
攪拌脱泡方法及び攪拌脱泡装置
【課題】自転公転式の攪拌脱泡装置の分野において、攪拌処理効率の高い攪拌脱泡方法、及び、攪拌脱泡装置を提供する。
【解決手段】攪拌脱泡方法は、材料Mが収納された収納容器100を公転させながら自転させることによって、材料を攪拌脱泡する方法であって、公転数を所定値以上に保った状態で、公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、当該比率を第2の値から第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程(ステップS14)を含む。攪拌脱泡処理工程を、比率変動復帰処理のインターバル(T)が材料の処理条件に合致するように行う。
【解決手段】攪拌脱泡方法は、材料Mが収納された収納容器100を公転させながら自転させることによって、材料を攪拌脱泡する方法であって、公転数を所定値以上に保った状態で、公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、当該比率を第2の値から第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程(ステップS14)を含む。攪拌脱泡処理工程を、比率変動復帰処理のインターバル(T)が材料の処理条件に合致するように行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、攪拌脱泡方法及び攪拌脱泡装置に関する。
【背景技術】
【0002】
材料が収納された容器を公転させながら自転させることによって当該材料を攪拌脱泡する装置(自転公転方式の攪拌脱泡装置)が知られている(例えば特許文献1参照)。この攪拌脱泡装置では、容器を公転させながら自転させることによって容器内の材料に作用する遠心力を利用して、材料を攪拌する(混練する、混合する、分散させる)とともに、材料に内在する気泡を放出させて脱泡することができる。
【0003】
また、自転公転方式の攪拌脱泡装置の分野では、材料に合わせて容器の回転条件を設定する技術が提案されている(特許文献2〜特許文献4参照)。なお、特許文献2及び特許文献3には、公転数に対する自転数の比率を連続的に変化させて所望の値に設定することが可能な技術が開示されており、特許文献4には、公転数に対する自転数の比率を、攪拌に適した値と脱泡に適した値とに切り替えることが可能な技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実公平5-32110号公報
【特許文献2】特開平10-43568号公報
【特許文献3】特開2004-243158号公報
【特許文献4】特開2000-271465号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の一つの態様は、自転公転式の攪拌脱泡装置の分野において、攪拌処理効率の高い攪拌脱泡方法、及び、攪拌脱泡装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本発明に係る攪拌脱泡方法は、
材料が収納された収納容器を公転させながら自転させることによって、前記材料を攪拌脱泡する方法であって、
前記公転数を所定値以上に保った状態で、前記公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、前記比率を前記第2の値から前記第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程を含み、
前記攪拌脱泡処理工程を、前記比率変動復帰処理のインターバルが前記材料の処理条件に合致するように行う。
【0007】
本発明によると、公転による遠心力が作用した状態で、材料を、収納容器内で激しく流動させることができる。そのため、材料の攪拌処理効率を高めることができるとともに、様々な性質(粘性やチクソ性や比重)の材料の攪拌処理に対応することが可能になる。また、材料の流動が公転による遠心力の作用を受けながら行われることから、材料を、攪拌処理と同時に脱泡処理することができる。そして、攪拌脱泡処理工程が、比率変動復帰処理のインターバルが材料の処理条件に合致するように行われることから、材料を最適処理することが可能になる。
【0008】
(2)この攪拌脱泡方法において、
前記攪拌脱泡処理工程を、前記材料の処理条件に合致した時間行ってもよい。
【0009】
(3)この攪拌脱泡方法において、
前記攪拌脱泡処理工程の前記比率変動復帰処理を、前記材料の処理条件に合致した回数行ってもよい。
【0010】
(4)この攪拌脱泡方法において、
前記攪拌脱泡処理工程のそれぞれの前記比率変動復帰処理を、前記変動処理と前記復帰処理とのインターバルが前記材料の処理条件に合致するように行ってもよい。
【0011】
(5)本発明に係る攪拌脱泡方法は、
材料が収納された収納容器を公転させながら自転させることによって、前記材料を攪拌脱泡する方法であって、
前記公転数に対する自転数の比率が第1の値である第1回転モードで前記収納容器を回転させる第1回転モード処理、及び、前記比率が第2の値である第2回転モードで前記収納容器を回転させる第2回転モード処理を、前記公転数を所定値以上に保った状態で、前記材料の処理条件に合わせて複数回繰り返す攪拌脱泡処理工程を含む。
【0012】
本発明によると、公転による遠心力が作用した状態で、材料を、収納容器内で激しく流動させることができる。そのため、材料の攪拌処理効率を高めることができるとともに、様々な性質(粘性やチクソ性や比重)の材料の攪拌処理に対応することが可能になる。また、材料の流動が公転による遠心力の作用を受けながら行われることから、材料を、攪拌処理と同時に脱泡処理することができる。そして、攪拌脱泡処理工程が、比率変動復帰処理のインターバルが材料の処理条件に合致するように行われることから、材料を最適処理することが可能になる。
【0013】
(6)この攪拌脱泡方法において、
前記攪拌脱泡処理工程に先立って行われる、前記材料の処理条件に合わせて、前記収納容器の回転モードを切り替える条件を設定する切り替え条件設定工程をさらに含んでもよい。
【0014】
(7)この攪拌脱泡方法において、
前記第1及び第2の値の小さい方の値を、前記材料が新たな気泡を巻き込まない値としてもよい。
【0015】
(8)この攪拌脱泡方法において、
前記第1及び第2の値の小さい方の値を、前記材料が遠心分離しない値としてもよい。
【0016】
(9)この攪拌脱泡方法において、
前記攪拌脱泡処理工程の後に、前記比率を前記第1及び第2の値の小さい方の値に設定して前記収納容器を所定時間公転させながら自転させる脱泡処理工程をさらに含んでもよい。
【0017】
(10)本発明に係る攪拌脱泡装置は、
材料が収納された収納容器を公転させながら自転させることによって前記材料を攪拌脱泡する攪拌脱泡装置であって、
所定の回転軸線を中心に回転可能に構成された回転体と、
前記回転体に対して自転可能に取り付けられた、前記収納容器を保持するための容器ホルダと、
前記回転体を回転させることによって前記容器ホルダを公転させる公転駆動機構と、
前記容器ホルダの公転に伴って前記容器ホルダに自転力を付与する、前記容器ホルダの公転数に対する自転数の比率が第1の値となる第1の状態、及び、前記比率が第2の値となる第2の状態に設定することが可能に構成された自転力付与機構と、
前記自転力付与機構の設定を切り替える切り替え機構と、
前記材料の処理条件に合わせて、前記公転数を所定値以上に保った状態で前記自転力付与機構の設定を切り替える処理が複数回行われるように、前記公転駆動機構及び前記切り替え機構を制御する制御部と、
を含む。
【0018】
本発明によると、公転による遠心力が作用した状態で、材料を、収納容器内で激しく流動させることができる。そのため、材料の攪拌処理効率を高めることができるとともに、様々な性質(粘性やチクソ性や比重)の材料の攪拌処理に対応することが可能になる。また、材料の流動が公転による遠心力の作用を受けながら行われることから、材料を、攪拌処理と同時に脱泡処理することができる。そして、自転力付与機構の設定を切り替える処理が、材料の処理条件に合致するように行われることから、材料を最適処理することが可能になる。
【図面の簡単な説明】
【0019】
【図1】第1の実施の形態に係る攪拌脱泡装置の構成を説明するための図。
【図2】第1の実施の形態に係る攪拌脱泡装置の構成を説明するための図。
【図3】第1の実施の形態に係る攪拌脱泡方法を説明するための図。
【図4】第1の実施の形態に係る攪拌脱泡方法を説明するための図。
【図5】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図6】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図7】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図8】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図9】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図10】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図11】第2の実施の形態に係る攪拌脱泡装置の構成を説明するための図。
【図12】第2の実施の形態に係る攪拌脱泡方法を説明するための図。
【図13】第2の実施の形態に係る攪拌脱泡方法を説明するための図。
【発明を実施するための形態】
【0020】
以下、本発明を適用した実施の形態について図面を参照して説明する。ただし、本発明は以下の実施の形態に限定されるものではない。すなわち、以下の実施の形態で説明するすべての構成が本発明にとって必須であるとは限らない。また、本発明は、以下の内容を自由に組み合わせたものを含む。
【0021】
1.第1の実施の形態
以下、本発明を適用した第1の実施の形態について、図1〜図10を参照して説明する。
【0022】
(1)攪拌脱泡装置1の構成
はじめに、本実施の形態に係る攪拌脱泡装置1の構成について、図1及び図2を参照して説明する。
【0023】
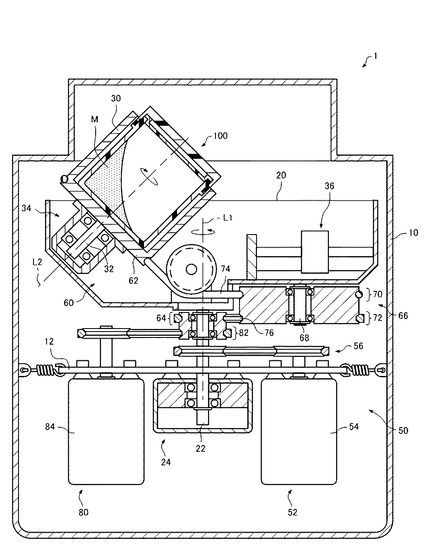
攪拌脱泡装置1は、図1に示すように、筐体10を有する。筐体10内部には、後述する種々の機構を支持するための支持基板12が、防振ばねを介して取り付けられている。筐体10は、図示しない開閉可能に構成されたドアを有し、当該ドアを開けると容器ホルダ30が露出して、容器ホルダ30に収納容器100を着脱することが可能になる。
【0024】
攪拌脱泡装置1は、図1に示すように、回転体20を含む。回転体20は、回転軸線L1を中心に、支持基板12(筐体10)に対して回転可能に構成されている。具体的には、攪拌脱泡装置1では、回転体20には回転軸22が固定されており、回転軸22が、支持基板12に固定されたベアリングユニット24に保持された構成となっている。これにより、回転体20を、支持基板12に対して回転可能とすることができる。なお、攪拌脱泡装置1では、回転軸線L1と回転軸22の延伸方向とは一致することになる。
【0025】
攪拌脱泡装置1は、図1に示すように、容器ホルダ30を含む。容器ホルダ30は、後述する収納容器100を保持する役割を果たす。容器ホルダ30は、回転体20の、回転軸線L1から所定間隔離れた位置に保持されている。これにより、容器ホルダ30は、回転体20の回転に伴って、回転軸線L1を中心に公転することとなる。
【0026】
容器ホルダ30は、回転体20に対して自転可能に保持される。具体的には、攪拌脱泡装置1では、容器ホルダ30には自転軸32が固定されており、自転軸32が、回転体20に固定されたベアリングユニット34に保持された構成となっている。これにより、容器ホルダ30が、回転体20に対して自転可能となる。
【0027】
なお、本実施の形態では、容器ホルダ30は、その自転軸線L2が、回転軸線L1(公転軸線)と斜めに交差するように構成されている。具体的には、攪拌脱泡装置1は、自転軸線L2が回転軸線L1と45度の角度で交差するように構成されている。ただし、変形例として、容器ホルダ30は、自転軸線L2が回転軸線L1と平行になるように、回転体20に取り付けることも可能である(図示せず)。
【0028】
本実施の形態では、一つの回転体20に、一つの容器ホルダ30が取り付けられている。そして、回転体20における容器ホルダ30とは反対側の位置には、バランス錘36が取り付けられている。このバランス錘36は、回転軸線L1からの距離が可変に構成されている。バランス錘36により、攪拌脱泡装置1を、安定して運転させることができる。ただし、変形例として、回転体20に、二個の容器ホルダ30を取り付けることも可能である。この場合、二個の容器ホルダ30を、回転軸線L1を中心とする点対称の配置となるように取り付ければ、攪拌脱泡装置を安定して動作させることができる。あるいは、攪拌脱泡装置を、一つの回転体20に三個以上の複数の容器ホルダ30を取り付けた構成とすることも可能である。
【0029】
攪拌脱泡装置1は、容器ホルダ30を公転させながら自転させる回転駆動機構50を含む。以下、回転駆動機構50の構成について説明する。
【0030】
回転駆動機構50は、公転駆動機構52を有する。公転駆動機構52は、回転体20を回転させることによって、容器ホルダ30を、回転軸線L1を中心に公転させる。本実施の形態では、公転駆動機構52は、モータ54と、モータ54の動力を回転軸22に伝達する動力伝達機構56によって実現されている。なお、モータ54は、インダクションモータやサーボモータ、あるいはPMモータなど、既に公知となっているいずれかのモータを利用することが可能である。
【0031】
回転駆動機構50は、また、自転力付与機構60を有する。自転力付与機構60は、容器ホルダ30の公転に伴って(回転体20の回転に伴って)、容器ホルダ30に自転力を付与する役割を果たす。また、自転力付与機構60は、容器ホルダ30の公転数に対する自転数の比率が第1の値となる第1の状態、及び、当該比率が第2の値となる第2の状態に設定することが可能に構成されている。以下、自転力付与機構60の詳細について説明する。
【0032】
自転力付与機構60は、自転プーリ62を有する。自転プーリ62は容器ホルダ30に固定されており、容器ホルダ30と一体的に挙動する。また、自転力付与機構60は自転力付与プーリ64を有する。自転力付与プーリ64は、ベアリングを介して回転軸22に取り付けられている。すなわち、自転力付与プーリ64は、回転軸22(回転軸線L1)と同心に、かつ、回転軸22の回転数とは独立した回転数で回転することが可能になっている。自転力付与機構60は、自転プーリ62と自転力付与プーリ64との間で動力を伝達する自転動力伝達機構66を有する。本実施の形態では、自転動力伝達機構66は、回転体20に固定された固定軸68と、ベアリングを介して固定軸68に取り付けられた第1補助プーリ70及び第2補助プーリ72と、自転プーリ62及び第1補助プーリ70にかけ回されたベルト74と、自転力付与プーリ64及び第2補助プーリ72にかけ回されたベルト76とを含んで構成されている。
【0033】
自転力付与機構60は、容器ホルダ30の公転数に対する自転数の比率が第1の値となる第1の状態、及び、当該比率が第2の値となる第2の状態に設定することが可能に構成されている。具体的には、回転駆動機構50では、自転力付与プーリ64がベアリングを介して回転軸22に取り付けられていることから、自転力付与プーリ64の回転が禁止された状態(第1の状態)、及び、自転力付与プーリ64の回転が自由に行われる状態(第2の状態)で回転軸22を回転させることができ、公転数に対する自転数の比率が異なる二つの状態を作り出すことが可能になる。なお、本実施の形態では、自転力付与機構60は、自転動力伝達機構66によって、自転プーリ62と自転力付与プーリ64との回転運動が関連付けられるため、自転力付与機構60が第1の状態に設定されると、自転プーリ62は遊星歯車機構と同様の挙動を示すことになる。そして、この時の容器ホルダ30の公転数に対する自転数の比率(第1の値)は、自転力付与機構60を構成する機械要素(自転プーリ62、自転力付与プーリ64、第1及び第2補助プーリ70,72の径)によって定まる値となる。また、自転力付与機構60が第2の状態に設定されると、容器ホルダ30の公転数に対する自転数の比率(第2の値)は、ゼロとなる。
【0034】
そして、回転駆動機構50は、自転力付与機構60の設定を切り替える切り替え手段80を含んでいる。切り替え手段80は、自転力付与プーリ64に固定された回転制御プーリ82と、回転制御プーリ82の回転を停止させる、又は、回転制御プーリ82の回転を自由な状態とする切り替え機構84によって実現することができる。本実施の形態では、切り替え機構84として、既に公知となっているいずれかの機構を適用することができるが、応答時間や発熱などの特性を考慮の上で選択することが好ましい。切り替え機構84は、具体的には、ブレーキ(例えばパウダブレーキやディスクブレーキ、油圧ブレーキなど)や、あるいはクラッチによって実現することができる。
【0035】
攪拌脱泡装置1は、回転センサ95(図2参照)をさらに備えた構成とすることが可能である。回転センサ95は、回転体20の回転数(容器ホルダ30の公転数)を検出することが可能に構成されている。回転センサ95を、容器ホルダ30の公転数及び自転数を検出する構成とすることも可能であり、容器ホルダ30の公転数のみを検出する構成とすることも可能である。
【0036】
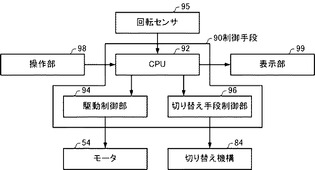
攪拌脱泡装置1は、図2に示す制御手段90を含む。制御手段90は、攪拌脱泡装置1の動作を統括制御する役割を果たす。制御手段90は、攪拌脱泡装置1をシーケンス制御するように構成することができる。以下、制御手段90について説明する。図2は、制御手段90について説明するための図である。
【0037】
制御手段90は、マイクロプロセッサ(CPU92)と、公転駆動機構52(モータ54)を制御する駆動制御部94と、切り替え手段80(切り替え機構84)を制御する切り替え手段制御部96とを含む。そして、CPU92は、運転データ(例えば、材料Mの処理条件に合わせてユーザが入力したデータ)に基づいて駆動制御部94及び切り替え手段制御部96に各種の信号を出力することにより、攪拌脱泡装置1の動作を制御する。
【0038】
ここで、攪拌脱泡装置1では、容器ホルダ30は回転体20の回転に伴って公転することから、モータ54の出力を制御することによって、容器ホルダ30の公転数が制御される。すなわち、モータ54の出力を制御することにより、容器ホルダ30を所望の公転数で公転させることが可能になる。
【0039】
例えばモータ54としてインダクションモータを採用する場合には、駆動制御部94は、インバータの動作を制御し、モータ54に供給される交流電力の周波数を所定値とするためのインバータ制御部によって実現することができる。あるいは、モータ54としてサーボモータを採用する場合には、駆動制御部94は、専用のドライバ及びハードウェアによって実現され、モータ54を所望の回転数で動作させるための各種処理を行う。そして、CPU92は、所定のタイミングで、駆動制御部94に各種の信号(収納容器100の公転数データ等)を送信する処理を行う。これにより、収納容器100を所望の回転数で回転させることができる。
【0040】
また、切り替え手段制御部96は、切り替え機構84のオン・オフを切り替える専用のドライバ及びハードウェアによって実現することができる。例えば切り替え機構84としてブレーキ(電磁ブレーキ)を採用する場合には、切り替え手段制御部96は、ブレーキに印加される電圧のオン・オフを切り替える電圧制御手段によって実現することができる。あるいは、切り替え機構84として油圧ブレーキを採用する場合には、切り替え手段制御部96は、油圧ブレーキに供給される油の流れを停止させる状態と解放する状態とを切り替える流量制御手段によって実現することができる。そして、CPU92は、切り替え手段制御部96に各種の信号(切り替えタイミングデータ等)を送信する処理を行う。切り替え手段制御部96によって、所望のタイミングで、容器ホルダ30の公転数に対する自転数の比率を切り替えることが可能になる。
【0041】
なお、本実施の形態では、制御部90(駆動制御部94及び切り替え手段制御部96)は、材料Mの処理条件に合わせて、公転数を所定値以上に保った状態で自転力付与機構60の設定(公転数に対する自転数の比率)を切り替える処理が複数回行われるように、公転駆動機構52及び切り替え機構84を制御する。自転力付与機構60の設定を切り替えるタイミングや、容器ホルダ30の公転数の具体的な値は、実験に基づいてユーザが設定することができる。そして、CPU92が、回転センサ95からの情報に基づいて駆動制御部94及び切り替え手段制御部96への信号送信処理を行うことで、容器ホルダ30を設定値通りに回転させることが可能になる。
【0042】
また、CPU92は、操作部98から入力された動作データを受け付けて、図示しない記憶部に格納する処理や、表示部99に各種情報(操作部98から入力された動作データや、攪拌脱泡装置1の運転状況等)を表示させるための処理を行う。
【0043】
(2)収納容器100
次に、本実施の形態に適用可能な収納容器100について説明する。収納容器100は、材料(被攪拌脱泡材料)Mが収納される容器である。収納容器100は、例えば有底円筒状の本体と、当該本体に着脱可能な蓋体とを含む構成とすることができる。収納容器100は、容器ホルダ30に着脱可能に構成されている。そして、収納容器100は、容器ホルダ30に保持されて容器ホルダ30の自転に伴って自転し、容器ホルダ30の公転に伴って公転する。なお、収納容器100は、容器ホルダ30に対する空回りを防止するための、空回り防止機構を備えた構成とすることも可能である。また、収納容器100の構成材料は特に限定されるものではなく、樹脂や金属など、既に公知となっているいずれかの材料によって構成された容器を利用することができる。
【0044】
(3)材料M
本実施の形態に適用可能な材料Mは、流体として挙動するものであればよく、その組成や用途は特に限定されるものではない。材料Mとして、例えば、接着剤、シーラント剤、液晶材料、半田ペースト、成型に利用される硬化性の樹脂材料、歯科用印象材料、歯科用セメント(穴埋め剤等)、粘性の強い液状の薬剤等の種々の材料を適用することができる。また、材料Mとして、液状の材料と粒状(粉状)の材料との混合材料を適用することも可能である。このとき、収納容器100には、材料Mとともに、粒状(粉状)材料を粉砕するための粉砕用メディア(例えばジルコニアボール)を収納することも可能である。
【0045】
(4)攪拌脱泡方法
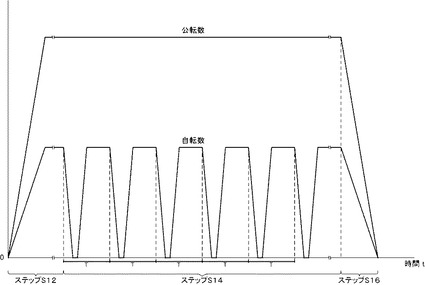
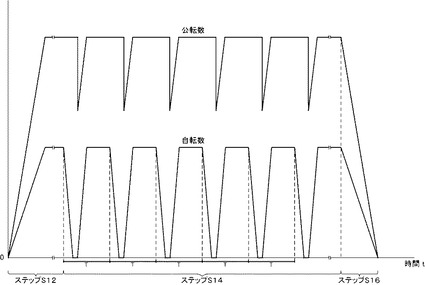
次に、本実施の形態に係る材料Mの攪拌脱泡方法について説明する。図3及び図4は、本実施の形態に係る材料Mの攪拌脱泡方法について説明するための図である。なお、図3は、材料Mの攪拌脱泡方法を説明するためのフローチャートであり、図4は材料Mの攪拌脱泡方法を説明するためのタイミングチャートである。
【0046】
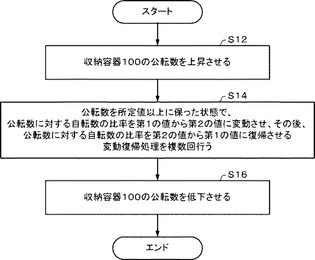
材料Mの攪拌脱泡方法は、図3に示すように、収納容器100の公転数を上昇させる工程(ステップS12)を含む。本工程は、容器ホルダ30に収納容器100を保持させ、容器ホルダ30の公転数を上昇させることによって実現することができる。なお、本工程における収納容器100(容器ホルダ30)の公転数に対する自転数の比率(自転公転比)は、第1及び第2の値のいずれに設定することも可能である。
【0047】
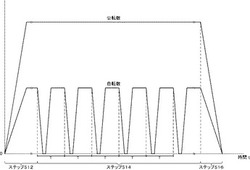
材料Mの攪拌脱泡方法は、図3に示すように、公転数を所定値以上に保った状態で、公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、公転数に対する自転数の比率を第2の値から第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程(ステップS14)を含む。本工程は、モータ54の出力を調整しながら、自転力付与機構60の設定を切り替えることによって実現することができる。なお、本工程は、公転数に対する自転数の比率が第1の値である第1回転モードで収納容器100を回転させる第1回転モード処理、及び、当該比率が第2の値である第2回転モードで収納容器100を回転させる第2回転モード処理を、公転数を所定値以上に保った状態で、材料Mの処理条件に合わせて複数回繰り返す工程であるといえる。
【0048】
なお、本実施の形態では、攪拌脱泡処理工程(ステップS14)を、比率変動復帰処理のインターバル(T:図4参照)が材料Mの処理条件に合致するように行う。ここで、材料Mの処理条件とは、要求される攪拌脱泡精度や、温度条件、処理時間の制限等があげられる。そして、比率変動復帰処理のインターバル(T)の具体的な値は、実験に基づいて導出することができる。なお、「比率変動復帰処理のインターバル(T)」とは、一つの比率変動復帰処理の開始から次の比率変動復帰処理の開始までの時間的な間隔とすることができる。また、収納容器100の公転数は、材料Mに十分な遠心力を作用させるに足る値であることが好ましく、具体的な値は、実験に基づいて導出することができる。そして、比率変動復帰処理のインターバル(T)は、収納容器100の公転数に関連付けて設定することも可能である。
【0049】
また、本実施の形態では、攪拌脱泡処理工程(ステップS14)の終了条件は、材料Mの処理条件に合わせてユーザが適宜設定することができる。例えば、攪拌脱泡処理工程(ステップS14)は、攪拌脱泡処理開始から所定時間経過後に終了させることができる。すなわち、攪拌脱泡処理工程(ステップS14)は、材料Mの処理条件に合致した時間行うことが可能である。あるいは、攪拌脱泡処理工程(ステップS14)は、比率変動復帰処理を所定回数行った後に終了させることができる。すなわち、攪拌脱泡処理工程(ステップS14)の変動復帰処理は、材料の処理条件に合致した回数行うことが可能である。
【0050】
さらに、本実施の形態では、攪拌脱泡処理工程(ステップS14)の比率変動復帰処理を、変動処理と復帰処理とのインターバルが材料Mの処理条件に合致するように行うことができる。なお、「変動処理と復帰処理とのインターバル」とは、一つの比率変動復帰処理における変動処理の開始から復帰処理の開始までの時間的な間隔とすることができる。
【0051】
本実施の形態における攪拌脱泡処理工程(ステップS14)の比率変動復帰処理のインターバル(T)、収納容器100の公転数、終了条件、変動処理と復帰処理とのインターバル等の諸条件は、材料Mの処理条件に合わせて設定することができ、具体的な値は実験によって導出することができる。すなわち、本実施の形態では、攪拌脱泡方法は、攪拌脱泡処理工程(ステップS14)に先立って、材料Mの処理条件に合わせて、収納容器100の回転モードを切り替える条件を導出し、設定する切り替え条件設定工程をさらに含んでいてもよい。
【0052】
そして、材料Mの攪拌脱泡方法は、図3に示すように、公転数を低下させて収納容器100を停止させる工程(ステップS16)を含む。本工程は、容器ホルダ30の公転数を低下させることによって実現することができる。なお、本工程における収納容器100(容器ホルダ30)の自転公転比は、第1及び第2の値のいずれに設定することも可能である。特に図示しないが、本工程における公転数に対する自転数の比率を第1及び第2の値の小さい方に設定すれば、収納容器100の停止時に、材料Mに新たな気泡が混入することを防止することができる。
【0053】
(5)効果
以下、本実施の形態が奏する作用効果について詳述する。
本実施の形態に係る攪拌脱泡方法では、収納容器100の公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、当該比率を第2の値から第1の値に復帰させる比率変動復帰処理を複数回行う。これにより、公転による遠心力が作用した状態で、材料Mを激しく流動させることができる。そのため、材料Mの攪拌処理効率を高めることができるとともに、様々な性質(粘性やチクソ性や比重)の材料Mの攪拌処理に対応することが可能になる。また、材料Mの流動が公転による遠心力の作用を受けながら行われることから、材料Mを、攪拌処理と同時に脱泡処理することができる。そして、攪拌脱泡処理工程が、比率変動復帰処理のインターバル(T)が材料Mの処理条件に合致するように行われることから、材料Mを最適処理することが可能になる。
【0054】
また、本実施の形態では、切り替え機構84は、自転力付与プーリ64の回転を禁止する、又は、自転力付与プーリ64の回転を自由にするという二つの状態を作り出す機能があれば足る。そのため、切り替え機構84を、単純な機構の装置で実現することができるとともに、その制御も容易かつ正確に行うことが可能になる。また、本実施の形態では、高効率の攪拌脱泡処理を実現することができるとともに、上記二つの状態の中間状態を作り出す必要がなくなるため、攪拌脱泡装置1のエネルギー効率を高めることができる。
【0055】
(6)変形例
以下、本実施の形態の変形例について説明する。
【0056】
(6−1)第1の変形例
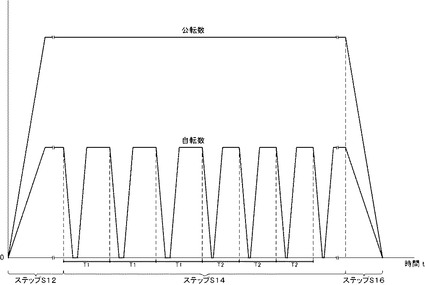
本変形例では、図5に示すように、攪拌脱泡処理工程(ステップS14)において、比率変動復帰処理のインターバルを変化させる。図5に示す例では、攪拌脱泡処理工程(ステップS14)の前半における比率変動復帰処理のインターバル(T1)と、後半における比率変動復帰処理のインターバル(T2)とが異なる値となっている。これによって、より好ましい条件で材料Mを攪拌脱泡処理することが可能になる。
【0057】
(6−2)第2の変形例
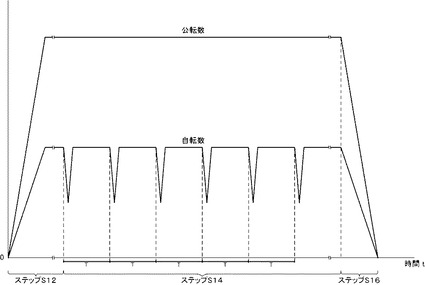
本変形例では、攪拌脱泡処理工程(ステップS14)において、比率変動復帰処理中に、変動処理と復帰処理のインターバルを変化させる。図6に示す例では、比率変動処理のインターバル(T)を一定に保ちながら、攪拌脱泡処理工程(ステップS14)の前半と後半とで、変動処理と復帰処理のインターバルを変化させている。これによって、より好ましい条件で材料Mを攪拌脱泡処理することが可能になる。
【0058】
(6−3)第3の変形例
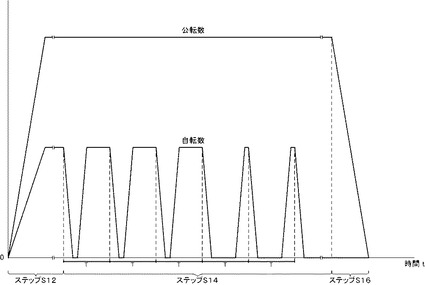
本変形例では、攪拌脱泡処理工程(ステップS14)において、収納容器100の公転数に対する自転数の比率(第1の値及び第2の値の少なくとも一方)が、攪拌脱泡装置1の装置構成(プーリ比等)から導出される値とは異なる値となるように、変動復帰処理を行う。図7の例では、比率変動処理と比率復帰処理のインターバルを所定値以下とすることで、公転数に対する自転数の比率が所定値以下にならないように、比率変動処理が行われている。
【0059】
本変形例によると、攪拌脱泡装置1の構成に拘わらず、収納容器100の公転数に対する自転数の比率(第1の値及び第2の値の少なくとも一方)を、弾力的に設定することができる。そのため、より材料Mの処理に適した挙動をさせることが可能になり、材料Mの処理精度を高めることができる。
【0060】
(6−4)第4の変形例
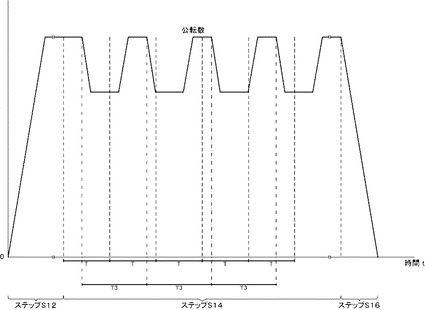
本変形例では、攪拌脱泡処理工程(ステップS14)において、公転数を変動させる。例えば、図8に示すように、自転数を上昇させる(公転数に対する自転数の比率を高める)前に公転数を低下させ、自転数と公転数を同時に上昇させることができる。あるいは、変動復帰処理のタイミングと連動しないように、公転数を変動させることも可能である。例えば、図9に示すように、公転数を、変動復帰処理のインターバル(T)とは異なるインターバル(T3)で周期的に変動させることや、図10に示すように、攪拌脱泡処理工程(ステップS14)の初期の公転数の設定値と、後期の公転数の設定値とを異なる値にすることも可能である。なお、本変形例における公転数やインターバル(T3)の具体的な値は、材料Mの処理条件や攪拌脱泡装置1の構成部材に合わせて適宜設定することができる。例えば公転数の下限値は、材料Mに一定以上の遠心力が作用する値とすることができる。
【0061】
2.第2の実施形態
以下、本発明を適用した第2の実施の形態について、図11〜図13を参照して説明する。
【0062】
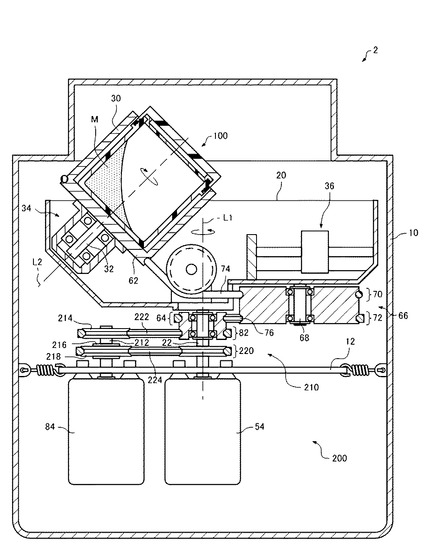
(1)攪拌脱泡装置2の構成
はじめに、本実施の形態に係る攪拌脱泡装置2の構成について、図11を参照して説明する。
【0063】
攪拌脱泡装置2は、容器ホルダ30を公転させながら自転させる回転駆動機構200を含む。そして回転駆動機構200は、容器ホルダ30の公転に伴って(回転体20の回転に伴って)、容器ホルダ30に自転力を付与する自転力付与機構210を含む。以下、自転力付与機構210の詳細について説明する。
【0064】
自転力付与機構210は、自転プーリ62、自転力付与プーリ64、及び、両者の間で動力を伝達する自転動力伝達機構66を有する。また、自転力付与機構210では、自転力付与プーリ64には回転制御プーリ82が固定されており、両者は一体的に挙動する。
【0065】
自転力付与機構210は、副軸212を有する。副軸212は、回転軸22から所定の間隔をあけた位置に、回転軸22と平行に延びるように配置されている。副軸212は、支持体12(筐体10)に対して回転可能に構成されている。
【0066】
自転力付与機構210は、副軸212に固定された副軸第1プーリ214を含む。副軸第1プーリ214は、副軸212に固定されるため、副軸212を中心に、副軸212と同じ回転数で回転する。
【0067】
自転力付与機構210は、副軸第2プーリ218を含む。副軸第2プーリ218は、一方向クラッチ216を介して副軸212に取り付けられている。
【0068】
そして、自転力付与機構210は、回転制御プーリ82と副軸第1プーリ214とにかけ回されたベルト222、及び、副軸第2プーリ218と回転軸22に固定された回転軸プーリ220とにかけ回されたベルト224を含む。
【0069】
自転力付与機構210によると、攪拌脱泡装置2を、副軸212が固定された状態(回転不能に設定された状態)で運転する第1回転モードと、副軸212を回転可能とした状態で運転する第2回転モードとの、2つの異なるモードで動作させることが可能になる。そして、この2つの動作モードでは、以下に示すように、容器ホルダ30の公転数に対する自転数の比は異なる値となる。なお、以下の式では、自転プーリ62、第1及び第2補助プーリ70,72、自転力付与プーリ64及び回転制御プーリ82、副軸第1プーリ214、副軸第2プーリ218、回転軸プーリ220の径を、それぞれ、D1〜D6とした(表1参照)。また、容器ホルダ30の自転数をω、公転数をWとした。
【0070】
すなわち、攪拌脱泡装置2において、副軸212を固定すると(攪拌脱泡装置2を第1のモードで動作させると)、副軸第1プーリ214が固定され、回転制御プーリ82(自転力付与プーリ64)が固定される。そして、この自転駆動機構では、容器ホルダ30の自転数は、回転体20の回転数(容器ホルダ30の公転数)と自転力付与プーリ64の回転数との差(相対的な回転数)、及び、自転力付与プーリ64と第1及び第2補助プーリ70,72と自転プーリ62の径に依存するため、このときの容器ホルダ30の自転公転比R1(すなわち第1の値)は、次式で表される。
【数1】

【0071】
なお、自転力付与機構210では、回転軸プーリ220は回転軸22に固定されており、ベルト224が回転軸プーリ220と副軸第2プーリ218とにかけ回されている。そのため、回転軸22が回転すると、常に、副軸第2プーリ218は回転することになる。しかしながら、この自転駆動機構では、一方向クラッチ216の作用により、副軸第2プーリ218の回転トルクは副軸212に伝達されない。そのため、副軸第2プーリ218と副軸212とは空回りすることになり、副軸212を固定した場合でも、回転軸22は自由に回転することが可能になる。
【0072】
これに対して、副軸212を回転可能に設定すると(攪拌脱泡装置1を第2のモードで動作させると)、自転力付与プーリ64及び回転制御プーリ82の回転数は、副軸第1プーリ214、副軸第2プーリ218、及び、回転軸プーリ220によって規制され、回転軸22の回転数に関連付けられることになる。そして、容器ホルダ30の自転数は、回転体20の回転数(容器ホルダ30の公転数)と自転力付与プーリ64の回転数との差(相対値)、及び、各プーリの径に依存するため、容器ホルダ30の自転公転比R2(すなわち第2の値)は、次式で表される。
【数2】
【0073】
このことから、攪拌脱泡装置2は、自転公転比が異なる2つの動作モードで動作することが可能になることがわかる。特に、この自転駆動機構によると、副軸212を「回転不能にする(固定する)」又は「回転可能にする」ことにより、動作モード(自転公転比)を変えることができる。また、攪拌脱泡装置2によると、副軸212を解放した場合の、容器ホルダ30の公転数に対する自転数の比率(第2の値)をゼロ以外の値にすることができる。
【0074】
なお、本実施の形態では、攪拌脱泡装置2は、第1回転モードにおいて材料Mを攪拌するため、収納容器100内で材料Mを流動させる必要がある。そのため、攪拌脱泡装置1は、第1回転モードにおける自転公転比(R1)が所定値以上となるように設計される必要がある。逆に、攪拌脱泡装置2は、第2回転モードにおいて材料Mが空気を巻き込むことを防止し、かつ、材料Mが遠心分離することを防止することが可能な値とすることが好ましい。そのため、攪拌脱泡装置2は、第2回転モードにおける自転公転数比(R2)が所定範囲となるように設計することが好ましい。
【0075】
具体例として、自転プーリ62、第1及び第2補助プーリ70,72、自転力付与プーリ64及び回転制御プーリ82、副軸第1プーリ214、副軸第2プーリ218、回転軸プーリ220の径を示すD1〜D6の値を表1のように設定すると、R1=2/5、R2=1/40となり、R1を十分大きな値とすることができるとともに、R2を十分小さな値とすることができる。
【表1】
【0076】
なお、上記の自転力付与機構210は、プーリとベルトを利用した動力伝達機構で実現しているが、本発明はこれに限られるものではなく、自転駆動機構を、歯車を利用して実現することも可能である。
【0077】
そして、攪拌脱泡装置2は、自転力付与機構210の設定を切り替える切り替え手段80を含んでいる。切り替え手段80は、副軸212の回転を停止させる、又は、副軸212の回転を自由な状態とする切り替え機構84によって実現することができる。
【0078】
(2)攪拌脱泡方法
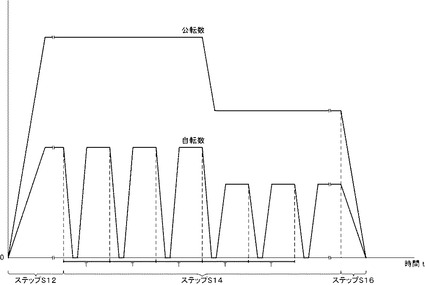
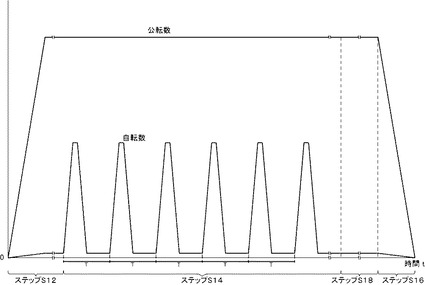
次に、本実施の形態に係る攪拌脱泡方法について、図12及び図13を参照して説明する。なお、図12は本実施の形態に係る攪拌脱泡方法を説明するためのフローチャートであり、図13はタイミングチャートである。
【0079】
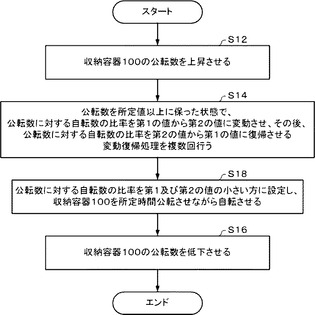
本実施の形態に係る材料Mの攪拌脱泡方法は、図12及び図13に示すように、収納容器100の公転数を上昇させる工程(ステップS12)と、公転数を所定値以上に保った状態で、公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、公転数に対する自転数の比率を第2の値から第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程(ステップS14)と、公転数に対する自転数の比率を、第1及び第2の値の小さい方(攪拌脱泡装置2では第2の値)に設定して収納容器100を所定時間公転させながら自転させる脱泡処理工程(ステップS18)と、収納容器100の公転数を低下させて収納容器100を停止させる工程(ステップS16)と、を含む。
【0080】
脱泡処理工程(ステップS18)における公転数及び処理時間は、材料Mの処理条件に合わせて適宜設定することが可能で、具体的な値は実験により導出することができる。なお、図13の例では、脱泡処理工程(ステップS18)における公転数は、攪拌脱泡処理工程(ステップS14)と同じ公転数となっている。しかしながら本発明はこれに限られるものではなく、脱泡処理工程(ステップS18)の公転数は、攪拌脱泡処理工程(ステップS14)の公転数よりも高くすることも、低くすることも可能で、また、脱泡処理工程中に変動させることも可能である(図示せず)。
【0081】
(3)効果
先に説明した通り、攪拌脱泡装置2は、第2回転モードにおける公転数に対する自転数の比率を、ゼロ以外の値に設定することができる。そのため、より好ましい条件で、材料Mを攪拌脱泡処理することが可能になる。また、攪拌脱泡装置2を利用した場合、攪拌脱泡処理工程(ステップS14)の後に、脱泡処理工程(ステップS18)を行っても、材料Mが遠心分離することを防止することができる。また、第2回転モードにおける公転数に対する自転数の比率は、第1回転モードにおける比率よりも小さいことから、材料Mが新たな気泡を巻き込むことも防止することができる。すなわち、本実施の形態では、攪拌脱泡処理工程(ステップS14)の後に脱泡処理工程(ステップS18)を行うことで、材料Mの攪拌脱泡処理精度を高めることができる。
【符号の説明】
【0082】
1…攪拌脱泡装置、 2…攪拌脱泡装置、 10…筐体、 12…支持基板、 20…回転体、 22…回転軸、 24…ベアリングユニット、 30…容器ホルダ、 32…自転軸、 34…ベアリングユニット、 36…バランス錘、 50…回転駆動機構、 52…公転駆動機構、 54…モータ、 56…動力伝達機構、 60…自転力付与機構、 62…自転プーリ、 64…自転力付与プーリ、 66…自転動力伝達機構、 68…固定軸、 70…第1補助プーリ、 72…第2補助プーリ、 74…ベルト、 76…ベルト、 80…切り替え手段、 82…回転制御プーリ、 84…切り替え機構、 90…制御手段、 92…CPU、 94…駆動制御部、 96…切り替え手段制御部、 98…操作部、 99…表示部、 100…収納容器、 200…回転駆動機構、 210…自転力付与機構、 212…副軸、 214…副軸第1プーリ、 216…一方向クラッチ、 218…副軸第2プーリ、 220…回転軸プーリ、 222…ベルト、 224…ベルト、 L1…回転軸線、 L2…自転軸線、 M…材料
【技術分野】
【0001】
本発明は、攪拌脱泡方法及び攪拌脱泡装置に関する。
【背景技術】
【0002】
材料が収納された容器を公転させながら自転させることによって当該材料を攪拌脱泡する装置(自転公転方式の攪拌脱泡装置)が知られている(例えば特許文献1参照)。この攪拌脱泡装置では、容器を公転させながら自転させることによって容器内の材料に作用する遠心力を利用して、材料を攪拌する(混練する、混合する、分散させる)とともに、材料に内在する気泡を放出させて脱泡することができる。
【0003】
また、自転公転方式の攪拌脱泡装置の分野では、材料に合わせて容器の回転条件を設定する技術が提案されている(特許文献2〜特許文献4参照)。なお、特許文献2及び特許文献3には、公転数に対する自転数の比率を連続的に変化させて所望の値に設定することが可能な技術が開示されており、特許文献4には、公転数に対する自転数の比率を、攪拌に適した値と脱泡に適した値とに切り替えることが可能な技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実公平5-32110号公報
【特許文献2】特開平10-43568号公報
【特許文献3】特開2004-243158号公報
【特許文献4】特開2000-271465号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の一つの態様は、自転公転式の攪拌脱泡装置の分野において、攪拌処理効率の高い攪拌脱泡方法、及び、攪拌脱泡装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本発明に係る攪拌脱泡方法は、
材料が収納された収納容器を公転させながら自転させることによって、前記材料を攪拌脱泡する方法であって、
前記公転数を所定値以上に保った状態で、前記公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、前記比率を前記第2の値から前記第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程を含み、
前記攪拌脱泡処理工程を、前記比率変動復帰処理のインターバルが前記材料の処理条件に合致するように行う。
【0007】
本発明によると、公転による遠心力が作用した状態で、材料を、収納容器内で激しく流動させることができる。そのため、材料の攪拌処理効率を高めることができるとともに、様々な性質(粘性やチクソ性や比重)の材料の攪拌処理に対応することが可能になる。また、材料の流動が公転による遠心力の作用を受けながら行われることから、材料を、攪拌処理と同時に脱泡処理することができる。そして、攪拌脱泡処理工程が、比率変動復帰処理のインターバルが材料の処理条件に合致するように行われることから、材料を最適処理することが可能になる。
【0008】
(2)この攪拌脱泡方法において、
前記攪拌脱泡処理工程を、前記材料の処理条件に合致した時間行ってもよい。
【0009】
(3)この攪拌脱泡方法において、
前記攪拌脱泡処理工程の前記比率変動復帰処理を、前記材料の処理条件に合致した回数行ってもよい。
【0010】
(4)この攪拌脱泡方法において、
前記攪拌脱泡処理工程のそれぞれの前記比率変動復帰処理を、前記変動処理と前記復帰処理とのインターバルが前記材料の処理条件に合致するように行ってもよい。
【0011】
(5)本発明に係る攪拌脱泡方法は、
材料が収納された収納容器を公転させながら自転させることによって、前記材料を攪拌脱泡する方法であって、
前記公転数に対する自転数の比率が第1の値である第1回転モードで前記収納容器を回転させる第1回転モード処理、及び、前記比率が第2の値である第2回転モードで前記収納容器を回転させる第2回転モード処理を、前記公転数を所定値以上に保った状態で、前記材料の処理条件に合わせて複数回繰り返す攪拌脱泡処理工程を含む。
【0012】
本発明によると、公転による遠心力が作用した状態で、材料を、収納容器内で激しく流動させることができる。そのため、材料の攪拌処理効率を高めることができるとともに、様々な性質(粘性やチクソ性や比重)の材料の攪拌処理に対応することが可能になる。また、材料の流動が公転による遠心力の作用を受けながら行われることから、材料を、攪拌処理と同時に脱泡処理することができる。そして、攪拌脱泡処理工程が、比率変動復帰処理のインターバルが材料の処理条件に合致するように行われることから、材料を最適処理することが可能になる。
【0013】
(6)この攪拌脱泡方法において、
前記攪拌脱泡処理工程に先立って行われる、前記材料の処理条件に合わせて、前記収納容器の回転モードを切り替える条件を設定する切り替え条件設定工程をさらに含んでもよい。
【0014】
(7)この攪拌脱泡方法において、
前記第1及び第2の値の小さい方の値を、前記材料が新たな気泡を巻き込まない値としてもよい。
【0015】
(8)この攪拌脱泡方法において、
前記第1及び第2の値の小さい方の値を、前記材料が遠心分離しない値としてもよい。
【0016】
(9)この攪拌脱泡方法において、
前記攪拌脱泡処理工程の後に、前記比率を前記第1及び第2の値の小さい方の値に設定して前記収納容器を所定時間公転させながら自転させる脱泡処理工程をさらに含んでもよい。
【0017】
(10)本発明に係る攪拌脱泡装置は、
材料が収納された収納容器を公転させながら自転させることによって前記材料を攪拌脱泡する攪拌脱泡装置であって、
所定の回転軸線を中心に回転可能に構成された回転体と、
前記回転体に対して自転可能に取り付けられた、前記収納容器を保持するための容器ホルダと、
前記回転体を回転させることによって前記容器ホルダを公転させる公転駆動機構と、
前記容器ホルダの公転に伴って前記容器ホルダに自転力を付与する、前記容器ホルダの公転数に対する自転数の比率が第1の値となる第1の状態、及び、前記比率が第2の値となる第2の状態に設定することが可能に構成された自転力付与機構と、
前記自転力付与機構の設定を切り替える切り替え機構と、
前記材料の処理条件に合わせて、前記公転数を所定値以上に保った状態で前記自転力付与機構の設定を切り替える処理が複数回行われるように、前記公転駆動機構及び前記切り替え機構を制御する制御部と、
を含む。
【0018】
本発明によると、公転による遠心力が作用した状態で、材料を、収納容器内で激しく流動させることができる。そのため、材料の攪拌処理効率を高めることができるとともに、様々な性質(粘性やチクソ性や比重)の材料の攪拌処理に対応することが可能になる。また、材料の流動が公転による遠心力の作用を受けながら行われることから、材料を、攪拌処理と同時に脱泡処理することができる。そして、自転力付与機構の設定を切り替える処理が、材料の処理条件に合致するように行われることから、材料を最適処理することが可能になる。
【図面の簡単な説明】
【0019】
【図1】第1の実施の形態に係る攪拌脱泡装置の構成を説明するための図。
【図2】第1の実施の形態に係る攪拌脱泡装置の構成を説明するための図。
【図3】第1の実施の形態に係る攪拌脱泡方法を説明するための図。
【図4】第1の実施の形態に係る攪拌脱泡方法を説明するための図。
【図5】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図6】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図7】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図8】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図9】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図10】第1の実施の形態の変形例に係る攪拌脱泡方法を説明するための図。
【図11】第2の実施の形態に係る攪拌脱泡装置の構成を説明するための図。
【図12】第2の実施の形態に係る攪拌脱泡方法を説明するための図。
【図13】第2の実施の形態に係る攪拌脱泡方法を説明するための図。
【発明を実施するための形態】
【0020】
以下、本発明を適用した実施の形態について図面を参照して説明する。ただし、本発明は以下の実施の形態に限定されるものではない。すなわち、以下の実施の形態で説明するすべての構成が本発明にとって必須であるとは限らない。また、本発明は、以下の内容を自由に組み合わせたものを含む。
【0021】
1.第1の実施の形態
以下、本発明を適用した第1の実施の形態について、図1〜図10を参照して説明する。
【0022】
(1)攪拌脱泡装置1の構成
はじめに、本実施の形態に係る攪拌脱泡装置1の構成について、図1及び図2を参照して説明する。
【0023】
攪拌脱泡装置1は、図1に示すように、筐体10を有する。筐体10内部には、後述する種々の機構を支持するための支持基板12が、防振ばねを介して取り付けられている。筐体10は、図示しない開閉可能に構成されたドアを有し、当該ドアを開けると容器ホルダ30が露出して、容器ホルダ30に収納容器100を着脱することが可能になる。
【0024】
攪拌脱泡装置1は、図1に示すように、回転体20を含む。回転体20は、回転軸線L1を中心に、支持基板12(筐体10)に対して回転可能に構成されている。具体的には、攪拌脱泡装置1では、回転体20には回転軸22が固定されており、回転軸22が、支持基板12に固定されたベアリングユニット24に保持された構成となっている。これにより、回転体20を、支持基板12に対して回転可能とすることができる。なお、攪拌脱泡装置1では、回転軸線L1と回転軸22の延伸方向とは一致することになる。
【0025】
攪拌脱泡装置1は、図1に示すように、容器ホルダ30を含む。容器ホルダ30は、後述する収納容器100を保持する役割を果たす。容器ホルダ30は、回転体20の、回転軸線L1から所定間隔離れた位置に保持されている。これにより、容器ホルダ30は、回転体20の回転に伴って、回転軸線L1を中心に公転することとなる。
【0026】
容器ホルダ30は、回転体20に対して自転可能に保持される。具体的には、攪拌脱泡装置1では、容器ホルダ30には自転軸32が固定されており、自転軸32が、回転体20に固定されたベアリングユニット34に保持された構成となっている。これにより、容器ホルダ30が、回転体20に対して自転可能となる。
【0027】
なお、本実施の形態では、容器ホルダ30は、その自転軸線L2が、回転軸線L1(公転軸線)と斜めに交差するように構成されている。具体的には、攪拌脱泡装置1は、自転軸線L2が回転軸線L1と45度の角度で交差するように構成されている。ただし、変形例として、容器ホルダ30は、自転軸線L2が回転軸線L1と平行になるように、回転体20に取り付けることも可能である(図示せず)。
【0028】
本実施の形態では、一つの回転体20に、一つの容器ホルダ30が取り付けられている。そして、回転体20における容器ホルダ30とは反対側の位置には、バランス錘36が取り付けられている。このバランス錘36は、回転軸線L1からの距離が可変に構成されている。バランス錘36により、攪拌脱泡装置1を、安定して運転させることができる。ただし、変形例として、回転体20に、二個の容器ホルダ30を取り付けることも可能である。この場合、二個の容器ホルダ30を、回転軸線L1を中心とする点対称の配置となるように取り付ければ、攪拌脱泡装置を安定して動作させることができる。あるいは、攪拌脱泡装置を、一つの回転体20に三個以上の複数の容器ホルダ30を取り付けた構成とすることも可能である。
【0029】
攪拌脱泡装置1は、容器ホルダ30を公転させながら自転させる回転駆動機構50を含む。以下、回転駆動機構50の構成について説明する。
【0030】
回転駆動機構50は、公転駆動機構52を有する。公転駆動機構52は、回転体20を回転させることによって、容器ホルダ30を、回転軸線L1を中心に公転させる。本実施の形態では、公転駆動機構52は、モータ54と、モータ54の動力を回転軸22に伝達する動力伝達機構56によって実現されている。なお、モータ54は、インダクションモータやサーボモータ、あるいはPMモータなど、既に公知となっているいずれかのモータを利用することが可能である。
【0031】
回転駆動機構50は、また、自転力付与機構60を有する。自転力付与機構60は、容器ホルダ30の公転に伴って(回転体20の回転に伴って)、容器ホルダ30に自転力を付与する役割を果たす。また、自転力付与機構60は、容器ホルダ30の公転数に対する自転数の比率が第1の値となる第1の状態、及び、当該比率が第2の値となる第2の状態に設定することが可能に構成されている。以下、自転力付与機構60の詳細について説明する。
【0032】
自転力付与機構60は、自転プーリ62を有する。自転プーリ62は容器ホルダ30に固定されており、容器ホルダ30と一体的に挙動する。また、自転力付与機構60は自転力付与プーリ64を有する。自転力付与プーリ64は、ベアリングを介して回転軸22に取り付けられている。すなわち、自転力付与プーリ64は、回転軸22(回転軸線L1)と同心に、かつ、回転軸22の回転数とは独立した回転数で回転することが可能になっている。自転力付与機構60は、自転プーリ62と自転力付与プーリ64との間で動力を伝達する自転動力伝達機構66を有する。本実施の形態では、自転動力伝達機構66は、回転体20に固定された固定軸68と、ベアリングを介して固定軸68に取り付けられた第1補助プーリ70及び第2補助プーリ72と、自転プーリ62及び第1補助プーリ70にかけ回されたベルト74と、自転力付与プーリ64及び第2補助プーリ72にかけ回されたベルト76とを含んで構成されている。
【0033】
自転力付与機構60は、容器ホルダ30の公転数に対する自転数の比率が第1の値となる第1の状態、及び、当該比率が第2の値となる第2の状態に設定することが可能に構成されている。具体的には、回転駆動機構50では、自転力付与プーリ64がベアリングを介して回転軸22に取り付けられていることから、自転力付与プーリ64の回転が禁止された状態(第1の状態)、及び、自転力付与プーリ64の回転が自由に行われる状態(第2の状態)で回転軸22を回転させることができ、公転数に対する自転数の比率が異なる二つの状態を作り出すことが可能になる。なお、本実施の形態では、自転力付与機構60は、自転動力伝達機構66によって、自転プーリ62と自転力付与プーリ64との回転運動が関連付けられるため、自転力付与機構60が第1の状態に設定されると、自転プーリ62は遊星歯車機構と同様の挙動を示すことになる。そして、この時の容器ホルダ30の公転数に対する自転数の比率(第1の値)は、自転力付与機構60を構成する機械要素(自転プーリ62、自転力付与プーリ64、第1及び第2補助プーリ70,72の径)によって定まる値となる。また、自転力付与機構60が第2の状態に設定されると、容器ホルダ30の公転数に対する自転数の比率(第2の値)は、ゼロとなる。
【0034】
そして、回転駆動機構50は、自転力付与機構60の設定を切り替える切り替え手段80を含んでいる。切り替え手段80は、自転力付与プーリ64に固定された回転制御プーリ82と、回転制御プーリ82の回転を停止させる、又は、回転制御プーリ82の回転を自由な状態とする切り替え機構84によって実現することができる。本実施の形態では、切り替え機構84として、既に公知となっているいずれかの機構を適用することができるが、応答時間や発熱などの特性を考慮の上で選択することが好ましい。切り替え機構84は、具体的には、ブレーキ(例えばパウダブレーキやディスクブレーキ、油圧ブレーキなど)や、あるいはクラッチによって実現することができる。
【0035】
攪拌脱泡装置1は、回転センサ95(図2参照)をさらに備えた構成とすることが可能である。回転センサ95は、回転体20の回転数(容器ホルダ30の公転数)を検出することが可能に構成されている。回転センサ95を、容器ホルダ30の公転数及び自転数を検出する構成とすることも可能であり、容器ホルダ30の公転数のみを検出する構成とすることも可能である。
【0036】
攪拌脱泡装置1は、図2に示す制御手段90を含む。制御手段90は、攪拌脱泡装置1の動作を統括制御する役割を果たす。制御手段90は、攪拌脱泡装置1をシーケンス制御するように構成することができる。以下、制御手段90について説明する。図2は、制御手段90について説明するための図である。
【0037】
制御手段90は、マイクロプロセッサ(CPU92)と、公転駆動機構52(モータ54)を制御する駆動制御部94と、切り替え手段80(切り替え機構84)を制御する切り替え手段制御部96とを含む。そして、CPU92は、運転データ(例えば、材料Mの処理条件に合わせてユーザが入力したデータ)に基づいて駆動制御部94及び切り替え手段制御部96に各種の信号を出力することにより、攪拌脱泡装置1の動作を制御する。
【0038】
ここで、攪拌脱泡装置1では、容器ホルダ30は回転体20の回転に伴って公転することから、モータ54の出力を制御することによって、容器ホルダ30の公転数が制御される。すなわち、モータ54の出力を制御することにより、容器ホルダ30を所望の公転数で公転させることが可能になる。
【0039】
例えばモータ54としてインダクションモータを採用する場合には、駆動制御部94は、インバータの動作を制御し、モータ54に供給される交流電力の周波数を所定値とするためのインバータ制御部によって実現することができる。あるいは、モータ54としてサーボモータを採用する場合には、駆動制御部94は、専用のドライバ及びハードウェアによって実現され、モータ54を所望の回転数で動作させるための各種処理を行う。そして、CPU92は、所定のタイミングで、駆動制御部94に各種の信号(収納容器100の公転数データ等)を送信する処理を行う。これにより、収納容器100を所望の回転数で回転させることができる。
【0040】
また、切り替え手段制御部96は、切り替え機構84のオン・オフを切り替える専用のドライバ及びハードウェアによって実現することができる。例えば切り替え機構84としてブレーキ(電磁ブレーキ)を採用する場合には、切り替え手段制御部96は、ブレーキに印加される電圧のオン・オフを切り替える電圧制御手段によって実現することができる。あるいは、切り替え機構84として油圧ブレーキを採用する場合には、切り替え手段制御部96は、油圧ブレーキに供給される油の流れを停止させる状態と解放する状態とを切り替える流量制御手段によって実現することができる。そして、CPU92は、切り替え手段制御部96に各種の信号(切り替えタイミングデータ等)を送信する処理を行う。切り替え手段制御部96によって、所望のタイミングで、容器ホルダ30の公転数に対する自転数の比率を切り替えることが可能になる。
【0041】
なお、本実施の形態では、制御部90(駆動制御部94及び切り替え手段制御部96)は、材料Mの処理条件に合わせて、公転数を所定値以上に保った状態で自転力付与機構60の設定(公転数に対する自転数の比率)を切り替える処理が複数回行われるように、公転駆動機構52及び切り替え機構84を制御する。自転力付与機構60の設定を切り替えるタイミングや、容器ホルダ30の公転数の具体的な値は、実験に基づいてユーザが設定することができる。そして、CPU92が、回転センサ95からの情報に基づいて駆動制御部94及び切り替え手段制御部96への信号送信処理を行うことで、容器ホルダ30を設定値通りに回転させることが可能になる。
【0042】
また、CPU92は、操作部98から入力された動作データを受け付けて、図示しない記憶部に格納する処理や、表示部99に各種情報(操作部98から入力された動作データや、攪拌脱泡装置1の運転状況等)を表示させるための処理を行う。
【0043】
(2)収納容器100
次に、本実施の形態に適用可能な収納容器100について説明する。収納容器100は、材料(被攪拌脱泡材料)Mが収納される容器である。収納容器100は、例えば有底円筒状の本体と、当該本体に着脱可能な蓋体とを含む構成とすることができる。収納容器100は、容器ホルダ30に着脱可能に構成されている。そして、収納容器100は、容器ホルダ30に保持されて容器ホルダ30の自転に伴って自転し、容器ホルダ30の公転に伴って公転する。なお、収納容器100は、容器ホルダ30に対する空回りを防止するための、空回り防止機構を備えた構成とすることも可能である。また、収納容器100の構成材料は特に限定されるものではなく、樹脂や金属など、既に公知となっているいずれかの材料によって構成された容器を利用することができる。
【0044】
(3)材料M
本実施の形態に適用可能な材料Mは、流体として挙動するものであればよく、その組成や用途は特に限定されるものではない。材料Mとして、例えば、接着剤、シーラント剤、液晶材料、半田ペースト、成型に利用される硬化性の樹脂材料、歯科用印象材料、歯科用セメント(穴埋め剤等)、粘性の強い液状の薬剤等の種々の材料を適用することができる。また、材料Mとして、液状の材料と粒状(粉状)の材料との混合材料を適用することも可能である。このとき、収納容器100には、材料Mとともに、粒状(粉状)材料を粉砕するための粉砕用メディア(例えばジルコニアボール)を収納することも可能である。
【0045】
(4)攪拌脱泡方法
次に、本実施の形態に係る材料Mの攪拌脱泡方法について説明する。図3及び図4は、本実施の形態に係る材料Mの攪拌脱泡方法について説明するための図である。なお、図3は、材料Mの攪拌脱泡方法を説明するためのフローチャートであり、図4は材料Mの攪拌脱泡方法を説明するためのタイミングチャートである。
【0046】
材料Mの攪拌脱泡方法は、図3に示すように、収納容器100の公転数を上昇させる工程(ステップS12)を含む。本工程は、容器ホルダ30に収納容器100を保持させ、容器ホルダ30の公転数を上昇させることによって実現することができる。なお、本工程における収納容器100(容器ホルダ30)の公転数に対する自転数の比率(自転公転比)は、第1及び第2の値のいずれに設定することも可能である。
【0047】
材料Mの攪拌脱泡方法は、図3に示すように、公転数を所定値以上に保った状態で、公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、公転数に対する自転数の比率を第2の値から第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程(ステップS14)を含む。本工程は、モータ54の出力を調整しながら、自転力付与機構60の設定を切り替えることによって実現することができる。なお、本工程は、公転数に対する自転数の比率が第1の値である第1回転モードで収納容器100を回転させる第1回転モード処理、及び、当該比率が第2の値である第2回転モードで収納容器100を回転させる第2回転モード処理を、公転数を所定値以上に保った状態で、材料Mの処理条件に合わせて複数回繰り返す工程であるといえる。
【0048】
なお、本実施の形態では、攪拌脱泡処理工程(ステップS14)を、比率変動復帰処理のインターバル(T:図4参照)が材料Mの処理条件に合致するように行う。ここで、材料Mの処理条件とは、要求される攪拌脱泡精度や、温度条件、処理時間の制限等があげられる。そして、比率変動復帰処理のインターバル(T)の具体的な値は、実験に基づいて導出することができる。なお、「比率変動復帰処理のインターバル(T)」とは、一つの比率変動復帰処理の開始から次の比率変動復帰処理の開始までの時間的な間隔とすることができる。また、収納容器100の公転数は、材料Mに十分な遠心力を作用させるに足る値であることが好ましく、具体的な値は、実験に基づいて導出することができる。そして、比率変動復帰処理のインターバル(T)は、収納容器100の公転数に関連付けて設定することも可能である。
【0049】
また、本実施の形態では、攪拌脱泡処理工程(ステップS14)の終了条件は、材料Mの処理条件に合わせてユーザが適宜設定することができる。例えば、攪拌脱泡処理工程(ステップS14)は、攪拌脱泡処理開始から所定時間経過後に終了させることができる。すなわち、攪拌脱泡処理工程(ステップS14)は、材料Mの処理条件に合致した時間行うことが可能である。あるいは、攪拌脱泡処理工程(ステップS14)は、比率変動復帰処理を所定回数行った後に終了させることができる。すなわち、攪拌脱泡処理工程(ステップS14)の変動復帰処理は、材料の処理条件に合致した回数行うことが可能である。
【0050】
さらに、本実施の形態では、攪拌脱泡処理工程(ステップS14)の比率変動復帰処理を、変動処理と復帰処理とのインターバルが材料Mの処理条件に合致するように行うことができる。なお、「変動処理と復帰処理とのインターバル」とは、一つの比率変動復帰処理における変動処理の開始から復帰処理の開始までの時間的な間隔とすることができる。
【0051】
本実施の形態における攪拌脱泡処理工程(ステップS14)の比率変動復帰処理のインターバル(T)、収納容器100の公転数、終了条件、変動処理と復帰処理とのインターバル等の諸条件は、材料Mの処理条件に合わせて設定することができ、具体的な値は実験によって導出することができる。すなわち、本実施の形態では、攪拌脱泡方法は、攪拌脱泡処理工程(ステップS14)に先立って、材料Mの処理条件に合わせて、収納容器100の回転モードを切り替える条件を導出し、設定する切り替え条件設定工程をさらに含んでいてもよい。
【0052】
そして、材料Mの攪拌脱泡方法は、図3に示すように、公転数を低下させて収納容器100を停止させる工程(ステップS16)を含む。本工程は、容器ホルダ30の公転数を低下させることによって実現することができる。なお、本工程における収納容器100(容器ホルダ30)の自転公転比は、第1及び第2の値のいずれに設定することも可能である。特に図示しないが、本工程における公転数に対する自転数の比率を第1及び第2の値の小さい方に設定すれば、収納容器100の停止時に、材料Mに新たな気泡が混入することを防止することができる。
【0053】
(5)効果
以下、本実施の形態が奏する作用効果について詳述する。
本実施の形態に係る攪拌脱泡方法では、収納容器100の公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、当該比率を第2の値から第1の値に復帰させる比率変動復帰処理を複数回行う。これにより、公転による遠心力が作用した状態で、材料Mを激しく流動させることができる。そのため、材料Mの攪拌処理効率を高めることができるとともに、様々な性質(粘性やチクソ性や比重)の材料Mの攪拌処理に対応することが可能になる。また、材料Mの流動が公転による遠心力の作用を受けながら行われることから、材料Mを、攪拌処理と同時に脱泡処理することができる。そして、攪拌脱泡処理工程が、比率変動復帰処理のインターバル(T)が材料Mの処理条件に合致するように行われることから、材料Mを最適処理することが可能になる。
【0054】
また、本実施の形態では、切り替え機構84は、自転力付与プーリ64の回転を禁止する、又は、自転力付与プーリ64の回転を自由にするという二つの状態を作り出す機能があれば足る。そのため、切り替え機構84を、単純な機構の装置で実現することができるとともに、その制御も容易かつ正確に行うことが可能になる。また、本実施の形態では、高効率の攪拌脱泡処理を実現することができるとともに、上記二つの状態の中間状態を作り出す必要がなくなるため、攪拌脱泡装置1のエネルギー効率を高めることができる。
【0055】
(6)変形例
以下、本実施の形態の変形例について説明する。
【0056】
(6−1)第1の変形例
本変形例では、図5に示すように、攪拌脱泡処理工程(ステップS14)において、比率変動復帰処理のインターバルを変化させる。図5に示す例では、攪拌脱泡処理工程(ステップS14)の前半における比率変動復帰処理のインターバル(T1)と、後半における比率変動復帰処理のインターバル(T2)とが異なる値となっている。これによって、より好ましい条件で材料Mを攪拌脱泡処理することが可能になる。
【0057】
(6−2)第2の変形例
本変形例では、攪拌脱泡処理工程(ステップS14)において、比率変動復帰処理中に、変動処理と復帰処理のインターバルを変化させる。図6に示す例では、比率変動処理のインターバル(T)を一定に保ちながら、攪拌脱泡処理工程(ステップS14)の前半と後半とで、変動処理と復帰処理のインターバルを変化させている。これによって、より好ましい条件で材料Mを攪拌脱泡処理することが可能になる。
【0058】
(6−3)第3の変形例
本変形例では、攪拌脱泡処理工程(ステップS14)において、収納容器100の公転数に対する自転数の比率(第1の値及び第2の値の少なくとも一方)が、攪拌脱泡装置1の装置構成(プーリ比等)から導出される値とは異なる値となるように、変動復帰処理を行う。図7の例では、比率変動処理と比率復帰処理のインターバルを所定値以下とすることで、公転数に対する自転数の比率が所定値以下にならないように、比率変動処理が行われている。
【0059】
本変形例によると、攪拌脱泡装置1の構成に拘わらず、収納容器100の公転数に対する自転数の比率(第1の値及び第2の値の少なくとも一方)を、弾力的に設定することができる。そのため、より材料Mの処理に適した挙動をさせることが可能になり、材料Mの処理精度を高めることができる。
【0060】
(6−4)第4の変形例
本変形例では、攪拌脱泡処理工程(ステップS14)において、公転数を変動させる。例えば、図8に示すように、自転数を上昇させる(公転数に対する自転数の比率を高める)前に公転数を低下させ、自転数と公転数を同時に上昇させることができる。あるいは、変動復帰処理のタイミングと連動しないように、公転数を変動させることも可能である。例えば、図9に示すように、公転数を、変動復帰処理のインターバル(T)とは異なるインターバル(T3)で周期的に変動させることや、図10に示すように、攪拌脱泡処理工程(ステップS14)の初期の公転数の設定値と、後期の公転数の設定値とを異なる値にすることも可能である。なお、本変形例における公転数やインターバル(T3)の具体的な値は、材料Mの処理条件や攪拌脱泡装置1の構成部材に合わせて適宜設定することができる。例えば公転数の下限値は、材料Mに一定以上の遠心力が作用する値とすることができる。
【0061】
2.第2の実施形態
以下、本発明を適用した第2の実施の形態について、図11〜図13を参照して説明する。
【0062】
(1)攪拌脱泡装置2の構成
はじめに、本実施の形態に係る攪拌脱泡装置2の構成について、図11を参照して説明する。
【0063】
攪拌脱泡装置2は、容器ホルダ30を公転させながら自転させる回転駆動機構200を含む。そして回転駆動機構200は、容器ホルダ30の公転に伴って(回転体20の回転に伴って)、容器ホルダ30に自転力を付与する自転力付与機構210を含む。以下、自転力付与機構210の詳細について説明する。
【0064】
自転力付与機構210は、自転プーリ62、自転力付与プーリ64、及び、両者の間で動力を伝達する自転動力伝達機構66を有する。また、自転力付与機構210では、自転力付与プーリ64には回転制御プーリ82が固定されており、両者は一体的に挙動する。
【0065】
自転力付与機構210は、副軸212を有する。副軸212は、回転軸22から所定の間隔をあけた位置に、回転軸22と平行に延びるように配置されている。副軸212は、支持体12(筐体10)に対して回転可能に構成されている。
【0066】
自転力付与機構210は、副軸212に固定された副軸第1プーリ214を含む。副軸第1プーリ214は、副軸212に固定されるため、副軸212を中心に、副軸212と同じ回転数で回転する。
【0067】
自転力付与機構210は、副軸第2プーリ218を含む。副軸第2プーリ218は、一方向クラッチ216を介して副軸212に取り付けられている。
【0068】
そして、自転力付与機構210は、回転制御プーリ82と副軸第1プーリ214とにかけ回されたベルト222、及び、副軸第2プーリ218と回転軸22に固定された回転軸プーリ220とにかけ回されたベルト224を含む。
【0069】
自転力付与機構210によると、攪拌脱泡装置2を、副軸212が固定された状態(回転不能に設定された状態)で運転する第1回転モードと、副軸212を回転可能とした状態で運転する第2回転モードとの、2つの異なるモードで動作させることが可能になる。そして、この2つの動作モードでは、以下に示すように、容器ホルダ30の公転数に対する自転数の比は異なる値となる。なお、以下の式では、自転プーリ62、第1及び第2補助プーリ70,72、自転力付与プーリ64及び回転制御プーリ82、副軸第1プーリ214、副軸第2プーリ218、回転軸プーリ220の径を、それぞれ、D1〜D6とした(表1参照)。また、容器ホルダ30の自転数をω、公転数をWとした。
【0070】
すなわち、攪拌脱泡装置2において、副軸212を固定すると(攪拌脱泡装置2を第1のモードで動作させると)、副軸第1プーリ214が固定され、回転制御プーリ82(自転力付与プーリ64)が固定される。そして、この自転駆動機構では、容器ホルダ30の自転数は、回転体20の回転数(容器ホルダ30の公転数)と自転力付与プーリ64の回転数との差(相対的な回転数)、及び、自転力付与プーリ64と第1及び第2補助プーリ70,72と自転プーリ62の径に依存するため、このときの容器ホルダ30の自転公転比R1(すなわち第1の値)は、次式で表される。
【数1】
【0071】
なお、自転力付与機構210では、回転軸プーリ220は回転軸22に固定されており、ベルト224が回転軸プーリ220と副軸第2プーリ218とにかけ回されている。そのため、回転軸22が回転すると、常に、副軸第2プーリ218は回転することになる。しかしながら、この自転駆動機構では、一方向クラッチ216の作用により、副軸第2プーリ218の回転トルクは副軸212に伝達されない。そのため、副軸第2プーリ218と副軸212とは空回りすることになり、副軸212を固定した場合でも、回転軸22は自由に回転することが可能になる。
【0072】
これに対して、副軸212を回転可能に設定すると(攪拌脱泡装置1を第2のモードで動作させると)、自転力付与プーリ64及び回転制御プーリ82の回転数は、副軸第1プーリ214、副軸第2プーリ218、及び、回転軸プーリ220によって規制され、回転軸22の回転数に関連付けられることになる。そして、容器ホルダ30の自転数は、回転体20の回転数(容器ホルダ30の公転数)と自転力付与プーリ64の回転数との差(相対値)、及び、各プーリの径に依存するため、容器ホルダ30の自転公転比R2(すなわち第2の値)は、次式で表される。
【数2】
【0073】
このことから、攪拌脱泡装置2は、自転公転比が異なる2つの動作モードで動作することが可能になることがわかる。特に、この自転駆動機構によると、副軸212を「回転不能にする(固定する)」又は「回転可能にする」ことにより、動作モード(自転公転比)を変えることができる。また、攪拌脱泡装置2によると、副軸212を解放した場合の、容器ホルダ30の公転数に対する自転数の比率(第2の値)をゼロ以外の値にすることができる。
【0074】
なお、本実施の形態では、攪拌脱泡装置2は、第1回転モードにおいて材料Mを攪拌するため、収納容器100内で材料Mを流動させる必要がある。そのため、攪拌脱泡装置1は、第1回転モードにおける自転公転比(R1)が所定値以上となるように設計される必要がある。逆に、攪拌脱泡装置2は、第2回転モードにおいて材料Mが空気を巻き込むことを防止し、かつ、材料Mが遠心分離することを防止することが可能な値とすることが好ましい。そのため、攪拌脱泡装置2は、第2回転モードにおける自転公転数比(R2)が所定範囲となるように設計することが好ましい。
【0075】
具体例として、自転プーリ62、第1及び第2補助プーリ70,72、自転力付与プーリ64及び回転制御プーリ82、副軸第1プーリ214、副軸第2プーリ218、回転軸プーリ220の径を示すD1〜D6の値を表1のように設定すると、R1=2/5、R2=1/40となり、R1を十分大きな値とすることができるとともに、R2を十分小さな値とすることができる。
【表1】
【0076】
なお、上記の自転力付与機構210は、プーリとベルトを利用した動力伝達機構で実現しているが、本発明はこれに限られるものではなく、自転駆動機構を、歯車を利用して実現することも可能である。
【0077】
そして、攪拌脱泡装置2は、自転力付与機構210の設定を切り替える切り替え手段80を含んでいる。切り替え手段80は、副軸212の回転を停止させる、又は、副軸212の回転を自由な状態とする切り替え機構84によって実現することができる。
【0078】
(2)攪拌脱泡方法
次に、本実施の形態に係る攪拌脱泡方法について、図12及び図13を参照して説明する。なお、図12は本実施の形態に係る攪拌脱泡方法を説明するためのフローチャートであり、図13はタイミングチャートである。
【0079】
本実施の形態に係る材料Mの攪拌脱泡方法は、図12及び図13に示すように、収納容器100の公転数を上昇させる工程(ステップS12)と、公転数を所定値以上に保った状態で、公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、公転数に対する自転数の比率を第2の値から第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程(ステップS14)と、公転数に対する自転数の比率を、第1及び第2の値の小さい方(攪拌脱泡装置2では第2の値)に設定して収納容器100を所定時間公転させながら自転させる脱泡処理工程(ステップS18)と、収納容器100の公転数を低下させて収納容器100を停止させる工程(ステップS16)と、を含む。
【0080】
脱泡処理工程(ステップS18)における公転数及び処理時間は、材料Mの処理条件に合わせて適宜設定することが可能で、具体的な値は実験により導出することができる。なお、図13の例では、脱泡処理工程(ステップS18)における公転数は、攪拌脱泡処理工程(ステップS14)と同じ公転数となっている。しかしながら本発明はこれに限られるものではなく、脱泡処理工程(ステップS18)の公転数は、攪拌脱泡処理工程(ステップS14)の公転数よりも高くすることも、低くすることも可能で、また、脱泡処理工程中に変動させることも可能である(図示せず)。
【0081】
(3)効果
先に説明した通り、攪拌脱泡装置2は、第2回転モードにおける公転数に対する自転数の比率を、ゼロ以外の値に設定することができる。そのため、より好ましい条件で、材料Mを攪拌脱泡処理することが可能になる。また、攪拌脱泡装置2を利用した場合、攪拌脱泡処理工程(ステップS14)の後に、脱泡処理工程(ステップS18)を行っても、材料Mが遠心分離することを防止することができる。また、第2回転モードにおける公転数に対する自転数の比率は、第1回転モードにおける比率よりも小さいことから、材料Mが新たな気泡を巻き込むことも防止することができる。すなわち、本実施の形態では、攪拌脱泡処理工程(ステップS14)の後に脱泡処理工程(ステップS18)を行うことで、材料Mの攪拌脱泡処理精度を高めることができる。
【符号の説明】
【0082】
1…攪拌脱泡装置、 2…攪拌脱泡装置、 10…筐体、 12…支持基板、 20…回転体、 22…回転軸、 24…ベアリングユニット、 30…容器ホルダ、 32…自転軸、 34…ベアリングユニット、 36…バランス錘、 50…回転駆動機構、 52…公転駆動機構、 54…モータ、 56…動力伝達機構、 60…自転力付与機構、 62…自転プーリ、 64…自転力付与プーリ、 66…自転動力伝達機構、 68…固定軸、 70…第1補助プーリ、 72…第2補助プーリ、 74…ベルト、 76…ベルト、 80…切り替え手段、 82…回転制御プーリ、 84…切り替え機構、 90…制御手段、 92…CPU、 94…駆動制御部、 96…切り替え手段制御部、 98…操作部、 99…表示部、 100…収納容器、 200…回転駆動機構、 210…自転力付与機構、 212…副軸、 214…副軸第1プーリ、 216…一方向クラッチ、 218…副軸第2プーリ、 220…回転軸プーリ、 222…ベルト、 224…ベルト、 L1…回転軸線、 L2…自転軸線、 M…材料
【特許請求の範囲】
【請求項1】
材料が収納された収納容器を公転させながら自転させることによって、前記材料を攪拌脱泡する方法であって、
前記公転数を所定値以上に保った状態で、前記公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、前記比率を前記第2の値から前記第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程を含み、
前記攪拌脱泡処理工程を、前記比率変動復帰処理のインターバルが前記材料の処理条件に合致するように行う攪拌脱泡方法。
【請求項2】
請求項1に記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程を、前記材料の処理条件に合致した時間行う攪拌脱泡方法。
【請求項3】
請求項1に記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程の前記比率変動復帰処理を、前記材料の処理条件に合致した回数行う攪拌脱泡方法。
【請求項4】
請求項1から請求項3のいずれかに記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程のそれぞれの前記比率変動復帰処理を、前記変動処理と前記復帰処理とのインターバルが前記材料の処理条件に合致するように行う攪拌脱泡方法。
【請求項5】
材料が収納された収納容器を公転させながら自転させることによって、前記材料を攪拌脱泡する方法であって、
前記公転数に対する自転数の比率が第1の値である第1回転モードで前記収納容器を回転させる第1回転モード処理、及び、前記比率が第2の値である第2回転モードで前記収納容器を回転させる第2回転モード処理を、前記公転数を所定値以上に保った状態で、前記材料の処理条件に合わせて複数回繰り返す攪拌脱泡処理工程を含む攪拌脱泡方法。
【請求項6】
請求項5に記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程に先立って行われる、前記材料の処理条件に合わせて、前記収納容器の回転モードを切り替える条件を設定する切り替え条件設定工程をさらに含む攪拌脱泡方法。
【請求項7】
請求項1から請求項6のいずれかに記載の攪拌脱泡方法において、
前記第1及び第2の値の小さい方の値を、前記材料が新たな気泡を巻き込まない値とする攪拌脱泡方法。
【請求項8】
請求項1から請求項7のいずれかに記載の攪拌脱泡方法において、
前記第1及び第2の値の小さい方の値を、前記材料が遠心分離しない値とする攪拌脱泡方法。
【請求項9】
請求項1から請求項8のいずれかに記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程の後に、前記比率を前記第1及び第2の値の小さい方の値に設定して前記収納容器を所定時間公転させながら自転させる脱泡処理工程をさらに含む攪拌脱泡方法。
【請求項10】
材料が収納された収納容器を公転させながら自転させることによって前記材料を攪拌脱泡する攪拌脱泡装置であって、
所定の回転軸線を中心に回転可能に構成された回転体と、
前記回転体に対して自転可能に取り付けられた、前記収納容器を保持するための容器ホルダと、
前記回転体を回転させることによって前記容器ホルダを公転させる公転駆動機構と、
前記容器ホルダの公転に伴って前記容器ホルダに自転力を付与する、前記容器ホルダの公転数に対する自転数の比率が第1の値となる第1の状態、及び、前記比率が第2の値となる第2の状態に設定することが可能に構成された自転力付与機構と、
前記自転力付与機構の設定を切り替える切り替え機構と、
前記材料の処理条件に合わせて、前記公転数を所定値以上に保った状態で前記自転力付与機構の設定を切り替える処理が複数回行われるように、前記公転駆動機構及び前記切り替え機構を制御する制御部と、
を含む攪拌脱泡装置。
【請求項1】
材料が収納された収納容器を公転させながら自転させることによって、前記材料を攪拌脱泡する方法であって、
前記公転数を所定値以上に保った状態で、前記公転数に対する自転数の比率を第1の値から第2の値に変動させ、その後、前記比率を前記第2の値から前記第1の値に復帰させる比率変動復帰処理を複数回行う攪拌脱泡処理工程を含み、
前記攪拌脱泡処理工程を、前記比率変動復帰処理のインターバルが前記材料の処理条件に合致するように行う攪拌脱泡方法。
【請求項2】
請求項1に記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程を、前記材料の処理条件に合致した時間行う攪拌脱泡方法。
【請求項3】
請求項1に記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程の前記比率変動復帰処理を、前記材料の処理条件に合致した回数行う攪拌脱泡方法。
【請求項4】
請求項1から請求項3のいずれかに記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程のそれぞれの前記比率変動復帰処理を、前記変動処理と前記復帰処理とのインターバルが前記材料の処理条件に合致するように行う攪拌脱泡方法。
【請求項5】
材料が収納された収納容器を公転させながら自転させることによって、前記材料を攪拌脱泡する方法であって、
前記公転数に対する自転数の比率が第1の値である第1回転モードで前記収納容器を回転させる第1回転モード処理、及び、前記比率が第2の値である第2回転モードで前記収納容器を回転させる第2回転モード処理を、前記公転数を所定値以上に保った状態で、前記材料の処理条件に合わせて複数回繰り返す攪拌脱泡処理工程を含む攪拌脱泡方法。
【請求項6】
請求項5に記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程に先立って行われる、前記材料の処理条件に合わせて、前記収納容器の回転モードを切り替える条件を設定する切り替え条件設定工程をさらに含む攪拌脱泡方法。
【請求項7】
請求項1から請求項6のいずれかに記載の攪拌脱泡方法において、
前記第1及び第2の値の小さい方の値を、前記材料が新たな気泡を巻き込まない値とする攪拌脱泡方法。
【請求項8】
請求項1から請求項7のいずれかに記載の攪拌脱泡方法において、
前記第1及び第2の値の小さい方の値を、前記材料が遠心分離しない値とする攪拌脱泡方法。
【請求項9】
請求項1から請求項8のいずれかに記載の攪拌脱泡方法において、
前記攪拌脱泡処理工程の後に、前記比率を前記第1及び第2の値の小さい方の値に設定して前記収納容器を所定時間公転させながら自転させる脱泡処理工程をさらに含む攪拌脱泡方法。
【請求項10】
材料が収納された収納容器を公転させながら自転させることによって前記材料を攪拌脱泡する攪拌脱泡装置であって、
所定の回転軸線を中心に回転可能に構成された回転体と、
前記回転体に対して自転可能に取り付けられた、前記収納容器を保持するための容器ホルダと、
前記回転体を回転させることによって前記容器ホルダを公転させる公転駆動機構と、
前記容器ホルダの公転に伴って前記容器ホルダに自転力を付与する、前記容器ホルダの公転数に対する自転数の比率が第1の値となる第1の状態、及び、前記比率が第2の値となる第2の状態に設定することが可能に構成された自転力付与機構と、
前記自転力付与機構の設定を切り替える切り替え機構と、
前記材料の処理条件に合わせて、前記公転数を所定値以上に保った状態で前記自転力付与機構の設定を切り替える処理が複数回行われるように、前記公転駆動機構及び前記切り替え機構を制御する制御部と、
を含む攪拌脱泡装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−92912(P2011−92912A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−252227(P2009−252227)
【出願日】平成21年11月2日(2009.11.2)
【出願人】(393030408)株式会社シンキー (34)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年11月2日(2009.11.2)
【出願人】(393030408)株式会社シンキー (34)
【Fターム(参考)】
[ Back to top ]