
操船支援装置
【課題】操作系の持ち替えの手間を省き、操船を容易にする。
【解決手段】推進機11,12および操舵機構を備えた船舶1のための操船支援装置を提供する。操船支援装置は、推進機11,12を前進駆動するための前進駆動位置、前記推進機を後進駆動するための後進駆動位置、および推進機11,12を非作動状態とする中立位置を選択可能なスロットルレバー8a,8bを含む第1操作手段と、スロットルレバー8a,8bに設けられ船舶1の左方向への移動を指令するための左移動操作子18Lと、スロットルレバー8a,8bに設けられ船舶1の右方向への移動を指令するための右移動操作子18Rとを含む、第2操作手段と、前記第2操作手段および前記第1操作手段の操作位置に応じて、推進機11,12のための目標推進力および前記操舵機構のための目標操舵角を含む目標値を求める目標値演算手段とを含む。
【解決手段】推進機11,12および操舵機構を備えた船舶1のための操船支援装置を提供する。操船支援装置は、推進機11,12を前進駆動するための前進駆動位置、前記推進機を後進駆動するための後進駆動位置、および推進機11,12を非作動状態とする中立位置を選択可能なスロットルレバー8a,8bを含む第1操作手段と、スロットルレバー8a,8bに設けられ船舶1の左方向への移動を指令するための左移動操作子18Lと、スロットルレバー8a,8bに設けられ船舶1の右方向への移動を指令するための右移動操作子18Rとを含む、第2操作手段と、前記第2操作手段および前記第1操作手段の操作位置に応じて、推進機11,12のための目標推進力および前記操舵機構のための目標操舵角を含む目標値を求める目標値演算手段とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、推進機および操舵機構を備えた船舶のための操船支援装置に関する。
【背景技術】
【0002】
船尾に備えられた一対の船外機の出力および操舵角を制御することによって、船舶を回頭させることなく横移動させることができる操船支援装置が提案されている(特許文献1)。この操船支援装置では、停泊操船支援開始ボタンを操作すると、通常航走モードから停泊操船支援モードに制御モードが切り換わる。停泊操船支援モードでは、十字ボタンの操作によって船舶を前後左右に横移動させることができる。これにより、離着岸時の操船が容易になる。横移動以外の通常の操船に際しては、操船者は、ステアリングハンドルを操作して操舵角を制御し、リモコンレバーを操作して船外機出力を制御する。
【0003】
通常航走モードでは、一対の船外機の操舵角は等しく設定される。これに対して、停泊操船支援モードでは、目的の移動方向と一対の船外機が発生する推進力の合力方向とが一致するように、各船外機の推進力および操舵角が定められる。したがって、一般に、停泊操船支援モードでは、一対の船外機の操舵角は異なる値となる。たとえば、船舶を真横に横移動させるときには、一方の船外機の推進力方向は斜め前方となり、他方の船外機の推進力方向は斜め後方となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−200004号公報
【発明の概要】
【課題を解決するための手段】
【0005】
桟橋の近くでは、操船者は、近傍の他の船舶を避けながら離着岸のための操船を行う。したがって、十字ボタンを用いた横移動操船が便利である。一方、桟橋を離れ、近隣の船舶からの距離が広がれば、横移動操船はもはや必要ではなくなる。停泊操船支援モードでは、推進機同士の推進力を相殺させて船舶の平行移動を達成している。そのため、低速での移動であっても、高いエンジン回転速度を維持する必要がある。したがって、通常航走モードでの操船が可能な状況では、停泊操船支援モードを使わない方がエネルギー効率がよい。
【0006】
停泊操船支援モードから通常航走モードへの移行の際には、十字ボタンを含む横移動操作系から、ステアリングハンドルおよびリモコンレバーを含む通常操作系への持ち替えが必要になる。逆に、通常航走モードから停泊操船支援モードへの移行の際には、通常操作系から横移動操作系への持ち替えが必要になる。離岸時や着岸時には、とくに、港の桟橋付近での移動の際に、操船者は、制御モードを頻繁に切り換える必要に迫られる。それに応じて、操船者は、操作系の持ち替えを頻繁に行う必要に迫られる。しかし、たびたび操作系を持ち替えるのは煩雑である。
【0007】
また、通常操作系および横移動操作系の両方を準備しておく必要があるから、操作系の構成が複雑であり、それに応じてコストも高くつく。さらに、小型船舶では、小さな操船スペースに二種類の操作系を配置するのは必ずしも容易ではない。
そこで、この発明の目的は、操作系の持ち替えの手間を省くことができ、操船を一層容易にすることができる操船支援装置を提供することである。
【0008】
この発明は、推進機および操舵機構を備えた船舶のための操船支援装置を提供する。この操船支援装置は、前記推進機を前進駆動するための前進駆動位置、前記推進機を後進駆動するための後進駆動位置、および前記推進機を非作動状態とする中立位置を選択可能なスロットルレバーを含む第1操作手段と、前記スロットルレバーに設けられ船舶の左方向への移動を指令するための左移動操作子と、前記スロットルレバーに設けられ船舶の右方向への移動を指令するための右移動操作子とを含む、第2操作手段と、前記第2操作手段の操作と、前記第1操作手段の操作位置とに応じて、前記推進機のための目標推進力および前記操舵機構のための目標操舵角を含む目標値を求める目標値演算手段とを含む。
【0009】
この発明の一実施形態では、前記第2操作手段は、操船者が右手で前記スロットルレバーを把持したとき、操船者の親指で押下できる位置に配置されている。
この発明の一実施形態に係る操船支援装置は、船舶に備えられた左右一対の推進機と、これらの推進機にそれぞれ対応する一対の操舵機構とに対応した目標値を生成するものであり、前記第1操作手段は、左の推進機に対応した左側スロットルレバーと、右の推進機に対応した右側スロットルレバーとを含み、前記左側スロットルレバーおよび右側スロットルレバーが、それぞれ、前進駆動位置、後進駆動位置および中立位置に操作可能であり、前記第2操作手段は、前記左側スロットルレバーに配置されている。
【0010】
この発明の一実施形態においては、前記左移動操作子は前記左側スロットルレバー上において、前記右移動操作子よりも下側に配置されている。
この発明の一実施形態においては、前記左側スロットルレバーおよび前記右側スロットルレバーの各頭部は、互いに近接する方向に折り曲げられて、ほぼ水平な把持部を形成している。
【0011】
この発明の一実施形態においては、前記操船支援装置は、通常航走モードおよび停泊操船支援モードを含む複数の制御モードに従う制御動作を行う航走制御装置を含み、前記第2操作手段が操作されると、所定の条件下で前記通常航走モードから前記停泊操船支援モードへ遷移する。
この発明の一実施形態においては、前記第2操作手段が操作されていない場合に、前記制御モードは前記通常航走モードとなる。
【0012】
この発明の一実施形態においては、前記所定の条件とは、
禁止条件1:前記左側スロットルレバーおよび前記右側スロットルレバーのいずれかの操作位置が前進出力調整領域または後進出力調整領域にあること、
禁止条件2:船舶の前進速度が所定の前進速度しきい値以上であること、
禁止条件3:船舶後進速度が所定の後進速度しきい値以上であること、
禁止条件4:前記操舵機構の操舵角を制御するためのステアリングハンドルの舵角が所定の舵角しきい値以上であること、ならびに
禁止条件5:船舶のエンジンの回転速度が所定のしきい値以上であること
の全てが否定される条件である。そして、前記航走制御装置は、前記禁止条件1〜5の少なくとも一つに該当する場合、停泊操船支援モードへの遷移のための操作を無効化する。
【0013】
また、この発明の一実施形態においては、前記航走制御装置は、前記禁止条件1〜5がすべて否定されることを条件に、前記通常航走モードから前記停泊操船支援モードへ遷移する。
【図面の簡単な説明】
【0014】
【図1】この発明の一実施形態に係る操船支援装置が適用された船舶の構成を説明するための概念図である。
【図2】船外機の構成を説明するための図解的な断面図である。
【図3】スロットル操作部の構成を拡大して示す斜視図である。
【図4】スロットルレバーの操作位置を説明するための側面図である。
【図5】ステアリング操作部の図解的な斜視図である。
【図6】船舶の主要部の電気的構成を説明するためのブロック図である。
【図7】制御モードの選択を説明するためのフローチャートである。
【図8】平行移動モードにおける目標値の設定および船舶の挙動を説明するための図である。
【図9】回頭ボタンおよびステアリングハンドルによる回頭制御操作を説明するための図である。
【図10】船体座標系を説明するための図である。
【図11】この発明の他の実施形態に係る船舶の主要部の電気的構成を示すブロック図である。
【発明を実施するための形態】
【0015】
以下では、この発明の実施の形態を、添付図面を参照して詳細に説明する。
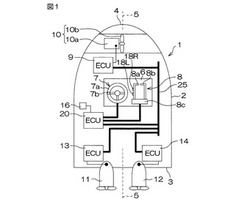
図1は、この発明の一実施形態に係る船舶1の構成を説明するための概念図である。この船舶1は、クルーザやボートのような比較的小型の船舶である。この船舶1の船体2には、一つのバウスラスタ10と、一対の船外機11,12が取り付けられている。船外機11,12は、船体2の船尾(トランサム)3に取り付けられている。この一対の船外機11,12は、船体2の船尾3および船首4を通る中心線5に対して、左右対称な位置に取り付けられている。すなわち、一方の船外機11は、船体2の左舷後部に取り付けられており、他方の船外機12は、船体2の右舷後部に取り付けられている。そこで、以下では、これらの船外機を区別するときには、それぞれ、「左舷船外機11」、「右舷船外機12」と呼ぶ。一方、バウスラスタ10は、船体2の船首4の付近に取り付けられている。このバウスラスタ10は、中心線5に交差する左右方向への推進力を発生する推進ユニットである。より具体的には、バウスラスタ10は、電動モータ10aと、これにより正転または逆転駆動されるプロペラ10bとを含む。プロペラ10bが生成する推進力は、船舶1の中心線に交差(直交)する水平方向(左右方向)に沿う。以下、バウスラスタ10および船外機11,12を総称するときには、「推進機10〜12」などという場合がある。
【0016】
バウスラスタ10には、電動モータ10aの回転方向および回転速度を制御する電子制御ユニット(ECU)9が内蔵されている。左舷船外機11および右舷船外機12には、それぞれ、電子制御ユニット13,14(以下、「船外機ECU13」、「船外機ECU14」という。)が内蔵されている。ただし、図1では、便宜上、推進機10〜12の本体部分とECU9,13,14とは分離して表してある。
【0017】
船体2の操船席には、操船のための操作卓6が設けられている。操作卓6には、たとえば、舵取り操作のためのステアリング操作部7と、船外機11,12の出力を調整するためのスロットル操作部8とが備えられている。この例では、ステアリング操作部7が左側に配置され、スロットル操作部8が右側に配置されている。ステアリング操作部7は、操作部材としてのステアリングハンドル7aを備える。また、スロットル操作部8は、左舷船外機11および右舷船外機12にそれぞれに対応したスロットルレバー8a,8bを備えている。スロットルレバー8a,8bの各頭部は、互いに近接する方向に折り曲げられて、ほぼ水平な把持部を形成している。これにより、操船者は、スロットルレバー8a,8bを両方同時に操作して、左右の船外機11,12のスロットル開度を実質的に等しく保ちながら、船外機11,12の出力を制御できる。ステアリングハンドル7aおよびスロットルレバー8a,8bの操作量を表す信号は、航走制御装置20に入力されるようになっている。
【0018】
航走制御装置20は、マイクロコンピュータを含む電子制御ユニット(ECU)である。航走制御装置20は、船体2内に配置されたLAN(ローカル・エリア・ネットワーク。以下「船内LAN」という。)25を介して、ECU9,13,14との間で通信を行う。より具体的には、航走制御装置20は、船外機ECU13,14から、船外機11,12に備えられたエンジンの回転速度を取得する。そして、航走制御装置20は、船外機ECU13,14に対して、目標シフト位置(前進、ニュートラル、後進)、目標エンジン回転速度および目標操舵角を表すデータを与えるようになっている。また、航走制御装置20は、バウスラスタ10に対応したECU9からプロペラ10bの回転速度情報を取得する。そして、航走制御装置20は、バウスラスタ10に対応したECU9に対して、電動モータ10aの目標回転方向および目標回転速度を与える。
【0019】
また、航走制御装置20には、速度センサ16の出力信号が入力されている。速度センサ16は、船舶1の前進速度および後進速度を検出して速度信号を出力するものである。速度センサ16は対水速度を検出するものでも、対地速度を検出するものでもよい。具体的には、速度センサ16は、ピトー管を用いて構成することができる。
航走制御装置20は、通常航走モードおよび平行移動モード(停泊操船支援モード)を含む複数の制御モードに従う制御動作を行う。
【0020】
通常航走モードでは、航走制御装置20は、ステアリング操作部7の操作に応じて、船外機11,12の目標操舵角を等しい値に設定する。したがって、船外機11,12は、互いに平行な方向に推進力を発生することになる。また、航走制御装置20は、各船外機11,12の目標エンジン回転速度および目標シフト位置を、スロットルレバー8a,8bの前後への傾倒操作量に応じて設定する。バウスラスタ10は停止状態に制御される。
【0021】
平行移動モードでは、航走制御装置20は、スロットルレバー8a,8bの操作位置に応じて定められる目標移動方向に船舶1を平行移動させ、ステアリングハンドル7aの操作量に応じたヨーモーメントで船舶1が回頭させる。すなわち、航走制御装置20は、このような平行移動が達成されるように船外機11,12の目標シフト位置、目標エンジン回転速度および目標操舵角を設定する。また、航走制御装置20は、バウスラスタ10の電動モータ10aに対して、目標回転方向および目標回転速度を設定する。平行移動モードでは、一般に、左右の船外機11,12が発生する推進力の方向は非平行となる。
【0022】
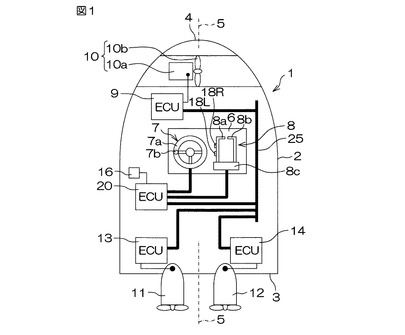
図2は、船外機11,12の共通の構成を説明するための図解的な断面図である。船外機11,12は、推進ユニット30と、この推進ユニット30を船体2に取り付ける取り付け機構31とを有している。取り付け機構31は、船体2の後尾板に着脱自在に固定されるクランプブラケット32と、このクランプブラケット32に水平回動軸としてのチルト軸33を中心に回動自在に結合されたスイベルブラケット34とを備えている。推進ユニット30は、スイベルブラケット34に、操舵軸35まわりに回動自在に取り付けられている。これにより、推進ユニット30を操舵軸35まわりに回動させることによって、操舵角(船体2の中心線に対して推進力の方向がなす方位角)を変化させることができる。また、スイベルブラケット34をチルト軸33まわりに回動させることによって、推進ユニット30のトリム角を変化させることができる。トリム角は、船体2に対する船外機11,12の取り付け角に対応する。
【0023】
推進ユニット30のハウジングは、トップカウリング36とアッパケース37とロアケース38とで構成されている。トップカウリング36内には、駆動源となるエンジン39がそのクランク軸の軸線が上下方向となるように設置されている。エンジン39のクランク軸下端に連結される動力伝達用のドライブシャフト41は、上下方向にアッパケース37内を通ってロアケース38内にまで延びている。
【0024】
ロアケース38の下部後側には、推進力発生部材となるプロペラ40が回転自在に装着されている。ロアケース38内には、プロペラ40の回転軸であるプロペラシャフト42が水平方向に通されている。このプロペラシャフト42には、ドライブシャフト41の回転が、クラッチ機構としてのシフト機構43を介して伝達されるようになっている。
シフト機構43は、ドライブシャフト41の下端に固定されたベベルギヤからなる駆動ギヤ43aと、プロペラシャフト42上に回動自在に配置されたベベルギヤからなる前進ギヤ43bと、同じくプロペラシャフト42上に回動自在に配置されたベベルギヤからなる後進ギヤ43cと、前進ギヤ43bおよび後進ギヤ43cの間に配置されたドッグクラッチ43dとを有している。
【0025】
前進ギヤ43bは前方側から駆動ギヤ43aに噛合しており、後進ギヤ43cは後方側から駆動ギヤ43aに噛合している。そのため、前進ギヤ43bおよび後進ギヤ43cは互いに反対方向に回転されることになる。
一方、ドッグクラッチ43dは、プロペラシャフト42にスプライン結合されている。すなわち、ドッグクラッチ43dは、プロペラシャフト42に対してその軸方向に摺動自在であるけれども、プロペラシャフト42に対する相対回動はできず、このプロペラシャフト42とともに回転する。
【0026】
ドッグクラッチ43dは、ドライブシャフト41と平行に上下方向に延びるシフトロッド44の軸周りの回動によって、プロペラシャフト42上で摺動される。これにより、ドッグクラッチ43dは、前進ギヤ43bと結合した前進位置と、後進ギヤ43cと結合した後進位置と、前進ギヤ43bおよび後進ギヤ43cのいずれとも結合されないニュートラル位置とのいずれかのシフト位置に制御される。
【0027】
ドッグクラッチ43dが前進位置にあるとき、前進ギヤ43bの回転がドッグクラッチ43dを介してプロペラシャフト42に伝達される。これにより、プロペラ40は、一方向(前進方向)に回転し、船体2を前進させる方向の推進力を発生する。一方、ドッグクラッチ43dが後進位置にあるとき、後進ギヤ43cの回転がドッグクラッチ43dを介してプロペラシャフト42に伝達される。後進ギヤ43cは、前進ギヤ43bとは反対方向に回転するため、プロペラ40は、反対方向(後進方向)に回転し、船体2を後進させる方向の推進力を発生する。ドッグクラッチ43dがニュートラル位置にあるとき、ドライブシャフト41の回転はプロペラシャフト42に伝達されない。すなわち、エンジン39とプロペラ40との間の駆動力伝達経路が遮断されるので、いずれの方向の推進力も生じない。
【0028】
エンジン39に関連して、このエンジン39を始動させるためのスタータモータ45が配置されている。スタータモータ45は、船外機ECU13,14によって制御される。また、エンジン39のスロットルバルブ46を作動させてスロットル開度を変化させ、エンジン39の吸入空気量を変化させるためのスロットルアクチュエータ51が備えられている。このスロットルアクチュエータ51は、電動モータからなっていてもよい。このスロットルアクチュエータ51の動作は、船外機ECU13,14によって制御される。エンジン39には、さらに、クランク軸の回転を検出することによってエンジン39の回転速度を検出するためのエンジン回転検出部48が備えられている。
【0029】
また、シフトロッド44に関連して、ドッグクラッチ43dのシフト位置を変化させるためのシフトアクチュエータ52(クラッチ作動装置)が設けられている。このシフトアクチュエータ52は、たとえば、電動モータからなり、船外機ECU13,14によって動作制御される。
さらに、推進ユニット30に固定された操舵ロッド47には、船外機ECU13,14によって制御される操舵アクチュエータ53が結合されている。操舵アクチュエータ53は、たとえば、DCサーボモータおよび減速器を含む構成とすることができる。この操舵アクチュエータ53を駆動することによって、推進ユニット30を操舵軸35まわりに回動させることができ、舵取り操作を行うことができる。このように、操舵アクチュエータ53、操舵ロッド47および操舵軸35を含む操舵機構50(電動ステアリング装置)が形成されている。この操舵機構50には、操舵角を検出するための操舵角センサ49が備えられている。操舵角センサ49は、たとえば、ポテンショメータからなる。
【0030】
また、クランプブラケット32とスイベルブラケット34との間には、たとえば液圧シリンダを含み、船外機ECU13,14によって制御されるトリムアクチュエータ(チルトトリムアクチュエータ)54が設けられている。このトリムアクチュエータ54は、チルト軸33まわりにスイベルブラケット34を回動させることにより、推進ユニット30をチルト軸33まわりに回動させる。これらは、推進ユニット30のトリム角を変化させるためのトリム機構56を構成している。トリム角は、トリム角センサ55によって検出されるようになっている。トリム角センサ55の出力信号は船外機ECU13,14に入力される。
【0031】
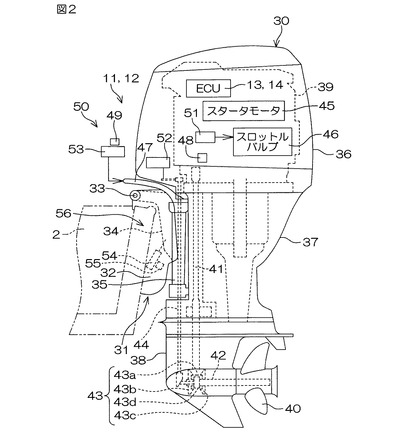
図3は、スロットル操作部8の構成を拡大して示す斜視図である。スロットル操作部8は、箱形の本体8cと、一対のスロットルレバー8a,8bとを備えている。スロットルレバー8a,8bは、本体8cの対向する一対の側面に取り付けられている。スロットルレバー8a,8bは、それぞれ前後方向に所定角度範囲で揺動可能とされている。通常航走モードにおいて、左側のスロットルレバー8aは左舷船外機11の出力制御のために用いられる。同様に、右側のスロットルレバー8bは右舷船外機12の出力制御のために用いられる。一方(この実施形態では左側)のスロットルレバー8aには、左平行移動ボタン18Lと、右平行移動ボタン18Rとが設けられている。これらは、操船者によって押下操作可能な押しボタンである。この実施形態では、左平行移動ボタン18Lが右平行移動ボタン18Rよりも下側に配置されている。いずれの平行移動ボタン18L,18Rも、スロットルレバー8a,8bを右手で握持したときに、操作者の親指で押下できる位置に配置されている。平行移動ボタン18L,18Rの操作/非操作を表す信号は、航走制御装置20に与えられるようになっている。これらの平行移動ボタン18L,18Rが押下されると、制御モードは、一定条件下で、通常航走モードから平行移動モードへと遷移する。なお、平行移動ボタン18L,18Rは、いずれか一方しか押下できないようになっている。
【0032】
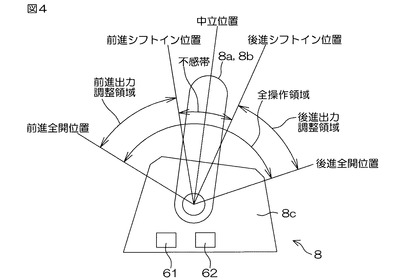
図4は、スロットルレバー8a,8bの操作位置を説明するための側面図である。スロットルレバー8a,8bの中立位置は、本体8cからほぼ直立した位置である。スロットルレバー8a,8bは、中立位置を中心とし、前進全開位置を前方端とし、後進前回位置を後方端とした所定角度範囲で傾倒(揺動)操作することができるようになっている。スロットルレバー8a,8bは、互いに独立に操作可能である。スロットルレバー8a,8bの傾倒量LxL,LxRは、本体8cに備えられた第1位置センサ61および第2位置センサ62によってそれぞれ検出され、航走制御装置20に与えられる。第1および第2位置センサ61,62は、それぞれ、ポテンショメータで構成することができる。
【0033】
スロットルレバー8a,8bを中立位置から前側へ所定量傾倒させたときのスロットルレバー8a,8bの傾倒位置は、前進シフトイン位置である。すなわち、通常航走モードにおいて、前進シフトイン位置までスロットルレバー8a,8bを前方に傾倒させると、航走制御装置20は、船外機11,12の目標シフト位置を、ニュートラル位置から前進位置に変更する。また、スロットルレバー8a,8bを中立位置から後側へ所定量傾倒させたときのスロットルレバー8a,8bの傾倒位置は、後進シフトイン位置である。すなわち、通常航走モードにおいて、後進シフトイン位置までスロットルレバー8a,8bを後方に傾倒させると、航走制御装置20は、船外機11,12の目標シフト位置を、ニュートラル位置から後進位置に変更する。スロットルレバー8a,8bが前進シフトイン位置と後進シフトイン位置との間にある場合には、航走制御装置20は、目標シフト位置をニュートラル位置に設定し、目標エンジン回転速度をアイドル回転速度に設定する。このとき、エンジン39の駆動力はプロペラ40に伝達されないので、船外機11,12からの推進力は発生しない。すなわち、前進シフトイン位置と後進シフトイン位置との間の操作領域は、推進力の発生に関与しない不感帯である。
【0034】
スロットルレバー8a,8bを前進シフトイン位置からさらに前進全開位置に向けて前方へ傾倒させると、航走制御装置20は、その傾倒量が多いほど目標エンジン回転速度を大きくする。すなわち、前進シフトイン位置を超えた前進側操作領域は、前進出力調整領域である。同様に、スロットルレバー8a,8bを後進シフトイン位置からさらに後進前回位置に向けて後方へ傾倒させると、航走制御装置20は、その傾倒量が多いほど目標エンジン回転速度を大きくする。すなわち、後進シフトイン位置を超えた後進側操作領域は、後進出力調整領域である。こうして、スロットルレバー8a,8bの操作によって、船外機11,12が発生する前進方向または後進方向の推進力の大きさを調整することができる。
【0035】
図示は省略するが、本体8cには、スロットルレバー8a,8bをそれぞれ中立位置、前進シフトイン位置および後進シフトイン位置で仮保持するための仮保持機構が備えられている。このような仮保持機構は、たとえば、スロットルレバー8a,8bとともに移動する可動部材を仮保持するノッチを含むものであってもよい。このような構成により、スロットルレバー8a,8bが中立位置、前進シフトイン位置および後進シフトイン位置に達すると、その位置でスロットルレバー8a,8bが保持され、軽い力では動かなくなる。つまり、操船者は、中立位置、前進シフトイン位置および後進シフトイン位置でクリック感を得ることができる。これにより、操船者は、中立位置、前進シフトイン位置および後進シフトイン位置を容易に認識できる。
【0036】
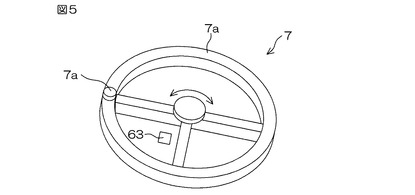
図5は、ステアリング操作部7の図解的な斜視図である。ステアリング操作部7は、ステアリングハンドル7aと、回頭ボタン7bとを備えている。この実施形態では、回頭ボタン7bは、ステアリングハンドル7aに設けられた押しボタンである。回頭ボタン7bは、ステアリングハンドル7aを把持した手(図5の例では左手)の親指で操作され得る位置に設けられてもよい。したがって、操船者は、ステアリングハンドル7aと回頭ボタン7bとを同時に操作することができる。図5の例では、ステアリングハンドル7aを左手で把持したときに、左手親指で回頭ボタン7bを操作できるから、同時にスロットル操作部8を右手で操作することができる。ステアリングハンドル7aの回動操作位置は、第3位置センサ63によって検出されるようになっている。第3位置センサ63は、たとえば、ポテンショメータで構成することができる。第3位置センサ63の検出信号、および回頭ボタン7bの操作信号は、航走制御装置20に与えられるようになっている。
【0037】
通常航走モードにおいて、航走制御装置20は、ステアリングハンドル7aの回動操作位置に応じた目標操舵角を設定する。この目標操舵角に応じて船外機11,12の操舵機構50が制御される。これにより、ステアリングハンドル7aの操作によって、舵取り制御を行うことができる。
一方、平行移動モードにおいては、回頭ボタン7bを押下しながらステアリングハンドル7aを操作すると、航走制御装置20は、ステアリングハンドル7aの操作量に応じた目標ヨーモーメントを設定する。より具体的には、回頭ボタン7bが押下されてからのステアリングハンドル7aの相対操作量および相対操作方向に対応する目標ヨーモーメントが設定される。
【0038】
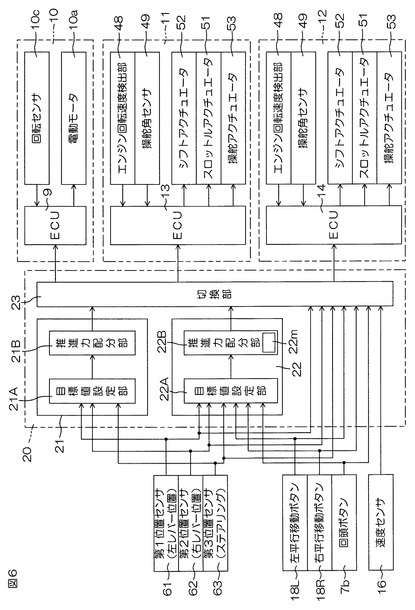
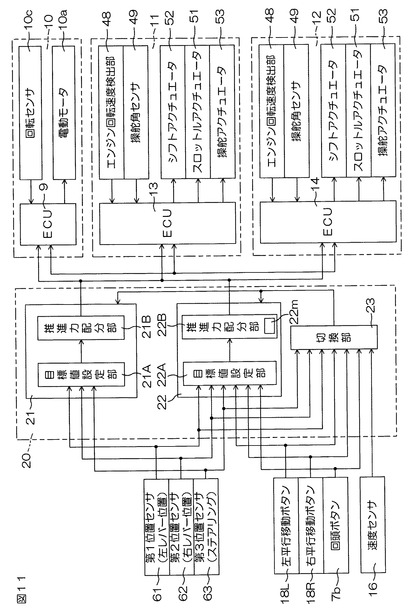
図6は、船舶1の主要部の電気的構成を説明するためのブロック図である。航走制御装置20は、CPU(中央処理装置)およびメモリを含むマイクロコンピュータを備えていて、このマイクロコンピュータが所定のソフトウェア処理を実行することにより、実質的に複数の機能処理部として動作する。この機能処理部には、第1および第2目標値演算部21,22と、切換部23とが含まれている。第1目標値演算部21は、通常航走モードのための目標値を演算する。第2目標値演算部22は、平行移動モードのための目標値を演算する。切換部23は、第1および第2目標値演算部21,22のいずれかによって演算される目標値を平行移動ボタン18L,18R、回頭ボタン7b、スロットルレバー8a,8bの操作状態等に応じて選択する。切換部23によって選択された目標値は、バウスラスタ10のためのECU9、左舷船外機11のための船外機ECU13、および右舷船外機12のための船外機ECU14へと与えられる。
【0039】
バウスラスタ10は、プロペラ10bを駆動する電動モータ10aと、電動モータ10aの回転速度(すなわち、プロペラ10bの回転速度)を検出する回転センサ10cとを有している。航走制御装置20は、ECU9に対して、目標回転方向および目標回転速度を含む目標値を与える。ECU9は、回転センサ10cからフィードバックされる回転信号を用い、目標回転方向および目標回転速度に基づいて電動モータ10aをフィードバック制御する。
【0040】
船外機11,12のECU13,14は、航走制御装置20から与えられる目標値に応じて、対応するスロットルアクチュエータ51、シフトアクチュエータ52および操舵アクチュエータ53を制御する。この場合の目標値は、目標シフト位置、目標エンジン回転速度および目標操舵角を含む。ECU13,14には、エンジン回転検出部48が検出するエンジン回転速度および操舵角センサ49が検出する操舵角が入力されている。ECU13,14は、エンジン回転検出部48によって検出されるエンジン回転速度が目標エンジン回転速度に一致するように、スロットルアクチュエータ51を制御する。また、ECU13,14は、操舵角センサ49によって検出される操舵角が目標操舵角に一致するように、操舵アクチュエータ53を制御(たとえばPD(比例微分)制御)する。
【0041】
第1目標値演算部21は、目標値設定部21Aと、推進力配分部21Bとを備えている。目標値設定部21Aは、左右のスロットルレバー8a,8bの前後方向の操作に応じて左舷および右舷の船外機11,12のための目標シフト位置および目標エンジン回転速度を生成する。また、目標値設定部21Aは、ステアリングハンドル7aの回動操作に応じて目標操舵角を生成する。推進力配分部21Bは、目標値設定部21Aによって生成された目標値(目標シフト位置、目標エンジン回転速度および目標操舵角)を左右の船外機11,12に対応した船外機ECU13,14に配分する。バウスラスタ10の電動モータ10aについては推進力配分部21Bは、その目標回転速度を零に設定する。
【0042】
目標値設定部21Aは、第1および第2位置センサ61,62によって検出される左右のスロットルレバー8a,8bの前後方向の傾倒量に応じて目標シフト位置および目標エンジン回転速度を生成する。
より具体的には、左側のスロットルレバー8aの前方への傾倒量が前進シフトイン位置に相当する値以上であれば、目標値設定部21Aは、左舷船外機11の目標シフト位置を前進位置とする。さらに、目標値設定部21Aは、スロットルレバー8aが前進シフトイン位置を超えてさらに前方へ傾倒されると、その傾倒量が大きいほど大きな目標エンジン回転速度を設定する。同様に、スロットルレバー8aの後方への傾倒量が後進シフトイン位置に相当する値以上であれば、目標値設定部21Aは、左舷船外機11の目標シフト位置を後進位置とする。さらに、目標値設定部21Aは、スロットルレバー8aが後進シフトイン位置を超えてさらに後方へ傾倒されると、その傾倒量が大きいほど大きな目標エンジン回転速度を設定する。スロットルレバー8aの前後方向の傾倒位置が前進シフトイン位置および後進シフトイン位置のいずれにも達していないときは、目標値設定部21Aは、左舷船外機11の目標シフト位置をニュートラル位置とする。さらに、スロットルレバー8aの傾倒位置が前進シフトイン位置から後方シフトイン位置までの範囲内であるときは、目標値設定部21Aは、目標エンジン回転速度をアイドル回転速度とする。
【0043】
目標値設定部21Aは、第2位置センサ62によって検出される右側スロットルレバー8bの操作位置に対しても同様の処理を行う。すなわち、右側スロットルレバー8bの操作位置に応じて右舷船外機12の目標シフト位置および目標エンジン回転速度を設定する。
このように左右の船外機11,12のために個別に設定された目標シフト位置および目標エンジン回転速度が、推進力配分部21Bによって、船外機ECU13,14にそれぞれ供給される。
【0044】
また、目標値設定部21Aは、第3位置センサ62によって検出されるステアリングハンドル7aのハンドル舵角(回動操作量および回動方向)に応じて、目標操舵角を設定する。具体的には、中立位置から右方向へのステアリングハンドル7aの回動操作に対しては、右旋回のための目標操舵角が設定される。同様に、中立位置から左方向へのステアリングハンドル7aの回動操作に対しては、左旋回のための目標操舵角が設定される。いずれの場合も、中立位置からの回動操作量が大きいほど、目標操舵角は、その絶対値(中立位置からの偏角)が大きな値とされる。こうして設定された目標操舵角は、推進力配分部21Bによって、船外機ECU13,14に共通に与えられる。これにより、左舷船外機11および右舷船外機12の操舵角は互いに等しい値に制御される。
【0045】
第2目標値演算部22は、目標値設定部22Aと、推進力配分部22Bとを備えている。目標値設定部22Aは、左右のスロットルレバー8a,8b、ステアリングハンドル7a、平行移動ボタン18L,18R、および回頭ボタン7bの操作に応じて、目標値を設定する。この場合の目標値は、船舶1の全体に作用させるべき目標推進力および目標進行方向ならびに目標ヨーモーメントを含む。目標値設定の詳細は、後述する。
【0046】
推進力配分部22Bは、目標値設定部22Aによって設定された目標値に応じて、推進機10〜12からそれぞれ発生させるべき推進力およびその方向を表す個別の目標値を演算する。すなわち、推進力配分部22Bは、バウスラスタ10に関しては、目標回転方向および目標回転速度を演算する。また、推進力配分部22Bは、船外機11,12に関しては、目標シフト位置、目標エンジン回転速度および目標操舵角を演算する。この場合、船外機11,12に与えられる目標値は、一般には、等しい値とならない。
【0047】
切換部23は、スロットルレバー8a,8bの操作位置、ステアリングハンドル7aの舵角、平行移動ボタン18L,18Rおよび回頭ボタン7bからの操作信号、ならびに速度センサ16によって検出される船舶1の速度に応じて、制御モードを切り換える。切換部23は、第1目標値演算部21による演算結果を選択する通常航走モードと、第2目標値演算部22による演算結果を選択する平行移動モードとの間で制御モードを切り換える。切換部23によって選択された演算結果(目標値)は、バウスラスタ10、左舷船外機11および右舷船外機12のECU9,13,14へと送られる。
【0048】
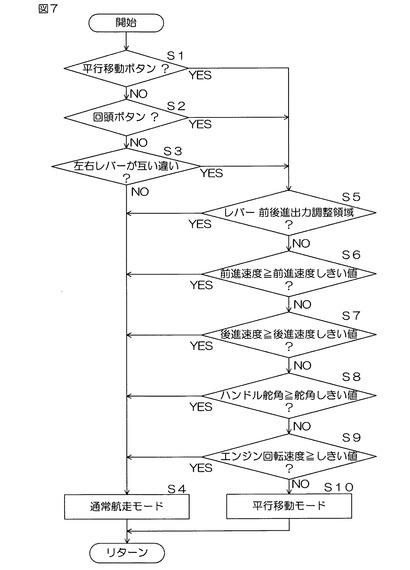
図7は、制御モードの選択(切換部23の作用)を説明するためのフローチャートである。初期制御モードは、通常航走モードとされている。すなわち、切換部23は、第1目標値演算部21によって演算される目標値を選択して、推進機10〜12に与える。
航走制御装置20は、平行移動ボタン18L,18Rおよび回頭ボタン7bの操作信号、ならびにスロットルレバー8a,8bの操作信号(第1および第2センサ61,62の検出信号)を参照する。より具体的には、航走制御装置20は、平行移動ボタン18L,18Rおよび回頭ボタン7bのいずれかが操作されているかどうかを判断する(ステップS1,S2)。さらに、航走制御装置20は、左右のスロットルレバー8a,8bの操作が、互い違いのシフトイン位置であるかどうかを判断する(ステップS3)。すなわち、左側スロットルレバー8aが前進シフトイン位置にあり、右側スロットルレバー8bが後進シフトイン位置にあるとき、この判断が肯定される。また、左側スロットルレバー8aが後進シフトイン位置にあり、右側スロットルレバー8bが前進シフトイン位置にあるときにも、ステップS3の判断が肯定される。ボタン18L,18R,7aのいずれもが操作されておらず(ステップS1,S2:NO)、かつ、スロットルレバー8a,8bが互い違いのシフトイン位置にない(ステップS3:NO)場合、航走制御装置20は、通常航走モードを選択する(ステップS4)。
【0049】
ステップS1〜S3のいずれかの判断が肯定されると、次に説明する禁止条件1〜5(ステップS5〜S9)がすべて否定されることを条件に、航走制御装置20は、平行移動モードを選択する(ステップS10)。禁止条件1〜5のいずれかが肯定されると(ステップS5〜S9:YES)、航走制御装置20は、平行移動モードへの遷移のための操作(ステップS1〜S3)を無効化する。この場合、航走制御装置20は、通常航走モードを選択する(ステップS4)。
【0050】
禁止条件1(ステップS5):いずれかのスロットルレバー8a,8bの操作位置が、前進出力調整領域または後進出力調整領域にある。スロットルレバー8a,8bの操作位置が前進出力領域または後進出力領域にあるとき、操船者は、船舶1の高速移動を意図していると考えられる。そこで、この場合には、航走制御装置20は、平行移動モードへの遷移を禁止する。
【0051】
禁止条件2(ステップS6):前進速度が所定の前進速度しきい値以上である。前進速度とは、前進方向の速度の絶対値である。前進速度しきい値は、たとえば、4km/hとされる。高速で航走中に操船者がスロットルレバー8a,8bをシフトイン位置や中立位置に戻す場合が考えられる。この場合、船舶1は、しばらくの間、惰性で航走する。このとき、航走制御装置20は、充分に速度が落ちるまで、平行移動モードへの遷移を禁止する。
【0052】
禁止条件3(ステップS7):後進速度が所定の後進速度しきい値以上である。後進速度とは、後進方向の速度の絶対値である。後進速度しきい値は、たとえば、2km/hとされる。この禁止条件3は禁止条件2と同様の条件である。すなわち、船舶1が惰性で高速に航走している場合、航走制御装置20は、充分に速度が落ちるまで、平行移動モードへの遷移を禁止する。
【0053】
禁止条件4(ステップS8):ハンドル舵角が所定の舵角しきい値以上である。ハンドル舵角がステアリングハンドル7aの最大舵角付近(操作端)付近の値であるとき、ステアリングハンドル7aの操作による回頭の制御が一方向にしかできなくなるおそれがある。そこで、航走制御装置20は、第3位置センサ63が検出するハンドル舵角の絶対値が、舵角しきい値以上であるとき、平行移動モードへの遷移を禁止する。たとえば、ステアリングハンドル7aの最大ハンドル舵角が±180度であるとする。この場合に、回頭制御のために±45度のハンドル操作を可能とするためには、前記舵角しきい値は135度とすればよい。
【0054】
禁止条件5(ステップS9):エンジン回転速度が所定のしきい値以上である。エンジン回転速度が高い状態で制御モードが切り換わると、エンジン回転速度の急変および推進方向の急変が生じるおそれがある。そこで、航走制御装置20は、船外機11,12のいずれかのエンジン回転速度がしきい値(たとえば2000rpm)以上であるとき、平行移動モードへの遷移を禁止する。なお、船外機ECU13,14は、シフトアクチュエータ52およびスロットルアクチュエータ51を協調制御し、好適なタイミングでシフトインおよびシフトアウトするように制御する。
【0055】
平行移動モードへの遷移条件(ステップS1〜S3)を満たす操作が行われた場合において、いずれかの禁止条件(ステップS5〜S9)に該当するときには、平行移動モードへの遷移のための操作が無効化されたことを操船者に報知するようにしてもよい。このような報知は、インジケータ(たとえばインジケータランプ)やアラーム音などの報知ユニットを設け、これを航走制御装置20によって制御することで行える。
【0056】
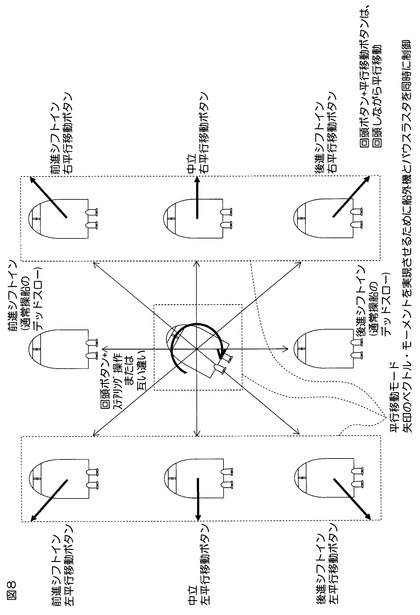
図8は、平行移動モードにおける目標値の設定および船舶の挙動を説明するための図である。
まず、左平行移動ボタン18Lが押されたときの動作について説明する。航走制御装置20は、左右のスロットルレバー8a,8bがいずれも中立位置にある場合には、左方向を目標移動方向とし、左平行移動(真横移動)のための目標値を演算する。左右のスロットルレバー8a,8bがいずれも前進シフトイン位置にある場合には、航走制御装置20は、左斜め前方向(たとえば、船舶1の中心線に対して45度の角度をなす方向)を目標移動方向とし、この方向に船舶1を平行移動させるための目標値を演算する。左右のスロットルレバー8a,8bがいずれも後進シフトイン位置にある場合には、航走制御装置20は、左斜め後ろ方向(たとえば、船舶1の中心線に対して45度の角度をなす方向)を目標移動方向とする。そして、航走制御装置20は、この方向に船舶1を平行移動させるための目標値を演算する。
【0057】
右平行移動ボタン18Rが押されたときの動作も同様である。すなわち、航走制御装置20は、左右のスロットルレバー8a,8bがいずれも中立位置にある場合には、右方向を目標移動方向とし、右平行移動(真横移動)のための目標値を演算する。左右のスロットルレバー8a,8bがいずれも前進シフトイン位置にある場合には、航走制御装置20は、右斜め前方向(たとえば、船舶1の中心線に対して45度の角度をなす方向)を目標移動方向とし、この方向に船舶1を平行移動させるための目標値を演算する。左右のスロットルレバー8a,8bがいずれも後進シフトイン位置にある場合には、航走制御装置20は、右斜め後ろ方向(たとえば、船舶1の中心線に対して45度の角度をなす方向)を目標移動方向とする。そして、航走制御装置20は、この方向に船舶1を平行移動させるための目標値を演算する。
【0058】
次に、左右のスロットルレバー8a,8bの操作位置が互い違いのシフトイン位置である場合の動作について説明する。左側のスロットルレバー8aの操作位置が前進シフトイン位置であり、右側のスロットルレバー8bの操作位置が後進シフトイン位置である場合には、航走制御装置20は、船舶1をその場で右回り(時計まわり)に回頭させるための目標値を演算する。逆に、左側のスロットルレバー8aの操作位置が後進シフトイン位置であり、右側のスロットルレバー8bの操作位置が前進シフトイン位置である場合には、航走制御装置20は、船舶1をその場で左回り(反時計まわり)に回頭させるための目標値を演算する。いずれの場合も、目標ヨーモーメントが、予め定める一定値となるように、推進機10〜12のための目標値が演算されてもよい。
【0059】
いずれの平行移動ボタン18L,18Rも操作されていない場合に、左右のスロットルレバー8a,8bがいずれも前進シフトイン位置にあるときには、制御モードは、通常航走モードとなる。このとき、航走制御装置20は、微速前進(デッドスロー)のための目標値を設定する。同様に、いずれの平行移動ボタン18L,18Rも操作されていない場合に、左右のスロットルレバー8a,8bがいずれも後進シフトイン位置にあるときには、制御モードは、通常航走モードとなる。このとき、航走制御装置20は、微速後進(デッドスロー)のための目標値を設定する。
【0060】
回頭ボタン7bが押されると、航走制御装置20は、スロットルレバー8a,8bの位置によらずに、平行移動モードに切り換える。つまり、回頭ボタン7bおよびステアリングハンドル7aの操作による回頭制御は、スロットルレバー8a,8bを互い違いのシフトイン位置とする操作に優先する。回頭ボタン7bおよびステアリングハンドル7aによる船舶1の回頭は、その場で生じる場合もあり、また、平行移動と並行して生じる場合もある。
【0061】
つまり、操船者が、左平行移動ボタン18Lを操作し、スロットルレバー8a,8bをいずれも前進シフトイン位置まで操作し、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を左斜め前方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、左斜め前に平行移動しながら回頭することになる。また、操船者が、左平行移動ボタン18Lを操作し、スロットルレバー8a,8bをいずれも中立位置とし、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を左方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、左に平行移動(真横移動)しながら回頭する。また、操船者が、左平行移動ボタン18Lを操作し、スロットルレバー8a,8bをいずれも後進シフトイン位置まで操作し、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を左斜め後ろ方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、左斜め後ろに平行移動しながら回頭する。
【0062】
同様に、操船者が、右平行移動ボタン18Rを操作し、スロットルレバー8a,8bをいずれも前進シフトイン位置まで操作し、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を右斜め前方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は右斜め前に平行移動しながら回頭する。また、操船者が、右平行移動ボタン18Rを操作し、スロットルレバー8a,8bをいずれも中立位置とし、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を右方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、右に平行移動(真横移動)しながら回頭する。また、操船者が、右平行移動ボタン18Rを操作し、スロットルレバー8a,8bをいずれも後進シフトイン位置まで操作し、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を右斜め後ろ方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、右斜め後ろに平行移動しながら回頭する。
【0063】
平行移動(瞬間回転中心の直線的移動)による船舶1の移動方向は、前後左右、左斜め前、左斜め後、右斜め前および右斜め後の8方向となる。したがって、船舶1は、任意の方向に平行移動できるわけではない。しかし、船外機11,12の最低推進力はアイドル回転速度によって制限されるから、推進力のつり合いによって任意の方向への合成推進力を得ることができるわけではない。したがって、任意の方向への平行移動を指示できる操作ユニットを備える場合に、指令した方向への平行移動が実際上不可能であると、操船者の意図とは異なる挙動を船舶が示すことになり、違和感の原因となる。よって、平行移動の方向が8方向に制限される本実施形態の構成は、実用上の問題がないばかりでなく、違和感を生じにくい点でむしろ好ましい構成であると言える。
【0064】
次に、通常航走モードにおける目標値の設定について説明する。
スロットルレバー8a,8bの前後方向の傾倒量LxL,LxRは、前方側に対して正符号、後方側に対して負符号が与えられるものとする。第1目標値演算部21の目標値設定部21Aは、前進シフトイン位置よりも前方側、および後進シフトイン位置よりも後方側の操作位置に対応する傾倒量LxL,LxRに対して、左右の船外機11,12のための目標エンジン回転速度nL,nRをそれぞれ設定する。具体的には、目標値設定部21Aは、nL=cx×LxL、nR=cx×LxRにより、目標エンジン回転速度nL,nRを設定する。ただし、目標エンジン回転速度nL,nRは前進回転に対して正符号、後進回転に対して負符号が与えられるものとする。また、cxは係数(たとえば定数)である。さらに、目標値設定部21Aは、ステアリングハンドル7aのハンドル舵角(回動操作量)Lzに応じて、δd=cz×Lzにより、目標操舵角δdを設定する。ただし、czは係数(たとえば定数)であり、ハンドル舵角Lzは、たとえば、右方向操作に対して正符号、左方向操作に対して負符号が与えられるものとする。したがって、目標操舵角δdは、右方向操舵に対して正符号、左方向操舵に対して負符号を有することになる。
【0065】
第1目標値演算部21の推進力配分部21Bは、バウスラスタ10の目標回転速度を零に設定するとともに、左舷船外機11のエンジン回転速度nLおよび右舷船外機12の目標エンジン回転速度nRを船外機ECU13,14にそれぞれ送信する。また、推進力配分部21Bは、左舷船外機11の目標操舵角δLおよび右舷船外機12の目標操舵角δRを、δL=δR=δdとする。これにより、通常航走モードでは、バウスラスタ10は停止状態とされる一方で、左右の船外機11,12の操舵角は等しくなり、これらの船外機11,12はスロットルレバー8a,8bの操作に応じた推進力をそれぞれ発生することになる。
【0066】
次に、平行移動モードにおける目標値の設定について説明する。
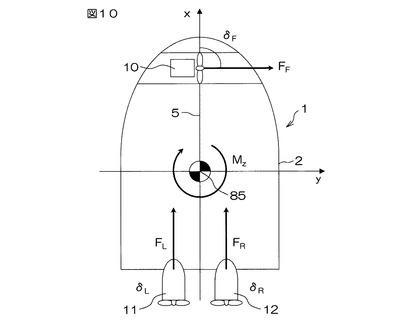
この実施形態では、平行移動モードにおいて、船外機11,12の操舵角は、予め定める一定値に設定される。たとえば、第2目標値演算部22は、左舷船外機11の目標操舵角δLを−π/6(rad)に固定し、右舷船外機12の目標操舵角δRをπ/6(rad)に固定する。バウスラスタ10の操舵角δF(プロペラが発生する推進力の方向)は、機械的に固定されていて、π/2(rad)である。ここで、「操舵角」は、船体2の中心線5(図1参照)に対するプロペラ回転軸線の偏角であり、船首から船尾に向かう方向を0度とし、これに対して左回り方向を正にとり、右回り方向を負にとったものである。プロペラ回転軸線は、バウスラスタ10については、プロペラ10bから右方向に向かう方向に延び、船外機11,12については、当該船外機11,12から船舶後方へ離れる方向に延びるものとする。
【0067】
平行移動モードにおける船舶1の進行方向および回頭角速度は、専ら、バウスラスタ10および船外機11,12のプロペラ回転方向およびプロペラ回転速度(つまり、推進力の方向および大きさ)によって調整される。
第2目標値演算部22の目標値設定部22Aは、スロットルレバー8a,8bの操作位置Lxに応じて、前後方向目標スラスト(推進力)Fdx=cx×Lxを求める。ただし、係数cxは、通常航走モード時とは異なる値である。また、操作位置Lxは、前進シフトイン位置に対してLx=1、中立位置に対してLx=0、後進シフトイン位置に対してLx=−1の各値が割り当てられており、左右のスロットルレバー8a,8bに共通の値である。
【0068】
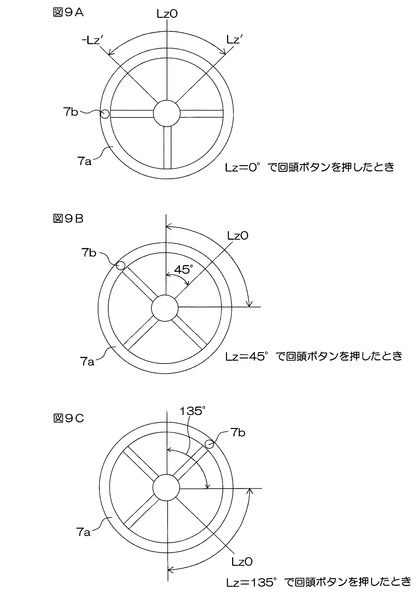
また、目標値設定部22Aは、左右の平行移動ボタン18L,18の操作状態Lyに応じて、左右方向目標スラスト(推進力)Fdy=cy×Lyを求める。ただし、操作状態Lyは、右平行移動ボタン18Rが操作されていればLy=1、いずれの平行移動ボタン18L,18Rも操作されていなければLy=0、左平行移動ボタン18Lが操作されていればLy=−1の各値をとるものとする。さらに、目標値設定部22Aは、相対回動操作量(相対操舵量)Lz′に応じて、船舶1を旋回させるための目標ヨーモーメントMdz=cz×Lz′を求める。ただし、cyは係数(定数)である。また、相対回動操作量Lz′は、回頭ボタン7bの操作が開始されたときに第3位置センサ63が検出する初期ハンドル舵角(初期回動操作量)Lz0に対するステアリングハンドル7aの相対ハンドル舵角(相対回動操作量)である。すなわち、相対回動操作量Lz′は、第3位置センサ63が検出するハンドル舵角(絶対回動操作量)Lzを用いて、Lz′=Lz−Lz0と表される。
【0069】
より具体的には、図9A〜図9Cに示すように、回頭ボタン7bが押されると、目標値設定部22Aは、その時点での第3位置センサ63の出力をメモリ(図示せず)記憶し、これを初期ハンドル舵角Lz0とする。回頭ボタン7bが押されている間にステアリングハンドル7aが回転すると、目標値設定部22Aは、第3位置センサ63の出力(現在のハンドル舵角)Lzに基づいて、相対回動操作量(相対ハンドル舵角)Lz′=Lz−Lz0を求める。この相対回動操作量Lz′に基づいて、目標値設定部22Aは、目標ヨーモーメントMdz(目標トルク)を求める。なお、図9Aは初期ハンドル舵角Lz0が0度(舵角中立位置)のときの様子を示し、図9Bは初期ハンドル舵角Lz0が45度のときの様子を示し、図9Cは初期ハンドル舵角Lz0が135度のときの様子を示す。全操舵角範囲が舵角中立位置から±180度以内であるとすると、舵角中立位置からのハンドル舵角絶対値が135度を超える領域では、右方向または左方向への45度の相対舵角を確保できなくなる。この場合に、平行移動モードへの遷移が禁止されるのは前述のとおりである(図7のステップS8参照)。
【0070】
回頭ボタン7bが押されていないときには、目標値設定部22Aは、スロットルレバー8a,8bの操作位置に応じて値Lz′を定める。すなわち、左右のスロットルレバー8a,8bが同位置であればLz′=0とされる。また、左側のスロットルレバー8aが前進シフトイン位置であり、右側のスロットルレバー8bが後進シフトイン位置であればLz′=1とされる。さらに、左側のスロットルレバー8aが後進シフトイン位置であり、右側のスロットルレバー8bが前進シフトイン位置であればLz′=−1とされる。こうして定められた値Lz′を用いて、目標値設定部22Aは、目標ヨーモーメントMdz=cz×Lz′を求める。左右のスロットルレバー8a,8bが互い違いのシフトイン位置にあることは、第1および第2位置センサ61,62によって検出されるシフトイン位置の符号が不一致であることに基づいて判定できる。
【0071】
こうして求められた目標値Fdx,Fdy,Mdzに基づいて、バウスラスタ10、および船外機11,12が生成すべき個別の推進力が、推進力配分部22Bによって求められる。
推進力配分部22Bの働きについてより詳細に説明する。説明にあたり、次の記号を導入する。
FF:バウスラスタが出力するスラスト
FL:左舷船外機が出力するスラスト
FR:右舷船外機が出力するスラスト
(xF,yF):船体座標系におけるバウスラスタの位置
(xL,yL):船体座標系における左舷船外機の位置
(xR,yR):船体座標系における右舷船外機の位置
δF:バウスラスタの目標操舵角
δL:左舷船外機の目標操舵角
δR:右舷船外機の目標操舵角
「船体座標系」とは、図10に示すように船舶1の瞬間回転中心80を原点とし、中心線5に沿ってx軸をとり、x軸に直交する水平方向(左右方向)にy軸をとった座標系である。
【0072】
制御のための推進力とモーメントをτ=[Fdx Fdy Mdz]T(ただし、Tは行列およびベクトルの転置を表す)と表し、各推進機10,11,12が出力すべき推進力をf=[FF FL FR]Tと表すと、fは、次の制御分配行列T(δ)を用いて計算される。
f=T(δ)-1τ ……(1)
制御分配行列T(δ)は、次のように表される。
【0073】
T(δ)=[TF TL TR] ……(2)
TF=[cosδFsinδF xFsinδF−yFcosδF]T ……(3)
TL=[cosδLsinδL xLsinδL−yLcosδL]T ……(4)
TR=[cosδRsinδR xRsinδR−yRcosδR]T ……(5)
前述のとおり、この実施形態では、δF=π/2(rad)、δL=−π/6(rad)、δR=π/6(rad)としている。これらは一例であり、一般には、T(δ)が逆行列T(δ)-1を持つように定めればよく、固定値である必要もない。
【0074】
このようにして推進力配分部22Bによって目標スラストFd=fおよび目標操舵角δd=[δF δL δR]Tが定められる。推進力配分部22Bは、さらに、目標スラストFdから、バウスラスタ10の目標回転速度nFと、船外機11,12の目標エンジン回転速度nL,nRを求める。目標回転速度nFの符号は、バウスラスタ10の電動モータ10aの目標回転方向を表す。また、目標エンジン回転速度nL,nRの符号は、船外機11,12の目標シフト位置を表す。こうして求められた目標値nF,nL,nR,δF,δL,δRが、対応する推進機10,11,12のECU9,13,14に分配される。
【0075】
プロペラが発生するスラストTは、次式により得られる。
T=ρD4KT(J)n|n| ……(6)
ここで、ρは水の密度、Dはプロペラ直径、nはプロペラ回転速度、Jは前進率であり、次式で与えられる。
J=u/(nD) ……(7)
uはプロペラ後流の速度(船舶の速度。バウスラスタ10に関しては実質的に零と見なせる。)である。KTはスラスト係数であり、前進率Jの関数となっていて、実測やシミュレーションによって求められる。したがって、現在のプロペラ後流の速度とプロペラ回転速度が分かれば、現在発生しているスラストとトルクが分かる。
【0076】
第2目標値演算部22の推進力配分部22Bには、マップ22m(図6参照)が備えられている。このマップ22mには、バウスラスタ10および船外機11,12のそれぞれに対応して、船舶1の速度およびプロペラ回転速度の種々の値に対応するスラスト係数KT(J)が保持されている。
推進力配分部22Bは、速度センサ16によって検出される船舶1の速度、ECU9から与えられる現在のプロペラ回転速度、およびECU13,14から与えられる現在のエンジン回転速度を用いてマップ22mを参照することにより、スラスト係数KTを求める。さらに、推進力配分部22Bは、そのスラスト係数KTを用いて、前記(6)式から、目標スラストFdに対応する各推進機10〜12の目標回転速度nF,nL,nRを求める。
【0077】
バウスラスタ10のECU9は、プロペラ回転速度(電動モータの回転速度)が目標回転速度nFに一致するように、電動モータ10aのフィードバック制御(たとえば、PID(比例積分微分)制御)を実行する。また、船外機11,12のECU13,14は、プロペラ回転速度(エンジン回転速度)が目標回転速度nL,nRに一致するように、スロットルアクチュエータ51をフィードバック制御(たとえば、PID制御)する。
【0078】
以上のように、この実施形態によれば、通常航走モードおよび平行移動モードの両方に対してステアリング操作部7およびスロットル操作部8を共通に用いることができる。したがって、操船者は、制御モードに応じて操作系を持ち替える必要がない。これにより、出港時および帰港時における操作を簡単にすることができる。また、通常航走モードと平行移動モードとで操作系を共有できるので、操作系全体の構成を簡素化でき、それに応じてコストを削減できるうえ、操作系の設置スペースの削減も可能となる。
【0079】
図11は、この発明の他の実施形態に係る船舶の主要部の電気的構成を示すブロック図である。この図11において、前述の図6に示された各部と同等の部分には同一参照符号を付すこととする。前述の実施形態では、制御モードを切り換える切換部23は、第1および第2目標値演算部21,22の演算結果(目標値)のいずれかを選択して推進機10〜12に供給するようになっている。これに対して、この実施形態では、切換部23は、第1および第2目標値演算部21,22のいずれか一方を活性化し、他方を非活性状態とする。そして、当該活性状態の目標値演算部21,22が生成する目標値が、推進機10〜12に供給される。この構成によっても、前述の第1の実施形態と同様の作用効果を達成できる。
【0080】
以上、この発明の実施形態について説明してきたけれども、この発明はさらに他の形態で実施することもできる。たとえば、前述の実施形態では、推進機の出力に関する目標値として、電動モータまたはエンジンの目標回転速度が演算されているけれども、目標スロットル開度、目標スラスト、目標速度などを用いることもできる。また、前述の実施形態では、船舶の回頭に関する目標値として目標操舵角が演算されているけれども、目標ヨー角速度を用いることもできる。
【0081】
また、図7に示した処理において、船舶1の速度を用いた判断(ステップS6,S7)は、省かれてもよい。エンジン回転速度が所定のしきい値以上であることを、平行移動モードへの遷移を禁止する条件の一つとされているからである(ステップS9)。
また、現在の制御モードが通常航走モードか平行移動モードかを表示するインジケータ(たとえばインジケータランプ)を設けてもよい。このようなインジケータは、操作卓6に設けることができる。
【0082】
また、前述の実施形態では、ステアリングハンドル7aに回頭ボタン7bが設けられているけれども、他の場所に回頭ボタンを設けても差し支えない。さらに、左右の平行移動ボタン18L,18Rが、左側スロットルレバー8aに設けられる必要もない。たとえば、右側スロットルレバー8bに平行移動ボタン18L,18Rを配置してもよい。また、左側スロットルレバー8aに左平行移動ボタン18Lを配置する一方で、右側スロットルレバー8bに右平行移動ボタン18Rを配置してもよい。また、熟練した操船者にとっては平行移動モードは必ずしも必要ではないから、回頭ボタンおよび平行移動ボタンを覆うカバー部材が備えられていてもよい。
【0083】
さらに、前述の実施形態では、推進機として、バウスラスタ10および船外機11,12が備えられている例について説明したけれども、バウスラスタ10は必ずしも必要ではない。すなわち、左右一対の船外機11,12が発生する推進力のつり合いを利用して、平行移動モードにおける操船を実現してもよい。
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【0084】
特許請求の範囲に記載した発明以外にも、この明細書および図面の記載から、次のような特徴が抽出され得る。
A1.推進機および操舵機構を備えた船舶のための操船支援装置であって、
前記推進機を前進駆動するための前進駆動位置、前記推進機を後進駆動するための後進駆動位置、および前記推進機を非作動状態とする中立位置を選択可能な第1操作手段と、
船舶の左右への移動を指令するための第2操作手段と、
前記第2操作手段によって左右への移動が指令されたときに、前記第1操作手段の操作位置に応じた方向へ船舶が平行移動するように、前記推進機のための目標推進力および前記操舵機構のための目標操舵角を含む目標値を求める目標値演算手段とを含む、操船支援装置。
【0085】
「平行移動」とは、船舶の中心(たとえば瞬間回転中心)が直線的に移動する移動状態をいう。
この構成によれば、通常航走時には、第1操作手段の操作に応じて推進機の動作を制御できる。一方、第2操作手段によって左右への移動が指令されたときは、第1操作手段の操作位置に応じた方向へ船舶が平行移動するように、目標推進力および目標操舵角を含む目標値が演算される。この目標値に応じて推進機および操舵機構が制御されることによって、当該方向に船舶を平行移動させることができる。こうして、第1操作手段を、通常航走時および平行移動時に共通に用いることができるから、操作系の持ち替えの手間を省くことができる。また、操作系を通常航走と平行移動とに共用できるから、操作系全体の構成が簡単になり、それに応じてコストを削減できる。さらに、操作系の設置スペースが小さくなる。
【0086】
前記目標値演算手段によって求められた目標値に応じて、前記推進機および操舵機構を制御する制御手段がさらに備えられていることが好ましい。このような制御手段は、操船支援装置に備えられてもよいし、推進機および操舵機構に備えられてもよい。
前記操舵機構の操舵角を制御するために操作可能なステアリングハンドルをさらに含むことが好ましい。この場合に、前記目標値演算手段は、ステアリングハンドルおよび前記第1操作手段の操作位置に応じて目標値を求める通常航走モードと、前記第2操作手段によって左右への移動が指令されたときに前記第1操作手段の操作位置に応じた方向への平行移動のための目標値を定める平行移動モードとを有するものであることが好ましい。より具体的には、前記目標値演算手段は、通常航走モードのための目標値を演算する第1目標値演算ユニット(モジュール)と、平行移動モードのための目標値を演算する第2目標値演算ユニット(モジュール)と、通常航走モードと平行移動モードとのいずれかを選択する切換手段とを含むものであってもよい。この場合、前記切換手段は、前記第1および第2目標値演算ユニットのいずれか一つの目標値演算ユニットを選択する選択手段を含むものであってもよい。この選択手段は、第1および第2目標値演算ユニットから一つの目標値演算ユニットを選択して、その演算結果を出力する選択出力手段であってもよい。また、前記選択手段は、第1および第2目標値演算ユニットから一つの目標値演算ユニットを選択して活性化する選択活性化手段であってもよい。
【0087】
A2.前記第2操作手段は、左方向への移動を指令するための左移動操作子と、右方向への移動を指令するための右移動操作子とを含み、
前記目標値演算手段は、前記左移動操作子および右移動操作子の操作と、前記第1操作手段の操作位置との組み合わせに応じた方向への平行移動のための目標値を求めるものである、A1項に記載の操船支援装置。
【0088】
この構成によれば、左移動操作子および右移動操作子と第1操作手段の操作位置との組み合わせによって、多数の目標移動方向を設定でき、その目標移動方向に船舶を平行移動させることができる。
目標移動方向の設定例を示せば、次のとおりである。ただし、(4)〜(6)は、左右の移動操作子がいずれも操作されていない(OFF状態)であるので、通常航走モードに従う動作である。
【0089】
【表1】

【0090】
A3.前記操船支援装置は、船舶に備えられた左右一対の推進機と、これらの推進機にそれぞれ対応する一対の操舵機構とに対応した目標値を生成するものであり、
前記第1操作手段は、左の推進機に対応した左操作子(左側スロットルレバー)と、右の推進機に対応した右操作子(右側スロットルレバー)とを含み、前記左操作子および右操作子が、それぞれ、前進駆動位置、後進駆動位置および中立位置に操作可能であり、
前記目標値演算手段は、前記左操作子および右操作子の操作位置の組み合わせが前進駆動位置および後進駆動位置であるときに、船舶をその場で回頭させるための目標値を求めるものである、A1項またはA2項に記載の操船支援装置。
【0091】
「左操作子および右操作子の操作位置の組み合わせが前進駆動位置および後進駆動位置であるとき」とは、次のアおよびイの両方の操作状態を含む趣旨である。
ア.左操作子が前進駆動位置にあり、右操作子が後進駆動位置にある。
イ.左操作子が後進駆動位置にあり、右操作子が前進駆動位置にある。
前記の構成によれば、第1操作手段の左移動操作子および右移動操作子が反対方向の駆動を指令する操作位置とされると、船舶がその場で回頭することになる。これにより、通常航走のための操作系をその場回頭のために兼用することができる。
【0092】
たとえば、左操作子が前進駆動位置にあり、右操作子が後進駆動位置にあるときには右回頭のための目標値を設定し、左操作子が後進駆動位置にあり、右操作子が前進駆動位置にあるときには左回頭のための目標値を設定するとよい。
A4.前記目標値演算手段は、前記第1操作手段の前記中立位置からの操作量が所定値を超えているときには、前記第2操作手段による指令を無効化し、前記第1操作手段の操作量に応じて目標値を求めるものである、A1項〜A3項のいずれか一項に記載の操船支援装置。
【0093】
この構成によれば、第1操作手段を中立位置から大きく操作したときには、通常航走のための操作が行われたものとして、第2操作手段による平行移動モードの設定が無効化される。これにより、演算モードは、通常航走モードとなる。
たとえば、第1操作手段の操作位置は、中立位置、最低前進推進力指令位置(前進シフトイン位置)、前進出力調整領域、最低後進推進力指令位置(後進シフトイン位置)、および後進出力調整領域をとれるようになっていてもよい。最低前進推進力指令位置とは、前進方向の最低推進力が発生される操作位置である。前進出力調整領域とは、最低前進推進力指令位置を超えた前進側操作領域であり、操作位置に応じて、前進最低推進力よりも大きな範囲で前進方向の推進力を調整できる領域である。同様に、最低後進推進力指令位置とは、後進方向の最低推進力が発生される操作位置である。後進出力調整領域とは、最低後進推進力指令位置を超えた後進側操作領域であり、操作位置に応じて、後進最低推進力よりも大きな範囲で後進方向の推進力を調整できる領域である。この場合に、前進出力調整領域および後進出力調整領域では、第2操作手段(平行移動モード)が無効化されるようにしてもよい。したがって、平行移動のための前進駆動位置および後進駆動位置は、それぞれ、最低前進推進力指令位置および最低後進推進力指令位置に対応する。
【0094】
操作位置の認識を容易にするために、中立位置、最低前進推進力指令位置および最低後進推進力指令位置で操作位置を仮保持する操作位置仮保持手段が備えられていることが好ましい。操作位置仮保持手段は、操作子とともに移動する可動部材をノッチで仮保持する構造であってもよい。
A5.船舶の速度を検出する速度検出手段をさらに含み、
前記目標値演算手段は、前記速度検出手段によって検出される船舶の速度が所定の速度しきい値以上のときには、前記第2操作手段による指令を無効化して、目標値を求めるものである、A1項〜A4項のいずれか一項に記載の操船支援装置。
【0095】
この構成によれば、船舶の速度が速度しきい値を超えているときには、通常の航走状態であると判断され、第2操作手段の操作が無効とされる。したがって、平行移動モードへの移行が禁止される。これにより、船舶の速度が速い状況で平行移動モードに移行することに伴う違和感を軽減できる。
A6.前記船舶の平行移動中に船舶を回頭させるための回頭操作手段をさらに含み、
前記目標値演算手段は、前記第2操作手段によって左右への移動が指令されたときに、船舶が前記第1操作手段の操作位置に応じた方向へ平行移動しながら回頭するように、前記目標値を求めるものである、A1項〜A5項のいずれか一項に記載の操船支援装置。
【0096】
この構成によれば、平行移動中に、船舶を回頭させることができる。
A7.前記回頭操作手段が、前記操舵機構の操舵角を制御するためのステアリングハンドルに備えられている、A6項に記載の操船支援装置。
この構成によれば、ステアリングハンドルに設けられた回頭操作手段の操作によって回頭を指令することができる。これにより、通常航走時において操舵角の調整のために用いられるステアリングハンドルを保持した状態で回頭のための操作を行うことができる。
【0097】
A8.前記目標値演算手段は、平行移動時の目標回頭値を前記ステアリングハンドルの操作量(より具体的には相対操舵量)に応じて定め、この目標回頭値に従って前記目標値を求めるものである、A7項に記載の操船支援装置。前記目標回頭値とは、船舶の瞬間中心周りの目標ヨーモーメントであってもよいし、目標ヨー角速度であってもよい。
この構成によれば、ステアリングハンドルに備えられた回頭操作手段を操作し、さらに、ステアリングハンドルを操作することによって、その操作量に応じて船舶を回頭させることができる。これにより、通常航走時に操舵角の調整のために用いられるステアリングハンドルを、平行移動時における回頭制御のために共有できる。
【0098】
A9.前記目標値演算手段は、前記ステアリングハンドルのハンドル舵角が所定の舵角しきい値以上のときに、前記回頭操作手段による指令を無効化するものである、A7項またはA8項に記載の操船支援装置。
この構成によれば、ハンドル舵角が所定の舵角しきい値以上であれば、回頭操作が無効となるので、過大な目標回頭値が設定されることを回避できる。たとえば、ハンドル舵角が舵角しきい値以上のときには、平行移動モードに遷移せずに、通常航走モードを維持するようにしてもよい。ハンドル舵角が大きいときには、操船者は、平行移動ではなく、通常航走を望んでいると考えられるからである。
【0099】
A10.船体と、
この船体に取り付けられた推進機および操舵機構と、
前記推進機および操舵機構のための目標値を求めるA1項〜A9項のいずれか一項に記載の操船支援装置とを含む、船舶。
この構成によれば、通常航走のための操作手段を平行移動にも共用できるから、操作系の持ち替えが不要である。したがって、操作が簡単になる。そのうえ、操作系の構成が簡単になるので、船舶全体のコストを低減できる。また、操作系の設置スペースが小さくなるから、小型の船舶においても、優れた操作性を確保できる。
【0100】
なお、船舶は、クルーザ、釣り船、ウォータージェット、水上滑走艇(watercraft)のような比較的小型のものであってもよい。
また、船舶に備えられる推進機は、船外機(アウトボードモータ)、船内外機(スターンドライブ。インボードモータ・アウトボードドライブ)、船内機(インボードモータ)、ウォータージェットドライブのいずれの形態であってもよい。船外機は、原動機(エンジンまたは電動モータ)および推進力発生部材(プロペラ)を含む推進ユニットを船外に有し、さらに、推進ユニット全体を船体に対して水平方向に回動させる操舵機構が付設されたものである。船内外機は、原動機が船内に配置され、推進力発生部材および舵切り機構を含むドライブユニットが船外に配置されたものである。船内機は、原動機およびドライブユニットがいずれも船体に内蔵され、ドライブユニットからプロペラシャフトが船外に延び出た形態を有する。この場合、操舵機構は別途設けられる。ウォータージェットドライブは、船底から吸い込んだ水をポンプで加速し、船尾の噴射ノズルから噴射することで推進力を得るものである。この場合、操舵機構は、噴射ノズルと、この噴射ノズルを水平面に沿って回動させる機構とで構成される。
【0101】
以下に、「課題を解決するための手段」の項等に記載した用語と前述の実施形態における用語との対応関係を示す。
推進機:バウスラスタ10、船外機11,12
操舵機構:操舵機構50
船舶:船舶1
第1操作手段:スロットルレバー8a,8b
第2操作手段:平行移動ボタン18L,18R
目標値演算手段:第1および第2目標値演算部21,22
切換手段:切換部23
制御手段:ECU9,13,14
目標値演算ユニット:第1および第2目標値演算部21,22
選択出力手段:切換部23(図6)
選択活性化手段:切換部23(図11)
左移動操作子:左平行移動ボタン18L
右移動操作子:右平行移動ボタン18R
左操作子:左側スロットルレバー8a
右操作子:右側スロットルレバー8b
速度検出手段:速度センサ16
回頭操作手段:回頭ボタン7b
ステアリングハンドル:ステアリングハンドル7a
船体:船体2
操船支援装置:ステアリング操作部7、スロットル操作部8、速度センサ16、航走制御装置20
【符号の説明】
【0102】
1 船舶
2 船体
6 操作卓
7 ステアリング操作部
7a ステアリングハンドル
7b 回頭ボタン
8 スロットル操作部
8a 左側スロットルレバー
8b 右側スロットルレバー
9 ECU
10 バウスラスタ
10a 電動モータ
10b プロペラ
10c 回転センサ
11 左舷船外機
12 右舷船外機
13,14 船外機ECU
16 速度センサ
18L 左平行移動ボタン
18R 右平行移動ボタン
20 航走制御装置
21 第1目標値演算部
21A 目標値設定部
21B 推進力配分部
22 第2目標値演算部
22A 目標値設定部
22B 推進力配分部
22m マップ
23 切換部
30 推進ユニット
39 エンジン
40 プロペラ
43 シフト機構
46 スロットルバルブ
47 操舵ロッド
48 エンジン回転検出部
49 操舵角センサ
50 操舵機構
51 スロットルアクチュエータ
52 シフトアクチュエータ
53 操舵アクチュエータ
61 第1位置センサ
62 第2位置センサ
63 第3位置センサ
【技術分野】
【0001】
この発明は、推進機および操舵機構を備えた船舶のための操船支援装置に関する。
【背景技術】
【0002】
船尾に備えられた一対の船外機の出力および操舵角を制御することによって、船舶を回頭させることなく横移動させることができる操船支援装置が提案されている(特許文献1)。この操船支援装置では、停泊操船支援開始ボタンを操作すると、通常航走モードから停泊操船支援モードに制御モードが切り換わる。停泊操船支援モードでは、十字ボタンの操作によって船舶を前後左右に横移動させることができる。これにより、離着岸時の操船が容易になる。横移動以外の通常の操船に際しては、操船者は、ステアリングハンドルを操作して操舵角を制御し、リモコンレバーを操作して船外機出力を制御する。
【0003】
通常航走モードでは、一対の船外機の操舵角は等しく設定される。これに対して、停泊操船支援モードでは、目的の移動方向と一対の船外機が発生する推進力の合力方向とが一致するように、各船外機の推進力および操舵角が定められる。したがって、一般に、停泊操船支援モードでは、一対の船外機の操舵角は異なる値となる。たとえば、船舶を真横に横移動させるときには、一方の船外機の推進力方向は斜め前方となり、他方の船外機の推進力方向は斜め後方となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−200004号公報
【発明の概要】
【課題を解決するための手段】
【0005】
桟橋の近くでは、操船者は、近傍の他の船舶を避けながら離着岸のための操船を行う。したがって、十字ボタンを用いた横移動操船が便利である。一方、桟橋を離れ、近隣の船舶からの距離が広がれば、横移動操船はもはや必要ではなくなる。停泊操船支援モードでは、推進機同士の推進力を相殺させて船舶の平行移動を達成している。そのため、低速での移動であっても、高いエンジン回転速度を維持する必要がある。したがって、通常航走モードでの操船が可能な状況では、停泊操船支援モードを使わない方がエネルギー効率がよい。
【0006】
停泊操船支援モードから通常航走モードへの移行の際には、十字ボタンを含む横移動操作系から、ステアリングハンドルおよびリモコンレバーを含む通常操作系への持ち替えが必要になる。逆に、通常航走モードから停泊操船支援モードへの移行の際には、通常操作系から横移動操作系への持ち替えが必要になる。離岸時や着岸時には、とくに、港の桟橋付近での移動の際に、操船者は、制御モードを頻繁に切り換える必要に迫られる。それに応じて、操船者は、操作系の持ち替えを頻繁に行う必要に迫られる。しかし、たびたび操作系を持ち替えるのは煩雑である。
【0007】
また、通常操作系および横移動操作系の両方を準備しておく必要があるから、操作系の構成が複雑であり、それに応じてコストも高くつく。さらに、小型船舶では、小さな操船スペースに二種類の操作系を配置するのは必ずしも容易ではない。
そこで、この発明の目的は、操作系の持ち替えの手間を省くことができ、操船を一層容易にすることができる操船支援装置を提供することである。
【0008】
この発明は、推進機および操舵機構を備えた船舶のための操船支援装置を提供する。この操船支援装置は、前記推進機を前進駆動するための前進駆動位置、前記推進機を後進駆動するための後進駆動位置、および前記推進機を非作動状態とする中立位置を選択可能なスロットルレバーを含む第1操作手段と、前記スロットルレバーに設けられ船舶の左方向への移動を指令するための左移動操作子と、前記スロットルレバーに設けられ船舶の右方向への移動を指令するための右移動操作子とを含む、第2操作手段と、前記第2操作手段の操作と、前記第1操作手段の操作位置とに応じて、前記推進機のための目標推進力および前記操舵機構のための目標操舵角を含む目標値を求める目標値演算手段とを含む。
【0009】
この発明の一実施形態では、前記第2操作手段は、操船者が右手で前記スロットルレバーを把持したとき、操船者の親指で押下できる位置に配置されている。
この発明の一実施形態に係る操船支援装置は、船舶に備えられた左右一対の推進機と、これらの推進機にそれぞれ対応する一対の操舵機構とに対応した目標値を生成するものであり、前記第1操作手段は、左の推進機に対応した左側スロットルレバーと、右の推進機に対応した右側スロットルレバーとを含み、前記左側スロットルレバーおよび右側スロットルレバーが、それぞれ、前進駆動位置、後進駆動位置および中立位置に操作可能であり、前記第2操作手段は、前記左側スロットルレバーに配置されている。
【0010】
この発明の一実施形態においては、前記左移動操作子は前記左側スロットルレバー上において、前記右移動操作子よりも下側に配置されている。
この発明の一実施形態においては、前記左側スロットルレバーおよび前記右側スロットルレバーの各頭部は、互いに近接する方向に折り曲げられて、ほぼ水平な把持部を形成している。
【0011】
この発明の一実施形態においては、前記操船支援装置は、通常航走モードおよび停泊操船支援モードを含む複数の制御モードに従う制御動作を行う航走制御装置を含み、前記第2操作手段が操作されると、所定の条件下で前記通常航走モードから前記停泊操船支援モードへ遷移する。
この発明の一実施形態においては、前記第2操作手段が操作されていない場合に、前記制御モードは前記通常航走モードとなる。
【0012】
この発明の一実施形態においては、前記所定の条件とは、
禁止条件1:前記左側スロットルレバーおよび前記右側スロットルレバーのいずれかの操作位置が前進出力調整領域または後進出力調整領域にあること、
禁止条件2:船舶の前進速度が所定の前進速度しきい値以上であること、
禁止条件3:船舶後進速度が所定の後進速度しきい値以上であること、
禁止条件4:前記操舵機構の操舵角を制御するためのステアリングハンドルの舵角が所定の舵角しきい値以上であること、ならびに
禁止条件5:船舶のエンジンの回転速度が所定のしきい値以上であること
の全てが否定される条件である。そして、前記航走制御装置は、前記禁止条件1〜5の少なくとも一つに該当する場合、停泊操船支援モードへの遷移のための操作を無効化する。
【0013】
また、この発明の一実施形態においては、前記航走制御装置は、前記禁止条件1〜5がすべて否定されることを条件に、前記通常航走モードから前記停泊操船支援モードへ遷移する。
【図面の簡単な説明】
【0014】
【図1】この発明の一実施形態に係る操船支援装置が適用された船舶の構成を説明するための概念図である。
【図2】船外機の構成を説明するための図解的な断面図である。
【図3】スロットル操作部の構成を拡大して示す斜視図である。
【図4】スロットルレバーの操作位置を説明するための側面図である。
【図5】ステアリング操作部の図解的な斜視図である。
【図6】船舶の主要部の電気的構成を説明するためのブロック図である。
【図7】制御モードの選択を説明するためのフローチャートである。
【図8】平行移動モードにおける目標値の設定および船舶の挙動を説明するための図である。
【図9】回頭ボタンおよびステアリングハンドルによる回頭制御操作を説明するための図である。
【図10】船体座標系を説明するための図である。
【図11】この発明の他の実施形態に係る船舶の主要部の電気的構成を示すブロック図である。
【発明を実施するための形態】
【0015】
以下では、この発明の実施の形態を、添付図面を参照して詳細に説明する。
図1は、この発明の一実施形態に係る船舶1の構成を説明するための概念図である。この船舶1は、クルーザやボートのような比較的小型の船舶である。この船舶1の船体2には、一つのバウスラスタ10と、一対の船外機11,12が取り付けられている。船外機11,12は、船体2の船尾(トランサム)3に取り付けられている。この一対の船外機11,12は、船体2の船尾3および船首4を通る中心線5に対して、左右対称な位置に取り付けられている。すなわち、一方の船外機11は、船体2の左舷後部に取り付けられており、他方の船外機12は、船体2の右舷後部に取り付けられている。そこで、以下では、これらの船外機を区別するときには、それぞれ、「左舷船外機11」、「右舷船外機12」と呼ぶ。一方、バウスラスタ10は、船体2の船首4の付近に取り付けられている。このバウスラスタ10は、中心線5に交差する左右方向への推進力を発生する推進ユニットである。より具体的には、バウスラスタ10は、電動モータ10aと、これにより正転または逆転駆動されるプロペラ10bとを含む。プロペラ10bが生成する推進力は、船舶1の中心線に交差(直交)する水平方向(左右方向)に沿う。以下、バウスラスタ10および船外機11,12を総称するときには、「推進機10〜12」などという場合がある。
【0016】
バウスラスタ10には、電動モータ10aの回転方向および回転速度を制御する電子制御ユニット(ECU)9が内蔵されている。左舷船外機11および右舷船外機12には、それぞれ、電子制御ユニット13,14(以下、「船外機ECU13」、「船外機ECU14」という。)が内蔵されている。ただし、図1では、便宜上、推進機10〜12の本体部分とECU9,13,14とは分離して表してある。
【0017】
船体2の操船席には、操船のための操作卓6が設けられている。操作卓6には、たとえば、舵取り操作のためのステアリング操作部7と、船外機11,12の出力を調整するためのスロットル操作部8とが備えられている。この例では、ステアリング操作部7が左側に配置され、スロットル操作部8が右側に配置されている。ステアリング操作部7は、操作部材としてのステアリングハンドル7aを備える。また、スロットル操作部8は、左舷船外機11および右舷船外機12にそれぞれに対応したスロットルレバー8a,8bを備えている。スロットルレバー8a,8bの各頭部は、互いに近接する方向に折り曲げられて、ほぼ水平な把持部を形成している。これにより、操船者は、スロットルレバー8a,8bを両方同時に操作して、左右の船外機11,12のスロットル開度を実質的に等しく保ちながら、船外機11,12の出力を制御できる。ステアリングハンドル7aおよびスロットルレバー8a,8bの操作量を表す信号は、航走制御装置20に入力されるようになっている。
【0018】
航走制御装置20は、マイクロコンピュータを含む電子制御ユニット(ECU)である。航走制御装置20は、船体2内に配置されたLAN(ローカル・エリア・ネットワーク。以下「船内LAN」という。)25を介して、ECU9,13,14との間で通信を行う。より具体的には、航走制御装置20は、船外機ECU13,14から、船外機11,12に備えられたエンジンの回転速度を取得する。そして、航走制御装置20は、船外機ECU13,14に対して、目標シフト位置(前進、ニュートラル、後進)、目標エンジン回転速度および目標操舵角を表すデータを与えるようになっている。また、航走制御装置20は、バウスラスタ10に対応したECU9からプロペラ10bの回転速度情報を取得する。そして、航走制御装置20は、バウスラスタ10に対応したECU9に対して、電動モータ10aの目標回転方向および目標回転速度を与える。
【0019】
また、航走制御装置20には、速度センサ16の出力信号が入力されている。速度センサ16は、船舶1の前進速度および後進速度を検出して速度信号を出力するものである。速度センサ16は対水速度を検出するものでも、対地速度を検出するものでもよい。具体的には、速度センサ16は、ピトー管を用いて構成することができる。
航走制御装置20は、通常航走モードおよび平行移動モード(停泊操船支援モード)を含む複数の制御モードに従う制御動作を行う。
【0020】
通常航走モードでは、航走制御装置20は、ステアリング操作部7の操作に応じて、船外機11,12の目標操舵角を等しい値に設定する。したがって、船外機11,12は、互いに平行な方向に推進力を発生することになる。また、航走制御装置20は、各船外機11,12の目標エンジン回転速度および目標シフト位置を、スロットルレバー8a,8bの前後への傾倒操作量に応じて設定する。バウスラスタ10は停止状態に制御される。
【0021】
平行移動モードでは、航走制御装置20は、スロットルレバー8a,8bの操作位置に応じて定められる目標移動方向に船舶1を平行移動させ、ステアリングハンドル7aの操作量に応じたヨーモーメントで船舶1が回頭させる。すなわち、航走制御装置20は、このような平行移動が達成されるように船外機11,12の目標シフト位置、目標エンジン回転速度および目標操舵角を設定する。また、航走制御装置20は、バウスラスタ10の電動モータ10aに対して、目標回転方向および目標回転速度を設定する。平行移動モードでは、一般に、左右の船外機11,12が発生する推進力の方向は非平行となる。
【0022】
図2は、船外機11,12の共通の構成を説明するための図解的な断面図である。船外機11,12は、推進ユニット30と、この推進ユニット30を船体2に取り付ける取り付け機構31とを有している。取り付け機構31は、船体2の後尾板に着脱自在に固定されるクランプブラケット32と、このクランプブラケット32に水平回動軸としてのチルト軸33を中心に回動自在に結合されたスイベルブラケット34とを備えている。推進ユニット30は、スイベルブラケット34に、操舵軸35まわりに回動自在に取り付けられている。これにより、推進ユニット30を操舵軸35まわりに回動させることによって、操舵角(船体2の中心線に対して推進力の方向がなす方位角)を変化させることができる。また、スイベルブラケット34をチルト軸33まわりに回動させることによって、推進ユニット30のトリム角を変化させることができる。トリム角は、船体2に対する船外機11,12の取り付け角に対応する。
【0023】
推進ユニット30のハウジングは、トップカウリング36とアッパケース37とロアケース38とで構成されている。トップカウリング36内には、駆動源となるエンジン39がそのクランク軸の軸線が上下方向となるように設置されている。エンジン39のクランク軸下端に連結される動力伝達用のドライブシャフト41は、上下方向にアッパケース37内を通ってロアケース38内にまで延びている。
【0024】
ロアケース38の下部後側には、推進力発生部材となるプロペラ40が回転自在に装着されている。ロアケース38内には、プロペラ40の回転軸であるプロペラシャフト42が水平方向に通されている。このプロペラシャフト42には、ドライブシャフト41の回転が、クラッチ機構としてのシフト機構43を介して伝達されるようになっている。
シフト機構43は、ドライブシャフト41の下端に固定されたベベルギヤからなる駆動ギヤ43aと、プロペラシャフト42上に回動自在に配置されたベベルギヤからなる前進ギヤ43bと、同じくプロペラシャフト42上に回動自在に配置されたベベルギヤからなる後進ギヤ43cと、前進ギヤ43bおよび後進ギヤ43cの間に配置されたドッグクラッチ43dとを有している。
【0025】
前進ギヤ43bは前方側から駆動ギヤ43aに噛合しており、後進ギヤ43cは後方側から駆動ギヤ43aに噛合している。そのため、前進ギヤ43bおよび後進ギヤ43cは互いに反対方向に回転されることになる。
一方、ドッグクラッチ43dは、プロペラシャフト42にスプライン結合されている。すなわち、ドッグクラッチ43dは、プロペラシャフト42に対してその軸方向に摺動自在であるけれども、プロペラシャフト42に対する相対回動はできず、このプロペラシャフト42とともに回転する。
【0026】
ドッグクラッチ43dは、ドライブシャフト41と平行に上下方向に延びるシフトロッド44の軸周りの回動によって、プロペラシャフト42上で摺動される。これにより、ドッグクラッチ43dは、前進ギヤ43bと結合した前進位置と、後進ギヤ43cと結合した後進位置と、前進ギヤ43bおよび後進ギヤ43cのいずれとも結合されないニュートラル位置とのいずれかのシフト位置に制御される。
【0027】
ドッグクラッチ43dが前進位置にあるとき、前進ギヤ43bの回転がドッグクラッチ43dを介してプロペラシャフト42に伝達される。これにより、プロペラ40は、一方向(前進方向)に回転し、船体2を前進させる方向の推進力を発生する。一方、ドッグクラッチ43dが後進位置にあるとき、後進ギヤ43cの回転がドッグクラッチ43dを介してプロペラシャフト42に伝達される。後進ギヤ43cは、前進ギヤ43bとは反対方向に回転するため、プロペラ40は、反対方向(後進方向)に回転し、船体2を後進させる方向の推進力を発生する。ドッグクラッチ43dがニュートラル位置にあるとき、ドライブシャフト41の回転はプロペラシャフト42に伝達されない。すなわち、エンジン39とプロペラ40との間の駆動力伝達経路が遮断されるので、いずれの方向の推進力も生じない。
【0028】
エンジン39に関連して、このエンジン39を始動させるためのスタータモータ45が配置されている。スタータモータ45は、船外機ECU13,14によって制御される。また、エンジン39のスロットルバルブ46を作動させてスロットル開度を変化させ、エンジン39の吸入空気量を変化させるためのスロットルアクチュエータ51が備えられている。このスロットルアクチュエータ51は、電動モータからなっていてもよい。このスロットルアクチュエータ51の動作は、船外機ECU13,14によって制御される。エンジン39には、さらに、クランク軸の回転を検出することによってエンジン39の回転速度を検出するためのエンジン回転検出部48が備えられている。
【0029】
また、シフトロッド44に関連して、ドッグクラッチ43dのシフト位置を変化させるためのシフトアクチュエータ52(クラッチ作動装置)が設けられている。このシフトアクチュエータ52は、たとえば、電動モータからなり、船外機ECU13,14によって動作制御される。
さらに、推進ユニット30に固定された操舵ロッド47には、船外機ECU13,14によって制御される操舵アクチュエータ53が結合されている。操舵アクチュエータ53は、たとえば、DCサーボモータおよび減速器を含む構成とすることができる。この操舵アクチュエータ53を駆動することによって、推進ユニット30を操舵軸35まわりに回動させることができ、舵取り操作を行うことができる。このように、操舵アクチュエータ53、操舵ロッド47および操舵軸35を含む操舵機構50(電動ステアリング装置)が形成されている。この操舵機構50には、操舵角を検出するための操舵角センサ49が備えられている。操舵角センサ49は、たとえば、ポテンショメータからなる。
【0030】
また、クランプブラケット32とスイベルブラケット34との間には、たとえば液圧シリンダを含み、船外機ECU13,14によって制御されるトリムアクチュエータ(チルトトリムアクチュエータ)54が設けられている。このトリムアクチュエータ54は、チルト軸33まわりにスイベルブラケット34を回動させることにより、推進ユニット30をチルト軸33まわりに回動させる。これらは、推進ユニット30のトリム角を変化させるためのトリム機構56を構成している。トリム角は、トリム角センサ55によって検出されるようになっている。トリム角センサ55の出力信号は船外機ECU13,14に入力される。
【0031】
図3は、スロットル操作部8の構成を拡大して示す斜視図である。スロットル操作部8は、箱形の本体8cと、一対のスロットルレバー8a,8bとを備えている。スロットルレバー8a,8bは、本体8cの対向する一対の側面に取り付けられている。スロットルレバー8a,8bは、それぞれ前後方向に所定角度範囲で揺動可能とされている。通常航走モードにおいて、左側のスロットルレバー8aは左舷船外機11の出力制御のために用いられる。同様に、右側のスロットルレバー8bは右舷船外機12の出力制御のために用いられる。一方(この実施形態では左側)のスロットルレバー8aには、左平行移動ボタン18Lと、右平行移動ボタン18Rとが設けられている。これらは、操船者によって押下操作可能な押しボタンである。この実施形態では、左平行移動ボタン18Lが右平行移動ボタン18Rよりも下側に配置されている。いずれの平行移動ボタン18L,18Rも、スロットルレバー8a,8bを右手で握持したときに、操作者の親指で押下できる位置に配置されている。平行移動ボタン18L,18Rの操作/非操作を表す信号は、航走制御装置20に与えられるようになっている。これらの平行移動ボタン18L,18Rが押下されると、制御モードは、一定条件下で、通常航走モードから平行移動モードへと遷移する。なお、平行移動ボタン18L,18Rは、いずれか一方しか押下できないようになっている。
【0032】
図4は、スロットルレバー8a,8bの操作位置を説明するための側面図である。スロットルレバー8a,8bの中立位置は、本体8cからほぼ直立した位置である。スロットルレバー8a,8bは、中立位置を中心とし、前進全開位置を前方端とし、後進前回位置を後方端とした所定角度範囲で傾倒(揺動)操作することができるようになっている。スロットルレバー8a,8bは、互いに独立に操作可能である。スロットルレバー8a,8bの傾倒量LxL,LxRは、本体8cに備えられた第1位置センサ61および第2位置センサ62によってそれぞれ検出され、航走制御装置20に与えられる。第1および第2位置センサ61,62は、それぞれ、ポテンショメータで構成することができる。
【0033】
スロットルレバー8a,8bを中立位置から前側へ所定量傾倒させたときのスロットルレバー8a,8bの傾倒位置は、前進シフトイン位置である。すなわち、通常航走モードにおいて、前進シフトイン位置までスロットルレバー8a,8bを前方に傾倒させると、航走制御装置20は、船外機11,12の目標シフト位置を、ニュートラル位置から前進位置に変更する。また、スロットルレバー8a,8bを中立位置から後側へ所定量傾倒させたときのスロットルレバー8a,8bの傾倒位置は、後進シフトイン位置である。すなわち、通常航走モードにおいて、後進シフトイン位置までスロットルレバー8a,8bを後方に傾倒させると、航走制御装置20は、船外機11,12の目標シフト位置を、ニュートラル位置から後進位置に変更する。スロットルレバー8a,8bが前進シフトイン位置と後進シフトイン位置との間にある場合には、航走制御装置20は、目標シフト位置をニュートラル位置に設定し、目標エンジン回転速度をアイドル回転速度に設定する。このとき、エンジン39の駆動力はプロペラ40に伝達されないので、船外機11,12からの推進力は発生しない。すなわち、前進シフトイン位置と後進シフトイン位置との間の操作領域は、推進力の発生に関与しない不感帯である。
【0034】
スロットルレバー8a,8bを前進シフトイン位置からさらに前進全開位置に向けて前方へ傾倒させると、航走制御装置20は、その傾倒量が多いほど目標エンジン回転速度を大きくする。すなわち、前進シフトイン位置を超えた前進側操作領域は、前進出力調整領域である。同様に、スロットルレバー8a,8bを後進シフトイン位置からさらに後進前回位置に向けて後方へ傾倒させると、航走制御装置20は、その傾倒量が多いほど目標エンジン回転速度を大きくする。すなわち、後進シフトイン位置を超えた後進側操作領域は、後進出力調整領域である。こうして、スロットルレバー8a,8bの操作によって、船外機11,12が発生する前進方向または後進方向の推進力の大きさを調整することができる。
【0035】
図示は省略するが、本体8cには、スロットルレバー8a,8bをそれぞれ中立位置、前進シフトイン位置および後進シフトイン位置で仮保持するための仮保持機構が備えられている。このような仮保持機構は、たとえば、スロットルレバー8a,8bとともに移動する可動部材を仮保持するノッチを含むものであってもよい。このような構成により、スロットルレバー8a,8bが中立位置、前進シフトイン位置および後進シフトイン位置に達すると、その位置でスロットルレバー8a,8bが保持され、軽い力では動かなくなる。つまり、操船者は、中立位置、前進シフトイン位置および後進シフトイン位置でクリック感を得ることができる。これにより、操船者は、中立位置、前進シフトイン位置および後進シフトイン位置を容易に認識できる。
【0036】
図5は、ステアリング操作部7の図解的な斜視図である。ステアリング操作部7は、ステアリングハンドル7aと、回頭ボタン7bとを備えている。この実施形態では、回頭ボタン7bは、ステアリングハンドル7aに設けられた押しボタンである。回頭ボタン7bは、ステアリングハンドル7aを把持した手(図5の例では左手)の親指で操作され得る位置に設けられてもよい。したがって、操船者は、ステアリングハンドル7aと回頭ボタン7bとを同時に操作することができる。図5の例では、ステアリングハンドル7aを左手で把持したときに、左手親指で回頭ボタン7bを操作できるから、同時にスロットル操作部8を右手で操作することができる。ステアリングハンドル7aの回動操作位置は、第3位置センサ63によって検出されるようになっている。第3位置センサ63は、たとえば、ポテンショメータで構成することができる。第3位置センサ63の検出信号、および回頭ボタン7bの操作信号は、航走制御装置20に与えられるようになっている。
【0037】
通常航走モードにおいて、航走制御装置20は、ステアリングハンドル7aの回動操作位置に応じた目標操舵角を設定する。この目標操舵角に応じて船外機11,12の操舵機構50が制御される。これにより、ステアリングハンドル7aの操作によって、舵取り制御を行うことができる。
一方、平行移動モードにおいては、回頭ボタン7bを押下しながらステアリングハンドル7aを操作すると、航走制御装置20は、ステアリングハンドル7aの操作量に応じた目標ヨーモーメントを設定する。より具体的には、回頭ボタン7bが押下されてからのステアリングハンドル7aの相対操作量および相対操作方向に対応する目標ヨーモーメントが設定される。
【0038】
図6は、船舶1の主要部の電気的構成を説明するためのブロック図である。航走制御装置20は、CPU(中央処理装置)およびメモリを含むマイクロコンピュータを備えていて、このマイクロコンピュータが所定のソフトウェア処理を実行することにより、実質的に複数の機能処理部として動作する。この機能処理部には、第1および第2目標値演算部21,22と、切換部23とが含まれている。第1目標値演算部21は、通常航走モードのための目標値を演算する。第2目標値演算部22は、平行移動モードのための目標値を演算する。切換部23は、第1および第2目標値演算部21,22のいずれかによって演算される目標値を平行移動ボタン18L,18R、回頭ボタン7b、スロットルレバー8a,8bの操作状態等に応じて選択する。切換部23によって選択された目標値は、バウスラスタ10のためのECU9、左舷船外機11のための船外機ECU13、および右舷船外機12のための船外機ECU14へと与えられる。
【0039】
バウスラスタ10は、プロペラ10bを駆動する電動モータ10aと、電動モータ10aの回転速度(すなわち、プロペラ10bの回転速度)を検出する回転センサ10cとを有している。航走制御装置20は、ECU9に対して、目標回転方向および目標回転速度を含む目標値を与える。ECU9は、回転センサ10cからフィードバックされる回転信号を用い、目標回転方向および目標回転速度に基づいて電動モータ10aをフィードバック制御する。
【0040】
船外機11,12のECU13,14は、航走制御装置20から与えられる目標値に応じて、対応するスロットルアクチュエータ51、シフトアクチュエータ52および操舵アクチュエータ53を制御する。この場合の目標値は、目標シフト位置、目標エンジン回転速度および目標操舵角を含む。ECU13,14には、エンジン回転検出部48が検出するエンジン回転速度および操舵角センサ49が検出する操舵角が入力されている。ECU13,14は、エンジン回転検出部48によって検出されるエンジン回転速度が目標エンジン回転速度に一致するように、スロットルアクチュエータ51を制御する。また、ECU13,14は、操舵角センサ49によって検出される操舵角が目標操舵角に一致するように、操舵アクチュエータ53を制御(たとえばPD(比例微分)制御)する。
【0041】
第1目標値演算部21は、目標値設定部21Aと、推進力配分部21Bとを備えている。目標値設定部21Aは、左右のスロットルレバー8a,8bの前後方向の操作に応じて左舷および右舷の船外機11,12のための目標シフト位置および目標エンジン回転速度を生成する。また、目標値設定部21Aは、ステアリングハンドル7aの回動操作に応じて目標操舵角を生成する。推進力配分部21Bは、目標値設定部21Aによって生成された目標値(目標シフト位置、目標エンジン回転速度および目標操舵角)を左右の船外機11,12に対応した船外機ECU13,14に配分する。バウスラスタ10の電動モータ10aについては推進力配分部21Bは、その目標回転速度を零に設定する。
【0042】
目標値設定部21Aは、第1および第2位置センサ61,62によって検出される左右のスロットルレバー8a,8bの前後方向の傾倒量に応じて目標シフト位置および目標エンジン回転速度を生成する。
より具体的には、左側のスロットルレバー8aの前方への傾倒量が前進シフトイン位置に相当する値以上であれば、目標値設定部21Aは、左舷船外機11の目標シフト位置を前進位置とする。さらに、目標値設定部21Aは、スロットルレバー8aが前進シフトイン位置を超えてさらに前方へ傾倒されると、その傾倒量が大きいほど大きな目標エンジン回転速度を設定する。同様に、スロットルレバー8aの後方への傾倒量が後進シフトイン位置に相当する値以上であれば、目標値設定部21Aは、左舷船外機11の目標シフト位置を後進位置とする。さらに、目標値設定部21Aは、スロットルレバー8aが後進シフトイン位置を超えてさらに後方へ傾倒されると、その傾倒量が大きいほど大きな目標エンジン回転速度を設定する。スロットルレバー8aの前後方向の傾倒位置が前進シフトイン位置および後進シフトイン位置のいずれにも達していないときは、目標値設定部21Aは、左舷船外機11の目標シフト位置をニュートラル位置とする。さらに、スロットルレバー8aの傾倒位置が前進シフトイン位置から後方シフトイン位置までの範囲内であるときは、目標値設定部21Aは、目標エンジン回転速度をアイドル回転速度とする。
【0043】
目標値設定部21Aは、第2位置センサ62によって検出される右側スロットルレバー8bの操作位置に対しても同様の処理を行う。すなわち、右側スロットルレバー8bの操作位置に応じて右舷船外機12の目標シフト位置および目標エンジン回転速度を設定する。
このように左右の船外機11,12のために個別に設定された目標シフト位置および目標エンジン回転速度が、推進力配分部21Bによって、船外機ECU13,14にそれぞれ供給される。
【0044】
また、目標値設定部21Aは、第3位置センサ62によって検出されるステアリングハンドル7aのハンドル舵角(回動操作量および回動方向)に応じて、目標操舵角を設定する。具体的には、中立位置から右方向へのステアリングハンドル7aの回動操作に対しては、右旋回のための目標操舵角が設定される。同様に、中立位置から左方向へのステアリングハンドル7aの回動操作に対しては、左旋回のための目標操舵角が設定される。いずれの場合も、中立位置からの回動操作量が大きいほど、目標操舵角は、その絶対値(中立位置からの偏角)が大きな値とされる。こうして設定された目標操舵角は、推進力配分部21Bによって、船外機ECU13,14に共通に与えられる。これにより、左舷船外機11および右舷船外機12の操舵角は互いに等しい値に制御される。
【0045】
第2目標値演算部22は、目標値設定部22Aと、推進力配分部22Bとを備えている。目標値設定部22Aは、左右のスロットルレバー8a,8b、ステアリングハンドル7a、平行移動ボタン18L,18R、および回頭ボタン7bの操作に応じて、目標値を設定する。この場合の目標値は、船舶1の全体に作用させるべき目標推進力および目標進行方向ならびに目標ヨーモーメントを含む。目標値設定の詳細は、後述する。
【0046】
推進力配分部22Bは、目標値設定部22Aによって設定された目標値に応じて、推進機10〜12からそれぞれ発生させるべき推進力およびその方向を表す個別の目標値を演算する。すなわち、推進力配分部22Bは、バウスラスタ10に関しては、目標回転方向および目標回転速度を演算する。また、推進力配分部22Bは、船外機11,12に関しては、目標シフト位置、目標エンジン回転速度および目標操舵角を演算する。この場合、船外機11,12に与えられる目標値は、一般には、等しい値とならない。
【0047】
切換部23は、スロットルレバー8a,8bの操作位置、ステアリングハンドル7aの舵角、平行移動ボタン18L,18Rおよび回頭ボタン7bからの操作信号、ならびに速度センサ16によって検出される船舶1の速度に応じて、制御モードを切り換える。切換部23は、第1目標値演算部21による演算結果を選択する通常航走モードと、第2目標値演算部22による演算結果を選択する平行移動モードとの間で制御モードを切り換える。切換部23によって選択された演算結果(目標値)は、バウスラスタ10、左舷船外機11および右舷船外機12のECU9,13,14へと送られる。
【0048】
図7は、制御モードの選択(切換部23の作用)を説明するためのフローチャートである。初期制御モードは、通常航走モードとされている。すなわち、切換部23は、第1目標値演算部21によって演算される目標値を選択して、推進機10〜12に与える。
航走制御装置20は、平行移動ボタン18L,18Rおよび回頭ボタン7bの操作信号、ならびにスロットルレバー8a,8bの操作信号(第1および第2センサ61,62の検出信号)を参照する。より具体的には、航走制御装置20は、平行移動ボタン18L,18Rおよび回頭ボタン7bのいずれかが操作されているかどうかを判断する(ステップS1,S2)。さらに、航走制御装置20は、左右のスロットルレバー8a,8bの操作が、互い違いのシフトイン位置であるかどうかを判断する(ステップS3)。すなわち、左側スロットルレバー8aが前進シフトイン位置にあり、右側スロットルレバー8bが後進シフトイン位置にあるとき、この判断が肯定される。また、左側スロットルレバー8aが後進シフトイン位置にあり、右側スロットルレバー8bが前進シフトイン位置にあるときにも、ステップS3の判断が肯定される。ボタン18L,18R,7aのいずれもが操作されておらず(ステップS1,S2:NO)、かつ、スロットルレバー8a,8bが互い違いのシフトイン位置にない(ステップS3:NO)場合、航走制御装置20は、通常航走モードを選択する(ステップS4)。
【0049】
ステップS1〜S3のいずれかの判断が肯定されると、次に説明する禁止条件1〜5(ステップS5〜S9)がすべて否定されることを条件に、航走制御装置20は、平行移動モードを選択する(ステップS10)。禁止条件1〜5のいずれかが肯定されると(ステップS5〜S9:YES)、航走制御装置20は、平行移動モードへの遷移のための操作(ステップS1〜S3)を無効化する。この場合、航走制御装置20は、通常航走モードを選択する(ステップS4)。
【0050】
禁止条件1(ステップS5):いずれかのスロットルレバー8a,8bの操作位置が、前進出力調整領域または後進出力調整領域にある。スロットルレバー8a,8bの操作位置が前進出力領域または後進出力領域にあるとき、操船者は、船舶1の高速移動を意図していると考えられる。そこで、この場合には、航走制御装置20は、平行移動モードへの遷移を禁止する。
【0051】
禁止条件2(ステップS6):前進速度が所定の前進速度しきい値以上である。前進速度とは、前進方向の速度の絶対値である。前進速度しきい値は、たとえば、4km/hとされる。高速で航走中に操船者がスロットルレバー8a,8bをシフトイン位置や中立位置に戻す場合が考えられる。この場合、船舶1は、しばらくの間、惰性で航走する。このとき、航走制御装置20は、充分に速度が落ちるまで、平行移動モードへの遷移を禁止する。
【0052】
禁止条件3(ステップS7):後進速度が所定の後進速度しきい値以上である。後進速度とは、後進方向の速度の絶対値である。後進速度しきい値は、たとえば、2km/hとされる。この禁止条件3は禁止条件2と同様の条件である。すなわち、船舶1が惰性で高速に航走している場合、航走制御装置20は、充分に速度が落ちるまで、平行移動モードへの遷移を禁止する。
【0053】
禁止条件4(ステップS8):ハンドル舵角が所定の舵角しきい値以上である。ハンドル舵角がステアリングハンドル7aの最大舵角付近(操作端)付近の値であるとき、ステアリングハンドル7aの操作による回頭の制御が一方向にしかできなくなるおそれがある。そこで、航走制御装置20は、第3位置センサ63が検出するハンドル舵角の絶対値が、舵角しきい値以上であるとき、平行移動モードへの遷移を禁止する。たとえば、ステアリングハンドル7aの最大ハンドル舵角が±180度であるとする。この場合に、回頭制御のために±45度のハンドル操作を可能とするためには、前記舵角しきい値は135度とすればよい。
【0054】
禁止条件5(ステップS9):エンジン回転速度が所定のしきい値以上である。エンジン回転速度が高い状態で制御モードが切り換わると、エンジン回転速度の急変および推進方向の急変が生じるおそれがある。そこで、航走制御装置20は、船外機11,12のいずれかのエンジン回転速度がしきい値(たとえば2000rpm)以上であるとき、平行移動モードへの遷移を禁止する。なお、船外機ECU13,14は、シフトアクチュエータ52およびスロットルアクチュエータ51を協調制御し、好適なタイミングでシフトインおよびシフトアウトするように制御する。
【0055】
平行移動モードへの遷移条件(ステップS1〜S3)を満たす操作が行われた場合において、いずれかの禁止条件(ステップS5〜S9)に該当するときには、平行移動モードへの遷移のための操作が無効化されたことを操船者に報知するようにしてもよい。このような報知は、インジケータ(たとえばインジケータランプ)やアラーム音などの報知ユニットを設け、これを航走制御装置20によって制御することで行える。
【0056】
図8は、平行移動モードにおける目標値の設定および船舶の挙動を説明するための図である。
まず、左平行移動ボタン18Lが押されたときの動作について説明する。航走制御装置20は、左右のスロットルレバー8a,8bがいずれも中立位置にある場合には、左方向を目標移動方向とし、左平行移動(真横移動)のための目標値を演算する。左右のスロットルレバー8a,8bがいずれも前進シフトイン位置にある場合には、航走制御装置20は、左斜め前方向(たとえば、船舶1の中心線に対して45度の角度をなす方向)を目標移動方向とし、この方向に船舶1を平行移動させるための目標値を演算する。左右のスロットルレバー8a,8bがいずれも後進シフトイン位置にある場合には、航走制御装置20は、左斜め後ろ方向(たとえば、船舶1の中心線に対して45度の角度をなす方向)を目標移動方向とする。そして、航走制御装置20は、この方向に船舶1を平行移動させるための目標値を演算する。
【0057】
右平行移動ボタン18Rが押されたときの動作も同様である。すなわち、航走制御装置20は、左右のスロットルレバー8a,8bがいずれも中立位置にある場合には、右方向を目標移動方向とし、右平行移動(真横移動)のための目標値を演算する。左右のスロットルレバー8a,8bがいずれも前進シフトイン位置にある場合には、航走制御装置20は、右斜め前方向(たとえば、船舶1の中心線に対して45度の角度をなす方向)を目標移動方向とし、この方向に船舶1を平行移動させるための目標値を演算する。左右のスロットルレバー8a,8bがいずれも後進シフトイン位置にある場合には、航走制御装置20は、右斜め後ろ方向(たとえば、船舶1の中心線に対して45度の角度をなす方向)を目標移動方向とする。そして、航走制御装置20は、この方向に船舶1を平行移動させるための目標値を演算する。
【0058】
次に、左右のスロットルレバー8a,8bの操作位置が互い違いのシフトイン位置である場合の動作について説明する。左側のスロットルレバー8aの操作位置が前進シフトイン位置であり、右側のスロットルレバー8bの操作位置が後進シフトイン位置である場合には、航走制御装置20は、船舶1をその場で右回り(時計まわり)に回頭させるための目標値を演算する。逆に、左側のスロットルレバー8aの操作位置が後進シフトイン位置であり、右側のスロットルレバー8bの操作位置が前進シフトイン位置である場合には、航走制御装置20は、船舶1をその場で左回り(反時計まわり)に回頭させるための目標値を演算する。いずれの場合も、目標ヨーモーメントが、予め定める一定値となるように、推進機10〜12のための目標値が演算されてもよい。
【0059】
いずれの平行移動ボタン18L,18Rも操作されていない場合に、左右のスロットルレバー8a,8bがいずれも前進シフトイン位置にあるときには、制御モードは、通常航走モードとなる。このとき、航走制御装置20は、微速前進(デッドスロー)のための目標値を設定する。同様に、いずれの平行移動ボタン18L,18Rも操作されていない場合に、左右のスロットルレバー8a,8bがいずれも後進シフトイン位置にあるときには、制御モードは、通常航走モードとなる。このとき、航走制御装置20は、微速後進(デッドスロー)のための目標値を設定する。
【0060】
回頭ボタン7bが押されると、航走制御装置20は、スロットルレバー8a,8bの位置によらずに、平行移動モードに切り換える。つまり、回頭ボタン7bおよびステアリングハンドル7aの操作による回頭制御は、スロットルレバー8a,8bを互い違いのシフトイン位置とする操作に優先する。回頭ボタン7bおよびステアリングハンドル7aによる船舶1の回頭は、その場で生じる場合もあり、また、平行移動と並行して生じる場合もある。
【0061】
つまり、操船者が、左平行移動ボタン18Lを操作し、スロットルレバー8a,8bをいずれも前進シフトイン位置まで操作し、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を左斜め前方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、左斜め前に平行移動しながら回頭することになる。また、操船者が、左平行移動ボタン18Lを操作し、スロットルレバー8a,8bをいずれも中立位置とし、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を左方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、左に平行移動(真横移動)しながら回頭する。また、操船者が、左平行移動ボタン18Lを操作し、スロットルレバー8a,8bをいずれも後進シフトイン位置まで操作し、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を左斜め後ろ方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、左斜め後ろに平行移動しながら回頭する。
【0062】
同様に、操船者が、右平行移動ボタン18Rを操作し、スロットルレバー8a,8bをいずれも前進シフトイン位置まで操作し、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を右斜め前方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は右斜め前に平行移動しながら回頭する。また、操船者が、右平行移動ボタン18Rを操作し、スロットルレバー8a,8bをいずれも中立位置とし、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を右方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、右に平行移動(真横移動)しながら回頭する。また、操船者が、右平行移動ボタン18Rを操作し、スロットルレバー8a,8bをいずれも後進シフトイン位置まで操作し、かつ、回頭ボタン7bおよびステアリングハンドル7aによる回頭操作を行うとする。この場合、航走制御装置20は、船舶1の目標移動方向を右斜め後ろ方向に定め、目標ヨーモーメントをステアリングハンドル7aの操作に応じて定める。これらの目標移動方向および目標ヨーモーメントに応じて、航走制御装置20は、推進機10〜12のための目標値を演算する。したがって、船舶1は、右斜め後ろに平行移動しながら回頭する。
【0063】
平行移動(瞬間回転中心の直線的移動)による船舶1の移動方向は、前後左右、左斜め前、左斜め後、右斜め前および右斜め後の8方向となる。したがって、船舶1は、任意の方向に平行移動できるわけではない。しかし、船外機11,12の最低推進力はアイドル回転速度によって制限されるから、推進力のつり合いによって任意の方向への合成推進力を得ることができるわけではない。したがって、任意の方向への平行移動を指示できる操作ユニットを備える場合に、指令した方向への平行移動が実際上不可能であると、操船者の意図とは異なる挙動を船舶が示すことになり、違和感の原因となる。よって、平行移動の方向が8方向に制限される本実施形態の構成は、実用上の問題がないばかりでなく、違和感を生じにくい点でむしろ好ましい構成であると言える。
【0064】
次に、通常航走モードにおける目標値の設定について説明する。
スロットルレバー8a,8bの前後方向の傾倒量LxL,LxRは、前方側に対して正符号、後方側に対して負符号が与えられるものとする。第1目標値演算部21の目標値設定部21Aは、前進シフトイン位置よりも前方側、および後進シフトイン位置よりも後方側の操作位置に対応する傾倒量LxL,LxRに対して、左右の船外機11,12のための目標エンジン回転速度nL,nRをそれぞれ設定する。具体的には、目標値設定部21Aは、nL=cx×LxL、nR=cx×LxRにより、目標エンジン回転速度nL,nRを設定する。ただし、目標エンジン回転速度nL,nRは前進回転に対して正符号、後進回転に対して負符号が与えられるものとする。また、cxは係数(たとえば定数)である。さらに、目標値設定部21Aは、ステアリングハンドル7aのハンドル舵角(回動操作量)Lzに応じて、δd=cz×Lzにより、目標操舵角δdを設定する。ただし、czは係数(たとえば定数)であり、ハンドル舵角Lzは、たとえば、右方向操作に対して正符号、左方向操作に対して負符号が与えられるものとする。したがって、目標操舵角δdは、右方向操舵に対して正符号、左方向操舵に対して負符号を有することになる。
【0065】
第1目標値演算部21の推進力配分部21Bは、バウスラスタ10の目標回転速度を零に設定するとともに、左舷船外機11のエンジン回転速度nLおよび右舷船外機12の目標エンジン回転速度nRを船外機ECU13,14にそれぞれ送信する。また、推進力配分部21Bは、左舷船外機11の目標操舵角δLおよび右舷船外機12の目標操舵角δRを、δL=δR=δdとする。これにより、通常航走モードでは、バウスラスタ10は停止状態とされる一方で、左右の船外機11,12の操舵角は等しくなり、これらの船外機11,12はスロットルレバー8a,8bの操作に応じた推進力をそれぞれ発生することになる。
【0066】
次に、平行移動モードにおける目標値の設定について説明する。
この実施形態では、平行移動モードにおいて、船外機11,12の操舵角は、予め定める一定値に設定される。たとえば、第2目標値演算部22は、左舷船外機11の目標操舵角δLを−π/6(rad)に固定し、右舷船外機12の目標操舵角δRをπ/6(rad)に固定する。バウスラスタ10の操舵角δF(プロペラが発生する推進力の方向)は、機械的に固定されていて、π/2(rad)である。ここで、「操舵角」は、船体2の中心線5(図1参照)に対するプロペラ回転軸線の偏角であり、船首から船尾に向かう方向を0度とし、これに対して左回り方向を正にとり、右回り方向を負にとったものである。プロペラ回転軸線は、バウスラスタ10については、プロペラ10bから右方向に向かう方向に延び、船外機11,12については、当該船外機11,12から船舶後方へ離れる方向に延びるものとする。
【0067】
平行移動モードにおける船舶1の進行方向および回頭角速度は、専ら、バウスラスタ10および船外機11,12のプロペラ回転方向およびプロペラ回転速度(つまり、推進力の方向および大きさ)によって調整される。
第2目標値演算部22の目標値設定部22Aは、スロットルレバー8a,8bの操作位置Lxに応じて、前後方向目標スラスト(推進力)Fdx=cx×Lxを求める。ただし、係数cxは、通常航走モード時とは異なる値である。また、操作位置Lxは、前進シフトイン位置に対してLx=1、中立位置に対してLx=0、後進シフトイン位置に対してLx=−1の各値が割り当てられており、左右のスロットルレバー8a,8bに共通の値である。
【0068】
また、目標値設定部22Aは、左右の平行移動ボタン18L,18の操作状態Lyに応じて、左右方向目標スラスト(推進力)Fdy=cy×Lyを求める。ただし、操作状態Lyは、右平行移動ボタン18Rが操作されていればLy=1、いずれの平行移動ボタン18L,18Rも操作されていなければLy=0、左平行移動ボタン18Lが操作されていればLy=−1の各値をとるものとする。さらに、目標値設定部22Aは、相対回動操作量(相対操舵量)Lz′に応じて、船舶1を旋回させるための目標ヨーモーメントMdz=cz×Lz′を求める。ただし、cyは係数(定数)である。また、相対回動操作量Lz′は、回頭ボタン7bの操作が開始されたときに第3位置センサ63が検出する初期ハンドル舵角(初期回動操作量)Lz0に対するステアリングハンドル7aの相対ハンドル舵角(相対回動操作量)である。すなわち、相対回動操作量Lz′は、第3位置センサ63が検出するハンドル舵角(絶対回動操作量)Lzを用いて、Lz′=Lz−Lz0と表される。
【0069】
より具体的には、図9A〜図9Cに示すように、回頭ボタン7bが押されると、目標値設定部22Aは、その時点での第3位置センサ63の出力をメモリ(図示せず)記憶し、これを初期ハンドル舵角Lz0とする。回頭ボタン7bが押されている間にステアリングハンドル7aが回転すると、目標値設定部22Aは、第3位置センサ63の出力(現在のハンドル舵角)Lzに基づいて、相対回動操作量(相対ハンドル舵角)Lz′=Lz−Lz0を求める。この相対回動操作量Lz′に基づいて、目標値設定部22Aは、目標ヨーモーメントMdz(目標トルク)を求める。なお、図9Aは初期ハンドル舵角Lz0が0度(舵角中立位置)のときの様子を示し、図9Bは初期ハンドル舵角Lz0が45度のときの様子を示し、図9Cは初期ハンドル舵角Lz0が135度のときの様子を示す。全操舵角範囲が舵角中立位置から±180度以内であるとすると、舵角中立位置からのハンドル舵角絶対値が135度を超える領域では、右方向または左方向への45度の相対舵角を確保できなくなる。この場合に、平行移動モードへの遷移が禁止されるのは前述のとおりである(図7のステップS8参照)。
【0070】
回頭ボタン7bが押されていないときには、目標値設定部22Aは、スロットルレバー8a,8bの操作位置に応じて値Lz′を定める。すなわち、左右のスロットルレバー8a,8bが同位置であればLz′=0とされる。また、左側のスロットルレバー8aが前進シフトイン位置であり、右側のスロットルレバー8bが後進シフトイン位置であればLz′=1とされる。さらに、左側のスロットルレバー8aが後進シフトイン位置であり、右側のスロットルレバー8bが前進シフトイン位置であればLz′=−1とされる。こうして定められた値Lz′を用いて、目標値設定部22Aは、目標ヨーモーメントMdz=cz×Lz′を求める。左右のスロットルレバー8a,8bが互い違いのシフトイン位置にあることは、第1および第2位置センサ61,62によって検出されるシフトイン位置の符号が不一致であることに基づいて判定できる。
【0071】
こうして求められた目標値Fdx,Fdy,Mdzに基づいて、バウスラスタ10、および船外機11,12が生成すべき個別の推進力が、推進力配分部22Bによって求められる。
推進力配分部22Bの働きについてより詳細に説明する。説明にあたり、次の記号を導入する。
FF:バウスラスタが出力するスラスト
FL:左舷船外機が出力するスラスト
FR:右舷船外機が出力するスラスト
(xF,yF):船体座標系におけるバウスラスタの位置
(xL,yL):船体座標系における左舷船外機の位置
(xR,yR):船体座標系における右舷船外機の位置
δF:バウスラスタの目標操舵角
δL:左舷船外機の目標操舵角
δR:右舷船外機の目標操舵角
「船体座標系」とは、図10に示すように船舶1の瞬間回転中心80を原点とし、中心線5に沿ってx軸をとり、x軸に直交する水平方向(左右方向)にy軸をとった座標系である。
【0072】
制御のための推進力とモーメントをτ=[Fdx Fdy Mdz]T(ただし、Tは行列およびベクトルの転置を表す)と表し、各推進機10,11,12が出力すべき推進力をf=[FF FL FR]Tと表すと、fは、次の制御分配行列T(δ)を用いて計算される。
f=T(δ)-1τ ……(1)
制御分配行列T(δ)は、次のように表される。
【0073】
T(δ)=[TF TL TR] ……(2)
TF=[cosδFsinδF xFsinδF−yFcosδF]T ……(3)
TL=[cosδLsinδL xLsinδL−yLcosδL]T ……(4)
TR=[cosδRsinδR xRsinδR−yRcosδR]T ……(5)
前述のとおり、この実施形態では、δF=π/2(rad)、δL=−π/6(rad)、δR=π/6(rad)としている。これらは一例であり、一般には、T(δ)が逆行列T(δ)-1を持つように定めればよく、固定値である必要もない。
【0074】
このようにして推進力配分部22Bによって目標スラストFd=fおよび目標操舵角δd=[δF δL δR]Tが定められる。推進力配分部22Bは、さらに、目標スラストFdから、バウスラスタ10の目標回転速度nFと、船外機11,12の目標エンジン回転速度nL,nRを求める。目標回転速度nFの符号は、バウスラスタ10の電動モータ10aの目標回転方向を表す。また、目標エンジン回転速度nL,nRの符号は、船外機11,12の目標シフト位置を表す。こうして求められた目標値nF,nL,nR,δF,δL,δRが、対応する推進機10,11,12のECU9,13,14に分配される。
【0075】
プロペラが発生するスラストTは、次式により得られる。
T=ρD4KT(J)n|n| ……(6)
ここで、ρは水の密度、Dはプロペラ直径、nはプロペラ回転速度、Jは前進率であり、次式で与えられる。
J=u/(nD) ……(7)
uはプロペラ後流の速度(船舶の速度。バウスラスタ10に関しては実質的に零と見なせる。)である。KTはスラスト係数であり、前進率Jの関数となっていて、実測やシミュレーションによって求められる。したがって、現在のプロペラ後流の速度とプロペラ回転速度が分かれば、現在発生しているスラストとトルクが分かる。
【0076】
第2目標値演算部22の推進力配分部22Bには、マップ22m(図6参照)が備えられている。このマップ22mには、バウスラスタ10および船外機11,12のそれぞれに対応して、船舶1の速度およびプロペラ回転速度の種々の値に対応するスラスト係数KT(J)が保持されている。
推進力配分部22Bは、速度センサ16によって検出される船舶1の速度、ECU9から与えられる現在のプロペラ回転速度、およびECU13,14から与えられる現在のエンジン回転速度を用いてマップ22mを参照することにより、スラスト係数KTを求める。さらに、推進力配分部22Bは、そのスラスト係数KTを用いて、前記(6)式から、目標スラストFdに対応する各推進機10〜12の目標回転速度nF,nL,nRを求める。
【0077】
バウスラスタ10のECU9は、プロペラ回転速度(電動モータの回転速度)が目標回転速度nFに一致するように、電動モータ10aのフィードバック制御(たとえば、PID(比例積分微分)制御)を実行する。また、船外機11,12のECU13,14は、プロペラ回転速度(エンジン回転速度)が目標回転速度nL,nRに一致するように、スロットルアクチュエータ51をフィードバック制御(たとえば、PID制御)する。
【0078】
以上のように、この実施形態によれば、通常航走モードおよび平行移動モードの両方に対してステアリング操作部7およびスロットル操作部8を共通に用いることができる。したがって、操船者は、制御モードに応じて操作系を持ち替える必要がない。これにより、出港時および帰港時における操作を簡単にすることができる。また、通常航走モードと平行移動モードとで操作系を共有できるので、操作系全体の構成を簡素化でき、それに応じてコストを削減できるうえ、操作系の設置スペースの削減も可能となる。
【0079】
図11は、この発明の他の実施形態に係る船舶の主要部の電気的構成を示すブロック図である。この図11において、前述の図6に示された各部と同等の部分には同一参照符号を付すこととする。前述の実施形態では、制御モードを切り換える切換部23は、第1および第2目標値演算部21,22の演算結果(目標値)のいずれかを選択して推進機10〜12に供給するようになっている。これに対して、この実施形態では、切換部23は、第1および第2目標値演算部21,22のいずれか一方を活性化し、他方を非活性状態とする。そして、当該活性状態の目標値演算部21,22が生成する目標値が、推進機10〜12に供給される。この構成によっても、前述の第1の実施形態と同様の作用効果を達成できる。
【0080】
以上、この発明の実施形態について説明してきたけれども、この発明はさらに他の形態で実施することもできる。たとえば、前述の実施形態では、推進機の出力に関する目標値として、電動モータまたはエンジンの目標回転速度が演算されているけれども、目標スロットル開度、目標スラスト、目標速度などを用いることもできる。また、前述の実施形態では、船舶の回頭に関する目標値として目標操舵角が演算されているけれども、目標ヨー角速度を用いることもできる。
【0081】
また、図7に示した処理において、船舶1の速度を用いた判断(ステップS6,S7)は、省かれてもよい。エンジン回転速度が所定のしきい値以上であることを、平行移動モードへの遷移を禁止する条件の一つとされているからである(ステップS9)。
また、現在の制御モードが通常航走モードか平行移動モードかを表示するインジケータ(たとえばインジケータランプ)を設けてもよい。このようなインジケータは、操作卓6に設けることができる。
【0082】
また、前述の実施形態では、ステアリングハンドル7aに回頭ボタン7bが設けられているけれども、他の場所に回頭ボタンを設けても差し支えない。さらに、左右の平行移動ボタン18L,18Rが、左側スロットルレバー8aに設けられる必要もない。たとえば、右側スロットルレバー8bに平行移動ボタン18L,18Rを配置してもよい。また、左側スロットルレバー8aに左平行移動ボタン18Lを配置する一方で、右側スロットルレバー8bに右平行移動ボタン18Rを配置してもよい。また、熟練した操船者にとっては平行移動モードは必ずしも必要ではないから、回頭ボタンおよび平行移動ボタンを覆うカバー部材が備えられていてもよい。
【0083】
さらに、前述の実施形態では、推進機として、バウスラスタ10および船外機11,12が備えられている例について説明したけれども、バウスラスタ10は必ずしも必要ではない。すなわち、左右一対の船外機11,12が発生する推進力のつり合いを利用して、平行移動モードにおける操船を実現してもよい。
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【0084】
特許請求の範囲に記載した発明以外にも、この明細書および図面の記載から、次のような特徴が抽出され得る。
A1.推進機および操舵機構を備えた船舶のための操船支援装置であって、
前記推進機を前進駆動するための前進駆動位置、前記推進機を後進駆動するための後進駆動位置、および前記推進機を非作動状態とする中立位置を選択可能な第1操作手段と、
船舶の左右への移動を指令するための第2操作手段と、
前記第2操作手段によって左右への移動が指令されたときに、前記第1操作手段の操作位置に応じた方向へ船舶が平行移動するように、前記推進機のための目標推進力および前記操舵機構のための目標操舵角を含む目標値を求める目標値演算手段とを含む、操船支援装置。
【0085】
「平行移動」とは、船舶の中心(たとえば瞬間回転中心)が直線的に移動する移動状態をいう。
この構成によれば、通常航走時には、第1操作手段の操作に応じて推進機の動作を制御できる。一方、第2操作手段によって左右への移動が指令されたときは、第1操作手段の操作位置に応じた方向へ船舶が平行移動するように、目標推進力および目標操舵角を含む目標値が演算される。この目標値に応じて推進機および操舵機構が制御されることによって、当該方向に船舶を平行移動させることができる。こうして、第1操作手段を、通常航走時および平行移動時に共通に用いることができるから、操作系の持ち替えの手間を省くことができる。また、操作系を通常航走と平行移動とに共用できるから、操作系全体の構成が簡単になり、それに応じてコストを削減できる。さらに、操作系の設置スペースが小さくなる。
【0086】
前記目標値演算手段によって求められた目標値に応じて、前記推進機および操舵機構を制御する制御手段がさらに備えられていることが好ましい。このような制御手段は、操船支援装置に備えられてもよいし、推進機および操舵機構に備えられてもよい。
前記操舵機構の操舵角を制御するために操作可能なステアリングハンドルをさらに含むことが好ましい。この場合に、前記目標値演算手段は、ステアリングハンドルおよび前記第1操作手段の操作位置に応じて目標値を求める通常航走モードと、前記第2操作手段によって左右への移動が指令されたときに前記第1操作手段の操作位置に応じた方向への平行移動のための目標値を定める平行移動モードとを有するものであることが好ましい。より具体的には、前記目標値演算手段は、通常航走モードのための目標値を演算する第1目標値演算ユニット(モジュール)と、平行移動モードのための目標値を演算する第2目標値演算ユニット(モジュール)と、通常航走モードと平行移動モードとのいずれかを選択する切換手段とを含むものであってもよい。この場合、前記切換手段は、前記第1および第2目標値演算ユニットのいずれか一つの目標値演算ユニットを選択する選択手段を含むものであってもよい。この選択手段は、第1および第2目標値演算ユニットから一つの目標値演算ユニットを選択して、その演算結果を出力する選択出力手段であってもよい。また、前記選択手段は、第1および第2目標値演算ユニットから一つの目標値演算ユニットを選択して活性化する選択活性化手段であってもよい。
【0087】
A2.前記第2操作手段は、左方向への移動を指令するための左移動操作子と、右方向への移動を指令するための右移動操作子とを含み、
前記目標値演算手段は、前記左移動操作子および右移動操作子の操作と、前記第1操作手段の操作位置との組み合わせに応じた方向への平行移動のための目標値を求めるものである、A1項に記載の操船支援装置。
【0088】
この構成によれば、左移動操作子および右移動操作子と第1操作手段の操作位置との組み合わせによって、多数の目標移動方向を設定でき、その目標移動方向に船舶を平行移動させることができる。
目標移動方向の設定例を示せば、次のとおりである。ただし、(4)〜(6)は、左右の移動操作子がいずれも操作されていない(OFF状態)であるので、通常航走モードに従う動作である。
【0089】
【表1】
【0090】
A3.前記操船支援装置は、船舶に備えられた左右一対の推進機と、これらの推進機にそれぞれ対応する一対の操舵機構とに対応した目標値を生成するものであり、
前記第1操作手段は、左の推進機に対応した左操作子(左側スロットルレバー)と、右の推進機に対応した右操作子(右側スロットルレバー)とを含み、前記左操作子および右操作子が、それぞれ、前進駆動位置、後進駆動位置および中立位置に操作可能であり、
前記目標値演算手段は、前記左操作子および右操作子の操作位置の組み合わせが前進駆動位置および後進駆動位置であるときに、船舶をその場で回頭させるための目標値を求めるものである、A1項またはA2項に記載の操船支援装置。
【0091】
「左操作子および右操作子の操作位置の組み合わせが前進駆動位置および後進駆動位置であるとき」とは、次のアおよびイの両方の操作状態を含む趣旨である。
ア.左操作子が前進駆動位置にあり、右操作子が後進駆動位置にある。
イ.左操作子が後進駆動位置にあり、右操作子が前進駆動位置にある。
前記の構成によれば、第1操作手段の左移動操作子および右移動操作子が反対方向の駆動を指令する操作位置とされると、船舶がその場で回頭することになる。これにより、通常航走のための操作系をその場回頭のために兼用することができる。
【0092】
たとえば、左操作子が前進駆動位置にあり、右操作子が後進駆動位置にあるときには右回頭のための目標値を設定し、左操作子が後進駆動位置にあり、右操作子が前進駆動位置にあるときには左回頭のための目標値を設定するとよい。
A4.前記目標値演算手段は、前記第1操作手段の前記中立位置からの操作量が所定値を超えているときには、前記第2操作手段による指令を無効化し、前記第1操作手段の操作量に応じて目標値を求めるものである、A1項〜A3項のいずれか一項に記載の操船支援装置。
【0093】
この構成によれば、第1操作手段を中立位置から大きく操作したときには、通常航走のための操作が行われたものとして、第2操作手段による平行移動モードの設定が無効化される。これにより、演算モードは、通常航走モードとなる。
たとえば、第1操作手段の操作位置は、中立位置、最低前進推進力指令位置(前進シフトイン位置)、前進出力調整領域、最低後進推進力指令位置(後進シフトイン位置)、および後進出力調整領域をとれるようになっていてもよい。最低前進推進力指令位置とは、前進方向の最低推進力が発生される操作位置である。前進出力調整領域とは、最低前進推進力指令位置を超えた前進側操作領域であり、操作位置に応じて、前進最低推進力よりも大きな範囲で前進方向の推進力を調整できる領域である。同様に、最低後進推進力指令位置とは、後進方向の最低推進力が発生される操作位置である。後進出力調整領域とは、最低後進推進力指令位置を超えた後進側操作領域であり、操作位置に応じて、後進最低推進力よりも大きな範囲で後進方向の推進力を調整できる領域である。この場合に、前進出力調整領域および後進出力調整領域では、第2操作手段(平行移動モード)が無効化されるようにしてもよい。したがって、平行移動のための前進駆動位置および後進駆動位置は、それぞれ、最低前進推進力指令位置および最低後進推進力指令位置に対応する。
【0094】
操作位置の認識を容易にするために、中立位置、最低前進推進力指令位置および最低後進推進力指令位置で操作位置を仮保持する操作位置仮保持手段が備えられていることが好ましい。操作位置仮保持手段は、操作子とともに移動する可動部材をノッチで仮保持する構造であってもよい。
A5.船舶の速度を検出する速度検出手段をさらに含み、
前記目標値演算手段は、前記速度検出手段によって検出される船舶の速度が所定の速度しきい値以上のときには、前記第2操作手段による指令を無効化して、目標値を求めるものである、A1項〜A4項のいずれか一項に記載の操船支援装置。
【0095】
この構成によれば、船舶の速度が速度しきい値を超えているときには、通常の航走状態であると判断され、第2操作手段の操作が無効とされる。したがって、平行移動モードへの移行が禁止される。これにより、船舶の速度が速い状況で平行移動モードに移行することに伴う違和感を軽減できる。
A6.前記船舶の平行移動中に船舶を回頭させるための回頭操作手段をさらに含み、
前記目標値演算手段は、前記第2操作手段によって左右への移動が指令されたときに、船舶が前記第1操作手段の操作位置に応じた方向へ平行移動しながら回頭するように、前記目標値を求めるものである、A1項〜A5項のいずれか一項に記載の操船支援装置。
【0096】
この構成によれば、平行移動中に、船舶を回頭させることができる。
A7.前記回頭操作手段が、前記操舵機構の操舵角を制御するためのステアリングハンドルに備えられている、A6項に記載の操船支援装置。
この構成によれば、ステアリングハンドルに設けられた回頭操作手段の操作によって回頭を指令することができる。これにより、通常航走時において操舵角の調整のために用いられるステアリングハンドルを保持した状態で回頭のための操作を行うことができる。
【0097】
A8.前記目標値演算手段は、平行移動時の目標回頭値を前記ステアリングハンドルの操作量(より具体的には相対操舵量)に応じて定め、この目標回頭値に従って前記目標値を求めるものである、A7項に記載の操船支援装置。前記目標回頭値とは、船舶の瞬間中心周りの目標ヨーモーメントであってもよいし、目標ヨー角速度であってもよい。
この構成によれば、ステアリングハンドルに備えられた回頭操作手段を操作し、さらに、ステアリングハンドルを操作することによって、その操作量に応じて船舶を回頭させることができる。これにより、通常航走時に操舵角の調整のために用いられるステアリングハンドルを、平行移動時における回頭制御のために共有できる。
【0098】
A9.前記目標値演算手段は、前記ステアリングハンドルのハンドル舵角が所定の舵角しきい値以上のときに、前記回頭操作手段による指令を無効化するものである、A7項またはA8項に記載の操船支援装置。
この構成によれば、ハンドル舵角が所定の舵角しきい値以上であれば、回頭操作が無効となるので、過大な目標回頭値が設定されることを回避できる。たとえば、ハンドル舵角が舵角しきい値以上のときには、平行移動モードに遷移せずに、通常航走モードを維持するようにしてもよい。ハンドル舵角が大きいときには、操船者は、平行移動ではなく、通常航走を望んでいると考えられるからである。
【0099】
A10.船体と、
この船体に取り付けられた推進機および操舵機構と、
前記推進機および操舵機構のための目標値を求めるA1項〜A9項のいずれか一項に記載の操船支援装置とを含む、船舶。
この構成によれば、通常航走のための操作手段を平行移動にも共用できるから、操作系の持ち替えが不要である。したがって、操作が簡単になる。そのうえ、操作系の構成が簡単になるので、船舶全体のコストを低減できる。また、操作系の設置スペースが小さくなるから、小型の船舶においても、優れた操作性を確保できる。
【0100】
なお、船舶は、クルーザ、釣り船、ウォータージェット、水上滑走艇(watercraft)のような比較的小型のものであってもよい。
また、船舶に備えられる推進機は、船外機(アウトボードモータ)、船内外機(スターンドライブ。インボードモータ・アウトボードドライブ)、船内機(インボードモータ)、ウォータージェットドライブのいずれの形態であってもよい。船外機は、原動機(エンジンまたは電動モータ)および推進力発生部材(プロペラ)を含む推進ユニットを船外に有し、さらに、推進ユニット全体を船体に対して水平方向に回動させる操舵機構が付設されたものである。船内外機は、原動機が船内に配置され、推進力発生部材および舵切り機構を含むドライブユニットが船外に配置されたものである。船内機は、原動機およびドライブユニットがいずれも船体に内蔵され、ドライブユニットからプロペラシャフトが船外に延び出た形態を有する。この場合、操舵機構は別途設けられる。ウォータージェットドライブは、船底から吸い込んだ水をポンプで加速し、船尾の噴射ノズルから噴射することで推進力を得るものである。この場合、操舵機構は、噴射ノズルと、この噴射ノズルを水平面に沿って回動させる機構とで構成される。
【0101】
以下に、「課題を解決するための手段」の項等に記載した用語と前述の実施形態における用語との対応関係を示す。
推進機:バウスラスタ10、船外機11,12
操舵機構:操舵機構50
船舶:船舶1
第1操作手段:スロットルレバー8a,8b
第2操作手段:平行移動ボタン18L,18R
目標値演算手段:第1および第2目標値演算部21,22
切換手段:切換部23
制御手段:ECU9,13,14
目標値演算ユニット:第1および第2目標値演算部21,22
選択出力手段:切換部23(図6)
選択活性化手段:切換部23(図11)
左移動操作子:左平行移動ボタン18L
右移動操作子:右平行移動ボタン18R
左操作子:左側スロットルレバー8a
右操作子:右側スロットルレバー8b
速度検出手段:速度センサ16
回頭操作手段:回頭ボタン7b
ステアリングハンドル:ステアリングハンドル7a
船体:船体2
操船支援装置:ステアリング操作部7、スロットル操作部8、速度センサ16、航走制御装置20
【符号の説明】
【0102】
1 船舶
2 船体
6 操作卓
7 ステアリング操作部
7a ステアリングハンドル
7b 回頭ボタン
8 スロットル操作部
8a 左側スロットルレバー
8b 右側スロットルレバー
9 ECU
10 バウスラスタ
10a 電動モータ
10b プロペラ
10c 回転センサ
11 左舷船外機
12 右舷船外機
13,14 船外機ECU
16 速度センサ
18L 左平行移動ボタン
18R 右平行移動ボタン
20 航走制御装置
21 第1目標値演算部
21A 目標値設定部
21B 推進力配分部
22 第2目標値演算部
22A 目標値設定部
22B 推進力配分部
22m マップ
23 切換部
30 推進ユニット
39 エンジン
40 プロペラ
43 シフト機構
46 スロットルバルブ
47 操舵ロッド
48 エンジン回転検出部
49 操舵角センサ
50 操舵機構
51 スロットルアクチュエータ
52 シフトアクチュエータ
53 操舵アクチュエータ
61 第1位置センサ
62 第2位置センサ
63 第3位置センサ
【特許請求の範囲】
【請求項1】
推進機および操舵機構を備えた船舶のための操船支援装置であって、
前記推進機を前進駆動するための前進駆動位置、前記推進機を後進駆動するための後進駆動位置、および前記推進機を非作動状態とする中立位置を選択可能なスロットルレバーを含む第1操作手段と、
前記スロットルレバーに設けられ船舶の左方向への移動を指令するための左移動操作子と、前記スロットルレバーに設けられ船舶の右方向への移動を指令するための右移動操作子とを含む、第2操作手段と、
前記第2操作手段の操作と、前記第1操作手段の操作位置とに応じて、前記推進機のための目標推進力および前記操舵機構のための目標操舵角を含む目標値を求める目標値演算手段とを含む、操船支援装置。
【請求項2】
前記第2操作手段は、操船者が右手で前記スロットルレバーを把持したとき、操船者の親指で押下できる位置に配置されている、請求項1に記載の操船支援装置。
【請求項3】
前記操船支援装置は、船舶に備えられた左右一対の推進機と、これらの推進機にそれぞれ対応する一対の操舵機構とに対応した目標値を生成するものであり、
前記第1操作手段は、左の推進機に対応した左側スロットルレバーと、右の推進機に対応した右側スロットルレバーとを含み、前記左側スロットルレバーおよび右側スロットルレバーが、それぞれ、前進駆動位置、後進駆動位置および中立位置に操作可能であり、
前記第2操作手段は、前記左側スロットルレバーに配置されている、請求項1または2に記載の操船支援装置。
【請求項4】
前記左移動操作子は前記左側スロットルレバー上において、前記右移動操作子よりも下側に配置されている、請求項3に記載の操船支援装置。
【請求項5】
前記左側スロットルレバーおよび前記右側スロットルレバーの各頭部は、互いに近接する方向に折り曲げられて、ほぼ水平な把持部を形成している、請求項3または4に記載の操船支援装置。
【請求項6】
通常航走モードおよび停泊操船支援モードを含む複数の制御モードに従う制御動作を行う航走制御装置を含み、前記第2操作手段が操作されると、所定の条件下で前記通常航走モードから前記停泊操船支援モードへ遷移する、請求項1〜5のいずれか一項に記載の操船支援装置。
【請求項7】
前記第2操作手段が操作されていない場合に、前記制御モードは前記通常航走モードとなる、請求項6に記載の操船支援装置。
【請求項8】
前記所定の条件とは、
禁止条件1:前記左側スロットルレバーおよび前記右側スロットルレバーのいずれかの操作位置が前進出力調整領域または後進出力調整領域にあること、
禁止条件2:船舶の前進速度が所定の前進速度しきい値以上であること、
禁止条件3:船舶後進速度が所定の後進速度しきい値以上であること、
禁止条件4:前記操舵機構の操舵角を制御するためのステアリングハンドルの舵角が所定の舵角しきい値以上であること、ならびに
禁止条件5:船舶のエンジンの回転速度が所定のしきい値以上であること
の全てが否定される条件であり、
前記航走制御装置は、前記禁止条件1〜5の少なくとも一つに該当する場合、停泊操船支援モードへの遷移のための操作を無効化する、請求項6または7に記載の操船支援装置。
【請求項9】
前記所定の条件とは、
禁止条件1:前記左側スロットルレバーおよび前記右側スロットルレバーのいずれかの操作位置が前進出力調整領域または後進出力調整領域にあること、
禁止条件2:船舶の前進速度が所定の前進速度しきい値以上であること、
禁止条件3:船舶後進速度が所定の後進速度しきい値以上であること、
禁止条件4:前記操舵機構の操舵角を制御するためのステアリングハンドルの舵角が所定の舵角しきい値以上であること、ならびに
禁止条件5:船舶のエンジンの回転速度が所定のしきい値以上であること
の全てが否定される条件であり、
前記航走制御装置は、前記禁止条件1〜5がすべて否定されることを条件に、前記通常航走モードから前記停泊操船支援モードへ遷移する、請求項6または7に記載の操船支援装置。
【請求項1】
推進機および操舵機構を備えた船舶のための操船支援装置であって、
前記推進機を前進駆動するための前進駆動位置、前記推進機を後進駆動するための後進駆動位置、および前記推進機を非作動状態とする中立位置を選択可能なスロットルレバーを含む第1操作手段と、
前記スロットルレバーに設けられ船舶の左方向への移動を指令するための左移動操作子と、前記スロットルレバーに設けられ船舶の右方向への移動を指令するための右移動操作子とを含む、第2操作手段と、
前記第2操作手段の操作と、前記第1操作手段の操作位置とに応じて、前記推進機のための目標推進力および前記操舵機構のための目標操舵角を含む目標値を求める目標値演算手段とを含む、操船支援装置。
【請求項2】
前記第2操作手段は、操船者が右手で前記スロットルレバーを把持したとき、操船者の親指で押下できる位置に配置されている、請求項1に記載の操船支援装置。
【請求項3】
前記操船支援装置は、船舶に備えられた左右一対の推進機と、これらの推進機にそれぞれ対応する一対の操舵機構とに対応した目標値を生成するものであり、
前記第1操作手段は、左の推進機に対応した左側スロットルレバーと、右の推進機に対応した右側スロットルレバーとを含み、前記左側スロットルレバーおよび右側スロットルレバーが、それぞれ、前進駆動位置、後進駆動位置および中立位置に操作可能であり、
前記第2操作手段は、前記左側スロットルレバーに配置されている、請求項1または2に記載の操船支援装置。
【請求項4】
前記左移動操作子は前記左側スロットルレバー上において、前記右移動操作子よりも下側に配置されている、請求項3に記載の操船支援装置。
【請求項5】
前記左側スロットルレバーおよび前記右側スロットルレバーの各頭部は、互いに近接する方向に折り曲げられて、ほぼ水平な把持部を形成している、請求項3または4に記載の操船支援装置。
【請求項6】
通常航走モードおよび停泊操船支援モードを含む複数の制御モードに従う制御動作を行う航走制御装置を含み、前記第2操作手段が操作されると、所定の条件下で前記通常航走モードから前記停泊操船支援モードへ遷移する、請求項1〜5のいずれか一項に記載の操船支援装置。
【請求項7】
前記第2操作手段が操作されていない場合に、前記制御モードは前記通常航走モードとなる、請求項6に記載の操船支援装置。
【請求項8】
前記所定の条件とは、
禁止条件1:前記左側スロットルレバーおよび前記右側スロットルレバーのいずれかの操作位置が前進出力調整領域または後進出力調整領域にあること、
禁止条件2:船舶の前進速度が所定の前進速度しきい値以上であること、
禁止条件3:船舶後進速度が所定の後進速度しきい値以上であること、
禁止条件4:前記操舵機構の操舵角を制御するためのステアリングハンドルの舵角が所定の舵角しきい値以上であること、ならびに
禁止条件5:船舶のエンジンの回転速度が所定のしきい値以上であること
の全てが否定される条件であり、
前記航走制御装置は、前記禁止条件1〜5の少なくとも一つに該当する場合、停泊操船支援モードへの遷移のための操作を無効化する、請求項6または7に記載の操船支援装置。
【請求項9】
前記所定の条件とは、
禁止条件1:前記左側スロットルレバーおよび前記右側スロットルレバーのいずれかの操作位置が前進出力調整領域または後進出力調整領域にあること、
禁止条件2:船舶の前進速度が所定の前進速度しきい値以上であること、
禁止条件3:船舶後進速度が所定の後進速度しきい値以上であること、
禁止条件4:前記操舵機構の操舵角を制御するためのステアリングハンドルの舵角が所定の舵角しきい値以上であること、ならびに
禁止条件5:船舶のエンジンの回転速度が所定のしきい値以上であること
の全てが否定される条件であり、
前記航走制御装置は、前記禁止条件1〜5がすべて否定されることを条件に、前記通常航走モードから前記停泊操船支援モードへ遷移する、請求項6または7に記載の操船支援装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−32161(P2013−32161A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2012−250551(P2012−250551)
【出願日】平成24年11月14日(2012.11.14)
【分割の表示】特願2008−309862(P2008−309862)の分割
【原出願日】平成20年12月4日(2008.12.4)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成24年11月14日(2012.11.14)
【分割の表示】特願2008−309862(P2008−309862)の分割
【原出願日】平成20年12月4日(2008.12.4)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
[ Back to top ]