
放射線治療システムの位置決めシステムの較正方法
固定された焦点を有する放射線ユニット10、患者の治療体積部を固定する固定ユニット50、及び位置決めシステム20を含む放射線治療システムの較正。位置決めシステム20は、固定された枠組22、患者の全身を担持し移動させる可動キャリッジ24、モータ、モータを制御する制御システム、及び位置決めシステム20と固定係合状態で固定ユニット50を着脱可能に装着する少なくとも1つの係合ポイント30、32を含む。固定ユニット50に対して規定された固定ユニット座標系が設けられる。キャリッジ24の運動軸線の直線性誤差、及び運動軸線と座標系との角度オフセットを求め、これによって座標系の軸線と位置決めシステム20の運動軸線との関係を求める。次に、放射線治療ユニット10に対して固定した関係で位置決めシステムを装着して、位置決めシステム20に対する焦点を求め、それによって焦点と座標系との関係も求める。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、放射線治療の分野に関するものである。とりわけ、本発明は、固定された放射焦点を有する放射線治療ユニットを有する放射線治療システムの位置決めシステムを較正する方法に関するものである。
【背景技術】
【0002】
外科的技術の発達は、長年にわたって大きな進歩を遂げてきた。例えば、脳外科手術を必要とする患者の場合、現在では患者を苦しめる心的外傷がほとんど無い非侵襲的外科手術が利用できる。
【0003】
非侵襲的外科手術の1つのシステムが、Leksell Gamma Knife(登録商標)という名前で販売されており、これはガンマ放射線によってこのような手術を行うものである。放射線は、多数の固定された放射線源から放出され、コリメータ、すなわち断面の制限されたビームを獲得する通路又はチャネルによって集束され、規定された目標又は治療体積部に向かいうる。各線源からは、途中の組織を損傷させるには不十分なガンマ放射線の線量が供給される。しかし、全放射線源からの放射ビームが交差又は集中する箇所では組織の破壊が生じ、これによって放射が組織破壊レベルに到達する。集中する点を、以降では「焦点」と呼ぶ。このようなガンマ放射線装置が、米国特許第4780898号で言及され、説明されている。
【0004】
公知のシステムでは、患者の頭部が、頭部の治療体積部の位置を規定する固定装置により固定されて、位置決めシステム内に固定される。位置決めシステムは、固定装置及び頭部を移動させて、治療体積部を焦点に一致した状態に位置決めする。すなわち、治療体積部を焦点に位置決めする場合、患者の頭部のみが移動される。したがって、移動すべき部分、すなわち患者の頭部および固定装置のサイズ及び重量は明確に規定され、制限された範囲内にある。前記移動をさせるモータは固定装置の近傍に、又は固定装置に配置でき、位置決めシステムの公差を非常に小さく維持することができる。システムの欠点は、身体が静止したまま頭部が移動される際に、患者が多少の不快感を経験し得ることである。特に、米国特許第5528651号で説明されているように、実際の外科手術中に頭部が移動される場合は、そうである。
【特許文献1】米国特許第4780898号明細書
【特許文献2】米国特許第5528651号明細書
【発明の開示】
【発明が解決しようとする課題】
【0005】
したがって、治療体積部を焦点に位置決めする際に、患者の全身を移動させる脳外科手術用放射線治療システムに対する要求がある。しかし、このようなシステムは、幼児から体長2メートル、体重200キログラムを超える患者まで、あらゆるサイズの患者に対応できる位置決めシステムを必要とする。このため、治療体積部を焦点に位置決めする際に十分な正確さを達成するために、患者位置決めシステムに含まれる構造的部品には極めて小さい公差が必要になる。
【0006】
さらに、頭部だけではなく患者の全身を移動するために、患者を移動させるために設けられたモータ及び直線案内システムは、従来の放射線治療システムよりも焦点から遠い距離に配置されなければならない。通常、モータと案内面と焦点との間の距離が大きくなると、公差を小さくするという要件がさらに厳しくなる。構造的公差を改善すると、通常は生産費が上昇するので、特に協働して移動する部品を備えるシステムを生産する場合、このような位置決めシステムは、生産費が非常に高くなる。
【0007】
本発明の目的は、放射線治療システムの位置決めシステムを較正するための改良された方法を提供することである。
【課題を解決するための手段】
【0008】
以上及びその他の目的は、独立請求項で規定された特徴を有する較正方法を提供することによって達成される。好ましい具体例が、従属請求項で規定されている。
【0009】
本発明の第1の観点によると、固定された放射線焦点を有する放射線治療ユニットと、固定ユニット自身に対して患者の治療体積部を固定する固定ユニットと、放射線治療ユニットの前記固定された焦点に対して患者の治療体積部を位置決めする位置決めシステムとを含む、放射線治療システムの位置決めシステムを較正する方法が提供される。位置決めシステムは、放射線治療ユニットに剛性係合(rigid engagement)された固定された枠組と、患者の全身を担持して移動させる可動キャリッジと、3つの実質的に直交する運動軸線に沿ってキャリッジを移動させる少なくとも1つのモータと、前記モータを制御する制御システムと、位置決めシステムを前記固定ユニットに固定係合した状態で着脱可能に装着する少なくとも1つの係合ポイントとを含む。較正方法は、
固定ユニットに対して規定された固定ユニット座標系を設けるステップであって、固定ユニット座標系が、治療体積部を規定するように配置される、固定ユニット座標系を設けるステップと、
キャリッジの運動軸線の直線性誤差、及び前記運動軸線と前記固定ユニット座標系との角度オフセットを求め、それによって前記固定ユニット座標系の軸線と位置決めシステムの運動軸線との関係を求めるステップと、
放射線治療ユニットに対して固定した関係で位置決めシステムを装着するステップと、
患者位置決めシステムに対して放射線治療ユニットの放射線焦点を求め、それによって前記焦点と前記固定ユニット座標系との関係も求めるステップとを含む。
【0010】
したがって、本発明は患者位置決めシステムの運動軸線と治療体積部を規定する座標系との角度オフセット及び直線オフセットを求め、さらに患者位置決めシステムに対する放射線焦点を求めるという洞察に基づく。したがって、治療体積部を規定する座標系に対する焦点の位置は、患者位置決めシステムを介して与えられる。それによって放射線焦点に対する患者の体内の治療体積部の適正かつ正確な位置決めが、放射線治療中に位置決めシステムの運動軸線の移動又は位置決めにおいて、位置決めシステムの求められた角度オフセット及び直線オフセットを補償するために取得したオフセット情報を使用することによって可能になる。
【0011】
本発明の結果得られる1つの主要な利点は、患者位置決めシステムの運動軸線の較正が、位置決めシステムの製造時に、すなわち製造工場において適切に実行できることである。放射線治療を施すべき医療施設、通常は病院で、放射線治療システムを組み立てた後、固定ユニット座標系に対する固定された放射線焦点の実際の位置を測定すると、その後に位置決めシステムを較正する必要なく、放射線治療システムの使用準備が整う。したがって、本発明では、「現場で」位置決めシステムを較正する必要性がなくなる。これは幾つかの利点を伴う。位置決めシステムの製造に関連して較正を実行するので、較正中に発見された不具合は全て、時には遠いこともある医療施設へと人員及び機器を輸送する必要なく、容易に処理できる。
【0012】
さらに、製造施設で較正が実行されるため、先進の精密な較正及び測定ツールを使用できる。このツールは輸送が困難であるか、非常に費用がかかり、場合によっては病院で使用することは不適切であり、不可能なことさえある。較正されたシステムの精度に関する包括的かつ非常に正確な検証が、製造施設で実行すると可能になり、したがってより良好な製品が提供される。病院にシステムを設置する際に必要な作業量及びスペースも減少させる。設置する人は、位置決めシステムの較正の専門家である必要はない。むしろ、較正する人は、システム全体の検証、すなわち、位置決めシステムを放射線治療ユニットに装着した後のことに集中できる。
【0013】
本明細書では、固定ユニットという用語は、患者、又は治療すべき組織領域を含む患者の一部分を固定するユニットを指す。例えば、治療領域又は体積部が、患者の頭部内にある組織の一部である場合、固定ユニットは通常、例えば固定ねじなどによって患者の頭蓋に固定された頭部固定枠を構成する。次に、固定ユニットの座標は、固定ユニット座標系によって規定され、これは、治療体積部との固定関係を通して、治療体積部の外形の画定にも使用される。使用時には、固定ユニット、したがって固定ユニット座標系は、固定された放射線焦点に対して移動され、したがって固定ユニット座標系の意図された座標に焦点が正確に位置決めされる。
【0014】
このような固定ユニット及び座標系の例は、それぞれ、レクセル(Leksell)定位頭部枠及びレクセルXYZ座標系を含む。レクセルXYZ座標系は、3つの直交する辺の配置された固定ユニットの枠と完全に位置合わせされた3つの直交軸線によって規定されたデカルト座標系である。患者に対して、x軸は患者の内−側方方向に延在し、y軸は前方−後方方向に延在し、z軸は頭側−尾側方向に延在する。すなわち、患者をレクセルXYZ座標系に適切に位置決めすると、x軸は患者の耳から耳へ、z軸は頭部から爪先へ、y軸は背中から正面へと延びる。しかし、請求の範囲にある本発明の範囲から逸脱することなく、固定ユニット、さらに他のタイプの固定ユニットによって固定された体積部を規定する他の座標系を使用できることに留意されたい。
【0015】
治療体積部を固定する固定ユニットには、位置決めシステムに設けた少なくとも1つ係合ポイントに対応する、固定ユニットを装着するための少なくとも1つの係合ポイントが設けられる。装着されると、固定ユニットは患者位置決めシステムに固定係合され、位置決めシステムに対して並進又は回転することができない。そのために、回転又は角度の固定を容易にするように、複数の係合ポイントを使用することが好ましい。しかし、1つの固定ポイントにより、固定ユニットと位置決めシステムとの角度及び並進関係をロックすることも、本発明の範囲内で想定される。
【0016】
固定ユニットと患者位置決めシステムとの間に使用する係合ポイントが1つでも、幾つかでも、位置決めシステムの係合構成の係合ポイントは、固定枠又は他の治療体積部固定ユニットに対する遊び又はすきまのない状態で、非常に高い精度をもって製造される。これは、固定ユニット全体にも当てはまる。すなわち、患者位置決めシステムへの固定ユニットの固定は、非常に高い位置決め精度および再現性を有し、これはシステム全体のそれよりも高い。これによって、固定座標系と固定ユニットの係合ポイント、したがって位置決めシステムとの関係が、システムによって知られ、また固定される。したがって、位置決めシステムと係合した状態で固定ユニットを装着した場合は、常に、位置決めシステムを再較正する必要はない。さらに、新しい固定ユニット毎に位置決めシステムを再較正する必要がなく、幾つかの固定ユニットを同じ位置決めシステムに使用できる。その結果、単に位置決めシステムの係合ポイントを較正することによって、固定ユニット座標系を位置決めシステムに対して較正できる。
【0017】
固定された放射線焦点を意図した座標に位置決めするために固定ユニット座標系が移動されるので、固定ユニットの位置決めを精密かつ正確に制御しなければならない。したがって、固定ユニットを位置決めする位置決めシステムは、名目座標の意図された位置決めと、現実の座標の実際の位置決めとの偏差、すなわち周囲の空間に対する偏差を補償するように較正しなければならない。上述したように、固定ユニット座標系は位置決めシステムの係合ポイントに対して固定されているので、これは係合ポイントの移動を測定することによって達成でき、それによってアッベ誤差などの直線性誤差、及び患者位置決めシステムの運動軸線の角度オフセットを求めることができる。
【0018】
本発明の好ましい具体例によると、患者位置決めシステムのキャリッジの運動軸線の直線性誤差、及び運動軸線と固定ユニット座標系との角度オフセットは、係合ポイントと固定関係にある治療体積部又は固定ユニット座標系内の固定位置に配置された測定ポイントの実際の位置を測定することによって求められる。次に、測定ポイントを新しい名目位置で位置決めするために、キャリッジを3つの直交軸線の1つに沿って名目距離だけ移動させ、実際の位置と名目位置との差を3つの軸線全部に沿って測定し、記録する。これを、軸線に沿って全ての望ましい位置が測定されるまで、前記1つの軸線に沿って繰り返し、次に他の2つの運動軸線で繰り返す。3つの軸線全部に沿って所望の全位置でこれを実行すると、位置決めシステムの制御システムは、固定ユニット座標系を所望の実際位置で位置決めするために必要な名目座標を計算するために、記録された差を使用できる。
【0019】
1つの軸線に沿って記録された実際の位置毎に、3つの軸線全部の補償値とともに名目座標を記憶することが好ましい。各軸線に沿った各測定位置で、3つの軸線全部に沿った実際位置と名目位置との差が記録されるので、実際位置毎に9つの補償値が記憶される。
【0020】
時には、治療空間内の各単独位置、すなわち放射線治療のために放射線焦点を位置決めできる放射線固定座標系の全座標を較正することが望ましい。しかし、本発明の好ましい具体例によると、上述した較正を、座標系の各座標軸に沿ってのみ実行する。すなわち、x軸で較正測定を実行する場合、y軸及びz軸に沿った名目位置は変更しない。さらに、各軸に沿った測定は、基本的に固定ユニット座標系の中心で実行することが好ましい。すなわち、較正測定を実行する3つの軸線の交点は、基本的に座標系の、したがって予想される治療空間の中心に配置されるように実行される。
【0021】
さらに、実際位置と名目位置との差を、キャリッジが名目運動を実行したばかりの軸線について、他の2つの軸線に沿った差の測定とは別個に測定することが好ましい。すなわち、軸線の直線性誤差の測定は、各運動軸線の真直度を測定する測定ステップとは別個の測定ステップで実行される。真直度測定を実行する前に、軸線の直線性誤差の測定を測定した全位置で実行する、又はその逆であることが好ましい。次に、直線性誤差の測定により適切な測定方法及び装置を、1つの測定ステップで使用し、角度オフセット測定により適切な測定方法及び装置を、他の測定ステップで使用できる。
【0022】
当業者には理解されるように、上述した具体例は、直線性誤差及び角度オフセットを求めるために較正測定を実行できる方法の1つの適切な具体例を提供するのみであり、多数の他の具体例がある。例えば、直線性誤差及び角度オフセットを同時に測定する較正方法を使用して、較正測定を実行することができる。さらに、直交軸線に沿った測定を、任意の又はランダムな順序で実行できる。また、上述した具体例では、測定位置は1回に1つの軸線に沿って増分(インクリメント)される。他の具体例では、直交軸線のうちの2つ、又は3つの全部に沿って位置を増分することにより、その後の測定位置に到達することができる。これらの代替方法は全て、本発明の範囲内で想定される。
【0023】
本発明の例示的具体例によると、位置決めシステムの運動軸線の上述した較正に、較正測定アダプタを使用することが好ましい。1つの具体例によると、アダプタは開放された立方体、すなわち固定ユニット座標系の直交軸線に正確に対応し、それと一致する側面が3つしかない立方体の形態である。次に、実空間に固定位置を有するダイアル・インジケータを、例えば運動軸線の直線性誤差を求めるために使用できる。例えば、ダイアル・インジケータの突き当たる端部を、立方体の側面の1つと突き当たった状態で配置できる。立方体を、理想的には立方体の1つの側面と位置合わせされるべき位置決めシステムの軸線の1つに沿って、すなわち理想的にはその面の1つの運動軸線に沿って移動させる場合に、ダイアル・インジケータの全ての運動を記録する。それによって、立方体の面の理想的運動に対する位置決め軸線の運動の差を記録する。これらのインジケータの運動は、言うまでもなく座標系が配置された軸線に直交する固定ユニット座標系の運動を示す。したがって、ダイアル・インジケータは、固定ユニット座標系と位置決めシステムの運動軸線との角度偏差又はオフセットを測定するのに適切である。
【0024】
別の具体例では、アダプタは、位置決めシステムの係合ポイントに装着可能で、固定ユニット座標系の該当する部分内に含まれる空間内で光学部材を保持する取付具の形態でよい。座標系の異なる名目位置の光学機器の位置の差分は、従来のレーザ干渉計技術を使用して求めることができ、これは患者位置決めシステムの運動軸線のアッベ誤差などの直線性誤差を求めるのに適切である。
【0025】
例えば上述したレーザ干渉計技術を、上述した方法でダイアル・インジケータを使用することと組み合わせて使用することにより、直線性誤差を測定する1つの第1測定方法を、角度オフセットを測定する別の測定方法と組み合わせることが好ましい。
【0026】
これは好ましい具体例ではないが、実際の位置、及び場合によっては固定ユニットの方位を正確に測定する測定システムを設ければ、固定ユニット自体を、様々な位置で直線性及び角度誤差を求めるために使用できることにも留意されたい。
【0027】
言うまでもなく、当業者に容易に理解されるように、前記直線性誤差及び角度オフセットを求めるために使用できる多くの他のタイプの位置測定システムがある。したがって、本明細書で提供する具体例は、本発明の範囲をこのようなシステムに制限するものではない。逆に、請求の範囲に示された本発明は、位置決めシステムによる運動及び位置決め中に係合ポイントの実際の位置を求める特定のシステムに限定されない。
【0028】
治療現場で放射線治療システムを組み立てる場合は、患者位置決めシステムの固定された枠組を、放射線治療ユニットに確実に取り付ける。これにより、放射線治療ユニットに対して固定された放射線焦点の位置は、患者位置決めシステムの非常に高剛性の枠組に対しても固定される。放射線治療ユニットと患者位置決めシステムとが固定されて係合しているので、わずかな振動などの放射線治療ユニットの運動は全て、位置決めユニットに対応する運動をもたらす。したがって、位置決めシステムを放射線治療ユニットに取り付けると、放射線治療ユニット、したがって固定された放射線焦点と、位置決めシステムの固定された枠組との間に相対運動がなくなる。
【0029】
次に、患者位置決めシステムに対する固定された放射線焦点の正確な位置を求める。上述したように、放射線焦点は、コリメータ装置内に配置されたコリメータによって規定される。これは、多くの異なる方法で求めることができる。1つの例示的具体例によると、放射線ユニットに、放射線焦点に対して位置が知られている基準マークを設ける。「マーク」という用語は、広義に解釈される、すなわち光学、機械、磁気、誘導などの任意のタイプの適切な基準マークを含む。1つの好ましい具体例によると、基準マークは、放射線ユニットのコリメータ装置に設けた測定穴の形態である。
【0030】
別の例示的具体例によると、高い正確さで製造され、同じく高い正確さでコリメータ装置を取り付けた取付具を使用できる。取付具には、コリメータ装置の焦点を表示する窪み又は突起などの機械的部材を設ける。或いは、機械的部材は、焦点に対して非常に良好に規定された距離を有する位置をマークすることができる。
【0031】
次に、これらの例示的具体例の両方で、測定装置を、好ましくは固定ユニットの装着に使用される係合ポイントに対して固定された関係で、患者位置決めシステムに装着できる。したがって、表示された放射線焦点の位置又は基準マークを求めるために、測定装置を使用する。測定装置は、接触式測定プローブの形態であることが好ましいが、具体例として光学測定装置などの形態でもよい。放射線焦点の正確な位置を求めるこのようなシステムの利点は、例えば放射線を遮断した状態で、又は放射線源を放射線ユニットに装填する前など、放射線なしで求められることである。これは言うまでもなく、基準マーク又はポイントと放射線焦点との位置関係の正確さに高い要求を設定する。
【0032】
さらに別の例示的具体例によると、例えば人体模型を使用し、模型内の特定の位置に放射線感受性フィルムを設けた状態で、放射線測定によって、固定された放射線焦点を求める。放射線焦点の範囲及び位置を求めるために、放射線領域内を移動する小さいポイントで放射線を検出する模型を使用することが好ましい。別の具体例によると、ガンマ放射線に対して感受性のある写真用フィルムを使用できる。位置決めシステムに対する正確な焦点位置を求める別の方法は、非常に良好に画定された感受性体積部を有する放射能感受性ダイオードを使用することを含む。検出された放射線と直線的に比例する出力を提供するダイオードを使用することが適切である。このような放射線検出ダイオードの1つの具体例は、医療機器の放射線焦点を較正するために放射線を測定する従来通りの手段であるシリコンp−n接合ダイオードの形態の半導体電磁界検出器である。
【0033】
したがって、ダイオードで焦点領域を走査することにより、放射線焦点の正確な相対位置を求めることができる。このような測定の利点は、言うまでもなく、放射線焦点の位置を求める上述の間接的方法と比較して、放射線焦点の位置を直接測定することである。
【0034】
当業者には容易に理解されるように、放射線焦点を求めるために知られている様々な方法が使用でき、そのうち幾つかが上記で説明されている。しかし、本発明は、本明細書で示し、説明する特定の実施例に限定されず、放射線焦点を求める任意の適切な測定方法は、本発明の範囲に入るものと想定される。
【0035】
次に、本発明の好ましい実施例を、添付図面を参照してさらに詳細に説明する。
【実施例】
【0036】
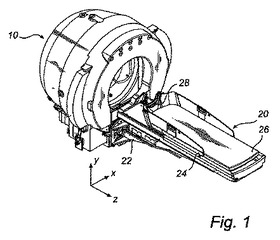
図1〜図6を参照すると、本発明の適用可能な放射線治療システムは、放射線ユニット10及び患者位置決めユニット20を備える。放射線ユニット10内には、放射性線源、放射性線源ホルダ、コリメータ本体、及び外部遮蔽部材が設けられる。コリメータ本体は、当技術分野でよく知られているような形態で共通の焦点に向かって配向された多数のコリメータ・チャネルを備える。
【0037】
コリメータ本体は、放射線がコリメータ・チャネルを通る場合以外には患者に到達することを防止する放射線遮蔽体としても作用する。本発明に適用可能な放射線治療システムのコリメータ装置の例は、国際公開第2004/06269A1号に見ることができ、これは参照により全体が本明細書に援用される。しかし、本発明は、米国特許第4780898号で開示されているように、放射線を固定した焦点へと平行化する他の構成を使用する放射線治療システムにも適用可能である。
【0038】
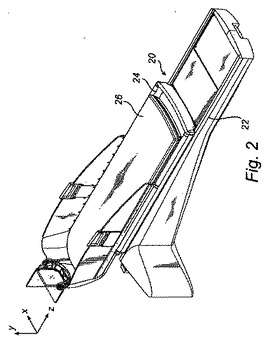
患者位置決めユニット20は、剛性を有する枠組22、滑動又は移動可能なキャリッジ24、及び枠組22に対してキャリッジ24を移動させるモータ(図示せず)を備える。キャリッジ24にはさらに、患者の全身を担持して移動させる患者ベッド26が設けられる。キャリッジ24の一端には、患者固定ユニット50を直接、又はアダプタ・ユニット42を介して受け取り、固定する固定装置28が設けられる。図示の実施例によると、固定装置28は、2つの係合ポイント30、32を備え、これは患者固定ユニットが可動キャリッジ24に対して並進及び/又は回転運動することを防止するために配置される。
【0039】
図1及び図2から理解できるように、記載の実施例は、人間の患者の頭部にある目標体積部にガンマ放射線治療を施す放射線治療システムに関するものである。このような治療は、往々にして定位手術と呼ばれる。治療中に、患者の頭部は、図5に図示の定位頭部枠50の形態の固定ユニット内に固定される。定位頭部枠は、放射線治療システムの係合ポイント30、32に係合するような構成である係合ポイント51を有する。したがって、定位手術中に、患者の頭部は定位枠50内に固定され、これは係合ポイント30、32、51を介して患者位置決めシステムに固定状態で取り付けられている。放射線焦点に対して図1に示す3つの直交軸線x、y及びzに沿って患者の頭部内にある治療体積部を移動させる間、患者の全身がその軸線に沿って移動される。したがって、頭部枠50と患者位置決めシステム20のキャリッジ24との間に相対運動はない。
【0040】
次に図5を参照すると、定位頭部枠50の形態の固定ユニットが図示されている。頭部枠50は、前方梁52、後方梁ム53、及び右側及び左側梁54、55により構成された基体を備える。基体の梁は、相互に対して直交状態で装着され、各梁の長手方向は、以下で説明するレクセルXYZ座標系のx軸及びy軸方向に完全に平行に配置され、前後梁52、53はx軸に平行であり、側部梁54、55はy軸に平行である。梁には、固定装置28の係合ポイント30、32と固定状態で係合するように配置された係合ポイント51が設けられる。
【0041】
さらに、基体の各隅には、垂直ポスト56、57が設けられ、このポストは、治療手順全体で定位頭部枠50に対して頭部を固定するために、ねじを保持するように配置される。したがって、各ポスト56、57の上端には、頭部枠を患者の頭蓋に固定する固定ねじ58を設けられる。さらに、z軸に沿った各ポストの位置は、患者の頭部のサイズ及び形状に適応させて調節できる。
【0042】
図6は、デカルト座標系であるレクセルXYZ座標系を、患者の頭部の周囲に適用されている標準的枠との関連で示す。図で見られるように、座標の原点(0,0,0)は、後頭部の背後で、右耳の外側かつ頭頂部の上方に配置される。したがって、患者の頭部の目標領域又は焦点は、正の座標で規定される。x軸は、患者の右耳から左耳へと延在する仮想線に平行に延在する。y軸は、患者の首(後方)から鼻(前方)へと引いた線に平行に延在する。z軸は、患者の身体の長手方向に平行に延在する。以下では、レクセルXYZ座標系の座標を、レクセル座標と呼ぶ。
【0043】
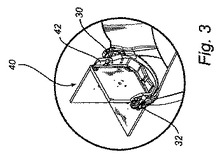
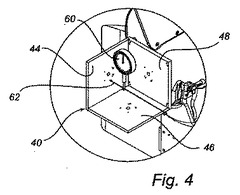
次に図2〜図4に戻ると、固定装置28の係合ポイント30、32に固定状態で装着されたアダプタ・ユニット42が図示されている。上述したように、アダプタ・ユニット42は、定位枠50の装着を容易にするために使用できる。しかし、これらの図では、較正基準ユニット40を位置決めユニット20の固定装置28に装着するために、アダプタ・ユニット42が使用される。基準ユニット40は、開いた立方体、すなわち3つの直交する側壁44、46、48を有する立方体の形態である。壁44、46、48の範囲は、レクセルXYZ座標系に対応し、したがって左側壁44はYZ面にあり、後側壁46はXZ面にあり、底側壁48はXY面にある。「左」、「後」及び「底」という用語は、ベッド26に横になる患者に関するものである。
【0044】
説明した実施例では、較正測定を実行するために、2つのダイアル・インジケータ60を使用する。しかし、例証のために、図4には1つのダイアル・インジケータしか図示されていない。各ダイアル・インジケータ60は、測定スティック又はピン62及び表示ダイアルを備える。測定スティック62の長手方向での移動は、表示ダイアルに伝達されて、表示される。したがって、側壁44がX方向に移動する、例えば角度偏差又はオフセットを較正するためにy軸又はz軸に沿って立方体40を移動させると、この移動が測定スティック62により計られて、記録可能になる。
【0045】
較正動作中に、2つの面に延在する軸線について角度オフセット測定を実行する場合に、2つのダイアル・インジケータは、測定スティック62が2つの側壁に突き当たるように配置される。すなわち、z軸に沿ったレクセル座標系の移動を提供する運動軸線を較正する場合、それぞれ第1及び第2ダイアル・インジケータの測定スティックが、YZ面の側壁44及びXZ面の側壁46に突き当たる。したがって、位置決めシステムがz軸に沿って立方体を移動させると、XZ面に突き当たるダイアル・インジケータは、x軸に沿った角度オフセットを測定し、YZ面に突き当たるダイアル・インジケータは、図で示すように、y軸に沿った角度オフセットを測定する。
【0046】
ダイアル・インジケータ60は、例証のために図4には図示されていない保持構成によって、位置決めシステムに対して焦点が配置される箇所の近傍で、固定され、正確に規定された位置に保持される。インジケータは、ダイアル上に結果を提示するのではなく、較正の測定結果を電子的に記録し、記憶するために、電子記憶手段に接続することができる。
【0047】
本発明の最も好ましい実施例によると、角度オフセットを測定するステップと、直線性又はアッベ誤差を測定するステップは、別個に実行される。説明した実施例では、角度オフセットの測定を、直線性誤差の測定の前に実行するが、測定の順序は逆転させることもできる。
【0048】
角度オフセットを較正する場合は、上述した方法で1回に1つの運動軸線を測定する。最初に、仮想放射線焦点を規定する。この仮想焦点の正確な位置は重大ではないが、その位置は測定を通して固定される。その後、位置決めシステムを制御して、例えば、仮想焦点がレクセル座標でミリメートル単位で(0,100,100)に配置される。この時点で、2つのダイアル・インジケータの測定スティック62は、後及び底側壁46、48、すなわちXZ面及びXY面それぞれの壁に突き当たる。ダイアルの振れを読み、個々の読み取り値を記録する。次に、焦点をレクセル座標の(20,100,100)に配置するために、立方体、すなわち座標系をx軸に沿って移動させる。再び新しい座標でダイアルを読み、読み取り値を記憶する。
【0049】
これを、例えば仮想焦点が(200,100,100)に配置されるまで、較正すべきx軸の部分に沿って繰り返す。次に、仮想焦点を、残りの運動軸線の1つの一端、この例ではレクセル座標の(100,0,100)に位置決めする。したがって、次にy軸が較正される。ダイアル・インジケータを、その測定スティックが左側壁及び底側壁44、48に突き当たるように再位置決めし、y軸について測定手順を繰り返す。最後に、仮想焦点を(100,100,0)に配置し、表示ダイアルを再位置決めして、残りの軸線、この場合はz軸で同様の測定を実行する。
【0050】
次に、各ポイントについてx軸、y軸及びz軸それぞれに沿って今求めた角度オフセットを記憶する。したがって、各軸線に沿った各ポイントについて2つ、すなわち他の2つの軸線のそれぞれについて1つの補償値がある。ここでレクセル座標毎に、x方向、y方向及びz方向の補償値があるように、これらを加え合わせる。較正方法を続けると、レクセル座標系と位置決めシステムの運動軸線との角度オフセットを補償するように意図された補償値ができる。しかし、これは、運動軸線の直線性に起こり得る誤差、例えばアッベ誤差を考慮に入れていない。好ましい実施例によると、運動軸線の直線性を較正するために、第2の較正ステップを使用する。
【0051】
次に、レーザ干渉計システムを使用する。例えばアダプタ・ユニット42を、したがってレクセル座標系を使用して、反射器の形態の第1光学部材を、係合ポイント30、32に対して固定した関係で位置決めして、装着する。位置決めシステムの固定された枠組に対する固定位置に、すなわち実際の座標の固定位置に第2光学部材を配置する。さらに、2つの光学部材間の距離の変化を測定するために、レーザを使用する。
【0052】
最初に、仮想焦点が(0,100,100)になるように、レクセル座標系を移動させる。次に、仮想焦点を新しい座標にx軸に沿って位置決めし、これによって第1光学部材を名目距離だけ移動させる。実際の移動距離を、レーザを使用して測定し、光学部材が移動した名目距離、すなわち位置決めシステムが制御して記録した通りの距離と比較する。実際の移動と名目移動との差を較正テーブルに記憶し、その座標の直線補償値を表示する。次に、最初はx軸全体に沿って、次にy軸及びz軸について同様の形で、これを繰り返す。名目位置又は移動と実際の位置又は移動との差を、測定した座標毎に記録する。このように記録した値は、それぞれx軸、y軸及びz軸の補償値である。
【0053】
次に、直線性誤差の補償値を、角度オフセットの補償値に加算することができる。したがって、レクセル座標毎に、加算された補償値は、9つの異なる補償値、すなわち各軸線について1つの直線性補償及び2つの角度補償で構成される。したがって、各座標の実際の座標と名目座標との間の補償は、下式のように表すことができる。
(X,Y,Z)=(XNom+XComp,YNom+YComp,ZNom+ZComp)
ここで、
XComp=(LinErrX−axis+AngOffY−axis+AngOffZ−axis)
YComp=(AngOffX−axis+LinErrY−axis+AngOffZ−axis)
ZComp=(AngOffX−axis+AngOffY−axis+LinErrZ−axis)
である。
【0054】
本発明の最も好ましい実施例によると、上述した較正ステップは、患者位置決めシステムを製造するか、少なくとも組み立てる工場で実行される。前記較正の後、患者位置決めシステム20と放射線ユニット10を、例えば患者位置決めシステム20の剛性を有する枠組22を放射線ユニット10の対応する剛性を有する枠組にボルト締めすることによって、相互にしっかり取り付ける。この取り付けは、放射線治療システムを使用することが意図されている医療施設で実行される。
【0055】
患者位置決めシステム20及び放射線ユニット10を治療現場で相互にしっかり取り付けた場合、患者位置決めシステムに対して固定された放射線焦点の実際の位置を求める。上述したように、放射線焦点を配置する位置を決定するのは、放射線ユニット10のコリメータ装置に含まれるコリメータ、すなわちコリメータの配向、設計及び方向並びに線源である。したがって、放射線源からの放射線を検出又は測定する必要なく、放射線焦点の実際の位置を求め、計算することができる。
【0056】
好ましい実施例によると、取付具を非常に高い精度をもってコリメータ装置内に取り付けることによって、放射線焦点を求める。取付具は、取付具をコリメータ装置内に取り付けた場合に、コリメータ装置の焦点が、取付具に設けた識別可能な窪みによって表示されるように配置される。窪みを識別し、それによって位置決めシステムに対する放射線焦点の位置を求めるために、患者位置決めシステムの係合ポイント30、32内に装着したプローブを使用する。
【0057】
次に、位置決めシステムに対して固定された放射線焦点の実際の位置を求めた場合、放射線焦点の実際の位置と仮想焦点の推測位置とのオフセットを記録し、記憶する。3つの直交軸線全部を考慮に入れた座標のオフセットを、放射線焦点とレクセルXYZ座標系との名目位置と実際の位置の関係を補償するために使用する。
【0058】
本発明を、その例示的実施例を使用して以上で説明してきたが、請求の範囲で定義されているような本発明の範囲から逸脱することなく、当業者に理解されるようなその変更、改造及び組合せが可能である。例えば、ガンマ放射線に対して感受性のある写真用フィルムを含む模型、又は放射線焦点を検出するために治療体積部内で移動できる放射線感受性ダイオードなどの放射線感受性測定手段で焦点を測定することにより、放射線焦点を求めることができる。さらに、直線性誤差及び角度オフセットについて位置決めシステムの運動軸線を較正するステップを実行するために、幾つかの異なる測定方法を使用することができる。
【図面の簡単な説明】
【0059】
【図1】本発明を使用した較正に適切な放射線治療システムの一般的原理を示す図。
【図2】本発明の較正方法に使用する位置決めシステムを示す図。
【図3】患者位置決めシステムの運動軸線の直線性誤差及び角度オフセットを求める際に使用するアダプタの一例を示す図。
【図4】ダイアル・インジケータを使用した測定中の図3のアダプタを示す図。
【図5】固定ユニットを示す図。
【図6】レクセルXYZ座標系を示す図。
【技術分野】
【0001】
本発明は、放射線治療の分野に関するものである。とりわけ、本発明は、固定された放射焦点を有する放射線治療ユニットを有する放射線治療システムの位置決めシステムを較正する方法に関するものである。
【背景技術】
【0002】
外科的技術の発達は、長年にわたって大きな進歩を遂げてきた。例えば、脳外科手術を必要とする患者の場合、現在では患者を苦しめる心的外傷がほとんど無い非侵襲的外科手術が利用できる。
【0003】
非侵襲的外科手術の1つのシステムが、Leksell Gamma Knife(登録商標)という名前で販売されており、これはガンマ放射線によってこのような手術を行うものである。放射線は、多数の固定された放射線源から放出され、コリメータ、すなわち断面の制限されたビームを獲得する通路又はチャネルによって集束され、規定された目標又は治療体積部に向かいうる。各線源からは、途中の組織を損傷させるには不十分なガンマ放射線の線量が供給される。しかし、全放射線源からの放射ビームが交差又は集中する箇所では組織の破壊が生じ、これによって放射が組織破壊レベルに到達する。集中する点を、以降では「焦点」と呼ぶ。このようなガンマ放射線装置が、米国特許第4780898号で言及され、説明されている。
【0004】
公知のシステムでは、患者の頭部が、頭部の治療体積部の位置を規定する固定装置により固定されて、位置決めシステム内に固定される。位置決めシステムは、固定装置及び頭部を移動させて、治療体積部を焦点に一致した状態に位置決めする。すなわち、治療体積部を焦点に位置決めする場合、患者の頭部のみが移動される。したがって、移動すべき部分、すなわち患者の頭部および固定装置のサイズ及び重量は明確に規定され、制限された範囲内にある。前記移動をさせるモータは固定装置の近傍に、又は固定装置に配置でき、位置決めシステムの公差を非常に小さく維持することができる。システムの欠点は、身体が静止したまま頭部が移動される際に、患者が多少の不快感を経験し得ることである。特に、米国特許第5528651号で説明されているように、実際の外科手術中に頭部が移動される場合は、そうである。
【特許文献1】米国特許第4780898号明細書
【特許文献2】米国特許第5528651号明細書
【発明の開示】
【発明が解決しようとする課題】
【0005】
したがって、治療体積部を焦点に位置決めする際に、患者の全身を移動させる脳外科手術用放射線治療システムに対する要求がある。しかし、このようなシステムは、幼児から体長2メートル、体重200キログラムを超える患者まで、あらゆるサイズの患者に対応できる位置決めシステムを必要とする。このため、治療体積部を焦点に位置決めする際に十分な正確さを達成するために、患者位置決めシステムに含まれる構造的部品には極めて小さい公差が必要になる。
【0006】
さらに、頭部だけではなく患者の全身を移動するために、患者を移動させるために設けられたモータ及び直線案内システムは、従来の放射線治療システムよりも焦点から遠い距離に配置されなければならない。通常、モータと案内面と焦点との間の距離が大きくなると、公差を小さくするという要件がさらに厳しくなる。構造的公差を改善すると、通常は生産費が上昇するので、特に協働して移動する部品を備えるシステムを生産する場合、このような位置決めシステムは、生産費が非常に高くなる。
【0007】
本発明の目的は、放射線治療システムの位置決めシステムを較正するための改良された方法を提供することである。
【課題を解決するための手段】
【0008】
以上及びその他の目的は、独立請求項で規定された特徴を有する較正方法を提供することによって達成される。好ましい具体例が、従属請求項で規定されている。
【0009】
本発明の第1の観点によると、固定された放射線焦点を有する放射線治療ユニットと、固定ユニット自身に対して患者の治療体積部を固定する固定ユニットと、放射線治療ユニットの前記固定された焦点に対して患者の治療体積部を位置決めする位置決めシステムとを含む、放射線治療システムの位置決めシステムを較正する方法が提供される。位置決めシステムは、放射線治療ユニットに剛性係合(rigid engagement)された固定された枠組と、患者の全身を担持して移動させる可動キャリッジと、3つの実質的に直交する運動軸線に沿ってキャリッジを移動させる少なくとも1つのモータと、前記モータを制御する制御システムと、位置決めシステムを前記固定ユニットに固定係合した状態で着脱可能に装着する少なくとも1つの係合ポイントとを含む。較正方法は、
固定ユニットに対して規定された固定ユニット座標系を設けるステップであって、固定ユニット座標系が、治療体積部を規定するように配置される、固定ユニット座標系を設けるステップと、
キャリッジの運動軸線の直線性誤差、及び前記運動軸線と前記固定ユニット座標系との角度オフセットを求め、それによって前記固定ユニット座標系の軸線と位置決めシステムの運動軸線との関係を求めるステップと、
放射線治療ユニットに対して固定した関係で位置決めシステムを装着するステップと、
患者位置決めシステムに対して放射線治療ユニットの放射線焦点を求め、それによって前記焦点と前記固定ユニット座標系との関係も求めるステップとを含む。
【0010】
したがって、本発明は患者位置決めシステムの運動軸線と治療体積部を規定する座標系との角度オフセット及び直線オフセットを求め、さらに患者位置決めシステムに対する放射線焦点を求めるという洞察に基づく。したがって、治療体積部を規定する座標系に対する焦点の位置は、患者位置決めシステムを介して与えられる。それによって放射線焦点に対する患者の体内の治療体積部の適正かつ正確な位置決めが、放射線治療中に位置決めシステムの運動軸線の移動又は位置決めにおいて、位置決めシステムの求められた角度オフセット及び直線オフセットを補償するために取得したオフセット情報を使用することによって可能になる。
【0011】
本発明の結果得られる1つの主要な利点は、患者位置決めシステムの運動軸線の較正が、位置決めシステムの製造時に、すなわち製造工場において適切に実行できることである。放射線治療を施すべき医療施設、通常は病院で、放射線治療システムを組み立てた後、固定ユニット座標系に対する固定された放射線焦点の実際の位置を測定すると、その後に位置決めシステムを較正する必要なく、放射線治療システムの使用準備が整う。したがって、本発明では、「現場で」位置決めシステムを較正する必要性がなくなる。これは幾つかの利点を伴う。位置決めシステムの製造に関連して較正を実行するので、較正中に発見された不具合は全て、時には遠いこともある医療施設へと人員及び機器を輸送する必要なく、容易に処理できる。
【0012】
さらに、製造施設で較正が実行されるため、先進の精密な較正及び測定ツールを使用できる。このツールは輸送が困難であるか、非常に費用がかかり、場合によっては病院で使用することは不適切であり、不可能なことさえある。較正されたシステムの精度に関する包括的かつ非常に正確な検証が、製造施設で実行すると可能になり、したがってより良好な製品が提供される。病院にシステムを設置する際に必要な作業量及びスペースも減少させる。設置する人は、位置決めシステムの較正の専門家である必要はない。むしろ、較正する人は、システム全体の検証、すなわち、位置決めシステムを放射線治療ユニットに装着した後のことに集中できる。
【0013】
本明細書では、固定ユニットという用語は、患者、又は治療すべき組織領域を含む患者の一部分を固定するユニットを指す。例えば、治療領域又は体積部が、患者の頭部内にある組織の一部である場合、固定ユニットは通常、例えば固定ねじなどによって患者の頭蓋に固定された頭部固定枠を構成する。次に、固定ユニットの座標は、固定ユニット座標系によって規定され、これは、治療体積部との固定関係を通して、治療体積部の外形の画定にも使用される。使用時には、固定ユニット、したがって固定ユニット座標系は、固定された放射線焦点に対して移動され、したがって固定ユニット座標系の意図された座標に焦点が正確に位置決めされる。
【0014】
このような固定ユニット及び座標系の例は、それぞれ、レクセル(Leksell)定位頭部枠及びレクセルXYZ座標系を含む。レクセルXYZ座標系は、3つの直交する辺の配置された固定ユニットの枠と完全に位置合わせされた3つの直交軸線によって規定されたデカルト座標系である。患者に対して、x軸は患者の内−側方方向に延在し、y軸は前方−後方方向に延在し、z軸は頭側−尾側方向に延在する。すなわち、患者をレクセルXYZ座標系に適切に位置決めすると、x軸は患者の耳から耳へ、z軸は頭部から爪先へ、y軸は背中から正面へと延びる。しかし、請求の範囲にある本発明の範囲から逸脱することなく、固定ユニット、さらに他のタイプの固定ユニットによって固定された体積部を規定する他の座標系を使用できることに留意されたい。
【0015】
治療体積部を固定する固定ユニットには、位置決めシステムに設けた少なくとも1つ係合ポイントに対応する、固定ユニットを装着するための少なくとも1つの係合ポイントが設けられる。装着されると、固定ユニットは患者位置決めシステムに固定係合され、位置決めシステムに対して並進又は回転することができない。そのために、回転又は角度の固定を容易にするように、複数の係合ポイントを使用することが好ましい。しかし、1つの固定ポイントにより、固定ユニットと位置決めシステムとの角度及び並進関係をロックすることも、本発明の範囲内で想定される。
【0016】
固定ユニットと患者位置決めシステムとの間に使用する係合ポイントが1つでも、幾つかでも、位置決めシステムの係合構成の係合ポイントは、固定枠又は他の治療体積部固定ユニットに対する遊び又はすきまのない状態で、非常に高い精度をもって製造される。これは、固定ユニット全体にも当てはまる。すなわち、患者位置決めシステムへの固定ユニットの固定は、非常に高い位置決め精度および再現性を有し、これはシステム全体のそれよりも高い。これによって、固定座標系と固定ユニットの係合ポイント、したがって位置決めシステムとの関係が、システムによって知られ、また固定される。したがって、位置決めシステムと係合した状態で固定ユニットを装着した場合は、常に、位置決めシステムを再較正する必要はない。さらに、新しい固定ユニット毎に位置決めシステムを再較正する必要がなく、幾つかの固定ユニットを同じ位置決めシステムに使用できる。その結果、単に位置決めシステムの係合ポイントを較正することによって、固定ユニット座標系を位置決めシステムに対して較正できる。
【0017】
固定された放射線焦点を意図した座標に位置決めするために固定ユニット座標系が移動されるので、固定ユニットの位置決めを精密かつ正確に制御しなければならない。したがって、固定ユニットを位置決めする位置決めシステムは、名目座標の意図された位置決めと、現実の座標の実際の位置決めとの偏差、すなわち周囲の空間に対する偏差を補償するように較正しなければならない。上述したように、固定ユニット座標系は位置決めシステムの係合ポイントに対して固定されているので、これは係合ポイントの移動を測定することによって達成でき、それによってアッベ誤差などの直線性誤差、及び患者位置決めシステムの運動軸線の角度オフセットを求めることができる。
【0018】
本発明の好ましい具体例によると、患者位置決めシステムのキャリッジの運動軸線の直線性誤差、及び運動軸線と固定ユニット座標系との角度オフセットは、係合ポイントと固定関係にある治療体積部又は固定ユニット座標系内の固定位置に配置された測定ポイントの実際の位置を測定することによって求められる。次に、測定ポイントを新しい名目位置で位置決めするために、キャリッジを3つの直交軸線の1つに沿って名目距離だけ移動させ、実際の位置と名目位置との差を3つの軸線全部に沿って測定し、記録する。これを、軸線に沿って全ての望ましい位置が測定されるまで、前記1つの軸線に沿って繰り返し、次に他の2つの運動軸線で繰り返す。3つの軸線全部に沿って所望の全位置でこれを実行すると、位置決めシステムの制御システムは、固定ユニット座標系を所望の実際位置で位置決めするために必要な名目座標を計算するために、記録された差を使用できる。
【0019】
1つの軸線に沿って記録された実際の位置毎に、3つの軸線全部の補償値とともに名目座標を記憶することが好ましい。各軸線に沿った各測定位置で、3つの軸線全部に沿った実際位置と名目位置との差が記録されるので、実際位置毎に9つの補償値が記憶される。
【0020】
時には、治療空間内の各単独位置、すなわち放射線治療のために放射線焦点を位置決めできる放射線固定座標系の全座標を較正することが望ましい。しかし、本発明の好ましい具体例によると、上述した較正を、座標系の各座標軸に沿ってのみ実行する。すなわち、x軸で較正測定を実行する場合、y軸及びz軸に沿った名目位置は変更しない。さらに、各軸に沿った測定は、基本的に固定ユニット座標系の中心で実行することが好ましい。すなわち、較正測定を実行する3つの軸線の交点は、基本的に座標系の、したがって予想される治療空間の中心に配置されるように実行される。
【0021】
さらに、実際位置と名目位置との差を、キャリッジが名目運動を実行したばかりの軸線について、他の2つの軸線に沿った差の測定とは別個に測定することが好ましい。すなわち、軸線の直線性誤差の測定は、各運動軸線の真直度を測定する測定ステップとは別個の測定ステップで実行される。真直度測定を実行する前に、軸線の直線性誤差の測定を測定した全位置で実行する、又はその逆であることが好ましい。次に、直線性誤差の測定により適切な測定方法及び装置を、1つの測定ステップで使用し、角度オフセット測定により適切な測定方法及び装置を、他の測定ステップで使用できる。
【0022】
当業者には理解されるように、上述した具体例は、直線性誤差及び角度オフセットを求めるために較正測定を実行できる方法の1つの適切な具体例を提供するのみであり、多数の他の具体例がある。例えば、直線性誤差及び角度オフセットを同時に測定する較正方法を使用して、較正測定を実行することができる。さらに、直交軸線に沿った測定を、任意の又はランダムな順序で実行できる。また、上述した具体例では、測定位置は1回に1つの軸線に沿って増分(インクリメント)される。他の具体例では、直交軸線のうちの2つ、又は3つの全部に沿って位置を増分することにより、その後の測定位置に到達することができる。これらの代替方法は全て、本発明の範囲内で想定される。
【0023】
本発明の例示的具体例によると、位置決めシステムの運動軸線の上述した較正に、較正測定アダプタを使用することが好ましい。1つの具体例によると、アダプタは開放された立方体、すなわち固定ユニット座標系の直交軸線に正確に対応し、それと一致する側面が3つしかない立方体の形態である。次に、実空間に固定位置を有するダイアル・インジケータを、例えば運動軸線の直線性誤差を求めるために使用できる。例えば、ダイアル・インジケータの突き当たる端部を、立方体の側面の1つと突き当たった状態で配置できる。立方体を、理想的には立方体の1つの側面と位置合わせされるべき位置決めシステムの軸線の1つに沿って、すなわち理想的にはその面の1つの運動軸線に沿って移動させる場合に、ダイアル・インジケータの全ての運動を記録する。それによって、立方体の面の理想的運動に対する位置決め軸線の運動の差を記録する。これらのインジケータの運動は、言うまでもなく座標系が配置された軸線に直交する固定ユニット座標系の運動を示す。したがって、ダイアル・インジケータは、固定ユニット座標系と位置決めシステムの運動軸線との角度偏差又はオフセットを測定するのに適切である。
【0024】
別の具体例では、アダプタは、位置決めシステムの係合ポイントに装着可能で、固定ユニット座標系の該当する部分内に含まれる空間内で光学部材を保持する取付具の形態でよい。座標系の異なる名目位置の光学機器の位置の差分は、従来のレーザ干渉計技術を使用して求めることができ、これは患者位置決めシステムの運動軸線のアッベ誤差などの直線性誤差を求めるのに適切である。
【0025】
例えば上述したレーザ干渉計技術を、上述した方法でダイアル・インジケータを使用することと組み合わせて使用することにより、直線性誤差を測定する1つの第1測定方法を、角度オフセットを測定する別の測定方法と組み合わせることが好ましい。
【0026】
これは好ましい具体例ではないが、実際の位置、及び場合によっては固定ユニットの方位を正確に測定する測定システムを設ければ、固定ユニット自体を、様々な位置で直線性及び角度誤差を求めるために使用できることにも留意されたい。
【0027】
言うまでもなく、当業者に容易に理解されるように、前記直線性誤差及び角度オフセットを求めるために使用できる多くの他のタイプの位置測定システムがある。したがって、本明細書で提供する具体例は、本発明の範囲をこのようなシステムに制限するものではない。逆に、請求の範囲に示された本発明は、位置決めシステムによる運動及び位置決め中に係合ポイントの実際の位置を求める特定のシステムに限定されない。
【0028】
治療現場で放射線治療システムを組み立てる場合は、患者位置決めシステムの固定された枠組を、放射線治療ユニットに確実に取り付ける。これにより、放射線治療ユニットに対して固定された放射線焦点の位置は、患者位置決めシステムの非常に高剛性の枠組に対しても固定される。放射線治療ユニットと患者位置決めシステムとが固定されて係合しているので、わずかな振動などの放射線治療ユニットの運動は全て、位置決めユニットに対応する運動をもたらす。したがって、位置決めシステムを放射線治療ユニットに取り付けると、放射線治療ユニット、したがって固定された放射線焦点と、位置決めシステムの固定された枠組との間に相対運動がなくなる。
【0029】
次に、患者位置決めシステムに対する固定された放射線焦点の正確な位置を求める。上述したように、放射線焦点は、コリメータ装置内に配置されたコリメータによって規定される。これは、多くの異なる方法で求めることができる。1つの例示的具体例によると、放射線ユニットに、放射線焦点に対して位置が知られている基準マークを設ける。「マーク」という用語は、広義に解釈される、すなわち光学、機械、磁気、誘導などの任意のタイプの適切な基準マークを含む。1つの好ましい具体例によると、基準マークは、放射線ユニットのコリメータ装置に設けた測定穴の形態である。
【0030】
別の例示的具体例によると、高い正確さで製造され、同じく高い正確さでコリメータ装置を取り付けた取付具を使用できる。取付具には、コリメータ装置の焦点を表示する窪み又は突起などの機械的部材を設ける。或いは、機械的部材は、焦点に対して非常に良好に規定された距離を有する位置をマークすることができる。
【0031】
次に、これらの例示的具体例の両方で、測定装置を、好ましくは固定ユニットの装着に使用される係合ポイントに対して固定された関係で、患者位置決めシステムに装着できる。したがって、表示された放射線焦点の位置又は基準マークを求めるために、測定装置を使用する。測定装置は、接触式測定プローブの形態であることが好ましいが、具体例として光学測定装置などの形態でもよい。放射線焦点の正確な位置を求めるこのようなシステムの利点は、例えば放射線を遮断した状態で、又は放射線源を放射線ユニットに装填する前など、放射線なしで求められることである。これは言うまでもなく、基準マーク又はポイントと放射線焦点との位置関係の正確さに高い要求を設定する。
【0032】
さらに別の例示的具体例によると、例えば人体模型を使用し、模型内の特定の位置に放射線感受性フィルムを設けた状態で、放射線測定によって、固定された放射線焦点を求める。放射線焦点の範囲及び位置を求めるために、放射線領域内を移動する小さいポイントで放射線を検出する模型を使用することが好ましい。別の具体例によると、ガンマ放射線に対して感受性のある写真用フィルムを使用できる。位置決めシステムに対する正確な焦点位置を求める別の方法は、非常に良好に画定された感受性体積部を有する放射能感受性ダイオードを使用することを含む。検出された放射線と直線的に比例する出力を提供するダイオードを使用することが適切である。このような放射線検出ダイオードの1つの具体例は、医療機器の放射線焦点を較正するために放射線を測定する従来通りの手段であるシリコンp−n接合ダイオードの形態の半導体電磁界検出器である。
【0033】
したがって、ダイオードで焦点領域を走査することにより、放射線焦点の正確な相対位置を求めることができる。このような測定の利点は、言うまでもなく、放射線焦点の位置を求める上述の間接的方法と比較して、放射線焦点の位置を直接測定することである。
【0034】
当業者には容易に理解されるように、放射線焦点を求めるために知られている様々な方法が使用でき、そのうち幾つかが上記で説明されている。しかし、本発明は、本明細書で示し、説明する特定の実施例に限定されず、放射線焦点を求める任意の適切な測定方法は、本発明の範囲に入るものと想定される。
【0035】
次に、本発明の好ましい実施例を、添付図面を参照してさらに詳細に説明する。
【実施例】
【0036】
図1〜図6を参照すると、本発明の適用可能な放射線治療システムは、放射線ユニット10及び患者位置決めユニット20を備える。放射線ユニット10内には、放射性線源、放射性線源ホルダ、コリメータ本体、及び外部遮蔽部材が設けられる。コリメータ本体は、当技術分野でよく知られているような形態で共通の焦点に向かって配向された多数のコリメータ・チャネルを備える。
【0037】
コリメータ本体は、放射線がコリメータ・チャネルを通る場合以外には患者に到達することを防止する放射線遮蔽体としても作用する。本発明に適用可能な放射線治療システムのコリメータ装置の例は、国際公開第2004/06269A1号に見ることができ、これは参照により全体が本明細書に援用される。しかし、本発明は、米国特許第4780898号で開示されているように、放射線を固定した焦点へと平行化する他の構成を使用する放射線治療システムにも適用可能である。
【0038】
患者位置決めユニット20は、剛性を有する枠組22、滑動又は移動可能なキャリッジ24、及び枠組22に対してキャリッジ24を移動させるモータ(図示せず)を備える。キャリッジ24にはさらに、患者の全身を担持して移動させる患者ベッド26が設けられる。キャリッジ24の一端には、患者固定ユニット50を直接、又はアダプタ・ユニット42を介して受け取り、固定する固定装置28が設けられる。図示の実施例によると、固定装置28は、2つの係合ポイント30、32を備え、これは患者固定ユニットが可動キャリッジ24に対して並進及び/又は回転運動することを防止するために配置される。
【0039】
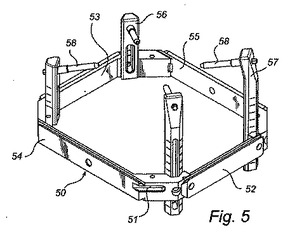
図1及び図2から理解できるように、記載の実施例は、人間の患者の頭部にある目標体積部にガンマ放射線治療を施す放射線治療システムに関するものである。このような治療は、往々にして定位手術と呼ばれる。治療中に、患者の頭部は、図5に図示の定位頭部枠50の形態の固定ユニット内に固定される。定位頭部枠は、放射線治療システムの係合ポイント30、32に係合するような構成である係合ポイント51を有する。したがって、定位手術中に、患者の頭部は定位枠50内に固定され、これは係合ポイント30、32、51を介して患者位置決めシステムに固定状態で取り付けられている。放射線焦点に対して図1に示す3つの直交軸線x、y及びzに沿って患者の頭部内にある治療体積部を移動させる間、患者の全身がその軸線に沿って移動される。したがって、頭部枠50と患者位置決めシステム20のキャリッジ24との間に相対運動はない。
【0040】
次に図5を参照すると、定位頭部枠50の形態の固定ユニットが図示されている。頭部枠50は、前方梁52、後方梁ム53、及び右側及び左側梁54、55により構成された基体を備える。基体の梁は、相互に対して直交状態で装着され、各梁の長手方向は、以下で説明するレクセルXYZ座標系のx軸及びy軸方向に完全に平行に配置され、前後梁52、53はx軸に平行であり、側部梁54、55はy軸に平行である。梁には、固定装置28の係合ポイント30、32と固定状態で係合するように配置された係合ポイント51が設けられる。
【0041】
さらに、基体の各隅には、垂直ポスト56、57が設けられ、このポストは、治療手順全体で定位頭部枠50に対して頭部を固定するために、ねじを保持するように配置される。したがって、各ポスト56、57の上端には、頭部枠を患者の頭蓋に固定する固定ねじ58を設けられる。さらに、z軸に沿った各ポストの位置は、患者の頭部のサイズ及び形状に適応させて調節できる。
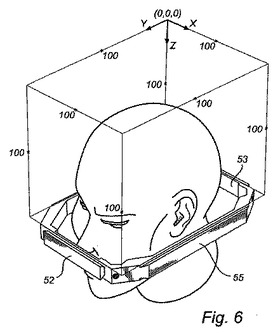
【0042】
図6は、デカルト座標系であるレクセルXYZ座標系を、患者の頭部の周囲に適用されている標準的枠との関連で示す。図で見られるように、座標の原点(0,0,0)は、後頭部の背後で、右耳の外側かつ頭頂部の上方に配置される。したがって、患者の頭部の目標領域又は焦点は、正の座標で規定される。x軸は、患者の右耳から左耳へと延在する仮想線に平行に延在する。y軸は、患者の首(後方)から鼻(前方)へと引いた線に平行に延在する。z軸は、患者の身体の長手方向に平行に延在する。以下では、レクセルXYZ座標系の座標を、レクセル座標と呼ぶ。
【0043】
次に図2〜図4に戻ると、固定装置28の係合ポイント30、32に固定状態で装着されたアダプタ・ユニット42が図示されている。上述したように、アダプタ・ユニット42は、定位枠50の装着を容易にするために使用できる。しかし、これらの図では、較正基準ユニット40を位置決めユニット20の固定装置28に装着するために、アダプタ・ユニット42が使用される。基準ユニット40は、開いた立方体、すなわち3つの直交する側壁44、46、48を有する立方体の形態である。壁44、46、48の範囲は、レクセルXYZ座標系に対応し、したがって左側壁44はYZ面にあり、後側壁46はXZ面にあり、底側壁48はXY面にある。「左」、「後」及び「底」という用語は、ベッド26に横になる患者に関するものである。
【0044】
説明した実施例では、較正測定を実行するために、2つのダイアル・インジケータ60を使用する。しかし、例証のために、図4には1つのダイアル・インジケータしか図示されていない。各ダイアル・インジケータ60は、測定スティック又はピン62及び表示ダイアルを備える。測定スティック62の長手方向での移動は、表示ダイアルに伝達されて、表示される。したがって、側壁44がX方向に移動する、例えば角度偏差又はオフセットを較正するためにy軸又はz軸に沿って立方体40を移動させると、この移動が測定スティック62により計られて、記録可能になる。
【0045】
較正動作中に、2つの面に延在する軸線について角度オフセット測定を実行する場合に、2つのダイアル・インジケータは、測定スティック62が2つの側壁に突き当たるように配置される。すなわち、z軸に沿ったレクセル座標系の移動を提供する運動軸線を較正する場合、それぞれ第1及び第2ダイアル・インジケータの測定スティックが、YZ面の側壁44及びXZ面の側壁46に突き当たる。したがって、位置決めシステムがz軸に沿って立方体を移動させると、XZ面に突き当たるダイアル・インジケータは、x軸に沿った角度オフセットを測定し、YZ面に突き当たるダイアル・インジケータは、図で示すように、y軸に沿った角度オフセットを測定する。
【0046】
ダイアル・インジケータ60は、例証のために図4には図示されていない保持構成によって、位置決めシステムに対して焦点が配置される箇所の近傍で、固定され、正確に規定された位置に保持される。インジケータは、ダイアル上に結果を提示するのではなく、較正の測定結果を電子的に記録し、記憶するために、電子記憶手段に接続することができる。
【0047】
本発明の最も好ましい実施例によると、角度オフセットを測定するステップと、直線性又はアッベ誤差を測定するステップは、別個に実行される。説明した実施例では、角度オフセットの測定を、直線性誤差の測定の前に実行するが、測定の順序は逆転させることもできる。
【0048】
角度オフセットを較正する場合は、上述した方法で1回に1つの運動軸線を測定する。最初に、仮想放射線焦点を規定する。この仮想焦点の正確な位置は重大ではないが、その位置は測定を通して固定される。その後、位置決めシステムを制御して、例えば、仮想焦点がレクセル座標でミリメートル単位で(0,100,100)に配置される。この時点で、2つのダイアル・インジケータの測定スティック62は、後及び底側壁46、48、すなわちXZ面及びXY面それぞれの壁に突き当たる。ダイアルの振れを読み、個々の読み取り値を記録する。次に、焦点をレクセル座標の(20,100,100)に配置するために、立方体、すなわち座標系をx軸に沿って移動させる。再び新しい座標でダイアルを読み、読み取り値を記憶する。
【0049】
これを、例えば仮想焦点が(200,100,100)に配置されるまで、較正すべきx軸の部分に沿って繰り返す。次に、仮想焦点を、残りの運動軸線の1つの一端、この例ではレクセル座標の(100,0,100)に位置決めする。したがって、次にy軸が較正される。ダイアル・インジケータを、その測定スティックが左側壁及び底側壁44、48に突き当たるように再位置決めし、y軸について測定手順を繰り返す。最後に、仮想焦点を(100,100,0)に配置し、表示ダイアルを再位置決めして、残りの軸線、この場合はz軸で同様の測定を実行する。
【0050】
次に、各ポイントについてx軸、y軸及びz軸それぞれに沿って今求めた角度オフセットを記憶する。したがって、各軸線に沿った各ポイントについて2つ、すなわち他の2つの軸線のそれぞれについて1つの補償値がある。ここでレクセル座標毎に、x方向、y方向及びz方向の補償値があるように、これらを加え合わせる。較正方法を続けると、レクセル座標系と位置決めシステムの運動軸線との角度オフセットを補償するように意図された補償値ができる。しかし、これは、運動軸線の直線性に起こり得る誤差、例えばアッベ誤差を考慮に入れていない。好ましい実施例によると、運動軸線の直線性を較正するために、第2の較正ステップを使用する。
【0051】
次に、レーザ干渉計システムを使用する。例えばアダプタ・ユニット42を、したがってレクセル座標系を使用して、反射器の形態の第1光学部材を、係合ポイント30、32に対して固定した関係で位置決めして、装着する。位置決めシステムの固定された枠組に対する固定位置に、すなわち実際の座標の固定位置に第2光学部材を配置する。さらに、2つの光学部材間の距離の変化を測定するために、レーザを使用する。
【0052】
最初に、仮想焦点が(0,100,100)になるように、レクセル座標系を移動させる。次に、仮想焦点を新しい座標にx軸に沿って位置決めし、これによって第1光学部材を名目距離だけ移動させる。実際の移動距離を、レーザを使用して測定し、光学部材が移動した名目距離、すなわち位置決めシステムが制御して記録した通りの距離と比較する。実際の移動と名目移動との差を較正テーブルに記憶し、その座標の直線補償値を表示する。次に、最初はx軸全体に沿って、次にy軸及びz軸について同様の形で、これを繰り返す。名目位置又は移動と実際の位置又は移動との差を、測定した座標毎に記録する。このように記録した値は、それぞれx軸、y軸及びz軸の補償値である。
【0053】
次に、直線性誤差の補償値を、角度オフセットの補償値に加算することができる。したがって、レクセル座標毎に、加算された補償値は、9つの異なる補償値、すなわち各軸線について1つの直線性補償及び2つの角度補償で構成される。したがって、各座標の実際の座標と名目座標との間の補償は、下式のように表すことができる。
(X,Y,Z)=(XNom+XComp,YNom+YComp,ZNom+ZComp)
ここで、
XComp=(LinErrX−axis+AngOffY−axis+AngOffZ−axis)
YComp=(AngOffX−axis+LinErrY−axis+AngOffZ−axis)
ZComp=(AngOffX−axis+AngOffY−axis+LinErrZ−axis)
である。
【0054】
本発明の最も好ましい実施例によると、上述した較正ステップは、患者位置決めシステムを製造するか、少なくとも組み立てる工場で実行される。前記較正の後、患者位置決めシステム20と放射線ユニット10を、例えば患者位置決めシステム20の剛性を有する枠組22を放射線ユニット10の対応する剛性を有する枠組にボルト締めすることによって、相互にしっかり取り付ける。この取り付けは、放射線治療システムを使用することが意図されている医療施設で実行される。
【0055】
患者位置決めシステム20及び放射線ユニット10を治療現場で相互にしっかり取り付けた場合、患者位置決めシステムに対して固定された放射線焦点の実際の位置を求める。上述したように、放射線焦点を配置する位置を決定するのは、放射線ユニット10のコリメータ装置に含まれるコリメータ、すなわちコリメータの配向、設計及び方向並びに線源である。したがって、放射線源からの放射線を検出又は測定する必要なく、放射線焦点の実際の位置を求め、計算することができる。
【0056】
好ましい実施例によると、取付具を非常に高い精度をもってコリメータ装置内に取り付けることによって、放射線焦点を求める。取付具は、取付具をコリメータ装置内に取り付けた場合に、コリメータ装置の焦点が、取付具に設けた識別可能な窪みによって表示されるように配置される。窪みを識別し、それによって位置決めシステムに対する放射線焦点の位置を求めるために、患者位置決めシステムの係合ポイント30、32内に装着したプローブを使用する。
【0057】
次に、位置決めシステムに対して固定された放射線焦点の実際の位置を求めた場合、放射線焦点の実際の位置と仮想焦点の推測位置とのオフセットを記録し、記憶する。3つの直交軸線全部を考慮に入れた座標のオフセットを、放射線焦点とレクセルXYZ座標系との名目位置と実際の位置の関係を補償するために使用する。
【0058】
本発明を、その例示的実施例を使用して以上で説明してきたが、請求の範囲で定義されているような本発明の範囲から逸脱することなく、当業者に理解されるようなその変更、改造及び組合せが可能である。例えば、ガンマ放射線に対して感受性のある写真用フィルムを含む模型、又は放射線焦点を検出するために治療体積部内で移動できる放射線感受性ダイオードなどの放射線感受性測定手段で焦点を測定することにより、放射線焦点を求めることができる。さらに、直線性誤差及び角度オフセットについて位置決めシステムの運動軸線を較正するステップを実行するために、幾つかの異なる測定方法を使用することができる。
【図面の簡単な説明】
【0059】
【図1】本発明を使用した較正に適切な放射線治療システムの一般的原理を示す図。
【図2】本発明の較正方法に使用する位置決めシステムを示す図。
【図3】患者位置決めシステムの運動軸線の直線性誤差及び角度オフセットを求める際に使用するアダプタの一例を示す図。
【図4】ダイアル・インジケータを使用した測定中の図3のアダプタを示す図。
【図5】固定ユニットを示す図。
【図6】レクセルXYZ座標系を示す図。
【特許請求の範囲】
【請求項1】
放射線治療システムの位置決めシステムを較正する方法において、前記システムが、
固定された放射線焦点を有する放射線治療ユニット(10)と、
固定ユニットに対して患者の治療体積部を固定する固定ユニット(50)と、
前記放射線治療ユニット(10)の前記固定された焦点に対して前記患者の治療体積部を位置決めする位置決めシステム(20)であって、前記位置決めシステム(10)が、前記放射線治療ユニット(10)に剛性係合された固定された枠組(22)、前記患者の全身を担持して移動させる可動キャリッジ(24)、実質的に直交する3つの運動軸線に沿って前記キャリッジ(24)を移動させる少なくとも1つのモータ、前記モータを制御する制御システム、及び前記位置決めシステム(20)に前記固定ユニット(50)を固定係合した状態で着脱可能に装着する少なくとも1つの係合ポイント(30、32)を含む、位置決めシステム(10)とを
含み、
前記較正方法が、
a)前記固定ユニット(50)に対して規定された固定ユニット座標系を設けるステップであって、前記固定ユニット座標系が治療体積部を規定するように配置される、固定ユニット座標系を設けるステップと、
b)前記キャリッジ(24)の前記運動軸線の直線性誤差、及び前記運動軸線と前記固定ユニット座標系との角度オフセットを求め、それによって前記固定ユニット座標系の前記軸線と前記位置決めシステム(20)の前記運動軸線との関係を求めるステップと、
c)前記放射線治療ユニット(10)に対して固定した関係で前記位置決めシステム(20)を装着するステップと、
d)前記患者位置決めシステム(20)に対して前記放射線治療ユニットの前記放射線焦点を求め、それによって前記焦点と前記固定ユニット座標系との関係も求めるステップとを含む、位置決めシステムを較正する方法。
【請求項2】
直線性誤差及び角度オフセットを求める前記ステップb)が、さらに、
b1)前記係合ポイント(30、32)に対して固定されている測定ポイントの実際の位置を測定するステップと、
b2)前記キャリッジ(24)を、前記位置決めシステムの前記3つの運動軸線のうち1つに沿って名目距離だけ新しい名目位置へと移動させるステップと、
b3)3つの軸線の全部に沿って、前記測定ポイントの前記実際の位置と前記名目位置との差を測定するステップと、
b4)前記1つの軸線に沿って所望の全位置が測定されるまで、ステップb2)とステップb3)を繰り返すステップと、
b5)他の2つの運動軸線でステップb2)からステップb4)を繰り返すステップと、
b6)測定した位置について、3つの軸線の全部に沿って前記差を記録するステップと、
b7)全部の測定位置についてステップb6)を繰り返すステップとを含み、
これにより、前記制御システムが、実際の位置に到達するために必要な前記キャリッジ(24)の前記名目移動を計算するために、前記記録した差を使用することができる、請求項1に記載された位置決めシステムを較正する方法。
【請求項3】
1つの軸線に沿った実際の位置毎に、名目値を3つの軸線の全部の補償値とともに記録し、それによって測定位置毎に9つ、軸線毎に3つの補償値が記憶される、請求項2に記載された位置決めシステムを較正する方法。
【請求項4】
前記差を測定する前記ステップb3)が、任意の順序で、
前記キャリッジ(24)が第1測定ステップで移動したばかりの前記軸線について、前記差を測定する段階と、
軸線の直線性測定を実行する段階と、
第2測定ステップで他の2つの軸線に沿って、軸線の真直度測定を実行する段階と
を含む、請求項2又は請求項3に記載された位置決めシステムを較正する方法。
【請求項5】
前記第1測定が、前記第2測定の実行前に、全測定位置で実行される、又はその逆である、請求項4に記載された位置決めシステムを較正する方法。
【請求項6】
前記第1測定が、ダイアル・インジケータ測定を使用して実行される、請求項4又は請求項5に記載された位置決めシステムを較正する方法。
【請求項7】
前記第2測定が、レーザ干渉計測定を使用して実行される、請求項4から請求項6までのいずれか1項に記載された位置決めシステムを較正する方法。
【請求項8】
直線性誤差及び角度オフセットを求める前記ステップb)がさらに、
前記位置決めシステムの前記係合ポイントを使用して、測定取付具を装着するステップと、
前記測定ポイントを前記測定取付具内に取り付けるステップと
を含む、請求項2から請求項7までのいずれか1項に記載された位置決めシステムを較正する方法。
【請求項9】
前記患者位置決めシステムに対して前記放射線治療ユニットの前記放射線焦点を求める前記ステップd)が、さらに、
前記固定された焦点を規定するように配置されたコリメータ装置に対して固定された関係で取付具ユニットを装着するステップであって、前記取付具ユニットが、前記取付具ユニットを前記コリメータ装置内に装着した場合に、前記固定された焦点を表示するマークを有する、取付具ユニットを装着するステップと、
前記患者位置決めシステムに対して固定された関係で測定ユニットを装着するステップと、
前記測定ユニットを使用して、前記マークの位置を測定するステップと
を含む、請求項1から請求項8までのいずれか1項に記載された位置決めシステムを較正する方法。
【請求項10】
前記係合ポイントを使用して、前記測定ユニットを固定関係で装着する、請求項9に記載された位置決めシステムを較正する方法。
【請求項11】
前記測定ユニットが測定プローブを含む、請求項9又は請求項10に記載された位置決めシステムを較正する方法。
【請求項12】
前記患者位置決めシステムに対して前記放射線治療ユニットの前記放射線焦点を求める前記ステップd)が、さらに、
放射線測定手段を、前記患者位置決めシステムに対して固定された関係で配置するステップと、
前記放射線ユニット内で放射される前記放射線を測定するステップと、
前記患者位置決めシステムに対して前記放射線焦点を求めるステップと
を含む、請求項1から請求項8までのいずれか1項に記載された位置決めシステムを較正する方法。
【請求項13】
前記測定手段が放射線感受性ダイオードを含む、請求項12に記載された位置決めシステムを較正する方法。
【請求項14】
前記患者位置決めシステムに対して前記放射線治療ユニットの前記放射線焦点を求める前記ステップd)が、前記放射線治療を施すべき医療施設で実行される、請求項1から請求項13までのいずれか1項に記載された位置決めシステムを較正する方法。
【請求項1】
放射線治療システムの位置決めシステムを較正する方法において、前記システムが、
固定された放射線焦点を有する放射線治療ユニット(10)と、
固定ユニットに対して患者の治療体積部を固定する固定ユニット(50)と、
前記放射線治療ユニット(10)の前記固定された焦点に対して前記患者の治療体積部を位置決めする位置決めシステム(20)であって、前記位置決めシステム(10)が、前記放射線治療ユニット(10)に剛性係合された固定された枠組(22)、前記患者の全身を担持して移動させる可動キャリッジ(24)、実質的に直交する3つの運動軸線に沿って前記キャリッジ(24)を移動させる少なくとも1つのモータ、前記モータを制御する制御システム、及び前記位置決めシステム(20)に前記固定ユニット(50)を固定係合した状態で着脱可能に装着する少なくとも1つの係合ポイント(30、32)を含む、位置決めシステム(10)とを
含み、
前記較正方法が、
a)前記固定ユニット(50)に対して規定された固定ユニット座標系を設けるステップであって、前記固定ユニット座標系が治療体積部を規定するように配置される、固定ユニット座標系を設けるステップと、
b)前記キャリッジ(24)の前記運動軸線の直線性誤差、及び前記運動軸線と前記固定ユニット座標系との角度オフセットを求め、それによって前記固定ユニット座標系の前記軸線と前記位置決めシステム(20)の前記運動軸線との関係を求めるステップと、
c)前記放射線治療ユニット(10)に対して固定した関係で前記位置決めシステム(20)を装着するステップと、
d)前記患者位置決めシステム(20)に対して前記放射線治療ユニットの前記放射線焦点を求め、それによって前記焦点と前記固定ユニット座標系との関係も求めるステップとを含む、位置決めシステムを較正する方法。
【請求項2】
直線性誤差及び角度オフセットを求める前記ステップb)が、さらに、
b1)前記係合ポイント(30、32)に対して固定されている測定ポイントの実際の位置を測定するステップと、
b2)前記キャリッジ(24)を、前記位置決めシステムの前記3つの運動軸線のうち1つに沿って名目距離だけ新しい名目位置へと移動させるステップと、
b3)3つの軸線の全部に沿って、前記測定ポイントの前記実際の位置と前記名目位置との差を測定するステップと、
b4)前記1つの軸線に沿って所望の全位置が測定されるまで、ステップb2)とステップb3)を繰り返すステップと、
b5)他の2つの運動軸線でステップb2)からステップb4)を繰り返すステップと、
b6)測定した位置について、3つの軸線の全部に沿って前記差を記録するステップと、
b7)全部の測定位置についてステップb6)を繰り返すステップとを含み、
これにより、前記制御システムが、実際の位置に到達するために必要な前記キャリッジ(24)の前記名目移動を計算するために、前記記録した差を使用することができる、請求項1に記載された位置決めシステムを較正する方法。
【請求項3】
1つの軸線に沿った実際の位置毎に、名目値を3つの軸線の全部の補償値とともに記録し、それによって測定位置毎に9つ、軸線毎に3つの補償値が記憶される、請求項2に記載された位置決めシステムを較正する方法。
【請求項4】
前記差を測定する前記ステップb3)が、任意の順序で、
前記キャリッジ(24)が第1測定ステップで移動したばかりの前記軸線について、前記差を測定する段階と、
軸線の直線性測定を実行する段階と、
第2測定ステップで他の2つの軸線に沿って、軸線の真直度測定を実行する段階と
を含む、請求項2又は請求項3に記載された位置決めシステムを較正する方法。
【請求項5】
前記第1測定が、前記第2測定の実行前に、全測定位置で実行される、又はその逆である、請求項4に記載された位置決めシステムを較正する方法。
【請求項6】
前記第1測定が、ダイアル・インジケータ測定を使用して実行される、請求項4又は請求項5に記載された位置決めシステムを較正する方法。
【請求項7】
前記第2測定が、レーザ干渉計測定を使用して実行される、請求項4から請求項6までのいずれか1項に記載された位置決めシステムを較正する方法。
【請求項8】
直線性誤差及び角度オフセットを求める前記ステップb)がさらに、
前記位置決めシステムの前記係合ポイントを使用して、測定取付具を装着するステップと、
前記測定ポイントを前記測定取付具内に取り付けるステップと
を含む、請求項2から請求項7までのいずれか1項に記載された位置決めシステムを較正する方法。
【請求項9】
前記患者位置決めシステムに対して前記放射線治療ユニットの前記放射線焦点を求める前記ステップd)が、さらに、
前記固定された焦点を規定するように配置されたコリメータ装置に対して固定された関係で取付具ユニットを装着するステップであって、前記取付具ユニットが、前記取付具ユニットを前記コリメータ装置内に装着した場合に、前記固定された焦点を表示するマークを有する、取付具ユニットを装着するステップと、
前記患者位置決めシステムに対して固定された関係で測定ユニットを装着するステップと、
前記測定ユニットを使用して、前記マークの位置を測定するステップと
を含む、請求項1から請求項8までのいずれか1項に記載された位置決めシステムを較正する方法。
【請求項10】
前記係合ポイントを使用して、前記測定ユニットを固定関係で装着する、請求項9に記載された位置決めシステムを較正する方法。
【請求項11】
前記測定ユニットが測定プローブを含む、請求項9又は請求項10に記載された位置決めシステムを較正する方法。
【請求項12】
前記患者位置決めシステムに対して前記放射線治療ユニットの前記放射線焦点を求める前記ステップd)が、さらに、
放射線測定手段を、前記患者位置決めシステムに対して固定された関係で配置するステップと、
前記放射線ユニット内で放射される前記放射線を測定するステップと、
前記患者位置決めシステムに対して前記放射線焦点を求めるステップと
を含む、請求項1から請求項8までのいずれか1項に記載された位置決めシステムを較正する方法。
【請求項13】
前記測定手段が放射線感受性ダイオードを含む、請求項12に記載された位置決めシステムを較正する方法。
【請求項14】
前記患者位置決めシステムに対して前記放射線治療ユニットの前記放射線焦点を求める前記ステップd)が、前記放射線治療を施すべき医療施設で実行される、請求項1から請求項13までのいずれか1項に記載された位置決めシステムを較正する方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2008−535596(P2008−535596A)
【公表日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願番号】特願2008−505807(P2008−505807)
【出願日】平成18年4月12日(2006.4.12)
【国際出願番号】PCT/EP2006/003373
【国際公開番号】WO2006/108634
【国際公開日】平成18年10月19日(2006.10.19)
【出願人】(505005500)エレクタ アクチボラゲット(パブル) (8)
【Fターム(参考)】
【公表日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願日】平成18年4月12日(2006.4.12)
【国際出願番号】PCT/EP2006/003373
【国際公開番号】WO2006/108634
【国際公開日】平成18年10月19日(2006.10.19)
【出願人】(505005500)エレクタ アクチボラゲット(パブル) (8)
【Fターム(参考)】
[ Back to top ]