
放射線治療装置制御装置、放射線治療装置制御装置の処理方法及びそのプログラム

【課題】マーカが埋め込まれた被写体へ放射線を照射して生成された放射線透視画像中のマーカの検出速度を上げることができる放射線治療装置制御装置を提供する。
【解決手段】放射線透視画像中における、ある画素からマーカの線幅の半分以上の所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該画素について特定して、当該輝度差の情報を放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する。画素毎輝度差情報において輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定し、マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定する。
【解決手段】放射線透視画像中における、ある画素からマーカの線幅の半分以上の所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該画素について特定して、当該輝度差の情報を放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する。画素毎輝度差情報において輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定し、マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中のマーカを検出する放射線治療装置制御装置及び放射線治療装置制御装置の処理方法並びにそのプログラムに関する。
【背景技術】
【0002】
主に金属で形成された線状のマーカを人体の患部付近に埋め込んで、後に人体に放射線を照射して撮像した放射線透視画像から前記マーカの位置を特定することで、患部の位置を特定する技術が放射線治療装置で利用されている。また関連する技術が特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3053389号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の特許文献1の技術では、撮像して得た画像と、テンプレート画像とを用いて、濃淡正規化相互相関法によるテンプレートマッチングを行うことで、画像中からマーカを検出する処理を行っている。
しかしながら、この方法においては正規化相互相関法を用いているため、処理時間を要するという課題が存在する。
【0005】
そこでこの発明は、上記の課題を解決することのできる放射線治療装置制御装置、放射線治療装置制御装置の処理方法及びそのプログラムを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明は、マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する放射線治療装置制御装置であって、前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成するマーカエッジ強調部と、前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定するノイズ除去部と、前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定するマーカ特定部と、を備えることを特徴とする放射線治療装置制御装置である。
【0007】
また本発明は、上述の放射線治療装置制御装置において、前記放射線透視画像中における各画素についての輝度値を対数変換する対数変換部とを備え、前記マーカエッジ強調部は、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成することを特徴とする。
【0008】
また本発明は、上述の放射線治療装置制御装置において、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定するマーカ上複数点特定部と、前記マーカの複数点を含むテンプレート画像範囲を設定するテンプレート範囲設定部と、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成するテンプレート画像生成部と、を備え、前記マーカ特定部は、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定することを特徴とする。
【0009】
また本発明は、上述の放射線治療装置制御装置において、前記マーカ上複数点特定部は、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を、異なる時刻に生成された前記放射線透視画像それぞれについて特定し、前記テンプレート範囲設定部は、前記マーカの複数点を含むテンプレート画像範囲を、異なる時刻に生成された前記放射線透視画像それぞれについて設定し、前記テンプレート画像生成部は、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を、異なる時刻に生成された前記放射線透視画像それぞれについて複数生成し、前記テンプレート画像に近い画素の纏まりの範囲を示すマッチング対象範囲を、前記複数のテンプレート画像それぞれについて特定するマッチング対象範囲特定部を備え、前記マーカ特定部は、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲を包含する前記マッチング対象範囲を決定し、前記探索範囲において前記決定したマッチング対象範囲に属するテンプレート画像の範囲と同一の位置範囲の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記決定したマッチング対象範囲に属するテンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定することを特徴とする。
【0010】
また本発明は、上述の放射線治療装置制御装置において、前記マーカ特定部は、前記探索範囲を包含する前記マッチング対象範囲が複数存在する場合には、当該探索範囲を包含する複数の異なる前記マッチング対象範囲を決定し、前記決定した複数のマッチング対象範囲のうちの1つのマッチング対象範囲に属する前記探索範囲の一部範囲については、当該一部範囲の画素と、前記1つのマッチング対象範囲に属するテンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であるとの判定に利用した前記探索範囲内の位置範囲の原点および前記1つのマッチング対象範囲に属するテンプレート画像が示すマーカの端点の当該テンプレート画像における座標と、を用いて、前記放射線透視画像中に出現するマーカの端点座標を特定することを特徴とする。
【0011】
また本発明は、上述の放射線治療装置制御装置において、前記放射線透視画像中における前記複数点を結ぶ線上に対応する画素以外の画素を以降の処理における対象除外を決定し、当該対象除外を示す情報を前記複数点を結ぶ線上に対応する画素複数点を結ぶ線上に対応する画素それぞれついて保持したマスク情報を、異なる時刻に生成された前記放射線透視画像それぞれについて生成するテンプレートマスク設定部と、を備え、前記マーカ特定部は、前記マスク情報で保持された画素の輝度差の情報を用いずに前記相関値の算出を行うことを特徴とする。
【0012】
また本発明は、マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する処理方法であって、前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成し、前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定し、前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定することを特徴とする処理方法である。
【0013】
また本発明は、上述の処理方法において、前記放射線透視画像中における各画素についての輝度値を対数変換し、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成することを特徴とする。
【0014】
また本発明は、上述の処理方法において、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定し、前記マーカの複数点を含むテンプレート画像範囲を設定し、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成し、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定することを特徴とする。
【0015】
また本発明は、マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する放射線治療装置制御装置のコンピュータを、前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成するマーカエッジ強調手段、前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定するノイズ除去手段、前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定するマーカ特定手段、として機能させることを特徴とするプログラムである。
【0016】
また本発明は、上述のプログラムを、前記放射線透視画像中における各画素についての輝度値を対数変換する対数変換手段として機能させ、前記マーカエッジ強調手段を、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する手段として機能させることを特徴とする。
【0017】
また本発明は、上述のプログラムを、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定するマーカ上複数点特定手段、前記マーカの複数点を含むテンプレート画像範囲を設定するテンプレート範囲設定手段、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成するテンプレート画像生成手段、として機能させ、前記マーカ特定手段を、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する手段として機能させることを特徴とする。
【発明の効果】
【0018】
本発明によれば、マーカ画像を生成するにあたり、正規化相関の処理を用いないため、マーカの検出速度を上げることができる。
また、放射線透視画像の各画素の輝度値の対数変換を行い、これにより、マーカを示す各画素の輝度と、それ以外の箇所の画素の輝度との輝度差を均一にするような処理を行っているため、一定の輝度値の閾値を用いて、簡易にマーカを検出できるような仕組みとし、これによりマーカ検出の処理速度を上げることができる。
【図面の簡単な説明】
【0019】
【図1】放射線治療装置制御装置の構成を示すブロック図である。
【図2】放射線透視画像のイメージ図である。
【図3】放射線治療装置制御装置の事前処理のフローを示す第1の図である。
【図4】画素毎輝度差情報の作成処理の概要を示す第1の図である。
【図5】画素毎輝度差情報の作成処理の概要を示す第2の図である。
【図6】テンプレート画像範囲を示す図である。
【図7】テンプレートマスク処理を示す第1の図である。
【図8】テンプレートマスク処理を示す第2の図である。
【図9】テンプレートマスク処理を示す第3の図である。
【図10】パタンマッチング事前処理の概要を示す図である。
【図11】マーカ特定処理の処理フローを示す図である。
【図12】ノイズ除去処理で用いる対象画素を基準とした処理方向を示す図である。
【図13】ノイズ除去処理の処理概要を示す第1の図である。
【図14】ノイズ除去処理の処理概要を示す第1の図である。
【図15】ノイズ除去処理の処理概要を示す第2の図である。
【図16】ノイズ除去処理の処理概要を示す第3の図である。
【図17】ノイズ除去処理の処理概要を示す第4の図である。
【図18】ノイズ除去処理の処理概要を示す第5の図である。
【図19】マーカ候補特定処理の概要を示す図である。
【図20】パタンマッチング事前処理の概要を示す図である。
【図21】パタンマッチング処理の概要を示す第1の図である。
【図22】回転テンプレート画像を用いてマーカの端点を算出する概要を示す図である。
【図23】パタンマッチング処理の概要を示す第2の図である。
【発明を実施するための形態】
【0020】
以下、本発明の一実施形態による放射線治療装置制御装置を図面を参照して説明する。
図1は同実施形態による放射線治療装置制御装置の構成を示すブロック図である。
この図において、符号1は放射線治療装置制御装置である。そして、放射線治療装置制御装置1は、放射線透視画像生成部101、テンプレート登録制御部102、マーカ上複数点特定部103、対数変換部104、マーカエッジ強調部105、テンプレート範囲設定部106、端点位置設定部107、テンプレートマスク設定部108、テンプレート画像生成部109、マッチング対象範囲特定部110、ノイズ除去部111、マーカ特定部112、記憶部113を備えている。
【0021】
図示しない放射線治療装置は、放射線(X線)を出射する放射線照射装置及び当該放射線を検出するための放射線検出器を具備する。放射線検出器は、放射線照射装置から出射されて図示しない被写体(人体)を透過した放射線を受光して、その被写体の放射線透視画像の生成用の画像データを生成する。放射線治療装置制御装置1は、放射線治療装置から得た当該画像データを基に放射線透視画像をデジタル生成するなど、プログラムを起動することによって、上記各処理部を機能させる。なお、放射線検出器としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0022】
人体の患部付近には、Au,Pt等の人体への影響が少なく且つX線の透過性が低いものからなる、マーカが埋め込まれている。このため、前記放射線透視画像において当該マーカ位置を特定することにより、患部位置の同定を容易に行うことが可能となる。
【0023】
図2は放射線透視画像のイメージ図である。
図3は放射線治療装置制御装置の事前処理のフローを示す第1の図である。
次に、本実施形態による放射線治療装置制御装置の処理フローの詳細について説明する。なお、本実施形態では、マーカはその形状が線状であり、被写体内に曲線状(山なりの形状)に配される場合を例に挙げて説明を行う。
【0024】
<事前処理>
放射線透視画像生成部101は、放射線治療装置から得た画像データを基に、放射線透視画像をデジタル生成する。テンプレート登録制御部102はその放射線透視画像をモニタに表示する(図2参照)。なお、図2は、便宜上、マーカのみを示しているが、放射線透視画像にはマーカの他に、骨、内臓など、人体を構成する要素も写っている。マーカのX線透過性は、この人体構成要素のものよりも、低いものとする。
【0025】
(ステップS1;マーカ上の端点を含む複数点の特定処理)
当該放射線透視画像がモニタに表示されると、ユーザは、放射線治療装置制御装置1に備わるキーボードやマウス等の入力手段を用いて、放射線透視画像中に現れているマーカの幅(マーカのx座標方向の両端の距離)と高さ(マーカのy座標方向の両端の距離)を表すことのできる位置に印をつける。例えばマーカの形状が図2で示すような山なりの形状である場合には、山なりとなっている頂点と、2つの端点の、合計3点の位置に印をつける。本実施形態においては図示するように、山なりとなっている頂点と、2つの端点の、合計3点の位置に印をつけた場合の例を用いて説明する。
【0026】
図2においては、端点のx座標の距離がマーカの形状の幅となり、山なりの頂点の座標からより距離が離れている端点のy座標と当該頂点のy座標との距離がマーカの形状の高さとなる。なお、マーカの形状が直線を示すような場合には2つの端点の位置に印をつけるようにしてもよい。マーカの形状が直線である場合には端点の位置に印をつけるだけで、マーカを包含する矩形の幅と高さを特定できるためである。なお、ユーザが印をつける点は、マーカの放射線透視画像中における端点を含む複数点であれば幾つであってもよい。そして、マーカ上複数点特定部103が、印をつけられた位置の座標を、マーカ暫定座標情報(前述の例では、2つの端点及び山なりの頂点の各々の座標)として記憶部113に保持する。そして、ユーザがテンプレート登録処理開始を、入力手段などを用いて入力すると、テンプレート登録処理に含まれるテンプレート画像生成処理を開始する。
【0027】
(ステップS2;放射線透視画像の各画素の輝度値の対数変換処理)
放射線透視画像はマーカと骨、内臓などの人体を構成する要素が重畳して撮像される。その重畳状況は、放射線透視画像内において、X線照射方向(撮像方向)及び人体のマーカ埋め込み位置により異なる。このため、放射線透視画像中のマーカを示す各画素の輝度と、それ以外の箇所の画素の輝度との輝度差が、マーカを表す画素の全てで一定ではない場合が発生する。
テンプレート画像を作成する上では、マーカ位置を明確にする必要があるため、前記輝度差を均一にする必要がある。よって、対数変換部104が、放射線透視画像における各画素の輝度を、式(1)を用いて対数変換する。
【0028】
【数1】

【0029】
当該式(1)において、iは画素の輝度値を示している。つまり式(1)においてlog10(i)が対数変換処理を示している。その他は14bitのデータを8bitに圧縮する要素、低輝度のノイズをカットするノイズカット要素を含んでいる。
【0030】
図4は画素毎輝度差情報の作成処理の概要を示す第1の図である。
(ステップS3;画素毎輝度差情報の作成処理)
次にマーカエッジ強調部105が、放射線透視画像を用いて、当該画像中に写るマーカの周囲の画素との輝度差を示す画素毎輝度差情報を作成する処理を行う。
当該処理においては、図4で示すように、放射線透視画像中における、ある画素(対象画素)の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差(本実施形態においては小さい値を示す輝度差)を、ある画素を通る複数の異なる方向について算出する。当該所定距離としては、マーカの線幅(幅方向長さ)の半分以上が例示される。
【0031】
マーカエッジ強調部105は、各方向について算出した輝度差のうちの最も大きい輝度差の情報を当該ある画素について特定する。マーカエッジ強調部105は、当該輝度差の情報を放射線透視画像中の全ての画素について算出する処理を行う。なお、本処理において必ずしも全ての画素について算出を行う必要はない。例えば、予めマーカ位置が推定できる場合には、放射線透視画像においてマーカが明らかに位置しないと判断される画素は当該処理を割愛することでも構わない。この場合には、複数の画素について算出する処理を行うこととなる。以下の処理においても同様であるが、便宜上、ここでは全ての画素について算出する場合を例に取り説明する。
【0032】
つまり、マーカエッジ強調部105は、ある対象画素について、放射線透視画像の水平方向(以下、a方向)、左上右下方向(以下、b方向)、上下方向(以下、c方向)、左下右上方向(以下、d方向)のそれぞれについて、一定距離の位置にある他の画素との輝度差を算出して、当該輝度差のうち最も小さい輝度差を、当該対象画素の輝度値の強さとして算出する。図4では、放射線透視画像の対象画素(7,8)についてa方向の直線上の左右の2画素までの一定距離を示している。ここで、本実施形態において、一定距離は、マーカの太さ(線幅;幅長方向長さ)の半分程度である。図4においては説明の便宜上、マーカの線幅に比べて一定距離を示す長さが大きく表れている。
【0033】
図5は画素毎輝度差情報の作成処理の概要を示す第2の図である。
マーカエッジ強調部105は、ある対象画素について、例えばa方向に一定距離離れた位置との輝度差によって算出する。このとき、対象画素を通る直線上の対象画素から一定距離にある対向する2つの画素(画素a,画素b)の輝度と、対象画素との輝度との輝度差のうち小さい値を選択する(図5(A)参照)。図5においては対象画素と画素aとの輝度差と、対象画素と画素bとの輝度差は、画素aとの輝度差の方が小さいため、この輝度差を採用する。
なお、マーカを表す輝度の遷移は図5(A)で示すように対象画素位置の付近が周囲の画素よりも低い状態となるが、対象画素位置を基準とした輝度の値の遷移がこのようにならない場合には、その対象画素はマーカを表していない画素である可能性が高い。例えば、対象画素を通る直線上の対象画素から一定距離にある対向する2つの画素(画素a,画素b)のうち一方の画素(例えば画素a)の輝度値が対象画素の輝度値とほぼ同じかそれより低い場合も考えられる。この場合、対象画素はマーカを表していないと考えられるためこのような対象画素をマーカの画素として検出しないようにするために、対象画素を通る直線上の対象画素から一定距離にある対向する2つの画素(画素a,画素b)の輝度と、対象画素との輝度との輝度差のうち、小さい値を選択する処理を行っている。
ここで、ある対象画素についてa方向に一定距離(マーカの太さの半分程度)離れた位置からの輝度差は、当該a方向に垂直なc方向にマーカの線が写っている場合の当該マーカの検出に有効である。
【0034】
なお、対象画素と、当該対象画素から一定距離の位置の画素の輝度差は、対象画素(x,y)の輝度をI(x,y)とし、一定距離を(dx,dy)とすると、一方の画素(図5では画素a)との間の輝度差I’(x,y)は、
【0035】
【数2】
【0036】
他方の画素(図5では画素b)との間の輝度差I”(x,y)は、
【0037】
【数3】
【0038】
により表すことができる。そして、輝度差I’(x,y)または輝度差I”(x,y)のうち輝度差の小さいほうが採用される。
【0039】
なお、b方向の輝度差の算出の場合には、対象画素の左上と右下に隣接する画素方向について、対象画素から一定距離の位置の2つの画素との輝度差のうちの小さい値を採用する。
また、c方向の輝度差の算出の場合には、対象画素の上と下に隣接する画素方向(上下方向)について、対象画素から一定距離の位置の2つの画素との輝度差のうちの小さい値を採用する。
また、d方向の輝度差の算出の場合には、対象画素の左下と右上に隣接する画素方向について、対象画素から一定距離の位置の2つの画素との輝度差のうちの小さい値を採用する。
そして、マーカエッジ強調部105は、ある対象画素に対してa方向、b方向、c方向、d方向のそれぞれの方向について算出した輝度差のうち、最も大きい輝度差を、当該対象画素の輝度差として特定する。そして、マーカエッジ強調部105は、放射線透視画像の全ての画素に対して特定した輝度差の情報を保持する画素毎輝度差情報を作成して記憶部113へする。
【0040】
(ステップS4;テンプレート画像範囲の設定処理)
図6はテンプレート画像範囲を示す図である。
テンプレート範囲設定部106は、テンプレート登録制御部102によって記憶部113に登録されたマーカ暫定座標情報を読取る。そして、テンプレート範囲設定部106は、マーカ暫定座標情報で示されるマーカの点の座標を包含する矩形範囲であるテンプレート画像範囲を、放射線透視画像内において特定する。より具体的には、テンプレート範囲設定部106は、図6で示すような山なりのマーカの、山の頂点と、2つの端点の合計3点の座標を保持しているマーカ暫定座標情報を読み取る。そして、この座標のうち最小と最大のX座標をそれぞれxmin(左側端点のX座標)、xmax(右側端点のX座標)とし、また最小と最大のY座標をそれぞれymin(山なりの頂点のY座標)、ymax(右側端点のY座標)とすると、テンプレート範囲設定部106は、図6で示すような、
xmin−m≦x≦xmax+m
ymin−m≦y≦ymin+m
の範囲を、テンプレート画像範囲として設定する。
【0041】
次に端点位置設定部107が、マーカの端点それぞれの、テンプレート画像範囲の左上の原点からの相対座標を算出する。マーカの端点をそれぞれの放射線透視画像における座標について、端点A(xa,ya)、端点B(xb,yb)とし、テンプレート画像の左上の原点の、放射線透視画像における座標を(x1,y1)とすると、端点Aのテンプレート画像内における相対座標は端点A(xa−x1,ya−y1)で表され、端点Bのテンプレート画像内における相対座標は端点B(xb−x1,yb−y1)となる。そして、端点位置設定部107は、それらマーカの各端点のテンプレート画像範囲における座標を保持した端点座標情報を記憶部113に記録する。
【0042】
(ステップS5;マスク情報生成処理)
図7はテンプレートマスク処理を示す第1の図である。
図8はテンプレートマスク処理を示す第2の図である。
図9はテンプレートマスク処理を示す第3の図である。
次に、テンプレートマスク設定部108が、端点座標情報を記憶部113から読取り、当該端点座標情報で示される座標を結ぶ直線上の画素を、テンプレート画像範囲において特定する(図7)。そして、当該特定した画素についてマスク対象外と特定する。また、テンプレートマスク設定部108は、既にマスク対象外と特定した画素の左右上下斜めの周り近傍8画素について、全てマスク対象外と特定する(図8)。そして、テンプレート画像範囲内の画素のうち、マスク対象外と特定されなかった全ての画素についてマスク対象と特定する(図9)。そして、テンプレートマスク設定部108は、テンプレート画像範囲においてマスク対象外と特定されなかった全ての画素についてマスク対象であることを示す情報(以降の処理対象から外すことを示す情報、例えばフラグなどで保持する)を保持したマスク情報を生成して、テンプレート画像の識別情報に対応付けて記憶部113に記録する。
【0043】
(ステップS6;テンプレート画像生成処理)
また、テンプレート画像生成部109は、テンプレート画像範囲で示される各画素の情報(放射線透視画像の原点を基準とする座標、テンプレート画像範囲の原点を基準とする座標、画素毎輝度差情報)と端点座標情報(マーカの2つの端点の座標)とを含むテンプレート画像を生成する。
また、放射線治療装置制御装置1は異なる時刻(例えば、0.1秒おきの時刻など)に亘って複数回、放射線治療装置から得た画像データを基に、放射線透視画像をデジタル生成する。そしてそれぞれの放射線透視画像を用いて、上述の各処理によって、各放射線透視画像に対応するテンプレート画像やマスク情報等を同様に生成する。本実施形態においては、3つの放射線透視画像を用いて、それぞれの当該画像に対応する3つのテンプレート画像を生成する。そして、テンプレート登録制御部102は、3つのテンプレート画像を生成したかを判定し、3つのテンプレート画像を生成したと判定した場合には、テンプレート画像生成部109へテンプレート画像生成処理を通知する。そして、テンプレート登録制御部102は、生成した3つのテンプレート画像を、記憶部113に記録する。
【0044】
(ステップS7;マッチング条件情報登録処理)
またユーザは放射線治療装置制御装置1に、テンプレート画像を用いたマッチング処理におけるマッチング条件情報を登録する。
ここで、テンプレート画像は、患部が人体のどこにあるかを特定するために用いられるが、当該テンプレート画像の指定(上記で生成された3つのテンプレート画像の指定)、マスク情報の指定、テンプレート画像と新たに取得した画像におけるマーカの相関値が幾つ以上であれば一致したと判定するかを示す最低限の相関値の閾値の指定、それ以上の相関値となった場合にその後の処理を打ち切る相関値の指定、テンプレート画像を回転させてマッチング処理を行う場合の回転角度の上限値の指定を行い、それらの情報を放射線治療装置制御装置1が記憶する。
【0045】
そして、テンプレート画像の生成が終了した後に、患部の人体での位置を特定するために、放射線透視画像生成部101が、新たな放射線透視画像をデジタル生成する。なお当該新たな放射線透視画像を以降、説明の便宜上、患部位置特定時生成画像と呼ぶこととする。そして、患部の人体での位置の特定を行う場合には、患部位置特定時生成画像と、テンプレート画像とをパタンマッチングによって比較することとなる。
【0046】
(ステップS8;マッチング対象範囲特定処理)
図10はパタンマッチング事前処理の概要を示す図である。
ここで、当該パタンマッチング処理を行う前提として、さらなる情報の設定を放射線治療装置制御装置1が行う。当該情報の設定は、患部位置特定時生成画像に出現することとなるマーカの画像内の範囲(マッチング対象範囲)に応じて、どの放射線透視画像中に設定されたどのマッチング対象範囲に対応するテンプレート画像を用いてマッチング処理を行うかを特定する情報を設定する処理である。つまり当該処理は、どのマッチング対象範囲に属するテンプレート画像を用いて、患部位置特定時生成画像においてマーカを示す画素を特定するのかを決定するための情報設定の処理であるため、マッチング対象範囲特定処理と呼ぶこととする。そしてこの処理を、マッチング対象範囲特定部110が行う。
【0047】
図10の(a1)、(a2)、(a3)には、異なるタイミングで取得した放射線透視画像に基づいて生成した3つのテンプレート画像の、放射線透視画像内における位置を示している。このように、異なるタイミングで取得したテンプレート画像は、患者の呼吸の影響等により、放射線透視画像内の異なる位置で写っているマーカそれぞれの範囲を包含する画像となっている。
【0048】
そして、どのテンプレート画像を用いてマッチング処理を行うかを決定する情報を設定する処理においては、図10の(b1)で示すように、まず、マッチング対象範囲特定部110が、放射線透視画像における各テンプレート画像内の画素の座標を、テンプレート画像から読み取る。そして、マッチング対象範囲特定部110は、各テンプレート画像における中心座標を算出する。ここで、3つのテンプレート画像をそれぞれテンプレート画像A、テンプレート画像B、テンプレート画像Cと呼ぶこととする。またテンプレート画像Aの中心画素を画素a、テンプレート画像Bの中心画素を画素b、テンプレート画像Bの中心画素を画素cと呼ぶこととする。テンプレート画像の中心画素の座標の算出処理はどのようなものであってもよい。例えば、テンプレート画像の中心となる画素が1つに定まらない場合には、中心付近の画素の何れかの画素を中心画素としてその座標を算出するようにしてもよい。
【0049】
そして、マッチング対象範囲特定部110は、放射線透視画像のある画素の座標から、各テンプレート画像の中心画素の座標までの距離を算出して、当該ある画素から最も近い距離に位置するテンプレート画像を、放射線透視画像の全ての画素について算出する。そして、マッチング対象範囲特定部110は、ある特定のテンプレート画像の中心画素に近い各画素のまとまりを一つのマッチング対象範囲の候補と決定する。つまり、本実施形態においては、図10の(b2)で示すように、テンプレート画像Aの中心画素に近い画素のまとまりの範囲をマッチング対象範囲の候補A、テンプレート画像Bの中心画素に近い画素のまとまりの範囲をマッチング対象範囲の候補B、テンプレート画像Cの中心画素に近い画素のまとまりの範囲をマッチング対象範囲の候補Cとして、3つのマッチング対象範囲の候補を決定する。
【0050】
そして、マッチング対象範囲特定部110は、マッチング対象範囲の候補Aを全て包含する矩形範囲をマッチング対象範囲Aと決定し、マッチング対象範囲の候補Bを全て包含する矩形範囲をマッチング対象範囲Bと決定し、マッチング対象範囲の候補Cを全て包含する矩形範囲をマッチング対象範囲Cと決定する。これにより、マッチング対象範囲特定部110は、放射線透視画像の画像範囲において、各マッチング対象範囲が示す座標情報と、当該マッチング対象範囲に出現したマーカを示す画素の特定に利用するテンプレート画像との組合せの情報を、マッチング対象範囲毎に保持したマッチング対象範囲情報を生成して記憶部113に保持する。具体的には、マッチング対象範囲情報は、例えば、マッチング対象範囲Aの範囲を示す座標(左上と右下の2座標)とテンプレート画像Aの情報との組合せ、マッチング対象範囲Bの範囲を示す座標(左上と右下の2座標)とテンプレート画像Bの情報との組合せ、マッチング対象範囲Cの範囲を示す座標(左上と右下の2座標)とテンプレート画像Cの情報との組合せを保持する情報である。
【0051】
なお、本実施形態において、マッチング対象範囲特定部110は、マッチング対象範囲の候補を全て包含する矩形範囲をマッチング対象範囲と決定しているが、図10(b3)で示すように、一方のマッチング対象範囲が他方のマッチング対象範囲とが重なり合う場合には(マッチング対象範囲Bとマッチング対象範囲Cが重なり合っている)、重なり合う範囲を生じないように処理してもよい。例えば、重なり合う矩形範囲の中央から一方のマッチング対象範囲の側の範囲と、当該重なり合う矩形範囲の中央から他方のマッチング対象範囲の側範囲とでそれぞれ分割して、当該分割した範囲を一方のマッチング対象範囲と、他方のマッチング対象範囲とに組み入れて、重なり合う矩形範囲が生じないように処理してもよい。
【0052】
そして、患部位置特定時生成画像に出現することとなるマーカが、マッチング対象範囲Aの範囲に出現した場合についてはテンプレート画像Aとパタンマッチングを行うこととなり、患部位置特定時生成画像に出現することとなるマーカが、マッチング対象範囲Bの範囲に出現した場合についてはテンプレート画像Bとパタンマッチングを行うこととなり、患部位置特定時生成画像に出現することとなるマーカが、マッチング対象範囲Cの範囲に出現した場合についてはテンプレート画像Cとパタンマッチングを行うこととなる。
または、患部位置特定時生成画像に出現することとなるマーカが、複数のマッチング対象範囲に出現した場合については、それら複数のマッチング対象範囲に対応するテンプレート画像を用いてパタンマッチングを行うこととなる。
【0053】
<マーカ特定処理>
(ステップS11;患部位置特定時生成画像の各画素の輝度値の対数変換処理)
図11は放射線治療装置制御装置1におけるマーカ特定処理の処理フローを示す図である。
次に、患部付近に埋め込まれたマーカの位置特定を行う処理について順を追って説明する。
このとき、放射線治療装置制御装置1は、放射線治療装置から得た画像データを基に、放射線透視画像生成部101が、患部位置特定時生成画像(放射線透視画像と同じように取得される画像であるが、患部位置特定時に生成する新たな画像であるため上記したように呼称を変えている)をデジタル生成する。すると、対数変換部104が、上述したテンプレート画像生成時の処理と同様に、患部位置特定時生成画像における各画素の輝度を、式(1)を用いて対数変換する。
【0054】
(ステップS12;画素毎輝度差情報の作成処理)
また、対数変換の処理が終了すると、マーカエッジ強調部105が、患部位置特定時生成画像を用いて、上述したテンプレート画像生成時における処理と同様に、対象画素と当該対象画素から一定距離の位置にある他の画素との輝度差をa方向(水平方向)、b方向(左上右下対角方向)、c方向(上下方向)、d方向(左下右上対角方向)のそれぞれについて算出して、当該輝度差のうち最も小さい輝度差を、当該対象画素の輝度値の周囲からの強さとして算出する処理を、患部位置特定時生成画像の全ての画素について行う。
そして、マーカエッジ強調部105は、ある対象画素に対してa方向、b方向、c方向、d方向のそれぞれの方向について算出した輝度差のうち、最も大きい輝度差を、当該対象画素の輝度差として特定する。そして、マーカエッジ強調部105は、患部位置特定時生成画像の全ての画素に対して特定した輝度差の情報を保持する画素毎輝度差情報を作成して記憶部113に記録する。
【0055】
さらに、マーカエッジ強調部105は、対象画素(画像中の全画素)のa方向について算出した輝度差の情報を保持したa方向輝度差情報と、対象画素(画像中の全画素)のb方向について算出した輝度差の情報を保持したb方向輝度差情報と、対象画素(画像中の全画素)のc方向について算出した輝度差の情報を保持したc方向輝度差情報と、対象画素(画像中の全画素)のd方向について算出した輝度差の情報を保持したd方向輝度差情報と、のそれぞれを作成して、記憶部113に記録する。
【0056】
(ステップS13;ノイズ除去処理)
次に、ノイズ除去部111が、マーカエッジ強調部105によって生成されたa方向輝度差情報を用いて、輝度差が所定の閾値未満と判定された画素を、マーカ候補を示す画素として特定し、輝度差が所定の閾値以上と判定された画素をマーカ以外の画素として特定した後、ノイズ除去処理を行う。
【0057】
図12はノイズ除去処理で用いるある対象画素を基準とした処理方向を示す図である。
図13はノイズ除去処理の処理概要を示す第1の図である。
図14はノイズ除去処理の処理概要を示す第1の図である。
図15はノイズ除去処理の処理概要を示す第2の図である。
図16はノイズ除去処理の処理概要を示す第3の図である。
図17はノイズ除去処理の処理概要を示す第4の図である。
図18はノイズ除去処理の処理概要を示す第5の図である。
【0058】
図12〜図18を用いてノイズ除去処理について説明する。
[a方向ノイズ除去結果データの作成処理]
まず、図13(A)で示すように、ノイズ除去部111は、マーカエッジ強調部105の生成したa方向輝度差情報を読み込んで、各画素のうち輝度差が閾値以上の画素(周囲との輝度差があるため濃度が濃い画素)についてのマーカ出現強度を“1”、各画素のうち輝度差が閾値未満の画素についてのマーカ出現強度を“0”と2値化したa方向輝度差2値化情報を作成する。図13の(A)では、ハッチングして表した画素をマーカ出現強度“1”と判定した画素、ハッチングのない画素をマーカ出現強度“0”と判定した画素として示している。
【0059】
次に、ノイズ除去部111は、a方向輝度差2値化情報を用いて、マーカ出現強度“1”の画素を通る直線方向であって、当該マーカ出現強度“1”の画素を基準に図12で示したa方向(画像の左右方向)に連なる2つの画素のマーカ出現強度を全て“1”と更新する。これにより図13(B)で示すように、マーカ出現強度“1”とされる画素の範囲がa方向に膨張する(a方向輝度差2値化情報を用いたa方向の第1膨張処理)。
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いた第1膨張処理の終了後の情報に基づいて、マーカ出現強度“0”の画素を通る直線方向であって、当該マーカ出現強度“0”の画素を基準に図12で示したa方向(画像の左右方向)に連なる2つの画素のマーカ出現強度を全て“0”と更新する。これにより図13(C)で示すように、マーカ出現強度“1”とされる画素の範囲がa方向で収縮する(a方向輝度差2値化情報を用いたa方向の第1収縮処理)。
【0060】
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いた第1収縮処理の終了後の情報に基づいて、マーカ出現強度“0”の画素を通る直線方向であって、当該マーカ出現強度“0”の画素を基準に図12で示したa方向(画像の左右方向)に連なる2つの画素のマーカ出現強度を全て“0”と更新する。これにより図14(D)で示すように、マーカ出現強度“1”とされる画素の範囲がa方向でさらに収縮する(a方向輝度差2値化情報を用いたa方向の第2収縮処理)。
また、ノイズ除去部111は、上記第2収縮処理の終了後の情報に基づいて、マーカ出現強度“1”の画素を通る直線方向であって、当該マーカ出現強度“1”の画素を基準に図12で示したa方向(画像の左右方向)に連なる2つの画素のマーカ出現強度を全て“1”と更新する。これにより図14(E)で示すように、マーカ出現強度“1”とされる画素の範囲がa方向で膨張する(a方向輝度差2値化情報を用いたa方向の第2膨張処理)。
そして、ノイズ除去部111はa方向輝度差2値化情報を用いたa方向の第2膨張処理の結果を保持するa方向輝度差2値化情報を用いたa方向マーカ出現強度データを記憶部113に記録する。
【0061】
図12で示すように、a方向(水平方向)との成す角度が45°の両隣の方向を示すb方向とd方向の中間の2つの方向をe方向(第1の水平・対角中間方向)、h方向(第2の水平・対角中間方向)と呼ぶこととする。そして、ノイズ除去部111は、e方向と、h方向についても、a方向に対して行った、第1膨張処理→第1収縮処理→第2収縮処理→第2膨張処理を行う。
【0062】
つまり、a方向輝度差2値化情報を用いたe方向(第1の水平・対角中間方向)の膨張処理は、図15の“e方向(第1の水平・対角中間方向)の膨張処理の説明”で示すように、Xで示す画素のa方向輝度差2値化情報におけるマーカ出現強度の値が“1”であれば、Xの画素を基準にa方向の両側に連なる各1つずつの画素と、その画素とはb方向であってXの画素に隣接しない外側方向に1つ連なる各画素とで示されるYで示す画素のマーカ出現強度の値を“1”とする処理を、画像中の全ての画素について行う処理である。
また、a方向輝度差2値化情報を用いたe方向(第1の水平・対角中間方向)の収縮処理は、図15の“e方向(第1の水平・対角中間方向)の収縮処理の説明”で示すように、Mで示す画素のa方向輝度差2値化情報におけるマーカ出現強度の値が“0”であれば、Mの画素を基準にa方向の両側に連なる各1つずつの画素と、その画素とはb方向であってMの画素に隣接しない外側方向に1つ連なる各画素とで示されるNで示す画素のマーカ出現強度の値を“0”とする処理を、画像中の全ての画素について行う処理である。
【0063】
つまり、ノイズ除去部111は、a方向輝度差2値化情報を用いたe方向(第1の水平・対角中間方向)の膨張処理において、図15の(F)で示すような既に作成したa方向輝度差2値化情報を用いて、図15(G)で示すような、1回目のe方向(第1の水平・対角中間方向)の膨張処理を行う(a方向輝度差2値化情報を用いたe方向の第1膨張処理)。
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたe方向の第1膨張処理の終了後の情報に基づいて、図15(H)で示すような、1回目のe方向(第1の水平・対角中間方向)の収縮処理を行う(a方向輝度差2値化情報を用いたe方向の第1収縮処理)。
【0064】
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたe方向の第1収縮処理の終了後の情報に基づいて、図16(I)で示すような、2回目のe方向(第1の水平・対角中間方向)の収縮処理を行う(a方向輝度差2値化情報を用いたe方向の第2収縮処理)。なお図16の(I)では、この時点でマーカ出現強度“1”となる画素が消滅する例を示している。
そして、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたe方向の第2収縮処理の終了後の情報に基づいて、図16(K)で示すような、2回目のe方向(第1の水平・対角中間方向)の膨張処理を行う(a方向輝度差2値化情報を用いたe方向の第2膨張処理)。図16の(I)の時点でマーカ出現強度“1”となる画素が消滅しているため、その後に膨張処理をしてもマーカ出現強度“1”となる画素が出現しない場合の例を示している。
そして、ノイズ除去部111はa方向輝度差2値化情報を用いたe方向の第2膨張処理の結果を保持するa方向輝度差2値化情報を用いたe方向マーカ出現強度データを記憶部113に記録する。
【0065】
また、a方向輝度差2値化情報を用いたh方向(第2の水平・対角中間方向)の膨張処理は、図示を省略するが、ある画素Xで示す画素のa方向輝度差2値化情報におけるマーカ出現強度の値が“1”であれば、Xの画素を基準にa方向の両側に連なる各1つずつの画素と、その画素とはd方向であってXの画素に隣接しない外側方向に1つ連なる各画素のマーカ出現強度の値を“1”とする処理を、画像中の全ての画素について行う処理である。
また、a方向輝度差2値化情報を用いたh方向(第2の水平・対角中間方向)の収縮処理は、図示を省略するが、ある画素Mで示す画素のa方向輝度差2値化情報におけるマーカ出現強度の値が“0”であれば、Mの画素を基準にa方向の両側に連なる各1つずつの画素と、その画素とはd方向であってMの画素に隣接しない外側方向に1つ連なる各画素のマーカ出現強度の値を“0”とする処理を、画像中の全ての画素について行う処理である。
【0066】
つまり、ノイズ除去部111は、1回目のa方向輝度差2値化情報を用いたh方向(第2の水平・対角中間方向)の膨張処理を行う(a方向輝度差2値化情報を用いたh方向の第1膨張処理)。
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたh方向の第1膨張処理の終了後の情報に基づいて、1回目のh方向(第2の水平・対角中間方向)の収縮処理を行う(a方向輝度差2値化情報を用いたh方向の第1収縮処理)。
【0067】
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたh方向の第1収縮処理の終了後の情報に基づいて、2回目のh方向(第2の水平・対角中間方向)の収縮処理を行う(a方向輝度差2値化情報を用いたh方向の第2収縮処理)。
そして、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたh方向の第2収縮処理の終了後の情報に基づいて、2回目のh方向(第2の水平・対角中間方向)の膨張処理を行う(a方向輝度差2値化情報を用いたh方向の第2膨張処理)。
そして、ノイズ除去部111はa方向輝度差2値化情報を用いたh方向の第2膨張処理の結果を保持するa方向輝度差2値化情報を用いたh方向マーカ出現強度データを記憶部113に記録する。
【0068】
以上の処理により、ノイズ除去部111は、a方向輝度差2値化情報を用いて、a方向マーカ出現強度データ、e方向マーカ出現強度データ、h方向マーカ出現強度データを作成している。図17の(A)はa方向輝度差2値化情報、(B)はa方向マーカ出現強度データ、(C)はe方向マーカ出現強度データ、(D)はh方向マーカ出現強度データを示している。
そして、ノイズ除去部111は、作成したa方向マーカ出現強度データ、e方向マーカ出現強度データ、h方向マーカ出現強度データ内の、2値化された輝度を示す各画素のうち、何れかのマーカ出現強度データにおいて少なくとも“1”の値を示す画素をマーカ出現強度“1”として採用する。そして、ノイズ除去部111は、当該採用したマーカ出現強度データの示すマーカ出現強度が“1”となっている画素を、患部位置特定時生成画像内におけるマーカ候補として、当該マーカ候補の画素の情報を保持したa方向ノイズ除去結果データを作成する。図17においては、(B)で示すa方向マーカ強調データにおいてのみ大きい値を示す画素が存在するため、a方向ノイズ除去結果データで示されるマーカ候補の画素は、図17(B)で示すa方向マーカ強調データにおいてのみ大きい値を示す画素と同一となっている。
【0069】
また、ノイズ除去部111は、a方向ノイズ除去結果データの作成処理と同様の方法で、b方向ノイズ除去結果データ、c方向ノイズ除去結果データ、d方向ノイズ除去結果データを作成する。
【0070】
[b方向ノイズ除去結果データの作成処理]
図示を省略するが、b方向ノイズ除去結果データの作成処理においては、ノイズ除去部111は、マーカエッジ強調部105の生成したb方向輝度差情報を読み込んで、各画素のうち輝度差が閾値以上の画素についてのマーカ出現強度を“1”、各画素のうち輝度差が閾値未満の画素についてのマーカ出現強度を“0”と2値化したb方向輝度差2値化情報を作成する。
【0071】
そして、ノイズ除去部111は、b方向輝度差2値化情報を用いたb方向の第1膨張処理、b方向輝度差2値化情報を用いたb方向の第1収縮処理、b方向輝度差2値化情報を用いたb方向の第2収縮処理、b方向輝度差2値化情報を用いたb方向の第2膨張処理を行う。そして、ノイズ除去部111はb方向輝度差2値化情報を用いたb方向の第2膨張処理の結果を保持するb方向輝度差2値化情報を用いたb方向マーカ出現強度データを記憶部113に記録する。
【0072】
また、b方向(左上右下方向)との成す角度が45°の両隣の方向を示すa方向とc方向の中間の2つの方向をe方向(第1の水平・対角中間方向)、f方向(第1の上下・対角中間方向)と呼ぶこととする。そして、ノイズ除去部111は、e方向と、f方向についても、b方向に対して行った、第1膨張処理→第1収縮処理→第2収縮処理→第2膨張処理と同様の処理を行う。
【0073】
つまり、ノイズ除去部111は、b方向輝度差2値化情報を用いたe方向の第1膨張処理、b方向輝度差2値化情報を用いたe方向の第1収縮処理、b方向輝度差2値化情報を用いたe方向の第2収縮処理、b方向輝度差2値化情報を用いたe方向の第2膨張処理、を行う。そして、ノイズ除去部111は、b方向輝度差2値化情報を用いたe方向の第2膨張処理の結果を保持するb方向輝度差2値化情報を用いたe方向マーカ出現強度データを記憶部113に記録する。
【0074】
また、ノイズ除去部111は、b方向輝度差2値化情報を用いたf方向の第1膨張処理、b方向輝度差2値化情報を用いたf方向の第1収縮処理、b方向輝度差2値化情報を用いたf方向の第2収縮処理、b方向輝度差2値化情報を用いたf方向の第2膨張処理を行う。
そして、ノイズ除去部111はb方向輝度差2値化情報を用いたf方向の第2膨張処理の結果を保持するb方向輝度差2値化情報を用いたf方向マーカ出現強度データを記憶部113に記録する。
【0075】
また、ノイズ除去部111は、作成したb方向輝度差2値化情報を用いたb方向マーカ出現強度データ、b方向輝度差2値化情報を用いたe方向マーカ出現強度データ、b方向輝度差2値化情報を用いたf方向マーカ出現強度データ内の、2値化された輝度を示す各画素のうち、何れかのマーカ出現強度データにおいて大きい値を示す画素をマーカ出現強度“1”として採用する。そして、ノイズ除去部111は、当該採用したマーカ出現強度データの示すマーカ出現強度が“1”となっている画素を、患部位置特定時生成画像内におけるマーカ候補として、当該マーカ候補の画素の情報を保持したb方向ノイズ除去結果データを作成する。
【0076】
[c方向ノイズ除去結果データの作成処理]
図示を省略するが、c方向ノイズ除去結果データの作成処理においては、ノイズ除去部111は、マーカエッジ強調部105の生成したc方向輝度差情報を読み込んで、各画素のうち輝度差が閾値以上の画素についてのマーカ出現強度を“1”、各画素のうち輝度差が閾値未満の画素についてのマーカ出現強度を“0”と2値化したc方向輝度差2値化情報を作成する。
【0077】
そして、ノイズ除去部111は、c方向輝度差2値化情報を用いたc方向の第1膨張処理、c方向輝度差2値化情報を用いたc方向の第1収縮処理、c方向輝度差2値化情報を用いたc方向の第2収縮処理、c方向輝度差2値化情報を用いたc方向の第2膨張処理、を行う。
また、ノイズ除去部111はc方向輝度差2値化情報を用いたc方向の第2膨張処理の結果を保持するc方向輝度差2値化情報を用いたc方向マーカ出現強度データを記憶部113に記録する。
【0078】
また、ノイズ除去部111は、c方向(上下方向)との成す角度が45°の両隣の方向を示すb方向とd方向の中間の2つの方向をf方向(第1の上下・対角中間方向)、g方向(第2の上下・対角中間方向)と呼ぶこととする。そして、ノイズ除去部111は、f方向と、g方向についても、c方向に対して行った、第1膨張処理→第1収縮処理→第2収縮処理→第2膨張処理と同様の処理を行う。
【0079】
つまり、ノイズ除去部111は、c方向輝度差2値化情報を用いたf方向の第1膨張処理、c方向輝度差2値化情報を用いたf方向の第1収縮処理、c方向輝度差2値化情報を用いたf方向の第2収縮処理、c方向輝度差2値化情報を用いたf方向の第2膨張処理、を行う。
そして、ノイズ除去部111は、c方向輝度差2値化情報を用いたf方向の第2膨張処理の結果を保持するc方向輝度差2値化情報を用いたf方向マーカ出現強度データを記憶部113に記録する。
【0080】
また、ノイズ除去部111は、c方向輝度差2値化情報を用いたg方向の第1膨張処理、c方向輝度差2値化情報を用いたg方向の第1収縮処理、c方向輝度差2値化情報を用いたg方向の第2収縮処理、c方向輝度差2値化情報を用いたg方向の第2膨張処理、を行う。
そして、ノイズ除去部111はc方向輝度差2値化情報を用いたg方向の第2膨張処理の結果を保持するc方向輝度差2値化情報を用いたg方向マーカ出現強度データを記憶部113に記録する。
【0081】
次にノイズ除去部111は、作成したc方向輝度差2値化情報を用いたc方向マーカ出現強度データ、c方向輝度差2値化情報を用いたf方向マーカ出現強度データ、c方向輝度差2値化情報を用いたg方向マーカ出現強度データ内の、2値化された輝度を示す各画素のうち、何れかのマーカ出現強度データにおいて大きい値を示す画素をマーカ出現強度“1”として採用する。そして、ノイズ除去部111は、当該採用したマーカ出現強度データの示すマーカ出現強度が“1”となっている画素を、患部位置特定時生成画像内におけるマーカ候補として、当該マーカ候補の画素の情報を保持したc方向ノイズ除去結果データを作成する。
【0082】
[d方向ノイズ除去結果データの作成処理]
また、図示を省略するが、d方向ノイズ除去結果データの作成処理においては、ノイズ除去部111は、マーカエッジ強調部105の生成したd方向輝度差情報を読み込んで、各画素のうち輝度差が閾値以上の画素についてのマーカ出現強度を“1”、各画素のうち輝度差が閾値未満の画素についてのマーカ出現強度を“0”と2値化したd方向輝度差2値化情報を作成する。
【0083】
そして、ノイズ除去部111は、d方向輝度差2値化情報を用いたd方向の第1膨張処理、d方向輝度差2値化情報を用いたd方向の第1収縮処理、d方向輝度差2値化情報を用いたd方向の第2収縮処理、d方向輝度差2値化情報を用いたd方向の第2膨張処理、を行う。
そして、ノイズ除去部111はd方向輝度差2値化情報を用いたd方向の第2膨張処理の結果を保持するd方向輝度差2値化情報を用いたd方向マーカ出現強度データを記憶部113に記録する。
【0084】
また、ノイズ除去部111は、d方向(左下右上方向)との成す角度が45°の両隣の方向を示すc方向とa方向の中間の2つの方向をg方向(第2の上下・対角中間方向)、h方向(第2の水平・対角中間方向)と呼ぶこととする。そして、ノイズ除去部111は、g方向と、h方向についても、d方向に対して行った、d方向輝度差2値化情報を用いた第1膨張処理→第1収縮処理→第2収縮処理→第2膨張処理と同様の処理を行う。
【0085】
つまり、ノイズ除去部111は、d方向輝度差2値化情報を用いたg方向の第1膨張処理、d方向輝度差2値化情報を用いたg方向の第1収縮処理、d方向輝度差2値化情報を用いたg方向の第2収縮処理、d方向輝度差2値化情報を用いたg方向の第2膨張処理、を行う。
ノイズ除去部111は、d方向輝度差2値化情報を用いたg方向の第2膨張処理の結果を保持するd方向輝度差2値化情報を用いたg方向マーカ出現強度データを記憶部113に記録する。
【0086】
また、ノイズ除去部111は、d方向輝度差2値化情報を用いたh方向の第1膨張処理、d方向輝度差2値化情報を用いたh方向の第1収縮処理、d方向輝度差2値化情報を用いたh方向の第2収縮処理、d方向輝度差2値化情報を用いたh方向の第2膨張処理を行う。
ノイズ除去部111はd方向輝度差2値化情報を用いたh方向の第2膨張処理の結果を保持するd方向輝度差2値化情報を用いたh方向マーカ出現強度データを記憶部113に記録する。
【0087】
そして、ノイズ除去部111は、作成したd方向輝度差2値化情報を用いたd方向マーカ出現強度データ、d方向輝度差2値化情報を用いたg方向マーカ出現強度データ、d方向輝度差2値化情報を用いたh方向マーカ出現強度データ内の、2値化された輝度を示す各画素のうち、何れかのマーカ出現強度データにおいて大きい値を示す画素をマーカ出現強度“1”として採用する。そして、ノイズ除去部111は、当該採用したマーカ出現強度データの示すマーカ出現強度が“1”となっている画素を、患部位置特定時生成画像内におけるマーカ候補として、当該マーカ候補の画素の情報を保持したd方向ノイズ除去結果データを作成する。
【0088】
以上の処理により、ノイズ除去部111が、a方向ノイズ除去結果データ、b方向ノイズ除去結果データ、c方向ノイズ除去結果データ、d方向ノイズ除去結果データを作成する。ここで、図18の(A)にはa方向ノイズ除去結果データを、図18の(B)にはb方向ノイズ除去結果データを、図18の(C)にはc方向ノイズ除去結果データを、図18の(D)にはd方向ノイズ除去結果データを示している。
そして、ノイズ除去部111は、a方向ノイズ除去結果データにおいてマーカ候補と特定されている画素、b方向ノイズ除去結果データにおいてマーカ候補と特定されている画素、c方向ノイズ除去結果データにおいてマーカ候補と特定されている画素、d方向ノイズ除去結果データにおいてマーカ候補とされている画素全てをマーカ候補群となる画素として特定し、患部位置特定時生成画像内においてマーカ候補群となる画素がどの情報であるかを示す情報(画像中のマーカ候補群に含まれる画素の座標)を保持したマーカ候補群データを生成する。
【0089】
(ステップS14;マーカ候補特定処理)
図19はマーカ候補特定処理の概要を示す図である。
次に、マーカ特定部112が、マーカ候補群データの中から、マーカ候補を特定する。当該処理の詳細は、図19で示すように、まず、マーカ特定部112が、マーカ候補群データを入力し(図19(A))、当該データにおいてマーカ候補群と特定された画素を、隣接する画素の纏まりによって特定される複数の領域ごとにラベリング(分類)を行う。図19(B)においては、マーカ候補群データから隣接する画素のまとまりを示す2つの領域P、領域Qのうち、領域Pの画素にラベリング“1”を、また領域Qの画素にラベリング“2”をそれぞれ付与する。
【0090】
そして、マーカ特定部112は、“1”とラベリングされた画素の数及び“2”とラベリングされた画素の数に基づいて、当該領域Pの領域及びQの領域がマーカとして見合うだけの領域範囲の閾値以上かを判定する。そして閾値以上である場合には、その領域に含まれる画素を、マーカの画素の候補として特定する。図19では、領域Pのみが、マーカとして見合う領域範囲の閾値以上の範囲であるとして、当該領域Pが選択された場合の例を示している。そしてマーカ特定部112は、患部位置特定時生成画像内のマーカ候補として特定された画素情報を保持するマーカ候補データを生成し(図19(C)参照)、記憶部113に記録する。
【0091】
なお、放射線治療装置制御装置1は、患部位置特定時生成画像と事前に登録したテンプレート画像とを比較してマーカを特定する処理をしない場合には、この時点で得られたマーカ候補の画素をマーカとして特定し、当該マーカの画素の情報を保持するマーカ画像を生成するようにしてもよい。このような処理によれば、マーカ画像を生成するにあたり、正規化相関の処理を用いないため、マーカの検出速度を上げることができる。
また、上述の処理において、各画素の輝度値の対数変換を行い、これにより、マーカを示す各画素の輝度と、それ以外の箇所の画素の輝度との輝度差を均一にするような処理を行っているため、一定の輝度値の閾値を用いて、簡易にマーカを検出できるような仕組みとし、これによりマーカ検出の処理速度を上げることができる。
【0092】
図20はパタンマッチング事前処理の概要を示す図である。
(ステップS15;探索範囲決定処理)
マーカ特定部112は、作成したマーカ候補データの示すマーカ候補の画素の情報によって得られるマーカ候補画像において、マーカ候補として特定された画素のx座標の最小値xminと最大値xmaxで示されるマーカ候補の幅W1を算出する。またマーカ特定部112は、マーカ候補として特定された画素のy座標の最小値yminと最大値ymaxで示されるマーカ候補の高さH1を算出する。そして、マーカ候補の画素を包含する幅H1、高さW1の領域を探索範囲として暫定的に決定する(図20(B)参照)。
【0093】
また、マーカ特定部112は、事前にテンプレート登録制御部102の処理によって記録されたテンプレート画像の情報を記憶部113から読取り、当該テンプレート画像の情報に格納されたテンプレート画像の放射線透視画像中における座標の情報に基づいて、テンプレート画像の幅W2と高さH2と検出する。そして、マーカ特定部112は、マーカ候補の幅W1と、テンプレート画像の幅W2とを比較する。またマーカ特定部112は、マーカ候補の高さH1と、テンプレート画像の高さH2とを比較する。そして、W1<W2である場合には、探索範囲の幅を広げる(図20(B)参照)。なおW1≧W2の場合には探索範囲を広げなくてもよい。またはW1≧W2の場合であっても探索範囲を広げるようにしてもよい。探索範囲を広げるか広げないかはどの程度、マーカの特定の精度を上げるかによる。
【0094】
当該探索範囲の幅を広げる処理としては、例えば、探索範囲の幅方向のx座標の最小値をxmin、最大値をxmaxとすると、最小値がxmin−W2、最大値がxmax+W2となるように広げる。このような処理により、探索範囲の幅(探索範囲のx座標方向の両端の距離)は、例えば暫定的に決定した探索範囲の幅W1のほぼ2倍〜3倍に広がることとなる。マーカの幅がテンプレート画像の幅よりも狭い場合には、患部位置特定時生成画像から得られたマーカ候補が実際よりも短く検出されているということである。従って、本処理で探索範囲を広げることにより、マーカ候補と考えられる画素を特定する処理の精度を向上させることができる。また、実際のマーカの端の一部のみマーカ候補として特定されている場合には、そのマーカ候補の右側または左側に、ほぼマーカの実際の幅と等しい距離の幅においてマーカ候補として特定できていない画素が隠れている可能性がある。従って、探索範囲を広げる際に暫定的に決定した探索範囲を右側と左側のそれぞれにおいて、マーカの幅とほぼ同じと考えられるテンプレート画像の幅分の距離を広げている。
【0095】
また、同様に、H1<H2である場合には、探索範囲の高さを広げる(図20(B)参照)。なおH1≧H2の場合には探索範囲を必ずしも広げなくてもよい。探索範囲を広げるか広げないかはどの程度、マーカの特定の精度を上げるかによる。
当該探索範囲の高さを広げる処理としては、例えば、探索範囲の高さ方向のy座標の最小値をymin、最大値をymaxとすると、最小値がymin−H2、最大値がymax+H2となるように広げる。このような処理により、探索範囲の高さが、暫定的に決定した探索範囲の高さH1のほぼ2倍〜3倍に広がることとなる。マーカの高さがテンプレート画像の高さよりも狭い場合には、患部位置特定時生成画像から得られたマーカ候補が実際よりも短く検出されているということである。従って、本処理で探索範囲を広げることにより、マーカ候補と考えられる画素を特定する処理の精度を向上させることができる。また、実際のマーカの一部のみマーカ候補として特定されている場合には、そのマーカ候補の上側または下側に、ほぼマーカの実際の高さと等しい距離の高さにおいてマーカ候補として特定できていない画素が隠れている可能性がある。従って、探索範囲の高さを広げる際に暫定的に決定した探索範囲を上側と下側のそれぞれにおいて、マーカの高さとほぼ同じと考えられるテンプレート画像の高さ分の距離を広げている。以上の処理により探索範囲が決定される。
【0096】
(ステップS16;利用テンプレート画像判定処理)
そして、次にマーカ特定部112は、事前にマッチング対象範囲特定部110によって生成されたマッチング対象範囲情報を記憶部113から読み取る。そして、マーカ特定部112は、マッチング対象範囲情報に格納されている、マッチング対象範囲A,B,Cの範囲を示す座標の情報に基づいて、マッチング対象範囲Aの領域と、マッチング対象範囲Bの領域と、マッチング対象範囲Cの領域とを検出する。そして、マーカ特定部112は、既に決定した探索範囲の患部位置特定時生成画像の位置を探索範囲が示す座標の情報から検出し、当該探索範囲の患部位置特定時生成画像における位置が、マッチング対象範囲A,B,Cのどの領域に含まれるかを判定する(図20(C)参照)。
【0097】
そして、マーカ特定部112は、探索範囲がマッチング対象範囲Aの領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Aの範囲を示す座標に紐付けられているテンプレート画像Aの情報を読み取って、当該テンプレート画像Aを用いてパタンマッチング処理を行うと判定する。
またマーカ特定部112は、探索範囲がマッチング対象範囲Bの領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Bの範囲を示す座標に紐付けられているテンプレート画像Bの情報を読み取って、当該テンプレート画像Bを用いてパタンマッチング処理を行うと判定する。
またマーカ特定部112は、探索範囲がマッチング対象範囲Cの領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Cの範囲を示す座標に紐付けられているテンプレート画像Cの情報を読み取って、当該テンプレート画像Cを用いてパタンマッチング処理を行うと判定する。
【0098】
または、マーカ特定部112は、探索範囲がマッチング対象範囲AとBの両方の領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Aの範囲を示す座標に紐付けられているテンプレート画像Aの情報と、マッチング対象範囲Bの範囲を示す座標に紐付けられているテンプレート画像Bの情報とを読み取って、当該テンプレート画像A及び当該テンプレート画像Bを用いてパタンマッチング処理を行うと判定する。
または、マーカ特定部112は、探索範囲がマッチング対象範囲BとCの両方の領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Bの範囲を示す座標に紐付けられているテンプレート画像Bの情報と、マッチング対象範囲Cの範囲を示す座標に紐付けられているテンプレート画像Cの情報とを読み取って、当該テンプレート画像B及び当該テンプレート画像Cを用いてパタンマッチング処理を行うと判定する。
ここで、図20(D)で示すように、探索範囲が複数のマッチング対象範囲の領域にまたがる場合には、マッチング対象範囲に包含されている探索範囲の一部を、当該マッチング対象範囲で特定されるテンプレート画像を用いてパタンマッチング処理する。
【0099】
(ステップS17;パタンマッチング処理)
図21はパタンマッチング処理の概要を示す第1の図である。
今、探索範囲がマッチング対象範囲Aに含まれているものとする。この場合は、次に、マーカ特定部112は、探索範囲の患部位置特定時生成画像における位置に基づいて決定したマッチング対象範囲Aの範囲を示す座標に紐付けられているテンプレート画像Aを記憶部113から読み取る。また、マーカ特定部112は、事前に記憶部113に記録された、テンプレート画像を回転させてマッチング処理を行う場合の回転角度の上限値を読み取る。そして、マーカ特定部112は、回転角度の上限値を用いてテンプレート画像を時計回りと反時計回りにそれぞれ回転させた回転テンプレート画像2つ生成する。例えば図21の(B)で示すように回転角度の上限値を5°とすると、5°回転させた回転テンプレート画像と、−5°回転させた回転テンプレート画像を生成する。なお、回転角度の上限値まで、所定の角度刻みで更に多くの回転テンプレート画像を作成するようにしてもよい。
【0100】
そして、マーカ特定部112は、テンプレート画像Aの情報に格納されている画素毎輝度差情報と、患部位置特定時生成画像の探索範囲における画素毎輝度差情報とを読み取る。また、マーカ特定部112は、テンプレート画像Aのマスク情報を記憶部113から読み取る。そして、マーカ特定部112は、テンプレート画像Aの画素毎輝度差情報と、探索範囲の画素毎輝度差情報とを用いて、探索範囲の原点と、テンプレート画像Aの原点とを重ね合わせた時の、テンプレート画像の範囲に相当する探索範囲内の位置範囲において、探索範囲の位置範囲における各画素の輝度差と、それら各画素に位置対応するテンプレート画像Aの各画素の輝度差との相関を算出する(パタンマッチング処理)。このとき、マーカ特定部112は、テンプレート画像Aのマスク情報を用いて、当該マスク情報においてマスク対象とされた画素について、探索範囲における対応する画素との間での相関の算出を行わない。これにより、パタンマッチング処理量を軽減することができる。
【0101】
マーカ特定部112は、予めマッチング条件情報として記憶部113に登録した最低限の相関値の閾値と、処理を打ち切る相関値(以下、処理打ち切り相関値と呼ぶ)とを読取り、テンプレート画像との相関を計算している探索範囲内の位置範囲(パタンマッチング処理において、テンプレート画像の原点と)について算出した現在の相関値が、最低限の相関値の閾値以上かの判定と、処理打ち切り相関値以上かの判定を行う。そして、現在の相関値が最低限の相関値の閾値以上であれば、テンプレート画像との相関を計算している探索範囲内の現在の位置範囲を、マーカ検出範囲候補として特定し、そのマーカ検出範囲候補とした探索範囲内の位置範囲を示す座標と、その位置範囲について算出した相関値を対応付けて記憶部113に記録する。
【0102】
そして、マーカ特定部112は、現在の相関値が、最低限の相関値の閾値未満である場合、および特定したマーカ検出範囲候補とした探索範囲内の位置範囲を示す座標を記憶部113に記録した後には、テンプレート画像と同じ範囲の位置範囲を探索範囲内で1画素ずらす。そして、マーカ特定部112は、再度、当該探索範囲の位置範囲における各画素の輝度差と、それら各画素に位置対応するテンプレート画像Aの各画素の輝度差との相関を算出する(パタンマッチング処理)。そして、マーカ特定部112は、図21(C)で示すように、位置範囲を1画素ずつずらしながら、パタンマッチング処理を行っていく。本実施形態において位置範囲を1画素ずつずらす手法は、例えば、水平方向(右方向)にずらしていき、位置範囲が探索範囲からはみ出す場合には、はみ出す前に垂直方向に1画素ずらす(下方向)。そして、垂直方向に1画素ずらした後は逆側の水平方向(左方向)にずらしていき、位置範囲が探索範囲からはみ出す場合には、はみ出す前に垂直方向に1画素ずらす(下方向)。そしてこのような処理を繰り返す。
【0103】
また、マーカ特定部112は、探索範囲内で位置範囲をずらす処理において、テンプレート画像の原点とは対角の角の座標と、探索範囲の原点とは対角の角の座標とが一致することによって、探索範囲内で位置範囲をこれ以上ずらすことができなくなった場合には、パタンマッチング処理を打ち切る。
また、マーカ特定部112は、図21(D)で示すように、回転テンプレート画像を用いて同様のパタンマッチング処理を行い、マーカ検出範囲候補を決定する。そして、マーカ特定部112は、マーカ検出範囲候補として特定した探索範囲内の位置範囲についての相関値のうち、最も高い値を示す位置範囲をマーカ検出範囲として決定する。マーカ特定部112は、現在の相関値が打ち切り相関値以上の場合には、当該現在の位置範囲について算出した相関値が最も高い値であるため、その位置範囲をマーカ検出範囲として特定する。
【0104】
そしてマーカ特定部112は、当該特定した探索範囲内におけるマーカ検出範囲の座標と、テンプレート画像Aに出現するマーカの端点の座標(テンプレート画像Aの情報内の端点座標情報に格納されている端点の座標)とから、マーカの患部位置特定時生成画像内における座標を算出する。例えば、特定したマーカ検出範囲の原点に対応する探索範囲内の座標が(xt,yt)であり、テンプレート画像Aに格納されたマーカの2つの端点の座標が(xe1,ye1)、(xe2,ye2)である場合には、患部位置特定時生成画像内に出現するマーカの2つの端点の座標(xfa,yfa)、(xfb,yfb)を、それぞれ、
(xfa,yfa)=(xt+xe1,yt+ye1)
(xfb,yfb)=(xt+xe2,yt+ye2)
と算出する。これにより、放射線治療装置制御装置1は、マーカの2つの端点を用いて、その近傍にある患部を判定する。
【0105】
図22は回転テンプレート画像を用いてマーカの端点を算出する概要を示す図である。
回転テンプレート画像を用いたパタンマッチング処理により決定したマーカ検出範囲に基づいて、患部位置特定時生成画像内に出現するマーカの端点の画素の座標を算出する場合には、図22に示すように、テンプレート画像のマーカの端点を回転する処理が必要となる。このとき、テンプレート画像の原点の画素の座標に対応する探索範囲内の画素の座標が(xt,yt)、テンプレート画像内に出現するマーカの端点の座標が(xe,ye)、回転テンプレート画像の回転角度がθである場合には、患部位置特定時生成画像内に出現するマーカの端点の座標(xf,yf)は、
(xf,yf)
=(xt+xecosθ−yesinθ,yt+xesinθ−yecosθ)
により算出する。
【0106】
図23はパタンマッチング処理の概要を示す第2の図である。
図23(B)で示すように、探索範囲が複数のマッチング対象範囲の領域にまたがる場合には、マッチング対象範囲に包含されている探索範囲の一部を、当該マッチング対象範囲で特定されるテンプレート画像を用いてパタンマッチング処理することとなるが、この場合のパタンマッチング処理について説明する。
図23(B)においては、探索範囲の上部がマッチング対象範囲Aの領域にあり、探索範囲の下部がマッチング対象範囲Bの領域に存在する場合の例である。ここで探索範囲の上部を探索範囲A、探索範囲の下部を探索範囲Bと呼ぶこととする。
【0107】
この場合には、マーカ特定部112は、テンプレート画像Aの画素毎輝度差情報と、探索範囲Aの画素毎輝度差情報とを用いて、探索範囲Aの原点と、テンプレート画像Aの原点とを重ね合わせた時の、テンプレート画像Aの範囲に相当する探索範囲A内の位置範囲において、探索範囲Aの位置範囲における各画素の輝度差と、それら各画素に位置対応するテンプレート画像Aの各画素の輝度差との相関を算出する。そして、探索範囲Aがテンプレート画像Aよりも広い場合には、1画素ずつ上記の手法と同様に位置範囲をずらしてパタンマッチング処理を行っていく。
【0108】
また同様に、マーカ特定部112は、テンプレート画像Bの画素毎輝度差情報と、探索範囲Bの画素毎輝度差情報とを用いて、探索範囲Bの原点と、テンプレート画像Bの原点とを重ね合わせた時の、テンプレート画像Bの範囲に相当する探索範囲B内の位置範囲において、探索範囲Bの位置範囲における各画素の輝度差と、それら各画素に位置対応するテンプレート画像Bの各画素の輝度差との相関を算出する。そして、探索範囲Bがテンプレート画像Bよりも広い場合には、1画素ずつ上記の手法と同様に位置範囲をずらしてパタンマッチング処理を行っていく。
【0109】
そして、マーカ特定部112は、テンプレート画像Aの画素毎輝度差情報と、探索範囲Aの画素毎輝度差情報とを用いて算出した相関値が最も高い場合には、探索範囲内におけるマーカ検出範囲の座標と、テンプレート画像Aに出現するマーカの端点の座標とから、マーカの患部位置特定時生成画像内における座標を算出する。
他方、マーカ特定部112は、テンプレート画像Bの画素毎輝度差情報と、探索範囲Bの画素毎輝度差情報とを用いて算出した相関値が最も高い場合には、探索範囲内におけるマーカ検出範囲の座標と、テンプレート画像Bに出現するマーカの端点の座標とから、マーカの患部位置特定時生成画像内における座標を算出する。
【0110】
このように、放射線透視画像中の異なる位置に出現するマーカそれぞれのテンプレート画像を予め作成しておき、放射線照射治療時に新たに生成された画像中のマーカの位置に最も近いテンプレート画像を利用して、パタンマッチング処理を行っている。これにより、精度の高いマーカの画像中の位置検出を行うことができる。
【0111】
なお、上述の処理においては、一つの方向から放射線を照射することにより得られた放射線透視画像を用いて複数のテンプレート画像を生成し、また放射線照射治療時の画像についても同じ方向から放射線を照射することにより得られた画像を用いて、テンプレート画像とのパタンマッチング処理を行っている。しかしながら、患者に対する放射線照射角度を変えた場合にもマーカの位置が検出できるように、複数の方向から放射線を照射することにより得られた放射線透視画像を用いて複数のテンプレート画像を照射方向ごとに生成するようにしてもよい。その場合には、放射線照射治療時の画像についても複数の方向から放射線を照射することにより得られた画像を用いて、各方向の複数のテンプレート画像とのパタンマッチング処理を行うようにする。
【0112】
なお、上述の放射線治療装置制御装置は内部に、コンピュータシステムを有している。そして、上述した各処理の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0113】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0114】
101・・・放射線透視画像生成部
102・・・テンプレート登録制御部
103・・・マーカ上複数点特定部
104・・・対数変換部
105・・・マーカエッジ強調部
106・・・テンプレート範囲設定部
107・・・端点位置設定部
108・・・テンプレートマスク設定部
109・・・テンプレート画像生成部
110・・・マッチング対象範囲特定部
111・・・ノイズ除去部
112・・・マーカ特定部
113・・・記憶部
【技術分野】
【0001】
本発明は、マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中のマーカを検出する放射線治療装置制御装置及び放射線治療装置制御装置の処理方法並びにそのプログラムに関する。
【背景技術】
【0002】
主に金属で形成された線状のマーカを人体の患部付近に埋め込んで、後に人体に放射線を照射して撮像した放射線透視画像から前記マーカの位置を特定することで、患部の位置を特定する技術が放射線治療装置で利用されている。また関連する技術が特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3053389号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の特許文献1の技術では、撮像して得た画像と、テンプレート画像とを用いて、濃淡正規化相互相関法によるテンプレートマッチングを行うことで、画像中からマーカを検出する処理を行っている。
しかしながら、この方法においては正規化相互相関法を用いているため、処理時間を要するという課題が存在する。
【0005】
そこでこの発明は、上記の課題を解決することのできる放射線治療装置制御装置、放射線治療装置制御装置の処理方法及びそのプログラムを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明は、マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する放射線治療装置制御装置であって、前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成するマーカエッジ強調部と、前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定するノイズ除去部と、前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定するマーカ特定部と、を備えることを特徴とする放射線治療装置制御装置である。
【0007】
また本発明は、上述の放射線治療装置制御装置において、前記放射線透視画像中における各画素についての輝度値を対数変換する対数変換部とを備え、前記マーカエッジ強調部は、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成することを特徴とする。
【0008】
また本発明は、上述の放射線治療装置制御装置において、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定するマーカ上複数点特定部と、前記マーカの複数点を含むテンプレート画像範囲を設定するテンプレート範囲設定部と、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成するテンプレート画像生成部と、を備え、前記マーカ特定部は、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定することを特徴とする。
【0009】
また本発明は、上述の放射線治療装置制御装置において、前記マーカ上複数点特定部は、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を、異なる時刻に生成された前記放射線透視画像それぞれについて特定し、前記テンプレート範囲設定部は、前記マーカの複数点を含むテンプレート画像範囲を、異なる時刻に生成された前記放射線透視画像それぞれについて設定し、前記テンプレート画像生成部は、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を、異なる時刻に生成された前記放射線透視画像それぞれについて複数生成し、前記テンプレート画像に近い画素の纏まりの範囲を示すマッチング対象範囲を、前記複数のテンプレート画像それぞれについて特定するマッチング対象範囲特定部を備え、前記マーカ特定部は、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲を包含する前記マッチング対象範囲を決定し、前記探索範囲において前記決定したマッチング対象範囲に属するテンプレート画像の範囲と同一の位置範囲の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記決定したマッチング対象範囲に属するテンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定することを特徴とする。
【0010】
また本発明は、上述の放射線治療装置制御装置において、前記マーカ特定部は、前記探索範囲を包含する前記マッチング対象範囲が複数存在する場合には、当該探索範囲を包含する複数の異なる前記マッチング対象範囲を決定し、前記決定した複数のマッチング対象範囲のうちの1つのマッチング対象範囲に属する前記探索範囲の一部範囲については、当該一部範囲の画素と、前記1つのマッチング対象範囲に属するテンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であるとの判定に利用した前記探索範囲内の位置範囲の原点および前記1つのマッチング対象範囲に属するテンプレート画像が示すマーカの端点の当該テンプレート画像における座標と、を用いて、前記放射線透視画像中に出現するマーカの端点座標を特定することを特徴とする。
【0011】
また本発明は、上述の放射線治療装置制御装置において、前記放射線透視画像中における前記複数点を結ぶ線上に対応する画素以外の画素を以降の処理における対象除外を決定し、当該対象除外を示す情報を前記複数点を結ぶ線上に対応する画素複数点を結ぶ線上に対応する画素それぞれついて保持したマスク情報を、異なる時刻に生成された前記放射線透視画像それぞれについて生成するテンプレートマスク設定部と、を備え、前記マーカ特定部は、前記マスク情報で保持された画素の輝度差の情報を用いずに前記相関値の算出を行うことを特徴とする。
【0012】
また本発明は、マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する処理方法であって、前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成し、前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定し、前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定することを特徴とする処理方法である。
【0013】
また本発明は、上述の処理方法において、前記放射線透視画像中における各画素についての輝度値を対数変換し、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成することを特徴とする。
【0014】
また本発明は、上述の処理方法において、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定し、前記マーカの複数点を含むテンプレート画像範囲を設定し、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成し、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定することを特徴とする。
【0015】
また本発明は、マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する放射線治療装置制御装置のコンピュータを、前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成するマーカエッジ強調手段、前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定するノイズ除去手段、前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定するマーカ特定手段、として機能させることを特徴とするプログラムである。
【0016】
また本発明は、上述のプログラムを、前記放射線透視画像中における各画素についての輝度値を対数変換する対数変換手段として機能させ、前記マーカエッジ強調手段を、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する手段として機能させることを特徴とする。
【0017】
また本発明は、上述のプログラムを、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定するマーカ上複数点特定手段、前記マーカの複数点を含むテンプレート画像範囲を設定するテンプレート範囲設定手段、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成するテンプレート画像生成手段、として機能させ、前記マーカ特定手段を、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する手段として機能させることを特徴とする。
【発明の効果】
【0018】
本発明によれば、マーカ画像を生成するにあたり、正規化相関の処理を用いないため、マーカの検出速度を上げることができる。
また、放射線透視画像の各画素の輝度値の対数変換を行い、これにより、マーカを示す各画素の輝度と、それ以外の箇所の画素の輝度との輝度差を均一にするような処理を行っているため、一定の輝度値の閾値を用いて、簡易にマーカを検出できるような仕組みとし、これによりマーカ検出の処理速度を上げることができる。
【図面の簡単な説明】
【0019】
【図1】放射線治療装置制御装置の構成を示すブロック図である。
【図2】放射線透視画像のイメージ図である。
【図3】放射線治療装置制御装置の事前処理のフローを示す第1の図である。
【図4】画素毎輝度差情報の作成処理の概要を示す第1の図である。
【図5】画素毎輝度差情報の作成処理の概要を示す第2の図である。
【図6】テンプレート画像範囲を示す図である。
【図7】テンプレートマスク処理を示す第1の図である。
【図8】テンプレートマスク処理を示す第2の図である。
【図9】テンプレートマスク処理を示す第3の図である。
【図10】パタンマッチング事前処理の概要を示す図である。
【図11】マーカ特定処理の処理フローを示す図である。
【図12】ノイズ除去処理で用いる対象画素を基準とした処理方向を示す図である。
【図13】ノイズ除去処理の処理概要を示す第1の図である。
【図14】ノイズ除去処理の処理概要を示す第1の図である。
【図15】ノイズ除去処理の処理概要を示す第2の図である。
【図16】ノイズ除去処理の処理概要を示す第3の図である。
【図17】ノイズ除去処理の処理概要を示す第4の図である。
【図18】ノイズ除去処理の処理概要を示す第5の図である。
【図19】マーカ候補特定処理の概要を示す図である。
【図20】パタンマッチング事前処理の概要を示す図である。
【図21】パタンマッチング処理の概要を示す第1の図である。
【図22】回転テンプレート画像を用いてマーカの端点を算出する概要を示す図である。
【図23】パタンマッチング処理の概要を示す第2の図である。
【発明を実施するための形態】
【0020】
以下、本発明の一実施形態による放射線治療装置制御装置を図面を参照して説明する。
図1は同実施形態による放射線治療装置制御装置の構成を示すブロック図である。
この図において、符号1は放射線治療装置制御装置である。そして、放射線治療装置制御装置1は、放射線透視画像生成部101、テンプレート登録制御部102、マーカ上複数点特定部103、対数変換部104、マーカエッジ強調部105、テンプレート範囲設定部106、端点位置設定部107、テンプレートマスク設定部108、テンプレート画像生成部109、マッチング対象範囲特定部110、ノイズ除去部111、マーカ特定部112、記憶部113を備えている。
【0021】
図示しない放射線治療装置は、放射線(X線)を出射する放射線照射装置及び当該放射線を検出するための放射線検出器を具備する。放射線検出器は、放射線照射装置から出射されて図示しない被写体(人体)を透過した放射線を受光して、その被写体の放射線透視画像の生成用の画像データを生成する。放射線治療装置制御装置1は、放射線治療装置から得た当該画像データを基に放射線透視画像をデジタル生成するなど、プログラムを起動することによって、上記各処理部を機能させる。なお、放射線検出器としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0022】
人体の患部付近には、Au,Pt等の人体への影響が少なく且つX線の透過性が低いものからなる、マーカが埋め込まれている。このため、前記放射線透視画像において当該マーカ位置を特定することにより、患部位置の同定を容易に行うことが可能となる。
【0023】
図2は放射線透視画像のイメージ図である。
図3は放射線治療装置制御装置の事前処理のフローを示す第1の図である。
次に、本実施形態による放射線治療装置制御装置の処理フローの詳細について説明する。なお、本実施形態では、マーカはその形状が線状であり、被写体内に曲線状(山なりの形状)に配される場合を例に挙げて説明を行う。
【0024】
<事前処理>
放射線透視画像生成部101は、放射線治療装置から得た画像データを基に、放射線透視画像をデジタル生成する。テンプレート登録制御部102はその放射線透視画像をモニタに表示する(図2参照)。なお、図2は、便宜上、マーカのみを示しているが、放射線透視画像にはマーカの他に、骨、内臓など、人体を構成する要素も写っている。マーカのX線透過性は、この人体構成要素のものよりも、低いものとする。
【0025】
(ステップS1;マーカ上の端点を含む複数点の特定処理)
当該放射線透視画像がモニタに表示されると、ユーザは、放射線治療装置制御装置1に備わるキーボードやマウス等の入力手段を用いて、放射線透視画像中に現れているマーカの幅(マーカのx座標方向の両端の距離)と高さ(マーカのy座標方向の両端の距離)を表すことのできる位置に印をつける。例えばマーカの形状が図2で示すような山なりの形状である場合には、山なりとなっている頂点と、2つの端点の、合計3点の位置に印をつける。本実施形態においては図示するように、山なりとなっている頂点と、2つの端点の、合計3点の位置に印をつけた場合の例を用いて説明する。
【0026】
図2においては、端点のx座標の距離がマーカの形状の幅となり、山なりの頂点の座標からより距離が離れている端点のy座標と当該頂点のy座標との距離がマーカの形状の高さとなる。なお、マーカの形状が直線を示すような場合には2つの端点の位置に印をつけるようにしてもよい。マーカの形状が直線である場合には端点の位置に印をつけるだけで、マーカを包含する矩形の幅と高さを特定できるためである。なお、ユーザが印をつける点は、マーカの放射線透視画像中における端点を含む複数点であれば幾つであってもよい。そして、マーカ上複数点特定部103が、印をつけられた位置の座標を、マーカ暫定座標情報(前述の例では、2つの端点及び山なりの頂点の各々の座標)として記憶部113に保持する。そして、ユーザがテンプレート登録処理開始を、入力手段などを用いて入力すると、テンプレート登録処理に含まれるテンプレート画像生成処理を開始する。
【0027】
(ステップS2;放射線透視画像の各画素の輝度値の対数変換処理)
放射線透視画像はマーカと骨、内臓などの人体を構成する要素が重畳して撮像される。その重畳状況は、放射線透視画像内において、X線照射方向(撮像方向)及び人体のマーカ埋め込み位置により異なる。このため、放射線透視画像中のマーカを示す各画素の輝度と、それ以外の箇所の画素の輝度との輝度差が、マーカを表す画素の全てで一定ではない場合が発生する。
テンプレート画像を作成する上では、マーカ位置を明確にする必要があるため、前記輝度差を均一にする必要がある。よって、対数変換部104が、放射線透視画像における各画素の輝度を、式(1)を用いて対数変換する。
【0028】
【数1】
【0029】
当該式(1)において、iは画素の輝度値を示している。つまり式(1)においてlog10(i)が対数変換処理を示している。その他は14bitのデータを8bitに圧縮する要素、低輝度のノイズをカットするノイズカット要素を含んでいる。
【0030】
図4は画素毎輝度差情報の作成処理の概要を示す第1の図である。
(ステップS3;画素毎輝度差情報の作成処理)
次にマーカエッジ強調部105が、放射線透視画像を用いて、当該画像中に写るマーカの周囲の画素との輝度差を示す画素毎輝度差情報を作成する処理を行う。
当該処理においては、図4で示すように、放射線透視画像中における、ある画素(対象画素)の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差(本実施形態においては小さい値を示す輝度差)を、ある画素を通る複数の異なる方向について算出する。当該所定距離としては、マーカの線幅(幅方向長さ)の半分以上が例示される。
【0031】
マーカエッジ強調部105は、各方向について算出した輝度差のうちの最も大きい輝度差の情報を当該ある画素について特定する。マーカエッジ強調部105は、当該輝度差の情報を放射線透視画像中の全ての画素について算出する処理を行う。なお、本処理において必ずしも全ての画素について算出を行う必要はない。例えば、予めマーカ位置が推定できる場合には、放射線透視画像においてマーカが明らかに位置しないと判断される画素は当該処理を割愛することでも構わない。この場合には、複数の画素について算出する処理を行うこととなる。以下の処理においても同様であるが、便宜上、ここでは全ての画素について算出する場合を例に取り説明する。
【0032】
つまり、マーカエッジ強調部105は、ある対象画素について、放射線透視画像の水平方向(以下、a方向)、左上右下方向(以下、b方向)、上下方向(以下、c方向)、左下右上方向(以下、d方向)のそれぞれについて、一定距離の位置にある他の画素との輝度差を算出して、当該輝度差のうち最も小さい輝度差を、当該対象画素の輝度値の強さとして算出する。図4では、放射線透視画像の対象画素(7,8)についてa方向の直線上の左右の2画素までの一定距離を示している。ここで、本実施形態において、一定距離は、マーカの太さ(線幅;幅長方向長さ)の半分程度である。図4においては説明の便宜上、マーカの線幅に比べて一定距離を示す長さが大きく表れている。
【0033】
図5は画素毎輝度差情報の作成処理の概要を示す第2の図である。
マーカエッジ強調部105は、ある対象画素について、例えばa方向に一定距離離れた位置との輝度差によって算出する。このとき、対象画素を通る直線上の対象画素から一定距離にある対向する2つの画素(画素a,画素b)の輝度と、対象画素との輝度との輝度差のうち小さい値を選択する(図5(A)参照)。図5においては対象画素と画素aとの輝度差と、対象画素と画素bとの輝度差は、画素aとの輝度差の方が小さいため、この輝度差を採用する。
なお、マーカを表す輝度の遷移は図5(A)で示すように対象画素位置の付近が周囲の画素よりも低い状態となるが、対象画素位置を基準とした輝度の値の遷移がこのようにならない場合には、その対象画素はマーカを表していない画素である可能性が高い。例えば、対象画素を通る直線上の対象画素から一定距離にある対向する2つの画素(画素a,画素b)のうち一方の画素(例えば画素a)の輝度値が対象画素の輝度値とほぼ同じかそれより低い場合も考えられる。この場合、対象画素はマーカを表していないと考えられるためこのような対象画素をマーカの画素として検出しないようにするために、対象画素を通る直線上の対象画素から一定距離にある対向する2つの画素(画素a,画素b)の輝度と、対象画素との輝度との輝度差のうち、小さい値を選択する処理を行っている。
ここで、ある対象画素についてa方向に一定距離(マーカの太さの半分程度)離れた位置からの輝度差は、当該a方向に垂直なc方向にマーカの線が写っている場合の当該マーカの検出に有効である。
【0034】
なお、対象画素と、当該対象画素から一定距離の位置の画素の輝度差は、対象画素(x,y)の輝度をI(x,y)とし、一定距離を(dx,dy)とすると、一方の画素(図5では画素a)との間の輝度差I’(x,y)は、
【0035】
【数2】
【0036】
他方の画素(図5では画素b)との間の輝度差I”(x,y)は、
【0037】
【数3】
【0038】
により表すことができる。そして、輝度差I’(x,y)または輝度差I”(x,y)のうち輝度差の小さいほうが採用される。
【0039】
なお、b方向の輝度差の算出の場合には、対象画素の左上と右下に隣接する画素方向について、対象画素から一定距離の位置の2つの画素との輝度差のうちの小さい値を採用する。
また、c方向の輝度差の算出の場合には、対象画素の上と下に隣接する画素方向(上下方向)について、対象画素から一定距離の位置の2つの画素との輝度差のうちの小さい値を採用する。
また、d方向の輝度差の算出の場合には、対象画素の左下と右上に隣接する画素方向について、対象画素から一定距離の位置の2つの画素との輝度差のうちの小さい値を採用する。
そして、マーカエッジ強調部105は、ある対象画素に対してa方向、b方向、c方向、d方向のそれぞれの方向について算出した輝度差のうち、最も大きい輝度差を、当該対象画素の輝度差として特定する。そして、マーカエッジ強調部105は、放射線透視画像の全ての画素に対して特定した輝度差の情報を保持する画素毎輝度差情報を作成して記憶部113へする。
【0040】
(ステップS4;テンプレート画像範囲の設定処理)
図6はテンプレート画像範囲を示す図である。
テンプレート範囲設定部106は、テンプレート登録制御部102によって記憶部113に登録されたマーカ暫定座標情報を読取る。そして、テンプレート範囲設定部106は、マーカ暫定座標情報で示されるマーカの点の座標を包含する矩形範囲であるテンプレート画像範囲を、放射線透視画像内において特定する。より具体的には、テンプレート範囲設定部106は、図6で示すような山なりのマーカの、山の頂点と、2つの端点の合計3点の座標を保持しているマーカ暫定座標情報を読み取る。そして、この座標のうち最小と最大のX座標をそれぞれxmin(左側端点のX座標)、xmax(右側端点のX座標)とし、また最小と最大のY座標をそれぞれymin(山なりの頂点のY座標)、ymax(右側端点のY座標)とすると、テンプレート範囲設定部106は、図6で示すような、
xmin−m≦x≦xmax+m
ymin−m≦y≦ymin+m
の範囲を、テンプレート画像範囲として設定する。
【0041】
次に端点位置設定部107が、マーカの端点それぞれの、テンプレート画像範囲の左上の原点からの相対座標を算出する。マーカの端点をそれぞれの放射線透視画像における座標について、端点A(xa,ya)、端点B(xb,yb)とし、テンプレート画像の左上の原点の、放射線透視画像における座標を(x1,y1)とすると、端点Aのテンプレート画像内における相対座標は端点A(xa−x1,ya−y1)で表され、端点Bのテンプレート画像内における相対座標は端点B(xb−x1,yb−y1)となる。そして、端点位置設定部107は、それらマーカの各端点のテンプレート画像範囲における座標を保持した端点座標情報を記憶部113に記録する。
【0042】
(ステップS5;マスク情報生成処理)
図7はテンプレートマスク処理を示す第1の図である。
図8はテンプレートマスク処理を示す第2の図である。
図9はテンプレートマスク処理を示す第3の図である。
次に、テンプレートマスク設定部108が、端点座標情報を記憶部113から読取り、当該端点座標情報で示される座標を結ぶ直線上の画素を、テンプレート画像範囲において特定する(図7)。そして、当該特定した画素についてマスク対象外と特定する。また、テンプレートマスク設定部108は、既にマスク対象外と特定した画素の左右上下斜めの周り近傍8画素について、全てマスク対象外と特定する(図8)。そして、テンプレート画像範囲内の画素のうち、マスク対象外と特定されなかった全ての画素についてマスク対象と特定する(図9)。そして、テンプレートマスク設定部108は、テンプレート画像範囲においてマスク対象外と特定されなかった全ての画素についてマスク対象であることを示す情報(以降の処理対象から外すことを示す情報、例えばフラグなどで保持する)を保持したマスク情報を生成して、テンプレート画像の識別情報に対応付けて記憶部113に記録する。
【0043】
(ステップS6;テンプレート画像生成処理)
また、テンプレート画像生成部109は、テンプレート画像範囲で示される各画素の情報(放射線透視画像の原点を基準とする座標、テンプレート画像範囲の原点を基準とする座標、画素毎輝度差情報)と端点座標情報(マーカの2つの端点の座標)とを含むテンプレート画像を生成する。
また、放射線治療装置制御装置1は異なる時刻(例えば、0.1秒おきの時刻など)に亘って複数回、放射線治療装置から得た画像データを基に、放射線透視画像をデジタル生成する。そしてそれぞれの放射線透視画像を用いて、上述の各処理によって、各放射線透視画像に対応するテンプレート画像やマスク情報等を同様に生成する。本実施形態においては、3つの放射線透視画像を用いて、それぞれの当該画像に対応する3つのテンプレート画像を生成する。そして、テンプレート登録制御部102は、3つのテンプレート画像を生成したかを判定し、3つのテンプレート画像を生成したと判定した場合には、テンプレート画像生成部109へテンプレート画像生成処理を通知する。そして、テンプレート登録制御部102は、生成した3つのテンプレート画像を、記憶部113に記録する。
【0044】
(ステップS7;マッチング条件情報登録処理)
またユーザは放射線治療装置制御装置1に、テンプレート画像を用いたマッチング処理におけるマッチング条件情報を登録する。
ここで、テンプレート画像は、患部が人体のどこにあるかを特定するために用いられるが、当該テンプレート画像の指定(上記で生成された3つのテンプレート画像の指定)、マスク情報の指定、テンプレート画像と新たに取得した画像におけるマーカの相関値が幾つ以上であれば一致したと判定するかを示す最低限の相関値の閾値の指定、それ以上の相関値となった場合にその後の処理を打ち切る相関値の指定、テンプレート画像を回転させてマッチング処理を行う場合の回転角度の上限値の指定を行い、それらの情報を放射線治療装置制御装置1が記憶する。
【0045】
そして、テンプレート画像の生成が終了した後に、患部の人体での位置を特定するために、放射線透視画像生成部101が、新たな放射線透視画像をデジタル生成する。なお当該新たな放射線透視画像を以降、説明の便宜上、患部位置特定時生成画像と呼ぶこととする。そして、患部の人体での位置の特定を行う場合には、患部位置特定時生成画像と、テンプレート画像とをパタンマッチングによって比較することとなる。
【0046】
(ステップS8;マッチング対象範囲特定処理)
図10はパタンマッチング事前処理の概要を示す図である。
ここで、当該パタンマッチング処理を行う前提として、さらなる情報の設定を放射線治療装置制御装置1が行う。当該情報の設定は、患部位置特定時生成画像に出現することとなるマーカの画像内の範囲(マッチング対象範囲)に応じて、どの放射線透視画像中に設定されたどのマッチング対象範囲に対応するテンプレート画像を用いてマッチング処理を行うかを特定する情報を設定する処理である。つまり当該処理は、どのマッチング対象範囲に属するテンプレート画像を用いて、患部位置特定時生成画像においてマーカを示す画素を特定するのかを決定するための情報設定の処理であるため、マッチング対象範囲特定処理と呼ぶこととする。そしてこの処理を、マッチング対象範囲特定部110が行う。
【0047】
図10の(a1)、(a2)、(a3)には、異なるタイミングで取得した放射線透視画像に基づいて生成した3つのテンプレート画像の、放射線透視画像内における位置を示している。このように、異なるタイミングで取得したテンプレート画像は、患者の呼吸の影響等により、放射線透視画像内の異なる位置で写っているマーカそれぞれの範囲を包含する画像となっている。
【0048】
そして、どのテンプレート画像を用いてマッチング処理を行うかを決定する情報を設定する処理においては、図10の(b1)で示すように、まず、マッチング対象範囲特定部110が、放射線透視画像における各テンプレート画像内の画素の座標を、テンプレート画像から読み取る。そして、マッチング対象範囲特定部110は、各テンプレート画像における中心座標を算出する。ここで、3つのテンプレート画像をそれぞれテンプレート画像A、テンプレート画像B、テンプレート画像Cと呼ぶこととする。またテンプレート画像Aの中心画素を画素a、テンプレート画像Bの中心画素を画素b、テンプレート画像Bの中心画素を画素cと呼ぶこととする。テンプレート画像の中心画素の座標の算出処理はどのようなものであってもよい。例えば、テンプレート画像の中心となる画素が1つに定まらない場合には、中心付近の画素の何れかの画素を中心画素としてその座標を算出するようにしてもよい。
【0049】
そして、マッチング対象範囲特定部110は、放射線透視画像のある画素の座標から、各テンプレート画像の中心画素の座標までの距離を算出して、当該ある画素から最も近い距離に位置するテンプレート画像を、放射線透視画像の全ての画素について算出する。そして、マッチング対象範囲特定部110は、ある特定のテンプレート画像の中心画素に近い各画素のまとまりを一つのマッチング対象範囲の候補と決定する。つまり、本実施形態においては、図10の(b2)で示すように、テンプレート画像Aの中心画素に近い画素のまとまりの範囲をマッチング対象範囲の候補A、テンプレート画像Bの中心画素に近い画素のまとまりの範囲をマッチング対象範囲の候補B、テンプレート画像Cの中心画素に近い画素のまとまりの範囲をマッチング対象範囲の候補Cとして、3つのマッチング対象範囲の候補を決定する。
【0050】
そして、マッチング対象範囲特定部110は、マッチング対象範囲の候補Aを全て包含する矩形範囲をマッチング対象範囲Aと決定し、マッチング対象範囲の候補Bを全て包含する矩形範囲をマッチング対象範囲Bと決定し、マッチング対象範囲の候補Cを全て包含する矩形範囲をマッチング対象範囲Cと決定する。これにより、マッチング対象範囲特定部110は、放射線透視画像の画像範囲において、各マッチング対象範囲が示す座標情報と、当該マッチング対象範囲に出現したマーカを示す画素の特定に利用するテンプレート画像との組合せの情報を、マッチング対象範囲毎に保持したマッチング対象範囲情報を生成して記憶部113に保持する。具体的には、マッチング対象範囲情報は、例えば、マッチング対象範囲Aの範囲を示す座標(左上と右下の2座標)とテンプレート画像Aの情報との組合せ、マッチング対象範囲Bの範囲を示す座標(左上と右下の2座標)とテンプレート画像Bの情報との組合せ、マッチング対象範囲Cの範囲を示す座標(左上と右下の2座標)とテンプレート画像Cの情報との組合せを保持する情報である。
【0051】
なお、本実施形態において、マッチング対象範囲特定部110は、マッチング対象範囲の候補を全て包含する矩形範囲をマッチング対象範囲と決定しているが、図10(b3)で示すように、一方のマッチング対象範囲が他方のマッチング対象範囲とが重なり合う場合には(マッチング対象範囲Bとマッチング対象範囲Cが重なり合っている)、重なり合う範囲を生じないように処理してもよい。例えば、重なり合う矩形範囲の中央から一方のマッチング対象範囲の側の範囲と、当該重なり合う矩形範囲の中央から他方のマッチング対象範囲の側範囲とでそれぞれ分割して、当該分割した範囲を一方のマッチング対象範囲と、他方のマッチング対象範囲とに組み入れて、重なり合う矩形範囲が生じないように処理してもよい。
【0052】
そして、患部位置特定時生成画像に出現することとなるマーカが、マッチング対象範囲Aの範囲に出現した場合についてはテンプレート画像Aとパタンマッチングを行うこととなり、患部位置特定時生成画像に出現することとなるマーカが、マッチング対象範囲Bの範囲に出現した場合についてはテンプレート画像Bとパタンマッチングを行うこととなり、患部位置特定時生成画像に出現することとなるマーカが、マッチング対象範囲Cの範囲に出現した場合についてはテンプレート画像Cとパタンマッチングを行うこととなる。
または、患部位置特定時生成画像に出現することとなるマーカが、複数のマッチング対象範囲に出現した場合については、それら複数のマッチング対象範囲に対応するテンプレート画像を用いてパタンマッチングを行うこととなる。
【0053】
<マーカ特定処理>
(ステップS11;患部位置特定時生成画像の各画素の輝度値の対数変換処理)
図11は放射線治療装置制御装置1におけるマーカ特定処理の処理フローを示す図である。
次に、患部付近に埋め込まれたマーカの位置特定を行う処理について順を追って説明する。
このとき、放射線治療装置制御装置1は、放射線治療装置から得た画像データを基に、放射線透視画像生成部101が、患部位置特定時生成画像(放射線透視画像と同じように取得される画像であるが、患部位置特定時に生成する新たな画像であるため上記したように呼称を変えている)をデジタル生成する。すると、対数変換部104が、上述したテンプレート画像生成時の処理と同様に、患部位置特定時生成画像における各画素の輝度を、式(1)を用いて対数変換する。
【0054】
(ステップS12;画素毎輝度差情報の作成処理)
また、対数変換の処理が終了すると、マーカエッジ強調部105が、患部位置特定時生成画像を用いて、上述したテンプレート画像生成時における処理と同様に、対象画素と当該対象画素から一定距離の位置にある他の画素との輝度差をa方向(水平方向)、b方向(左上右下対角方向)、c方向(上下方向)、d方向(左下右上対角方向)のそれぞれについて算出して、当該輝度差のうち最も小さい輝度差を、当該対象画素の輝度値の周囲からの強さとして算出する処理を、患部位置特定時生成画像の全ての画素について行う。
そして、マーカエッジ強調部105は、ある対象画素に対してa方向、b方向、c方向、d方向のそれぞれの方向について算出した輝度差のうち、最も大きい輝度差を、当該対象画素の輝度差として特定する。そして、マーカエッジ強調部105は、患部位置特定時生成画像の全ての画素に対して特定した輝度差の情報を保持する画素毎輝度差情報を作成して記憶部113に記録する。
【0055】
さらに、マーカエッジ強調部105は、対象画素(画像中の全画素)のa方向について算出した輝度差の情報を保持したa方向輝度差情報と、対象画素(画像中の全画素)のb方向について算出した輝度差の情報を保持したb方向輝度差情報と、対象画素(画像中の全画素)のc方向について算出した輝度差の情報を保持したc方向輝度差情報と、対象画素(画像中の全画素)のd方向について算出した輝度差の情報を保持したd方向輝度差情報と、のそれぞれを作成して、記憶部113に記録する。
【0056】
(ステップS13;ノイズ除去処理)
次に、ノイズ除去部111が、マーカエッジ強調部105によって生成されたa方向輝度差情報を用いて、輝度差が所定の閾値未満と判定された画素を、マーカ候補を示す画素として特定し、輝度差が所定の閾値以上と判定された画素をマーカ以外の画素として特定した後、ノイズ除去処理を行う。
【0057】
図12はノイズ除去処理で用いるある対象画素を基準とした処理方向を示す図である。
図13はノイズ除去処理の処理概要を示す第1の図である。
図14はノイズ除去処理の処理概要を示す第1の図である。
図15はノイズ除去処理の処理概要を示す第2の図である。
図16はノイズ除去処理の処理概要を示す第3の図である。
図17はノイズ除去処理の処理概要を示す第4の図である。
図18はノイズ除去処理の処理概要を示す第5の図である。
【0058】
図12〜図18を用いてノイズ除去処理について説明する。
[a方向ノイズ除去結果データの作成処理]
まず、図13(A)で示すように、ノイズ除去部111は、マーカエッジ強調部105の生成したa方向輝度差情報を読み込んで、各画素のうち輝度差が閾値以上の画素(周囲との輝度差があるため濃度が濃い画素)についてのマーカ出現強度を“1”、各画素のうち輝度差が閾値未満の画素についてのマーカ出現強度を“0”と2値化したa方向輝度差2値化情報を作成する。図13の(A)では、ハッチングして表した画素をマーカ出現強度“1”と判定した画素、ハッチングのない画素をマーカ出現強度“0”と判定した画素として示している。
【0059】
次に、ノイズ除去部111は、a方向輝度差2値化情報を用いて、マーカ出現強度“1”の画素を通る直線方向であって、当該マーカ出現強度“1”の画素を基準に図12で示したa方向(画像の左右方向)に連なる2つの画素のマーカ出現強度を全て“1”と更新する。これにより図13(B)で示すように、マーカ出現強度“1”とされる画素の範囲がa方向に膨張する(a方向輝度差2値化情報を用いたa方向の第1膨張処理)。
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いた第1膨張処理の終了後の情報に基づいて、マーカ出現強度“0”の画素を通る直線方向であって、当該マーカ出現強度“0”の画素を基準に図12で示したa方向(画像の左右方向)に連なる2つの画素のマーカ出現強度を全て“0”と更新する。これにより図13(C)で示すように、マーカ出現強度“1”とされる画素の範囲がa方向で収縮する(a方向輝度差2値化情報を用いたa方向の第1収縮処理)。
【0060】
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いた第1収縮処理の終了後の情報に基づいて、マーカ出現強度“0”の画素を通る直線方向であって、当該マーカ出現強度“0”の画素を基準に図12で示したa方向(画像の左右方向)に連なる2つの画素のマーカ出現強度を全て“0”と更新する。これにより図14(D)で示すように、マーカ出現強度“1”とされる画素の範囲がa方向でさらに収縮する(a方向輝度差2値化情報を用いたa方向の第2収縮処理)。
また、ノイズ除去部111は、上記第2収縮処理の終了後の情報に基づいて、マーカ出現強度“1”の画素を通る直線方向であって、当該マーカ出現強度“1”の画素を基準に図12で示したa方向(画像の左右方向)に連なる2つの画素のマーカ出現強度を全て“1”と更新する。これにより図14(E)で示すように、マーカ出現強度“1”とされる画素の範囲がa方向で膨張する(a方向輝度差2値化情報を用いたa方向の第2膨張処理)。
そして、ノイズ除去部111はa方向輝度差2値化情報を用いたa方向の第2膨張処理の結果を保持するa方向輝度差2値化情報を用いたa方向マーカ出現強度データを記憶部113に記録する。
【0061】
図12で示すように、a方向(水平方向)との成す角度が45°の両隣の方向を示すb方向とd方向の中間の2つの方向をe方向(第1の水平・対角中間方向)、h方向(第2の水平・対角中間方向)と呼ぶこととする。そして、ノイズ除去部111は、e方向と、h方向についても、a方向に対して行った、第1膨張処理→第1収縮処理→第2収縮処理→第2膨張処理を行う。
【0062】
つまり、a方向輝度差2値化情報を用いたe方向(第1の水平・対角中間方向)の膨張処理は、図15の“e方向(第1の水平・対角中間方向)の膨張処理の説明”で示すように、Xで示す画素のa方向輝度差2値化情報におけるマーカ出現強度の値が“1”であれば、Xの画素を基準にa方向の両側に連なる各1つずつの画素と、その画素とはb方向であってXの画素に隣接しない外側方向に1つ連なる各画素とで示されるYで示す画素のマーカ出現強度の値を“1”とする処理を、画像中の全ての画素について行う処理である。
また、a方向輝度差2値化情報を用いたe方向(第1の水平・対角中間方向)の収縮処理は、図15の“e方向(第1の水平・対角中間方向)の収縮処理の説明”で示すように、Mで示す画素のa方向輝度差2値化情報におけるマーカ出現強度の値が“0”であれば、Mの画素を基準にa方向の両側に連なる各1つずつの画素と、その画素とはb方向であってMの画素に隣接しない外側方向に1つ連なる各画素とで示されるNで示す画素のマーカ出現強度の値を“0”とする処理を、画像中の全ての画素について行う処理である。
【0063】
つまり、ノイズ除去部111は、a方向輝度差2値化情報を用いたe方向(第1の水平・対角中間方向)の膨張処理において、図15の(F)で示すような既に作成したa方向輝度差2値化情報を用いて、図15(G)で示すような、1回目のe方向(第1の水平・対角中間方向)の膨張処理を行う(a方向輝度差2値化情報を用いたe方向の第1膨張処理)。
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたe方向の第1膨張処理の終了後の情報に基づいて、図15(H)で示すような、1回目のe方向(第1の水平・対角中間方向)の収縮処理を行う(a方向輝度差2値化情報を用いたe方向の第1収縮処理)。
【0064】
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたe方向の第1収縮処理の終了後の情報に基づいて、図16(I)で示すような、2回目のe方向(第1の水平・対角中間方向)の収縮処理を行う(a方向輝度差2値化情報を用いたe方向の第2収縮処理)。なお図16の(I)では、この時点でマーカ出現強度“1”となる画素が消滅する例を示している。
そして、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたe方向の第2収縮処理の終了後の情報に基づいて、図16(K)で示すような、2回目のe方向(第1の水平・対角中間方向)の膨張処理を行う(a方向輝度差2値化情報を用いたe方向の第2膨張処理)。図16の(I)の時点でマーカ出現強度“1”となる画素が消滅しているため、その後に膨張処理をしてもマーカ出現強度“1”となる画素が出現しない場合の例を示している。
そして、ノイズ除去部111はa方向輝度差2値化情報を用いたe方向の第2膨張処理の結果を保持するa方向輝度差2値化情報を用いたe方向マーカ出現強度データを記憶部113に記録する。
【0065】
また、a方向輝度差2値化情報を用いたh方向(第2の水平・対角中間方向)の膨張処理は、図示を省略するが、ある画素Xで示す画素のa方向輝度差2値化情報におけるマーカ出現強度の値が“1”であれば、Xの画素を基準にa方向の両側に連なる各1つずつの画素と、その画素とはd方向であってXの画素に隣接しない外側方向に1つ連なる各画素のマーカ出現強度の値を“1”とする処理を、画像中の全ての画素について行う処理である。
また、a方向輝度差2値化情報を用いたh方向(第2の水平・対角中間方向)の収縮処理は、図示を省略するが、ある画素Mで示す画素のa方向輝度差2値化情報におけるマーカ出現強度の値が“0”であれば、Mの画素を基準にa方向の両側に連なる各1つずつの画素と、その画素とはd方向であってMの画素に隣接しない外側方向に1つ連なる各画素のマーカ出現強度の値を“0”とする処理を、画像中の全ての画素について行う処理である。
【0066】
つまり、ノイズ除去部111は、1回目のa方向輝度差2値化情報を用いたh方向(第2の水平・対角中間方向)の膨張処理を行う(a方向輝度差2値化情報を用いたh方向の第1膨張処理)。
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたh方向の第1膨張処理の終了後の情報に基づいて、1回目のh方向(第2の水平・対角中間方向)の収縮処理を行う(a方向輝度差2値化情報を用いたh方向の第1収縮処理)。
【0067】
また、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたh方向の第1収縮処理の終了後の情報に基づいて、2回目のh方向(第2の水平・対角中間方向)の収縮処理を行う(a方向輝度差2値化情報を用いたh方向の第2収縮処理)。
そして、ノイズ除去部111は、上記a方向輝度差2値化情報を用いたh方向の第2収縮処理の終了後の情報に基づいて、2回目のh方向(第2の水平・対角中間方向)の膨張処理を行う(a方向輝度差2値化情報を用いたh方向の第2膨張処理)。
そして、ノイズ除去部111はa方向輝度差2値化情報を用いたh方向の第2膨張処理の結果を保持するa方向輝度差2値化情報を用いたh方向マーカ出現強度データを記憶部113に記録する。
【0068】
以上の処理により、ノイズ除去部111は、a方向輝度差2値化情報を用いて、a方向マーカ出現強度データ、e方向マーカ出現強度データ、h方向マーカ出現強度データを作成している。図17の(A)はa方向輝度差2値化情報、(B)はa方向マーカ出現強度データ、(C)はe方向マーカ出現強度データ、(D)はh方向マーカ出現強度データを示している。
そして、ノイズ除去部111は、作成したa方向マーカ出現強度データ、e方向マーカ出現強度データ、h方向マーカ出現強度データ内の、2値化された輝度を示す各画素のうち、何れかのマーカ出現強度データにおいて少なくとも“1”の値を示す画素をマーカ出現強度“1”として採用する。そして、ノイズ除去部111は、当該採用したマーカ出現強度データの示すマーカ出現強度が“1”となっている画素を、患部位置特定時生成画像内におけるマーカ候補として、当該マーカ候補の画素の情報を保持したa方向ノイズ除去結果データを作成する。図17においては、(B)で示すa方向マーカ強調データにおいてのみ大きい値を示す画素が存在するため、a方向ノイズ除去結果データで示されるマーカ候補の画素は、図17(B)で示すa方向マーカ強調データにおいてのみ大きい値を示す画素と同一となっている。
【0069】
また、ノイズ除去部111は、a方向ノイズ除去結果データの作成処理と同様の方法で、b方向ノイズ除去結果データ、c方向ノイズ除去結果データ、d方向ノイズ除去結果データを作成する。
【0070】
[b方向ノイズ除去結果データの作成処理]
図示を省略するが、b方向ノイズ除去結果データの作成処理においては、ノイズ除去部111は、マーカエッジ強調部105の生成したb方向輝度差情報を読み込んで、各画素のうち輝度差が閾値以上の画素についてのマーカ出現強度を“1”、各画素のうち輝度差が閾値未満の画素についてのマーカ出現強度を“0”と2値化したb方向輝度差2値化情報を作成する。
【0071】
そして、ノイズ除去部111は、b方向輝度差2値化情報を用いたb方向の第1膨張処理、b方向輝度差2値化情報を用いたb方向の第1収縮処理、b方向輝度差2値化情報を用いたb方向の第2収縮処理、b方向輝度差2値化情報を用いたb方向の第2膨張処理を行う。そして、ノイズ除去部111はb方向輝度差2値化情報を用いたb方向の第2膨張処理の結果を保持するb方向輝度差2値化情報を用いたb方向マーカ出現強度データを記憶部113に記録する。
【0072】
また、b方向(左上右下方向)との成す角度が45°の両隣の方向を示すa方向とc方向の中間の2つの方向をe方向(第1の水平・対角中間方向)、f方向(第1の上下・対角中間方向)と呼ぶこととする。そして、ノイズ除去部111は、e方向と、f方向についても、b方向に対して行った、第1膨張処理→第1収縮処理→第2収縮処理→第2膨張処理と同様の処理を行う。
【0073】
つまり、ノイズ除去部111は、b方向輝度差2値化情報を用いたe方向の第1膨張処理、b方向輝度差2値化情報を用いたe方向の第1収縮処理、b方向輝度差2値化情報を用いたe方向の第2収縮処理、b方向輝度差2値化情報を用いたe方向の第2膨張処理、を行う。そして、ノイズ除去部111は、b方向輝度差2値化情報を用いたe方向の第2膨張処理の結果を保持するb方向輝度差2値化情報を用いたe方向マーカ出現強度データを記憶部113に記録する。
【0074】
また、ノイズ除去部111は、b方向輝度差2値化情報を用いたf方向の第1膨張処理、b方向輝度差2値化情報を用いたf方向の第1収縮処理、b方向輝度差2値化情報を用いたf方向の第2収縮処理、b方向輝度差2値化情報を用いたf方向の第2膨張処理を行う。
そして、ノイズ除去部111はb方向輝度差2値化情報を用いたf方向の第2膨張処理の結果を保持するb方向輝度差2値化情報を用いたf方向マーカ出現強度データを記憶部113に記録する。
【0075】
また、ノイズ除去部111は、作成したb方向輝度差2値化情報を用いたb方向マーカ出現強度データ、b方向輝度差2値化情報を用いたe方向マーカ出現強度データ、b方向輝度差2値化情報を用いたf方向マーカ出現強度データ内の、2値化された輝度を示す各画素のうち、何れかのマーカ出現強度データにおいて大きい値を示す画素をマーカ出現強度“1”として採用する。そして、ノイズ除去部111は、当該採用したマーカ出現強度データの示すマーカ出現強度が“1”となっている画素を、患部位置特定時生成画像内におけるマーカ候補として、当該マーカ候補の画素の情報を保持したb方向ノイズ除去結果データを作成する。
【0076】
[c方向ノイズ除去結果データの作成処理]
図示を省略するが、c方向ノイズ除去結果データの作成処理においては、ノイズ除去部111は、マーカエッジ強調部105の生成したc方向輝度差情報を読み込んで、各画素のうち輝度差が閾値以上の画素についてのマーカ出現強度を“1”、各画素のうち輝度差が閾値未満の画素についてのマーカ出現強度を“0”と2値化したc方向輝度差2値化情報を作成する。
【0077】
そして、ノイズ除去部111は、c方向輝度差2値化情報を用いたc方向の第1膨張処理、c方向輝度差2値化情報を用いたc方向の第1収縮処理、c方向輝度差2値化情報を用いたc方向の第2収縮処理、c方向輝度差2値化情報を用いたc方向の第2膨張処理、を行う。
また、ノイズ除去部111はc方向輝度差2値化情報を用いたc方向の第2膨張処理の結果を保持するc方向輝度差2値化情報を用いたc方向マーカ出現強度データを記憶部113に記録する。
【0078】
また、ノイズ除去部111は、c方向(上下方向)との成す角度が45°の両隣の方向を示すb方向とd方向の中間の2つの方向をf方向(第1の上下・対角中間方向)、g方向(第2の上下・対角中間方向)と呼ぶこととする。そして、ノイズ除去部111は、f方向と、g方向についても、c方向に対して行った、第1膨張処理→第1収縮処理→第2収縮処理→第2膨張処理と同様の処理を行う。
【0079】
つまり、ノイズ除去部111は、c方向輝度差2値化情報を用いたf方向の第1膨張処理、c方向輝度差2値化情報を用いたf方向の第1収縮処理、c方向輝度差2値化情報を用いたf方向の第2収縮処理、c方向輝度差2値化情報を用いたf方向の第2膨張処理、を行う。
そして、ノイズ除去部111は、c方向輝度差2値化情報を用いたf方向の第2膨張処理の結果を保持するc方向輝度差2値化情報を用いたf方向マーカ出現強度データを記憶部113に記録する。
【0080】
また、ノイズ除去部111は、c方向輝度差2値化情報を用いたg方向の第1膨張処理、c方向輝度差2値化情報を用いたg方向の第1収縮処理、c方向輝度差2値化情報を用いたg方向の第2収縮処理、c方向輝度差2値化情報を用いたg方向の第2膨張処理、を行う。
そして、ノイズ除去部111はc方向輝度差2値化情報を用いたg方向の第2膨張処理の結果を保持するc方向輝度差2値化情報を用いたg方向マーカ出現強度データを記憶部113に記録する。
【0081】
次にノイズ除去部111は、作成したc方向輝度差2値化情報を用いたc方向マーカ出現強度データ、c方向輝度差2値化情報を用いたf方向マーカ出現強度データ、c方向輝度差2値化情報を用いたg方向マーカ出現強度データ内の、2値化された輝度を示す各画素のうち、何れかのマーカ出現強度データにおいて大きい値を示す画素をマーカ出現強度“1”として採用する。そして、ノイズ除去部111は、当該採用したマーカ出現強度データの示すマーカ出現強度が“1”となっている画素を、患部位置特定時生成画像内におけるマーカ候補として、当該マーカ候補の画素の情報を保持したc方向ノイズ除去結果データを作成する。
【0082】
[d方向ノイズ除去結果データの作成処理]
また、図示を省略するが、d方向ノイズ除去結果データの作成処理においては、ノイズ除去部111は、マーカエッジ強調部105の生成したd方向輝度差情報を読み込んで、各画素のうち輝度差が閾値以上の画素についてのマーカ出現強度を“1”、各画素のうち輝度差が閾値未満の画素についてのマーカ出現強度を“0”と2値化したd方向輝度差2値化情報を作成する。
【0083】
そして、ノイズ除去部111は、d方向輝度差2値化情報を用いたd方向の第1膨張処理、d方向輝度差2値化情報を用いたd方向の第1収縮処理、d方向輝度差2値化情報を用いたd方向の第2収縮処理、d方向輝度差2値化情報を用いたd方向の第2膨張処理、を行う。
そして、ノイズ除去部111はd方向輝度差2値化情報を用いたd方向の第2膨張処理の結果を保持するd方向輝度差2値化情報を用いたd方向マーカ出現強度データを記憶部113に記録する。
【0084】
また、ノイズ除去部111は、d方向(左下右上方向)との成す角度が45°の両隣の方向を示すc方向とa方向の中間の2つの方向をg方向(第2の上下・対角中間方向)、h方向(第2の水平・対角中間方向)と呼ぶこととする。そして、ノイズ除去部111は、g方向と、h方向についても、d方向に対して行った、d方向輝度差2値化情報を用いた第1膨張処理→第1収縮処理→第2収縮処理→第2膨張処理と同様の処理を行う。
【0085】
つまり、ノイズ除去部111は、d方向輝度差2値化情報を用いたg方向の第1膨張処理、d方向輝度差2値化情報を用いたg方向の第1収縮処理、d方向輝度差2値化情報を用いたg方向の第2収縮処理、d方向輝度差2値化情報を用いたg方向の第2膨張処理、を行う。
ノイズ除去部111は、d方向輝度差2値化情報を用いたg方向の第2膨張処理の結果を保持するd方向輝度差2値化情報を用いたg方向マーカ出現強度データを記憶部113に記録する。
【0086】
また、ノイズ除去部111は、d方向輝度差2値化情報を用いたh方向の第1膨張処理、d方向輝度差2値化情報を用いたh方向の第1収縮処理、d方向輝度差2値化情報を用いたh方向の第2収縮処理、d方向輝度差2値化情報を用いたh方向の第2膨張処理を行う。
ノイズ除去部111はd方向輝度差2値化情報を用いたh方向の第2膨張処理の結果を保持するd方向輝度差2値化情報を用いたh方向マーカ出現強度データを記憶部113に記録する。
【0087】
そして、ノイズ除去部111は、作成したd方向輝度差2値化情報を用いたd方向マーカ出現強度データ、d方向輝度差2値化情報を用いたg方向マーカ出現強度データ、d方向輝度差2値化情報を用いたh方向マーカ出現強度データ内の、2値化された輝度を示す各画素のうち、何れかのマーカ出現強度データにおいて大きい値を示す画素をマーカ出現強度“1”として採用する。そして、ノイズ除去部111は、当該採用したマーカ出現強度データの示すマーカ出現強度が“1”となっている画素を、患部位置特定時生成画像内におけるマーカ候補として、当該マーカ候補の画素の情報を保持したd方向ノイズ除去結果データを作成する。
【0088】
以上の処理により、ノイズ除去部111が、a方向ノイズ除去結果データ、b方向ノイズ除去結果データ、c方向ノイズ除去結果データ、d方向ノイズ除去結果データを作成する。ここで、図18の(A)にはa方向ノイズ除去結果データを、図18の(B)にはb方向ノイズ除去結果データを、図18の(C)にはc方向ノイズ除去結果データを、図18の(D)にはd方向ノイズ除去結果データを示している。
そして、ノイズ除去部111は、a方向ノイズ除去結果データにおいてマーカ候補と特定されている画素、b方向ノイズ除去結果データにおいてマーカ候補と特定されている画素、c方向ノイズ除去結果データにおいてマーカ候補と特定されている画素、d方向ノイズ除去結果データにおいてマーカ候補とされている画素全てをマーカ候補群となる画素として特定し、患部位置特定時生成画像内においてマーカ候補群となる画素がどの情報であるかを示す情報(画像中のマーカ候補群に含まれる画素の座標)を保持したマーカ候補群データを生成する。
【0089】
(ステップS14;マーカ候補特定処理)
図19はマーカ候補特定処理の概要を示す図である。
次に、マーカ特定部112が、マーカ候補群データの中から、マーカ候補を特定する。当該処理の詳細は、図19で示すように、まず、マーカ特定部112が、マーカ候補群データを入力し(図19(A))、当該データにおいてマーカ候補群と特定された画素を、隣接する画素の纏まりによって特定される複数の領域ごとにラベリング(分類)を行う。図19(B)においては、マーカ候補群データから隣接する画素のまとまりを示す2つの領域P、領域Qのうち、領域Pの画素にラベリング“1”を、また領域Qの画素にラベリング“2”をそれぞれ付与する。
【0090】
そして、マーカ特定部112は、“1”とラベリングされた画素の数及び“2”とラベリングされた画素の数に基づいて、当該領域Pの領域及びQの領域がマーカとして見合うだけの領域範囲の閾値以上かを判定する。そして閾値以上である場合には、その領域に含まれる画素を、マーカの画素の候補として特定する。図19では、領域Pのみが、マーカとして見合う領域範囲の閾値以上の範囲であるとして、当該領域Pが選択された場合の例を示している。そしてマーカ特定部112は、患部位置特定時生成画像内のマーカ候補として特定された画素情報を保持するマーカ候補データを生成し(図19(C)参照)、記憶部113に記録する。
【0091】
なお、放射線治療装置制御装置1は、患部位置特定時生成画像と事前に登録したテンプレート画像とを比較してマーカを特定する処理をしない場合には、この時点で得られたマーカ候補の画素をマーカとして特定し、当該マーカの画素の情報を保持するマーカ画像を生成するようにしてもよい。このような処理によれば、マーカ画像を生成するにあたり、正規化相関の処理を用いないため、マーカの検出速度を上げることができる。
また、上述の処理において、各画素の輝度値の対数変換を行い、これにより、マーカを示す各画素の輝度と、それ以外の箇所の画素の輝度との輝度差を均一にするような処理を行っているため、一定の輝度値の閾値を用いて、簡易にマーカを検出できるような仕組みとし、これによりマーカ検出の処理速度を上げることができる。
【0092】
図20はパタンマッチング事前処理の概要を示す図である。
(ステップS15;探索範囲決定処理)
マーカ特定部112は、作成したマーカ候補データの示すマーカ候補の画素の情報によって得られるマーカ候補画像において、マーカ候補として特定された画素のx座標の最小値xminと最大値xmaxで示されるマーカ候補の幅W1を算出する。またマーカ特定部112は、マーカ候補として特定された画素のy座標の最小値yminと最大値ymaxで示されるマーカ候補の高さH1を算出する。そして、マーカ候補の画素を包含する幅H1、高さW1の領域を探索範囲として暫定的に決定する(図20(B)参照)。
【0093】
また、マーカ特定部112は、事前にテンプレート登録制御部102の処理によって記録されたテンプレート画像の情報を記憶部113から読取り、当該テンプレート画像の情報に格納されたテンプレート画像の放射線透視画像中における座標の情報に基づいて、テンプレート画像の幅W2と高さH2と検出する。そして、マーカ特定部112は、マーカ候補の幅W1と、テンプレート画像の幅W2とを比較する。またマーカ特定部112は、マーカ候補の高さH1と、テンプレート画像の高さH2とを比較する。そして、W1<W2である場合には、探索範囲の幅を広げる(図20(B)参照)。なおW1≧W2の場合には探索範囲を広げなくてもよい。またはW1≧W2の場合であっても探索範囲を広げるようにしてもよい。探索範囲を広げるか広げないかはどの程度、マーカの特定の精度を上げるかによる。
【0094】
当該探索範囲の幅を広げる処理としては、例えば、探索範囲の幅方向のx座標の最小値をxmin、最大値をxmaxとすると、最小値がxmin−W2、最大値がxmax+W2となるように広げる。このような処理により、探索範囲の幅(探索範囲のx座標方向の両端の距離)は、例えば暫定的に決定した探索範囲の幅W1のほぼ2倍〜3倍に広がることとなる。マーカの幅がテンプレート画像の幅よりも狭い場合には、患部位置特定時生成画像から得られたマーカ候補が実際よりも短く検出されているということである。従って、本処理で探索範囲を広げることにより、マーカ候補と考えられる画素を特定する処理の精度を向上させることができる。また、実際のマーカの端の一部のみマーカ候補として特定されている場合には、そのマーカ候補の右側または左側に、ほぼマーカの実際の幅と等しい距離の幅においてマーカ候補として特定できていない画素が隠れている可能性がある。従って、探索範囲を広げる際に暫定的に決定した探索範囲を右側と左側のそれぞれにおいて、マーカの幅とほぼ同じと考えられるテンプレート画像の幅分の距離を広げている。
【0095】
また、同様に、H1<H2である場合には、探索範囲の高さを広げる(図20(B)参照)。なおH1≧H2の場合には探索範囲を必ずしも広げなくてもよい。探索範囲を広げるか広げないかはどの程度、マーカの特定の精度を上げるかによる。
当該探索範囲の高さを広げる処理としては、例えば、探索範囲の高さ方向のy座標の最小値をymin、最大値をymaxとすると、最小値がymin−H2、最大値がymax+H2となるように広げる。このような処理により、探索範囲の高さが、暫定的に決定した探索範囲の高さH1のほぼ2倍〜3倍に広がることとなる。マーカの高さがテンプレート画像の高さよりも狭い場合には、患部位置特定時生成画像から得られたマーカ候補が実際よりも短く検出されているということである。従って、本処理で探索範囲を広げることにより、マーカ候補と考えられる画素を特定する処理の精度を向上させることができる。また、実際のマーカの一部のみマーカ候補として特定されている場合には、そのマーカ候補の上側または下側に、ほぼマーカの実際の高さと等しい距離の高さにおいてマーカ候補として特定できていない画素が隠れている可能性がある。従って、探索範囲の高さを広げる際に暫定的に決定した探索範囲を上側と下側のそれぞれにおいて、マーカの高さとほぼ同じと考えられるテンプレート画像の高さ分の距離を広げている。以上の処理により探索範囲が決定される。
【0096】
(ステップS16;利用テンプレート画像判定処理)
そして、次にマーカ特定部112は、事前にマッチング対象範囲特定部110によって生成されたマッチング対象範囲情報を記憶部113から読み取る。そして、マーカ特定部112は、マッチング対象範囲情報に格納されている、マッチング対象範囲A,B,Cの範囲を示す座標の情報に基づいて、マッチング対象範囲Aの領域と、マッチング対象範囲Bの領域と、マッチング対象範囲Cの領域とを検出する。そして、マーカ特定部112は、既に決定した探索範囲の患部位置特定時生成画像の位置を探索範囲が示す座標の情報から検出し、当該探索範囲の患部位置特定時生成画像における位置が、マッチング対象範囲A,B,Cのどの領域に含まれるかを判定する(図20(C)参照)。
【0097】
そして、マーカ特定部112は、探索範囲がマッチング対象範囲Aの領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Aの範囲を示す座標に紐付けられているテンプレート画像Aの情報を読み取って、当該テンプレート画像Aを用いてパタンマッチング処理を行うと判定する。
またマーカ特定部112は、探索範囲がマッチング対象範囲Bの領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Bの範囲を示す座標に紐付けられているテンプレート画像Bの情報を読み取って、当該テンプレート画像Bを用いてパタンマッチング処理を行うと判定する。
またマーカ特定部112は、探索範囲がマッチング対象範囲Cの領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Cの範囲を示す座標に紐付けられているテンプレート画像Cの情報を読み取って、当該テンプレート画像Cを用いてパタンマッチング処理を行うと判定する。
【0098】
または、マーカ特定部112は、探索範囲がマッチング対象範囲AとBの両方の領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Aの範囲を示す座標に紐付けられているテンプレート画像Aの情報と、マッチング対象範囲Bの範囲を示す座標に紐付けられているテンプレート画像Bの情報とを読み取って、当該テンプレート画像A及び当該テンプレート画像Bを用いてパタンマッチング処理を行うと判定する。
または、マーカ特定部112は、探索範囲がマッチング対象範囲BとCの両方の領域に含まれる場合には、マッチング対象範囲情報においてマッチング対象範囲Bの範囲を示す座標に紐付けられているテンプレート画像Bの情報と、マッチング対象範囲Cの範囲を示す座標に紐付けられているテンプレート画像Cの情報とを読み取って、当該テンプレート画像B及び当該テンプレート画像Cを用いてパタンマッチング処理を行うと判定する。
ここで、図20(D)で示すように、探索範囲が複数のマッチング対象範囲の領域にまたがる場合には、マッチング対象範囲に包含されている探索範囲の一部を、当該マッチング対象範囲で特定されるテンプレート画像を用いてパタンマッチング処理する。
【0099】
(ステップS17;パタンマッチング処理)
図21はパタンマッチング処理の概要を示す第1の図である。
今、探索範囲がマッチング対象範囲Aに含まれているものとする。この場合は、次に、マーカ特定部112は、探索範囲の患部位置特定時生成画像における位置に基づいて決定したマッチング対象範囲Aの範囲を示す座標に紐付けられているテンプレート画像Aを記憶部113から読み取る。また、マーカ特定部112は、事前に記憶部113に記録された、テンプレート画像を回転させてマッチング処理を行う場合の回転角度の上限値を読み取る。そして、マーカ特定部112は、回転角度の上限値を用いてテンプレート画像を時計回りと反時計回りにそれぞれ回転させた回転テンプレート画像2つ生成する。例えば図21の(B)で示すように回転角度の上限値を5°とすると、5°回転させた回転テンプレート画像と、−5°回転させた回転テンプレート画像を生成する。なお、回転角度の上限値まで、所定の角度刻みで更に多くの回転テンプレート画像を作成するようにしてもよい。
【0100】
そして、マーカ特定部112は、テンプレート画像Aの情報に格納されている画素毎輝度差情報と、患部位置特定時生成画像の探索範囲における画素毎輝度差情報とを読み取る。また、マーカ特定部112は、テンプレート画像Aのマスク情報を記憶部113から読み取る。そして、マーカ特定部112は、テンプレート画像Aの画素毎輝度差情報と、探索範囲の画素毎輝度差情報とを用いて、探索範囲の原点と、テンプレート画像Aの原点とを重ね合わせた時の、テンプレート画像の範囲に相当する探索範囲内の位置範囲において、探索範囲の位置範囲における各画素の輝度差と、それら各画素に位置対応するテンプレート画像Aの各画素の輝度差との相関を算出する(パタンマッチング処理)。このとき、マーカ特定部112は、テンプレート画像Aのマスク情報を用いて、当該マスク情報においてマスク対象とされた画素について、探索範囲における対応する画素との間での相関の算出を行わない。これにより、パタンマッチング処理量を軽減することができる。
【0101】
マーカ特定部112は、予めマッチング条件情報として記憶部113に登録した最低限の相関値の閾値と、処理を打ち切る相関値(以下、処理打ち切り相関値と呼ぶ)とを読取り、テンプレート画像との相関を計算している探索範囲内の位置範囲(パタンマッチング処理において、テンプレート画像の原点と)について算出した現在の相関値が、最低限の相関値の閾値以上かの判定と、処理打ち切り相関値以上かの判定を行う。そして、現在の相関値が最低限の相関値の閾値以上であれば、テンプレート画像との相関を計算している探索範囲内の現在の位置範囲を、マーカ検出範囲候補として特定し、そのマーカ検出範囲候補とした探索範囲内の位置範囲を示す座標と、その位置範囲について算出した相関値を対応付けて記憶部113に記録する。
【0102】
そして、マーカ特定部112は、現在の相関値が、最低限の相関値の閾値未満である場合、および特定したマーカ検出範囲候補とした探索範囲内の位置範囲を示す座標を記憶部113に記録した後には、テンプレート画像と同じ範囲の位置範囲を探索範囲内で1画素ずらす。そして、マーカ特定部112は、再度、当該探索範囲の位置範囲における各画素の輝度差と、それら各画素に位置対応するテンプレート画像Aの各画素の輝度差との相関を算出する(パタンマッチング処理)。そして、マーカ特定部112は、図21(C)で示すように、位置範囲を1画素ずつずらしながら、パタンマッチング処理を行っていく。本実施形態において位置範囲を1画素ずつずらす手法は、例えば、水平方向(右方向)にずらしていき、位置範囲が探索範囲からはみ出す場合には、はみ出す前に垂直方向に1画素ずらす(下方向)。そして、垂直方向に1画素ずらした後は逆側の水平方向(左方向)にずらしていき、位置範囲が探索範囲からはみ出す場合には、はみ出す前に垂直方向に1画素ずらす(下方向)。そしてこのような処理を繰り返す。
【0103】
また、マーカ特定部112は、探索範囲内で位置範囲をずらす処理において、テンプレート画像の原点とは対角の角の座標と、探索範囲の原点とは対角の角の座標とが一致することによって、探索範囲内で位置範囲をこれ以上ずらすことができなくなった場合には、パタンマッチング処理を打ち切る。
また、マーカ特定部112は、図21(D)で示すように、回転テンプレート画像を用いて同様のパタンマッチング処理を行い、マーカ検出範囲候補を決定する。そして、マーカ特定部112は、マーカ検出範囲候補として特定した探索範囲内の位置範囲についての相関値のうち、最も高い値を示す位置範囲をマーカ検出範囲として決定する。マーカ特定部112は、現在の相関値が打ち切り相関値以上の場合には、当該現在の位置範囲について算出した相関値が最も高い値であるため、その位置範囲をマーカ検出範囲として特定する。
【0104】
そしてマーカ特定部112は、当該特定した探索範囲内におけるマーカ検出範囲の座標と、テンプレート画像Aに出現するマーカの端点の座標(テンプレート画像Aの情報内の端点座標情報に格納されている端点の座標)とから、マーカの患部位置特定時生成画像内における座標を算出する。例えば、特定したマーカ検出範囲の原点に対応する探索範囲内の座標が(xt,yt)であり、テンプレート画像Aに格納されたマーカの2つの端点の座標が(xe1,ye1)、(xe2,ye2)である場合には、患部位置特定時生成画像内に出現するマーカの2つの端点の座標(xfa,yfa)、(xfb,yfb)を、それぞれ、
(xfa,yfa)=(xt+xe1,yt+ye1)
(xfb,yfb)=(xt+xe2,yt+ye2)
と算出する。これにより、放射線治療装置制御装置1は、マーカの2つの端点を用いて、その近傍にある患部を判定する。
【0105】
図22は回転テンプレート画像を用いてマーカの端点を算出する概要を示す図である。
回転テンプレート画像を用いたパタンマッチング処理により決定したマーカ検出範囲に基づいて、患部位置特定時生成画像内に出現するマーカの端点の画素の座標を算出する場合には、図22に示すように、テンプレート画像のマーカの端点を回転する処理が必要となる。このとき、テンプレート画像の原点の画素の座標に対応する探索範囲内の画素の座標が(xt,yt)、テンプレート画像内に出現するマーカの端点の座標が(xe,ye)、回転テンプレート画像の回転角度がθである場合には、患部位置特定時生成画像内に出現するマーカの端点の座標(xf,yf)は、
(xf,yf)
=(xt+xecosθ−yesinθ,yt+xesinθ−yecosθ)
により算出する。
【0106】
図23はパタンマッチング処理の概要を示す第2の図である。
図23(B)で示すように、探索範囲が複数のマッチング対象範囲の領域にまたがる場合には、マッチング対象範囲に包含されている探索範囲の一部を、当該マッチング対象範囲で特定されるテンプレート画像を用いてパタンマッチング処理することとなるが、この場合のパタンマッチング処理について説明する。
図23(B)においては、探索範囲の上部がマッチング対象範囲Aの領域にあり、探索範囲の下部がマッチング対象範囲Bの領域に存在する場合の例である。ここで探索範囲の上部を探索範囲A、探索範囲の下部を探索範囲Bと呼ぶこととする。
【0107】
この場合には、マーカ特定部112は、テンプレート画像Aの画素毎輝度差情報と、探索範囲Aの画素毎輝度差情報とを用いて、探索範囲Aの原点と、テンプレート画像Aの原点とを重ね合わせた時の、テンプレート画像Aの範囲に相当する探索範囲A内の位置範囲において、探索範囲Aの位置範囲における各画素の輝度差と、それら各画素に位置対応するテンプレート画像Aの各画素の輝度差との相関を算出する。そして、探索範囲Aがテンプレート画像Aよりも広い場合には、1画素ずつ上記の手法と同様に位置範囲をずらしてパタンマッチング処理を行っていく。
【0108】
また同様に、マーカ特定部112は、テンプレート画像Bの画素毎輝度差情報と、探索範囲Bの画素毎輝度差情報とを用いて、探索範囲Bの原点と、テンプレート画像Bの原点とを重ね合わせた時の、テンプレート画像Bの範囲に相当する探索範囲B内の位置範囲において、探索範囲Bの位置範囲における各画素の輝度差と、それら各画素に位置対応するテンプレート画像Bの各画素の輝度差との相関を算出する。そして、探索範囲Bがテンプレート画像Bよりも広い場合には、1画素ずつ上記の手法と同様に位置範囲をずらしてパタンマッチング処理を行っていく。
【0109】
そして、マーカ特定部112は、テンプレート画像Aの画素毎輝度差情報と、探索範囲Aの画素毎輝度差情報とを用いて算出した相関値が最も高い場合には、探索範囲内におけるマーカ検出範囲の座標と、テンプレート画像Aに出現するマーカの端点の座標とから、マーカの患部位置特定時生成画像内における座標を算出する。
他方、マーカ特定部112は、テンプレート画像Bの画素毎輝度差情報と、探索範囲Bの画素毎輝度差情報とを用いて算出した相関値が最も高い場合には、探索範囲内におけるマーカ検出範囲の座標と、テンプレート画像Bに出現するマーカの端点の座標とから、マーカの患部位置特定時生成画像内における座標を算出する。
【0110】
このように、放射線透視画像中の異なる位置に出現するマーカそれぞれのテンプレート画像を予め作成しておき、放射線照射治療時に新たに生成された画像中のマーカの位置に最も近いテンプレート画像を利用して、パタンマッチング処理を行っている。これにより、精度の高いマーカの画像中の位置検出を行うことができる。
【0111】
なお、上述の処理においては、一つの方向から放射線を照射することにより得られた放射線透視画像を用いて複数のテンプレート画像を生成し、また放射線照射治療時の画像についても同じ方向から放射線を照射することにより得られた画像を用いて、テンプレート画像とのパタンマッチング処理を行っている。しかしながら、患者に対する放射線照射角度を変えた場合にもマーカの位置が検出できるように、複数の方向から放射線を照射することにより得られた放射線透視画像を用いて複数のテンプレート画像を照射方向ごとに生成するようにしてもよい。その場合には、放射線照射治療時の画像についても複数の方向から放射線を照射することにより得られた画像を用いて、各方向の複数のテンプレート画像とのパタンマッチング処理を行うようにする。
【0112】
なお、上述の放射線治療装置制御装置は内部に、コンピュータシステムを有している。そして、上述した各処理の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0113】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0114】
101・・・放射線透視画像生成部
102・・・テンプレート登録制御部
103・・・マーカ上複数点特定部
104・・・対数変換部
105・・・マーカエッジ強調部
106・・・テンプレート範囲設定部
107・・・端点位置設定部
108・・・テンプレートマスク設定部
109・・・テンプレート画像生成部
110・・・マッチング対象範囲特定部
111・・・ノイズ除去部
112・・・マーカ特定部
113・・・記憶部
【特許請求の範囲】
【請求項1】
マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する放射線治療装置制御装置であって、
前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成するマーカエッジ強調部と、
前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定するノイズ除去部と、
前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定するマーカ特定部と、
を備えることを特徴とする放射線治療装置制御装置。
【請求項2】
前記放射線透視画像中における各画素についての輝度値を対数変換する対数変換部とを備え、
前記マーカエッジ強調部は、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する
ことを特徴とする請求項1に記載の放射線治療装置制御装置。
【請求項3】
前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定するマーカ上複数点特定部と、
前記マーカの複数点を含むテンプレート画像範囲を設定するテンプレート範囲設定部と、
前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成するテンプレート画像生成部と、
を備え、
前記マーカ特定部は、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する
ことを特徴とする請求項1または請求項2に記載の放射線治療装置制御装置。
【請求項4】
前記マーカ上複数点特定部は、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を、異なる時刻に生成された前記放射線透視画像それぞれについて特定し、
前記テンプレート範囲設定部は、前記マーカの複数点を含むテンプレート画像範囲を、異なる時刻に生成された前記放射線透視画像それぞれについて設定し、
前記テンプレート画像生成部は、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を、異なる時刻に生成された前記放射線透視画像それぞれについて複数生成し、
前記テンプレート画像に近い画素の纏まりの範囲を示すマッチング対象範囲を、前記複数のテンプレート画像それぞれについて特定するマッチング対象範囲特定部を備え、
前記マーカ特定部は、
前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、
当該探索範囲を包含する前記マッチング対象範囲を決定し、
前記探索範囲において前記決定したマッチング対象範囲に属するテンプレート画像の範囲と同一の位置範囲の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、
当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記決定したマッチング対象範囲に属するテンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する
ことを特徴とする請求項3に記載の放射線治療装置制御装置。
【請求項5】
前記マーカ特定部は、前記探索範囲を包含する前記マッチング対象範囲が複数存在する場合には、当該探索範囲を包含する複数の異なる前記マッチング対象範囲を決定し、
前記決定した複数のマッチング対象範囲のうちの1つのマッチング対象範囲に属する前記探索範囲の一部範囲については、当該一部範囲の画素と、前記1つのマッチング対象範囲に属するテンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、
当該相関値が閾値以上であるとの判定に利用した前記探索範囲内の位置範囲の原点および前記1つのマッチング対象範囲に属するテンプレート画像が示すマーカの端点の当該テンプレート画像における座標と、を用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する
ことを特徴とする請求項4に記載の放射線治療装置制御装置。
【請求項6】
前記放射線透視画像中における前記複数点を結ぶ線上に対応する画素以外の画素を以降の処理における対象除外を決定し、当該対象除外を示す情報を前記複数点を結ぶ線上に対応する画素複数点を結ぶ線上に対応する画素それぞれついて保持したマスク情報を、異なる時刻に生成された前記放射線透視画像それぞれについて生成するテンプレートマスク設定部と、を備え、
前記マーカ特定部は、前記マスク情報で保持された画素の輝度差の情報を用いずに前記相関値の算出を行う
ことを特徴とする請求項3から請求項5の何れか一項に記載の放射線治療装置制御装置。
【請求項7】
マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する処理方法であって、
前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成し、
前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定し、
前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定する
ことを特徴とする処理方法。
【請求項8】
前記放射線透視画像中における各画素についての輝度値を対数変換し、
前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する
ことを特徴とする請求項7に記載の処理方法。
【請求項9】
前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定し、
前記マーカの複数点を含むテンプレート画像範囲を設定し、
前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成し、
前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する
ことを特徴とする請求項7または請求項8に記載の処理方法。
【請求項10】
マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する放射線治療装置制御装置のコンピュータを、
前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成するマーカエッジ強調手段、
前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定するノイズ除去手段、
前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定するマーカ特定手段、
として機能させることを特徴とするプログラム。
【請求項11】
前記放射線透視画像中における各画素についての輝度値を対数変換する対数変換手段として機能させ、
前記マーカエッジ強調手段を、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する手段として機能させる
ことを特徴とする請求項10に記載のプログラム。
【請求項12】
前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定するマーカ上複数点特定手段、
前記マーカの複数点を含むテンプレート画像範囲を設定するテンプレート範囲設定手段、
前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成するテンプレート画像生成手段、として機能させ、
前記マーカ特定手段を、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する手段として機能させる
ことを特徴とする請求項10または請求項11に記載のプログラム。
【請求項1】
マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する放射線治療装置制御装置であって、
前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成するマーカエッジ強調部と、
前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定するノイズ除去部と、
前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定するマーカ特定部と、
を備えることを特徴とする放射線治療装置制御装置。
【請求項2】
前記放射線透視画像中における各画素についての輝度値を対数変換する対数変換部とを備え、
前記マーカエッジ強調部は、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する
ことを特徴とする請求項1に記載の放射線治療装置制御装置。
【請求項3】
前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定するマーカ上複数点特定部と、
前記マーカの複数点を含むテンプレート画像範囲を設定するテンプレート範囲設定部と、
前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成するテンプレート画像生成部と、
を備え、
前記マーカ特定部は、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する
ことを特徴とする請求項1または請求項2に記載の放射線治療装置制御装置。
【請求項4】
前記マーカ上複数点特定部は、前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を、異なる時刻に生成された前記放射線透視画像それぞれについて特定し、
前記テンプレート範囲設定部は、前記マーカの複数点を含むテンプレート画像範囲を、異なる時刻に生成された前記放射線透視画像それぞれについて設定し、
前記テンプレート画像生成部は、前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を、異なる時刻に生成された前記放射線透視画像それぞれについて複数生成し、
前記テンプレート画像に近い画素の纏まりの範囲を示すマッチング対象範囲を、前記複数のテンプレート画像それぞれについて特定するマッチング対象範囲特定部を備え、
前記マーカ特定部は、
前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、
当該探索範囲を包含する前記マッチング対象範囲を決定し、
前記探索範囲において前記決定したマッチング対象範囲に属するテンプレート画像の範囲と同一の位置範囲の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、
当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記決定したマッチング対象範囲に属するテンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する
ことを特徴とする請求項3に記載の放射線治療装置制御装置。
【請求項5】
前記マーカ特定部は、前記探索範囲を包含する前記マッチング対象範囲が複数存在する場合には、当該探索範囲を包含する複数の異なる前記マッチング対象範囲を決定し、
前記決定した複数のマッチング対象範囲のうちの1つのマッチング対象範囲に属する前記探索範囲の一部範囲については、当該一部範囲の画素と、前記1つのマッチング対象範囲に属するテンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、
当該相関値が閾値以上であるとの判定に利用した前記探索範囲内の位置範囲の原点および前記1つのマッチング対象範囲に属するテンプレート画像が示すマーカの端点の当該テンプレート画像における座標と、を用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する
ことを特徴とする請求項4に記載の放射線治療装置制御装置。
【請求項6】
前記放射線透視画像中における前記複数点を結ぶ線上に対応する画素以外の画素を以降の処理における対象除外を決定し、当該対象除外を示す情報を前記複数点を結ぶ線上に対応する画素複数点を結ぶ線上に対応する画素それぞれついて保持したマスク情報を、異なる時刻に生成された前記放射線透視画像それぞれについて生成するテンプレートマスク設定部と、を備え、
前記マーカ特定部は、前記マスク情報で保持された画素の輝度差の情報を用いずに前記相関値の算出を行う
ことを特徴とする請求項3から請求項5の何れか一項に記載の放射線治療装置制御装置。
【請求項7】
マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する処理方法であって、
前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成し、
前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定し、
前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定する
ことを特徴とする処理方法。
【請求項8】
前記放射線透視画像中における各画素についての輝度値を対数変換し、
前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する
ことを特徴とする請求項7に記載の処理方法。
【請求項9】
前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定し、
前記マーカの複数点を含むテンプレート画像範囲を設定し、
前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成し、
前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する
ことを特徴とする請求項7または請求項8に記載の処理方法。
【請求項10】
マーカが埋め込まれた被写体へ放射線を照射してデジタル生成された放射線透視画像中の前記マーカを検出する放射線治療装置制御装置のコンピュータを、
前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成するマーカエッジ強調手段、
前記画素毎輝度差情報において前記輝度差が所定の閾値以上の画素のうちノイズと判定される画素を除去してマーカ候補となる画素を特定するノイズ除去手段、
前記マーカ候補となる画素について、隣接する画素の纏まりによって複数の領域に分類して、領域の範囲が閾値以上の領域に属する画素を、マーカを示す画素として特定するマーカ特定手段、
として機能させることを特徴とするプログラム。
【請求項11】
前記放射線透視画像中における各画素についての輝度値を対数変換する対数変換手段として機能させ、
前記マーカエッジ強調手段を、前記対数変換後の前記放射線透視画像中における、ある画素の輝度と、当該ある画素を通る所定方向の直線上に位置し、当該ある画素から所定距離に位置する対向する2つの画素の各輝度と、の輝度差のうちの何れか一方の輝度差を、前記ある画素を通る複数の異なる方向について算出し、そのうちの最も大きい輝度差の情報を当該ある画素について特定して、当該輝度差の情報を前記放射線透視画像中の複数の画素について保持した画素毎輝度差情報を作成する手段として機能させる
ことを特徴とする請求項10に記載のプログラム。
【請求項12】
前記放射線透視画像中に出現するマーカの当該放射線透視画像中における端点を含む複数点を特定するマーカ上複数点特定手段、
前記マーカの複数点を含むテンプレート画像範囲を設定するテンプレート範囲設定手段、
前記端点の情報と、前記テンプレート画像範囲の情報と、当該テンプレート画像範囲の前記放射線透視画像中における位置の情報と、を含むテンプレート画像情報を生成するテンプレート画像生成手段、として機能させ、
前記マーカ特定手段を、前記分類した領域の範囲が閾値以上の領域を含む探索範囲を決定し、当該探索範囲内の画素と、前記テンプレート画像を示す画素の前記画素毎輝度差情報に基づく輝度差を用いて算出した相関値を算出し、当該相関値が閾値以上であると判定した場合の前記探索範囲内の位置範囲の原点と、前記テンプレート画像が示すマーカの端点の当該テンプレート画像における座標とを用いて、前記放射線透視画像中に出現するマーカの端点座標を特定する手段として機能させる
ことを特徴とする請求項10または請求項11に記載のプログラム。
【図1】

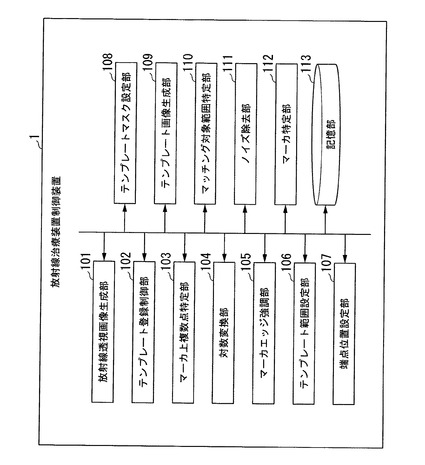
【図2】

【図3】
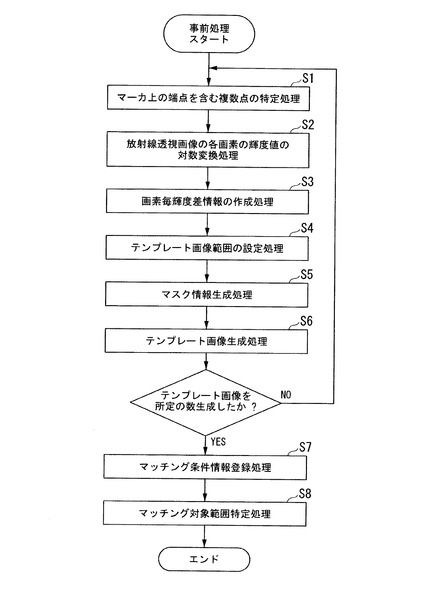
【図4】
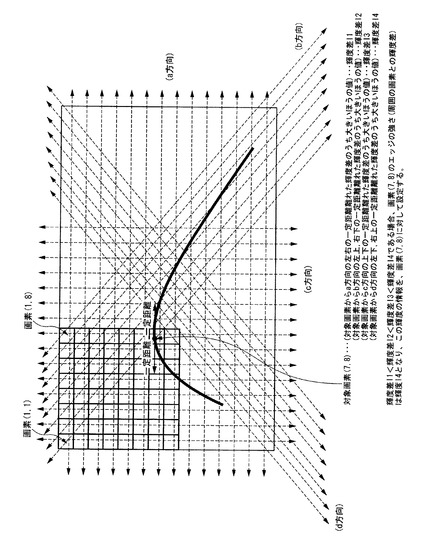
【図5】

【図6】

【図7】
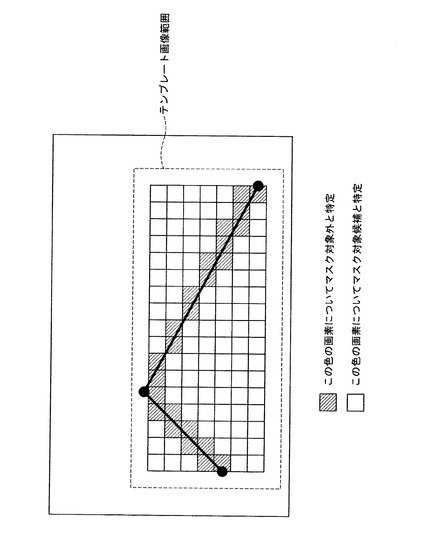
【図8】
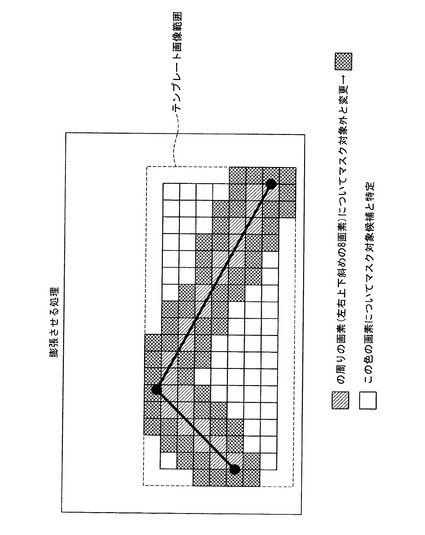
【図9】
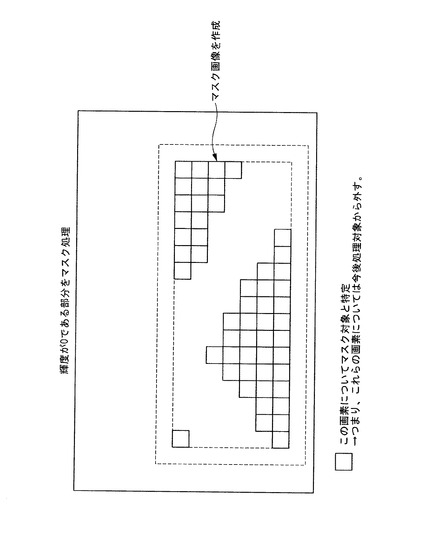
【図10】

【図11】
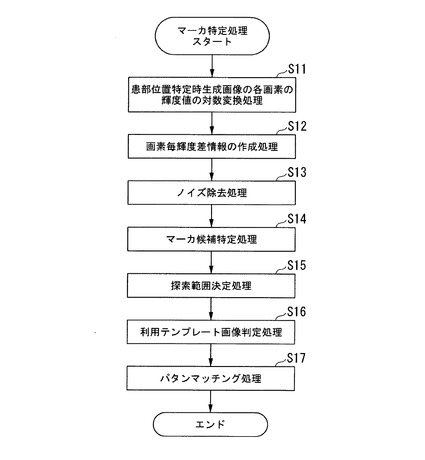
【図12】

【図13】
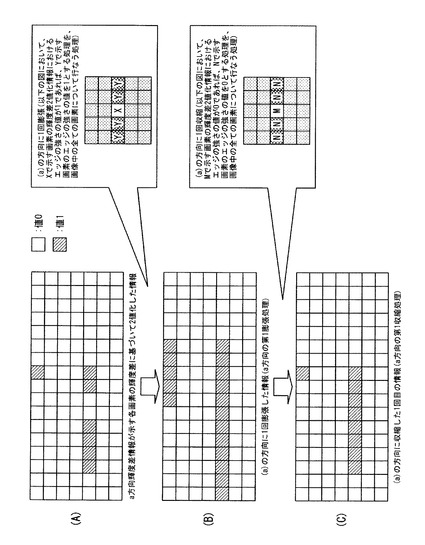
【図14】
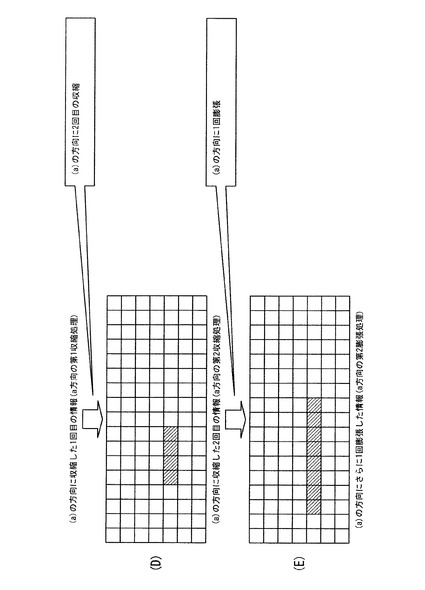
【図15】
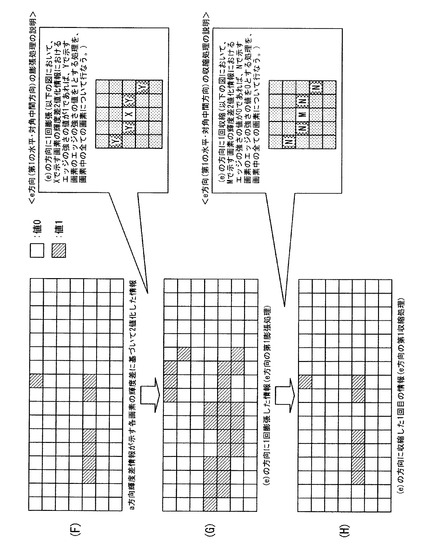
【図16】
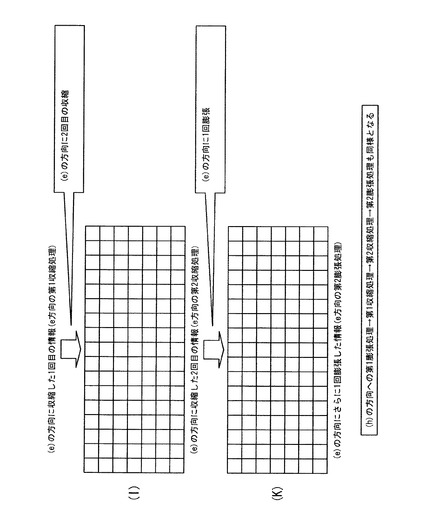
【図17】
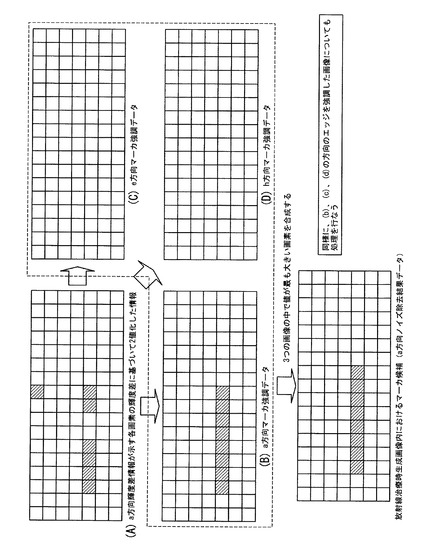
【図18】

【図19】

【図20】

【図21】
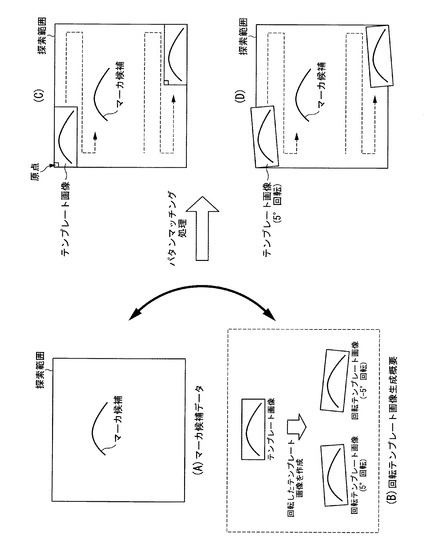
【図22】
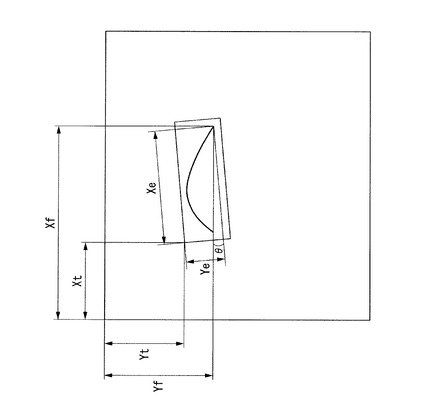
【図23】
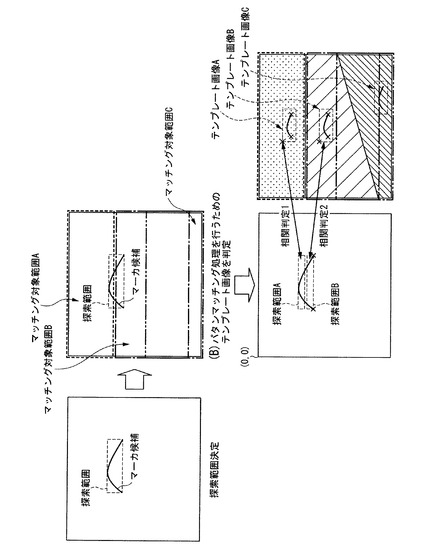
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2012−170767(P2012−170767A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−38226(P2011−38226)
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]