
擬似痛覚提供装置とその方法
【課題】擬似痛覚を速い反応時間で生成する。
【解決手段】この発明の擬似痛覚提供装置は、刺激部と、刺激部移動駆動部と、駆動制御部と、温度制御部と、位置検出部を具備する。人間の皮膚を傷つけることがない温度範囲の温度に設定された高温度素子と低温度素子とが温度分離部を挟んで隣接して配置されて構成される刺激部が皮膚に接触され、刺激部の予め定めた位置において高温素子と低音素子とが周期的に入れ替わるように移動駆動されることで擬似痛覚を提供する。事前に温度設定された高温度素子と低温度素子の移動周期を制御する方法なので、穏やかな温度変化に依存する従来方法よりも、速い反応時間で応答性良く擬似痛覚を生成することが可能である。
【解決手段】この発明の擬似痛覚提供装置は、刺激部と、刺激部移動駆動部と、駆動制御部と、温度制御部と、位置検出部を具備する。人間の皮膚を傷つけることがない温度範囲の温度に設定された高温度素子と低温度素子とが温度分離部を挟んで隣接して配置されて構成される刺激部が皮膚に接触され、刺激部の予め定めた位置において高温素子と低音素子とが周期的に入れ替わるように移動駆動されることで擬似痛覚を提供する。事前に温度設定された高温度素子と低温度素子の移動周期を制御する方法なので、穏やかな温度変化に依存する従来方法よりも、速い反応時間で応答性良く擬似痛覚を生成することが可能である。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、人間の皮膚を傷つけることが無い範囲の温度を用いて触覚提示を行う装置であり、特に痛み感覚を生成する擬似痛覚提供装置とその方法に関する。
【背景技術】
【0002】
従来、危険を知らせる時に用いられる注意喚起の方法には、視覚や聴覚に直接作用する警報やサイレン等が用いられていた。一方、コンピュータによって創出された仮想空間や、離れてコミュニケーションを取る遠隔通信環境等においては、注意喚起の方法として警報やサイレンは使い難い場合が多い。つまり、仮想空間における事象や遠隔通信の内容を知覚することが出来ない第三者が近くに位置する状況では、周囲に拡散する警報等は迷惑になるので使えない場合がある。そこで、特定の個人に対して注意喚起が可能な新たな方法の開発が期待されている。
【0003】
注意を与えるためには、脊髄反射を利用する電気ショックのような方法が、反応時間が速く有効である。しかし、人体の皮膚組織を損傷させる危険がある。皮膚組織を損傷することなく灼熱痛に近い痛覚を生じる方法としてタンベルグのThermal grill illusionと呼ばれる錯覚の存在が知られている(非特許文献1)。
【0004】
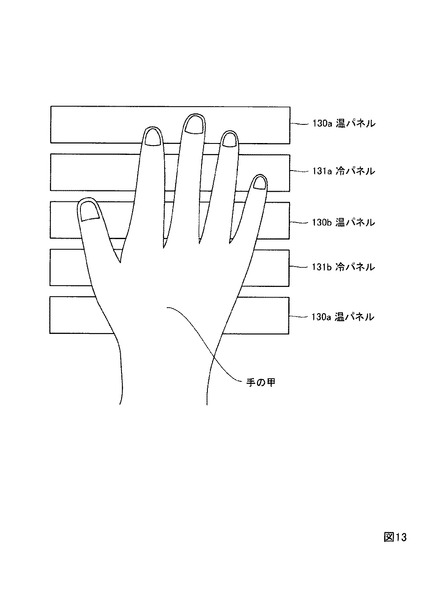
図13を参照してThermal grill illusionを簡単に説明する。手の甲の反対側(手の平)に、指先側から手首方向に向けて短冊状の温パネル130a,130bと冷パネル131a,131b(以降、a,bは省略する)が交互に複数個配置され、手の平がそれらパネルに接触している。温パネル130の温度は約40℃、冷パネル131の温度は約20℃に設定されている。どちらの温度も火傷をしない温度に設定されているが、約40℃と20℃の温度刺激を同時に与えることで灼熱痛に近い痛みを人間に錯覚させることが出来る。この方法による擬似痛覚の発生は、その刺激を与えた時に、痛覚と関係が高い脳の前帯状回(24野)の血流が増加することで確認されている。
【0005】
仮想空間や遠隔通信環境における注意喚起にこの方法を用いることは、その反応時間の遅さから困難であった。例えば、温パネル130と冷パネル131にペルチェ素子を用いた場合、パネルの大きさや供給する電流値にもよるが、−5〜50℃の範囲の制御に関して20℃/秒というのが最も速い報告である(非特許文献2)。つまり、体温若しくは室
温程度の温度にある温パネル130と冷パネル131とに、約20℃の温度差を発生させるのに約1秒の時間が必要である。したがって、人間は穏やかにじんわりと痛みを感じることになる。一度与えた痛みを除去する場合も同様である。このように従来の方法では、速い反応時間で擬似痛覚を生成することが出来なかった。特にペルチェ素子においては、温度を下げる制御を高速に行うことが難しい。
【0006】
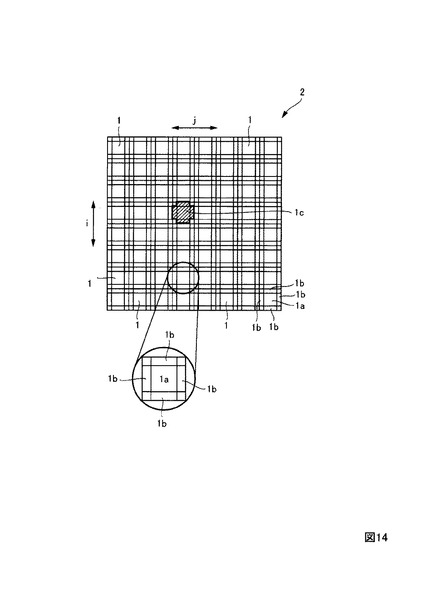
そのペルチェ素子の温度変化の応答性を改善する工夫が特許文献1に開示されている。図14を参照して特許文献1の方法を簡単に説明する。方形状の熱情報出力部2は、熱制御用素子1がi行j列のマトリックス状に配置されて形成される。各熱制御用素子1は、主素子1aと、主素子1aに隣接して配置される補助素子1bとから構成される。特許文献1の方法は、制御目標位置に対応する熱制御素子1を構成する主素子1aと補助素子1bとを同時に制御することで温度制御の追従性の向上を図ったものである。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】Craig AD,Bushnell MC.The thermal grill illusion:unmasking the burn of cold pain. Science.1994;265:252-5.
【非特許文献2】D.G Caldwell,A.Wardle, and M.Goodwin,”Telepresence:Visual, audio and tactile feedback and control of a twin armed mobile robot”,Proceedings of the IEEE International Conference on Robotics and Automation,1994,part 1,244-249
【特許文献】
【0008】
【特許文献1】特開2000−112536号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、特許文献1の方法を用いても、仮想空間や遠隔通信環境に用いて好適な擬似痛覚を生成するために必要な、速い反応時間の温度変化を発生させることが出来なかった。この発明は、このような点に鑑みてなされたものであり、人体の細胞組織を傷つけることなく擬似痛覚を速い反応時間で生成する擬似痛覚提供装置と、その方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
この発明の擬似痛覚提供装置は、刺激部と、刺激部移動駆動部と、駆動制御部と、温度制御部と、位置検出部とを具備する。刺激部は、人間の皮膚を傷つけることがない温度に設定された第1温度センサを備えた高温度素子と第2温度センサを備えた低温度素子とが温度分離部を挟んで隣接して配置されて構成される。刺激部移動駆動部は、刺激部の予め定めた位置において高温素子と低温素子とが周期的に入れ替わるように移動させる。駆動制御部は刺激部の移動周期を制御する。温度制御部は、第1温度センサと第2温度センサからの温度情報に基づいて、高温度素子と低温度素子との温度差を所定の温度に制御する。位置検出部は、刺激部の位置を検出して位置情報を出力する。そして、駆動制御部が、位置情報によって刺激部の移動周期を可変する。
【発明の効果】
【0011】
人間の温度感覚は、空間解像度は低いが時間解像度は高いことが知られている。この発明は、その時間解像度の高い温度感覚を利用してThermal grill illusionと同等の擬似痛覚を生成するものである。つまり、事前に温度設定された高温度素子と低温度素子の移動周期を制御する方法なので、穏やかな温度変化に依存する従来方法よりも、速い反応時間で応答性良く擬似痛覚を生成することが可能になる。
【図面の簡単な説明】
【0012】
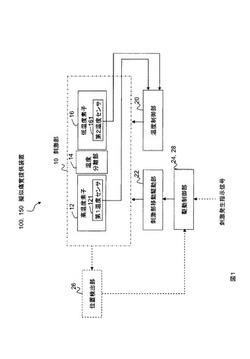
【図1】この発明の擬似痛覚提供装置100,150の機能構成例を示す図。
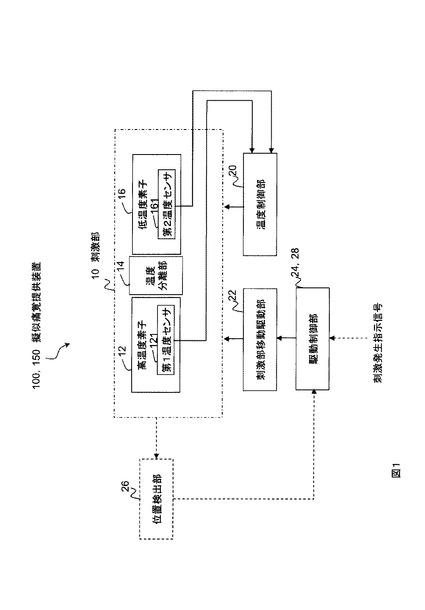
【図2】擬似痛覚提供装置100の動作フローを示す図。
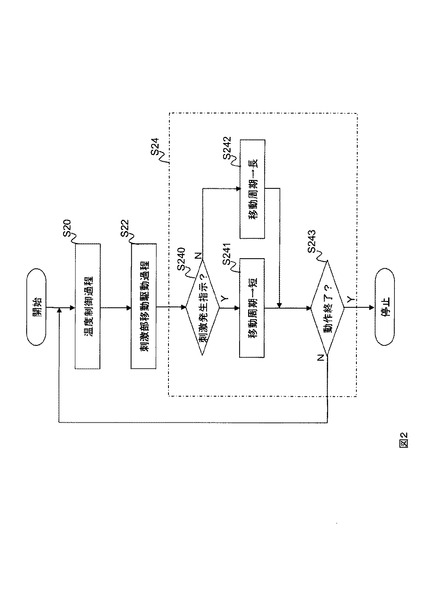
【図3】高温度素子12と低温度素子16の切り替え速度(刺激部の移動周期)と痛みと感じる確率との関係例を模式的に示す図。
【図4】経過時間と刺激温度の変化の関係を示す図。
【図5】擬似痛覚提供装置100の具体的な構成例を示す図。
【図6】筐体60に収納した擬似痛覚提供装置100を示す図。
【図7】図6のA−A中心線断面図。
【図8】擬似痛覚提供装置150の動作フローを示す図。
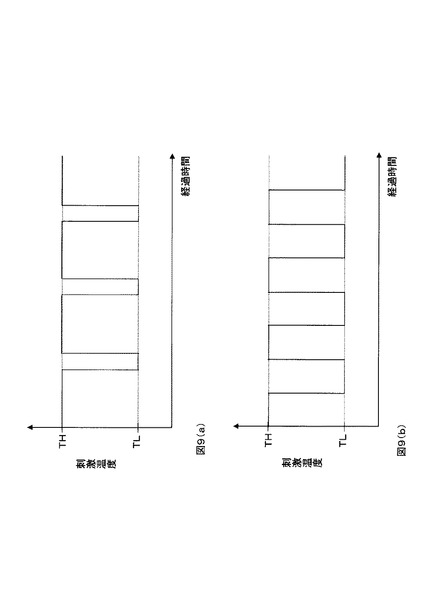
【図9】擬似痛覚提供装置150が生成する刺激温度の時間変化を示す図であり、(a)は刺激部の位置に基づいて駆動速度を可変した場合を示す図、(b)は刺激部の位置によらずに駆動速度を一定とした場合を示す図である。
【図10】刺激部の変形例1を示す図。
【図11】刺激部の変形例2を示す図。
【図12】刺激部10″の具体的な構成例を示す図。
【図13】非特許文献1に開示されたThermal grill illusionを説明する図。
【図14】特許文献1に開示されたペルチェ素子の温度制御方法を説明する図。
【発明を実施するための形態】
【0013】
以下、この発明の実施の形態を図面を参照して説明する。複数の図面中同一のものには同じ参照符号を付し、説明は繰り返さない。
【実施例1】
【0014】
図1にこの発明の擬似痛覚提供装置100の機能構成例を示す。図2にその動作フローを示す。擬似痛覚提供装置100は、刺激部10と、刺激部移動駆動部22と、駆動制御部24とを具備する。刺激部10は、人間の皮膚を傷つけることが無い温度範囲に設定された高温度素子12と低温度素子16とが温度分離部14を挟んで隣接して配置される。刺激部移動駆動部22は、刺激部10を周期的に移動させる。駆動制御部24は、刺激部10の移動周期を制御する。
【0015】
高温度素子12は第1温度センサ121を備え、低温度素子16は第2温度センサ161を備える。第1温度センサ121と第2温度センサ161の温度情報は、温度制御部20に入力される。温度制御部20は、第1温度センサ121と第2温度センサ161からの温度情報に基づいて、高温度素子12と低温度素子16との温度差を所定の温度に制御する(ステップS20、図2)。第1温度センサ121と第2温度センサ161は、例えば一般的な温度検出に用いられるサーミスタである。第1温度センサ121と高温度素子12、第2温度センサ161と低温度素子16は、それぞれ一体となるように形成されている。
【0016】
高温度素子12と低温度素子16の温度は、人間の皮膚を傷つけない温度に設定される。高温度素子12の温度は、長い時間皮膚に接触しても低温火傷をする心配の無い30℃以上〜40℃未満の温度に設定するのが良く、例えば35℃に設定される。低温度素子16の温度は、長い時間皮膚に接触しても凍傷の心配の無い20℃以下〜10℃以上の温度に設定するのが良く、例えば15℃に設定される。刺激部移動駆動部22は、所定の温度差に設定された高温度素子12と低温度素子16とを含む刺激部10を、駆動制御部24が設定した移動周期で移動させる(ステップS22)。駆動制御部24は、刺激部10の移動周期を制御する(ステップS24)。
【0017】
図3に刺激部10の移動周期と被験者が痛みと感じる確率との関係を示す。横軸は高温度素子12と低温度素子16の切り替え速度を〔Hz〕で表す。刺激部10の移動周期は、後述するように刺激部の構成の仕方によって色々な場合が想定される。ここでは、説明の都合上、移動周期を切り替え速度〔Hz〕で表す。縦軸は被験者が痛みと感じる確率である。
【0018】
人間は、高温度素子12と低温度素子16の切り替え速度が遅いと、高温度素子12の温かさと低温度素子16の冷たさとを交互に感じるだけで、痛みとして知覚することが無い。逆に切り替え速度が速いと、高温度素子12の温かさと低温度素子16の冷たさとが平均化された一定の温度として感じるだけである。その両者の間に痛みと感じる切り替え速度が存在する。つまり、切り替え速度に対する痛みと感じる確率の特性は、大雑把にいって上に凸の放物線を描く。
【0019】
この特性を用いれば、切り替え速度(刺激部の移動周期)を変えることで擬似痛覚の生成を制御することが出来る。例えば、擬似痛覚を生成しない場合は、切り替え速度を低速にしておき、痛みを生成する場合は切り替え速度を速くする。または、逆に擬似痛覚を生成しない場合の切り替え速度を高速にしておき、痛みを生成する場合に痛みと感じる確率が1に近くなる速度に減速するように制御しても良い。
【0020】
駆動制御部24は、その制御を外部からの刺激発生指示信号に基づいて行う。発生指示ありの場合は(ステップS240のY)、例えば1Hz(図3の○)であった刺激部10の切り替え速度を例えば5Hz(●)に変化させる。つまり、刺激部10の移動周期を短くする(ステップS241)。刺激発生の指示が無い場合は(ステップS240のN)、例えば1Hzであった刺激部10の切り替え速度をそのまま維持する。つまり、刺激部10の移動周期を長いままとする(ステップS242)。駆動制御部24が設定した刺激部10の移動周期は、図示しない動作終了を指示する動作終了指示信号が入力される(ステップS243のY)まで維持される。
【0021】
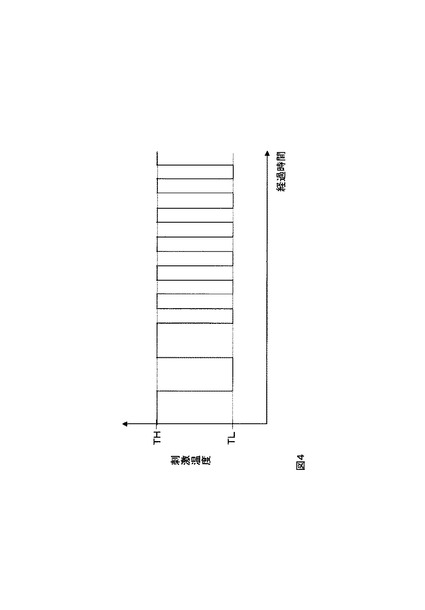
切り替え速度が5Hzに変化した時、刺激部10に例えば指先を接触させている被験者は痛みを感じることになる。図4に横軸を経過時間とし、縦軸を刺激温度とした特性を示す。刺激温度とは高温度素子12の温度THと低温度素子16の温度TLによる温度刺激のことである。擬似痛覚生成時は、このように刺激温度の切り替え速度が速くなる。この切り替え速度を変化させる制御は、刺激部移動駆動部22が例えば直流モータで構成される場合は、駆動制御部24が直流モータに供給する電流値を変えて行う。この切り替え速度の変化は、温度変化の約1秒に対して十分速く、0.1秒以内で制御することが可能で
ある。よって、速い反応時間で擬似痛覚を生成することが出来る。
【0022】
なお、刺激部10の移動周期を外部からの刺激発生指示信号に基づいて切り替える例で説明を行ったが、その切り替え方法は用途によっていろいろ考えられる。例えばタイマーによって自動的に切り替えても良いし、常時痛みを発生する切り替え速度(移動周期)に固定しておいても良い。
【0023】
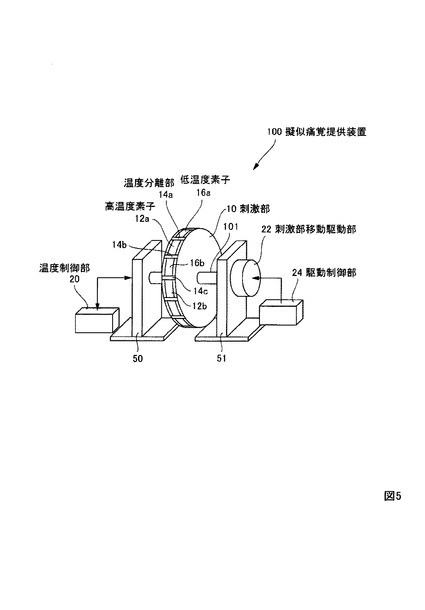
図5に擬似痛覚生成装置100の具体的な構成例を示す。刺激部10は中心軸101を有する円板形状であり、中心軸の両端は支柱50と51とで支持されている。その円板形状の厚み部外周に低温度素子16aと高温度素子12aとが温度分離部14aを挟んで円周方向に隣接して配置される。高温度素子12aの両側に温度分離部14aと14bとが配置され、その隣に低温度素子16aと16bとが配置されている。つまり、高温度素子12と低温度素子16とが温度分離部14を挟んで、円板形状の厚み部外周の円周方向に複数個配置される。
【0024】
中心軸101の一方を支持する支柱51の外側には回転モータである刺激部移動駆動部22が設けられ、回転モータが直接中心軸101を回転させるように構成されている。刺激部移動駆動部22には駆動制御部24が接続されている。中心軸101の他方を支持する支柱50の外側には、図示しないスリップリングが設けられ、そのスリップリングを介して刺激部の温度を制御する制御信号が、温度制御部20に接続される。スリップリングとは、固定側から回転側に電気信号を供給するロータリーコネクターであり、一般的なものである。
【0025】
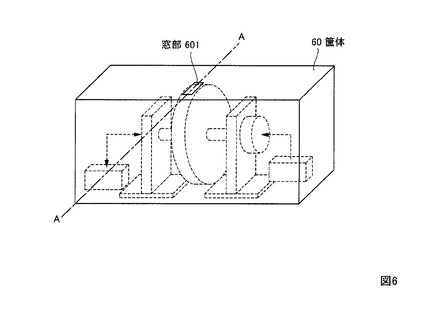
以上のように構成された擬似痛覚提供装置100の刺激部10の回転方向に例えば被験者が指を乗せることによって、擬似痛覚を感じることが出来る。なお、回転する刺激部10が露出しているのは、安全上好ましくないので図6に示すように窓部601を有する筐体60内に擬似痛覚提供装置100を収容するようにしても良い。筐体60は、刺激部10の移動方向と直交する方向の幅が狭く、移動方向と同方向の長さが長い窓部601を備える。窓部601は、刺激部10の直上に近接して配置されるように設けられる。
【0026】
図6に示すA−A中心線で切断した断面を図7に示す。窓部601に被験者の指を乗せることによって、指の腹の部分だけが刺激部10と接触するので、より安全な擬似痛覚提供装置とすることが出来る。なお、被験者は、擬似痛覚と同時に、指と刺激部10との摩擦感を感じることになる。よって、摩擦感を減らす目的で、刺激部10の表面は滑らかに形成されている。例えば刺激部10の表面に、皮膚との摩擦係数が小さく熱伝導度の高い膜を塗布しても良い。または、指との接触部分には例えば手触りの良いフェルトを用い、当該フェルトと刺激部10との間には、金属粉を含んだ熱伝導度の高いゲルを充填させるようにしても良い。
【0027】
以上述べた実施例1の擬似痛覚提供装置100は、刺激部10の移動周期が短い場合と長い場合の2つしか無い例として説明を行なったが、移動周期を3つ以上の複数個用意して置き、それを切り替えるようにしても良い。なお、実施例1の例では、刺激部10の高温度素子12と低温度素子16の回転方向の長さを等しく形成すると、高温度素子12の温度THと低温度素子16の温度TLの各時間は必ず同じになる(図4参照)。これは刺激部10の移動周期を変えても変わらない。そこで刺激温度の時間幅を更に自由に制御出来るようにした実施例2を次に示して説明する。
【実施例2】
【0028】
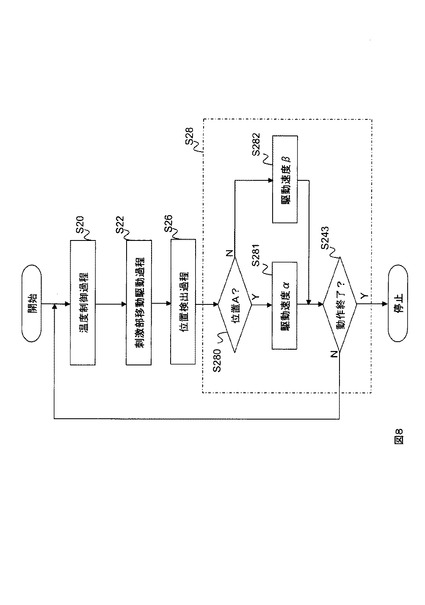
図1に実施例2の擬似痛覚提供装置150の機能構成例を示す。その動作フローを図8に示す。実施例1との違いは、位置検出部26を備える点と、駆動制御部28の制御方法が異なる点である。位置検出部26は、刺激部10の位置を検出する(ステップS26、図8)。位置検出部26は、例えば一般的なロータリーエンコーダであり、刺激部10の位置情報をディジタル値で出力する。したがって、位置検出部26を備えることで、窓部601の直下に高温度素子12と低温度素子16のどちらが位置するのかを、簡単に検出することが可能である(ステップS280)。駆動制御部28は、位置検出部26で検出した刺激部10の位置情報によって刺激部の回転速度を切り替える。例えば、窓部601の直下に高温度素子12が位置する場合を位置Aとし、その時の駆動速度を例えば遅く設定する(ステップS281)。そして、低温度素子16が窓部601の直下に位置する場合は駆動速度を速く設定する(ステップS282)。このように刺激部10の回転速度を制御すると図9(a)に示すように、温度THの時間を長く、温度TLの時間を短くすることが出来る。このように実施例2の構成によれば、刺激温度の温度THと温度TLの変化する時間の比率を自由に変更することが可能である。もちろん、ステップS281とステップS282とで設定する移動速度を同じに設定することで、実施例1と同じように温度THと温度TLの時間を等しくすることも可能である。
【0029】
〔変形例1〕
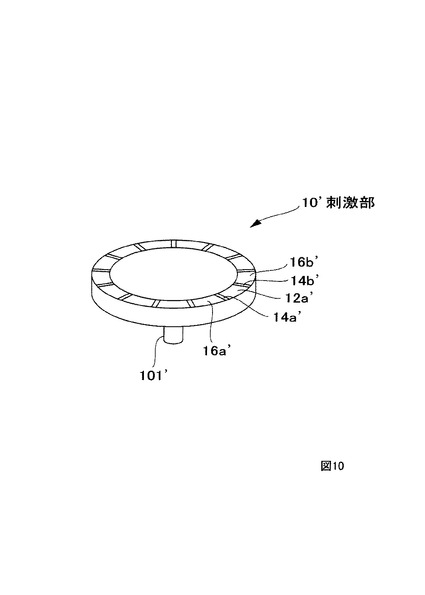
刺激部10は、上記した例に限定されず種々の変形が可能である。図10に刺激部10を、ターンテーブル状に変形した例を示す。刺激部10′は、一方の面に中心軸101′を有する円板形状であり、中心軸101′は鉛直方向に支持される。そして、中心軸101′と反対側の円板の外縁部表面に高温度素子12a′と低温度素子16a′とが、温度分離部14a′を挟んで円周方向に隣接して配置される。高温度素子12a′の時計回りの円周方向には、温度分離部14a′を挟んで低温度素子16a′が配置され、反時計回りの円周方向には、温度分離部14b′を挟んで低温度素子16b′が配置される。つまり、円板の外縁部表面の円周上に複数の高温度素子と低温度素子とが、温度分離部を挟んで隣接して配置されている。このような刺激部10′を用いて擬似痛覚提供装置100,150を構成すれば、図6に示した筐体60の高さを薄くすることが出来る。また、この場合は、窓部601を円周上に複数個配置することが可能になるので、複数の被験者に同時に擬似痛覚を与えることも可能になる。
【0030】
〔変形例2〕
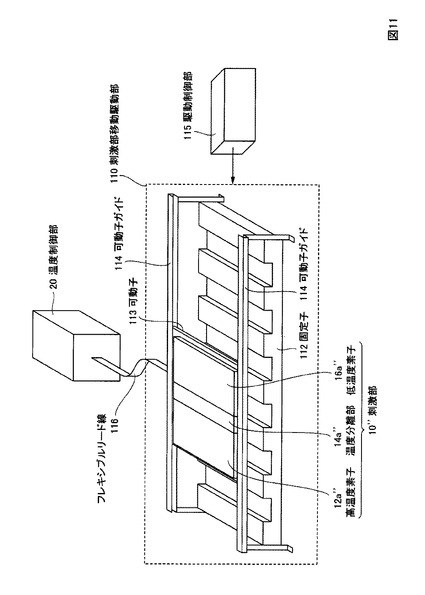
刺激部10の移動は回転運動によらなくても良い。図11に刺激部10″を平板形状とし、刺激部移動駆動部110をリニアモータで構成した擬似痛覚提供装置の変形例を示す。刺激部移動駆動部110は、固定子112と可動子113と、可動子113の移動方向に沿って可動子113の両端をガイドする可動子ガイド114とで構成される一般的なリニアモータである。固定子112と反対側の可動子113上に平板形状の刺激部10″が固定されている。温度制御部20は、実施例1と2の温度制御部と同じものである。刺激部10″が平行移動するので、可動子113の上に固定された高温度素子12a″と低温度素子16a″と、温度制御部20とはスリップリングに変わってフレキシブルリード線116で接続される。
【0031】
駆動制御部115は、リニアモータの駆動を制御する点が実施例1,2と異なるが、図2と図8で示した制御方法は同じである。位置検出部26は、可動子ガイド114内に可動子の位置を検出する接点を設けることで実現出来る。接点は極めて簡単なものなので、図示した説明は省略する。
【0032】
〔高温度素子と低温度素子〕
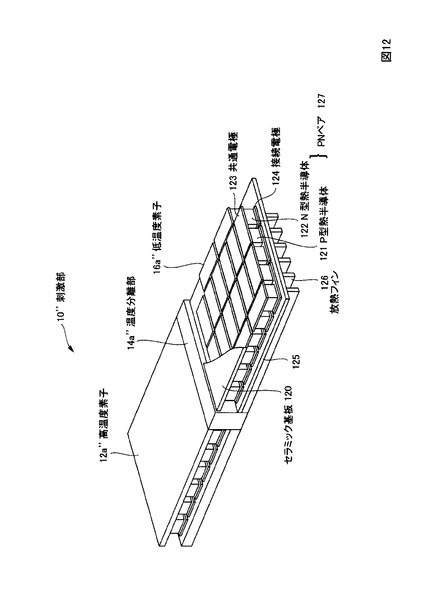
ここで、高温度素子12と低温度素子16の具体例を刺激部10″を例にして説明する。高温度素子12と低温度素子16は、例えばペルチェ素子で構成することが出来る。図12に刺激部10″をペルチェ素子で構成した構成例を示す。図12は一部破断斜視図であり、低温度素子16a″が皮膚と接触する側のセラッミク基板120の一部を破断させ内部構造を露出させている。ペルチェ素子は、ビスマス・テルル合金を主成分とした同じ大きさの直方体形状のP型熱半導体121とN型熱半導体122とを一組としたPNペア127が複数個接続されて構成される一般的なものである。
【0033】
そのPNペア127は、P型熱半導体121とN型熱半導体122と、その一端面に共通して接続される共通電極123と、その共通電極123と反対側のPNペア127の他端面にそれぞれ接続される接続電極124とで構成される。そのPNペア127の接続電極124が、他のPNペアに接続され、更に、複数のPNペアを構成する共通電極123と接続電極124とが、例えばセラミック基板120,125で挟まれてペルチェモジュールを構成する。ペルチェモジュールに流す電流の向きによって、放熱と吸熱を切り替えることが出来る。つまり、低温度素子16と高温度素子12の基本的な構成は全く同じであり、それぞれに供給する電流の向きが反対の関係にある。低温度素子16のセラミック基板120側の温度は高温になるため放熱のための放熱フィン126が設けられている。
【0034】
ペルチェ素子で構成された高温度素子12″と低温度素子16″とは、熱伝導度の低い物質、例えばガラス材料からなる温度分離部14″を挟んで一体とされて刺激部10″を構成する。
【0035】
以上述べたペルチェ素子で構成された高温度素子12と低温度素子16は、実施例1,2と変形例1で説明した刺激部にも利用可能である。なお、低温度素子16はペルチェ素子で構成するのが好ましいが、高温度素子12は抵抗体に電流を流して発生するジュール熱を用いたより一般的な方法でも構わない。また、上記した刺激部10〜10″(以降〜10″は省略する)、高温度素子12と低温度素子16とが同じ大きさで、且つ、その間に温度分離部14を備える形状としたが、その形状に限定されない。例えば、高温度素子12を大きく、低温度素子16を小さく形成しても良い。また、温度分離部14の形状を高温度素子12や低温度素子16よりも大きくしても良い。このように刺激部10は種々の形状が考えられる。
【0036】
以上述べたようにこの発明の擬似痛覚提供装置によれば、人間の皮膚を傷つけることがない温度に設定された高温度素子と低温度素子とから成る刺激部を、周期的に移動駆動させて皮膚に接触させ、その移動周期を制御することで、速い反応時間で擬似痛覚を与えることが可能になる。
【0037】
この発明の技術思想に基づく擬似痛覚提供装置とその方法は、上述の実施形態に限定されるものではなく、この発明の趣旨を逸脱しない範囲で適宜変更が可能である。例えば、上記した実施例では、刺激部の移動周期のみを可変する例で説明を行ったが、温度差を可変する制御を加えても良い。温度差制御も加えることで擬似痛覚生成の制御の自由度を更に上げることが出来る。
【0038】
この発明の、温度設定済みの高温度素子と低温度素子とを移動させて皮膚の一箇所に温度刺激を与えるという技術思想に鑑みると、従来法のように大きな面積の温度素子を必要としない。よって、温度素子が小面積の故に、温度設定の高速化が可能である。したがって、刺激部の移動周期は一定で、温度差制御のみでも速い反応時間で擬似痛覚を与えることが可能である。
【0039】
また、上記した例では、擬似痛覚提供装置は据え置き型の例であったが、この発明はこの例に限定されない。擬似痛覚提供装置全体を小型化すれば腕時計型やリストバンド、アームバンドの形態にし、人が常時携帯出来るようにすることも可能である。
【0040】
また、温度素子の温度は、温度設定された温水や冷水を循環させることで設定するようにしても良い。つまり、高温度素子と低温度素子の温度設定手段は、人体の皮膚を傷つけることの無い2種類の温度が得られれば、どのような手段でも構わない。
【技術分野】
【0001】
この発明は、人間の皮膚を傷つけることが無い範囲の温度を用いて触覚提示を行う装置であり、特に痛み感覚を生成する擬似痛覚提供装置とその方法に関する。
【背景技術】
【0002】
従来、危険を知らせる時に用いられる注意喚起の方法には、視覚や聴覚に直接作用する警報やサイレン等が用いられていた。一方、コンピュータによって創出された仮想空間や、離れてコミュニケーションを取る遠隔通信環境等においては、注意喚起の方法として警報やサイレンは使い難い場合が多い。つまり、仮想空間における事象や遠隔通信の内容を知覚することが出来ない第三者が近くに位置する状況では、周囲に拡散する警報等は迷惑になるので使えない場合がある。そこで、特定の個人に対して注意喚起が可能な新たな方法の開発が期待されている。
【0003】
注意を与えるためには、脊髄反射を利用する電気ショックのような方法が、反応時間が速く有効である。しかし、人体の皮膚組織を損傷させる危険がある。皮膚組織を損傷することなく灼熱痛に近い痛覚を生じる方法としてタンベルグのThermal grill illusionと呼ばれる錯覚の存在が知られている(非特許文献1)。
【0004】
図13を参照してThermal grill illusionを簡単に説明する。手の甲の反対側(手の平)に、指先側から手首方向に向けて短冊状の温パネル130a,130bと冷パネル131a,131b(以降、a,bは省略する)が交互に複数個配置され、手の平がそれらパネルに接触している。温パネル130の温度は約40℃、冷パネル131の温度は約20℃に設定されている。どちらの温度も火傷をしない温度に設定されているが、約40℃と20℃の温度刺激を同時に与えることで灼熱痛に近い痛みを人間に錯覚させることが出来る。この方法による擬似痛覚の発生は、その刺激を与えた時に、痛覚と関係が高い脳の前帯状回(24野)の血流が増加することで確認されている。
【0005】
仮想空間や遠隔通信環境における注意喚起にこの方法を用いることは、その反応時間の遅さから困難であった。例えば、温パネル130と冷パネル131にペルチェ素子を用いた場合、パネルの大きさや供給する電流値にもよるが、−5〜50℃の範囲の制御に関して20℃/秒というのが最も速い報告である(非特許文献2)。つまり、体温若しくは室
温程度の温度にある温パネル130と冷パネル131とに、約20℃の温度差を発生させるのに約1秒の時間が必要である。したがって、人間は穏やかにじんわりと痛みを感じることになる。一度与えた痛みを除去する場合も同様である。このように従来の方法では、速い反応時間で擬似痛覚を生成することが出来なかった。特にペルチェ素子においては、温度を下げる制御を高速に行うことが難しい。
【0006】
そのペルチェ素子の温度変化の応答性を改善する工夫が特許文献1に開示されている。図14を参照して特許文献1の方法を簡単に説明する。方形状の熱情報出力部2は、熱制御用素子1がi行j列のマトリックス状に配置されて形成される。各熱制御用素子1は、主素子1aと、主素子1aに隣接して配置される補助素子1bとから構成される。特許文献1の方法は、制御目標位置に対応する熱制御素子1を構成する主素子1aと補助素子1bとを同時に制御することで温度制御の追従性の向上を図ったものである。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】Craig AD,Bushnell MC.The thermal grill illusion:unmasking the burn of cold pain. Science.1994;265:252-5.
【非特許文献2】D.G Caldwell,A.Wardle, and M.Goodwin,”Telepresence:Visual, audio and tactile feedback and control of a twin armed mobile robot”,Proceedings of the IEEE International Conference on Robotics and Automation,1994,part 1,244-249
【特許文献】
【0008】
【特許文献1】特開2000−112536号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、特許文献1の方法を用いても、仮想空間や遠隔通信環境に用いて好適な擬似痛覚を生成するために必要な、速い反応時間の温度変化を発生させることが出来なかった。この発明は、このような点に鑑みてなされたものであり、人体の細胞組織を傷つけることなく擬似痛覚を速い反応時間で生成する擬似痛覚提供装置と、その方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
この発明の擬似痛覚提供装置は、刺激部と、刺激部移動駆動部と、駆動制御部と、温度制御部と、位置検出部とを具備する。刺激部は、人間の皮膚を傷つけることがない温度に設定された第1温度センサを備えた高温度素子と第2温度センサを備えた低温度素子とが温度分離部を挟んで隣接して配置されて構成される。刺激部移動駆動部は、刺激部の予め定めた位置において高温素子と低温素子とが周期的に入れ替わるように移動させる。駆動制御部は刺激部の移動周期を制御する。温度制御部は、第1温度センサと第2温度センサからの温度情報に基づいて、高温度素子と低温度素子との温度差を所定の温度に制御する。位置検出部は、刺激部の位置を検出して位置情報を出力する。そして、駆動制御部が、位置情報によって刺激部の移動周期を可変する。
【発明の効果】
【0011】
人間の温度感覚は、空間解像度は低いが時間解像度は高いことが知られている。この発明は、その時間解像度の高い温度感覚を利用してThermal grill illusionと同等の擬似痛覚を生成するものである。つまり、事前に温度設定された高温度素子と低温度素子の移動周期を制御する方法なので、穏やかな温度変化に依存する従来方法よりも、速い反応時間で応答性良く擬似痛覚を生成することが可能になる。
【図面の簡単な説明】
【0012】
【図1】この発明の擬似痛覚提供装置100,150の機能構成例を示す図。
【図2】擬似痛覚提供装置100の動作フローを示す図。
【図3】高温度素子12と低温度素子16の切り替え速度(刺激部の移動周期)と痛みと感じる確率との関係例を模式的に示す図。
【図4】経過時間と刺激温度の変化の関係を示す図。
【図5】擬似痛覚提供装置100の具体的な構成例を示す図。
【図6】筐体60に収納した擬似痛覚提供装置100を示す図。
【図7】図6のA−A中心線断面図。
【図8】擬似痛覚提供装置150の動作フローを示す図。
【図9】擬似痛覚提供装置150が生成する刺激温度の時間変化を示す図であり、(a)は刺激部の位置に基づいて駆動速度を可変した場合を示す図、(b)は刺激部の位置によらずに駆動速度を一定とした場合を示す図である。
【図10】刺激部の変形例1を示す図。
【図11】刺激部の変形例2を示す図。
【図12】刺激部10″の具体的な構成例を示す図。
【図13】非特許文献1に開示されたThermal grill illusionを説明する図。
【図14】特許文献1に開示されたペルチェ素子の温度制御方法を説明する図。
【発明を実施するための形態】
【0013】
以下、この発明の実施の形態を図面を参照して説明する。複数の図面中同一のものには同じ参照符号を付し、説明は繰り返さない。
【実施例1】
【0014】
図1にこの発明の擬似痛覚提供装置100の機能構成例を示す。図2にその動作フローを示す。擬似痛覚提供装置100は、刺激部10と、刺激部移動駆動部22と、駆動制御部24とを具備する。刺激部10は、人間の皮膚を傷つけることが無い温度範囲に設定された高温度素子12と低温度素子16とが温度分離部14を挟んで隣接して配置される。刺激部移動駆動部22は、刺激部10を周期的に移動させる。駆動制御部24は、刺激部10の移動周期を制御する。
【0015】
高温度素子12は第1温度センサ121を備え、低温度素子16は第2温度センサ161を備える。第1温度センサ121と第2温度センサ161の温度情報は、温度制御部20に入力される。温度制御部20は、第1温度センサ121と第2温度センサ161からの温度情報に基づいて、高温度素子12と低温度素子16との温度差を所定の温度に制御する(ステップS20、図2)。第1温度センサ121と第2温度センサ161は、例えば一般的な温度検出に用いられるサーミスタである。第1温度センサ121と高温度素子12、第2温度センサ161と低温度素子16は、それぞれ一体となるように形成されている。
【0016】
高温度素子12と低温度素子16の温度は、人間の皮膚を傷つけない温度に設定される。高温度素子12の温度は、長い時間皮膚に接触しても低温火傷をする心配の無い30℃以上〜40℃未満の温度に設定するのが良く、例えば35℃に設定される。低温度素子16の温度は、長い時間皮膚に接触しても凍傷の心配の無い20℃以下〜10℃以上の温度に設定するのが良く、例えば15℃に設定される。刺激部移動駆動部22は、所定の温度差に設定された高温度素子12と低温度素子16とを含む刺激部10を、駆動制御部24が設定した移動周期で移動させる(ステップS22)。駆動制御部24は、刺激部10の移動周期を制御する(ステップS24)。
【0017】
図3に刺激部10の移動周期と被験者が痛みと感じる確率との関係を示す。横軸は高温度素子12と低温度素子16の切り替え速度を〔Hz〕で表す。刺激部10の移動周期は、後述するように刺激部の構成の仕方によって色々な場合が想定される。ここでは、説明の都合上、移動周期を切り替え速度〔Hz〕で表す。縦軸は被験者が痛みと感じる確率である。
【0018】
人間は、高温度素子12と低温度素子16の切り替え速度が遅いと、高温度素子12の温かさと低温度素子16の冷たさとを交互に感じるだけで、痛みとして知覚することが無い。逆に切り替え速度が速いと、高温度素子12の温かさと低温度素子16の冷たさとが平均化された一定の温度として感じるだけである。その両者の間に痛みと感じる切り替え速度が存在する。つまり、切り替え速度に対する痛みと感じる確率の特性は、大雑把にいって上に凸の放物線を描く。
【0019】
この特性を用いれば、切り替え速度(刺激部の移動周期)を変えることで擬似痛覚の生成を制御することが出来る。例えば、擬似痛覚を生成しない場合は、切り替え速度を低速にしておき、痛みを生成する場合は切り替え速度を速くする。または、逆に擬似痛覚を生成しない場合の切り替え速度を高速にしておき、痛みを生成する場合に痛みと感じる確率が1に近くなる速度に減速するように制御しても良い。
【0020】
駆動制御部24は、その制御を外部からの刺激発生指示信号に基づいて行う。発生指示ありの場合は(ステップS240のY)、例えば1Hz(図3の○)であった刺激部10の切り替え速度を例えば5Hz(●)に変化させる。つまり、刺激部10の移動周期を短くする(ステップS241)。刺激発生の指示が無い場合は(ステップS240のN)、例えば1Hzであった刺激部10の切り替え速度をそのまま維持する。つまり、刺激部10の移動周期を長いままとする(ステップS242)。駆動制御部24が設定した刺激部10の移動周期は、図示しない動作終了を指示する動作終了指示信号が入力される(ステップS243のY)まで維持される。
【0021】
切り替え速度が5Hzに変化した時、刺激部10に例えば指先を接触させている被験者は痛みを感じることになる。図4に横軸を経過時間とし、縦軸を刺激温度とした特性を示す。刺激温度とは高温度素子12の温度THと低温度素子16の温度TLによる温度刺激のことである。擬似痛覚生成時は、このように刺激温度の切り替え速度が速くなる。この切り替え速度を変化させる制御は、刺激部移動駆動部22が例えば直流モータで構成される場合は、駆動制御部24が直流モータに供給する電流値を変えて行う。この切り替え速度の変化は、温度変化の約1秒に対して十分速く、0.1秒以内で制御することが可能で
ある。よって、速い反応時間で擬似痛覚を生成することが出来る。
【0022】
なお、刺激部10の移動周期を外部からの刺激発生指示信号に基づいて切り替える例で説明を行ったが、その切り替え方法は用途によっていろいろ考えられる。例えばタイマーによって自動的に切り替えても良いし、常時痛みを発生する切り替え速度(移動周期)に固定しておいても良い。
【0023】
図5に擬似痛覚生成装置100の具体的な構成例を示す。刺激部10は中心軸101を有する円板形状であり、中心軸の両端は支柱50と51とで支持されている。その円板形状の厚み部外周に低温度素子16aと高温度素子12aとが温度分離部14aを挟んで円周方向に隣接して配置される。高温度素子12aの両側に温度分離部14aと14bとが配置され、その隣に低温度素子16aと16bとが配置されている。つまり、高温度素子12と低温度素子16とが温度分離部14を挟んで、円板形状の厚み部外周の円周方向に複数個配置される。
【0024】
中心軸101の一方を支持する支柱51の外側には回転モータである刺激部移動駆動部22が設けられ、回転モータが直接中心軸101を回転させるように構成されている。刺激部移動駆動部22には駆動制御部24が接続されている。中心軸101の他方を支持する支柱50の外側には、図示しないスリップリングが設けられ、そのスリップリングを介して刺激部の温度を制御する制御信号が、温度制御部20に接続される。スリップリングとは、固定側から回転側に電気信号を供給するロータリーコネクターであり、一般的なものである。
【0025】
以上のように構成された擬似痛覚提供装置100の刺激部10の回転方向に例えば被験者が指を乗せることによって、擬似痛覚を感じることが出来る。なお、回転する刺激部10が露出しているのは、安全上好ましくないので図6に示すように窓部601を有する筐体60内に擬似痛覚提供装置100を収容するようにしても良い。筐体60は、刺激部10の移動方向と直交する方向の幅が狭く、移動方向と同方向の長さが長い窓部601を備える。窓部601は、刺激部10の直上に近接して配置されるように設けられる。
【0026】
図6に示すA−A中心線で切断した断面を図7に示す。窓部601に被験者の指を乗せることによって、指の腹の部分だけが刺激部10と接触するので、より安全な擬似痛覚提供装置とすることが出来る。なお、被験者は、擬似痛覚と同時に、指と刺激部10との摩擦感を感じることになる。よって、摩擦感を減らす目的で、刺激部10の表面は滑らかに形成されている。例えば刺激部10の表面に、皮膚との摩擦係数が小さく熱伝導度の高い膜を塗布しても良い。または、指との接触部分には例えば手触りの良いフェルトを用い、当該フェルトと刺激部10との間には、金属粉を含んだ熱伝導度の高いゲルを充填させるようにしても良い。
【0027】
以上述べた実施例1の擬似痛覚提供装置100は、刺激部10の移動周期が短い場合と長い場合の2つしか無い例として説明を行なったが、移動周期を3つ以上の複数個用意して置き、それを切り替えるようにしても良い。なお、実施例1の例では、刺激部10の高温度素子12と低温度素子16の回転方向の長さを等しく形成すると、高温度素子12の温度THと低温度素子16の温度TLの各時間は必ず同じになる(図4参照)。これは刺激部10の移動周期を変えても変わらない。そこで刺激温度の時間幅を更に自由に制御出来るようにした実施例2を次に示して説明する。
【実施例2】
【0028】
図1に実施例2の擬似痛覚提供装置150の機能構成例を示す。その動作フローを図8に示す。実施例1との違いは、位置検出部26を備える点と、駆動制御部28の制御方法が異なる点である。位置検出部26は、刺激部10の位置を検出する(ステップS26、図8)。位置検出部26は、例えば一般的なロータリーエンコーダであり、刺激部10の位置情報をディジタル値で出力する。したがって、位置検出部26を備えることで、窓部601の直下に高温度素子12と低温度素子16のどちらが位置するのかを、簡単に検出することが可能である(ステップS280)。駆動制御部28は、位置検出部26で検出した刺激部10の位置情報によって刺激部の回転速度を切り替える。例えば、窓部601の直下に高温度素子12が位置する場合を位置Aとし、その時の駆動速度を例えば遅く設定する(ステップS281)。そして、低温度素子16が窓部601の直下に位置する場合は駆動速度を速く設定する(ステップS282)。このように刺激部10の回転速度を制御すると図9(a)に示すように、温度THの時間を長く、温度TLの時間を短くすることが出来る。このように実施例2の構成によれば、刺激温度の温度THと温度TLの変化する時間の比率を自由に変更することが可能である。もちろん、ステップS281とステップS282とで設定する移動速度を同じに設定することで、実施例1と同じように温度THと温度TLの時間を等しくすることも可能である。
【0029】
〔変形例1〕
刺激部10は、上記した例に限定されず種々の変形が可能である。図10に刺激部10を、ターンテーブル状に変形した例を示す。刺激部10′は、一方の面に中心軸101′を有する円板形状であり、中心軸101′は鉛直方向に支持される。そして、中心軸101′と反対側の円板の外縁部表面に高温度素子12a′と低温度素子16a′とが、温度分離部14a′を挟んで円周方向に隣接して配置される。高温度素子12a′の時計回りの円周方向には、温度分離部14a′を挟んで低温度素子16a′が配置され、反時計回りの円周方向には、温度分離部14b′を挟んで低温度素子16b′が配置される。つまり、円板の外縁部表面の円周上に複数の高温度素子と低温度素子とが、温度分離部を挟んで隣接して配置されている。このような刺激部10′を用いて擬似痛覚提供装置100,150を構成すれば、図6に示した筐体60の高さを薄くすることが出来る。また、この場合は、窓部601を円周上に複数個配置することが可能になるので、複数の被験者に同時に擬似痛覚を与えることも可能になる。
【0030】
〔変形例2〕
刺激部10の移動は回転運動によらなくても良い。図11に刺激部10″を平板形状とし、刺激部移動駆動部110をリニアモータで構成した擬似痛覚提供装置の変形例を示す。刺激部移動駆動部110は、固定子112と可動子113と、可動子113の移動方向に沿って可動子113の両端をガイドする可動子ガイド114とで構成される一般的なリニアモータである。固定子112と反対側の可動子113上に平板形状の刺激部10″が固定されている。温度制御部20は、実施例1と2の温度制御部と同じものである。刺激部10″が平行移動するので、可動子113の上に固定された高温度素子12a″と低温度素子16a″と、温度制御部20とはスリップリングに変わってフレキシブルリード線116で接続される。
【0031】
駆動制御部115は、リニアモータの駆動を制御する点が実施例1,2と異なるが、図2と図8で示した制御方法は同じである。位置検出部26は、可動子ガイド114内に可動子の位置を検出する接点を設けることで実現出来る。接点は極めて簡単なものなので、図示した説明は省略する。
【0032】
〔高温度素子と低温度素子〕
ここで、高温度素子12と低温度素子16の具体例を刺激部10″を例にして説明する。高温度素子12と低温度素子16は、例えばペルチェ素子で構成することが出来る。図12に刺激部10″をペルチェ素子で構成した構成例を示す。図12は一部破断斜視図であり、低温度素子16a″が皮膚と接触する側のセラッミク基板120の一部を破断させ内部構造を露出させている。ペルチェ素子は、ビスマス・テルル合金を主成分とした同じ大きさの直方体形状のP型熱半導体121とN型熱半導体122とを一組としたPNペア127が複数個接続されて構成される一般的なものである。
【0033】
そのPNペア127は、P型熱半導体121とN型熱半導体122と、その一端面に共通して接続される共通電極123と、その共通電極123と反対側のPNペア127の他端面にそれぞれ接続される接続電極124とで構成される。そのPNペア127の接続電極124が、他のPNペアに接続され、更に、複数のPNペアを構成する共通電極123と接続電極124とが、例えばセラミック基板120,125で挟まれてペルチェモジュールを構成する。ペルチェモジュールに流す電流の向きによって、放熱と吸熱を切り替えることが出来る。つまり、低温度素子16と高温度素子12の基本的な構成は全く同じであり、それぞれに供給する電流の向きが反対の関係にある。低温度素子16のセラミック基板120側の温度は高温になるため放熱のための放熱フィン126が設けられている。
【0034】
ペルチェ素子で構成された高温度素子12″と低温度素子16″とは、熱伝導度の低い物質、例えばガラス材料からなる温度分離部14″を挟んで一体とされて刺激部10″を構成する。
【0035】
以上述べたペルチェ素子で構成された高温度素子12と低温度素子16は、実施例1,2と変形例1で説明した刺激部にも利用可能である。なお、低温度素子16はペルチェ素子で構成するのが好ましいが、高温度素子12は抵抗体に電流を流して発生するジュール熱を用いたより一般的な方法でも構わない。また、上記した刺激部10〜10″(以降〜10″は省略する)、高温度素子12と低温度素子16とが同じ大きさで、且つ、その間に温度分離部14を備える形状としたが、その形状に限定されない。例えば、高温度素子12を大きく、低温度素子16を小さく形成しても良い。また、温度分離部14の形状を高温度素子12や低温度素子16よりも大きくしても良い。このように刺激部10は種々の形状が考えられる。
【0036】
以上述べたようにこの発明の擬似痛覚提供装置によれば、人間の皮膚を傷つけることがない温度に設定された高温度素子と低温度素子とから成る刺激部を、周期的に移動駆動させて皮膚に接触させ、その移動周期を制御することで、速い反応時間で擬似痛覚を与えることが可能になる。
【0037】
この発明の技術思想に基づく擬似痛覚提供装置とその方法は、上述の実施形態に限定されるものではなく、この発明の趣旨を逸脱しない範囲で適宜変更が可能である。例えば、上記した実施例では、刺激部の移動周期のみを可変する例で説明を行ったが、温度差を可変する制御を加えても良い。温度差制御も加えることで擬似痛覚生成の制御の自由度を更に上げることが出来る。
【0038】
この発明の、温度設定済みの高温度素子と低温度素子とを移動させて皮膚の一箇所に温度刺激を与えるという技術思想に鑑みると、従来法のように大きな面積の温度素子を必要としない。よって、温度素子が小面積の故に、温度設定の高速化が可能である。したがって、刺激部の移動周期は一定で、温度差制御のみでも速い反応時間で擬似痛覚を与えることが可能である。
【0039】
また、上記した例では、擬似痛覚提供装置は据え置き型の例であったが、この発明はこの例に限定されない。擬似痛覚提供装置全体を小型化すれば腕時計型やリストバンド、アームバンドの形態にし、人が常時携帯出来るようにすることも可能である。
【0040】
また、温度素子の温度は、温度設定された温水や冷水を循環させることで設定するようにしても良い。つまり、高温度素子と低温度素子の温度設定手段は、人体の皮膚を傷つけることの無い2種類の温度が得られれば、どのような手段でも構わない。
【特許請求の範囲】
【請求項1】
人間の皮膚を傷つけることがない温度に設定された第1温度センサを備えた高温度素子と第2温度センサを備えた低温度素子とが温度分離部を挟んで隣接して配置される刺激部と、
上記刺激部の予め定めた位置において上記高温素子と上記低温素子とが周期的に入れ替わるように移動させる刺激部移動駆動部と、
上記刺激部の移動周期を制御する駆動制御部と、
上記第1温度センサと上記第2温度センサからの温度情報に基づいて、上記高温度素子と上記低温度素子との温度差を所定の温度に制御する温度制御部と、
上記刺激部の位置を検出して位置情報を出力する位置検出部と、
を具備し、
上記駆動制御部が、上記位置情報によって上記刺激部の移動周期を可変して制御することを特徴とする擬似痛覚提供装置。
【請求項2】
請求項1に記載した擬似痛覚提供装置において、
上記低温度素子は、ペルチェ素子で構成されることを特徴とする擬似痛覚提供装置。
【請求項3】
請求項1又は2に記載した擬似痛覚提供装置において、
上記刺激部は、中心軸を有する円板形状であり、上記円板の厚み部外周に上記高温度素子と上記低温度素子とが上記温度分離部を挟んで、それぞれ円周方向に隣接して配置されるものであり、
上記刺激部移動駆動部は、回転モータである、
ことを特徴とする擬似痛覚提供装置。
【請求項4】
請求項1又は2に記載した擬似痛覚提供装置において、
上記刺激部は、一方の面に中心軸を有する円板形状であり、上記中心軸と反対側の円板の外縁部表面に上記高温度素子と上記低温度素子とが上記温度分離部を挟んで、それぞれ円周方向に隣接して配置されるものであり、
上記刺激部移動駆動部は、回転モータである、
ことを特徴とする擬似痛覚提供装置。
【請求項5】
請求項1又は2に記載した擬似痛覚提供装置において、
上記刺激部は平板形状であり、上記平板上に上記高温度素子と低温度素子とが温度分離部を挟んで隣接して配置されるものであり、
上記刺激部移動駆動部は、リニアモータである、
ことを特徴とする擬似痛覚提供装置。
【請求項6】
温度制御部が、第1温度センサを備えた高温度素子と第2温度センサを備えた低温度素子とが温度分離部を挟んで隣接して配置される刺激部の、上記高温度素子と上記低温度素子との温度差を、所定の温度に制御する温度制御過程と、
刺激部移動駆動部が、上記刺激部の予め定めた位置において上記高温度素子と上記低温度素子とを周期的に入れ替わるように移動させる刺激部移動駆動過程と、
駆動制御部が、上記刺激部の移動周期を制御する駆動制御過程と、
位置検出部が、上記刺激部の位置を検出して位置情報を出力する位置検出過程と、
を含み、
上記駆動制御過程は、上記位置情報によって上記刺激部の移動周期を可変する過程であることを特徴とする擬似痛覚提供方法。
【請求項1】
人間の皮膚を傷つけることがない温度に設定された第1温度センサを備えた高温度素子と第2温度センサを備えた低温度素子とが温度分離部を挟んで隣接して配置される刺激部と、
上記刺激部の予め定めた位置において上記高温素子と上記低温素子とが周期的に入れ替わるように移動させる刺激部移動駆動部と、
上記刺激部の移動周期を制御する駆動制御部と、
上記第1温度センサと上記第2温度センサからの温度情報に基づいて、上記高温度素子と上記低温度素子との温度差を所定の温度に制御する温度制御部と、
上記刺激部の位置を検出して位置情報を出力する位置検出部と、
を具備し、
上記駆動制御部が、上記位置情報によって上記刺激部の移動周期を可変して制御することを特徴とする擬似痛覚提供装置。
【請求項2】
請求項1に記載した擬似痛覚提供装置において、
上記低温度素子は、ペルチェ素子で構成されることを特徴とする擬似痛覚提供装置。
【請求項3】
請求項1又は2に記載した擬似痛覚提供装置において、
上記刺激部は、中心軸を有する円板形状であり、上記円板の厚み部外周に上記高温度素子と上記低温度素子とが上記温度分離部を挟んで、それぞれ円周方向に隣接して配置されるものであり、
上記刺激部移動駆動部は、回転モータである、
ことを特徴とする擬似痛覚提供装置。
【請求項4】
請求項1又は2に記載した擬似痛覚提供装置において、
上記刺激部は、一方の面に中心軸を有する円板形状であり、上記中心軸と反対側の円板の外縁部表面に上記高温度素子と上記低温度素子とが上記温度分離部を挟んで、それぞれ円周方向に隣接して配置されるものであり、
上記刺激部移動駆動部は、回転モータである、
ことを特徴とする擬似痛覚提供装置。
【請求項5】
請求項1又は2に記載した擬似痛覚提供装置において、
上記刺激部は平板形状であり、上記平板上に上記高温度素子と低温度素子とが温度分離部を挟んで隣接して配置されるものであり、
上記刺激部移動駆動部は、リニアモータである、
ことを特徴とする擬似痛覚提供装置。
【請求項6】
温度制御部が、第1温度センサを備えた高温度素子と第2温度センサを備えた低温度素子とが温度分離部を挟んで隣接して配置される刺激部の、上記高温度素子と上記低温度素子との温度差を、所定の温度に制御する温度制御過程と、
刺激部移動駆動部が、上記刺激部の予め定めた位置において上記高温度素子と上記低温度素子とを周期的に入れ替わるように移動させる刺激部移動駆動過程と、
駆動制御部が、上記刺激部の移動周期を制御する駆動制御過程と、
位置検出部が、上記刺激部の位置を検出して位置情報を出力する位置検出過程と、
を含み、
上記駆動制御過程は、上記位置情報によって上記刺激部の移動周期を可変する過程であることを特徴とする擬似痛覚提供方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−164348(P2012−164348A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2012−100576(P2012−100576)
【出願日】平成24年4月26日(2012.4.26)
【分割の表示】特願2008−189527(P2008−189527)の分割
【原出願日】平成20年7月23日(2008.7.23)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成24年4月26日(2012.4.26)
【分割の表示】特願2008−189527(P2008−189527)の分割
【原出願日】平成20年7月23日(2008.7.23)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
[ Back to top ]