
改良されたタイミングコンベヤーを提供するためのシステムと方法
コンベヤーは、コンベヤーベルト、複数のローラー、及びフライトを含む。ローラーは、ローラーがローラー係合面と係合し、ローラーによって支持される物体を平面上で移動させるために回転するように、ローラー係合面と係合するように構成された下面、及び実質的に平面を形成する上面を有する。フライトは、フライトにモーメントを与えるためにコンベヤーベルトの下でカム面と係合するように構成されたカム、及び引込み位置から延伸位置まで回転することによってモーメントに応答する突起を含む。

【発明の詳細な説明】
【技術分野】
【0001】
(関連出願についてのクロスリファレンス)
本出願は、2006年12月14日に出願された、シリアル番号11/610,737号、「改良されたタイミングコンベヤーを提供するためのシステムと方法」という発明の名称の、同時係属の米国非仮出願の優先権を主張する。
【背景技術】
【0002】
(背景)
コンベヤーシステムで物体を搬送するとき、多くの場合、既知の相対的な位置に物体を配置するか又はコンベヤーベルト上で最少の間隔(スペーシング)を維持することが必要である。このことに対処する従来技術の装置は、作動可能なパッケージ停止要素と組み合わせて多数のセンサを使用しなければならなかった。そのような装置は、ベルシャドスキーの米国特許6,648,125号(引用により本願明細書に含まれるものとする)に記載されている。コンベヤーのスペーシングを達成する他の方法は、ベルトと異なる(通常、より遅い)速度で進む、高架の又は下部に取り付けたスペーシングバーを有する標準的なコンベヤーベルトを含む。これらの装置は複雑であり、コンベヤーの経路に沿ってパッケージを減速するか又は停止させるため、コンベヤーの効率を減少させる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
従って、産業界には、これまで対処されていない上述の欠陥及び欠点に対処する必要がある。
【課題を解決するための手段】
【0004】
(要約)
一実施形態において、コンベヤーは、コンベヤーベルト、複数のローラー、及びフライトを含む。ローラーは、ローラーがローラー係合面と係合し且つ回転してローラーによって支持される物体を平面上で移動させるように、ローラー係合面と係合するように構成された下側面と、実質的に平面を形成する上側面と、を有する。フライトは、コンベヤーベルトの下でカム面と係合してフライトにモーメントをもたらすように構成されたカムと、引込み位置から延伸位置まで回転することによってそのモーメントに対処する突起と、を含む。
【0005】
一実施形態において、コンベヤーは、コンベヤーベルト、複数のローラー、及びフライトを含む。コンベヤーベルトは、地面に対するコンベヤーベルトの速度でベルトの走行方向に移動するように構成される。複数のローラーは、ベルトの走行方向に回転するように構成される。ローラーの回転によって、コンベヤーベルト上の物体は、地面に対して増加した速度でローラーの上を移動するようになる。フライトは、カム及び突起を有する。カムは、突起にモーメントをもたらして、突起を引込み位置から延伸位置まで回転させる。
【0006】
一実施形態において、コンベヤーは、コンベヤーベルト、複数のローラー、位置決め要素、及びローラー係合面を含む。コンベヤーベルトは、ベルトの走行方向に移動するように構成され、コンベヤーベルト上に配置された物体は、コンベヤーベルトによってベルトの走行方向に搬送される。複数のローラーは、コンベヤーに連結され、ベルトの走行方向に回転するように構成され、コンベヤーベルトに配置されて回転するローラーと接触した物体は、コンベヤーベルトに対して回転しているローラーに沿ってベルトの走行方向に移動する。位置決め要素は、コンベヤーベルトに連結され、コンベヤーベルトに対して物体を停止させるように構成され、物体は、コンベヤーベルトと共にベルトの走行方向に搬送される。ローラー係合面は、コンベヤーベルトに隣接して配置され、ローラーと係合してローラーを回転させるように構成され、ローラー係合面は、ベルトの走行方向と反対の方向に移動するように構成される。
【0007】
本開示の多くの側面は、以下の図面を参照してよりよく理解することができる。図面の構成要素は、必ずしも正確な縮尺ではなく、それよりも、本開示の原則を明確に示すことに重点が置かれている。また、図面において、同様の符号は、いくつかの図の全体にわたって対応する部分を表わす。
【図面の簡単な説明】
【0008】
【図1】本願明細書に開示されるタイミングコンベヤーを使用するコンベヤーシステムの実施形態の上面図を示すブロック図である。
【図2A】本願明細書に開示されるタイミングコンベヤーの実施形態の側面図を異なる処理段階で示すブロック図である。
【図2B】本願明細書に開示されるタイミングコンベヤーの実施形態の側面図を異なる処理段階で示すブロック図である。
【図3】本願明細書に開示される一実施形態のコンベヤーの部分上面図を示すブロック図である。
【図4】本願明細書に開示される他の実施形態のコンベヤーの部分上面図を示すブロック図である。
【図5A】本願明細書に開示されるタイミングコンベヤーの他の実施形態の側面図を異なる処理段階で示すブロック図である。
【図5B】本願明細書に開示されるタイミングコンベヤーの他の実施形態の側面図を異なる処理段階で示すブロック図である。
【図6】本願明細書に開示されるコンベヤーの他の実施形態の部分上面図を示すブロック図である。
【図7】図6の実施形態の側面図を示すブロック図である。
【図8】本願明細書に開示されるコンベヤーの他の実施形態の側面図を示すブロック図である。
【図9】本願明細書に開示される直線的に作動可能なフライトの実施形態の引込み位置での部分側面図である。
【図10】本願明細書に開示される直線的に作動可能なフライトの実施形態の延伸位置での部分側面図である。
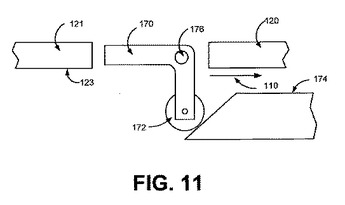
【図11】本願明細書に開示される回転式に作動可能なフライトの実施形態の引込み位置での部分側面図である。
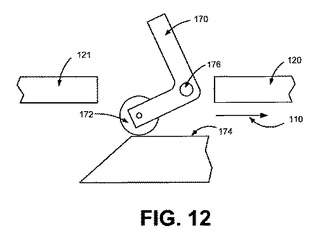
【図12】本願明細書に開示される回転式に作動可能なフライトの実施形態の延伸位置での部分側面図である。
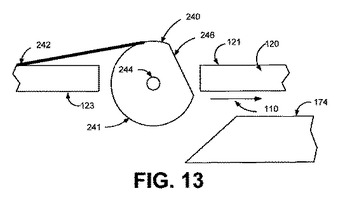
【図13】本願明細書に開示される回転式に作動可能なフライトの別の実施形態の引込み位置での部分側面図である。
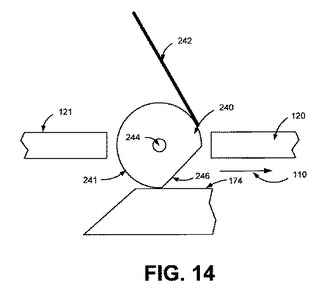
【図14】本願明細書に開示される回転式に作動可能なフライトの別の実施形態の延伸位置での部分側面図である。
【図15】本願明細書に開示されるタイミングコンベヤーベルトを使用するコンベヤーシステムの実施形態の部分上面図を示すブロック図である。
【図16】図13に示されるタイミング部の別の実施形態の部分上面図を示すブロック図である。
【図17】図14の実施形態に使用されるコンベヤーの実施形態の部分上面図を示すブロック図である。
【図18】コンベヤを製造する方法の実施形態を示すブロック図である。
【図19】物体を搬送する方法の実施形態を示すブロック図である。
【図20】物体を配置する方法の実施形態を示すブロック図である。
【図21】コンベヤーの他の実施形態の部分上面図を示す図であり、コンベヤーは複数の回転式に作動可能なフライトを備えている。
【図22】図21に示されるコンベヤーの部分側面図である。
【図23】図21に示されるコンベヤーの正面図であり、延伸位置にある回転式に作動可能なフライトを示す。
【図24】図21に示されるコンベヤーの部分側面図であり、回転式に作動可能なフライトの上に配置された物体を示す。
【図25】図21に示されるコンベヤの部分側面図であり、回転式に作動可能なフライトから物体を移動する回転しているローラーを示す。
【図26】図21に示されるコンベヤーの部分側面図であり、物体がフライトから移動した後に引込み位置から延伸位置まで回転する回転式に作動可能なフライトを示す。
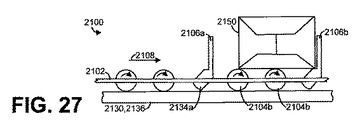
【図27】図21に示されるコンベヤーの部分側面図であり、延伸位置にある回転式に作動可能なフライトを示し、隣接する次のフライトによって停止されている物体を示す。
【図28】ベルトの走行方向と反対の方向に移動するローラー係合面を有するコンベヤーの実施形態の部分側面図である。
【図29】コンベヤーの他の実施形態の部分上面図を示す図であり、コンベヤーは回転式に作動可能なフライトの複数の他の実施形態を有する。
【図30】図29に示されるコンベヤーの正面図であり、延伸位置にある回転式に作動可能なフライトを示す。
【発明を実施するための形態】
【0009】
(詳細な説明)
次に、本開示の様々な側面を要約して、図面に示される開示の説明について詳細に言及する。これらの図面と関連して開示を説明するが、本願明細書に開示される1つの実施形態又は複数の実施形態に制限する意図はない。逆に、その意図は、添付の請求の範囲によって定義される開示の範囲内に含まれるすべての代替物、変更例及び均等物をカバーすることである。
【0010】
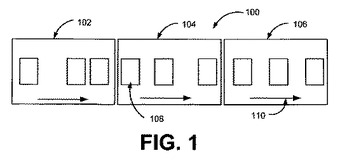
ここで図1を参照する。図1は、タイミングコンベヤーを使用するコンベヤーシステムの実施形態の上面図を示すブロック図である。コンベヤーシステム100は、フィーダーコンベヤー102、タイミングコンベヤー104、及び受け取りコンベヤー106を含む。これらのコンベヤーの各々は、ベルト走行方向110に物体108を移動するために使用される。フィーダーコンベヤー102上の物体108は、ランダムなスペーシング又は間隔で搬送され得る。フィーダーコンベヤー102からタイミングコンベヤー104へ移行する物体108は、タイミングコンベヤー104によって位置を動かされ、それにより、受け取りコンベヤー106は、所定の間隔で物体108を受け取る。所定の間隔は、その後のコンベヤー処理、例えば、シングルレーンタイミング、並列同相タイミング、並列異相(位相外れ)タイミング、及び非平行合流(マージング)などを容易にする。
【0011】
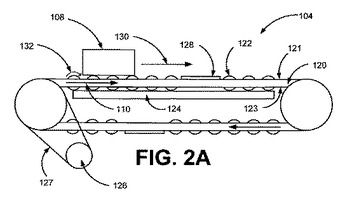
次に図2A及び2Bを参照する。図2A及び2Bは、2つの異なる処理段階にあるタイミングコンベヤーの実施形態の側面図を示すブロック図である。タイミングコンベヤー104は、概して加速要素と位置決め要素を含む。タイミングコンベヤー104のこの実施形態は、キャビティ(図示せず)を有するコンベヤーベルト120を含み、キャビティは加速要素であるローラー122を収容する。コンベヤーベルト120の非限定的な例は、コスタンツォに対する米国特許6,494,312号(引用により本願明細書に含まれるものとする)に開示されるような、マットトップチェーンである。各ローラーがコンベヤーベルト120の上面121より上とコンベヤーベルト120の底面123より下に延伸するように、ローラー122は必要な大きさにされ、配置される。ローラー122は、非限定的かつ例示的な行と列の形で配置されることができる。ローラー122は、コンベヤーベルト内に整列配置されてベルト走行方向110に物体を加速する。タイミングコンベヤー104はまた、例示的な位置決め要素として、コンベヤーベルト120の上面121に沿って特定の間隔に配置される摩擦パッド128を含む。ローラー係合面124は、ローラー122がローラー係合面124と接触するように、コンベヤーベルト120の下に配置される。ローラー係合面124は、概ね平らな要素であることができ、高い摩擦係数を有する上面を含むことができる。ゴム又はゴム系の合成物は、高い摩擦係数を有する材料の一つの非限定的な例である。タイミングコンベヤー104はまた、コンベヤー駆動要素126を含む。コンベヤー駆動要素126は、図2A及び2Bに図示したように、ベルト又はチェーン127を用いてコンベヤーベルト120に機械的に連結された、外部に取り付けられた回転駆動要素として示されるが、コンベヤー駆動要素126は、この開示の範囲及び趣旨の中で多くの異なる形態を取ることができる。例えば、コンベヤー駆動要素126は、タイミングコンベヤー104に直接連結されてもよいし、又は、ギアボックス、駆動軸(ドライブシャフト)及び自在継手(ユニバーサルジョイント)を含むがこれに限定されない他の技術を用いて機械的に連結されてもよい。
【0012】
図2Aに示すように、コンベヤーベルト120がベルト走行方向110に移動するとき、ローラー122はローラー係合面124と接触する。ローラー122とローラー係合面124の間の摩擦係合によって、ローラーの回転132が生じる。物体108がローラー122によって支持されるとき、ローラーの回転132によって、物体108は、ローラー係合面124に対するコンベヤーベルト120の速度に等しいコンベヤーベルト120に対する速度130になり、それにより物体108はコンベヤーベルト120の速度の2倍で移動する。摩擦パッド128に到着するまで、物体108はコンベヤーベルト120に沿って移動する。このようにして、図2Bに図示したように、各物体108は、所定の位置134へ進む。所定の位置134は、概ね摩擦パッド128の位置に対応し、かつ、摩擦パッド128の位置によって決定される。摩擦パッド128は、本開示の精神及び範囲内で考えられる位置決め要素の、非常に多くのタイプの非限定的な例である。また、タイミングコンベヤー104は、様々な数の所定の位置134を含むことができる様々な長さに構成されることができる。
【0013】
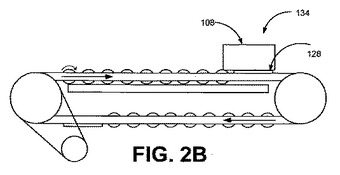
次に図3を参照する。図3は、一実施形態のコンベヤーベルトの部分上面図を示すブロック図である。図3の実施形態において、コンベヤーベルト120はマットトップチェーンを含み、マットトップチェーンは、互いにヒンジ的に固定されてコンベヤーループを形成する複数のチェーンセグメント119を含む。チェーンセグメント119は、マットトップチェーンセグメントであることができ、例えば、回転軸142に取り付けられるローラー122を受け入れることができる複数のキャビティ140を含む。チェーンセグメント119はまた、摩擦パッド128を受け入れることができる。図2A及び2Bを参照して上記したように、ローラー122は、ローラー係合面124との接触によって、物体を、コンベヤーベルト120に対してベルト走行方向110に移動させる。物体が摩擦パッド128を有するチェーンセグメント119に到達すると、コンベヤーベルト120に対する物体の移動が停止される。このように、摩擦パッド128(又は代替的な位置決め要素)の位置は、搬送される物体間の最終的な間隔(スペーシング)を決定する。
【0014】
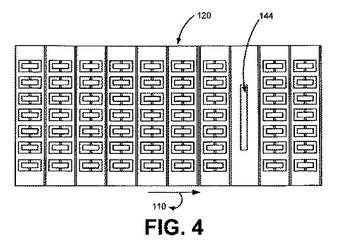
次に図4を参照する。図4は、他の実施形態におけるコンベヤーの部分上面図を示すブロック図である。本実施形態において、コンベヤーベルト120上の位置決め要素は、フライト144である。フライト144は、概ね、コンベヤーに沿った特定の位置でコンベヤーに対する物体の移動を妨げる、コンベヤー上に又はコンベヤーに沿って取り付けられた止め具(ストップ)として説明されることができる。図3を参照して上記した摩擦パッドと対照的に、フライト144は、ローラー122によってつくられる面と概ね同一平面内にはなく、代わりに、ローラー122によってつくられる平面より上に延伸する。ローラーの頂点によって定義される平面より上に延伸し、フライト144は、コンベヤー上の物体に、比較的不動の停止位置をもたらす。フライト144は、摩擦パッド128に対比して、より正確に制御された所定の位置をもたらし得る。また、摩擦パッド128とは異なり、フライト144を使用する所定の配置は、コンベヤー速度によって変化することが少ない。摩擦パッド128は、減速の割合がフライト144の使用に付随する減速の割合より小さいので、コンベヤー上の物体の性質によっては、より望ましい可能性がある。位置決め要素は、摩擦パッド、フライト、それらの組み合わせ、又は他の適切な要素として実施されることができる。
【0015】
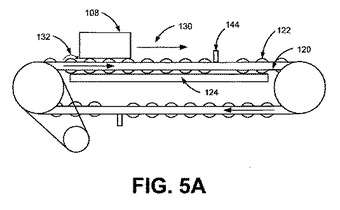
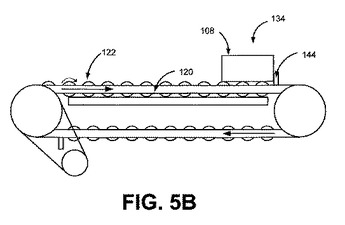
次に図5A及び5Bを参照する。図5A及び5Bは、2つの異なる処理段階にある、タイミングコンベヤーの他の実施形態の側面図を示すブロック図である。図5Aに示すように、物体108は、ローラー122との係合によって相対速度130で移動している。図5Bに示すように、物体108がフライト144によって定められる所定の位置134に到達すると、物体108はコンベヤーベルト120に対して停止される。このように、搬送される物体の各々は、フライト144間の距離によって決定される間隔で、タイミングコンベヤーから退出する。
【0016】
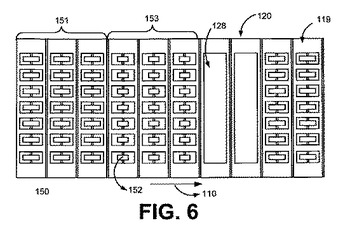
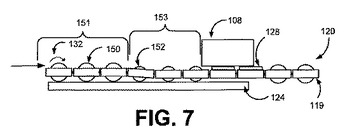
次に図6を参照する。図6は、コンベヤーの他の実施形態の部分上面図を示すブロック図である。コンベヤーベルト120は、ローラーか又は例えば摩擦パッド128などの位置決め要素を有することができる、複数のチェーンセグメント119を含むことができる。コンベヤーベルト120は、高係合領域151及び低係合領域153を含む。高係合領域151は、概して、ローラー150と搬送される物体108の間の滑りが除去されるか又は低減されるように、ローラー150と搬送される物体108の間の十分な摩擦係合によって特徴づけられる。同様に、低係合領域153は、概して、高係合領域151に対して、ローラー152と搬送される物体108の間の低下したレベルの摩擦係合によって特徴づけられる。従って、ローラー152と搬送される物体108の間の滑りは、高係合領域151で経験される滑りに対して増大される。
【0017】
高係合領域151は、ローラー150と搬送される物体108の間の滑りを低減するか又は除去することによって、搬送される物体108との摩擦係合を増大するように設計されたローラー150を有して構成される。滑りを低減するか又はを除去するための一つの技術は、より大きいローラー150の使用である。加えて又は代わりに、高係合領域151は、ローラー150と搬送される物体108の間により大きな摩係合をもたらすために、比較的大きい摩擦係数の表面を有するローラー150を使用することができる。同様に、低係合領域153は、より小さいローラー152及び/又は比較的低い摩擦係数の表面を有するローラーを使用することができる。より小さいローラー152及び/又は低い摩擦係数のローラーは、減速の間及び搬送される物体108がコンベヤーに対して停止した後、搬送される物体108がローラー上で滑ることを可能にする。任意で、コンベヤーベルト120は、2つより多い係合のレベルを含むことができ、様々なサイズのローラー、様々な摩擦係数を有するローラー、及び、任意のそれらの組み合わせを用いることにより、様々なレベルの係合を達成することができる。
【0018】
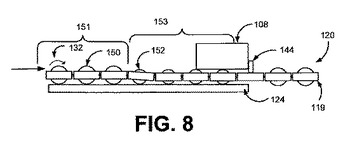
図7を参照する。図7は、図6に示した実施形態の側面図を示すブロック図である。コンベヤーベルト120は、大きいローラー150を有する高係合領域151及び小さいローラー152を有する低係合領域153を含む。図6を参照して上記したように、低係合領域153はまた、より低い摩擦係数を有するローラーを特徴としてもよく、それにより物体が摩擦パッド128との接触によって減速するときにローラーと物体の間の滑りを可能にする、図示のように、コンベヤーベルト120の柔軟な性質によって、大きいローラー150と小さいローラー152の両方が、ローラー係合面124と係合することができる。このように、高係合領域151と低係合領域153の両方のローラー150、152が、ローラー係合面124との接触によって回転を受ける。図8は、コンベヤーベルト120の他の実施形態の側面図を示すブロック図であり、図8に示すように、複数の係合領域の概念はまた、位置決め要素としてフライト144を使用して実施すことができる。フライト144は、様々な異なる方法で実施されることができる。例えば、フライト144は、コンベヤー上で延伸位置を維持する定位置構造として構成され得る。或いは、フライト144は、例えば、コンベヤー経路に沿った1つ又は複数の特定の場所で作動可能である可動フライトであることができる。
【0019】
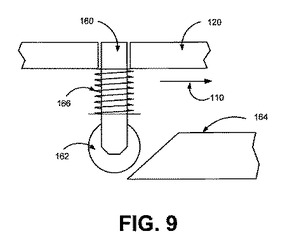
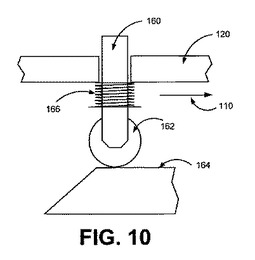
図9を参照する。図9は、引込み位置にある直線的に作動可能なフライトの実施形態の部分側面図である。直線的に作動可能なフライト160は、コンベヤーベルト120に固定され、引込み位置ではコンベヤーベルト120の表面より上に延伸する。直線的に作動可能なフライト160は、カムローラー162を含み、任意で、直線的に作動可能なフライト160が作動されないときに引込み位置を維持するための付勢要素166を含む。コンベヤーベルト120がベルト走行方向110に移動するとき、カムローラー162は、カム面164と係合し、フライト160を、隣接するローラー152の上面によって定められる平面より上に延伸した位置まで垂直に移動させる。非限定的な例において、カム面164は、ローラー係合面又はローラー係合面の所定の面であることができる。或いは、カム面164は、フライト160を作動させるための別個の構造であることができ、更に、フライトの位置の独立した制御をもたらすために調節可能であることができる。図10は延伸位置にある直線的に作動可能なフライトの実施形態の部分側面図であり、図10に示すように、カムローラー162は、カム面164と係合し、直線的に作動可能なフライト160をコンベヤーベルト120より上に延伸した位置まで移動させる。カムローラー162の係合が、妨げられなければ直線的に作動可能なフライト160を延長するのに十分であるときは、フライト160の作動は、搬送される物体が直線的に作動可能なフライト160上に配置される場合に延伸するのに必要な力で行われなくてもよい。或いは(図示せず)、直線的に作動可能なフライト160は、複数のピースが伸縮自在(入れ子状)に構成された組立体を含むように構成されることができ、この組立体は、直線的に作動可能なフライト160が搬送される物体の下で作動する場合に複数のピースがつぶれる、内部付勢要素を含む。
【0020】
次に図11を参照する。図11は、引込み位置にある回転式に(回転するように)作動可能なフライトの実施形態の部分側面図である。回転式に作動可能なフライト170は、ピボットピン又は回転軸176によってコンベヤーベルト120のキャビティ内に旋回可能に取り付けられる。回転式に作動可能なフライト170は、全体的に、ピボットピン176から2つの方向に延伸する。回転式に作動可能なフライト170は、コンベヤーの上面121又はコンベヤーにあるローラーの上面によって定められる平面に概ね平行な第1の方向に延伸し、格納されるとき、コンベヤーの上面121又はコンベヤーにあるローラーの上面によって定められる面の下に配置される。回転式に作動可能なフライト170は、コンベヤーベルト120の底面123の下で、第2の方向に延伸する。この第2の方向に、回転式に作動可能なフライト170は、カムローラー172を含む。コンベヤーベルト120がベルト走行方向110に進むとき、カムローラー172はカム面174と係合する。図12は、延伸位置にある回転式に作動可能なフライトの実施形態の部分側面図であり、図12に示されるように、カムローラー172とカム面174の間の係合によって、回転式に作動可能なフライト170が、ピボットピン176のまわりを旋回する。この旋回動作によって、回転式に作動可能なフライト170は、コンベヤーベルト120の上面121より上に延伸する。
【0021】
次に図13を参照する。図13は、引込み位置にある回転式に作動可能なフライトの別の実施形態の部分側面図である。回転式に作動可能なフライト240が、ピボットピン又は回転軸244によってコンベヤーベルト120のキャビティ内に旋回可能に取り付けられている。回転式に作動可能なフライト240は、平坦な側面246を有するローラー241と、フライト延伸部材242と、を含む。引込み位置において、フライト延伸部材242は、概ね、コンベヤー120にあるローラーの上面によって定められる平面か又はこの平面の下にある、コンベヤーベルト120の上面121に載置される。コンベヤーベルト120がベルト走行方向110に進むとき、ローラー241はカム面174と係合する。図14は、延伸位置にある回転式に作動可能なフライトの別の実施形態の部分側面図であり、図14に示されるように、ローラー241とカム面174の間の係合によって、回転式に作動可能なフライト240が、ピボットピン176のまわりを旋回する。この旋回動作によって、回転式に作動可能なフライト延伸部材242は、コンベヤーベルト120の上面121より上に延伸する。ローラーの頂点に沿って移動している物体がフライト延伸部材242と係合すると、ローラー241は、ローラー241の平坦な側面246がカム面174に最も近くなる位置まで更に回転される。平坦な側面246がカム面174に最も近くなるとき、回転式に作動可能なフライトはカム面174と摩擦係合せず、スリップは発生しない。
【0022】
直線的に作動可能なフライト、及び、回転式に作動可能なフライトは、単にこの開示において考えられるフライトの例であって、開示の範囲又は精神を制限することは意図されていない。例えば、作動可能なフライトを、1つ又は複数のカムと動作可能に係合する複数のフライトによって実施するように構成することができる。ここで、カムは、カムローラー、回転するカム面上の偏心突出部(ローブ)、及びカム面などを含むが、これらに限定されるものではない。
【0023】
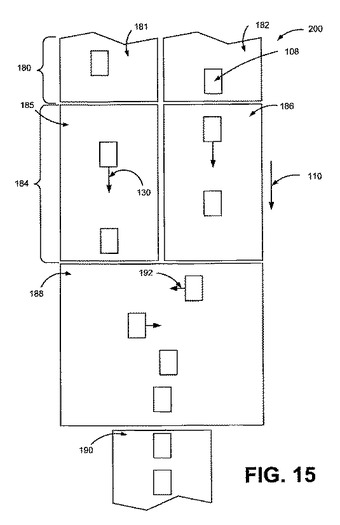
次に図15を参照する。図15は、タイミングコンベヤーベルトを使用するコンベヤーシステムの実施形態の部分上面図を示すブロック図である。コンベヤーシステム200は、フィーダー部180、タイミング部184、切り離し部188、及び後処理部190を含む。フィーダー部180は、第1のフィードコンベヤ181及び第2のフィードコンベヤ182を含む。フィードコンベヤ181、182の各々は、物体108をタイミング部184へ、不規則な間隔で且つ横方向の不規則なベルト位置に移すことができる。タイミング部184は、それぞれ、第1及び第2のフィードコンベヤ181、182に対応する、第1のタイミングコンベヤー185及び第2のタイミングコンベヤー186を含む。タイミング部184によって受け取られた物体は、それらが第1及び第2のタイミングコンベヤー185、186上の所定の位置に到達するまで、相対速度130に加速される。この非限定的な例では、第1及び第2のタイミングコンベヤー185、186の所定の位置は、物体108が位相をずらしてタイミング部184から離れるように設定される。言い換えれば、第1のタイミングコンベヤー185から離れる物体は、第2のタイミングコンベヤー186から離れる連続する物体の間で、切り離し部188に到達する。
【0024】
他の実施態様では、タイミング部184は、次のプロセスコンベヤーに対して実質的に同一の(すなわち同相の)位置に物体108を送るために使用される。物体108が切り離し部188に送られると、物体108は切り離し部188の中央に向かって横方向192に向かわせられる。第1及び第2のコンベヤー185、186に、それぞれ、位相がずれた配置で物体を位置付けることによって、結果として生じる切り離された物体は、単一の線内にあるように構成され、次の処理のために均一に間隔を置いて配置される。物体108が次の処理のためのコンベヤー190に受け取られるとき、物体108は物体間に一定の均一な距離を有する単一の縦の列に配置される。図15に示されるコンベヤーシステムは、単に例示的なものであり、決して開示の範囲又は精神を制限することを意図していない。例えば、第1及び第2のタイミングコンベヤーは、2つの物体が後続の処理のために並んで送られることができるように、平行に並んで且つ同位相で使用されることができる。また、複数のタイミングコンベヤーを、例えば合流行程において、搬送される物体が合流するときに互いに接触しないことを確実にするために、非平行配置で使用することができる。
【0025】
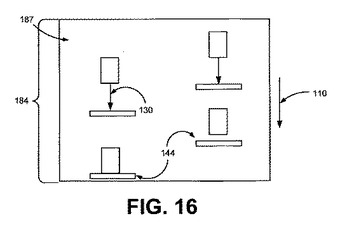
図16を参照する。図16は、図15に示されるタイミング部184の別の実施形態の部分上面図を示すブロック図である。複数のコンベヤーの起点の間で所望の位相関係を得るために複数のタイミングコンベヤー185、186を含むタイミング部184の代わりに、タイミング部184が、1つのタイミングコンベヤー187を含む。タイミングコンベヤー187は、ベルト幅の一部と係合するように配置され、且つ、複数のコンベヤーの起点の間に所望の位相関係をつくるように相対的な間隔(スペーシング)を有して配置される複数のフライト144を含む。例えば、図示のように、フライト144は、コンベヤーの左側で搬送される物体を、コンベヤーの右側にある物体と位相をずらして(異にして)、間隔を置いて配置するように構成される。別の方法において、物体の同時の到着が要求される場合には、左側及び右側のフライトが互いに隣接して配置される。また、摩擦パッド又は他の位置決め要素を、フライトの代わりに使用することができる。
【0026】
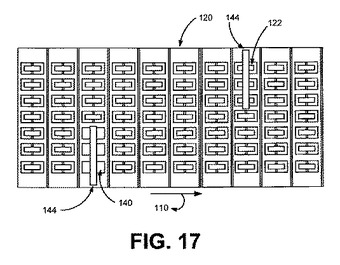
次に図17を参照する。図17は、図16の実施形態で使用されるコンベヤーの実施形態の部分上面図を示すブロック図である。コンベヤーベルト120は、各々がコンベヤーベルト120の幅の一部のみにわたるように構成される複数のフライト144を含む。このように、コンベヤーベルト120の異なる部分に送られた物体は、次のコンベヤーシステム要素(図示せず)に位相がずれた形で送られるように配置されることができる。コンベヤーベルト120は、フライト144又は他の位置決め要素を複数のキャビティ140の上又は中に受け入れるように構成されることができる。或いは、フライト144又は他の位置決め要素を、キャビティ140からローラー122を取り外さずにコンベヤーベルト120に取り付けることができる。位置決め要素の配置を非常に容易に構成する能力は、タイミングコンベヤーのフレキシビリティ及び有用性を増大する。
【0027】
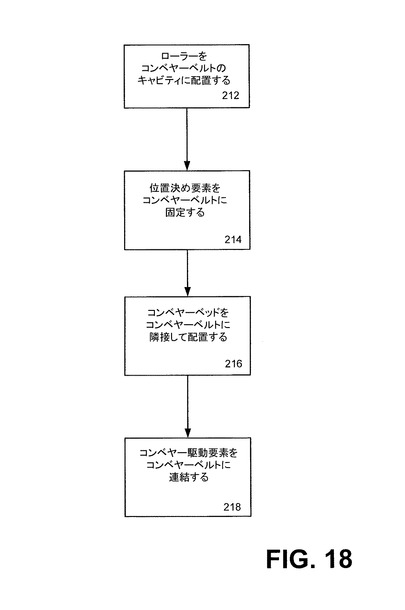
次に図18を参照する。図18は、本願明細書に開示されるコンベヤーを製造する方法の実施形態を示すブロック図である。ブロック212で、ローラーを、チェーンセグメントのキャビティに配置する。ブロック214で、位置決め要素をコンベヤーベルトに固定する。ブロック216で、ローラー係合面をコンベヤーベルトに隣接して配置し、ブロック218で、コンベヤー駆動要素をコンベヤーベルトに連結する。
【0028】
コンベヤーは、任意で、様々な寸法の、様々な摩擦特性を有するローラーを含むことができる。搬送される物体との異なる係合のレベルで作用する領域をつくるために、異なるローラーの構成を配置することができる。例えば、加速能力を高めるために、より高い摩擦係数を有するより大きいローラーを、高係合領域内に使用することができる。同様に、搬送される物体とローラーの間でスリップすることが望ましい性質である場合には、より低い摩擦係数を有するより小さいローラーを、低係合領域内に使用することができる。
【0029】
コンベヤーシステムは、また、様々な異なる位置決め要素を使用し得る。例えば、1つ又は複数の摩擦パッドを、比較的滑らかな減速をもたらすために使用することができる。或いは、固定の又は作動可能なフライトを、より正確な停止位置をもたらすために使用することができる。また、最終的な間隔すなわち搬送される物体間の距離を決定するために、コンベヤー速度と共に、位置決め要素の数及びそれらの間隔(スペーシング)を設定することができる。更に、上記のように、様々な異なる駆動連結方法を使用する様々な異なる駆動方式によって、コンベヤーを駆動することができる。
【0030】
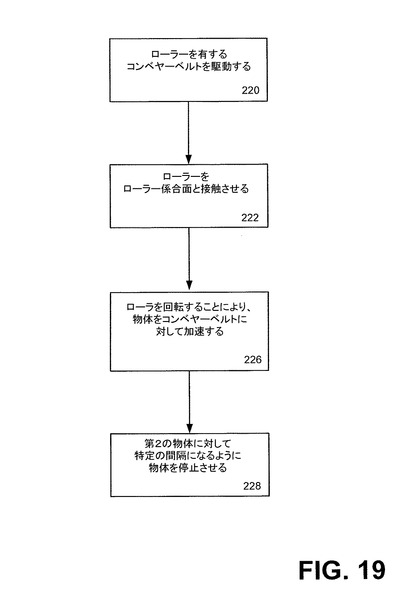
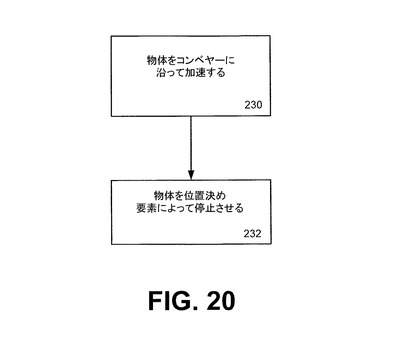
次に図19を参照する。図19は、物体を等間隔で配置する方法の実施形態を示すブロック図である。ブロック220で、ローラーを有するコンベヤーベルトを駆動し、ブロック222で、ローラー係合面をローラーと接触させる。コンベヤーベルトがローラー係合面に沿って走行すると、ローラーが回転する。ブロック226で、物体を、回転するローラーとの接触により、コンベヤーベルトに対して加速する。ブロック228で、物体を、第2の物体に対して特定の間隔になるように、コンベヤーベルト上で停止させる。同様に、図20を参照すると、本願明細書の開示のいくつかの実施形態は、物体を配置する方法として見ることができる。この方法は、物体をコンベヤーベルトに沿って加速するブロック230で開始される。ブロック232で、所望の位置に従って、物体を位置決め要素によって停止させる。コンベヤーに対して物体を移動することによって、コンベヤー速度を低下せずに所望の間隔(スペーシング)を定めることが可能となり、それによってスループット及び従ってコンベヤー動作の効率が増大する。
【0031】
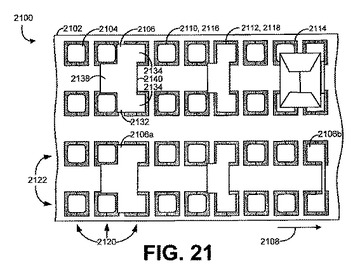
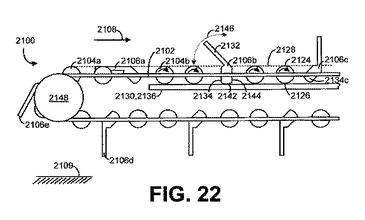
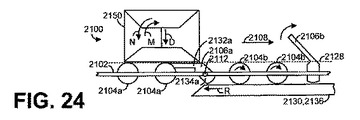
図21は、コンベヤー2100の他の実施形態の部分上面図を示す図である。コンベヤー2100は、コンベヤーベルト2102、複数のローラー2104、及び1つ又は複数の回転式に作動可能なフライト2106を含む。図22は、2100で示されるコンベヤーの部分側面図であり、図22に示すように、コンベヤーベルト2102は、地面2109と実質的に平行であり、地面に対するコンベヤーベルトの速度でベルトの走行方向2108に進むように構成される。但し、その他の構成も可能である。
【0032】
図21を参照すると、ローラー2104及びフライト2106が、コンベヤーベルト2102に連結されている。各ローラー2104は、回転軸2110を有し、ローラーはそのまわりを回転するように構成される。図示の実施形態において、ローラー2104が回転する軸2110は、コンベヤーベルト2102の開口部2114内でローラーを懸架するために使用される軸2116である。同様に、フライト2106は回転軸線2112を有し、フライトが回転軸線2112のまわりを回転するように構成され、図示の実施形態において、軸2112は、1つ又は複数の開口部2114内でフライトを懸架するために使用される軸2118である。コンベヤーベルト2102は、コンベヤーベルトを貫通して形成される複数のこれらの開口部2114を含み、開口部は互いに離れて間隔を置いて配置される。開口部2114は、一連の横の列2120及び縦の列2122などの任意のパターンで配置されることができる。図示の実施形態において、各開口部2114は、ローラー2104又はフライト2106によって塞がれている。但し、各開口部が塞がれることは必須ではない。ローラー2104及びフライト2106がベルトの走行方向に回転するように、回転軸2116、2118はベルトの走行方向2108に対して実質的に垂直であってもよい。但し、その他の構成も可能である。
【0033】
図22を参照すると、ローラーの上面2124がコンベヤーベルトより上に配置され、ローラーの下面2126がコンベヤーベルトより下に配置されるように、各ローラー2104は、コンベヤーベルト2102の厚みより大きい直径を有する。平面2128は、ローラー2104の実質的にすべての上面2124によって、コンベヤーベルト2102より上に形成され、平面はコンベヤーベルトと実質的に平行である。図示の実施形態では、実質的にローラー2104の全ての上面2124が、平面2128と同一平面上にある。他の実施態様において、例えば、ローラーが奇妙な形をしているか又は他のローラーよりわずかに大きいか小さい直径を有する場合、ローラー2104の上面2124が平面2128を形成しなくてもよく、単一のローラーが平面内にその上面を有さなくてもよい。
【0034】
ローラー係合面2130は、少なくともいくつかのローラーの下面2126に隣接して、コンベヤーベルト2102の下に配置される。コンベヤーベルト2102がベルトの走行方向2108に移動するとき、ローラー2104の下面2126はローラー係合面2130と接触する。ローラー係合面2130と係合しているローラー2104は回転し、一方、ローラー係合面と係合していないローラーは回転しない。例えば、図示の実施形態において、ローラー2104bはベルトの走行方向2108に回転し、一方、ローラー2104aは回転しない。しかしながら、ローラー2104が回転しているかどうかに関係なく、ローラーは、コンベヤーベルト2102と共に、地面2109に対するコンベヤーベルトの速度で並進する。例えば、ローラー2104aが回転しない場合であっても、ローラー2104aはコンベヤーベルト2102と共にベルトの走行方向2108に並進する。
【0035】
各フライト2106は、コンベヤーベルト2102の上に突起2132を有し、突起2132は、コンベヤーベルトの下で少なくとも一つのカム2134に連結される。カム2134は、フライト2106(図24を参照)に力Rを与えるために、コンベヤーベルト2102の下に配置されるカム面2136と係合するように構成される。突起2132は、引込み位置から延伸位置まで回転することによって力Rに応答するように構成される。引込み位置では、突起2132は、ローラー2104の上面2124によって形成される平面2128より上に延伸しないが、延伸位置では、突起は平面より上に延伸する。一旦フライトが延伸位置になると、カム2134はカム面2136を接触せずに通過するか又はカム面2136から離れるように構成される。その結果、カムはもはやカム面と接触せず、カム面に対して横すべりしない。
【0036】
図示の実施形態において、フライト2106aは引込み位置で示され、フライト2106aの突起は平面2128と同一平面に示される。但し、他の構成も可能である。カム2134がカム面2136と接触する結果として、引込み位置と延伸位置の間で回転経路2146に沿って回転するフライト2106bが示される。フライト2106cは、平面2128より上に延伸する突起及びカム面2136を通過するカム2134cと共に、延伸位置で示される。
【0037】
図示のように、カム2134は、湾曲する下面と、湾曲する下面の後方に沿ったリリーフ2144と、を有するカムローラー2142である。コンベヤーベルト2102がベルトの走行方向2108に移動するとき、カムローラー2142はカム面2136と接触する。カムローラー2142の湾曲する下面は、カム面2136に沿って回転し、突起2132を延伸位置に回転させる。一旦突起2132が延伸位置になると、カムローラー2142のリリーフ2144はカム面2136に隣接(接触)し、それによりカムローラーはカム面に対して横すべりしない。図示のように、カム面2136はローラー係合面2130と同一である。但し、他の実施形態において、2つの面が互いに異なってもよい。
【0038】
いくつかの実施形態において、コンベヤーベルト2102は、ループで走行するように構成されてもよい。例えば、図22において、コンベヤー2100は回転ドラム2148を含み、コンベヤーベルト2102は回転ドラム2148に巻きついている。ループ中の位置では、フライト2106は、フライトの突起2132が下向きに垂れ下がった状態でコンベヤーベルト2102の下に配置され、コンベヤーベルトが回転ドラム2148のまわりを移動するとき、フライトは重力によって引込み位置に引っ張られる。例えば、フライト2106dは下向きに垂れ下がっており、フライト2106eの突起は重力によって引込み位置に引っ張られている。一旦コンベヤーベルト2102が回転ドラム2148のまわりを走行すると、フライト2106aは突起2132が引込み位置に配置される。
【0039】
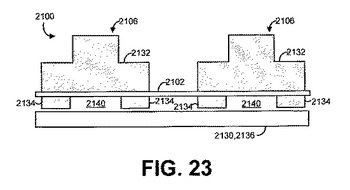
再び図21を参照すると、フライト2106は、開口部2114のいくつかに懸架されている。図示のように、フライト2106は、隣接する開口部2114に懸架され、且つ突起2132によってコンベヤーベルト2102より上で互いに連結される2つのカム2134を含む。但し、他の実施形態において、フライトは1つのカム又は2つ以上のカムを有してもよい。突起2132は、隣接する次の横列2120にあるローラー2104間に適合し(形や大きさが合い)、ローラーに重ならないような大きさ及び形状にされる。但し、突起は、ローラーが配置される開口部2114にわずかに重なってもよい。突起2132が延伸位置にあるときにコンベヤーベルト2102より上に延伸する高さを増大するために、突起は、隣接する次の横列2120にあるローラー2104間に延伸する延長タブ部2138を有してもよい。突起2138はまた、カム2134によって塞がれる開口部2114の間に、リリーフ開口部2140を有してもよい。図23は、延伸位置にあるフライトを示すコンベヤー2100の正面図であり、図23に示すように、リリーフ開口部2140は、突起2132及びコンベヤーベルト2102が互いに干渉せずに、フライト2106が延伸位置に回転することを可能にする。回転式に作動可能なフライト2106の特定の実施形態を上記したが、上記開示から様々な実施形態を想像することができ、それらの実施形態の全てが本開示の範囲内に含まれることが意図される。
【0040】
次に、図24〜27を参照して、コンベヤー2100の動作を説明する。図24〜27の各々は、コンベヤーベルト2102に配置される物体2150を様々な位置で示す、コンベヤー2100の部分側面図である。コンベヤーベルト2102は、ベルトの走行方向2108に移動するように構成される。ローラー2104は、ローラーの上面2124によって定められる平面2128の上でコンベヤーベルト2102に沿って物体2150を移動するように構成される。フライト2106は、物体2150が平面2128上を移動するのを妨害するように構成され、それにより物体は、コンベヤーベルト上の他の物体に対して予め定めた間隔(スペーシング)を有してコンベヤーベルト2102から退出する。フライト2106は引込み位置と延伸位置の間を移動可能であるので、物体2150はフライトの上に配置されてもよい。このような場合、コンベヤー2100は、フライト2106が引込み位置にとどまり、物体2150が回転するフライトによって妨げられずにコンベヤーベルト2102に沿って移動し続けることができるように構成される。
【0041】
詳細には、コンベヤーベルト2102は、ベルトの走行方向2108に地面2109に対するコンベヤーベルトの速度で移動するように構成される。コンベヤーベルト2102上の物体2150は、ローラー2104によって支持される。最初は、コンベヤーベルト2102がローラー係合面2130に接していないので、ローラー2104は回転していない。例えば、図24において、ローラー2104aは回転していない。従って、物体2150はローラー2104に対して静止しており、物体、ローラー及びコンベヤーベルト2102は、同時に、地面2109に対するコンベヤーベルトの速度でベルトの走行方向2108に並進する。
【0042】
図24において、物体2150は、フライト2106aの上に配置されている。フライトの突起2132aが引込み位置にあり、従って突起が平面2128より上に延伸しないので、物体2150はフライト2106の上に配置されることができる。コンベヤーベルト2102が移動するとき、フライトが延伸位置に回転することができるように、フライト2106aはカム面2136に隣接して配置される。カム2134aがカム面2136と接触し、フライトを延伸位置に回転させるように力Rがフライト2106aに与えられるが、物体2150がフライトに下向きの力Dを働かせるため、フライトは引込み位置にとどまる。
【0043】
より詳細には、力Rは、係合の場所2135でカム2134aとカム面2136の間の摩擦によって生成される。但し、他の実施形態において、力Rを他の方法で生成することができる。係合の場所2135がフライト2106aの回転軸線2112から離れて間隔を置いて配置されるので、フライトを延伸位置に回転させようとするモーメントMが、フライト2106aに加えられる。同時に、物体2150が、フライト2106aに下向きの力Dを働かせ、フライトが延伸位置に回転するのを防止しようとするモーメントNをフライトに加える。フライト2106aがカム2134aとカム面2136の間の係合にもかかわらず、引込み位置にとどまるように、モーメントMはモーメントNを越えない。コンベヤー2100が、ある範囲の形状、重量及び構成を有する物体2150を搬送することができることに注意されたい。従って、モーメントMがモーメントNを越えないことを確実にするために、フライト2106が、ある範囲の形状、重量、材料及び構成を有してもよい。
【0044】
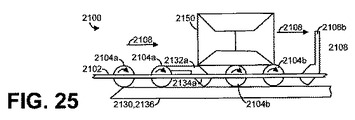
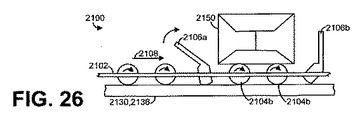
図25において、コンベヤーベルト2102がベルトの走行方向2108に移動し続けるとき、カム2134aは一時的にカム面2136に沿って横すべりする。フライト2106aは、カム2134aがカム面2136と接触している場合であっても引込み位置にとどまるので、コンベヤーベルト2102上の物体2150は妨害されない。物体2150を支持しているローラー2014aは、ローラー係合面2130と接触させられて回転し始める。ローラー2104aの回転は、ローラーの上面によって形成される平面2128に沿って、ベルトの走行方向2108に物体2150を移動させる。図26に示すように、カム2134aがカム面2136上でもはや横すべりせず、その代わりにカム面に沿って回転してフライト2106aに力Rを与えるように、物体2150はフライト2106aから移動する。フライト2106aは、引込み位置から延伸位置まで回転することによって、力Rに応答する。一旦フライト2106aが延伸位置になると、カムがカム面に接触して摩耗しないように、図27に示すように、カム2134aはカム面2136に接触しないで引っ張られる。従って、コンベヤー2100は、フライト2106が引込み位置にあるときは物体2150の移動を妨げないが、延伸位置にあるときは物体の移動を妨げるように構成される。いくつかの実施形態において、突起2132の上面は、物体が比較的容易にフライト2106の上を移動することができるように、比較的低い摩擦係数を有する材料である。
【0045】
上述のように、物体2150は、ローラー2104の回転により、コンベヤーベルト2102に対してある速度を達成する。物体2150の移動は、図24〜27において、コンベヤーベルト2102上での物体の相対的な位置の変化によって示される。物体2150がコンベヤーベルト2102に対して移動しているので、物体はコンベヤーベルト上の物体の位置を制御するために、隣接する次のフライト2106bによって停止される。図24において、フライト2106bは、その突起2132bが平面2128より上に延伸して物体の移動を妨げるように、延伸位置に回転している。図25〜26において、回転しているローラー2104は、物体がフライト2106bに隣接して配置されるまで、コンベヤーベルトに対して物体を移動する。図27において、フライト2106bが物体2150を停止し、物体の位置が制御される。
【0046】
物体2150がコンベヤーベルト2102に対して回転しているローラー2104に沿って移動しているとき、物体は、地面2109に対して増大された速度で移動する。少しもスリップしない実施形態では、コンベヤーベルト2102に対する物体2150の速度は、地面2109に対するコンベヤーベルトの速度と実質的に同じである。このような場合、物体2150が地面2109に対して移動する増大された速度は、実質的に地面に対するコンベヤーベルト2102の速度の2倍である。スリップがある実施形態では、物体2150は、ローラー2104の回転によって、地面2109に対するコンベヤーベルトの速度より少ないコンベヤーベルト2102に対する速度を達成する。このような場合、物体2150が地面2109に対して移動する増大された速度は、地面に対するコンベヤーベルト2102の速度より大きいが、地面に対するコンベヤーベルトの速度の2倍より小さい。いくつかの実施形態において、比較的高い摩擦係数を有する材料を、ローラー2104の外面及び/又はローラー係合面2130に使用することができる。それにより、ローラーと物体2150の間及び/又はローラーとローラー係合面の間でのスリップが妨げられる。
【0047】
なお、一旦ローラー2104が回転すると、物体2150は、ローラーが回転するのを止めるか又は物体が延伸位置にあるフライト2106によって停止されるまで、増大された速度で移動する。図24では、物体2150は回転していないローラー2104aによって支持されており、従って、物体は、コンベヤーベルト2102と共に地面2109に対するコンベヤーベルトの速度で移動する。図25〜26では、物体2150は回転しているローラー2104によって支持されており、従って、物体は地面2109に対して増大された速度で移動する。図27では、フライト2106bが物体2150の移動を妨げるので、物体は、増大された速度で移動するのをやめて、コンベヤーベルト2102と共に地面2109に対するコンベヤーベルトの速度で移動するだけにする。このようにして、物体2150のスペーシングが達成される。
【0048】
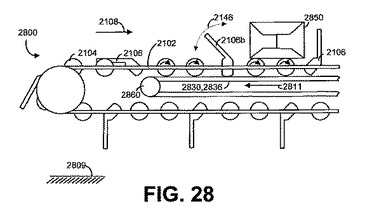
図28は、ベルトの走行方向2108と反対の方向2811に移動するように構成されたローラー係合面2830を有する、コンベヤー2800の実施形態の部分側面図である。ローラー係合面2830の移動は、ローラー2104の回転速度を増大する。結果として、回転するローラー2104に沿って移動する物体2850は、ローラー係合面2830が移動しない場合の速度より、比較的大きい速度で移動する。ローラー係合面2830が地面に対して0を超える速度で移動する場合、コンベヤーベルト2102に対する物体2850の速度は、地面2109に対するコンベヤーベルト2102の速度より大きい。このような場合、地面2809に対する物体2850の速度は、地面に対するコンベヤーベルト2102の速度の2倍より大きい。
【0049】
物体2850が地面2109に対して搬送される速度を増大することは、比較的小さいスペース(フットプリント)を有するコンベヤー2800が必要とされる場合に望ましいであろう。物体2850が比較的速い速度で搬送されるので、比較的短いコンベヤーベルト2102を使用することができる。従って、コンベヤー2800は、より小さいスペース(フットプリント)を有することができる。
【0050】
いくつかの実施形態において、例えばカム面及びローラー係合面2830が同じ面である実施形態において、カム面2836は、ベルトの走行方向2108と反対の方向2811にを移動する。このような場合、カム面2836が移動しない場合よりも、フライト2106は、回転経路2146に沿って比較的速く回転する。
【0051】
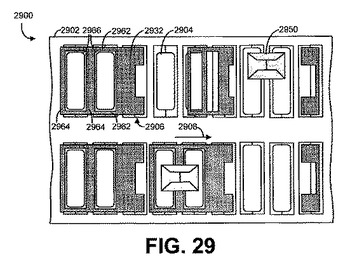
図29は、コンベヤー2900の他の実施形態の部分上面図を示す図である。コンベヤー2900の構成は、比較的小さい物体2950を搬送するのに適している。詳細には、物体2950は、コンベヤーベルト2902に平行な平面における比較的小さい表面積を意味する、比較的小さいスペース(フットプリント)を有する。従って、ローラー2904は、ローラーの表面積が増大されるように、比較的大きく及び/又は比較的互いに近い。例えば、図示されたローラー2904は、横方向の円筒状ローラーである。増大された表面積は、その物体2950とローラー2904との適切な接触を確実にする。それにより、ローラーが物体を支持し、物体がローラーからコンベヤーベルト上へ落ちる傾向が低下する。
【0052】
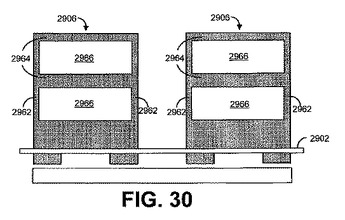
フライト2906は、1つ又は複数の隣接するローラー2904のまわりに適合する(形や大きさが合う)か又はローラー2904と対になる(一致する)ように構成される。フライト2906の突起2932は、延長バー2962及びクロスバー2964などの、一連の挟み込み(インターリービング)部材2960を含む。延長バー2962は、ローラー2904の横に、ベルトの走行方向2908にかかっている。一方、クロスバー2964は、延長バーを互いに連結するために延長バー2962の間にかかっている。延長バー2962とクロスバー2964の間に開口部2966が形成され、ローラー2904が開口部に収まっている。この実施形態のローラー2904は、比較的大きく及び/又は互いに比較的近く、従って引込み位置にあるとき、コンベヤーベルト2902上の突起2932のための空間がより小さいので、このような構成は有利だろう。
【0053】
図30は、延伸位置にあるにフライト2906を示す、図29に示されたコンベヤー2900の正面図である。図示のように、フライトがコンベヤーベルトに沿って移動している物体2950の移動を妨げることができるように、フライト2906はコンベヤーベルト2902より上に延伸するように構成される。フライト2906は、コンベヤーベルト2902より上に比較的高く延伸するので、フライトはまた、比較的高い物体2950用に構成され得る。
【0054】
本開示の上記の実施形態は(特に、図示したいかなる実施形態も)、単に実施態様の可能な例にすぎず、単に本開示の原理の明確な理解のために記載されただけであることが強調されなければならない。本開示の上記実施形態に対して、多くの変更及び修正が、本開示の精神及び原理から実質的に逸脱せずになされるだろう。すべてのこのような修正及び変更を、本開示の範囲及び本開示内で本願明細書に含み、特許請求の範囲によって保護することが意図される。
【技術分野】
【0001】
(関連出願についてのクロスリファレンス)
本出願は、2006年12月14日に出願された、シリアル番号11/610,737号、「改良されたタイミングコンベヤーを提供するためのシステムと方法」という発明の名称の、同時係属の米国非仮出願の優先権を主張する。
【背景技術】
【0002】
(背景)
コンベヤーシステムで物体を搬送するとき、多くの場合、既知の相対的な位置に物体を配置するか又はコンベヤーベルト上で最少の間隔(スペーシング)を維持することが必要である。このことに対処する従来技術の装置は、作動可能なパッケージ停止要素と組み合わせて多数のセンサを使用しなければならなかった。そのような装置は、ベルシャドスキーの米国特許6,648,125号(引用により本願明細書に含まれるものとする)に記載されている。コンベヤーのスペーシングを達成する他の方法は、ベルトと異なる(通常、より遅い)速度で進む、高架の又は下部に取り付けたスペーシングバーを有する標準的なコンベヤーベルトを含む。これらの装置は複雑であり、コンベヤーの経路に沿ってパッケージを減速するか又は停止させるため、コンベヤーの効率を減少させる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
従って、産業界には、これまで対処されていない上述の欠陥及び欠点に対処する必要がある。
【課題を解決するための手段】
【0004】
(要約)
一実施形態において、コンベヤーは、コンベヤーベルト、複数のローラー、及びフライトを含む。ローラーは、ローラーがローラー係合面と係合し且つ回転してローラーによって支持される物体を平面上で移動させるように、ローラー係合面と係合するように構成された下側面と、実質的に平面を形成する上側面と、を有する。フライトは、コンベヤーベルトの下でカム面と係合してフライトにモーメントをもたらすように構成されたカムと、引込み位置から延伸位置まで回転することによってそのモーメントに対処する突起と、を含む。
【0005】
一実施形態において、コンベヤーは、コンベヤーベルト、複数のローラー、及びフライトを含む。コンベヤーベルトは、地面に対するコンベヤーベルトの速度でベルトの走行方向に移動するように構成される。複数のローラーは、ベルトの走行方向に回転するように構成される。ローラーの回転によって、コンベヤーベルト上の物体は、地面に対して増加した速度でローラーの上を移動するようになる。フライトは、カム及び突起を有する。カムは、突起にモーメントをもたらして、突起を引込み位置から延伸位置まで回転させる。
【0006】
一実施形態において、コンベヤーは、コンベヤーベルト、複数のローラー、位置決め要素、及びローラー係合面を含む。コンベヤーベルトは、ベルトの走行方向に移動するように構成され、コンベヤーベルト上に配置された物体は、コンベヤーベルトによってベルトの走行方向に搬送される。複数のローラーは、コンベヤーに連結され、ベルトの走行方向に回転するように構成され、コンベヤーベルトに配置されて回転するローラーと接触した物体は、コンベヤーベルトに対して回転しているローラーに沿ってベルトの走行方向に移動する。位置決め要素は、コンベヤーベルトに連結され、コンベヤーベルトに対して物体を停止させるように構成され、物体は、コンベヤーベルトと共にベルトの走行方向に搬送される。ローラー係合面は、コンベヤーベルトに隣接して配置され、ローラーと係合してローラーを回転させるように構成され、ローラー係合面は、ベルトの走行方向と反対の方向に移動するように構成される。
【0007】
本開示の多くの側面は、以下の図面を参照してよりよく理解することができる。図面の構成要素は、必ずしも正確な縮尺ではなく、それよりも、本開示の原則を明確に示すことに重点が置かれている。また、図面において、同様の符号は、いくつかの図の全体にわたって対応する部分を表わす。
【図面の簡単な説明】
【0008】
【図1】本願明細書に開示されるタイミングコンベヤーを使用するコンベヤーシステムの実施形態の上面図を示すブロック図である。
【図2A】本願明細書に開示されるタイミングコンベヤーの実施形態の側面図を異なる処理段階で示すブロック図である。
【図2B】本願明細書に開示されるタイミングコンベヤーの実施形態の側面図を異なる処理段階で示すブロック図である。
【図3】本願明細書に開示される一実施形態のコンベヤーの部分上面図を示すブロック図である。
【図4】本願明細書に開示される他の実施形態のコンベヤーの部分上面図を示すブロック図である。
【図5A】本願明細書に開示されるタイミングコンベヤーの他の実施形態の側面図を異なる処理段階で示すブロック図である。
【図5B】本願明細書に開示されるタイミングコンベヤーの他の実施形態の側面図を異なる処理段階で示すブロック図である。
【図6】本願明細書に開示されるコンベヤーの他の実施形態の部分上面図を示すブロック図である。
【図7】図6の実施形態の側面図を示すブロック図である。
【図8】本願明細書に開示されるコンベヤーの他の実施形態の側面図を示すブロック図である。
【図9】本願明細書に開示される直線的に作動可能なフライトの実施形態の引込み位置での部分側面図である。
【図10】本願明細書に開示される直線的に作動可能なフライトの実施形態の延伸位置での部分側面図である。
【図11】本願明細書に開示される回転式に作動可能なフライトの実施形態の引込み位置での部分側面図である。
【図12】本願明細書に開示される回転式に作動可能なフライトの実施形態の延伸位置での部分側面図である。
【図13】本願明細書に開示される回転式に作動可能なフライトの別の実施形態の引込み位置での部分側面図である。
【図14】本願明細書に開示される回転式に作動可能なフライトの別の実施形態の延伸位置での部分側面図である。
【図15】本願明細書に開示されるタイミングコンベヤーベルトを使用するコンベヤーシステムの実施形態の部分上面図を示すブロック図である。
【図16】図13に示されるタイミング部の別の実施形態の部分上面図を示すブロック図である。
【図17】図14の実施形態に使用されるコンベヤーの実施形態の部分上面図を示すブロック図である。
【図18】コンベヤを製造する方法の実施形態を示すブロック図である。
【図19】物体を搬送する方法の実施形態を示すブロック図である。
【図20】物体を配置する方法の実施形態を示すブロック図である。
【図21】コンベヤーの他の実施形態の部分上面図を示す図であり、コンベヤーは複数の回転式に作動可能なフライトを備えている。
【図22】図21に示されるコンベヤーの部分側面図である。
【図23】図21に示されるコンベヤーの正面図であり、延伸位置にある回転式に作動可能なフライトを示す。
【図24】図21に示されるコンベヤーの部分側面図であり、回転式に作動可能なフライトの上に配置された物体を示す。
【図25】図21に示されるコンベヤの部分側面図であり、回転式に作動可能なフライトから物体を移動する回転しているローラーを示す。
【図26】図21に示されるコンベヤーの部分側面図であり、物体がフライトから移動した後に引込み位置から延伸位置まで回転する回転式に作動可能なフライトを示す。
【図27】図21に示されるコンベヤーの部分側面図であり、延伸位置にある回転式に作動可能なフライトを示し、隣接する次のフライトによって停止されている物体を示す。
【図28】ベルトの走行方向と反対の方向に移動するローラー係合面を有するコンベヤーの実施形態の部分側面図である。
【図29】コンベヤーの他の実施形態の部分上面図を示す図であり、コンベヤーは回転式に作動可能なフライトの複数の他の実施形態を有する。
【図30】図29に示されるコンベヤーの正面図であり、延伸位置にある回転式に作動可能なフライトを示す。
【発明を実施するための形態】
【0009】
(詳細な説明)
次に、本開示の様々な側面を要約して、図面に示される開示の説明について詳細に言及する。これらの図面と関連して開示を説明するが、本願明細書に開示される1つの実施形態又は複数の実施形態に制限する意図はない。逆に、その意図は、添付の請求の範囲によって定義される開示の範囲内に含まれるすべての代替物、変更例及び均等物をカバーすることである。
【0010】
ここで図1を参照する。図1は、タイミングコンベヤーを使用するコンベヤーシステムの実施形態の上面図を示すブロック図である。コンベヤーシステム100は、フィーダーコンベヤー102、タイミングコンベヤー104、及び受け取りコンベヤー106を含む。これらのコンベヤーの各々は、ベルト走行方向110に物体108を移動するために使用される。フィーダーコンベヤー102上の物体108は、ランダムなスペーシング又は間隔で搬送され得る。フィーダーコンベヤー102からタイミングコンベヤー104へ移行する物体108は、タイミングコンベヤー104によって位置を動かされ、それにより、受け取りコンベヤー106は、所定の間隔で物体108を受け取る。所定の間隔は、その後のコンベヤー処理、例えば、シングルレーンタイミング、並列同相タイミング、並列異相(位相外れ)タイミング、及び非平行合流(マージング)などを容易にする。
【0011】
次に図2A及び2Bを参照する。図2A及び2Bは、2つの異なる処理段階にあるタイミングコンベヤーの実施形態の側面図を示すブロック図である。タイミングコンベヤー104は、概して加速要素と位置決め要素を含む。タイミングコンベヤー104のこの実施形態は、キャビティ(図示せず)を有するコンベヤーベルト120を含み、キャビティは加速要素であるローラー122を収容する。コンベヤーベルト120の非限定的な例は、コスタンツォに対する米国特許6,494,312号(引用により本願明細書に含まれるものとする)に開示されるような、マットトップチェーンである。各ローラーがコンベヤーベルト120の上面121より上とコンベヤーベルト120の底面123より下に延伸するように、ローラー122は必要な大きさにされ、配置される。ローラー122は、非限定的かつ例示的な行と列の形で配置されることができる。ローラー122は、コンベヤーベルト内に整列配置されてベルト走行方向110に物体を加速する。タイミングコンベヤー104はまた、例示的な位置決め要素として、コンベヤーベルト120の上面121に沿って特定の間隔に配置される摩擦パッド128を含む。ローラー係合面124は、ローラー122がローラー係合面124と接触するように、コンベヤーベルト120の下に配置される。ローラー係合面124は、概ね平らな要素であることができ、高い摩擦係数を有する上面を含むことができる。ゴム又はゴム系の合成物は、高い摩擦係数を有する材料の一つの非限定的な例である。タイミングコンベヤー104はまた、コンベヤー駆動要素126を含む。コンベヤー駆動要素126は、図2A及び2Bに図示したように、ベルト又はチェーン127を用いてコンベヤーベルト120に機械的に連結された、外部に取り付けられた回転駆動要素として示されるが、コンベヤー駆動要素126は、この開示の範囲及び趣旨の中で多くの異なる形態を取ることができる。例えば、コンベヤー駆動要素126は、タイミングコンベヤー104に直接連結されてもよいし、又は、ギアボックス、駆動軸(ドライブシャフト)及び自在継手(ユニバーサルジョイント)を含むがこれに限定されない他の技術を用いて機械的に連結されてもよい。
【0012】
図2Aに示すように、コンベヤーベルト120がベルト走行方向110に移動するとき、ローラー122はローラー係合面124と接触する。ローラー122とローラー係合面124の間の摩擦係合によって、ローラーの回転132が生じる。物体108がローラー122によって支持されるとき、ローラーの回転132によって、物体108は、ローラー係合面124に対するコンベヤーベルト120の速度に等しいコンベヤーベルト120に対する速度130になり、それにより物体108はコンベヤーベルト120の速度の2倍で移動する。摩擦パッド128に到着するまで、物体108はコンベヤーベルト120に沿って移動する。このようにして、図2Bに図示したように、各物体108は、所定の位置134へ進む。所定の位置134は、概ね摩擦パッド128の位置に対応し、かつ、摩擦パッド128の位置によって決定される。摩擦パッド128は、本開示の精神及び範囲内で考えられる位置決め要素の、非常に多くのタイプの非限定的な例である。また、タイミングコンベヤー104は、様々な数の所定の位置134を含むことができる様々な長さに構成されることができる。
【0013】
次に図3を参照する。図3は、一実施形態のコンベヤーベルトの部分上面図を示すブロック図である。図3の実施形態において、コンベヤーベルト120はマットトップチェーンを含み、マットトップチェーンは、互いにヒンジ的に固定されてコンベヤーループを形成する複数のチェーンセグメント119を含む。チェーンセグメント119は、マットトップチェーンセグメントであることができ、例えば、回転軸142に取り付けられるローラー122を受け入れることができる複数のキャビティ140を含む。チェーンセグメント119はまた、摩擦パッド128を受け入れることができる。図2A及び2Bを参照して上記したように、ローラー122は、ローラー係合面124との接触によって、物体を、コンベヤーベルト120に対してベルト走行方向110に移動させる。物体が摩擦パッド128を有するチェーンセグメント119に到達すると、コンベヤーベルト120に対する物体の移動が停止される。このように、摩擦パッド128(又は代替的な位置決め要素)の位置は、搬送される物体間の最終的な間隔(スペーシング)を決定する。
【0014】
次に図4を参照する。図4は、他の実施形態におけるコンベヤーの部分上面図を示すブロック図である。本実施形態において、コンベヤーベルト120上の位置決め要素は、フライト144である。フライト144は、概ね、コンベヤーに沿った特定の位置でコンベヤーに対する物体の移動を妨げる、コンベヤー上に又はコンベヤーに沿って取り付けられた止め具(ストップ)として説明されることができる。図3を参照して上記した摩擦パッドと対照的に、フライト144は、ローラー122によってつくられる面と概ね同一平面内にはなく、代わりに、ローラー122によってつくられる平面より上に延伸する。ローラーの頂点によって定義される平面より上に延伸し、フライト144は、コンベヤー上の物体に、比較的不動の停止位置をもたらす。フライト144は、摩擦パッド128に対比して、より正確に制御された所定の位置をもたらし得る。また、摩擦パッド128とは異なり、フライト144を使用する所定の配置は、コンベヤー速度によって変化することが少ない。摩擦パッド128は、減速の割合がフライト144の使用に付随する減速の割合より小さいので、コンベヤー上の物体の性質によっては、より望ましい可能性がある。位置決め要素は、摩擦パッド、フライト、それらの組み合わせ、又は他の適切な要素として実施されることができる。
【0015】
次に図5A及び5Bを参照する。図5A及び5Bは、2つの異なる処理段階にある、タイミングコンベヤーの他の実施形態の側面図を示すブロック図である。図5Aに示すように、物体108は、ローラー122との係合によって相対速度130で移動している。図5Bに示すように、物体108がフライト144によって定められる所定の位置134に到達すると、物体108はコンベヤーベルト120に対して停止される。このように、搬送される物体の各々は、フライト144間の距離によって決定される間隔で、タイミングコンベヤーから退出する。
【0016】
次に図6を参照する。図6は、コンベヤーの他の実施形態の部分上面図を示すブロック図である。コンベヤーベルト120は、ローラーか又は例えば摩擦パッド128などの位置決め要素を有することができる、複数のチェーンセグメント119を含むことができる。コンベヤーベルト120は、高係合領域151及び低係合領域153を含む。高係合領域151は、概して、ローラー150と搬送される物体108の間の滑りが除去されるか又は低減されるように、ローラー150と搬送される物体108の間の十分な摩擦係合によって特徴づけられる。同様に、低係合領域153は、概して、高係合領域151に対して、ローラー152と搬送される物体108の間の低下したレベルの摩擦係合によって特徴づけられる。従って、ローラー152と搬送される物体108の間の滑りは、高係合領域151で経験される滑りに対して増大される。
【0017】
高係合領域151は、ローラー150と搬送される物体108の間の滑りを低減するか又は除去することによって、搬送される物体108との摩擦係合を増大するように設計されたローラー150を有して構成される。滑りを低減するか又はを除去するための一つの技術は、より大きいローラー150の使用である。加えて又は代わりに、高係合領域151は、ローラー150と搬送される物体108の間により大きな摩係合をもたらすために、比較的大きい摩擦係数の表面を有するローラー150を使用することができる。同様に、低係合領域153は、より小さいローラー152及び/又は比較的低い摩擦係数の表面を有するローラーを使用することができる。より小さいローラー152及び/又は低い摩擦係数のローラーは、減速の間及び搬送される物体108がコンベヤーに対して停止した後、搬送される物体108がローラー上で滑ることを可能にする。任意で、コンベヤーベルト120は、2つより多い係合のレベルを含むことができ、様々なサイズのローラー、様々な摩擦係数を有するローラー、及び、任意のそれらの組み合わせを用いることにより、様々なレベルの係合を達成することができる。
【0018】
図7を参照する。図7は、図6に示した実施形態の側面図を示すブロック図である。コンベヤーベルト120は、大きいローラー150を有する高係合領域151及び小さいローラー152を有する低係合領域153を含む。図6を参照して上記したように、低係合領域153はまた、より低い摩擦係数を有するローラーを特徴としてもよく、それにより物体が摩擦パッド128との接触によって減速するときにローラーと物体の間の滑りを可能にする、図示のように、コンベヤーベルト120の柔軟な性質によって、大きいローラー150と小さいローラー152の両方が、ローラー係合面124と係合することができる。このように、高係合領域151と低係合領域153の両方のローラー150、152が、ローラー係合面124との接触によって回転を受ける。図8は、コンベヤーベルト120の他の実施形態の側面図を示すブロック図であり、図8に示すように、複数の係合領域の概念はまた、位置決め要素としてフライト144を使用して実施すことができる。フライト144は、様々な異なる方法で実施されることができる。例えば、フライト144は、コンベヤー上で延伸位置を維持する定位置構造として構成され得る。或いは、フライト144は、例えば、コンベヤー経路に沿った1つ又は複数の特定の場所で作動可能である可動フライトであることができる。
【0019】
図9を参照する。図9は、引込み位置にある直線的に作動可能なフライトの実施形態の部分側面図である。直線的に作動可能なフライト160は、コンベヤーベルト120に固定され、引込み位置ではコンベヤーベルト120の表面より上に延伸する。直線的に作動可能なフライト160は、カムローラー162を含み、任意で、直線的に作動可能なフライト160が作動されないときに引込み位置を維持するための付勢要素166を含む。コンベヤーベルト120がベルト走行方向110に移動するとき、カムローラー162は、カム面164と係合し、フライト160を、隣接するローラー152の上面によって定められる平面より上に延伸した位置まで垂直に移動させる。非限定的な例において、カム面164は、ローラー係合面又はローラー係合面の所定の面であることができる。或いは、カム面164は、フライト160を作動させるための別個の構造であることができ、更に、フライトの位置の独立した制御をもたらすために調節可能であることができる。図10は延伸位置にある直線的に作動可能なフライトの実施形態の部分側面図であり、図10に示すように、カムローラー162は、カム面164と係合し、直線的に作動可能なフライト160をコンベヤーベルト120より上に延伸した位置まで移動させる。カムローラー162の係合が、妨げられなければ直線的に作動可能なフライト160を延長するのに十分であるときは、フライト160の作動は、搬送される物体が直線的に作動可能なフライト160上に配置される場合に延伸するのに必要な力で行われなくてもよい。或いは(図示せず)、直線的に作動可能なフライト160は、複数のピースが伸縮自在(入れ子状)に構成された組立体を含むように構成されることができ、この組立体は、直線的に作動可能なフライト160が搬送される物体の下で作動する場合に複数のピースがつぶれる、内部付勢要素を含む。
【0020】
次に図11を参照する。図11は、引込み位置にある回転式に(回転するように)作動可能なフライトの実施形態の部分側面図である。回転式に作動可能なフライト170は、ピボットピン又は回転軸176によってコンベヤーベルト120のキャビティ内に旋回可能に取り付けられる。回転式に作動可能なフライト170は、全体的に、ピボットピン176から2つの方向に延伸する。回転式に作動可能なフライト170は、コンベヤーの上面121又はコンベヤーにあるローラーの上面によって定められる平面に概ね平行な第1の方向に延伸し、格納されるとき、コンベヤーの上面121又はコンベヤーにあるローラーの上面によって定められる面の下に配置される。回転式に作動可能なフライト170は、コンベヤーベルト120の底面123の下で、第2の方向に延伸する。この第2の方向に、回転式に作動可能なフライト170は、カムローラー172を含む。コンベヤーベルト120がベルト走行方向110に進むとき、カムローラー172はカム面174と係合する。図12は、延伸位置にある回転式に作動可能なフライトの実施形態の部分側面図であり、図12に示されるように、カムローラー172とカム面174の間の係合によって、回転式に作動可能なフライト170が、ピボットピン176のまわりを旋回する。この旋回動作によって、回転式に作動可能なフライト170は、コンベヤーベルト120の上面121より上に延伸する。
【0021】
次に図13を参照する。図13は、引込み位置にある回転式に作動可能なフライトの別の実施形態の部分側面図である。回転式に作動可能なフライト240が、ピボットピン又は回転軸244によってコンベヤーベルト120のキャビティ内に旋回可能に取り付けられている。回転式に作動可能なフライト240は、平坦な側面246を有するローラー241と、フライト延伸部材242と、を含む。引込み位置において、フライト延伸部材242は、概ね、コンベヤー120にあるローラーの上面によって定められる平面か又はこの平面の下にある、コンベヤーベルト120の上面121に載置される。コンベヤーベルト120がベルト走行方向110に進むとき、ローラー241はカム面174と係合する。図14は、延伸位置にある回転式に作動可能なフライトの別の実施形態の部分側面図であり、図14に示されるように、ローラー241とカム面174の間の係合によって、回転式に作動可能なフライト240が、ピボットピン176のまわりを旋回する。この旋回動作によって、回転式に作動可能なフライト延伸部材242は、コンベヤーベルト120の上面121より上に延伸する。ローラーの頂点に沿って移動している物体がフライト延伸部材242と係合すると、ローラー241は、ローラー241の平坦な側面246がカム面174に最も近くなる位置まで更に回転される。平坦な側面246がカム面174に最も近くなるとき、回転式に作動可能なフライトはカム面174と摩擦係合せず、スリップは発生しない。
【0022】
直線的に作動可能なフライト、及び、回転式に作動可能なフライトは、単にこの開示において考えられるフライトの例であって、開示の範囲又は精神を制限することは意図されていない。例えば、作動可能なフライトを、1つ又は複数のカムと動作可能に係合する複数のフライトによって実施するように構成することができる。ここで、カムは、カムローラー、回転するカム面上の偏心突出部(ローブ)、及びカム面などを含むが、これらに限定されるものではない。
【0023】
次に図15を参照する。図15は、タイミングコンベヤーベルトを使用するコンベヤーシステムの実施形態の部分上面図を示すブロック図である。コンベヤーシステム200は、フィーダー部180、タイミング部184、切り離し部188、及び後処理部190を含む。フィーダー部180は、第1のフィードコンベヤ181及び第2のフィードコンベヤ182を含む。フィードコンベヤ181、182の各々は、物体108をタイミング部184へ、不規則な間隔で且つ横方向の不規則なベルト位置に移すことができる。タイミング部184は、それぞれ、第1及び第2のフィードコンベヤ181、182に対応する、第1のタイミングコンベヤー185及び第2のタイミングコンベヤー186を含む。タイミング部184によって受け取られた物体は、それらが第1及び第2のタイミングコンベヤー185、186上の所定の位置に到達するまで、相対速度130に加速される。この非限定的な例では、第1及び第2のタイミングコンベヤー185、186の所定の位置は、物体108が位相をずらしてタイミング部184から離れるように設定される。言い換えれば、第1のタイミングコンベヤー185から離れる物体は、第2のタイミングコンベヤー186から離れる連続する物体の間で、切り離し部188に到達する。
【0024】
他の実施態様では、タイミング部184は、次のプロセスコンベヤーに対して実質的に同一の(すなわち同相の)位置に物体108を送るために使用される。物体108が切り離し部188に送られると、物体108は切り離し部188の中央に向かって横方向192に向かわせられる。第1及び第2のコンベヤー185、186に、それぞれ、位相がずれた配置で物体を位置付けることによって、結果として生じる切り離された物体は、単一の線内にあるように構成され、次の処理のために均一に間隔を置いて配置される。物体108が次の処理のためのコンベヤー190に受け取られるとき、物体108は物体間に一定の均一な距離を有する単一の縦の列に配置される。図15に示されるコンベヤーシステムは、単に例示的なものであり、決して開示の範囲又は精神を制限することを意図していない。例えば、第1及び第2のタイミングコンベヤーは、2つの物体が後続の処理のために並んで送られることができるように、平行に並んで且つ同位相で使用されることができる。また、複数のタイミングコンベヤーを、例えば合流行程において、搬送される物体が合流するときに互いに接触しないことを確実にするために、非平行配置で使用することができる。
【0025】
図16を参照する。図16は、図15に示されるタイミング部184の別の実施形態の部分上面図を示すブロック図である。複数のコンベヤーの起点の間で所望の位相関係を得るために複数のタイミングコンベヤー185、186を含むタイミング部184の代わりに、タイミング部184が、1つのタイミングコンベヤー187を含む。タイミングコンベヤー187は、ベルト幅の一部と係合するように配置され、且つ、複数のコンベヤーの起点の間に所望の位相関係をつくるように相対的な間隔(スペーシング)を有して配置される複数のフライト144を含む。例えば、図示のように、フライト144は、コンベヤーの左側で搬送される物体を、コンベヤーの右側にある物体と位相をずらして(異にして)、間隔を置いて配置するように構成される。別の方法において、物体の同時の到着が要求される場合には、左側及び右側のフライトが互いに隣接して配置される。また、摩擦パッド又は他の位置決め要素を、フライトの代わりに使用することができる。
【0026】
次に図17を参照する。図17は、図16の実施形態で使用されるコンベヤーの実施形態の部分上面図を示すブロック図である。コンベヤーベルト120は、各々がコンベヤーベルト120の幅の一部のみにわたるように構成される複数のフライト144を含む。このように、コンベヤーベルト120の異なる部分に送られた物体は、次のコンベヤーシステム要素(図示せず)に位相がずれた形で送られるように配置されることができる。コンベヤーベルト120は、フライト144又は他の位置決め要素を複数のキャビティ140の上又は中に受け入れるように構成されることができる。或いは、フライト144又は他の位置決め要素を、キャビティ140からローラー122を取り外さずにコンベヤーベルト120に取り付けることができる。位置決め要素の配置を非常に容易に構成する能力は、タイミングコンベヤーのフレキシビリティ及び有用性を増大する。
【0027】
次に図18を参照する。図18は、本願明細書に開示されるコンベヤーを製造する方法の実施形態を示すブロック図である。ブロック212で、ローラーを、チェーンセグメントのキャビティに配置する。ブロック214で、位置決め要素をコンベヤーベルトに固定する。ブロック216で、ローラー係合面をコンベヤーベルトに隣接して配置し、ブロック218で、コンベヤー駆動要素をコンベヤーベルトに連結する。
【0028】
コンベヤーは、任意で、様々な寸法の、様々な摩擦特性を有するローラーを含むことができる。搬送される物体との異なる係合のレベルで作用する領域をつくるために、異なるローラーの構成を配置することができる。例えば、加速能力を高めるために、より高い摩擦係数を有するより大きいローラーを、高係合領域内に使用することができる。同様に、搬送される物体とローラーの間でスリップすることが望ましい性質である場合には、より低い摩擦係数を有するより小さいローラーを、低係合領域内に使用することができる。
【0029】
コンベヤーシステムは、また、様々な異なる位置決め要素を使用し得る。例えば、1つ又は複数の摩擦パッドを、比較的滑らかな減速をもたらすために使用することができる。或いは、固定の又は作動可能なフライトを、より正確な停止位置をもたらすために使用することができる。また、最終的な間隔すなわち搬送される物体間の距離を決定するために、コンベヤー速度と共に、位置決め要素の数及びそれらの間隔(スペーシング)を設定することができる。更に、上記のように、様々な異なる駆動連結方法を使用する様々な異なる駆動方式によって、コンベヤーを駆動することができる。
【0030】
次に図19を参照する。図19は、物体を等間隔で配置する方法の実施形態を示すブロック図である。ブロック220で、ローラーを有するコンベヤーベルトを駆動し、ブロック222で、ローラー係合面をローラーと接触させる。コンベヤーベルトがローラー係合面に沿って走行すると、ローラーが回転する。ブロック226で、物体を、回転するローラーとの接触により、コンベヤーベルトに対して加速する。ブロック228で、物体を、第2の物体に対して特定の間隔になるように、コンベヤーベルト上で停止させる。同様に、図20を参照すると、本願明細書の開示のいくつかの実施形態は、物体を配置する方法として見ることができる。この方法は、物体をコンベヤーベルトに沿って加速するブロック230で開始される。ブロック232で、所望の位置に従って、物体を位置決め要素によって停止させる。コンベヤーに対して物体を移動することによって、コンベヤー速度を低下せずに所望の間隔(スペーシング)を定めることが可能となり、それによってスループット及び従ってコンベヤー動作の効率が増大する。
【0031】
図21は、コンベヤー2100の他の実施形態の部分上面図を示す図である。コンベヤー2100は、コンベヤーベルト2102、複数のローラー2104、及び1つ又は複数の回転式に作動可能なフライト2106を含む。図22は、2100で示されるコンベヤーの部分側面図であり、図22に示すように、コンベヤーベルト2102は、地面2109と実質的に平行であり、地面に対するコンベヤーベルトの速度でベルトの走行方向2108に進むように構成される。但し、その他の構成も可能である。
【0032】
図21を参照すると、ローラー2104及びフライト2106が、コンベヤーベルト2102に連結されている。各ローラー2104は、回転軸2110を有し、ローラーはそのまわりを回転するように構成される。図示の実施形態において、ローラー2104が回転する軸2110は、コンベヤーベルト2102の開口部2114内でローラーを懸架するために使用される軸2116である。同様に、フライト2106は回転軸線2112を有し、フライトが回転軸線2112のまわりを回転するように構成され、図示の実施形態において、軸2112は、1つ又は複数の開口部2114内でフライトを懸架するために使用される軸2118である。コンベヤーベルト2102は、コンベヤーベルトを貫通して形成される複数のこれらの開口部2114を含み、開口部は互いに離れて間隔を置いて配置される。開口部2114は、一連の横の列2120及び縦の列2122などの任意のパターンで配置されることができる。図示の実施形態において、各開口部2114は、ローラー2104又はフライト2106によって塞がれている。但し、各開口部が塞がれることは必須ではない。ローラー2104及びフライト2106がベルトの走行方向に回転するように、回転軸2116、2118はベルトの走行方向2108に対して実質的に垂直であってもよい。但し、その他の構成も可能である。
【0033】
図22を参照すると、ローラーの上面2124がコンベヤーベルトより上に配置され、ローラーの下面2126がコンベヤーベルトより下に配置されるように、各ローラー2104は、コンベヤーベルト2102の厚みより大きい直径を有する。平面2128は、ローラー2104の実質的にすべての上面2124によって、コンベヤーベルト2102より上に形成され、平面はコンベヤーベルトと実質的に平行である。図示の実施形態では、実質的にローラー2104の全ての上面2124が、平面2128と同一平面上にある。他の実施態様において、例えば、ローラーが奇妙な形をしているか又は他のローラーよりわずかに大きいか小さい直径を有する場合、ローラー2104の上面2124が平面2128を形成しなくてもよく、単一のローラーが平面内にその上面を有さなくてもよい。
【0034】
ローラー係合面2130は、少なくともいくつかのローラーの下面2126に隣接して、コンベヤーベルト2102の下に配置される。コンベヤーベルト2102がベルトの走行方向2108に移動するとき、ローラー2104の下面2126はローラー係合面2130と接触する。ローラー係合面2130と係合しているローラー2104は回転し、一方、ローラー係合面と係合していないローラーは回転しない。例えば、図示の実施形態において、ローラー2104bはベルトの走行方向2108に回転し、一方、ローラー2104aは回転しない。しかしながら、ローラー2104が回転しているかどうかに関係なく、ローラーは、コンベヤーベルト2102と共に、地面2109に対するコンベヤーベルトの速度で並進する。例えば、ローラー2104aが回転しない場合であっても、ローラー2104aはコンベヤーベルト2102と共にベルトの走行方向2108に並進する。
【0035】
各フライト2106は、コンベヤーベルト2102の上に突起2132を有し、突起2132は、コンベヤーベルトの下で少なくとも一つのカム2134に連結される。カム2134は、フライト2106(図24を参照)に力Rを与えるために、コンベヤーベルト2102の下に配置されるカム面2136と係合するように構成される。突起2132は、引込み位置から延伸位置まで回転することによって力Rに応答するように構成される。引込み位置では、突起2132は、ローラー2104の上面2124によって形成される平面2128より上に延伸しないが、延伸位置では、突起は平面より上に延伸する。一旦フライトが延伸位置になると、カム2134はカム面2136を接触せずに通過するか又はカム面2136から離れるように構成される。その結果、カムはもはやカム面と接触せず、カム面に対して横すべりしない。
【0036】
図示の実施形態において、フライト2106aは引込み位置で示され、フライト2106aの突起は平面2128と同一平面に示される。但し、他の構成も可能である。カム2134がカム面2136と接触する結果として、引込み位置と延伸位置の間で回転経路2146に沿って回転するフライト2106bが示される。フライト2106cは、平面2128より上に延伸する突起及びカム面2136を通過するカム2134cと共に、延伸位置で示される。
【0037】
図示のように、カム2134は、湾曲する下面と、湾曲する下面の後方に沿ったリリーフ2144と、を有するカムローラー2142である。コンベヤーベルト2102がベルトの走行方向2108に移動するとき、カムローラー2142はカム面2136と接触する。カムローラー2142の湾曲する下面は、カム面2136に沿って回転し、突起2132を延伸位置に回転させる。一旦突起2132が延伸位置になると、カムローラー2142のリリーフ2144はカム面2136に隣接(接触)し、それによりカムローラーはカム面に対して横すべりしない。図示のように、カム面2136はローラー係合面2130と同一である。但し、他の実施形態において、2つの面が互いに異なってもよい。
【0038】
いくつかの実施形態において、コンベヤーベルト2102は、ループで走行するように構成されてもよい。例えば、図22において、コンベヤー2100は回転ドラム2148を含み、コンベヤーベルト2102は回転ドラム2148に巻きついている。ループ中の位置では、フライト2106は、フライトの突起2132が下向きに垂れ下がった状態でコンベヤーベルト2102の下に配置され、コンベヤーベルトが回転ドラム2148のまわりを移動するとき、フライトは重力によって引込み位置に引っ張られる。例えば、フライト2106dは下向きに垂れ下がっており、フライト2106eの突起は重力によって引込み位置に引っ張られている。一旦コンベヤーベルト2102が回転ドラム2148のまわりを走行すると、フライト2106aは突起2132が引込み位置に配置される。
【0039】
再び図21を参照すると、フライト2106は、開口部2114のいくつかに懸架されている。図示のように、フライト2106は、隣接する開口部2114に懸架され、且つ突起2132によってコンベヤーベルト2102より上で互いに連結される2つのカム2134を含む。但し、他の実施形態において、フライトは1つのカム又は2つ以上のカムを有してもよい。突起2132は、隣接する次の横列2120にあるローラー2104間に適合し(形や大きさが合い)、ローラーに重ならないような大きさ及び形状にされる。但し、突起は、ローラーが配置される開口部2114にわずかに重なってもよい。突起2132が延伸位置にあるときにコンベヤーベルト2102より上に延伸する高さを増大するために、突起は、隣接する次の横列2120にあるローラー2104間に延伸する延長タブ部2138を有してもよい。突起2138はまた、カム2134によって塞がれる開口部2114の間に、リリーフ開口部2140を有してもよい。図23は、延伸位置にあるフライトを示すコンベヤー2100の正面図であり、図23に示すように、リリーフ開口部2140は、突起2132及びコンベヤーベルト2102が互いに干渉せずに、フライト2106が延伸位置に回転することを可能にする。回転式に作動可能なフライト2106の特定の実施形態を上記したが、上記開示から様々な実施形態を想像することができ、それらの実施形態の全てが本開示の範囲内に含まれることが意図される。
【0040】
次に、図24〜27を参照して、コンベヤー2100の動作を説明する。図24〜27の各々は、コンベヤーベルト2102に配置される物体2150を様々な位置で示す、コンベヤー2100の部分側面図である。コンベヤーベルト2102は、ベルトの走行方向2108に移動するように構成される。ローラー2104は、ローラーの上面2124によって定められる平面2128の上でコンベヤーベルト2102に沿って物体2150を移動するように構成される。フライト2106は、物体2150が平面2128上を移動するのを妨害するように構成され、それにより物体は、コンベヤーベルト上の他の物体に対して予め定めた間隔(スペーシング)を有してコンベヤーベルト2102から退出する。フライト2106は引込み位置と延伸位置の間を移動可能であるので、物体2150はフライトの上に配置されてもよい。このような場合、コンベヤー2100は、フライト2106が引込み位置にとどまり、物体2150が回転するフライトによって妨げられずにコンベヤーベルト2102に沿って移動し続けることができるように構成される。
【0041】
詳細には、コンベヤーベルト2102は、ベルトの走行方向2108に地面2109に対するコンベヤーベルトの速度で移動するように構成される。コンベヤーベルト2102上の物体2150は、ローラー2104によって支持される。最初は、コンベヤーベルト2102がローラー係合面2130に接していないので、ローラー2104は回転していない。例えば、図24において、ローラー2104aは回転していない。従って、物体2150はローラー2104に対して静止しており、物体、ローラー及びコンベヤーベルト2102は、同時に、地面2109に対するコンベヤーベルトの速度でベルトの走行方向2108に並進する。
【0042】
図24において、物体2150は、フライト2106aの上に配置されている。フライトの突起2132aが引込み位置にあり、従って突起が平面2128より上に延伸しないので、物体2150はフライト2106の上に配置されることができる。コンベヤーベルト2102が移動するとき、フライトが延伸位置に回転することができるように、フライト2106aはカム面2136に隣接して配置される。カム2134aがカム面2136と接触し、フライトを延伸位置に回転させるように力Rがフライト2106aに与えられるが、物体2150がフライトに下向きの力Dを働かせるため、フライトは引込み位置にとどまる。
【0043】
より詳細には、力Rは、係合の場所2135でカム2134aとカム面2136の間の摩擦によって生成される。但し、他の実施形態において、力Rを他の方法で生成することができる。係合の場所2135がフライト2106aの回転軸線2112から離れて間隔を置いて配置されるので、フライトを延伸位置に回転させようとするモーメントMが、フライト2106aに加えられる。同時に、物体2150が、フライト2106aに下向きの力Dを働かせ、フライトが延伸位置に回転するのを防止しようとするモーメントNをフライトに加える。フライト2106aがカム2134aとカム面2136の間の係合にもかかわらず、引込み位置にとどまるように、モーメントMはモーメントNを越えない。コンベヤー2100が、ある範囲の形状、重量及び構成を有する物体2150を搬送することができることに注意されたい。従って、モーメントMがモーメントNを越えないことを確実にするために、フライト2106が、ある範囲の形状、重量、材料及び構成を有してもよい。
【0044】
図25において、コンベヤーベルト2102がベルトの走行方向2108に移動し続けるとき、カム2134aは一時的にカム面2136に沿って横すべりする。フライト2106aは、カム2134aがカム面2136と接触している場合であっても引込み位置にとどまるので、コンベヤーベルト2102上の物体2150は妨害されない。物体2150を支持しているローラー2014aは、ローラー係合面2130と接触させられて回転し始める。ローラー2104aの回転は、ローラーの上面によって形成される平面2128に沿って、ベルトの走行方向2108に物体2150を移動させる。図26に示すように、カム2134aがカム面2136上でもはや横すべりせず、その代わりにカム面に沿って回転してフライト2106aに力Rを与えるように、物体2150はフライト2106aから移動する。フライト2106aは、引込み位置から延伸位置まで回転することによって、力Rに応答する。一旦フライト2106aが延伸位置になると、カムがカム面に接触して摩耗しないように、図27に示すように、カム2134aはカム面2136に接触しないで引っ張られる。従って、コンベヤー2100は、フライト2106が引込み位置にあるときは物体2150の移動を妨げないが、延伸位置にあるときは物体の移動を妨げるように構成される。いくつかの実施形態において、突起2132の上面は、物体が比較的容易にフライト2106の上を移動することができるように、比較的低い摩擦係数を有する材料である。
【0045】
上述のように、物体2150は、ローラー2104の回転により、コンベヤーベルト2102に対してある速度を達成する。物体2150の移動は、図24〜27において、コンベヤーベルト2102上での物体の相対的な位置の変化によって示される。物体2150がコンベヤーベルト2102に対して移動しているので、物体はコンベヤーベルト上の物体の位置を制御するために、隣接する次のフライト2106bによって停止される。図24において、フライト2106bは、その突起2132bが平面2128より上に延伸して物体の移動を妨げるように、延伸位置に回転している。図25〜26において、回転しているローラー2104は、物体がフライト2106bに隣接して配置されるまで、コンベヤーベルトに対して物体を移動する。図27において、フライト2106bが物体2150を停止し、物体の位置が制御される。
【0046】
物体2150がコンベヤーベルト2102に対して回転しているローラー2104に沿って移動しているとき、物体は、地面2109に対して増大された速度で移動する。少しもスリップしない実施形態では、コンベヤーベルト2102に対する物体2150の速度は、地面2109に対するコンベヤーベルトの速度と実質的に同じである。このような場合、物体2150が地面2109に対して移動する増大された速度は、実質的に地面に対するコンベヤーベルト2102の速度の2倍である。スリップがある実施形態では、物体2150は、ローラー2104の回転によって、地面2109に対するコンベヤーベルトの速度より少ないコンベヤーベルト2102に対する速度を達成する。このような場合、物体2150が地面2109に対して移動する増大された速度は、地面に対するコンベヤーベルト2102の速度より大きいが、地面に対するコンベヤーベルトの速度の2倍より小さい。いくつかの実施形態において、比較的高い摩擦係数を有する材料を、ローラー2104の外面及び/又はローラー係合面2130に使用することができる。それにより、ローラーと物体2150の間及び/又はローラーとローラー係合面の間でのスリップが妨げられる。
【0047】
なお、一旦ローラー2104が回転すると、物体2150は、ローラーが回転するのを止めるか又は物体が延伸位置にあるフライト2106によって停止されるまで、増大された速度で移動する。図24では、物体2150は回転していないローラー2104aによって支持されており、従って、物体は、コンベヤーベルト2102と共に地面2109に対するコンベヤーベルトの速度で移動する。図25〜26では、物体2150は回転しているローラー2104によって支持されており、従って、物体は地面2109に対して増大された速度で移動する。図27では、フライト2106bが物体2150の移動を妨げるので、物体は、増大された速度で移動するのをやめて、コンベヤーベルト2102と共に地面2109に対するコンベヤーベルトの速度で移動するだけにする。このようにして、物体2150のスペーシングが達成される。
【0048】
図28は、ベルトの走行方向2108と反対の方向2811に移動するように構成されたローラー係合面2830を有する、コンベヤー2800の実施形態の部分側面図である。ローラー係合面2830の移動は、ローラー2104の回転速度を増大する。結果として、回転するローラー2104に沿って移動する物体2850は、ローラー係合面2830が移動しない場合の速度より、比較的大きい速度で移動する。ローラー係合面2830が地面に対して0を超える速度で移動する場合、コンベヤーベルト2102に対する物体2850の速度は、地面2109に対するコンベヤーベルト2102の速度より大きい。このような場合、地面2809に対する物体2850の速度は、地面に対するコンベヤーベルト2102の速度の2倍より大きい。
【0049】
物体2850が地面2109に対して搬送される速度を増大することは、比較的小さいスペース(フットプリント)を有するコンベヤー2800が必要とされる場合に望ましいであろう。物体2850が比較的速い速度で搬送されるので、比較的短いコンベヤーベルト2102を使用することができる。従って、コンベヤー2800は、より小さいスペース(フットプリント)を有することができる。
【0050】
いくつかの実施形態において、例えばカム面及びローラー係合面2830が同じ面である実施形態において、カム面2836は、ベルトの走行方向2108と反対の方向2811にを移動する。このような場合、カム面2836が移動しない場合よりも、フライト2106は、回転経路2146に沿って比較的速く回転する。
【0051】
図29は、コンベヤー2900の他の実施形態の部分上面図を示す図である。コンベヤー2900の構成は、比較的小さい物体2950を搬送するのに適している。詳細には、物体2950は、コンベヤーベルト2902に平行な平面における比較的小さい表面積を意味する、比較的小さいスペース(フットプリント)を有する。従って、ローラー2904は、ローラーの表面積が増大されるように、比較的大きく及び/又は比較的互いに近い。例えば、図示されたローラー2904は、横方向の円筒状ローラーである。増大された表面積は、その物体2950とローラー2904との適切な接触を確実にする。それにより、ローラーが物体を支持し、物体がローラーからコンベヤーベルト上へ落ちる傾向が低下する。
【0052】
フライト2906は、1つ又は複数の隣接するローラー2904のまわりに適合する(形や大きさが合う)か又はローラー2904と対になる(一致する)ように構成される。フライト2906の突起2932は、延長バー2962及びクロスバー2964などの、一連の挟み込み(インターリービング)部材2960を含む。延長バー2962は、ローラー2904の横に、ベルトの走行方向2908にかかっている。一方、クロスバー2964は、延長バーを互いに連結するために延長バー2962の間にかかっている。延長バー2962とクロスバー2964の間に開口部2966が形成され、ローラー2904が開口部に収まっている。この実施形態のローラー2904は、比較的大きく及び/又は互いに比較的近く、従って引込み位置にあるとき、コンベヤーベルト2902上の突起2932のための空間がより小さいので、このような構成は有利だろう。
【0053】
図30は、延伸位置にあるにフライト2906を示す、図29に示されたコンベヤー2900の正面図である。図示のように、フライトがコンベヤーベルトに沿って移動している物体2950の移動を妨げることができるように、フライト2906はコンベヤーベルト2902より上に延伸するように構成される。フライト2906は、コンベヤーベルト2902より上に比較的高く延伸するので、フライトはまた、比較的高い物体2950用に構成され得る。
【0054】
本開示の上記の実施形態は(特に、図示したいかなる実施形態も)、単に実施態様の可能な例にすぎず、単に本開示の原理の明確な理解のために記載されただけであることが強調されなければならない。本開示の上記実施形態に対して、多くの変更及び修正が、本開示の精神及び原理から実質的に逸脱せずになされるだろう。すべてのこのような修正及び変更を、本開示の範囲及び本開示内で本願明細書に含み、特許請求の範囲によって保護することが意図される。
【特許請求の範囲】
【請求項1】
コンベヤーベルトと、
前記コンベヤーベルトに連結された複数のローラーであって、前記コンベヤーベルトの下でローラー係合面と係合するように構成された下面、及び実質的に前記コンベヤーベルトより上に平面を形成する上面を有し、前記ローラー係合面と係合し、前記ローラーによって支持される物体を前記平面上で移動させるように回転する、ローラーと、
前記コンベヤーベルトに連結されたフライトであって、前記コンベヤーベルトの下でカム面と係合して前記フライトにモーメントを与えるように構成されたカム、及び引込み位置から延伸位置まで回転することによって前記モーメントに応答する突起を含む、フライトと、
を含むコンベヤー。
【請求項2】
前記フライトの上に配置される物体が、前記フライトを引込み位置に回転させようとするモーメントを前記フライトにかけ、前記フライトの上に物体が配置されたとき、前記カムと前記カム面の間の係合にもかかわらず、前記フライトが引込み位置にとどまるように、前記カム面によって前記フライトにかけられるモーメントが、前記物体によって前記フライトにかけられるモーメントを越えない、請求項1に記載のコンベヤー。
【請求項3】
前記コンベヤーベルトが、ベルトの走行方向に移動するように構成され、前記ローラー係合面が、前記ベルトの走行方向と反対の方向に移動するように構成された、請求項1に記載のコンベヤー。
【請求項4】
前記カムが、前記フライトが引込み位置にあるとき前記カム面と係合し、前記フライトが延伸位置にあるとき前記カム面を離れるように構成された、請求項1に記載のコンベヤー。
【請求項5】
前記カムが、後方に沿ったリリーフを有するカムローラーであり、前記リリーフは、前記フライトが延伸位置になると、前記カムローラーが前記カム面に関して横すべりするのを防止する、請求項1に記載のコンベヤー。
【請求項6】
前記カム面が前記ローラー係合面と同一面である、請求項1に記載のコンベヤー。
【請求項7】
前記突起が、前記フライトが延伸位置にあるとき前記平面より上に延伸するが、前記フライトが引込み位置にあるとき前記平面より上に延伸しない、請求項1に記載のコンベヤー。
【請求項8】
前記コンベヤーベルトが、地面と実質的に平行であり、
前記平面が、前記コンベヤーベルトと実質的に平行であり、
前記突起が引込み位置にあるとき、前記突起が前記平面と実質的に同一平面上にある、請求項1に記載のコンベヤー。
【請求項9】
前記コンベヤーベルトが、複数の開口部を含み、
前記ローラーの上面が前記コンベヤーベルトより上にあり、前記ローラーの下面が前記コンベヤーベルトより下にあるように、前記ローラーが前記開口部のいくつかに懸架され、各ローラーが回転軸によって懸架され、前記ローラーが前記回転軸のまわりを回転するように構成され、
前記フライトの突起が前記コンベヤーベルトより上にあり、前記フライトのカムが前記コンベヤーベルトより下にあるように、前記フライトが前記開口部のいくつかに懸架され、各フライトが回転軸によって懸架され、前記フライトが前記回転軸のまわりを回転する、請求項1に記載のコンベヤー。
【請求項10】
前記コンベヤーベルトの開口部が実質的に横列及び縦列に配置され、各開口部が、隣接する横列及び縦列の開口部から離れて間隔を置いて配置され、
前記フライトが、少なくとも2つのカムを含み、前記カムが隣接する開口部に配置され、前記突起によって前記コンベヤーベルトの上で互いに連結されている、請求項9に記載のコンベヤー。
【請求項11】
前記コンベヤーベルトの開口部が実質的に横列及び縦列に配置され、各開口部が隣接する横列及び縦列の開口部から離れて間隔を置いて配置され、
前記フライトが、少なくとも2つのカムを含み、前記カムが隣接する開口部に配置され、前記突起によって前記コンベヤーベルトの上で互いに連結され、
前記突起が、一連の挟み込み部材を含み、前記挟み込み部材が隣接するローラーのまわりに適合する、請求項9に記載のコンベヤー。
【請求項12】
地面に対するコンベヤーベルトの速度でベルトの走行方向に移動するように構成されたコンベヤーベルトと、
前記ベルトの走行方向に回転するように構成された複数のローラーであって、前記ローラーの回転により、前記コンベヤーベルト上の物体が前記地面に対して増大された速度で前記ローラーの上を移動する、ローラーと、
カム及び突起を有するフライトであって、前記カムが前記フライトにモーメントを与えて前記突起を引込み位置から延伸位置まで回転させる、フライトと、
を含むコンベヤー。
【請求項13】
前記フライトの上に配置される物体が、前記フライトを引込み位置に回転させようとするモーメントを前記フライトにかけ、前記物体が前記フライトの上に配置されたとき、前記フライトが引込み位置にとどまるように、前記カムによって前記フライトにかけられるモーメントが、前記物体によって前記フライトにかけられるモーメントフライトを越えない、請求項12に記載のコンベヤー。
【請求項14】
ローラー係合面を更に備え、前記ローラーが、前記ローラー係合面との係合の結果として、前記ベルトの走行方向に回転するように構成されている、請求項12に記載のコンベヤー。
【請求項15】
前記ローラー係合面が、前記ベルトの走行方向と反対方向に移動するように構成されている、請求項13に記載のコンベヤー。
【請求項16】
前記物体が前記回転するローラーによって搬送される前記地面に対する増大された速度が、少なくとも実質的に前記地面に対するコンベヤーベルトの速度の2倍である、請求項12に記載のコンベヤー。
【請求項17】
前記回転するローラーが前記地面に対する増大された速度で前記突起を越えて前記物体を移動させるように、前記突起が、引込み位置にあるときに物体の移動を妨げず、
前記コンベヤーベルトが前記ベルトの走行方向に前記地面に対するコンベヤーベルトの速度で物体を移動させるように、前記突起が、延伸位置にあるときに物体の移動を妨げる、請求項12に記載のコンベヤー。
【請求項18】
カム面を更に備え、前記突起は、前記コンベヤーベルトが前記ベルトの走行方向に移動し始めるとき、引込み位置にあり、前記カムが前記カム面と係合して前記フライトを引込み位置から延伸位置まで揺動させるように前記コンベヤーベルトが前記カム面に隣接して配置されるまで、引込み位置にとどまる、請求項12に記載のコンベヤー。
【請求項19】
物体が前記突起の上に配置され且つ前記カムが前記カム面と係合するとき、前記カムが一時的に前記カム面上を横すべりして前記フライトが引込み位置にとどまり、前記干渉している物体が増大された速度で移動し続けるように前記ローラーが回転し続け、前記カムが前記フライトを延伸位置に回転させることができるように前記ローラーが前記物体を前記突起から移動させる、請求項18に記載のコンベヤー。
【請求項20】
前記突起が引込み位置にあるとき、前記回転するローラーが比較的容易に前記突起を越えて物体を移動させるように、前記突起の上面が比較的低い摩擦係数を有する材料であり、
前記回転するローラーが、前記ローラーによって移動されている前記物体又は前記ローラーを回転させるために係合している前記ローラー係合面に対して比較的ほとんどスリップしないように、前記ローラーの外面が比較的高い摩擦係数を有する材料である、請求項12に記載のコンベヤー。
【請求項21】
コンベヤーであって、
ベルトの走行方向に移動するように構成されたコンベヤーベルトであって、前記コンベヤーベルト上に配置された物体が前記コンベヤーベルトと共に前記ベルトの走行方向に搬送される、コンベヤーベルトと、
前記コンベヤーに連結され、前記ベルトの走行方向に回転するように構成された複数のローラーであって、前記コンベヤーベルト上に配置されて前記回転するローラーと接触した物体が、前記コンベヤーベルトに対して前記回転するローラーに沿って前記ベルトの走行方向に移動する、複数のローラーと、
前記コンベヤーベルトに連結され、物体が前記ベルトの走行方向に前記コンベヤーベルトと共に搬送されるように、前記コンベヤーベルトに対して物体を停止させるように構成された位置決め要素と、
前記コンベヤーベルトに隣接して配置され、前記ローラーと係合して前記ローラーを回転させるように構成されたローラー係合面であって、前記ベルトの走行方向と反対の方向に移動するように構成されたローラー係合面コンベヤーと、
を含むコンベヤー。
【請求項22】
前記コンベヤーベルトが、地面に対するコンベヤーベルトの速度で移動するように構成され、
前記ローラー係合面が、ゼロより大きい速度で移動するように構成され、前記回転するローラーが、前記地面に対するコンベヤーベルトの速度を越える前記コンベヤーベルトに対する速度で物体を移動させる、請求項21に記載のコンベヤー。
【請求項23】
前記ローラーが、最初は前記コンベヤーベルトと共に前記地面に対するコンベヤーベルトの速度で移動し、物体が、前記ローラーによって支持され、且つ前記ローラーと共に前記地面に対するコンベヤーベルトの速度で移動し、
前記ベルトの走行方向の前記コンベヤーベルトの移動によって、前記ローラーが回転し始めるように前記コンベヤーベルトが前記ローラー係合面に隣接して配置され、
前記ローラーの回転によって、物体が前記地面に対するコンベヤーベルトの速度の2倍より大きい速度で地面に対して移動するように、物体が前記コンベヤーベルトに対してある速度に達し、
物体が前記コンベヤーベルトに対して停止し、再び前記地面に対するコンベヤーベルトの速度で前記コンベヤーベルトと共に移動するように、前記コンベヤーベルトに対する物体の移動によって、物体がその後に前記位置決め要素と接触する、請求項22に記載のコンベヤー。
【請求項1】
コンベヤーベルトと、
前記コンベヤーベルトに連結された複数のローラーであって、前記コンベヤーベルトの下でローラー係合面と係合するように構成された下面、及び実質的に前記コンベヤーベルトより上に平面を形成する上面を有し、前記ローラー係合面と係合し、前記ローラーによって支持される物体を前記平面上で移動させるように回転する、ローラーと、
前記コンベヤーベルトに連結されたフライトであって、前記コンベヤーベルトの下でカム面と係合して前記フライトにモーメントを与えるように構成されたカム、及び引込み位置から延伸位置まで回転することによって前記モーメントに応答する突起を含む、フライトと、
を含むコンベヤー。
【請求項2】
前記フライトの上に配置される物体が、前記フライトを引込み位置に回転させようとするモーメントを前記フライトにかけ、前記フライトの上に物体が配置されたとき、前記カムと前記カム面の間の係合にもかかわらず、前記フライトが引込み位置にとどまるように、前記カム面によって前記フライトにかけられるモーメントが、前記物体によって前記フライトにかけられるモーメントを越えない、請求項1に記載のコンベヤー。
【請求項3】
前記コンベヤーベルトが、ベルトの走行方向に移動するように構成され、前記ローラー係合面が、前記ベルトの走行方向と反対の方向に移動するように構成された、請求項1に記載のコンベヤー。
【請求項4】
前記カムが、前記フライトが引込み位置にあるとき前記カム面と係合し、前記フライトが延伸位置にあるとき前記カム面を離れるように構成された、請求項1に記載のコンベヤー。
【請求項5】
前記カムが、後方に沿ったリリーフを有するカムローラーであり、前記リリーフは、前記フライトが延伸位置になると、前記カムローラーが前記カム面に関して横すべりするのを防止する、請求項1に記載のコンベヤー。
【請求項6】
前記カム面が前記ローラー係合面と同一面である、請求項1に記載のコンベヤー。
【請求項7】
前記突起が、前記フライトが延伸位置にあるとき前記平面より上に延伸するが、前記フライトが引込み位置にあるとき前記平面より上に延伸しない、請求項1に記載のコンベヤー。
【請求項8】
前記コンベヤーベルトが、地面と実質的に平行であり、
前記平面が、前記コンベヤーベルトと実質的に平行であり、
前記突起が引込み位置にあるとき、前記突起が前記平面と実質的に同一平面上にある、請求項1に記載のコンベヤー。
【請求項9】
前記コンベヤーベルトが、複数の開口部を含み、
前記ローラーの上面が前記コンベヤーベルトより上にあり、前記ローラーの下面が前記コンベヤーベルトより下にあるように、前記ローラーが前記開口部のいくつかに懸架され、各ローラーが回転軸によって懸架され、前記ローラーが前記回転軸のまわりを回転するように構成され、
前記フライトの突起が前記コンベヤーベルトより上にあり、前記フライトのカムが前記コンベヤーベルトより下にあるように、前記フライトが前記開口部のいくつかに懸架され、各フライトが回転軸によって懸架され、前記フライトが前記回転軸のまわりを回転する、請求項1に記載のコンベヤー。
【請求項10】
前記コンベヤーベルトの開口部が実質的に横列及び縦列に配置され、各開口部が、隣接する横列及び縦列の開口部から離れて間隔を置いて配置され、
前記フライトが、少なくとも2つのカムを含み、前記カムが隣接する開口部に配置され、前記突起によって前記コンベヤーベルトの上で互いに連結されている、請求項9に記載のコンベヤー。
【請求項11】
前記コンベヤーベルトの開口部が実質的に横列及び縦列に配置され、各開口部が隣接する横列及び縦列の開口部から離れて間隔を置いて配置され、
前記フライトが、少なくとも2つのカムを含み、前記カムが隣接する開口部に配置され、前記突起によって前記コンベヤーベルトの上で互いに連結され、
前記突起が、一連の挟み込み部材を含み、前記挟み込み部材が隣接するローラーのまわりに適合する、請求項9に記載のコンベヤー。
【請求項12】
地面に対するコンベヤーベルトの速度でベルトの走行方向に移動するように構成されたコンベヤーベルトと、
前記ベルトの走行方向に回転するように構成された複数のローラーであって、前記ローラーの回転により、前記コンベヤーベルト上の物体が前記地面に対して増大された速度で前記ローラーの上を移動する、ローラーと、
カム及び突起を有するフライトであって、前記カムが前記フライトにモーメントを与えて前記突起を引込み位置から延伸位置まで回転させる、フライトと、
を含むコンベヤー。
【請求項13】
前記フライトの上に配置される物体が、前記フライトを引込み位置に回転させようとするモーメントを前記フライトにかけ、前記物体が前記フライトの上に配置されたとき、前記フライトが引込み位置にとどまるように、前記カムによって前記フライトにかけられるモーメントが、前記物体によって前記フライトにかけられるモーメントフライトを越えない、請求項12に記載のコンベヤー。
【請求項14】
ローラー係合面を更に備え、前記ローラーが、前記ローラー係合面との係合の結果として、前記ベルトの走行方向に回転するように構成されている、請求項12に記載のコンベヤー。
【請求項15】
前記ローラー係合面が、前記ベルトの走行方向と反対方向に移動するように構成されている、請求項13に記載のコンベヤー。
【請求項16】
前記物体が前記回転するローラーによって搬送される前記地面に対する増大された速度が、少なくとも実質的に前記地面に対するコンベヤーベルトの速度の2倍である、請求項12に記載のコンベヤー。
【請求項17】
前記回転するローラーが前記地面に対する増大された速度で前記突起を越えて前記物体を移動させるように、前記突起が、引込み位置にあるときに物体の移動を妨げず、
前記コンベヤーベルトが前記ベルトの走行方向に前記地面に対するコンベヤーベルトの速度で物体を移動させるように、前記突起が、延伸位置にあるときに物体の移動を妨げる、請求項12に記載のコンベヤー。
【請求項18】
カム面を更に備え、前記突起は、前記コンベヤーベルトが前記ベルトの走行方向に移動し始めるとき、引込み位置にあり、前記カムが前記カム面と係合して前記フライトを引込み位置から延伸位置まで揺動させるように前記コンベヤーベルトが前記カム面に隣接して配置されるまで、引込み位置にとどまる、請求項12に記載のコンベヤー。
【請求項19】
物体が前記突起の上に配置され且つ前記カムが前記カム面と係合するとき、前記カムが一時的に前記カム面上を横すべりして前記フライトが引込み位置にとどまり、前記干渉している物体が増大された速度で移動し続けるように前記ローラーが回転し続け、前記カムが前記フライトを延伸位置に回転させることができるように前記ローラーが前記物体を前記突起から移動させる、請求項18に記載のコンベヤー。
【請求項20】
前記突起が引込み位置にあるとき、前記回転するローラーが比較的容易に前記突起を越えて物体を移動させるように、前記突起の上面が比較的低い摩擦係数を有する材料であり、
前記回転するローラーが、前記ローラーによって移動されている前記物体又は前記ローラーを回転させるために係合している前記ローラー係合面に対して比較的ほとんどスリップしないように、前記ローラーの外面が比較的高い摩擦係数を有する材料である、請求項12に記載のコンベヤー。
【請求項21】
コンベヤーであって、
ベルトの走行方向に移動するように構成されたコンベヤーベルトであって、前記コンベヤーベルト上に配置された物体が前記コンベヤーベルトと共に前記ベルトの走行方向に搬送される、コンベヤーベルトと、
前記コンベヤーに連結され、前記ベルトの走行方向に回転するように構成された複数のローラーであって、前記コンベヤーベルト上に配置されて前記回転するローラーと接触した物体が、前記コンベヤーベルトに対して前記回転するローラーに沿って前記ベルトの走行方向に移動する、複数のローラーと、
前記コンベヤーベルトに連結され、物体が前記ベルトの走行方向に前記コンベヤーベルトと共に搬送されるように、前記コンベヤーベルトに対して物体を停止させるように構成された位置決め要素と、
前記コンベヤーベルトに隣接して配置され、前記ローラーと係合して前記ローラーを回転させるように構成されたローラー係合面であって、前記ベルトの走行方向と反対の方向に移動するように構成されたローラー係合面コンベヤーと、
を含むコンベヤー。
【請求項22】
前記コンベヤーベルトが、地面に対するコンベヤーベルトの速度で移動するように構成され、
前記ローラー係合面が、ゼロより大きい速度で移動するように構成され、前記回転するローラーが、前記地面に対するコンベヤーベルトの速度を越える前記コンベヤーベルトに対する速度で物体を移動させる、請求項21に記載のコンベヤー。
【請求項23】
前記ローラーが、最初は前記コンベヤーベルトと共に前記地面に対するコンベヤーベルトの速度で移動し、物体が、前記ローラーによって支持され、且つ前記ローラーと共に前記地面に対するコンベヤーベルトの速度で移動し、
前記ベルトの走行方向の前記コンベヤーベルトの移動によって、前記ローラーが回転し始めるように前記コンベヤーベルトが前記ローラー係合面に隣接して配置され、
前記ローラーの回転によって、物体が前記地面に対するコンベヤーベルトの速度の2倍より大きい速度で地面に対して移動するように、物体が前記コンベヤーベルトに対してある速度に達し、
物体が前記コンベヤーベルトに対して停止し、再び前記地面に対するコンベヤーベルトの速度で前記コンベヤーベルトと共に移動するように、前記コンベヤーベルトに対する物体の移動によって、物体がその後に前記位置決め要素と接触する、請求項22に記載のコンベヤー。
【図1】

【図2A】
【図2B】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図2A】
【図2B】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【公表番号】特表2010−513166(P2010−513166A)
【公表日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願番号】特願2009−541543(P2009−541543)
【出願日】平成19年12月12日(2007.12.12)
【国際出願番号】PCT/US2007/087153
【国際公開番号】WO2008/076732
【国際公開日】平成20年6月26日(2008.6.26)
【出願人】(506152704)レイトラム リミテッド ライアビリティー カンパニー (21)
【氏名又は名称原語表記】LAITRAM,L.L.C.
【Fターム(参考)】
【公表日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願日】平成19年12月12日(2007.12.12)
【国際出願番号】PCT/US2007/087153
【国際公開番号】WO2008/076732
【国際公開日】平成20年6月26日(2008.6.26)
【出願人】(506152704)レイトラム リミテッド ライアビリティー カンパニー (21)
【氏名又は名称原語表記】LAITRAM,L.L.C.
【Fターム(参考)】
[ Back to top ]