
操作検出回路、操作検出装置、操作検出制御装置及び電子機器
【課題】操作部の動きを検出できるだけでなく、操作部を強制的に動かすことができる、操作検出回路を提供すること。
【解決手段】操作部の動きに応じてインダクタンスが変化するインダクタL1に接続される操作検出回路であって、第1の電圧部91とインダクタL1の一方の端部である第1の端部aとの間に配置されたトランジスタQ1と、第2の電圧部92とインダクタL1のもう一方の端部である第2の端部bとの間に配置された抵抗R1と、抵抗R1に並列に接続されたトランジスタQ2とを備え、トランジスタQ1がオン且つトランジスタQ2がオフのとき、インダクタL1と抵抗R1に検出電流i1を流すことによって、操作部の動きに応じた検出信号を端部bから出力し、トランジスタQ1がオン且つトランジスタQ2がオンのとき、操作部を可動させる駆動電流i2をインダクタL1に流す、ことを特徴とする、操作検出回路。
【解決手段】操作部の動きに応じてインダクタンスが変化するインダクタL1に接続される操作検出回路であって、第1の電圧部91とインダクタL1の一方の端部である第1の端部aとの間に配置されたトランジスタQ1と、第2の電圧部92とインダクタL1のもう一方の端部である第2の端部bとの間に配置された抵抗R1と、抵抗R1に並列に接続されたトランジスタQ2とを備え、トランジスタQ1がオン且つトランジスタQ2がオフのとき、インダクタL1と抵抗R1に検出電流i1を流すことによって、操作部の動きに応じた検出信号を端部bから出力し、トランジスタQ1がオン且つトランジスタQ2がオンのとき、操作部を可動させる駆動電流i2をインダクタL1に流す、ことを特徴とする、操作検出回路。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操作部の動きに応じてインダクタンスが変化するインダクタに接続される操作検出回路、該操作検出回路を備える操作検出装置、該操作検出回路を備える操作検出制御装置、該操作検出回路を備える電子機器に関する。
【背景技術】
【0002】
従来技術として、操作者による操作入力が作用する操作部を備え、操作部の動きを操作入力の変化として検出する操作入力装置が知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−3536号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の従来技術では、操作入力の作用による操作部の動きを検出することはできるものの、操作部を強制的に動かすことができない。
【0005】
そこで、本発明は、操作部の動きを検出できるだけでなく、操作部を強制的に動かすことができる、操作検出回路の提供を目的とする。また、本発明は、該操作検出回路を備える操作検出装置、該操作検出回路を備える操作検出制御装置、該操作検出回路を備える電子機器の提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明に係る操作検出回路は、
操作部の動きに応じてインダクタンスが変化するインダクタに接続される操作検出回路であって、
前記インダクタの第1の端部に接続される第1のスイッチング素子と、
前記インダクタの第2の端部に接続される抵抗と、
前記抵抗に並列に接続される第2のスイッチング素子とを備え、
前記第1のスイッチング素子がオンすることにより、前記インダクタと前記抵抗に電流を流すことによって、前記操作部の動きに応じた検出信号を前記第2の端部から出力し、
前記第1のスイッチング素子がオン且つ前記第2のスイッチング素子がオンすることにより、前記操作部を可動させる駆動電流を前記インダクタに流す、ことを特徴とするものである。
【0007】
また、上記目的を達成するため、本発明に係る操作検出装置は、
本発明に係る操作検出回路と、前記操作部及び前記インダクタを有する操作入力装置とを備えることを特徴とするものである。
【0008】
また、上記目的を達成するため、本発明に係る操作検出制御装置は、
本発明に係る操作検出回路と、制御回路とを備え、
前記制御回路は、
前記第1のスイッチング素子をオン/オフさせる制御信号を出力する第1の出力部と、
前記第2のスイッチング素子をオン/オフさせる制御信号を出力する第2の出力部と、
前記検出信号が入力される入力部とを有することを特徴とするものである。
【0009】
また、上記目的を達成するため、本発明に係る電子機器は、
本発明に係る操作検出制御装置と、前記操作部及び前記インダクタを有する操作入力装置とを備えることを特徴とするものである。
【発明の効果】
【0010】
本発明によれば、操作部の動きを検出できるだけでなく、操作部を強制的に動かすことができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態である電子機器10の構成を示したブロック図である。
【図2】操作部21を強制的に可動させる磁界が発生していない初期状態を示した図である。
【図3】操作部21を強制的に可動させる磁界Hが発生している状態を示した図である。
【図4】検出回路30及び制御回路40の第1の構成例である。
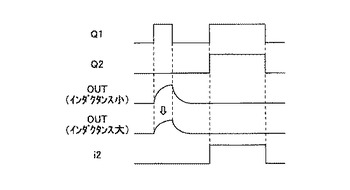
【図5】スイッチング素子Q1,Q2のオン/オフと出力電圧OUTと駆動電流i2との関係を示したタイムチャートである。
【図6】検出回路30及び制御回路40の第2の構成例である。
【図7】検出回路30及び制御回路40の第3の構成例である。
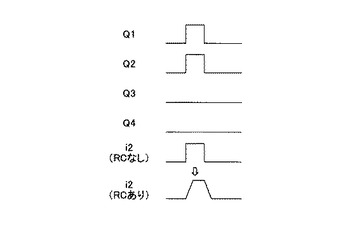
【図8】コンデンサC1,C2及び抵抗R2,R3の有無による駆動電流i2の違いを示したタイムチャートである。
【図9】検出回路30及び制御回路40の第4の構成例である。
【図10】検出回路30及び制御回路40の第5の構成例である。
【図11】検出回路30及び制御回路40の第6の構成例である。
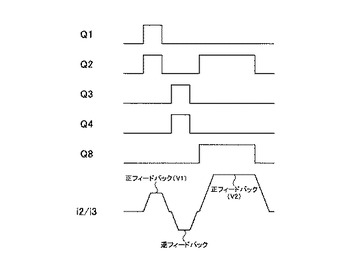
【図12】大きさの異なる正フィードバック力を発生させたときのタイムチャートである。
【図13】検出回路30及び制御回路40の第7の構成例である。
【図14】検出回路30及び制御回路40の第8の構成例である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態を図面に従って説明する。
【0013】
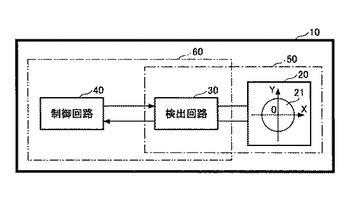
図1は、本発明の一実施形態である電子機器10の構成を示したブロック図である。電子機器10は、操作入力装置20と、検出回路30と、制御回路40とを備えている。電子機器10は、操作入力装置20及び検出回路30を、操作検出装置50として備えている。また、電子機器10は、検出回路30及び制御回路40を、操作検出制御装置60として備えている。
【0014】
操作入力装置20は、X,Y,Z軸によって定まる直交座標系において、XY平面の法線方向側から入力される操作入力を操作部21で受ける操作インターフェイスである。操作入力は、操作者(ユーザ)の手指等によって直接又は間接的に操作部21に作用する。操作入力装置20及び検出回路30は、操作部21で受けた操作入力に応じて変化する出力信号を出力する。その出力信号に基づいて操作者による操作入力が制御回路40などの制御部(具体的には、マイクロコンピュータ)によって検出される。操作入力の検出によって、その検出された操作入力に対応する操作内容を制御回路40などの制御部に把握させることができる。
【0015】
操作入力装置20は、電子機器10に搭載又は接続される。電子機器10の具体例として、携帯端末(携帯電話、携帯ゲーム機、音楽や映像の携帯プレーヤーなど)、ゲーム機、パーソナルコンピュータ、車両用コンピュータ、汎用コンピュータ、操作コントローラ、マウス、電化製品などのホスト機器が挙げられる。操作入力装置20と電子機器10との接続形態は、有線接続でもよいし、無線接続でもよい。また、操作入力装置自体が、操作コントローラやマウスなどの電子機器であってもよい。
【0016】
操作入力装置20は、例えば、そのような電子機器10に搭載又は接続されるディスプレイの画面上に表示されるオブジェクトを、操作者が意図した操作内容に従って、移動させることができる。画面上に表示されるオブジェクトは、例えば、カーソルやポインタなどの指示表示である。キャラクターなどの表示物でもよい。また、操作者が所定の操作入力を与えることにより、その操作入力に対応する電子機器10の所望の機能を発揮させることができる。
【0017】
検出回路30は、制御回路40から出力される第1の制御信号に基づいて、操作入力の作用による操作部21の動きを検出し、その動きに応じた検出信号を制御回路40に対して出力する。また、検出回路30は、操作入力の検出機能の他に、制御回路40から出力される第2の制御信号に基づいて、操作部21を強制的に動かすことが可能な力を発生させる駆動回路としても機能する。操作部21が強制的に可動することで、操作部21に直接又は間接的に触れる操作者に対して力(フィードバック力ともいう)を与えることができる。
【0018】
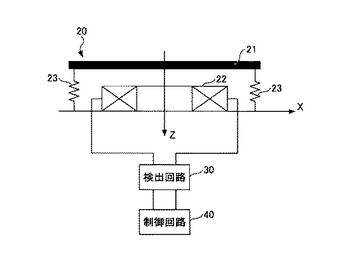
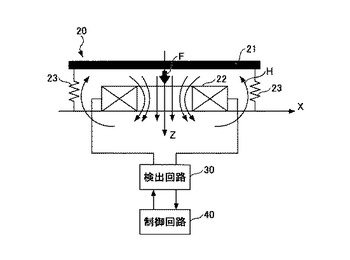
図2,3は、操作入力装置20の動作説明図であって、操作入力装置20の構成を模式的に示した正面視図である。図2は、操作部21を強制的に可動させる磁界が発生していない初期状態を示しており、図3は、操作部21を強制的に可動させる磁界が発生している状態を示している。操作入力装置20は、操作部21と、コイル22と、支持部材23とを備えている。
【0019】
操作部21は、操作部21の操作面に直接又は間接的に作用する操作入力により押し込まれることによって、XY平面に対して任意の方向に傾倒(チルト)する方向キーである。操作部21は、傾倒せずにZ方向に移動するものでもよいし、傾倒したままZ方向に移動するものでもよい。操作部21は、操作部21に操作入力が作用していないときの初期位置に復帰するように付勢する支持部材23で支持されているとよい。支持部材23は、例えば、操作部21をその初期位置に復帰させる弾性力を操作部21に付与する部材であればよく、支持部材25の具体例として、スプリング、ゴム、スポンジなどの弾性部材が挙げられる。
【0020】
コイル22は、操作入力による操作部21の押し込みを検出する検出部として機能するインダクタである。コイル22は、例えば、操作部21の押し込み量を測定対象とする素子であって、操作部21の押し込み量に応じて変化するアナログ信号波形を検出回路30に対して出力するものである。
【0021】
コイル22は、コイル22と操作部21との距離に応じて変化するアナログ信号波形を出力する素子であるので、コイル22と操作部21との距離が操作部21の押し込み量に応じて変化するようにコイル22を配置することによって、操作部21の押し込み量を非接触で測定できる。
【0022】
コイル22は、操作部21の押し込み量に応じて自己インダクタンスが変化する。検出回路30は、コイル22の自己インダクタンスの変化を操作部21の押し込み量の変化として検出する。例えば、操作部21に対向する位置にコイル22を固定し、操作部21にヨーク材を取り付けることで、操作部21の押し込みによりコイル22周囲の透磁率が変化するため、コイル22の自己インダクタンスを容易に変化させることができる。操作部21自体をヨーク材にしてもよい。また、操作部21に対向する位置にヨーク材を固定し、操作部21にコイル22を取り付けても、操作部21の押し込み量に応じてコイル22の自己インダクタンスを容易に変化させることができる。
【0023】
検出回路30は、コイル22から出力されたアナログ信号波形から、コイル22の自己インダクタンスの変化に等価的に変化する物理量を検出することで、その物理量の検出値を、操作部21の押し込み量に対応する検出データとして、制御回路40に対して供給する。検出回路30は、例えば、制御回路40から出力される第1の制御信号に従って、コイル22に第1のパルス信号を供給することによって、コイル22から出力されたアナログ信号波形に、コイル22の自己インダクタンスの変化に等価的に変化する物理量を発生させる。
【0024】
例えば、コイル22の軸方向においてコイル22と操作部21との距離が近づくにつれて、コイル22周辺の透磁率が増加し、コイル22の自己インダクタンスが増加する場合を考える。コイル22の自己インダクタンスが増加するにつれて、第1のパルス信号の供給によりコイル22によって発生するパルス電圧波形の振幅も大きくなる。検出回路30は、その振幅をコイル22の自己インダクタンスの変化に等価的に変化する物理量として検出することで、その振幅の検出値を操作部21の押し込み量に対応する検出データとして制御回路40に対して供給できる。
【0025】
また、例えば、コイル22の自己インダクタンスが増加するにつれて、第1のパルス信号の供給によりコイル22に流れるパルス電流波形の傾きが緩やかになる。検出回路30は、その傾きをコイル22の自己インダクタンスの変化に等価的に変化する物理量として検出することで、その傾きの検出値を操作部21の押し込み量に対応する検出データとして制御回路40に対して供給できる。
【0026】
また、検出回路30は、制御回路40から出力される第2の制御信号に従って、コイル22に第1のパルス信号に対して位相が異なる第2のパルス信号を供給することによって操作部21を変位させる磁界Hを発生させる駆動回路としても機能する。検出回路30は、例えば、第2のパルス信号に対応するパルス電流がコイル22に流れることにより発生する磁界Hによって、操作部21を可動させる力Fを発生させる。
【0027】
検出回路30は、コイル22に流す電流の向きを変えることにより磁界Hの向きを変えることによって、コイル22に近づく方向に操作部21を動かす吸引力F(正フィードバック力ともいう)を発生させたり、コイル22から離れる方向に操作部21を動かす反発力F(逆フィードバック力ともいう)を発生させたりすることができる。もちろん、吸引力Fを逆フィードバック力と定義してもよいし、反発力Fを正フィードバック力と定義してもよい。検出回路30は、操作部21を可動させる力Fを連続的に発生させることで、操作部21を振動させたり、操作部21に触れる操作者に対してクリック感を与えるような動作を操作部21にさせたりすることができる。
【0028】
第2のパルス信号に対応するパルス電流は、操作部21を強制的に動かすことが可能な大きさの力Fを発生させるため、第1のパルス信号に対応するパルス電流よりも大きくする。また、第1のパルス信号及び第2のパルス信号は、矩形波でもよいし、三角波でもよいし、ノコギリ波でもよい。
【0029】
次に、検出回路30及び制御回路40の構成について説明する。
【0030】
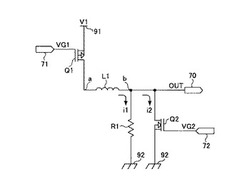
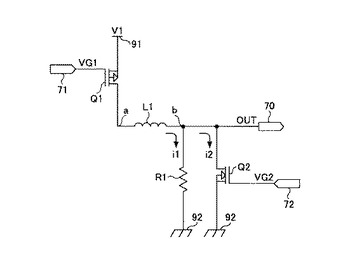
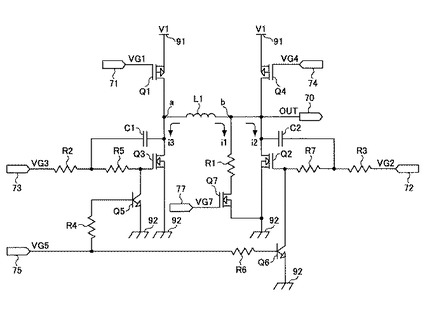
図4は、検出回路30及び制御回路40の第1の構成例である。インダクタL1は、上述の操作入力装置20に構成される素子であり、上述の操作部21の動きに応じて自己インダクタンスが変化するコイル22に相当するものである。VG*(*は数字を表す)は、制御回路40から出力される制御信号を表し、OUTは、検出回路30から出力される検出信号の電圧(検出回路30の出力電圧)を表している。
【0031】
制御回路40は、トランジスタQ1をオン/オフさせる制御信号VG1を出力する出力部71と、トランジスタQ2をオン/オフさせる制御信号VG2を出力する出力部72と、操作部21の動きに応じてインダクタL1の自己インダクタンスが変化することにより、インダクタL1の片側の端部電圧に応じたアナログ検出信号が入力される入力部70とを有する。そのアナログ検出信号は、入力部70に構成されるA/Dコンバータに入力される。
【0032】
検出回路30は、インダクタL1の一方の端部である第1の端部(以下、端部aという)に接続されるトランジスタQ1と、インダクタL1のもう一方の端部である第2の端部(以下、端部bという)に接続される抵抗R1と、抵抗R1に並列に接続されるトランジスタQ2とを備えている。端部a,bには、インダクタL1の端部と同電位の部位(例えば、配線など)が含まれてよい。
【0033】
トランジスタQ1は、制御信号VG1が入力される制御電極と、第1の電圧部91に接続される第1の主電極と、端部aに接続される第2の主電極とを備えるスイッチング素子である。トランジスタQ2は、制御信号VG2が入力される制御電極と、第2の電圧部92に接続される第1の主電極と、端部bに接続される第2の主電極とを備えるスイッチング素子である。
【0034】
トランジスタQ1,Q2がMOSFETの場合、制御電極はゲートに相当し、第1の主電極はソースに相当し、第2の主電極はドレインに相当する。トランジスタQ1,Q2がIGBTの場合、制御電極はゲートに相当し、第1の主電極はエミッタに相当し、第2の主電極はコレクタに相当する。また、トランジスタQ1,Q2は、バイポーラトランジスタなどの他のスイッチング素子でもよい。後述の他のトランジスタQ*(*は数字を表す)も同様である。
【0035】
トランジスタQ1は、第1の電圧部91と端部aとの間に配置され、第1の電圧部91と端部aとの間の電流経路の導通/遮断を切り替えるPチャネル型の素子である。トランジスタQ2は、第2の電圧部92と端部bとの間に配置され、第2の電圧部92と端部bとの間の電流経路の導通/遮断を切り替えるNチャネル型の素子である。
【0036】
第1の電圧部91の電圧V1は、第2の電圧部92の電圧よりも高く設定され、例えば、電圧V1は正の電源電圧に相当し、第2の電圧部92の電圧はグランド電圧に相当する。
【0037】
抵抗R1は、第2の電圧部92と端部bとの間に配置されている。抵抗R1は、インダクタL1に接続されることによってインダクタL1をLとするLR回路を構成する。
【0038】
【表1】

検出回路30は、トランジスタQ1が制御信号VG1によってオンし且つトランジスタQ2が制御信号VG2によってオフすることにより、インダクタL1と抵抗R1にパルス状の検出電流i1を流す。パルス状の検出電流i1が流れることによって、操作部21の動きに応じた検出信号が、検出回路30の出力電圧OUTとして端部bから出力される。インダクタL1の自己インダクタンスが操作部21の押し込み量に応じて変化すると、図5に示されるように、その変化量に応じて出力電圧OUTのピーク電圧が変化する。制御回路40の入力部70は、そのピーク電圧の大きさを検出することによって、操作部21の押し込み量(操作者の操作入力量)を検出できる。
【0039】
一方、検出回路30は、トランジスタQ1が制御信号VG1によってオン且つトランジスタQ2が制御信号VG2によってオンすることにより、操作部21を可動させるパルス状の駆動電流i2をインダクタL1に流す。トランジスタQ2のオンにより、抵抗R1の両端が短絡されるため、検出電流i1よりも電流値の大きな駆動電流i2が、インダクタL1とトランジスタQ2に流れることによって、操作部21を動かすことが可能な強い磁界をインダクタL1の周囲に発生させて、操作部21を強制的に可動させることができる。
【0040】
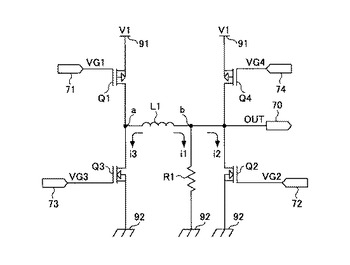
図6は、検出回路30及び制御回路40の第2の構成例である。上述の構成と同様の構成についての説明は省略する。
【0041】
図6の検出回路30は、図4の構成に対して、端部aに接続されるトランジスタQ3,端部bに接続されるQ4が追加されている。
【0042】
制御回路40は、トランジスタQ3をオン/オフさせる制御信号VG3を出力する出力部73と、トランジスタQ4をオン/オフさせる制御信号VG4を出力する出力部74とを有する。
【0043】
検出回路30は、端部aに接続され抵抗R1に並列に接続されるトランジスタQ3と、端部bに接続されるトランジスタQ4とを備えている。トランジスタQ3は、制御信号VG3が入力される制御電極と、第2の電圧部92に接続される第1の主電極と、端部aに接続される第2の主電極とを備えるスイッチング素子である。トランジスタQ4は、制御信号VG4が入力される制御電極と、第1の電圧部91に接続される第1の主電極と、端部bに接続される第2の主電極とを備えるスイッチング素子である。
【0044】
トランジスタQ3は、第2の電圧部92と端部aとの間に配置され、第2の電圧部92と端部aとの間の電流経路の導通/遮断を切り替えるNチャネル型の素子である。トランジスタQ4は、第1の電圧部91と端部bとの間に配置され、第1の電圧部91と端部bとの間の電流経路の導通/遮断を切り替えるPチャネル型の素子である。
【0045】
【表2】
検出回路30は、操作部21の押し込み量を検出するときには、各トランジスタが各制御信号VGによって表2のようにオン又はオフすることにより、インダクタL1と抵抗R1にパルス状の検出電流i1を流すことによって、操作部21の動きに応じた検出信号を端部bから出力する。
【0046】
一方、検出回路30は、操作部21に正フィードバック力を与えるときには、各トランジスタが各制御信号VGによって表2のようにオン又はオフすることにより、操作部21を可動させるパルス状の駆動電流i2をインダクタL1に流す。トランジスタQ2のオンにより、抵抗R1の両端が短絡されるため、検出電流i1よりも電流値の大きな駆動電流i2が、インダクタL1とトランジスタQ2に流れることによって、操作部21をインダクタL1に近づける方向に動かすことが可能な強い磁界をインダクタL1の周囲に発生させて、操作部21を強制的に可動させることができる。
【0047】
また、検出回路30は、操作部21に逆フィードバック力を与えるときには、各トランジスタが各制御信号VGによって表2のようにオン又はオフすることにより、操作部21を可動させるパルス状の駆動電流i3をインダクタL1に流す。この場合、駆動電流i3は、駆動電流i2に対して逆向きに流れる。したがって、検出電流i1よりも電流値の大きな駆動電流i3が、インダクタL1とトランジスタQ3に流れることによって、操作部21をインダクタL1から離れる方向に動かすことが可能な強い磁界をインダクタL1の周囲に発生させて、操作部21を強制的に可動させることができる。
【0048】
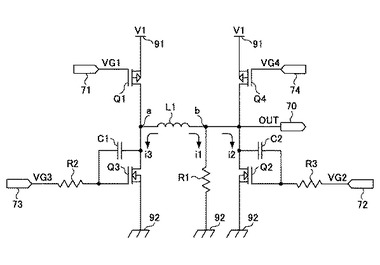
図7は、検出回路30及び制御回路40の第3の構成例である。上述の構成と同様の構成についての説明は省略する。
【0049】
図7の検出回路30は、図6の構成に対して、トランジスタQ2の制御電極と端子b側の主電極との間にキャパシタC2が挿入され、トランジスタQ3の制御電極と端子a側の主電極との間にキャパシタC1が挿入されている。
【0050】
キャパシタC2の一方の端部は、抵抗R3とトランジスタQ2の制御電極との間に接続され、もう一方の端部は、端部bに接続されている。キャパシタC1の一方の端部は、抵抗R2とトランジスタQ3の制御電極との間に接続され、もう一方の端部は、端部aに接続されている。つまり、トランジスタQ2,Q3の制御電極と主電極との間に、RCフィルタが構成されている。
【0051】
このように、キャパシタC1,C2を挿入にすることによって、図8に示されるように、フィードバック力の付与時にインダクタL1に流れる駆動電流i2の応答が、キャパシタC1,C2が挿入されてない場合に比べて遅くなるため、操作部21にフィードバック力を付与する時に発生する異音(ノイズ音)を抑えることができる。
【0052】
図9は、検出回路30及び制御回路40の第4の構成例である。上述の構成と同様の構成についての説明は省略する。
【0053】
図9の検出回路30は、図7の構成に対して、トランジスタQ2をオフのまま固定可能な第1のオフ固定部と、トランジスタQ3をオフのまま固定可能な第2のオフ固定部とを備えている。図9には、第1のオフ固定部として、抵抗R6及びトランジスタQ6が例示され、第2のオフ固定部として、抵抗R4及びトランジスタQ5が例示されている。制御回路40は、トランジスタQ5,Q6をオン/オフさせる制御信号VG5を出力する出力部75を有する。検出回路30は、各トランジスタが各制御信号VGによって表3のようにオン又はオフすることにより、検出電流i1又は駆動電流i2又は駆動電流i3を流す。
【0054】
【表3】
制御回路40は、操作部21の押し込み量を検出するときに、制御信号VG5によって、トランジスタQ5,Q6をオンすることによって、トランジスタQ2,Q3のオフ状態を維持する。これにより、操作部21の押し込み量を検出するときに、キャパシタC2,C1を介してトランジスタQ2,Q3の制御電極の電圧が持ち上がって、トランジスタQ2,Q3がオンしてしまうことを防ぐことができる。
【0055】
また、図9の検出回路30は、図7の構成に対して、抵抗R1に流れる電流を遮断可能な遮断部を備えている。図9には、この遮断部として、抵抗R1と第2の電圧部92との間に挿入されたトランジスタQ7が例示されている。制御回路40は、トランジスタQ7をオン/オフさせる制御信号VG7を出力する出力部77を有する。トランジスタQ7は、制御信号VG7が入力される制御電極と、第2の電圧部92に接続される第1の主電極と、抵抗R1に接続される第2の主電極とを有する。トランジスタQ7は、端部bと抵抗R1との間に挿入されてもよい。
【0056】
制御回路40は、操作部21の押し込み量を検出するときは、トランジスタQ7をオンし、操作部21にフィードバック力を与えるときは、トランジスタQ7をオフさせる。これにより、操作部21にフィードバック力を与えるときに、抵抗R1にわずかに流れる電流によって、駆動電流i2又はi3の応答が速くなることにより、異音が発生することを抑制できる。
【0057】
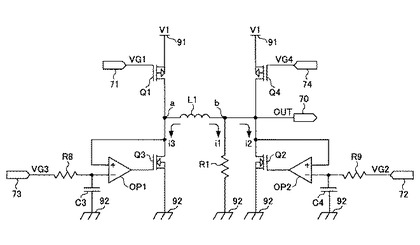
図10は、検出回路30及び制御回路40の第5の構成例である。上述の構成と同様の構成についての説明は省略する。
【0058】
図10の検出回路30は、図6の構成に対して、オペアンプOP1,OP2を備えている。オペアンプOP2は、トランジスタQ2の端部b側の主電極が接続される非反転入力端子と、制御信号VG2が入力される反転入力端子と、トランジスタQ2の制御電極が接続される出力端子とを有している。オペアンプOP1は、トランジスタQ3の端部a側の主電極が接続される非反転入力端子と、制御信号VG3が入力される反転入力端子と、トランジスタQ3の制御電極が接続される出力端子とを有している。制御信号VG2は、抵抗R9とキャパシタC4から構成されるRCフィルタを介して、オペアンプOP2の反転入力端子に入力され、制御信号VG3は、抵抗R8とキャパシタC3から構成されるRCフィルタを介して、オペアンプOP1の反転入力端子に入力される。
【0059】
このように、オペアンプOP1,OP2を構成することによって、上述のキャパシタC1,C2を挿入した場合と同様に、操作部21にフィードバック力を付与する時に発生する異音を抑えることができる。すなわち、フィードバック力の付与時にインダクタL1に流れる駆動電流i2の応答を、オペアンプOP1,OP2が構成されてない場合に比べて遅くできる。また、オペアンプOP1,OP2を構成することによって、図9の構成から、トランジスタQ5,Q6と、抵抗R4,R6と、制御信号VG5を出力する出力部75とを削除することができる。
【0060】
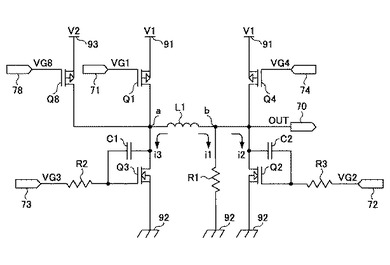
図11は、検出回路30及び制御回路40の第6の構成例である。上述の構成と同様の構成についての説明は省略する。
【0061】
図11の検出回路30は、図7の構成に対して、トランジスタQ1のオンにより端部aに印加される電圧V1と異なる電圧V2を端部aに印加可能な電圧印加部を備えている。図11には、この電圧印加部として、トランジスタQ8が例示されている。制御回路40は、トランジスタQ8をオン/オフさせる制御信号VG8を出力する出力部78を有する。トランジスタQ8は、制御信号VG8が入力される制御電極と、第3の電圧部93に接続される第1の主電極と、端部aに接続される第2の主電極とを有する。第3の電圧部93の電圧V2は、例えば第1の電圧部91の電圧V1よりも大きく設定される。検出回路30は、各トランジスタが各制御信号VGによって表4のようにオン又はオフすることにより、検出電流i1又は駆動電流i2又は駆動電流i3を流す。
【0062】
【表4】
制御回路40は、制御部21に正フィードバック力を与えるときに、トランジスタQ1をオフしトランジスタQ8をオンすることにより、電圧V1よりも大きい第3の電圧部93の電圧V2を端子aに印加する。これにより、トランジスタQ1をオンしトランジスタQ8をオフすることによって電圧V1を端子aに印加する場合よりも大きな正フィードバック力を操作部21に与えることができる。
【0063】
図12は、大きさの異なる正フィードバック力を発生させたときのタイムチャートである。図12は、電圧V2を電圧V1の2倍に設定した場合に、クリック感を発生させるパターンの一例である。フィードバック力を連続に発生させることによって振動を与えることが可能となる。
【0064】
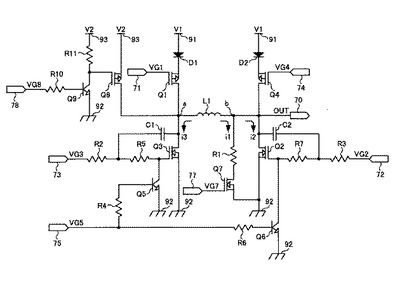
図13は、検出回路30及び制御回路40の第7の構成例である。上述の構成と同様の構成についての説明は省略する。
【0065】
図13の検出回路30は、電圧V1よりも大きな電圧V2がトランジスタQ8のオンにより端子aに印加されることによって、トランジスタQ1,Q4に並列に接続される不図示の保護ダイオード(又は、トランジスタQ1,Q4に内蔵されている寄生ダイオード)を介して、第1の電圧部91に電流が逆流することを防止する逆流防止部を備えている。図13には、この逆流防止部として、図11の構成に対して、ダイオードD1,D2が追加されている。
【0066】
また、図13の検出回路30は、電圧V1で動作する制御回路40から出力される制御信号VG8によって、電圧V2に接続されるトランジスタQ8がオン/オフできるように、レベルシフト回路を備えている。このレベルシフト回路は、トランジスタQ9と抵抗R10,R11から構成されている。
【0067】
検出回路30は、各トランジスタが各制御信号VGによって表5のようにオン又はオフすることにより、検出電流i1又は駆動電流i2又は駆動電流i3を流す。
【0068】
【表5】
制御回路40は、制御部21に正フィードバック力を与えるときに、トランジスタQ1をオフしトランジスタQ8をオンすることにより、電圧V1よりも大きい第3の電圧部93の電圧V2を端子aに印加する。これにより、トランジスタQ1をオンしトランジスタQ8をオフすることによって電圧V1を端子aに印加する場合よりも大きな正フィードバック力を操作部21に与えることができる。
【0069】
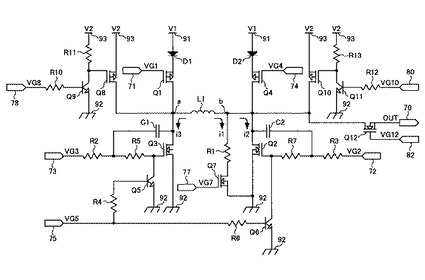
図14は、検出回路30及び制御回路40の第8の構成例である。上述の構成と同様の構成についての説明は省略する。
【0070】
図14の検出回路30は、図13の構成に対して、トランジスタQ4のオンにより端部bに印加される電圧V1と異なる電圧V2を端部bに印加可能な電圧印加部を備えている。図14には、この電圧印加部として、トランジスタQ10が例示されている。制御回路40は、トランジスタQ10をオン/オフさせる制御信号VG10を出力する出力部80を有する。
【0071】
また、図14の検出回路30は、電圧V1で動作する制御回路40から出力される制御信号VG10によって、電圧V2に接続されるトランジスタQ10がオン/オフできるように、レベルシフト回路を備えている。このレベルシフト回路は、トランジスタQ11と抵抗R12,R13から構成されている。
【0072】
また、図14の検出回路30は、電圧V1よりも大きな電圧V2が、トランジスタQ10のオンにより、電圧V1で動作する制御回路40の入力部70に印加されることを防止する電圧遮断部を有している。図14には、この電圧遮断部として、トランジスタQ12が例示されている。制御回路40は、トランジスタQ12をオン/オフさせる制御信号VG12を出力する出力部82を有する。
【0073】
検出回路30は、各トランジスタが各制御信号VGによって表6のようにオン又はオフすることにより、検出電流i1又は駆動電流i2又は駆動電流i3を流す。
【0074】
【表6】
制御回路40は、制御部21に逆フィードバック力を与えるときに、トランジスタQ4をオフしトランジスタQ10をオンすることにより、電圧V1よりも大きい第3の電圧部93の電圧V2を端子bに印加する。これにより、トランジスタQ4をオンしトランジスタQ10をオフすることによって電圧V1を端子bに印加する場合よりも大きな逆フィードバック力を操作部21に与えることができる。
【0075】
このとき、制御回路40は、入力部70に電圧V2が印加されることを防ぐため、フィードバック力を与えるときにはトランジスタ12をオフする。一方、制御回路40は、入力部70が操作部21の動きに応じたアナログ電圧OUTを検出できるように、操作部21の押し込み量を検出するときには、トランジスタ12をオンする。
【0076】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形、改良及び置換を加えることができる。上述の実施例それぞれの各部の構成を組み合わせてもよい。
【0077】
例えば、上述の実施例では、第1の電圧部91の電圧V1が第2の電圧部92の電圧よりも大きい場合を示したが、各トランジスタQの構成を変更することによって(例えば、Nチャネル素子をPチャネル素子に変更し、Pチャネル素子をNチャネル素子に変更することによって)、第1の電圧部91の電圧V1が第2の電圧部92の電圧よりも低くてもよい。
【符号の説明】
【0078】
10 電子機器
20 操作入力装置
21 操作部
22 コイル
23 支持部材
30 検出回路
40 制御回路
50 操作検出装置
60 操作検出制御装置
70 入力部
71〜82 出力部
91 第1の電圧部
92 第2の電圧部
93 第3の電圧部
i1 検出電流
i2,i3 駆動電流
C* キャパシタ
L1 インダクタ
OP* オペアンプ
Q* トランジスタ
R* 抵抗
VG* 制御信号
*は数字
【技術分野】
【0001】
本発明は、操作部の動きに応じてインダクタンスが変化するインダクタに接続される操作検出回路、該操作検出回路を備える操作検出装置、該操作検出回路を備える操作検出制御装置、該操作検出回路を備える電子機器に関する。
【背景技術】
【0002】
従来技術として、操作者による操作入力が作用する操作部を備え、操作部の動きを操作入力の変化として検出する操作入力装置が知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−3536号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の従来技術では、操作入力の作用による操作部の動きを検出することはできるものの、操作部を強制的に動かすことができない。
【0005】
そこで、本発明は、操作部の動きを検出できるだけでなく、操作部を強制的に動かすことができる、操作検出回路の提供を目的とする。また、本発明は、該操作検出回路を備える操作検出装置、該操作検出回路を備える操作検出制御装置、該操作検出回路を備える電子機器の提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明に係る操作検出回路は、
操作部の動きに応じてインダクタンスが変化するインダクタに接続される操作検出回路であって、
前記インダクタの第1の端部に接続される第1のスイッチング素子と、
前記インダクタの第2の端部に接続される抵抗と、
前記抵抗に並列に接続される第2のスイッチング素子とを備え、
前記第1のスイッチング素子がオンすることにより、前記インダクタと前記抵抗に電流を流すことによって、前記操作部の動きに応じた検出信号を前記第2の端部から出力し、
前記第1のスイッチング素子がオン且つ前記第2のスイッチング素子がオンすることにより、前記操作部を可動させる駆動電流を前記インダクタに流す、ことを特徴とするものである。
【0007】
また、上記目的を達成するため、本発明に係る操作検出装置は、
本発明に係る操作検出回路と、前記操作部及び前記インダクタを有する操作入力装置とを備えることを特徴とするものである。
【0008】
また、上記目的を達成するため、本発明に係る操作検出制御装置は、
本発明に係る操作検出回路と、制御回路とを備え、
前記制御回路は、
前記第1のスイッチング素子をオン/オフさせる制御信号を出力する第1の出力部と、
前記第2のスイッチング素子をオン/オフさせる制御信号を出力する第2の出力部と、
前記検出信号が入力される入力部とを有することを特徴とするものである。
【0009】
また、上記目的を達成するため、本発明に係る電子機器は、
本発明に係る操作検出制御装置と、前記操作部及び前記インダクタを有する操作入力装置とを備えることを特徴とするものである。
【発明の効果】
【0010】
本発明によれば、操作部の動きを検出できるだけでなく、操作部を強制的に動かすことができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態である電子機器10の構成を示したブロック図である。
【図2】操作部21を強制的に可動させる磁界が発生していない初期状態を示した図である。
【図3】操作部21を強制的に可動させる磁界Hが発生している状態を示した図である。
【図4】検出回路30及び制御回路40の第1の構成例である。
【図5】スイッチング素子Q1,Q2のオン/オフと出力電圧OUTと駆動電流i2との関係を示したタイムチャートである。
【図6】検出回路30及び制御回路40の第2の構成例である。
【図7】検出回路30及び制御回路40の第3の構成例である。
【図8】コンデンサC1,C2及び抵抗R2,R3の有無による駆動電流i2の違いを示したタイムチャートである。
【図9】検出回路30及び制御回路40の第4の構成例である。
【図10】検出回路30及び制御回路40の第5の構成例である。
【図11】検出回路30及び制御回路40の第6の構成例である。
【図12】大きさの異なる正フィードバック力を発生させたときのタイムチャートである。
【図13】検出回路30及び制御回路40の第7の構成例である。
【図14】検出回路30及び制御回路40の第8の構成例である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態を図面に従って説明する。
【0013】
図1は、本発明の一実施形態である電子機器10の構成を示したブロック図である。電子機器10は、操作入力装置20と、検出回路30と、制御回路40とを備えている。電子機器10は、操作入力装置20及び検出回路30を、操作検出装置50として備えている。また、電子機器10は、検出回路30及び制御回路40を、操作検出制御装置60として備えている。
【0014】
操作入力装置20は、X,Y,Z軸によって定まる直交座標系において、XY平面の法線方向側から入力される操作入力を操作部21で受ける操作インターフェイスである。操作入力は、操作者(ユーザ)の手指等によって直接又は間接的に操作部21に作用する。操作入力装置20及び検出回路30は、操作部21で受けた操作入力に応じて変化する出力信号を出力する。その出力信号に基づいて操作者による操作入力が制御回路40などの制御部(具体的には、マイクロコンピュータ)によって検出される。操作入力の検出によって、その検出された操作入力に対応する操作内容を制御回路40などの制御部に把握させることができる。
【0015】
操作入力装置20は、電子機器10に搭載又は接続される。電子機器10の具体例として、携帯端末(携帯電話、携帯ゲーム機、音楽や映像の携帯プレーヤーなど)、ゲーム機、パーソナルコンピュータ、車両用コンピュータ、汎用コンピュータ、操作コントローラ、マウス、電化製品などのホスト機器が挙げられる。操作入力装置20と電子機器10との接続形態は、有線接続でもよいし、無線接続でもよい。また、操作入力装置自体が、操作コントローラやマウスなどの電子機器であってもよい。
【0016】
操作入力装置20は、例えば、そのような電子機器10に搭載又は接続されるディスプレイの画面上に表示されるオブジェクトを、操作者が意図した操作内容に従って、移動させることができる。画面上に表示されるオブジェクトは、例えば、カーソルやポインタなどの指示表示である。キャラクターなどの表示物でもよい。また、操作者が所定の操作入力を与えることにより、その操作入力に対応する電子機器10の所望の機能を発揮させることができる。
【0017】
検出回路30は、制御回路40から出力される第1の制御信号に基づいて、操作入力の作用による操作部21の動きを検出し、その動きに応じた検出信号を制御回路40に対して出力する。また、検出回路30は、操作入力の検出機能の他に、制御回路40から出力される第2の制御信号に基づいて、操作部21を強制的に動かすことが可能な力を発生させる駆動回路としても機能する。操作部21が強制的に可動することで、操作部21に直接又は間接的に触れる操作者に対して力(フィードバック力ともいう)を与えることができる。
【0018】
図2,3は、操作入力装置20の動作説明図であって、操作入力装置20の構成を模式的に示した正面視図である。図2は、操作部21を強制的に可動させる磁界が発生していない初期状態を示しており、図3は、操作部21を強制的に可動させる磁界が発生している状態を示している。操作入力装置20は、操作部21と、コイル22と、支持部材23とを備えている。
【0019】
操作部21は、操作部21の操作面に直接又は間接的に作用する操作入力により押し込まれることによって、XY平面に対して任意の方向に傾倒(チルト)する方向キーである。操作部21は、傾倒せずにZ方向に移動するものでもよいし、傾倒したままZ方向に移動するものでもよい。操作部21は、操作部21に操作入力が作用していないときの初期位置に復帰するように付勢する支持部材23で支持されているとよい。支持部材23は、例えば、操作部21をその初期位置に復帰させる弾性力を操作部21に付与する部材であればよく、支持部材25の具体例として、スプリング、ゴム、スポンジなどの弾性部材が挙げられる。
【0020】
コイル22は、操作入力による操作部21の押し込みを検出する検出部として機能するインダクタである。コイル22は、例えば、操作部21の押し込み量を測定対象とする素子であって、操作部21の押し込み量に応じて変化するアナログ信号波形を検出回路30に対して出力するものである。
【0021】
コイル22は、コイル22と操作部21との距離に応じて変化するアナログ信号波形を出力する素子であるので、コイル22と操作部21との距離が操作部21の押し込み量に応じて変化するようにコイル22を配置することによって、操作部21の押し込み量を非接触で測定できる。
【0022】
コイル22は、操作部21の押し込み量に応じて自己インダクタンスが変化する。検出回路30は、コイル22の自己インダクタンスの変化を操作部21の押し込み量の変化として検出する。例えば、操作部21に対向する位置にコイル22を固定し、操作部21にヨーク材を取り付けることで、操作部21の押し込みによりコイル22周囲の透磁率が変化するため、コイル22の自己インダクタンスを容易に変化させることができる。操作部21自体をヨーク材にしてもよい。また、操作部21に対向する位置にヨーク材を固定し、操作部21にコイル22を取り付けても、操作部21の押し込み量に応じてコイル22の自己インダクタンスを容易に変化させることができる。
【0023】
検出回路30は、コイル22から出力されたアナログ信号波形から、コイル22の自己インダクタンスの変化に等価的に変化する物理量を検出することで、その物理量の検出値を、操作部21の押し込み量に対応する検出データとして、制御回路40に対して供給する。検出回路30は、例えば、制御回路40から出力される第1の制御信号に従って、コイル22に第1のパルス信号を供給することによって、コイル22から出力されたアナログ信号波形に、コイル22の自己インダクタンスの変化に等価的に変化する物理量を発生させる。
【0024】
例えば、コイル22の軸方向においてコイル22と操作部21との距離が近づくにつれて、コイル22周辺の透磁率が増加し、コイル22の自己インダクタンスが増加する場合を考える。コイル22の自己インダクタンスが増加するにつれて、第1のパルス信号の供給によりコイル22によって発生するパルス電圧波形の振幅も大きくなる。検出回路30は、その振幅をコイル22の自己インダクタンスの変化に等価的に変化する物理量として検出することで、その振幅の検出値を操作部21の押し込み量に対応する検出データとして制御回路40に対して供給できる。
【0025】
また、例えば、コイル22の自己インダクタンスが増加するにつれて、第1のパルス信号の供給によりコイル22に流れるパルス電流波形の傾きが緩やかになる。検出回路30は、その傾きをコイル22の自己インダクタンスの変化に等価的に変化する物理量として検出することで、その傾きの検出値を操作部21の押し込み量に対応する検出データとして制御回路40に対して供給できる。
【0026】
また、検出回路30は、制御回路40から出力される第2の制御信号に従って、コイル22に第1のパルス信号に対して位相が異なる第2のパルス信号を供給することによって操作部21を変位させる磁界Hを発生させる駆動回路としても機能する。検出回路30は、例えば、第2のパルス信号に対応するパルス電流がコイル22に流れることにより発生する磁界Hによって、操作部21を可動させる力Fを発生させる。
【0027】
検出回路30は、コイル22に流す電流の向きを変えることにより磁界Hの向きを変えることによって、コイル22に近づく方向に操作部21を動かす吸引力F(正フィードバック力ともいう)を発生させたり、コイル22から離れる方向に操作部21を動かす反発力F(逆フィードバック力ともいう)を発生させたりすることができる。もちろん、吸引力Fを逆フィードバック力と定義してもよいし、反発力Fを正フィードバック力と定義してもよい。検出回路30は、操作部21を可動させる力Fを連続的に発生させることで、操作部21を振動させたり、操作部21に触れる操作者に対してクリック感を与えるような動作を操作部21にさせたりすることができる。
【0028】
第2のパルス信号に対応するパルス電流は、操作部21を強制的に動かすことが可能な大きさの力Fを発生させるため、第1のパルス信号に対応するパルス電流よりも大きくする。また、第1のパルス信号及び第2のパルス信号は、矩形波でもよいし、三角波でもよいし、ノコギリ波でもよい。
【0029】
次に、検出回路30及び制御回路40の構成について説明する。
【0030】
図4は、検出回路30及び制御回路40の第1の構成例である。インダクタL1は、上述の操作入力装置20に構成される素子であり、上述の操作部21の動きに応じて自己インダクタンスが変化するコイル22に相当するものである。VG*(*は数字を表す)は、制御回路40から出力される制御信号を表し、OUTは、検出回路30から出力される検出信号の電圧(検出回路30の出力電圧)を表している。
【0031】
制御回路40は、トランジスタQ1をオン/オフさせる制御信号VG1を出力する出力部71と、トランジスタQ2をオン/オフさせる制御信号VG2を出力する出力部72と、操作部21の動きに応じてインダクタL1の自己インダクタンスが変化することにより、インダクタL1の片側の端部電圧に応じたアナログ検出信号が入力される入力部70とを有する。そのアナログ検出信号は、入力部70に構成されるA/Dコンバータに入力される。
【0032】
検出回路30は、インダクタL1の一方の端部である第1の端部(以下、端部aという)に接続されるトランジスタQ1と、インダクタL1のもう一方の端部である第2の端部(以下、端部bという)に接続される抵抗R1と、抵抗R1に並列に接続されるトランジスタQ2とを備えている。端部a,bには、インダクタL1の端部と同電位の部位(例えば、配線など)が含まれてよい。
【0033】
トランジスタQ1は、制御信号VG1が入力される制御電極と、第1の電圧部91に接続される第1の主電極と、端部aに接続される第2の主電極とを備えるスイッチング素子である。トランジスタQ2は、制御信号VG2が入力される制御電極と、第2の電圧部92に接続される第1の主電極と、端部bに接続される第2の主電極とを備えるスイッチング素子である。
【0034】
トランジスタQ1,Q2がMOSFETの場合、制御電極はゲートに相当し、第1の主電極はソースに相当し、第2の主電極はドレインに相当する。トランジスタQ1,Q2がIGBTの場合、制御電極はゲートに相当し、第1の主電極はエミッタに相当し、第2の主電極はコレクタに相当する。また、トランジスタQ1,Q2は、バイポーラトランジスタなどの他のスイッチング素子でもよい。後述の他のトランジスタQ*(*は数字を表す)も同様である。
【0035】
トランジスタQ1は、第1の電圧部91と端部aとの間に配置され、第1の電圧部91と端部aとの間の電流経路の導通/遮断を切り替えるPチャネル型の素子である。トランジスタQ2は、第2の電圧部92と端部bとの間に配置され、第2の電圧部92と端部bとの間の電流経路の導通/遮断を切り替えるNチャネル型の素子である。
【0036】
第1の電圧部91の電圧V1は、第2の電圧部92の電圧よりも高く設定され、例えば、電圧V1は正の電源電圧に相当し、第2の電圧部92の電圧はグランド電圧に相当する。
【0037】
抵抗R1は、第2の電圧部92と端部bとの間に配置されている。抵抗R1は、インダクタL1に接続されることによってインダクタL1をLとするLR回路を構成する。
【0038】
【表1】
検出回路30は、トランジスタQ1が制御信号VG1によってオンし且つトランジスタQ2が制御信号VG2によってオフすることにより、インダクタL1と抵抗R1にパルス状の検出電流i1を流す。パルス状の検出電流i1が流れることによって、操作部21の動きに応じた検出信号が、検出回路30の出力電圧OUTとして端部bから出力される。インダクタL1の自己インダクタンスが操作部21の押し込み量に応じて変化すると、図5に示されるように、その変化量に応じて出力電圧OUTのピーク電圧が変化する。制御回路40の入力部70は、そのピーク電圧の大きさを検出することによって、操作部21の押し込み量(操作者の操作入力量)を検出できる。
【0039】
一方、検出回路30は、トランジスタQ1が制御信号VG1によってオン且つトランジスタQ2が制御信号VG2によってオンすることにより、操作部21を可動させるパルス状の駆動電流i2をインダクタL1に流す。トランジスタQ2のオンにより、抵抗R1の両端が短絡されるため、検出電流i1よりも電流値の大きな駆動電流i2が、インダクタL1とトランジスタQ2に流れることによって、操作部21を動かすことが可能な強い磁界をインダクタL1の周囲に発生させて、操作部21を強制的に可動させることができる。
【0040】
図6は、検出回路30及び制御回路40の第2の構成例である。上述の構成と同様の構成についての説明は省略する。
【0041】
図6の検出回路30は、図4の構成に対して、端部aに接続されるトランジスタQ3,端部bに接続されるQ4が追加されている。
【0042】
制御回路40は、トランジスタQ3をオン/オフさせる制御信号VG3を出力する出力部73と、トランジスタQ4をオン/オフさせる制御信号VG4を出力する出力部74とを有する。
【0043】
検出回路30は、端部aに接続され抵抗R1に並列に接続されるトランジスタQ3と、端部bに接続されるトランジスタQ4とを備えている。トランジスタQ3は、制御信号VG3が入力される制御電極と、第2の電圧部92に接続される第1の主電極と、端部aに接続される第2の主電極とを備えるスイッチング素子である。トランジスタQ4は、制御信号VG4が入力される制御電極と、第1の電圧部91に接続される第1の主電極と、端部bに接続される第2の主電極とを備えるスイッチング素子である。
【0044】
トランジスタQ3は、第2の電圧部92と端部aとの間に配置され、第2の電圧部92と端部aとの間の電流経路の導通/遮断を切り替えるNチャネル型の素子である。トランジスタQ4は、第1の電圧部91と端部bとの間に配置され、第1の電圧部91と端部bとの間の電流経路の導通/遮断を切り替えるPチャネル型の素子である。
【0045】
【表2】
検出回路30は、操作部21の押し込み量を検出するときには、各トランジスタが各制御信号VGによって表2のようにオン又はオフすることにより、インダクタL1と抵抗R1にパルス状の検出電流i1を流すことによって、操作部21の動きに応じた検出信号を端部bから出力する。
【0046】
一方、検出回路30は、操作部21に正フィードバック力を与えるときには、各トランジスタが各制御信号VGによって表2のようにオン又はオフすることにより、操作部21を可動させるパルス状の駆動電流i2をインダクタL1に流す。トランジスタQ2のオンにより、抵抗R1の両端が短絡されるため、検出電流i1よりも電流値の大きな駆動電流i2が、インダクタL1とトランジスタQ2に流れることによって、操作部21をインダクタL1に近づける方向に動かすことが可能な強い磁界をインダクタL1の周囲に発生させて、操作部21を強制的に可動させることができる。
【0047】
また、検出回路30は、操作部21に逆フィードバック力を与えるときには、各トランジスタが各制御信号VGによって表2のようにオン又はオフすることにより、操作部21を可動させるパルス状の駆動電流i3をインダクタL1に流す。この場合、駆動電流i3は、駆動電流i2に対して逆向きに流れる。したがって、検出電流i1よりも電流値の大きな駆動電流i3が、インダクタL1とトランジスタQ3に流れることによって、操作部21をインダクタL1から離れる方向に動かすことが可能な強い磁界をインダクタL1の周囲に発生させて、操作部21を強制的に可動させることができる。
【0048】
図7は、検出回路30及び制御回路40の第3の構成例である。上述の構成と同様の構成についての説明は省略する。
【0049】
図7の検出回路30は、図6の構成に対して、トランジスタQ2の制御電極と端子b側の主電極との間にキャパシタC2が挿入され、トランジスタQ3の制御電極と端子a側の主電極との間にキャパシタC1が挿入されている。
【0050】
キャパシタC2の一方の端部は、抵抗R3とトランジスタQ2の制御電極との間に接続され、もう一方の端部は、端部bに接続されている。キャパシタC1の一方の端部は、抵抗R2とトランジスタQ3の制御電極との間に接続され、もう一方の端部は、端部aに接続されている。つまり、トランジスタQ2,Q3の制御電極と主電極との間に、RCフィルタが構成されている。
【0051】
このように、キャパシタC1,C2を挿入にすることによって、図8に示されるように、フィードバック力の付与時にインダクタL1に流れる駆動電流i2の応答が、キャパシタC1,C2が挿入されてない場合に比べて遅くなるため、操作部21にフィードバック力を付与する時に発生する異音(ノイズ音)を抑えることができる。
【0052】
図9は、検出回路30及び制御回路40の第4の構成例である。上述の構成と同様の構成についての説明は省略する。
【0053】
図9の検出回路30は、図7の構成に対して、トランジスタQ2をオフのまま固定可能な第1のオフ固定部と、トランジスタQ3をオフのまま固定可能な第2のオフ固定部とを備えている。図9には、第1のオフ固定部として、抵抗R6及びトランジスタQ6が例示され、第2のオフ固定部として、抵抗R4及びトランジスタQ5が例示されている。制御回路40は、トランジスタQ5,Q6をオン/オフさせる制御信号VG5を出力する出力部75を有する。検出回路30は、各トランジスタが各制御信号VGによって表3のようにオン又はオフすることにより、検出電流i1又は駆動電流i2又は駆動電流i3を流す。
【0054】
【表3】
制御回路40は、操作部21の押し込み量を検出するときに、制御信号VG5によって、トランジスタQ5,Q6をオンすることによって、トランジスタQ2,Q3のオフ状態を維持する。これにより、操作部21の押し込み量を検出するときに、キャパシタC2,C1を介してトランジスタQ2,Q3の制御電極の電圧が持ち上がって、トランジスタQ2,Q3がオンしてしまうことを防ぐことができる。
【0055】
また、図9の検出回路30は、図7の構成に対して、抵抗R1に流れる電流を遮断可能な遮断部を備えている。図9には、この遮断部として、抵抗R1と第2の電圧部92との間に挿入されたトランジスタQ7が例示されている。制御回路40は、トランジスタQ7をオン/オフさせる制御信号VG7を出力する出力部77を有する。トランジスタQ7は、制御信号VG7が入力される制御電極と、第2の電圧部92に接続される第1の主電極と、抵抗R1に接続される第2の主電極とを有する。トランジスタQ7は、端部bと抵抗R1との間に挿入されてもよい。
【0056】
制御回路40は、操作部21の押し込み量を検出するときは、トランジスタQ7をオンし、操作部21にフィードバック力を与えるときは、トランジスタQ7をオフさせる。これにより、操作部21にフィードバック力を与えるときに、抵抗R1にわずかに流れる電流によって、駆動電流i2又はi3の応答が速くなることにより、異音が発生することを抑制できる。
【0057】
図10は、検出回路30及び制御回路40の第5の構成例である。上述の構成と同様の構成についての説明は省略する。
【0058】
図10の検出回路30は、図6の構成に対して、オペアンプOP1,OP2を備えている。オペアンプOP2は、トランジスタQ2の端部b側の主電極が接続される非反転入力端子と、制御信号VG2が入力される反転入力端子と、トランジスタQ2の制御電極が接続される出力端子とを有している。オペアンプOP1は、トランジスタQ3の端部a側の主電極が接続される非反転入力端子と、制御信号VG3が入力される反転入力端子と、トランジスタQ3の制御電極が接続される出力端子とを有している。制御信号VG2は、抵抗R9とキャパシタC4から構成されるRCフィルタを介して、オペアンプOP2の反転入力端子に入力され、制御信号VG3は、抵抗R8とキャパシタC3から構成されるRCフィルタを介して、オペアンプOP1の反転入力端子に入力される。
【0059】
このように、オペアンプOP1,OP2を構成することによって、上述のキャパシタC1,C2を挿入した場合と同様に、操作部21にフィードバック力を付与する時に発生する異音を抑えることができる。すなわち、フィードバック力の付与時にインダクタL1に流れる駆動電流i2の応答を、オペアンプOP1,OP2が構成されてない場合に比べて遅くできる。また、オペアンプOP1,OP2を構成することによって、図9の構成から、トランジスタQ5,Q6と、抵抗R4,R6と、制御信号VG5を出力する出力部75とを削除することができる。
【0060】
図11は、検出回路30及び制御回路40の第6の構成例である。上述の構成と同様の構成についての説明は省略する。
【0061】
図11の検出回路30は、図7の構成に対して、トランジスタQ1のオンにより端部aに印加される電圧V1と異なる電圧V2を端部aに印加可能な電圧印加部を備えている。図11には、この電圧印加部として、トランジスタQ8が例示されている。制御回路40は、トランジスタQ8をオン/オフさせる制御信号VG8を出力する出力部78を有する。トランジスタQ8は、制御信号VG8が入力される制御電極と、第3の電圧部93に接続される第1の主電極と、端部aに接続される第2の主電極とを有する。第3の電圧部93の電圧V2は、例えば第1の電圧部91の電圧V1よりも大きく設定される。検出回路30は、各トランジスタが各制御信号VGによって表4のようにオン又はオフすることにより、検出電流i1又は駆動電流i2又は駆動電流i3を流す。
【0062】
【表4】
制御回路40は、制御部21に正フィードバック力を与えるときに、トランジスタQ1をオフしトランジスタQ8をオンすることにより、電圧V1よりも大きい第3の電圧部93の電圧V2を端子aに印加する。これにより、トランジスタQ1をオンしトランジスタQ8をオフすることによって電圧V1を端子aに印加する場合よりも大きな正フィードバック力を操作部21に与えることができる。
【0063】
図12は、大きさの異なる正フィードバック力を発生させたときのタイムチャートである。図12は、電圧V2を電圧V1の2倍に設定した場合に、クリック感を発生させるパターンの一例である。フィードバック力を連続に発生させることによって振動を与えることが可能となる。
【0064】
図13は、検出回路30及び制御回路40の第7の構成例である。上述の構成と同様の構成についての説明は省略する。
【0065】
図13の検出回路30は、電圧V1よりも大きな電圧V2がトランジスタQ8のオンにより端子aに印加されることによって、トランジスタQ1,Q4に並列に接続される不図示の保護ダイオード(又は、トランジスタQ1,Q4に内蔵されている寄生ダイオード)を介して、第1の電圧部91に電流が逆流することを防止する逆流防止部を備えている。図13には、この逆流防止部として、図11の構成に対して、ダイオードD1,D2が追加されている。
【0066】
また、図13の検出回路30は、電圧V1で動作する制御回路40から出力される制御信号VG8によって、電圧V2に接続されるトランジスタQ8がオン/オフできるように、レベルシフト回路を備えている。このレベルシフト回路は、トランジスタQ9と抵抗R10,R11から構成されている。
【0067】
検出回路30は、各トランジスタが各制御信号VGによって表5のようにオン又はオフすることにより、検出電流i1又は駆動電流i2又は駆動電流i3を流す。
【0068】
【表5】
制御回路40は、制御部21に正フィードバック力を与えるときに、トランジスタQ1をオフしトランジスタQ8をオンすることにより、電圧V1よりも大きい第3の電圧部93の電圧V2を端子aに印加する。これにより、トランジスタQ1をオンしトランジスタQ8をオフすることによって電圧V1を端子aに印加する場合よりも大きな正フィードバック力を操作部21に与えることができる。
【0069】
図14は、検出回路30及び制御回路40の第8の構成例である。上述の構成と同様の構成についての説明は省略する。
【0070】
図14の検出回路30は、図13の構成に対して、トランジスタQ4のオンにより端部bに印加される電圧V1と異なる電圧V2を端部bに印加可能な電圧印加部を備えている。図14には、この電圧印加部として、トランジスタQ10が例示されている。制御回路40は、トランジスタQ10をオン/オフさせる制御信号VG10を出力する出力部80を有する。
【0071】
また、図14の検出回路30は、電圧V1で動作する制御回路40から出力される制御信号VG10によって、電圧V2に接続されるトランジスタQ10がオン/オフできるように、レベルシフト回路を備えている。このレベルシフト回路は、トランジスタQ11と抵抗R12,R13から構成されている。
【0072】
また、図14の検出回路30は、電圧V1よりも大きな電圧V2が、トランジスタQ10のオンにより、電圧V1で動作する制御回路40の入力部70に印加されることを防止する電圧遮断部を有している。図14には、この電圧遮断部として、トランジスタQ12が例示されている。制御回路40は、トランジスタQ12をオン/オフさせる制御信号VG12を出力する出力部82を有する。
【0073】
検出回路30は、各トランジスタが各制御信号VGによって表6のようにオン又はオフすることにより、検出電流i1又は駆動電流i2又は駆動電流i3を流す。
【0074】
【表6】
制御回路40は、制御部21に逆フィードバック力を与えるときに、トランジスタQ4をオフしトランジスタQ10をオンすることにより、電圧V1よりも大きい第3の電圧部93の電圧V2を端子bに印加する。これにより、トランジスタQ4をオンしトランジスタQ10をオフすることによって電圧V1を端子bに印加する場合よりも大きな逆フィードバック力を操作部21に与えることができる。
【0075】
このとき、制御回路40は、入力部70に電圧V2が印加されることを防ぐため、フィードバック力を与えるときにはトランジスタ12をオフする。一方、制御回路40は、入力部70が操作部21の動きに応じたアナログ電圧OUTを検出できるように、操作部21の押し込み量を検出するときには、トランジスタ12をオンする。
【0076】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形、改良及び置換を加えることができる。上述の実施例それぞれの各部の構成を組み合わせてもよい。
【0077】
例えば、上述の実施例では、第1の電圧部91の電圧V1が第2の電圧部92の電圧よりも大きい場合を示したが、各トランジスタQの構成を変更することによって(例えば、Nチャネル素子をPチャネル素子に変更し、Pチャネル素子をNチャネル素子に変更することによって)、第1の電圧部91の電圧V1が第2の電圧部92の電圧よりも低くてもよい。
【符号の説明】
【0078】
10 電子機器
20 操作入力装置
21 操作部
22 コイル
23 支持部材
30 検出回路
40 制御回路
50 操作検出装置
60 操作検出制御装置
70 入力部
71〜82 出力部
91 第1の電圧部
92 第2の電圧部
93 第3の電圧部
i1 検出電流
i2,i3 駆動電流
C* キャパシタ
L1 インダクタ
OP* オペアンプ
Q* トランジスタ
R* 抵抗
VG* 制御信号
*は数字
【特許請求の範囲】
【請求項1】
操作部の動きに応じてインダクタンスが変化するインダクタに接続される操作検出回路であって、
前記インダクタの第1の端部に接続される第1のスイッチング素子と、
前記インダクタの第2の端部に接続される抵抗と、
前記抵抗に並列に接続される第2のスイッチング素子とを備え、
前記第1のスイッチング素子がオンすることにより、前記インダクタと前記抵抗に電流を流すことによって、前記操作部の動きに応じた検出信号を前記第2の端部から出力し、
前記第1のスイッチング素子がオン且つ前記第2のスイッチング素子がオンすることにより、前記操作部を可動させる駆動電流を前記インダクタに流す、ことを特徴とする、操作検出回路。
【請求項2】
前記第1の端部に接続される第3のスイッチング素子と、
前記第2の端部に接続される第4のスイッチング素子とを備え、
前記第3のスイッチング素子がオン且つ前記第4のスイッチング素子がオンすることにより、前記第1のスイッチング素子がオン且つ前記第2のスイッチング素子がオンするときと逆向きに、前記駆動電流を前記インダクタに流す、請求項1に記載の操作検出回路。
【請求項3】
前記第2のスイッチング素子の制御電極と前記第2のスイッチング素子の前記第2の端部側の主電極との間、及び前記第3のスイッチング素子の制御電極と前記第3のスイッチング素子の前記第1の端部側の主電極との間にキャパシタを備える、請求項2に記載の操作検出回路。
【請求項4】
前記第2のスイッチング素子をオフ固定可能な第1のオフ固定部と、
前記第3のスイッチング素子をオフ固定可能な第2のオフ固定部とを備える、請求項3に記載の操作検出回路。
【請求項5】
前記抵抗に流れる電流を遮断可能な遮断部を備える、請求項3又は4に記載の操作検出回路。
【請求項6】
前記第2のスイッチング素子の前記第2の端部側の主電極が接続される入力端と、前記第2のスイッチング素子の制御電極が接続される出力端とを有する第1のオペアンプと、
前記第3のスイッチング素子の前記第1の端部側の主電極が接続される入力端と、前記第3のスイッチング素子の制御電極が接続される出力端とを有する第2のオペアンプとを備える、請求項2に記載の操作検出回路。
【請求項7】
前記第1のスイッチング素子のオンにより前記第1の端部に印加される電圧と異なる電圧を前記第1の端部に印加可能な電圧印加部を備える、請求項1から6のいずれか一項に記載の操作検出回路。
【請求項8】
前記第4のスイッチング素子のオンにより前記第2の端部に印加される電圧と異なる電圧を前記第2の端部に印加可能な電圧印加部を備える、請求項7に記載の操作検出回路。
【請求項9】
前記第2のスイッチング素子の制御電極と前記第2のスイッチング素子の前記第2の端部側の主電極との間にキャパシタを備える、請求項1に記載の操作検出回路。
【請求項10】
前記第2のスイッチング素子をオフ固定可能なオフ固定部を備える、請求項9に記載の操作検出回路。
【請求項11】
前記抵抗に流れる電流を遮断可能な遮断部を備える、請求項9又は10に記載の操作検出回路。
【請求項12】
前記第2のスイッチング素子の前記第2の端部側の主電極が接続される入力端と、前記第2のスイッチング素子の制御電極が接続される出力端とを有するオペアンプを備える、請求項1に記載の操作検出回路。
【請求項13】
前記第1のスイッチング素子のオンにより前記第1の端部に印加される電圧と異なる電圧を前記第1の端部に印加可能な電圧印加部を備える、請求項9から12のいずれか一項に記載の操作検出回路。
【請求項14】
請求項1から13のいずれか一項に記載の操作検出回路と、前記操作部及び前記インダクタを有する操作入力装置とを備える、操作検出装置。
【請求項15】
請求項1に記載の操作検出回路と、制御回路とを備える操作検出制御装置であって、
前記制御回路は、
前記第1のスイッチング素子をオン/オフさせる制御信号を出力する第1の出力部と、
前記第2のスイッチング素子をオン/オフさせる制御信号を出力する第2の出力部と、
前記検出信号が入力される入力部とを有する、操作検出制御装置。
【請求項16】
請求項2に記載の操作検出回路と、制御回路とを備える操作検出制御装置であって、
前記制御回路は、
前記第1のスイッチング素子をオン/オフさせる制御信号を出力する第1の出力部と、
前記第2のスイッチング素子をオン/オフさせる制御信号を出力する第2の出力部と、
前記第3のスイッチング素子をオン/オフさせる制御信号を出力する第3の出力部と、
前記第4のスイッチング素子をオン/オフさせる制御信号を出力する第4の出力部と、
前記検出信号が入力される入力部とを有する、操作検出制御装置。
【請求項17】
請求項15に記載の操作検出制御装置と、前記操作部及び前記インダクタを有する操作入力装置とを備える電子機器。
【請求項18】
請求項16に記載の操作検出制御装置と、前記操作部及び前記インダクタを有する操作入力装置とを備える電子機器。
【請求項1】
操作部の動きに応じてインダクタンスが変化するインダクタに接続される操作検出回路であって、
前記インダクタの第1の端部に接続される第1のスイッチング素子と、
前記インダクタの第2の端部に接続される抵抗と、
前記抵抗に並列に接続される第2のスイッチング素子とを備え、
前記第1のスイッチング素子がオンすることにより、前記インダクタと前記抵抗に電流を流すことによって、前記操作部の動きに応じた検出信号を前記第2の端部から出力し、
前記第1のスイッチング素子がオン且つ前記第2のスイッチング素子がオンすることにより、前記操作部を可動させる駆動電流を前記インダクタに流す、ことを特徴とする、操作検出回路。
【請求項2】
前記第1の端部に接続される第3のスイッチング素子と、
前記第2の端部に接続される第4のスイッチング素子とを備え、
前記第3のスイッチング素子がオン且つ前記第4のスイッチング素子がオンすることにより、前記第1のスイッチング素子がオン且つ前記第2のスイッチング素子がオンするときと逆向きに、前記駆動電流を前記インダクタに流す、請求項1に記載の操作検出回路。
【請求項3】
前記第2のスイッチング素子の制御電極と前記第2のスイッチング素子の前記第2の端部側の主電極との間、及び前記第3のスイッチング素子の制御電極と前記第3のスイッチング素子の前記第1の端部側の主電極との間にキャパシタを備える、請求項2に記載の操作検出回路。
【請求項4】
前記第2のスイッチング素子をオフ固定可能な第1のオフ固定部と、
前記第3のスイッチング素子をオフ固定可能な第2のオフ固定部とを備える、請求項3に記載の操作検出回路。
【請求項5】
前記抵抗に流れる電流を遮断可能な遮断部を備える、請求項3又は4に記載の操作検出回路。
【請求項6】
前記第2のスイッチング素子の前記第2の端部側の主電極が接続される入力端と、前記第2のスイッチング素子の制御電極が接続される出力端とを有する第1のオペアンプと、
前記第3のスイッチング素子の前記第1の端部側の主電極が接続される入力端と、前記第3のスイッチング素子の制御電極が接続される出力端とを有する第2のオペアンプとを備える、請求項2に記載の操作検出回路。
【請求項7】
前記第1のスイッチング素子のオンにより前記第1の端部に印加される電圧と異なる電圧を前記第1の端部に印加可能な電圧印加部を備える、請求項1から6のいずれか一項に記載の操作検出回路。
【請求項8】
前記第4のスイッチング素子のオンにより前記第2の端部に印加される電圧と異なる電圧を前記第2の端部に印加可能な電圧印加部を備える、請求項7に記載の操作検出回路。
【請求項9】
前記第2のスイッチング素子の制御電極と前記第2のスイッチング素子の前記第2の端部側の主電極との間にキャパシタを備える、請求項1に記載の操作検出回路。
【請求項10】
前記第2のスイッチング素子をオフ固定可能なオフ固定部を備える、請求項9に記載の操作検出回路。
【請求項11】
前記抵抗に流れる電流を遮断可能な遮断部を備える、請求項9又は10に記載の操作検出回路。
【請求項12】
前記第2のスイッチング素子の前記第2の端部側の主電極が接続される入力端と、前記第2のスイッチング素子の制御電極が接続される出力端とを有するオペアンプを備える、請求項1に記載の操作検出回路。
【請求項13】
前記第1のスイッチング素子のオンにより前記第1の端部に印加される電圧と異なる電圧を前記第1の端部に印加可能な電圧印加部を備える、請求項9から12のいずれか一項に記載の操作検出回路。
【請求項14】
請求項1から13のいずれか一項に記載の操作検出回路と、前記操作部及び前記インダクタを有する操作入力装置とを備える、操作検出装置。
【請求項15】
請求項1に記載の操作検出回路と、制御回路とを備える操作検出制御装置であって、
前記制御回路は、
前記第1のスイッチング素子をオン/オフさせる制御信号を出力する第1の出力部と、
前記第2のスイッチング素子をオン/オフさせる制御信号を出力する第2の出力部と、
前記検出信号が入力される入力部とを有する、操作検出制御装置。
【請求項16】
請求項2に記載の操作検出回路と、制御回路とを備える操作検出制御装置であって、
前記制御回路は、
前記第1のスイッチング素子をオン/オフさせる制御信号を出力する第1の出力部と、
前記第2のスイッチング素子をオン/オフさせる制御信号を出力する第2の出力部と、
前記第3のスイッチング素子をオン/オフさせる制御信号を出力する第3の出力部と、
前記第4のスイッチング素子をオン/オフさせる制御信号を出力する第4の出力部と、
前記検出信号が入力される入力部とを有する、操作検出制御装置。
【請求項17】
請求項15に記載の操作検出制御装置と、前記操作部及び前記インダクタを有する操作入力装置とを備える電子機器。
【請求項18】
請求項16に記載の操作検出制御装置と、前記操作部及び前記インダクタを有する操作入力装置とを備える電子機器。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−106105(P2013−106105A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246905(P2011−246905)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000006220)ミツミ電機株式会社 (1,651)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000006220)ミツミ電機株式会社 (1,651)
【Fターム(参考)】
[ Back to top ]