
放射線治療装置制御装置および放射線治療装置制御方法
【課題】被検体の不快感を軽減すること。
【解決手段】患者が計画時に配置される計画時位置を収集するステップ(S1)と、患者が位置合わせ時に配置される位置合わせ時位置を収集するステップ(S2)と、リングがリング角度からリング角度オフセット値だけずれて配置され、ガントリがガントリ角度からガントリ角度オフセット値だけずれて配置されたときに、治療時位置に対して照射ヘッドが配置される向きが、リングがリング角度に配置され、ガントリがガントリ角度に配置されたときに、計画時位置に対して照射ヘッドが配置される向きに一致するように、治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出するステップ(S3)と、患者を患者位置に配置するステップ(S5)とを備えている。このとき、患者を位置合わせ時位置から治療時位置まで移動させるときの回転移動量を低減するように、患者位置を算出することができる。
【解決手段】患者が計画時に配置される計画時位置を収集するステップ(S1)と、患者が位置合わせ時に配置される位置合わせ時位置を収集するステップ(S2)と、リングがリング角度からリング角度オフセット値だけずれて配置され、ガントリがガントリ角度からガントリ角度オフセット値だけずれて配置されたときに、治療時位置に対して照射ヘッドが配置される向きが、リングがリング角度に配置され、ガントリがガントリ角度に配置されたときに、計画時位置に対して照射ヘッドが配置される向きに一致するように、治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出するステップ(S3)と、患者を患者位置に配置するステップ(S5)とを備えている。このとき、患者を位置合わせ時位置から治療時位置まで移動させるときの回転移動量を低減するように、患者位置を算出することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、放射線治療装置制御方法および放射線治療装置制御装置に関し、特に、人体内部の腫瘍患部を放射線治療するときに利用される放射線治療装置制御方法および放射線治療装置制御装置に関する。
【背景技術】
【0002】
腫瘍患部に治療用放射線を曝射することにより患者を治療する放射線治療が知られている。その放射線治療を実行する放射線治療装置は、カウチに横臥する患者のX線画像を撮像するイメージャシステムと、その患者に治療用放射線を曝射する治療用放射線照射装置とを備えている。その放射線治療装置は、事前に撮影された患者のCT画像とそのイメージャシステムにより直前に撮影されたその患者のX線画像とに基づいてその患者の患部が所定の位置に配置されるようにそのカウチが位置調整された後に、その治療用放射線照射装置によりその患部に治療用放射線を曝射する。患者を位置合わせするときに、その患者の不快感を軽減することが望まれている。
【0003】
特開2006−51215号公報には、患部の位置合わせが正確に行われる放射線治療装置用の治療台が開示されている。その放射線治療装置用治療台は、支持台と、前記支持台の上部に取り付けられ、鉛直方向から見たときに前記支持台との重なりが最も大きい第1位置と前記支持台との重なりが最も小さい第2位置とに配置されることが可能な天板とを具備し、前記天板の上に患者が載せられたときの前記天板の撓みの大きさは、前記第1位置と前記第2位置とで同じである。
【0004】
米国特許第7373676号明細書には、患者を位置合わせするための患者支持装置が開示されている。その患者支持装置は、互いに垂直である3軸に平行に平行移動することができ、かつ、その3軸を中心に回転移動することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−51215号公報
【特許文献2】米国特許第7373676号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、患者を位置合わせするときに、その患者の不快感を軽減する放射線治療装置制御装置および放射線治療装置制御方法を提供することにある。
本発明の他の課題は、患者を位置合わせするときに、その患者の負荷を軽減する放射線治療装置制御装置および放射線治療装置制御方法を提供することにある。
本発明のさらに他の課題は、患者が放射線治療するときに、その患者が乗るカウチを低床化する放射線治療装置制御装置および放射線治療装置制御方法を提供することにある。
【課題を解決するための手段】
【0007】
以下に、発明を実施するための形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0008】
本発明による放射線治療装置制御装置(10)は、計画時位置データ収集部(62)と位置合わせ時位置データ収集部(63)と補正量算出部(64)と治療計画収集部(61)と照射ヘッド駆動部(66)とを備えている。計画時位置データ収集部(62)は、被検体(35)が計画時に配置される計画時位置を示している計画時位置データを収集する。位置合わせ時位置データ収集部(63)は、被検体(35)がその計画時と異なる位置合わせ時に配置される位置合わせ時位置を示している位置合わせ時3次元データを測定する。補正量算出部(64)は、その計画時位置データとその位置合わせ時3次元データとに基づいて治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出する。治療計画収集部(61)は、基礎に対して回転可能に支持されるリング(2)に対して回転可能に支持されるガントリ(3)に支持される照射ヘッド(6)がその計画時位置に対して配置される曝射方向を収集する。その曝射方向は、ガントリ角度とリング角度とを示している。照射ヘッド駆動部(66)は、その基礎に対してリング(2)が補正後リング角度に配置されるように、かつ、リング(2)に対してガントリ(3)が補正後ガントリ角度に配置されるように、リング(2)とガントリ(3)とを移動させる照射ヘッド駆動装置(21)をその曝射方向に基づいて制御する。その補正後リング角度は、そのリング角度からそのリング角度オフセット値を減算した差を示している。その補正後ガントリ角度は、ガントリ角度からガントリ角度オフセット値を減算した差を示している。ガントリ角度オフセット値とそのリング角度オフセット値とは、その基礎に対してリング(2)がその補正後リング角度に配置され、リング(2)に対してガントリ(3)がその補正後ガントリ角度に配置されたときに、照射ヘッド(6)がその治療時位置に対してその曝射方向に配置されるように、算出される。
【0009】
このような放射線治療装置制御装置(10)は、被検体(35)を位置合わせ時位置から治療時位置まで移動させるときに被検体(35)を回転移動させる回転移動量を低減するように、または、その治療時位置が所定の範囲に含まれるように、その治療時位置を算出することができる。このため、このような放射線治療装置制御装置(10)は、被検体(35)を位置合わせ時位置からその治療時位置まで移動させるときに、または、被検体(35)が治療時位置に配置されるときに、被検体(35)の不快感を軽減することができる。
【0010】
本発明による放射線治療装置制御装置(10)は、被検体(35)がその治療時位置に配置され、かつ、その基礎に対してリング(2)がその補正後リング角度に配置され、かつ、リング(2)に対してガントリ(3)がその補正後ガントリ角度に配置された後に、照射ヘッド(6)から被検体(35)に治療用放射線(24)が曝射されるように照射ヘッド(6)を制御する照射部(67)をさらに備えていることが好ましい。
【0011】
本発明による放射線治療装置制御装置(10)は、被検体(35)がその位置合わせ時位置からその治療時位置に移動するように、被検体(35)を移動させるカウチ駆動装置(35)を制御するカウチ駆動部(65)をさらに備えていることが好ましい。
【0012】
その位置合わせ時位置からその治療時位置までの被検体(35)の移動は、その基礎に対して固定された方向に平行である回転軸(51)を中心に回転する回転移動と、その基礎に対する平行移動とから形成されている。すなわち、その治療時位置は、その位置合わせ時位置からその治療時位置までの被検体(35)の移動が、その基礎に対して固定された方向に平行である回転軸を中心に回転する回転移動と、その基礎に対する平行移動とから形成されるように、算出される。このような放射線治療装置制御装置(10)によれば、被検体(35)を支持するカウチを移動させるカウチ駆動装置(35)は、1つの回転軸のみを中心に回転させるように形成されることができ、複数の回転軸を中心に回転させることができる機構を備えている他のカウチ駆動装置(35)に比較して、より安価に、よりコンパクトに形成されることができる。このとき、そのカウチは、より低床化されることができ、被検体(35)がカウチに乗るときの被検体(35)の負荷を低減することができる。
【0013】
カウチ駆動装置(35)は、その基礎に対して平行移動可能に支持される第1フレーム(41)と、第1フレーム(41)に対して第1回転軸(51)を中心に回転可能に支持される第2フレームと、第1フレーム(41)に対して第1方向(52)に平行にガイド(45)を平行移動させる回転移動用駆動装置(49)と、第1方向(52)と平行でない第2方向に平行に平行移動可能にガイド(45)に支持されるスライダと、その基礎に対してその第2フレームを平行移動させる平行移動用駆動装置とを備えている。このとき、そのスライダは、第1回転軸(51)と異なる第2回転軸(53)を中心に回転可能にその第2フレームに支持されている。
【0014】
その位置合わせ時3次元データは、ガントリ(3)に支持されるイメージャシステム(25、26、27、28)により撮影された透視画像を示していることが好ましい。
【0015】
その計画時位置データは、イメージャシステム(25、26、27、28)と別個である他のモダリティ(20)により測定された3次元データを示していることが好ましい。
【0016】
その治療時位置は、その補正後リング角度がそのリング角度に一致するように、算出されることが好ましい。または、その治療時位置は、その補正後ガントリ角度がガントリ角度に一致するように、算出されることが好ましい。
【0017】
本発明による放射線治療装置制御方法は、被検体(35)が計画時に配置される計画時位置を示している計画時位置データを収集するステップと、被検体(35)がその計画時と異なる位置合わせ時に配置される位置合わせ時位置を示している位置合わせ時3次元データを収集するステップと、その計画時位置データとその位置合わせ時3次元データとに基づいて治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出するステップと、基礎に対して回転可能に支持されるリング(2)に対して回転可能に支持されるガントリ(3)に支持される照射ヘッド(6)がその計画時位置に対して配置される曝射方向を収集するステップと、その基礎に対してリング(2)が補正後リング角度に配置されるように、かつ、リング(2)に対してガントリ(3)が補正後ガントリ角度に配置されるように、リング(2)とガントリ(3)とを移動させるステップとを備えている。その曝射方向は、ガントリ角度とリング角度とを示している。その補正後リング角度は、そのリング角度からそのリング角度オフセット値を減算した差を示している。その補正後ガントリ角度は、ガントリ角度からガントリ角度オフセット値を減算した差を示している。ガントリ角度オフセット値とそのリング角度オフセット値とは、その基礎に対してリング(2)がその補正後リング角度に配置され、リング(2)に対してガントリ(3)がその補正後ガントリ角度に配置されたときに、照射ヘッド(6)がその治療時位置に対してその曝射方向に配置されるように、算出される。このような放射線治療装置制御方法は、被検体(35)を位置合わせ時位置から治療時位置まで移動させるときに被検体(35)を回転移動させる回転移動量を低減するように、または、その治療時位置が所定の範囲に含まれるように、その治療時位置を算出することができる。このため、このような放射線治療装置制御方法は、被検体(35)を位置合わせ時位置からその治療時位置まで移動させるときに、または、被検体(35)が治療時位置に配置されるときに、被検体(35)の不快感を軽減することができる。
【0018】
その位置合わせ時位置からその治療時位置までの被検体(35)の移動は、その基礎に対して固定された方向に平行である回転軸(51)を中心に回転する回転移動と、その基礎に対する平行移動とから形成されている。すなわち、その治療時位置は、その位置合わせ時位置からその治療時位置までの被検体(35)の移動が、その基礎に対して固定された方向に平行である回転軸を中心に回転する回転移動と、その基礎に対する平行移動とから形成されるように、算出される。このような放射線治療装置制御方法によれば、被検体(35)を支持するカウチを移動させるカウチ駆動装置(35)は、1つの回転軸のみを中心に回転させるように形成されることができ、複数の回転軸を中心に回転させることができる機構を備えている他のカウチ駆動装置(35)に比較して、より安価に、よりコンパクトに形成されることができる。その結果、このような放射線治療装置制御方法によれば、そのカウチは、より低床化されることができ、被検体(35)がカウチに乗るときの被検体(35)の負荷を低減することができる。
【0019】
その位置合わせ時3次元データは、ガントリ(3)に支持されるイメージャシステム(25、26、27、28)により撮影された透視画像を示していることが好ましい。
【0020】
その計画時位置データは、イメージャシステム(25、26、27、28)と別個である他のモダリティ(20)により測定された3次元データを示していることが好ましい。
【0021】
その治療時位置は、その補正後リング角度がそのリング角度に一致するように、算出されることが好ましい。または、その治療時位置は、その補正後ガントリ角度がガントリ角度に一致するように、算出されることが好ましい。
【0022】
本発明によるコンピュータプログラムは、本発明による放射線治療装置制御方法をコンピュータに実行させることが好ましい。
【発明の効果】
【0023】
本発明による放射線治療装置制御装置および放射線治療装置制御方法は、被検体を位置合わせするときに、その被検体を回転移動させる回転移動量を低減することができ、または、その被検体を所定の向きに配置することができる。
【図面の簡単な説明】
【0024】
【図1】図1は、放射線治療システムを示すブロック図である。
【図2】図2は、放射線治療装置を示す斜視図である。
【図3】図3は、カウチ駆動装置を示す平面図である。
【図4】図4は、カウチ駆動装置の他の状態を示す平面図である。
【図5】図5は、カウチ駆動装置のさらに他の状態を示す平面図である。
【図6】図6は、放射線治療装置制御装置を示すブロック図である。
【図7】図7は、患者を位置合わせする動作を示すフローチャートである。
【発明を実施するための形態】
【0025】
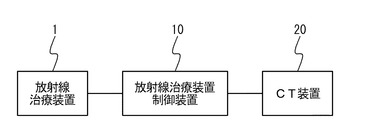
図面を参照して、本発明による放射線治療装置制御装置の実施の形態を記載する。その放射線治療装置制御装置10は、図1に示されているように、放射線治療システムに適用されている。その放射線治療システムは、放射線治療装置1と放射線治療装置制御装置10とコンピュータ断層撮影装置20とを備えている。放射線治療装置制御装置10は、双方向に情報を伝送することができるように、放射線治療装置1とコンピュータ断層撮影装置20とに接続されている。
【0026】
コンピュータ断層撮影装置20は、各方向からX線を被写体に曝射させて複数の透視画像を撮影し、その複数の透視画像をコンピュータで画像処理してその被写体の断面の画像を生成し、その複数の透視画像をコンピュータで画像処理してその被写体の内部の状態を示す3次元データを生成する。その3次元データは、その被写体を形成する複数の部位のX線が吸収される程度を示している。その複数のボクセルは、それぞれ、その被写体が配置される空間に隙間なく充填される複数の領域に対応している。たとえば、その複数の領域は、それぞれ、直方体に形成されている。その複数のCT値のうちの任意のボクセルに対応する1つのCT値(Computed Tomography number)は、その複数の領域のうちのその任意のボクセルに対応する領域の透過係数(X線吸収係数)に対応している。すなわち、その領域を透過したX線の強度I1は、その透過係数λを用いて、次式:
I1=I0e−λx
により表現される。ここで、I0は、そのX線がその領域に入射する前の強度を示している。変数xは、その領域の厚さを示している。
【0027】
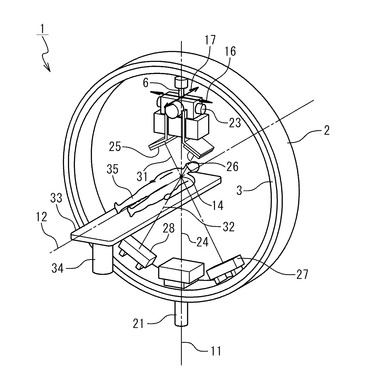
放射線治療装置1は、図2に示されているように、Oリング2と走行ガントリ3と治療用放射線照射装置6とを備えている。Oリング2は、リング状に形成され、リング回転軸11を中心に回転可能に基礎に支持されている。リング回転軸11は、鉛直方向に平行である。走行ガントリ3は、リング状に形成されている。走行ガントリ3は、Oリング2のリングの内側に配置され、ガントリ回転軸12を中心に回転可能にOリング2に支持されている。ガントリ回転軸12は、鉛直方向に垂直であり、アイソセンタ14でリング回転軸11と交差している。ガントリ回転軸12は、Oリング2に対して固定され、すなわち、Oリング2とともにリング回転軸11を中心に回転する。
【0028】
治療用放射線照射装置6は、走行ガントリ3のリングの内側に配置されている。治療用放射線照射装置6は、チルト軸16に回転可能に、かつ、パン軸17に回転可能に、走行ガントリ3に支持されている。チルト軸16は、パン軸17に直交している。チルト軸16とパン軸17との交点は、アイソセンタ14から1mだけ離れている。治療用放射線照射装置6は、放射線治療装置制御装置10により制御されることにより、照射野が制御された治療用放射線24を出射する。治療用放射線24は、治療用放射線照射装置6が有する仮想的点線源から出射され、その仮想的点線源を頂点とする円錐状のコーンビームである。その仮想的点線源は、チルト軸16とパン軸17との交点に配置されている。
【0029】
放射線治療装置1は、さらに、リング駆動装置21とジンバル装置23とを備え、図示されていないガントリ駆動装置を備えている。リング駆動装置21は、放射線治療装置制御装置10により制御されることにより、リング回転軸11を中心にOリング2を回転させる。リング駆動装置21は、さらに、基礎に対してOリング2が配置されるリング角度を測定し、そのリング角度を放射線治療装置制御装置10に出力する。そのガントリ駆動装置は、放射線治療装置制御装置10により制御されることにより、ガントリ回転軸12を中心に走行ガントリ3を回転させる。そのガントリ駆動装置は、さらに、Oリング2に対して走行ガントリ3が配置されるガントリ角度を測定し、そのガントリ角度を放射線治療装置制御装置10に出力する。
【0030】
ジンバル装置23は、放射線治療装置制御装置10により制御されることにより、チルト軸16を中心に治療用放射線照射装置6を回転させ、パン軸17を中心に治療用放射線照射装置6を回転させる。ジンバル装置23は、さらに、チルト軸16を中心に走行ガントリ3に対して治療用放射線照射装置6が回転するチルト角を測定し、そのチルト角を放射線治療装置制御装置10に出力する。ジンバル装置23は、さらに、パン軸17を中心に走行ガントリ3に対して治療用放射線照射装置6が回転するパン角を測定し、そのパン角を放射線治療装置制御装置10に出力する。
【0031】
治療用放射線24は、治療用放射線照射装置6が走行ガントリ3にこのように支持されることにより、治療用放射線照射装置6がアイソセンタ14に向くように走行ガントリ3に一旦固定されると、リング駆動装置21によりOリング2が回転されても、または、そのガントリ駆動装置により走行ガントリ3が回転されても、常に概ねアイソセンタ14に出射される。すなわち、放射線治療装置1は、走行・旋回を行うことで任意方向からアイソセンタ14に向けて治療用放射線24の曝射が可能になる。
【0032】
放射線治療装置1は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置1は、第1診断用放射線照射装置25と第2診断用放射線照射装置26と第1撮像装置27と第2撮像装置28とを備えている。第1診断用放射線照射装置25は、走行ガントリ3に支持され、アイソセンタ14から第1診断用放射線照射装置25を結ぶ線分とアイソセンタ14から治療用放射線照射装置6を結ぶ線分とのなす角が鋭角になるように、走行ガントリ3のリングの内側に配置されている。第2診断用放射線照射装置26は、走行ガントリ3に支持され、アイソセンタ14から第2診断用放射線照射装置26を結ぶ線分とアイソセンタ14から治療用放射線照射装置6を結ぶ線分とのなす角が鋭角になるように、走行ガントリ3のリングの内側に配置されている。第2診断用放射線照射装置26は、さらに、アイソセンタ14から第1診断用放射線照射装置25を結ぶ線分とアイソセンタ14から第2診断用放射線照射装置26を結ぶ線分とのなす角が直角(90度)になるように、配置されている。
【0033】
第1診断用放射線照射装置25は、放射線治療装置制御装置10により制御されることにより、所定のタイミングで第1診断用放射線31をアイソセンタ14に向けて出射する。第1診断用放射線31は、第1診断用放射線照射装置25が有する仮想的点線源から出射され、その仮想的点線源を頂点とする円錐状のコーンビームである。第2診断用放射線照射装置26は、放射線治療装置制御装置10により制御されることにより、所定のタイミングで第2診断用放射線32をアイソセンタ14に向けて出射する。第2診断用放射線32は、第2診断用放射線照射装置26が有する仮想的点線源から出射され、その仮想的点線源を頂点とする円錐状のコーンビームである。
【0034】
第1撮像装置27は、受光部を備えている。第1撮像装置27は、放射線治療装置制御装置10により制御されることにより、その受光部に受光されるX線に基づいて第1透視画像を生成する。第1撮像装置27としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。第1撮像装置27は、走行ガントリ3に支持され、第1診断用放射線31によりアイソセンタ14が中央に映し出される透視画像が撮像されるように、配置されている。すなわち、第1撮像装置27は、第1撮像装置27の受光部の中央と第1診断用放射線31が放射される仮想的点線源とアイソセンタ14とが直線上に配置されるように、配置されている。
【0035】
第2撮像装置28は、受光部を備えている。第2撮像装置28は、放射線治療装置制御装置10により制御されることにより、その受光部に受光されるX線に基づいて第2透視画像を生成する。第2撮像装置28としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。第2撮像装置28は、走行ガントリ3に支持され、第2診断用放射線32によりアイソセンタ14が中央に映し出される透視画像が撮像されるように、配置されている。すなわち、第2撮像装置28は、第2撮像装置28の受光部の中央と第2診断用放射線32が放射される仮想的点線源とアイソセンタ14とが直線上に配置されるように、配置されている。
【0036】
その透視画像は、複数のピクセルから形成されている。その複数のピクセルは、その透視画像上にマトリクス状に配置され、それぞれ輝度に対応付けられている。その透視画像は、その複数のピクセルの各々に対応する輝度がその複数のピクセルの各々に着色されることにより、被写体を映し出している。
【0037】
放射線治療装置1は、さらに、カウチ33とカウチ駆動装置34とを備えている。カウチ33は、X軸とY軸とZ軸とに平行に平行移動可能に、かつ、そのX軸を中心に回転移動可能に、基礎に支持されている。そのX軸とY軸とZ軸とは、互いに直交している。カウチ33は、その放射線治療システムにより治療される患者35が横臥することに利用される。カウチ33は、図示されていない固定具を備えている。その固定具は、患者35が動かないように、患者35をカウチ33に固定する。カウチ駆動装置34は、放射線治療装置制御装置10により制御されることにより、カウチ33を回転移動させ、カウチ33を平行移動させる。
【0038】
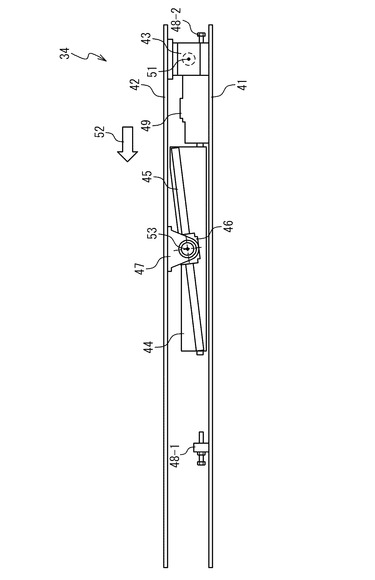
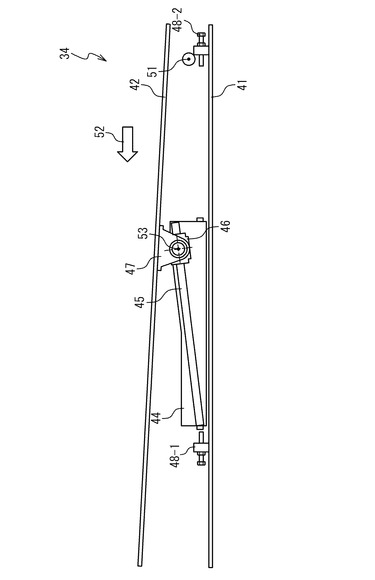
図3は、カウチ駆動装置34を示している。カウチ駆動装置34は、フレーム41と天板支持部品42とを備えている。フレーム41は、板状に形成されている。フレーム41は、基礎に対して平行移動することができるように、基礎に支持されている。天板支持部品42は、板状に形成され、カウチ33に固定されている。天板支持部品42は、軸受43を介して、回転軸51を中心に回転することができるように、フレーム41に支持されている。回転軸51は、リング回転軸11に垂直である。
【0039】
カウチ駆動装置34は、さらに、フレーム44と傾斜直動ガイド45とスライダ46とを備えている。フレーム44は、反Oリング方向52に平行に平行移動することができるように、フレーム41に支持されている。反Oリング方向52は、回転軸51に垂直であり、かつ、リング回転軸11に垂直である。傾斜直動ガイド45は、棒状に形成され、フレーム44に固定されている。スライダ46は、傾斜直動ガイド45に沿って平行移動可能に、傾斜直動ガイド45に支持されている。スライダ46は、軸受47を介して、回転軸53を中心に回転することができるように、天板支持部品42に支持されている。
【0040】
カウチ駆動装置34は、さらに、ストッパ48−1〜48−2と回転移動用駆動装置49とを備えている。ストッパ48−1は、フレーム44が所定の位置に配置されたときにフレーム44に接触するように、フレーム41に固定されて配置されている。すなわち、ストッパ48−1は、その所定の位置より反Oリング方向52にフレーム44が移動しないように、フレーム44の可動域を制限している。ストッパ48−2は、フレーム44が所定の位置に配置されたときにフレーム44に接触するように、フレーム41に固定されて配置されている。すなわち、ストッパ48−2は、その所定の位置より反Oリング方向52にフレーム44が移動しないように、フレーム44の可動域を制限している。回転移動用駆動装置49は、放射線治療装置制御装置10により制御されることにより、フレーム41に対してフレーム44を反Oリング方向52に平行に平行移動させる。
【0041】
カウチ駆動装置34は、さらに、図示されていない平行移動用駆動装置を備えている。その平行移動用駆動装置は、放射線治療装置制御装置10により制御されることにより、基礎に対してフレーム41を平行移動させる。すなわち、その平行移動用駆動装置は、放射線治療装置制御装置10により制御されることにより、基礎に対して天板支持部品42を平行移動させ、基礎に対してカウチ33を平行移動させる。
【0042】
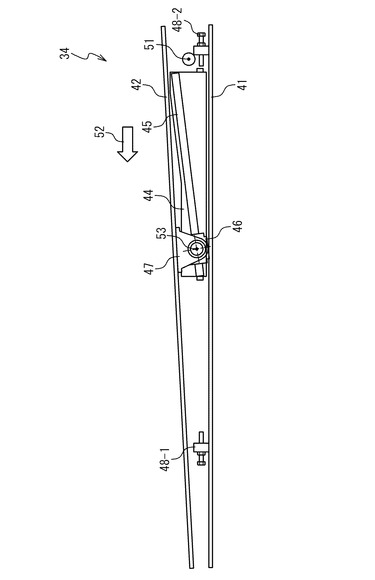
図4は、フレーム44が反Oリング方向52に平行移動したときに、カウチ駆動装置34の状態を示している。スライダ46は、フレーム44が反Oリング方向52に平行移動したときに、傾斜直動ガイド45に案内されて、フレーム41から遠ざかるように移動する。天板支持部品42は、スライダ46がフレーム41から遠ざかるように移動したときに、回転軸51を中心に時計回りに回転する。
【0043】
図5は、フレーム44が反Oリング方向52の反対方向に平行移動したときに、カウチ駆動装置34の状態を示している。スライダ46は、フレーム44が反Oリング方向52の反対方向に平行移動したときに、傾斜直動ガイド45に案内されて、フレーム41に近づくように移動する。天板支持部品42は、スライダ46がフレーム41に近づくように移動したときに、回転軸51を中心に反時計回りに回転する。
【0044】
このようなカウチ駆動装置34は、互いに平行でない複数の回転軸を中心にカウチ33を回転移動させることができる他のカウチ駆動装置に比較して、よりコンパクトである。このため、カウチ駆動装置34によれば、カウチ33は、低床化させることができ、放射線治療される患者35がカウチ33に乗るときの負担を低減することができる。
【0045】
図6は、放射線治療装置制御装置10を示している。放射線治療装置制御装置10は、コンピュータであり、図示されていないCPUと記憶装置とリムーバルメモリドライブと通信装置と入力装置と出力装置とインターフェースとを備えている。そのCPUは、放射線治療装置制御装置10にインストールされるコンピュータプログラムを実行して、その記憶装置とリムーバルメモリドライブと通信装置と入力装置と出力装置とインターフェースとを制御する。その記憶装置は、そのコンピュータプログラムを記録する。その記憶装置は、さらに、そのCPUにより利用される情報を記録する。そのリムーバルメモリドライブは、コンピュータプログラムが記録されている記録媒体が挿入されたときに、そのコンピュータプログラムを放射線治療装置制御装置10にインストールするときに利用される。その通信装置は、通信回線網を介して放射線治療装置制御装置10に接続される他のコンピュータからコンピュータプログラムを放射線治療装置制御装置10にダウンロードし、そのコンピュータプログラムを放射線治療装置制御装置10にインストールするときに利用される。その入力装置は、ユーザに操作されることにより生成される情報をそのCPUに出力する。その入力装置としては、キーボード、マウスが例示される。その出力装置は、そのCPUにより生成された情報をユーザに認識可能に出力する。その出力装置としては、そのCPUにより生成された画像を表示するディスプレイが例示される。
【0046】
そのインターフェースは、放射線治療装置制御装置10に接続される外部機器により生成される情報をそのCPUに出力し、そのCPUにより生成された情報をその外部機器に出力する。その外部機器は、コンピュータ断層撮影装置20と治療用放射線照射装置6とリング駆動装置21とガントリ駆動装置とジンバル装置23と第1診断用放射線照射装置25と第2診断用放射線照射装置26と第1撮像装置27と第2撮像装置28とカウチ駆動装置34とを含んでいる。
【0047】
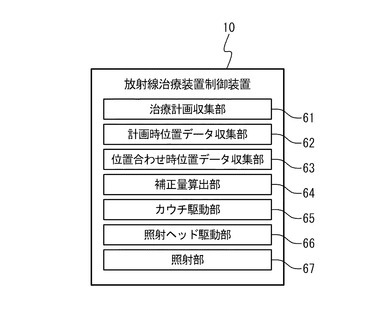
放射線治療装置制御装置10にインストールされるコンピュータプログラムは、放射線治療装置制御装置10に複数の機能をそれぞれ実現させるための複数のコンピュータプログラムから形成されている。その複数の機能は、治療計画収集部61と計画時位置データ収集部62と位置合わせ時位置データ収集部63と補正量算出部64とカウチ駆動部65と照射ヘッド駆動部66と照射部67とを含んでいる。
【0048】
治療計画収集部61は、入力装置から治療計画を収集する。その治療計画は、コンピュータ断層撮影装置20により撮影された患者35の3次元データに基づいて作成され、曝射条件を示している。その曝射条件は、曝射方向と線量とを示している。その曝射方向は、患者35に治療用放射線24を曝射する方向を示し、リング角度とガントリ角度とを示している。そのリング角度は、基礎に対してOリング2が配置される位置を示している。そのガントリ角度は、Oリング2に対して走行ガントリ3が配置される位置を示している。その線量は、その曝射方向から患者35に曝射される治療用放射線24の線量を示している。
【0049】
計画時位置データ収集部62は、治療計画収集部61により収集される治療計画を作成するときに利用された3次元データをコンピュータ断層撮影装置20から収集する。その3次元データは、複数のボクセルに複数のCT値を対応付けている。計画時位置データ収集部62は、その3次元データに基づいて計画時位置を算出する。その計画時位置は、その3次元データを再構成する際にコンピュータ断層撮影装置20により複数の透視画像が撮影された時に患者35が配置された位置と向きとを示している。このとき、その治療計画が示す曝射方向は、その計画時位置に配置された患者35に治療用放射線24を曝射する方向を示している。
【0050】
位置合わせ時位置データ収集部63は、カウチ33に横臥した患者35を映す位置合わせ時第1透視画像と位置合わせ時第2透視画像とが撮影されるように、放射線治療装置1を制御する。すなわち、位置合わせ時位置データ収集部63は、患者35がカウチ33に固定されているときに、基礎に対してカウチ33が適当な位置に配置されるように、カウチ駆動装置34を制御する。位置合わせ時位置データ収集部63は、さらに、基礎に対してOリング2が適当なリング角度に配置されるように、リング駆動装置21を制御する。位置合わせ時位置データ収集部63は、さらに、Oリング2に対して走行ガントリ3が適当なガントリ角度に配置されるように、放射線治療装置1のガントリ駆動装置を制御する。
【0051】
位置合わせ時位置データ収集部63は、さらに、Oリング2と走行ガントリ3とが適当な位置に配置されているときに、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。位置合わせ時位置データ収集部63は、さらに、第1診断用放射線31が患者35に曝射されたときに、患者35を透過したX線に基づいて位置合わせ時第1透視画像が生成されるように、第1撮像装置27を制御する。その位置合わせ時第1透視画像が示す複数の輝度のうちの任意のピクセルに対応する輝度は、第1撮像装置27の受光部のうちのその任意のピクセルに対応する領域と第1診断用放射線照射装置25とを結ぶ線分上に配置される物体をX線が透過する透過率に対応している。
【0052】
位置合わせ時位置データ収集部63は、さらに、Oリング2と走行ガントリ3とがその適当な位置に配置されているときに、第2診断用放射線32が曝射されるように、第2診断用放射線照射装置26を制御する。位置合わせ時位置データ収集部63は、さらに、第2診断用放射線32が患者35に曝射されたときに、患者35を透過したX線に基づいて位置合わせ時第2透視画像が生成されるように、第2撮像装置28を制御する。その位置合わせ時第2透視画像が示す複数の輝度のうちの任意のピクセルに対応する輝度は、第2撮像装置28の受光部のうちのその任意のピクセルに対応する領域と第2診断用放射線照射装置26とを結ぶ線分上に配置される物体をX線が透過する透過率に対応している。
【0053】
位置合わせ時位置データ収集部63は、さらに、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とに基づいて位置合わせ時位置を算出する。その位置合わせ位置は、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とが撮影された時に患者35が配置された位置と向きとを示している。
【0054】
補正量算出部64は、計画時位置データ収集部62により算出された計画時位置と位置合わせ時位置データ収集部63により算出された位置合わせ時位置とに基づいて患者位置とリング角度オフセット値とガントリ角度オフセット値とを算出する。
【0055】
その患者位置は、患者35が配置される位置と向きとを示し、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とが撮影された時に患者35が配置された位置からカウチ駆動装置34により移動することができる位置と向きとを示している。すなわち、その患者位置は、位置合わせ時位置データ収集部63により算出された位置合わせ時位置に配置された患者35を、平行移動と回転軸51を中心に回転する回転移動とによりその患者位置に移動することができるように、算出される。
【0056】
そのリング角度オフセット値は、計画時リング角度から治療時リング角度を減算した差を示している。そのガントリ角度オフセット値は、計画時ガントリ角度から治療時ガントリ角度を減算した差を示している。このとき、基礎に対してOリング2がその治療時リング角度に配置され、Oリング2に対して走行ガントリ3がその治療時ガントリ角度に配置されたときに、その患者位置に対して治療用放射線照射装置6が配置される治療時向きは、基礎に対してOリング2がその計画時リング角度に配置され、Oリング2に対して走行ガントリ3がその計画時ガントリ角度に配置されたときに、その計画時位置に対して治療用放射線照射装置6が配置される計画時向きに一致している。すなわち、そのガントリ角度オフセット値とそのリング角度オフセット値とは、その治療時向きがその計画時向きに一致するように、算出される。
【0057】
カウチ駆動部65は、補正量算出部64により算出された患者位置に基づいて、位置合わせ時位置データ収集部63により算出された位置合わせ時位置に配置された患者35がその患者位置に移動するように、カウチ駆動装置34を制御する。すなわち、カウチ駆動部65は、その患者位置が示す向きに患者35が向くように回転移動用駆動装置49を制御し、その患者位置が示す位置に患者35が配置されるようにカウチ駆動装置34の平行移動用駆動装置を制御する。
【0058】
照射ヘッド駆動部66は、治療計画収集部61により収集された治療計画が示す曝射方向に基づいて、放射線治療装置1を制御する。すなわち、照射ヘッド駆動部66は、基礎に対してOリング2が補正後リング角度に配置されるように、リング駆動装置21を制御する。照射ヘッド駆動部66は、さらに、Oリング2に対して走行ガントリ3が補正後ガントリ角度に配置されるように、放射線治療装置1のガントリ駆動装置を制御する。その補正後リング角度は、その曝射方向が示すリング角度から補正量算出部64により算出されたリング角度オフセット値を減算した値を示している。その補正後ガントリ角度は、その曝射条件が示すガントリ角度から補正量算出部64により算出されたガントリ角度オフセット値を減算した値を示している。
【0059】
照射部67は、カウチ駆動部65により患者35がその患者位置に配置され、照射ヘッド駆動部66により治療用放射線照射装置6が所定の位置に配置された後に、患者35の患部を映し出す治療時第1透視画像と治療時第2透視画像とが撮影されるように、放射線治療装置1を制御する。すなわち、照射部67は、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。照射部67は、治療時第1透視画像が撮像されるように、第1撮像装置27を制御する。照射部67は、第2診断用放射線32が曝射されるように、第2診断用放射線照射装置26を制御する。照射部67は、治療時第2透視画像が撮像されるように、第2撮像装置28を制御する。
【0060】
照射部67は、さらに、その治療時第1透視画像と治療時第2透視画像とに基づいて、患者35の患部の位置を算出し、その患部の形状を算出する。照射部67は、さらに、その算出された患部の位置に治療用放射線照射装置6が向くように、ジンバル装置23を制御する。照射部67は、さらに、その患部の形状に治療用放射線24の照射野が一致するように、治療用放射線照射装置6を制御し、その患部に治療用放射線24が曝射されるように、治療用放射線照射装置6を制御する。照射部67は、さらに、その曝射条件が示す線量の治療用放射線24が患者35の患部に曝射されるまで、その治療時第1透視画像と治療時第2透視画像との撮影から治療用放射線24の曝射までの動作を繰り返して実行する。
【0061】
本発明による放射線治療装置制御方法の実施の形態は、放射線治療装置制御装置10により実行され、治療計画を作成する動作と患者を位置合わせする動作と放射線治療する動作とを備えている。
【0062】
その治療計画を作成する動作では、まず、ユーザは、コンピュータ断層撮影装置20を用いて、複数の透視画像を撮影し、その複数の透視画像に基づいて患者35の内部の状態を示す3次元データを生成する。その3次元データは、計画時位置を示している。その計画時位置は、その複数の透視画像が撮影された時に患者35が配置された位置と向きとを示している。ユーザは、さらに、その3次元データに基づいて治療計画を作成する。その治療計画は、曝射条件を示している。その曝射条件は、曝射方向と線量とを示している。その曝射方向は、その計画時位置に対して治療用放射線24が配置される計画時向きを示し、リング角度とガントリ角度とを示している。そのリング角度は、基礎に対してOリング2が配置される位置を示している。そのガントリ角度は、Oリング2に対して走行ガントリ3が配置される位置を示している。その線量は、その曝射方向から患者35に曝射される治療用放射線24の線量を示している。ユーザは、放射線治療装置制御装置10の入力装置を介して、その治療計画を放射線治療装置制御装置10に入力する。
【0063】
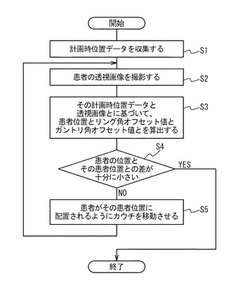
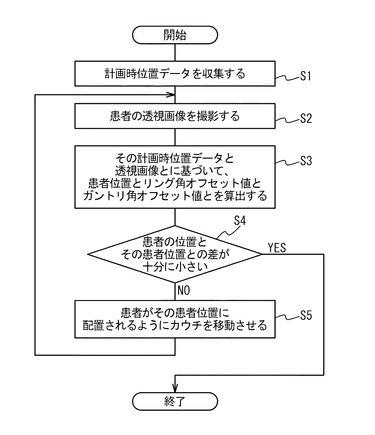
図7は、その患者を位置合わせする動作を示している。その患者を位置合わせする動作は、その治療計画を作成する動作が実行された後に、たとえば、その治療計画を作成する動作が実行されてから数日後に、実行される。放射線治療装置制御装置10は、その治療計画を作成するときに利用された3次元データをコンピュータ断層撮影装置20から収集する(ステップS1)。放射線治療装置制御装置10は、その3次元データに基づいてその計画時位置を算出する。
【0064】
患者35は、カウチ33に乗り、カウチ33に横臥する。ユーザは、患者35がカウチ33に横臥した後に、固定具を用いて患者35をカウチ33に固定する。放射線治療装置制御装置10は、患者35がカウチ33に固定された後に、患者35の患部が概ねアイソセンタ14に配置されるように、カウチ駆動装置34を制御する。
【0065】
放射線治療装置制御装置10は、カウチ33に横臥した患者35を映す位置合わせ時第1透視画像と位置合わせ時第2透視画像とが撮影されるように、放射線治療装置1を制御する(ステップS2)。すなわち、放射線治療装置制御装置10は、患者35がカウチ33に固定された後に、患者35の患部が概ねアイソセンタ14に配置されるように、カウチ駆動装置34を制御する。放射線治療装置制御装置10は、さらに、患者35の患部がイメージャシステムにより撮像されるように、走行ガントリ3を適当な位置まで移動させる。すなわち、放射線治療装置制御装置10は、基礎に対してOリング2が適当なリング角度に配置されるように、リング駆動装置21を制御する。放射線治療装置制御装置10は、さらに、Oリング2に対して走行ガントリ3が適当なガントリ角度に配置されるように、放射線治療装置1のガントリ駆動装置を制御する。
【0066】
放射線治療装置制御装置10は、さらに、Oリング2と走行ガントリ3とがその適当な位置に配置されているときに、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。放射線治療装置制御装置10は、さらに、第1診断用放射線31が患者35に曝射されたときに、患者35を透過したX線に基づいて位置合わせ時第1透視画像が生成されるように、第1撮像装置27を制御する。放射線治療装置制御装置10は、さらに、Oリング2と走行ガントリ3とが所定の位置に配置されているときに、第2診断用放射線32が曝射されるように、第2診断用放射線照射装置26を制御する。放射線治療装置制御装置10は、さらに、第2診断用放射線32が患者35に曝射されたときに、患者35を透過したX線に基づいて位置合わせ時第2透視画像が生成されるように、第2撮像装置28を制御する。
【0067】
放射線治療装置制御装置10は、さらに、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とに基づいて位置合わせ時位置を算出する。その位置合わせ位置は、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とが撮影された時に患者35が配置された位置と向きとを示している。
【0068】
放射線治療装置制御装置10は、その位置合わせ時位置とステップS1で算出された計画時位置とに基づいて患者位置とリング角度オフセット値とガントリ角度オフセット値とを算出する(ステップS3)。その患者位置は、患者35が配置される位置と向きとを示し、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とが撮影された時に患者35が配置された位置からカウチ駆動装置34により移動することができる位置と向きとを示している。すなわち、その患者位置は、放射線治療装置制御装置10により算出された位置合わせ時位置に配置された患者35を、平行移動と回転軸51を中心に回転する回転移動とによりその患者位置に移動することができるように、算出される。
【0069】
そのリング角度オフセット値は、計画時リング角度から治療時リング角度を減算した差を示している。そのガントリ角度オフセット値は、計画時ガントリ角度から治療時ガントリ角度を減算した差を示している。このとき、基礎に対してOリング2がその治療時リング角度に配置され、Oリング2に対して走行ガントリ3がその治療時ガントリ角度に配置されたときに、その患者位置に対して治療用放射線照射装置6が配置される治療時向きは、基礎に対してOリング2がその計画時リング角度に配置され、Oリング2に対して走行ガントリ3がその計画時ガントリ角度に配置されたときに、その計画時位置に対して治療用放射線照射装置6が配置される計画時向きに一致している。すなわち、そのガントリ角度オフセット値とそのリング角度オフセット値とは、その治療時向きがその計画時向きに一致するように、算出される。
【0070】
放射線治療装置制御装置10は、その位置合わせ時位置とその患者位置との差が所定の値より大きいときに(ステップS4、NO)、患者35がその患者位置に移動するように、カウチ駆動装置34を制御する(ステップS5)。すなわち、放射線治療装置制御装置10は、その位置合わせ時位置が示す向きに向いている患者35が、その患者位置が示す向きに向くように、回転移動用駆動装置49を制御する。放射線治療装置制御装置10は、その位置合わせ時位置が示す位置に配置されている患者35が、その患者位置が示す位置に配置されるように、カウチ駆動装置34の平行移動用駆動装置を制御する。
【0071】
放射線治療装置制御装置10は、患者35がその患者位置に移動するようにカウチ駆動装置34を制御した後に、カウチ33に横臥した患者35を映す位置合わせ時第1透視画像と位置合わせ時第2透視画像とが再度撮影されるように、放射線治療装置1を制御する(ステップS2)。放射線治療装置制御装置10は、さらに、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とに基づいて位置合わせ時位置を再度算出する。放射線治療装置制御装置10は、その位置合わせ時位置とステップS1で収集された計画時位置とに基づいて患者位置とリング角度オフセット値とガントリ角度オフセット値とを再度算出する(ステップS3)。
【0072】
放射線治療装置制御装置10は、その位置合わせ時位置とその患者位置との差がその所定の値より小さくなるまで(ステップS4、YES)、ステップS5とステップS2とステップS3とを繰り返して実行する。
【0073】
その放射線治療する動作は、患者を位置合わせする動作が実行された直後に実行される。放射線治療装置制御装置10は、その治療計画が示す曝射条件に基づいて、放射線治療装置1を制御する。すなわち、放射線治療装置制御装置10は、基礎に対してOリング2が補正後リング角度に配置されるように、リング駆動装置21を制御する。放射線治療装置制御装置10は、さらに、Oリング2に対して走行ガントリ3が補正後ガントリ角度に配置されるように、放射線治療装置1のガントリ駆動装置を制御する。その補正後リング角度は、その曝射条件が示すリング角度から補正量算出部64により算出されたリング角度オフセット値を減算した値を示している。その補正後ガントリ角度は、その曝射条件が示すガントリ角度から補正量算出部64により算出されたガントリ角度オフセット値を減算した値を示している。
【0074】
放射線治療装置制御装置10は、次いで、患者35の患部を映し出す治療時第1透視画像と治療時第2透視画像とが撮影されるように、放射線治療装置1を制御する。すなわち、放射線治療装置制御装置10は、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。放射線治療装置制御装置10は、治療時第1透視画像が撮像されるように、第1撮像装置27を制御する。放射線治療装置制御装置10は、第2診断用放射線32が曝射されるように、第2診断用放射線照射装置26を制御する。放射線治療装置制御装置10は、治療時第2透視画像が撮像されるように、第2撮像装置28を制御する。
【0075】
放射線治療装置制御装置10は、さらに、その治療時第1透視画像と治療時第2透視画像とに基づいて、患者35の患部の位置を算出し、その患部の形状を算出する。放射線治療装置制御装置10は、さらに、その算出された患部の位置に治療用放射線照射装置6が向くように、ジンバル装置23を制御する。放射線治療装置制御装置10は、さらに、その患部の形状に治療用放射線24の照射野が一致するように、治療用放射線照射装置6を制御し、その患部に治療用放射線24が曝射されるように、治療用放射線照射装置6を制御する。放射線治療装置制御装置10は、さらに、その曝射条件が示す線量の治療用放射線24が患者35の患部に曝射されるまで、その治療時第1透視画像と治療時第2透視画像との撮影から治療用放射線24の曝射までの動作を繰り返して実行する。
【0076】
このような放射線治療によれば、放射線治療装置制御装置10は、患者35の患部が運動している場合でも、その患部に治療用放射線24をより高精度に曝射することができ、患者35をより高精度に放射線治療することができる。
【0077】
なお、その治療計画は、複数の曝射条件を示すこともできる。このとき、放射線治療装置制御装置10は、その曝射条件ごとに、このような放射線治療する動作を実行する。
【0078】
このような放射線治療装置制御方法によれば、放射線治療装置制御装置10は、患者35を位置合わせするときに、カウチ33を回転軸51と平行でない回転軸を中心に回転移動させる必要がない。このため、放射線治療装置1は、2軸または3軸の回転軸を中心にカウチ33を回転させることができる他のカウチ駆動装置よりコンパクトであるカウチ駆動装置34を適用することができる。このとき、放射線治療装置制御装置10は、カウチ33をより低床化することができ、患者35がカウチ33に乗る負荷を軽減することができる。放射線治療装置制御装置10は、さらに、患者35の位置合わせ時に、回転による患者35の不快感を軽減することができる。
【0079】
なお、カウチ駆動装置34は、2軸または3軸の回転軸を中心にカウチ33を回転させることができる他のカウチ駆動装置に置換されることができる。この場合も、放射線治療装置制御装置10は、カウチ駆動装置34が適用された場合と同様にして、患者35がカウチ33に乗る負荷を軽減することができる。
【0080】
補正量算出部64は、このようなカウチ駆動装置が放射線治療装置1に適用されているときに、患者35の位置合わせ時に患者35を回転移動させる回転移動量がより低減するように、その患者位置を算出することもできる。このような患者位置の算出によれば、放射線治療装置制御装置10は、カウチ33に横臥した患者35の回転による不快感を軽減することができる。
【0081】
補正量算出部64は、カウチ駆動装置34がリング回転軸11に平行である他の回転軸を中心にカウチ33をさらに回転させることができるときに、計画時位置データ収集部62により算出された計画時位置と位置合わせ時位置データ収集部63により算出された位置合わせ時位置とに基づいて、リング角度オフセット値が0を示すように患者位置とガントリ角度オフセット値とを算出することもできる。すなわち、そのガントリ角度オフセット値は、計画時ガントリ角度から治療時ガントリ角度を減算した差を示している。基礎に対してOリング2があるリング角度に配置され、Oリング2に対して走行ガントリ3がその治療時ガントリ角度に配置されたときに、その患者位置に対して治療用放射線照射装置6が配置される治療時向きは、基礎に対してOリング2がそのリング角度に配置され、Oリング2に対して走行ガントリ3がその計画時ガントリ角度に配置されたときに、その計画時位置に対して治療用放射線照射装置6が配置される計画時向きに一致している。すなわち、その患者位置とそのガントリ角度オフセット値は、その治療時向きがその計画時向きに一致するように、算出される。このような患者位置によれば、放射線治療装置制御装置10は、患者35を位置合わせするときに、カウチ33を互いに垂直である3軸の回転軸を中心に回転移動させる必要がない。このため、放射線治療装置1は、3軸の回転軸を中心にカウチ33を回転させることができる他のカウチ駆動装置よりコンパクトである2軸の回転駆動装置を適用することができる。このとき、放射線治療装置制御装置10は、カウチ33をより低床化することができ、患者35がカウチ33に乗る負荷を軽減することができる。
【0082】
補正量算出部64は、カウチ駆動装置34がリング回転軸11と回転軸51とに垂直である他の回転軸を中心にカウチ33をさらに回転させることができるときに、計画時位置データ収集部62により算出された計画時位置と位置合わせ時位置データ収集部63により算出された位置合わせ時位置とに基づいて、ガントリ角度オフセット値が0を示すように患者位置とリング角度オフセット値とを算出することもできる。すなわち、そのリング角度オフセット値は、計画時リング角度から治療時リング角度を減算した差を示している。基礎に対してOリング2がその計画時リング角度に配置され、Oリング2に対して走行ガントリ3があるガントリ角度に配置されたときに、その患者位置に対して治療用放射線照射装置6が配置される治療時向きは、基礎に対してOリング2がその治療時リング角度に配置され、Oリング2に対して走行ガントリ3がそのガントリ角度に配置されたときに、その計画時位置に対して治療用放射線照射装置6が配置される計画時向きに一致している。すなわち、その患者位置とそのリング角度オフセット値は、その治療時向きがその計画時向きに一致するように、算出される。このような患者位置によれば、放射線治療装置制御装置10は、患者35を位置合わせするときに、カウチ33を互いに垂直である3軸の回転軸を中心に回転移動させる必要がない。このため、放射線治療装置1は、3軸の回転軸を中心にカウチ33を回転させることができる他のカウチ駆動装置よりコンパクトである2軸の回転駆動装置を適用することができる。このとき、放射線治療装置制御装置10は、カウチ33をより低床化することができ、患者35がカウチ33に乗る負荷を軽減することができる。
【0083】
本発明による放射線治療装置制御装置の実施のさらに他の形態は、既述の実施の形態における位置合わせ時位置データ収集部63が他の位置合わせ時位置データ収集部に置換されている。その位置合わせ時位置データ収集部は、位置合わせ時位置データ収集部63は、さらに、Oリング2が適当な位置に配置されているときに、Oリング2に対して走行ガントリ3が一定の角速度でガントリ回転軸12を中心に回転するように、そのガントリ駆動装置を制御する。その位置合わせ時位置データ収集部は、さらに、走行ガントリ3が所定のガントリ角度に配置されたときに、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。その所定のガントリ角度としては、公差が0.5度であり、その初項と末項との差が180度である等差数列が例示される。その位置合わせ時位置データ収集部は、さらに、Oリング2に対して走行ガントリ3がその所定のガントリ角度に配置されたときに、再構成用透視画像が撮像されるように、第1撮像装置27を制御する。
【0084】
その位置合わせ時位置データ収集部は、その複数の再構成用透視画像に基づいて三次元データを再構成する。その三次元データは、複数のボクセルに複数のCT値を対応付けている。その複数のボクセルは、それぞれ、患者35が配置される空間に隙間なく充填される複数の領域に対応している。たとえば、その複数の領域は、それぞれ、直方体に形成されている。その複数のCT値のうちの任意のボクセルに対応する1つのCT値は、その複数の領域のうちのその任意のボクセルに対応する領域の透過係数(X線吸収係数)に対応している。その位置合わせ時位置データ収集部は、その三次元データに基づいて、その複数の再構成用透視画像が撮影された時に患者35が配置された位置と向きとを示す位置合わせ時位置を算出する。
【0085】
このような位置合わせ時位置データ収集部が適用された放射線治療装置制御装置も、既述の実施の形態における放射線治療装置制御装置10と同様にして、患者35の負荷を軽減することができ、患者35の不快感を軽減することができる。
【0086】
なお、その位置合わせ時位置データ収集部は、放射線治療装置1のイメージャシステムと異なる他のセンサにより測定された値によりその位置合わせ時位置を算出することもできる。そのセンサとしては、PET(Positron Emission Tomography)、MRI(Magnetic Resonance Imaging)、被写体の3次元幾何モデルを測定するレーザスキャナが例示される。このような位置合わせ時位置データ収集部が適用された放射線治療装置制御装置も、既述の実施の形態における放射線治療装置制御装置10と同様にして、患者35の負荷を軽減することができ、患者35の不快感を軽減することができる。
【符号の説明】
【0087】
1 :放射線治療装置
10:放射線治療装置制御装置
20:コンピュータ断層撮影装置
2 :Oリング
3 :走行ガントリ
6 :治療用放射線照射装置
11:リング回転軸
12:ガントリ回転軸
14:アイソセンタ
16:チルト軸
17:パン軸
21:リング駆動装置
23:ジンバル装置
24:治療用放射線
25:第1診断用放射線照射装置
26:第2診断用放射線照射装置
27:第1撮像装置
28:第2撮像装置
31:第1診断用放射線
32:第2診断用放射線
33:カウチ
34:カウチ駆動装置
35:患者
41:フレーム
42:天板支持部品
43:軸受
44:フレーム
45:傾斜直動ガイド
46:スライダ
47:軸受
48−1〜48−2:ストッパ
49:回転移動用駆動装置
51:回転軸
52:反Oリング方向
53:回転軸
61:治療計画収集部
62:計画時位置データ収集部
63:位置合わせ時位置データ収集部
64:補正量算出部
65:カウチ駆動部
66:照射ヘッド駆動部
67:照射部
【技術分野】
【0001】
本発明は、放射線治療装置制御方法および放射線治療装置制御装置に関し、特に、人体内部の腫瘍患部を放射線治療するときに利用される放射線治療装置制御方法および放射線治療装置制御装置に関する。
【背景技術】
【0002】
腫瘍患部に治療用放射線を曝射することにより患者を治療する放射線治療が知られている。その放射線治療を実行する放射線治療装置は、カウチに横臥する患者のX線画像を撮像するイメージャシステムと、その患者に治療用放射線を曝射する治療用放射線照射装置とを備えている。その放射線治療装置は、事前に撮影された患者のCT画像とそのイメージャシステムにより直前に撮影されたその患者のX線画像とに基づいてその患者の患部が所定の位置に配置されるようにそのカウチが位置調整された後に、その治療用放射線照射装置によりその患部に治療用放射線を曝射する。患者を位置合わせするときに、その患者の不快感を軽減することが望まれている。
【0003】
特開2006−51215号公報には、患部の位置合わせが正確に行われる放射線治療装置用の治療台が開示されている。その放射線治療装置用治療台は、支持台と、前記支持台の上部に取り付けられ、鉛直方向から見たときに前記支持台との重なりが最も大きい第1位置と前記支持台との重なりが最も小さい第2位置とに配置されることが可能な天板とを具備し、前記天板の上に患者が載せられたときの前記天板の撓みの大きさは、前記第1位置と前記第2位置とで同じである。
【0004】
米国特許第7373676号明細書には、患者を位置合わせするための患者支持装置が開示されている。その患者支持装置は、互いに垂直である3軸に平行に平行移動することができ、かつ、その3軸を中心に回転移動することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−51215号公報
【特許文献2】米国特許第7373676号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、患者を位置合わせするときに、その患者の不快感を軽減する放射線治療装置制御装置および放射線治療装置制御方法を提供することにある。
本発明の他の課題は、患者を位置合わせするときに、その患者の負荷を軽減する放射線治療装置制御装置および放射線治療装置制御方法を提供することにある。
本発明のさらに他の課題は、患者が放射線治療するときに、その患者が乗るカウチを低床化する放射線治療装置制御装置および放射線治療装置制御方法を提供することにある。
【課題を解決するための手段】
【0007】
以下に、発明を実施するための形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0008】
本発明による放射線治療装置制御装置(10)は、計画時位置データ収集部(62)と位置合わせ時位置データ収集部(63)と補正量算出部(64)と治療計画収集部(61)と照射ヘッド駆動部(66)とを備えている。計画時位置データ収集部(62)は、被検体(35)が計画時に配置される計画時位置を示している計画時位置データを収集する。位置合わせ時位置データ収集部(63)は、被検体(35)がその計画時と異なる位置合わせ時に配置される位置合わせ時位置を示している位置合わせ時3次元データを測定する。補正量算出部(64)は、その計画時位置データとその位置合わせ時3次元データとに基づいて治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出する。治療計画収集部(61)は、基礎に対して回転可能に支持されるリング(2)に対して回転可能に支持されるガントリ(3)に支持される照射ヘッド(6)がその計画時位置に対して配置される曝射方向を収集する。その曝射方向は、ガントリ角度とリング角度とを示している。照射ヘッド駆動部(66)は、その基礎に対してリング(2)が補正後リング角度に配置されるように、かつ、リング(2)に対してガントリ(3)が補正後ガントリ角度に配置されるように、リング(2)とガントリ(3)とを移動させる照射ヘッド駆動装置(21)をその曝射方向に基づいて制御する。その補正後リング角度は、そのリング角度からそのリング角度オフセット値を減算した差を示している。その補正後ガントリ角度は、ガントリ角度からガントリ角度オフセット値を減算した差を示している。ガントリ角度オフセット値とそのリング角度オフセット値とは、その基礎に対してリング(2)がその補正後リング角度に配置され、リング(2)に対してガントリ(3)がその補正後ガントリ角度に配置されたときに、照射ヘッド(6)がその治療時位置に対してその曝射方向に配置されるように、算出される。
【0009】
このような放射線治療装置制御装置(10)は、被検体(35)を位置合わせ時位置から治療時位置まで移動させるときに被検体(35)を回転移動させる回転移動量を低減するように、または、その治療時位置が所定の範囲に含まれるように、その治療時位置を算出することができる。このため、このような放射線治療装置制御装置(10)は、被検体(35)を位置合わせ時位置からその治療時位置まで移動させるときに、または、被検体(35)が治療時位置に配置されるときに、被検体(35)の不快感を軽減することができる。
【0010】
本発明による放射線治療装置制御装置(10)は、被検体(35)がその治療時位置に配置され、かつ、その基礎に対してリング(2)がその補正後リング角度に配置され、かつ、リング(2)に対してガントリ(3)がその補正後ガントリ角度に配置された後に、照射ヘッド(6)から被検体(35)に治療用放射線(24)が曝射されるように照射ヘッド(6)を制御する照射部(67)をさらに備えていることが好ましい。
【0011】
本発明による放射線治療装置制御装置(10)は、被検体(35)がその位置合わせ時位置からその治療時位置に移動するように、被検体(35)を移動させるカウチ駆動装置(35)を制御するカウチ駆動部(65)をさらに備えていることが好ましい。
【0012】
その位置合わせ時位置からその治療時位置までの被検体(35)の移動は、その基礎に対して固定された方向に平行である回転軸(51)を中心に回転する回転移動と、その基礎に対する平行移動とから形成されている。すなわち、その治療時位置は、その位置合わせ時位置からその治療時位置までの被検体(35)の移動が、その基礎に対して固定された方向に平行である回転軸を中心に回転する回転移動と、その基礎に対する平行移動とから形成されるように、算出される。このような放射線治療装置制御装置(10)によれば、被検体(35)を支持するカウチを移動させるカウチ駆動装置(35)は、1つの回転軸のみを中心に回転させるように形成されることができ、複数の回転軸を中心に回転させることができる機構を備えている他のカウチ駆動装置(35)に比較して、より安価に、よりコンパクトに形成されることができる。このとき、そのカウチは、より低床化されることができ、被検体(35)がカウチに乗るときの被検体(35)の負荷を低減することができる。
【0013】
カウチ駆動装置(35)は、その基礎に対して平行移動可能に支持される第1フレーム(41)と、第1フレーム(41)に対して第1回転軸(51)を中心に回転可能に支持される第2フレームと、第1フレーム(41)に対して第1方向(52)に平行にガイド(45)を平行移動させる回転移動用駆動装置(49)と、第1方向(52)と平行でない第2方向に平行に平行移動可能にガイド(45)に支持されるスライダと、その基礎に対してその第2フレームを平行移動させる平行移動用駆動装置とを備えている。このとき、そのスライダは、第1回転軸(51)と異なる第2回転軸(53)を中心に回転可能にその第2フレームに支持されている。
【0014】
その位置合わせ時3次元データは、ガントリ(3)に支持されるイメージャシステム(25、26、27、28)により撮影された透視画像を示していることが好ましい。
【0015】
その計画時位置データは、イメージャシステム(25、26、27、28)と別個である他のモダリティ(20)により測定された3次元データを示していることが好ましい。
【0016】
その治療時位置は、その補正後リング角度がそのリング角度に一致するように、算出されることが好ましい。または、その治療時位置は、その補正後ガントリ角度がガントリ角度に一致するように、算出されることが好ましい。
【0017】
本発明による放射線治療装置制御方法は、被検体(35)が計画時に配置される計画時位置を示している計画時位置データを収集するステップと、被検体(35)がその計画時と異なる位置合わせ時に配置される位置合わせ時位置を示している位置合わせ時3次元データを収集するステップと、その計画時位置データとその位置合わせ時3次元データとに基づいて治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出するステップと、基礎に対して回転可能に支持されるリング(2)に対して回転可能に支持されるガントリ(3)に支持される照射ヘッド(6)がその計画時位置に対して配置される曝射方向を収集するステップと、その基礎に対してリング(2)が補正後リング角度に配置されるように、かつ、リング(2)に対してガントリ(3)が補正後ガントリ角度に配置されるように、リング(2)とガントリ(3)とを移動させるステップとを備えている。その曝射方向は、ガントリ角度とリング角度とを示している。その補正後リング角度は、そのリング角度からそのリング角度オフセット値を減算した差を示している。その補正後ガントリ角度は、ガントリ角度からガントリ角度オフセット値を減算した差を示している。ガントリ角度オフセット値とそのリング角度オフセット値とは、その基礎に対してリング(2)がその補正後リング角度に配置され、リング(2)に対してガントリ(3)がその補正後ガントリ角度に配置されたときに、照射ヘッド(6)がその治療時位置に対してその曝射方向に配置されるように、算出される。このような放射線治療装置制御方法は、被検体(35)を位置合わせ時位置から治療時位置まで移動させるときに被検体(35)を回転移動させる回転移動量を低減するように、または、その治療時位置が所定の範囲に含まれるように、その治療時位置を算出することができる。このため、このような放射線治療装置制御方法は、被検体(35)を位置合わせ時位置からその治療時位置まで移動させるときに、または、被検体(35)が治療時位置に配置されるときに、被検体(35)の不快感を軽減することができる。
【0018】
その位置合わせ時位置からその治療時位置までの被検体(35)の移動は、その基礎に対して固定された方向に平行である回転軸(51)を中心に回転する回転移動と、その基礎に対する平行移動とから形成されている。すなわち、その治療時位置は、その位置合わせ時位置からその治療時位置までの被検体(35)の移動が、その基礎に対して固定された方向に平行である回転軸を中心に回転する回転移動と、その基礎に対する平行移動とから形成されるように、算出される。このような放射線治療装置制御方法によれば、被検体(35)を支持するカウチを移動させるカウチ駆動装置(35)は、1つの回転軸のみを中心に回転させるように形成されることができ、複数の回転軸を中心に回転させることができる機構を備えている他のカウチ駆動装置(35)に比較して、より安価に、よりコンパクトに形成されることができる。その結果、このような放射線治療装置制御方法によれば、そのカウチは、より低床化されることができ、被検体(35)がカウチに乗るときの被検体(35)の負荷を低減することができる。
【0019】
その位置合わせ時3次元データは、ガントリ(3)に支持されるイメージャシステム(25、26、27、28)により撮影された透視画像を示していることが好ましい。
【0020】
その計画時位置データは、イメージャシステム(25、26、27、28)と別個である他のモダリティ(20)により測定された3次元データを示していることが好ましい。
【0021】
その治療時位置は、その補正後リング角度がそのリング角度に一致するように、算出されることが好ましい。または、その治療時位置は、その補正後ガントリ角度がガントリ角度に一致するように、算出されることが好ましい。
【0022】
本発明によるコンピュータプログラムは、本発明による放射線治療装置制御方法をコンピュータに実行させることが好ましい。
【発明の効果】
【0023】
本発明による放射線治療装置制御装置および放射線治療装置制御方法は、被検体を位置合わせするときに、その被検体を回転移動させる回転移動量を低減することができ、または、その被検体を所定の向きに配置することができる。
【図面の簡単な説明】
【0024】
【図1】図1は、放射線治療システムを示すブロック図である。
【図2】図2は、放射線治療装置を示す斜視図である。
【図3】図3は、カウチ駆動装置を示す平面図である。
【図4】図4は、カウチ駆動装置の他の状態を示す平面図である。
【図5】図5は、カウチ駆動装置のさらに他の状態を示す平面図である。
【図6】図6は、放射線治療装置制御装置を示すブロック図である。
【図7】図7は、患者を位置合わせする動作を示すフローチャートである。
【発明を実施するための形態】
【0025】
図面を参照して、本発明による放射線治療装置制御装置の実施の形態を記載する。その放射線治療装置制御装置10は、図1に示されているように、放射線治療システムに適用されている。その放射線治療システムは、放射線治療装置1と放射線治療装置制御装置10とコンピュータ断層撮影装置20とを備えている。放射線治療装置制御装置10は、双方向に情報を伝送することができるように、放射線治療装置1とコンピュータ断層撮影装置20とに接続されている。
【0026】
コンピュータ断層撮影装置20は、各方向からX線を被写体に曝射させて複数の透視画像を撮影し、その複数の透視画像をコンピュータで画像処理してその被写体の断面の画像を生成し、その複数の透視画像をコンピュータで画像処理してその被写体の内部の状態を示す3次元データを生成する。その3次元データは、その被写体を形成する複数の部位のX線が吸収される程度を示している。その複数のボクセルは、それぞれ、その被写体が配置される空間に隙間なく充填される複数の領域に対応している。たとえば、その複数の領域は、それぞれ、直方体に形成されている。その複数のCT値のうちの任意のボクセルに対応する1つのCT値(Computed Tomography number)は、その複数の領域のうちのその任意のボクセルに対応する領域の透過係数(X線吸収係数)に対応している。すなわち、その領域を透過したX線の強度I1は、その透過係数λを用いて、次式:
I1=I0e−λx
により表現される。ここで、I0は、そのX線がその領域に入射する前の強度を示している。変数xは、その領域の厚さを示している。
【0027】
放射線治療装置1は、図2に示されているように、Oリング2と走行ガントリ3と治療用放射線照射装置6とを備えている。Oリング2は、リング状に形成され、リング回転軸11を中心に回転可能に基礎に支持されている。リング回転軸11は、鉛直方向に平行である。走行ガントリ3は、リング状に形成されている。走行ガントリ3は、Oリング2のリングの内側に配置され、ガントリ回転軸12を中心に回転可能にOリング2に支持されている。ガントリ回転軸12は、鉛直方向に垂直であり、アイソセンタ14でリング回転軸11と交差している。ガントリ回転軸12は、Oリング2に対して固定され、すなわち、Oリング2とともにリング回転軸11を中心に回転する。
【0028】
治療用放射線照射装置6は、走行ガントリ3のリングの内側に配置されている。治療用放射線照射装置6は、チルト軸16に回転可能に、かつ、パン軸17に回転可能に、走行ガントリ3に支持されている。チルト軸16は、パン軸17に直交している。チルト軸16とパン軸17との交点は、アイソセンタ14から1mだけ離れている。治療用放射線照射装置6は、放射線治療装置制御装置10により制御されることにより、照射野が制御された治療用放射線24を出射する。治療用放射線24は、治療用放射線照射装置6が有する仮想的点線源から出射され、その仮想的点線源を頂点とする円錐状のコーンビームである。その仮想的点線源は、チルト軸16とパン軸17との交点に配置されている。
【0029】
放射線治療装置1は、さらに、リング駆動装置21とジンバル装置23とを備え、図示されていないガントリ駆動装置を備えている。リング駆動装置21は、放射線治療装置制御装置10により制御されることにより、リング回転軸11を中心にOリング2を回転させる。リング駆動装置21は、さらに、基礎に対してOリング2が配置されるリング角度を測定し、そのリング角度を放射線治療装置制御装置10に出力する。そのガントリ駆動装置は、放射線治療装置制御装置10により制御されることにより、ガントリ回転軸12を中心に走行ガントリ3を回転させる。そのガントリ駆動装置は、さらに、Oリング2に対して走行ガントリ3が配置されるガントリ角度を測定し、そのガントリ角度を放射線治療装置制御装置10に出力する。
【0030】
ジンバル装置23は、放射線治療装置制御装置10により制御されることにより、チルト軸16を中心に治療用放射線照射装置6を回転させ、パン軸17を中心に治療用放射線照射装置6を回転させる。ジンバル装置23は、さらに、チルト軸16を中心に走行ガントリ3に対して治療用放射線照射装置6が回転するチルト角を測定し、そのチルト角を放射線治療装置制御装置10に出力する。ジンバル装置23は、さらに、パン軸17を中心に走行ガントリ3に対して治療用放射線照射装置6が回転するパン角を測定し、そのパン角を放射線治療装置制御装置10に出力する。
【0031】
治療用放射線24は、治療用放射線照射装置6が走行ガントリ3にこのように支持されることにより、治療用放射線照射装置6がアイソセンタ14に向くように走行ガントリ3に一旦固定されると、リング駆動装置21によりOリング2が回転されても、または、そのガントリ駆動装置により走行ガントリ3が回転されても、常に概ねアイソセンタ14に出射される。すなわち、放射線治療装置1は、走行・旋回を行うことで任意方向からアイソセンタ14に向けて治療用放射線24の曝射が可能になる。
【0032】
放射線治療装置1は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置1は、第1診断用放射線照射装置25と第2診断用放射線照射装置26と第1撮像装置27と第2撮像装置28とを備えている。第1診断用放射線照射装置25は、走行ガントリ3に支持され、アイソセンタ14から第1診断用放射線照射装置25を結ぶ線分とアイソセンタ14から治療用放射線照射装置6を結ぶ線分とのなす角が鋭角になるように、走行ガントリ3のリングの内側に配置されている。第2診断用放射線照射装置26は、走行ガントリ3に支持され、アイソセンタ14から第2診断用放射線照射装置26を結ぶ線分とアイソセンタ14から治療用放射線照射装置6を結ぶ線分とのなす角が鋭角になるように、走行ガントリ3のリングの内側に配置されている。第2診断用放射線照射装置26は、さらに、アイソセンタ14から第1診断用放射線照射装置25を結ぶ線分とアイソセンタ14から第2診断用放射線照射装置26を結ぶ線分とのなす角が直角(90度)になるように、配置されている。
【0033】
第1診断用放射線照射装置25は、放射線治療装置制御装置10により制御されることにより、所定のタイミングで第1診断用放射線31をアイソセンタ14に向けて出射する。第1診断用放射線31は、第1診断用放射線照射装置25が有する仮想的点線源から出射され、その仮想的点線源を頂点とする円錐状のコーンビームである。第2診断用放射線照射装置26は、放射線治療装置制御装置10により制御されることにより、所定のタイミングで第2診断用放射線32をアイソセンタ14に向けて出射する。第2診断用放射線32は、第2診断用放射線照射装置26が有する仮想的点線源から出射され、その仮想的点線源を頂点とする円錐状のコーンビームである。
【0034】
第1撮像装置27は、受光部を備えている。第1撮像装置27は、放射線治療装置制御装置10により制御されることにより、その受光部に受光されるX線に基づいて第1透視画像を生成する。第1撮像装置27としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。第1撮像装置27は、走行ガントリ3に支持され、第1診断用放射線31によりアイソセンタ14が中央に映し出される透視画像が撮像されるように、配置されている。すなわち、第1撮像装置27は、第1撮像装置27の受光部の中央と第1診断用放射線31が放射される仮想的点線源とアイソセンタ14とが直線上に配置されるように、配置されている。
【0035】
第2撮像装置28は、受光部を備えている。第2撮像装置28は、放射線治療装置制御装置10により制御されることにより、その受光部に受光されるX線に基づいて第2透視画像を生成する。第2撮像装置28としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。第2撮像装置28は、走行ガントリ3に支持され、第2診断用放射線32によりアイソセンタ14が中央に映し出される透視画像が撮像されるように、配置されている。すなわち、第2撮像装置28は、第2撮像装置28の受光部の中央と第2診断用放射線32が放射される仮想的点線源とアイソセンタ14とが直線上に配置されるように、配置されている。
【0036】
その透視画像は、複数のピクセルから形成されている。その複数のピクセルは、その透視画像上にマトリクス状に配置され、それぞれ輝度に対応付けられている。その透視画像は、その複数のピクセルの各々に対応する輝度がその複数のピクセルの各々に着色されることにより、被写体を映し出している。
【0037】
放射線治療装置1は、さらに、カウチ33とカウチ駆動装置34とを備えている。カウチ33は、X軸とY軸とZ軸とに平行に平行移動可能に、かつ、そのX軸を中心に回転移動可能に、基礎に支持されている。そのX軸とY軸とZ軸とは、互いに直交している。カウチ33は、その放射線治療システムにより治療される患者35が横臥することに利用される。カウチ33は、図示されていない固定具を備えている。その固定具は、患者35が動かないように、患者35をカウチ33に固定する。カウチ駆動装置34は、放射線治療装置制御装置10により制御されることにより、カウチ33を回転移動させ、カウチ33を平行移動させる。
【0038】
図3は、カウチ駆動装置34を示している。カウチ駆動装置34は、フレーム41と天板支持部品42とを備えている。フレーム41は、板状に形成されている。フレーム41は、基礎に対して平行移動することができるように、基礎に支持されている。天板支持部品42は、板状に形成され、カウチ33に固定されている。天板支持部品42は、軸受43を介して、回転軸51を中心に回転することができるように、フレーム41に支持されている。回転軸51は、リング回転軸11に垂直である。
【0039】
カウチ駆動装置34は、さらに、フレーム44と傾斜直動ガイド45とスライダ46とを備えている。フレーム44は、反Oリング方向52に平行に平行移動することができるように、フレーム41に支持されている。反Oリング方向52は、回転軸51に垂直であり、かつ、リング回転軸11に垂直である。傾斜直動ガイド45は、棒状に形成され、フレーム44に固定されている。スライダ46は、傾斜直動ガイド45に沿って平行移動可能に、傾斜直動ガイド45に支持されている。スライダ46は、軸受47を介して、回転軸53を中心に回転することができるように、天板支持部品42に支持されている。
【0040】
カウチ駆動装置34は、さらに、ストッパ48−1〜48−2と回転移動用駆動装置49とを備えている。ストッパ48−1は、フレーム44が所定の位置に配置されたときにフレーム44に接触するように、フレーム41に固定されて配置されている。すなわち、ストッパ48−1は、その所定の位置より反Oリング方向52にフレーム44が移動しないように、フレーム44の可動域を制限している。ストッパ48−2は、フレーム44が所定の位置に配置されたときにフレーム44に接触するように、フレーム41に固定されて配置されている。すなわち、ストッパ48−2は、その所定の位置より反Oリング方向52にフレーム44が移動しないように、フレーム44の可動域を制限している。回転移動用駆動装置49は、放射線治療装置制御装置10により制御されることにより、フレーム41に対してフレーム44を反Oリング方向52に平行に平行移動させる。
【0041】
カウチ駆動装置34は、さらに、図示されていない平行移動用駆動装置を備えている。その平行移動用駆動装置は、放射線治療装置制御装置10により制御されることにより、基礎に対してフレーム41を平行移動させる。すなわち、その平行移動用駆動装置は、放射線治療装置制御装置10により制御されることにより、基礎に対して天板支持部品42を平行移動させ、基礎に対してカウチ33を平行移動させる。
【0042】
図4は、フレーム44が反Oリング方向52に平行移動したときに、カウチ駆動装置34の状態を示している。スライダ46は、フレーム44が反Oリング方向52に平行移動したときに、傾斜直動ガイド45に案内されて、フレーム41から遠ざかるように移動する。天板支持部品42は、スライダ46がフレーム41から遠ざかるように移動したときに、回転軸51を中心に時計回りに回転する。
【0043】
図5は、フレーム44が反Oリング方向52の反対方向に平行移動したときに、カウチ駆動装置34の状態を示している。スライダ46は、フレーム44が反Oリング方向52の反対方向に平行移動したときに、傾斜直動ガイド45に案内されて、フレーム41に近づくように移動する。天板支持部品42は、スライダ46がフレーム41に近づくように移動したときに、回転軸51を中心に反時計回りに回転する。
【0044】
このようなカウチ駆動装置34は、互いに平行でない複数の回転軸を中心にカウチ33を回転移動させることができる他のカウチ駆動装置に比較して、よりコンパクトである。このため、カウチ駆動装置34によれば、カウチ33は、低床化させることができ、放射線治療される患者35がカウチ33に乗るときの負担を低減することができる。
【0045】
図6は、放射線治療装置制御装置10を示している。放射線治療装置制御装置10は、コンピュータであり、図示されていないCPUと記憶装置とリムーバルメモリドライブと通信装置と入力装置と出力装置とインターフェースとを備えている。そのCPUは、放射線治療装置制御装置10にインストールされるコンピュータプログラムを実行して、その記憶装置とリムーバルメモリドライブと通信装置と入力装置と出力装置とインターフェースとを制御する。その記憶装置は、そのコンピュータプログラムを記録する。その記憶装置は、さらに、そのCPUにより利用される情報を記録する。そのリムーバルメモリドライブは、コンピュータプログラムが記録されている記録媒体が挿入されたときに、そのコンピュータプログラムを放射線治療装置制御装置10にインストールするときに利用される。その通信装置は、通信回線網を介して放射線治療装置制御装置10に接続される他のコンピュータからコンピュータプログラムを放射線治療装置制御装置10にダウンロードし、そのコンピュータプログラムを放射線治療装置制御装置10にインストールするときに利用される。その入力装置は、ユーザに操作されることにより生成される情報をそのCPUに出力する。その入力装置としては、キーボード、マウスが例示される。その出力装置は、そのCPUにより生成された情報をユーザに認識可能に出力する。その出力装置としては、そのCPUにより生成された画像を表示するディスプレイが例示される。
【0046】
そのインターフェースは、放射線治療装置制御装置10に接続される外部機器により生成される情報をそのCPUに出力し、そのCPUにより生成された情報をその外部機器に出力する。その外部機器は、コンピュータ断層撮影装置20と治療用放射線照射装置6とリング駆動装置21とガントリ駆動装置とジンバル装置23と第1診断用放射線照射装置25と第2診断用放射線照射装置26と第1撮像装置27と第2撮像装置28とカウチ駆動装置34とを含んでいる。
【0047】
放射線治療装置制御装置10にインストールされるコンピュータプログラムは、放射線治療装置制御装置10に複数の機能をそれぞれ実現させるための複数のコンピュータプログラムから形成されている。その複数の機能は、治療計画収集部61と計画時位置データ収集部62と位置合わせ時位置データ収集部63と補正量算出部64とカウチ駆動部65と照射ヘッド駆動部66と照射部67とを含んでいる。
【0048】
治療計画収集部61は、入力装置から治療計画を収集する。その治療計画は、コンピュータ断層撮影装置20により撮影された患者35の3次元データに基づいて作成され、曝射条件を示している。その曝射条件は、曝射方向と線量とを示している。その曝射方向は、患者35に治療用放射線24を曝射する方向を示し、リング角度とガントリ角度とを示している。そのリング角度は、基礎に対してOリング2が配置される位置を示している。そのガントリ角度は、Oリング2に対して走行ガントリ3が配置される位置を示している。その線量は、その曝射方向から患者35に曝射される治療用放射線24の線量を示している。
【0049】
計画時位置データ収集部62は、治療計画収集部61により収集される治療計画を作成するときに利用された3次元データをコンピュータ断層撮影装置20から収集する。その3次元データは、複数のボクセルに複数のCT値を対応付けている。計画時位置データ収集部62は、その3次元データに基づいて計画時位置を算出する。その計画時位置は、その3次元データを再構成する際にコンピュータ断層撮影装置20により複数の透視画像が撮影された時に患者35が配置された位置と向きとを示している。このとき、その治療計画が示す曝射方向は、その計画時位置に配置された患者35に治療用放射線24を曝射する方向を示している。
【0050】
位置合わせ時位置データ収集部63は、カウチ33に横臥した患者35を映す位置合わせ時第1透視画像と位置合わせ時第2透視画像とが撮影されるように、放射線治療装置1を制御する。すなわち、位置合わせ時位置データ収集部63は、患者35がカウチ33に固定されているときに、基礎に対してカウチ33が適当な位置に配置されるように、カウチ駆動装置34を制御する。位置合わせ時位置データ収集部63は、さらに、基礎に対してOリング2が適当なリング角度に配置されるように、リング駆動装置21を制御する。位置合わせ時位置データ収集部63は、さらに、Oリング2に対して走行ガントリ3が適当なガントリ角度に配置されるように、放射線治療装置1のガントリ駆動装置を制御する。
【0051】
位置合わせ時位置データ収集部63は、さらに、Oリング2と走行ガントリ3とが適当な位置に配置されているときに、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。位置合わせ時位置データ収集部63は、さらに、第1診断用放射線31が患者35に曝射されたときに、患者35を透過したX線に基づいて位置合わせ時第1透視画像が生成されるように、第1撮像装置27を制御する。その位置合わせ時第1透視画像が示す複数の輝度のうちの任意のピクセルに対応する輝度は、第1撮像装置27の受光部のうちのその任意のピクセルに対応する領域と第1診断用放射線照射装置25とを結ぶ線分上に配置される物体をX線が透過する透過率に対応している。
【0052】
位置合わせ時位置データ収集部63は、さらに、Oリング2と走行ガントリ3とがその適当な位置に配置されているときに、第2診断用放射線32が曝射されるように、第2診断用放射線照射装置26を制御する。位置合わせ時位置データ収集部63は、さらに、第2診断用放射線32が患者35に曝射されたときに、患者35を透過したX線に基づいて位置合わせ時第2透視画像が生成されるように、第2撮像装置28を制御する。その位置合わせ時第2透視画像が示す複数の輝度のうちの任意のピクセルに対応する輝度は、第2撮像装置28の受光部のうちのその任意のピクセルに対応する領域と第2診断用放射線照射装置26とを結ぶ線分上に配置される物体をX線が透過する透過率に対応している。
【0053】
位置合わせ時位置データ収集部63は、さらに、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とに基づいて位置合わせ時位置を算出する。その位置合わせ位置は、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とが撮影された時に患者35が配置された位置と向きとを示している。
【0054】
補正量算出部64は、計画時位置データ収集部62により算出された計画時位置と位置合わせ時位置データ収集部63により算出された位置合わせ時位置とに基づいて患者位置とリング角度オフセット値とガントリ角度オフセット値とを算出する。
【0055】
その患者位置は、患者35が配置される位置と向きとを示し、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とが撮影された時に患者35が配置された位置からカウチ駆動装置34により移動することができる位置と向きとを示している。すなわち、その患者位置は、位置合わせ時位置データ収集部63により算出された位置合わせ時位置に配置された患者35を、平行移動と回転軸51を中心に回転する回転移動とによりその患者位置に移動することができるように、算出される。
【0056】
そのリング角度オフセット値は、計画時リング角度から治療時リング角度を減算した差を示している。そのガントリ角度オフセット値は、計画時ガントリ角度から治療時ガントリ角度を減算した差を示している。このとき、基礎に対してOリング2がその治療時リング角度に配置され、Oリング2に対して走行ガントリ3がその治療時ガントリ角度に配置されたときに、その患者位置に対して治療用放射線照射装置6が配置される治療時向きは、基礎に対してOリング2がその計画時リング角度に配置され、Oリング2に対して走行ガントリ3がその計画時ガントリ角度に配置されたときに、その計画時位置に対して治療用放射線照射装置6が配置される計画時向きに一致している。すなわち、そのガントリ角度オフセット値とそのリング角度オフセット値とは、その治療時向きがその計画時向きに一致するように、算出される。
【0057】
カウチ駆動部65は、補正量算出部64により算出された患者位置に基づいて、位置合わせ時位置データ収集部63により算出された位置合わせ時位置に配置された患者35がその患者位置に移動するように、カウチ駆動装置34を制御する。すなわち、カウチ駆動部65は、その患者位置が示す向きに患者35が向くように回転移動用駆動装置49を制御し、その患者位置が示す位置に患者35が配置されるようにカウチ駆動装置34の平行移動用駆動装置を制御する。
【0058】
照射ヘッド駆動部66は、治療計画収集部61により収集された治療計画が示す曝射方向に基づいて、放射線治療装置1を制御する。すなわち、照射ヘッド駆動部66は、基礎に対してOリング2が補正後リング角度に配置されるように、リング駆動装置21を制御する。照射ヘッド駆動部66は、さらに、Oリング2に対して走行ガントリ3が補正後ガントリ角度に配置されるように、放射線治療装置1のガントリ駆動装置を制御する。その補正後リング角度は、その曝射方向が示すリング角度から補正量算出部64により算出されたリング角度オフセット値を減算した値を示している。その補正後ガントリ角度は、その曝射条件が示すガントリ角度から補正量算出部64により算出されたガントリ角度オフセット値を減算した値を示している。
【0059】
照射部67は、カウチ駆動部65により患者35がその患者位置に配置され、照射ヘッド駆動部66により治療用放射線照射装置6が所定の位置に配置された後に、患者35の患部を映し出す治療時第1透視画像と治療時第2透視画像とが撮影されるように、放射線治療装置1を制御する。すなわち、照射部67は、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。照射部67は、治療時第1透視画像が撮像されるように、第1撮像装置27を制御する。照射部67は、第2診断用放射線32が曝射されるように、第2診断用放射線照射装置26を制御する。照射部67は、治療時第2透視画像が撮像されるように、第2撮像装置28を制御する。
【0060】
照射部67は、さらに、その治療時第1透視画像と治療時第2透視画像とに基づいて、患者35の患部の位置を算出し、その患部の形状を算出する。照射部67は、さらに、その算出された患部の位置に治療用放射線照射装置6が向くように、ジンバル装置23を制御する。照射部67は、さらに、その患部の形状に治療用放射線24の照射野が一致するように、治療用放射線照射装置6を制御し、その患部に治療用放射線24が曝射されるように、治療用放射線照射装置6を制御する。照射部67は、さらに、その曝射条件が示す線量の治療用放射線24が患者35の患部に曝射されるまで、その治療時第1透視画像と治療時第2透視画像との撮影から治療用放射線24の曝射までの動作を繰り返して実行する。
【0061】
本発明による放射線治療装置制御方法の実施の形態は、放射線治療装置制御装置10により実行され、治療計画を作成する動作と患者を位置合わせする動作と放射線治療する動作とを備えている。
【0062】
その治療計画を作成する動作では、まず、ユーザは、コンピュータ断層撮影装置20を用いて、複数の透視画像を撮影し、その複数の透視画像に基づいて患者35の内部の状態を示す3次元データを生成する。その3次元データは、計画時位置を示している。その計画時位置は、その複数の透視画像が撮影された時に患者35が配置された位置と向きとを示している。ユーザは、さらに、その3次元データに基づいて治療計画を作成する。その治療計画は、曝射条件を示している。その曝射条件は、曝射方向と線量とを示している。その曝射方向は、その計画時位置に対して治療用放射線24が配置される計画時向きを示し、リング角度とガントリ角度とを示している。そのリング角度は、基礎に対してOリング2が配置される位置を示している。そのガントリ角度は、Oリング2に対して走行ガントリ3が配置される位置を示している。その線量は、その曝射方向から患者35に曝射される治療用放射線24の線量を示している。ユーザは、放射線治療装置制御装置10の入力装置を介して、その治療計画を放射線治療装置制御装置10に入力する。
【0063】
図7は、その患者を位置合わせする動作を示している。その患者を位置合わせする動作は、その治療計画を作成する動作が実行された後に、たとえば、その治療計画を作成する動作が実行されてから数日後に、実行される。放射線治療装置制御装置10は、その治療計画を作成するときに利用された3次元データをコンピュータ断層撮影装置20から収集する(ステップS1)。放射線治療装置制御装置10は、その3次元データに基づいてその計画時位置を算出する。
【0064】
患者35は、カウチ33に乗り、カウチ33に横臥する。ユーザは、患者35がカウチ33に横臥した後に、固定具を用いて患者35をカウチ33に固定する。放射線治療装置制御装置10は、患者35がカウチ33に固定された後に、患者35の患部が概ねアイソセンタ14に配置されるように、カウチ駆動装置34を制御する。
【0065】
放射線治療装置制御装置10は、カウチ33に横臥した患者35を映す位置合わせ時第1透視画像と位置合わせ時第2透視画像とが撮影されるように、放射線治療装置1を制御する(ステップS2)。すなわち、放射線治療装置制御装置10は、患者35がカウチ33に固定された後に、患者35の患部が概ねアイソセンタ14に配置されるように、カウチ駆動装置34を制御する。放射線治療装置制御装置10は、さらに、患者35の患部がイメージャシステムにより撮像されるように、走行ガントリ3を適当な位置まで移動させる。すなわち、放射線治療装置制御装置10は、基礎に対してOリング2が適当なリング角度に配置されるように、リング駆動装置21を制御する。放射線治療装置制御装置10は、さらに、Oリング2に対して走行ガントリ3が適当なガントリ角度に配置されるように、放射線治療装置1のガントリ駆動装置を制御する。
【0066】
放射線治療装置制御装置10は、さらに、Oリング2と走行ガントリ3とがその適当な位置に配置されているときに、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。放射線治療装置制御装置10は、さらに、第1診断用放射線31が患者35に曝射されたときに、患者35を透過したX線に基づいて位置合わせ時第1透視画像が生成されるように、第1撮像装置27を制御する。放射線治療装置制御装置10は、さらに、Oリング2と走行ガントリ3とが所定の位置に配置されているときに、第2診断用放射線32が曝射されるように、第2診断用放射線照射装置26を制御する。放射線治療装置制御装置10は、さらに、第2診断用放射線32が患者35に曝射されたときに、患者35を透過したX線に基づいて位置合わせ時第2透視画像が生成されるように、第2撮像装置28を制御する。
【0067】
放射線治療装置制御装置10は、さらに、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とに基づいて位置合わせ時位置を算出する。その位置合わせ位置は、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とが撮影された時に患者35が配置された位置と向きとを示している。
【0068】
放射線治療装置制御装置10は、その位置合わせ時位置とステップS1で算出された計画時位置とに基づいて患者位置とリング角度オフセット値とガントリ角度オフセット値とを算出する(ステップS3)。その患者位置は、患者35が配置される位置と向きとを示し、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とが撮影された時に患者35が配置された位置からカウチ駆動装置34により移動することができる位置と向きとを示している。すなわち、その患者位置は、放射線治療装置制御装置10により算出された位置合わせ時位置に配置された患者35を、平行移動と回転軸51を中心に回転する回転移動とによりその患者位置に移動することができるように、算出される。
【0069】
そのリング角度オフセット値は、計画時リング角度から治療時リング角度を減算した差を示している。そのガントリ角度オフセット値は、計画時ガントリ角度から治療時ガントリ角度を減算した差を示している。このとき、基礎に対してOリング2がその治療時リング角度に配置され、Oリング2に対して走行ガントリ3がその治療時ガントリ角度に配置されたときに、その患者位置に対して治療用放射線照射装置6が配置される治療時向きは、基礎に対してOリング2がその計画時リング角度に配置され、Oリング2に対して走行ガントリ3がその計画時ガントリ角度に配置されたときに、その計画時位置に対して治療用放射線照射装置6が配置される計画時向きに一致している。すなわち、そのガントリ角度オフセット値とそのリング角度オフセット値とは、その治療時向きがその計画時向きに一致するように、算出される。
【0070】
放射線治療装置制御装置10は、その位置合わせ時位置とその患者位置との差が所定の値より大きいときに(ステップS4、NO)、患者35がその患者位置に移動するように、カウチ駆動装置34を制御する(ステップS5)。すなわち、放射線治療装置制御装置10は、その位置合わせ時位置が示す向きに向いている患者35が、その患者位置が示す向きに向くように、回転移動用駆動装置49を制御する。放射線治療装置制御装置10は、その位置合わせ時位置が示す位置に配置されている患者35が、その患者位置が示す位置に配置されるように、カウチ駆動装置34の平行移動用駆動装置を制御する。
【0071】
放射線治療装置制御装置10は、患者35がその患者位置に移動するようにカウチ駆動装置34を制御した後に、カウチ33に横臥した患者35を映す位置合わせ時第1透視画像と位置合わせ時第2透視画像とが再度撮影されるように、放射線治療装置1を制御する(ステップS2)。放射線治療装置制御装置10は、さらに、その位置合わせ時第1透視画像とその位置合わせ時第2透視画像とに基づいて位置合わせ時位置を再度算出する。放射線治療装置制御装置10は、その位置合わせ時位置とステップS1で収集された計画時位置とに基づいて患者位置とリング角度オフセット値とガントリ角度オフセット値とを再度算出する(ステップS3)。
【0072】
放射線治療装置制御装置10は、その位置合わせ時位置とその患者位置との差がその所定の値より小さくなるまで(ステップS4、YES)、ステップS5とステップS2とステップS3とを繰り返して実行する。
【0073】
その放射線治療する動作は、患者を位置合わせする動作が実行された直後に実行される。放射線治療装置制御装置10は、その治療計画が示す曝射条件に基づいて、放射線治療装置1を制御する。すなわち、放射線治療装置制御装置10は、基礎に対してOリング2が補正後リング角度に配置されるように、リング駆動装置21を制御する。放射線治療装置制御装置10は、さらに、Oリング2に対して走行ガントリ3が補正後ガントリ角度に配置されるように、放射線治療装置1のガントリ駆動装置を制御する。その補正後リング角度は、その曝射条件が示すリング角度から補正量算出部64により算出されたリング角度オフセット値を減算した値を示している。その補正後ガントリ角度は、その曝射条件が示すガントリ角度から補正量算出部64により算出されたガントリ角度オフセット値を減算した値を示している。
【0074】
放射線治療装置制御装置10は、次いで、患者35の患部を映し出す治療時第1透視画像と治療時第2透視画像とが撮影されるように、放射線治療装置1を制御する。すなわち、放射線治療装置制御装置10は、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。放射線治療装置制御装置10は、治療時第1透視画像が撮像されるように、第1撮像装置27を制御する。放射線治療装置制御装置10は、第2診断用放射線32が曝射されるように、第2診断用放射線照射装置26を制御する。放射線治療装置制御装置10は、治療時第2透視画像が撮像されるように、第2撮像装置28を制御する。
【0075】
放射線治療装置制御装置10は、さらに、その治療時第1透視画像と治療時第2透視画像とに基づいて、患者35の患部の位置を算出し、その患部の形状を算出する。放射線治療装置制御装置10は、さらに、その算出された患部の位置に治療用放射線照射装置6が向くように、ジンバル装置23を制御する。放射線治療装置制御装置10は、さらに、その患部の形状に治療用放射線24の照射野が一致するように、治療用放射線照射装置6を制御し、その患部に治療用放射線24が曝射されるように、治療用放射線照射装置6を制御する。放射線治療装置制御装置10は、さらに、その曝射条件が示す線量の治療用放射線24が患者35の患部に曝射されるまで、その治療時第1透視画像と治療時第2透視画像との撮影から治療用放射線24の曝射までの動作を繰り返して実行する。
【0076】
このような放射線治療によれば、放射線治療装置制御装置10は、患者35の患部が運動している場合でも、その患部に治療用放射線24をより高精度に曝射することができ、患者35をより高精度に放射線治療することができる。
【0077】
なお、その治療計画は、複数の曝射条件を示すこともできる。このとき、放射線治療装置制御装置10は、その曝射条件ごとに、このような放射線治療する動作を実行する。
【0078】
このような放射線治療装置制御方法によれば、放射線治療装置制御装置10は、患者35を位置合わせするときに、カウチ33を回転軸51と平行でない回転軸を中心に回転移動させる必要がない。このため、放射線治療装置1は、2軸または3軸の回転軸を中心にカウチ33を回転させることができる他のカウチ駆動装置よりコンパクトであるカウチ駆動装置34を適用することができる。このとき、放射線治療装置制御装置10は、カウチ33をより低床化することができ、患者35がカウチ33に乗る負荷を軽減することができる。放射線治療装置制御装置10は、さらに、患者35の位置合わせ時に、回転による患者35の不快感を軽減することができる。
【0079】
なお、カウチ駆動装置34は、2軸または3軸の回転軸を中心にカウチ33を回転させることができる他のカウチ駆動装置に置換されることができる。この場合も、放射線治療装置制御装置10は、カウチ駆動装置34が適用された場合と同様にして、患者35がカウチ33に乗る負荷を軽減することができる。
【0080】
補正量算出部64は、このようなカウチ駆動装置が放射線治療装置1に適用されているときに、患者35の位置合わせ時に患者35を回転移動させる回転移動量がより低減するように、その患者位置を算出することもできる。このような患者位置の算出によれば、放射線治療装置制御装置10は、カウチ33に横臥した患者35の回転による不快感を軽減することができる。
【0081】
補正量算出部64は、カウチ駆動装置34がリング回転軸11に平行である他の回転軸を中心にカウチ33をさらに回転させることができるときに、計画時位置データ収集部62により算出された計画時位置と位置合わせ時位置データ収集部63により算出された位置合わせ時位置とに基づいて、リング角度オフセット値が0を示すように患者位置とガントリ角度オフセット値とを算出することもできる。すなわち、そのガントリ角度オフセット値は、計画時ガントリ角度から治療時ガントリ角度を減算した差を示している。基礎に対してOリング2があるリング角度に配置され、Oリング2に対して走行ガントリ3がその治療時ガントリ角度に配置されたときに、その患者位置に対して治療用放射線照射装置6が配置される治療時向きは、基礎に対してOリング2がそのリング角度に配置され、Oリング2に対して走行ガントリ3がその計画時ガントリ角度に配置されたときに、その計画時位置に対して治療用放射線照射装置6が配置される計画時向きに一致している。すなわち、その患者位置とそのガントリ角度オフセット値は、その治療時向きがその計画時向きに一致するように、算出される。このような患者位置によれば、放射線治療装置制御装置10は、患者35を位置合わせするときに、カウチ33を互いに垂直である3軸の回転軸を中心に回転移動させる必要がない。このため、放射線治療装置1は、3軸の回転軸を中心にカウチ33を回転させることができる他のカウチ駆動装置よりコンパクトである2軸の回転駆動装置を適用することができる。このとき、放射線治療装置制御装置10は、カウチ33をより低床化することができ、患者35がカウチ33に乗る負荷を軽減することができる。
【0082】
補正量算出部64は、カウチ駆動装置34がリング回転軸11と回転軸51とに垂直である他の回転軸を中心にカウチ33をさらに回転させることができるときに、計画時位置データ収集部62により算出された計画時位置と位置合わせ時位置データ収集部63により算出された位置合わせ時位置とに基づいて、ガントリ角度オフセット値が0を示すように患者位置とリング角度オフセット値とを算出することもできる。すなわち、そのリング角度オフセット値は、計画時リング角度から治療時リング角度を減算した差を示している。基礎に対してOリング2がその計画時リング角度に配置され、Oリング2に対して走行ガントリ3があるガントリ角度に配置されたときに、その患者位置に対して治療用放射線照射装置6が配置される治療時向きは、基礎に対してOリング2がその治療時リング角度に配置され、Oリング2に対して走行ガントリ3がそのガントリ角度に配置されたときに、その計画時位置に対して治療用放射線照射装置6が配置される計画時向きに一致している。すなわち、その患者位置とそのリング角度オフセット値は、その治療時向きがその計画時向きに一致するように、算出される。このような患者位置によれば、放射線治療装置制御装置10は、患者35を位置合わせするときに、カウチ33を互いに垂直である3軸の回転軸を中心に回転移動させる必要がない。このため、放射線治療装置1は、3軸の回転軸を中心にカウチ33を回転させることができる他のカウチ駆動装置よりコンパクトである2軸の回転駆動装置を適用することができる。このとき、放射線治療装置制御装置10は、カウチ33をより低床化することができ、患者35がカウチ33に乗る負荷を軽減することができる。
【0083】
本発明による放射線治療装置制御装置の実施のさらに他の形態は、既述の実施の形態における位置合わせ時位置データ収集部63が他の位置合わせ時位置データ収集部に置換されている。その位置合わせ時位置データ収集部は、位置合わせ時位置データ収集部63は、さらに、Oリング2が適当な位置に配置されているときに、Oリング2に対して走行ガントリ3が一定の角速度でガントリ回転軸12を中心に回転するように、そのガントリ駆動装置を制御する。その位置合わせ時位置データ収集部は、さらに、走行ガントリ3が所定のガントリ角度に配置されたときに、第1診断用放射線31が曝射されるように、第1診断用放射線照射装置25を制御する。その所定のガントリ角度としては、公差が0.5度であり、その初項と末項との差が180度である等差数列が例示される。その位置合わせ時位置データ収集部は、さらに、Oリング2に対して走行ガントリ3がその所定のガントリ角度に配置されたときに、再構成用透視画像が撮像されるように、第1撮像装置27を制御する。
【0084】
その位置合わせ時位置データ収集部は、その複数の再構成用透視画像に基づいて三次元データを再構成する。その三次元データは、複数のボクセルに複数のCT値を対応付けている。その複数のボクセルは、それぞれ、患者35が配置される空間に隙間なく充填される複数の領域に対応している。たとえば、その複数の領域は、それぞれ、直方体に形成されている。その複数のCT値のうちの任意のボクセルに対応する1つのCT値は、その複数の領域のうちのその任意のボクセルに対応する領域の透過係数(X線吸収係数)に対応している。その位置合わせ時位置データ収集部は、その三次元データに基づいて、その複数の再構成用透視画像が撮影された時に患者35が配置された位置と向きとを示す位置合わせ時位置を算出する。
【0085】
このような位置合わせ時位置データ収集部が適用された放射線治療装置制御装置も、既述の実施の形態における放射線治療装置制御装置10と同様にして、患者35の負荷を軽減することができ、患者35の不快感を軽減することができる。
【0086】
なお、その位置合わせ時位置データ収集部は、放射線治療装置1のイメージャシステムと異なる他のセンサにより測定された値によりその位置合わせ時位置を算出することもできる。そのセンサとしては、PET(Positron Emission Tomography)、MRI(Magnetic Resonance Imaging)、被写体の3次元幾何モデルを測定するレーザスキャナが例示される。このような位置合わせ時位置データ収集部が適用された放射線治療装置制御装置も、既述の実施の形態における放射線治療装置制御装置10と同様にして、患者35の負荷を軽減することができ、患者35の不快感を軽減することができる。
【符号の説明】
【0087】
1 :放射線治療装置
10:放射線治療装置制御装置
20:コンピュータ断層撮影装置
2 :Oリング
3 :走行ガントリ
6 :治療用放射線照射装置
11:リング回転軸
12:ガントリ回転軸
14:アイソセンタ
16:チルト軸
17:パン軸
21:リング駆動装置
23:ジンバル装置
24:治療用放射線
25:第1診断用放射線照射装置
26:第2診断用放射線照射装置
27:第1撮像装置
28:第2撮像装置
31:第1診断用放射線
32:第2診断用放射線
33:カウチ
34:カウチ駆動装置
35:患者
41:フレーム
42:天板支持部品
43:軸受
44:フレーム
45:傾斜直動ガイド
46:スライダ
47:軸受
48−1〜48−2:ストッパ
49:回転移動用駆動装置
51:回転軸
52:反Oリング方向
53:回転軸
61:治療計画収集部
62:計画時位置データ収集部
63:位置合わせ時位置データ収集部
64:補正量算出部
65:カウチ駆動部
66:照射ヘッド駆動部
67:照射部
【特許請求の範囲】
【請求項1】
被検体が計画時に配置される計画時位置を示す計画時位置データを収集する計画時位置データ収集部と、
前記被検体が前記計画時と異なる位置合わせ時に配置される位置合わせ時位置を示す位置合わせ時3次元データを測定する位置合わせ時位置データ収集部と、
前記計画時位置データと前記位置合わせ時3次元データとに基づいて治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出する補正量算出部と、
基礎に対して回転可能に支持されるリングに対して回転可能に支持されるガントリに支持される照射ヘッドが前記計画時位置に対して配置される曝射方向を収集する治療計画収集部と、
前記基礎に対して前記リングが補正後リング角度に配置されるように、かつ、前記リングに対して前記ガントリが補正後ガントリ角度に配置されるように、前記リングと前記ガントリとを移動させる照射ヘッド駆動装置を前記曝射方向に基づいて制御する照射ヘッド駆動部とを具備し、
前記曝射方向は、ガントリ角度とリング角度とを示し、
前記補正後リング角度は、前記リング角度から前記リング角度オフセット値を減算した差を示し、
前記補正後ガントリ角度は、前記ガントリ角度から前記ガントリ角度オフセット値を減算した差を示し、
前記ガントリ角度オフセット値と前記リング角度オフセット値とは、前記基礎に対して前記リングが前記補正後リング角度に配置され、前記リングに対して前記ガントリが前記補正後ガントリ角度に配置されたときに、前記照射ヘッドが前記治療時位置に対して前記曝射方向に配置されるように、算出される
放射線治療装置制御装置。
【請求項2】
請求項1において、
前記被検体が前記治療時位置に配置され、かつ、前記基礎に対して前記リングが前記補正後リング角度に配置され、かつ、前記リングに対して前記ガントリが前記補正後ガントリ角度に配置された後に、前記照射ヘッドから前記被検体に治療用放射線が曝射されるように前記照射ヘッドを制御する照射部
をさらに具備する放射線治療装置制御装置。
【請求項3】
請求項1〜請求項2のいずれかにおいて、
前記被検体が前記位置合わせ時位置から前記治療時位置に移動するように、前記被検体を移動させるカウチ駆動装置を制御するカウチ駆動部
をさらに具備する放射線治療装置制御装置。
【請求項4】
請求項3において、
前記位置合わせ時位置から前記治療時位置までの前記被検体の移動は、
前記基礎に対して固定された方向に平行である回転軸を中心に回転する回転移動と、
前記基礎に対する平行移動とから形成される
放射線治療装置制御装置。
【請求項5】
請求項4において、
前記カウチ駆動装置は、
前記基礎に対して平行移動可能に支持される第1フレームと、
前記第1フレームに対して第1回転軸を中心に回転可能に支持される第2フレームと、
前記第1フレームに対して第1方向に平行にガイドを平行移動させる回転移動用駆動装置と、
前記第1方向と平行でない第2方向に平行に平行移動可能に前記ガイドに支持されるスライダと、
前記基礎に対して前記第2フレームを平行移動させる平行移動用駆動装置とを備え、
前記スライダは、前記第1回転軸と異なる第2回転軸を中心に回転可能に前記第2フレームに支持される
放射線治療装置制御装置。
【請求項6】
請求項1〜請求項5のいずれかにおいて、
前記位置合わせ時3次元データは、前記ガントリに支持されるイメージャシステムにより撮影された透視画像を示す
放射線治療装置制御装置。
【請求項7】
請求項6において、
前記計画時位置データは、前記イメージャシステムと別個である他のモダリティにより測定された3次元データを示す
放射線治療装置制御装置。
【請求項8】
請求項3において、
前記治療時位置は、前記補正後リング角度が前記リング角度に一致するように、算出される
放射線治療装置制御装置。
【請求項9】
請求項3において、
前記治療時位置は、前記補正後ガントリ角度が前記ガントリ角度に一致するように、算出される
放射線治療装置制御装置。
【請求項10】
被検体が計画時に配置される計画時位置を示す計画時位置データを収集するステップと、
前記被検体が前記計画時と異なる位置合わせ時に配置される位置合わせ時位置を示す位置合わせ時3次元データを収集するステップと、
前記計画時位置データと前記位置合わせ時3次元データとに基づいて治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出するステップと、
基礎に対して回転可能に支持されるリングに対して回転可能に支持されるガントリに支持される照射ヘッドが前記計画時位置に対して配置される曝射方向を収集するステップと、
前記基礎に対して前記リングが補正後リング角度に配置されるように、かつ、前記リングに対して前記ガントリが補正後ガントリ角度に配置されるように、前記リングと前記ガントリとを移動させるステップとを具備し、
前記曝射方向は、ガントリ角度とリング角度とを示し、
前記補正後リング角度は、前記リング角度から前記リング角度オフセット値を減算した差を示し、
前記補正後ガントリ角度は、前記ガントリ角度から前記ガントリ角度オフセット値を減算した差を示し、
前記ガントリ角度オフセット値と前記リング角度オフセット値とは、前記基礎に対して前記リングが前記補正後リング角度に配置され、前記リングに対して前記ガントリが前記補正後ガントリ角度に配置されたときに、前記照射ヘッドが前記治療時位置に対して前記曝射方向に配置されるように、算出される
放射線治療装置制御方法。
【請求項11】
請求項10において、
前記位置合わせ時位置から前記治療時位置までの前記被検体の移動は、
前記基礎に対して固定された方向に平行である回転軸を中心に回転する回転移動と、
前記基礎に対する平行移動とから形成される
放射線治療装置制御方法。
【請求項12】
請求項10〜請求項11のいずれかにおいて、
前記位置合わせ時3次元データは、前記ガントリに支持されるイメージャシステムにより撮影された透視画像を示す
放射線治療装置制御方法。
【請求項13】
請求項12において、
前記計画時位置データは、前記イメージャシステムと別個である他のモダリティにより測定された3次元データを示す
放射線治療装置制御方法。
【請求項14】
請求項10において、
前記治療時位置は、前記補正後リング角度が前記リング角度に一致するように、算出される
放射線治療装置制御方法。
【請求項15】
請求項10において、
前記治療時位置は、前記補正後ガントリ角度が前記ガントリ角度に一致するように、算出される
放射線治療装置制御方法。
【請求項16】
請求項10〜請求項15のいずれかに記載される放射線治療装置制御方法をコンピュータに実行させるためのコンピュータプログラム。
【請求項1】
被検体が計画時に配置される計画時位置を示す計画時位置データを収集する計画時位置データ収集部と、
前記被検体が前記計画時と異なる位置合わせ時に配置される位置合わせ時位置を示す位置合わせ時3次元データを測定する位置合わせ時位置データ収集部と、
前記計画時位置データと前記位置合わせ時3次元データとに基づいて治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出する補正量算出部と、
基礎に対して回転可能に支持されるリングに対して回転可能に支持されるガントリに支持される照射ヘッドが前記計画時位置に対して配置される曝射方向を収集する治療計画収集部と、
前記基礎に対して前記リングが補正後リング角度に配置されるように、かつ、前記リングに対して前記ガントリが補正後ガントリ角度に配置されるように、前記リングと前記ガントリとを移動させる照射ヘッド駆動装置を前記曝射方向に基づいて制御する照射ヘッド駆動部とを具備し、
前記曝射方向は、ガントリ角度とリング角度とを示し、
前記補正後リング角度は、前記リング角度から前記リング角度オフセット値を減算した差を示し、
前記補正後ガントリ角度は、前記ガントリ角度から前記ガントリ角度オフセット値を減算した差を示し、
前記ガントリ角度オフセット値と前記リング角度オフセット値とは、前記基礎に対して前記リングが前記補正後リング角度に配置され、前記リングに対して前記ガントリが前記補正後ガントリ角度に配置されたときに、前記照射ヘッドが前記治療時位置に対して前記曝射方向に配置されるように、算出される
放射線治療装置制御装置。
【請求項2】
請求項1において、
前記被検体が前記治療時位置に配置され、かつ、前記基礎に対して前記リングが前記補正後リング角度に配置され、かつ、前記リングに対して前記ガントリが前記補正後ガントリ角度に配置された後に、前記照射ヘッドから前記被検体に治療用放射線が曝射されるように前記照射ヘッドを制御する照射部
をさらに具備する放射線治療装置制御装置。
【請求項3】
請求項1〜請求項2のいずれかにおいて、
前記被検体が前記位置合わせ時位置から前記治療時位置に移動するように、前記被検体を移動させるカウチ駆動装置を制御するカウチ駆動部
をさらに具備する放射線治療装置制御装置。
【請求項4】
請求項3において、
前記位置合わせ時位置から前記治療時位置までの前記被検体の移動は、
前記基礎に対して固定された方向に平行である回転軸を中心に回転する回転移動と、
前記基礎に対する平行移動とから形成される
放射線治療装置制御装置。
【請求項5】
請求項4において、
前記カウチ駆動装置は、
前記基礎に対して平行移動可能に支持される第1フレームと、
前記第1フレームに対して第1回転軸を中心に回転可能に支持される第2フレームと、
前記第1フレームに対して第1方向に平行にガイドを平行移動させる回転移動用駆動装置と、
前記第1方向と平行でない第2方向に平行に平行移動可能に前記ガイドに支持されるスライダと、
前記基礎に対して前記第2フレームを平行移動させる平行移動用駆動装置とを備え、
前記スライダは、前記第1回転軸と異なる第2回転軸を中心に回転可能に前記第2フレームに支持される
放射線治療装置制御装置。
【請求項6】
請求項1〜請求項5のいずれかにおいて、
前記位置合わせ時3次元データは、前記ガントリに支持されるイメージャシステムにより撮影された透視画像を示す
放射線治療装置制御装置。
【請求項7】
請求項6において、
前記計画時位置データは、前記イメージャシステムと別個である他のモダリティにより測定された3次元データを示す
放射線治療装置制御装置。
【請求項8】
請求項3において、
前記治療時位置は、前記補正後リング角度が前記リング角度に一致するように、算出される
放射線治療装置制御装置。
【請求項9】
請求項3において、
前記治療時位置は、前記補正後ガントリ角度が前記ガントリ角度に一致するように、算出される
放射線治療装置制御装置。
【請求項10】
被検体が計画時に配置される計画時位置を示す計画時位置データを収集するステップと、
前記被検体が前記計画時と異なる位置合わせ時に配置される位置合わせ時位置を示す位置合わせ時3次元データを収集するステップと、
前記計画時位置データと前記位置合わせ時3次元データとに基づいて治療時位置とガントリ角度オフセット値とリング角度オフセット値とを算出するステップと、
基礎に対して回転可能に支持されるリングに対して回転可能に支持されるガントリに支持される照射ヘッドが前記計画時位置に対して配置される曝射方向を収集するステップと、
前記基礎に対して前記リングが補正後リング角度に配置されるように、かつ、前記リングに対して前記ガントリが補正後ガントリ角度に配置されるように、前記リングと前記ガントリとを移動させるステップとを具備し、
前記曝射方向は、ガントリ角度とリング角度とを示し、
前記補正後リング角度は、前記リング角度から前記リング角度オフセット値を減算した差を示し、
前記補正後ガントリ角度は、前記ガントリ角度から前記ガントリ角度オフセット値を減算した差を示し、
前記ガントリ角度オフセット値と前記リング角度オフセット値とは、前記基礎に対して前記リングが前記補正後リング角度に配置され、前記リングに対して前記ガントリが前記補正後ガントリ角度に配置されたときに、前記照射ヘッドが前記治療時位置に対して前記曝射方向に配置されるように、算出される
放射線治療装置制御方法。
【請求項11】
請求項10において、
前記位置合わせ時位置から前記治療時位置までの前記被検体の移動は、
前記基礎に対して固定された方向に平行である回転軸を中心に回転する回転移動と、
前記基礎に対する平行移動とから形成される
放射線治療装置制御方法。
【請求項12】
請求項10〜請求項11のいずれかにおいて、
前記位置合わせ時3次元データは、前記ガントリに支持されるイメージャシステムにより撮影された透視画像を示す
放射線治療装置制御方法。
【請求項13】
請求項12において、
前記計画時位置データは、前記イメージャシステムと別個である他のモダリティにより測定された3次元データを示す
放射線治療装置制御方法。
【請求項14】
請求項10において、
前記治療時位置は、前記補正後リング角度が前記リング角度に一致するように、算出される
放射線治療装置制御方法。
【請求項15】
請求項10において、
前記治療時位置は、前記補正後ガントリ角度が前記ガントリ角度に一致するように、算出される
放射線治療装置制御方法。
【請求項16】
請求項10〜請求項15のいずれかに記載される放射線治療装置制御方法をコンピュータに実行させるためのコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−70880(P2012−70880A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2010−217356(P2010−217356)
【出願日】平成22年9月28日(2010.9.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成22年9月28日(2010.9.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]