通信などを用いることができる。
【0008】
また、操作器と通信制御服との間で行われる無線通信では、いずれが送信側となっていずれが受信側となってもよく、また、双方向の通信が行われてもよい。
また、同期コードとしては、種々なものが用いられてもよい。
また、送信対象となるデータとしては、種々なデータが用いられてもよく、例えば、初期設定や設定変更に関するデータや、位置情報の要求や通知に関するデータなどを用いることができる。
また、誤り検出用データとしては、種々なデータが用いられてもよく、例えば、補数を用いたサム値のデータなどを用いることができる。
【0009】
また、送信側では、同一のデータについて同期コードとデータとその誤り検出用データとの組を複数回送信する場合における送信回数としては、種々な回数が用いられてもよい。
また、受信側では、送信側から複数回送信される同期コードとデータとその誤り検出用データとの組を受信する場合には、例えば、早い回数から優先して、誤り検出用データに基づいて誤りが検出されなかった時点で受信したデータを正しい受信データとして取得することとし、同一のデータについてはそれ以降の受信処理を停止することで、受信処理を効率化することができる。
【発明の効果】
【0010】
以上説明したように、本発明に係る操作器システムによると、操作器が行動者により持たれ、通信制御服が行動者の体に装着されて、行動者が行動を行うに際して、操作器と通信制御服との間では、送信側が同期コードと送信対象となるデータとその誤り検出用データとの組を同一の送信対象となるデータについて各回毎に同期コードを異ならせて複数回送信し、受信側が受信した同期コードとデータとその誤り検出用データとの組について誤り検出用データに基づく誤りが非検出であった時点で受信したデータを取得するようにしたため、例えば、行動者(人)が操作器を持って行動を行うに際して、行動者の体に装着する服(通信制御服)に設けられる通信機と、操作器に設けられる制御器との間の通信を効率化することができる。
【発明を実施するための最良の形態】
【0011】
本発明に係る一実施例を図面を参照して説明する。
図1には、本発明の一実施例に係る操作器システムの構成例を示してある。
本例の操作器システムは、光信号送受信器11及び制御器12を有した操作器1と、行動者となる人員(人)の体に装着される服(通信制御服)2に設けられる装置を備えている。
通信制御服2に設けられる装置として、光信号送受信装置21(本例では、複数の光信号送受信装置A1〜A6がある)と、信号制御装置22と、無線装置3を備えている。
光信号送受信装置21は、光信号送受信器31と、制御部32を有している。
信号制御装置22は、制御部33を有している。
【0012】
ここで、通信制御服2に、マイコンや無線機などの各種の部品が付加されている。
また、上記のように、操作器1には制御器12が設けられている。この制御器12は、無線や光信号による通信などの各種の制御を行う。
光信号送受信装置21は、例えばレーザや赤外線などの信号経路のある通信制御服2に設けられ、その他の光信号送受信装置や信号制御装置22と通信可能に接続され、光信号送受信器11、31を介して操作器1と通信可能である。
また、信号制御装置22は、例えば光信号送受信装置21を介して操作器1の光信号送受信器11と通信可能に接続され、無線装置3と無線により通信可能に接続され、データの送受や判定や各種の制御などを行う。
また、操作器1に設けられた制御器12は、操作器1が人員により持たれることから、基本的な位置はある特定の位置になるが、作業中には例えば立っていたり寝ていたり左側に向けたり右側に向けたりと様々であるため、通信制御服2との位置関係は固定にはならず変動し得る。
【0013】
複数の行動者の操作器1に対して、時刻設定や初期設定などのために一斉にデータを送信する場合には、例えば、無線装置3に対して無線によりデータを送信し、当該データを無線装置3から信号制御装置22へ送信してデータ処理して、光信号送受信装置21を介して操作器1の光信号送受信器11へ送信する。
また、ある特定の行動者の操作器1のみに対して、制御などのためにデータを送信する場合には、例えば、通信制御服2の光信号送受信装置21へ光信号でデータを送信し、信号制御装置22によりデータ処理し、光信号送受信装置21を介して操作器1の光信号送受信器11へ送信する。
【0014】
図2には、信号制御装置22の構成例を示してある。
本例の信号制御装置22は、ブザー41を有した制御部33を備えている。
また、信号制御装置22は、光信号送受信装置21との間で制御信号を送受信し、無線装置3との間で制御信号を送受信する。
【0015】
図3(a)、(b)には、通信制御服2の一例を示してある。
図3(a)には、通信制御服2を着用した人を前面から見た様子の一例を示してあり、図3(b)には、通信制御服2を着用した人を背面から見た様子の一例を示してある。
本例の通信制御服2は、チョッキタイプの形状を有しており、例えば、頭部用の光信号通信器の機能として使用され得る頭部の光信号送受信装置A1や、腕部用の光信号通信器の機能として使用され得る腕部の光信号送受信装置A2〜A5や、胴部用の光信号通信器の機能として使用され得る胴部の光信号送受信装置A6や、背中部の信号制御装置22や、背中部の無線装置3を設けてある。
【0016】
図4には、信号データ通信の系統の一例を示してある。
図4には、通信制御服2を着用した人員が操作器1を手に持っている様子の一例を示してある。
通信制御服2には、光信号送受信装置A1〜A6や、信号制御装置22や、無線装置3が設けられている。
図4に示されるように、外部の操作器1の光信号送受信器11からレーザ光線として発射されたデータ(光信号データ)が頭部や腕部や胴部などの受光装置(例えば、光信号送受信装置A1〜A6に設けられた機能)に当たると、当該受光装置がその旨を示す信号を例えば赤外線により光信号送受信装置A1〜A6へ送信する。これにより、光信号送受信装置A1〜A6は、外部の操作器1からのレーザ光線が人員に当たったことを把握する。
【0017】
また、光信号送受信装置A1〜A6から信号制御装置22へ例えば受光データや部位接続情報や電圧低下情報などの通信データや制御データが送信され、また、信号制御装置22から光信号送受信装置A1〜A6へ光信号送信データや現示表示情報などの通信データや制御データが送信される。
信号制御装置22では、光信号送受信装置A1〜A6が受光したレーザ光線を内部で電気的に変換した信号を、信号処理し、光信号データや、現示表示情報などを送信する。
【0018】
以下で、更に、本例の操作器システムについて詳しく説明する。
本例の操作器システムでは、通信制御服2の装置は、随時変更される様々な情報を別の系統(例えば、別の操作器システム)から受信しており、必要時に保有制御器(制御器12)により要求されるので、その時点での最新のデータを提供する。
保有制御器(制御器12)と通信制御服2との角度などの物理的な関係は固定ではなく、通信制御服2を装着した人員の移動などの行動に伴って様々である。
また、通信制御服2の数と制御器12の数との関係は、1対1である場合もあり、或いは、1対n(nは複数)である場合もある。更に、通信制御服2を装着して作業を行う人員の数としては、1人である場合もあり、複数人である場合もあり、また、多人数で密集するような場合もある。このため、このような様々な状態において、任意の時点で、人員の通信制御服2と制御器12との間で通信を行うことが必要となる。
【0019】
図5には、人員に装着された通信制御服2と、当該人員により持たれる2個の操作器1の制御器12(制御器B1、B2)との間で無線により通信する様子の一例を示してある。
本例では、通信制御服2の通信機(本例では、光信号送受信装置A1〜A6)と制御器B1、B2との間の通信に赤外線を用いることから、携帯電話などのような無線と違い、壁などで遮蔽されているエリアにいる通信制御服2の通信機と制御器B1、B2との間ではデータの送受は行われない。
また、通信制御服2と制御器B1、B2との数の関係が1対nであるときには、通信可能な範囲で制御器B1、B2同士が接近した場合に、それぞれの制御器B1、B2を識別することが必要となる。
このような場合には、それぞれの制御器B1、B2毎に異なる識別番号(ナンバー)を設定し、そして、通信制御服2を介して信号制御装置22が、予め、自己が所持する制御器B1、B2に付せられたナンバーの情報を保有登録する。そして、自己の保有しない制御器B1、B2からのデータは受け付けない。なお、このようなナンバーの情報を登録する装置としては、種々な装置が用いられてもよく、例えば、操作器1の制御器12(制御器B1、B2)や、光信号送受信装置21などを用いることもできる。
【0020】
通信制御服2の通信機などは、送信するときには送信するデータ内に送信相手となる制御器B1、B2のナンバーを含ませて載せ、制御器B1、B2から受信したデータについては当該データに含まれる制御器B1、B2のナンバーが自己に保有登録された制御器のナンバーであれば当該データを取得する。
また、例えば、通信制御服2の通信機などでは、制御器B1、B2から受信したデータ内に含まれる制御器のナンバーを確認して、自己に保有登録された制御器のナンバーである場合には自己の情報を送信する。
同様に、それぞれの制御器B1、B2は、自己に設定されたナンバーの情報を記憶しており、送信するときには送信するデータ内に自己のナンバーを含ませて載せ、通信制御服2の通信機から受信したデータについては当該データに含まれる制御器のナンバーが自己のナンバーと一致すれば当該データを取得する。
このように、制御器B1、B2の登録を複数行えば、通信制御服2と制御器B1、B2との数の関係を1対nとして個別に通信することが可能である。
【0021】
図6には、通信制御服2の通信機と複数の制御器B1、B2とが個別に通信する様子の一例を示してある。
ここで、制御器B1にはナンバー“2000”が設定されており、制御器B2にはナンバー“1000”が設定されており、通信制御服2の通信機などには無線通信相手とする制御器のナンバーとして制御器B2のナンバー“1000”が設定されている。
この場合、通信制御服2の通信機などでは、自己に設定されている制御器のナンバー“1000”を有する制御器B2との間では当該ナンバー“1000”を含むデータを送信や受信して無線通信を行うが、自己に設定されていない制御器のナンバー“2000”を有する制御器B1との間では無線通信を行わない。
例えば、通信制御服2の通信機などでは、ナンバー“1000”の制御器B2からの信号に応答して返答の信号を送信するが、ナンバー“2000”の制御器B1からの信号に対しては受信しても返答しない。
【0022】
図7(a)、(b)には、通信制御服2に設けられた通信機(本例では、光信号送受信装置A1〜A6)と、操作器1に設けられた制御器12との間で通信される赤外線データの伝送フォーマットの一例を示してある。
図7(a)には、赤外線データのフレームの構成例を示してあり、図7(b)には、同期コードの一例を示してある。
図7(a)に示されるように、本例では、通信制御服2の通信機が有する送信機は、制御器12に対して、1回目の同期コード(同期コード1)、1回目のデータ(データ1回目)、1回目のサム値、2回目の同期コード(同期コード2)、2回目のデータ(データ2回目)、2回目のサム値、3回目の同期コード(同期コード3)、3回目のデータ(データ3回目)、3回目のサム値、の順に送信する。
図7(b)に示されるように、本例では、同期コード1と同期コード2と同期コード3はそれぞれ異なっている。
【0023】
このように、本例では、通信制御服2の側から操作器1(制御器12)の側へ同一のデータを3回(データ1回目、データ2回目、データ3回目)送信するに際して、各回のデータに何回目のデータであるかを識別することが可能な同期コードを付け、その後にデータをつなげて、最後にそのデータのサム値を付けるフォーマットとした。また、各回の同期コードを回数毎に変更する。
各回のデータは、バイト(byte)毎のD7を必ず0とし、サム値としてはデータの開始から終了までの総和について2の補数をとり、その1バイトのデータのD7を0とする。データは1回目から3回目まで同一であるため、サム値も同様となり、つまり、3回の送信データはそれぞれ同期コードのみが異なっている。
【0024】
そして、データ成立条件としては、同期コード1からサム値まで(同期コード1、データ1回目、そのサム値)を取得することができて当該サム値が正しい場合、或いは、同期コード2からサム値まで(同期コード2、データ2回目、そのサム値)を取得することができて当該サム値が正しい場合、或いは、同期コード3からサム値まで(同期コード3、データ3回目、そのサム値)を取得することができて当該サム値が正しい場合のいずれかの場合に、データが確定したと判断する。
【0025】
本例のフォーマットでは、サム値からそのデータで整合性がとれるため、少なくともいずれかの同期コードからそのサム値までの情報を取得することができれば受信したデータが成立する。つまり、本例では、1回目のデータが成立すれば2回目以降のデータは不要となり、1回目のデータが成立しなくとも2回目のデータが成立すれば3回目のデータは不要となる。このため、例えば図13に示されるようなフォーマットを用いた場合と比べて、データの取得時間を短くすることが可能であり、例えば、人員が腕を動作するような場合においても、送受信データの成立確率を大きくすることが可能である。
なお、本例では、同期コードはD7が1であり、それ以外はD7が0であるため、例えば、データの途中から取得するような場合においても、必ず同期コードの開始位置を認識することが可能である。
【0026】
図8(a)、(b)には、通信制御服2の通信機が有する送信機から操作器1の制御器12へ赤外線データを送信する場合における伝送フォーマットの具体的な一例を示してある。
図8(a)には、赤外線データのフレームの構成例を示してあり、図8(b)には、同期コードの一例を示してある。
図8(a)に示されるように、本例では、通信制御服2の通信機が有する送信機は、制御器12に対して、1回目の同期コード(同期コード1)、1回目のデータ(レーザデータ1回目)、1回目のBCC、2回目の同期コード(同期コード2)、2回目のデータ(レーザデータ2回目)、2回目のBCC、3回目の同期コード(同期コード3)、3回目のデータ(レーザデータ3回目)、3回目のBCC、の順に送信する。
図8(b)に示されるように、本例では、同期コード1と同期コード2と同期コード3はそれぞれ異なっている。
【0027】
ここで、本例では、同期コードは1バイトであり、レーザデータは9バイトであり、BCCは1バイトである。レーザデータとしては、72ビットのレーザデータを8ビットずつ9個分に分けて、9バイトのデータとして、赤外線データの1回分としている。
また、BCCとしては、例えばブロック誤りを検出することが可能なデータが用いられ、本例では、レーザデータの1バイト目のデータから9バイト目のデータまでの総和について2の補数の下位7ビットを用いている。
本例では、データ1回目からデータ3回目のうちで、同期コードからBCCまでを正しく取得することができた1回分のデータを、受信データとして確定する。
【0028】
次に、本例の操作器システムで行われる動作の一例を示す。
図9には、通信制御服2の通信機が有する受信機による無線受信の処理手順の一例を示してある。
通信制御服2では、情報発信元から無線により送信されたデータを受信機により受信すると(ステップS1)、受信したデータを例えばメモリに記憶する処理を行う(ステップS2)。
【0029】
図10には、通信制御服2の通信機が有する受信機による、操作器1の制御器12からの受信の処理手順の一例を示してある。
通信制御服2では、操作器1の制御器12からデータ要求を行うためなどのデータを受信機により受信すると(ステップS11)、受信データが自己にナンバーが保有登録された制御器12からの発信であるか否かを判定し(ステップS12)、自己にナンバーが保有登録されていない制御器12からの発信であると判定した場合には受信データを破棄する(ステップS15)。
一方、通信制御服2では、受信データが自己にナンバーが保有登録された制御器12からの発信であると判定した場合には、受信データの内容に基づいて返信が必要であるか否かを判定し(ステップS13)、返信が必要でなければ受信データをメモリに記憶し(ステップS16)、返信が必要であればメモリに記憶されたデータから検索して対応するデータを返信のために送信機により送信する(ステップS14)。
【0030】
図11には、通信制御服2の通信機が有する送信機からの無線送信の処理手順の一例を示してある。
通信制御服2では、情報発信元からデータの送信要求があったか否かを判定し(ステップS21)、データの送信要求があった場合には、情報発信元に対して対応するデータを送信機により無線により送信する(ステップS22)。
【0031】
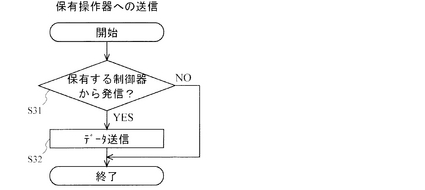
図12には、通信制御服2の通信機が有する送信機から操作器1の制御器12への送信の処理手順の一例を示してある。
通信制御服2では、自己にナンバーが保有登録された制御器12からの発信を受信機により受信したか否かを判定し(ステップS31)、受信した場合には、当該制御器12に対してデータを送信機により送信する(ステップS32)。
【0032】
以上のように、本例の操作器システムでは、行動者である人員の体に装着する通信制御服(データ送信機など)2と当該人員が持つ操作器1(制御器12)との間で行われるデータ通信において、データの正誤の判定にチェックサム(本例では、サム値或いはBCC)を用いることにより、通信制御服2から制御器12へ短時間でデータ送信を行うことを可能とした。
【0033】
本例の操作器システムでは、システムの運用において、通信制御服2とその通信制御服2が保有する制御器12との間で通信を行って、情報を交換する必要がある。通信制御服2や制御器12は静止しているわけではなく人員の行動に伴って移動するため、通信制御服2と制御器12との間の状態は必ずしも最良な通信状態ではない。そこで、本例では、通信制御服2と制御器12とが互いに移動しているような状態においても良好な通信を行うために、その通信が少しでも確率よくデータを取得することができるように、図7や図8に示されるような通信フォーマットや通信方式を用いた。
また、本例では、通信制御服2は無線機能(例えば、携帯電話などのような無線機能)を搭載して新規情報を随時得ることができるが、制御器12は小型であること等の制約があるために無線機能(例えば、携帯電話などのような無線機能)を搭載することができない場合に対応して、制御器12は常に通信制御服2を装着した人員が持つという運用を利用して、赤外線を用いて通信制御服2より任意に情報を送受信することとした。
【0034】
従って、本例の操作器システムでは、送受信のデータフォーマットを短時間でデータを取得することが可能なものとすることにより、行動者となる人員の動作中においても、当該人員により装着された通信制御服2と当該人員により持たれた操作器1の制御器12との間での通信可能な確率が上昇する。また、本例の通信制御服2では、各制御器12のナンバーを用いることにより、自己が保有する制御器12のみと通信することができる。
ここで、本例では、送受信のデータフォーマットを短時間でデータを取得することが可能なものとしたが、更に、通信速度を上げると、効果的である。
【0035】
なお、本例の操作器システムでは、操作器1が有する制御器12が光信号送受信器11により通信制御服2が有する通信機(本例では、光信号送受信装置21の光信号送受信器31)との間で図7や図8に示されるフォーマットを用いて光信号により無線通信(本例では、赤外線通信)を行う機能により操作器無線通信手段が構成されており、通信制御服2が有する通信機(本例では、光信号送受信装置21の光信号送受信器31)が操作器1が有する光信号送受信器11を介して制御器12との間で図7や図8に示されるフォーマットを用いて光信号により無線通信(本例では、赤外線通信)を行う機能により通信制御服無線通信手段が構成されている。
【0036】
一例として、本例のような操作器システムを、射撃訓練システムに適用することが可能である。
例えば、レーザ光線などによるデータを操作器1が送信するようにして、通信制御服2を体に装着した人員(行動者)が操作器1を持ってレーザ光線などを発し、また、通信制御服2の光信号送受信装置21は他の人員の操作器1から発せられたレーザ光線などを受信したことを検出する。
【0037】
ここで、本発明に係る操作器システムや各装置などの構成としては、必ずしも以上に示したものに限られず、種々な構成が用いられてもよい。また、本発明は、例えば、本発明に係る処理を実行する方法或いは方式や、このような方法や方式を実現するためのプログラムや当該プログラムを記録する記録媒体などとして提供することも可能であり、また、種々な装置やシステムとして提供することも可能である。
また、本発明の適用分野としては、必ずしも以上に示したものに限られず、本発明は、種々な分野に適用することが可能なものである。
また、本発明に係る操作器システムや各装置などにおいて行われる各種の処理としては、例えばプロセッサやメモリ等を備えたハードウエア資源においてプロセッサがROM(Read Only Memory)に格納された制御プログラムを実行することにより制御される構成が用いられてもよく、また、例えば当該処理を実行するための各機能手段が独立したハードウエア回路として構成されてもよい。
また、本発明は上記の制御プログラムを格納したフロッピー(登録商標)ディスクやCD(Compact Disc)−ROM等のコンピュータにより読み取り可能な記録媒体や当該プログラム(自体)として把握することもでき、当該制御プログラムを当該記録媒体からコンピュータに入力してプロセッサに実行させることにより、本発明に係る処理を遂行させることができる。
【図面の簡単な説明】
【0038】
【図1】本発明の一実施例に係る操作器システムの構成例を示す図である。
【図2】信号制御装置の構成例を示す図である。
【図3】通信制御服の一例を示す図である。
【図4】信号データ通信系統の一例を示す図である。
【図5】通信制御服と制御器との通信の一例を示す図である。
【図6】通信制御服と複数の制御器との通信の一例を示す図である。
【図7】光信号データの伝送フォーマットの一例を示す図である。
【図8】光信号データの伝送フォーマットの具体的な一例を示す図である。
【図9】通信制御服による無線受信の処理手順の一例を示す図である。
【図10】通信制御服による操作器からの受信の処理手順の一例を示す図である。
【図11】通信制御服からの無線送信の処理手順の一例を示す図である。
【図12】通信制御服から保有操作器への送信の処理手順の一例を示す図である。
【図13】光信号データの伝送フォーマットの一例を示す図である。
【符号の説明】
【0039】
1・・操作器、 2・・通信制御服、 3・・無線装置、 11・・光信号送受信器、 12、B1、B2・・制御器、 21、31、A1〜A6・・光信号送受信装置、 22・・信号制御装置、 32、33・・制御部、 41・・ブザー、
【特許請求の範囲】
【請求項1】
行動者が操作器の操作を行う操作器システムにおいて、
前記行動者により持たれる操作器と、
前記行動者の体に装着される通信制御服と、を設け、
前記操作器は、前記通信制御服との間で無線により通信を行う操作器無線通信手段を備え、
前記通信制御服は、前記操作器との間で無線により通信を行う通信制御服無線通信手段を備え、
前記操作器の前記操作器無線通信手段と前記通信制御服の前記通信制御服無線通信手段は、送信側では同期コードと送信対象となるデータとその誤り検出用データとの組を同一の送信対象となるデータについて各回毎に同期コードを異ならせて複数回送信する処理を実行し、受信側では受信した同期コードとデータとその誤り検出用データとの組について誤り検出用データに基づく誤りが非検出であった場合に受信データとして取得する処理を実行する、
ことを特徴とする操作器システム。
【請求項1】
行動者が操作器の操作を行う操作器システムにおいて、
前記行動者により持たれる操作器と、
前記行動者の体に装着される通信制御服と、を設け、
前記操作器は、前記通信制御服との間で無線により通信を行う操作器無線通信手段を備え、
前記通信制御服は、前記操作器との間で無線により通信を行う通信制御服無線通信手段を備え、
前記操作器の前記操作器無線通信手段と前記通信制御服の前記通信制御服無線通信手段は、送信側では同期コードと送信対象となるデータとその誤り検出用データとの組を同一の送信対象となるデータについて各回毎に同期コードを異ならせて複数回送信する処理を実行し、受信側では受信した同期コードとデータとその誤り検出用データとの組について誤り検出用データに基づく誤りが非検出であった場合に受信データとして取得する処理を実行する、
ことを特徴とする操作器システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2006−121308(P2006−121308A)
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願番号】特願2004−305796(P2004−305796)
【出願日】平成16年10月20日(2004.10.20)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願日】平成16年10月20日(2004.10.20)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
[ Back to top ]