
放射線治療及び他の医療用途におけるターゲットの実時間追跡のためのシステム及び方法
放射線治療及び他の用途のための実時間でターゲットを追跡するシステムと方法が開示される。1つの実施形態において、方法は、患者体内にターゲットに関連する位置に埋め込まれたマーカーの位置情報を時刻tnにおいて収集するステップと、時刻tnにおいて収集された位置情報に基づいてターゲットの位置を示す客観的出力を供給するステップを含む。客観的出力は、位置情報が収集された時刻tnから1ミリ秒乃至2秒以内に、メモリ・デバイス、ユーザ・インタフェース、及び/又は放射線照射装置に供給される。本方法のこの実施形態は、少なくとも治療処置の一部の間に、10−200msの周期で客観的出力を供給するステップをさらに含むことができる。例えば、本方法は、イオン化放射線のビームを発生して、該ビームをマシーン・アイソセンターに向けるステップと、患者をイオン化放射線ビームで照射しながら、10−200ミリ秒ごとに、収集手続きと供給手続きを連続的に繰り返すステップをさらに含むことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に放射線治療システムに関し、より特定的には放射線治療を教導し評価するために、実時間でターゲットを正確に位置決めして、追跡するためのシステムと方法に関する。本発明は、しかし、他の医療用途においても有用である。
本願は、2004年9月16日出願の米国特許仮出願第60/610,509号、及び2004年7月23日出願の米国特許仮出願第60/590,894号の利益を主張するものであり、これらの両方の特許文献はその全体が引用によりここに組み入れられる。
【背景技術】
【0002】
放射線治療は、前立腺ガン、肺ガン、脳腫瘍及び多くの他の種類の局部ガンを治療するための重要で高度に成功的な治療方法となっている。放射線治療処置は一般に(a)放射線のパラメータ(例えば、線量、形状など)を決定する計画過程、(b)放射線ビームに対してターゲットを望ましい位置に配置するための患者の位置設定の過程、(c)ガンを照射する放射線照射期間、及び(d)放射線照射期間の効果の評価するための検証過程を含む。多くの放射線治療処置は、約5日から45日までの期間にわたる幾つかの放射線照射期間(即ち、照射分画)を必要とする。
【0003】
放射線療法による局部ガンの治療を改善するためには、大部分のガンを撲滅するにはより高い線量がより効果的であるので、一般的には放射線量を増すことが望ましい。しかし、放射線量を増すことは、健康な組織に合併症を起す可能性を増すことにもなる。従って、放射線治療の有効性は、腫瘍に照射される放射線の全線量と腫瘍に隣接する正常組織に照射される線量との両方に依存する。腫瘍に隣接する正常組織を保護するために、放射線は、健康な組織の小部分だけが照射されるように、ターゲットの周りの厳密な治療マージン内に処方されるべきである。例えば、前立腺ガンに関する治療マージンは、直腸、膀胱、及び球部尿道の組織への照射を避けるように選択されるべきである。同様に、肺ガンに関する治療マージンは、健康な肺組織又は他の組織への照射を避けるように選択されるべきである。従って、腫瘍に照射される放射線量を増すことが望ましいばかりでなく、健康組織への照射を減ずることも望ましい。
【0004】
放射線治療の1つの困難は、多くの場合ターゲットが放射線照射期間中に又はその期間と期間の間に、患者の体内で移動することである。例えば、前立腺は、呼吸運動及び/又は充満/排出(例えば、充満又は空の膀胱)のために、放射線照射期間中に患者の体内で移動する。肺の腫瘍もまた、呼吸運動及び心臓機能(例えば、鼓動及び脈管収縮/膨張)のために放射線照射期間中に移動する。そのような移動を補償するために、治療マージンは、腫瘍が治療体積の外へ出ないように、一般には望ましい大きさよりも大きくなる。これは、より大きな治療マージンはより大きな体積の正常組織を照射する可能性があるので、望ましい解決法ではない。
【0005】
放射線治療のもう1つの難題は、腫瘍を放射線ビームに正確に位置合せすることである。現在の位置設定過程では、患者の上の外部参照マーキングを放射線照射装置の視覚位置調整ガイドに位置合せするのが一般的である。一例として、腫瘍は初めにイメージング・システム(例えば、X線コンピュータ処理トモグラフィ(CT)、磁気共鳴イメージング(MRI)、又は超音波装置)を用いて患者体内において識別される。次に、患者の体外の二つ又はそれ以上の位置調整点に対する腫瘍の近似的な位置が決定される。位置設定の間、患者体内の治療ターゲットを放射線ビームのビーム・アイソセンター(ここではまたマシーン・アイソセンターとも呼ぶ)に配置するために、外部マークは放射線照射装置の基準座標系によって位置合せされる。外部マークを用いる通常の位置設定過程は、患者治療計画過程と治療期間の間で、及び/又は治療期間中にターゲットが外部マーカーに対して移動する可能性があるので、一般には不適当である。従って、ターゲットをマシーン・アイソセンターに配置するために、外部マークが所定の位置にある場合でも、ターゲットの位置をマシーン・アイソセンターから外すこともある。ターゲットと放射線ビームの間の如何なる初期の位置調整不良も正常組織への照射をもたらし易いので、そのようなオフセットを縮小又は除去することが望ましい。さらに、呼吸、臓器充満、又は心臓条件のために治療中にターゲットが移動すると、如何なる初期の位置調整不良も正常組織への照射をさらに悪化させ易くなる。従って、毎日毎日の及び瞬間瞬間のターゲットの運動の変化は、患者に適用される放射線量を増すことに関する重要な課題を提起する。
【0006】
外部マークを用いる通常の位置設定及び治療過程はまた、マークと検知器の間の直線的な照準線を必要とする。この必要条件は、埋め込まれたマーカー又は患者体内の他の状態(即ち、検知器及び/又は光源の照準線から外れた)のマーカーに対してはこれらのシステムを役に立たなくする。従って、通常の光学的追跡システムは、医療用途におけるそれらの有用性を制限する多くの制約をもつ。
【発明の開示】
【0007】
添付の図面において、同じ参照番号は類似の要素又は構成部分を表す。図面中の要素のサイズと相対位置は必ずしも一定の縮尺で描かれてはいない。例えば、種々の要素の形状及び角度は一定の縮尺で描かれてはおらず、これらの要素の幾つかは、図の見易さを改善するために、任意に拡大され配置されている。さらに、要素が描かれている特定の形状は、特定の要素の実際の形状に関する何らかの情報を伝えることを意図したものではなく、単に、図面中での認識を容易にするために選択されている。
【0008】
以下の説明において、本発明の種々の実施形態の完全な理解をもたらすために、ある特定の詳細が示される。しかし、当業者は、これらの特定の詳細の1つ又はそれ以上を用いずに、或いは他の方法、構成成分、要素などを用いて、本発明を実施することが可能であることを認識するであろう。他の例においては、ターゲットの位置決め及び追跡システムに関連する周知の構造体は、本発明の実施形態の説明を不必要に不明瞭にしないように、示されない又は詳細には説明されない。
【0009】
文脈が変更を必要としない限り、本明細書及び添付の特許請求項を通して、「含む」という語、及びその「含む」及び「含んでいる」などの派生語は、「含んでいるが限定はされない」という意味を含んだ開かれた意味に解釈されたい。
【0010】
本明細書を通して、「1つの実施形態」又は「一実施形態」への言及は、その実施形態に関連して説明される特定の特徴、構造体、又は特性が、本発明の少なくとも1つの実施形態に含まれることを意味する。従って、本明細書を通して種々の場所に現れる「1つの実施形態において」又は「一実施形態において」という語句は、必ずしも全てが同じ実施形態を指すわけではない。さらに、特定の特徴、構造体、又は特性は、1つ又はそれ以上の実施形態において任意の適切な仕方で組み合せることができる。
ここに与えられる見出しは便利だけのためであり、特許請求される本発明の範囲及び趣意を説明するものではない。
【発明を実施するための最良の形態】
【0011】
A. 概観
図1−図24は、本発明の実施形態による、患者体内のターゲットを実時間で位置決めし、追跡し、モニターするためのシステム及び幾つかの構成要素を示す。システム及び構成要素は、ターゲットをより効果的に治療するように放射線治療を導き制御する。図1−図24を参照して以下で説明されるシステムの幾つかの実施形態は、本発明の態様により、肺、前立腺、頭、首、胸、及び体の他の部分におけるターゲットを治療するために用いることができる。さらに、図1−図24に示されるマーカー及び位置決めシステムはまた、外科的用途又は他の医療用途に用いることもができる。種々の図面全体にわたって、類似の参照番号は類似の構成要素及び特徴を表す。
【0012】
本発明の幾つかの実施形態は、ターゲットを追跡する方法、即ち、医療用途において患者体内のターゲットの位置及び/又は回転を実質的に実時間で測定する方法に向けられる。その方法の1つの実施形態は、ターゲットに対して実質的に固定されているマーカーの位置データを収集するステップを含む。この実施形態はさらに、外部基準座標系(即ち、患者体外の基準座標系)におけるマーカーの位置を決定するステップと、マーカーの位置に対応する外部基準座標系における客観的出力を生ずるステップとを含む。客観的出力は、臨床的に許容できる追跡誤差の範囲内で、ターゲットの位置を実時間で適切に追跡する頻度/周期で繰返し与えられる。従って、ターゲットを追跡する方法は、診断、計画、治療又は他の型の医療過程の間中、ターゲットを正確に追跡することを可能にする。多くの特定の用途において、客観的出力は、そのような治療過程に位置データを用いために、位置データ収集後に適切に短い待ち時間内に、且つ、十分に高い頻度で与えられる。
【0013】
別の特定の実施形態は、イオン化放射線ビームを用いて患者体内のターゲットを治療する方法であって、患者体内のターゲットに関連する位置に埋め込まれたマーカーの位置情報を時刻tnにおいて収集するステップと、時刻tnに収集された位置情報に基づいて、ターゲットの位置を示す客観的出力を供給するステップとを含む方法である。客観的出力は、位置情報が収集された時刻tnから2秒以内に、メモリ・デバイス、ユーザ・インタフェース、及び/又は放射線照射装置に供給される。本方法のこの実施形態は、治療過程の少なくとも一部分の間に、2秒又はそれ以下の周期で客観的出力を供給するステップをさらに含むことができる。例えば、本方法はさらに、イオン化放射線ビームを発生するステップと、このビームをマシーン・アイソセンターに向けるステップと、イオン化放射線ビームで患者を照射する際に、10−200ms毎に収集過程及び供給過程を連続的に繰り返すステップとを含むことができる。
【0014】
患者体内のターゲットを追跡する方法の別の実施形態は、患者体内のターゲットに関連する位置に配置されるマーカーの位置情報を取得するステップと、位置情報に基づいて外部基準座標系内でのマーカーの位置を決定するステップとを含む。この実施形態は、(a)ユーザ・インタフェースにおけるターゲット位置の表示のポーズがヒトには容易に認識できないように十分に高い頻度で、及び、(b)マーカーの位置情報の取得と少なくとも実質的に同時であるように短い待ち時間で、ターゲットの位置を示す客観的出力をユーザ・インタフェースに供給するステップをさらに含む。
【0015】
本発明の別の実施形態は、イオン化放射線ビームを発生し、そのビームをターゲットに関連して向けることにより、イオン化放射線ビームを用いて患者のターゲットを治療する方法に向けられる。この方法はさらに、ビームをビーム・アイソセンターに向けている間に、患者体内のターゲットに関連する位置に埋め込まれたマーカーの位置情報を収集するステップを含む。さらに、この方法は、収集された位置情報に基づいて、ビーム・アイソセンターに相対的なターゲットの位置を示す客観的出力を供給するステップを含む。この方法はさらに、客観的出力をビームのパラメータと相関させるステップと、客観的出力に基づいてビームを制御するステップを含むことができる。例えば、ターゲットが望ましい照射ゾーン内にあるときにだけ患者を照射するように、ビームをゲート制御することができる。さらに、患者を照射している間、ターゲットをビーム・アイソセンターに対して望ましい位置に維持する実時間の動的制御をもたらすように、客観的出力によって患者を自動的に移動させるか又はビームの形状を自動的に適合させることができる。
【0016】
この節では、本発明の種々の実施形態が、これらの実施形態の説明を完全に理解し実際的にするための特定の細部を提供するために説明される。当業者は、しかし、本発明がこれらの細部の幾つかを用いずに実施できること、又は本発明に追加の細部を加えることができることを理解するであろう。文脈が許す箇所では、単数形又は複数形の用語は、それぞれ、複数形又は単数形の用語を含むことが可能である。さらに、「又は」という語は、少なくとも2つの品目に言及して他の品目を除外した単一の品目だけを意味することに特に限定されない限り、それらリスト中で「又は」を用いることは、(a)リスト中の任意の単一品目、(b)リスト中の全ての品目、或いは(c)リスト中の品目の任意の組み合せを含むと解釈されたい。加えて、用語「含む」は、全体にわたって、任意により多数の同じ特徴物及び/又は他の型の特徴物又は構成要素が排除されないように、少なくとも列挙された特徴物を含むことを意味する。
【0017】
B. 実時間追跡システムを有する放射線治療システム
図1及び図2は、患者6の肺4、前立腺、胸、頭、首又は他の部分の内のターゲット2(例えば、腫瘍)に、誘導型放射線治療を施すための放射線治療システム1の種々の態様を示す。放射線治療システム1は、位置決めシステム10と放射線照射装置20を有する。位置決めシステム10は、治療計画、患者位置設定の間、及び/又は放射線照射装置からイオン化放射線をターゲットに適用している際に、ターゲット2の実際の位置を実時間で位置測定して追跡する追跡ユニットである。従って、ターゲット2は患者体内で、前述のように、呼吸、臓器充満/排出、心臓機能又は他の内部運動のために移動する可能性があるが、位置決めシステム10は、放射線照射装置の外部基準座標系又は患者体外の他の外部基準座標系に対するターゲットの運動を正確に追跡して、ターゲット周辺の小さな限定範囲内に放射線を正確に照射するようにする。位置決めシステム10はまた、マーカーの配置と軌跡をモニターして、イオン化放射線を用いずに腫瘍の変化の早期の指標を提供するようにすることができる。さらに、位置決めシステム10は、連続的にターゲットを追跡して客観的データ(例えば、絶対基準座標系における3次元座標)をメモリ・デバイス、ユーザ・インタフェース、線形加速器、及び/又は他のデバイスに供給する。システム1は、以下で、患者の肺内部の腫瘍又は他のターゲットを治療するための誘導型放射線治療の文脈において説明されるが、本システムは、患者体内の前立腺又は他のターゲットを、他の治療及び/又は診断のために追跡しモニターするために用いることができる。
【0018】
示された実施形態の放射線源はイオン化放射線装置20(即ち、線形加速器)である。適切な線形加速器は、米国カリフォルニア州パロアルト所在のVarian Medical Systems, Inc.、米国ニュージャージー州イゼリン所在のSiemens Medical Systems, Inc.、米国ニュージャージー州イゼリン所在のElekta Instruments, Inc.、又は、日本の三菱電機株式会社によって製造されている。それらの線形加速器は、通常の単一又は多重場の放射線治療、3D等角的放射線治療(3D CRT)、強度変調型放射線治療(IMRT)、定位固定型放射線治療、及びトモ・セラピーを遂行することができる。放射線源20は、可動構台22から、ゲート制御され輪郭付け又は形状成形されたイオン化放射線のビーム21を、放射線源20に関連する外部絶対基準座標系での既知の位置にある範囲又は体積に向けて照射することができる。イオン化放射線ビーム21が向けられる点又は体積は、マシーン・アイソセンターと呼ばれる。
【0019】
追跡システムは、位置決めシステム10、及び1つ又はそれ以上のマーカー40を含む。位置決めシステム10は、3次元基準座標系におけるマーカー40の実際の位置を決定し、マーカー40は普通患者6の体内に埋込まれる。図1及び図2に示される実施形態においては、より具体的に、マーカー40a−40cとして個別に識別される3つのマーカーが、患者6の肺4の内部又はその近くの、ターゲット2の内部又はその近傍に埋込まれている。他の用途においては、単一のマーカー、2つのマーカー、又は3を越える数のマーカーを特定の用途によって用いることができる。例えば、2つのマーカーが望ましいが、その理由は、ターゲットの位置を正確に決定することができからであり、また、2つのマーカーの間の時間経過に伴う如何なる相対的変位も患者体内でのマーカー移動をモニターするのに用いることができるからである。マーカー40は、少なくとも実質的にターゲット2に対して固定される(例えば、マーカーは直接にターゲットと共に動くか、又はターゲットの移動に少なくとも直接に比例して動く)ようにターゲット2に対して配置されることが望ましい。マーカー40の間の相対位置、及びターゲット2のターゲット・アイソセンターTとマーカー40との間の相対位置は、患者がテーブル上に配置される前の治療計画段階の際に、CTスキャナ又は他の型のイメージング・システムによって定義される外部基準座標系に対して決定することができる。図1及び図2に示されるシステム1の特定の実施形態においては、隣接する健康組織への副次効果を軽減し、所望の線量がターゲットに適用されることを確実にするために、患者の位置設定過程の間及び患者を照射している間、位置決めシステム10は、絶対外部基準座標系に対するマーカー40の3次元座標を実時間で追跡する。
【0020】
C. マーカー及び位置決めシステムの一般的態様
図3は、患者体内の腫瘍又は他のターゲットを治療するための、位置決めシステム10及びマーカー40a−40cの一実施形態の操作を示す略図である。位置決めシステム10及びマーカー40a−40cは、放射線照射期間の前、間、及び後にターゲット2(図1及び図2)の位置を決定するために用いる。より具体的には、位置決めシステム10は、位置設定、治療、展開、シミュレーション、外科手術、及び/又は他の医療過程の間に実時間で、マーカー40a−40cの位置を決定し、客観的なターゲット位置データをメモリ、ユーザ・インタフェース、線形加速器、及び/又は他のデバイスに供給する。位置決めシステムの1つの実施形態においては、実時間とは、客観的な座標の指標が、(a)データ中のポーズがヒトには認識できないように十分に高いリフレッシュ速度(即ち、頻度)で、且つ(b)位置決定信号の測定と少なくとも実質的に同時であるような十分に短い待ち時間で、ユーザ・インタフェースに供給されることを意味する。他の実施形態においては、実時間とは客観的データを放射線照射装置に供給するための高頻度の範囲及び低待ち時間の範囲によって定義され、或いは、さらに他の実施形態においては、実時間は、マーカーの位置に対応する客観的データを供給するとして定義される(例えば、ターゲットの位置を実時間で適切に追跡する頻度、及び/又はマーカーの位置データの取得と実質的に同時の待ち時間において)。
【0021】
1. 位置決めシステム
位置決めシステム10は励起源60(例えば、パルス磁場発生装置)、センサ・アセンブリ70、並びに、励起源60及びセンサ・アセンブリ70の両方に結合したコントローラ80を含む。励起源60は患者6の体内のマーカー40a−40c(図1)の少なくとも1つを励起するために励起エネルギーを発生する。図3に示される励起源60の実施形態は、種々の周波数のパルス磁場を生成する。例えば、励起源60は、第1のマーカー40aを励起するために第1の周波数E1、第2のマーカー40bを励起するために第2の周波数E2、第3のマーカー40cを励起するために第3の周波数E3において磁場を周波数分割多重化することができる。励起エネルギーに応答して、マーカー40a−40cは、独自の応答周波数において位置信号L1-3を発生する。より具体的には、第1マーカー40aは、第1周波数E1における励起エネルギーに応答して、第1周波数において第1の位置信号L1を発生し、第2マーカー40bは、第2周波数E2における励起エネルギーに応答して、第2周波数において第2の位置信号L2を発生し、第3マーカー40cは、第3周波数E3における励起エネルギーに応答して、第3周波数において第3の位置信号L3を発生する。2つのマーカーを用いる代替の実施形態においては、励起源は、周波数E1とE2における磁場を発生し、マーカー40a−40bは、それぞれ位置信号L1とL2を発生する。
【0022】
センサ・アセンブリ70は、マーカー40a−40cからの位置信号L1-3を検出するための複数のコイルを含むことができる。センサ・アセンブリ70は、相互に少なくとも実質的に共面である複数のコイルを有する平坦パネルとすることができる。他の実施形態においては、センサ・アセンブリ70はコイルの非平面型配列とすることができる。
【0023】
コントローラ80は、ハードウェア、励起源60に動作して励起エネルギーを種々の周波数E1-3に分割多重化させる命令を含むソフトウェア又は他のコンピュータ動作可能な媒体を含む。例えば、コントローラ80は、励起源60に第1の励起期間に第1周波数E1の励起エネルギーを発生させ、次にコントローラ80は、センサ・アセンブリ70が第1周波数E1の励起エネルギーの存在なしに第1マーカー40aからの第1位置信号L1を検出する第1の検出段階のために、励起源60に第1周波数E1の励起エネルギーを終了させる。次にコントローラ80は励起源60に、(a)第2の励起期間に第2周波数E2の第2励起エネルギーを発生させ、そして(b)センサ・アセンブリ70が第2周波数E2の励起エネルギーの存在なしに第2マーカー40bからの第2位置信号L2を検出する第2の検出段階のために、第2周波数E2の励起エネルギーを終了させる。コントローラ80は次にこの動作を、第3の検出段階に第3マーカー40cが第3位置信号L3をセンサ・アセンブリ70に伝達するように、第3周波数E3の第3励起エネルギーに対して繰り返す。従って、励起源60は、励起期間に励起エネルギーをマーカー40a−40cの共鳴周波数におけるパルス磁場の形態で無線伝達し、マーカー40a−40cは検出段階中に位置信号L1-3をセンサ・アセンブリ70に無線伝達する。励起及び検出段階は、ノイズを低減するために検出信号を平均することを可能にするように繰り返すことができることが認識されるであろう。
【0024】
コントローラ80内、又は別個の信号プロセッサ内、又は他のコンピュータ内のコンピュータ動作可能な媒体はまた、3次元基準座標系におけるマーカー40a−40cの各々の絶対位置を決定する命令を含む。センサ・アセンブリ70によって与えられる、位置信号L1-3の各々の大きさに対応する信号に基づいて、コントローラ80及び/又は別個の信号プロセッサは、3次元基準座標系におけるマーカー40a−40cの各々の絶対座標を計算する。マーカー40a−40cの各々の絶対座標は、基準座標系におけるターゲットの座標を計算するのに用いることができる客観的データである。複数のマーカーが用いられるときは、ターゲットの回転も計算できる。
【0025】
2. 実時間追跡
位置決めシステム10及び少なくとも1つのマーカー40は、治療計画、位置設定、放射線照射期間、及び放射線治療過程の他の期間中に、マシーン・アイソセンター又は別の患者体外の外部基準座標系に関してターゲット2を実時間追跡することを可能にする。多くの実施形態において、実時間追跡とは、マーカーの位置データを収集すること、外部基準座標系におけるマーカーの位置を決定すること、及びマーカーの位置に対応する外部基準座標系における客観的出力を供給することを意味する。客観的出力はターゲットを実時間で適切に追跡する頻度、及び/又は、位置データの収集と少なくとも実質的に同時となる待ち時間(例えば、一般的に同時の時間内で)で供給される。
【0026】
例えば、実時間追跡の幾つかの実施形態は、マーカーの位置を決定すること、及びマシーン・アイソセンターに対するターゲットの位置を計算することを、(a)ユーザ・インタフェースにおけるターゲット位置の表示中のポーズが処置の妨げにならない或いはヒトには容易に識別できないような十分に高い頻度で、且つ(b)マーカーからの位置信号の測定と少なくとも実質的に同時となるように十分に短い待ち時間で、行うものとして定義される。或いは、実時間とは、位置決めシステム10が各々の個別のマーカー40の絶対位置及び/又はターゲットの位置を、1msから5秒までの周期で、又は、多くの用途においては約10から100msまでの周期で、又は幾つかの特定の用途においては約20から50msまでの周期で、計算することを意味する。ユーザ・インタフェースに関する用途においては、例えば、周期は12.5ms(即ち、80Hzの周波数)、16.667ms(60Hz)、20ms(50Hz)、及び/又は50ms(20Hz)とすることができる。
【0027】
或いは、実時間追跡はさらに、位置決めシステム10が、マーカー40から位置信号が伝達された時刻から10msから5秒までの待ち時間内に、マーカー40及び/又はターゲット2の絶対位置をメモリ・デバイス、ユーザ・インタフェース、線形加速器又は他のデバイスに供給することを意味することができる。より特定的な用途においては、位置決めシステムは、一般にマーカー40及び/又はターゲット2の位置を約20から50msまでの待ち時間内に供給する。従って、位置決めシステム10は、より多くの放射線量をターゲットに適用することができ、且つ、健康組織に対する副次効果を軽減することができる故に放射線治療の効果を高めると期待される様式で、外部基準座標系に対するマーカー40及び/又はターゲット2の位置をモニターするための実時間追跡を提供する。
【0028】
或いは、実時間追跡はさらに、追跡誤差によって規定することができる。動くターゲットの位置の測定は、一般に追跡誤差と呼ばれる運動に起因する誤差を被る。本発明の態様によれば、位置決めシステム10及び少なくとも1つのマーカー40は、マシーン・アイソセンター又は他の外部基準座標系に関して、ターゲット2を臨床的に有意な限度内の追跡誤差での実時間追跡を可能にする。
【0029】
追跡誤差は、任意の実際的測定システムが示す2つの限界、即ち(a)ターゲット位置が検出される時刻と位置測定値が利用可能になる時刻との間の待ち時間、及び(b)測定の周期性によるサンプリング遅れ、による。例えば、ターゲットが5cm/sで動き、測定システムが200msの待ち時間を有する場合には、位置測定値は1cmの誤差を有することになる。この例における誤差は、他の如何なる測定誤差にもよらず、待ち時間だけによるもので、単に、位置が検出された時刻と位置測定値が使用可能となる時刻との間にターゲットが動いたという事実による。この例示的な測定システムが、さらに200msのサンプリング周期(即ち、5Hzのサンプリング周波数)を有する場合には、平均追跡誤差は1.5cmで、最大追跡誤差は2cmに増加する。
【0030】
実時間追跡システムが医療用途において有用であるためには、追跡誤差を臨床的に有意な限度内に抑えることが望ましい。例えば、放射線治療のために肺腫瘍の運動を追跡するシステムにおいては、追跡誤差を5mm以内に抑えることが望ましい。放射線治療のために他の臓器を追跡ときには、許容追跡誤差はもっと小さくなる可能性がある。本発明の態様によれば、実時間追跡は、臨床的に有意な限度内の追跡誤差を伴うターゲットの位置及び/又は回転の測定を意味する。
【0031】
ここで説明されているシステムは、ターゲットの位置、回転、及び運動を特徴付けるための登録点として役立つ1つ又はそれ以上のマーカーを用いる。本発明の態様によれば、マーカーはターゲットと実質的に固定した関係を有する。マーカーがターゲットと実質的に固定した関係をもたないとすれば、別の型の追跡誤差を被ることになる。このことは一般に、追跡誤差が臨床的に有意な限度内となり、従って、マーカーを、ターゲットの典型的な運動を表す組織又は骨の中に配置することができるようにするために、ターゲットに固定するか又はその十分近くに埋め込むことを必要とする。例えば、前立腺に関しては、ターゲットの運動を表す組織は、前立腺に極めて近接する又は隣接する組織を含むことになる。前立腺を含むターゲットに隣接する組織は、前立腺、腫瘍自体、又はターゲットから指定された動径距離内の組織を含む可能性がある。前立腺に関しては、ターゲットから5cmの動径距離にある組織の追跡が、ターゲットの運動に関して臨床的に有用な典型的運動を与えることになる。代替のターゲット位置追跡によれば、動径距離はより大きく又はより小さくすることができる。
【0032】
本発明の態様によれば、マーカーの運動はターゲットの運動の代理となる。従って、マーカーは、追跡されるターゲットに直接相関して動くように配置される。追跡されるターゲットによって、ターゲットとマーカーの間の直接的相関は変化することになる。例えば、長骨内では、マーカーは、骨内のターゲットの運動に直接相関する運動を与えるように骨に沿った何所かに配置することができる。例えば、頭又は首の骨組織に実質的に応じて動く軟組織に関しては、マーカーは、ターゲットの運動と直接相関する代理運動を与えるように咬合ブロック内に配置することができる。軟組織に関して及び上に詳細に論じたように、マーカーは、ターゲット運動に直接的相関を有する代理を与える隣接する軟組織内に配置することができる。
【0033】
図4は、ターゲットの位置と状態をモニターするための実時間追跡の幾つかの態様と使用法を示すフロー図である。この実施形態においては、放射線治療のための統合された方法90は、多くの放射線画分にわたって放射線を患者に照射する計画を決定する放射線計画過程91を含む。放射線計画過程91は、普通、腫瘍又は他の型のターゲットの画像をX線、CT、MRI、又は超音波イメージングを用いて取得するイメージング段階を含む。画像は、マーカーの間の相対的距離、及びターゲットとマーカーの間の相対的位置を測定するためにヒトによって解析される。図5Aは、例えば、患者6、ターゲット2、及びマーカー40の断面を示すCT画像の表示である。図5Bを参照すると、CTスキャナの基準座標系RCTにおけるマーカー40の座標(x0、y0、z0)はオペレータによって決定されることができる。腫瘍の座標は、マーカーとターゲットの間のオフセットを確かめるために同じ仕方で決定することができる。
【0034】
放射線計画過程91はまた、イメージング装置から離れた観察区域において位置決めシステム10(図3)を用いてターゲットを追跡することを含む。マーカー40(図3)は、ターゲットの形態(例えば、サイズ/形状)の時間経過による変化を識別するため、及び患者体内のターゲットの移動によって生じる軌跡を決定する(例えば、シミュレーション)ために追跡することができる。多くの治療計画のためには、コンピュータは、マーカー又はターゲットの位置に関する客観的出力データを実時間でユーザに供給する必要はなく、むしろデータは実時間で記録することができる。イメージング段階の間に得られる画像、及びシミュレーション過程において位置決めシステム10を用いてマーカーを追跡することによって得られる付加的データに基づいて、ターゲットに放射線を照射するための治療計画がつくられる。
【0035】
位置決めシステム10とマーカー40は、放射線照射のための自動的な患者位置設定過程を可能にする。治療計画の作成後、方法90は、ターゲットとマーカーがセンサ・アセンブリに一般に隣接するように、患者が可動支持台の上に配置される。前述のように、マーカーを励起するために励起源が始動され、センサがマーカーからの信号強度を測定する。次に、コンピュータ・コントローラは(a)マシーン・アイソセンターに対するマーカー及びターゲットの位置の客観的値を計算し、そして(b)ターゲットの位置とマシーン・アイソセンターの間の客観的オフセット値を決定する。図6を参照すると、例えば、客観的オフセット値は、マシーン・アイソセンターに対するターゲットの垂直方向、横方向、及び縦方向のオフセットを表示するユーザ・インタフェースに供給することができる。ユーザ・インタフェースは、さらに又はその代わりに、ターゲットの回転を表示することができる。
【0036】
位置決めシステム10の幾つかの実施形態の1つの態様は、フィールド・センサ70によって受け取られるデータの人為的な解釈を用いずに、フィールド・センサ70からの位置データをコントローラ80又は他のコンピュータ内で処理することによって、客観的値がユーザ・インタフェース又は他のデバイスに供給されることである。オフセット値が許容範囲の外にある場合には、コンピュータは自動的に支持台の制御システムを起動して、ターゲット・アイソセンターがマシーン・アイソセンターに一致するまで、マシーン・アイソセンターに対してテーブル上面を移動させる。コンピュータ・コントローラは、一般に、オフセットの客観的出力データをテーブル・コントロール・システムに前に規定したように実時間で供給する。例えば、出力は放射線照射装置に供給されるので、高速(1−20ms)で短い待ち時間(10−20ms)とすることができる。出力データが支持台コントローラに加えて又はその代わりにユーザ・インタフェースに供給される場合には、比較的低速度(20−50ms)及び長い待ち時間(50−200ms)とすることができる。
【0037】
1つの実施形態において、コンピュータ・コントローラはまた、シミュレートされた位置と配向に相対的なマーカーの位置と配向を決定する。シミュレートされたマーカーの位置は、実際のマーカーがシミュレートされたマーカーの選択された位置となるときにターゲットがマシーン・アイソセンターにくるように、選択される。マーカーが、シミュレートされたマーカーに対して適切に位置及び配向の調整がされていない場合には、適切なマーカー位置調整に必要であるように支持台が調節される。このマーカー位置調整はターゲットを6つの次元、即ち、X、Y、Z、ピッチ、ヨー、及びロール、に関して、ターゲットを適切に配置する。従って、患者は自動的に、ターゲットへの放射線治療を正確に施すためのマシーン・アイソセンターに対する正しい位置及び回転位置に配置される。
【0038】
図4に戻って参照すると、方法90はさらに放射線照射期間93を含む。図7は、位置決めシステム10が放射線照射期間93の間にターゲットを追跡し、ターゲットとマシーン・アイソセンターの間のオフセットに応じて放射線照射装置20を制御する自動過程のさらに進んだ態様を示す。例えば、ターゲットの位置がマシーン・アイソセンターからの変位の許容できる程度又は範囲の外にある場合には、位置決めシステム10は放射線照射を中断する又はビームの初期作動を止めるための信号を送る。別の実施形態においては、位置決めシステム10は、自動的に台上面27及び患者6(一体として)を再配置して、放射線照射期間の間、ターゲットが動く場合にもターゲット・アイソセンターがマシーン・アイソセンターの望ましい範囲内とどまるようにする。さらに別の実施形態においては、位置決めシステム10は、ターゲットがマシーン・アイソセンターの望ましい範囲内にあるときにだけ、放射線を作動させる信号を送る(例えば、ゲート制御される治療)。肺内部のターゲットを治療する場合には、ゲート制御される治療の1つの実施形態は、吸気/呼気の間ターゲットを追跡するステップと、患者に彼/彼女の呼吸を吸気/呼気の1サイクルの終了状態に保持させるステップと、コンピュータ80がターゲットとマシーン・アイソセンターの間の客観的オフセット値が望ましい範囲内にあると判断したときにビーム21を作動させるステップとを含む。従って、位置決めシステムは、患者を照射している際に実時間での台27及び/又はビーム21の動的調節を可能にする。このことは、放射線がターゲットに正確に、ターゲットの周りに大きな治療マージンを必要とせずに、照射されることを確実にするものと期待される。
【0039】
位置決めシステムは、オフセット及び/又は回転の客観的データを線形加速器及び/又は患者支持台に、前に規定された実時間で供給する。例えば、位置設定過程92の間自動的に患者支持台の位置調整を行うステップに関して前述したように、位置決めシステムは一般に客観的出力を、マーカーの位置データを取得するのと少なくとも実質的に同時に、及び/又はターゲットを実時間で追跡するのに十分な頻度で、放射線照射装置に供給する。客観的出力は、例えば、短い周期(1−20ms)で短い待ち時間(10−20ms)で供給することができ、その結果、ビーム21を制御する信号を放射線照射期間の間放射線照射装置に対して同じ時間周期で供給することができる。実時間追跡の別の実施例においては、客観的出力はオン・ビーム期間中に複数回(例えば、ビーム放出中に、2回、5回、10回又はそれ以上の回数)供給することができる。放射線ビームを終了又は作動させる場合、又はビーム・コリメータの照準を調節する場合には、一般に更新速度を最大にし、待ち時間を最小にすることが望ましい。従って、幾つかの実施形態においては、位置決めシステムは、ターゲット位置及び/又はマーカー位置の客観的出力データを、10ms又はそれ以下の周期及び10ms又はそれ以下の待ち時間で供給することができる。
【0040】
方法90はさらに、放射線照射期間93からの実時間客観的出力データを放射線ビームのパラメータの状態と比較する検証過程94を含む。例えば、放射線照射期間93の間、対応する時間間隔で、ターゲット位置をビーム強度、ビーム位置、及びコリメータの配置に相関させることができる。この相関は、ターゲット内又はその周囲の別々の領域へ照射する放射線量を決定するために用いることができる。この情報はまた、ターゲットの形態又はターゲットの軌跡における変化に注目することによって、ターゲットの特定の範囲に対する放射線照射の効果を判断するために用いることができる。
【0041】
方法90はさらに、検証過程94からのデータを治療が完了したかどうか判断するために解析する第1の判定(ブロック95)を含むことができる。治療が完了していない場合には、方法90はさらに、治療計画をターゲットの変化を補償するように修正すべきかどうかを判断するために、検証過程の結果を解析する第2の判定(ブロック95)を含む。修正が必要な場合には、方法は計画過程90を繰り返して進むことができる。反対に、治療計画が適切な結果をもたらしている場合には、方法90は、放射線治療の次の画分における位置設定過程92、放射線照射期間93、及び検証過程94を繰返すことによって進むことができる。
【0042】
位置決めシステム10は、個々に又は組合せによって、厳格なマージン内でターゲットに高い放射線量を正確に照射する機能を増強する幾つかの特徴を有する。例えば、位置決めシステムの多くの実施形態には、患者体内に埋め込まれて実質的にターゲットに固定される無鉛マーカーが用いられる。従って、マーカーは直接ターゲットと共に、又はターゲットの移動に比例して、移動する。その結果、治療過程の前、進行中、及び後で、呼吸、臓器充満、心臓機能又は他の要因によるターゲットの内部移動を識別し正確に追跡することができる。さらに、位置決めシステム10の多くの態様においては、客観的出力を供給する様式で、無鉛マーカーを外部絶対基準座標系において追跡するために非イオン化エネルギーが用いられる。一般に客観的出力は、位置決めシステム10がターゲットを追跡して客観的出力を供給する間に、人為的解釈データ(例えば、画像)を有することなしにコンピュータ・システム内で決定される。このことは、マーカーの位置が検出される時刻と客観的出力がデバイス又はユーザに供給される時刻との間の待ち時間を相当に低減する。例えば、このことは、ターゲットの位置に対応する客観的出力が、マーカーの位置データの収集と少なくとも実質的に同時に供給されることを可能にする。システムはまた、データの主観的な解釈に関連するユーザ間のばらつきを事実上排除する。
【0043】
D. マーカー及び位置決めシステムの特定の実施形態
マーカー、励起源、センサ及びコントローラの以下の特定の実施形態は、図1−図7を参照して前述されたシステム及び方法を実施するための付加的な詳細を与える。本発明者は、マーカーと、(a)無線伝達された励起エネルギーに応答して無線伝達される位置信号を生成し、(b)肺、前立腺、又は患者の他の部分の中に埋め込まれるように十分に小さな断面積を有するマーカーの位置を、正確に決定する位置決めシステムと、を開発するために多くの問題を克服した。これらの特性をもつシステムは、(a)イオン化放射線を必要としないこと、(b)マーカーとセンサの間の照準線を必要としないこと、及び(c)ターゲットの位置及び/又は回転の客観的測定値をもたらすこと、を含む幾つかの実際的な利点を有する。以下の特定の実施形態は、当業者が、患者体内の腫瘍に関連する放射線治療のためのそのような位置決めシステムを製造し使用することができるように、十分に詳しく説明されるが、しかし、本発明は、マーカー、励起源、センサ・アセンブリ及び/又はコントローラの以下の実施形態に限定はされない。
【0044】
1. マーカー
図8Aは、位置決めシステム10(図1−図7)と共に用いるマーカー100の等角図である。図8Aに示されるマーカー100の実施形態は、ケーシング110、及びケーシング110内の磁気トランスポンダ120(例えば、共振回路)を含む。ケーシング110は、患者体内に埋込まれるか、又は器具本体内に挿入される形態にされた防壁である。或いは、ケーシング110は患者の皮膚に外側から接着するような形態とすることができる。ケーシング110は、気管支鏡又は経皮経胸腔注入物などの小さな注入器具の孔内にフィットするサイズにした一般に円筒状のカプセルとすることができるが、しかしケーシング110は他の形態をもち、より大きく又はより小さくすることもできる。例えば、ケーシング110は、ケーシング110を柔組織に固定するためのかかり又は他の機構を有するか、或いは、患者の皮膚に外からケーシング110を取付けるための接着剤を有することができる。マーカー100を患者に固定するのに適切な固定機構は、引用によりここに組み入れられる、米国を指定国とする国際公開公報第WO 02/39917 A1号に開示されている。1つの実施形態においては、ケーシング110は(a)閉鎖端114及び開放端116を有するカプセル又はシェル112、及び(b)シェル112の開放端116における密封材118を含む。ケーシング110と密封材118は、プラスティック、セラミックス、ガラス、又は他の適切な生体適合性材料から作ることができる。
【0045】
磁気トランスポンダ120は、前述のように、無線で伝達された励起場に応答して位置信号を無線で伝達する共振回路を含むことができる。この実施形態においては、磁気トランスポンダ120は導電体124の複数の巻き線によって規定されるコイル122を備える。磁気トランスポンダ120の多くの実施形態はまた、コイル122に結合したコンデンサ126を含む。コイル122は選択された共振周波数で共振する。コイル122は、コンデンサなしに巻き線の寄生容量を用いるだけの共振周波数で共振することができる、或いは、共振周波数はコイル122とコンデンサ126の組み合わせを用いて生成することができる。それゆえコイル122は、励起エネルギーに応答して、それ自体で又はコンデンサ126との組合せによって選択された共振周波数の交流磁場を生成する。示される実施形態の導電体124は、約45−52のゲージを有する熱風又はアルコールで接合されたワイヤとすることができる。コイル122は800−1000の巻き数をもつことができ、巻き線は堅い積層コイル状に巻くことが好ましい。磁気トランスポンダ120は、適切な透磁率をもつ材料から構成されるコア128をさらに含むことができる。例えば、コア128はフェライト又は別の材料から構成される強磁性要素とすることができる。磁気トランスポンダ120は、接着剤129によってケーシング110に固定することができる。
【0046】
マーカー100はまた、放射線写真画像内でマーカーをよりよく識別できるようにするために、放射線写真画像の画質を向上させるイメージング素子を含む。イメージング素子はまた、マーカーが磁気トランスポンダ120の磁気的図心に少なくとも近似的に一致する放射線写真図心を有するように、放射線写真画像内の放射線写真プロフィルを有する。以下でより詳しく説明するように、放射線写真図心と磁気的図心は互いに正確に一致する必要はないが、むしろ許容範囲内にすることができる。
【0047】
図8Bは、本発明の一実施形態によるイメージング素子130を示す図8Aの線8B−8Bに沿った、マーカー100の断面図である。図8A−図8Bに示されるイメージング素子130は、第1のコントラスト素子132と第2のコントラスト素子134を含む。第1及び第2コントラスト素子132及び134は、一般に、マーカー100が磁気トランスポンダ120の磁気的図心Mcと少なくとも実質的に一致する放射線写真図心Rcを有するように、磁気トランスポンダ120に対して配置される。例えば、イメージング素子130が2つのコントラスト素子を含むときは、コントラスト素子は磁気トランスポンダ120に対して、及び/又は相互に、対称的に配置することができる。コントラスト素子はまた、磁気トランスポンダ120から放射線写真内で識別することができる。そのような実施形態において、別個のコントラスト素子の対称的な配置は、放射線写真画像内でマーカー100の放射線写真図心を正確に決定する機能を向上させる。
【0048】
図8A−図8Bに示される第1及び第2コントラスト素子132と134は、コア128の対向する端部に配置される連続的なリングである。第1コントラスト素子132は、コア128の第1の端部136aに又はその周囲に配置することができ、第2コントラスト素子134は、コア128の第2の端部136bに又はその周囲に配置することができる。図8A−図8Bに示される連続リングは、実質的に同じ直径及び厚さを有する。しかし、他の実施形態においては、第1及び第2コントラスト素子132と134は、他の形態をもつこと、及び/又はコア128に対して他の位置に配置することができる。例えば、第1及び第2コントラスト素子132と134は、異なる直径及び/又は厚さを有するリングとすることができる。
【0049】
イメージング素子130によって生成される画像の放射線写真図心は、磁気的図心Mcと完全に一致する必要はなく、むしろ放射線写真図心と磁気的図心は許容範囲内で一致するべきである。例えば、放射線写真図心Rcは、図心間のオフセットが約5mmより小さいとき、磁気的図心Mcと少なくとも近似的に一致すると見なすことができる。より厳格な用途においては、磁気的図心Mcと放射線写真図心Rcは、図心間のオフセットが2mm、或いは1mmより小さいとき、互いに少なくとも実質的に一致すると見なされる。他の用途においては、磁気的図心Mcは、磁気トランスポンダ120及び/又はマーカー100の長さの半分より小さな距離だけ図心が離れているとき、少なくとも近似的に放射線写真図心と一致する。
【0050】
イメージング素子130は、放射線写真画像を生成するのに用いられる放射線ビームの入射光子を高い割合で吸収する材料で作り、それに適した形態とすることができる。例えば、画像形成放射線がメガボルト範囲の高加速電圧を有するとき、イメージング素子130は、結果として得られる放射線写真内で認識可能となるようにイメージング素子に入射する光子フルエンスを十分に吸収するために、少なくとも部分的に、十分な厚さと断面積をもつ高密度材料で作ることができる。治療に用いられる多くの高エネルギー・ビームは、6MV−25MVの加速電圧を有し、これらのビームは多くの場合、5MV−10MVの範囲内、より特定的には6MV−8MVの範囲内で、放射線写真画像を生成するのに用いられる。従って、イメージング素子130は、5MV−10MVの加速電圧、より特定的には6MV−8MVの加速電圧を有するビームを用いて生成される画像内で認識可能となるように入射光子フルエンスを十分に吸収する材料から作ることができる。
【0051】
イメージング素子130の幾つかの特定的な実施形態は、金、タングステン、白金、及び/又は他の高密度金属から作ることができる。これらの実施形態において、イメージング素子130は、19.25g/cm3の密度(タングステンの密度)及び/又は約21.4g/cm3の密度(白金の密度)を有する材料から構成することができる。従って、イメージング素子130の多くの実施形態は、19g/cm3以上の密度を有する。しかし他の実施形態においては、イメージング素子130の材料は、実質的により低い密度を有することができる。例えば、低密度材料を有するイメージング素子は、放射線写真画像を生成するのに低エネルギー放射線を用いる用途に適している。さらに、第1及び第2コントラスト素子132及び134は、第1コントラスト素子132は第1の材料から作ることができ、第2コントラスト素子134は第2の材料から作ることができる、というように異なる材料から構成することができる。
【0052】
図8Bを参照すると、マーカー100はさらに、コア128の、コンデンサ126とは反対側の端部にモジュール140を含むことができる。図8Bに示されるマーカー100の実施形態においては、モジュール140は、放射線写真画像の対称性を高めるためにコンデンサ126に対して対称的に配置される。第1及び第2コントラスト素子132と134の場合と同様に、モジュール140とコンデンサ126は、マーカーの磁気的図心が、マーカー100の放射線写真図心と、少なくとも近似的に一致するように配置される。モジュール140は、コンデンサ126と同一の別のコンデンサとすることができ、或いは、モジュール140は電気的不活性素子とすることができる。適切な電気的不活性モジュールは、コンデンサ126と同じ形状をもち、コイル122、コア128、及びイメージング素子130に対して互いに対称的になるように配置されたセラミック・ブロックを含む。さらに他の実施形態においては、モジュール140は、磁気トランスポンダ120に電気的に結合した異なる型の電気的活性素子とすることができる。
【0053】
マーカーを用いる1つの具体的な過程は、第1の様式を用いてマーカーの画像を形成するステップと、次に第2の様式を用いて患者のターゲット及び/又はマーカーを追跡するステップを含む。例えば、ターゲットに対するマーカーの位置は、放射線を用いてマーカーとターゲットの画像を形成することによって決めることができる。マーカー及び/又はターゲットは、次に、励起エネルギーに応答してマーカーが生成する磁場を用いて、位置決定し、追跡することができる。
【0054】
図8A−図8Bに示されるマーカー100は、マーカーと患者のターゲットの間の相対的位置をより正確に決定するために、通常の磁気マーカーに比べて画質の向上した放射線写真画像を生成すると期待される。例えば、図8Cはマーカー100と患者のターゲットTの放射線写真画像150を示す。第1及び第2コントラスト素子132と134は、磁気トランスポンダ120の構成部品よりも高密度の材料から構成することができるので、放射線写真画像内ではより明瞭となること期待される。第1及び第2コントラスト素子132と134は、従って、磁気トランスポンダ120の構成部品が画像内で識別可能である用途においては、亜鈴形の球状端部のように見えることが可能である。特定のメガボルトの用途においては、磁気トランスポンダ120の構成部品は放射線写真画像150上には全く現れず、第1及び第2コントラスト素子132と134は、互いに離れた別個の領域として現れることになる。いずれの実施形態においても、第1及び第2コントラスト素子132と134は、マーカー100の放射線写真図心Rcを画像150内で位置決めする基準座標軸を与える。さらに、イメージング素子130は、放射線写真図心Rcが少なくとも近似的に磁気的図心Mcと一致するように配置されているので、ターゲットTと磁気的図心Mcの間の相対的なオフセット又は位置は、マーカーを用いて正確に決めることができる。従って、図8A−図8Cに示されるマーカー100の実施形態は、放射線写真画像内で放射線写真画像図心及び磁気的図心の不正確な見積もりによる誤差を減ずることが期待される。
【0055】
図9Aは,内部の構成要素を示すための切取り部分を有する、マーカー200の等角図であり、図9Bは、図9Aの線9B−9Bに沿って描かれたマーカー200の断面図である。マーカー200は上で図8Aに示されたマーカー100に類似し、従って、類似の参照番号は類似の構成要素を表す。マーカー200は、単一のコントラスト素子によって規定されるイメージング素子230を含む点で、マーカー100とは異なる。イメージング素子230は一般に、マーカー200の放射線写真図心が少なくとも近似的に磁気トランスポンダ120の磁気的図心と一致するように、磁気トランスポンダ120に対して配置される。イメージング素子230は、より具体的には、磁気トランスポンダ120の中央領域にあってコイル122の周りに伸びるリングである。イメージング素子230は、図8A−図8Bのイメージング素子130に関して前述されたのと同じ材料で構成することができる。イメージング素子230は、コイル122の外径に近似的に等しい内径と、ケーシング110内に入る外径を有することができる。しかし、図9Bに示されるように、スペーサ231を、イメージング素子230の内径とコイル122の外径の間に入れることができる。
【0056】
マーカー200は前述のマーカー100と同様に機能することが期待される。しかし、マーカー200は放射線写真画像内に2つの別個の離れた点をもたらす2つの離れたコントラスト素子をもたない。それでもなおイメージング素子230は、放射線写真画像内でマーカー200の放射線写真図心を識別すること、及び、マーカー200の放射線写真図心が、少なくとも近似的に、磁気トランスポンダ120の磁気的図心に一致するように配置することができることによって大いに有用である。
【0057】
図10Aは、切取り部分を有するマーカー300の等角図であり、図10Bは、図10Aの線10B−10Bに沿って描かれたマーカー300の断面図である。マーカー300は、図9A−図9Bに示されたマーカー200に実質的に類似し、従って、図8A−図10Bにおいて、類似の参照番号は類似の構成要素を表す。イメージング素子330は、マーカー300の放射線写真図心が、少なくとも近似的に磁気トランスポンダ120の磁気的図心に一致するように、磁気トランスポンダ120に対して配置される高密度リングとすることができる。マーカー300は、より具体的には、ケーシング110の周りのイメージング素子330を含む。マーカー300は、図9A−図9Bに示されたマーカー200と非常に類似した様式で機能することが期待される。
【0058】
図11は、本発明の別の実施形態による、マーカー400を示す、切取り部分を有する等角図である。マーカー400は、図8A−図8Cに示されたマーカー100に類似し、従って、これらの図において類似の参照番号は類似の構成要素を表す。マーカー400は、磁気トランスポンダ120の一方の端部に第1のコントラスト素子432、及び磁気トランスポンダ120の別の端部に第2のコントラスト素子434を含むイメージング素子430を有する。第1及び第2コントラスト素子432と434は、適切な高密度材料から構成される球である。コントラスト素子432と434は、例えば、金、タングステン、白金、又は、放射線写真画像形成に用いるのに適切な他の高密度材料で構成することができる。マーカー400は、前述のマーカー100と類似した様式で機能することが期待される。
【0059】
図12は、本発明のさらに別の実施形態による、マーカー500の切取り部分を有する等角図である。マーカー500は、図8A及び図11に示されたマーカー100及び400に実質的に類似し、従って、これらの図において類似の参照番号は類似の構成要素を表す。マーカー500は、第1のコントラスト素子532と第2のコントラスト素子534を含むイメージング素子530を有する。第1及び第2コントラスト素子532と534は、磁気トランスポンダ120の対向する端部の近傍に配置することができる。第1及び第2コントラスト素子532と534は、渦電流を減ずるためのギャップ535をもつ不連続なリングとすることができる。コントラスト素子532と534は、本発明の他の実施形態による他のイメージング素子のコントラスト素子に関して前述されたのと同じ材料で構成することができる。
【0060】
本発明によるマーカーの付加的な実施形態は、ケーシング110、磁気トランスポンダ120のコア128(図8B)、及び/又はケーシング内の接着剤129(図8B)に組み込まれるか、さもなければ、それらと統合されるイメージング素子を含むことができる。例えば、高密度材料の粒子をフェライトと混合し、コア128を形成するように押出し成形することができる。代替の実施形態においては、高密度材料の粒子をガラス又は他の材料と混合してケーシング110を形成するか、或いはケーシング110を高密度材料でコートすることができる。さらに他の実施形態においては、高密度材料を接着剤129と混合し、ケーシング110に射出成形することができる。これらの実施形態のいずれにおいても、高密度材料をケーシング110、コア128及び/又は接着剤129の組み合せの中に組み込むことができる。適切な高密度材料は、前述のように、タングステン、金及び/又は白金を含むことができる。
【0061】
図8A−図12を参照して前述されたマーカーは、位置決めシステム10(図1−図7)内のマーカー40に用いることができる。位置決めシステム10は、同じ型のイメージング素子をもつ幾つかのマーカーを有することができ、或いは、異なるイメージング素子をもつマーカーを同じ装置と共に用いることができる。これらのマーカーの幾つかの付加的な詳細、及びマーカーの他の実施形態は、引用によりここに組み入れられる米国特許出願第10/334,698号及び第10/746,888号に記載されている。例えば、マーカーは、低エネルギー放射線の用途のためには、如何なるイメージング素子も含まなくともよく、或いは、米国特許出願第10/334,698号に開示されているように、マーカーは、MRIイメージングに関する問題を減ずるために、フェライト及び金属の低減された体積を有することができる。
【0062】
2. 位置決めシステム
図13は、基準座標系に関するマーカー40(図式的に示される)の絶対位置を決めるための位置決めシステム1000の略ブロック図である。位置決めシステム1000は、励起源1010、センサ・アセンブリ1012、センサ・アセンブリ1012と動作可能なように結合する信号プロセッサ1014、及び、励起源1012及び信号プロセッサ1014と動作可能なように結合するコントローラ1016を含む。励起源1010は、図3を参照して前述された励起源60の1つの実施形態であり、センサ・アセンブリ1012は、図3を参照して前述されたセンサ・アセンブリ70の1つの実施形態であり、コントローラ1016は、図3を参照して前述されたコントローラ80の1つの実施形態である。
【0063】
励起源1010は、マーカー40の共振周波数に整合する選択された周波数のエネルギーをもつ波形を有する磁場を発生するように調整することができる。励起源1010によって発生された磁場は、マーカーをそれぞれの周波数において励起する。マーカー40が励起された後、励起源1010は直ちにオフの位置に切り替えられ、パルス磁場励起場は、マーカーが無線で位置信号を伝達する間終結される。このことは、励起源1010からの著しく強力な磁場からの無視できない妨害を受けずに、センサ・アセンブリ1012がマーカー40からの位置信号を検出することを可能にする。従って、励起源1010は、センサ・アセンブリ1012がマーカー40からの位置信号を十分な信号対雑音比で測定することを可能にし、その結果信号プロセッサ1014又はコントローラ1016は、基準座標系に関するマーカー40の絶対位置を正確に算出することができる。
【0064】
a. 励起源
図13をなお参照すると、励起源1010は、高電圧電源1040、電源1040に結合するエネルギー貯蔵デバイス1042、及びエネルギー貯蔵デバイス1042に結合するスイッチング・ネットワーク1044を含む。励起源1010はまた、スイッチング・ネットワーク1044に結合するコイル・アセンブリ1046を含む。1つの実施形態においては、電源1040は500V電源であるが、より高い又は低い電圧の他の電源も用いることはできる。1つの実施形態におけるエネルギー貯蔵デバイス1042は、電源1040によって充電され、比較的一定の充電状態に維持されることが可能な高電圧コンデンサである。エネルギー貯蔵デバイス1042は、コイル・アセンブリ1046内のコイルへのエネルギーの供給と、それらからのエネルギーの受け取りを交互に行う。
【0065】
エネルギー貯蔵デバイス1042は、電力損失を減らすために低い直列抵抗をもちながら、エネルギー貯蔵デバイス内での電圧降下を減らすのに適当なエネルギーを貯蔵することができる。エネルギー貯蔵デバイス1042はまた、コイル・アセンブリ1046をより効果的に駆動するために低い直列インダクタンスをもつ。エネルギー貯蔵デバイス1042に適切なコンデンサは、閃光エネルギー用途に用いられるアルミニウム電解コンデンサを含む。代替のエネルギー貯蔵デバイスはまた、NiCd及び鉛蓄電池、及び、タンタル、薄膜などの代りの型のコンデンサを含むことができる。
【0066】
スイッチング・ネットワーク1044は、個々のHブリッジ・スイッチ1050(参照番号1050a−dにより個々に識別される)を含み、コイル・アセンブリ1046は、個々のソース・コイル1052(参照番号1052a−dにより個々に識別される)を含む。各々のHブリッジ・スイッチ1050は、エネルギー貯蔵デバイス1042とソース・コイル1052の1つとの間のエネルギーの流れを制御する。例えば、Hブリッジ・スイッチ#1 1050aは、独立にソース・コイル#1 1052aへの/からのエネルギーの流れを制御し、Hブリッジ・スイッチ#2 1050bは、独立にソース・コイル#2 1052bへの/からのエネルギーの流れを制御し、Hブリッジ・スイッチ#3 1050cは、独立にソース・コイル#3 1052cへの/からのエネルギーの流れを制御し、Hブリッジ・スイッチ#4 1050dは、独立にソース・コイル#4 1052dへの/からのエネルギーの流れを制御する。従って、スイッチング・ネットワーク1044は、ソース・コイル1052a−dの各々によって発生される磁場の位相を独立に制御する。Hブリッジ1050は、全てのソース・コイル1052のための電気信号が同位相になるように構成することができ、或いは、Hブリッジ1050は、1つ又はそれ以上のソース・コイル1052が180°位相がずれるように構成することができる。さらに、Hブリッジ・スイッチ1050は、1つ又はそれ以上のソース・コイル1052のための電気信号が、種々の位相をもつ磁場を同時に供給するために、0°と180°の間で位相がずれるように構成することができる。
【0067】
ソース・コイル1052は、基準座標系に対して固定された共面配列に配置することができる。各ソース・コイル1052は、平坦な実質的に直線のコイルを形成するように配置された四角の平面型巻き線とすることができる。異なる実施形態においては、ソース・コイル1052は他の形状及び他の配置を取ることができる。1つの実施形態においては、ソース・コイル1052は、プリント回路基板の層内に形成された個々の導電線であるか、又は発泡フレーム内にあるワイヤの巻き線である。或いは、ソース・コイル1052は、異なる基板内に形成するか又は配置して、その結果2つ又はそれ以上のソース・コイルが互いに共面でなくなるようにすることができる。さらに、本発明の代りの実施形態は、図13に示されるよりも少ない又は多くのソース・コイルを有することができる。
【0068】
ソース・コイル1052からの選択された磁場は、結合して、励起体積内で任意の空間的方向にマーカー40を励起するために種々の3次元形状をもつことのできる調整可能な励起場を形成する。ソース・コイル1052の平面配列が概ね水平であるときは、励起体積は、コイル・アセンブリ1046の中央領域に近似的に対応する範囲の上方に位置する。励起体積はコイル・アセンブリ1046に隣接し、内部の磁場の強さがマーカー40を適切に励起するのに十分である、3次元空間である。
【0069】
図14−図16は、示されるXYZ座標系に対して異なる軸の周りに励起場を生成するために、位相の異なる組み合せでソース・コイルに供給される交流電気信号を有するソース・コイル1052の平面配列の略図である。各ソース・コイルは2つの外側辺1112と2つの内側辺1114を有する。1つのソース・コイル1052の各内側辺1114は、別のソース・コイル1052の内側辺1114に隣接するが、しかし全てのソース・コイル1052の外側辺1112は、如何なる他のソース・コイル1052にも隣接しない。
【0070】
図14の実施形態においては、全てのソース・コイル1052a−dは、同時に同じ位相の交流電気信号を受け取る。その結果、電流は全てのソース・コイル内を同じ方向に流れ、1つのソース・コイル(例えば、ソース・コイル1052a)の内側辺1114に沿って流れる電流の方向1113は、2つの隣接するソース・コイル(例えば、ソース・コイル1052cと1052b)の内側辺1114に沿って流れる電流の方向1113と逆となる。従って、内側辺1114に沿って生成される磁場は互いに相殺し、その結果、磁場はソース・コイルの外側辺1112に沿って流れる電流から事実上生成される。図14に示されるソース・コイル1052a−dからの磁場の組み合せによって形成される結果としての励起場は、励起体積1109内で概ねZ方向の磁気モーメント1115をもつ。この励起場は、Z軸に平行なマーカー、或いはZ軸方向に角度成分をもって配置された(即ち、Z軸に直交しない)マーカーを励起する。
【0071】
図15は、異なる空間的配向をもつ第2の励起場を生成するための第2の位相の組み合せで供給される交流電気信号を有するソース・コイル1052a−dの略図である。この実施形態においては、ソース・コイル1052aと1052cが互いに同位相であり、ソース・コイル1052bと1052dが互いに同位相である。しかしながら、ソース・コイル1052a及び1052cは、ソース・コイル1052b及び1052dと位相が180度ずれる。ソース・コイル1052a−dからの磁場は結合して、励起体積1109内に概ねY軸方向の磁気モーメント1217を有する励起場を生成する。従って、この励起場は、Y軸に平行なマーカー、或いはY軸方向に角度成分をもって配置されたマーカーを励起する。
【0072】
図16は、異なる空間的配向をもつ第3の励起場を生成するための第3の位相の組み合せで供給される交流電気信号を有するソース・コイル1052a−dの略図である。この実施形態においては、ソース・コイル1052aと1052bが互いに同位相であり、ソース・コイル1052cと1052dが互いに同位相である。しかしながら、ソース・コイル1052a及び1052bは、ソース・コイル1052c及び1052dと位相が180度ずれる。ソース・コイル1052a−dからの磁場は結合して、励起体積1109内に概ねX軸方向の磁気モーメント1319を有する励起場を生成する。従って、この励起場は、X軸に平行なマーカー、或いは、X軸方向に角度成分をもって配置されたマーカーを励起する。
【0073】
図17は、Y軸に平行な縦軸をもつマーカー40を励起するための励起場1424を生成する電流を示す、ソース・コイル1052a−dの略図である。スイッチング・ネットワーク1044(図13)は、ソース・コイル1052a−dに供給される交流電気信号の位相が図15の配置に類似するように構成される。これは、マーカー40を励起するために、Y方向に磁気モーメントをもつ励起場1424を生成する。
【0074】
図18はさらに、種々の空間的配向にある任意のマーカー40を励起するように励起場を空間的に調整する機能を示す。この実施形態においては、スイッチング・ネットワーク1044(図13)は、ソース・コイル1052a−dに供給される交流電気信号の位相が図14に示される配置に類似するように構成される。これは、Z軸に平行な縦軸をもつマーカー40を励起するZ方向に磁気モーメントをもつ励起場を生成する。
【0075】
励起体積1109内の励起場の空間的配置は、ソース・コイル1052a−dに供給される電気信号に位相を変えるためにスイッチング・ネットワークを操作することによって迅速に調整することができる。その結果、全体の磁気励起場は、励起体積1109内でX,Y又はZ方向のいずれかに配向するように変化させることができる。励起場の空間的配向のこの調整は、励起体積1109内の盲点を減ずるか又は除去する。従って、励起体積1109内のマーカー40は、無鉛マーカーの空間的配向に関らず、ソース・コイル1052a−dによって励起することができる。
【0076】
1つの実施形態においては、励起源1010はセンサ・アセンブリ1012に結合し、その結果、スイッチング・ネットワーク1044(図13)は、センサ・アセンブリによって受け取られる信号の強さによって、X、Y、及びZ軸に沿う励起場のパルス生成の配向を調整する。マーカー40からの位置信号が不十分である場合には、スイッチング・ネットワーク1044は、異なる軸又は軸間の方向にモーメントをもつ励起場を生成するために、ソース・コイル1052a−dへのその後のパルス供給の間に、励起場の空間的配向を自動的に変化させることができる。スイッチング・ネットワーク1044は、センサ・アセンブリ1012がマーカーからの十分な位置信号を受け取るまで操作することができる。
【0077】
図13に示される励起源1010は、励起段階中はマーカー40にエネルギー供給するためにソース・コイル1052a−dを励起すること、次いで、センサ・アセンブリ1012がマーカー40によって無線で伝達される減衰位置信号を検出する検出段階中はソース・コイル1052a−dを能動的に脱励起すること、を交互に行う。ソース・コイル1052a−dを能動的に励起及び脱励起するために、スイッチング・ネットワーク1044は、エネルギー貯蔵デバイス1042からの貯蔵エネルギーをソース・コイル1052a−dに伝達すること、次にソース・コイル1052a−dからエネルギー貯蔵デバイス1042にエネルギーを再伝達すること、を交互に行うように構成される。スイッチング・ネットワーク1044は、ソース・コイル1052の両端の電圧が正及び負の極性の間で交替するように、第1及び第2の「オン」位置の間で交替する。例えば、スイッチング・ネットワーク1044が第1の「オン」位置に切り替えられるとき、エネルギー貯蔵デバイス1042内のエネルギーがソース・コイル1052a−dに向って流れる。スイッチング・ネットワーク1044が第2の「オン」位置に切り替えられるときには、ソース・コイル1052a−d内のエネルギーが能動的にソース・コイル1052a−dから取り出され、エネルギー貯蔵デバイス1042に向って戻されるように極性が反転する。その結果、ソース・コイル1052a−d内のエネルギーは直ちにエネルギー貯蔵デバイス1042に戻されて、ソース・コイル1052a−dから伝達される励起場を突然終結し、消費電力をエネルギー貯蔵デバイス1042に保存する。このことは、励起エネルギーを周囲から除去し、その結果、センサ・アセンブリ1012は、励起源1010からの非常に大きな励起エネルギーによる妨害なしに、マーカー40からの位置信号を検出することができる。励起源1010の幾つかの付加的な詳細及び代りの実施形態は、引用によりその全体がここに組み入れられる、2002年8月7日提出の米国特許出願番号第10/213,980号であって、現在は米国特許第6,822,570号である特許文献に開示されている。
【0078】
b. センサ・アセンブリ
図19Aは、位置決めシステム(図13)中に用いるセンサ・アセンブリ1012の幾つかの構成要素を示す分解等角図である。センサ・アセンブリ1012は、パネル1604上に形成されるか又はそれによって支持される複数のコイル1602を有する検出ユニット1601を含む。コイル1602は、センサ・アレイ1605に配列されたフィールド・センサ又は磁束センサとすることができる。
【0079】
パネル1604は、DuPont社製のKAPTON(登録商標)のシートのような、実質的に非導電性の材料とすることができる。KAPTON(登録商標)は、非常に安定、強靭、そして薄い膜が必要なとき(放射線ビーム汚染を防止するためなど)に特に有用であるが、パネル1604は、他の材料から作り、そして他の形状とすることができる。例えば、FR4(エポキシ・ガラス基板)、GETEK又は他のテフロン(登録商標)・ベースの基板、及び他の市販材料は、パネル1604に用いることができる。さらに、パネル1604は平坦で高度に平面の構造体とすることができるが、他の実施形態においては、パネルは少なくとも1つの軸に沿って湾曲してもよい。いずれの実施形態においても、フィールド・センサ(例えばコイル)は、1つのフィールド・センサの平面が、隣接するフィールド・センサの平面と少なくとも実質的に共面である局所的な平面アレイに配列される。例えば、1つのコイルによって規定される平面と、隣接するコイルによって規定される平面との間の角度は、近似的に0°から10°までとすることができ、より一般的には5°未満である。しかし、幾つかの状況においては、1つ又はそれ以上のコイルは、アレイ内の他のコイルに対して10°より大きな角度にすることができる。
【0080】
図19Aに示されるセンサ・アセンブリ1012は、パネル1604に貼り合わされたコア1620を随意に含むことができる。コア1620は、堅い材料から作られた支持部品とすることができ、或いは、コア1620は、独立気泡ロハセル発泡体などの低密度発泡体とすることができる。コア1620は、動作温度範囲全域にわたって、センサ・アセンブリ1012の形状及びコイル1602間の相対的配向が所定の範囲内にとどまるように、低い熱膨張係数を有する安定な層であることが好ましい。
【0081】
センサ・アセンブリ1012は、検出サブシステムの1つの側面に第1の外カバー1630a、及び向いの側面に第2の外カバー1630bをさらに含むことができる。第1及び第2外カバー1630a−bは、ケブラー又はサーマウント・フィルムなどの、薄い熱的に安定な層とすることができる。第1及び第2外カバー1630a−bの各々は、望ましくない外部電場をコイル1602に達しないように遮断する電気シールド1632を含むことができる。電気シールド1632は、普通ファラデー・シールドと呼ばれる配置の櫛形シールドの輪郭を示す、金メッキされた銅ストリップの複数の平行脚とすることができる。シールドは、シールドに適切な他の材料から形成可能であることが理解されよう。電気シールドは、プリント回路基板製造技術又は他の技術を用いて、第1及び第2外カバー上に形成することができる。
【0082】
コイル1602をもつパネル1604は、粘着剤又は他の型の接着剤を用いてコア1620に貼り合わせることができる。第1及び第2外カバー1630a−bは、同様に、パネル1604とコア1620の組立品に貼り合わせることができる。貼り合わせられた組立品は、広い動作温度範囲全域にわたってコイル1602の配列を規定された配置に固定する堅い構造体を形成する。従って、センサ・アセンブリ1012は、動作中その表面全域で実質的に歪まない。例えば、センサ・アセンブリ1012は、±0.5mm以下、幾つかの場合には±0.3mm以下の歪みで、コイル1602の配列を固定位置に保持することができる。検出サブシステムの剛直性は、無鉛マーカーの正確な位置の非常に正確で繰返し可能な実時間モニタリングをもたらす。
【0083】
さらに別の実施形態においては、センサ・アセンブリ1012は、励起源1010の構成要素である複数のソース・コイルをさらに含むことができる。センサ・アセンブリ1012をソース・コイルと結合させる1つの適切な配列は、引用によりここに組み入れられる、2002年12月30日提出の「パネル型センサ/ソース・アレイ・アセンブリ」と題する米国特許出願整理番号第10/334,700号に開示されている。
【0084】
図19Bは、さらに検出ユニット1601の一実施形態を示す。この実施形態においては、検出ユニット1601は32個のセンサ・コイル1602を含み、各コイル1602は別々のチャネル1606(「Ch 0」から「Ch 31」までのチャネルとして個々の示される)に関連付けられる。パネル1604の全体の寸法は約40cm×54cmであるが、アレイ1605は約40cmの第1の寸法D1及び約40cmの第2の寸法D2を有する。代替の実施形態においては、アレイ1605は他の寸法又は他の配置(例えば、円形の)を有することができる。加えて、アレイ1605は、8−64個のコイルなど、より多数又は少数のコイルをもつことが可能であり、さらにコイルの数は2の累乗とすることができる。
【0085】
コイル1602は、パネル1604上に形成される銅又は別の適切な導電金属の導電トレース又は堆積物とすることができる。各コイル1602は、約0.15mmの幅をもち、各コイル内の隣接する巻きの間の間隔が約0.13mmであるトレースを有する。コイル1602は、約15から90までの巻きを有し、特定の用途においては、各コイルは約40巻きを有する。15未満の巻きを有するコイルは、一部の用途のためには十分に敏感ではない可能性があり、90を超える巻きを有するコイルは、励起中にソース信号からの過剰電圧、及び、コイルの低い自己共振周波数による過剰な整定時間をもたらす可能性がある。しかし、他の用途においては、コイル1602は15未満の巻き又は90超の巻きを有することができる。
【0086】
図19Bに示されるように、コイル1602は正方形渦巻きに配列されるが、円形、組み合った6角形、3角形などの配列のような他の配置を用いることもできる。そのような正方形渦巻きは、信号対雑音比を改善するように大きな割合の表面積を用いる。正方形コイルはまた、円形コイルに比較して、デザイン・レイアウト及びアレイのモデリングを簡単にする。例えば、円形コイルは、マーカー40からの磁束を結合させるのに表面積を無駄にする可能性がある。コイル1602は、約40mmの内寸法と約62mmの外寸法を有するが、用途によって他の寸法も可能である。感度は、製造許容範囲内で可能な限り外寸法に近い内寸法をもちいることによって改善することができる。幾つかの実施形態においては、コイル1602は互いに同一であるか、又は実質的に類似するように構成される。
【0087】
アレイ1605内のコイル1602のピッチは、少なくとも部分的に、マーカーとコイル・アレイの間の最短距離の関数である。1つの実施形態においては、コイルは約67mmのピッチで配列される。この特定の配列は、無線マーカー40がセンサ・アセンブリ1012から約7−27cmの位置に配置されるときに特に適している。無線マーカーが7cmより近い場合には、検出サブシステムはより小さなピッチで配列されたセンサ・コイルを含むことができる。一般に、無線マーカーがコイルのアレイから比較的短距離において検出されるときは、より小さなピッチが望ましい。例えば、コイル1602のピッチは、マーカーとアレイの間の最短距離の約50%から200%までである。
【0088】
一般に、アレイ1605及びアレイ内のコイル1602の寸法及び配置は、それらの動作周波数領域、マーカー40からアレイまでの距離、マーカーの信号強度、及び幾つかの他の因子に依存する。当業者は、少なくとも部分的に、望ましい周波数領域及びマーカーからコイルまでの距離に依存して、他の寸法及び配置を用いることができることを直ちに認識するであろう。
【0089】
アレイ1605は、マーカーによって放射される磁場を測定するために大口径を与える寸法にされる。マーカー信号はソース信号及び室内の他の磁場よりも遥かに小さいので、無線で伝達されたエネルギー・ソースに応答して、無線でマーカー信号を伝達する埋め込み可能なマーカーによって放射される信号を正確に測定することは、特にやりがいのある問題となり得る。アレイ1605の寸法は、非近接場ソースからの妨害を減らしながら、マーカーの近接場を優先的に測定するように選択することができる。1つの実施形態においては、アレイ1605は、マーカーがコイル平面から離される所定の最大検出距離の約100%から300%までである、コイル占有表面積全域にわたる最大寸法D1又はD2をもつ寸法とされる。従って、アレイ1605の寸法は、マーカー信号を正確に測定するためにマーカーがアレイから離されるべき距離を特定することによって決定され、次にコイルは、アレイの最大寸法がその距離の約100%から300%までとなるように配置される。アレイ1605の最大寸法は、例えば、マーカーがアレイから離される検出距離の約200%にすることができる。1つの特定的な実施形態においては、マーカー40は20cmの検出距離をもち、コイル1602のアレイの最大寸法は、20cmと60cmの間であり、より特定的には40cmである。
【0090】
上述の最大寸法を有するコイル・アレイは、非近接場ソースからの妨害を低減するフィルターを本来的にもたらすので特に有用である。従って、本発明の幾つかの実施形態の1つの態様は、アレイが優先的に近接場ソース(即ち、マーカーによって生成される場)を測定し、非近接場ソースからの妨害を取り除くように、マーカーからの信号に基づいてアレイの寸法を決めることである。
【0091】
コイル1602は、各コイルの内側部分又は区域を通じて、無線マーカー40によって生成される磁束を受け取り、次に磁場成分の量又は大きさを表す又はそれに比例する電流信号を生成する電磁場センサである。磁場成分はまた、各コイル1602の面に垂直である。各コイルは別々のチャネルを表し、従って各コイルは32個の出力ポート1606の内の1つに信号を出力する。下記のプリアンプを各出力ポート1606に備えることができる。プリアンプ(又はインピーダンス・バッファ)をコイルの近傍に配置することは、ここで説明されるように、コイルに対する容量負荷を最小にする。示されてはいないが、検出ユニット1601はまた、各コイル1602から対応する出力ポート1606へ信号を伝達して別々のチャネルを規定する、導電トレース又は導電経路を含む。次にポートは、適切な形態のプラグ及び連結ケーブルを取り付けることのできるパネル1604上に形成されたコネクタ1608に結合される。
【0092】
検出ユニット1601はまた、オンボード・メモリ又は、電気的に消去可能でプログラム可能な読み出し専用メモリ(EEPROM)1610のような他の回路を含むことができる。EEPROM1610は、シリアル番号、改訂番号、製造年月日などの製造情報をストアすることができる。EEPROM1610はまた、チャネル毎の較正データ、及びラン・タイムの記録をストアすることができる。ラン・タイムは、アレイが照射された全放射線量の指標を与え、その指標は検出サブシステムの交替が必要なときにシステムに警告を発することができる。
【0093】
1つの平面だけが示されるが、無線マーカー40の3次元位置の決定の助けとなるように、付加的なコイル又は電磁場センサをパネル1604に垂直に配置することができる。他の寸法のコイル又はセンサを付け加えることは、無線マーカー40から受け取る全エネルギーを増すことができるとしても、そのアレイの複雑さは過剰に増加することになる。本発明者は、無線マーカー40の3次元座標は図19A−Bに示される平面型アレイを用いて検出できることを見出した。
【0094】
センサ・アセンブリ1012を実装することは、幾つかの考慮すべきことを含む。第1に、コイル1062は理想的な開回路を与えられない可能性がある。その代りに、それらコイルは、大部分が、コイル1602をプリアンプに接続するトレース又は導電経路による寄生容量、及び、減衰ネットワーク(以下に説明される)及びプリアンプの入力インピーダンス(低い入力インピーダンスが好ましいが)によって負荷を受ける可能性が十分にある。これらの組み合せられた負荷は、コイル1602が変化する磁束と結合するときに電流フローを生じる。従って、任意の1つのコイル1602は、無線マーカー40からの磁束だけでなく、同様に他の全てのコイルからの磁束に結合する。これらの電流フローは下流での信号処理において考慮されなければならない。
【0095】
第2の考慮すべきことは、コイル1602に対する容量負荷である。一般に、コイル1602に対する容量負荷は最小にすることが望ましい。容量負荷はコイル自体の共振回路を形成し、それが、励起源1010が電力供給されるときに過剰な電圧オーバーシュートをもたらす。そのような電圧オーバーシュートは、コイル1602全体にわたる減衰又は「スナッビング」ネットワークによって制限又は減衰されるべきである。より大きな容量負荷はより低いインピーダンスの減衰ネットワークを必要とし、それが実質的な電量消費及び減衰ネットワーク内の加熱をもたらす可能性がある。
【0096】
もう1つの考慮すべきことは、低雑音のプリアンプを使用することである。プリアンプはまた、センサ・アセンブリ1012の1つの用途が線形加速器(LINAC)を用いる放射線治療システムであるために、放射線耐性とすることができる。その結果、PNPバイポーラ・トランジスタ及び分離した素子が好ましい。さらに、良好な整定時間がAC回路又は出力によっては達成できない場合、特にアナログ・ディジタル・コンバータがAC出力信号の広い振動を処理できない場合には、DC結合回路が好ましいことがある。
【0097】
図20は、例えば、差動増幅器1704をもつスナッビング・ネットワーク1702の一実施形態を示す。スナッビング・ネットワーク1702は、2組の直列に結合した抵抗と、それらの間を橋絡する1つのコンデンサを含む。バイアス回路1706は差動増幅器の調整を可能にし、一方較正入力1708は差動増幅器の両方の入力脚部をバランスさせることを可能にする。コイル1602は、1対の高電圧保護ダイオード1710を伴う差動増幅器1704の入力部に結合される。DCオフセットは、差動増幅器1704の入力トランジスタのベースに結合された1対の抵抗(ゼロ値をもつように示されている)によって調整することができる。出力部におけるESD保護ダイオード1712、及びフィルター・コンデンサ(10nF値を有するように示されている)などの付加的な保護回路が備えられている。
【0098】
c. 信号プロセッサ及びコントローラ
図13に示される信号プロセッサ1014及びコントローラ1016は、センサ・アセンブリ1012からの信号を受け取り、基準座標系内でのマーカー40の絶対位置を算出する。適切な信号処理システム及びアルゴリズムは、米国特許出願整理番号第10/679,801号、第10/749,478号、第10/750,456号、第10/750,164号、第10/750,165号、第10/749,860号、及び第10/750,453号に開示されており、これらの全ては引用によりここに組み入れられる。
【実施例1】
【0099】
概観
実時間追跡のための本システムの有効性を判断するために、実験ファントムに基づく研究が実施された。この実験においては、3軸における任意の運動を、0.3mmの精度で各次元において10cm/secまで加速することを可能にする特別製作の4Dステージが構築された。位置の精度は、ステージ・システムに取り付けられた3Dディジタイジング・アームによって測定された。図21に示されるように、x、y及びz方向のそれぞれにおいて、2cm、4cm及び2cm、並びに、1cm、2cm及び1cmのピーク・ツー・ピーク運動により、2つの楕円が造られた。毎分15、17及び20回の呼吸に相当する3つの周期が用いられた。単一のトランスポンダは33ms、67ms及び100msの積算時間において用いられ、2つのトランスポンダは67ms及び100msの積算時間において用いられた。トランスポンダは4Dステージに乗せられた特別製作のファントムの内部に配置した。実験は、平均的な肺ガン患者の位置を模するために、AC磁気アレイから14cm離れたアイソセンターを用いて実施された。4Dステージは、実時間追跡システムがトランスポンダの位置を測定した際に、各々の軌跡を走査した。測定された位置はファントムの位置と比較された。楕円の大きさ、速度、トランスポンダの個数及び積算時間の効果の特徴が調べられた。
【0100】
実験の要約
図22に示されるように、2乗平均平方根(RMS)誤差は、各々の楕円、周期、及びトランスポンダ積算時間に対して、1mm未満であった。本システムは、楕円の経路全体にわたり、例えば、毎分17回の呼吸における大きな楕円の軌跡内で、目標点を追跡することができた。図23は、位置決めの誤差のヒストグラムであり、各測定点について誤差範囲が小さいことを示している。図24に示されるように、RMS誤差は、殆どの軌跡において速度が増す領域で高くなった。この実験に関しては、単一トランスポンダ・システムがデュアル・トランスポンダシステムより僅かに良好に動作し、最良のシステムは67msの積算時間を有する単一トランスポンダであった。
【0101】
結論
示された実施形態の前記の説明は、要約中で説明されることを含めて、網羅的であること、又は本発明を開示されたとおりの形態に限定すること、を意図したものではない。例証のために特定の実施形態及び実施例が本明細書で説明されているが、当業者が認識するであろうように、本発明の精神と範囲から逸脱することなしに種々の均等な変更を施すことができる。ここで提供された本発明の教示は、必ずしも例示的なシステムが一般的に前述されていなくとも、ターゲットの位置決め及び追跡のシステムに適用することができる。
【0102】
前述の種々の実施形態は、さらに進んだ実施形態を与えるように組み合せることができる。この明細書において引用された及び/又はアプリケーション・データ・シートに記載された、全ての米国特許、米国特許出願公開公報、米国特許出願、外国の特許、外国の特許出願及び非特許出版物は、それらの全体が引用によりここに組み入れられる。本発明の態様は、本発明のさらに進んだ実施形態を与えるために、必要ならば、種々の特許、出願及び刊行物のシステム、デバイス及びコンセプトを用いるように変更することができる。
【0103】
これら及び他の変更は、前述の詳しい説明を考慮して施すことができる。一般に、添付の特許請求項において用いられる用語は、本明細書及び特許請求項中で開示される特定の実施形態に本発明を限定するものと解釈されるべきではなく、体内の選択されたターゲットの位置を決定し、モニターし、及び/又は追跡するための装置と方法を提供するように、特許請求項に従って動作する、ターゲットの位置を決めモニターする全てのシステムを含むものと解釈されたい。従って、本発明は添付の特許請求項による以外には限定されない。
【図面の簡単な説明】
【0104】
【図1】本発明の一実施形態による、ターゲットの位置決めとモニターに用いる追跡システムの側面図である。励起可能マーカーは患者体内のターゲット内に又はそれに隣接して埋め込まれるように示されている。
【図2】可動支持台上の患者及び患者体内に埋め込まれたマーカーの略立面図である。
【図3】本発明の一実施形態による位置決めシステム及び患者体内に埋め込まれた複数のマーカーを概略的に示す側面図である。
【図4】本発明の一実施形態による、放射線治療のための実時間ターゲット追跡を用いる統合放射線治療過程の流れ図である。
【図5A】放射線治療及び他の医療用途におけるターゲットの実時間追跡のためのシステム及び方法の一態様を示すCT画像の表示である。
【図5B】CTスキャナの基準座標系を概略的に示す図である。
【図6】本発明の一実施形態による客観的出力を表示するためのユーザ・インタフェースのスクリーンショットである。
【図7】本発明の一実施形態による放射線照射期間の等角図である。
【図8A】本発明の一実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図8B】図8Aのマーカーの線8B−8Bに沿って描かれた断面図である。
【図8C】図8A−図8Bのマーカーの放射線画像の実例である。
【図9A】本発明の別の実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図9B】図9Aのマーカーの線9B−9Bに沿って描かれた断面図である。
【図10A】本発明の別の実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図10B】図10Aのマーカーの線10B−10Bに沿って描かれた断面図である。
【図11】本発明の別の実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図12】本発明のさらに別の実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図13】本発明の一実施形態によるターゲットの追跡に用いるための位置決めシステムの略ブロック図である。
【図14】第1の励起場を生成するための第1の位相の組合せの電気信号を搬送する共面電源コイルの配列の略図である。
【図15】第2の励起場を生成するための第2の位相の組合せの電気信号を搬送する共面電源コイルの配列の略図である。
【図16】第3の励起場を生成するための第3の位相の組合せの電気信号を搬送する共面電源コイルの配列の略図である。
【図17】第1の空間方向にマーカーを活性化するための磁気励起場を示す共面電源コイルの配列の略図である。
【図18】第2の空間方向にマーカーを活性化するための磁気励起場を示す共面電源コイルの配列の略図である。
【図19A】本発明の一実施形態による位置決めシステムと共に用いるためのセンサ・アセンブリの個々の構成要素を示す分解等角図である。
【図19B】図19Aのセンサ・アセンブリ内で用いる検出ユニットの平面図である。
【図20】図19Aのセンサ・アセンブリと共に用いるプリアンプの略図である。
【図21】本システムの実験ファントムをベースとする研究からの例証的な腫瘍の運動楕円のグラフである。
【図22】本システムの実験ファントムをベースとする研究からの2乗平均平方根(RMS)誤差のグラフである。
【図23】本システムの実験ファントムをベースとする研究からの位置決め誤差の例示的なヒストグラムである。
【図24】本システムの実験ファントムをベースとする研究からの速さの関数としての位置誤差のグラフである。
【技術分野】
【0001】
本発明は、一般に放射線治療システムに関し、より特定的には放射線治療を教導し評価するために、実時間でターゲットを正確に位置決めして、追跡するためのシステムと方法に関する。本発明は、しかし、他の医療用途においても有用である。
本願は、2004年9月16日出願の米国特許仮出願第60/610,509号、及び2004年7月23日出願の米国特許仮出願第60/590,894号の利益を主張するものであり、これらの両方の特許文献はその全体が引用によりここに組み入れられる。
【背景技術】
【0002】
放射線治療は、前立腺ガン、肺ガン、脳腫瘍及び多くの他の種類の局部ガンを治療するための重要で高度に成功的な治療方法となっている。放射線治療処置は一般に(a)放射線のパラメータ(例えば、線量、形状など)を決定する計画過程、(b)放射線ビームに対してターゲットを望ましい位置に配置するための患者の位置設定の過程、(c)ガンを照射する放射線照射期間、及び(d)放射線照射期間の効果の評価するための検証過程を含む。多くの放射線治療処置は、約5日から45日までの期間にわたる幾つかの放射線照射期間(即ち、照射分画)を必要とする。
【0003】
放射線療法による局部ガンの治療を改善するためには、大部分のガンを撲滅するにはより高い線量がより効果的であるので、一般的には放射線量を増すことが望ましい。しかし、放射線量を増すことは、健康な組織に合併症を起す可能性を増すことにもなる。従って、放射線治療の有効性は、腫瘍に照射される放射線の全線量と腫瘍に隣接する正常組織に照射される線量との両方に依存する。腫瘍に隣接する正常組織を保護するために、放射線は、健康な組織の小部分だけが照射されるように、ターゲットの周りの厳密な治療マージン内に処方されるべきである。例えば、前立腺ガンに関する治療マージンは、直腸、膀胱、及び球部尿道の組織への照射を避けるように選択されるべきである。同様に、肺ガンに関する治療マージンは、健康な肺組織又は他の組織への照射を避けるように選択されるべきである。従って、腫瘍に照射される放射線量を増すことが望ましいばかりでなく、健康組織への照射を減ずることも望ましい。
【0004】
放射線治療の1つの困難は、多くの場合ターゲットが放射線照射期間中に又はその期間と期間の間に、患者の体内で移動することである。例えば、前立腺は、呼吸運動及び/又は充満/排出(例えば、充満又は空の膀胱)のために、放射線照射期間中に患者の体内で移動する。肺の腫瘍もまた、呼吸運動及び心臓機能(例えば、鼓動及び脈管収縮/膨張)のために放射線照射期間中に移動する。そのような移動を補償するために、治療マージンは、腫瘍が治療体積の外へ出ないように、一般には望ましい大きさよりも大きくなる。これは、より大きな治療マージンはより大きな体積の正常組織を照射する可能性があるので、望ましい解決法ではない。
【0005】
放射線治療のもう1つの難題は、腫瘍を放射線ビームに正確に位置合せすることである。現在の位置設定過程では、患者の上の外部参照マーキングを放射線照射装置の視覚位置調整ガイドに位置合せするのが一般的である。一例として、腫瘍は初めにイメージング・システム(例えば、X線コンピュータ処理トモグラフィ(CT)、磁気共鳴イメージング(MRI)、又は超音波装置)を用いて患者体内において識別される。次に、患者の体外の二つ又はそれ以上の位置調整点に対する腫瘍の近似的な位置が決定される。位置設定の間、患者体内の治療ターゲットを放射線ビームのビーム・アイソセンター(ここではまたマシーン・アイソセンターとも呼ぶ)に配置するために、外部マークは放射線照射装置の基準座標系によって位置合せされる。外部マークを用いる通常の位置設定過程は、患者治療計画過程と治療期間の間で、及び/又は治療期間中にターゲットが外部マーカーに対して移動する可能性があるので、一般には不適当である。従って、ターゲットをマシーン・アイソセンターに配置するために、外部マークが所定の位置にある場合でも、ターゲットの位置をマシーン・アイソセンターから外すこともある。ターゲットと放射線ビームの間の如何なる初期の位置調整不良も正常組織への照射をもたらし易いので、そのようなオフセットを縮小又は除去することが望ましい。さらに、呼吸、臓器充満、又は心臓条件のために治療中にターゲットが移動すると、如何なる初期の位置調整不良も正常組織への照射をさらに悪化させ易くなる。従って、毎日毎日の及び瞬間瞬間のターゲットの運動の変化は、患者に適用される放射線量を増すことに関する重要な課題を提起する。
【0006】
外部マークを用いる通常の位置設定及び治療過程はまた、マークと検知器の間の直線的な照準線を必要とする。この必要条件は、埋め込まれたマーカー又は患者体内の他の状態(即ち、検知器及び/又は光源の照準線から外れた)のマーカーに対してはこれらのシステムを役に立たなくする。従って、通常の光学的追跡システムは、医療用途におけるそれらの有用性を制限する多くの制約をもつ。
【発明の開示】
【0007】
添付の図面において、同じ参照番号は類似の要素又は構成部分を表す。図面中の要素のサイズと相対位置は必ずしも一定の縮尺で描かれてはいない。例えば、種々の要素の形状及び角度は一定の縮尺で描かれてはおらず、これらの要素の幾つかは、図の見易さを改善するために、任意に拡大され配置されている。さらに、要素が描かれている特定の形状は、特定の要素の実際の形状に関する何らかの情報を伝えることを意図したものではなく、単に、図面中での認識を容易にするために選択されている。
【0008】
以下の説明において、本発明の種々の実施形態の完全な理解をもたらすために、ある特定の詳細が示される。しかし、当業者は、これらの特定の詳細の1つ又はそれ以上を用いずに、或いは他の方法、構成成分、要素などを用いて、本発明を実施することが可能であることを認識するであろう。他の例においては、ターゲットの位置決め及び追跡システムに関連する周知の構造体は、本発明の実施形態の説明を不必要に不明瞭にしないように、示されない又は詳細には説明されない。
【0009】
文脈が変更を必要としない限り、本明細書及び添付の特許請求項を通して、「含む」という語、及びその「含む」及び「含んでいる」などの派生語は、「含んでいるが限定はされない」という意味を含んだ開かれた意味に解釈されたい。
【0010】
本明細書を通して、「1つの実施形態」又は「一実施形態」への言及は、その実施形態に関連して説明される特定の特徴、構造体、又は特性が、本発明の少なくとも1つの実施形態に含まれることを意味する。従って、本明細書を通して種々の場所に現れる「1つの実施形態において」又は「一実施形態において」という語句は、必ずしも全てが同じ実施形態を指すわけではない。さらに、特定の特徴、構造体、又は特性は、1つ又はそれ以上の実施形態において任意の適切な仕方で組み合せることができる。
ここに与えられる見出しは便利だけのためであり、特許請求される本発明の範囲及び趣意を説明するものではない。
【発明を実施するための最良の形態】
【0011】
A. 概観
図1−図24は、本発明の実施形態による、患者体内のターゲットを実時間で位置決めし、追跡し、モニターするためのシステム及び幾つかの構成要素を示す。システム及び構成要素は、ターゲットをより効果的に治療するように放射線治療を導き制御する。図1−図24を参照して以下で説明されるシステムの幾つかの実施形態は、本発明の態様により、肺、前立腺、頭、首、胸、及び体の他の部分におけるターゲットを治療するために用いることができる。さらに、図1−図24に示されるマーカー及び位置決めシステムはまた、外科的用途又は他の医療用途に用いることもができる。種々の図面全体にわたって、類似の参照番号は類似の構成要素及び特徴を表す。
【0012】
本発明の幾つかの実施形態は、ターゲットを追跡する方法、即ち、医療用途において患者体内のターゲットの位置及び/又は回転を実質的に実時間で測定する方法に向けられる。その方法の1つの実施形態は、ターゲットに対して実質的に固定されているマーカーの位置データを収集するステップを含む。この実施形態はさらに、外部基準座標系(即ち、患者体外の基準座標系)におけるマーカーの位置を決定するステップと、マーカーの位置に対応する外部基準座標系における客観的出力を生ずるステップとを含む。客観的出力は、臨床的に許容できる追跡誤差の範囲内で、ターゲットの位置を実時間で適切に追跡する頻度/周期で繰返し与えられる。従って、ターゲットを追跡する方法は、診断、計画、治療又は他の型の医療過程の間中、ターゲットを正確に追跡することを可能にする。多くの特定の用途において、客観的出力は、そのような治療過程に位置データを用いために、位置データ収集後に適切に短い待ち時間内に、且つ、十分に高い頻度で与えられる。
【0013】
別の特定の実施形態は、イオン化放射線ビームを用いて患者体内のターゲットを治療する方法であって、患者体内のターゲットに関連する位置に埋め込まれたマーカーの位置情報を時刻tnにおいて収集するステップと、時刻tnに収集された位置情報に基づいて、ターゲットの位置を示す客観的出力を供給するステップとを含む方法である。客観的出力は、位置情報が収集された時刻tnから2秒以内に、メモリ・デバイス、ユーザ・インタフェース、及び/又は放射線照射装置に供給される。本方法のこの実施形態は、治療過程の少なくとも一部分の間に、2秒又はそれ以下の周期で客観的出力を供給するステップをさらに含むことができる。例えば、本方法はさらに、イオン化放射線ビームを発生するステップと、このビームをマシーン・アイソセンターに向けるステップと、イオン化放射線ビームで患者を照射する際に、10−200ms毎に収集過程及び供給過程を連続的に繰り返すステップとを含むことができる。
【0014】
患者体内のターゲットを追跡する方法の別の実施形態は、患者体内のターゲットに関連する位置に配置されるマーカーの位置情報を取得するステップと、位置情報に基づいて外部基準座標系内でのマーカーの位置を決定するステップとを含む。この実施形態は、(a)ユーザ・インタフェースにおけるターゲット位置の表示のポーズがヒトには容易に認識できないように十分に高い頻度で、及び、(b)マーカーの位置情報の取得と少なくとも実質的に同時であるように短い待ち時間で、ターゲットの位置を示す客観的出力をユーザ・インタフェースに供給するステップをさらに含む。
【0015】
本発明の別の実施形態は、イオン化放射線ビームを発生し、そのビームをターゲットに関連して向けることにより、イオン化放射線ビームを用いて患者のターゲットを治療する方法に向けられる。この方法はさらに、ビームをビーム・アイソセンターに向けている間に、患者体内のターゲットに関連する位置に埋め込まれたマーカーの位置情報を収集するステップを含む。さらに、この方法は、収集された位置情報に基づいて、ビーム・アイソセンターに相対的なターゲットの位置を示す客観的出力を供給するステップを含む。この方法はさらに、客観的出力をビームのパラメータと相関させるステップと、客観的出力に基づいてビームを制御するステップを含むことができる。例えば、ターゲットが望ましい照射ゾーン内にあるときにだけ患者を照射するように、ビームをゲート制御することができる。さらに、患者を照射している間、ターゲットをビーム・アイソセンターに対して望ましい位置に維持する実時間の動的制御をもたらすように、客観的出力によって患者を自動的に移動させるか又はビームの形状を自動的に適合させることができる。
【0016】
この節では、本発明の種々の実施形態が、これらの実施形態の説明を完全に理解し実際的にするための特定の細部を提供するために説明される。当業者は、しかし、本発明がこれらの細部の幾つかを用いずに実施できること、又は本発明に追加の細部を加えることができることを理解するであろう。文脈が許す箇所では、単数形又は複数形の用語は、それぞれ、複数形又は単数形の用語を含むことが可能である。さらに、「又は」という語は、少なくとも2つの品目に言及して他の品目を除外した単一の品目だけを意味することに特に限定されない限り、それらリスト中で「又は」を用いることは、(a)リスト中の任意の単一品目、(b)リスト中の全ての品目、或いは(c)リスト中の品目の任意の組み合せを含むと解釈されたい。加えて、用語「含む」は、全体にわたって、任意により多数の同じ特徴物及び/又は他の型の特徴物又は構成要素が排除されないように、少なくとも列挙された特徴物を含むことを意味する。
【0017】
B. 実時間追跡システムを有する放射線治療システム
図1及び図2は、患者6の肺4、前立腺、胸、頭、首又は他の部分の内のターゲット2(例えば、腫瘍)に、誘導型放射線治療を施すための放射線治療システム1の種々の態様を示す。放射線治療システム1は、位置決めシステム10と放射線照射装置20を有する。位置決めシステム10は、治療計画、患者位置設定の間、及び/又は放射線照射装置からイオン化放射線をターゲットに適用している際に、ターゲット2の実際の位置を実時間で位置測定して追跡する追跡ユニットである。従って、ターゲット2は患者体内で、前述のように、呼吸、臓器充満/排出、心臓機能又は他の内部運動のために移動する可能性があるが、位置決めシステム10は、放射線照射装置の外部基準座標系又は患者体外の他の外部基準座標系に対するターゲットの運動を正確に追跡して、ターゲット周辺の小さな限定範囲内に放射線を正確に照射するようにする。位置決めシステム10はまた、マーカーの配置と軌跡をモニターして、イオン化放射線を用いずに腫瘍の変化の早期の指標を提供するようにすることができる。さらに、位置決めシステム10は、連続的にターゲットを追跡して客観的データ(例えば、絶対基準座標系における3次元座標)をメモリ・デバイス、ユーザ・インタフェース、線形加速器、及び/又は他のデバイスに供給する。システム1は、以下で、患者の肺内部の腫瘍又は他のターゲットを治療するための誘導型放射線治療の文脈において説明されるが、本システムは、患者体内の前立腺又は他のターゲットを、他の治療及び/又は診断のために追跡しモニターするために用いることができる。
【0018】
示された実施形態の放射線源はイオン化放射線装置20(即ち、線形加速器)である。適切な線形加速器は、米国カリフォルニア州パロアルト所在のVarian Medical Systems, Inc.、米国ニュージャージー州イゼリン所在のSiemens Medical Systems, Inc.、米国ニュージャージー州イゼリン所在のElekta Instruments, Inc.、又は、日本の三菱電機株式会社によって製造されている。それらの線形加速器は、通常の単一又は多重場の放射線治療、3D等角的放射線治療(3D CRT)、強度変調型放射線治療(IMRT)、定位固定型放射線治療、及びトモ・セラピーを遂行することができる。放射線源20は、可動構台22から、ゲート制御され輪郭付け又は形状成形されたイオン化放射線のビーム21を、放射線源20に関連する外部絶対基準座標系での既知の位置にある範囲又は体積に向けて照射することができる。イオン化放射線ビーム21が向けられる点又は体積は、マシーン・アイソセンターと呼ばれる。
【0019】
追跡システムは、位置決めシステム10、及び1つ又はそれ以上のマーカー40を含む。位置決めシステム10は、3次元基準座標系におけるマーカー40の実際の位置を決定し、マーカー40は普通患者6の体内に埋込まれる。図1及び図2に示される実施形態においては、より具体的に、マーカー40a−40cとして個別に識別される3つのマーカーが、患者6の肺4の内部又はその近くの、ターゲット2の内部又はその近傍に埋込まれている。他の用途においては、単一のマーカー、2つのマーカー、又は3を越える数のマーカーを特定の用途によって用いることができる。例えば、2つのマーカーが望ましいが、その理由は、ターゲットの位置を正確に決定することができからであり、また、2つのマーカーの間の時間経過に伴う如何なる相対的変位も患者体内でのマーカー移動をモニターするのに用いることができるからである。マーカー40は、少なくとも実質的にターゲット2に対して固定される(例えば、マーカーは直接にターゲットと共に動くか、又はターゲットの移動に少なくとも直接に比例して動く)ようにターゲット2に対して配置されることが望ましい。マーカー40の間の相対位置、及びターゲット2のターゲット・アイソセンターTとマーカー40との間の相対位置は、患者がテーブル上に配置される前の治療計画段階の際に、CTスキャナ又は他の型のイメージング・システムによって定義される外部基準座標系に対して決定することができる。図1及び図2に示されるシステム1の特定の実施形態においては、隣接する健康組織への副次効果を軽減し、所望の線量がターゲットに適用されることを確実にするために、患者の位置設定過程の間及び患者を照射している間、位置決めシステム10は、絶対外部基準座標系に対するマーカー40の3次元座標を実時間で追跡する。
【0020】
C. マーカー及び位置決めシステムの一般的態様
図3は、患者体内の腫瘍又は他のターゲットを治療するための、位置決めシステム10及びマーカー40a−40cの一実施形態の操作を示す略図である。位置決めシステム10及びマーカー40a−40cは、放射線照射期間の前、間、及び後にターゲット2(図1及び図2)の位置を決定するために用いる。より具体的には、位置決めシステム10は、位置設定、治療、展開、シミュレーション、外科手術、及び/又は他の医療過程の間に実時間で、マーカー40a−40cの位置を決定し、客観的なターゲット位置データをメモリ、ユーザ・インタフェース、線形加速器、及び/又は他のデバイスに供給する。位置決めシステムの1つの実施形態においては、実時間とは、客観的な座標の指標が、(a)データ中のポーズがヒトには認識できないように十分に高いリフレッシュ速度(即ち、頻度)で、且つ(b)位置決定信号の測定と少なくとも実質的に同時であるような十分に短い待ち時間で、ユーザ・インタフェースに供給されることを意味する。他の実施形態においては、実時間とは客観的データを放射線照射装置に供給するための高頻度の範囲及び低待ち時間の範囲によって定義され、或いは、さらに他の実施形態においては、実時間は、マーカーの位置に対応する客観的データを供給するとして定義される(例えば、ターゲットの位置を実時間で適切に追跡する頻度、及び/又はマーカーの位置データの取得と実質的に同時の待ち時間において)。
【0021】
1. 位置決めシステム
位置決めシステム10は励起源60(例えば、パルス磁場発生装置)、センサ・アセンブリ70、並びに、励起源60及びセンサ・アセンブリ70の両方に結合したコントローラ80を含む。励起源60は患者6の体内のマーカー40a−40c(図1)の少なくとも1つを励起するために励起エネルギーを発生する。図3に示される励起源60の実施形態は、種々の周波数のパルス磁場を生成する。例えば、励起源60は、第1のマーカー40aを励起するために第1の周波数E1、第2のマーカー40bを励起するために第2の周波数E2、第3のマーカー40cを励起するために第3の周波数E3において磁場を周波数分割多重化することができる。励起エネルギーに応答して、マーカー40a−40cは、独自の応答周波数において位置信号L1-3を発生する。より具体的には、第1マーカー40aは、第1周波数E1における励起エネルギーに応答して、第1周波数において第1の位置信号L1を発生し、第2マーカー40bは、第2周波数E2における励起エネルギーに応答して、第2周波数において第2の位置信号L2を発生し、第3マーカー40cは、第3周波数E3における励起エネルギーに応答して、第3周波数において第3の位置信号L3を発生する。2つのマーカーを用いる代替の実施形態においては、励起源は、周波数E1とE2における磁場を発生し、マーカー40a−40bは、それぞれ位置信号L1とL2を発生する。
【0022】
センサ・アセンブリ70は、マーカー40a−40cからの位置信号L1-3を検出するための複数のコイルを含むことができる。センサ・アセンブリ70は、相互に少なくとも実質的に共面である複数のコイルを有する平坦パネルとすることができる。他の実施形態においては、センサ・アセンブリ70はコイルの非平面型配列とすることができる。
【0023】
コントローラ80は、ハードウェア、励起源60に動作して励起エネルギーを種々の周波数E1-3に分割多重化させる命令を含むソフトウェア又は他のコンピュータ動作可能な媒体を含む。例えば、コントローラ80は、励起源60に第1の励起期間に第1周波数E1の励起エネルギーを発生させ、次にコントローラ80は、センサ・アセンブリ70が第1周波数E1の励起エネルギーの存在なしに第1マーカー40aからの第1位置信号L1を検出する第1の検出段階のために、励起源60に第1周波数E1の励起エネルギーを終了させる。次にコントローラ80は励起源60に、(a)第2の励起期間に第2周波数E2の第2励起エネルギーを発生させ、そして(b)センサ・アセンブリ70が第2周波数E2の励起エネルギーの存在なしに第2マーカー40bからの第2位置信号L2を検出する第2の検出段階のために、第2周波数E2の励起エネルギーを終了させる。コントローラ80は次にこの動作を、第3の検出段階に第3マーカー40cが第3位置信号L3をセンサ・アセンブリ70に伝達するように、第3周波数E3の第3励起エネルギーに対して繰り返す。従って、励起源60は、励起期間に励起エネルギーをマーカー40a−40cの共鳴周波数におけるパルス磁場の形態で無線伝達し、マーカー40a−40cは検出段階中に位置信号L1-3をセンサ・アセンブリ70に無線伝達する。励起及び検出段階は、ノイズを低減するために検出信号を平均することを可能にするように繰り返すことができることが認識されるであろう。
【0024】
コントローラ80内、又は別個の信号プロセッサ内、又は他のコンピュータ内のコンピュータ動作可能な媒体はまた、3次元基準座標系におけるマーカー40a−40cの各々の絶対位置を決定する命令を含む。センサ・アセンブリ70によって与えられる、位置信号L1-3の各々の大きさに対応する信号に基づいて、コントローラ80及び/又は別個の信号プロセッサは、3次元基準座標系におけるマーカー40a−40cの各々の絶対座標を計算する。マーカー40a−40cの各々の絶対座標は、基準座標系におけるターゲットの座標を計算するのに用いることができる客観的データである。複数のマーカーが用いられるときは、ターゲットの回転も計算できる。
【0025】
2. 実時間追跡
位置決めシステム10及び少なくとも1つのマーカー40は、治療計画、位置設定、放射線照射期間、及び放射線治療過程の他の期間中に、マシーン・アイソセンター又は別の患者体外の外部基準座標系に関してターゲット2を実時間追跡することを可能にする。多くの実施形態において、実時間追跡とは、マーカーの位置データを収集すること、外部基準座標系におけるマーカーの位置を決定すること、及びマーカーの位置に対応する外部基準座標系における客観的出力を供給することを意味する。客観的出力はターゲットを実時間で適切に追跡する頻度、及び/又は、位置データの収集と少なくとも実質的に同時となる待ち時間(例えば、一般的に同時の時間内で)で供給される。
【0026】
例えば、実時間追跡の幾つかの実施形態は、マーカーの位置を決定すること、及びマシーン・アイソセンターに対するターゲットの位置を計算することを、(a)ユーザ・インタフェースにおけるターゲット位置の表示中のポーズが処置の妨げにならない或いはヒトには容易に識別できないような十分に高い頻度で、且つ(b)マーカーからの位置信号の測定と少なくとも実質的に同時となるように十分に短い待ち時間で、行うものとして定義される。或いは、実時間とは、位置決めシステム10が各々の個別のマーカー40の絶対位置及び/又はターゲットの位置を、1msから5秒までの周期で、又は、多くの用途においては約10から100msまでの周期で、又は幾つかの特定の用途においては約20から50msまでの周期で、計算することを意味する。ユーザ・インタフェースに関する用途においては、例えば、周期は12.5ms(即ち、80Hzの周波数)、16.667ms(60Hz)、20ms(50Hz)、及び/又は50ms(20Hz)とすることができる。
【0027】
或いは、実時間追跡はさらに、位置決めシステム10が、マーカー40から位置信号が伝達された時刻から10msから5秒までの待ち時間内に、マーカー40及び/又はターゲット2の絶対位置をメモリ・デバイス、ユーザ・インタフェース、線形加速器又は他のデバイスに供給することを意味することができる。より特定的な用途においては、位置決めシステムは、一般にマーカー40及び/又はターゲット2の位置を約20から50msまでの待ち時間内に供給する。従って、位置決めシステム10は、より多くの放射線量をターゲットに適用することができ、且つ、健康組織に対する副次効果を軽減することができる故に放射線治療の効果を高めると期待される様式で、外部基準座標系に対するマーカー40及び/又はターゲット2の位置をモニターするための実時間追跡を提供する。
【0028】
或いは、実時間追跡はさらに、追跡誤差によって規定することができる。動くターゲットの位置の測定は、一般に追跡誤差と呼ばれる運動に起因する誤差を被る。本発明の態様によれば、位置決めシステム10及び少なくとも1つのマーカー40は、マシーン・アイソセンター又は他の外部基準座標系に関して、ターゲット2を臨床的に有意な限度内の追跡誤差での実時間追跡を可能にする。
【0029】
追跡誤差は、任意の実際的測定システムが示す2つの限界、即ち(a)ターゲット位置が検出される時刻と位置測定値が利用可能になる時刻との間の待ち時間、及び(b)測定の周期性によるサンプリング遅れ、による。例えば、ターゲットが5cm/sで動き、測定システムが200msの待ち時間を有する場合には、位置測定値は1cmの誤差を有することになる。この例における誤差は、他の如何なる測定誤差にもよらず、待ち時間だけによるもので、単に、位置が検出された時刻と位置測定値が使用可能となる時刻との間にターゲットが動いたという事実による。この例示的な測定システムが、さらに200msのサンプリング周期(即ち、5Hzのサンプリング周波数)を有する場合には、平均追跡誤差は1.5cmで、最大追跡誤差は2cmに増加する。
【0030】
実時間追跡システムが医療用途において有用であるためには、追跡誤差を臨床的に有意な限度内に抑えることが望ましい。例えば、放射線治療のために肺腫瘍の運動を追跡するシステムにおいては、追跡誤差を5mm以内に抑えることが望ましい。放射線治療のために他の臓器を追跡ときには、許容追跡誤差はもっと小さくなる可能性がある。本発明の態様によれば、実時間追跡は、臨床的に有意な限度内の追跡誤差を伴うターゲットの位置及び/又は回転の測定を意味する。
【0031】
ここで説明されているシステムは、ターゲットの位置、回転、及び運動を特徴付けるための登録点として役立つ1つ又はそれ以上のマーカーを用いる。本発明の態様によれば、マーカーはターゲットと実質的に固定した関係を有する。マーカーがターゲットと実質的に固定した関係をもたないとすれば、別の型の追跡誤差を被ることになる。このことは一般に、追跡誤差が臨床的に有意な限度内となり、従って、マーカーを、ターゲットの典型的な運動を表す組織又は骨の中に配置することができるようにするために、ターゲットに固定するか又はその十分近くに埋め込むことを必要とする。例えば、前立腺に関しては、ターゲットの運動を表す組織は、前立腺に極めて近接する又は隣接する組織を含むことになる。前立腺を含むターゲットに隣接する組織は、前立腺、腫瘍自体、又はターゲットから指定された動径距離内の組織を含む可能性がある。前立腺に関しては、ターゲットから5cmの動径距離にある組織の追跡が、ターゲットの運動に関して臨床的に有用な典型的運動を与えることになる。代替のターゲット位置追跡によれば、動径距離はより大きく又はより小さくすることができる。
【0032】
本発明の態様によれば、マーカーの運動はターゲットの運動の代理となる。従って、マーカーは、追跡されるターゲットに直接相関して動くように配置される。追跡されるターゲットによって、ターゲットとマーカーの間の直接的相関は変化することになる。例えば、長骨内では、マーカーは、骨内のターゲットの運動に直接相関する運動を与えるように骨に沿った何所かに配置することができる。例えば、頭又は首の骨組織に実質的に応じて動く軟組織に関しては、マーカーは、ターゲットの運動と直接相関する代理運動を与えるように咬合ブロック内に配置することができる。軟組織に関して及び上に詳細に論じたように、マーカーは、ターゲット運動に直接的相関を有する代理を与える隣接する軟組織内に配置することができる。
【0033】
図4は、ターゲットの位置と状態をモニターするための実時間追跡の幾つかの態様と使用法を示すフロー図である。この実施形態においては、放射線治療のための統合された方法90は、多くの放射線画分にわたって放射線を患者に照射する計画を決定する放射線計画過程91を含む。放射線計画過程91は、普通、腫瘍又は他の型のターゲットの画像をX線、CT、MRI、又は超音波イメージングを用いて取得するイメージング段階を含む。画像は、マーカーの間の相対的距離、及びターゲットとマーカーの間の相対的位置を測定するためにヒトによって解析される。図5Aは、例えば、患者6、ターゲット2、及びマーカー40の断面を示すCT画像の表示である。図5Bを参照すると、CTスキャナの基準座標系RCTにおけるマーカー40の座標(x0、y0、z0)はオペレータによって決定されることができる。腫瘍の座標は、マーカーとターゲットの間のオフセットを確かめるために同じ仕方で決定することができる。
【0034】
放射線計画過程91はまた、イメージング装置から離れた観察区域において位置決めシステム10(図3)を用いてターゲットを追跡することを含む。マーカー40(図3)は、ターゲットの形態(例えば、サイズ/形状)の時間経過による変化を識別するため、及び患者体内のターゲットの移動によって生じる軌跡を決定する(例えば、シミュレーション)ために追跡することができる。多くの治療計画のためには、コンピュータは、マーカー又はターゲットの位置に関する客観的出力データを実時間でユーザに供給する必要はなく、むしろデータは実時間で記録することができる。イメージング段階の間に得られる画像、及びシミュレーション過程において位置決めシステム10を用いてマーカーを追跡することによって得られる付加的データに基づいて、ターゲットに放射線を照射するための治療計画がつくられる。
【0035】
位置決めシステム10とマーカー40は、放射線照射のための自動的な患者位置設定過程を可能にする。治療計画の作成後、方法90は、ターゲットとマーカーがセンサ・アセンブリに一般に隣接するように、患者が可動支持台の上に配置される。前述のように、マーカーを励起するために励起源が始動され、センサがマーカーからの信号強度を測定する。次に、コンピュータ・コントローラは(a)マシーン・アイソセンターに対するマーカー及びターゲットの位置の客観的値を計算し、そして(b)ターゲットの位置とマシーン・アイソセンターの間の客観的オフセット値を決定する。図6を参照すると、例えば、客観的オフセット値は、マシーン・アイソセンターに対するターゲットの垂直方向、横方向、及び縦方向のオフセットを表示するユーザ・インタフェースに供給することができる。ユーザ・インタフェースは、さらに又はその代わりに、ターゲットの回転を表示することができる。
【0036】
位置決めシステム10の幾つかの実施形態の1つの態様は、フィールド・センサ70によって受け取られるデータの人為的な解釈を用いずに、フィールド・センサ70からの位置データをコントローラ80又は他のコンピュータ内で処理することによって、客観的値がユーザ・インタフェース又は他のデバイスに供給されることである。オフセット値が許容範囲の外にある場合には、コンピュータは自動的に支持台の制御システムを起動して、ターゲット・アイソセンターがマシーン・アイソセンターに一致するまで、マシーン・アイソセンターに対してテーブル上面を移動させる。コンピュータ・コントローラは、一般に、オフセットの客観的出力データをテーブル・コントロール・システムに前に規定したように実時間で供給する。例えば、出力は放射線照射装置に供給されるので、高速(1−20ms)で短い待ち時間(10−20ms)とすることができる。出力データが支持台コントローラに加えて又はその代わりにユーザ・インタフェースに供給される場合には、比較的低速度(20−50ms)及び長い待ち時間(50−200ms)とすることができる。
【0037】
1つの実施形態において、コンピュータ・コントローラはまた、シミュレートされた位置と配向に相対的なマーカーの位置と配向を決定する。シミュレートされたマーカーの位置は、実際のマーカーがシミュレートされたマーカーの選択された位置となるときにターゲットがマシーン・アイソセンターにくるように、選択される。マーカーが、シミュレートされたマーカーに対して適切に位置及び配向の調整がされていない場合には、適切なマーカー位置調整に必要であるように支持台が調節される。このマーカー位置調整はターゲットを6つの次元、即ち、X、Y、Z、ピッチ、ヨー、及びロール、に関して、ターゲットを適切に配置する。従って、患者は自動的に、ターゲットへの放射線治療を正確に施すためのマシーン・アイソセンターに対する正しい位置及び回転位置に配置される。
【0038】
図4に戻って参照すると、方法90はさらに放射線照射期間93を含む。図7は、位置決めシステム10が放射線照射期間93の間にターゲットを追跡し、ターゲットとマシーン・アイソセンターの間のオフセットに応じて放射線照射装置20を制御する自動過程のさらに進んだ態様を示す。例えば、ターゲットの位置がマシーン・アイソセンターからの変位の許容できる程度又は範囲の外にある場合には、位置決めシステム10は放射線照射を中断する又はビームの初期作動を止めるための信号を送る。別の実施形態においては、位置決めシステム10は、自動的に台上面27及び患者6(一体として)を再配置して、放射線照射期間の間、ターゲットが動く場合にもターゲット・アイソセンターがマシーン・アイソセンターの望ましい範囲内とどまるようにする。さらに別の実施形態においては、位置決めシステム10は、ターゲットがマシーン・アイソセンターの望ましい範囲内にあるときにだけ、放射線を作動させる信号を送る(例えば、ゲート制御される治療)。肺内部のターゲットを治療する場合には、ゲート制御される治療の1つの実施形態は、吸気/呼気の間ターゲットを追跡するステップと、患者に彼/彼女の呼吸を吸気/呼気の1サイクルの終了状態に保持させるステップと、コンピュータ80がターゲットとマシーン・アイソセンターの間の客観的オフセット値が望ましい範囲内にあると判断したときにビーム21を作動させるステップとを含む。従って、位置決めシステムは、患者を照射している際に実時間での台27及び/又はビーム21の動的調節を可能にする。このことは、放射線がターゲットに正確に、ターゲットの周りに大きな治療マージンを必要とせずに、照射されることを確実にするものと期待される。
【0039】
位置決めシステムは、オフセット及び/又は回転の客観的データを線形加速器及び/又は患者支持台に、前に規定された実時間で供給する。例えば、位置設定過程92の間自動的に患者支持台の位置調整を行うステップに関して前述したように、位置決めシステムは一般に客観的出力を、マーカーの位置データを取得するのと少なくとも実質的に同時に、及び/又はターゲットを実時間で追跡するのに十分な頻度で、放射線照射装置に供給する。客観的出力は、例えば、短い周期(1−20ms)で短い待ち時間(10−20ms)で供給することができ、その結果、ビーム21を制御する信号を放射線照射期間の間放射線照射装置に対して同じ時間周期で供給することができる。実時間追跡の別の実施例においては、客観的出力はオン・ビーム期間中に複数回(例えば、ビーム放出中に、2回、5回、10回又はそれ以上の回数)供給することができる。放射線ビームを終了又は作動させる場合、又はビーム・コリメータの照準を調節する場合には、一般に更新速度を最大にし、待ち時間を最小にすることが望ましい。従って、幾つかの実施形態においては、位置決めシステムは、ターゲット位置及び/又はマーカー位置の客観的出力データを、10ms又はそれ以下の周期及び10ms又はそれ以下の待ち時間で供給することができる。
【0040】
方法90はさらに、放射線照射期間93からの実時間客観的出力データを放射線ビームのパラメータの状態と比較する検証過程94を含む。例えば、放射線照射期間93の間、対応する時間間隔で、ターゲット位置をビーム強度、ビーム位置、及びコリメータの配置に相関させることができる。この相関は、ターゲット内又はその周囲の別々の領域へ照射する放射線量を決定するために用いることができる。この情報はまた、ターゲットの形態又はターゲットの軌跡における変化に注目することによって、ターゲットの特定の範囲に対する放射線照射の効果を判断するために用いることができる。
【0041】
方法90はさらに、検証過程94からのデータを治療が完了したかどうか判断するために解析する第1の判定(ブロック95)を含むことができる。治療が完了していない場合には、方法90はさらに、治療計画をターゲットの変化を補償するように修正すべきかどうかを判断するために、検証過程の結果を解析する第2の判定(ブロック95)を含む。修正が必要な場合には、方法は計画過程90を繰り返して進むことができる。反対に、治療計画が適切な結果をもたらしている場合には、方法90は、放射線治療の次の画分における位置設定過程92、放射線照射期間93、及び検証過程94を繰返すことによって進むことができる。
【0042】
位置決めシステム10は、個々に又は組合せによって、厳格なマージン内でターゲットに高い放射線量を正確に照射する機能を増強する幾つかの特徴を有する。例えば、位置決めシステムの多くの実施形態には、患者体内に埋め込まれて実質的にターゲットに固定される無鉛マーカーが用いられる。従って、マーカーは直接ターゲットと共に、又はターゲットの移動に比例して、移動する。その結果、治療過程の前、進行中、及び後で、呼吸、臓器充満、心臓機能又は他の要因によるターゲットの内部移動を識別し正確に追跡することができる。さらに、位置決めシステム10の多くの態様においては、客観的出力を供給する様式で、無鉛マーカーを外部絶対基準座標系において追跡するために非イオン化エネルギーが用いられる。一般に客観的出力は、位置決めシステム10がターゲットを追跡して客観的出力を供給する間に、人為的解釈データ(例えば、画像)を有することなしにコンピュータ・システム内で決定される。このことは、マーカーの位置が検出される時刻と客観的出力がデバイス又はユーザに供給される時刻との間の待ち時間を相当に低減する。例えば、このことは、ターゲットの位置に対応する客観的出力が、マーカーの位置データの収集と少なくとも実質的に同時に供給されることを可能にする。システムはまた、データの主観的な解釈に関連するユーザ間のばらつきを事実上排除する。
【0043】
D. マーカー及び位置決めシステムの特定の実施形態
マーカー、励起源、センサ及びコントローラの以下の特定の実施形態は、図1−図7を参照して前述されたシステム及び方法を実施するための付加的な詳細を与える。本発明者は、マーカーと、(a)無線伝達された励起エネルギーに応答して無線伝達される位置信号を生成し、(b)肺、前立腺、又は患者の他の部分の中に埋め込まれるように十分に小さな断面積を有するマーカーの位置を、正確に決定する位置決めシステムと、を開発するために多くの問題を克服した。これらの特性をもつシステムは、(a)イオン化放射線を必要としないこと、(b)マーカーとセンサの間の照準線を必要としないこと、及び(c)ターゲットの位置及び/又は回転の客観的測定値をもたらすこと、を含む幾つかの実際的な利点を有する。以下の特定の実施形態は、当業者が、患者体内の腫瘍に関連する放射線治療のためのそのような位置決めシステムを製造し使用することができるように、十分に詳しく説明されるが、しかし、本発明は、マーカー、励起源、センサ・アセンブリ及び/又はコントローラの以下の実施形態に限定はされない。
【0044】
1. マーカー
図8Aは、位置決めシステム10(図1−図7)と共に用いるマーカー100の等角図である。図8Aに示されるマーカー100の実施形態は、ケーシング110、及びケーシング110内の磁気トランスポンダ120(例えば、共振回路)を含む。ケーシング110は、患者体内に埋込まれるか、又は器具本体内に挿入される形態にされた防壁である。或いは、ケーシング110は患者の皮膚に外側から接着するような形態とすることができる。ケーシング110は、気管支鏡又は経皮経胸腔注入物などの小さな注入器具の孔内にフィットするサイズにした一般に円筒状のカプセルとすることができるが、しかしケーシング110は他の形態をもち、より大きく又はより小さくすることもできる。例えば、ケーシング110は、ケーシング110を柔組織に固定するためのかかり又は他の機構を有するか、或いは、患者の皮膚に外からケーシング110を取付けるための接着剤を有することができる。マーカー100を患者に固定するのに適切な固定機構は、引用によりここに組み入れられる、米国を指定国とする国際公開公報第WO 02/39917 A1号に開示されている。1つの実施形態においては、ケーシング110は(a)閉鎖端114及び開放端116を有するカプセル又はシェル112、及び(b)シェル112の開放端116における密封材118を含む。ケーシング110と密封材118は、プラスティック、セラミックス、ガラス、又は他の適切な生体適合性材料から作ることができる。
【0045】
磁気トランスポンダ120は、前述のように、無線で伝達された励起場に応答して位置信号を無線で伝達する共振回路を含むことができる。この実施形態においては、磁気トランスポンダ120は導電体124の複数の巻き線によって規定されるコイル122を備える。磁気トランスポンダ120の多くの実施形態はまた、コイル122に結合したコンデンサ126を含む。コイル122は選択された共振周波数で共振する。コイル122は、コンデンサなしに巻き線の寄生容量を用いるだけの共振周波数で共振することができる、或いは、共振周波数はコイル122とコンデンサ126の組み合わせを用いて生成することができる。それゆえコイル122は、励起エネルギーに応答して、それ自体で又はコンデンサ126との組合せによって選択された共振周波数の交流磁場を生成する。示される実施形態の導電体124は、約45−52のゲージを有する熱風又はアルコールで接合されたワイヤとすることができる。コイル122は800−1000の巻き数をもつことができ、巻き線は堅い積層コイル状に巻くことが好ましい。磁気トランスポンダ120は、適切な透磁率をもつ材料から構成されるコア128をさらに含むことができる。例えば、コア128はフェライト又は別の材料から構成される強磁性要素とすることができる。磁気トランスポンダ120は、接着剤129によってケーシング110に固定することができる。
【0046】
マーカー100はまた、放射線写真画像内でマーカーをよりよく識別できるようにするために、放射線写真画像の画質を向上させるイメージング素子を含む。イメージング素子はまた、マーカーが磁気トランスポンダ120の磁気的図心に少なくとも近似的に一致する放射線写真図心を有するように、放射線写真画像内の放射線写真プロフィルを有する。以下でより詳しく説明するように、放射線写真図心と磁気的図心は互いに正確に一致する必要はないが、むしろ許容範囲内にすることができる。
【0047】
図8Bは、本発明の一実施形態によるイメージング素子130を示す図8Aの線8B−8Bに沿った、マーカー100の断面図である。図8A−図8Bに示されるイメージング素子130は、第1のコントラスト素子132と第2のコントラスト素子134を含む。第1及び第2コントラスト素子132及び134は、一般に、マーカー100が磁気トランスポンダ120の磁気的図心Mcと少なくとも実質的に一致する放射線写真図心Rcを有するように、磁気トランスポンダ120に対して配置される。例えば、イメージング素子130が2つのコントラスト素子を含むときは、コントラスト素子は磁気トランスポンダ120に対して、及び/又は相互に、対称的に配置することができる。コントラスト素子はまた、磁気トランスポンダ120から放射線写真内で識別することができる。そのような実施形態において、別個のコントラスト素子の対称的な配置は、放射線写真画像内でマーカー100の放射線写真図心を正確に決定する機能を向上させる。
【0048】
図8A−図8Bに示される第1及び第2コントラスト素子132と134は、コア128の対向する端部に配置される連続的なリングである。第1コントラスト素子132は、コア128の第1の端部136aに又はその周囲に配置することができ、第2コントラスト素子134は、コア128の第2の端部136bに又はその周囲に配置することができる。図8A−図8Bに示される連続リングは、実質的に同じ直径及び厚さを有する。しかし、他の実施形態においては、第1及び第2コントラスト素子132と134は、他の形態をもつこと、及び/又はコア128に対して他の位置に配置することができる。例えば、第1及び第2コントラスト素子132と134は、異なる直径及び/又は厚さを有するリングとすることができる。
【0049】
イメージング素子130によって生成される画像の放射線写真図心は、磁気的図心Mcと完全に一致する必要はなく、むしろ放射線写真図心と磁気的図心は許容範囲内で一致するべきである。例えば、放射線写真図心Rcは、図心間のオフセットが約5mmより小さいとき、磁気的図心Mcと少なくとも近似的に一致すると見なすことができる。より厳格な用途においては、磁気的図心Mcと放射線写真図心Rcは、図心間のオフセットが2mm、或いは1mmより小さいとき、互いに少なくとも実質的に一致すると見なされる。他の用途においては、磁気的図心Mcは、磁気トランスポンダ120及び/又はマーカー100の長さの半分より小さな距離だけ図心が離れているとき、少なくとも近似的に放射線写真図心と一致する。
【0050】
イメージング素子130は、放射線写真画像を生成するのに用いられる放射線ビームの入射光子を高い割合で吸収する材料で作り、それに適した形態とすることができる。例えば、画像形成放射線がメガボルト範囲の高加速電圧を有するとき、イメージング素子130は、結果として得られる放射線写真内で認識可能となるようにイメージング素子に入射する光子フルエンスを十分に吸収するために、少なくとも部分的に、十分な厚さと断面積をもつ高密度材料で作ることができる。治療に用いられる多くの高エネルギー・ビームは、6MV−25MVの加速電圧を有し、これらのビームは多くの場合、5MV−10MVの範囲内、より特定的には6MV−8MVの範囲内で、放射線写真画像を生成するのに用いられる。従って、イメージング素子130は、5MV−10MVの加速電圧、より特定的には6MV−8MVの加速電圧を有するビームを用いて生成される画像内で認識可能となるように入射光子フルエンスを十分に吸収する材料から作ることができる。
【0051】
イメージング素子130の幾つかの特定的な実施形態は、金、タングステン、白金、及び/又は他の高密度金属から作ることができる。これらの実施形態において、イメージング素子130は、19.25g/cm3の密度(タングステンの密度)及び/又は約21.4g/cm3の密度(白金の密度)を有する材料から構成することができる。従って、イメージング素子130の多くの実施形態は、19g/cm3以上の密度を有する。しかし他の実施形態においては、イメージング素子130の材料は、実質的により低い密度を有することができる。例えば、低密度材料を有するイメージング素子は、放射線写真画像を生成するのに低エネルギー放射線を用いる用途に適している。さらに、第1及び第2コントラスト素子132及び134は、第1コントラスト素子132は第1の材料から作ることができ、第2コントラスト素子134は第2の材料から作ることができる、というように異なる材料から構成することができる。
【0052】
図8Bを参照すると、マーカー100はさらに、コア128の、コンデンサ126とは反対側の端部にモジュール140を含むことができる。図8Bに示されるマーカー100の実施形態においては、モジュール140は、放射線写真画像の対称性を高めるためにコンデンサ126に対して対称的に配置される。第1及び第2コントラスト素子132と134の場合と同様に、モジュール140とコンデンサ126は、マーカーの磁気的図心が、マーカー100の放射線写真図心と、少なくとも近似的に一致するように配置される。モジュール140は、コンデンサ126と同一の別のコンデンサとすることができ、或いは、モジュール140は電気的不活性素子とすることができる。適切な電気的不活性モジュールは、コンデンサ126と同じ形状をもち、コイル122、コア128、及びイメージング素子130に対して互いに対称的になるように配置されたセラミック・ブロックを含む。さらに他の実施形態においては、モジュール140は、磁気トランスポンダ120に電気的に結合した異なる型の電気的活性素子とすることができる。
【0053】
マーカーを用いる1つの具体的な過程は、第1の様式を用いてマーカーの画像を形成するステップと、次に第2の様式を用いて患者のターゲット及び/又はマーカーを追跡するステップを含む。例えば、ターゲットに対するマーカーの位置は、放射線を用いてマーカーとターゲットの画像を形成することによって決めることができる。マーカー及び/又はターゲットは、次に、励起エネルギーに応答してマーカーが生成する磁場を用いて、位置決定し、追跡することができる。
【0054】
図8A−図8Bに示されるマーカー100は、マーカーと患者のターゲットの間の相対的位置をより正確に決定するために、通常の磁気マーカーに比べて画質の向上した放射線写真画像を生成すると期待される。例えば、図8Cはマーカー100と患者のターゲットTの放射線写真画像150を示す。第1及び第2コントラスト素子132と134は、磁気トランスポンダ120の構成部品よりも高密度の材料から構成することができるので、放射線写真画像内ではより明瞭となること期待される。第1及び第2コントラスト素子132と134は、従って、磁気トランスポンダ120の構成部品が画像内で識別可能である用途においては、亜鈴形の球状端部のように見えることが可能である。特定のメガボルトの用途においては、磁気トランスポンダ120の構成部品は放射線写真画像150上には全く現れず、第1及び第2コントラスト素子132と134は、互いに離れた別個の領域として現れることになる。いずれの実施形態においても、第1及び第2コントラスト素子132と134は、マーカー100の放射線写真図心Rcを画像150内で位置決めする基準座標軸を与える。さらに、イメージング素子130は、放射線写真図心Rcが少なくとも近似的に磁気的図心Mcと一致するように配置されているので、ターゲットTと磁気的図心Mcの間の相対的なオフセット又は位置は、マーカーを用いて正確に決めることができる。従って、図8A−図8Cに示されるマーカー100の実施形態は、放射線写真画像内で放射線写真画像図心及び磁気的図心の不正確な見積もりによる誤差を減ずることが期待される。
【0055】
図9Aは,内部の構成要素を示すための切取り部分を有する、マーカー200の等角図であり、図9Bは、図9Aの線9B−9Bに沿って描かれたマーカー200の断面図である。マーカー200は上で図8Aに示されたマーカー100に類似し、従って、類似の参照番号は類似の構成要素を表す。マーカー200は、単一のコントラスト素子によって規定されるイメージング素子230を含む点で、マーカー100とは異なる。イメージング素子230は一般に、マーカー200の放射線写真図心が少なくとも近似的に磁気トランスポンダ120の磁気的図心と一致するように、磁気トランスポンダ120に対して配置される。イメージング素子230は、より具体的には、磁気トランスポンダ120の中央領域にあってコイル122の周りに伸びるリングである。イメージング素子230は、図8A−図8Bのイメージング素子130に関して前述されたのと同じ材料で構成することができる。イメージング素子230は、コイル122の外径に近似的に等しい内径と、ケーシング110内に入る外径を有することができる。しかし、図9Bに示されるように、スペーサ231を、イメージング素子230の内径とコイル122の外径の間に入れることができる。
【0056】
マーカー200は前述のマーカー100と同様に機能することが期待される。しかし、マーカー200は放射線写真画像内に2つの別個の離れた点をもたらす2つの離れたコントラスト素子をもたない。それでもなおイメージング素子230は、放射線写真画像内でマーカー200の放射線写真図心を識別すること、及び、マーカー200の放射線写真図心が、少なくとも近似的に、磁気トランスポンダ120の磁気的図心に一致するように配置することができることによって大いに有用である。
【0057】
図10Aは、切取り部分を有するマーカー300の等角図であり、図10Bは、図10Aの線10B−10Bに沿って描かれたマーカー300の断面図である。マーカー300は、図9A−図9Bに示されたマーカー200に実質的に類似し、従って、図8A−図10Bにおいて、類似の参照番号は類似の構成要素を表す。イメージング素子330は、マーカー300の放射線写真図心が、少なくとも近似的に磁気トランスポンダ120の磁気的図心に一致するように、磁気トランスポンダ120に対して配置される高密度リングとすることができる。マーカー300は、より具体的には、ケーシング110の周りのイメージング素子330を含む。マーカー300は、図9A−図9Bに示されたマーカー200と非常に類似した様式で機能することが期待される。
【0058】
図11は、本発明の別の実施形態による、マーカー400を示す、切取り部分を有する等角図である。マーカー400は、図8A−図8Cに示されたマーカー100に類似し、従って、これらの図において類似の参照番号は類似の構成要素を表す。マーカー400は、磁気トランスポンダ120の一方の端部に第1のコントラスト素子432、及び磁気トランスポンダ120の別の端部に第2のコントラスト素子434を含むイメージング素子430を有する。第1及び第2コントラスト素子432と434は、適切な高密度材料から構成される球である。コントラスト素子432と434は、例えば、金、タングステン、白金、又は、放射線写真画像形成に用いるのに適切な他の高密度材料で構成することができる。マーカー400は、前述のマーカー100と類似した様式で機能することが期待される。
【0059】
図12は、本発明のさらに別の実施形態による、マーカー500の切取り部分を有する等角図である。マーカー500は、図8A及び図11に示されたマーカー100及び400に実質的に類似し、従って、これらの図において類似の参照番号は類似の構成要素を表す。マーカー500は、第1のコントラスト素子532と第2のコントラスト素子534を含むイメージング素子530を有する。第1及び第2コントラスト素子532と534は、磁気トランスポンダ120の対向する端部の近傍に配置することができる。第1及び第2コントラスト素子532と534は、渦電流を減ずるためのギャップ535をもつ不連続なリングとすることができる。コントラスト素子532と534は、本発明の他の実施形態による他のイメージング素子のコントラスト素子に関して前述されたのと同じ材料で構成することができる。
【0060】
本発明によるマーカーの付加的な実施形態は、ケーシング110、磁気トランスポンダ120のコア128(図8B)、及び/又はケーシング内の接着剤129(図8B)に組み込まれるか、さもなければ、それらと統合されるイメージング素子を含むことができる。例えば、高密度材料の粒子をフェライトと混合し、コア128を形成するように押出し成形することができる。代替の実施形態においては、高密度材料の粒子をガラス又は他の材料と混合してケーシング110を形成するか、或いはケーシング110を高密度材料でコートすることができる。さらに他の実施形態においては、高密度材料を接着剤129と混合し、ケーシング110に射出成形することができる。これらの実施形態のいずれにおいても、高密度材料をケーシング110、コア128及び/又は接着剤129の組み合せの中に組み込むことができる。適切な高密度材料は、前述のように、タングステン、金及び/又は白金を含むことができる。
【0061】
図8A−図12を参照して前述されたマーカーは、位置決めシステム10(図1−図7)内のマーカー40に用いることができる。位置決めシステム10は、同じ型のイメージング素子をもつ幾つかのマーカーを有することができ、或いは、異なるイメージング素子をもつマーカーを同じ装置と共に用いることができる。これらのマーカーの幾つかの付加的な詳細、及びマーカーの他の実施形態は、引用によりここに組み入れられる米国特許出願第10/334,698号及び第10/746,888号に記載されている。例えば、マーカーは、低エネルギー放射線の用途のためには、如何なるイメージング素子も含まなくともよく、或いは、米国特許出願第10/334,698号に開示されているように、マーカーは、MRIイメージングに関する問題を減ずるために、フェライト及び金属の低減された体積を有することができる。
【0062】
2. 位置決めシステム
図13は、基準座標系に関するマーカー40(図式的に示される)の絶対位置を決めるための位置決めシステム1000の略ブロック図である。位置決めシステム1000は、励起源1010、センサ・アセンブリ1012、センサ・アセンブリ1012と動作可能なように結合する信号プロセッサ1014、及び、励起源1012及び信号プロセッサ1014と動作可能なように結合するコントローラ1016を含む。励起源1010は、図3を参照して前述された励起源60の1つの実施形態であり、センサ・アセンブリ1012は、図3を参照して前述されたセンサ・アセンブリ70の1つの実施形態であり、コントローラ1016は、図3を参照して前述されたコントローラ80の1つの実施形態である。
【0063】
励起源1010は、マーカー40の共振周波数に整合する選択された周波数のエネルギーをもつ波形を有する磁場を発生するように調整することができる。励起源1010によって発生された磁場は、マーカーをそれぞれの周波数において励起する。マーカー40が励起された後、励起源1010は直ちにオフの位置に切り替えられ、パルス磁場励起場は、マーカーが無線で位置信号を伝達する間終結される。このことは、励起源1010からの著しく強力な磁場からの無視できない妨害を受けずに、センサ・アセンブリ1012がマーカー40からの位置信号を検出することを可能にする。従って、励起源1010は、センサ・アセンブリ1012がマーカー40からの位置信号を十分な信号対雑音比で測定することを可能にし、その結果信号プロセッサ1014又はコントローラ1016は、基準座標系に関するマーカー40の絶対位置を正確に算出することができる。
【0064】
a. 励起源
図13をなお参照すると、励起源1010は、高電圧電源1040、電源1040に結合するエネルギー貯蔵デバイス1042、及びエネルギー貯蔵デバイス1042に結合するスイッチング・ネットワーク1044を含む。励起源1010はまた、スイッチング・ネットワーク1044に結合するコイル・アセンブリ1046を含む。1つの実施形態においては、電源1040は500V電源であるが、より高い又は低い電圧の他の電源も用いることはできる。1つの実施形態におけるエネルギー貯蔵デバイス1042は、電源1040によって充電され、比較的一定の充電状態に維持されることが可能な高電圧コンデンサである。エネルギー貯蔵デバイス1042は、コイル・アセンブリ1046内のコイルへのエネルギーの供給と、それらからのエネルギーの受け取りを交互に行う。
【0065】
エネルギー貯蔵デバイス1042は、電力損失を減らすために低い直列抵抗をもちながら、エネルギー貯蔵デバイス内での電圧降下を減らすのに適当なエネルギーを貯蔵することができる。エネルギー貯蔵デバイス1042はまた、コイル・アセンブリ1046をより効果的に駆動するために低い直列インダクタンスをもつ。エネルギー貯蔵デバイス1042に適切なコンデンサは、閃光エネルギー用途に用いられるアルミニウム電解コンデンサを含む。代替のエネルギー貯蔵デバイスはまた、NiCd及び鉛蓄電池、及び、タンタル、薄膜などの代りの型のコンデンサを含むことができる。
【0066】
スイッチング・ネットワーク1044は、個々のHブリッジ・スイッチ1050(参照番号1050a−dにより個々に識別される)を含み、コイル・アセンブリ1046は、個々のソース・コイル1052(参照番号1052a−dにより個々に識別される)を含む。各々のHブリッジ・スイッチ1050は、エネルギー貯蔵デバイス1042とソース・コイル1052の1つとの間のエネルギーの流れを制御する。例えば、Hブリッジ・スイッチ#1 1050aは、独立にソース・コイル#1 1052aへの/からのエネルギーの流れを制御し、Hブリッジ・スイッチ#2 1050bは、独立にソース・コイル#2 1052bへの/からのエネルギーの流れを制御し、Hブリッジ・スイッチ#3 1050cは、独立にソース・コイル#3 1052cへの/からのエネルギーの流れを制御し、Hブリッジ・スイッチ#4 1050dは、独立にソース・コイル#4 1052dへの/からのエネルギーの流れを制御する。従って、スイッチング・ネットワーク1044は、ソース・コイル1052a−dの各々によって発生される磁場の位相を独立に制御する。Hブリッジ1050は、全てのソース・コイル1052のための電気信号が同位相になるように構成することができ、或いは、Hブリッジ1050は、1つ又はそれ以上のソース・コイル1052が180°位相がずれるように構成することができる。さらに、Hブリッジ・スイッチ1050は、1つ又はそれ以上のソース・コイル1052のための電気信号が、種々の位相をもつ磁場を同時に供給するために、0°と180°の間で位相がずれるように構成することができる。
【0067】
ソース・コイル1052は、基準座標系に対して固定された共面配列に配置することができる。各ソース・コイル1052は、平坦な実質的に直線のコイルを形成するように配置された四角の平面型巻き線とすることができる。異なる実施形態においては、ソース・コイル1052は他の形状及び他の配置を取ることができる。1つの実施形態においては、ソース・コイル1052は、プリント回路基板の層内に形成された個々の導電線であるか、又は発泡フレーム内にあるワイヤの巻き線である。或いは、ソース・コイル1052は、異なる基板内に形成するか又は配置して、その結果2つ又はそれ以上のソース・コイルが互いに共面でなくなるようにすることができる。さらに、本発明の代りの実施形態は、図13に示されるよりも少ない又は多くのソース・コイルを有することができる。
【0068】
ソース・コイル1052からの選択された磁場は、結合して、励起体積内で任意の空間的方向にマーカー40を励起するために種々の3次元形状をもつことのできる調整可能な励起場を形成する。ソース・コイル1052の平面配列が概ね水平であるときは、励起体積は、コイル・アセンブリ1046の中央領域に近似的に対応する範囲の上方に位置する。励起体積はコイル・アセンブリ1046に隣接し、内部の磁場の強さがマーカー40を適切に励起するのに十分である、3次元空間である。
【0069】
図14−図16は、示されるXYZ座標系に対して異なる軸の周りに励起場を生成するために、位相の異なる組み合せでソース・コイルに供給される交流電気信号を有するソース・コイル1052の平面配列の略図である。各ソース・コイルは2つの外側辺1112と2つの内側辺1114を有する。1つのソース・コイル1052の各内側辺1114は、別のソース・コイル1052の内側辺1114に隣接するが、しかし全てのソース・コイル1052の外側辺1112は、如何なる他のソース・コイル1052にも隣接しない。
【0070】
図14の実施形態においては、全てのソース・コイル1052a−dは、同時に同じ位相の交流電気信号を受け取る。その結果、電流は全てのソース・コイル内を同じ方向に流れ、1つのソース・コイル(例えば、ソース・コイル1052a)の内側辺1114に沿って流れる電流の方向1113は、2つの隣接するソース・コイル(例えば、ソース・コイル1052cと1052b)の内側辺1114に沿って流れる電流の方向1113と逆となる。従って、内側辺1114に沿って生成される磁場は互いに相殺し、その結果、磁場はソース・コイルの外側辺1112に沿って流れる電流から事実上生成される。図14に示されるソース・コイル1052a−dからの磁場の組み合せによって形成される結果としての励起場は、励起体積1109内で概ねZ方向の磁気モーメント1115をもつ。この励起場は、Z軸に平行なマーカー、或いはZ軸方向に角度成分をもって配置された(即ち、Z軸に直交しない)マーカーを励起する。
【0071】
図15は、異なる空間的配向をもつ第2の励起場を生成するための第2の位相の組み合せで供給される交流電気信号を有するソース・コイル1052a−dの略図である。この実施形態においては、ソース・コイル1052aと1052cが互いに同位相であり、ソース・コイル1052bと1052dが互いに同位相である。しかしながら、ソース・コイル1052a及び1052cは、ソース・コイル1052b及び1052dと位相が180度ずれる。ソース・コイル1052a−dからの磁場は結合して、励起体積1109内に概ねY軸方向の磁気モーメント1217を有する励起場を生成する。従って、この励起場は、Y軸に平行なマーカー、或いはY軸方向に角度成分をもって配置されたマーカーを励起する。
【0072】
図16は、異なる空間的配向をもつ第3の励起場を生成するための第3の位相の組み合せで供給される交流電気信号を有するソース・コイル1052a−dの略図である。この実施形態においては、ソース・コイル1052aと1052bが互いに同位相であり、ソース・コイル1052cと1052dが互いに同位相である。しかしながら、ソース・コイル1052a及び1052bは、ソース・コイル1052c及び1052dと位相が180度ずれる。ソース・コイル1052a−dからの磁場は結合して、励起体積1109内に概ねX軸方向の磁気モーメント1319を有する励起場を生成する。従って、この励起場は、X軸に平行なマーカー、或いは、X軸方向に角度成分をもって配置されたマーカーを励起する。
【0073】
図17は、Y軸に平行な縦軸をもつマーカー40を励起するための励起場1424を生成する電流を示す、ソース・コイル1052a−dの略図である。スイッチング・ネットワーク1044(図13)は、ソース・コイル1052a−dに供給される交流電気信号の位相が図15の配置に類似するように構成される。これは、マーカー40を励起するために、Y方向に磁気モーメントをもつ励起場1424を生成する。
【0074】
図18はさらに、種々の空間的配向にある任意のマーカー40を励起するように励起場を空間的に調整する機能を示す。この実施形態においては、スイッチング・ネットワーク1044(図13)は、ソース・コイル1052a−dに供給される交流電気信号の位相が図14に示される配置に類似するように構成される。これは、Z軸に平行な縦軸をもつマーカー40を励起するZ方向に磁気モーメントをもつ励起場を生成する。
【0075】
励起体積1109内の励起場の空間的配置は、ソース・コイル1052a−dに供給される電気信号に位相を変えるためにスイッチング・ネットワークを操作することによって迅速に調整することができる。その結果、全体の磁気励起場は、励起体積1109内でX,Y又はZ方向のいずれかに配向するように変化させることができる。励起場の空間的配向のこの調整は、励起体積1109内の盲点を減ずるか又は除去する。従って、励起体積1109内のマーカー40は、無鉛マーカーの空間的配向に関らず、ソース・コイル1052a−dによって励起することができる。
【0076】
1つの実施形態においては、励起源1010はセンサ・アセンブリ1012に結合し、その結果、スイッチング・ネットワーク1044(図13)は、センサ・アセンブリによって受け取られる信号の強さによって、X、Y、及びZ軸に沿う励起場のパルス生成の配向を調整する。マーカー40からの位置信号が不十分である場合には、スイッチング・ネットワーク1044は、異なる軸又は軸間の方向にモーメントをもつ励起場を生成するために、ソース・コイル1052a−dへのその後のパルス供給の間に、励起場の空間的配向を自動的に変化させることができる。スイッチング・ネットワーク1044は、センサ・アセンブリ1012がマーカーからの十分な位置信号を受け取るまで操作することができる。
【0077】
図13に示される励起源1010は、励起段階中はマーカー40にエネルギー供給するためにソース・コイル1052a−dを励起すること、次いで、センサ・アセンブリ1012がマーカー40によって無線で伝達される減衰位置信号を検出する検出段階中はソース・コイル1052a−dを能動的に脱励起すること、を交互に行う。ソース・コイル1052a−dを能動的に励起及び脱励起するために、スイッチング・ネットワーク1044は、エネルギー貯蔵デバイス1042からの貯蔵エネルギーをソース・コイル1052a−dに伝達すること、次にソース・コイル1052a−dからエネルギー貯蔵デバイス1042にエネルギーを再伝達すること、を交互に行うように構成される。スイッチング・ネットワーク1044は、ソース・コイル1052の両端の電圧が正及び負の極性の間で交替するように、第1及び第2の「オン」位置の間で交替する。例えば、スイッチング・ネットワーク1044が第1の「オン」位置に切り替えられるとき、エネルギー貯蔵デバイス1042内のエネルギーがソース・コイル1052a−dに向って流れる。スイッチング・ネットワーク1044が第2の「オン」位置に切り替えられるときには、ソース・コイル1052a−d内のエネルギーが能動的にソース・コイル1052a−dから取り出され、エネルギー貯蔵デバイス1042に向って戻されるように極性が反転する。その結果、ソース・コイル1052a−d内のエネルギーは直ちにエネルギー貯蔵デバイス1042に戻されて、ソース・コイル1052a−dから伝達される励起場を突然終結し、消費電力をエネルギー貯蔵デバイス1042に保存する。このことは、励起エネルギーを周囲から除去し、その結果、センサ・アセンブリ1012は、励起源1010からの非常に大きな励起エネルギーによる妨害なしに、マーカー40からの位置信号を検出することができる。励起源1010の幾つかの付加的な詳細及び代りの実施形態は、引用によりその全体がここに組み入れられる、2002年8月7日提出の米国特許出願番号第10/213,980号であって、現在は米国特許第6,822,570号である特許文献に開示されている。
【0078】
b. センサ・アセンブリ
図19Aは、位置決めシステム(図13)中に用いるセンサ・アセンブリ1012の幾つかの構成要素を示す分解等角図である。センサ・アセンブリ1012は、パネル1604上に形成されるか又はそれによって支持される複数のコイル1602を有する検出ユニット1601を含む。コイル1602は、センサ・アレイ1605に配列されたフィールド・センサ又は磁束センサとすることができる。
【0079】
パネル1604は、DuPont社製のKAPTON(登録商標)のシートのような、実質的に非導電性の材料とすることができる。KAPTON(登録商標)は、非常に安定、強靭、そして薄い膜が必要なとき(放射線ビーム汚染を防止するためなど)に特に有用であるが、パネル1604は、他の材料から作り、そして他の形状とすることができる。例えば、FR4(エポキシ・ガラス基板)、GETEK又は他のテフロン(登録商標)・ベースの基板、及び他の市販材料は、パネル1604に用いることができる。さらに、パネル1604は平坦で高度に平面の構造体とすることができるが、他の実施形態においては、パネルは少なくとも1つの軸に沿って湾曲してもよい。いずれの実施形態においても、フィールド・センサ(例えばコイル)は、1つのフィールド・センサの平面が、隣接するフィールド・センサの平面と少なくとも実質的に共面である局所的な平面アレイに配列される。例えば、1つのコイルによって規定される平面と、隣接するコイルによって規定される平面との間の角度は、近似的に0°から10°までとすることができ、より一般的には5°未満である。しかし、幾つかの状況においては、1つ又はそれ以上のコイルは、アレイ内の他のコイルに対して10°より大きな角度にすることができる。
【0080】
図19Aに示されるセンサ・アセンブリ1012は、パネル1604に貼り合わされたコア1620を随意に含むことができる。コア1620は、堅い材料から作られた支持部品とすることができ、或いは、コア1620は、独立気泡ロハセル発泡体などの低密度発泡体とすることができる。コア1620は、動作温度範囲全域にわたって、センサ・アセンブリ1012の形状及びコイル1602間の相対的配向が所定の範囲内にとどまるように、低い熱膨張係数を有する安定な層であることが好ましい。
【0081】
センサ・アセンブリ1012は、検出サブシステムの1つの側面に第1の外カバー1630a、及び向いの側面に第2の外カバー1630bをさらに含むことができる。第1及び第2外カバー1630a−bは、ケブラー又はサーマウント・フィルムなどの、薄い熱的に安定な層とすることができる。第1及び第2外カバー1630a−bの各々は、望ましくない外部電場をコイル1602に達しないように遮断する電気シールド1632を含むことができる。電気シールド1632は、普通ファラデー・シールドと呼ばれる配置の櫛形シールドの輪郭を示す、金メッキされた銅ストリップの複数の平行脚とすることができる。シールドは、シールドに適切な他の材料から形成可能であることが理解されよう。電気シールドは、プリント回路基板製造技術又は他の技術を用いて、第1及び第2外カバー上に形成することができる。
【0082】
コイル1602をもつパネル1604は、粘着剤又は他の型の接着剤を用いてコア1620に貼り合わせることができる。第1及び第2外カバー1630a−bは、同様に、パネル1604とコア1620の組立品に貼り合わせることができる。貼り合わせられた組立品は、広い動作温度範囲全域にわたってコイル1602の配列を規定された配置に固定する堅い構造体を形成する。従って、センサ・アセンブリ1012は、動作中その表面全域で実質的に歪まない。例えば、センサ・アセンブリ1012は、±0.5mm以下、幾つかの場合には±0.3mm以下の歪みで、コイル1602の配列を固定位置に保持することができる。検出サブシステムの剛直性は、無鉛マーカーの正確な位置の非常に正確で繰返し可能な実時間モニタリングをもたらす。
【0083】
さらに別の実施形態においては、センサ・アセンブリ1012は、励起源1010の構成要素である複数のソース・コイルをさらに含むことができる。センサ・アセンブリ1012をソース・コイルと結合させる1つの適切な配列は、引用によりここに組み入れられる、2002年12月30日提出の「パネル型センサ/ソース・アレイ・アセンブリ」と題する米国特許出願整理番号第10/334,700号に開示されている。
【0084】
図19Bは、さらに検出ユニット1601の一実施形態を示す。この実施形態においては、検出ユニット1601は32個のセンサ・コイル1602を含み、各コイル1602は別々のチャネル1606(「Ch 0」から「Ch 31」までのチャネルとして個々の示される)に関連付けられる。パネル1604の全体の寸法は約40cm×54cmであるが、アレイ1605は約40cmの第1の寸法D1及び約40cmの第2の寸法D2を有する。代替の実施形態においては、アレイ1605は他の寸法又は他の配置(例えば、円形の)を有することができる。加えて、アレイ1605は、8−64個のコイルなど、より多数又は少数のコイルをもつことが可能であり、さらにコイルの数は2の累乗とすることができる。
【0085】
コイル1602は、パネル1604上に形成される銅又は別の適切な導電金属の導電トレース又は堆積物とすることができる。各コイル1602は、約0.15mmの幅をもち、各コイル内の隣接する巻きの間の間隔が約0.13mmであるトレースを有する。コイル1602は、約15から90までの巻きを有し、特定の用途においては、各コイルは約40巻きを有する。15未満の巻きを有するコイルは、一部の用途のためには十分に敏感ではない可能性があり、90を超える巻きを有するコイルは、励起中にソース信号からの過剰電圧、及び、コイルの低い自己共振周波数による過剰な整定時間をもたらす可能性がある。しかし、他の用途においては、コイル1602は15未満の巻き又は90超の巻きを有することができる。
【0086】
図19Bに示されるように、コイル1602は正方形渦巻きに配列されるが、円形、組み合った6角形、3角形などの配列のような他の配置を用いることもできる。そのような正方形渦巻きは、信号対雑音比を改善するように大きな割合の表面積を用いる。正方形コイルはまた、円形コイルに比較して、デザイン・レイアウト及びアレイのモデリングを簡単にする。例えば、円形コイルは、マーカー40からの磁束を結合させるのに表面積を無駄にする可能性がある。コイル1602は、約40mmの内寸法と約62mmの外寸法を有するが、用途によって他の寸法も可能である。感度は、製造許容範囲内で可能な限り外寸法に近い内寸法をもちいることによって改善することができる。幾つかの実施形態においては、コイル1602は互いに同一であるか、又は実質的に類似するように構成される。
【0087】
アレイ1605内のコイル1602のピッチは、少なくとも部分的に、マーカーとコイル・アレイの間の最短距離の関数である。1つの実施形態においては、コイルは約67mmのピッチで配列される。この特定の配列は、無線マーカー40がセンサ・アセンブリ1012から約7−27cmの位置に配置されるときに特に適している。無線マーカーが7cmより近い場合には、検出サブシステムはより小さなピッチで配列されたセンサ・コイルを含むことができる。一般に、無線マーカーがコイルのアレイから比較的短距離において検出されるときは、より小さなピッチが望ましい。例えば、コイル1602のピッチは、マーカーとアレイの間の最短距離の約50%から200%までである。
【0088】
一般に、アレイ1605及びアレイ内のコイル1602の寸法及び配置は、それらの動作周波数領域、マーカー40からアレイまでの距離、マーカーの信号強度、及び幾つかの他の因子に依存する。当業者は、少なくとも部分的に、望ましい周波数領域及びマーカーからコイルまでの距離に依存して、他の寸法及び配置を用いることができることを直ちに認識するであろう。
【0089】
アレイ1605は、マーカーによって放射される磁場を測定するために大口径を与える寸法にされる。マーカー信号はソース信号及び室内の他の磁場よりも遥かに小さいので、無線で伝達されたエネルギー・ソースに応答して、無線でマーカー信号を伝達する埋め込み可能なマーカーによって放射される信号を正確に測定することは、特にやりがいのある問題となり得る。アレイ1605の寸法は、非近接場ソースからの妨害を減らしながら、マーカーの近接場を優先的に測定するように選択することができる。1つの実施形態においては、アレイ1605は、マーカーがコイル平面から離される所定の最大検出距離の約100%から300%までである、コイル占有表面積全域にわたる最大寸法D1又はD2をもつ寸法とされる。従って、アレイ1605の寸法は、マーカー信号を正確に測定するためにマーカーがアレイから離されるべき距離を特定することによって決定され、次にコイルは、アレイの最大寸法がその距離の約100%から300%までとなるように配置される。アレイ1605の最大寸法は、例えば、マーカーがアレイから離される検出距離の約200%にすることができる。1つの特定的な実施形態においては、マーカー40は20cmの検出距離をもち、コイル1602のアレイの最大寸法は、20cmと60cmの間であり、より特定的には40cmである。
【0090】
上述の最大寸法を有するコイル・アレイは、非近接場ソースからの妨害を低減するフィルターを本来的にもたらすので特に有用である。従って、本発明の幾つかの実施形態の1つの態様は、アレイが優先的に近接場ソース(即ち、マーカーによって生成される場)を測定し、非近接場ソースからの妨害を取り除くように、マーカーからの信号に基づいてアレイの寸法を決めることである。
【0091】
コイル1602は、各コイルの内側部分又は区域を通じて、無線マーカー40によって生成される磁束を受け取り、次に磁場成分の量又は大きさを表す又はそれに比例する電流信号を生成する電磁場センサである。磁場成分はまた、各コイル1602の面に垂直である。各コイルは別々のチャネルを表し、従って各コイルは32個の出力ポート1606の内の1つに信号を出力する。下記のプリアンプを各出力ポート1606に備えることができる。プリアンプ(又はインピーダンス・バッファ)をコイルの近傍に配置することは、ここで説明されるように、コイルに対する容量負荷を最小にする。示されてはいないが、検出ユニット1601はまた、各コイル1602から対応する出力ポート1606へ信号を伝達して別々のチャネルを規定する、導電トレース又は導電経路を含む。次にポートは、適切な形態のプラグ及び連結ケーブルを取り付けることのできるパネル1604上に形成されたコネクタ1608に結合される。
【0092】
検出ユニット1601はまた、オンボード・メモリ又は、電気的に消去可能でプログラム可能な読み出し専用メモリ(EEPROM)1610のような他の回路を含むことができる。EEPROM1610は、シリアル番号、改訂番号、製造年月日などの製造情報をストアすることができる。EEPROM1610はまた、チャネル毎の較正データ、及びラン・タイムの記録をストアすることができる。ラン・タイムは、アレイが照射された全放射線量の指標を与え、その指標は検出サブシステムの交替が必要なときにシステムに警告を発することができる。
【0093】
1つの平面だけが示されるが、無線マーカー40の3次元位置の決定の助けとなるように、付加的なコイル又は電磁場センサをパネル1604に垂直に配置することができる。他の寸法のコイル又はセンサを付け加えることは、無線マーカー40から受け取る全エネルギーを増すことができるとしても、そのアレイの複雑さは過剰に増加することになる。本発明者は、無線マーカー40の3次元座標は図19A−Bに示される平面型アレイを用いて検出できることを見出した。
【0094】
センサ・アセンブリ1012を実装することは、幾つかの考慮すべきことを含む。第1に、コイル1062は理想的な開回路を与えられない可能性がある。その代りに、それらコイルは、大部分が、コイル1602をプリアンプに接続するトレース又は導電経路による寄生容量、及び、減衰ネットワーク(以下に説明される)及びプリアンプの入力インピーダンス(低い入力インピーダンスが好ましいが)によって負荷を受ける可能性が十分にある。これらの組み合せられた負荷は、コイル1602が変化する磁束と結合するときに電流フローを生じる。従って、任意の1つのコイル1602は、無線マーカー40からの磁束だけでなく、同様に他の全てのコイルからの磁束に結合する。これらの電流フローは下流での信号処理において考慮されなければならない。
【0095】
第2の考慮すべきことは、コイル1602に対する容量負荷である。一般に、コイル1602に対する容量負荷は最小にすることが望ましい。容量負荷はコイル自体の共振回路を形成し、それが、励起源1010が電力供給されるときに過剰な電圧オーバーシュートをもたらす。そのような電圧オーバーシュートは、コイル1602全体にわたる減衰又は「スナッビング」ネットワークによって制限又は減衰されるべきである。より大きな容量負荷はより低いインピーダンスの減衰ネットワークを必要とし、それが実質的な電量消費及び減衰ネットワーク内の加熱をもたらす可能性がある。
【0096】
もう1つの考慮すべきことは、低雑音のプリアンプを使用することである。プリアンプはまた、センサ・アセンブリ1012の1つの用途が線形加速器(LINAC)を用いる放射線治療システムであるために、放射線耐性とすることができる。その結果、PNPバイポーラ・トランジスタ及び分離した素子が好ましい。さらに、良好な整定時間がAC回路又は出力によっては達成できない場合、特にアナログ・ディジタル・コンバータがAC出力信号の広い振動を処理できない場合には、DC結合回路が好ましいことがある。
【0097】
図20は、例えば、差動増幅器1704をもつスナッビング・ネットワーク1702の一実施形態を示す。スナッビング・ネットワーク1702は、2組の直列に結合した抵抗と、それらの間を橋絡する1つのコンデンサを含む。バイアス回路1706は差動増幅器の調整を可能にし、一方較正入力1708は差動増幅器の両方の入力脚部をバランスさせることを可能にする。コイル1602は、1対の高電圧保護ダイオード1710を伴う差動増幅器1704の入力部に結合される。DCオフセットは、差動増幅器1704の入力トランジスタのベースに結合された1対の抵抗(ゼロ値をもつように示されている)によって調整することができる。出力部におけるESD保護ダイオード1712、及びフィルター・コンデンサ(10nF値を有するように示されている)などの付加的な保護回路が備えられている。
【0098】
c. 信号プロセッサ及びコントローラ
図13に示される信号プロセッサ1014及びコントローラ1016は、センサ・アセンブリ1012からの信号を受け取り、基準座標系内でのマーカー40の絶対位置を算出する。適切な信号処理システム及びアルゴリズムは、米国特許出願整理番号第10/679,801号、第10/749,478号、第10/750,456号、第10/750,164号、第10/750,165号、第10/749,860号、及び第10/750,453号に開示されており、これらの全ては引用によりここに組み入れられる。
【実施例1】
【0099】
概観
実時間追跡のための本システムの有効性を判断するために、実験ファントムに基づく研究が実施された。この実験においては、3軸における任意の運動を、0.3mmの精度で各次元において10cm/secまで加速することを可能にする特別製作の4Dステージが構築された。位置の精度は、ステージ・システムに取り付けられた3Dディジタイジング・アームによって測定された。図21に示されるように、x、y及びz方向のそれぞれにおいて、2cm、4cm及び2cm、並びに、1cm、2cm及び1cmのピーク・ツー・ピーク運動により、2つの楕円が造られた。毎分15、17及び20回の呼吸に相当する3つの周期が用いられた。単一のトランスポンダは33ms、67ms及び100msの積算時間において用いられ、2つのトランスポンダは67ms及び100msの積算時間において用いられた。トランスポンダは4Dステージに乗せられた特別製作のファントムの内部に配置した。実験は、平均的な肺ガン患者の位置を模するために、AC磁気アレイから14cm離れたアイソセンターを用いて実施された。4Dステージは、実時間追跡システムがトランスポンダの位置を測定した際に、各々の軌跡を走査した。測定された位置はファントムの位置と比較された。楕円の大きさ、速度、トランスポンダの個数及び積算時間の効果の特徴が調べられた。
【0100】
実験の要約
図22に示されるように、2乗平均平方根(RMS)誤差は、各々の楕円、周期、及びトランスポンダ積算時間に対して、1mm未満であった。本システムは、楕円の経路全体にわたり、例えば、毎分17回の呼吸における大きな楕円の軌跡内で、目標点を追跡することができた。図23は、位置決めの誤差のヒストグラムであり、各測定点について誤差範囲が小さいことを示している。図24に示されるように、RMS誤差は、殆どの軌跡において速度が増す領域で高くなった。この実験に関しては、単一トランスポンダ・システムがデュアル・トランスポンダシステムより僅かに良好に動作し、最良のシステムは67msの積算時間を有する単一トランスポンダであった。
【0101】
結論
示された実施形態の前記の説明は、要約中で説明されることを含めて、網羅的であること、又は本発明を開示されたとおりの形態に限定すること、を意図したものではない。例証のために特定の実施形態及び実施例が本明細書で説明されているが、当業者が認識するであろうように、本発明の精神と範囲から逸脱することなしに種々の均等な変更を施すことができる。ここで提供された本発明の教示は、必ずしも例示的なシステムが一般的に前述されていなくとも、ターゲットの位置決め及び追跡のシステムに適用することができる。
【0102】
前述の種々の実施形態は、さらに進んだ実施形態を与えるように組み合せることができる。この明細書において引用された及び/又はアプリケーション・データ・シートに記載された、全ての米国特許、米国特許出願公開公報、米国特許出願、外国の特許、外国の特許出願及び非特許出版物は、それらの全体が引用によりここに組み入れられる。本発明の態様は、本発明のさらに進んだ実施形態を与えるために、必要ならば、種々の特許、出願及び刊行物のシステム、デバイス及びコンセプトを用いるように変更することができる。
【0103】
これら及び他の変更は、前述の詳しい説明を考慮して施すことができる。一般に、添付の特許請求項において用いられる用語は、本明細書及び特許請求項中で開示される特定の実施形態に本発明を限定するものと解釈されるべきではなく、体内の選択されたターゲットの位置を決定し、モニターし、及び/又は追跡するための装置と方法を提供するように、特許請求項に従って動作する、ターゲットの位置を決めモニターする全てのシステムを含むものと解釈されたい。従って、本発明は添付の特許請求項による以外には限定されない。
【図面の簡単な説明】
【0104】
【図1】本発明の一実施形態による、ターゲットの位置決めとモニターに用いる追跡システムの側面図である。励起可能マーカーは患者体内のターゲット内に又はそれに隣接して埋め込まれるように示されている。
【図2】可動支持台上の患者及び患者体内に埋め込まれたマーカーの略立面図である。
【図3】本発明の一実施形態による位置決めシステム及び患者体内に埋め込まれた複数のマーカーを概略的に示す側面図である。
【図4】本発明の一実施形態による、放射線治療のための実時間ターゲット追跡を用いる統合放射線治療過程の流れ図である。
【図5A】放射線治療及び他の医療用途におけるターゲットの実時間追跡のためのシステム及び方法の一態様を示すCT画像の表示である。
【図5B】CTスキャナの基準座標系を概略的に示す図である。
【図6】本発明の一実施形態による客観的出力を表示するためのユーザ・インタフェースのスクリーンショットである。
【図7】本発明の一実施形態による放射線照射期間の等角図である。
【図8A】本発明の一実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図8B】図8Aのマーカーの線8B−8Bに沿って描かれた断面図である。
【図8C】図8A−図8Bのマーカーの放射線画像の実例である。
【図9A】本発明の別の実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図9B】図9Aのマーカーの線9B−9Bに沿って描かれた断面図である。
【図10A】本発明の別の実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図10B】図10Aのマーカーの線10B−10Bに沿って描かれた断面図である。
【図11】本発明の別の実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図12】本発明のさらに別の実施形態による位置決めシステムと共に用いるためのマーカーの等角図である。
【図13】本発明の一実施形態によるターゲットの追跡に用いるための位置決めシステムの略ブロック図である。
【図14】第1の励起場を生成するための第1の位相の組合せの電気信号を搬送する共面電源コイルの配列の略図である。
【図15】第2の励起場を生成するための第2の位相の組合せの電気信号を搬送する共面電源コイルの配列の略図である。
【図16】第3の励起場を生成するための第3の位相の組合せの電気信号を搬送する共面電源コイルの配列の略図である。
【図17】第1の空間方向にマーカーを活性化するための磁気励起場を示す共面電源コイルの配列の略図である。
【図18】第2の空間方向にマーカーを活性化するための磁気励起場を示す共面電源コイルの配列の略図である。
【図19A】本発明の一実施形態による位置決めシステムと共に用いるためのセンサ・アセンブリの個々の構成要素を示す分解等角図である。
【図19B】図19Aのセンサ・アセンブリ内で用いる検出ユニットの平面図である。
【図20】図19Aのセンサ・アセンブリと共に用いるプリアンプの略図である。
【図21】本システムの実験ファントムをベースとする研究からの例証的な腫瘍の運動楕円のグラフである。
【図22】本システムの実験ファントムをベースとする研究からの2乗平均平方根(RMS)誤差のグラフである。
【図23】本システムの実験ファントムをベースとする研究からの位置決め誤差の例示的なヒストグラムである。
【図24】本システムの実験ファントムをベースとする研究からの速さの関数としての位置誤差のグラフである。
【特許請求の範囲】
【請求項1】
医療用途における、ヒトの患者体内のターゲットを、該ターゲットに実質的に固定されるように該患者体内に固定されたマーカーを用いて追跡する方法であって、
前記マーカーの位置データを収集するステップと、
前記位置データに基づいて、外部基準座標系における前記マーカーの位置を決定するステップと、
(a)前記マーカーの前記位置に対応し、(b)追跡誤差が5mm未満となる頻度で与えられる、前記外部基準座標系における客観的出力を生成するステップと、
を含む方法。
【請求項2】
前記マーカーは、無線で伝達される非イオン化励起エネルギーに応答して位置信号を無線で伝達する小さなトランスポンダを備え、前記位置データを収集するステップは、前記位置信号を検出するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項3】
前記マーカーは、前記患者体内に埋め込まれる形態にされ、前記方法は、前記マーカーが前記ターゲットの動きに直接相関して動くように、前記ターゲットの少なくとも近傍の位置に前記マーカーを埋め込むステップをさらに含むことを特徴とする、請求項2に記載の方法。
【請求項4】
前記マーカーは、前記患者体内に埋め込まれる形態にされ、無線で伝達される非イオン化励起エネルギーに応答して位置信号を無線で伝達するトランスポンダを有する小さな無鉛マーカーを含み、前記方法は前記マーカーを埋め込むステップを含み、前記位置データを収集するステップは前記位置信号を検出するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項5】
前記マーカーは、無線で伝達される交流磁場に応答して、交流磁気位置信号を無線で伝達する小さな交流磁気トランスポンダを備え、前記位置データを収集するステップは、交流磁気位置信号を検出するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項6】
前記客観的出力は、少なくとも1つの前記位置データ及び前記マーカーの前記決定位置に関する人為的解釈なしに生成されることを特徴とする、請求項1に記載の方法。
【請求項7】
前記客観的出力は、前記外部基準座標系における3次元座標を含むことを特徴とする、請求項1に記載の方法。
【請求項8】
前記客観的出力は、前記ターゲットの位置とコンピュータ・システム内で決定されたターゲットの望ましい位置との間のオフセット値を含むことを特徴とする、請求項1に記載の方法。
【請求項9】
前記位置データは時刻tnにおいて収集され、前記ターゲットの前記位置に対応する前記客観的出力を供給するステップは、前記客観的出力を、時刻tnから約5秒以内の待ち時間で、約15秒以下の周期で、ユーザ・インタフェース、メモリ・デバイス、コンピュータ及び医療デバイスの少なくとも1つに供給するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項10】
前記待ち時間は、約2秒以下の周期において時刻tnから約2秒以内であることを特徴とする、請求項9に記載の方法。
【請求項11】
前記待ち時間は、約1秒以下の周期において時刻tnから約1秒以内であることを特徴とする、請求項9に記載の方法。
【請求項12】
前記待ち時間は、約200ミリ秒以下の周期において時刻tnから約100ミリ秒以内であることを特徴とする、請求項9に記載の方法。
【請求項13】
前記待ち時間は、約50ミリ秒以下の周期において時刻tnから約50ミリ秒以内であることを特徴とする、請求項9に記載の方法。
【請求項14】
前記周期は約12.5ミリ秒であることを特徴とする、請求項9に記載の方法。
【請求項15】
前記周期は約16.67ミリ秒であることを特徴とする、請求項9に記載の方法。
【請求項16】
前記周期は約20ミリ秒であることを特徴とする、請求項9に記載の方法。
【請求項17】
前記収集、決定及び供給手続きを実行しながら、放射線照射装置のアイソセンターに対して望ましい位置に前記ターゲットを配置するように、前記患者を配置するステップをさらに含むことを特徴とする、請求項1に記載の方法。
【請求項18】
前記収集、決定及び供給手続きを実行しながら、放射線照射装置のアイソセンターに向けられた高強度イオン化ビームで前記患者を照射するステップをさらに含むことを特徴とする、請求項1に記載の方法。
【請求項19】
前記収集、決定及び供給手続きを実行しながら、患者位置及び前記高強度イオン化ビームのパラメータの少なくとも1つを制御するステップをさらに含むことを特徴とする、請求項18に記載の方法。
【請求項20】
前記ターゲットが前記マシーン・アイソセンターに対して望ましい位置にあることが示されるときに、前記非イオン化ビームがオンとなるように前記非イオン化ビームのオン・オフ状態を制御するステップをさらに含むことを特徴とする、請求項19に記載の方法。
【請求項21】
前記マシーン・センターに対して望ましい位置に前記ターゲットを配置するために、前記患者を移動させるステップをさらに含むことを特徴とする、請求項19に記載の方法。
【請求項22】
前記非イオン化ビーム形状を変更するステップをさらに含むことを特徴とする、請求項19に記載の方法。
【請求項23】
前記外部基準座標系における前記客観的出力を供給するステップは、前記マーカーの位置を決定するために用いられる位置データを収集するステップと少なくとも実質的に同時に前記客観的出力を供給するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項24】
前記頻度は、ビーム・オンの期間に複数の客観的出力を供給するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項25】
患者体内のターゲットを治療する放射線治療において、該患者体内に該ターゲットに関連する位置に埋め込まれたマーカーを用いて、該ターゲットを実時間で追跡する方法であって、
時刻tnにおける前記マーカーの位置データを収集するステップと、
前記位置データに基づいて、外部基準座標系における前記マーカーの位置を決定するステップと、
前記ターゲットの前記位置に対応する客観的出力を、時刻tnから2秒以内の待ち時間内に、ユーザ・インタフェース、メモリ・デバイス及び/又は放射線照射装置に供給するステップと、
少なくとも2秒ごとに、前記供給手続きを繰り返すステップと、
を含む方法。
【請求項26】
前記マーカーは、無線で伝達される非イオン化励起エネルギーに応答して位置信号を無線で伝達する小さなトランスポンダを備え、前記位置データを収集するステップは、前記マーカーによって無線で伝達される前記位置信号を検出するステップを含むことを特徴とする、請求項25に記載の方法。
【請求項27】
前記マーカーは、無線で伝達される交流磁場に応答して、交流磁気位置信号を無線で伝達する小さな交流磁気トランスポンダを備え、前記位置データを収集するステップは、前記マーカーによって無線で伝達される交流磁気位置信号を検出するステップを含むことを特徴とする、請求項25に記載の方法。
【請求項28】
前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターとの間のオフセット座標を含むことを特徴とする、請求項25に記載の方法。
【請求項29】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約1秒の待ち時間内に、約1ミリ秒乃至約1秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項28に記載の方法。
【請求項30】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項28に記載の方法。
【請求項31】
前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約50ミリ秒の待ち時間内に、約20ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項28に記載の方法。
【請求項32】
前記客観的出力は、前記ターゲットの前記位置に関する外部基準座標系における座標を含み、前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記座標を前記ユーザ・インタフェースに送るステップを含むことを特徴とする、請求項25に記載の方法。
【請求項33】
前記周期は約12.5ミリ秒であることを特徴とする、請求項32に記載の方法。
【請求項34】
前記周期は約16.67ミリ秒であることを特徴とする、請求項32に記載の方法。
【請求項35】
前記周期は約20ミリ秒であることを特徴とする、請求項32に記載の方法。
【請求項36】
前記収集、決定及び供給手続きを実行しながら、前記放射線照射装置のアイソセンターに対して望ましい位置に前記ターゲットを配置するように、前記患者を配置するステップをさらに含むことを特徴とする、請求項25に記載の方法。
【請求項37】
前記客観的出力は、前記ターゲットの位置と前記放射線照射装置の前記アイソセンターに対する前記ターゲットの望ましい位置との間のオフセット座標を含み、前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項36に記載の方法。
【請求項38】
前記客観的出力を供給ステップは、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェースに送るステップを含むことを特徴とする、請求項37に記載の方法。
【請求項39】
前記客観的出力を供給ステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を、前記放射線照射装置に送るステップを含み、前記放射線照射装置は、前記オフセット座標によって患者支持台を自動的に移動させることを特徴とする、請求項37に記載の方法。
【請求項40】
前記収集、決定及び供給手続きを実行しながら、前記放射線照射装置からの放射線ビームで前記ターゲットを照射するステップをさらに含むことを特徴とする、請求項25に記載の方法。
【請求項41】
前記客観的出力は、前記ターゲットの位置と前記放射線照射装置のアイソセンターに対する前記ターゲットの望ましい位置との間のオフセット座標を含み、前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記放射線照射装置に送るステップを含むことを特徴とする、請求項40に記載の方法。
【請求項42】
前記オフセット座標によって前記放射線照射装置のパラメータを制御するステップをさらに含むことを特徴とする、請求項41に記載の方法。
【請求項43】
前記放射線照射装置の前記パラメータを制御するステップは、前記ターゲットが前記アイソセンターの許容範囲の外にあることを示す所定の値を前記オフセット座標が超えるとき、前記放射線ビームを終結させるステップを含むことを特徴とする、請求項42に記載の方法。
【請求項44】
前記放射線照射装置の前記パラメータを制御するステップは、前記オフセット座標によって患者支持台を自動的に移動させるステップを含むことを特徴とする、請求項42に記載の方法。
【請求項45】
患者体内のターゲットを治療する放射線治療において、該ターゲットを追跡する方法であって、
前記患者体内で前記ターゲットに関連する位置に配置されたマーカーの位置データを取得するステップと、
前記位置データに基づいて、外部基準座標系における前記マーカーの位置を決定するステップと、
ユーザ・インタフェースに対して、前記マーカーの前記決定された位置に基づいて前記ターゲットの位置を示す客観的出力を、(a)前記ユーザ・インタフェースでのターゲット位置の表示における一時停止がヒトにはすぐには認識できないように十分に高い頻度、及び(b)前記マーカーの前記位置データの取得と少なくとも実質的に同時となるように十分に短い待ち時間で供給するステップと、
を含む方法。
【請求項46】
前記マーカーは、無線で伝達される非イオン化励起エネルギーに応答して位置信号を無線で伝達する小さなトランスポンダを備え、前記位置データを取得するステップは、前記マーカーから無線で伝達される前記位置信号を検出するステップを含むことを特徴とする、請求項45に記載の方法。
【請求項47】
前記マーカーは、無線で伝達される交流磁場に応答して、交流磁気位置信号を無線で伝達する小さな交流磁気トランスポンダを備え、前記位置データを取得するステップは、前記マーカーにより無線で伝達される前記交流磁気位置信号を検出するステップを含むことを特徴とする、請求項45に記載の方法。
【請求項48】
前記位置データは時刻tnにおいて取得され、前記客観的出力は、前記ターゲットの前記位置と放射線照射装置のアイソセンターに対して前記ターゲットの望ましい位置との間のオフセット座標を含むことを特徴とする、請求項45に記載の方法。
【請求項49】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約1秒の待ち時間内に、約1ミリ秒乃至約1秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項48に記載の方法。
【請求項50】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項48に記載の方法。
【請求項51】
前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約50ミリ秒の待ち時間内に、約20ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項48に記載の方法。
【請求項52】
前記位置データは時刻tnにおいて取得され、前記客観的出力は、前記外部座標系における前記ターゲットの位置に関連する座標を含み、前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記座標を、前記ユーザ・インタフェースに送るステップを含むことを特徴とする、請求項45に記載の方法。
【請求項53】
前記収集、決定及び供給手続きを実行しながら、放射線照射装置のアイソセンターに対して望ましい位置に前記ターゲットを配置するように、前記患者を配置するステップをさらに含むことを特徴とする、請求項45に記載の方法。
【請求項54】
前記位置データは時刻tnにおいて取得され、前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置の前記アイソセンターに対して前記ターゲットの望ましい位置との間のオフセット座標を含み、前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェース及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項45に記載の方法。
【請求項55】
前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェースに送るステップを含むことを特徴とする、請求項54に記載の方法。
【請求項56】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記放射線照射装置に送るステップを含み、前記放射線照射装置は、前記オフセット座標によって患者支持台を移動させることを特徴とする、請求項54に記載の方法。
【請求項57】
前記取得、決定及び供給手続きを実行しながら、放射線照射装置からの放射線ビームで前記ターゲットを照射するステップをさらに含むことを特徴とする、請求項45に記載の方法。
【請求項58】
前記位置データは時刻tnにおいて取得され、前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターに対して前記ターゲットの望ましい位置との間のオフセット座標を含み、前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記放射線照射装置に送るステップを含むことを特徴とする、請求項57に記載の方法。
【請求項59】
前記オフセット座標によって前記放射線照射装置のパラメータを制御するステップをさらに含むことを特徴とする、請求項58に記載の方法。
【請求項60】
前記放射線照射装置のパラメータを制御するステップは、前記ターゲットが前記アイソセンターの許容範囲の外にあることを示す所定の値を前記オフセット座標が超えるとき、放射線ビームを終結させるステップを含むことを特徴とする、請求項59に記載の方法。
【請求項61】
前記放射線照射装置のパラメータを制御するステップは、前記オフセット座標によって患者支持台を自動的に移動させるステップを含むことを特徴とする、請求項59に記載の方法。
【請求項62】
患者のターゲットを、該患者体内に該ターゲットに関連する位置に埋め込まれたマーカーを用いて治療するための放射線治療システムであって、
イオン化放射線ビームを発生するビーム発生器、アイソセンター、及び、前記ビームを前記アイソセンターに向ける照準器、を含む放射線照射装置と、
時刻tnにおいて前記マーカーの位置データを取得する検出器と、
前記位置データを受け取るために前記検出器と動作可能なように結合するコンピュータであって、前記位置データに基づいて前記マーカーの位置を決定し、前記ターゲットの位置を示す客観的出力を、時刻tnから2秒以下の待ち時間内に、2秒以下の周期で、ユーザ・インタフェース、メモリ・デバイス、及び/又は放射線照射装置に供給するコンピュータ動作可能媒体を有するコンピュータと、
を備えるシステム。
【請求項63】
非イオン化励起エネルギーを無線で伝達するように構成された励起源と、前記無線で伝達された非イオン化励起エネルギーに応答して位置信号を無線で伝達するように構成された小さなトランスポンダを有するマーカーとをさらに備え、前記検出器は、前記マーカーによって無線で伝達された前記位置信号を検出するように構成されることを特徴とする、請求項62に記載の放射線治療システム。
【請求項64】
交流磁場を無線で伝達するように構成された励起源と、前記無線で伝達された交流磁場に応答して交流磁気位置信号を無線で伝達する小さな交流磁気トランスポンダを有するマーカーとを備え、前記検出器は、前記マーカーによって無線で伝達された前記交流磁気位置信号を検出するように構成されたコイルを含むことを特徴とする、請求項62に記載の放射線治療システム。
【請求項65】
前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターに対して前記ターゲットの望ましい位置との間のオフセット座標を含むことを特徴とする、請求項62に記載の放射線治療システム。
【請求項66】
前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約1秒の待ち時間内に、約1ミリ秒乃至約1秒の周期で、前記オフセット座標を前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送ることを特徴とする、請求項65に記載の放射線治療システム。
【請求項67】
前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送ることを特徴とする、請求項65に記載の放射線治療システム。
【請求項68】
前記コンピュータ動作可能媒体は、時刻tnから約10ミリ秒乃至約50ミリ秒の待ち時間内に、約20ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送ることを特徴とする、請求項65に記載の放射線治療システム。
【請求項69】
前記客観的出力は、前記ターゲットの前記位置に関する前記外部基準座標系における座標を含み、前記コンピュータ動作可能媒体は、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記座標を前記ユーザ・インタフェースに送ることを特徴とする、請求項65に記載の放射線治療システム。
【請求項70】
前記コンピュータ動作可能媒体は、前記ターゲットを前記放射線照射装置のアイソセンターに対して望ましい位置に配置するように前記患者を配置するための信号を送ることを特徴とする、請求項62に記載の放射線治療システム。
【請求項71】
前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターとの間のオフセット座標を含み、前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送ることを特徴とする、請求項70に記載の放射線治療システム。
【請求項72】
前記コンピュータ動作可能媒体は、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェースに送ることを特徴とする、請求項71に記載の放射線治療システム。
【請求項73】
前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記放射線照射装置に送り、前記放射線照射装置は前記オフセット座標によって患者支持台を自動的に移動させるように構成されることを特徴とする、請求項71に記載の放射線治療システム。
【請求項74】
前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターとの間のオフセット座標を含み、前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記座標を前記放射線照射装置に送ることを特徴とする、請求項62に記載の放射線治療システム。
【請求項75】
患者のターゲットを、該患者体内に該ターゲットに関連する位置に埋め込まれたマーカーを用いて治療するための追跡システムであって、
時刻tnにおいて前記マーカーの位置データを取得する検出器と、
前記位置データを受け取るために前記検出器と動作可能なように結合するコンピュータであって、前記位置データに基づいて前記マーカーの位置を決定し、時刻tnから10−200ミリ秒の待ち時間内に、10−100ミリ秒の周期で、前記ターゲットの位置を示す客観的出力を供給するコンピュータ動作可能媒体を有するコンピュータと、
を備えるシステム。
【請求項76】
イオン化放射線を用いて患者のターゲットを治療する方法であって、
イオン化放射線のビームを発生し、該ビームを前記ターゲットに向けるステップと、
前記ビームを前記ビーム・アイソセンターに向けながら、患者体内の前記ターゲットに関連する位置に埋め込まれたマーカーの位置情報を収集するステップと、
前記収集された位置情報に基づいて、前記ビーム・アイソセンターに対する前記ターゲットの位置を示す客観的出力を供給するステップと、
前記客観的出力を前記ビームのパラメータと相関させるステップと、
を含む方法。
【請求項77】
イオン化放射線を用いて患者のターゲットを治療する方法であって、
イオン化放射線のビームを発生し、マルチリーフ・コリメータを用いて該ビームを前記ターゲットに向けるステップと、
前記ビームを前記ビーム・アイソセンターに向けながら、患者体内の前記ターゲットに関連する位置に埋め込まれたマーカーの位置情報を収集するステップと、
前記収集された位置情報に基づいて、前記ビーム・アイソセンターに対する前記患者の前記ターゲットの位置を示す客観的出力を供給し、前記客観的出力に基づいてマルチリーフ・コリメータの配置を制御するステップと、
を含む方法。
【請求項78】
イオン化放射線を用いて患者のターゲットを治療する方法であって、
イオン化放射線のビームを発生し、該ビームを前記ターゲットに向けるステップと、
(a)前記ビームを前記ビーム・アイソセンターに向けながら、患者体内の前記ターゲットに関連する位置に埋め込まれたマーカーの位置情報を収集し、そして(b)前記ビームを前記ビーム・アイソセンターに、位置決めシステムを再較正することなしに少なくとも10秒間向けながら、前記マーカーの前記収集された位置情報に基づいて、前記ビーム・アイソセンターに対する前記ターゲットの位置を示す客観的出力を供給するための、位置決めシステムを操作するステップと、
を含む方法。
【請求項1】
医療用途における、ヒトの患者体内のターゲットを、該ターゲットに実質的に固定されるように該患者体内に固定されたマーカーを用いて追跡する方法であって、
前記マーカーの位置データを収集するステップと、
前記位置データに基づいて、外部基準座標系における前記マーカーの位置を決定するステップと、
(a)前記マーカーの前記位置に対応し、(b)追跡誤差が5mm未満となる頻度で与えられる、前記外部基準座標系における客観的出力を生成するステップと、
を含む方法。
【請求項2】
前記マーカーは、無線で伝達される非イオン化励起エネルギーに応答して位置信号を無線で伝達する小さなトランスポンダを備え、前記位置データを収集するステップは、前記位置信号を検出するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項3】
前記マーカーは、前記患者体内に埋め込まれる形態にされ、前記方法は、前記マーカーが前記ターゲットの動きに直接相関して動くように、前記ターゲットの少なくとも近傍の位置に前記マーカーを埋め込むステップをさらに含むことを特徴とする、請求項2に記載の方法。
【請求項4】
前記マーカーは、前記患者体内に埋め込まれる形態にされ、無線で伝達される非イオン化励起エネルギーに応答して位置信号を無線で伝達するトランスポンダを有する小さな無鉛マーカーを含み、前記方法は前記マーカーを埋め込むステップを含み、前記位置データを収集するステップは前記位置信号を検出するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項5】
前記マーカーは、無線で伝達される交流磁場に応答して、交流磁気位置信号を無線で伝達する小さな交流磁気トランスポンダを備え、前記位置データを収集するステップは、交流磁気位置信号を検出するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項6】
前記客観的出力は、少なくとも1つの前記位置データ及び前記マーカーの前記決定位置に関する人為的解釈なしに生成されることを特徴とする、請求項1に記載の方法。
【請求項7】
前記客観的出力は、前記外部基準座標系における3次元座標を含むことを特徴とする、請求項1に記載の方法。
【請求項8】
前記客観的出力は、前記ターゲットの位置とコンピュータ・システム内で決定されたターゲットの望ましい位置との間のオフセット値を含むことを特徴とする、請求項1に記載の方法。
【請求項9】
前記位置データは時刻tnにおいて収集され、前記ターゲットの前記位置に対応する前記客観的出力を供給するステップは、前記客観的出力を、時刻tnから約5秒以内の待ち時間で、約15秒以下の周期で、ユーザ・インタフェース、メモリ・デバイス、コンピュータ及び医療デバイスの少なくとも1つに供給するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項10】
前記待ち時間は、約2秒以下の周期において時刻tnから約2秒以内であることを特徴とする、請求項9に記載の方法。
【請求項11】
前記待ち時間は、約1秒以下の周期において時刻tnから約1秒以内であることを特徴とする、請求項9に記載の方法。
【請求項12】
前記待ち時間は、約200ミリ秒以下の周期において時刻tnから約100ミリ秒以内であることを特徴とする、請求項9に記載の方法。
【請求項13】
前記待ち時間は、約50ミリ秒以下の周期において時刻tnから約50ミリ秒以内であることを特徴とする、請求項9に記載の方法。
【請求項14】
前記周期は約12.5ミリ秒であることを特徴とする、請求項9に記載の方法。
【請求項15】
前記周期は約16.67ミリ秒であることを特徴とする、請求項9に記載の方法。
【請求項16】
前記周期は約20ミリ秒であることを特徴とする、請求項9に記載の方法。
【請求項17】
前記収集、決定及び供給手続きを実行しながら、放射線照射装置のアイソセンターに対して望ましい位置に前記ターゲットを配置するように、前記患者を配置するステップをさらに含むことを特徴とする、請求項1に記載の方法。
【請求項18】
前記収集、決定及び供給手続きを実行しながら、放射線照射装置のアイソセンターに向けられた高強度イオン化ビームで前記患者を照射するステップをさらに含むことを特徴とする、請求項1に記載の方法。
【請求項19】
前記収集、決定及び供給手続きを実行しながら、患者位置及び前記高強度イオン化ビームのパラメータの少なくとも1つを制御するステップをさらに含むことを特徴とする、請求項18に記載の方法。
【請求項20】
前記ターゲットが前記マシーン・アイソセンターに対して望ましい位置にあることが示されるときに、前記非イオン化ビームがオンとなるように前記非イオン化ビームのオン・オフ状態を制御するステップをさらに含むことを特徴とする、請求項19に記載の方法。
【請求項21】
前記マシーン・センターに対して望ましい位置に前記ターゲットを配置するために、前記患者を移動させるステップをさらに含むことを特徴とする、請求項19に記載の方法。
【請求項22】
前記非イオン化ビーム形状を変更するステップをさらに含むことを特徴とする、請求項19に記載の方法。
【請求項23】
前記外部基準座標系における前記客観的出力を供給するステップは、前記マーカーの位置を決定するために用いられる位置データを収集するステップと少なくとも実質的に同時に前記客観的出力を供給するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項24】
前記頻度は、ビーム・オンの期間に複数の客観的出力を供給するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項25】
患者体内のターゲットを治療する放射線治療において、該患者体内に該ターゲットに関連する位置に埋め込まれたマーカーを用いて、該ターゲットを実時間で追跡する方法であって、
時刻tnにおける前記マーカーの位置データを収集するステップと、
前記位置データに基づいて、外部基準座標系における前記マーカーの位置を決定するステップと、
前記ターゲットの前記位置に対応する客観的出力を、時刻tnから2秒以内の待ち時間内に、ユーザ・インタフェース、メモリ・デバイス及び/又は放射線照射装置に供給するステップと、
少なくとも2秒ごとに、前記供給手続きを繰り返すステップと、
を含む方法。
【請求項26】
前記マーカーは、無線で伝達される非イオン化励起エネルギーに応答して位置信号を無線で伝達する小さなトランスポンダを備え、前記位置データを収集するステップは、前記マーカーによって無線で伝達される前記位置信号を検出するステップを含むことを特徴とする、請求項25に記載の方法。
【請求項27】
前記マーカーは、無線で伝達される交流磁場に応答して、交流磁気位置信号を無線で伝達する小さな交流磁気トランスポンダを備え、前記位置データを収集するステップは、前記マーカーによって無線で伝達される交流磁気位置信号を検出するステップを含むことを特徴とする、請求項25に記載の方法。
【請求項28】
前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターとの間のオフセット座標を含むことを特徴とする、請求項25に記載の方法。
【請求項29】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約1秒の待ち時間内に、約1ミリ秒乃至約1秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項28に記載の方法。
【請求項30】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項28に記載の方法。
【請求項31】
前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約50ミリ秒の待ち時間内に、約20ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項28に記載の方法。
【請求項32】
前記客観的出力は、前記ターゲットの前記位置に関する外部基準座標系における座標を含み、前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記座標を前記ユーザ・インタフェースに送るステップを含むことを特徴とする、請求項25に記載の方法。
【請求項33】
前記周期は約12.5ミリ秒であることを特徴とする、請求項32に記載の方法。
【請求項34】
前記周期は約16.67ミリ秒であることを特徴とする、請求項32に記載の方法。
【請求項35】
前記周期は約20ミリ秒であることを特徴とする、請求項32に記載の方法。
【請求項36】
前記収集、決定及び供給手続きを実行しながら、前記放射線照射装置のアイソセンターに対して望ましい位置に前記ターゲットを配置するように、前記患者を配置するステップをさらに含むことを特徴とする、請求項25に記載の方法。
【請求項37】
前記客観的出力は、前記ターゲットの位置と前記放射線照射装置の前記アイソセンターに対する前記ターゲットの望ましい位置との間のオフセット座標を含み、前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項36に記載の方法。
【請求項38】
前記客観的出力を供給ステップは、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェースに送るステップを含むことを特徴とする、請求項37に記載の方法。
【請求項39】
前記客観的出力を供給ステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を、前記放射線照射装置に送るステップを含み、前記放射線照射装置は、前記オフセット座標によって患者支持台を自動的に移動させることを特徴とする、請求項37に記載の方法。
【請求項40】
前記収集、決定及び供給手続きを実行しながら、前記放射線照射装置からの放射線ビームで前記ターゲットを照射するステップをさらに含むことを特徴とする、請求項25に記載の方法。
【請求項41】
前記客観的出力は、前記ターゲットの位置と前記放射線照射装置のアイソセンターに対する前記ターゲットの望ましい位置との間のオフセット座標を含み、前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記放射線照射装置に送るステップを含むことを特徴とする、請求項40に記載の方法。
【請求項42】
前記オフセット座標によって前記放射線照射装置のパラメータを制御するステップをさらに含むことを特徴とする、請求項41に記載の方法。
【請求項43】
前記放射線照射装置の前記パラメータを制御するステップは、前記ターゲットが前記アイソセンターの許容範囲の外にあることを示す所定の値を前記オフセット座標が超えるとき、前記放射線ビームを終結させるステップを含むことを特徴とする、請求項42に記載の方法。
【請求項44】
前記放射線照射装置の前記パラメータを制御するステップは、前記オフセット座標によって患者支持台を自動的に移動させるステップを含むことを特徴とする、請求項42に記載の方法。
【請求項45】
患者体内のターゲットを治療する放射線治療において、該ターゲットを追跡する方法であって、
前記患者体内で前記ターゲットに関連する位置に配置されたマーカーの位置データを取得するステップと、
前記位置データに基づいて、外部基準座標系における前記マーカーの位置を決定するステップと、
ユーザ・インタフェースに対して、前記マーカーの前記決定された位置に基づいて前記ターゲットの位置を示す客観的出力を、(a)前記ユーザ・インタフェースでのターゲット位置の表示における一時停止がヒトにはすぐには認識できないように十分に高い頻度、及び(b)前記マーカーの前記位置データの取得と少なくとも実質的に同時となるように十分に短い待ち時間で供給するステップと、
を含む方法。
【請求項46】
前記マーカーは、無線で伝達される非イオン化励起エネルギーに応答して位置信号を無線で伝達する小さなトランスポンダを備え、前記位置データを取得するステップは、前記マーカーから無線で伝達される前記位置信号を検出するステップを含むことを特徴とする、請求項45に記載の方法。
【請求項47】
前記マーカーは、無線で伝達される交流磁場に応答して、交流磁気位置信号を無線で伝達する小さな交流磁気トランスポンダを備え、前記位置データを取得するステップは、前記マーカーにより無線で伝達される前記交流磁気位置信号を検出するステップを含むことを特徴とする、請求項45に記載の方法。
【請求項48】
前記位置データは時刻tnにおいて取得され、前記客観的出力は、前記ターゲットの前記位置と放射線照射装置のアイソセンターに対して前記ターゲットの望ましい位置との間のオフセット座標を含むことを特徴とする、請求項45に記載の方法。
【請求項49】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約1秒の待ち時間内に、約1ミリ秒乃至約1秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項48に記載の方法。
【請求項50】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項48に記載の方法。
【請求項51】
前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約50ミリ秒の待ち時間内に、約20ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を、前記ユーザ・インタフェース及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項48に記載の方法。
【請求項52】
前記位置データは時刻tnにおいて取得され、前記客観的出力は、前記外部座標系における前記ターゲットの位置に関連する座標を含み、前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記座標を、前記ユーザ・インタフェースに送るステップを含むことを特徴とする、請求項45に記載の方法。
【請求項53】
前記収集、決定及び供給手続きを実行しながら、放射線照射装置のアイソセンターに対して望ましい位置に前記ターゲットを配置するように、前記患者を配置するステップをさらに含むことを特徴とする、請求項45に記載の方法。
【請求項54】
前記位置データは時刻tnにおいて取得され、前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置の前記アイソセンターに対して前記ターゲットの望ましい位置との間のオフセット座標を含み、前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェース及び/又は前記放射線照射装置に送るステップを含むことを特徴とする、請求項45に記載の方法。
【請求項55】
前記客観的出力を供給するステップは、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェースに送るステップを含むことを特徴とする、請求項54に記載の方法。
【請求項56】
前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記放射線照射装置に送るステップを含み、前記放射線照射装置は、前記オフセット座標によって患者支持台を移動させることを特徴とする、請求項54に記載の方法。
【請求項57】
前記取得、決定及び供給手続きを実行しながら、放射線照射装置からの放射線ビームで前記ターゲットを照射するステップをさらに含むことを特徴とする、請求項45に記載の方法。
【請求項58】
前記位置データは時刻tnにおいて取得され、前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターに対して前記ターゲットの望ましい位置との間のオフセット座標を含み、前記客観的出力を供給するステップは、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記放射線照射装置に送るステップを含むことを特徴とする、請求項57に記載の方法。
【請求項59】
前記オフセット座標によって前記放射線照射装置のパラメータを制御するステップをさらに含むことを特徴とする、請求項58に記載の方法。
【請求項60】
前記放射線照射装置のパラメータを制御するステップは、前記ターゲットが前記アイソセンターの許容範囲の外にあることを示す所定の値を前記オフセット座標が超えるとき、放射線ビームを終結させるステップを含むことを特徴とする、請求項59に記載の方法。
【請求項61】
前記放射線照射装置のパラメータを制御するステップは、前記オフセット座標によって患者支持台を自動的に移動させるステップを含むことを特徴とする、請求項59に記載の方法。
【請求項62】
患者のターゲットを、該患者体内に該ターゲットに関連する位置に埋め込まれたマーカーを用いて治療するための放射線治療システムであって、
イオン化放射線ビームを発生するビーム発生器、アイソセンター、及び、前記ビームを前記アイソセンターに向ける照準器、を含む放射線照射装置と、
時刻tnにおいて前記マーカーの位置データを取得する検出器と、
前記位置データを受け取るために前記検出器と動作可能なように結合するコンピュータであって、前記位置データに基づいて前記マーカーの位置を決定し、前記ターゲットの位置を示す客観的出力を、時刻tnから2秒以下の待ち時間内に、2秒以下の周期で、ユーザ・インタフェース、メモリ・デバイス、及び/又は放射線照射装置に供給するコンピュータ動作可能媒体を有するコンピュータと、
を備えるシステム。
【請求項63】
非イオン化励起エネルギーを無線で伝達するように構成された励起源と、前記無線で伝達された非イオン化励起エネルギーに応答して位置信号を無線で伝達するように構成された小さなトランスポンダを有するマーカーとをさらに備え、前記検出器は、前記マーカーによって無線で伝達された前記位置信号を検出するように構成されることを特徴とする、請求項62に記載の放射線治療システム。
【請求項64】
交流磁場を無線で伝達するように構成された励起源と、前記無線で伝達された交流磁場に応答して交流磁気位置信号を無線で伝達する小さな交流磁気トランスポンダを有するマーカーとを備え、前記検出器は、前記マーカーによって無線で伝達された前記交流磁気位置信号を検出するように構成されたコイルを含むことを特徴とする、請求項62に記載の放射線治療システム。
【請求項65】
前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターに対して前記ターゲットの望ましい位置との間のオフセット座標を含むことを特徴とする、請求項62に記載の放射線治療システム。
【請求項66】
前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約1秒の待ち時間内に、約1ミリ秒乃至約1秒の周期で、前記オフセット座標を前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送ることを特徴とする、請求項65に記載の放射線治療システム。
【請求項67】
前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送ることを特徴とする、請求項65に記載の放射線治療システム。
【請求項68】
前記コンピュータ動作可能媒体は、時刻tnから約10ミリ秒乃至約50ミリ秒の待ち時間内に、約20ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送ることを特徴とする、請求項65に記載の放射線治療システム。
【請求項69】
前記客観的出力は、前記ターゲットの前記位置に関する前記外部基準座標系における座標を含み、前記コンピュータ動作可能媒体は、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記座標を前記ユーザ・インタフェースに送ることを特徴とする、請求項65に記載の放射線治療システム。
【請求項70】
前記コンピュータ動作可能媒体は、前記ターゲットを前記放射線照射装置のアイソセンターに対して望ましい位置に配置するように前記患者を配置するための信号を送ることを特徴とする、請求項62に記載の放射線治療システム。
【請求項71】
前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターとの間のオフセット座標を含み、前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェース、前記メモリ・デバイス及び/又は前記放射線照射装置に送ることを特徴とする、請求項70に記載の放射線治療システム。
【請求項72】
前記コンピュータ動作可能媒体は、時刻tnから約10ミリ秒乃至約100ミリ秒の待ち時間内に、約10ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記ユーザ・インタフェースに送ることを特徴とする、請求項71に記載の放射線治療システム。
【請求項73】
前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約50ミリ秒の周期で、前記オフセット座標を前記放射線照射装置に送り、前記放射線照射装置は前記オフセット座標によって患者支持台を自動的に移動させるように構成されることを特徴とする、請求項71に記載の放射線治療システム。
【請求項74】
前記客観的出力は、前記ターゲットの前記位置と前記放射線照射装置のアイソセンターとの間のオフセット座標を含み、前記コンピュータ動作可能媒体は、時刻tnから約1ミリ秒乃至約100ミリ秒の待ち時間内に、約1ミリ秒乃至約200ミリ秒の周期で、前記座標を前記放射線照射装置に送ることを特徴とする、請求項62に記載の放射線治療システム。
【請求項75】
患者のターゲットを、該患者体内に該ターゲットに関連する位置に埋め込まれたマーカーを用いて治療するための追跡システムであって、
時刻tnにおいて前記マーカーの位置データを取得する検出器と、
前記位置データを受け取るために前記検出器と動作可能なように結合するコンピュータであって、前記位置データに基づいて前記マーカーの位置を決定し、時刻tnから10−200ミリ秒の待ち時間内に、10−100ミリ秒の周期で、前記ターゲットの位置を示す客観的出力を供給するコンピュータ動作可能媒体を有するコンピュータと、
を備えるシステム。
【請求項76】
イオン化放射線を用いて患者のターゲットを治療する方法であって、
イオン化放射線のビームを発生し、該ビームを前記ターゲットに向けるステップと、
前記ビームを前記ビーム・アイソセンターに向けながら、患者体内の前記ターゲットに関連する位置に埋め込まれたマーカーの位置情報を収集するステップと、
前記収集された位置情報に基づいて、前記ビーム・アイソセンターに対する前記ターゲットの位置を示す客観的出力を供給するステップと、
前記客観的出力を前記ビームのパラメータと相関させるステップと、
を含む方法。
【請求項77】
イオン化放射線を用いて患者のターゲットを治療する方法であって、
イオン化放射線のビームを発生し、マルチリーフ・コリメータを用いて該ビームを前記ターゲットに向けるステップと、
前記ビームを前記ビーム・アイソセンターに向けながら、患者体内の前記ターゲットに関連する位置に埋め込まれたマーカーの位置情報を収集するステップと、
前記収集された位置情報に基づいて、前記ビーム・アイソセンターに対する前記患者の前記ターゲットの位置を示す客観的出力を供給し、前記客観的出力に基づいてマルチリーフ・コリメータの配置を制御するステップと、
を含む方法。
【請求項78】
イオン化放射線を用いて患者のターゲットを治療する方法であって、
イオン化放射線のビームを発生し、該ビームを前記ターゲットに向けるステップと、
(a)前記ビームを前記ビーム・アイソセンターに向けながら、患者体内の前記ターゲットに関連する位置に埋め込まれたマーカーの位置情報を収集し、そして(b)前記ビームを前記ビーム・アイソセンターに、位置決めシステムを再較正することなしに少なくとも10秒間向けながら、前記マーカーの前記収集された位置情報に基づいて、前記ビーム・アイソセンターに対する前記ターゲットの位置を示す客観的出力を供給するための、位置決めシステムを操作するステップと、
を含む方法。
【図1】


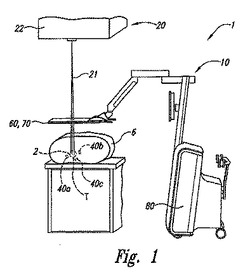
【図2】
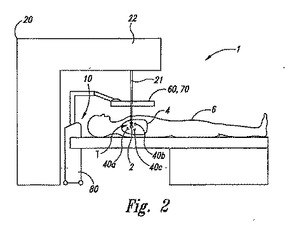
【図3】
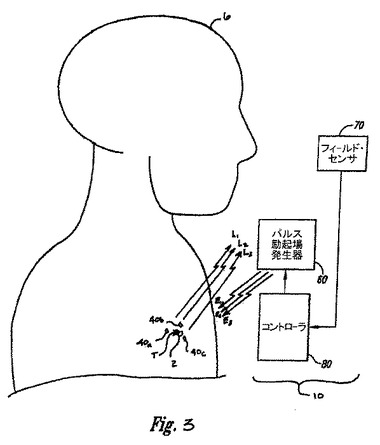
【図4】
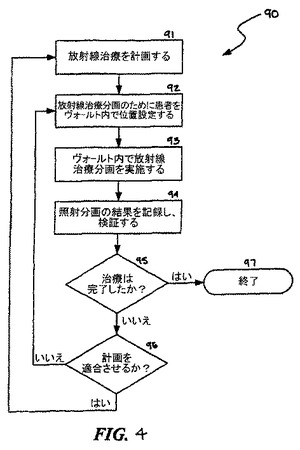
【図5A】
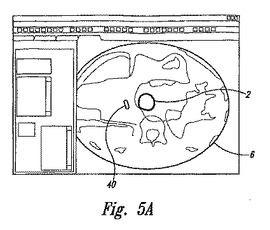
【図5B】
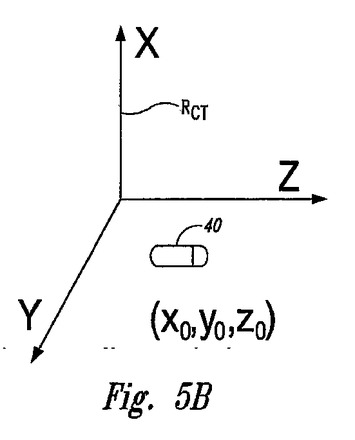
【図6】
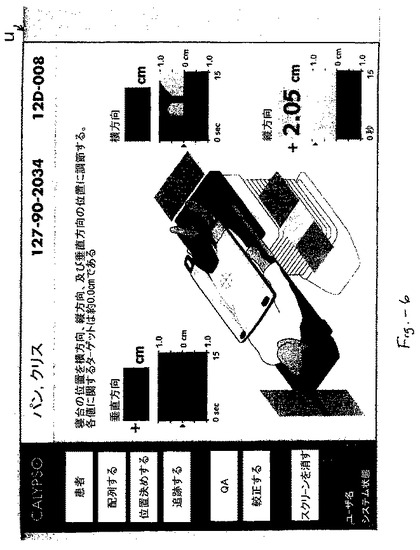
【図7】
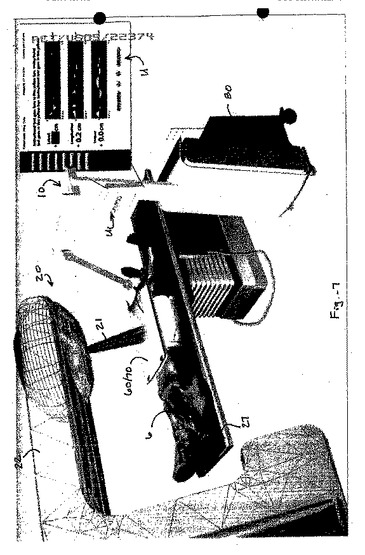
【図8A】
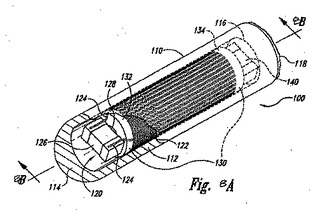
【図8B】
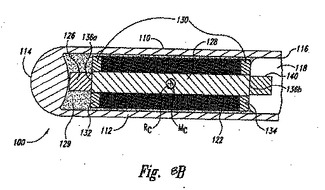
【図8C】
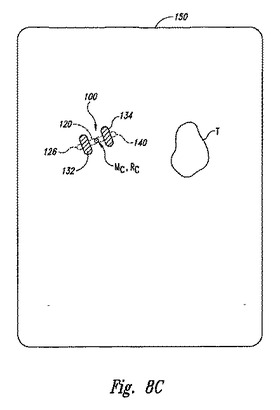
【図9A】

【図9B】

【図10A】
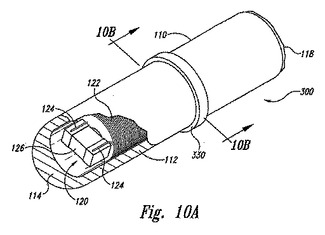
【図10B】
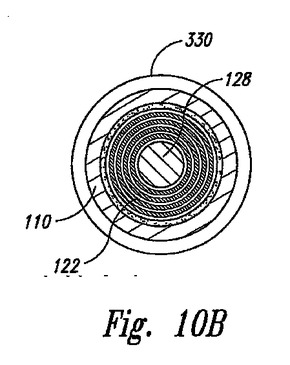
【図11】
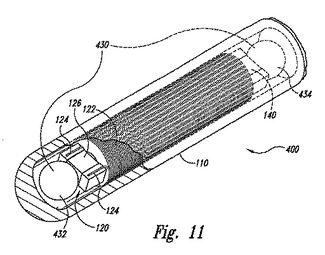
【図12】
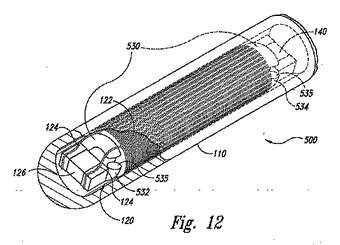
【図13】
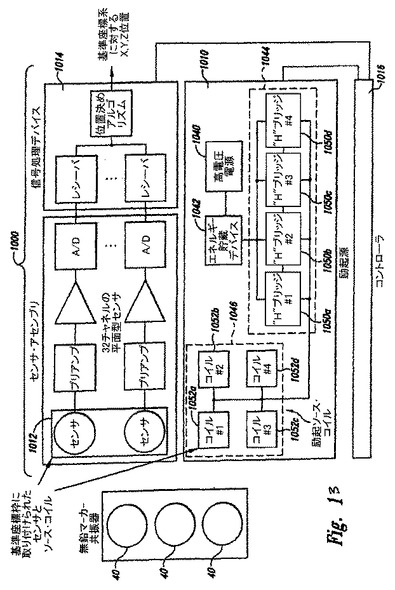
【図14】
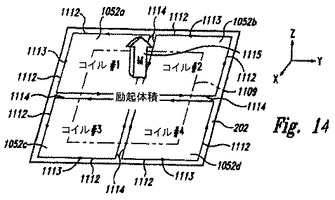
【図15】
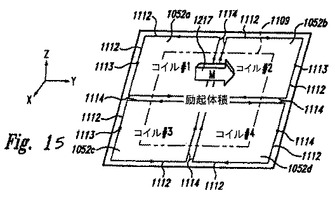
【図16】
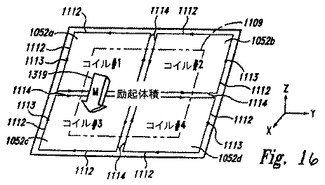
【図17】
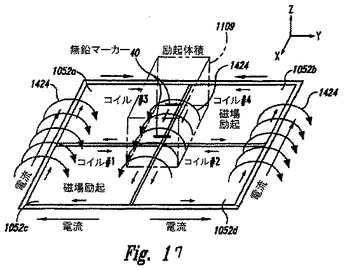
【図18】
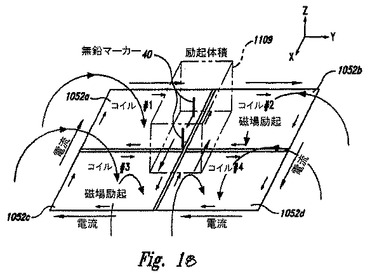
【図19A】
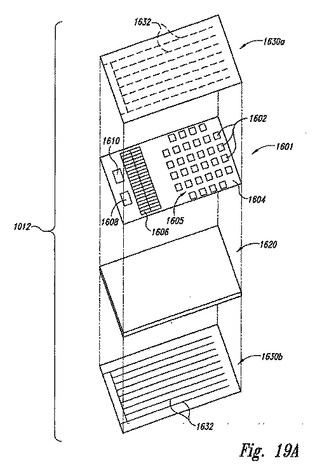
【図19B】
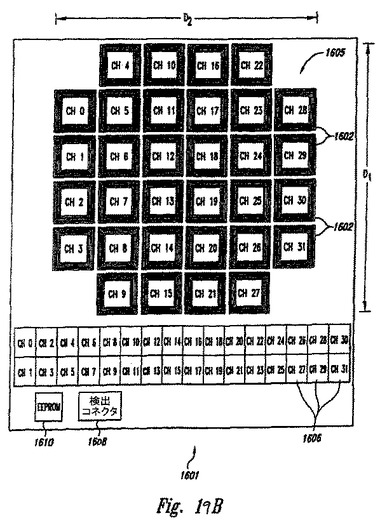
【図20】
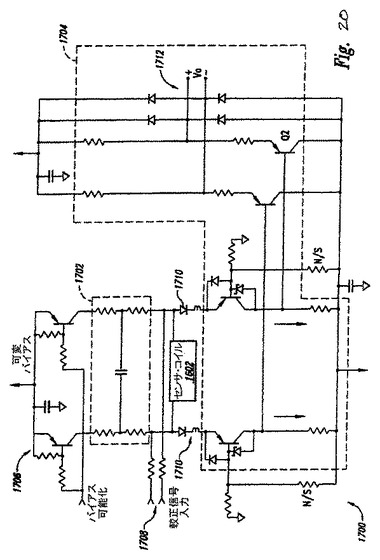
【図21】
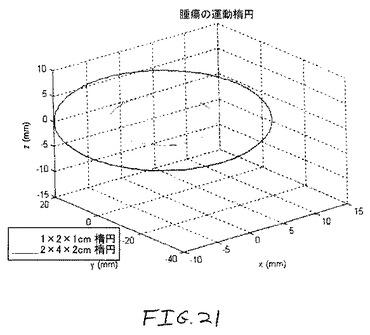
【図22】
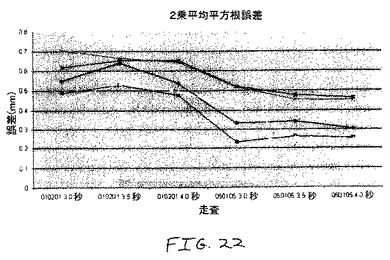
【図23】
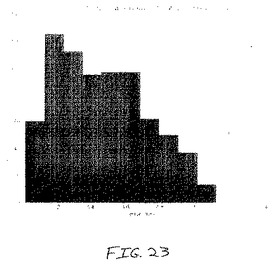
【図24】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図9A】
【図9B】
【図10A】
【図10B】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19A】
【図19B】
【図20】
【図21】
【図22】
【図23】
【図24】
【公表番号】特表2008−507329(P2008−507329A)
【公表日】平成20年3月13日(2008.3.13)
【国際特許分類】
【出願番号】特願2007−522514(P2007−522514)
【出願日】平成17年6月24日(2005.6.24)
【国際出願番号】PCT/US2005/022374
【国際公開番号】WO2006/023055
【国際公開日】平成18年3月2日(2006.3.2)
【出願人】(504233731)カリプソー メディカル テクノロジーズ インコーポレイテッド (6)
【Fターム(参考)】
【公表日】平成20年3月13日(2008.3.13)
【国際特許分類】
【出願日】平成17年6月24日(2005.6.24)
【国際出願番号】PCT/US2005/022374
【国際公開番号】WO2006/023055
【国際公開日】平成18年3月2日(2006.3.2)
【出願人】(504233731)カリプソー メディカル テクノロジーズ インコーポレイテッド (6)
【Fターム(参考)】
[ Back to top ]