
放射線治療装置およびガントリ角度制限方法
【課題】放射線照射装置を支持するガントリの回転を機械的に制限するときの回転可能範囲を拡大すること。
【解決手段】ガントリ14に接合される固定ストッパ51と、ガントリ14を回転可能に支持するOリング12に接合される切替ストッパ53とを備えている。切替ストッパ53は、第1状態でガントリ14がガントリ回転正方向極限角度をガントリ回転正方向58の反対方向に回転するときに第2状態に遷移し、第2状態でガントリ14がガントリ回転正方向極限角度をガントリ回転正方向58に回転するときに第1状態に遷移し、第1状態でガントリ14がガントリ回転正方向極限角度をガントリ回転正方向58に回転するときに固定ストッパ51と衝突する。すなわち、切替ストッパ53と固定ストッパ51とは、ガントリ回転正方向極限角度から、ガントリ14をガントリ回転正方向58の反対方向に1回転以上回転しても回転を制限しない。
【解決手段】ガントリ14に接合される固定ストッパ51と、ガントリ14を回転可能に支持するOリング12に接合される切替ストッパ53とを備えている。切替ストッパ53は、第1状態でガントリ14がガントリ回転正方向極限角度をガントリ回転正方向58の反対方向に回転するときに第2状態に遷移し、第2状態でガントリ14がガントリ回転正方向極限角度をガントリ回転正方向58に回転するときに第1状態に遷移し、第1状態でガントリ14がガントリ回転正方向極限角度をガントリ回転正方向58に回転するときに固定ストッパ51と衝突する。すなわち、切替ストッパ53と固定ストッパ51とは、ガントリ回転正方向極限角度から、ガントリ14をガントリ回転正方向58の反対方向に1回転以上回転しても回転を制限しない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、放射線治療装置およびガントリ角度制限方法に関し、特に、患部に放射線を照射することにより患者を治療するときに利用される放射線治療装置およびガントリ角度制限方法に関する。
【背景技術】
【0002】
患部(腫瘍)に治療用放射線を照射することにより患者を治療する放射線治療が知られている。その放射線治療は、CT技術の発達並びにコンピュータ技術の発達による放射線治療計画装置の発展により、高精度な体内線量分布予測に基づいて治療計画が立案され、その治療計画を再現し高精度に治療を行うことができる。このような放射線治療では、その患部に互いに異なる方向から治療用放射線が照射される。その放射線治療を実行する放射線治療装置は、回転可能に支持されているガントリと、そのガントリに支持されている治療用放射線照射装置とを備えている。ユーザは、そのガントリを回転させることにより治療用放射線照射装置を所定の位置に駆動して、その治療用放射線照射装置を用いて治療用放射線を患者の患部に照射する。
【0003】
その放射線治療装置は、さらに、そのガントリに支持される装置と外部装置との間に電気信号を伝送するケーブルを備えている。そのケーブルは、その放射線治療装置がそのガントリの回転を制御することができなくなる暴走状態に陥ったときに、そのガントリが多回転することにより破断してしまい、その電気信号を伝送することができなくなることがある。このような放射線治療装置は、スリップリングを介して、そのガントリに支持される装置とその外部装置とを電気的に接続することにより、そのガントリが多回転してもその電気信号を連続的に伝送することができる。しかしながら、このようなスリップリングは、そのガントリの回転によりその電気信号にノイズが乗り易く、その放射線治療装置に適当でない。このため、このような放射線治療装置は、一般的に、そのスリップリングが適用されないで、ガントリの回転を制御できなくなる暴走状態に陥った場合に備えてガントリの回転を機械的に停止させる停止機構が設けられている。
【0004】
その停止機構としては、そのガントリの回転可能角度を0〜360°(±180°)に制限するものが例示され、極限センサまたはメカストッパが例示される。このような放射線治療装置は、このようなガントリの角度制限が治療の選択肢を狭めることがある。放射線治療装置は、ガントリの回転を制御できなくなる暴走状態に陥った場合に備えてガントリの回転を機械的に停止させ、かつ、治療用放射線照射装置が駆動される範囲を拡大することが望まれている。
【0005】
実開昭58−108853号公報には、ガントリの回転範囲を広げて、治療機能を増やした回転角度制限機構が開示されている。その回転角度制限機構は、正逆に回転できる回転体の外周に沿って設けられた両端にある突起部とこれら突起部の中間にある円弧部とからなるカムと、前記回転体の外側にある固定端に設けられたブロックと、このブロックに支持された前記回転体の回転軸と平行な回転軸をもって回転する従回転板と、この従回転板の外周近傍でこの従回転板の一方に突出して設けられかつ前記カムの前記突起部にはつき当るが前記円弧部には当らないように設けられた複数のピンと、これらピンを設けた前記従回転板の裏面に突出して設けられこの従回転板の回転により前記ブロックにつき当るストッパとを含み構成される。
【0006】
【特許文献1】実開昭58−108853号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の課題は、放射線照射装置を支持するガントリの回転を機械的に制限するときの回転可能な範囲を拡大する放射線治療装置を提供することにある。
本発明の他の課題は、放射線照射装置を支持するガントリの回転を機械的に制限するストッパの構造がより簡易である放射線治療装置を提供することにある。
本発明のさらに他の課題は、放射線照射装置を支持するガントリの回転を機械的に制限するストッパの破損を防止する放射線治療装置およびガントリ角度制限方法を提供することにある。
【課題を解決するための手段】
【0008】
以下に、発明を実施するための最良の形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための最良の形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0009】
本発明による放射線治療装置(3)は、治療用放射線(23)を出射する放射線照射装置(16)を支持する走行ガントリ(14)と、走行ガントリ(14)を回転可能に支持するOリング(12)と、Oリング(12)または走行ガントリ(14)の一方(14)に接合される固定ストッパ(51)と、Oリング(12)または走行ガントリ(14)の他方(12)に接合される切替メカストッパ(53)とを備えている。切替メカストッパ(53)は、第1状態にある場合で、Oリング(12)に対して走行ガントリ(14)が正方向極限角度をガントリ回転正方向(58)に回転するときに、固定ストッパ(51)に接触することにより走行ガントリ(14)がガントリ回転正方向(58)に回転することを停止させる。切替メカストッパ(53)は、その第1状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)の反対方向(59)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第1状態から第2状態に遷移する。すなわち、走行ガントリ(14)は、切替メカストッパ(53)と固定ストッパ(51)とによりガントリ回転正方向(58)への回転が制限される正方向極限角度からガントリ回転正方向(58)の反対方向(59)に1回転回転しても、切替メカストッパ(53)と固定ストッパ(51)とによりガントリ回転正方向(58)の反対方向(59)への回転が制限されない。このため、放射線治療装置(3)は、走行ガントリ(14)の回転を機械的に制限するときの回転可能な範囲を一回転以上に拡大することができ、放射線照射装置(16)が駆動される範囲を拡大することができる。
【0010】
切替メカストッパ(53)は、その第2状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第2状態からその第1状態に遷移する。すなわち、走行ガントリ(14)は、切替メカストッパ(53)と固定ストッパ(51)とによりガントリ回転正方向(58)への回転が制限された正方向極限角度からガントリ回転正方向(58)の反対方向(59)に1回転以上回転した後に、ガントリ回転正方向(58)に1回転以上回転することができる。このため、放射線治療装置(3)は、走行ガントリ(14)の回転を機械的に制限するときの回転可能な範囲を一回転以上に拡大することができ、放射線照射装置(16)が駆動される範囲を拡大することができる。
【0011】
切替メカストッパ(53)は、ストッパ本体(71)とストッパ(73)とを備えている。ストッパ本体(71)は、他方(12)に回転可能に支持されている。ここで、切替メカストッパ(53)は、その第2状態にあるときにストッパ本体(71)がストッパ回転正方向(83)に回転することによりその第2状態からその第1状態に遷移し、その第1状態にあるときにストッパ本体(71)がストッパ回転正方向(83)の反対方向に回転することによりその第1状態からその第2状態に遷移する。ストッパ(73)は、切替メカストッパ(53)がその第1状態にあるときに、ストッパ本体(71)をストッパ回転正方向(83)に回転しないようにストッパ本体(71)に接触する。ストッパ(73)は、切替メカストッパ(53)がその第2状態にあるときに、ストッパ本体(71)をストッパ回転正方向(83)の反対方向に回転しないようにもしている。ストッパ本体(71)は、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、固定ストッパ(51)に衝突することによりストッパ回転正方向(83)に回転する。ストッパ本体(71)は、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、固定ストッパ(51)に衝突することによりストッパ回転正方向(83)の反対方向に回転する。すなわち、切替メカストッパ(53)は、その第1状態にあるときに、ストッパ本体(71)がストッパ回転正方向(83)の反対方向に回転することによりその第2状態に遷移し、その第2状態にあるときに、ストッパ本体(71)がストッパ回転正方向(83)に回転することによりその第1状態に遷移する。このとき、ストッパ本体(71)は、切替メカストッパ(53)が第1状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、固定ストッパ(51)との衝突によりストッパ回転正方向(83)に回転しないで、走行ガントリ(14)のガントリ回転正方向(58)の回転を停止させる。
【0012】
切替メカストッパ(53)は、弾性体(74)をさらに備えている。弾性体(74)は、切替メカストッパ(53)がその第1状態にあるときに、ストッパ本体(71)がストッパ回転正方向(83)に回転するようにストッパ本体(71)に弾性力を印加し、切替メカストッパ(53)がその第2状態にあるときに、ストッパ本体(71)がストッパ回転正方向(83)の反対方向に回転するようにストッパ本体(71)に弾性力を印加する。このとき、ストッパ本体(71)は、その第1状態と第2状態との中間の中途半端な状態で止まってしまうことが防止され、切替メカストッパ(53)は、誤動作が防止される。
【0013】
本発明による放射線治療装置(3)は、他方(12)に接合される他の切替メカストッパ(54)をさらに備えている。他の切替メカストッパ(54)は、第3状態にある場合で、走行ガントリ(14)がその負方向極限角度をガントリ回転正方向(58)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第3状態から第4状態に遷移する。他の切替メカストッパ(54)は、その第4状態にある場合で、走行ガントリ(14)がその負方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)の反対方向(59)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第4状態からその第3状態に遷移する。他の切替メカストッパ(54)は、その第3状態にある場合で、走行ガントリ(14)が負方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、固定ストッパ(51)に接触することにより走行ガントリ(14)がガントリ回転正方向(58)の反対方向(59)に回転することを停止させる。すなわち、走行ガントリ(14)は、固定ストッパ(51)と他の切替メカストッパ(54)とによりガントリ回転正方向(58)の反対方向(59)への回転が制限される負方向極限角度からガントリ回転正方向(58)に1回転しても、他の切替メカストッパ(54)と固定ストッパ(51)とによりガントリ回転正方向(58)への回転が制限されない。このとき、放射線照射装置(16)が駆動される範囲は、切替メカストッパ(53)と他の切替メカストッパ(54)とが配置される位置により決定する。このため、放射線治療装置(3)は、切替メカストッパ(53)と他の切替メカストッパ(54)とが適切に配置されることにより、放射線照射装置(16)が駆動される範囲を所望の範囲に設計されることができる。
【0014】
本発明による放射線治療装置(3)は、Oリング(12)または走行ガントリ(14)の一方(14)に接合される他の固定ストッパ(61)と、Oリング(12)または走行ガントリ(14)の他方(12)に接合される他の切替メカストッパ(64)とをさらに備えている。他の切替メカストッパ(64)は、第3状態にある場合で、走行ガントリ(14)がその負方向極限角度をガントリ回転正方向(58)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)に回転することを停止させないで、他の固定ストッパ(61)に接触することによりその第3状態から第4状態に遷移する。他の切替メカストッパ(64)は、その第4状態にある場合で、走行ガントリ(14)がその負方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)の反対方向(59)に回転することを停止させないで、他の固定ストッパ(61)に接触することによりその第4状態からその第3状態に遷移する。他の切替メカストッパ(64)は、その第3状態にある場合で、走行ガントリ(14)が負方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、他の固定ストッパ(61)に接触することにより走行ガントリ(14)がガントリ回転正方向(58)の反対方向(59)に回転することを停止させる。すなわち、走行ガントリ(14)は、他の固定ストッパ(61)と他の切替メカストッパ(64)とによりガントリ回転正方向(58)の反対方向(59)への回転が制限される負方向極限角度からガントリ回転正方向(58)に1回転しても、他の切替メカストッパ(64)と他の固定ストッパ(61)とによりガントリ回転正方向(58)への回転が制限されない。このとき、放射線照射装置(16)が駆動される範囲は、固定ストッパ(51)と切替メカストッパ(53)と他の固定ストッパ(61)と他の切替メカストッパ(64)とが配置される位置により決定する。このため、放射線治療装置(3)は、固定ストッパ(51)と切替メカストッパ(53)と他の固定ストッパ(61)と他の切替メカストッパ(64)とが適切に配置されることにより、放射線照射装置(16)が駆動される範囲を所望の範囲に設計されることができる。
【0015】
本発明による放射線治療装置(3)は、切替メカストッパ(53)の状態を検出するストッパ切替センサ(55)と、走行ガントリ(14)の角度が所定範囲内にあるかどうかを検出する極限センサ(57)とをさらに備えている。このとき、放射線治療装置(3)は、その測定された状態とその角度とに基づいて、切替メカストッパ(53)と固定ストッパ(51)とにより回転が制限される直前のタイミングを検出することができる。
【0016】
本発明による放射線治療装置(3)は、走行ガントリ(14)の角度がその所定範囲内にあるときに極限センサ(57)に接触するドグ(52)をさらに備えている。ドグ(52)は、切替メカストッパ(53)に接触しないように一方(14)に接合されていることが好ましい。
【0017】
本発明による放射線治療装置(3)は、その角度が所定範囲内にあり、かつ、その測定された状態がその第1状態にあるときに、Oリング(12)に対して走行ガントリ(14)を制動するブレーキをさらに備えている。放射線治療装置(3)は、固定ストッパと切替メカストッパが強烈に衝突しないようにすることができる。
【0018】
そのブレーキは、Oリング(12)に対して走行ガントリ(14)を駆動する駆動装置と、その角度がその所定範囲内にあり、かつ、その測定された状態がその第1状態にあるときに、Oリング(12)に対して走行ガントリ(14)が停止するようにその駆動装置を制御する制御装置(5)を備えている。すなわち、Oリング(12)に対して走行ガントリ(14)を駆動する駆動装置は、固定ストッパと切替メカストッパが強烈に衝突しないようにOリング(12)に対して走行ガントリ(14)を制動するブレーキに兼用することが好ましい。
【0019】
本発明による放射線治療装置(3)は、その一方(14)に接合される他の固定ストッパ(61)と、その他方(12)に接合される他の切替メカストッパ(63)とをさらに備えている。他の切替メカストッパ(63)は、第1状態にある場合で、走行ガントリ(14)が正方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、その第1状態から第2状態に遷移する。その第2状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、その第2状態からその第1状態に遷移する。その第1状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、他の固定ストッパ(61)と衝突して、走行ガントリ(14)がガントリ回転正方向(58)に回転することを停止させる。
【0020】
固定ストッパ(51)が接合される一方は、走行ガントリ(14)であり、切替メカストッパ(53)が接合される他方は、Oリング(12)であることが好ましい。
【0021】
本発明によるガントリ角度制限方法は、放射線治療装置(3)を用いて実行される。放射線治療装置(3)は、治療用放射線(23)を出射する放射線照射装置(16)を支持する走行ガントリ(14)と、走行ガントリ(14)を回転可能に支持するOリング(12)と、Oリング(12)または走行ガントリ(14)の一方(14)に接合される固定ストッパ(51)と、Oリング(12)または走行ガントリ(14)の他方(12)に接合される切替メカストッパ(53)と、ストッパ切替センサ(55)と、極限センサ(57)と、ブレーキとを備えている。切替メカストッパ(53)は、第1状態にある場合で、Oリング(12)に対して走行ガントリ(14)が正方向極限角度をガントリ回転正方向(58)に回転するときに、固定ストッパ(51)に接触することにより走行ガントリ(14)がガントリ回転正方向(58)に回転することを停止させる。切替メカストッパ(53)は、その第1状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)の反対方向(59)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第1状態から第2状態に遷移する。切替メカストッパ(53)は、その第2状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第2状態からその第1状態に遷移する。
すなわち、走行ガントリ(14)は、切替メカストッパ(53)と固定ストッパ(51)とによりガントリ回転正方向(58)への回転が制限された正方向極限角度からガントリ回転正方向(58)の反対方向(59)に1回転以上回転した後に、ガントリ回転正方向(58)に1回転以上回転することができる。このため、放射線治療装置(3)は、走行ガントリ(14)の回転を機械的に制限するときの回転可能な範囲を一回転以上に拡大することができ、放射線照射装置(16)が駆動される範囲を拡大することができる。本発明によるガントリ角度制限方法は、ストッパ切替センサ(55)を用いて切替メカストッパ(53)の状態を検出するステップと、極限センサ(57)を用いて走行ガントリ(14)の角度が所定範囲内にあるかどうかを検出するステップと、その角度が所定範囲内にあり、かつ、その測定された状態がその第1状態にあるときに、そのブレーキを用いてOリング(12)に対して走行ガントリ(14)を制動するステップとを備えている。このようなガントリ角度制限方法によれば、切替メカストッパ(53)と固定ストッパ(51)とにより回転が制限される直前のタイミングを検出することができ、そのタイミングで走行ガントリ(14)を制動することにより固定ストッパ(51)と切替メカストッパ(53)が強烈に衝突しないようにすることができる。
【発明の効果】
【0022】
本発明による放射線治療装置は、ガントリ回転正方向への回転が制限された極限角度から、ガントリ回転正方向の反対方向に1回転回転しても、ガントリ回転正方向の反対方向への回転が制限されない。このため、本発明による放射線治療装置は、ガントリの回転を機械的に制限するときの回転可能な範囲を一回転以上に拡大することができ、放射線照射装置が駆動される範囲を拡大することができる。
【発明を実施するための最良の形態】
【0023】
図面を参照して、本発明による放射線治療装置の実施の形態を記載する。その放射線治療装置3は、図1に示されているように、制御装置5を備えている。制御装置5は、パーソナルコンピュータに例示されるコンピュータである。制御装置5は、双方向に情報を伝送することができるように、放射線治療装置3に接続されている。
【0024】
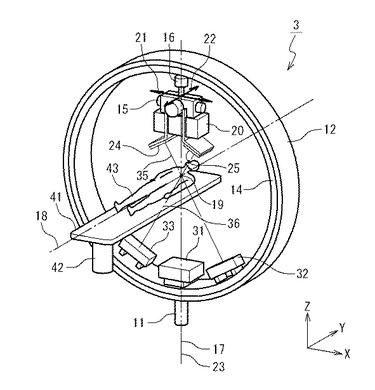
図2は、放射線治療装置3を示している。放射線治療装置3は、旋回駆動装置11とOリング12と走行ガントリ14と首振り機構15と治療用放射線照射装置16とを備えている。旋回駆動装置11は、回転軸17を中心に回転可能にOリング12を土台に支持し、制御装置5により制御されて回転軸17を中心にOリング12を回転させる。回転軸17は、鉛直方向に平行である。Oリング12は、回転軸18を中心とするリング状に形成され、回転軸18を中心に回転可能に走行ガントリ14を支持している。回転軸18は、鉛直方向に垂直であり、回転軸17に含まれるアイソセンタ19を通る。回転軸18は、さらに、Oリング12に対して固定され、すなわち、Oリング12とともに回転軸17を中心に回転する。走行ガントリ14は、回転軸18を中心とするリング状に形成され、Oリング12のリングと同心円になるように配置されている。放射線治療装置3は、さらに、図示されていない走行駆動装置を備えている。その走行駆動装置は、制御装置5により制御されて回転軸18を中心に走行ガントリ14を回転させる。
【0025】
首振り機構15は、走行ガントリ14のリングの内側に固定され、治療用放射線照射装置16が走行ガントリ14の内側に配置されるように、治療用放射線照射装置16を走行ガントリ14に支持している。首振り機構15は、パン軸21およびチルト軸22を有している。チルト軸22は、走行ガントリ14に対して固定され、回転軸18に交差しないで回転軸18に平行である。パン軸21は、チルト軸22に直交している。首振り機構15は、制御装置5により制御されて、パン軸21を中心に治療用放射線照射装置16を回転させ、チルト軸22を中心に治療用放射線照射装置16を回転させる。
【0026】
治療用放射線照射装置16は、制御装置5により制御されて、治療用放射線23を放射する。治療用放射線23は、パン軸21とチルト軸22とが交差する交点を通る直線に概ね沿って放射される。治療用放射線23は、一様強度分布を持つように形成されている。治療用放射線照射装置16は、MLC(マルチリーフコリメータ)20を備えている。そのMLC20は、制御装置5により制御され、治療用放射線23の一部を遮蔽することにより、治療用放射線23が患者に照射されるときの照射野の形状を変更する。
【0027】
治療用放射線23は、このように治療用放射線照射装置16が走行ガントリ14に支持されることにより、首振り機構15で治療用放射線照射装置16がアイソセンタ19に向かうように一旦調整されると、旋回駆動装置11によりOリング12が回転し、または、その走行駆動装置により走行ガントリ14が回転しても、常に概ねアイソセンタ19を通る。即ち、走行・旋回を行うことで任意方向からアイソセンタ19に向けて治療用放射線23の照射が可能になる。
【0028】
放射線治療装置3は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置3は、診断用X線源24、25とセンサアレイ32、33とを備えている。診断用X線源24は、走行ガントリ14に支持されている。診断用X線源24は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源24を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源24は、制御装置5により制御されてアイソセンタ19に向けて診断用X線35を放射する。診断用X線35は、診断用X線源24が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。診断用X線源25は、走行ガントリ14に支持されている。診断用X線源25は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源25を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源25は、制御装置5により制御されてアイソセンタ19に向けて診断用X線36を放射する。診断用X線36は、診断用X線源25が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。
【0029】
センサアレイ32は、走行ガントリ14に支持されている。センサアレイ32は、診断用X線源24により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線35を受光して、その被写体の透過画像を生成する。センサアレイ33は、走行ガントリ14に支持されている。センサアレイ33は、診断用X線源25により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線36を受光して、その被写体の透過画像を生成する。センサアレイ32、33としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0030】
このようなイメージャシステムによれば、センサアレイ32、33により得た画像信号に基づき、アイソセンタ19を中心とする透過画像を生成することができる。
【0031】
放射線治療装置3は、さらに、センサアレイ31を備えている。センサアレイ31は、センサアレイ31と治療用放射線照射装置16とを結ぶ線分がアイソセンタ19を通るように配置されて、走行ガントリ14のリングの内側に固定されている。センサアレイ31は、治療用放射線照射装置16により放射されてアイソセンタ19の周辺の被写体を透過した治療用放射線23を受光して、その被写体の透過画像を生成する。センサアレイ31としては、FPD、X線IIが例示される。
【0032】
放射線治療装置3は、さらに、カウチ41とカウチ駆動装置42とを備えている。カウチ41は、放射線治療システム1により治療される患者43が横臥することに利用される。カウチ41は、図示されていない固定具を備えている。その固定具は、その患者が動かないように、その患者をカウチ41に固定する。カウチ駆動装置42は、カウチ41を土台に支持し、制御装置5により制御されてカウチ41を移動させる。
【0033】
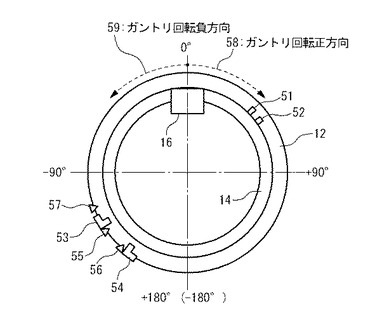
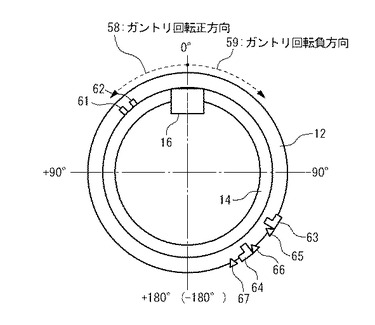
放射線治療装置3は、さらに、ガントリ角度制限装置を備えている。そのガントリ角度制限装置は、図3に示されているように、固定ストッパ51と正方向極限センサ用ドグ52と切替メカストッパ53と切替メカストッパ54とストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とを備えている。固定ストッパ51は、走行ガントリ14の一部に接合されている。正方向極限センサ用ドグ52は、走行ガントリ14の固定ストッパ51のガントリ回転正方向側の近傍に接合されている。切替メカストッパ53は、走行ガントリ14が初期状態から正方向極限角度(たとえば、+190度)までガントリ回転正方向58に回転したときに、固定ストッパ51の近傍に配置されるように、Oリング12に配置されている。その初期状態は、治療用放射線照射装置16がアイソセンタ19の鉛直上側に配置されている状態を示している。切替メカストッパ54は、走行ガントリ14が初期状態から負方向極限角度(たとえば、−190度)までガントリ回転負方向59に回転したときに、固定ストッパ51の近傍に配置されるように、Oリング12に配置されている。ストッパ切替センサ55は、Oリング12のうちの切替メカストッパ53の近傍に配置され、図示されていないケーブルを介して制御装置5に情報伝達可能に接続されている。ストッパ切替センサ55は、切替メカストッパ53の状態を検出し、そのケーブルを介してその検出結果を制御装置5に出力する。ストッパ切替センサ56は、Oリング12のうちの切替メカストッパ54の近傍に配置され、図示されていないケーブルを介して制御装置5に情報伝達可能に接続されている。ストッパ切替センサ56は、切替メカストッパ54の状態を検出し、そのケーブルを介してその検出結果を制御装置5に出力する。正方向極限センサ57は、走行ガントリ14が初期状態から概ね正方向極限角度だけガントリ回転正方向58に回転したときに、正方向極限センサ用ドグ52の近傍に配置されるように、Oリング12に配置されている。正方向極限センサ57は、さらに、図示されていないケーブルを介して制御装置5に情報伝達可能に接続されている。正方向極限センサ57は、正方向極限センサ用ドグ52が近傍に配置されているかどうかを検出することにより、走行ガントリ14が正方向極限領域に配置されているかどうかを検出し、そのケーブルを介してその検出結果を制御装置5に出力する。その正方向極限領域は、走行ガントリ14が正方向極限角度からガントリ回転負方向59に所定の角度(たとえば、2度)だけ回転した角度までの領域を示し、たとえば、+190度〜+188度(−170度〜−172度)の範囲を示している。固定ストッパ51と正方向極限センサ用ドグ52と切替メカストッパ53と切替メカストッパ54とストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とは、Oリング12または走行ガントリ14の同じ側に配置されている。
【0034】
ストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とがOリング12に接合されていることによれば、ストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とが走行ガントリ14に接合されていることに比較して、制御装置5と接続するケーブルがより短く設計することができ、好ましい。なお、そのケーブルの長さに頓着しない場合には、ストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とを走行ガントリ14に配置し、固定ストッパ51と正方向極限センサ用ドグ52とをOリング12に配置することもできる。
【0035】
そのガントリ角度制限装置は、さらに、図4に示されているように、固定ストッパ61と負方向極限センサ用ドグ62と切替メカストッパ63と切替メカストッパ64とストッパ切替センサ65とストッパ切替センサ66と負方向極限センサ67とを備えている。固定ストッパ61と負方向極限センサ用ドグ62とは、走行ガントリ14の固定ストッパ51と正方向極限センサ用ドグ52とが配置される面の反対側の面に配置されている。切替メカストッパ63と切替メカストッパ64とストッパ切替センサ65とストッパ切替センサ66と負方向極限センサ67とは、Oリングの切替メカストッパ53と切替メカストッパ54とストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とが配置されている面の反対側の面に配置されている。固定ストッパ61は、走行ガントリ14の一部に接合されている。負方向極限センサ用ドグ62は、走行ガントリ14の固定ストッパ61のガントリ回転負方向側の近傍に接合されている。切替メカストッパ63は、走行ガントリ14が初期状態から正方向極限角度だけガントリ回転正方向58に回転したときに、固定ストッパ61の近傍に配置されるように、Oリング12に配置されている。切替メカストッパ64は、走行ガントリ14が初期状態から負方向極限角度だけガントリ回転負方向59に回転したときに、固定ストッパ61の近傍に配置されるように、Oリング12に配置されている。ストッパ切替センサ65は、Oリング12のうちの切替メカストッパ63の近傍に配置され、切替メカストッパ63の状態を検出し、その検出結果を制御装置5に出力する。ストッパ切替センサ66は、Oリング12のうちの切替メカストッパ64の近傍に配置され、切替メカストッパ64の状態を検出し、その検出結果を制御装置5に出力する。負方向極限センサ67は、走行ガントリ14が初期状態から概ね負方向極限角度だけガントリ回転負方向59に回転したときに、負方向極限センサ用ドグ62の近傍に配置されるように、Oリング12に配置されている。負方向極限センサ67は、負方向極限センサ用ドグ62が近傍に配置されているかどうかを検出することにより、走行ガントリ14が負方向極限領域に配置されているかどうかを検出し、その検出結果を制御装置5に出力する。その負方向極限領域は、走行ガントリ14が負方向極限角度からガントリ回転正方向58に所定の角度(たとえば、2度)だけ回転した角度までの領域を示し、たとえば、−190度〜−188度(+170度〜+172度)の範囲を示している。
【0036】
図5は、正方向極限センサ用ドグ52と正方向極限センサ57とを示している。正方向極限センサ用ドグ52は、走行ガントリ14に接合されている。正方向極限センサ57は、Oリング12に接合されている。正方向極限センサ用ドグ52と正方向極限センサ57とは、走行ガントリ14が正方向極限領域に位置するときに、互いに接触するように配置されている。正方向極限センサ57は、正方向極限センサ用ドグ52と接触したときに、走行ガントリ14が正方向極限領域に位置していることを制御装置5に出力する。
【0037】
図5は、さらに、切替メカストッパ53を示している。切替メカストッパ53は、切替メカストッパ本体71と軸受け72とストッパ73とバネ74とを備えている。切替メカストッパ本体71は、衝突面75、76、78、79が形成されている。軸受け72は、回転軸80を中心に回転可能に切替メカストッパ本体71をOリング12に支持している。回転軸80は、回転軸18に平行になるように形成されている。
【0038】
ストッパ73は、Oリング12に接合されている。ストッパ73は、切替メカストッパ本体71が回転軸80を中心にストッパ回転正方向83に回転するときに、切替メカストッパ本体71の衝突面76に衝突して、切替メカストッパ本体71が回転可能である範囲を制限している。ストッパ73は、さらに、切替メカストッパ本体71が回転軸80を中心にストッパ回転正方向83の反対方向に回転するときに、切替メカストッパ本体71の衝突面75に衝突して、切替メカストッパ本体71が回転可能である範囲を制限している。ストッパ73は、ゴムから形成されている2つのゴム板84を備えている。ゴム板84の1つは、ストッパ73のうちの衝突面75に衝突する部分に接合されている。ゴム板84の他の1つは、ストッパ73のうちの衝突面76に衝突する部分に接合されている。ゴム板84は、切替メカストッパ本体71が回転してストッパ73に衝突する音を低減して、患者に無用な心配をかけない様にすることができる。なお、ゴム板84は、切替メカストッパ本体71がストッパ73に衝突する音を低減する他の防音材から形成されることもできる。その防音材としては、スポンジが例示される。
【0039】
バネ74は、弾性体から形成され、両端が切替メカストッパ本体71の一部とOリング12の一部とに接合されている。その両端が接合される位置は、切替メカストッパ本体71の衝突面75と衝突面76との両方がストッパ73に接触していないときに最も伸びるように、たとえば、バネ74が回転軸80に交差するように切替メカストッパ本体71が回転したときに最も伸びるように、配置されている。このとき、バネ74は、切替メカストッパ本体71の衝突面75がストッパ73に接触しているときに、切替メカストッパ本体71がストッパ回転正方向83の反対方向に回転するように、切替メカストッパ本体71に弾性力を印加する。バネ74は、さらに、衝突面76がストッパ73に接触しているときに、切替メカストッパ本体71がストッパ回転正方向83に回転するように、切替メカストッパ本体71に弾性力を印加する。バネ74は、さらに、衝突面75と衝突面76との両方がストッパ73に接触していないときに、切替メカストッパ本体71が回転するように、切替メカストッパ本体71に弾性力を印加している。
【0040】
切替メカストッパ53は、切替メカストッパ本体71が回転軸80を中心に回転することにより、複数の状態を遷移する。その複数の状態は、第1状態と第2状態とを含んでいる。その第1状態は、切替メカストッパ本体71の衝突面76がストッパ73に接触している状態を示している。その第2状態は、切替メカストッパ本体71の衝突面75がストッパ73に接触している状態を示している。切替メカストッパ本体71は、切替メカストッパ53が第1状態であるときに、ストッパ回転正方向83に回転不可能であり、ストッパ回転正方向83の反対方向に回転可能である。切替メカストッパ本体71は、切替メカストッパ53が第2状態であるときに、ストッパ回転正方向83に回転可能であり、ストッパ回転正方向83の反対方向に回転不可能である。
【0041】
図5は、さらに、ストッパ切替センサ55を示している。ストッパ切替センサ55は、切替メカストッパ53が第1状態であるときに切替メカストッパ本体71に接触しないで、切替メカストッパ53が第2状態であるときに切替メカストッパ本体71の一部が接触するように形成されている。ストッパ切替センサ55は、切替メカストッパ本体71が接触しているかどうかに基づいて、切替メカストッパ53が第1状態であるか第2状態であるかを制御装置5に出力する。
【0042】
図5は、さらに、固定ストッパ51を示している。固定ストッパ51は、衝突面81と衝突面82とが形成されている。衝突面81と衝突面82とは、Oリング12に対して走行ガントリ14が回転したときに、切替メカストッパ53の切替メカストッパ本体71の一部に衝突するような位置に形成されている。
【0043】
図6は、切替メカストッパ本体71を示している。切替メカストッパ本体71は、切り欠き85、86が形成されている。切り欠き85は、衝突面75と衝突面78とが形成されている部分に形成されている。切り欠き85は、さらに、切替メカストッパ53が第1状態である場合で、Oリング12に対して走行ガントリ14が回転するときに正方向極限センサ用ドグ52が通過する領域に形成されている。切り欠き86は、衝突面76と衝突面79とが形成されている部分に形成されている。切り欠き86は、さらに、切替メカストッパ53が第2状態である場合で、Oリング12に対して走行ガントリ14が回転するときに正方向極限センサ用ドグ52が通過する領域に形成されている。すなわち、正方向極限センサ用ドグ52は、回転軸18と平行な方向に関して、固定ストッパ51が配置される位置と異なる2位置に配置されている。このため、切替メカストッパ本体71は、切り欠き85、86により、Oリング12に対して走行ガントリ14が回転するときに、正方向極限センサ用ドグ52と接触しないで、固定ストッパ51に接触する。
【0044】
正方向極限センサ57は、回転軸18と平行な方向に関して、切替メカストッパ53および切替メカストッパ54が配置される位置と異なる2位置に配置され、正方向極限センサ用ドグ52と一致する位置に配置されている。このため、正方向極限センサ57は、Oリング12に対して走行ガントリ14が回転するときに、固定ストッパ51と接触しないで、正方向極限センサ用ドグ52と接触する。
【0045】
図7は、切替メカストッパ53が第1状態であるときに、走行ガントリ14が正方向極限角度に位置したときの状態を示している。固定ストッパ51は、このとき、衝突面81が切替メカストッパ本体71の衝突面75に衝突している。固定ストッパ51は、走行ガントリ14がガントリ回転正方向58に回転するときに、切替メカストッパ本体71の衝突面75を押して、切替メカストッパ本体71をストッパ回転正方向83に回転させる力を切替メカストッパ本体71に印加する。切替メカストッパ本体71は、このとき、ストッパ73によりストッパ回転正方向83に回転不可能である。このため、走行ガントリ14は、このとき、ガントリ回転正方向58に回転不可能になる。
【0046】
図8は、切替メカストッパ53が第1状態であるときに、走行ガントリ14が正方向極限角度の近傍までガントリ回転正方向58の反対のガントリ回転負方向59に回転したときの状態を示している。固定ストッパ51は、このとき、衝突面82が切替メカストッパ本体71の衝突面78に衝突する。固定ストッパ51は、走行ガントリ14がガントリ回転負方向59に回転するときに、切替メカストッパ本体71の衝突面78を押して、切替メカストッパ本体71をストッパ回転正方向83の反対方向に回転させる力を切替メカストッパ本体71に印加する。切替メカストッパ本体71は、このとき、ストッパ回転正方向83の反対方向に回転可能である。
【0047】
図9は、図8の状態から走行ガントリ14がガントリ回転負方向59に所定の角度だけ回転したときの状態を示している。固定ストッパ51は、走行ガントリ14がガントリ回転負方向59に回転するときに、切替メカストッパ本体71の衝突面78を押して、切替メカストッパ本体71をストッパ回転正方向83の反対方向に回転させる。すなわち、走行ガントリ14は、切替メカストッパ53が第1状態であるときに、正方向極限角度の位置までガントリ回転負方向59に回転可能である。
【0048】
バネ74は、衝突面76がストッパ73に接触している図8の状態から図9の状態になるまでの間に、切替メカストッパ本体71をストッパ回転正方向83に回転させる弾性力を切替メカストッパ本体71に印加する。バネ74は、さらに、図9の状態から少しだけ切替メカストッパ本体71がストッパ回転正方向83の反対方向に回転すると、切替メカストッパ本体71をストッパ回転正方向83の反対方向に回転させる弾性力を切替メカストッパ本体71に印加する。すなわち、バネ74は、衝突面75または衝突面76の一方がストッパ73に接触するように弾性力を切替メカストッパ本体71に印加し、切替メカストッパ53が第1状態と第2状態との中間の中途半端な状態で止まってしまうことを防止している。
【0049】
切替メカストッパ53は、走行ガントリ14が図9の状態からガントリ回転負方向59にさらに回転すると、切替メカストッパ本体71がストッパ回転正方向83の反対方向に回転して、図10に示されているように、衝突面75がストッパ73に接触して第1状態から第2状態に遷移する。
【0050】
固定ストッパ51は、図10に示されているように、切替メカストッパ53が第2状態である場合で、走行ガントリ14がガントリ回転正方向58に回転するときに、衝突面81が切替メカストッパ本体71の衝突面79に衝突する。固定ストッパ51は、走行ガントリ14がガントリ回転正方向58に回転するときに、切替メカストッパ本体71の衝突面79を押して、切替メカストッパ本体71をストッパ回転正方向83に回転させる力を切替メカストッパ本体71に印加する。切替メカストッパ本体71は、このとき、ストッパ回転正方向83に回転可能である。このため、切替メカストッパ53は、走行ガントリ14がガントリ回転正方向58に回転するときに、切替メカストッパ本体71がストッパ回転正方向83に回転し、図9のような状態を介して第1状態になる。すなわち、走行ガントリ14は、切替メカストッパ53が第2状態であるときに、ガントリ回転正方向58に回転可能である。
【0051】
切替メカストッパ54は、切替メカストッパ53と同様に形成されている。すなわち、切替メカストッパ54は、切替メカストッパ本体と軸受けとストッパとバネとを備えている。その軸受けは、回転可能にその切替メカストッパ本体をOリング12に支持している。そのストッパは、Oリング12に接合されている。そのストッパは、その切替メカストッパ本体がその回転軸を中心に回転するときに、その切替メカストッパ本体に衝突して、その切替メカストッパ本体が回転可能である範囲を制限している。切替メカストッパ54は、その切替メカストッパ本体がその回転軸を中心に回転することにより、第3状態と第4状態とを遷移する。そのバネは、さらに、その切替メカストッパ本体がそのストッパに接触していないときに、その切替メカストッパ本体が回転するように、すなわち、切替メカストッパ54が第3状態と第4状態との一方になるように、その切替メカストッパ本体に弾性力を印加している。
【0052】
切替メカストッパ54は、第3状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転正方向58に回転するときに、第3状態から第4状態に遷移する。切替メカストッパ54は、さらに、第4状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転するときに、第4状態から第3状態に遷移する。切替メカストッパ54は、さらに、第3状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転するときに、走行ガントリ14の回転を阻止する。
【0053】
ストッパ切替センサ56は、切替メカストッパ54が第3状態であるときに切替メカストッパ54の切替メカストッパ本体に接触しないで、切替メカストッパ54が第4状態であるときに切替メカストッパ54の切替メカストッパ本体の一部が接触するように形成されている。ストッパ切替センサ56は、切替メカストッパ54の切替メカストッパ本体が接触しているかどうかに基づいて、切替メカストッパ54が第3状態であるか第4状態であるかを制御装置5に出力する。
【0054】
固定ストッパ61は、固定ストッパ51と同様に形成されている。切替メカストッパ63は、切替メカストッパ53と同様に形成され、切替メカストッパ53と同様に動作する。すなわち、切替メカストッパ63は、切替メカストッパ本体と軸受けとストッパとバネとを備えている。その軸受けは、回転可能にその切替メカストッパ本体をOリング12に支持している。そのストッパは、Oリング12に接合されている。そのストッパは、その切替メカストッパ本体がその回転軸を中心に回転するときに、その切替メカストッパ本体に衝突して、その切替メカストッパ本体が回転可能である範囲を制限している。切替メカストッパ63は、その切替メカストッパ本体がその回転軸を中心に回転することにより、第1状態と第2状態とを遷移する。そのバネは、さらに、その切替メカストッパ本体がそのストッパに接触していないときに、その切替メカストッパ本体が回転するように、すなわち、切替メカストッパ63が第1状態と第2状態との一方になるように、その切替メカストッパ本体に弾性力を印加している。
【0055】
切替メカストッパ63は、第1状態である場合で、走行ガントリ14が正方向極限角度をガントリ回転負方向59に回転するときに、第1状態から第2状態に遷移する。切替メカストッパ63は、さらに、第2状態である場合で、走行ガントリ14が正方向極限角度をガントリ回転正方向58に回転するときに、第2状態から第1状態に遷移する。切替メカストッパ63は、さらに、第1状態である場合で、走行ガントリ14が正方向極限角度をガントリ回転正方向58に回転するときに、走行ガントリ14の回転を阻止する。
【0056】
ストッパ切替センサ65は、切替メカストッパ63が第1状態であるときに切替メカストッパ63の切替メカストッパ本体に接触しないで、切替メカストッパ63が第2状態であるときに切替メカストッパ63の切替メカストッパ本体の一部が接触するように形成されている。ストッパ切替センサ65は、切替メカストッパ63の切替メカストッパ本体が接触しているかどうかに基づいて、切替メカストッパ63が第1状態であるか第2状態であるかを制御装置5に出力する。
【0057】
切替メカストッパ64は、切替メカストッパ53と同様に形成され、切替メカストッパ54と同様に動作する。すなわち、切替メカストッパ64は、切替メカストッパ本体と軸受けとストッパとバネとを備えている。その軸受けは、回転可能にその切替メカストッパ本体をOリング12に支持している。そのストッパは、Oリング12に接合されている。そのストッパは、その切替メカストッパ本体がその回転軸を中心に回転するときに、その切替メカストッパ本体に衝突して、その切替メカストッパ本体が回転可能である範囲を制限している。切替メカストッパ64は、その切替メカストッパ本体がその回転軸を中心に回転することにより、第3状態と第4状態とを遷移する。そのバネは、さらに、その切替メカストッパ本体がそのストッパに接触していないときに、その切替メカストッパ本体が回転するように、すなわち、切替メカストッパ64が第3状態と第4状態との一方になるように、その切替メカストッパ本体に弾性力を印加している。
【0058】
切替メカストッパ64は、第3状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転正方向58に回転するときに、第3状態から第4状態に遷移する。切替メカストッパ64は、さらに、第4状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転するときに、第4状態から第3状態に遷移する。切替メカストッパ64は、さらに、第3状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転するときに、走行ガントリ14の回転を阻止する。
【0059】
ストッパ切替センサ66は、切替メカストッパ64が第3状態であるときに切替メカストッパ64の切替メカストッパ本体に接触しないで、切替メカストッパ64が第4状態であるときに切替メカストッパ64の切替メカストッパ本体の一部が接触するように形成されている。ストッパ切替センサ66は、切替メカストッパ64の切替メカストッパ本体が接触しているかどうかに基づいて、切替メカストッパ64が第3状態であるか第4状態であるかを制御装置5に出力する。
【0060】
負方向極限センサ用ドグ62は、正方向極限センサ用ドグ52と同様に形成され、負方向極限センサ67は、正方向極限センサ57と同様に形成されている。すなわち、負方向極限センサ用ドグ62と負方向極限センサ67とは、走行ガントリ14が負方向極限領域に位置するときに、互いに接触するように配置されている。負方向極限センサ67は、負方向極限センサ用ドグ62と接触したときに、走行ガントリ14が負方向極限領域に位置していることを制御装置5に出力する。
【0061】
図11は、そのガントリ角度制限装置の動作を示している。そのガントリ角度制限装置は、走行ガントリ14が初期状態であるときに、切替メカストッパ53、63が第1状態であり、切替メカストッパ54、64が第3状態である(状態S1)。切替メカストッパ54、64は、走行ガントリ14がガントリ回転正方向58に回転して初期状態から負方向極限角度を通過したときに、第3状態から第4状態に遷移する(状態S2)。正方向極限センサ57は、走行ガントリ14がガントリ回転正方向58にさらに回転して正方向極限領域に位置したときに、走行ガントリ14が正方向極限領域に位置したことを制御装置5に出力する(状態S3)。切替メカストッパ53、63は、走行ガントリ14がガントリ回転正方向58にさらに回転して正方向極限角度に位置したときに、走行ガントリ14のガントリ回転正方向58の回転を阻止する(状態S4)。切替メカストッパ54、64は、走行ガントリ14が正方向極限角度からガントリ回転負方向59に回転して負方向極限角度を通過したときに、第4状態から第3状態に遷移する。
【0062】
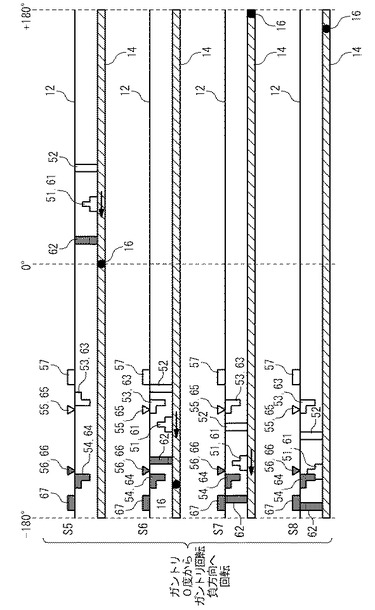
図12は、そのガントリ角度制限装置の動作を示している。そのガントリ角度制限装置は、走行ガントリ14が初期状態であるときに、切替メカストッパ53、63が第1状態であり、切替メカストッパ54、64が第3状態である(状態S5)。切替メカストッパ53、63は、走行ガントリ14がガントリ回転負方向59に回転して初期状態から正方向極限角度を通過したときに、第1状態から第2状態に遷移する(状態S6)。負方向極限センサ67は、走行ガントリ14がガントリ回転負方向59にさらに回転して負方向極限領域に位置したときに、走行ガントリ14が負方向極限領域に位置したことを制御装置5に出力する(状態S7)。切替メカストッパ54、64は、走行ガントリ14がガントリ回転負方向59にさらに回転して負方向極限角度に位置したときに、走行ガントリ14のガントリ回転負方向59の回転を阻止する(状態S8)。切替メカストッパ53、63は、走行ガントリ14が負方向極限角度からガントリ回転正方向58に回転して正方向極限角度を通過したときに、第2状態から第1状態に遷移する。
【0063】
このとき、放射線治療装置3は、走行ガントリ14の回転を制御できなくなる暴走状態に陥ったときに、固定ストッパ51が切替メカストッパ53、54に衝突することにより、または、固定ストッパ61が切替メカストッパ63、64に衝突することにより、その回転を制動することができる。放射線治療装置3は、さらに、固定ストッパ51、61と切替メカストッパ53、54、63、64とを適切に配置することにより、走行ガントリ14の回転を機械的に制限するときの回転可能な範囲を1回転以上2回転未満の任意の範囲に設計することができる。放射線治療装置3は、さらに、走行ガントリ14の回転可能な範囲を拡大することにより、治療用放射線照射装置16が駆動される範囲を拡大することができる。
【0064】
なお、放射線治療装置3は、固定ストッパ61と切替メカストッパ63と切替メカストッパ64とストッパ切替センサ65とストッパ切替センサ66とを削除することもできる。このとき、放射線治療装置3は、固定ストッパ51が切替メカストッパ53に衝突することにより、走行ガントリ14が正方向極限角度をガントリ回転正方向58に回転することを制限し、固定ストッパ51が切替メカストッパ54に衝突することにより、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転することを制限することができる。
【0065】
なお、放射線治療装置3は、切替メカストッパ54とストッパ切替センサ56と切替メカストッパ63とストッパ切替センサ65とを削除することもできる。このとき、放射線治療装置3は、固定ストッパ51が切替メカストッパ53に衝突することにより、走行ガントリ14が正方向極限角度をガントリ回転正方向58に回転することを制限し、固定ストッパ61が切替メカストッパ64に衝突することにより、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転することを制限することができる。
【0066】
放射線治療装置1により実行される動作は、治療計画を作成する動作と、セットアップする動作と、放射線治療する動作とを備えている。
【0067】
その治療計画を作成する動作では、まず、ユーザは、その患者の患部とその患部の周辺の部位との3次元データに基づいて、その患者の患部とその患部の周辺の臓器とを示す画像を生成する。ユーザは、制御装置5を用いてその画像を閲覧し、その患部の位置を特定する。ユーザは、さらに、その画像に基づいて治療計画を作成し、その治療計画を制御装置5に入力する。その治療計画は、その患者の患部に治療用放射線を照射する照射角度と、その各照射角度から照射する治療用放射線の線量および性状とを示している。
【0068】
そのセットアップする動作は、放射線治療する動作の直前に実行され、カウチ41を駆動する動作と治療用放射線照射装置16を駆動する動作とを備えている。カウチ41を駆動する動作では、ユーザは、まず、その3次元データを採取したときと同様の姿勢に放射線治療装置3のカウチ41にその患者を固定する。ユーザは、患者の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。ユーザは、その透過画像の撮像とカウチ41の移動とを繰り返して、患者の患部がアイソセンタ19に正確に重なるように患者の患部を配置する。
【0069】
その放射線治療する動作は、患者の患部に対する治療用放射線照射装置の相対位置が治療計画が示す照射角度に許容範囲内で一致するように、カウチ41とOリング12と走行ガントリ14とが駆動された後に実行される。その放射線治療する動作では、制御装置5は、その治療計画が示す線量だけ、治療用放射線照射装置を用いて治療用放射線を患者の患部に照射する。その放射線治療する動作としては、呼吸同期照射(ゲイテッドイラディエイション)、動体追尾照射が例示される。その呼吸同期照射は、観測される患者の運動に基づいて治療用放射線を照射したり照射を停止したりする手法である。その動体追尾照射は、患部の位置を観測し、その位置に治療用放射線を照射する手法である。
【0070】
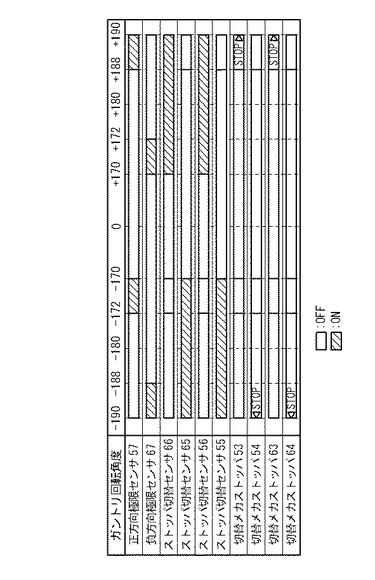
図13は、正方向極限角度が+190度であり、負方向極限角度が−190度であるときの、ストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とストッパ切替センサ65とストッパ切替センサ66と負方向極限センサ67との検出結果を示している。正方向極限センサ57は、走行ガントリ14が+188度〜+190度の範囲と−170度〜−172度の範囲とに位置しているときに、オンを出力する。負方向極限センサ67は、走行ガントリ14が−188度〜−190度の範囲と+170度〜+172度の範囲とに位置しているときに、オンを出力する。
【0071】
ストッパ切替センサ55は、切替メカストッパ53が第2状態であるときに、オンを出力する。すなわち、ストッパ切替センサ55は、走行ガントリ14が−170度〜−190度の範囲に位置しているときに、オンを出力する。ストッパ切替センサ56は、切替メカストッパ54が第4状態であるときに、オンを出力する。すなわち、ストッパ切替センサ56は、走行ガントリ14が+170度〜+190度の範囲に位置しているときに、オンを出力する。ストッパ切替センサ65は、切替メカストッパ63が第2状態であるときに、オンを出力する。すなわち、ストッパ切替センサ65は、走行ガントリ14が−170度〜−190度の範囲に位置しているときに、オンを出力する。ストッパ切替センサ66は、切替メカストッパ64が第4状態であるときに、オンを出力する。すなわち、ストッパ切替センサ66は、走行ガントリ14が+170度〜+190度の範囲に位置しているときに、オンを出力する。
【0072】
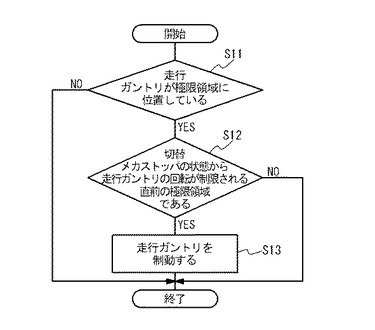
図14は、本発明によるガントリ角度制限方法の実施の形態を示している。このガントリ角度制限方法は、常時に実行され、少なくともその放射線治療する動作の最中に実行される。制御装置5は、周期的に、正方向極限センサ57の検出結果と負方向極限センサ67の検出結果とを収集する(ステップS11)。制御装置5は、正方向極限センサ57または負方向極限センサ67がオンを出力したときに(ステップS11、YES)、ストッパ切替センサ55とストッパ切替センサ56とストッパ切替センサ65とストッパ切替センサ66との検出結果を収集する(ステップS12)。制御装置5は、正方向極限センサ57がオンを出力し、かつ、ストッパ切替センサ56とストッパ切替センサ66とがオンを出力するときに(ステップS12、YES)、走行ガントリ14が停止するように、走行ガントリ14を駆動する走行駆動装置を制御する(ステップS13)。さらに、制御装置5は、負方向極限センサ67がオンを出力し、かつ、ストッパ切替センサ55とストッパ切替センサ65とがオンを出力したときに(ステップS12、YES)、走行ガントリ14が停止するように、走行ガントリ14を駆動する走行駆動装置を制御する(ステップS13)。
【0073】
このようなガントリ角度制限方法によれば、固定ストッパ51が切替メカストッパ53に衝突する直前のタイミングを検出することができ、固定ストッパ61が切替メカストッパ64に衝突する直前のタイミングを検出することができる。このようなガントリ角度制限方法は、その検出されたタイミングで走行ガントリ14を制動することにより、固定ストッパ51が切替メカストッパ53に強烈に衝突することを防止し、固定ストッパ61が切替メカストッパ64に強烈に衝突することを防止し、ガントリ角度制限装置の破損を防止することができる。さらに、放射線治療装置3は、固定ストッパ51が切替メカストッパ53に衝突するときに、または固定ストッパ61が切替メカストッパ64に衝突するときに、大きな音が立たないで、患者43の恐怖心を低減することができる。
【0074】
なお、ガントリ角度制限方法は、ステップS13で走行ガントリ14を駆動する走行駆動装置のモータの電源をその検出されたタイミングでOFFすることもできる。このようなガントリ角度制限方法によれば、走行ガントリ14を駆動する走行駆動装置が走行ガントリ14の回転を制御できなくなる暴走状態に陥ったときに、既述の実施の形態におけるガントリ角度制限方法と同様にして、ガントリ角度制限装置の破損を防止することができ、患者43の恐怖心を低減することができる。
【0075】
なお、正方向極限センサ57は、走行ガントリ14が正方向極限領域に配置されているかどうかを検出することができる他のセンサに置換されることができる。そのセンサとしては、走行ガントリ14の回転角度を測定する角度計、エンコーダが例示される。その角度計は、走行ガントリ14の回転角度を測定する。そのエンコーダは、走行ガントリ14を駆動する走行駆動装置に適用されるモーターに取り付けられ、そのモーターの回転軸の回転角度を測定する。このようなセンサが適用された放射線治療装置は、既述の実施の形態における放射線治療装置3と同様にして、固定ストッパ51が切替メカストッパ53に衝突する直前のタイミングを検出することができ、固定ストッパ61が切替メカストッパ64に衝突する直前のタイミングを検出することができる。さらに、負方向極限センサ67は、正方向極限センサ57と同様にして、走行ガントリ14が負方向極限領域に配置されているかどうかを検出することができる他のセンサに置換されることができる。
【0076】
なお、制御装置5は、走行ガントリ14を駆動する走行駆動装置と異なる制動装置を用いて走行ガントリ14の回転を制動することもできる。その制動装置としては、メカニカルなブレーキが例示される。そのブレーキは、ブレーキドラムとブレーキシューとを備えている。そのブレーキドラムは、走行ガントリ14に固定されている。そのブレーキシューは、Oリング12に固定され、制御装置5に制御されて、そのブレーキドラムに接触され、そのブレーキドラムとブレーキシューとの摩擦力により走行ガントリ14の回転を制動する。このような制動装置が適用された放射線治療装置は、既述の実施の形態における放射線治療装置3と同様にして、ガントリ角度制限装置の破損を防止することができ、患者43の恐怖心を低減することができる。このような制動装置が適用された放射線治療装置は、さらに、走行ガントリ14を駆動する走行駆動装置が走行ガントリ14の回転を制御できなくなる暴走状態に陥ったときでも、ガントリ角度制限装置の破損を防止することができ、患者43の恐怖心を低減することができる。
【0077】
なお、放射線治療装置3は、その制動装置を他の装置に置換することもできる。その装置としては、固定ストッパ51が切替メカストッパ53に衝突する直前のタイミングを通知し、または、検出することができ、固定ストッパ61が切替メカストッパ64に衝突する直前のタイミングを通知する警報装置が例示される。このような放射線治療装置によれば、患者43は、固定ストッパ51が切替メカストッパ53に衝突することを、または、固定ストッパ61が切替メカストッパ64に衝突することを、事前に知ることができ、走行ガントリ14が急に停止したり、大きな音が立ったりするときの恐怖心を低減することができる。
【0078】
さらに、制御装置5は、放射線治療する動作で利用される制御装置と別個に設置することもできる。
【図面の簡単な説明】
【0079】
【図1】図1は、本発明による放射線治療装置を示すブロック図である。
【図2】図2は、本発明による放射線治療装置を示す斜視図である。
【図3】図3は、ガントリ角度制限装置を示す平面図である。
【図4】図4は、ガントリ角度制限装置を示す平面図である。
【図5】図5は、ガントリ角度制限装置の1つの状態を示す平面図である。
【図6】図6は、切替メカストッパ本体を示す斜視図である。
【図7】図7は、ガントリ角度制限装置の他の状態を示す平面図である。
【図8】図8は、ガントリ角度制限装置のさらに他の状態を示す平面図である。
【図9】図9は、ガントリ角度制限装置のさらに他の状態を示す平面図である。
【図10】図10は、ガントリ角度制限装置のさらに他の状態を示す平面図である。
【図11】図11は、ガントリ角度制限装置の動作を示す概念図である。
【図12】図12は、ガントリ角度制限装置の動作を示す概念図である。
【図13】図13は、センサの検出結果を示し、ガントリ角度制限装置の状態を示すグラフである。
【図14】図14は、本発明によるガントリ角度制限方法を示すフローチャートである。
【符号の説明】
【0080】
3 :放射線治療装置
5 :制御装置
11:旋回駆動装置
12:Oリング
14:走行ガントリ
15:首振り機構
16:治療用放射線照射装置
17:回転軸
18:回転軸
19:アイソセンタ
21:パン軸
22:チルト軸
23:治療用放射線
24:診断用X線源
25:診断用X線源
31:センサアレイ
32:センサアレイ
33:センサアレイ
35:診断用X線
36:診断用X線
41:カウチ
42:カウチ駆動装置
43:患者
51:固定ストッパ
52:正方向極限センサ用ドグ
53:切替メカストッパ
54:切替メカストッパ
55:ストッパ切替センサ
56:ストッパ切替センサ
57:正方向極限センサ
58:正方向
59:負方向
61:固定ストッパ
62:負方向極限センサ用ドグ
63:切替メカストッパ
64:切替メカストッパ
65:ストッパ切替センサ
66:ストッパ切替センサ
67:負方向極限センサ
71:切替メカストッパ本体
72:軸受け
73:ストッパ
74:バネ
75、76、78、79:衝突面
80:回転軸
81:衝突面
82:衝突面
83:ストッパ回転正方向
84:ゴム板
85、86:切り欠き
【技術分野】
【0001】
本発明は、放射線治療装置およびガントリ角度制限方法に関し、特に、患部に放射線を照射することにより患者を治療するときに利用される放射線治療装置およびガントリ角度制限方法に関する。
【背景技術】
【0002】
患部(腫瘍)に治療用放射線を照射することにより患者を治療する放射線治療が知られている。その放射線治療は、CT技術の発達並びにコンピュータ技術の発達による放射線治療計画装置の発展により、高精度な体内線量分布予測に基づいて治療計画が立案され、その治療計画を再現し高精度に治療を行うことができる。このような放射線治療では、その患部に互いに異なる方向から治療用放射線が照射される。その放射線治療を実行する放射線治療装置は、回転可能に支持されているガントリと、そのガントリに支持されている治療用放射線照射装置とを備えている。ユーザは、そのガントリを回転させることにより治療用放射線照射装置を所定の位置に駆動して、その治療用放射線照射装置を用いて治療用放射線を患者の患部に照射する。
【0003】
その放射線治療装置は、さらに、そのガントリに支持される装置と外部装置との間に電気信号を伝送するケーブルを備えている。そのケーブルは、その放射線治療装置がそのガントリの回転を制御することができなくなる暴走状態に陥ったときに、そのガントリが多回転することにより破断してしまい、その電気信号を伝送することができなくなることがある。このような放射線治療装置は、スリップリングを介して、そのガントリに支持される装置とその外部装置とを電気的に接続することにより、そのガントリが多回転してもその電気信号を連続的に伝送することができる。しかしながら、このようなスリップリングは、そのガントリの回転によりその電気信号にノイズが乗り易く、その放射線治療装置に適当でない。このため、このような放射線治療装置は、一般的に、そのスリップリングが適用されないで、ガントリの回転を制御できなくなる暴走状態に陥った場合に備えてガントリの回転を機械的に停止させる停止機構が設けられている。
【0004】
その停止機構としては、そのガントリの回転可能角度を0〜360°(±180°)に制限するものが例示され、極限センサまたはメカストッパが例示される。このような放射線治療装置は、このようなガントリの角度制限が治療の選択肢を狭めることがある。放射線治療装置は、ガントリの回転を制御できなくなる暴走状態に陥った場合に備えてガントリの回転を機械的に停止させ、かつ、治療用放射線照射装置が駆動される範囲を拡大することが望まれている。
【0005】
実開昭58−108853号公報には、ガントリの回転範囲を広げて、治療機能を増やした回転角度制限機構が開示されている。その回転角度制限機構は、正逆に回転できる回転体の外周に沿って設けられた両端にある突起部とこれら突起部の中間にある円弧部とからなるカムと、前記回転体の外側にある固定端に設けられたブロックと、このブロックに支持された前記回転体の回転軸と平行な回転軸をもって回転する従回転板と、この従回転板の外周近傍でこの従回転板の一方に突出して設けられかつ前記カムの前記突起部にはつき当るが前記円弧部には当らないように設けられた複数のピンと、これらピンを設けた前記従回転板の裏面に突出して設けられこの従回転板の回転により前記ブロックにつき当るストッパとを含み構成される。
【0006】
【特許文献1】実開昭58−108853号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の課題は、放射線照射装置を支持するガントリの回転を機械的に制限するときの回転可能な範囲を拡大する放射線治療装置を提供することにある。
本発明の他の課題は、放射線照射装置を支持するガントリの回転を機械的に制限するストッパの構造がより簡易である放射線治療装置を提供することにある。
本発明のさらに他の課題は、放射線照射装置を支持するガントリの回転を機械的に制限するストッパの破損を防止する放射線治療装置およびガントリ角度制限方法を提供することにある。
【課題を解決するための手段】
【0008】
以下に、発明を実施するための最良の形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための最良の形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0009】
本発明による放射線治療装置(3)は、治療用放射線(23)を出射する放射線照射装置(16)を支持する走行ガントリ(14)と、走行ガントリ(14)を回転可能に支持するOリング(12)と、Oリング(12)または走行ガントリ(14)の一方(14)に接合される固定ストッパ(51)と、Oリング(12)または走行ガントリ(14)の他方(12)に接合される切替メカストッパ(53)とを備えている。切替メカストッパ(53)は、第1状態にある場合で、Oリング(12)に対して走行ガントリ(14)が正方向極限角度をガントリ回転正方向(58)に回転するときに、固定ストッパ(51)に接触することにより走行ガントリ(14)がガントリ回転正方向(58)に回転することを停止させる。切替メカストッパ(53)は、その第1状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)の反対方向(59)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第1状態から第2状態に遷移する。すなわち、走行ガントリ(14)は、切替メカストッパ(53)と固定ストッパ(51)とによりガントリ回転正方向(58)への回転が制限される正方向極限角度からガントリ回転正方向(58)の反対方向(59)に1回転回転しても、切替メカストッパ(53)と固定ストッパ(51)とによりガントリ回転正方向(58)の反対方向(59)への回転が制限されない。このため、放射線治療装置(3)は、走行ガントリ(14)の回転を機械的に制限するときの回転可能な範囲を一回転以上に拡大することができ、放射線照射装置(16)が駆動される範囲を拡大することができる。
【0010】
切替メカストッパ(53)は、その第2状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第2状態からその第1状態に遷移する。すなわち、走行ガントリ(14)は、切替メカストッパ(53)と固定ストッパ(51)とによりガントリ回転正方向(58)への回転が制限された正方向極限角度からガントリ回転正方向(58)の反対方向(59)に1回転以上回転した後に、ガントリ回転正方向(58)に1回転以上回転することができる。このため、放射線治療装置(3)は、走行ガントリ(14)の回転を機械的に制限するときの回転可能な範囲を一回転以上に拡大することができ、放射線照射装置(16)が駆動される範囲を拡大することができる。
【0011】
切替メカストッパ(53)は、ストッパ本体(71)とストッパ(73)とを備えている。ストッパ本体(71)は、他方(12)に回転可能に支持されている。ここで、切替メカストッパ(53)は、その第2状態にあるときにストッパ本体(71)がストッパ回転正方向(83)に回転することによりその第2状態からその第1状態に遷移し、その第1状態にあるときにストッパ本体(71)がストッパ回転正方向(83)の反対方向に回転することによりその第1状態からその第2状態に遷移する。ストッパ(73)は、切替メカストッパ(53)がその第1状態にあるときに、ストッパ本体(71)をストッパ回転正方向(83)に回転しないようにストッパ本体(71)に接触する。ストッパ(73)は、切替メカストッパ(53)がその第2状態にあるときに、ストッパ本体(71)をストッパ回転正方向(83)の反対方向に回転しないようにもしている。ストッパ本体(71)は、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、固定ストッパ(51)に衝突することによりストッパ回転正方向(83)に回転する。ストッパ本体(71)は、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、固定ストッパ(51)に衝突することによりストッパ回転正方向(83)の反対方向に回転する。すなわち、切替メカストッパ(53)は、その第1状態にあるときに、ストッパ本体(71)がストッパ回転正方向(83)の反対方向に回転することによりその第2状態に遷移し、その第2状態にあるときに、ストッパ本体(71)がストッパ回転正方向(83)に回転することによりその第1状態に遷移する。このとき、ストッパ本体(71)は、切替メカストッパ(53)が第1状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、固定ストッパ(51)との衝突によりストッパ回転正方向(83)に回転しないで、走行ガントリ(14)のガントリ回転正方向(58)の回転を停止させる。
【0012】
切替メカストッパ(53)は、弾性体(74)をさらに備えている。弾性体(74)は、切替メカストッパ(53)がその第1状態にあるときに、ストッパ本体(71)がストッパ回転正方向(83)に回転するようにストッパ本体(71)に弾性力を印加し、切替メカストッパ(53)がその第2状態にあるときに、ストッパ本体(71)がストッパ回転正方向(83)の反対方向に回転するようにストッパ本体(71)に弾性力を印加する。このとき、ストッパ本体(71)は、その第1状態と第2状態との中間の中途半端な状態で止まってしまうことが防止され、切替メカストッパ(53)は、誤動作が防止される。
【0013】
本発明による放射線治療装置(3)は、他方(12)に接合される他の切替メカストッパ(54)をさらに備えている。他の切替メカストッパ(54)は、第3状態にある場合で、走行ガントリ(14)がその負方向極限角度をガントリ回転正方向(58)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第3状態から第4状態に遷移する。他の切替メカストッパ(54)は、その第4状態にある場合で、走行ガントリ(14)がその負方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)の反対方向(59)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第4状態からその第3状態に遷移する。他の切替メカストッパ(54)は、その第3状態にある場合で、走行ガントリ(14)が負方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、固定ストッパ(51)に接触することにより走行ガントリ(14)がガントリ回転正方向(58)の反対方向(59)に回転することを停止させる。すなわち、走行ガントリ(14)は、固定ストッパ(51)と他の切替メカストッパ(54)とによりガントリ回転正方向(58)の反対方向(59)への回転が制限される負方向極限角度からガントリ回転正方向(58)に1回転しても、他の切替メカストッパ(54)と固定ストッパ(51)とによりガントリ回転正方向(58)への回転が制限されない。このとき、放射線照射装置(16)が駆動される範囲は、切替メカストッパ(53)と他の切替メカストッパ(54)とが配置される位置により決定する。このため、放射線治療装置(3)は、切替メカストッパ(53)と他の切替メカストッパ(54)とが適切に配置されることにより、放射線照射装置(16)が駆動される範囲を所望の範囲に設計されることができる。
【0014】
本発明による放射線治療装置(3)は、Oリング(12)または走行ガントリ(14)の一方(14)に接合される他の固定ストッパ(61)と、Oリング(12)または走行ガントリ(14)の他方(12)に接合される他の切替メカストッパ(64)とをさらに備えている。他の切替メカストッパ(64)は、第3状態にある場合で、走行ガントリ(14)がその負方向極限角度をガントリ回転正方向(58)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)に回転することを停止させないで、他の固定ストッパ(61)に接触することによりその第3状態から第4状態に遷移する。他の切替メカストッパ(64)は、その第4状態にある場合で、走行ガントリ(14)がその負方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)の反対方向(59)に回転することを停止させないで、他の固定ストッパ(61)に接触することによりその第4状態からその第3状態に遷移する。他の切替メカストッパ(64)は、その第3状態にある場合で、走行ガントリ(14)が負方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、他の固定ストッパ(61)に接触することにより走行ガントリ(14)がガントリ回転正方向(58)の反対方向(59)に回転することを停止させる。すなわち、走行ガントリ(14)は、他の固定ストッパ(61)と他の切替メカストッパ(64)とによりガントリ回転正方向(58)の反対方向(59)への回転が制限される負方向極限角度からガントリ回転正方向(58)に1回転しても、他の切替メカストッパ(64)と他の固定ストッパ(61)とによりガントリ回転正方向(58)への回転が制限されない。このとき、放射線照射装置(16)が駆動される範囲は、固定ストッパ(51)と切替メカストッパ(53)と他の固定ストッパ(61)と他の切替メカストッパ(64)とが配置される位置により決定する。このため、放射線治療装置(3)は、固定ストッパ(51)と切替メカストッパ(53)と他の固定ストッパ(61)と他の切替メカストッパ(64)とが適切に配置されることにより、放射線照射装置(16)が駆動される範囲を所望の範囲に設計されることができる。
【0015】
本発明による放射線治療装置(3)は、切替メカストッパ(53)の状態を検出するストッパ切替センサ(55)と、走行ガントリ(14)の角度が所定範囲内にあるかどうかを検出する極限センサ(57)とをさらに備えている。このとき、放射線治療装置(3)は、その測定された状態とその角度とに基づいて、切替メカストッパ(53)と固定ストッパ(51)とにより回転が制限される直前のタイミングを検出することができる。
【0016】
本発明による放射線治療装置(3)は、走行ガントリ(14)の角度がその所定範囲内にあるときに極限センサ(57)に接触するドグ(52)をさらに備えている。ドグ(52)は、切替メカストッパ(53)に接触しないように一方(14)に接合されていることが好ましい。
【0017】
本発明による放射線治療装置(3)は、その角度が所定範囲内にあり、かつ、その測定された状態がその第1状態にあるときに、Oリング(12)に対して走行ガントリ(14)を制動するブレーキをさらに備えている。放射線治療装置(3)は、固定ストッパと切替メカストッパが強烈に衝突しないようにすることができる。
【0018】
そのブレーキは、Oリング(12)に対して走行ガントリ(14)を駆動する駆動装置と、その角度がその所定範囲内にあり、かつ、その測定された状態がその第1状態にあるときに、Oリング(12)に対して走行ガントリ(14)が停止するようにその駆動装置を制御する制御装置(5)を備えている。すなわち、Oリング(12)に対して走行ガントリ(14)を駆動する駆動装置は、固定ストッパと切替メカストッパが強烈に衝突しないようにOリング(12)に対して走行ガントリ(14)を制動するブレーキに兼用することが好ましい。
【0019】
本発明による放射線治療装置(3)は、その一方(14)に接合される他の固定ストッパ(61)と、その他方(12)に接合される他の切替メカストッパ(63)とをさらに備えている。他の切替メカストッパ(63)は、第1状態にある場合で、走行ガントリ(14)が正方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、その第1状態から第2状態に遷移する。その第2状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、その第2状態からその第1状態に遷移する。その第1状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、他の固定ストッパ(61)と衝突して、走行ガントリ(14)がガントリ回転正方向(58)に回転することを停止させる。
【0020】
固定ストッパ(51)が接合される一方は、走行ガントリ(14)であり、切替メカストッパ(53)が接合される他方は、Oリング(12)であることが好ましい。
【0021】
本発明によるガントリ角度制限方法は、放射線治療装置(3)を用いて実行される。放射線治療装置(3)は、治療用放射線(23)を出射する放射線照射装置(16)を支持する走行ガントリ(14)と、走行ガントリ(14)を回転可能に支持するOリング(12)と、Oリング(12)または走行ガントリ(14)の一方(14)に接合される固定ストッパ(51)と、Oリング(12)または走行ガントリ(14)の他方(12)に接合される切替メカストッパ(53)と、ストッパ切替センサ(55)と、極限センサ(57)と、ブレーキとを備えている。切替メカストッパ(53)は、第1状態にある場合で、Oリング(12)に対して走行ガントリ(14)が正方向極限角度をガントリ回転正方向(58)に回転するときに、固定ストッパ(51)に接触することにより走行ガントリ(14)がガントリ回転正方向(58)に回転することを停止させる。切替メカストッパ(53)は、その第1状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)の反対方向(59)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)の反対方向(59)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第1状態から第2状態に遷移する。切替メカストッパ(53)は、その第2状態にある場合で、走行ガントリ(14)がその正方向極限角度をガントリ回転正方向(58)に回転するときに、走行ガントリ(14)をガントリ回転正方向(58)に回転することを停止させないで、固定ストッパ(51)に接触することによりその第2状態からその第1状態に遷移する。
すなわち、走行ガントリ(14)は、切替メカストッパ(53)と固定ストッパ(51)とによりガントリ回転正方向(58)への回転が制限された正方向極限角度からガントリ回転正方向(58)の反対方向(59)に1回転以上回転した後に、ガントリ回転正方向(58)に1回転以上回転することができる。このため、放射線治療装置(3)は、走行ガントリ(14)の回転を機械的に制限するときの回転可能な範囲を一回転以上に拡大することができ、放射線照射装置(16)が駆動される範囲を拡大することができる。本発明によるガントリ角度制限方法は、ストッパ切替センサ(55)を用いて切替メカストッパ(53)の状態を検出するステップと、極限センサ(57)を用いて走行ガントリ(14)の角度が所定範囲内にあるかどうかを検出するステップと、その角度が所定範囲内にあり、かつ、その測定された状態がその第1状態にあるときに、そのブレーキを用いてOリング(12)に対して走行ガントリ(14)を制動するステップとを備えている。このようなガントリ角度制限方法によれば、切替メカストッパ(53)と固定ストッパ(51)とにより回転が制限される直前のタイミングを検出することができ、そのタイミングで走行ガントリ(14)を制動することにより固定ストッパ(51)と切替メカストッパ(53)が強烈に衝突しないようにすることができる。
【発明の効果】
【0022】
本発明による放射線治療装置は、ガントリ回転正方向への回転が制限された極限角度から、ガントリ回転正方向の反対方向に1回転回転しても、ガントリ回転正方向の反対方向への回転が制限されない。このため、本発明による放射線治療装置は、ガントリの回転を機械的に制限するときの回転可能な範囲を一回転以上に拡大することができ、放射線照射装置が駆動される範囲を拡大することができる。
【発明を実施するための最良の形態】
【0023】
図面を参照して、本発明による放射線治療装置の実施の形態を記載する。その放射線治療装置3は、図1に示されているように、制御装置5を備えている。制御装置5は、パーソナルコンピュータに例示されるコンピュータである。制御装置5は、双方向に情報を伝送することができるように、放射線治療装置3に接続されている。
【0024】
図2は、放射線治療装置3を示している。放射線治療装置3は、旋回駆動装置11とOリング12と走行ガントリ14と首振り機構15と治療用放射線照射装置16とを備えている。旋回駆動装置11は、回転軸17を中心に回転可能にOリング12を土台に支持し、制御装置5により制御されて回転軸17を中心にOリング12を回転させる。回転軸17は、鉛直方向に平行である。Oリング12は、回転軸18を中心とするリング状に形成され、回転軸18を中心に回転可能に走行ガントリ14を支持している。回転軸18は、鉛直方向に垂直であり、回転軸17に含まれるアイソセンタ19を通る。回転軸18は、さらに、Oリング12に対して固定され、すなわち、Oリング12とともに回転軸17を中心に回転する。走行ガントリ14は、回転軸18を中心とするリング状に形成され、Oリング12のリングと同心円になるように配置されている。放射線治療装置3は、さらに、図示されていない走行駆動装置を備えている。その走行駆動装置は、制御装置5により制御されて回転軸18を中心に走行ガントリ14を回転させる。
【0025】
首振り機構15は、走行ガントリ14のリングの内側に固定され、治療用放射線照射装置16が走行ガントリ14の内側に配置されるように、治療用放射線照射装置16を走行ガントリ14に支持している。首振り機構15は、パン軸21およびチルト軸22を有している。チルト軸22は、走行ガントリ14に対して固定され、回転軸18に交差しないで回転軸18に平行である。パン軸21は、チルト軸22に直交している。首振り機構15は、制御装置5により制御されて、パン軸21を中心に治療用放射線照射装置16を回転させ、チルト軸22を中心に治療用放射線照射装置16を回転させる。
【0026】
治療用放射線照射装置16は、制御装置5により制御されて、治療用放射線23を放射する。治療用放射線23は、パン軸21とチルト軸22とが交差する交点を通る直線に概ね沿って放射される。治療用放射線23は、一様強度分布を持つように形成されている。治療用放射線照射装置16は、MLC(マルチリーフコリメータ)20を備えている。そのMLC20は、制御装置5により制御され、治療用放射線23の一部を遮蔽することにより、治療用放射線23が患者に照射されるときの照射野の形状を変更する。
【0027】
治療用放射線23は、このように治療用放射線照射装置16が走行ガントリ14に支持されることにより、首振り機構15で治療用放射線照射装置16がアイソセンタ19に向かうように一旦調整されると、旋回駆動装置11によりOリング12が回転し、または、その走行駆動装置により走行ガントリ14が回転しても、常に概ねアイソセンタ19を通る。即ち、走行・旋回を行うことで任意方向からアイソセンタ19に向けて治療用放射線23の照射が可能になる。
【0028】
放射線治療装置3は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置3は、診断用X線源24、25とセンサアレイ32、33とを備えている。診断用X線源24は、走行ガントリ14に支持されている。診断用X線源24は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源24を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源24は、制御装置5により制御されてアイソセンタ19に向けて診断用X線35を放射する。診断用X線35は、診断用X線源24が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。診断用X線源25は、走行ガントリ14に支持されている。診断用X線源25は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源25を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源25は、制御装置5により制御されてアイソセンタ19に向けて診断用X線36を放射する。診断用X線36は、診断用X線源25が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。
【0029】
センサアレイ32は、走行ガントリ14に支持されている。センサアレイ32は、診断用X線源24により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線35を受光して、その被写体の透過画像を生成する。センサアレイ33は、走行ガントリ14に支持されている。センサアレイ33は、診断用X線源25により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線36を受光して、その被写体の透過画像を生成する。センサアレイ32、33としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0030】
このようなイメージャシステムによれば、センサアレイ32、33により得た画像信号に基づき、アイソセンタ19を中心とする透過画像を生成することができる。
【0031】
放射線治療装置3は、さらに、センサアレイ31を備えている。センサアレイ31は、センサアレイ31と治療用放射線照射装置16とを結ぶ線分がアイソセンタ19を通るように配置されて、走行ガントリ14のリングの内側に固定されている。センサアレイ31は、治療用放射線照射装置16により放射されてアイソセンタ19の周辺の被写体を透過した治療用放射線23を受光して、その被写体の透過画像を生成する。センサアレイ31としては、FPD、X線IIが例示される。
【0032】
放射線治療装置3は、さらに、カウチ41とカウチ駆動装置42とを備えている。カウチ41は、放射線治療システム1により治療される患者43が横臥することに利用される。カウチ41は、図示されていない固定具を備えている。その固定具は、その患者が動かないように、その患者をカウチ41に固定する。カウチ駆動装置42は、カウチ41を土台に支持し、制御装置5により制御されてカウチ41を移動させる。
【0033】
放射線治療装置3は、さらに、ガントリ角度制限装置を備えている。そのガントリ角度制限装置は、図3に示されているように、固定ストッパ51と正方向極限センサ用ドグ52と切替メカストッパ53と切替メカストッパ54とストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とを備えている。固定ストッパ51は、走行ガントリ14の一部に接合されている。正方向極限センサ用ドグ52は、走行ガントリ14の固定ストッパ51のガントリ回転正方向側の近傍に接合されている。切替メカストッパ53は、走行ガントリ14が初期状態から正方向極限角度(たとえば、+190度)までガントリ回転正方向58に回転したときに、固定ストッパ51の近傍に配置されるように、Oリング12に配置されている。その初期状態は、治療用放射線照射装置16がアイソセンタ19の鉛直上側に配置されている状態を示している。切替メカストッパ54は、走行ガントリ14が初期状態から負方向極限角度(たとえば、−190度)までガントリ回転負方向59に回転したときに、固定ストッパ51の近傍に配置されるように、Oリング12に配置されている。ストッパ切替センサ55は、Oリング12のうちの切替メカストッパ53の近傍に配置され、図示されていないケーブルを介して制御装置5に情報伝達可能に接続されている。ストッパ切替センサ55は、切替メカストッパ53の状態を検出し、そのケーブルを介してその検出結果を制御装置5に出力する。ストッパ切替センサ56は、Oリング12のうちの切替メカストッパ54の近傍に配置され、図示されていないケーブルを介して制御装置5に情報伝達可能に接続されている。ストッパ切替センサ56は、切替メカストッパ54の状態を検出し、そのケーブルを介してその検出結果を制御装置5に出力する。正方向極限センサ57は、走行ガントリ14が初期状態から概ね正方向極限角度だけガントリ回転正方向58に回転したときに、正方向極限センサ用ドグ52の近傍に配置されるように、Oリング12に配置されている。正方向極限センサ57は、さらに、図示されていないケーブルを介して制御装置5に情報伝達可能に接続されている。正方向極限センサ57は、正方向極限センサ用ドグ52が近傍に配置されているかどうかを検出することにより、走行ガントリ14が正方向極限領域に配置されているかどうかを検出し、そのケーブルを介してその検出結果を制御装置5に出力する。その正方向極限領域は、走行ガントリ14が正方向極限角度からガントリ回転負方向59に所定の角度(たとえば、2度)だけ回転した角度までの領域を示し、たとえば、+190度〜+188度(−170度〜−172度)の範囲を示している。固定ストッパ51と正方向極限センサ用ドグ52と切替メカストッパ53と切替メカストッパ54とストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とは、Oリング12または走行ガントリ14の同じ側に配置されている。
【0034】
ストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とがOリング12に接合されていることによれば、ストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とが走行ガントリ14に接合されていることに比較して、制御装置5と接続するケーブルがより短く設計することができ、好ましい。なお、そのケーブルの長さに頓着しない場合には、ストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とを走行ガントリ14に配置し、固定ストッパ51と正方向極限センサ用ドグ52とをOリング12に配置することもできる。
【0035】
そのガントリ角度制限装置は、さらに、図4に示されているように、固定ストッパ61と負方向極限センサ用ドグ62と切替メカストッパ63と切替メカストッパ64とストッパ切替センサ65とストッパ切替センサ66と負方向極限センサ67とを備えている。固定ストッパ61と負方向極限センサ用ドグ62とは、走行ガントリ14の固定ストッパ51と正方向極限センサ用ドグ52とが配置される面の反対側の面に配置されている。切替メカストッパ63と切替メカストッパ64とストッパ切替センサ65とストッパ切替センサ66と負方向極限センサ67とは、Oリングの切替メカストッパ53と切替メカストッパ54とストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とが配置されている面の反対側の面に配置されている。固定ストッパ61は、走行ガントリ14の一部に接合されている。負方向極限センサ用ドグ62は、走行ガントリ14の固定ストッパ61のガントリ回転負方向側の近傍に接合されている。切替メカストッパ63は、走行ガントリ14が初期状態から正方向極限角度だけガントリ回転正方向58に回転したときに、固定ストッパ61の近傍に配置されるように、Oリング12に配置されている。切替メカストッパ64は、走行ガントリ14が初期状態から負方向極限角度だけガントリ回転負方向59に回転したときに、固定ストッパ61の近傍に配置されるように、Oリング12に配置されている。ストッパ切替センサ65は、Oリング12のうちの切替メカストッパ63の近傍に配置され、切替メカストッパ63の状態を検出し、その検出結果を制御装置5に出力する。ストッパ切替センサ66は、Oリング12のうちの切替メカストッパ64の近傍に配置され、切替メカストッパ64の状態を検出し、その検出結果を制御装置5に出力する。負方向極限センサ67は、走行ガントリ14が初期状態から概ね負方向極限角度だけガントリ回転負方向59に回転したときに、負方向極限センサ用ドグ62の近傍に配置されるように、Oリング12に配置されている。負方向極限センサ67は、負方向極限センサ用ドグ62が近傍に配置されているかどうかを検出することにより、走行ガントリ14が負方向極限領域に配置されているかどうかを検出し、その検出結果を制御装置5に出力する。その負方向極限領域は、走行ガントリ14が負方向極限角度からガントリ回転正方向58に所定の角度(たとえば、2度)だけ回転した角度までの領域を示し、たとえば、−190度〜−188度(+170度〜+172度)の範囲を示している。
【0036】
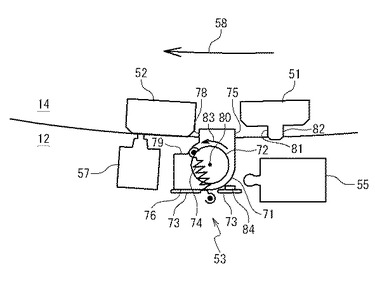
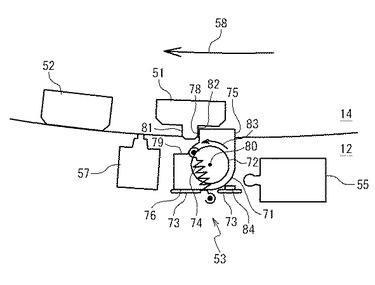
図5は、正方向極限センサ用ドグ52と正方向極限センサ57とを示している。正方向極限センサ用ドグ52は、走行ガントリ14に接合されている。正方向極限センサ57は、Oリング12に接合されている。正方向極限センサ用ドグ52と正方向極限センサ57とは、走行ガントリ14が正方向極限領域に位置するときに、互いに接触するように配置されている。正方向極限センサ57は、正方向極限センサ用ドグ52と接触したときに、走行ガントリ14が正方向極限領域に位置していることを制御装置5に出力する。
【0037】
図5は、さらに、切替メカストッパ53を示している。切替メカストッパ53は、切替メカストッパ本体71と軸受け72とストッパ73とバネ74とを備えている。切替メカストッパ本体71は、衝突面75、76、78、79が形成されている。軸受け72は、回転軸80を中心に回転可能に切替メカストッパ本体71をOリング12に支持している。回転軸80は、回転軸18に平行になるように形成されている。
【0038】
ストッパ73は、Oリング12に接合されている。ストッパ73は、切替メカストッパ本体71が回転軸80を中心にストッパ回転正方向83に回転するときに、切替メカストッパ本体71の衝突面76に衝突して、切替メカストッパ本体71が回転可能である範囲を制限している。ストッパ73は、さらに、切替メカストッパ本体71が回転軸80を中心にストッパ回転正方向83の反対方向に回転するときに、切替メカストッパ本体71の衝突面75に衝突して、切替メカストッパ本体71が回転可能である範囲を制限している。ストッパ73は、ゴムから形成されている2つのゴム板84を備えている。ゴム板84の1つは、ストッパ73のうちの衝突面75に衝突する部分に接合されている。ゴム板84の他の1つは、ストッパ73のうちの衝突面76に衝突する部分に接合されている。ゴム板84は、切替メカストッパ本体71が回転してストッパ73に衝突する音を低減して、患者に無用な心配をかけない様にすることができる。なお、ゴム板84は、切替メカストッパ本体71がストッパ73に衝突する音を低減する他の防音材から形成されることもできる。その防音材としては、スポンジが例示される。
【0039】
バネ74は、弾性体から形成され、両端が切替メカストッパ本体71の一部とOリング12の一部とに接合されている。その両端が接合される位置は、切替メカストッパ本体71の衝突面75と衝突面76との両方がストッパ73に接触していないときに最も伸びるように、たとえば、バネ74が回転軸80に交差するように切替メカストッパ本体71が回転したときに最も伸びるように、配置されている。このとき、バネ74は、切替メカストッパ本体71の衝突面75がストッパ73に接触しているときに、切替メカストッパ本体71がストッパ回転正方向83の反対方向に回転するように、切替メカストッパ本体71に弾性力を印加する。バネ74は、さらに、衝突面76がストッパ73に接触しているときに、切替メカストッパ本体71がストッパ回転正方向83に回転するように、切替メカストッパ本体71に弾性力を印加する。バネ74は、さらに、衝突面75と衝突面76との両方がストッパ73に接触していないときに、切替メカストッパ本体71が回転するように、切替メカストッパ本体71に弾性力を印加している。
【0040】
切替メカストッパ53は、切替メカストッパ本体71が回転軸80を中心に回転することにより、複数の状態を遷移する。その複数の状態は、第1状態と第2状態とを含んでいる。その第1状態は、切替メカストッパ本体71の衝突面76がストッパ73に接触している状態を示している。その第2状態は、切替メカストッパ本体71の衝突面75がストッパ73に接触している状態を示している。切替メカストッパ本体71は、切替メカストッパ53が第1状態であるときに、ストッパ回転正方向83に回転不可能であり、ストッパ回転正方向83の反対方向に回転可能である。切替メカストッパ本体71は、切替メカストッパ53が第2状態であるときに、ストッパ回転正方向83に回転可能であり、ストッパ回転正方向83の反対方向に回転不可能である。
【0041】
図5は、さらに、ストッパ切替センサ55を示している。ストッパ切替センサ55は、切替メカストッパ53が第1状態であるときに切替メカストッパ本体71に接触しないで、切替メカストッパ53が第2状態であるときに切替メカストッパ本体71の一部が接触するように形成されている。ストッパ切替センサ55は、切替メカストッパ本体71が接触しているかどうかに基づいて、切替メカストッパ53が第1状態であるか第2状態であるかを制御装置5に出力する。
【0042】
図5は、さらに、固定ストッパ51を示している。固定ストッパ51は、衝突面81と衝突面82とが形成されている。衝突面81と衝突面82とは、Oリング12に対して走行ガントリ14が回転したときに、切替メカストッパ53の切替メカストッパ本体71の一部に衝突するような位置に形成されている。
【0043】
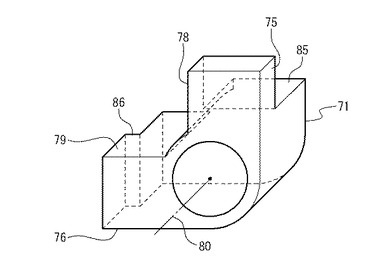
図6は、切替メカストッパ本体71を示している。切替メカストッパ本体71は、切り欠き85、86が形成されている。切り欠き85は、衝突面75と衝突面78とが形成されている部分に形成されている。切り欠き85は、さらに、切替メカストッパ53が第1状態である場合で、Oリング12に対して走行ガントリ14が回転するときに正方向極限センサ用ドグ52が通過する領域に形成されている。切り欠き86は、衝突面76と衝突面79とが形成されている部分に形成されている。切り欠き86は、さらに、切替メカストッパ53が第2状態である場合で、Oリング12に対して走行ガントリ14が回転するときに正方向極限センサ用ドグ52が通過する領域に形成されている。すなわち、正方向極限センサ用ドグ52は、回転軸18と平行な方向に関して、固定ストッパ51が配置される位置と異なる2位置に配置されている。このため、切替メカストッパ本体71は、切り欠き85、86により、Oリング12に対して走行ガントリ14が回転するときに、正方向極限センサ用ドグ52と接触しないで、固定ストッパ51に接触する。
【0044】
正方向極限センサ57は、回転軸18と平行な方向に関して、切替メカストッパ53および切替メカストッパ54が配置される位置と異なる2位置に配置され、正方向極限センサ用ドグ52と一致する位置に配置されている。このため、正方向極限センサ57は、Oリング12に対して走行ガントリ14が回転するときに、固定ストッパ51と接触しないで、正方向極限センサ用ドグ52と接触する。
【0045】
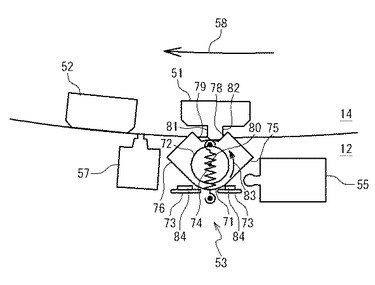
図7は、切替メカストッパ53が第1状態であるときに、走行ガントリ14が正方向極限角度に位置したときの状態を示している。固定ストッパ51は、このとき、衝突面81が切替メカストッパ本体71の衝突面75に衝突している。固定ストッパ51は、走行ガントリ14がガントリ回転正方向58に回転するときに、切替メカストッパ本体71の衝突面75を押して、切替メカストッパ本体71をストッパ回転正方向83に回転させる力を切替メカストッパ本体71に印加する。切替メカストッパ本体71は、このとき、ストッパ73によりストッパ回転正方向83に回転不可能である。このため、走行ガントリ14は、このとき、ガントリ回転正方向58に回転不可能になる。
【0046】
図8は、切替メカストッパ53が第1状態であるときに、走行ガントリ14が正方向極限角度の近傍までガントリ回転正方向58の反対のガントリ回転負方向59に回転したときの状態を示している。固定ストッパ51は、このとき、衝突面82が切替メカストッパ本体71の衝突面78に衝突する。固定ストッパ51は、走行ガントリ14がガントリ回転負方向59に回転するときに、切替メカストッパ本体71の衝突面78を押して、切替メカストッパ本体71をストッパ回転正方向83の反対方向に回転させる力を切替メカストッパ本体71に印加する。切替メカストッパ本体71は、このとき、ストッパ回転正方向83の反対方向に回転可能である。
【0047】
図9は、図8の状態から走行ガントリ14がガントリ回転負方向59に所定の角度だけ回転したときの状態を示している。固定ストッパ51は、走行ガントリ14がガントリ回転負方向59に回転するときに、切替メカストッパ本体71の衝突面78を押して、切替メカストッパ本体71をストッパ回転正方向83の反対方向に回転させる。すなわち、走行ガントリ14は、切替メカストッパ53が第1状態であるときに、正方向極限角度の位置までガントリ回転負方向59に回転可能である。
【0048】
バネ74は、衝突面76がストッパ73に接触している図8の状態から図9の状態になるまでの間に、切替メカストッパ本体71をストッパ回転正方向83に回転させる弾性力を切替メカストッパ本体71に印加する。バネ74は、さらに、図9の状態から少しだけ切替メカストッパ本体71がストッパ回転正方向83の反対方向に回転すると、切替メカストッパ本体71をストッパ回転正方向83の反対方向に回転させる弾性力を切替メカストッパ本体71に印加する。すなわち、バネ74は、衝突面75または衝突面76の一方がストッパ73に接触するように弾性力を切替メカストッパ本体71に印加し、切替メカストッパ53が第1状態と第2状態との中間の中途半端な状態で止まってしまうことを防止している。
【0049】
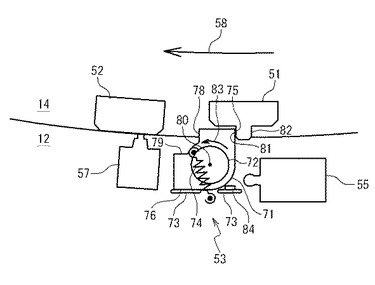
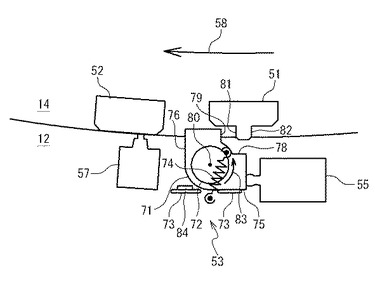
切替メカストッパ53は、走行ガントリ14が図9の状態からガントリ回転負方向59にさらに回転すると、切替メカストッパ本体71がストッパ回転正方向83の反対方向に回転して、図10に示されているように、衝突面75がストッパ73に接触して第1状態から第2状態に遷移する。
【0050】
固定ストッパ51は、図10に示されているように、切替メカストッパ53が第2状態である場合で、走行ガントリ14がガントリ回転正方向58に回転するときに、衝突面81が切替メカストッパ本体71の衝突面79に衝突する。固定ストッパ51は、走行ガントリ14がガントリ回転正方向58に回転するときに、切替メカストッパ本体71の衝突面79を押して、切替メカストッパ本体71をストッパ回転正方向83に回転させる力を切替メカストッパ本体71に印加する。切替メカストッパ本体71は、このとき、ストッパ回転正方向83に回転可能である。このため、切替メカストッパ53は、走行ガントリ14がガントリ回転正方向58に回転するときに、切替メカストッパ本体71がストッパ回転正方向83に回転し、図9のような状態を介して第1状態になる。すなわち、走行ガントリ14は、切替メカストッパ53が第2状態であるときに、ガントリ回転正方向58に回転可能である。
【0051】
切替メカストッパ54は、切替メカストッパ53と同様に形成されている。すなわち、切替メカストッパ54は、切替メカストッパ本体と軸受けとストッパとバネとを備えている。その軸受けは、回転可能にその切替メカストッパ本体をOリング12に支持している。そのストッパは、Oリング12に接合されている。そのストッパは、その切替メカストッパ本体がその回転軸を中心に回転するときに、その切替メカストッパ本体に衝突して、その切替メカストッパ本体が回転可能である範囲を制限している。切替メカストッパ54は、その切替メカストッパ本体がその回転軸を中心に回転することにより、第3状態と第4状態とを遷移する。そのバネは、さらに、その切替メカストッパ本体がそのストッパに接触していないときに、その切替メカストッパ本体が回転するように、すなわち、切替メカストッパ54が第3状態と第4状態との一方になるように、その切替メカストッパ本体に弾性力を印加している。
【0052】
切替メカストッパ54は、第3状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転正方向58に回転するときに、第3状態から第4状態に遷移する。切替メカストッパ54は、さらに、第4状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転するときに、第4状態から第3状態に遷移する。切替メカストッパ54は、さらに、第3状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転するときに、走行ガントリ14の回転を阻止する。
【0053】
ストッパ切替センサ56は、切替メカストッパ54が第3状態であるときに切替メカストッパ54の切替メカストッパ本体に接触しないで、切替メカストッパ54が第4状態であるときに切替メカストッパ54の切替メカストッパ本体の一部が接触するように形成されている。ストッパ切替センサ56は、切替メカストッパ54の切替メカストッパ本体が接触しているかどうかに基づいて、切替メカストッパ54が第3状態であるか第4状態であるかを制御装置5に出力する。
【0054】
固定ストッパ61は、固定ストッパ51と同様に形成されている。切替メカストッパ63は、切替メカストッパ53と同様に形成され、切替メカストッパ53と同様に動作する。すなわち、切替メカストッパ63は、切替メカストッパ本体と軸受けとストッパとバネとを備えている。その軸受けは、回転可能にその切替メカストッパ本体をOリング12に支持している。そのストッパは、Oリング12に接合されている。そのストッパは、その切替メカストッパ本体がその回転軸を中心に回転するときに、その切替メカストッパ本体に衝突して、その切替メカストッパ本体が回転可能である範囲を制限している。切替メカストッパ63は、その切替メカストッパ本体がその回転軸を中心に回転することにより、第1状態と第2状態とを遷移する。そのバネは、さらに、その切替メカストッパ本体がそのストッパに接触していないときに、その切替メカストッパ本体が回転するように、すなわち、切替メカストッパ63が第1状態と第2状態との一方になるように、その切替メカストッパ本体に弾性力を印加している。
【0055】
切替メカストッパ63は、第1状態である場合で、走行ガントリ14が正方向極限角度をガントリ回転負方向59に回転するときに、第1状態から第2状態に遷移する。切替メカストッパ63は、さらに、第2状態である場合で、走行ガントリ14が正方向極限角度をガントリ回転正方向58に回転するときに、第2状態から第1状態に遷移する。切替メカストッパ63は、さらに、第1状態である場合で、走行ガントリ14が正方向極限角度をガントリ回転正方向58に回転するときに、走行ガントリ14の回転を阻止する。
【0056】
ストッパ切替センサ65は、切替メカストッパ63が第1状態であるときに切替メカストッパ63の切替メカストッパ本体に接触しないで、切替メカストッパ63が第2状態であるときに切替メカストッパ63の切替メカストッパ本体の一部が接触するように形成されている。ストッパ切替センサ65は、切替メカストッパ63の切替メカストッパ本体が接触しているかどうかに基づいて、切替メカストッパ63が第1状態であるか第2状態であるかを制御装置5に出力する。
【0057】
切替メカストッパ64は、切替メカストッパ53と同様に形成され、切替メカストッパ54と同様に動作する。すなわち、切替メカストッパ64は、切替メカストッパ本体と軸受けとストッパとバネとを備えている。その軸受けは、回転可能にその切替メカストッパ本体をOリング12に支持している。そのストッパは、Oリング12に接合されている。そのストッパは、その切替メカストッパ本体がその回転軸を中心に回転するときに、その切替メカストッパ本体に衝突して、その切替メカストッパ本体が回転可能である範囲を制限している。切替メカストッパ64は、その切替メカストッパ本体がその回転軸を中心に回転することにより、第3状態と第4状態とを遷移する。そのバネは、さらに、その切替メカストッパ本体がそのストッパに接触していないときに、その切替メカストッパ本体が回転するように、すなわち、切替メカストッパ64が第3状態と第4状態との一方になるように、その切替メカストッパ本体に弾性力を印加している。
【0058】
切替メカストッパ64は、第3状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転正方向58に回転するときに、第3状態から第4状態に遷移する。切替メカストッパ64は、さらに、第4状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転するときに、第4状態から第3状態に遷移する。切替メカストッパ64は、さらに、第3状態である場合で、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転するときに、走行ガントリ14の回転を阻止する。
【0059】
ストッパ切替センサ66は、切替メカストッパ64が第3状態であるときに切替メカストッパ64の切替メカストッパ本体に接触しないで、切替メカストッパ64が第4状態であるときに切替メカストッパ64の切替メカストッパ本体の一部が接触するように形成されている。ストッパ切替センサ66は、切替メカストッパ64の切替メカストッパ本体が接触しているかどうかに基づいて、切替メカストッパ64が第3状態であるか第4状態であるかを制御装置5に出力する。
【0060】
負方向極限センサ用ドグ62は、正方向極限センサ用ドグ52と同様に形成され、負方向極限センサ67は、正方向極限センサ57と同様に形成されている。すなわち、負方向極限センサ用ドグ62と負方向極限センサ67とは、走行ガントリ14が負方向極限領域に位置するときに、互いに接触するように配置されている。負方向極限センサ67は、負方向極限センサ用ドグ62と接触したときに、走行ガントリ14が負方向極限領域に位置していることを制御装置5に出力する。
【0061】
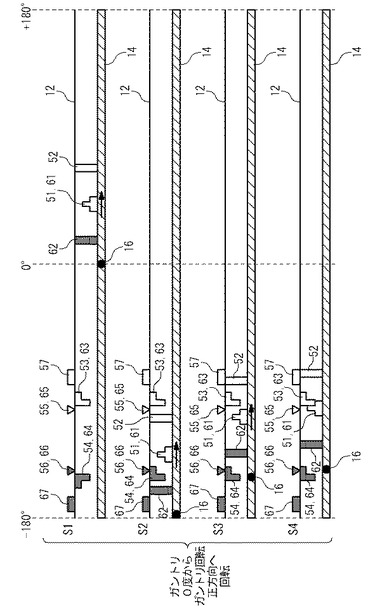
図11は、そのガントリ角度制限装置の動作を示している。そのガントリ角度制限装置は、走行ガントリ14が初期状態であるときに、切替メカストッパ53、63が第1状態であり、切替メカストッパ54、64が第3状態である(状態S1)。切替メカストッパ54、64は、走行ガントリ14がガントリ回転正方向58に回転して初期状態から負方向極限角度を通過したときに、第3状態から第4状態に遷移する(状態S2)。正方向極限センサ57は、走行ガントリ14がガントリ回転正方向58にさらに回転して正方向極限領域に位置したときに、走行ガントリ14が正方向極限領域に位置したことを制御装置5に出力する(状態S3)。切替メカストッパ53、63は、走行ガントリ14がガントリ回転正方向58にさらに回転して正方向極限角度に位置したときに、走行ガントリ14のガントリ回転正方向58の回転を阻止する(状態S4)。切替メカストッパ54、64は、走行ガントリ14が正方向極限角度からガントリ回転負方向59に回転して負方向極限角度を通過したときに、第4状態から第3状態に遷移する。
【0062】
図12は、そのガントリ角度制限装置の動作を示している。そのガントリ角度制限装置は、走行ガントリ14が初期状態であるときに、切替メカストッパ53、63が第1状態であり、切替メカストッパ54、64が第3状態である(状態S5)。切替メカストッパ53、63は、走行ガントリ14がガントリ回転負方向59に回転して初期状態から正方向極限角度を通過したときに、第1状態から第2状態に遷移する(状態S6)。負方向極限センサ67は、走行ガントリ14がガントリ回転負方向59にさらに回転して負方向極限領域に位置したときに、走行ガントリ14が負方向極限領域に位置したことを制御装置5に出力する(状態S7)。切替メカストッパ54、64は、走行ガントリ14がガントリ回転負方向59にさらに回転して負方向極限角度に位置したときに、走行ガントリ14のガントリ回転負方向59の回転を阻止する(状態S8)。切替メカストッパ53、63は、走行ガントリ14が負方向極限角度からガントリ回転正方向58に回転して正方向極限角度を通過したときに、第2状態から第1状態に遷移する。
【0063】
このとき、放射線治療装置3は、走行ガントリ14の回転を制御できなくなる暴走状態に陥ったときに、固定ストッパ51が切替メカストッパ53、54に衝突することにより、または、固定ストッパ61が切替メカストッパ63、64に衝突することにより、その回転を制動することができる。放射線治療装置3は、さらに、固定ストッパ51、61と切替メカストッパ53、54、63、64とを適切に配置することにより、走行ガントリ14の回転を機械的に制限するときの回転可能な範囲を1回転以上2回転未満の任意の範囲に設計することができる。放射線治療装置3は、さらに、走行ガントリ14の回転可能な範囲を拡大することにより、治療用放射線照射装置16が駆動される範囲を拡大することができる。
【0064】
なお、放射線治療装置3は、固定ストッパ61と切替メカストッパ63と切替メカストッパ64とストッパ切替センサ65とストッパ切替センサ66とを削除することもできる。このとき、放射線治療装置3は、固定ストッパ51が切替メカストッパ53に衝突することにより、走行ガントリ14が正方向極限角度をガントリ回転正方向58に回転することを制限し、固定ストッパ51が切替メカストッパ54に衝突することにより、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転することを制限することができる。
【0065】
なお、放射線治療装置3は、切替メカストッパ54とストッパ切替センサ56と切替メカストッパ63とストッパ切替センサ65とを削除することもできる。このとき、放射線治療装置3は、固定ストッパ51が切替メカストッパ53に衝突することにより、走行ガントリ14が正方向極限角度をガントリ回転正方向58に回転することを制限し、固定ストッパ61が切替メカストッパ64に衝突することにより、走行ガントリ14が負方向極限角度をガントリ回転負方向59に回転することを制限することができる。
【0066】
放射線治療装置1により実行される動作は、治療計画を作成する動作と、セットアップする動作と、放射線治療する動作とを備えている。
【0067】
その治療計画を作成する動作では、まず、ユーザは、その患者の患部とその患部の周辺の部位との3次元データに基づいて、その患者の患部とその患部の周辺の臓器とを示す画像を生成する。ユーザは、制御装置5を用いてその画像を閲覧し、その患部の位置を特定する。ユーザは、さらに、その画像に基づいて治療計画を作成し、その治療計画を制御装置5に入力する。その治療計画は、その患者の患部に治療用放射線を照射する照射角度と、その各照射角度から照射する治療用放射線の線量および性状とを示している。
【0068】
そのセットアップする動作は、放射線治療する動作の直前に実行され、カウチ41を駆動する動作と治療用放射線照射装置16を駆動する動作とを備えている。カウチ41を駆動する動作では、ユーザは、まず、その3次元データを採取したときと同様の姿勢に放射線治療装置3のカウチ41にその患者を固定する。ユーザは、患者の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。ユーザは、その透過画像の撮像とカウチ41の移動とを繰り返して、患者の患部がアイソセンタ19に正確に重なるように患者の患部を配置する。
【0069】
その放射線治療する動作は、患者の患部に対する治療用放射線照射装置の相対位置が治療計画が示す照射角度に許容範囲内で一致するように、カウチ41とOリング12と走行ガントリ14とが駆動された後に実行される。その放射線治療する動作では、制御装置5は、その治療計画が示す線量だけ、治療用放射線照射装置を用いて治療用放射線を患者の患部に照射する。その放射線治療する動作としては、呼吸同期照射(ゲイテッドイラディエイション)、動体追尾照射が例示される。その呼吸同期照射は、観測される患者の運動に基づいて治療用放射線を照射したり照射を停止したりする手法である。その動体追尾照射は、患部の位置を観測し、その位置に治療用放射線を照射する手法である。
【0070】
図13は、正方向極限角度が+190度であり、負方向極限角度が−190度であるときの、ストッパ切替センサ55とストッパ切替センサ56と正方向極限センサ57とストッパ切替センサ65とストッパ切替センサ66と負方向極限センサ67との検出結果を示している。正方向極限センサ57は、走行ガントリ14が+188度〜+190度の範囲と−170度〜−172度の範囲とに位置しているときに、オンを出力する。負方向極限センサ67は、走行ガントリ14が−188度〜−190度の範囲と+170度〜+172度の範囲とに位置しているときに、オンを出力する。
【0071】
ストッパ切替センサ55は、切替メカストッパ53が第2状態であるときに、オンを出力する。すなわち、ストッパ切替センサ55は、走行ガントリ14が−170度〜−190度の範囲に位置しているときに、オンを出力する。ストッパ切替センサ56は、切替メカストッパ54が第4状態であるときに、オンを出力する。すなわち、ストッパ切替センサ56は、走行ガントリ14が+170度〜+190度の範囲に位置しているときに、オンを出力する。ストッパ切替センサ65は、切替メカストッパ63が第2状態であるときに、オンを出力する。すなわち、ストッパ切替センサ65は、走行ガントリ14が−170度〜−190度の範囲に位置しているときに、オンを出力する。ストッパ切替センサ66は、切替メカストッパ64が第4状態であるときに、オンを出力する。すなわち、ストッパ切替センサ66は、走行ガントリ14が+170度〜+190度の範囲に位置しているときに、オンを出力する。
【0072】
図14は、本発明によるガントリ角度制限方法の実施の形態を示している。このガントリ角度制限方法は、常時に実行され、少なくともその放射線治療する動作の最中に実行される。制御装置5は、周期的に、正方向極限センサ57の検出結果と負方向極限センサ67の検出結果とを収集する(ステップS11)。制御装置5は、正方向極限センサ57または負方向極限センサ67がオンを出力したときに(ステップS11、YES)、ストッパ切替センサ55とストッパ切替センサ56とストッパ切替センサ65とストッパ切替センサ66との検出結果を収集する(ステップS12)。制御装置5は、正方向極限センサ57がオンを出力し、かつ、ストッパ切替センサ56とストッパ切替センサ66とがオンを出力するときに(ステップS12、YES)、走行ガントリ14が停止するように、走行ガントリ14を駆動する走行駆動装置を制御する(ステップS13)。さらに、制御装置5は、負方向極限センサ67がオンを出力し、かつ、ストッパ切替センサ55とストッパ切替センサ65とがオンを出力したときに(ステップS12、YES)、走行ガントリ14が停止するように、走行ガントリ14を駆動する走行駆動装置を制御する(ステップS13)。
【0073】
このようなガントリ角度制限方法によれば、固定ストッパ51が切替メカストッパ53に衝突する直前のタイミングを検出することができ、固定ストッパ61が切替メカストッパ64に衝突する直前のタイミングを検出することができる。このようなガントリ角度制限方法は、その検出されたタイミングで走行ガントリ14を制動することにより、固定ストッパ51が切替メカストッパ53に強烈に衝突することを防止し、固定ストッパ61が切替メカストッパ64に強烈に衝突することを防止し、ガントリ角度制限装置の破損を防止することができる。さらに、放射線治療装置3は、固定ストッパ51が切替メカストッパ53に衝突するときに、または固定ストッパ61が切替メカストッパ64に衝突するときに、大きな音が立たないで、患者43の恐怖心を低減することができる。
【0074】
なお、ガントリ角度制限方法は、ステップS13で走行ガントリ14を駆動する走行駆動装置のモータの電源をその検出されたタイミングでOFFすることもできる。このようなガントリ角度制限方法によれば、走行ガントリ14を駆動する走行駆動装置が走行ガントリ14の回転を制御できなくなる暴走状態に陥ったときに、既述の実施の形態におけるガントリ角度制限方法と同様にして、ガントリ角度制限装置の破損を防止することができ、患者43の恐怖心を低減することができる。
【0075】
なお、正方向極限センサ57は、走行ガントリ14が正方向極限領域に配置されているかどうかを検出することができる他のセンサに置換されることができる。そのセンサとしては、走行ガントリ14の回転角度を測定する角度計、エンコーダが例示される。その角度計は、走行ガントリ14の回転角度を測定する。そのエンコーダは、走行ガントリ14を駆動する走行駆動装置に適用されるモーターに取り付けられ、そのモーターの回転軸の回転角度を測定する。このようなセンサが適用された放射線治療装置は、既述の実施の形態における放射線治療装置3と同様にして、固定ストッパ51が切替メカストッパ53に衝突する直前のタイミングを検出することができ、固定ストッパ61が切替メカストッパ64に衝突する直前のタイミングを検出することができる。さらに、負方向極限センサ67は、正方向極限センサ57と同様にして、走行ガントリ14が負方向極限領域に配置されているかどうかを検出することができる他のセンサに置換されることができる。
【0076】
なお、制御装置5は、走行ガントリ14を駆動する走行駆動装置と異なる制動装置を用いて走行ガントリ14の回転を制動することもできる。その制動装置としては、メカニカルなブレーキが例示される。そのブレーキは、ブレーキドラムとブレーキシューとを備えている。そのブレーキドラムは、走行ガントリ14に固定されている。そのブレーキシューは、Oリング12に固定され、制御装置5に制御されて、そのブレーキドラムに接触され、そのブレーキドラムとブレーキシューとの摩擦力により走行ガントリ14の回転を制動する。このような制動装置が適用された放射線治療装置は、既述の実施の形態における放射線治療装置3と同様にして、ガントリ角度制限装置の破損を防止することができ、患者43の恐怖心を低減することができる。このような制動装置が適用された放射線治療装置は、さらに、走行ガントリ14を駆動する走行駆動装置が走行ガントリ14の回転を制御できなくなる暴走状態に陥ったときでも、ガントリ角度制限装置の破損を防止することができ、患者43の恐怖心を低減することができる。
【0077】
なお、放射線治療装置3は、その制動装置を他の装置に置換することもできる。その装置としては、固定ストッパ51が切替メカストッパ53に衝突する直前のタイミングを通知し、または、検出することができ、固定ストッパ61が切替メカストッパ64に衝突する直前のタイミングを通知する警報装置が例示される。このような放射線治療装置によれば、患者43は、固定ストッパ51が切替メカストッパ53に衝突することを、または、固定ストッパ61が切替メカストッパ64に衝突することを、事前に知ることができ、走行ガントリ14が急に停止したり、大きな音が立ったりするときの恐怖心を低減することができる。
【0078】
さらに、制御装置5は、放射線治療する動作で利用される制御装置と別個に設置することもできる。
【図面の簡単な説明】
【0079】
【図1】図1は、本発明による放射線治療装置を示すブロック図である。
【図2】図2は、本発明による放射線治療装置を示す斜視図である。
【図3】図3は、ガントリ角度制限装置を示す平面図である。
【図4】図4は、ガントリ角度制限装置を示す平面図である。
【図5】図5は、ガントリ角度制限装置の1つの状態を示す平面図である。
【図6】図6は、切替メカストッパ本体を示す斜視図である。
【図7】図7は、ガントリ角度制限装置の他の状態を示す平面図である。
【図8】図8は、ガントリ角度制限装置のさらに他の状態を示す平面図である。
【図9】図9は、ガントリ角度制限装置のさらに他の状態を示す平面図である。
【図10】図10は、ガントリ角度制限装置のさらに他の状態を示す平面図である。
【図11】図11は、ガントリ角度制限装置の動作を示す概念図である。
【図12】図12は、ガントリ角度制限装置の動作を示す概念図である。
【図13】図13は、センサの検出結果を示し、ガントリ角度制限装置の状態を示すグラフである。
【図14】図14は、本発明によるガントリ角度制限方法を示すフローチャートである。
【符号の説明】
【0080】
3 :放射線治療装置
5 :制御装置
11:旋回駆動装置
12:Oリング
14:走行ガントリ
15:首振り機構
16:治療用放射線照射装置
17:回転軸
18:回転軸
19:アイソセンタ
21:パン軸
22:チルト軸
23:治療用放射線
24:診断用X線源
25:診断用X線源
31:センサアレイ
32:センサアレイ
33:センサアレイ
35:診断用X線
36:診断用X線
41:カウチ
42:カウチ駆動装置
43:患者
51:固定ストッパ
52:正方向極限センサ用ドグ
53:切替メカストッパ
54:切替メカストッパ
55:ストッパ切替センサ
56:ストッパ切替センサ
57:正方向極限センサ
58:正方向
59:負方向
61:固定ストッパ
62:負方向極限センサ用ドグ
63:切替メカストッパ
64:切替メカストッパ
65:ストッパ切替センサ
66:ストッパ切替センサ
67:負方向極限センサ
71:切替メカストッパ本体
72:軸受け
73:ストッパ
74:バネ
75、76、78、79:衝突面
80:回転軸
81:衝突面
82:衝突面
83:ストッパ回転正方向
84:ゴム板
85、86:切り欠き
【特許請求の範囲】
【請求項1】
治療用放射線を出射する放射線照射装置を支持する走行ガントリと、
前記走行ガントリを回転可能に支持するOリングと、
前記Oリングまたは前記走行ガントリの一方に接合される固定ストッパと、
前記Oリングまたは前記走行ガントリの他方に接合される切替メカストッパとを具備し、
前記切替メカストッパは、
第1状態にある場合で、前記Oリングに対して前記走行ガントリが正方向極限角度をガントリ回転正方向に回転するときに、前記固定ストッパに接触することにより前記走行ガントリが前記ガントリ回転正方向に回転することを停止させ、
前記第1状態にある場合で、前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向の反対方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第1状態から第2状態に遷移する
放射線治療装置。
【請求項2】
請求項1において、
前記切替メカストッパは、
前記第2状態にある場合で、前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第2状態から前記第1状態に遷移する
放射線治療装置。
【請求項3】
請求項2において、
前記切替メカストッパは、
前記他方に回転可能に支持されるストッパ本体と、ここで、前記切替メカストッパは、前記第2状態にあるときに前記ストッパ本体がストッパ回転正方向に回転することにより前記第2状態から前記第1状態に遷移し、前記第1状態にあるときに前記ストッパ本体が前記ストッパ回転正方向の反対方向に回転することにより前記第1状態から前記第2状態に遷移し、
前記切替メカストッパが前記第1状態にあるときに、前記ストッパ本体が前記ストッパ回転正方向に回転しないように前記ストッパ本体に接触するストッパとを備え、
前記ストッパは、前記切替メカストッパが前記第2状態にあるときに、前記ストッパ本体が前記ストッパ回転正方向の反対方向に回転しないようにし、
前記ストッパ本体は、
前記切替メカストッパが前記第2状態で前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向に回転するときに、前記固定ストッパに衝突することにより前記ストッパ回転正方向に回転し、
前記切替メカストッパが前記第1状態で前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記固定ストッパに衝突することにより前記ストッパ回転正方向の反対方向に回転する
放射線治療装置。
【請求項4】
請求項3において、
前記切替メカストッパは、前記切替メカストッパが前記第1状態にあるときに前記ストッパ本体が前記ストッパ回転正方向に回転するように前記ストッパ本体に弾性力を印加する弾性体を更に備え、
前記弾性体は、前記切替メカストッパが前記第2状態にあるときに前記ストッパ本体が前記ストッパ回転正方向の反対方向に回転するように、前記ストッパ本体に弾性力を印加する
放射線治療装置。
【請求項5】
請求項1〜請求項4のいずれかにおいて、
前記他方に接合される他の切替メカストッパを更に具備し、
前記他の切替メカストッパは、
第3状態にある場合で、前記走行ガントリが負方向極限角度を前記ガントリ回転正方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第3状態から第4状態に遷移し、
前記第4状態にある場合で、前記走行ガントリが前記負方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向の反対方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第4状態から前記第3状態に遷移し、
前記第3状態にある場合で、前記走行ガントリが前記負方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記固定ストッパに接触することにより前記走行ガントリが前記ガントリ回転正方向の反対方向に回転することを停止させる
放射線治療装置。
【請求項6】
請求項1〜請求項4のいずれかにおいて、
前記Oリングまたは前記走行ガントリの一方に接合される他の固定ストッパと、
前記Oリングまたは前記走行ガントリの他方に接合される他の切替メカストッパとを更に具備し、
前記他の切替メカストッパは、
前記第3状態にある場合で、前記走行ガントリが負方向極限角度を前記ガントリ回転正方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向に回転することを停止させないで、前記他の固定ストッパに接触することにより前記第3状態から第4状態に遷移し、
前記第4状態にある場合で、前記走行ガントリが前記負方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向の反対方向に回転することを停止させないで、前記他の固定ストッパに接触することにより前記第4状態から前記第3状態に遷移し、
前記第3状態にある場合で、前記走行ガントリが前記負方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記他の固定ストッパに接触することにより前記走行ガントリが前記ガントリ回転正方向の反対方向に回転することを停止させる
放射線治療装置。
【請求項7】
請求項1〜請求項4のいずれかにおいて、
前記切替メカストッパの状態を検出するストッパ切替センサと、
前記走行ガントリの角度が所定範囲内にあるかどうかを検出する極限センサ
とを更に具備する放射線治療装置。
【請求項8】
請求項7において、
前記走行ガントリの角度が前記所定範囲内にあるときに前記極限センサに接触するドグを更に具備し、
前記ドグは、前記切替メカストッパに接触しないように前記一方に接合される
放射線治療装置。
【請求項9】
請求項7または請求項8のいずれかにおいて、
前記走行ガントリの角度が前記所定範囲内にあり、かつ、前記切替メカストッパの状態が前記第1状態にあるときに、前記Oリングに対して前記走行ガントリを制動するブレーキ
を更に具備する放射線治療装置。
【請求項10】
請求項9において、
前記ブレーキは、
前記Oリングに対して前記走行ガントリを駆動する駆動装置と、
前記走行ガントリの角度が前記所定範囲内にあり、かつ、前記切替メカストッパの状態が前記第1状態にあるときに、前記Oリングに対して前記走行ガントリが停止するように前記駆動装置を制御する制御装置を備える
放射線治療装置。
【請求項11】
治療用放射線を出射する放射線照射装置を支持する走行ガントリと、
前記走行ガントリを回転可能に支持するOリングと、
前記Oリングまたは前記走行ガントリの一方に接合される固定ストッパと、
前記Oリングまたは前記走行ガントリの他方に接合される切替メカストッパと、
ストッパ切替センサと、
極限センサと、
ブレーキとを備え、
前記切替メカストッパは、
第1状態にある場合で、前記Oリングに対して前記走行ガントリが正方向極限角度をガントリ回転正方向に回転するときに、前記固定ストッパに接触することにより前記走行ガントリが前記ガントリ回転正方向に回転することを停止させ、
前記第1状態にある場合で、前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向の反対方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第1状態から前記第2状態に遷移し、
前記第2状態にある場合で、前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第2状態から前記第1状態に遷移する
放射線治療装置
を用いて実行されるガントリ角度制限方法であり、
前記ストッパ切替センサを用いて前記切替メカストッパの状態を検出するステップと、
前記極限センサを用いて前記走行ガントリの角度が所定範囲内にあるかどうかを検出するステップと、
前記走行ガントリの角度が前記所定範囲内にあり、かつ、前記切替メカストッパの状態が前記第1状態にあるときに、前記ブレーキを用いて前記Oリングに対して前記走行ガントリを制動するステップ
とを具備するガントリ角度制限方法。
【請求項1】
治療用放射線を出射する放射線照射装置を支持する走行ガントリと、
前記走行ガントリを回転可能に支持するOリングと、
前記Oリングまたは前記走行ガントリの一方に接合される固定ストッパと、
前記Oリングまたは前記走行ガントリの他方に接合される切替メカストッパとを具備し、
前記切替メカストッパは、
第1状態にある場合で、前記Oリングに対して前記走行ガントリが正方向極限角度をガントリ回転正方向に回転するときに、前記固定ストッパに接触することにより前記走行ガントリが前記ガントリ回転正方向に回転することを停止させ、
前記第1状態にある場合で、前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向の反対方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第1状態から第2状態に遷移する
放射線治療装置。
【請求項2】
請求項1において、
前記切替メカストッパは、
前記第2状態にある場合で、前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第2状態から前記第1状態に遷移する
放射線治療装置。
【請求項3】
請求項2において、
前記切替メカストッパは、
前記他方に回転可能に支持されるストッパ本体と、ここで、前記切替メカストッパは、前記第2状態にあるときに前記ストッパ本体がストッパ回転正方向に回転することにより前記第2状態から前記第1状態に遷移し、前記第1状態にあるときに前記ストッパ本体が前記ストッパ回転正方向の反対方向に回転することにより前記第1状態から前記第2状態に遷移し、
前記切替メカストッパが前記第1状態にあるときに、前記ストッパ本体が前記ストッパ回転正方向に回転しないように前記ストッパ本体に接触するストッパとを備え、
前記ストッパは、前記切替メカストッパが前記第2状態にあるときに、前記ストッパ本体が前記ストッパ回転正方向の反対方向に回転しないようにし、
前記ストッパ本体は、
前記切替メカストッパが前記第2状態で前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向に回転するときに、前記固定ストッパに衝突することにより前記ストッパ回転正方向に回転し、
前記切替メカストッパが前記第1状態で前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記固定ストッパに衝突することにより前記ストッパ回転正方向の反対方向に回転する
放射線治療装置。
【請求項4】
請求項3において、
前記切替メカストッパは、前記切替メカストッパが前記第1状態にあるときに前記ストッパ本体が前記ストッパ回転正方向に回転するように前記ストッパ本体に弾性力を印加する弾性体を更に備え、
前記弾性体は、前記切替メカストッパが前記第2状態にあるときに前記ストッパ本体が前記ストッパ回転正方向の反対方向に回転するように、前記ストッパ本体に弾性力を印加する
放射線治療装置。
【請求項5】
請求項1〜請求項4のいずれかにおいて、
前記他方に接合される他の切替メカストッパを更に具備し、
前記他の切替メカストッパは、
第3状態にある場合で、前記走行ガントリが負方向極限角度を前記ガントリ回転正方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第3状態から第4状態に遷移し、
前記第4状態にある場合で、前記走行ガントリが前記負方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向の反対方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第4状態から前記第3状態に遷移し、
前記第3状態にある場合で、前記走行ガントリが前記負方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記固定ストッパに接触することにより前記走行ガントリが前記ガントリ回転正方向の反対方向に回転することを停止させる
放射線治療装置。
【請求項6】
請求項1〜請求項4のいずれかにおいて、
前記Oリングまたは前記走行ガントリの一方に接合される他の固定ストッパと、
前記Oリングまたは前記走行ガントリの他方に接合される他の切替メカストッパとを更に具備し、
前記他の切替メカストッパは、
前記第3状態にある場合で、前記走行ガントリが負方向極限角度を前記ガントリ回転正方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向に回転することを停止させないで、前記他の固定ストッパに接触することにより前記第3状態から第4状態に遷移し、
前記第4状態にある場合で、前記走行ガントリが前記負方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向の反対方向に回転することを停止させないで、前記他の固定ストッパに接触することにより前記第4状態から前記第3状態に遷移し、
前記第3状態にある場合で、前記走行ガントリが前記負方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記他の固定ストッパに接触することにより前記走行ガントリが前記ガントリ回転正方向の反対方向に回転することを停止させる
放射線治療装置。
【請求項7】
請求項1〜請求項4のいずれかにおいて、
前記切替メカストッパの状態を検出するストッパ切替センサと、
前記走行ガントリの角度が所定範囲内にあるかどうかを検出する極限センサ
とを更に具備する放射線治療装置。
【請求項8】
請求項7において、
前記走行ガントリの角度が前記所定範囲内にあるときに前記極限センサに接触するドグを更に具備し、
前記ドグは、前記切替メカストッパに接触しないように前記一方に接合される
放射線治療装置。
【請求項9】
請求項7または請求項8のいずれかにおいて、
前記走行ガントリの角度が前記所定範囲内にあり、かつ、前記切替メカストッパの状態が前記第1状態にあるときに、前記Oリングに対して前記走行ガントリを制動するブレーキ
を更に具備する放射線治療装置。
【請求項10】
請求項9において、
前記ブレーキは、
前記Oリングに対して前記走行ガントリを駆動する駆動装置と、
前記走行ガントリの角度が前記所定範囲内にあり、かつ、前記切替メカストッパの状態が前記第1状態にあるときに、前記Oリングに対して前記走行ガントリが停止するように前記駆動装置を制御する制御装置を備える
放射線治療装置。
【請求項11】
治療用放射線を出射する放射線照射装置を支持する走行ガントリと、
前記走行ガントリを回転可能に支持するOリングと、
前記Oリングまたは前記走行ガントリの一方に接合される固定ストッパと、
前記Oリングまたは前記走行ガントリの他方に接合される切替メカストッパと、
ストッパ切替センサと、
極限センサと、
ブレーキとを備え、
前記切替メカストッパは、
第1状態にある場合で、前記Oリングに対して前記走行ガントリが正方向極限角度をガントリ回転正方向に回転するときに、前記固定ストッパに接触することにより前記走行ガントリが前記ガントリ回転正方向に回転することを停止させ、
前記第1状態にある場合で、前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向の反対方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向の反対方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第1状態から前記第2状態に遷移し、
前記第2状態にある場合で、前記走行ガントリが前記正方向極限角度を前記ガントリ回転正方向に回転するときに、前記走行ガントリを前記ガントリ回転正方向に回転することを停止させないで、前記固定ストッパに接触することにより前記第2状態から前記第1状態に遷移する
放射線治療装置
を用いて実行されるガントリ角度制限方法であり、
前記ストッパ切替センサを用いて前記切替メカストッパの状態を検出するステップと、
前記極限センサを用いて前記走行ガントリの角度が所定範囲内にあるかどうかを検出するステップと、
前記走行ガントリの角度が前記所定範囲内にあり、かつ、前記切替メカストッパの状態が前記第1状態にあるときに、前記ブレーキを用いて前記Oリングに対して前記走行ガントリを制動するステップ
とを具備するガントリ角度制限方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2009−297324(P2009−297324A)
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願番号】特願2008−156241(P2008−156241)
【出願日】平成20年6月16日(2008.6.16)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願日】平成20年6月16日(2008.6.16)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]