
操作感触付与型入力装置
【課題】音発生に専用のアクチュエータを設けることなく、音の発生に関して最適な設計を取り入れることができる操作感触付与型入力装置を提供する。
【解決手段】操作感触付与型入力装置10は、操作部材12の回転操作に対して電磁ブレーキ24を作動させ、アーマチュア22を吸着して摩擦による抵抗力を付与する。このとき、アーマチュア22とは別に電磁ブレーキ24の作動により発生した磁力で打撃子34が吸着されると、梃子の原理で共鳴板32を叩き、操作音を発生させる。特に専用のアクチュエータは不要であるが、音の発生に関して共鳴板32や打撃子34を用いているので、これらの最適設計を図ることができる。
【解決手段】操作感触付与型入力装置10は、操作部材12の回転操作に対して電磁ブレーキ24を作動させ、アーマチュア22を吸着して摩擦による抵抗力を付与する。このとき、アーマチュア22とは別に電磁ブレーキ24の作動により発生した磁力で打撃子34が吸着されると、梃子の原理で共鳴板32を叩き、操作音を発生させる。特に専用のアクチュエータは不要であるが、音の発生に関して共鳴板32や打撃子34を用いているので、これらの最適設計を図ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各種の電子機器や車載電装品等の入力デバイスとして利用することができ、その際、操作者に力学的な操作感触を付与するとともに操作音を発生することができる操作感触付与型入力装置に関する。
【背景技術】
【0002】
従来、この種の操作感触付与型入力装置に関して、操作部材の操作状態を音と振動によって報知し、操作状態を操作者にフィードバックする先行技術が知られている(例えば、特許文献1参照。)。すなわちこの先行技術は、操作部材に連結された操作軸にコーン形状の金属板を取り付けておき、この金属板をソレノイドの駆動棒により打撃して音を発生させるものである。
【0003】
上記の先行技術によれば、操作部材の操作状態に応じて打撃による音を発生させつつ、打撃による振動を操作部材に伝達することができるので、報知音の発生と振動の伝達を共通の部材で行うことができ、それだけ構造を単純化することができる。
【0004】
また、その他の先行技術として、操作体(操作部材)の変位を電磁ブレーキで規制して摩擦抵抗力を付与しつつ、その際、電磁ブレーキのコイルに連続的なパルス信号を印加することで、ヨークにアーマチュアを周期的に衝突させて報知音を発生させるものがある(例えば、特許文献2参照。)。この先行技術によれば、操作感触の付与を目的とした電磁ブレーキを用いて音を発生させることができるので、より構造を簡素化し、装置全体の小型化を図ることができる。
【特許文献1】特開2006−39825号公報
【特許文献2】特開2004−355500号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した2つの先行技術はいずれも、1つの部材を音の発生だけに用いるのではなく、別の目的にも使用することで、構造の簡素化を図ることができる点に優位性がある。
【0006】
その上で前者の先行技術(特許文献1)では、音や振動を発生させるために専用のアクチュエータ(ソレノイド)を設ける必要があるため、それだけ部品点数が多くなることはどうしても避けられない。この点、後者の先行技術(特許文献2)は専用のアクチュエータを必要としないものの、音の発生原理がアーマチュアとヨークとの衝突によるものであるため、それ以上に音の質感を向上したり、最適な設計を実現したりすることまでは望めない。
【0007】
そこで本発明は、特に音を発生させるためだけに専用のアクチュエータを設けることなく、音の発生に関して最適な設計を採り入れることができる操作感触付与型入力装置を提供するものである。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本発明は以下の解決手段を採用する。
【0009】
解決手段1:本発明の操作感触付与型入力装置は、その基本構成として、操作者により操作されて変位する操作部材と、操作部材の変位に伴って変位するアーマチュアを有した電磁ブレーキとを備えている。電磁ブレーキは、通電時にアーマチュアを吸着する磁力を発生させて操作部材の操作に対して摩擦による抵抗力を付与するものである。
【0010】
一方、音を発生させるための構成として、本発明の操作感触付与型入力装置は、可動部材及び音発生部材を備えている。このうち可動部材は、アーマチュアとは別に電磁ブレーキの発生させる磁力が及ぶ位置に設けられ、電磁ブレーキの通電時にその磁力で吸着される磁性を有している。また音発生部材は、可動部材が電磁ブレーキに吸着されて変位すると、この変位に伴い可動部材により打撃されて操作音を発生させるものである。
【0011】
本発明の操作感触付与型入力装置によれば、電磁ブレーキに通電することで操作者の操作に対して抵抗力を付与しつつ、そのときの磁力で可動部材を変位させることで音発生部材から操作音を発生させることができる。このため、音を発生させるためだけに専用のアクチュエータを設ける必要はない。また、音の発生原理が可動部材と音発生部材との衝突によるものであるため、これらの形状や材質、大きさ、互いの組み合わせ等を任意に選定することで、音の質感を向上させたり、音の発生に関して最適な設計を容易に実現したりすることができる。
【0012】
解決手段2:また本発明の操作感触付与型入力装置は、操作部材の位置を検出する検出手段と、検出手段による検出結果に基づき電磁ブレーキの通電状態を制御することにより、操作部材の操作に対する抵抗力の付与とともに音発生部材からの操作音の発生を制御する制御手段とをさらに備えてもよい。
【0013】
解決手段1の構成に検出手段及び制御手段の構成を追加すれば、操作者による操作に応じて操作部材の位置が任意に変化する際、制御上で意図した位置やタイミングで電磁ブレーキによる操作感触を付与しつつ、これに合わせて最適なタイミングで操作音を発生させることができる。これにより、操作者の触覚と聴覚に対して同時に訴えかけた操作感触を付与することができる。
【0014】
解決手段3:また本発明の操作感触付与型入力装置は、保持部材をさらに備えてもよい。保持部材は、電磁ブレーキの非通電時に可動部材を所定の初期位置に保持する保持力を付与する一方、電磁ブレーキの通電時にその磁力で可動部材が吸着されると、その保持力に抗して可動部材が変位するのを許容するとともに、電磁ブレーキが通電状態から非通電状態になると、その保持力により可動部材を初期位置に復帰させるものである。
【0015】
解決手段1,2の構成に保持部材を追加すれば、電磁ブレーキの非通電時に可動部材を初期位置で待機させておき、通電時にはそこから可動部材を変位させて音発生部材を打撃した後、再び可動部材を初期位置に復帰させることができる。このため、電磁ブレーキを非通電状態から通電状態へ切り替える度に操作音を発生させることができる。また、電磁ブレーキの非通電時には保持部材を同じ初期位置に安定して保持することができるので、不用意に保持部材が変位して音を発生させてしまうことがない。
【0016】
解決手段4:上記の解決手段3において、電磁ブレーキは、通電時に印加される駆動電圧に応じた大きさで磁力を発生させることができる。また保持部材は、電磁ブレーキに印加される駆動電圧が最大値に達した場合に可動部材が音発生部材を打撃する位置まで変位するのを許容する。
【0017】
解決手段4によれば、電磁ブレーキに対して最大値に達しない駆動電圧が印加されている間は、通電状態であっても操作音が発生せず、駆動電圧が最大値に達すると、そこで操作音が発生することになる。したがって、制御手段により駆動電圧を制御する態様(解決手段2)であれば、制御上で駆動電圧を最大値に到達させるタイミングで最大の抵抗力を付与しつつ、そのタイミングに合わせて操作音を発生させることができる。
【0018】
解決手段5:解決手段2から4において、制御手段は、操作者の操作に応じて変化する操作部材の位置と電磁ブレーキに対して印加するべき駆動電圧の大きさとの関係を予め定めたフォースカーブに基づいて電磁ブレーキの通電状態を制御することにより、フォースカーブ上で駆動電圧が最大値に達する時期に合わせて音発生部材から操作音を発生させる制御を行うこともできる。
【0019】
解決手段5によれば、操作部材の位置が変化する際に予めフォースカーブで定めたパターンに基づいて抵抗力を付与することができるので、例えば連続した操作の途中位置でクリック感触を発生させたり、ある位置で壁に突き当たったような感触(いわゆる壁感触)を発生させたりすることができる。また、これらの感触を発生させる位置でタイミングよく操作音を発生させることにより、操作者に対して感覚的に違和感のない操作感触(触覚及び聴覚に訴えかけるもの)を付与することができる。
【0020】
解決手段6:また解決手段5において、制御手段は、フォースカーブとして、操作者の操作に応じて変化する操作部材の位置を所定の座標軸上でみた位置座標としたとき、座標軸上に予め規定された複数の極大位置でそれぞれ駆動電圧の大きさが最大値となり、個々の極大位置から両側にそれぞれ所定間隔をおいた極小位置でいずれも駆動電圧が最小値となる関係を定めていてもよい。
【0021】
この場合、連続的に操作部材の位置が変化していく間、複数の極大位置でそれぞれクリック感を発生させつつ、それぞれの位置で操作音を発生させることができる。また、座標軸上でみて極大位置から両側へ向かう方向についてフォースカーブが対称形であるため、制御上で操作部材の両方向への変位に対してフォースカーブを共通に適用することができる。
【発明の効果】
【0022】
本発明の操作感触付与型入力装置は、専用のアクチュエータやスピーカを設けることなく操作音を発生させることができる上、音の発生を賄う要素について最適な設計を行うことができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施形態について図面を参照しながら説明する。本発明の操作感触付与型入力装置は、例えば、各種の電子機器(コンピュータ機器、オーディオ機器、ビデオ機器)をはじめ、カーナビゲーション装置等の車載電装品用の入力デバイス(ユーザインタフェース)として利用することができる。
【0024】
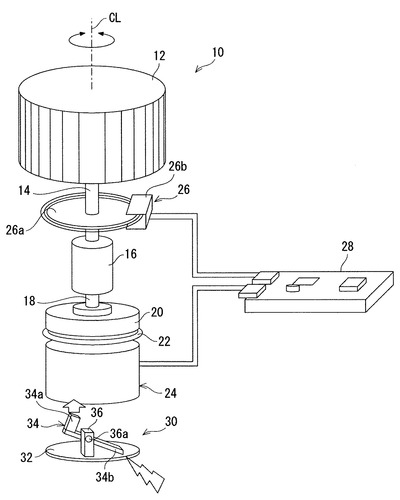
図1は、一実施形態の操作感触付与型入力装置10の全体的な構成を概略的に示す斜視図である。先ず、操作感触付与型入力装置10は操作部材12を備えており、この操作部材12は、例えば回転式のつまみ形状(ダイヤル形状)をなしている。操作者は操作部材12をつまんだ状態で回転操作することができ、このとき操作部材12は図中に一点鎖線で示される中心軸線CLの回りに回転する。
【0025】
操作部材12は、例えば回転軸14の一端に連結されている。この回転軸14は上記の中心軸線CLに沿って操作部材12から一方向(図1中の下方向)に延びており、回転軸14は操作部材12とともに中心軸線CLの回りに回転する。
【0026】
回転軸14には、その軸方向でみて操作部材12と反対側の端部に弾性部材16が取り付けられている。弾性部材16は、例えば操作部材12の中心軸線CLを中心とした円柱形状をなしており、その軸方向でみた一端(図1中の上端)に上記の回転軸14が連結されている他、他端(下端)には別の回転軸18が連結されている。
【0027】
回転軸18もまた、操作部材12の中心軸線CLを中心とした軸部材であり、操作部材12、回転軸14、弾性部材16及び回転軸18は同じ中心軸線CL上に配置されている。なお、弾性部材16と各回転軸14,18とは、それぞれの接合部で強固に接合されているため、操作部材12が回転操作されると、これに伴って回転軸14、弾性部材16及び回転軸18は中心軸線CLの回りに回転する。なお弾性部材16には、例えば材料としてゴムを使用することができる。
【0028】
回転軸18には、その軸方向でみて弾性部材16と反対側の端部にカラー部材20が取り付けられている。カラー部材20は、例えば全体として段付きの円盤形状をなしており、回転軸18を中心としてラジアル方向に拡がっている。このカラー部材20もまた、操作部材12が操作されると、回転軸14や弾性部材16、回転軸18とともに中心軸線CLの回りに回転する。
【0029】
〔電磁ブレーキ〕
操作感触付与型入力装置10は電磁ブレーキ24を備えており、上記のカラー部材20には、中心軸線CLの方向でみて回転軸18と反対側の端面(図1中の下端面)にアーマチュア22が連結されている。電磁ブレーキ24は、通電時に発生させる磁力でアーマチュア22を吸着する。このときの摩擦により、電磁ブレーキ24は操作部材12の操作に対して抵抗力を付与することができる。
【0030】
なお、図1には示されていないが、アーマチュア22とカラー部材20との間には板ばねが設けられており、この板ばねの弾性変形に伴い、電磁ブレーキ24の作動(通電)時にアーマチュア22はカラー部材20に対して中心軸線CLの方向(スラスト方向)に移動可能である。またアーマチュア22は、その全体が磁性金属(例えば鉄)である。
【0031】
〔位置の検出〕
また操作感触付与型入力装置10は、操作部材12の位置(回転角)を検出する要素としてエンコーダ26を備えている。エンコーダ26はコード板26a及びフォトインタラプタ26bを有しており、このうちコード板26aは、例えば回転軸14の外周に取り付けられている。コード板26aは回転軸14を中心とした薄板の円盤形状をなしており、その周方向には一定ピッチで図示しないスリットが形成されている。
【0032】
フォトインタラプタ26bは、例えば2条の検出光を互いに異なる位置でコード板26aのスリットに透過させる位置関係に調整されている。操作部材12が回転操作されると、これに伴って回転軸14とともにコード板26aが回転し、フォトインタラプタ26bから位相差を持った2相の回転角信号(エンコーダパルス)が出力される。
【0033】
〔弾性部材の機能〕
また上記の弾性部材16は、電磁ブレーキ24によりアーマチュア22が吸着された状態(抵抗力が付与された状態)で操作部材12が操作されると、その回転方向にねじり変形(弾性変形)を生じる。ただし弾性部材16には、付与される抵抗力が最大の状態で操作部材12が操作されたとしても、そのときのトルクに対して充分な剛性を有する材料を用いるため、そこで弾性部材16が降伏したり、破断したりすることはない。したがって弾性部材16は、通常の弾性範囲内で変形しつつ、操作部材12に対する操作を回転軸14から次の回転軸18及びカラー部材20にまで伝達することができる。これにより、操作者がある程度の操作力を操作部材12に加えると、アーマチュア22をスリップさせながら操作部材12を引き続き回転させることができる。
【0034】
一方で弾性部材16は、上記のように弾性変形を生じた状態で操作者が操作部材12から手を離したり、操作力を緩めたりすると、それまでの変形状態から復帰する。この復帰に伴い、弾性部材16は回転軸14とともに操作部材12及びコード板26aをそれまでと逆方向へ僅かに回転させる。したがって、電磁ブレーキ24による抵抗力が付与された状態で操作部材12が操作力を受けなくなると、操作部材12の位置(回転角度)はそれまでの移動方向(回転方向)と逆方向へ僅かに変化する。
【0035】
〔音発生部〕
また操作感触付与型入力装置10は、操作音を発生する要素として音発生部30を備えており、この音発生部30は、主に共鳴板32及び打撃子34を有している。音発生部30は、上記の電磁ブレーキ24が作動すると、その磁力で打撃子34が吸着されて変位し、共鳴板32を打撃して音を発生させることができる。
【0036】
〔可動部材〕
支持部材36は支持ピン36aを有しており、打撃子34は支持部材36に対して支持ピン36aを中心として回転(いわゆる揺動)可能に支持されている。この支持ピン36aを挟んで打撃子34の一端は吸着部34aとして構成されており、この吸着部34aには磁性材料が用いられている。また、打撃子34の他端は打撃部34bとして構成されており、打撃子34はこの打撃部34bで共鳴板32を叩くことができる。
【0037】
〔音発生部材〕
共鳴板32は、例えば金属製、樹脂製、木製等の円盤で構成されている。共鳴板32は、打撃子34により打撃されることで音(操作音)を発生するものであるが、その材質や形状、大きさ、厚み等を任意に変更することで、音の発生に関する条件(例えば音質、音量、音階等)を様々に変化させることができる。
【0038】
〔制御部〕
さらに操作感触付与型入力装置10は、上記のエンコーダ26とともに制御上の要素として制御部28を備えている。制御部28は、上記のエンコーダ26及び電磁ブレーキ24に接続されており、制御部28にはエンコーダ26(フォトインタラプタ26b)から制御部28に対して検出信号(エンコーダパルス)が入力される一方、制御部28から電磁ブレーキ24に対して駆動信号(駆動電圧)が出力されている。以下、制御に関する構成について説明する。
【0039】
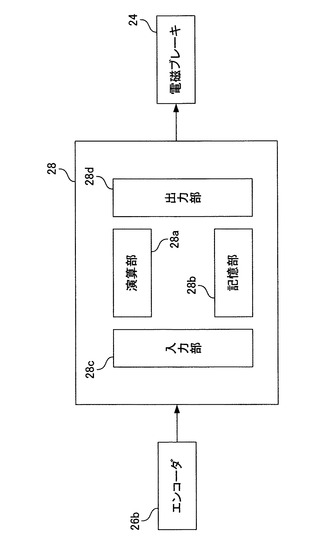
図2は、操作感触付与型入力装置10の制御系の構成を概略的に示すブロック図である。上記の制御部28は、例えばプロセッサ(CPU)を用いた演算部28aを有する他、RAM、ROM等のメモリデバイスを用いた記憶部28b、そして入力部28c及び出力部28dを有したマイクロコンピュータとして構成されている。
【0040】
フォトインタラプタ26bから出力される回転角信号は、それぞれ入力部28cでA/D変換されて演算部28aに入力される。演算部28aは、この入力信号に基づいて回転軸14(操作部材12)の回転角度及び回転方向を演算する。また演算部28aは、回転角度及び回転方向の演算結果に基づいて制御信号を出力し、電磁ブレーキ24の作動(発生する磁力の大きさ、タイミング等)を制御する。このときの制御信号は、出力部28dを通じて電磁ブレーキ24に供給される駆動電圧に変換される。
【0041】
〔電磁ブレーキの作動と音の発生〕
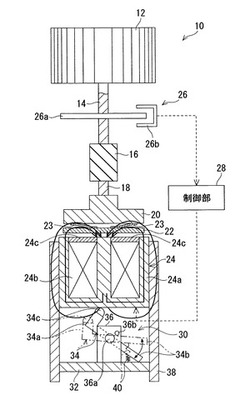
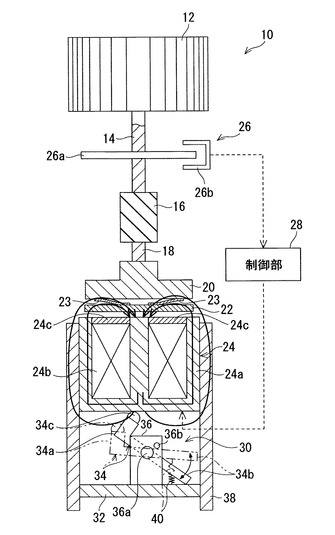
図3は、電磁ブレーキ24の作動と音の発生に関するメカニズムを示した図である。なお図3中、操作感触付与型入力装置10は、操作部材12と回転軸14の一部を除いてその構成要素が断面で示されている。また図3には、図1中に示されていない要素が追加されている。一方、図3中、制御部28については単にブロック要素として示されている。以下、具体的に説明する。
【0042】
図3に示される構造例では、電磁ブレーキ24及び音発生部30が1つの素子筐体38に収容されている。素子筐体38は例えば円筒形状の部材であり、電磁ブレーキ24は、素子筐体38の一端(ここでは上端)の開口から内部に嵌め込むようにして固定されている。
【0043】
また共鳴板32は、素子筐体38の他端(ここでは下端)の開口を塞ぐようにしてその内部に嵌め合わされている。そして、支持部材36及び打撃子34は、共鳴板32と電磁ブレーキ24との間に配置された状態で素子筐体38の内部に収容されている。
【0044】
なお図3には示されていないが、回転軸14,18を含むその他の部分は、例えば別の筐体に収容された状態で回転自在に支持されている。
【0045】
〔電磁ブレーキの構造〕
電磁ブレーキ24は、その本体部分に例えば縦断面がE字形状をなすケース型コア24aを有している。電磁ブレーキ24は、このケース型コア24aの内部にフープ状の巻線24bを配置した構造である。電磁ブレーキ24の作動(通電)時には、この巻線24bの回りに磁界が発生し、このときの磁力線は、図3中に矢印で示されるようにケース型コア24aの内部を通るものもあれば、ケース型コア24aの外側(素子筐体38内部)を通るものもあり、その磁力が及ぶ範囲は電磁ブレーキ24の周囲にまで拡がっている。なお、素子筐体38は非磁性材料(例えば樹脂材料)で成型されている。
【0046】
上記のアーマチュア22は、電磁ブレーキ24の作動(通電)時に磁力線が集中する位置(磁極)の近傍に設けられている。このため電磁ブレーキ24は、その作動時にアーマチュア22を効率よく吸着することができる。なお図3には、アーマチュア22をカラー部材20に連結するための板ばね23が断面で示されている。
【0047】
また図3でみて、ケース型コア24aの上端には接触子24cが設けられており、この接触子24cはケース型コア24aの上端面(巻線24bの上側)を塞いでいる。接触子24cは、電磁ブレーキ24の作動(通電)時にアーマチュア22と接触することで、摩擦を発生させる部分である。
【0048】
そして打撃子34は、アーマチュア22の反対側で、電磁ブレーキ24の作動時に磁力線が集中する位置(磁極)の近傍に設けられている。このため電磁ブレーキ24は、その作動時に打撃子34(吸着部34a)をも効率よく吸着することができる。
【0049】
〔保持部材〕
共鳴板32の上面には、例えば圧縮タイプのコイルばね40が設けられており、このコイルばね40は、その一端が打撃子34(打撃部34b)に接続されている。電磁ブレーキ24の非作動(非通電)時、コイルばね40はその反発力で打撃部34bを押し上げることにより、打撃子34を図3中の二点鎖線で示される初期位置に保持することができる(保持力の発生)。
【0050】
一方、支持部材36には、上記の支持ピン36aとは別にストッパピン36bが設けられている。このストッパピン36bは、コイルばね40により打撃部34bが押し上げられた状態でその上面に接触し、打撃子34全体を初期位置に停止させる。
【0051】
電磁ブレーキ24が作動して磁力が発生すると、上記のように打撃子34(打撃部34b)が吸着され、図3中に実線で示されるように打撃子34全体が変位する。なお、このとき電磁ブレーキ24は、コイルばね40の反発力に抗して打撃子34を吸着するだけの磁力を発生させている。言い換えれば、電磁ブレーキ24の発生させる磁力がコイルばね40の反発力に打ち勝つ大きさに達すると、打撃子34がコイルばね40の反発力に抗して変位し、電磁ブレーキ24に吸着されることになる。
【0052】
そして、上記のように打撃子34が電磁ブレーキ24に吸着されて変位すると、打撃子34(打撃部34b)が共鳴板32を打撃することで操作音が発生する。また、このとき支持ピン36aから吸着部34aの先端までの長さと、打撃部34bの先端までの長さとの比(レバー比)を適切に設定することで、打撃子34が共鳴板32を叩く際のエネルギーを最適に設計することもできる。
【0053】
なお、図3に示される構造例では、吸着部34aの先端に半円形状のパッド34cが設けられている。パッド34cは、例えば非磁性材料の衝撃吸収体(ゴム等)で成型することができ、このようなパッド34cを設けることで、電磁ブレーキ24と打撃子34との接触による衝撃を緩和したり、共鳴板32以外からの音が発生したりするのを防止することができる。なおパッド34cは必須の要素ではなく、適宜に取り除いてもよい。
【0054】
〔制御例〕
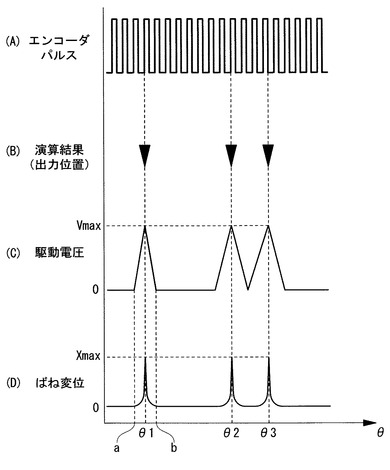
次に図4は、上記の制御部28による電磁ブレーキ24の制御例を一例として示すタイミングチャートである。以下、制御例について説明する。
【0055】
図4中(A):例えば、操作者が操作部材12を等速で回転させる操作を行った場合を想定する。この場合、エンコーダ26(フォトインタラプタ26b)から出力されるエンコーダパルス(1相のみ示す)は略一定周期の波形となる。
【0056】
このとき制御部28は、入力されたエンコーダパルスに基づいて演算部28aにより演算処理を行い、操作部材12の現在の位置(位置座標)を算出する。ここで算出された位置は、例えば操作部材12の現在の回転角座標として表すことができる。したがって図4中に示される横軸は、右方向に時間の経過を表すとともに、回転操作に伴う操作部材12の回転角座標(θ)の変化を表している。
【0057】
〔出力位置(極大位置)〕
図4中(B):このような回転操作の過程において、演算部28aは操作部材12の位置(回転角)の変化に応じてクリック感触と操作音を発生させるタイミングを演算結果として決定する(図中の縦長▼印)。ここでは、例として操作部材12の位置が横軸上の座標θ1,θ2,θ3に達するタイミングでそれぞれクリック感触と操作音を発生させるものとする。
【0058】
図4中(C):このとき制御部28は、予め定めたフォースカーブに基づいて電磁ブレーキ24に対して印加するべき駆動電圧を制御する。例えば、横軸上の座標θ1が次にクリック感触と操作音を発生させるタイミングであった場合、演算部28aはこの座標θ1を中心として、横軸上で両側にそれぞれ同じ間隔(例えば1パルス分に相当する回転角度)をおいた座標a,bから座標θ1に向かって急激に傾斜した左右対称のフォースカーブ(左側は登り坂、右側は下り坂)を設定する。なお、フォースカーブの傾斜は任意であり、他の座標θ2,θ3では傾斜をある程度緩やかに設定することもできる。また、フォースカーブは記憶部28bに予め記憶しておくことができる。
【0059】
この場合、フォースカーブ上で駆動電圧が0Vの範囲内(座標aの左側)では電磁ブレーキ24が非作動(非通電)であり、この間、操作部材12には特段の抵抗力は付与されていない。そしてこの後、操作部材12の位置の変化に伴って回転角座標が座標a(極小位置)の右側に移動すると、フォースカーブの傾斜に従って駆動電圧が上昇し、座標θ1で駆動電圧は最大値Vmaxに達する(極大位置)。この時点で付与される抵抗力は最大値となっている。
【0060】
さらに操作部材12が回転し、座標θ1を過ぎて右側に回転角座標が移動すると、今度は駆動電圧が急激に低下し、座標b(極小位置)で駆動電圧は0Vとなる。これにより、操作部材12に付与される抵抗力は一気に低下するので、この間の抵抗力の変化により操作者に対してクリック感触を付与することができる。
【0061】
図4中(D):この間にコイルばね40は、電磁ブレーキ24に印加される駆動電圧が最大値Vmaxに達するタイミングで一気に変位(弾性変形)する。すなわち、操作部材12の位置が座標θ1に達する直前までは、電磁ブレーキ24に最大値Vmax未満の駆動電圧が印加されていても、コイルばね40はほとんど変位しない。
【0062】
そして、操作部材12の回転角座標が移動して座標θ1に到達し、電磁ブレーキ24に印加される駆動電圧が最大値Vmaxに達すると、そのとき発生する最大の磁力で一気に打撃子34が引き寄せられる結果、コイルばね40の変位が最大値Xmaxになる。また、このとき上記のように共鳴板32の打撃による操作音が発生する。
【0063】
この後、さらに操作部材12が回転して座標θ1を通り過ぎ、駆動電圧が最大値Vmax未満になると、コイルばね40はその反発力で一気に復元し、打撃子34を初期位置に復帰させることができる。これにより、打撃子34(打撃部34b)が共鳴板32を叩いた後ですぐに共鳴板32から離れるので、その振動を不自然に阻害することなく、質感のよい音を発生させることができる。
【0064】
なお、ここでは横軸上で右方向に座標が移動していく場合を挙げているが、図4中(C)に示されるフォースカーブは座標θ1,θ2,θ3を中心として対称形状であるため、両方向への移動について共通に適用することができる。
【0065】
その他に、クリック感触ではなく壁感触を付与するフォースカーブを用いることもできる。例えば、座標θ1の左側では駆動電圧を0Vとし、座標θ1から右側では駆動電圧を最大値Vmaxとしてもよい。この場合も同様に、操作部材12の位置が座標θ1に達したタイミングで最大の抵抗力を付与するとともに、合わせて操作音を発生させることができる。
【0066】
以上のように本実施形態の操作感触付与型入力装置10は、特に専用のアクチュエータを設けなくても、電磁ブレーキ24の作動状態に連動したタイミングで操作音を発生させることができる。
【0067】
その一方で、音の発生に関して専用の共鳴板32と打撃子34を用いることができるので、これらの材質や質量、形状、大きさ、配置等の様々な条件を最適化することで、所望の音質や音色を実現することができる。
【0068】
本発明は上述した実施形態に制約されることなく、種々に変形して実施することができる。一実施形態では円盤状の共鳴板32と打撃子34との組み合わせを例に挙げているが、共鳴板32を立体的な形状(例えばコーン形状、筒形状)としてもよい。
【0069】
また共鳴板32を用いることなく、電磁ブレーキ24を打撃子34で打撃することで操作音を発生させる構成であってもよい。この場合でも、電磁ブレーキ24のケース型コア24aを最適な設定とすることにより、所望の操作音を実現することができる。
【0070】
一実施形態では、打撃子34の保持にコイルばね40を用いているが、例えばコイルばね40の代わりに打撃部34bに錘を設置することで、重力を用いて自然に打撃子34を初期位置に保持したり、復帰させたりすることもできる。
【0071】
また一実施形態では、操作部材12をつまみ形状としているが、操作部材12はドラム形状であってもよいし、スティック形状や球形状であってもよい。また、操作部材12は回転させるものだけでなく、例えばスライドさせたり、レバーのようにスイングさせたりするものであってもよい。
【0072】
電磁ブレーキ24のフォースカーブは図示とともに挙げた例(山形状や壁パターンのもの)に限らず、その他のパターン(例えば矩形状のものや台形状のもの)を採用してもよい。
【0073】
また、回転状態の検出はコード板26aとフォトインタラプタ26bとの組み合わせだけでなく、例えば反射板とフォトスイッチとの組み合わせで実現してもよい。
【0074】
その他、図示とともに示した各種部材の形状や配置はいずれも好ましい例であり、本発明の実施に際してこれらを適宜変更可能であることはいうまでもない。
【図面の簡単な説明】
【0075】
【図1】一実施形態の操作感触付与型入力装置の全体的な構成を概略的に示す斜視図である。
【図2】制御系の構成を概略的に示すブロック図である。
【図3】電磁ブレーキの作動と音の発生に関するメカニズムを示した図である。
【図4】制御部による電磁ブレーキの制御例を一例として示すタイミングチャートである。
【符号の説明】
【0076】
10 操作感触付与型入力装置
12 操作部材
14 回転軸
16 弾性部材
18 回転軸
20 カラー部材
22 アーマチュア
24 電磁ブレーキ
28 制御部
28a 演算部
28d 出力部
30 音発生部
32 共鳴板
34 打撃子
40 コイルばね
【技術分野】
【0001】
本発明は、各種の電子機器や車載電装品等の入力デバイスとして利用することができ、その際、操作者に力学的な操作感触を付与するとともに操作音を発生することができる操作感触付与型入力装置に関する。
【背景技術】
【0002】
従来、この種の操作感触付与型入力装置に関して、操作部材の操作状態を音と振動によって報知し、操作状態を操作者にフィードバックする先行技術が知られている(例えば、特許文献1参照。)。すなわちこの先行技術は、操作部材に連結された操作軸にコーン形状の金属板を取り付けておき、この金属板をソレノイドの駆動棒により打撃して音を発生させるものである。
【0003】
上記の先行技術によれば、操作部材の操作状態に応じて打撃による音を発生させつつ、打撃による振動を操作部材に伝達することができるので、報知音の発生と振動の伝達を共通の部材で行うことができ、それだけ構造を単純化することができる。
【0004】
また、その他の先行技術として、操作体(操作部材)の変位を電磁ブレーキで規制して摩擦抵抗力を付与しつつ、その際、電磁ブレーキのコイルに連続的なパルス信号を印加することで、ヨークにアーマチュアを周期的に衝突させて報知音を発生させるものがある(例えば、特許文献2参照。)。この先行技術によれば、操作感触の付与を目的とした電磁ブレーキを用いて音を発生させることができるので、より構造を簡素化し、装置全体の小型化を図ることができる。
【特許文献1】特開2006−39825号公報
【特許文献2】特開2004−355500号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した2つの先行技術はいずれも、1つの部材を音の発生だけに用いるのではなく、別の目的にも使用することで、構造の簡素化を図ることができる点に優位性がある。
【0006】
その上で前者の先行技術(特許文献1)では、音や振動を発生させるために専用のアクチュエータ(ソレノイド)を設ける必要があるため、それだけ部品点数が多くなることはどうしても避けられない。この点、後者の先行技術(特許文献2)は専用のアクチュエータを必要としないものの、音の発生原理がアーマチュアとヨークとの衝突によるものであるため、それ以上に音の質感を向上したり、最適な設計を実現したりすることまでは望めない。
【0007】
そこで本発明は、特に音を発生させるためだけに専用のアクチュエータを設けることなく、音の発生に関して最適な設計を採り入れることができる操作感触付与型入力装置を提供するものである。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本発明は以下の解決手段を採用する。
【0009】
解決手段1:本発明の操作感触付与型入力装置は、その基本構成として、操作者により操作されて変位する操作部材と、操作部材の変位に伴って変位するアーマチュアを有した電磁ブレーキとを備えている。電磁ブレーキは、通電時にアーマチュアを吸着する磁力を発生させて操作部材の操作に対して摩擦による抵抗力を付与するものである。
【0010】
一方、音を発生させるための構成として、本発明の操作感触付与型入力装置は、可動部材及び音発生部材を備えている。このうち可動部材は、アーマチュアとは別に電磁ブレーキの発生させる磁力が及ぶ位置に設けられ、電磁ブレーキの通電時にその磁力で吸着される磁性を有している。また音発生部材は、可動部材が電磁ブレーキに吸着されて変位すると、この変位に伴い可動部材により打撃されて操作音を発生させるものである。
【0011】
本発明の操作感触付与型入力装置によれば、電磁ブレーキに通電することで操作者の操作に対して抵抗力を付与しつつ、そのときの磁力で可動部材を変位させることで音発生部材から操作音を発生させることができる。このため、音を発生させるためだけに専用のアクチュエータを設ける必要はない。また、音の発生原理が可動部材と音発生部材との衝突によるものであるため、これらの形状や材質、大きさ、互いの組み合わせ等を任意に選定することで、音の質感を向上させたり、音の発生に関して最適な設計を容易に実現したりすることができる。
【0012】
解決手段2:また本発明の操作感触付与型入力装置は、操作部材の位置を検出する検出手段と、検出手段による検出結果に基づき電磁ブレーキの通電状態を制御することにより、操作部材の操作に対する抵抗力の付与とともに音発生部材からの操作音の発生を制御する制御手段とをさらに備えてもよい。
【0013】
解決手段1の構成に検出手段及び制御手段の構成を追加すれば、操作者による操作に応じて操作部材の位置が任意に変化する際、制御上で意図した位置やタイミングで電磁ブレーキによる操作感触を付与しつつ、これに合わせて最適なタイミングで操作音を発生させることができる。これにより、操作者の触覚と聴覚に対して同時に訴えかけた操作感触を付与することができる。
【0014】
解決手段3:また本発明の操作感触付与型入力装置は、保持部材をさらに備えてもよい。保持部材は、電磁ブレーキの非通電時に可動部材を所定の初期位置に保持する保持力を付与する一方、電磁ブレーキの通電時にその磁力で可動部材が吸着されると、その保持力に抗して可動部材が変位するのを許容するとともに、電磁ブレーキが通電状態から非通電状態になると、その保持力により可動部材を初期位置に復帰させるものである。
【0015】
解決手段1,2の構成に保持部材を追加すれば、電磁ブレーキの非通電時に可動部材を初期位置で待機させておき、通電時にはそこから可動部材を変位させて音発生部材を打撃した後、再び可動部材を初期位置に復帰させることができる。このため、電磁ブレーキを非通電状態から通電状態へ切り替える度に操作音を発生させることができる。また、電磁ブレーキの非通電時には保持部材を同じ初期位置に安定して保持することができるので、不用意に保持部材が変位して音を発生させてしまうことがない。
【0016】
解決手段4:上記の解決手段3において、電磁ブレーキは、通電時に印加される駆動電圧に応じた大きさで磁力を発生させることができる。また保持部材は、電磁ブレーキに印加される駆動電圧が最大値に達した場合に可動部材が音発生部材を打撃する位置まで変位するのを許容する。
【0017】
解決手段4によれば、電磁ブレーキに対して最大値に達しない駆動電圧が印加されている間は、通電状態であっても操作音が発生せず、駆動電圧が最大値に達すると、そこで操作音が発生することになる。したがって、制御手段により駆動電圧を制御する態様(解決手段2)であれば、制御上で駆動電圧を最大値に到達させるタイミングで最大の抵抗力を付与しつつ、そのタイミングに合わせて操作音を発生させることができる。
【0018】
解決手段5:解決手段2から4において、制御手段は、操作者の操作に応じて変化する操作部材の位置と電磁ブレーキに対して印加するべき駆動電圧の大きさとの関係を予め定めたフォースカーブに基づいて電磁ブレーキの通電状態を制御することにより、フォースカーブ上で駆動電圧が最大値に達する時期に合わせて音発生部材から操作音を発生させる制御を行うこともできる。
【0019】
解決手段5によれば、操作部材の位置が変化する際に予めフォースカーブで定めたパターンに基づいて抵抗力を付与することができるので、例えば連続した操作の途中位置でクリック感触を発生させたり、ある位置で壁に突き当たったような感触(いわゆる壁感触)を発生させたりすることができる。また、これらの感触を発生させる位置でタイミングよく操作音を発生させることにより、操作者に対して感覚的に違和感のない操作感触(触覚及び聴覚に訴えかけるもの)を付与することができる。
【0020】
解決手段6:また解決手段5において、制御手段は、フォースカーブとして、操作者の操作に応じて変化する操作部材の位置を所定の座標軸上でみた位置座標としたとき、座標軸上に予め規定された複数の極大位置でそれぞれ駆動電圧の大きさが最大値となり、個々の極大位置から両側にそれぞれ所定間隔をおいた極小位置でいずれも駆動電圧が最小値となる関係を定めていてもよい。
【0021】
この場合、連続的に操作部材の位置が変化していく間、複数の極大位置でそれぞれクリック感を発生させつつ、それぞれの位置で操作音を発生させることができる。また、座標軸上でみて極大位置から両側へ向かう方向についてフォースカーブが対称形であるため、制御上で操作部材の両方向への変位に対してフォースカーブを共通に適用することができる。
【発明の効果】
【0022】
本発明の操作感触付与型入力装置は、専用のアクチュエータやスピーカを設けることなく操作音を発生させることができる上、音の発生を賄う要素について最適な設計を行うことができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施形態について図面を参照しながら説明する。本発明の操作感触付与型入力装置は、例えば、各種の電子機器(コンピュータ機器、オーディオ機器、ビデオ機器)をはじめ、カーナビゲーション装置等の車載電装品用の入力デバイス(ユーザインタフェース)として利用することができる。
【0024】
図1は、一実施形態の操作感触付与型入力装置10の全体的な構成を概略的に示す斜視図である。先ず、操作感触付与型入力装置10は操作部材12を備えており、この操作部材12は、例えば回転式のつまみ形状(ダイヤル形状)をなしている。操作者は操作部材12をつまんだ状態で回転操作することができ、このとき操作部材12は図中に一点鎖線で示される中心軸線CLの回りに回転する。
【0025】
操作部材12は、例えば回転軸14の一端に連結されている。この回転軸14は上記の中心軸線CLに沿って操作部材12から一方向(図1中の下方向)に延びており、回転軸14は操作部材12とともに中心軸線CLの回りに回転する。
【0026】
回転軸14には、その軸方向でみて操作部材12と反対側の端部に弾性部材16が取り付けられている。弾性部材16は、例えば操作部材12の中心軸線CLを中心とした円柱形状をなしており、その軸方向でみた一端(図1中の上端)に上記の回転軸14が連結されている他、他端(下端)には別の回転軸18が連結されている。
【0027】
回転軸18もまた、操作部材12の中心軸線CLを中心とした軸部材であり、操作部材12、回転軸14、弾性部材16及び回転軸18は同じ中心軸線CL上に配置されている。なお、弾性部材16と各回転軸14,18とは、それぞれの接合部で強固に接合されているため、操作部材12が回転操作されると、これに伴って回転軸14、弾性部材16及び回転軸18は中心軸線CLの回りに回転する。なお弾性部材16には、例えば材料としてゴムを使用することができる。
【0028】
回転軸18には、その軸方向でみて弾性部材16と反対側の端部にカラー部材20が取り付けられている。カラー部材20は、例えば全体として段付きの円盤形状をなしており、回転軸18を中心としてラジアル方向に拡がっている。このカラー部材20もまた、操作部材12が操作されると、回転軸14や弾性部材16、回転軸18とともに中心軸線CLの回りに回転する。
【0029】
〔電磁ブレーキ〕
操作感触付与型入力装置10は電磁ブレーキ24を備えており、上記のカラー部材20には、中心軸線CLの方向でみて回転軸18と反対側の端面(図1中の下端面)にアーマチュア22が連結されている。電磁ブレーキ24は、通電時に発生させる磁力でアーマチュア22を吸着する。このときの摩擦により、電磁ブレーキ24は操作部材12の操作に対して抵抗力を付与することができる。
【0030】
なお、図1には示されていないが、アーマチュア22とカラー部材20との間には板ばねが設けられており、この板ばねの弾性変形に伴い、電磁ブレーキ24の作動(通電)時にアーマチュア22はカラー部材20に対して中心軸線CLの方向(スラスト方向)に移動可能である。またアーマチュア22は、その全体が磁性金属(例えば鉄)である。
【0031】
〔位置の検出〕
また操作感触付与型入力装置10は、操作部材12の位置(回転角)を検出する要素としてエンコーダ26を備えている。エンコーダ26はコード板26a及びフォトインタラプタ26bを有しており、このうちコード板26aは、例えば回転軸14の外周に取り付けられている。コード板26aは回転軸14を中心とした薄板の円盤形状をなしており、その周方向には一定ピッチで図示しないスリットが形成されている。
【0032】
フォトインタラプタ26bは、例えば2条の検出光を互いに異なる位置でコード板26aのスリットに透過させる位置関係に調整されている。操作部材12が回転操作されると、これに伴って回転軸14とともにコード板26aが回転し、フォトインタラプタ26bから位相差を持った2相の回転角信号(エンコーダパルス)が出力される。
【0033】
〔弾性部材の機能〕
また上記の弾性部材16は、電磁ブレーキ24によりアーマチュア22が吸着された状態(抵抗力が付与された状態)で操作部材12が操作されると、その回転方向にねじり変形(弾性変形)を生じる。ただし弾性部材16には、付与される抵抗力が最大の状態で操作部材12が操作されたとしても、そのときのトルクに対して充分な剛性を有する材料を用いるため、そこで弾性部材16が降伏したり、破断したりすることはない。したがって弾性部材16は、通常の弾性範囲内で変形しつつ、操作部材12に対する操作を回転軸14から次の回転軸18及びカラー部材20にまで伝達することができる。これにより、操作者がある程度の操作力を操作部材12に加えると、アーマチュア22をスリップさせながら操作部材12を引き続き回転させることができる。
【0034】
一方で弾性部材16は、上記のように弾性変形を生じた状態で操作者が操作部材12から手を離したり、操作力を緩めたりすると、それまでの変形状態から復帰する。この復帰に伴い、弾性部材16は回転軸14とともに操作部材12及びコード板26aをそれまでと逆方向へ僅かに回転させる。したがって、電磁ブレーキ24による抵抗力が付与された状態で操作部材12が操作力を受けなくなると、操作部材12の位置(回転角度)はそれまでの移動方向(回転方向)と逆方向へ僅かに変化する。
【0035】
〔音発生部〕
また操作感触付与型入力装置10は、操作音を発生する要素として音発生部30を備えており、この音発生部30は、主に共鳴板32及び打撃子34を有している。音発生部30は、上記の電磁ブレーキ24が作動すると、その磁力で打撃子34が吸着されて変位し、共鳴板32を打撃して音を発生させることができる。
【0036】
〔可動部材〕
支持部材36は支持ピン36aを有しており、打撃子34は支持部材36に対して支持ピン36aを中心として回転(いわゆる揺動)可能に支持されている。この支持ピン36aを挟んで打撃子34の一端は吸着部34aとして構成されており、この吸着部34aには磁性材料が用いられている。また、打撃子34の他端は打撃部34bとして構成されており、打撃子34はこの打撃部34bで共鳴板32を叩くことができる。
【0037】
〔音発生部材〕
共鳴板32は、例えば金属製、樹脂製、木製等の円盤で構成されている。共鳴板32は、打撃子34により打撃されることで音(操作音)を発生するものであるが、その材質や形状、大きさ、厚み等を任意に変更することで、音の発生に関する条件(例えば音質、音量、音階等)を様々に変化させることができる。
【0038】
〔制御部〕
さらに操作感触付与型入力装置10は、上記のエンコーダ26とともに制御上の要素として制御部28を備えている。制御部28は、上記のエンコーダ26及び電磁ブレーキ24に接続されており、制御部28にはエンコーダ26(フォトインタラプタ26b)から制御部28に対して検出信号(エンコーダパルス)が入力される一方、制御部28から電磁ブレーキ24に対して駆動信号(駆動電圧)が出力されている。以下、制御に関する構成について説明する。
【0039】
図2は、操作感触付与型入力装置10の制御系の構成を概略的に示すブロック図である。上記の制御部28は、例えばプロセッサ(CPU)を用いた演算部28aを有する他、RAM、ROM等のメモリデバイスを用いた記憶部28b、そして入力部28c及び出力部28dを有したマイクロコンピュータとして構成されている。
【0040】
フォトインタラプタ26bから出力される回転角信号は、それぞれ入力部28cでA/D変換されて演算部28aに入力される。演算部28aは、この入力信号に基づいて回転軸14(操作部材12)の回転角度及び回転方向を演算する。また演算部28aは、回転角度及び回転方向の演算結果に基づいて制御信号を出力し、電磁ブレーキ24の作動(発生する磁力の大きさ、タイミング等)を制御する。このときの制御信号は、出力部28dを通じて電磁ブレーキ24に供給される駆動電圧に変換される。
【0041】
〔電磁ブレーキの作動と音の発生〕
図3は、電磁ブレーキ24の作動と音の発生に関するメカニズムを示した図である。なお図3中、操作感触付与型入力装置10は、操作部材12と回転軸14の一部を除いてその構成要素が断面で示されている。また図3には、図1中に示されていない要素が追加されている。一方、図3中、制御部28については単にブロック要素として示されている。以下、具体的に説明する。
【0042】
図3に示される構造例では、電磁ブレーキ24及び音発生部30が1つの素子筐体38に収容されている。素子筐体38は例えば円筒形状の部材であり、電磁ブレーキ24は、素子筐体38の一端(ここでは上端)の開口から内部に嵌め込むようにして固定されている。
【0043】
また共鳴板32は、素子筐体38の他端(ここでは下端)の開口を塞ぐようにしてその内部に嵌め合わされている。そして、支持部材36及び打撃子34は、共鳴板32と電磁ブレーキ24との間に配置された状態で素子筐体38の内部に収容されている。
【0044】
なお図3には示されていないが、回転軸14,18を含むその他の部分は、例えば別の筐体に収容された状態で回転自在に支持されている。
【0045】
〔電磁ブレーキの構造〕
電磁ブレーキ24は、その本体部分に例えば縦断面がE字形状をなすケース型コア24aを有している。電磁ブレーキ24は、このケース型コア24aの内部にフープ状の巻線24bを配置した構造である。電磁ブレーキ24の作動(通電)時には、この巻線24bの回りに磁界が発生し、このときの磁力線は、図3中に矢印で示されるようにケース型コア24aの内部を通るものもあれば、ケース型コア24aの外側(素子筐体38内部)を通るものもあり、その磁力が及ぶ範囲は電磁ブレーキ24の周囲にまで拡がっている。なお、素子筐体38は非磁性材料(例えば樹脂材料)で成型されている。
【0046】
上記のアーマチュア22は、電磁ブレーキ24の作動(通電)時に磁力線が集中する位置(磁極)の近傍に設けられている。このため電磁ブレーキ24は、その作動時にアーマチュア22を効率よく吸着することができる。なお図3には、アーマチュア22をカラー部材20に連結するための板ばね23が断面で示されている。
【0047】
また図3でみて、ケース型コア24aの上端には接触子24cが設けられており、この接触子24cはケース型コア24aの上端面(巻線24bの上側)を塞いでいる。接触子24cは、電磁ブレーキ24の作動(通電)時にアーマチュア22と接触することで、摩擦を発生させる部分である。
【0048】
そして打撃子34は、アーマチュア22の反対側で、電磁ブレーキ24の作動時に磁力線が集中する位置(磁極)の近傍に設けられている。このため電磁ブレーキ24は、その作動時に打撃子34(吸着部34a)をも効率よく吸着することができる。
【0049】
〔保持部材〕
共鳴板32の上面には、例えば圧縮タイプのコイルばね40が設けられており、このコイルばね40は、その一端が打撃子34(打撃部34b)に接続されている。電磁ブレーキ24の非作動(非通電)時、コイルばね40はその反発力で打撃部34bを押し上げることにより、打撃子34を図3中の二点鎖線で示される初期位置に保持することができる(保持力の発生)。
【0050】
一方、支持部材36には、上記の支持ピン36aとは別にストッパピン36bが設けられている。このストッパピン36bは、コイルばね40により打撃部34bが押し上げられた状態でその上面に接触し、打撃子34全体を初期位置に停止させる。
【0051】
電磁ブレーキ24が作動して磁力が発生すると、上記のように打撃子34(打撃部34b)が吸着され、図3中に実線で示されるように打撃子34全体が変位する。なお、このとき電磁ブレーキ24は、コイルばね40の反発力に抗して打撃子34を吸着するだけの磁力を発生させている。言い換えれば、電磁ブレーキ24の発生させる磁力がコイルばね40の反発力に打ち勝つ大きさに達すると、打撃子34がコイルばね40の反発力に抗して変位し、電磁ブレーキ24に吸着されることになる。
【0052】
そして、上記のように打撃子34が電磁ブレーキ24に吸着されて変位すると、打撃子34(打撃部34b)が共鳴板32を打撃することで操作音が発生する。また、このとき支持ピン36aから吸着部34aの先端までの長さと、打撃部34bの先端までの長さとの比(レバー比)を適切に設定することで、打撃子34が共鳴板32を叩く際のエネルギーを最適に設計することもできる。
【0053】
なお、図3に示される構造例では、吸着部34aの先端に半円形状のパッド34cが設けられている。パッド34cは、例えば非磁性材料の衝撃吸収体(ゴム等)で成型することができ、このようなパッド34cを設けることで、電磁ブレーキ24と打撃子34との接触による衝撃を緩和したり、共鳴板32以外からの音が発生したりするのを防止することができる。なおパッド34cは必須の要素ではなく、適宜に取り除いてもよい。
【0054】
〔制御例〕
次に図4は、上記の制御部28による電磁ブレーキ24の制御例を一例として示すタイミングチャートである。以下、制御例について説明する。
【0055】
図4中(A):例えば、操作者が操作部材12を等速で回転させる操作を行った場合を想定する。この場合、エンコーダ26(フォトインタラプタ26b)から出力されるエンコーダパルス(1相のみ示す)は略一定周期の波形となる。
【0056】
このとき制御部28は、入力されたエンコーダパルスに基づいて演算部28aにより演算処理を行い、操作部材12の現在の位置(位置座標)を算出する。ここで算出された位置は、例えば操作部材12の現在の回転角座標として表すことができる。したがって図4中に示される横軸は、右方向に時間の経過を表すとともに、回転操作に伴う操作部材12の回転角座標(θ)の変化を表している。
【0057】
〔出力位置(極大位置)〕
図4中(B):このような回転操作の過程において、演算部28aは操作部材12の位置(回転角)の変化に応じてクリック感触と操作音を発生させるタイミングを演算結果として決定する(図中の縦長▼印)。ここでは、例として操作部材12の位置が横軸上の座標θ1,θ2,θ3に達するタイミングでそれぞれクリック感触と操作音を発生させるものとする。
【0058】
図4中(C):このとき制御部28は、予め定めたフォースカーブに基づいて電磁ブレーキ24に対して印加するべき駆動電圧を制御する。例えば、横軸上の座標θ1が次にクリック感触と操作音を発生させるタイミングであった場合、演算部28aはこの座標θ1を中心として、横軸上で両側にそれぞれ同じ間隔(例えば1パルス分に相当する回転角度)をおいた座標a,bから座標θ1に向かって急激に傾斜した左右対称のフォースカーブ(左側は登り坂、右側は下り坂)を設定する。なお、フォースカーブの傾斜は任意であり、他の座標θ2,θ3では傾斜をある程度緩やかに設定することもできる。また、フォースカーブは記憶部28bに予め記憶しておくことができる。
【0059】
この場合、フォースカーブ上で駆動電圧が0Vの範囲内(座標aの左側)では電磁ブレーキ24が非作動(非通電)であり、この間、操作部材12には特段の抵抗力は付与されていない。そしてこの後、操作部材12の位置の変化に伴って回転角座標が座標a(極小位置)の右側に移動すると、フォースカーブの傾斜に従って駆動電圧が上昇し、座標θ1で駆動電圧は最大値Vmaxに達する(極大位置)。この時点で付与される抵抗力は最大値となっている。
【0060】
さらに操作部材12が回転し、座標θ1を過ぎて右側に回転角座標が移動すると、今度は駆動電圧が急激に低下し、座標b(極小位置)で駆動電圧は0Vとなる。これにより、操作部材12に付与される抵抗力は一気に低下するので、この間の抵抗力の変化により操作者に対してクリック感触を付与することができる。
【0061】
図4中(D):この間にコイルばね40は、電磁ブレーキ24に印加される駆動電圧が最大値Vmaxに達するタイミングで一気に変位(弾性変形)する。すなわち、操作部材12の位置が座標θ1に達する直前までは、電磁ブレーキ24に最大値Vmax未満の駆動電圧が印加されていても、コイルばね40はほとんど変位しない。
【0062】
そして、操作部材12の回転角座標が移動して座標θ1に到達し、電磁ブレーキ24に印加される駆動電圧が最大値Vmaxに達すると、そのとき発生する最大の磁力で一気に打撃子34が引き寄せられる結果、コイルばね40の変位が最大値Xmaxになる。また、このとき上記のように共鳴板32の打撃による操作音が発生する。
【0063】
この後、さらに操作部材12が回転して座標θ1を通り過ぎ、駆動電圧が最大値Vmax未満になると、コイルばね40はその反発力で一気に復元し、打撃子34を初期位置に復帰させることができる。これにより、打撃子34(打撃部34b)が共鳴板32を叩いた後ですぐに共鳴板32から離れるので、その振動を不自然に阻害することなく、質感のよい音を発生させることができる。
【0064】
なお、ここでは横軸上で右方向に座標が移動していく場合を挙げているが、図4中(C)に示されるフォースカーブは座標θ1,θ2,θ3を中心として対称形状であるため、両方向への移動について共通に適用することができる。
【0065】
その他に、クリック感触ではなく壁感触を付与するフォースカーブを用いることもできる。例えば、座標θ1の左側では駆動電圧を0Vとし、座標θ1から右側では駆動電圧を最大値Vmaxとしてもよい。この場合も同様に、操作部材12の位置が座標θ1に達したタイミングで最大の抵抗力を付与するとともに、合わせて操作音を発生させることができる。
【0066】
以上のように本実施形態の操作感触付与型入力装置10は、特に専用のアクチュエータを設けなくても、電磁ブレーキ24の作動状態に連動したタイミングで操作音を発生させることができる。
【0067】
その一方で、音の発生に関して専用の共鳴板32と打撃子34を用いることができるので、これらの材質や質量、形状、大きさ、配置等の様々な条件を最適化することで、所望の音質や音色を実現することができる。
【0068】
本発明は上述した実施形態に制約されることなく、種々に変形して実施することができる。一実施形態では円盤状の共鳴板32と打撃子34との組み合わせを例に挙げているが、共鳴板32を立体的な形状(例えばコーン形状、筒形状)としてもよい。
【0069】
また共鳴板32を用いることなく、電磁ブレーキ24を打撃子34で打撃することで操作音を発生させる構成であってもよい。この場合でも、電磁ブレーキ24のケース型コア24aを最適な設定とすることにより、所望の操作音を実現することができる。
【0070】
一実施形態では、打撃子34の保持にコイルばね40を用いているが、例えばコイルばね40の代わりに打撃部34bに錘を設置することで、重力を用いて自然に打撃子34を初期位置に保持したり、復帰させたりすることもできる。
【0071】
また一実施形態では、操作部材12をつまみ形状としているが、操作部材12はドラム形状であってもよいし、スティック形状や球形状であってもよい。また、操作部材12は回転させるものだけでなく、例えばスライドさせたり、レバーのようにスイングさせたりするものであってもよい。
【0072】
電磁ブレーキ24のフォースカーブは図示とともに挙げた例(山形状や壁パターンのもの)に限らず、その他のパターン(例えば矩形状のものや台形状のもの)を採用してもよい。
【0073】
また、回転状態の検出はコード板26aとフォトインタラプタ26bとの組み合わせだけでなく、例えば反射板とフォトスイッチとの組み合わせで実現してもよい。
【0074】
その他、図示とともに示した各種部材の形状や配置はいずれも好ましい例であり、本発明の実施に際してこれらを適宜変更可能であることはいうまでもない。
【図面の簡単な説明】
【0075】
【図1】一実施形態の操作感触付与型入力装置の全体的な構成を概略的に示す斜視図である。
【図2】制御系の構成を概略的に示すブロック図である。
【図3】電磁ブレーキの作動と音の発生に関するメカニズムを示した図である。
【図4】制御部による電磁ブレーキの制御例を一例として示すタイミングチャートである。
【符号の説明】
【0076】
10 操作感触付与型入力装置
12 操作部材
14 回転軸
16 弾性部材
18 回転軸
20 カラー部材
22 アーマチュア
24 電磁ブレーキ
28 制御部
28a 演算部
28d 出力部
30 音発生部
32 共鳴板
34 打撃子
40 コイルばね
【特許請求の範囲】
【請求項1】
操作者により操作されて変位する操作部材と、
前記操作部材の変位に伴って変位するアーマチュアを有し、通電時に前記アーマチュアを吸着する磁力を発生させて前記操作部材の操作に対して摩擦による抵抗力を付与する電磁ブレーキと、
前記アーマチュアとは別に前記電磁ブレーキの発生させる磁力が及ぶ位置に設けられ、前記電磁ブレーキの通電時にその磁力で吸着される磁性を有した可動部材と、
前記可動部材が前記電磁ブレーキに吸着されて変位すると、この変位に伴い前記可動部材により打撃されて操作音を発生させる音発生部材と
を備えた操作感触付与型入力装置。
【請求項2】
請求項1に記載の操作感触付与型入力装置において、
前記操作部材の位置を検出する検出手段と、
前記検出手段による検出結果に基づき前記電磁ブレーキの通電状態を制御することにより、前記操作部材の操作に対する前記抵抗力の付与とともに前記音発生部材からの操作音の発生を制御する制御手段と
をさらに備えた操作感触付与型入力装置。
【請求項3】
請求項1又は2に記載の操作感触付与型入力装置において、
前記電磁ブレーキの非通電時に前記可動部材を所定の初期位置に保持する保持力を付与する一方、前記電磁ブレーキの通電時にその磁力で前記可動部材が吸着されると、前記保持力に抗して前記可動部材が変位するのを許容するとともに、前記電磁ブレーキが通電状態から非通電状態になると、前記保持力により前記可動部材を前記初期位置に復帰させる保持部材をさらに備えた操作感触付与型入力装置。
【請求項4】
請求項3に記載の操作感触付与型入力装置において、
前記電磁ブレーキは、
通電時に印加される駆動電圧に応じた大きさで磁力を発生させ、
前記保持部材は、
前記電磁ブレーキに印加される駆動電圧が最大値に達した場合に前記可動部材が前記音発生部材を打撃する位置まで変位するのを許容することを特徴とする操作感触付与型入力装置。
【請求項5】
請求項2から4のいずれかに記載の操作感触付与型入力装置において、
前記制御手段は、
操作者の操作に応じて変化する前記操作部材の位置と前記電磁ブレーキに対して印加するべき駆動電圧の大きさとの関係を予め定めたフォースカーブに基づいて前記電磁ブレーキの通電状態を制御することにより、前記フォースカーブ上で駆動電圧が最大値に達する時期に合わせて前記音発生部材から操作音を発生させる制御を行うことを特徴とする操作感触付与型入力装置。
【請求項6】
請求項5に記載の操作感触付与型入力装置において、
前記制御手段は、
前記フォースカーブとして、操作者の操作に応じて変化する前記操作部材の位置を所定の座標軸上でみた位置座標としたとき、前記座標軸上に予め規定された複数の極大位置でそれぞれ前記駆動電圧の大きさが最大値となり、個々の前記極大位置から両側にそれぞれ所定間隔をおいた極小位置でいずれも前記駆動電圧が最小値となる関係を定めていることを特徴とする操作感触付与型入力装置。
【請求項1】
操作者により操作されて変位する操作部材と、
前記操作部材の変位に伴って変位するアーマチュアを有し、通電時に前記アーマチュアを吸着する磁力を発生させて前記操作部材の操作に対して摩擦による抵抗力を付与する電磁ブレーキと、
前記アーマチュアとは別に前記電磁ブレーキの発生させる磁力が及ぶ位置に設けられ、前記電磁ブレーキの通電時にその磁力で吸着される磁性を有した可動部材と、
前記可動部材が前記電磁ブレーキに吸着されて変位すると、この変位に伴い前記可動部材により打撃されて操作音を発生させる音発生部材と
を備えた操作感触付与型入力装置。
【請求項2】
請求項1に記載の操作感触付与型入力装置において、
前記操作部材の位置を検出する検出手段と、
前記検出手段による検出結果に基づき前記電磁ブレーキの通電状態を制御することにより、前記操作部材の操作に対する前記抵抗力の付与とともに前記音発生部材からの操作音の発生を制御する制御手段と
をさらに備えた操作感触付与型入力装置。
【請求項3】
請求項1又は2に記載の操作感触付与型入力装置において、
前記電磁ブレーキの非通電時に前記可動部材を所定の初期位置に保持する保持力を付与する一方、前記電磁ブレーキの通電時にその磁力で前記可動部材が吸着されると、前記保持力に抗して前記可動部材が変位するのを許容するとともに、前記電磁ブレーキが通電状態から非通電状態になると、前記保持力により前記可動部材を前記初期位置に復帰させる保持部材をさらに備えた操作感触付与型入力装置。
【請求項4】
請求項3に記載の操作感触付与型入力装置において、
前記電磁ブレーキは、
通電時に印加される駆動電圧に応じた大きさで磁力を発生させ、
前記保持部材は、
前記電磁ブレーキに印加される駆動電圧が最大値に達した場合に前記可動部材が前記音発生部材を打撃する位置まで変位するのを許容することを特徴とする操作感触付与型入力装置。
【請求項5】
請求項2から4のいずれかに記載の操作感触付与型入力装置において、
前記制御手段は、
操作者の操作に応じて変化する前記操作部材の位置と前記電磁ブレーキに対して印加するべき駆動電圧の大きさとの関係を予め定めたフォースカーブに基づいて前記電磁ブレーキの通電状態を制御することにより、前記フォースカーブ上で駆動電圧が最大値に達する時期に合わせて前記音発生部材から操作音を発生させる制御を行うことを特徴とする操作感触付与型入力装置。
【請求項6】
請求項5に記載の操作感触付与型入力装置において、
前記制御手段は、
前記フォースカーブとして、操作者の操作に応じて変化する前記操作部材の位置を所定の座標軸上でみた位置座標としたとき、前記座標軸上に予め規定された複数の極大位置でそれぞれ前記駆動電圧の大きさが最大値となり、個々の前記極大位置から両側にそれぞれ所定間隔をおいた極小位置でいずれも前記駆動電圧が最小値となる関係を定めていることを特徴とする操作感触付与型入力装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−134728(P2010−134728A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2008−310399(P2008−310399)
【出願日】平成20年12月5日(2008.12.5)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成20年12月5日(2008.12.5)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]