
放射性ダストモニタ
【課題】
放射性ダストモニタの性能上、二律背反している放射能検出感度の向上と、濾紙の節約を一挙に解決すること。漏洩検出試験の簡易化と、前記試験において放射線検出器の負圧による破壊からの本質安全化と、並びに、省エネルギーを図る。
【解決手段】
運転方式を濾紙消費量優先運転と放射能検出感度優運転との2運転方式とし、放射能レベルに応じて何れか一方を自動選択し、自律運転する手段により、二律背反を解決する。前記2運転方式において、空気流路に負圧と流量検出器とを併設し、前者で濾紙送り、後者で流量を制御する。即ち、単純機能別制御手段を用いる。配管系に2個の開閉自動弁を配設し、前記弁とポンプとをシーケンス制御して気密試験を簡便に実施する手段を用いる。
放射性ダストモニタの性能上、二律背反している放射能検出感度の向上と、濾紙の節約を一挙に解決すること。漏洩検出試験の簡易化と、前記試験において放射線検出器の負圧による破壊からの本質安全化と、並びに、省エネルギーを図る。
【解決手段】
運転方式を濾紙消費量優先運転と放射能検出感度優運転との2運転方式とし、放射能レベルに応じて何れか一方を自動選択し、自律運転する手段により、二律背反を解決する。前記2運転方式において、空気流路に負圧と流量検出器とを併設し、前者で濾紙送り、後者で流量を制御する。即ち、単純機能別制御手段を用いる。配管系に2個の開閉自動弁を配設し、前記弁とポンプとをシーケンス制御して気密試験を簡便に実施する手段を用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は放射線防護を目的として、放射線利用施設の作業環境、周辺環境、並びに施設の排気系などにおいて、濾過式ダストサンプラにより空気中に浮遊する放射性粒子状物質(放射性ダスト:本願中では「塵埃」と省略)を採取し、GM管、シンチレーション検出器などによりα、β、γ線いずれかを検出して、その指示値が放射線管理上設定された放射能レベル以上であったとき警報を発する放射性ダストモニタに関する。
【背景技術】
【0002】
【特許文献1】特許公報(B2) :平5-80993号
【特許文献2】公開特許公報(A) :特開平8-86877号
【特許文献3】特許公報(B2) :特許第3078515号
【特許文献4】公開特許公報(A) :特開平6-94838号
【0003】
放射線利用施設には、放射線防護上、塵埃を捕集し、放射能レベルを連続的に監視する放射性ダストモニタが設置されている。放射性ダストモニタは日本工業規格JIS Z 4316に規定されている。この規定の4構造4.1構造一般(1)によると「放射性ダストモニタは、ダストサンプラ、放射線検出装置、計数指示装置、警報装置などで構成されていること」と規定されている。更に、日本工業規格では、前記ダストサンプラを別規格JIS Z 4601で規定している。即ち、ダストサンプラとは、放射性ダストモニタの部分構造の呼称であって、塵埃を濾過によって捕集する構造部分を指している。
【0004】
従来の放射性ダストモニタのダストサンプラ部を主体に描画した構成図を図7に示す。サンプリングする空気は、吸引ポンプ1により、測定対象箇所R(この場合は、放射線利用施設の部屋を想定している)の空気を管20を通して吸引し、管21を通して吸引元の対象箇所Rに排気する。気密コンテナ8の内部には両端部を拡管されたサンプリング空気管2とその拡管の端部間の隙間に巻紙長尺濾紙3が配設されている。
【0005】
巻紙長尺濾紙3は濾紙送りモータ4により随時繰り出される。濾紙の上流側に捕集された塵埃の放射線は放射線検出器5で検出され、その検出信号はアンプユニット6を介して制御装置77に伝達される。巻紙長尺濾紙3を紙末まで使い切り使用済となった場合、開閉自在気密扉9を開いて使用済(旧品)濾紙3を取出し、新品の巻紙長尺濾紙3と交換する。
【0006】
制御装置77は、常時、駆動モータ17を最大定速回転することによりホンプ1を最大定流量運転しながら、流量検出器14から送られてくる流量信号が、予め設定された流量設定値に一致するように流量調節弁78の開口面積を調節する。その結果、サンプリング空気流量は常に設定値流量に(流量調節弁による定値制御)PI制御される。
【0007】
前記の如く従来の放射性ダストモニタは、集塵部で塵埃を捕集する構造である。濾紙3は捕集時間が経過すると目詰りが進行する為、目詰が進行し閾値に達すると巻紙濾紙3を「間欠的」に所定長だけ繰出し、集塵部を未使用部の濾紙に入換える。
【0008】
流量検出器14で検出した流量信号は、アンプユニット15を介し、制御装置77に伝達され、信号が閾値を越えるごと毎に濾紙送りモータ4を駆動し、巻紙長尺濾紙3を繰出す。
【0009】
負圧検出器11は一般に使用されない。その理由は前述の流量検出器14のみで十分制御可能だからである。即ち、従来の放射性ダストモニタには流量調節弁78のPI制御の為に流量信号が必須であるから、負圧検出器11を2重に配設する必要は無かった。しかし、極まれには流量検出器14と負圧検出器11とを二重に配設する場合があるが、その場合、負圧検出器11の信号は、通常、ポンプ1の過負荷防止の為に使用されていた。
【0010】
濾紙更新の為の濾紙送り制御方式は前記の「間欠送り法」だけで無く「連続送り法」がある。連続送り法は、常時、濾紙を極微速度(通常20〜50mm/Hr)で巻き取る方法である。
【0011】
さて以下に、前途の従来技術を特許文献上から考察する。特許公報(B2):平5-80993に記載の如く、空気流量又は負圧を検出し、検出値の何れか一方が濾紙交換の閾値を超えた時、濾紙の目詰りが進行していると判断し濾紙の繰出しを自動的に行っていた。
【0012】
しかし、この発明は、完全な目詰りに達する直前の目詰り状態を濾紙交換の閾値とする為、濾紙交換直後のまだ目詰していない状態と、目詰りが究極的に進行した交換直前の状態とでは濾紙通過流量に顕著な差が生じる。この流量差に引きずられ放射能レベル検出精度に誤差を生じさせる問題があった。
【0013】
この誤差問題を解決する為、公開特許公報(A):特開平8-86877に記載の如く、吸引ポンプ上流に流量調節弁78を配設し、濾紙を通過する流量を定値制御している。この流量調節弁による定値制御の実用的具体例は特許公報(B2):特許第3078515 に第4の手段として記載の如く、流量調節弁にソレノイド駆動のオリフィス弁等を用いて流路断面積を自動的に可変することにより達成している。
【0014】
前記の流量調節弁による定値制御は本質的に流量の階段状制御であり、動と静の繰返し運動により制御される。即ち、動摩擦と静摩擦が介在する世界で駆動される為、滑らかな応答性と正確さに問題があった。
【0015】
のみならず、流量調節弁による定値制御は、吸引ポンプを常時最大定流量で運転しながら、圧力損失を調節し流量を制御する為、直流モータの抵抗制御の如く、原理的にエネルギーを無駄使いする運転方法である。放射性ダストモニタの様に365日24時間休み無く連続運転する場合、省電力上問題があった。勿論、流路断面積可変の為、可変縮流部に異物を挟み込む危険も無視できない。
【0016】
一方、更に、従来の放射性ダストモニタは、公開特許公報(A):特開平6-94838の(0006)項に記載されている如く、検出感度を上げようとすると、放射能レベルの判定間隔が長くなって応答性が低下し、低濃度域の測定であるにも拘らず濾紙の消費が多い為に不経済であるといった問題もあった。
【0017】
この問題は、前記特開平6-94838に記載の如く、放射線検出器の測定値に応じて集塵時間とダスト吸引流量とを自動的に変化させて解決している。即ち、高放射能検出状態(異常時)が生じた場合、集塵時間を短縮し、かつ吸引流量を増するように自動調整するので、通常時は濾紙の消費が抑えられ、且つ、異常時に迅速・正確な測定が可能になる。
【0018】
しかし、この出願は濾紙交換の繰出し条件が、単に集塵時間のみである為、通常時、濾紙を目詰り限度ギリギリまで使うことが出来ない問題が残る。即ち、濾紙の無駄使い防止の為に更なる改良の余地があった。
【0019】
放射性ダストモニタにおいて検出精度上極めて重要なことは、気密系(開閉自在気密扉9を付設する気密コンテナ8と、空気配管2を指す)を気密に保つことである。もしこの気密が保たれ無い場合は、流量検出器14を通過する空気流量が、所謂、水増しされる為、放射能レベル検出精度に危険側の誤差を生ずる。
【0020】
新旧の巻紙長尺濾紙3の交換は、交換するたび毎に開閉自在気密扉9を開放し、交換作業後、閉塞する。前記濾紙新旧交換作業において、例えば、知らずに扉ガスケットに異物を挟み込み扉9を閉める等、何らかの人的過誤を含む不具合により、気密が確保されない場合がある。この気密確認は、原理的に濾紙新旧交換作業毎に必要であるが、簡便な気密試験法が無い為、濾紙新旧交換作業毎に実施されていないのが実態であった。勿論、この簡便な気密試験法が可能になれば、放射性ダストモニタの製作工場での完成検査と、放射線施設で使用中の定期検査の手段として活用されることは言うまでも無い。
【発明の開示】
【発明が解決しようとする課題】
【0021】
放射性ダストモニタの性能上、二律背反している放射能検出感度(含:応答性)の向上と濾紙の節約とを解決し、更に省電力を達成することにある。放射性ダストモニタは、放射線施設で単一な連続運転で使用されている。運転の実際経験から、施設運転時(主に平日の昼間)に高検出感度運転を行い、施設休止時(夜間と休日)に低検出感度運転を行うと、放射線防護と経済(省電力と省濾紙)とを両立することが可能であることに気付いた。
【0022】
言い換えると、単純な単一運転から、通常時(放射能レベル:通常時)は濾紙消費量優先運転を行い、異常時(放射線濃度レベル:異常時)は感度優先運転を行うとも言える。即ち、単純単一運転にするだけに留まらず、各種の運転状況に応じて、木目細かく運転方式を選択することにより、前記二律背反を解決する放射性ダストモニタを提供することにある。
【0023】
木目細かくとは、単純に採取した塵埃の放射線測定だけで無く、今まで想定・対処外であつた、放射性ダストモニタの設置場所の放射線バックグランド値が上昇した場合の配慮も含まれる。例えば、設置場所付近に誰かが知らずに放射性汚染物質を持ち込んだ場合、バックグランド値が上昇し放射性ダストモニタの検出感度が低下する。この様な時、自動的に検出感度を高める必要が生ずる。
【課題を解決するための手段】
【0024】
手段1:運転方式を濾紙消費量優先運転と放射能検出感度優運転との2運転方式とし、状況に応じて何れか一方を選択する。即ち、2運転方式択一手段を用いる。前記の2運転方式は、更に夫々、濾紙送り制御方式と流量制御とが異なる。この違いを具体的に一覧表化して表1に示す。
【0025】
【表1】

【0026】
表1に示す如く、濾紙送り制御方式には間欠送り法と連続送り法の2方法がある。この発明を実施する場合、下記する、夫々の特徴を考慮して何れか一方を選択する必要がある。
間欠送り法は、濾紙が停止状態で放射線測定を行うので、通常、検出器の測定値(放射線カウント値)は時間経過に応じて漸上する。連続送り法は、濾紙が常時微動状態(一般に20〜50mm/Hr)で放射線測定を行うので、通常、検出器の測定値(放射線カウント値)は一定する。従って、後者、即ち、連続送り法は、原理的に放射能レベルの変化に対する応答性が高い。
【0027】
濾紙送り制御方式の採用・選択に際し、濾紙消費量優先運転においては間欠送り法、放射能検出感度優先運転においては連続送り法 (前記一覧表おいて太線枠で示す) を採用・選択することが出来る。
【0028】
この選択に依れば、濾紙消費量優先運転において濾紙繰出しの速度制御を回避することが出来、且つ、放射能検出感度優先運転において高い応答性を得ることが出来る。即ち、連続送り法の「負圧の増加量が閾値を超える時間に応じて、濾紙繰出しの速度制御を行う」とは、負圧の増加率に応じて濾紙繰出しの速度制御を行う訳である。言葉は簡単であるが、実際の制御は、他の三種類の濾紙送り制御法に比べ格段に複雑である。この速度制御の回避は実用上極めて有効である。
【0029】
間欠送り法と連続送り法の関係は、距離制御と速度制御の関係なので間欠送り法の制御を理解すると、連続送り法の制御原理は通常の技術者が比較的容易に類推できる。従って、この明細書では重複説明の煩雑さを避け、間欠送り法を主体に説明し、連続送り法を副次的に説明する。
【0030】
手段2:前記2運転方式択一手段に於いて、具体的に択一する場合、先ず最初に、自動運転と手動運転の選択(自動/手動-運転選択,<Step:C>)を手動で選択する。しかし、若し、後者を選択した場合は、更に運転方式の手動選択<Step:D>を行う手段を用いる。即ち、前述の手段1の2運転方式択一に於いて、二段階手動選択手段を用いる。
【0031】
前者(自動運転)を選択した場合、自動的に運転方式自動選択が起動して、単位時間毎に放射能レベルを測定し、放射能レベルに応じて運転方式(濾紙消費量優先運転又は放射能検出感度優先運転)を自動・自律的に選択しながら運転を継続する。一方、後者(手動運転)を選択した場合は、更に人間系で何れか一方の運転方式(濾紙消費量優先運転又は放射能検出感度優先運転<Step:D>)を選択する必要がある。
【0032】
手段3:単純機能別制御手段を用いる。即ち、空気流路に負圧検出器と流量検出器とを並列に配設し、負圧検出系で専ら濾紙送りを制御し、流量検出系で専ら流量制御を行う。
【0033】
手段4:吸引ポンプに完全垂下特性のポンプを使用する手段を用いる。一般にポンプの垂下特性とは圧力が上昇すると流量が減少(垂下)する特性を指す。一般的な遠心式ポンプの小流量域ではこの垂下特性を逸脱するものも存在する。本願中で完全垂下特性ポンプとは全流量域において回転数が下降すると流量が下降する特性のポンプを指す。通常この完全垂下特性は、容積移送式真空ポンプ(JIS B 8126-2)を用いることで達成される。
【0034】
手段5:吸引ポンプ駆動モータに三相誘導又は同期モータを用い、その回転速度をインバータユニットにより、フィードバック周波数制御する手段を用いる。換言すると、誘導又は同期モータをPI制御し、回転速度法により流量を定値自動制御することになる。PI制御とはインバータユニットのプロセス制御機能の内のPI制御、即ち、比例(Proportion)+積分(Integral)+微分(Differential)=PID制御の簡易型、比例(P)+積分(I)=PI制御を指す。
【0035】
手段6:気密系(気密コンテナと配管)を簡便に気密試験する手段を用いる。即ち、放射性ダストモニタの空気入口直後と吸引ポンプ入口直前に遠隔操作自動開閉弁を配設し、配設した2個の弁と吸引ポンプをシーケンス制御して、気密を簡便に試験する。前記の如く、この簡便な気密試験は遠隔操作自動開閉弁とシーケンス制御で達成されるが、軽装備で目的を達成させたい場合は、自動弁を手動弁に変更し、シーケンス制御に依らず手動操作しても目的を達成出来る。
(作用)
【0036】
手段1:2運転方式択一手段を用いる為、施設運転時(主に平日の昼間)と施設休止時(主に夜間と休日)、通常時(放射能レベル:通常時)と異常時(放射能レベル:異常時)等の状況に応じて、随時、最善の運転方式を選択出来る。即ち、状況に応じて、濾紙消費量優先運転を行うことにより濾紙を目詰まり限度ギリギリまで使い切る事が出来るので、完璧に近い消費量優先運転が可能である。更に、放射能検出感度優先運転を行うので、前記特開平6-94838と同等以上の検出感度と応答性を実現出来る。
【0037】
前述の明細書では放射能検出感度優先運転における、濾紙送り制御方式(間欠送り法・連続送り法)は共に、負圧値を濾紙の繰出しに関係させず、単純に時間のみで濾紙の繰出しを制御をしている。しかし、この放射能検出感度優先運転においても負圧繰出し制御を採用する応用も可能である。この応用を採用すると中庸を狙うことが出来る。即ち、少々感度を犠牲することにより、濾紙消費を向上させる応用が可能である。
【0038】
手段2:二段階手動選択手段を用いる為、運転方式(濾紙消費量優先運転又は放射能検出感度優先運転)の自動選択と手動選択が任意自在に可能である。従って、自動運転を選択すると、施設運転時(主に平日の昼間)・施設休止時(主に夜間と休日)、又は、通常時・異常時を問わず、運転方式を自動選択して自律的に運転を継続する。
【0039】
しかし、何らかの事情で、施設運転時には感度優先運転、施設休止時には消費量優先運転、を行いたい強い人間的意思が働いた場合は、手動選択でこの何れか一方の運転方式を選択することができる。勿論、単に施設の運転・休止、通常・異常に留まらず、その他の各種の状況と事情に応じて運転方式を選択できる事は言うまでも無い。
【0040】
勿論、自動運転に於いて、放射性ダストモニタの設置場所の放射線バックグランド値を常時入力するようにしておけば、このバックグランド値が上昇した場合、検出感度を高める運転を行うようにすることが可能である。
【0041】
手段3:単純機能別制御手段を用いる為、制御が単純・確実化する。のみならず、運転中の制御に不具合が生じた場合、不具合箇所を容易に発見できる。更に、吸引ポンプ停止が原理の異なる二つのシステムで停止する。即ち、完全な目詰りによるポンプの過負荷トリップが、負圧検出・制御系と流量検出・制御系とで二重に保護される。
【0042】
例えば具体的に、濾紙送り制御に不具合を生じて濾紙が完全に目詰した場合、先ず、応答の速い負圧系が作動して吸引ポンプモータを自動停止する。何らかの不具合により前記の負圧系が動作しない場合は、次に流量系が働いて、吸引ポンプモータを自動停止する。
【0043】
手段4:完全垂下特性のポンプを使用する手段を用いる為、塵埃により圧力損失が増加すると流量が減少する。流量が減少した場合、ポンプ回転数を上昇させることで、流量を回復すことができる。完全垂下特性ポンプを用いることにより、ポンプ運転全流量域に於いてこの回復が容易に可能となる。この完全特性は、本発明の如く、気密試験時の極小流量域から、検出感度優先運転時の大流量域まで広く使用される場合、極めて有効である。
【0044】
手段5:吸引ポンプの回転速度をインバータユニットによりフィードバック周波数制御する手段、即ち、回転速度法により流量を定値自動制御する為、静摩擦が介在しない動摩擦のみの滑らか且つ正確な流量制御が可能である。のみならず、圧力損失の強弱に頼る流量制御(ダンパ制御)によらないので、省電力が達成される。
【0045】
具体的には低流量運転(濾紙消費量優先運転)の電力は大流量運転(放射能検出感度優先運転)の1/4程度の電力で運転可能である。365日24時間連続運転する放射性ダストモニタの場合、この省電力効果は極めて有効である。尚、流量制御が正確になる為、放射能レベル測定精度が向上する事は言うまでも無い。
【0046】
のみならず、インバータユニットによりフィードバック制御するので、電源電圧の変動に対する吸引流量の安定性が高精度で保証される。即ち、放射性ダストモニタのJIS規格Z4316性能3.2項では「電源電圧を90%値に下げたとき、吸引流量の変化は±10%」と規定されている。しかし、このフィードバック制御によれと吸引流量の変化を±1〜2%以内に収めることができる。
【0047】
三相誘導モータに代え、永久磁石式同期モータを用いインバータ制御すれば更なる回転速度の精度向上と、省電力とが可能であるが、放射性ダストモニタにはそこまで高級なシステムを採用しなくても、簡便・安価な本システムで十分である。製作の難易性に注目すると、従来の流量調節弁の制御は専用の制御装置が必要であるが、本システムは単に市販のインバータシステムを購入することにより達成される。尚、単相誘導モータは原理的にインバータ駆動が不可能の為、トライアック(triode AC switch:TRIAC)を用い位相制御すれば速度制御が可能であるが、大容量モータ駆動に不向きである。のみならず、三相誘導モータシステムによるより速度制御精度と、省電力効果とが著しく劣る。
【0048】
手段6:気密系を簡便に気密試験する手段を用いる為、濾紙新旧交換作業毎に気密確認ができるので放射能レベル検出精度と、測定の信頼性とが向上する。更に、モータの回転速度制御とポンプの垂下特性が組合される為に生ずる2次的特性から、検出器の圧壊に対して本質安全が図られる。
【0049】
一般に放射線検出器は極微弱な放射線を透過させる為、透過検出面が薄膜で構成されているので、過大な負圧に耐えられない。
【0050】
前記の2次的特性から、吸引ポンプを低周波数の任意の定回転数(例えば、気密試験速度10Hz=300rpm)で運転することにより、流路内の負圧はポンプ性能曲線に沿って漸減する。即ち、流路内の負圧を過大な負圧にする事無く、単に時間の経過のみで希望の負圧に設定できる。従って、放射線検出器が過度の負圧から保護される為、真空破壊弁等の特別な過負圧保護手段を必要としない。即ち、検出器の圧壊に対し本質的安全が図られる。
【発明の効果】
【0051】
濾紙消費量優先運転と放射能感度優先運転とを状況に応じて適切に選択できるので、濾紙の無駄使い防止と検出感度の向上が矛盾無く両立できる。通常、濾紙の無駄使い防止は、単なる濾紙の節約効果より、放射線管理区域内の濾紙新旧交換の作業頻度を低減させる為、作業工数と放射線被爆量の低減効果の方が大きい。
【0052】
インバータユニットによるモータの回転速度制御により流量制御されるのでポンプ動力の節約が可能になる。負圧信号と流量信号による単純機能別制御手段を用いるので、制御が単純化且つ確実化する。のみならず吸引ポンプの過負荷保護が二重化される。更に、回転速度制御により流量が極めて正確に制御されるので、測定精度が向上する。
【0053】
濾紙新旧交換作業毎に装置の気密試験が簡便に行えるので、測定精度と測定値の信頼度が向上する。この気密試験法は、製作工場の完成検査と放射線施設の定期検査の手段として有効に利用できる。更に、気密試験時、モータの回転速度制御とポンプ特性との組合せ効果によって、放射線検出器の過度の負圧による破損に対し、本質安全が図られる。
【0054】
放射性ダストモニタの設置場所の放射線バックグランド値を常時入力すれば、このバックグランド値が上昇した場合、高感度運転を行うことができる。
【発明を実施するための最良の形態】
【0055】
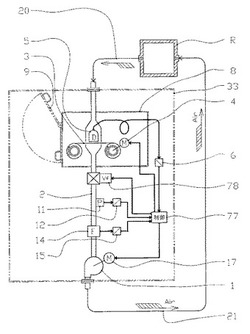
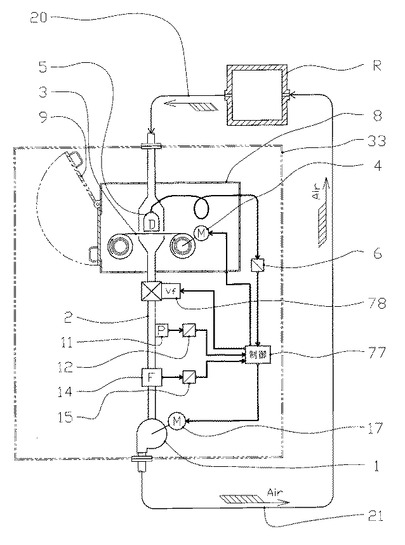
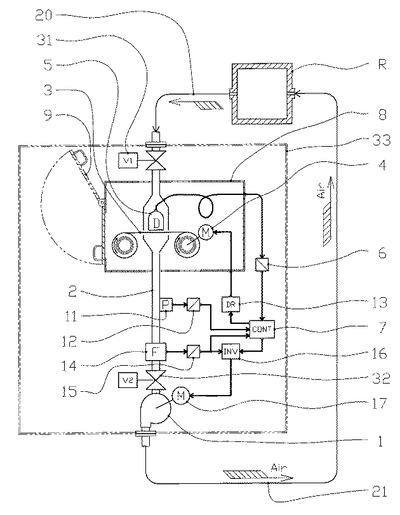
以下、図面を参照し本発明の一実施例を説明する。図1は、本発明の一実施例に係る放射性ダストモニタのダストサンプラ部を主体に描画した構成図である。尚、図中の符号は、図7(従来の構成図)と機能が一致するものは符号を合わせている。
【0056】
サンプリングする空気は、吸引ポンプ1により、測定対象箇所R(この場合は、放射線利用施設の部屋を想定している)の空気を管20を通して吸引し、管21を通して吸引元のRに排気する。気密コンテナ8の中には両端部を拡管されたサンプリング空気管2とその拡管の端部間の隙間に巻紙長尺濾紙3が配設されている。
【0057】
巻紙長尺濾紙3は濾紙送りモータ4により随時繰り出される。濾紙の上流側に捕集された塵埃の放射線は放射線検出器5で検出され、その検出信号はアンプユニット6を介して制御装置7に伝達される。伝達された前記信号は、濾紙送りモータ4の制御の為に用いられる。のみならず、ダスト放射性モニタの本来の目的の為、即ち、その指示値が放射線管理上設定された放射能レベル以上であったとき警報を発する為に使用される。
【0058】
放射線検出器5の配設位置は、図1に示す如くの空気流路中に限定されない。検出器の点検に有利な空気流路外側に配置しても良いが、塵埃捕集と放射線測定とに時間遅れが生ずる。しかし、この時間遅れを塵埃中に含まれる自然放射線の減衰の為に逆利用することも可能である。
【0059】
巻紙長尺濾紙3を紙末まで使い切り使用済となった場合、開閉自在気密扉9を開いて使用済(旧品)濾紙3を取出し、新品の巻紙長尺濾紙3と交換する。負圧検出器11で検出した圧力信号は、アンプユニット12で制御用に処理され制御装置7に送られる。流量検出器14で検出した流量信号は、アンプユニット15で制御用に処理され吸引ポンプ1の駆動モータ用インバータユニット16と制御装置7に送られる。
【0060】
制御装置7は、放射線検出器5からの放射能レベル信号により濾紙消費量優先運転又は放射能検出感度優先運転の何れか一方を選択する。前者、濾紙消費量優先運転の場合、負圧検出器11の負圧があらかじめ設定しておいた閾値を越えるごと毎に、ドライバー13が働いて濾紙送りモータ4駆動し、濾紙を規定量だけ繰出す。
【0061】
一方、後者、放射能検出感度優先運転の場合は、負圧検出器11の負圧に関係なく、単に制御装置7に内蔵するタイマーにより一定時間間隔でドライバー13が働いて濾紙送りモータ4駆動する。この場合のタイマー間隔は濾紙が明らかに目詰まりしない短い間隔(濾紙消費は大きくなる)に設定される。
【0062】
上記の説明は、濾紙送り制御方式が間欠送り法の場合である。連続送り法の場合は負圧の増加量が閾値を超える時間に応じて濾紙の送り速度を制御する為、当然、濾紙送りモータ4はフィードバック制御される。従って、濾紙送りモータ4は、一段高級なサーボモータ(servo motor)と専用のドライバー13を用いる必要がある。
【0063】
制御装置7であらかじめ設定した目標流量の電圧換算値と流量検出値の電圧換算値とをインバータユニット16内で比較し、その偏差を零にするようにフィードバック制御される。その結果により時々刻々モータ17の回転速度が変化(増速)し、吸引ポンプ1の流量が定値制御される。尚、濾紙消費量優先運転時は低流量定値フィードバック制御され、放射能検出感度優先運転時は大流量定値フィードバック制御される。
【0064】
前記制御装置7は、汎用のプログラマブル コントローラ(programmable controller)通称PC(又はPLC)として、現在大量に市販されているもので十分制御可能である。前記PCは、中央処理装置(CPU)、20点前後の入・出力回路、メモリの他、更に、補助リレー、クロックリレー、及び、カウンタなどが付属しているものを必要とする。
【0065】
放射性ダストモニタ33のサンプリング空気管2の空気入口直後には遠隔操作自動開閉弁(V1)31が配設されている。ホンプ入口直前には遠隔操作自動開閉弁(V2)32が配設されている。
【0066】
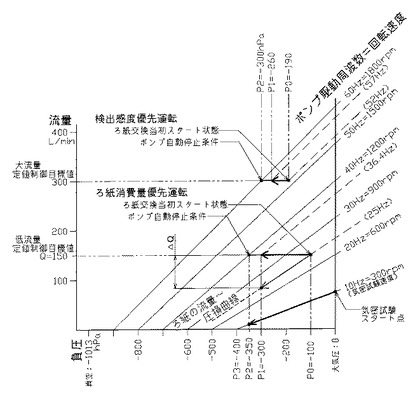
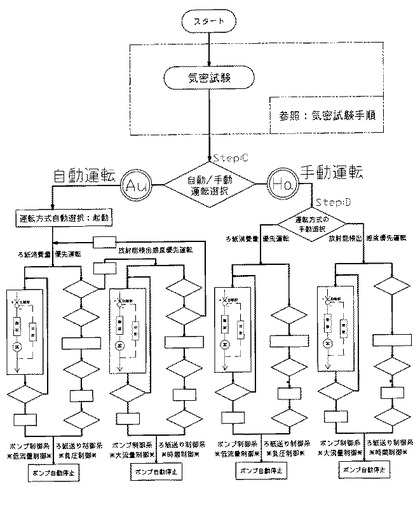
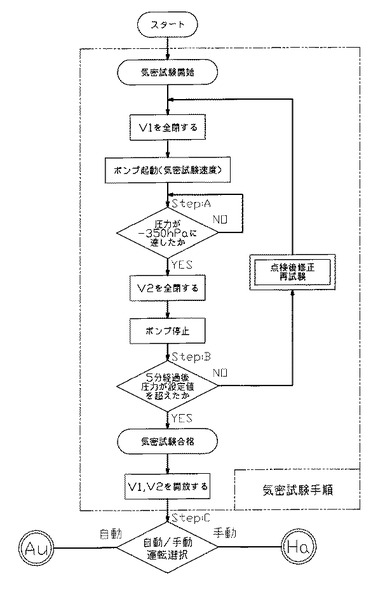
(動作手順の説明:)以上のように構成された放射性ダストモニタの動作について図2、3、4、5、及び図6を参照しながら説明する。図2。容積移送式真空ポンプの特性曲線上に、放射性ダストモニタの使用状況を書き込んだ吸引ポンプ1の使用状況の説明図である。図3は総合運転手順図、図4、5、及び図6は、図3の部分拡大手順図である。具体的にはて、図4は気密試験手順図、図5は自動運転手順図、図6は手動運転手順図である。図7は制御スイッチの配置図である。
【0067】
(気密試験手順の説明:図3)放射性ダストモニタを起動(スタート)すると、気密試験が開始する。開始直後、弁(V1)31が自動閉鎖し、吸引ポンプ1が気密試験速度(10Hz=300rpm,第2図の気密試験スタート点で示す)で自動起動して、定回転速度(回転速度法による流量の定値自動制御と異なる)で駆動を継続する。
【0068】
従って、起動後は、10Hzのポンプ特性曲線に従ってP3=-400hPaに向かって徐々に減圧される為、過度に減圧されて放射線検出器5を破損する危険が無い。P2=-350hPaに到達する(<Step:A>)と弁(V2)32が自動閉鎖し、次に吸引ポンプ1が停止する。JIS規格に従い停止して5分間経過後、負圧検出器11があらかじめ設定された負圧値を保持していた場合、気密試験が合格と判断される(<Step:B>)。合格(合格ランプ:点灯)の場合、次の操作、即ち、放射性ダストモニタの本来の放射線モニタ運転に備えて、弁(V1)31、(V2)32が自動開放する。尚、負圧値を保持していない場合は、不合格(不合格ランプ:点灯)と判断され、人間系が不具合点を再調整後、再試験を行う。
【0069】
(参考:)日本工業規格の放射性ダストモニタ(JIS Z 4316)の部分構造規格であるダストサンプラ(JIS Z 4601)では、前記気密試験の漏洩量が定格流量の5%以下に規定されている。この試験法は流路内の圧力と大気との差を130hPa以下に減圧し、5分経過後の圧力を測定し、定められた計算式により漏洩量を算定するように規定されている。
【0070】
次に放射性ダストモニタの本来の運転、即ち、放射線モニタ運転の動作手順について、図3、5図を参照しながら説明する。尚、この動作手順の説明は、濾紙送り制御が間欠送り法の場合である。この他に濾紙送り制御には連続送り法がある。
【0071】
前者を説明すると、後者を容易に類推出来るので繰返しを回避し説明を省略する。前者は負圧と繰出し時間間隔の関係であるが、後者は単位時間毎の負圧の増加量(負圧の増加率)と繰出し速度の関係である。
【0072】
(自動/手動運転選択の説明:図3)さて、前述の気密試験が合格し、弁V1、V2が開放されると、先ず、人間系で自動/手動運転選択(<Step:C>)を行う。自動運転を選択すると((Au))側、即ち、[運転方式自動選択:起動]が自動起動し、濾紙消費量優先運転と放射能検出感度優先運転とを自動的に選択しながら自律的に運転を継続する。一方、手動運転を選択すると((Ha))側、即ち、人間系で運転方式の選択(<Step:D>)を行い、運転方式(濾紙消費量優先運転又は放射能検出感度優先運転)の何れか一方を手動選択する。
【0073】
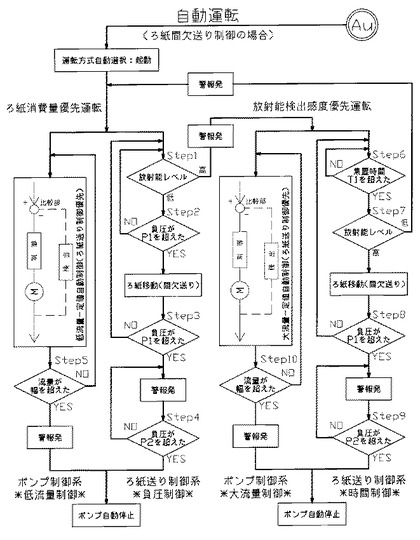
(自動運転の説明:図5)説明を戻し、<Step:C>で自動運転を選択し、((Au))側の[運転方式自動選択:起動]が自動起動した場合の動作を以下に説明する。その場合は、図5に示す如く、直ちに、濾紙消費量優先運転が開始し、ポンプ制御系と濾紙送り制御系が同時起動する。
【0074】
先にポンプ制御系の動作を説明する。低流量-定値自動制御が作動し、吸引ポンプ1は図2の濾紙交換当初スタート状態(P0= -100hPa,25Hz)で起動する。起動後は、ポンプ回転速度制御、即ち、ポンプ駆動周波数の高・低制御によりQ=150L/min線に沿うように流量が定値制御される。流量が流量幅の閾値(例えば±10%)を超えた場合(<Step5>)、計測精度範囲を逸脱としたと判断され警報を発信した後、吸引ポンプ1は自動停止する。
【0075】
次に濾紙消費量優先運転における濾紙送り制御系の作動を説明する。吸引ポンプ起動後、放射線検出器5により、一定時間隔で放射能レベルが検出され(<Step1>)、閾値より高い場合は放射能検出感度優先運転に移行する。閾値より低い場合は<Step2>へ進む。
【0076】
<Step2>で負圧が閾値P1(=-300hPa)を超えた場合、濾紙目詰と判断し、濾紙送りモータ4が駆動し濾紙3が更新される。この時、何らかの事情で濾紙送りモータ4が駆動しない場合、又は、濾紙送りモータ4が駆動しても濾紙3が更新されない場合は、<Step3>で閾値P1(=-300hPa)を超え、警報が発信され、更に<Step4>でP2(=-350hPa)に達すると濾紙目詰が限界に達したと判断され吸引ポンプ1が自動停止する。
【0077】
(参考:)流量定値制御が働く(本発明技術)場合と働かない(従来)場合とを比較する。前述の低流量-定値自動制御が作動した状態で、吸引ポンプ1を図2の濾紙交換当初スタート状態(P0= -100hPa,25Hz)で始動すると、Q=150L/min線に沿うように定値制御される。しかし、ここで定値制御を働かせない場合、流量は、回転速度25Hz線に沿って垂下し、P1(=-300hPa)に達するので、濾紙通過流量はΔQ(=66.7L/min)だけ低下する。このΔQL/minは、放射能レベル測定精度を著しく低下させる。勿論、この誤差問題を解決する為、公開特許公報(A):特開平8-86877と特許公報(B2):特許第3078515では、流量調節弁78により流量を定値制御しているが、定値した流量が直線でなく鋸歯状を呈する。
【0078】
次に説明し残した放射能検出感度優先運転の動作について説明する。<Step1>で閾値より高い場合は警報を発し、濾紙消費量優先運転から放射能検出感度優先運転に移行する。
【0079】
先にポンプ制御系の動作を説明する。低流量-定値自動制御から大流量-定値自動制御に移行し、吸引ポンプ1は図2の濾紙交換当初スタート状態(P0=-190hPa,52Hz)で起動する。具体的には、ポンプ回転速度制御、即ち、ポンプ駆動周波数の高・低制御によりQ=300L/min線に沿うように制御される。流量が流量幅の閾値(例えば±10%)を超えた場合(<Step10>)、計測精度範囲を逸脱としたと判断され警報を発信し、吸引ポンプ1は自動停止する。
【0080】
次に放射能検出感度優先運転における濾紙送り制御系の作動を説明する。ポンプ起動後、放射線検出器5により、一定時間(T1)間隔(<Step6>)で放射能レベルが検出され(<Step7>)、閾値より低い場合は濾紙消費量優先運転に戻る。閾値より高い場合は、濾紙モータ4が駆動し濾紙3が繰出され新濾紙状態(P0=-190hPa,52Hz)に更新される。この時、何らかの事情で濾紙送りモータ4が駆動しない場合、又は、濾紙送りモータ4が駆動しても濾紙3が更新されない場合は、<Step8>の閾値P1=-260hPa,57Hzを超えた時、警報を発信し、更にP2=-300hPa,60Hz状態に達すると濾紙目詰が限界に達したと判断され吸引ポンプ1が自動停止する。
【0081】
以上に説明した如く、((Au))側の自動運転に依れば、<Step1>と<Step7>で放射能レベルに従って運転方式を自動的に選択するので、ポンプが自動停止しない限り、自律的に運転を継続する。
【0082】
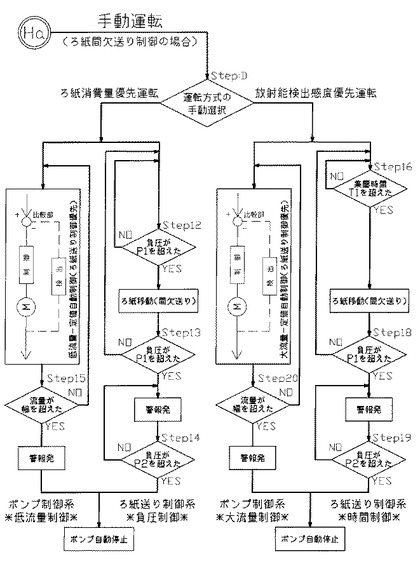
(手動運転の説明:図6)少し説明を戻し、<Step:C>で((Ha))側の手動運転を選択すると、更に再度人間系が運転方式の手動選択(<Step:D>)を行う。即ち、濾紙消費量優先運転か放射能検出感度優先運転かの何れか一方を選択する。
【0083】
<Step:D>で、何れか一方を選択すると前述の自動運転の場合と異なり、放射能レベルに関係されることなく、選択した運転方式を単純に実行する。以下に作動手順を説明する。説明の殆んどの全ては、自動運転の内容と重複している。
【0084】
<Step:D>で濾紙消費量優先運転を選択した場合、図6に示す如く、直ちに、濾紙消費量優先運転が開始し、ポンプ制御系と濾紙送り制御系が同時起動する。
【0085】
先にポンプ制御系の動作を説明する。自動運転の場合と同様に低流量-定値自動制御が作動し、吸引ポンプ1は図2の濾紙交換当初スタート状態(P0= -100hPa,25Hz)で起動する。起動後は、ポンプ回転速度制御、即ち、ポンプ駆動周波数の高・低制御によりQ=150L/min線に沿うように定値制御される。流量が流量幅の閾値(例えば±10%)を超えた場合(<Step15>)、計測精度範囲を逸脱としたと判断され警報を発信し、吸引ポンプ1は自動停止する。
【0086】
次に濾紙消費量優先運転における濾紙送り制御系の作動を説明する。自動運転の場合と異なり、放射能レベルに関係すること無く、直ちに<Step12>が判定される。
【0087】
<Step12>で負圧が閾値P1(=-300hPa)を超えた場合、濾紙目詰と判断し、濾紙送りモータ4が駆動し濾紙3が更新される。この時、何らかの事情で濾紙送りモータ4が駆動しない場合、又は、濾紙送りモータ4が駆動しても濾紙3が更新されない場合は、<Step13>で閾値P1(=-300hPa)を超え、警報が発信され、更に<Step14>でP2(=-350hPa)に達すると濾紙目詰が限界に達したと判断され吸引ポンプ1が自動停止する。
【0088】
次に説明し残した放射能検出感度優先運転の動作について説明する。<Step:D>で放射能検出感度優先運転を選択した場合、図6に示す如く、直ちに、放射能検出感度優先運転が開始し、ポンプ制御系と濾紙送り制御系が同時起動する。
【0089】
先にポンプ制御系の動作を説明する。自動運転の場合と同様に低流量-定値自動制御が作動し、吸引ポンプ1は図2の濾紙交換当初スタート状態(P0=-190hPa,52Hz) で起動する。具体的には、ポンプ回転速度制御、即ち、ポンプ駆動周波数の高・低制御によりQ=300L/min線に沿うように定値制御される。流量が流量幅の閾値(例えば±10%)を超えた場合(<Step20>)、計測精度範囲を逸脱としたと判断され警報を発信し、吸引ポンプ1は自動停止する。
【0090】
次に濾紙消費量優先運転における濾紙送り制御系の作動を説明する。自動運転の場合と異なり、放射能レベルに関係すること無く、一定時間(T1)間隔(<Step16>)で濾紙モータ4が駆動し濾紙3が繰出され新濾紙状態(P0=-190hPa,52Hz)に更新される。この時、何らかの事情で濾紙送りモータ4が駆動しない場合、又は、濾紙送りモータ4が駆動しても濾紙3が更新されない場合は、<Step18>の閾値P1=-260hPa,57Hzを超えた時、警報を発信し、更にP2=-300hPa,60Hz状態に達すると濾紙目詰が限界に達したと判断され吸引ポンプ1が自動停止する。
【0091】
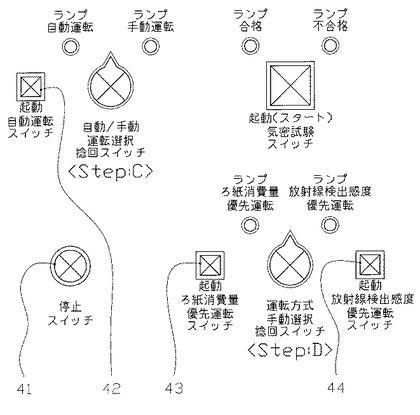
(制御スイッチの説明:図7)捻回式スイッチ<Step:C>と<Step:D>は、図3,4及び6の運転手順図に表示された<Step:C>と<Step:D>に相当する。前記の2個の捻回式スイッチ以外は全て押しボタンスイッチである。全てのスイッチの動作形式は、モーメンタリ動作形である。前述の制御装置7が汎用のプログラマブル コントローラ(通称PC又はPLC)である為、操作上面倒なオルタネイト動作形を用いず、モーメンタリ動作形に統一出来るからである。
【0092】
6個のランプは運転状況を表示すランプである、即ち、自動運転又は手動運転の何れの運転方式を選定しているか、と、何れの優先運転を選定しているか、とを表示する。気密試験スイッチの上部に配設された合格/不合格ランプは、気密試験実施中、両ランプが同時に点滅する。試験完了時、何れかのランプが点灯して試験結果を表示する。
【0093】
予め両方の捻回スイッチで夫々を選択し、ランプの点灯で夫々の選定状態を確認後、気密試験の起動(スタート)スイッチを押すと、図3に示す手順に従って、気密試験運転が起動し、試験終了後、ポンプが自動起動する。しかし、何らかの意志が働いて、気密試験をスキップ(跳び越す)して、直ちに自動運転を起動したい場合は、捻回スイッチ<Step:C>で自動運転を選択後、自動運転起動スイッチ42を押すと、気密試験に関係なく、自動運転が起動する。同様に、手動選択で濾紙消費量優先運転を直接手動選択する場合は、<Step:D>を選択後、イッチ43を押す。更に、同様に放射線検出感度優先運転を直接手動選択する場合は、スイッチ44を押すことになる。尚、停止スイッチ41を押すと放射性ダストモニタは、直ちにその場で全ての運転を停止する。
【図面の簡単な説明】
【0094】
【図1】本発明の一実施例に係る放射性ダストモニタの構成図である。
【図2】容積移送式真空ポンプ性能曲線を下敷きにした使用状況説明図である。
【図3】総合運転手順である。
【図4】総合運転の内、気密試験手順図である。
【図5】総合運転の内、自動運転手順図である。
【図6】総合運転の内、手動運転手順図である。
【図7】放射性ダストモニタの制御スイッチの配置図である。
【図8】従来の放射性ダストモニタの構成図である。
【符号の説明】
【0095】
1 吸引ポンプ
3 塵埃捕集濾紙
5 放射線検出器
8 開閉扉付気密コンテナ
11 負圧検出器
14 流量検出器
16 インバータユニット
17 吸引ポンプ駆動モータ
33 放射性ダストモニタ
31 開閉自在弁
32 開閉自在弁
【技術分野】
【0001】
本発明は放射線防護を目的として、放射線利用施設の作業環境、周辺環境、並びに施設の排気系などにおいて、濾過式ダストサンプラにより空気中に浮遊する放射性粒子状物質(放射性ダスト:本願中では「塵埃」と省略)を採取し、GM管、シンチレーション検出器などによりα、β、γ線いずれかを検出して、その指示値が放射線管理上設定された放射能レベル以上であったとき警報を発する放射性ダストモニタに関する。
【背景技術】
【0002】
【特許文献1】特許公報(B2) :平5-80993号
【特許文献2】公開特許公報(A) :特開平8-86877号
【特許文献3】特許公報(B2) :特許第3078515号
【特許文献4】公開特許公報(A) :特開平6-94838号
【0003】
放射線利用施設には、放射線防護上、塵埃を捕集し、放射能レベルを連続的に監視する放射性ダストモニタが設置されている。放射性ダストモニタは日本工業規格JIS Z 4316に規定されている。この規定の4構造4.1構造一般(1)によると「放射性ダストモニタは、ダストサンプラ、放射線検出装置、計数指示装置、警報装置などで構成されていること」と規定されている。更に、日本工業規格では、前記ダストサンプラを別規格JIS Z 4601で規定している。即ち、ダストサンプラとは、放射性ダストモニタの部分構造の呼称であって、塵埃を濾過によって捕集する構造部分を指している。
【0004】
従来の放射性ダストモニタのダストサンプラ部を主体に描画した構成図を図7に示す。サンプリングする空気は、吸引ポンプ1により、測定対象箇所R(この場合は、放射線利用施設の部屋を想定している)の空気を管20を通して吸引し、管21を通して吸引元の対象箇所Rに排気する。気密コンテナ8の内部には両端部を拡管されたサンプリング空気管2とその拡管の端部間の隙間に巻紙長尺濾紙3が配設されている。
【0005】
巻紙長尺濾紙3は濾紙送りモータ4により随時繰り出される。濾紙の上流側に捕集された塵埃の放射線は放射線検出器5で検出され、その検出信号はアンプユニット6を介して制御装置77に伝達される。巻紙長尺濾紙3を紙末まで使い切り使用済となった場合、開閉自在気密扉9を開いて使用済(旧品)濾紙3を取出し、新品の巻紙長尺濾紙3と交換する。
【0006】
制御装置77は、常時、駆動モータ17を最大定速回転することによりホンプ1を最大定流量運転しながら、流量検出器14から送られてくる流量信号が、予め設定された流量設定値に一致するように流量調節弁78の開口面積を調節する。その結果、サンプリング空気流量は常に設定値流量に(流量調節弁による定値制御)PI制御される。
【0007】
前記の如く従来の放射性ダストモニタは、集塵部で塵埃を捕集する構造である。濾紙3は捕集時間が経過すると目詰りが進行する為、目詰が進行し閾値に達すると巻紙濾紙3を「間欠的」に所定長だけ繰出し、集塵部を未使用部の濾紙に入換える。
【0008】
流量検出器14で検出した流量信号は、アンプユニット15を介し、制御装置77に伝達され、信号が閾値を越えるごと毎に濾紙送りモータ4を駆動し、巻紙長尺濾紙3を繰出す。
【0009】
負圧検出器11は一般に使用されない。その理由は前述の流量検出器14のみで十分制御可能だからである。即ち、従来の放射性ダストモニタには流量調節弁78のPI制御の為に流量信号が必須であるから、負圧検出器11を2重に配設する必要は無かった。しかし、極まれには流量検出器14と負圧検出器11とを二重に配設する場合があるが、その場合、負圧検出器11の信号は、通常、ポンプ1の過負荷防止の為に使用されていた。
【0010】
濾紙更新の為の濾紙送り制御方式は前記の「間欠送り法」だけで無く「連続送り法」がある。連続送り法は、常時、濾紙を極微速度(通常20〜50mm/Hr)で巻き取る方法である。
【0011】
さて以下に、前途の従来技術を特許文献上から考察する。特許公報(B2):平5-80993に記載の如く、空気流量又は負圧を検出し、検出値の何れか一方が濾紙交換の閾値を超えた時、濾紙の目詰りが進行していると判断し濾紙の繰出しを自動的に行っていた。
【0012】
しかし、この発明は、完全な目詰りに達する直前の目詰り状態を濾紙交換の閾値とする為、濾紙交換直後のまだ目詰していない状態と、目詰りが究極的に進行した交換直前の状態とでは濾紙通過流量に顕著な差が生じる。この流量差に引きずられ放射能レベル検出精度に誤差を生じさせる問題があった。
【0013】
この誤差問題を解決する為、公開特許公報(A):特開平8-86877に記載の如く、吸引ポンプ上流に流量調節弁78を配設し、濾紙を通過する流量を定値制御している。この流量調節弁による定値制御の実用的具体例は特許公報(B2):特許第3078515 に第4の手段として記載の如く、流量調節弁にソレノイド駆動のオリフィス弁等を用いて流路断面積を自動的に可変することにより達成している。
【0014】
前記の流量調節弁による定値制御は本質的に流量の階段状制御であり、動と静の繰返し運動により制御される。即ち、動摩擦と静摩擦が介在する世界で駆動される為、滑らかな応答性と正確さに問題があった。
【0015】
のみならず、流量調節弁による定値制御は、吸引ポンプを常時最大定流量で運転しながら、圧力損失を調節し流量を制御する為、直流モータの抵抗制御の如く、原理的にエネルギーを無駄使いする運転方法である。放射性ダストモニタの様に365日24時間休み無く連続運転する場合、省電力上問題があった。勿論、流路断面積可変の為、可変縮流部に異物を挟み込む危険も無視できない。
【0016】
一方、更に、従来の放射性ダストモニタは、公開特許公報(A):特開平6-94838の(0006)項に記載されている如く、検出感度を上げようとすると、放射能レベルの判定間隔が長くなって応答性が低下し、低濃度域の測定であるにも拘らず濾紙の消費が多い為に不経済であるといった問題もあった。
【0017】
この問題は、前記特開平6-94838に記載の如く、放射線検出器の測定値に応じて集塵時間とダスト吸引流量とを自動的に変化させて解決している。即ち、高放射能検出状態(異常時)が生じた場合、集塵時間を短縮し、かつ吸引流量を増するように自動調整するので、通常時は濾紙の消費が抑えられ、且つ、異常時に迅速・正確な測定が可能になる。
【0018】
しかし、この出願は濾紙交換の繰出し条件が、単に集塵時間のみである為、通常時、濾紙を目詰り限度ギリギリまで使うことが出来ない問題が残る。即ち、濾紙の無駄使い防止の為に更なる改良の余地があった。
【0019】
放射性ダストモニタにおいて検出精度上極めて重要なことは、気密系(開閉自在気密扉9を付設する気密コンテナ8と、空気配管2を指す)を気密に保つことである。もしこの気密が保たれ無い場合は、流量検出器14を通過する空気流量が、所謂、水増しされる為、放射能レベル検出精度に危険側の誤差を生ずる。
【0020】
新旧の巻紙長尺濾紙3の交換は、交換するたび毎に開閉自在気密扉9を開放し、交換作業後、閉塞する。前記濾紙新旧交換作業において、例えば、知らずに扉ガスケットに異物を挟み込み扉9を閉める等、何らかの人的過誤を含む不具合により、気密が確保されない場合がある。この気密確認は、原理的に濾紙新旧交換作業毎に必要であるが、簡便な気密試験法が無い為、濾紙新旧交換作業毎に実施されていないのが実態であった。勿論、この簡便な気密試験法が可能になれば、放射性ダストモニタの製作工場での完成検査と、放射線施設で使用中の定期検査の手段として活用されることは言うまでも無い。
【発明の開示】
【発明が解決しようとする課題】
【0021】
放射性ダストモニタの性能上、二律背反している放射能検出感度(含:応答性)の向上と濾紙の節約とを解決し、更に省電力を達成することにある。放射性ダストモニタは、放射線施設で単一な連続運転で使用されている。運転の実際経験から、施設運転時(主に平日の昼間)に高検出感度運転を行い、施設休止時(夜間と休日)に低検出感度運転を行うと、放射線防護と経済(省電力と省濾紙)とを両立することが可能であることに気付いた。
【0022】
言い換えると、単純な単一運転から、通常時(放射能レベル:通常時)は濾紙消費量優先運転を行い、異常時(放射線濃度レベル:異常時)は感度優先運転を行うとも言える。即ち、単純単一運転にするだけに留まらず、各種の運転状況に応じて、木目細かく運転方式を選択することにより、前記二律背反を解決する放射性ダストモニタを提供することにある。
【0023】
木目細かくとは、単純に採取した塵埃の放射線測定だけで無く、今まで想定・対処外であつた、放射性ダストモニタの設置場所の放射線バックグランド値が上昇した場合の配慮も含まれる。例えば、設置場所付近に誰かが知らずに放射性汚染物質を持ち込んだ場合、バックグランド値が上昇し放射性ダストモニタの検出感度が低下する。この様な時、自動的に検出感度を高める必要が生ずる。
【課題を解決するための手段】
【0024】
手段1:運転方式を濾紙消費量優先運転と放射能検出感度優運転との2運転方式とし、状況に応じて何れか一方を選択する。即ち、2運転方式択一手段を用いる。前記の2運転方式は、更に夫々、濾紙送り制御方式と流量制御とが異なる。この違いを具体的に一覧表化して表1に示す。
【0025】
【表1】
【0026】
表1に示す如く、濾紙送り制御方式には間欠送り法と連続送り法の2方法がある。この発明を実施する場合、下記する、夫々の特徴を考慮して何れか一方を選択する必要がある。
間欠送り法は、濾紙が停止状態で放射線測定を行うので、通常、検出器の測定値(放射線カウント値)は時間経過に応じて漸上する。連続送り法は、濾紙が常時微動状態(一般に20〜50mm/Hr)で放射線測定を行うので、通常、検出器の測定値(放射線カウント値)は一定する。従って、後者、即ち、連続送り法は、原理的に放射能レベルの変化に対する応答性が高い。
【0027】
濾紙送り制御方式の採用・選択に際し、濾紙消費量優先運転においては間欠送り法、放射能検出感度優先運転においては連続送り法 (前記一覧表おいて太線枠で示す) を採用・選択することが出来る。
【0028】
この選択に依れば、濾紙消費量優先運転において濾紙繰出しの速度制御を回避することが出来、且つ、放射能検出感度優先運転において高い応答性を得ることが出来る。即ち、連続送り法の「負圧の増加量が閾値を超える時間に応じて、濾紙繰出しの速度制御を行う」とは、負圧の増加率に応じて濾紙繰出しの速度制御を行う訳である。言葉は簡単であるが、実際の制御は、他の三種類の濾紙送り制御法に比べ格段に複雑である。この速度制御の回避は実用上極めて有効である。
【0029】
間欠送り法と連続送り法の関係は、距離制御と速度制御の関係なので間欠送り法の制御を理解すると、連続送り法の制御原理は通常の技術者が比較的容易に類推できる。従って、この明細書では重複説明の煩雑さを避け、間欠送り法を主体に説明し、連続送り法を副次的に説明する。
【0030】
手段2:前記2運転方式択一手段に於いて、具体的に択一する場合、先ず最初に、自動運転と手動運転の選択(自動/手動-運転選択,<Step:C>)を手動で選択する。しかし、若し、後者を選択した場合は、更に運転方式の手動選択<Step:D>を行う手段を用いる。即ち、前述の手段1の2運転方式択一に於いて、二段階手動選択手段を用いる。
【0031】
前者(自動運転)を選択した場合、自動的に運転方式自動選択が起動して、単位時間毎に放射能レベルを測定し、放射能レベルに応じて運転方式(濾紙消費量優先運転又は放射能検出感度優先運転)を自動・自律的に選択しながら運転を継続する。一方、後者(手動運転)を選択した場合は、更に人間系で何れか一方の運転方式(濾紙消費量優先運転又は放射能検出感度優先運転<Step:D>)を選択する必要がある。
【0032】
手段3:単純機能別制御手段を用いる。即ち、空気流路に負圧検出器と流量検出器とを並列に配設し、負圧検出系で専ら濾紙送りを制御し、流量検出系で専ら流量制御を行う。
【0033】
手段4:吸引ポンプに完全垂下特性のポンプを使用する手段を用いる。一般にポンプの垂下特性とは圧力が上昇すると流量が減少(垂下)する特性を指す。一般的な遠心式ポンプの小流量域ではこの垂下特性を逸脱するものも存在する。本願中で完全垂下特性ポンプとは全流量域において回転数が下降すると流量が下降する特性のポンプを指す。通常この完全垂下特性は、容積移送式真空ポンプ(JIS B 8126-2)を用いることで達成される。
【0034】
手段5:吸引ポンプ駆動モータに三相誘導又は同期モータを用い、その回転速度をインバータユニットにより、フィードバック周波数制御する手段を用いる。換言すると、誘導又は同期モータをPI制御し、回転速度法により流量を定値自動制御することになる。PI制御とはインバータユニットのプロセス制御機能の内のPI制御、即ち、比例(Proportion)+積分(Integral)+微分(Differential)=PID制御の簡易型、比例(P)+積分(I)=PI制御を指す。
【0035】
手段6:気密系(気密コンテナと配管)を簡便に気密試験する手段を用いる。即ち、放射性ダストモニタの空気入口直後と吸引ポンプ入口直前に遠隔操作自動開閉弁を配設し、配設した2個の弁と吸引ポンプをシーケンス制御して、気密を簡便に試験する。前記の如く、この簡便な気密試験は遠隔操作自動開閉弁とシーケンス制御で達成されるが、軽装備で目的を達成させたい場合は、自動弁を手動弁に変更し、シーケンス制御に依らず手動操作しても目的を達成出来る。
(作用)
【0036】
手段1:2運転方式択一手段を用いる為、施設運転時(主に平日の昼間)と施設休止時(主に夜間と休日)、通常時(放射能レベル:通常時)と異常時(放射能レベル:異常時)等の状況に応じて、随時、最善の運転方式を選択出来る。即ち、状況に応じて、濾紙消費量優先運転を行うことにより濾紙を目詰まり限度ギリギリまで使い切る事が出来るので、完璧に近い消費量優先運転が可能である。更に、放射能検出感度優先運転を行うので、前記特開平6-94838と同等以上の検出感度と応答性を実現出来る。
【0037】
前述の明細書では放射能検出感度優先運転における、濾紙送り制御方式(間欠送り法・連続送り法)は共に、負圧値を濾紙の繰出しに関係させず、単純に時間のみで濾紙の繰出しを制御をしている。しかし、この放射能検出感度優先運転においても負圧繰出し制御を採用する応用も可能である。この応用を採用すると中庸を狙うことが出来る。即ち、少々感度を犠牲することにより、濾紙消費を向上させる応用が可能である。
【0038】
手段2:二段階手動選択手段を用いる為、運転方式(濾紙消費量優先運転又は放射能検出感度優先運転)の自動選択と手動選択が任意自在に可能である。従って、自動運転を選択すると、施設運転時(主に平日の昼間)・施設休止時(主に夜間と休日)、又は、通常時・異常時を問わず、運転方式を自動選択して自律的に運転を継続する。
【0039】
しかし、何らかの事情で、施設運転時には感度優先運転、施設休止時には消費量優先運転、を行いたい強い人間的意思が働いた場合は、手動選択でこの何れか一方の運転方式を選択することができる。勿論、単に施設の運転・休止、通常・異常に留まらず、その他の各種の状況と事情に応じて運転方式を選択できる事は言うまでも無い。
【0040】
勿論、自動運転に於いて、放射性ダストモニタの設置場所の放射線バックグランド値を常時入力するようにしておけば、このバックグランド値が上昇した場合、検出感度を高める運転を行うようにすることが可能である。
【0041】
手段3:単純機能別制御手段を用いる為、制御が単純・確実化する。のみならず、運転中の制御に不具合が生じた場合、不具合箇所を容易に発見できる。更に、吸引ポンプ停止が原理の異なる二つのシステムで停止する。即ち、完全な目詰りによるポンプの過負荷トリップが、負圧検出・制御系と流量検出・制御系とで二重に保護される。
【0042】
例えば具体的に、濾紙送り制御に不具合を生じて濾紙が完全に目詰した場合、先ず、応答の速い負圧系が作動して吸引ポンプモータを自動停止する。何らかの不具合により前記の負圧系が動作しない場合は、次に流量系が働いて、吸引ポンプモータを自動停止する。
【0043】
手段4:完全垂下特性のポンプを使用する手段を用いる為、塵埃により圧力損失が増加すると流量が減少する。流量が減少した場合、ポンプ回転数を上昇させることで、流量を回復すことができる。完全垂下特性ポンプを用いることにより、ポンプ運転全流量域に於いてこの回復が容易に可能となる。この完全特性は、本発明の如く、気密試験時の極小流量域から、検出感度優先運転時の大流量域まで広く使用される場合、極めて有効である。
【0044】
手段5:吸引ポンプの回転速度をインバータユニットによりフィードバック周波数制御する手段、即ち、回転速度法により流量を定値自動制御する為、静摩擦が介在しない動摩擦のみの滑らか且つ正確な流量制御が可能である。のみならず、圧力損失の強弱に頼る流量制御(ダンパ制御)によらないので、省電力が達成される。
【0045】
具体的には低流量運転(濾紙消費量優先運転)の電力は大流量運転(放射能検出感度優先運転)の1/4程度の電力で運転可能である。365日24時間連続運転する放射性ダストモニタの場合、この省電力効果は極めて有効である。尚、流量制御が正確になる為、放射能レベル測定精度が向上する事は言うまでも無い。
【0046】
のみならず、インバータユニットによりフィードバック制御するので、電源電圧の変動に対する吸引流量の安定性が高精度で保証される。即ち、放射性ダストモニタのJIS規格Z4316性能3.2項では「電源電圧を90%値に下げたとき、吸引流量の変化は±10%」と規定されている。しかし、このフィードバック制御によれと吸引流量の変化を±1〜2%以内に収めることができる。
【0047】
三相誘導モータに代え、永久磁石式同期モータを用いインバータ制御すれば更なる回転速度の精度向上と、省電力とが可能であるが、放射性ダストモニタにはそこまで高級なシステムを採用しなくても、簡便・安価な本システムで十分である。製作の難易性に注目すると、従来の流量調節弁の制御は専用の制御装置が必要であるが、本システムは単に市販のインバータシステムを購入することにより達成される。尚、単相誘導モータは原理的にインバータ駆動が不可能の為、トライアック(triode AC switch:TRIAC)を用い位相制御すれば速度制御が可能であるが、大容量モータ駆動に不向きである。のみならず、三相誘導モータシステムによるより速度制御精度と、省電力効果とが著しく劣る。
【0048】
手段6:気密系を簡便に気密試験する手段を用いる為、濾紙新旧交換作業毎に気密確認ができるので放射能レベル検出精度と、測定の信頼性とが向上する。更に、モータの回転速度制御とポンプの垂下特性が組合される為に生ずる2次的特性から、検出器の圧壊に対して本質安全が図られる。
【0049】
一般に放射線検出器は極微弱な放射線を透過させる為、透過検出面が薄膜で構成されているので、過大な負圧に耐えられない。
【0050】
前記の2次的特性から、吸引ポンプを低周波数の任意の定回転数(例えば、気密試験速度10Hz=300rpm)で運転することにより、流路内の負圧はポンプ性能曲線に沿って漸減する。即ち、流路内の負圧を過大な負圧にする事無く、単に時間の経過のみで希望の負圧に設定できる。従って、放射線検出器が過度の負圧から保護される為、真空破壊弁等の特別な過負圧保護手段を必要としない。即ち、検出器の圧壊に対し本質的安全が図られる。
【発明の効果】
【0051】
濾紙消費量優先運転と放射能感度優先運転とを状況に応じて適切に選択できるので、濾紙の無駄使い防止と検出感度の向上が矛盾無く両立できる。通常、濾紙の無駄使い防止は、単なる濾紙の節約効果より、放射線管理区域内の濾紙新旧交換の作業頻度を低減させる為、作業工数と放射線被爆量の低減効果の方が大きい。
【0052】
インバータユニットによるモータの回転速度制御により流量制御されるのでポンプ動力の節約が可能になる。負圧信号と流量信号による単純機能別制御手段を用いるので、制御が単純化且つ確実化する。のみならず吸引ポンプの過負荷保護が二重化される。更に、回転速度制御により流量が極めて正確に制御されるので、測定精度が向上する。
【0053】
濾紙新旧交換作業毎に装置の気密試験が簡便に行えるので、測定精度と測定値の信頼度が向上する。この気密試験法は、製作工場の完成検査と放射線施設の定期検査の手段として有効に利用できる。更に、気密試験時、モータの回転速度制御とポンプ特性との組合せ効果によって、放射線検出器の過度の負圧による破損に対し、本質安全が図られる。
【0054】
放射性ダストモニタの設置場所の放射線バックグランド値を常時入力すれば、このバックグランド値が上昇した場合、高感度運転を行うことができる。
【発明を実施するための最良の形態】
【0055】
以下、図面を参照し本発明の一実施例を説明する。図1は、本発明の一実施例に係る放射性ダストモニタのダストサンプラ部を主体に描画した構成図である。尚、図中の符号は、図7(従来の構成図)と機能が一致するものは符号を合わせている。
【0056】
サンプリングする空気は、吸引ポンプ1により、測定対象箇所R(この場合は、放射線利用施設の部屋を想定している)の空気を管20を通して吸引し、管21を通して吸引元のRに排気する。気密コンテナ8の中には両端部を拡管されたサンプリング空気管2とその拡管の端部間の隙間に巻紙長尺濾紙3が配設されている。
【0057】
巻紙長尺濾紙3は濾紙送りモータ4により随時繰り出される。濾紙の上流側に捕集された塵埃の放射線は放射線検出器5で検出され、その検出信号はアンプユニット6を介して制御装置7に伝達される。伝達された前記信号は、濾紙送りモータ4の制御の為に用いられる。のみならず、ダスト放射性モニタの本来の目的の為、即ち、その指示値が放射線管理上設定された放射能レベル以上であったとき警報を発する為に使用される。
【0058】
放射線検出器5の配設位置は、図1に示す如くの空気流路中に限定されない。検出器の点検に有利な空気流路外側に配置しても良いが、塵埃捕集と放射線測定とに時間遅れが生ずる。しかし、この時間遅れを塵埃中に含まれる自然放射線の減衰の為に逆利用することも可能である。
【0059】
巻紙長尺濾紙3を紙末まで使い切り使用済となった場合、開閉自在気密扉9を開いて使用済(旧品)濾紙3を取出し、新品の巻紙長尺濾紙3と交換する。負圧検出器11で検出した圧力信号は、アンプユニット12で制御用に処理され制御装置7に送られる。流量検出器14で検出した流量信号は、アンプユニット15で制御用に処理され吸引ポンプ1の駆動モータ用インバータユニット16と制御装置7に送られる。
【0060】
制御装置7は、放射線検出器5からの放射能レベル信号により濾紙消費量優先運転又は放射能検出感度優先運転の何れか一方を選択する。前者、濾紙消費量優先運転の場合、負圧検出器11の負圧があらかじめ設定しておいた閾値を越えるごと毎に、ドライバー13が働いて濾紙送りモータ4駆動し、濾紙を規定量だけ繰出す。
【0061】
一方、後者、放射能検出感度優先運転の場合は、負圧検出器11の負圧に関係なく、単に制御装置7に内蔵するタイマーにより一定時間間隔でドライバー13が働いて濾紙送りモータ4駆動する。この場合のタイマー間隔は濾紙が明らかに目詰まりしない短い間隔(濾紙消費は大きくなる)に設定される。
【0062】
上記の説明は、濾紙送り制御方式が間欠送り法の場合である。連続送り法の場合は負圧の増加量が閾値を超える時間に応じて濾紙の送り速度を制御する為、当然、濾紙送りモータ4はフィードバック制御される。従って、濾紙送りモータ4は、一段高級なサーボモータ(servo motor)と専用のドライバー13を用いる必要がある。
【0063】
制御装置7であらかじめ設定した目標流量の電圧換算値と流量検出値の電圧換算値とをインバータユニット16内で比較し、その偏差を零にするようにフィードバック制御される。その結果により時々刻々モータ17の回転速度が変化(増速)し、吸引ポンプ1の流量が定値制御される。尚、濾紙消費量優先運転時は低流量定値フィードバック制御され、放射能検出感度優先運転時は大流量定値フィードバック制御される。
【0064】
前記制御装置7は、汎用のプログラマブル コントローラ(programmable controller)通称PC(又はPLC)として、現在大量に市販されているもので十分制御可能である。前記PCは、中央処理装置(CPU)、20点前後の入・出力回路、メモリの他、更に、補助リレー、クロックリレー、及び、カウンタなどが付属しているものを必要とする。
【0065】
放射性ダストモニタ33のサンプリング空気管2の空気入口直後には遠隔操作自動開閉弁(V1)31が配設されている。ホンプ入口直前には遠隔操作自動開閉弁(V2)32が配設されている。
【0066】
(動作手順の説明:)以上のように構成された放射性ダストモニタの動作について図2、3、4、5、及び図6を参照しながら説明する。図2。容積移送式真空ポンプの特性曲線上に、放射性ダストモニタの使用状況を書き込んだ吸引ポンプ1の使用状況の説明図である。図3は総合運転手順図、図4、5、及び図6は、図3の部分拡大手順図である。具体的にはて、図4は気密試験手順図、図5は自動運転手順図、図6は手動運転手順図である。図7は制御スイッチの配置図である。
【0067】
(気密試験手順の説明:図3)放射性ダストモニタを起動(スタート)すると、気密試験が開始する。開始直後、弁(V1)31が自動閉鎖し、吸引ポンプ1が気密試験速度(10Hz=300rpm,第2図の気密試験スタート点で示す)で自動起動して、定回転速度(回転速度法による流量の定値自動制御と異なる)で駆動を継続する。
【0068】
従って、起動後は、10Hzのポンプ特性曲線に従ってP3=-400hPaに向かって徐々に減圧される為、過度に減圧されて放射線検出器5を破損する危険が無い。P2=-350hPaに到達する(<Step:A>)と弁(V2)32が自動閉鎖し、次に吸引ポンプ1が停止する。JIS規格に従い停止して5分間経過後、負圧検出器11があらかじめ設定された負圧値を保持していた場合、気密試験が合格と判断される(<Step:B>)。合格(合格ランプ:点灯)の場合、次の操作、即ち、放射性ダストモニタの本来の放射線モニタ運転に備えて、弁(V1)31、(V2)32が自動開放する。尚、負圧値を保持していない場合は、不合格(不合格ランプ:点灯)と判断され、人間系が不具合点を再調整後、再試験を行う。
【0069】
(参考:)日本工業規格の放射性ダストモニタ(JIS Z 4316)の部分構造規格であるダストサンプラ(JIS Z 4601)では、前記気密試験の漏洩量が定格流量の5%以下に規定されている。この試験法は流路内の圧力と大気との差を130hPa以下に減圧し、5分経過後の圧力を測定し、定められた計算式により漏洩量を算定するように規定されている。
【0070】
次に放射性ダストモニタの本来の運転、即ち、放射線モニタ運転の動作手順について、図3、5図を参照しながら説明する。尚、この動作手順の説明は、濾紙送り制御が間欠送り法の場合である。この他に濾紙送り制御には連続送り法がある。
【0071】
前者を説明すると、後者を容易に類推出来るので繰返しを回避し説明を省略する。前者は負圧と繰出し時間間隔の関係であるが、後者は単位時間毎の負圧の増加量(負圧の増加率)と繰出し速度の関係である。
【0072】
(自動/手動運転選択の説明:図3)さて、前述の気密試験が合格し、弁V1、V2が開放されると、先ず、人間系で自動/手動運転選択(<Step:C>)を行う。自動運転を選択すると((Au))側、即ち、[運転方式自動選択:起動]が自動起動し、濾紙消費量優先運転と放射能検出感度優先運転とを自動的に選択しながら自律的に運転を継続する。一方、手動運転を選択すると((Ha))側、即ち、人間系で運転方式の選択(<Step:D>)を行い、運転方式(濾紙消費量優先運転又は放射能検出感度優先運転)の何れか一方を手動選択する。
【0073】
(自動運転の説明:図5)説明を戻し、<Step:C>で自動運転を選択し、((Au))側の[運転方式自動選択:起動]が自動起動した場合の動作を以下に説明する。その場合は、図5に示す如く、直ちに、濾紙消費量優先運転が開始し、ポンプ制御系と濾紙送り制御系が同時起動する。
【0074】
先にポンプ制御系の動作を説明する。低流量-定値自動制御が作動し、吸引ポンプ1は図2の濾紙交換当初スタート状態(P0= -100hPa,25Hz)で起動する。起動後は、ポンプ回転速度制御、即ち、ポンプ駆動周波数の高・低制御によりQ=150L/min線に沿うように流量が定値制御される。流量が流量幅の閾値(例えば±10%)を超えた場合(<Step5>)、計測精度範囲を逸脱としたと判断され警報を発信した後、吸引ポンプ1は自動停止する。
【0075】
次に濾紙消費量優先運転における濾紙送り制御系の作動を説明する。吸引ポンプ起動後、放射線検出器5により、一定時間隔で放射能レベルが検出され(<Step1>)、閾値より高い場合は放射能検出感度優先運転に移行する。閾値より低い場合は<Step2>へ進む。
【0076】
<Step2>で負圧が閾値P1(=-300hPa)を超えた場合、濾紙目詰と判断し、濾紙送りモータ4が駆動し濾紙3が更新される。この時、何らかの事情で濾紙送りモータ4が駆動しない場合、又は、濾紙送りモータ4が駆動しても濾紙3が更新されない場合は、<Step3>で閾値P1(=-300hPa)を超え、警報が発信され、更に<Step4>でP2(=-350hPa)に達すると濾紙目詰が限界に達したと判断され吸引ポンプ1が自動停止する。
【0077】
(参考:)流量定値制御が働く(本発明技術)場合と働かない(従来)場合とを比較する。前述の低流量-定値自動制御が作動した状態で、吸引ポンプ1を図2の濾紙交換当初スタート状態(P0= -100hPa,25Hz)で始動すると、Q=150L/min線に沿うように定値制御される。しかし、ここで定値制御を働かせない場合、流量は、回転速度25Hz線に沿って垂下し、P1(=-300hPa)に達するので、濾紙通過流量はΔQ(=66.7L/min)だけ低下する。このΔQL/minは、放射能レベル測定精度を著しく低下させる。勿論、この誤差問題を解決する為、公開特許公報(A):特開平8-86877と特許公報(B2):特許第3078515では、流量調節弁78により流量を定値制御しているが、定値した流量が直線でなく鋸歯状を呈する。
【0078】
次に説明し残した放射能検出感度優先運転の動作について説明する。<Step1>で閾値より高い場合は警報を発し、濾紙消費量優先運転から放射能検出感度優先運転に移行する。
【0079】
先にポンプ制御系の動作を説明する。低流量-定値自動制御から大流量-定値自動制御に移行し、吸引ポンプ1は図2の濾紙交換当初スタート状態(P0=-190hPa,52Hz)で起動する。具体的には、ポンプ回転速度制御、即ち、ポンプ駆動周波数の高・低制御によりQ=300L/min線に沿うように制御される。流量が流量幅の閾値(例えば±10%)を超えた場合(<Step10>)、計測精度範囲を逸脱としたと判断され警報を発信し、吸引ポンプ1は自動停止する。
【0080】
次に放射能検出感度優先運転における濾紙送り制御系の作動を説明する。ポンプ起動後、放射線検出器5により、一定時間(T1)間隔(<Step6>)で放射能レベルが検出され(<Step7>)、閾値より低い場合は濾紙消費量優先運転に戻る。閾値より高い場合は、濾紙モータ4が駆動し濾紙3が繰出され新濾紙状態(P0=-190hPa,52Hz)に更新される。この時、何らかの事情で濾紙送りモータ4が駆動しない場合、又は、濾紙送りモータ4が駆動しても濾紙3が更新されない場合は、<Step8>の閾値P1=-260hPa,57Hzを超えた時、警報を発信し、更にP2=-300hPa,60Hz状態に達すると濾紙目詰が限界に達したと判断され吸引ポンプ1が自動停止する。
【0081】
以上に説明した如く、((Au))側の自動運転に依れば、<Step1>と<Step7>で放射能レベルに従って運転方式を自動的に選択するので、ポンプが自動停止しない限り、自律的に運転を継続する。
【0082】
(手動運転の説明:図6)少し説明を戻し、<Step:C>で((Ha))側の手動運転を選択すると、更に再度人間系が運転方式の手動選択(<Step:D>)を行う。即ち、濾紙消費量優先運転か放射能検出感度優先運転かの何れか一方を選択する。
【0083】
<Step:D>で、何れか一方を選択すると前述の自動運転の場合と異なり、放射能レベルに関係されることなく、選択した運転方式を単純に実行する。以下に作動手順を説明する。説明の殆んどの全ては、自動運転の内容と重複している。
【0084】
<Step:D>で濾紙消費量優先運転を選択した場合、図6に示す如く、直ちに、濾紙消費量優先運転が開始し、ポンプ制御系と濾紙送り制御系が同時起動する。
【0085】
先にポンプ制御系の動作を説明する。自動運転の場合と同様に低流量-定値自動制御が作動し、吸引ポンプ1は図2の濾紙交換当初スタート状態(P0= -100hPa,25Hz)で起動する。起動後は、ポンプ回転速度制御、即ち、ポンプ駆動周波数の高・低制御によりQ=150L/min線に沿うように定値制御される。流量が流量幅の閾値(例えば±10%)を超えた場合(<Step15>)、計測精度範囲を逸脱としたと判断され警報を発信し、吸引ポンプ1は自動停止する。
【0086】
次に濾紙消費量優先運転における濾紙送り制御系の作動を説明する。自動運転の場合と異なり、放射能レベルに関係すること無く、直ちに<Step12>が判定される。
【0087】
<Step12>で負圧が閾値P1(=-300hPa)を超えた場合、濾紙目詰と判断し、濾紙送りモータ4が駆動し濾紙3が更新される。この時、何らかの事情で濾紙送りモータ4が駆動しない場合、又は、濾紙送りモータ4が駆動しても濾紙3が更新されない場合は、<Step13>で閾値P1(=-300hPa)を超え、警報が発信され、更に<Step14>でP2(=-350hPa)に達すると濾紙目詰が限界に達したと判断され吸引ポンプ1が自動停止する。
【0088】
次に説明し残した放射能検出感度優先運転の動作について説明する。<Step:D>で放射能検出感度優先運転を選択した場合、図6に示す如く、直ちに、放射能検出感度優先運転が開始し、ポンプ制御系と濾紙送り制御系が同時起動する。
【0089】
先にポンプ制御系の動作を説明する。自動運転の場合と同様に低流量-定値自動制御が作動し、吸引ポンプ1は図2の濾紙交換当初スタート状態(P0=-190hPa,52Hz) で起動する。具体的には、ポンプ回転速度制御、即ち、ポンプ駆動周波数の高・低制御によりQ=300L/min線に沿うように定値制御される。流量が流量幅の閾値(例えば±10%)を超えた場合(<Step20>)、計測精度範囲を逸脱としたと判断され警報を発信し、吸引ポンプ1は自動停止する。
【0090】
次に濾紙消費量優先運転における濾紙送り制御系の作動を説明する。自動運転の場合と異なり、放射能レベルに関係すること無く、一定時間(T1)間隔(<Step16>)で濾紙モータ4が駆動し濾紙3が繰出され新濾紙状態(P0=-190hPa,52Hz)に更新される。この時、何らかの事情で濾紙送りモータ4が駆動しない場合、又は、濾紙送りモータ4が駆動しても濾紙3が更新されない場合は、<Step18>の閾値P1=-260hPa,57Hzを超えた時、警報を発信し、更にP2=-300hPa,60Hz状態に達すると濾紙目詰が限界に達したと判断され吸引ポンプ1が自動停止する。
【0091】
(制御スイッチの説明:図7)捻回式スイッチ<Step:C>と<Step:D>は、図3,4及び6の運転手順図に表示された<Step:C>と<Step:D>に相当する。前記の2個の捻回式スイッチ以外は全て押しボタンスイッチである。全てのスイッチの動作形式は、モーメンタリ動作形である。前述の制御装置7が汎用のプログラマブル コントローラ(通称PC又はPLC)である為、操作上面倒なオルタネイト動作形を用いず、モーメンタリ動作形に統一出来るからである。
【0092】
6個のランプは運転状況を表示すランプである、即ち、自動運転又は手動運転の何れの運転方式を選定しているか、と、何れの優先運転を選定しているか、とを表示する。気密試験スイッチの上部に配設された合格/不合格ランプは、気密試験実施中、両ランプが同時に点滅する。試験完了時、何れかのランプが点灯して試験結果を表示する。
【0093】
予め両方の捻回スイッチで夫々を選択し、ランプの点灯で夫々の選定状態を確認後、気密試験の起動(スタート)スイッチを押すと、図3に示す手順に従って、気密試験運転が起動し、試験終了後、ポンプが自動起動する。しかし、何らかの意志が働いて、気密試験をスキップ(跳び越す)して、直ちに自動運転を起動したい場合は、捻回スイッチ<Step:C>で自動運転を選択後、自動運転起動スイッチ42を押すと、気密試験に関係なく、自動運転が起動する。同様に、手動選択で濾紙消費量優先運転を直接手動選択する場合は、<Step:D>を選択後、イッチ43を押す。更に、同様に放射線検出感度優先運転を直接手動選択する場合は、スイッチ44を押すことになる。尚、停止スイッチ41を押すと放射性ダストモニタは、直ちにその場で全ての運転を停止する。
【図面の簡単な説明】
【0094】
【図1】本発明の一実施例に係る放射性ダストモニタの構成図である。
【図2】容積移送式真空ポンプ性能曲線を下敷きにした使用状況説明図である。
【図3】総合運転手順である。
【図4】総合運転の内、気密試験手順図である。
【図5】総合運転の内、自動運転手順図である。
【図6】総合運転の内、手動運転手順図である。
【図7】放射性ダストモニタの制御スイッチの配置図である。
【図8】従来の放射性ダストモニタの構成図である。
【符号の説明】
【0095】
1 吸引ポンプ
3 塵埃捕集濾紙
5 放射線検出器
8 開閉扉付気密コンテナ
11 負圧検出器
14 流量検出器
16 インバータユニット
17 吸引ポンプ駆動モータ
33 放射性ダストモニタ
31 開閉自在弁
32 開閉自在弁
【特許請求の範囲】
【請求項1】
放射線防護を目的として、放射線利用施設の作業環境等にあって、ポンプを用いて空気を吸引するとともに、その空気吸入経路の所定箇所に塵埃捕集濾紙を設けて前記空気中に浮遊する放射性粒子状物質(放射性ダスト:本願中では「塵埃」と省略)を採取し、GM管、シンチレーション検出器などによりα、β、γ線いずれかを検出して、その指示値が放射線管理上設定された放射能レベル以上であったとき警報を発する放射性ダストモニタにおいて、
空気吸入経路途中に配設した負圧検出器と、
同経路に配設した流量検出器と、
同経路に配設した塵埃捕集濾紙と、
同経路に配設した放射線検出器と、
同経路の最下流に配設した容積移送式の吸引ポンプと、
前記吸引ポンプ駆動する為の三相誘導又は同期モータと、
前記モータの回転速度を制御するインバータユニットと、
濾紙交換用開閉扉付気密コンテナと、
前記放射線検出器の検出した放射能レベルに応じて濾紙消費量優先運転又は放射能検出感度優先運転の何れか一方の運転方式を自動選択する手段と、
前記放射線検出器の検出した放射能レベルに関係なく濾紙消費量優先運転又は放射能検出感度優先運転の何れか一方の運転方式を手動選択する(Step:D)手段と、
予め前記二つの手段の何れか一方の手段を手動選択する(Step:C)手段と、
前記濾紙消費量優先運転において、前記塵埃捕集濾紙が完全な目詰まり状態に達する前の前記空気中に含まれる塵埃の捕集が十分に可能な目詰まり状態を表す指標となる濾紙交換負圧閾値が設定され、前記負圧検出器の負圧が前記閾値を超える毎に一定長さの濾紙を間欠的に繰出させる間欠送り法又は(若しくは)負圧が前記閾値を超える時間に応じて濾紙の繰出し速度を制御する連続送り法との何れか一方による濾紙送り制御方式と、
前記放射能検出感度優先運転において、前記塵埃捕集濾紙が完全な目詰まり状態に達する前の前記空気中に含まれる塵埃の捕集が十分に可能な目詰まり状態を表す指標となる濾紙交換時間が設定され、濾紙が交換された後の濾紙の通算使用時間が前記設定時間を超えた時、前記一定長さの濾紙を間欠的に繰出させる間欠送り法又は(若しくは)単純に濾紙を一定速度で繰出す連続送り法との何れか一方による濾紙送り制御方式と、
前記濾紙消費量優先運転において、前記流量検出器の流量値をフィードバックし、モータ回転速度法により、吸引流量を定値自動制御する手段と、
前記放射能検出感度優先運転において、前記流量検出器の流量値をフィードバックし、モータ回転速度法により、吸引流量を定値自動制御する手段と、
を有する放射性ダストモニタ。
【請求項2】
前記濾紙消費量優先運転において前記吸引ポンプの継続運転が困難となる状態を表す指標となるポンプ停止用設定値が、前記負圧値と流量値との2重に設定され、少なくとも一方の物理量が前記設定値を超えた時、ポンプ停止信号を出力する信号手段と、
前記検出感度優先運転において前記吸引ポンプの継続運転が困難となる状態を表す指標となるポンプ停止用設定値が、前記負圧値と流量値との2重に設定され、少なくとも一方の物理量が前記設定値を超えた時、ポンプ停止信号を出力する信号手段と、
を有する前記(請求項1)の放射性ダストモニタ。
【請求項3】
空気吸入経路の入口直近に配設した開閉自在弁と、
同経路の前記ポンプ入口直近に配設した開閉自在弁と、
を有する(請求項1)の放射性ダストモニタ。
【請求項4】
空気吸入経路の入口直近に配設した遠隔操作開閉自在弁と、
同経路の前記ポンプ入口直近に配設した遠隔操作開閉自在弁と、
前記2個の遠隔操作開閉自在弁と吸引ポンプとをシーケンス制御して、気密系を気密試験する手段を有する(請求項1)の放射性ダストモニタ。
【請求項5】
自動/手動-運転選択スイッチ(Step:C)の直近近傍に自動運転表示ランプと手動運転表示ランプを配設したことと、運転方式手動選択スイッチ(Step:D)の直近近傍に濾紙消費量優先運転ランプと放射線感度優先運転ランプを配設したこととを特徴とする(請求項1)の放射性ダストモニタ。
【請求項1】
放射線防護を目的として、放射線利用施設の作業環境等にあって、ポンプを用いて空気を吸引するとともに、その空気吸入経路の所定箇所に塵埃捕集濾紙を設けて前記空気中に浮遊する放射性粒子状物質(放射性ダスト:本願中では「塵埃」と省略)を採取し、GM管、シンチレーション検出器などによりα、β、γ線いずれかを検出して、その指示値が放射線管理上設定された放射能レベル以上であったとき警報を発する放射性ダストモニタにおいて、
空気吸入経路途中に配設した負圧検出器と、
同経路に配設した流量検出器と、
同経路に配設した塵埃捕集濾紙と、
同経路に配設した放射線検出器と、
同経路の最下流に配設した容積移送式の吸引ポンプと、
前記吸引ポンプ駆動する為の三相誘導又は同期モータと、
前記モータの回転速度を制御するインバータユニットと、
濾紙交換用開閉扉付気密コンテナと、
前記放射線検出器の検出した放射能レベルに応じて濾紙消費量優先運転又は放射能検出感度優先運転の何れか一方の運転方式を自動選択する手段と、
前記放射線検出器の検出した放射能レベルに関係なく濾紙消費量優先運転又は放射能検出感度優先運転の何れか一方の運転方式を手動選択する(Step:D)手段と、
予め前記二つの手段の何れか一方の手段を手動選択する(Step:C)手段と、
前記濾紙消費量優先運転において、前記塵埃捕集濾紙が完全な目詰まり状態に達する前の前記空気中に含まれる塵埃の捕集が十分に可能な目詰まり状態を表す指標となる濾紙交換負圧閾値が設定され、前記負圧検出器の負圧が前記閾値を超える毎に一定長さの濾紙を間欠的に繰出させる間欠送り法又は(若しくは)負圧が前記閾値を超える時間に応じて濾紙の繰出し速度を制御する連続送り法との何れか一方による濾紙送り制御方式と、
前記放射能検出感度優先運転において、前記塵埃捕集濾紙が完全な目詰まり状態に達する前の前記空気中に含まれる塵埃の捕集が十分に可能な目詰まり状態を表す指標となる濾紙交換時間が設定され、濾紙が交換された後の濾紙の通算使用時間が前記設定時間を超えた時、前記一定長さの濾紙を間欠的に繰出させる間欠送り法又は(若しくは)単純に濾紙を一定速度で繰出す連続送り法との何れか一方による濾紙送り制御方式と、
前記濾紙消費量優先運転において、前記流量検出器の流量値をフィードバックし、モータ回転速度法により、吸引流量を定値自動制御する手段と、
前記放射能検出感度優先運転において、前記流量検出器の流量値をフィードバックし、モータ回転速度法により、吸引流量を定値自動制御する手段と、
を有する放射性ダストモニタ。
【請求項2】
前記濾紙消費量優先運転において前記吸引ポンプの継続運転が困難となる状態を表す指標となるポンプ停止用設定値が、前記負圧値と流量値との2重に設定され、少なくとも一方の物理量が前記設定値を超えた時、ポンプ停止信号を出力する信号手段と、
前記検出感度優先運転において前記吸引ポンプの継続運転が困難となる状態を表す指標となるポンプ停止用設定値が、前記負圧値と流量値との2重に設定され、少なくとも一方の物理量が前記設定値を超えた時、ポンプ停止信号を出力する信号手段と、
を有する前記(請求項1)の放射性ダストモニタ。
【請求項3】
空気吸入経路の入口直近に配設した開閉自在弁と、
同経路の前記ポンプ入口直近に配設した開閉自在弁と、
を有する(請求項1)の放射性ダストモニタ。
【請求項4】
空気吸入経路の入口直近に配設した遠隔操作開閉自在弁と、
同経路の前記ポンプ入口直近に配設した遠隔操作開閉自在弁と、
前記2個の遠隔操作開閉自在弁と吸引ポンプとをシーケンス制御して、気密系を気密試験する手段を有する(請求項1)の放射性ダストモニタ。
【請求項5】
自動/手動-運転選択スイッチ(Step:C)の直近近傍に自動運転表示ランプと手動運転表示ランプを配設したことと、運転方式手動選択スイッチ(Step:D)の直近近傍に濾紙消費量優先運転ランプと放射線感度優先運転ランプを配設したこととを特徴とする(請求項1)の放射性ダストモニタ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−292528(P2007−292528A)
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願番号】特願2006−118699(P2006−118699)
【出願日】平成18年4月24日(2006.4.24)
【出願人】(306013717)大日機械工業株式会社 (2)
【Fターム(参考)】
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願日】平成18年4月24日(2006.4.24)
【出願人】(306013717)大日機械工業株式会社 (2)
【Fターム(参考)】
[ Back to top ]