
操作子装置
【課題】3つのユニット間における回動基準の一元的解釈を可能にし、設計モジュールを簡素化する。
【解決手段】子ユニット30は、第1の軸中心AX1の周りに親ユニット10に対して相対的に回動自在で、操作子56を有する孫ユニット50は、第1の軸中心AX1に直交する第2の軸中心AX2の周りに子ユニット30に対して相対的に回動自在である。第1のロータリボリューム32が、第1の軸中心AX1の周りの親ユニット10と子ユニット30との相対的な回動量を検出し、第2のロータリボリューム39が、第2の軸中心AX2の周りの子ユニット30と孫ユニット50との相対的な回動量を検出する。ロータリボリューム32、39はいずれも、子ユニット30の電気回路基板43に実装される。
【解決手段】子ユニット30は、第1の軸中心AX1の周りに親ユニット10に対して相対的に回動自在で、操作子56を有する孫ユニット50は、第1の軸中心AX1に直交する第2の軸中心AX2の周りに子ユニット30に対して相対的に回動自在である。第1のロータリボリューム32が、第1の軸中心AX1の周りの親ユニット10と子ユニット30との相対的な回動量を検出し、第2のロータリボリューム39が、第2の軸中心AX2の周りの子ユニット30と孫ユニット50との相対的な回動量を検出する。ロータリボリューム32、39はいずれも、子ユニット30の電気回路基板43に実装される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、第1の軸中心の周りに第1のユニットに対して第2のユニットが相対的に回動すると共に、第1の軸中心とは平行でない第2の軸中心の周りに第2のユニットに対して第3のユニットが相対的に回動する操作子装置に関する。
【背景技術】
【0002】
従来、3つのユニットを有するジョイスティック等の操作子装置において、第1の軸中心の周りに第1のユニットに対して第2のユニットが相対的に回動すると共に、第1の軸中心とは平行でない第2の軸中心の周りに第2のユニットに対して第3のユニットが相対的に回動するものが知られている。
【0003】
例えば、特許文献1の装置では、ベースプレート(第1のユニット)にジョイスティック本体(第2のユニット)が回転自在に配設され、ジョイスティック本体に対して、握り部、操作桿、ガイドステー及びフィンガーレスト等を含んで一体に可動する第3のユニットが回動自在に配設される。ジョイスティック本体の回転方向の軸線と第3のユニットの回動方向の軸線とは直交している。
【0004】
ベースプレートに対するジョイスティック本体の回転動作は、ベースプレートに設けたスライドボリュームにより検出される。ジョイスティック本体に対する第3のユニットの回動動作は、ジョイスティック本体に設けたロータリボリュームによって検出される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3381852号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の装置において、ベースプレートを親ユニット、ジョイスティック本体を子ユニット、第3のユニットを孫ユニットと見なした場合、親ユニットに対して子ユニットが回動自在で、子ユニットに対して孫ユニットが回動自在とされる構成となっている。
【0007】
しかしながら、スライドボリュームで検出するのは、あくまで親ユニットに対する子ユニットの相対的な動作である。また、ロータリボリュームで検出するのは、あくまで子ユニットに対する孫ユニットの相対的な動作である。そのため、孫ユニットの動作には、親ユニットに対する子ユニットの動作が重畳されることになる。
【0008】
このことから、モジュール設計の概念上は、第1の軸中心周りの動作の上に第2の軸中心周りの動作が積層された解釈となり、モジュール設計をいたずらに複雑にする結果となっていた。
【0009】
また、電気回路基板の配置や信号線の配線は、回動量を検出するボリュームの配置に依存するため、構成を簡素化する観点からは改善の余地がある。
【0010】
本発明は上記従来技術の問題を解決するためになされたものであり、その目的は、3つのユニット間における回動基準の一元的解釈を可能にし、設計モジュールを簡素化することができる操作子装置を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するために本発明の請求項1の操作子装置は、第1のユニット(10)と、第1の軸中心(AX1)の周りに前記第1のユニットに対して相対的に回動自在な第2のユニット(30)と、操作子(56)を有してなり、前記第1の軸中心に平行でない第2の軸中心(AX2)の周りに前記第2のユニットに対して相対的に回動自在な第3のユニット(50)と、前記第1の軸中心の周りの前記第1のユニットと前記第2のユニットとの相対的な回動量を検出する第1の検出手段(32)と、前記第2の軸中心の周りの前記第2のユニットと前記第3のユニットとの相対的な回動量を検出する第2の検出手段(39)とを有し、前記第1の検出手段及び前記第2の検出手段はいずれも、前記第2のユニットに配設されたことを特徴とする。
【0012】
好ましくは、前記第1の検出手段及び前記第2の検出手段は、前記第2のユニットに配設された共通の電気回路基板(43)に実装される。好ましくは、前記第1の検出手段からの信号線と前記第2の検出手段からの信号線とが1つに束ねられた信号束線(45)として外部に導出される。好ましくは、前記第1の検出手段及び前記第2の検出手段を覆うように、前記第1の検出手段及び前記第2の検出手段に共通のEMC対策用の導電性カバー(70)が設けられたことを特徴とする請求項1〜3のいずれか1項に記載の操作子装置。
【0013】
なお、上記括弧内の符号は例示である。
【発明の効果】
【0014】
本発明の請求項1によれば、3つのユニット間における回動基準の一元的解釈を可能にし、設計モジュールを簡素化することができる。
【0015】
請求項2によれば、電気回路基板の構成を簡素化することができる。
【0016】
請求項3によれば、モジュールの極力上流で信号線をまとめられるようにして信号束線の取り扱いを容易にすることができる。
【0017】
請求項4によれば、検出手段に関するEMC対策のための構成を簡素化することができる。
【図面の簡単な説明】
【0018】
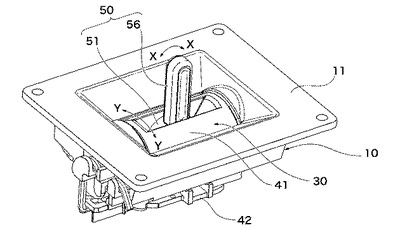
【図1】本発明の一実施の形態に係る操作子装置の斜視図である。
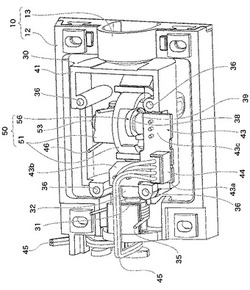
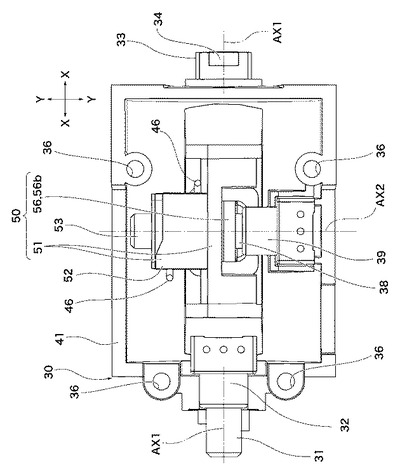
【図2】上ケースを取り外した状態の操作子装置の底面図である。
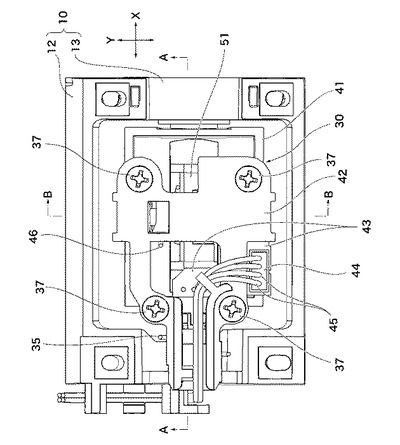
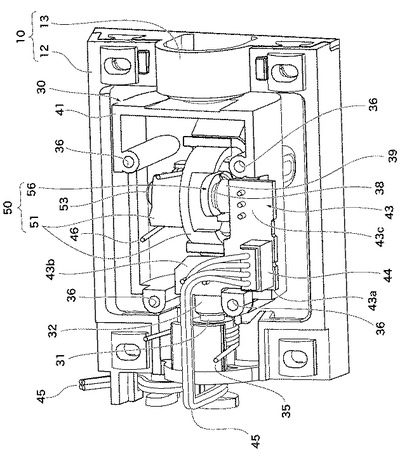
【図3】上ケース及び下フレームを取り外した状態の操作子装置の底面側の斜視図である。
【図4】子ユニットの主要部品及び孫ユニットの底面図である。
【図5】図2のA−A線に沿う断面図である。
【図6】図2のB−B線に沿う断面図である。
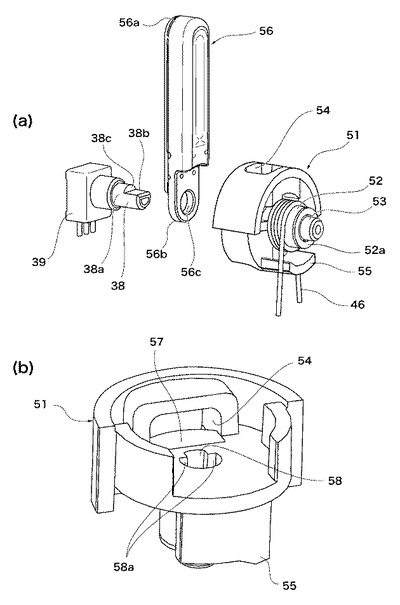
【図7】第2のロータリボリューム及び孫ユニットの分解斜視図、カバー体の斜視図である。
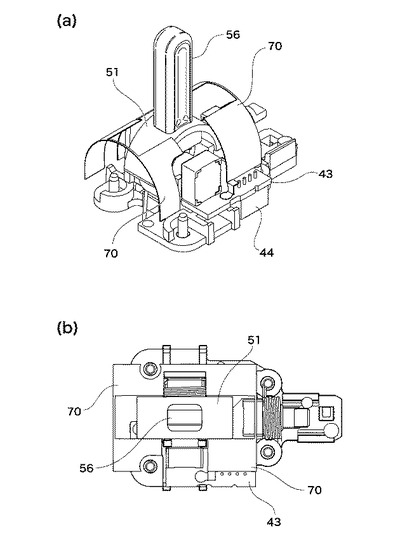
【図8】導電性カバーを設けると共に、大ハウス、小ハウス、ホイール及び上ケース等を除いて示した操作子装置の斜視図、上面図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施の形態を図面を参照して説明する。
【0020】
図1は、本発明の一実施の形態に係る操作子装置の斜視図である。この操作子装置は、例えばジョイスティックとして構成され、用途としては電子楽器の楽音制御用の入力装置等が適している。制御対象としては、例えば音高、音色、音量のほか、ビブラート、リバーブ等の各種効果に関する楽音パラメータが考えられる。ただし、楽音制御に限定されるものではなく、楽器以外の電気機器(ゲーム装置等)にも適用可能である。
【0021】
この操作子装置は、大別して3つのユニットから構成される。すなわち、第1のユニットである親ユニット10、第2のユニットである子ユニット30、第3のユニットである孫ユニット50を有する。孫ユニット50は、子ユニット30に対してX方向に相対的に回動自在である。子ユニット30は、親ユニット10に対してY方向に相対的に回動自在である。電気機器に親ユニット10が固定されるとし、親ユニット10を固定体と考えれば、子ユニット30と孫ユニット50は可動体といえる。
【0022】
操作子56は、操作者により直接操作される構成要素であり、孫ユニット50及び/又は子ユニット30の可動により、X方向及びY方向、またはこれら双方の成分を含む方向に操作が可能である。例えば操作子56をX方向の成分を含む方向に操作すると、それに応じて孫ユニット50がX方向に回動する。操作子56をY方向の成分を含む方向に操作すると、それに応じて子ユニット30が孫ユニット50と一体となって親ユニット10に対してY方向に回動する。
【0023】
親ユニット10は上ケース11を有する。子ユニット30は、いずれも樹脂製のホイール41及び下フレーム42を有する。孫ユニット50は、それぞれ別体に構成される操作子56とカバー体51とからなる。ホイール41は子ユニット30と一体的で、外観となって現れる外観部品である。子ユニット30における外観部品としてはホイール41が唯一で全てである。操作子56は、非操作時において上ケース11から突出している。以降の説明上、操作子56の突出方向を上方とする。また、以降の各図面では、各ユニットは、非操作状態である初期位置にある状態で示している。
【0024】
図2は、上ケース11を取り外した状態の操作子装置の底面図である。図3は、上ケース11及び下フレーム42を取り外した状態の操作子装置の底面側の斜視図である。親ユニット10は、上ケース11のほか、いずれも樹脂製の大ハウス12及び小ハウス13を構成部品とし、これらの部品によって一体的に構成される。
【0025】
図4は、子ユニット30の主要部品及び孫ユニット50の底面図である。子ユニット30において、ホイール41の下部の4箇所の取り付け穴36に下フレーム42がネジ37(図2)で固定され、両者は一体的となっている。下フレーム42の下面には、電気回路基板43が固着される(図2、図3)。電気回路基板43は、屈曲部43aから直交する2方向に腕部(延設部)が延設されて底面視で略L字型(く字状)に構成される(図3)。屈曲部43aにはコネクタ端子部44が取り付けられる(図3)。
【0026】
図4に示すように、子ユニット30には、第1のロータリボリューム32、第2のロータリボリューム39が配設される。具体的には、電気回路基板43の2つの延設部の先端部43b、43c(図3)に、それぞれロータリボリューム32、39が実装される。そして、各ロータリボリューム32、39からの信号線が屈曲部43aのコネクタ端子部44において1つに束ねられて、信号束線45として装置外部へ導出され(図2、図3)、信号線の取り扱いが容易になっている。
【0027】
ロータリボリューム32、39は、それぞれのハウジングが電気回路基板43に固定されると共に、それぞれの回動軸がハウジングに対し回動自在となっている。第1のロータリボリューム32の第1の回動軸31の第1の軸中心AX1がY方向に直交し、第2のロータリボリューム39の第2の回動軸38の第2の軸中心AX2がX方向に直交するように、各ロータリボリューム32、39のハウジングが位置決めされて固定される(図4)。従って、軸中心AX1、AX2の位置はいずれも、子ユニット30に対して固定的になっている。
【0028】
第1のロータリボリューム32は、第1の軸中心AX1の周りの親ユニット10と子ユニット30とのY方向の相対的な回動量を検出する。第2のロータリボリューム39は、第2の軸中心AX2の周りの子ユニット30と孫ユニット50とのX方向の相対的な回動量を検出する。ロータリボリューム32、39は、各々の回動軸の回転によりユニット間の相対的な回動量を検出できる構成であればよく、センサの構成は特に限定されない。
【0029】
図4に示すように、子ユニット30において、第1のロータリボリューム32が配設される端部とは反対の端部に突起軸33が突設される。突起軸33の軸芯は第1の軸中心AX1と一致している。突起軸33の先端部の上下には、鍔部34が一体に形成されている。
【0030】
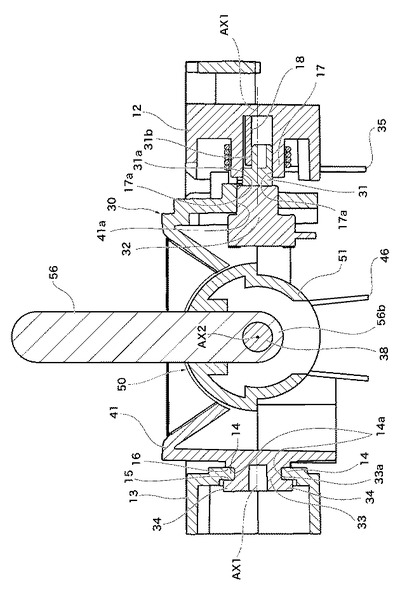
図5は、図2のA−A線に沿う断面図であり、下フレーム42、電気回路基板43及びこれらに取り付いているものの図示を省略している。
【0031】
親ユニット10と子ユニット30とは次のように回動自在に係合している。まず、図5に示すように、子ユニット30の突起軸33の外周面33aに、親ユニット10の小ハウス13の軸受け部14の軸受け面14aが嵌合され、突起軸33が軸受け部14に軸支される。その際、鍔部34は、軸受け部14に対して所定の回転角度だけ回転させた状態で挿通し、その後に図5に示すような回転角度に戻すことで係合可能であり、軸受け部14の規制面15、16の間に軸受け部14が嵌合される。その結果、子ユニット30は、小ハウス13に対して、第1の軸中心AX1に直交する方向(平面方向)の位置決めと共に、第1の軸中心AX1に平行な方向の位置決めもなされる。
【0032】
一方、親ユニット10の大ハウス12には、軸受け部14の位置とは反対側の端部において、筒状軸部17が形成されている。筒状軸部17の内周面である軸受け面17aに、第1のロータリボリューム32の第1の回動軸31の外周面31aが挿通嵌合されて軸支されている。これにより、子ユニット30は、大ハウス12に対して第1の軸中心AX1に直交する方向(平面方向)の位置決めがなされる。
【0033】
このようにして、大ハウス12と小ハウス13とは、子ユニット30との位置決めがなされた状態で互いにネジ止め固定される。
【0034】
また、軸受け面17aには内側肉部18が形成され、第1の回動軸31には切り欠き部31bが形成され、そして内側肉部18が切り欠き部31bに当接している。これにより、子ユニット30が親ユニット10の大ハウス12に対して相対的に回動すると、内側肉部18が切り欠き部31bを駆動し、第1の回動軸31が回動することになる。さらに、筒状軸部17の外周面にはコイルバネ35が装着されている。コイルバネ35は、大ハウス12に係止されると共に、子ユニット30の下フレーム42によって開く方向に駆動され、子ユニット30に対して初期位置への復帰力を与える。
【0035】
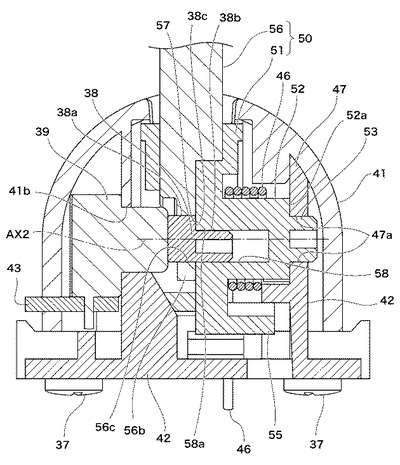
図6は、図2のB−B線に沿う断面図であり、親ユニット10の図示を省略している。図7(a)は、第2のロータリボリューム39及び孫ユニット50の分解斜視図、図7(b)はカバー体51の斜視図である。
【0036】
子ユニット30と孫ユニット50とは次のように回動自在に係合している。まず、図6、図7(a)に示すように、第2のロータリボリューム39の第2の回動軸38には切り欠き部38bが形成され、切り欠き部38bに連接して、第2の回動軸38の先端方向を向く端面38cが形成されている。
【0037】
図7(a)に示すように、孫ユニット50において、カバー体51は樹脂で一体に形成され、操作子56は、ゴム、またはカバー体51より柔らかい樹脂で一体に形成される。操作子56は棒状に形成され、主に操作される先端部56aと下部である板状の連結部56bとを有する。連結部56bには軸挿通穴56cが形成されている。
【0038】
図7(a)、(b)に示すように、カバー体51には、上下方向に貫通する係合穴54が形成される。また、図7(a)に示すように、カバー体51には、同心の太軸52と細軸53が形成され、太軸52の外周面にコイルバネ46が装着されている。図6、図7(b)に示すように、太軸52には、それと同心の軸挿通穴58が形成され、軸挿通穴58には内側肉部58aが形成される。
【0039】
図6に示すように、操作子56はカバー体51の係合穴54に挿通される。操作子56は、その弾性により係合穴54に対して嵌合状態となる。この状態で、操作子56の軸挿通穴56c及びカバー体51の軸挿通穴58に、第2のロータリボリューム39の第2の回動軸38が挿通される(図5も参照)。これにより、第2の回動軸38の外周面38aに軸挿通穴56c及び軸挿通穴58が係合し、操作子56及びカバー体51がそれぞれ第2の回動軸38に直接軸支される。カバー体51は、操作子56の一部(下半部)を覆う。さらに、細軸53が子ユニット30の下フレーム42のリブ47に形成された軸受け面47aに軸支される。これらにより、操作子56及びカバー体51は、子ユニット30に対して、第2の回動軸38の第2の軸中心AX2に直交する方向(平面方向)の位置決めがなされる。
【0040】
また、カバー体51の垂直面57(図7(b))が第2の回動軸38の端面38cに当接すると共に、カバー体51の太軸52の端面52aが下フレーム42のリブ47に当接することで、カバー体51は、第2の軸中心AX2に平行な方向の位置が規制される。これにより、孫ユニット50は、子ユニット30に対して第2の軸中心AX2に平行な方向の位置決めがなされる。
【0041】
ところで、子ユニット30における第1のロータリボリューム32の位置決め(第1の回動軸31の半径方向の位置決め)を行う上で、子ユニット30のホイール41の第1の半円凹面41a(図5参照)に、第1のロータリボリューム32のハウジングの外面を受けさせて、半円凹面41aを位置決めに用いるようにすることもできる。同様に、子ユニット30における第2のロータリボリューム39の位置決め(第2の回動軸38の半径方向の位置決め)を行う上で、ホイール41の第2の半円凹面41b(図6参照)に、第2のロータリボリューム39のハウジングの外面を受けさせて、半円凹面41bを位置決めに用いるようにすることもできる。
【0042】
カバー体51の軸挿通穴58の内側肉部58aが第2のロータリボリューム39の第2の回動軸38の切り欠き部38bに当接している。孫ユニット50が子ユニット30に対して相対的に回動すると、内側肉部58aが切り欠き部38bを駆動し、第2の回動軸38が回動することになる。また、カバー体51の太軸52の外周面にはコイルバネ46が装着される。コイルバネ46は、下フレーム42に係止されると共に、カバー体51の駆動部55(図6、図7)によって開く方向に駆動され、孫ユニット50に対して初期位置への復帰力を与える。
【0043】
操作子56を、第2の軸中心AX2の周り(X方向)に回動操作すると、その操作力が係合穴54を介してカバー体51に伝わることで、カバー体51が操作子56と一体に可動し、孫ユニット50が子ユニット30に対して第2の軸中心AX2の周りに回動する。また、操作子56を、第1の軸中心AX1の周り(Y方向)に回動操作すると、カバー体51だけでなく子ユニット30も孫ユニット50と一体に可動し、孫ユニット50及び子ユニット30が親ユニット10に対して第1の軸中心AX1の周りに回動する。第1の軸中心AX1の周りと第2の軸中心AX2の周りの複合的な回動も可能である。
【0044】
本実施の形態によれば、第1のロータリボリューム32及び第2のロータリボリューム39がいずれも、子ユニット30に配設されたので、3つのユニット間における回動基準の一元的解釈を可能にし、設計モジュールを簡素化することができる。特に、誤差の積層が抑えられるので、検出精度を高めることに繋がる。
【0045】
また、2つのロータリボリューム32、39が共通の電気回路基板43に実装されたので、ロータリボリューム32、39からの電気信号を1つの基板に一元集約でき、電気回路基板の構成を簡素化することができる。特に、電気回路基板43がL字型に構成され、ロータリボリューム32、39からの信号線が1つの信号束線45として外部へ導出されるので、モジュールの極力上流で信号線をまとめられるようにして取り扱いを容易にすることができる。
【0046】
本実施の形態によればまた、軸中心AX1、AX2の位置は子ユニット30に対して固定的である。そして、それぞれ親ユニット10に一体的な大ハウス12、小ハウス13は、いずれも第1の軸中心AX1を軸芯とする第1の回動軸31、突起軸33に対して組み付けられて、第1の軸中心AX1に直交する方向において直接に位置決めされる(図5)。さらに、それぞれ孫ユニット50に一体的なカバー体51、操作子56は、第2の軸中心AX2を軸芯とする第2の回動軸38に対して組み付けられて、第2の軸中心AX2に直交する方向において直接に位置決めされる(図6)。すなわち、第2の軸中心AX2の周りに子ユニット30に対して相対的に回動自在なように第2の回動軸38に直接軸支される。
【0047】
これらにより、親ユニット10、子ユニット30及び孫ユニット50の位置関係につき、2軸基準に直接位置決めすることができ、累積誤差が抑えられ正確に位置決めされるので、製品の組み付け精度を高めることができる。これは、可動部分の擦れの懸念を抑えながら隙間をより小さく設定できることにも繋がり、異物や静電気の進入防止、怪我防止、小型化等に有利である。また、直接軸支されることで強度を高めることができる。操作子56においては強度向上や正確な位置決めによって操作感触や操作性が向上するという利点もある。
【0048】
子ユニット30についてみれば、互いに平行でない第1の回動軸31及び突起軸33と第2の回動軸38とが、子ユニット30に固定される。そして、子ユニット30に一体的な外観部品の全てであるホイール41が、軸中心AX1に直交する方向に対して第1の回動軸31に直接位置決めされると同時に軸中心AX2に直交する方向に対して第2の回動軸38に直接位置決めされている。これにより、ホイール41を2軸基準に位置決めでき、外観品質を高めることができる。
【0049】
しかも、第1の回動軸31は第1のロータリボリューム32の回転軸を兼ね、第2の回動軸38は第2のロータリボリューム39の回転軸を兼ねる。これらにより、親ユニット10及び子ユニット30間、並びに、子ユニット30及び孫ユニット50間の各回動量の検出精度が高まると共に、部品点数の増加を抑えることができる。
【0050】
また、軸中心AX1、AX2に直接位置決めされる部品のうち、孫ユニット50において一体的となるカバー体51及び操作子56は、外観となって現れる外観部品であり、良好な外観を保つ上で有利である。さらに、上記直接位置決めされる部品のうち、他部品と動的に係合する機構部品については、機構動作が良好になるという利点もある。機構部品として例えば、親ユニット10の大ハウス12の内側肉部18が、切り欠き部31bを介して第1の回動軸31を駆動する。また孫ユニット50のカバー体51が、切り欠き部38bを介して第2の回動軸38を駆動するほか、駆動部55によってコイルバネ46を駆動する。なお、これら2軸基準に位置決めされる部品は、各ユニットを構成し一体的となる部品であるが、各ユニットそれ自身という概念であってもよい。
【0051】
また、操作子56の軸挿通穴56c、カバー体51の軸挿通穴58に、それぞれ第2の回動軸38が挿通されることで操作子56及びカバー体51が直接軸支されるので、操作子56及びカバー体51については、位置精度が高まると共に、第2の回動軸38に対する抜け止め機構も特別に設ける必要がない。なお、操作子56及びカバー体51が直接軸支されるという観点では、軸部と穴部との関係が逆であってもよい。
【0052】
また、操作子56の操作力が、係合穴54を介してカバー体51に伝わり、カバー体51が操作子56と一体に可動するので、操作子56とカバー体51との特別な固定を要することなく両者を一体に回動させることができる。しかも接着等の固着手段も不要である。なお、カバー体51が操作子56と一体に可動するという観点に限れば、両者の係合関係は、係合穴とそれに挿通される棒体という構成に限定されるものではない。
【0053】
ところで、第1のロータリボリューム32、第2のロータリボリューム39に関するEMC対策の観点で、図8に示すように、導電性カバーを設けるのが望ましい。
【0054】
図8(a)、(b)は、導電性カバーを設けると共に、大ハウス12、小ハウス13、ホイール41及び上ケース11等を除いて示した操作子装置の斜視図、上面図である。
【0055】
図8(a)、(b)に示すように、導電性カバー70を、ホイール41(図6)の内側に貼着等により固定し、電気回路基板43の不図示のグランドに導通するよう配設する。導電性カバー70は、部品との干渉を避ける必要があるが、ホイール41の内面形状にほぼ沿い、ロータリボリューム32、39を極力広い範囲で共通に覆うように配設される。導電性カバー70は、ロータリボリューム32、39と外部との間の電磁波の送受信を抑制するための部材であり、アルミや銅等の導電性の金属でなる単一部材である。共通で単一の部材にて電磁波対策となるので、ロータリボリューム32、39に関するEMC対策を簡素な構成にて実現することができる。
【0056】
また、EMC対策の観点からは、コネクタ端子部44から導出される信号束線45の途中に、フェライトコア等のフィルタ部品を設けるのが望ましい。
【0057】
なお、軸中心AX1、AX2は互いに平行でなければよく、直交することは必須でない。また、カバー体51の係合穴54の貫通方向は、第1の軸中心AX1に平行でなければよく、直交することは必須でない。
【0058】
なお、3つのユニット間における回動基準の一元的解釈を可能にする観点、あるいは各ユニットを2軸基準に位置決めする観点からは、各ロータリボリューム32、39の回動軸31、38の軸芯がそれぞれユニット間の回動中心に相当することは必須でない。
【符号の説明】
【0059】
10 親ユニット(第1のユニット)、 30 子ユニット(第2のユニット)、 32 第1のロータリボリューム(第1の検出手段)、 39 第2のロータリボリューム(第2の検出手段)、 43 電気回路基板、 43a 屈曲部、 43b、43c 先端部、 45 信号束線、 50 孫ユニット(第3のユニット)、 56 操作子、 70 導電性カバー、 AX1 第1の軸中心、 AX2 第2の軸中心
【技術分野】
【0001】
本発明は、第1の軸中心の周りに第1のユニットに対して第2のユニットが相対的に回動すると共に、第1の軸中心とは平行でない第2の軸中心の周りに第2のユニットに対して第3のユニットが相対的に回動する操作子装置に関する。
【背景技術】
【0002】
従来、3つのユニットを有するジョイスティック等の操作子装置において、第1の軸中心の周りに第1のユニットに対して第2のユニットが相対的に回動すると共に、第1の軸中心とは平行でない第2の軸中心の周りに第2のユニットに対して第3のユニットが相対的に回動するものが知られている。
【0003】
例えば、特許文献1の装置では、ベースプレート(第1のユニット)にジョイスティック本体(第2のユニット)が回転自在に配設され、ジョイスティック本体に対して、握り部、操作桿、ガイドステー及びフィンガーレスト等を含んで一体に可動する第3のユニットが回動自在に配設される。ジョイスティック本体の回転方向の軸線と第3のユニットの回動方向の軸線とは直交している。
【0004】
ベースプレートに対するジョイスティック本体の回転動作は、ベースプレートに設けたスライドボリュームにより検出される。ジョイスティック本体に対する第3のユニットの回動動作は、ジョイスティック本体に設けたロータリボリュームによって検出される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3381852号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の装置において、ベースプレートを親ユニット、ジョイスティック本体を子ユニット、第3のユニットを孫ユニットと見なした場合、親ユニットに対して子ユニットが回動自在で、子ユニットに対して孫ユニットが回動自在とされる構成となっている。
【0007】
しかしながら、スライドボリュームで検出するのは、あくまで親ユニットに対する子ユニットの相対的な動作である。また、ロータリボリュームで検出するのは、あくまで子ユニットに対する孫ユニットの相対的な動作である。そのため、孫ユニットの動作には、親ユニットに対する子ユニットの動作が重畳されることになる。
【0008】
このことから、モジュール設計の概念上は、第1の軸中心周りの動作の上に第2の軸中心周りの動作が積層された解釈となり、モジュール設計をいたずらに複雑にする結果となっていた。
【0009】
また、電気回路基板の配置や信号線の配線は、回動量を検出するボリュームの配置に依存するため、構成を簡素化する観点からは改善の余地がある。
【0010】
本発明は上記従来技術の問題を解決するためになされたものであり、その目的は、3つのユニット間における回動基準の一元的解釈を可能にし、設計モジュールを簡素化することができる操作子装置を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するために本発明の請求項1の操作子装置は、第1のユニット(10)と、第1の軸中心(AX1)の周りに前記第1のユニットに対して相対的に回動自在な第2のユニット(30)と、操作子(56)を有してなり、前記第1の軸中心に平行でない第2の軸中心(AX2)の周りに前記第2のユニットに対して相対的に回動自在な第3のユニット(50)と、前記第1の軸中心の周りの前記第1のユニットと前記第2のユニットとの相対的な回動量を検出する第1の検出手段(32)と、前記第2の軸中心の周りの前記第2のユニットと前記第3のユニットとの相対的な回動量を検出する第2の検出手段(39)とを有し、前記第1の検出手段及び前記第2の検出手段はいずれも、前記第2のユニットに配設されたことを特徴とする。
【0012】
好ましくは、前記第1の検出手段及び前記第2の検出手段は、前記第2のユニットに配設された共通の電気回路基板(43)に実装される。好ましくは、前記第1の検出手段からの信号線と前記第2の検出手段からの信号線とが1つに束ねられた信号束線(45)として外部に導出される。好ましくは、前記第1の検出手段及び前記第2の検出手段を覆うように、前記第1の検出手段及び前記第2の検出手段に共通のEMC対策用の導電性カバー(70)が設けられたことを特徴とする請求項1〜3のいずれか1項に記載の操作子装置。
【0013】
なお、上記括弧内の符号は例示である。
【発明の効果】
【0014】
本発明の請求項1によれば、3つのユニット間における回動基準の一元的解釈を可能にし、設計モジュールを簡素化することができる。
【0015】
請求項2によれば、電気回路基板の構成を簡素化することができる。
【0016】
請求項3によれば、モジュールの極力上流で信号線をまとめられるようにして信号束線の取り扱いを容易にすることができる。
【0017】
請求項4によれば、検出手段に関するEMC対策のための構成を簡素化することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施の形態に係る操作子装置の斜視図である。
【図2】上ケースを取り外した状態の操作子装置の底面図である。
【図3】上ケース及び下フレームを取り外した状態の操作子装置の底面側の斜視図である。
【図4】子ユニットの主要部品及び孫ユニットの底面図である。
【図5】図2のA−A線に沿う断面図である。
【図6】図2のB−B線に沿う断面図である。
【図7】第2のロータリボリューム及び孫ユニットの分解斜視図、カバー体の斜視図である。
【図8】導電性カバーを設けると共に、大ハウス、小ハウス、ホイール及び上ケース等を除いて示した操作子装置の斜視図、上面図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施の形態を図面を参照して説明する。
【0020】
図1は、本発明の一実施の形態に係る操作子装置の斜視図である。この操作子装置は、例えばジョイスティックとして構成され、用途としては電子楽器の楽音制御用の入力装置等が適している。制御対象としては、例えば音高、音色、音量のほか、ビブラート、リバーブ等の各種効果に関する楽音パラメータが考えられる。ただし、楽音制御に限定されるものではなく、楽器以外の電気機器(ゲーム装置等)にも適用可能である。
【0021】
この操作子装置は、大別して3つのユニットから構成される。すなわち、第1のユニットである親ユニット10、第2のユニットである子ユニット30、第3のユニットである孫ユニット50を有する。孫ユニット50は、子ユニット30に対してX方向に相対的に回動自在である。子ユニット30は、親ユニット10に対してY方向に相対的に回動自在である。電気機器に親ユニット10が固定されるとし、親ユニット10を固定体と考えれば、子ユニット30と孫ユニット50は可動体といえる。
【0022】
操作子56は、操作者により直接操作される構成要素であり、孫ユニット50及び/又は子ユニット30の可動により、X方向及びY方向、またはこれら双方の成分を含む方向に操作が可能である。例えば操作子56をX方向の成分を含む方向に操作すると、それに応じて孫ユニット50がX方向に回動する。操作子56をY方向の成分を含む方向に操作すると、それに応じて子ユニット30が孫ユニット50と一体となって親ユニット10に対してY方向に回動する。
【0023】
親ユニット10は上ケース11を有する。子ユニット30は、いずれも樹脂製のホイール41及び下フレーム42を有する。孫ユニット50は、それぞれ別体に構成される操作子56とカバー体51とからなる。ホイール41は子ユニット30と一体的で、外観となって現れる外観部品である。子ユニット30における外観部品としてはホイール41が唯一で全てである。操作子56は、非操作時において上ケース11から突出している。以降の説明上、操作子56の突出方向を上方とする。また、以降の各図面では、各ユニットは、非操作状態である初期位置にある状態で示している。
【0024】
図2は、上ケース11を取り外した状態の操作子装置の底面図である。図3は、上ケース11及び下フレーム42を取り外した状態の操作子装置の底面側の斜視図である。親ユニット10は、上ケース11のほか、いずれも樹脂製の大ハウス12及び小ハウス13を構成部品とし、これらの部品によって一体的に構成される。
【0025】
図4は、子ユニット30の主要部品及び孫ユニット50の底面図である。子ユニット30において、ホイール41の下部の4箇所の取り付け穴36に下フレーム42がネジ37(図2)で固定され、両者は一体的となっている。下フレーム42の下面には、電気回路基板43が固着される(図2、図3)。電気回路基板43は、屈曲部43aから直交する2方向に腕部(延設部)が延設されて底面視で略L字型(く字状)に構成される(図3)。屈曲部43aにはコネクタ端子部44が取り付けられる(図3)。
【0026】
図4に示すように、子ユニット30には、第1のロータリボリューム32、第2のロータリボリューム39が配設される。具体的には、電気回路基板43の2つの延設部の先端部43b、43c(図3)に、それぞれロータリボリューム32、39が実装される。そして、各ロータリボリューム32、39からの信号線が屈曲部43aのコネクタ端子部44において1つに束ねられて、信号束線45として装置外部へ導出され(図2、図3)、信号線の取り扱いが容易になっている。
【0027】
ロータリボリューム32、39は、それぞれのハウジングが電気回路基板43に固定されると共に、それぞれの回動軸がハウジングに対し回動自在となっている。第1のロータリボリューム32の第1の回動軸31の第1の軸中心AX1がY方向に直交し、第2のロータリボリューム39の第2の回動軸38の第2の軸中心AX2がX方向に直交するように、各ロータリボリューム32、39のハウジングが位置決めされて固定される(図4)。従って、軸中心AX1、AX2の位置はいずれも、子ユニット30に対して固定的になっている。
【0028】
第1のロータリボリューム32は、第1の軸中心AX1の周りの親ユニット10と子ユニット30とのY方向の相対的な回動量を検出する。第2のロータリボリューム39は、第2の軸中心AX2の周りの子ユニット30と孫ユニット50とのX方向の相対的な回動量を検出する。ロータリボリューム32、39は、各々の回動軸の回転によりユニット間の相対的な回動量を検出できる構成であればよく、センサの構成は特に限定されない。
【0029】
図4に示すように、子ユニット30において、第1のロータリボリューム32が配設される端部とは反対の端部に突起軸33が突設される。突起軸33の軸芯は第1の軸中心AX1と一致している。突起軸33の先端部の上下には、鍔部34が一体に形成されている。
【0030】
図5は、図2のA−A線に沿う断面図であり、下フレーム42、電気回路基板43及びこれらに取り付いているものの図示を省略している。
【0031】
親ユニット10と子ユニット30とは次のように回動自在に係合している。まず、図5に示すように、子ユニット30の突起軸33の外周面33aに、親ユニット10の小ハウス13の軸受け部14の軸受け面14aが嵌合され、突起軸33が軸受け部14に軸支される。その際、鍔部34は、軸受け部14に対して所定の回転角度だけ回転させた状態で挿通し、その後に図5に示すような回転角度に戻すことで係合可能であり、軸受け部14の規制面15、16の間に軸受け部14が嵌合される。その結果、子ユニット30は、小ハウス13に対して、第1の軸中心AX1に直交する方向(平面方向)の位置決めと共に、第1の軸中心AX1に平行な方向の位置決めもなされる。
【0032】
一方、親ユニット10の大ハウス12には、軸受け部14の位置とは反対側の端部において、筒状軸部17が形成されている。筒状軸部17の内周面である軸受け面17aに、第1のロータリボリューム32の第1の回動軸31の外周面31aが挿通嵌合されて軸支されている。これにより、子ユニット30は、大ハウス12に対して第1の軸中心AX1に直交する方向(平面方向)の位置決めがなされる。
【0033】
このようにして、大ハウス12と小ハウス13とは、子ユニット30との位置決めがなされた状態で互いにネジ止め固定される。
【0034】
また、軸受け面17aには内側肉部18が形成され、第1の回動軸31には切り欠き部31bが形成され、そして内側肉部18が切り欠き部31bに当接している。これにより、子ユニット30が親ユニット10の大ハウス12に対して相対的に回動すると、内側肉部18が切り欠き部31bを駆動し、第1の回動軸31が回動することになる。さらに、筒状軸部17の外周面にはコイルバネ35が装着されている。コイルバネ35は、大ハウス12に係止されると共に、子ユニット30の下フレーム42によって開く方向に駆動され、子ユニット30に対して初期位置への復帰力を与える。
【0035】
図6は、図2のB−B線に沿う断面図であり、親ユニット10の図示を省略している。図7(a)は、第2のロータリボリューム39及び孫ユニット50の分解斜視図、図7(b)はカバー体51の斜視図である。
【0036】
子ユニット30と孫ユニット50とは次のように回動自在に係合している。まず、図6、図7(a)に示すように、第2のロータリボリューム39の第2の回動軸38には切り欠き部38bが形成され、切り欠き部38bに連接して、第2の回動軸38の先端方向を向く端面38cが形成されている。
【0037】
図7(a)に示すように、孫ユニット50において、カバー体51は樹脂で一体に形成され、操作子56は、ゴム、またはカバー体51より柔らかい樹脂で一体に形成される。操作子56は棒状に形成され、主に操作される先端部56aと下部である板状の連結部56bとを有する。連結部56bには軸挿通穴56cが形成されている。
【0038】
図7(a)、(b)に示すように、カバー体51には、上下方向に貫通する係合穴54が形成される。また、図7(a)に示すように、カバー体51には、同心の太軸52と細軸53が形成され、太軸52の外周面にコイルバネ46が装着されている。図6、図7(b)に示すように、太軸52には、それと同心の軸挿通穴58が形成され、軸挿通穴58には内側肉部58aが形成される。
【0039】
図6に示すように、操作子56はカバー体51の係合穴54に挿通される。操作子56は、その弾性により係合穴54に対して嵌合状態となる。この状態で、操作子56の軸挿通穴56c及びカバー体51の軸挿通穴58に、第2のロータリボリューム39の第2の回動軸38が挿通される(図5も参照)。これにより、第2の回動軸38の外周面38aに軸挿通穴56c及び軸挿通穴58が係合し、操作子56及びカバー体51がそれぞれ第2の回動軸38に直接軸支される。カバー体51は、操作子56の一部(下半部)を覆う。さらに、細軸53が子ユニット30の下フレーム42のリブ47に形成された軸受け面47aに軸支される。これらにより、操作子56及びカバー体51は、子ユニット30に対して、第2の回動軸38の第2の軸中心AX2に直交する方向(平面方向)の位置決めがなされる。
【0040】
また、カバー体51の垂直面57(図7(b))が第2の回動軸38の端面38cに当接すると共に、カバー体51の太軸52の端面52aが下フレーム42のリブ47に当接することで、カバー体51は、第2の軸中心AX2に平行な方向の位置が規制される。これにより、孫ユニット50は、子ユニット30に対して第2の軸中心AX2に平行な方向の位置決めがなされる。
【0041】
ところで、子ユニット30における第1のロータリボリューム32の位置決め(第1の回動軸31の半径方向の位置決め)を行う上で、子ユニット30のホイール41の第1の半円凹面41a(図5参照)に、第1のロータリボリューム32のハウジングの外面を受けさせて、半円凹面41aを位置決めに用いるようにすることもできる。同様に、子ユニット30における第2のロータリボリューム39の位置決め(第2の回動軸38の半径方向の位置決め)を行う上で、ホイール41の第2の半円凹面41b(図6参照)に、第2のロータリボリューム39のハウジングの外面を受けさせて、半円凹面41bを位置決めに用いるようにすることもできる。
【0042】
カバー体51の軸挿通穴58の内側肉部58aが第2のロータリボリューム39の第2の回動軸38の切り欠き部38bに当接している。孫ユニット50が子ユニット30に対して相対的に回動すると、内側肉部58aが切り欠き部38bを駆動し、第2の回動軸38が回動することになる。また、カバー体51の太軸52の外周面にはコイルバネ46が装着される。コイルバネ46は、下フレーム42に係止されると共に、カバー体51の駆動部55(図6、図7)によって開く方向に駆動され、孫ユニット50に対して初期位置への復帰力を与える。
【0043】
操作子56を、第2の軸中心AX2の周り(X方向)に回動操作すると、その操作力が係合穴54を介してカバー体51に伝わることで、カバー体51が操作子56と一体に可動し、孫ユニット50が子ユニット30に対して第2の軸中心AX2の周りに回動する。また、操作子56を、第1の軸中心AX1の周り(Y方向)に回動操作すると、カバー体51だけでなく子ユニット30も孫ユニット50と一体に可動し、孫ユニット50及び子ユニット30が親ユニット10に対して第1の軸中心AX1の周りに回動する。第1の軸中心AX1の周りと第2の軸中心AX2の周りの複合的な回動も可能である。
【0044】
本実施の形態によれば、第1のロータリボリューム32及び第2のロータリボリューム39がいずれも、子ユニット30に配設されたので、3つのユニット間における回動基準の一元的解釈を可能にし、設計モジュールを簡素化することができる。特に、誤差の積層が抑えられるので、検出精度を高めることに繋がる。
【0045】
また、2つのロータリボリューム32、39が共通の電気回路基板43に実装されたので、ロータリボリューム32、39からの電気信号を1つの基板に一元集約でき、電気回路基板の構成を簡素化することができる。特に、電気回路基板43がL字型に構成され、ロータリボリューム32、39からの信号線が1つの信号束線45として外部へ導出されるので、モジュールの極力上流で信号線をまとめられるようにして取り扱いを容易にすることができる。
【0046】
本実施の形態によればまた、軸中心AX1、AX2の位置は子ユニット30に対して固定的である。そして、それぞれ親ユニット10に一体的な大ハウス12、小ハウス13は、いずれも第1の軸中心AX1を軸芯とする第1の回動軸31、突起軸33に対して組み付けられて、第1の軸中心AX1に直交する方向において直接に位置決めされる(図5)。さらに、それぞれ孫ユニット50に一体的なカバー体51、操作子56は、第2の軸中心AX2を軸芯とする第2の回動軸38に対して組み付けられて、第2の軸中心AX2に直交する方向において直接に位置決めされる(図6)。すなわち、第2の軸中心AX2の周りに子ユニット30に対して相対的に回動自在なように第2の回動軸38に直接軸支される。
【0047】
これらにより、親ユニット10、子ユニット30及び孫ユニット50の位置関係につき、2軸基準に直接位置決めすることができ、累積誤差が抑えられ正確に位置決めされるので、製品の組み付け精度を高めることができる。これは、可動部分の擦れの懸念を抑えながら隙間をより小さく設定できることにも繋がり、異物や静電気の進入防止、怪我防止、小型化等に有利である。また、直接軸支されることで強度を高めることができる。操作子56においては強度向上や正確な位置決めによって操作感触や操作性が向上するという利点もある。
【0048】
子ユニット30についてみれば、互いに平行でない第1の回動軸31及び突起軸33と第2の回動軸38とが、子ユニット30に固定される。そして、子ユニット30に一体的な外観部品の全てであるホイール41が、軸中心AX1に直交する方向に対して第1の回動軸31に直接位置決めされると同時に軸中心AX2に直交する方向に対して第2の回動軸38に直接位置決めされている。これにより、ホイール41を2軸基準に位置決めでき、外観品質を高めることができる。
【0049】
しかも、第1の回動軸31は第1のロータリボリューム32の回転軸を兼ね、第2の回動軸38は第2のロータリボリューム39の回転軸を兼ねる。これらにより、親ユニット10及び子ユニット30間、並びに、子ユニット30及び孫ユニット50間の各回動量の検出精度が高まると共に、部品点数の増加を抑えることができる。
【0050】
また、軸中心AX1、AX2に直接位置決めされる部品のうち、孫ユニット50において一体的となるカバー体51及び操作子56は、外観となって現れる外観部品であり、良好な外観を保つ上で有利である。さらに、上記直接位置決めされる部品のうち、他部品と動的に係合する機構部品については、機構動作が良好になるという利点もある。機構部品として例えば、親ユニット10の大ハウス12の内側肉部18が、切り欠き部31bを介して第1の回動軸31を駆動する。また孫ユニット50のカバー体51が、切り欠き部38bを介して第2の回動軸38を駆動するほか、駆動部55によってコイルバネ46を駆動する。なお、これら2軸基準に位置決めされる部品は、各ユニットを構成し一体的となる部品であるが、各ユニットそれ自身という概念であってもよい。
【0051】
また、操作子56の軸挿通穴56c、カバー体51の軸挿通穴58に、それぞれ第2の回動軸38が挿通されることで操作子56及びカバー体51が直接軸支されるので、操作子56及びカバー体51については、位置精度が高まると共に、第2の回動軸38に対する抜け止め機構も特別に設ける必要がない。なお、操作子56及びカバー体51が直接軸支されるという観点では、軸部と穴部との関係が逆であってもよい。
【0052】
また、操作子56の操作力が、係合穴54を介してカバー体51に伝わり、カバー体51が操作子56と一体に可動するので、操作子56とカバー体51との特別な固定を要することなく両者を一体に回動させることができる。しかも接着等の固着手段も不要である。なお、カバー体51が操作子56と一体に可動するという観点に限れば、両者の係合関係は、係合穴とそれに挿通される棒体という構成に限定されるものではない。
【0053】
ところで、第1のロータリボリューム32、第2のロータリボリューム39に関するEMC対策の観点で、図8に示すように、導電性カバーを設けるのが望ましい。
【0054】
図8(a)、(b)は、導電性カバーを設けると共に、大ハウス12、小ハウス13、ホイール41及び上ケース11等を除いて示した操作子装置の斜視図、上面図である。
【0055】
図8(a)、(b)に示すように、導電性カバー70を、ホイール41(図6)の内側に貼着等により固定し、電気回路基板43の不図示のグランドに導通するよう配設する。導電性カバー70は、部品との干渉を避ける必要があるが、ホイール41の内面形状にほぼ沿い、ロータリボリューム32、39を極力広い範囲で共通に覆うように配設される。導電性カバー70は、ロータリボリューム32、39と外部との間の電磁波の送受信を抑制するための部材であり、アルミや銅等の導電性の金属でなる単一部材である。共通で単一の部材にて電磁波対策となるので、ロータリボリューム32、39に関するEMC対策を簡素な構成にて実現することができる。
【0056】
また、EMC対策の観点からは、コネクタ端子部44から導出される信号束線45の途中に、フェライトコア等のフィルタ部品を設けるのが望ましい。
【0057】
なお、軸中心AX1、AX2は互いに平行でなければよく、直交することは必須でない。また、カバー体51の係合穴54の貫通方向は、第1の軸中心AX1に平行でなければよく、直交することは必須でない。
【0058】
なお、3つのユニット間における回動基準の一元的解釈を可能にする観点、あるいは各ユニットを2軸基準に位置決めする観点からは、各ロータリボリューム32、39の回動軸31、38の軸芯がそれぞれユニット間の回動中心に相当することは必須でない。
【符号の説明】
【0059】
10 親ユニット(第1のユニット)、 30 子ユニット(第2のユニット)、 32 第1のロータリボリューム(第1の検出手段)、 39 第2のロータリボリューム(第2の検出手段)、 43 電気回路基板、 43a 屈曲部、 43b、43c 先端部、 45 信号束線、 50 孫ユニット(第3のユニット)、 56 操作子、 70 導電性カバー、 AX1 第1の軸中心、 AX2 第2の軸中心
【特許請求の範囲】
【請求項1】
第1のユニットと、
第1の軸中心の周りに前記第1のユニットに対して相対的に回動自在な第2のユニットと、
操作子を有してなり、前記第1の軸中心に平行でない第2の軸中心の周りに前記第2のユニットに対して相対的に回動自在な第3のユニットと、
前記第1の軸中心の周りの前記第1のユニットと前記第2のユニットとの相対的な回動量を検出する第1の検出手段と、
前記第2の軸中心の周りの前記第2のユニットと前記第3のユニットとの相対的な回動量を検出する第2の検出手段とを有し、
前記第1の検出手段及び前記第2の検出手段はいずれも、前記第2のユニットに配設されたことを特徴とする操作子装置。
【請求項2】
前記第1の検出手段及び前記第2の検出手段は、前記第2のユニットに配設された共通の電気回路基板に実装されたことを特徴とする請求項1記載の操作子装置。
【請求項3】
前記第1の検出手段からの信号線と前記第2の検出手段からの信号線とが1つに束ねられた信号束線として外部に導出されることを特徴とする請求項1または2記載の操作子装置。
【請求項4】
前記第1の検出手段及び前記第2の検出手段を覆うように、前記第1の検出手段及び前記第2の検出手段に共通のEMC対策用の導電性カバーが設けられたことを特徴とする請求項1〜3のいずれか1項に記載の操作子装置。
【請求項1】
第1のユニットと、
第1の軸中心の周りに前記第1のユニットに対して相対的に回動自在な第2のユニットと、
操作子を有してなり、前記第1の軸中心に平行でない第2の軸中心の周りに前記第2のユニットに対して相対的に回動自在な第3のユニットと、
前記第1の軸中心の周りの前記第1のユニットと前記第2のユニットとの相対的な回動量を検出する第1の検出手段と、
前記第2の軸中心の周りの前記第2のユニットと前記第3のユニットとの相対的な回動量を検出する第2の検出手段とを有し、
前記第1の検出手段及び前記第2の検出手段はいずれも、前記第2のユニットに配設されたことを特徴とする操作子装置。
【請求項2】
前記第1の検出手段及び前記第2の検出手段は、前記第2のユニットに配設された共通の電気回路基板に実装されたことを特徴とする請求項1記載の操作子装置。
【請求項3】
前記第1の検出手段からの信号線と前記第2の検出手段からの信号線とが1つに束ねられた信号束線として外部に導出されることを特徴とする請求項1または2記載の操作子装置。
【請求項4】
前記第1の検出手段及び前記第2の検出手段を覆うように、前記第1の検出手段及び前記第2の検出手段に共通のEMC対策用の導電性カバーが設けられたことを特徴とする請求項1〜3のいずれか1項に記載の操作子装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−37526(P2013−37526A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−173040(P2011−173040)
【出願日】平成23年8月8日(2011.8.8)
【出願人】(000004075)ヤマハ株式会社 (5,930)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月8日(2011.8.8)
【出願人】(000004075)ヤマハ株式会社 (5,930)
【Fターム(参考)】
[ Back to top ]