
支援制御装置
【課題】走行計画に基づく車両制御とドライバの操作とをより一層効率的に協調させることができ、その結果、走行計画をより一層高い達成度で達成することができる支援制御装置を提供することを課題とする。
【解決手段】車両に搭載されたECUは、生成した燃費向上を達成可能な目標速度パターンに対して、“加速区間”と“惰性走行区間”の2つの区間を定義し、定義した各々の区間に応じて、燃費向上を達成可能な支援制御を実施する。
【解決手段】車両に搭載されたECUは、生成した燃費向上を達成可能な目標速度パターンに対して、“加速区間”と“惰性走行区間”の2つの区間を定義し、定義した各々の区間に応じて、燃費向上を達成可能な支援制御を実施する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は支援制御装置に関する。
【背景技術】
【0002】
特許文献1には、車両を含む移動体の走行計画における目標軌跡(区間全て)に対して区間を設定し、区間毎の移動拘束条件を設定して、区間全てを走行した際の走行結果を向上させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−327545号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、ドライバの実運転操作に伴う要求加速度に対して、実速度パターンを目標速度パターンに近づけるために、当該目標速度パターンに基づく車両制御とドライバの操作とをどのように協調させるかについては考慮していないので、走行計画に基づく車両制御とドライバの操作とをより一層効率的に協調させるためには改善の余地があるという問題点があった。
【0005】
本発明は、上記の事情に鑑みてなされたものであって、走行計画に基づく車両制御とドライバの操作とをより一層効率的に協調させることができ、その結果、走行計画をより一層高い達成度で達成することができる支援制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明にかかる支援制御装置は、制御部を備えた支援制御装置であって、前記制御部は、車両が走行する際に目標とする速度に関する制御量のパターンを目標速度制御量パターンとして生成し、前記目標速度制御量パターンに基づいて、走行状態に対応する複数の区間を定義し、定義した前記区間毎に、走行計画の達成を支援するための支援制御を実施すること、を特徴とする。
【0007】
本発明にかかる支援制御装置は、前記に記載の支援制御装置において、前記制御部は、前記区間に対応する前記走行状態に関する情報及び/又は前記目標速度制御量パターンにおける前記速度に関する制御量とドライバから前記車両に入力された前記速度に関する制御量との乖離に関する情報を、視覚及び/又は聴覚で認識可能に出力すること、を特徴とする。
【発明の効果】
【0008】
本発明にかかる支援制御装置は、車両が走行する際に目標とする速度に関する制御量のパターンを目標速度制御量パターンとして生成し、生成した目標速度制御量パターンに基づいて、走行状態に対応する複数の区間を定義し、定義した区間毎に、走行計画の達成を支援するための支援制御を実施するので、走行計画に基づく車両制御とドライバの操作とをより一層効率的に協調させることができ、その結果、走行計画をより一層高い達成度で達成することができるという効果を奏する。
【0009】
本発明にかかる支援制御装置は、区間に対応する走行状態に関する情報及び/又は目標速度制御量パターンにおける速度に関する制御量とドライバから車両に入力された速度に関する制御量との乖離に関する情報を、視覚及び/又は聴覚で認識可能に出力するので、走行計画に基づく車両制御とドライバの操作との親和性を向上させることができ、その結果、走行計画をさらに一層高い達成度で達成することができるという効果を奏する。換言すると、本発明にかかる支援制御装置は、積極的な支援制御を行い、かつ走行状態に関する情報や乖離に関する情報をドライバに積極的に与えるので、これら2つの相互作用によりドライバの操作と車両制御との親和性を向上させ、その結果、走行計画をより高いパフォーマンスで実現することができるという効果を奏する。また、本発明にかかる支援制御装置は、走行状態に関する情報及び/又は目標パターンとドライバ入力との乖離に関する情報を出力するので、車両側を積極的に支援制御した場合でも、当該支援制御の実施に対するドライバの違和感や唐突感を効果的に防止することができるという効果を奏する。
【図面の簡単な説明】
【0010】
【図1】図1は、ECU等の構成を示す図である。
【図2】図2は、目標速度パターンの一例を示す模式図である。
【図3】図3は、加速区間及び惰性走行区間の一例を示す模式図である。
【図4】図4は、区間と支援制御との関係の一例を示す図である。
【図5】図5は、区間インジケータの一例を示す図である。
【図6】図6は、評価インジケータの一例を示す図である。
【図7】図7は、メイン動作の一例を示すフローチャートである。
【図8】図8は、区間表示動作の一例を示すフローチャートである。
【図9】図9は、評価点表示動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下に、本発明にかかる支援制御装置の実施形態を図面に基づいて説明する。なお、以下では、走行計画に燃費重視が含まれている場合の実施形態を一例として説明するが、本発明は当該実施形態により限定されるものではない。
【0012】
[1.概要]
まず、本実施形態の概要について説明する。
【0013】
燃費支援システムの代表的なものとして、例えばトヨタ自動車株式会社の“エコモード”や本田技研工業株式会社の“ECON”、富士重工業株式会社の“SI−DRIVE”などが存在している。これら各社のシステムは、“ふんわりアクセル支援制御”や“エコモード制御”とも呼ばれ、ドライバのアクセル入力を、控えめな程度で燃費が良い方向へ変化させる。また、これらシステムは、ドライバがSW等でモード選択する仕様となっている。
【0014】
しかし、これらシステムでは、ドライバの操作入力を主体(正解)としており、さらに制御側はドライバによるアクセルやブレーキの操作入力が無駄なものか否かを判定することが出来ない(当該判断のための目標を持っていない)。そのため、これらシステムでは、ドライバの操作入力が支配的なままとなり、制御側は燃費向上に対して控えめな支援しか出来ない。その結果、これらシステムでは、5%程度(公称値)の燃費向上に止まり、大幅な燃費向上は難しかった。
【0015】
そこで、本実施形態では、制御側が、与えられたコース(目標走行経路)とタスク(例えば目的地、目的地への目標到着時間、燃費重視などを含む)に従って目標速度パターン又は目標加速度パターン(速度に関する制御量のパターンとしての目標速度制御量パターン)を含む走行計画を生成し、生成した目標速度パターン又は目標加速度パターンを走行状態(走行パターン)によって区間分けし、区間によって燃費向上のための支援制御を積極的に切り替えることで、従来のシステムに比べて大幅な燃費向上を可能とした。
【0016】
ところで、このような本実施形態の手法(区間定義を用いた低燃費支援制御)によって従来の燃費支援システムに比べて大幅な燃費向上を実現することができるが、その一方で、積極的な支援制御とその切り替えはドライバに違和感や唐突感を与える可能性がある。なお、ドライバが入力したアクセルやシフト等の操作が良いか悪いかを燃費によって判定・評価するエコインジケータやシフトインジケータ等は存在していた。また、特開2002−370560号公報には、走行予定経路(曲線路、傾斜路)の先読み情報に基づいて走行予定経路の各区間において燃費が向上するように目標加減速度(目標パターン)を設定し、目標加速度(経済領域、順経済領域、非経済領域に分けて示す)に対する実際の加速度との乖離度を表示する技術が開示されている。また、特開2009−149286号公報には、適切なアクセル操作を車両内表示器に示して運転者に燃費の良いアクセルワークの情報を提供することでCO2の削減を図る技術が開示されている。
【0017】
しかし、インジケータ等のこれら従来技術では、ドライバの入力を評価の対象としているため、当該入力がムダか否かを判定することができなかった。
【0018】
そこで、本実施形態では、HMI(ヒューマンマシンインタフェース)要素を“明示”・“提示”・“評価”の3つに分類し、これらの分類に対応するHMIを設置することで、車両側を積極的に支援制御したりそれを切り替えたりした際にドライバが抱く可能性のある唐突感や違和感の防止を可能とし、さらにドライバにタスク達成のための協力を仰ぎ、その結果より高い燃費向上パフォーマンスの実現をも可能とした。
【0019】
この“明示”の要素によって、ドライバは、“今、制御側が何をしようとしているか、どのような支援をしようとしているか”を知ることができるようになる。また、この“提示”の要素によって、ドライバは、“今、制御側が自分に何をして欲しいのか”を知ることができるようになる。また、この“評価”の要素によって、ドライバは、“自分の行った操作や入力がどれだけタスク達成に貢献したか”を知ることができるようになる。
【0020】
[2.構成]
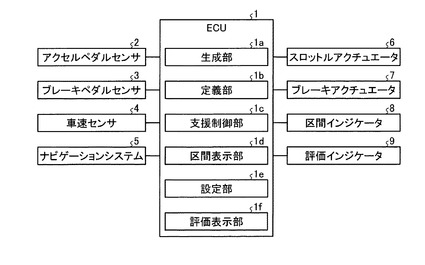
つぎに、本実施形態のECU(電子制御ユニット)等の構成について図1を参照しながら説明する。図1は、本実施形態のECU等の構成を示す図である。
【0021】
図1において、符号1は車両に搭載されたECU(本発明にかかる支援制御装置を含む)であり、符号2はアクセルペダルセンサであり、符号3はブレーキペダルセンサであり、符号4は車速センサであり、符号5はナビゲーションシステムであり、符号6はスロットルアクチュエータであり、符号7はブレーキアクチュエータであり、符号8は区間インジケータであり、符号9は評価インジケータである。図1において、符号1aは生成部であり、符号1bは定義部であり、符号1cは支援制御部であり、符号1dは区間表示部であり、符号1eは設定部であり、符号1fは評価表示部である。
【0022】
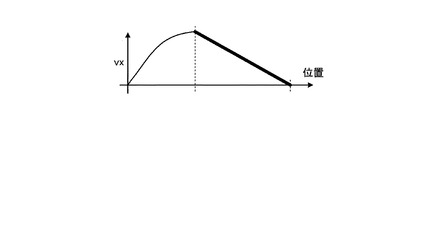
生成部1aは、コース形状情報(例えばR情報、路面μ情報など)及びドライバの希望タスク(例えばゴール地点、到達時間、燃費重視など)に基づいて、当該希望タスクを満たす中で最適と評価される結果を導き出す速度(又は加速度)の変化に関する目標速度パターン(又は目標加速度パターン)を生成する。具体的には、希望タスクとしてゴール地点及びそこへの到達時間が設定された場合、生成部1aは、当該設定されたこれら条件を満たす範囲で最も燃費が良いと評価された目標速度パターン(又は目標加速度パターン)を生成する。図2に、生成部1aで生成する目標速度パターンの一例を示す。
【0023】
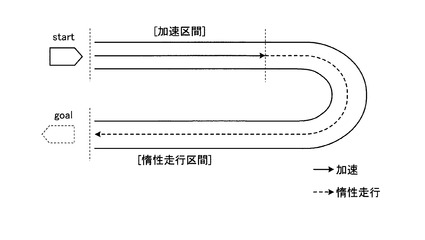
図1に戻り、定義部1bは、生成部1aで得られた目標速度パターン(又は目標加速度パターン)を、走行状態によって区間分けする。換言すると、定義部1bは、目標速度又は目標加速度に応じて、与えられたコースを区間分けする。ここで、可能な限り燃費を向上させる為には(そもそも無駄な加速をしない為にも)、不必要な減速を避ける速度パターンが必要であるので、本実施形態では、“加速”と、エンジンブレーキも使用しない“惰性走行”を、走行状態(走行パターン)として組み入れる。そして、本実施形態では、燃費を重視するために、目標速度パターン(又は目標加速度パターン)を、速度を上げる区間である“加速区間”と、実質転がり抵抗のみで惰性走行する区間である“惰性走行区間”の2つに分割する。図3に、定義部1bで定義した加速区間及び惰性走行区間の一例をコースと対応付けて示す。
【0024】
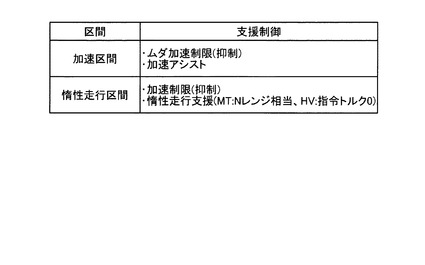
図1に戻り、支援制御部1cは、生成部1aで生成した目標速度パターン(又は目標加速度パターン)と定義部1bで定義した区間を基に、燃費重視の支援制御を実施する。具体的には、支援制御部1cは、加速区間では、目標加速度とドライバの要求加速度との乖離に応じて“ムダ加速制限(抑制)”と“加速アシスト”のいずれか又は両方の支援制御を実施し、惰性走行区間では、アクセルペダルのON/OFFの状態に応じて“加速制限(抑制)”と“惰性走行支援”のいずれかの支援制御を実施する。図4に、区間と支援制御との関係の一例を示す。
【0025】
ここで、“ムダ加速制限(抑制)”とは、ドライバの入力した要求加速度が目標加速度パターンを超えているような場合に、当該入力に対して制限又は抑制をかける支援制御である。“加速アシスト”とは、ドライバの入力した要求加速度が目標加速度パターンを下回ってドライバの設定したタスクの達成が困難になったような場合に、危険に至らず且つドライバが違和感を覚えない範囲で当該入力に対して嵩上げを行う支援制御である。
【0026】
ここで、ムダ加速制限と加速アシストの両方の支援制御を同時に実現するのに用いることができるドライバ違和感考慮協調手法について説明する。「感覚量Eは、刺激Rの対数に比例する」というウェーバーフェヒナー則(E[dB]=K×log(R))に基づいて、運転者の要求加速度と、駆動力制御装置により設定された加速度の目標値とが調停され、加速度の指令値が設定される。感覚量Eには、現在の刺激(加速度)に対して、刺激の変化に気付くか気付かないかの境の刺激変化量dE[dB]である弁別閾が存在する。運転者の要求加速度を基準に、加速度の絶対値増側および減側にそれぞれ弁別閾が設定される。なお、車両の駆動力制御では、運転者に加わる加速度は、車両の加速度と同一(実質的に同一)であり、車両の加速度を変化させると、運転者に加わる加速度は、車両の加速度と同様に変化する。言い換えると、運転者に加わる加速度に代えて、車両の加速度を刺激Rとして運転者の感覚量Eを算出することができる。
【0027】
また、刺激の時系列変化に気付く閾dE/dt[dB/s]が設けられる。時系列弁別閾には、ドライバの要求ジャークを基準に、絶対値増側(後述するジャーク補正量上限値)、減側(後述するジャーク補正量下限値)の2値が設けられる。加速度の変化に気付く弁別閾、およびジャークの変化に気付く時系列弁別閾に基づいて、加速度(駆動力)および加速度の変化速度(加加速度)にそれぞれガード値が設定される。さらに、アクセルペダルやブレーキペダルに対する運転者の操作量が短時間で大きく変化する場合、すなわち、運転者が大きな加速度の変化を望んでいる場合には、加加速度のガード値が緩められる。
【0028】
支援制御部1cの説明に戻り、“加速制限(抑制)”とは、ドライバがアクセルペダルをONした場合に、惰性走行区間におけるドライバの要求加速度を積極的に抑制する支援制御である。なお、惰性走行区間では基本的に加速する必要がない(換言すると、加速しなくても、設定したタスクを十分に達成することができる)と判断できることから、加速制限の支援制御をこのように設定した。“惰性走行支援”とは、ドライバがアクセルペダルをOFFした場合に、エンジンブレーキをかけずに車両を惰性走行(車両が出力するトルクをゼロにする)させる支援制御である。
【0029】
ここで、本実施形態では、1.制御側が、目標速度・加速度パターンを持っていること、2.制御側が、コース上のある位置(区間)において、どのような走行状態(走行パターン)であるべきか(例えば加速区間において何が無駄なのか)を知っていること、が特長(優位点)であり、これにより、ドライバの操作入力に対して制御側が積極的且つ効果的な支援制御を実施することができる。
【0030】
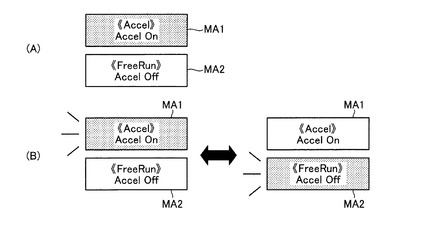
図1に戻り、区間表示部1dは、現在走行している位置(区間)における走行状態(走行パターン)のステータス(具体的には“加速”又は“惰性走行”)を、車両に設置された区間インジケータ8に表示させる。ここで、区間インジケータ8の一例について図5を参照して説明する。区間インジケータ8は、図5の(A)に示すようなインジケータMA1及びMA2の組からなる。インジケータMA1は、加速区間であることの明示やドライバへの要求内容の提示等を例えば文字や点灯等で行うための表示器であり、インジケータMA2は、惰性走行区間であることの明示やドライバへの要求内容の提示等を文字や点灯等で行うための表示器である。区間表示部1dは、図5の(B)に示すように、現在位置における区間情報に基づいてインジケータMA1及びMA2の点灯を切り替える。なお、図5では、文字の一例として、加速区間の明示とアクセルペダルOnの提示に対応する「《Accel》Accel On」、および惰性走行区間の明示とアクセルペダルOffの提示に対応する「《FreeRun》Accel Off」を挙げている。
【0031】
図1に戻り、設定部1eは、目標速度パターンにおける目標速度に関する制御量とドライバが入力した速度に関する制御量との乖離度(例えば目標速度とドライバ入力速度との差)又は目標加速度パターンにおける目標加速度に関する制御量とドライバが入力した加速度に関する制御量との乖離度(例えば目標加速度とドライバ入力加速度との差)に対して、段階的に評価点を設定する。
【0032】
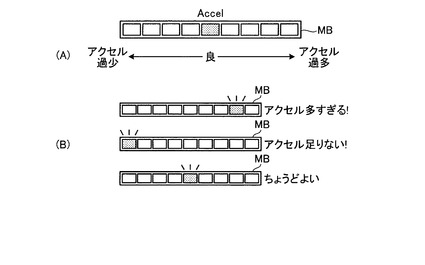
評価表示部1fは、設定部1eで設定した評価点を、車両に設置された評価インジケータ9に表示させる。ここで、評価インジケータ9の一例について図6を参照して説明する。評価インジケータ9は、図6の(A)に示すようなインジケータMBである。インジケータMBは、評価点と対応付けられた点灯可能な区画を複数(奇数個が好ましい)並べて構成された、評価点を区画の点灯により表示するための表示器である。評価表示部1fは、評価点に対応する区画を定義(決定)し、図6の(B)に示すように、定義した区画を点灯させる。
【0033】
ここで、本実施形態では、ドライバの操作入力に対して制御側が積極的且つ効果的な支援制御を実施するが、これに加えて、制御側が持っている又は知っている情報をインジケータを介して制御側がドライバに積極的に与えるので、これらの相互作用によって、ドライバの操作と車両制御との親和性をより向上させ、その結果、より高い燃費向上パフォーマンスを実現することができる。
【0034】
[2.動作]
つぎに、上述した構成のECU1で行われるメイン動作等の一例について図7等を参照して説明する。図7は、本実施形態のメイン動作の一例を示すフローチャートである。
【0035】
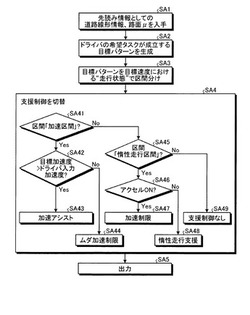
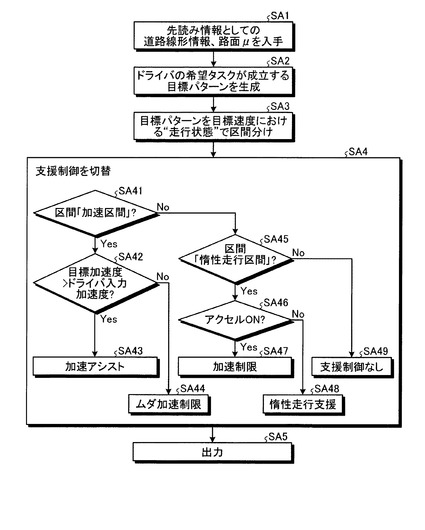
まず、ECU1は、先読み情報としての道路線形情報および路面μを入手する(ステップSA1)。
【0036】
つぎに、生成部1aは、ステップSA1で入手した情報に基づいて、目標到達時間や燃費最適などを含むドライバの希望タスクが成立する目標速度・加速度パターン(目標速度制御量パターンを含む)を生成する(ステップSA2)。
【0037】
ここで、目標速度パターンの演算の一例について説明する。加速区間と惰性走行区間(減速区間)に分割し、各々異なる評価式を用いて目標速度パターンを演算する。具体的には、道路形状情報ファイルに記憶された道路形状情報に基づいて、道路上を車両が走行する場合の走行状態(走行パターン)を予測し、予測された走行状態(走行パターン)に基づいて、道路を複数の道路区間に分割し、道路区間毎に評価関数を設定し、道路区間毎に設定された評価関数に基づいて、道路上を走行する車両の走行軌跡を演算する。また、分割された道路区間の区切り位置を可変条件として走行軌跡を演算する。走行軌跡とは、コース(目標走行経路)における車両の走行位置である。
【0038】
また、道路形状情報ファイルに記憶された道路形状情報に基づいて、道路上を車両が走行する場合に予測される速度パターンを演算し、演算された速度パターンに基づいて、道路区間として少なくとも加速区間と減速区間に分割し、加速区間に加速区間用の評価関数を、減速区間に減速区間用の評価関数を設定する。また、加速区間には、エンジン回転数が中回転以上の場合をゼロ回転付近の場合と比べて望ましいと評価する評価関数、より具体的には、エンジンの熱効率の最良点を1としたときの各点の熱効率の比率を求め、全体から1を引いたものが評価値となるよう評価関数を設定し、エンジン回転数がゼロ回転付近の評価値を0より大きな数値とする。また、減速区間には、エンジン回転数がゼロ回転付近の場合を中回転以上の場合と比べて望ましいと評価する評価関数、より具体的には、転がり抵抗を基準として0とした場合に、転がり抵抗の減速度から離れた加減速度エネルギーに対して、ハイブリッドシステムにおけるエネルギー入出力のロスを比例させた数値が評価値となる評価関数を設定し、エンジン回転数が中回転以上の場合を0より大きな数値とする。
【0039】
また、道路形状情報ファイルに記憶された道路形状情報に基づいて、道路上を車両が走行する場合に予測される摩擦円使用率を演算し、演算された摩擦円使用率が相対的に高い道路区間に、摩擦円使用率が相対的に低い道路区間とは異なる評価関数、より具体的には、加速区間に、エンジン回転状態を基本としてハイブリッドシステムと合わせて熱効率を重視した加速を望ましいと評価する評価関数を設定し、減速区間に、エンジンオフ状態を基本として回生と電力アシストによる減速を望ましいと評価する評価関数を設定する。
【0040】
続いて、目標速度パターンの演算の他の一例について説明する。標準的に生成された速度パターン(定常円最高速度パターン)を走行制御開始位置から終了位置に向けて速度状態を修正し、走行制御終了位置から開始位置に向けて速度状態を修正して、目標速度パターンを演算する。具体的には、目標走行経路(コース)に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、目標走行経路における走行制御の開始位置から走行制御の終了位置に向けて速度状態の修正処理を実行する第1速度状態修正手段と、目標走行経路における走行制御の終了位置から走行制御の開始位置に向けて速度状態の修正処理を実行する第2速度状態修正手段とを設けている。従って、最適化手法を用いることなく、目標走行経路における走行制御の開始位置から終了位置に向けて速度状態の修正処理を実行すると共に、走行制御の終了位置から開始位置に向けて速度状態の修正処理を実行することで、走行経路に応じた速度パターンを短時間で生成する。また、加速側の速度状態を修正処理すると共に、減速側の速度状態を修正処理している。この場合、速度状態を低速側に修正処理している。
【0041】
また、目標走行経路を一定の間隔に分割する走行経路分割手段を設け、分割された領域ごとに速度状態を修正処理し、隣接する領域の速度状態を比較し、速度が高い領域の速度状態を低速側に修正処理している。この場合、隣接する領域の加速度または減速度を比較し、加速度超過または減速度超過を抑制するように修正処理している。従って、目標走行経路を一定の間隔に分割し、各領域ごとに速度状態を低速側に修正処理する。
【0042】
なお、目標走行経路における定常円最高速度パターンに対して、走行開始点から走行終了点に向けて隣接点同士の加速度を算出してから、走行終了点から走行開始点に向けて隣接点同士の減速度を算出してもよく、また、目標走行経路における定常円最高速度パターンに対して、走行終了点から走行開始点に向けて隣接点同士の減速度を算出してから、走行開始点から走行終了点に向けて隣接点同士の加速度を算出してもよい。
【0043】
図7の説明に戻り、定義部1bは、ステップSA2で生成した目標速度・加速度パターンを、当該目標速度・加速度パターンにおける走行状態で、“加速区間”と“惰性走行区間”の2つに区間分けする(ステップSA3)。
【0044】
つぎに、支援制御部1dは、車両の実走行を監視しながら、ステップSA3で定義した区間に応じた支援制御を実施する(ステップSA4)。
【0045】
具体的には、支援制御部1dは、車両の実走行の位置がステップSA3で定義した加速区間である場合(ステップSA41:Yes)において、さらに、現在のアクセルペダル入力量、ブレーキペダル入力量および車速から推定されたドライバの入力加速度が目標加速度を下回る場合(ステップSA42:Yes)には、上述した“加速アシスト”の支援制御を実施し(ステップSA43)、一方、当該入力加速度が目標加速度を下回らない場合(ステップSA42:No)には、上述した“ムダ加速制限”の支援制御を実施する(ステップSA44)。具体的には、ステップSA43では、“加速アシスト”の支援制御として、アクセル開度−要求加速度マップのゲインを上げ、ステップSA44では、“ムダ加速制限”の支援制御として、アクセル開度−要求加速度マップのゲインを下げる。
【0046】
また、支援制御部1dは、車両の実走行状態がステップSA3で定義した加速区間でない場合(ステップSA41:No)においてさらにその実走行状態が惰性走行区間である場合(ステップSA45:Yes)には、ドライバがアクセルをONしていれば(ステップSA46:Yes)、上述した“加速制限”の支援制御を実施し(ステップSA47)、一方ドライバがアクセルをONしていなければ(ステップSA46:No)、上述した“惰性走行支援”の支援制御を実施する(ステップSA48)。具体的には、ステップSA47では、“加速制限”の支援制御として、アクセル開度−要求加速度マップのゲインを大幅に下げる。なお、ステップSA47で実施する加速制限での抑制ゲインは、ステップSA44で実施するムダ加速制限での抑制ゲインよりも大きなものに設定してもよい。また、ステップSA48では、“惰性走行支援”の支援制御として、HV(ハイブリッド)車の場合には車両が出力するトルクをゼロにしたり、MT(マニュアルトランスミッション)車の場合にはN(ニュートラル)レンジ相当で走行させたりする。
【0047】
また、支援制御部1dは、車両の実走行の位置が惰性走行区間でない場合(ステップSA45:No)には、支援制御を実施しない(ステップSA49)。例えば、マップのゲインが書き換えられていれば、当該ゲインを当初の状態に戻す。
【0048】
図7のメイン動作の説明に戻り、ECU1は、ステップSA4で切り替えられた支援制御を実行するために、各アクチュエータの出力を制御する(ステップSA5)。具体的には、ステップSA4における支援制御の実施によってゲインが書き換えられたアクセル開度−要求加速度のマップに従って車両が走行されるように、スロットルアクチュエータ6等の出力を制御する。
【0049】
これにて、本実施形態のメイン動作の説明を終了する。
【0050】
つぎに、上述した構成のECU1で行われる区間表示動作の一例について図8を参照して説明する。図8は、本実施形態の区間表示動作の一例を示すフローチャートである。
【0051】
まず、区間表示部1dは、車両の実走行状態が加速区間である場合(ステップSB1:Yes)には、インジケータMA1を点灯させ且つインジケータMA2を消灯させる(ステップSB2)。
【0052】
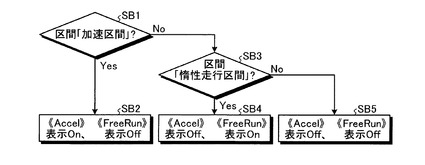
また、区間表示部1dは、車両の実走行状態が加速区間でない場合(ステップSB1:No)において、惰性走行区間であるとき(ステップSB3:Yes)にはインジケータMA1を消灯させ且つインジケータMA2を点灯させ(ステップSB4)、惰性走行区間でないとき(ステップSB3:No)にはインジケータMA1及びインジケータMA2を共に消灯させる(ステップSB5)。
【0053】
これにて、本実施形態の区間表示動作の説明を終了する。
【0054】
つぎに、上述した構成のECU1で行われる評価点表示動作の一例について図9を参照して説明する。図9は、本実施形態の評価点表示動作の一例を示すフローチャートである。
【0055】
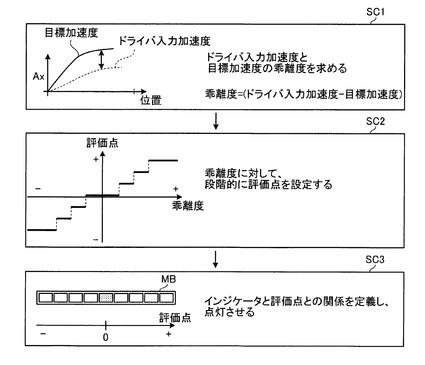
まず、評価部1eは、現在のアクセルペダル入力量、ブレーキペダル入力量および車速から推定されたドライバの入力加速度と目標加速度との差「入力加速度−目標加速度」を、乖離度として求める(ステップSC1)。
【0056】
つぎに、評価部1eは、予め設けられている乖離度−評価点マップに基づいて、ステップSC1で求めた乖離度に対して、評価点を段階的に設定する(ステップSC2)。
【0057】
そして、評価表示部1fは、インジケータMBを構成する複数の区画の中から、ステップSC2で設定した評価点に対応する区画を定義(決定)し、定義した区画を点灯させる(ステップSC3)。具体的には、評価点が大きくなるにつれて評価点をより右側の区画と対応付けることで、図6に示すような形で、ドライバにアクセル操作が多すぎること(アクセル過多)を知らせることができる。また、評価点が小さくなるにつれて評価点をより左側の区画と対応付けることで、図6に示すような形で、ドライバにアクセル操作が足りないこと(アクセル過少)を知らせることができる。また、評価点が中間的なものであれば評価点をより中央の区画と対応付けることで、図6に示すような形で、ドライバにアクセル操作が丁度良いことを知らせることができる。
【0058】
これにて、本実施形態の評価点表示動作の説明を終了する。
【0059】
[3.まとめ]
以上説明したように、本実施形態によれば、コース形状他の情報を用いて目標速度パターン(目標速度制御量パターン)を生成し、生成した目標速度パターンを複数の速度パターン区間に分割し、分割した区間に応じてドライバ操作に対する支援制御を実施する。これにより、ドライバの要求に対して、目標速度パターンに応じた最適な支援制御を実施し、走行計画とドライバ操作とを効率的に協調制御させて、車両の実走行結果を当該走行計画により近づけることができる。
【0060】
また、本実施形態によれば、“加速区間”や“惰性走行区間”といった区間に関する情報、“アクセルON”や“アクセルOFF”といったドライバへの操作要求に関する情報、及び目標パターンとドライバ入力との乖離度に関する情報を、インジケータに表示する。これにより、車両側を積極的に支援制御した場合でも、ドライバへの当該支援制御に対する違和感や唐突感を防止することができる。また、本実施形態によれば、制御側が、目標速度・加速度パターンを持っており、又ある位置(区間)において車両がどのような走行状態(走行パターン)であるべきなのかを知っているので、制御側が積極的な支援制御を行い且つこれらの情報をドライバに積極的に与えることにより、この2つの相互作用によって、ドライバ操作と車両制御の親和性をより向上させ、その結果、より高いパフォーマンスでのタスクの実現を可能とした。
【産業上の利用可能性】
【0061】
以上のように、本発明にかかる支援制御装置は、自動車製造産業において有用であり、特に、走行計画をより一層高い達成度で達成するための利用に適している。
【符号の説明】
【0062】
1 ECU
1a 生成部
1b 定義部
1c 支援制御部
1d 区間表示部
1e 設定部
1f 評価表示部
8 区間インジケータ
9 評価インジケータ
【技術分野】
【0001】
本発明は支援制御装置に関する。
【背景技術】
【0002】
特許文献1には、車両を含む移動体の走行計画における目標軌跡(区間全て)に対して区間を設定し、区間毎の移動拘束条件を設定して、区間全てを走行した際の走行結果を向上させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−327545号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、ドライバの実運転操作に伴う要求加速度に対して、実速度パターンを目標速度パターンに近づけるために、当該目標速度パターンに基づく車両制御とドライバの操作とをどのように協調させるかについては考慮していないので、走行計画に基づく車両制御とドライバの操作とをより一層効率的に協調させるためには改善の余地があるという問題点があった。
【0005】
本発明は、上記の事情に鑑みてなされたものであって、走行計画に基づく車両制御とドライバの操作とをより一層効率的に協調させることができ、その結果、走行計画をより一層高い達成度で達成することができる支援制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明にかかる支援制御装置は、制御部を備えた支援制御装置であって、前記制御部は、車両が走行する際に目標とする速度に関する制御量のパターンを目標速度制御量パターンとして生成し、前記目標速度制御量パターンに基づいて、走行状態に対応する複数の区間を定義し、定義した前記区間毎に、走行計画の達成を支援するための支援制御を実施すること、を特徴とする。
【0007】
本発明にかかる支援制御装置は、前記に記載の支援制御装置において、前記制御部は、前記区間に対応する前記走行状態に関する情報及び/又は前記目標速度制御量パターンにおける前記速度に関する制御量とドライバから前記車両に入力された前記速度に関する制御量との乖離に関する情報を、視覚及び/又は聴覚で認識可能に出力すること、を特徴とする。
【発明の効果】
【0008】
本発明にかかる支援制御装置は、車両が走行する際に目標とする速度に関する制御量のパターンを目標速度制御量パターンとして生成し、生成した目標速度制御量パターンに基づいて、走行状態に対応する複数の区間を定義し、定義した区間毎に、走行計画の達成を支援するための支援制御を実施するので、走行計画に基づく車両制御とドライバの操作とをより一層効率的に協調させることができ、その結果、走行計画をより一層高い達成度で達成することができるという効果を奏する。
【0009】
本発明にかかる支援制御装置は、区間に対応する走行状態に関する情報及び/又は目標速度制御量パターンにおける速度に関する制御量とドライバから車両に入力された速度に関する制御量との乖離に関する情報を、視覚及び/又は聴覚で認識可能に出力するので、走行計画に基づく車両制御とドライバの操作との親和性を向上させることができ、その結果、走行計画をさらに一層高い達成度で達成することができるという効果を奏する。換言すると、本発明にかかる支援制御装置は、積極的な支援制御を行い、かつ走行状態に関する情報や乖離に関する情報をドライバに積極的に与えるので、これら2つの相互作用によりドライバの操作と車両制御との親和性を向上させ、その結果、走行計画をより高いパフォーマンスで実現することができるという効果を奏する。また、本発明にかかる支援制御装置は、走行状態に関する情報及び/又は目標パターンとドライバ入力との乖離に関する情報を出力するので、車両側を積極的に支援制御した場合でも、当該支援制御の実施に対するドライバの違和感や唐突感を効果的に防止することができるという効果を奏する。
【図面の簡単な説明】
【0010】
【図1】図1は、ECU等の構成を示す図である。
【図2】図2は、目標速度パターンの一例を示す模式図である。
【図3】図3は、加速区間及び惰性走行区間の一例を示す模式図である。
【図4】図4は、区間と支援制御との関係の一例を示す図である。
【図5】図5は、区間インジケータの一例を示す図である。
【図6】図6は、評価インジケータの一例を示す図である。
【図7】図7は、メイン動作の一例を示すフローチャートである。
【図8】図8は、区間表示動作の一例を示すフローチャートである。
【図9】図9は、評価点表示動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下に、本発明にかかる支援制御装置の実施形態を図面に基づいて説明する。なお、以下では、走行計画に燃費重視が含まれている場合の実施形態を一例として説明するが、本発明は当該実施形態により限定されるものではない。
【0012】
[1.概要]
まず、本実施形態の概要について説明する。
【0013】
燃費支援システムの代表的なものとして、例えばトヨタ自動車株式会社の“エコモード”や本田技研工業株式会社の“ECON”、富士重工業株式会社の“SI−DRIVE”などが存在している。これら各社のシステムは、“ふんわりアクセル支援制御”や“エコモード制御”とも呼ばれ、ドライバのアクセル入力を、控えめな程度で燃費が良い方向へ変化させる。また、これらシステムは、ドライバがSW等でモード選択する仕様となっている。
【0014】
しかし、これらシステムでは、ドライバの操作入力を主体(正解)としており、さらに制御側はドライバによるアクセルやブレーキの操作入力が無駄なものか否かを判定することが出来ない(当該判断のための目標を持っていない)。そのため、これらシステムでは、ドライバの操作入力が支配的なままとなり、制御側は燃費向上に対して控えめな支援しか出来ない。その結果、これらシステムでは、5%程度(公称値)の燃費向上に止まり、大幅な燃費向上は難しかった。
【0015】
そこで、本実施形態では、制御側が、与えられたコース(目標走行経路)とタスク(例えば目的地、目的地への目標到着時間、燃費重視などを含む)に従って目標速度パターン又は目標加速度パターン(速度に関する制御量のパターンとしての目標速度制御量パターン)を含む走行計画を生成し、生成した目標速度パターン又は目標加速度パターンを走行状態(走行パターン)によって区間分けし、区間によって燃費向上のための支援制御を積極的に切り替えることで、従来のシステムに比べて大幅な燃費向上を可能とした。
【0016】
ところで、このような本実施形態の手法(区間定義を用いた低燃費支援制御)によって従来の燃費支援システムに比べて大幅な燃費向上を実現することができるが、その一方で、積極的な支援制御とその切り替えはドライバに違和感や唐突感を与える可能性がある。なお、ドライバが入力したアクセルやシフト等の操作が良いか悪いかを燃費によって判定・評価するエコインジケータやシフトインジケータ等は存在していた。また、特開2002−370560号公報には、走行予定経路(曲線路、傾斜路)の先読み情報に基づいて走行予定経路の各区間において燃費が向上するように目標加減速度(目標パターン)を設定し、目標加速度(経済領域、順経済領域、非経済領域に分けて示す)に対する実際の加速度との乖離度を表示する技術が開示されている。また、特開2009−149286号公報には、適切なアクセル操作を車両内表示器に示して運転者に燃費の良いアクセルワークの情報を提供することでCO2の削減を図る技術が開示されている。
【0017】
しかし、インジケータ等のこれら従来技術では、ドライバの入力を評価の対象としているため、当該入力がムダか否かを判定することができなかった。
【0018】
そこで、本実施形態では、HMI(ヒューマンマシンインタフェース)要素を“明示”・“提示”・“評価”の3つに分類し、これらの分類に対応するHMIを設置することで、車両側を積極的に支援制御したりそれを切り替えたりした際にドライバが抱く可能性のある唐突感や違和感の防止を可能とし、さらにドライバにタスク達成のための協力を仰ぎ、その結果より高い燃費向上パフォーマンスの実現をも可能とした。
【0019】
この“明示”の要素によって、ドライバは、“今、制御側が何をしようとしているか、どのような支援をしようとしているか”を知ることができるようになる。また、この“提示”の要素によって、ドライバは、“今、制御側が自分に何をして欲しいのか”を知ることができるようになる。また、この“評価”の要素によって、ドライバは、“自分の行った操作や入力がどれだけタスク達成に貢献したか”を知ることができるようになる。
【0020】
[2.構成]
つぎに、本実施形態のECU(電子制御ユニット)等の構成について図1を参照しながら説明する。図1は、本実施形態のECU等の構成を示す図である。
【0021】
図1において、符号1は車両に搭載されたECU(本発明にかかる支援制御装置を含む)であり、符号2はアクセルペダルセンサであり、符号3はブレーキペダルセンサであり、符号4は車速センサであり、符号5はナビゲーションシステムであり、符号6はスロットルアクチュエータであり、符号7はブレーキアクチュエータであり、符号8は区間インジケータであり、符号9は評価インジケータである。図1において、符号1aは生成部であり、符号1bは定義部であり、符号1cは支援制御部であり、符号1dは区間表示部であり、符号1eは設定部であり、符号1fは評価表示部である。
【0022】
生成部1aは、コース形状情報(例えばR情報、路面μ情報など)及びドライバの希望タスク(例えばゴール地点、到達時間、燃費重視など)に基づいて、当該希望タスクを満たす中で最適と評価される結果を導き出す速度(又は加速度)の変化に関する目標速度パターン(又は目標加速度パターン)を生成する。具体的には、希望タスクとしてゴール地点及びそこへの到達時間が設定された場合、生成部1aは、当該設定されたこれら条件を満たす範囲で最も燃費が良いと評価された目標速度パターン(又は目標加速度パターン)を生成する。図2に、生成部1aで生成する目標速度パターンの一例を示す。
【0023】
図1に戻り、定義部1bは、生成部1aで得られた目標速度パターン(又は目標加速度パターン)を、走行状態によって区間分けする。換言すると、定義部1bは、目標速度又は目標加速度に応じて、与えられたコースを区間分けする。ここで、可能な限り燃費を向上させる為には(そもそも無駄な加速をしない為にも)、不必要な減速を避ける速度パターンが必要であるので、本実施形態では、“加速”と、エンジンブレーキも使用しない“惰性走行”を、走行状態(走行パターン)として組み入れる。そして、本実施形態では、燃費を重視するために、目標速度パターン(又は目標加速度パターン)を、速度を上げる区間である“加速区間”と、実質転がり抵抗のみで惰性走行する区間である“惰性走行区間”の2つに分割する。図3に、定義部1bで定義した加速区間及び惰性走行区間の一例をコースと対応付けて示す。
【0024】
図1に戻り、支援制御部1cは、生成部1aで生成した目標速度パターン(又は目標加速度パターン)と定義部1bで定義した区間を基に、燃費重視の支援制御を実施する。具体的には、支援制御部1cは、加速区間では、目標加速度とドライバの要求加速度との乖離に応じて“ムダ加速制限(抑制)”と“加速アシスト”のいずれか又は両方の支援制御を実施し、惰性走行区間では、アクセルペダルのON/OFFの状態に応じて“加速制限(抑制)”と“惰性走行支援”のいずれかの支援制御を実施する。図4に、区間と支援制御との関係の一例を示す。
【0025】
ここで、“ムダ加速制限(抑制)”とは、ドライバの入力した要求加速度が目標加速度パターンを超えているような場合に、当該入力に対して制限又は抑制をかける支援制御である。“加速アシスト”とは、ドライバの入力した要求加速度が目標加速度パターンを下回ってドライバの設定したタスクの達成が困難になったような場合に、危険に至らず且つドライバが違和感を覚えない範囲で当該入力に対して嵩上げを行う支援制御である。
【0026】
ここで、ムダ加速制限と加速アシストの両方の支援制御を同時に実現するのに用いることができるドライバ違和感考慮協調手法について説明する。「感覚量Eは、刺激Rの対数に比例する」というウェーバーフェヒナー則(E[dB]=K×log(R))に基づいて、運転者の要求加速度と、駆動力制御装置により設定された加速度の目標値とが調停され、加速度の指令値が設定される。感覚量Eには、現在の刺激(加速度)に対して、刺激の変化に気付くか気付かないかの境の刺激変化量dE[dB]である弁別閾が存在する。運転者の要求加速度を基準に、加速度の絶対値増側および減側にそれぞれ弁別閾が設定される。なお、車両の駆動力制御では、運転者に加わる加速度は、車両の加速度と同一(実質的に同一)であり、車両の加速度を変化させると、運転者に加わる加速度は、車両の加速度と同様に変化する。言い換えると、運転者に加わる加速度に代えて、車両の加速度を刺激Rとして運転者の感覚量Eを算出することができる。
【0027】
また、刺激の時系列変化に気付く閾dE/dt[dB/s]が設けられる。時系列弁別閾には、ドライバの要求ジャークを基準に、絶対値増側(後述するジャーク補正量上限値)、減側(後述するジャーク補正量下限値)の2値が設けられる。加速度の変化に気付く弁別閾、およびジャークの変化に気付く時系列弁別閾に基づいて、加速度(駆動力)および加速度の変化速度(加加速度)にそれぞれガード値が設定される。さらに、アクセルペダルやブレーキペダルに対する運転者の操作量が短時間で大きく変化する場合、すなわち、運転者が大きな加速度の変化を望んでいる場合には、加加速度のガード値が緩められる。
【0028】
支援制御部1cの説明に戻り、“加速制限(抑制)”とは、ドライバがアクセルペダルをONした場合に、惰性走行区間におけるドライバの要求加速度を積極的に抑制する支援制御である。なお、惰性走行区間では基本的に加速する必要がない(換言すると、加速しなくても、設定したタスクを十分に達成することができる)と判断できることから、加速制限の支援制御をこのように設定した。“惰性走行支援”とは、ドライバがアクセルペダルをOFFした場合に、エンジンブレーキをかけずに車両を惰性走行(車両が出力するトルクをゼロにする)させる支援制御である。
【0029】
ここで、本実施形態では、1.制御側が、目標速度・加速度パターンを持っていること、2.制御側が、コース上のある位置(区間)において、どのような走行状態(走行パターン)であるべきか(例えば加速区間において何が無駄なのか)を知っていること、が特長(優位点)であり、これにより、ドライバの操作入力に対して制御側が積極的且つ効果的な支援制御を実施することができる。
【0030】
図1に戻り、区間表示部1dは、現在走行している位置(区間)における走行状態(走行パターン)のステータス(具体的には“加速”又は“惰性走行”)を、車両に設置された区間インジケータ8に表示させる。ここで、区間インジケータ8の一例について図5を参照して説明する。区間インジケータ8は、図5の(A)に示すようなインジケータMA1及びMA2の組からなる。インジケータMA1は、加速区間であることの明示やドライバへの要求内容の提示等を例えば文字や点灯等で行うための表示器であり、インジケータMA2は、惰性走行区間であることの明示やドライバへの要求内容の提示等を文字や点灯等で行うための表示器である。区間表示部1dは、図5の(B)に示すように、現在位置における区間情報に基づいてインジケータMA1及びMA2の点灯を切り替える。なお、図5では、文字の一例として、加速区間の明示とアクセルペダルOnの提示に対応する「《Accel》Accel On」、および惰性走行区間の明示とアクセルペダルOffの提示に対応する「《FreeRun》Accel Off」を挙げている。
【0031】
図1に戻り、設定部1eは、目標速度パターンにおける目標速度に関する制御量とドライバが入力した速度に関する制御量との乖離度(例えば目標速度とドライバ入力速度との差)又は目標加速度パターンにおける目標加速度に関する制御量とドライバが入力した加速度に関する制御量との乖離度(例えば目標加速度とドライバ入力加速度との差)に対して、段階的に評価点を設定する。
【0032】
評価表示部1fは、設定部1eで設定した評価点を、車両に設置された評価インジケータ9に表示させる。ここで、評価インジケータ9の一例について図6を参照して説明する。評価インジケータ9は、図6の(A)に示すようなインジケータMBである。インジケータMBは、評価点と対応付けられた点灯可能な区画を複数(奇数個が好ましい)並べて構成された、評価点を区画の点灯により表示するための表示器である。評価表示部1fは、評価点に対応する区画を定義(決定)し、図6の(B)に示すように、定義した区画を点灯させる。
【0033】
ここで、本実施形態では、ドライバの操作入力に対して制御側が積極的且つ効果的な支援制御を実施するが、これに加えて、制御側が持っている又は知っている情報をインジケータを介して制御側がドライバに積極的に与えるので、これらの相互作用によって、ドライバの操作と車両制御との親和性をより向上させ、その結果、より高い燃費向上パフォーマンスを実現することができる。
【0034】
[2.動作]
つぎに、上述した構成のECU1で行われるメイン動作等の一例について図7等を参照して説明する。図7は、本実施形態のメイン動作の一例を示すフローチャートである。
【0035】
まず、ECU1は、先読み情報としての道路線形情報および路面μを入手する(ステップSA1)。
【0036】
つぎに、生成部1aは、ステップSA1で入手した情報に基づいて、目標到達時間や燃費最適などを含むドライバの希望タスクが成立する目標速度・加速度パターン(目標速度制御量パターンを含む)を生成する(ステップSA2)。
【0037】
ここで、目標速度パターンの演算の一例について説明する。加速区間と惰性走行区間(減速区間)に分割し、各々異なる評価式を用いて目標速度パターンを演算する。具体的には、道路形状情報ファイルに記憶された道路形状情報に基づいて、道路上を車両が走行する場合の走行状態(走行パターン)を予測し、予測された走行状態(走行パターン)に基づいて、道路を複数の道路区間に分割し、道路区間毎に評価関数を設定し、道路区間毎に設定された評価関数に基づいて、道路上を走行する車両の走行軌跡を演算する。また、分割された道路区間の区切り位置を可変条件として走行軌跡を演算する。走行軌跡とは、コース(目標走行経路)における車両の走行位置である。
【0038】
また、道路形状情報ファイルに記憶された道路形状情報に基づいて、道路上を車両が走行する場合に予測される速度パターンを演算し、演算された速度パターンに基づいて、道路区間として少なくとも加速区間と減速区間に分割し、加速区間に加速区間用の評価関数を、減速区間に減速区間用の評価関数を設定する。また、加速区間には、エンジン回転数が中回転以上の場合をゼロ回転付近の場合と比べて望ましいと評価する評価関数、より具体的には、エンジンの熱効率の最良点を1としたときの各点の熱効率の比率を求め、全体から1を引いたものが評価値となるよう評価関数を設定し、エンジン回転数がゼロ回転付近の評価値を0より大きな数値とする。また、減速区間には、エンジン回転数がゼロ回転付近の場合を中回転以上の場合と比べて望ましいと評価する評価関数、より具体的には、転がり抵抗を基準として0とした場合に、転がり抵抗の減速度から離れた加減速度エネルギーに対して、ハイブリッドシステムにおけるエネルギー入出力のロスを比例させた数値が評価値となる評価関数を設定し、エンジン回転数が中回転以上の場合を0より大きな数値とする。
【0039】
また、道路形状情報ファイルに記憶された道路形状情報に基づいて、道路上を車両が走行する場合に予測される摩擦円使用率を演算し、演算された摩擦円使用率が相対的に高い道路区間に、摩擦円使用率が相対的に低い道路区間とは異なる評価関数、より具体的には、加速区間に、エンジン回転状態を基本としてハイブリッドシステムと合わせて熱効率を重視した加速を望ましいと評価する評価関数を設定し、減速区間に、エンジンオフ状態を基本として回生と電力アシストによる減速を望ましいと評価する評価関数を設定する。
【0040】
続いて、目標速度パターンの演算の他の一例について説明する。標準的に生成された速度パターン(定常円最高速度パターン)を走行制御開始位置から終了位置に向けて速度状態を修正し、走行制御終了位置から開始位置に向けて速度状態を修正して、目標速度パターンを演算する。具体的には、目標走行経路(コース)に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、目標走行経路における走行制御の開始位置から走行制御の終了位置に向けて速度状態の修正処理を実行する第1速度状態修正手段と、目標走行経路における走行制御の終了位置から走行制御の開始位置に向けて速度状態の修正処理を実行する第2速度状態修正手段とを設けている。従って、最適化手法を用いることなく、目標走行経路における走行制御の開始位置から終了位置に向けて速度状態の修正処理を実行すると共に、走行制御の終了位置から開始位置に向けて速度状態の修正処理を実行することで、走行経路に応じた速度パターンを短時間で生成する。また、加速側の速度状態を修正処理すると共に、減速側の速度状態を修正処理している。この場合、速度状態を低速側に修正処理している。
【0041】
また、目標走行経路を一定の間隔に分割する走行経路分割手段を設け、分割された領域ごとに速度状態を修正処理し、隣接する領域の速度状態を比較し、速度が高い領域の速度状態を低速側に修正処理している。この場合、隣接する領域の加速度または減速度を比較し、加速度超過または減速度超過を抑制するように修正処理している。従って、目標走行経路を一定の間隔に分割し、各領域ごとに速度状態を低速側に修正処理する。
【0042】
なお、目標走行経路における定常円最高速度パターンに対して、走行開始点から走行終了点に向けて隣接点同士の加速度を算出してから、走行終了点から走行開始点に向けて隣接点同士の減速度を算出してもよく、また、目標走行経路における定常円最高速度パターンに対して、走行終了点から走行開始点に向けて隣接点同士の減速度を算出してから、走行開始点から走行終了点に向けて隣接点同士の加速度を算出してもよい。
【0043】
図7の説明に戻り、定義部1bは、ステップSA2で生成した目標速度・加速度パターンを、当該目標速度・加速度パターンにおける走行状態で、“加速区間”と“惰性走行区間”の2つに区間分けする(ステップSA3)。
【0044】
つぎに、支援制御部1dは、車両の実走行を監視しながら、ステップSA3で定義した区間に応じた支援制御を実施する(ステップSA4)。
【0045】
具体的には、支援制御部1dは、車両の実走行の位置がステップSA3で定義した加速区間である場合(ステップSA41:Yes)において、さらに、現在のアクセルペダル入力量、ブレーキペダル入力量および車速から推定されたドライバの入力加速度が目標加速度を下回る場合(ステップSA42:Yes)には、上述した“加速アシスト”の支援制御を実施し(ステップSA43)、一方、当該入力加速度が目標加速度を下回らない場合(ステップSA42:No)には、上述した“ムダ加速制限”の支援制御を実施する(ステップSA44)。具体的には、ステップSA43では、“加速アシスト”の支援制御として、アクセル開度−要求加速度マップのゲインを上げ、ステップSA44では、“ムダ加速制限”の支援制御として、アクセル開度−要求加速度マップのゲインを下げる。
【0046】
また、支援制御部1dは、車両の実走行状態がステップSA3で定義した加速区間でない場合(ステップSA41:No)においてさらにその実走行状態が惰性走行区間である場合(ステップSA45:Yes)には、ドライバがアクセルをONしていれば(ステップSA46:Yes)、上述した“加速制限”の支援制御を実施し(ステップSA47)、一方ドライバがアクセルをONしていなければ(ステップSA46:No)、上述した“惰性走行支援”の支援制御を実施する(ステップSA48)。具体的には、ステップSA47では、“加速制限”の支援制御として、アクセル開度−要求加速度マップのゲインを大幅に下げる。なお、ステップSA47で実施する加速制限での抑制ゲインは、ステップSA44で実施するムダ加速制限での抑制ゲインよりも大きなものに設定してもよい。また、ステップSA48では、“惰性走行支援”の支援制御として、HV(ハイブリッド)車の場合には車両が出力するトルクをゼロにしたり、MT(マニュアルトランスミッション)車の場合にはN(ニュートラル)レンジ相当で走行させたりする。
【0047】
また、支援制御部1dは、車両の実走行の位置が惰性走行区間でない場合(ステップSA45:No)には、支援制御を実施しない(ステップSA49)。例えば、マップのゲインが書き換えられていれば、当該ゲインを当初の状態に戻す。
【0048】
図7のメイン動作の説明に戻り、ECU1は、ステップSA4で切り替えられた支援制御を実行するために、各アクチュエータの出力を制御する(ステップSA5)。具体的には、ステップSA4における支援制御の実施によってゲインが書き換えられたアクセル開度−要求加速度のマップに従って車両が走行されるように、スロットルアクチュエータ6等の出力を制御する。
【0049】
これにて、本実施形態のメイン動作の説明を終了する。
【0050】
つぎに、上述した構成のECU1で行われる区間表示動作の一例について図8を参照して説明する。図8は、本実施形態の区間表示動作の一例を示すフローチャートである。
【0051】
まず、区間表示部1dは、車両の実走行状態が加速区間である場合(ステップSB1:Yes)には、インジケータMA1を点灯させ且つインジケータMA2を消灯させる(ステップSB2)。
【0052】
また、区間表示部1dは、車両の実走行状態が加速区間でない場合(ステップSB1:No)において、惰性走行区間であるとき(ステップSB3:Yes)にはインジケータMA1を消灯させ且つインジケータMA2を点灯させ(ステップSB4)、惰性走行区間でないとき(ステップSB3:No)にはインジケータMA1及びインジケータMA2を共に消灯させる(ステップSB5)。
【0053】
これにて、本実施形態の区間表示動作の説明を終了する。
【0054】
つぎに、上述した構成のECU1で行われる評価点表示動作の一例について図9を参照して説明する。図9は、本実施形態の評価点表示動作の一例を示すフローチャートである。
【0055】
まず、評価部1eは、現在のアクセルペダル入力量、ブレーキペダル入力量および車速から推定されたドライバの入力加速度と目標加速度との差「入力加速度−目標加速度」を、乖離度として求める(ステップSC1)。
【0056】
つぎに、評価部1eは、予め設けられている乖離度−評価点マップに基づいて、ステップSC1で求めた乖離度に対して、評価点を段階的に設定する(ステップSC2)。
【0057】
そして、評価表示部1fは、インジケータMBを構成する複数の区画の中から、ステップSC2で設定した評価点に対応する区画を定義(決定)し、定義した区画を点灯させる(ステップSC3)。具体的には、評価点が大きくなるにつれて評価点をより右側の区画と対応付けることで、図6に示すような形で、ドライバにアクセル操作が多すぎること(アクセル過多)を知らせることができる。また、評価点が小さくなるにつれて評価点をより左側の区画と対応付けることで、図6に示すような形で、ドライバにアクセル操作が足りないこと(アクセル過少)を知らせることができる。また、評価点が中間的なものであれば評価点をより中央の区画と対応付けることで、図6に示すような形で、ドライバにアクセル操作が丁度良いことを知らせることができる。
【0058】
これにて、本実施形態の評価点表示動作の説明を終了する。
【0059】
[3.まとめ]
以上説明したように、本実施形態によれば、コース形状他の情報を用いて目標速度パターン(目標速度制御量パターン)を生成し、生成した目標速度パターンを複数の速度パターン区間に分割し、分割した区間に応じてドライバ操作に対する支援制御を実施する。これにより、ドライバの要求に対して、目標速度パターンに応じた最適な支援制御を実施し、走行計画とドライバ操作とを効率的に協調制御させて、車両の実走行結果を当該走行計画により近づけることができる。
【0060】
また、本実施形態によれば、“加速区間”や“惰性走行区間”といった区間に関する情報、“アクセルON”や“アクセルOFF”といったドライバへの操作要求に関する情報、及び目標パターンとドライバ入力との乖離度に関する情報を、インジケータに表示する。これにより、車両側を積極的に支援制御した場合でも、ドライバへの当該支援制御に対する違和感や唐突感を防止することができる。また、本実施形態によれば、制御側が、目標速度・加速度パターンを持っており、又ある位置(区間)において車両がどのような走行状態(走行パターン)であるべきなのかを知っているので、制御側が積極的な支援制御を行い且つこれらの情報をドライバに積極的に与えることにより、この2つの相互作用によって、ドライバ操作と車両制御の親和性をより向上させ、その結果、より高いパフォーマンスでのタスクの実現を可能とした。
【産業上の利用可能性】
【0061】
以上のように、本発明にかかる支援制御装置は、自動車製造産業において有用であり、特に、走行計画をより一層高い達成度で達成するための利用に適している。
【符号の説明】
【0062】
1 ECU
1a 生成部
1b 定義部
1c 支援制御部
1d 区間表示部
1e 設定部
1f 評価表示部
8 区間インジケータ
9 評価インジケータ
【特許請求の範囲】
【請求項1】
制御部を備えた支援制御装置であって、
前記制御部は、車両が走行する際に目標とする速度に関する制御量のパターンを目標速度制御量パターンとして生成し、前記目標速度制御量パターンに基づいて、走行状態に対応する複数の区間を定義し、定義した前記区間毎に、走行計画の達成を支援するための支援制御を実施すること、
を特徴とする支援制御装置。
【請求項2】
前記制御部は、前記区間に対応する前記走行状態に関する情報及び/又は前記目標速度制御量パターンにおける前記速度に関する制御量とドライバから前記車両に入力された前記速度に関する制御量との乖離に関する情報を、視覚及び/又は聴覚で認識可能に出力すること、
を特徴とする請求項1に記載の支援制御装置。
【請求項1】
制御部を備えた支援制御装置であって、
前記制御部は、車両が走行する際に目標とする速度に関する制御量のパターンを目標速度制御量パターンとして生成し、前記目標速度制御量パターンに基づいて、走行状態に対応する複数の区間を定義し、定義した前記区間毎に、走行計画の達成を支援するための支援制御を実施すること、
を特徴とする支援制御装置。
【請求項2】
前記制御部は、前記区間に対応する前記走行状態に関する情報及び/又は前記目標速度制御量パターンにおける前記速度に関する制御量とドライバから前記車両に入力された前記速度に関する制御量との乖離に関する情報を、視覚及び/又は聴覚で認識可能に出力すること、
を特徴とする請求項1に記載の支援制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−173524(P2011−173524A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2010−39340(P2010−39340)
【出願日】平成22年2月24日(2010.2.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願日】平成22年2月24日(2010.2.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]