
操作装置
【課題】対象細胞を高効率で操作可能な操作装置を提供すること。
【解決手段】近接部としてのZ駆動部44により、対象操作部であるチップ部36を操作対象に近接させ、この近接させた状態で、駆動部としてのピエゾアクチュエータ38Aによって、チップ部36を対象の方向へ駆動することにより、対象を操作する。
【解決手段】近接部としてのZ駆動部44により、対象操作部であるチップ部36を操作対象に近接させ、この近接させた状態で、駆動部としてのピエゾアクチュエータ38Aによって、チップ部36を対象の方向へ駆動することにより、対象を操作する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操作対象として細胞や卵子などの微細物を操作する操作装置に関する。
【背景技術】
【0002】
従来より、細胞や卵子などの微細物を操作する操作装置が知られている。
例えば、特許文献1には、内部に遺伝子等の導入物質の充填された微小な注入針を対象である細胞に挿入することにより、細胞内に導入物質を導入操作する細胞操作装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−261929号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示された細胞操作装置は、中空の注入針を利用することで、導入物質を細胞内に導入するように細胞を操作している。しかしながら、上記特許文献1に開示された細胞操作装置は、細胞へのアプローチのためのアクチュエータと細胞を操作するためのアクチュエータが一緒なので、細胞操作或いは細胞へのアプローチに特化した駆動ができなくなり、効率的に細胞を操作できない課題があった。また、このような針を利用すれば細胞に力学的刺激を与える等、その他の細胞操作を行うことも可能だが、やはり同じ問題点を有している。
【0005】
本発明は、上記の点に鑑みてなされたもので、対象を高効率で操作可能な操作装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の操作装置の一態様は、
対象を操作するための対象操作部と、
前記対象操作部を前記対象に近接させる近接部と、
前記対象を操作するように、前記対象に近接させられた対象操作部を駆動する駆動部と、
を具備することを特徴とする。
【発明の効果】
【0007】
本発明によれば、対象を高効率で操作可能な操作装置を提供することができる。
【図面の簡単な説明】
【0008】
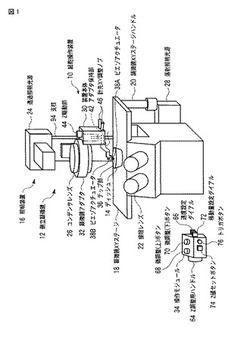
【図1】図1は、本発明の操作装置の第1実施形態に係る細胞操作装置を示す全体構成図である。
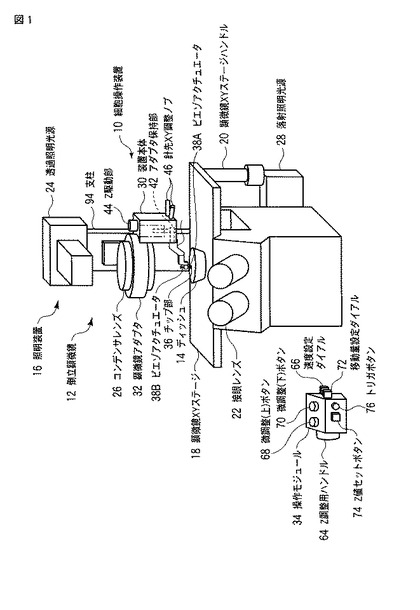
【図2】図2(A)は、第1実施形態に係る細胞操作装置の特徴部の構成を示す図であり、図2(B)は、カンチレバーチップの構成を示す図であり、図2(C)は、チップ部の斜視図であり、図2(D)は、ピエゾアクチュエータの伸長方向を説明するための図である。
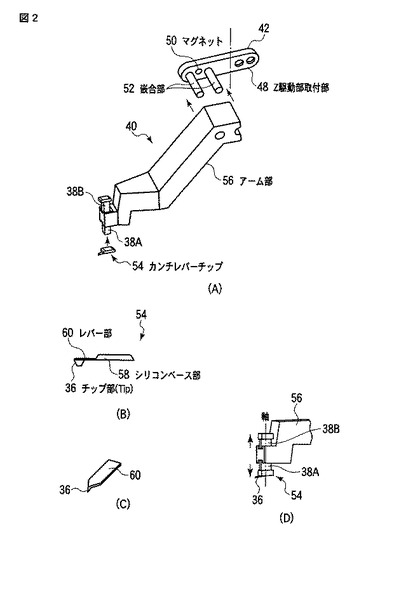
【図3】図3は、第1実施形態に係る細胞操作装置の電気的な構成を示すブロック図である。
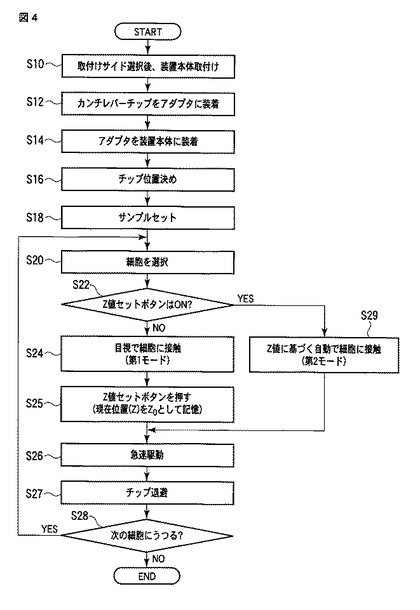
【図4】図4は、第1実施形態に係る細胞操作装置を用いたチップ駆動方法を説明するためのフローチャートを示す図である。
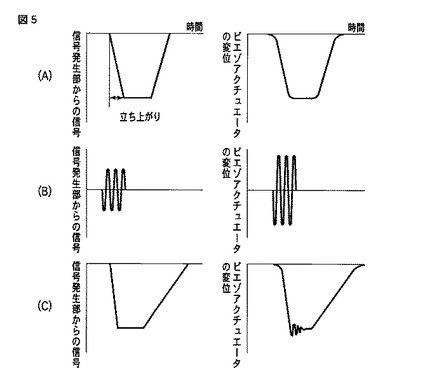
【図5】図5(A)乃至(C)はそれぞれ、信号発生部からの信号とそれに応じたピエゾアクチュエータの変位の時間変化の例を示す図である。
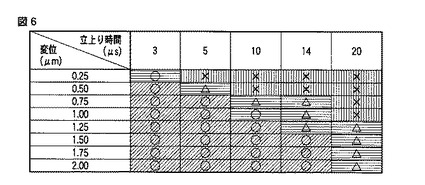
【図6】図6は、第1実施形態に係る細胞操作装置において図5(A)の信号発生部からの信号を用いた場合の細胞操作の実験結果を示す図である。
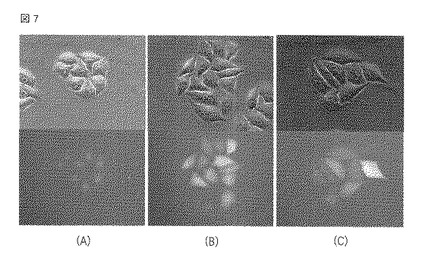
【図7】図7は、第1実施形態に係る細胞操作装置による細胞操作の別の実験結果を示す図である。
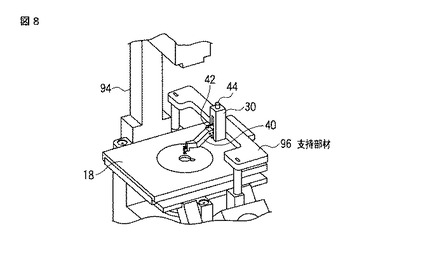
【図8】図8は、本発明の操作装置の第2実施形態に係る細胞操作装置の特徴部の構成を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明を実施するための形態を図面を参照して説明する。
[第1実施形態]
まず、本発明の操作装置の第1実施形態を、細胞操作装置を例にして、図1乃至図4を参照して説明する。
【0010】
本細胞操作装置10は、図1に示すように、操作対象である細胞を観察するための倒立顕微鏡12に装着して使用される。
【0011】
倒立顕微鏡12は、細胞を収容したディッシュ14上の細胞を照明する照明装置16と、上記ディッシュ14をX方向及びY方向に移動する顕微鏡XYステージ18と、該顕微鏡XYステージ18を駆動する顕微鏡XYステージハンドル20と、細胞において反射あるいは透過した光、あるいは細胞から発生した蛍光を観察するための図示しない対物レンズ及び接眼レンズ22と、を備えている。
【0012】
なお、ディッシュ14は、細胞の観察を行えるよう、少なくともその底面は透明な材料、例えばガラスで形成されている。
【0013】
なお、ここでは、手動操作される倒立顕微鏡12を説明したが、コンピュータにより顕微鏡XYステージ18を駆動制御する電動の倒立形顕微鏡であっても良い。更に、CCDカメラ等を備え、モニタに観察画像を表示するような倒立形顕微鏡でも良い。
【0014】
また、上記照明装置16には、細胞に対して、上記接眼レンズ22とは反対側から照明光を照射する透過照明光源24と、該透過照明光源24から発せられた照明光を細胞に集光するコンデンサレンズ26と、細胞に対して上記接眼レンズ22と同一方向から照明光を照射する落射照明光源28とが備えられている。
【0015】
そして、本実施形態に係る細胞操作装置10は、装置本体30と、該装置本体30のコンデンサレンズ26への取り付け部である顕微鏡アダプタ32と、上記装置本体30に図示しないケーブルを介して接続され、任意の位置に設置可能な操作モジュール34と、から構成されている。図1では、装置本体30を、接眼レンズ22が設けられた側である倒立顕微鏡12の前面側に対し、コンデンサレンズ26の右側に装着した状態を示している。
【0016】
装置本体30は、駆動対象であるチップ部36が装着されるピエゾアクチュエータ38Aを備えるアダプタ40を取り付けるためのアダプタ保持部42と、該アダプタ保持部42をZ方向に移動することで上記チップ部36をZ方向に移動させるZ駆動部44と、上記アダプタ保持部42をX方向及びY方向に移動することで上記チップ部のXY位置を調整する針先XY調整ノブ46と、を備えている。
【0017】
ここで、アダプタ保持部42には、図2(A)に示すように、Z駆動部44の図示しない直線移動機構に、図示しないXY駆動機構(針先XY調整ノブ46はこの駆動機構によりアダプタ保持部42を駆動する)を介して取り付けるためのZ駆動部取付部48とは長手方向反対側に、上記アダプタ40を着脱自在に装着するための装着部材、例えばアダプタ40が金属製ないしは対応する箇所に金属部を設けたものであればマグネット50、が設けられている。なお、図2(A)において、一点鎖線の右側が装置本体30内に収容される部分である。即ち、上記マグネット50は、装置本体30外部となる位置に設けられている。また、このマグネット50の近傍に、アダプタ40の位置決めのために、アダプタ40に設けられた穴や溝に嵌合する嵌合部52が配設されている。嵌合部52は、倒立顕微鏡12の前面側に向けて突出しており、アダプタ40がこの前面側から差し込みにより装着できるようになっている。
【0018】
なお、装置本体30がコンデンサレンズ26の左側に装着された際にもアダプタ40を装着できるように、マグネット50及び嵌合部52をアダプタ保持部42の裏面側にも設けても良い。あるいは、装置本体30の装着位置に応じて、アダプタ保持部42を交換可能に構成しても良い。
【0019】
上記アダプタ40のピエゾアクチュエータ38Aには、対象操作部であるチップ(tip)部36を形成したカンチレバーチップ(Chip)54が、例えば接着により装着されている。カンチレバーチップ54は、シリコンプロセスにより製造されるもので、図2(B)に示すように、他の部分との接着用のシリコンベース部58と、該シリコンベース部58から延在し、例えば厚み2.7μm、長さ240μmで2N/m程度の弾性定数を持つ可撓性のレバー部60と、該レバー部60の自由端に、該レバー部60の長手方向に対しておおむね90度の角度で形成された上記チップ部36とからなる。即ち、図2(C)に示すように、チップ部36は、中空ではない針部であり、それを保持する弾性部材であるレバー部60から略直角方向に延伸した構造となっている。ここで中空でない針部とは、その内部が充填された針部であれば形態を問わない。
【0020】
本実施形態に係る細胞操作装置10では、このようなカンチレバーチップ54を、対象としての細胞を操作するようにチップ部36を駆動する駆動部として機能する、アダプタ40のピエゾアクチュエータ38Aに装着した後、該カンチレバーチップ54を装着したアダプタ40を装置本体30に装着するようになっている。こうすることで、基本的に交換品度の高い構成品(消耗品)であるカンチレバーチップ54を交換することができ、コンタミネーションの虞なく、該細胞操作装置10を繰り返し使用することができる。
【0021】
また、微細なカンチレバーチップ54を、装置本体30から延伸する部材に直接装着する構成とすると、作業性が悪く、装着作業時にチップ部36が顕微鏡XYステージ18等の倒立顕微鏡12の何処かに当たって破損してしまう虞がある。本実施形態では、装置本体30から取り外したアダプタ40にカンチレバーチップ54を装着した上で、該アダプタ40を装置本体30の前面側から装着するようにしているので、そのような破損の虞を少なくすることができる。
【0022】
なお、アダプタ40は、ピエゾアクチュエータ38Aを、一方の端部がZ駆動部取付部48によりZ駆動部44に接続されるアーム部56の、他端側に設けているが、さらに、図2(D)に示すように、第2のピエゾアクチュエータ38Bを、該アーム部56を介してピエゾアクチュエータ38Aと対向する位置に配置している。ここで、ピエゾアクチュエータ38Aと第2のピエゾアクチュエータ38Bとは、ほぼ同じ質量を持っているが、ほぼ逆相で駆動されることにより、同図中に矢印で示すように、対向する方向に伸長するようになっている。
【0023】
コンデンサレンズ26からの光のけられを防ぎ、良好な細胞観察をするためには、カンチレバーチップ54(チップ部36)と、コンデンサレンズ26からの照明光の範囲外にある装置本体30(Z駆動部44)との間を、長いアーム部56で接続する必要があるが、一方で、ピエゾアクチュエータ38Aは、チップ部36を確実に急速駆動させるため、チップ部36の直近に置く必要がある。これは、ピエゾアクチュエータとチップ部36とを途中に長いアームのような大きい構造物を介して接続すると、その構造物の低周波数の共振のために、チップ部36はピエゾアクチュエータの変位とは全く異なる変位を起こしてしまうからである。
【0024】
また、ピエゾアクチュエータ38Aがチップ部36の直近にあっても、ピエゾアクチュエータ38Aの振動は、やはり背後のアーム部56の共振を引き起こすことに変わりはない。そこで、本実施形態では、ピエゾアクチュエータ38Aと同等な性能をもった第2の駆動部としての第2のピエゾアクチュエータ38Bを、アーム部56に対して対称的な位置におき、逆相で駆動することで、アーム部56への励振を最小限に抑えるようにしている。
【0025】
なお、ピエゾアクチュエータ38Aの駆動軸と第2のピエゾアクチュエータ38Bの駆動軸とは、略一致していることが好ましいが、完全に同軸上になくても良い。一方のピエゾアクチュエータの駆動軸の延長線上に他方のピエゾアクチュエータの一部が重なっていればアーム部56への励振を抑える効果が得られる。
【0026】
アダプタ40は、装置本体30に装着された際に、所定の角度で斜め下方に向けて延伸するように、アーム部56の形状が設定されている。そして、カンチレバーチップ54は、このアーム部56のピエゾアクチュエータ38Aに対して所定の角度となるように取り付けられている。また、上記したようにチップ部36は、レバー部60の長手方向から略直角方向に延びるように設けられている。従って、アダプタ40が装置本体30に装着された状態では、チップ部36は、レバー部60の自由端において、先端をほぼ鉛直下方に向けて保持されることとなる。
【0027】
上記アダプタ40のアーム部56が延伸する角度については、アーム部56が、コンデンサレンズ26に干渉したり、逆に、ディッシュ14の側壁に干渉してしまわないような角度とすることが必要である。
【0028】
一方、細胞操作装置10の操作モジュール34は、図1に示すように、Z調整用ハンドル64、速度設定ダイアル66、微調整(上)ボタン68、微調整(下)ボタン70、移動量設定ダイアル72、Z値セットボタン74、及びトリガボタン76を備えている。
【0029】
ここで、Z調整用ハンドル64及び速度設定ダイアル66は、アダプタ保持部42の粗いZ方向の移動(mm単位)に使用するものである。Z調整用ハンドル64の回転操作により、その回転方向に応じて上記Z駆動部44を用いてアダプタ保持部42がZ方向に駆動され、速度設定ダイアル66は、Z調整用ハンドル64の回転操作に応じた駆動量を大・中・小の3段階で切り替え設定するためのものである。
【0030】
また、微調整ボタン68,70及び移動量設定ダイアル72は、アダプタ保持部42の細かいZ方向の移動(μm単位)に使用するものである。微調整(上)ボタン68又は微調整(下)ボタン70の操作により、そのボタンに応じて上記Z駆動部44を用いてアダプタ保持部42がZ方向に微小駆動され、移動量設定ダイアル72は、1回の微調整ボタン68,70のON操作に応じた微小駆動量を大・中・小の3段階で切り替え設定するためのものである。
【0031】
Z値セットボタン74は、Z方向任意の位置を記憶する指示を行うためのボタンであり、上記Z調整用ハンドル64や上記微調整ボタン68,70を操作しても該Z値セットボタン74により記憶された位置よりも下(ディッシュ14内のサンプルの方向)にはアダプタ保持部42が下降しないようにするものである。なお、このZ値セットボタン74は、図示しないラッチ機構を備えており、操作者が押下操作即ちON操作すると、再度押下操作されるまで、その押下状態即ちON状態を維持する。以降、Z値セットボタン74がOFF状態におけるZ調整用ハンドル64及び微調整ボタン68,70の操作を「第1モード」と呼び、Z値セットボタン74がON状態におけるZ調整用ハンドル64及び微調整ボタン68,70の操作を「第2モード」と呼ぶ。
【0032】
トリガボタン76は、駆動部であるピエゾアクチュエータ38A(及び第2の駆動部であるピエゾアクチュエータ38B)を動作させる指示を行うためのボタンである。
【0033】
図3は、本実施形態に係る細胞操作装置10の電気的な構成を示すブロック図である。
装置本体30は、上記Z駆動部44に加えて、アダプタ保持部42の位置を検出するための位置検出部78を備えている。この位置検出部78としては、アダプタ保持部42の位置を、光学的に直接検出するものであっても良いし、Z駆動部44の駆動量を検出することで間接的に検出するものであっても良い。また、位置検出部78を、装置本体30とは別体に設けても構わない。
【0034】
操作モジュール34は、入力部80、記憶部82、判定部84、表示灯86、制御部88、パワーアンプ90、及び電源92を備えている。
【0035】
入力部80は、上記Z調整用ハンドル64及び上記微調整ボタン68,70のON操作に応じて移動指示信号を出力する移動指示部80Aと、上記速度設定ダイアル66によって設定された移動速度を示す速度設定信号を出力する速度設定部80Bと、上記移動量設定ダイアル72によって設定された移動量を示す移動量設定信号を出力する移動量設定部80Cと、上記Z値セットボタン74のON操作に応じてZ値セット信号を出力するZ値セット部80Dと、予め記憶されたパターンを有する第1の駆動信号とその逆相の第2の駆動信号とを上記トリガボタン76のON操作に応じて出力する信号発生部80Eと、を含む。この入力部80の内、移動指示部80A、速度設定部80B、移動量設定部80C、及びZ値セット部80Dから出力される各信号は、制御部88に入力される。一方、信号発生部80Eから出力される第1及び第2の駆動信号は、パワーアンプ90に入力される。
【0036】
記憶部82は、上記Z値セットボタン74がON操作されたときの、上記位置検出部78で検出されたアダプタ保持部42の位置をZ値として記憶するものである。判定部84は、上記位置検出部78で検出したアダプタ保持部42の位置と記憶部82に記憶されているZ値とを比較して、アダプタ保持部42が上記Z値の位置に到達したか否かを判定するものである。表示灯86は、上記Z値セット部80Dからの上記Z値セット信号に応じて点灯するものであり、操作者は該表示灯86の点灯によりZ値の記憶を確認できるようにしている。なお、Z駆動部44がステッピングモータで構成される場合は、Z値セットボタン74がON操作された位置からのステップ数(上向きを+、下向きを−とする)を記憶部82で記憶することにより、総ステップ数が0になることをもってZ値の位置への到達を判定することが可能となる。よって、この場合は、位置検出部78からの情報は不要であるので、位置検出部78を省略することができる。
【0037】
制御部88は、該細胞操作装置10の全体を制御するものである。パワーアンプ90は、信号発生部80Eから出力される第1の駆動信号を増幅してピエゾアクチュエータ38Aに印加すると共に、信号発生部80Eから出力される上記第1の駆動信号とは逆相の第2の駆動信号を増幅してピエゾアクチュエータ38Bに印加する。そして、電源92は、該細胞操作装置10の各部を動作させる電力を供給するものである。
【0038】
以下、このように構成された本実施形態に係る細胞操作装置10を用いたチップ駆動方法について説明する。
【0039】
ここでは、本実施形態に係る細胞操作装置10を用いて、ディッシュ14内の培養液中で培養される細胞に物質を導入する場合を例に説明する。
【0040】
即ち、図4に示すように、まず、装置本体30の取付けサイドを選択して、コンデンサレンズ26に顕微鏡アダプタ32を介して装着する(ステップS10)。
【0041】
次に、装置本体30から取り外されているアダプタ40のピエゾアクチュエータ38Aに、カンチレバーチップ54を装着する(ステップS12)。そして、そのカンチレバーチップ54が装着されたアダプタ40を、倒立顕微鏡12の前面側から、装置本体30のアダプタ保持部42に装着する(ステップS14)。
【0042】
その後、チップ位置決めを行う(ステップS16)。即ち、接眼レンズ22で観察しながら装置本体30の針先XY調整ノブ46と操作モジュール34のZ調整用ハンドル64を操作して、目視により、ピエゾアクチュエータ38Aの先端に形成されているチップ部36の位置を、図示しない対物レンズの中央位置(視野中央位置)に設定する。これは、顕微鏡XYステージ18にディッシュ14を載置せずに行う。なお、Z方向に関しては、操作モジュール34の速度設定ダイアル66を大又は中にセットして、Z調整用ハンドル64の操作により、視野にカンチレバーチップ54のレバー部60が目視で確認できるところまで、チップ部36の下降動作を行う。
【0043】
こうしてチップ位置決めがなされたならば、次に、サンプルのセット、即ち、顕微鏡XYステージ18上へのディッシュ14の載置を行う(ステップS18)。これは、操作モジュール34のZ調整用ハンドル64を操作してアダプタ40先端のチップ部36を安全な領域(Z方向上側)に退避し、かつ、倒立顕微鏡12の支柱94を後ろ側に倒し(装置本体30全体が移動)、サンプルセットのスペースを確保した上で、ディッシュ14(サンプル)を顕微鏡XYステージ18に載置し、その後に倒立顕微鏡12の支柱94を元に戻すというようにして実施する。なお、ディッシュ14(サンプル)は、当該ディッシュ14内の培養液中で培養される細胞に物質を導入するために、その導入しようとする物質を分散させた状態でセットされる。
【0044】
そして、導入対象の細胞を選択する(ステップS20)。これは、まず、接眼レンズ22で観察しながら、顕微鏡XYステージハンドル20を操作することで、顕微鏡XYステージ18を作動させ、ディッシュ14内の観察したい細胞を顕微鏡観察下に配置する。その後、Z駆動部44を作動させ、チップ部36を細胞の上方から細胞に近接させる。即ち、まず、接眼レンズ22で観察しながら視野にカンチレバーチップ54のレバー部60が目視で確認できるところまで、チップ部36のZ方向への下降動作を行う。これは、操作モジュール34の速度設定ダイアル66を小にセットして、Z調整用ハンドル64の操作により行う。ディッシュ14内の細胞とチップ部36とが同じ高さではないので、チップ部36には合焦しておらず、チップ部36を観察することは困難であり、よって、チップ部36よりも大きく合焦していなくても大まかに識別可能なレバー部60を指標としてZ方向への下降動作を行う。そして、視野にレバー部60が目視で確認できるところまで下降させたならば、次に、接眼レンズ22で観察しながら目視で、顕微鏡XYステージのXY方向への調整を行い、導入対象の細胞の真上にチップ部36と思われる位置を設定する。以上のようにして、導入対象の細胞を選択する(決定する)。
【0045】
その後の動作は、操作モジュール34の記憶部82にZ値をセットしているか否かにより異なる。
【0046】
1回目のチップ駆動では、まだ記憶部82にZ値をセットしていないので(ステップS22)、第1モード(Z値なし)でのチップ導入を行う。即ち、操作モジュール34のZ調整用ハンドル64又は微調整ボタン68,70を操作しながら、接眼レンズ22で観察して、「細胞の歪み」を確認しながら、Z方向の最適位置であるディッシュ14内の細胞に接触する位置を決める(ステップS24)。このとき、Z調整用ハンドル64の操作は、速度設定ダイアル66の大・中・小でその感度を適宜切り替えながら行うことになる。また、微調整ボタン68,70の操作は、移動量設定ダイアル72の大・中・小でその感度適宜切り替えながら行うことなる。このような操作に応じて、Z駆動部44がアダプタ40のアーム部56の先端部に取り付けられたチップ部36を下降させディッシュ14の底面へ近づけていく。そして、チップ部36の先端が下降していく途中において、ディッシュ14内の細胞に接触したことを確認したならば、そこで、操作モジュール34のZ調整用ハンドル64又は微調整ボタン68,70の操作を終了する。このように、Z駆動部44は、中空でない針部であるチップ部36を操作対象の細胞に近接させる近接部として機能する。
【0047】
このとき、操作モジュール34のZ値セットボタン74を押すことで、位置検出部78で検出されるそのときのアダプタ保持部42の位置を最適位置を示すZ値(Z0)として、記憶部82に記憶させる(ステップS25)。
【0048】
そして、操作モジュール34のトリガボタン76を押すことで、駆動部であるピエゾアクチュエータ38Aを、上記近接部としてのZ駆動部44が近接させる速度よりも速い速度でチップ部36を細胞の方向へ駆動させることにより、細胞の細胞膜を穿孔する(ステップS26)。このように、ピエゾアクチュエータ38Aは、細胞にチップ部36を近接させた状態で、該チップ部36に対して、上記近接部としてのZ駆動部44が近接させるときと異なる速度で、細胞の細胞膜を穿孔する駆動を行う駆動部としても機能する。具体的には、ピエゾアクチュエータ38Aは、チップ部36を介して細胞に撃力を与えることにより、細胞の細胞膜を穿孔することとなる。このとき、ピエゾアクチュエータ38Aの最大の伸長量を、チップ部36がディッシュ14の底面に到達する前に伸長が停止するようなものとしておくことで、チップ部36がディッシュ14の底面との衝突で壊れる虞を無くすことができる。
【0049】
ここでは撃力を与えることにより穿孔した例を示したが、細胞に対して圧力を与えられれば力の度合は問わない。細胞に対して、穿孔に至らない程度の力学的刺激を与えることにより細胞の特定の機能を活性化させる等のツールとして利用することができる。
【0050】
このようにして細胞膜が穿孔されると、その孔にディッシュ14内に分散された物質が流通されることとなり、物質が細胞内に流入する。導入しようとする粒子のサイズ等によっては、完全に穿孔しなくてもチップ部36で細胞を変形させることによる物理的刺激でストレッチレセプター等に結合されたチャンネルが開くことによっても流入する。
【0051】
その後、操作モジュール34のZ調整用ハンドル64を操作して、アダプタ40のアーム部56を上昇させることで、チップ部36を退避させる(ステップS27)。この際には、操作モジュール34の速度設定ダイアル66を中又は小にセットして、Z調整用ハンドル64の操作により、チップ部36の上昇動作を行う。
【0052】
なお、チップ部36を上昇させてチップ部36を細胞から引き抜いた後は、ある一定時間が経過すると、細胞膜は自己修復により回復し、細胞内に物質が取り込まれた状態となる。
【0053】
以下、任意のサンプル細胞個々に対して物質の導入を繰り返し行う。
即ち、接眼レンズ22で観察しながら、顕微鏡XYステージハンドル20を操作することで、顕微鏡XYステージ18を作動させ、導入対象の細胞の真上にチップ部36を設定する。つまり、導入対象の細胞を選択する(ステップS20)。
【0054】
2回目からのチップ駆動では、記憶部82にZ値をセットしているので(ステップS22)、第2モード(Z値セットあり)でのチップ導入動作を実施することになる(ステップS29)。この場合には、Z値が記憶部82にセットされているので、水平方向を位置決めした後は、Z調整用ハンドル64及び微調整ボタン66、68による行き過ぎた操作を気にせずに、チップ部36を十分下降させる操作をするだけで、最適位置まで下降させることができる。即ち、操作モジュール34の判定部84が位置検出部78で検出したアダプタ保持部42の位置と記憶部82にセットされているZ値とを比較して、アダプタ保持部42(チップ部36)が上記Z値の位置に到達したと判定したならば、操作モジュール34の制御部88は、Z調整用ハンドル64及び微調整ボタン66、68が操作されても、それ以上Z駆動部44が下降しないように制御することができる。
【0055】
なお、最適Z位置が記憶部82にセットされているので、その位置まで自動でアダプタ保持部42(チップ部36)が下降するようにしても良い。即ち、第2モードでのハンドル操作を自動化しても良い。
【0056】
また、細胞毎にチップ部36を近接させてチップ部36の細胞への接触を確認した後、いったんチップ部36を所定の距離退避させ、接触位置から所定距離上方まで再度近接させた後、急速駆動を行っても良い。例えば、ピエゾアクチュエータ38Aによる急速駆動に要する距離が3μmであったとすれば、それより短い、接触位置から2μm上方にチップ部36を再接近させた後に急速駆動を行う。この操作により、チップ部36のディッシュ14の底面への衝突や、細胞に深く刺し過ぎることによる細胞の生存率の劣化を抑えることができる。この「所定距離退避→再接近」の流れは、装置のバックラッシュによる位置ずれを防ぐために行っている。
【0057】
また逆に、高さがある細胞では、接触位置よりも所定距離下方にセットして、急速駆動を行うことにより、確実な挿入を行うことも考えられる。
【0058】
要するに、細胞への接触またはその他の手段でチップ部36をいったん位置決めし、その位置を基準にしてそこから所定の距離移動させた後に急速駆動を行うことで、より確実に、またはチップ部36の破損や生存率の劣化なく物質の導入が可能になる。その他の手段としては、ディッシュ14底面への接触が考えられる。チップ部36の細胞への接触は細胞の変形を観察すること等により検出でき、チップ部36のディッシュ14の底面への接触は、その接触に伴ってチップ部36が持ち上げられ、レバー部60が変形することによりチップ部36の水平方向の位置がずれること、またはレバー部60の変形に伴い、チップ部36上にコートされたピエゾ抵抗の値が変わること、またはレバー部60の変形そのものを光てこ等の技術により測定することで、鋭敏に検出できる。
【0059】
また、この一連の動き(所定の距離退避→再接近→急速駆動)を自動化して、ボタンを押す等の1回の操作で行うことで操作を簡便にすることができる。
【0060】
また、手動操作型の倒立顕微鏡12ではなく、コンピュータにより顕微鏡XYステージ18を駆動制御すると共に、CCDカメラ等を備え、モニタに観察画像を表示するような電動型の倒立形顕微鏡においては、物質の導入が必要な細胞を予め画像上で選択しておき、自動でその位置まで移動するようにしても良い。即ち、顕微鏡XYステージ18のXY方向への調整も自動化しても良い。
【0061】
なお、細胞内に導入する物質としては、遺伝子、色素、量子ドットなどの蛍光試薬、イオン、ペプチド、タンパク質、多糖類、等、ディッシュ14内に分散できるものであれば良い。
【0062】
[実験例1]
信号発生部80Eから急峻な立上りの信号を入力するとピエゾアクチュエータ38Aは急峻に伸長し、チップ部36を急速駆動する。この急速駆動の速度をどの程度にすれば細胞に物質が導入されるかについて以下の実験を行った。
【0063】
細胞はHeLa細胞を利用した。3枚のディッシュにHeLa細胞を培養した。各ディッシュの培養液を、SYTOX(分子量1kDa)を5μM含むHBSSに置換した。SYTOXは、DNAと結合することにより488nm励起(B励起)で523nmの蛍光を放出する特性を持つため、穿孔により細胞内に進入したことを蛍光観察により確認できる。各ディッシュのHeLa細胞に対して以下の実験を行った。使用したカンチレバーチップ54のレバー部60の弾性定数は1.8N/m、チップ部36の先端径は10nmである。
【0064】
実験は、次の1〜3のように行った。
1.細胞にチップ部36を接触させる。
2.信号発生部80Eよりパワーアンプ90を介して図5(A)の左側に示すような形状の信号をピエゾアクチュエータ38Aに供給する(ピエゾアクチュエータ38Bには、逆相の信号を供給する)。これにより、ピエゾアクチュエータ38Aは、図5(A)の右側に示すように変位する。
3.B励起で蛍光観察を行い、穿孔を確認する。
【0065】
この実験を、立上り時間と変位(ピエゾアクチュエータ38Aの変位量。従って針の変位量である)を図6のパラメータの範囲で変更しながら行った。この実験を3枚のディッシュについて行い、結果をまとめたのが図6である。図6は、3つのディッシュ全てにおいて穿孔できた条件を丸印、3つのディッシュとも穿孔できなかった条件をバツ印、1又は2つのディッシュで穿孔できたものを三角印で表した。ここで、変位/立上り時間により、立上り速度を計算して、100mm/s超の条件を斜線のハッチング、50mm/s超で100mm/s以下を横線のハッチング、50mm/s以下を縦線のハッチングで表示してある。この速度分布と導入結果の比較から、50mm/s超の立上り速度をもつ信号を与えることで、導入が可能であることがわかる。さらに100mm/s超の立上り速度の信号を与えることで、細胞の条件によらず導入が可能になる。
【0066】
特性の異なるカンチレバーチップ54(レバー部60の弾性定数26N/m、チップ部36の先端径7nm)でも同じ実験を行い、ほぼ同様の結果が得られている。
【0067】
[実験例2]
また、より大きい分子量の色素に対しても導入実験を行った。
細胞はHeLa細胞を利用した。ディッシュにHeLa細胞を培養して、培養液を、Alexa488 dextran(分子量10kDa)を20μM含むHBSSに置換した。その後、上記実験例1の1.と2.の操作を繰り返し行った。信号の条件は、図6における立上り時間5μs、変位0.5μm、1μm、1.5μmの3種類である。
【0068】
上記操作終了後、色素を含むHBSSを色素を含まないHBSSに置換して、B励起で蛍光観察を行った(色素Alexa488 dextranはSYTOXと異なり、B励起によりDNAとの結合によらず蛍光を放出するため、細胞への導入確認のためには、実験後に溶液を、色素を含まないものに置換する必要がある)。図7は、その結果を示す図で、(A)は変位0.5μmの場合、(B)は変位1μmの場合、(C)は変位1.5μmの場合、をそれぞれ示しており、上段は位相差像、下段は蛍光像である。
【0069】
図7に示すように、変位1μm、1.5μmでは操作を行ったコロニーの細胞全てが光っているが、変位0.5μmでは光っていない(変位0.5μmで中心部が白く光っているのは、細胞膜に付着した色素で、導入はできていない)。従って、より分子量の大きい色素に対しても、100mm/sを超える領域で導入可能であることが判った。
【0070】
本実験例2と上記実験例1を比較すると、50mm/s超100mm/s以下の条件は、より分子量の小さい物質を導入可能な条件であることが判る。
【0071】
これらの実験より、チップ部36での穿孔は、チップ部36の速度と強い相関があり、ある幅をもった、穿孔可能な閾値があることがわかった。その閾値は、急速駆動の変位量によらないことも、本実験により明らかになった。
【0072】
従って、信号の形状は、最大速度が上記50mm/s、好ましくは100mm/s、を超える充分な高速になれば、図5(A)のような急速な立上りを持つ駆動でも良く、図5(B)のような振動駆動でも良い。また、その組み合わせでも良い。
【0073】
また、図5(C)のように、急速な立上りを持つ信号を与えた時に生じるメカ的な共振(アーム部56、ピエゾアクチュエータ38A,38B等の共振)で高速の共振的な変位が変位信号に重畳された場合、合計速度が上記50mm/s、好ましくは100mm/s、を超えれば導入可能である。
【0074】
以上のように、本第1実施形態に係る細胞操作装置によれば、針部(チップ部36)が中空でないため、例えばディッシュ14の底面に接触したときに針部の先端の破損の危険が少ない。
【0075】
また、レバー部60のような弾性部材で針部(チップ部36)を支えることにより、さらに破損の危険が少ない。
【0076】
また、注入針と異なり、中空でない針部(チップ部36)を含むカンチレバーチップ54は、駆動させる部分に注入する溶液、溶液輸送部等を含まず、MEMSプロセスで作製された微細な針部(チップ部36)とその支持部(レバー部60)、シリコンベース部58だけから構成され、非常に小型軽量である。このような針部(チップ部36)は、駆動部(ピエゾアクチュエータ38A)が近接部(Z駆動部44)と独立して備えられた別体のユニットであるため以下のようなメリットを持つ。駆動部(ピエゾアクチュエータ38A)は針部(チップ部36)と非常に近い、つまり針部と近接した位置でシリコンベース部58と接着される。そのため駆動部(ピエゾアクチュエータ38A)の駆動波形が途中の構造体で緩和されたり、近接部等の周囲に備えられた構造体による共振等による変調を受けずにダイレクトに伝達され、効率のよい穿孔が可能になる。また中空でない針部(チップ部36)は前述のように軽量に構成でき、慣性が小さいため、大きな加減速が可能で、結局高速駆動が可能になる。すなわち、細胞への接触状態またはその数μm上の位置から急速駆動を行い、50mm/sを超える速度を出して穿孔を行った後、ディッシュ14の底面に到達する前にチップ部36を停止することができる。また、小型の駆動部(ピエゾアクチュエータ38A)だけが針部(チップ部36)に近接しており、よりストロークが長いため大型の近接部(Z駆動部44)はアーム部56を介して別体に配置されているため、コンデンサレンズ26からの光のけられが最小限でおさえられ、細胞の観察に適した配置をとることができる。
【0077】
一般に、細胞は高さ数μmから10μmのものが多いため、駆動部分の質量が大きいマイクロインジェクションではディッシュ14の底面への衝突を避けるための充分な減速ができず、本実施形態のような高速の駆動は不可能である。従って、本実施形態によれば、導入確率の高い速度を維持しながら、針がディッシュ底面への衝突を起こさず、針の破損の危険が少ない細胞操作装置を構成できる。
【0078】
また、本実施形態では細胞を対象としたが、対象は他の微細物であっても良い。ここで、微細物とは、近接部としてのZ駆動部44によって対象操作部であるチップ部36を対象に近接させる際や、駆動部としてのピエゾアクチュエータ38Aによってチップ部36を駆動して対象を操作する際に、対象とチップ部36の位置関係を目視で正確に把握するのが困難であって拡大観察が必要な大きさ程度のものであることを意味している。この微細物としては、具体的には、細胞のほかに卵子、リポソーム、人工膜構造、等が挙げられる。膜構造の対象には急速駆動等により穿孔することができ、それにより遺伝子、タンパク質等の物質導入を行うことができる。また、細胞、卵子等は急速駆動で撃力を与えることにより力学刺激を与えることができる。
【0079】
また、本実施形態では、穿孔動作が近接する操作より速いことを特徴とする場合を示したが、細胞の特性によっては、近接する操作と方向が異なる駆動、速度が遅い駆動、異なる駆動パターンによりより効率のよい穿孔が可能であることも考えられる。また、細胞に近づく方向だけでなく、他の軸に向いた駆動も合わせることで穿孔その他の操作を効率的に行うことができる場合がある。たとえば細胞をなぞる動き、なぞる動きを往復または表面上を2次元スキャンしつつ針を細胞内に陥入する動き、細胞方向に対する振動的運動を行いつつ細胞表面をなぞるまたは振動的運動を行いつつ2次元スキャンする動き、等である。また、穿孔以外の動作、たとえば力学刺激のような細胞操作を行う場合にも、細胞膜の特性によっては、近接する操作と方向が異なる駆動、速度が遅い駆動、異なる駆動パターン、2軸、3軸の駆動等により、より効率のよい細胞操作が可能になることも考えられる。
【0080】
いずれの場合も、近接操作を行うアクチュエータ(Z駆動部44)と異なる独立のアクチュエータ(ピエゾアクチュエータ38A)によって駆動することにより、より効率的な細胞操作を行うことが可能になる。
【0081】
[第2実施形態]
次に、本発明の第2実施形態に係る細胞操作装置について、図8を参照して説明する。図8は、本実施形態に係る細胞操作装置の特徴部の構成を示す図である。
【0082】
本実施形態においては、細胞操作装置10の装置本体30は、上記第1実施形態のようにコンデンサレンズ26に装着される構成ではなく、顕微鏡下部から顕微鏡上側の顕微鏡XYステージ18にブリッジ状の支持部材96を渡して、そこに取り付ける構成としたものである。
【0083】
このような構成としても、上記第1実施形態と同様の効果が得られる。
以上、実施形態に基づいて本発明を説明したが、本発明は上述した実施形態に限定されるものではなく、本発明の要旨の範囲内で種々の変形や応用が可能なことは勿論である。
【0084】
例えば、細胞操作装置10の装置本体30の装着位置は、コンデンサレンズ26を支持する支持部等、上記第1及び第2実施形態で説明した以外の位置としても良い。
【符号の説明】
【0085】
10…細胞操作装置、 12…倒立顕微鏡、 14…ディッシュ、 18…顕微鏡XYステージ、 26…コンデンサレンズ、 30…装置本体、 32…顕微鏡アダプタ、 34…操作モジュール、 36…チップ部、 38A…ピエゾアクチュエータ、 38B…第2のピエゾアクチュエータ、 40…アダプタ、 42…アダプタ保持部、 44…Z駆動部、 46…XY調整ノブ、 48…Z駆動部取付部、 50…マグネット、 52…嵌合部、 54…カンチレバーチップ、 56…アーム部、 58…シリコンベース部、 60…レバー部、 74…Z値セットボタン、 76…トリガボタン、 78…位置検出部、 80…入力部、 80A…移動指示部、 80B…速度設定部、 80C…移動量設定部、 80D…Z値セット部、 80E…信号発生部、 82…記憶部、 84…判定部、 86…表示灯、 88…制御部、 90…パワーアンプ、 92…電源、 96…支持部材。
【技術分野】
【0001】
本発明は、操作対象として細胞や卵子などの微細物を操作する操作装置に関する。
【背景技術】
【0002】
従来より、細胞や卵子などの微細物を操作する操作装置が知られている。
例えば、特許文献1には、内部に遺伝子等の導入物質の充填された微小な注入針を対象である細胞に挿入することにより、細胞内に導入物質を導入操作する細胞操作装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−261929号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示された細胞操作装置は、中空の注入針を利用することで、導入物質を細胞内に導入するように細胞を操作している。しかしながら、上記特許文献1に開示された細胞操作装置は、細胞へのアプローチのためのアクチュエータと細胞を操作するためのアクチュエータが一緒なので、細胞操作或いは細胞へのアプローチに特化した駆動ができなくなり、効率的に細胞を操作できない課題があった。また、このような針を利用すれば細胞に力学的刺激を与える等、その他の細胞操作を行うことも可能だが、やはり同じ問題点を有している。
【0005】
本発明は、上記の点に鑑みてなされたもので、対象を高効率で操作可能な操作装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の操作装置の一態様は、
対象を操作するための対象操作部と、
前記対象操作部を前記対象に近接させる近接部と、
前記対象を操作するように、前記対象に近接させられた対象操作部を駆動する駆動部と、
を具備することを特徴とする。
【発明の効果】
【0007】
本発明によれば、対象を高効率で操作可能な操作装置を提供することができる。
【図面の簡単な説明】
【0008】
【図1】図1は、本発明の操作装置の第1実施形態に係る細胞操作装置を示す全体構成図である。
【図2】図2(A)は、第1実施形態に係る細胞操作装置の特徴部の構成を示す図であり、図2(B)は、カンチレバーチップの構成を示す図であり、図2(C)は、チップ部の斜視図であり、図2(D)は、ピエゾアクチュエータの伸長方向を説明するための図である。
【図3】図3は、第1実施形態に係る細胞操作装置の電気的な構成を示すブロック図である。
【図4】図4は、第1実施形態に係る細胞操作装置を用いたチップ駆動方法を説明するためのフローチャートを示す図である。
【図5】図5(A)乃至(C)はそれぞれ、信号発生部からの信号とそれに応じたピエゾアクチュエータの変位の時間変化の例を示す図である。
【図6】図6は、第1実施形態に係る細胞操作装置において図5(A)の信号発生部からの信号を用いた場合の細胞操作の実験結果を示す図である。
【図7】図7は、第1実施形態に係る細胞操作装置による細胞操作の別の実験結果を示す図である。
【図8】図8は、本発明の操作装置の第2実施形態に係る細胞操作装置の特徴部の構成を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明を実施するための形態を図面を参照して説明する。
[第1実施形態]
まず、本発明の操作装置の第1実施形態を、細胞操作装置を例にして、図1乃至図4を参照して説明する。
【0010】
本細胞操作装置10は、図1に示すように、操作対象である細胞を観察するための倒立顕微鏡12に装着して使用される。
【0011】
倒立顕微鏡12は、細胞を収容したディッシュ14上の細胞を照明する照明装置16と、上記ディッシュ14をX方向及びY方向に移動する顕微鏡XYステージ18と、該顕微鏡XYステージ18を駆動する顕微鏡XYステージハンドル20と、細胞において反射あるいは透過した光、あるいは細胞から発生した蛍光を観察するための図示しない対物レンズ及び接眼レンズ22と、を備えている。
【0012】
なお、ディッシュ14は、細胞の観察を行えるよう、少なくともその底面は透明な材料、例えばガラスで形成されている。
【0013】
なお、ここでは、手動操作される倒立顕微鏡12を説明したが、コンピュータにより顕微鏡XYステージ18を駆動制御する電動の倒立形顕微鏡であっても良い。更に、CCDカメラ等を備え、モニタに観察画像を表示するような倒立形顕微鏡でも良い。
【0014】
また、上記照明装置16には、細胞に対して、上記接眼レンズ22とは反対側から照明光を照射する透過照明光源24と、該透過照明光源24から発せられた照明光を細胞に集光するコンデンサレンズ26と、細胞に対して上記接眼レンズ22と同一方向から照明光を照射する落射照明光源28とが備えられている。
【0015】
そして、本実施形態に係る細胞操作装置10は、装置本体30と、該装置本体30のコンデンサレンズ26への取り付け部である顕微鏡アダプタ32と、上記装置本体30に図示しないケーブルを介して接続され、任意の位置に設置可能な操作モジュール34と、から構成されている。図1では、装置本体30を、接眼レンズ22が設けられた側である倒立顕微鏡12の前面側に対し、コンデンサレンズ26の右側に装着した状態を示している。
【0016】
装置本体30は、駆動対象であるチップ部36が装着されるピエゾアクチュエータ38Aを備えるアダプタ40を取り付けるためのアダプタ保持部42と、該アダプタ保持部42をZ方向に移動することで上記チップ部36をZ方向に移動させるZ駆動部44と、上記アダプタ保持部42をX方向及びY方向に移動することで上記チップ部のXY位置を調整する針先XY調整ノブ46と、を備えている。
【0017】
ここで、アダプタ保持部42には、図2(A)に示すように、Z駆動部44の図示しない直線移動機構に、図示しないXY駆動機構(針先XY調整ノブ46はこの駆動機構によりアダプタ保持部42を駆動する)を介して取り付けるためのZ駆動部取付部48とは長手方向反対側に、上記アダプタ40を着脱自在に装着するための装着部材、例えばアダプタ40が金属製ないしは対応する箇所に金属部を設けたものであればマグネット50、が設けられている。なお、図2(A)において、一点鎖線の右側が装置本体30内に収容される部分である。即ち、上記マグネット50は、装置本体30外部となる位置に設けられている。また、このマグネット50の近傍に、アダプタ40の位置決めのために、アダプタ40に設けられた穴や溝に嵌合する嵌合部52が配設されている。嵌合部52は、倒立顕微鏡12の前面側に向けて突出しており、アダプタ40がこの前面側から差し込みにより装着できるようになっている。
【0018】
なお、装置本体30がコンデンサレンズ26の左側に装着された際にもアダプタ40を装着できるように、マグネット50及び嵌合部52をアダプタ保持部42の裏面側にも設けても良い。あるいは、装置本体30の装着位置に応じて、アダプタ保持部42を交換可能に構成しても良い。
【0019】
上記アダプタ40のピエゾアクチュエータ38Aには、対象操作部であるチップ(tip)部36を形成したカンチレバーチップ(Chip)54が、例えば接着により装着されている。カンチレバーチップ54は、シリコンプロセスにより製造されるもので、図2(B)に示すように、他の部分との接着用のシリコンベース部58と、該シリコンベース部58から延在し、例えば厚み2.7μm、長さ240μmで2N/m程度の弾性定数を持つ可撓性のレバー部60と、該レバー部60の自由端に、該レバー部60の長手方向に対しておおむね90度の角度で形成された上記チップ部36とからなる。即ち、図2(C)に示すように、チップ部36は、中空ではない針部であり、それを保持する弾性部材であるレバー部60から略直角方向に延伸した構造となっている。ここで中空でない針部とは、その内部が充填された針部であれば形態を問わない。
【0020】
本実施形態に係る細胞操作装置10では、このようなカンチレバーチップ54を、対象としての細胞を操作するようにチップ部36を駆動する駆動部として機能する、アダプタ40のピエゾアクチュエータ38Aに装着した後、該カンチレバーチップ54を装着したアダプタ40を装置本体30に装着するようになっている。こうすることで、基本的に交換品度の高い構成品(消耗品)であるカンチレバーチップ54を交換することができ、コンタミネーションの虞なく、該細胞操作装置10を繰り返し使用することができる。
【0021】
また、微細なカンチレバーチップ54を、装置本体30から延伸する部材に直接装着する構成とすると、作業性が悪く、装着作業時にチップ部36が顕微鏡XYステージ18等の倒立顕微鏡12の何処かに当たって破損してしまう虞がある。本実施形態では、装置本体30から取り外したアダプタ40にカンチレバーチップ54を装着した上で、該アダプタ40を装置本体30の前面側から装着するようにしているので、そのような破損の虞を少なくすることができる。
【0022】
なお、アダプタ40は、ピエゾアクチュエータ38Aを、一方の端部がZ駆動部取付部48によりZ駆動部44に接続されるアーム部56の、他端側に設けているが、さらに、図2(D)に示すように、第2のピエゾアクチュエータ38Bを、該アーム部56を介してピエゾアクチュエータ38Aと対向する位置に配置している。ここで、ピエゾアクチュエータ38Aと第2のピエゾアクチュエータ38Bとは、ほぼ同じ質量を持っているが、ほぼ逆相で駆動されることにより、同図中に矢印で示すように、対向する方向に伸長するようになっている。
【0023】
コンデンサレンズ26からの光のけられを防ぎ、良好な細胞観察をするためには、カンチレバーチップ54(チップ部36)と、コンデンサレンズ26からの照明光の範囲外にある装置本体30(Z駆動部44)との間を、長いアーム部56で接続する必要があるが、一方で、ピエゾアクチュエータ38Aは、チップ部36を確実に急速駆動させるため、チップ部36の直近に置く必要がある。これは、ピエゾアクチュエータとチップ部36とを途中に長いアームのような大きい構造物を介して接続すると、その構造物の低周波数の共振のために、チップ部36はピエゾアクチュエータの変位とは全く異なる変位を起こしてしまうからである。
【0024】
また、ピエゾアクチュエータ38Aがチップ部36の直近にあっても、ピエゾアクチュエータ38Aの振動は、やはり背後のアーム部56の共振を引き起こすことに変わりはない。そこで、本実施形態では、ピエゾアクチュエータ38Aと同等な性能をもった第2の駆動部としての第2のピエゾアクチュエータ38Bを、アーム部56に対して対称的な位置におき、逆相で駆動することで、アーム部56への励振を最小限に抑えるようにしている。
【0025】
なお、ピエゾアクチュエータ38Aの駆動軸と第2のピエゾアクチュエータ38Bの駆動軸とは、略一致していることが好ましいが、完全に同軸上になくても良い。一方のピエゾアクチュエータの駆動軸の延長線上に他方のピエゾアクチュエータの一部が重なっていればアーム部56への励振を抑える効果が得られる。
【0026】
アダプタ40は、装置本体30に装着された際に、所定の角度で斜め下方に向けて延伸するように、アーム部56の形状が設定されている。そして、カンチレバーチップ54は、このアーム部56のピエゾアクチュエータ38Aに対して所定の角度となるように取り付けられている。また、上記したようにチップ部36は、レバー部60の長手方向から略直角方向に延びるように設けられている。従って、アダプタ40が装置本体30に装着された状態では、チップ部36は、レバー部60の自由端において、先端をほぼ鉛直下方に向けて保持されることとなる。
【0027】
上記アダプタ40のアーム部56が延伸する角度については、アーム部56が、コンデンサレンズ26に干渉したり、逆に、ディッシュ14の側壁に干渉してしまわないような角度とすることが必要である。
【0028】
一方、細胞操作装置10の操作モジュール34は、図1に示すように、Z調整用ハンドル64、速度設定ダイアル66、微調整(上)ボタン68、微調整(下)ボタン70、移動量設定ダイアル72、Z値セットボタン74、及びトリガボタン76を備えている。
【0029】
ここで、Z調整用ハンドル64及び速度設定ダイアル66は、アダプタ保持部42の粗いZ方向の移動(mm単位)に使用するものである。Z調整用ハンドル64の回転操作により、その回転方向に応じて上記Z駆動部44を用いてアダプタ保持部42がZ方向に駆動され、速度設定ダイアル66は、Z調整用ハンドル64の回転操作に応じた駆動量を大・中・小の3段階で切り替え設定するためのものである。
【0030】
また、微調整ボタン68,70及び移動量設定ダイアル72は、アダプタ保持部42の細かいZ方向の移動(μm単位)に使用するものである。微調整(上)ボタン68又は微調整(下)ボタン70の操作により、そのボタンに応じて上記Z駆動部44を用いてアダプタ保持部42がZ方向に微小駆動され、移動量設定ダイアル72は、1回の微調整ボタン68,70のON操作に応じた微小駆動量を大・中・小の3段階で切り替え設定するためのものである。
【0031】
Z値セットボタン74は、Z方向任意の位置を記憶する指示を行うためのボタンであり、上記Z調整用ハンドル64や上記微調整ボタン68,70を操作しても該Z値セットボタン74により記憶された位置よりも下(ディッシュ14内のサンプルの方向)にはアダプタ保持部42が下降しないようにするものである。なお、このZ値セットボタン74は、図示しないラッチ機構を備えており、操作者が押下操作即ちON操作すると、再度押下操作されるまで、その押下状態即ちON状態を維持する。以降、Z値セットボタン74がOFF状態におけるZ調整用ハンドル64及び微調整ボタン68,70の操作を「第1モード」と呼び、Z値セットボタン74がON状態におけるZ調整用ハンドル64及び微調整ボタン68,70の操作を「第2モード」と呼ぶ。
【0032】
トリガボタン76は、駆動部であるピエゾアクチュエータ38A(及び第2の駆動部であるピエゾアクチュエータ38B)を動作させる指示を行うためのボタンである。
【0033】
図3は、本実施形態に係る細胞操作装置10の電気的な構成を示すブロック図である。
装置本体30は、上記Z駆動部44に加えて、アダプタ保持部42の位置を検出するための位置検出部78を備えている。この位置検出部78としては、アダプタ保持部42の位置を、光学的に直接検出するものであっても良いし、Z駆動部44の駆動量を検出することで間接的に検出するものであっても良い。また、位置検出部78を、装置本体30とは別体に設けても構わない。
【0034】
操作モジュール34は、入力部80、記憶部82、判定部84、表示灯86、制御部88、パワーアンプ90、及び電源92を備えている。
【0035】
入力部80は、上記Z調整用ハンドル64及び上記微調整ボタン68,70のON操作に応じて移動指示信号を出力する移動指示部80Aと、上記速度設定ダイアル66によって設定された移動速度を示す速度設定信号を出力する速度設定部80Bと、上記移動量設定ダイアル72によって設定された移動量を示す移動量設定信号を出力する移動量設定部80Cと、上記Z値セットボタン74のON操作に応じてZ値セット信号を出力するZ値セット部80Dと、予め記憶されたパターンを有する第1の駆動信号とその逆相の第2の駆動信号とを上記トリガボタン76のON操作に応じて出力する信号発生部80Eと、を含む。この入力部80の内、移動指示部80A、速度設定部80B、移動量設定部80C、及びZ値セット部80Dから出力される各信号は、制御部88に入力される。一方、信号発生部80Eから出力される第1及び第2の駆動信号は、パワーアンプ90に入力される。
【0036】
記憶部82は、上記Z値セットボタン74がON操作されたときの、上記位置検出部78で検出されたアダプタ保持部42の位置をZ値として記憶するものである。判定部84は、上記位置検出部78で検出したアダプタ保持部42の位置と記憶部82に記憶されているZ値とを比較して、アダプタ保持部42が上記Z値の位置に到達したか否かを判定するものである。表示灯86は、上記Z値セット部80Dからの上記Z値セット信号に応じて点灯するものであり、操作者は該表示灯86の点灯によりZ値の記憶を確認できるようにしている。なお、Z駆動部44がステッピングモータで構成される場合は、Z値セットボタン74がON操作された位置からのステップ数(上向きを+、下向きを−とする)を記憶部82で記憶することにより、総ステップ数が0になることをもってZ値の位置への到達を判定することが可能となる。よって、この場合は、位置検出部78からの情報は不要であるので、位置検出部78を省略することができる。
【0037】
制御部88は、該細胞操作装置10の全体を制御するものである。パワーアンプ90は、信号発生部80Eから出力される第1の駆動信号を増幅してピエゾアクチュエータ38Aに印加すると共に、信号発生部80Eから出力される上記第1の駆動信号とは逆相の第2の駆動信号を増幅してピエゾアクチュエータ38Bに印加する。そして、電源92は、該細胞操作装置10の各部を動作させる電力を供給するものである。
【0038】
以下、このように構成された本実施形態に係る細胞操作装置10を用いたチップ駆動方法について説明する。
【0039】
ここでは、本実施形態に係る細胞操作装置10を用いて、ディッシュ14内の培養液中で培養される細胞に物質を導入する場合を例に説明する。
【0040】
即ち、図4に示すように、まず、装置本体30の取付けサイドを選択して、コンデンサレンズ26に顕微鏡アダプタ32を介して装着する(ステップS10)。
【0041】
次に、装置本体30から取り外されているアダプタ40のピエゾアクチュエータ38Aに、カンチレバーチップ54を装着する(ステップS12)。そして、そのカンチレバーチップ54が装着されたアダプタ40を、倒立顕微鏡12の前面側から、装置本体30のアダプタ保持部42に装着する(ステップS14)。
【0042】
その後、チップ位置決めを行う(ステップS16)。即ち、接眼レンズ22で観察しながら装置本体30の針先XY調整ノブ46と操作モジュール34のZ調整用ハンドル64を操作して、目視により、ピエゾアクチュエータ38Aの先端に形成されているチップ部36の位置を、図示しない対物レンズの中央位置(視野中央位置)に設定する。これは、顕微鏡XYステージ18にディッシュ14を載置せずに行う。なお、Z方向に関しては、操作モジュール34の速度設定ダイアル66を大又は中にセットして、Z調整用ハンドル64の操作により、視野にカンチレバーチップ54のレバー部60が目視で確認できるところまで、チップ部36の下降動作を行う。
【0043】
こうしてチップ位置決めがなされたならば、次に、サンプルのセット、即ち、顕微鏡XYステージ18上へのディッシュ14の載置を行う(ステップS18)。これは、操作モジュール34のZ調整用ハンドル64を操作してアダプタ40先端のチップ部36を安全な領域(Z方向上側)に退避し、かつ、倒立顕微鏡12の支柱94を後ろ側に倒し(装置本体30全体が移動)、サンプルセットのスペースを確保した上で、ディッシュ14(サンプル)を顕微鏡XYステージ18に載置し、その後に倒立顕微鏡12の支柱94を元に戻すというようにして実施する。なお、ディッシュ14(サンプル)は、当該ディッシュ14内の培養液中で培養される細胞に物質を導入するために、その導入しようとする物質を分散させた状態でセットされる。
【0044】
そして、導入対象の細胞を選択する(ステップS20)。これは、まず、接眼レンズ22で観察しながら、顕微鏡XYステージハンドル20を操作することで、顕微鏡XYステージ18を作動させ、ディッシュ14内の観察したい細胞を顕微鏡観察下に配置する。その後、Z駆動部44を作動させ、チップ部36を細胞の上方から細胞に近接させる。即ち、まず、接眼レンズ22で観察しながら視野にカンチレバーチップ54のレバー部60が目視で確認できるところまで、チップ部36のZ方向への下降動作を行う。これは、操作モジュール34の速度設定ダイアル66を小にセットして、Z調整用ハンドル64の操作により行う。ディッシュ14内の細胞とチップ部36とが同じ高さではないので、チップ部36には合焦しておらず、チップ部36を観察することは困難であり、よって、チップ部36よりも大きく合焦していなくても大まかに識別可能なレバー部60を指標としてZ方向への下降動作を行う。そして、視野にレバー部60が目視で確認できるところまで下降させたならば、次に、接眼レンズ22で観察しながら目視で、顕微鏡XYステージのXY方向への調整を行い、導入対象の細胞の真上にチップ部36と思われる位置を設定する。以上のようにして、導入対象の細胞を選択する(決定する)。
【0045】
その後の動作は、操作モジュール34の記憶部82にZ値をセットしているか否かにより異なる。
【0046】
1回目のチップ駆動では、まだ記憶部82にZ値をセットしていないので(ステップS22)、第1モード(Z値なし)でのチップ導入を行う。即ち、操作モジュール34のZ調整用ハンドル64又は微調整ボタン68,70を操作しながら、接眼レンズ22で観察して、「細胞の歪み」を確認しながら、Z方向の最適位置であるディッシュ14内の細胞に接触する位置を決める(ステップS24)。このとき、Z調整用ハンドル64の操作は、速度設定ダイアル66の大・中・小でその感度を適宜切り替えながら行うことになる。また、微調整ボタン68,70の操作は、移動量設定ダイアル72の大・中・小でその感度適宜切り替えながら行うことなる。このような操作に応じて、Z駆動部44がアダプタ40のアーム部56の先端部に取り付けられたチップ部36を下降させディッシュ14の底面へ近づけていく。そして、チップ部36の先端が下降していく途中において、ディッシュ14内の細胞に接触したことを確認したならば、そこで、操作モジュール34のZ調整用ハンドル64又は微調整ボタン68,70の操作を終了する。このように、Z駆動部44は、中空でない針部であるチップ部36を操作対象の細胞に近接させる近接部として機能する。
【0047】
このとき、操作モジュール34のZ値セットボタン74を押すことで、位置検出部78で検出されるそのときのアダプタ保持部42の位置を最適位置を示すZ値(Z0)として、記憶部82に記憶させる(ステップS25)。
【0048】
そして、操作モジュール34のトリガボタン76を押すことで、駆動部であるピエゾアクチュエータ38Aを、上記近接部としてのZ駆動部44が近接させる速度よりも速い速度でチップ部36を細胞の方向へ駆動させることにより、細胞の細胞膜を穿孔する(ステップS26)。このように、ピエゾアクチュエータ38Aは、細胞にチップ部36を近接させた状態で、該チップ部36に対して、上記近接部としてのZ駆動部44が近接させるときと異なる速度で、細胞の細胞膜を穿孔する駆動を行う駆動部としても機能する。具体的には、ピエゾアクチュエータ38Aは、チップ部36を介して細胞に撃力を与えることにより、細胞の細胞膜を穿孔することとなる。このとき、ピエゾアクチュエータ38Aの最大の伸長量を、チップ部36がディッシュ14の底面に到達する前に伸長が停止するようなものとしておくことで、チップ部36がディッシュ14の底面との衝突で壊れる虞を無くすことができる。
【0049】
ここでは撃力を与えることにより穿孔した例を示したが、細胞に対して圧力を与えられれば力の度合は問わない。細胞に対して、穿孔に至らない程度の力学的刺激を与えることにより細胞の特定の機能を活性化させる等のツールとして利用することができる。
【0050】
このようにして細胞膜が穿孔されると、その孔にディッシュ14内に分散された物質が流通されることとなり、物質が細胞内に流入する。導入しようとする粒子のサイズ等によっては、完全に穿孔しなくてもチップ部36で細胞を変形させることによる物理的刺激でストレッチレセプター等に結合されたチャンネルが開くことによっても流入する。
【0051】
その後、操作モジュール34のZ調整用ハンドル64を操作して、アダプタ40のアーム部56を上昇させることで、チップ部36を退避させる(ステップS27)。この際には、操作モジュール34の速度設定ダイアル66を中又は小にセットして、Z調整用ハンドル64の操作により、チップ部36の上昇動作を行う。
【0052】
なお、チップ部36を上昇させてチップ部36を細胞から引き抜いた後は、ある一定時間が経過すると、細胞膜は自己修復により回復し、細胞内に物質が取り込まれた状態となる。
【0053】
以下、任意のサンプル細胞個々に対して物質の導入を繰り返し行う。
即ち、接眼レンズ22で観察しながら、顕微鏡XYステージハンドル20を操作することで、顕微鏡XYステージ18を作動させ、導入対象の細胞の真上にチップ部36を設定する。つまり、導入対象の細胞を選択する(ステップS20)。
【0054】
2回目からのチップ駆動では、記憶部82にZ値をセットしているので(ステップS22)、第2モード(Z値セットあり)でのチップ導入動作を実施することになる(ステップS29)。この場合には、Z値が記憶部82にセットされているので、水平方向を位置決めした後は、Z調整用ハンドル64及び微調整ボタン66、68による行き過ぎた操作を気にせずに、チップ部36を十分下降させる操作をするだけで、最適位置まで下降させることができる。即ち、操作モジュール34の判定部84が位置検出部78で検出したアダプタ保持部42の位置と記憶部82にセットされているZ値とを比較して、アダプタ保持部42(チップ部36)が上記Z値の位置に到達したと判定したならば、操作モジュール34の制御部88は、Z調整用ハンドル64及び微調整ボタン66、68が操作されても、それ以上Z駆動部44が下降しないように制御することができる。
【0055】
なお、最適Z位置が記憶部82にセットされているので、その位置まで自動でアダプタ保持部42(チップ部36)が下降するようにしても良い。即ち、第2モードでのハンドル操作を自動化しても良い。
【0056】
また、細胞毎にチップ部36を近接させてチップ部36の細胞への接触を確認した後、いったんチップ部36を所定の距離退避させ、接触位置から所定距離上方まで再度近接させた後、急速駆動を行っても良い。例えば、ピエゾアクチュエータ38Aによる急速駆動に要する距離が3μmであったとすれば、それより短い、接触位置から2μm上方にチップ部36を再接近させた後に急速駆動を行う。この操作により、チップ部36のディッシュ14の底面への衝突や、細胞に深く刺し過ぎることによる細胞の生存率の劣化を抑えることができる。この「所定距離退避→再接近」の流れは、装置のバックラッシュによる位置ずれを防ぐために行っている。
【0057】
また逆に、高さがある細胞では、接触位置よりも所定距離下方にセットして、急速駆動を行うことにより、確実な挿入を行うことも考えられる。
【0058】
要するに、細胞への接触またはその他の手段でチップ部36をいったん位置決めし、その位置を基準にしてそこから所定の距離移動させた後に急速駆動を行うことで、より確実に、またはチップ部36の破損や生存率の劣化なく物質の導入が可能になる。その他の手段としては、ディッシュ14底面への接触が考えられる。チップ部36の細胞への接触は細胞の変形を観察すること等により検出でき、チップ部36のディッシュ14の底面への接触は、その接触に伴ってチップ部36が持ち上げられ、レバー部60が変形することによりチップ部36の水平方向の位置がずれること、またはレバー部60の変形に伴い、チップ部36上にコートされたピエゾ抵抗の値が変わること、またはレバー部60の変形そのものを光てこ等の技術により測定することで、鋭敏に検出できる。
【0059】
また、この一連の動き(所定の距離退避→再接近→急速駆動)を自動化して、ボタンを押す等の1回の操作で行うことで操作を簡便にすることができる。
【0060】
また、手動操作型の倒立顕微鏡12ではなく、コンピュータにより顕微鏡XYステージ18を駆動制御すると共に、CCDカメラ等を備え、モニタに観察画像を表示するような電動型の倒立形顕微鏡においては、物質の導入が必要な細胞を予め画像上で選択しておき、自動でその位置まで移動するようにしても良い。即ち、顕微鏡XYステージ18のXY方向への調整も自動化しても良い。
【0061】
なお、細胞内に導入する物質としては、遺伝子、色素、量子ドットなどの蛍光試薬、イオン、ペプチド、タンパク質、多糖類、等、ディッシュ14内に分散できるものであれば良い。
【0062】
[実験例1]
信号発生部80Eから急峻な立上りの信号を入力するとピエゾアクチュエータ38Aは急峻に伸長し、チップ部36を急速駆動する。この急速駆動の速度をどの程度にすれば細胞に物質が導入されるかについて以下の実験を行った。
【0063】
細胞はHeLa細胞を利用した。3枚のディッシュにHeLa細胞を培養した。各ディッシュの培養液を、SYTOX(分子量1kDa)を5μM含むHBSSに置換した。SYTOXは、DNAと結合することにより488nm励起(B励起)で523nmの蛍光を放出する特性を持つため、穿孔により細胞内に進入したことを蛍光観察により確認できる。各ディッシュのHeLa細胞に対して以下の実験を行った。使用したカンチレバーチップ54のレバー部60の弾性定数は1.8N/m、チップ部36の先端径は10nmである。
【0064】
実験は、次の1〜3のように行った。
1.細胞にチップ部36を接触させる。
2.信号発生部80Eよりパワーアンプ90を介して図5(A)の左側に示すような形状の信号をピエゾアクチュエータ38Aに供給する(ピエゾアクチュエータ38Bには、逆相の信号を供給する)。これにより、ピエゾアクチュエータ38Aは、図5(A)の右側に示すように変位する。
3.B励起で蛍光観察を行い、穿孔を確認する。
【0065】
この実験を、立上り時間と変位(ピエゾアクチュエータ38Aの変位量。従って針の変位量である)を図6のパラメータの範囲で変更しながら行った。この実験を3枚のディッシュについて行い、結果をまとめたのが図6である。図6は、3つのディッシュ全てにおいて穿孔できた条件を丸印、3つのディッシュとも穿孔できなかった条件をバツ印、1又は2つのディッシュで穿孔できたものを三角印で表した。ここで、変位/立上り時間により、立上り速度を計算して、100mm/s超の条件を斜線のハッチング、50mm/s超で100mm/s以下を横線のハッチング、50mm/s以下を縦線のハッチングで表示してある。この速度分布と導入結果の比較から、50mm/s超の立上り速度をもつ信号を与えることで、導入が可能であることがわかる。さらに100mm/s超の立上り速度の信号を与えることで、細胞の条件によらず導入が可能になる。
【0066】
特性の異なるカンチレバーチップ54(レバー部60の弾性定数26N/m、チップ部36の先端径7nm)でも同じ実験を行い、ほぼ同様の結果が得られている。
【0067】
[実験例2]
また、より大きい分子量の色素に対しても導入実験を行った。
細胞はHeLa細胞を利用した。ディッシュにHeLa細胞を培養して、培養液を、Alexa488 dextran(分子量10kDa)を20μM含むHBSSに置換した。その後、上記実験例1の1.と2.の操作を繰り返し行った。信号の条件は、図6における立上り時間5μs、変位0.5μm、1μm、1.5μmの3種類である。
【0068】
上記操作終了後、色素を含むHBSSを色素を含まないHBSSに置換して、B励起で蛍光観察を行った(色素Alexa488 dextranはSYTOXと異なり、B励起によりDNAとの結合によらず蛍光を放出するため、細胞への導入確認のためには、実験後に溶液を、色素を含まないものに置換する必要がある)。図7は、その結果を示す図で、(A)は変位0.5μmの場合、(B)は変位1μmの場合、(C)は変位1.5μmの場合、をそれぞれ示しており、上段は位相差像、下段は蛍光像である。
【0069】
図7に示すように、変位1μm、1.5μmでは操作を行ったコロニーの細胞全てが光っているが、変位0.5μmでは光っていない(変位0.5μmで中心部が白く光っているのは、細胞膜に付着した色素で、導入はできていない)。従って、より分子量の大きい色素に対しても、100mm/sを超える領域で導入可能であることが判った。
【0070】
本実験例2と上記実験例1を比較すると、50mm/s超100mm/s以下の条件は、より分子量の小さい物質を導入可能な条件であることが判る。
【0071】
これらの実験より、チップ部36での穿孔は、チップ部36の速度と強い相関があり、ある幅をもった、穿孔可能な閾値があることがわかった。その閾値は、急速駆動の変位量によらないことも、本実験により明らかになった。
【0072】
従って、信号の形状は、最大速度が上記50mm/s、好ましくは100mm/s、を超える充分な高速になれば、図5(A)のような急速な立上りを持つ駆動でも良く、図5(B)のような振動駆動でも良い。また、その組み合わせでも良い。
【0073】
また、図5(C)のように、急速な立上りを持つ信号を与えた時に生じるメカ的な共振(アーム部56、ピエゾアクチュエータ38A,38B等の共振)で高速の共振的な変位が変位信号に重畳された場合、合計速度が上記50mm/s、好ましくは100mm/s、を超えれば導入可能である。
【0074】
以上のように、本第1実施形態に係る細胞操作装置によれば、針部(チップ部36)が中空でないため、例えばディッシュ14の底面に接触したときに針部の先端の破損の危険が少ない。
【0075】
また、レバー部60のような弾性部材で針部(チップ部36)を支えることにより、さらに破損の危険が少ない。
【0076】
また、注入針と異なり、中空でない針部(チップ部36)を含むカンチレバーチップ54は、駆動させる部分に注入する溶液、溶液輸送部等を含まず、MEMSプロセスで作製された微細な針部(チップ部36)とその支持部(レバー部60)、シリコンベース部58だけから構成され、非常に小型軽量である。このような針部(チップ部36)は、駆動部(ピエゾアクチュエータ38A)が近接部(Z駆動部44)と独立して備えられた別体のユニットであるため以下のようなメリットを持つ。駆動部(ピエゾアクチュエータ38A)は針部(チップ部36)と非常に近い、つまり針部と近接した位置でシリコンベース部58と接着される。そのため駆動部(ピエゾアクチュエータ38A)の駆動波形が途中の構造体で緩和されたり、近接部等の周囲に備えられた構造体による共振等による変調を受けずにダイレクトに伝達され、効率のよい穿孔が可能になる。また中空でない針部(チップ部36)は前述のように軽量に構成でき、慣性が小さいため、大きな加減速が可能で、結局高速駆動が可能になる。すなわち、細胞への接触状態またはその数μm上の位置から急速駆動を行い、50mm/sを超える速度を出して穿孔を行った後、ディッシュ14の底面に到達する前にチップ部36を停止することができる。また、小型の駆動部(ピエゾアクチュエータ38A)だけが針部(チップ部36)に近接しており、よりストロークが長いため大型の近接部(Z駆動部44)はアーム部56を介して別体に配置されているため、コンデンサレンズ26からの光のけられが最小限でおさえられ、細胞の観察に適した配置をとることができる。
【0077】
一般に、細胞は高さ数μmから10μmのものが多いため、駆動部分の質量が大きいマイクロインジェクションではディッシュ14の底面への衝突を避けるための充分な減速ができず、本実施形態のような高速の駆動は不可能である。従って、本実施形態によれば、導入確率の高い速度を維持しながら、針がディッシュ底面への衝突を起こさず、針の破損の危険が少ない細胞操作装置を構成できる。
【0078】
また、本実施形態では細胞を対象としたが、対象は他の微細物であっても良い。ここで、微細物とは、近接部としてのZ駆動部44によって対象操作部であるチップ部36を対象に近接させる際や、駆動部としてのピエゾアクチュエータ38Aによってチップ部36を駆動して対象を操作する際に、対象とチップ部36の位置関係を目視で正確に把握するのが困難であって拡大観察が必要な大きさ程度のものであることを意味している。この微細物としては、具体的には、細胞のほかに卵子、リポソーム、人工膜構造、等が挙げられる。膜構造の対象には急速駆動等により穿孔することができ、それにより遺伝子、タンパク質等の物質導入を行うことができる。また、細胞、卵子等は急速駆動で撃力を与えることにより力学刺激を与えることができる。
【0079】
また、本実施形態では、穿孔動作が近接する操作より速いことを特徴とする場合を示したが、細胞の特性によっては、近接する操作と方向が異なる駆動、速度が遅い駆動、異なる駆動パターンによりより効率のよい穿孔が可能であることも考えられる。また、細胞に近づく方向だけでなく、他の軸に向いた駆動も合わせることで穿孔その他の操作を効率的に行うことができる場合がある。たとえば細胞をなぞる動き、なぞる動きを往復または表面上を2次元スキャンしつつ針を細胞内に陥入する動き、細胞方向に対する振動的運動を行いつつ細胞表面をなぞるまたは振動的運動を行いつつ2次元スキャンする動き、等である。また、穿孔以外の動作、たとえば力学刺激のような細胞操作を行う場合にも、細胞膜の特性によっては、近接する操作と方向が異なる駆動、速度が遅い駆動、異なる駆動パターン、2軸、3軸の駆動等により、より効率のよい細胞操作が可能になることも考えられる。
【0080】
いずれの場合も、近接操作を行うアクチュエータ(Z駆動部44)と異なる独立のアクチュエータ(ピエゾアクチュエータ38A)によって駆動することにより、より効率的な細胞操作を行うことが可能になる。
【0081】
[第2実施形態]
次に、本発明の第2実施形態に係る細胞操作装置について、図8を参照して説明する。図8は、本実施形態に係る細胞操作装置の特徴部の構成を示す図である。
【0082】
本実施形態においては、細胞操作装置10の装置本体30は、上記第1実施形態のようにコンデンサレンズ26に装着される構成ではなく、顕微鏡下部から顕微鏡上側の顕微鏡XYステージ18にブリッジ状の支持部材96を渡して、そこに取り付ける構成としたものである。
【0083】
このような構成としても、上記第1実施形態と同様の効果が得られる。
以上、実施形態に基づいて本発明を説明したが、本発明は上述した実施形態に限定されるものではなく、本発明の要旨の範囲内で種々の変形や応用が可能なことは勿論である。
【0084】
例えば、細胞操作装置10の装置本体30の装着位置は、コンデンサレンズ26を支持する支持部等、上記第1及び第2実施形態で説明した以外の位置としても良い。
【符号の説明】
【0085】
10…細胞操作装置、 12…倒立顕微鏡、 14…ディッシュ、 18…顕微鏡XYステージ、 26…コンデンサレンズ、 30…装置本体、 32…顕微鏡アダプタ、 34…操作モジュール、 36…チップ部、 38A…ピエゾアクチュエータ、 38B…第2のピエゾアクチュエータ、 40…アダプタ、 42…アダプタ保持部、 44…Z駆動部、 46…XY調整ノブ、 48…Z駆動部取付部、 50…マグネット、 52…嵌合部、 54…カンチレバーチップ、 56…アーム部、 58…シリコンベース部、 60…レバー部、 74…Z値セットボタン、 76…トリガボタン、 78…位置検出部、 80…入力部、 80A…移動指示部、 80B…速度設定部、 80C…移動量設定部、 80D…Z値セット部、 80E…信号発生部、 82…記憶部、 84…判定部、 86…表示灯、 88…制御部、 90…パワーアンプ、 92…電源、 96…支持部材。
【特許請求の範囲】
【請求項1】
対象を操作するための対象操作部と、
前記対象操作部を前記対象に近接させる近接部と、
前記対象を操作するように、前記対象に近接させられた対象操作部を駆動する駆動部と、
を具備することを特徴とする操作装置。
【請求項2】
前記駆動部は、前記対象に撃力を与えるように前記対象操作部を駆動することを特徴とする請求項1に記載の操作装置。
【請求項3】
前記駆動部は、前記対象を穿孔するような操作をするように前記対象操作部を駆動することを特徴とすることを特徴とする請求項1または2に記載の操作装置。
【請求項4】
前記駆動部は、前記対象に近接させられた前記対象操作部を、前記近接部が近接させるときと異なる速度で駆動することを特徴とする請求項1乃至3のいずれかに記載の操作装置。
【請求項5】
前記駆動部は、前記対象に近接させられた前記対象操作部を、前記近接部が近接させるときよりも速い速度で駆動することを特徴とする請求項1乃至4のいずれかに記載の操作装置。
【請求項6】
前記駆動部は、前記対象操作部の直近にあり、
前記駆動部は、アーム部を介して前記近接部と接続されていることを特徴とする請求項請求項1乃至5のいずれかに記載の操作装置。
【請求項7】
前記駆動部は、前記対象操作部の前記対象の方向の速度成分が50mm/sを超えるように、前記対象操作部を駆動することを特徴とする請求項1乃至6のいずれかに記載の操作装置。
【請求項8】
前記駆動部は、前記対象操作部の前記対象の方向の速度成分が100mm/sを超えるように、前記対象操作部を駆動することを特徴とする請求項1乃至7のいずれかに記載の操作装置。
【請求項9】
前記駆動部は、前記対象操作部に対して、少なくとも3軸の自由度を持った運動を与えることを特徴とする請求項1乃至8のいずれかに記載の操作装置。
【請求項10】
前記対象操作部は、前記駆動部に接続された弾性部材によって保持され、該弾性部材から略直角方向に延伸され、
前記対象操作部の前記弾性部材からの延伸の方向が、前記対象の方向であることを特徴とする請求項1乃至3のいずれかに記載の操作装置。
【請求項11】
前記アーム部を介して前記駆動部と対向する位置に配置され、前記駆動部とは逆相で動作する第2の駆動部を更に具備することを特徴とする請求項6に記載の操作装置。
【請求項12】
前記駆動部と前記第2の駆動部は、一方の駆動軸の延長線上に他方の一部が設置されることを特徴とする請求項11に記載の操作装置。
【請求項13】
前記駆動部の駆動軸と前記第2の駆動部の駆動軸とは、略一致していることを特徴とする請求項11に記載の細胞操作装置。
【請求項14】
前記近接部と前記対象操作部は、拡大された前記対象の像の情報を用いることを特徴とする請求項1乃至13のいずれかに記載の操作装置。
【請求項15】
前記対象は、微細物であることを特徴とする請求項1乃至14のいずれかに記載の操作装置。
【請求項16】
前記対象は、薄膜構造をもつことを特徴とする請求項1乃至15のいずれかに記載の操作装置。
【請求項17】
前記駆動部は、前記近接部と独立して備えられていることを特徴とする請求項1乃至16のいずれかに記載の操作装置。
【請求項18】
前記駆動部は、前記針部と近接して備えられていることを特徴とする請求項1乃至17のいずれかに記載の操作装置。
【請求項1】
対象を操作するための対象操作部と、
前記対象操作部を前記対象に近接させる近接部と、
前記対象を操作するように、前記対象に近接させられた対象操作部を駆動する駆動部と、
を具備することを特徴とする操作装置。
【請求項2】
前記駆動部は、前記対象に撃力を与えるように前記対象操作部を駆動することを特徴とする請求項1に記載の操作装置。
【請求項3】
前記駆動部は、前記対象を穿孔するような操作をするように前記対象操作部を駆動することを特徴とすることを特徴とする請求項1または2に記載の操作装置。
【請求項4】
前記駆動部は、前記対象に近接させられた前記対象操作部を、前記近接部が近接させるときと異なる速度で駆動することを特徴とする請求項1乃至3のいずれかに記載の操作装置。
【請求項5】
前記駆動部は、前記対象に近接させられた前記対象操作部を、前記近接部が近接させるときよりも速い速度で駆動することを特徴とする請求項1乃至4のいずれかに記載の操作装置。
【請求項6】
前記駆動部は、前記対象操作部の直近にあり、
前記駆動部は、アーム部を介して前記近接部と接続されていることを特徴とする請求項請求項1乃至5のいずれかに記載の操作装置。
【請求項7】
前記駆動部は、前記対象操作部の前記対象の方向の速度成分が50mm/sを超えるように、前記対象操作部を駆動することを特徴とする請求項1乃至6のいずれかに記載の操作装置。
【請求項8】
前記駆動部は、前記対象操作部の前記対象の方向の速度成分が100mm/sを超えるように、前記対象操作部を駆動することを特徴とする請求項1乃至7のいずれかに記載の操作装置。
【請求項9】
前記駆動部は、前記対象操作部に対して、少なくとも3軸の自由度を持った運動を与えることを特徴とする請求項1乃至8のいずれかに記載の操作装置。
【請求項10】
前記対象操作部は、前記駆動部に接続された弾性部材によって保持され、該弾性部材から略直角方向に延伸され、
前記対象操作部の前記弾性部材からの延伸の方向が、前記対象の方向であることを特徴とする請求項1乃至3のいずれかに記載の操作装置。
【請求項11】
前記アーム部を介して前記駆動部と対向する位置に配置され、前記駆動部とは逆相で動作する第2の駆動部を更に具備することを特徴とする請求項6に記載の操作装置。
【請求項12】
前記駆動部と前記第2の駆動部は、一方の駆動軸の延長線上に他方の一部が設置されることを特徴とする請求項11に記載の操作装置。
【請求項13】
前記駆動部の駆動軸と前記第2の駆動部の駆動軸とは、略一致していることを特徴とする請求項11に記載の細胞操作装置。
【請求項14】
前記近接部と前記対象操作部は、拡大された前記対象の像の情報を用いることを特徴とする請求項1乃至13のいずれかに記載の操作装置。
【請求項15】
前記対象は、微細物であることを特徴とする請求項1乃至14のいずれかに記載の操作装置。
【請求項16】
前記対象は、薄膜構造をもつことを特徴とする請求項1乃至15のいずれかに記載の操作装置。
【請求項17】
前記駆動部は、前記近接部と独立して備えられていることを特徴とする請求項1乃至16のいずれかに記載の操作装置。
【請求項18】
前記駆動部は、前記針部と近接して備えられていることを特徴とする請求項1乃至17のいずれかに記載の操作装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−244910(P2012−244910A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−116920(P2011−116920)
【出願日】平成23年5月25日(2011.5.25)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月25日(2011.5.25)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]