
攪拌装置及び分析装置
【課題】攪拌に要する時間を短縮することが可能な攪拌装置及び分析装置を提供すること。
【解決手段】容器に保持された液体を音波によって攪拌する攪拌装置及び分析装置。攪拌装置20は、圧電基板上に配置された発音部24b,24cを有し、発音部が電気的に並列接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されている表面弾性波素子24と、複数の発音部の少なくとも二つの発音部が音波を同時に発生するように表面弾性波素子に入力する駆動信号の周波数を制御する駆動制御部21とを備えている。
【解決手段】容器に保持された液体を音波によって攪拌する攪拌装置及び分析装置。攪拌装置20は、圧電基板上に配置された発音部24b,24cを有し、発音部が電気的に並列接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されている表面弾性波素子24と、複数の発音部の少なくとも二つの発音部が音波を同時に発生するように表面弾性波素子に入力する駆動信号の周波数を制御する駆動制御部21とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、攪拌装置及び分析装置に関するものである。
【背景技術】
【0002】
従来、容器に保持された液体を音波によって攪拌するこの種の攪拌装置は、音波発生手段が中心周波数の異なる複数の発音部を有し、駆動周波数を変更することにより音波を放射する発音部を複数の発音部の中の特定の発音部に時分割で切り替えることで攪拌を行うものがある(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2007−108062号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に開示された攪拌装置は、複数の発音部を時分割で切り替えることによって攪拌を行うことから、複数の発音部の中の一部の発音部しか攪拌に使用せず、攪拌に時間が掛かるという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、攪拌に要する時間を短縮することが可能な攪拌装置及び分析装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の攪拌装置は、容器に保持された液体を音波によって攪拌する攪拌装置であって、圧電基板上に配置された発音部を有し、複数の前記発音部が電気的に並列接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から前記容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されている音波発生手段と、前記複数の発音部の少なくとも二つの発音部が音波を同時に発生するように前記音波発生手段に入力する駆動信号の周波数を制御する駆動制御手段と、を備えることを特徴とする。
【0007】
また、本発明の攪拌装置は、上記の発明において、前記複数の発音部は、前記駆動信号の周波数に応じて各発音部の電気的入力信号に対する振動の応答強度の比率が変化することを特徴とする。
【0008】
また、本発明の攪拌装置は、上記の発明において、前記複数の発音部は、前記駆動信号の周波数に応じて音波を発生する発音部が切り替わることを特徴とする。
【0009】
また、本発明の攪拌装置は、上記の発明において、前記駆動制御手段は、前記液体の分析項目、前記液体の性状又は液量の情報に基づいて前記音波発生手段に入力する前記駆動信号の周波数を変化させることを特徴とする。
【0010】
また、本発明の攪拌装置は、上記の発明において、前記駆動制御手段は、前記駆動信号の周波数を変化させることにより前記液体中を旋回する音響流を生じさせることを特徴とする。
【0011】
また、上述した課題を解決し、目的を達成するために、本発明の分析装置は、容器に保持された検体と試薬とを含む液体試料を攪拌して反応させ、反応液を分析する分析装置であって、前記攪拌装置を備えることを特徴とする。
【発明の効果】
【0012】
本発明の攪拌装置は、圧電基板上に配置された発音部を有し、複数の発音部が電気的に並列接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されている音波発生手段と、複数の発音部の少なくとも二つの発音部が音波を同時に発生するように音波発生手段に入力する駆動信号の周波数を制御する駆動制御手段とを備え、本発明の分析装置は前記攪拌装置を備えるので、少なくとも二つの発音部から同時に発生する音波によって攪拌対象の液体中に生ずる音響流の態様が多様化し、攪拌に要する時間を短縮することができるという効果を奏する。
【発明を実施するための最良の形態】
【0013】
以下、本発明の攪拌装置及び分析装置にかかる実施の形態について、図面を参照しつつ詳細に説明する。図1は、攪拌装置を備えた自動分析装置の概略構成図である。図2は、図1に示す自動分析装置を構成するキュベットホイールのA部を拡大し、一部を断面にして示す斜視図である。図3は、反応容器を収容したキュベットホイールをホイール電極の位置で水平に切断した断面平面図である。図4は、攪拌装置の概略構成を反応容器の斜視図と共に示すブロック図である。
【0014】
自動分析装置1は、図1及び図2に示すように、試薬テーブル2,3、キュベットホイール4、検体容器移送機構8、分析光学系12、洗浄機構13、制御部15及び攪拌装置20を備えている。
【0015】
試薬テーブル2,3は、図1に示すように、それぞれ周方向に配置される複数の試薬容器2a,3aを保持し、駆動手段に回転されて試薬容器2a,3aを周方向に搬送する。
【0016】
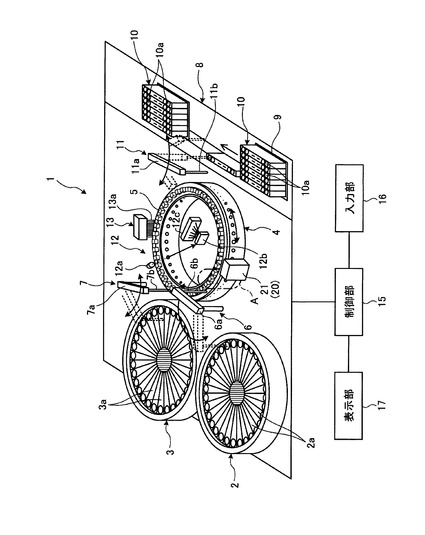
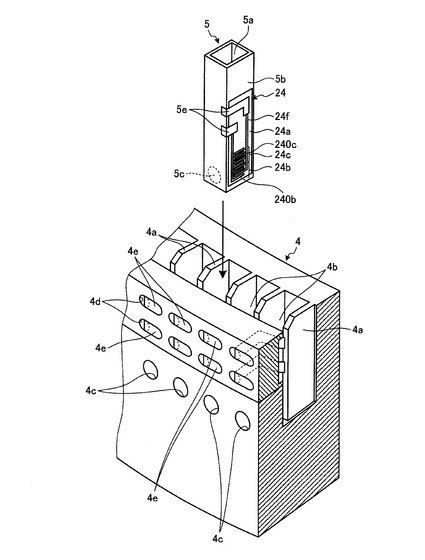
キュベットホイール4は、図1に示すように、周方向に沿って設けた複数の仕切り板4aによって反応容器5を配置する複数のホルダ4bが周方向に形成され、図示しない駆動手段によって矢印で示す方向に回転されて反応容器5を搬送する。キュベットホイール4は、図2に示すように、各ホルダ4bの下部に対応する位置に半径方向に測光孔4cが形成され、測光孔4cの上部に設けた上下2つの挿通孔4dのそれぞれを利用してホイール電極4eが取り付けられている。ホイール電極4eは、図2及び図3に示すように、挿通孔4dから延出した一端が折り曲げられてキュベットホイール4の外面に当接し、挿通孔4dから延出した他端は同様に折り曲げられてホルダ4bの内面近傍に配置され、ホルダ4bに配置した反応容器5をばね力によって保持している。反応容器5は、近傍に設けた試薬分注機構6,7によって試薬テーブル2,3の試薬容器2a,3aから試薬が分注される。ここで、試薬分注機構6,7は、それぞれ水平面内を矢印方向に回動するアーム6a,7aに試薬を分注するプローブ6b,7bが設けられ、洗浄水によってプローブ6b,7bを洗浄する洗浄手段を有している。
【0017】
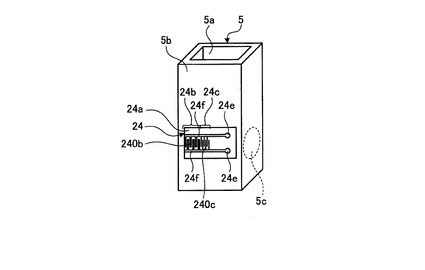
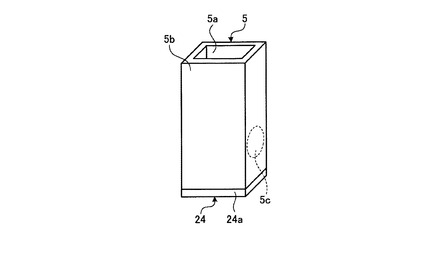
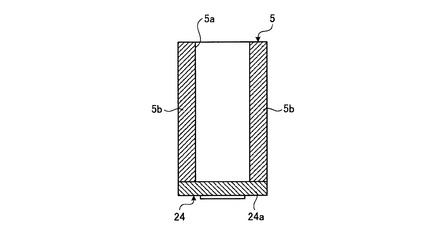
一方、反応容器5は、光学的に透明な素材から成形され、図2に示すように、上部に開口5aを有する四角筒状のキュベットであり、側壁5bに音波発生手段として表面弾性波素子24が取り付けられると共に、表面弾性波素子24の一組の入力端子24eのそれぞれと接続される電極パッド5eが取り付けられている。反応容器5は、後述する分析光学系12から出射された分析光の80%以上を透過する素材、例えば、耐熱ガラスを含むガラス,環状オレフィンやポリスチレン等の合成樹脂が使用される。反応容器5は、表面弾性波素子24を取り付けた部分に隣接する下部側の点線によって囲まれた部分が前記分析光を透過させる測光用の窓5cとして利用される。反応容器5は、使用に際して表面弾性波素子24を仕切り板4a側に向けてホルダ4bにセットされる。これにより、反応容器5は、図3に示すように、各電極パッド5eが対応するホイール電極4eと接触する。ここで、電極パッド5eは、表面弾性波素子24に一体的に設けられた構成となっている。
【0018】
検体容器移送機構8は、図1に示すように、フィーダ9に配列した複数のラック10を矢印方向に沿って1つずつ移送する移送手段であり、ラック10を歩進させながら移送する。ラック10は、検体を収容した複数の検体容器10aを保持している。ここで、検体容器10aは、検体容器移送機構8によって移送されるラック10の歩進が停止するごとに、水平方向に回動するアーム11aとプローブ11bとを有する検体分注機構11によって検体が各反応容器5へ分注される。このため、検体分注機構11は、洗浄水によってプローブ11bを洗浄する洗浄手段を有している。
【0019】
分析光学系12は、試薬と検体とが反応した反応容器5内の液体試料を分析するための分析光を出射するもので、図1に示すように、発光部12a,分光部12b及び受光部12cを有している。発光部12aから出射された分析光は、反応容器5内の液体試料を透過し、分光部12bと対向する位置に設けた受光部12cによって受光される。受光部12cは、制御部15と接続されている。
【0020】
洗浄機構13は、ノズル13aによって反応容器5内の液体試料を吸引して排出した後、ノズル13aによって洗剤や洗浄水等の洗浄液等を繰り返し注入し、吸引することにより、分析光学系12による分析が終了した反応容器5を洗浄する。
【0021】
制御部15は、自動分析装置1の各部の作動を制御すると共に、発光部12aの出射光量と受光部12cが受光した光量に基づく反応容器5内の液体試料の吸光度に基づいて検体の成分や濃度等を分析し、例えば、マイクロコンピュータ等が使用される。制御部15は、図1に示すように、入力部16及び表示部17と接続されている。入力部16は、制御部15へ検査項目等を入力する操作を行う部分であり、例えば、キーボードやマウス等が使用される。入力部16は、攪拌装置20の表面弾性波素子24に入力する駆動信号の周波数を切り替える操作等にも使用される。表示部17は、分析内容や警報等を表示するもので、ディスプレイパネル等が使用される。
【0022】
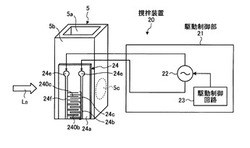
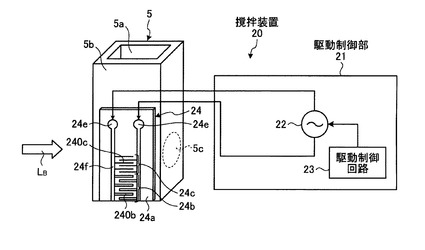
攪拌装置20は、図4に示すように、駆動制御部21と音波発生手段として表面弾性波素子24とを有している。
【0023】
駆動制御部21は、制御部15を介して入力部16から入力される液体の分析項目、液体の性状又は液量等の情報に基づいて表面弾性波素子24に入力する駆動信号の周波数を変更し、音波を発生する発音部の位置を切り替える駆動制御部である。このとき、駆動制御部21は、複数の発音部24b,24cが周波数の異なる音波を同時に発生するように、共通する共振周波数帯内で駆動信号の周波数を制御する。駆動制御部21は、キュベットホイール4の外周にキュベットホイール4と対向させて配置され(図1参照)、ハウジング21aに設けたブラシ状の接触子21b(図3参照)の他に、ハウジング21a内に信号発生器22と駆動制御回路23を備えている。接触子21bは、2つのホイール電極4eと対向するハウジング21aに設けられ、キュベットホイール4が停止すると対応するホイール電極4eと接触し、駆動制御部21と反応容器5の表面弾性波素子24とが電気的に接続される。
【0024】
信号発生器22は、駆動制御回路23から入力される制御信号に基づいて発振周波数を変更可能な発振回路を有しており、数MHz〜数百MHz程度の高周波の駆動信号を表面弾性波素子24に入力する。駆動制御回路23は、メモリとタイマを内蔵した電子制御手段(ECU)が使用され、制御部15を介して入力部16から入力される制御信号に基づいて信号発生器22の作動を制御することにより、信号発生器22が表面弾性波素子24へ出力する駆動信号の電圧や電流を制御する。駆動制御回路23は、信号発生器22の作動を制御することにより、例えば、表面弾性波素子24が発する音波の特性(周波数,強度,位相,波の特性)、波形(正弦波,三角波,矩形波,バースト波等)或いは変調(振幅変調,周波数変調)等を制御する。また、駆動制御回路23は、内蔵したタイマに従って信号発生器22が発振する高周波信号の周波数を変化させることができる。
【0025】
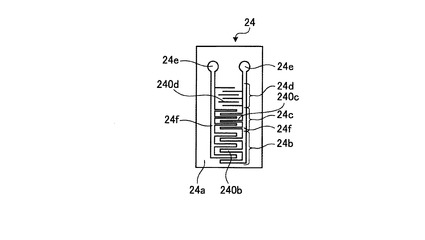
表面弾性波素子24は、図4に示すように、圧電基板24aの表面に櫛型電極(IDT)240b,240cからなる発音部24b,24cが間隔を置いて形成され、一組の入力端子24eとの間がバスバー24fによって並列接続されている。表面弾性波素子24は、圧電基板24aの長手方向を側壁5bの長手方向に向け、エポキシ樹脂等の音響整合層を介して反応容器5の側壁5bに取り付けられている。発音部24b,24cは、駆動制御部21から入力された駆動信号を表面弾性波(音波)に変換する発音部である。また、表面弾性波素子24は、入力端子24eと単一の駆動制御部21との間がホイール電極4eに接触する接触子21bによって接続されている。
【0026】
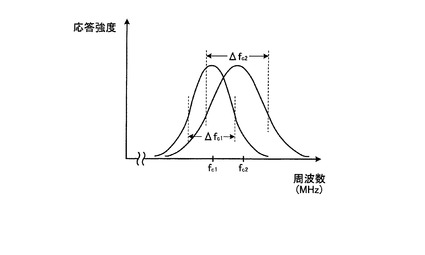
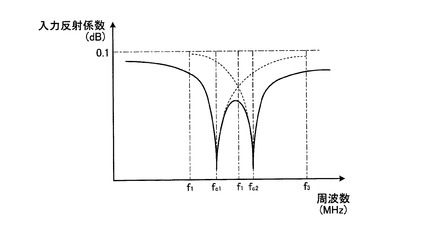
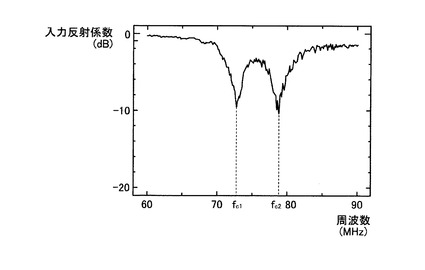
このとき、発音部24b,24cは、共振周波数帯の一部が重複している。即ち、発音部24b,24cは、図5に示すように、発音部24bの基本波の中心周波数がfc1、発音部24cの基本波の中心周波数がfc2(fc1<fc2)(MHz)であり、それぞれの中心周波数における電気的入力信号に対する振動の応答強度の−3dBの応答強度値となる半値幅Δfc1,Δfc2を共振周波数帯と定義し、その共振周波数帯の一部が重複している。また、発音部24b,24cは、入力反射係数(dB)に関し、図6に点線で示す周波数特性を個別に有しており、実線が2つを合わせた周波数特性を示している。更に、発音部24b,24cは、音響流の起点が交互に位置するように形成されている。これについては、後述する。
【0027】
ここで、圧電基板24aとしては、例えば、YカットZ伝搬(YZ)のニオブ酸リチウム(LiNbO3)結晶を使用することができる。また、発音部24b,24cは、入力端子24eやバスバー24fと共にフォトリソグラフィの技術によって圧電基板24a上に形成する。また、表面弾性波素子24は、液体やジェル等の音響整合層を介して反応容器5に離接自在に取り付けてもよい。なお、図4に示す表面弾性波素子24を含め、以下に説明する表面弾性波素子を示す図面は、構成の概略を示すことを主目的とするため、発音部を構成する複数の櫛型電極の線幅、ピッチ又は圧電基板24a上の位置は必ずしも正確に描いていない。
【0028】
以上のように構成される自動分析装置1は、回転するキュベットホイール4によって周方向に沿って搬送されてくる複数の反応容器5に試薬分注機構6,7が試薬容器2a,3aから試薬を順次分注する。試薬が分注された反応容器5は、検体分注機構11によってラック10に保持された複数の検体容器10aから検体が順次分注される。そして、キュベットホイール4が停止する都度、接触子21bがホイール電極4eと接触し、駆動制御部21と反応容器5の表面弾性波素子24とが電気的に接続される。このため、反応容器5は、分注された試薬と検体が攪拌装置20によって順次攪拌されて反応する。
【0029】
自動分析装置1においては、通常、試薬の量に比べて検体の量が少なく、攪拌によって液体中に生ずる一連の流れによって反応容器5に分注された少量の検体が多量の試薬に引き込まれて検体と試薬との反応が促進される。このようにして検体と試薬が反応した反応液は、キュベットホイール4が再び回転したときに分析光学系12を通過し、図4に示すように、発光部12aから出射された光束LBが透過する。このとき、反応容器5内の試薬と検体の反応液は、受光部12cで側光され、制御部15によって成分濃度等が分析される。そして、分析が終了した反応容器5は、洗浄機構13によって洗浄された後、再度検体の分析に使用される。
【0030】
このとき、自動分析装置1は、制御部15を介して入力部16から予め入力された制御信号に基づき、キュベットホイール4の停止時に駆動制御部21が接触子21bから入力端子24eに駆動信号を入力する。これにより、表面弾性波素子24は、入力される駆動信号の周波数に応じて発音部24b又は発音部24cが駆動され、表面弾性波(バルク波)を誘起する。誘起された表面弾性波(バルク波)は、音響整合層から反応容器5の側壁5b内へと伝搬し、音響インピーダンスが近い液体試料中へ縦波になって漏れ出してゆく。この結果、反応容器5内には、液体試料中の発音部24b又は発音部24cに対応する位置を起点として斜め上方と斜め下方に向かう2つの流れが生じ、分注された試薬と検体はこの2つの流れによって攪拌される。
【0031】
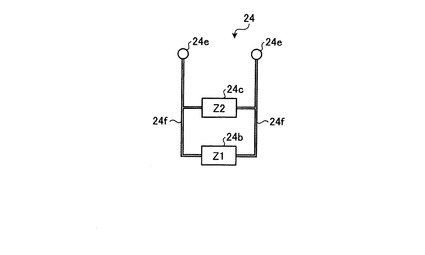
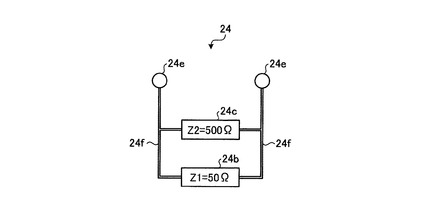
ここで、表面弾性波素子24は、発音部24b,24cのそれぞれの中心周波数における電気インピーダンスを外部電気系と同じ50Ωとなるように設計しておく。このとき、表面弾性波素子24は、発音部24b,24cの電気インピーダンスをそれぞれZ1,Z2として等価回路を示すと図7に示すようになる。このため、例えば、駆動制御部21が表面弾性波素子24に周波数fc1の駆動信号を入力すると、図8に示すように、発音部24bは電気インピーダンスがZ1=50Ω、発音部24cは電気インピーダンスがZ2=500Ωとなる。このため、表面弾性波素子24は、発音部24bが強く励振されるのに対し、発音部24cが弱く励振される。
【0032】
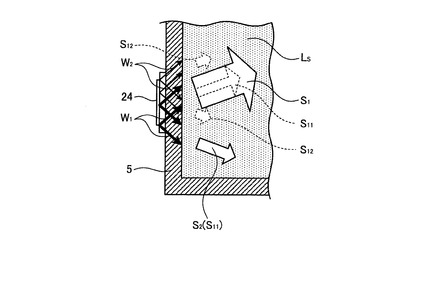
ここで、発音部24b,24cが励振されて発生した音波は、図9に示すように、それぞれ圧電基板24a、反応容器5の側壁5bを伝搬し、側壁5bと反応容器5に収容された液体試料Lsとの固−液界面において縦波にモード変換されて液体試料Ls中に放射される。この放射された縦波が液体試料中を伝搬するのに伴って音響流が生ずる。このとき、発音部24b,24cは、音響流の起点が交互に位置するように形成されており、発音部24bが励振されて発生した音波W1に起因する音響流をS11とし、発音部24cが励振されて発生した音波W2に起因する音響流をS12とする。
【0033】
すると、図示のように、発音部24bが発生した音波W1に起因する音響流S11のうち液体試料Ls中に右斜め上方へ生ずる音響流S11は、発音部24cが発生した音波W2に起因して液体試料Ls中に斜め上方と斜め下方へ生ずる2つの音響流S12に挟まれた位置に発生する。このため、2つの音響流S12は、右斜め上方へ生ずる音響流S11と一体化して断面積が大きく、流速の速い音響流S1となる。一方、発音部24bが発生した音波W1に起因して液体試料Ls中に右斜め下方へ生ずる音響流S11は、単独の流れであり、音響流S1に比べて断面積が小さく、流速が遅い流れである。このため、表面弾性波素子24を駆動周波数F=fc1で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、非対称な音響流S1と音響流S2(=S11)が生ずる。
【0034】
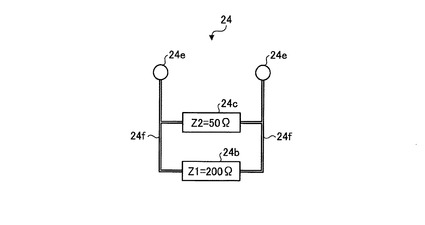
一方、例えば、駆動制御部21が表面弾性波素子24に周波数fc2の駆動信号を入力すると、図10に示すように、発音部24bは電気インピーダンスがZ1=200Ω、発音部24cは電気インピーダンスがZ2=50Ωと略逆になる。このため、表面弾性波素子24は、前記とは逆に、発音部24bが弱く励振されるのに対し、発音部24cが強く励振される。
【0035】
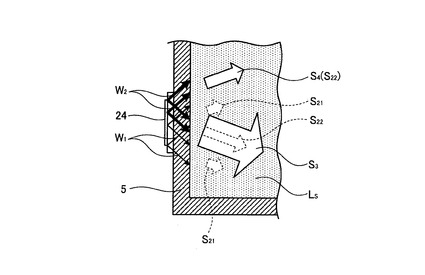
従って、発音部24b,24cは、音響流の起点が交互に位置するように形成されているので、図11に示すように、発音部24cが発生した音波W2に起因する音響流S22のうち液体試料Ls中に右斜め下方へ生ずる音響流S22は、発音部24bが発生した音波W1に起因して液体試料Ls中に右斜め上方と左斜め上方へ生ずる2つの音響流S21に挟まれた位置に発生する。このため、2つの音響流S21は、右斜め下方へ生ずる音響流S22と一体化して断面積が大きく、流速の速い音響流S3となる。一方、発音部24cが発生した音波W2に起因して液体試料Ls中に右斜め上方へ生ずる音響流S22は、単独の流れであり、音響流S3に比べて断面積が小さく、流速が遅い流れである。このため、表面弾性波素子24を駆動周波数F=fc2で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、非対称な音響流S3と音響流S4(=S22)が生ずる。
【0036】
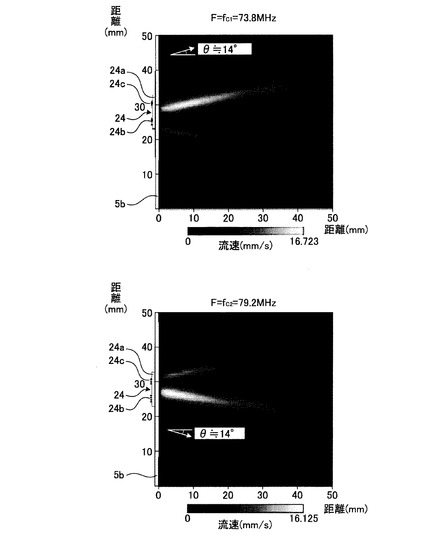
ここで、中心周波数fc1,fc2及び入力反射係数(dB)に関し、図12に示す周波数特性の発音部24b,24cを有する表面弾性波素子24を用いた攪拌装置20を使用して反応容器5に収容したイオン交換水を攪拌した。このとき、駆動周波数F=fc1で表面弾性波素子24を駆動した場合に発生した音響流の流速分布と、駆動周波数F=fc2で表面弾性波素子24を駆動した場合に発生した音響流の流速分布をそれぞれ図13に示す。
【0037】
図13は、表面弾性波素子24をそれぞれ中心周波数fc1(=78.3MHz)と中心周波数fc2(=79.2MHz)で駆動した際の、反応容器5に収容されたイオン交換水中の音響流の流速(mm/s)分布をPIVによって視覚化した図であり、縦軸及び横軸は、表面弾性波素子24を取り付けた側壁5b内面と底壁上面の交線を基準とした側壁5bに沿った上方向への距離(mm)と側壁5bの垂直方向への距離(mm)をそれぞれ示している。
【0038】
なお、図中、θは、側壁5bの垂直面に対して音響流がなす角度を示している。また、PIVは、画像処理流速測定法(Particle Image Velocimetry)であり、通常、目に見えない流れにトレーサ等のマーカを付加し、目に見えるようにする流れの可視化技術に画像処理・画像解析技術を加え、流れ場の瞬時・多点の速度情報を得る方法である。
【0039】
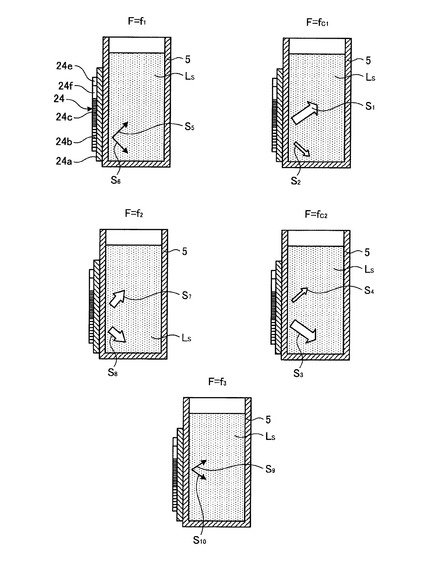
一方、表面弾性波素子24を発音部24bの中心周波数fc1よりも低い駆動周波数F=f1(<fc1)で駆動すると、発音部24bは電気インピーダンスがZ1=200Ω、発音部24cは電気インピーダンスがZ2=∞となる。このため、表面弾性波素子24は、発音部24bのみが弱く励振される。このため、表面弾性波素子24を駆動周波数F=f1で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、断面積が最小で、流速が遅い対称な音響流S5,S6が生ずる。
【0040】
また、表面弾性波素子24を発音部24bの中心周波数fc1と発音部24cの中心周波数fc2の中間の駆動周波数F=f2(fc1<f2<fc2)で駆動すると、発音部24b及び発音部24cは電気インピーダンスがZ1,Z2=100Ω、となる。このため、表面弾性波素子24は、電気インピーダンスが50Ωと200Ωの間の強さに発音部24b及び発音部24cがそれぞれ略同じ程度に励振される。このため、表面弾性波素子24を駆動周波数F=f2で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、音響流S7,S8と流速は略等しいが、断面積が僅かに大きい対称な音響流S7,S8が生ずる。
【0041】
一方、表面弾性波素子24を発音部24cの中心周波数fc2よりも高い駆動周波数F=f3(>fc2)で駆動すると、発音部24bは電気インピーダンスがZ1=∞、発音部24cは電気インピーダンスがZ2=200Ωとなる。このため、表面弾性波素子24は、発音部24cのみが弱く励振される。このため、表面弾性波素子24を駆動周波数F=f3で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、断面積が最小で、流速が遅い対称な音響流S9,S10が生ずる。
【0042】
従って、反応容器5に収容された液体試料Ls中に生ずる音響流を駆動周波数F=f1,fc1,f2,fc2,f3ごとに示すと図14のようになる。なお、外部電気系の電気インピーダンスが他の値、例えば、70Ωの場合には、発音部24b,24cの中心周波数における電気インピーダンスが70Ωとなるように設計しておけばよい。
【0043】
従って、自動分析装置1は、予め検体と試薬とを組み合わせて駆動周波数の違いによる攪拌状態を実測しながら攪拌が最良となる駆動周波数と検体及び試薬との組み合わせ、駆動周波数と液量との組み合わせ或いはこれら双方の組み合わせ等として作成して制御部15に記憶させておく。そして、制御部15は、ホストコンピュータ等から入力される分析情報に含まれる検体と試薬との組み合わせから自動的に攪拌装置20の駆動周波数を選択し、駆動制御回路23に出力する。これにより、攪拌装置20は、検体と試薬との組み合わせに最適な周波数で表面弾性波素子24を駆動するようにすることができる。
【0044】
このため、自動分析装置1は、表面弾性波素子24を駆動する駆動信号の駆動周波数を駆動制御部21によって切り替え、例えば、反応容器5が保持した液体試料の量が少ない場合には、周波数f1の駆動信号を表面弾性波素子24に入力する。すると、攪拌装置20は、表面弾性波素子24の発音部24bのみが弱く励振され、エネルギー消費を抑えつつ液体試料を効率良く攪拌することができる。
【0045】
これに対して、反応容器5が保持した液体試料の量が多い場合、周波数fc1又は周波数fc2の駆動信号を表面弾性波素子24に入力する。すると、攪拌装置20は、表面弾性波素子24の発音部24bや発音部24cが強く励振される。この結果、図9、図11及び図14に示したように、反応容器5が保持した液体試料Lsには、非対称な音響流S1,S2又は音響流S3,S4によって液体試料Ls全体を大きく旋回する攪拌流が発生して液体試料Ls全体に亘って攪拌することができる。
【0046】
このように、攪拌装置20は、複数の発音部24b,24cが周波数の異なる音波を同時に発生するように、駆動周波数Fを駆動制御部21によって周波数帯(f1〜f3)内で制御することにより、常に1以上の発音部を駆動して反応容器5が保持した液体試料Lsを液量に応じて攪拌する。このため、共振周波数帯が重複しない表面弾性波素子を使用した従来の攪拌装置に比べて発生する音響流の態様が多様化するので、攪拌効率が向上し、攪拌に要する時間を短縮することが可能になる。
【0047】
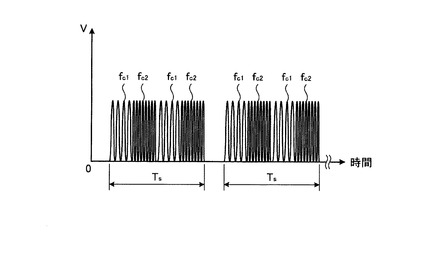
このとき、攪拌装置20は、表面弾性波素子24に入力する駆動信号の周波数を、図15に示すように、攪拌時間Ts内で周波数fc1と周波数fc2とに時分割で交互に変化させてもよい。このようにすると、反応容器5が保持した液体試料Lsに非対称な音響流S1,S2と非対称な音響流S3,S4とが交互に発生し、容器底部は言うに及ばず気液界面にも攪拌流を生じさせ、液体試料Ls全体に亘って攪拌することができる。なお、周波数fc1,fc2の切り替え時間は、必ずしも1:1である必要はなく、液体試料Lsの粘性等の性状又は液量等に応じて適宜設定、変更しても良い。
【0048】
また、表面弾性波素子24は、発音部24bと発音部24cの位置を入れ替えてもよい。このように配置すると、表面弾性波素子24は、図14に示す音響流とは異なる分布の音響流を発生させることができる。
【0049】
(変形例)
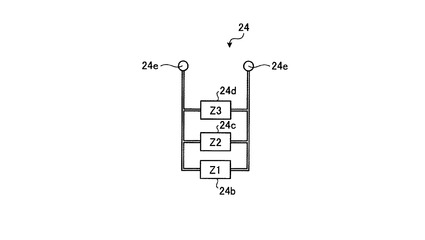
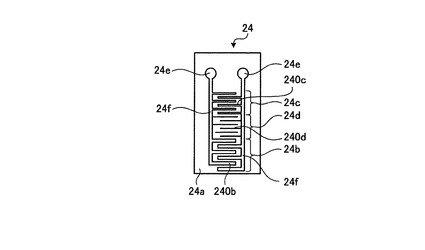
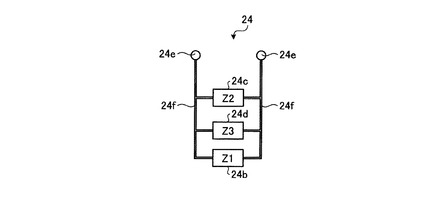
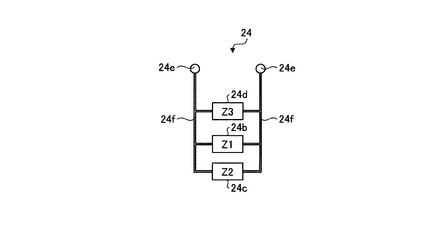
ここで、表面弾性波素子24は、図16に示すように、中心周波数fc1,fc2の発音部24b,24cに加えて中心周波数fc3(fc1<fc2<fc3)(MHz)の発音部24dを並列接続してもよい。この場合、表面弾性波素子24は、発音部24b,24c,24dのそれぞれの中心周波数における電気インピーダンスを外部電気系と同じ50Ωとなるように設計しておく。また、表面弾性波素子24は、発音部24b,24c,24dそれぞれの電気インピーダンスをそれぞれZ1,Z2,Z3として等価回路を示すと図17に示すようになる。
【0050】
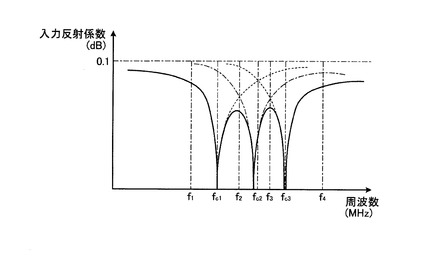
このとき、発音部24b,24c,24dは、共振周波数帯の一部が重複している。そして、発音部24b,24c,24dは、入力反射係数(dB)に関し、図18に点線で示す周波数特性を個別に有しており、実線が3つを合わせた周波数特性を示している。また、表面弾性波素子24のそれぞれ隣り合う発音部24b,24c及び発音部24c,24dは、音響流の起点が交互に位置するように形成されている。
【0051】
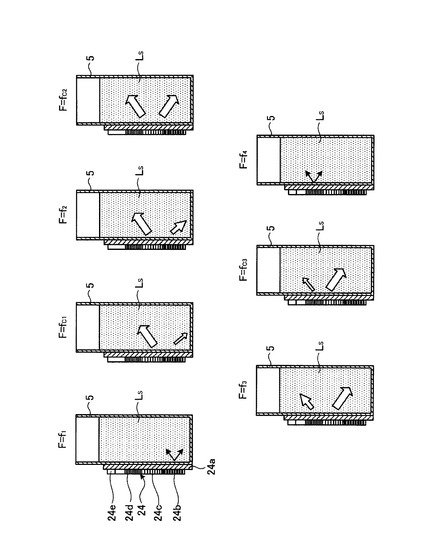
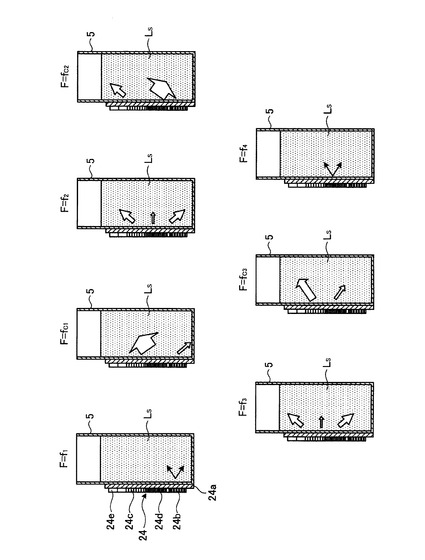
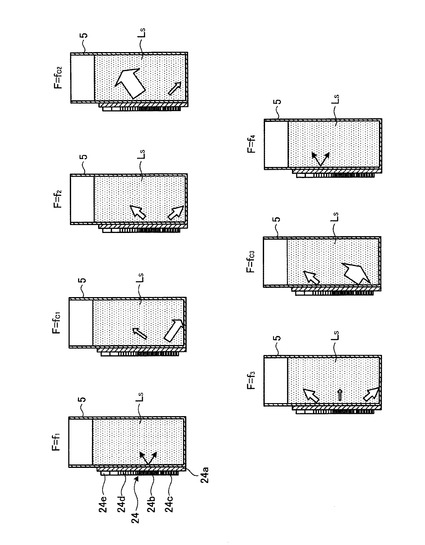
従って、表面弾性波素子24を、例えば、発音部24bの中心周波数fc1よりも低い駆動周波数F=f1(<fc1)で駆動すると、発音部24bのみが弱く励振される。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、断面積が最小で、流速が遅い対称な音響流が生ずる。
【0052】
次に、表面弾性波素子24を発音部24bの中心周波数fc1と同じ駆動周波数F=fc1で駆動すると、図9で説明したように、発音部24bが強く励振され、発音部24cが弱く励振されるのに対し、発音部24dは殆ど励振されることはない。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、断面積及び流速が増し、斜め上向きの流れが卓越した非対称の音響流が生ずる。
【0053】
次いで、表面弾性波素子24を、発音部24bの中心周波数fc1と発音部24cの中心周波数の中間の周波数である駆動周波数F=f2(fc1<f2<fc2)で駆動すると、発音部24b,24cが同じ強度で励振され、発音部24dが弱く励振される。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、斜め上向きの音響流が駆動周波数F=fc1の場合より僅かに上側にシフトして発生すると共に、斜め下向きで、断面積が増加した音響流が発生する。
【0054】
また、表面弾性波素子24を発音部24cの中心周波数fc2である駆動周波数F=fc2で駆動すると、発音部24cが強く励振されると共に、発音部24b,24dが同じ強度で発音部24cよりも弱く励振される。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には斜め上向きと斜め下向きの対称の音響流が生ずる。
【0055】
次に、表面弾性波素子24を、発音部24cの中心周波数fc2と発音部24dの中心周波数fc3の中間の周波数f3である駆動周波数F=f3(fc2<f3<fc3)で駆動すると、発音部24c,24dが同じ強度で励振されるのに対し、発音部24cの励振は発音部24c,24dよりも弱い。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、斜め下向きの流れが斜め上向きよりも卓越した音響流が生ずる。
【0056】
次いで、表面弾性波素子24を、発音部24dの中心周波数fc3である駆動周波数F=fc3で駆動すると、発音部24dが強く励振され、発音部24cが弱く励振されるのに対し、発音部24bは殆ど励振されることはない。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、斜め下向きの流れが斜め上向きよりも卓越した音響流が生ずる。このとき、斜め下向きの流れは、駆動周波数F=f3の場合より僅かに上側にシフトしている。
【0057】
そして、表面弾性波素子24を、発音部24dの中心周波数fc3を超えた駆動周波数F=f4(>fc3)で駆動すると、発音部24dのみが弱く励振される。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、発音部24d近傍から断面積が最小で、流速が遅い対称な音響流が生ずる。
【0058】
このように、図14と図19を比較すれば明らかないように、発音部24dを追加することにより、表面弾性波素子24は、液体試料Ls中に生じる音響流が複雑になる。従って、発音部24dを追加した表面弾性波素子24を使用すると、攪拌装置20は、表面弾性波素子24を駆動する周波数を適宜変更することにより、反応容器5が保持した液体試料中に種々の音響流を発生させることができるので、過剰なエネルギー消費を抑えつつ液体試料を液量に応じて効率良く攪拌することができ、攪拌に要する時間を短縮することが可能になる。
【0059】
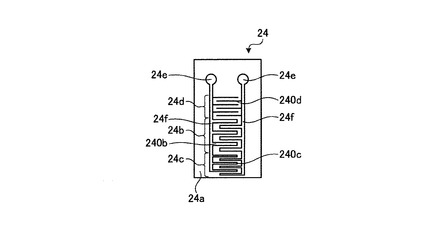
この場合、表面弾性波素子24は、図20に示すように、発音部24bと発音部24cの間に発音部24dを配置してもよい。表面弾性波素子24は、発音部24b,24c,24dそれぞれの電気インピーダンスをそれぞれZ1,Z2,Z3として等価回路を示すと図21に示すようになる。
【0060】
このとき、上記説明に基づいて、反応容器5に収容された液体試料Ls中に生ずる音響流を駆動周波数F=f1,fc1,f2,fc2,f3,fc3,f4ごとに示すと、図22にそれぞれ矢印で示すようになる。図22に示す音響流を図19に示す音響流と比較すると明らかなように、表面弾性波素子24は、発音部24b,24c,24dの配置を換えることにより、液体試料Ls中に生ずる音響流が更に変化する。このため、発音部24b,24c,24dをこのように配置した表面弾性波素子24を使用すると、攪拌装置20は、表面弾性波素子24を駆動する周波数を適宜変更することにより、過剰なエネルギー消費を抑えつつ液体試料を液量に応じて効率良く攪拌することができ、攪拌に要する時間を短縮することが可能になる。
【0061】
従って、表面弾性波素子24は、図23に示すように、発音部24cと発音部24dの間に発音部24bを配置してもよい。このとき、表面弾性波素子24の等価回路を、発音部24b,24c,24dそれぞれの電気インピーダンスをそれぞれZ1,Z2,Z3として図24に示す。
【0062】
この場合、反応容器5に収容された液体試料Ls中に生ずる音響流は、駆動周波数F=f1,fc1,f2,fc2,f3,fc3,f4ごとに、それぞれ図25に矢印で示すようになる。このため、発音部24b,24c,24dをこのように配置した表面弾性波素子24を使用すると、攪拌装置20は、駆動周波数ごとに異なる音響流が反応容器5内の液体試料Ls中に生じ、過剰なエネルギー消費を抑えつつ液体試料を液量に応じて効率良く攪拌することができ、攪拌に要する時間を短縮することが可能になる。
【0063】
ここで、発音部24b,24c,24dを有する表面弾性波素子24を使用した攪拌装置20は、表面弾性波素子24に入力する駆動信号の周波数を、攪拌時間内に時分割で駆動周波数F=fc1,fc2,fc3と交互に変化させてもよい。
【0064】
なお、発音部24b,24cを有する表面弾性波素子24を使用した攪拌装置20は、攪拌時間内に周波数f1〜f3の間で、発音部24b,24c,24dを有する表面弾性波素子24を使用した攪拌装置20は、攪拌時間内に周波数f1〜f4の間で、それぞれ駆動周波数Fをスライドさせて変化させてもよい。
【0065】
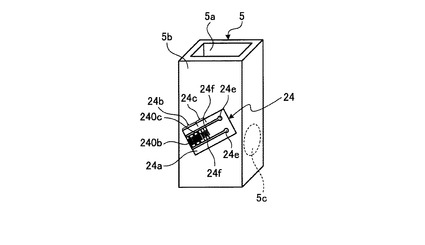
また、以上で説明した各種表面弾性波素子24は、図26に示すように、反応容器5の側壁5bに圧電基板24aの長手方向を側壁5bの幅方向に向けて取り付けてもよい。このように取り付けると、攪拌装置20は、水平方向の流れを含む駆動周波数ごとに異なる音響流を発生させることができる。従って、以上で説明した各種表面弾性波素子24は、図27に示すように、側壁5bに圧電基板24aの長手方向を側壁5bの幅方向に対して傾斜させて取り付けると、水平方向成分と鉛直方向成分の流れを含む駆動周波数ごとに異なる音響流を発生させることができる。
【0066】
更に、以上で説明した各種表面弾性波素子24は、図28に示すように、反応容器5の底面に取り付けても良い。この場合、表面弾性波素子24は、発生させる音響流の向きを考慮して圧電基板24aの長手方向を種々の方向に向けて取り付けることができる。
【0067】
また、以上で説明した各種表面弾性波素子24を取り付ける反応容器は、四角筒状の反応容器5に代えて円筒状としてもよい。
【0068】
一方、以上で説明した各種表面弾性波素子24は、無線で駆動しても良いし、バルク波の他に表面弾性波を使用して反応容器5が保持した液体試料を攪拌してもよい。
【0069】
更に、図29に示すように、表面弾性波素子24は、反応容器5の底面を兼ねてもよい。
【0070】
なお、上述の表面弾性波素子24は、単独の圧電基板24a上に複数の発音部が形成されているが、これらの発音部が単独の圧電基板24a上に形成されている必要は無く、複数の発音部が電気的に並列に接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されていればよい。また、用途に応じて、複数の発音部の形状や配置(寸法、位置)等を適宜最適化してもよい。
【図面の簡単な説明】
【0071】
【図1】攪拌装置を備えた自動分析装置の概略構成図である。
【図2】図1に示す自動分析装置を構成するキュベットホイールのA部を拡大し、一部を断面にして示す斜視図である。
【図3】反応容器を収容したキュベットホイールをホイール電極の位置で水平に切断した断面平面図である。
【図4】攪拌装置の概略構成を反応容器の斜視図と共に示すブロック図である。
【図5】一部が重複する発音部の共振周波数帯を示す図である。
【図6】図4の攪拌装置を構成する表面弾性波素子の発音部が有する中心周波数及び入力反射係数に関する周波数特性図である。
【図7】図4の攪拌装置を構成する表面弾性波素子の等価回路図である。
【図8】図7の表面弾性波素子を一方の発音部の中心周波数で駆動した場合の等価回路図である。
【図9】図8の場合に各発音部が発生する音波と、音波によって液体試料中に生ずる音響流を説明する反応容器の部分断面図である。
【図10】図7の表面弾性波素子を他方の発音部の中心周波数で駆動した場合の等価回路図である。
【図11】図10の場合に各発音部が発生する音波と、音波によって液体試料中に生ずる音響流を説明する反応容器の部分断面図である。
【図12】表面弾性波素子が有する二つの発音部が有する中心周波数及び入力反射係数の一例を示す周波数特性図である。
【図13】図12に示す周波数特性を有するそれぞれの発音部を中心周波数で駆動した場合に発生する音響流の流速分布を視覚化した図である。
【図14】図4の表面弾性波素子を駆動した場合に、反応容器に収容された液体試料中に生ずる音響流を駆動周波数ごとに示した図である。
【図15】表面弾性波素子を駆動する駆動信号の一例を示す波形図である。
【図16】攪拌装置を構成する表面弾性波素子の変形例を示す正面図である。
【図17】図16に示す表面弾性波素子の等価回路図である。
【図18】図16に示す表面弾性波素子の発音部が有する中心周波数及び入力反射係数に関する周波数特性図である。
【図19】図16に示す表面弾性波素子を駆動した場合に、反応容器に収容された液体試料中に生ずる音響流を駆動周波数ごとに示した図である。
【図20】図16に示す表面弾性波素子の変形例を示す正面図である。
【図21】図20に示す表面弾性波素子の等価回路図である。
【図22】図20に示す表面弾性波素子を駆動した場合に、反応容器に収容された液体試料中に生ずる音響流を駆動周波数ごとに示した図である。
【図23】図16に示す表面弾性波素子の他の変形例を示す正面図である。
【図24】図23に示す表面弾性波素子の等価回路図である。
【図25】図23に示す表面弾性波素子を駆動した場合に、反応容器に収容された液体試料中に生ずる音響流を駆動周波数ごとに示した図である。
【図26】表面弾性波素子を反応容器に取り付ける他の取付け方を示す斜視図である。
【図27】表面弾性波素子を反応容器に取り付ける更に他の取付け方を示す斜視図である。
【図28】表面弾性波素子を反応容器の底面に取り付ける取付け方を示す斜視図である。
【図29】表面弾性波素子を反応容器の底面と兼ねる取付け方を示す斜視図である。
【符号の説明】
【0072】
1 自動分析装置
2,3 試薬テーブル
4 キュベットホイール
5 反応容器
6,7 試薬分注機構
8 検体容器移送機構
9 フィーダ
10 ラック
11 検体分注機構
12 分析光学系
13 洗浄機構
15 制御部
16 入力部
17 表示部
20 攪拌装置
21 駆動制御部
22 信号発生器
23 駆動制御回路
24 表面弾性波素子
24a 圧電基板
24b,24c 発音部
24d 発音部
24e 入力端子
24f バスバー
240b,240c 櫛型電極(IDT)
240d 櫛型電極(IDT)
【技術分野】
【0001】
本発明は、攪拌装置及び分析装置に関するものである。
【背景技術】
【0002】
従来、容器に保持された液体を音波によって攪拌するこの種の攪拌装置は、音波発生手段が中心周波数の異なる複数の発音部を有し、駆動周波数を変更することにより音波を放射する発音部を複数の発音部の中の特定の発音部に時分割で切り替えることで攪拌を行うものがある(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2007−108062号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に開示された攪拌装置は、複数の発音部を時分割で切り替えることによって攪拌を行うことから、複数の発音部の中の一部の発音部しか攪拌に使用せず、攪拌に時間が掛かるという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、攪拌に要する時間を短縮することが可能な攪拌装置及び分析装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の攪拌装置は、容器に保持された液体を音波によって攪拌する攪拌装置であって、圧電基板上に配置された発音部を有し、複数の前記発音部が電気的に並列接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から前記容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されている音波発生手段と、前記複数の発音部の少なくとも二つの発音部が音波を同時に発生するように前記音波発生手段に入力する駆動信号の周波数を制御する駆動制御手段と、を備えることを特徴とする。
【0007】
また、本発明の攪拌装置は、上記の発明において、前記複数の発音部は、前記駆動信号の周波数に応じて各発音部の電気的入力信号に対する振動の応答強度の比率が変化することを特徴とする。
【0008】
また、本発明の攪拌装置は、上記の発明において、前記複数の発音部は、前記駆動信号の周波数に応じて音波を発生する発音部が切り替わることを特徴とする。
【0009】
また、本発明の攪拌装置は、上記の発明において、前記駆動制御手段は、前記液体の分析項目、前記液体の性状又は液量の情報に基づいて前記音波発生手段に入力する前記駆動信号の周波数を変化させることを特徴とする。
【0010】
また、本発明の攪拌装置は、上記の発明において、前記駆動制御手段は、前記駆動信号の周波数を変化させることにより前記液体中を旋回する音響流を生じさせることを特徴とする。
【0011】
また、上述した課題を解決し、目的を達成するために、本発明の分析装置は、容器に保持された検体と試薬とを含む液体試料を攪拌して反応させ、反応液を分析する分析装置であって、前記攪拌装置を備えることを特徴とする。
【発明の効果】
【0012】
本発明の攪拌装置は、圧電基板上に配置された発音部を有し、複数の発音部が電気的に並列接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されている音波発生手段と、複数の発音部の少なくとも二つの発音部が音波を同時に発生するように音波発生手段に入力する駆動信号の周波数を制御する駆動制御手段とを備え、本発明の分析装置は前記攪拌装置を備えるので、少なくとも二つの発音部から同時に発生する音波によって攪拌対象の液体中に生ずる音響流の態様が多様化し、攪拌に要する時間を短縮することができるという効果を奏する。
【発明を実施するための最良の形態】
【0013】
以下、本発明の攪拌装置及び分析装置にかかる実施の形態について、図面を参照しつつ詳細に説明する。図1は、攪拌装置を備えた自動分析装置の概略構成図である。図2は、図1に示す自動分析装置を構成するキュベットホイールのA部を拡大し、一部を断面にして示す斜視図である。図3は、反応容器を収容したキュベットホイールをホイール電極の位置で水平に切断した断面平面図である。図4は、攪拌装置の概略構成を反応容器の斜視図と共に示すブロック図である。
【0014】
自動分析装置1は、図1及び図2に示すように、試薬テーブル2,3、キュベットホイール4、検体容器移送機構8、分析光学系12、洗浄機構13、制御部15及び攪拌装置20を備えている。
【0015】
試薬テーブル2,3は、図1に示すように、それぞれ周方向に配置される複数の試薬容器2a,3aを保持し、駆動手段に回転されて試薬容器2a,3aを周方向に搬送する。
【0016】
キュベットホイール4は、図1に示すように、周方向に沿って設けた複数の仕切り板4aによって反応容器5を配置する複数のホルダ4bが周方向に形成され、図示しない駆動手段によって矢印で示す方向に回転されて反応容器5を搬送する。キュベットホイール4は、図2に示すように、各ホルダ4bの下部に対応する位置に半径方向に測光孔4cが形成され、測光孔4cの上部に設けた上下2つの挿通孔4dのそれぞれを利用してホイール電極4eが取り付けられている。ホイール電極4eは、図2及び図3に示すように、挿通孔4dから延出した一端が折り曲げられてキュベットホイール4の外面に当接し、挿通孔4dから延出した他端は同様に折り曲げられてホルダ4bの内面近傍に配置され、ホルダ4bに配置した反応容器5をばね力によって保持している。反応容器5は、近傍に設けた試薬分注機構6,7によって試薬テーブル2,3の試薬容器2a,3aから試薬が分注される。ここで、試薬分注機構6,7は、それぞれ水平面内を矢印方向に回動するアーム6a,7aに試薬を分注するプローブ6b,7bが設けられ、洗浄水によってプローブ6b,7bを洗浄する洗浄手段を有している。
【0017】
一方、反応容器5は、光学的に透明な素材から成形され、図2に示すように、上部に開口5aを有する四角筒状のキュベットであり、側壁5bに音波発生手段として表面弾性波素子24が取り付けられると共に、表面弾性波素子24の一組の入力端子24eのそれぞれと接続される電極パッド5eが取り付けられている。反応容器5は、後述する分析光学系12から出射された分析光の80%以上を透過する素材、例えば、耐熱ガラスを含むガラス,環状オレフィンやポリスチレン等の合成樹脂が使用される。反応容器5は、表面弾性波素子24を取り付けた部分に隣接する下部側の点線によって囲まれた部分が前記分析光を透過させる測光用の窓5cとして利用される。反応容器5は、使用に際して表面弾性波素子24を仕切り板4a側に向けてホルダ4bにセットされる。これにより、反応容器5は、図3に示すように、各電極パッド5eが対応するホイール電極4eと接触する。ここで、電極パッド5eは、表面弾性波素子24に一体的に設けられた構成となっている。
【0018】
検体容器移送機構8は、図1に示すように、フィーダ9に配列した複数のラック10を矢印方向に沿って1つずつ移送する移送手段であり、ラック10を歩進させながら移送する。ラック10は、検体を収容した複数の検体容器10aを保持している。ここで、検体容器10aは、検体容器移送機構8によって移送されるラック10の歩進が停止するごとに、水平方向に回動するアーム11aとプローブ11bとを有する検体分注機構11によって検体が各反応容器5へ分注される。このため、検体分注機構11は、洗浄水によってプローブ11bを洗浄する洗浄手段を有している。
【0019】
分析光学系12は、試薬と検体とが反応した反応容器5内の液体試料を分析するための分析光を出射するもので、図1に示すように、発光部12a,分光部12b及び受光部12cを有している。発光部12aから出射された分析光は、反応容器5内の液体試料を透過し、分光部12bと対向する位置に設けた受光部12cによって受光される。受光部12cは、制御部15と接続されている。
【0020】
洗浄機構13は、ノズル13aによって反応容器5内の液体試料を吸引して排出した後、ノズル13aによって洗剤や洗浄水等の洗浄液等を繰り返し注入し、吸引することにより、分析光学系12による分析が終了した反応容器5を洗浄する。
【0021】
制御部15は、自動分析装置1の各部の作動を制御すると共に、発光部12aの出射光量と受光部12cが受光した光量に基づく反応容器5内の液体試料の吸光度に基づいて検体の成分や濃度等を分析し、例えば、マイクロコンピュータ等が使用される。制御部15は、図1に示すように、入力部16及び表示部17と接続されている。入力部16は、制御部15へ検査項目等を入力する操作を行う部分であり、例えば、キーボードやマウス等が使用される。入力部16は、攪拌装置20の表面弾性波素子24に入力する駆動信号の周波数を切り替える操作等にも使用される。表示部17は、分析内容や警報等を表示するもので、ディスプレイパネル等が使用される。
【0022】
攪拌装置20は、図4に示すように、駆動制御部21と音波発生手段として表面弾性波素子24とを有している。
【0023】
駆動制御部21は、制御部15を介して入力部16から入力される液体の分析項目、液体の性状又は液量等の情報に基づいて表面弾性波素子24に入力する駆動信号の周波数を変更し、音波を発生する発音部の位置を切り替える駆動制御部である。このとき、駆動制御部21は、複数の発音部24b,24cが周波数の異なる音波を同時に発生するように、共通する共振周波数帯内で駆動信号の周波数を制御する。駆動制御部21は、キュベットホイール4の外周にキュベットホイール4と対向させて配置され(図1参照)、ハウジング21aに設けたブラシ状の接触子21b(図3参照)の他に、ハウジング21a内に信号発生器22と駆動制御回路23を備えている。接触子21bは、2つのホイール電極4eと対向するハウジング21aに設けられ、キュベットホイール4が停止すると対応するホイール電極4eと接触し、駆動制御部21と反応容器5の表面弾性波素子24とが電気的に接続される。
【0024】
信号発生器22は、駆動制御回路23から入力される制御信号に基づいて発振周波数を変更可能な発振回路を有しており、数MHz〜数百MHz程度の高周波の駆動信号を表面弾性波素子24に入力する。駆動制御回路23は、メモリとタイマを内蔵した電子制御手段(ECU)が使用され、制御部15を介して入力部16から入力される制御信号に基づいて信号発生器22の作動を制御することにより、信号発生器22が表面弾性波素子24へ出力する駆動信号の電圧や電流を制御する。駆動制御回路23は、信号発生器22の作動を制御することにより、例えば、表面弾性波素子24が発する音波の特性(周波数,強度,位相,波の特性)、波形(正弦波,三角波,矩形波,バースト波等)或いは変調(振幅変調,周波数変調)等を制御する。また、駆動制御回路23は、内蔵したタイマに従って信号発生器22が発振する高周波信号の周波数を変化させることができる。
【0025】
表面弾性波素子24は、図4に示すように、圧電基板24aの表面に櫛型電極(IDT)240b,240cからなる発音部24b,24cが間隔を置いて形成され、一組の入力端子24eとの間がバスバー24fによって並列接続されている。表面弾性波素子24は、圧電基板24aの長手方向を側壁5bの長手方向に向け、エポキシ樹脂等の音響整合層を介して反応容器5の側壁5bに取り付けられている。発音部24b,24cは、駆動制御部21から入力された駆動信号を表面弾性波(音波)に変換する発音部である。また、表面弾性波素子24は、入力端子24eと単一の駆動制御部21との間がホイール電極4eに接触する接触子21bによって接続されている。
【0026】
このとき、発音部24b,24cは、共振周波数帯の一部が重複している。即ち、発音部24b,24cは、図5に示すように、発音部24bの基本波の中心周波数がfc1、発音部24cの基本波の中心周波数がfc2(fc1<fc2)(MHz)であり、それぞれの中心周波数における電気的入力信号に対する振動の応答強度の−3dBの応答強度値となる半値幅Δfc1,Δfc2を共振周波数帯と定義し、その共振周波数帯の一部が重複している。また、発音部24b,24cは、入力反射係数(dB)に関し、図6に点線で示す周波数特性を個別に有しており、実線が2つを合わせた周波数特性を示している。更に、発音部24b,24cは、音響流の起点が交互に位置するように形成されている。これについては、後述する。
【0027】
ここで、圧電基板24aとしては、例えば、YカットZ伝搬(YZ)のニオブ酸リチウム(LiNbO3)結晶を使用することができる。また、発音部24b,24cは、入力端子24eやバスバー24fと共にフォトリソグラフィの技術によって圧電基板24a上に形成する。また、表面弾性波素子24は、液体やジェル等の音響整合層を介して反応容器5に離接自在に取り付けてもよい。なお、図4に示す表面弾性波素子24を含め、以下に説明する表面弾性波素子を示す図面は、構成の概略を示すことを主目的とするため、発音部を構成する複数の櫛型電極の線幅、ピッチ又は圧電基板24a上の位置は必ずしも正確に描いていない。
【0028】
以上のように構成される自動分析装置1は、回転するキュベットホイール4によって周方向に沿って搬送されてくる複数の反応容器5に試薬分注機構6,7が試薬容器2a,3aから試薬を順次分注する。試薬が分注された反応容器5は、検体分注機構11によってラック10に保持された複数の検体容器10aから検体が順次分注される。そして、キュベットホイール4が停止する都度、接触子21bがホイール電極4eと接触し、駆動制御部21と反応容器5の表面弾性波素子24とが電気的に接続される。このため、反応容器5は、分注された試薬と検体が攪拌装置20によって順次攪拌されて反応する。
【0029】
自動分析装置1においては、通常、試薬の量に比べて検体の量が少なく、攪拌によって液体中に生ずる一連の流れによって反応容器5に分注された少量の検体が多量の試薬に引き込まれて検体と試薬との反応が促進される。このようにして検体と試薬が反応した反応液は、キュベットホイール4が再び回転したときに分析光学系12を通過し、図4に示すように、発光部12aから出射された光束LBが透過する。このとき、反応容器5内の試薬と検体の反応液は、受光部12cで側光され、制御部15によって成分濃度等が分析される。そして、分析が終了した反応容器5は、洗浄機構13によって洗浄された後、再度検体の分析に使用される。
【0030】
このとき、自動分析装置1は、制御部15を介して入力部16から予め入力された制御信号に基づき、キュベットホイール4の停止時に駆動制御部21が接触子21bから入力端子24eに駆動信号を入力する。これにより、表面弾性波素子24は、入力される駆動信号の周波数に応じて発音部24b又は発音部24cが駆動され、表面弾性波(バルク波)を誘起する。誘起された表面弾性波(バルク波)は、音響整合層から反応容器5の側壁5b内へと伝搬し、音響インピーダンスが近い液体試料中へ縦波になって漏れ出してゆく。この結果、反応容器5内には、液体試料中の発音部24b又は発音部24cに対応する位置を起点として斜め上方と斜め下方に向かう2つの流れが生じ、分注された試薬と検体はこの2つの流れによって攪拌される。
【0031】
ここで、表面弾性波素子24は、発音部24b,24cのそれぞれの中心周波数における電気インピーダンスを外部電気系と同じ50Ωとなるように設計しておく。このとき、表面弾性波素子24は、発音部24b,24cの電気インピーダンスをそれぞれZ1,Z2として等価回路を示すと図7に示すようになる。このため、例えば、駆動制御部21が表面弾性波素子24に周波数fc1の駆動信号を入力すると、図8に示すように、発音部24bは電気インピーダンスがZ1=50Ω、発音部24cは電気インピーダンスがZ2=500Ωとなる。このため、表面弾性波素子24は、発音部24bが強く励振されるのに対し、発音部24cが弱く励振される。
【0032】
ここで、発音部24b,24cが励振されて発生した音波は、図9に示すように、それぞれ圧電基板24a、反応容器5の側壁5bを伝搬し、側壁5bと反応容器5に収容された液体試料Lsとの固−液界面において縦波にモード変換されて液体試料Ls中に放射される。この放射された縦波が液体試料中を伝搬するのに伴って音響流が生ずる。このとき、発音部24b,24cは、音響流の起点が交互に位置するように形成されており、発音部24bが励振されて発生した音波W1に起因する音響流をS11とし、発音部24cが励振されて発生した音波W2に起因する音響流をS12とする。
【0033】
すると、図示のように、発音部24bが発生した音波W1に起因する音響流S11のうち液体試料Ls中に右斜め上方へ生ずる音響流S11は、発音部24cが発生した音波W2に起因して液体試料Ls中に斜め上方と斜め下方へ生ずる2つの音響流S12に挟まれた位置に発生する。このため、2つの音響流S12は、右斜め上方へ生ずる音響流S11と一体化して断面積が大きく、流速の速い音響流S1となる。一方、発音部24bが発生した音波W1に起因して液体試料Ls中に右斜め下方へ生ずる音響流S11は、単独の流れであり、音響流S1に比べて断面積が小さく、流速が遅い流れである。このため、表面弾性波素子24を駆動周波数F=fc1で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、非対称な音響流S1と音響流S2(=S11)が生ずる。
【0034】
一方、例えば、駆動制御部21が表面弾性波素子24に周波数fc2の駆動信号を入力すると、図10に示すように、発音部24bは電気インピーダンスがZ1=200Ω、発音部24cは電気インピーダンスがZ2=50Ωと略逆になる。このため、表面弾性波素子24は、前記とは逆に、発音部24bが弱く励振されるのに対し、発音部24cが強く励振される。
【0035】
従って、発音部24b,24cは、音響流の起点が交互に位置するように形成されているので、図11に示すように、発音部24cが発生した音波W2に起因する音響流S22のうち液体試料Ls中に右斜め下方へ生ずる音響流S22は、発音部24bが発生した音波W1に起因して液体試料Ls中に右斜め上方と左斜め上方へ生ずる2つの音響流S21に挟まれた位置に発生する。このため、2つの音響流S21は、右斜め下方へ生ずる音響流S22と一体化して断面積が大きく、流速の速い音響流S3となる。一方、発音部24cが発生した音波W2に起因して液体試料Ls中に右斜め上方へ生ずる音響流S22は、単独の流れであり、音響流S3に比べて断面積が小さく、流速が遅い流れである。このため、表面弾性波素子24を駆動周波数F=fc2で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、非対称な音響流S3と音響流S4(=S22)が生ずる。
【0036】
ここで、中心周波数fc1,fc2及び入力反射係数(dB)に関し、図12に示す周波数特性の発音部24b,24cを有する表面弾性波素子24を用いた攪拌装置20を使用して反応容器5に収容したイオン交換水を攪拌した。このとき、駆動周波数F=fc1で表面弾性波素子24を駆動した場合に発生した音響流の流速分布と、駆動周波数F=fc2で表面弾性波素子24を駆動した場合に発生した音響流の流速分布をそれぞれ図13に示す。
【0037】
図13は、表面弾性波素子24をそれぞれ中心周波数fc1(=78.3MHz)と中心周波数fc2(=79.2MHz)で駆動した際の、反応容器5に収容されたイオン交換水中の音響流の流速(mm/s)分布をPIVによって視覚化した図であり、縦軸及び横軸は、表面弾性波素子24を取り付けた側壁5b内面と底壁上面の交線を基準とした側壁5bに沿った上方向への距離(mm)と側壁5bの垂直方向への距離(mm)をそれぞれ示している。
【0038】
なお、図中、θは、側壁5bの垂直面に対して音響流がなす角度を示している。また、PIVは、画像処理流速測定法(Particle Image Velocimetry)であり、通常、目に見えない流れにトレーサ等のマーカを付加し、目に見えるようにする流れの可視化技術に画像処理・画像解析技術を加え、流れ場の瞬時・多点の速度情報を得る方法である。
【0039】
一方、表面弾性波素子24を発音部24bの中心周波数fc1よりも低い駆動周波数F=f1(<fc1)で駆動すると、発音部24bは電気インピーダンスがZ1=200Ω、発音部24cは電気インピーダンスがZ2=∞となる。このため、表面弾性波素子24は、発音部24bのみが弱く励振される。このため、表面弾性波素子24を駆動周波数F=f1で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、断面積が最小で、流速が遅い対称な音響流S5,S6が生ずる。
【0040】
また、表面弾性波素子24を発音部24bの中心周波数fc1と発音部24cの中心周波数fc2の中間の駆動周波数F=f2(fc1<f2<fc2)で駆動すると、発音部24b及び発音部24cは電気インピーダンスがZ1,Z2=100Ω、となる。このため、表面弾性波素子24は、電気インピーダンスが50Ωと200Ωの間の強さに発音部24b及び発音部24cがそれぞれ略同じ程度に励振される。このため、表面弾性波素子24を駆動周波数F=f2で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、音響流S7,S8と流速は略等しいが、断面積が僅かに大きい対称な音響流S7,S8が生ずる。
【0041】
一方、表面弾性波素子24を発音部24cの中心周波数fc2よりも高い駆動周波数F=f3(>fc2)で駆動すると、発音部24bは電気インピーダンスがZ1=∞、発音部24cは電気インピーダンスがZ2=200Ωとなる。このため、表面弾性波素子24は、発音部24cのみが弱く励振される。このため、表面弾性波素子24を駆動周波数F=f3で駆動した場合、巨視的に見ると、反応容器5に収容された液体試料Ls中には、断面積が最小で、流速が遅い対称な音響流S9,S10が生ずる。
【0042】
従って、反応容器5に収容された液体試料Ls中に生ずる音響流を駆動周波数F=f1,fc1,f2,fc2,f3ごとに示すと図14のようになる。なお、外部電気系の電気インピーダンスが他の値、例えば、70Ωの場合には、発音部24b,24cの中心周波数における電気インピーダンスが70Ωとなるように設計しておけばよい。
【0043】
従って、自動分析装置1は、予め検体と試薬とを組み合わせて駆動周波数の違いによる攪拌状態を実測しながら攪拌が最良となる駆動周波数と検体及び試薬との組み合わせ、駆動周波数と液量との組み合わせ或いはこれら双方の組み合わせ等として作成して制御部15に記憶させておく。そして、制御部15は、ホストコンピュータ等から入力される分析情報に含まれる検体と試薬との組み合わせから自動的に攪拌装置20の駆動周波数を選択し、駆動制御回路23に出力する。これにより、攪拌装置20は、検体と試薬との組み合わせに最適な周波数で表面弾性波素子24を駆動するようにすることができる。
【0044】
このため、自動分析装置1は、表面弾性波素子24を駆動する駆動信号の駆動周波数を駆動制御部21によって切り替え、例えば、反応容器5が保持した液体試料の量が少ない場合には、周波数f1の駆動信号を表面弾性波素子24に入力する。すると、攪拌装置20は、表面弾性波素子24の発音部24bのみが弱く励振され、エネルギー消費を抑えつつ液体試料を効率良く攪拌することができる。
【0045】
これに対して、反応容器5が保持した液体試料の量が多い場合、周波数fc1又は周波数fc2の駆動信号を表面弾性波素子24に入力する。すると、攪拌装置20は、表面弾性波素子24の発音部24bや発音部24cが強く励振される。この結果、図9、図11及び図14に示したように、反応容器5が保持した液体試料Lsには、非対称な音響流S1,S2又は音響流S3,S4によって液体試料Ls全体を大きく旋回する攪拌流が発生して液体試料Ls全体に亘って攪拌することができる。
【0046】
このように、攪拌装置20は、複数の発音部24b,24cが周波数の異なる音波を同時に発生するように、駆動周波数Fを駆動制御部21によって周波数帯(f1〜f3)内で制御することにより、常に1以上の発音部を駆動して反応容器5が保持した液体試料Lsを液量に応じて攪拌する。このため、共振周波数帯が重複しない表面弾性波素子を使用した従来の攪拌装置に比べて発生する音響流の態様が多様化するので、攪拌効率が向上し、攪拌に要する時間を短縮することが可能になる。
【0047】
このとき、攪拌装置20は、表面弾性波素子24に入力する駆動信号の周波数を、図15に示すように、攪拌時間Ts内で周波数fc1と周波数fc2とに時分割で交互に変化させてもよい。このようにすると、反応容器5が保持した液体試料Lsに非対称な音響流S1,S2と非対称な音響流S3,S4とが交互に発生し、容器底部は言うに及ばず気液界面にも攪拌流を生じさせ、液体試料Ls全体に亘って攪拌することができる。なお、周波数fc1,fc2の切り替え時間は、必ずしも1:1である必要はなく、液体試料Lsの粘性等の性状又は液量等に応じて適宜設定、変更しても良い。
【0048】
また、表面弾性波素子24は、発音部24bと発音部24cの位置を入れ替えてもよい。このように配置すると、表面弾性波素子24は、図14に示す音響流とは異なる分布の音響流を発生させることができる。
【0049】
(変形例)
ここで、表面弾性波素子24は、図16に示すように、中心周波数fc1,fc2の発音部24b,24cに加えて中心周波数fc3(fc1<fc2<fc3)(MHz)の発音部24dを並列接続してもよい。この場合、表面弾性波素子24は、発音部24b,24c,24dのそれぞれの中心周波数における電気インピーダンスを外部電気系と同じ50Ωとなるように設計しておく。また、表面弾性波素子24は、発音部24b,24c,24dそれぞれの電気インピーダンスをそれぞれZ1,Z2,Z3として等価回路を示すと図17に示すようになる。
【0050】
このとき、発音部24b,24c,24dは、共振周波数帯の一部が重複している。そして、発音部24b,24c,24dは、入力反射係数(dB)に関し、図18に点線で示す周波数特性を個別に有しており、実線が3つを合わせた周波数特性を示している。また、表面弾性波素子24のそれぞれ隣り合う発音部24b,24c及び発音部24c,24dは、音響流の起点が交互に位置するように形成されている。
【0051】
従って、表面弾性波素子24を、例えば、発音部24bの中心周波数fc1よりも低い駆動周波数F=f1(<fc1)で駆動すると、発音部24bのみが弱く励振される。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、断面積が最小で、流速が遅い対称な音響流が生ずる。
【0052】
次に、表面弾性波素子24を発音部24bの中心周波数fc1と同じ駆動周波数F=fc1で駆動すると、図9で説明したように、発音部24bが強く励振され、発音部24cが弱く励振されるのに対し、発音部24dは殆ど励振されることはない。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、断面積及び流速が増し、斜め上向きの流れが卓越した非対称の音響流が生ずる。
【0053】
次いで、表面弾性波素子24を、発音部24bの中心周波数fc1と発音部24cの中心周波数の中間の周波数である駆動周波数F=f2(fc1<f2<fc2)で駆動すると、発音部24b,24cが同じ強度で励振され、発音部24dが弱く励振される。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、斜め上向きの音響流が駆動周波数F=fc1の場合より僅かに上側にシフトして発生すると共に、斜め下向きで、断面積が増加した音響流が発生する。
【0054】
また、表面弾性波素子24を発音部24cの中心周波数fc2である駆動周波数F=fc2で駆動すると、発音部24cが強く励振されると共に、発音部24b,24dが同じ強度で発音部24cよりも弱く励振される。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には斜め上向きと斜め下向きの対称の音響流が生ずる。
【0055】
次に、表面弾性波素子24を、発音部24cの中心周波数fc2と発音部24dの中心周波数fc3の中間の周波数f3である駆動周波数F=f3(fc2<f3<fc3)で駆動すると、発音部24c,24dが同じ強度で励振されるのに対し、発音部24cの励振は発音部24c,24dよりも弱い。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、斜め下向きの流れが斜め上向きよりも卓越した音響流が生ずる。
【0056】
次いで、表面弾性波素子24を、発音部24dの中心周波数fc3である駆動周波数F=fc3で駆動すると、発音部24dが強く励振され、発音部24cが弱く励振されるのに対し、発音部24bは殆ど励振されることはない。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、斜め下向きの流れが斜め上向きよりも卓越した音響流が生ずる。このとき、斜め下向きの流れは、駆動周波数F=f3の場合より僅かに上側にシフトしている。
【0057】
そして、表面弾性波素子24を、発音部24dの中心周波数fc3を超えた駆動周波数F=f4(>fc3)で駆動すると、発音部24dのみが弱く励振される。このため、巨視的に見ると、図19に矢印で示すように、反応容器5に収容された液体試料Ls中には、発音部24d近傍から断面積が最小で、流速が遅い対称な音響流が生ずる。
【0058】
このように、図14と図19を比較すれば明らかないように、発音部24dを追加することにより、表面弾性波素子24は、液体試料Ls中に生じる音響流が複雑になる。従って、発音部24dを追加した表面弾性波素子24を使用すると、攪拌装置20は、表面弾性波素子24を駆動する周波数を適宜変更することにより、反応容器5が保持した液体試料中に種々の音響流を発生させることができるので、過剰なエネルギー消費を抑えつつ液体試料を液量に応じて効率良く攪拌することができ、攪拌に要する時間を短縮することが可能になる。
【0059】
この場合、表面弾性波素子24は、図20に示すように、発音部24bと発音部24cの間に発音部24dを配置してもよい。表面弾性波素子24は、発音部24b,24c,24dそれぞれの電気インピーダンスをそれぞれZ1,Z2,Z3として等価回路を示すと図21に示すようになる。
【0060】
このとき、上記説明に基づいて、反応容器5に収容された液体試料Ls中に生ずる音響流を駆動周波数F=f1,fc1,f2,fc2,f3,fc3,f4ごとに示すと、図22にそれぞれ矢印で示すようになる。図22に示す音響流を図19に示す音響流と比較すると明らかなように、表面弾性波素子24は、発音部24b,24c,24dの配置を換えることにより、液体試料Ls中に生ずる音響流が更に変化する。このため、発音部24b,24c,24dをこのように配置した表面弾性波素子24を使用すると、攪拌装置20は、表面弾性波素子24を駆動する周波数を適宜変更することにより、過剰なエネルギー消費を抑えつつ液体試料を液量に応じて効率良く攪拌することができ、攪拌に要する時間を短縮することが可能になる。
【0061】
従って、表面弾性波素子24は、図23に示すように、発音部24cと発音部24dの間に発音部24bを配置してもよい。このとき、表面弾性波素子24の等価回路を、発音部24b,24c,24dそれぞれの電気インピーダンスをそれぞれZ1,Z2,Z3として図24に示す。
【0062】
この場合、反応容器5に収容された液体試料Ls中に生ずる音響流は、駆動周波数F=f1,fc1,f2,fc2,f3,fc3,f4ごとに、それぞれ図25に矢印で示すようになる。このため、発音部24b,24c,24dをこのように配置した表面弾性波素子24を使用すると、攪拌装置20は、駆動周波数ごとに異なる音響流が反応容器5内の液体試料Ls中に生じ、過剰なエネルギー消費を抑えつつ液体試料を液量に応じて効率良く攪拌することができ、攪拌に要する時間を短縮することが可能になる。
【0063】
ここで、発音部24b,24c,24dを有する表面弾性波素子24を使用した攪拌装置20は、表面弾性波素子24に入力する駆動信号の周波数を、攪拌時間内に時分割で駆動周波数F=fc1,fc2,fc3と交互に変化させてもよい。
【0064】
なお、発音部24b,24cを有する表面弾性波素子24を使用した攪拌装置20は、攪拌時間内に周波数f1〜f3の間で、発音部24b,24c,24dを有する表面弾性波素子24を使用した攪拌装置20は、攪拌時間内に周波数f1〜f4の間で、それぞれ駆動周波数Fをスライドさせて変化させてもよい。
【0065】
また、以上で説明した各種表面弾性波素子24は、図26に示すように、反応容器5の側壁5bに圧電基板24aの長手方向を側壁5bの幅方向に向けて取り付けてもよい。このように取り付けると、攪拌装置20は、水平方向の流れを含む駆動周波数ごとに異なる音響流を発生させることができる。従って、以上で説明した各種表面弾性波素子24は、図27に示すように、側壁5bに圧電基板24aの長手方向を側壁5bの幅方向に対して傾斜させて取り付けると、水平方向成分と鉛直方向成分の流れを含む駆動周波数ごとに異なる音響流を発生させることができる。
【0066】
更に、以上で説明した各種表面弾性波素子24は、図28に示すように、反応容器5の底面に取り付けても良い。この場合、表面弾性波素子24は、発生させる音響流の向きを考慮して圧電基板24aの長手方向を種々の方向に向けて取り付けることができる。
【0067】
また、以上で説明した各種表面弾性波素子24を取り付ける反応容器は、四角筒状の反応容器5に代えて円筒状としてもよい。
【0068】
一方、以上で説明した各種表面弾性波素子24は、無線で駆動しても良いし、バルク波の他に表面弾性波を使用して反応容器5が保持した液体試料を攪拌してもよい。
【0069】
更に、図29に示すように、表面弾性波素子24は、反応容器5の底面を兼ねてもよい。
【0070】
なお、上述の表面弾性波素子24は、単独の圧電基板24a上に複数の発音部が形成されているが、これらの発音部が単独の圧電基板24a上に形成されている必要は無く、複数の発音部が電気的に並列に接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されていればよい。また、用途に応じて、複数の発音部の形状や配置(寸法、位置)等を適宜最適化してもよい。
【図面の簡単な説明】
【0071】
【図1】攪拌装置を備えた自動分析装置の概略構成図である。
【図2】図1に示す自動分析装置を構成するキュベットホイールのA部を拡大し、一部を断面にして示す斜視図である。
【図3】反応容器を収容したキュベットホイールをホイール電極の位置で水平に切断した断面平面図である。
【図4】攪拌装置の概略構成を反応容器の斜視図と共に示すブロック図である。
【図5】一部が重複する発音部の共振周波数帯を示す図である。
【図6】図4の攪拌装置を構成する表面弾性波素子の発音部が有する中心周波数及び入力反射係数に関する周波数特性図である。
【図7】図4の攪拌装置を構成する表面弾性波素子の等価回路図である。
【図8】図7の表面弾性波素子を一方の発音部の中心周波数で駆動した場合の等価回路図である。
【図9】図8の場合に各発音部が発生する音波と、音波によって液体試料中に生ずる音響流を説明する反応容器の部分断面図である。
【図10】図7の表面弾性波素子を他方の発音部の中心周波数で駆動した場合の等価回路図である。
【図11】図10の場合に各発音部が発生する音波と、音波によって液体試料中に生ずる音響流を説明する反応容器の部分断面図である。
【図12】表面弾性波素子が有する二つの発音部が有する中心周波数及び入力反射係数の一例を示す周波数特性図である。
【図13】図12に示す周波数特性を有するそれぞれの発音部を中心周波数で駆動した場合に発生する音響流の流速分布を視覚化した図である。
【図14】図4の表面弾性波素子を駆動した場合に、反応容器に収容された液体試料中に生ずる音響流を駆動周波数ごとに示した図である。
【図15】表面弾性波素子を駆動する駆動信号の一例を示す波形図である。
【図16】攪拌装置を構成する表面弾性波素子の変形例を示す正面図である。
【図17】図16に示す表面弾性波素子の等価回路図である。
【図18】図16に示す表面弾性波素子の発音部が有する中心周波数及び入力反射係数に関する周波数特性図である。
【図19】図16に示す表面弾性波素子を駆動した場合に、反応容器に収容された液体試料中に生ずる音響流を駆動周波数ごとに示した図である。
【図20】図16に示す表面弾性波素子の変形例を示す正面図である。
【図21】図20に示す表面弾性波素子の等価回路図である。
【図22】図20に示す表面弾性波素子を駆動した場合に、反応容器に収容された液体試料中に生ずる音響流を駆動周波数ごとに示した図である。
【図23】図16に示す表面弾性波素子の他の変形例を示す正面図である。
【図24】図23に示す表面弾性波素子の等価回路図である。
【図25】図23に示す表面弾性波素子を駆動した場合に、反応容器に収容された液体試料中に生ずる音響流を駆動周波数ごとに示した図である。
【図26】表面弾性波素子を反応容器に取り付ける他の取付け方を示す斜視図である。
【図27】表面弾性波素子を反応容器に取り付ける更に他の取付け方を示す斜視図である。
【図28】表面弾性波素子を反応容器の底面に取り付ける取付け方を示す斜視図である。
【図29】表面弾性波素子を反応容器の底面と兼ねる取付け方を示す斜視図である。
【符号の説明】
【0072】
1 自動分析装置
2,3 試薬テーブル
4 キュベットホイール
5 反応容器
6,7 試薬分注機構
8 検体容器移送機構
9 フィーダ
10 ラック
11 検体分注機構
12 分析光学系
13 洗浄機構
15 制御部
16 入力部
17 表示部
20 攪拌装置
21 駆動制御部
22 信号発生器
23 駆動制御回路
24 表面弾性波素子
24a 圧電基板
24b,24c 発音部
24d 発音部
24e 入力端子
24f バスバー
240b,240c 櫛型電極(IDT)
240d 櫛型電極(IDT)
【特許請求の範囲】
【請求項1】
容器に保持された液体を音波によって攪拌する攪拌装置であって、
圧電基板上に配置された発音部を有し、複数の前記発音部が電気的に並列接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から前記容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されている音波発生手段と、
前記複数の発音部の少なくとも二つの発音部が音波を同時に発生するように前記音波発生手段に入力する駆動信号の周波数を制御する駆動制御手段と、
を備えることを特徴とする攪拌装置。
【請求項2】
前記複数の発音部は、前記駆動信号の周波数に応じて各発音部の電気的入力信号に対する振動の応答強度の比率が変化することを特徴とする請求項1に記載の攪拌装置。
【請求項3】
前記複数の発音部は、前記駆動信号の周波数に応じて音波を発生する発音部が切り替わることを特徴とする請求項1に記載の攪拌装置。
【請求項4】
前記駆動制御手段は、前記液体の分析項目、前記液体の性状又は液量の情報に基づいて前記音波発生手段に入力する前記駆動信号の周波数を変化させることを特徴とする請求項1に記載の攪拌装置。
【請求項5】
前記駆動制御手段は、前記駆動信号の周波数を変化させることにより前記液体中を旋回する音響流を生じさせることを特徴とする請求項1に記載の攪拌装置。
【請求項6】
容器に保持された検体と試薬とを含む液体試料を攪拌して反応させ、反応液を分析する分析装置であって、請求項1〜5のいずれか一つに記載の攪拌装置を備えることを特徴とする分析装置。
【請求項1】
容器に保持された液体を音波によって攪拌する攪拌装置であって、
圧電基板上に配置された発音部を有し、複数の前記発音部が電気的に並列接続され、かつそれぞれの基本波の中心周波数が互いに異なると共に、それぞれの共振周波数帯の一部が重複し、異なる発音部から前記容器内に放射された音波により生ずる音響流の起点が交互に位置するように形成されている音波発生手段と、
前記複数の発音部の少なくとも二つの発音部が音波を同時に発生するように前記音波発生手段に入力する駆動信号の周波数を制御する駆動制御手段と、
を備えることを特徴とする攪拌装置。
【請求項2】
前記複数の発音部は、前記駆動信号の周波数に応じて各発音部の電気的入力信号に対する振動の応答強度の比率が変化することを特徴とする請求項1に記載の攪拌装置。
【請求項3】
前記複数の発音部は、前記駆動信号の周波数に応じて音波を発生する発音部が切り替わることを特徴とする請求項1に記載の攪拌装置。
【請求項4】
前記駆動制御手段は、前記液体の分析項目、前記液体の性状又は液量の情報に基づいて前記音波発生手段に入力する前記駆動信号の周波数を変化させることを特徴とする請求項1に記載の攪拌装置。
【請求項5】
前記駆動制御手段は、前記駆動信号の周波数を変化させることにより前記液体中を旋回する音響流を生じさせることを特徴とする請求項1に記載の攪拌装置。
【請求項6】
容器に保持された検体と試薬とを含む液体試料を攪拌して反応させ、反応液を分析する分析装置であって、請求項1〜5のいずれか一つに記載の攪拌装置を備えることを特徴とする分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公開番号】特開2010−91306(P2010−91306A)
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願番号】特願2008−259084(P2008−259084)
【出願日】平成20年10月3日(2008.10.3)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願日】平成20年10月3日(2008.10.3)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]