
支援型ナビゲーションシステムのための方法および装置
本発明はナビゲーションシステム及びその要素に関する。ネットワーク要素(M)は、少なくとも1つのナビゲーションシステムに関連する支援データを形成するための受信機(M.2.2)を備える。ネットワーク要素(M)は、ナビゲーションシステム及び選択されたモードの標示を支援データに挿入し、選択されたデータに従い支援データを構築する。またネットワーク要素(M)は、支援データを通信ネットワーク(P)を介して装置(R)に送信するための送信機(M.3.1)を有する。装置(R)は、少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、支援データをネットワーク要素(M)から受信するための受信機(R.2.2)と、受信した支援データを調査するように構成される調査要素(R.1.1)とを備える。支援データは、装置(R)の測位を実行するための測位受信機によって使用される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、支援型ナビゲーションシステムの分野に関し、より具体的には、支援データが通信ネットワークから端末に配信されるフォーマットに関する。また本発明は、衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機を備える装置にも関する。また本発明は、衛星ナビゲーションシステムの支援データを受信機に送信するための送信機を備えるネットワーク要素にも関する。さらに本発明は、衛星ナビゲーションシステムの支援データを測位受信機に届けるための方法、コンピュータプログラム、および信号に関する。
【発明の背景】
【0002】
既知のナビゲーションシステムの1つにGPSシステム(Global Positioning System)が挙げられる。このGPSシステムは、現在、24基を上回る衛星を備えており、そのうちの半分は、通常、同時に受信機の視界に入る。これらの衛星は、例えば、衛星のエフェメリスデータ(Ephemeris data)、ならびに衛星の時間に関するデータを送信する。測位に使用される受信機は、通常は、測位システムに属するいくつかの衛星から受信機に同時に受信される信号の伝播時間を計算することによってその位置を推定し、信号の送信時間(Time of Transmission; ToT)を計算する。測位に関し、典型的には、受信機は、位置を算出するために、視界に入る少なくとも4つの衛星の信号を受信しなくてはならない。既に開始中のその他のナビゲーションシステムとして、ロシアのGLONASSが挙げられる。
【0003】
今後、GPSおよびGLONASS以外に、その他の衛星型ナビゲーションシステムも現れるだろう。欧州では、ガリレオシステムが現在構築中であり、あと数年で動作可能になる。また、宇宙ベース強化システム(Space Based Augmentation Systems; SBAS)(WAAS、EGNOS、GAGAN)も現在計画中である。地上の固定ナビゲーションステーションを使用するローカルエリア強化システム(Local Area Augmentation Systems; LAAS)は、ますます多く見られるようになってきている。厳密に言うと、ローカルエリア強化システムは、実際は、衛星型ナビゲーションシステムではないが、ナビゲーションステーションは「疑似的衛星」または「疑似衛星」と呼ばれている。また、衛星型システムに適用可能なナビゲーションの原理は、ローカルエリア強化システムにも適用可能である。疑似衛星の信号は、標準のGNSS受信機で受信可能である。さらに、日本では、準天頂衛星システム(Quasi-Zenith Satellite System; QZSS)と呼ばれる独自のGPS/ガリレオ補完システムを開発中である。
【0004】
疑似的衛星を使用するシステムを備える衛星型ナビゲーションシステムは、総称して全地球的ナビゲーション衛星システム(Global Navigation Satellite Systems; GNSS)と呼ばれることが可能である。今後、恐らく、複数のナビゲーションシステムを同時にまたは代替的に使用して、測位動作を実行できる測位受信機が現れるだろう。このような混合型受信機では、例えば、第1のシステムの信号強度が一定限度未満になる場合、または第1のシステムに十分な可視衛星が存在しない場合、または第1のシステムの可視衛星の配置が測位に適切でない場合に、第1のシステムから第2のシステムに切り替えることができる。異なるシステムの同時使用は、視野に入る衛星の数が限られる市街地などの厳しい状況において問題となる。このような場合、1つだけのシステムに基づくナビゲーションは、信号の利用可能性が低いために実用的には不可能である。しかしながら、異なるナビゲーションシステムを混合して使用することによって、このような難しい信号条件におけるナビゲーションが可能になる。
【0005】
GPSシステムの各衛星は、L1と呼ばれる1575.42MHzの搬送周波数で測距信号を送信する。また、この周波数は、154f0(f0=10.23MHz)とも示される。さらに、衛星は、L2と呼ばれる1227.6MHz(つまり120f0)の搬送周波数で別の測距信号を送信する。衛星において、信号の変調は、少なくとも1つの疑似乱数系列で実行される。この疑似乱数系列は、衛星毎に異なる。変調の結果、符号変調広帯域信号が発生する。使用する変調技術により、異なる衛星から送信される信号を、受信機に区別することが可能になるが、送信に使用する搬送周波数は実質的に同じである。ドップラー効果により、幾何学的配置形状に応じて、搬送周波数にわずかな変化(±1kHz)が生じる。この変調技術は、符号分割多元接続(Code Division Multiple Access; CDMA)と呼ばれる。各衛星において、L1信号を変調するために使用される疑似系列は、例えば、ゴールド符号系の符号であるいわゆるC/A符号(Coarse/Acquisition符号)である。各GPS衛星は、個々のC/A符号を使用して信号を送信する。符号は、2つの1023ビットバイナリ系列の2を法とした和として形成される。第1のバイナリ系列G1は、多項式X10+X3+1で形成され、第2のバイナリ系列G2は、衛星毎に遅延が異なるように、多項式X10+X9+X8+X6+X3+X2+1の遅延によって形成される。この配列により、同一の符号発生器で、異なるC/A符号を形成することが可能になる。従って、C/A符号は、GPSシステムにおけるチッピング速度が1.023MHzであるバイナリ符号である。C/A符号は、1023個のチップを含み、符号エポック(符号エポック)は1ミリ秒である。L1搬送波信号は、50ビット/秒のビットレートでナビゲーション情報によってさらに変調される。ナビゲーション情報は、衛星の調子、その軌道、時間データなどに関する情報を含む。
【0006】
GPSシステムにおいて、衛星は、エフェメリスデータおよび時間データを含むナビゲーションメッセージを送信し、このメッセージを使用して、測位受信機において所定の時点における衛星の位置を決定する。これらのエフェメリスデータおよび時間データは、フレームにおいて送信される。このフレームは、さらにサブフレームに分割される。図6は、このようなフレーム構造FRの例を示す。GPSシステムにおいて、各フレームは、1500ビットを含み、各々が300ビットである5つのサブフレームに分割される。1ビットの送信に20ミリ秒かかることから、各サブフレームの送信には、6秒かかることになり、フレーム全体は、30秒で送信される。サブフレームは、1から5まで番号が付けられる。各サブフレーム1において、例えば、時間データは、サブフレームの送信の時点と、GPSシステムの時間に対する衛星時計の偏差に関する情報とを示す時間データが送信される。
【0007】
サブフレーム2および3は、エフェメリスデータの送信に使用される。サブフレーム4は、協定世界時(Universal Time, Coordinated:UTC)などのその他のシステム情報を含む。サブフレーム5は、全衛星に関するアルマナックデータの送信を目的とする。これらのサブフレームおよびフレームの実体は、25個のフレームつまりは125個のサブフレームを含むGPSナビゲーションメッセージと呼ばれる。従って、ナビゲーションメッセージの長さは、12分30秒である。
【0008】
GPSシステムにおいて、時間は、週の開始から秒で測定される。GPSシステムにおいて、週の開始の時点は、土曜日と日曜日の間の午前零時である。送信される各サブフレームには、サブフレームが送信された時のGPS週の時点に関する情報が含まれる。従って、時間データは、特定のビットの送信の時点、すなわち、GPSシステムにおけるサブフレームの最終ビットの送信の時点を示す。衛星において、時間は、高精度の原子時計によって測定される。それにも関わらず、各衛星の動作は、GPSシステムの制御センター(図示せず)で制御され、例えば、時間比較を実行することによって、衛星における測時エラーを検出し、その情報を衛星に送信する。
【0009】
ナビゲーションシステムが異なると、衛星の数、衛星の軌道パラメータ、ナビゲーションメッセージの構造なども異なる場合がある。ゆえに、GPS型測位受信機の動作パラメータは、別の衛星システムの測位受信機において適用可能でない場合がある。一方、少なくともガリレオの設計原理では、GPSとガリレオの間にいくつかの類似性があることを示しており、少なくともガリレオの受信機が、測位の際にGPS衛星信号を利用可能であるようにしている。
【0010】
測位装置(または測位受信機)、つまりナビゲーションシステムにおいて送信された信号に基づき測位を実行できる装置は、所要の数の衛星から十分に強力な信号を常に受信できるとは限らない。例えば、装置が3次元測位を実行するべきである場合に、4つの衛星からの信号を受信不可能であることが発生し得る。これは、屋内、都市環境などにおいて発生し得る。方法およびシステムは、通信ネットワークが、不利な信号条件において測位可能であるように開発されてきた。通信ネットワークが、ナビゲーションモデル支援だけしか受信機に提供しない場合、2次元測位における最低3つの信号、または3次元測位における最低4つの信号の必要性は軽減されない。しかしながら、ネットワークが、例えば、高度決定に使用可能である気圧に関するアシストを提供する場合、3次元測位について3つの衛星で十分になる。これらのいわゆる支援型ナビゲーションシステムは、その他の通信システムを利用して、衛星に関する情報を測位装置に送信する。支援データを受信および利用することがそれぞれ可能であるこのような測位装置は、支援型GNSS受信機と呼ばれることが可能であり、あるいはより一般的には、支援型測位装置と呼ばれることが可能である。
【0011】
現在、GPS衛星に関する支援データのみが、符号分割多元接続(Code Division Multiple Access; CDMA)、移動通信用グローバルシステム(Global System for Mobile communications; GSM)、および広帯域符号分割多元接続(Wideband Code Division Multiple Access; W-CDMA)のネットワークにおいて、支援型GNSS受信機に供給可能である。この支援データフォーマットは、GPS-ICD-200空間信号(Signal-In-Space; SIS)仕様に記載されるGPSナビゲーションモデルに厳密に従っている。このナビゲーションモデルには、時計モデル(clock mode)および軌道モデル(orbit model)が含まれる。より正確には、時計モデルは、衛星時間をシステム時間(この場合、GPS時間)に関連付けるために使用される。軌道モデルは、所定の時点における衛星位置を計算するために使用される。両データは、衛星ナビゲーションに不可欠である。
【0012】
支援データが利用可能か否かは、測位受信機の性能に大きな影響を及ぼしうる。GPSシステムでは、良好な信号条件において、GPS衛星によりブロードキャストされた信号からGPS受信機がナビゲーションメッセージのコピーを抽出するのに少なくとも18秒(最初の3つのサブフレーム長さ)かかる。ゆえに、ナビゲーションモデルの有効なコピー(例えば、前回のセッションからのコピー)が利用可能でない場合、GPS衛星が測位計算において使用可能になるまでに少なくとも18秒かかる。ここで、AGPS受信機(支援型GPS)において、GSMまたは汎用移動通信システム(Universal Mobile Telecommunications System; UMTS)などのセルラネットワークが、ナビゲーションメッセージのコピーを受信機に送信するため、受信機は、衛星ブロードキャストからデータを抽出する必要はなく、セルラネットワークから直接データを入手することが可能である。初期位置算出時間(Time To First Fix; TTFF)は、18秒未満に短縮可能になる。この初期位置算出時間の短縮は、例えば、緊急通報の測位時に重大になり得る。また、これにより、ユーザが、ユーザの現在位置付近で利用可能なサービスに関する情報を要求する際などの、種々の使用事例におけるユーザ体験が改善される。このような種類の位置情報サービス(Location Based Service; LBS)は、要求に応じて決定されたユーザ位置を利用する。ゆえに、位置決定の遅延により、LBSからユーザへの1つまたは複数の応答が遅延する可能性がある。
【0013】
さらに、不利な信号条件において、支援型データの利用は、ナビゲーションのための単なる選択肢である場合がある。これは、信号電力レベルの低下により、GNSS受信機がナビゲーションメッセージのコピーを入手不可能であり得ることが原因となる。しかしながら、外部ソース(セルラネットワークなど)から受信機にナビゲーションデータが提供されると、ナビゲーションは再び可能になる。この特徴は、衛星信号を減衰させる建物およびその他の障害物により信号レベルが大幅に変動する可能性のある屋内状況および市街地において重要になり得る。
【0014】
国際特許出願公報第WO02/67462号は、セルラー通信ネットワークにおけるGPS支援データメッセージと、セルラネットワークにおいてGPS支援データを送信するための方法とを開示している。
【0015】
支援型測位受信機を有する携帯端末が支援データを要求する場合、ネットワークは、支援型測位受信機の視野に入る衛星毎に1つのナビゲーションモデルを携帯端末に送信する。支援データを送信するフォーマットについては、種々の規格に記載される。制御プレーンソリューションには、GSMにおける無線リソース位置サービスプロトコル(Radio Resource Location Services Protocol; RRLP)、W-CDMAおよびCDMAのIS-801.1/IS-801.Aにおける無線リソース制御(Radio Resource Control; RRC)が含まれる。ブロードキャスト支援データの情報要素は、GSMの規格TS 44.035で規定される。最終的に、ユーザプレーンソリューションOMA SUPL1.0およびCDMAネットワーク用の種々の専用ソリューションが存在する。これらの全ソリューションの共通要因は、GPS対応であることのみである。しかしながら、ガリレオ計画により、全規格は、ガリレオの適合性を達成するように近い将来修正されるだろう。
【0016】
従って、近い将来、GPSの支援だけでは十分でなくなること、また、新しいシステムに対応可能にするために、新しいデータフォーマットを開発しなければならないことは明らかである。
【0017】
新しいシステムならびにGPSに支援データを提供する際の問題は、全衛星システムの記述に使用可能であるナビゲーションモデル(時計および軌道モデル)を見つけることによって低減することができる。直接的なソリューションとして、システム毎にナビゲーションメッセージフォーマットを入手し、そのフォーマットを使用することが挙げられる。しかしながら、これにより、種々の異なるメッセージ(システム毎の異なるメッセージフォーマット)がもたらされ、実装が困難になり得る。さらに、ネイティブフォーマットもセルラー規格に不適合であり得る。ゆえに、最終的なソリューションは、種々の異なるフォーマットを必要としないようにしなければならない。
【0018】
共通フォーマットを開発する際の課題には、まず、衛星のインデックス化が含まれる。衛星インデックスを使用して特定の衛星でナビゲーションモデルを識別する。問題は、システム毎にそのシステム独自のインデックス化方法があることである。
【0019】
GPSは、疑似ランダム雑音(Pseudo-Random Noise; PRN)番号に基づいて、衛星(宇宙機(Space Vehicle; SV))にインデックスを付ける。PRN番号は、衛星が使用するCDMA拡散符号で識別可能である。
【0020】
ガリレオは、7ビットのフィールド(1-128)を使用して衛星を識別する。番号は、衛星が使用するPRN符号で識別可能である。
【0021】
GLONASSは、5ビットのフィールドを使用して衛星を特徴付ける。番号は、軌道面における衛星位置で識別可能である(この位置を「スロット」と呼ぶ)。さらに、その他のシステムとは対照的に、GLONASSは、周波数分割多元接続(Frequency Division Multiple Access; FDMA)を使用して、衛星ブロードキャストをスペクトル拡散する。ここで、GLONASSにおいてCDMA拡散符号も使用することに留意されたい。ゆえに、衛星スロット番号をブロードキャスト周波数にマッピングする表が存在する。このマッピングは、いかなる支援データフォーマットにも含まれなければならない。
【0022】
SBASシステムは、GPSと類似したPRN番号を使用するが、120のオフセットを有する。ゆえに、SBASシステムの第1の衛星は、120の衛星番号を有する。
【0023】
QZSS SIS ICDは、まだ公開されていないため、システムにおける衛星インデックス付与に関する詳細情報はない。しかしながら、システムはGPSの強化であるため、GPS適合フォーマットがQZSSでも適合可能である可能性が高い。
【0024】
疑似衛星(LAAS)は、インデックス化の点において最も問題となる。現在では、疑似衛星のインデックス化に規定される規格は存在しない。しかしながら、GPS型のPRNを使用することから、インデックス化は、GPS型のインデックス化に少なくとも概略的にでも従うべきである。ゆえに、衛星インデックスの範囲が十分であることを確認することによって、GPS型衛星インデックス付与でLAAS送信機を記述することが可能になるべきである。
【0025】
第2の問題は時計モデルである。いかなるシステムの時計モデルも、次式よって提供される:

ここで、tSYSTEM(t)は、時点tにおけるシステム時間(例えば、GPS時間)であり、tSV(t)は時点tにおける衛星時間であり、tREFERENCEは、モデル基準時間であり、ai(a∈{0,1,2})は、0次、1次、2次のモデル係数である。相対論的補正項(Relativisitic Correction Term)はこの数式には示されない。この数式はシステム毎に同一であるため、一般化モデルを開発する際の問題は、
1)各システムによって必要とされる値の範囲を対象とし、かつ、
2)システム毎の精度(または、分解能)の必要性が満たされる、
ようなビット数およびスケールファクタを発見することだけである。
【0026】
第3の問題は軌道モデルを含む。上述のとおり、各システムは、システム独自のフォーマットを有する(同一フォーマットを使用するGPSおよびガリレオは除外する)。GPSおよびガリレオは、ケプラー軌道パラメータセットを使用する。このパラメータセットは、6つの軌道パラメータ、3つの線形補正項(Linear Correction Term)、ならびに6つの調和引力補正項(Harmonic Gravitation Correction Term)を含む。GPSおよびガリレオとは対照的に、GLONASSナビゲーションモデルは、所定の時点における衛星位置、速度、および加速度に関する情報のみを含む。次に、その情報を使用して(運動方程式の初期値問題を解決することによって)、ある時点における衛星位置を予測することができる。SBASは、ある意味において、GLONASSに類似したフォーマットを利用する。SBASナビゲーションメッセージには、所定の時点におけるECEFシステムの衛星位置、速度、および加速度に関する情報が含まれる。このデータを使用して、単純な外挿によって衛星位置を予測する。これはGLONASSとは対照的であり、運動方程式は、時間において統合される。上述のように、QZSS ICDはまだ利用可能でないため、ナビゲーションメッセージの詳細フォーマットは不明である。しかしながら、GPS型エフェメリスデータまたはSBAS型ブロードキャストにQZSS信号が適合することを引用する文献が存在する。従って、新しいフォーマットがGPSおよびSBASに適合することが確実になることによって、QZSS軌道は、GPSのフォーマットを使用して記述されてもよい。LAASでは、地心地球固定フレーム(Earth-Centered Earth Fixed; ECEF座標系規定)において、静止している物体を軌道モデルが記述可能であることが必要である。また、疑似衛星は、位置に関して非常に厳しい分解能の必要性を有する。場合により、疑似衛星位置を約5mmの分解能で記述可能であることが必要である。
【0027】
このような必要条件(インデックス化、時計モデル、および軌道モデル)の他に、ナビゲーションモデルは、モデル基準時間(時間モデルにおけるtREFERENCE、似たようなタイムスタンプが軌道モデルでも必要とされる)、モデル有効期間、データの発行(モデルデータセットを区別可能にするため)、SVの調子(SVからのナビゲーションデータが使用可能か否かを示す)に関する情報を含まなければならない。
【0028】
言うまでもなく、ほとんどのシステムは、これらの項目を表す独自の方法を有する。範囲および精度の必要性は、システムによって異なる。さらに、今後のGPS(およびその他のシステム)が、1つの信号だけでなく異なる周波数で種々の信号を送信するようになることから、現行の衛星調子フィールドには修正が必要となる。
【0029】
次に、支援データフォーマットは、全システム特有の項目ならびにパラメータ範囲および精度の必要性を考慮するようなものでなければならない。
【0030】
最終的に、現行の支援データフォーマットに関する問題は、そのフォーマットによって、1組のナビゲーションデータが所定の衛星に利用可能であるようにすることだけである。これは、ナビゲーションモデルの更新時に、端末に新しい組データを提供しなければならないことを意味する。しかしながら、既に現時点において、5〜10日間有効なナビゲーションデータを提供する商用サービスが存在する。ナビゲーションモデルの有効期限は延長しないが、そのサービスは、1つの衛星のために、多数の組のナビゲーションデータを送信する。ユーザが、1度のダウンロードでこの先数週間に必要とされる全支援データを受信することから、これは、支援型GNSSにおいて有利である。ゆえに、新しい支援データフォーマットは、現行モデルにおいてこのような長期軌道フィッティングに対応可能でなければならない。
【0031】
現在に至るまで、この問題に対するソリューションはなかった。これは、支援データの配信が、GPSシステムと、CDMAネットワークとに限定されていたからである。
【0032】
支援データを端末に届ける際の現行のソリューションとして、GPSのナビゲーションモデルを衛星ブロードキャストから直接入手し、これらのデータを修正し、使用する種々の規格に応じて、そのデータをネットワークにおける端末に届けることが挙げられる。
【特許文献1】WO02/67462
【発明の摘要】
【0033】
本発明は、複数のナビゲーションシステムにおける衛星時計動作および衛星軌道を特徴付けるために使用可能である汎用ナビゲーションモデルを含む。汎用ナビゲーションモデルは、少なくともGPS、ガリレオ、GLONASS、SBAS、LAAS、およびQZSSで適用可能である。また、将来現れる未知のシステムにおいても適用可能である。
【0034】
インデックス化問題に関しては、衛星インデックスフィールド(Satellite Index Field)を拡張し、フィールドの上位ビットが、ナビゲーションシステム(GPS、ガリレオ、GLONASS、SBAS、LAAS、QZSS、またはいくつかの今後のシステム)を規定し、また、下位ビットが、システムのネイティブフォーマットにおいて衛星インデックスを表すようにすることにより、解決されてきた。このフィールドを、以下SSインデックスと呼ぶこととし、SSは"System and Satellite"すなわち「システムおよび衛星」を表す。また、GLONASS特有のも存在し、これにより、衛星ブロードキャスト周波数(またはチャネル)へのSSインデックスのマッピングが可能になる。
【0035】
時計モデル問題に関しては、全システムの時計モデルが汎用時計モデルを使用して記述可能であるようなビット数およびスケールファクタを係数のために見つけることによって解決してきた。しかしながら、本発明は、システム毎に異なる時計モデルを使用することを除外しない。
【0036】
軌道モデル問題に関しては、マルチモードモデルを導入することによって解決してきた。モデルのモードとして、例えば、モード1:ケプラーモデルと、モード2:ECEF座標における位置と、モード3:ECEF座標における位置、速度、および加速度、とが挙げられる。必要性に応じてさらなるモードを追加してもよい。本概念に関する例示的実施形態は、SSインデックス(つまり、システム)の上位ビットがモデルモードを規定することにある。しかしながら、その他の実装を使用して、例えば、モードインデックスを使用することによってモデルモードを示すことも可能である。モードは、相互排他的である。
【0037】
長期軌道フィッティング(Long-term orbit fits)は、特に何も必要としない。モデルが使用可能である場合に、基準時間および有効期間は正確に規定される。長期データ(Long-term data)が利用可能である場合、ネットワークは端末に長期データを提供する。同一の衛星(または、SSインデックス)に関する多数の組のナビゲーションデータの格納および処理は、端末が引き受ける。しかしながら、ナビゲーションモデルが、ブロードキャストされるナビゲーションモデルに基づかず、長期データに基づく場合、そのことは、例えば、データ発行フィールドにおいて示されてもよい。また、その他の実装も可能である。
【0038】
本発明の第1の側面によると、
・ 少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを受信するための受信機(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備える装置(R)であって、前記支援データにおける前記支援データのモードを判定するように構成される判定要素(R.1.2)を備え、ここで前記支援データは、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成されている、装置(R)が提供される。
【0039】
本発明の第2の側面によると、少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)と、前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)とを備えるネットワーク要素(M)であって、前記制御要素(M.1)が、
・ 前記支援データの送信のためのモードを選択し、
・ 前記ナビゲーションシステムの標示を前記支援データに挿入し、
・ 前記選択されたモードに従い、前記支援データを構築する、
ように構成されることを特徴とする、ネットワーク要素(M)が提供される。
【0040】
本発明の第3の側面によると、ネットワーク要素(M)及び装置(R)を有するシステムであって、前記ネットワーク要素(M)が、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)と、
・ 前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)と、
を備え、前記装置(R)が、
・ 前記少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、
・ 支援データを前記ネットワーク要素(M)から受信するための受信機(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備えるシステムが提供される。このシステムにおいて、前記制御要素(M.1)は、
・ 前記支援データの送信のためのモードを選択し、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入し、
・ 前記選択されたモードに従い、前記支援データを構築する、
ように構成され、前記装置(R)は、
・ 前記支援データにおける前記支援データの前記モードを判定するように構成される判定要素(R.1.2)
を備え、ここで前記支援データは、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成される。
【0041】
本発明の第4の側面によると、 少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)を備える装置(R)のためのモジュール(R.1)であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを受信するための受信要素(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備えるモジュールが提供される。このモジュールは、さらに、
・ 前記支援データにおける支援データのモードを判定するように構成される判定要素(R.1.2)と、
・ 前記支援データの前記モードに関する標示を、前記測位受信機に送るための出力と、
を備え、前記支援データが、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成されていることを特徴とする。
【0042】
本発明の第5の側面によると、 支援データを装置(R)に送信するための方法であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを形成することと、
・ 前記支援データを前記装置(R)に送ることと、
を含む方法が提供される。この方法は、さらに、
・ 前記支援データが関連する前記ナビゲーションシステムを決定することと、
・ 前記支援データを送信するためのモードを選択することと、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入することと、
・ 前記選択されたモードに従い、前記支援データを構築することと、
を含むことを特徴とする。
【0043】
本発明の第6の側面によると、少なくとも1つのナビゲーションシステムに関連する支援データを形成すること、及び、支援データを装置(R)に送信することのための、コンピュータにより実行可能な命令を有するコンピュータプログラムを格納するためのコンピュータプログラム製品が提供される。この製品のコンピュータプログラムは、
・ 前記支援データが関連する前記ナビゲーションシステムを決定することと、
・ 前記支援データを送信するためのモードを選択することと、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入することと、
・ 前記選択されたモードに従い、前記支援データを構築することと、
のための、コンピュータにより実行可能な命令をさらに含むことを特徴とする。
【0044】
本発明の第7の側面によると、支援データを装置(R)に届けるための信号であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データと、、
・ 前記支援データが関連する前記ナビゲーションシステムの標示と、
・ 前記支援データを送信するために選択されたモードと、
をさらに含み、前記支援データは、前記選択されたモードに従い構築されていることを特徴とする、信号が提供される。
【0045】
本発明の第8の側面によると、支援データを装置(R)に届けるための、記録された信号を含む搬送波が提供される。この搬送波において、前記信号は、少なくとも1つのナビゲーションシステムに関連する支援データを含み、さらに前記信号は、前記支援データが関連する前記ナビゲーションシステム及び前記支援データを送信するために選択されたモードの標示を含み、前記支援データは、前記選択されたモードに従い構築されていることを特徴とする。
【0046】
本発明の第9の側面によると、少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)、及び、前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)を備える支援データサーバ(X)が提供される。この支援データサーバにおいて、前記制御要素(M.1)は、
・ 前記支援データを送信するためのモードを選択し、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入し
・ 前記選択されたモードに従い前記支援データを構築する、
ように構成されることを特徴とする。
【0047】
本発明は、従来技術よりも優れたいくつかの利点を示す。本発明に従うフォーマットは、様々なセルラー規格やGNSSシステムに適している。これらの特徴により、世界的に適用可能なソリューションによって実装のためのコストが低減されるため、本発明は、非常に魅力的なソリューションとなる。これは、携帯電話機メーカーならびに通信ネットワークのオペレータだけでなく、商用支援データサービスを提供しようとするプロバイダーにとっても同様である。RRLPおよびRRCにおける従来技術の実装では、支援型GPS受信機にGPS支援データを提供する可能性があるだけである。ガリレオ、GLONASS、SBAS、LAAS、またはQZSSをサポートする可能性はない。この点は、従来からの欠点であって、本発明を使用するために修正可能である。ガリレオ支援データは、RRLPおよびRRCにほぼ確実に含まれるであろうことから、本フォーマットは、今後のシステムにも対応可能であるように、広く汎用なものになる可能性がある。
【発明の詳細な説明】
【0048】
以下、添付の図面を参照して、本発明について更に詳細に説明する。
【0049】
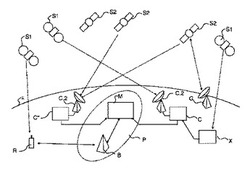
図1において、装置Rの測位に使用可能なシステム1の例を示す。システム1は、例えばGPSなどの第1のナビゲーションシステムの衛星S1、例えばGLONASSなどの第2のナビゲーションシステムの衛星S2などの、基準局(Reference Station)Sを備える。ここで、GPSおよびGLONASSは、本明細書において非限定的な例として言及されるだけあって、衛星以外のその他の基準局S(例えば、LAASの疑似衛星)も使用可能であることに留意されたい。また、基準局の数は、図1に示されるよりも多い。ナビゲーションシステムは、1つ以上の地上局(Ground Station)Gを備える。地上局Gは、ナビゲーションシステム2、3の衛星S1、S2の動作をそれぞれ制御する。地上局Gは、例えば、衛星の軌道の偏差および衛星の時計の精度を決定することが可能である(図示せず)。地上局Gが、衛星S1、S2の軌道または時計を修正する必要性を検出する場合、地上局Gは、制御信号(または複数の制御信号)を衛星S1、S2に送信する。次に、衛星S1、S2は、1つまたは複数の制御信号に基づいて修正動作を実行する。すなわち、地上局Gとは、ナビゲーションシステムの地上部分を言及している。
【0050】
衛星S1、S2は、動作中にその装備の状態を監視している。衛星S1、S2は、例えば、いわゆるウォッチドック動作(watch-dog operation)を使用して、装備に生じ得る不良を検出および報告してもよい。そのエラーおよび不調は、瞬間的または長期的なものである場合がある。調子データに基づき、場合によっては、いくつかの不良を修正することが可能であり、あるいは調子の悪い衛星によって送信された情報を完全に無視することが可能である。調子の悪い衛星S1、S2は、ナビゲーションメッセージの衛星調子フィールドに、衛星の不良を示すフラグを設定する。また、衛星S1、S2は、ナビゲーションメッセージにおいて、1つまたは複数の信号が適切に動作していないことを示すことも可能である。また、地上局Gは、適切に動作していないある衛星を検出することが可能であり、かつその衛星の誤作動中の1つまたは複数の不調中の信号に関する標示を設定することも可能である。次に、この標示は、ナビゲーションメッセージにおいて、通信ネットワークPに送信されることが可能である。
【0051】
非限定的な本例示的実施形態において、通信ネットワークPは、GSMネットワークであり、また、ネットワーク要素C、C"と通信するネットワーク要素Mは、GSMネットワークの移動通信交換センター(Mobile Switching Centre; MSC)である。基準受信機(Reference Receiver )C.2は、支援データをネットワーク要素Mに送信することが可能である。ネットワーク要素は、支援データをメモリM.4(図3)に格納して、支援型測位動作(Assisted Positioning Operation)の実行に装置Rが支援データを必要とする場合に、装置Rに送信するようにする。また、必要とされる前に、ネットワーク要素Mから装置Rに支援データを送信することも可能である。例えば、装置Rは、全可視衛星の支援データを要求し、後で使用するために、装置RのメモリR4にナビゲーションデータを保存することが可能である。
【0052】
また、ネットワーク要素Mは、GSMネットワークのサービス移動位置センター(Serving Mobile Location Centre; SMLC)であることも可能である。サービス移動位置センターは、別々のネットワーク要素(MSCなど)、あるいは位置情報サービスの対応に必要な機能を含む基地局B(基地局制御装置(Base Station Controller; BSC))における統合機能である。SMLCは、装置Rの位置決めに必要なリソースの全体の調整およびスケジューリングを管理する。また、SMLCは、最終位置推定を計算し、達成精度を推定する。SMLCは、無線インターフェース測定を入手する目的で、多数の位置測定ユニット(Location Measurement Unit; LMU)を制御し、サービス提供する範囲における移動局加入者の位置決めまたはその位置決めを援助してもよい。
【0053】
次に、基準受信機C.2の例示的実施形態に関する主要要素について、図2を参照してより詳細に説明する。ここに開示される内容は、第1のナビゲーションシステムの基準受信機Cおよび第2のナビゲーションシステムの基準受信機C"の両方に適用可能であるが、実際の実装においては、相互に異なる可能性がある。基準受信機C.2は、基準受信機C.2の動作を制御するための制御装置C.1を備える。制御装置C.1は、例えば、プロセッサ、マイクロプロセッサ、デジタル信号プロセッサ(Digital Signal Processor; DSP)、またはこれらの組み合わせを備える。当然ながら、複数のプロセッサ、マイクロプロセッサ、DSPなども制御装置C.1に存在可能である。また、ナビゲーションシステムの衛星S1、S2から信号を受信するための受信機C.2.も存在する。基準受信機C.2は、通信ネットワークPのネットワーク要素Mと直接または間接的に通信するための通信ブロックC.3をさらに備える。通信ブロックC.3は、信号をネットワーク要素Mに送信するための送信機C.3.1を備え、必要に応じて、ネットワーク要素Mによって基準受信機C.2に送信された信号を受信するための受信機C.3.2を備える。また、基準受信機C.2は、データおよびソフトウェア(コンピュータプログラムコード)を格納するためのメモリC.4も備えてもよい。
【0054】
ネットワーク要素Mの例示的実施形態に関する構造について図3に示す。ネットワーク要素Mは、制御装置M.1を備える。また、ネットワーク要素の制御装置M.1は、プロセッサ、マイクロプロセッサ、デジタル信号プロセッサ(Digital Signal Processor; DSP)、またはその組み合わせを備えてもよい。当然ながら、複数のプロセッサ、マイクロプロセッサ、DSPなども制御装置M.1に存在可能である。ネットワーク要素Mは、第1の通信ブロックM.2によって、基準受信機C.2と通信可能である。第1の通信ブロックM.2は、ナビゲーションシステムの基準受信機C.2から信号を受信するための受信機M.2.2を備える。また、第1の通信ブロックM.2は、例えば、要求メッセージをナビゲーションシステムの基準受信機C.2に送信するための送信機M.2.1を備えてもよい。ネットワーク要素Mは、基地局Bまたは通信ネットワークPのその他のアクセスポイントと通信するための第2の通信ブロックC.3をさらに備える。第2の通信ブロックM.3は、信号を基地局Bに送信するための送信機M.3.1と、基地局Bによってネットワーク要素Mに送信された信号を受信するための受信機M.3.2とを備える。また、ネットワーク要素Mは、データおよびソフトェア(コンピュータプログラムコード)を格納するためのメモリM.4も備える。
【0055】
ネットワーク要素Mは、基準受信機C.2を使用することによって衛星ブロードキャストから支援データを入手するか、またはこのような情報を収集して通信ネットワークに送信することを目的とする支援データサーバXなどの、その他のいくつかの外部ソリューションから支援データを入手する。支援データサーバXは、ナビゲーションデータの受信、支援データの形成および送信に関する動作に関し、ネットワーク要素Mと類似の要素を備える(つまり、受信機M.2.2、制御装置M.1、送信機M.3.1、メモリM.4)。また、支援データサーバXは、基準受信機C.2の要素を備えてもよい。支援データサーバXは、例えば、商用サービスプロバイダのサーバであり、そのサーバから料金を伴って支援データを要求可能である。
【0056】
図4は、本発明の例示的実施形態に従う装置Rを簡易ブロック図として示す。装置Rは、1つ以上のナビゲーションシステムの基準局S1、S2から信号を受信するための1つ以上の測位受信機(Positioning Receiver)R.3を備える。装置Rが対応することを目的とするナビゲーションシステム毎に、1つの測位受信機R.3が設けられることが可能であり、あるいは、複数のナビゲーションシステムの信号に基づいて測位を実行するための1つの測位受信機R.3を用いることとしてもよい。また、装置Rは、装置Rの動作を制御するための制御装置R.1を備える。また、ネットワーク要素の制御装置R.1は、プロセッサ、マイクロプロセッサ、デジタル信号プロセッサ(Digital Signal Processor; DSP)、またはこれらの組み合わせを備えてもよい。当然ながら、複数のプロセッサ、マイクロプロセッサ、DSPなども存在可能である。また、測位受信機R.3は、制御要素R.3.1(例えば、プロセッサ、マイクロプロセッサ、および/またはDSP)を備えることが可能であり、または測位受信機R.3は、測位時に装置Rの制御装置を使用することが可能である。また、測位動作のうちのいくつかは、測位受信機R.3の制御要素R.3.1によって実行可能であり、その他のいくつかの測位動作は、装置の制御装置R.1によって実行可能である。装置Rは、通信ブロックR.2によって、通信ネットワークPの基地局Bと通信することが可能である。通信ブロックR.2は、通信ネットワークPの基地局Bから信号を受信するための受信機R.2.2を備える。また、通信ブロックM.2は、通信ネットワークPの基地局Bにメッセージを送信するための送信機R.2.1を備える。データおよびソフトウェアは、装置のメモリR.4に格納可能である。また、装置Rには、ユーザインターフェース(User Interface; UI)R.5が設けられる。このユーザインターフェースには、例えば、ディスプレイR.5.1、キーパッドR.5.2(および/またはキーボード)、ならびにマイクおよびスピーカなどのオーディオ手段R.5.3が含まれる。またこの装置は、複数のユーザインターフェースを有することも可能である。
【0057】
装置Rは、例えば、それ自体既知である移動通信装置であり、通信ネットワークPと通信することを目的とする。ユーザインターフェースR.5は、移動通信部分と測位受信機R.3との両方に共通していることが可能である。
【0058】
支援データフォーマットフィールド(Assistance Data Format Field)に関する非限定的な例について、表1および図5を参照して以下に開示する。軌道モデルの問題は、マルチモードモデル(Multi Mode Model)を導入することによって解決されている。モデルのモードは、少なくとも、
モード1:少なくともGPS、ガリレオ、およびQZSSシステムをサポートするケプラーモデル、
モード2:少なくともLAASシステムをサポートする、ECEF座標における位置、
モード3:少なくともGLONASS、SBAS、およびQZSSシステムをサポートする、ECEF座標における位置、速度、および加速度、
である。また、今後のシステム用に、3つを上回るモードが存在可能であり、また、本発明の異なる種類の実装も存在可能である。
【0059】
表1において、関連するビット数、スケールファクタ、および異なるモードを示す。表に従って説明する。
【表1】
【0060】
表1は、フィールドならびに異なるモード1、2、および3の例を開示している。表1の情報は、6つの部分に分けられることができる。第1の部分はフィールドtoe_MSBを含む。このフィールドは、エフェメリスの時間toeおよび時計モデルの基準時間tocに関する12個の最上位ビット(MSB)を特定し、UTC時間(協定世界時)で提供される。装置Rは、ナビゲーションモデルの受信時に、エフェメリスの時間toeおよび時計モデルの基準時間tocにおいて生じ得るロールオーバを補うべきである。エフェメリスの時間toeおよび時計モデルの基準時間tocは、約1.7週間の期間を有する。
【0061】
第2の部分は、衛星およびフォーマットの識別情報である。第2の部分は、支援メッセージAにおけるモード毎に存在する(図5)。第2の部分の第1のフィールドは、システムおよび衛星識別情報SS_IDを含む。システムおよび衛星標示を使用して、異なる衛星および衛星システムを規定する。システムおよび衛星識別情報SS_IDは、本非限定的例において、9ビットのフィールドであり、2つのサブフィールドに分割される。第1のサブフィールド(システムID)は、衛星システムのID番号を含み、第2のサブフィールド(SV/スロットID)は、ナビゲーションデータが従うシステムにおける衛星のインデックスを含む。システムおよび衛星識別情報SS_IDのビットマスクは、本例において、以下のとおりである。
システムID(3ビット、値の範囲0 ... 7)
xxx-----
SV/スロットID(6ビット、値の範囲0 ... 63)
---xxxxxx
【0062】
すなわち、3つの最上位ビットは、衛星システムを示し、6つの最終ビットは、衛星を示す。
【0063】
システムIDの仕様について表2に開示する。
【表2】
【0064】
SV/スロットIDは、ブロードキャストされるナビゲーションモデルの衛星インデックスである。
【0065】
第2の部分の第2のフィールドは、搬送周波数インデックス(Carrier Frequency Index)を含む。このパラメータは、GLONASS特有の周波数チャネルインデックスである(軌道におけるスロットを示す衛星インデックスおよびナビゲーション信号周波数間のマッピング。このマッピングは、GLONASSアルマナックブロードキャストに含まれる)。これは、GLONASS以外のその他のいかなるシステムについても0に設定される。このフィールドの値の範囲は[-7,-13]である。
【0066】
第2の部分の第3のフィールドは、フィッティング間隔(Fit Interval)を含む。このフィールドは、ナビゲーションモデルの有効期間を特定する。このフィールドの値の範囲は、0.125〜448hである。このパラメータは、以下の表3に記載されるように、特別な浮動小数点表示に従って特定される。
【表3】
【0067】
フィッティング間隔が63(=26-1)であることは、特定の衛星のナビゲーションモデルに関する無限の間隔を規定する特別な意味を有する。
【0068】
第2の部分の第4のフィールドは、SVの調子(SV Health)を示す。このパラメータは、衛星の現在の調子に関する情報を提供する。調子値は、GNSSシステム特有である(例えば、ICD-GPS-200を参照)。
【0069】
第2の部分の第5のフィールドは、データ発行(Issue Of Data)を含む。データ発行フィールドは、ナビゲーションモデルの識別子を含む。例えば、ブロードキャストされるGPSエフェメリスの場合、GPS-ICD-200に記載のように、IOD(Issue Of Data)の10個の最下位ビット(LSB)はIODCインデックスを含む。ナビゲーションモデルが、ブロードキャストされるいかなるエフェメリスにも基づかないが、ナビゲーションシステムの外部のソースから提供される長期フィッティングに基づく場合、IODのMSBも設定される。
【0070】
第3の部分は、衛星時計モデル(Satellite Clock Model)に関する。第3の部分の第1のフィールドは、時計モデルの基準時間について最下位ビットに報告するtocを含む。12個のMSBが、フィールドtoe_MSB.の第1の部分に含まれる。第3の部分の2つめのaf0、3つめのaf1、および第4のフィールドaf2は、時計モデルの0次、1次、2次の係数を含む。
【0071】
第3の部分の第5のフィールドは、L1およびL2ブロードキャスト間の装備群遅延(Equipment group delay)を示すTGD含む。このパラメータは、GPSおよびGLONASSシステムに関して規定される。
【0072】
第4の部分は、ケプラーパラメータを使用する衛星ナビゲーションモデルである第1のモードに関する。
【0073】
ケプラーパラメータを使用して規定されるナビゲーションモデルは、GPS-ICD-200におけるGPSに関する規定と同一である。このパラメータセットは、モード1において、つまりGPSおよびガリレオシステムの衛星に関連する支援データと共に使用される。モデルパラメータに関する説明について、以下の表4に示す。
【表4】
【0074】
ケプラーパラメータは、GPSおよびガリレオのネイティブフォーマットである。しかしながら、GLONASSおよびSBASのネイティブフォーマットは、GPSおよびガリレオで使用されるフォーマットとは異なる。軌道に関する履歴データを使用することによって、GLONASSおよびSBASフォーマットをGPS/ガリレオ型軌道モデルに変換することが可能であるが、GLONASSおよびSBASのブロードキャストされる軌道モデルのネイティブフォーマットを汎用モデルに含めることを可能にすることが有利である。これは、疑似衛星が実質的に静止して維持される場合に、静止物体をケプラーパラメータで表すことによって、多数のビットをパラメータ:
に加えることが必要になるため、LAASの観点から見ても有利である。さらに、ケプラーパラメータは、数センチメートルの精度で物体位置を提示可能であるだけである。しかしながら、疑似衛星では、最良のナビゲーションソリューションを入手可能にするために、センチメートル未満の分解能(つまり、1cmより小さい分解能)を有することが重要である。モデルにおけるGLONASS/SBASのネイティブフォーマットを使用することによって、さらなるフォーマット変換を行わずに、平面ECEF座標におけるLAAS送信機の位置を表すことが可能になる。
【0075】
第5の部分は、ECEF座標を使用する衛星ナビゲーションモデルである、第2および第3のモードに関連する。
【0076】
このパラメータセットは、モード2(つまり、LAASに関する)およびモード3(つまり、GLONASSおよびSBAS)において使用される。
【表5】
【0077】
位置フィールドにおける最上位ビット(MSB)の数は、GLONASSおよびSBAS範囲の必要性が満たされるように選択される。しかしながら、MSBの数は、必要に応じてQZSS軌道を表すのにも十分である。
【0078】
一方、LSBの数は、LAAS(分解能3.9ミリメートル)によって設定される分解能の必要性を表す。
【0079】
第6の部分は、衛星位置精度モデルに関連する。この部分は2つのフィールドを含む。第1のフィールドはパラメータr0を含み、第2のフィールドはパラメータr1を含む。これらのパラメータを使用して、
により、時間におけるナビゲーションモデルのエラー伝播を記述することが可能である。
【0080】
GPSに関し、パラメータr0は、GPS-ICD-200仕様の記載のように、ユーザ距離精度(User Range Accuracy; URA)である。
【0081】
ナビゲーションシステムの支援データメッセージを、通信ネットワークにおいて、例えば、ネットワーク要素Mから装置Rに送信する必要がある場合、情報は、通信ネットワークに適用可能な1つ以上のメッセージに割り当てられる。例えば、GSM通信ネットワークにおいて、位置関連情報の送信用に形成される特定のメッセージ配信手法(無線リソースLCSプロトコル(Radio Resource LCS Protocol; RRLP))が存在する。本手法は、規格3GPP TS 44.031に規定される。この規格は、ネットワーク要素Mと装置Rの間で交換される支援型GPSデータのフォーマットを規定する。本発明において、本手法を使用して、より一般的な調子データを装置Rに送信することが可能になる。
【0082】
ネットワーク要素Mにおいて、DGPS補正、エフェメリスおよび時計補正、ならびにアルマナックデータなどの利用可能なナビゲーション情報は、1つまたは複数の支援データメッセージの対応するフィールドに割り当てられる。特定の衛星に関するエフェメリス、時計補正、アルマナック(Almanac)、およびその他のデータは、その衛星の衛星ナビゲーションメッセージから、または外部サービスXから入手される。メッセージは、基準受信機Cによって、または外部サービスモジュールXにおける基準受信機によって受信される。支援データメッセージは、情報が暗号化されているか否かを示す暗号化制御要素と、暗号化通し番号要素と、およびデータ情報要素とを含む。データ情報要素(データIE)は、ナビゲーション情報を搬送する。要素について以下の表6に示す。
【0083】
支援データメッセージは、メッセージ全体を占有する必要のない固定長メッセージに組み込まれるように構築される。それは、3つのデータセットを含むことが可能であり、その3つのデータセットとは、DGPS補正、エフェメリスおよび時計補正、ならびにアルマナックおよびその他のデータ情報である。固定長メッセージの情報要素が、利用可能なビットよりも少ない場合、残りのメッセージは、充填ビットで充填される。通常、未定義の予備ビットは要素間で使用することはできない。例示的実施形態において、支援データメッセージをブロードキャストするチャネルとして、例えば、SMSCB DRXサービスが使用されるCBCHが挙げられる。1つのSMSCBメッセージは、82オクテットの固定情報データ長さを有し、GPS支援データの最大長さは82オクテットである。装置Rは、3GPP TS 23.041に言明されるメッセージ識別子で、LCS SMSCBメッセージを識別することが可能である。
【表6】
【0084】
図5において、本発明の例示的実施形態に従う例示的な支援メッセージを示す。メッセージは、エフェメリスの時間toeおよび時計モデルの基準時間tocに関する12個の最上位ビット(MSB)を含み、UTC時間(協定世界時)で提供される。このパラメータの後に多数の支援データレコードA.2(ADATA1、ADATA2、 ... 、ADATAn)が続く。各支援データレコードA.2は、ナビゲーションシステムの1つの衛星S1、S2に関連する支援データを含む。非限定的な例として、メッセージAの第1および第2のデータ記録は、GPSシステムの2つの衛星に関する支援情報を含んでもよく、また、メッセージAの第3のデータ記録は、ガリレオシステムの1つの衛星に関する支援情報を含んでもよい。
【0085】
支援データレコードA.2の構造について、図5のメッセージAの下に示す。支援データレコードA.2は、例えば、衛星およびフォーマット識別記録A.2.1、時計モデル記録A.2.2、ナビゲーションモデル記録A.2.3、および位置精度モデル記録A.2.4を含む。また、これらの4つの異なる記録A.2.1、 ... 、A.2.4の数よりも多いまたは少ない支援データレコードA2の記録を規定することも可能である。
【0086】
ナビゲーションモデル記録A.2.3の構造についても図5に示され、上により詳しく開示されるように、表1の第3の部分のフィールドを含む。例えば、ナビゲーションモデル記録A.2.3の支援データがGPS、ガリレオ、またはQZSSシステムのデータを含む場合、図5においてモード1と示される構造を使用してもよい。また、ナビゲーションモデル記録A.2.3の支援データがLAASシステムのデータを含む場合、図5においてモード2と示される構造を使用してもよく、ナビゲーションモデル記録A.2.3の支援データがGLONASSまたはSBASシステムのデータを含む場合、図5におけるモード3と示される構造を使用してもよい。また、QZSSシステムの衛星では、例えば、モード3の構造を使用可能であってもよい。
【0087】
ここで、支援メッセージAの各ナビゲーションモデル記録A.2.3は、それぞれのモードの全フィールドを含むべきであることに留意されたい。モード選択は、パラメータが関連するナビゲーションシステムに基づくことが可能であり、または、別の選択基準を使用して、支援データの送信に関するモードを選択することが可能である。この場合、選択されるモードは、必ずしもナビゲーションシステムに依存しているとは限らない。
【0088】
次に、本発明に従う支援メッセージフォーマットの利用に関する例示的状況について以下に説明する。ネットワーク要素は、基準受信機C.2から受信したナビゲーションデータを格納するためのメモリM.4において、格納領域M4.1を有する。例えば、第1のナビゲーションシステムの衛星に関するナビゲーションデータが格納されていない場合、ネットワーク要素の制御装置M.1は、クエリメッセージ(図示せず)を作成し、それをネットワーク要素の第1の通信ブロックM.2に送る。送信機M.2.1は、必要に応じてメッセージにプロトコル対話を行ない、第1のナビゲーションシステムの基準受信機Cにメッセージを送信する。第1の基準受信機Cの第2の通信ブロックの受信機C.3.2は、メッセージを受信し、必要に応じてメッセージにプロトコル変換を行ない、基準受信機Cの制御装置C.1にメッセージを送る。制御装置C.1は、メッセージを調査しナビゲーションデータをネットワーク要素Mに送信する要求であるかを決定する。メモリC.4が、要求されたナビゲーションデータを含む場合、それは、送信前にナビゲーションデータを更新する必要がなければ、ネットワーク要素Mに送信可能である。
【0089】
ナビゲーションデータの更新後、基準受信機の制御装置C.1は、ナビゲーションデータを含むメッセージを作成し、それを、第1の基準受信機Cの第2の通信ブロックの送信機C.3.1に送る。送信機C.3.1は、必要に応じてプロトコル対話を行なった後、ナビゲーションデータをネットワーク要素Mに送信する。ネットワーク要素の受信機M.2.2は、メッセージを受信し、必要に応じてプロトコル対話を行ない、ネットワーク要素の制御装置M.1にメッセージを送るか、あるいはメッセージにおいて受信したナビゲーションデータを、ネットワーク要素のメモリM.4に直接保存する。メモリは、異なるナビゲーションシステムの衛星に関するナビゲーションデータを格納するための特定の領域(図3のM.4.1、M.4.2)を含んでもよい。従って、データは、ナビゲーションデータの受信先のナビゲーションシステムのために確保される領域に格納される。
【0090】
支援データは、例えば、要求に応じて、またはブロードキャスト送信によって、通信ネットワークPの制御チャネル上で装置Rに送信可能である。GSMシステムにおいて、GPSに関するこのようなブロードキャスト送信で使用可能なGPS支援データブロードキャストメッセージフォーマットは、規定されている。支援データは、本発明において規定されるフォーマットを利用するメッセージに含まれる。例えば、ネットワーク要素Mの制御装置M.1は、どの種類のナビゲーションデータがメモリM.4に格納されているかを調査する。例えば、メモリは、第1のナビゲーションシステムの1つ以上の衛星に関するナビゲーションデータと、第2のナビゲーションシステムの1つ以上の衛星に関するナビゲーションデータと、を含み、また、制御装置M.1は、例えば、以下の要領で、メモリM.4における支援データメッセージ格納領域M.4.3において、支援メッセージAを構築することができる。制御装置M.1は、ナビゲーションデータからエフェメリスの時間toeを検索し、エフェメリスの時間に関する12個の最上位ビットを、メッセージAの第1のフィールドA.1に格納する。
【0091】
ここで、この支援データフォーマットにおける時間の定義は、現在のGPS時間とは異なることを留意されたい。前述のとおり、例えば、GPS時間は、週毎に周期する。新しい時間定義は、このような周期で機能しない。さらに、時間定義の方法は、本発明の観点から見ると関連性がない。
【0092】
次に、制御装置は、第1の格納領域M.4.1に格納される第1のナビゲーションシステムのナビゲーションデータを閲覧して、第1の支援データレコードA.2(ADATA1)を形成する。制御装置M.1は、システムの種類を決定し(M.1.2)、衛星およびフォーマット識別記録A.2.1におけるSS_IDフィールドの最初の3つのビットを適宜設定する(M.1.2)。その他の6つのビットは、該当するナビゲーションデータの衛星番号に基づいて設定される。対応するように、衛星およびフォーマット識別記録A.2.1のその他のフィールドを埋める。また、時計モデル記録A.2.2のフィールドは、時計モデルの基準時間および係数に基づいて埋められる。L1およびL2ブロードキャスト間の装備群遅延TGDは、支援データがGPSまたはGLONASSシステムの衛星に関連する場合に埋められる。パラメータTGDは、その他のシステムでも必要とされてもよい。
【0093】
ナビゲーションモデル記録A.2.3の利用は、ナビゲーションシステムに依存する。すなわち、制御装置M.1は、利用可能なモードである、モード1、モード2、モード3、または本明細書に記載されていないその他のいくつかの追加のモードのうちの1つを選択する。
【0094】
また、位置精度モデル記録A.2.4も、時間におけるナビゲーションモデルエラー伝播を報告するために埋められる。
【0095】
メモリM.4に第1のナビゲーションシステムの別の衛星に関するナビゲーションデータが存在する場合、ネットワーク要素の制御装置M.1は、第2の支援データレコードA.2(ADATA2)を適宜形成する。
【0096】
支援データメッセージA.2が、全てのナビゲーションデータ格納領域M.4.1、M.4.2に格納されるナビゲーションデータから作成されると、支援データメッセージは、通信ネットワークに送信可能である。制御装置M.1.は、支援データメッセージ格納領域M.4.3におけるデータを、ネットワーク要素の第2の通信ブロックM.3に送る。ネットワーク要素Mの第2の通信ブロックの送信機M.3.1は、支援データを搬送する送信のための信号の形成に必要な動作を実行し、信号を通信ネットワークPに送信する。
【0097】
信号は、装置Rの通信ブロックの受信機R.2.2により受信される。受信機R.2.2は、受信した信号からデータを復調し、例えば、装置Rの制御装置R.1にデータを送る。制御装置R.1は、装置RのメモリR.4にデータを格納し、支援データを調査する(R.1.1)。その調査は、受信した支援データレコードの各々のモードを判定すること(R.1.2)を含む。そのモードに関する標示は、例えば、制御装置R.1の出力線R.1.3を介して測位受信機R.3に転送可能である。しかしながら、制御装置R.1を測位動作に使用することも可能であり、この場合、データ(モードおよび/または支援データ)を、測位受信機R.3に送る必要はなくてもよいが、制御装置R.1は、メモリR.4に格納されたデータを使用することが可能である。
【0098】
メモリR.4は、支援データメッセージにおいて受信されるナビゲーションデータを格納するための格納領域R.4.1を含むことが可能である。また、ナビゲーションデータは、状況により、受信した衛星信号を復調することによって衛星からも受信可能である。
【0099】
支援データが、1つまたは複数の支援データレコードから検索される場合、その記録は、メモリに保存し、測位の際に使用可能である。例えば、測位受信機R.3が、1つまたは2つの衛星からの信号を復調可能であるだけである場合、測位受信機R.3は、それ自体既知である測位を実行するために、支援データを使用することができる。
【0100】
装置Rは、一定の間隔で、または所定の条件が満たされると、測位を実行することが可能である。所定の条件には、例えば、ユーザが例えば緊急センターへの呼び出しを開始する状況、ユーザが装置Rのメニューから測位動作を選択する状況、装置Rおよび通信ネットワークPが、通信ネットワークPの別のセルにハンドオーバーを実行する状況、通信ネットワークPが測位要求を装置Rに送信する状況などのうちの1つ以上が含まれることが可能である。
【0101】
また、通信ネットワーク、例えば、ネットワーク要素Mは、装置Rに測位を実行するように要求することも可能である。この要求は、RRLPメッセージ配信機構を使用して送信可能である。また、その返信も、RRLPメッセージ配信機構を使用して送信可能である。
【0102】
測位が実行される場合、装置の測位受信機R.3または制御装置R.1は、メモリR.4に格納されるナビゲーションデータが十分最新であるか否かを調査することが可能である。ナビゲーションデータのいくつかが最新でない場合(つまり、ナビゲーションデータが、既定時間よりも古い場合)、あるいは必要なナビゲーションデータのいくつかが不足している場合、装置は、要求メッセージを作成し、通信ネットワークP、例えば基地局Bに送信することができる。基地局Bは、要求メッセージをネットワーク要素Mに送る。ネットワーク要素Mは、要求されたナビゲーションデータを収集し、返信メッセージを作成する。次に、返信メッセージは、接続中の基地局Bを介して装置Rに送信される。装置の通信ブロックR.2の受信機R.2.1は、返信メッセージを受信および復調し、ナビゲーションデータを検索する。ナビゲーションデータは、例えば、メモリR.4のナビゲーションデータ格納領域R.4.1に格納される。
【0103】
本発明の別の実施形態において、ネットワーク要素Mは、少なくともいくつかの測位計算を実行する。本実施形態において、装置Rは、例えば、搬送波位相測定を実行し、その測定結果を測定情報メッセージ(GNSS測定情報)においてネットワーク要素Mに送信することによって、ネットワーク要素Mを支援する。また、ネットワーク要素Mは、基準受信機C.2からナビゲーションデータを受信することによって支援データの形成をするか、あるいはネットワーク要素Mは、支援データサーバXから支援データを受信する。次に、ネットワーク要素Mは、測定データおよび支援データを使用することによって、装置Rの位置を計算する。別の選択肢として、別のサーバ(図示せず)で位置計算を実行することが挙げられる。この場合、ネットワークサーバMは、測定結果および支援データを別のサーバに送信する。
【0104】
さらに別の実施形態において、装置Rは、疑似距離測定を実行し、その測定結果を測定情報メッセージ(GNSS測定情報)においてネットワーク要素Mに送信する。ネットワーク要素Mは、測定結果と、ネットワーク要素Mにより形成される支援データまたは支援データサーバXから受信される支援データとを使用する。次に、ネットワーク要素Mは、疑似距離測定データおよび支援データを使用して、装置Rの位置を計算するか、あるいはネットワーク要素Mは、疑似距離測定データおよび支援データを、位置計算を実行する別のサーバ(図示せず)に送信する。
【0105】
これらの上述の実施形態において、装置Rからネットワーク要素Mに送信される測定情報は、ナビゲーションシステムに依存してもよいが、上に提示される原理を使用して、ナビゲーションシステムに依存しない一般的なメッセージを作成することも可能である。
【0106】
本発明の中核は、マルチモード機能にある。SSインデックスのMSBによって表される衛星システム(GPS、ガリレオ、GLONASS、SBAS、LAAS、QZSS、またはその他のいくつか)は、モードを規定してもよい。しかしながら、モードは、その他の要因を使用しても決定されてもよい。次に、モードは、軌道モデルモードを規定し、また、特定の実装において、時計モデルモードも規定する。
【0107】
当然ながら、衛星にインデックスを付ける方法(つまり、ナビゲーションモデル識別情報が、システムおよびSVに関する情報を含むこと)は、本発明において重要な要素である。GLONASSでは、搬送周波数インデックスが(SSインデックスに加えて)不可欠である。
【0108】
時計モデルは、本例の実装における全モードについて(つまりは、全ナビゲーションシステムについて)共通であることに留意されたい。しかしながら、時計モデルは、モードに応じて変化してもよい。
【0109】
特定のナビゲーション支援メッセージが、種々の項目(特に、toe_MSB、フィッティング間隔、SVの調子、IOD、tocTGD、toe、r0、r1)を含むことに留意されたい。これらの項目は、当然ながら、ナビゲーションモデルが適切に機能するには重要であるが、本発明の観点から見ると重要ではない(これらのパラメータは、フォーマットを規定するテーブルにおいて括弧で囲まれている)。例えば、モデルの基準時間は、種々の方式(ここで、toe_MSB、toc、およびtoe)で提供可能であるが、それを変更することによって、マルチモード機能に影響は及ばない。別の例として、フィッティング間隔は、浮動小数点値として規定される(上記の表3)。これは、単なる例であり、フィッティング間隔は、システム特有の問題を考慮するその他のいくつかの手段においても特定可能である。本発明の観点から見ると重要ではないパラメータは、完全を期すためにだけ提供される。
【0110】
また、実際のビット数およびスケールファクタは、新しい仕様または解明が出現する場合に変更する可能性があることを強調されたい。ビット数および/またはスケールファクタの変更により、本発明の本質は変更されない。例えば、分解能を速度成分に加えることによって、異なる発明になることはない。さらに別の例として、SS IDについて検討する。規格において現行のインデックス化方法は、GPS衛星のみしか区別できない。ここで提案されたSS IDは、システムおよび衛星に関する情報を含む。これらの2つは、同一のフィールドで表されることが可能であるが、そうする必要はない(但し、システムは、その他のいくつかのフィールドで規定される)。従って、上述のように、フィールドの単なる修正によって本発明の本質は変更されない。
【0111】
通信ネットワークPは、無線ネットワーク、有線ネットワーク、またはこれらの組み合わせであることが可能である。通信ネットワークに関するいくつかの非限定的な例について上述しているが、WLANおよびWiMaxネットワークも本明細書において言及可能である。
【0112】
システムの様々な要素の動作は、ソフトウェアによって主に実行可能である。つまり、要素の制御装置は、コンピュータ命令に基づいて動作する。当然ながら、それらのいくつかの動作または一部は、「ハードコード」であることが可能であり、つまりハードウェアにより実装可能である。
【図面の簡単な説明】
【0113】
【図1】本発明が適用可能なシステムを一般化した略図として示す。
【図2】本発明の例示的実施形態に従うナビゲーションシステムの基準受信機を、簡易ブロック図として示す。
【図3】本発明の例示的実施形態に従うネットワーク要素を、簡易ブロック図として示す。
【図4】本発明の例示的実施形態に従う装置を簡易ブロック図として示す。
【図5】本発明の例示的実施形態に従うメッセージを示す。
【図6】GPSシステムにおいて使用されるフレーム構造の例を示す。
【技術分野】
【0001】
本発明は、支援型ナビゲーションシステムの分野に関し、より具体的には、支援データが通信ネットワークから端末に配信されるフォーマットに関する。また本発明は、衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機を備える装置にも関する。また本発明は、衛星ナビゲーションシステムの支援データを受信機に送信するための送信機を備えるネットワーク要素にも関する。さらに本発明は、衛星ナビゲーションシステムの支援データを測位受信機に届けるための方法、コンピュータプログラム、および信号に関する。
【発明の背景】
【0002】
既知のナビゲーションシステムの1つにGPSシステム(Global Positioning System)が挙げられる。このGPSシステムは、現在、24基を上回る衛星を備えており、そのうちの半分は、通常、同時に受信機の視界に入る。これらの衛星は、例えば、衛星のエフェメリスデータ(Ephemeris data)、ならびに衛星の時間に関するデータを送信する。測位に使用される受信機は、通常は、測位システムに属するいくつかの衛星から受信機に同時に受信される信号の伝播時間を計算することによってその位置を推定し、信号の送信時間(Time of Transmission; ToT)を計算する。測位に関し、典型的には、受信機は、位置を算出するために、視界に入る少なくとも4つの衛星の信号を受信しなくてはならない。既に開始中のその他のナビゲーションシステムとして、ロシアのGLONASSが挙げられる。
【0003】
今後、GPSおよびGLONASS以外に、その他の衛星型ナビゲーションシステムも現れるだろう。欧州では、ガリレオシステムが現在構築中であり、あと数年で動作可能になる。また、宇宙ベース強化システム(Space Based Augmentation Systems; SBAS)(WAAS、EGNOS、GAGAN)も現在計画中である。地上の固定ナビゲーションステーションを使用するローカルエリア強化システム(Local Area Augmentation Systems; LAAS)は、ますます多く見られるようになってきている。厳密に言うと、ローカルエリア強化システムは、実際は、衛星型ナビゲーションシステムではないが、ナビゲーションステーションは「疑似的衛星」または「疑似衛星」と呼ばれている。また、衛星型システムに適用可能なナビゲーションの原理は、ローカルエリア強化システムにも適用可能である。疑似衛星の信号は、標準のGNSS受信機で受信可能である。さらに、日本では、準天頂衛星システム(Quasi-Zenith Satellite System; QZSS)と呼ばれる独自のGPS/ガリレオ補完システムを開発中である。
【0004】
疑似的衛星を使用するシステムを備える衛星型ナビゲーションシステムは、総称して全地球的ナビゲーション衛星システム(Global Navigation Satellite Systems; GNSS)と呼ばれることが可能である。今後、恐らく、複数のナビゲーションシステムを同時にまたは代替的に使用して、測位動作を実行できる測位受信機が現れるだろう。このような混合型受信機では、例えば、第1のシステムの信号強度が一定限度未満になる場合、または第1のシステムに十分な可視衛星が存在しない場合、または第1のシステムの可視衛星の配置が測位に適切でない場合に、第1のシステムから第2のシステムに切り替えることができる。異なるシステムの同時使用は、視野に入る衛星の数が限られる市街地などの厳しい状況において問題となる。このような場合、1つだけのシステムに基づくナビゲーションは、信号の利用可能性が低いために実用的には不可能である。しかしながら、異なるナビゲーションシステムを混合して使用することによって、このような難しい信号条件におけるナビゲーションが可能になる。
【0005】
GPSシステムの各衛星は、L1と呼ばれる1575.42MHzの搬送周波数で測距信号を送信する。また、この周波数は、154f0(f0=10.23MHz)とも示される。さらに、衛星は、L2と呼ばれる1227.6MHz(つまり120f0)の搬送周波数で別の測距信号を送信する。衛星において、信号の変調は、少なくとも1つの疑似乱数系列で実行される。この疑似乱数系列は、衛星毎に異なる。変調の結果、符号変調広帯域信号が発生する。使用する変調技術により、異なる衛星から送信される信号を、受信機に区別することが可能になるが、送信に使用する搬送周波数は実質的に同じである。ドップラー効果により、幾何学的配置形状に応じて、搬送周波数にわずかな変化(±1kHz)が生じる。この変調技術は、符号分割多元接続(Code Division Multiple Access; CDMA)と呼ばれる。各衛星において、L1信号を変調するために使用される疑似系列は、例えば、ゴールド符号系の符号であるいわゆるC/A符号(Coarse/Acquisition符号)である。各GPS衛星は、個々のC/A符号を使用して信号を送信する。符号は、2つの1023ビットバイナリ系列の2を法とした和として形成される。第1のバイナリ系列G1は、多項式X10+X3+1で形成され、第2のバイナリ系列G2は、衛星毎に遅延が異なるように、多項式X10+X9+X8+X6+X3+X2+1の遅延によって形成される。この配列により、同一の符号発生器で、異なるC/A符号を形成することが可能になる。従って、C/A符号は、GPSシステムにおけるチッピング速度が1.023MHzであるバイナリ符号である。C/A符号は、1023個のチップを含み、符号エポック(符号エポック)は1ミリ秒である。L1搬送波信号は、50ビット/秒のビットレートでナビゲーション情報によってさらに変調される。ナビゲーション情報は、衛星の調子、その軌道、時間データなどに関する情報を含む。
【0006】
GPSシステムにおいて、衛星は、エフェメリスデータおよび時間データを含むナビゲーションメッセージを送信し、このメッセージを使用して、測位受信機において所定の時点における衛星の位置を決定する。これらのエフェメリスデータおよび時間データは、フレームにおいて送信される。このフレームは、さらにサブフレームに分割される。図6は、このようなフレーム構造FRの例を示す。GPSシステムにおいて、各フレームは、1500ビットを含み、各々が300ビットである5つのサブフレームに分割される。1ビットの送信に20ミリ秒かかることから、各サブフレームの送信には、6秒かかることになり、フレーム全体は、30秒で送信される。サブフレームは、1から5まで番号が付けられる。各サブフレーム1において、例えば、時間データは、サブフレームの送信の時点と、GPSシステムの時間に対する衛星時計の偏差に関する情報とを示す時間データが送信される。
【0007】
サブフレーム2および3は、エフェメリスデータの送信に使用される。サブフレーム4は、協定世界時(Universal Time, Coordinated:UTC)などのその他のシステム情報を含む。サブフレーム5は、全衛星に関するアルマナックデータの送信を目的とする。これらのサブフレームおよびフレームの実体は、25個のフレームつまりは125個のサブフレームを含むGPSナビゲーションメッセージと呼ばれる。従って、ナビゲーションメッセージの長さは、12分30秒である。
【0008】
GPSシステムにおいて、時間は、週の開始から秒で測定される。GPSシステムにおいて、週の開始の時点は、土曜日と日曜日の間の午前零時である。送信される各サブフレームには、サブフレームが送信された時のGPS週の時点に関する情報が含まれる。従って、時間データは、特定のビットの送信の時点、すなわち、GPSシステムにおけるサブフレームの最終ビットの送信の時点を示す。衛星において、時間は、高精度の原子時計によって測定される。それにも関わらず、各衛星の動作は、GPSシステムの制御センター(図示せず)で制御され、例えば、時間比較を実行することによって、衛星における測時エラーを検出し、その情報を衛星に送信する。
【0009】
ナビゲーションシステムが異なると、衛星の数、衛星の軌道パラメータ、ナビゲーションメッセージの構造なども異なる場合がある。ゆえに、GPS型測位受信機の動作パラメータは、別の衛星システムの測位受信機において適用可能でない場合がある。一方、少なくともガリレオの設計原理では、GPSとガリレオの間にいくつかの類似性があることを示しており、少なくともガリレオの受信機が、測位の際にGPS衛星信号を利用可能であるようにしている。
【0010】
測位装置(または測位受信機)、つまりナビゲーションシステムにおいて送信された信号に基づき測位を実行できる装置は、所要の数の衛星から十分に強力な信号を常に受信できるとは限らない。例えば、装置が3次元測位を実行するべきである場合に、4つの衛星からの信号を受信不可能であることが発生し得る。これは、屋内、都市環境などにおいて発生し得る。方法およびシステムは、通信ネットワークが、不利な信号条件において測位可能であるように開発されてきた。通信ネットワークが、ナビゲーションモデル支援だけしか受信機に提供しない場合、2次元測位における最低3つの信号、または3次元測位における最低4つの信号の必要性は軽減されない。しかしながら、ネットワークが、例えば、高度決定に使用可能である気圧に関するアシストを提供する場合、3次元測位について3つの衛星で十分になる。これらのいわゆる支援型ナビゲーションシステムは、その他の通信システムを利用して、衛星に関する情報を測位装置に送信する。支援データを受信および利用することがそれぞれ可能であるこのような測位装置は、支援型GNSS受信機と呼ばれることが可能であり、あるいはより一般的には、支援型測位装置と呼ばれることが可能である。
【0011】
現在、GPS衛星に関する支援データのみが、符号分割多元接続(Code Division Multiple Access; CDMA)、移動通信用グローバルシステム(Global System for Mobile communications; GSM)、および広帯域符号分割多元接続(Wideband Code Division Multiple Access; W-CDMA)のネットワークにおいて、支援型GNSS受信機に供給可能である。この支援データフォーマットは、GPS-ICD-200空間信号(Signal-In-Space; SIS)仕様に記載されるGPSナビゲーションモデルに厳密に従っている。このナビゲーションモデルには、時計モデル(clock mode)および軌道モデル(orbit model)が含まれる。より正確には、時計モデルは、衛星時間をシステム時間(この場合、GPS時間)に関連付けるために使用される。軌道モデルは、所定の時点における衛星位置を計算するために使用される。両データは、衛星ナビゲーションに不可欠である。
【0012】
支援データが利用可能か否かは、測位受信機の性能に大きな影響を及ぼしうる。GPSシステムでは、良好な信号条件において、GPS衛星によりブロードキャストされた信号からGPS受信機がナビゲーションメッセージのコピーを抽出するのに少なくとも18秒(最初の3つのサブフレーム長さ)かかる。ゆえに、ナビゲーションモデルの有効なコピー(例えば、前回のセッションからのコピー)が利用可能でない場合、GPS衛星が測位計算において使用可能になるまでに少なくとも18秒かかる。ここで、AGPS受信機(支援型GPS)において、GSMまたは汎用移動通信システム(Universal Mobile Telecommunications System; UMTS)などのセルラネットワークが、ナビゲーションメッセージのコピーを受信機に送信するため、受信機は、衛星ブロードキャストからデータを抽出する必要はなく、セルラネットワークから直接データを入手することが可能である。初期位置算出時間(Time To First Fix; TTFF)は、18秒未満に短縮可能になる。この初期位置算出時間の短縮は、例えば、緊急通報の測位時に重大になり得る。また、これにより、ユーザが、ユーザの現在位置付近で利用可能なサービスに関する情報を要求する際などの、種々の使用事例におけるユーザ体験が改善される。このような種類の位置情報サービス(Location Based Service; LBS)は、要求に応じて決定されたユーザ位置を利用する。ゆえに、位置決定の遅延により、LBSからユーザへの1つまたは複数の応答が遅延する可能性がある。
【0013】
さらに、不利な信号条件において、支援型データの利用は、ナビゲーションのための単なる選択肢である場合がある。これは、信号電力レベルの低下により、GNSS受信機がナビゲーションメッセージのコピーを入手不可能であり得ることが原因となる。しかしながら、外部ソース(セルラネットワークなど)から受信機にナビゲーションデータが提供されると、ナビゲーションは再び可能になる。この特徴は、衛星信号を減衰させる建物およびその他の障害物により信号レベルが大幅に変動する可能性のある屋内状況および市街地において重要になり得る。
【0014】
国際特許出願公報第WO02/67462号は、セルラー通信ネットワークにおけるGPS支援データメッセージと、セルラネットワークにおいてGPS支援データを送信するための方法とを開示している。
【0015】
支援型測位受信機を有する携帯端末が支援データを要求する場合、ネットワークは、支援型測位受信機の視野に入る衛星毎に1つのナビゲーションモデルを携帯端末に送信する。支援データを送信するフォーマットについては、種々の規格に記載される。制御プレーンソリューションには、GSMにおける無線リソース位置サービスプロトコル(Radio Resource Location Services Protocol; RRLP)、W-CDMAおよびCDMAのIS-801.1/IS-801.Aにおける無線リソース制御(Radio Resource Control; RRC)が含まれる。ブロードキャスト支援データの情報要素は、GSMの規格TS 44.035で規定される。最終的に、ユーザプレーンソリューションOMA SUPL1.0およびCDMAネットワーク用の種々の専用ソリューションが存在する。これらの全ソリューションの共通要因は、GPS対応であることのみである。しかしながら、ガリレオ計画により、全規格は、ガリレオの適合性を達成するように近い将来修正されるだろう。
【0016】
従って、近い将来、GPSの支援だけでは十分でなくなること、また、新しいシステムに対応可能にするために、新しいデータフォーマットを開発しなければならないことは明らかである。
【0017】
新しいシステムならびにGPSに支援データを提供する際の問題は、全衛星システムの記述に使用可能であるナビゲーションモデル(時計および軌道モデル)を見つけることによって低減することができる。直接的なソリューションとして、システム毎にナビゲーションメッセージフォーマットを入手し、そのフォーマットを使用することが挙げられる。しかしながら、これにより、種々の異なるメッセージ(システム毎の異なるメッセージフォーマット)がもたらされ、実装が困難になり得る。さらに、ネイティブフォーマットもセルラー規格に不適合であり得る。ゆえに、最終的なソリューションは、種々の異なるフォーマットを必要としないようにしなければならない。
【0018】
共通フォーマットを開発する際の課題には、まず、衛星のインデックス化が含まれる。衛星インデックスを使用して特定の衛星でナビゲーションモデルを識別する。問題は、システム毎にそのシステム独自のインデックス化方法があることである。
【0019】
GPSは、疑似ランダム雑音(Pseudo-Random Noise; PRN)番号に基づいて、衛星(宇宙機(Space Vehicle; SV))にインデックスを付ける。PRN番号は、衛星が使用するCDMA拡散符号で識別可能である。
【0020】
ガリレオは、7ビットのフィールド(1-128)を使用して衛星を識別する。番号は、衛星が使用するPRN符号で識別可能である。
【0021】
GLONASSは、5ビットのフィールドを使用して衛星を特徴付ける。番号は、軌道面における衛星位置で識別可能である(この位置を「スロット」と呼ぶ)。さらに、その他のシステムとは対照的に、GLONASSは、周波数分割多元接続(Frequency Division Multiple Access; FDMA)を使用して、衛星ブロードキャストをスペクトル拡散する。ここで、GLONASSにおいてCDMA拡散符号も使用することに留意されたい。ゆえに、衛星スロット番号をブロードキャスト周波数にマッピングする表が存在する。このマッピングは、いかなる支援データフォーマットにも含まれなければならない。
【0022】
SBASシステムは、GPSと類似したPRN番号を使用するが、120のオフセットを有する。ゆえに、SBASシステムの第1の衛星は、120の衛星番号を有する。
【0023】
QZSS SIS ICDは、まだ公開されていないため、システムにおける衛星インデックス付与に関する詳細情報はない。しかしながら、システムはGPSの強化であるため、GPS適合フォーマットがQZSSでも適合可能である可能性が高い。
【0024】
疑似衛星(LAAS)は、インデックス化の点において最も問題となる。現在では、疑似衛星のインデックス化に規定される規格は存在しない。しかしながら、GPS型のPRNを使用することから、インデックス化は、GPS型のインデックス化に少なくとも概略的にでも従うべきである。ゆえに、衛星インデックスの範囲が十分であることを確認することによって、GPS型衛星インデックス付与でLAAS送信機を記述することが可能になるべきである。
【0025】
第2の問題は時計モデルである。いかなるシステムの時計モデルも、次式よって提供される:
ここで、tSYSTEM(t)は、時点tにおけるシステム時間(例えば、GPS時間)であり、tSV(t)は時点tにおける衛星時間であり、tREFERENCEは、モデル基準時間であり、ai(a∈{0,1,2})は、0次、1次、2次のモデル係数である。相対論的補正項(Relativisitic Correction Term)はこの数式には示されない。この数式はシステム毎に同一であるため、一般化モデルを開発する際の問題は、
1)各システムによって必要とされる値の範囲を対象とし、かつ、
2)システム毎の精度(または、分解能)の必要性が満たされる、
ようなビット数およびスケールファクタを発見することだけである。
【0026】
第3の問題は軌道モデルを含む。上述のとおり、各システムは、システム独自のフォーマットを有する(同一フォーマットを使用するGPSおよびガリレオは除外する)。GPSおよびガリレオは、ケプラー軌道パラメータセットを使用する。このパラメータセットは、6つの軌道パラメータ、3つの線形補正項(Linear Correction Term)、ならびに6つの調和引力補正項(Harmonic Gravitation Correction Term)を含む。GPSおよびガリレオとは対照的に、GLONASSナビゲーションモデルは、所定の時点における衛星位置、速度、および加速度に関する情報のみを含む。次に、その情報を使用して(運動方程式の初期値問題を解決することによって)、ある時点における衛星位置を予測することができる。SBASは、ある意味において、GLONASSに類似したフォーマットを利用する。SBASナビゲーションメッセージには、所定の時点におけるECEFシステムの衛星位置、速度、および加速度に関する情報が含まれる。このデータを使用して、単純な外挿によって衛星位置を予測する。これはGLONASSとは対照的であり、運動方程式は、時間において統合される。上述のように、QZSS ICDはまだ利用可能でないため、ナビゲーションメッセージの詳細フォーマットは不明である。しかしながら、GPS型エフェメリスデータまたはSBAS型ブロードキャストにQZSS信号が適合することを引用する文献が存在する。従って、新しいフォーマットがGPSおよびSBASに適合することが確実になることによって、QZSS軌道は、GPSのフォーマットを使用して記述されてもよい。LAASでは、地心地球固定フレーム(Earth-Centered Earth Fixed; ECEF座標系規定)において、静止している物体を軌道モデルが記述可能であることが必要である。また、疑似衛星は、位置に関して非常に厳しい分解能の必要性を有する。場合により、疑似衛星位置を約5mmの分解能で記述可能であることが必要である。
【0027】
このような必要条件(インデックス化、時計モデル、および軌道モデル)の他に、ナビゲーションモデルは、モデル基準時間(時間モデルにおけるtREFERENCE、似たようなタイムスタンプが軌道モデルでも必要とされる)、モデル有効期間、データの発行(モデルデータセットを区別可能にするため)、SVの調子(SVからのナビゲーションデータが使用可能か否かを示す)に関する情報を含まなければならない。
【0028】
言うまでもなく、ほとんどのシステムは、これらの項目を表す独自の方法を有する。範囲および精度の必要性は、システムによって異なる。さらに、今後のGPS(およびその他のシステム)が、1つの信号だけでなく異なる周波数で種々の信号を送信するようになることから、現行の衛星調子フィールドには修正が必要となる。
【0029】
次に、支援データフォーマットは、全システム特有の項目ならびにパラメータ範囲および精度の必要性を考慮するようなものでなければならない。
【0030】
最終的に、現行の支援データフォーマットに関する問題は、そのフォーマットによって、1組のナビゲーションデータが所定の衛星に利用可能であるようにすることだけである。これは、ナビゲーションモデルの更新時に、端末に新しい組データを提供しなければならないことを意味する。しかしながら、既に現時点において、5〜10日間有効なナビゲーションデータを提供する商用サービスが存在する。ナビゲーションモデルの有効期限は延長しないが、そのサービスは、1つの衛星のために、多数の組のナビゲーションデータを送信する。ユーザが、1度のダウンロードでこの先数週間に必要とされる全支援データを受信することから、これは、支援型GNSSにおいて有利である。ゆえに、新しい支援データフォーマットは、現行モデルにおいてこのような長期軌道フィッティングに対応可能でなければならない。
【0031】
現在に至るまで、この問題に対するソリューションはなかった。これは、支援データの配信が、GPSシステムと、CDMAネットワークとに限定されていたからである。
【0032】
支援データを端末に届ける際の現行のソリューションとして、GPSのナビゲーションモデルを衛星ブロードキャストから直接入手し、これらのデータを修正し、使用する種々の規格に応じて、そのデータをネットワークにおける端末に届けることが挙げられる。
【特許文献1】WO02/67462
【発明の摘要】
【0033】
本発明は、複数のナビゲーションシステムにおける衛星時計動作および衛星軌道を特徴付けるために使用可能である汎用ナビゲーションモデルを含む。汎用ナビゲーションモデルは、少なくともGPS、ガリレオ、GLONASS、SBAS、LAAS、およびQZSSで適用可能である。また、将来現れる未知のシステムにおいても適用可能である。
【0034】
インデックス化問題に関しては、衛星インデックスフィールド(Satellite Index Field)を拡張し、フィールドの上位ビットが、ナビゲーションシステム(GPS、ガリレオ、GLONASS、SBAS、LAAS、QZSS、またはいくつかの今後のシステム)を規定し、また、下位ビットが、システムのネイティブフォーマットにおいて衛星インデックスを表すようにすることにより、解決されてきた。このフィールドを、以下SSインデックスと呼ぶこととし、SSは"System and Satellite"すなわち「システムおよび衛星」を表す。また、GLONASS特有のも存在し、これにより、衛星ブロードキャスト周波数(またはチャネル)へのSSインデックスのマッピングが可能になる。
【0035】
時計モデル問題に関しては、全システムの時計モデルが汎用時計モデルを使用して記述可能であるようなビット数およびスケールファクタを係数のために見つけることによって解決してきた。しかしながら、本発明は、システム毎に異なる時計モデルを使用することを除外しない。
【0036】
軌道モデル問題に関しては、マルチモードモデルを導入することによって解決してきた。モデルのモードとして、例えば、モード1:ケプラーモデルと、モード2:ECEF座標における位置と、モード3:ECEF座標における位置、速度、および加速度、とが挙げられる。必要性に応じてさらなるモードを追加してもよい。本概念に関する例示的実施形態は、SSインデックス(つまり、システム)の上位ビットがモデルモードを規定することにある。しかしながら、その他の実装を使用して、例えば、モードインデックスを使用することによってモデルモードを示すことも可能である。モードは、相互排他的である。
【0037】
長期軌道フィッティング(Long-term orbit fits)は、特に何も必要としない。モデルが使用可能である場合に、基準時間および有効期間は正確に規定される。長期データ(Long-term data)が利用可能である場合、ネットワークは端末に長期データを提供する。同一の衛星(または、SSインデックス)に関する多数の組のナビゲーションデータの格納および処理は、端末が引き受ける。しかしながら、ナビゲーションモデルが、ブロードキャストされるナビゲーションモデルに基づかず、長期データに基づく場合、そのことは、例えば、データ発行フィールドにおいて示されてもよい。また、その他の実装も可能である。
【0038】
本発明の第1の側面によると、
・ 少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを受信するための受信機(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備える装置(R)であって、前記支援データにおける前記支援データのモードを判定するように構成される判定要素(R.1.2)を備え、ここで前記支援データは、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成されている、装置(R)が提供される。
【0039】
本発明の第2の側面によると、少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)と、前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)とを備えるネットワーク要素(M)であって、前記制御要素(M.1)が、
・ 前記支援データの送信のためのモードを選択し、
・ 前記ナビゲーションシステムの標示を前記支援データに挿入し、
・ 前記選択されたモードに従い、前記支援データを構築する、
ように構成されることを特徴とする、ネットワーク要素(M)が提供される。
【0040】
本発明の第3の側面によると、ネットワーク要素(M)及び装置(R)を有するシステムであって、前記ネットワーク要素(M)が、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)と、
・ 前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)と、
を備え、前記装置(R)が、
・ 前記少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、
・ 支援データを前記ネットワーク要素(M)から受信するための受信機(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備えるシステムが提供される。このシステムにおいて、前記制御要素(M.1)は、
・ 前記支援データの送信のためのモードを選択し、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入し、
・ 前記選択されたモードに従い、前記支援データを構築する、
ように構成され、前記装置(R)は、
・ 前記支援データにおける前記支援データの前記モードを判定するように構成される判定要素(R.1.2)
を備え、ここで前記支援データは、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成される。
【0041】
本発明の第4の側面によると、 少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)を備える装置(R)のためのモジュール(R.1)であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを受信するための受信要素(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備えるモジュールが提供される。このモジュールは、さらに、
・ 前記支援データにおける支援データのモードを判定するように構成される判定要素(R.1.2)と、
・ 前記支援データの前記モードに関する標示を、前記測位受信機に送るための出力と、
を備え、前記支援データが、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成されていることを特徴とする。
【0042】
本発明の第5の側面によると、 支援データを装置(R)に送信するための方法であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを形成することと、
・ 前記支援データを前記装置(R)に送ることと、
を含む方法が提供される。この方法は、さらに、
・ 前記支援データが関連する前記ナビゲーションシステムを決定することと、
・ 前記支援データを送信するためのモードを選択することと、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入することと、
・ 前記選択されたモードに従い、前記支援データを構築することと、
を含むことを特徴とする。
【0043】
本発明の第6の側面によると、少なくとも1つのナビゲーションシステムに関連する支援データを形成すること、及び、支援データを装置(R)に送信することのための、コンピュータにより実行可能な命令を有するコンピュータプログラムを格納するためのコンピュータプログラム製品が提供される。この製品のコンピュータプログラムは、
・ 前記支援データが関連する前記ナビゲーションシステムを決定することと、
・ 前記支援データを送信するためのモードを選択することと、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入することと、
・ 前記選択されたモードに従い、前記支援データを構築することと、
のための、コンピュータにより実行可能な命令をさらに含むことを特徴とする。
【0044】
本発明の第7の側面によると、支援データを装置(R)に届けるための信号であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データと、、
・ 前記支援データが関連する前記ナビゲーションシステムの標示と、
・ 前記支援データを送信するために選択されたモードと、
をさらに含み、前記支援データは、前記選択されたモードに従い構築されていることを特徴とする、信号が提供される。
【0045】
本発明の第8の側面によると、支援データを装置(R)に届けるための、記録された信号を含む搬送波が提供される。この搬送波において、前記信号は、少なくとも1つのナビゲーションシステムに関連する支援データを含み、さらに前記信号は、前記支援データが関連する前記ナビゲーションシステム及び前記支援データを送信するために選択されたモードの標示を含み、前記支援データは、前記選択されたモードに従い構築されていることを特徴とする。
【0046】
本発明の第9の側面によると、少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)、及び、前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)を備える支援データサーバ(X)が提供される。この支援データサーバにおいて、前記制御要素(M.1)は、
・ 前記支援データを送信するためのモードを選択し、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入し
・ 前記選択されたモードに従い前記支援データを構築する、
ように構成されることを特徴とする。
【0047】
本発明は、従来技術よりも優れたいくつかの利点を示す。本発明に従うフォーマットは、様々なセルラー規格やGNSSシステムに適している。これらの特徴により、世界的に適用可能なソリューションによって実装のためのコストが低減されるため、本発明は、非常に魅力的なソリューションとなる。これは、携帯電話機メーカーならびに通信ネットワークのオペレータだけでなく、商用支援データサービスを提供しようとするプロバイダーにとっても同様である。RRLPおよびRRCにおける従来技術の実装では、支援型GPS受信機にGPS支援データを提供する可能性があるだけである。ガリレオ、GLONASS、SBAS、LAAS、またはQZSSをサポートする可能性はない。この点は、従来からの欠点であって、本発明を使用するために修正可能である。ガリレオ支援データは、RRLPおよびRRCにほぼ確実に含まれるであろうことから、本フォーマットは、今後のシステムにも対応可能であるように、広く汎用なものになる可能性がある。
【発明の詳細な説明】
【0048】
以下、添付の図面を参照して、本発明について更に詳細に説明する。
【0049】
図1において、装置Rの測位に使用可能なシステム1の例を示す。システム1は、例えばGPSなどの第1のナビゲーションシステムの衛星S1、例えばGLONASSなどの第2のナビゲーションシステムの衛星S2などの、基準局(Reference Station)Sを備える。ここで、GPSおよびGLONASSは、本明細書において非限定的な例として言及されるだけあって、衛星以外のその他の基準局S(例えば、LAASの疑似衛星)も使用可能であることに留意されたい。また、基準局の数は、図1に示されるよりも多い。ナビゲーションシステムは、1つ以上の地上局(Ground Station)Gを備える。地上局Gは、ナビゲーションシステム2、3の衛星S1、S2の動作をそれぞれ制御する。地上局Gは、例えば、衛星の軌道の偏差および衛星の時計の精度を決定することが可能である(図示せず)。地上局Gが、衛星S1、S2の軌道または時計を修正する必要性を検出する場合、地上局Gは、制御信号(または複数の制御信号)を衛星S1、S2に送信する。次に、衛星S1、S2は、1つまたは複数の制御信号に基づいて修正動作を実行する。すなわち、地上局Gとは、ナビゲーションシステムの地上部分を言及している。
【0050】
衛星S1、S2は、動作中にその装備の状態を監視している。衛星S1、S2は、例えば、いわゆるウォッチドック動作(watch-dog operation)を使用して、装備に生じ得る不良を検出および報告してもよい。そのエラーおよび不調は、瞬間的または長期的なものである場合がある。調子データに基づき、場合によっては、いくつかの不良を修正することが可能であり、あるいは調子の悪い衛星によって送信された情報を完全に無視することが可能である。調子の悪い衛星S1、S2は、ナビゲーションメッセージの衛星調子フィールドに、衛星の不良を示すフラグを設定する。また、衛星S1、S2は、ナビゲーションメッセージにおいて、1つまたは複数の信号が適切に動作していないことを示すことも可能である。また、地上局Gは、適切に動作していないある衛星を検出することが可能であり、かつその衛星の誤作動中の1つまたは複数の不調中の信号に関する標示を設定することも可能である。次に、この標示は、ナビゲーションメッセージにおいて、通信ネットワークPに送信されることが可能である。
【0051】
非限定的な本例示的実施形態において、通信ネットワークPは、GSMネットワークであり、また、ネットワーク要素C、C"と通信するネットワーク要素Mは、GSMネットワークの移動通信交換センター(Mobile Switching Centre; MSC)である。基準受信機(Reference Receiver )C.2は、支援データをネットワーク要素Mに送信することが可能である。ネットワーク要素は、支援データをメモリM.4(図3)に格納して、支援型測位動作(Assisted Positioning Operation)の実行に装置Rが支援データを必要とする場合に、装置Rに送信するようにする。また、必要とされる前に、ネットワーク要素Mから装置Rに支援データを送信することも可能である。例えば、装置Rは、全可視衛星の支援データを要求し、後で使用するために、装置RのメモリR4にナビゲーションデータを保存することが可能である。
【0052】
また、ネットワーク要素Mは、GSMネットワークのサービス移動位置センター(Serving Mobile Location Centre; SMLC)であることも可能である。サービス移動位置センターは、別々のネットワーク要素(MSCなど)、あるいは位置情報サービスの対応に必要な機能を含む基地局B(基地局制御装置(Base Station Controller; BSC))における統合機能である。SMLCは、装置Rの位置決めに必要なリソースの全体の調整およびスケジューリングを管理する。また、SMLCは、最終位置推定を計算し、達成精度を推定する。SMLCは、無線インターフェース測定を入手する目的で、多数の位置測定ユニット(Location Measurement Unit; LMU)を制御し、サービス提供する範囲における移動局加入者の位置決めまたはその位置決めを援助してもよい。
【0053】
次に、基準受信機C.2の例示的実施形態に関する主要要素について、図2を参照してより詳細に説明する。ここに開示される内容は、第1のナビゲーションシステムの基準受信機Cおよび第2のナビゲーションシステムの基準受信機C"の両方に適用可能であるが、実際の実装においては、相互に異なる可能性がある。基準受信機C.2は、基準受信機C.2の動作を制御するための制御装置C.1を備える。制御装置C.1は、例えば、プロセッサ、マイクロプロセッサ、デジタル信号プロセッサ(Digital Signal Processor; DSP)、またはこれらの組み合わせを備える。当然ながら、複数のプロセッサ、マイクロプロセッサ、DSPなども制御装置C.1に存在可能である。また、ナビゲーションシステムの衛星S1、S2から信号を受信するための受信機C.2.も存在する。基準受信機C.2は、通信ネットワークPのネットワーク要素Mと直接または間接的に通信するための通信ブロックC.3をさらに備える。通信ブロックC.3は、信号をネットワーク要素Mに送信するための送信機C.3.1を備え、必要に応じて、ネットワーク要素Mによって基準受信機C.2に送信された信号を受信するための受信機C.3.2を備える。また、基準受信機C.2は、データおよびソフトウェア(コンピュータプログラムコード)を格納するためのメモリC.4も備えてもよい。
【0054】
ネットワーク要素Mの例示的実施形態に関する構造について図3に示す。ネットワーク要素Mは、制御装置M.1を備える。また、ネットワーク要素の制御装置M.1は、プロセッサ、マイクロプロセッサ、デジタル信号プロセッサ(Digital Signal Processor; DSP)、またはその組み合わせを備えてもよい。当然ながら、複数のプロセッサ、マイクロプロセッサ、DSPなども制御装置M.1に存在可能である。ネットワーク要素Mは、第1の通信ブロックM.2によって、基準受信機C.2と通信可能である。第1の通信ブロックM.2は、ナビゲーションシステムの基準受信機C.2から信号を受信するための受信機M.2.2を備える。また、第1の通信ブロックM.2は、例えば、要求メッセージをナビゲーションシステムの基準受信機C.2に送信するための送信機M.2.1を備えてもよい。ネットワーク要素Mは、基地局Bまたは通信ネットワークPのその他のアクセスポイントと通信するための第2の通信ブロックC.3をさらに備える。第2の通信ブロックM.3は、信号を基地局Bに送信するための送信機M.3.1と、基地局Bによってネットワーク要素Mに送信された信号を受信するための受信機M.3.2とを備える。また、ネットワーク要素Mは、データおよびソフトェア(コンピュータプログラムコード)を格納するためのメモリM.4も備える。
【0055】
ネットワーク要素Mは、基準受信機C.2を使用することによって衛星ブロードキャストから支援データを入手するか、またはこのような情報を収集して通信ネットワークに送信することを目的とする支援データサーバXなどの、その他のいくつかの外部ソリューションから支援データを入手する。支援データサーバXは、ナビゲーションデータの受信、支援データの形成および送信に関する動作に関し、ネットワーク要素Mと類似の要素を備える(つまり、受信機M.2.2、制御装置M.1、送信機M.3.1、メモリM.4)。また、支援データサーバXは、基準受信機C.2の要素を備えてもよい。支援データサーバXは、例えば、商用サービスプロバイダのサーバであり、そのサーバから料金を伴って支援データを要求可能である。
【0056】
図4は、本発明の例示的実施形態に従う装置Rを簡易ブロック図として示す。装置Rは、1つ以上のナビゲーションシステムの基準局S1、S2から信号を受信するための1つ以上の測位受信機(Positioning Receiver)R.3を備える。装置Rが対応することを目的とするナビゲーションシステム毎に、1つの測位受信機R.3が設けられることが可能であり、あるいは、複数のナビゲーションシステムの信号に基づいて測位を実行するための1つの測位受信機R.3を用いることとしてもよい。また、装置Rは、装置Rの動作を制御するための制御装置R.1を備える。また、ネットワーク要素の制御装置R.1は、プロセッサ、マイクロプロセッサ、デジタル信号プロセッサ(Digital Signal Processor; DSP)、またはこれらの組み合わせを備えてもよい。当然ながら、複数のプロセッサ、マイクロプロセッサ、DSPなども存在可能である。また、測位受信機R.3は、制御要素R.3.1(例えば、プロセッサ、マイクロプロセッサ、および/またはDSP)を備えることが可能であり、または測位受信機R.3は、測位時に装置Rの制御装置を使用することが可能である。また、測位動作のうちのいくつかは、測位受信機R.3の制御要素R.3.1によって実行可能であり、その他のいくつかの測位動作は、装置の制御装置R.1によって実行可能である。装置Rは、通信ブロックR.2によって、通信ネットワークPの基地局Bと通信することが可能である。通信ブロックR.2は、通信ネットワークPの基地局Bから信号を受信するための受信機R.2.2を備える。また、通信ブロックM.2は、通信ネットワークPの基地局Bにメッセージを送信するための送信機R.2.1を備える。データおよびソフトウェアは、装置のメモリR.4に格納可能である。また、装置Rには、ユーザインターフェース(User Interface; UI)R.5が設けられる。このユーザインターフェースには、例えば、ディスプレイR.5.1、キーパッドR.5.2(および/またはキーボード)、ならびにマイクおよびスピーカなどのオーディオ手段R.5.3が含まれる。またこの装置は、複数のユーザインターフェースを有することも可能である。
【0057】
装置Rは、例えば、それ自体既知である移動通信装置であり、通信ネットワークPと通信することを目的とする。ユーザインターフェースR.5は、移動通信部分と測位受信機R.3との両方に共通していることが可能である。
【0058】
支援データフォーマットフィールド(Assistance Data Format Field)に関する非限定的な例について、表1および図5を参照して以下に開示する。軌道モデルの問題は、マルチモードモデル(Multi Mode Model)を導入することによって解決されている。モデルのモードは、少なくとも、
モード1:少なくともGPS、ガリレオ、およびQZSSシステムをサポートするケプラーモデル、
モード2:少なくともLAASシステムをサポートする、ECEF座標における位置、
モード3:少なくともGLONASS、SBAS、およびQZSSシステムをサポートする、ECEF座標における位置、速度、および加速度、
である。また、今後のシステム用に、3つを上回るモードが存在可能であり、また、本発明の異なる種類の実装も存在可能である。
【0059】
表1において、関連するビット数、スケールファクタ、および異なるモードを示す。表に従って説明する。
【表1】
【0060】
表1は、フィールドならびに異なるモード1、2、および3の例を開示している。表1の情報は、6つの部分に分けられることができる。第1の部分はフィールドtoe_MSBを含む。このフィールドは、エフェメリスの時間toeおよび時計モデルの基準時間tocに関する12個の最上位ビット(MSB)を特定し、UTC時間(協定世界時)で提供される。装置Rは、ナビゲーションモデルの受信時に、エフェメリスの時間toeおよび時計モデルの基準時間tocにおいて生じ得るロールオーバを補うべきである。エフェメリスの時間toeおよび時計モデルの基準時間tocは、約1.7週間の期間を有する。
【0061】
第2の部分は、衛星およびフォーマットの識別情報である。第2の部分は、支援メッセージAにおけるモード毎に存在する(図5)。第2の部分の第1のフィールドは、システムおよび衛星識別情報SS_IDを含む。システムおよび衛星標示を使用して、異なる衛星および衛星システムを規定する。システムおよび衛星識別情報SS_IDは、本非限定的例において、9ビットのフィールドであり、2つのサブフィールドに分割される。第1のサブフィールド(システムID)は、衛星システムのID番号を含み、第2のサブフィールド(SV/スロットID)は、ナビゲーションデータが従うシステムにおける衛星のインデックスを含む。システムおよび衛星識別情報SS_IDのビットマスクは、本例において、以下のとおりである。
システムID(3ビット、値の範囲0 ... 7)
xxx-----
SV/スロットID(6ビット、値の範囲0 ... 63)
---xxxxxx
【0062】
すなわち、3つの最上位ビットは、衛星システムを示し、6つの最終ビットは、衛星を示す。
【0063】
システムIDの仕様について表2に開示する。
【表2】
【0064】
SV/スロットIDは、ブロードキャストされるナビゲーションモデルの衛星インデックスである。
【0065】
第2の部分の第2のフィールドは、搬送周波数インデックス(Carrier Frequency Index)を含む。このパラメータは、GLONASS特有の周波数チャネルインデックスである(軌道におけるスロットを示す衛星インデックスおよびナビゲーション信号周波数間のマッピング。このマッピングは、GLONASSアルマナックブロードキャストに含まれる)。これは、GLONASS以外のその他のいかなるシステムについても0に設定される。このフィールドの値の範囲は[-7,-13]である。
【0066】
第2の部分の第3のフィールドは、フィッティング間隔(Fit Interval)を含む。このフィールドは、ナビゲーションモデルの有効期間を特定する。このフィールドの値の範囲は、0.125〜448hである。このパラメータは、以下の表3に記載されるように、特別な浮動小数点表示に従って特定される。
【表3】
【0067】
フィッティング間隔が63(=26-1)であることは、特定の衛星のナビゲーションモデルに関する無限の間隔を規定する特別な意味を有する。
【0068】
第2の部分の第4のフィールドは、SVの調子(SV Health)を示す。このパラメータは、衛星の現在の調子に関する情報を提供する。調子値は、GNSSシステム特有である(例えば、ICD-GPS-200を参照)。
【0069】
第2の部分の第5のフィールドは、データ発行(Issue Of Data)を含む。データ発行フィールドは、ナビゲーションモデルの識別子を含む。例えば、ブロードキャストされるGPSエフェメリスの場合、GPS-ICD-200に記載のように、IOD(Issue Of Data)の10個の最下位ビット(LSB)はIODCインデックスを含む。ナビゲーションモデルが、ブロードキャストされるいかなるエフェメリスにも基づかないが、ナビゲーションシステムの外部のソースから提供される長期フィッティングに基づく場合、IODのMSBも設定される。
【0070】
第3の部分は、衛星時計モデル(Satellite Clock Model)に関する。第3の部分の第1のフィールドは、時計モデルの基準時間について最下位ビットに報告するtocを含む。12個のMSBが、フィールドtoe_MSB.の第1の部分に含まれる。第3の部分の2つめのaf0、3つめのaf1、および第4のフィールドaf2は、時計モデルの0次、1次、2次の係数を含む。
【0071】
第3の部分の第5のフィールドは、L1およびL2ブロードキャスト間の装備群遅延(Equipment group delay)を示すTGD含む。このパラメータは、GPSおよびGLONASSシステムに関して規定される。
【0072】
第4の部分は、ケプラーパラメータを使用する衛星ナビゲーションモデルである第1のモードに関する。
【0073】
ケプラーパラメータを使用して規定されるナビゲーションモデルは、GPS-ICD-200におけるGPSに関する規定と同一である。このパラメータセットは、モード1において、つまりGPSおよびガリレオシステムの衛星に関連する支援データと共に使用される。モデルパラメータに関する説明について、以下の表4に示す。
【表4】
【0074】
ケプラーパラメータは、GPSおよびガリレオのネイティブフォーマットである。しかしながら、GLONASSおよびSBASのネイティブフォーマットは、GPSおよびガリレオで使用されるフォーマットとは異なる。軌道に関する履歴データを使用することによって、GLONASSおよびSBASフォーマットをGPS/ガリレオ型軌道モデルに変換することが可能であるが、GLONASSおよびSBASのブロードキャストされる軌道モデルのネイティブフォーマットを汎用モデルに含めることを可能にすることが有利である。これは、疑似衛星が実質的に静止して維持される場合に、静止物体をケプラーパラメータで表すことによって、多数のビットをパラメータ:
に加えることが必要になるため、LAASの観点から見ても有利である。さらに、ケプラーパラメータは、数センチメートルの精度で物体位置を提示可能であるだけである。しかしながら、疑似衛星では、最良のナビゲーションソリューションを入手可能にするために、センチメートル未満の分解能(つまり、1cmより小さい分解能)を有することが重要である。モデルにおけるGLONASS/SBASのネイティブフォーマットを使用することによって、さらなるフォーマット変換を行わずに、平面ECEF座標におけるLAAS送信機の位置を表すことが可能になる。
【0075】
第5の部分は、ECEF座標を使用する衛星ナビゲーションモデルである、第2および第3のモードに関連する。
【0076】
このパラメータセットは、モード2(つまり、LAASに関する)およびモード3(つまり、GLONASSおよびSBAS)において使用される。
【表5】
【0077】
位置フィールドにおける最上位ビット(MSB)の数は、GLONASSおよびSBAS範囲の必要性が満たされるように選択される。しかしながら、MSBの数は、必要に応じてQZSS軌道を表すのにも十分である。
【0078】
一方、LSBの数は、LAAS(分解能3.9ミリメートル)によって設定される分解能の必要性を表す。
【0079】
第6の部分は、衛星位置精度モデルに関連する。この部分は2つのフィールドを含む。第1のフィールドはパラメータr0を含み、第2のフィールドはパラメータr1を含む。これらのパラメータを使用して、
により、時間におけるナビゲーションモデルのエラー伝播を記述することが可能である。
【0080】
GPSに関し、パラメータr0は、GPS-ICD-200仕様の記載のように、ユーザ距離精度(User Range Accuracy; URA)である。
【0081】
ナビゲーションシステムの支援データメッセージを、通信ネットワークにおいて、例えば、ネットワーク要素Mから装置Rに送信する必要がある場合、情報は、通信ネットワークに適用可能な1つ以上のメッセージに割り当てられる。例えば、GSM通信ネットワークにおいて、位置関連情報の送信用に形成される特定のメッセージ配信手法(無線リソースLCSプロトコル(Radio Resource LCS Protocol; RRLP))が存在する。本手法は、規格3GPP TS 44.031に規定される。この規格は、ネットワーク要素Mと装置Rの間で交換される支援型GPSデータのフォーマットを規定する。本発明において、本手法を使用して、より一般的な調子データを装置Rに送信することが可能になる。
【0082】
ネットワーク要素Mにおいて、DGPS補正、エフェメリスおよび時計補正、ならびにアルマナックデータなどの利用可能なナビゲーション情報は、1つまたは複数の支援データメッセージの対応するフィールドに割り当てられる。特定の衛星に関するエフェメリス、時計補正、アルマナック(Almanac)、およびその他のデータは、その衛星の衛星ナビゲーションメッセージから、または外部サービスXから入手される。メッセージは、基準受信機Cによって、または外部サービスモジュールXにおける基準受信機によって受信される。支援データメッセージは、情報が暗号化されているか否かを示す暗号化制御要素と、暗号化通し番号要素と、およびデータ情報要素とを含む。データ情報要素(データIE)は、ナビゲーション情報を搬送する。要素について以下の表6に示す。
【0083】
支援データメッセージは、メッセージ全体を占有する必要のない固定長メッセージに組み込まれるように構築される。それは、3つのデータセットを含むことが可能であり、その3つのデータセットとは、DGPS補正、エフェメリスおよび時計補正、ならびにアルマナックおよびその他のデータ情報である。固定長メッセージの情報要素が、利用可能なビットよりも少ない場合、残りのメッセージは、充填ビットで充填される。通常、未定義の予備ビットは要素間で使用することはできない。例示的実施形態において、支援データメッセージをブロードキャストするチャネルとして、例えば、SMSCB DRXサービスが使用されるCBCHが挙げられる。1つのSMSCBメッセージは、82オクテットの固定情報データ長さを有し、GPS支援データの最大長さは82オクテットである。装置Rは、3GPP TS 23.041に言明されるメッセージ識別子で、LCS SMSCBメッセージを識別することが可能である。
【表6】
【0084】
図5において、本発明の例示的実施形態に従う例示的な支援メッセージを示す。メッセージは、エフェメリスの時間toeおよび時計モデルの基準時間tocに関する12個の最上位ビット(MSB)を含み、UTC時間(協定世界時)で提供される。このパラメータの後に多数の支援データレコードA.2(ADATA1、ADATA2、 ... 、ADATAn)が続く。各支援データレコードA.2は、ナビゲーションシステムの1つの衛星S1、S2に関連する支援データを含む。非限定的な例として、メッセージAの第1および第2のデータ記録は、GPSシステムの2つの衛星に関する支援情報を含んでもよく、また、メッセージAの第3のデータ記録は、ガリレオシステムの1つの衛星に関する支援情報を含んでもよい。
【0085】
支援データレコードA.2の構造について、図5のメッセージAの下に示す。支援データレコードA.2は、例えば、衛星およびフォーマット識別記録A.2.1、時計モデル記録A.2.2、ナビゲーションモデル記録A.2.3、および位置精度モデル記録A.2.4を含む。また、これらの4つの異なる記録A.2.1、 ... 、A.2.4の数よりも多いまたは少ない支援データレコードA2の記録を規定することも可能である。
【0086】
ナビゲーションモデル記録A.2.3の構造についても図5に示され、上により詳しく開示されるように、表1の第3の部分のフィールドを含む。例えば、ナビゲーションモデル記録A.2.3の支援データがGPS、ガリレオ、またはQZSSシステムのデータを含む場合、図5においてモード1と示される構造を使用してもよい。また、ナビゲーションモデル記録A.2.3の支援データがLAASシステムのデータを含む場合、図5においてモード2と示される構造を使用してもよく、ナビゲーションモデル記録A.2.3の支援データがGLONASSまたはSBASシステムのデータを含む場合、図5におけるモード3と示される構造を使用してもよい。また、QZSSシステムの衛星では、例えば、モード3の構造を使用可能であってもよい。
【0087】
ここで、支援メッセージAの各ナビゲーションモデル記録A.2.3は、それぞれのモードの全フィールドを含むべきであることに留意されたい。モード選択は、パラメータが関連するナビゲーションシステムに基づくことが可能であり、または、別の選択基準を使用して、支援データの送信に関するモードを選択することが可能である。この場合、選択されるモードは、必ずしもナビゲーションシステムに依存しているとは限らない。
【0088】
次に、本発明に従う支援メッセージフォーマットの利用に関する例示的状況について以下に説明する。ネットワーク要素は、基準受信機C.2から受信したナビゲーションデータを格納するためのメモリM.4において、格納領域M4.1を有する。例えば、第1のナビゲーションシステムの衛星に関するナビゲーションデータが格納されていない場合、ネットワーク要素の制御装置M.1は、クエリメッセージ(図示せず)を作成し、それをネットワーク要素の第1の通信ブロックM.2に送る。送信機M.2.1は、必要に応じてメッセージにプロトコル対話を行ない、第1のナビゲーションシステムの基準受信機Cにメッセージを送信する。第1の基準受信機Cの第2の通信ブロックの受信機C.3.2は、メッセージを受信し、必要に応じてメッセージにプロトコル変換を行ない、基準受信機Cの制御装置C.1にメッセージを送る。制御装置C.1は、メッセージを調査しナビゲーションデータをネットワーク要素Mに送信する要求であるかを決定する。メモリC.4が、要求されたナビゲーションデータを含む場合、それは、送信前にナビゲーションデータを更新する必要がなければ、ネットワーク要素Mに送信可能である。
【0089】
ナビゲーションデータの更新後、基準受信機の制御装置C.1は、ナビゲーションデータを含むメッセージを作成し、それを、第1の基準受信機Cの第2の通信ブロックの送信機C.3.1に送る。送信機C.3.1は、必要に応じてプロトコル対話を行なった後、ナビゲーションデータをネットワーク要素Mに送信する。ネットワーク要素の受信機M.2.2は、メッセージを受信し、必要に応じてプロトコル対話を行ない、ネットワーク要素の制御装置M.1にメッセージを送るか、あるいはメッセージにおいて受信したナビゲーションデータを、ネットワーク要素のメモリM.4に直接保存する。メモリは、異なるナビゲーションシステムの衛星に関するナビゲーションデータを格納するための特定の領域(図3のM.4.1、M.4.2)を含んでもよい。従って、データは、ナビゲーションデータの受信先のナビゲーションシステムのために確保される領域に格納される。
【0090】
支援データは、例えば、要求に応じて、またはブロードキャスト送信によって、通信ネットワークPの制御チャネル上で装置Rに送信可能である。GSMシステムにおいて、GPSに関するこのようなブロードキャスト送信で使用可能なGPS支援データブロードキャストメッセージフォーマットは、規定されている。支援データは、本発明において規定されるフォーマットを利用するメッセージに含まれる。例えば、ネットワーク要素Mの制御装置M.1は、どの種類のナビゲーションデータがメモリM.4に格納されているかを調査する。例えば、メモリは、第1のナビゲーションシステムの1つ以上の衛星に関するナビゲーションデータと、第2のナビゲーションシステムの1つ以上の衛星に関するナビゲーションデータと、を含み、また、制御装置M.1は、例えば、以下の要領で、メモリM.4における支援データメッセージ格納領域M.4.3において、支援メッセージAを構築することができる。制御装置M.1は、ナビゲーションデータからエフェメリスの時間toeを検索し、エフェメリスの時間に関する12個の最上位ビットを、メッセージAの第1のフィールドA.1に格納する。
【0091】
ここで、この支援データフォーマットにおける時間の定義は、現在のGPS時間とは異なることを留意されたい。前述のとおり、例えば、GPS時間は、週毎に周期する。新しい時間定義は、このような周期で機能しない。さらに、時間定義の方法は、本発明の観点から見ると関連性がない。
【0092】
次に、制御装置は、第1の格納領域M.4.1に格納される第1のナビゲーションシステムのナビゲーションデータを閲覧して、第1の支援データレコードA.2(ADATA1)を形成する。制御装置M.1は、システムの種類を決定し(M.1.2)、衛星およびフォーマット識別記録A.2.1におけるSS_IDフィールドの最初の3つのビットを適宜設定する(M.1.2)。その他の6つのビットは、該当するナビゲーションデータの衛星番号に基づいて設定される。対応するように、衛星およびフォーマット識別記録A.2.1のその他のフィールドを埋める。また、時計モデル記録A.2.2のフィールドは、時計モデルの基準時間および係数に基づいて埋められる。L1およびL2ブロードキャスト間の装備群遅延TGDは、支援データがGPSまたはGLONASSシステムの衛星に関連する場合に埋められる。パラメータTGDは、その他のシステムでも必要とされてもよい。
【0093】
ナビゲーションモデル記録A.2.3の利用は、ナビゲーションシステムに依存する。すなわち、制御装置M.1は、利用可能なモードである、モード1、モード2、モード3、または本明細書に記載されていないその他のいくつかの追加のモードのうちの1つを選択する。
【0094】
また、位置精度モデル記録A.2.4も、時間におけるナビゲーションモデルエラー伝播を報告するために埋められる。
【0095】
メモリM.4に第1のナビゲーションシステムの別の衛星に関するナビゲーションデータが存在する場合、ネットワーク要素の制御装置M.1は、第2の支援データレコードA.2(ADATA2)を適宜形成する。
【0096】
支援データメッセージA.2が、全てのナビゲーションデータ格納領域M.4.1、M.4.2に格納されるナビゲーションデータから作成されると、支援データメッセージは、通信ネットワークに送信可能である。制御装置M.1.は、支援データメッセージ格納領域M.4.3におけるデータを、ネットワーク要素の第2の通信ブロックM.3に送る。ネットワーク要素Mの第2の通信ブロックの送信機M.3.1は、支援データを搬送する送信のための信号の形成に必要な動作を実行し、信号を通信ネットワークPに送信する。
【0097】
信号は、装置Rの通信ブロックの受信機R.2.2により受信される。受信機R.2.2は、受信した信号からデータを復調し、例えば、装置Rの制御装置R.1にデータを送る。制御装置R.1は、装置RのメモリR.4にデータを格納し、支援データを調査する(R.1.1)。その調査は、受信した支援データレコードの各々のモードを判定すること(R.1.2)を含む。そのモードに関する標示は、例えば、制御装置R.1の出力線R.1.3を介して測位受信機R.3に転送可能である。しかしながら、制御装置R.1を測位動作に使用することも可能であり、この場合、データ(モードおよび/または支援データ)を、測位受信機R.3に送る必要はなくてもよいが、制御装置R.1は、メモリR.4に格納されたデータを使用することが可能である。
【0098】
メモリR.4は、支援データメッセージにおいて受信されるナビゲーションデータを格納するための格納領域R.4.1を含むことが可能である。また、ナビゲーションデータは、状況により、受信した衛星信号を復調することによって衛星からも受信可能である。
【0099】
支援データが、1つまたは複数の支援データレコードから検索される場合、その記録は、メモリに保存し、測位の際に使用可能である。例えば、測位受信機R.3が、1つまたは2つの衛星からの信号を復調可能であるだけである場合、測位受信機R.3は、それ自体既知である測位を実行するために、支援データを使用することができる。
【0100】
装置Rは、一定の間隔で、または所定の条件が満たされると、測位を実行することが可能である。所定の条件には、例えば、ユーザが例えば緊急センターへの呼び出しを開始する状況、ユーザが装置Rのメニューから測位動作を選択する状況、装置Rおよび通信ネットワークPが、通信ネットワークPの別のセルにハンドオーバーを実行する状況、通信ネットワークPが測位要求を装置Rに送信する状況などのうちの1つ以上が含まれることが可能である。
【0101】
また、通信ネットワーク、例えば、ネットワーク要素Mは、装置Rに測位を実行するように要求することも可能である。この要求は、RRLPメッセージ配信機構を使用して送信可能である。また、その返信も、RRLPメッセージ配信機構を使用して送信可能である。
【0102】
測位が実行される場合、装置の測位受信機R.3または制御装置R.1は、メモリR.4に格納されるナビゲーションデータが十分最新であるか否かを調査することが可能である。ナビゲーションデータのいくつかが最新でない場合(つまり、ナビゲーションデータが、既定時間よりも古い場合)、あるいは必要なナビゲーションデータのいくつかが不足している場合、装置は、要求メッセージを作成し、通信ネットワークP、例えば基地局Bに送信することができる。基地局Bは、要求メッセージをネットワーク要素Mに送る。ネットワーク要素Mは、要求されたナビゲーションデータを収集し、返信メッセージを作成する。次に、返信メッセージは、接続中の基地局Bを介して装置Rに送信される。装置の通信ブロックR.2の受信機R.2.1は、返信メッセージを受信および復調し、ナビゲーションデータを検索する。ナビゲーションデータは、例えば、メモリR.4のナビゲーションデータ格納領域R.4.1に格納される。
【0103】
本発明の別の実施形態において、ネットワーク要素Mは、少なくともいくつかの測位計算を実行する。本実施形態において、装置Rは、例えば、搬送波位相測定を実行し、その測定結果を測定情報メッセージ(GNSS測定情報)においてネットワーク要素Mに送信することによって、ネットワーク要素Mを支援する。また、ネットワーク要素Mは、基準受信機C.2からナビゲーションデータを受信することによって支援データの形成をするか、あるいはネットワーク要素Mは、支援データサーバXから支援データを受信する。次に、ネットワーク要素Mは、測定データおよび支援データを使用することによって、装置Rの位置を計算する。別の選択肢として、別のサーバ(図示せず)で位置計算を実行することが挙げられる。この場合、ネットワークサーバMは、測定結果および支援データを別のサーバに送信する。
【0104】
さらに別の実施形態において、装置Rは、疑似距離測定を実行し、その測定結果を測定情報メッセージ(GNSS測定情報)においてネットワーク要素Mに送信する。ネットワーク要素Mは、測定結果と、ネットワーク要素Mにより形成される支援データまたは支援データサーバXから受信される支援データとを使用する。次に、ネットワーク要素Mは、疑似距離測定データおよび支援データを使用して、装置Rの位置を計算するか、あるいはネットワーク要素Mは、疑似距離測定データおよび支援データを、位置計算を実行する別のサーバ(図示せず)に送信する。
【0105】
これらの上述の実施形態において、装置Rからネットワーク要素Mに送信される測定情報は、ナビゲーションシステムに依存してもよいが、上に提示される原理を使用して、ナビゲーションシステムに依存しない一般的なメッセージを作成することも可能である。
【0106】
本発明の中核は、マルチモード機能にある。SSインデックスのMSBによって表される衛星システム(GPS、ガリレオ、GLONASS、SBAS、LAAS、QZSS、またはその他のいくつか)は、モードを規定してもよい。しかしながら、モードは、その他の要因を使用しても決定されてもよい。次に、モードは、軌道モデルモードを規定し、また、特定の実装において、時計モデルモードも規定する。
【0107】
当然ながら、衛星にインデックスを付ける方法(つまり、ナビゲーションモデル識別情報が、システムおよびSVに関する情報を含むこと)は、本発明において重要な要素である。GLONASSでは、搬送周波数インデックスが(SSインデックスに加えて)不可欠である。
【0108】
時計モデルは、本例の実装における全モードについて(つまりは、全ナビゲーションシステムについて)共通であることに留意されたい。しかしながら、時計モデルは、モードに応じて変化してもよい。
【0109】
特定のナビゲーション支援メッセージが、種々の項目(特に、toe_MSB、フィッティング間隔、SVの調子、IOD、tocTGD、toe、r0、r1)を含むことに留意されたい。これらの項目は、当然ながら、ナビゲーションモデルが適切に機能するには重要であるが、本発明の観点から見ると重要ではない(これらのパラメータは、フォーマットを規定するテーブルにおいて括弧で囲まれている)。例えば、モデルの基準時間は、種々の方式(ここで、toe_MSB、toc、およびtoe)で提供可能であるが、それを変更することによって、マルチモード機能に影響は及ばない。別の例として、フィッティング間隔は、浮動小数点値として規定される(上記の表3)。これは、単なる例であり、フィッティング間隔は、システム特有の問題を考慮するその他のいくつかの手段においても特定可能である。本発明の観点から見ると重要ではないパラメータは、完全を期すためにだけ提供される。
【0110】
また、実際のビット数およびスケールファクタは、新しい仕様または解明が出現する場合に変更する可能性があることを強調されたい。ビット数および/またはスケールファクタの変更により、本発明の本質は変更されない。例えば、分解能を速度成分に加えることによって、異なる発明になることはない。さらに別の例として、SS IDについて検討する。規格において現行のインデックス化方法は、GPS衛星のみしか区別できない。ここで提案されたSS IDは、システムおよび衛星に関する情報を含む。これらの2つは、同一のフィールドで表されることが可能であるが、そうする必要はない(但し、システムは、その他のいくつかのフィールドで規定される)。従って、上述のように、フィールドの単なる修正によって本発明の本質は変更されない。
【0111】
通信ネットワークPは、無線ネットワーク、有線ネットワーク、またはこれらの組み合わせであることが可能である。通信ネットワークに関するいくつかの非限定的な例について上述しているが、WLANおよびWiMaxネットワークも本明細書において言及可能である。
【0112】
システムの様々な要素の動作は、ソフトウェアによって主に実行可能である。つまり、要素の制御装置は、コンピュータ命令に基づいて動作する。当然ながら、それらのいくつかの動作または一部は、「ハードコード」であることが可能であり、つまりハードウェアにより実装可能である。
【図面の簡単な説明】
【0113】
【図1】本発明が適用可能なシステムを一般化した略図として示す。
【図2】本発明の例示的実施形態に従うナビゲーションシステムの基準受信機を、簡易ブロック図として示す。
【図3】本発明の例示的実施形態に従うネットワーク要素を、簡易ブロック図として示す。
【図4】本発明の例示的実施形態に従う装置を簡易ブロック図として示す。
【図5】本発明の例示的実施形態に従うメッセージを示す。
【図6】GPSシステムにおいて使用されるフレーム構造の例を示す。
【特許請求の範囲】
【請求項1】
・ 少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを受信するための受信機(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備える装置(R)であって、前記支援データにおける前記支援データのモードを判定するように構成される判定要素(R.1.2)を備え、ここで前記支援データは、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成されている、装置(R)。
【請求項2】
前記測位受信機は、少なくとも2つの異なるナビゲーションシステムから信号を受信するように構成されることを特徴とする、請求項1に記載の装置(R)。
【請求項3】
前記支援データは、通信ネットワーク(P)から受信されることを特徴とする、請求項1または2に記載の装置(R)。
【請求項4】
前記通信ネットワーク(P)は、セルラネットワークであることを特徴とする、請求項3に記載の装置(R)。
【請求項5】
移動通信装置であることを特徴とする、請求項1から4のいずれかに記載の装置(R)。
【請求項6】
前記支援データは、前記支援データが関連する前記ナビゲーションシステムに関する標示を含み、前記判定要素(R.1.2)は、前記ナビゲーションシステムに関する前記標示を調査するよう構成されることを特徴とする、請求項1から5のいずれかに記載の装置(R)。
【請求項7】
前記ナビゲーションシステムに関する前記標示は、前記支援データが関連する前記衛星に関する標示も含み、前記判定要素(R.1.2)は、前記衛星の前記標示も調査するように構成されることを特徴とする、請求項6に記載の装置(R)。
【請求項8】
少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)と、
前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)と、
を備えるネットワーク要素(M)であって、前記制御要素(M.1)が、
・ 前記支援データの送信のためのモードを選択し、
・ 前記ナビゲーションシステムの標示を前記支援データに挿入し、
・ 前記選択されたモードに従い、前記支援データを構築する、
ように構成されることを特徴とする、ネットワーク要素(M)。
【請求項9】
前記ネットワーク要素(M)は、
・ 少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを格納するためのメモリ(M.4)と、
・ 前記ナビゲーションデータが関連する前記ナビゲーションシステムを決定するために、前記ナビゲーションデータを調査するように構成される調査要素(M.1.2)と、
をさらに備えることを特徴とする、請求項8に記載のネットワーク要素(M)。
【請求項10】
前記制御要素(M.1)は、前記ナビゲーションデータに基づいて、前記支援データを形成するように構成されることを特徴とする、請求項9に記載のネットワーク要素(M)。
【請求項11】
前記ネットワーク要素(M)は、少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを受信するための受信機(M.2.2)も備えることを特徴とする、請求項9または10に記載のネットワーク要素(M)。
【請求項12】
前記ナビゲーションデータは、前記ナビゲーションデータが関連する前記衛星に関する標示も含み、前記判定要素(R.1.2)は、前記衛星に関する標示も前記支援データに挿入するように構成されることを特徴とする、請求項9または11に記載のネットワーク要素(M)。
【請求項13】
前記支援データは、1つ以上の支援データレコードを含むことを特徴とする、請求項8から12のいずれかに記載のネットワーク要素(M)。
【請求項14】
前記支援データレコードは、
・ モード1
・ モード2
・ モード3
のうちの少なくとも1つのモードを有することを特徴とする、請求項13のいずれかに記載のネットワーク要素(M)。
【請求項15】
前記通信ネットワーク(P)は、セルラネットワークであることを特徴とする、請求項8から14のいずれかに記載のネットワーク要素(M)。
【請求項16】
前記ネットワーク要素(M)は、GSMシステムの移動通信交換センターであることを特徴とする、請求項15に記載のネットワーク要素(M)。
【請求項17】
前記支援データは、
・ 全地球測位システム(Global Positioning System)
・ GLONASS
・ ガリレオ(Galileo)
・ 準天頂衛星システム(Quasi-Zenith Satellite System)
・ 宇宙ベース強化システム(Space Based Augmentation System)
・ ローカルエリア強化システム(Local Area Augmentation System)
のうちの少なくとも1つに関連することを特徴とする、請求項8から16のいずれかに記載のネットワーク要素(M)。
【請求項18】
前記制御要素(M.1)は、前記支援データが関連する前記ナビゲーションシステムに基づいて、前記モードを選択するように構成され、前記ナビゲーションデータの前記標示は、前記選択されたモードも含むことを特徴とする、請求項8から17のいずれかに記載のネットワーク要素(M)。
【請求項19】
ネットワーク要素(M)及び装置(R)を有するシステムであって、前記ネットワーク要素(M)が、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)と、
・ 前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)と、
を備え、前記装置(R)が、
・ 前記少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、
・ 支援データを前記ネットワーク要素(M)から受信するための受信機(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備え、さらに、前記制御要素(M.1)が、
・ 前記支援データの送信のためのモードを選択し、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入し、
・ 前記選択されたモードに従い、前記支援データを構築する、
ように構成され、前記装置(R)が、
・ 前記支援データにおける前記支援データの前記モードを判定するように構成される判定要素(R.1.2)
を備え、ここで前記支援データは、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成される、システム。
【請求項20】
前記ネットワーク要素(M)は、少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを受信するための受信機(M.2.2)も備えることを特徴とする、請求項19に記載のシステム。
【請求項21】
前記ネットワーク要素(M)は、
・ 前記受信したナビゲーションデータを格納するためのメモリ(M.4)と、
・ 前記ナビゲーションデータが関連する前記ナビゲーションシステムを決定するために、前記ナビゲーションデータを調査するように構成される調査要素(M.1.2)と、
を、さらに備えることを特徴とする、請求項20に記載のシステム。
【請求項22】
前記制御要素(M.1)は、前記ナビゲーションデータに基づいて、前記支援データを形成するように構成されることを特徴とする、請求項20または21に記載のシステム。
【請求項23】
前記ナビゲーションデータは、前記ナビゲーションデータが関連する前記衛星に関する標示も含み、前記判定要素(R.1.2)は、前記衛星に関する標示も前記支援データに挿入するように構成される、請求項20から22のいずれかに記載のシステム。
【請求項24】
前記支援データは、1つ以上の支援データレコードを含むことを特徴とする、請求項19から23のいずれかに記載のシステム。
【請求項25】
ネットワーク要素が、
・ GSM通信ネットワーク
・ UMTS通信ネットワーク
・ CDMA通信ネットワーク
・ W-CDMA通信ネットワーク
・ WLAN通信ネットワーク
・ WiMax通信ネットワーク
のうちの1つであることを特徴とする、請求項19から24のいずれかに記載のシステム。
【請求項26】
前記ナビゲーションシステムは、
・ 全地球測位システム(Global Positioning System)
・ GLONASS
・ ガリレオ(Galileo)
・ 準天頂衛星システム(Quasi-Zenith Satellite System)
・ 宇宙ベース強化システム(Space Based Augmentation System)
・ ローカルエリア強化システム(Local Area Augmentation System)
のうちの少なくとも1つであることを特徴とする、請求項19から25のいずれかに記載のシステム。
【請求項27】
前記制御要素(M.1)は、前記支援データが関連する前記ナビゲーションシステムに基づいて、前記モードを選択するように構成され、前記ナビゲーションデータの前記標示は、前記選択されたモードも含むことを特徴とする、請求項19から26のいずれかに記載のシステム。
【請求項28】
少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)を備える装置(R)のためのモジュール(R.1)であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを受信するための受信要素(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備え、さらに、
・ 前記支援データにおける支援データのモードを判定するように構成される判定要素(R.1.2)と、
・ 前記支援データの前記モードに関する標示を、前記測位受信機に送るための出力と、
を備え、前記支援データが、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成されていることを特徴とする、モジュール。
【請求項29】
支援データを装置(R)に送信するための方法であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを形成することと、
・ 前記支援データを前記装置(R)に送ることと、
を含み、さらに、
・ 前記支援データが関連する前記ナビゲーションシステムを決定することと、
・ 前記支援データを送信するためのモードを選択することと、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入することと、
・ 前記選択されたモードに従い、前記支援データを構築することと、
を含むことを特徴とする、方法。
【請求項30】
前記方法は、外部のサービスから支援データを入手することをさらに含むことを特徴とする、請求項29に記載の方法。
【請求項31】
前記入手することは、少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを基準局(S1、S2)から受信することを含むことを特徴とする、請求項30に記載の方法。
【請求項32】
前記方法は、衛星に関する標示を前記支援データに挿入することをさらに含むことを特徴とする、請求項29、30、または31に記載の方法。
【請求項33】
前記送ることは、前記支援データを通信ネットワーク(P)に送信することを含むことを特徴とする、請求項29から32のいずれかに記載の方法。
【請求項34】
前記通信ネットワークは、セルラネットワークであることを特徴とする、請求項33に記載の方法。
【請求項35】
前記支援データを前記構築することは、前記支援データのために、
・ モード1
・ モード2
・ モード3
のうちの少なくとも1つのモードを選択することを含むことを特徴とする、請求項29から34のいずれかに記載の方法。
【請求項36】
前記モードは、前記支援データが関連する前記ナビゲーションシステムに基づいて選択され、前記ナビゲーションデータの前記標示も、前記選択されたモードを示すように使用されることを特徴とする、請求項29から35のいずれかに記載の方法。
【請求項37】
少なくとも1つのナビゲーションシステムに関連する支援データを形成すること、及び、支援データを装置(R)に送信することのための、コンピュータにより実行可能な命令を有するコンピュータプログラムを格納するためのコンピュータプログラム製品であって、前記コンピュータプログラムは、
・ 前記支援データが関連する前記ナビゲーションシステムを決定することと、
・ 前記支援データを送信するためのモードを選択することと、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入することと、
・ 前記選択されたモードに従い、前記支援データを構築することと、
のための、コンピュータにより実行可能な命令をさらに含むことを特徴とする、コンピュータプログラム製品。
【請求項38】
支援データを外部のサービスから入手するためのコンピュータにより実行可能な命令をさらに含むことを特徴とする、請求項37に記載のコンピュータプログラム製品。
【請求項39】
前記入手することは、少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを基準局(S1、S2)から受信することを含むこと特徴とする、請求項38に記載のコンピュータプログラム製品。
【請求項40】
衛星に関する標示を前記支援データ挿入するためのコンピュータにより実行可能な命令をさらに含むことを特徴とする、請求項37、38、または39に記載のコンピュータプログラム製品。
【請求項41】
前記支援データが関連する前記ナビゲーションシステムに基づいて、支援データレコードを形成するためのコンピュータにより実行可能な命令をさらに含むことを特徴とする、請求項37から40のいずれかに記載のコンピュータプログラム製品。
【請求項42】
前記支援データを送信するためのモードを選択するための前記コンピュータにより実行可能な命令は、前記支援データが関連する前記ナビゲーションシステムに基づいて前記モードを選択し、かつ前記選択されたモードの前記標示として、前記ナビゲーションデータの前記標示を使用するための命令を含むことを特徴とする、請求項37から40のいずれかに記載のコンピュータプログラム製品。
【請求項43】
支援データを装置(R)に届けるための信号であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データと、、
・ 前記支援データが関連する前記ナビゲーションシステムの標示と、
・ 前記支援データを送信するために選択されたモードと、
をさらに含み、前記支援データは、前記選択されたモードに従い構築されていることを特徴とする、信号。
【請求項44】
支援データを装置(R)に届けるための、記録された信号を含む搬送波であって、前記信号が、少なくとも1つのナビゲーションシステムに関連する支援データを含み、
さらに前記信号が、前記支援データが関連する前記ナビゲーションシステム及び前記支援データを送信するために選択されたモードの標示を含み、
前記支援データは、前記選択されたモードに従い構築されていることを特徴とする、
搬送波。
【請求項45】
少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)、及び、前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)を備える支援データサーバ(X)であって、前記制御要素(M.1)が、
・ 前記支援データを送信するためのモードを選択し、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入し
・ 前記選択されたモードに従い前記支援データを構築する、
ように構成されることを特徴とする、
支援データサーバ(X)。
【請求項46】
少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを受信するための受信機(M.2.2)も備えることを特徴とする、請求項45に記載の支援データサーバ(X)。
【請求項1】
・ 少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを受信するための受信機(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備える装置(R)であって、前記支援データにおける前記支援データのモードを判定するように構成される判定要素(R.1.2)を備え、ここで前記支援データは、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成されている、装置(R)。
【請求項2】
前記測位受信機は、少なくとも2つの異なるナビゲーションシステムから信号を受信するように構成されることを特徴とする、請求項1に記載の装置(R)。
【請求項3】
前記支援データは、通信ネットワーク(P)から受信されることを特徴とする、請求項1または2に記載の装置(R)。
【請求項4】
前記通信ネットワーク(P)は、セルラネットワークであることを特徴とする、請求項3に記載の装置(R)。
【請求項5】
移動通信装置であることを特徴とする、請求項1から4のいずれかに記載の装置(R)。
【請求項6】
前記支援データは、前記支援データが関連する前記ナビゲーションシステムに関する標示を含み、前記判定要素(R.1.2)は、前記ナビゲーションシステムに関する前記標示を調査するよう構成されることを特徴とする、請求項1から5のいずれかに記載の装置(R)。
【請求項7】
前記ナビゲーションシステムに関する前記標示は、前記支援データが関連する前記衛星に関する標示も含み、前記判定要素(R.1.2)は、前記衛星の前記標示も調査するように構成されることを特徴とする、請求項6に記載の装置(R)。
【請求項8】
少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)と、
前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)と、
を備えるネットワーク要素(M)であって、前記制御要素(M.1)が、
・ 前記支援データの送信のためのモードを選択し、
・ 前記ナビゲーションシステムの標示を前記支援データに挿入し、
・ 前記選択されたモードに従い、前記支援データを構築する、
ように構成されることを特徴とする、ネットワーク要素(M)。
【請求項9】
前記ネットワーク要素(M)は、
・ 少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを格納するためのメモリ(M.4)と、
・ 前記ナビゲーションデータが関連する前記ナビゲーションシステムを決定するために、前記ナビゲーションデータを調査するように構成される調査要素(M.1.2)と、
をさらに備えることを特徴とする、請求項8に記載のネットワーク要素(M)。
【請求項10】
前記制御要素(M.1)は、前記ナビゲーションデータに基づいて、前記支援データを形成するように構成されることを特徴とする、請求項9に記載のネットワーク要素(M)。
【請求項11】
前記ネットワーク要素(M)は、少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを受信するための受信機(M.2.2)も備えることを特徴とする、請求項9または10に記載のネットワーク要素(M)。
【請求項12】
前記ナビゲーションデータは、前記ナビゲーションデータが関連する前記衛星に関する標示も含み、前記判定要素(R.1.2)は、前記衛星に関する標示も前記支援データに挿入するように構成されることを特徴とする、請求項9または11に記載のネットワーク要素(M)。
【請求項13】
前記支援データは、1つ以上の支援データレコードを含むことを特徴とする、請求項8から12のいずれかに記載のネットワーク要素(M)。
【請求項14】
前記支援データレコードは、
・ モード1
・ モード2
・ モード3
のうちの少なくとも1つのモードを有することを特徴とする、請求項13のいずれかに記載のネットワーク要素(M)。
【請求項15】
前記通信ネットワーク(P)は、セルラネットワークであることを特徴とする、請求項8から14のいずれかに記載のネットワーク要素(M)。
【請求項16】
前記ネットワーク要素(M)は、GSMシステムの移動通信交換センターであることを特徴とする、請求項15に記載のネットワーク要素(M)。
【請求項17】
前記支援データは、
・ 全地球測位システム(Global Positioning System)
・ GLONASS
・ ガリレオ(Galileo)
・ 準天頂衛星システム(Quasi-Zenith Satellite System)
・ 宇宙ベース強化システム(Space Based Augmentation System)
・ ローカルエリア強化システム(Local Area Augmentation System)
のうちの少なくとも1つに関連することを特徴とする、請求項8から16のいずれかに記載のネットワーク要素(M)。
【請求項18】
前記制御要素(M.1)は、前記支援データが関連する前記ナビゲーションシステムに基づいて、前記モードを選択するように構成され、前記ナビゲーションデータの前記標示は、前記選択されたモードも含むことを特徴とする、請求項8から17のいずれかに記載のネットワーク要素(M)。
【請求項19】
ネットワーク要素(M)及び装置(R)を有するシステムであって、前記ネットワーク要素(M)が、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)と、
・ 前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)と、
を備え、前記装置(R)が、
・ 前記少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、
・ 支援データを前記ネットワーク要素(M)から受信するための受信機(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備え、さらに、前記制御要素(M.1)が、
・ 前記支援データの送信のためのモードを選択し、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入し、
・ 前記選択されたモードに従い、前記支援データを構築する、
ように構成され、前記装置(R)が、
・ 前記支援データにおける前記支援データの前記モードを判定するように構成される判定要素(R.1.2)
を備え、ここで前記支援データは、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成される、システム。
【請求項20】
前記ネットワーク要素(M)は、少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを受信するための受信機(M.2.2)も備えることを特徴とする、請求項19に記載のシステム。
【請求項21】
前記ネットワーク要素(M)は、
・ 前記受信したナビゲーションデータを格納するためのメモリ(M.4)と、
・ 前記ナビゲーションデータが関連する前記ナビゲーションシステムを決定するために、前記ナビゲーションデータを調査するように構成される調査要素(M.1.2)と、
を、さらに備えることを特徴とする、請求項20に記載のシステム。
【請求項22】
前記制御要素(M.1)は、前記ナビゲーションデータに基づいて、前記支援データを形成するように構成されることを特徴とする、請求項20または21に記載のシステム。
【請求項23】
前記ナビゲーションデータは、前記ナビゲーションデータが関連する前記衛星に関する標示も含み、前記判定要素(R.1.2)は、前記衛星に関する標示も前記支援データに挿入するように構成される、請求項20から22のいずれかに記載のシステム。
【請求項24】
前記支援データは、1つ以上の支援データレコードを含むことを特徴とする、請求項19から23のいずれかに記載のシステム。
【請求項25】
ネットワーク要素が、
・ GSM通信ネットワーク
・ UMTS通信ネットワーク
・ CDMA通信ネットワーク
・ W-CDMA通信ネットワーク
・ WLAN通信ネットワーク
・ WiMax通信ネットワーク
のうちの1つであることを特徴とする、請求項19から24のいずれかに記載のシステム。
【請求項26】
前記ナビゲーションシステムは、
・ 全地球測位システム(Global Positioning System)
・ GLONASS
・ ガリレオ(Galileo)
・ 準天頂衛星システム(Quasi-Zenith Satellite System)
・ 宇宙ベース強化システム(Space Based Augmentation System)
・ ローカルエリア強化システム(Local Area Augmentation System)
のうちの少なくとも1つであることを特徴とする、請求項19から25のいずれかに記載のシステム。
【請求項27】
前記制御要素(M.1)は、前記支援データが関連する前記ナビゲーションシステムに基づいて、前記モードを選択するように構成され、前記ナビゲーションデータの前記標示は、前記選択されたモードも含むことを特徴とする、請求項19から26のいずれかに記載のシステム。
【請求項28】
少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)を備える装置(R)のためのモジュール(R.1)であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを受信するための受信要素(R.2.2)と、
・ 前記受信した支援データを調査するように構成される調査要素(R.1.1)と、
を備え、さらに、
・ 前記支援データにおける支援データのモードを判定するように構成される判定要素(R.1.2)と、
・ 前記支援データの前記モードに関する標示を、前記測位受信機に送るための出力と、
を備え、前記支援データが、前記装置(R)の測位を実行するための前記測位受信機によって使用されるように構成されていることを特徴とする、モジュール。
【請求項29】
支援データを装置(R)に送信するための方法であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データを形成することと、
・ 前記支援データを前記装置(R)に送ることと、
を含み、さらに、
・ 前記支援データが関連する前記ナビゲーションシステムを決定することと、
・ 前記支援データを送信するためのモードを選択することと、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入することと、
・ 前記選択されたモードに従い、前記支援データを構築することと、
を含むことを特徴とする、方法。
【請求項30】
前記方法は、外部のサービスから支援データを入手することをさらに含むことを特徴とする、請求項29に記載の方法。
【請求項31】
前記入手することは、少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを基準局(S1、S2)から受信することを含むことを特徴とする、請求項30に記載の方法。
【請求項32】
前記方法は、衛星に関する標示を前記支援データに挿入することをさらに含むことを特徴とする、請求項29、30、または31に記載の方法。
【請求項33】
前記送ることは、前記支援データを通信ネットワーク(P)に送信することを含むことを特徴とする、請求項29から32のいずれかに記載の方法。
【請求項34】
前記通信ネットワークは、セルラネットワークであることを特徴とする、請求項33に記載の方法。
【請求項35】
前記支援データを前記構築することは、前記支援データのために、
・ モード1
・ モード2
・ モード3
のうちの少なくとも1つのモードを選択することを含むことを特徴とする、請求項29から34のいずれかに記載の方法。
【請求項36】
前記モードは、前記支援データが関連する前記ナビゲーションシステムに基づいて選択され、前記ナビゲーションデータの前記標示も、前記選択されたモードを示すように使用されることを特徴とする、請求項29から35のいずれかに記載の方法。
【請求項37】
少なくとも1つのナビゲーションシステムに関連する支援データを形成すること、及び、支援データを装置(R)に送信することのための、コンピュータにより実行可能な命令を有するコンピュータプログラムを格納するためのコンピュータプログラム製品であって、前記コンピュータプログラムは、
・ 前記支援データが関連する前記ナビゲーションシステムを決定することと、
・ 前記支援データを送信するためのモードを選択することと、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入することと、
・ 前記選択されたモードに従い、前記支援データを構築することと、
のための、コンピュータにより実行可能な命令をさらに含むことを特徴とする、コンピュータプログラム製品。
【請求項38】
支援データを外部のサービスから入手するためのコンピュータにより実行可能な命令をさらに含むことを特徴とする、請求項37に記載のコンピュータプログラム製品。
【請求項39】
前記入手することは、少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを基準局(S1、S2)から受信することを含むこと特徴とする、請求項38に記載のコンピュータプログラム製品。
【請求項40】
衛星に関する標示を前記支援データ挿入するためのコンピュータにより実行可能な命令をさらに含むことを特徴とする、請求項37、38、または39に記載のコンピュータプログラム製品。
【請求項41】
前記支援データが関連する前記ナビゲーションシステムに基づいて、支援データレコードを形成するためのコンピュータにより実行可能な命令をさらに含むことを特徴とする、請求項37から40のいずれかに記載のコンピュータプログラム製品。
【請求項42】
前記支援データを送信するためのモードを選択するための前記コンピュータにより実行可能な命令は、前記支援データが関連する前記ナビゲーションシステムに基づいて前記モードを選択し、かつ前記選択されたモードの前記標示として、前記ナビゲーションデータの前記標示を使用するための命令を含むことを特徴とする、請求項37から40のいずれかに記載のコンピュータプログラム製品。
【請求項43】
支援データを装置(R)に届けるための信号であって、
・ 少なくとも1つのナビゲーションシステムに関連する支援データと、、
・ 前記支援データが関連する前記ナビゲーションシステムの標示と、
・ 前記支援データを送信するために選択されたモードと、
をさらに含み、前記支援データは、前記選択されたモードに従い構築されていることを特徴とする、信号。
【請求項44】
支援データを装置(R)に届けるための、記録された信号を含む搬送波であって、前記信号が、少なくとも1つのナビゲーションシステムに関連する支援データを含み、
さらに前記信号が、前記支援データが関連する前記ナビゲーションシステム及び前記支援データを送信するために選択されたモードの標示を含み、
前記支援データは、前記選択されたモードに従い構築されていることを特徴とする、
搬送波。
【請求項45】
少なくとも1つのナビゲーションシステムに関連する支援データを形成するための制御要素(M.1)、及び、前記支援データを通信ネットワーク(P)に送信するための送信要素(M.3.1)を備える支援データサーバ(X)であって、前記制御要素(M.1)が、
・ 前記支援データを送信するためのモードを選択し、
・ 前記ナビゲーションシステム及び前記選択されたモードの標示を前記支援データに挿入し
・ 前記選択されたモードに従い前記支援データを構築する、
ように構成されることを特徴とする、
支援データサーバ(X)。
【請求項46】
少なくとも1つの衛星ナビゲーションシステムのナビゲーションデータを受信するための受信機(M.2.2)も備えることを特徴とする、請求項45に記載の支援データサーバ(X)。
【図1】

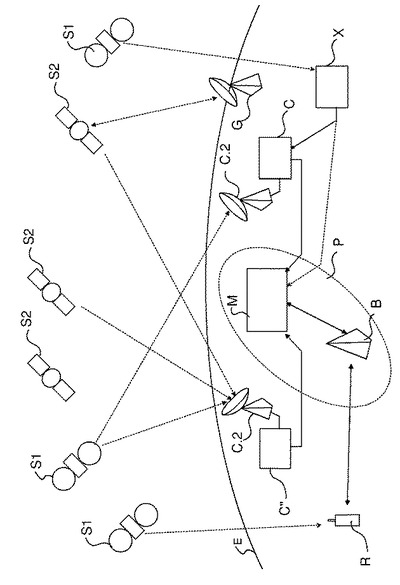
【図2】
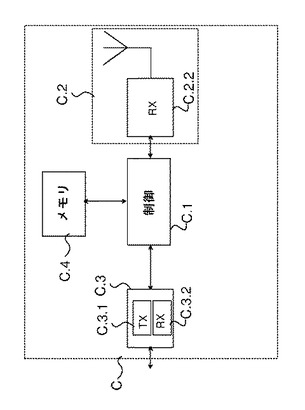
【図3】
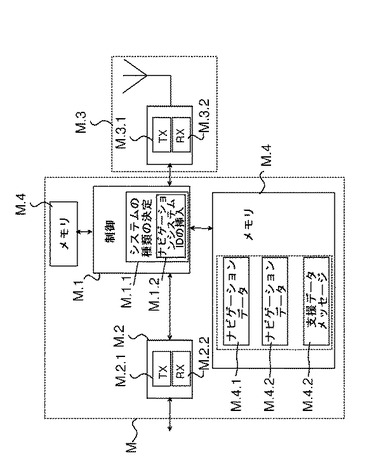
【図4】
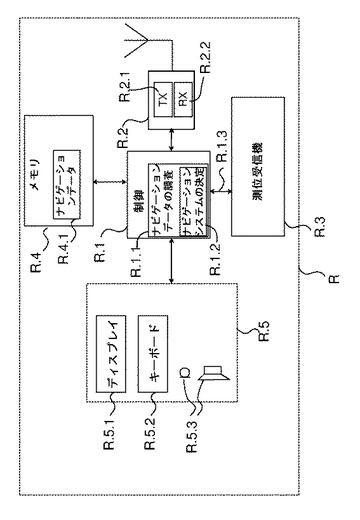
【図5】
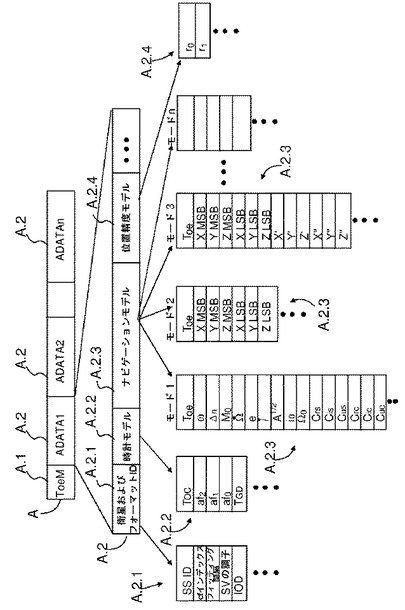
【図6】
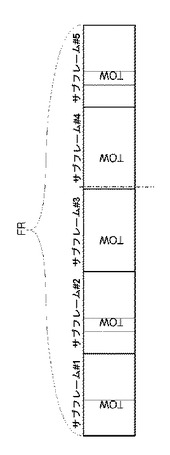
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2009−528529(P2009−528529A)
【公表日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願番号】特願2008−556803(P2008−556803)
【出願日】平成18年2月28日(2006.2.28)
【国際出願番号】PCT/FI2006/050084
【国際公開番号】WO2007/099196
【国際公開日】平成19年9月7日(2007.9.7)
【出願人】(398012616)ノキア コーポレイション (1,359)
【Fターム(参考)】
【公表日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願日】平成18年2月28日(2006.2.28)
【国際出願番号】PCT/FI2006/050084
【国際公開番号】WO2007/099196
【国際公開日】平成19年9月7日(2007.9.7)
【出願人】(398012616)ノキア コーポレイション (1,359)
【Fターム(参考)】
[ Back to top ]