
操作端末
【課題】ユーザの身体に装着されて使用される操作端末であって、小型化可能で身体への装着も容易でありながら、少なくとも3つ以上の状態を検出して多種類の信号を操作対象に送信可能な操作端末を提供すること。
【解決手段】遠隔操作端末1は、ユーザの人差し指が挿入されるトロイダルコイル3を備え、指に当接した印加用電極5,7に発振回路11から電気信号を印加してトロイダルコイル3の発生電圧を参照することで、人差し指と親指と接触/離間を検出する。また、加速度センサ13は、制御ユニット10に加わる衝撃を加速度として検出する。このため、遠隔操作端末1が装着された人差し指と、その指と同じ手の親指との接触打指がなされた場合には、その衝撃を加速度センサ13が検出し、前記接触も検出される。親指と中指との接触打指がなされた場合は、加速度センサ13による衝撃の検出のみがなされる。
【解決手段】遠隔操作端末1は、ユーザの人差し指が挿入されるトロイダルコイル3を備え、指に当接した印加用電極5,7に発振回路11から電気信号を印加してトロイダルコイル3の発生電圧を参照することで、人差し指と親指と接触/離間を検出する。また、加速度センサ13は、制御ユニット10に加わる衝撃を加速度として検出する。このため、遠隔操作端末1が装着された人差し指と、その指と同じ手の親指との接触打指がなされた場合には、その衝撃を加速度センサ13が検出し、前記接触も検出される。親指と中指との接触打指がなされた場合は、加速度センサ13による衝撃の検出のみがなされる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ユーザの身体に装着されて使用される操作端末に関する。
【背景技術】
【0002】
従来、ユーザの身体に装着されて使用される操作端末としては、指に装着されて使用される指輪状の身体装着型入力装置が提案されている(例えば、特許文献1参照)。この身体装着型入力装置では、例えば当該身体装着型入力装置が装着された人差し指の先端と、その人差し指と同じ手の親指の先端とが接触して閉環状の閉じた導体路が形成された場合に、そのことを電気的に検出して、機器の操作等に応用することができる。
【0003】
より具体的に説明すれば、前記身体装着型入力装置は、指の軸方向に沿って並列配置された、環状電極で構成される一対の印加用電極と、電流センサとを備え、電流センサが、電極に囲まれた領域の外部に設けられている。前記一対の印加用電極間には、交流信号が印加され、人差し指の先端と親指の先端とが接触すると、電流センサによる電流計測地点には、電流が流れる。一方、人差し指の先端と親指の先端とが接触していない場合には、電流センサによる電流計測地点に電流は流れない。前記身体装着型入力装置では、このような現象の発生を利用して、人差し指と親指とが接触しているか否かを判定する。そして、判定結果に従って、操作対象としての外部装置に対してコマンドを送信するのである。
【0004】
ところが、特許文献1の装置では、親指と人差し指との接触または離間といった2つの状態しか検出できない。このため、特許文献1の装置では、操作対象に多種類のコマンド(信号)を送信するのは困難である。
【0005】
一方、ユーザの身体に装着されて使用される端末装置として、5本の指のどの指で床などの支持面を叩いたかを検出手段な装置も提案されている(例えば、特許文献2参照)。すなわち、特許文献2には、マイクを使用したセンサを5本の指のそれぞれに装着して、各指が支持面を叩いたときに発生する音を個々に検出する装置が提案されている。また、特許文献2には、マイクを使用したセンサを手首に1つだけ装着して、各指の骨格等の違いによって生じる周波数分布等の特徴に基づいて、どの指で支持面が叩かれたか判断する装置も提案されている。この特許文献2に記載の各装置では、少なくとも3つ以上の状態を検出して多種類の信号を操作対象に送信可能である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許4683148号公報
【特許文献2】特開平7−121294号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところが、特許文献2における前者の装置では、5本の指のそれぞれにセンサを装着する必要があるため、身体への着脱が煩わしい。一方、特許文献2における後者の装置では、周波数分布等を分析してどの指が操作されたかを検出するためには、シグナルプロセッサで信号解析する必要が生じる。このため、当該装置では、装置の小型化が困難である。なお、この装置において、手首に装着されるセンサが収音した音声をそのまま操作対象に送信し、操作対象側で周波数分布等の分析を行うことも考えられる。しかしながら、その場合、センサと操作対象との間で通信される無線情報が大規模化し、無線通信に要する消費電力が増大する。
【0008】
そこで、本発明は、ユーザの身体に装着されて使用される操作端末であって、小型化可能で身体への装着も容易でありながら、少なくとも3つ以上の状態を検出して多種類の信号を操作対象に送信可能な操作端末を提供することを目的としてなされた。
【課題を解決するための手段】
【0009】
前記目的を達するためになされた本発明は、ユーザの身体に装着されて使用される操作端末であって、前記身体のうち、接触及び離間可能な2つの身体部位の身体表面を通じた接触によって閉環状の閉じた導体路が形成される身体部位の表面に、配置され、前記導体路が形成されているか否かを検出することにより前記2つの身体部位が接触しているか否かを検出する接触検出手段と、当該操作端末に加わる衝撃を検出する衝撃検出手段と、前記接触検出手段の検出結果と前記衝撃検出手段の検出結果とに基づき、ユーザの動作を判別する動作判別手段と、前記動作判別手段が判別したユーザの動作に対応した信号を操作対象に送信する送信手段と、を備えたことを特徴としている。
【0010】
このように構成された本発明の操作端末では、接触検出手段は、接触及び離間可能な2つの身体部位の身体表面を通じた接触によって閉環状の閉じた導体路が形成される身体部位の表面に配置されている。このため、前記2つの身体部位が接触して前記閉環状の閉じた導体路が形成されているか、前記2つの身体部位が離間して前記導体路が形成されていないかによって、接触検出手段における電気的な環境は変化する。そこで、接触検出手段は、前記導体路の形成されているか否かを検出することにより前記2つの身体部位が接触しているか否かを検出する。また、衝撃検出手段は、当該操作端末に加わる衝撃を検出する。
【0011】
この結果、前記接触検出手段の検出結果と前記衝撃検出手段の検出結果との組み合わせは、少なくとも3種類以上の態様を取り得る。このため、前記各検出結果に基づいてユーザの動作を判別する動作判別手段は、ユーザの動作を少なくとも3種類以上に判別することができる。送信手段は、前記動作判別手段が判別したユーザの動作に対応した信号を操作対象に送信するので、少なくとも2種類以上の多種類の信号を操作対象に送信することができる。しかも、本発明の操作端末は、前述のように接触検出手段と衝撃検出手段とを備えた簡単な構成を有しており、各指毎に装着するなどの必要もないので、良好に小型化可能で身体への装着も容易である。
【0012】
なお、前記接触検出手段は、当該接触検出手段が配置された前記身体部位の表面に前記導体路に沿って電気信号を印加する信号印加手段と、前記印加手段によって印加されて前記導体路に沿って閉環状に流れる前記電気信号を検出する信号検出手段と、を備えたものであってもよい。
【0013】
その場合、当該接触検出手段が配置された前記身体部位の表面に前記導体路に沿って信号印加手段が電気信号を印加すると、前記導体路が形成されていればその導体路に沿って当該電気信号が流れるが、前記導体路が形成されていない場合は流れない。そこで、前記印加手段によって印加されて前記導体路に沿って閉環状に流れる前記電気信号を信号検出手段を介して検出すれば、前述のように前記導体路が形成されているか否か、すなわち前記2つの身体部位が接触しているか否かを、検出することができる。
【0014】
また、前記動作判別手段は、前記接触検出手段の検出結果と前記衝撃検出手段の検出結果との各時点における組み合わせに基づいて、前記ユーザの動作を判別してもよい。この場合、次のように種々のユーザの動作を判別することができる。例えば、前記2つの身体部位が離間した状態から移動して接触した時点では、接触検出手段が前記接触を検出すると同時に衝撃検出手段も衝撃を検出する。前記2つの身体部位が接触を継続している時点では、接触検出手段は前記接触を検出し続けるものの衝撃検出手段は衝撃を検出しない。更に、前記2つの身体部位は離間したままで、前記接触検出手段を通る導体路は形成しない他の身体部位の接触が起こってその衝撃が衝撃検出手段に伝わると、接触検出手段は前記接触を検出しないが衝撃検出手段は衝撃を検出する。このように、接触検出手段の検出結果と衝撃検出手段の検出結果との各時点における組み合わせに基づいてユーザの動作を判別する場合、種々のユーザの動作を判別することができる。
【0015】
また、前記2つの身体部位は同じ手の異なる2本の指であり、本発明の操作端末はいずれか一方の前記指に装着される指輪状に構成されてもよい。その場合、操作端末は、指輪状であるため装着が容易で、手の指の動作によって前記多種類の信号を操作対象に送信することができるので操作性にも優れている。
【0016】
また、前記送信手段は、前記信号を無線によって前記操作対象に送信してもよく、その場合、操作端末と操作対象とを直接接続する必要がなく、操作端末の操作性を一層向上させることができる。
【図面の簡単な説明】
【0017】
【図1】第1実施例の遠隔操作端末における電極等の配置態様を表すブロック図である。
【図2】その遠隔操作端末における計測系の等価回路図である。
【図3】その遠隔操作端末の手指判別部の処理を表すフローチャートである。
【図4】第2実施例の遠隔操作端末の透過斜視図(a)及び電極等の配置態様を表す説明図(b)である。
【図5】その遠隔操作端末を腕輪として使用する例を示した図である。
【図6】第3実施例の遠隔操作端末の要部構成を表すブロック図(a)及び電極等の配置態様を表す説明図(b)である。
【図7】第5実施例の遠隔操作端末の要部構成を表すブロック図(a)及び電極等の配置態様を表す説明図(b)である。
【発明を実施するための形態】
【0018】
以下に本発明の実施例について、図面と共に説明する。
[第1実施例]
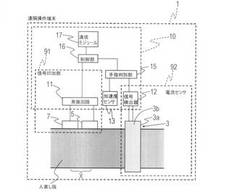
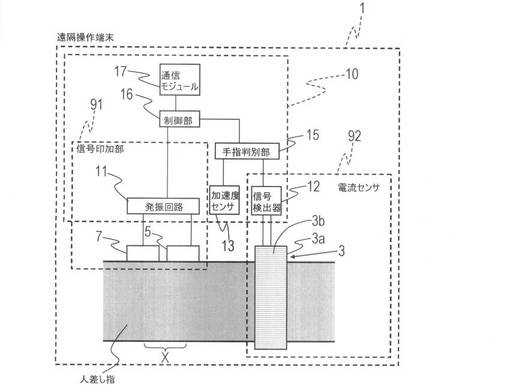
図1は、第1実施例の遠隔操作端末1における電極等の配置態様を表すブロック図である。図1に示すように、本実施例の遠隔操作端末1は、ユーザの人差し指に装着される指輪状に構成されており、その人差し指が挿入される環状のトロイダルコイル3を備えている。また、遠隔操作端末1は、そのトロイダルコイル3から前記人差し指の軸方向に離れた位置に、一対の印加用電極5,7を、前記軸方向に沿って並列に備えている。更に、トロイダルコイル3には、その外周の一部に制御ユニット10が固定されており、前述の印加用電極5,7は、その制御ユニット10に固定されることにより、トロイダルコイル3へ挿入された指の表面に当接するように配置されている。
【0019】
なお、トロイダルコイル3と制御ユニット10と印加用電極5,7とは、物理的に直接固定されている必要はなく、樹脂等によって指輪状に構成されたケーシングを介して一体化されていてもよい。そして、その場合、制御ユニット10の収納部外形は、装飾用指輪の飾り部分を模したものとしてもよい。また、トロイダルコイル3と一対の印加用電極5,7との位置関係は、どちらが人差し指の根本側に配置されてもよい。すなわち、遠隔操作端末1を指に装着して使用するに当たって、遠隔操作端末1の向きは不問である。
【0020】
印加用電極5,7は、制御ユニット10の発振回路11に電気的に接続されており、その発振回路11から両者の間に交流の電気信号が印加される。また、人差し指の当該トロイダルコイル3に挿入された箇所を前記軸方向(すなわち、トロイダルコイル3と交差する方向)に流れる電流に応じた電圧が、トロイダルコイル3に発生し、その電圧は制御ユニット10の信号検出器12に入力される。具体的には、トロイダルコイル3は、ドーナツ状のコア3aにコイル3bが巻回された電流トランスとして構成され、電磁誘導により、前記軸方向に流れる電流に応じた電圧がコイル3bの両端に発生する。その電圧が、信号検出器12によって検出される。
【0021】
ここで、本実施例において前記軸方向に流れる電流をトロイダルコイル3で検出しているのは、当該電流が、以下に述べるように印加用電極5,7を通じて印加された交流の電気信号であるためである。但し、印加用電極5,7間には、直流信号を印加してもよく、この場合、人差し指の前記箇所を軸方向に流れる電流は、ホール素子を用いて検出することができる。具体的には、切れ目を有する環状のコアの当該切れ目に、ホール素子が配置されてなるセンサを用いることができ、切れ目を構成するコアの両端間に生じる磁場がホール素子に作用することを利用して、前記箇所を軸方向に流れる電流を検出することができる。
【0022】
なお、以下の説明において、一対の印加用電極5,7と発振回路11とをまとめて信号印加部91といい、トロイダルコイル3と信号検出器12とをまとめて電流センサ92という場合がある。
【0023】
続いて、制御ユニット10の詳細構成を説明する前に、遠隔操作端末1の動作原理を説明する。ここで、遠隔操作端末1が人差し指に装着された状態で、ユーザの身体運動により、その人差し指が同じ手の親指と接触/離間される場合を考える。
【0024】
この場合、人差し指と親指とが離間された状態では、印加用電極5,7間に信号を印加しても、前記電気信号は、基本的に、印加用電極5,7に挟まれた身体部位(図1に示される領域X)を流れるのみで、電流センサ92の検出電圧はゼロになる。
【0025】
一方、人差し指と親指とが接触した状態では、親指、人差し指、並びに、親指及び人差し指の根元で親指と人差し指とを結ぶ身体部位によって、閉環状の閉じた導体路が形成され、トロイダルコイル3は、親指と人差し指との接触点が介在した状態で電気的に印加用電極5,7に挟まれた状態となる。よって、トロイダルコイル3の挿入箇所には前記電気信号が流れて、その出力電圧(実効値)は、ゼロより大きい値となる。
【0026】
本実施例では、このような現象を利用して、電流センサ92の検出電圧に基づき、ユーザの身体運動によって親指と人差し指とが接触または離間したことをユーザの動作として判別する。
【0027】
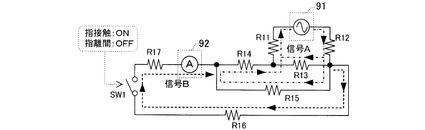
なお、図2は、印加用電極7を人差し指の根本側にして遠隔操作端末1を装着した場合の、トロイダルコイル3及び印加用電極5,7に係る遠隔操作端末1における計測系の等価回路図である。但し、図2では、印加用電極5,7に印加される電気信号が伝播する身体部位の抵抗を、説明を簡単するため集中定数系で表現する。具体的に、図2に示す抵抗R11は、印加用電極5と指との間の接触抵抗を表し、抵抗R12は、印加用電極7と指との間の接触抵抗を表す。また、抵抗R13は、印加用電極5,7に挟まれた領域X(図1参照)に対応する身体部位表面の電気抵抗を表し、抵抗R14は、トロイダルコイル3から印加用電極5までの身体部位表面の電気抵抗を表す。
【0028】
この他、抵抗R15は、身体内部を通じて印加用電極5よりもトロイダルコイル3側に回りこみながら印加用電極5,7間を伝播する電気信号の当該伝播経路(身体内部)の電気抵抗を表し、抵抗R16は、印加用電極7から人差し指の付け根を介して親指の先端に至る身体部位の電気抵抗を表し、抵抗R17は、人差し指の先端からトロイダルコイル3までの身体部位の電気抵抗を表す。また、図2において、スイッチSW1は、人差し指と親指との接触/離間を表現したものであり、交流電源は、信号印加部91に対応し、電流計は、電流センサ92に対応する。
【0029】
また、図2に示す一点鎖線は、人差し指と親指との接触/離間に拘らず、常に印加用電極5,7間を伝播する電気信号Aの流れを示したものであり、破線は、人差し指と親指とが接触した際に、印加用電極5,7間を伝播する電気信号Bの流れを示したものである。
【0030】
本実施例の遠隔操作端末1を人差し指に装着して、親指との接触/離間を行うと、このように電気信号の伝播態様は変化し、電流センサ92の検出電圧も変化する。本実施例の遠隔操作端末1は、このように変化する発生電圧に基づき、ユーザの身体運動によって指が接触/離間したことを検知する。
【0031】
図1に戻って、制御ユニット10は、前述の発振回路11,信号検出器12の他に、加速度センサ13,手指判別部15,制御部16,通信モジュール17を備えている。加速度センサ13は、制御ユニット10に加わる衝撃を加速度として検出する。このため、遠隔操作端末1が装着された人差し指と、その指と同じ手の親指とが離間した状態から移動して接触したいわゆる接触打指がなされた場合には、その衝撃を加速度センサ13が検出する。また、加速度センサ13は、その他の接触打指、例えば、遠隔操作端末1が装着された人差し指と同じ手の親指,中指の接触打指による衝撃も同様に検出する。
【0032】
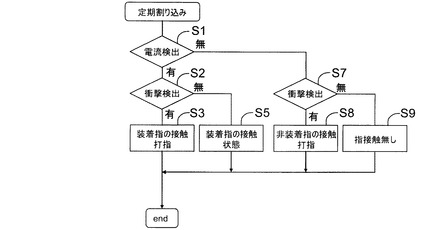
そこで、手指判別部15は、信号検出器12と加速度センサ13とから送られる信号に基づいて、ユーザの前記手の指の動作を次のように判別する。図3は、手指判別部15において定期的に実行される定期割り込み処理を表すフローチャートである。なお、手指判別部15及び制御部16は、CPU,ROM,RAMを中心としたマイクロコンピュータとして構成されている。また、制御部16は、発振回路11に前記電気信号の出力を定期的に指令すると共に、その指令の出力に同期して、手指判別部15にこの処理の実行を指示する。その指示がなされたときに、手指判別部15のCPUはその手指判別部15のROMに記憶されたプログラムに基づいて図3の処理を実行する。
【0033】
図3に示すように、この処理では、先ず、S1(Sはステップを表す:以下同様)にて、人差し指を前述のように流れる電流がトロイダルコイル3を介して検出されたか否かが判断される。電流が検出された場合は(S1:有)、処理はS2へ移行し、加速度センサ13を介して衝撃が検出された否かが判断され、衝撃が検出された場合は(S2:有)、処理はS3へ移行する。S3では、装着指(人差し指)が親指と接触打指されたと判断されて、処理が一旦終了する。なお、前記人差し指と親指とがもう一方の手の手のひらに同時に当接した場合などにも、同様に前記電流が検出され(S1:有)、衝撃も検出されるが(S2:有)、S3では、これらの条件が成立したときには、親指と人差し指との接触打指とみなすのである。この点は、後述のS5,S8,S9も同様である。
【0034】
一方、前記電流が検出されたが(S1:有)、衝撃が検出されなかった場合は(S2:無)、処理はS5へ移行する。S5では、装着指(人差し指)が親指と接触状態を維持しているものと判断されて、処理が一旦終了する。また、前記電流が検出されなかった場合は(S1:無)、処理はS7へ移行し、S2と同様に前記衝撃が検出されたか否かが判断される。そして、衝撃が検出された場合は(S2:有)、処理はS8へ移行し、中指(非装着指)が親指と接触打指されたものと判断されて、処理が一旦終了する。更に、前記電流も検出されず(S1:無)、衝撃も検出されなかった場合は(S7:無)、処理はS9へ移行し、遠隔操作端末1が装着された手において接触した指はないものと判断されて、処理が一旦終了する。
【0035】
以上のようにして、手指判別部15は、信号検出器12と加速度センサ13とから送られる信号に基づいて、接触状態にある手指を判別する。すると、制御部16は、通信モジュール17を介して、その判別結果に対応した信号を操作対象に送信する。ここで、操作対象としては種々の対象が考えられ、その操作対象に応じて前記送信される信号も様々である。
【0036】
例えば、操作対象がテレビジョン受像器の場合、人差し指が親指と接触打指される毎に音量を変更するコマンド(信号)を送信し、中指が親指と接触打指される毎にチャンネルを変更するコマンド(信号)を送信するといった制御が考えられる。また、操作対象がエアコンの場合、人差し指が親指と接触打指される毎に設定温度を変更するコマンド(信号)を送信し、中指が親指と接触打指される毎に除湿,冷房,暖房等の運転モードを変更するコマンド(信号)を送信するといった制御が考えられる。
【0037】
このように、本実施例の遠隔操作端末1では、ユーザの動作を少なくとも3種類以上に判別することができ、その動作に対応した少なくとも2種類以上の信号(コマンド)を操作対象に送信することができる。しかも、遠隔操作端末1は、前述のように簡単な構成を有しており、各指毎に装着するなどの必要もないので、良好に小型化可能で身体への装着も容易である。
【0038】
また、図3では詳記していないが、本実施例では、図3の処理による判断結果(S3〜S9のいずれか)の各時点における変化を参照することで、更に多種類の信号を操作対象に送信することも可能となる。すなわち、図3の処理が実行される毎の前記判断結果が、S5からS9を経ずにS3に変わった場合、人差し指と親指とを接触状態に維持したままで、更にその人差し指または親指が中指で接触打指されたと判断することができる。前述のテレビジョン受像器の例であれば、このような接触打指がなされる毎に、画面の明るさを変更するコマンド(信号)を送信するなどしてもよい。また、人差し指と親指とを接触状態に維持したままで、更にその人差し指または親指が中指で接触打指されたことが判断可能な場合、操作対象がパーソナルコンピュータ等である場合に、人差し指と親指との接触をShiftキー代わりに利用してもよい。
【0039】
なお、発振回路11は、印加用電極5,7に挟まれた身体部位に交流の電気信号(交流電圧)を印加するものであり、定電圧駆動または定電流駆動されるものであれば、種々のものが適用できる。例えば、前記電気信号は、三角波にされてもよいし、正弦波、矩形波、ノコギリ波などにされてもよい。
【0040】
また、信号検出器12は、トロイダルコイル3に発生する電圧を検出するものであれば種々のものが適用できる。例えば、本願出願人が前述の特許文献1に示したように、トロイダルコイル3の両端に接続されて、その両端電圧を増幅した増幅信号を出力する差動増幅回路と、その差動増幅回路の出力信号(交流信号)を整流して直流信号に変換する整流器と、を備え、整流器からの出力信号を、デジタル値に変換した上で電流計測値として手指判別部15に出力するものであってもよい。この場合、トロイダルコイル3の両端に生じる電圧の実効値が、そのトロイダルコイル3が装着される身体部位の軸方向に流れる電流計測値(実効値)に変換されて出力される。その他にも、信号検出器12としては、前記特許文献1に開示した種々のものが適用できる。
【0041】
[第2実施例]
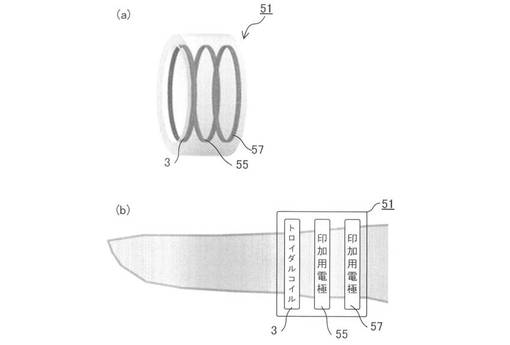
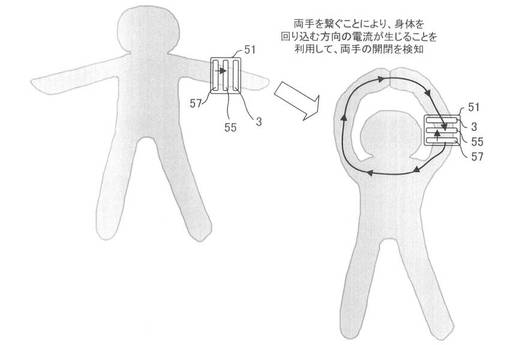
なお、第1実施例では、トロイダルコイル3のみに人差し指が挿入され、印加用電極5,7は人差し指の表面に当接するものとしたが、図4(a),(b)に示す第2実施例の遠隔操作端末51のように、印加用電極55,57も円環状に構成して人差し指が挿入されるようにしてもよい。また、上記各実施例においては、遠隔操作端末1,51を人差し指に装着に装着するための指輪形状としたが、他の指に装着されてもよく、更に、大型化して腕に装着可能な腕輪形状とされてもよい。図5は、遠隔操作端末51をそのように変形した例を表している。図5に示すように、この場合、例えば、両手を繋ぐ動作及び離す動作により、操作対象を遠隔操作することが可能である。更に、このような遠隔操作端末51は、脚に装着されてもよい。
【0042】
[第3実施例]
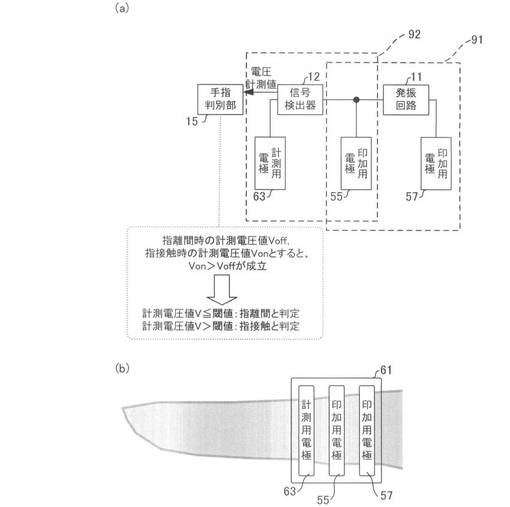
また、図6(a)は、信号印加部91及び電流センサ92の変形例を表すブロック図であり、図6(b)はその信号印加部91,電流センサ92を採用した第3実施例の遠隔操作端末61の電極等の配置態様を表す説明図である。図6に示すように、この遠隔操作端末61は、第2実施例と同様の印加用電極55,57を備え、トロイダルコイル3の代わりに円環状の計測用電極63を備えている。
【0043】
この場合、信号検出器12は、印加用電極55,57のうち計測用電極63側の印加用電極55と、計測用電極63との間の電圧を計測電圧値Vとして検出する。そして、手指判別部15における前記親指と人差し指との接触に係る判断は、次のように変化する。すなわち、信号検出器12から入力される電圧計測値Vが、予め定められた閾値を超えていると、指が接触していると判定し、電圧計測値Vが前記閾値以下であると、指が離間していると判定するのである。
【0044】
[第4実施例]
また、図6と同様の回路において、信号検出器12は、印加用電極55と計測用電極63との間に生じる電圧(交流信号)に基づき、計測用電極63から入力される交流信号の、印加用電極55,57間に印加された交流信号に対する位相遅れ(即ち、遅れ方向を正値とした位相差)を計測してもよい。この場合、前記計測された位相遅れ計測値が、予め定められた閾値を超えていると、指が接触していると判定し、位相遅れ計測値が、閾値以下であると、指が離間していると判定することができる。
【0045】
[第5実施例]
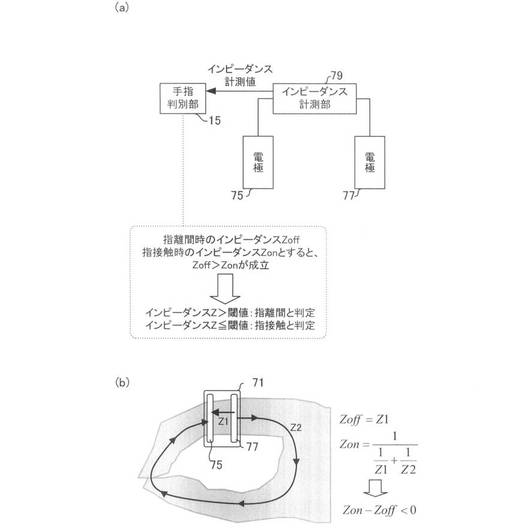
更に、信号印加部91及び電流センサ92は、必ずしも別体の回路構成でなくてもよい。続いて、そのような構成を採用した第5実施例について説明する。図7(a)は、第5実施例における信号印加部91及び電流センサ92に対応する構成を表すブロック図であり、図7(b)はその構成を採用した第5実施例の電極等の配置態様を表す説明図である。図7に示すように、この遠隔操作端末71は、第2〜第4実施例の印加用電極55,57と同様の環状の電極75,77を備えている一方、トロイダルコイル3も計測用電極63も備えていない。
【0046】
図7(a)に示すように、この遠隔操作端末71は、電極75,77間のインピーダンスを計測して、このインピーダンス計測値を手指判別部15に入力するインピーダンス計測部79を備えている。図7(b)に示すように、指が接触されている状態でインピーダンス計測部79により計測されるインピーダンスZonは、指の接触点を介さずに電気信号が伝播する電極75,77間の経路のインピーダンスZ1と、指の接触点を介して電気信号が伝播する電極75,77間の経路のインピーダンスZ2とを、並列接続したときのインピーダンスZ1・Z2/(Z1+Z2)に等しくなる(Zon=Z1・Z2/(Z1+Z2))。これに対し、指が離間している状態でインピーダンス計測部79により計測されるインピーダンスZoffは、上記インピーダンスZ1に等しくなる(Zoff=Z1)。
【0047】
従って、指が離間されている状態でインピーダンス計測部79により計測されるインピーダンスZoffと、指が接触されている状態でインピーダンス計測部79により計測されるインピーダンスZonとの間には、不等式Zoff>Zonが成立する。そこで、手指判別部15における前記親指と人差し指との接触に係る判断は、次のような処理とすることができる。すなわち、インピーダンス計測部79から入力されるインピーダンス計測値が、予め定められた閾値を超えていると、指が離間していると判定し、インピーダンス計測値が、閾値以下であると、指が接触していると判定するのである。
【0048】
[その他]
また、本発明は、上記実施例に限定されるものではなく、種々の態様を採ることができる。例えば、指の接触/離間を検出する接触検出手段としての構成は、前記各実施例の構成の他、前記特許文献1や特開2010−282345号公報において本願出願人が提案している各種構成を採用することができる。
【0049】
また、上記各実施例では、操作対象へコマンドを無線出力するようにしたが、有線にてコマンドを出力する構成にされてもよい。但し、コマンドを無線出力する場合の方が、遠隔操作端末1〜71の操作性が向上する。
【0050】
[発明との対応]
なお、前記実施形態において、「特許請求の範囲」に記載の操作端末は遠隔操作端末1〜71に対応する。また、信号印加手段は信号印加部91に、電流センサ92は信号検出手段に、それぞれ対応し、両者が接触検出手段に対応する。更に、加速度センサ13は衝撃検出手段に、手指判別部15は動作判別手段に、通信モジュール17は送信手段に、それぞれ対応する。
【符号の説明】
【0051】
1,51,61,71…遠隔操作端末 3…トロイダルコイル
5,7,55,57…印加用電極 10…制御ユニット
11…発振回路 12…信号検出器
13…加速度センサ 15…手指判別部
16…制御部 17…通信モジュール
63…計測用電極 74,75…電極
79…インピーダンス計測部 91…信号印加部
92…電流センサ
【技術分野】
【0001】
本発明は、ユーザの身体に装着されて使用される操作端末に関する。
【背景技術】
【0002】
従来、ユーザの身体に装着されて使用される操作端末としては、指に装着されて使用される指輪状の身体装着型入力装置が提案されている(例えば、特許文献1参照)。この身体装着型入力装置では、例えば当該身体装着型入力装置が装着された人差し指の先端と、その人差し指と同じ手の親指の先端とが接触して閉環状の閉じた導体路が形成された場合に、そのことを電気的に検出して、機器の操作等に応用することができる。
【0003】
より具体的に説明すれば、前記身体装着型入力装置は、指の軸方向に沿って並列配置された、環状電極で構成される一対の印加用電極と、電流センサとを備え、電流センサが、電極に囲まれた領域の外部に設けられている。前記一対の印加用電極間には、交流信号が印加され、人差し指の先端と親指の先端とが接触すると、電流センサによる電流計測地点には、電流が流れる。一方、人差し指の先端と親指の先端とが接触していない場合には、電流センサによる電流計測地点に電流は流れない。前記身体装着型入力装置では、このような現象の発生を利用して、人差し指と親指とが接触しているか否かを判定する。そして、判定結果に従って、操作対象としての外部装置に対してコマンドを送信するのである。
【0004】
ところが、特許文献1の装置では、親指と人差し指との接触または離間といった2つの状態しか検出できない。このため、特許文献1の装置では、操作対象に多種類のコマンド(信号)を送信するのは困難である。
【0005】
一方、ユーザの身体に装着されて使用される端末装置として、5本の指のどの指で床などの支持面を叩いたかを検出手段な装置も提案されている(例えば、特許文献2参照)。すなわち、特許文献2には、マイクを使用したセンサを5本の指のそれぞれに装着して、各指が支持面を叩いたときに発生する音を個々に検出する装置が提案されている。また、特許文献2には、マイクを使用したセンサを手首に1つだけ装着して、各指の骨格等の違いによって生じる周波数分布等の特徴に基づいて、どの指で支持面が叩かれたか判断する装置も提案されている。この特許文献2に記載の各装置では、少なくとも3つ以上の状態を検出して多種類の信号を操作対象に送信可能である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許4683148号公報
【特許文献2】特開平7−121294号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところが、特許文献2における前者の装置では、5本の指のそれぞれにセンサを装着する必要があるため、身体への着脱が煩わしい。一方、特許文献2における後者の装置では、周波数分布等を分析してどの指が操作されたかを検出するためには、シグナルプロセッサで信号解析する必要が生じる。このため、当該装置では、装置の小型化が困難である。なお、この装置において、手首に装着されるセンサが収音した音声をそのまま操作対象に送信し、操作対象側で周波数分布等の分析を行うことも考えられる。しかしながら、その場合、センサと操作対象との間で通信される無線情報が大規模化し、無線通信に要する消費電力が増大する。
【0008】
そこで、本発明は、ユーザの身体に装着されて使用される操作端末であって、小型化可能で身体への装着も容易でありながら、少なくとも3つ以上の状態を検出して多種類の信号を操作対象に送信可能な操作端末を提供することを目的としてなされた。
【課題を解決するための手段】
【0009】
前記目的を達するためになされた本発明は、ユーザの身体に装着されて使用される操作端末であって、前記身体のうち、接触及び離間可能な2つの身体部位の身体表面を通じた接触によって閉環状の閉じた導体路が形成される身体部位の表面に、配置され、前記導体路が形成されているか否かを検出することにより前記2つの身体部位が接触しているか否かを検出する接触検出手段と、当該操作端末に加わる衝撃を検出する衝撃検出手段と、前記接触検出手段の検出結果と前記衝撃検出手段の検出結果とに基づき、ユーザの動作を判別する動作判別手段と、前記動作判別手段が判別したユーザの動作に対応した信号を操作対象に送信する送信手段と、を備えたことを特徴としている。
【0010】
このように構成された本発明の操作端末では、接触検出手段は、接触及び離間可能な2つの身体部位の身体表面を通じた接触によって閉環状の閉じた導体路が形成される身体部位の表面に配置されている。このため、前記2つの身体部位が接触して前記閉環状の閉じた導体路が形成されているか、前記2つの身体部位が離間して前記導体路が形成されていないかによって、接触検出手段における電気的な環境は変化する。そこで、接触検出手段は、前記導体路の形成されているか否かを検出することにより前記2つの身体部位が接触しているか否かを検出する。また、衝撃検出手段は、当該操作端末に加わる衝撃を検出する。
【0011】
この結果、前記接触検出手段の検出結果と前記衝撃検出手段の検出結果との組み合わせは、少なくとも3種類以上の態様を取り得る。このため、前記各検出結果に基づいてユーザの動作を判別する動作判別手段は、ユーザの動作を少なくとも3種類以上に判別することができる。送信手段は、前記動作判別手段が判別したユーザの動作に対応した信号を操作対象に送信するので、少なくとも2種類以上の多種類の信号を操作対象に送信することができる。しかも、本発明の操作端末は、前述のように接触検出手段と衝撃検出手段とを備えた簡単な構成を有しており、各指毎に装着するなどの必要もないので、良好に小型化可能で身体への装着も容易である。
【0012】
なお、前記接触検出手段は、当該接触検出手段が配置された前記身体部位の表面に前記導体路に沿って電気信号を印加する信号印加手段と、前記印加手段によって印加されて前記導体路に沿って閉環状に流れる前記電気信号を検出する信号検出手段と、を備えたものであってもよい。
【0013】
その場合、当該接触検出手段が配置された前記身体部位の表面に前記導体路に沿って信号印加手段が電気信号を印加すると、前記導体路が形成されていればその導体路に沿って当該電気信号が流れるが、前記導体路が形成されていない場合は流れない。そこで、前記印加手段によって印加されて前記導体路に沿って閉環状に流れる前記電気信号を信号検出手段を介して検出すれば、前述のように前記導体路が形成されているか否か、すなわち前記2つの身体部位が接触しているか否かを、検出することができる。
【0014】
また、前記動作判別手段は、前記接触検出手段の検出結果と前記衝撃検出手段の検出結果との各時点における組み合わせに基づいて、前記ユーザの動作を判別してもよい。この場合、次のように種々のユーザの動作を判別することができる。例えば、前記2つの身体部位が離間した状態から移動して接触した時点では、接触検出手段が前記接触を検出すると同時に衝撃検出手段も衝撃を検出する。前記2つの身体部位が接触を継続している時点では、接触検出手段は前記接触を検出し続けるものの衝撃検出手段は衝撃を検出しない。更に、前記2つの身体部位は離間したままで、前記接触検出手段を通る導体路は形成しない他の身体部位の接触が起こってその衝撃が衝撃検出手段に伝わると、接触検出手段は前記接触を検出しないが衝撃検出手段は衝撃を検出する。このように、接触検出手段の検出結果と衝撃検出手段の検出結果との各時点における組み合わせに基づいてユーザの動作を判別する場合、種々のユーザの動作を判別することができる。
【0015】
また、前記2つの身体部位は同じ手の異なる2本の指であり、本発明の操作端末はいずれか一方の前記指に装着される指輪状に構成されてもよい。その場合、操作端末は、指輪状であるため装着が容易で、手の指の動作によって前記多種類の信号を操作対象に送信することができるので操作性にも優れている。
【0016】
また、前記送信手段は、前記信号を無線によって前記操作対象に送信してもよく、その場合、操作端末と操作対象とを直接接続する必要がなく、操作端末の操作性を一層向上させることができる。
【図面の簡単な説明】
【0017】
【図1】第1実施例の遠隔操作端末における電極等の配置態様を表すブロック図である。
【図2】その遠隔操作端末における計測系の等価回路図である。
【図3】その遠隔操作端末の手指判別部の処理を表すフローチャートである。
【図4】第2実施例の遠隔操作端末の透過斜視図(a)及び電極等の配置態様を表す説明図(b)である。
【図5】その遠隔操作端末を腕輪として使用する例を示した図である。
【図6】第3実施例の遠隔操作端末の要部構成を表すブロック図(a)及び電極等の配置態様を表す説明図(b)である。
【図7】第5実施例の遠隔操作端末の要部構成を表すブロック図(a)及び電極等の配置態様を表す説明図(b)である。
【発明を実施するための形態】
【0018】
以下に本発明の実施例について、図面と共に説明する。
[第1実施例]
図1は、第1実施例の遠隔操作端末1における電極等の配置態様を表すブロック図である。図1に示すように、本実施例の遠隔操作端末1は、ユーザの人差し指に装着される指輪状に構成されており、その人差し指が挿入される環状のトロイダルコイル3を備えている。また、遠隔操作端末1は、そのトロイダルコイル3から前記人差し指の軸方向に離れた位置に、一対の印加用電極5,7を、前記軸方向に沿って並列に備えている。更に、トロイダルコイル3には、その外周の一部に制御ユニット10が固定されており、前述の印加用電極5,7は、その制御ユニット10に固定されることにより、トロイダルコイル3へ挿入された指の表面に当接するように配置されている。
【0019】
なお、トロイダルコイル3と制御ユニット10と印加用電極5,7とは、物理的に直接固定されている必要はなく、樹脂等によって指輪状に構成されたケーシングを介して一体化されていてもよい。そして、その場合、制御ユニット10の収納部外形は、装飾用指輪の飾り部分を模したものとしてもよい。また、トロイダルコイル3と一対の印加用電極5,7との位置関係は、どちらが人差し指の根本側に配置されてもよい。すなわち、遠隔操作端末1を指に装着して使用するに当たって、遠隔操作端末1の向きは不問である。
【0020】
印加用電極5,7は、制御ユニット10の発振回路11に電気的に接続されており、その発振回路11から両者の間に交流の電気信号が印加される。また、人差し指の当該トロイダルコイル3に挿入された箇所を前記軸方向(すなわち、トロイダルコイル3と交差する方向)に流れる電流に応じた電圧が、トロイダルコイル3に発生し、その電圧は制御ユニット10の信号検出器12に入力される。具体的には、トロイダルコイル3は、ドーナツ状のコア3aにコイル3bが巻回された電流トランスとして構成され、電磁誘導により、前記軸方向に流れる電流に応じた電圧がコイル3bの両端に発生する。その電圧が、信号検出器12によって検出される。
【0021】
ここで、本実施例において前記軸方向に流れる電流をトロイダルコイル3で検出しているのは、当該電流が、以下に述べるように印加用電極5,7を通じて印加された交流の電気信号であるためである。但し、印加用電極5,7間には、直流信号を印加してもよく、この場合、人差し指の前記箇所を軸方向に流れる電流は、ホール素子を用いて検出することができる。具体的には、切れ目を有する環状のコアの当該切れ目に、ホール素子が配置されてなるセンサを用いることができ、切れ目を構成するコアの両端間に生じる磁場がホール素子に作用することを利用して、前記箇所を軸方向に流れる電流を検出することができる。
【0022】
なお、以下の説明において、一対の印加用電極5,7と発振回路11とをまとめて信号印加部91といい、トロイダルコイル3と信号検出器12とをまとめて電流センサ92という場合がある。
【0023】
続いて、制御ユニット10の詳細構成を説明する前に、遠隔操作端末1の動作原理を説明する。ここで、遠隔操作端末1が人差し指に装着された状態で、ユーザの身体運動により、その人差し指が同じ手の親指と接触/離間される場合を考える。
【0024】
この場合、人差し指と親指とが離間された状態では、印加用電極5,7間に信号を印加しても、前記電気信号は、基本的に、印加用電極5,7に挟まれた身体部位(図1に示される領域X)を流れるのみで、電流センサ92の検出電圧はゼロになる。
【0025】
一方、人差し指と親指とが接触した状態では、親指、人差し指、並びに、親指及び人差し指の根元で親指と人差し指とを結ぶ身体部位によって、閉環状の閉じた導体路が形成され、トロイダルコイル3は、親指と人差し指との接触点が介在した状態で電気的に印加用電極5,7に挟まれた状態となる。よって、トロイダルコイル3の挿入箇所には前記電気信号が流れて、その出力電圧(実効値)は、ゼロより大きい値となる。
【0026】
本実施例では、このような現象を利用して、電流センサ92の検出電圧に基づき、ユーザの身体運動によって親指と人差し指とが接触または離間したことをユーザの動作として判別する。
【0027】
なお、図2は、印加用電極7を人差し指の根本側にして遠隔操作端末1を装着した場合の、トロイダルコイル3及び印加用電極5,7に係る遠隔操作端末1における計測系の等価回路図である。但し、図2では、印加用電極5,7に印加される電気信号が伝播する身体部位の抵抗を、説明を簡単するため集中定数系で表現する。具体的に、図2に示す抵抗R11は、印加用電極5と指との間の接触抵抗を表し、抵抗R12は、印加用電極7と指との間の接触抵抗を表す。また、抵抗R13は、印加用電極5,7に挟まれた領域X(図1参照)に対応する身体部位表面の電気抵抗を表し、抵抗R14は、トロイダルコイル3から印加用電極5までの身体部位表面の電気抵抗を表す。
【0028】
この他、抵抗R15は、身体内部を通じて印加用電極5よりもトロイダルコイル3側に回りこみながら印加用電極5,7間を伝播する電気信号の当該伝播経路(身体内部)の電気抵抗を表し、抵抗R16は、印加用電極7から人差し指の付け根を介して親指の先端に至る身体部位の電気抵抗を表し、抵抗R17は、人差し指の先端からトロイダルコイル3までの身体部位の電気抵抗を表す。また、図2において、スイッチSW1は、人差し指と親指との接触/離間を表現したものであり、交流電源は、信号印加部91に対応し、電流計は、電流センサ92に対応する。
【0029】
また、図2に示す一点鎖線は、人差し指と親指との接触/離間に拘らず、常に印加用電極5,7間を伝播する電気信号Aの流れを示したものであり、破線は、人差し指と親指とが接触した際に、印加用電極5,7間を伝播する電気信号Bの流れを示したものである。
【0030】
本実施例の遠隔操作端末1を人差し指に装着して、親指との接触/離間を行うと、このように電気信号の伝播態様は変化し、電流センサ92の検出電圧も変化する。本実施例の遠隔操作端末1は、このように変化する発生電圧に基づき、ユーザの身体運動によって指が接触/離間したことを検知する。
【0031】
図1に戻って、制御ユニット10は、前述の発振回路11,信号検出器12の他に、加速度センサ13,手指判別部15,制御部16,通信モジュール17を備えている。加速度センサ13は、制御ユニット10に加わる衝撃を加速度として検出する。このため、遠隔操作端末1が装着された人差し指と、その指と同じ手の親指とが離間した状態から移動して接触したいわゆる接触打指がなされた場合には、その衝撃を加速度センサ13が検出する。また、加速度センサ13は、その他の接触打指、例えば、遠隔操作端末1が装着された人差し指と同じ手の親指,中指の接触打指による衝撃も同様に検出する。
【0032】
そこで、手指判別部15は、信号検出器12と加速度センサ13とから送られる信号に基づいて、ユーザの前記手の指の動作を次のように判別する。図3は、手指判別部15において定期的に実行される定期割り込み処理を表すフローチャートである。なお、手指判別部15及び制御部16は、CPU,ROM,RAMを中心としたマイクロコンピュータとして構成されている。また、制御部16は、発振回路11に前記電気信号の出力を定期的に指令すると共に、その指令の出力に同期して、手指判別部15にこの処理の実行を指示する。その指示がなされたときに、手指判別部15のCPUはその手指判別部15のROMに記憶されたプログラムに基づいて図3の処理を実行する。
【0033】
図3に示すように、この処理では、先ず、S1(Sはステップを表す:以下同様)にて、人差し指を前述のように流れる電流がトロイダルコイル3を介して検出されたか否かが判断される。電流が検出された場合は(S1:有)、処理はS2へ移行し、加速度センサ13を介して衝撃が検出された否かが判断され、衝撃が検出された場合は(S2:有)、処理はS3へ移行する。S3では、装着指(人差し指)が親指と接触打指されたと判断されて、処理が一旦終了する。なお、前記人差し指と親指とがもう一方の手の手のひらに同時に当接した場合などにも、同様に前記電流が検出され(S1:有)、衝撃も検出されるが(S2:有)、S3では、これらの条件が成立したときには、親指と人差し指との接触打指とみなすのである。この点は、後述のS5,S8,S9も同様である。
【0034】
一方、前記電流が検出されたが(S1:有)、衝撃が検出されなかった場合は(S2:無)、処理はS5へ移行する。S5では、装着指(人差し指)が親指と接触状態を維持しているものと判断されて、処理が一旦終了する。また、前記電流が検出されなかった場合は(S1:無)、処理はS7へ移行し、S2と同様に前記衝撃が検出されたか否かが判断される。そして、衝撃が検出された場合は(S2:有)、処理はS8へ移行し、中指(非装着指)が親指と接触打指されたものと判断されて、処理が一旦終了する。更に、前記電流も検出されず(S1:無)、衝撃も検出されなかった場合は(S7:無)、処理はS9へ移行し、遠隔操作端末1が装着された手において接触した指はないものと判断されて、処理が一旦終了する。
【0035】
以上のようにして、手指判別部15は、信号検出器12と加速度センサ13とから送られる信号に基づいて、接触状態にある手指を判別する。すると、制御部16は、通信モジュール17を介して、その判別結果に対応した信号を操作対象に送信する。ここで、操作対象としては種々の対象が考えられ、その操作対象に応じて前記送信される信号も様々である。
【0036】
例えば、操作対象がテレビジョン受像器の場合、人差し指が親指と接触打指される毎に音量を変更するコマンド(信号)を送信し、中指が親指と接触打指される毎にチャンネルを変更するコマンド(信号)を送信するといった制御が考えられる。また、操作対象がエアコンの場合、人差し指が親指と接触打指される毎に設定温度を変更するコマンド(信号)を送信し、中指が親指と接触打指される毎に除湿,冷房,暖房等の運転モードを変更するコマンド(信号)を送信するといった制御が考えられる。
【0037】
このように、本実施例の遠隔操作端末1では、ユーザの動作を少なくとも3種類以上に判別することができ、その動作に対応した少なくとも2種類以上の信号(コマンド)を操作対象に送信することができる。しかも、遠隔操作端末1は、前述のように簡単な構成を有しており、各指毎に装着するなどの必要もないので、良好に小型化可能で身体への装着も容易である。
【0038】
また、図3では詳記していないが、本実施例では、図3の処理による判断結果(S3〜S9のいずれか)の各時点における変化を参照することで、更に多種類の信号を操作対象に送信することも可能となる。すなわち、図3の処理が実行される毎の前記判断結果が、S5からS9を経ずにS3に変わった場合、人差し指と親指とを接触状態に維持したままで、更にその人差し指または親指が中指で接触打指されたと判断することができる。前述のテレビジョン受像器の例であれば、このような接触打指がなされる毎に、画面の明るさを変更するコマンド(信号)を送信するなどしてもよい。また、人差し指と親指とを接触状態に維持したままで、更にその人差し指または親指が中指で接触打指されたことが判断可能な場合、操作対象がパーソナルコンピュータ等である場合に、人差し指と親指との接触をShiftキー代わりに利用してもよい。
【0039】
なお、発振回路11は、印加用電極5,7に挟まれた身体部位に交流の電気信号(交流電圧)を印加するものであり、定電圧駆動または定電流駆動されるものであれば、種々のものが適用できる。例えば、前記電気信号は、三角波にされてもよいし、正弦波、矩形波、ノコギリ波などにされてもよい。
【0040】
また、信号検出器12は、トロイダルコイル3に発生する電圧を検出するものであれば種々のものが適用できる。例えば、本願出願人が前述の特許文献1に示したように、トロイダルコイル3の両端に接続されて、その両端電圧を増幅した増幅信号を出力する差動増幅回路と、その差動増幅回路の出力信号(交流信号)を整流して直流信号に変換する整流器と、を備え、整流器からの出力信号を、デジタル値に変換した上で電流計測値として手指判別部15に出力するものであってもよい。この場合、トロイダルコイル3の両端に生じる電圧の実効値が、そのトロイダルコイル3が装着される身体部位の軸方向に流れる電流計測値(実効値)に変換されて出力される。その他にも、信号検出器12としては、前記特許文献1に開示した種々のものが適用できる。
【0041】
[第2実施例]
なお、第1実施例では、トロイダルコイル3のみに人差し指が挿入され、印加用電極5,7は人差し指の表面に当接するものとしたが、図4(a),(b)に示す第2実施例の遠隔操作端末51のように、印加用電極55,57も円環状に構成して人差し指が挿入されるようにしてもよい。また、上記各実施例においては、遠隔操作端末1,51を人差し指に装着に装着するための指輪形状としたが、他の指に装着されてもよく、更に、大型化して腕に装着可能な腕輪形状とされてもよい。図5は、遠隔操作端末51をそのように変形した例を表している。図5に示すように、この場合、例えば、両手を繋ぐ動作及び離す動作により、操作対象を遠隔操作することが可能である。更に、このような遠隔操作端末51は、脚に装着されてもよい。
【0042】
[第3実施例]
また、図6(a)は、信号印加部91及び電流センサ92の変形例を表すブロック図であり、図6(b)はその信号印加部91,電流センサ92を採用した第3実施例の遠隔操作端末61の電極等の配置態様を表す説明図である。図6に示すように、この遠隔操作端末61は、第2実施例と同様の印加用電極55,57を備え、トロイダルコイル3の代わりに円環状の計測用電極63を備えている。
【0043】
この場合、信号検出器12は、印加用電極55,57のうち計測用電極63側の印加用電極55と、計測用電極63との間の電圧を計測電圧値Vとして検出する。そして、手指判別部15における前記親指と人差し指との接触に係る判断は、次のように変化する。すなわち、信号検出器12から入力される電圧計測値Vが、予め定められた閾値を超えていると、指が接触していると判定し、電圧計測値Vが前記閾値以下であると、指が離間していると判定するのである。
【0044】
[第4実施例]
また、図6と同様の回路において、信号検出器12は、印加用電極55と計測用電極63との間に生じる電圧(交流信号)に基づき、計測用電極63から入力される交流信号の、印加用電極55,57間に印加された交流信号に対する位相遅れ(即ち、遅れ方向を正値とした位相差)を計測してもよい。この場合、前記計測された位相遅れ計測値が、予め定められた閾値を超えていると、指が接触していると判定し、位相遅れ計測値が、閾値以下であると、指が離間していると判定することができる。
【0045】
[第5実施例]
更に、信号印加部91及び電流センサ92は、必ずしも別体の回路構成でなくてもよい。続いて、そのような構成を採用した第5実施例について説明する。図7(a)は、第5実施例における信号印加部91及び電流センサ92に対応する構成を表すブロック図であり、図7(b)はその構成を採用した第5実施例の電極等の配置態様を表す説明図である。図7に示すように、この遠隔操作端末71は、第2〜第4実施例の印加用電極55,57と同様の環状の電極75,77を備えている一方、トロイダルコイル3も計測用電極63も備えていない。
【0046】
図7(a)に示すように、この遠隔操作端末71は、電極75,77間のインピーダンスを計測して、このインピーダンス計測値を手指判別部15に入力するインピーダンス計測部79を備えている。図7(b)に示すように、指が接触されている状態でインピーダンス計測部79により計測されるインピーダンスZonは、指の接触点を介さずに電気信号が伝播する電極75,77間の経路のインピーダンスZ1と、指の接触点を介して電気信号が伝播する電極75,77間の経路のインピーダンスZ2とを、並列接続したときのインピーダンスZ1・Z2/(Z1+Z2)に等しくなる(Zon=Z1・Z2/(Z1+Z2))。これに対し、指が離間している状態でインピーダンス計測部79により計測されるインピーダンスZoffは、上記インピーダンスZ1に等しくなる(Zoff=Z1)。
【0047】
従って、指が離間されている状態でインピーダンス計測部79により計測されるインピーダンスZoffと、指が接触されている状態でインピーダンス計測部79により計測されるインピーダンスZonとの間には、不等式Zoff>Zonが成立する。そこで、手指判別部15における前記親指と人差し指との接触に係る判断は、次のような処理とすることができる。すなわち、インピーダンス計測部79から入力されるインピーダンス計測値が、予め定められた閾値を超えていると、指が離間していると判定し、インピーダンス計測値が、閾値以下であると、指が接触していると判定するのである。
【0048】
[その他]
また、本発明は、上記実施例に限定されるものではなく、種々の態様を採ることができる。例えば、指の接触/離間を検出する接触検出手段としての構成は、前記各実施例の構成の他、前記特許文献1や特開2010−282345号公報において本願出願人が提案している各種構成を採用することができる。
【0049】
また、上記各実施例では、操作対象へコマンドを無線出力するようにしたが、有線にてコマンドを出力する構成にされてもよい。但し、コマンドを無線出力する場合の方が、遠隔操作端末1〜71の操作性が向上する。
【0050】
[発明との対応]
なお、前記実施形態において、「特許請求の範囲」に記載の操作端末は遠隔操作端末1〜71に対応する。また、信号印加手段は信号印加部91に、電流センサ92は信号検出手段に、それぞれ対応し、両者が接触検出手段に対応する。更に、加速度センサ13は衝撃検出手段に、手指判別部15は動作判別手段に、通信モジュール17は送信手段に、それぞれ対応する。
【符号の説明】
【0051】
1,51,61,71…遠隔操作端末 3…トロイダルコイル
5,7,55,57…印加用電極 10…制御ユニット
11…発振回路 12…信号検出器
13…加速度センサ 15…手指判別部
16…制御部 17…通信モジュール
63…計測用電極 74,75…電極
79…インピーダンス計測部 91…信号印加部
92…電流センサ
【特許請求の範囲】
【請求項1】
ユーザの身体に装着されて使用される操作端末であって、
前記身体のうち、接触及び離間可能な2つの身体部位の身体表面を通じた接触によって閉環状の閉じた導体路が形成される身体部位の表面に、配置され、前記導体路が形成されているか否かを検出することにより前記2つの身体部位が接触しているか否かを検出する接触検出手段と、
当該操作端末に加わる衝撃を検出する衝撃検出手段と、
前記接触検出手段の検出結果と前記衝撃検出手段の検出結果とに基づき、ユーザの動作を判別する動作判別手段と、
前記動作判別手段が判別したユーザの動作に対応した信号を操作対象に送信する送信手段と、
を備えたことを特徴とする操作端末。
【請求項2】
前記接触検出手段は、
当該接触検出手段が配置された前記身体部位の表面に前記導体路に沿って電気信号を印加する信号印加手段と、
前記印加手段によって印加されて前記導体路に沿って閉環状に流れる前記電気信号を検出する信号検出手段と、
を備えたことを特徴とする請求項1に記載の操作端末。
【請求項3】
前記動作判別手段は、前記接触検出手段の検出結果と前記衝撃検出手段の検出結果との各時点における組み合わせに基づいて、前記ユーザの動作を判別することを特徴とする請求項1または2に記載の操作端末。
【請求項4】
前記2つの身体部位は同じ手の異なる2本の指であり、
いずれか一方の前記指に装着される指輪状に構成されたことを特徴とする請求項1〜3のいずれか1項に記載の操作端末。
【請求項5】
前記送信手段は、前記信号を無線によって前記操作対象に送信することを特徴とする請求項1〜4のいずれか1項に記載の操作端末。
【請求項1】
ユーザの身体に装着されて使用される操作端末であって、
前記身体のうち、接触及び離間可能な2つの身体部位の身体表面を通じた接触によって閉環状の閉じた導体路が形成される身体部位の表面に、配置され、前記導体路が形成されているか否かを検出することにより前記2つの身体部位が接触しているか否かを検出する接触検出手段と、
当該操作端末に加わる衝撃を検出する衝撃検出手段と、
前記接触検出手段の検出結果と前記衝撃検出手段の検出結果とに基づき、ユーザの動作を判別する動作判別手段と、
前記動作判別手段が判別したユーザの動作に対応した信号を操作対象に送信する送信手段と、
を備えたことを特徴とする操作端末。
【請求項2】
前記接触検出手段は、
当該接触検出手段が配置された前記身体部位の表面に前記導体路に沿って電気信号を印加する信号印加手段と、
前記印加手段によって印加されて前記導体路に沿って閉環状に流れる前記電気信号を検出する信号検出手段と、
を備えたことを特徴とする請求項1に記載の操作端末。
【請求項3】
前記動作判別手段は、前記接触検出手段の検出結果と前記衝撃検出手段の検出結果との各時点における組み合わせに基づいて、前記ユーザの動作を判別することを特徴とする請求項1または2に記載の操作端末。
【請求項4】
前記2つの身体部位は同じ手の異なる2本の指であり、
いずれか一方の前記指に装着される指輪状に構成されたことを特徴とする請求項1〜3のいずれか1項に記載の操作端末。
【請求項5】
前記送信手段は、前記信号を無線によって前記操作対象に送信することを特徴とする請求項1〜4のいずれか1項に記載の操作端末。
【図2】


【図3】
【図1】
【図4】
【図5】
【図6】
【図7】
【図3】
【図1】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−8314(P2013−8314A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−142072(P2011−142072)
【出願日】平成23年6月27日(2011.6.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月27日(2011.6.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]