
放射線治療のための局所的調整デバイス
処置中患者の解剖学的部分を位置決めするクレードルは、複数の膨張可能流体チャンバと、各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取るべく構成された圧力レギュレータとを含む。処置中患者の解剖学的部分を位置決めするシステムは、上記クレードルと、各流体チャンバの圧力を制御するべく構成された制御ユニットとを含む。処置中患者の解剖学的部分を位置決めする方法は、当該解剖学的部分を上記クレードルに配置するステップと、当該解剖学的部分を所望位置に維持するべく各流体チャンバの圧力を調整するステップとを含む。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は放射線治療のための局所的調整デバイスに関する。頭頸部放射線治療のための現行手順は、患者の頭部を位置決めするクレードルのモールディングを必要とする。患者は、当該形成されたクレードルに対して頭部を所定位置にクランプするマスクを装着する。特定の患者それぞれに対する専用の鋳型を形成するにはコストがかかり、著しい量の時間が必要となる。さらに、処置の最中に、当該鋳型の再鋳造を必要とする患者の解剖学的構造の変化が生じ得る。
【先行技術文献】
【特許文献】
【0002】
【特許文献1】米国特許第4,034,748号明細書
【特許文献2】米国特許第4,543,947号明細書
【特許文献3】米国特許出願公開第2002/0103520(A1)号明細書
【特許文献4】国際公開第1993/21867(A1)号パンフレット
【特許文献5】国際公開第1998/41126(A1)号パンフレット
【特許文献6】国際公開第1998/17177(A1)号パンフレット
【特許文献7】米国特許第6,842,502号明細書
【特許文献8】米国特許第7,760,849号明細書
【発明の概要】
【0003】
本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めする手段を与える。
【0004】
一実施例において、本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めするクレードルを与える。本クレードルは、複数の膨張可能流体チャンバと圧力レギュレータとを含む。各流体チャンバは、当該解剖学的部分の複数表面の一つに対して力を加えるべく構成される。圧力レギュレータは、各流体チャンバの圧力を、他のすべての流体チャンバから独立して調整するべく構成される。当該調整は、各流体チャンバへ流体を供給するか又は各流体チャンバから流体を抜き取ることによって行われる。
【0005】
他実施例において、本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めするシステムを与える。本システムはクレードルと制御ユニットとを含む。本クレードルは、複数の膨張可能流体チャンバと圧力レギュレータとを含む。各流体チャンバは、当該解剖学的部分の複数表面の一つに対して力を加えるべく構成される。当該複数の流体チャンバの少なくとも2つが当該解剖学的部分に対して実質的に反対の力を加える。これにより、当該解剖学的部分は本クレードルに固定される。圧力レギュレータは、各流体チャンバの圧力を、他のすべての流体チャンバから独立して調整するべく構成される。当該調整は、各流体チャンバへ流体を供給するか又は各流体チャンバから流体を抜き取ることによって行われる。本制御ユニットは、圧力レギュレータに対して各流体チャンバの圧力を調整するよう指令を与え、当該解剖学的部分を所望位置に維持するべく構成される。
【0006】
さらなる実施例において、本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めする方法を与える。本方法は、当該解剖学的部分をクレードルに配置するステップであって、当該クレードルは複数の膨張可能流体チャンバを有し、各流体チャンバは当該解剖学的部分の複数表面の一つに対して力を加えるべく構成され、当該流体チャンバの少なくとも2つが当該解剖学的部分に対して実質的に反対の力を加え、当該解剖学的部分が固定されたクレードルとなるステップと、各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることにより各流体チャンバの圧力を調整するステップであって、当該解剖学的部分が所望位置に維持されるステップとを含む。
【図面の簡単な説明】
【0007】
添付図面において、本要素は必ずしも縮尺どおりに描かれておらず、むしろ本発明の原理を説明する上で強調されている。さらに、図面全体にわたり、同様の参照番号は対応する部品を示す。
【0008】
【図1】放射線治療システムの一実施例を概略的に示す。本放射線治療システムは、本発明に係る、累積処置線量の自動構成、推定、及び評価のための線量追跡・フィードバックプロセス及び可能なワークフロー、並びに、適応計画最適化のための患者の解剖学的構造及び線量フィードバックを用いる。
【図2a】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図2b】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図2c】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図2d】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図2e】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図3】本発明に係る、処置中に患者の頭部を位置決めするクレードルの斜視図である。
【図4】本発明に係る、処置中に患者の頭部を位置決めするシステムの平面図である。
【図5】図4のシステムの側面図である。
【図6】本発明に係る、処置中に患者の頭部を位置決めするクレードルの他実施例の斜視図である。
【発明を実施するための形態】
【0009】
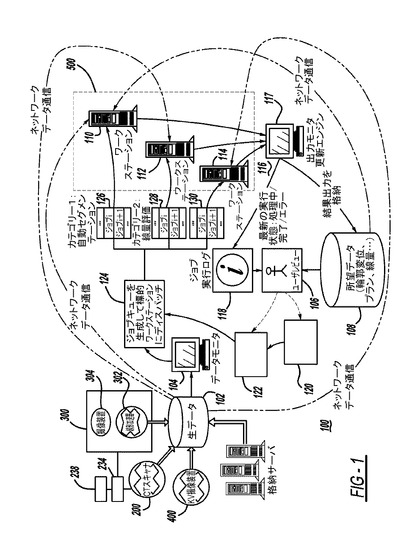
ここで図1を参照すると、コーンビームコンピュータ断層撮影(CBCT)画像誘導適応放射線治療(IGART)システム100のような体積画像誘導適応放射線治療システム、及び一日累積処置線量の自動構成・評価のための対応ワークフローの概略図が示される。図1に示すように、CBCT・IGARTシステム100は、以下のいくつかの主要システムを含む。(1)X線コーンビームコンピュータ断層撮影システム200のような3次元体積撮像システム、(2)線形加速器302のような放射線治療線源及び撮像装置304を含むメガボルト(MeV)システム300、(3)キロボルト(kV)ポータル撮像装置プロセッサ/ソフトウェアシステム400、及び(4)処置線量追跡・フィードバックシステム500である。これらはそれぞれ以下に説明する。
【0010】
コーンビームコンピュータ断層撮影システム200の機械的動作は、従来のコンピュータ断層撮影システムのそれと同様であるが、全体積画像を、線源及び検出器の2回未満の回転(好ましくは1回の回転)を介して取得できる点が異なる。これは、従来のコンピュータ断層撮影で使用された1次元(1D)検出器とは対照的に、2次元(2D)検出器の使用により可能となる。
【0011】
周知のコーンビームコンピュータ断層撮影撮像システムの一例は、特許文献7に記載されており、その全内容は本明細書に参照として組み入れられる。特許文献7は、キロボルトX線管と、アモルファスシリコン検出器のアレイを有するフラットパネル撮像装置とを含むコーンビームコンピュータ断層撮影撮像システムの一例を記載する。患者が処置テーブル上に横たわると、X線管及びフラットパネル撮像装置が、複数画像を取得するべく患者のまわりを調和して回転する。
【0012】
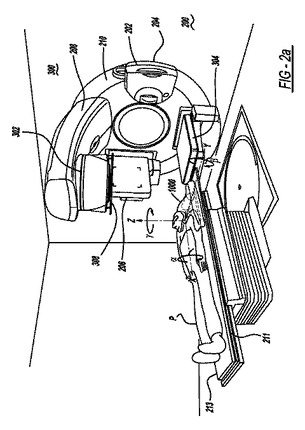
体積撮像システムが図2aに示される。具体的には、図2aは、英国Elekta of CrawleyによりSynergy(登録商標)の商品名で販売されている壁取り付けコーンビームコンピュータ断層撮影システム200及びMeVポータル撮像システム300の一実施例を示す。当該システム200及び300は、特許文献8に記載されており、その全内容は本明細書に参照として組み入れられる。
【0013】
コーンビームコンピュータ断層撮影システム200は、X線管202のようなX線源と、回転コリメータ204と、ガントリー208に取り付けられたフラットパネル撮像装置/検出器206とを含む。図2aに示すように、CBCTシステム200は、医療線形加速器302のガントリー208の、平坦で丸い回転可能なドラム210の表面に取り付けることができる。ここで、X線管202により生成されるX線ビームは、放射線治療線源302により生成される処置ビームとほぼ直交する。
【0014】
なお、検出器206は、それぞれがアモルファスシリコン(a−Si:H)及び薄膜トランジスタからなる複数の半導体センサの2次元アレイからなり得る。各センサからのアナログ信号が統合されてデジタル化される。デジタル値がデータ格納サーバ102に転送される。
【0015】
コリメータ204からの扇状ビームが患者Pの幅を横切り上述の態様で検出器206全体に衝突した後、コンピュータ234(図1に示す)はドラム210に指令を与え、ドラム210を回転させてX線源202、コリメータ204、及び検出器206を患者Pまわりに他の位置まで回転させる。上述のスキャニングプロセスが繰り返されて他の2次元投影が生成される。X線源202、コリメータ204、及び検出器206の上記回転は、コーンビームコンピュータ断層撮影画像を形成するべく十分な数の2次元画像が取得されるまで続けられる。この目的のためには、2回転未満の回転が必要となる(360°未満の回転から形成される複数の画像も同様に形成される)。各位置からの2次元投影がコンピュータ234で結合されて、上述のコーンビームコンピュータ断層撮影システムのものと同様に、ディスプレイ238に表示される3次元画像が生成される。
【0016】
図2aに示すように、MeV撮像システム300は、回転ドラム210に別個に取り付けられる別個の放射線治療線源302と検出器/撮像装置304とを含む。線源302は、X線管202よりも高い出力レベルで動作する。これにより、可動テーブル211(コンピュータ234を介してx、y、及びz方向に可動)上に横たわる患者の標的体積の処置が可能となる。線源302は、X線、又は光子、陽子、若しくは電子のような粒子のビームを生成する。これらは、約4MeVから約25MeVの範囲のエネルギーを有する。本明細書では、線源302からのビームは、いずれのタイプであっても放射線と称する。
【0017】
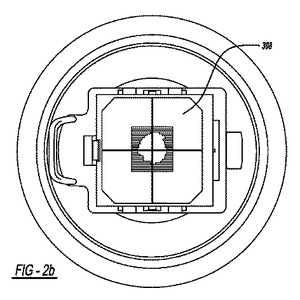
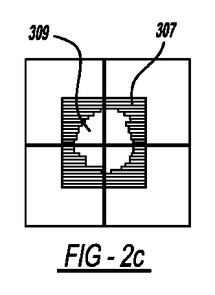
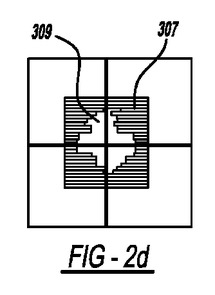
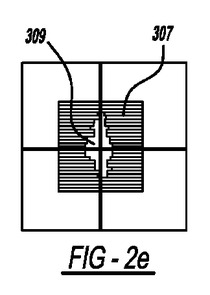
上述のように、線源302からの放射線は、患者の、腫瘍のような特定の興味領域を処置するべく使用される。当該興味領域に到達する前に放射線ビームは、マルチリーフ307(図2b−e)を調整することにより、一つのマルチリーフコリメータ308を介する特定の断面領域309を有する形状にされる。断面領域309は、ビームが被処置興味領域と相互作用するが患者の健康な領域とは相互作用しないように選択される。興味領域を貫通する放射線が、周知の態様で撮像装置304を介して画像化され得る。
【0018】
図1に示すように、処置線量追跡・フィードバックシステム500は、ワークステーション又はデータサーバ110を含む。ワークステーション又はデータサーバ110は、コーンビームコンピュータ断層撮影システム200により生成された、サーバ102から受け取られた患者の3次元体積画像について、セグメンテーション/レジストレーションプロセスを行う専用のプロセッサを含む。ワークステーション110は、各体積画像内にある各体積画像データの識別及びレジストレーションを行うことができる。当該識別及びレジストレーションにより、一の治療セッションと他の治療セッションとの間で同じ体積画像データの位置を追跡することができる。
【0019】
治療線量追跡・フィードバックシステム500はさらに、(1)ワークステーション110により行われるセグメンテーション/レジストレーションプロセスに基づいて、及び(2)参照プランに応じて被測定患者に衝突する、線源302から放出されてサーバ102に格納される放射線ビームのパラメータ、例えば角度位置、ビームエネルギー、及び当該ビームの断面形状に基づいて、処置線量構成プロセスを行う専用のプロセッサを含むワークステーション又はデータサーバ112を含む。当該パラメータは、ガントリー208の角度位置、コリメータ308の角度配向、マルチリーフコリメータ308のリーフの位置、テーブル211の位置、及び放射線ビームのエネルギーの形態であり得る。画像小体積の位置及び形状のデータがひとたびわかると、全く同じ小体積により受け取られた処置線量を、患者に衝突する線源302から放出された放射線ビームの上記パラメータに基づいて決定/構成することができる。当該決定は、システム200により生成された各体積画像についての各画像小体積データに対してなされる。
【0020】
処置線量追跡・フィードバックシステム500はさらに、(1)放射線治療処置を、オフライン及びオンライン情報に基づいて実時間の態様の特定の日のために調整すること、又は(2)放射線治療処置プランを、オフライン情報に基づいて非実時間の態様で調整すること、のいずれかが可能な適応プラニングプロセスを行う専用のプロセッサを含むワークステーション又はデータサーバ114を含む。当該調整は、ワークステーション112により計算された線量が処置プランにより好ましい線量とどれくらい異なるのかに基づいている。なお、用語「実時間」とは、放射線治療線源がアクティブにされて患者の処置をしている時間を称する。用語「オンライン」とは患者が処置テーブル上にいるときを称し、「オフライン」とは患者が処置テーブルから離れているときを称する。
【0021】
まとめると、処置線量追跡・フィードバックシステム500は、治療セッション中の実時間態様で測定される体積画像情報及び治療ビームパラメータに基づいて、実時間の処置線量構成及び4D適応プラニングを行うことができる。システム500はまた、非実時間態様で適応プラニングをすることもできる。なお、一代替実施例では、ワークステーション110、112、及び114は、ワークステーション110、112、及び114に関連付けられたプロセスが一以上のプロセッサにより行われる一つのワークステーションに結合することができる。なお、ワークステーション112により決定された実時間処置線量構成、及びワークステーション114により決定された適応プラニングは、品質保証(QA)評価ステーション116のモニタ117上に表示することができる。モニタ117に表示された情報に基づいて、医療従事者は必要に応じ、計算された4D適応プランを許容可能なパラメータ内に収まるように変更することができる。すなわち、QA評価ステーション116は、治療セッションに対して生じる将来の実時間変更の信頼を確実にする方法として機能する。このシナリオでは、QA評価ステーション116及び処置線量追跡・フィードバックシステム500は集合的に、4Dプラニング・制御システムとみなすことができる。
【0022】
念頭にあるオンボード・コーンビームコンピュータ断層撮影システム200、メガボルト撮像・放射線治療システム300、QA評価ステーション116、及び処置線量追跡・フィードバックシステム500の上記説明により、図1のCBCT・IGARTシステム100を理解することができる。特に、上述のオンライン体積撮像情報及び実時間治療ビームパラメータは、システム200、300、及び400からキャプチャされてデータ格納サーバ108に格納される。体積撮像情報及び治療ビームパラメータはその後、データモニタジョブコントローラ104に送られる。データモニタジョブコントローラ104は、予め計画された処置スケジュール及びプロトコルに基づいてワークステーション110、112、及び114のそれぞれにタスクを自動的に割り当てて当該タスクの達成を制御する。当該タスクは、臨床的な優先度に基づいて、ワークステーション110、112、及び114のそれぞれにディスパッチされる時間ジョブキュー124に格納される。当該臨床的な優先度は、医師評価/決定実行ステーション106の処置レビュー及び評価に基づいて、臨床ユーザ要求122から再び割り当てることができる。追加的に、ステーション106はまた、処置/プラン修正決定に対する指令を与えることができる。修正サーバ120は、ステーション106から指令を受け取り、システム300に関する進行中の処置プラン、ビーム、又は患者位置を、適応プラニングワークステーション114からもたらされた最適適応プランに基づいて修正する。
【0023】
図1に示すように、サーバ102からの生データもワークステーション110に送られる。ワークステーション110は、コーンビームコンピュータ断層撮影システム200により生成される患者の3次元体積画像について自動セグメンテーション/レジストレーションプロセスを行うべく特化されている。サーバ102からの生データもワークステーション112及びワークステーション114に送られる。ワークステーション112は、生データから一日累積処置線量の構成/評価を行う。ワークステーション114は、生データから適応プラニングを行う。3つのワークステーション110、112、及び114はそれぞれ、それらのジョブキュー126、128、及び130の順序で、それらのタスクを自動的に行う。
【0024】
図1に示すように、ワークステーション110、112、及び114からもたらされたセグメンテーション/レジストレーション、処置線量構成、及び適応プラニングの情報はQA評価ステーション116に送られる。QA評価ステーション116は臨床ユーザと相互作用を行い、必要に応じて上記ワークステーション110、112、及び114からの結果を検証及び修正する。QA評価ステーション116からの出力はその後、派生データサーバ108に格納される。
【0025】
QAステーション116は、ジョブ実行ログサーバ118に最新の実行状態を与える。ジョブ実行ログサーバ118は、情報処理が現在行われているか否か、処理が完了したか否か、又はエラーが発生したか否かの情報を与える。ワークステーション112及び114それぞれにより処置線量構成又は適応プラニング修正のタスクが完了するときはいつでも、評価ステーション116は、現行処置状態と、以前の処置からの患者及び処置のデータに基づいて推定された完了処置線量・結果パラメータとの双方を含む処置評価情報を与える。QA評価ステーション116におけるユーザはその後、新たな情報の要求又は臨床処置スケジュールの修正のいずれかを目的として、高優先度ジョブ要求サーバ122に指令又は新たな臨床スケジュールを与えることができる。追加的に、ユーザはサーバ120を介して、新たな適応プランを実行する決定をすることも又は処置/患者位置の修正を行うこともできる。
【0026】
CBCT・IGARTシステム100は、とりわけkVポータル撮像プロセッサ/ソフトウェアを介したkVポータル撮像プロセス、及び画像誘導放射線治療プロセスを含むいくつかのプロセスを行う。システム100のさらなる詳細は、2009年9月9日出願の米国特許出願第12/556,270号明細書に見出すことができる。その全内容は本明細書に参照として組み入れられる。
【0027】
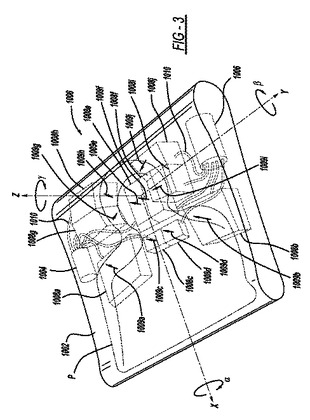
上述のCBCT・IGARTシステム100を使用して患者の解剖学的部分の撮像及び処置を行う場合、当該解剖学的部分を適切な位置に固定することが重要である。ここで図3を参照すると、本発明の一実施例が、放射線治療の処置中に患者Pの解剖学的部分の位置決めをするクレードル1000を与える。クレードル1000は、複数の膨張可能流体チャンバ1008と、一以上の圧力レギュレータ1004及び1006とを含む。図3に示す一実施例においてクレードル1000はさらにカバー1002を含む。カバー1002は、流体チャンバ1008aからjと、一以上の圧力レギュレータ1004及び1006とを収容する。
【0028】
複数の流体チャンバ1008のそれぞれは、解剖学的部分の複数表面の一つに対して力を加えるべく膨張するように構成される。これにより、解剖学的部分は処置のための固定位置に維持される。好ましくは、各流体チャンバ1008は、解剖学的部分の限定された領域に対して力を加える。流体チャンバ1008が解剖学的部分の表面に対して加える力は力ベクトル1009によって示す。好ましくは、流体チャンバ1008は、少なくとも2つの力ベクトル1009が互いに実質的に対向するように配列される。これにより、解剖学的部分はクレードル1000に固定される。
【0029】
クレードル1000の様々な要素すなわち流体チャンバ1008及びカバー1002(該当する場合)は典型的に、X線又は粒子放射線を減衰させない材料から作られる。流体チャンバ1008は、流体が供給されると膨張し流体が抜き取られると収縮することができる任意の適切な可撓性、弾性、及び流体密封性の材料又は膜から構成される。流体チャンバ1008は、流体が供給及び抜き取りされるとすべての方向に膨張及び収縮するべく構成される。または、流体チャンバ1008は、流体が供給又は抜き取りされると主に一軸(図示せず)方向に膨張又は収縮することができるアコーディオン状構成を有する。好ましくは、各流体チャンバ1008は一軸方向に膨張及び収縮する。さらに好ましくは、各流体チャンバ1008は、各力ベクトル1009に平行な一軸方向に膨張する。
【0030】
圧力レギュレータ1004及び1006は、各流体チャンバ1008の圧力を、他のすべての流体チャンバ1008から独立して調整するべく構成される。これは、各流体チャンバに流体を供給し又は各流体チャンバから流体を抜き取ることによる。圧力レギュレータ1004及び1006はそれぞれ、流体チャンバ1008に流体を供給するポンプ(図示せず)、及び流体チャンバ1008から流体を抜き取るベント(図示せず)を含む。しかしながら、当業者に周知の他の適切な圧力レギュレータも、本発明の範囲又は要旨を逸脱することなく使用することができる。圧力レギュレータ1004及び1006は、管セクション1010により流体チャンバ1008に接続される。しかしながら、他の適切な取り付け配列及び手段を使用してもよい。最後に、図3に示す実施例は2つの圧力レギュレータ1004及び1006を含むが、他の適切な任意数の圧力レギュレータを使用してもよい。例えば、一つの圧力レギュレータを使用してもよい。代替的に、各流体チャンバ1008に対して別個の圧力レギュレータを使用してもよい。
【0031】
圧力レギュレータ1004及び1006は、各流体チャンバ1008を他のすべての流体チャンバ1008から独立して調整するべく構成されるので、クレードル1000によりオペレータは、患者Pの解剖学的部分の位置を全6自由度までにおいて調整することができる。具体的には、各流体チャンバ1008に所定量の流体を供給することによって、又は各流体チャンバ1008から所定量の流体を抜き取ることによって、解剖学的部分を、縦軸x、横軸y、又は垂直軸zの方向に並進させることができる。さらに、解剖学的部分を、縦軸x(矢印αで示す)まわりに、横軸y(矢印βで示す)まわりに、又は垂直軸z(矢印γで示す)まわりに回転することができる。
【0032】
当業者には理解できることだが、クレードル1000は、本発明の範囲又は要旨を逸脱することなく流体チャンバ1008の適切な配列を選択することによって、患者の任意の適切な解剖学的部分を位置決めするべく構成される。例えば、クレードル1000は、患者の頭部、腕、手、骨盤、脚、又は足を位置決めするべく構成される。図3に示す実施例において、クレードルは患者の頭部を位置決めするべく構成される。さらに、クレードル1000は、患者が立位、座位、腹臥位、又は背臥位にあるときに患者の解剖学的部分を位置決めするべく構成される。図3に示す実施例において、クレードル1000は、患者が処置中にカウチ上で背臥位にあるときに患者の頭部を位置決めするべく構成される。
【0033】
図3に示す実施例において、クレードル1000は、10の流体チャンバ1008aからjを含む。具体的には、クレードル1000の当該実施例は、患者の頸部の後ろに対して第1力を加えるべく構成された2つの第1流体チャンバ1008c及び1008dと、患者の頭部の後に対して第2力を加えるべく構成された2つの第2流体チャンバ1008e及び1008fと、患者の頭部の左側に対して第3力を加えるべく構成された2つの第3流体チャンバ1008i及び1008jと、患者の頭部の右側に対して第4力を加えるべく構成された2つの第4流体チャンバ1008g及び1008hと、患者の肩の後ろに対して第5力を加えるべく構成された2つの第5流体チャンバ1008a及び1008bとを含む。
【0034】
第1流体チャンバ1008c及び1008dは、流体が第1流体チャンバ1008c及び1008dに供給されると患者の頸部の後ろに対し増大した第1力を加えるべく構成され、並びに流体が第1流体チャンバ1008c及び1008dから抜き取られると患者の頸部の後ろに対し減少した第1力を加えるべく構成される。第1流体チャンバ1008c及び1008dは、右頸部流体チャンバ1008c及び左頸部流体チャンバ1008dを含む。右頸部流体チャンバ1008cは、流体が右頸部流体チャンバ1008cに供給されると患者の頸部の右後側に対し、力ベクトル1009cで示すように増大した力を加えるべく構成され、及び流体が右頸部流体チャンバ1008cから抜き取られると患者の頸部の右後側に対し、減少した力を加えるべく構成される。左頸部流体チャンバ1008dは、流体が左頸部流体チャンバ1008dに供給されると患者の頸部の左後側に対し、力ベクトル1009dで示すように増大した力を加えるべく構成され、及び流体が左頸部流体チャンバ1008dから抜き取られると患者の頸部の左後側に対し減少した力を加えるべく構成される。
【0035】
第2流体チャンバ1008e及び1008fは、流体が第2流体チャンバ1008e及び1008fに供給されると患者の頭部の後ろに対し増大した第2力を加えるべく構成され、並びに流体が第2流体チャンバ1008e及び1008fから抜き取られると患者の頭部の後ろに対し減少した第2力を加えるべく構成される。第2流体チャンバ1008e及び1008fは、右頭部流体チャンバ1008e及び左頭部流体チャンバ1008fを含む。右頭部流体チャンバ1008eは、流体が右頭部流体チャンバ1008eに供給されると患者の頭部の右後側に対し、力ベクトル1009eに示すように増大した力を加えるべく構成され、及び流体が右頭部流体チャンバ1008eから抜き取られると患者の頭部の右後側に対し減少した力を加えるべく構成される。左頭部流体チャンバ1008fは、流体が左頭部流体チャンバ1008fに供給されると、患者の頭部の左後側に対し、力ベクトル1009fに示すように増大した力を加えるべく構成され、及び流体が左頭部流体チャンバ1008fから抜き取られると患者の頭部の左後側に対し減少した力を加えるべく構成される。
【0036】
第3流体チャンバ1008i及び1008jは、流体が第3流体チャンバ1008i及び1008jに供給されると患者の頭部の左側に対し増大した第3力を加えるべく構成され、並びに流体が第3流体チャンバ1008i及び1008jから抜き取られると患者の頭部の左側に対し減少した第3力を加えるべく構成される。第3流体チャンバ1008i及び1008jは、左こめかみ流体チャンバ1008i及び左上頭部流体チャンバ1008jを含む。左こめかみ流体チャンバ1008iは、流体が左こめかみ流体チャンバ1008iに供給されると、患者の頭部の左こめかみに対し、力ベクトル1009iに示すように増大した力を加えるべく構成され、及び流体が左こめかみ流体チャンバ1008iから抜き取られると患者の頭部の左こめかみに対し減少した力を加えるべく構成される。左上頭部流体チャンバ1008jは、流体が左上頭部流体チャンバ1008jに供給されると、力ベクトル1009jに示すように患者の左こめかみ上方にある患者の頭部の左側に対し増大した力を加えるべく構成され、及び流体が左上頭部流体チャンバ1008jから抜き取られると患者の左こめかみ上方にある患者の頭部の左側に対し減少した力を加える。
【0037】
第4流体チャンバ1008g及び1008hは、流体が第4流体チャンバ1008g及び1008hに供給されると患者の頭部の右側に対し増大した第4力を加えるべく構成され、並びに流体が第4流体チャンバ1008g及び1008hから抜き取られると患者の頭部の右側に対し減少した第4力加えるべく構成される。第4流体チャンバ1008g及び1008hは、右こめかみ流体チャンバ1008g及び右上頭部流体チャンバ1008hを含む。右こめかみ流体チャンバ1008gは、流体が右こめかみ流体チャンバ1008gに供給されると、力ベクトル1009gに示すように、患者の頭部の右こめかみに対し増大した力を加えるべく構成され、及び流体が右こめかみ流体チャンバ1008gから抜き取られると患者の頭部の右こめかみに対し減少した力を加えるべく構成される。右上頭部流体チャンバ1008hは、流体が右上頭部流体チャンバ1008hに供給されると、力ベクトル1009hに示すように、患者の右こめかみ上方にある患者の頭部の右側に対し増大した力を加えるべく構成され、及び流体が右上頭部流体チャンバ1008hから抜き取られると患者の右こめかみ上方にある患者の頭部の右側に対し減少した力を加える。
【0038】
第5流体チャンバ1008a及び1008bは、流体が第5流体チャンバに供給されると患者の肩の後ろに対し増大した第5力を加えるべく構成され、及び流体が第5流体チャンバから抜き取られると患者の肩の後ろに対し減少した第5力を加えるべく構成される。第5流体チャンバ1008a及び1008bは、右肩流体チャンバ1008a及び左肩流体チャンバ1008bを含む。右肩流体チャンバ1008aは、流体が右肩流体チャンバ1008aに供給されると、力ベクトル1009aに示すように患者の右肩の後ろに対し増大した力を加えるべく構成され、及び流体が右肩流体チャンバ1008aから抜き取られると患者の右肩の後ろに対し減少した力を加えるべく構成される。左肩流体チャンバ1008bは、流体が左肩流体チャンバ1008bに供給されると、力ベクトル1009bに示すように患者の左肩の後ろに対し増大した力を加えるべく構成され、及び流体が左肩流体チャンバ1008bから抜き取られると患者の左肩の後ろに対し減少した力を加えるべく構成される。
【0039】
図3に示すクレードル1000の実施例は10の流体チャンバ1008aからjを有するが、本発明の範囲又は要旨を逸脱することなくクレードルが流体チャンバ1008の適切な任意の数を有することが当業者に理解される。さらに、流体チャンバ1008は、本発明の範囲又は要旨を逸脱することなく任意の適切な構成に配列してよい。
【0040】
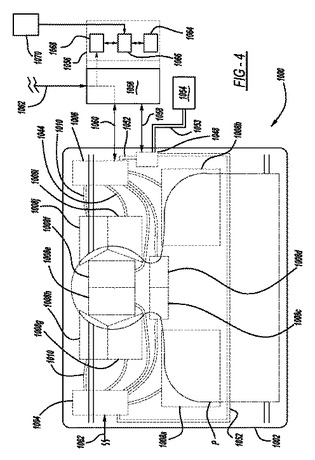
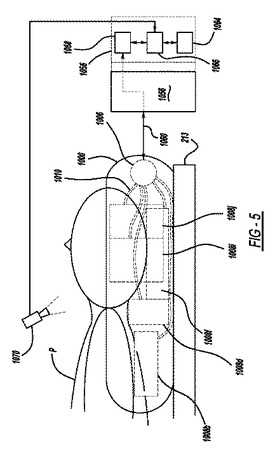
ここで図4及び5を参照すると、本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めするシステムも与える。本システムは、図3を参照して記載されたクレードル1000と、制御ユニット1056とを含む。本制御ユニットは、圧力レギュレータ1004及び1006に対して各流体チャンバ1008の圧力を所望圧力に調整するよう指令を与え、患者の解剖学的部分を所望位置に維持するべく構成される。本システムはさらに、コンジット1053を通してバルブ1048に流体を供給するべく構成された流体源1054を含む。バルブ1048は、コンジット1052により圧力レギュレータ1004及び1006に接続される。
【0041】
本システムは、当該解剖学的部分を任意の所望位置に維持するべく構成される。いくつかの実施例において、所望位置は所定位置である。例えば、第2処置セッションでの所望位置は、第1セッション中の当該解剖学的部分の第1位置と実質的に同様である。本明細書において使用される用語「第1セッション」とは、何回の処置セッションが先行し又は当該処置セッションが後続するかにかかわらず、任意の処置セッションを称し、事前処置プラニングセッションとも称する。本明細書において使用される用語「第2セッション」とは、第1セッションに続く任意の処置セッションを称する。
【0042】
上述の独立したクレードル1000と同様、本発明の範囲又は要旨を逸脱することなく本システムは、クレードル1000の流体チャンバ1008の適切な配置を選択することにより患者の任意の適切な解剖学的部分を位置決めするべく構成される。例えば、本システムは、患者の頭部、腕、手、骨盤、脚、又は脚を位置決めするべく構成される。図4及び5に示す実施例において当該クレードルは、患者が放射線治療の処置中にカウチ上で背臥位にあるときに患者の頭部を位置決めするべく構成される。
【0043】
制御ユニット1056は、当業者に周知の任意の手段により、圧力レギュレータ1004及び1006と、オプションとしてバルブ1048と通信する。例えば、制御ユニット1056は、配線1062、1060、及び1058それぞれにより、圧力レギュレータ1004及び1006と並びにオプションとしてバルブ1048と通信する。代替的に、当該制御ユニットは、無線で圧力レギュレータ1004及び1006と並びにオプションとしてバルブ1048と通信する。
【0044】
いくつかの実施例において、制御ユニット1056は、オペレータからの手動入力を受け取って流体チャンバ1008の一以上の圧力を調整し、並びに当該指令を圧力レギュレータ1004及び1006に中継するべく構成される。「自動システム」と称する他実施例において、制御ユニット1056は、流体チャンバ1008のそれぞれの所望圧力を自動的な態様で決定するべく構成される。自動システムの制御ユニット1056はまた、手動入力を受け取るべく構成することもできる。
【0045】
自動システムにおいて、当該制御ユニットは、メモリ手段1064、マイクロプロセッサ1066、及び信号伝達手段1068を含む。メモリ手段1064は、データ格納に有用な当業者に周知の任意のデバイスである。すなわち、当該メモリ手段は、コンピュータサーバ、コンピュータハードディスク、コンピュータフロッピー(登録商標)ディスク、CD−ROM、フラッシュデバイス、又は任意の適切なデータ格納手段である。マイクロプロセッサ1066は、データ操作に有用な当業者に周知の任意のコンピュータプロセッサである。マイクロプロセッサ1066は、有線又は無線通信を含む当業者に周知の任意の手段によりメモリ手段1064と通信する。信号伝達手段1068は、マイクロプロセッサ1066から圧力コントローラ1004及び1006に並びにオプションとしてバルブ1048に指令を送るのに有用な当業者に周知の任意のデバイスである。上述のように、制御ユニット1056の信号伝達手段1068は、配線1062、1060、及び1058それぞれを介して又は無線通信により、圧力レギュレータ1004及び1006と並びにオプションとしてバルブ1048と通信する。
【0046】
自動システムの第1実施例において、本システムは、流体チャンバそれぞれの圧力を所定圧力に調整することにより当該解剖学的部分を所定位置に位置決めするべく構成される。第1セッションにおいて、各流体チャンバの所定圧力は、患者の解剖学的部分を所定位置に配置するべく使用される必須圧力をコンピュータモデリングすることにより決定される。第2処置セッションにおいて、当該所定圧力は、第1セッション中の当該解剖学的部分の第1位置を参照して決定される。この場合、第2処置セッション中の各流体チャンバの所定圧力は、第1セッション中の各流体チャンバの圧力と実質的に同様である。
【0047】
自動システムの第1実施例において、メモリ手段1064は、各流体チャンバ1008に対する所定膨張データを格納するべく構成される。各流体チャンバ1008の所定膨張データは、当該解剖学的部分の所定位置に対応する各流体チャンバ1008の所定圧力を表す。第2処置セッションにおいて、各流体チャンバ1008の所定圧力は、第1セッション中の各流体チャンバ1008の圧力と実質的に同様である。
【0048】
自動システムの第1実施例において、マイクロプロセッサ1066は、各流体チャンバのための所定膨張データをメモリ手段1064から受け取り、当該流体チャンバのための所定膨張データに基づいて各流体チャンバ1008の所定圧力を決定するべく構成される。
【0049】
自動システムの第1実施例において、信号伝達手段1068は、各流体チャンバ1008の所定圧力に関する指令をマイクロプロセッサ1066から受け取り、膨張信号を圧力レギュレータ1004及び1006に並びにオプションとしてバルブ1048に送るべく構成される。当該膨張信号は、圧力レギュレータ1004及び1006に対して各流体チャンバ1008の圧力を所定圧力に調整するよう指令を与える。
【0050】
図5に最も明確に示される自動システムの第2実施例において、本システムは、実時間患者表面測定等のオンボード撮像を使用して当該解剖学的部分を所定位置に位置決めするべく構成される。本システムは、室内の光学、X線、MRI画像である現行画像により表される当該解剖学的部分の現行位置を、当該解剖学的部分の第1画像により表される当該解剖学的部分の所定位置と対比することにより、当該解剖学的部分を当該所定位置に位置決めする。第1画像は、第1セッション中に取得されている。
【0051】
自動システムの第2実施例において、本システムは撮像デバイス1070を含む。撮像デバイス1070は、患者の解剖学的部分の画像を取得するのに適切な当業者に周知の任意のデバイスである。例えば、撮像デバイス1070は、ビデオカメラ、コンピュータ断層撮影スキャナ、又はMRI撮像装置である。好ましくは、撮像デバイス1070はビデオカメラである。さらに好ましくは、撮像デバイス1070、動画を取得するのに適切なビデオカメラである。撮像デバイス1070は、当該解剖学的部分の現行位置を表す現行画像を取得するべく構成される。好ましくは、当該現行画像は、当該解剖学的部分の現行位置の動画である。
【0052】
自動システムの第2実施例において、メモリ手段1064は、当該解剖学的部分の所定位置を表す第1画像を格納するべく構成される。上述のように第1画像は第1セッション中に取得されているので、第1画像に示される当該解剖学的部分の所定位置は、第1セッション中の当該解剖学的部分の第1位置である。第1画像は、ビデオ撮像又はコンピュータ断層撮影撮像を含むがこれらに限られない当業者に周知の任意の手段により取得されている。好ましくは、第1画像は当該解剖学的部分の静止画像である。
【0053】
自動システムの第2実施例において、マイクロプロセッサ1066は、メモリ手段1064から第1画像を及び撮像デバイス1070から現行画像を受け取るべく構成される。マイクロプロセッサ1066はさらに、当該解剖学的部分の現行位置(当該現行画像により表される)を当該解剖学的部分の所定位置(第1画像により表される)と対比することにより各流体チャンバ1008の有効圧力を決定し、当該解剖学的部分の現行位置を、当該解剖学的部分の現行位置が当該解剖学的部分の所定位置と実質的に同様となるように調整するべく構成される。
【0054】
当該解剖学的部分の現行位置を当該解剖学的部分の所定位置と対比するとき、マイクロプロセッサ1066は当該解剖学的部分の所定の解剖学的標識の現行位置及び所定位置を対比するのが好ましい。本明細書において使用される用語「解剖学的標識」とは、解剖学的部分の特徴であって、例えば、患者の体重増加又は体重減少による変化、患者の水和レベルの変化、又は患者の服装又はヘアスタイルの変化による変化のような当該解剖学的部分の全体形状の予測可能な変化があってもその位置が変化しないものを称する。例えば、当該解剖学的部分が患者の頭部である場合、適切な解剖学的標識は、患者の鼻の先及び患者頭蓋の前頭骨を含む。
【0055】
自動システムの第2実施例において、信号伝達手段1068は、各流体チャンバ1008の有効圧力に関するマイクロプロセッサ1066から指令を受け取るべく構成される。信号伝達手段1068はまた、圧力レギュレータ1004及び1006に並びにオプションとしてバルブ1048に調整信号を送るべく構成される。当該調整信号は、圧力レギュレータ1004及び1006に対して各流体チャンバ1008の圧力を当該有効圧力に調整するよう指令を与える。
【0056】
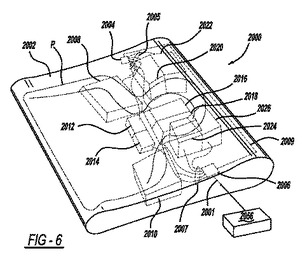
ここで図6を参照すると、本発明の原理を使用する他のクレードル2000が示される。その主な要素としてクレードル2000は、可撓性カバー2002、並びに、それぞれが適切な可撓性の材料又は膜で作られた10の流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026のセットを含む。
【0057】
流体チャンバ2008及び2010は主に患者の肩領域にサポートを与え、流体チャンバ2012及び2014は主に患者の頸部領域にサポートを与え、流体チャンバ2016及び2018は患者の頭部の後ろにサポートを与え、並びに流体チャンバ2020、2022、2024、及び2026は患者の頭部のいずれかの側に側方サポートを与える。
【0058】
カバー2002にはまた、一対のマイクロプロセッサ2004及び2006も取り囲まれる。マイクロプロセッサ2006は電気接続2001により制御ユニット2056に接続され、及び他方のマイクロプロセッサ2004は電気接続2009により制御ユニット2056に接続される。いくつかの実装において、マイクロプロセッサ2004は制御ユニット2056に直接接続される。
【0059】
各流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026は、個別に電気制御される圧力レギュレータ又はポンプとして動作する。したがって、流体チャンバは、一セットの電気接続2005及び一セットの電気接続2007それぞれを介してマイクロプロセッサ2004及び2006と通信する。具体的には、各流体チャンバ2008、2012、2016、2020、及び2022が、電気接続2005のセットの各電気接続を介して個別の信号をマイクロプロセッサ2004から受け取り、各流体チャンバ2010、2014、2018、2024、及び2026が、電気接続2007のセットの各電気接続を介して個別の信号をマイクロプロセッサ2006から受け取る。当該信号は、各空気チャンバに対して所望圧力を達成するように指令を与える。
【0060】
マイクロプロセッサ2004及び2006は、制御ユニット2056から信号を受け取り制御ユニット2056にフィードバックを与える。所定の実装において、制御ユニット2056とマイクロプロセッサ2004及び2006との通信は無線である。さらなる他の実装において、制御ユニット2056は、一セットの電気接続により又は無線システムにより流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026と直接通信する。制御ユニット2056はオペレータから指令を直接受け取り、及び/又は制御ユニット2056は上述の制御ユニット1056に類似する自動システムを含む。
【0061】
クレードル2000の使用時において、流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026は、各空気チャンバが個別に膨張することで患者の頭部を抱え込む。制御ユニット2056は、マイクロプロセッサ2004及び2006に対して、様々な流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026の圧力を調整するよう指令を与え、患者の頭部の固定及び/又は位置決めを与える。クレードル2000は患者の処置中においても、その他の身体部分又は解剖学的部分を固定するべく使用することができる。クレードル2000はまた、例えば患者が位置を変える場合、処置中の患者の移動も可能とする。
【0062】
クレードル2000は、10の流体チャンバを有して示されているが、クレードル2000のその他の実装によれば、10よりも少ないチャンバ又は多いチャンバを使用できる。ビデオカメラを使用することにより、患者のレジストレーションが行われる。したがって、ビデオカメラの使用は、いかなる線量被爆も含まない。クレードル2000の様々な要素は典型的に、放射線を減衰させない材料から作られる。ソフトウェアを制御ユニット2056に実装し、必要に応じて患者を位置決め及び再位置決めするべく様々な流体チャンバの圧力を調整することができる。
【0063】
陽子治療システムにおいては、固定されたビームが大きな加速器によって形成されるのが典型的である。したがって、当該ビームは、治療セッション同士の間又は特定の治療セッション中に再位置決めすることが難しい。さらに、患者の所定の解剖学的特徴は、従来のテーブル又はカウチへの陽子ビームを使用して治療することが難しい。クレードル1000及び2000の様々な実装は、当該陽子治療システムにおいて使用するのに適切であって、チェア型システム上の座っている患者に対して適応することができる。
【0064】
本発明はまた、処置中に患者の解剖学的部分を位置決めする方法を与える。本方法は一般に、(1)患者の解剖学的部分を、例えば図3を参照して上述したクレードルのような、複数の膨張可能流体チャンバを有するクレードルに配置するステップと、(2)各流体チャンバに流体を供給するか又は流体を抜き取ることにより、各流体チャンバの圧力を所望圧力に調整して当該解剖学的部分を所望位置に維持するステップとを含む。本方法で使用されるクレードルの膨張可能流体チャンバは、図3を参照して上述したクレードルのものと同様、当該解剖学的部分の複数表面の一つに対して力を加えるべく構成される。当該複数の流体チャンバの少なくとも2つは、当該解剖学的部分に対して実質的に反対の力を加える。これにより、当該解剖学的部分は当該クレードルに固定される。
【0065】
当業者に理解されることだが、本方法は、患者の頭部、腕、手、骨盤、脚、又は足を含む患者の様々な解剖学的部分を位置決めするべく使用される。好ましくは、本方法は患者の頭部を位置決めするべく使用される。しかしながら、本方法が、本発明の範囲又は要旨を逸脱することなく、患者の任意の適切な解剖学的部分を位置決めするべく使用されることがわかる。
【0066】
さらに、本方法において当該流体チャンバを膨張させる目的で、任意の適切な流体が使用されることもわかる。好ましくは、当該流体は放射線透過性流体であり、例えば空気、窒素、アルゴン等の適切な放射線透過流体である。さらに好ましくは、当該流体は空気、窒素、又はアルゴンである。最も好ましくは、当該流体は空気である。しかしながら、任意の流体が、本発明の範囲又は要旨を逸脱することなく使用されることがわかる。
【0067】
上述の方法は、第1セッション中又は第2処置セッション中のいずれかにおいて患者の解剖学的部分を位置決めするべく使用される。上述のように、用語「第1セッション」とは、何回の処置セッションが先行し又は当該処置セッションが後続するかにかかわらず、任意の処置セッションを称するものとし、事前処置プラニングセッションとも称する。本明細書において使用される用語「第2セッション」とは、第1セッションに続く任意の処置セッションを称する。
【0068】
本方法の第1実施例において、第1セッション中に患者の解剖学的部分を位置決めするべく本発明の方法が使用される。当該実施例において、各流体チャンバの圧力は、医療従事者又は技術者により手動で制御される。各流体チャンバの圧力は、個別に各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることにより、当該解剖学的部分の所望位置が達成されるまで所望圧力に調整される。当該実施例において、当該解剖学的部分の所望位置とは、患者が快適であって関連処置を投与するのに適切な任意の位置である。
【0069】
本方法の第2実施例において、第2処置セッション中に患者の解剖学的部分を位置決めするべく本発明の方法が使用される。第2処置セッション中の当該解剖学的部分の所望位置は、先行する第1セッション中の当該解剖学的部分の第1位置と実質的に同様である。
【0070】
本方法の第2実施例の第1変形例において、当該所望位置は、各流体チャンバの圧力を、第1セッション中の当該流体チャンバの圧力と実質的に同様となるように調整することによって、第2処置セッション中に達成される。
【0071】
本方法の第2実施例の第2変形例において、当該所望位置は、第2処置セッション中の当該解剖学的部分の現行位置を、第1セッション中の当該解剖学的部分の第1位置と対比することによって達成される。これは、第1セッション中に取得された当該解剖学的部分の第1画像に具体化される。各流体チャンバの圧力はその後、当該解剖学的部分の現行位置を調整するべく当該流体チャンバに流体を供給するか又は当該流体チャンバから流体を抜き取ることによって、有効圧力に調整される。これにより、当該解剖学的部分の現行位置が当該第1画像に示される当該解剖学的部分の第1位置と整合する。したがって、本方法の第2実施例の変形例は以下のステップを含む。(1)第1セッション中に当該解剖学的部分の第1画像を取得するステップであって、当該第1画像は当該解剖学的部分の第1位置を表すステップ、(2)第2処置セッションの始まりにおいて、患者の解剖学的部分を、例えば図3を参照して上述したクレードルのような、複数の膨張可能流体チャンバを有するクレードルに配置するステップ、(3)当該解剖学的部分の現行位置を当該解剖学的部分の第1位置と対比するステップ、及び(4)当該解剖学的部分の現行位置を調整するべく各流体チャンバの圧力を有効圧力に調整するステップであって、当該解剖学的部分の現行位置が当該解剖学的部分の第1位置と実質的に同様となるステップである。
【0072】
当該解剖学的部分の現行位置を当該解剖学的部分の第1位置と対比するステップ、及び各流体チャンバの圧力を有効圧力に調整するステップは、手動により、又は図4及び5を参照して上述したシステムのような自動システムにより、本発明の範囲又は要旨を逸脱することなく行うことができる。
【0073】
当該ステップを手動で行う場合、オペレータは、当該解剖学的部分の現行位置と第1画像に具体化された当該解剖学的部分の第1位置とを視覚的に対比する。オペレータはその後、当該解剖学的部分の現行位置を調整するべく各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることによって、各流体チャンバの圧力を手動で調整し、当該解剖学的部分の現行位置は当該解剖学的部分の第1位置と実質的に同様となる。
【0074】
自動システムを使用するステップを行うには、オペレータは、図4及び5を参照して上述したシステムを使用する。当該自動システムの撮像デバイスは、当該解剖学的部分の現行位置を表す現行画像を取得する。当該自動システムのマイクロプロセッサはその後、当該解剖学的部分の現行位置(現行画像に具体化される)を当該解剖学的部分の第1位置(第1画像に具体化される)と対比する。当該自動システムの信号伝達手段はその後、圧力レギュレータに対して当該解剖学的部分の現行位置を調整するよう指令を与える。これにより、当該解剖学的部分の現行位置は当該解剖学的部分の第1位置と実質的に同様となる。
【0075】
本発明が所定の好ましい実施例に関して記載されてきたが、本発明は、開示された実施例に限られないことがわかる。当業者は、以下の特許請求の範囲から逸脱することなく様々な修正を行うことができる。
【技術分野】
【0001】
本発明は放射線治療のための局所的調整デバイスに関する。頭頸部放射線治療のための現行手順は、患者の頭部を位置決めするクレードルのモールディングを必要とする。患者は、当該形成されたクレードルに対して頭部を所定位置にクランプするマスクを装着する。特定の患者それぞれに対する専用の鋳型を形成するにはコストがかかり、著しい量の時間が必要となる。さらに、処置の最中に、当該鋳型の再鋳造を必要とする患者の解剖学的構造の変化が生じ得る。
【先行技術文献】
【特許文献】
【0002】
【特許文献1】米国特許第4,034,748号明細書
【特許文献2】米国特許第4,543,947号明細書
【特許文献3】米国特許出願公開第2002/0103520(A1)号明細書
【特許文献4】国際公開第1993/21867(A1)号パンフレット
【特許文献5】国際公開第1998/41126(A1)号パンフレット
【特許文献6】国際公開第1998/17177(A1)号パンフレット
【特許文献7】米国特許第6,842,502号明細書
【特許文献8】米国特許第7,760,849号明細書
【発明の概要】
【0003】
本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めする手段を与える。
【0004】
一実施例において、本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めするクレードルを与える。本クレードルは、複数の膨張可能流体チャンバと圧力レギュレータとを含む。各流体チャンバは、当該解剖学的部分の複数表面の一つに対して力を加えるべく構成される。圧力レギュレータは、各流体チャンバの圧力を、他のすべての流体チャンバから独立して調整するべく構成される。当該調整は、各流体チャンバへ流体を供給するか又は各流体チャンバから流体を抜き取ることによって行われる。
【0005】
他実施例において、本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めするシステムを与える。本システムはクレードルと制御ユニットとを含む。本クレードルは、複数の膨張可能流体チャンバと圧力レギュレータとを含む。各流体チャンバは、当該解剖学的部分の複数表面の一つに対して力を加えるべく構成される。当該複数の流体チャンバの少なくとも2つが当該解剖学的部分に対して実質的に反対の力を加える。これにより、当該解剖学的部分は本クレードルに固定される。圧力レギュレータは、各流体チャンバの圧力を、他のすべての流体チャンバから独立して調整するべく構成される。当該調整は、各流体チャンバへ流体を供給するか又は各流体チャンバから流体を抜き取ることによって行われる。本制御ユニットは、圧力レギュレータに対して各流体チャンバの圧力を調整するよう指令を与え、当該解剖学的部分を所望位置に維持するべく構成される。
【0006】
さらなる実施例において、本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めする方法を与える。本方法は、当該解剖学的部分をクレードルに配置するステップであって、当該クレードルは複数の膨張可能流体チャンバを有し、各流体チャンバは当該解剖学的部分の複数表面の一つに対して力を加えるべく構成され、当該流体チャンバの少なくとも2つが当該解剖学的部分に対して実質的に反対の力を加え、当該解剖学的部分が固定されたクレードルとなるステップと、各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることにより各流体チャンバの圧力を調整するステップであって、当該解剖学的部分が所望位置に維持されるステップとを含む。
【図面の簡単な説明】
【0007】
添付図面において、本要素は必ずしも縮尺どおりに描かれておらず、むしろ本発明の原理を説明する上で強調されている。さらに、図面全体にわたり、同様の参照番号は対応する部品を示す。
【0008】
【図1】放射線治療システムの一実施例を概略的に示す。本放射線治療システムは、本発明に係る、累積処置線量の自動構成、推定、及び評価のための線量追跡・フィードバックプロセス及び可能なワークフロー、並びに、適応計画最適化のための患者の解剖学的構造及び線量フィードバックを用いる。
【図2a】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図2b】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図2c】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図2d】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図2e】本発明に係る線量追跡・フィードバックを行うべく、図1の放射線治療システムに関して使用されるオンボード撮像システムの一実施例を示す。
【図3】本発明に係る、処置中に患者の頭部を位置決めするクレードルの斜視図である。
【図4】本発明に係る、処置中に患者の頭部を位置決めするシステムの平面図である。
【図5】図4のシステムの側面図である。
【図6】本発明に係る、処置中に患者の頭部を位置決めするクレードルの他実施例の斜視図である。
【発明を実施するための形態】
【0009】
ここで図1を参照すると、コーンビームコンピュータ断層撮影(CBCT)画像誘導適応放射線治療(IGART)システム100のような体積画像誘導適応放射線治療システム、及び一日累積処置線量の自動構成・評価のための対応ワークフローの概略図が示される。図1に示すように、CBCT・IGARTシステム100は、以下のいくつかの主要システムを含む。(1)X線コーンビームコンピュータ断層撮影システム200のような3次元体積撮像システム、(2)線形加速器302のような放射線治療線源及び撮像装置304を含むメガボルト(MeV)システム300、(3)キロボルト(kV)ポータル撮像装置プロセッサ/ソフトウェアシステム400、及び(4)処置線量追跡・フィードバックシステム500である。これらはそれぞれ以下に説明する。
【0010】
コーンビームコンピュータ断層撮影システム200の機械的動作は、従来のコンピュータ断層撮影システムのそれと同様であるが、全体積画像を、線源及び検出器の2回未満の回転(好ましくは1回の回転)を介して取得できる点が異なる。これは、従来のコンピュータ断層撮影で使用された1次元(1D)検出器とは対照的に、2次元(2D)検出器の使用により可能となる。
【0011】
周知のコーンビームコンピュータ断層撮影撮像システムの一例は、特許文献7に記載されており、その全内容は本明細書に参照として組み入れられる。特許文献7は、キロボルトX線管と、アモルファスシリコン検出器のアレイを有するフラットパネル撮像装置とを含むコーンビームコンピュータ断層撮影撮像システムの一例を記載する。患者が処置テーブル上に横たわると、X線管及びフラットパネル撮像装置が、複数画像を取得するべく患者のまわりを調和して回転する。
【0012】
体積撮像システムが図2aに示される。具体的には、図2aは、英国Elekta of CrawleyによりSynergy(登録商標)の商品名で販売されている壁取り付けコーンビームコンピュータ断層撮影システム200及びMeVポータル撮像システム300の一実施例を示す。当該システム200及び300は、特許文献8に記載されており、その全内容は本明細書に参照として組み入れられる。
【0013】
コーンビームコンピュータ断層撮影システム200は、X線管202のようなX線源と、回転コリメータ204と、ガントリー208に取り付けられたフラットパネル撮像装置/検出器206とを含む。図2aに示すように、CBCTシステム200は、医療線形加速器302のガントリー208の、平坦で丸い回転可能なドラム210の表面に取り付けることができる。ここで、X線管202により生成されるX線ビームは、放射線治療線源302により生成される処置ビームとほぼ直交する。
【0014】
なお、検出器206は、それぞれがアモルファスシリコン(a−Si:H)及び薄膜トランジスタからなる複数の半導体センサの2次元アレイからなり得る。各センサからのアナログ信号が統合されてデジタル化される。デジタル値がデータ格納サーバ102に転送される。
【0015】
コリメータ204からの扇状ビームが患者Pの幅を横切り上述の態様で検出器206全体に衝突した後、コンピュータ234(図1に示す)はドラム210に指令を与え、ドラム210を回転させてX線源202、コリメータ204、及び検出器206を患者Pまわりに他の位置まで回転させる。上述のスキャニングプロセスが繰り返されて他の2次元投影が生成される。X線源202、コリメータ204、及び検出器206の上記回転は、コーンビームコンピュータ断層撮影画像を形成するべく十分な数の2次元画像が取得されるまで続けられる。この目的のためには、2回転未満の回転が必要となる(360°未満の回転から形成される複数の画像も同様に形成される)。各位置からの2次元投影がコンピュータ234で結合されて、上述のコーンビームコンピュータ断層撮影システムのものと同様に、ディスプレイ238に表示される3次元画像が生成される。
【0016】
図2aに示すように、MeV撮像システム300は、回転ドラム210に別個に取り付けられる別個の放射線治療線源302と検出器/撮像装置304とを含む。線源302は、X線管202よりも高い出力レベルで動作する。これにより、可動テーブル211(コンピュータ234を介してx、y、及びz方向に可動)上に横たわる患者の標的体積の処置が可能となる。線源302は、X線、又は光子、陽子、若しくは電子のような粒子のビームを生成する。これらは、約4MeVから約25MeVの範囲のエネルギーを有する。本明細書では、線源302からのビームは、いずれのタイプであっても放射線と称する。
【0017】
上述のように、線源302からの放射線は、患者の、腫瘍のような特定の興味領域を処置するべく使用される。当該興味領域に到達する前に放射線ビームは、マルチリーフ307(図2b−e)を調整することにより、一つのマルチリーフコリメータ308を介する特定の断面領域309を有する形状にされる。断面領域309は、ビームが被処置興味領域と相互作用するが患者の健康な領域とは相互作用しないように選択される。興味領域を貫通する放射線が、周知の態様で撮像装置304を介して画像化され得る。
【0018】
図1に示すように、処置線量追跡・フィードバックシステム500は、ワークステーション又はデータサーバ110を含む。ワークステーション又はデータサーバ110は、コーンビームコンピュータ断層撮影システム200により生成された、サーバ102から受け取られた患者の3次元体積画像について、セグメンテーション/レジストレーションプロセスを行う専用のプロセッサを含む。ワークステーション110は、各体積画像内にある各体積画像データの識別及びレジストレーションを行うことができる。当該識別及びレジストレーションにより、一の治療セッションと他の治療セッションとの間で同じ体積画像データの位置を追跡することができる。
【0019】
治療線量追跡・フィードバックシステム500はさらに、(1)ワークステーション110により行われるセグメンテーション/レジストレーションプロセスに基づいて、及び(2)参照プランに応じて被測定患者に衝突する、線源302から放出されてサーバ102に格納される放射線ビームのパラメータ、例えば角度位置、ビームエネルギー、及び当該ビームの断面形状に基づいて、処置線量構成プロセスを行う専用のプロセッサを含むワークステーション又はデータサーバ112を含む。当該パラメータは、ガントリー208の角度位置、コリメータ308の角度配向、マルチリーフコリメータ308のリーフの位置、テーブル211の位置、及び放射線ビームのエネルギーの形態であり得る。画像小体積の位置及び形状のデータがひとたびわかると、全く同じ小体積により受け取られた処置線量を、患者に衝突する線源302から放出された放射線ビームの上記パラメータに基づいて決定/構成することができる。当該決定は、システム200により生成された各体積画像についての各画像小体積データに対してなされる。
【0020】
処置線量追跡・フィードバックシステム500はさらに、(1)放射線治療処置を、オフライン及びオンライン情報に基づいて実時間の態様の特定の日のために調整すること、又は(2)放射線治療処置プランを、オフライン情報に基づいて非実時間の態様で調整すること、のいずれかが可能な適応プラニングプロセスを行う専用のプロセッサを含むワークステーション又はデータサーバ114を含む。当該調整は、ワークステーション112により計算された線量が処置プランにより好ましい線量とどれくらい異なるのかに基づいている。なお、用語「実時間」とは、放射線治療線源がアクティブにされて患者の処置をしている時間を称する。用語「オンライン」とは患者が処置テーブル上にいるときを称し、「オフライン」とは患者が処置テーブルから離れているときを称する。
【0021】
まとめると、処置線量追跡・フィードバックシステム500は、治療セッション中の実時間態様で測定される体積画像情報及び治療ビームパラメータに基づいて、実時間の処置線量構成及び4D適応プラニングを行うことができる。システム500はまた、非実時間態様で適応プラニングをすることもできる。なお、一代替実施例では、ワークステーション110、112、及び114は、ワークステーション110、112、及び114に関連付けられたプロセスが一以上のプロセッサにより行われる一つのワークステーションに結合することができる。なお、ワークステーション112により決定された実時間処置線量構成、及びワークステーション114により決定された適応プラニングは、品質保証(QA)評価ステーション116のモニタ117上に表示することができる。モニタ117に表示された情報に基づいて、医療従事者は必要に応じ、計算された4D適応プランを許容可能なパラメータ内に収まるように変更することができる。すなわち、QA評価ステーション116は、治療セッションに対して生じる将来の実時間変更の信頼を確実にする方法として機能する。このシナリオでは、QA評価ステーション116及び処置線量追跡・フィードバックシステム500は集合的に、4Dプラニング・制御システムとみなすことができる。
【0022】
念頭にあるオンボード・コーンビームコンピュータ断層撮影システム200、メガボルト撮像・放射線治療システム300、QA評価ステーション116、及び処置線量追跡・フィードバックシステム500の上記説明により、図1のCBCT・IGARTシステム100を理解することができる。特に、上述のオンライン体積撮像情報及び実時間治療ビームパラメータは、システム200、300、及び400からキャプチャされてデータ格納サーバ108に格納される。体積撮像情報及び治療ビームパラメータはその後、データモニタジョブコントローラ104に送られる。データモニタジョブコントローラ104は、予め計画された処置スケジュール及びプロトコルに基づいてワークステーション110、112、及び114のそれぞれにタスクを自動的に割り当てて当該タスクの達成を制御する。当該タスクは、臨床的な優先度に基づいて、ワークステーション110、112、及び114のそれぞれにディスパッチされる時間ジョブキュー124に格納される。当該臨床的な優先度は、医師評価/決定実行ステーション106の処置レビュー及び評価に基づいて、臨床ユーザ要求122から再び割り当てることができる。追加的に、ステーション106はまた、処置/プラン修正決定に対する指令を与えることができる。修正サーバ120は、ステーション106から指令を受け取り、システム300に関する進行中の処置プラン、ビーム、又は患者位置を、適応プラニングワークステーション114からもたらされた最適適応プランに基づいて修正する。
【0023】
図1に示すように、サーバ102からの生データもワークステーション110に送られる。ワークステーション110は、コーンビームコンピュータ断層撮影システム200により生成される患者の3次元体積画像について自動セグメンテーション/レジストレーションプロセスを行うべく特化されている。サーバ102からの生データもワークステーション112及びワークステーション114に送られる。ワークステーション112は、生データから一日累積処置線量の構成/評価を行う。ワークステーション114は、生データから適応プラニングを行う。3つのワークステーション110、112、及び114はそれぞれ、それらのジョブキュー126、128、及び130の順序で、それらのタスクを自動的に行う。
【0024】
図1に示すように、ワークステーション110、112、及び114からもたらされたセグメンテーション/レジストレーション、処置線量構成、及び適応プラニングの情報はQA評価ステーション116に送られる。QA評価ステーション116は臨床ユーザと相互作用を行い、必要に応じて上記ワークステーション110、112、及び114からの結果を検証及び修正する。QA評価ステーション116からの出力はその後、派生データサーバ108に格納される。
【0025】
QAステーション116は、ジョブ実行ログサーバ118に最新の実行状態を与える。ジョブ実行ログサーバ118は、情報処理が現在行われているか否か、処理が完了したか否か、又はエラーが発生したか否かの情報を与える。ワークステーション112及び114それぞれにより処置線量構成又は適応プラニング修正のタスクが完了するときはいつでも、評価ステーション116は、現行処置状態と、以前の処置からの患者及び処置のデータに基づいて推定された完了処置線量・結果パラメータとの双方を含む処置評価情報を与える。QA評価ステーション116におけるユーザはその後、新たな情報の要求又は臨床処置スケジュールの修正のいずれかを目的として、高優先度ジョブ要求サーバ122に指令又は新たな臨床スケジュールを与えることができる。追加的に、ユーザはサーバ120を介して、新たな適応プランを実行する決定をすることも又は処置/患者位置の修正を行うこともできる。
【0026】
CBCT・IGARTシステム100は、とりわけkVポータル撮像プロセッサ/ソフトウェアを介したkVポータル撮像プロセス、及び画像誘導放射線治療プロセスを含むいくつかのプロセスを行う。システム100のさらなる詳細は、2009年9月9日出願の米国特許出願第12/556,270号明細書に見出すことができる。その全内容は本明細書に参照として組み入れられる。
【0027】
上述のCBCT・IGARTシステム100を使用して患者の解剖学的部分の撮像及び処置を行う場合、当該解剖学的部分を適切な位置に固定することが重要である。ここで図3を参照すると、本発明の一実施例が、放射線治療の処置中に患者Pの解剖学的部分の位置決めをするクレードル1000を与える。クレードル1000は、複数の膨張可能流体チャンバ1008と、一以上の圧力レギュレータ1004及び1006とを含む。図3に示す一実施例においてクレードル1000はさらにカバー1002を含む。カバー1002は、流体チャンバ1008aからjと、一以上の圧力レギュレータ1004及び1006とを収容する。
【0028】
複数の流体チャンバ1008のそれぞれは、解剖学的部分の複数表面の一つに対して力を加えるべく膨張するように構成される。これにより、解剖学的部分は処置のための固定位置に維持される。好ましくは、各流体チャンバ1008は、解剖学的部分の限定された領域に対して力を加える。流体チャンバ1008が解剖学的部分の表面に対して加える力は力ベクトル1009によって示す。好ましくは、流体チャンバ1008は、少なくとも2つの力ベクトル1009が互いに実質的に対向するように配列される。これにより、解剖学的部分はクレードル1000に固定される。
【0029】
クレードル1000の様々な要素すなわち流体チャンバ1008及びカバー1002(該当する場合)は典型的に、X線又は粒子放射線を減衰させない材料から作られる。流体チャンバ1008は、流体が供給されると膨張し流体が抜き取られると収縮することができる任意の適切な可撓性、弾性、及び流体密封性の材料又は膜から構成される。流体チャンバ1008は、流体が供給及び抜き取りされるとすべての方向に膨張及び収縮するべく構成される。または、流体チャンバ1008は、流体が供給又は抜き取りされると主に一軸(図示せず)方向に膨張又は収縮することができるアコーディオン状構成を有する。好ましくは、各流体チャンバ1008は一軸方向に膨張及び収縮する。さらに好ましくは、各流体チャンバ1008は、各力ベクトル1009に平行な一軸方向に膨張する。
【0030】
圧力レギュレータ1004及び1006は、各流体チャンバ1008の圧力を、他のすべての流体チャンバ1008から独立して調整するべく構成される。これは、各流体チャンバに流体を供給し又は各流体チャンバから流体を抜き取ることによる。圧力レギュレータ1004及び1006はそれぞれ、流体チャンバ1008に流体を供給するポンプ(図示せず)、及び流体チャンバ1008から流体を抜き取るベント(図示せず)を含む。しかしながら、当業者に周知の他の適切な圧力レギュレータも、本発明の範囲又は要旨を逸脱することなく使用することができる。圧力レギュレータ1004及び1006は、管セクション1010により流体チャンバ1008に接続される。しかしながら、他の適切な取り付け配列及び手段を使用してもよい。最後に、図3に示す実施例は2つの圧力レギュレータ1004及び1006を含むが、他の適切な任意数の圧力レギュレータを使用してもよい。例えば、一つの圧力レギュレータを使用してもよい。代替的に、各流体チャンバ1008に対して別個の圧力レギュレータを使用してもよい。
【0031】
圧力レギュレータ1004及び1006は、各流体チャンバ1008を他のすべての流体チャンバ1008から独立して調整するべく構成されるので、クレードル1000によりオペレータは、患者Pの解剖学的部分の位置を全6自由度までにおいて調整することができる。具体的には、各流体チャンバ1008に所定量の流体を供給することによって、又は各流体チャンバ1008から所定量の流体を抜き取ることによって、解剖学的部分を、縦軸x、横軸y、又は垂直軸zの方向に並進させることができる。さらに、解剖学的部分を、縦軸x(矢印αで示す)まわりに、横軸y(矢印βで示す)まわりに、又は垂直軸z(矢印γで示す)まわりに回転することができる。
【0032】
当業者には理解できることだが、クレードル1000は、本発明の範囲又は要旨を逸脱することなく流体チャンバ1008の適切な配列を選択することによって、患者の任意の適切な解剖学的部分を位置決めするべく構成される。例えば、クレードル1000は、患者の頭部、腕、手、骨盤、脚、又は足を位置決めするべく構成される。図3に示す実施例において、クレードルは患者の頭部を位置決めするべく構成される。さらに、クレードル1000は、患者が立位、座位、腹臥位、又は背臥位にあるときに患者の解剖学的部分を位置決めするべく構成される。図3に示す実施例において、クレードル1000は、患者が処置中にカウチ上で背臥位にあるときに患者の頭部を位置決めするべく構成される。
【0033】
図3に示す実施例において、クレードル1000は、10の流体チャンバ1008aからjを含む。具体的には、クレードル1000の当該実施例は、患者の頸部の後ろに対して第1力を加えるべく構成された2つの第1流体チャンバ1008c及び1008dと、患者の頭部の後に対して第2力を加えるべく構成された2つの第2流体チャンバ1008e及び1008fと、患者の頭部の左側に対して第3力を加えるべく構成された2つの第3流体チャンバ1008i及び1008jと、患者の頭部の右側に対して第4力を加えるべく構成された2つの第4流体チャンバ1008g及び1008hと、患者の肩の後ろに対して第5力を加えるべく構成された2つの第5流体チャンバ1008a及び1008bとを含む。
【0034】
第1流体チャンバ1008c及び1008dは、流体が第1流体チャンバ1008c及び1008dに供給されると患者の頸部の後ろに対し増大した第1力を加えるべく構成され、並びに流体が第1流体チャンバ1008c及び1008dから抜き取られると患者の頸部の後ろに対し減少した第1力を加えるべく構成される。第1流体チャンバ1008c及び1008dは、右頸部流体チャンバ1008c及び左頸部流体チャンバ1008dを含む。右頸部流体チャンバ1008cは、流体が右頸部流体チャンバ1008cに供給されると患者の頸部の右後側に対し、力ベクトル1009cで示すように増大した力を加えるべく構成され、及び流体が右頸部流体チャンバ1008cから抜き取られると患者の頸部の右後側に対し、減少した力を加えるべく構成される。左頸部流体チャンバ1008dは、流体が左頸部流体チャンバ1008dに供給されると患者の頸部の左後側に対し、力ベクトル1009dで示すように増大した力を加えるべく構成され、及び流体が左頸部流体チャンバ1008dから抜き取られると患者の頸部の左後側に対し減少した力を加えるべく構成される。
【0035】
第2流体チャンバ1008e及び1008fは、流体が第2流体チャンバ1008e及び1008fに供給されると患者の頭部の後ろに対し増大した第2力を加えるべく構成され、並びに流体が第2流体チャンバ1008e及び1008fから抜き取られると患者の頭部の後ろに対し減少した第2力を加えるべく構成される。第2流体チャンバ1008e及び1008fは、右頭部流体チャンバ1008e及び左頭部流体チャンバ1008fを含む。右頭部流体チャンバ1008eは、流体が右頭部流体チャンバ1008eに供給されると患者の頭部の右後側に対し、力ベクトル1009eに示すように増大した力を加えるべく構成され、及び流体が右頭部流体チャンバ1008eから抜き取られると患者の頭部の右後側に対し減少した力を加えるべく構成される。左頭部流体チャンバ1008fは、流体が左頭部流体チャンバ1008fに供給されると、患者の頭部の左後側に対し、力ベクトル1009fに示すように増大した力を加えるべく構成され、及び流体が左頭部流体チャンバ1008fから抜き取られると患者の頭部の左後側に対し減少した力を加えるべく構成される。
【0036】
第3流体チャンバ1008i及び1008jは、流体が第3流体チャンバ1008i及び1008jに供給されると患者の頭部の左側に対し増大した第3力を加えるべく構成され、並びに流体が第3流体チャンバ1008i及び1008jから抜き取られると患者の頭部の左側に対し減少した第3力を加えるべく構成される。第3流体チャンバ1008i及び1008jは、左こめかみ流体チャンバ1008i及び左上頭部流体チャンバ1008jを含む。左こめかみ流体チャンバ1008iは、流体が左こめかみ流体チャンバ1008iに供給されると、患者の頭部の左こめかみに対し、力ベクトル1009iに示すように増大した力を加えるべく構成され、及び流体が左こめかみ流体チャンバ1008iから抜き取られると患者の頭部の左こめかみに対し減少した力を加えるべく構成される。左上頭部流体チャンバ1008jは、流体が左上頭部流体チャンバ1008jに供給されると、力ベクトル1009jに示すように患者の左こめかみ上方にある患者の頭部の左側に対し増大した力を加えるべく構成され、及び流体が左上頭部流体チャンバ1008jから抜き取られると患者の左こめかみ上方にある患者の頭部の左側に対し減少した力を加える。
【0037】
第4流体チャンバ1008g及び1008hは、流体が第4流体チャンバ1008g及び1008hに供給されると患者の頭部の右側に対し増大した第4力を加えるべく構成され、並びに流体が第4流体チャンバ1008g及び1008hから抜き取られると患者の頭部の右側に対し減少した第4力加えるべく構成される。第4流体チャンバ1008g及び1008hは、右こめかみ流体チャンバ1008g及び右上頭部流体チャンバ1008hを含む。右こめかみ流体チャンバ1008gは、流体が右こめかみ流体チャンバ1008gに供給されると、力ベクトル1009gに示すように、患者の頭部の右こめかみに対し増大した力を加えるべく構成され、及び流体が右こめかみ流体チャンバ1008gから抜き取られると患者の頭部の右こめかみに対し減少した力を加えるべく構成される。右上頭部流体チャンバ1008hは、流体が右上頭部流体チャンバ1008hに供給されると、力ベクトル1009hに示すように、患者の右こめかみ上方にある患者の頭部の右側に対し増大した力を加えるべく構成され、及び流体が右上頭部流体チャンバ1008hから抜き取られると患者の右こめかみ上方にある患者の頭部の右側に対し減少した力を加える。
【0038】
第5流体チャンバ1008a及び1008bは、流体が第5流体チャンバに供給されると患者の肩の後ろに対し増大した第5力を加えるべく構成され、及び流体が第5流体チャンバから抜き取られると患者の肩の後ろに対し減少した第5力を加えるべく構成される。第5流体チャンバ1008a及び1008bは、右肩流体チャンバ1008a及び左肩流体チャンバ1008bを含む。右肩流体チャンバ1008aは、流体が右肩流体チャンバ1008aに供給されると、力ベクトル1009aに示すように患者の右肩の後ろに対し増大した力を加えるべく構成され、及び流体が右肩流体チャンバ1008aから抜き取られると患者の右肩の後ろに対し減少した力を加えるべく構成される。左肩流体チャンバ1008bは、流体が左肩流体チャンバ1008bに供給されると、力ベクトル1009bに示すように患者の左肩の後ろに対し増大した力を加えるべく構成され、及び流体が左肩流体チャンバ1008bから抜き取られると患者の左肩の後ろに対し減少した力を加えるべく構成される。
【0039】
図3に示すクレードル1000の実施例は10の流体チャンバ1008aからjを有するが、本発明の範囲又は要旨を逸脱することなくクレードルが流体チャンバ1008の適切な任意の数を有することが当業者に理解される。さらに、流体チャンバ1008は、本発明の範囲又は要旨を逸脱することなく任意の適切な構成に配列してよい。
【0040】
ここで図4及び5を参照すると、本発明は、放射線治療の処置中に患者の解剖学的部分を位置決めするシステムも与える。本システムは、図3を参照して記載されたクレードル1000と、制御ユニット1056とを含む。本制御ユニットは、圧力レギュレータ1004及び1006に対して各流体チャンバ1008の圧力を所望圧力に調整するよう指令を与え、患者の解剖学的部分を所望位置に維持するべく構成される。本システムはさらに、コンジット1053を通してバルブ1048に流体を供給するべく構成された流体源1054を含む。バルブ1048は、コンジット1052により圧力レギュレータ1004及び1006に接続される。
【0041】
本システムは、当該解剖学的部分を任意の所望位置に維持するべく構成される。いくつかの実施例において、所望位置は所定位置である。例えば、第2処置セッションでの所望位置は、第1セッション中の当該解剖学的部分の第1位置と実質的に同様である。本明細書において使用される用語「第1セッション」とは、何回の処置セッションが先行し又は当該処置セッションが後続するかにかかわらず、任意の処置セッションを称し、事前処置プラニングセッションとも称する。本明細書において使用される用語「第2セッション」とは、第1セッションに続く任意の処置セッションを称する。
【0042】
上述の独立したクレードル1000と同様、本発明の範囲又は要旨を逸脱することなく本システムは、クレードル1000の流体チャンバ1008の適切な配置を選択することにより患者の任意の適切な解剖学的部分を位置決めするべく構成される。例えば、本システムは、患者の頭部、腕、手、骨盤、脚、又は脚を位置決めするべく構成される。図4及び5に示す実施例において当該クレードルは、患者が放射線治療の処置中にカウチ上で背臥位にあるときに患者の頭部を位置決めするべく構成される。
【0043】
制御ユニット1056は、当業者に周知の任意の手段により、圧力レギュレータ1004及び1006と、オプションとしてバルブ1048と通信する。例えば、制御ユニット1056は、配線1062、1060、及び1058それぞれにより、圧力レギュレータ1004及び1006と並びにオプションとしてバルブ1048と通信する。代替的に、当該制御ユニットは、無線で圧力レギュレータ1004及び1006と並びにオプションとしてバルブ1048と通信する。
【0044】
いくつかの実施例において、制御ユニット1056は、オペレータからの手動入力を受け取って流体チャンバ1008の一以上の圧力を調整し、並びに当該指令を圧力レギュレータ1004及び1006に中継するべく構成される。「自動システム」と称する他実施例において、制御ユニット1056は、流体チャンバ1008のそれぞれの所望圧力を自動的な態様で決定するべく構成される。自動システムの制御ユニット1056はまた、手動入力を受け取るべく構成することもできる。
【0045】
自動システムにおいて、当該制御ユニットは、メモリ手段1064、マイクロプロセッサ1066、及び信号伝達手段1068を含む。メモリ手段1064は、データ格納に有用な当業者に周知の任意のデバイスである。すなわち、当該メモリ手段は、コンピュータサーバ、コンピュータハードディスク、コンピュータフロッピー(登録商標)ディスク、CD−ROM、フラッシュデバイス、又は任意の適切なデータ格納手段である。マイクロプロセッサ1066は、データ操作に有用な当業者に周知の任意のコンピュータプロセッサである。マイクロプロセッサ1066は、有線又は無線通信を含む当業者に周知の任意の手段によりメモリ手段1064と通信する。信号伝達手段1068は、マイクロプロセッサ1066から圧力コントローラ1004及び1006に並びにオプションとしてバルブ1048に指令を送るのに有用な当業者に周知の任意のデバイスである。上述のように、制御ユニット1056の信号伝達手段1068は、配線1062、1060、及び1058それぞれを介して又は無線通信により、圧力レギュレータ1004及び1006と並びにオプションとしてバルブ1048と通信する。
【0046】
自動システムの第1実施例において、本システムは、流体チャンバそれぞれの圧力を所定圧力に調整することにより当該解剖学的部分を所定位置に位置決めするべく構成される。第1セッションにおいて、各流体チャンバの所定圧力は、患者の解剖学的部分を所定位置に配置するべく使用される必須圧力をコンピュータモデリングすることにより決定される。第2処置セッションにおいて、当該所定圧力は、第1セッション中の当該解剖学的部分の第1位置を参照して決定される。この場合、第2処置セッション中の各流体チャンバの所定圧力は、第1セッション中の各流体チャンバの圧力と実質的に同様である。
【0047】
自動システムの第1実施例において、メモリ手段1064は、各流体チャンバ1008に対する所定膨張データを格納するべく構成される。各流体チャンバ1008の所定膨張データは、当該解剖学的部分の所定位置に対応する各流体チャンバ1008の所定圧力を表す。第2処置セッションにおいて、各流体チャンバ1008の所定圧力は、第1セッション中の各流体チャンバ1008の圧力と実質的に同様である。
【0048】
自動システムの第1実施例において、マイクロプロセッサ1066は、各流体チャンバのための所定膨張データをメモリ手段1064から受け取り、当該流体チャンバのための所定膨張データに基づいて各流体チャンバ1008の所定圧力を決定するべく構成される。
【0049】
自動システムの第1実施例において、信号伝達手段1068は、各流体チャンバ1008の所定圧力に関する指令をマイクロプロセッサ1066から受け取り、膨張信号を圧力レギュレータ1004及び1006に並びにオプションとしてバルブ1048に送るべく構成される。当該膨張信号は、圧力レギュレータ1004及び1006に対して各流体チャンバ1008の圧力を所定圧力に調整するよう指令を与える。
【0050】
図5に最も明確に示される自動システムの第2実施例において、本システムは、実時間患者表面測定等のオンボード撮像を使用して当該解剖学的部分を所定位置に位置決めするべく構成される。本システムは、室内の光学、X線、MRI画像である現行画像により表される当該解剖学的部分の現行位置を、当該解剖学的部分の第1画像により表される当該解剖学的部分の所定位置と対比することにより、当該解剖学的部分を当該所定位置に位置決めする。第1画像は、第1セッション中に取得されている。
【0051】
自動システムの第2実施例において、本システムは撮像デバイス1070を含む。撮像デバイス1070は、患者の解剖学的部分の画像を取得するのに適切な当業者に周知の任意のデバイスである。例えば、撮像デバイス1070は、ビデオカメラ、コンピュータ断層撮影スキャナ、又はMRI撮像装置である。好ましくは、撮像デバイス1070はビデオカメラである。さらに好ましくは、撮像デバイス1070、動画を取得するのに適切なビデオカメラである。撮像デバイス1070は、当該解剖学的部分の現行位置を表す現行画像を取得するべく構成される。好ましくは、当該現行画像は、当該解剖学的部分の現行位置の動画である。
【0052】
自動システムの第2実施例において、メモリ手段1064は、当該解剖学的部分の所定位置を表す第1画像を格納するべく構成される。上述のように第1画像は第1セッション中に取得されているので、第1画像に示される当該解剖学的部分の所定位置は、第1セッション中の当該解剖学的部分の第1位置である。第1画像は、ビデオ撮像又はコンピュータ断層撮影撮像を含むがこれらに限られない当業者に周知の任意の手段により取得されている。好ましくは、第1画像は当該解剖学的部分の静止画像である。
【0053】
自動システムの第2実施例において、マイクロプロセッサ1066は、メモリ手段1064から第1画像を及び撮像デバイス1070から現行画像を受け取るべく構成される。マイクロプロセッサ1066はさらに、当該解剖学的部分の現行位置(当該現行画像により表される)を当該解剖学的部分の所定位置(第1画像により表される)と対比することにより各流体チャンバ1008の有効圧力を決定し、当該解剖学的部分の現行位置を、当該解剖学的部分の現行位置が当該解剖学的部分の所定位置と実質的に同様となるように調整するべく構成される。
【0054】
当該解剖学的部分の現行位置を当該解剖学的部分の所定位置と対比するとき、マイクロプロセッサ1066は当該解剖学的部分の所定の解剖学的標識の現行位置及び所定位置を対比するのが好ましい。本明細書において使用される用語「解剖学的標識」とは、解剖学的部分の特徴であって、例えば、患者の体重増加又は体重減少による変化、患者の水和レベルの変化、又は患者の服装又はヘアスタイルの変化による変化のような当該解剖学的部分の全体形状の予測可能な変化があってもその位置が変化しないものを称する。例えば、当該解剖学的部分が患者の頭部である場合、適切な解剖学的標識は、患者の鼻の先及び患者頭蓋の前頭骨を含む。
【0055】
自動システムの第2実施例において、信号伝達手段1068は、各流体チャンバ1008の有効圧力に関するマイクロプロセッサ1066から指令を受け取るべく構成される。信号伝達手段1068はまた、圧力レギュレータ1004及び1006に並びにオプションとしてバルブ1048に調整信号を送るべく構成される。当該調整信号は、圧力レギュレータ1004及び1006に対して各流体チャンバ1008の圧力を当該有効圧力に調整するよう指令を与える。
【0056】
ここで図6を参照すると、本発明の原理を使用する他のクレードル2000が示される。その主な要素としてクレードル2000は、可撓性カバー2002、並びに、それぞれが適切な可撓性の材料又は膜で作られた10の流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026のセットを含む。
【0057】
流体チャンバ2008及び2010は主に患者の肩領域にサポートを与え、流体チャンバ2012及び2014は主に患者の頸部領域にサポートを与え、流体チャンバ2016及び2018は患者の頭部の後ろにサポートを与え、並びに流体チャンバ2020、2022、2024、及び2026は患者の頭部のいずれかの側に側方サポートを与える。
【0058】
カバー2002にはまた、一対のマイクロプロセッサ2004及び2006も取り囲まれる。マイクロプロセッサ2006は電気接続2001により制御ユニット2056に接続され、及び他方のマイクロプロセッサ2004は電気接続2009により制御ユニット2056に接続される。いくつかの実装において、マイクロプロセッサ2004は制御ユニット2056に直接接続される。
【0059】
各流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026は、個別に電気制御される圧力レギュレータ又はポンプとして動作する。したがって、流体チャンバは、一セットの電気接続2005及び一セットの電気接続2007それぞれを介してマイクロプロセッサ2004及び2006と通信する。具体的には、各流体チャンバ2008、2012、2016、2020、及び2022が、電気接続2005のセットの各電気接続を介して個別の信号をマイクロプロセッサ2004から受け取り、各流体チャンバ2010、2014、2018、2024、及び2026が、電気接続2007のセットの各電気接続を介して個別の信号をマイクロプロセッサ2006から受け取る。当該信号は、各空気チャンバに対して所望圧力を達成するように指令を与える。
【0060】
マイクロプロセッサ2004及び2006は、制御ユニット2056から信号を受け取り制御ユニット2056にフィードバックを与える。所定の実装において、制御ユニット2056とマイクロプロセッサ2004及び2006との通信は無線である。さらなる他の実装において、制御ユニット2056は、一セットの電気接続により又は無線システムにより流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026と直接通信する。制御ユニット2056はオペレータから指令を直接受け取り、及び/又は制御ユニット2056は上述の制御ユニット1056に類似する自動システムを含む。
【0061】
クレードル2000の使用時において、流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026は、各空気チャンバが個別に膨張することで患者の頭部を抱え込む。制御ユニット2056は、マイクロプロセッサ2004及び2006に対して、様々な流体チャンバ2008、2010、2012、2014、2016、2018、2020、2022、2024、及び2026の圧力を調整するよう指令を与え、患者の頭部の固定及び/又は位置決めを与える。クレードル2000は患者の処置中においても、その他の身体部分又は解剖学的部分を固定するべく使用することができる。クレードル2000はまた、例えば患者が位置を変える場合、処置中の患者の移動も可能とする。
【0062】
クレードル2000は、10の流体チャンバを有して示されているが、クレードル2000のその他の実装によれば、10よりも少ないチャンバ又は多いチャンバを使用できる。ビデオカメラを使用することにより、患者のレジストレーションが行われる。したがって、ビデオカメラの使用は、いかなる線量被爆も含まない。クレードル2000の様々な要素は典型的に、放射線を減衰させない材料から作られる。ソフトウェアを制御ユニット2056に実装し、必要に応じて患者を位置決め及び再位置決めするべく様々な流体チャンバの圧力を調整することができる。
【0063】
陽子治療システムにおいては、固定されたビームが大きな加速器によって形成されるのが典型的である。したがって、当該ビームは、治療セッション同士の間又は特定の治療セッション中に再位置決めすることが難しい。さらに、患者の所定の解剖学的特徴は、従来のテーブル又はカウチへの陽子ビームを使用して治療することが難しい。クレードル1000及び2000の様々な実装は、当該陽子治療システムにおいて使用するのに適切であって、チェア型システム上の座っている患者に対して適応することができる。
【0064】
本発明はまた、処置中に患者の解剖学的部分を位置決めする方法を与える。本方法は一般に、(1)患者の解剖学的部分を、例えば図3を参照して上述したクレードルのような、複数の膨張可能流体チャンバを有するクレードルに配置するステップと、(2)各流体チャンバに流体を供給するか又は流体を抜き取ることにより、各流体チャンバの圧力を所望圧力に調整して当該解剖学的部分を所望位置に維持するステップとを含む。本方法で使用されるクレードルの膨張可能流体チャンバは、図3を参照して上述したクレードルのものと同様、当該解剖学的部分の複数表面の一つに対して力を加えるべく構成される。当該複数の流体チャンバの少なくとも2つは、当該解剖学的部分に対して実質的に反対の力を加える。これにより、当該解剖学的部分は当該クレードルに固定される。
【0065】
当業者に理解されることだが、本方法は、患者の頭部、腕、手、骨盤、脚、又は足を含む患者の様々な解剖学的部分を位置決めするべく使用される。好ましくは、本方法は患者の頭部を位置決めするべく使用される。しかしながら、本方法が、本発明の範囲又は要旨を逸脱することなく、患者の任意の適切な解剖学的部分を位置決めするべく使用されることがわかる。
【0066】
さらに、本方法において当該流体チャンバを膨張させる目的で、任意の適切な流体が使用されることもわかる。好ましくは、当該流体は放射線透過性流体であり、例えば空気、窒素、アルゴン等の適切な放射線透過流体である。さらに好ましくは、当該流体は空気、窒素、又はアルゴンである。最も好ましくは、当該流体は空気である。しかしながら、任意の流体が、本発明の範囲又は要旨を逸脱することなく使用されることがわかる。
【0067】
上述の方法は、第1セッション中又は第2処置セッション中のいずれかにおいて患者の解剖学的部分を位置決めするべく使用される。上述のように、用語「第1セッション」とは、何回の処置セッションが先行し又は当該処置セッションが後続するかにかかわらず、任意の処置セッションを称するものとし、事前処置プラニングセッションとも称する。本明細書において使用される用語「第2セッション」とは、第1セッションに続く任意の処置セッションを称する。
【0068】
本方法の第1実施例において、第1セッション中に患者の解剖学的部分を位置決めするべく本発明の方法が使用される。当該実施例において、各流体チャンバの圧力は、医療従事者又は技術者により手動で制御される。各流体チャンバの圧力は、個別に各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることにより、当該解剖学的部分の所望位置が達成されるまで所望圧力に調整される。当該実施例において、当該解剖学的部分の所望位置とは、患者が快適であって関連処置を投与するのに適切な任意の位置である。
【0069】
本方法の第2実施例において、第2処置セッション中に患者の解剖学的部分を位置決めするべく本発明の方法が使用される。第2処置セッション中の当該解剖学的部分の所望位置は、先行する第1セッション中の当該解剖学的部分の第1位置と実質的に同様である。
【0070】
本方法の第2実施例の第1変形例において、当該所望位置は、各流体チャンバの圧力を、第1セッション中の当該流体チャンバの圧力と実質的に同様となるように調整することによって、第2処置セッション中に達成される。
【0071】
本方法の第2実施例の第2変形例において、当該所望位置は、第2処置セッション中の当該解剖学的部分の現行位置を、第1セッション中の当該解剖学的部分の第1位置と対比することによって達成される。これは、第1セッション中に取得された当該解剖学的部分の第1画像に具体化される。各流体チャンバの圧力はその後、当該解剖学的部分の現行位置を調整するべく当該流体チャンバに流体を供給するか又は当該流体チャンバから流体を抜き取ることによって、有効圧力に調整される。これにより、当該解剖学的部分の現行位置が当該第1画像に示される当該解剖学的部分の第1位置と整合する。したがって、本方法の第2実施例の変形例は以下のステップを含む。(1)第1セッション中に当該解剖学的部分の第1画像を取得するステップであって、当該第1画像は当該解剖学的部分の第1位置を表すステップ、(2)第2処置セッションの始まりにおいて、患者の解剖学的部分を、例えば図3を参照して上述したクレードルのような、複数の膨張可能流体チャンバを有するクレードルに配置するステップ、(3)当該解剖学的部分の現行位置を当該解剖学的部分の第1位置と対比するステップ、及び(4)当該解剖学的部分の現行位置を調整するべく各流体チャンバの圧力を有効圧力に調整するステップであって、当該解剖学的部分の現行位置が当該解剖学的部分の第1位置と実質的に同様となるステップである。
【0072】
当該解剖学的部分の現行位置を当該解剖学的部分の第1位置と対比するステップ、及び各流体チャンバの圧力を有効圧力に調整するステップは、手動により、又は図4及び5を参照して上述したシステムのような自動システムにより、本発明の範囲又は要旨を逸脱することなく行うことができる。
【0073】
当該ステップを手動で行う場合、オペレータは、当該解剖学的部分の現行位置と第1画像に具体化された当該解剖学的部分の第1位置とを視覚的に対比する。オペレータはその後、当該解剖学的部分の現行位置を調整するべく各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることによって、各流体チャンバの圧力を手動で調整し、当該解剖学的部分の現行位置は当該解剖学的部分の第1位置と実質的に同様となる。
【0074】
自動システムを使用するステップを行うには、オペレータは、図4及び5を参照して上述したシステムを使用する。当該自動システムの撮像デバイスは、当該解剖学的部分の現行位置を表す現行画像を取得する。当該自動システムのマイクロプロセッサはその後、当該解剖学的部分の現行位置(現行画像に具体化される)を当該解剖学的部分の第1位置(第1画像に具体化される)と対比する。当該自動システムの信号伝達手段はその後、圧力レギュレータに対して当該解剖学的部分の現行位置を調整するよう指令を与える。これにより、当該解剖学的部分の現行位置は当該解剖学的部分の第1位置と実質的に同様となる。
【0075】
本発明が所定の好ましい実施例に関して記載されてきたが、本発明は、開示された実施例に限られないことがわかる。当業者は、以下の特許請求の範囲から逸脱することなく様々な修正を行うことができる。
【特許請求の範囲】
【請求項1】
放射線治療の処置中に患者の解剖学的部分を位置決めするクレードルであって、
複数の膨張可能流体チャンバと、圧力レギュレータとを含み、
各流体チャンバは、前記解剖学的部分の複数表面の一つに対して力を加えるべく構成され、
前記圧力レギュレータは、各流体チャンバの圧力を、各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることによって、他のすべての流体チャンバから独立して調整するべく構成されるクレードル。
【請求項2】
前記複数の流体チャンバの少なくとも2つが、前記解剖学的部分を前記クレードルに固定するべく前記解剖学的部分に対して実質的に反対の力を加える、請求項1に記載のクレードル。
【請求項3】
前記解剖学的部分は患者の頭部である、請求項2に記載のクレードル。
【請求項4】
前記患者は処置中、カウチ上で背臥位にある、請求項3に記載のクレードル。
【請求項5】
前記複数の膨張可能流体チャンバは、
前記患者の頸部の後ろに対して第1力を加えるべく構成された第1流体チャンバと、
前記患者の頭部の後ろに対して第2力を加えるべく構成された第2流体チャンバと、
前記患者の頭部の左側に対して第3力を加えるべく構成された第3流体チャンバと、
前記患者の頭部の右側に対して第4力を加えるべく構成された第4流体チャンバと
を含む、請求項3に記載のクレードル。
【請求項6】
前記第1力は、前記第1流体チャンバに流体が供給されると大きさが増加し、前記第1流体チャンバから流体が抜き取られると大きさが減少する、請求項5に記載のクレードル。
【請求項7】
前記第2力は、前記第2流体チャンバに流体が供給されると大きさが増加し、前記第2流体チャンバから流体が抜き取られると大きさが減少する、請求項5に記載のクレードル。
【請求項8】
前記第3力は、前記第3流体チャンバに流体が供給されると大きさが増加し、前記第3流体チャンバから流体が抜き取られると大きさが減少する、請求項5に記載のクレードル。
【請求項9】
前記第4力は、前記第4流体チャンバに流体が供給されると大きさが増加し、前記第4流体チャンバから流体が抜き取られると大きさが減少する、請求項5に記載のクレードル。
【請求項10】
放射線治療の処置中に患者の解剖学的部分を位置決めするシステムであって、
クレードルと制御ユニットとを含み、
前記クレードルは、
複数の膨張可能流体チャンバと
圧力レギュレータと
を含み、
各流体チャンバは、前記解剖学的部分の複数表面の一つに対して力を加えるべく構成され、前記複数の流体チャンバの少なくとも2つは前記解剖学的部分に対して実質的に反対の力を加え、前記解剖学的部分は前記クレードルに固定され、
前記圧力レギュレータは、各流体チャンバの圧力を、各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることによって、他のすべての流体チャンバから独立して調整するべく構成され、
前記制御ユニットは、前記圧力レギュレータに対して各流体チャンバの圧力を調整するよう指令を与え、当該解剖学的部分を所望位置に維持するべく構成されるシステム。
【請求項11】
前記所望位置は所定位置である、請求項10に記載のシステム。
【請求項12】
前記制御ユニットは、メモリ手段と、マイクロプロセッサと、信号伝達手段とをさらに含み、
前記メモリ手段は、各流体チャンバのための所定膨張データを格納するべく構成され、前記所定膨張データは、各流体チャンバの所定圧力を表し、前記所定圧力は、前記解剖学的部分の前記所定位置に対応し、
前記マイクロプロセッサは、前記メモリ手段から前記所定膨張データを受け取り、前記所定膨張データに基づいて各流体チャンバの前記所定圧力を決定するべく構成され、
前記信号伝達手段は、前記マイクロプロセッサから各流体チャンバの前記所定圧力に関する指令を受け取り、前記圧力レギュレータに膨張信号を送るべく構成され、前記膨張信号は、前記圧力レギュレータに対して各流体チャンバの圧力を前記所定圧力に調整するよう指令を与える、請求項11に記載のシステム。
【請求項13】
前記解剖学的部分は前記患者の頭部である、請求項12に記載のシステム。
【請求項14】
第2処置セッション中の前記解剖学的部分の前記所定位置は、第1セッション中の前記解剖学的部分の第1位置と実質的に同様である、請求項11に記載のシステム。
【請求項15】
前記解剖学的部分の現行位置を表す現行画像を取得するべく構成された撮像デバイスをさらに含み、
前記制御ユニットは、メモリ手段と、マイクロプロセッサと、信号伝達手段とをさらに含み、
前記メモリ手段は、前記第1セッション中に取得された第1画像を格納するべく構成され、前記第1画像は、前記第1セッション中の前記解剖学的部分の第1位置を表し、
前記マイクロプロセッサは、前記メモリ手段から前記第1画像を及び前記撮像デバイスから前記現行画像を受け取り、前記第1画像及び前記現行画像に基づいて、前記解剖学的部分の前記現行位置を、前記解剖学的部分の前記現行位置が前記解剖学的部分の前記第1位置と実質的に同様となるように調整するべく各流体チャンバの有効圧力を決定するように構成され、
前記信号伝達手段は、前記マイクロプロセッサから各流体チャンバの前記有効圧力に関する指令を受け取って前記圧力レギュレータに調整信号を送るべく構成され、前記調整信号は、前記圧力レギュレータに対して各流体チャンバの圧力を前記有効圧力に調整するように指令を与える、請求項14に記載のシステム。
【請求項16】
前記撮像デバイスはビデオカメラであり、前記現行画像は動画である、請求項15に記載のシステム。
【請求項17】
前記解剖学的部分は前記患者の頭部である、請求項15に記載のシステム。
【請求項18】
放射線治療の処置中に患者の解剖学的部分を位置決めする方法であって、
前記解剖学的部分をクレードルに配置するステップであって、前記クレードルは複数の膨張可能流体チャンバを有し、各流体チャンバは前記解剖学的部分の複数表面の一つに対して力を加えるべく構成され、前記複数の流体チャンバの少なくとも2つが前記解剖学的部分に対して実質的に反対の力を加え、前記解剖学的部分が固定されたクレードルとなるステップと、
各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることにより、前記解剖学的部分を所望位置に維持するべく各流体チャンバの圧力を調整するステップと
を含む方法。
【請求項19】
第2処置セッション中の前記解剖学的部分の前記所望位置は、第1セッション中の前記解剖学的部分の第1位置と実質的に同様である、請求項18に記載の方法。
【請求項20】
前記各流体チャンバの圧力を調整するステップは、各流体チャンバの圧力が第1セッション中の各流体チャンバの圧力と実質的に同様となるように各流体チャンバの圧力を調整することを含む、請求項19に記載の方法。
【請求項21】
前記解剖学的部分は前記患者の頭部である、請求項20に記載の方法。
【請求項22】
第1セッション中に前記解剖学的部分の第1画像を取得するステップであって、前記第1画像は前記解剖学的部分の前記第1位置を表すステップと、
前記解剖学的部分の現行位置を前記解剖学的部分の前記第1位置と対比するステップと
をさらに含み、
前記各流体チャンバの圧力を調整するステップは、前記解剖学的部分の現行位置を調整するべく各流体チャンバの圧力を有効圧力に調整するステップであって、前記解剖学的部分の現行位置が前記解剖学的部分の前記第1位置と実質的に同様となるステップである、請求項19に記載の方法。
【請求項23】
前記解剖学的部分は前記患者の頭部である、請求項22に記載の方法。
【請求項1】
放射線治療の処置中に患者の解剖学的部分を位置決めするクレードルであって、
複数の膨張可能流体チャンバと、圧力レギュレータとを含み、
各流体チャンバは、前記解剖学的部分の複数表面の一つに対して力を加えるべく構成され、
前記圧力レギュレータは、各流体チャンバの圧力を、各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることによって、他のすべての流体チャンバから独立して調整するべく構成されるクレードル。
【請求項2】
前記複数の流体チャンバの少なくとも2つが、前記解剖学的部分を前記クレードルに固定するべく前記解剖学的部分に対して実質的に反対の力を加える、請求項1に記載のクレードル。
【請求項3】
前記解剖学的部分は患者の頭部である、請求項2に記載のクレードル。
【請求項4】
前記患者は処置中、カウチ上で背臥位にある、請求項3に記載のクレードル。
【請求項5】
前記複数の膨張可能流体チャンバは、
前記患者の頸部の後ろに対して第1力を加えるべく構成された第1流体チャンバと、
前記患者の頭部の後ろに対して第2力を加えるべく構成された第2流体チャンバと、
前記患者の頭部の左側に対して第3力を加えるべく構成された第3流体チャンバと、
前記患者の頭部の右側に対して第4力を加えるべく構成された第4流体チャンバと
を含む、請求項3に記載のクレードル。
【請求項6】
前記第1力は、前記第1流体チャンバに流体が供給されると大きさが増加し、前記第1流体チャンバから流体が抜き取られると大きさが減少する、請求項5に記載のクレードル。
【請求項7】
前記第2力は、前記第2流体チャンバに流体が供給されると大きさが増加し、前記第2流体チャンバから流体が抜き取られると大きさが減少する、請求項5に記載のクレードル。
【請求項8】
前記第3力は、前記第3流体チャンバに流体が供給されると大きさが増加し、前記第3流体チャンバから流体が抜き取られると大きさが減少する、請求項5に記載のクレードル。
【請求項9】
前記第4力は、前記第4流体チャンバに流体が供給されると大きさが増加し、前記第4流体チャンバから流体が抜き取られると大きさが減少する、請求項5に記載のクレードル。
【請求項10】
放射線治療の処置中に患者の解剖学的部分を位置決めするシステムであって、
クレードルと制御ユニットとを含み、
前記クレードルは、
複数の膨張可能流体チャンバと
圧力レギュレータと
を含み、
各流体チャンバは、前記解剖学的部分の複数表面の一つに対して力を加えるべく構成され、前記複数の流体チャンバの少なくとも2つは前記解剖学的部分に対して実質的に反対の力を加え、前記解剖学的部分は前記クレードルに固定され、
前記圧力レギュレータは、各流体チャンバの圧力を、各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることによって、他のすべての流体チャンバから独立して調整するべく構成され、
前記制御ユニットは、前記圧力レギュレータに対して各流体チャンバの圧力を調整するよう指令を与え、当該解剖学的部分を所望位置に維持するべく構成されるシステム。
【請求項11】
前記所望位置は所定位置である、請求項10に記載のシステム。
【請求項12】
前記制御ユニットは、メモリ手段と、マイクロプロセッサと、信号伝達手段とをさらに含み、
前記メモリ手段は、各流体チャンバのための所定膨張データを格納するべく構成され、前記所定膨張データは、各流体チャンバの所定圧力を表し、前記所定圧力は、前記解剖学的部分の前記所定位置に対応し、
前記マイクロプロセッサは、前記メモリ手段から前記所定膨張データを受け取り、前記所定膨張データに基づいて各流体チャンバの前記所定圧力を決定するべく構成され、
前記信号伝達手段は、前記マイクロプロセッサから各流体チャンバの前記所定圧力に関する指令を受け取り、前記圧力レギュレータに膨張信号を送るべく構成され、前記膨張信号は、前記圧力レギュレータに対して各流体チャンバの圧力を前記所定圧力に調整するよう指令を与える、請求項11に記載のシステム。
【請求項13】
前記解剖学的部分は前記患者の頭部である、請求項12に記載のシステム。
【請求項14】
第2処置セッション中の前記解剖学的部分の前記所定位置は、第1セッション中の前記解剖学的部分の第1位置と実質的に同様である、請求項11に記載のシステム。
【請求項15】
前記解剖学的部分の現行位置を表す現行画像を取得するべく構成された撮像デバイスをさらに含み、
前記制御ユニットは、メモリ手段と、マイクロプロセッサと、信号伝達手段とをさらに含み、
前記メモリ手段は、前記第1セッション中に取得された第1画像を格納するべく構成され、前記第1画像は、前記第1セッション中の前記解剖学的部分の第1位置を表し、
前記マイクロプロセッサは、前記メモリ手段から前記第1画像を及び前記撮像デバイスから前記現行画像を受け取り、前記第1画像及び前記現行画像に基づいて、前記解剖学的部分の前記現行位置を、前記解剖学的部分の前記現行位置が前記解剖学的部分の前記第1位置と実質的に同様となるように調整するべく各流体チャンバの有効圧力を決定するように構成され、
前記信号伝達手段は、前記マイクロプロセッサから各流体チャンバの前記有効圧力に関する指令を受け取って前記圧力レギュレータに調整信号を送るべく構成され、前記調整信号は、前記圧力レギュレータに対して各流体チャンバの圧力を前記有効圧力に調整するように指令を与える、請求項14に記載のシステム。
【請求項16】
前記撮像デバイスはビデオカメラであり、前記現行画像は動画である、請求項15に記載のシステム。
【請求項17】
前記解剖学的部分は前記患者の頭部である、請求項15に記載のシステム。
【請求項18】
放射線治療の処置中に患者の解剖学的部分を位置決めする方法であって、
前記解剖学的部分をクレードルに配置するステップであって、前記クレードルは複数の膨張可能流体チャンバを有し、各流体チャンバは前記解剖学的部分の複数表面の一つに対して力を加えるべく構成され、前記複数の流体チャンバの少なくとも2つが前記解剖学的部分に対して実質的に反対の力を加え、前記解剖学的部分が固定されたクレードルとなるステップと、
各流体チャンバに流体を供給するか又は各流体チャンバから流体を抜き取ることにより、前記解剖学的部分を所望位置に維持するべく各流体チャンバの圧力を調整するステップと
を含む方法。
【請求項19】
第2処置セッション中の前記解剖学的部分の前記所望位置は、第1セッション中の前記解剖学的部分の第1位置と実質的に同様である、請求項18に記載の方法。
【請求項20】
前記各流体チャンバの圧力を調整するステップは、各流体チャンバの圧力が第1セッション中の各流体チャンバの圧力と実質的に同様となるように各流体チャンバの圧力を調整することを含む、請求項19に記載の方法。
【請求項21】
前記解剖学的部分は前記患者の頭部である、請求項20に記載の方法。
【請求項22】
第1セッション中に前記解剖学的部分の第1画像を取得するステップであって、前記第1画像は前記解剖学的部分の前記第1位置を表すステップと、
前記解剖学的部分の現行位置を前記解剖学的部分の前記第1位置と対比するステップと
をさらに含み、
前記各流体チャンバの圧力を調整するステップは、前記解剖学的部分の現行位置を調整するべく各流体チャンバの圧力を有効圧力に調整するステップであって、前記解剖学的部分の現行位置が前記解剖学的部分の前記第1位置と実質的に同様となるステップである、請求項19に記載の方法。
【請求項23】
前記解剖学的部分は前記患者の頭部である、請求項22に記載の方法。
【図1】

【図2a】
【図2b】
【図2c】
【図2d】
【図2e】
【図3】
【図4】
【図5】
【図6】
【図2a】
【図2b】
【図2c】
【図2d】
【図2e】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2013−517915(P2013−517915A)
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−551365(P2012−551365)
【出願日】平成23年1月31日(2011.1.31)
【国際出願番号】PCT/US2011/023149
【国際公開番号】WO2011/094674
【国際公開日】平成23年8月4日(2011.8.4)
【出願人】(596047609)
【氏名又は名称原語表記】WILLIAM BEAUMONT HOSPITAL
【住所又は居所原語表記】3601 WEST THIRTEEN MILE ROAD, ROYAL OAK, MICHIGAN 48072,UNITED STATES OF AMERICA
【Fターム(参考)】
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年1月31日(2011.1.31)
【国際出願番号】PCT/US2011/023149
【国際公開番号】WO2011/094674
【国際公開日】平成23年8月4日(2011.8.4)
【出願人】(596047609)
【氏名又は名称原語表記】WILLIAM BEAUMONT HOSPITAL
【住所又は居所原語表記】3601 WEST THIRTEEN MILE ROAD, ROYAL OAK, MICHIGAN 48072,UNITED STATES OF AMERICA
【Fターム(参考)】
[ Back to top ]