
放射線治療装置制御装置および放射線治療装置の作動方法
【課題】治療用放射線を曝射する放射線照射装置を移動させる駆動装置のモータトリップを防止し、かつ、その放射線照射装置を高精度に移動させること。
【解決手段】被検体の内部の特定部位が配置される特定部位位置に基づいて目標位置131を算出する照射対象検出部と、治療用放射線を曝射する放射線照射装置が補正後目標位置132に向くように、その放射線照射装置を移動させる駆動装置を制御する首振り位置制御部とを備えている。補正後目標位置132は、治療期間の前の準備期間96に、目標位置131より放射線照射装置16が向いている位置に近い位置を示し、その治療期間97に、目標位置131を示している。
【解決手段】被検体の内部の特定部位が配置される特定部位位置に基づいて目標位置131を算出する照射対象検出部と、治療用放射線を曝射する放射線照射装置が補正後目標位置132に向くように、その放射線照射装置を移動させる駆動装置を制御する首振り位置制御部とを備えている。補正後目標位置132は、治療期間の前の準備期間96に、目標位置131より放射線照射装置16が向いている位置に近い位置を示し、その治療期間97に、目標位置131を示している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、放射線治療装置制御装置および放射線治療装置の作動方法に関し、特に、患部に放射線を照射することにより患者を治療するときに利用される放射線治療装置制御装置および放射線治療装置の作動方法に関する。
【背景技術】
【0002】
腫瘍患部に治療用放射線を曝射することにより患者を治療する放射線治療が知られている。その放射線治療を実行する放射線治療装置は、その治療用放射線を曝射する治療用放射線照射装置と、その患者の患部の位置を測定するセンサと、その測定された位置にその治療用放射線が照射されるようにその治療用放射線照射装置を移動させる駆動装置とを備えている。このような放射線治療装置によれば、その患者の呼吸等に伴ってその患部が動く場合でも、その患部に治療用放射線を照射することができる。このような放射線治療は、治療効果が高いことが望まれ、その治療用放射線は、その患部の細胞に曝射される線量に比較して、正常な細胞に曝射される線量がより小さいことが望まれている。このため、その放射線治療装置は、その治療用放射線をより高精度にその患部に曝射することが望まれ、その治療用放射線照射装置をより高精度に移動させることが望まれている。その放射線治療装置は、さらに、その駆動装置の応答性が高いことが望まれ、かつ、その駆動装置の動作が安定していることが望まれている。
【0003】
特開2004−65808号公報には、照射野を広い照射野から微細な不整形照射野まで形成し、照射時間の短縮と患者の体動に対しても適切に照射でき、かつ小型化が可能な放射線治療装置が開示されている。その放射線治療装置は、電子線の発生源と、前記電子線の方向を変える偏向電磁石と、真空を保持しながら前記電子線を通過させる真空窓と、前記電子線を散乱させる散乱箔と、前記電子線をX線に変換するターゲットと、電子線とX線の線量分布を照射面において一様にする平坦化フィルタと、電子線とX線を絞り込むコリメータと、電子線とX線の線量を測定する線量計から構成される照射ヘッドと、前記照射ヘッドを保持するガントリーアームを含む放射線治療装置であって、前記電子線の発生源と前記偏向電磁石とを真空ロータリージョイントで結合し、前記ガントリーアーム回転軸と平行で仮想線源位置を通る軸を中心として前記照射ヘッドを首振り運動させる回転手段を備えている。
【0004】
特開2006−21046号公報には、放射線の照射治療中においても、リアルタイムに治療野の状態をモニタすることが可能な放射線治療装置が開示されている。その放射線治療装置は、O型ガントリと、前記O型ガントリに移動可能に設けられ、被検体の治療野へ治療用放射線を照射する放射線照射ヘッドと、前記O型ガントリに移動可能に設けられ、前記被検体の前記治療野に診断用X線を照射するX線源と、前記O型ガントリに移動可能に設けられ、前記被検体を透過した前記診断用X線の透過X線を検出して、診断画像データとして出力するセンサアレイとを具備し、前記センサアレイは、前記放射線照射ヘッドを挟んで対象な位置に設けられ、前記O型ガントリ上を前記放射線照射ヘッドの移動に連動して動き、前記X線源は、前記センサアレイの動きに連動して動く。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−65808号公報
【特許文献2】特開2006−21046号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、治療用放射線を曝射する放射線照射装置を移動させる駆動装置のモータトリップを防止し、かつ、その放射線照射装置を高精度に移動させる放射線治療装置制御装置および放射線治療装置の作動方法を提供することにある。
【課題を解決するための手段】
【0007】
以下に、発明を実施するための形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0008】
本発明による放射線治療装置制御装置(10)は、被検体(43)の内部の特定部位が測定時刻に配置される特定部位位置に基づいて目標位置(131)を算出する照射対象検出部(52)と、治療用放射線(23)を曝射する放射線照射装置(16)がその測定時刻より後の制御時刻に補正後目標位置(132)に向くように、放射線照射装置(16)を移動させる駆動装置(15)を制御する首振り位置制御部(54)とを備えている。補正後目標位置(132)は、その制御時刻が準備期間(96)に含まれるときに、目標位置(131)より、その制御時刻の直前に放射線照射装置(16)が向いている位置に近い位置を示している。補正後目標位置(132)は、その制御時刻が準備期間(96)の後の治療期間(97)に含まれるときに、目標位置(131)を示している。このような放射線治療装置制御装置(10)は、放射線照射装置(16)が緩やかに移動するように駆動装置(15)を制御した後に放射線照射装置(16)がその特定部位を追尾するように駆動装置(15)を制御することにより、駆動装置(15)のモータトリップを防止し、かつ、放射線照射装置(16)を高精度に移動させることができる。
【0009】
補正後目標位置(132)は、その制御時刻が準備期間(96)に含まれるときに、初期位置と目標位置(131)と結ぶ線分を内分する位置を示している。このとき、補正後目標位置(132)がその線分を内分する内分比(95)(141)は、時間の経過とともに補正後目標位置(132)が目標位置(131)に漸近するように算出されることが好ましい。
【0010】
内分比(95)が単位時間当たりに変化する変化量は、一定であることが好ましい。
【0011】
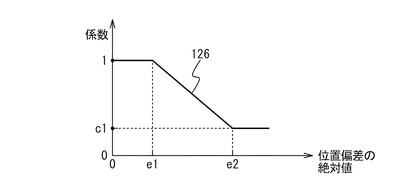
首振り位置制御部(54)は、補正後目標位置(132)と放射線照射装置(16)が向いている位置との位置偏差(88)に基づいて操作量(124)を算出する操作量算出部(121)と、位置偏差(88)に基づいて係数(125)を算出する係数演算部(122)と、操作量(124)に係数(125)を乗算して補正後操作量(89)を算出する乗算器(123)とを備えている。係数(125)は、位置偏差(88)の絶対値に関して単純に減少することが好ましい。
【0012】
首振り位置制御部(54)は、補正後目標位置(132)の変化に基づいてフィードフォワード操作量(124)を算出するフィードフォワード部をさらに備えている。このとき、駆動装置(15)は、そのフィードフォワード操作量(124)にさらに基づいて制御されることが好ましい。
【0013】
首振り位置制御部(54)は、駆動装置(15)が制御されるときに駆動装置(15)に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出する温度ドリフト補正部をさらに備えている。駆動装置(15)は、その温度ドリフト量にさらに基づいて制御されることが好ましい。
【0014】
本発明による放射線治療装置(3)の作動方法は、被検体(43)の内部の特定部位が測定時刻に配置される特定部位位置に基づいて目標位置(131)を算出するステップと、治療用放射線(23)を曝射する放射線照射装置(16)がその測定時刻より後の制御時刻に補正後目標位置(132)に向くように、放射線照射装置(16)を移動させる駆動装置(15)を制御するステップとを備えている。補正後目標位置(132)は、その制御時刻が準備期間(96)に含まれるときに、目標位置(131)より、その制御時刻の直前に放射線照射装置(16)が向いている位置に近い位置を示している。その制御時刻が準備期間(96)の後の治療期間(97)に含まれるときに、目標位置(131)を示している。このような放射線治療装置(3)の作動方法によれば、放射線治療装置制御装置(10)は、放射線照射装置(16)が緩やかに移動するように駆動装置(15)を制御した後に放射線照射装置(16)がその特定部位を追尾するように駆動装置(15)を制御することにより、駆動装置(15)のモータトリップを防止し、かつ、放射線照射装置(16)を高精度に移動させることができる。
【0015】
補正後目標位置(132)は、その制御時刻が準備期間(96)に含まれるときに、初期位置と目標位置(131)と結ぶ線分を内分する位置を示している。補正後目標位置(132)がその線分を内分する内分比(95)(141)は、時間の経過とともに補正後目標位置(132)が目標位置(131)に漸近するように算出される。
【0016】
内分比(95)が単位時間当たりに変化する変化量は、一定であることが好ましい。
【0017】
本発明による放射線治療装置(3)の作動方法は、補正後目標位置(132)と放射線照射装置(16)が向いている位置との位置偏差(88)に基づいて操作量(124)を算出するステップと、位置偏差(88)に基づいて係数(125)を算出するステップと、操作量(124)に係数(125)を乗算して補正後操作量(89)を算出するステップとをさらに備えている。係数(125)は、位置偏差(88)の絶対値に関して単純に減少する。駆動装置(15)は、補正後操作量(89)に基づいて制御されることが好ましい。
【0018】
本発明による放射線治療装置(3)の作動方法は、補正後目標位置(132)の変化に基づいてフィードフォワード操作量(124)を算出するステップをさらに備えている。このとき、駆動装置(15)は、そのフィードフォワード操作量(124)にさらに基づいて制御されることが好ましい。
【0019】
本発明による放射線治療装置(3)の作動方法は、駆動装置(15)が制御されるときに駆動装置(15)に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出するステップをさらに備えている。このとき、駆動装置(15)は、その温度ドリフト量にさらに基づいて制御されることが好ましい。
【発明の効果】
【0020】
本発明による放射線治療装置制御装置および放射線治療装置の作動方法は、治療用放射線を曝射する放射線照射装置を移動させるときに、その放射線照射装置を移動させる駆動装置のモータトリップを防止し、かつ、その放射線照射装置を高精度に移動させることができる。
【図面の簡単な説明】
【0021】
【図1】図1は、放射線治療装置を示す斜視図である。
【図2】図2は、放射線治療装置制御装置を示すブロック図である。
【図3】図3は、首振り位置制御部を示すブロック図である。
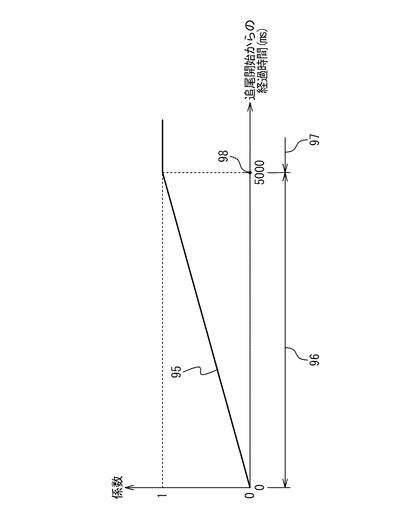
【図4】図4は、目標位置補正部により算出される係数の変化を示すグラフである。
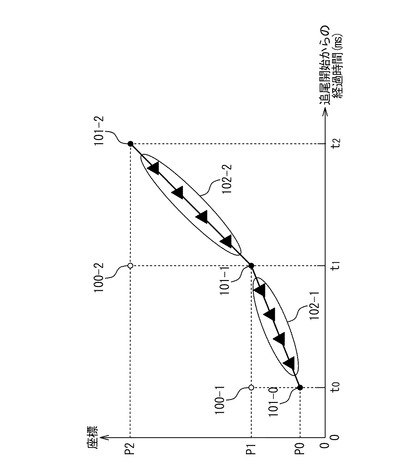
【図5】図5は、補間指令値作成部により算出される補間指令値を示すグラフである。
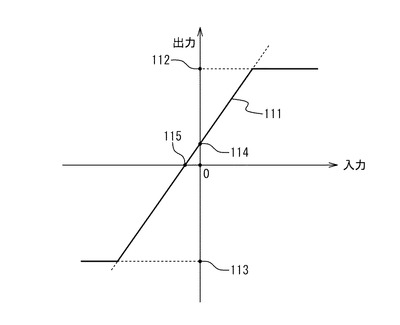
【図6】図6は、D/A変換回路の入力と出力の関係を示すグラフである。
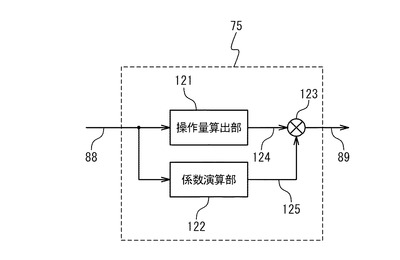
【図7】図7は、操作量算出部を示すブロック図である。
【図8】図8は、位置偏差と係数との関係を示すグラフである。
【図9】図9は、目標位置の変化と補正後目標位置の変化と補間指令値の変化とを示すグラフである。
【図10】図10は、目標位置補正部により算出される他の係数の変化を示すグラフである。
【発明を実施するための形態】
【0022】
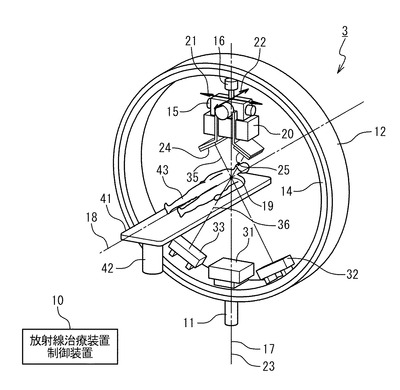
図面を参照して、本発明による放射線治療装置制御装置の実施の形態を記載する。その放射線治療装置制御装置10は、図1に示されているように、放射線治療システムに適用されている。その放射線治療システムは、放射線治療装置制御装置10と放射線治療装置3とを備えている。放射線治療装置制御装置10は、パーソナルコンピュータに例示されるコンピュータである。放射線治療装置制御装置10と放射線治療装置3とは、双方向に情報を伝送することができるように、互いに接続されている。
【0023】
放射線治療装置3は、Oリング12と走行ガントリ14と治療用放射線照射装置16とを備えている。Oリング12は、リング状に形成され、回転軸17を中心に回転可能に基礎に支持されている。回転軸17は、鉛直方向に平行である。走行ガントリ14は、リング状に形成され、Oリング12のリングの内側に配置され、回転軸18を中心に回転可能にOリング12に支持されている。回転軸18は、鉛直方向に垂直であり、回転軸17に含まれるアイソセンタ19を通っている。回転軸18は、Oリング12に対して固定され、すなわち、Oリング12とともに回転軸17を中心に回転する。
【0024】
治療用放射線照射装置16は、走行ガントリ14のリングの内側に配置されている。治療用放射線照射装置16は、チルト軸21に回転可能に、かつ、パン軸22に回転可能に、走行ガントリ14に支持されている。パン軸22は、走行ガントリ14に対して固定され、回転軸18に交差しないで回転軸18に平行である。チルト軸21は、パン軸22に直交している。チルト軸21とパン軸22との交点は、アイソセンタ19から1mだけ離れている。
【0025】
放射線治療装置3は、さらに、旋回駆動装置11と首振り装置15とを備え、図示されていない走行駆動装置を備えている。旋回駆動装置11は、放射線治療装置制御装置10により制御されることにより、回転軸17を中心にOリング12を回転させる。旋回駆動装置11は、さらに、基礎に対してOリング12が配置される旋回角度を測定し、その旋回角度を放射線治療装置制御装置10に出力する。その走行駆動装置は、放射線治療装置制御装置10により制御されることにより、回転軸18を中心に走行ガントリ14を回転させる。その走行駆動装置は、さらに、Oリング12に対して走行ガントリ14が配置されるガントリ角度を測定し、そのガントリ角度を放射線治療装置制御装置10に出力する。
【0026】
首振り装置15は、放射線治療装置制御装置10により制御されることにより、チルト軸21を中心に治療用放射線照射装置16を回転させ、パン軸22を中心に治療用放射線照射装置16を回転させる。首振り装置15は、さらに、チルト軸21を中心に走行ガントリ14に対して治療用放射線照射装置16が回転するチルト角を測定し、そのチルト角を放射線治療装置制御装置10に出力する。首振り装置15は、さらに、パン軸22を中心に走行ガントリ14に対して治療用放射線照射装置16が回転するパン角を測定し、そのパン角を放射線治療装置制御装置10に出力する。
【0027】
治療用放射線照射装置16は、放射線治療装置制御装置10により制御されることにより、治療用放射線23を曝射する。治療用放射線23は、パン軸22とチルト軸21とが交差する交点を頂点とするコーンビームである。治療用放射線23は、一様強度分布を持つように形成されている。治療用放射線照射装置16は、マルチリーフコリメータ20を備えている。マルチリーフコリメータ20は、治療用放射線23が進行する領域に配置されるように、治療用放射線照射装置16に固定されている。マルチリーフコリメータ20は、放射線治療装置制御装置10により制御されることにより、治療用放射線23の一部を遮蔽し、治療用放射線23が患者に照射されるときの照射野の形状を変更する。
【0028】
治療用放射線23は、このように治療用放射線照射装置16が走行ガントリ14に支持されることにより、治療用放射線照射装置16がアイソセンタ19に向かうように走行ガントリ14に固定されると、旋回駆動装置11によりOリング12が回転し、または、その走行駆動装置により走行ガントリ14が回転しても、常に概ねアイソセンタ19を通る。即ち、走行・旋回を行うことで任意方向からアイソセンタ19に向けて治療用放射線23の照射が可能になる。
【0029】
放射線治療装置3は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置3は、第1診断用X線源24と第2診断用X線源25と第1センサアレイ32と第2センサアレイ33とを備えている。第1診断用X線源24は、走行ガントリ14に支持され、アイソセンタ19から第1診断用X線源24を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とのなす角が鋭角になるように、走行ガントリ14のリングの内側に配置されている。第2診断用X線源25は、走行ガントリ14に支持され、アイソセンタ19から第2診断用X線源25を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とのなす角が鋭角になるように、走行ガントリ14のリングの内側に配置されている。第2診断用X線源25は、さらに、アイソセンタ19から第1診断用X線源24を結ぶ線分とアイソセンタ19から第2診断用X線源25を結ぶ線分とのなす角が直角(90度)になるように、配置されている。第1センサアレイ32は、走行ガントリ14に支持され、アイソセンタ19を介して第1診断用X線源24に対向するように、配置されている。第2センサアレイ33は、走行ガントリ14に支持され、アイソセンタ19を介して第2診断用X線源25に対向するように、配置されている。
【0030】
第1診断用X線源24は、放射線治療装置制御装置10により制御されることにより、所定のタイミングで第1診断用X線35をアイソセンタ19に向けて曝射する。第1診断用X線35は、第1診断用X線源24が有する1点から曝射され、その1点を頂点とする円錐状のコーンビームである。第2診断用X線源25は、放射線治療装置制御装置10により制御されることにより、所定のタイミングで第2診断用X線36をアイソセンタ19に向けて曝射する。第2診断用X線36は、第2診断用X線源25が有する1点から曝射され、その1点を頂点とする円錐状のコーンビームである。
【0031】
第1センサアレイ32は、受光部を備えている。第1センサアレイ32は、放射線治療装置制御装置10により制御されることにより、その受光部に受光されるX線に基づいて第1透視画像を生成する。第2センサアレイ33は、受光部を備えている。第2センサアレイ33は、放射線治療装置制御装置10により制御されることにより、その受光部に受光されるX線に基づいて第2透視画像を生成する。その透視画像は、複数の画素から形成されている。その複数の画素は、その透視画像上にマトリクス状に配置され、それぞれ輝度に対応付けられている。その透視画像は、その複数の画素の各々に対応する輝度がその複数の画素の各々に着色されることにより、被写体を映し出している。第1センサアレイ32と第2センサアレイ33としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0032】
このようなイメージャシステムによれば、第1センサアレイ32と第2センサアレイ33とにより得た画像信号に基づき、アイソセンタ19を中心とする透視画像を生成することができる。
【0033】
放射線治療装置3は、さらに、カウチ41とカウチ駆動装置42とを備えている。カウチ41は、x軸とy軸とz軸とを中心に回転移動可能に、かつ、そのx軸とy軸とz軸とに平行に平行移動可能に基礎に支持されている。そのx軸とy軸とz軸とは、互いに直交している。カウチ41は、その放射線治療システムにより治療される患者43が横臥することに利用される。カウチ41は、図示されていない固定具を備えている。その固定具は、患者43が動かないように、患者43をカウチ41に固定する。カウチ駆動装置42は、放射線治療装置制御装置10により制御されることにより、カウチ41を回転移動させ、カウチ41を平行移動させる。
【0034】
図2は、放射線治療装置制御装置10を示している。その放射線治療装置制御装置10は、コンピュータであり、図示されていないCPUと記憶装置とリムーバルメモリドライブと通信装置と入力装置と出力装置とインターフェースとを備えている。そのCPUは、放射線治療装置制御装置10にインストールされるコンピュータプログラムを実行して、その記憶装置と入力装置と出力装置とを制御する。その記憶装置は、そのコンピュータプログラムを記録し、そのCPUに利用される情報を記録し、そのCPUにより生成される情報を記録する。そのリムーバルメモリドライブは、記録媒体が挿入されたときに、その記録媒体に記録されているデータを読み出すことに利用される。そのリムーバルメモリドライブは、特に、コンピュータプログラムが記録されている記録媒体が挿入されたときに、そのコンピュータプログラムを放射線治療装置制御装置10にインストールするときに利用される。その通信装置は、通信回線網を介して接続される他のコンピュータから配信される情報を放射線治療装置制御装置10にダウンロードする。その通信装置は、特に、他のコンピュータからコンピュータプログラムを放射線治療装置制御装置10にダウンロードし、そのコンピュータプログラムを放射線治療装置制御装置10にインストールするときに利用される。その入力装置は、ユーザに操作されることにより生成される情報をそのCPUに出力する。その入力装置としては、キーボード、マウスが例示される。その出力装置は、そのCPUにより生成された情報をユーザに認識可能に出力する。その出力装置としては、そのCPUにより生成された画像を表示するディスプレイが例示される。
【0035】
そのインターフェースは、放射線治療装置制御装置10に接続される外部機器により生成される情報をそのCPUに出力し、そのCPUにより生成された情報をその外部機器に出力する。その外部機器は、放射線治療装置3の旋回駆動装置11と走行駆動装置と首振り装置15と治療用放射線照射装置16とマルチリーフコリメータ20と第1診断用X線源24と第2診断用X線源25と第1センサアレイ32と第2センサアレイ33とカウチ駆動装置42とを含んでいる。
【0036】
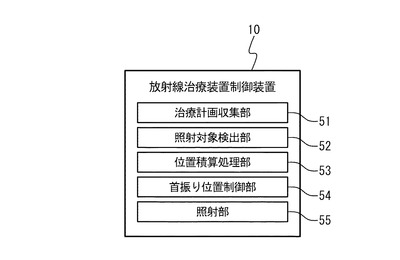
放射線治療装置制御装置10にインストールされるコンピュータプログラムは、放射線治療装置制御装置10に複数の機能をそれぞれ実現させるための複数のコンピュータプログラムから形成されている。その複数の機能は、治療計画収集部51と照射対象検出部52と位置積算処理部53と首振り位置制御部54と照射部55とを含んでいる。
【0037】
治療計画収集部51は、入力装置から治療計画を収集する。その治療計画は、照射角度と線量との組み合わせを示している。その照射角度は、患者43の患部に治療用放射線23を照射する方向を示し、カウチ位置とOリング回転角とガントリ回転角とを示している。そのカウチ位置は、基礎に対するカウチ41の位置を示している。そのOリング回転角は、基礎に対するOリング12の位置を示している。そのガントリ回転角は、Oリング12に対する走行ガントリ14の位置を示している。その線量は、その照射角度から患者43に照射される治療用放射線23の線量を示している。
【0038】
照射対象検出部52は、その治療計画が示すカウチ位置にカウチ41が配置されるように、すなわち、患者43の患部が概ねアイソセンタ19に配置されるように、カウチ駆動装置42を制御する。照射対象検出部52は、さらに、その治療計画が示すOリング回転角にOリング12が配置されるように、旋回駆動装置11を制御する。照射対象検出部52は、さらに、その治療計画が示すガントリ回転角に走行ガントリ14が配置されるように、放射線治療装置3の走行駆動装置を制御する。
【0039】
照射対象検出部52は、その治療計画が示す所定の位置にカウチ41とOリング12と走行ガントリ14とが所定の位置に配置された後に、第1診断用X線35が患者43に周期的に(たとえば、50ms間隔で)曝射されるように、第1診断用X線源24を制御する。照射対象検出部52は、さらに、第1診断用X線35が曝射される複数の時刻に第2診断用X線36が患者43に周期的に曝射されるように、第2診断用X線源25を制御する。照射対象検出部52は、さらに、第1診断用X線35が患者43に曝射されたときに、患者43を透過したX線に基づいて複数の第1透過画像が生成されるように、第1センサアレイ32を制御する。照射対象検出部52は、さらに、第2診断用X線36が患者43に曝射されたときに、患者43を透過したX線に基づいて複数の第2透過画像が生成されるように、第2センサアレイ33を制御する。
【0040】
照射対象検出部52は、その複数の第1透過画像と複数の第2透過画像とに基づいて複数の特定部位位置を算出する。その複数の特定部位位置は、第1診断用X線35(第2診断用X線36)が曝射される複数の時刻に患者43の患部が配置されていた位置をそれぞれ示している。すなわち、照射対象検出部52は、その第1透過画像と第2透過画像が撮影されるごとに、その第1透過画像と第2透過画像とに基づいて患者43の患部が配置されている特定部位位置を算出する。
【0041】
照射対象検出部52は、さらに、その特定部位位置に基づいて目標位置を算出する。その目標位置は、その第1透過画像と第2透過画像が撮影された時刻から50msだけ経過した時刻に患者43の患部が配置されている位置を示している。
【0042】
位置積算処理部53は、治療用放射線照射装置16が現在時刻に向いている位置を測定するように、首振り装置15を制御する。その位置は、治療用放射線照射装置16のチルト角とパン角とから形成されている。すなわち、位置積算処理部53は、治療用放射線照射装置16のチルト角とパン角とを測定するように、首振り装置15を制御し、そのチルト角とパン角とに基づいて治療用放射線照射装置16が現在時刻に向いている位置を算出する。
【0043】
首振り位置制御部54は、照射対象検出部52により算出された目標位置に基づいて、操作量を算出する。首振り装置15は、その操作量に基づいて、治療用放射線照射装置16をパン軸22またはチルト軸21を中心に回転移動させる。このとき、首振り位置制御部54は、照射対象検出部52により複数の第1透過画像が撮影される測定周期に比較して十分に短いサンプリング周期(たとえば、5ms)でその操作量を算出する。
【0044】
照射部55は、首振り位置制御部54により治療用放射線照射装置16が向けられようとしている位置と治療用放射線照射装置16が実際に向いている位置との差が所定範囲に含まれるときに、治療用放射線23が曝射されるように、治療用放射線照射装置16を制御する。
【0045】
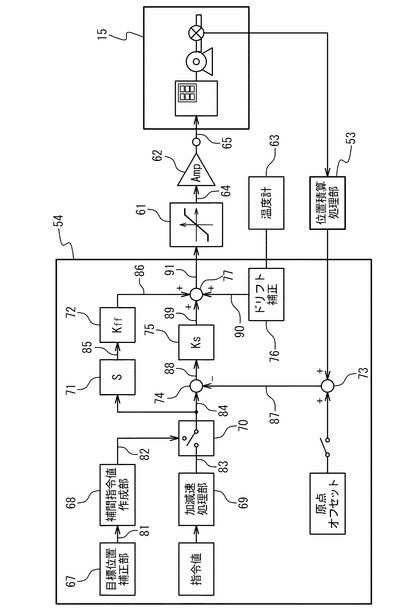
放射線治療装置3は、さらに、図3に示されているように、D/A変換回路61とアンプ62と温度計63とを備えている。D/A変換回路61は、放射線治療装置制御装置10により算出された操作量に対応する電圧の制御電気信号64を生成する。アンプ62は、制御電気信号64の電圧を増幅した増幅後電気信号65を出力する。D/A変換回路61とアンプ62とは、配電盤に配置されている。温度計63は、その配電盤の温度を測定し、その温度を放射線治療装置制御装置10に出力する。
【0046】
図3は、さらに、首振り位置制御部54を示している。首振り位置制御部54は、目標位置補正部67と補間指令値作成部68と加減速処理部69とスイッチ70と微分部71とフィードフォワード部72と加算器73と加算器74と操作量算出部75と温度ドリフト補正部76と加算器77とを備えている。
【0047】
目標位置補正部67は、照射対象検出部52により算出された目標位置を算出するために用いられた第1透過画像と第2透過画像とが撮影された時刻に基づいて係数を算出する。目標位置補正部67は、照射対象検出部52により算出された目標位置とその係数とに基づいて補正後目標位置81を算出する。補間指令値作成部68は、補正後目標位置81に基づいて補間指令値82を算出する。このとき、補間指令値82は、補正後目標位置81が算出される測定周期(たとえば、50ms)に比較して十分に短いサンプリング周期(たとえば、5ms)毎に算出される。
【0048】
加減速処理部69は、加減速補正後指令値83を出力する。加減速補正後指令値83は、アイソセンタ19が配置された位置を示している。
【0049】
スイッチ70は、入力装置を介して放射線治療装置制御装置10に入力される情報に基づいて指令値84を算出する。指令値84は、補間指令値82と加減速補正後指令値83とのうちの一方を示し、追尾を行うときに補間指令値82を示し、追尾を行わないときに加減速補正後指令値83を示している。
【0050】
微分部71は、指令値84に基づいて速度85を算出する。速度85は、指令値84が単位時間当たりに変化した変化量を示している。フィードフォワード部72は、速度85に基づいてフィードフォワード操作量86を算出する。
【0051】
加算器73は、位置積算処理部53により測定される位置に基づいて位置実績値87を算出する。位置実績値87は、位置積算処理部53により測定される位置に原点オフセット値が加算された値を示している。加算器74は、指令値84と位置実績値87とに基づいて位置偏差88を算出する。位置偏差88は、指令値84から位置実績値87を減算した差を示している。
【0052】
操作量算出部75は、位置偏差88に基づいて操作量89を算出する。温度ドリフト補正部76は、温度計63により測定された温度に基づいて温度ドリフト補正量90を算出する。加算器77は、フィードフォワード操作量86と操作量89と温度ドリフト補正量90とに基づいて操作量91を算出する。操作量91は、フィードフォワード操作量86と操作量89と温度ドリフト補正量90とを加算した和を示している。
【0053】
図4は、目標位置補正部67により算出される係数の変化を示している。その変化95は、その係数が算出される期間が準備期間96と治療期間97とから形成されていることを示している。準備期間96は、その係数が算出される期間のうちの分離時刻98より前の期間を示している。治療期間97は、その係数が算出される期間のうちの分離時刻98より後の期間を示している。分離時刻98は、追尾が開始した時刻から5000msだけ経過した時刻を示している。変化95は、さらに、その追尾が開始した時刻に0を示すことを示している。変化95は、さらに、準備期間96で、その経過時間に比例するように増加することを示している。変化95は、さらに、治療期間97で、1を示すことを示している。
【0054】
このとき、目標位置補正部67により算出される補正後目標位置81は、照射対象検出部52により算出された目標位置とアイソセンタ19とを結ぶ線分を内分する点の位置を示している。補正後目標位置81が示す位置がその線分を内分する内分比は、その係数に一致している。すなわち、補正後目標位置81が示す位置は、その係数が0を示すときにアイソセンタ19を示し、その係数が1を示すときに照射対象検出部52により算出された目標位置を示している。なお、その線分は、アイソセンタ19と異なる他の位置と目標位置とを結ぶ他の線分に置換することができる。アイソセンタ19と異なる他の位置としては、放射線照射装置16が追尾開始時に向いていた位置が例示される。
【0055】
図5は、補間指令値作成部68により算出される補間指令値82を示している。補間指令値82は、サンプリング周期ごとの複数の時刻に対応する複数の補間指令値から形成されている。その複数の補間指令値のうちの時刻t0に対応する補間指令値101−0は、時刻t0より測定周期(50ms)だけ前の時刻に目標位置補正部67により算出された補正後目標位置に一致している。その複数の補間指令値のうちの時刻t1に対応する補間指令値101−1は、時刻t1より測定周期(50ms)だけ前の時刻t0に目標位置補正部67により算出された補正後目標位置100−1に一致している。その複数の補間指令値のうちの時刻t2に対応する補間指令値101−2は、時刻t2より測定周期だけ前の時刻t1に目標位置補正部67により算出された補正後目標位置100−2に一致している。
【0056】
その複数の補間指令値のうちの時刻t0から時刻t1までの期間に対応する複数の補間指令値102−1は、補間指令値101−0と補間指令値101−1とを内挿するように、算出される。その複数の補間指令値のうちの時刻t1から時刻t2までの期間に対応する複数の補間指令値102−2は、補間指令値101−1と補間指令値101−2とを内挿するように、算出される。
【0057】
図6は、D/A変換回路61とアンプ62とから形成される配電盤の入力と出力の関係を示している。その関係111は、その入力に関してその出力が単純に増加していることを示し、その出力がその入力に概ね比例していることを示している。関係111は、さらに、その出力が最大値112を有していることを示し、その出力が最小値113を有していることを示している。関係111は、さらに、その入力が0を示すときにその出力が0と異なる値114を示すことを示し、その出力が0を示すときにその入力が0と異なる値115を示すことを示している。値114と値115とは、その配電盤の温度により変化する。
【0058】
このとき、温度ドリフト補正部76は、配電盤の温度に基づいて値115がどのように変化するかを記憶装置に記録し、温度計63により測定された配電盤の温度に基づいて、操作量89とフィードフォワード操作量86との和が0と示すときに、制御電気信号64の電圧が0Vを示すように、温度ドリフト補正量90を算出する。すなわち、温度ドリフト補正量90は、温度計63により測定された配電盤の温度に対応する値115に−1を乗算した値を示している。このような制御によれば、放射線治療装置制御装置10は、操作量89とフィードフォワード操作量86との和が0を示すときに、または指定したある値以下の値を示すときに、すなわち、首振り装置15を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0059】
図7は、操作量算出部75を示している。操作量算出部75は、操作量算出部本体121と係数演算部122と乗算器123とを備えている。操作量算出部本体121は、位置偏差88に基づいて補正前操作量124を算出する。このような算出は、周知のものが適用される。係数演算部122は、位置偏差88に基づいて係数125を算出する。乗算器123は、補正前操作量124と係数125とに基づいて操作量算出部75の出力である操作量89を算出する。操作量89は、補正前操作量124に係数125を乗算した積を示している。
【0060】
図8は、位置偏差88と係数125との関係を示している。その関係126は、位置偏差88の絶対値に関して、係数125が単純に減少していることを示している。関係126は、さらに、位置偏差88の絶対値が値e1以下であるときに、係数125が1を示すことを示している。関係126は、さらに、位置偏差88の絶対値が値e1以上であり、かつ、値e2以下であるときに、係数125が、位置偏差88の増加と共に、減少していることを示している。関係126は、さらに、位置偏差88の絶対値が値e2以上であるときに、係数125が値c1を示すことを示している。値c1は、首振り装置15により生成される駆動力が、放射線照射装置16が回転する静止摩擦より大きくなるように、設定される。
【0061】
このような係数125によれば、位置偏差88が大きいときに、操作量89が大きくなり過ぎない。このため、放射線治療装置制御装置10は、位置偏差88が大きいときに、首振り装置15を用いて治療用放射線照射装置16をより安定して移動させることができる。このため、放射線治療装置制御装置10は、首振り装置15が補正前操作量124に基づいて制御される既存の放射線治療装置制御装置に比較して、位置偏差88が大きいときに、操作量89を小さくすることができ、首振り装置15を用いて放射線照射装置16を安定して回転させることができ、首振り装置15をより高精度に制御することができる。
【0062】
本発明による放射線治療装置の作動方法は、放射線治療装置制御装置10により実行される。ユーザは、まず、入力装置を介して、事前に作成された治療計画を放射線治療装置制御装置10に入力する。その治療計画は、照射角度と線量との組み合わせを示している。その照射角度は、患者43の患部に治療用放射線23を照射する方向を示し、カウチ位置とOリング回転角とガントリ回転角とを示している。そのカウチ位置は、基礎に対するカウチ41の位置と向きとを示している。そのOリング回転角は、基礎に対するOリング12の位置を示している。そのガントリ回転角は、Oリング12に対する走行ガントリ14の位置を示している。その線量は、その各照射角度から患者43に照射される治療用放射線23の線量を示している。
【0063】
ユーザは、放射線治療装置3のカウチ41に患者43を固定する。放射線治療装置制御装置10は、その治療計画が示すカウチ位置にカウチ41が配置されるように、カウチ駆動装置42を制御する。放射線治療装置制御装置10は、さらに、その治療計画が示すOリング回転角にOリング12が配置されるように、旋回駆動装置11を制御する。放射線治療装置制御装置10は、さらに、その治療計画が示すガントリ回転角に走行ガントリ14が配置されるように、放射線治療装置3の走行駆動装置を制御する。
【0064】
放射線治療装置制御装置10は、その治療計画が示す所定の位置にカウチ41とOリング12と走行ガントリ14とが所定の位置に配置された後に、第1診断用X線35が患者43に周期的に(たとえば、50ms間隔で)曝射されるように、第1診断用X線源24を制御する。放射線治療装置制御装置10は、さらに、第1診断用X線35が曝射される複数の時刻に第2診断用X線36が患者43に周期的に曝射されるように、第2診断用X線源25を制御する。放射線治療装置制御装置10は、さらに、第1診断用X線35が患者43に曝射されたときに、患者43を透過したX線に基づいて複数の第1透過画像が生成されるように、第1センサアレイ32を制御する。放射線治療装置制御装置10は、さらに、第2診断用X線36が患者43に曝射されたときに、患者43を透過したX線に基づいて複数の第2透過画像が生成されるように、第2センサアレイ33を制御する。
【0065】
放射線治療装置制御装置10は、時刻t0に撮影された第1透過画像と第2透過画像とに基づいて特定部位位置を算出する。その特定部位位置は、時刻t0に患者43の患部が配置されていた位置を示している。放射線治療装置制御装置10は、さらに、その特定部位位置に基づいて目標位置を算出する。その目標位置は、時刻t0から50msだけ経過した時刻t1に患者43の患部が配置されている位置を示している。放射線治療装置制御装置10は、図4の変化95に一致するように、時刻t0に基づいて係数を算出する。放射線治療装置制御装置10は、図5に示されているように、その目標位置とその係数とに基づいて補正後目標位置100−1を算出する。補正後目標位置81は、その目標位置とアイソセンタ19とを結ぶ線分を、その係数が示す比で内分する点の位置を示している。放射線治療装置制御装置10は、補正後目標位置100−1に基づいて補間指令値101−1と複数の補間指令値102−1とを算出する。
【0066】
放射線治療装置制御装置10は、その補間指令値が単位時間当たりに変化した変化量に基づいてフィードフォワード操作量86を算出する。
【0067】
放射線治療装置制御装置10は、首振り装置15により測定される位置とその補間指令値との位置偏差88に基づいて補正前操作量124を算出する。放射線治療装置制御装置10は、さらに、図8の関係126に一致するように、係数125を算出する。放射線治療装置制御装置10は、補正前操作量124に係数125を乗算した積を示す操作量89を算出する。
【0068】
放射線治療装置制御装置10は、温度計63により測定された温度に基づいて温度ドリフト補正量90を算出する。
【0069】
放射線治療装置制御装置10は、フィードフォワード操作量86と操作量89と温度ドリフト補正量90とに基づいて操作量91を算出する。D/A変換回路61は、操作量91に対応する電圧の制御電気信号64を生成する。アンプ62は、制御電気信号64の電圧を増幅した増幅後電気信号65を出力する。D/A変換回路61とアンプ62とは、配電盤に配置されている。首振り装置15は、増幅後電気信号65が供給されることにより、パン軸22を中心に放射線照射装置16を回転させ、チルト軸21を中心に放射線照射装置16を回転させる。
【0070】
放射線治療装置制御装置10は、現在時刻が準備期間96に含まれるときに、治療用放射線23が曝射されないように、治療用放射線照射装置16を制御する。放射線治療装置制御装置10は、現在時刻が治療期間97に含まれるときに、その補間指令値が示す位置と治療用放射線照射装置16が現在時刻に向いている位置との差が所定範囲に含まれるときに、治療用放射線23が曝射されるように、治療用放射線照射装置16を制御する。放射線治療装置制御装置10は、その補間指令値と治療用放射線照射装置16が現在時刻に向いている位置との差が所定範囲に含まれないときに、治療用放射線23が曝射されないように、治療用放射線照射装置16を制御する。放射線治療装置制御装置10は、その補間指令値が算出されるサンプリング周期で、治療用放射線照射装置16を繰り返し制御する。
【0071】
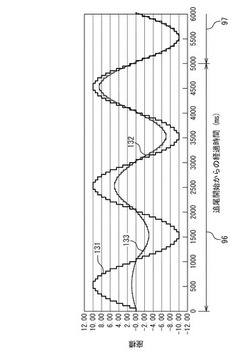
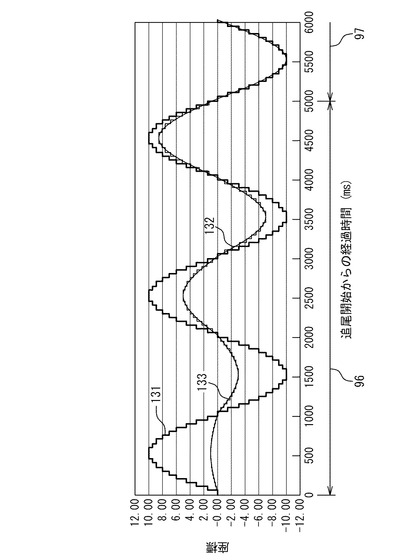
図9は、患者43の患部が配置されていた位置に基づいて算出された目標位置の変化を示している。その変化131は、その目標位置が測定周期(50ms)毎に算出されることを示している。図9は、さらに、その目標位置に基づいて算出される補正後目標位置の変化を示している。その変化132は、その補正後目標位置が準備期間96で緩やかに変化し、その補正後目標位置が治療期間97でその目標位置に一致することを示している。図9は、さらに、その補正後目標位置に基づいて算出される補間指令値の変化を示している。その変化133は、その目標位置が算出される測定周期(50ms)より短い周期でその補間指令値が算出されることを示している。変化133は、さらに、その補間指令値が準備期間96で緩やかに変化することを示している。変化133は、さらに、その目標位置が治療期間97でその補間指令値に一致することを示している。
【0072】
患者43の患部だけに治療用放射線23を曝射するには、より短い時間で放射線照射装置16を患者43の患部へ正確に向ける必要があり、首振り動作には、高応答性が求められる。これを実現するため、一般的に、制御ゲインを大きくしている。しかし、制御ゲインが大きいと、追尾動作開始時に放射線照射装置16の現在位置と目標位置が大きく離れている場合に、首振り装置15のモータに過負荷がかかりトリップする可能性がある。本発明による放射線治療装置の作動方法によれば、放射線治療装置制御装置10は、治療用放射線照射装置16が初期にアイソセンタ19を向いていた場合に、準備期間96に治療用放射線照射装置16が急激に移動するように、制御されることがない。このため、放射線治療装置制御装置10は、制御ゲインを大きくすることにより応答性を向上させた状態であっても、準備期間96に首振り装置15がモータトリップすることが防止される。
【0073】
操作量89は、係数125が図8の関係126に示されているように変化するために、位置偏差88が大きいときに、操作量89が大きくなり過ぎない。このため、放射線治療装置制御装置10は、位置偏差88が大きいときに、首振り装置15を用いて放射線照射装置16をより安定して移動させることができる。このため、放射線治療装置制御装置10は、係数演算部122と乗算器123とを備えない周知の既存の放射線治療装置制御装置に比較して、首振り装置15を用いて放射線照射装置16を安定して回転させることができ、首振り装置15をより高精度に制御することができる。
【0074】
本発明による放射線治療装置の作動方法では、放射線治療装置制御装置10は、さらに、温度計63により測定された配電盤の温度に基づいて温度ドリフト補正量90を算出する。このような温度ドリフト補正量90によれば、放射線治療装置制御装置10は、首振り装置15を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0075】
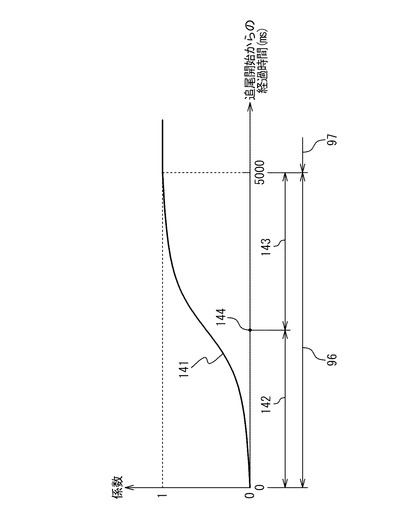
目標位置補正部67により算出される係数は、既述の形態における変化95と異なる変化に置換されることができる。その係数は、その追尾が開始した時刻に0を示し、準備期間96でその経過時間に関して単純に増加し、治療期間97で1を示していればよい。図10は、その変化の例を示している。その変化141は、準備期間96が第1期間142と第2期間143とから形成されていることを示している。第1期間142は、準備期間96のうちの分離時刻144より前の期間を示している。第2期間143は、準備期間96のうちの分離時刻144より後の期間を示している。分離時刻144は、準備期間96属する任意の時刻である。変化141は、その追尾が開始した時刻に0を示すことを示している。変化141は、さらに、第1期間142で、下に凸に単純に増加することを示している。変化141は、さらに、第2期間143で、上に凸に単純に増加することを示している。変化141は、さらに、治療期間97で、1を示すことを示している。放射線治療装置制御装置10は、このような変化141が適用された場合でも、既述の実施の形態と同様にして、制御ゲインを大きくすることにより応答性を向上させた状態で準備期間96に首振り装置15がモータトリップすることを防止することができる。
【0076】
なお、放射線治療装置制御装置10は、放射線治療装置3のイメージャシステムと異なる他のセンサに基づいて算出される特定部位位置に基づいて目標位置を算出することもできる。そのセンサとしては、赤外線カメラが例示される。このとき、放射線治療装置制御装置10は、患者43の体表面に配置されたマーカがその赤外線カメラにより撮影された赤外線画像に映し出される位置に基づいて患者43の患部の位置を算出し、その位置に基づいてその目標位置を算出する。放射線治療装置制御装置10は、このようなセンサが適用された場合でも、既述の実施の形態と同様にして、制御ゲインを大きくすることにより応答性を向上させた状態で準備期間96に首振り装置15がモータトリップすることを防止することができる。
【符号の説明】
【0077】
3 :放射線治療装置
10:放射線治療装置制御装置
11:旋回駆動装置
12:Oリング
14:走行ガントリ
15:首振り装置
16:放射線照射装置
17:回転軸
18:回転軸
19:アイソセンタ
20:マルチリーフコリメータ
21:チルト軸
22:パン軸
23:治療用放射線
24:第1診断用X線源
25:第2診断用X線源
32:第1センサアレイ
33:第2センサアレイ
35:第1診断用X線
36:第2診断用X線
41:カウチ
42:カウチ駆動装置
43:患者
51:治療計画収集部
52:照射対象検出部
53:位置積算処理部
54:首振り位置制御部
55:照射部
61:D/A変換回路
62:アンプ
63:温度計
64:制御電気信号
65:増幅後電気信号
67:目標位置補正部
68:補間指令値作成部
69:加減速処理部
70:スイッチ
71:微分部
72:フィードフォワード部
73:加算器
74:加算器
75:操作量算出部
76:温度ドリフト補正部
77:加算器
81:補正後目標位置
82:補間指令値
83:加減速補正後指令値
84:指令値
85:速度
86:フィードフォワード操作量
87:位置実績値
88:位置偏差
89:操作量
90:温度ドリフト補正量
91:操作量
95:変化
96:準備期間
97:治療期間
98:分離時刻
100−1〜100−2:補正後目標位置
101−0〜101−2:補間指令値
102−1〜102−2:補間指令値
111:関係
112:最大値
113:最小値
114:値
115:値
121:操作量算出部本体
122:係数演算部
123:乗算器
124:補正前操作量
125:係数
126:関係
131:変化
132:変化
133:変化
141:変化
142:第1期間
143:第2期間
144:分離時刻
【技術分野】
【0001】
本発明は、放射線治療装置制御装置および放射線治療装置の作動方法に関し、特に、患部に放射線を照射することにより患者を治療するときに利用される放射線治療装置制御装置および放射線治療装置の作動方法に関する。
【背景技術】
【0002】
腫瘍患部に治療用放射線を曝射することにより患者を治療する放射線治療が知られている。その放射線治療を実行する放射線治療装置は、その治療用放射線を曝射する治療用放射線照射装置と、その患者の患部の位置を測定するセンサと、その測定された位置にその治療用放射線が照射されるようにその治療用放射線照射装置を移動させる駆動装置とを備えている。このような放射線治療装置によれば、その患者の呼吸等に伴ってその患部が動く場合でも、その患部に治療用放射線を照射することができる。このような放射線治療は、治療効果が高いことが望まれ、その治療用放射線は、その患部の細胞に曝射される線量に比較して、正常な細胞に曝射される線量がより小さいことが望まれている。このため、その放射線治療装置は、その治療用放射線をより高精度にその患部に曝射することが望まれ、その治療用放射線照射装置をより高精度に移動させることが望まれている。その放射線治療装置は、さらに、その駆動装置の応答性が高いことが望まれ、かつ、その駆動装置の動作が安定していることが望まれている。
【0003】
特開2004−65808号公報には、照射野を広い照射野から微細な不整形照射野まで形成し、照射時間の短縮と患者の体動に対しても適切に照射でき、かつ小型化が可能な放射線治療装置が開示されている。その放射線治療装置は、電子線の発生源と、前記電子線の方向を変える偏向電磁石と、真空を保持しながら前記電子線を通過させる真空窓と、前記電子線を散乱させる散乱箔と、前記電子線をX線に変換するターゲットと、電子線とX線の線量分布を照射面において一様にする平坦化フィルタと、電子線とX線を絞り込むコリメータと、電子線とX線の線量を測定する線量計から構成される照射ヘッドと、前記照射ヘッドを保持するガントリーアームを含む放射線治療装置であって、前記電子線の発生源と前記偏向電磁石とを真空ロータリージョイントで結合し、前記ガントリーアーム回転軸と平行で仮想線源位置を通る軸を中心として前記照射ヘッドを首振り運動させる回転手段を備えている。
【0004】
特開2006−21046号公報には、放射線の照射治療中においても、リアルタイムに治療野の状態をモニタすることが可能な放射線治療装置が開示されている。その放射線治療装置は、O型ガントリと、前記O型ガントリに移動可能に設けられ、被検体の治療野へ治療用放射線を照射する放射線照射ヘッドと、前記O型ガントリに移動可能に設けられ、前記被検体の前記治療野に診断用X線を照射するX線源と、前記O型ガントリに移動可能に設けられ、前記被検体を透過した前記診断用X線の透過X線を検出して、診断画像データとして出力するセンサアレイとを具備し、前記センサアレイは、前記放射線照射ヘッドを挟んで対象な位置に設けられ、前記O型ガントリ上を前記放射線照射ヘッドの移動に連動して動き、前記X線源は、前記センサアレイの動きに連動して動く。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−65808号公報
【特許文献2】特開2006−21046号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、治療用放射線を曝射する放射線照射装置を移動させる駆動装置のモータトリップを防止し、かつ、その放射線照射装置を高精度に移動させる放射線治療装置制御装置および放射線治療装置の作動方法を提供することにある。
【課題を解決するための手段】
【0007】
以下に、発明を実施するための形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0008】
本発明による放射線治療装置制御装置(10)は、被検体(43)の内部の特定部位が測定時刻に配置される特定部位位置に基づいて目標位置(131)を算出する照射対象検出部(52)と、治療用放射線(23)を曝射する放射線照射装置(16)がその測定時刻より後の制御時刻に補正後目標位置(132)に向くように、放射線照射装置(16)を移動させる駆動装置(15)を制御する首振り位置制御部(54)とを備えている。補正後目標位置(132)は、その制御時刻が準備期間(96)に含まれるときに、目標位置(131)より、その制御時刻の直前に放射線照射装置(16)が向いている位置に近い位置を示している。補正後目標位置(132)は、その制御時刻が準備期間(96)の後の治療期間(97)に含まれるときに、目標位置(131)を示している。このような放射線治療装置制御装置(10)は、放射線照射装置(16)が緩やかに移動するように駆動装置(15)を制御した後に放射線照射装置(16)がその特定部位を追尾するように駆動装置(15)を制御することにより、駆動装置(15)のモータトリップを防止し、かつ、放射線照射装置(16)を高精度に移動させることができる。
【0009】
補正後目標位置(132)は、その制御時刻が準備期間(96)に含まれるときに、初期位置と目標位置(131)と結ぶ線分を内分する位置を示している。このとき、補正後目標位置(132)がその線分を内分する内分比(95)(141)は、時間の経過とともに補正後目標位置(132)が目標位置(131)に漸近するように算出されることが好ましい。
【0010】
内分比(95)が単位時間当たりに変化する変化量は、一定であることが好ましい。
【0011】
首振り位置制御部(54)は、補正後目標位置(132)と放射線照射装置(16)が向いている位置との位置偏差(88)に基づいて操作量(124)を算出する操作量算出部(121)と、位置偏差(88)に基づいて係数(125)を算出する係数演算部(122)と、操作量(124)に係数(125)を乗算して補正後操作量(89)を算出する乗算器(123)とを備えている。係数(125)は、位置偏差(88)の絶対値に関して単純に減少することが好ましい。
【0012】
首振り位置制御部(54)は、補正後目標位置(132)の変化に基づいてフィードフォワード操作量(124)を算出するフィードフォワード部をさらに備えている。このとき、駆動装置(15)は、そのフィードフォワード操作量(124)にさらに基づいて制御されることが好ましい。
【0013】
首振り位置制御部(54)は、駆動装置(15)が制御されるときに駆動装置(15)に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出する温度ドリフト補正部をさらに備えている。駆動装置(15)は、その温度ドリフト量にさらに基づいて制御されることが好ましい。
【0014】
本発明による放射線治療装置(3)の作動方法は、被検体(43)の内部の特定部位が測定時刻に配置される特定部位位置に基づいて目標位置(131)を算出するステップと、治療用放射線(23)を曝射する放射線照射装置(16)がその測定時刻より後の制御時刻に補正後目標位置(132)に向くように、放射線照射装置(16)を移動させる駆動装置(15)を制御するステップとを備えている。補正後目標位置(132)は、その制御時刻が準備期間(96)に含まれるときに、目標位置(131)より、その制御時刻の直前に放射線照射装置(16)が向いている位置に近い位置を示している。その制御時刻が準備期間(96)の後の治療期間(97)に含まれるときに、目標位置(131)を示している。このような放射線治療装置(3)の作動方法によれば、放射線治療装置制御装置(10)は、放射線照射装置(16)が緩やかに移動するように駆動装置(15)を制御した後に放射線照射装置(16)がその特定部位を追尾するように駆動装置(15)を制御することにより、駆動装置(15)のモータトリップを防止し、かつ、放射線照射装置(16)を高精度に移動させることができる。
【0015】
補正後目標位置(132)は、その制御時刻が準備期間(96)に含まれるときに、初期位置と目標位置(131)と結ぶ線分を内分する位置を示している。補正後目標位置(132)がその線分を内分する内分比(95)(141)は、時間の経過とともに補正後目標位置(132)が目標位置(131)に漸近するように算出される。
【0016】
内分比(95)が単位時間当たりに変化する変化量は、一定であることが好ましい。
【0017】
本発明による放射線治療装置(3)の作動方法は、補正後目標位置(132)と放射線照射装置(16)が向いている位置との位置偏差(88)に基づいて操作量(124)を算出するステップと、位置偏差(88)に基づいて係数(125)を算出するステップと、操作量(124)に係数(125)を乗算して補正後操作量(89)を算出するステップとをさらに備えている。係数(125)は、位置偏差(88)の絶対値に関して単純に減少する。駆動装置(15)は、補正後操作量(89)に基づいて制御されることが好ましい。
【0018】
本発明による放射線治療装置(3)の作動方法は、補正後目標位置(132)の変化に基づいてフィードフォワード操作量(124)を算出するステップをさらに備えている。このとき、駆動装置(15)は、そのフィードフォワード操作量(124)にさらに基づいて制御されることが好ましい。
【0019】
本発明による放射線治療装置(3)の作動方法は、駆動装置(15)が制御されるときに駆動装置(15)に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出するステップをさらに備えている。このとき、駆動装置(15)は、その温度ドリフト量にさらに基づいて制御されることが好ましい。
【発明の効果】
【0020】
本発明による放射線治療装置制御装置および放射線治療装置の作動方法は、治療用放射線を曝射する放射線照射装置を移動させるときに、その放射線照射装置を移動させる駆動装置のモータトリップを防止し、かつ、その放射線照射装置を高精度に移動させることができる。
【図面の簡単な説明】
【0021】
【図1】図1は、放射線治療装置を示す斜視図である。
【図2】図2は、放射線治療装置制御装置を示すブロック図である。
【図3】図3は、首振り位置制御部を示すブロック図である。
【図4】図4は、目標位置補正部により算出される係数の変化を示すグラフである。
【図5】図5は、補間指令値作成部により算出される補間指令値を示すグラフである。
【図6】図6は、D/A変換回路の入力と出力の関係を示すグラフである。
【図7】図7は、操作量算出部を示すブロック図である。
【図8】図8は、位置偏差と係数との関係を示すグラフである。
【図9】図9は、目標位置の変化と補正後目標位置の変化と補間指令値の変化とを示すグラフである。
【図10】図10は、目標位置補正部により算出される他の係数の変化を示すグラフである。
【発明を実施するための形態】
【0022】
図面を参照して、本発明による放射線治療装置制御装置の実施の形態を記載する。その放射線治療装置制御装置10は、図1に示されているように、放射線治療システムに適用されている。その放射線治療システムは、放射線治療装置制御装置10と放射線治療装置3とを備えている。放射線治療装置制御装置10は、パーソナルコンピュータに例示されるコンピュータである。放射線治療装置制御装置10と放射線治療装置3とは、双方向に情報を伝送することができるように、互いに接続されている。
【0023】
放射線治療装置3は、Oリング12と走行ガントリ14と治療用放射線照射装置16とを備えている。Oリング12は、リング状に形成され、回転軸17を中心に回転可能に基礎に支持されている。回転軸17は、鉛直方向に平行である。走行ガントリ14は、リング状に形成され、Oリング12のリングの内側に配置され、回転軸18を中心に回転可能にOリング12に支持されている。回転軸18は、鉛直方向に垂直であり、回転軸17に含まれるアイソセンタ19を通っている。回転軸18は、Oリング12に対して固定され、すなわち、Oリング12とともに回転軸17を中心に回転する。
【0024】
治療用放射線照射装置16は、走行ガントリ14のリングの内側に配置されている。治療用放射線照射装置16は、チルト軸21に回転可能に、かつ、パン軸22に回転可能に、走行ガントリ14に支持されている。パン軸22は、走行ガントリ14に対して固定され、回転軸18に交差しないで回転軸18に平行である。チルト軸21は、パン軸22に直交している。チルト軸21とパン軸22との交点は、アイソセンタ19から1mだけ離れている。
【0025】
放射線治療装置3は、さらに、旋回駆動装置11と首振り装置15とを備え、図示されていない走行駆動装置を備えている。旋回駆動装置11は、放射線治療装置制御装置10により制御されることにより、回転軸17を中心にOリング12を回転させる。旋回駆動装置11は、さらに、基礎に対してOリング12が配置される旋回角度を測定し、その旋回角度を放射線治療装置制御装置10に出力する。その走行駆動装置は、放射線治療装置制御装置10により制御されることにより、回転軸18を中心に走行ガントリ14を回転させる。その走行駆動装置は、さらに、Oリング12に対して走行ガントリ14が配置されるガントリ角度を測定し、そのガントリ角度を放射線治療装置制御装置10に出力する。
【0026】
首振り装置15は、放射線治療装置制御装置10により制御されることにより、チルト軸21を中心に治療用放射線照射装置16を回転させ、パン軸22を中心に治療用放射線照射装置16を回転させる。首振り装置15は、さらに、チルト軸21を中心に走行ガントリ14に対して治療用放射線照射装置16が回転するチルト角を測定し、そのチルト角を放射線治療装置制御装置10に出力する。首振り装置15は、さらに、パン軸22を中心に走行ガントリ14に対して治療用放射線照射装置16が回転するパン角を測定し、そのパン角を放射線治療装置制御装置10に出力する。
【0027】
治療用放射線照射装置16は、放射線治療装置制御装置10により制御されることにより、治療用放射線23を曝射する。治療用放射線23は、パン軸22とチルト軸21とが交差する交点を頂点とするコーンビームである。治療用放射線23は、一様強度分布を持つように形成されている。治療用放射線照射装置16は、マルチリーフコリメータ20を備えている。マルチリーフコリメータ20は、治療用放射線23が進行する領域に配置されるように、治療用放射線照射装置16に固定されている。マルチリーフコリメータ20は、放射線治療装置制御装置10により制御されることにより、治療用放射線23の一部を遮蔽し、治療用放射線23が患者に照射されるときの照射野の形状を変更する。
【0028】
治療用放射線23は、このように治療用放射線照射装置16が走行ガントリ14に支持されることにより、治療用放射線照射装置16がアイソセンタ19に向かうように走行ガントリ14に固定されると、旋回駆動装置11によりOリング12が回転し、または、その走行駆動装置により走行ガントリ14が回転しても、常に概ねアイソセンタ19を通る。即ち、走行・旋回を行うことで任意方向からアイソセンタ19に向けて治療用放射線23の照射が可能になる。
【0029】
放射線治療装置3は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置3は、第1診断用X線源24と第2診断用X線源25と第1センサアレイ32と第2センサアレイ33とを備えている。第1診断用X線源24は、走行ガントリ14に支持され、アイソセンタ19から第1診断用X線源24を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とのなす角が鋭角になるように、走行ガントリ14のリングの内側に配置されている。第2診断用X線源25は、走行ガントリ14に支持され、アイソセンタ19から第2診断用X線源25を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とのなす角が鋭角になるように、走行ガントリ14のリングの内側に配置されている。第2診断用X線源25は、さらに、アイソセンタ19から第1診断用X線源24を結ぶ線分とアイソセンタ19から第2診断用X線源25を結ぶ線分とのなす角が直角(90度)になるように、配置されている。第1センサアレイ32は、走行ガントリ14に支持され、アイソセンタ19を介して第1診断用X線源24に対向するように、配置されている。第2センサアレイ33は、走行ガントリ14に支持され、アイソセンタ19を介して第2診断用X線源25に対向するように、配置されている。
【0030】
第1診断用X線源24は、放射線治療装置制御装置10により制御されることにより、所定のタイミングで第1診断用X線35をアイソセンタ19に向けて曝射する。第1診断用X線35は、第1診断用X線源24が有する1点から曝射され、その1点を頂点とする円錐状のコーンビームである。第2診断用X線源25は、放射線治療装置制御装置10により制御されることにより、所定のタイミングで第2診断用X線36をアイソセンタ19に向けて曝射する。第2診断用X線36は、第2診断用X線源25が有する1点から曝射され、その1点を頂点とする円錐状のコーンビームである。
【0031】
第1センサアレイ32は、受光部を備えている。第1センサアレイ32は、放射線治療装置制御装置10により制御されることにより、その受光部に受光されるX線に基づいて第1透視画像を生成する。第2センサアレイ33は、受光部を備えている。第2センサアレイ33は、放射線治療装置制御装置10により制御されることにより、その受光部に受光されるX線に基づいて第2透視画像を生成する。その透視画像は、複数の画素から形成されている。その複数の画素は、その透視画像上にマトリクス状に配置され、それぞれ輝度に対応付けられている。その透視画像は、その複数の画素の各々に対応する輝度がその複数の画素の各々に着色されることにより、被写体を映し出している。第1センサアレイ32と第2センサアレイ33としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0032】
このようなイメージャシステムによれば、第1センサアレイ32と第2センサアレイ33とにより得た画像信号に基づき、アイソセンタ19を中心とする透視画像を生成することができる。
【0033】
放射線治療装置3は、さらに、カウチ41とカウチ駆動装置42とを備えている。カウチ41は、x軸とy軸とz軸とを中心に回転移動可能に、かつ、そのx軸とy軸とz軸とに平行に平行移動可能に基礎に支持されている。そのx軸とy軸とz軸とは、互いに直交している。カウチ41は、その放射線治療システムにより治療される患者43が横臥することに利用される。カウチ41は、図示されていない固定具を備えている。その固定具は、患者43が動かないように、患者43をカウチ41に固定する。カウチ駆動装置42は、放射線治療装置制御装置10により制御されることにより、カウチ41を回転移動させ、カウチ41を平行移動させる。
【0034】
図2は、放射線治療装置制御装置10を示している。その放射線治療装置制御装置10は、コンピュータであり、図示されていないCPUと記憶装置とリムーバルメモリドライブと通信装置と入力装置と出力装置とインターフェースとを備えている。そのCPUは、放射線治療装置制御装置10にインストールされるコンピュータプログラムを実行して、その記憶装置と入力装置と出力装置とを制御する。その記憶装置は、そのコンピュータプログラムを記録し、そのCPUに利用される情報を記録し、そのCPUにより生成される情報を記録する。そのリムーバルメモリドライブは、記録媒体が挿入されたときに、その記録媒体に記録されているデータを読み出すことに利用される。そのリムーバルメモリドライブは、特に、コンピュータプログラムが記録されている記録媒体が挿入されたときに、そのコンピュータプログラムを放射線治療装置制御装置10にインストールするときに利用される。その通信装置は、通信回線網を介して接続される他のコンピュータから配信される情報を放射線治療装置制御装置10にダウンロードする。その通信装置は、特に、他のコンピュータからコンピュータプログラムを放射線治療装置制御装置10にダウンロードし、そのコンピュータプログラムを放射線治療装置制御装置10にインストールするときに利用される。その入力装置は、ユーザに操作されることにより生成される情報をそのCPUに出力する。その入力装置としては、キーボード、マウスが例示される。その出力装置は、そのCPUにより生成された情報をユーザに認識可能に出力する。その出力装置としては、そのCPUにより生成された画像を表示するディスプレイが例示される。
【0035】
そのインターフェースは、放射線治療装置制御装置10に接続される外部機器により生成される情報をそのCPUに出力し、そのCPUにより生成された情報をその外部機器に出力する。その外部機器は、放射線治療装置3の旋回駆動装置11と走行駆動装置と首振り装置15と治療用放射線照射装置16とマルチリーフコリメータ20と第1診断用X線源24と第2診断用X線源25と第1センサアレイ32と第2センサアレイ33とカウチ駆動装置42とを含んでいる。
【0036】
放射線治療装置制御装置10にインストールされるコンピュータプログラムは、放射線治療装置制御装置10に複数の機能をそれぞれ実現させるための複数のコンピュータプログラムから形成されている。その複数の機能は、治療計画収集部51と照射対象検出部52と位置積算処理部53と首振り位置制御部54と照射部55とを含んでいる。
【0037】
治療計画収集部51は、入力装置から治療計画を収集する。その治療計画は、照射角度と線量との組み合わせを示している。その照射角度は、患者43の患部に治療用放射線23を照射する方向を示し、カウチ位置とOリング回転角とガントリ回転角とを示している。そのカウチ位置は、基礎に対するカウチ41の位置を示している。そのOリング回転角は、基礎に対するOリング12の位置を示している。そのガントリ回転角は、Oリング12に対する走行ガントリ14の位置を示している。その線量は、その照射角度から患者43に照射される治療用放射線23の線量を示している。
【0038】
照射対象検出部52は、その治療計画が示すカウチ位置にカウチ41が配置されるように、すなわち、患者43の患部が概ねアイソセンタ19に配置されるように、カウチ駆動装置42を制御する。照射対象検出部52は、さらに、その治療計画が示すOリング回転角にOリング12が配置されるように、旋回駆動装置11を制御する。照射対象検出部52は、さらに、その治療計画が示すガントリ回転角に走行ガントリ14が配置されるように、放射線治療装置3の走行駆動装置を制御する。
【0039】
照射対象検出部52は、その治療計画が示す所定の位置にカウチ41とOリング12と走行ガントリ14とが所定の位置に配置された後に、第1診断用X線35が患者43に周期的に(たとえば、50ms間隔で)曝射されるように、第1診断用X線源24を制御する。照射対象検出部52は、さらに、第1診断用X線35が曝射される複数の時刻に第2診断用X線36が患者43に周期的に曝射されるように、第2診断用X線源25を制御する。照射対象検出部52は、さらに、第1診断用X線35が患者43に曝射されたときに、患者43を透過したX線に基づいて複数の第1透過画像が生成されるように、第1センサアレイ32を制御する。照射対象検出部52は、さらに、第2診断用X線36が患者43に曝射されたときに、患者43を透過したX線に基づいて複数の第2透過画像が生成されるように、第2センサアレイ33を制御する。
【0040】
照射対象検出部52は、その複数の第1透過画像と複数の第2透過画像とに基づいて複数の特定部位位置を算出する。その複数の特定部位位置は、第1診断用X線35(第2診断用X線36)が曝射される複数の時刻に患者43の患部が配置されていた位置をそれぞれ示している。すなわち、照射対象検出部52は、その第1透過画像と第2透過画像が撮影されるごとに、その第1透過画像と第2透過画像とに基づいて患者43の患部が配置されている特定部位位置を算出する。
【0041】
照射対象検出部52は、さらに、その特定部位位置に基づいて目標位置を算出する。その目標位置は、その第1透過画像と第2透過画像が撮影された時刻から50msだけ経過した時刻に患者43の患部が配置されている位置を示している。
【0042】
位置積算処理部53は、治療用放射線照射装置16が現在時刻に向いている位置を測定するように、首振り装置15を制御する。その位置は、治療用放射線照射装置16のチルト角とパン角とから形成されている。すなわち、位置積算処理部53は、治療用放射線照射装置16のチルト角とパン角とを測定するように、首振り装置15を制御し、そのチルト角とパン角とに基づいて治療用放射線照射装置16が現在時刻に向いている位置を算出する。
【0043】
首振り位置制御部54は、照射対象検出部52により算出された目標位置に基づいて、操作量を算出する。首振り装置15は、その操作量に基づいて、治療用放射線照射装置16をパン軸22またはチルト軸21を中心に回転移動させる。このとき、首振り位置制御部54は、照射対象検出部52により複数の第1透過画像が撮影される測定周期に比較して十分に短いサンプリング周期(たとえば、5ms)でその操作量を算出する。
【0044】
照射部55は、首振り位置制御部54により治療用放射線照射装置16が向けられようとしている位置と治療用放射線照射装置16が実際に向いている位置との差が所定範囲に含まれるときに、治療用放射線23が曝射されるように、治療用放射線照射装置16を制御する。
【0045】
放射線治療装置3は、さらに、図3に示されているように、D/A変換回路61とアンプ62と温度計63とを備えている。D/A変換回路61は、放射線治療装置制御装置10により算出された操作量に対応する電圧の制御電気信号64を生成する。アンプ62は、制御電気信号64の電圧を増幅した増幅後電気信号65を出力する。D/A変換回路61とアンプ62とは、配電盤に配置されている。温度計63は、その配電盤の温度を測定し、その温度を放射線治療装置制御装置10に出力する。
【0046】
図3は、さらに、首振り位置制御部54を示している。首振り位置制御部54は、目標位置補正部67と補間指令値作成部68と加減速処理部69とスイッチ70と微分部71とフィードフォワード部72と加算器73と加算器74と操作量算出部75と温度ドリフト補正部76と加算器77とを備えている。
【0047】
目標位置補正部67は、照射対象検出部52により算出された目標位置を算出するために用いられた第1透過画像と第2透過画像とが撮影された時刻に基づいて係数を算出する。目標位置補正部67は、照射対象検出部52により算出された目標位置とその係数とに基づいて補正後目標位置81を算出する。補間指令値作成部68は、補正後目標位置81に基づいて補間指令値82を算出する。このとき、補間指令値82は、補正後目標位置81が算出される測定周期(たとえば、50ms)に比較して十分に短いサンプリング周期(たとえば、5ms)毎に算出される。
【0048】
加減速処理部69は、加減速補正後指令値83を出力する。加減速補正後指令値83は、アイソセンタ19が配置された位置を示している。
【0049】
スイッチ70は、入力装置を介して放射線治療装置制御装置10に入力される情報に基づいて指令値84を算出する。指令値84は、補間指令値82と加減速補正後指令値83とのうちの一方を示し、追尾を行うときに補間指令値82を示し、追尾を行わないときに加減速補正後指令値83を示している。
【0050】
微分部71は、指令値84に基づいて速度85を算出する。速度85は、指令値84が単位時間当たりに変化した変化量を示している。フィードフォワード部72は、速度85に基づいてフィードフォワード操作量86を算出する。
【0051】
加算器73は、位置積算処理部53により測定される位置に基づいて位置実績値87を算出する。位置実績値87は、位置積算処理部53により測定される位置に原点オフセット値が加算された値を示している。加算器74は、指令値84と位置実績値87とに基づいて位置偏差88を算出する。位置偏差88は、指令値84から位置実績値87を減算した差を示している。
【0052】
操作量算出部75は、位置偏差88に基づいて操作量89を算出する。温度ドリフト補正部76は、温度計63により測定された温度に基づいて温度ドリフト補正量90を算出する。加算器77は、フィードフォワード操作量86と操作量89と温度ドリフト補正量90とに基づいて操作量91を算出する。操作量91は、フィードフォワード操作量86と操作量89と温度ドリフト補正量90とを加算した和を示している。
【0053】
図4は、目標位置補正部67により算出される係数の変化を示している。その変化95は、その係数が算出される期間が準備期間96と治療期間97とから形成されていることを示している。準備期間96は、その係数が算出される期間のうちの分離時刻98より前の期間を示している。治療期間97は、その係数が算出される期間のうちの分離時刻98より後の期間を示している。分離時刻98は、追尾が開始した時刻から5000msだけ経過した時刻を示している。変化95は、さらに、その追尾が開始した時刻に0を示すことを示している。変化95は、さらに、準備期間96で、その経過時間に比例するように増加することを示している。変化95は、さらに、治療期間97で、1を示すことを示している。
【0054】
このとき、目標位置補正部67により算出される補正後目標位置81は、照射対象検出部52により算出された目標位置とアイソセンタ19とを結ぶ線分を内分する点の位置を示している。補正後目標位置81が示す位置がその線分を内分する内分比は、その係数に一致している。すなわち、補正後目標位置81が示す位置は、その係数が0を示すときにアイソセンタ19を示し、その係数が1を示すときに照射対象検出部52により算出された目標位置を示している。なお、その線分は、アイソセンタ19と異なる他の位置と目標位置とを結ぶ他の線分に置換することができる。アイソセンタ19と異なる他の位置としては、放射線照射装置16が追尾開始時に向いていた位置が例示される。
【0055】
図5は、補間指令値作成部68により算出される補間指令値82を示している。補間指令値82は、サンプリング周期ごとの複数の時刻に対応する複数の補間指令値から形成されている。その複数の補間指令値のうちの時刻t0に対応する補間指令値101−0は、時刻t0より測定周期(50ms)だけ前の時刻に目標位置補正部67により算出された補正後目標位置に一致している。その複数の補間指令値のうちの時刻t1に対応する補間指令値101−1は、時刻t1より測定周期(50ms)だけ前の時刻t0に目標位置補正部67により算出された補正後目標位置100−1に一致している。その複数の補間指令値のうちの時刻t2に対応する補間指令値101−2は、時刻t2より測定周期だけ前の時刻t1に目標位置補正部67により算出された補正後目標位置100−2に一致している。
【0056】
その複数の補間指令値のうちの時刻t0から時刻t1までの期間に対応する複数の補間指令値102−1は、補間指令値101−0と補間指令値101−1とを内挿するように、算出される。その複数の補間指令値のうちの時刻t1から時刻t2までの期間に対応する複数の補間指令値102−2は、補間指令値101−1と補間指令値101−2とを内挿するように、算出される。
【0057】
図6は、D/A変換回路61とアンプ62とから形成される配電盤の入力と出力の関係を示している。その関係111は、その入力に関してその出力が単純に増加していることを示し、その出力がその入力に概ね比例していることを示している。関係111は、さらに、その出力が最大値112を有していることを示し、その出力が最小値113を有していることを示している。関係111は、さらに、その入力が0を示すときにその出力が0と異なる値114を示すことを示し、その出力が0を示すときにその入力が0と異なる値115を示すことを示している。値114と値115とは、その配電盤の温度により変化する。
【0058】
このとき、温度ドリフト補正部76は、配電盤の温度に基づいて値115がどのように変化するかを記憶装置に記録し、温度計63により測定された配電盤の温度に基づいて、操作量89とフィードフォワード操作量86との和が0と示すときに、制御電気信号64の電圧が0Vを示すように、温度ドリフト補正量90を算出する。すなわち、温度ドリフト補正量90は、温度計63により測定された配電盤の温度に対応する値115に−1を乗算した値を示している。このような制御によれば、放射線治療装置制御装置10は、操作量89とフィードフォワード操作量86との和が0を示すときに、または指定したある値以下の値を示すときに、すなわち、首振り装置15を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0059】
図7は、操作量算出部75を示している。操作量算出部75は、操作量算出部本体121と係数演算部122と乗算器123とを備えている。操作量算出部本体121は、位置偏差88に基づいて補正前操作量124を算出する。このような算出は、周知のものが適用される。係数演算部122は、位置偏差88に基づいて係数125を算出する。乗算器123は、補正前操作量124と係数125とに基づいて操作量算出部75の出力である操作量89を算出する。操作量89は、補正前操作量124に係数125を乗算した積を示している。
【0060】
図8は、位置偏差88と係数125との関係を示している。その関係126は、位置偏差88の絶対値に関して、係数125が単純に減少していることを示している。関係126は、さらに、位置偏差88の絶対値が値e1以下であるときに、係数125が1を示すことを示している。関係126は、さらに、位置偏差88の絶対値が値e1以上であり、かつ、値e2以下であるときに、係数125が、位置偏差88の増加と共に、減少していることを示している。関係126は、さらに、位置偏差88の絶対値が値e2以上であるときに、係数125が値c1を示すことを示している。値c1は、首振り装置15により生成される駆動力が、放射線照射装置16が回転する静止摩擦より大きくなるように、設定される。
【0061】
このような係数125によれば、位置偏差88が大きいときに、操作量89が大きくなり過ぎない。このため、放射線治療装置制御装置10は、位置偏差88が大きいときに、首振り装置15を用いて治療用放射線照射装置16をより安定して移動させることができる。このため、放射線治療装置制御装置10は、首振り装置15が補正前操作量124に基づいて制御される既存の放射線治療装置制御装置に比較して、位置偏差88が大きいときに、操作量89を小さくすることができ、首振り装置15を用いて放射線照射装置16を安定して回転させることができ、首振り装置15をより高精度に制御することができる。
【0062】
本発明による放射線治療装置の作動方法は、放射線治療装置制御装置10により実行される。ユーザは、まず、入力装置を介して、事前に作成された治療計画を放射線治療装置制御装置10に入力する。その治療計画は、照射角度と線量との組み合わせを示している。その照射角度は、患者43の患部に治療用放射線23を照射する方向を示し、カウチ位置とOリング回転角とガントリ回転角とを示している。そのカウチ位置は、基礎に対するカウチ41の位置と向きとを示している。そのOリング回転角は、基礎に対するOリング12の位置を示している。そのガントリ回転角は、Oリング12に対する走行ガントリ14の位置を示している。その線量は、その各照射角度から患者43に照射される治療用放射線23の線量を示している。
【0063】
ユーザは、放射線治療装置3のカウチ41に患者43を固定する。放射線治療装置制御装置10は、その治療計画が示すカウチ位置にカウチ41が配置されるように、カウチ駆動装置42を制御する。放射線治療装置制御装置10は、さらに、その治療計画が示すOリング回転角にOリング12が配置されるように、旋回駆動装置11を制御する。放射線治療装置制御装置10は、さらに、その治療計画が示すガントリ回転角に走行ガントリ14が配置されるように、放射線治療装置3の走行駆動装置を制御する。
【0064】
放射線治療装置制御装置10は、その治療計画が示す所定の位置にカウチ41とOリング12と走行ガントリ14とが所定の位置に配置された後に、第1診断用X線35が患者43に周期的に(たとえば、50ms間隔で)曝射されるように、第1診断用X線源24を制御する。放射線治療装置制御装置10は、さらに、第1診断用X線35が曝射される複数の時刻に第2診断用X線36が患者43に周期的に曝射されるように、第2診断用X線源25を制御する。放射線治療装置制御装置10は、さらに、第1診断用X線35が患者43に曝射されたときに、患者43を透過したX線に基づいて複数の第1透過画像が生成されるように、第1センサアレイ32を制御する。放射線治療装置制御装置10は、さらに、第2診断用X線36が患者43に曝射されたときに、患者43を透過したX線に基づいて複数の第2透過画像が生成されるように、第2センサアレイ33を制御する。
【0065】
放射線治療装置制御装置10は、時刻t0に撮影された第1透過画像と第2透過画像とに基づいて特定部位位置を算出する。その特定部位位置は、時刻t0に患者43の患部が配置されていた位置を示している。放射線治療装置制御装置10は、さらに、その特定部位位置に基づいて目標位置を算出する。その目標位置は、時刻t0から50msだけ経過した時刻t1に患者43の患部が配置されている位置を示している。放射線治療装置制御装置10は、図4の変化95に一致するように、時刻t0に基づいて係数を算出する。放射線治療装置制御装置10は、図5に示されているように、その目標位置とその係数とに基づいて補正後目標位置100−1を算出する。補正後目標位置81は、その目標位置とアイソセンタ19とを結ぶ線分を、その係数が示す比で内分する点の位置を示している。放射線治療装置制御装置10は、補正後目標位置100−1に基づいて補間指令値101−1と複数の補間指令値102−1とを算出する。
【0066】
放射線治療装置制御装置10は、その補間指令値が単位時間当たりに変化した変化量に基づいてフィードフォワード操作量86を算出する。
【0067】
放射線治療装置制御装置10は、首振り装置15により測定される位置とその補間指令値との位置偏差88に基づいて補正前操作量124を算出する。放射線治療装置制御装置10は、さらに、図8の関係126に一致するように、係数125を算出する。放射線治療装置制御装置10は、補正前操作量124に係数125を乗算した積を示す操作量89を算出する。
【0068】
放射線治療装置制御装置10は、温度計63により測定された温度に基づいて温度ドリフト補正量90を算出する。
【0069】
放射線治療装置制御装置10は、フィードフォワード操作量86と操作量89と温度ドリフト補正量90とに基づいて操作量91を算出する。D/A変換回路61は、操作量91に対応する電圧の制御電気信号64を生成する。アンプ62は、制御電気信号64の電圧を増幅した増幅後電気信号65を出力する。D/A変換回路61とアンプ62とは、配電盤に配置されている。首振り装置15は、増幅後電気信号65が供給されることにより、パン軸22を中心に放射線照射装置16を回転させ、チルト軸21を中心に放射線照射装置16を回転させる。
【0070】
放射線治療装置制御装置10は、現在時刻が準備期間96に含まれるときに、治療用放射線23が曝射されないように、治療用放射線照射装置16を制御する。放射線治療装置制御装置10は、現在時刻が治療期間97に含まれるときに、その補間指令値が示す位置と治療用放射線照射装置16が現在時刻に向いている位置との差が所定範囲に含まれるときに、治療用放射線23が曝射されるように、治療用放射線照射装置16を制御する。放射線治療装置制御装置10は、その補間指令値と治療用放射線照射装置16が現在時刻に向いている位置との差が所定範囲に含まれないときに、治療用放射線23が曝射されないように、治療用放射線照射装置16を制御する。放射線治療装置制御装置10は、その補間指令値が算出されるサンプリング周期で、治療用放射線照射装置16を繰り返し制御する。
【0071】
図9は、患者43の患部が配置されていた位置に基づいて算出された目標位置の変化を示している。その変化131は、その目標位置が測定周期(50ms)毎に算出されることを示している。図9は、さらに、その目標位置に基づいて算出される補正後目標位置の変化を示している。その変化132は、その補正後目標位置が準備期間96で緩やかに変化し、その補正後目標位置が治療期間97でその目標位置に一致することを示している。図9は、さらに、その補正後目標位置に基づいて算出される補間指令値の変化を示している。その変化133は、その目標位置が算出される測定周期(50ms)より短い周期でその補間指令値が算出されることを示している。変化133は、さらに、その補間指令値が準備期間96で緩やかに変化することを示している。変化133は、さらに、その目標位置が治療期間97でその補間指令値に一致することを示している。
【0072】
患者43の患部だけに治療用放射線23を曝射するには、より短い時間で放射線照射装置16を患者43の患部へ正確に向ける必要があり、首振り動作には、高応答性が求められる。これを実現するため、一般的に、制御ゲインを大きくしている。しかし、制御ゲインが大きいと、追尾動作開始時に放射線照射装置16の現在位置と目標位置が大きく離れている場合に、首振り装置15のモータに過負荷がかかりトリップする可能性がある。本発明による放射線治療装置の作動方法によれば、放射線治療装置制御装置10は、治療用放射線照射装置16が初期にアイソセンタ19を向いていた場合に、準備期間96に治療用放射線照射装置16が急激に移動するように、制御されることがない。このため、放射線治療装置制御装置10は、制御ゲインを大きくすることにより応答性を向上させた状態であっても、準備期間96に首振り装置15がモータトリップすることが防止される。
【0073】
操作量89は、係数125が図8の関係126に示されているように変化するために、位置偏差88が大きいときに、操作量89が大きくなり過ぎない。このため、放射線治療装置制御装置10は、位置偏差88が大きいときに、首振り装置15を用いて放射線照射装置16をより安定して移動させることができる。このため、放射線治療装置制御装置10は、係数演算部122と乗算器123とを備えない周知の既存の放射線治療装置制御装置に比較して、首振り装置15を用いて放射線照射装置16を安定して回転させることができ、首振り装置15をより高精度に制御することができる。
【0074】
本発明による放射線治療装置の作動方法では、放射線治療装置制御装置10は、さらに、温度計63により測定された配電盤の温度に基づいて温度ドリフト補正量90を算出する。このような温度ドリフト補正量90によれば、放射線治療装置制御装置10は、首振り装置15を駆動する必要がないときに、より確実に駆動させないように制御することができる。
【0075】
目標位置補正部67により算出される係数は、既述の形態における変化95と異なる変化に置換されることができる。その係数は、その追尾が開始した時刻に0を示し、準備期間96でその経過時間に関して単純に増加し、治療期間97で1を示していればよい。図10は、その変化の例を示している。その変化141は、準備期間96が第1期間142と第2期間143とから形成されていることを示している。第1期間142は、準備期間96のうちの分離時刻144より前の期間を示している。第2期間143は、準備期間96のうちの分離時刻144より後の期間を示している。分離時刻144は、準備期間96属する任意の時刻である。変化141は、その追尾が開始した時刻に0を示すことを示している。変化141は、さらに、第1期間142で、下に凸に単純に増加することを示している。変化141は、さらに、第2期間143で、上に凸に単純に増加することを示している。変化141は、さらに、治療期間97で、1を示すことを示している。放射線治療装置制御装置10は、このような変化141が適用された場合でも、既述の実施の形態と同様にして、制御ゲインを大きくすることにより応答性を向上させた状態で準備期間96に首振り装置15がモータトリップすることを防止することができる。
【0076】
なお、放射線治療装置制御装置10は、放射線治療装置3のイメージャシステムと異なる他のセンサに基づいて算出される特定部位位置に基づいて目標位置を算出することもできる。そのセンサとしては、赤外線カメラが例示される。このとき、放射線治療装置制御装置10は、患者43の体表面に配置されたマーカがその赤外線カメラにより撮影された赤外線画像に映し出される位置に基づいて患者43の患部の位置を算出し、その位置に基づいてその目標位置を算出する。放射線治療装置制御装置10は、このようなセンサが適用された場合でも、既述の実施の形態と同様にして、制御ゲインを大きくすることにより応答性を向上させた状態で準備期間96に首振り装置15がモータトリップすることを防止することができる。
【符号の説明】
【0077】
3 :放射線治療装置
10:放射線治療装置制御装置
11:旋回駆動装置
12:Oリング
14:走行ガントリ
15:首振り装置
16:放射線照射装置
17:回転軸
18:回転軸
19:アイソセンタ
20:マルチリーフコリメータ
21:チルト軸
22:パン軸
23:治療用放射線
24:第1診断用X線源
25:第2診断用X線源
32:第1センサアレイ
33:第2センサアレイ
35:第1診断用X線
36:第2診断用X線
41:カウチ
42:カウチ駆動装置
43:患者
51:治療計画収集部
52:照射対象検出部
53:位置積算処理部
54:首振り位置制御部
55:照射部
61:D/A変換回路
62:アンプ
63:温度計
64:制御電気信号
65:増幅後電気信号
67:目標位置補正部
68:補間指令値作成部
69:加減速処理部
70:スイッチ
71:微分部
72:フィードフォワード部
73:加算器
74:加算器
75:操作量算出部
76:温度ドリフト補正部
77:加算器
81:補正後目標位置
82:補間指令値
83:加減速補正後指令値
84:指令値
85:速度
86:フィードフォワード操作量
87:位置実績値
88:位置偏差
89:操作量
90:温度ドリフト補正量
91:操作量
95:変化
96:準備期間
97:治療期間
98:分離時刻
100−1〜100−2:補正後目標位置
101−0〜101−2:補間指令値
102−1〜102−2:補間指令値
111:関係
112:最大値
113:最小値
114:値
115:値
121:操作量算出部本体
122:係数演算部
123:乗算器
124:補正前操作量
125:係数
126:関係
131:変化
132:変化
133:変化
141:変化
142:第1期間
143:第2期間
144:分離時刻
【特許請求の範囲】
【請求項1】
被検体の内部の特定部位が測定時刻に配置される特定部位位置に基づいて目標位置を算出する照射対象検出部と、
治療用放射線を曝射する放射線照射装置が前記測定時刻より後の制御時刻に補正後目標位置に向くように、前記放射線照射装置を移動させる駆動装置を制御する首振り位置制御部とを具備し、
前記補正後目標位置は、
前記制御時刻が準備期間に含まれるときに、前記目標位置より、前記制御時刻の直前に前記放射線照射装置が向いている位置に近い位置を示し、
前記制御時刻が前記準備期間の後の治療期間に含まれるときに、前記目標位置を示す
放射線治療装置制御装置。
【請求項2】
請求項1において、
前記補正後目標位置は、前記制御時刻が前記準備期間に含まれるときに、初期位置と前記目標位置と結ぶ線分を内分する位置を示し、
前記補正後目標位置が前記線分を内分する内分比は、時間の経過とともに前記補正後目標位置が前記目標位置に漸近するように算出される
放射線治療装置制御装置。
【請求項3】
請求項2において、
前記内分比が単位時間当たりに変化する変化量は、一定である
放射線治療装置制御装置。
【請求項4】
請求項1〜請求項3のいずれかにおいて、
前記首振り位置制御部は、
前記補正後目標位置と前記放射線照射装置が向いている位置との位置偏差に基づいて操作量を算出する操作量算出部と、
前記位置偏差に基づいて係数を算出する係数演算部と、
前記操作量に前記係数を乗算して補正後操作量を算出する乗算器とを備え、
前記係数は、前記位置偏差の絶対値に関して単純に減少し、
前記駆動装置は、前記補正後操作量に基づいて制御される
放射線治療装置制御装置。
【請求項5】
請求項4において、
前記首振り位置制御部は、前記補正後目標位置の変化に基づいてフィードフォワード操作量を算出するフィードフォワード部をさらに備え、
前記駆動装置は、前記フィードフォワード操作量にさらに基づいて制御される
放射線治療装置制御装置。
【請求項6】
請求項4または請求項5のいずれかにおいて、
前記首振り位置制御部は、前記駆動装置が制御されるときに前記駆動装置に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出する温度ドリフト補正部をさらに備え、
前記駆動装置は、前記温度ドリフト量にさらに基づいて制御される
放射線治療装置制御装置。
【請求項7】
被検体の内部の特定部位が測定時刻に配置される特定部位位置に基づいて目標位置を算出するステップと、
治療用放射線を曝射する放射線照射装置が前記測定時刻より後の制御時刻に補正後目標位置に向くように、前記放射線照射装置を移動させる駆動装置を制御するステップとを具備し、
前記補正後目標位置は、
前記制御時刻が準備期間に含まれるときに、前記目標位置より、前記制御時刻の直前に前記放射線照射装置が向いている位置に近い位置を示し、
前記制御時刻が前記準備期間の後の治療期間に含まれるときに、前記目標位置を示す
放射線治療装置の作動方法。
【請求項8】
請求項7において、
前記補正後目標位置は、前記制御時刻が前記準備期間に含まれるときに、初期位置と前記目標位置と結ぶ線分を内分する位置を示し、
前記補正後目標位置が前記線分を内分する内分比は、時間の経過とともに前記補正後目標位置が前記目標位置に漸近するように算出される
放射線治療装置の作動方法。
【請求項9】
請求項8において、
前記内分比が単位時間当たりに変化する変化量は、一定である
放射線治療装置の作動方法。
【請求項10】
請求項7〜請求項9のいずれかにおいて、
前記補正後目標位置と前記放射線照射装置が向いている位置との位置偏差に基づいて操作量を算出するステップと、
前記位置偏差に基づいて係数を算出するステップと、
前記操作量に前記係数を乗算して補正後操作量を算出するステップとをさらに具備し、
前記係数は、前記位置偏差の絶対値に関して単純に減少し、
前記駆動装置は、前記補正後操作量に基づいて制御される
放射線治療装置の作動方法。
【請求項11】
請求項10において、
前記補正後目標位置の変化に基づいてフィードフォワード操作量を算出するステップをさらに具備し、
前記駆動装置は、前記フィードフォワード操作量にさらに基づいて制御される
放射線治療装置の作動方法。
【請求項12】
請求項10または請求項11のいずれかにおいて、
前記駆動装置が制御されるときに前記駆動装置に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出するステップをさらに具備し、
前記駆動装置は、前記温度ドリフト量にさらに基づいて制御される
放射線治療装置の作動方法。
【請求項1】
被検体の内部の特定部位が測定時刻に配置される特定部位位置に基づいて目標位置を算出する照射対象検出部と、
治療用放射線を曝射する放射線照射装置が前記測定時刻より後の制御時刻に補正後目標位置に向くように、前記放射線照射装置を移動させる駆動装置を制御する首振り位置制御部とを具備し、
前記補正後目標位置は、
前記制御時刻が準備期間に含まれるときに、前記目標位置より、前記制御時刻の直前に前記放射線照射装置が向いている位置に近い位置を示し、
前記制御時刻が前記準備期間の後の治療期間に含まれるときに、前記目標位置を示す
放射線治療装置制御装置。
【請求項2】
請求項1において、
前記補正後目標位置は、前記制御時刻が前記準備期間に含まれるときに、初期位置と前記目標位置と結ぶ線分を内分する位置を示し、
前記補正後目標位置が前記線分を内分する内分比は、時間の経過とともに前記補正後目標位置が前記目標位置に漸近するように算出される
放射線治療装置制御装置。
【請求項3】
請求項2において、
前記内分比が単位時間当たりに変化する変化量は、一定である
放射線治療装置制御装置。
【請求項4】
請求項1〜請求項3のいずれかにおいて、
前記首振り位置制御部は、
前記補正後目標位置と前記放射線照射装置が向いている位置との位置偏差に基づいて操作量を算出する操作量算出部と、
前記位置偏差に基づいて係数を算出する係数演算部と、
前記操作量に前記係数を乗算して補正後操作量を算出する乗算器とを備え、
前記係数は、前記位置偏差の絶対値に関して単純に減少し、
前記駆動装置は、前記補正後操作量に基づいて制御される
放射線治療装置制御装置。
【請求項5】
請求項4において、
前記首振り位置制御部は、前記補正後目標位置の変化に基づいてフィードフォワード操作量を算出するフィードフォワード部をさらに備え、
前記駆動装置は、前記フィードフォワード操作量にさらに基づいて制御される
放射線治療装置制御装置。
【請求項6】
請求項4または請求項5のいずれかにおいて、
前記首振り位置制御部は、前記駆動装置が制御されるときに前記駆動装置に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出する温度ドリフト補正部をさらに備え、
前記駆動装置は、前記温度ドリフト量にさらに基づいて制御される
放射線治療装置制御装置。
【請求項7】
被検体の内部の特定部位が測定時刻に配置される特定部位位置に基づいて目標位置を算出するステップと、
治療用放射線を曝射する放射線照射装置が前記測定時刻より後の制御時刻に補正後目標位置に向くように、前記放射線照射装置を移動させる駆動装置を制御するステップとを具備し、
前記補正後目標位置は、
前記制御時刻が準備期間に含まれるときに、前記目標位置より、前記制御時刻の直前に前記放射線照射装置が向いている位置に近い位置を示し、
前記制御時刻が前記準備期間の後の治療期間に含まれるときに、前記目標位置を示す
放射線治療装置の作動方法。
【請求項8】
請求項7において、
前記補正後目標位置は、前記制御時刻が前記準備期間に含まれるときに、初期位置と前記目標位置と結ぶ線分を内分する位置を示し、
前記補正後目標位置が前記線分を内分する内分比は、時間の経過とともに前記補正後目標位置が前記目標位置に漸近するように算出される
放射線治療装置の作動方法。
【請求項9】
請求項8において、
前記内分比が単位時間当たりに変化する変化量は、一定である
放射線治療装置の作動方法。
【請求項10】
請求項7〜請求項9のいずれかにおいて、
前記補正後目標位置と前記放射線照射装置が向いている位置との位置偏差に基づいて操作量を算出するステップと、
前記位置偏差に基づいて係数を算出するステップと、
前記操作量に前記係数を乗算して補正後操作量を算出するステップとをさらに具備し、
前記係数は、前記位置偏差の絶対値に関して単純に減少し、
前記駆動装置は、前記補正後操作量に基づいて制御される
放射線治療装置の作動方法。
【請求項11】
請求項10において、
前記補正後目標位置の変化に基づいてフィードフォワード操作量を算出するステップをさらに具備し、
前記駆動装置は、前記フィードフォワード操作量にさらに基づいて制御される
放射線治療装置の作動方法。
【請求項12】
請求項10または請求項11のいずれかにおいて、
前記駆動装置が制御されるときに前記駆動装置に供給される電気信号を生成する装置の温度に基づいて温度ドリフト量を算出するステップをさらに具備し、
前記駆動装置は、前記温度ドリフト量にさらに基づいて制御される
放射線治療装置の作動方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−167307(P2011−167307A)
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願番号】特願2010−32853(P2010−32853)
【出願日】平成22年2月17日(2010.2.17)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願日】平成22年2月17日(2010.2.17)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]