
操作装置、その情報処理方法及び情報処理装置
【課題】操作性の向上を図ることのできる操作装置を提供する。
【解決手段】この操作装置は、表裏対向する2つの面を第1の面及び第2の面として有する筐体と、前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作を検出を行う検出部を含む第1の操作入力部と、前記第2の面に設けられた第2の操作入力部と、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部とを具備する。
【解決手段】この操作装置は、表裏対向する2つの面を第1の面及び第2の面として有する筐体と、前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作を検出を行う検出部を含む第1の操作入力部と、前記第2の面に設けられた第2の操作入力部と、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部とを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、テレビジョン受像機などの情報処理装置を遠隔操作する操作装置、その情報処理方法及び、操作装置の制御対象である情報処理装置に関する。
【背景技術】
【0002】
テレビジョン受像機などの情報処理装置をリモートコントロールする無線操作端末は、赤外線通信を利用する赤外線リモコンが主流とされてきた。しかし、赤外線リモコンでは、赤外線の指向性が強いために、リモコンを被制御機器の方向へ赤外線の発光部を向ける必要があった。これに対し、電波の指向性は比較的弱いため、近年では、高周波電波を用いたRF(Radio Frequency)リモコンが開発されて主流となりつつある。また、RFリモコンの規格を標準化するための試みが各団体によってなされている。
【0003】
例えば、近距離無線通信規格IEEE(登録商標)(Institute of Electrical and Electronic Engineers)802.15.4に準拠し、IEEE(登録商標)802.15.4の上位に相当するネットワーク層、セキュリティ層、アプリケーション層の仕様としてZigBee(登録商標)が標準化されている。さらに、IEEE(登録商標)802.15.4をもとに、業界団体によってRFリモコン規格ZigBee(登録商標) RF4CE(Radio Frequency for Consumer Electronics)が標準化されている。
【0004】
例えば、特許文献1には、RF4CEなどのRF無線信号を用いてテレビジョン受像機などの情報処理装置をコントロールする操作端末に関する技術が開示されている。また、特許文献2には、6面直方体からなる筐体の2つの主面に操作用のキーを設けたリモートコントロール装置が開示されている。このリモートコントロール装置は、さらに2つの主面のどちらを表にした姿勢となっているかを検出し、裏側の主面の操作キーを無効することが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2011−034294号公報
【特許文献2】特開平6−89634号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、近年、情報処理装置の多機能化は目覚しく、例えば、インターネットに接続して、インターネット上の様々なサービスを利用することが可能なテレビジョン受像機なども登場している。したがって、このように多機能の情報処理装置を遠隔操作するための操作装置においても、タッチパッドなどのポインティングデバイスやキーボードの必要性が増大してきている。しかし、ポインティングデバイスやキーボードはある程度の面サイズを要するため搭載場所をとり、操作装置のサイズを大きくする要因となる。そこで、キーボードとタッチパッドなどを操作装置の表裏対向する2つの面に配置することが検討されている。このような構成を採った場合、操作性を高めるための様々な改良が期待されている。
【0007】
以上のような事情に鑑み、本技術の目的は、操作性の向上を図ることのできる操作装置、その操作装置の情報処理御方法及び情報処理装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本技術に係る一形態である操作装置は、表裏対向する2つの面を第1の面及び第2の面として有する筐体と、前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部と、前記第2の面に設けられた第2の操作入力部と、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部とを具備する。
【0009】
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、前記変換部は、前記検出部により検出された座標を(X,Y)、前記第2の面側から前記座標検出空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出空間のY軸方向の長さをα、前記座標検出空間のX軸方向の長さをβとして、
X’=α−Y
Y’=β−X
の計算式により変換を行うものであってよい。
【0010】
上記の操作装置において、前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備するものであってよい。
【0011】
前記制御部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にするものであってよい。
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にするものであってもよい。
【0012】
本技術に係る操作装置は、前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部をさらに具備し、前記判定部は、前記撮像部により撮像された画像をもとに前記姿勢を判定するものであってよい。
【0013】
前記変換部は、前記座標検出部の座標系で得た検出座標を(X,Y)、前記第2の面側から前記座標検出空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出部の検出空間のY軸方向の長さをαとして、
X’=α−X
Y’=Y
の計算式により変換を行うものであってもよい。
【0014】
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部の座標系により検出された前記移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−y
y’=−x
の計算式により変換を行うものであってもよい。
【0015】
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、前記変換部は、前記座標検出部の座標系で得た移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−x
y’=y
の計算式により変換を行うものであってもよい。
【0016】
本技術に係るその他の形態である操作装置の情報処理方法は、所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部が設けられた第1の面と、第2の操作入力部が設けられ、前記第1の面に表裏対向する第2の面を有する筐体の、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定し、前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する、というものである。
【0017】
本技術に係るその他の形態である情報処理装置は、表裏対向する2つの面を第1の面及び第2の面として有する筐体と、前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部と、前記第2の面に設けられた第2の操作入力部と、を具備する操作装置の、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部とを具備する。
【発明の効果】
【0018】
以上のように、本技術によれば、操作性の高い操作装置を提供することができる。
【図面の簡単な説明】
【0019】
【図1】本技術に係る第1の実施形態の情報処理システムの構成を示すブロック図である。
【図2】図1の情報処理装置のハードウェア構成を示す図である。
【図3】図1の操作装置のリモコン面側の外観図である。
【図4】図1の操作装置のキーボード面側の外観図である。
【図5】図1の操作装置のバードウェア構成を示すブロック図である。
【図6】図1の操作装置のタッチパッド操作姿勢を示す図である。
【図7】図1の操作装置のキーボード操作姿勢を示す図である。
【図8】図1の操作装置のキーボード面をユーザ側に向けたままその裏側面にあるタッチパッドを操作するときの状態を示す図である。
【図9】図1の操作装置のタッチパッドの座標系を説明するための図である。
【図10】図1の操作装置においてキーボード面側からタッチパッドの座標検出空間を透視した座標系を説明するための図である。
【図11】変形例1の操作装置の第2のタッチパッド操作姿勢を示す図である。
【図12】変形例1の操作装置のタッチパッド操作姿勢を示す図である。
【図13】変形例4の操作装置による姿勢検出の方法を説明するための図である。
【図14】同じく変形例4の操作装置による姿勢検出の方法を説明するための図である。
【図15】変形例5の操作装置を説明するための図である。
【発明を実施するための形態】
【0020】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
本実施形態は、例えばテレビジョン受像機、ゲーム機、録画装置、パーソナルコンピュータなどの情報処理装置を、例えばケーブル伝送信号、Ir信号、RF信号、無線LANなどの伝送路を用いて遠隔操作する操作装置に関するものである。
【0021】
近年、情報処理装置の多機能化は目覚しく、例えば、インターネットに接続して、インターネット上の様々なサービスを利用することが可能なテレビジョン受像機なども登場している。そこで、例えばパーソナルコンピュータ用のキーボードなどに採用された標準的なキー配列を備えたQWERTYキーボードや、タッチパッドなどを搭載した遠隔操作装置も登場してきている。また、QWERTYキーボードとタッチパッドなどをユーザから見て1つの面に搭載するとなると、操作装置の面サイズが大きくなり、操作装置の大型化を招くことになる。そこで、QWERTYキーボードとタッチパッドなどのポインティングデバイスを操作装置の表裏対向する2つの面に配置することが検討されている。
【0022】
QWERTYキーボードとタッチパッドなどを操作装置の表裏対向する2つの面に配置した場合、タッチパッドなどの操作の形態として、QWERTYキーボードの搭載された面をユーザ側に向けたまま、タッチパッドなどを操作する、といった形態が考えられる。QWERTYキーボードの搭載された面をユーザ側に向けたまま裏側面にあるタッチパッドを操作する際には、ユーザはタッチパッドの座標系を裏側から見ていることを意識しながらの操作を行う必要があり、直感的な操作ができなくなることで、操作性が著しく低下する。
【0023】
本実施形態の操作装置は、姿勢を検知するために必要な加速度センサなどの検出部を内蔵する。この操作装置は、検出部の検出値をもとに姿勢を検出し、タッチパッドが配置された第1の面とQWERTYキーボードが配置された第2の面とで、どちらの面がユーザに面しているかかを判定するとともに、操作装置の縦横の姿勢の向きを判定する。操作装置は、判定した結果をもとに、必要に応じて、タッチパッドにより検出された座標などの情報を、第2の面側からタッチパッドの座標検出空間を透視した座標系の情報に変換するものである。
【0024】
以下、本実施形態の操作装置を詳細に説明する。
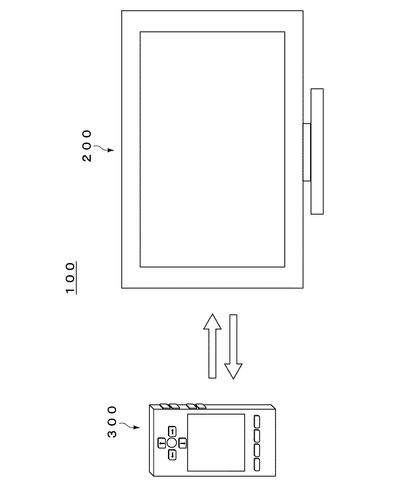
<第1の実施形態>
図1は、本技術に係る第1の実施形態の情報処理システムの構成を示すブロック図である。同図に示すように、本実施形態の情報処理システム100は、操作対象である情報処理装置200と、情報処理装置200を遠隔操作する操作装置300とを有する。情報処理装置200は、例えば、テレビジョン受像機、パーソナルコンピュータ、レコーダ、プレーヤ、ゲーム機など、基本的なコンピュータのハードウェア構成を含むものであれば何であってもよい。また、情報処理装置200は、インターネットなどのネットワークに接続して、ウェブページなどの閲覧を行うことが可能な機器であってもよい。
【0025】
[情報処理装置200の構成]
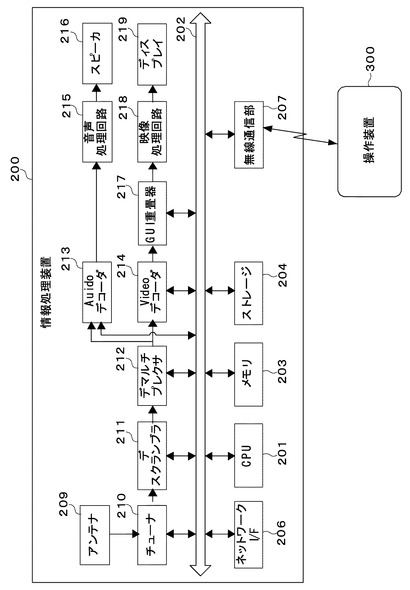
図2は情報処理装置200のハードウェア構成を示す図である。
本実施形態では、情報処理装置200としてテレビジョン受像機を用いた場合を説明する。
【0026】
この情報処理装置200は、CPU(Central Processing Unit)201、バス202、メモリ203、ストレージ204、ネットワークI/F206、無線通信部207を有する。情報処理装置200は、また、アンテナ209、チューナ210、デスクランブラ211、デマルチプレクサ212、Audioデコーダ213、Videoデコーダ214、音声処理回路215、スピーカ216、GUI重畳器217、映像処理回路218、ディスプレイ219を有している。
【0027】
この情報処理装置200では、CPU201が、バス202を介して接続されたメモリ203又はストレージ204に記憶されているプログラムに従って各種処理を実行する。
【0028】
無線通信部207は、操作装置300との間で無線による双方向の信号の通信を行う。無線通信の方式としては、例えば、IR(赤外線)方式、家電用RFリモコンの国際規格であるRF4CE(Radio Frequency for Consumer Electronics)などのRF方式、IEEE 802.11b規格などに準拠した無線LANなどが挙げられる。
【0029】
アンテナ209は、デジタル放送信号などを受信してチューナ210に入力する。
【0030】
チューナ210は、デジタル放送信号から所定のチャンネルの放送信号を抽出する。チューナ210は、この抽出した放送信号に対して復調処理を施して得た所定のチャンネルのトランスポートストリームをデスクランブラ211に出力する。
【0031】
デスクランブラ211は、情報処理装置200に装着された所定のICカード(図示せず)にあらかじめ記憶されている解除キーを用いて、チューナ210から入力されたトランスポートストリームのスクランブルを解除する。デスクランブラ211は、このスクランブル解除済のトランスポートストリームをデマルチプレクサ212に出力する。
【0032】
デマルチプレクサ212は、デスクランブラ211から入力されたスクランブル解除済のトランスポートストリームからオーディオデータとビデオデータとを分離する。デマルチプレクサ212は、分離したオーディオデータをAudioデコーダ213に出力し、分離したビデオデータをVideoデコーダ214に出力する。
【0033】
Audioデコーダ213は、デマルチプレクサ212から入力されたオーディオデータをデコードし、得られた音声データを、音声処理回路215に出力する。
音声処理回路215は、Audioデコーダ213から入力された音声データに対してD/A(Digital/Analog)変換、増幅処理などを施し、得られた音声信号をスピーカ216に出力する。
【0034】
Videoデコーダ214は、デマルチプレクサ212から入力されたビデオデータをデコードし、得られた映像データを、GUI(Graphical User Interface)重畳器217に出力する。
【0035】
GUI重畳器217は、Videoデコーダ214から入力された映像データに対して、OSD(On Screen Display)などのグラフィックデータを重畳して、映像処理回路218に出力する。
【0036】
映像処理回路218は、GUI重畳器217から入力された映像データに対して、所定の画像処理、D/A(Digital/Analog)変換などを施し、得られた映像信号をディスプレイ219に出力する。
【0037】
また、CPU201は、操作装置300からの録画に関する操作信号、あるいはメモリ203に設定された録画予約のための情報をもとに、デジタル放送を受信し、所定のチャンネルのトランスポートストリームを得て、これを番組の映像音声データとして、ストレージ204に保存することができる。
【0038】
このようにして、情報処理装置200は、デジタル放送を受信して、その番組を視聴可能なようにディスプレイ219およびスピーカ216を通じて出力したり、ストレージ204に録画したりすることができる。また、CPU201は、ネットワークI/F206を通じてインターネットにアクセスし、取得したウェブページをディスプレイ219に表示させたりすることもできる。
【0039】
[操作装置300の構成]
次に、操作装置300の構成を説明する。
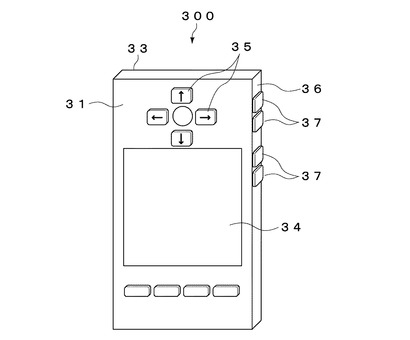
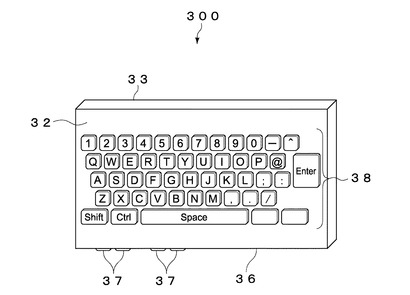
図3は操作装置300のリモコン面側の外観図である。図4は操作装置300のキーボード面側の外観図である。
【0040】
図3及び図4に示すように、操作装置300は、表裏対向する長方形の2つの面を主面31,32として有し、主面31,32の2軸方向のサイズに対して、それらの2軸に対して直交する軸方向(奥行き方向)のサイズが十分小さい計6面体の直方体形状の筐体33を有する。表裏対向する2つの主面はどちらもユーザにとっての操作面となっている。すなわち、一方の主面31(「リモコン面31」とも呼ぶ。)には、タッチパッド34と、カーソルキー35などのキーが第1の操作入力部として設けられている。タッチパッド34は一方の主面31においてほぼ中央の領域に配置されている。これは、キーボード操作姿勢(後述する。)での操作時にユーザにとってタッチパッド34の操作はブラインド操作となることから、リモコン面31の中心とタッチパッド34の中心座標とを一致もしくはほぼ一致させることで、タッチパッド34のブラインドによる一定の操作性を確保できる。筐体33のリモコン面31に対して表裏対向する関係にある他方の主面32(「キーボード面32」とも呼ぶ。)には、QWERTYキーボードなどのキーボード38が第2の操作入力部として設けられている。筐体33のリモコン面31及びキーボード面32以外の4面(以下これらをそれぞれ「側面」と呼ぶ。)のうち少なくとも1つの側面36には、例えば、音量調整、選局など、例えば使用頻度の高い複数のキー37が設けられている。
【0041】
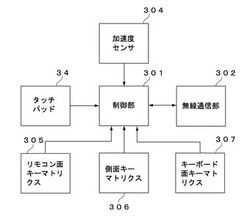
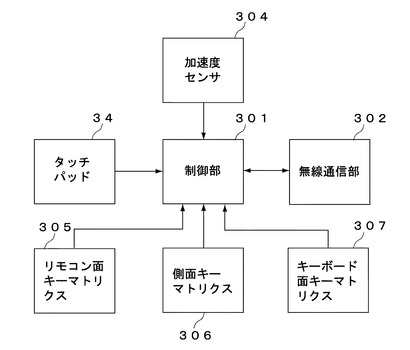
図5は、操作装置300のバードウェア構成を示すブロック図である。
操作装置300は、制御部301、無線通信部302、タッチパッド34、加速度センサ304、リモコン面キーマトリクス305、側面キーマトリクス306、キーボード面キーマトリクス307を有する。
【0042】
制御部301は、操作装置300を構成する各ブロックの全体的な制御、各種の演算処理、各ブロック間でのデータのやりとりを制御する。
【0043】
無線通信部302は、情報処理装置200との間で無線による双方向の信号の通信を行う。無線通信の方式としては、例えば、IR(赤外線)方式、家電用RFリモコンの国際規格であるRF4CE(Radio Frequency for Consumer Electronics)などのRF方式、IEEE 802.11b規格などに準拠した無線LANなどが挙げられる。
【0044】
タッチパッド34は、ユーザがタッチした位置の座標を検出するデバイスである。タッチパッド34は、例えば、静電容量方式、抵抗膜方式などのタッチセンサなどにより構成される。
【0045】
加速度センサ304は、3軸(X軸、Y軸、Z軸)方向の加速度を検出するセンサである。加速度センサ304の検出信号は制御部301に供給され、操作装置300の姿勢を検出するための情報として処理される。なお、操作装置300の姿勢を検出する手段としては、加速度センサ304の他に、重力方向に対する角度を検出するジャイロセンサなどがある。あるいは、図示しないカメラにより操作装置300から見た周辺の映像を撮像し、操作装置300内の制御部301あるいは情報処理装置200内のCPU201などにおいて、その撮影画像を解析して、操作装置300の姿勢を検出する方法などもある。
【0046】
リモコン面キーマトリクス305は、リモコン面31に設けられたカーソルキー35などのキーに対する操作を検出して制御部301に通知する。
側面キーマトリクス306は、筐体33の側面36に設けられたキー37に対する操作を検出して制御部301に通知する。
キーボード面32キーマトリクス307は、キーボード38に対する操作を検出して制御部301に通知する。
【0047】
<動作の説明>
次に、本実施形態の操作装置300の動作を説明する。
【0048】
操作装置300の制御部301は、予め組み込まれたタッチパッド検出情報の変換用プログラムに基づいて次のような制御を行う。
【0049】
操作装置300の制御部301は、加速度センサ304によって得られた検出結果をもとに操作装置300の操作姿勢を判定する(判定部)。
【0050】
本実施形態の操作装置300を操作する際の姿勢には少なくとも次の2種類の基本姿勢がある。
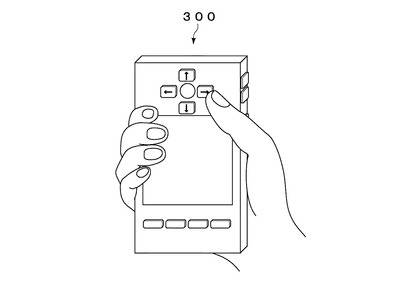
1.リモコン面31をユーザに向けて縦向きの姿勢(以下「タッチパッド操作姿勢」と呼ぶ。)(図6参照)。
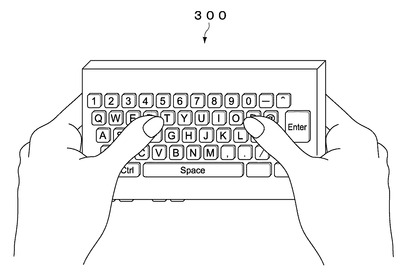
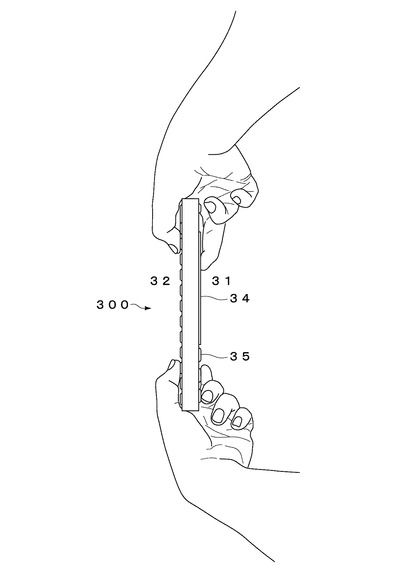
2.キーボード面32をユーザに向けて横向きの姿勢(図7参照)(以下「キーボード操作姿勢」と呼ぶ。)。横向きに使用されるのは、QWERTYキーボードなどのキーボード38のキー配列が横長であるためである。ユーザは操作装置300の両端部分を両手で持って両手の指を使ってキー入力を行うことになる。また、この姿勢での操作の際に、図8に示すように、ユーザは背面側(リモコン面31側)に指を廻してタッチパッド34の操作を行うこともできる。
【0051】
加速度センサ304によって得られた検出結果をもとに操作装置300の操作姿勢を判定する方法としては、例えば、以下がある。
1.制御部301が、加速度センサ304の出力をもとにリモコン面31とキーボード面32のどちらが、より重力方向を向いているかを判定する。制御部301が、リモコン面31の方がより重力方向を向いていることを判定した場合にはキーボード操作姿勢にあることを判定し、キーボード面32の方がより重力方向を向いていることを判定した場合にはタッチパッド操作姿勢にあることを判定する。
2.操作装置300の長手方向と短手方向のどちらが、より重力方向を向いているかを判定する。制御部301が、操作装置300の長手方向の方がより重力方向を向いていることを判定した場合にはタッチパッド操作姿勢にあることを判定し、短手方向の方がより重力方向を向いていることを判定した場合にはキーボード操作姿勢にあることを判定する。
3.上記の2つの判定方法を併用する。すなわち、制御部301が、リモコン面31の方がより重力方向を向き、かつ短手方向の方がより重力方向を向いていることを判定した場合にはキーボード操作姿勢にあることを判定する。また、制御部301は、キーボード面32の方がより重力方向を向き、かつ長手方向の方がより重力方向を向いていることを判定した場合にはタッチパッド操作姿勢にあることを判定する。その他の場合には無視する。
【0052】
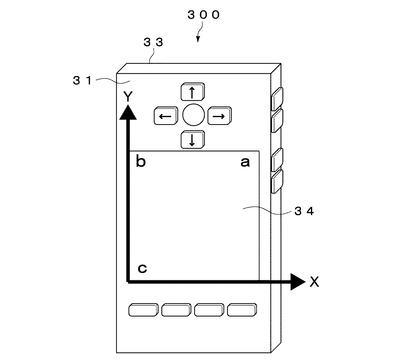
制御部301は、タッチパッド操作姿勢を判定したとき、タッチパッド34の出力情報をそのまま有効とする。ここで、タッチパッド34の座標検出空間の座標系は、図9に示すように、タッチパッド34の左下端の点cを基準座標(X=0,Y=0)として、左右方向をX軸方向、上下方向をY軸方向としたものである。
【0053】
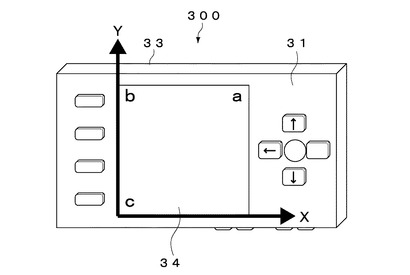
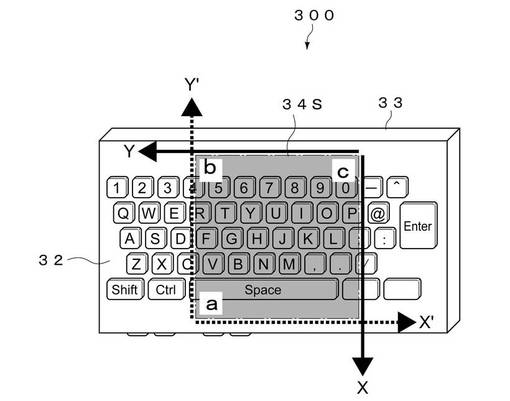
これに対し、図10に示すように、キーボード操作姿勢にあるとき、タッチパッド34の座標検出空間の座標系と、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系とは鏡面対称かつ180度回転対称の関係となる。そこで制御部301は、キーボード操作姿勢が判定されたとき、タッチパッド34により検出された座標(X,Y)をキーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系の座標(X’,Y’)に下記の計算によって変換する(変換部)。
【0054】
X’=α−Y
Y’=β−X
但し、αはタッチパッド34のY軸方向の長さ、βはタッチパッド34のX軸方向の長さである。
なお、ここでは、タッチパッド34のX軸方向とY軸方向の長さが同一であることを想定した。これに対し、X軸方向とY軸方向の長さが異なる場合(タッチパッド34の座標検出空間が長方形である場合)には、上記の変換のとき、縦横比に応じて、これらの計算式に採用するY、Xの値をスケール変換、センター補正、あるいはその両方などによって調整すればよい。
【0055】
このようにキーボード操作姿勢でのタッチパッド34の操作に対して検出された座標を、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系の座標に変換することで、キーボード操作姿勢でのタッチパッド34の操作をユーザの座標系の感覚通りに行うことができる。
【0056】
ところで、上記のように筐体33の裏表に操作入力部をそれぞれ設けた場合、ユーザから見て裏側の操作入力部のキーなどを誤って操作してしまう可能性がある。そこで、本実施形態の操作装置300において、制御部301は、加速度センサ304の出力をもとに判定された操作姿勢に応じて、ユーザから見て裏側の面に設けられた操作入力部を停止状態にするように制御を行う。例えば、キーボード操作姿勢が判定された場合には、制御部301は、リモコン面31に設けられたカーソルキー35などのキーの操作に対する検出を停止状態にするように制御を行う。これによりユーザから見て裏側の面に設けられた操作入力部の誤操作を防止することができる。
【0057】
<変形例1>
次に、上記実施形態の変形例を説明する。
本変形例の操作装置300Aは、操作時の2種類の基本姿勢が上記の実施形態と異なる。
1a.リモコン面31をユーザに向けて横向きの姿勢(以下「第2のタッチパッド操作姿勢」と呼ぶ。)(図11参照)。
2b.キーボード面32をユーザに向けて横向きの姿勢(図12参照)(以下「キーボード操作姿勢」と呼ぶ。)。このキーボード操作姿勢は、上記の実施形態と同じである。
【0058】
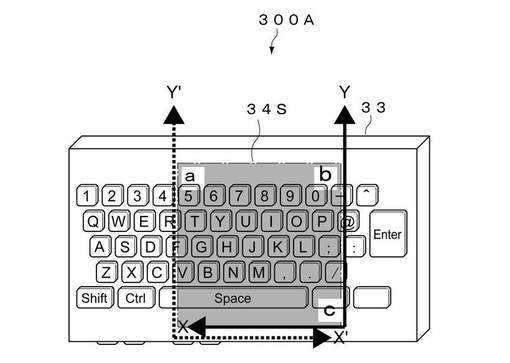
図11に示すように、第2のタッチパッド操作姿勢が判定されたとき、制御部301は、タッチパッド34の出力情報をそのまま有効とする。これに対し、図12に示すように、キーボード操作姿勢にあるとき、タッチパッド34の座標系と、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系とは鏡面対称の関係となる。そこで操作装置300Aの制御部301は、キーボード操作姿勢が判定されたとき、タッチパッド34により検出された座標(X,Y)をキーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系の座標(X’,Y’)に下記の計算によって変換する。
【0059】
X’=α−X
Y’=Y
但し、αはタッチパッド34のY軸方向の長さである。
【0060】
なお、本変形例1においては、加速度センサ304によって得られた検出結果をもとに、例えば以下のようにして操作装置300Aの操作姿勢を判定する。
1.制御部301が、加速度センサ304の出力をもとにリモコン面31とキーボード面32のどちらが、より重力方向を向いているかを判定する。制御部301が、リモコン面31の方がより重力方向を向いていることを判定した場合にはキーボード操作姿勢にあることを判定し、キーボード面32の方がより重力方向を向いていることを判定した場合にはタッチパッド操作姿勢にあることを判定する。
【0061】
このようにしてキーボード操作姿勢でのタッチパッド34の操作に対して検出されたタッチパッド34の座標系での座標を、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系の座標に変換することで、キーボード操作姿勢でのタッチパッド34の操作をユーザの座標系の感覚通りに行うことができる。
【0062】
<変形例2>
次に、上記実施形態の変形例2を説明する。
以上の説明では、タッチパッド34により検出された座標を変換処理する場合について説明した。
【0063】
本変形例2は、座標ではなく移動情報(移動量及び移動方向)、より具体的には単位時間当たりに移動した指などの検出子の2点間の座標の差分を変換処理対象としたものである。
【0064】
この場合、タッチパッド34により検出された移動情報(x,y)を、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系での移動情報(x’,y’)に変換するための計算式は以下のようになる。
リモコン面31をユーザに向けて縦向きの姿勢と、キーボード面32をユーザに向けて横向きの姿勢とを操作時の基本姿勢とする場合、
x’=−y
y’=−x
【0065】
また、リモコン面31をユーザに向けて横向きの姿勢と、キーボード面32をユーザに向けて横向きの姿勢を操作時の基本姿勢とする場合、
x’=−x
y’=y
なお、ここでは、タッチパッド34のX軸方向とY軸方向の長さが同一であることを想定した。これに対し、X軸方向とY軸方向の長さが異なる場合(タッチパッド34の座標検出空間が長方形である場合)には、上記の変換のとき、縦横比に応じて、これらの計算式に採用するx、yの値をスケール変換、センター補正、あるいはその両方などによって調整すればよい。
【0066】
<変形例3>
上記の実施形態及び変形例の座標の変換や、キーの検出停止などの制御は、操作装置300の制御部301によってではなく、操作装置300の制御対象である情報処理装置200のCPU201(図2)にて行うようにしてもよい。操作装置300と情報処理装置200とがRF信号、無線LANなど、比較的高速な無線通信を可能とする場合には、情報処理装置200のCPU201による制御によっても、実用上十分なリアルタイム性が得られる。
【0067】
<変形例4>
上記の実施形態では、加速度センサ304を用いて操作装置300の姿勢を判定することとしたが、操作装置300に設けられたカメラによって撮影された画像をもとに操作装置300の姿勢を判定するようにしてもよい。
【0068】
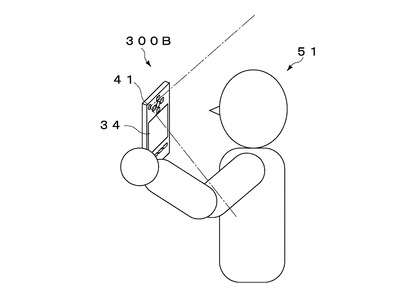
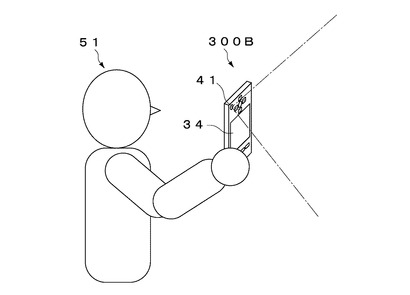
図13及び図14は、操作装置300Bに設けられたカメラによって撮影された画像をもとに操作装置300Bの姿勢を判定する様子を示す図である。
操作装置300Bにおいて、カメラのレンズ41はリモコン面31またはキーボード面32のいずれか一方に設けられている。図の例では、カメラのレンズ41はリモコン面側に設けられているものとする。
【0069】
操作装置300Bの制御部301は、カメラによって撮像されたユーザ51の顔の画像のパターンマッチングなどによってユーザ51を認識する。認識されたユーザ51が予め登録されたユーザと一致する場合、制御部301は、操作装置300Bがリモコン面31をユーザ51に向けた姿勢にあることを判定する(図13参照)。逆に、登録されたユーザの顔が認識されなかった場合には、制御部301は、操作装置300Bがキーボード面32をユーザ51に向けた姿勢にあることを判定する(図14参照)。
【0070】
また、このカメラによる姿勢の判定と、加速度センサ304による操作装置300Bの横向き/縦向きの姿勢の判定結果とを組み合わせて、操作装置300Bの姿勢の最終的な判定結果とすることもできる。
【0071】
これにより、操作装置300Bの姿勢をより精度良く判定することができる。例えば、操作装置300Bは、ユーザ51の目の高さよりも低い位置で操作される場合と、ユーザ51の目の高さよりも高い位置で操作される場合がある。変形例3の方法によれば、そのいずれの状態においても、タッチパッド操作姿勢とキーボード操作姿勢を精度良く判定することが可能である。
【0072】
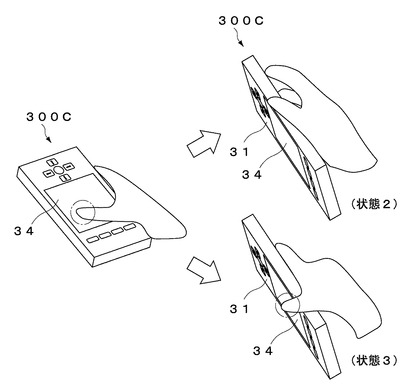
<変形例5>
タッチパッド34で指などの検出子が検出された状態においては、カメラの撮影画像や加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化するようにしてもよい。
【0073】
図15は、この制御の様子を示す図である。
タッチパッド操作姿勢(状態1)から操作装置300Cの姿勢が、リモコン面31がより重力方向を向くように変えられたとき(状態2)、制御部301は加速度センサ304の出力をもとに操作装置300Cの姿勢がキーボード操作姿勢に変化したことを判定する。このときタッチパッド34に指などが触れた状態にある場合(状態3)、すなわちタッチパッド34から情報が出力されている場合には、制御部301はカメラの撮影画像や加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化する。これにより操作装置300Cの姿勢はタッチパッド操作姿勢のままであるものとして制御が行われる
【0074】
このようにすることによって、リモコン面31での入力操作時に発生した姿勢の変化により、リモコン面31に存在するキーの操作に対する検出がユーザの意に反して停止されることを防止することができる。
【0075】
同様の原理で、キーボード操作姿勢でキーボード38のキーが押されていることが検出された状態においては、カメラから得た撮影画像や加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化するようにしてもよい。
【0076】
さらに、リモコン面の操作ボタンが通常の操作時の頻度を考慮して決められた所定値以上の頻度で操作されている間は、加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化して、タッチパッド操作姿勢での制御を行うようにしてもよい。
【0077】
同様に、キーボード38のキーが通常の操作時の頻度を考慮して決められた所定値以上の頻度で操作されている間は、加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化して、キーボード操作姿勢での制御を行うようにしてもよい。
【0078】
なお、本技術は以下のような構成も採ることができる。
(1) 表裏対向する2つの面を第1の面及び第2の面として有する筐体と、
前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作を検出を行う検出部を含む第1の操作入力部と、
前記第2の面に設けられた第2の操作入力部と、
前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、
前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部と
を具備する操作装置。
(2)前記(1)に記載の操作装置であって、
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、
前記変換部は、前記検出部により検出された座標を(X,Y)、前記第2の面側から前記座標検出空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出空間のY軸方向の長さをα、前記座標検出空間のX軸方向の長さをβとして、
X’=α−Y
Y’=β−X
の計算式により変換を行う
操作装置。
(3)前記(1)または(2)に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
(4)前記(1)から(3)のうちいずれか1つに記載の操作装置であって、
前記判定部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
(5)前記(1)から(4)のうちいずれか1つに記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
(6)前記(1)から(4)のうちいずれか1つに記載の操作装置であって、
前記判定部は、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部と、
前記制御部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
(7)前記(1)に記載の操作装置であって、
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、
前記変換部は、
前記座標検出部の座標系で得た検出座標を(X,Y)、前記第2の面側から前記空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出部の検出空間のY軸方向の長さをαとして、
X’=α−X
Y’=Y
の計算式により変換を行う
操作装置。
(8)前記(7)に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
(9)前記(7)または(8)に記載の操作装置であって、
前記判定部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
(10)前記(7)から(9)のうちいずれか1つに記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
(11)前記(7)から(10)のうちいずれか1つに記載の操作装置であって、
前記判定部は、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部と、
前記制御部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
(12)前記(1)に記載の操作装置であって、
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部により検出された前記移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−y
y’=−x
の計算式により変換を行う
操作装置。
(13)前記(12)に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
(14)前記(12)または(13)に記載の操作装置であって、
前記判定部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
(15)前記(12)から(14)のうちいずれか1つに記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
(16)前記(12)から(15)のうちいずれか1つに記載の操作装置であって、
前記判定部は、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部と、
前記制御部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
(17)前記(1)に記載の操作装置であって、
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部の座標系で得た移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−x
y’=y
の計算式により変換を行う
操作装置。
(18)前記(17)に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
(19)前記(17)または(18)に記載の操作装置であって、
前記判定部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
(20)前記(17)から(19)のうちいずれか1つに記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
(21)前記(17)から(20)のうちいずれか1つに記載の操作装置であって、
前記判定部は、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部と、
前記制御部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
【0079】
なお、本技術は以上説明した実施の形態には限定されるものではなく、本技術の技術思想の範囲内で種々の変形が可能である。
【符号の説明】
【0080】
31…リモコン面
32…キーボード面
33…筐体
34…タッチパッド
34S…座標検出空間
35…カーソルキー
38…キーボード
100…情報処理システム
200…情報処理装置
201…CPU
300…操作装置
301…制御部
304…加速度センサ
305…リモコン面キーマトリクス
306…側面キーマトリクス
307…キーボード面キーマトリクス
【技術分野】
【0001】
本技術は、テレビジョン受像機などの情報処理装置を遠隔操作する操作装置、その情報処理方法及び、操作装置の制御対象である情報処理装置に関する。
【背景技術】
【0002】
テレビジョン受像機などの情報処理装置をリモートコントロールする無線操作端末は、赤外線通信を利用する赤外線リモコンが主流とされてきた。しかし、赤外線リモコンでは、赤外線の指向性が強いために、リモコンを被制御機器の方向へ赤外線の発光部を向ける必要があった。これに対し、電波の指向性は比較的弱いため、近年では、高周波電波を用いたRF(Radio Frequency)リモコンが開発されて主流となりつつある。また、RFリモコンの規格を標準化するための試みが各団体によってなされている。
【0003】
例えば、近距離無線通信規格IEEE(登録商標)(Institute of Electrical and Electronic Engineers)802.15.4に準拠し、IEEE(登録商標)802.15.4の上位に相当するネットワーク層、セキュリティ層、アプリケーション層の仕様としてZigBee(登録商標)が標準化されている。さらに、IEEE(登録商標)802.15.4をもとに、業界団体によってRFリモコン規格ZigBee(登録商標) RF4CE(Radio Frequency for Consumer Electronics)が標準化されている。
【0004】
例えば、特許文献1には、RF4CEなどのRF無線信号を用いてテレビジョン受像機などの情報処理装置をコントロールする操作端末に関する技術が開示されている。また、特許文献2には、6面直方体からなる筐体の2つの主面に操作用のキーを設けたリモートコントロール装置が開示されている。このリモートコントロール装置は、さらに2つの主面のどちらを表にした姿勢となっているかを検出し、裏側の主面の操作キーを無効することが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2011−034294号公報
【特許文献2】特開平6−89634号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、近年、情報処理装置の多機能化は目覚しく、例えば、インターネットに接続して、インターネット上の様々なサービスを利用することが可能なテレビジョン受像機なども登場している。したがって、このように多機能の情報処理装置を遠隔操作するための操作装置においても、タッチパッドなどのポインティングデバイスやキーボードの必要性が増大してきている。しかし、ポインティングデバイスやキーボードはある程度の面サイズを要するため搭載場所をとり、操作装置のサイズを大きくする要因となる。そこで、キーボードとタッチパッドなどを操作装置の表裏対向する2つの面に配置することが検討されている。このような構成を採った場合、操作性を高めるための様々な改良が期待されている。
【0007】
以上のような事情に鑑み、本技術の目的は、操作性の向上を図ることのできる操作装置、その操作装置の情報処理御方法及び情報処理装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本技術に係る一形態である操作装置は、表裏対向する2つの面を第1の面及び第2の面として有する筐体と、前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部と、前記第2の面に設けられた第2の操作入力部と、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部とを具備する。
【0009】
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、前記変換部は、前記検出部により検出された座標を(X,Y)、前記第2の面側から前記座標検出空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出空間のY軸方向の長さをα、前記座標検出空間のX軸方向の長さをβとして、
X’=α−Y
Y’=β−X
の計算式により変換を行うものであってよい。
【0010】
上記の操作装置において、前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備するものであってよい。
【0011】
前記制御部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にするものであってよい。
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にするものであってもよい。
【0012】
本技術に係る操作装置は、前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部をさらに具備し、前記判定部は、前記撮像部により撮像された画像をもとに前記姿勢を判定するものであってよい。
【0013】
前記変換部は、前記座標検出部の座標系で得た検出座標を(X,Y)、前記第2の面側から前記座標検出空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出部の検出空間のY軸方向の長さをαとして、
X’=α−X
Y’=Y
の計算式により変換を行うものであってもよい。
【0014】
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部の座標系により検出された前記移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−y
y’=−x
の計算式により変換を行うものであってもよい。
【0015】
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、前記変換部は、前記座標検出部の座標系で得た移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−x
y’=y
の計算式により変換を行うものであってもよい。
【0016】
本技術に係るその他の形態である操作装置の情報処理方法は、所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部が設けられた第1の面と、第2の操作入力部が設けられ、前記第1の面に表裏対向する第2の面を有する筐体の、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定し、前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する、というものである。
【0017】
本技術に係るその他の形態である情報処理装置は、表裏対向する2つの面を第1の面及び第2の面として有する筐体と、前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部と、前記第2の面に設けられた第2の操作入力部と、を具備する操作装置の、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部とを具備する。
【発明の効果】
【0018】
以上のように、本技術によれば、操作性の高い操作装置を提供することができる。
【図面の簡単な説明】
【0019】
【図1】本技術に係る第1の実施形態の情報処理システムの構成を示すブロック図である。
【図2】図1の情報処理装置のハードウェア構成を示す図である。
【図3】図1の操作装置のリモコン面側の外観図である。
【図4】図1の操作装置のキーボード面側の外観図である。
【図5】図1の操作装置のバードウェア構成を示すブロック図である。
【図6】図1の操作装置のタッチパッド操作姿勢を示す図である。
【図7】図1の操作装置のキーボード操作姿勢を示す図である。
【図8】図1の操作装置のキーボード面をユーザ側に向けたままその裏側面にあるタッチパッドを操作するときの状態を示す図である。
【図9】図1の操作装置のタッチパッドの座標系を説明するための図である。
【図10】図1の操作装置においてキーボード面側からタッチパッドの座標検出空間を透視した座標系を説明するための図である。
【図11】変形例1の操作装置の第2のタッチパッド操作姿勢を示す図である。
【図12】変形例1の操作装置のタッチパッド操作姿勢を示す図である。
【図13】変形例4の操作装置による姿勢検出の方法を説明するための図である。
【図14】同じく変形例4の操作装置による姿勢検出の方法を説明するための図である。
【図15】変形例5の操作装置を説明するための図である。
【発明を実施するための形態】
【0020】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
本実施形態は、例えばテレビジョン受像機、ゲーム機、録画装置、パーソナルコンピュータなどの情報処理装置を、例えばケーブル伝送信号、Ir信号、RF信号、無線LANなどの伝送路を用いて遠隔操作する操作装置に関するものである。
【0021】
近年、情報処理装置の多機能化は目覚しく、例えば、インターネットに接続して、インターネット上の様々なサービスを利用することが可能なテレビジョン受像機なども登場している。そこで、例えばパーソナルコンピュータ用のキーボードなどに採用された標準的なキー配列を備えたQWERTYキーボードや、タッチパッドなどを搭載した遠隔操作装置も登場してきている。また、QWERTYキーボードとタッチパッドなどをユーザから見て1つの面に搭載するとなると、操作装置の面サイズが大きくなり、操作装置の大型化を招くことになる。そこで、QWERTYキーボードとタッチパッドなどのポインティングデバイスを操作装置の表裏対向する2つの面に配置することが検討されている。
【0022】
QWERTYキーボードとタッチパッドなどを操作装置の表裏対向する2つの面に配置した場合、タッチパッドなどの操作の形態として、QWERTYキーボードの搭載された面をユーザ側に向けたまま、タッチパッドなどを操作する、といった形態が考えられる。QWERTYキーボードの搭載された面をユーザ側に向けたまま裏側面にあるタッチパッドを操作する際には、ユーザはタッチパッドの座標系を裏側から見ていることを意識しながらの操作を行う必要があり、直感的な操作ができなくなることで、操作性が著しく低下する。
【0023】
本実施形態の操作装置は、姿勢を検知するために必要な加速度センサなどの検出部を内蔵する。この操作装置は、検出部の検出値をもとに姿勢を検出し、タッチパッドが配置された第1の面とQWERTYキーボードが配置された第2の面とで、どちらの面がユーザに面しているかかを判定するとともに、操作装置の縦横の姿勢の向きを判定する。操作装置は、判定した結果をもとに、必要に応じて、タッチパッドにより検出された座標などの情報を、第2の面側からタッチパッドの座標検出空間を透視した座標系の情報に変換するものである。
【0024】
以下、本実施形態の操作装置を詳細に説明する。
<第1の実施形態>
図1は、本技術に係る第1の実施形態の情報処理システムの構成を示すブロック図である。同図に示すように、本実施形態の情報処理システム100は、操作対象である情報処理装置200と、情報処理装置200を遠隔操作する操作装置300とを有する。情報処理装置200は、例えば、テレビジョン受像機、パーソナルコンピュータ、レコーダ、プレーヤ、ゲーム機など、基本的なコンピュータのハードウェア構成を含むものであれば何であってもよい。また、情報処理装置200は、インターネットなどのネットワークに接続して、ウェブページなどの閲覧を行うことが可能な機器であってもよい。
【0025】
[情報処理装置200の構成]
図2は情報処理装置200のハードウェア構成を示す図である。
本実施形態では、情報処理装置200としてテレビジョン受像機を用いた場合を説明する。
【0026】
この情報処理装置200は、CPU(Central Processing Unit)201、バス202、メモリ203、ストレージ204、ネットワークI/F206、無線通信部207を有する。情報処理装置200は、また、アンテナ209、チューナ210、デスクランブラ211、デマルチプレクサ212、Audioデコーダ213、Videoデコーダ214、音声処理回路215、スピーカ216、GUI重畳器217、映像処理回路218、ディスプレイ219を有している。
【0027】
この情報処理装置200では、CPU201が、バス202を介して接続されたメモリ203又はストレージ204に記憶されているプログラムに従って各種処理を実行する。
【0028】
無線通信部207は、操作装置300との間で無線による双方向の信号の通信を行う。無線通信の方式としては、例えば、IR(赤外線)方式、家電用RFリモコンの国際規格であるRF4CE(Radio Frequency for Consumer Electronics)などのRF方式、IEEE 802.11b規格などに準拠した無線LANなどが挙げられる。
【0029】
アンテナ209は、デジタル放送信号などを受信してチューナ210に入力する。
【0030】
チューナ210は、デジタル放送信号から所定のチャンネルの放送信号を抽出する。チューナ210は、この抽出した放送信号に対して復調処理を施して得た所定のチャンネルのトランスポートストリームをデスクランブラ211に出力する。
【0031】
デスクランブラ211は、情報処理装置200に装着された所定のICカード(図示せず)にあらかじめ記憶されている解除キーを用いて、チューナ210から入力されたトランスポートストリームのスクランブルを解除する。デスクランブラ211は、このスクランブル解除済のトランスポートストリームをデマルチプレクサ212に出力する。
【0032】
デマルチプレクサ212は、デスクランブラ211から入力されたスクランブル解除済のトランスポートストリームからオーディオデータとビデオデータとを分離する。デマルチプレクサ212は、分離したオーディオデータをAudioデコーダ213に出力し、分離したビデオデータをVideoデコーダ214に出力する。
【0033】
Audioデコーダ213は、デマルチプレクサ212から入力されたオーディオデータをデコードし、得られた音声データを、音声処理回路215に出力する。
音声処理回路215は、Audioデコーダ213から入力された音声データに対してD/A(Digital/Analog)変換、増幅処理などを施し、得られた音声信号をスピーカ216に出力する。
【0034】
Videoデコーダ214は、デマルチプレクサ212から入力されたビデオデータをデコードし、得られた映像データを、GUI(Graphical User Interface)重畳器217に出力する。
【0035】
GUI重畳器217は、Videoデコーダ214から入力された映像データに対して、OSD(On Screen Display)などのグラフィックデータを重畳して、映像処理回路218に出力する。
【0036】
映像処理回路218は、GUI重畳器217から入力された映像データに対して、所定の画像処理、D/A(Digital/Analog)変換などを施し、得られた映像信号をディスプレイ219に出力する。
【0037】
また、CPU201は、操作装置300からの録画に関する操作信号、あるいはメモリ203に設定された録画予約のための情報をもとに、デジタル放送を受信し、所定のチャンネルのトランスポートストリームを得て、これを番組の映像音声データとして、ストレージ204に保存することができる。
【0038】
このようにして、情報処理装置200は、デジタル放送を受信して、その番組を視聴可能なようにディスプレイ219およびスピーカ216を通じて出力したり、ストレージ204に録画したりすることができる。また、CPU201は、ネットワークI/F206を通じてインターネットにアクセスし、取得したウェブページをディスプレイ219に表示させたりすることもできる。
【0039】
[操作装置300の構成]
次に、操作装置300の構成を説明する。
図3は操作装置300のリモコン面側の外観図である。図4は操作装置300のキーボード面側の外観図である。
【0040】
図3及び図4に示すように、操作装置300は、表裏対向する長方形の2つの面を主面31,32として有し、主面31,32の2軸方向のサイズに対して、それらの2軸に対して直交する軸方向(奥行き方向)のサイズが十分小さい計6面体の直方体形状の筐体33を有する。表裏対向する2つの主面はどちらもユーザにとっての操作面となっている。すなわち、一方の主面31(「リモコン面31」とも呼ぶ。)には、タッチパッド34と、カーソルキー35などのキーが第1の操作入力部として設けられている。タッチパッド34は一方の主面31においてほぼ中央の領域に配置されている。これは、キーボード操作姿勢(後述する。)での操作時にユーザにとってタッチパッド34の操作はブラインド操作となることから、リモコン面31の中心とタッチパッド34の中心座標とを一致もしくはほぼ一致させることで、タッチパッド34のブラインドによる一定の操作性を確保できる。筐体33のリモコン面31に対して表裏対向する関係にある他方の主面32(「キーボード面32」とも呼ぶ。)には、QWERTYキーボードなどのキーボード38が第2の操作入力部として設けられている。筐体33のリモコン面31及びキーボード面32以外の4面(以下これらをそれぞれ「側面」と呼ぶ。)のうち少なくとも1つの側面36には、例えば、音量調整、選局など、例えば使用頻度の高い複数のキー37が設けられている。
【0041】
図5は、操作装置300のバードウェア構成を示すブロック図である。
操作装置300は、制御部301、無線通信部302、タッチパッド34、加速度センサ304、リモコン面キーマトリクス305、側面キーマトリクス306、キーボード面キーマトリクス307を有する。
【0042】
制御部301は、操作装置300を構成する各ブロックの全体的な制御、各種の演算処理、各ブロック間でのデータのやりとりを制御する。
【0043】
無線通信部302は、情報処理装置200との間で無線による双方向の信号の通信を行う。無線通信の方式としては、例えば、IR(赤外線)方式、家電用RFリモコンの国際規格であるRF4CE(Radio Frequency for Consumer Electronics)などのRF方式、IEEE 802.11b規格などに準拠した無線LANなどが挙げられる。
【0044】
タッチパッド34は、ユーザがタッチした位置の座標を検出するデバイスである。タッチパッド34は、例えば、静電容量方式、抵抗膜方式などのタッチセンサなどにより構成される。
【0045】
加速度センサ304は、3軸(X軸、Y軸、Z軸)方向の加速度を検出するセンサである。加速度センサ304の検出信号は制御部301に供給され、操作装置300の姿勢を検出するための情報として処理される。なお、操作装置300の姿勢を検出する手段としては、加速度センサ304の他に、重力方向に対する角度を検出するジャイロセンサなどがある。あるいは、図示しないカメラにより操作装置300から見た周辺の映像を撮像し、操作装置300内の制御部301あるいは情報処理装置200内のCPU201などにおいて、その撮影画像を解析して、操作装置300の姿勢を検出する方法などもある。
【0046】
リモコン面キーマトリクス305は、リモコン面31に設けられたカーソルキー35などのキーに対する操作を検出して制御部301に通知する。
側面キーマトリクス306は、筐体33の側面36に設けられたキー37に対する操作を検出して制御部301に通知する。
キーボード面32キーマトリクス307は、キーボード38に対する操作を検出して制御部301に通知する。
【0047】
<動作の説明>
次に、本実施形態の操作装置300の動作を説明する。
【0048】
操作装置300の制御部301は、予め組み込まれたタッチパッド検出情報の変換用プログラムに基づいて次のような制御を行う。
【0049】
操作装置300の制御部301は、加速度センサ304によって得られた検出結果をもとに操作装置300の操作姿勢を判定する(判定部)。
【0050】
本実施形態の操作装置300を操作する際の姿勢には少なくとも次の2種類の基本姿勢がある。
1.リモコン面31をユーザに向けて縦向きの姿勢(以下「タッチパッド操作姿勢」と呼ぶ。)(図6参照)。
2.キーボード面32をユーザに向けて横向きの姿勢(図7参照)(以下「キーボード操作姿勢」と呼ぶ。)。横向きに使用されるのは、QWERTYキーボードなどのキーボード38のキー配列が横長であるためである。ユーザは操作装置300の両端部分を両手で持って両手の指を使ってキー入力を行うことになる。また、この姿勢での操作の際に、図8に示すように、ユーザは背面側(リモコン面31側)に指を廻してタッチパッド34の操作を行うこともできる。
【0051】
加速度センサ304によって得られた検出結果をもとに操作装置300の操作姿勢を判定する方法としては、例えば、以下がある。
1.制御部301が、加速度センサ304の出力をもとにリモコン面31とキーボード面32のどちらが、より重力方向を向いているかを判定する。制御部301が、リモコン面31の方がより重力方向を向いていることを判定した場合にはキーボード操作姿勢にあることを判定し、キーボード面32の方がより重力方向を向いていることを判定した場合にはタッチパッド操作姿勢にあることを判定する。
2.操作装置300の長手方向と短手方向のどちらが、より重力方向を向いているかを判定する。制御部301が、操作装置300の長手方向の方がより重力方向を向いていることを判定した場合にはタッチパッド操作姿勢にあることを判定し、短手方向の方がより重力方向を向いていることを判定した場合にはキーボード操作姿勢にあることを判定する。
3.上記の2つの判定方法を併用する。すなわち、制御部301が、リモコン面31の方がより重力方向を向き、かつ短手方向の方がより重力方向を向いていることを判定した場合にはキーボード操作姿勢にあることを判定する。また、制御部301は、キーボード面32の方がより重力方向を向き、かつ長手方向の方がより重力方向を向いていることを判定した場合にはタッチパッド操作姿勢にあることを判定する。その他の場合には無視する。
【0052】
制御部301は、タッチパッド操作姿勢を判定したとき、タッチパッド34の出力情報をそのまま有効とする。ここで、タッチパッド34の座標検出空間の座標系は、図9に示すように、タッチパッド34の左下端の点cを基準座標(X=0,Y=0)として、左右方向をX軸方向、上下方向をY軸方向としたものである。
【0053】
これに対し、図10に示すように、キーボード操作姿勢にあるとき、タッチパッド34の座標検出空間の座標系と、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系とは鏡面対称かつ180度回転対称の関係となる。そこで制御部301は、キーボード操作姿勢が判定されたとき、タッチパッド34により検出された座標(X,Y)をキーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系の座標(X’,Y’)に下記の計算によって変換する(変換部)。
【0054】
X’=α−Y
Y’=β−X
但し、αはタッチパッド34のY軸方向の長さ、βはタッチパッド34のX軸方向の長さである。
なお、ここでは、タッチパッド34のX軸方向とY軸方向の長さが同一であることを想定した。これに対し、X軸方向とY軸方向の長さが異なる場合(タッチパッド34の座標検出空間が長方形である場合)には、上記の変換のとき、縦横比に応じて、これらの計算式に採用するY、Xの値をスケール変換、センター補正、あるいはその両方などによって調整すればよい。
【0055】
このようにキーボード操作姿勢でのタッチパッド34の操作に対して検出された座標を、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系の座標に変換することで、キーボード操作姿勢でのタッチパッド34の操作をユーザの座標系の感覚通りに行うことができる。
【0056】
ところで、上記のように筐体33の裏表に操作入力部をそれぞれ設けた場合、ユーザから見て裏側の操作入力部のキーなどを誤って操作してしまう可能性がある。そこで、本実施形態の操作装置300において、制御部301は、加速度センサ304の出力をもとに判定された操作姿勢に応じて、ユーザから見て裏側の面に設けられた操作入力部を停止状態にするように制御を行う。例えば、キーボード操作姿勢が判定された場合には、制御部301は、リモコン面31に設けられたカーソルキー35などのキーの操作に対する検出を停止状態にするように制御を行う。これによりユーザから見て裏側の面に設けられた操作入力部の誤操作を防止することができる。
【0057】
<変形例1>
次に、上記実施形態の変形例を説明する。
本変形例の操作装置300Aは、操作時の2種類の基本姿勢が上記の実施形態と異なる。
1a.リモコン面31をユーザに向けて横向きの姿勢(以下「第2のタッチパッド操作姿勢」と呼ぶ。)(図11参照)。
2b.キーボード面32をユーザに向けて横向きの姿勢(図12参照)(以下「キーボード操作姿勢」と呼ぶ。)。このキーボード操作姿勢は、上記の実施形態と同じである。
【0058】
図11に示すように、第2のタッチパッド操作姿勢が判定されたとき、制御部301は、タッチパッド34の出力情報をそのまま有効とする。これに対し、図12に示すように、キーボード操作姿勢にあるとき、タッチパッド34の座標系と、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系とは鏡面対称の関係となる。そこで操作装置300Aの制御部301は、キーボード操作姿勢が判定されたとき、タッチパッド34により検出された座標(X,Y)をキーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系の座標(X’,Y’)に下記の計算によって変換する。
【0059】
X’=α−X
Y’=Y
但し、αはタッチパッド34のY軸方向の長さである。
【0060】
なお、本変形例1においては、加速度センサ304によって得られた検出結果をもとに、例えば以下のようにして操作装置300Aの操作姿勢を判定する。
1.制御部301が、加速度センサ304の出力をもとにリモコン面31とキーボード面32のどちらが、より重力方向を向いているかを判定する。制御部301が、リモコン面31の方がより重力方向を向いていることを判定した場合にはキーボード操作姿勢にあることを判定し、キーボード面32の方がより重力方向を向いていることを判定した場合にはタッチパッド操作姿勢にあることを判定する。
【0061】
このようにしてキーボード操作姿勢でのタッチパッド34の操作に対して検出されたタッチパッド34の座標系での座標を、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系の座標に変換することで、キーボード操作姿勢でのタッチパッド34の操作をユーザの座標系の感覚通りに行うことができる。
【0062】
<変形例2>
次に、上記実施形態の変形例2を説明する。
以上の説明では、タッチパッド34により検出された座標を変換処理する場合について説明した。
【0063】
本変形例2は、座標ではなく移動情報(移動量及び移動方向)、より具体的には単位時間当たりに移動した指などの検出子の2点間の座標の差分を変換処理対象としたものである。
【0064】
この場合、タッチパッド34により検出された移動情報(x,y)を、キーボード面32からタッチパッド34の座標検出空間34Sを透視した座標系での移動情報(x’,y’)に変換するための計算式は以下のようになる。
リモコン面31をユーザに向けて縦向きの姿勢と、キーボード面32をユーザに向けて横向きの姿勢とを操作時の基本姿勢とする場合、
x’=−y
y’=−x
【0065】
また、リモコン面31をユーザに向けて横向きの姿勢と、キーボード面32をユーザに向けて横向きの姿勢を操作時の基本姿勢とする場合、
x’=−x
y’=y
なお、ここでは、タッチパッド34のX軸方向とY軸方向の長さが同一であることを想定した。これに対し、X軸方向とY軸方向の長さが異なる場合(タッチパッド34の座標検出空間が長方形である場合)には、上記の変換のとき、縦横比に応じて、これらの計算式に採用するx、yの値をスケール変換、センター補正、あるいはその両方などによって調整すればよい。
【0066】
<変形例3>
上記の実施形態及び変形例の座標の変換や、キーの検出停止などの制御は、操作装置300の制御部301によってではなく、操作装置300の制御対象である情報処理装置200のCPU201(図2)にて行うようにしてもよい。操作装置300と情報処理装置200とがRF信号、無線LANなど、比較的高速な無線通信を可能とする場合には、情報処理装置200のCPU201による制御によっても、実用上十分なリアルタイム性が得られる。
【0067】
<変形例4>
上記の実施形態では、加速度センサ304を用いて操作装置300の姿勢を判定することとしたが、操作装置300に設けられたカメラによって撮影された画像をもとに操作装置300の姿勢を判定するようにしてもよい。
【0068】
図13及び図14は、操作装置300Bに設けられたカメラによって撮影された画像をもとに操作装置300Bの姿勢を判定する様子を示す図である。
操作装置300Bにおいて、カメラのレンズ41はリモコン面31またはキーボード面32のいずれか一方に設けられている。図の例では、カメラのレンズ41はリモコン面側に設けられているものとする。
【0069】
操作装置300Bの制御部301は、カメラによって撮像されたユーザ51の顔の画像のパターンマッチングなどによってユーザ51を認識する。認識されたユーザ51が予め登録されたユーザと一致する場合、制御部301は、操作装置300Bがリモコン面31をユーザ51に向けた姿勢にあることを判定する(図13参照)。逆に、登録されたユーザの顔が認識されなかった場合には、制御部301は、操作装置300Bがキーボード面32をユーザ51に向けた姿勢にあることを判定する(図14参照)。
【0070】
また、このカメラによる姿勢の判定と、加速度センサ304による操作装置300Bの横向き/縦向きの姿勢の判定結果とを組み合わせて、操作装置300Bの姿勢の最終的な判定結果とすることもできる。
【0071】
これにより、操作装置300Bの姿勢をより精度良く判定することができる。例えば、操作装置300Bは、ユーザ51の目の高さよりも低い位置で操作される場合と、ユーザ51の目の高さよりも高い位置で操作される場合がある。変形例3の方法によれば、そのいずれの状態においても、タッチパッド操作姿勢とキーボード操作姿勢を精度良く判定することが可能である。
【0072】
<変形例5>
タッチパッド34で指などの検出子が検出された状態においては、カメラの撮影画像や加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化するようにしてもよい。
【0073】
図15は、この制御の様子を示す図である。
タッチパッド操作姿勢(状態1)から操作装置300Cの姿勢が、リモコン面31がより重力方向を向くように変えられたとき(状態2)、制御部301は加速度センサ304の出力をもとに操作装置300Cの姿勢がキーボード操作姿勢に変化したことを判定する。このときタッチパッド34に指などが触れた状態にある場合(状態3)、すなわちタッチパッド34から情報が出力されている場合には、制御部301はカメラの撮影画像や加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化する。これにより操作装置300Cの姿勢はタッチパッド操作姿勢のままであるものとして制御が行われる
【0074】
このようにすることによって、リモコン面31での入力操作時に発生した姿勢の変化により、リモコン面31に存在するキーの操作に対する検出がユーザの意に反して停止されることを防止することができる。
【0075】
同様の原理で、キーボード操作姿勢でキーボード38のキーが押されていることが検出された状態においては、カメラから得た撮影画像や加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化するようにしてもよい。
【0076】
さらに、リモコン面の操作ボタンが通常の操作時の頻度を考慮して決められた所定値以上の頻度で操作されている間は、加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化して、タッチパッド操作姿勢での制御を行うようにしてもよい。
【0077】
同様に、キーボード38のキーが通常の操作時の頻度を考慮して決められた所定値以上の頻度で操作されている間は、加速度センサ304の出力に基づくタッチパッド操作姿勢及びキーボード操作姿勢の判定を無効化して、キーボード操作姿勢での制御を行うようにしてもよい。
【0078】
なお、本技術は以下のような構成も採ることができる。
(1) 表裏対向する2つの面を第1の面及び第2の面として有する筐体と、
前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作を検出を行う検出部を含む第1の操作入力部と、
前記第2の面に設けられた第2の操作入力部と、
前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、
前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部と
を具備する操作装置。
(2)前記(1)に記載の操作装置であって、
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、
前記変換部は、前記検出部により検出された座標を(X,Y)、前記第2の面側から前記座標検出空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出空間のY軸方向の長さをα、前記座標検出空間のX軸方向の長さをβとして、
X’=α−Y
Y’=β−X
の計算式により変換を行う
操作装置。
(3)前記(1)または(2)に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
(4)前記(1)から(3)のうちいずれか1つに記載の操作装置であって、
前記判定部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
(5)前記(1)から(4)のうちいずれか1つに記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
(6)前記(1)から(4)のうちいずれか1つに記載の操作装置であって、
前記判定部は、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部と、
前記制御部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
(7)前記(1)に記載の操作装置であって、
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、
前記変換部は、
前記座標検出部の座標系で得た検出座標を(X,Y)、前記第2の面側から前記空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出部の検出空間のY軸方向の長さをαとして、
X’=α−X
Y’=Y
の計算式により変換を行う
操作装置。
(8)前記(7)に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
(9)前記(7)または(8)に記載の操作装置であって、
前記判定部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
(10)前記(7)から(9)のうちいずれか1つに記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
(11)前記(7)から(10)のうちいずれか1つに記載の操作装置であって、
前記判定部は、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部と、
前記制御部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
(12)前記(1)に記載の操作装置であって、
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部により検出された前記移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−y
y’=−x
の計算式により変換を行う
操作装置。
(13)前記(12)に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
(14)前記(12)または(13)に記載の操作装置であって、
前記判定部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
(15)前記(12)から(14)のうちいずれか1つに記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
(16)前記(12)から(15)のうちいずれか1つに記載の操作装置であって、
前記判定部は、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部と、
前記制御部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
(17)前記(1)に記載の操作装置であって、
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部の座標系で得た移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−x
y’=y
の計算式により変換を行う
操作装置。
(18)前記(17)に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
(19)前記(17)または(18)に記載の操作装置であって、
前記判定部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
(20)前記(17)から(19)のうちいずれか1つに記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
(21)前記(17)から(20)のうちいずれか1つに記載の操作装置であって、
前記判定部は、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部と、
前記制御部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
【0079】
なお、本技術は以上説明した実施の形態には限定されるものではなく、本技術の技術思想の範囲内で種々の変形が可能である。
【符号の説明】
【0080】
31…リモコン面
32…キーボード面
33…筐体
34…タッチパッド
34S…座標検出空間
35…カーソルキー
38…キーボード
100…情報処理システム
200…情報処理装置
201…CPU
300…操作装置
301…制御部
304…加速度センサ
305…リモコン面キーマトリクス
306…側面キーマトリクス
307…キーボード面キーマトリクス
【特許請求の範囲】
【請求項1】
表裏対向する2つの面を第1の面及び第2の面として有する筐体と、
前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部と、
前記第2の面に設けられた第2の操作入力部と、
前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、
前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部と
を具備する操作装置。
【請求項2】
請求項1に記載の操作装置であって、
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、
前記変換部は、前記検出部により検出された座標を(X,Y)、前記第2の面側から前記座標検出空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出空間のY軸方向の長さをα、前記座標検出空間のX軸方向の長さをβとして、
X’=α−Y
Y’=β−X
の計算式により変換を行う
操作装置。
【請求項3】
請求項2に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
【請求項4】
請求項3に記載の操作装置であって、
前記制御部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
【請求項5】
請求項4に記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
【請求項6】
請求項5に記載の操作装置であって、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部をさらに具備し、
前記判定部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
【請求項7】
請求項1に記載の操作装置であって、
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、
前記変換部は、
前記座標検出部の座標系で得た検出座標を(X,Y)、前記第2の面側から前記空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出部の検出空間のY軸方向の長さをαとして、
X’=α−X
Y’=Y
の計算式により変換を行う
操作装置。
【請求項8】
請求項1に記載の操作装置であって、
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部により検出された前記移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−y
y’=−x
の計算式により変換を行う
操作装置。
【請求項9】
請求項1に記載の操作装置であって、
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部の座標系で得た移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−x
y’=y
の計算式により変換を行う
操作装置。
【請求項10】
所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部が設けられた第1の面と、第2の操作入力部が設けられ、前記第1の面に表裏対向する第2の面を有する筐体の、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定し、
前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する
操作装置の情報処理方法。
【請求項11】
表裏対向する2つの面を第1の面及び第2の面として有する筐体と、
前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部と、
前記第2の面に設けられた第2の操作入力部と、
を具備する操作装置の、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、
前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部と
を具備する情報処理装置。
【請求項1】
表裏対向する2つの面を第1の面及び第2の面として有する筐体と、
前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部と、
前記第2の面に設けられた第2の操作入力部と、
前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、
前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部と
を具備する操作装置。
【請求項2】
請求項1に記載の操作装置であって、
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、
前記変換部は、前記検出部により検出された座標を(X,Y)、前記第2の面側から前記座標検出空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出空間のY軸方向の長さをα、前記座標検出空間のX軸方向の長さをβとして、
X’=α−Y
Y’=β−X
の計算式により変換を行う
操作装置。
【請求項3】
請求項2に記載の操作装置であって、
前記第1の操作入力部は、前記検出部とともに1以上のキー操作部を有し、
前記姿勢が判定されたとき、前記キー操作部の操作の検出を停止状態にする制御部をさらに具備する
操作装置。
【請求項4】
請求項3に記載の操作装置であって、
前記制御部は、前記検出部から情報が出力されているとき、前記姿勢の判定を停止状態にする
操作装置。
【請求項5】
請求項4に記載の操作装置であって、
前記制御部は、前記第2の操作入力部が操作されているとき、前記姿勢の判定を停止状態にする
操作装置。
【請求項6】
請求項5に記載の操作装置であって、
前記第1の面及び前記第2の面のいずれか一方の正面側を撮影可能な撮像部をさらに具備し、
前記判定部は、前記撮像部により撮像された画像をもとに前記姿勢を判定する
操作装置。
【請求項7】
請求項1に記載の操作装置であって、
前記検出部は、前記座標検出空間に対してユーザにより指示された座標を検出し、
前記変換部は、
前記座標検出部の座標系で得た検出座標を(X,Y)、前記第2の面側から前記空間を透視した座標系での検出座標を(X’,Y’)、前記座標検出部の検出空間のY軸方向の長さをαとして、
X’=α−X
Y’=Y
の計算式により変換を行う
操作装置。
【請求項8】
請求項1に記載の操作装置であって、
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部により検出された前記移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−y
y’=−x
の計算式により変換を行う
操作装置。
【請求項9】
請求項1に記載の操作装置であって、
前記検出部は、前記座標検出空間に対するユーザの操作による移動情報を検出し、
前記変換部は、
前記座標検出部の座標系で得た移動情報を(x,y)、前記第2の面側から前記座標検出空間を透視した座標系での移動情報を(x’,y’)として、
x’=−x
y’=y
の計算式により変換を行う
操作装置。
【請求項10】
所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部が設けられた第1の面と、第2の操作入力部が設けられ、前記第1の面に表裏対向する第2の面を有する筐体の、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定し、
前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する
操作装置の情報処理方法。
【請求項11】
表裏対向する2つの面を第1の面及び第2の面として有する筐体と、
前記第1の面に設けられ、当該第1の面上の所定の座標検出空間に対するユーザの操作の検出を行う検出部を含む第1の操作入力部と、
前記第2の面に設けられた第2の操作入力部と、
を具備する操作装置の、前記第2の面側から前記検出部の前記座標検出空間に対するユーザの操作が行われるときの前記筐体の姿勢を判定する判定部と、
前記姿勢が判定されたとき、前記検出部により検出された情報を、前記第2の面側から前記座標検出空間を透視した座標系の情報に変換する変換部と
を具備する情報処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図13】
【図14】
【図15】
【図10】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図13】
【図14】
【図15】
【図10】
【図12】
【公開番号】特開2013−50907(P2013−50907A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−189439(P2011−189439)
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]