
支持ブラダを有する圧縮服装置
【課題】治療ブラダと、支持ブラダとを含む圧縮服装置を提供すること。
【解決手段】膨張可能治療ブラダと、膨張可能支持ブラダとを含む圧縮服であって、圧縮服は、治療ブラダが身体部分の標的圧縮領域を覆うように身体部分に選択可能に位置決め可能である、圧縮服と、ブラダ内のガス圧力を増加させることによってブラダを選択可能に加圧するための、治療ブラダおよび支持ブラダに動作可能に接続可能な加圧器であって、加圧器は、センサであって、身体部分の配向と、身体部分の動作と、身体部分の加速度と、標的圧縮領域に対する該服の動作と、治療ブラダ内の圧力と、支持ブラダ内の圧力と、治療ブラダ内のガス体積と、支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの物理的特性を表す信号を感知し、生成する、センサと、センサに動作可能に接続されるコントローラとを含む、加圧器とを備えている、圧縮服装置。
【解決手段】膨張可能治療ブラダと、膨張可能支持ブラダとを含む圧縮服であって、圧縮服は、治療ブラダが身体部分の標的圧縮領域を覆うように身体部分に選択可能に位置決め可能である、圧縮服と、ブラダ内のガス圧力を増加させることによってブラダを選択可能に加圧するための、治療ブラダおよび支持ブラダに動作可能に接続可能な加圧器であって、加圧器は、センサであって、身体部分の配向と、身体部分の動作と、身体部分の加速度と、標的圧縮領域に対する該服の動作と、治療ブラダ内の圧力と、支持ブラダ内の圧力と、治療ブラダ内のガス体積と、支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの物理的特性を表す信号を感知し、生成する、センサと、センサに動作可能に接続されるコントローラとを含む、加圧器とを備えている、圧縮服装置。
【発明の詳細な説明】
【技術分野】
【0001】
(発明の分野)
本発明は、概して圧縮服装置に関し、より詳細には治療ブラダと、支持ブラダとを含む圧縮服装置に関する。
【背景技術】
【0002】
(発明の背景)
概して動けない患者および類似の人たちの主な関心は、深部静脈血栓(DVT)および末梢水腫など、血液にクロットを形成する医学状態である。そのような患者および人たちは、外科手術、麻酔、長い期間のベッド療養などを受ける人たちを含む。これらの凝血状態は、概して下肢および/または骨盤の深部静脈に起る。腸骨、大腿骨、膝窩および脛骨などのこれらの静脈は、脱酸素血液を心臓に戻す。例えば、これらの静脈における血液循環が病気、傷害または無活動のために妨げられた場合、血液が蓄積するかまたは鬱血する傾向がある。血液の静止した鬱血は凝血の形成を引き起こし得、凝血の形成は心臓血管の循環を妨げ得る。最も深刻には、凝血のフラグメントは、壊れて離れ、移動し得る。肺動脈塞栓は、主肺動脈をブロックする可能性のあるフラグメントから形成し得、生命にかかわり得る。本発明はまた、リンパ水腫などの他の状態の治療にも適用され得る。
【0003】
従来の脈管圧縮システムは、圧縮服を周期的に膨張させるコントローラに流体流れ可能に接続される圧縮服を含む。圧縮服の周期的膨張は、血液循環を改善し、DVTの可能性を減少させる。導管のシステムは、圧縮服をコントローラに接続する。より新しい脈管圧縮服は、ポータブルコントローラを有し、ポータブルコントローラは、第一に圧縮服を取り外す必要がなくまたはコントローラと圧縮服との接続を切る必要がなく、患者が自由に辺りを動き得るように、はるかにより小さくそして圧縮服に取り付けさえ可能である。これらの新しい圧縮服は、患者が静止しているかまたは歩行している場合に着用され得、使用の便利さのために患者のコンプライアンスを高め得る。
【0004】
断続的に圧縮治療を身体部分(例えば、脚などの四肢)に適用する能動的圧縮服は、深部静脈血栓(DVT)予防と、水腫防止と、傷治療の促進とを含む多くの用途を有する。そのような圧縮服の性能は、服の初期の適合または密着を保持する服の能力および身体部分の周りに膨張可能ブラダを最初の位置に保持する膨張可能プラダの能力に影響されやすい。この保持することは、歩き、座り、立ち上り、および転がりなどの歩行中および歩行後に圧縮服が用いられる場合、非常に困難になり得る。服は、身体部分の回りで緩むかまたは身体部分を滑り落ち、膨張可能ブラダと対応する体部分との整列不良を引き起こしがちであり、結果として、効果のない圧縮治療および/または不快をもたらし得る。本発明は、適用される圧縮治療を改善するために、身体部分に服の所望の適合を維持することおよび身体部分の標的圧縮領域に対して適切な位置に膨張可能ブラダを維持することに関する。
【発明の概要】
【課題を解決するための手段】
【0005】
(発明の概要)
本発明の1つの局面は、膨張可能治療ブラダと、膨張可能支持ブラダとを有する圧縮服を含む圧縮服装置に関する。圧縮服は、治療ブラダが身体部分の標的圧縮領域を覆うように身体部分に選択可能に位置決め可能である。圧縮服装置は、ブラダ内のガス圧力を増加させることによってブラダを選択可能に加圧するための、治療ブラダおよび支持ブラダに動作可能に接続可能な加圧器をさらに含む。加圧器は、身体部分の配向と、身体部分の動作と、身体部分の加速度と、標的圧縮領域に対する服の動作と、治療ブラダ内の圧力と、支持ブラダ内の圧力と、治療ブラダ内のガス体積と、支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの物理的特性を表す信号を感知および生成するセンサを含む。加圧器は、センサに動作可能に接続されるコントローラをさらに含む。コントローラは、治療ブラダに加圧ガスを周期的に向けることにより、身体部分の標的圧縮領域に断続的な圧縮治療を提供し、物理的特性を表す、センサから受信された信号に応答して支持ブラダに加圧ガスを向けることにより、標的圧縮領域に対して適切な位置に治療ブラダを維持する。
【0006】
本発明の別の局面は、人間の身体部分の標的圧縮領域に圧縮治療を提供する方法に関する。方法は、膨張可能治療ブラダと、膨張可能支持ブラダとを有する圧縮服によって身体部分の標的圧縮領域を覆うこと含む。方法は、身体部分の配向と、身体部分の動作と、身体部分の加速度と、標的圧縮領域に対する服の動作と、治療ブラダ内の圧力と、支持ブラダ内の圧力と、治療ブラダ内のガス体積と、支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの特性を感知することをさらに含む。支持ブラダは、感知された特性に応答して加圧されることにより、標的圧縮領域に対して適切な位置に治療ブラダを維持する。治療ブラダは、周期的に加圧されることにより、身体部分の標的圧縮領域に断続的な圧縮治療を提供する。
【0007】
本発明の別の局面は、身体部分の標的圧縮領域を覆うようなサイズおよび形状である膨張可能治療ブラダを含む圧縮服装置に関する。圧縮服は、標的圧縮領域に対して適切な位置に治療ブラダを保持するために、治療ブラダに接続される膨張可能支持ブラダをさらに含む。加圧器は、治療ブラダおよび支持ブラダに動作可能に接続される。加圧器はまた、支持ブラダを加圧することにより、適切な位置に治療ブラダを保持し、治療ブラダを周期的に加圧することにより、身体部分の標的圧縮領域に断続的な圧縮治療を提供する。
【0008】
例えば、本発明は以下の項目を提供する。
(項目1)
圧縮服装置であって、
膨張可能治療ブラダと、膨張可能支持ブラダとを含む圧縮服であって、該圧縮服は、該治療ブラダが身体部分の標的圧縮領域を覆うように該身体部分に選択可能に位置決め可能である、圧縮服と、
該ブラダ内のガス圧力を増加させることによって該ブラダを選択可能に加圧するための、該治療ブラダおよび該支持ブラダに動作可能に接続可能な加圧器であって、該加圧器は、
センサであって、該身体部分の配向と、該身体部分の動作と、該身体部分の加速度と、該標的圧縮領域に対する該服の動作と、該治療ブラダ内の圧力と、該支持ブラダ内の圧力と、該治療ブラダ内のガス体積と、該支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの物理的特性を表す信号を感知および生成する、センサと、
該センサに動作可能に接続されるコントローラであって、該コントローラは、該治療ブラダに加圧ガスを周期的に向けることにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供し、該物理的特性を表す、該センサから受信された信号に応答して該支持ブラダに加圧ガスを向けることにより、該標的圧縮領域に対して適切な位置に該治療ブラダを維持する、コントローラと
を含む、加圧器と
を備えている、圧縮服装置。
(項目2)
上記コントローラは、上記身体部分の配向が所定の配向範囲外であることを示す、上記センサから受信された信号に応答して上記支持ブラダに加圧ガスを向ける、上記項目のいずれか1項に記載の圧縮服装置。
(項目3)
上記コントローラは、上記身体部分が横になっている配向を表す、上記センサから受信される信号に応答して上記支持ブラダからガスを排出することによって、該支持ブラダ内のガス圧力を減少させる、上記項目のいずれか1項に記載の圧縮服装置。
(項目4)
上記コントローラは、上記身体部分の加速度が所定の加速度範囲外であることを示す、上記センサから受信された信号に応答して上記支持ブラダに加圧ガスを向ける、上記項目のずれか1項に記載の圧縮服装置。
(項目5)
上記コントローラは、上記支持ブラダが上記身体部分の動きに概ね従う圧力を該支持ブラダ内のガス圧力が超えることを防ぐ、上記項目のいずれか1項に記載の圧縮服装置。
(項目6)
上記膨張可能治療ブラダは、上記圧縮服に順番に配置される3つの別個の治療ブラダから成り、
上記コントローラは、各治療ブラダに加圧ガスを順番に向けることにより、上記身体部分の上記標的圧縮領域に断続的な圧縮治療を提供し、該身体部分において体液の流れを蠕動的に増加させる、上記項目のいずれか1項に記載の圧縮服装置。
(項目7)
人間の身体部分の標的圧縮領域に圧縮治療を提供する方法であって、
膨張可能治療ブラダと、膨張可能支持ブラダとを有する圧縮服によって該身体部分の該標的圧縮領域を覆うことと、
該身体部分の配向と、該身体部分の動作と、該身体部分の加速度と、該標的圧縮領域に対する該服の動作と、該治療ブラダ内の圧力と、該支持ブラダ内の圧力と、該治療ブラダ内のガス体積と、該支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの特性を感知することと、
該感知された特性に応答して該支持ブラダを加圧することにより、該標的圧縮領域に対して適切な位置に該治療ブラダを維持することと、
該治療ブラダを周期的に加圧することにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供することと
を包含する、方法。
(項目8)
上記身体部分は、脚であり、上記支持ブラダは、概ね直立している該脚の配向を感知することに応答して加圧される、上記項目のいずれか1項に記載の方法。
(項目9)
上記身体部分は、脚であり、上記支持ブラダは、上記人間が横たわっていることを示す、該脚の感知された動作に応答して加圧される、上記項目のいずれか1項に記載の方法。
(項目10)
上記身体部分の配向が所定の配向範囲外であること感知することに応答して上記支持ブラダ内の圧力を減少させることをさらに包含する、上記項目のいずれか1項に記載の方法。
(項目11)
上記支持ブラダは、上記身体部分の加速度が所定の加速度範囲外であることに応答して加圧される、上記項目のいずれか1項に記載の方法。
(項目12)
上記支持ブラダが上記身体部分の動きに概ね従う圧力を該支持ブラダ内の圧力が超えるのを防ぐことをさらに包含する、上記項目のいずれか1項に記載の方法。
(項目13)
圧縮服装置であって、
身体部分の標的圧縮領域を覆うようなサイズおよび形状である膨張可能治療ブラダと、
該標的圧縮領域に対して適切な位置に該治療ブラダを保持するために、該治療ブラダに接続される膨張可能支持ブラダと、
該治療ブラダおよび該支持ブラダに動作可能に接続される加圧器であって、該加圧器は、該支持ブラダを加圧することにより、適切な位置に該治療ブラダを保持し、該治療ブラダを周期的に加圧することにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供する、加圧器と
を備えている、圧縮服装置。
(項目14)
上記支持ブラダは、上記治療ブラダに対して位置を決められ、該治療ブラダが上記身体部分の上記標的圧縮領域を覆う適切な位置にある場合、該身体部分に沿う長手方向および該体部分の周りの周囲方向のうちの少なくとも1つの方に延びるようなサイズおよび形状である、上記項目のいずれか1項に記載の圧縮服装置。
(項目15)
上記治療ブラダは、上記身体部分に上記標的圧縮領域に順番に圧力を提供するために複数の別個の治療ブラダを備えている、上記項目のいずれか1項に記載の圧縮服装置。
【0009】
(摘要)
圧縮服装置は、圧縮服と、加圧器とを含む。加圧器は、圧縮服の治療ブラダを断続的に加圧することにより、圧縮服の支持ブラダを断続的に加圧し、圧縮服の適合を高め、服が着用される身体部分の標的圧縮領域に対して適切な位置に治療ブラダを維持する。支持ブラダは、感知された物理的特性に少なくとも部分的に基づいて必要に応じ選択可能に加圧され得る。
【0010】
他の目的および特徴は、一部は明らかであり、一部は以下に指摘される。
【図面の簡単な説明】
【0011】
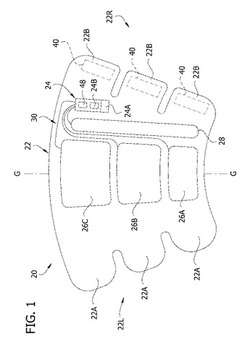
【図1】図1は、開いた巻き付けられない構成で示される本発明の圧縮服装置の平面図である。
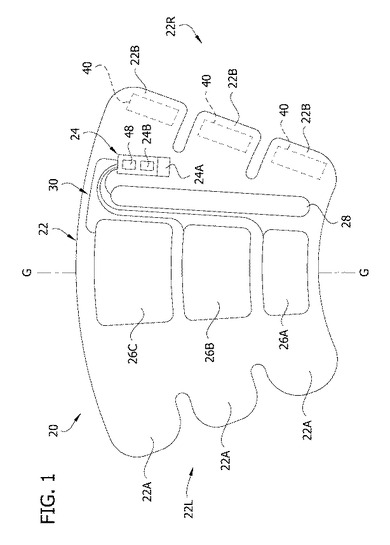
【図2】図2は、脚にある圧縮服装置の側斜視図である。
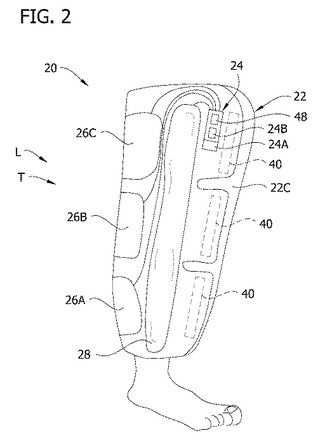
【図3】図3は、概ね水平配向における脚にある圧縮服装置の側面図であり、圧縮服装置の支持ブラダは、加圧された状態で示される。
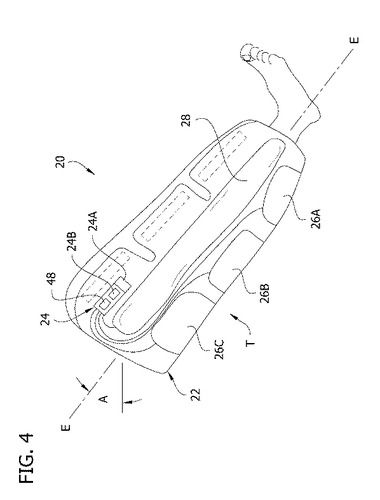
【図4】図4は、傾斜した配向における脚にある圧縮服装置の側面図であり、支持ブラダは、加圧された状態で示される。
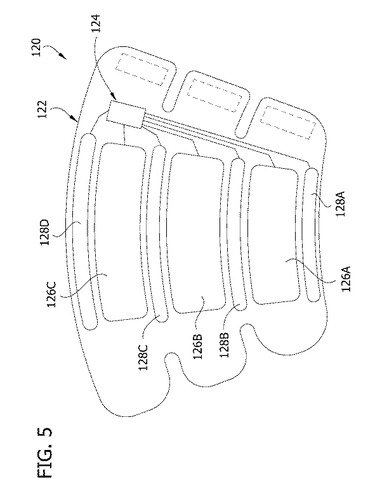
【図5】図5は、本発明の圧縮服装置の第2の実施形態の平面図である。
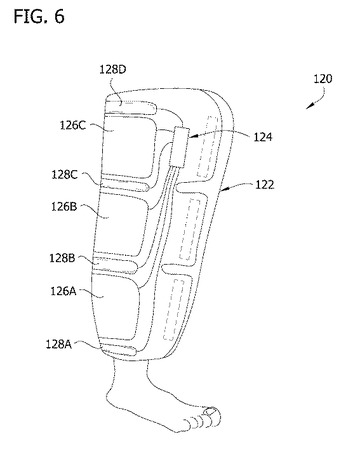
【図6】図6は、図5の圧縮服装置の側面図であり、圧縮服装置の支持ブラダは、加圧された状態で示される。
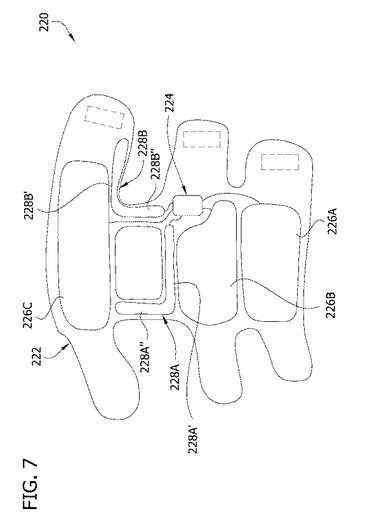
【図7】図7は、本発明の圧縮服装置の第3の実施形態の平面図である。
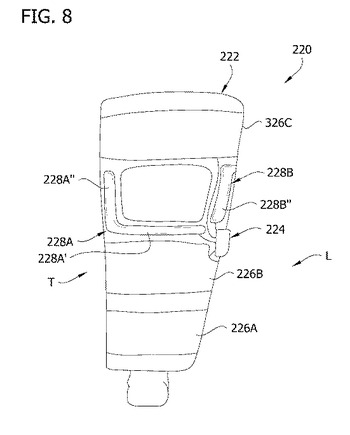
【図8】図8は、図7の圧縮服装置の背面図であり、圧縮服装置の支持ブラダは、加圧された状態で示される。
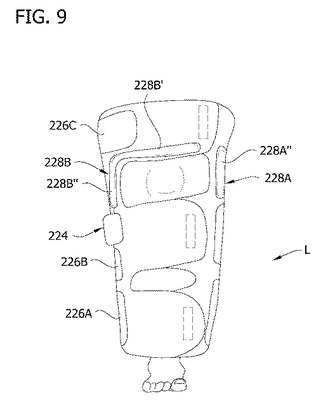
【図9】図9は、図8の圧縮服装置の正面図である。
【0012】
図面全体を通して対応する参照文字は対応する部分を示す。
【発明を実施するための形態】
【0013】
(詳細な説明)
図面、特に図1〜図4を参照すると、着用者の身体部分に圧縮治療を適用する圧縮服装置は、概して20で示される。以下に詳細に説明されるように、圧縮服装置20は、四肢(例えば、脚または腕)などの身体部分を断続的に圧縮するために用いられ得る。本明細書において参照され、図面全体を通して示される身体部分は、概してLで示される脚である。
【0014】
圧縮服装置20は、概して22で示される圧縮服と、概して24で示される加圧器とを含む。圧縮服22は、3つの治療ブラダ26A〜26Cと、支持ブラダ28とを含む。より詳細に以下に説明されるように、加圧器24は、治療ブラダ26A〜26Cを断続的に加圧することにより、身体部分Lに圧縮治療を与え、支持ブラダ28を加圧することにより、身体部分に対して適切な位置に治療ブラダを維持する。加圧器24は、ブラダを膨張させるために、例えば導管30(図1)などによって、ブラダ26A〜26Cに動作可能に接続される。例示される加圧器24は、圧縮服22に取り付けられる。加圧器が圧縮服に取り外し可能に取り付けられ、圧縮服のブラダに動作可能に接続される構成は、米国特許出願12/241,670(Vess)および米国特許出願12/241,936(Vess)において、より詳細に説明され、これらの特許出願は両方とも、Tyco Healthcare Group LPに譲渡され、それらの特許出願の全体が参照によって本明細書により援用される。加圧器24が圧縮服22に取り付けられるように構成されない場合などの他の実施形態は、本発明の範囲内である。
【0015】
圧縮服22は、治療ブラダ26A〜26Cが身体部分の標的圧縮領域Tを覆うかまたはその上にあるように、身体部分Lに選択可能に位置決め可能である。標的圧縮領域Tは、圧縮服22が圧縮治療を与えることを望まれる身体部分Lの任意の部分であり得る。例えば、脚の標的圧縮領域は、概して、ふくらはぎまたは大腿の後方部分など脚Lの背面またはその特定の部分を含む。脚Lの背面はふくらはぎと大腿筋とを含み、静脈はふくらはぎおよび大腿筋を通過し、静脈の圧縮はこれらの静脈内の血流を増す。脚の後部の一部分または脚のより大きい部分など、他の標的圧縮領域が用いられ得る。
【0016】
例示される圧縮服22は、「大腿長」サイズを有する。すなわち、圧縮服は、概してくるぶしから大腿まで延びる。図3に示されるように、治療ブラダ26A〜26Cは、服22に位置を決められ、概して脚Lの背面の上にあり、より詳細には、それぞれくるぶし、ふくらはぎ、および大腿の上にある。3つの治療ブラダA26〜26Cは、脚Lに沿って順番に配置される。他のサイズおよび形状の服22(例えば、概ねくるぶしから膝下まで延びる「膝長さ」)または治療ブラダ26A〜26Cの異なる構成(例えば、1つ、2つまたはそれよい多い治療ブラダ)を有する服22は、本発明の範囲内である。
【0017】
圧縮服22は、所望の標的圧縮領域Tの上に治療ブラダ26A〜26Cの位置を決め、圧縮服の対向する側22L、22R(図1)が互いに重なり合うように脚の周りに圧縮服を巻き付けることによって、自己保持(self−retaining)構成で脚Lに配置され得る。治療ブラダ26A〜26Cの加圧が身体部分Lの圧縮を引き起こすように、概して密着した適合かまたは気持のよい適合が望ましい。例示される圧縮服22は、圧縮服の各側22L、22Rに対応するストラップ22A、22Bを含むことにより、圧縮服の締め付けおよび固定を容易にする。圧縮服22は、圧縮服の対向する側22L、22Rを引いて、重ね合わせることによって、脚Lの周りに締め付けられる。圧縮服22は、ファスナ40によって脚Lの周りに固定され得る。例えば、例示される実施形態のファスナ40は、圧縮服22Cの外側表面上のループ布に固定するために、ストラップ22Bにフック布(これも40として示される)の部分を含む(図2)。標的圧縮領域に対して治療ブラダを配置するために身体部分に選択可能に位置決めすることが可能である他の構成を有する圧縮服は、本発明の範囲内である。
【0018】
例示される支持ブラダ28は、圧縮服22の長手方向軸G−−Gに概ね平行である圧縮服22の長さに沿って延びる細長いブラダを含む(図1)。支持ブラダ28は、圧縮服22が着用されると、(脚の長手方向軸E−−Eに概ね平行である(図3))脚Lに沿って長手方向に延びるようなサイズであり、形状である。図2に示されるように、使用時、支持ブラダ28は、ブラダが脚Lの外側に沿って延びるように圧縮服22上に位置を決められる。支持ブラダ28は、くるぶしの近くから膝上にまで延びる。加圧されると、支持ブラダ28は、圧縮服22に構造的支持を提供する。支持ブラダ28は、圧縮服22の概ね可撓性の性質に対して剛性を提供する。例えば、着用者が立っているとき、支持ブラダ28は、圧縮服22に十分な剛性を提供し得、圧縮服が脚に「ずり落ちない(stay−up)」(すなわち、ひとりでに落ちない」)ようにし得る。しかしながら、支持ブラダ28内の圧力は、支持ブラダが身体部分Lの動きに概ね従う圧力を超えることが防止されることが望ましい。換言すると、支持ブラダ28は、実質的に剛性の支持を提供しないかまたは膝を曲げるなどの脚Lの全体の動きを妨げないことが望ましい。支持ブラダ28は、圧縮服22を圧縮服22が着用される身体部分Lに対する剛性のブレースにするためには用いられない。加圧されると、支持ブラダ28は、脚Lの外側表面に接触した状態に、圧縮服22の内側表面を維持することにより、圧縮服が脚に対して動くことを防ぐ摩擦を提供する。支持ブラダ28は、脚Lの方に内側に拡張するように構成され得、それにより脚と圧縮服との間の空間を満たして、より密着した適合を作り得る。より密着した適合は、圧縮服22と脚Lとの間の摩擦を増加させる。支持ブラダ28が異なる構成を有する実施形態、すなわち、2つ、3つ、4つ、またはそれより多い支持ブラダが用いられる実施形態は、本発明の範囲内である。
【0019】
圧縮服22は、当該分野において公知の様々な方法で組み立てられ得る。一構造において、服22は、ブラダラインに沿って一緒に溶接されて、ブラダ26A〜26C、28を形成する、概ね可撓性の流体不浸透性材料(たとえば、PVC)製の向かい合う内側シートおよび外側シートから形成される。あるいは、ブラダ26A〜26C、28は、別個に形成され得、圧縮服22に取り付けられ得る。
【0020】
加圧器24は、治療ブラダ26A〜26Cを断続的に加圧することにより、圧縮治療を脚Lに提供する。加圧器24は、必要に応じて、加圧ガスまたは圧縮ガス24Aの供給源(例えば、バッテリ駆動ポンプ)と、加圧ガスをブラダ26A〜26C、28に向けるコントローラ24Bとを含む。コントローラ24Bは、マイクロプロセッサと、適切な弁(図示されていない)とを含み得る。コントローラ24Bは、加圧ガスを治療ブラダ26A〜26Cに周期的に向けることにより、断続的な圧縮治療を標的圧縮領域Tに提供する。例えば、コントローラ24Bは、加圧ガスを治療ブラダ26A〜26Cに向け、治療ブラダを周期的に順番に(例えば、くるぶしから大腿に)加圧することにより、蠕動的に体液の流れを増加させる。コントローラ24Bは、様々な他の断続的膨張ルーチンを実行するように構成され、プログラムされ得、それらのすべては、本発明の範囲内である。
【0021】
上記に説明されるように、加圧器24は、支持ブラダ28を加圧することにより、圧縮服の所望の適合を維持し、および/または標的圧縮領域Tに対して治療ブラダ26A〜26Cの位置を維持する。コントローラ24Bは、支持ブラダ28内のガス圧力が静止状態が生じる圧力を超えることを防ぐことが望ましい。支持ブラダ28内の圧力は、所定の定圧またはベースライン圧力で維持され得るか、またはブラダは、選択可能に加圧され得る(すなわち、必要に応じて加圧され得る)。支持ブラダ28内において定圧を維持することは、着用者に不快さを引き起こし得る。例えば、支持ブラダ28は、長時間の露出後不快となる、皮膚刺激または皮膚圧力を脚Lに引き起こし得る。さらに、支持ブラダ28によって引き起こされる密着した適合は、服と脚Lとの間の空気循環を妨げ得、体熱の滞留および汗の起こり得る蓄積を引き起こし得る。そこで、支持ブラダ28を選択可能に、すなわち、支持ブラダが必要である状況において支持ブラダ28を加圧することが望まれ得、その結果、支持ブラダ内の加圧が概して必要ではない場合、支持ブラダは、概して加圧されないかまたは低レベルで加圧される。
【0022】
支持ブラダ28の選択可能な加圧を容易にするために、加圧器は、コントローラ24Bに動作可能に接続される1つ以上のセンサ48を含む。センサ48は、支持ブラダ28の加圧に関連する物理的特性を感知する。例えば、センサ48は、身体部分Lの配向、身体部分の動き、標的圧縮領域Tに対する服22の動き、治療ブラダ26A〜26C内の圧力、支持ブラダ28内の圧力、治療ブラダ内のガス体積、および/または支持ブラダ内のガス体積を感知するように適合され得る。そのような特性は、より詳細に以下に説明される。センサ48はそのような特性を示す信号を生成し、それらの信号はコントローラ24Bに通信される。コントローラ24Bは、センサ48から受信された信号に少なくとも部分的に基づいて、支持ブラダ28を加圧する。例示されるセンサ48は、加圧器24に備え付けられるが、センサ48は、加圧器から分離され得、圧縮服22上に別個に取り付けられ得るかまたは着用者のどこか他の場所に位置を定められ得る。様々なタイプのセンサ48が用いられ得る。例えば、加速度計、および容量、ピエゾ抵抗、ホール効果、磁気抵抗、共鳴ビーム、または他の技術に基づく他のセンサが用いられ得る。
【0023】
図3において、脚Lは概ね水平の位置で示され、支持ブラダ28は概ね低圧力または加圧されない状態で示される。図3における脚Lの位置は、圧縮服の着用者がベッドに横たわっているときの脚の起こり得る位置を表す。脚Lへの服22の所望の適合または標的圧縮領域Tに対する治療ブラダ26A〜26Cの所望の位置を維持するために、支持ブラダ28は、この位置において圧力を必要としない場合があるかまたは最小量の圧力を必要とし得る。例えば、もし着用者がベッドで転がるか、または着用者の脚Lの配向を変える場合、治療ブラダ26A〜26Cが標的圧縮領域Tに対して動くことを防ぐために、支持ブラダ28内の圧力の増加が望まれ得る。図2および図4は、加圧状態での支持ブラダ28を示す。
【0024】
コントローラ24Bは、感知された四肢配向に基づいて支持ブラダ28を加圧し得る。例えば、コントローラ24Bは、身体部分Lの配向が閾値配向を超えるかまたは所定の配向範囲外であることを示す信号をセンサ48から受信し、その信号に応答して、支持ブラダ28に加圧ガスを向け得る。脚の長手方向軸E−−Eが水平に対して少なくとも30度である場合(例えば、図4における角度A)、支持ブラダ28は加圧され得る。水平に対して40、50、60、70、または80度など、他の閾値配向が用いられ得る。あるいは、脚の長手方向軸E−−Eが水平に対して0〜30、0〜40、0〜50、0〜60、0〜70、または0〜80度などの所定の配向範囲外である場合、支持ブラダは加圧され得る。さらに、脚Lが概ね直立していること(例えば、図2)をセンサ48が示す場合、支持ブラダ28は加圧され得、脚が横たわっている場合(例えば、図3)、支持ブラダ28内の圧力は排出され得る。身体部分Lの傾斜角は、センサ48として加速度計を用いて決定され得る。加速度計48からの信号は、ソフトウェアまたはハードウェアを用いてフィルタリングされ、傾斜角により加速度を認識し、傾斜角は、コントローラ24Bによって測定され、評価される。センサ48はまた、脚Lの角配向(すなわち、膝の曲がり)を感知するために用いられ得、この場合、2つのセンサ48が必要であり得る。例えば、第1のセンサは大腿部分に隣接して位置を決められ得、第2のセンサはくるぶし部分に隣接して位置を決められ得、2つのセンサの接近は、監視されて、角度を決定し得る(図示されていない)。脚Lの配向が水平に近づいたとき、または脚が所定の時間概ね水平のままであった後、支持ブラダ28内の圧力は減少させられ得る。
【0025】
コントローラ24Bはまた、標的圧縮領域Tに対する服22の感知された動きに基づいて、支持ブラダ28を加圧し得る。例えば、センサ48は、脚Lについての長手方向または周囲方向の服22の動きを感知するように適合され得る。そのようなセンサ48は、脚Lの表面に沿った動きを感知するために、圧縮服の内面(図示されていない)に位置を決められ得る。さらに、例えば1つのセンサが服の上、もう1つのセンサが着用者の他のところにある2つのセンサ48が用いられ得、互いに対するセンサの位置が監視され得る。そのような配置は、膝の曲がりの形態における動きを監視するために用いられ得る。
【0026】
コントローラ24Bはまた、感知された四肢の動きまたは加速度に基づいて支持ブラダ28を加圧し得る。脚Lが動いている間に服が脚の上を滑る(slip)かまたはスライド(slide)しがちであり得るので、着用者がベッドで動くかまたは歩行中の場合、脚Lに対する良好な適合を有する圧縮服22のニーズが増加する。コントローラ24Bは、身体部分Lの動作または加速度が動作または加速度の閾値量を超えるかまたは所定の加速度範囲外であることを示す信号をセンサ48から受信し、その信号に応答して、支持ブラダ28に加圧ガスを向け得る。例えば、四肢Lが所定の最小量より大きく動いていることをセンサ48が示す場合、支持ブラダ28は加圧され得る。さらに、着用者が歩行中であることをセンサ48が示す場合、支持ブラダ28は加圧され得る。例えば、センサ48は、加速度計であり得、コントローラ24Bは、着用者が「ステップ計数」を用いて歩いているときを決定するようにプログラムされ得、ここで、コントローラ24Bは、縦軸の加速度の傾きの変化が起こるたびにステップを認識する。あるいは、GPSトラッカー48は、動きを感知し、動きに基づいて支持ブラダ28の加圧を引き起こすために用いられ得る。動作および加速度を検出するために他のタイプのセンサが用いられ得る。支持ブラダ28内の圧力は、動きまたは加速度がもはや感知されなくなった後、直ちにまたは所定の時間に減少させられ得る。
【0027】
さらに、コントローラ24Bは、膨張のサイクル中に治療ブラダ26A〜26Cのうちの1つの治療ブラダ内において達成された圧力または達成されたガス体積に基づいて支持ブラダ28を加圧し得る。膨張のサイクル中に治療ブラダ26A〜26Cのうちの1つの治療ブラダ内において所望の圧力を達成しないことは、圧縮服22の適合が緩んでいることを示し得る。それに応じて、コントローラ24Bは、支持ブラダ28内の圧力を増加させ得、支持ブラダ28は、次に脚の周りの圧縮服22の適合を密着させ、結果として、治療ブラダ内の圧力の増加をもたらし(同じ体積のガスを仮定する)、次の圧縮のサイクルにおいて四肢に対する所望の圧縮を達成する。コントローラ24Bが、四肢Lに所望の量の圧縮を与える圧力まで治療ブラダを自動的に膨張させるようにプログラムされる場合、治療ブラダ26A〜26Cのうちの1つの治療ブラダ内において感知される過剰の量のガス体積もまた、圧縮服22の適合が緩んでいることを示し得る。それに応じて、コントローラ24Bは、支持ブラダ28を加圧し得、支持ブラダ28は、四肢Lに対する所望の圧縮を達成するのに必要なガスの体積を減少させ、従って次の圧縮のサイクルで治療ブラダにおいて達成されるガスの体積を減少させる。
【0028】
コントローラ24Bは、支持ブラダ28内の圧力またはガス体積に基づいて、支持ブラダ28を加圧し得る。いくつかの実施形態において、支持ブラダ28を選択可能に加圧する代わりに、支持ブラダ28内において定圧またはベースライン圧力を維持することが望まれ得る。支持ブラダ28内の圧力またはガス体積はセンサ48によって監視され得、定圧またはベースライン圧力を維持ために圧力が減少させられるかまたは増加させられることが必要である場合、センサ48は、コントローラ24Bに信号を送る。
【0029】
支持ブラダ28の選択可能な加圧は、異なるモードで実行され得る。例えば、支持ブラダ28の加圧は、「全部か無か」であり得る。換言すると、支持ブラダ28が選択可能に加圧される場合、支持ブラダ28は、所定の定圧で加圧されるか、または概して加圧されないかもしくはベースライン圧力で加圧されるかのいずれかである。あるいは、支持ブラダ28は、一定に増加して加圧され得る。例えば、支持ブラダ28内の圧力は、水平に対する配向の変化の増分(例えば、10度ごと)ごと、動きの大きさまたは速度の増加の変化(例えば、毎秒0.1メートルごと)、または加速度の増加の変化に対して、1mmHgだけ増加させられ得る。
【0030】
使用のサイクルにおいて、圧縮服装置20は脚Lなどの身体部分に配置され、治療ブラダ26A〜26Cは所望の標的圧縮領域Tを覆うかまたはその上にある。加圧器24は、治療ブラダ26A〜26Cを断続的に加圧することにより、圧縮治療を与える。加圧器はまた、絶えずまたは(例えば、感知された物理的特性に基づいて)選択可能に支持ブラダ28を加圧することにより、身体部分Lに対する圧縮服22の所望の適合を維持し、標的圧縮領域Tに対して適切な位置に治療圧縮ブラダ26A〜26Cを維持する。
【0031】
図5および図6は、本発明の圧縮服装置120の第2の実施形態を例示する。圧縮服装置120は、上記に説明される圧縮服装置20に類似し、対応する部分は、概して同じ参照番号プラス100によって示される。この実施形態は、4つの支持ブラダ128A〜128Dを含み、4つの支持ブラダ128A〜128Dは、圧縮服122が着用された場合、身体部分Lの周りにおいて周囲方向に延びるように位置を決められる。例示される支持ブラダ128A〜128Dは、治療ブラダ126A〜126Cの上、下、間に位置を決められる。使用時、上記に説明されたように、加圧器124は、治療ブラダ126A〜126Cおよび支持ブラダ128A〜128Dを加圧し得る。
【0032】
図7〜図9は、本発明の圧縮服装置220の第3の実施形態を例示する。圧縮服装置220は、上記に説明された圧縮服装置20に類似し、対応する部分は、概して同じ参照番号プラス200によって示される。この実施形態において、第1の支持ブラダ228Aおよび第2の支持ブラダ228Bが提供される。支持ブラダ228A、228Bは、膝を「形作る」。第1の支持ブラダ228Aが加圧された場合、第1の支持ブラダ228Aは、ふくらはぎの上部に沿った脚の周りにおいて周囲方向に延びることにより、ふくらはぎの上部の周りに服222を「サスペンドする」第1の部分228A’を含む。第2の支持ブラダ228Bが加圧された場合、第2の支持ブラダ228Bは、膝頭の上部に沿った脚の周りにおいて周囲方向に延びることにより、膝頭の上部の周りに服222を「サスペンドする」第1の部分228B’を含む。これらの第1の部分228A’、228B’は、脚Lに対するので、長手方向への圧縮服222の望ましくない動きを防ぐ。第1の支持ブラダ228Aはまた、膝の内側に隣接して脚Lの長さに沿って延びる第2の部分228A”を含み、第2の支持ブラダ228Bはまた、膝の外側に隣接して脚Lの長さに沿って延びる第2の部分228B”を含む。これらの第2の部分228A”、228B”は、脚Lに対する周囲方向への圧縮服222の望ましくない動きを防ぐことを助ける。使用時、加圧器224は、上記に説明されたように、治療ブラダ226A〜226Cおよび支持ブラダ228A、228Bを加圧することにより、所望の適合を維持し、標的圧縮領域Tに対して適切な位置に治療ブラダを維持し得る。
【0033】
本発明を詳細に説明したが、添付の特許請求の範囲に規定される本発明の範囲から逸脱することなく修正および変形が可能であることは明らかである。
【0034】
本発明の要素または本発明の好ましい実施形態を紹介する場合、冠詞[a」、「an」、「the」および「said(該)」は、1つ以上の要素があることを意味することが意図される。用語「comprising(含む、備えている)」、「including(含む)」および「having(有する)」は、含んでいることが意図され、記載された要素以外の追加の要素があり得ることを意味する。
【0035】
上記を考慮して、本発明のいくつかの目的が達成され他の有利な結果が獲得されることが分かる。
【0036】
本発明の範囲から逸脱することなく上記の構造および方法に様々な変更がなされ得るので、上記の説明に含まれ、添付の図面に示されるすべての事項は例示として解釈されるべきであって、限定する意味で解釈されるべきではないことが意図される。
【符号の説明】
【0037】
20 圧縮服装置
22 圧縮服
24 加圧器
24A 加圧ガスまたは圧縮ガス
24B コントローラ
26A 治療ブラダ
26B 治療ブラダ
26C 治療ブラダ
28 支持ブラダ
30 導管
40 ファスナ
【技術分野】
【0001】
(発明の分野)
本発明は、概して圧縮服装置に関し、より詳細には治療ブラダと、支持ブラダとを含む圧縮服装置に関する。
【背景技術】
【0002】
(発明の背景)
概して動けない患者および類似の人たちの主な関心は、深部静脈血栓(DVT)および末梢水腫など、血液にクロットを形成する医学状態である。そのような患者および人たちは、外科手術、麻酔、長い期間のベッド療養などを受ける人たちを含む。これらの凝血状態は、概して下肢および/または骨盤の深部静脈に起る。腸骨、大腿骨、膝窩および脛骨などのこれらの静脈は、脱酸素血液を心臓に戻す。例えば、これらの静脈における血液循環が病気、傷害または無活動のために妨げられた場合、血液が蓄積するかまたは鬱血する傾向がある。血液の静止した鬱血は凝血の形成を引き起こし得、凝血の形成は心臓血管の循環を妨げ得る。最も深刻には、凝血のフラグメントは、壊れて離れ、移動し得る。肺動脈塞栓は、主肺動脈をブロックする可能性のあるフラグメントから形成し得、生命にかかわり得る。本発明はまた、リンパ水腫などの他の状態の治療にも適用され得る。
【0003】
従来の脈管圧縮システムは、圧縮服を周期的に膨張させるコントローラに流体流れ可能に接続される圧縮服を含む。圧縮服の周期的膨張は、血液循環を改善し、DVTの可能性を減少させる。導管のシステムは、圧縮服をコントローラに接続する。より新しい脈管圧縮服は、ポータブルコントローラを有し、ポータブルコントローラは、第一に圧縮服を取り外す必要がなくまたはコントローラと圧縮服との接続を切る必要がなく、患者が自由に辺りを動き得るように、はるかにより小さくそして圧縮服に取り付けさえ可能である。これらの新しい圧縮服は、患者が静止しているかまたは歩行している場合に着用され得、使用の便利さのために患者のコンプライアンスを高め得る。
【0004】
断続的に圧縮治療を身体部分(例えば、脚などの四肢)に適用する能動的圧縮服は、深部静脈血栓(DVT)予防と、水腫防止と、傷治療の促進とを含む多くの用途を有する。そのような圧縮服の性能は、服の初期の適合または密着を保持する服の能力および身体部分の周りに膨張可能ブラダを最初の位置に保持する膨張可能プラダの能力に影響されやすい。この保持することは、歩き、座り、立ち上り、および転がりなどの歩行中および歩行後に圧縮服が用いられる場合、非常に困難になり得る。服は、身体部分の回りで緩むかまたは身体部分を滑り落ち、膨張可能ブラダと対応する体部分との整列不良を引き起こしがちであり、結果として、効果のない圧縮治療および/または不快をもたらし得る。本発明は、適用される圧縮治療を改善するために、身体部分に服の所望の適合を維持することおよび身体部分の標的圧縮領域に対して適切な位置に膨張可能ブラダを維持することに関する。
【発明の概要】
【課題を解決するための手段】
【0005】
(発明の概要)
本発明の1つの局面は、膨張可能治療ブラダと、膨張可能支持ブラダとを有する圧縮服を含む圧縮服装置に関する。圧縮服は、治療ブラダが身体部分の標的圧縮領域を覆うように身体部分に選択可能に位置決め可能である。圧縮服装置は、ブラダ内のガス圧力を増加させることによってブラダを選択可能に加圧するための、治療ブラダおよび支持ブラダに動作可能に接続可能な加圧器をさらに含む。加圧器は、身体部分の配向と、身体部分の動作と、身体部分の加速度と、標的圧縮領域に対する服の動作と、治療ブラダ内の圧力と、支持ブラダ内の圧力と、治療ブラダ内のガス体積と、支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの物理的特性を表す信号を感知および生成するセンサを含む。加圧器は、センサに動作可能に接続されるコントローラをさらに含む。コントローラは、治療ブラダに加圧ガスを周期的に向けることにより、身体部分の標的圧縮領域に断続的な圧縮治療を提供し、物理的特性を表す、センサから受信された信号に応答して支持ブラダに加圧ガスを向けることにより、標的圧縮領域に対して適切な位置に治療ブラダを維持する。
【0006】
本発明の別の局面は、人間の身体部分の標的圧縮領域に圧縮治療を提供する方法に関する。方法は、膨張可能治療ブラダと、膨張可能支持ブラダとを有する圧縮服によって身体部分の標的圧縮領域を覆うこと含む。方法は、身体部分の配向と、身体部分の動作と、身体部分の加速度と、標的圧縮領域に対する服の動作と、治療ブラダ内の圧力と、支持ブラダ内の圧力と、治療ブラダ内のガス体積と、支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの特性を感知することをさらに含む。支持ブラダは、感知された特性に応答して加圧されることにより、標的圧縮領域に対して適切な位置に治療ブラダを維持する。治療ブラダは、周期的に加圧されることにより、身体部分の標的圧縮領域に断続的な圧縮治療を提供する。
【0007】
本発明の別の局面は、身体部分の標的圧縮領域を覆うようなサイズおよび形状である膨張可能治療ブラダを含む圧縮服装置に関する。圧縮服は、標的圧縮領域に対して適切な位置に治療ブラダを保持するために、治療ブラダに接続される膨張可能支持ブラダをさらに含む。加圧器は、治療ブラダおよび支持ブラダに動作可能に接続される。加圧器はまた、支持ブラダを加圧することにより、適切な位置に治療ブラダを保持し、治療ブラダを周期的に加圧することにより、身体部分の標的圧縮領域に断続的な圧縮治療を提供する。
【0008】
例えば、本発明は以下の項目を提供する。
(項目1)
圧縮服装置であって、
膨張可能治療ブラダと、膨張可能支持ブラダとを含む圧縮服であって、該圧縮服は、該治療ブラダが身体部分の標的圧縮領域を覆うように該身体部分に選択可能に位置決め可能である、圧縮服と、
該ブラダ内のガス圧力を増加させることによって該ブラダを選択可能に加圧するための、該治療ブラダおよび該支持ブラダに動作可能に接続可能な加圧器であって、該加圧器は、
センサであって、該身体部分の配向と、該身体部分の動作と、該身体部分の加速度と、該標的圧縮領域に対する該服の動作と、該治療ブラダ内の圧力と、該支持ブラダ内の圧力と、該治療ブラダ内のガス体積と、該支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの物理的特性を表す信号を感知および生成する、センサと、
該センサに動作可能に接続されるコントローラであって、該コントローラは、該治療ブラダに加圧ガスを周期的に向けることにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供し、該物理的特性を表す、該センサから受信された信号に応答して該支持ブラダに加圧ガスを向けることにより、該標的圧縮領域に対して適切な位置に該治療ブラダを維持する、コントローラと
を含む、加圧器と
を備えている、圧縮服装置。
(項目2)
上記コントローラは、上記身体部分の配向が所定の配向範囲外であることを示す、上記センサから受信された信号に応答して上記支持ブラダに加圧ガスを向ける、上記項目のいずれか1項に記載の圧縮服装置。
(項目3)
上記コントローラは、上記身体部分が横になっている配向を表す、上記センサから受信される信号に応答して上記支持ブラダからガスを排出することによって、該支持ブラダ内のガス圧力を減少させる、上記項目のいずれか1項に記載の圧縮服装置。
(項目4)
上記コントローラは、上記身体部分の加速度が所定の加速度範囲外であることを示す、上記センサから受信された信号に応答して上記支持ブラダに加圧ガスを向ける、上記項目のずれか1項に記載の圧縮服装置。
(項目5)
上記コントローラは、上記支持ブラダが上記身体部分の動きに概ね従う圧力を該支持ブラダ内のガス圧力が超えることを防ぐ、上記項目のいずれか1項に記載の圧縮服装置。
(項目6)
上記膨張可能治療ブラダは、上記圧縮服に順番に配置される3つの別個の治療ブラダから成り、
上記コントローラは、各治療ブラダに加圧ガスを順番に向けることにより、上記身体部分の上記標的圧縮領域に断続的な圧縮治療を提供し、該身体部分において体液の流れを蠕動的に増加させる、上記項目のいずれか1項に記載の圧縮服装置。
(項目7)
人間の身体部分の標的圧縮領域に圧縮治療を提供する方法であって、
膨張可能治療ブラダと、膨張可能支持ブラダとを有する圧縮服によって該身体部分の該標的圧縮領域を覆うことと、
該身体部分の配向と、該身体部分の動作と、該身体部分の加速度と、該標的圧縮領域に対する該服の動作と、該治療ブラダ内の圧力と、該支持ブラダ内の圧力と、該治療ブラダ内のガス体積と、該支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの特性を感知することと、
該感知された特性に応答して該支持ブラダを加圧することにより、該標的圧縮領域に対して適切な位置に該治療ブラダを維持することと、
該治療ブラダを周期的に加圧することにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供することと
を包含する、方法。
(項目8)
上記身体部分は、脚であり、上記支持ブラダは、概ね直立している該脚の配向を感知することに応答して加圧される、上記項目のいずれか1項に記載の方法。
(項目9)
上記身体部分は、脚であり、上記支持ブラダは、上記人間が横たわっていることを示す、該脚の感知された動作に応答して加圧される、上記項目のいずれか1項に記載の方法。
(項目10)
上記身体部分の配向が所定の配向範囲外であること感知することに応答して上記支持ブラダ内の圧力を減少させることをさらに包含する、上記項目のいずれか1項に記載の方法。
(項目11)
上記支持ブラダは、上記身体部分の加速度が所定の加速度範囲外であることに応答して加圧される、上記項目のいずれか1項に記載の方法。
(項目12)
上記支持ブラダが上記身体部分の動きに概ね従う圧力を該支持ブラダ内の圧力が超えるのを防ぐことをさらに包含する、上記項目のいずれか1項に記載の方法。
(項目13)
圧縮服装置であって、
身体部分の標的圧縮領域を覆うようなサイズおよび形状である膨張可能治療ブラダと、
該標的圧縮領域に対して適切な位置に該治療ブラダを保持するために、該治療ブラダに接続される膨張可能支持ブラダと、
該治療ブラダおよび該支持ブラダに動作可能に接続される加圧器であって、該加圧器は、該支持ブラダを加圧することにより、適切な位置に該治療ブラダを保持し、該治療ブラダを周期的に加圧することにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供する、加圧器と
を備えている、圧縮服装置。
(項目14)
上記支持ブラダは、上記治療ブラダに対して位置を決められ、該治療ブラダが上記身体部分の上記標的圧縮領域を覆う適切な位置にある場合、該身体部分に沿う長手方向および該体部分の周りの周囲方向のうちの少なくとも1つの方に延びるようなサイズおよび形状である、上記項目のいずれか1項に記載の圧縮服装置。
(項目15)
上記治療ブラダは、上記身体部分に上記標的圧縮領域に順番に圧力を提供するために複数の別個の治療ブラダを備えている、上記項目のいずれか1項に記載の圧縮服装置。
【0009】
(摘要)
圧縮服装置は、圧縮服と、加圧器とを含む。加圧器は、圧縮服の治療ブラダを断続的に加圧することにより、圧縮服の支持ブラダを断続的に加圧し、圧縮服の適合を高め、服が着用される身体部分の標的圧縮領域に対して適切な位置に治療ブラダを維持する。支持ブラダは、感知された物理的特性に少なくとも部分的に基づいて必要に応じ選択可能に加圧され得る。
【0010】
他の目的および特徴は、一部は明らかであり、一部は以下に指摘される。
【図面の簡単な説明】
【0011】
【図1】図1は、開いた巻き付けられない構成で示される本発明の圧縮服装置の平面図である。
【図2】図2は、脚にある圧縮服装置の側斜視図である。
【図3】図3は、概ね水平配向における脚にある圧縮服装置の側面図であり、圧縮服装置の支持ブラダは、加圧された状態で示される。
【図4】図4は、傾斜した配向における脚にある圧縮服装置の側面図であり、支持ブラダは、加圧された状態で示される。
【図5】図5は、本発明の圧縮服装置の第2の実施形態の平面図である。
【図6】図6は、図5の圧縮服装置の側面図であり、圧縮服装置の支持ブラダは、加圧された状態で示される。
【図7】図7は、本発明の圧縮服装置の第3の実施形態の平面図である。
【図8】図8は、図7の圧縮服装置の背面図であり、圧縮服装置の支持ブラダは、加圧された状態で示される。
【図9】図9は、図8の圧縮服装置の正面図である。
【0012】
図面全体を通して対応する参照文字は対応する部分を示す。
【発明を実施するための形態】
【0013】
(詳細な説明)
図面、特に図1〜図4を参照すると、着用者の身体部分に圧縮治療を適用する圧縮服装置は、概して20で示される。以下に詳細に説明されるように、圧縮服装置20は、四肢(例えば、脚または腕)などの身体部分を断続的に圧縮するために用いられ得る。本明細書において参照され、図面全体を通して示される身体部分は、概してLで示される脚である。
【0014】
圧縮服装置20は、概して22で示される圧縮服と、概して24で示される加圧器とを含む。圧縮服22は、3つの治療ブラダ26A〜26Cと、支持ブラダ28とを含む。より詳細に以下に説明されるように、加圧器24は、治療ブラダ26A〜26Cを断続的に加圧することにより、身体部分Lに圧縮治療を与え、支持ブラダ28を加圧することにより、身体部分に対して適切な位置に治療ブラダを維持する。加圧器24は、ブラダを膨張させるために、例えば導管30(図1)などによって、ブラダ26A〜26Cに動作可能に接続される。例示される加圧器24は、圧縮服22に取り付けられる。加圧器が圧縮服に取り外し可能に取り付けられ、圧縮服のブラダに動作可能に接続される構成は、米国特許出願12/241,670(Vess)および米国特許出願12/241,936(Vess)において、より詳細に説明され、これらの特許出願は両方とも、Tyco Healthcare Group LPに譲渡され、それらの特許出願の全体が参照によって本明細書により援用される。加圧器24が圧縮服22に取り付けられるように構成されない場合などの他の実施形態は、本発明の範囲内である。
【0015】
圧縮服22は、治療ブラダ26A〜26Cが身体部分の標的圧縮領域Tを覆うかまたはその上にあるように、身体部分Lに選択可能に位置決め可能である。標的圧縮領域Tは、圧縮服22が圧縮治療を与えることを望まれる身体部分Lの任意の部分であり得る。例えば、脚の標的圧縮領域は、概して、ふくらはぎまたは大腿の後方部分など脚Lの背面またはその特定の部分を含む。脚Lの背面はふくらはぎと大腿筋とを含み、静脈はふくらはぎおよび大腿筋を通過し、静脈の圧縮はこれらの静脈内の血流を増す。脚の後部の一部分または脚のより大きい部分など、他の標的圧縮領域が用いられ得る。
【0016】
例示される圧縮服22は、「大腿長」サイズを有する。すなわち、圧縮服は、概してくるぶしから大腿まで延びる。図3に示されるように、治療ブラダ26A〜26Cは、服22に位置を決められ、概して脚Lの背面の上にあり、より詳細には、それぞれくるぶし、ふくらはぎ、および大腿の上にある。3つの治療ブラダA26〜26Cは、脚Lに沿って順番に配置される。他のサイズおよび形状の服22(例えば、概ねくるぶしから膝下まで延びる「膝長さ」)または治療ブラダ26A〜26Cの異なる構成(例えば、1つ、2つまたはそれよい多い治療ブラダ)を有する服22は、本発明の範囲内である。
【0017】
圧縮服22は、所望の標的圧縮領域Tの上に治療ブラダ26A〜26Cの位置を決め、圧縮服の対向する側22L、22R(図1)が互いに重なり合うように脚の周りに圧縮服を巻き付けることによって、自己保持(self−retaining)構成で脚Lに配置され得る。治療ブラダ26A〜26Cの加圧が身体部分Lの圧縮を引き起こすように、概して密着した適合かまたは気持のよい適合が望ましい。例示される圧縮服22は、圧縮服の各側22L、22Rに対応するストラップ22A、22Bを含むことにより、圧縮服の締め付けおよび固定を容易にする。圧縮服22は、圧縮服の対向する側22L、22Rを引いて、重ね合わせることによって、脚Lの周りに締め付けられる。圧縮服22は、ファスナ40によって脚Lの周りに固定され得る。例えば、例示される実施形態のファスナ40は、圧縮服22Cの外側表面上のループ布に固定するために、ストラップ22Bにフック布(これも40として示される)の部分を含む(図2)。標的圧縮領域に対して治療ブラダを配置するために身体部分に選択可能に位置決めすることが可能である他の構成を有する圧縮服は、本発明の範囲内である。
【0018】
例示される支持ブラダ28は、圧縮服22の長手方向軸G−−Gに概ね平行である圧縮服22の長さに沿って延びる細長いブラダを含む(図1)。支持ブラダ28は、圧縮服22が着用されると、(脚の長手方向軸E−−Eに概ね平行である(図3))脚Lに沿って長手方向に延びるようなサイズであり、形状である。図2に示されるように、使用時、支持ブラダ28は、ブラダが脚Lの外側に沿って延びるように圧縮服22上に位置を決められる。支持ブラダ28は、くるぶしの近くから膝上にまで延びる。加圧されると、支持ブラダ28は、圧縮服22に構造的支持を提供する。支持ブラダ28は、圧縮服22の概ね可撓性の性質に対して剛性を提供する。例えば、着用者が立っているとき、支持ブラダ28は、圧縮服22に十分な剛性を提供し得、圧縮服が脚に「ずり落ちない(stay−up)」(すなわち、ひとりでに落ちない」)ようにし得る。しかしながら、支持ブラダ28内の圧力は、支持ブラダが身体部分Lの動きに概ね従う圧力を超えることが防止されることが望ましい。換言すると、支持ブラダ28は、実質的に剛性の支持を提供しないかまたは膝を曲げるなどの脚Lの全体の動きを妨げないことが望ましい。支持ブラダ28は、圧縮服22を圧縮服22が着用される身体部分Lに対する剛性のブレースにするためには用いられない。加圧されると、支持ブラダ28は、脚Lの外側表面に接触した状態に、圧縮服22の内側表面を維持することにより、圧縮服が脚に対して動くことを防ぐ摩擦を提供する。支持ブラダ28は、脚Lの方に内側に拡張するように構成され得、それにより脚と圧縮服との間の空間を満たして、より密着した適合を作り得る。より密着した適合は、圧縮服22と脚Lとの間の摩擦を増加させる。支持ブラダ28が異なる構成を有する実施形態、すなわち、2つ、3つ、4つ、またはそれより多い支持ブラダが用いられる実施形態は、本発明の範囲内である。
【0019】
圧縮服22は、当該分野において公知の様々な方法で組み立てられ得る。一構造において、服22は、ブラダラインに沿って一緒に溶接されて、ブラダ26A〜26C、28を形成する、概ね可撓性の流体不浸透性材料(たとえば、PVC)製の向かい合う内側シートおよび外側シートから形成される。あるいは、ブラダ26A〜26C、28は、別個に形成され得、圧縮服22に取り付けられ得る。
【0020】
加圧器24は、治療ブラダ26A〜26Cを断続的に加圧することにより、圧縮治療を脚Lに提供する。加圧器24は、必要に応じて、加圧ガスまたは圧縮ガス24Aの供給源(例えば、バッテリ駆動ポンプ)と、加圧ガスをブラダ26A〜26C、28に向けるコントローラ24Bとを含む。コントローラ24Bは、マイクロプロセッサと、適切な弁(図示されていない)とを含み得る。コントローラ24Bは、加圧ガスを治療ブラダ26A〜26Cに周期的に向けることにより、断続的な圧縮治療を標的圧縮領域Tに提供する。例えば、コントローラ24Bは、加圧ガスを治療ブラダ26A〜26Cに向け、治療ブラダを周期的に順番に(例えば、くるぶしから大腿に)加圧することにより、蠕動的に体液の流れを増加させる。コントローラ24Bは、様々な他の断続的膨張ルーチンを実行するように構成され、プログラムされ得、それらのすべては、本発明の範囲内である。
【0021】
上記に説明されるように、加圧器24は、支持ブラダ28を加圧することにより、圧縮服の所望の適合を維持し、および/または標的圧縮領域Tに対して治療ブラダ26A〜26Cの位置を維持する。コントローラ24Bは、支持ブラダ28内のガス圧力が静止状態が生じる圧力を超えることを防ぐことが望ましい。支持ブラダ28内の圧力は、所定の定圧またはベースライン圧力で維持され得るか、またはブラダは、選択可能に加圧され得る(すなわち、必要に応じて加圧され得る)。支持ブラダ28内において定圧を維持することは、着用者に不快さを引き起こし得る。例えば、支持ブラダ28は、長時間の露出後不快となる、皮膚刺激または皮膚圧力を脚Lに引き起こし得る。さらに、支持ブラダ28によって引き起こされる密着した適合は、服と脚Lとの間の空気循環を妨げ得、体熱の滞留および汗の起こり得る蓄積を引き起こし得る。そこで、支持ブラダ28を選択可能に、すなわち、支持ブラダが必要である状況において支持ブラダ28を加圧することが望まれ得、その結果、支持ブラダ内の加圧が概して必要ではない場合、支持ブラダは、概して加圧されないかまたは低レベルで加圧される。
【0022】
支持ブラダ28の選択可能な加圧を容易にするために、加圧器は、コントローラ24Bに動作可能に接続される1つ以上のセンサ48を含む。センサ48は、支持ブラダ28の加圧に関連する物理的特性を感知する。例えば、センサ48は、身体部分Lの配向、身体部分の動き、標的圧縮領域Tに対する服22の動き、治療ブラダ26A〜26C内の圧力、支持ブラダ28内の圧力、治療ブラダ内のガス体積、および/または支持ブラダ内のガス体積を感知するように適合され得る。そのような特性は、より詳細に以下に説明される。センサ48はそのような特性を示す信号を生成し、それらの信号はコントローラ24Bに通信される。コントローラ24Bは、センサ48から受信された信号に少なくとも部分的に基づいて、支持ブラダ28を加圧する。例示されるセンサ48は、加圧器24に備え付けられるが、センサ48は、加圧器から分離され得、圧縮服22上に別個に取り付けられ得るかまたは着用者のどこか他の場所に位置を定められ得る。様々なタイプのセンサ48が用いられ得る。例えば、加速度計、および容量、ピエゾ抵抗、ホール効果、磁気抵抗、共鳴ビーム、または他の技術に基づく他のセンサが用いられ得る。
【0023】
図3において、脚Lは概ね水平の位置で示され、支持ブラダ28は概ね低圧力または加圧されない状態で示される。図3における脚Lの位置は、圧縮服の着用者がベッドに横たわっているときの脚の起こり得る位置を表す。脚Lへの服22の所望の適合または標的圧縮領域Tに対する治療ブラダ26A〜26Cの所望の位置を維持するために、支持ブラダ28は、この位置において圧力を必要としない場合があるかまたは最小量の圧力を必要とし得る。例えば、もし着用者がベッドで転がるか、または着用者の脚Lの配向を変える場合、治療ブラダ26A〜26Cが標的圧縮領域Tに対して動くことを防ぐために、支持ブラダ28内の圧力の増加が望まれ得る。図2および図4は、加圧状態での支持ブラダ28を示す。
【0024】
コントローラ24Bは、感知された四肢配向に基づいて支持ブラダ28を加圧し得る。例えば、コントローラ24Bは、身体部分Lの配向が閾値配向を超えるかまたは所定の配向範囲外であることを示す信号をセンサ48から受信し、その信号に応答して、支持ブラダ28に加圧ガスを向け得る。脚の長手方向軸E−−Eが水平に対して少なくとも30度である場合(例えば、図4における角度A)、支持ブラダ28は加圧され得る。水平に対して40、50、60、70、または80度など、他の閾値配向が用いられ得る。あるいは、脚の長手方向軸E−−Eが水平に対して0〜30、0〜40、0〜50、0〜60、0〜70、または0〜80度などの所定の配向範囲外である場合、支持ブラダは加圧され得る。さらに、脚Lが概ね直立していること(例えば、図2)をセンサ48が示す場合、支持ブラダ28は加圧され得、脚が横たわっている場合(例えば、図3)、支持ブラダ28内の圧力は排出され得る。身体部分Lの傾斜角は、センサ48として加速度計を用いて決定され得る。加速度計48からの信号は、ソフトウェアまたはハードウェアを用いてフィルタリングされ、傾斜角により加速度を認識し、傾斜角は、コントローラ24Bによって測定され、評価される。センサ48はまた、脚Lの角配向(すなわち、膝の曲がり)を感知するために用いられ得、この場合、2つのセンサ48が必要であり得る。例えば、第1のセンサは大腿部分に隣接して位置を決められ得、第2のセンサはくるぶし部分に隣接して位置を決められ得、2つのセンサの接近は、監視されて、角度を決定し得る(図示されていない)。脚Lの配向が水平に近づいたとき、または脚が所定の時間概ね水平のままであった後、支持ブラダ28内の圧力は減少させられ得る。
【0025】
コントローラ24Bはまた、標的圧縮領域Tに対する服22の感知された動きに基づいて、支持ブラダ28を加圧し得る。例えば、センサ48は、脚Lについての長手方向または周囲方向の服22の動きを感知するように適合され得る。そのようなセンサ48は、脚Lの表面に沿った動きを感知するために、圧縮服の内面(図示されていない)に位置を決められ得る。さらに、例えば1つのセンサが服の上、もう1つのセンサが着用者の他のところにある2つのセンサ48が用いられ得、互いに対するセンサの位置が監視され得る。そのような配置は、膝の曲がりの形態における動きを監視するために用いられ得る。
【0026】
コントローラ24Bはまた、感知された四肢の動きまたは加速度に基づいて支持ブラダ28を加圧し得る。脚Lが動いている間に服が脚の上を滑る(slip)かまたはスライド(slide)しがちであり得るので、着用者がベッドで動くかまたは歩行中の場合、脚Lに対する良好な適合を有する圧縮服22のニーズが増加する。コントローラ24Bは、身体部分Lの動作または加速度が動作または加速度の閾値量を超えるかまたは所定の加速度範囲外であることを示す信号をセンサ48から受信し、その信号に応答して、支持ブラダ28に加圧ガスを向け得る。例えば、四肢Lが所定の最小量より大きく動いていることをセンサ48が示す場合、支持ブラダ28は加圧され得る。さらに、着用者が歩行中であることをセンサ48が示す場合、支持ブラダ28は加圧され得る。例えば、センサ48は、加速度計であり得、コントローラ24Bは、着用者が「ステップ計数」を用いて歩いているときを決定するようにプログラムされ得、ここで、コントローラ24Bは、縦軸の加速度の傾きの変化が起こるたびにステップを認識する。あるいは、GPSトラッカー48は、動きを感知し、動きに基づいて支持ブラダ28の加圧を引き起こすために用いられ得る。動作および加速度を検出するために他のタイプのセンサが用いられ得る。支持ブラダ28内の圧力は、動きまたは加速度がもはや感知されなくなった後、直ちにまたは所定の時間に減少させられ得る。
【0027】
さらに、コントローラ24Bは、膨張のサイクル中に治療ブラダ26A〜26Cのうちの1つの治療ブラダ内において達成された圧力または達成されたガス体積に基づいて支持ブラダ28を加圧し得る。膨張のサイクル中に治療ブラダ26A〜26Cのうちの1つの治療ブラダ内において所望の圧力を達成しないことは、圧縮服22の適合が緩んでいることを示し得る。それに応じて、コントローラ24Bは、支持ブラダ28内の圧力を増加させ得、支持ブラダ28は、次に脚の周りの圧縮服22の適合を密着させ、結果として、治療ブラダ内の圧力の増加をもたらし(同じ体積のガスを仮定する)、次の圧縮のサイクルにおいて四肢に対する所望の圧縮を達成する。コントローラ24Bが、四肢Lに所望の量の圧縮を与える圧力まで治療ブラダを自動的に膨張させるようにプログラムされる場合、治療ブラダ26A〜26Cのうちの1つの治療ブラダ内において感知される過剰の量のガス体積もまた、圧縮服22の適合が緩んでいることを示し得る。それに応じて、コントローラ24Bは、支持ブラダ28を加圧し得、支持ブラダ28は、四肢Lに対する所望の圧縮を達成するのに必要なガスの体積を減少させ、従って次の圧縮のサイクルで治療ブラダにおいて達成されるガスの体積を減少させる。
【0028】
コントローラ24Bは、支持ブラダ28内の圧力またはガス体積に基づいて、支持ブラダ28を加圧し得る。いくつかの実施形態において、支持ブラダ28を選択可能に加圧する代わりに、支持ブラダ28内において定圧またはベースライン圧力を維持することが望まれ得る。支持ブラダ28内の圧力またはガス体積はセンサ48によって監視され得、定圧またはベースライン圧力を維持ために圧力が減少させられるかまたは増加させられることが必要である場合、センサ48は、コントローラ24Bに信号を送る。
【0029】
支持ブラダ28の選択可能な加圧は、異なるモードで実行され得る。例えば、支持ブラダ28の加圧は、「全部か無か」であり得る。換言すると、支持ブラダ28が選択可能に加圧される場合、支持ブラダ28は、所定の定圧で加圧されるか、または概して加圧されないかもしくはベースライン圧力で加圧されるかのいずれかである。あるいは、支持ブラダ28は、一定に増加して加圧され得る。例えば、支持ブラダ28内の圧力は、水平に対する配向の変化の増分(例えば、10度ごと)ごと、動きの大きさまたは速度の増加の変化(例えば、毎秒0.1メートルごと)、または加速度の増加の変化に対して、1mmHgだけ増加させられ得る。
【0030】
使用のサイクルにおいて、圧縮服装置20は脚Lなどの身体部分に配置され、治療ブラダ26A〜26Cは所望の標的圧縮領域Tを覆うかまたはその上にある。加圧器24は、治療ブラダ26A〜26Cを断続的に加圧することにより、圧縮治療を与える。加圧器はまた、絶えずまたは(例えば、感知された物理的特性に基づいて)選択可能に支持ブラダ28を加圧することにより、身体部分Lに対する圧縮服22の所望の適合を維持し、標的圧縮領域Tに対して適切な位置に治療圧縮ブラダ26A〜26Cを維持する。
【0031】
図5および図6は、本発明の圧縮服装置120の第2の実施形態を例示する。圧縮服装置120は、上記に説明される圧縮服装置20に類似し、対応する部分は、概して同じ参照番号プラス100によって示される。この実施形態は、4つの支持ブラダ128A〜128Dを含み、4つの支持ブラダ128A〜128Dは、圧縮服122が着用された場合、身体部分Lの周りにおいて周囲方向に延びるように位置を決められる。例示される支持ブラダ128A〜128Dは、治療ブラダ126A〜126Cの上、下、間に位置を決められる。使用時、上記に説明されたように、加圧器124は、治療ブラダ126A〜126Cおよび支持ブラダ128A〜128Dを加圧し得る。
【0032】
図7〜図9は、本発明の圧縮服装置220の第3の実施形態を例示する。圧縮服装置220は、上記に説明された圧縮服装置20に類似し、対応する部分は、概して同じ参照番号プラス200によって示される。この実施形態において、第1の支持ブラダ228Aおよび第2の支持ブラダ228Bが提供される。支持ブラダ228A、228Bは、膝を「形作る」。第1の支持ブラダ228Aが加圧された場合、第1の支持ブラダ228Aは、ふくらはぎの上部に沿った脚の周りにおいて周囲方向に延びることにより、ふくらはぎの上部の周りに服222を「サスペンドする」第1の部分228A’を含む。第2の支持ブラダ228Bが加圧された場合、第2の支持ブラダ228Bは、膝頭の上部に沿った脚の周りにおいて周囲方向に延びることにより、膝頭の上部の周りに服222を「サスペンドする」第1の部分228B’を含む。これらの第1の部分228A’、228B’は、脚Lに対するので、長手方向への圧縮服222の望ましくない動きを防ぐ。第1の支持ブラダ228Aはまた、膝の内側に隣接して脚Lの長さに沿って延びる第2の部分228A”を含み、第2の支持ブラダ228Bはまた、膝の外側に隣接して脚Lの長さに沿って延びる第2の部分228B”を含む。これらの第2の部分228A”、228B”は、脚Lに対する周囲方向への圧縮服222の望ましくない動きを防ぐことを助ける。使用時、加圧器224は、上記に説明されたように、治療ブラダ226A〜226Cおよび支持ブラダ228A、228Bを加圧することにより、所望の適合を維持し、標的圧縮領域Tに対して適切な位置に治療ブラダを維持し得る。
【0033】
本発明を詳細に説明したが、添付の特許請求の範囲に規定される本発明の範囲から逸脱することなく修正および変形が可能であることは明らかである。
【0034】
本発明の要素または本発明の好ましい実施形態を紹介する場合、冠詞[a」、「an」、「the」および「said(該)」は、1つ以上の要素があることを意味することが意図される。用語「comprising(含む、備えている)」、「including(含む)」および「having(有する)」は、含んでいることが意図され、記載された要素以外の追加の要素があり得ることを意味する。
【0035】
上記を考慮して、本発明のいくつかの目的が達成され他の有利な結果が獲得されることが分かる。
【0036】
本発明の範囲から逸脱することなく上記の構造および方法に様々な変更がなされ得るので、上記の説明に含まれ、添付の図面に示されるすべての事項は例示として解釈されるべきであって、限定する意味で解釈されるべきではないことが意図される。
【符号の説明】
【0037】
20 圧縮服装置
22 圧縮服
24 加圧器
24A 加圧ガスまたは圧縮ガス
24B コントローラ
26A 治療ブラダ
26B 治療ブラダ
26C 治療ブラダ
28 支持ブラダ
30 導管
40 ファスナ
【特許請求の範囲】
【請求項1】
圧縮服装置であって、
膨張可能治療ブラダと、膨張可能支持ブラダとを含む圧縮服であって、該圧縮服は、該治療ブラダが身体部分の標的圧縮領域を覆うように該身体部分に選択可能に位置決め可能である、圧縮服と、
該ブラダ内のガス圧力を増加させることによって該ブラダを選択可能に加圧するための、該治療ブラダおよび該支持ブラダに動作可能に接続可能な加圧器であって、該加圧器は、
センサであって、該身体部分の配向と、該身体部分の動作と、該身体部分の加速度と、該標的圧縮領域に対する該服の動作と、該治療ブラダ内の圧力と、該支持ブラダ内の圧力と、該治療ブラダ内のガス体積と、該支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの物理的特性を表す信号を感知および生成する、センサと、
該センサに動作可能に接続されるコントローラであって、該コントローラは、該治療ブラダに加圧ガスを周期的に向けることにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供し、該物理的特性を表す、該センサから受信された信号に応答して該支持ブラダに加圧ガスを向けることにより、該標的圧縮領域に対して適切な位置に該治療ブラダを維持する、コントローラと
を含む、加圧器と
を備えている、圧縮服装置。
【請求項2】
前記コントローラは、前記身体部分の配向が所定の配向範囲外であることを示す、前記センサから受信された信号に応答して前記支持ブラダに加圧ガスを向ける、請求項1に記載の圧縮服装置。
【請求項3】
前記コントローラは、前記身体部分が横になっている配向を表す、前記センサから受信される信号に応答して前記支持ブラダからガスを排出することによって、該支持ブラダ内のガス圧力を減少させる、請求項1または2に記載の圧縮服装置。
【請求項4】
前記コントローラは、前記身体部分の加速度が所定の加速度範囲外であることを示す、前記センサから受信された信号に応答して前記支持ブラダに加圧ガスを向ける、請求項1〜3のいずれか1項に記載の圧縮服装置。
【請求項5】
前記コントローラは、前記支持ブラダが前記身体部分の動きに概ね従う圧力を該支持ブラダ内のガス圧力が超えることを防ぐ、請求項1〜4のいずれか1項に記載の圧縮服装置。
【請求項6】
前記膨張可能治療ブラダは、前記圧縮服に順番に配置される3つの別個の治療ブラダから成り、
前記コントローラは、各治療ブラダに加圧ガスを順番に向けることにより、前記身体部分の前記標的圧縮領域に断続的な圧縮治療を提供し、該身体部分において体液の流れを蠕動的に増加させる、請求項1〜5のいずれか1項に記載の圧縮服装置。
【請求項7】
人間の身体部分の標的圧縮領域に圧縮治療を提供する方法であって、
膨張可能治療ブラダと、膨張可能支持ブラダとを有する圧縮服によって該身体部分の該標的圧縮領域を覆うことと、
該身体部分の配向と、該身体部分の動作と、該身体部分の加速度と、該標的圧縮領域に対する該服の動作と、該治療ブラダ内の圧力と、該支持ブラダ内の圧力と、該治療ブラダ内のガス体積と、該支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの特性を感知することと、
該感知された特性に応答して該支持ブラダを加圧することにより、該標的圧縮領域に対して適切な位置に該治療ブラダを維持することと、
該治療ブラダを周期的に加圧することにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供することと
を包含する、方法。
【請求項8】
前記身体部分は、脚であり、前記支持ブラダは、概ね直立している該脚の配向を感知することに応答して加圧される、請求項7に記載の方法。
【請求項9】
前記身体部分は、脚であり、前記支持ブラダは、前記人間が横たわっていることを示す、該脚の感知された動作に応答して加圧される、請求項7または8に記載の方法。
【請求項10】
前記身体部分の配向が所定の配向範囲外であること感知することに応答して前記支持ブラダ内の圧力を減少させることをさらに包含する、請求項7〜9のいずれか1項に記載の方法。
【請求項11】
前記支持ブラダは、前記身体部分の加速度が所定の加速度範囲外であることに応答して加圧される、請求項7〜10のいずれか1項に記載の方法。
【請求項12】
前記支持ブラダが前記身体部分の動きに概ね従う圧力を該支持ブラダ内の圧力が超えるのを防ぐことをさらに包含する、請求項7〜11のいずれか1項に記載の方法。
【請求項13】
圧縮服装置であって、
身体部分の標的圧縮領域を覆うようなサイズおよび形状である膨張可能治療ブラダと、
該標的圧縮領域に対して適切な位置に該治療ブラダを保持するために、該治療ブラダに接続される膨張可能支持ブラダと、
該治療ブラダおよび該支持ブラダに動作可能に接続される加圧器であって、該加圧器は、該支持ブラダを加圧することにより、適切な位置に該治療ブラダを保持し、該治療ブラダを周期的に加圧することにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供する、加圧器と
を備えている、圧縮服装置。
【請求項14】
前記支持ブラダは、前記治療ブラダに対して位置を決められ、該治療ブラダが前記身体部分の前記標的圧縮領域を覆う適切な位置にある場合、該身体部分に沿う長手方向および該体部分の周りの周囲方向のうちの少なくとも1つの方に延びるようなサイズおよび形状である、請求項13に記載の圧縮服装置。
【請求項15】
前記治療ブラダは、前記身体部分に前記標的圧縮領域に順番に圧力を提供するために複数の別個の治療ブラダを備えている、請求項13または14に記載の圧縮服装置。
【請求項1】
圧縮服装置であって、
膨張可能治療ブラダと、膨張可能支持ブラダとを含む圧縮服であって、該圧縮服は、該治療ブラダが身体部分の標的圧縮領域を覆うように該身体部分に選択可能に位置決め可能である、圧縮服と、
該ブラダ内のガス圧力を増加させることによって該ブラダを選択可能に加圧するための、該治療ブラダおよび該支持ブラダに動作可能に接続可能な加圧器であって、該加圧器は、
センサであって、該身体部分の配向と、該身体部分の動作と、該身体部分の加速度と、該標的圧縮領域に対する該服の動作と、該治療ブラダ内の圧力と、該支持ブラダ内の圧力と、該治療ブラダ内のガス体積と、該支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの物理的特性を表す信号を感知および生成する、センサと、
該センサに動作可能に接続されるコントローラであって、該コントローラは、該治療ブラダに加圧ガスを周期的に向けることにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供し、該物理的特性を表す、該センサから受信された信号に応答して該支持ブラダに加圧ガスを向けることにより、該標的圧縮領域に対して適切な位置に該治療ブラダを維持する、コントローラと
を含む、加圧器と
を備えている、圧縮服装置。
【請求項2】
前記コントローラは、前記身体部分の配向が所定の配向範囲外であることを示す、前記センサから受信された信号に応答して前記支持ブラダに加圧ガスを向ける、請求項1に記載の圧縮服装置。
【請求項3】
前記コントローラは、前記身体部分が横になっている配向を表す、前記センサから受信される信号に応答して前記支持ブラダからガスを排出することによって、該支持ブラダ内のガス圧力を減少させる、請求項1または2に記載の圧縮服装置。
【請求項4】
前記コントローラは、前記身体部分の加速度が所定の加速度範囲外であることを示す、前記センサから受信された信号に応答して前記支持ブラダに加圧ガスを向ける、請求項1〜3のいずれか1項に記載の圧縮服装置。
【請求項5】
前記コントローラは、前記支持ブラダが前記身体部分の動きに概ね従う圧力を該支持ブラダ内のガス圧力が超えることを防ぐ、請求項1〜4のいずれか1項に記載の圧縮服装置。
【請求項6】
前記膨張可能治療ブラダは、前記圧縮服に順番に配置される3つの別個の治療ブラダから成り、
前記コントローラは、各治療ブラダに加圧ガスを順番に向けることにより、前記身体部分の前記標的圧縮領域に断続的な圧縮治療を提供し、該身体部分において体液の流れを蠕動的に増加させる、請求項1〜5のいずれか1項に記載の圧縮服装置。
【請求項7】
人間の身体部分の標的圧縮領域に圧縮治療を提供する方法であって、
膨張可能治療ブラダと、膨張可能支持ブラダとを有する圧縮服によって該身体部分の該標的圧縮領域を覆うことと、
該身体部分の配向と、該身体部分の動作と、該身体部分の加速度と、該標的圧縮領域に対する該服の動作と、該治療ブラダ内の圧力と、該支持ブラダ内の圧力と、該治療ブラダ内のガス体積と、該支持ブラダ内のガス体積とから成る特性の群から選択される少なくとも1つの特性を感知することと、
該感知された特性に応答して該支持ブラダを加圧することにより、該標的圧縮領域に対して適切な位置に該治療ブラダを維持することと、
該治療ブラダを周期的に加圧することにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供することと
を包含する、方法。
【請求項8】
前記身体部分は、脚であり、前記支持ブラダは、概ね直立している該脚の配向を感知することに応答して加圧される、請求項7に記載の方法。
【請求項9】
前記身体部分は、脚であり、前記支持ブラダは、前記人間が横たわっていることを示す、該脚の感知された動作に応答して加圧される、請求項7または8に記載の方法。
【請求項10】
前記身体部分の配向が所定の配向範囲外であること感知することに応答して前記支持ブラダ内の圧力を減少させることをさらに包含する、請求項7〜9のいずれか1項に記載の方法。
【請求項11】
前記支持ブラダは、前記身体部分の加速度が所定の加速度範囲外であることに応答して加圧される、請求項7〜10のいずれか1項に記載の方法。
【請求項12】
前記支持ブラダが前記身体部分の動きに概ね従う圧力を該支持ブラダ内の圧力が超えるのを防ぐことをさらに包含する、請求項7〜11のいずれか1項に記載の方法。
【請求項13】
圧縮服装置であって、
身体部分の標的圧縮領域を覆うようなサイズおよび形状である膨張可能治療ブラダと、
該標的圧縮領域に対して適切な位置に該治療ブラダを保持するために、該治療ブラダに接続される膨張可能支持ブラダと、
該治療ブラダおよび該支持ブラダに動作可能に接続される加圧器であって、該加圧器は、該支持ブラダを加圧することにより、適切な位置に該治療ブラダを保持し、該治療ブラダを周期的に加圧することにより、該身体部分の該標的圧縮領域に断続的な圧縮治療を提供する、加圧器と
を備えている、圧縮服装置。
【請求項14】
前記支持ブラダは、前記治療ブラダに対して位置を決められ、該治療ブラダが前記身体部分の前記標的圧縮領域を覆う適切な位置にある場合、該身体部分に沿う長手方向および該体部分の周りの周囲方向のうちの少なくとも1つの方に延びるようなサイズおよび形状である、請求項13に記載の圧縮服装置。
【請求項15】
前記治療ブラダは、前記身体部分に前記標的圧縮領域に順番に圧力を提供するために複数の別個の治療ブラダを備えている、請求項13または14に記載の圧縮服装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−71133(P2012−71133A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2011−211028(P2011−211028)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]