
操作子の評価システム及び評価データの生成方法
【課題】移動体に組み込まれる操作子の操作性を効果的に事前に評価するシステムを提供すること。
【解決手段】操作子の評価システム100は、移動体の操縦者により操作される操作子30の評価システムである。評価システム100は、操作子の出力30に基づいて操作子を評価するための第1評価データを生成する第1評価データ生成部、又は操作子30の操作時に操縦者が受ける身体的負担の測定値に基づいて操作子を評価するための第2評価データを生成する第2評価データ生成部を備える。操作子30の出力に基づいて生成された評価データによれば、操縦者の実際の操作内容を評価できる。操縦者が受ける身体的負担の測定値に基づいて生成された評価データによれば、操縦者の実際の操作負担を評価できる。これによって、実際の操作時に近い条件で操作子の操作性を評価できる。
【解決手段】操作子の評価システム100は、移動体の操縦者により操作される操作子30の評価システムである。評価システム100は、操作子の出力30に基づいて操作子を評価するための第1評価データを生成する第1評価データ生成部、又は操作子30の操作時に操縦者が受ける身体的負担の測定値に基づいて操作子を評価するための第2評価データを生成する第2評価データ生成部を備える。操作子30の出力に基づいて生成された評価データによれば、操縦者の実際の操作内容を評価できる。操縦者が受ける身体的負担の測定値に基づいて生成された評価データによれば、操縦者の実際の操作負担を評価できる。これによって、実際の操作時に近い条件で操作子の操作性を評価できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操作子の評価システム及び評価データの生成方法に関する。
【背景技術】
【0002】
近年、様々な用途で活用が見込まれるロボットが注目されている。例えば、楽器演奏等のアミューズメントを提供するパートナーロボット、被介護者に介護を提供するパートナーロボット、及び生産ラインの生産を手助けするロボットが注目されている。
【0003】
ロボットは、操縦者の指示に基づいて又は自立的に空間を移動する。前者の場合、一般的に、操縦者は、操作装置を操作することによりロボットの空間移動を操作する。なお、操作装置は、ロボット本体に設けられる場合もあれば、ロボット本体とは別体として設けられる場合もある。また、ロボットには、操縦者が実際に搭乗するタイプもあれば、操縦者が実際に搭乗しないタイプもある。特許文献1には、操縦者がロボットに搭乗する搭乗型ロボットが開示されている。
【特許文献1】特開2005−186650号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、操作子の操作性は、操縦者による操作子の把持方法、操作子自体の構造、操作子の取り付け位置、及び操作子に割り当てられた操作内容等の影響を受ける。ロボットに対する操作子の組み込み後に、操作子の操作性を改善することが必要になった場合、その改善のために多大な労力と費用が必要になり、結果としてロボットの開発スケジュールが長期化してしまう場合がある。
【0005】
例えば、ロボットに対する操作子の組み込み位置の変更が伴うと、その変更のためにロボット自体の構造も修正する必要が生じ、多大な労力と費用が必要になる。このように、操作子の操作性を効果的に事前に評価するシステムの実現が強く望まれている。
【0006】
本発明は、かかる課題を解決するためになされたものであり、移動体に組み込まれる操作子の操作性を効果的に事前に評価するシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明にかかる操作子の評価システムは、移動体の操縦者により操作される操作子の評価システムであって、前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成する第1評価データ生成部、又は前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する第2評価データ生成部を備える。
【0008】
操作子の出力に基づいて生成された評価データによれば、操縦者の実際の操作内容を評価できる。操縦者が受ける身体的負担の測定値に基づいて生成された評価データによれば、操縦者の実際の操作負担を評価できる。これによって、実際の操作時に近い条件で操作子の操作性を評価できる。
【0009】
前記第1評価データ生成部は、前記操作子の出力によって決定付けられる前記移動体の移動軌跡の評価に基づいて前記第1評価データを生成する、と良い。
【0010】
前記第1評価データ生成部は、予め設定された目標軌跡に対する前記移動軌跡のずれの評価に基づいて前記第1評価データを生成する、と良い。
【0011】
前記第2評価データ生成部は、生体情報測定部の出力に基づいて前記第2評価データを生成する、と良い。
【0012】
前記移動体が仮想移動する仮想移動空間を描画するデータを生成する描画データ生成部を更に備える、と良い。
【0013】
前記移動体の操縦時に前記操縦者が受ける外乱を生成する外乱生成部を更に備える、と良い。
【0014】
前記外乱生成部は、前記仮想移動空間に設定された外乱要因に応じて外乱を生成する、と良い。
【0015】
本発明に係る評価システムは、移動体の操縦者により操作される操作子と、前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成する第1評価データ生成部と、前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する第2評価データ生成部と、を備える。
【0016】
本発明に係る評価データの生成方法は、移動体の操縦者により操作される操作子の評価データを生成する方法であって、第1評価データ生成部は、前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成し、第2評価データ生成部は、前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する。
【発明の効果】
【0017】
本発明によれば、移動体に組み込まれる操作子の操作性を効果的に事前に評価するシステムを提供することができる。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照しつつ、本発明の実施の形態について説明する。なお、各実施の形態は、説明の便宜上、簡略化されている。図面は簡略的なものであるから、図面の記載を根拠として本発明の技術的範囲を狭く解釈してはならない。図面は、もっぱら技術的事項の説明のためのものであり、図面に示された要素の正確な大きさ等は反映していない。同一の要素には、同一の符号を付し、重複する説明は省略するものとする。
【0019】
[第1の実施形態]
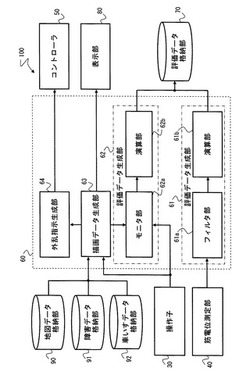
以下、図1乃至図12を参照して、本発明の第1の実施形態について説明する。図1は、評価システムの概略的な構成を示すブロック図である。図2は、演算処理部の構成を示す概略的なブロック図である。図3は、評価システムの部分的な外観を示す概略的な説明図である。図4は、操作子の概略的な構成を示す説明図である。図5は、評価システムの概略的なシステム構成を示す説明図である。図6は、操作子の出力に基づいて評価データを生成する評価データ生成部の動作を示すフローチャートである。図7は、操作子の出力に基づいて評価データを生成する評価データ生成部の動作を説明するための説明図である。図8は、筋電位測定部の出力に基づいて評価データを生成する評価データ生成部の動作を示すフローチャートである。図9は、筋電位測定部から出力される筋電位データ(筋電図)である。図10は、フィルタ処理後の筋電位データ(筋電図)である。図11は、筋電位データの演算処理により得られた最大筋力比の時間変化を示す評価データである。図12は、筋電位の測定箇所を示す模式図である。
【0020】
図1に示すように、評価システム100は、電動車いす10、外乱生成部20、操作子30、筋電位測定部(生体情報測定部)40、コントローラ(制御部)50、演算処理部60、評価データ格納部70、表示部80、地図データ格納部90、障害データ格納部91、及び車いすデータ格納部92を有する。
【0021】
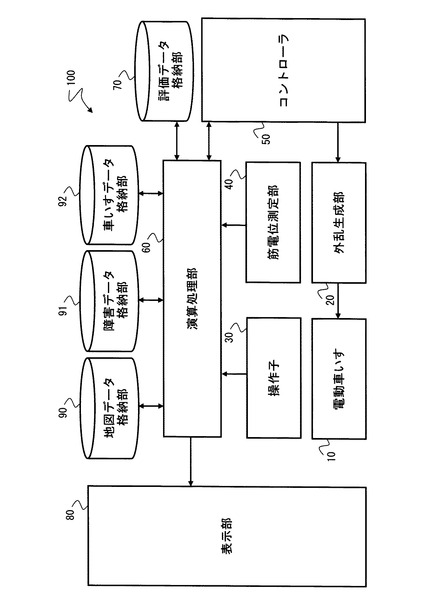
図2に示すように、演算処理部60は、評価データ生成部61、評価データ生成部62、描画データ生成部63、及び外乱指示生成部64を有する。評価データ生成部61は、フィルタ部61a、および演算部61bを有する。評価データ生成部62は、モニタ部62a、および演算部62bを有する。
【0022】
評価システム100は、操作子30の操作性を評価するための評価データを生成し、これを評価データ格納部70に保持する。操作子の開発者は、評価データ格納部70に格納された評価データに基づいて操作子の操作性を評価する。この評価システム100によれば、試作段階の操作子30の操作性を、実機に組み込む前に、実機に組み込んだ状態に近い状態で評価することができる。そして、ロボット等の移動体に組み込まれる操作子の操作性を効果的に事前に評価することができる。操作子の事前評価に基づいて、操作子の把持方法、操作子の構造、本体に対する取り付け位置、及び操作子に割り当てる操作内容を修正する。安全性及び快適性等の様々な観点から操作子の操作性を評価し、これを操作子の設計にフィードバックすることができる。操作子の安全かつ快適な操作性を確保しつつ、操作子が取り付けられるロボット等の移動体の開発効率を効果的に高めることができる。この点は、後述の説明からより明らかになる。
【0023】
図1に示すように、操作子30の出力は、演算処理部60に接続される。筋電位測定部40の出力は、演算処理部60に接続される。地図データ格納部90の入出力と演算処理部60の入出力は互いに接続されている。障害データ格納部91の入出力と演算処理部60の入出力は互いに接続されている。車いすデータ格納部92の入出力と演算処理部60の入出力は互いに接続されている。評価データ格納部70の入出力と演算処理部60の入出力は互いに接続されている。コントローラ50の入出力と演算処理部60の入出力は互いに接続されている。演算処理部80の出力は、表示部80に接続されている。コントローラ50の出力は、外乱生成部20に接続されている。外乱生成部20の出力は、電動車いす10に接続されている。なお、ここでは、電動車いす10は、外乱生成部20に対して電気的に接続されておらず、物理的に接続されている。
【0024】
図2に示すように、地図データ格納部90、障害データ格納部91、及び車いすデータ格納部92の入出力は、描画データ生成部63の入出力に接続される。描画データ生成部63の出力は、外乱指示生成部64、表示部80、及びモニタ部62aに接続される。外乱指示生成部64の出力は、コントローラ50に接続される。描画データ生成部63の出力は、表示部80に接続される。操作子30の出力は、描画データ生成部63、及びモニタ部62aに接続される。モニタ部62aの出力は、演算部62bに接続される。演算部62bの出力は、評価データ格納部70に接続される。筋電位測定部40の出力は、フィルタ部61aに接続される。フィルタ部61aの出力は、演算部61bに接続される。演算部61bの出力は、評価データ格納部70に接続される。
【0025】
図1及び図2に示す要素の各機能について説明する前に、図3及び図4を参照して、評価システムの概要について説明する。
【0026】
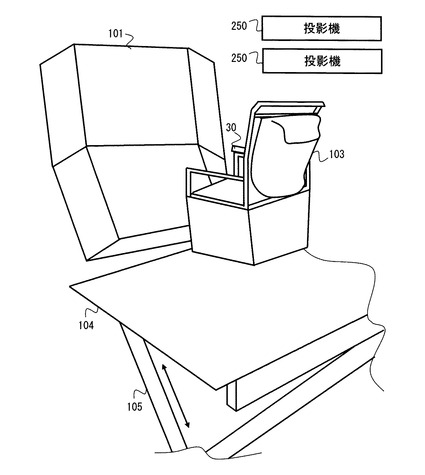
図3に示すように、仮想空間で電動車いすとして機能するいす103が予めステージ104上に固定されている。いす103には、試作段階の操作子30が予め取り付けられている。いす103の前方には、スクリーン101が設けられている。スクリーン101には、投影機250によって、電動車いすが移動する仮想空間が描写される。電動車いすの操縦者は、前方に表示された仮想空間を見ながら、操作子30を操作し、仮想空間内で電動車いすを操縦する。
【0027】
スクリーン101は、操縦者から見た上下左右の仮想空間を表示する。これによって、実空間での評価に近い条件で試作段階の操作子30の操作性を評価することができる。なお、スクリーン101は、投影機250により投影される像を表示する領域であれば足り、その具体的な構成は任意である。4台の投影機250を用意して、スクリーン101に仮想空間を投影しても良い。この場合には、スクリーン101を左端領域、中央上領域、中央下領域、右端領域に4分割し、4台の投影機250を夫々の領域に対応付ければ良い。
【0028】
ステージ104は、軸方向に沿って伸縮可能な支持アーム105によって支持されている。支持アーム105が伸縮することによってステージ104は傾いたり水平な状態に戻ったりする。支持アーム105の制御によってステージ104を動かし、これによっていす103に座っている操縦者に外乱を与える。ここでは、仮想空間内での電動車いすの状態に応じて操縦者に外乱を与える。つまり、仮想空間内で電動車いすがバンプ上に乗り上げた場合、これに合わせて支持アーム105を制御し、いす103に座っている操縦者にバンプにのりあげた振動を与える。これによって、仮想空間で電動車いすを操縦しているにも関わらず、実空間で電動車いすの実機を操縦している感覚にあわせることができる。結果的に、実空間での操縦時に近い条件で後述の評価データを取得することができる。そして、実空間での評価に近い条件で試作段階の操作子30の操作性を評価することができる。
【0029】
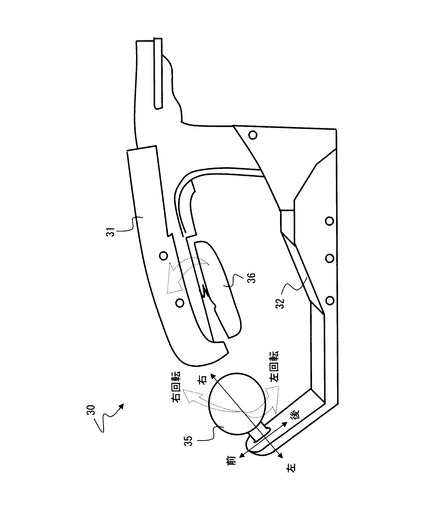
図4に示すように、操作子30は、ハンドレスト31、ベース32、球体レバー35、およびブレーキレバー36を有する。操縦者は、球体レバー35を前、後、左、右に傾倒させることによって、仮想空間内で電動車いすを操縦する。操縦者は、球体レバー35を右又は左に回転させることによって、仮想空間内で電動車いすを右又は左に回転させる。操縦者は、ハンドレスト31に手のひらを載せた状態で、人差し指から小指でブレーキレバー36を握り締めることによって、仮想空間内で移動する電動車いすを減速させる。
【0030】
図1及び図2に戻って説明する。
【0031】
電動車いす10は、上述のいす103に相当する。電動車いす10は、スクリーン101に描画される仮想空間内を操縦者による操作子30の操作に応じて仮想移動する。なお、電動車いす10は、ステージ104に固定されており、操縦者による操作子30の操作に応じて実空間を移動することはない。
【0032】
外乱生成部20は、電動車いす10に搭乗している操縦者に対して与えられる外乱を生成する。外乱生成部20は、上述の支持アーム105を含んで形成される。外乱生成部20は、コントローラ50からの制御信号に応じて、ステージ104を駆動する。これによって、ステージ104上のいす103に着座している操縦者に外乱(振動)が与えられる。なお、外乱生成部20の具体的な構成は任意である。また、操縦者に与えられる外乱の具体的な内容も任意である。
【0033】
操作子30は、ロボット等の移動体に組み込まれる前の試作段階の操作装置である。電動車いす10の操縦者は、操作子30を操作することによって仮想空間内で電動車いすを操縦する。操作子30内には、各種のセンサ(例えば、圧力センサ、アブソリュートエンコーダ等)が組み込まれている。操作子30は、操縦者による操作内容に応じた電気信号を演算処理部60に出力する。例えば、操作子30は、ブレーキレバー36の変位量に応じた電気信号を演算処理部60に出力する。操作子30は、球体レバー35の右回転量に応じた電気信号を演算処理部60に出力する。操作子30は、球体レバー35の前方向への傾倒に応じた電気信号を演算処理部60に出力する。なお、操作子30と演算処理部60間には、後述のDSP200(図5参照)が接続されている。
【0034】
筋電位測定部40は、操縦者の腕等の筋肉の電位を測定する。操縦者の筋肉の電位は、その操作負担に応じて変化する。筋電位(生体情報)を測定することによって、操縦者が受ける身体的負担を定量化することができる。筋電位測定部40の出力は、演算処理部60に接続される。なお、筋電位測定部40は、端子電極、A/D変換部等によって形成される。なお、ここでは、操縦者の操作負担を評価するために操縦者の筋電位値を取得しているが、他の指標(生体情報)で操縦者の操作負担を評価しても良い。
【0035】
コントローラ50は、演算処理部60からの制御指示に応じて外乱生成部20を制御する。コントローラ50は、通常のコンピュータでプログラムがCPUで実行されることで実現される。
【0036】
演算処理部60は、様々な機能を実行する。演算処理部60は、通常のコンピュータでプログラムがCPUで実行されることで実現される。演算処理部60の機能については後述する。
【0037】
評価データ格納部70は、演算処理部60から出力される評価データを格納する。
【0038】
表示部80は、演算処理部60から出力される描画データに基づいて電動車いす10が仮想移動する仮想空間を表示する。
【0039】
地図データ格納部90は、電動車いす10が仮想移動する仮想空間の地図データを記憶する。障害データ格納部91は、電動車いす10が仮想移動する仮想空間内で生じうる障害データを記憶する。車いすデータ格納部92は、仮想空間内に仮想存在する電動車いす10自体に関するデータを記憶する。データ格納部は、コンピュータに含まれる一般的な記憶装置によって形成される。
【0040】
地図データは、3次元画像ソフトによって予め生成される。地図データは、仮想空間の描画データである。障害データは、仮想的又は実測に基づいて生成される。障害データは、仮想空間に障害を設定するデータである。なお、障害データを実測の振動に基づいて生成することによって、実際の操作状態に適合した条件で操作子の操作性を評価することができる。車いすデータは、仮想空間に車いすを表示するためのデータである。
【0041】
図2を参照して説明する。
【0042】
評価データ生成部61は、筋電位測定部40の出力に基づいて、操作子30の操作性を評価するための評価データを生成する。評価データ生成部61によって生成された評価データによれば、操作子30を実際に操作する操縦者の身体的な負担を直接的に評価することができる。快適性の観点から操作子30の操作性を評価することで、操作子30の構造等の要因に起因して操縦者に無理な身体的な負担が生じていないかを検証することができる。評価データ生成部61に含まれるフィルタ部61a、及び演算部61bの機能は後述する。
【0043】
評価データ生成部62は、操作子30の出力に基づいて、操作子30の操作性を評価するための評価データを生成する。評価データ生成部62によって生成された評価データによれば、操縦者による操作子30の実際の操作内容を評価することができる。これによって、操作者の意図に沿う操作指示が操作子30に入力されているか、操作者による操作指示に時間的な遅れが生じていないか等を検証することができる。このように操作子30の操作性を評価することで、操作子30の構造等の要因に起因して操作子の操作性が損なわれないかを検証することができる。評価データ生成部62に含まれるモニタ部62a、及び演算部62bの機能は後述する。
【0044】
描画データ生成部63は、地図データ、障害データ、車いすデータ、及び操作子30の出力に基づいて描画データを生成する。描画データは、操作子30の出力に応じて生成される。従って、操縦者の前方のスクリーン101には、操作子30の操作に応じた仮想空間が投影される。なお、描画データ生成部63は、プログラムがCPU(Central Processing Unit)で実行されることで実現される。
【0045】
外乱指示生成部64は、操作子30の操作に応じて仮想空間内で外乱が生じたとき、外乱指示信号を生成する。外乱指示生成部64は、描画データ生成部63から出力される情報に基づいて外乱指示信号を生成する。例えば、外乱指示生成部64は、仮想空間内での電動車いすの位置情報と仮想空間内での障害の位置情報とに基づいて外乱を生成する。具体的には、仮想空間内での路面に形成されたバンプ上に電動車いすがのりあげた場合に、外乱指示生成部64は、電動車いすが受ける作用に応じた外乱指示信号を生成する。
【0046】
コントローラ50は、外乱指示生成部64から出力される外乱指示信号に応じて外乱生成部20を制御する。
【0047】
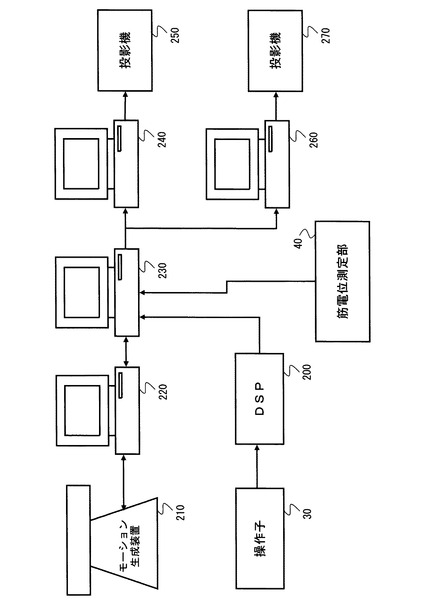
図5を参照して、評価システム100の具体的なシステム構成について説明する。図5に示すように、評価システム100は、複数のコンピュータ220、230、240、260を含んで形成される。なお、モーション生成装置210は、上述の外乱生成部20に相当する。DSP200は、デジタル信号処理部として機能し、操作子30の出力をA/D変換してコンピュータ230に出力する。
【0048】
コンピュータ220は、上述のコントローラ50に相当する。コンピュータ230は、上述の演算処理部60に相当する。コンピュータ230のハードディスクには、上述の地図データ、障害データ、車いすデータが格納されている。また、コンピュータ230のハードディスクは、上述の評価データ格納部70として機能する。コンピュータ240、投影機250は、上述の表示部80に相当する。同様に、コンピュータ260、投影機270は、上述の表示部80に相当する。
【0049】
評価システム100のシステム構成は如何様であっても良い。評価システム100のシステム構成は、図5に示すものに限定されるべきではない。なお、各コンピュータは、CPU、ハードディスク、マザーボード、ドーターボード等によって形成される一般的な情報処理装置である。各コンピュータは、LAN(Local Area Network)配線等によって相互に通信可能な状態で接続される。
【0050】
次に、図6を参照して、評価データ生成部62が評価データを生成する手順について説明する。
【0051】
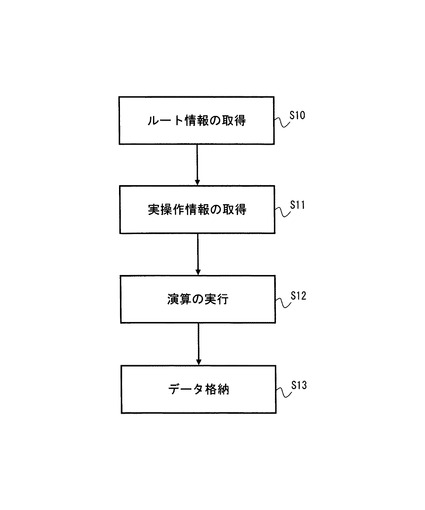
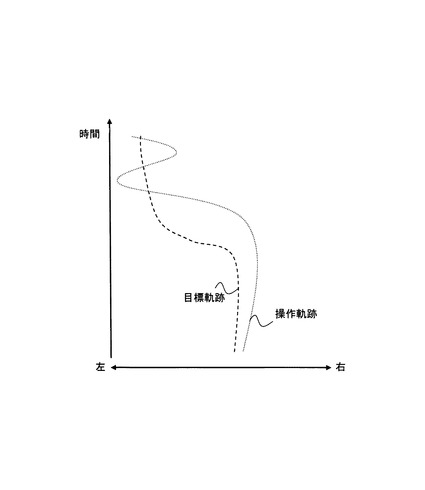
なお、評価データ生成部62は、図7に示す目標軌跡に対する操作軌跡のずれを評価することによって、操縦者の実際の操作内容を評価するための評価データを生成する。なお、目標軌跡とは、仮想空間内で電動車いすが所定のルールに従って移動する際に生成される移動軌跡である。操作軌跡は、操作子30の操作に応じて仮想空間内を電動車いすが移動する際に生成される移動軌跡である。目標軌跡に対する移動軌跡のずれを評価することによって、特に安全性の観点から操作子30の操作性を評価することができる。なお、目標軌跡の設定方法は任意である。所定のルールに従って仮想空間をスクリーンに描画することで目標軌跡を設定しても良い。スクリーンに所定のルールで移動するターゲットを描画することで目標軌跡を設定しても良い。
【0052】
図6を参照して説明する。
【0053】
まず、評価データ生成部62は、ルート情報を取得する(S10)。具体的には、モニタ部62aは、描画データ生成部63から出力される情報に基づいて、仮想空間内での電動車いすのルート情報(目標軌跡)を取得する。なお、描画データ生成部63は、地図データに基づいて、仮想空間内で電動車いすが仮想移動すべきルート情報を取得し、これをモニタ部62aに出力しているものとする。なお、モニタ部62a自体にルート情報を予め記憶しておいても良い。
【0054】
次に、評価データ生成部62は、実操作情報を取得する(S11)。具体的には、モニタ部62aは、操作子30の出力に基づいて、仮想空間内で電動車いすが仮想移動する軌跡(操作軌跡)をモニタする。
【0055】
次に、評価データ生成部62は、演算の実行をする(S12)。具体的には、演算部62bは、仮想空間内での電動車いすの目標軌跡に対して電動車いすの移動軌跡(操作軌跡)を関連付ける。これによって、図7に示す目標軌跡に対する移動軌跡の関係を示す評価データが生成される。また、演算部62bは、目標軌跡に対する移動軌跡のずれ量も算出する。これによって、操作子の操作内容とずれ量間の対応関係も明らかにすることができる。なお、ずれ量の算出方法は任意である。減算等によって両者の差分値を演算すれば良い。
【0056】
次に、評価データ生成部62は、生成した評価データを評価データ格納部70に格納する(S13)。操作子30の開発者は、評価データ格納部70に格納された評価データに基づいて、プロトタイプの操作子30の操作性を評価することができる。
【0057】
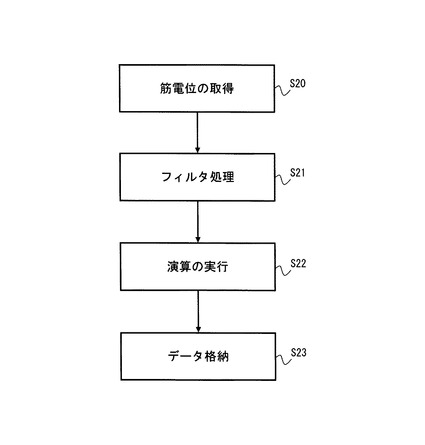
図8乃至図12を参照して、評価データ生成部61の動作について説明する。
【0058】
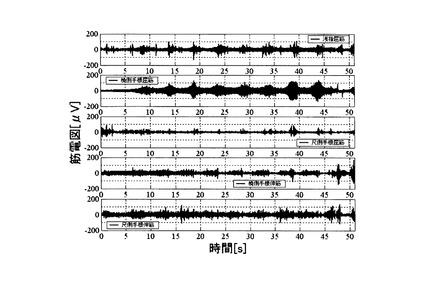
まず、筋電位測定部40は、筋電位値を取得する(S20)。具体的には、筋電位測定部40は、操縦者の筋肉に接続された端子電極の出力をA/D変換して出力する。筋電位測定部40の出力によって、図9に示す筋電図(筋電図データ)が生成される。
【0059】
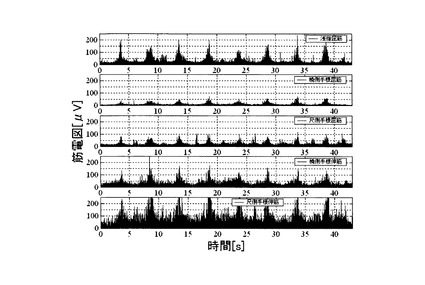
次に、評価データ生成部61は、筋電位測定部40の出力に基づいて生成された筋電図データに対してフィルタ処理を実行する(S21)。具体的には、フィルタ部61aは、筋電図データに対して離散フーリエ変換をする。次に、10〜250Hzのバンドパスフィルタで処理する。次に、逆フーリエ変換する。最後に、整流化処理をする(移動平均の演算処理をする)。このようにして、図10に示すフィルタ処理後の筋電図データが生成される。
【0060】
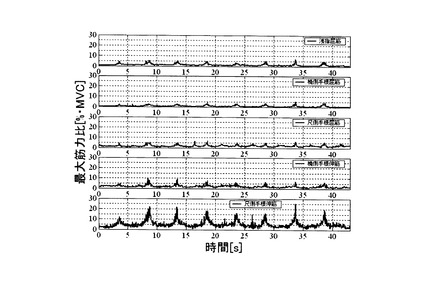
次に、評価データ生成部61は、フィルタ処理後の筋電図データに対して演算を実行する(S22)。これによって、筋負担を評価するための評価データが生成される。具体的には、演算部61bは、フィルタ処理後の筋電図データに基づいて筋力比を算出する。これによって、図11に示す筋力比データ(評価データ)が生成される。
【0061】
次に、評価データ生成部61は、算出した筋力比データを評価データ格納部70に格納する(S23)。操作子30の開発者は、筋力比データを参照することで、操作子30を操作する操縦者の身体的な負担を評価することができる。
【0062】
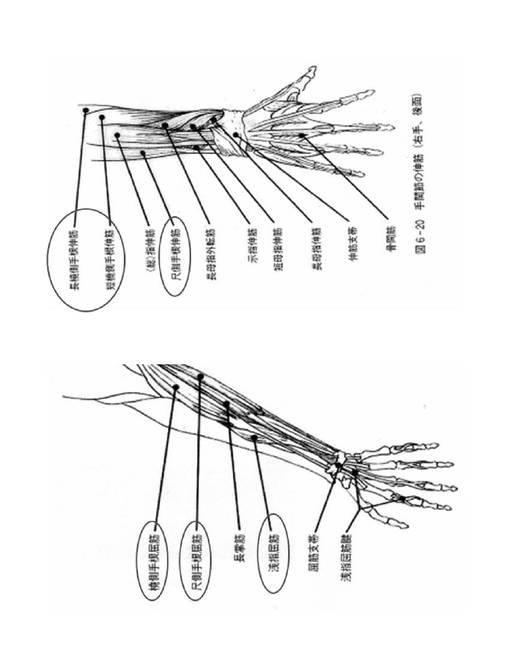
なお、図9乃至図11に示すデータは、上から順に、浅指屈筋、撓側手根屈筋、尺側手根屈筋、撓側手根伸筋、尺側手根伸筋(図12参照)に対応する。このように、複数の筋肉に対応して評価データを生成すると良い。これによって、操縦者が受ける身体的負担を精度良く評価することが可能になる。
【0063】
上述の説明から明らかなように、本実施形態では、操作子の出力に基づいて評価データを生成する。この評価データによれば、操縦者の実際の操作内容を評価できる。また、操縦者が受ける身体的負担の測定値に基づいて評価データを生成する。これによれば、操縦者の実際の操作負担を評価できる。これによって、実際の操作時に近い条件で操作子の操作性を評価できる。
【0064】
また、本実施形態では、操作子30の操作状態に応じて操縦者に対して外乱を与える。具体的には、障害データに基づいて仮想空間に設定された障害によって仮想空間内の電動車いすに衝撃が加わったことを検出し、この検出結果に基づいて操縦者に外乱を与える。これによって、操作子30の操作感覚を実空間内で電動車いすを操縦している感覚に近づけることができる。このような条件で生成された評価データによれば、実際の操作時に近い条件で操作子の操作性を評価できる。
【0065】
本発明の技術的な範囲は上述の実施形態に限定されない。操作子の具体的な形状等は任意である。操作子が組み込まれる移動体の種類は任意である。
【産業上の利用可能性】
【0066】
本発明は、例えば、ロボット等の移動体に組み込まれる操作子の評価システムとして適用可能である。
【図面の簡単な説明】
【0067】
【図1】本発明の第1の実施形態にかかる評価システムの概略的な構成を示すブロック図である。
【図2】本発明の第1の実施形態にかかる演算処理部60の構成を示す概略的なブロック図である。
【図3】本発明の第1の実施形態にかかる評価システムの部分的な外観を示す概略的な説明図である。
【図4】本発明の第1の実施形態にかかる操作子の概略的な構成を示す説明図である。
【図5】本発明の第1の実施形態にかかる評価システムの概略的なシステム構成を示す説明図である。
【図6】本発明の第1の実施形態にかかる操作子の出力に基づいて評価データを生成する評価データ生成部の動作を示すフローチャートである。
【図7】本発明の第1の実施形態にかかる操作子の出力に基づいて評価データを生成する評価データ生成部の動作を説明するための説明図である。
【図8】本発明の第1の実施形態にかかる筋電位測定部の出力に基づいて評価データを生成する評価データ生成部の動作を示すフローチャートである。
【図9】本発明の第1の実施形態にかかる筋電位測定部から出力される筋電位データ(筋電図)である。
【図10】本発明の第1の実施形態にかかるフィルタ処理後の筋電位データ(筋電図)である。
【図11】本発明の第1の実施形態にかかる筋電位データの演算処理により得られた最大筋力比の時間変化を示す評価データ(グラフ)である。
【図12】本発明の第1の実施形態にかかる筋電位の測定箇所を示す模式図である。
【符号の説明】
【0068】
100 評価システム
20 外乱生成部
30 操作子
40 筋電位測定部
50 コントローラ
60 演算処理部
70 データ格納部
80 演算処理部
80 表示部
90 地図データ格納部
91 障害データ格納部
92 車いすデータ格納部
61a フィルタ部
61b 演算部
61 評価データ生成部
62a モニタ部
62b 演算部
62 評価データ生成部
63 描画データ生成部
64 外乱指示生成部
101 スクリーン
104 ステージ
105 支持アーム
210 モーション生成装置
220 コンピュータ
230 コンピュータ
240 コンピュータ
250 投影機
260 コンピュータ
270 投影機
31 ハンドレスト
32 ベース
35 球体レバー
36 ブレーキレバー
【技術分野】
【0001】
本発明は、操作子の評価システム及び評価データの生成方法に関する。
【背景技術】
【0002】
近年、様々な用途で活用が見込まれるロボットが注目されている。例えば、楽器演奏等のアミューズメントを提供するパートナーロボット、被介護者に介護を提供するパートナーロボット、及び生産ラインの生産を手助けするロボットが注目されている。
【0003】
ロボットは、操縦者の指示に基づいて又は自立的に空間を移動する。前者の場合、一般的に、操縦者は、操作装置を操作することによりロボットの空間移動を操作する。なお、操作装置は、ロボット本体に設けられる場合もあれば、ロボット本体とは別体として設けられる場合もある。また、ロボットには、操縦者が実際に搭乗するタイプもあれば、操縦者が実際に搭乗しないタイプもある。特許文献1には、操縦者がロボットに搭乗する搭乗型ロボットが開示されている。
【特許文献1】特開2005−186650号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、操作子の操作性は、操縦者による操作子の把持方法、操作子自体の構造、操作子の取り付け位置、及び操作子に割り当てられた操作内容等の影響を受ける。ロボットに対する操作子の組み込み後に、操作子の操作性を改善することが必要になった場合、その改善のために多大な労力と費用が必要になり、結果としてロボットの開発スケジュールが長期化してしまう場合がある。
【0005】
例えば、ロボットに対する操作子の組み込み位置の変更が伴うと、その変更のためにロボット自体の構造も修正する必要が生じ、多大な労力と費用が必要になる。このように、操作子の操作性を効果的に事前に評価するシステムの実現が強く望まれている。
【0006】
本発明は、かかる課題を解決するためになされたものであり、移動体に組み込まれる操作子の操作性を効果的に事前に評価するシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明にかかる操作子の評価システムは、移動体の操縦者により操作される操作子の評価システムであって、前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成する第1評価データ生成部、又は前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する第2評価データ生成部を備える。
【0008】
操作子の出力に基づいて生成された評価データによれば、操縦者の実際の操作内容を評価できる。操縦者が受ける身体的負担の測定値に基づいて生成された評価データによれば、操縦者の実際の操作負担を評価できる。これによって、実際の操作時に近い条件で操作子の操作性を評価できる。
【0009】
前記第1評価データ生成部は、前記操作子の出力によって決定付けられる前記移動体の移動軌跡の評価に基づいて前記第1評価データを生成する、と良い。
【0010】
前記第1評価データ生成部は、予め設定された目標軌跡に対する前記移動軌跡のずれの評価に基づいて前記第1評価データを生成する、と良い。
【0011】
前記第2評価データ生成部は、生体情報測定部の出力に基づいて前記第2評価データを生成する、と良い。
【0012】
前記移動体が仮想移動する仮想移動空間を描画するデータを生成する描画データ生成部を更に備える、と良い。
【0013】
前記移動体の操縦時に前記操縦者が受ける外乱を生成する外乱生成部を更に備える、と良い。
【0014】
前記外乱生成部は、前記仮想移動空間に設定された外乱要因に応じて外乱を生成する、と良い。
【0015】
本発明に係る評価システムは、移動体の操縦者により操作される操作子と、前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成する第1評価データ生成部と、前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する第2評価データ生成部と、を備える。
【0016】
本発明に係る評価データの生成方法は、移動体の操縦者により操作される操作子の評価データを生成する方法であって、第1評価データ生成部は、前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成し、第2評価データ生成部は、前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する。
【発明の効果】
【0017】
本発明によれば、移動体に組み込まれる操作子の操作性を効果的に事前に評価するシステムを提供することができる。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照しつつ、本発明の実施の形態について説明する。なお、各実施の形態は、説明の便宜上、簡略化されている。図面は簡略的なものであるから、図面の記載を根拠として本発明の技術的範囲を狭く解釈してはならない。図面は、もっぱら技術的事項の説明のためのものであり、図面に示された要素の正確な大きさ等は反映していない。同一の要素には、同一の符号を付し、重複する説明は省略するものとする。
【0019】
[第1の実施形態]
以下、図1乃至図12を参照して、本発明の第1の実施形態について説明する。図1は、評価システムの概略的な構成を示すブロック図である。図2は、演算処理部の構成を示す概略的なブロック図である。図3は、評価システムの部分的な外観を示す概略的な説明図である。図4は、操作子の概略的な構成を示す説明図である。図5は、評価システムの概略的なシステム構成を示す説明図である。図6は、操作子の出力に基づいて評価データを生成する評価データ生成部の動作を示すフローチャートである。図7は、操作子の出力に基づいて評価データを生成する評価データ生成部の動作を説明するための説明図である。図8は、筋電位測定部の出力に基づいて評価データを生成する評価データ生成部の動作を示すフローチャートである。図9は、筋電位測定部から出力される筋電位データ(筋電図)である。図10は、フィルタ処理後の筋電位データ(筋電図)である。図11は、筋電位データの演算処理により得られた最大筋力比の時間変化を示す評価データである。図12は、筋電位の測定箇所を示す模式図である。
【0020】
図1に示すように、評価システム100は、電動車いす10、外乱生成部20、操作子30、筋電位測定部(生体情報測定部)40、コントローラ(制御部)50、演算処理部60、評価データ格納部70、表示部80、地図データ格納部90、障害データ格納部91、及び車いすデータ格納部92を有する。
【0021】
図2に示すように、演算処理部60は、評価データ生成部61、評価データ生成部62、描画データ生成部63、及び外乱指示生成部64を有する。評価データ生成部61は、フィルタ部61a、および演算部61bを有する。評価データ生成部62は、モニタ部62a、および演算部62bを有する。
【0022】
評価システム100は、操作子30の操作性を評価するための評価データを生成し、これを評価データ格納部70に保持する。操作子の開発者は、評価データ格納部70に格納された評価データに基づいて操作子の操作性を評価する。この評価システム100によれば、試作段階の操作子30の操作性を、実機に組み込む前に、実機に組み込んだ状態に近い状態で評価することができる。そして、ロボット等の移動体に組み込まれる操作子の操作性を効果的に事前に評価することができる。操作子の事前評価に基づいて、操作子の把持方法、操作子の構造、本体に対する取り付け位置、及び操作子に割り当てる操作内容を修正する。安全性及び快適性等の様々な観点から操作子の操作性を評価し、これを操作子の設計にフィードバックすることができる。操作子の安全かつ快適な操作性を確保しつつ、操作子が取り付けられるロボット等の移動体の開発効率を効果的に高めることができる。この点は、後述の説明からより明らかになる。
【0023】
図1に示すように、操作子30の出力は、演算処理部60に接続される。筋電位測定部40の出力は、演算処理部60に接続される。地図データ格納部90の入出力と演算処理部60の入出力は互いに接続されている。障害データ格納部91の入出力と演算処理部60の入出力は互いに接続されている。車いすデータ格納部92の入出力と演算処理部60の入出力は互いに接続されている。評価データ格納部70の入出力と演算処理部60の入出力は互いに接続されている。コントローラ50の入出力と演算処理部60の入出力は互いに接続されている。演算処理部80の出力は、表示部80に接続されている。コントローラ50の出力は、外乱生成部20に接続されている。外乱生成部20の出力は、電動車いす10に接続されている。なお、ここでは、電動車いす10は、外乱生成部20に対して電気的に接続されておらず、物理的に接続されている。
【0024】
図2に示すように、地図データ格納部90、障害データ格納部91、及び車いすデータ格納部92の入出力は、描画データ生成部63の入出力に接続される。描画データ生成部63の出力は、外乱指示生成部64、表示部80、及びモニタ部62aに接続される。外乱指示生成部64の出力は、コントローラ50に接続される。描画データ生成部63の出力は、表示部80に接続される。操作子30の出力は、描画データ生成部63、及びモニタ部62aに接続される。モニタ部62aの出力は、演算部62bに接続される。演算部62bの出力は、評価データ格納部70に接続される。筋電位測定部40の出力は、フィルタ部61aに接続される。フィルタ部61aの出力は、演算部61bに接続される。演算部61bの出力は、評価データ格納部70に接続される。
【0025】
図1及び図2に示す要素の各機能について説明する前に、図3及び図4を参照して、評価システムの概要について説明する。
【0026】
図3に示すように、仮想空間で電動車いすとして機能するいす103が予めステージ104上に固定されている。いす103には、試作段階の操作子30が予め取り付けられている。いす103の前方には、スクリーン101が設けられている。スクリーン101には、投影機250によって、電動車いすが移動する仮想空間が描写される。電動車いすの操縦者は、前方に表示された仮想空間を見ながら、操作子30を操作し、仮想空間内で電動車いすを操縦する。
【0027】
スクリーン101は、操縦者から見た上下左右の仮想空間を表示する。これによって、実空間での評価に近い条件で試作段階の操作子30の操作性を評価することができる。なお、スクリーン101は、投影機250により投影される像を表示する領域であれば足り、その具体的な構成は任意である。4台の投影機250を用意して、スクリーン101に仮想空間を投影しても良い。この場合には、スクリーン101を左端領域、中央上領域、中央下領域、右端領域に4分割し、4台の投影機250を夫々の領域に対応付ければ良い。
【0028】
ステージ104は、軸方向に沿って伸縮可能な支持アーム105によって支持されている。支持アーム105が伸縮することによってステージ104は傾いたり水平な状態に戻ったりする。支持アーム105の制御によってステージ104を動かし、これによっていす103に座っている操縦者に外乱を与える。ここでは、仮想空間内での電動車いすの状態に応じて操縦者に外乱を与える。つまり、仮想空間内で電動車いすがバンプ上に乗り上げた場合、これに合わせて支持アーム105を制御し、いす103に座っている操縦者にバンプにのりあげた振動を与える。これによって、仮想空間で電動車いすを操縦しているにも関わらず、実空間で電動車いすの実機を操縦している感覚にあわせることができる。結果的に、実空間での操縦時に近い条件で後述の評価データを取得することができる。そして、実空間での評価に近い条件で試作段階の操作子30の操作性を評価することができる。
【0029】
図4に示すように、操作子30は、ハンドレスト31、ベース32、球体レバー35、およびブレーキレバー36を有する。操縦者は、球体レバー35を前、後、左、右に傾倒させることによって、仮想空間内で電動車いすを操縦する。操縦者は、球体レバー35を右又は左に回転させることによって、仮想空間内で電動車いすを右又は左に回転させる。操縦者は、ハンドレスト31に手のひらを載せた状態で、人差し指から小指でブレーキレバー36を握り締めることによって、仮想空間内で移動する電動車いすを減速させる。
【0030】
図1及び図2に戻って説明する。
【0031】
電動車いす10は、上述のいす103に相当する。電動車いす10は、スクリーン101に描画される仮想空間内を操縦者による操作子30の操作に応じて仮想移動する。なお、電動車いす10は、ステージ104に固定されており、操縦者による操作子30の操作に応じて実空間を移動することはない。
【0032】
外乱生成部20は、電動車いす10に搭乗している操縦者に対して与えられる外乱を生成する。外乱生成部20は、上述の支持アーム105を含んで形成される。外乱生成部20は、コントローラ50からの制御信号に応じて、ステージ104を駆動する。これによって、ステージ104上のいす103に着座している操縦者に外乱(振動)が与えられる。なお、外乱生成部20の具体的な構成は任意である。また、操縦者に与えられる外乱の具体的な内容も任意である。
【0033】
操作子30は、ロボット等の移動体に組み込まれる前の試作段階の操作装置である。電動車いす10の操縦者は、操作子30を操作することによって仮想空間内で電動車いすを操縦する。操作子30内には、各種のセンサ(例えば、圧力センサ、アブソリュートエンコーダ等)が組み込まれている。操作子30は、操縦者による操作内容に応じた電気信号を演算処理部60に出力する。例えば、操作子30は、ブレーキレバー36の変位量に応じた電気信号を演算処理部60に出力する。操作子30は、球体レバー35の右回転量に応じた電気信号を演算処理部60に出力する。操作子30は、球体レバー35の前方向への傾倒に応じた電気信号を演算処理部60に出力する。なお、操作子30と演算処理部60間には、後述のDSP200(図5参照)が接続されている。
【0034】
筋電位測定部40は、操縦者の腕等の筋肉の電位を測定する。操縦者の筋肉の電位は、その操作負担に応じて変化する。筋電位(生体情報)を測定することによって、操縦者が受ける身体的負担を定量化することができる。筋電位測定部40の出力は、演算処理部60に接続される。なお、筋電位測定部40は、端子電極、A/D変換部等によって形成される。なお、ここでは、操縦者の操作負担を評価するために操縦者の筋電位値を取得しているが、他の指標(生体情報)で操縦者の操作負担を評価しても良い。
【0035】
コントローラ50は、演算処理部60からの制御指示に応じて外乱生成部20を制御する。コントローラ50は、通常のコンピュータでプログラムがCPUで実行されることで実現される。
【0036】
演算処理部60は、様々な機能を実行する。演算処理部60は、通常のコンピュータでプログラムがCPUで実行されることで実現される。演算処理部60の機能については後述する。
【0037】
評価データ格納部70は、演算処理部60から出力される評価データを格納する。
【0038】
表示部80は、演算処理部60から出力される描画データに基づいて電動車いす10が仮想移動する仮想空間を表示する。
【0039】
地図データ格納部90は、電動車いす10が仮想移動する仮想空間の地図データを記憶する。障害データ格納部91は、電動車いす10が仮想移動する仮想空間内で生じうる障害データを記憶する。車いすデータ格納部92は、仮想空間内に仮想存在する電動車いす10自体に関するデータを記憶する。データ格納部は、コンピュータに含まれる一般的な記憶装置によって形成される。
【0040】
地図データは、3次元画像ソフトによって予め生成される。地図データは、仮想空間の描画データである。障害データは、仮想的又は実測に基づいて生成される。障害データは、仮想空間に障害を設定するデータである。なお、障害データを実測の振動に基づいて生成することによって、実際の操作状態に適合した条件で操作子の操作性を評価することができる。車いすデータは、仮想空間に車いすを表示するためのデータである。
【0041】
図2を参照して説明する。
【0042】
評価データ生成部61は、筋電位測定部40の出力に基づいて、操作子30の操作性を評価するための評価データを生成する。評価データ生成部61によって生成された評価データによれば、操作子30を実際に操作する操縦者の身体的な負担を直接的に評価することができる。快適性の観点から操作子30の操作性を評価することで、操作子30の構造等の要因に起因して操縦者に無理な身体的な負担が生じていないかを検証することができる。評価データ生成部61に含まれるフィルタ部61a、及び演算部61bの機能は後述する。
【0043】
評価データ生成部62は、操作子30の出力に基づいて、操作子30の操作性を評価するための評価データを生成する。評価データ生成部62によって生成された評価データによれば、操縦者による操作子30の実際の操作内容を評価することができる。これによって、操作者の意図に沿う操作指示が操作子30に入力されているか、操作者による操作指示に時間的な遅れが生じていないか等を検証することができる。このように操作子30の操作性を評価することで、操作子30の構造等の要因に起因して操作子の操作性が損なわれないかを検証することができる。評価データ生成部62に含まれるモニタ部62a、及び演算部62bの機能は後述する。
【0044】
描画データ生成部63は、地図データ、障害データ、車いすデータ、及び操作子30の出力に基づいて描画データを生成する。描画データは、操作子30の出力に応じて生成される。従って、操縦者の前方のスクリーン101には、操作子30の操作に応じた仮想空間が投影される。なお、描画データ生成部63は、プログラムがCPU(Central Processing Unit)で実行されることで実現される。
【0045】
外乱指示生成部64は、操作子30の操作に応じて仮想空間内で外乱が生じたとき、外乱指示信号を生成する。外乱指示生成部64は、描画データ生成部63から出力される情報に基づいて外乱指示信号を生成する。例えば、外乱指示生成部64は、仮想空間内での電動車いすの位置情報と仮想空間内での障害の位置情報とに基づいて外乱を生成する。具体的には、仮想空間内での路面に形成されたバンプ上に電動車いすがのりあげた場合に、外乱指示生成部64は、電動車いすが受ける作用に応じた外乱指示信号を生成する。
【0046】
コントローラ50は、外乱指示生成部64から出力される外乱指示信号に応じて外乱生成部20を制御する。
【0047】
図5を参照して、評価システム100の具体的なシステム構成について説明する。図5に示すように、評価システム100は、複数のコンピュータ220、230、240、260を含んで形成される。なお、モーション生成装置210は、上述の外乱生成部20に相当する。DSP200は、デジタル信号処理部として機能し、操作子30の出力をA/D変換してコンピュータ230に出力する。
【0048】
コンピュータ220は、上述のコントローラ50に相当する。コンピュータ230は、上述の演算処理部60に相当する。コンピュータ230のハードディスクには、上述の地図データ、障害データ、車いすデータが格納されている。また、コンピュータ230のハードディスクは、上述の評価データ格納部70として機能する。コンピュータ240、投影機250は、上述の表示部80に相当する。同様に、コンピュータ260、投影機270は、上述の表示部80に相当する。
【0049】
評価システム100のシステム構成は如何様であっても良い。評価システム100のシステム構成は、図5に示すものに限定されるべきではない。なお、各コンピュータは、CPU、ハードディスク、マザーボード、ドーターボード等によって形成される一般的な情報処理装置である。各コンピュータは、LAN(Local Area Network)配線等によって相互に通信可能な状態で接続される。
【0050】
次に、図6を参照して、評価データ生成部62が評価データを生成する手順について説明する。
【0051】
なお、評価データ生成部62は、図7に示す目標軌跡に対する操作軌跡のずれを評価することによって、操縦者の実際の操作内容を評価するための評価データを生成する。なお、目標軌跡とは、仮想空間内で電動車いすが所定のルールに従って移動する際に生成される移動軌跡である。操作軌跡は、操作子30の操作に応じて仮想空間内を電動車いすが移動する際に生成される移動軌跡である。目標軌跡に対する移動軌跡のずれを評価することによって、特に安全性の観点から操作子30の操作性を評価することができる。なお、目標軌跡の設定方法は任意である。所定のルールに従って仮想空間をスクリーンに描画することで目標軌跡を設定しても良い。スクリーンに所定のルールで移動するターゲットを描画することで目標軌跡を設定しても良い。
【0052】
図6を参照して説明する。
【0053】
まず、評価データ生成部62は、ルート情報を取得する(S10)。具体的には、モニタ部62aは、描画データ生成部63から出力される情報に基づいて、仮想空間内での電動車いすのルート情報(目標軌跡)を取得する。なお、描画データ生成部63は、地図データに基づいて、仮想空間内で電動車いすが仮想移動すべきルート情報を取得し、これをモニタ部62aに出力しているものとする。なお、モニタ部62a自体にルート情報を予め記憶しておいても良い。
【0054】
次に、評価データ生成部62は、実操作情報を取得する(S11)。具体的には、モニタ部62aは、操作子30の出力に基づいて、仮想空間内で電動車いすが仮想移動する軌跡(操作軌跡)をモニタする。
【0055】
次に、評価データ生成部62は、演算の実行をする(S12)。具体的には、演算部62bは、仮想空間内での電動車いすの目標軌跡に対して電動車いすの移動軌跡(操作軌跡)を関連付ける。これによって、図7に示す目標軌跡に対する移動軌跡の関係を示す評価データが生成される。また、演算部62bは、目標軌跡に対する移動軌跡のずれ量も算出する。これによって、操作子の操作内容とずれ量間の対応関係も明らかにすることができる。なお、ずれ量の算出方法は任意である。減算等によって両者の差分値を演算すれば良い。
【0056】
次に、評価データ生成部62は、生成した評価データを評価データ格納部70に格納する(S13)。操作子30の開発者は、評価データ格納部70に格納された評価データに基づいて、プロトタイプの操作子30の操作性を評価することができる。
【0057】
図8乃至図12を参照して、評価データ生成部61の動作について説明する。
【0058】
まず、筋電位測定部40は、筋電位値を取得する(S20)。具体的には、筋電位測定部40は、操縦者の筋肉に接続された端子電極の出力をA/D変換して出力する。筋電位測定部40の出力によって、図9に示す筋電図(筋電図データ)が生成される。
【0059】
次に、評価データ生成部61は、筋電位測定部40の出力に基づいて生成された筋電図データに対してフィルタ処理を実行する(S21)。具体的には、フィルタ部61aは、筋電図データに対して離散フーリエ変換をする。次に、10〜250Hzのバンドパスフィルタで処理する。次に、逆フーリエ変換する。最後に、整流化処理をする(移動平均の演算処理をする)。このようにして、図10に示すフィルタ処理後の筋電図データが生成される。
【0060】
次に、評価データ生成部61は、フィルタ処理後の筋電図データに対して演算を実行する(S22)。これによって、筋負担を評価するための評価データが生成される。具体的には、演算部61bは、フィルタ処理後の筋電図データに基づいて筋力比を算出する。これによって、図11に示す筋力比データ(評価データ)が生成される。
【0061】
次に、評価データ生成部61は、算出した筋力比データを評価データ格納部70に格納する(S23)。操作子30の開発者は、筋力比データを参照することで、操作子30を操作する操縦者の身体的な負担を評価することができる。
【0062】
なお、図9乃至図11に示すデータは、上から順に、浅指屈筋、撓側手根屈筋、尺側手根屈筋、撓側手根伸筋、尺側手根伸筋(図12参照)に対応する。このように、複数の筋肉に対応して評価データを生成すると良い。これによって、操縦者が受ける身体的負担を精度良く評価することが可能になる。
【0063】
上述の説明から明らかなように、本実施形態では、操作子の出力に基づいて評価データを生成する。この評価データによれば、操縦者の実際の操作内容を評価できる。また、操縦者が受ける身体的負担の測定値に基づいて評価データを生成する。これによれば、操縦者の実際の操作負担を評価できる。これによって、実際の操作時に近い条件で操作子の操作性を評価できる。
【0064】
また、本実施形態では、操作子30の操作状態に応じて操縦者に対して外乱を与える。具体的には、障害データに基づいて仮想空間に設定された障害によって仮想空間内の電動車いすに衝撃が加わったことを検出し、この検出結果に基づいて操縦者に外乱を与える。これによって、操作子30の操作感覚を実空間内で電動車いすを操縦している感覚に近づけることができる。このような条件で生成された評価データによれば、実際の操作時に近い条件で操作子の操作性を評価できる。
【0065】
本発明の技術的な範囲は上述の実施形態に限定されない。操作子の具体的な形状等は任意である。操作子が組み込まれる移動体の種類は任意である。
【産業上の利用可能性】
【0066】
本発明は、例えば、ロボット等の移動体に組み込まれる操作子の評価システムとして適用可能である。
【図面の簡単な説明】
【0067】
【図1】本発明の第1の実施形態にかかる評価システムの概略的な構成を示すブロック図である。
【図2】本発明の第1の実施形態にかかる演算処理部60の構成を示す概略的なブロック図である。
【図3】本発明の第1の実施形態にかかる評価システムの部分的な外観を示す概略的な説明図である。
【図4】本発明の第1の実施形態にかかる操作子の概略的な構成を示す説明図である。
【図5】本発明の第1の実施形態にかかる評価システムの概略的なシステム構成を示す説明図である。
【図6】本発明の第1の実施形態にかかる操作子の出力に基づいて評価データを生成する評価データ生成部の動作を示すフローチャートである。
【図7】本発明の第1の実施形態にかかる操作子の出力に基づいて評価データを生成する評価データ生成部の動作を説明するための説明図である。
【図8】本発明の第1の実施形態にかかる筋電位測定部の出力に基づいて評価データを生成する評価データ生成部の動作を示すフローチャートである。
【図9】本発明の第1の実施形態にかかる筋電位測定部から出力される筋電位データ(筋電図)である。
【図10】本発明の第1の実施形態にかかるフィルタ処理後の筋電位データ(筋電図)である。
【図11】本発明の第1の実施形態にかかる筋電位データの演算処理により得られた最大筋力比の時間変化を示す評価データ(グラフ)である。
【図12】本発明の第1の実施形態にかかる筋電位の測定箇所を示す模式図である。
【符号の説明】
【0068】
100 評価システム
20 外乱生成部
30 操作子
40 筋電位測定部
50 コントローラ
60 演算処理部
70 データ格納部
80 演算処理部
80 表示部
90 地図データ格納部
91 障害データ格納部
92 車いすデータ格納部
61a フィルタ部
61b 演算部
61 評価データ生成部
62a モニタ部
62b 演算部
62 評価データ生成部
63 描画データ生成部
64 外乱指示生成部
101 スクリーン
104 ステージ
105 支持アーム
210 モーション生成装置
220 コンピュータ
230 コンピュータ
240 コンピュータ
250 投影機
260 コンピュータ
270 投影機
31 ハンドレスト
32 ベース
35 球体レバー
36 ブレーキレバー
【特許請求の範囲】
【請求項1】
移動体の操縦者により操作される操作子の評価システムであって、
前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成する第1評価データ生成部、又は前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する第2評価データ生成部を備える操作子の評価システム。
【請求項2】
前記第1評価データ生成部は、前記操作子の出力によって決定付けられる前記移動体の移動軌跡の評価に基づいて前記第1評価データを生成することを特徴とする請求項1に記載の評価システム。
【請求項3】
前記第1評価データ生成部は、予め設定された目標軌跡に対する前記移動軌跡のずれの評価に基づいて前記第1評価データを生成することを特徴とする請求項2に記載の評価システム。
【請求項4】
前記第2評価データ生成部は、生体情報測定部の出力に基づいて前記第2評価データを生成することを特徴とする請求項1乃至3のいずれか一項に記載の評価システム。
【請求項5】
前記移動体が仮想移動する仮想移動空間を描画するデータを生成する描画データ生成部を更に備えることを特徴とする請求項1乃至4のいずれか一項に記載の評価システム。
【請求項6】
前記移動体の操縦時に前記操縦者が受ける外乱を生成する外乱生成部を更に備えることを特徴とする請求項1乃至5のいずれか一項に記載の評価システム。
【請求項7】
前記外乱生成部は、前記仮想移動空間に設定された外乱要因に応じて外乱を生成することを特徴とする請求項6に記載の評価システム。
【請求項8】
移動体の操縦者により操作される操作子と、
前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成する第1評価データ生成部と、
前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する第2評価データ生成部と、
を備える操作子の評価システム。
【請求項9】
移動体の操縦者により操作される操作子の評価データを生成する方法であって、
第1評価データ生成部は、前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成し、
第2評価データ生成部は、前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する、
評価データの生成方法。
【請求項1】
移動体の操縦者により操作される操作子の評価システムであって、
前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成する第1評価データ生成部、又は前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する第2評価データ生成部を備える操作子の評価システム。
【請求項2】
前記第1評価データ生成部は、前記操作子の出力によって決定付けられる前記移動体の移動軌跡の評価に基づいて前記第1評価データを生成することを特徴とする請求項1に記載の評価システム。
【請求項3】
前記第1評価データ生成部は、予め設定された目標軌跡に対する前記移動軌跡のずれの評価に基づいて前記第1評価データを生成することを特徴とする請求項2に記載の評価システム。
【請求項4】
前記第2評価データ生成部は、生体情報測定部の出力に基づいて前記第2評価データを生成することを特徴とする請求項1乃至3のいずれか一項に記載の評価システム。
【請求項5】
前記移動体が仮想移動する仮想移動空間を描画するデータを生成する描画データ生成部を更に備えることを特徴とする請求項1乃至4のいずれか一項に記載の評価システム。
【請求項6】
前記移動体の操縦時に前記操縦者が受ける外乱を生成する外乱生成部を更に備えることを特徴とする請求項1乃至5のいずれか一項に記載の評価システム。
【請求項7】
前記外乱生成部は、前記仮想移動空間に設定された外乱要因に応じて外乱を生成することを特徴とする請求項6に記載の評価システム。
【請求項8】
移動体の操縦者により操作される操作子と、
前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成する第1評価データ生成部と、
前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する第2評価データ生成部と、
を備える操作子の評価システム。
【請求項9】
移動体の操縦者により操作される操作子の評価データを生成する方法であって、
第1評価データ生成部は、前記操作子の出力に基づいて前記操作子を評価するための第1評価データを生成し、
第2評価データ生成部は、前記操作子の操作時に前記操縦者が受ける身体的負担の測定値に基づいて前記操作子を評価するための第2評価データを生成する、
評価データの生成方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−64213(P2010−64213A)
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願番号】特願2008−234503(P2008−234503)
【出願日】平成20年9月12日(2008.9.12)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成19年度、文部科学省、科学技術総合研究委託事業、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
【Fターム(参考)】
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願日】平成20年9月12日(2008.9.12)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成19年度、文部科学省、科学技術総合研究委託事業、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
【Fターム(参考)】
[ Back to top ]