
支援計算を伴う衛星測位
【課題】衛星信号サンプルからポジションフィックスを計算する。
【解決手段】サンプルの第1の組から第1のポジションフィックスを計算する。第1のポジションフィックスの計算中に生成される第1の基準情報をメモリに記憶する。サンプルの第2の組から第2のポジションフィックスを計算する。第2のポジションフィックスの計算中に生成される第2の基準情報をメモリに記憶する。第3の時間に受信器により発生される衛星信号サンプルの組、または、そのような衛星信号サンプルの組から得られる距離測定値を受信し、第3のポジションフィックスを計算するためにサンプルの組または距離測定値を処理する。処理は、第1および第2のポジションフィックスの計算中に生成される基準情報によって支援される。
【解決手段】サンプルの第1の組から第1のポジションフィックスを計算する。第1のポジションフィックスの計算中に生成される第1の基準情報をメモリに記憶する。サンプルの第2の組から第2のポジションフィックスを計算する。第2のポジションフィックスの計算中に生成される第2の基準情報をメモリに記憶する。第3の時間に受信器により発生される衛星信号サンプルの組、または、そのような衛星信号サンプルの組から得られる距離測定値を受信し、第3のポジションフィックスを計算するためにサンプルの組または距離測定値を処理する。処理は、第1および第2のポジションフィックスの計算中に生成される基準情報によって支援される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、グローバル・ナビゲーション・サテライト・システム(GNSS)のための受信器、および、そのような受信器によって受信された衛星信号を処理する方法に関する。特に、本発明はグローバル・ポジショニング・システム(GPS)に関する。
【背景技術】
【0002】
GPSは、6つの異なる軌道面内にある最大で32個の周回軌道衛星(宇宙ビークル「SV」と呼ばれる)のネットワークから成る衛星に基づくナビゲーションシステムである。システム設計によって24個の衛星が必要だが、それよりも多い衛星があればカバレッジが向上する。衛星は絶えず動いており、24時間もしないうちに地球の周りで2つの完全な軌道を描く。
【0003】
衛星によって送信されるGPS信号は、規則的態様で連続的に繰り返される疑似ランダムコードを使用する直接シーケンススペクトル拡散として一般に知られる形態を成す。衛星は、公衆が自由に利用できる粗精度/捕捉コードすなわちC/Aコードと、通常は軍事用途のために確保される制限された精密コードすなわちPコードとを含む異なる拡散コードを伴う幾つかの信号を送信する。C/Aコードは、1000分の1秒ごとに繰り返す1.023MHzのチップレートで送信される1,023ビットの長さの疑似ランダムコードである。それぞれの衛星は別個のC/Aコードを送信し、それにより、衛星を一意的に特定できる。
【0004】
データメッセージは、各衛星によりC/Aコード上で変調され、送信衛星の詳細な軌道パラメータ(エフェメリス(ephemeris)と呼ばれる)などの重要な情報、衛星のクロックにおけるエラーに関する情報、衛星の状態(正常(healthy)または不正常(unhealthy))、現在の日付け、および、時間を含む。この情報は、正確なポジションを決定するためにGPS受信器に欠かせない。それぞれの衛星は、エフェメリスおよびそれ自体における詳細なクロック補正パラメータのみを送信し、したがって、支援されないGPS受信器は、ポジション計算においてそれが使用したい各衛星のデータメッセージの適切な部分を処理しなければならない。
【0005】
データメッセージはいわゆるアルマナックも含み、アルマナックは、他の全ての衛星に関するあまり正確でない情報を含み、かつ、あまり頻繁には更新されない。アルマナックデータにより、GPS受信器は各GPS衛星が一日中いるべき場所を常に推定でき、それにより、受信器は、いずれの衛星を探すべきかを更に効率的に選択できる。各衛星は、システム内の全ての衛星に関する軌道情報を示すアルマナックデータを送信する。
【0006】
従来のリアルタイムGPS受信器は、送信されたデータメッセージを読み出して、エフェメリス、アルマナック、および、連続使用のための他のデータを保存する。
【0007】
ポジションを決定するため、GPS受信器は、衛星によって信号が送信された時間と、その信号がGPS受信器によって受信された時間とを比較する。受信器は、時間差により、その特定の衛星がどの程度離れているのかが分かる。その衛星におけるエフェメリスにより、GPS受信器は衛星のポジションを正確に決定できる。複数の衛星からの距離測定値とそれらのポジションの知見とを組み合わせることにより、三辺測量によってポジションを得ることができる。最小限の3つの衛星を用いて、GPS受信器は、緯度/経度ポジション(2Dポジションフィックス)を決定できる。4個またはそれ以上の衛星を用いて、GPS受信器は、緯度、経度、および、高度を含む3Dポジションを決定できる。衛星から受信される情報は、GPS受信器内のリアルタイムクロック(RTC)をセットする(または補正する)ために使用することもできる。
【0008】
衛星からの信号の見掛けのドップラー偏移を処理することにより、GPS受信器は、移動の速度および方向(「対地速度」および「対地軌道」とそれぞれ称される)を正確に与えることもできる。
【0009】
衛星からの完全なデータ信号は37,500ビットナビゲーションメッセージから成り、これは、50bpsで送信するのに12.5分かかる。データ信号は25個の30秒フレームへ分けられ、各フレームが1500ビットを有し、これらは5個の6秒サブフレームへと分けられる。それぞれの6秒サブフレームは10個の30ビットワードへ分けられる。ポジションフィックス(エフェメリスなど)のために必要な全ての情報が各フレーム内に含まれ、そのため、GPS受信器は、一般に、いわゆるコールドスタートからポジションフィックスを生成するために約30秒を要する。これは、しばしば、「タイム・トゥ・ファースト・フィックス」(TTFF)と呼ばれる。
【0010】
第1のサブフレームはクロック補正データを与え、第2および第3のサブフレームはエフェメリスデータを与え、また、アルマナックデータは第4および第5のサブフレーム内にある。
【0011】
SVの全てが同じ周波数で送信する。特定の衛星からの信号を区別するため、受信器は、その衛星によって使用中であることが分かっているC/Aコードのレプリカを発生させて、このレプリカが入力信号と同期されるようにこのレプリカを合わせる必要がある。前記入力信号は、衛星から受信器へ移動する信号の飛行時間(一般的には約0.07秒)に主に起因して未知の量だけ遅延される。一般に、レプリカを入力信号と同期させるために必要なアライメントを受信器が正確に予測することは不可能であり、そのため、何らかの形態の検索が必要とされる。この場合、多くのアライメントが順々に試みられ、最良の適合が選択される。多くの候補アライメントを評価するこのプロセスは相関と称される。というのは、通常、受信信号が特定のSVからのC/Aコードを有する成分を含むかどうかを決定するために、受信器が各衛星ごとに順々に受信信号と既知のC/Aコードとの間で相関関数を実施するためである。相関関数は、複数の相対的なタイミングごとに計算されなければならず、また、相関ピークが見出されるときには、この相関は特定のタイミングおよび特定のSVに対応する。順々に発見されるタイミングは、SVからの特定の距離に対応する。
【0012】
それぞれの衛星のC/Aコードの検索は、受信器によって観察される衛星信号の見掛けの周波数が変化するという事実によって複雑化される。変化の主な根源は、衛星の動きに起因するドップラー効果;受信器の動きに起因するドップラー効果;ならびに、受信器の周波数合成器内の局部発振器(LO)のドリフトおよびオフセットである。そのため、C/Aコードの徹底的な検索は、一連の周波数シフトごとに一連の位相(時間的)シフトで相関関数の評価を必要とする。
【0013】
相関プロセスは時として「逆拡散」と称される。これは、このプロセスが信号からの拡散コードを除去するからである。決定されたコード位相−すなわち、相関関数のピークのタイミングは、距離計算で用いる正確なタイミング情報を明らかにする。しかしながら、コードが1000分の1秒ごとに繰り返されると、粗いタイミングも決定される必要がある。一般に、あまり頻繁に繰り返さないデータ成分は、50bpsデータメッセージやその特定の部分、例えばサブフレームプリアンブルまたはサブフレーム・ハンドオーバー・ワードの個々のビットなど、更に粗いタイミング評価のため(すなわち、GPS時間を得ることができるようにするため)に使用される。
【0014】
コード位相および粗いタイミング情報は、共に、「疑似距離(pseudo-range)」を含む。これは、それらの情報が衛星からのメッセージの飛行時間を特定するからである。この飛行時間は、光の速度cにより移動される距離に関連付けられる。これは、衛星のクロックと受信器のRTCとの間の相対的なオフセットが知られていないため、「疑似」距離または相対距離(真の距離ではない)である。しかしながら、このオフセットは全ての衛星に対して同じであり(それらのクロックが同期されるからである)、そのため、様々な衛星の組における疑似距離は、三辺測量計算により固有のポジションフィックスを決定するのに十分な情報を与える。
【0015】
GPS受信器の大部分は、衛星からの信号が受信されると、これらの信号を「リアルタイムで」処理することにより機能し、それにより、現在の時間における装置のポジションが報告される。そのような「従来の」GPS受信器は、常に、
− GPS信号を受信するのに適したアンテナと、
− 所望の信号を増幅し、フィルタリングし、中間周波数(IF)まで混合し、それにより、それらの信号が通常は数MHz程度のサンプリングレートで適したアナログ・デジタル(A/D)変換器を通過できるようにするアナログRF回路(しばしば、GPSフロントエンドと呼ばれる)と、
− 通常は何らかの形態のマイクロコントローラと組み合わされるA/D変換器により発生されるIFデータサンプルに関して相関プロセスを行なうデジタル信号処理(DSP)ハードウェアであって、前記マイクロコントローラが、前記信号処理ハードウェアを制御して所望のポジションフィックスを計算するために必要な「高レベル」処理を行なう、デジタル信号処理(DSP)ハードウェアと、
を備える。
【0016】
「ストア・アンド・プロセス・レイター」(「キャプチャ・アンド・プロセス」としても知られており、以下ではそのように称する)というあまり知られていない概念も詳しく調べられてきた。これは、従来のアンテナおよびアナログRF回路により収集されるIFデータサンプルを、該サンプルをその後のある時(秒、分、時間、または更には、数日)に、何らかの場所で処理する前に、何らかの形態のメモリに記憶することを伴う。このような場所は、処理リソースが大きくおよび/または受信器がバッテリによって給電されないことが多い。
【0017】
このことは、キャプチャ・アンド・プロセス受信器がリアルタイム受信器よりもかなり簡単であることを意味する。サンプルの短いセグメントだけ−例えば、データに値する100〜200msを記憶する必要がある。各SVからの(非常に遅い)データメッセージをデコードする必要はもはやなく、相関を行なって疑似距離を決定する必要もなく、また、三辺測量計算を実行してポジションフィックスを得る必要ももはやない。したがって、従来の受信器のデジタル信号処理ハードウェアの大半を排除でき、それにより、複雑さおよびコストが低減される。電力消費量もかなり低減され、それにより、バッテリ寿命が長くなる。
【0018】
ポジションフィックスを計算するために必要なDSPハードウェアを含む他のキャプチャ・アンド・プロセス受信器も提案されてきた。1つのモードにおいて、そのような装置は、GPS信号を受信し、サンプリングして、メモリに記憶するが、それらを処理しない。装置は、別個のモードへ切り換えられると、信号の受信を中止して、代わりに、予め記憶されたサンプルを処理し始める。この種の装置は、例えばユーザが旅行から戻った後に回顧的なトラックログまたは動作の履歴を発生させるのに適している。
【発明の概要】
【課題を解決するための手段】
【0019】
本発明の第1の態様によれば、衛星信号サンプルからポジションフィックスを計算する方法であって、
第1のポジションフィックスの計算中に生成される第1の基準情報を取得するステップであって、第1のポジションフィックスは、第1の時間に計算された衛星測位受信器のポジションである、ステップと、
第2のポジションフィックスの計算中に生成される第2の基準情報を取得するステップであって、第2のポジションフィックスは、第2の時間に計算された受信器の計算されたポジションである、ステップと、
第3の時間に受信器により生成される衛星信号サンプルの組、または、そのような衛星信号サンプルの組から得られる距離測定値を受信するステップと、
第3のポジションフィックスを計算するために、サンプルの組または距離測定値を処理するステップと、
を備え、
前記処理するステップは、第1および第2のポジションフィックスの計算中に生成される基準情報によって支援される、
方法が提供される。
【0020】
このようにすると、第3のポジションフィックスの計算を更に簡単に、更に素早く、エネルギをあまり消費することなく、すなわち、他の方法より更に効率的に行なうことができる。第1および第2のポジションフィックスの計算からそれぞれ得られる第1および第2の基準情報を組み合わせて、第3のポジションフィックスの計算を知的にサポートすることができる。例えば、ポジションフィックスにわたる労力の重複を最小限に抑えることにより計算労力を軽減できる。
【0021】
本発明者等は、基準情報の単一の断片からの予測と比べて、基準情報の2つ以上の断片が、多くの状況で極めて有利であることを認識した。例えば、2つの時間点における基準情報により、情報の傾向を考慮に入れることができるため、より正確な予測が可能である。そのような動向の知見によって、場合によっては、未知のパラメータのための検索範囲を制約することもできる。したがって、基準情報の2つの断片が利用される場合には、第3のポジションフィックスの計算においてかなり高い効率を得ることができる。
【0022】
第1および第2の基準情報は、それぞれ第1および第2のポジションフィックスの計算の産物である。例えば、基準情報は、ポジションフィックスそのもの、距離測定値などの中間結果、または、クロックエラー(すなわち、受信器のクロックと衛星クロックとの間の差)などの副次的効果として生み出される情報であってもよい。計算の複雑さまたは計算量を減少させるために、基準情報は第3のポジションフィックスの計算で使用できる情報を含むことが好ましい。基準情報は、例えば第3のポジションフィックスの計算において、パラメータをブートするために使用されてもよい。好ましくは、第3のポジションフィックスを計算するのに適する対応値を予測するために、基準情報は時間的に前後に推定され得る値を含む。
【0023】
第1、第2、および、第3の時間は任意の順序で生じてもよい。優先順位は、「第1」、「第2」、または、「第3」という用語によって示唆されない。
【0024】
幾つかの実施形態では、サンプルも距離測定値(コード位相または疑似距離)もメモリに記憶されない。すなわち、サンプルは、ポジションフィックスを計算するために、メモリに記憶されることなく直ちに処理される。これはリアルタイムな衛星測位受信器を与える。
【0025】
他の実施形態において、サンプルまたは距離測定値は、その後の処理のために、意図的な遅延をもってメモリに記憶される。この遅延処理は、サンプルを発生させた衛星測位受信器によって、または、データが転送される何らかの他の外部装置によって行なわれてもよい。この手法は、本明細書中では、「キャプチャ・アンド・プロセス」衛星測位と称される。幾つかの実施形態は、「キャプチャ・アンド・プロセス」手法およびリアルタイム測位の両方の混合を使用してもよい。
【0026】
距離測定値は、例えば、コード位相、キャリア位相、または、疑似距離測定値を備えてもよい。一般に、距離測定値は、衛星測位受信器から一群の測位衛星の中の1つの衛星までの距離に関する何らかの情報を(暗示的にまたは明示的に)与える値である。距離測定値は、距離によって、または、信号の飛行時間もしくは到達時間によって表わされてもよい。多くのタイプの距離測定値は、絶対的なまたは固有の測定値ではない−それらの測定値は一般にある程度の相対性または曖昧さを組み入れる。例えば、コード位相測定値は、それ自身で、拡散コードの1つの完全な繰り返しの周期(当該技術分野では「コードエポック」として知られている)内で、(相対的な)到達時間を特定する。衛星データメッセージのいずれのコードエポックが観察されているかに関しては曖昧なままである。したがって、用語「距離測定値」は、ある程度の曖昧さを含む測定値、ならびに、絶対的および/または固有の距離測定値の両方を含むように理解されるべきである。
【0027】
処理は、第1、第2、および、第3の時間の知見、または、これらの時間の間の1つ以上の相対比較を使用してもよい。
【0028】
この処理は、時間の相対知見−例えば第1の時間と第2の時間との間の差;第2の時間と第3の時間との間の差;および/または、第1の時間と第3の時間との間の差を使用することを含んでもよい。時間差を正確に決定することが、対応する絶対時間を決定することよりも容易なこともあり得る。
【0029】
時間差を測定することは、ポジションフィックスを計算するために使用されるサンプルのそれぞれの組を受信している経過時間を測定することを含んでもよい。
【0030】
すなわち、サンプルの1つの組を生じさせる衛星信号の到達時間と、サンプルの他の組を生じさせる衛星信号の到達時間との間の差の記録が維持されてもよい。それぞれの時間スタンプを差し引くことにより差を計算するようになっている場合よりも、正確にこの差を測定できる場合がある。例えば、差は、高品質かつ高周波な発振器信号などの受信器で発生される発振器信号の周期をカウントすることによって、または、衛星信号におけるキャリアの周期をカウントすることによって測定されてもよい。これは、精度を高めるために、周期信号の立ち上がりまたは/および立ち下りの数を観察してカウントすることによって行なわれてもよい。好ましくは、このカウント技術は、アナログ・デジタル変換およびその後のデジタル処理のために高周波クロック信号を発生させる周波数合成器によって生成される発振器信号に適用される。これにより、経過時間の測定は、高周波発振器の精度の利益を享受できる。
【0031】
第1および第2の基準情報はそれぞれ、それぞれのポジションフィックス;ポジションフィックスと関連付けられる衛星クロック時間;衛星クロック時間と受信器クロック時間との間のクロックエラー;受信器と衛星との間の距離測定値;衛星から受信される信号の観察されたドップラー偏移のうちの少なくとも1つを備えることが好ましい。
【0032】
前記支援は、第1および第2の時間における基準情報に基づいて、第3の時間における対応する情報を予測するステップを備えることが好ましい。
【0033】
したがって、支援は、第3のポジションフィックス;第3の時間に対応する衛星クロック時間;第3の時間におけるクロックエラー;第3の時間における距離測定値;および、第3の時間において受信器により観察できたかもしれない衛星信号のドップラー偏移のうちの1つ以上に関して期待値を予測しまたは推定するステップを含んでもよい。
【0034】
基準情報の2つの断片に基づく予測は、より簡単な形式の予測、例えば異なるポジションフィックスの初期の計算中に発生される基準情報の1つの断片をコピーする場合よりも優れている(したがって、より有用な結果を与える)。ここで、基準情報の2つの断片「に基づいて」予測を行なうとは、基準情報の2つの断片のうちのいずれか一方の値を変えることにより予測の結果を変えることができることを意味する。
【0035】
前記予測は、第1および第2の時間にそれぞれ対応する第1および第2の値に基づいて、第3の時間に対応する第3の値を補間しまたは外挿するステップを備えてもよい。
【0036】
第3の時間が第1の時間と第2の時間との間に生じる場合に、補間が行なわれる。この場合、第1の基準情報はサンプルの組が発生される前の時間によってもたらされ、また、第2の基準情報はサンプルの組が発生された後の時間によってもたらされる。
【0037】
逆に、第3の時間が第1の時間と第2の時間との間にない場合−すなわち、第3の時間が第1および第2の時間の両方の前または後にある場合に、外挿が行なわれる。
【0038】
補間または外挿は種々の適した方法を使用してもよい。例えば、補間または外挿が線形であってもよくまたは非線形であってもよい。
【0039】
予測ステップは、移動の速度および/または方向の推定値を使用して第3のポジションを予測するステップを有利に含んでもよい。
【0040】
速度、方向、または、速さの推定値は、(例えば、移動の瞬間もしくは平均の速度または移動方向)測定値に基づいてもよい。あるいは、GPS受信器が使用される用途または使用されることが意図される用途の知見に基づいて、速度などのパラメータが推測されてもよい。したがって、受信装置が、歩行、ランニングまたはサイクリングなどの特定のレジャーで使用されるようになっている場合に、最大速度が推定されてもよい。GPS受信器が異なる活動のための異なるモードを有してもよく、また、最大速度の推定値は、いずれのモードが現在選択されているのかに依存してもよい。
【0041】
前記処理は、他の時間に対応する1つ以上の更なるポジションフィックスの計算中に生成される基準情報によって、更に支援されてもよい。
【0042】
更なるポジションフィックスは、これらの他の時間に計算された受信器のポジションである。
【0043】
補間または外挿の非線形方法においては、特に、3つ以上の時間点からの基準情報を利用することが有用または必要な場合がある。非線形方法としては、二次、三次、または、更に高次の多項式補間または外挿、および、曲線適合法を挙げることができる(しかし、これらに限定されない)。
【0044】
前記支援は、前記処理で使用されるべきパラメータを選択するまたは得るステップを備えてもよい。
【0045】
ある場合には、選択されたパラメータが予測された情報(第1および第2の基準情報から予測された情報)と同じであってもよい。例えば、基準情報がドップラー偏移を備えてもよく、予測された情報がドップラー偏移であってもよく、また、計算で使用されるパラメータがドップラー偏移であってもよい。
【0046】
他の場合には、パラメータが何らかの方法で予測情報から得られてもよい。例えば、基準情報がそれぞれの(第1および第2の)ポジションフィックスの位置座標であってもよく、予測情報が第3のポジションフィックスにおける予期される位置座標であってもよく、また、処理で使用されるパラメータは、信号サンプルの組を逆拡散する際に開始点として使用されるべき予期されるコード位相であってもよい。この例では、予期されるコード位相は、同様に第3の時間および対応する衛星の動きに関する何らかの知見に基づいて、予測ポジションから得ることができる。
【0047】
パラメータは、逆拡散計算で使用されるべきキャリア周波数または距離測定値の初期推定値であることが好ましい。
【0048】
例えば、予期されるドップラー偏移に関する情報は、受信器で観察されるキャリア周波数を予測するために、既知の衛星送信周波数と組み合わせることができる。これは、逆拡散を行なう相関演算(検索)において開始点として使用することができる。
【0049】
本発明の更なる態様によれば、衛星測位システムからの信号を処理する方法であって、
データの第1、第2、および、第3の組を受信するステップであり、各組が、
衛星測位受信器で衛星信号をサンプリングすることによって得られる衛星信号のサンプル、または、
そのようなサンプルから得られる距離測定値、
を備えており、データの第1、第2、および、第3の組が、第1、第2、および、第3の時刻に対応する、ステップと、
第1および第2のポジションフィックスをそれぞれ得るためにデータの第1および第2の組を処理するステップであって、その処理の過程で、それぞれの第1および第2の基準情報が生成されるステップと、その後、
請求項1に記載の方法にしたがって、データの第3の組を処理するステップと、
を備える方法が提供される。
【0050】
また、コンピュータで実行される場合に、前述した方法のステップの全てを行なうようになっているコンピュータプログラムコード手段を備えるコンピュータプログラム、および、コンピュータ可読媒体で具現化されるそのようなコンピュータプログラムも提供される。
【0051】
本発明の他の態様によれば、
衛星測位信号を受信するためのRFフロントエンドと、
受信した信号をサンプリングし、信号サンプルを生成するためのアナログ・デジタル変換器と、
メモリと、
プロセッサであって、
第1のポジションフィックスを計算するために、サンプルの第1の組を処理し、
第2のポジションフィックスを計算するために、サンプルの第2の組を処理し、
それぞれの計算の過程で生成される第1および第2の基準情報をメモリに記憶する、ように構成されるプロセッサと、
を備え、
プロセッサは、更に、サンプルの第3の組、または、サンプルの第3の組から得られる距離測定値を処理して、第3のポジションフィックスを計算するように構成されており、これが第1および第2の基準情報によって支援される、
衛星測位受信器が提供される。
【0052】
本発明の更なる他の態様によれば、
衛星測位信号を受信するためのRFフロントエンドと、
受信した信号をサンプリングし、信号サンプルを生成するためのアナログ・デジタル変換器と、
メモリと、
プロセッサであって、
第1のポジションフィックスを計算するために、サンプルの第1の組を処理し、
第2のポジションフィックスを計算するために、サンプルの第2の組を処理し、
それぞれの計算の過程で生成される第1および第2の基準情報をメモリに記憶する、
ように構成されるプロセッサと、
を備え、
更に、サンプルの第3の組、または、サンプルの第3の組から得られる距離測定値をメモリに記憶するように構成されており、
それにより、サンプルの第3の組、または、距離測定値をその後に処理して、第3のポジションフィックスを計算することができ、これが第1および第2の基準情報によって支援される、
衛星測位受信器が提供される。
【0053】
受信器は、更に、記憶されたサンプルの第3の組または距離測定値をメモリから読み出し、それらを処理して第3のポジションフィックスを計算するように構成されていてもよく、前記処理が第1および第2の基準情報によって支援される。
【0054】
受信器は、メモリに記憶された第1および第2の基準情報とサンプルの第3の組または距離測定値とを外部装置へアップロードするようになっていてもよく、それにより、それらを処理して第3のポジションフィックスを計算する。
【0055】
ここで、添付図面を参照して、本発明を一例として説明する。
【図面の簡単な説明】
【0056】
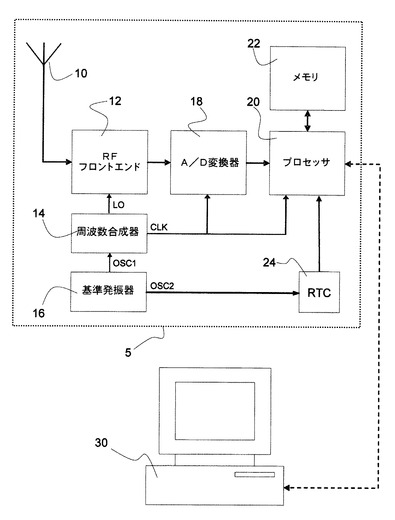
【図1】本発明の一実施形態に係るGPS受信器を示すブロック図である。
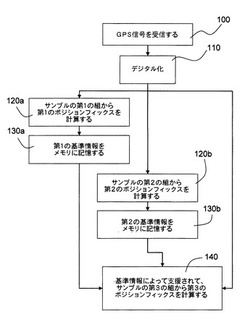
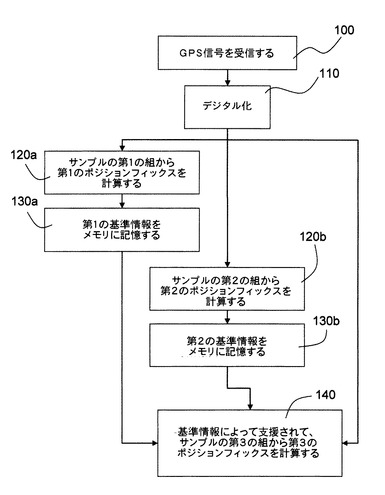
【図2】一実施形態に係る方法を示すフローチャートである。
【発明を実施するための形態】
【0057】
図1は、本発明の実施形態にしたがって動作するのに適するGPS受信器を示している。GPS受信器5は、RFフロントエンド12に結合されるアンテナ10を備える。RFフロントエンド12は、アンテナ10を介して受信されるGPS信号を増幅するための回路を含む。また、RFフロントエンドは、フィルタリング回路およびミキサをふくみ、フィルタリング回路は、帯域外干渉を減衰させる。ミキサは、受信信号と周波数合成器14により生成される局部発振器(LO)信号とを乗じて、和周波数および差周波数の信号を発生させる。周波数合成器14は、基準発振器16により生成される高周波出力OSC1により駆動される。本実施形態において、基準発振器16の高周波出力OSC1は26MHzの周波数で動作する。更なる適したフィルタリングの後、RFフロントエンド12におけるミキシング動作は、アナログ・デジタル変換器18に入力される中間周波数(IF)信号をもたらす。A/D変換器18により発生される信号サンプルは、処理のためにプロセッサ20へ出力される。A/D変換器18およびプロセッサ20はいずれも、周波数合成器14によって発生される高速クロック出力CLKによってクロックされる。なお、RFフロントエンド12およびA/D変換器18のアナログ回路は当業者に良く知られるような従来型であってもよい。
【0058】
本発明の第1の実施形態によれば、プロセッサ20は、信号が受信されてサンプリングされると直ぐに、A/D変換器18から受信される信号サンプルを処理してポジションフィックスを発生させる。この処理は、疑似距離を得て、ポジションフィックスを計算することを含む。したがって、このモードは、目下のポジションフィックスが与えられるため、リアルタイムナビゲーションに適している。
【0059】
ポジションフィックスを計算するために信号サンプルのそれぞれの組を処理している最中に、プロセッサ20は、その後の計算を支援するために使用され得る基準情報を発生させる。この基準情報は、その後の使用のためにメモリ22に記憶される。適した基準情報の例については以下で更に詳しく説明する。
【0060】
プロセッサ20が2つのポジションフィックスを計算したら、2つの対応する基準情報の断片をメモリ22で利用できる。その後、プロセッサが第3の衛星信号サンプルの組から第3のポジションフィックスを計算したいときには、これらの2つの基準情報の断片が使用される。
【0061】
本発明の第2の実施形態によれば、プロセッサは、代わりに、処理を完了することなくデータをメモリ22に記憶するように動作可能である。典型的な第2の実施形態において、メモリ22に記憶されるデータは、A/D変換器18によって与えられるIF信号の未加工サンプルを備える。しかしながら、他の実施形態において、メモリ22に記憶されるデータは、疑似距離または他の距離測定値などの部分的に処理されたデータを代替的に備えてもよい。
【0062】
現在の時間の経路を維持するためにリアルタイムクロック(RTC)24も設けられ、該リアルタイムクロックは、メモリ22に記憶されるデータと関連付けられるタイムスタンプを生成するために使用できる。これにより、データが関連付けられるおおよその時間を、その後に決定できる。ここに記載される実施例において、RTC24は、基準発振器16により生成される第2の出力OSC2によって駆動される。しかしながら、RTC24は周波数合成器14の必要とされる速度よりも遅い速度で起動するため、低周波出力OSC2を与えるために基準発振器16内で分周器が使用される。このようにして、基準発振器16は、単一の水晶からマスタークロック信号を発生させるマスター発振器として作用し、マスタークロック信号に合わせて周波数合成器14およびRTC24の両方が同期される。本実施形態において、基準発振器16の低周波出力OSC2は、約1000の分周器比率を示す約26kHzの周波数で動作する。
【0063】
また、プロセッサ20は、周波数合成器14により生成される高速クロック出力CLKの周期をカウントすることによって様々な事象間の時間差を測定するように動作可能である。周波数合成器信号CLKはRTCにおける内部タイミング信号よりもかなり高い周波数で起動するため、事象間のこれらの時間間隔をこのようにして更に正確に測定することができる。時間間隔の測定におけるより細かい精度のために、プロセッサは、高速クロック信号CLKの立ち上がりおよび立ち下りの両方をカウントできる。
【0064】
なお、プロセッサ20は、1つ以上の特定用途向け集積回路(ASIC)などの注文仕立てのハードウェア装置として実施されてもよい。あるいは、プロセッサ20は、適切にプログラムされた1つ以上の汎用処理ユニットまたはデジタル信号プロセッサ(DSP)を備えてもよい。いずれかの代替手段の実施は、当業者の能力の範囲内に十分ある。
【0065】
GPS受信器5は、通信リンクを介してパーソナルコンピュータ30に接続できる。このリンクは、有線(例えばUSB)であってもよくまたは無線(例えばブルートゥースまたはWLAN)であってもよい。前述した第2の実施形態では、衛星信号の処理の一部または全てがパーソナルコンピュータで行なわれてもよい。これについては、以下の実施例で更に詳しく説明する。
【0066】
ここで、図2を参照して、本発明の第1の実施形態に係る方法ついて説明する。
【0067】
ステップ100では、GPS受信器5がGPS信号を受信する。これらの信号は、GPS信号サンプルを発生させるために、A/D変換器18によりリアルタイムでデジタル化される(110)。プロセッサ20は、ポジションフィックスを計算するために、サンプルの第1の組をリアルタイムで処理する(120a)。この計算で生成される基準情報はメモリ22に記憶される(130a)。プロセスは信号サンプルの第2の組に関して繰り返される。これらの信号サンプルは第2のポジションフィックスを計算するためにステップ120bで処理され、生成される第2の基準情報がメモリに記憶される(130b)。2つの処理ステップ120a、120bおよび2つの記憶ステップ130a、130bはほぼ同じである。
【0068】
その後のある時間に、プロセッサは、第3のポジションフィックスを計算しようとして、信号サンプルの第3の組を処理する(140)。処理140は、(デジタル化された信号サンプルの第3の組に加えて)第1および第2の基準情報を入力として使用するため、ステップ120aおよび120bの処理とは異なる。基準情報の2つの項目は、第3のポジションフィックスの計算を支援するために使用される。
【0069】
この支援は様々な方法で行なうことができ、以下、その方法の実施例を説明する。これらの実施例は前述した本発明の第1の実施形態に関連し、該実施例では、処理がGPS受信器5内で完全に行なわれる。しかしながら、当業者であれば分かるように、処理がGPS受信器5と外部装置30との間で分配されるときまたは更には外部装置30で完全に行なわれるときにも同様の原理を適用できる。
【0070】
実施例1
この実施例において、第1および第2のポジションフィックスの計算中に生成された基準情報は、第1および第2のポジション自体の知見−すなわち、リアルタイムで計算される第1のポジションの座標を含む。これらのポジションは、第3のポジションを推定するために使用できる。すなわち、基準情報の2つの断片は、対応する情報(第3のポジション)を第3の時間に予測するために使用される。
【0071】
予測は、第1、第2、および、第3の時間の順序に応じて位置座標を補間するまたは外挿することを含んでもよい。第3の時間が第1の時間と第2の時間との間にある場合には、第1のポジションと第2のポジションとの間で受信器により取得された経路が合理的に方向付けられた(すなわち、畳み込みされない)という仮定に基づいて線形補間を使用できる。この仮定が満たされる限りでは、予測されたポジションが役立つ。同様に、第3の時間が第1および第2の時間の両方の前または後である場合には、線形外挿を使用できる。これは、受信器の移動の方向および速度が関与される時間間隔にわたって適度に均一であると仮定する。
【0072】
線形補間または線形外挿を行なうときには、第1および第2の時間に関してメモリ22に記憶されるタイムスタンプが、サンプルの第3の組の捕捉の時間の知見と共に使用される。しかしながら、他の更に簡単な実施例では、2つのポジションが関連する時間を参照することなく単に平均化されてもよい。
【0073】
ポジションの最初の推定を行なうことにより、考え得る可視SVを予測できる。その結果、逆拡散プロセスでは、更に効率的に検索を行なうことができる。例えば、SVの同じ組が可視である(すなわち、信号サンプルの第2の組で検出できる)と想定され得る。したがって、相関演算は、これらのSVのためのPRN(拡散)コードを優先させることができる。
【0074】
第3のポジションの推定(予測)が利用できると、衛星軌道データ(エフェメリスなど)を使用して、サンプルの第3の組の捕捉時に、そのポジションから見えた衛星を決定できる。エフェメリスデータは、第1および第2のポジションフィックスがステップ120aおよび120bにおいて計算されるように利用できなければならず、また、同じデータを使用して衛星の視認性を予測できる。ここで、第3のポジションで可視と予測された衛星の識別情報は、信号サンプルの第3の組が処理されるときに、逆拡散演算をブートするために使用されるパラメータを表わす。
【0075】
また、第1および第2のポジションフィックスに基づいて、処理の他のパラメータを選択することもできる。例えば、時間およびポジションが正確に知られる限りでは、コード位相を予測できる。このコード位相は、その予測されたポジションおよび時間に任意の所定の可視衛星に関して観察される。このコード位相パラメータは、逆拡散演算における相関検索のために開始点として使用できる。
【0076】
実施例2
他の有用なタイプの基準情報はクロックエラー(受信器のリアルタイムクロック24により測定される時間と同期衛星クロックにより決定されるGPS時間との間の見掛けの相違)である。これは、うまく計算されたポジションフィックスのそれぞれごとに、一意的に決定される。これは、衛星クロック時間が三辺測量計算の出力のうちの1つだからである。
【0077】
予測のために1つのリアルタイムフィックスだけが使用された場合には、このエラーは、既知の基準と未知の現在の値との間で任意の方向に移動できた。(唯一の)基準ポジションフィックスとサンプルの第3の組の発生との間の時間差が長ければ長いほど、なされるべき許容量も大きくなる(ある上限まで−例えば、ポジションの偏位においては地球のサイズ)。
単一の基準点を発端として、(例えば)サンプルの第2の組におけるクロックエラーの限界は、以下のように表わすことができる。
ClkErrR+/−(MaxClkErrRate*(TC−TR))
【0078】
ここで、ClkErrRは時間TRにおいて単一の基準に関して測定されたクロックエラーであり、捕捉(サンプルの第3の組)が時間TCで記録され、MaxClkErrRateは、クロックエラーの最大変化率−通常は受信器の基準発振器16で使用されかつ100万分の1で測定される水晶発振器部分の仕様により規定される−である。
【0079】
計算された(基準)ポジションフィックスがサンプルの第3の組の両側で利用できる場合には、補間を使用して幾つかの改良が可能になる。すなわち、
1)対象のパラメータにおける限界は、基準測定の両方によって抑制される。したがって、例えば、最大クロックエラーは、
ClkErrR1+(MaxClkErrRate*(TC−TR1))、および、
ClkErrR2+(MaxClkErrRate*(TR2−TC))
のうちの最小である。
最小クロックエラーは、
ClkErrR1−(MaxClkErrRate*(TC−TR1))、および、
ClkErrR2−(MaxClkErrRate*(TR2−TC))
(TR1がTCの前に来て、TR2が後であると仮定する)
のうちの最大である。
2)相関検索のための開始点は、ClkErrR1とClkErrR2(TR1、TC、および、TR2に比例する)との間の線形補間に基づいて選択できる。
3)クロックエラーの2つの基準値が時間的に互いにかなり近い場合(これが一般的)には、MaxClkErrRateの値を更に減らすことができる。これは、クロックエラーが前の値に戻る前に大きく偏位することはほとんどないからである。
【0080】
これらの改良のそれぞれの効果は、逆拡散中にコード位相における検索範囲を(多くの場合にはかなり)減少させること、および、より良好な開始値(すなわち、初期推定値)を与えることである。これは、成功率を高めやすく、また、計算コストを低減する。
【0081】
補間は、測定誤差のための項を含んでもよい−例えば、前述した測定クロックエラーClkErrR1およびClkErrR2が不確定であってもよい。不確定性が大きくなる速度は、より洗練された(例えば、非線形)態様でモデリングされてもよい。受信器速度およびクロックドリフト(すなわち、クロックエラーの変化率)の(基準フィックスからの)知見を組み入れることが望ましい場合もある。
【0082】
ClkErrR1=ClkErrR2で、かつ、MaxClkErrRateが一定である場合、「最小」規準は、2つの基準点TR1およびTR2のうちの近い方を選択して、その単一の基準からエラーを予測するのと等しくなると見ることができる。しかしながら、この組の条件は実際のところは極めて起こりそうにない。これは、それが、既存の一定のオフセットだけで受信器の基準発振器16内の水晶が衛星クロックの速度と完全に同期されることを示唆するからである。
【0083】
前述したように、相関検索のためのパラメータは、クロックエラーの予測値に基づいて選択できる。特に、検索のための開始点をクロックエラー予測に基づいて選択することができ、また、検索範囲を最小および最大予測クロックエラーに基づいて選択できる。開始コード位相を選択するため、第3の時刻におけるクロックエラーの予測値が、第1(または第2)のポジションフィックスに関して得られる衛星クロック時間およびそのポジションフィックスに関して測定されたコード位相と組み合わされる。同様の手法を使用して、最小および最大予測クロックエラーに基づいて検索範囲の終点を選択できる。この簡単な手法は、受信器が第1の(またはそれぞれ第2の)ポジションフィックスと第3の時刻との間で大幅に移動しなかったと仮定する。また、この手法は、衛星の軌道運動に起因して、受信器から対象の衛星までの距離が大きく変化しなかったと仮定する。一般に、これは、サンプルの組同士の間の時間間隔が適度に短くかつ受信器が高速で移動していない場合に当てはまる。これらの単純化する仮定を避ける別の手法については以下の第4の実施例で説明する。
【0084】
この実施例では、開始コード位相は、両方のポジションフィックスのクロックエラーに基づく予測を使用して、単一の基準から(第1および第2のポジションフィックスのうちの一方または他方から)予測されると見ることができる。以下の第3の実施例では、2つの(またはそれ以上の)基準点から補間(または外挿)を使用してコード位相をどのようにして予測できるのかについて説明する。
【0085】
実施例3
逆拡散中に距離測定値を予測するための他の方法は、第1および第2のポジションフィックスからの対応する距離測定値を、基準情報として使用することである。この場合、第1および第2の基準情報のそれぞれは、GPS衛星のうちの所定の1つに関して計算される距離測定値(例えば、コード位相)を含む。これらの2つの値は、第3の時間およびポジションにおける対応するコード位相値を予測するために使用される。この予測は、2つの基準コード位相から補間または外挿することを含んでもよい。この場合、予測された値は、ポジションフィックス計算で使用されるべきパラメータと同じタイプのものである。すなわち、予測されたコード位相は、相関検索において初期コード位相として直接に使用され、そのため、パラメータタイプ間の変換が必要とされない。
【0086】
同様の態様で、(観察された衛星キャリア周波数の)ドップラー偏移などの値は、第1および第2の基準ポジションフィックスと関連付けられる測定されたドップラー偏移からの補間または外挿によって予測できる。
【0087】
第4の実施例
これらの異なる実施例で使用される異なるタイプの情報は有利に組み合わせて使用できる。例えば、(第1の実施形態の場合のように)ポジションの使用は、より良い支援を与えるために(第2の実施形態の場合のような)時間の使用と有利に組み合わせることができる。第1および第2のポジションならびに時間間隔に基づいて、第3の時間における装置の、想定し得るポジションの軌跡を推定できる。移動の速度および方向の知見は、サンプルの第3の組が発生された時間におけるポジションを推定するために使用できる。あるいは、移動速度を測定できない場合には、GPS受信器が意図される用途の知見に基づいて、最大速度を仮定できる。例えば、GPS受信器が自転車のアクセサリとして設計される場合には、一組の仮定をすることができる。一方、GPS受信器が車内ナビゲーション装置として設計される(または、車のシガレットライターソケットにより給電される携帯用ナビゲーション装置である)場合には、より高い速度が想定されてもよい。時間およびポジションのおおよその推定が良好であればあるほど、サンプルの第3の組の処理時に更に見込みのある効率向上が大きい。このとき、以下のようなアルゴリズムを適用できる。
【0088】
1)前述した実施例2の場合のように、予測されたクロックエラーおよび予測されたクロックエラーの予測範囲が計算される。
2)前述した実施例1の場合のように、既知の第1および第2のポジションから、予期されるポジションの初期推定値が(例えば補間によって)予測される。
3)移動の速度および方向から、第3のポジションにおける想定し得る範囲の限界を予測できる(知られる範囲で)。ここで、ポジションの範囲の予測は、前述した第2の実施例におけるクロックエラーの範囲の予測に類似する。すなわち、開始点、ならびに、最大および最小変化率(速度)を知ると、時間座標のもっともらしい範囲と同じ方法で空間座標のもっともらしい範囲を定めることができる。
4)その後、予測ポジションおよび予測時間がSVの既知の動きと組み合わされ、それにより、予期される疑似距離、したがって信号のコード位相が予測される。これは、検索のための開始点を与える。同様に、ポジションの予測範囲およびクロックエラーの予測範囲をSV動きデータと組み合わせて、開始点に関する適切な(および、願わくは狭い)検索範囲をもたらすことができる。なお、SVの動きは、エフェメリスデータから得ることができるが、補正/改良が適用されるアルマナックデータ、または、天体機械モデルを使用することによりその通常の妥当性範囲を逸脱した「古い」(stale)エフェメリスなどの他の手段によって得ることもできる。
5)その後、これらの選択されたパラメータを使用して第3のポジションフィックスの計算が進む。
【0089】
本発明を図面および先の説明で詳しく図示して述べてきたが、そのような図および説明は、例示または典型例と見なされるべきであり、限定的に見なされるべきではない。つまり、本発明は開示された実施形態に限定されない。
【0090】
先の実施例は2つの基準点からの補間および外挿について説明してきたが、無論、同じ技術を更に多くの基準点を使用することにまで及ばせることができる。例えば、当業者であれば分かるように、様々な曲線適合アルゴリズムを使用して、任意の数の基準点に基づいて、未知の変数値を予測することができる。
【0091】
前述したように、本発明の実施形態に係る方法は、リアルタイムおよびオフライン(キャプチャ・アンド・プロセス)の両方の衛星測位に適用できる。サンプルの第1、第2、および、第3の組がオフラインで処理される場合、それらのサンプルの組は任意の望ましい順序で処理されてもよい。これは、これらのサンプルの組が発生された順序と必ずしも同じでなくてもよい。
【0092】
1つの例では、発生されるべきサンプルの第1の組および最後の組が最初に処理されてもよい。ただし、これらのサンプルの組同士の間の補間が何らかの他の対からの外挿よりも信頼できる予測子である可能性が高いと仮定する。
【0093】
他の例では、順序を選択するための能動的なまたは適応的な選択ステップが存在する。国際公開第2009/000842号パンフレットは、信号サンプルの複数の組をバッチとして効率的に処理するための手続きについて記載する。最初の処理は、最も見込みのある(うまく処理するために最も簡単な)サンプルの組を特定するために使用される。この特定されたサンプルの組がポジションフィックスを計算するために処理されたら、その結果を単一の基準として使用して、他のポジションフィックスの計算を支援できる。本発明を国際公開第2009/000842号パンフレットの方法と組み合わせることができる。典型的な組み合わせ方法では、最も見込みのある2つの組を選択するために、サンプルの3つ(またはそれ以上)の組に関して予備的な処理が行なわれる。これらの2つの組は、ポジションフィックスを計算するために最初に十分に処理される。その後、先に計算された2つのポジションフィックスからの支援を使用して残りの組が処理される。
【0094】
とりわけ、幾つかの(キャプチャ・アンド・プロセス)実施形態では、全疑似距離を測定して記憶する代わりに、受信器がコード位相を記憶する。これは、粗いタイミング(データメッセージにおけるポジション)を確立するために必要とされる更なる処理を遅らせる。しかしながら、この場合には、粗いタイミングの曖昧さを解決できるようにするため、コード位相がその後に処理されるときに補足的な情報が必要とされるであろう。したがって、一般に、何らかの他の情報をコード位相と共に記憶するか、別個に得る必要がある。
【0095】
粗いタイミングは多種多様な方法で決定することができ、そのため、コード位相を増やすために記憶されるべきデータのタイプも幅広く変化し得る。最終的に、必要なのは、コード位相測定値が対応する時刻のおおよその推定値であり、また、この推定値を衛星クロックに関連付けるための何らかの方法である。その場合、これにより、データメッセージにおけるポジションを決定できる。おおよその時間は受信器の内部リアルタイムクロックから決定することができる。ただし、曖昧さを解決できるように十分に正確にこのリアルタイムクロックと衛星クロックとの間の関係を確立できる場合に限る。したがって、1つの実施例では、測定されたコード位相を補足するために、内部リアルタイムクロックによって発生されるタイムスタンプを記憶することができる。衛星クロックとの関係は、衛星クロック情報を(局所的なタイムスタンプと共に)引き出すのに十分長い信号サンプルのブロックを、間欠的に記憶することによって、確立できる。粗いタイミングを決定するための別の方法は当業者に明らかである。例えば、粗いタイミングを外挿するために(コード位相が測定された時間における)ポジションの粗い推定値を使用することができる(タイミングは、全ての時刻に受信器に対する衛星の相対的なポジションに一意的に関連付けられるからである)。粗いポジション推定値は、何らかの外部ソースから入手でき、または、例えば、衛星群の観察されたドップラー偏移から計算できる。このように、見掛けの(観察された)衛星放送周波数を記憶することは、記憶されたコード位相のための補足にも適し得る。
【0096】
国際公開第2006/018803号パンフレットは、信号サンプルと共にタイムスタンプを記憶する、1つの効率的で効果的な方法について記載する。この方法は、(少なくとも)サンプルの第3の組がその後の処理のためにメモリ20に記憶される本発明の実施形態で使用されてもよい。GPS信号サンプルのごく一部をタイムスタンプビットによってメモリに簡単に上書きする(置き換えする)ことができる。これは、タイムスタンプの別個の記録の必要性を回避するだけでなく、受信されたサンプルに対するタイムスタンプの正確な同期化を確保する。サンプルの捕捉された組の僅かな欠けた部分は、通常、その後の処理ステップを悪化させない。
【0097】
受信器5は、支援サーバからアルマナック、エフェメリス、または、場合により全衛星データメッセージ記録を得ることができる、支援(assisted)GPS(A−GPS)受信器であってもよい。サーバは、固定GPS受信器または世界中に分散される受信器のネットワークから、この情報を収集してもよい。これらの基準受信器のそれぞれは、デコードされた衛星データメッセージを中央データベースへ報告する。あるいは、モバイルGPS受信器のネットワークから支援データを動的に収集できる。すなわち、それぞれのGPS受信器は、衛星データメッセージのそれ自身の断片的な観察結果を中央サーバと共有する。サーバは、これらの観察結果を集めて完全な記録を形成し、その後、全ての受信器がこの記録にアクセスできる。データ支援サーバとの通信は、任意の都合の良い手段によって行なうことができるが、通常はある種の無線データ接続を介してなされる。
【0098】
公称的に古い衛星軌道データは、衛星の軌道を外挿するより先進的な技術を使用することによって、改善されてもよい。例えば、衛星軌道のより良い推定値をもたらすために、(地球、太陽、および、月のような)天体の動き、相互作用、および、重力的影響のモデルが使用されてもよい。これにより、通常の有効期間をかなり(前後のいずれかで)外れても、エフェメリスおよびアルマナック情報を使用できる。
【0099】
なお、前述した実施形態は、RF信号が中間周波数までミックスダウンされるスーパーヘテロダイン受信器構造に関連して説明されてきた。無論、当業者であれば容易に分かるように、同一の原理が直接変換受信器に適用される。実際、そのような受信器は、単にゼロの中間周波数を有すると見なすことができる。
【0100】
同様に、図1の実施形態は受信器を示しており、この受信器は、リアルタイムクロック(RTC)24および周波数合成器14の両方が、同じソース、すなわち、単一の水晶から動作する単一のマスター基準発振器16から、クロック信号を得る。無論、本発明の適用可能性はこの構造に限定されない。他の実施形態において、RTC24は、自身の水晶(例えば32.768kHz RTC水晶)を使用する別個の更に遅く作動するRTC発振器によって駆動されてもよい。したがって、RTCを駆動させるクロック信号は、周波数合成器14を駆動させるクロック信号から独立し得る。
【0101】
容易に分かるように、本発明はポジション推定値の計算に限定されない。無論、速度などの他のパラメータが更に計算されてもよい。例えば、受信器のポジションが分かると、衛星測位信号のドップラー偏移から速度を計算することが良く知られている。
【0102】
幾つかの実施形態では、RFフロントエンドにおける従来のフィルタリングに加えて、信号がサンプリングされた後に、受信されたGPS信号の更なるフィルタリングが行なわれてもよい。例えば、米国特許出願公開第2008/0240315号明細書は、干渉抑制のための方法および回路について記載する。フィルタリングは、RFフロントエンドの一部であってもよく、または、ベースバンド処理の一部であってもよい。この種のデジタルフィルタリングが適応できてもよい。すなわち、サンプリングされた信号は、干渉が存在するかどうかを決定するために解析されてもよく、干渉が存在する場合には、干渉の特性(例えば、周波数または電力)が測定される。この場合、デジタルフィルタリングは、干渉を最適に打ち消すまたは減衰させるように自動的に適合され得る。フィルタリングをより高いサンプルレートで行なった後(デジタル・アナログ変換器による出力として)、フィルタリングされた信号サンプルを、記憶または処理する前に、更に低いレートまで間引くことが特に有益な場合がある。間引きに代えてまたは抜き取りに加えて、それぞれのサンプルのビット幅(すなわち、ビット解像度)がそのような処理後に減少されてもよい。サンプルが記憶されるようになっている場合には、記憶量およびメモリインタフェースにおけるスループット要求の両方が減少される。サンプルが直ちに処理されるようになっている場合、抜き取りおよび/またはビット解像度低減は、処理ハードウェアの電力消費量および/または複雑さを減少させることができる。しかしながら、事前にフィルタリングすることにより、結果として生じる解像度低減信号の質が高まりやすい。
【0103】
したがって、本明細書中において、受信信号を「サンプリングする」、および、それに伴う信号サンプルを「記憶する」という言及は、サンプリングステップ(アナログ・デジタル変換)とサンプルを記憶するステップとの間に更なるフィルタリングの可能性を含むように解釈されるべきである。
【0104】
開示された実施形態の他のバリエーションは、図面、開示内容、および、添付の特許請求の範囲を検討することにより、特許請求の範囲に記載される発明を実施する際に当業者により理解されて行なわれ得る。特許請求の範囲における用語「備える(comprising)」は他の要素またはステップを排除せず、また、不定冠詞「1つの(a、an)」は複数を排除しない。単一のプロセッサまたは他のユニットが特許請求の範囲に列挙される幾つかの項目の機能を満たしてもよい。互いに異なる従属請求項に特定の測定が列挙されているという事実だけで、測定されたこれらの組み合わせを有利に使用できないということを示唆するものではない。コンピュータプログラムは、光学記憶媒体または他のハードウェアの一部と共にもしくは一部として供給される固体記憶媒体などの適した媒体に記憶され/分配されてもよいが、インターネットまたは他の有線もしくは無線通信システムなどによって他の形式で分配されてもよい。特許請求の範囲における任意の参照符号は、本発明の範囲を限定するものと解釈されるべきではない。
【0105】
前述した実施形態は、GPSを使用する衛星測位に集中してきた。しかしながら、当業者であれば分かるように、本発明の範囲はGPSの使用に限定されない。同じ原理が同様に他の衛星測位システムにも適用できる。これらは一般に「グローバル・ナビゲーション・サテライト・システム」(GNSS)として知られる。GNSSの他の例としては、ロシアの「グローバル・ナビゲーション・サテライト・システム」(GLONASS)や欧州のプロジェクト「ガリレオ」が挙げられるが、これらに限定されない。
【0106】
本発明は衛星測位システムに関連するが、当業者であれば分かるように、同じまたは同様の技術を、基準ビーコンが宇宙ビークルでない測位システムに適用することもできる。例えば、「スードライト(pseudolites)」による測位が衛星測位に代わるものとして提案されてきた。スードライトは、一般に、GPS衛星によって送信される信号に類似する(または同一の)信号を送信する地上送信器である。したがって、スードライトは、GPS衛星によって使用される同じL1周波数、および、同様のスペクトル拡散変調方式を使用してもよい。スードライト信号を衛星測位信号と同じ方法で処理できる限りにおいて、本明細書は、第1および第2のポジションフィックスの計算の過程で生成される基準情報によって支援される、スードライト信号から第3のポジションフィックスを計算する等価な技術を開示していると解釈されるべきである。
【技術分野】
【0001】
本発明は、グローバル・ナビゲーション・サテライト・システム(GNSS)のための受信器、および、そのような受信器によって受信された衛星信号を処理する方法に関する。特に、本発明はグローバル・ポジショニング・システム(GPS)に関する。
【背景技術】
【0002】
GPSは、6つの異なる軌道面内にある最大で32個の周回軌道衛星(宇宙ビークル「SV」と呼ばれる)のネットワークから成る衛星に基づくナビゲーションシステムである。システム設計によって24個の衛星が必要だが、それよりも多い衛星があればカバレッジが向上する。衛星は絶えず動いており、24時間もしないうちに地球の周りで2つの完全な軌道を描く。
【0003】
衛星によって送信されるGPS信号は、規則的態様で連続的に繰り返される疑似ランダムコードを使用する直接シーケンススペクトル拡散として一般に知られる形態を成す。衛星は、公衆が自由に利用できる粗精度/捕捉コードすなわちC/Aコードと、通常は軍事用途のために確保される制限された精密コードすなわちPコードとを含む異なる拡散コードを伴う幾つかの信号を送信する。C/Aコードは、1000分の1秒ごとに繰り返す1.023MHzのチップレートで送信される1,023ビットの長さの疑似ランダムコードである。それぞれの衛星は別個のC/Aコードを送信し、それにより、衛星を一意的に特定できる。
【0004】
データメッセージは、各衛星によりC/Aコード上で変調され、送信衛星の詳細な軌道パラメータ(エフェメリス(ephemeris)と呼ばれる)などの重要な情報、衛星のクロックにおけるエラーに関する情報、衛星の状態(正常(healthy)または不正常(unhealthy))、現在の日付け、および、時間を含む。この情報は、正確なポジションを決定するためにGPS受信器に欠かせない。それぞれの衛星は、エフェメリスおよびそれ自体における詳細なクロック補正パラメータのみを送信し、したがって、支援されないGPS受信器は、ポジション計算においてそれが使用したい各衛星のデータメッセージの適切な部分を処理しなければならない。
【0005】
データメッセージはいわゆるアルマナックも含み、アルマナックは、他の全ての衛星に関するあまり正確でない情報を含み、かつ、あまり頻繁には更新されない。アルマナックデータにより、GPS受信器は各GPS衛星が一日中いるべき場所を常に推定でき、それにより、受信器は、いずれの衛星を探すべきかを更に効率的に選択できる。各衛星は、システム内の全ての衛星に関する軌道情報を示すアルマナックデータを送信する。
【0006】
従来のリアルタイムGPS受信器は、送信されたデータメッセージを読み出して、エフェメリス、アルマナック、および、連続使用のための他のデータを保存する。
【0007】
ポジションを決定するため、GPS受信器は、衛星によって信号が送信された時間と、その信号がGPS受信器によって受信された時間とを比較する。受信器は、時間差により、その特定の衛星がどの程度離れているのかが分かる。その衛星におけるエフェメリスにより、GPS受信器は衛星のポジションを正確に決定できる。複数の衛星からの距離測定値とそれらのポジションの知見とを組み合わせることにより、三辺測量によってポジションを得ることができる。最小限の3つの衛星を用いて、GPS受信器は、緯度/経度ポジション(2Dポジションフィックス)を決定できる。4個またはそれ以上の衛星を用いて、GPS受信器は、緯度、経度、および、高度を含む3Dポジションを決定できる。衛星から受信される情報は、GPS受信器内のリアルタイムクロック(RTC)をセットする(または補正する)ために使用することもできる。
【0008】
衛星からの信号の見掛けのドップラー偏移を処理することにより、GPS受信器は、移動の速度および方向(「対地速度」および「対地軌道」とそれぞれ称される)を正確に与えることもできる。
【0009】
衛星からの完全なデータ信号は37,500ビットナビゲーションメッセージから成り、これは、50bpsで送信するのに12.5分かかる。データ信号は25個の30秒フレームへ分けられ、各フレームが1500ビットを有し、これらは5個の6秒サブフレームへと分けられる。それぞれの6秒サブフレームは10個の30ビットワードへ分けられる。ポジションフィックス(エフェメリスなど)のために必要な全ての情報が各フレーム内に含まれ、そのため、GPS受信器は、一般に、いわゆるコールドスタートからポジションフィックスを生成するために約30秒を要する。これは、しばしば、「タイム・トゥ・ファースト・フィックス」(TTFF)と呼ばれる。
【0010】
第1のサブフレームはクロック補正データを与え、第2および第3のサブフレームはエフェメリスデータを与え、また、アルマナックデータは第4および第5のサブフレーム内にある。
【0011】
SVの全てが同じ周波数で送信する。特定の衛星からの信号を区別するため、受信器は、その衛星によって使用中であることが分かっているC/Aコードのレプリカを発生させて、このレプリカが入力信号と同期されるようにこのレプリカを合わせる必要がある。前記入力信号は、衛星から受信器へ移動する信号の飛行時間(一般的には約0.07秒)に主に起因して未知の量だけ遅延される。一般に、レプリカを入力信号と同期させるために必要なアライメントを受信器が正確に予測することは不可能であり、そのため、何らかの形態の検索が必要とされる。この場合、多くのアライメントが順々に試みられ、最良の適合が選択される。多くの候補アライメントを評価するこのプロセスは相関と称される。というのは、通常、受信信号が特定のSVからのC/Aコードを有する成分を含むかどうかを決定するために、受信器が各衛星ごとに順々に受信信号と既知のC/Aコードとの間で相関関数を実施するためである。相関関数は、複数の相対的なタイミングごとに計算されなければならず、また、相関ピークが見出されるときには、この相関は特定のタイミングおよび特定のSVに対応する。順々に発見されるタイミングは、SVからの特定の距離に対応する。
【0012】
それぞれの衛星のC/Aコードの検索は、受信器によって観察される衛星信号の見掛けの周波数が変化するという事実によって複雑化される。変化の主な根源は、衛星の動きに起因するドップラー効果;受信器の動きに起因するドップラー効果;ならびに、受信器の周波数合成器内の局部発振器(LO)のドリフトおよびオフセットである。そのため、C/Aコードの徹底的な検索は、一連の周波数シフトごとに一連の位相(時間的)シフトで相関関数の評価を必要とする。
【0013】
相関プロセスは時として「逆拡散」と称される。これは、このプロセスが信号からの拡散コードを除去するからである。決定されたコード位相−すなわち、相関関数のピークのタイミングは、距離計算で用いる正確なタイミング情報を明らかにする。しかしながら、コードが1000分の1秒ごとに繰り返されると、粗いタイミングも決定される必要がある。一般に、あまり頻繁に繰り返さないデータ成分は、50bpsデータメッセージやその特定の部分、例えばサブフレームプリアンブルまたはサブフレーム・ハンドオーバー・ワードの個々のビットなど、更に粗いタイミング評価のため(すなわち、GPS時間を得ることができるようにするため)に使用される。
【0014】
コード位相および粗いタイミング情報は、共に、「疑似距離(pseudo-range)」を含む。これは、それらの情報が衛星からのメッセージの飛行時間を特定するからである。この飛行時間は、光の速度cにより移動される距離に関連付けられる。これは、衛星のクロックと受信器のRTCとの間の相対的なオフセットが知られていないため、「疑似」距離または相対距離(真の距離ではない)である。しかしながら、このオフセットは全ての衛星に対して同じであり(それらのクロックが同期されるからである)、そのため、様々な衛星の組における疑似距離は、三辺測量計算により固有のポジションフィックスを決定するのに十分な情報を与える。
【0015】
GPS受信器の大部分は、衛星からの信号が受信されると、これらの信号を「リアルタイムで」処理することにより機能し、それにより、現在の時間における装置のポジションが報告される。そのような「従来の」GPS受信器は、常に、
− GPS信号を受信するのに適したアンテナと、
− 所望の信号を増幅し、フィルタリングし、中間周波数(IF)まで混合し、それにより、それらの信号が通常は数MHz程度のサンプリングレートで適したアナログ・デジタル(A/D)変換器を通過できるようにするアナログRF回路(しばしば、GPSフロントエンドと呼ばれる)と、
− 通常は何らかの形態のマイクロコントローラと組み合わされるA/D変換器により発生されるIFデータサンプルに関して相関プロセスを行なうデジタル信号処理(DSP)ハードウェアであって、前記マイクロコントローラが、前記信号処理ハードウェアを制御して所望のポジションフィックスを計算するために必要な「高レベル」処理を行なう、デジタル信号処理(DSP)ハードウェアと、
を備える。
【0016】
「ストア・アンド・プロセス・レイター」(「キャプチャ・アンド・プロセス」としても知られており、以下ではそのように称する)というあまり知られていない概念も詳しく調べられてきた。これは、従来のアンテナおよびアナログRF回路により収集されるIFデータサンプルを、該サンプルをその後のある時(秒、分、時間、または更には、数日)に、何らかの場所で処理する前に、何らかの形態のメモリに記憶することを伴う。このような場所は、処理リソースが大きくおよび/または受信器がバッテリによって給電されないことが多い。
【0017】
このことは、キャプチャ・アンド・プロセス受信器がリアルタイム受信器よりもかなり簡単であることを意味する。サンプルの短いセグメントだけ−例えば、データに値する100〜200msを記憶する必要がある。各SVからの(非常に遅い)データメッセージをデコードする必要はもはやなく、相関を行なって疑似距離を決定する必要もなく、また、三辺測量計算を実行してポジションフィックスを得る必要ももはやない。したがって、従来の受信器のデジタル信号処理ハードウェアの大半を排除でき、それにより、複雑さおよびコストが低減される。電力消費量もかなり低減され、それにより、バッテリ寿命が長くなる。
【0018】
ポジションフィックスを計算するために必要なDSPハードウェアを含む他のキャプチャ・アンド・プロセス受信器も提案されてきた。1つのモードにおいて、そのような装置は、GPS信号を受信し、サンプリングして、メモリに記憶するが、それらを処理しない。装置は、別個のモードへ切り換えられると、信号の受信を中止して、代わりに、予め記憶されたサンプルを処理し始める。この種の装置は、例えばユーザが旅行から戻った後に回顧的なトラックログまたは動作の履歴を発生させるのに適している。
【発明の概要】
【課題を解決するための手段】
【0019】
本発明の第1の態様によれば、衛星信号サンプルからポジションフィックスを計算する方法であって、
第1のポジションフィックスの計算中に生成される第1の基準情報を取得するステップであって、第1のポジションフィックスは、第1の時間に計算された衛星測位受信器のポジションである、ステップと、
第2のポジションフィックスの計算中に生成される第2の基準情報を取得するステップであって、第2のポジションフィックスは、第2の時間に計算された受信器の計算されたポジションである、ステップと、
第3の時間に受信器により生成される衛星信号サンプルの組、または、そのような衛星信号サンプルの組から得られる距離測定値を受信するステップと、
第3のポジションフィックスを計算するために、サンプルの組または距離測定値を処理するステップと、
を備え、
前記処理するステップは、第1および第2のポジションフィックスの計算中に生成される基準情報によって支援される、
方法が提供される。
【0020】
このようにすると、第3のポジションフィックスの計算を更に簡単に、更に素早く、エネルギをあまり消費することなく、すなわち、他の方法より更に効率的に行なうことができる。第1および第2のポジションフィックスの計算からそれぞれ得られる第1および第2の基準情報を組み合わせて、第3のポジションフィックスの計算を知的にサポートすることができる。例えば、ポジションフィックスにわたる労力の重複を最小限に抑えることにより計算労力を軽減できる。
【0021】
本発明者等は、基準情報の単一の断片からの予測と比べて、基準情報の2つ以上の断片が、多くの状況で極めて有利であることを認識した。例えば、2つの時間点における基準情報により、情報の傾向を考慮に入れることができるため、より正確な予測が可能である。そのような動向の知見によって、場合によっては、未知のパラメータのための検索範囲を制約することもできる。したがって、基準情報の2つの断片が利用される場合には、第3のポジションフィックスの計算においてかなり高い効率を得ることができる。
【0022】
第1および第2の基準情報は、それぞれ第1および第2のポジションフィックスの計算の産物である。例えば、基準情報は、ポジションフィックスそのもの、距離測定値などの中間結果、または、クロックエラー(すなわち、受信器のクロックと衛星クロックとの間の差)などの副次的効果として生み出される情報であってもよい。計算の複雑さまたは計算量を減少させるために、基準情報は第3のポジションフィックスの計算で使用できる情報を含むことが好ましい。基準情報は、例えば第3のポジションフィックスの計算において、パラメータをブートするために使用されてもよい。好ましくは、第3のポジションフィックスを計算するのに適する対応値を予測するために、基準情報は時間的に前後に推定され得る値を含む。
【0023】
第1、第2、および、第3の時間は任意の順序で生じてもよい。優先順位は、「第1」、「第2」、または、「第3」という用語によって示唆されない。
【0024】
幾つかの実施形態では、サンプルも距離測定値(コード位相または疑似距離)もメモリに記憶されない。すなわち、サンプルは、ポジションフィックスを計算するために、メモリに記憶されることなく直ちに処理される。これはリアルタイムな衛星測位受信器を与える。
【0025】
他の実施形態において、サンプルまたは距離測定値は、その後の処理のために、意図的な遅延をもってメモリに記憶される。この遅延処理は、サンプルを発生させた衛星測位受信器によって、または、データが転送される何らかの他の外部装置によって行なわれてもよい。この手法は、本明細書中では、「キャプチャ・アンド・プロセス」衛星測位と称される。幾つかの実施形態は、「キャプチャ・アンド・プロセス」手法およびリアルタイム測位の両方の混合を使用してもよい。
【0026】
距離測定値は、例えば、コード位相、キャリア位相、または、疑似距離測定値を備えてもよい。一般に、距離測定値は、衛星測位受信器から一群の測位衛星の中の1つの衛星までの距離に関する何らかの情報を(暗示的にまたは明示的に)与える値である。距離測定値は、距離によって、または、信号の飛行時間もしくは到達時間によって表わされてもよい。多くのタイプの距離測定値は、絶対的なまたは固有の測定値ではない−それらの測定値は一般にある程度の相対性または曖昧さを組み入れる。例えば、コード位相測定値は、それ自身で、拡散コードの1つの完全な繰り返しの周期(当該技術分野では「コードエポック」として知られている)内で、(相対的な)到達時間を特定する。衛星データメッセージのいずれのコードエポックが観察されているかに関しては曖昧なままである。したがって、用語「距離測定値」は、ある程度の曖昧さを含む測定値、ならびに、絶対的および/または固有の距離測定値の両方を含むように理解されるべきである。
【0027】
処理は、第1、第2、および、第3の時間の知見、または、これらの時間の間の1つ以上の相対比較を使用してもよい。
【0028】
この処理は、時間の相対知見−例えば第1の時間と第2の時間との間の差;第2の時間と第3の時間との間の差;および/または、第1の時間と第3の時間との間の差を使用することを含んでもよい。時間差を正確に決定することが、対応する絶対時間を決定することよりも容易なこともあり得る。
【0029】
時間差を測定することは、ポジションフィックスを計算するために使用されるサンプルのそれぞれの組を受信している経過時間を測定することを含んでもよい。
【0030】
すなわち、サンプルの1つの組を生じさせる衛星信号の到達時間と、サンプルの他の組を生じさせる衛星信号の到達時間との間の差の記録が維持されてもよい。それぞれの時間スタンプを差し引くことにより差を計算するようになっている場合よりも、正確にこの差を測定できる場合がある。例えば、差は、高品質かつ高周波な発振器信号などの受信器で発生される発振器信号の周期をカウントすることによって、または、衛星信号におけるキャリアの周期をカウントすることによって測定されてもよい。これは、精度を高めるために、周期信号の立ち上がりまたは/および立ち下りの数を観察してカウントすることによって行なわれてもよい。好ましくは、このカウント技術は、アナログ・デジタル変換およびその後のデジタル処理のために高周波クロック信号を発生させる周波数合成器によって生成される発振器信号に適用される。これにより、経過時間の測定は、高周波発振器の精度の利益を享受できる。
【0031】
第1および第2の基準情報はそれぞれ、それぞれのポジションフィックス;ポジションフィックスと関連付けられる衛星クロック時間;衛星クロック時間と受信器クロック時間との間のクロックエラー;受信器と衛星との間の距離測定値;衛星から受信される信号の観察されたドップラー偏移のうちの少なくとも1つを備えることが好ましい。
【0032】
前記支援は、第1および第2の時間における基準情報に基づいて、第3の時間における対応する情報を予測するステップを備えることが好ましい。
【0033】
したがって、支援は、第3のポジションフィックス;第3の時間に対応する衛星クロック時間;第3の時間におけるクロックエラー;第3の時間における距離測定値;および、第3の時間において受信器により観察できたかもしれない衛星信号のドップラー偏移のうちの1つ以上に関して期待値を予測しまたは推定するステップを含んでもよい。
【0034】
基準情報の2つの断片に基づく予測は、より簡単な形式の予測、例えば異なるポジションフィックスの初期の計算中に発生される基準情報の1つの断片をコピーする場合よりも優れている(したがって、より有用な結果を与える)。ここで、基準情報の2つの断片「に基づいて」予測を行なうとは、基準情報の2つの断片のうちのいずれか一方の値を変えることにより予測の結果を変えることができることを意味する。
【0035】
前記予測は、第1および第2の時間にそれぞれ対応する第1および第2の値に基づいて、第3の時間に対応する第3の値を補間しまたは外挿するステップを備えてもよい。
【0036】
第3の時間が第1の時間と第2の時間との間に生じる場合に、補間が行なわれる。この場合、第1の基準情報はサンプルの組が発生される前の時間によってもたらされ、また、第2の基準情報はサンプルの組が発生された後の時間によってもたらされる。
【0037】
逆に、第3の時間が第1の時間と第2の時間との間にない場合−すなわち、第3の時間が第1および第2の時間の両方の前または後にある場合に、外挿が行なわれる。
【0038】
補間または外挿は種々の適した方法を使用してもよい。例えば、補間または外挿が線形であってもよくまたは非線形であってもよい。
【0039】
予測ステップは、移動の速度および/または方向の推定値を使用して第3のポジションを予測するステップを有利に含んでもよい。
【0040】
速度、方向、または、速さの推定値は、(例えば、移動の瞬間もしくは平均の速度または移動方向)測定値に基づいてもよい。あるいは、GPS受信器が使用される用途または使用されることが意図される用途の知見に基づいて、速度などのパラメータが推測されてもよい。したがって、受信装置が、歩行、ランニングまたはサイクリングなどの特定のレジャーで使用されるようになっている場合に、最大速度が推定されてもよい。GPS受信器が異なる活動のための異なるモードを有してもよく、また、最大速度の推定値は、いずれのモードが現在選択されているのかに依存してもよい。
【0041】
前記処理は、他の時間に対応する1つ以上の更なるポジションフィックスの計算中に生成される基準情報によって、更に支援されてもよい。
【0042】
更なるポジションフィックスは、これらの他の時間に計算された受信器のポジションである。
【0043】
補間または外挿の非線形方法においては、特に、3つ以上の時間点からの基準情報を利用することが有用または必要な場合がある。非線形方法としては、二次、三次、または、更に高次の多項式補間または外挿、および、曲線適合法を挙げることができる(しかし、これらに限定されない)。
【0044】
前記支援は、前記処理で使用されるべきパラメータを選択するまたは得るステップを備えてもよい。
【0045】
ある場合には、選択されたパラメータが予測された情報(第1および第2の基準情報から予測された情報)と同じであってもよい。例えば、基準情報がドップラー偏移を備えてもよく、予測された情報がドップラー偏移であってもよく、また、計算で使用されるパラメータがドップラー偏移であってもよい。
【0046】
他の場合には、パラメータが何らかの方法で予測情報から得られてもよい。例えば、基準情報がそれぞれの(第1および第2の)ポジションフィックスの位置座標であってもよく、予測情報が第3のポジションフィックスにおける予期される位置座標であってもよく、また、処理で使用されるパラメータは、信号サンプルの組を逆拡散する際に開始点として使用されるべき予期されるコード位相であってもよい。この例では、予期されるコード位相は、同様に第3の時間および対応する衛星の動きに関する何らかの知見に基づいて、予測ポジションから得ることができる。
【0047】
パラメータは、逆拡散計算で使用されるべきキャリア周波数または距離測定値の初期推定値であることが好ましい。
【0048】
例えば、予期されるドップラー偏移に関する情報は、受信器で観察されるキャリア周波数を予測するために、既知の衛星送信周波数と組み合わせることができる。これは、逆拡散を行なう相関演算(検索)において開始点として使用することができる。
【0049】
本発明の更なる態様によれば、衛星測位システムからの信号を処理する方法であって、
データの第1、第2、および、第3の組を受信するステップであり、各組が、
衛星測位受信器で衛星信号をサンプリングすることによって得られる衛星信号のサンプル、または、
そのようなサンプルから得られる距離測定値、
を備えており、データの第1、第2、および、第3の組が、第1、第2、および、第3の時刻に対応する、ステップと、
第1および第2のポジションフィックスをそれぞれ得るためにデータの第1および第2の組を処理するステップであって、その処理の過程で、それぞれの第1および第2の基準情報が生成されるステップと、その後、
請求項1に記載の方法にしたがって、データの第3の組を処理するステップと、
を備える方法が提供される。
【0050】
また、コンピュータで実行される場合に、前述した方法のステップの全てを行なうようになっているコンピュータプログラムコード手段を備えるコンピュータプログラム、および、コンピュータ可読媒体で具現化されるそのようなコンピュータプログラムも提供される。
【0051】
本発明の他の態様によれば、
衛星測位信号を受信するためのRFフロントエンドと、
受信した信号をサンプリングし、信号サンプルを生成するためのアナログ・デジタル変換器と、
メモリと、
プロセッサであって、
第1のポジションフィックスを計算するために、サンプルの第1の組を処理し、
第2のポジションフィックスを計算するために、サンプルの第2の組を処理し、
それぞれの計算の過程で生成される第1および第2の基準情報をメモリに記憶する、ように構成されるプロセッサと、
を備え、
プロセッサは、更に、サンプルの第3の組、または、サンプルの第3の組から得られる距離測定値を処理して、第3のポジションフィックスを計算するように構成されており、これが第1および第2の基準情報によって支援される、
衛星測位受信器が提供される。
【0052】
本発明の更なる他の態様によれば、
衛星測位信号を受信するためのRFフロントエンドと、
受信した信号をサンプリングし、信号サンプルを生成するためのアナログ・デジタル変換器と、
メモリと、
プロセッサであって、
第1のポジションフィックスを計算するために、サンプルの第1の組を処理し、
第2のポジションフィックスを計算するために、サンプルの第2の組を処理し、
それぞれの計算の過程で生成される第1および第2の基準情報をメモリに記憶する、
ように構成されるプロセッサと、
を備え、
更に、サンプルの第3の組、または、サンプルの第3の組から得られる距離測定値をメモリに記憶するように構成されており、
それにより、サンプルの第3の組、または、距離測定値をその後に処理して、第3のポジションフィックスを計算することができ、これが第1および第2の基準情報によって支援される、
衛星測位受信器が提供される。
【0053】
受信器は、更に、記憶されたサンプルの第3の組または距離測定値をメモリから読み出し、それらを処理して第3のポジションフィックスを計算するように構成されていてもよく、前記処理が第1および第2の基準情報によって支援される。
【0054】
受信器は、メモリに記憶された第1および第2の基準情報とサンプルの第3の組または距離測定値とを外部装置へアップロードするようになっていてもよく、それにより、それらを処理して第3のポジションフィックスを計算する。
【0055】
ここで、添付図面を参照して、本発明を一例として説明する。
【図面の簡単な説明】
【0056】
【図1】本発明の一実施形態に係るGPS受信器を示すブロック図である。
【図2】一実施形態に係る方法を示すフローチャートである。
【発明を実施するための形態】
【0057】
図1は、本発明の実施形態にしたがって動作するのに適するGPS受信器を示している。GPS受信器5は、RFフロントエンド12に結合されるアンテナ10を備える。RFフロントエンド12は、アンテナ10を介して受信されるGPS信号を増幅するための回路を含む。また、RFフロントエンドは、フィルタリング回路およびミキサをふくみ、フィルタリング回路は、帯域外干渉を減衰させる。ミキサは、受信信号と周波数合成器14により生成される局部発振器(LO)信号とを乗じて、和周波数および差周波数の信号を発生させる。周波数合成器14は、基準発振器16により生成される高周波出力OSC1により駆動される。本実施形態において、基準発振器16の高周波出力OSC1は26MHzの周波数で動作する。更なる適したフィルタリングの後、RFフロントエンド12におけるミキシング動作は、アナログ・デジタル変換器18に入力される中間周波数(IF)信号をもたらす。A/D変換器18により発生される信号サンプルは、処理のためにプロセッサ20へ出力される。A/D変換器18およびプロセッサ20はいずれも、周波数合成器14によって発生される高速クロック出力CLKによってクロックされる。なお、RFフロントエンド12およびA/D変換器18のアナログ回路は当業者に良く知られるような従来型であってもよい。
【0058】
本発明の第1の実施形態によれば、プロセッサ20は、信号が受信されてサンプリングされると直ぐに、A/D変換器18から受信される信号サンプルを処理してポジションフィックスを発生させる。この処理は、疑似距離を得て、ポジションフィックスを計算することを含む。したがって、このモードは、目下のポジションフィックスが与えられるため、リアルタイムナビゲーションに適している。
【0059】
ポジションフィックスを計算するために信号サンプルのそれぞれの組を処理している最中に、プロセッサ20は、その後の計算を支援するために使用され得る基準情報を発生させる。この基準情報は、その後の使用のためにメモリ22に記憶される。適した基準情報の例については以下で更に詳しく説明する。
【0060】
プロセッサ20が2つのポジションフィックスを計算したら、2つの対応する基準情報の断片をメモリ22で利用できる。その後、プロセッサが第3の衛星信号サンプルの組から第3のポジションフィックスを計算したいときには、これらの2つの基準情報の断片が使用される。
【0061】
本発明の第2の実施形態によれば、プロセッサは、代わりに、処理を完了することなくデータをメモリ22に記憶するように動作可能である。典型的な第2の実施形態において、メモリ22に記憶されるデータは、A/D変換器18によって与えられるIF信号の未加工サンプルを備える。しかしながら、他の実施形態において、メモリ22に記憶されるデータは、疑似距離または他の距離測定値などの部分的に処理されたデータを代替的に備えてもよい。
【0062】
現在の時間の経路を維持するためにリアルタイムクロック(RTC)24も設けられ、該リアルタイムクロックは、メモリ22に記憶されるデータと関連付けられるタイムスタンプを生成するために使用できる。これにより、データが関連付けられるおおよその時間を、その後に決定できる。ここに記載される実施例において、RTC24は、基準発振器16により生成される第2の出力OSC2によって駆動される。しかしながら、RTC24は周波数合成器14の必要とされる速度よりも遅い速度で起動するため、低周波出力OSC2を与えるために基準発振器16内で分周器が使用される。このようにして、基準発振器16は、単一の水晶からマスタークロック信号を発生させるマスター発振器として作用し、マスタークロック信号に合わせて周波数合成器14およびRTC24の両方が同期される。本実施形態において、基準発振器16の低周波出力OSC2は、約1000の分周器比率を示す約26kHzの周波数で動作する。
【0063】
また、プロセッサ20は、周波数合成器14により生成される高速クロック出力CLKの周期をカウントすることによって様々な事象間の時間差を測定するように動作可能である。周波数合成器信号CLKはRTCにおける内部タイミング信号よりもかなり高い周波数で起動するため、事象間のこれらの時間間隔をこのようにして更に正確に測定することができる。時間間隔の測定におけるより細かい精度のために、プロセッサは、高速クロック信号CLKの立ち上がりおよび立ち下りの両方をカウントできる。
【0064】
なお、プロセッサ20は、1つ以上の特定用途向け集積回路(ASIC)などの注文仕立てのハードウェア装置として実施されてもよい。あるいは、プロセッサ20は、適切にプログラムされた1つ以上の汎用処理ユニットまたはデジタル信号プロセッサ(DSP)を備えてもよい。いずれかの代替手段の実施は、当業者の能力の範囲内に十分ある。
【0065】
GPS受信器5は、通信リンクを介してパーソナルコンピュータ30に接続できる。このリンクは、有線(例えばUSB)であってもよくまたは無線(例えばブルートゥースまたはWLAN)であってもよい。前述した第2の実施形態では、衛星信号の処理の一部または全てがパーソナルコンピュータで行なわれてもよい。これについては、以下の実施例で更に詳しく説明する。
【0066】
ここで、図2を参照して、本発明の第1の実施形態に係る方法ついて説明する。
【0067】
ステップ100では、GPS受信器5がGPS信号を受信する。これらの信号は、GPS信号サンプルを発生させるために、A/D変換器18によりリアルタイムでデジタル化される(110)。プロセッサ20は、ポジションフィックスを計算するために、サンプルの第1の組をリアルタイムで処理する(120a)。この計算で生成される基準情報はメモリ22に記憶される(130a)。プロセスは信号サンプルの第2の組に関して繰り返される。これらの信号サンプルは第2のポジションフィックスを計算するためにステップ120bで処理され、生成される第2の基準情報がメモリに記憶される(130b)。2つの処理ステップ120a、120bおよび2つの記憶ステップ130a、130bはほぼ同じである。
【0068】
その後のある時間に、プロセッサは、第3のポジションフィックスを計算しようとして、信号サンプルの第3の組を処理する(140)。処理140は、(デジタル化された信号サンプルの第3の組に加えて)第1および第2の基準情報を入力として使用するため、ステップ120aおよび120bの処理とは異なる。基準情報の2つの項目は、第3のポジションフィックスの計算を支援するために使用される。
【0069】
この支援は様々な方法で行なうことができ、以下、その方法の実施例を説明する。これらの実施例は前述した本発明の第1の実施形態に関連し、該実施例では、処理がGPS受信器5内で完全に行なわれる。しかしながら、当業者であれば分かるように、処理がGPS受信器5と外部装置30との間で分配されるときまたは更には外部装置30で完全に行なわれるときにも同様の原理を適用できる。
【0070】
実施例1
この実施例において、第1および第2のポジションフィックスの計算中に生成された基準情報は、第1および第2のポジション自体の知見−すなわち、リアルタイムで計算される第1のポジションの座標を含む。これらのポジションは、第3のポジションを推定するために使用できる。すなわち、基準情報の2つの断片は、対応する情報(第3のポジション)を第3の時間に予測するために使用される。
【0071】
予測は、第1、第2、および、第3の時間の順序に応じて位置座標を補間するまたは外挿することを含んでもよい。第3の時間が第1の時間と第2の時間との間にある場合には、第1のポジションと第2のポジションとの間で受信器により取得された経路が合理的に方向付けられた(すなわち、畳み込みされない)という仮定に基づいて線形補間を使用できる。この仮定が満たされる限りでは、予測されたポジションが役立つ。同様に、第3の時間が第1および第2の時間の両方の前または後である場合には、線形外挿を使用できる。これは、受信器の移動の方向および速度が関与される時間間隔にわたって適度に均一であると仮定する。
【0072】
線形補間または線形外挿を行なうときには、第1および第2の時間に関してメモリ22に記憶されるタイムスタンプが、サンプルの第3の組の捕捉の時間の知見と共に使用される。しかしながら、他の更に簡単な実施例では、2つのポジションが関連する時間を参照することなく単に平均化されてもよい。
【0073】
ポジションの最初の推定を行なうことにより、考え得る可視SVを予測できる。その結果、逆拡散プロセスでは、更に効率的に検索を行なうことができる。例えば、SVの同じ組が可視である(すなわち、信号サンプルの第2の組で検出できる)と想定され得る。したがって、相関演算は、これらのSVのためのPRN(拡散)コードを優先させることができる。
【0074】
第3のポジションの推定(予測)が利用できると、衛星軌道データ(エフェメリスなど)を使用して、サンプルの第3の組の捕捉時に、そのポジションから見えた衛星を決定できる。エフェメリスデータは、第1および第2のポジションフィックスがステップ120aおよび120bにおいて計算されるように利用できなければならず、また、同じデータを使用して衛星の視認性を予測できる。ここで、第3のポジションで可視と予測された衛星の識別情報は、信号サンプルの第3の組が処理されるときに、逆拡散演算をブートするために使用されるパラメータを表わす。
【0075】
また、第1および第2のポジションフィックスに基づいて、処理の他のパラメータを選択することもできる。例えば、時間およびポジションが正確に知られる限りでは、コード位相を予測できる。このコード位相は、その予測されたポジションおよび時間に任意の所定の可視衛星に関して観察される。このコード位相パラメータは、逆拡散演算における相関検索のために開始点として使用できる。
【0076】
実施例2
他の有用なタイプの基準情報はクロックエラー(受信器のリアルタイムクロック24により測定される時間と同期衛星クロックにより決定されるGPS時間との間の見掛けの相違)である。これは、うまく計算されたポジションフィックスのそれぞれごとに、一意的に決定される。これは、衛星クロック時間が三辺測量計算の出力のうちの1つだからである。
【0077】
予測のために1つのリアルタイムフィックスだけが使用された場合には、このエラーは、既知の基準と未知の現在の値との間で任意の方向に移動できた。(唯一の)基準ポジションフィックスとサンプルの第3の組の発生との間の時間差が長ければ長いほど、なされるべき許容量も大きくなる(ある上限まで−例えば、ポジションの偏位においては地球のサイズ)。
単一の基準点を発端として、(例えば)サンプルの第2の組におけるクロックエラーの限界は、以下のように表わすことができる。
ClkErrR+/−(MaxClkErrRate*(TC−TR))
【0078】
ここで、ClkErrRは時間TRにおいて単一の基準に関して測定されたクロックエラーであり、捕捉(サンプルの第3の組)が時間TCで記録され、MaxClkErrRateは、クロックエラーの最大変化率−通常は受信器の基準発振器16で使用されかつ100万分の1で測定される水晶発振器部分の仕様により規定される−である。
【0079】
計算された(基準)ポジションフィックスがサンプルの第3の組の両側で利用できる場合には、補間を使用して幾つかの改良が可能になる。すなわち、
1)対象のパラメータにおける限界は、基準測定の両方によって抑制される。したがって、例えば、最大クロックエラーは、
ClkErrR1+(MaxClkErrRate*(TC−TR1))、および、
ClkErrR2+(MaxClkErrRate*(TR2−TC))
のうちの最小である。
最小クロックエラーは、
ClkErrR1−(MaxClkErrRate*(TC−TR1))、および、
ClkErrR2−(MaxClkErrRate*(TR2−TC))
(TR1がTCの前に来て、TR2が後であると仮定する)
のうちの最大である。
2)相関検索のための開始点は、ClkErrR1とClkErrR2(TR1、TC、および、TR2に比例する)との間の線形補間に基づいて選択できる。
3)クロックエラーの2つの基準値が時間的に互いにかなり近い場合(これが一般的)には、MaxClkErrRateの値を更に減らすことができる。これは、クロックエラーが前の値に戻る前に大きく偏位することはほとんどないからである。
【0080】
これらの改良のそれぞれの効果は、逆拡散中にコード位相における検索範囲を(多くの場合にはかなり)減少させること、および、より良好な開始値(すなわち、初期推定値)を与えることである。これは、成功率を高めやすく、また、計算コストを低減する。
【0081】
補間は、測定誤差のための項を含んでもよい−例えば、前述した測定クロックエラーClkErrR1およびClkErrR2が不確定であってもよい。不確定性が大きくなる速度は、より洗練された(例えば、非線形)態様でモデリングされてもよい。受信器速度およびクロックドリフト(すなわち、クロックエラーの変化率)の(基準フィックスからの)知見を組み入れることが望ましい場合もある。
【0082】
ClkErrR1=ClkErrR2で、かつ、MaxClkErrRateが一定である場合、「最小」規準は、2つの基準点TR1およびTR2のうちの近い方を選択して、その単一の基準からエラーを予測するのと等しくなると見ることができる。しかしながら、この組の条件は実際のところは極めて起こりそうにない。これは、それが、既存の一定のオフセットだけで受信器の基準発振器16内の水晶が衛星クロックの速度と完全に同期されることを示唆するからである。
【0083】
前述したように、相関検索のためのパラメータは、クロックエラーの予測値に基づいて選択できる。特に、検索のための開始点をクロックエラー予測に基づいて選択することができ、また、検索範囲を最小および最大予測クロックエラーに基づいて選択できる。開始コード位相を選択するため、第3の時刻におけるクロックエラーの予測値が、第1(または第2)のポジションフィックスに関して得られる衛星クロック時間およびそのポジションフィックスに関して測定されたコード位相と組み合わされる。同様の手法を使用して、最小および最大予測クロックエラーに基づいて検索範囲の終点を選択できる。この簡単な手法は、受信器が第1の(またはそれぞれ第2の)ポジションフィックスと第3の時刻との間で大幅に移動しなかったと仮定する。また、この手法は、衛星の軌道運動に起因して、受信器から対象の衛星までの距離が大きく変化しなかったと仮定する。一般に、これは、サンプルの組同士の間の時間間隔が適度に短くかつ受信器が高速で移動していない場合に当てはまる。これらの単純化する仮定を避ける別の手法については以下の第4の実施例で説明する。
【0084】
この実施例では、開始コード位相は、両方のポジションフィックスのクロックエラーに基づく予測を使用して、単一の基準から(第1および第2のポジションフィックスのうちの一方または他方から)予測されると見ることができる。以下の第3の実施例では、2つの(またはそれ以上の)基準点から補間(または外挿)を使用してコード位相をどのようにして予測できるのかについて説明する。
【0085】
実施例3
逆拡散中に距離測定値を予測するための他の方法は、第1および第2のポジションフィックスからの対応する距離測定値を、基準情報として使用することである。この場合、第1および第2の基準情報のそれぞれは、GPS衛星のうちの所定の1つに関して計算される距離測定値(例えば、コード位相)を含む。これらの2つの値は、第3の時間およびポジションにおける対応するコード位相値を予測するために使用される。この予測は、2つの基準コード位相から補間または外挿することを含んでもよい。この場合、予測された値は、ポジションフィックス計算で使用されるべきパラメータと同じタイプのものである。すなわち、予測されたコード位相は、相関検索において初期コード位相として直接に使用され、そのため、パラメータタイプ間の変換が必要とされない。
【0086】
同様の態様で、(観察された衛星キャリア周波数の)ドップラー偏移などの値は、第1および第2の基準ポジションフィックスと関連付けられる測定されたドップラー偏移からの補間または外挿によって予測できる。
【0087】
第4の実施例
これらの異なる実施例で使用される異なるタイプの情報は有利に組み合わせて使用できる。例えば、(第1の実施形態の場合のように)ポジションの使用は、より良い支援を与えるために(第2の実施形態の場合のような)時間の使用と有利に組み合わせることができる。第1および第2のポジションならびに時間間隔に基づいて、第3の時間における装置の、想定し得るポジションの軌跡を推定できる。移動の速度および方向の知見は、サンプルの第3の組が発生された時間におけるポジションを推定するために使用できる。あるいは、移動速度を測定できない場合には、GPS受信器が意図される用途の知見に基づいて、最大速度を仮定できる。例えば、GPS受信器が自転車のアクセサリとして設計される場合には、一組の仮定をすることができる。一方、GPS受信器が車内ナビゲーション装置として設計される(または、車のシガレットライターソケットにより給電される携帯用ナビゲーション装置である)場合には、より高い速度が想定されてもよい。時間およびポジションのおおよその推定が良好であればあるほど、サンプルの第3の組の処理時に更に見込みのある効率向上が大きい。このとき、以下のようなアルゴリズムを適用できる。
【0088】
1)前述した実施例2の場合のように、予測されたクロックエラーおよび予測されたクロックエラーの予測範囲が計算される。
2)前述した実施例1の場合のように、既知の第1および第2のポジションから、予期されるポジションの初期推定値が(例えば補間によって)予測される。
3)移動の速度および方向から、第3のポジションにおける想定し得る範囲の限界を予測できる(知られる範囲で)。ここで、ポジションの範囲の予測は、前述した第2の実施例におけるクロックエラーの範囲の予測に類似する。すなわち、開始点、ならびに、最大および最小変化率(速度)を知ると、時間座標のもっともらしい範囲と同じ方法で空間座標のもっともらしい範囲を定めることができる。
4)その後、予測ポジションおよび予測時間がSVの既知の動きと組み合わされ、それにより、予期される疑似距離、したがって信号のコード位相が予測される。これは、検索のための開始点を与える。同様に、ポジションの予測範囲およびクロックエラーの予測範囲をSV動きデータと組み合わせて、開始点に関する適切な(および、願わくは狭い)検索範囲をもたらすことができる。なお、SVの動きは、エフェメリスデータから得ることができるが、補正/改良が適用されるアルマナックデータ、または、天体機械モデルを使用することによりその通常の妥当性範囲を逸脱した「古い」(stale)エフェメリスなどの他の手段によって得ることもできる。
5)その後、これらの選択されたパラメータを使用して第3のポジションフィックスの計算が進む。
【0089】
本発明を図面および先の説明で詳しく図示して述べてきたが、そのような図および説明は、例示または典型例と見なされるべきであり、限定的に見なされるべきではない。つまり、本発明は開示された実施形態に限定されない。
【0090】
先の実施例は2つの基準点からの補間および外挿について説明してきたが、無論、同じ技術を更に多くの基準点を使用することにまで及ばせることができる。例えば、当業者であれば分かるように、様々な曲線適合アルゴリズムを使用して、任意の数の基準点に基づいて、未知の変数値を予測することができる。
【0091】
前述したように、本発明の実施形態に係る方法は、リアルタイムおよびオフライン(キャプチャ・アンド・プロセス)の両方の衛星測位に適用できる。サンプルの第1、第2、および、第3の組がオフラインで処理される場合、それらのサンプルの組は任意の望ましい順序で処理されてもよい。これは、これらのサンプルの組が発生された順序と必ずしも同じでなくてもよい。
【0092】
1つの例では、発生されるべきサンプルの第1の組および最後の組が最初に処理されてもよい。ただし、これらのサンプルの組同士の間の補間が何らかの他の対からの外挿よりも信頼できる予測子である可能性が高いと仮定する。
【0093】
他の例では、順序を選択するための能動的なまたは適応的な選択ステップが存在する。国際公開第2009/000842号パンフレットは、信号サンプルの複数の組をバッチとして効率的に処理するための手続きについて記載する。最初の処理は、最も見込みのある(うまく処理するために最も簡単な)サンプルの組を特定するために使用される。この特定されたサンプルの組がポジションフィックスを計算するために処理されたら、その結果を単一の基準として使用して、他のポジションフィックスの計算を支援できる。本発明を国際公開第2009/000842号パンフレットの方法と組み合わせることができる。典型的な組み合わせ方法では、最も見込みのある2つの組を選択するために、サンプルの3つ(またはそれ以上)の組に関して予備的な処理が行なわれる。これらの2つの組は、ポジションフィックスを計算するために最初に十分に処理される。その後、先に計算された2つのポジションフィックスからの支援を使用して残りの組が処理される。
【0094】
とりわけ、幾つかの(キャプチャ・アンド・プロセス)実施形態では、全疑似距離を測定して記憶する代わりに、受信器がコード位相を記憶する。これは、粗いタイミング(データメッセージにおけるポジション)を確立するために必要とされる更なる処理を遅らせる。しかしながら、この場合には、粗いタイミングの曖昧さを解決できるようにするため、コード位相がその後に処理されるときに補足的な情報が必要とされるであろう。したがって、一般に、何らかの他の情報をコード位相と共に記憶するか、別個に得る必要がある。
【0095】
粗いタイミングは多種多様な方法で決定することができ、そのため、コード位相を増やすために記憶されるべきデータのタイプも幅広く変化し得る。最終的に、必要なのは、コード位相測定値が対応する時刻のおおよその推定値であり、また、この推定値を衛星クロックに関連付けるための何らかの方法である。その場合、これにより、データメッセージにおけるポジションを決定できる。おおよその時間は受信器の内部リアルタイムクロックから決定することができる。ただし、曖昧さを解決できるように十分に正確にこのリアルタイムクロックと衛星クロックとの間の関係を確立できる場合に限る。したがって、1つの実施例では、測定されたコード位相を補足するために、内部リアルタイムクロックによって発生されるタイムスタンプを記憶することができる。衛星クロックとの関係は、衛星クロック情報を(局所的なタイムスタンプと共に)引き出すのに十分長い信号サンプルのブロックを、間欠的に記憶することによって、確立できる。粗いタイミングを決定するための別の方法は当業者に明らかである。例えば、粗いタイミングを外挿するために(コード位相が測定された時間における)ポジションの粗い推定値を使用することができる(タイミングは、全ての時刻に受信器に対する衛星の相対的なポジションに一意的に関連付けられるからである)。粗いポジション推定値は、何らかの外部ソースから入手でき、または、例えば、衛星群の観察されたドップラー偏移から計算できる。このように、見掛けの(観察された)衛星放送周波数を記憶することは、記憶されたコード位相のための補足にも適し得る。
【0096】
国際公開第2006/018803号パンフレットは、信号サンプルと共にタイムスタンプを記憶する、1つの効率的で効果的な方法について記載する。この方法は、(少なくとも)サンプルの第3の組がその後の処理のためにメモリ20に記憶される本発明の実施形態で使用されてもよい。GPS信号サンプルのごく一部をタイムスタンプビットによってメモリに簡単に上書きする(置き換えする)ことができる。これは、タイムスタンプの別個の記録の必要性を回避するだけでなく、受信されたサンプルに対するタイムスタンプの正確な同期化を確保する。サンプルの捕捉された組の僅かな欠けた部分は、通常、その後の処理ステップを悪化させない。
【0097】
受信器5は、支援サーバからアルマナック、エフェメリス、または、場合により全衛星データメッセージ記録を得ることができる、支援(assisted)GPS(A−GPS)受信器であってもよい。サーバは、固定GPS受信器または世界中に分散される受信器のネットワークから、この情報を収集してもよい。これらの基準受信器のそれぞれは、デコードされた衛星データメッセージを中央データベースへ報告する。あるいは、モバイルGPS受信器のネットワークから支援データを動的に収集できる。すなわち、それぞれのGPS受信器は、衛星データメッセージのそれ自身の断片的な観察結果を中央サーバと共有する。サーバは、これらの観察結果を集めて完全な記録を形成し、その後、全ての受信器がこの記録にアクセスできる。データ支援サーバとの通信は、任意の都合の良い手段によって行なうことができるが、通常はある種の無線データ接続を介してなされる。
【0098】
公称的に古い衛星軌道データは、衛星の軌道を外挿するより先進的な技術を使用することによって、改善されてもよい。例えば、衛星軌道のより良い推定値をもたらすために、(地球、太陽、および、月のような)天体の動き、相互作用、および、重力的影響のモデルが使用されてもよい。これにより、通常の有効期間をかなり(前後のいずれかで)外れても、エフェメリスおよびアルマナック情報を使用できる。
【0099】
なお、前述した実施形態は、RF信号が中間周波数までミックスダウンされるスーパーヘテロダイン受信器構造に関連して説明されてきた。無論、当業者であれば容易に分かるように、同一の原理が直接変換受信器に適用される。実際、そのような受信器は、単にゼロの中間周波数を有すると見なすことができる。
【0100】
同様に、図1の実施形態は受信器を示しており、この受信器は、リアルタイムクロック(RTC)24および周波数合成器14の両方が、同じソース、すなわち、単一の水晶から動作する単一のマスター基準発振器16から、クロック信号を得る。無論、本発明の適用可能性はこの構造に限定されない。他の実施形態において、RTC24は、自身の水晶(例えば32.768kHz RTC水晶)を使用する別個の更に遅く作動するRTC発振器によって駆動されてもよい。したがって、RTCを駆動させるクロック信号は、周波数合成器14を駆動させるクロック信号から独立し得る。
【0101】
容易に分かるように、本発明はポジション推定値の計算に限定されない。無論、速度などの他のパラメータが更に計算されてもよい。例えば、受信器のポジションが分かると、衛星測位信号のドップラー偏移から速度を計算することが良く知られている。
【0102】
幾つかの実施形態では、RFフロントエンドにおける従来のフィルタリングに加えて、信号がサンプリングされた後に、受信されたGPS信号の更なるフィルタリングが行なわれてもよい。例えば、米国特許出願公開第2008/0240315号明細書は、干渉抑制のための方法および回路について記載する。フィルタリングは、RFフロントエンドの一部であってもよく、または、ベースバンド処理の一部であってもよい。この種のデジタルフィルタリングが適応できてもよい。すなわち、サンプリングされた信号は、干渉が存在するかどうかを決定するために解析されてもよく、干渉が存在する場合には、干渉の特性(例えば、周波数または電力)が測定される。この場合、デジタルフィルタリングは、干渉を最適に打ち消すまたは減衰させるように自動的に適合され得る。フィルタリングをより高いサンプルレートで行なった後(デジタル・アナログ変換器による出力として)、フィルタリングされた信号サンプルを、記憶または処理する前に、更に低いレートまで間引くことが特に有益な場合がある。間引きに代えてまたは抜き取りに加えて、それぞれのサンプルのビット幅(すなわち、ビット解像度)がそのような処理後に減少されてもよい。サンプルが記憶されるようになっている場合には、記憶量およびメモリインタフェースにおけるスループット要求の両方が減少される。サンプルが直ちに処理されるようになっている場合、抜き取りおよび/またはビット解像度低減は、処理ハードウェアの電力消費量および/または複雑さを減少させることができる。しかしながら、事前にフィルタリングすることにより、結果として生じる解像度低減信号の質が高まりやすい。
【0103】
したがって、本明細書中において、受信信号を「サンプリングする」、および、それに伴う信号サンプルを「記憶する」という言及は、サンプリングステップ(アナログ・デジタル変換)とサンプルを記憶するステップとの間に更なるフィルタリングの可能性を含むように解釈されるべきである。
【0104】
開示された実施形態の他のバリエーションは、図面、開示内容、および、添付の特許請求の範囲を検討することにより、特許請求の範囲に記載される発明を実施する際に当業者により理解されて行なわれ得る。特許請求の範囲における用語「備える(comprising)」は他の要素またはステップを排除せず、また、不定冠詞「1つの(a、an)」は複数を排除しない。単一のプロセッサまたは他のユニットが特許請求の範囲に列挙される幾つかの項目の機能を満たしてもよい。互いに異なる従属請求項に特定の測定が列挙されているという事実だけで、測定されたこれらの組み合わせを有利に使用できないということを示唆するものではない。コンピュータプログラムは、光学記憶媒体または他のハードウェアの一部と共にもしくは一部として供給される固体記憶媒体などの適した媒体に記憶され/分配されてもよいが、インターネットまたは他の有線もしくは無線通信システムなどによって他の形式で分配されてもよい。特許請求の範囲における任意の参照符号は、本発明の範囲を限定するものと解釈されるべきではない。
【0105】
前述した実施形態は、GPSを使用する衛星測位に集中してきた。しかしながら、当業者であれば分かるように、本発明の範囲はGPSの使用に限定されない。同じ原理が同様に他の衛星測位システムにも適用できる。これらは一般に「グローバル・ナビゲーション・サテライト・システム」(GNSS)として知られる。GNSSの他の例としては、ロシアの「グローバル・ナビゲーション・サテライト・システム」(GLONASS)や欧州のプロジェクト「ガリレオ」が挙げられるが、これらに限定されない。
【0106】
本発明は衛星測位システムに関連するが、当業者であれば分かるように、同じまたは同様の技術を、基準ビーコンが宇宙ビークルでない測位システムに適用することもできる。例えば、「スードライト(pseudolites)」による測位が衛星測位に代わるものとして提案されてきた。スードライトは、一般に、GPS衛星によって送信される信号に類似する(または同一の)信号を送信する地上送信器である。したがって、スードライトは、GPS衛星によって使用される同じL1周波数、および、同様のスペクトル拡散変調方式を使用してもよい。スードライト信号を衛星測位信号と同じ方法で処理できる限りにおいて、本明細書は、第1および第2のポジションフィックスの計算の過程で生成される基準情報によって支援される、スードライト信号から第3のポジションフィックスを計算する等価な技術を開示していると解釈されるべきである。
【特許請求の範囲】
【請求項1】
衛星信号サンプルからポジションフィックスを計算する方法であって、
第1のポジションフィックスの計算(120a)中に生成される第1の基準情報を取得するステップであって、前記第1のポジションフィックスは、第1の時間に計算された衛星測位受信器(5)のポジションである、ステップと、
第2のポジションフィックスの計算(120b)中に生成される第2の基準情報を取得するステップであって、前記第2のポジションフィックスは、第2の時間に計算された前記衛星測位受信器(5)のポジションである、ステップと、
第3の時間に前記受信器により生成される衛星信号サンプルの組、または、そのような衛星信号サンプルの組から得られる距離測定値を受信するステップと、
第3のポジションフィックスを計算するために、前記サンプルの組、または、前記距離測定値を処理するステップ(140)と、を備え、
前記処理するステップ(140)は、前記第1および第2のポジションフィックスの計算中に生成される前記基準情報によって支援される、方法。
【請求項2】
前記処理するステップは、前記第1、第2、および、第3の時間の知見、または、これらの時間の間の1つ以上の相対比較を使用する、請求項1に記載の方法。
【請求項3】
前記第1および第2の基準情報はそれぞれ、
各前記ポジションフィックス、
前記ポジションフィックスと関連付けられる衛星クロック時間、
前記衛星クロック時間と受信器クロック時間との間のクロックエラー、
前記受信器と衛星との間の距離測定値、および
衛星から受信される信号の観察されたドップラー偏移、
のうちの少なくとも1つを備える、請求項1または請求項2に記載の方法。
【請求項4】
前記支援は、前記第1および第2の時間における前記基準情報に基づいて、前記第3の時間における対応する情報を予測するステップを備える、請求項1から請求項3のいずれか一項に記載の方法。
【請求項5】
前記予測は、前記第1および第2の時間にそれぞれ対応する第1および第2の値に基づいて、前記第3の時間に対応する第3の値を補間または外挿するステップを備える、請求項4に記載の方法。
【請求項6】
前記予測は、移動の速度および/または方向の推定値を使用して前記第3のポジションを予測するステップを含む、請求項4または請求項5に記載の方法。
【請求項7】
前記処理するステップは、他の時間に対応する1つ以上の更なるポジションフィックスの計算中に生成される基準情報によって更に支援される、請求項1から請求項6のいずれか一項に記載の方法。
【請求項8】
前記支援は、前記処理するステップで使用されるべきパラメータを選択するステップを備える、請求項1から請求項7のいずれか一項に記載の方法。
【請求項9】
前記パラメータは、逆拡散計算で使用されるべき距離測定値またはキャリア周波数の初期推定値である、請求項8に記載の方法。
【請求項10】
衛星測位システムからの信号を処理する方法であって、
データの第1、第2、および、第3の組を受信するステップであって、各組が、
衛星測位受信器(5)で衛星信号をサンプリングする(110)ことによって得られる衛星信号のサンプル、または、
そのようなサンプルから得られる距離測定値、
を備えており、前記データの第1、第2、および、第3の組が、第1、第2、および、第3の時刻に対応する、ステップと、
第1および第2のポジションフィックスをそれぞれ得るために前記データの第1および第2の組を処理するステップであって(120a、120b)、その処理の過程で、それぞれの第1および第2の基準情報が生成される(130a、130b)、ステップと、その後、
請求項1から請求項9のいずれか一項に記載の方法にしたがって、前記データの第3の組を処理する(140)ステップと、を備える方法。
【請求項11】
コンピュータで実行されるときに、請求項1から請求項10のいずれか一項に記載のステップの全てを行なうように構成されるコンピュータプログラムコード手段を備えるコンピュータプログラム。
【請求項12】
衛星測位信号を受信する(100)ためのRFフロントエンド(12)と、
前記受信した信号をサンプリングし(110)、信号サンプルを生成するためのアナログ・デジタル変換器(18)と、
メモリ(22)と、
プロセッサ(20)であって、
第1のポジションフィックスを計算するために、サンプルの第1の組を処理し(120a)、
第2のポジションフィックスを計算するために、サンプルの第2の組を処理し(120b)、
それぞれの計算の過程で生成される第1および第2の基準情報をメモリ(22)に記憶する(130a、130b)、ように構成されるプロセッサ(20)と、
を備え、
プロセッサ(20)は、更に、サンプルの第3の組、または、前記サンプルの第3の組から得られる距離測定値を処理して(140)、第3のポジションフィックスを計算するように構成されており、これが前記第1および第2の基準情報によって支援される、衛星測位受信器(5)。
【請求項13】
衛星測位信号を受信する(100)ためのRFフロントエンド(12)と、
前記受信した信号をサンプリング(110)し、信号サンプルを生成するためのアナログ・デジタル変換器(18)と、
メモリ(22)と、
プロセッサ(20)であって、
第1のポジションフィックスを計算するために、サンプルの第1の組を処理し(120a)、
第2のポジションフィックスを計算するために、サンプルの第2の組を処理し(120b)、
それぞれの計算の過程で生成される第1および第2の基準情報をメモリ(22)に記憶する(130a、130b)、ように構成されるプロセッサ(20)と、
を備え、
更に、サンプルの第3の組、または、前記サンプルの第3の組から得られる距離測定値をメモリ(22)に記憶するように構成されており、
それにより、前記サンプルの第3の組、または、前記距離測定値をその後に処理して(140)、第3のポジションフィックスを計算することができ、これが前記第1および第2の基準情報によって支援される、衛星測位受信器(5)。
【請求項14】
更に、
記憶された前記サンプルの第3の組、または、前記距離測定値をメモリ(22)から読み出し、
それらを処理して前記第3のポジションフィックスを計算する(140)、ように構成されており、
前記処理(140)が前記第1および第2の基準情報によって支援される、請求項13に記載の衛星測位受信器。
【請求項15】
メモリ(22)に記憶された、前記第1の基準情報と、前記第2の基準情報と、前記サンプルの第3の組または前記距離測定値と、を外部装置(30)へアップロードするように構成されており、それらを処理して前記第3のポジションフィックスを計算する(140)、請求項13に記載の衛星測位受信器。
【請求項1】
衛星信号サンプルからポジションフィックスを計算する方法であって、
第1のポジションフィックスの計算(120a)中に生成される第1の基準情報を取得するステップであって、前記第1のポジションフィックスは、第1の時間に計算された衛星測位受信器(5)のポジションである、ステップと、
第2のポジションフィックスの計算(120b)中に生成される第2の基準情報を取得するステップであって、前記第2のポジションフィックスは、第2の時間に計算された前記衛星測位受信器(5)のポジションである、ステップと、
第3の時間に前記受信器により生成される衛星信号サンプルの組、または、そのような衛星信号サンプルの組から得られる距離測定値を受信するステップと、
第3のポジションフィックスを計算するために、前記サンプルの組、または、前記距離測定値を処理するステップ(140)と、を備え、
前記処理するステップ(140)は、前記第1および第2のポジションフィックスの計算中に生成される前記基準情報によって支援される、方法。
【請求項2】
前記処理するステップは、前記第1、第2、および、第3の時間の知見、または、これらの時間の間の1つ以上の相対比較を使用する、請求項1に記載の方法。
【請求項3】
前記第1および第2の基準情報はそれぞれ、
各前記ポジションフィックス、
前記ポジションフィックスと関連付けられる衛星クロック時間、
前記衛星クロック時間と受信器クロック時間との間のクロックエラー、
前記受信器と衛星との間の距離測定値、および
衛星から受信される信号の観察されたドップラー偏移、
のうちの少なくとも1つを備える、請求項1または請求項2に記載の方法。
【請求項4】
前記支援は、前記第1および第2の時間における前記基準情報に基づいて、前記第3の時間における対応する情報を予測するステップを備える、請求項1から請求項3のいずれか一項に記載の方法。
【請求項5】
前記予測は、前記第1および第2の時間にそれぞれ対応する第1および第2の値に基づいて、前記第3の時間に対応する第3の値を補間または外挿するステップを備える、請求項4に記載の方法。
【請求項6】
前記予測は、移動の速度および/または方向の推定値を使用して前記第3のポジションを予測するステップを含む、請求項4または請求項5に記載の方法。
【請求項7】
前記処理するステップは、他の時間に対応する1つ以上の更なるポジションフィックスの計算中に生成される基準情報によって更に支援される、請求項1から請求項6のいずれか一項に記載の方法。
【請求項8】
前記支援は、前記処理するステップで使用されるべきパラメータを選択するステップを備える、請求項1から請求項7のいずれか一項に記載の方法。
【請求項9】
前記パラメータは、逆拡散計算で使用されるべき距離測定値またはキャリア周波数の初期推定値である、請求項8に記載の方法。
【請求項10】
衛星測位システムからの信号を処理する方法であって、
データの第1、第2、および、第3の組を受信するステップであって、各組が、
衛星測位受信器(5)で衛星信号をサンプリングする(110)ことによって得られる衛星信号のサンプル、または、
そのようなサンプルから得られる距離測定値、
を備えており、前記データの第1、第2、および、第3の組が、第1、第2、および、第3の時刻に対応する、ステップと、
第1および第2のポジションフィックスをそれぞれ得るために前記データの第1および第2の組を処理するステップであって(120a、120b)、その処理の過程で、それぞれの第1および第2の基準情報が生成される(130a、130b)、ステップと、その後、
請求項1から請求項9のいずれか一項に記載の方法にしたがって、前記データの第3の組を処理する(140)ステップと、を備える方法。
【請求項11】
コンピュータで実行されるときに、請求項1から請求項10のいずれか一項に記載のステップの全てを行なうように構成されるコンピュータプログラムコード手段を備えるコンピュータプログラム。
【請求項12】
衛星測位信号を受信する(100)ためのRFフロントエンド(12)と、
前記受信した信号をサンプリングし(110)、信号サンプルを生成するためのアナログ・デジタル変換器(18)と、
メモリ(22)と、
プロセッサ(20)であって、
第1のポジションフィックスを計算するために、サンプルの第1の組を処理し(120a)、
第2のポジションフィックスを計算するために、サンプルの第2の組を処理し(120b)、
それぞれの計算の過程で生成される第1および第2の基準情報をメモリ(22)に記憶する(130a、130b)、ように構成されるプロセッサ(20)と、
を備え、
プロセッサ(20)は、更に、サンプルの第3の組、または、前記サンプルの第3の組から得られる距離測定値を処理して(140)、第3のポジションフィックスを計算するように構成されており、これが前記第1および第2の基準情報によって支援される、衛星測位受信器(5)。
【請求項13】
衛星測位信号を受信する(100)ためのRFフロントエンド(12)と、
前記受信した信号をサンプリング(110)し、信号サンプルを生成するためのアナログ・デジタル変換器(18)と、
メモリ(22)と、
プロセッサ(20)であって、
第1のポジションフィックスを計算するために、サンプルの第1の組を処理し(120a)、
第2のポジションフィックスを計算するために、サンプルの第2の組を処理し(120b)、
それぞれの計算の過程で生成される第1および第2の基準情報をメモリ(22)に記憶する(130a、130b)、ように構成されるプロセッサ(20)と、
を備え、
更に、サンプルの第3の組、または、前記サンプルの第3の組から得られる距離測定値をメモリ(22)に記憶するように構成されており、
それにより、前記サンプルの第3の組、または、前記距離測定値をその後に処理して(140)、第3のポジションフィックスを計算することができ、これが前記第1および第2の基準情報によって支援される、衛星測位受信器(5)。
【請求項14】
更に、
記憶された前記サンプルの第3の組、または、前記距離測定値をメモリ(22)から読み出し、
それらを処理して前記第3のポジションフィックスを計算する(140)、ように構成されており、
前記処理(140)が前記第1および第2の基準情報によって支援される、請求項13に記載の衛星測位受信器。
【請求項15】
メモリ(22)に記憶された、前記第1の基準情報と、前記第2の基準情報と、前記サンプルの第3の組または前記距離測定値と、を外部装置(30)へアップロードするように構成されており、それらを処理して前記第3のポジションフィックスを計算する(140)、請求項13に記載の衛星測位受信器。
【図1】


【図2】
【図2】
【公開番号】特開2012−255779(P2012−255779A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−124117(P2012−124117)
【出願日】平成24年5月31日(2012.5.31)
【出願人】(510112671)ユー‐ブロックス、アクチエンゲゼルシャフト (15)
【氏名又は名称原語表記】U−BLOX A.G.
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2012−124117(P2012−124117)
【出願日】平成24年5月31日(2012.5.31)
【出願人】(510112671)ユー‐ブロックス、アクチエンゲゼルシャフト (15)
【氏名又は名称原語表記】U−BLOX A.G.
【Fターム(参考)】
[ Back to top ]