
支援型無線位置判断(determination)システムのための向上したデータメッセージング効率
【課題】冗長な、または余分なデータを低減または削除する。さらに、無線デバイスが追加の容量を負わされないことと、無線デバイスが正確な位置情報を与えられることを保証する。
【解決手段】複数の基地局と、基地局と通信するように適応させられた、移動電話およびパーソナルディジタルアシスタントのような、複数の無線デバイスとを含む。無線デバイスの地理的位置を判断する位置判断システムも含む。位置判断システムは、位置判断エンティティ(position determination entity, PDE)を含み、これは、基地局に接続され、無線デバイスの位置を計算するプロセシングサーバとしての役割を果たす。
【解決手段】複数の基地局と、基地局と通信するように適応させられた、移動電話およびパーソナルディジタルアシスタントのような、複数の無線デバイスとを含む。無線デバイスの地理的位置を判断する位置判断システムも含む。位置判断システムは、位置判断エンティティ(position determination entity, PDE)を含み、これは、基地局に接続され、無線デバイスの位置を計算するプロセシングサーバとしての役割を果たす。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、位置判断システムおよび方法に関し、特に、支援型無線位置判断システムにおいて位置に基づくデータを効率的にメッセージングするシステムおよび方法に関する。
【背景技術】
【0002】
基準点の地理的位置を判断する(determining)システムは、当技術においてよく知られている。一般に使用されている位置判断システムは、全地球測位システム(Global Positioning System, GPS)である。GPSは、任意の所与の時間において、任意の地理的位置から、少なくとも4つのGPS衛星が水平線よりも上にあるように、間隔を置いて地球を周回している衛星のネットワークを含む。
【0003】
動作において、各GPS衛星は、その現在の位置および現在の時刻を連続的に同報通信する。地球上では、GPS受信機が、これらの同報通信信号に含まれている情報を使用して、その地理的位置を、その経度、緯度、および高度に関して計算することができる。GPS受信機は、一般に、視界内の4つ以上のGPS衛星から同報通信される信号をサーチし、収集する。次に、GPS受信機は、各同報通信信号の同報通信時間と受信時間との間の時間間隔を使用して、GPS受信機と4つ以上のGPS衛星の各々との間の距離を計算する。これらの距離の測定値は、同報通信信号において受信された位置および時間の情報と共に、GPS受信機がその地理的位置を計算することを可能にする。
【0004】
政府の規制と消費者の関心との両方が、無線電話のような無線デバイスにおける地理的位置の機能に対する要望を駆り立てた。したがって、GPS機能を無線デバイスに取り入れることが望ましい。しかしながら、無線デバイスは、ネットワーク容量およびバッテリ寿命の問題に対して極めてセンシティブ(sensitive)である。したがって、GPS機能を行うために無線デバイスに従来のGPS受信機を加えることは、無線デバイスにおいて位置の位置特定を行うことにおける十分な解決案ではない。
【0005】
したがって、ネットワーク容量およびデバイスのバッテリ寿命のための最低限の追加コストで、GPS機能を無線デバイスに提供する無線システムを有することが望ましい。
【0006】
ネットワーク容量およびデバイスのバッテリ寿命に対するコストを最小化する、GPS機能を無線デバイスに提供する1つのこのようなシステムは、“支援型無線位置判断システム”と呼ばれる。このシステムにおいて、位置判断エンティティ(position determination entity, PDE)は、一般に、複数の基地局と、少なくとも1つの無線デバイスまたは移動局(mobile station, MS)とを含む無線通信ネットワークの一部である。支援型無線位置判断システムでは、PDEは、MSがその位置を判断するのを補助するために使用される。システムは、また、無線通信ネットワークにおけるデバイスの接続性のアーキテクチャに関する標準規格に基づき得る。1つのこのような標準規格は、デュアルモードのスペクトラム拡散システムのための電気通信工業会の位置判断サービスの標準規格−アデンダム(Telecommunication Industry Association Position Determination Service Standard for Dual-Mode Spread Spectrum System-Addendum(TIA/EIA IS-801-1))である。
【0007】
具体的には、支援型無線位置判断システムの実施形態において、PDEは、無線通信ネットワークのカバレッジエリア全体に分散された静止GPS受信機のネットワークを介して複数のGPS衛星の位置を継続的に追跡する。GPS信号をサーチする前に、MSは、GPSの補助情報に対する要求を、ローカル基地局を介してPDEへ送信する。
【0008】
次に、PDEは、MSに、GPS衛星に関するエフェメリスデータ(ephemeris data)および感度支援データのような、補助情報を提供する。例えば、PDEは、ローカル基地局の識別を使用して、MSのおおよその位置特定(location)と、おそらく無線デバイスの視界内であるGPS衛星の識別および位置(position)とを判断し得る。このシステムの欠点は、MSに正確な(precise)位置特定情報を提供するためには、PDEからMSへ送られるデータが冗長であるか、あるいはそうでなければ、不要であり得ることである。冗長または不要なデータは、MSの地理的位置を決定(fix)するために必要とされる帯域幅要件および時間を増加させる。
【0009】
したがって、冗長および/または余分なデータを低減または削除し、それによって、無線デバイスの位置特定を決定するためのデータ帯域幅要件を低減し、時間を向上する一方で、それでもなお、無線デバイスが追加コストを負わされないことを保証する、支援型無線位置判断システムにおいてデバイスを相互接続するシステムおよび方法を提供することが望ましい。さらに加えて、このようなシステムおよび方法は、依然として、無線デバイスがその地理的位置を正確に判断するのに十分な測位(positioning)情報を提供することが望ましい。
【発明の概要】
【0010】
支援型無線位置判断システムにおいて無線デバイスのユーザに位置関係情報を提供するためのシステムおよび方法の実施形態が開示される。1つの実施形態では、支援型無線位置判断システムは、複数の基地局と、基地局と通信するように適応させられた移動電話、携帯情報端末、あるいはそれに類するもののような、複数の無線デバイスとを含む。
【0011】
無線位置判断システムは、無線デバイスの地理的位置を判断するシステムをさらに含む。この実施形態では、位置判断エンティティ(PDE)は、基地局に接続され、無線デバイスに衛星支援を提供するプロセシングサイト(processing site)としての役割を果たす。より具体的には、PDEと無線デバイスとの間でメッセージング通信し、冗長または余分なデータの送信を低減または削除するシステムおよび方法が提供される。加えて、システムおよび方法は、無線デバイスが追加のコストおよび重みを負わされないことと、無線デバイスが正確な位置特定情報を提供されることとを保証する。システムおよび方法の実施形態は、TIA/EIA IS−801の標準規格および/または他の標準規格に準拠する。
【0012】
さらなる実施形態では、無線位置判断システムは、PDEおよび無線デバイスを含み、PDEと無線デバイスとの間で情報をメッセージングするための方法が提供される。この方法は、第1の補助情報をPDEから無線通信リンクを介して受信することを含む。次に、冗長な衛星測位信号が、受信された第1の補助情報に基づいて判断される。次に、判断された冗長な衛星測位信号に基づいて、第2の補助情報に対する要求が、無線通信リンクを介してPDEへ送信される。要求された第2の補助情報は、PDEから無線通信リンクを介して受信される。次に、測位衛星からの必要な衛星測位信号が、受信された第2の補助情報に基づいて位置特定(located)される。次に、無線デバイスの地理的な位置が、位置特定された衛星の測位信号に基づいて判断される。
【0013】
方法の実施形態は、捕捉支援(Acquisition Assistance, AA)を得ることを含む。次に、AA情報に基づいて、複数の全地球測位システム(GPS)の衛星からの第1の複数の衛星測位信号に対する浅いサーチ(shallow search)が行われる。次に、複数のGPS衛星からの第1の複数の衛星測位信号が、浅いサーチを使用して、位置特定される。浅いサーチによって位置特定された第1の複数の衛星測位信号が、無線デバイスに関する許容可能な地理的位置決定を生じさせる(yield)ために十分な衛星測位信号を有するかどうかについての判断が行われる。
【0014】
第1の複数の衛星測位信号が、無線デバイスに関する許容可能な決定を生じさせるために十分な信号を有していない場合、複数のGPS衛星からの第2の複数の衛星測位信号を生じさせるための感度支援(sensitivity assistance, SA)情報に対する要求が送信される。第2の複数の衛星測位信号に関する要求されたSA情報を受信した後、深いサーチ(deep search)が、受信されたSA情報に基づいて、複数のGPS衛星からの第2の複数の衛星測位信号に対して行われる。
【0015】
次に、浅いサーチによって位置特定された第1の複数の衛星測位信号と、深いサーチによって位置特定された第2の複数の衛星測位信号とが、無線デバイスに関する許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有しているかどうかについての別の判断が行われる。十分な信号がある場合、複数のGPS衛星からの、位置特定された第1および第2の複数の衛星測位信号に基づいて、無線デバイスに関する地理的位置決定に対する判断が行われる。
【0016】
また別の方法の実施形態では、方法は、粗い(coarse)時間推定情報、粗い位置推定情報、および全地球測位システム(GPS)のアルマナック(almanac)情報を得ることを含む。次に、測位衛星の第1のエフェメリス(ephemeris)が検査され、測位衛星のための第1のエフェメリスの状態情報が第1の時間の閾値よりも低いかどうかを判断する。
【0017】
次に、第1のエフェメリスの状態が第1の閾値以上である場合、測位衛星が、無線デバイスの可視水平線(viewable horizon)よりも上にあるかどうかについて、判断が行われる。次に、測位衛星が、前記無線デバイスの可視水平線よりも上にある場合、位置判断エンティティ(PDE)から測位衛星の第2のエフェメリスを要求するマスクが行われる。次に、測位衛星の第2のエフェメリスのためのマスクを有する要求が、PDEへ送信される。次に、無線デバイスがその地理的位置を判断するために、PDEは第2のエフェメリスを無線デバイスに送信する。
【0018】
図面において、構成要素は、必ずしも一定の比例に応じていない。同様の参照番号は、異なる図面における同様または類似の部分を指す。
【詳細な説明】
【0019】
位置に関係する情報を、無線デバイスまたは移動局(MS)のユーザに提供するシステムおよび方法が示されている。より具体的には、冗長なデータを低減または削除する、支援型無線位置判断システムにおいてデバイスを相互接続するシステムおよび方法が提供される。加えて、システムおよび方法は、支援型無線位置判断システムにおける無線デバイスが、追加のコストおよび重みを負わさないこと、および無線デバイスが正確な位置特定情報を提供されることを保証する。さらに、システムおよび方法の実施形態は、TIA/EIA IS−801の標準規格および/または他の標準規格に準拠し得る。
【0020】
ある特定の実施形態によって思い描かれる支援型無線位置判断システムにおいて、静止GPS受信機を有する基地局は、既知の位置に維持されている。この基地局は、そのGPSで計算された位置をその既知の位置と比較して、そのGPSで計算された位置における検出された誤差を修正するために使用できるGPS衛星のためのディファレンシャル(differential)修正データを導出する。GPSで計算された位置における誤差は、大気および対流圏の状態、衛星データにおける誤差、受信誤差、および他の誤差の原因によって引き起こされうる。ディファレンシャル修正データは、基地局のカバレッジエリアにおけるGPS機能を有する無線または移動デバイスへ送信され得る。GPSの位置の計算においてディファレンシャル修正データを使用することによって、GPS受信機の地理的位置は、追加された精度で判断されうる。
【0021】
加えて、無線デバイスあるいはMSは、視界内にあるGPS衛星からの同報通信信号を位置特定するときに移動デバイスを支援する位置判断エンティティ(PDE)を介して、補助情報をさらに受信し得る。PDEは、視界内にあるGPS衛星の位置を継続的に追跡して、これらのGPS衛星の識別および位置を、同報通信信号の関連するドップラー周波数のような他の補助情報と共に、基地局のカバレッジエリア内の無線デバイスへ送信する。補助情報は、無線デバイスに、視界内のGPS衛星のおおよその位置特定を知らせ、それによって、要求されるサーチウィンドウを狭め、GPSの同報通信信号を捕捉するのに必要とされる時間量を著しく低減させる。大抵の無線デバイスの移動GPS機構は、正確なGPS衛星の位置情報を欠き、したがって、時間および周波数において衛星を探すための場所についての情報を欠くので、支援なしでは、ほんの4つのGPS衛星の同報通信信号でさえもサーチするプロセスは時間がかかり得る。
【0022】
具体的には、1つの実施形態において、GPS信号の捕捉時間(acquisition time)は、位置判断エンティティ(PDE)を使用して低減される。PDEは、一般に、複数の基地局と少なくとも1つの移動局(MS)とを含む無線通信ネットワークの一部である。PDEは、無線通信ネットワークのカバレッジエリアにわたって分散された静止GPS受信機のネットワークを介してGPS衛星の位置を継続的に追跡する。GPS信号をサーチする前に、MSは、GPS補助情報に対する要求を、ローカル基地局を介してPDEへ送信する。
【0023】
次に、PDEは、MSによって要求された補助情報を送信する。例えば、ローカル基地局の識別を使用して、PDEは、MSのおおよその位置特定を判断して、MSに、おそらくは(likely)視界内にあるGPS衛星の識別および位置と、各識別されたGPS信号の予測ドップラーシフトとを提供し得る。一般に、PDEによってまとめられる(compile)実時間情報は、またMSにおいて使用および記憶され得る標準のアルマナックデータよりも、より正確であり、しばしば、GPS信号のより短い捕捉時間をもたらしうる。
【0024】
GPS信号の捕捉時間は、符号分割多元接続(code division multiple access, CDMA)ネットワークにおいて、さらに一層低減されることができる。CDMAネットワークでは、各基地局は、GPS時間と同期され、かつタイミングビーコンをそのカバレッジエリア内の移動デバイスへ送信するクロックを維持する。移動デバイスは、タイミングビーコンを使用して、それらの内部クロックを基地局のクロックと同期させるが、この同期化は、移動デバイスに達する信号における伝搬遅延の影響を受けやすい(subject to)。
【0025】
PDEおよび静止GPS受信機もまた、GPS時間と同期するクロックを維持する。動作中、静止GPS受信機は、各PNフレーム(例えば、1023チップのPN符号系列)の始まりが、静止GPS受信機によって受信される時間を追跡する。PDEは、視界内のGPS衛星の識別を、各GPS信号の関連するドップラーシフトおよび関連するPNフレームの受信時間と共に、移動デバイスへ送信する。移動デバイスは、この補助情報を使用して、視界内のGPS衛星、関連するGPS信号の予測受信周波数、および関連するPNフレームが静止GPS受信機において受信されることが予測される時間を識別し得る。例えば、移動デバイスは、受信された補助情報を使用して、その生成された1023チップのPN符号系列を、受信されたGPS信号からの整合する1023チップ系列と迅速に整列または相関させ(例えば、信号をコヒーレントに統合し(coherent integrating))、受信されたGPS信号を検出するためのその捕捉時間を向上する。
【0026】
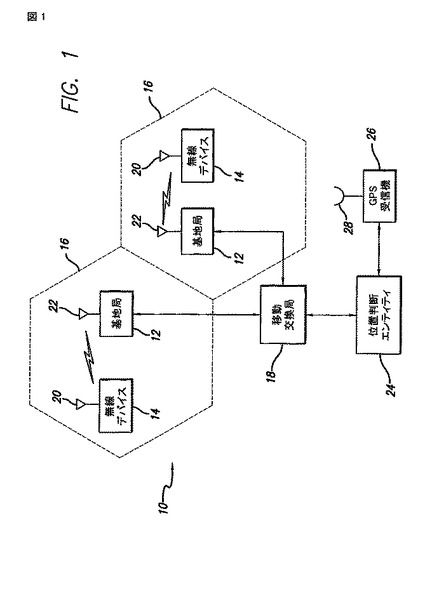
図1は、無線通信システム10の実施形態を示しており、この中では、セルベース(cell-based)の通信システムが、複数の基地局12と複数の無線デバイス14とを含む。各基地局12は、基地局12によってサービスされる地域的カバレッジエリアを定めている、関連するセル16を有する。セル16のうちの1つの内に位置する各無線デバイス14は、符号分割多元接続(CDMA)のような所定のディジタル通信プロトコルにしたがって、データパケットを交換することによって、関連する基地局12と通信する。
【0027】
無線デバイス14は、移動電話、携帯情報端末(personal digital assistant, PDA)、乗物のナビゲーションシステム、ポータブルコンピュータ、あるいはそれに類するものを含む、無線通信リンクによって基地局12と通信することが可能な任意のデバイスでありうる。移動交換局(mobile switching center, MSC)18は、呼の設定、無線デバイス間の呼のルーティング、および無線デバイスと、公衆交換電話網(public switched telephone network, PSTN)またはインターネットのような少なくとも1つの通信ネットワークとの間の呼のルーティングを含む、セル16における無線通信を管理する。無線通信システム10は、複数のMSCを含むことができ、それぞれが複数のセル16を管理する。
【0028】
別の実施形態では、無線通信システムは、無線デバイスから、および無線デバイスへデータを送信するように適応させられた任意の無線システムであり得る。このシステムは、地上波(terrestrial)または衛星ベースのセルラ通信システム、例えば、セルラ電話システム、パーソナル通信システム、専用移動無線システム、高度移動電話システム(Advanced Mobile Phone System)、ページャシステム、無線パケットデータシステム、あるいはそれに類するものを含み得る。
【0029】
無線通信システム10は、少なくとも1つの無線デバイス(または、MS)14の地理的位置を判断するようにさらに適応させられている。1つの実施形態では、全地球測位システム(GPS)のような衛星測位システムが、位置の判断に使用される。各MSまたは無線デバイス14は、ローカル基地局12と通信するため、および周回しているGPS衛星(または、SV)から送信されたGPS信号を受信するための少なくとも1つのアンテナ20を含む。各基地局12は、MS14と通信するための少なくとも1つのアンテナ22を含んでいる。位置判断エンティティ(PDE)24は、MSC18を介して基地局12に接続され、MS14を、視界内のGPS衛星を位置特定すること、およびMS14のそれぞれの地理的位置を計算することにおいて支援する。MS14は、データバーストメッセージング(data burst messaging, DBM)を介して、またはTCP/IPを介しての何れかによって、PDE24と通信することができる。DBMの場合は、非常にインフラストラクチャに依存し、TCP/IPの場合は、MSC18がIWFまたはPDSNに接続されて、PDE24とMS14との間にTCP/IP接続を提供する。
【0030】
より具体的な実施形態では、PDE24は、GPSアンテナ28を介してGPS信号を受信する少なくとも1つの静止GPS受信機26を使用して、GPS衛星の位置を追跡するコンピュータシステムである。無線通信システム10は、好ましくは、そのカバレッジエリア全体にわたって位置するGPS受信機26のネットワークを含む。1つの実施形態では、各基地局12は、基地局のカバレッジエリア16内の無線デバイス14に支援を提供するために、PDE24および静止GPS受信機26を含む。
【0031】
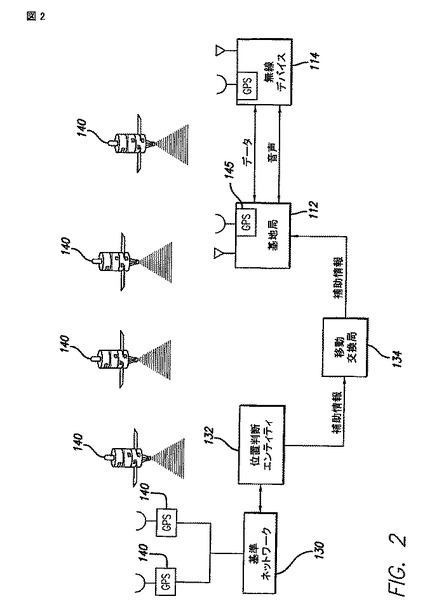
ここで、無線デバイスの地理的位置を判断するプロセスが、図2のブロック図を参照して説明される。PDE132は、基準ネットワーク130を介して、複数のGPS衛星140の位置を継続的に追跡し、視界内のGPS衛星140の各々についての現在の情報を維持する。すなわち、PDE132は、アルマナック(almanac)、エフェメリス(ephemeris)、およびディファレンシャル修正情報をPDE132に提供する、複数のGPS受信機140を有する、広域基準ネットワークのような基準ネットワーク130に接続される。次に、補助情報またはデータは、DBMの場合は、PDE132からMSC134へ、あるいは、PDSN(図示せず)を介してMSC134へ流れる。次に、補助データは、MSC134から、基地局112、例えば、BSC/BTSへ、そして最終的に、無線デバイス114へ流れる。加えて、基地局は、GPS受信機145を有し得る。1つの実施形態では、GPS受信機145は、CDMA送信信号の時間同期化のためのものであり、PDE132によってアクセス可能ではない。
【0032】
無線デバイス114の地理的位置を判断するプロセスは、無線デバイス114のユーザによって開始されることができる。代替の実施形態では、位置判断プロセスはまた、基地局112、PDE132、MSC134、または図1に示されている無線通信システム10の一部である、あるいはそれに接続された別のデバイスまたはエンティティによって開始され得る。位置判断プロセスが開始された後、無線デバイス114は、GPS補助情報を、PDE132から基地局112を介して要求する。PDE132は、GPS受信機130の視界内にあるGPS衛星140を識別し、GPS受信機130に関して、特定のGPS時間における、識別されたGPS衛星140の各々についての現在の位置、ドップラー周波数、および擬似距離(pseudoranges)を判断する。このGPS補助情報は、基地局112を介して無線デバイス114へ送信される。
【0033】
無線デバイス114は基地局112と通信状態にあり、したがってその最も近くに(proximate to)あるので、このGPS補助情報は、無線デバイスに114に、視界内のGPS衛星140のおおよその位置を提供し、GPS衛星信号のサーチ範囲を著しく低減させることができる。いったん、GPS衛星信号が捕捉されると、無線デバイス114の地理的位置は、当技術において周知の方法にしたがって判断され得る。
【0034】
既に記載したように、ある特定の実施形態は、またTIA/EIA IS−801とも準拠する、支援型無線位置判断システムに適用可能である。TIA/EIA IS−801−1の標準規格に準拠する支援型無線位置システムでは、幾つかの不備が、余分なデータの送信を要求する。これらの不要な送信は、セッション時間を増加させ、エンドユーザに、通信事業者(carrier)による不必要なデータサービス料金を負担させる。したがって、1つの実施形態は、冗長なデータを低減または削除する支援型無線位置判断システムにおいてデバイスを相互接続するシステムおよび方法を提供する。この実施形態は、TIA/EIA IS−801−1の不備を、この標準規格の将来の改正において、あるいはTIA/EIA IS−801−1の標準規格に準拠するカスタム(custom)、あるいはプロプライエタリ(proprietary)、のメッセージを使用して、緩和するために適用可能であり得る。
【0035】
しかしながら、位置判断システムにおいて送信される冗長な、または、そうでなければ不要なデータを低減することにおいて提示される課題は、どのデータが本当に冗長であり、また、どのデータがそうでなく、実際に無線または移動デバイスの位置特定情報を判断するための正確さに貢献できるかを判断することである。例えば、4つのGPS衛星140からのGPS衛星信号が、無線デバイス114の地理的位置を判断するのに使用されることができるが、より多くのGPS衛星140からのGPS衛星信号は、より一層正確な地理的位置を提供するであろう。すなわち、GPS衛星信号を提供するのに使用される視界内のGPS衛星140がより多くなると、無線デバイス114の地理的位置をより正確に判断することができる。したがって、実施形態において、支援型無線位置判断システム内の無線デバイスが、無線デバイスの位置特定情報を正確に判断することについての全ての必要な情報を提供されることを保証するシステムおよび方法が提供される。
【0036】
特定の実施形態において、補助情報または信号の2つの特定のメッセージタイプ(例えば、図2に示されているPDE132から無線デバイス114へ送られるメッセージまたは補助データ)に焦点を合わせたシステムおよび方法が展開される。2つのメッセージタイプ、すなわち、MS支援型動作モード(MS-Assisted mode of operation)において使用される感度支援情報と、MSに基づく動作モード(MS-Based mode of operation)において使用されるGPSエフェメリス情報とは、メッセージのサイズおよび送信の周波数に関して最も問題になり得る。MS支援型モードでは、PDEが補助データをMSへ送って、1回の試み(single-shot)の位置決定を行い、位置計算はPDE内で行われる。MSに基づくモードでは、最終的に、エフェメリスデータのリフレッシュが要求されるまで、PDEは、エフェメリスおよびアルマナック情報をMSへ送り、MSが、MS(例えば、ハンドセット)内で多数の位置決定を行うことを可能にする。したがって、実施形態は、支援型無線位置判断システムのMS支援型モードとMSに基づくモードとの両方で適用可能である。すなわち、説明された実施形態は、MSまたは移動体が、PDEから感度支援(SA)データおよびGPSエフェメリスデータを要求することができる支援型無線位置判断システム内で実施されることができる。PDEは、SAデータに対する要求に応答して、SA提供(Provide SA)メッセージを送信し、GPSエフェメリスデータに対する要求に応答して、エフェメリス提供(Provide Ephemeris)メッセージを送信する。
【0037】
例えば、MSに基づく設計のシステムでは、移動体は、エフェメリスデータを頻繁に要求して、水平線(または、設定された高度マスク)の上方にまさに昇っている衛星に関する情報を得る。これら要求は、頻繁に行われ、移動体が、サービスの外(すなわち、CDMAのカバレッジの外)へ出て行く(drift)場合に(このような場合は、移動体は新しいエフェメリスをもはや受信することができない)、移動体のエフェメリス・データベースが可能な限り完全になることを保証する。この実施の大きな欠点は、移動体が、以前に視界内にあった衛星に関する幾つかの冗長なエフェメリスの更新を受信することである。アルマナックが移動体において利用可能(available)であり、移動体の位置のおおまかな(crude)推定値が利用可能であり、移動体がシステム時間の基準を有していると仮定すると、何れの衛星が設定された高度マスクの上方に昇っている(または、間もなく昇ることになる)かを予想することができる。したがって、1つの実施形態では、移動体が、衛星の特定のセットに関するGPSのエフェメリスを要求することを可能にするために、新しい要求メッセージが展開される(developed)。
【0038】
加えて、MS支援型設計のシステムでは、移動体からの要求に応答して、PDEによって提供されるSA提供(Provide SA)メッセージは、PDEの基準ネットワーク(例えば、PDEの広域基準ネットワークすなわちWARN(Wide Area Reference Network, WARN))の視界内の全衛星の感度ビット(sensitivity bit)を含み得る。SAビットは、到来する衛星信号に対するビット変調を取り除くために使用され、その結果、20ミリ秒のビット継続期間よりも長いコヒーレントな統合が行われ得ることに留意されたい。より長いコヒーレントな統合は、向上された感度をもたらす。PDEのWARNにおいて、感度ビットは、510感度ビットに加えて、各々のこのような衛星または宇宙ビークル(Space Vehicle, SV)に含まれる幾つかのオーバーヘッドフィールドを含む。しかしながら、MSは、多くの場合、すべての衛星またはSVに関して感度ビットを必要とするわけではない。例えば、MSまたは移動体が、1つのSVへの(例えば、窓を介しての)見通し線(line of sight)と、別のSVへの(例えば、天井/屋根を介しての)遮られた経路とを有すると仮定する。移動体は、SAなしに、第1のSVを検出でき、なおかつ、第2のSVを検出するためにSAを必要とする。したがって、別の実施形態では、移動体が衛星の特定のセットに関するSAを要求することを可能にする、新しい要求メッセージが展開される。しかしながら、感度支援に現在使用されている要求メッセージは、変更パラメータをもたないことがある。したがって、さらなる実施形態では、PDEは、複数のデフォルト方式を使用して、SAビットストリームの開始時間のみならず、MSへ送るビット数をも調節する。
【0039】
さらに以下に説明されるように、支援型無線位置判断システム内の他の機能および特徴が達成され得る。例えば、位置判断の正確さが向上されることができ、またはMSの位置を決定するための時間のような、位置特定の判断に必要とされる時間が低減されることができる。
【0040】
例示的な実施形態では、既存のTIA/EIA IS−801−1標準規格内のカスタム(custom)/プロプライエタリ(proprietary)のメッセージのアプローチが展開される。あるいは、TIA/EIA IS−801の将来のバージョンにおける変更された非プロプライエタリ(non-proprietary)メッセージが使用されうる。非プロプライエタリのメッセージのアプローチの場合、既存のSAおよびエフェメリスの要求とは異なる新しい要求の要素が、標準規格に加えられることになるであろう。しかしながら、カスタム/プロプライエタリのアプローチでは、追加のフィールドが、既存のSAおよびエフェメリス要求メッセージの最後に加えられることになることになるであろう。
【0041】
位置判断データメッセージ(Position Determination Data Message, PDDM)
具体的には、TIA/EIA IS−801−1の標準規格に準拠するプロプライエタリの要求メッセージのアプローチでは、MSまたは移動体は、SV固有のSAまたはSV固有のエフェメリスを要求することができる。SV固有のSAまたはエフェメリスを要求するとき、移動体は、位置判断データメッセージ(PDDM)をフォーマットし、ただし、PD_MSG_TYPEのヘッダフィールドが192(16進法においてC0)に設定される。これは、それがプロプライエタリのメッセージであることを識別する。このような要求は、同じPDDMにおける他の従来のTIA/EIA IS−801−1の要求と共にパッケージ化されるべきではない。さらに加えて、保守的であるために、プロプライエタリおよび従来のPDDMは、別々のパケット/データバーストにおいて送られることが好ましい。
【0042】
より具体的な実施形態のPDDMにおける、上述されたMS要求要素および対応するPDE応答要素の詳細が、以下にさらに説明される。
【0043】
1.SV固有のGPS感度支援
a.要求
SVのGPS感度支援要求(Request SV GPS Sensitivity Assistance)メッセージは、次のレコードを含む。
【表1】

【0044】
SV_MASK−SVのビットマスク。このフィールドは、感度支援が要求されているGPS衛星のサブセットを特定する。最下位ビット(ビット0)は、SV PRN 1を表わす。最上位ビット(ビット31)は、SV PRN 32を表わす。‘1’のビット値は、データが要求されていることを示す。
【0045】
MIN_REF_BIT_NUM−最小の要求される参照ビット数。このパラメータは、 “参照ビット”と呼ばれる1500ビットのGPSフレーム内の特定のビット、すなわち、対応する応答メッセージにおいて移動体に戻されるNAV_MSG_BITSの前半の最後のビットの位置を伝える。移動体は、このフィールドを、0ないし1499の範囲における最小参照ビットの要求された位置に設定することになっている。このフィールドは、ネットワークの遅延がないと仮定して、感度支援が移動体において有益であり得る最も早い時間を示すのに使用されるべきである。感度支援提供(Provide Sensitivity Assistance)のメッセージにおいてREF_BIT_NUMを設定するとき、PDEは、要求された最小参照ビット数の最大値と、(ネットワークの遅延においてモデル化されている)REF_BIT_NUMを設定するための内部アルゴリズムの結果とを選択することになっている。その代わりに、移動体が、参照ビット数を指定したくないときは、このフィールドは、2047に設定されることになっており、PDEは、対応する応答メッセージにおけるREF_BIT_NUMを選択するためのデフォルトのアルゴリズムを使用するであろう。
【0046】
MIN_DR_SIZE−SVごとの最小の要求されるデータレコードのサイズ。各衛星に対して要求される、1ないし255の範囲における2ビットの対の数。例えば、255の値は、SVごとに510 SAビットが要求されていることを示す。このフィールドは、使用に必要とされるビット数を示し、ネットワーク遅延における変化を反映するための埋め込みを含まない。PDEは、このフィールドによって示されたビット数を最小値で送ることになっているが、ネットワークの遅延における変化の関数としてビット数を増加し得る(合計で510ビットを超えない)。
【0047】
b.応答
PDEは、上述のプロプライエタリの要求を受信すると、請求されていない(unsolicited)(TIA/EIA IS−801−1)のGPS感度支援提供(Provide GPS Sensitivity Assistance)のメッセージで応答する。しかしながら、この応答メッセージにおいて、PDEは、要求メッセージのSV_MASKフィールドにおいて要求されていないいずれのSVのデータを取り除く。MIN_REF_BIT_NUMが2047に設定される場合、PDEは、デフォルトのアルゴリズムを使用して、応答メッセージにおけるMIN_REF_BIT_NUMを設定する(この結果を、DEFAULT_REF_BIT_NUMと呼ぶ)。その代わりに、MIN_REF_BIT_NUMが、0ないし1499の範囲内である場合、PDEは、応答メッセージ内のREF_BIT_NUMを、MAX(DEFAULT_REF_BIT_NUM,MIN_REF_BIT_NUM)に設定する。SAの応答におけるビット数について、PDEは、少なくともMIN_DR_SIZEのビットの対で応答する。PDEは、さらに、この値を埋め込み、ネットワーク遅延における変化の責任を取る(例えば、最大遅延−最小遅延を取り、ビット数を判断し、これを使用して、埋め込む)。SAの応答メッセージにおけるDR_SIZEのフィールドは、要求されたMIN_DR_SIZEおよび埋め込み数を反映すべきである。PDEは、いずれの要求されたSVについてのいずれのSAのデータを有していない場合、またはそれが要求に応じることができない何か他のある理由があるとき、プロプライエタリの拒絶メッセージを送る。
【0048】
2.SV固有のGPSエフェメリス
a.要求
SVのGPSエフェメリスを要求(Request SV GPS Ephemeris)のメッセージは、次のレコードを含んでいる。
【表2】
【0049】
AB_PAR_REQ−要求されるアルファ/ベータパラメータ(Alpha/Beta parameter requested)。アルファ/ベータパラメータが要求される場合、移動局はこのフィールドを‘1’に設定し、そうでないときは、移動局はこのフィールドを‘0’に設定することになっている。
【0050】
SV_MASK−SVビットのマスク(SV bit mask)。このフィールドは、エフェメリスが要求されているGPS衛星のサブセットを特定する。最下位ビット(ビット0)は、SV PRN 1を表す。最上位ビット(ビット31)は、SV PRN 32を表す。‘1’のビット値は、データが要求されていることを示す。
【0051】
b.応答
PDEは、上述のカスタムの要求を受信すると、請求されていない(TIA/EIA IS−801−1)のGPSエフェメリスを要求(Provide GPS Ephemeris)のメッセージで応答する。しかしながら、この応答メッセージにおいて、PDEは、要求メッセージのSV_MASKフィールドにおいて要求されていないいずれのSVのデータを取り除く。PDEが、いずれの要求されたSVのいずれのエフェメリスデータを有していない場合、またはそれが要求に応じることができない何か他のある理由があるときは、拒絶メッセージを送る。
【0052】
加えて、1つの実施形態では、上述の要求が、SAおよびエフェメリスに対する既存の要求メッセージに適用されて、レガシー(legacy)のPDEへ送られる場合、PDEは、既存の要求に加えられた新しいフィールドを無視して、単に、従来(conventional)の応答をレガシーメッセージと共に送ることができる。さらに加えて、MSの実施形態は、最初にカスタムの要求メッセージを送り、次に、メッセージが拒絶された場合、レガシーの要求メッセージを送るように構成され得る(これは、MSがネットワーク、すなわち多くのPDEを支援していて、それらの一部がレガシーのPDEであり得るネットワーク間でローミングしているときに、とくに有益であり得る)。さらに、実施形態は、移動体および/またはPDEのためのソフトウェアプログラム内で実施されることができる。
【0053】
SV固有のSA
特定のMS支援型モードシステムでは、このMS支援型システムにおけるMSは、次の特徴で構成される。(MSにおいてイネーブルされる場合の)特徴は、GPSサーチスケジューラおよびセッションマネージャ(Session Manager, SM)を含む。GPSスケジューラは、深いモードサーチ(deep mode search)(すなわち、SAデータを要求するサーチ)が要求されるときを判断し、次に、深いモード(したがって、SAデータ)を要求している特定のSVのマスク(例えば、SV PRN)を計算する。次に、マスクは、MSのSMへ送られる。次に、SMは、(例えば、MSが要求する要素についてのテーブルにおいて特定されているメッセージのような)PDDMへの新しい要求をフォーマットする。1つの実施形態では、後方互換性のために、PDDMのMIN_REF_BIT_NUMのフィールドは、2047に設定されることができ、MIN_DR_SIZEのフィールドは、255に設定されることができる。別の実施形態では、これらのフィールドはまた、おそらくは、適応可能なやり方で最適化され、性能をさらに向上することができる。なお別の実施形態では、SMは、何れの要求がカスタマイズされる必要があるかを決める。
【0054】
加えて、DBMの実施は、TCP/IPの移送よりも実質的に悪いスループットを示す傾向があるので、上述のMSの実施形態は、DBMの移送を使用する無線システムにとってとくに有益であり得る。例えば、従来のDBMの無線ネットワークでは、最初のSAの要求からSAの応答の受信を完了するまでのターンアラウンド時間は、平均して約6秒である。しかしながら、ターンアラウンド時間に対する向上の量は、MSが遭遇し得る異なる信号状態に依存する。(例えば、晴天、遮られていないときは)全SVが浅いサーチモードでMSによって見付けられ、したがって、深いモードは不要あり得る。このような場合は、SAは要求されないであろう。同様に、奥行きのある屋内のシナリオでは、浅いサーチでは、SVは見付けられず、したがって、依然として、全SVに対してSAデータが要求され得る。しかしながら、幾つかのSVが、それらが深いサーチを要求しない十分に強い信号をもつ二義的なシナリオがある。このような場合は、SAデータは、SVのサブセットのみに対して要求され、この変化は、余分のデータの送信を著しく低減させるであろう。
【0055】
ここで図3を参照すると、SV固有の感度支援(Sensitivity Assistance, SA)を要求する例示的な方法300が、図3に示されている。ステップ302において、方法300は、捕捉支援(Acquisition Assistance, AA)を得て、全SVに対して浅いサーチを行う。次に、方法300は、ステップ304に移り、早期終了アルゴリズム(early exit algorism)を行い、浅いサーチが、(例えば、MSの)許容可能な位置特定の決定を生じさせるのに十分に良好な品質測定値を生成した(produced)かどうかを判断する。浅いサーチが許容可能な決定を提供すると判断されると、方法300は、ステップ312に移り、全ての検出されたSVを報告する。浅いサーチが、許容可能な決定を提供しないと判断されると、方法300は、ステップ308に移り、感度支援に対する要求をサーバ(例えば、PDE)へ送る。ステップ308において、要求は、(例えば、SV固有のSAを要求して)浅いサーチで検出されなかったSVのSAデータのみを求める。次に、方法300は、ステップ310に移り、SAデータを使用して、深いモードサーチを行う。図3に示されている方法300は、支援型無線位置判断システムにおいて種々の機構によって行われることができ、他の既知の位置判断ステップを含み得る。
【0056】
特に、より具体的な第1のMS支援型モードシステムの実施形態では、SAデータに対する従来の要求は、新しいプロプライエタリの要求によって置き換えられる。サーチスケジューラにおいて、浅いモード(shallow mode)が完了した後で、早期終了アルゴリズムが実行される。深いモードサーチが必要であると判断され、深いモードサーチを行うのに十分な“時間”がある場合には(この計算は、セッションのQoS/PRQの設定に基づき得る)、サーチスケジューラは、SV固有のSA要求メッセージをフォーマットする。ある特定の実施形態では、前のSAデータが期限切れになると、SAデータを再び要求する能力(capability)があるので、アルゴリズムは、深いモードで既にサーチされたSVの場合を扱うべきである。
【0057】
SVのマスクを判断するために、実施形態にしたがって、サーチスケジューラは、コンピュータ読み出し可能な媒体に埋め込まれ得る次の擬似関数コードによって表わされる例示的な機能のセットを行う。
【表3】
【0058】
設定(MIN_REF_BIT_NUMおよびMIN_DR_SIZE)に基づいて、PDEは、それが従来送っていたものと同一であるが、SVの幾つかが取り除かれたGPSのSAメッセージで応答すべきである。PDEが、幾つかの要求されたSVのSAビットを有していない場合、PDEは、応答メッセージにおいて、それらのSVも同様に除外すべきである。PDEはまた、オプションで、順方向リンクメッセージの時間タグを使用して、ネットワークの遅延をモデル化することができる。
【0059】
上述の特定の第1のMS支援型モードシステムの実施形態において、データの帯域幅を確保(save)することができる3つの場合がある。
【0060】
1.浅いモードにおいて、強い測定値が既に見付かっている場合、
2.SAデータを再要求する、および深いモードにおいて、SVのサーチングが既に行われた場合、および、
3.捕捉支援(Acquisition Assistance, AA)データになかった、新しく昇った衛星のSAデータを必要としない場合。
【0061】
理想的には、上述の実施形態は、屋外の、水平線の遮られた(horizon-obstructed)場合、屋外の、遮られた場合、および良好な屋内の場合のいずれにおいて、従来のシステムよりも、正確さが失われず、決定時間が向上しているべきである。水平線の遮られた場合では、MSは、良好な視界、すなわち360°、を有するが、木または建物のような障害物が存在し、したがって、幾つかのSVが(高度において)約5°ないし15°の角度では不可視である。屋外の、遮られた場合では、MS、例えば、ハンドセットは、いくらかの遮られていないクリアな空の視界と、高い度合いの完全な遮断とを有し、理想的には、高いコンクリートおよび鋼鉄製の建物から1ないし2メートルである。良好な屋内の場合では、ハンドセットは、見通し線上に2ないし3つの衛星が一般に視界内にあるように、窓の近くに置かれるべきである。
【0062】
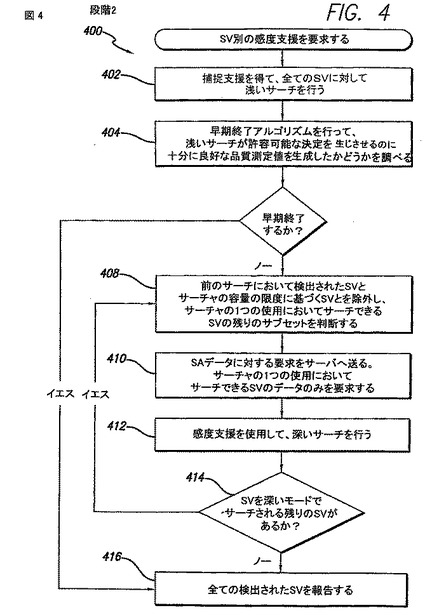
ここで図4を参照すると、SV固有の感度支援(SA)を要求するための、例示的な方法400のような、別の方法が提供される。ステップ402では、方法400は、捕捉支援(AA)を得て、全SVに対して浅いサーチを行う。次に、方法400は、ステップ404に移り、早期終了アルゴリズムを行い、浅いサーチが、許容可能なMSの位置特定の決定を生じさせるのに十分に良好な品質測定値を生成したかどうかを判断する。浅いサーチが、許容可能な決定を提供すると判断された場合、方法400は、ステップ416に移り、全ての検出されたSVを報告する。浅いサーチが許容可能な決定を提供しないと判断された場合、方法400は、ステップ408に移り、浅いサーチにおいて検出されたSVを除外し、さらに、サーチャの容量の限度に基づいてSVを除外する。
【0063】
ステップ408はまた、サーチャ(例えば、MSにおけるサーチャ)の1つの使用(usage)においてサーチされることができるSVの残りのサブセットを判断する。次に、方法400は、ステップ410に移り、SAデータに対する要求を、サーバ(例えば、PDE)へ送る。ステップ410において、(例えば、SV固有のSAを要求する)サーチャの1つの使用においてサーチされることができるSVの残りのサブセットのSAデータに対する要求のみが求められる。その後、方法400は、決定ステップ414に移り、深いモードでサーチされる残りのSVがあるかどうかを判断する。深いモードでサーチされる残りのSVがない場合、方法400は、ステップ416に移り、全ての検出されたSVを報告する。深いモードでサーチされる残りのSVがあるときは、方法400はステップ408に戻る。
【0064】
特に、より具体的な第2のMS支援型モードシステムの実施形態では、SAデータに対する従来の要求は、この新しいプロプライエタリの要求によって置き換えられる。この実施形態において、サーチスケジューラは、浅いモードサーチが完了した後で、早期終了アルゴリズムを実行する。深いモードサーチが要求され、深いモードの計算を行うのに十分な“時間”があると判断された場合、サーチスケジューラは、SV固有のSA要求メッセージをフォーマットする。
【0065】
この実施形態と、特定の第1のMS支援型モードシステムの実施形態との主な相違は、(深いサーチを要求する全SVとは対照的に)第2の実施形態が、実施形態の計画が、到来する(upcoming)サーチの呼び出しでサーチする衛星のデータのみを要求することである。第2の相違は、第2の実施形態は10秒未満のデータを要求することができ、要求されるデータ量は、知的に適応させられる。したがって、この実施形態は、各深いモードサーチの前に、一度SAデータを要求することになる。実施形態はまた、各深いモードサーチャの呼び出しの後に、早期終了アルゴリズムを行って、それまでに得られた測定値の数値(number)が、十分な基準を満たしているかどうかを確かめ得る。
【0066】
したがって、より具体的な第2のMS支援型モードシステムの実施形態のサーチスケジューラは、実施形態にしたがって、コンピュータ読み出し可能媒体に埋め込まれ得る次の擬似関数コードによって表わされる例示的な機能のセットを行うべきである。
【表4】
【0067】
この実施形態では、(より具体的な第1のMS支援型モードシステムの実施形態における単に3つの場合とは対照的に)データ帯域幅を次に示すように確保することができる第4の場合がある。
【0068】
1.浅いモードにおいて、強い測定値が既に見付かっている場合、
2.SAデータを再要求する、および深いモードにおいて、SVのサーチングが既に行われた場合、
3.AAデータになかった、新しく昇った衛星のSAデータを必要としない場合、および
【0069】
4.SAデータを要求する、および次のGPSのサーチャの呼び出しにおいて、サーチャがSVに到達できない場合。
【0070】
SV固有のエフェメリス
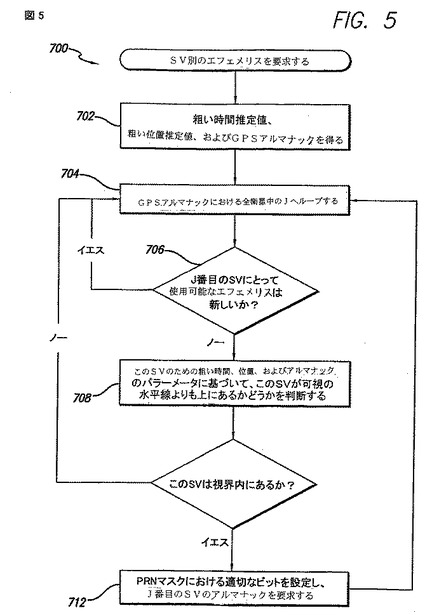
ここで図5を参照すると、SV固有のエフェメリスを要求する例示的な方法700が提供される。ステップ702において、方法700は、全SVのための粗い時間推定値、粗い移動体の位置推定値、およびGPS衛星のアルマナックデータを得る。粗い時間推定値は、CDMAの時間から求めることができる。粗い位置推定値は、現在の方法を使用している無線デバイスの前の位置の解に基づくことができる。GPS衛星のアルマナックは、無線デバイスに既に記憶されているか、またはダウンロードされていることが可能である。決定706において、方法700は、複数のSV(例えば、32個のSV)の中のSV(例えば、J番目のSV)のエフェメリスデータを検査し、SVのエフェメリスが“新しい(fresh)”かどうかを判断する。エフェメリスデータの年齢(age)が、エフェメリスが一定であり続け、変化しない時間量、および最低限の正確さの要件を維持する時間量よりも低いときは、エフェメリスデータは“新しい”と見なされる。エフェメリスデータの年齢は、例えば、有効期間の時間または最後のリフレッシュメントの時間を有する状態(status)であり得る。SV(例えば、J番目のSV)のエフェメリスが、“新しい”ものでないと判断された場合、方法は、ステップ704へループを戻って、複数のSVの中の別のSVのエフェメリスデータを検査する。
【0071】
SVのエフェメリスデータが、“新しい”ものでないと判断されるか、またはいずれのエフェメリスデータも、J番目のSVのために利用可能でない場合、方法は、ステップ708に移る。ステップ708において、SVが、SVのための粗い時間、位置、およびアルマナックのパラメータに基づいて、可視水平線、例えば、この方法を使用している無線デバイスの可視水平線よりも上にあるかどうかが判断される。SVが可視であると判断された場合、方法700は、ステップ712に移り、SVのPRNのマスクのようなマスクにおける適切なビットを設定し、SVのエフェメリスを要求する。SVが視界内にないと判断された場合、方法は、ステップ704にループして戻り、別のSVのエフェメリスデータを検査する。加えて、複数のSVの中の全てではないSVが、マスクされるか、または視界内にあると判断された場合、方法は、ステップ704にループして戻る。
【0072】
特定のMSに基づくモードシステムの実施形態では、エフェメリスの要求間における最小の間隔を保証するために課される時間の閾値(T1)にしたがうことを条件として、MSに基づくモードシステムにおけるMSは、決定が要求されるときは必ず、エフェメリスを要求する。この時間の閾値は、30分ないし120分の範囲内に設定され得る。ここでは、より小さい閾値が、より小さいWARNネットワークに対応する。この実施形態では、任意のGPS衛星から送信されたエフェメリスデータは、2時間の期間において一定であるべきである。最低限の正確さの要件を支援するために、少なくとも現在のエフェメリスデータ、または前の2時間の間隔からのエフェメリスデータが、所与の衛星のために使用可能であるべきである。
【0073】
したがって、例えば、4時間のデフォルト値が、T2(すなわち、変化のない2時間、および最低限の正確さの要件のための別の2時間)に使用されることができるが、T2の他の値も可能である。したがって、T1が30分に設定され、T2が4時間に設定される場合、エフェメリスは、所与の衛星について、8回のうちの7回は不必要に更新されうる。MSは、位置エンジン(Position Engine, PE)を含む。SV固有のエフェメリスの要求では、PEは、エフェメリスデータのためのSV_MASKをフォーマットする。PEに関する動作の2つの場合(または、モード)があり、場合(A)は、記憶されたエフェメリスがないか、または全ての記憶されているエフェメリスが古くなっている(stale)、場合(B)は、1つ以上のSVのための有効な(古くなっていない)エフェメリスがある。さらに加えて、この実施形態のコンテキストでは、SVのエフェメリスは、このエフェメリスデータの有効時間(例えば、PDEからの最後のリフレッシュメントの時間)から、ある特定の時間量(T2)が経過した場合、“古くなった(stale)”と見なされる。
【0074】
場合(A)では、エフェメリスデータが、PDEに可視の全てのSVに対して要求されるので、PEは、SV_MASKを65535(16進法において、FFFF)に設定することになる。
【0075】
場合(B)では、PEは、2つのタスクを行うであろう。第1に、それは、(例えば、記憶されているエフェメリスの状態を検査することによって、)いずれの記憶されているエフェメリスが古くなっているかどうかを判断する。任意のこのようなSVについて、それらが依然として視界内にある場合には(例えば、アルマナックを調べて、衛星の粗い位置を計算することにより、衛星が設定された高度マスクよりも依然として上にある場合には、それは視界内にあると考える)、SV_MASKにおいて、対応するビットは、“1”に設定されることになる。第2に、PEは、高度マスクより上に最近昇った、または(例えば、アルマナックの計算に基づいて)昇ろうとしているところであるSVのセットを判断するであろう。これらのSVについて、SV_MASKにおけるビットは、それにしたがって設定されることになる。
【0076】
このMSに基づくモードシステムの実施形態、または代替の実施形態は、場合(A)を完全に回避し、単に、全てのSVに、古いエフェメリスを有しているとしてフラグを立てることによって、唯一の考慮する場合(B)の考慮を必要とすることに留意されたい。しかしながら、エフェメリスのデータベースが空であるときは、アルマナックの計算を行って、何れの衛星が視界内であるかを判断することは、時間の無駄である。参照ネットワークにとって利用可能な全エフェメリスデータを要求することで十分であり、したがって、場合(B)の要求される計算を回避する。
【0077】
それにも関わらず、複合のSV_MASKをSMへ送ることができる。エフェメリスに関する前のSMのSV固有の要求が、少なくともT1か、またはもう数秒前であった場合、SMは、上記テーブルに記述されているPDDMとして特定されるSV固有のエフェメリスの要求をフォーマットし、送信することになる。他の変更は、MSのソフトウェアにおいて要求されない。冗長なデータはもはや送信されないので、送信されるデータを増加せずに、T1を大幅に低減できることに留意されたい。T1におけるこの低減は、エフェメリスの利用可能性および位置を判断するためのその正確さを向上するはずである。
【0078】
上述のMSに基づくモードシステムの実施形態の利点を示すために、例えば、常に10個の衛星が視界内にあり(時々、幾つかが高度マスクよりも低く下がり、他のものは昇ってくる)、エフェメリスデータが4時間(T2=4時間)の間有効であると仮定する。この場合、例えば、T1を1時間に設定して、従来のエフェメリス要求を使用すると、542バイト/時間を要求することになる。T1が最小値の30分に設定されると、1084バイト/時間が要求されることになる。この実施形態では、データのスループットは、136バイト/時間に低減される。T2が6時間に増加されると、データ要件は、さらに90バイト/時間まで降下する。この新しい方式では、エフェメリス・データベースを可能なかぎり最新に維持するというペナルティ(penalty)なしで、T1が低減されうる。T1はまた、過度に低く設定にされるべきでないこと、または応答メッセージ当りのエフェメリスデータが2つ以上のSVに相当しないであろうことにも留意されたい。したがって、定数T1およびT2は、システムの調査の一部として最適化されるべきである。例えば、通信事業者がパケット単位ごとに請求する(carriers charge on a per packet basis)か、および/または多数のSVに相当するエフェメリスデータを単一のパケットに記憶することができるかを考慮することによって、T1およびT2を最適化することができる。
【0079】
代替の特定のMSに基づくモードシステムの実施形態では、MSは、それが有効なエフェメリスデータを有している全SVのマスクを単純に計算して、マスクを反転し、それをSMに提供することができる。しかしながら、この代替の実施形態では、大きなWARNネットワークに関する問題が存在しうる。例えば、1つの問題は、正確さへのごくわずかな向上とともに、過剰な量のエフェメリスデータを得ることである。
【0080】
このように、支援型無線位置判断システムのデータメッセージング効率を向上するシステムおよび方法の実施形態が記載されてきたが、種々の変更、適合(adaptation)、およびそれらの代替の実施形態が行われ得ることが理解されるべきである。例えば、記載されている概念は、GPSシステム以外の、他の位置判断システムによって提供されるサービスを向上するために使用され得る。記載された概念は、このような位置判断システム内で、他のメッセージを拡張するために使用され得る。さらに加えて、検討された実施形態は、MS支援型モードシステムにおいて使用されるGPS感度支援メッセージ、MSに基づくモードシステムにおいて使用されるGPSエフェメリスメッセージ、および支援型無線位置判断システムにおいて使用されるGPS補助メッセージに適応可能であることが理解されるべきである
【図面の簡単な説明】
【0081】
【図1】無線通信システムを示すブロック図。
【図2】無線通信システムの動作の実施形態を示すブロック図。
【図3】方法の実施形態の例示的なステップを示すフローチャート。
【図4】別の方法の実施形態の例示的なステップを示すフローチャート。
【図5】さらに別の方法の実施形態の例示的なステップを示すフローチャート。
【技術分野】
【0001】
本発明は、一般に、位置判断システムおよび方法に関し、特に、支援型無線位置判断システムにおいて位置に基づくデータを効率的にメッセージングするシステムおよび方法に関する。
【背景技術】
【0002】
基準点の地理的位置を判断する(determining)システムは、当技術においてよく知られている。一般に使用されている位置判断システムは、全地球測位システム(Global Positioning System, GPS)である。GPSは、任意の所与の時間において、任意の地理的位置から、少なくとも4つのGPS衛星が水平線よりも上にあるように、間隔を置いて地球を周回している衛星のネットワークを含む。
【0003】
動作において、各GPS衛星は、その現在の位置および現在の時刻を連続的に同報通信する。地球上では、GPS受信機が、これらの同報通信信号に含まれている情報を使用して、その地理的位置を、その経度、緯度、および高度に関して計算することができる。GPS受信機は、一般に、視界内の4つ以上のGPS衛星から同報通信される信号をサーチし、収集する。次に、GPS受信機は、各同報通信信号の同報通信時間と受信時間との間の時間間隔を使用して、GPS受信機と4つ以上のGPS衛星の各々との間の距離を計算する。これらの距離の測定値は、同報通信信号において受信された位置および時間の情報と共に、GPS受信機がその地理的位置を計算することを可能にする。
【0004】
政府の規制と消費者の関心との両方が、無線電話のような無線デバイスにおける地理的位置の機能に対する要望を駆り立てた。したがって、GPS機能を無線デバイスに取り入れることが望ましい。しかしながら、無線デバイスは、ネットワーク容量およびバッテリ寿命の問題に対して極めてセンシティブ(sensitive)である。したがって、GPS機能を行うために無線デバイスに従来のGPS受信機を加えることは、無線デバイスにおいて位置の位置特定を行うことにおける十分な解決案ではない。
【0005】
したがって、ネットワーク容量およびデバイスのバッテリ寿命のための最低限の追加コストで、GPS機能を無線デバイスに提供する無線システムを有することが望ましい。
【0006】
ネットワーク容量およびデバイスのバッテリ寿命に対するコストを最小化する、GPS機能を無線デバイスに提供する1つのこのようなシステムは、“支援型無線位置判断システム”と呼ばれる。このシステムにおいて、位置判断エンティティ(position determination entity, PDE)は、一般に、複数の基地局と、少なくとも1つの無線デバイスまたは移動局(mobile station, MS)とを含む無線通信ネットワークの一部である。支援型無線位置判断システムでは、PDEは、MSがその位置を判断するのを補助するために使用される。システムは、また、無線通信ネットワークにおけるデバイスの接続性のアーキテクチャに関する標準規格に基づき得る。1つのこのような標準規格は、デュアルモードのスペクトラム拡散システムのための電気通信工業会の位置判断サービスの標準規格−アデンダム(Telecommunication Industry Association Position Determination Service Standard for Dual-Mode Spread Spectrum System-Addendum(TIA/EIA IS-801-1))である。
【0007】
具体的には、支援型無線位置判断システムの実施形態において、PDEは、無線通信ネットワークのカバレッジエリア全体に分散された静止GPS受信機のネットワークを介して複数のGPS衛星の位置を継続的に追跡する。GPS信号をサーチする前に、MSは、GPSの補助情報に対する要求を、ローカル基地局を介してPDEへ送信する。
【0008】
次に、PDEは、MSに、GPS衛星に関するエフェメリスデータ(ephemeris data)および感度支援データのような、補助情報を提供する。例えば、PDEは、ローカル基地局の識別を使用して、MSのおおよその位置特定(location)と、おそらく無線デバイスの視界内であるGPS衛星の識別および位置(position)とを判断し得る。このシステムの欠点は、MSに正確な(precise)位置特定情報を提供するためには、PDEからMSへ送られるデータが冗長であるか、あるいはそうでなければ、不要であり得ることである。冗長または不要なデータは、MSの地理的位置を決定(fix)するために必要とされる帯域幅要件および時間を増加させる。
【0009】
したがって、冗長および/または余分なデータを低減または削除し、それによって、無線デバイスの位置特定を決定するためのデータ帯域幅要件を低減し、時間を向上する一方で、それでもなお、無線デバイスが追加コストを負わされないことを保証する、支援型無線位置判断システムにおいてデバイスを相互接続するシステムおよび方法を提供することが望ましい。さらに加えて、このようなシステムおよび方法は、依然として、無線デバイスがその地理的位置を正確に判断するのに十分な測位(positioning)情報を提供することが望ましい。
【発明の概要】
【0010】
支援型無線位置判断システムにおいて無線デバイスのユーザに位置関係情報を提供するためのシステムおよび方法の実施形態が開示される。1つの実施形態では、支援型無線位置判断システムは、複数の基地局と、基地局と通信するように適応させられた移動電話、携帯情報端末、あるいはそれに類するもののような、複数の無線デバイスとを含む。
【0011】
無線位置判断システムは、無線デバイスの地理的位置を判断するシステムをさらに含む。この実施形態では、位置判断エンティティ(PDE)は、基地局に接続され、無線デバイスに衛星支援を提供するプロセシングサイト(processing site)としての役割を果たす。より具体的には、PDEと無線デバイスとの間でメッセージング通信し、冗長または余分なデータの送信を低減または削除するシステムおよび方法が提供される。加えて、システムおよび方法は、無線デバイスが追加のコストおよび重みを負わされないことと、無線デバイスが正確な位置特定情報を提供されることとを保証する。システムおよび方法の実施形態は、TIA/EIA IS−801の標準規格および/または他の標準規格に準拠する。
【0012】
さらなる実施形態では、無線位置判断システムは、PDEおよび無線デバイスを含み、PDEと無線デバイスとの間で情報をメッセージングするための方法が提供される。この方法は、第1の補助情報をPDEから無線通信リンクを介して受信することを含む。次に、冗長な衛星測位信号が、受信された第1の補助情報に基づいて判断される。次に、判断された冗長な衛星測位信号に基づいて、第2の補助情報に対する要求が、無線通信リンクを介してPDEへ送信される。要求された第2の補助情報は、PDEから無線通信リンクを介して受信される。次に、測位衛星からの必要な衛星測位信号が、受信された第2の補助情報に基づいて位置特定(located)される。次に、無線デバイスの地理的な位置が、位置特定された衛星の測位信号に基づいて判断される。
【0013】
方法の実施形態は、捕捉支援(Acquisition Assistance, AA)を得ることを含む。次に、AA情報に基づいて、複数の全地球測位システム(GPS)の衛星からの第1の複数の衛星測位信号に対する浅いサーチ(shallow search)が行われる。次に、複数のGPS衛星からの第1の複数の衛星測位信号が、浅いサーチを使用して、位置特定される。浅いサーチによって位置特定された第1の複数の衛星測位信号が、無線デバイスに関する許容可能な地理的位置決定を生じさせる(yield)ために十分な衛星測位信号を有するかどうかについての判断が行われる。
【0014】
第1の複数の衛星測位信号が、無線デバイスに関する許容可能な決定を生じさせるために十分な信号を有していない場合、複数のGPS衛星からの第2の複数の衛星測位信号を生じさせるための感度支援(sensitivity assistance, SA)情報に対する要求が送信される。第2の複数の衛星測位信号に関する要求されたSA情報を受信した後、深いサーチ(deep search)が、受信されたSA情報に基づいて、複数のGPS衛星からの第2の複数の衛星測位信号に対して行われる。
【0015】
次に、浅いサーチによって位置特定された第1の複数の衛星測位信号と、深いサーチによって位置特定された第2の複数の衛星測位信号とが、無線デバイスに関する許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有しているかどうかについての別の判断が行われる。十分な信号がある場合、複数のGPS衛星からの、位置特定された第1および第2の複数の衛星測位信号に基づいて、無線デバイスに関する地理的位置決定に対する判断が行われる。
【0016】
また別の方法の実施形態では、方法は、粗い(coarse)時間推定情報、粗い位置推定情報、および全地球測位システム(GPS)のアルマナック(almanac)情報を得ることを含む。次に、測位衛星の第1のエフェメリス(ephemeris)が検査され、測位衛星のための第1のエフェメリスの状態情報が第1の時間の閾値よりも低いかどうかを判断する。
【0017】
次に、第1のエフェメリスの状態が第1の閾値以上である場合、測位衛星が、無線デバイスの可視水平線(viewable horizon)よりも上にあるかどうかについて、判断が行われる。次に、測位衛星が、前記無線デバイスの可視水平線よりも上にある場合、位置判断エンティティ(PDE)から測位衛星の第2のエフェメリスを要求するマスクが行われる。次に、測位衛星の第2のエフェメリスのためのマスクを有する要求が、PDEへ送信される。次に、無線デバイスがその地理的位置を判断するために、PDEは第2のエフェメリスを無線デバイスに送信する。
【0018】
図面において、構成要素は、必ずしも一定の比例に応じていない。同様の参照番号は、異なる図面における同様または類似の部分を指す。
【詳細な説明】
【0019】
位置に関係する情報を、無線デバイスまたは移動局(MS)のユーザに提供するシステムおよび方法が示されている。より具体的には、冗長なデータを低減または削除する、支援型無線位置判断システムにおいてデバイスを相互接続するシステムおよび方法が提供される。加えて、システムおよび方法は、支援型無線位置判断システムにおける無線デバイスが、追加のコストおよび重みを負わさないこと、および無線デバイスが正確な位置特定情報を提供されることを保証する。さらに、システムおよび方法の実施形態は、TIA/EIA IS−801の標準規格および/または他の標準規格に準拠し得る。
【0020】
ある特定の実施形態によって思い描かれる支援型無線位置判断システムにおいて、静止GPS受信機を有する基地局は、既知の位置に維持されている。この基地局は、そのGPSで計算された位置をその既知の位置と比較して、そのGPSで計算された位置における検出された誤差を修正するために使用できるGPS衛星のためのディファレンシャル(differential)修正データを導出する。GPSで計算された位置における誤差は、大気および対流圏の状態、衛星データにおける誤差、受信誤差、および他の誤差の原因によって引き起こされうる。ディファレンシャル修正データは、基地局のカバレッジエリアにおけるGPS機能を有する無線または移動デバイスへ送信され得る。GPSの位置の計算においてディファレンシャル修正データを使用することによって、GPS受信機の地理的位置は、追加された精度で判断されうる。
【0021】
加えて、無線デバイスあるいはMSは、視界内にあるGPS衛星からの同報通信信号を位置特定するときに移動デバイスを支援する位置判断エンティティ(PDE)を介して、補助情報をさらに受信し得る。PDEは、視界内にあるGPS衛星の位置を継続的に追跡して、これらのGPS衛星の識別および位置を、同報通信信号の関連するドップラー周波数のような他の補助情報と共に、基地局のカバレッジエリア内の無線デバイスへ送信する。補助情報は、無線デバイスに、視界内のGPS衛星のおおよその位置特定を知らせ、それによって、要求されるサーチウィンドウを狭め、GPSの同報通信信号を捕捉するのに必要とされる時間量を著しく低減させる。大抵の無線デバイスの移動GPS機構は、正確なGPS衛星の位置情報を欠き、したがって、時間および周波数において衛星を探すための場所についての情報を欠くので、支援なしでは、ほんの4つのGPS衛星の同報通信信号でさえもサーチするプロセスは時間がかかり得る。
【0022】
具体的には、1つの実施形態において、GPS信号の捕捉時間(acquisition time)は、位置判断エンティティ(PDE)を使用して低減される。PDEは、一般に、複数の基地局と少なくとも1つの移動局(MS)とを含む無線通信ネットワークの一部である。PDEは、無線通信ネットワークのカバレッジエリアにわたって分散された静止GPS受信機のネットワークを介してGPS衛星の位置を継続的に追跡する。GPS信号をサーチする前に、MSは、GPS補助情報に対する要求を、ローカル基地局を介してPDEへ送信する。
【0023】
次に、PDEは、MSによって要求された補助情報を送信する。例えば、ローカル基地局の識別を使用して、PDEは、MSのおおよその位置特定を判断して、MSに、おそらくは(likely)視界内にあるGPS衛星の識別および位置と、各識別されたGPS信号の予測ドップラーシフトとを提供し得る。一般に、PDEによってまとめられる(compile)実時間情報は、またMSにおいて使用および記憶され得る標準のアルマナックデータよりも、より正確であり、しばしば、GPS信号のより短い捕捉時間をもたらしうる。
【0024】
GPS信号の捕捉時間は、符号分割多元接続(code division multiple access, CDMA)ネットワークにおいて、さらに一層低減されることができる。CDMAネットワークでは、各基地局は、GPS時間と同期され、かつタイミングビーコンをそのカバレッジエリア内の移動デバイスへ送信するクロックを維持する。移動デバイスは、タイミングビーコンを使用して、それらの内部クロックを基地局のクロックと同期させるが、この同期化は、移動デバイスに達する信号における伝搬遅延の影響を受けやすい(subject to)。
【0025】
PDEおよび静止GPS受信機もまた、GPS時間と同期するクロックを維持する。動作中、静止GPS受信機は、各PNフレーム(例えば、1023チップのPN符号系列)の始まりが、静止GPS受信機によって受信される時間を追跡する。PDEは、視界内のGPS衛星の識別を、各GPS信号の関連するドップラーシフトおよび関連するPNフレームの受信時間と共に、移動デバイスへ送信する。移動デバイスは、この補助情報を使用して、視界内のGPS衛星、関連するGPS信号の予測受信周波数、および関連するPNフレームが静止GPS受信機において受信されることが予測される時間を識別し得る。例えば、移動デバイスは、受信された補助情報を使用して、その生成された1023チップのPN符号系列を、受信されたGPS信号からの整合する1023チップ系列と迅速に整列または相関させ(例えば、信号をコヒーレントに統合し(coherent integrating))、受信されたGPS信号を検出するためのその捕捉時間を向上する。
【0026】
図1は、無線通信システム10の実施形態を示しており、この中では、セルベース(cell-based)の通信システムが、複数の基地局12と複数の無線デバイス14とを含む。各基地局12は、基地局12によってサービスされる地域的カバレッジエリアを定めている、関連するセル16を有する。セル16のうちの1つの内に位置する各無線デバイス14は、符号分割多元接続(CDMA)のような所定のディジタル通信プロトコルにしたがって、データパケットを交換することによって、関連する基地局12と通信する。
【0027】
無線デバイス14は、移動電話、携帯情報端末(personal digital assistant, PDA)、乗物のナビゲーションシステム、ポータブルコンピュータ、あるいはそれに類するものを含む、無線通信リンクによって基地局12と通信することが可能な任意のデバイスでありうる。移動交換局(mobile switching center, MSC)18は、呼の設定、無線デバイス間の呼のルーティング、および無線デバイスと、公衆交換電話網(public switched telephone network, PSTN)またはインターネットのような少なくとも1つの通信ネットワークとの間の呼のルーティングを含む、セル16における無線通信を管理する。無線通信システム10は、複数のMSCを含むことができ、それぞれが複数のセル16を管理する。
【0028】
別の実施形態では、無線通信システムは、無線デバイスから、および無線デバイスへデータを送信するように適応させられた任意の無線システムであり得る。このシステムは、地上波(terrestrial)または衛星ベースのセルラ通信システム、例えば、セルラ電話システム、パーソナル通信システム、専用移動無線システム、高度移動電話システム(Advanced Mobile Phone System)、ページャシステム、無線パケットデータシステム、あるいはそれに類するものを含み得る。
【0029】
無線通信システム10は、少なくとも1つの無線デバイス(または、MS)14の地理的位置を判断するようにさらに適応させられている。1つの実施形態では、全地球測位システム(GPS)のような衛星測位システムが、位置の判断に使用される。各MSまたは無線デバイス14は、ローカル基地局12と通信するため、および周回しているGPS衛星(または、SV)から送信されたGPS信号を受信するための少なくとも1つのアンテナ20を含む。各基地局12は、MS14と通信するための少なくとも1つのアンテナ22を含んでいる。位置判断エンティティ(PDE)24は、MSC18を介して基地局12に接続され、MS14を、視界内のGPS衛星を位置特定すること、およびMS14のそれぞれの地理的位置を計算することにおいて支援する。MS14は、データバーストメッセージング(data burst messaging, DBM)を介して、またはTCP/IPを介しての何れかによって、PDE24と通信することができる。DBMの場合は、非常にインフラストラクチャに依存し、TCP/IPの場合は、MSC18がIWFまたはPDSNに接続されて、PDE24とMS14との間にTCP/IP接続を提供する。
【0030】
より具体的な実施形態では、PDE24は、GPSアンテナ28を介してGPS信号を受信する少なくとも1つの静止GPS受信機26を使用して、GPS衛星の位置を追跡するコンピュータシステムである。無線通信システム10は、好ましくは、そのカバレッジエリア全体にわたって位置するGPS受信機26のネットワークを含む。1つの実施形態では、各基地局12は、基地局のカバレッジエリア16内の無線デバイス14に支援を提供するために、PDE24および静止GPS受信機26を含む。
【0031】
ここで、無線デバイスの地理的位置を判断するプロセスが、図2のブロック図を参照して説明される。PDE132は、基準ネットワーク130を介して、複数のGPS衛星140の位置を継続的に追跡し、視界内のGPS衛星140の各々についての現在の情報を維持する。すなわち、PDE132は、アルマナック(almanac)、エフェメリス(ephemeris)、およびディファレンシャル修正情報をPDE132に提供する、複数のGPS受信機140を有する、広域基準ネットワークのような基準ネットワーク130に接続される。次に、補助情報またはデータは、DBMの場合は、PDE132からMSC134へ、あるいは、PDSN(図示せず)を介してMSC134へ流れる。次に、補助データは、MSC134から、基地局112、例えば、BSC/BTSへ、そして最終的に、無線デバイス114へ流れる。加えて、基地局は、GPS受信機145を有し得る。1つの実施形態では、GPS受信機145は、CDMA送信信号の時間同期化のためのものであり、PDE132によってアクセス可能ではない。
【0032】
無線デバイス114の地理的位置を判断するプロセスは、無線デバイス114のユーザによって開始されることができる。代替の実施形態では、位置判断プロセスはまた、基地局112、PDE132、MSC134、または図1に示されている無線通信システム10の一部である、あるいはそれに接続された別のデバイスまたはエンティティによって開始され得る。位置判断プロセスが開始された後、無線デバイス114は、GPS補助情報を、PDE132から基地局112を介して要求する。PDE132は、GPS受信機130の視界内にあるGPS衛星140を識別し、GPS受信機130に関して、特定のGPS時間における、識別されたGPS衛星140の各々についての現在の位置、ドップラー周波数、および擬似距離(pseudoranges)を判断する。このGPS補助情報は、基地局112を介して無線デバイス114へ送信される。
【0033】
無線デバイス114は基地局112と通信状態にあり、したがってその最も近くに(proximate to)あるので、このGPS補助情報は、無線デバイスに114に、視界内のGPS衛星140のおおよその位置を提供し、GPS衛星信号のサーチ範囲を著しく低減させることができる。いったん、GPS衛星信号が捕捉されると、無線デバイス114の地理的位置は、当技術において周知の方法にしたがって判断され得る。
【0034】
既に記載したように、ある特定の実施形態は、またTIA/EIA IS−801とも準拠する、支援型無線位置判断システムに適用可能である。TIA/EIA IS−801−1の標準規格に準拠する支援型無線位置システムでは、幾つかの不備が、余分なデータの送信を要求する。これらの不要な送信は、セッション時間を増加させ、エンドユーザに、通信事業者(carrier)による不必要なデータサービス料金を負担させる。したがって、1つの実施形態は、冗長なデータを低減または削除する支援型無線位置判断システムにおいてデバイスを相互接続するシステムおよび方法を提供する。この実施形態は、TIA/EIA IS−801−1の不備を、この標準規格の将来の改正において、あるいはTIA/EIA IS−801−1の標準規格に準拠するカスタム(custom)、あるいはプロプライエタリ(proprietary)、のメッセージを使用して、緩和するために適用可能であり得る。
【0035】
しかしながら、位置判断システムにおいて送信される冗長な、または、そうでなければ不要なデータを低減することにおいて提示される課題は、どのデータが本当に冗長であり、また、どのデータがそうでなく、実際に無線または移動デバイスの位置特定情報を判断するための正確さに貢献できるかを判断することである。例えば、4つのGPS衛星140からのGPS衛星信号が、無線デバイス114の地理的位置を判断するのに使用されることができるが、より多くのGPS衛星140からのGPS衛星信号は、より一層正確な地理的位置を提供するであろう。すなわち、GPS衛星信号を提供するのに使用される視界内のGPS衛星140がより多くなると、無線デバイス114の地理的位置をより正確に判断することができる。したがって、実施形態において、支援型無線位置判断システム内の無線デバイスが、無線デバイスの位置特定情報を正確に判断することについての全ての必要な情報を提供されることを保証するシステムおよび方法が提供される。
【0036】
特定の実施形態において、補助情報または信号の2つの特定のメッセージタイプ(例えば、図2に示されているPDE132から無線デバイス114へ送られるメッセージまたは補助データ)に焦点を合わせたシステムおよび方法が展開される。2つのメッセージタイプ、すなわち、MS支援型動作モード(MS-Assisted mode of operation)において使用される感度支援情報と、MSに基づく動作モード(MS-Based mode of operation)において使用されるGPSエフェメリス情報とは、メッセージのサイズおよび送信の周波数に関して最も問題になり得る。MS支援型モードでは、PDEが補助データをMSへ送って、1回の試み(single-shot)の位置決定を行い、位置計算はPDE内で行われる。MSに基づくモードでは、最終的に、エフェメリスデータのリフレッシュが要求されるまで、PDEは、エフェメリスおよびアルマナック情報をMSへ送り、MSが、MS(例えば、ハンドセット)内で多数の位置決定を行うことを可能にする。したがって、実施形態は、支援型無線位置判断システムのMS支援型モードとMSに基づくモードとの両方で適用可能である。すなわち、説明された実施形態は、MSまたは移動体が、PDEから感度支援(SA)データおよびGPSエフェメリスデータを要求することができる支援型無線位置判断システム内で実施されることができる。PDEは、SAデータに対する要求に応答して、SA提供(Provide SA)メッセージを送信し、GPSエフェメリスデータに対する要求に応答して、エフェメリス提供(Provide Ephemeris)メッセージを送信する。
【0037】
例えば、MSに基づく設計のシステムでは、移動体は、エフェメリスデータを頻繁に要求して、水平線(または、設定された高度マスク)の上方にまさに昇っている衛星に関する情報を得る。これら要求は、頻繁に行われ、移動体が、サービスの外(すなわち、CDMAのカバレッジの外)へ出て行く(drift)場合に(このような場合は、移動体は新しいエフェメリスをもはや受信することができない)、移動体のエフェメリス・データベースが可能な限り完全になることを保証する。この実施の大きな欠点は、移動体が、以前に視界内にあった衛星に関する幾つかの冗長なエフェメリスの更新を受信することである。アルマナックが移動体において利用可能(available)であり、移動体の位置のおおまかな(crude)推定値が利用可能であり、移動体がシステム時間の基準を有していると仮定すると、何れの衛星が設定された高度マスクの上方に昇っている(または、間もなく昇ることになる)かを予想することができる。したがって、1つの実施形態では、移動体が、衛星の特定のセットに関するGPSのエフェメリスを要求することを可能にするために、新しい要求メッセージが展開される(developed)。
【0038】
加えて、MS支援型設計のシステムでは、移動体からの要求に応答して、PDEによって提供されるSA提供(Provide SA)メッセージは、PDEの基準ネットワーク(例えば、PDEの広域基準ネットワークすなわちWARN(Wide Area Reference Network, WARN))の視界内の全衛星の感度ビット(sensitivity bit)を含み得る。SAビットは、到来する衛星信号に対するビット変調を取り除くために使用され、その結果、20ミリ秒のビット継続期間よりも長いコヒーレントな統合が行われ得ることに留意されたい。より長いコヒーレントな統合は、向上された感度をもたらす。PDEのWARNにおいて、感度ビットは、510感度ビットに加えて、各々のこのような衛星または宇宙ビークル(Space Vehicle, SV)に含まれる幾つかのオーバーヘッドフィールドを含む。しかしながら、MSは、多くの場合、すべての衛星またはSVに関して感度ビットを必要とするわけではない。例えば、MSまたは移動体が、1つのSVへの(例えば、窓を介しての)見通し線(line of sight)と、別のSVへの(例えば、天井/屋根を介しての)遮られた経路とを有すると仮定する。移動体は、SAなしに、第1のSVを検出でき、なおかつ、第2のSVを検出するためにSAを必要とする。したがって、別の実施形態では、移動体が衛星の特定のセットに関するSAを要求することを可能にする、新しい要求メッセージが展開される。しかしながら、感度支援に現在使用されている要求メッセージは、変更パラメータをもたないことがある。したがって、さらなる実施形態では、PDEは、複数のデフォルト方式を使用して、SAビットストリームの開始時間のみならず、MSへ送るビット数をも調節する。
【0039】
さらに以下に説明されるように、支援型無線位置判断システム内の他の機能および特徴が達成され得る。例えば、位置判断の正確さが向上されることができ、またはMSの位置を決定するための時間のような、位置特定の判断に必要とされる時間が低減されることができる。
【0040】
例示的な実施形態では、既存のTIA/EIA IS−801−1標準規格内のカスタム(custom)/プロプライエタリ(proprietary)のメッセージのアプローチが展開される。あるいは、TIA/EIA IS−801の将来のバージョンにおける変更された非プロプライエタリ(non-proprietary)メッセージが使用されうる。非プロプライエタリのメッセージのアプローチの場合、既存のSAおよびエフェメリスの要求とは異なる新しい要求の要素が、標準規格に加えられることになるであろう。しかしながら、カスタム/プロプライエタリのアプローチでは、追加のフィールドが、既存のSAおよびエフェメリス要求メッセージの最後に加えられることになることになるであろう。
【0041】
位置判断データメッセージ(Position Determination Data Message, PDDM)
具体的には、TIA/EIA IS−801−1の標準規格に準拠するプロプライエタリの要求メッセージのアプローチでは、MSまたは移動体は、SV固有のSAまたはSV固有のエフェメリスを要求することができる。SV固有のSAまたはエフェメリスを要求するとき、移動体は、位置判断データメッセージ(PDDM)をフォーマットし、ただし、PD_MSG_TYPEのヘッダフィールドが192(16進法においてC0)に設定される。これは、それがプロプライエタリのメッセージであることを識別する。このような要求は、同じPDDMにおける他の従来のTIA/EIA IS−801−1の要求と共にパッケージ化されるべきではない。さらに加えて、保守的であるために、プロプライエタリおよび従来のPDDMは、別々のパケット/データバーストにおいて送られることが好ましい。
【0042】
より具体的な実施形態のPDDMにおける、上述されたMS要求要素および対応するPDE応答要素の詳細が、以下にさらに説明される。
【0043】
1.SV固有のGPS感度支援
a.要求
SVのGPS感度支援要求(Request SV GPS Sensitivity Assistance)メッセージは、次のレコードを含む。
【表1】
【0044】
SV_MASK−SVのビットマスク。このフィールドは、感度支援が要求されているGPS衛星のサブセットを特定する。最下位ビット(ビット0)は、SV PRN 1を表わす。最上位ビット(ビット31)は、SV PRN 32を表わす。‘1’のビット値は、データが要求されていることを示す。
【0045】
MIN_REF_BIT_NUM−最小の要求される参照ビット数。このパラメータは、 “参照ビット”と呼ばれる1500ビットのGPSフレーム内の特定のビット、すなわち、対応する応答メッセージにおいて移動体に戻されるNAV_MSG_BITSの前半の最後のビットの位置を伝える。移動体は、このフィールドを、0ないし1499の範囲における最小参照ビットの要求された位置に設定することになっている。このフィールドは、ネットワークの遅延がないと仮定して、感度支援が移動体において有益であり得る最も早い時間を示すのに使用されるべきである。感度支援提供(Provide Sensitivity Assistance)のメッセージにおいてREF_BIT_NUMを設定するとき、PDEは、要求された最小参照ビット数の最大値と、(ネットワークの遅延においてモデル化されている)REF_BIT_NUMを設定するための内部アルゴリズムの結果とを選択することになっている。その代わりに、移動体が、参照ビット数を指定したくないときは、このフィールドは、2047に設定されることになっており、PDEは、対応する応答メッセージにおけるREF_BIT_NUMを選択するためのデフォルトのアルゴリズムを使用するであろう。
【0046】
MIN_DR_SIZE−SVごとの最小の要求されるデータレコードのサイズ。各衛星に対して要求される、1ないし255の範囲における2ビットの対の数。例えば、255の値は、SVごとに510 SAビットが要求されていることを示す。このフィールドは、使用に必要とされるビット数を示し、ネットワーク遅延における変化を反映するための埋め込みを含まない。PDEは、このフィールドによって示されたビット数を最小値で送ることになっているが、ネットワークの遅延における変化の関数としてビット数を増加し得る(合計で510ビットを超えない)。
【0047】
b.応答
PDEは、上述のプロプライエタリの要求を受信すると、請求されていない(unsolicited)(TIA/EIA IS−801−1)のGPS感度支援提供(Provide GPS Sensitivity Assistance)のメッセージで応答する。しかしながら、この応答メッセージにおいて、PDEは、要求メッセージのSV_MASKフィールドにおいて要求されていないいずれのSVのデータを取り除く。MIN_REF_BIT_NUMが2047に設定される場合、PDEは、デフォルトのアルゴリズムを使用して、応答メッセージにおけるMIN_REF_BIT_NUMを設定する(この結果を、DEFAULT_REF_BIT_NUMと呼ぶ)。その代わりに、MIN_REF_BIT_NUMが、0ないし1499の範囲内である場合、PDEは、応答メッセージ内のREF_BIT_NUMを、MAX(DEFAULT_REF_BIT_NUM,MIN_REF_BIT_NUM)に設定する。SAの応答におけるビット数について、PDEは、少なくともMIN_DR_SIZEのビットの対で応答する。PDEは、さらに、この値を埋め込み、ネットワーク遅延における変化の責任を取る(例えば、最大遅延−最小遅延を取り、ビット数を判断し、これを使用して、埋め込む)。SAの応答メッセージにおけるDR_SIZEのフィールドは、要求されたMIN_DR_SIZEおよび埋め込み数を反映すべきである。PDEは、いずれの要求されたSVについてのいずれのSAのデータを有していない場合、またはそれが要求に応じることができない何か他のある理由があるとき、プロプライエタリの拒絶メッセージを送る。
【0048】
2.SV固有のGPSエフェメリス
a.要求
SVのGPSエフェメリスを要求(Request SV GPS Ephemeris)のメッセージは、次のレコードを含んでいる。
【表2】
【0049】
AB_PAR_REQ−要求されるアルファ/ベータパラメータ(Alpha/Beta parameter requested)。アルファ/ベータパラメータが要求される場合、移動局はこのフィールドを‘1’に設定し、そうでないときは、移動局はこのフィールドを‘0’に設定することになっている。
【0050】
SV_MASK−SVビットのマスク(SV bit mask)。このフィールドは、エフェメリスが要求されているGPS衛星のサブセットを特定する。最下位ビット(ビット0)は、SV PRN 1を表す。最上位ビット(ビット31)は、SV PRN 32を表す。‘1’のビット値は、データが要求されていることを示す。
【0051】
b.応答
PDEは、上述のカスタムの要求を受信すると、請求されていない(TIA/EIA IS−801−1)のGPSエフェメリスを要求(Provide GPS Ephemeris)のメッセージで応答する。しかしながら、この応答メッセージにおいて、PDEは、要求メッセージのSV_MASKフィールドにおいて要求されていないいずれのSVのデータを取り除く。PDEが、いずれの要求されたSVのいずれのエフェメリスデータを有していない場合、またはそれが要求に応じることができない何か他のある理由があるときは、拒絶メッセージを送る。
【0052】
加えて、1つの実施形態では、上述の要求が、SAおよびエフェメリスに対する既存の要求メッセージに適用されて、レガシー(legacy)のPDEへ送られる場合、PDEは、既存の要求に加えられた新しいフィールドを無視して、単に、従来(conventional)の応答をレガシーメッセージと共に送ることができる。さらに加えて、MSの実施形態は、最初にカスタムの要求メッセージを送り、次に、メッセージが拒絶された場合、レガシーの要求メッセージを送るように構成され得る(これは、MSがネットワーク、すなわち多くのPDEを支援していて、それらの一部がレガシーのPDEであり得るネットワーク間でローミングしているときに、とくに有益であり得る)。さらに、実施形態は、移動体および/またはPDEのためのソフトウェアプログラム内で実施されることができる。
【0053】
SV固有のSA
特定のMS支援型モードシステムでは、このMS支援型システムにおけるMSは、次の特徴で構成される。(MSにおいてイネーブルされる場合の)特徴は、GPSサーチスケジューラおよびセッションマネージャ(Session Manager, SM)を含む。GPSスケジューラは、深いモードサーチ(deep mode search)(すなわち、SAデータを要求するサーチ)が要求されるときを判断し、次に、深いモード(したがって、SAデータ)を要求している特定のSVのマスク(例えば、SV PRN)を計算する。次に、マスクは、MSのSMへ送られる。次に、SMは、(例えば、MSが要求する要素についてのテーブルにおいて特定されているメッセージのような)PDDMへの新しい要求をフォーマットする。1つの実施形態では、後方互換性のために、PDDMのMIN_REF_BIT_NUMのフィールドは、2047に設定されることができ、MIN_DR_SIZEのフィールドは、255に設定されることができる。別の実施形態では、これらのフィールドはまた、おそらくは、適応可能なやり方で最適化され、性能をさらに向上することができる。なお別の実施形態では、SMは、何れの要求がカスタマイズされる必要があるかを決める。
【0054】
加えて、DBMの実施は、TCP/IPの移送よりも実質的に悪いスループットを示す傾向があるので、上述のMSの実施形態は、DBMの移送を使用する無線システムにとってとくに有益であり得る。例えば、従来のDBMの無線ネットワークでは、最初のSAの要求からSAの応答の受信を完了するまでのターンアラウンド時間は、平均して約6秒である。しかしながら、ターンアラウンド時間に対する向上の量は、MSが遭遇し得る異なる信号状態に依存する。(例えば、晴天、遮られていないときは)全SVが浅いサーチモードでMSによって見付けられ、したがって、深いモードは不要あり得る。このような場合は、SAは要求されないであろう。同様に、奥行きのある屋内のシナリオでは、浅いサーチでは、SVは見付けられず、したがって、依然として、全SVに対してSAデータが要求され得る。しかしながら、幾つかのSVが、それらが深いサーチを要求しない十分に強い信号をもつ二義的なシナリオがある。このような場合は、SAデータは、SVのサブセットのみに対して要求され、この変化は、余分のデータの送信を著しく低減させるであろう。
【0055】
ここで図3を参照すると、SV固有の感度支援(Sensitivity Assistance, SA)を要求する例示的な方法300が、図3に示されている。ステップ302において、方法300は、捕捉支援(Acquisition Assistance, AA)を得て、全SVに対して浅いサーチを行う。次に、方法300は、ステップ304に移り、早期終了アルゴリズム(early exit algorism)を行い、浅いサーチが、(例えば、MSの)許容可能な位置特定の決定を生じさせるのに十分に良好な品質測定値を生成した(produced)かどうかを判断する。浅いサーチが許容可能な決定を提供すると判断されると、方法300は、ステップ312に移り、全ての検出されたSVを報告する。浅いサーチが、許容可能な決定を提供しないと判断されると、方法300は、ステップ308に移り、感度支援に対する要求をサーバ(例えば、PDE)へ送る。ステップ308において、要求は、(例えば、SV固有のSAを要求して)浅いサーチで検出されなかったSVのSAデータのみを求める。次に、方法300は、ステップ310に移り、SAデータを使用して、深いモードサーチを行う。図3に示されている方法300は、支援型無線位置判断システムにおいて種々の機構によって行われることができ、他の既知の位置判断ステップを含み得る。
【0056】
特に、より具体的な第1のMS支援型モードシステムの実施形態では、SAデータに対する従来の要求は、新しいプロプライエタリの要求によって置き換えられる。サーチスケジューラにおいて、浅いモード(shallow mode)が完了した後で、早期終了アルゴリズムが実行される。深いモードサーチが必要であると判断され、深いモードサーチを行うのに十分な“時間”がある場合には(この計算は、セッションのQoS/PRQの設定に基づき得る)、サーチスケジューラは、SV固有のSA要求メッセージをフォーマットする。ある特定の実施形態では、前のSAデータが期限切れになると、SAデータを再び要求する能力(capability)があるので、アルゴリズムは、深いモードで既にサーチされたSVの場合を扱うべきである。
【0057】
SVのマスクを判断するために、実施形態にしたがって、サーチスケジューラは、コンピュータ読み出し可能な媒体に埋め込まれ得る次の擬似関数コードによって表わされる例示的な機能のセットを行う。
【表3】
【0058】
設定(MIN_REF_BIT_NUMおよびMIN_DR_SIZE)に基づいて、PDEは、それが従来送っていたものと同一であるが、SVの幾つかが取り除かれたGPSのSAメッセージで応答すべきである。PDEが、幾つかの要求されたSVのSAビットを有していない場合、PDEは、応答メッセージにおいて、それらのSVも同様に除外すべきである。PDEはまた、オプションで、順方向リンクメッセージの時間タグを使用して、ネットワークの遅延をモデル化することができる。
【0059】
上述の特定の第1のMS支援型モードシステムの実施形態において、データの帯域幅を確保(save)することができる3つの場合がある。
【0060】
1.浅いモードにおいて、強い測定値が既に見付かっている場合、
2.SAデータを再要求する、および深いモードにおいて、SVのサーチングが既に行われた場合、および、
3.捕捉支援(Acquisition Assistance, AA)データになかった、新しく昇った衛星のSAデータを必要としない場合。
【0061】
理想的には、上述の実施形態は、屋外の、水平線の遮られた(horizon-obstructed)場合、屋外の、遮られた場合、および良好な屋内の場合のいずれにおいて、従来のシステムよりも、正確さが失われず、決定時間が向上しているべきである。水平線の遮られた場合では、MSは、良好な視界、すなわち360°、を有するが、木または建物のような障害物が存在し、したがって、幾つかのSVが(高度において)約5°ないし15°の角度では不可視である。屋外の、遮られた場合では、MS、例えば、ハンドセットは、いくらかの遮られていないクリアな空の視界と、高い度合いの完全な遮断とを有し、理想的には、高いコンクリートおよび鋼鉄製の建物から1ないし2メートルである。良好な屋内の場合では、ハンドセットは、見通し線上に2ないし3つの衛星が一般に視界内にあるように、窓の近くに置かれるべきである。
【0062】
ここで図4を参照すると、SV固有の感度支援(SA)を要求するための、例示的な方法400のような、別の方法が提供される。ステップ402では、方法400は、捕捉支援(AA)を得て、全SVに対して浅いサーチを行う。次に、方法400は、ステップ404に移り、早期終了アルゴリズムを行い、浅いサーチが、許容可能なMSの位置特定の決定を生じさせるのに十分に良好な品質測定値を生成したかどうかを判断する。浅いサーチが、許容可能な決定を提供すると判断された場合、方法400は、ステップ416に移り、全ての検出されたSVを報告する。浅いサーチが許容可能な決定を提供しないと判断された場合、方法400は、ステップ408に移り、浅いサーチにおいて検出されたSVを除外し、さらに、サーチャの容量の限度に基づいてSVを除外する。
【0063】
ステップ408はまた、サーチャ(例えば、MSにおけるサーチャ)の1つの使用(usage)においてサーチされることができるSVの残りのサブセットを判断する。次に、方法400は、ステップ410に移り、SAデータに対する要求を、サーバ(例えば、PDE)へ送る。ステップ410において、(例えば、SV固有のSAを要求する)サーチャの1つの使用においてサーチされることができるSVの残りのサブセットのSAデータに対する要求のみが求められる。その後、方法400は、決定ステップ414に移り、深いモードでサーチされる残りのSVがあるかどうかを判断する。深いモードでサーチされる残りのSVがない場合、方法400は、ステップ416に移り、全ての検出されたSVを報告する。深いモードでサーチされる残りのSVがあるときは、方法400はステップ408に戻る。
【0064】
特に、より具体的な第2のMS支援型モードシステムの実施形態では、SAデータに対する従来の要求は、この新しいプロプライエタリの要求によって置き換えられる。この実施形態において、サーチスケジューラは、浅いモードサーチが完了した後で、早期終了アルゴリズムを実行する。深いモードサーチが要求され、深いモードの計算を行うのに十分な“時間”があると判断された場合、サーチスケジューラは、SV固有のSA要求メッセージをフォーマットする。
【0065】
この実施形態と、特定の第1のMS支援型モードシステムの実施形態との主な相違は、(深いサーチを要求する全SVとは対照的に)第2の実施形態が、実施形態の計画が、到来する(upcoming)サーチの呼び出しでサーチする衛星のデータのみを要求することである。第2の相違は、第2の実施形態は10秒未満のデータを要求することができ、要求されるデータ量は、知的に適応させられる。したがって、この実施形態は、各深いモードサーチの前に、一度SAデータを要求することになる。実施形態はまた、各深いモードサーチャの呼び出しの後に、早期終了アルゴリズムを行って、それまでに得られた測定値の数値(number)が、十分な基準を満たしているかどうかを確かめ得る。
【0066】
したがって、より具体的な第2のMS支援型モードシステムの実施形態のサーチスケジューラは、実施形態にしたがって、コンピュータ読み出し可能媒体に埋め込まれ得る次の擬似関数コードによって表わされる例示的な機能のセットを行うべきである。
【表4】
【0067】
この実施形態では、(より具体的な第1のMS支援型モードシステムの実施形態における単に3つの場合とは対照的に)データ帯域幅を次に示すように確保することができる第4の場合がある。
【0068】
1.浅いモードにおいて、強い測定値が既に見付かっている場合、
2.SAデータを再要求する、および深いモードにおいて、SVのサーチングが既に行われた場合、
3.AAデータになかった、新しく昇った衛星のSAデータを必要としない場合、および
【0069】
4.SAデータを要求する、および次のGPSのサーチャの呼び出しにおいて、サーチャがSVに到達できない場合。
【0070】
SV固有のエフェメリス
ここで図5を参照すると、SV固有のエフェメリスを要求する例示的な方法700が提供される。ステップ702において、方法700は、全SVのための粗い時間推定値、粗い移動体の位置推定値、およびGPS衛星のアルマナックデータを得る。粗い時間推定値は、CDMAの時間から求めることができる。粗い位置推定値は、現在の方法を使用している無線デバイスの前の位置の解に基づくことができる。GPS衛星のアルマナックは、無線デバイスに既に記憶されているか、またはダウンロードされていることが可能である。決定706において、方法700は、複数のSV(例えば、32個のSV)の中のSV(例えば、J番目のSV)のエフェメリスデータを検査し、SVのエフェメリスが“新しい(fresh)”かどうかを判断する。エフェメリスデータの年齢(age)が、エフェメリスが一定であり続け、変化しない時間量、および最低限の正確さの要件を維持する時間量よりも低いときは、エフェメリスデータは“新しい”と見なされる。エフェメリスデータの年齢は、例えば、有効期間の時間または最後のリフレッシュメントの時間を有する状態(status)であり得る。SV(例えば、J番目のSV)のエフェメリスが、“新しい”ものでないと判断された場合、方法は、ステップ704へループを戻って、複数のSVの中の別のSVのエフェメリスデータを検査する。
【0071】
SVのエフェメリスデータが、“新しい”ものでないと判断されるか、またはいずれのエフェメリスデータも、J番目のSVのために利用可能でない場合、方法は、ステップ708に移る。ステップ708において、SVが、SVのための粗い時間、位置、およびアルマナックのパラメータに基づいて、可視水平線、例えば、この方法を使用している無線デバイスの可視水平線よりも上にあるかどうかが判断される。SVが可視であると判断された場合、方法700は、ステップ712に移り、SVのPRNのマスクのようなマスクにおける適切なビットを設定し、SVのエフェメリスを要求する。SVが視界内にないと判断された場合、方法は、ステップ704にループして戻り、別のSVのエフェメリスデータを検査する。加えて、複数のSVの中の全てではないSVが、マスクされるか、または視界内にあると判断された場合、方法は、ステップ704にループして戻る。
【0072】
特定のMSに基づくモードシステムの実施形態では、エフェメリスの要求間における最小の間隔を保証するために課される時間の閾値(T1)にしたがうことを条件として、MSに基づくモードシステムにおけるMSは、決定が要求されるときは必ず、エフェメリスを要求する。この時間の閾値は、30分ないし120分の範囲内に設定され得る。ここでは、より小さい閾値が、より小さいWARNネットワークに対応する。この実施形態では、任意のGPS衛星から送信されたエフェメリスデータは、2時間の期間において一定であるべきである。最低限の正確さの要件を支援するために、少なくとも現在のエフェメリスデータ、または前の2時間の間隔からのエフェメリスデータが、所与の衛星のために使用可能であるべきである。
【0073】
したがって、例えば、4時間のデフォルト値が、T2(すなわち、変化のない2時間、および最低限の正確さの要件のための別の2時間)に使用されることができるが、T2の他の値も可能である。したがって、T1が30分に設定され、T2が4時間に設定される場合、エフェメリスは、所与の衛星について、8回のうちの7回は不必要に更新されうる。MSは、位置エンジン(Position Engine, PE)を含む。SV固有のエフェメリスの要求では、PEは、エフェメリスデータのためのSV_MASKをフォーマットする。PEに関する動作の2つの場合(または、モード)があり、場合(A)は、記憶されたエフェメリスがないか、または全ての記憶されているエフェメリスが古くなっている(stale)、場合(B)は、1つ以上のSVのための有効な(古くなっていない)エフェメリスがある。さらに加えて、この実施形態のコンテキストでは、SVのエフェメリスは、このエフェメリスデータの有効時間(例えば、PDEからの最後のリフレッシュメントの時間)から、ある特定の時間量(T2)が経過した場合、“古くなった(stale)”と見なされる。
【0074】
場合(A)では、エフェメリスデータが、PDEに可視の全てのSVに対して要求されるので、PEは、SV_MASKを65535(16進法において、FFFF)に設定することになる。
【0075】
場合(B)では、PEは、2つのタスクを行うであろう。第1に、それは、(例えば、記憶されているエフェメリスの状態を検査することによって、)いずれの記憶されているエフェメリスが古くなっているかどうかを判断する。任意のこのようなSVについて、それらが依然として視界内にある場合には(例えば、アルマナックを調べて、衛星の粗い位置を計算することにより、衛星が設定された高度マスクよりも依然として上にある場合には、それは視界内にあると考える)、SV_MASKにおいて、対応するビットは、“1”に設定されることになる。第2に、PEは、高度マスクより上に最近昇った、または(例えば、アルマナックの計算に基づいて)昇ろうとしているところであるSVのセットを判断するであろう。これらのSVについて、SV_MASKにおけるビットは、それにしたがって設定されることになる。
【0076】
このMSに基づくモードシステムの実施形態、または代替の実施形態は、場合(A)を完全に回避し、単に、全てのSVに、古いエフェメリスを有しているとしてフラグを立てることによって、唯一の考慮する場合(B)の考慮を必要とすることに留意されたい。しかしながら、エフェメリスのデータベースが空であるときは、アルマナックの計算を行って、何れの衛星が視界内であるかを判断することは、時間の無駄である。参照ネットワークにとって利用可能な全エフェメリスデータを要求することで十分であり、したがって、場合(B)の要求される計算を回避する。
【0077】
それにも関わらず、複合のSV_MASKをSMへ送ることができる。エフェメリスに関する前のSMのSV固有の要求が、少なくともT1か、またはもう数秒前であった場合、SMは、上記テーブルに記述されているPDDMとして特定されるSV固有のエフェメリスの要求をフォーマットし、送信することになる。他の変更は、MSのソフトウェアにおいて要求されない。冗長なデータはもはや送信されないので、送信されるデータを増加せずに、T1を大幅に低減できることに留意されたい。T1におけるこの低減は、エフェメリスの利用可能性および位置を判断するためのその正確さを向上するはずである。
【0078】
上述のMSに基づくモードシステムの実施形態の利点を示すために、例えば、常に10個の衛星が視界内にあり(時々、幾つかが高度マスクよりも低く下がり、他のものは昇ってくる)、エフェメリスデータが4時間(T2=4時間)の間有効であると仮定する。この場合、例えば、T1を1時間に設定して、従来のエフェメリス要求を使用すると、542バイト/時間を要求することになる。T1が最小値の30分に設定されると、1084バイト/時間が要求されることになる。この実施形態では、データのスループットは、136バイト/時間に低減される。T2が6時間に増加されると、データ要件は、さらに90バイト/時間まで降下する。この新しい方式では、エフェメリス・データベースを可能なかぎり最新に維持するというペナルティ(penalty)なしで、T1が低減されうる。T1はまた、過度に低く設定にされるべきでないこと、または応答メッセージ当りのエフェメリスデータが2つ以上のSVに相当しないであろうことにも留意されたい。したがって、定数T1およびT2は、システムの調査の一部として最適化されるべきである。例えば、通信事業者がパケット単位ごとに請求する(carriers charge on a per packet basis)か、および/または多数のSVに相当するエフェメリスデータを単一のパケットに記憶することができるかを考慮することによって、T1およびT2を最適化することができる。
【0079】
代替の特定のMSに基づくモードシステムの実施形態では、MSは、それが有効なエフェメリスデータを有している全SVのマスクを単純に計算して、マスクを反転し、それをSMに提供することができる。しかしながら、この代替の実施形態では、大きなWARNネットワークに関する問題が存在しうる。例えば、1つの問題は、正確さへのごくわずかな向上とともに、過剰な量のエフェメリスデータを得ることである。
【0080】
このように、支援型無線位置判断システムのデータメッセージング効率を向上するシステムおよび方法の実施形態が記載されてきたが、種々の変更、適合(adaptation)、およびそれらの代替の実施形態が行われ得ることが理解されるべきである。例えば、記載されている概念は、GPSシステム以外の、他の位置判断システムによって提供されるサービスを向上するために使用され得る。記載された概念は、このような位置判断システム内で、他のメッセージを拡張するために使用され得る。さらに加えて、検討された実施形態は、MS支援型モードシステムにおいて使用されるGPS感度支援メッセージ、MSに基づくモードシステムにおいて使用されるGPSエフェメリスメッセージ、および支援型無線位置判断システムにおいて使用されるGPS補助メッセージに適応可能であることが理解されるべきである
【図面の簡単な説明】
【0081】
【図1】無線通信システムを示すブロック図。
【図2】無線通信システムの動作の実施形態を示すブロック図。
【図3】方法の実施形態の例示的なステップを示すフローチャート。
【図4】別の方法の実施形態の例示的なステップを示すフローチャート。
【図5】さらに別の方法の実施形態の例示的なステップを示すフローチャート。
【特許請求の範囲】
【請求項1】
支援型無線位置判断システムにおいて位置に基づく情報をメッセージングする方法であって、
第1の補助情報を、位置判断エンティティ(PDE)から無線通信リンクを介して受信することと、
前記受信した第1の補助情報に基づいて、冗長な衛星測位信号を判断することと、
前記判断された冗長な衛星測位信号に基づいて、第2の補助情報に対する要求を、前記無線通信リンクを介して前記PDEへ送信することと、
前記要求された第2の補助情報を、前記PDEから前記無線通信リンクを介して受信することと、
前記受信した第2の補助情報に基づいて、測位衛星からの必要な衛星測位信号を位置特定することと、
前記位置特定された衛星測位信号に基づいて、地理的位置を判断することと、
を含む方法。
【請求項2】
前記第2の補助情報に対する前記送信された要求は、前記第2の補助情報の帯域幅要件を低減させる請求項1記載の方法。
【請求項3】
前記第2の補助情報に対する前記送信された要求は、前記地理的位置を判断するのに必要とされる時間量を低減させる請求項1記載の方法。
【請求項4】
前記PDEから前記無線通信リンクを介しての前記第1の補助情報は、複数の測位衛星に対して浅いサーチを行うための捕捉支援( AA)情報を含む請求項1記載の方法。
【請求項5】
前記受信された第1の補助情報に基づいて、前記冗長な衛星測位信号を前記判断することは、
前記複数の測位衛星に対する前記AA情報および前記浅いサーチに基づいて、前記複数の測位衛星からの複数の衛星測位信号を位置特定することと、
前記複数の測位衛星のための前記浅いサーチが、許容可能な地理的位置の決定を生じさせるのに十分な衛星測位信号を生成するかどうかを判断するために、早期終了アルゴリズムを行うことと、
を含む請求項4記載の方法。
【請求項6】
前記第2の補助情報は、前記複数の測位衛星のうちの測位衛星からの検出されていない衛星測位信号をサーチするための補助情報のみを含む請求項5記載の方法。
【請求項7】
前記受信された第2の補助情報に基づいて、前記測位衛星からの前記必要な衛星測位信号を前記位置特定することは、
前記第2の補助情報に基づいて、前記複数の測位衛星のうちの前記測位衛星からの前記検出されていない衛星の測位信号に対して深いサーチを行うことを含む請求項6記載の方法。
【請求項8】
前記必要な衛星測位信号は、前記検出されていない衛星測位信号と同等である衛星測位信号を含む請求項7記載の方法。
【請求項9】
前記受信された補助情報に基づいて、前記冗長な衛星測位信号を前記判断することは、
検出された衛星測位信号を既に提供した、前記複数の測位のうちの測位衛星を除外することをさらに含む請求項5記載の方法。
【請求項10】
前記冗長な衛星測位信号を前記判断することは、
無線デバイスの容量の限度に基づいて、前記複数の測位のうちの測位衛星を除外することをさらに含む請求項5記載の方法。
【請求項11】
前記冗長な衛星測位信号を前記判断することは、
前記地理的位置を判断するための使用においてサーチされることができる前記複数の測位のうちの測位衛星を判断することをさらに含む請求項5記載の方法。
【請求項12】
前記冗長な衛星測位信号を前記判断することは、
検出された衛星測位信号を既に提供した、前記複数の測位衛星のうちの第1の測位衛星を除外することと、
前記地理的位置を判断するための使用において使用されることができない、前記複数の測位衛星のうちの第2の測位衛星を除外することと、
をさらに含む請求項5記載の方法。
【請求項13】
前記必要な衛星測位信号は、前記複数の測位衛星のうちの第3の測位衛星からの測位信号を含む請求項12記載の方法。
【請求項14】
前記第3の測位衛星からの前記測位信号は、前記第2の補助情報に基づいて深いサーチを行うことによって位置特定される請求項13記載の方法。
【請求項15】
前記第2の補助情報は、前記複数の測位衛星のうちの測位衛星からの検出されていない衛星測位信号をサーチするための補助情報のみを含み、前記検出されていない衛星測位信号は、前記地理的位置を判断するための使用において使用されることができる請求項5記載の方法。
【請求項16】
前記第1の補助情報が、粗い全地球測位システム(GPS)時間推定値、粗い地理的位置推定値、およびGPSアルマナックのうちの1つを含む請求項1記載の方法。
【請求項17】
前記粗いGPS時間推定値は、符号分割多元接続( CDMA)の時間から導出することができる請求項16記載の方法。
【請求項18】
前記冗長な衛星測位信号を前記判断することは、
前記第1の補助情報に基づいて、第1の測位衛星のエフェメリスデータの新しさを判断することを含む請求項16記載の方法。
【請求項19】
前記冗長な衛星測位信号を前記判断することは、
前記粗い全地球測位システム(GPS)時間推定値、前記粗い地理的位置推定値、および前記GPSアルマナックに基づいて、前記第1の測位衛星の可視性を判断することをさらに含む請求項18記載の方法。
【請求項20】
前記冗長な衛星測位信号を前記判断することは、
前記第2の補助情報に対する前記要求のためのマスクを設定することをさらに含む請求項19記載の方法。
【請求項21】
前記マスクは、前記第2の補助情報が、前記PDEから前記無線通信リンクを介しての前記第1の測位衛星の新しいエフェメリスを含み、前記第2の補助情報の帯域幅要件を低減させることを保証する請求項20記載の方法。
【請求項22】
前記第1の測位衛星の前記エフェメリスの前記新しさは、第1の時間の閾値および第2の時間の閾値によって判断される請求項18記載の方法。
【請求項23】
前記第2の時間の閾値は、
前記第1の測位衛星の前記エフェメリスが一定であり続ける第1の時間期間と、
前記地理的位置を判断するための最低限の正確さの要件に基づく第2の時間期間と、
を含む請求項22記載の方法。
【請求項24】
前記第1の時間の閾値は、前記第2の補助情報の前記帯域幅要件を増加することなく、低減させることができる請求項22記載の方法。
【請求項25】
前記冗長な衛星測位信号を前記判断することは、
前記第1の補助情報に基づいて、第1の測位衛星のエフェメリスデータの有効性を判断することと、
前記第1の測位衛星の前記エフェメリスが有効であると判断された場合、前記第1の測位衛星の前記エフェメリスのためのマスクを設定することと、
前記マスクを反転することと、
前記第2の補助情報に対する前記要求に前記反転されたマスクを提供することと、
を含む請求項1記載の方法。
【請求項26】
前記判断された地理的位置は、前記支援型無線位置判断システムにおける移動電話の地理的位置を含み、前記PDEは、全地球測位システム(GPS)の受信機を含む請求項1記載の方法。
【請求項27】
前記支援型無線位置判断システムは、移動局( MS)支援型モードを含み、前記PDEは、前記移動電話のための全ての測位の計算を行う請求項26記載の方法。
【請求項28】
前記支援型無線位置判断システムは、移動局(MS)に基づくモードを含み、前記第2の補助情報は、前記移動電話に、前記受信された第2の補助情報に基づいて前記測位衛星からの前記必要な衛星測位信号を前記位置特定することと、前記位置特定された衛星測位信号に基づいて前記地理的位置を前記判断することとを行うことを可能にするためのエフェメリスを含む請求項26記載の方法。
【請求項29】
支援型無線位置判断システムにおいて位置に基づく情報をメッセージングする方法であって、
捕捉支援(AA)情報を得ることと、
前記AA情報に基づいて、複数の全地球測位システム(GPS)衛星の第1の複数の衛星測位信号に対して浅いサーチを行うことと、
前記浅いサーチに基づいて、前記複数のGPS衛星からの前記第1の複数の衛星測位信号を位置特定することと、
前記浅いサーチによって位置特定された前記第1の複数の衛星測位信号が、無線デバイスの許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有するかどうかを判断することと、
前記第1の複数の衛星測位信号が、前記無線デバイスの前記許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有していない場合、前記複数のGPS衛星からの第2の複数の衛星測位信号を生じさせるための感度支援(SA)情報に対する要求を送信することと、
前記複数のGPS衛星から前記第2の複数の衛星測位信号を生じさせるための前記要求されたSA情報を受信することと、
前記受信されたSA情報に基づいて、前記複数のGPS衛星からの前記第2の複数の衛星測位信号に対する深いサーチを行うことと、
前記深いサーチに基づいて、前記複数のGPS衛星からの前記第2の複数の衛星測位信号を位置特定することと、
前記浅いサーチによって位置特定された前記第1の複数の衛星測位信号と、前記深いサーチによって位置特定された前記第2の複数の衛星測位信号とが、前記無線デバイスの前記許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有しているかどうかを判断することと、
前記第1および第2の複数の衛星測位信号が、前記無線デバイスの前記許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有している場合、前記複数のGPS衛星からの前記位置特定された第1および第2の複数の衛星測位信号に基づいて前記無線デバイスの前記地理的位置決定を判断することと、
を含む方法。
【請求項30】
支援型無線位置判断システムにおいて位置に基づく情報をメッセージングする方法であって、
粗い時間推定情報、粗い位置推定情報、および全地球測位システム(GPS)アルマナック情報を得ることと、
測位衛星の第1のエフェメリスの状態を検査することと、
前記第1のエフェメリスの前記状態が、第1の時間の閾値よりも低いかどうかを判断することと、
前記状態が前記第1の時間の閾値よりも低くない場合、前記測位衛星が無線デバイスの可視水平線よりも上にあるどうかを判断することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が第1の時間の閾値よりも低くない場合には、位置判断エンティティ(PDE)から前記測位衛星の第2のエフェメリスを要求するためのマスクを設定することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が前記第1の時間の閾値よりも低くない場合には、前記測位衛星の第2のエフェメリスのための前記マスクを有する要求を、前記PDEへ送信することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が前記第1の時間の閾値よりも低くないときは、前記PDEから、前記測位衛星の前記要求された第2のエフェメリスを受信することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が前記第1の時間の閾値よりも低くない場合には、前記測位衛星の前記第2のエフェメリスに基づいて、前記測位衛星からの衛星測位信号を位置特定することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が前記第1の時間の閾値よりも低くない場合には、前記測位衛星からの前記位置特定された衛星測位信号に基づいて、前記無線デバイスの前記地理的位置を判断することと、
を含む方法。
【請求項31】
支援型無線位置判断システムにおいて位置に基づく情報をメッセージングするシステムであって、
第1の補助情報を位置判断エンティティ(PDE)から無線通信リンクを介して受信する手段と、
前記受信された第1の補助情報に基づいて、冗長な衛星測位信号を判断する手段と、
前記判断された冗長な衛星測位信号に基づいて、第2の補助情報に対する要求を、前記前記無線通信リンクを介して前記PDEへ送信する手段と、
前記要求された第2の補助情報を前記PDEから前記無線通信リンクを介して受信する手段と、
前記受信された第2の補助情報に基づいて、測位衛星からの必要な衛星測位信号を位置特定する手段と、
前記位置特定された衛星測位信号に基づいて、地理的位置を判断する手段と、
を含むシステム。
【請求項1】
支援型無線位置判断システムにおいて位置に基づく情報をメッセージングする方法であって、
第1の補助情報を、位置判断エンティティ(PDE)から無線通信リンクを介して受信することと、
前記受信した第1の補助情報に基づいて、冗長な衛星測位信号を判断することと、
前記判断された冗長な衛星測位信号に基づいて、第2の補助情報に対する要求を、前記無線通信リンクを介して前記PDEへ送信することと、
前記要求された第2の補助情報を、前記PDEから前記無線通信リンクを介して受信することと、
前記受信した第2の補助情報に基づいて、測位衛星からの必要な衛星測位信号を位置特定することと、
前記位置特定された衛星測位信号に基づいて、地理的位置を判断することと、
を含む方法。
【請求項2】
前記第2の補助情報に対する前記送信された要求は、前記第2の補助情報の帯域幅要件を低減させる請求項1記載の方法。
【請求項3】
前記第2の補助情報に対する前記送信された要求は、前記地理的位置を判断するのに必要とされる時間量を低減させる請求項1記載の方法。
【請求項4】
前記PDEから前記無線通信リンクを介しての前記第1の補助情報は、複数の測位衛星に対して浅いサーチを行うための捕捉支援( AA)情報を含む請求項1記載の方法。
【請求項5】
前記受信された第1の補助情報に基づいて、前記冗長な衛星測位信号を前記判断することは、
前記複数の測位衛星に対する前記AA情報および前記浅いサーチに基づいて、前記複数の測位衛星からの複数の衛星測位信号を位置特定することと、
前記複数の測位衛星のための前記浅いサーチが、許容可能な地理的位置の決定を生じさせるのに十分な衛星測位信号を生成するかどうかを判断するために、早期終了アルゴリズムを行うことと、
を含む請求項4記載の方法。
【請求項6】
前記第2の補助情報は、前記複数の測位衛星のうちの測位衛星からの検出されていない衛星測位信号をサーチするための補助情報のみを含む請求項5記載の方法。
【請求項7】
前記受信された第2の補助情報に基づいて、前記測位衛星からの前記必要な衛星測位信号を前記位置特定することは、
前記第2の補助情報に基づいて、前記複数の測位衛星のうちの前記測位衛星からの前記検出されていない衛星の測位信号に対して深いサーチを行うことを含む請求項6記載の方法。
【請求項8】
前記必要な衛星測位信号は、前記検出されていない衛星測位信号と同等である衛星測位信号を含む請求項7記載の方法。
【請求項9】
前記受信された補助情報に基づいて、前記冗長な衛星測位信号を前記判断することは、
検出された衛星測位信号を既に提供した、前記複数の測位のうちの測位衛星を除外することをさらに含む請求項5記載の方法。
【請求項10】
前記冗長な衛星測位信号を前記判断することは、
無線デバイスの容量の限度に基づいて、前記複数の測位のうちの測位衛星を除外することをさらに含む請求項5記載の方法。
【請求項11】
前記冗長な衛星測位信号を前記判断することは、
前記地理的位置を判断するための使用においてサーチされることができる前記複数の測位のうちの測位衛星を判断することをさらに含む請求項5記載の方法。
【請求項12】
前記冗長な衛星測位信号を前記判断することは、
検出された衛星測位信号を既に提供した、前記複数の測位衛星のうちの第1の測位衛星を除外することと、
前記地理的位置を判断するための使用において使用されることができない、前記複数の測位衛星のうちの第2の測位衛星を除外することと、
をさらに含む請求項5記載の方法。
【請求項13】
前記必要な衛星測位信号は、前記複数の測位衛星のうちの第3の測位衛星からの測位信号を含む請求項12記載の方法。
【請求項14】
前記第3の測位衛星からの前記測位信号は、前記第2の補助情報に基づいて深いサーチを行うことによって位置特定される請求項13記載の方法。
【請求項15】
前記第2の補助情報は、前記複数の測位衛星のうちの測位衛星からの検出されていない衛星測位信号をサーチするための補助情報のみを含み、前記検出されていない衛星測位信号は、前記地理的位置を判断するための使用において使用されることができる請求項5記載の方法。
【請求項16】
前記第1の補助情報が、粗い全地球測位システム(GPS)時間推定値、粗い地理的位置推定値、およびGPSアルマナックのうちの1つを含む請求項1記載の方法。
【請求項17】
前記粗いGPS時間推定値は、符号分割多元接続( CDMA)の時間から導出することができる請求項16記載の方法。
【請求項18】
前記冗長な衛星測位信号を前記判断することは、
前記第1の補助情報に基づいて、第1の測位衛星のエフェメリスデータの新しさを判断することを含む請求項16記載の方法。
【請求項19】
前記冗長な衛星測位信号を前記判断することは、
前記粗い全地球測位システム(GPS)時間推定値、前記粗い地理的位置推定値、および前記GPSアルマナックに基づいて、前記第1の測位衛星の可視性を判断することをさらに含む請求項18記載の方法。
【請求項20】
前記冗長な衛星測位信号を前記判断することは、
前記第2の補助情報に対する前記要求のためのマスクを設定することをさらに含む請求項19記載の方法。
【請求項21】
前記マスクは、前記第2の補助情報が、前記PDEから前記無線通信リンクを介しての前記第1の測位衛星の新しいエフェメリスを含み、前記第2の補助情報の帯域幅要件を低減させることを保証する請求項20記載の方法。
【請求項22】
前記第1の測位衛星の前記エフェメリスの前記新しさは、第1の時間の閾値および第2の時間の閾値によって判断される請求項18記載の方法。
【請求項23】
前記第2の時間の閾値は、
前記第1の測位衛星の前記エフェメリスが一定であり続ける第1の時間期間と、
前記地理的位置を判断するための最低限の正確さの要件に基づく第2の時間期間と、
を含む請求項22記載の方法。
【請求項24】
前記第1の時間の閾値は、前記第2の補助情報の前記帯域幅要件を増加することなく、低減させることができる請求項22記載の方法。
【請求項25】
前記冗長な衛星測位信号を前記判断することは、
前記第1の補助情報に基づいて、第1の測位衛星のエフェメリスデータの有効性を判断することと、
前記第1の測位衛星の前記エフェメリスが有効であると判断された場合、前記第1の測位衛星の前記エフェメリスのためのマスクを設定することと、
前記マスクを反転することと、
前記第2の補助情報に対する前記要求に前記反転されたマスクを提供することと、
を含む請求項1記載の方法。
【請求項26】
前記判断された地理的位置は、前記支援型無線位置判断システムにおける移動電話の地理的位置を含み、前記PDEは、全地球測位システム(GPS)の受信機を含む請求項1記載の方法。
【請求項27】
前記支援型無線位置判断システムは、移動局( MS)支援型モードを含み、前記PDEは、前記移動電話のための全ての測位の計算を行う請求項26記載の方法。
【請求項28】
前記支援型無線位置判断システムは、移動局(MS)に基づくモードを含み、前記第2の補助情報は、前記移動電話に、前記受信された第2の補助情報に基づいて前記測位衛星からの前記必要な衛星測位信号を前記位置特定することと、前記位置特定された衛星測位信号に基づいて前記地理的位置を前記判断することとを行うことを可能にするためのエフェメリスを含む請求項26記載の方法。
【請求項29】
支援型無線位置判断システムにおいて位置に基づく情報をメッセージングする方法であって、
捕捉支援(AA)情報を得ることと、
前記AA情報に基づいて、複数の全地球測位システム(GPS)衛星の第1の複数の衛星測位信号に対して浅いサーチを行うことと、
前記浅いサーチに基づいて、前記複数のGPS衛星からの前記第1の複数の衛星測位信号を位置特定することと、
前記浅いサーチによって位置特定された前記第1の複数の衛星測位信号が、無線デバイスの許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有するかどうかを判断することと、
前記第1の複数の衛星測位信号が、前記無線デバイスの前記許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有していない場合、前記複数のGPS衛星からの第2の複数の衛星測位信号を生じさせるための感度支援(SA)情報に対する要求を送信することと、
前記複数のGPS衛星から前記第2の複数の衛星測位信号を生じさせるための前記要求されたSA情報を受信することと、
前記受信されたSA情報に基づいて、前記複数のGPS衛星からの前記第2の複数の衛星測位信号に対する深いサーチを行うことと、
前記深いサーチに基づいて、前記複数のGPS衛星からの前記第2の複数の衛星測位信号を位置特定することと、
前記浅いサーチによって位置特定された前記第1の複数の衛星測位信号と、前記深いサーチによって位置特定された前記第2の複数の衛星測位信号とが、前記無線デバイスの前記許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有しているかどうかを判断することと、
前記第1および第2の複数の衛星測位信号が、前記無線デバイスの前記許容可能な地理的位置決定を生じさせるのに十分な衛星測位信号を有している場合、前記複数のGPS衛星からの前記位置特定された第1および第2の複数の衛星測位信号に基づいて前記無線デバイスの前記地理的位置決定を判断することと、
を含む方法。
【請求項30】
支援型無線位置判断システムにおいて位置に基づく情報をメッセージングする方法であって、
粗い時間推定情報、粗い位置推定情報、および全地球測位システム(GPS)アルマナック情報を得ることと、
測位衛星の第1のエフェメリスの状態を検査することと、
前記第1のエフェメリスの前記状態が、第1の時間の閾値よりも低いかどうかを判断することと、
前記状態が前記第1の時間の閾値よりも低くない場合、前記測位衛星が無線デバイスの可視水平線よりも上にあるどうかを判断することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が第1の時間の閾値よりも低くない場合には、位置判断エンティティ(PDE)から前記測位衛星の第2のエフェメリスを要求するためのマスクを設定することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が前記第1の時間の閾値よりも低くない場合には、前記測位衛星の第2のエフェメリスのための前記マスクを有する要求を、前記PDEへ送信することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が前記第1の時間の閾値よりも低くないときは、前記PDEから、前記測位衛星の前記要求された第2のエフェメリスを受信することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が前記第1の時間の閾値よりも低くない場合には、前記測位衛星の前記第2のエフェメリスに基づいて、前記測位衛星からの衛星測位信号を位置特定することと、
前記測位衛星が前記無線デバイスの前記可視水平線よりも上にあり、前記状態が前記第1の時間の閾値よりも低くない場合には、前記測位衛星からの前記位置特定された衛星測位信号に基づいて、前記無線デバイスの前記地理的位置を判断することと、
を含む方法。
【請求項31】
支援型無線位置判断システムにおいて位置に基づく情報をメッセージングするシステムであって、
第1の補助情報を位置判断エンティティ(PDE)から無線通信リンクを介して受信する手段と、
前記受信された第1の補助情報に基づいて、冗長な衛星測位信号を判断する手段と、
前記判断された冗長な衛星測位信号に基づいて、第2の補助情報に対する要求を、前記前記無線通信リンクを介して前記PDEへ送信する手段と、
前記要求された第2の補助情報を前記PDEから前記無線通信リンクを介して受信する手段と、
前記受信された第2の補助情報に基づいて、測位衛星からの必要な衛星測位信号を位置特定する手段と、
前記位置特定された衛星測位信号に基づいて、地理的位置を判断する手段と、
を含むシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−83657(P2013−83657A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−262934(P2012−262934)
【出願日】平成24年11月30日(2012.11.30)
【分割の表示】特願2007−515445(P2007−515445)の分割
【原出願日】平成17年5月26日(2005.5.26)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−262934(P2012−262934)
【出願日】平成24年11月30日(2012.11.30)
【分割の表示】特願2007−515445(P2007−515445)の分割
【原出願日】平成17年5月26日(2005.5.26)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]