
操業予測装置、操業予測方法、及びコンピュータプログラム
【課題】下工程の操業結果を予測するための予測モデルの学習用データを適切に選別しつつ、過学習を抑制する。
【解決手段】学習用実績データに最も近いSOMニューロンを勝者SOMニューロン602とし、勝者SOMニューロン602の値とその近傍にある近傍SOMニューロン603の値とを、学習用実績データの値に近づけるように修正してSOMの学習を行う。SOMの学習終了時のSOMニューロン602、603のそれぞれについて、値が最も近い学習用実績データを相互に関連付けて記憶する。そして、操業結果予測対象データと値が近い所定数のSOMニューロン602、603と、そのSOMニューロン602、603に関連付けられている学習用実績データとを学習用データ101、102とする。
【解決手段】学習用実績データに最も近いSOMニューロンを勝者SOMニューロン602とし、勝者SOMニューロン602の値とその近傍にある近傍SOMニューロン603の値とを、学習用実績データの値に近づけるように修正してSOMの学習を行う。SOMの学習終了時のSOMニューロン602、603のそれぞれについて、値が最も近い学習用実績データを相互に関連付けて記憶する。そして、操業結果予測対象データと値が近い所定数のSOMニューロン602、603と、そのSOMニューロン602、603に関連付けられている学習用実績データとを学習用データ101、102とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操業予測装置、操業予測方法、及びコンピュータプログラムに関し、特に、予測モデルを用いて操業の予測を行うために用いて好適なものである。
【背景技術】
【0002】
例えば、鋼材を製造するための製鋼プロセスの各工程における目標温度は、下工程からの要求によって決定される。すなわち、連続鋳造工程(CC)における鉄の凝固温度を起点として、下工程における溶鋼温度降下量を順次推定(予測)することで、各工程における目標温度が決定される。ここで問題になるのは、各工程及び工程間における溶鋼温度の降下量の不確かさである。各工程における溶鋼温度の降下量は、様々な要因の影響を受け、同一の鋼種の鋼材を製造する場合であっても、各工程及び工程間における溶鋼温度の降下量は一定ではない。そのため、従来は、オペレータが自身の経験・知見を駆使しつつも、安全側(すなわち高温側)に製鋼プロセスの各工程の目標温度を設定せざるを得なかった。
【0003】
そこで、操業実績データを活用して製鋼プロセスの各工程における目標温度を、階層型ニューラルネットワーク等の予測モデルを使ってパターン分類・予測することが考えられる。このような技術として特許文献1に記載の技術がある。特許文献1では、まず、転炉の吹止温度の終点挙動を、ニューラルネットワーク等を用いて大局的にグローバル推定した後、自己組織化マップモデル等を用いて、転炉吹練に関する操業条件を複数のグループにクラスタリングする。そして、クラスタリングしたグループ毎に、推定した転炉の吹止温度の誤差を、ニューラルネットワーク等を用いて評価・学習し、グローバル推定した転炉の吹止温度を、同定した誤差を用いて修正する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−294928号公報
【非特許文献】
【0005】
【非特許文献1】T.Kohonen著、「Self-organizing maps」、Springer、1996年
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前述した従来の技術では、ニューラルネットワーク等の予測モデルの学習をする際に、操業実績データのみを学習用データとして用いているので、データ数が少ないことによる未学習部分の発生や過学習により、予測の精度が低下してしまう虞がある。一方で、学習用データをむやみに多くすると、計算の負荷が大きくなるばかりでなく、不適切な学習用データを採用してしまう虞がある。
本発明はこのような問題点に鑑みてなされたものであり、下工程の操業結果を予測するための予測モデルの学習用データを適切に選別しつつ、過学習を抑制できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の操業予測装置は、製品又は半製品を製造するための操業条件である操業影響因子を入力とし、該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力とする予測モデルを用いて操業結果因子の予測を行う操業予測装置であって、過去の操業実績についての前記操業影響因子及び前記操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、前記予測モデルの学習を行うことを特徴とする。
【0008】
本発明の操業予測方法は、製品又は半製品を製造するための操業条件である操業影響因子を入力とし、該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力とする予測モデルを用いて操業結果因子の予測を行う操業予測方法であって、過去の操業実績についての前記操業影響因子及び前記操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、前記予測モデルの学習を行うことを特徴とする。
【0009】
本発明のコンピュータプログラムは、前記操業予測方法の各工程をコンピュータに実行させることを特徴とする。
【発明の効果】
【0010】
本発明によれば、過去の操業実績についての操業影響因子及び操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、操業影響因子を入力とし操業結果因子を出力とする予測モデルの学習を行う。したがって、予測モデルの学習用データとして適切な補間データを学習用補間データとして選択し加えることによって、学習用データのデータ数が少ないことで生じる未学習部分の発生や過学習を抑制することができる。よって、予測モデルを用いた操業の予測を正確に行えるようにする。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施形態を示し、NNを用いた予測結果と真の入出力関係との一例を概念的に示す図である。
【図2】本発明の第1の実施形態を示し、操業予測装置の機能的な構成の一例を示す図である。
【図3】本発明の第1の実施形態を示し、SOMの概念の一例を示す図である。
【図4】本発明の第1の実施形態を示し、SOMを使って生成する補間データの配置の一例を示す図である。
【図5】本発明の第1の実施形態を示し、SOMを使って生成する補間データの数に合わせてSOMの設定パラメータを算出する方法の一例を説明する図である。
【図6】本発明の第1の実施形態を示し、SOMによる学習の様子の一例を概念的に示す図である。
【図7−1】本発明の第1の実施形態を示し、操業予測装置の処理動作の一例を説明するフローチャートである。
【図7−2】本発明の第1の実施形態を示し、図7−1に続くフローチャートである。
【図8】本発明の第2の実施形態を示し、操業予測装置の機能的な構成の一例を示す図である。
【図9】本発明の第2の実施形態を示し、操業予測装置の処理動作の(一部の)一例を説明するフローチャートである。
【図10】本発明の実施例を示し、転炉の吹止温度の予測値(予測温度)と実績値(実績温度)との関係の一例を示す図である。
【発明を実施するための形態】
【0012】
以下、図面を参照しながら、本発明の実施形態を説明する。
<第1の実施形態>
まず、本発明の第1の実施形態について説明する。
図1は、予測モデルを用いた予測結果と真の入出力関係との一例を概念的に示す図である。具体的に図1(a)は、従来のように、実績データのみを学習用データとして用いた局所予測モデルによる予測結果と真の入出力関係との一例を示す。
図1(a)に示すように、実績データ101のみを学習用データとした局所予測モデルを用いると、学習用データの数が少ないために、予測結果110と真の入出力関係120との差が大きくなることがある。
これに対して、図1(b)は、本実施形態での局所予測モデルによる予測結果と真の入出力関係との一例を示す。本実施形態では、後述する実績データから構築した自己組織化マップ(SOM)を用いて、疎らに存在する実績データを補間する補間データを生成する。図1(b)に示すように、実績データ101にSOMによる補間データ102を学習用データとして加えて局所予測モデルの学習を行うと、予測結果130の真の入出力関係120に対する精度の向上が可能となる。
以下、このように局所予測モデルによる予測結果を向上させて、局所予測モデルを用いた操業の予測を正確に行えるようにする操業予測装置の一実施形態について説明する。
【0013】
図2は、操業予測装置200の機能的な構成の一例を示す図である。操業予測装置200は、例えば、CPU、ROM、RAM、HDD、及び各種のインターフェースを備えた情報処理装置(例えばPC)を用いることにより実現される。尚、本実施形態では、製鋼プロセスにおける転炉の吹止温度を操業結果因子とする場合を例に挙げて説明する。転炉の吹止温度は転炉における最高温度であり、ここで必要な温度を正確に予測することができれば、吹止温度が過剰に高く設定されている場合にそれを適切な値に下げることにより、製鋼プロセスにおける操業温度を下げることが可能となる。
【0014】
ここで、製鋼プロセスの一例を簡単に説明する。まず、製銑プロセスで得られた溶銑を転炉に装入する。次に、転炉により、溶銑中の燐や炭素等を取り除き(一次精錬を行い)、これにより出来上がった溶鋼を転炉から取鍋に移す。溶鋼を転炉から取鍋に移す作業を出鋼と呼ぶ。出鋼の際に、溶鋼と同時に、成分調整のための合金を併せて投入する。次に、取鍋内の溶鋼に含まれる水素や窒素等の気体を取り除くと共に、成分調整のための合金を溶鋼に添加する二次精錬を行う。最後に、取鍋内の溶鋼を連続鋳造機(の鋳型)に流し込み、連続鋳造機により鋼片を製造する。
【0015】
操業予測装置200は、後述するSOMを使用して補間データを生成し、実績データと生成した補間データとを用いて、階層型ニューラルネットワークとして構築された予測モデルを学習し、学習後の予測モデル(階層型ニューラルネットワーク)を用いた操業の予測を行う装置である。
【0016】
以下に、図2に示す操業予測装置200の各ブロックの詳細を説明する。
(データ取得部201)
データ取得部201は、データを外部から取得して記憶する。本実施形態では、データとして、実績データXj及び操業結果予測対象データFを取得する。実績データXjとは、後述するSOM学習部206にて、SOMの学習に用いられる操業実績データである。実績データXjとしては、以下の(1)〜(37)の37次元の実績データを取得するものとする。操業結果予測対象データFとは、オペレータによるユーザインターフェースの操作に基づいて入力されるデータであって、後述する予測モデルへの入力とするデータである。操業結果予測対象データFとしては、以下の(1)〜(36)の36次元の実績データを取得するものとする。
【0017】
(1)装入量合計(材料因子);転炉へ投入される溶銑の総量(重量)
(2)D01(材料因子);金属種D01の投入量(重量)
(3)D02(材料因子);金属種D02の投入量(重量)
(4)D03(材料因子);金属種D03の投入量(重量)
(5)D04(材料因子);金属種D04の投入量(重量)
(6)D05(材料因子);金属種D05の投入量(重量)
(7)D06(材料因子);金属種D06の投入量(重量)
(8)D07(材料因子);金属種D07の投入量(重量)
(9)D08(材料因子);金属種D08の投入量(重量)
(10)D09(材料因子);金属種D09の投入量(重量)
(11)D10(材料因子);金属種D10の投入量(重量)
(12)D合計(材料因子);金属種D01〜D10の投入量(重量)の合計
【0018】
(13)G01(材料因子);金属種G01の投入量(重量)
(14)G02(材料因子);金属種G02の投入量(重量)
(15)G03(材料因子);金属種G03の投入量(重量)
(16)G04(材料因子);金属種G04の投入量(重量)
(17)G05(材料因子);金属種G05の投入量(重量)
(18)G06(材料因子);金属種G06の投入量(重量)
(19)G合計(材料因子);金属種G01〜G10の投入量(重量)の合計
【0019】
(20)取鍋最終(温度因子);出鋼温度(転炉から取鍋に移されたときの溶鋼の温度)
(21)装入(鍋状況因子);装入の処理にかかった時間
(22)鍋NO(鍋状況因子);取鍋に固有の番号
(23)修理後回数(鍋状況因子);取鍋の耐火物を簡単に補修(熱間補修)してからの取鍋の使用回数
(24)累計回数(鍋状況因子);大規模に取鍋の耐火物を補修(冷間補修)してからの取鍋の使用回数
(25)鍋下がり(鍋状況因子);取鍋に関する情報
(26)スラグ厚(鍋状況因子);取鍋に関する情報
(27)即時開孔(鍋状況因子);取鍋に関する情報
(28)AMEPA回数(鍋状況因子);取鍋に設置のスラグ検出器に関する情報
(29)AMEPA可否(鍋状況因子);取鍋に設置のスラグ検出器に関する情報
(30)空鍋時間(鍋状況因子);取鍋に関する情報(取鍋から溶鋼が連続鋳造機に流し込まれた後、当該取鍋に転炉から次の溶鋼が移されるまでの時間(すなわち、取鍋が空となっている時間))
(31)炉号(鍋状況因子);どの転炉を使用したかを示す情報
(32)炉代(鍋状況因子);使用している転炉の鍋に固有の番号
(33)炉回数(代)(鍋状況因子);溶鋼を出す孔(出鋼孔)の交換回数を示す情報(この孔は使用すると大きくなる)
(34)炉回数(回)(鍋状況因子);溶鋼を出す孔の交換後の使用回数を示す情報
(35)銑鉄(温度因子);溶銑の温度
(36)取鍋1(温度因子);出鋼温度(「取鍋最終」とは計測タイミングが異なる)
(37)吹止温度(操業結果因子);転炉の吹止温度
【0020】
ここで、(37)の操業結果因子は、予測対象である転炉の吹止温度であり、ここでは、転炉の吹き止めから出鋼完了までの温度降下量の実績値に出鋼温度目標値を加えた温度が操業結果因子として設定される。操業結果因子として得られる吹止温度は、操業上の目標値として使用されるものである。(1)〜(19)の材料因子は、転炉へ投入される溶銑の総量と、製造している製品(鋼片)の成分(金属種)と、転炉吹き止め後に生じる溶鋼温度に与える製造条件の1つである「各金属種の投入量(ton/溶鋼量)」とを示す因子である。各金属種は、出鋼時と二次精錬時に投入(添加)されるが、材料因子として含まれる投入量は、出鋼時の投入量を示す。(21)〜(34)の鍋状況因子は、出鋼時に溶鋼を受ける器である取鍋の状況を示す因子である。(20)、(35)、(36)の温度因子は、吹き止め後の温度降下を示す因子である。予測を行う際には実績が存在しないので、温度因子として目標値を用いる。ここで、(1)〜(19)の材料因子、(21)〜(34)の鍋状況因子、及び(20)、(35)、(36)の温度因子は、溶鋼を製造するための操業条件であり、(37)の操業結果因子(操業結果として決まる因子)に影響を与えるので、操業影響因子と呼ばれる。
各チャージに付随する実績データの中には、使用する二次精錬設備名や連続鋳造設備名等、出鋼過程に全く関係ないものが含まれる。そこで、本実施形態では、出鋼過程に関係する37次元の実績データを採用するようにした。ただし、採用する実績データは、37次元の実績データに限定されるものではない。
【0021】
データ取得部201は、例えば、通信インターフェースが上位のコンピュータから実績データXjと操業結果予測対象データFの受信を行った後、又は、CPUが記憶媒体に記憶された実績データXjと操業結果予測対象データFの読み出しを行った後、又は、オペレータによるユーザインターフェースの操作に基づいて入力された操業結果予測対象データの読み出しを行った後、CPUが実績データXjと操業結果予測対象データFをHDD等に記憶することによって実現される。
尚、実績データに含まれる因子は前述したものに限定されず、また、各因子の具体的な項目の内容及び数も前述したものに限定されない。
【0022】
(データ正規化部202)
データ正規化部202は、データ取得部201で取得された実績データXj及び操業結果予測対象データFの値を正規化する。データ正規化部202は、実績データXの各因子の項目毎に予め設定されている最大値及び最小値を記憶媒体から読み出し、以下の(1)式の計算を行うことにより正規化値を算出する。
正規化値=(実績値−最小値)/(最大値−最小値) ・・・(1)
【0023】
(1)式において、「実績値」は、実績データXj及び操業結果予測対象データFの値である。また、「最大値」は、実績データXj及び操業結果予測対象データFの各項目において想定される最大値であり、「最小値」は、実績データXj及び操業結果予測対象データFの各項目において想定される最小値である。このように「最大値」及び「最小値」は、想定値であり、オペレータにより予め操業予測装置200に設定されるものである。ただし、「最大値」及び「最小値」を、それぞれ実績データXj及び操業結果予測対象データFの最大値及び最小値としてもよい。
(1)式の計算を行うことによって、実績データXj及び操業結果予測対象データFは0以上1以下の値のデータとなる。以降に説明する各ブロックで使用される実績データXj及び操業結果予測対象データFは、全て、データ正規化部202で正規化された実績データXj及び操業結果予測対象データFである。以下の説明では、必要に応じて「正規化した実績データ」、「正規化した操業結果予測対象データ」を、それぞれ「実績データ」、「操業結果予測対象データ」と称する。
【0024】
データ正規化部202は、例えば、CPUが、コンピュータプログラムに従って、HDD等から、実績データXj及び操業結果予測対象データFと、実績データXj及び操業結果予測対象データFの各項目の「最大値及び最小値」とを読み出して(1)式の計算を行い、その結果を、RAM等に記憶することによって実現される。
【0025】
(SOMパラメータ設定部203)
本実施形態では、後述するように、自己組織化マップ(Self-Organizing Maps)を用いて、階層型ニューラルネットワークとして構築された予測モデルの学習に用いる「実績データの補間データ」を生成するようにしている。以下に、自己組織化マップの概要を説明する。尚、自己組織化マップの詳細については、非特許文献1等に記載されている。また、以下の説明では、必要に応じて「ニューラルネットワーク」を「NN」と称し、「自己組織化マップ」を「SOM」と称する。
【0026】
SOMとは、多次元ベクトルの形で表現されたデータの集合から各々のデータの類似性を見出し、類似するデータ同士を2次元平面上の近傍へマッピングしておくことで、多数の高次元データを分類し、その特徴を抽出するデータマイニング手法である。SOMは、教師無し競合学習のアルゴリズムを持つ階層型NNに相当する。ただし、SOMは、予測モデル構築に用いられる階層型NNとは別のNNである。SOMは、データに関する外的基準を与えることなく、高次元データをその特徴に応じて分類し、低次元のマップ上に視覚化できることが特徴である。
【0027】
図3は、SOMの概念の一例を示す図である。
図3に示すように、SOMは、入力層301と競合層302の2つの層からなる。
第1層は、n次元の入力層301(Xj=(Xj1,Xj2,・・・,Xjn)は(j=1,2,・・・,J;Jは実績データの数)である。前述したように本実施形態では、実績データは37次元のデータであるので、nは「19」となる。第2層は、例えば2次元の格子状に配置されたSOMニューロンからなる競合層302である。尚、ここで、「SOMニューロン」という呼称の「SOM」は、予測モデルに用いられるNNのニューロンと区別して説明するための都合上、付したものである。このように、SOMには、入力層301のSOMニューロンと競合層302のSOMニューロンとが存在するが、以降に説明するSOMの学習においては、競合層302のSOMニューロンが対象になるので、今後断り無しに「SOMニューロン」と言う場合には、競合層302のSOMニューロンを指すものとする。
SOMによる補間データの作成の考え方としては、複数の実績データXjを、競合層302のSOMニューロンのうちの1つにそれぞれ対応付けて、複数の実績データXjに対応付いたSOMニューロンの値(SOMニューロンの内部に保持している参照ベクトル)を実績データXjに近づくように修正を行う。これと同時に競合層302上で隣接する近傍のSOMニューロンに対しても同様に、SOMニューロンの値の修正量を減じて修正を行う。これを繰り返して得られる競合層302のSOMニューロンが、補間データを表すものとする。
【0028】
入力層301のSOMニューロンと競合層302のSOMニューロンとは、全て連結している。図3は、競合層302のSOMニューロンの1つであるiと、入力層301の各ニューロンとの結合を示す図であり、競合層302の全てのSOMニューロンiと入力層301の各SOMニューロンとの間に、同様の結合が存在する。競合層302のSOMニューロンiと入力層301との結合重み係数ベクトルを、参照ベクトル(mi(t)=(m1i,m2i,・・・,mni)、(i=1,2,・・・,I;Iは競合層302のニューロンの数))と呼ぶ。また、参照ベクトルは、SOMニューロンに設定する2つの設定項目のうちの1つであり、SOMニューロンの値とも呼ぶ。尚、tは、後述するSOMの学習の回数であり、初期値を0とし、学習が行われる度にインクリメントされる。以降のSOMの学習では、実績データXjを教師として、参照ベクトルを教師に近付けるように修正するように学習が行われる。
【0029】
SOMパラメータ設定部203は、競合層302(仮想空間)において、2次元の格子状にSOMニューロンを配置する。このときSOMニューロンに設定する2つの設定項目うちの1つである競合層302の仮想空間上の位置を示す座標が設定される。2次元の格子状にSOMニューロンを配置する場合、SOMニューロンの座標を(X1,X2)で表す。以降のSOMの学習では、競合層302の仮想空間上の位置を示す座標は、一度定められた座標を修正しない。実績データXjを教師として、参照ベクトルを教師に近付けるように修正するように学習が行われる。ここで配置されるSOMニューロンの数Iは、実績データのセット数J(前述した(1)〜(37)のデータのセットの数)よりも多くし、この条件の下で、隣接する2つの実績データXjの間を補間する補間データの数Pの2乗に比例する、具体的には、SOMニューロンの数Iが、以下の(2)式のようになるのが好ましい。
I=J×(P+1)2 ・・・(2)
【0030】
例えば、SOMニューロンを競合層302の2次元の仮想空間に格子状に配置した状況で、実績データXjを用いてSOMニューロンを十分学習した結果、実績データXjと見なせるSOMニューロン(仮に実績SOMニューロンと呼ぶ)と、補間データとなるSOMニューロン(仮に補間SOMニューロンと呼ぶ)とが競合層302(仮想空間上)で配置が均一となるように生成されたとする。
【0031】
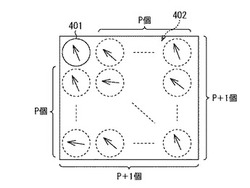
図4は、SOMを使って生成する補間データの配置の一例を示す図である。
図4には、一例として、2個の実績SOMニューロン401の間に1個の補間SOMニューロン402が生成されるように配置した場合を示す(実際には必ずしもこのように配置されない)。2種類のSOMニューロン401、402が均一に生成されているので、4つのSOMニューロンを1単位として、全体はこの単位の繰り返し配置となっている(図4に示す領域403に含まれる4つのSOMニューロン401a、402a、402c、402dが1単位であり、図4では4単位分を示している)。この場合、1つの実績データXjに対して4倍(内訳は、実績SOMニューロン401が1、補間SOMニューロン402が3)のSOMニューロンを用意する必要がある。
【0032】
図5は、SOMを使って生成する補間データの数に合わせてSOMの設定パラメータ(SOMニューロンの数I)を算出する方法の一例を説明する図である。
2個の実績SOMニューロン401の間にP個の補間SOMニューロン402を配置する場合のSOMニューロンの繰り返し配置の1単位分を図5に示す。1単位に含まれるSOMニューロン401、402の合計数は(1+P)2個あり、その内の1個が実績SOMニューロン401であり、それ以外は補間SOMニューロン402に相当する。つまり実績データXjの(1+P)2倍の個数のSOMニューロンを用意する必要がある。尚、ここで説明のために使用した実績SOMニューロン401と補間SOMニューロン402との両者を、後述する勝者実績データ抽出部212では、実績データXjの補間データとして区別なくSOMニューロンと扱っている。
本実施形態では、SOMパラメータ設定部203は、50×82個のSOMニューロン401、402を配置するものとする。実績データの数J=1024個に対して補間データの数P=1個としたので、SOMニューロンの数を1024×(1+1)2=4096個以上となるように、SOMニューロンを2次元の格子状に配置した。
【0033】
次に、SOMパラメータ設定部203は、競合層302で2次元の格子状に配置したSOMニューロンの参照ベクトルに対して初期値を設定する。すなわち、SOMパラメータ設定部203は、2次元の格子状に配置したSOMニューロンiと、37次元の入力層301とを、37次元の参照ベクトルの初期値(mi(0))で連結することを、2次元の格子状に配置したSOMニューロンiのそれぞれについて行う(図3を参照)。37次元の参照ベクトルの初期値は、例えば、乱数を用いることにより決定することができる。このSOMニューロンの値(37次元の参照ベクトル)は、実績データXjと対比されるデータとなる。
【0034】
図6は、SOMによる学習(競合学習)の様子の一例を概念的に示す図である。競合学習は、競合層302に配置したSOMニューロンの一部を選択し、参照ベクトルを実績データXjに合わせて修正を繰り返すことで行われる。図6に示す矢印付きの丸は、競合層302におけるSOMニューロンを示し、丸内の矢印は、当該SOMニューロンの値(参照ベクトル)を表す。概念としては、図6に示す例のように、SOMパラメータ設定部203によって、初期状態601が設定される。
SOMパラメータ設定部203は、例えば、CPUが、コンピュータプログラムに従って、SOMの初期状態の設定(SOMニューロンの配置(座標)と初期値の設定)を行い、その結果を、RAM等に記憶することにより実現される。
【0035】
(実績データ選択部204)
実績データ選択部204は、実績データ正規化部202で正規化された実績データXj(のセット)のうち、未選択の実績データXjを1つ選択する。
実績データ選択部204は、例えば、CPUが、コンピュータプログラムに従って、RAM等から実績データを読み出して、当該実績データをSOMの学習対象の実績データとしてRAM等に記憶することにより実現される。
(勝者SOMニューロン決定部205)
勝者SOMニューロン決定部205は、実績データ選択部204で選択された実績データXjの値(ベクトル)と、2次元の格子状に配置されたSOMニューロンの値(参照ベクトル)とのユークリッド距離を算出する。そして、勝者SOMニューロン決定部205は、算出したユークリッド距離が最小となるSOMニューロンを勝者SOMニューロンとして決定する。概念としては、図6に示す例のように、初期状態601のSOMニューロンの中から、実績データ610と矢印の方向が最も近いSOMニューロン602を選択することを指し、実績データ610と最も近いということで選択されたことを例えて「勝者」と名付けている。
【0036】
具体的には、勝者SOMニューロン決定部205は、以下の(3)式の計算を行って勝者SOMニューロン602を決定する。
|Xj−mc(t)|=min|Xj−mi(t)| ・・・(3)
ここで、Xjは、j番目の37次元の実績データ(37次元の参照ベクトルに相当)であり、mi(t)は、SOMニューロンiの現在値(37次元の参照ベクトル)である。また、minは、最小を採用することを示し、cは勝者SOMニューロン602であることを示す。
尚、本実施形態では、SOMニューロンの数が4100個(=50×82)であるので(すなわちiが1〜4100をとり得るので)、(3)式の右辺の「Xj−mi(t)」の値は4100個得られる。
勝者SOMニューロン決定部205は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、SOMの初期状態601と、SOMの学習対象の実績データとを読み出して(3)式の計算を行って勝者SOMニューロン602を決定し、決定した勝者SOMニューロン602の情報をRAM等に記憶することによって実現される。
【0037】
(SOM学習部206)
SOM学習部206は、勝者SOMニューロン決定部205により決定された勝者SOMニューロン602の値(参照ベクトル)と、競合層602上の配置で勝者SOMニューロン602に近い位置にある近傍SOMニューロンの値(参照ベクトル)とを、実績データ選択部204で選択された実績データXjの値(ベクトル)に近づける処理(学習処理)を、全ての実績データXjについて個別に行う。全ての実績データXjについて1度ずつ学習処理を行うことよって、学習回数を1回と数え、tを1だけ増加させる。概念としては、図6に示す例のように、勝者SOMニューロン602と近傍SOMニューロン603a〜603hの矢印の方向が、実績データ610の矢印の方向に近づくようにする(図6の「更新」と示されているSOMニューロン602と603a〜603hを含むハッチング箇所を参照)。
【0038】
本実施形態では、競合層302上の配置で勝者SOMニューロン602の座標に近いほど、参照ベクトルの修正量を大きくすると共に、SOMの学習の回数tが小さいほど、参照ベクトルの修正量を大きくするようにしている。具体的には、SOM学習部206は、以下の(4)式の計算を行って、SOMの学習を行う(勝者SOMニューロン602の値と近傍SOMニューロン603a〜603hの値とを修正する)。
mi(t+1)=mi(t)+hci(t)×|Xj−mi(t)| ・・・(4)
【0039】
(4)式において、mi(t)は、i番目の勝者SOMニューロン602の、学習回数tにおける値(参照ベクトル)、又は近傍SOMニューロン603の、学習回数tにおける値(参照ベクトル)である。Xjは、実績データ選択部204で選択されたj番目の実績データの値(ベクトル)である。また、mi(t+1)は、i番目の勝者SOMニューロン602の、学習回数t+1(すなわち更新後)における値(参照ベクトル)、又は近傍SOMニューロン603の、学習回数t+1における値(参照ベクトル)である。ここで、hci(t)は近傍関数と称されるものであり、例えば、以下の(5)式〜(7)式のように表される。近傍関数hci(t)は、SOMニューロンの値(参照ベクトル)と実績データの値(ベクトル)との差を小さくするための変更量を決める係数である。近傍関数hci(t)が1の場合には、1回の学習(修正)でSOMニューロンの値は実績データの値と一致することになる。
【0040】
hci(t)=α(t)×[(Rcut(t)−rci)/Rcut(t)] ・・・(5)
α(t)=α0×(1−t/T) ・・・(6)
Rcut(t)=Rcut0×(1−t/T) ・・・(7)
ここで、α(t)は学習率であり、その値は学習回数tに依存する。Rcut(t)は競合層302でSOMニューロンが配置されている仮想空間(2次元平面)上での距離を示す、カットオフ距離であり、その値は学習回数tに依存する(本実施形態では、このカットオフ距離Rcut(t)をSOMニューロンの座標を用いたマンハッタン距離で表す)。マンハッタン距離とは、2点の各座標の差の絶対値の総和を距離と定義するものである。
式で表すと、点a(座標(a1,a2))と点b(座標(b1,b2))の間のマンハッタン距離L(a,b)は以下の(8)式で表せる。
【0041】
【数1】

【0042】
(8)式において、添字kはベクトルの各要素を表している。nは、競合層302上の仮想空間の次元数を表している。
勝者SOMニューロン602から、競合層302上の配置で、このカットオフ距離Rcut(t)内にあるSOMニューロンが近傍SOMニューロン603となる。また、(5)式のrciは、勝者SOMニューロン602と近傍SOMニューロン603との競合層302上での距離である(本実施形態では、この距離rciをマンハッタン距離で表す)。尚、勝者SOMニューロン602について(4)式の計算をする場合には、rciは0(ゼロ)になる。また、(6)式において、α0は学習率α(t)の初期値であり、(7)式において、Rcut0はカットオフ距離Rcut(t)の初期値であり、(6)式及び(7)式において、Tは総学習回数である。
【0043】
(5)式〜(7)式に示すように、本実施形態では、競合層302上の配置で、勝者SOMニューロン602から近い位置にある近傍SOMニューロン603であるほど学習量(参照ベクトルの修正量)が大きくなり、学習回数tが増加するほど学習量(参照ベクトルの修正量)が小さくなるようにしている。
本実施形態では、総学習回数Tは100であり、カットオフ距離Rcut(t)は、その初期値Rcut0をRcut0=24としたので、24から0まで学習回数tの増加と共に減少する関数である。学習率α(t)は、その初期値α0をα0=0.5としたので、0.5から0まで学習回数tの増加と共に減少する関数であるとする。
SOM学習部206は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、勝者SOMニューロン602の情報と、SOMの状態(競合層302上の各SOMニューロン(座標と参照ベクトル))と、実績データXjとを読み出すと共に、HDD等から、総学習回数Tと、学習率の初期値α0と、カットオフ距離の初期値Rcut0を読み出して、(4)式〜(7)式の計算を行って勝者SOMニューロン602及び近傍SOMニューロン603の値(参照ベクトル)を更新し、更新後のSOMの状態の情報をRAM等に記憶することによって実現される。
【0044】
(SOM学習終了判定部207、SOM記憶部208)
SOM学習終了判定部207は、SOM学習部206によるSOMの学習を終了するか否かを判定する。例えば、SOM学習部206によるSOMの学習を総学習回数T実行すると、SOM学習終了判定部207は、SOM学習部206によるSOMの学習を終了すると判定することができる。また、勝者SOMニューロン602及び近傍SOMニューロン603について求めた(4)式の右辺第2項の値を加算し、加算値が所定値を下回った場合には、勝者SOMニューロン602及び近傍SOMニューロン603の値(参照ベクトル)の修正量が小さくなったと判断し、SOM学習終了判定部207は、SOM学習部206によるSOMの学習を終了すると判定することができる。このように、SOM学習終了判定部207によるSOMの学習の終了判定の方法は、特に限定されるものではない。
【0045】
そして、SOM学習部206によるSOMの学習を終了すると判定すると、SOM記憶部208は、そのときにSOM学習部206で学習されたSOMの状態(競合層302上の各SOMニューロン(座標と参照ベクトル))を、学習終了時のSOMニューロン(座標と参照ベクトル)として記憶媒体に記憶する。
SOM学習終了判定部207は、例えば、CPUが、コンピュータプログラムに従って、前述した判定基準による判定を行うことによって実現される。また、SOM記憶部208は、例えば、CPUが、コンピュータプログラムに従って、学習終了時のSOMの状態の情報をRAM等に記憶することによって実現される。
【0046】
以上説明した処理により、SOMの学習と、SOMによる補間データの生成とが行われる。以降説明する処理では、以下の手順で予測モデルの学習を行う。以下で学習される予測モデルは、操業結果予測対象データFの1つに対して、1つ構築される。つまり、1個の操業結果予測対象データFに対する予測を行った後に予測モデルが破棄され、また異なる操業結果予測対象データFに対して新たな予測モデルを構築することを繰り返す。
【0047】
a)SOMによって生成されたそれぞれの補間データに最も近い実績データXj(つまり、当該補間データがどの実績データXjを補間するものであるのか)を選択して、補間データとの紐付けを少なくとも1つ行う。補間データと紐付けられた実績データXjを、当該補間データに対する勝者実績データと呼ぶ(勝者実績データ関連部209)。
b)操業結果予測対象データF(段落[0018]で説明した、まだ操業実績が存在しない操業であって、操業結果因子を予測モデルによって予測したい対象である操業についての操業影響因子からなるデータ)から1つを選択して、予測モデル学習用SOMニューロン選択用データとして指定する(操業結果予測対象データ指定部210)。
【0048】
c)前記予測モデル学習用SOMニューロン選択用データは、予測したい操業結果因子がまだ存在しないデータであるため、当該予測モデル学習用SOMニューロン選択用データに近い操業条件の補間データ(SOMニューロン)を、予測モデル学習用SOMニューロン(=学習用補間データ)として選択する(予測モデル学習用SOMニューロン選択部211)。
d)前記a)で行った紐付けに従い、前記予測モデル学習用SOMニューロンに紐付けられた勝者実績データを選択する。この勝者実績データは、操業結果因子を予測したい操業結果予測対象データに近い操業条件の実績データ(=学習用実績データ)ということになる(勝者実績データ抽出部212)。
e)前記c)で選択された予測モデル学習用SOMニューロン(これを学習用補間データと呼ぶ)と、前記d)で選択された勝者実績データ(これを学習用実績データと呼ぶ)とを用いて、予測モデルの学習を行う。
以下に、各処理について詳細の手順を説明する。
【0049】
(勝者実績データ関連部209)
勝者実績データ関連部209では、予測モデルを構築する際に補間データとして使用されるSOMニューロンが、何れの実績データXjの補間データになっているかを少なくとも1つ示す。勝者実績データ関連部209は、学習終了時のSOMニューロンiを1つ指定して、指定したSOMニューロンiと、実績データ正規化部202で正規化された全ての実績データXjの値(ベクトル)とのユークリッド距離を算出する。そして、勝者実績データ関連部209は、算出したユークリッド距離が最小となる実績データXjを、指定したSOMニューロンに対する勝者実績データXcとして決定する。この具体的な計算は、例えば、(9)式のmi(t)を、学習終了時のSOMニューロンの値(参照ベクトル)とし、Xjを、実績データの値(ベクトル)とし、Xcを、勝者実績データの値(ベクトル)とすれば実現できる。尚、この勝者実績データの決定は、競合層302上のSOMニューロンのそれぞれについて個別に行われる。
|mi(t)−Xc|=min|mi(t)−Xj| ・・・(9)
【0050】
そして、勝者実績データ関連部209は、学習終了時のSOMニューロンのそれぞれと、当該SOMニューロンとユークリッド距離が最も近い勝者実績データXcの値とを相互に関連付けて記憶媒体に記憶する。
勝者実績データ関連部209は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、全ての実績データの値(ベクトル)と、学習終了時のSOMニューロンの値とを読み出し、前述した計算を行って、勝者実績データの値を算出し、学習終了時のSOMニューロンの夫々に対して、勝者実績データXcの値を関連付けてRAM等に記憶することにより実現される。
【0051】
(操業結果予測対象データ指定部210)
操業結果予測対象データ指定部210は、データ正規化部202で正規化された操業結果予測対象データF(ベクトル)の1つを指定して、それを予測モデル学習用SOMニューロン選択用データFsとする。本実施形態では、材料因子は19次元の情報であり、鍋状況因子は14次元の情報であり、温度因子は3次元の情報である。よって、予測モデル学習用SOMニューロン選択用データFsは36次元のベクトルで表現される。ただし、転炉の吹止温度を操業結果因子として予測する際には、温度因子に関しては実績値を入手できないため、目標値を用いる。
操業結果予測対象データ指定部210は、例えば、CPUが、RAM等から、操業結果予測対象データの値(ベクトル)を読み出して予測モデル学習用SOMニューロン選択用データの情報としてRAM等に記憶することにより実現される。
【0052】
(予測モデル学習用SOMニューロン選択部211)
予測モデル学習用SOMニューロン選択部211は、予測モデルとして構築するニューラルネットワーク(NN)を構築する際に必要となる学習用補間データを、SOMニューロンから選択するものである。学習終了時のSOMニューロンの値(参照ベクトル:37次元)のうち予測モデルの計算によって得られる因子(本実施形態では、操業結果因子1次元)を除く値mi-(36次元ベクトル)と、操業結果予測対象データ指定部210で指定された予測モデル学習用SOMニューロン選択用データFsの値(36次元ベクトル)とのユークリッド距離を算出する。そして、予測モデル学習用SOMニューロン選択部211は、算出したユークリッド距離が小さいものから順に、所定数のSOMニューロンを予測モデル学習用SOMニューロン(学習用補間データ)として選択する。尚、以下の説明では、前記所定数を必要に応じて「近傍点数」と称する。
【0053】
具体的な計算は、例えば、(10)式のFsを、予測モデル学習用SOMニューロン選択用データの値(ベクトル)とし、mi-(t)を、学習終了時のSOMニューロンの値のうち予測モデル学習用SOMニューロン選択用データに対応する因子の値(=NNの予測によって得られる因子を除く値(ベクトル))とし、mc-(t)を、選択するSOMニューロンの値(ベクトル)とすれば実現できる。
|Fs−mc-(t)|=min|Fs−mi-(t)| ・・・(10)
【0054】
ここで、本実施形態では、近傍点数として、「25、121、225、441、及び625」の5つの数を予め設定している。本実施形態では、近傍点数が、これら5つの近傍点数のそれぞれの場合について、後述するようにして(NN予測結果出力部216により)操業結果因子(転炉の吹止温度)を算出する。そして、算出された5つの操業結果因子(転炉の吹止温度)のうち、以下の(11)式で定義される決定係数R2の値が最も大きくなったときの操業結果因子(転炉の吹止温度)を採用する。
【0055】
【数2】
【0056】
(11)式において、jは、1,2,・・・,Jの整数(Jは実績データの数)である。yjは、転炉の吹止温度の実績値である。y-は、転炉の吹止温度の実績値yjの平均値である。fjは、転炉の吹止温度の予測値である。
【0057】
予測モデル学習用SOMニューロン選択部211は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、予測モデル学習用SOMニューロン選択用データFsの情報と、学習終了時のSOMニューロンの値とを読み出し、前述した計算を行って、SOMニューロンを予測モデル学習用SOMニューロンとして選択し、選択後の予測モデル学習用SOMニューロンの値をRAM等に記憶することにより実現される。
【0058】
(勝者実績データ抽出部212)
勝者実績データ抽出部212では、予測モデルの学習に用いる学習用実績データとして、SOMニューロンによる補間データに対応する勝者実績データXcを抽出する。すなわち、勝者実績データ抽出部212は、予測モデル学習用SOMニューロン選択部211で選択された予測モデル学習用SOMニューロン(学習用補間データ)に対し、勝者実績データ関連部209によって関連付けられた勝者実績データXcの値(ベクトル)を抽出する。そして、勝者実績データ抽出部212は、予測モデル学習用SOMニューロン選択部211で選択された予測モデル学習用SOMニューロンの値(参照ベクトル)と、抽出した勝者実績データの値(ベクトル)とをNNの学習に使用するデータ(学習用データ)とする。ここで、勝者実績データ抽出部212は、抽出した勝者実績データの中に、同じ実績データが重複する場合には、それらの重複を除いたものを学習用実績データとする。重複する実績データを学習用実績データとすると、後述するNNの学習が適切に行われなくなる虞があるからである。
勝者実績データ抽出部212は、例えば、CPUが、RAM等から、予測モデル学習用SOMニューロンの値(参照ベクトル)と、当該予測モデル学習用SOMニューロンに関連付けられている勝者実績データの値(ベクトル)を読み出し、勝者実績データの値の重複を排除した上で、それらを学習用データとしてRAM等に記憶することにより実現される。
【0059】
(NN学習部213、NN記憶部214)
NN学習部213は、予測モデルの一例である階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。
本実施形態では、出力層を操業結果因子(転炉の吹止温度)とし、入力層を操業影響因子(材料因子、鍋状況因子、及び温度因子)とする、3層のニューラルネットワークを用いるものとする。ここで、出力層と入力層の数は、それぞれの因子の数に等しい数とする。すなわち、出力層の数を1とし、入力層の数を36とする。また、中間層の数は、入力層の数と、学習用データ(のセット)の数とのうち、何れか少ない方の数とする。
【0060】
NN学習部213は、3層のニューラルネットワークの入力層と出力層に、勝者実績データ抽出部212で抽出された学習用実績データ(SOMニューロンによる補間データに対応する勝者実績データXc)と、予測モデル学習用SOMニューロン選択部211で選択された学習用補間データ(予測モデル学習用SOMニューロン)とからなる学習用データを与え、それらの値に合うように、入力層と中間層とを結合する結合重み係数(重み行列)及び中間層と出力層とを結合する結合重み係数(重み行列)を更新(学習)する。本実施形態では、この学習をバックプロパゲーションにより行うものとする。ただし、NNの学習の方法は、バックプロパゲーションに限定されるものではない。そして、NN学習部213は、このような学習を、入力層と出力層に与える学習用データを異ならせて繰り返し行う。ここで、全ての学習用データを1度ずつ学習に使用する(全ての学習用データの値を1度ずつ入力層と出力層に与える)ことで1回の学習が行われる。
【0061】
NN学習部213は、このような学習を行う度に、NNの学習を終了させるか否かを判定する。例えば、学習回数が所定値(例えば10万回)になったときにNNの学習を終了させると判断することができる。また、学習後のニューラルネットワークによる予測の結果と、学習用データの値との平均学習誤差が所定値(例えば1%)を下回ったときにNNの学習を終了させると判断することができる。
NN学習部213は、NNの学習を終了すると判断したときに得られているニューラルネットワークの情報をNN記憶部214に記憶する。
NN学習部213は、例えば、CPUが、RAM等から、学習用データを読み出して前述した処理を行ってニューラルネットワークを学習し、学習終了後のニューラルネットワークの情報を、例えばHDDにより実現されるNN記憶部214に記憶することによって実現される。尚、NN学習部213によるニューラルネットワークの学習は、公知の技術で実現できるので、ここでは、その詳細な説明を省略する。
【0062】
(NN予測部215)
NN予測部215は、オペレータによるユーザインターフェースの操作に基づいて、NN記憶部214に記憶されているニューラルネットワークの入力層に与える入力データ(操業結果予測対象データ指定部210で指定された予測モデル学習用SOMニューロン選択用データFs)を取得し、取得したデータをニューラルネットワークの入力層に与えて操業結果因子を得る(予測する)。本実施形態では、NN予測部215は、材料因子、鍋状況因子、及び温度因子のデータ(操業結果予測対象データ)を取得し、操業結果因子(転炉の吹止温度)を得る。操業結果予測対象データには、まだ操業実績が存在しない温度因子のデータを含む為、実績のない温度因子には目標値を設定し、入力に用いる。
NN予測部215は、例えば、CPUが、ユーザインターフェースの操作に基づく入力データをRAM等に記憶すると共に、HDD等から、学習終了後のニューラルネットワークの情報を読み出して、前述した処理を行うことによって、転炉の吹止温度の予測値を求めることにより実現される。
【0063】
(NN予測結果出力部216)
NN予測結果出力部216は、NN予測部215で予測された操業結果因子を出力する。NN予測結果出力部216は、例えば、転炉の吹止温度の予測値を、液晶ディスプレイ等の表示装置に表示したり、操業予測装置200に接続されたリムーバル記憶媒体に記憶したり、操業予測装置200内のHDD等に記憶したりすることができる。
NN予測結果出力部216は、例えば、CPUが、RAM等から、転炉の吹止温度の予測値を読み出して、表示データを生成したり、リムーバル記憶媒体やHDD等に記憶したりする処理を行うことにより実現される。
【0064】
(NN破棄部217)
予測モデル学習に用いたSOMニューロンや実績データが特定の条件に適合したデータのみであるため、幅広い条件での予測に用いるには一般性に欠ける。そのため、NN破棄部217では、特定の条件が一致しない場合に予測モデルを再利用することが難しいので、これを破棄させる。NN破棄部217は、NN予測結果出力部216による処理が1回終了すると、NN記憶部214に記憶されている学習終了後のニューラルネットワークの情報を破棄(削除)する。このように本実施形態では、one-timeのNNの学習を採用するようにしている。
NN破棄部217は、例えば、CPUが、転炉の吹止温度の予測値の出力処理を終えた後、HDD等に記憶されている学習終了後のニューラルネットワークの情報を破棄する処理を行うことにより実現される。
【0065】
(動作フローチャート)
次に、図7のフローチャートを参照しながら、操業予測装置200の処理動作の一例を説明する。
まず、図7−1のステップS1において、データ取得部201は、実績データXjと操業結果予測対象データFを外部から取得する。
次に、ステップS2において、データ正規化部202は、ステップS1で取得された実績データXjと操業結果予測対象データFの値を正規化する。
次に、ステップS3において、SOMパラメータ設定部203は、競合層302において、2次元の格子状にSOMニューロンを配置し、配置したSOMニューロンのそれぞれに対して初期値(mi(0))を設定する。
【0066】
次に、ステップS4において、実績データ選択部204は、ステップS2で正規化された実績データXj(のセット)のうち、未選択のものを1つ選択する。
次に、ステップS5において、勝者SOMニューロン決定部205は、ステップS4で選択された実績データXjの値(ベクトル)とユークリッド距離が最も近いSOMニューロンを勝者SOMニューロンと602して決定する。
次に、ステップS6において、SOM学習部206は、ステップS5で決定された勝者SOMニューロン602の値(参照ベクトル)と、競合層302上の座標位置で勝者SOMニューロン602に近い位置にある近傍SOMニューロン603の値(参照ベクトル)とを、ステップS4で選択された実績データXjの値(ベクトル)に近づけるように修正(学習)する。
【0067】
次に、ステップS7において、SOM学習終了判定部207は、SOMの学習を終了するか否かを判定する。判定基準の一例は前述した通りである。この判定の結果、SOMの学習を終了しない場合には、ステップS4に戻り、別の実績データが選択され、勝者SOMニューロン602の決定と、勝者SOMニューロン602及び近傍SOMニューロン603の修正とを行う。そして、SOMの学習を終了すると判定されると、ステップS8に進む。
ステップS8に進むと、SOM記憶部208は、ステップS7でSOMの学習を終了すると判定されたときのSOMの状態(競合層302上の各SOMニューロン(座標と参照ベクトル))を、学習終了時のSOMニューロンの値(参照ベクトル)として記憶する。
【0068】
次に、ステップS9において、勝者実績データ関連部209は、ステップS2で正規化された全ての実績データXjの値(ベクトル)のうち、ステップS8で記憶された学習終了時のSOMニューロンの値(参照ベクトル)とユークリッド距離が最も近い実績データを勝者実績データXcとして決定する。そして、勝者実績データ関連部209は、学習終了時のSOMニューロンのそれぞれと、当該SOMニューロンとユークリッド距離が最も近い勝者実績データXcの値とを相互に関連付けて記憶する。
次に、図7−2のステップS10において、操業結果予測対象データ指定部210は、ステップS2で正規化された操業結果予測対象データFの内の1つを予測モデル学習用SOMニューロン選択用データFsとして指定する。
【0069】
次に、ステップS11において、予測モデル学習用SOMニューロン選択部211は、ステップS8で記憶された学習終了時のSOMニューロンのうち、予測モデルによって得られる因子(操業結果因子)を除く値(ベクトル)が、ステップS10で指定された予測モデル学習用SOMニューロン選択用データFsの値(ベクトル)と近いものを、予測モデル学習用SOMニューロンとして所定数(近傍点数)だけ選択する。本実施形態では、近傍点数は、「25、121、225、441、625」であるので、5組の予測モデル学習用SOMニューロンが選択される。これら5組の予測モデル学習用SOMニューロンのそれぞれについてステップS11〜S17の処理が繰り返し行われることにより転炉の吹止温度の予測値が5つ得られる。そして、これら5つの転炉の吹止温度の予測値から、(11)式を用いて決定係数R2が算出される。本実施形態では、これら5つの操業結果因子(転炉の吹止温度の予測値)のうち、最も大きな値の決定係数R2が算出されたときの操業結果因子(転炉の吹止温度の予測値)が採用される。
【0070】
次に、ステップS12において、勝者実績データ抽出部212は、ステップS11で選択された予測モデル学習用SOMニューロンに関連付けて記憶されている勝者実績データXcの値(ベクトル)を抽出する(ステップS9を参照)。そして、勝者実績データ抽出部212は、ステップS11で選択された予測モデル学習用SOMニューロンの値(参照ベクトル)と、抽出した勝者実績データXcの値(ベクトル)とを予測モデルの学習に使用する学習用データとする。
【0071】
次に、ステップS13において、NN学習部213は、3層のニューラルネットワークの入力層と出力層に、ステップS11で選択された予測モデル学習用SOMニューロンと、ステップS12で抽出された勝者実績データXcとからなる学習用データを与え、それらの値に合うように、入力層と中間層とを結合する結合重み係数(重み行列)及び中間層と出力層とを結合する結合重み係数(重み行列)を更新(学習)する。
次に、ステップS14において、NN学習部213は、予測モデルの一例であるニューラルネットワークの学習を終了するか否かを判定する。判定基準の一例は前述した通りである。この判定の結果、ニューラルネットワークの学習を終了しないと判定された場合には、ステップS13に戻る。そして、ニューラルネットワークの学習を終了すると判定されると、ステップS15に進む。
【0072】
ステップS15に進むと、NN学習部213は、学習終了時のニューラルネットワークの情報をNN記憶部214に記憶する。
次に、ステップS16において、NN破棄部217は、学習終了時のニューラルネットワークを使用した転炉の吹止温度の予測値がNN予測部215によって求められ、且つ、その結果に対する出力処理がNN予測結果出力部216によって行われるまで(学習終了時のニューラルネットワークを使用した予測・出力が行われるまで)待機する。そして、学習終了時のニューラルネットワークを使用した予測・出力が行われると、ステップS17に進む。
ステップS17に進むと、NN破棄部217は、ステップS15でNN記憶部214に記憶された学習終了後のニューラルネットワークの情報を破棄(削除)する。
【0073】
(まとめ)
本実施形態の冒頭で説明したように、実績データ101のみを学習用データとした局所予測モデルを用いると、学習用データの数が少ないために、予測結果110と真の入出力関係120との差が大きくなることがある(図1(a)を参照)。これに対し、本実施形態では、以上の説明から明らかなように、実績データを元にSOMを構築し得られるSOMニューロンが、実績データに対する予測モデルの構築の際に補間データとして用いることが出来る。すなわち、図1(b)に示すように、実績データ101に加えてSOMニューロン102を学習用データとして加えた局所予測モデルを用いると、予測結果130の真の入出力関係120に対する精度が向上する。
【0074】
以上のように本実施形態では、実績データに最も近いSOMニューロンを勝者SOMニューロン602とし、勝者SOMニューロン602の値とそのSOMニューロン602の座標の近傍にある近傍SOMニューロン603の値とを、実績データの値に近づけるように修正してSOMの学習を行う。SOMの学習終了時のSOMニューロン602、603のそれぞれについて、値が最も近い実績データを相互に関連付けて記憶する。そして、操業結果予測対象データと値が近い所定数(近傍点数)のSOMニューロン602、603と、そのSOMニューロン602、603に関連付けられている実績データとを学習用データ101、102とする。したがって、予測モデルの学習用データとして適切な補間データを生成し加えることによって、データ数が少ないことで生じる未学習部分の発生や過学習を抑制することができる。よって、操業予測(転炉の吹止温度の予測)を正確に行うことができる。
【0075】
また、本実施形態では、ニューラルネットワークを使用した予測・出力が1回行われると、そのニューラルネットワークを破棄するようにした。したがって、直近の操業実績を反映させたニューラルネットワークを構築することができ、実際の操業を可及的に反映させた予測を行うことができる。
【0076】
(変形例)
本実施形態では、予測モデルとして階層型ニューラルネットワークを用いた場合を例に挙げて説明したが、予測モデルは階層型ニューラルネットワークに限定されない。すなわち、操業結果因子に影響を与える因子であって、製品又は半製品を製造するための操業因子である操業影響因子を入力し、当該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力する予測モデルであれば、どのような予測モデルであってもよい。また、操業結果因子は、転炉の吹止温度に限定されない。さらに、操業影響因子も、前述したものに限定されない。
【0077】
また、本実施形態では、予測モデル学習用SOMニューロン選択用データと値が近い所定数(近傍点数)の全てのSOMニューロン602、603を学習用補間データとし、そのSOMニューロン602、603に関連付けられている実績データを学習用実績データとし、学習用補間データと学習用実績データとをあわせて学習用データとした場合を例に挙げて説明した。しかしながら、例えば、予測モデル学習用SOMニューロン選択用データと値が近い所定数(近傍点数)のSOMニューロン602、603のうち、予測モデル学習用SOMニューロン選択用データに最も値が近いSOMニューロン602、603を除いたものと、所定数のSOMニューロン602、603に関連付けられている学習用実績データとを学習用データとしてもよい。このようにすれば、学習用実績データに過剰にフィッティングされたニューラルネットワークが構築されることを、より確実に防止することができる。
【0078】
<第2の実施形態>
次に、本発明の第2の実施形態について説明する。
前述した第1の実施形態では、実績データXjに含まれる、36個の操業影響因子のデータ(36次元のデータ)の全てを用いて、SOMの学習を行うようにした。これに対し、本実施形態では、SOMの学習に用いる操業影響因子を選択し、選択した操業影響因子のデータを用いてSOMの学習を行う。このように、本実施形態と、第1の実施形態とは、実績データ選択部204で選択される実績データXjが、全ての操業影響因子のデータではなく、前記のようにして選択された操業影響因子のデータである点が主として異なる。よって、本実施形態の説明において、第1の実施形態と同一の部分については、図1〜図7に付した符号と同一の符号を付す等して詳細な説明を省略する。
【0079】
図8は、操業予測装置800の機能的な構成の一例を示す図である。本実施形態の操業予測装置800も、第1の実施形態で説明した操業予測装置200と同様に、例えば、CPU、ROM、RAM、HDD、及び各種のインターフェースを備えた情報処理装置(例えばPC)を用いることにより実現される。
【0080】
(感度計算用NN学習部801)
感度計算用NN学習部801は、後述する操業影響因子の感度を計算するために使用する感度計算用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。感度計算用階層型ニューラルネットワークの学習方法は、NN学習部213で説明した階層型ニューラルネットワークと同じであるので、ここでは、その詳細な説明を省略する。
【0081】
ただし、感度計算用NN学習部801が構築する感度計算用階層型ニューラルネットワークは、予測モデル学習用SOMニューロンと勝者実績データXcとからなる学習用データを用いて得られるものではなく、実績データXjを学習用データとして用いることにより得られる通常の階層型ニューラルネットワークである。ここで、感度計算用階層型NN学習部801は、データ正規化部202により正規化された実績データXjを用いて感度計算用階層型ニューラルネットワークを構築する。よって、感度計算用階層型ニューラルネットワークへの入力と、感度計算用階層型ニューラルネットワークからの出力は、正規化された値となる。
感度計算用階層型NN学習部801は、例えば、CPUが、コンピュータプログラムに従って、RAM等から実績データを読み出して、感度計算用階層型ニューラルネットワークの学習を行い、その結果を示す情報をRAM等に記憶することにより実現される。
【0082】
(第1の感度計算用操業結果因子導出部802)
第1の感度計算用操業結果因子導出部802は、前記(1)〜(36)の操業影響因子の全ての値が(同一の)特定の値であるデータを、感度計算用階層型NN学習部801により学習された感度計算用階層型ニューラルネットワークに入力することにより、その出力である操業結果因子を得る。本実施形態では、特定の値として、正規化値の最大値である「1」と最小値である「0」との中央値である「0.5」を採用する。
尚、以下の説明では、第1の感度計算用操業結果因子導出部802で導出された操業結果因子の値を、必要に応じて「操業結果因子の基準値」と称する。
第1の感度計算用操業結果因子導出部802は、例えば、CPUが、コンピュータプログラムに従って、RAM等に記憶されている感度計算用階層型ニューラルネットワークに対して「0.5」を入力することにより、操業結果因子の基準値の情報を導出してRAM等に記憶することにより実現される。
【0083】
(第2の感度計算用操業結果因子導出部803)
第2の感度計算用操業結果因子導出部803は、前記(1)〜(36)の操業影響因子のうち、1つの操業影響因子の値が、第1の感度計算用操業結果因子導出部802で設定された特定の値とは異なる値であり、残りの操業影響因子の値が、第1の感度計算用操業結果因子導出部802で設定された特定の値であるデータを、感度計算用NN学習部801により学習された感度計算用階層型ニューラルネットワークに入力することにより、その出力である操業結果因子を得る。本実施形態では、第1の感度計算用操業結果因子導出部802で設定された特定の値とは異なる値として、正規化値の最大値である「1」を採用する。また、本実施形態では、前記(1)〜(36)の操業影響因子の数は「36」である。よって、第2の感度計算用操業結果因子導出部803は、36個の操業結果因子のそれぞれの値を「1」としたときの操業結果因子を36個得る。尚、以下の説明では、第2の感度計算用操業結果因子導出部803で導出された操業結果因子の値を、必要に応じて「操業結果因子の変動値」と称する。
【0084】
第2の感度計算用操業結果因子導出部803は、例えば、CPUが、コンピュータプログラムに従って、RAM等に記憶されている感度計算用階層型ニューラルネットワークに対して、1つの操業影響因子の値として「1」を、残りの操業影響因子の値として「0.5」を、それぞれ入力することにより、操業結果因子の変動値の情報を導出してRAM等に記憶することにより実現される。
【0085】
(感度導出部804)
感度導出部804は、前記(1)〜(36)の操業影響因子の感度をそれぞれ導出する。本実施形態では、操業影響因子の感度は、第1の感度計算用操業結果因子導出部802で導出された「操業結果因子の基準値」と、第2の感度計算用操業結果因子導出部803で得られた「操業結果因子の変動値」との差分の絶対値で定義される。
【0086】
前述したように、本実施形態では、前記(1)〜(36)の操業影響因子の数は「36」であり、第2の感度計算用操業結果因子導出部803により36個の操業結果因子の変動値が得られる。よって、感度導出部804は、36個の操業影響因子のそれぞれについて感度を導出する。
感度導出部804は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、第1の操業影響因子の基準値と第2の操業影響因子の変動値とを読み出し、前述した計算を行って、各操業影響因子の感度を導出してRAM等に記憶することにより実現される。
【0087】
(操業影響因子選択用NN学習部805、誤差評価部806、操業影響因子選択部807の概要)
本実施形態では、操業影響因子を入力層とし、操業結果因子を出力層とする3層の階層型ニューラルネットワークである操業影響因子選択用階層型ニューラルネットワークを用いて、SOMの学習を行うのに使用する1又は複数の操業影響因子を決定する。
このために、まず、操業影響因子選択用NN学習部805は、操業影響因子選択用階層型ニューラルネットワークを構築する。誤差評価部806は、構築された操業影響因子選択用階層型ニューラルネットワークの入力層に操業影響因子の実績データを与えることによって操業結果因子の予測値を導出し、当該操業結果因子の予測値と操業結果因子の実績データとの誤差を導出する。このような操業影響因子選択用階層型ニューラルネットワークの構築と誤差の導出とを、操業影響因子選択用階層型ニューラルネットワークの入力層(操業影響因子)を、感度の高いものから順に1つずつ増やして行う。これにより、入力層の数が異なる複数の操業影響因子選択用階層型ニューラルネットワークのそれぞれについての誤差(評価)が得られる。操業影響因子選択部807は、これら複数の操業影響因子選択用階層型ニューラルネットワークのうち、誤差が最も小さい操業影響因子選択用階層型ニューラルネットワークを割り出し、割り出した操業影響因子選択用階層型ニューラルネットワークの入力層となっている操業影響因子を、SOMの学習を行うのに使用する1又は複数の操業影響因子として決定する。以下に、操業影響因子選択用NN学習部805、誤差評価部806、及び操業影響因子選択部807が有する機能の詳細を説明する。
【0088】
(操業影響因子選択用NN学習部805)
操業影響因子選択用NN学習部805は、操業影響因子選択用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。
操業影響因子選択用NN学習部805は、感度導出部804で導出された「各操業影響因子の感度」の値が大きい順に、操業影響因子を1つずつ選択し、操業影響因子を1つずつ増やす。次に、操業影響因子選択用NN学習部805は、選択した操業影響因子を、操業影響因子選択用階層型ニューラルネットワークの入力層とし、前記(37)の操業結果因子(転炉の吹止温度)を出力層とする、3層の階層型ニューラルネットワークを、操業影響因子選択用階層型ニューラルネットワークとして構築する。
【0089】
そして、操業影響因子選択用NN学習部805は、構築した操業影響因子選択用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。操業影響因子選択用階層型ニューラルネットワークの学習方法は、NN学習部213で説明した階層型ニューラルネットワークと同じであるので、ここでは、その詳細な説明を省略する。
【0090】
ただし、操業影響因子選択用NN学習部805が構築する操業影響因子選択用階層型ニューラルネットワークも、前述した感度計算用階層型ニューラルネットワークと同様に、実績データXjを学習用データとして用いる通常の階層型ニューラルネットワークである。また、操業影響因子選択用NN学習部805は、前述した感度計算用階層型ニューラルネットワークと同様に、データ正規化部202により正規化された実績データXjを用いて感度計算用階層型ニューラルネットワークを構築する。よって、操業影響因子選択用階層型ニューラルネットワークへの入力と、操業影響因子選択用階層型ニューラルネットワークからの出力は、正規化された値となる。
【0091】
操業影響因子選択用NN学習部805は、例えば、CPUが、コンピュータプログラムに従って、RAM等から実績データを読み出して、操業影響因子選択用階層型ニューラルネットワークの学習を行い、その結果を示す情報をRAM等に記憶することにより実現される。
【0092】
(誤差評価部806)
誤差評価部806は、操業影響因子選択用NN学習部805により学習された操業影響因子選択用階層型ニューラルネットワークの入力層に、当該入力層に対応する操業影響因子の実績データXjを入力することにより、その出力である操業結果因子の予測値を得る。そして、誤差評価部806は、当該操業結果因子の予測値と、操業結果因子の実績データXjの値との誤差を、実績データXjのそれぞれについて導出し、それらの誤差二乗和を算出する。
本実施形態では、前記(1)〜(36)の操業影響因子の数は「36」であるので、操業影響因子選択用NN学習部805により、36個の操業影響因子選択用階層型ニューラルネットワークが構築される。したがって、誤差評価部806は、操業結果因子の予測値の計算として36回の計算を行う。よって、36個の誤差二乗和が算出される。また、本実施形態では、操業影響因子選択用NN学習部805により1つの操業影響因子選択用階層型ニューラルネットワークが構築される度に、誤差評価部806により1つの誤差二乗和が算出され、このような操業影響因子選択用階層型ニューラルネットワークの構築と誤差二乗和の算出とが36回繰り返し行われるようにしている。
誤差評価部806は、例えば、CPUが、コンピュータプログラムに従って、前述した誤差二乗和を導出し、導出した誤差二乗和をRAM等に記憶することにより実現される。
【0093】
(操業影響因子選択部807)
操業影響因子選択部807は、誤差評価部806により導出された36個の誤差二乗和のうち、最も値が小さい誤差二乗和が得られたときに操業影響因子選択用NN選択部805で選択された操業影響因子を、SOMの学習に使用する操業影響因子として決定する。
操業影響因子選択部807は、例えば、CPUが、コンピュータプログラムに従って、最も値が小さい誤差二乗和が得られたときの操業影響因子の情報をRAM等に記憶することにより実現される。
【0094】
学習用実績データ選択部204においては、データ正規化部202で正規化された実績データXj(のセット)のうち、操業影響因子選択部807で選択された操業影響因子のデータが選択されることになる。
【0095】
(動作フローチャート)
次に、図9のフローチャートを参照しながら、操業予測装置800の処理動作の一例を説明する。図9に示すフローチャートは、例えば、図7−1のステップS2とステップS3の間で実行されるものである。
まず、ステップS21において、感度計算用NN学習部801は、実績データXjを学習用データとして感度計算用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。
次に、ステップS22において、第1の感度計算用操業結果因子導出部802は、前記(1)〜(36)の操業影響因子の全ての値が「0.5」であるデータを、ステップS21で学習された後の感度計算用階層型ニューラルネットワークに入力することにより、その出力である操業結果因子の基準値を得る。
【0096】
次に、ステップS23において、第2の感度計算用操業結果因子導出部803は、前記(1)〜(36)の操業影響因子のうち、未選択の操業影響因子を1つ選択する。
次に、ステップS24において、第2の感度計算用操業結果因子導出部803は、ステップS23で選択した操業影響因子の値が「1」であるデータと、残りの操業影響因子の値が「0.5」であるデータを、ステップS21で学習された後の感度計算用階層型ニューラルネットワークに入力することにより、その出力である操業結果因子の変動値を得る。
【0097】
次に、ステップS25において、第2の感度計算用操業結果因子導出部803は、前記(1)〜(36)の操業影響因子の全てを選択したか否かを判定する。この判定の結果、前記(1)〜(36)の操業影響因子の全てを選択していない場合には、ステップS23に戻る。そして、前記(1)〜(36)の操業影響因子の全てを選択するまで、ステップS23〜S25の処理を繰り返し行う。
そして、前記(1)〜(36)の操業影響因子の全てについて、操業結果因子の変動値が得られると、ステップS26に進む。
【0098】
ステップS26に進むと、感度導出部804は、ステップS22で導出された「操業結果因子の基準値」と、ステップS24で導出された「36個の操業結果因子の変動値」との差分の絶対値である感度をそれぞれ導出する。
次に、ステップS27において、操業影響因子選択用NN学習部805は、ステップS26で導出された36個の未選択の感度のうち、最も値が大きい感度が得られたときの操業結果因子を1つ選択する。
次に、ステップS28において、操業影響因子選択用NN学習部805は、実績データXjを学習用データとして、現在の時点までにステップS27で選択された全ての操業影響因子を入力層とする操業影響因子選択用階層型ニューラルネットワークを構築し、構築した操業影響因子選択用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。
【0099】
次に、ステップS29において、誤差評価部806は、ステップS28で構築された操業影響因子選択用階層型ニューラルネットワークの入力層に、当該入力層に対応する操業影響因子の実績データXjを入力することにより得られた操業結果因子の値と、操業結果因子の実績データXjの値との誤差二乗和を導出する。
次に、ステップS30において、誤差評価部806は、前記(1)〜(36)の操業影響因子の全てを選択したか否かを判定する。この判定の結果、前記(1)〜(36)の操業影響因子の全てを選択していない場合には、ステップS27に戻る。そして、前記(1)〜(36)の操業影響因子の全てを選択するまで、ステップS27〜S30の処理を繰り返し行う。
【0100】
そして、前記(1)〜(36)の操業影響因子の全てについての誤差が得られると、ステップS31に進む。
ステップS31に進むと、操業影響因子選択部807は、ステップS29で導出された「前記(1)〜(36)の操業影響因子の全てについての誤差二乗和」のうち、最も値が小さい誤差二乗和が得られたときの操業影響因子を、SOMの学習に使用する操業影響因子として決定する。
そして、図7のフローチャートのステップS3に進む。この場合、ステップS4において選択される実績データXjは、前記(1)〜(36)の操業影響因子のうち、ステップS31で決定された操業影響因子のデータとなる。
【0101】
第1の実施形態で説明したように、SOMは、多次元ベクトルの形で表現された実績データの集合から各々のデータの類似性を見出し、類似するデータ同士を2次元平面上の近傍へマッピングしておくことで、多数の高次元データを分類し、その特徴を抽出するデータマイニング手法である。したがって、操業結果因子に与える影響が小さい操業影響因子であっても、離散的な値をとる操業影響因子等、各々の値を明確に分類することができる操業影響因子が、SOMによる実績データXjの分類に大きく影響を与えてしまう虞がある。そうすると、予測モデルの学習に使用する学習用データが、必ずしも予測モデルの学習に適したものにならなくなる虞がある。これに対し、本実施形態では、操業結果因子の基準値と操業結果因子の変動値との差分の絶対値で定義される感度に基づいて、SOMの学習に使用する操業影響因子を選択するようにした。したがって、操業結果因子に与える影響が相対的に大きい操業影響因子の感度の値が相対的に大きくなる傾向になる。よって、操業結果因子に与える影響が相対的に小さい操業影響因子を可及的に排除して、SOMの学習を行うことができる。その結果、予測モデルの学習に使用する学習用データを、より予測モデルの学習に適したものにすることができる。
【0102】
尚、本実施形態では、操業影響因子の感度に基づいて、SOMの学習に使用する操業影響因子を自動的に選択するようにした。しかしながら、必ずしもこのようにする必要はない。例えば、ユーザが、操業予測装置から提示された操業影響因子の感度を参照して、SOMの学習に使用する操業影響因子を選択し、操業予測装置が、ユーザにより選択された操業影響因子の実績データXjを用いてSOMの学習を行ってもよい。また、SOMの学習に使用する操業影響因子を自動的に選択する方法は、前述した方法に限定されるものではない。例えば、操業影響因子の感度の大きいものから所定の数(又は所定の割合)の操業影響因子をSOMの学習に使用する操業影響因子として選択してもよい。このように、SOMの学習に使用する操業影響因子については、感度に基づいて選択していればどのようにして選択してもよい。
【0103】
また、本実施形態では、全ての操業影響因子について誤差二乗和を導出するようにした。しかしながら、必ずしもこのようにする必要はない。例えば、誤差二乗和の値が、前回の値よりも大きくなった時点で誤差二乗和の導出を止め、それまでに導出した誤差二乗和の中で最も値が小さい誤差二乗和が得られたときの操業影響因子を、SOMの学習に使用する操業影響因子として決定してもよい。本実施形態では、操業影響因子選択用階層型ニューラルネットワークを学習する際に、入力層として採用する操業影響因子として、感度が大きい操業影響因子から順番に選択する。したがって、操業影響因子の選択数がある範囲までは、操業影響因子の選択数が多くなると誤差二乗和は小さくなるが、その範囲を超えると、操業影響因子の選択数が多くなると誤差二乗和は逆に大きくなる場合が多いと考えらえる。よって、誤差二乗和の値が、前回の値よりも大きくなった時点で誤差二乗和の導出を止めても、操業影響因子の選択に大きな誤りは起こらない。
【0104】
<実施例>
次に、本実施形態の実施例を説明する。
ここでは、4800件(4800チャージ)の実績データXjを使用した。1件の実績データXjは、前述した(1)〜(37)の37次元のデータである。これら4800組の実績データXjを時間順にソートして、操業時間が新しい800件の実績データXjを検証用データとし、残りの4000件の実績データXjを学習用データとした。
【0105】
学習用データは、操業結果因子と操業影響因子の全てが既知であるとする。本実施例では、SOMのマップサイズ(2次元の格子状に配置したSOMニューロンの数)を「400×400」とした。また、前述した操業影響因子の感度に基づいて、SOMの学習に使用する操業影響因子を選択する計算を行った結果、前記(1)〜(36)の操業影響因子のうち、SOMの学習に用いる操業影響因子は、以下の21個の操業影響因子となった。よって、実績データ選択部204で選択される実績データXjは、これら21個の操業影響因子のデータとなる。
【0106】
(1)装入量合計(材料因子);溶鋼量
(2)D01(材料因子);金属種D01の投入量
(3)D02(材料因子);金属種D02の投入量
(4)D03(材料因子);金属種D03の投入量
(5)D04(材料因子);金属種D04の投入量
(6)D05(材料因子);金属種D05の投入量
(7)D06(材料因子);金属種D06の投入量
(8)D07(材料因子);金属種D07の投入量
(9)D08(材料因子);金属種D08の投入量
(10)D09(材料因子);金属種D09の投入量
(11)D10(材料因子);金属種D10の投入量
(12)D合計(材料因子);金属種D01〜D10の投入量の合計
【0107】
(13)G01(材料因子);金属種G01の投入量
(14)G02(材料因子);金属種G02の投入量
(15)G03(材料因子);金属種G03の投入量
(16)G04(材料因子);金属種G04の投入量
(17)G05(材料因子);金属種G05の投入量
(18)G06(材料因子);金属種G06の投入量
(19)G合計(材料因子);金属種G01〜G10の投入量の合計
(20)取鍋最終(温度因子);出鋼温度
(30)空鍋時間(鍋状況因子);空鍋時間
【0108】
一方、検証用データは、操業結果因子(転炉の吹止温度)を未知とする(伏せておく)データである。この操業結果因子が予測対象であり、この検証用データが、操業結果予測対象データ指定部210で指定される予測モデル学習用SOMニューロン選択用データFsとなる。
【0109】
そして、検証用データと、学習用データを用いた学習が終了した時のSOMニューロンの値のうち、操業結果因子を除く値とのユークリッド距離が小さいものから順に、予め設定した近傍点数(=25、121、225、441、625)と同数のSOMニューロンを予測モデル学習用SOMニューロン(学習用補間データ)として選択した。
そして、予測モデル学習用SOMニューロンの値と、予測モデル学習用SOMニューロンに関連付けて記憶されている勝者実績データXcの値とを学習モデルの学習に使用する学習データとして、3層のニューラルネットワークの結合重み係数(重み行列)を更新(学習)した。
ここで、3層のニューラルネットワークのニューロン数を、以下のようにした。
入力層:21
中間層:21
出力層:1
また、結合重み係数(重み行列)については、PSO(Particle Swarm Optimization)を用いて計算(学習)した。
【0110】
学習が終了した3層のニューラルネットワークの入力層に、検証用データを入力することにより、当該3層のニューラルネットワークの出力層から出力される操業結果因子(転炉の吹止温度)を予測温度とした。
そして、予め設定されている近傍点数(25、121、225、441、625)のうち、最も値が大きい決定係数R2が得られたときの近傍点数は「225」であった。また、近傍点数が「225」であるときの決定係数R2の値は「0.833」であった。よって、近傍点数が「225」であるときの操業結果因子(転炉の吹止温度)を予測温度として採用した。
【0111】
そして、検証用データの(伏せておいた)操業結果因子(転炉の吹止温度)を実績温度とした。図10は、転炉の吹止温度の予測値(予測温度)と実績値(実績温度)との関係の一例を示す図である。図10に示すように、転炉の吹止温度の予測値(予測温度)と実績値(実績温度)とには高い相関があることが分かる。
【0112】
(請求項との関係)
尚、本実施形態では、例えば、操業結果因子(転炉の吹止温度)が「操業予測因子」に対応する。また、例えば、材料因子、鍋状況因子、及び温度因子が「操業影響因子」に対応する。
また、例えば、データ取得部201を用いることにより「データ取得手段」が実現され、勝者SOMニューロン決定部205を用いることにより「勝者SOMニューロン決定手段」が実現される。また、SOM学習部206を用いることにより「SOM学習手段」が実現され、カットオフ距離Rcut(t)が「所定の範囲」に対応する。また、予測モデル学習用SOMニューロン選択部211を用いることにより「予測モデル学習用SOMニューロン選択手段」が実現される。また、勝者実績データ関連部209を用いることにより「勝者実績データ関連手段」が実現される。また、NN学習部213を用いることにより「予測モデル学習手段」が実現される。また、SOMパラメータ設定部203を用いることにより「SOMパラメータ設定手段」が実現される。また、データ正規化部202を用いることにより「データ正規化手段」が実現される。また、NN記憶部214を用いることにより「予測モデル記憶手段」が実現される。また、NN破棄部217を用いることにより「破棄手段」が実現される。また、第1の感度計算用操業結果因子導出部802を用いることにより「第1の感度計算用操業結果因子導出手段」が実現される。また、第2の感度計算用操業結果因子導出部803を用いることにより「第2の感度計算用操業結果因子導出手段」が実現される。また、感度導出部804を用いることにより「感度導出手段」が実現される。また、操業影響因子選択用NN学習部805、誤差評価部806、及び操業影響因子選択部807を用いることにより「操業影響因子選択手段」が実現される。
【0113】
また、例えば、ステップS1の処理を実行することによりデータ取得工程が実現され、ステップS5の処理を実行することにより勝者SOMニューロン決定工程が実現される。また、例えば、ステップS6の処理を実行することによりSOM学習工程が実現される。また、例えば、ステップS11の処理を実行することにより予測モデル学習用SOMニューロン選択工程が実現される。また、ステップS9の処理を実行することにより勝者実績データ関連工程が実現される。また、ステップS13の処理を実行することにより予測モデル学習工程が実現される。また、例えば、ステップS15の処理を実行することにより予測モデル記憶工程が実現され、ステップS17の処理を実行することにより破棄工程が実現される。また、例えば、ステップS3の処理を実行することによりSOMパラメータ設定工程が実現される。また、例えば、ステップS2の処理を実行することによりデータ正規化工程が実現される。また、ステップS22の処理を実行することにより第1の感度計算用操業結果因子導出工程が実現される。また、ステップS23〜S25の処理を実行することにより第2の感度計算用操業結果因子導出工程が実現される。また、ステップS26の処理を実行することにより感度導出工程が実現される。また、ステップS27〜S31の処理を実行することにより操業影響因子選択工程が実現される。
【0114】
尚、以上説明した本発明の実施形態は、コンピュータがプログラムを実行することによって実現することができる。また、プログラムをコンピュータに供給するための手段、例えばかかるプログラムを記録したCD−ROM等のコンピュータ読み取り可能な記録媒体、又はかかるプログラムを伝送する伝送媒体も本発明の実施の形態として適用することができる。また、前記プログラムを記録したコンピュータ読み取り可能な記録媒体などのプログラムプロダクトも本発明の実施の形態として適用することができる。前記のプログラム、コンピュータ読み取り可能な記録媒体、伝送媒体及びプログラムプロダクトは、本発明の範疇に含まれる。
また、以上説明した本発明の実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその技術思想、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【符号の説明】
【0115】
200 操業予測装置
201 データ取得部
202 データ正規化部
203 SOMパラメータ設定部
204 学習用実績データ選択部
205 勝者SOMニューロン決定部
206 SOM学習部
207 SOM学習終了判定部
208 SOM記憶部
209 勝者実績データ関連部
210 操業結果予測対象データ指定部
211 予測モデル学習用SOMニューロン選択部
212 勝者実績データ抽出部
213 NN学習部
214 NN記憶部
215 NN予測部
216 NN予測結果出力部
217 NN破棄部
601 初期状態
602 勝者SOMニューロン
603 近傍SOMニューロン
【技術分野】
【0001】
本発明は、操業予測装置、操業予測方法、及びコンピュータプログラムに関し、特に、予測モデルを用いて操業の予測を行うために用いて好適なものである。
【背景技術】
【0002】
例えば、鋼材を製造するための製鋼プロセスの各工程における目標温度は、下工程からの要求によって決定される。すなわち、連続鋳造工程(CC)における鉄の凝固温度を起点として、下工程における溶鋼温度降下量を順次推定(予測)することで、各工程における目標温度が決定される。ここで問題になるのは、各工程及び工程間における溶鋼温度の降下量の不確かさである。各工程における溶鋼温度の降下量は、様々な要因の影響を受け、同一の鋼種の鋼材を製造する場合であっても、各工程及び工程間における溶鋼温度の降下量は一定ではない。そのため、従来は、オペレータが自身の経験・知見を駆使しつつも、安全側(すなわち高温側)に製鋼プロセスの各工程の目標温度を設定せざるを得なかった。
【0003】
そこで、操業実績データを活用して製鋼プロセスの各工程における目標温度を、階層型ニューラルネットワーク等の予測モデルを使ってパターン分類・予測することが考えられる。このような技術として特許文献1に記載の技術がある。特許文献1では、まず、転炉の吹止温度の終点挙動を、ニューラルネットワーク等を用いて大局的にグローバル推定した後、自己組織化マップモデル等を用いて、転炉吹練に関する操業条件を複数のグループにクラスタリングする。そして、クラスタリングしたグループ毎に、推定した転炉の吹止温度の誤差を、ニューラルネットワーク等を用いて評価・学習し、グローバル推定した転炉の吹止温度を、同定した誤差を用いて修正する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−294928号公報
【非特許文献】
【0005】
【非特許文献1】T.Kohonen著、「Self-organizing maps」、Springer、1996年
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前述した従来の技術では、ニューラルネットワーク等の予測モデルの学習をする際に、操業実績データのみを学習用データとして用いているので、データ数が少ないことによる未学習部分の発生や過学習により、予測の精度が低下してしまう虞がある。一方で、学習用データをむやみに多くすると、計算の負荷が大きくなるばかりでなく、不適切な学習用データを採用してしまう虞がある。
本発明はこのような問題点に鑑みてなされたものであり、下工程の操業結果を予測するための予測モデルの学習用データを適切に選別しつつ、過学習を抑制できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の操業予測装置は、製品又は半製品を製造するための操業条件である操業影響因子を入力とし、該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力とする予測モデルを用いて操業結果因子の予測を行う操業予測装置であって、過去の操業実績についての前記操業影響因子及び前記操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、前記予測モデルの学習を行うことを特徴とする。
【0008】
本発明の操業予測方法は、製品又は半製品を製造するための操業条件である操業影響因子を入力とし、該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力とする予測モデルを用いて操業結果因子の予測を行う操業予測方法であって、過去の操業実績についての前記操業影響因子及び前記操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、前記予測モデルの学習を行うことを特徴とする。
【0009】
本発明のコンピュータプログラムは、前記操業予測方法の各工程をコンピュータに実行させることを特徴とする。
【発明の効果】
【0010】
本発明によれば、過去の操業実績についての操業影響因子及び操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、操業影響因子を入力とし操業結果因子を出力とする予測モデルの学習を行う。したがって、予測モデルの学習用データとして適切な補間データを学習用補間データとして選択し加えることによって、学習用データのデータ数が少ないことで生じる未学習部分の発生や過学習を抑制することができる。よって、予測モデルを用いた操業の予測を正確に行えるようにする。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施形態を示し、NNを用いた予測結果と真の入出力関係との一例を概念的に示す図である。
【図2】本発明の第1の実施形態を示し、操業予測装置の機能的な構成の一例を示す図である。
【図3】本発明の第1の実施形態を示し、SOMの概念の一例を示す図である。
【図4】本発明の第1の実施形態を示し、SOMを使って生成する補間データの配置の一例を示す図である。
【図5】本発明の第1の実施形態を示し、SOMを使って生成する補間データの数に合わせてSOMの設定パラメータを算出する方法の一例を説明する図である。
【図6】本発明の第1の実施形態を示し、SOMによる学習の様子の一例を概念的に示す図である。
【図7−1】本発明の第1の実施形態を示し、操業予測装置の処理動作の一例を説明するフローチャートである。
【図7−2】本発明の第1の実施形態を示し、図7−1に続くフローチャートである。
【図8】本発明の第2の実施形態を示し、操業予測装置の機能的な構成の一例を示す図である。
【図9】本発明の第2の実施形態を示し、操業予測装置の処理動作の(一部の)一例を説明するフローチャートである。
【図10】本発明の実施例を示し、転炉の吹止温度の予測値(予測温度)と実績値(実績温度)との関係の一例を示す図である。
【発明を実施するための形態】
【0012】
以下、図面を参照しながら、本発明の実施形態を説明する。
<第1の実施形態>
まず、本発明の第1の実施形態について説明する。
図1は、予測モデルを用いた予測結果と真の入出力関係との一例を概念的に示す図である。具体的に図1(a)は、従来のように、実績データのみを学習用データとして用いた局所予測モデルによる予測結果と真の入出力関係との一例を示す。
図1(a)に示すように、実績データ101のみを学習用データとした局所予測モデルを用いると、学習用データの数が少ないために、予測結果110と真の入出力関係120との差が大きくなることがある。
これに対して、図1(b)は、本実施形態での局所予測モデルによる予測結果と真の入出力関係との一例を示す。本実施形態では、後述する実績データから構築した自己組織化マップ(SOM)を用いて、疎らに存在する実績データを補間する補間データを生成する。図1(b)に示すように、実績データ101にSOMによる補間データ102を学習用データとして加えて局所予測モデルの学習を行うと、予測結果130の真の入出力関係120に対する精度の向上が可能となる。
以下、このように局所予測モデルによる予測結果を向上させて、局所予測モデルを用いた操業の予測を正確に行えるようにする操業予測装置の一実施形態について説明する。
【0013】
図2は、操業予測装置200の機能的な構成の一例を示す図である。操業予測装置200は、例えば、CPU、ROM、RAM、HDD、及び各種のインターフェースを備えた情報処理装置(例えばPC)を用いることにより実現される。尚、本実施形態では、製鋼プロセスにおける転炉の吹止温度を操業結果因子とする場合を例に挙げて説明する。転炉の吹止温度は転炉における最高温度であり、ここで必要な温度を正確に予測することができれば、吹止温度が過剰に高く設定されている場合にそれを適切な値に下げることにより、製鋼プロセスにおける操業温度を下げることが可能となる。
【0014】
ここで、製鋼プロセスの一例を簡単に説明する。まず、製銑プロセスで得られた溶銑を転炉に装入する。次に、転炉により、溶銑中の燐や炭素等を取り除き(一次精錬を行い)、これにより出来上がった溶鋼を転炉から取鍋に移す。溶鋼を転炉から取鍋に移す作業を出鋼と呼ぶ。出鋼の際に、溶鋼と同時に、成分調整のための合金を併せて投入する。次に、取鍋内の溶鋼に含まれる水素や窒素等の気体を取り除くと共に、成分調整のための合金を溶鋼に添加する二次精錬を行う。最後に、取鍋内の溶鋼を連続鋳造機(の鋳型)に流し込み、連続鋳造機により鋼片を製造する。
【0015】
操業予測装置200は、後述するSOMを使用して補間データを生成し、実績データと生成した補間データとを用いて、階層型ニューラルネットワークとして構築された予測モデルを学習し、学習後の予測モデル(階層型ニューラルネットワーク)を用いた操業の予測を行う装置である。
【0016】
以下に、図2に示す操業予測装置200の各ブロックの詳細を説明する。
(データ取得部201)
データ取得部201は、データを外部から取得して記憶する。本実施形態では、データとして、実績データXj及び操業結果予測対象データFを取得する。実績データXjとは、後述するSOM学習部206にて、SOMの学習に用いられる操業実績データである。実績データXjとしては、以下の(1)〜(37)の37次元の実績データを取得するものとする。操業結果予測対象データFとは、オペレータによるユーザインターフェースの操作に基づいて入力されるデータであって、後述する予測モデルへの入力とするデータである。操業結果予測対象データFとしては、以下の(1)〜(36)の36次元の実績データを取得するものとする。
【0017】
(1)装入量合計(材料因子);転炉へ投入される溶銑の総量(重量)
(2)D01(材料因子);金属種D01の投入量(重量)
(3)D02(材料因子);金属種D02の投入量(重量)
(4)D03(材料因子);金属種D03の投入量(重量)
(5)D04(材料因子);金属種D04の投入量(重量)
(6)D05(材料因子);金属種D05の投入量(重量)
(7)D06(材料因子);金属種D06の投入量(重量)
(8)D07(材料因子);金属種D07の投入量(重量)
(9)D08(材料因子);金属種D08の投入量(重量)
(10)D09(材料因子);金属種D09の投入量(重量)
(11)D10(材料因子);金属種D10の投入量(重量)
(12)D合計(材料因子);金属種D01〜D10の投入量(重量)の合計
【0018】
(13)G01(材料因子);金属種G01の投入量(重量)
(14)G02(材料因子);金属種G02の投入量(重量)
(15)G03(材料因子);金属種G03の投入量(重量)
(16)G04(材料因子);金属種G04の投入量(重量)
(17)G05(材料因子);金属種G05の投入量(重量)
(18)G06(材料因子);金属種G06の投入量(重量)
(19)G合計(材料因子);金属種G01〜G10の投入量(重量)の合計
【0019】
(20)取鍋最終(温度因子);出鋼温度(転炉から取鍋に移されたときの溶鋼の温度)
(21)装入(鍋状況因子);装入の処理にかかった時間
(22)鍋NO(鍋状況因子);取鍋に固有の番号
(23)修理後回数(鍋状況因子);取鍋の耐火物を簡単に補修(熱間補修)してからの取鍋の使用回数
(24)累計回数(鍋状況因子);大規模に取鍋の耐火物を補修(冷間補修)してからの取鍋の使用回数
(25)鍋下がり(鍋状況因子);取鍋に関する情報
(26)スラグ厚(鍋状況因子);取鍋に関する情報
(27)即時開孔(鍋状況因子);取鍋に関する情報
(28)AMEPA回数(鍋状況因子);取鍋に設置のスラグ検出器に関する情報
(29)AMEPA可否(鍋状況因子);取鍋に設置のスラグ検出器に関する情報
(30)空鍋時間(鍋状況因子);取鍋に関する情報(取鍋から溶鋼が連続鋳造機に流し込まれた後、当該取鍋に転炉から次の溶鋼が移されるまでの時間(すなわち、取鍋が空となっている時間))
(31)炉号(鍋状況因子);どの転炉を使用したかを示す情報
(32)炉代(鍋状況因子);使用している転炉の鍋に固有の番号
(33)炉回数(代)(鍋状況因子);溶鋼を出す孔(出鋼孔)の交換回数を示す情報(この孔は使用すると大きくなる)
(34)炉回数(回)(鍋状況因子);溶鋼を出す孔の交換後の使用回数を示す情報
(35)銑鉄(温度因子);溶銑の温度
(36)取鍋1(温度因子);出鋼温度(「取鍋最終」とは計測タイミングが異なる)
(37)吹止温度(操業結果因子);転炉の吹止温度
【0020】
ここで、(37)の操業結果因子は、予測対象である転炉の吹止温度であり、ここでは、転炉の吹き止めから出鋼完了までの温度降下量の実績値に出鋼温度目標値を加えた温度が操業結果因子として設定される。操業結果因子として得られる吹止温度は、操業上の目標値として使用されるものである。(1)〜(19)の材料因子は、転炉へ投入される溶銑の総量と、製造している製品(鋼片)の成分(金属種)と、転炉吹き止め後に生じる溶鋼温度に与える製造条件の1つである「各金属種の投入量(ton/溶鋼量)」とを示す因子である。各金属種は、出鋼時と二次精錬時に投入(添加)されるが、材料因子として含まれる投入量は、出鋼時の投入量を示す。(21)〜(34)の鍋状況因子は、出鋼時に溶鋼を受ける器である取鍋の状況を示す因子である。(20)、(35)、(36)の温度因子は、吹き止め後の温度降下を示す因子である。予測を行う際には実績が存在しないので、温度因子として目標値を用いる。ここで、(1)〜(19)の材料因子、(21)〜(34)の鍋状況因子、及び(20)、(35)、(36)の温度因子は、溶鋼を製造するための操業条件であり、(37)の操業結果因子(操業結果として決まる因子)に影響を与えるので、操業影響因子と呼ばれる。
各チャージに付随する実績データの中には、使用する二次精錬設備名や連続鋳造設備名等、出鋼過程に全く関係ないものが含まれる。そこで、本実施形態では、出鋼過程に関係する37次元の実績データを採用するようにした。ただし、採用する実績データは、37次元の実績データに限定されるものではない。
【0021】
データ取得部201は、例えば、通信インターフェースが上位のコンピュータから実績データXjと操業結果予測対象データFの受信を行った後、又は、CPUが記憶媒体に記憶された実績データXjと操業結果予測対象データFの読み出しを行った後、又は、オペレータによるユーザインターフェースの操作に基づいて入力された操業結果予測対象データの読み出しを行った後、CPUが実績データXjと操業結果予測対象データFをHDD等に記憶することによって実現される。
尚、実績データに含まれる因子は前述したものに限定されず、また、各因子の具体的な項目の内容及び数も前述したものに限定されない。
【0022】
(データ正規化部202)
データ正規化部202は、データ取得部201で取得された実績データXj及び操業結果予測対象データFの値を正規化する。データ正規化部202は、実績データXの各因子の項目毎に予め設定されている最大値及び最小値を記憶媒体から読み出し、以下の(1)式の計算を行うことにより正規化値を算出する。
正規化値=(実績値−最小値)/(最大値−最小値) ・・・(1)
【0023】
(1)式において、「実績値」は、実績データXj及び操業結果予測対象データFの値である。また、「最大値」は、実績データXj及び操業結果予測対象データFの各項目において想定される最大値であり、「最小値」は、実績データXj及び操業結果予測対象データFの各項目において想定される最小値である。このように「最大値」及び「最小値」は、想定値であり、オペレータにより予め操業予測装置200に設定されるものである。ただし、「最大値」及び「最小値」を、それぞれ実績データXj及び操業結果予測対象データFの最大値及び最小値としてもよい。
(1)式の計算を行うことによって、実績データXj及び操業結果予測対象データFは0以上1以下の値のデータとなる。以降に説明する各ブロックで使用される実績データXj及び操業結果予測対象データFは、全て、データ正規化部202で正規化された実績データXj及び操業結果予測対象データFである。以下の説明では、必要に応じて「正規化した実績データ」、「正規化した操業結果予測対象データ」を、それぞれ「実績データ」、「操業結果予測対象データ」と称する。
【0024】
データ正規化部202は、例えば、CPUが、コンピュータプログラムに従って、HDD等から、実績データXj及び操業結果予測対象データFと、実績データXj及び操業結果予測対象データFの各項目の「最大値及び最小値」とを読み出して(1)式の計算を行い、その結果を、RAM等に記憶することによって実現される。
【0025】
(SOMパラメータ設定部203)
本実施形態では、後述するように、自己組織化マップ(Self-Organizing Maps)を用いて、階層型ニューラルネットワークとして構築された予測モデルの学習に用いる「実績データの補間データ」を生成するようにしている。以下に、自己組織化マップの概要を説明する。尚、自己組織化マップの詳細については、非特許文献1等に記載されている。また、以下の説明では、必要に応じて「ニューラルネットワーク」を「NN」と称し、「自己組織化マップ」を「SOM」と称する。
【0026】
SOMとは、多次元ベクトルの形で表現されたデータの集合から各々のデータの類似性を見出し、類似するデータ同士を2次元平面上の近傍へマッピングしておくことで、多数の高次元データを分類し、その特徴を抽出するデータマイニング手法である。SOMは、教師無し競合学習のアルゴリズムを持つ階層型NNに相当する。ただし、SOMは、予測モデル構築に用いられる階層型NNとは別のNNである。SOMは、データに関する外的基準を与えることなく、高次元データをその特徴に応じて分類し、低次元のマップ上に視覚化できることが特徴である。
【0027】
図3は、SOMの概念の一例を示す図である。
図3に示すように、SOMは、入力層301と競合層302の2つの層からなる。
第1層は、n次元の入力層301(Xj=(Xj1,Xj2,・・・,Xjn)は(j=1,2,・・・,J;Jは実績データの数)である。前述したように本実施形態では、実績データは37次元のデータであるので、nは「19」となる。第2層は、例えば2次元の格子状に配置されたSOMニューロンからなる競合層302である。尚、ここで、「SOMニューロン」という呼称の「SOM」は、予測モデルに用いられるNNのニューロンと区別して説明するための都合上、付したものである。このように、SOMには、入力層301のSOMニューロンと競合層302のSOMニューロンとが存在するが、以降に説明するSOMの学習においては、競合層302のSOMニューロンが対象になるので、今後断り無しに「SOMニューロン」と言う場合には、競合層302のSOMニューロンを指すものとする。
SOMによる補間データの作成の考え方としては、複数の実績データXjを、競合層302のSOMニューロンのうちの1つにそれぞれ対応付けて、複数の実績データXjに対応付いたSOMニューロンの値(SOMニューロンの内部に保持している参照ベクトル)を実績データXjに近づくように修正を行う。これと同時に競合層302上で隣接する近傍のSOMニューロンに対しても同様に、SOMニューロンの値の修正量を減じて修正を行う。これを繰り返して得られる競合層302のSOMニューロンが、補間データを表すものとする。
【0028】
入力層301のSOMニューロンと競合層302のSOMニューロンとは、全て連結している。図3は、競合層302のSOMニューロンの1つであるiと、入力層301の各ニューロンとの結合を示す図であり、競合層302の全てのSOMニューロンiと入力層301の各SOMニューロンとの間に、同様の結合が存在する。競合層302のSOMニューロンiと入力層301との結合重み係数ベクトルを、参照ベクトル(mi(t)=(m1i,m2i,・・・,mni)、(i=1,2,・・・,I;Iは競合層302のニューロンの数))と呼ぶ。また、参照ベクトルは、SOMニューロンに設定する2つの設定項目のうちの1つであり、SOMニューロンの値とも呼ぶ。尚、tは、後述するSOMの学習の回数であり、初期値を0とし、学習が行われる度にインクリメントされる。以降のSOMの学習では、実績データXjを教師として、参照ベクトルを教師に近付けるように修正するように学習が行われる。
【0029】
SOMパラメータ設定部203は、競合層302(仮想空間)において、2次元の格子状にSOMニューロンを配置する。このときSOMニューロンに設定する2つの設定項目うちの1つである競合層302の仮想空間上の位置を示す座標が設定される。2次元の格子状にSOMニューロンを配置する場合、SOMニューロンの座標を(X1,X2)で表す。以降のSOMの学習では、競合層302の仮想空間上の位置を示す座標は、一度定められた座標を修正しない。実績データXjを教師として、参照ベクトルを教師に近付けるように修正するように学習が行われる。ここで配置されるSOMニューロンの数Iは、実績データのセット数J(前述した(1)〜(37)のデータのセットの数)よりも多くし、この条件の下で、隣接する2つの実績データXjの間を補間する補間データの数Pの2乗に比例する、具体的には、SOMニューロンの数Iが、以下の(2)式のようになるのが好ましい。
I=J×(P+1)2 ・・・(2)
【0030】
例えば、SOMニューロンを競合層302の2次元の仮想空間に格子状に配置した状況で、実績データXjを用いてSOMニューロンを十分学習した結果、実績データXjと見なせるSOMニューロン(仮に実績SOMニューロンと呼ぶ)と、補間データとなるSOMニューロン(仮に補間SOMニューロンと呼ぶ)とが競合層302(仮想空間上)で配置が均一となるように生成されたとする。
【0031】
図4は、SOMを使って生成する補間データの配置の一例を示す図である。
図4には、一例として、2個の実績SOMニューロン401の間に1個の補間SOMニューロン402が生成されるように配置した場合を示す(実際には必ずしもこのように配置されない)。2種類のSOMニューロン401、402が均一に生成されているので、4つのSOMニューロンを1単位として、全体はこの単位の繰り返し配置となっている(図4に示す領域403に含まれる4つのSOMニューロン401a、402a、402c、402dが1単位であり、図4では4単位分を示している)。この場合、1つの実績データXjに対して4倍(内訳は、実績SOMニューロン401が1、補間SOMニューロン402が3)のSOMニューロンを用意する必要がある。
【0032】
図5は、SOMを使って生成する補間データの数に合わせてSOMの設定パラメータ(SOMニューロンの数I)を算出する方法の一例を説明する図である。
2個の実績SOMニューロン401の間にP個の補間SOMニューロン402を配置する場合のSOMニューロンの繰り返し配置の1単位分を図5に示す。1単位に含まれるSOMニューロン401、402の合計数は(1+P)2個あり、その内の1個が実績SOMニューロン401であり、それ以外は補間SOMニューロン402に相当する。つまり実績データXjの(1+P)2倍の個数のSOMニューロンを用意する必要がある。尚、ここで説明のために使用した実績SOMニューロン401と補間SOMニューロン402との両者を、後述する勝者実績データ抽出部212では、実績データXjの補間データとして区別なくSOMニューロンと扱っている。
本実施形態では、SOMパラメータ設定部203は、50×82個のSOMニューロン401、402を配置するものとする。実績データの数J=1024個に対して補間データの数P=1個としたので、SOMニューロンの数を1024×(1+1)2=4096個以上となるように、SOMニューロンを2次元の格子状に配置した。
【0033】
次に、SOMパラメータ設定部203は、競合層302で2次元の格子状に配置したSOMニューロンの参照ベクトルに対して初期値を設定する。すなわち、SOMパラメータ設定部203は、2次元の格子状に配置したSOMニューロンiと、37次元の入力層301とを、37次元の参照ベクトルの初期値(mi(0))で連結することを、2次元の格子状に配置したSOMニューロンiのそれぞれについて行う(図3を参照)。37次元の参照ベクトルの初期値は、例えば、乱数を用いることにより決定することができる。このSOMニューロンの値(37次元の参照ベクトル)は、実績データXjと対比されるデータとなる。
【0034】
図6は、SOMによる学習(競合学習)の様子の一例を概念的に示す図である。競合学習は、競合層302に配置したSOMニューロンの一部を選択し、参照ベクトルを実績データXjに合わせて修正を繰り返すことで行われる。図6に示す矢印付きの丸は、競合層302におけるSOMニューロンを示し、丸内の矢印は、当該SOMニューロンの値(参照ベクトル)を表す。概念としては、図6に示す例のように、SOMパラメータ設定部203によって、初期状態601が設定される。
SOMパラメータ設定部203は、例えば、CPUが、コンピュータプログラムに従って、SOMの初期状態の設定(SOMニューロンの配置(座標)と初期値の設定)を行い、その結果を、RAM等に記憶することにより実現される。
【0035】
(実績データ選択部204)
実績データ選択部204は、実績データ正規化部202で正規化された実績データXj(のセット)のうち、未選択の実績データXjを1つ選択する。
実績データ選択部204は、例えば、CPUが、コンピュータプログラムに従って、RAM等から実績データを読み出して、当該実績データをSOMの学習対象の実績データとしてRAM等に記憶することにより実現される。
(勝者SOMニューロン決定部205)
勝者SOMニューロン決定部205は、実績データ選択部204で選択された実績データXjの値(ベクトル)と、2次元の格子状に配置されたSOMニューロンの値(参照ベクトル)とのユークリッド距離を算出する。そして、勝者SOMニューロン決定部205は、算出したユークリッド距離が最小となるSOMニューロンを勝者SOMニューロンとして決定する。概念としては、図6に示す例のように、初期状態601のSOMニューロンの中から、実績データ610と矢印の方向が最も近いSOMニューロン602を選択することを指し、実績データ610と最も近いということで選択されたことを例えて「勝者」と名付けている。
【0036】
具体的には、勝者SOMニューロン決定部205は、以下の(3)式の計算を行って勝者SOMニューロン602を決定する。
|Xj−mc(t)|=min|Xj−mi(t)| ・・・(3)
ここで、Xjは、j番目の37次元の実績データ(37次元の参照ベクトルに相当)であり、mi(t)は、SOMニューロンiの現在値(37次元の参照ベクトル)である。また、minは、最小を採用することを示し、cは勝者SOMニューロン602であることを示す。
尚、本実施形態では、SOMニューロンの数が4100個(=50×82)であるので(すなわちiが1〜4100をとり得るので)、(3)式の右辺の「Xj−mi(t)」の値は4100個得られる。
勝者SOMニューロン決定部205は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、SOMの初期状態601と、SOMの学習対象の実績データとを読み出して(3)式の計算を行って勝者SOMニューロン602を決定し、決定した勝者SOMニューロン602の情報をRAM等に記憶することによって実現される。
【0037】
(SOM学習部206)
SOM学習部206は、勝者SOMニューロン決定部205により決定された勝者SOMニューロン602の値(参照ベクトル)と、競合層602上の配置で勝者SOMニューロン602に近い位置にある近傍SOMニューロンの値(参照ベクトル)とを、実績データ選択部204で選択された実績データXjの値(ベクトル)に近づける処理(学習処理)を、全ての実績データXjについて個別に行う。全ての実績データXjについて1度ずつ学習処理を行うことよって、学習回数を1回と数え、tを1だけ増加させる。概念としては、図6に示す例のように、勝者SOMニューロン602と近傍SOMニューロン603a〜603hの矢印の方向が、実績データ610の矢印の方向に近づくようにする(図6の「更新」と示されているSOMニューロン602と603a〜603hを含むハッチング箇所を参照)。
【0038】
本実施形態では、競合層302上の配置で勝者SOMニューロン602の座標に近いほど、参照ベクトルの修正量を大きくすると共に、SOMの学習の回数tが小さいほど、参照ベクトルの修正量を大きくするようにしている。具体的には、SOM学習部206は、以下の(4)式の計算を行って、SOMの学習を行う(勝者SOMニューロン602の値と近傍SOMニューロン603a〜603hの値とを修正する)。
mi(t+1)=mi(t)+hci(t)×|Xj−mi(t)| ・・・(4)
【0039】
(4)式において、mi(t)は、i番目の勝者SOMニューロン602の、学習回数tにおける値(参照ベクトル)、又は近傍SOMニューロン603の、学習回数tにおける値(参照ベクトル)である。Xjは、実績データ選択部204で選択されたj番目の実績データの値(ベクトル)である。また、mi(t+1)は、i番目の勝者SOMニューロン602の、学習回数t+1(すなわち更新後)における値(参照ベクトル)、又は近傍SOMニューロン603の、学習回数t+1における値(参照ベクトル)である。ここで、hci(t)は近傍関数と称されるものであり、例えば、以下の(5)式〜(7)式のように表される。近傍関数hci(t)は、SOMニューロンの値(参照ベクトル)と実績データの値(ベクトル)との差を小さくするための変更量を決める係数である。近傍関数hci(t)が1の場合には、1回の学習(修正)でSOMニューロンの値は実績データの値と一致することになる。
【0040】
hci(t)=α(t)×[(Rcut(t)−rci)/Rcut(t)] ・・・(5)
α(t)=α0×(1−t/T) ・・・(6)
Rcut(t)=Rcut0×(1−t/T) ・・・(7)
ここで、α(t)は学習率であり、その値は学習回数tに依存する。Rcut(t)は競合層302でSOMニューロンが配置されている仮想空間(2次元平面)上での距離を示す、カットオフ距離であり、その値は学習回数tに依存する(本実施形態では、このカットオフ距離Rcut(t)をSOMニューロンの座標を用いたマンハッタン距離で表す)。マンハッタン距離とは、2点の各座標の差の絶対値の総和を距離と定義するものである。
式で表すと、点a(座標(a1,a2))と点b(座標(b1,b2))の間のマンハッタン距離L(a,b)は以下の(8)式で表せる。
【0041】
【数1】
【0042】
(8)式において、添字kはベクトルの各要素を表している。nは、競合層302上の仮想空間の次元数を表している。
勝者SOMニューロン602から、競合層302上の配置で、このカットオフ距離Rcut(t)内にあるSOMニューロンが近傍SOMニューロン603となる。また、(5)式のrciは、勝者SOMニューロン602と近傍SOMニューロン603との競合層302上での距離である(本実施形態では、この距離rciをマンハッタン距離で表す)。尚、勝者SOMニューロン602について(4)式の計算をする場合には、rciは0(ゼロ)になる。また、(6)式において、α0は学習率α(t)の初期値であり、(7)式において、Rcut0はカットオフ距離Rcut(t)の初期値であり、(6)式及び(7)式において、Tは総学習回数である。
【0043】
(5)式〜(7)式に示すように、本実施形態では、競合層302上の配置で、勝者SOMニューロン602から近い位置にある近傍SOMニューロン603であるほど学習量(参照ベクトルの修正量)が大きくなり、学習回数tが増加するほど学習量(参照ベクトルの修正量)が小さくなるようにしている。
本実施形態では、総学習回数Tは100であり、カットオフ距離Rcut(t)は、その初期値Rcut0をRcut0=24としたので、24から0まで学習回数tの増加と共に減少する関数である。学習率α(t)は、その初期値α0をα0=0.5としたので、0.5から0まで学習回数tの増加と共に減少する関数であるとする。
SOM学習部206は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、勝者SOMニューロン602の情報と、SOMの状態(競合層302上の各SOMニューロン(座標と参照ベクトル))と、実績データXjとを読み出すと共に、HDD等から、総学習回数Tと、学習率の初期値α0と、カットオフ距離の初期値Rcut0を読み出して、(4)式〜(7)式の計算を行って勝者SOMニューロン602及び近傍SOMニューロン603の値(参照ベクトル)を更新し、更新後のSOMの状態の情報をRAM等に記憶することによって実現される。
【0044】
(SOM学習終了判定部207、SOM記憶部208)
SOM学習終了判定部207は、SOM学習部206によるSOMの学習を終了するか否かを判定する。例えば、SOM学習部206によるSOMの学習を総学習回数T実行すると、SOM学習終了判定部207は、SOM学習部206によるSOMの学習を終了すると判定することができる。また、勝者SOMニューロン602及び近傍SOMニューロン603について求めた(4)式の右辺第2項の値を加算し、加算値が所定値を下回った場合には、勝者SOMニューロン602及び近傍SOMニューロン603の値(参照ベクトル)の修正量が小さくなったと判断し、SOM学習終了判定部207は、SOM学習部206によるSOMの学習を終了すると判定することができる。このように、SOM学習終了判定部207によるSOMの学習の終了判定の方法は、特に限定されるものではない。
【0045】
そして、SOM学習部206によるSOMの学習を終了すると判定すると、SOM記憶部208は、そのときにSOM学習部206で学習されたSOMの状態(競合層302上の各SOMニューロン(座標と参照ベクトル))を、学習終了時のSOMニューロン(座標と参照ベクトル)として記憶媒体に記憶する。
SOM学習終了判定部207は、例えば、CPUが、コンピュータプログラムに従って、前述した判定基準による判定を行うことによって実現される。また、SOM記憶部208は、例えば、CPUが、コンピュータプログラムに従って、学習終了時のSOMの状態の情報をRAM等に記憶することによって実現される。
【0046】
以上説明した処理により、SOMの学習と、SOMによる補間データの生成とが行われる。以降説明する処理では、以下の手順で予測モデルの学習を行う。以下で学習される予測モデルは、操業結果予測対象データFの1つに対して、1つ構築される。つまり、1個の操業結果予測対象データFに対する予測を行った後に予測モデルが破棄され、また異なる操業結果予測対象データFに対して新たな予測モデルを構築することを繰り返す。
【0047】
a)SOMによって生成されたそれぞれの補間データに最も近い実績データXj(つまり、当該補間データがどの実績データXjを補間するものであるのか)を選択して、補間データとの紐付けを少なくとも1つ行う。補間データと紐付けられた実績データXjを、当該補間データに対する勝者実績データと呼ぶ(勝者実績データ関連部209)。
b)操業結果予測対象データF(段落[0018]で説明した、まだ操業実績が存在しない操業であって、操業結果因子を予測モデルによって予測したい対象である操業についての操業影響因子からなるデータ)から1つを選択して、予測モデル学習用SOMニューロン選択用データとして指定する(操業結果予測対象データ指定部210)。
【0048】
c)前記予測モデル学習用SOMニューロン選択用データは、予測したい操業結果因子がまだ存在しないデータであるため、当該予測モデル学習用SOMニューロン選択用データに近い操業条件の補間データ(SOMニューロン)を、予測モデル学習用SOMニューロン(=学習用補間データ)として選択する(予測モデル学習用SOMニューロン選択部211)。
d)前記a)で行った紐付けに従い、前記予測モデル学習用SOMニューロンに紐付けられた勝者実績データを選択する。この勝者実績データは、操業結果因子を予測したい操業結果予測対象データに近い操業条件の実績データ(=学習用実績データ)ということになる(勝者実績データ抽出部212)。
e)前記c)で選択された予測モデル学習用SOMニューロン(これを学習用補間データと呼ぶ)と、前記d)で選択された勝者実績データ(これを学習用実績データと呼ぶ)とを用いて、予測モデルの学習を行う。
以下に、各処理について詳細の手順を説明する。
【0049】
(勝者実績データ関連部209)
勝者実績データ関連部209では、予測モデルを構築する際に補間データとして使用されるSOMニューロンが、何れの実績データXjの補間データになっているかを少なくとも1つ示す。勝者実績データ関連部209は、学習終了時のSOMニューロンiを1つ指定して、指定したSOMニューロンiと、実績データ正規化部202で正規化された全ての実績データXjの値(ベクトル)とのユークリッド距離を算出する。そして、勝者実績データ関連部209は、算出したユークリッド距離が最小となる実績データXjを、指定したSOMニューロンに対する勝者実績データXcとして決定する。この具体的な計算は、例えば、(9)式のmi(t)を、学習終了時のSOMニューロンの値(参照ベクトル)とし、Xjを、実績データの値(ベクトル)とし、Xcを、勝者実績データの値(ベクトル)とすれば実現できる。尚、この勝者実績データの決定は、競合層302上のSOMニューロンのそれぞれについて個別に行われる。
|mi(t)−Xc|=min|mi(t)−Xj| ・・・(9)
【0050】
そして、勝者実績データ関連部209は、学習終了時のSOMニューロンのそれぞれと、当該SOMニューロンとユークリッド距離が最も近い勝者実績データXcの値とを相互に関連付けて記憶媒体に記憶する。
勝者実績データ関連部209は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、全ての実績データの値(ベクトル)と、学習終了時のSOMニューロンの値とを読み出し、前述した計算を行って、勝者実績データの値を算出し、学習終了時のSOMニューロンの夫々に対して、勝者実績データXcの値を関連付けてRAM等に記憶することにより実現される。
【0051】
(操業結果予測対象データ指定部210)
操業結果予測対象データ指定部210は、データ正規化部202で正規化された操業結果予測対象データF(ベクトル)の1つを指定して、それを予測モデル学習用SOMニューロン選択用データFsとする。本実施形態では、材料因子は19次元の情報であり、鍋状況因子は14次元の情報であり、温度因子は3次元の情報である。よって、予測モデル学習用SOMニューロン選択用データFsは36次元のベクトルで表現される。ただし、転炉の吹止温度を操業結果因子として予測する際には、温度因子に関しては実績値を入手できないため、目標値を用いる。
操業結果予測対象データ指定部210は、例えば、CPUが、RAM等から、操業結果予測対象データの値(ベクトル)を読み出して予測モデル学習用SOMニューロン選択用データの情報としてRAM等に記憶することにより実現される。
【0052】
(予測モデル学習用SOMニューロン選択部211)
予測モデル学習用SOMニューロン選択部211は、予測モデルとして構築するニューラルネットワーク(NN)を構築する際に必要となる学習用補間データを、SOMニューロンから選択するものである。学習終了時のSOMニューロンの値(参照ベクトル:37次元)のうち予測モデルの計算によって得られる因子(本実施形態では、操業結果因子1次元)を除く値mi-(36次元ベクトル)と、操業結果予測対象データ指定部210で指定された予測モデル学習用SOMニューロン選択用データFsの値(36次元ベクトル)とのユークリッド距離を算出する。そして、予測モデル学習用SOMニューロン選択部211は、算出したユークリッド距離が小さいものから順に、所定数のSOMニューロンを予測モデル学習用SOMニューロン(学習用補間データ)として選択する。尚、以下の説明では、前記所定数を必要に応じて「近傍点数」と称する。
【0053】
具体的な計算は、例えば、(10)式のFsを、予測モデル学習用SOMニューロン選択用データの値(ベクトル)とし、mi-(t)を、学習終了時のSOMニューロンの値のうち予測モデル学習用SOMニューロン選択用データに対応する因子の値(=NNの予測によって得られる因子を除く値(ベクトル))とし、mc-(t)を、選択するSOMニューロンの値(ベクトル)とすれば実現できる。
|Fs−mc-(t)|=min|Fs−mi-(t)| ・・・(10)
【0054】
ここで、本実施形態では、近傍点数として、「25、121、225、441、及び625」の5つの数を予め設定している。本実施形態では、近傍点数が、これら5つの近傍点数のそれぞれの場合について、後述するようにして(NN予測結果出力部216により)操業結果因子(転炉の吹止温度)を算出する。そして、算出された5つの操業結果因子(転炉の吹止温度)のうち、以下の(11)式で定義される決定係数R2の値が最も大きくなったときの操業結果因子(転炉の吹止温度)を採用する。
【0055】
【数2】
【0056】
(11)式において、jは、1,2,・・・,Jの整数(Jは実績データの数)である。yjは、転炉の吹止温度の実績値である。y-は、転炉の吹止温度の実績値yjの平均値である。fjは、転炉の吹止温度の予測値である。
【0057】
予測モデル学習用SOMニューロン選択部211は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、予測モデル学習用SOMニューロン選択用データFsの情報と、学習終了時のSOMニューロンの値とを読み出し、前述した計算を行って、SOMニューロンを予測モデル学習用SOMニューロンとして選択し、選択後の予測モデル学習用SOMニューロンの値をRAM等に記憶することにより実現される。
【0058】
(勝者実績データ抽出部212)
勝者実績データ抽出部212では、予測モデルの学習に用いる学習用実績データとして、SOMニューロンによる補間データに対応する勝者実績データXcを抽出する。すなわち、勝者実績データ抽出部212は、予測モデル学習用SOMニューロン選択部211で選択された予測モデル学習用SOMニューロン(学習用補間データ)に対し、勝者実績データ関連部209によって関連付けられた勝者実績データXcの値(ベクトル)を抽出する。そして、勝者実績データ抽出部212は、予測モデル学習用SOMニューロン選択部211で選択された予測モデル学習用SOMニューロンの値(参照ベクトル)と、抽出した勝者実績データの値(ベクトル)とをNNの学習に使用するデータ(学習用データ)とする。ここで、勝者実績データ抽出部212は、抽出した勝者実績データの中に、同じ実績データが重複する場合には、それらの重複を除いたものを学習用実績データとする。重複する実績データを学習用実績データとすると、後述するNNの学習が適切に行われなくなる虞があるからである。
勝者実績データ抽出部212は、例えば、CPUが、RAM等から、予測モデル学習用SOMニューロンの値(参照ベクトル)と、当該予測モデル学習用SOMニューロンに関連付けられている勝者実績データの値(ベクトル)を読み出し、勝者実績データの値の重複を排除した上で、それらを学習用データとしてRAM等に記憶することにより実現される。
【0059】
(NN学習部213、NN記憶部214)
NN学習部213は、予測モデルの一例である階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。
本実施形態では、出力層を操業結果因子(転炉の吹止温度)とし、入力層を操業影響因子(材料因子、鍋状況因子、及び温度因子)とする、3層のニューラルネットワークを用いるものとする。ここで、出力層と入力層の数は、それぞれの因子の数に等しい数とする。すなわち、出力層の数を1とし、入力層の数を36とする。また、中間層の数は、入力層の数と、学習用データ(のセット)の数とのうち、何れか少ない方の数とする。
【0060】
NN学習部213は、3層のニューラルネットワークの入力層と出力層に、勝者実績データ抽出部212で抽出された学習用実績データ(SOMニューロンによる補間データに対応する勝者実績データXc)と、予測モデル学習用SOMニューロン選択部211で選択された学習用補間データ(予測モデル学習用SOMニューロン)とからなる学習用データを与え、それらの値に合うように、入力層と中間層とを結合する結合重み係数(重み行列)及び中間層と出力層とを結合する結合重み係数(重み行列)を更新(学習)する。本実施形態では、この学習をバックプロパゲーションにより行うものとする。ただし、NNの学習の方法は、バックプロパゲーションに限定されるものではない。そして、NN学習部213は、このような学習を、入力層と出力層に与える学習用データを異ならせて繰り返し行う。ここで、全ての学習用データを1度ずつ学習に使用する(全ての学習用データの値を1度ずつ入力層と出力層に与える)ことで1回の学習が行われる。
【0061】
NN学習部213は、このような学習を行う度に、NNの学習を終了させるか否かを判定する。例えば、学習回数が所定値(例えば10万回)になったときにNNの学習を終了させると判断することができる。また、学習後のニューラルネットワークによる予測の結果と、学習用データの値との平均学習誤差が所定値(例えば1%)を下回ったときにNNの学習を終了させると判断することができる。
NN学習部213は、NNの学習を終了すると判断したときに得られているニューラルネットワークの情報をNN記憶部214に記憶する。
NN学習部213は、例えば、CPUが、RAM等から、学習用データを読み出して前述した処理を行ってニューラルネットワークを学習し、学習終了後のニューラルネットワークの情報を、例えばHDDにより実現されるNN記憶部214に記憶することによって実現される。尚、NN学習部213によるニューラルネットワークの学習は、公知の技術で実現できるので、ここでは、その詳細な説明を省略する。
【0062】
(NN予測部215)
NN予測部215は、オペレータによるユーザインターフェースの操作に基づいて、NN記憶部214に記憶されているニューラルネットワークの入力層に与える入力データ(操業結果予測対象データ指定部210で指定された予測モデル学習用SOMニューロン選択用データFs)を取得し、取得したデータをニューラルネットワークの入力層に与えて操業結果因子を得る(予測する)。本実施形態では、NN予測部215は、材料因子、鍋状況因子、及び温度因子のデータ(操業結果予測対象データ)を取得し、操業結果因子(転炉の吹止温度)を得る。操業結果予測対象データには、まだ操業実績が存在しない温度因子のデータを含む為、実績のない温度因子には目標値を設定し、入力に用いる。
NN予測部215は、例えば、CPUが、ユーザインターフェースの操作に基づく入力データをRAM等に記憶すると共に、HDD等から、学習終了後のニューラルネットワークの情報を読み出して、前述した処理を行うことによって、転炉の吹止温度の予測値を求めることにより実現される。
【0063】
(NN予測結果出力部216)
NN予測結果出力部216は、NN予測部215で予測された操業結果因子を出力する。NN予測結果出力部216は、例えば、転炉の吹止温度の予測値を、液晶ディスプレイ等の表示装置に表示したり、操業予測装置200に接続されたリムーバル記憶媒体に記憶したり、操業予測装置200内のHDD等に記憶したりすることができる。
NN予測結果出力部216は、例えば、CPUが、RAM等から、転炉の吹止温度の予測値を読み出して、表示データを生成したり、リムーバル記憶媒体やHDD等に記憶したりする処理を行うことにより実現される。
【0064】
(NN破棄部217)
予測モデル学習に用いたSOMニューロンや実績データが特定の条件に適合したデータのみであるため、幅広い条件での予測に用いるには一般性に欠ける。そのため、NN破棄部217では、特定の条件が一致しない場合に予測モデルを再利用することが難しいので、これを破棄させる。NN破棄部217は、NN予測結果出力部216による処理が1回終了すると、NN記憶部214に記憶されている学習終了後のニューラルネットワークの情報を破棄(削除)する。このように本実施形態では、one-timeのNNの学習を採用するようにしている。
NN破棄部217は、例えば、CPUが、転炉の吹止温度の予測値の出力処理を終えた後、HDD等に記憶されている学習終了後のニューラルネットワークの情報を破棄する処理を行うことにより実現される。
【0065】
(動作フローチャート)
次に、図7のフローチャートを参照しながら、操業予測装置200の処理動作の一例を説明する。
まず、図7−1のステップS1において、データ取得部201は、実績データXjと操業結果予測対象データFを外部から取得する。
次に、ステップS2において、データ正規化部202は、ステップS1で取得された実績データXjと操業結果予測対象データFの値を正規化する。
次に、ステップS3において、SOMパラメータ設定部203は、競合層302において、2次元の格子状にSOMニューロンを配置し、配置したSOMニューロンのそれぞれに対して初期値(mi(0))を設定する。
【0066】
次に、ステップS4において、実績データ選択部204は、ステップS2で正規化された実績データXj(のセット)のうち、未選択のものを1つ選択する。
次に、ステップS5において、勝者SOMニューロン決定部205は、ステップS4で選択された実績データXjの値(ベクトル)とユークリッド距離が最も近いSOMニューロンを勝者SOMニューロンと602して決定する。
次に、ステップS6において、SOM学習部206は、ステップS5で決定された勝者SOMニューロン602の値(参照ベクトル)と、競合層302上の座標位置で勝者SOMニューロン602に近い位置にある近傍SOMニューロン603の値(参照ベクトル)とを、ステップS4で選択された実績データXjの値(ベクトル)に近づけるように修正(学習)する。
【0067】
次に、ステップS7において、SOM学習終了判定部207は、SOMの学習を終了するか否かを判定する。判定基準の一例は前述した通りである。この判定の結果、SOMの学習を終了しない場合には、ステップS4に戻り、別の実績データが選択され、勝者SOMニューロン602の決定と、勝者SOMニューロン602及び近傍SOMニューロン603の修正とを行う。そして、SOMの学習を終了すると判定されると、ステップS8に進む。
ステップS8に進むと、SOM記憶部208は、ステップS7でSOMの学習を終了すると判定されたときのSOMの状態(競合層302上の各SOMニューロン(座標と参照ベクトル))を、学習終了時のSOMニューロンの値(参照ベクトル)として記憶する。
【0068】
次に、ステップS9において、勝者実績データ関連部209は、ステップS2で正規化された全ての実績データXjの値(ベクトル)のうち、ステップS8で記憶された学習終了時のSOMニューロンの値(参照ベクトル)とユークリッド距離が最も近い実績データを勝者実績データXcとして決定する。そして、勝者実績データ関連部209は、学習終了時のSOMニューロンのそれぞれと、当該SOMニューロンとユークリッド距離が最も近い勝者実績データXcの値とを相互に関連付けて記憶する。
次に、図7−2のステップS10において、操業結果予測対象データ指定部210は、ステップS2で正規化された操業結果予測対象データFの内の1つを予測モデル学習用SOMニューロン選択用データFsとして指定する。
【0069】
次に、ステップS11において、予測モデル学習用SOMニューロン選択部211は、ステップS8で記憶された学習終了時のSOMニューロンのうち、予測モデルによって得られる因子(操業結果因子)を除く値(ベクトル)が、ステップS10で指定された予測モデル学習用SOMニューロン選択用データFsの値(ベクトル)と近いものを、予測モデル学習用SOMニューロンとして所定数(近傍点数)だけ選択する。本実施形態では、近傍点数は、「25、121、225、441、625」であるので、5組の予測モデル学習用SOMニューロンが選択される。これら5組の予測モデル学習用SOMニューロンのそれぞれについてステップS11〜S17の処理が繰り返し行われることにより転炉の吹止温度の予測値が5つ得られる。そして、これら5つの転炉の吹止温度の予測値から、(11)式を用いて決定係数R2が算出される。本実施形態では、これら5つの操業結果因子(転炉の吹止温度の予測値)のうち、最も大きな値の決定係数R2が算出されたときの操業結果因子(転炉の吹止温度の予測値)が採用される。
【0070】
次に、ステップS12において、勝者実績データ抽出部212は、ステップS11で選択された予測モデル学習用SOMニューロンに関連付けて記憶されている勝者実績データXcの値(ベクトル)を抽出する(ステップS9を参照)。そして、勝者実績データ抽出部212は、ステップS11で選択された予測モデル学習用SOMニューロンの値(参照ベクトル)と、抽出した勝者実績データXcの値(ベクトル)とを予測モデルの学習に使用する学習用データとする。
【0071】
次に、ステップS13において、NN学習部213は、3層のニューラルネットワークの入力層と出力層に、ステップS11で選択された予測モデル学習用SOMニューロンと、ステップS12で抽出された勝者実績データXcとからなる学習用データを与え、それらの値に合うように、入力層と中間層とを結合する結合重み係数(重み行列)及び中間層と出力層とを結合する結合重み係数(重み行列)を更新(学習)する。
次に、ステップS14において、NN学習部213は、予測モデルの一例であるニューラルネットワークの学習を終了するか否かを判定する。判定基準の一例は前述した通りである。この判定の結果、ニューラルネットワークの学習を終了しないと判定された場合には、ステップS13に戻る。そして、ニューラルネットワークの学習を終了すると判定されると、ステップS15に進む。
【0072】
ステップS15に進むと、NN学習部213は、学習終了時のニューラルネットワークの情報をNN記憶部214に記憶する。
次に、ステップS16において、NN破棄部217は、学習終了時のニューラルネットワークを使用した転炉の吹止温度の予測値がNN予測部215によって求められ、且つ、その結果に対する出力処理がNN予測結果出力部216によって行われるまで(学習終了時のニューラルネットワークを使用した予測・出力が行われるまで)待機する。そして、学習終了時のニューラルネットワークを使用した予測・出力が行われると、ステップS17に進む。
ステップS17に進むと、NN破棄部217は、ステップS15でNN記憶部214に記憶された学習終了後のニューラルネットワークの情報を破棄(削除)する。
【0073】
(まとめ)
本実施形態の冒頭で説明したように、実績データ101のみを学習用データとした局所予測モデルを用いると、学習用データの数が少ないために、予測結果110と真の入出力関係120との差が大きくなることがある(図1(a)を参照)。これに対し、本実施形態では、以上の説明から明らかなように、実績データを元にSOMを構築し得られるSOMニューロンが、実績データに対する予測モデルの構築の際に補間データとして用いることが出来る。すなわち、図1(b)に示すように、実績データ101に加えてSOMニューロン102を学習用データとして加えた局所予測モデルを用いると、予測結果130の真の入出力関係120に対する精度が向上する。
【0074】
以上のように本実施形態では、実績データに最も近いSOMニューロンを勝者SOMニューロン602とし、勝者SOMニューロン602の値とそのSOMニューロン602の座標の近傍にある近傍SOMニューロン603の値とを、実績データの値に近づけるように修正してSOMの学習を行う。SOMの学習終了時のSOMニューロン602、603のそれぞれについて、値が最も近い実績データを相互に関連付けて記憶する。そして、操業結果予測対象データと値が近い所定数(近傍点数)のSOMニューロン602、603と、そのSOMニューロン602、603に関連付けられている実績データとを学習用データ101、102とする。したがって、予測モデルの学習用データとして適切な補間データを生成し加えることによって、データ数が少ないことで生じる未学習部分の発生や過学習を抑制することができる。よって、操業予測(転炉の吹止温度の予測)を正確に行うことができる。
【0075】
また、本実施形態では、ニューラルネットワークを使用した予測・出力が1回行われると、そのニューラルネットワークを破棄するようにした。したがって、直近の操業実績を反映させたニューラルネットワークを構築することができ、実際の操業を可及的に反映させた予測を行うことができる。
【0076】
(変形例)
本実施形態では、予測モデルとして階層型ニューラルネットワークを用いた場合を例に挙げて説明したが、予測モデルは階層型ニューラルネットワークに限定されない。すなわち、操業結果因子に影響を与える因子であって、製品又は半製品を製造するための操業因子である操業影響因子を入力し、当該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力する予測モデルであれば、どのような予測モデルであってもよい。また、操業結果因子は、転炉の吹止温度に限定されない。さらに、操業影響因子も、前述したものに限定されない。
【0077】
また、本実施形態では、予測モデル学習用SOMニューロン選択用データと値が近い所定数(近傍点数)の全てのSOMニューロン602、603を学習用補間データとし、そのSOMニューロン602、603に関連付けられている実績データを学習用実績データとし、学習用補間データと学習用実績データとをあわせて学習用データとした場合を例に挙げて説明した。しかしながら、例えば、予測モデル学習用SOMニューロン選択用データと値が近い所定数(近傍点数)のSOMニューロン602、603のうち、予測モデル学習用SOMニューロン選択用データに最も値が近いSOMニューロン602、603を除いたものと、所定数のSOMニューロン602、603に関連付けられている学習用実績データとを学習用データとしてもよい。このようにすれば、学習用実績データに過剰にフィッティングされたニューラルネットワークが構築されることを、より確実に防止することができる。
【0078】
<第2の実施形態>
次に、本発明の第2の実施形態について説明する。
前述した第1の実施形態では、実績データXjに含まれる、36個の操業影響因子のデータ(36次元のデータ)の全てを用いて、SOMの学習を行うようにした。これに対し、本実施形態では、SOMの学習に用いる操業影響因子を選択し、選択した操業影響因子のデータを用いてSOMの学習を行う。このように、本実施形態と、第1の実施形態とは、実績データ選択部204で選択される実績データXjが、全ての操業影響因子のデータではなく、前記のようにして選択された操業影響因子のデータである点が主として異なる。よって、本実施形態の説明において、第1の実施形態と同一の部分については、図1〜図7に付した符号と同一の符号を付す等して詳細な説明を省略する。
【0079】
図8は、操業予測装置800の機能的な構成の一例を示す図である。本実施形態の操業予測装置800も、第1の実施形態で説明した操業予測装置200と同様に、例えば、CPU、ROM、RAM、HDD、及び各種のインターフェースを備えた情報処理装置(例えばPC)を用いることにより実現される。
【0080】
(感度計算用NN学習部801)
感度計算用NN学習部801は、後述する操業影響因子の感度を計算するために使用する感度計算用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。感度計算用階層型ニューラルネットワークの学習方法は、NN学習部213で説明した階層型ニューラルネットワークと同じであるので、ここでは、その詳細な説明を省略する。
【0081】
ただし、感度計算用NN学習部801が構築する感度計算用階層型ニューラルネットワークは、予測モデル学習用SOMニューロンと勝者実績データXcとからなる学習用データを用いて得られるものではなく、実績データXjを学習用データとして用いることにより得られる通常の階層型ニューラルネットワークである。ここで、感度計算用階層型NN学習部801は、データ正規化部202により正規化された実績データXjを用いて感度計算用階層型ニューラルネットワークを構築する。よって、感度計算用階層型ニューラルネットワークへの入力と、感度計算用階層型ニューラルネットワークからの出力は、正規化された値となる。
感度計算用階層型NN学習部801は、例えば、CPUが、コンピュータプログラムに従って、RAM等から実績データを読み出して、感度計算用階層型ニューラルネットワークの学習を行い、その結果を示す情報をRAM等に記憶することにより実現される。
【0082】
(第1の感度計算用操業結果因子導出部802)
第1の感度計算用操業結果因子導出部802は、前記(1)〜(36)の操業影響因子の全ての値が(同一の)特定の値であるデータを、感度計算用階層型NN学習部801により学習された感度計算用階層型ニューラルネットワークに入力することにより、その出力である操業結果因子を得る。本実施形態では、特定の値として、正規化値の最大値である「1」と最小値である「0」との中央値である「0.5」を採用する。
尚、以下の説明では、第1の感度計算用操業結果因子導出部802で導出された操業結果因子の値を、必要に応じて「操業結果因子の基準値」と称する。
第1の感度計算用操業結果因子導出部802は、例えば、CPUが、コンピュータプログラムに従って、RAM等に記憶されている感度計算用階層型ニューラルネットワークに対して「0.5」を入力することにより、操業結果因子の基準値の情報を導出してRAM等に記憶することにより実現される。
【0083】
(第2の感度計算用操業結果因子導出部803)
第2の感度計算用操業結果因子導出部803は、前記(1)〜(36)の操業影響因子のうち、1つの操業影響因子の値が、第1の感度計算用操業結果因子導出部802で設定された特定の値とは異なる値であり、残りの操業影響因子の値が、第1の感度計算用操業結果因子導出部802で設定された特定の値であるデータを、感度計算用NN学習部801により学習された感度計算用階層型ニューラルネットワークに入力することにより、その出力である操業結果因子を得る。本実施形態では、第1の感度計算用操業結果因子導出部802で設定された特定の値とは異なる値として、正規化値の最大値である「1」を採用する。また、本実施形態では、前記(1)〜(36)の操業影響因子の数は「36」である。よって、第2の感度計算用操業結果因子導出部803は、36個の操業結果因子のそれぞれの値を「1」としたときの操業結果因子を36個得る。尚、以下の説明では、第2の感度計算用操業結果因子導出部803で導出された操業結果因子の値を、必要に応じて「操業結果因子の変動値」と称する。
【0084】
第2の感度計算用操業結果因子導出部803は、例えば、CPUが、コンピュータプログラムに従って、RAM等に記憶されている感度計算用階層型ニューラルネットワークに対して、1つの操業影響因子の値として「1」を、残りの操業影響因子の値として「0.5」を、それぞれ入力することにより、操業結果因子の変動値の情報を導出してRAM等に記憶することにより実現される。
【0085】
(感度導出部804)
感度導出部804は、前記(1)〜(36)の操業影響因子の感度をそれぞれ導出する。本実施形態では、操業影響因子の感度は、第1の感度計算用操業結果因子導出部802で導出された「操業結果因子の基準値」と、第2の感度計算用操業結果因子導出部803で得られた「操業結果因子の変動値」との差分の絶対値で定義される。
【0086】
前述したように、本実施形態では、前記(1)〜(36)の操業影響因子の数は「36」であり、第2の感度計算用操業結果因子導出部803により36個の操業結果因子の変動値が得られる。よって、感度導出部804は、36個の操業影響因子のそれぞれについて感度を導出する。
感度導出部804は、例えば、CPUが、コンピュータプログラムに従って、RAM等から、第1の操業影響因子の基準値と第2の操業影響因子の変動値とを読み出し、前述した計算を行って、各操業影響因子の感度を導出してRAM等に記憶することにより実現される。
【0087】
(操業影響因子選択用NN学習部805、誤差評価部806、操業影響因子選択部807の概要)
本実施形態では、操業影響因子を入力層とし、操業結果因子を出力層とする3層の階層型ニューラルネットワークである操業影響因子選択用階層型ニューラルネットワークを用いて、SOMの学習を行うのに使用する1又は複数の操業影響因子を決定する。
このために、まず、操業影響因子選択用NN学習部805は、操業影響因子選択用階層型ニューラルネットワークを構築する。誤差評価部806は、構築された操業影響因子選択用階層型ニューラルネットワークの入力層に操業影響因子の実績データを与えることによって操業結果因子の予測値を導出し、当該操業結果因子の予測値と操業結果因子の実績データとの誤差を導出する。このような操業影響因子選択用階層型ニューラルネットワークの構築と誤差の導出とを、操業影響因子選択用階層型ニューラルネットワークの入力層(操業影響因子)を、感度の高いものから順に1つずつ増やして行う。これにより、入力層の数が異なる複数の操業影響因子選択用階層型ニューラルネットワークのそれぞれについての誤差(評価)が得られる。操業影響因子選択部807は、これら複数の操業影響因子選択用階層型ニューラルネットワークのうち、誤差が最も小さい操業影響因子選択用階層型ニューラルネットワークを割り出し、割り出した操業影響因子選択用階層型ニューラルネットワークの入力層となっている操業影響因子を、SOMの学習を行うのに使用する1又は複数の操業影響因子として決定する。以下に、操業影響因子選択用NN学習部805、誤差評価部806、及び操業影響因子選択部807が有する機能の詳細を説明する。
【0088】
(操業影響因子選択用NN学習部805)
操業影響因子選択用NN学習部805は、操業影響因子選択用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。
操業影響因子選択用NN学習部805は、感度導出部804で導出された「各操業影響因子の感度」の値が大きい順に、操業影響因子を1つずつ選択し、操業影響因子を1つずつ増やす。次に、操業影響因子選択用NN学習部805は、選択した操業影響因子を、操業影響因子選択用階層型ニューラルネットワークの入力層とし、前記(37)の操業結果因子(転炉の吹止温度)を出力層とする、3層の階層型ニューラルネットワークを、操業影響因子選択用階層型ニューラルネットワークとして構築する。
【0089】
そして、操業影響因子選択用NN学習部805は、構築した操業影響因子選択用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。操業影響因子選択用階層型ニューラルネットワークの学習方法は、NN学習部213で説明した階層型ニューラルネットワークと同じであるので、ここでは、その詳細な説明を省略する。
【0090】
ただし、操業影響因子選択用NN学習部805が構築する操業影響因子選択用階層型ニューラルネットワークも、前述した感度計算用階層型ニューラルネットワークと同様に、実績データXjを学習用データとして用いる通常の階層型ニューラルネットワークである。また、操業影響因子選択用NN学習部805は、前述した感度計算用階層型ニューラルネットワークと同様に、データ正規化部202により正規化された実績データXjを用いて感度計算用階層型ニューラルネットワークを構築する。よって、操業影響因子選択用階層型ニューラルネットワークへの入力と、操業影響因子選択用階層型ニューラルネットワークからの出力は、正規化された値となる。
【0091】
操業影響因子選択用NN学習部805は、例えば、CPUが、コンピュータプログラムに従って、RAM等から実績データを読み出して、操業影響因子選択用階層型ニューラルネットワークの学習を行い、その結果を示す情報をRAM等に記憶することにより実現される。
【0092】
(誤差評価部806)
誤差評価部806は、操業影響因子選択用NN学習部805により学習された操業影響因子選択用階層型ニューラルネットワークの入力層に、当該入力層に対応する操業影響因子の実績データXjを入力することにより、その出力である操業結果因子の予測値を得る。そして、誤差評価部806は、当該操業結果因子の予測値と、操業結果因子の実績データXjの値との誤差を、実績データXjのそれぞれについて導出し、それらの誤差二乗和を算出する。
本実施形態では、前記(1)〜(36)の操業影響因子の数は「36」であるので、操業影響因子選択用NN学習部805により、36個の操業影響因子選択用階層型ニューラルネットワークが構築される。したがって、誤差評価部806は、操業結果因子の予測値の計算として36回の計算を行う。よって、36個の誤差二乗和が算出される。また、本実施形態では、操業影響因子選択用NN学習部805により1つの操業影響因子選択用階層型ニューラルネットワークが構築される度に、誤差評価部806により1つの誤差二乗和が算出され、このような操業影響因子選択用階層型ニューラルネットワークの構築と誤差二乗和の算出とが36回繰り返し行われるようにしている。
誤差評価部806は、例えば、CPUが、コンピュータプログラムに従って、前述した誤差二乗和を導出し、導出した誤差二乗和をRAM等に記憶することにより実現される。
【0093】
(操業影響因子選択部807)
操業影響因子選択部807は、誤差評価部806により導出された36個の誤差二乗和のうち、最も値が小さい誤差二乗和が得られたときに操業影響因子選択用NN選択部805で選択された操業影響因子を、SOMの学習に使用する操業影響因子として決定する。
操業影響因子選択部807は、例えば、CPUが、コンピュータプログラムに従って、最も値が小さい誤差二乗和が得られたときの操業影響因子の情報をRAM等に記憶することにより実現される。
【0094】
学習用実績データ選択部204においては、データ正規化部202で正規化された実績データXj(のセット)のうち、操業影響因子選択部807で選択された操業影響因子のデータが選択されることになる。
【0095】
(動作フローチャート)
次に、図9のフローチャートを参照しながら、操業予測装置800の処理動作の一例を説明する。図9に示すフローチャートは、例えば、図7−1のステップS2とステップS3の間で実行されるものである。
まず、ステップS21において、感度計算用NN学習部801は、実績データXjを学習用データとして感度計算用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。
次に、ステップS22において、第1の感度計算用操業結果因子導出部802は、前記(1)〜(36)の操業影響因子の全ての値が「0.5」であるデータを、ステップS21で学習された後の感度計算用階層型ニューラルネットワークに入力することにより、その出力である操業結果因子の基準値を得る。
【0096】
次に、ステップS23において、第2の感度計算用操業結果因子導出部803は、前記(1)〜(36)の操業影響因子のうち、未選択の操業影響因子を1つ選択する。
次に、ステップS24において、第2の感度計算用操業結果因子導出部803は、ステップS23で選択した操業影響因子の値が「1」であるデータと、残りの操業影響因子の値が「0.5」であるデータを、ステップS21で学習された後の感度計算用階層型ニューラルネットワークに入力することにより、その出力である操業結果因子の変動値を得る。
【0097】
次に、ステップS25において、第2の感度計算用操業結果因子導出部803は、前記(1)〜(36)の操業影響因子の全てを選択したか否かを判定する。この判定の結果、前記(1)〜(36)の操業影響因子の全てを選択していない場合には、ステップS23に戻る。そして、前記(1)〜(36)の操業影響因子の全てを選択するまで、ステップS23〜S25の処理を繰り返し行う。
そして、前記(1)〜(36)の操業影響因子の全てについて、操業結果因子の変動値が得られると、ステップS26に進む。
【0098】
ステップS26に進むと、感度導出部804は、ステップS22で導出された「操業結果因子の基準値」と、ステップS24で導出された「36個の操業結果因子の変動値」との差分の絶対値である感度をそれぞれ導出する。
次に、ステップS27において、操業影響因子選択用NN学習部805は、ステップS26で導出された36個の未選択の感度のうち、最も値が大きい感度が得られたときの操業結果因子を1つ選択する。
次に、ステップS28において、操業影響因子選択用NN学習部805は、実績データXjを学習用データとして、現在の時点までにステップS27で選択された全ての操業影響因子を入力層とする操業影響因子選択用階層型ニューラルネットワークを構築し、構築した操業影響因子選択用階層型ニューラルネットワークの結合重み係数(重み行列)の学習を行う。
【0099】
次に、ステップS29において、誤差評価部806は、ステップS28で構築された操業影響因子選択用階層型ニューラルネットワークの入力層に、当該入力層に対応する操業影響因子の実績データXjを入力することにより得られた操業結果因子の値と、操業結果因子の実績データXjの値との誤差二乗和を導出する。
次に、ステップS30において、誤差評価部806は、前記(1)〜(36)の操業影響因子の全てを選択したか否かを判定する。この判定の結果、前記(1)〜(36)の操業影響因子の全てを選択していない場合には、ステップS27に戻る。そして、前記(1)〜(36)の操業影響因子の全てを選択するまで、ステップS27〜S30の処理を繰り返し行う。
【0100】
そして、前記(1)〜(36)の操業影響因子の全てについての誤差が得られると、ステップS31に進む。
ステップS31に進むと、操業影響因子選択部807は、ステップS29で導出された「前記(1)〜(36)の操業影響因子の全てについての誤差二乗和」のうち、最も値が小さい誤差二乗和が得られたときの操業影響因子を、SOMの学習に使用する操業影響因子として決定する。
そして、図7のフローチャートのステップS3に進む。この場合、ステップS4において選択される実績データXjは、前記(1)〜(36)の操業影響因子のうち、ステップS31で決定された操業影響因子のデータとなる。
【0101】
第1の実施形態で説明したように、SOMは、多次元ベクトルの形で表現された実績データの集合から各々のデータの類似性を見出し、類似するデータ同士を2次元平面上の近傍へマッピングしておくことで、多数の高次元データを分類し、その特徴を抽出するデータマイニング手法である。したがって、操業結果因子に与える影響が小さい操業影響因子であっても、離散的な値をとる操業影響因子等、各々の値を明確に分類することができる操業影響因子が、SOMによる実績データXjの分類に大きく影響を与えてしまう虞がある。そうすると、予測モデルの学習に使用する学習用データが、必ずしも予測モデルの学習に適したものにならなくなる虞がある。これに対し、本実施形態では、操業結果因子の基準値と操業結果因子の変動値との差分の絶対値で定義される感度に基づいて、SOMの学習に使用する操業影響因子を選択するようにした。したがって、操業結果因子に与える影響が相対的に大きい操業影響因子の感度の値が相対的に大きくなる傾向になる。よって、操業結果因子に与える影響が相対的に小さい操業影響因子を可及的に排除して、SOMの学習を行うことができる。その結果、予測モデルの学習に使用する学習用データを、より予測モデルの学習に適したものにすることができる。
【0102】
尚、本実施形態では、操業影響因子の感度に基づいて、SOMの学習に使用する操業影響因子を自動的に選択するようにした。しかしながら、必ずしもこのようにする必要はない。例えば、ユーザが、操業予測装置から提示された操業影響因子の感度を参照して、SOMの学習に使用する操業影響因子を選択し、操業予測装置が、ユーザにより選択された操業影響因子の実績データXjを用いてSOMの学習を行ってもよい。また、SOMの学習に使用する操業影響因子を自動的に選択する方法は、前述した方法に限定されるものではない。例えば、操業影響因子の感度の大きいものから所定の数(又は所定の割合)の操業影響因子をSOMの学習に使用する操業影響因子として選択してもよい。このように、SOMの学習に使用する操業影響因子については、感度に基づいて選択していればどのようにして選択してもよい。
【0103】
また、本実施形態では、全ての操業影響因子について誤差二乗和を導出するようにした。しかしながら、必ずしもこのようにする必要はない。例えば、誤差二乗和の値が、前回の値よりも大きくなった時点で誤差二乗和の導出を止め、それまでに導出した誤差二乗和の中で最も値が小さい誤差二乗和が得られたときの操業影響因子を、SOMの学習に使用する操業影響因子として決定してもよい。本実施形態では、操業影響因子選択用階層型ニューラルネットワークを学習する際に、入力層として採用する操業影響因子として、感度が大きい操業影響因子から順番に選択する。したがって、操業影響因子の選択数がある範囲までは、操業影響因子の選択数が多くなると誤差二乗和は小さくなるが、その範囲を超えると、操業影響因子の選択数が多くなると誤差二乗和は逆に大きくなる場合が多いと考えらえる。よって、誤差二乗和の値が、前回の値よりも大きくなった時点で誤差二乗和の導出を止めても、操業影響因子の選択に大きな誤りは起こらない。
【0104】
<実施例>
次に、本実施形態の実施例を説明する。
ここでは、4800件(4800チャージ)の実績データXjを使用した。1件の実績データXjは、前述した(1)〜(37)の37次元のデータである。これら4800組の実績データXjを時間順にソートして、操業時間が新しい800件の実績データXjを検証用データとし、残りの4000件の実績データXjを学習用データとした。
【0105】
学習用データは、操業結果因子と操業影響因子の全てが既知であるとする。本実施例では、SOMのマップサイズ(2次元の格子状に配置したSOMニューロンの数)を「400×400」とした。また、前述した操業影響因子の感度に基づいて、SOMの学習に使用する操業影響因子を選択する計算を行った結果、前記(1)〜(36)の操業影響因子のうち、SOMの学習に用いる操業影響因子は、以下の21個の操業影響因子となった。よって、実績データ選択部204で選択される実績データXjは、これら21個の操業影響因子のデータとなる。
【0106】
(1)装入量合計(材料因子);溶鋼量
(2)D01(材料因子);金属種D01の投入量
(3)D02(材料因子);金属種D02の投入量
(4)D03(材料因子);金属種D03の投入量
(5)D04(材料因子);金属種D04の投入量
(6)D05(材料因子);金属種D05の投入量
(7)D06(材料因子);金属種D06の投入量
(8)D07(材料因子);金属種D07の投入量
(9)D08(材料因子);金属種D08の投入量
(10)D09(材料因子);金属種D09の投入量
(11)D10(材料因子);金属種D10の投入量
(12)D合計(材料因子);金属種D01〜D10の投入量の合計
【0107】
(13)G01(材料因子);金属種G01の投入量
(14)G02(材料因子);金属種G02の投入量
(15)G03(材料因子);金属種G03の投入量
(16)G04(材料因子);金属種G04の投入量
(17)G05(材料因子);金属種G05の投入量
(18)G06(材料因子);金属種G06の投入量
(19)G合計(材料因子);金属種G01〜G10の投入量の合計
(20)取鍋最終(温度因子);出鋼温度
(30)空鍋時間(鍋状況因子);空鍋時間
【0108】
一方、検証用データは、操業結果因子(転炉の吹止温度)を未知とする(伏せておく)データである。この操業結果因子が予測対象であり、この検証用データが、操業結果予測対象データ指定部210で指定される予測モデル学習用SOMニューロン選択用データFsとなる。
【0109】
そして、検証用データと、学習用データを用いた学習が終了した時のSOMニューロンの値のうち、操業結果因子を除く値とのユークリッド距離が小さいものから順に、予め設定した近傍点数(=25、121、225、441、625)と同数のSOMニューロンを予測モデル学習用SOMニューロン(学習用補間データ)として選択した。
そして、予測モデル学習用SOMニューロンの値と、予測モデル学習用SOMニューロンに関連付けて記憶されている勝者実績データXcの値とを学習モデルの学習に使用する学習データとして、3層のニューラルネットワークの結合重み係数(重み行列)を更新(学習)した。
ここで、3層のニューラルネットワークのニューロン数を、以下のようにした。
入力層:21
中間層:21
出力層:1
また、結合重み係数(重み行列)については、PSO(Particle Swarm Optimization)を用いて計算(学習)した。
【0110】
学習が終了した3層のニューラルネットワークの入力層に、検証用データを入力することにより、当該3層のニューラルネットワークの出力層から出力される操業結果因子(転炉の吹止温度)を予測温度とした。
そして、予め設定されている近傍点数(25、121、225、441、625)のうち、最も値が大きい決定係数R2が得られたときの近傍点数は「225」であった。また、近傍点数が「225」であるときの決定係数R2の値は「0.833」であった。よって、近傍点数が「225」であるときの操業結果因子(転炉の吹止温度)を予測温度として採用した。
【0111】
そして、検証用データの(伏せておいた)操業結果因子(転炉の吹止温度)を実績温度とした。図10は、転炉の吹止温度の予測値(予測温度)と実績値(実績温度)との関係の一例を示す図である。図10に示すように、転炉の吹止温度の予測値(予測温度)と実績値(実績温度)とには高い相関があることが分かる。
【0112】
(請求項との関係)
尚、本実施形態では、例えば、操業結果因子(転炉の吹止温度)が「操業予測因子」に対応する。また、例えば、材料因子、鍋状況因子、及び温度因子が「操業影響因子」に対応する。
また、例えば、データ取得部201を用いることにより「データ取得手段」が実現され、勝者SOMニューロン決定部205を用いることにより「勝者SOMニューロン決定手段」が実現される。また、SOM学習部206を用いることにより「SOM学習手段」が実現され、カットオフ距離Rcut(t)が「所定の範囲」に対応する。また、予測モデル学習用SOMニューロン選択部211を用いることにより「予測モデル学習用SOMニューロン選択手段」が実現される。また、勝者実績データ関連部209を用いることにより「勝者実績データ関連手段」が実現される。また、NN学習部213を用いることにより「予測モデル学習手段」が実現される。また、SOMパラメータ設定部203を用いることにより「SOMパラメータ設定手段」が実現される。また、データ正規化部202を用いることにより「データ正規化手段」が実現される。また、NN記憶部214を用いることにより「予測モデル記憶手段」が実現される。また、NN破棄部217を用いることにより「破棄手段」が実現される。また、第1の感度計算用操業結果因子導出部802を用いることにより「第1の感度計算用操業結果因子導出手段」が実現される。また、第2の感度計算用操業結果因子導出部803を用いることにより「第2の感度計算用操業結果因子導出手段」が実現される。また、感度導出部804を用いることにより「感度導出手段」が実現される。また、操業影響因子選択用NN学習部805、誤差評価部806、及び操業影響因子選択部807を用いることにより「操業影響因子選択手段」が実現される。
【0113】
また、例えば、ステップS1の処理を実行することによりデータ取得工程が実現され、ステップS5の処理を実行することにより勝者SOMニューロン決定工程が実現される。また、例えば、ステップS6の処理を実行することによりSOM学習工程が実現される。また、例えば、ステップS11の処理を実行することにより予測モデル学習用SOMニューロン選択工程が実現される。また、ステップS9の処理を実行することにより勝者実績データ関連工程が実現される。また、ステップS13の処理を実行することにより予測モデル学習工程が実現される。また、例えば、ステップS15の処理を実行することにより予測モデル記憶工程が実現され、ステップS17の処理を実行することにより破棄工程が実現される。また、例えば、ステップS3の処理を実行することによりSOMパラメータ設定工程が実現される。また、例えば、ステップS2の処理を実行することによりデータ正規化工程が実現される。また、ステップS22の処理を実行することにより第1の感度計算用操業結果因子導出工程が実現される。また、ステップS23〜S25の処理を実行することにより第2の感度計算用操業結果因子導出工程が実現される。また、ステップS26の処理を実行することにより感度導出工程が実現される。また、ステップS27〜S31の処理を実行することにより操業影響因子選択工程が実現される。
【0114】
尚、以上説明した本発明の実施形態は、コンピュータがプログラムを実行することによって実現することができる。また、プログラムをコンピュータに供給するための手段、例えばかかるプログラムを記録したCD−ROM等のコンピュータ読み取り可能な記録媒体、又はかかるプログラムを伝送する伝送媒体も本発明の実施の形態として適用することができる。また、前記プログラムを記録したコンピュータ読み取り可能な記録媒体などのプログラムプロダクトも本発明の実施の形態として適用することができる。前記のプログラム、コンピュータ読み取り可能な記録媒体、伝送媒体及びプログラムプロダクトは、本発明の範疇に含まれる。
また、以上説明した本発明の実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその技術思想、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【符号の説明】
【0115】
200 操業予測装置
201 データ取得部
202 データ正規化部
203 SOMパラメータ設定部
204 学習用実績データ選択部
205 勝者SOMニューロン決定部
206 SOM学習部
207 SOM学習終了判定部
208 SOM記憶部
209 勝者実績データ関連部
210 操業結果予測対象データ指定部
211 予測モデル学習用SOMニューロン選択部
212 勝者実績データ抽出部
213 NN学習部
214 NN記憶部
215 NN予測部
216 NN予測結果出力部
217 NN破棄部
601 初期状態
602 勝者SOMニューロン
603 近傍SOMニューロン
【特許請求の範囲】
【請求項1】
製品又は半製品を製造するための操業条件である操業影響因子を入力とし、該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力とする予測モデルを用いて操業結果因子の予測を行う操業予測装置であって、
過去の操業実績についての前記操業影響因子及び前記操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、前記予測モデルの学習を行うことを特徴とする操業予測装置。
【請求項2】
自己組織化マップを用いて、前記補間データの生成と、生成された該補間データからの前記学習用補間データの選択とを行うことを特徴とする、請求項1に記載の操業予測装置。
【請求項3】
前記実績データと、前記操業結果因子を予測する対象である操業に対する前記操業影響因子の情報を含む操業結果予測対象データと、を取得するデータ取得手段と、
前記操業影響因子及び前記操業結果因子の情報が設定されて自己組織化マップに配置されたSOMニューロンであって、前記実績データの値に最も値が近いSOMニューロンを勝者SOMニューロンとして決定することを、前記データ取得手段により取得された実績データについて個別に行う勝者SOMニューロン決定手段と、
前記勝者SOMニューロンの値と、前記自己組織化マップにおいて該勝者SOMニューロンから所定の範囲内に位置しているSOMニューロンである近傍SOMニューロンの値と、を前記実績データの値に近づけるように修正して、前記自己組織化マップを学習することを、前記データ取得手段により取得された実績データについて個別に行うSOM学習手段と、
前記SOM学習手段により学習された後の前記自己組織化マップに配置されているSOMニューロンのうち、前記操業影響因子の値が、前記データ取得手段により取得された操業結果予測対象データと近い所定数のSOMニューロンを、予測モデル学習用SOMニューロンとして選択する予測モデル学習用SOMニューロン選択手段と、
前記データ取得手段により取得された実績データから、前記予測モデル学習用SOMニューロン選択手段により選択された予測モデル学習用SOMニューロンに値が最も近い実績データを、勝者実績データとして決定することを、前記予測モデル学習用SOMニューロンのそれぞれについて個別に行う勝者実績データ関連手段と、
前記SOM学習手段により学習された後の前記自己組織化マップに配置されているSOMニューロンを前記補間データとし、前記予測モデル学習用SOMニューロン選択手段により選択された予測モデル学習用SOMニューロンを前記学習用補間データとし、該予測モデル学習用SOMニューロンに対応する前記勝者実績データを前記学習用実績データとして、前記予測モデルを学習する予測モデル学習手段と、を有することを特徴とする、請求項2に記載の操業予測装置。
【請求項4】
前記データ取得手段により取得された実績データの数よりも多い数のSOMニューロンを自己組織化マップに配置するSOMパラメータ設定手段を有することを特徴とする請求項3に記載の操業予測装置。
【請求項5】
前記SOM学習手段は、前記自己組織化マップにおいて前記勝者SOMニューロンに近い位置に配置されているSOMニューロンであるほど、SOMニューロンの値の修正量を多くすると共に、学習の回数が少ないほど、SOMニューロンの値の修正量を多くすることを特徴とする請求項3又は4に記載の操業予測装置。
【請求項6】
前記データ取得手段により取得された実績データと、操業結果予測対象データとを正規
化するデータ正規化手段を有し、
前記データ取得手段により取得された実績データと操業結果予測対象データとして、前記データ正規化手段により正規化された実績データと操業結果予測対象データとが使用されるようにすることを特徴とする請求項3〜5の何れか1項に記載の操業予測装置。
【請求項7】
前記予測モデル学習手段により学習された後の予測モデルを記憶する予測モデル記憶手段と、
前記予測モデル学習手段により学習された後の予測モデルを使用した前記操業結果因子の予測が1回終了すると、前記予測モデル記憶手段から当該予測モデルを破棄する破棄手段と、を有することを特徴とする請求項3〜6の何れか1項に記載の操業予測装置。
【請求項8】
複数の前記操業影響因子を入力とし、前記操業結果因子を出力とするニューラルネットワークに、当該複数の操業影響因子の値として特定の値を入力して前記操業結果因子の値を導出する第1の感度計算用操業結果因子導出手段と、
前記ニューラルネットワークに、前記複数の操業影響因子のうちの1つの操業影響因子の値として前記特定の値と異なる値を入力すると共に、残りの操業影響因子の値として前記特定の値を入力して前記操業結果因子の値を導出することを、前記複数の操業影響因子のそれぞれについて行う第2の感度計算用操業結果因子導出手段と、
前記第1の感度計算用操業結果因子導出手段により導出された操業結果因子の値と、前記第2の感度計算用操業結果因子導出手段により導出された操業結果因子の値とに基づいて、前記操業影響因子の感度を、前記複数の操業影響因子のそれぞれについて導出する感度導出手段と、
前記感度導出手段により導出された、前記複数の操業影響因子の感度に基づいて、前記複数の操業影響因子の一部を選択する操業影響因子選択手段と、を有し、
前記勝者SOMニューロン決定手段は、前記操業影響因子選択手段により選択された操業影響因子及び前記操業結果因子の情報が設定されて自己組織化マップに配置されたSOMニューロンであって、前記実績データの値に最も値が近いSOMニューロンを勝者SOMニューロンとして決定することを、前記データ取得手段により取得された実績データについて個別に行うことを特徴とする請求項3〜7の何れか1項に記載の操業予測装置。
【請求項9】
製品又は半製品を製造するための操業条件である操業影響因子を入力とし、該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力とする予測モデルを用いて操業結果因子の予測を行う操業予測方法であって、
過去の操業実績についての前記操業影響因子及び前記操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、前記予測モデルの学習を行うことを特徴とする操業予測方法。
【請求項10】
自己組織化マップを用いて、前記補間データの生成と、生成された該補間データからの前記学習用補間データの選択とを行うことを特徴とする、請求項9に記載の操業予測方法。
【請求項11】
前記実績データと、前記操業結果因子を予測する対象である操業に対する前記操業影響因子の情報を含む操業結果予測対象データと、を取得するデータ取得工程と、
前記操業影響因子及び前記操業結果因子の情報が設定されて自己組織化マップに配置されたSOMニューロンであって、前記実績データの値に最も値が近いSOMニューロンを勝者SOMニューロンとして決定することを、前記データ取得工程により取得された実績データについて個別に行う勝者SOMニューロン決定工程と、
前記勝者SOMニューロンの値と、前記自己組織化マップにおいて該勝者SOMニューロンから所定の範囲内に位置しているSOMニューロンである近傍SOMニューロンの値と、を前記実績データの値に近づけるように修正して、前記自己組織化マップを学習することを、前記データ取得工程により取得された実績データについて個別に行うSOM学習工程と、
前記SOM学習工程により学習された後の前記自己組織化マップに配置されているSOMニューロンのうち、前記操業影響因子の値が、前記データ取得工程により取得された操業結果予測対象データと近い所定数のSOMニューロンを、予測モデル学習用SOMニューロンとして選択する予測モデル学習用SOMニューロン選択工程と、
前記データ取得工程により取得された実績データから、前記予測モデル学習用SOMニューロン選択工程により選択された予測モデル学習用SOMニューロンに値が最も近い実績データを、勝者実績データとして決定することを、前記予測モデル学習用SOMニューロンのそれぞれについて個別に行う勝者実績データ関連工程と、
前記SOM学習工程により学習された後の前記自己組織化マップに配置されているSOMニューロンを前記補間データとし、前記予測モデル学習用SOMニューロン選択工程により選択された予測モデル学習用SOMニューロンを前記学習用補間データとし、該予測モデル学習用SOMニューロンに対応する前記勝者実績データを前記学習用実績データとして、前記予測モデルを学習する予測モデル学習工程と、を有することを特徴とする、請求項10に記載の操業予測方法。
【請求項12】
前記データ取得工程により取得された実績データの数よりも多い数のSOMニューロンを自己組織化マップに配置するSOMパラメータ設定工程を有することを特徴とする請求項11に記載の操業予測方法。
【請求項13】
前記SOM学習工程は、前記自己組織化マップにおいて前記勝者SOMニューロンに近い位置に配置されているSOMニューロンであるほど、SOMニューロンの値の修正量を多くすると共に、学習の回数が少ないほど、SOMニューロンの値の修正量を多くすることを特徴とする請求項11又は12に記載の操業予測方法。
【請求項14】
前記データ取得工程により取得された実績データと、操業結果予測対象データとを正規化するデータ正規化工程を有し、
前記データ取得工程により取得された実績データと操業結果予測対象データとして、前記データ正規化工程により正規化された実績データと操業結果予測対象データとが使用されるようにすることを特徴とする請求項11〜13の何れか1項に記載の操業予測方法。
【請求項15】
前記予測モデル学習工程により学習された後の予測モデルを記憶する予測モデル記憶工程と、
前記予測モデル学習工程により学習された後の予測モデルを使用した前記操業結果因子の予測が1回終了すると、前記予測モデル記憶工程から当該予測モデルを破棄する破棄工程と、を有することを特徴とする請求項11〜14の何れか1項に記載の操業予測方法。
【請求項16】
複数の前記操業影響因子を入力とし、前記操業結果因子を出力とするニューラルネットワークに、当該複数の操業影響因子の値として特定の値を入力して前記操業結果因子の値を導出する第1の感度計算用操業結果因子導出工程と、
前記ニューラルネットワークに、前記複数の操業影響因子のうちの1つの操業影響因子の値として前記特定の値と異なる値を入力すると共に、残りの操業影響因子の値として前記特定の値を入力して前記操業結果因子の値を導出することを、前記複数の操業影響因子のそれぞれについて行う第2の感度計算用操業結果因子導出工程と、
前記第1の感度計算用操業結果因子導出工程により導出された操業結果因子の値と、前記第2の感度計算用操業結果因子導出工程により導出された操業結果因子の値とに基づいて、前記操業影響因子の感度を、前記複数の操業影響因子のそれぞれについて導出する感度導出工程と、
前記感度導出工程により導出された、前記複数の操業影響因子の感度に基づいて、前記複数の操業影響因子の一部を選択する操業影響因子選択工程と、を有し、
前記勝者SOMニューロン決定工程は、前記操業影響因子選択工程により選択された操業影響因子及び前記操業結果因子の情報が設定されて自己組織化マップに配置されたSOMニューロンであって、前記実績データの値に最も値が近いSOMニューロンを勝者SOMニューロンとして決定することを、前記データ取得工程により取得された実績データについて個別に行うことを特徴とする請求項11〜15の何れか1項に記載の操業予測方法。
【請求項17】
請求項9〜16の何れか1項に記載の操業予測方法の各工程をコンピュータに実行させることを特徴とするコンピュータプログラム。
【請求項1】
製品又は半製品を製造するための操業条件である操業影響因子を入力とし、該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力とする予測モデルを用いて操業結果因子の予測を行う操業予測装置であって、
過去の操業実績についての前記操業影響因子及び前記操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、前記予測モデルの学習を行うことを特徴とする操業予測装置。
【請求項2】
自己組織化マップを用いて、前記補間データの生成と、生成された該補間データからの前記学習用補間データの選択とを行うことを特徴とする、請求項1に記載の操業予測装置。
【請求項3】
前記実績データと、前記操業結果因子を予測する対象である操業に対する前記操業影響因子の情報を含む操業結果予測対象データと、を取得するデータ取得手段と、
前記操業影響因子及び前記操業結果因子の情報が設定されて自己組織化マップに配置されたSOMニューロンであって、前記実績データの値に最も値が近いSOMニューロンを勝者SOMニューロンとして決定することを、前記データ取得手段により取得された実績データについて個別に行う勝者SOMニューロン決定手段と、
前記勝者SOMニューロンの値と、前記自己組織化マップにおいて該勝者SOMニューロンから所定の範囲内に位置しているSOMニューロンである近傍SOMニューロンの値と、を前記実績データの値に近づけるように修正して、前記自己組織化マップを学習することを、前記データ取得手段により取得された実績データについて個別に行うSOM学習手段と、
前記SOM学習手段により学習された後の前記自己組織化マップに配置されているSOMニューロンのうち、前記操業影響因子の値が、前記データ取得手段により取得された操業結果予測対象データと近い所定数のSOMニューロンを、予測モデル学習用SOMニューロンとして選択する予測モデル学習用SOMニューロン選択手段と、
前記データ取得手段により取得された実績データから、前記予測モデル学習用SOMニューロン選択手段により選択された予測モデル学習用SOMニューロンに値が最も近い実績データを、勝者実績データとして決定することを、前記予測モデル学習用SOMニューロンのそれぞれについて個別に行う勝者実績データ関連手段と、
前記SOM学習手段により学習された後の前記自己組織化マップに配置されているSOMニューロンを前記補間データとし、前記予測モデル学習用SOMニューロン選択手段により選択された予測モデル学習用SOMニューロンを前記学習用補間データとし、該予測モデル学習用SOMニューロンに対応する前記勝者実績データを前記学習用実績データとして、前記予測モデルを学習する予測モデル学習手段と、を有することを特徴とする、請求項2に記載の操業予測装置。
【請求項4】
前記データ取得手段により取得された実績データの数よりも多い数のSOMニューロンを自己組織化マップに配置するSOMパラメータ設定手段を有することを特徴とする請求項3に記載の操業予測装置。
【請求項5】
前記SOM学習手段は、前記自己組織化マップにおいて前記勝者SOMニューロンに近い位置に配置されているSOMニューロンであるほど、SOMニューロンの値の修正量を多くすると共に、学習の回数が少ないほど、SOMニューロンの値の修正量を多くすることを特徴とする請求項3又は4に記載の操業予測装置。
【請求項6】
前記データ取得手段により取得された実績データと、操業結果予測対象データとを正規
化するデータ正規化手段を有し、
前記データ取得手段により取得された実績データと操業結果予測対象データとして、前記データ正規化手段により正規化された実績データと操業結果予測対象データとが使用されるようにすることを特徴とする請求項3〜5の何れか1項に記載の操業予測装置。
【請求項7】
前記予測モデル学習手段により学習された後の予測モデルを記憶する予測モデル記憶手段と、
前記予測モデル学習手段により学習された後の予測モデルを使用した前記操業結果因子の予測が1回終了すると、前記予測モデル記憶手段から当該予測モデルを破棄する破棄手段と、を有することを特徴とする請求項3〜6の何れか1項に記載の操業予測装置。
【請求項8】
複数の前記操業影響因子を入力とし、前記操業結果因子を出力とするニューラルネットワークに、当該複数の操業影響因子の値として特定の値を入力して前記操業結果因子の値を導出する第1の感度計算用操業結果因子導出手段と、
前記ニューラルネットワークに、前記複数の操業影響因子のうちの1つの操業影響因子の値として前記特定の値と異なる値を入力すると共に、残りの操業影響因子の値として前記特定の値を入力して前記操業結果因子の値を導出することを、前記複数の操業影響因子のそれぞれについて行う第2の感度計算用操業結果因子導出手段と、
前記第1の感度計算用操業結果因子導出手段により導出された操業結果因子の値と、前記第2の感度計算用操業結果因子導出手段により導出された操業結果因子の値とに基づいて、前記操業影響因子の感度を、前記複数の操業影響因子のそれぞれについて導出する感度導出手段と、
前記感度導出手段により導出された、前記複数の操業影響因子の感度に基づいて、前記複数の操業影響因子の一部を選択する操業影響因子選択手段と、を有し、
前記勝者SOMニューロン決定手段は、前記操業影響因子選択手段により選択された操業影響因子及び前記操業結果因子の情報が設定されて自己組織化マップに配置されたSOMニューロンであって、前記実績データの値に最も値が近いSOMニューロンを勝者SOMニューロンとして決定することを、前記データ取得手段により取得された実績データについて個別に行うことを特徴とする請求項3〜7の何れか1項に記載の操業予測装置。
【請求項9】
製品又は半製品を製造するための操業条件である操業影響因子を入力とし、該操業影響因子の影響を受けて決定される操業結果である操業結果因子を出力とする予測モデルを用いて操業結果因子の予測を行う操業予測方法であって、
過去の操業実績についての前記操業影響因子及び前記操業結果因子の情報を含む複数の実績データから選択された学習用実績データと、該実績データのうちの2つのデータの間を補間する補間データから選択された学習用補間データと、を学習用データとして、前記予測モデルの学習を行うことを特徴とする操業予測方法。
【請求項10】
自己組織化マップを用いて、前記補間データの生成と、生成された該補間データからの前記学習用補間データの選択とを行うことを特徴とする、請求項9に記載の操業予測方法。
【請求項11】
前記実績データと、前記操業結果因子を予測する対象である操業に対する前記操業影響因子の情報を含む操業結果予測対象データと、を取得するデータ取得工程と、
前記操業影響因子及び前記操業結果因子の情報が設定されて自己組織化マップに配置されたSOMニューロンであって、前記実績データの値に最も値が近いSOMニューロンを勝者SOMニューロンとして決定することを、前記データ取得工程により取得された実績データについて個別に行う勝者SOMニューロン決定工程と、
前記勝者SOMニューロンの値と、前記自己組織化マップにおいて該勝者SOMニューロンから所定の範囲内に位置しているSOMニューロンである近傍SOMニューロンの値と、を前記実績データの値に近づけるように修正して、前記自己組織化マップを学習することを、前記データ取得工程により取得された実績データについて個別に行うSOM学習工程と、
前記SOM学習工程により学習された後の前記自己組織化マップに配置されているSOMニューロンのうち、前記操業影響因子の値が、前記データ取得工程により取得された操業結果予測対象データと近い所定数のSOMニューロンを、予測モデル学習用SOMニューロンとして選択する予測モデル学習用SOMニューロン選択工程と、
前記データ取得工程により取得された実績データから、前記予測モデル学習用SOMニューロン選択工程により選択された予測モデル学習用SOMニューロンに値が最も近い実績データを、勝者実績データとして決定することを、前記予測モデル学習用SOMニューロンのそれぞれについて個別に行う勝者実績データ関連工程と、
前記SOM学習工程により学習された後の前記自己組織化マップに配置されているSOMニューロンを前記補間データとし、前記予測モデル学習用SOMニューロン選択工程により選択された予測モデル学習用SOMニューロンを前記学習用補間データとし、該予測モデル学習用SOMニューロンに対応する前記勝者実績データを前記学習用実績データとして、前記予測モデルを学習する予測モデル学習工程と、を有することを特徴とする、請求項10に記載の操業予測方法。
【請求項12】
前記データ取得工程により取得された実績データの数よりも多い数のSOMニューロンを自己組織化マップに配置するSOMパラメータ設定工程を有することを特徴とする請求項11に記載の操業予測方法。
【請求項13】
前記SOM学習工程は、前記自己組織化マップにおいて前記勝者SOMニューロンに近い位置に配置されているSOMニューロンであるほど、SOMニューロンの値の修正量を多くすると共に、学習の回数が少ないほど、SOMニューロンの値の修正量を多くすることを特徴とする請求項11又は12に記載の操業予測方法。
【請求項14】
前記データ取得工程により取得された実績データと、操業結果予測対象データとを正規化するデータ正規化工程を有し、
前記データ取得工程により取得された実績データと操業結果予測対象データとして、前記データ正規化工程により正規化された実績データと操業結果予測対象データとが使用されるようにすることを特徴とする請求項11〜13の何れか1項に記載の操業予測方法。
【請求項15】
前記予測モデル学習工程により学習された後の予測モデルを記憶する予測モデル記憶工程と、
前記予測モデル学習工程により学習された後の予測モデルを使用した前記操業結果因子の予測が1回終了すると、前記予測モデル記憶工程から当該予測モデルを破棄する破棄工程と、を有することを特徴とする請求項11〜14の何れか1項に記載の操業予測方法。
【請求項16】
複数の前記操業影響因子を入力とし、前記操業結果因子を出力とするニューラルネットワークに、当該複数の操業影響因子の値として特定の値を入力して前記操業結果因子の値を導出する第1の感度計算用操業結果因子導出工程と、
前記ニューラルネットワークに、前記複数の操業影響因子のうちの1つの操業影響因子の値として前記特定の値と異なる値を入力すると共に、残りの操業影響因子の値として前記特定の値を入力して前記操業結果因子の値を導出することを、前記複数の操業影響因子のそれぞれについて行う第2の感度計算用操業結果因子導出工程と、
前記第1の感度計算用操業結果因子導出工程により導出された操業結果因子の値と、前記第2の感度計算用操業結果因子導出工程により導出された操業結果因子の値とに基づいて、前記操業影響因子の感度を、前記複数の操業影響因子のそれぞれについて導出する感度導出工程と、
前記感度導出工程により導出された、前記複数の操業影響因子の感度に基づいて、前記複数の操業影響因子の一部を選択する操業影響因子選択工程と、を有し、
前記勝者SOMニューロン決定工程は、前記操業影響因子選択工程により選択された操業影響因子及び前記操業結果因子の情報が設定されて自己組織化マップに配置されたSOMニューロンであって、前記実績データの値に最も値が近いSOMニューロンを勝者SOMニューロンとして決定することを、前記データ取得工程により取得された実績データについて個別に行うことを特徴とする請求項11〜15の何れか1項に記載の操業予測方法。
【請求項17】
請求項9〜16の何れか1項に記載の操業予測方法の各工程をコンピュータに実行させることを特徴とするコンピュータプログラム。
【図1】

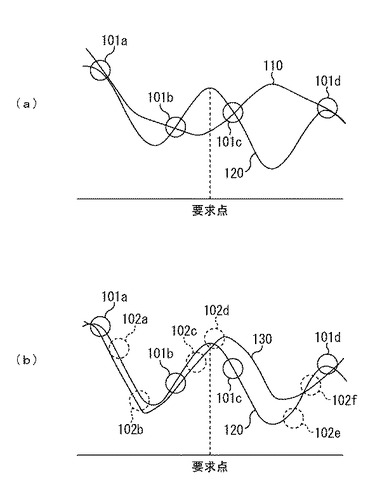
【図2】
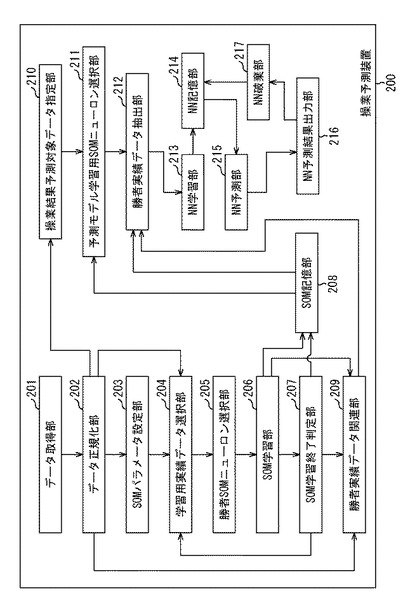
【図3】
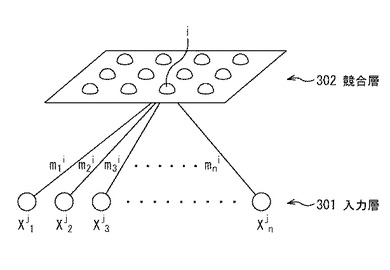
【図4】
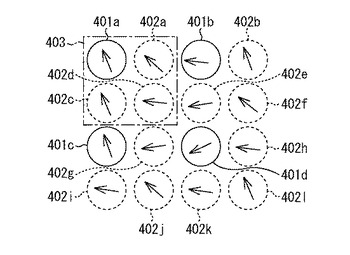
【図5】
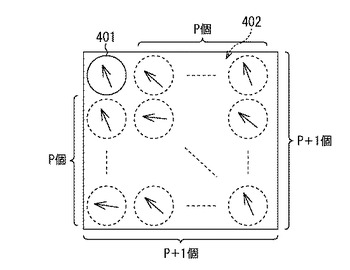
【図6】
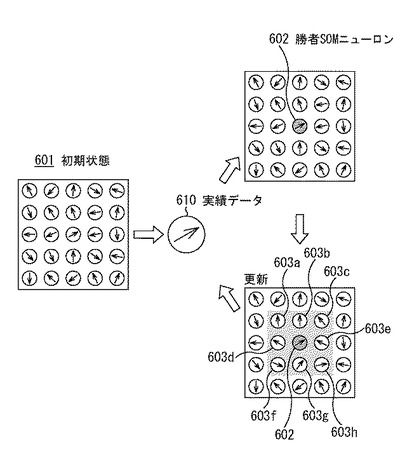
【図7−1】
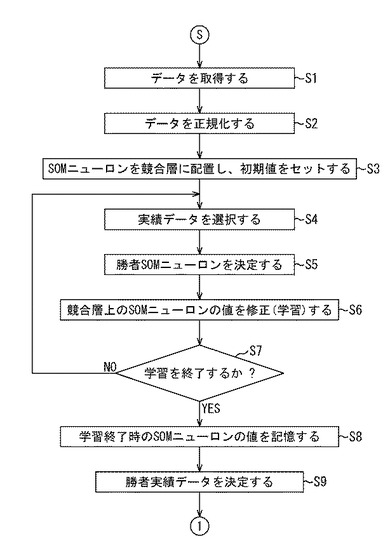
【図7−2】
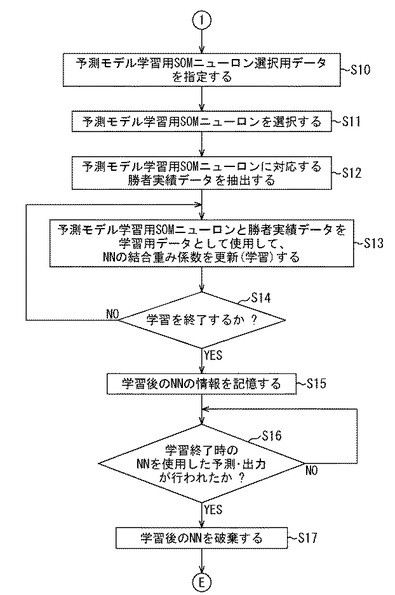
【図8】
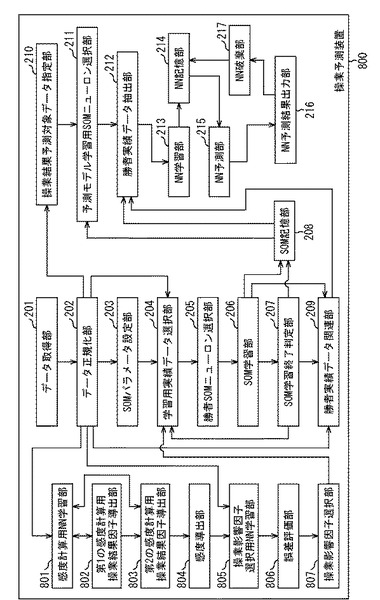
【図9】
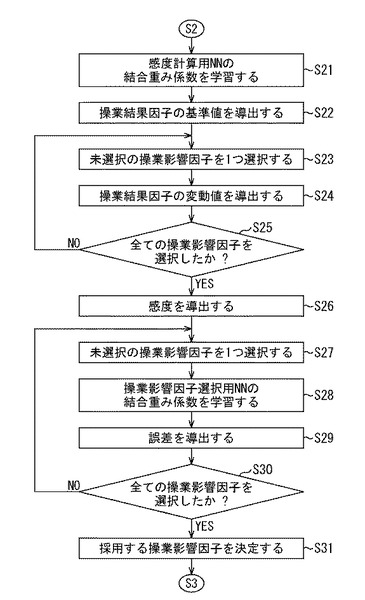
【図10】
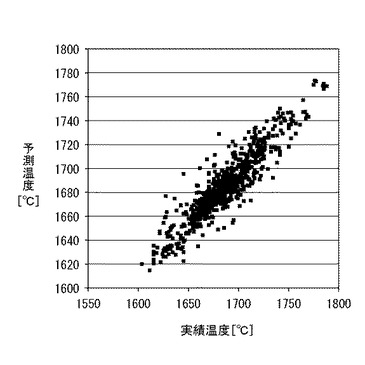
【図2】
【図3】
【図4】
【図5】
【図6】
【図7−1】
【図7−2】
【図8】
【図9】
【図10】
【公開番号】特開2012−226732(P2012−226732A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2012−26434(P2012−26434)
【出願日】平成24年2月9日(2012.2.9)
【出願人】(000006655)新日本製鐵株式会社 (6,474)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成24年2月9日(2012.2.9)
【出願人】(000006655)新日本製鐵株式会社 (6,474)
[ Back to top ]