
放射線治療装置制御装置および放射線照射方法

【課題】照射対象の位置決め操作や位置決め精度確認をより正確に実行すること。
【解決手段】治療用放射線23と撮影装置31とを用いてアイソセンタ19に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するステップと、撮影装置31と放射線照射装置16とを支持するガントリ14が配置される位置を計測するステップと、そのマーカ部材がそのテーブル作成用透過画像に映し出されるマーカ位置にそのガントリ位置が対応するように、マーカ位置テーブルを作成するステップとを備えている。このとき、ユーザは、ガントリ14が移動することによりアイソセンタ19がその透過画像に映し出されるマーカ位置が移動するときにも、そのマーカ位置テーブルを用いてその透過画像に写っている領域をより正確に認識することができ、その透過画像に基づいて治療用放射線23と対象43との位置関係をより正確に確認することができる。
【解決手段】治療用放射線23と撮影装置31とを用いてアイソセンタ19に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するステップと、撮影装置31と放射線照射装置16とを支持するガントリ14が配置される位置を計測するステップと、そのマーカ部材がそのテーブル作成用透過画像に映し出されるマーカ位置にそのガントリ位置が対応するように、マーカ位置テーブルを作成するステップとを備えている。このとき、ユーザは、ガントリ14が移動することによりアイソセンタ19がその透過画像に映し出されるマーカ位置が移動するときにも、そのマーカ位置テーブルを用いてその透過画像に写っている領域をより正確に認識することができ、その透過画像に基づいて治療用放射線23と対象43との位置関係をより正確に確認することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、放射線治療装置制御装置および放射線照射方法に関し、特に、人体内部の腫瘍患部を放射線治療するときに利用される放射線治療装置および放射線照射方法に関する。
【背景技術】
【0002】
患部(腫瘍)に治療用放射線を照射することにより患者を治療する放射線治療が知られている。その放射線治療は、治療効果が高いことが望まれ、その放射線は、患部の細胞に照射される線量に比較して、正常な細胞に照射される線量がより小さいことが望まれている。このためには治療用放射線を正確に患部に照射する必要がある。その放射線治療を実行する放射線治療装置は、患者の透過画像を撮像するイメージャシステムと、その治療用放射線を出射する治療用放射線照射装置と、その治療用放射線照射装置を駆動する駆動装置とを備えている。その放射線治療装置は、その透過画像に基づいて患部の位置を算出し、その位置に治療用放射線が照射されるようにその駆動装置を用いてその治療用放射線照射装置を駆動する。
【0003】
その治療用放射線照射装置とイメージャシステムとを支持する支持構造は、その支持構造そのものの自重や、その治療用放射線照射装置の重量によりたわむ。このため、その支持構造を移動したときに、その患者の透過画像は、所望の視野からずれている他の視野を写すことがある。このとき、照射対象の位置決め操作や位置決め精度確認において、ユーザに誤った情報を与えてしまう。照射対象の位置決め操作や位置決め精度確認をより正確に実行することが望まれている。
【0004】
特開平10−234715号公報には、改良された医用イメージングシステムが開示されている。その医用イメージングシステムは、放射ビームにより表される像を受け取り、該像を可視像に変換するように構成された像検出器を有し、前記の可視像は、上方限界−境界及び下方限界−境界を有する注目信号を規定するものであり、前記像検出器に作用結合されたビデオ検出器を有し、該ビデオ検出器は、前記可視像を受け取り、該可視像からヒストグラムを生成するものであり、ビデオ処理回路を有し、該ビデオ処理回路は、前記ヒストグラムから前記の注目信号の上方限界−境界を自動的に識別するように構成されていることを特徴とする。
【0005】
特表2001−503176号公報には、放射線治療装置の制御に利用できる装置が開示されている。その装置は、ポータル画像をシミュレーション画像と自動的に照合させる装置であって、前記ポータル画像及びシミュレーション画像をデジタル化してそれぞれデジタルポータル画像信号(DPIS)及びデジタルシミュレーション画像信号(DSIS)を発生させる手段と、前記DPIS及びDSISを処理して照合済みDPIS及びDSISを発生させる処理手段と、照合済みDPIS及びDSISから出力を発生させる出力手段とよりなる。
【0006】
特開2006−149438号公報には、利便性に優れ、再現性よく、照射計画に従った照射部位の位置照合を支援するための照射位置照合システムが開示されている。その照射位置照合システムは、放射線治療計画画像(DRR)と、治療前に撮影する照射野確認画像(LG)とを用いて、照射部位の位置を合わせるための照射位置照合システムであって、前記DRR及び照射野(FOV)形成のための形状データ、前記LGの画像を取得する画像取得手段と、取得した前記DRR及びLGの画像のサイズと位置を合わせる前処理手段と、前記DRRとLGの画像のエッジを強調するエッジ強調手段と、取得した前記形状データを用いて、LG内のFOVエッジを除去するFOVエッジ除去手段と、DRRとLGの画像を2値化する2値化手段と、2値化したDRRとLGの画像のエッジを細線化する細線化処理手段と、前記DRRとLGのずれを検出する照合手段と、照合した結果を表示する表示手段とを備えることを特徴とする。
【0007】
特開2007−267972号公報には、患部に対して適正量のX線を照射し、且つ患部周辺健全組織へのX線照射量の低減を図るために、治療用X線発生源から照射されるX線の照射軸を、常に照射対象患部の位置する所定位置に指向することのできるが開示されている。その放射線治療装置は、アイソセンタを通る第1の軸の周りに回動自在であり、前記アイソセンタで前記第1の軸に交差する第2の軸の周りにも回動自在なガントリと、前記ガントリに配設される撮像装置と、制御装置と、を具備し、前記制御装置は、前記ガントリの前記第1の軸の周りの角度として定義する旋回角度の複数の位置から、前記撮像装置によりマーカ部材の画像を撮像し、前記制御装置は、前記画像それぞれにおける視野位置に基づいて、前記アイソセンタ同定位置を同定する。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平10−234715号公報
【特許文献2】特表2001−503176号公報
【特許文献3】特開2006−149438号公報
【特許文献4】特開2007−267972号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の課題は、照射対象の位置決め操作や位置決め精度確認をより正確に実行する放射線治療装置制御装置および放射線照射方法を提供することにある。
【課題を解決するための手段】
【0010】
以下に、発明を実施するための形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0011】
本発明による放射線治療装置制御装置(2)は、治療用放射線(23)と撮影装置(31)とを用いて、固定された位置(19)に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するポータル画像撮影部(52)と、撮影装置(31)と治療用放射線(23)を射出する放射線照射装置(16)とを支持するガントリ(14)が配置される位置を計測するセンサ(11)から、そのテーブル作成用透過画像が撮影された時にガントリ(14)が配置されるガントリ位置を収集するガントリ位置収集部(51)と、そのマーカ部材がそのテーブル作成用透過画像に映し出されるマーカ位置を算出するマーカ位置算出部(53)と、ガントリ位置がそのマーカ位置に対応するように、複数ガントリ位置(68)を複数マーカ位置(69)に対応付けるマーカ位置テーブル(67)を更新するマーカ位置テーブル作成部(54)とを備えている。このような放射線治療装置制御装置(2)によれば、ユーザは、ガントリ(14)が移動することにより固定された位置(19)がその透過画像に映し出されるマーカ位置が移動するときにも、マーカ位置テーブル(67)を用いてその透過画像に写っている領域をより正確に認識することができる。このため、ユーザは、その透過画像に基づいて治療用放射線(23)と治療用放射線(23)が照射される対象(43)との位置関係をより正確に確認することができる。
【0012】
本発明による放射線治療装置制御装置(2)は、治療用放射線(23)と撮影装置(31)とを用いて撮影された追尾用透過画像と複数マーカ位置(69)のうちのその追尾用透過画像が撮像された時にガントリ(14)が配置された追尾用ガントリ位置に対応する追尾用マーカ位置とに基づいてずれ量を算出するずれ量算出部(56)と、複数ガントリ位置(87)と複数ずれ量(88)とを複数補正量(89)に対応付ける補正テーブル(86)を参照して、その追尾用ガントリ位置とそのずれ量とに対応する複数補正量(89)のうちの補正量に基づいて、駆動装置(15)を用いてガントリ(14)に対して放射線照射装置(16)を駆動するジンバル駆動部(57)をさらに備えていることが好ましい。
【0013】
本発明による放射線治療装置制御装置(2)は、その追尾用透過画像に基づいて、照射野変形装置(20)を用いて治療用放射線(23)の照射野を変形する照射部(60)をさらに備えている。
【0014】
本発明による放射線治療装置制御装置(2)は、治療用放射線(23)と撮影装置(31)とを用いて撮影された補正用透過画像に基づいて照射軸ずれ量を算出する照射軸ずれ量算出部(58)と、その補正用透過画像が撮影された時にガントリ(14)が配置されるガントリ位置とその照射軸ずれ量とに基づいて補正テーブル(86)を更新する補正テーブル作成部(59)をさらに備えている。
【0015】
マーカ位置テーブル作成部(54)は、複数マーカ位置(69)のうちの第1ガントリ位置に対応する第1マーカ位置に基づいて複数マーカ位置(69)のうちのその第1ガントリ位置と異なる第2ガントリ位置に対応する第2マーカ位置を算出し、その第2ガントリ位置がその第2マーカ位置に対応するようにマーカ位置テーブル(67)を更新する。このような放射線治療装置制御装置(2)は、マーカ位置テーブル(67)を作成するために複数ガントリ位置(68)毎に透過画像を撮影する必要がなく、すなわち、第2ガントリ位置にガントリ(14)を配置して透過画像を撮影する必要がなく、マーカ位置テーブル(67)をより速く作成することができる。
【0016】
本発明による放射線治療装置制御装置(2)は、治療用放射線(23)と撮影装置(31)とを用いて撮影された表示用透過画像とマーカ位置図形(94)とを示している表示画像(91)をディスプレイ(46)に表示している表示部(55)をさらに備えている。ガントリ位置収集部は、さらに、その透過画像が撮影された時にガントリ(14)が配置される表示用ガントリ位置を収集する。マーカ位置図形(94)は、複数マーカ位置(69)のうちのその表示用ガントリ位置に対応する表示用マーカ位置を示している。このような放射線治療装置制御装置(2)によれば、ユーザは、表示画像(91)に基づいてその表示用透過画像の被写体の位置をより正確に確認することができる。
【0017】
本発明による放射線照射方法は、治療用放射線(23)と撮影装置(31)とを用いて、固定された位置(19)に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するステップと、そのテーブル作成用透過画像が撮影された時に撮影装置(31)と治療用放射線(23)を射出する放射線照射装置(16)とを支持するガントリ(14)が配置されるガントリ位置を計測するステップと、そのマーカ部材がそのテーブル作成用透過画像に映し出されるマーカ位置を算出するステップと、ガントリ位置がそのマーカ位置に対応するように、複数ガントリ位置(68)を複数マーカ位置(69)に対応付けるマーカ位置テーブル(67)を更新するステップとを備えている。このような放射線照射方法によれば、ユーザは、ガントリ(14)が移動することにより固定された位置(19)がその透過画像に映し出されるマーカ位置が移動するときにも、マーカ位置テーブル(67)を用いてその透過画像に写っている領域をより正確に認識することができる。このため、ユーザは、その透過画像に基づいてその放射線とその放射線が照射される対象との位置関係をより正確に確認することができる。
【0018】
本発明による放射線照射方法は、治療用放射線(23)と撮影装置(31)とを用いて撮影された追尾用透過画像と複数マーカ位置(69)のうちのその追尾用透過画像が撮像された時にガントリ(14)が配置された追尾用ガントリ位置に対応する追尾用マーカ位置とに基づいてずれ量を算出するステップと、複数ガントリ位置(68)と複数ずれ量(88)とを複数補正量(89)に対応付ける補正テーブル(86)を参照して、その追尾用ガントリ位置とそのずれ量とに対応する複数補正量(89)のうちの補正量に基づいて放射線照射装置(16)をガントリ(14)に対して駆動するステップをさらに備えている。
【0019】
本発明による放射線照射方法は、その追尾用透過画像に基づいて治療用放射線(23)の照射野を変形するステップをさらに備えている。
【0020】
本発明による放射線照射方法は、治療用放射線(23)と撮影装置(31)とを用いて撮影された補正用透過画像に基づいて照射軸ずれ量を算出するステップと、その補正用透過画像が撮影された時にガントリ(14)が配置されるガントリ位置とその照射軸ずれ量とに基づいて補正テーブル(86)を更新するステップをさらに備えている。
【0021】
本発明による放射線照射方法は、複数マーカ位置(69)のうちの第1ガントリ位置に対応する第1マーカ位置に基づいて複数マーカ位置(69)のうちのその第1ガントリ位置と異なる第2ガントリ位置に対応する第2マーカ位置を算出するステップと、その第2ガントリ位置がその第2マーカ位置に対応するようにマーカ位置テーブル(67)を更新するステップとをさらに備えている。このような放射線照射方法は、マーカ位置テーブル(67)を作成するために複数ガントリ位置(68)毎に透過画像を撮影する必要がなく、マーカ位置テーブル(67)をより速く作成することができる。
【0022】
本発明による放射線照射方法は、治療用放射線(23)と撮影装置(31)とを用いて撮影された表示用透過画像とマーカ位置図形(94)とを示している表示画像(91)をディスプレイ(46)に表示しているステップをさらに備えている。マーカ位置図形(94)は、その透過画像が撮影された時にガントリ(14)が配置される表示用ガントリ位置に対応する複数マーカ位置(69)のうちの表示用マーカ位置を示している。このような放射線照射方法によれば、ユーザは、表示画像(91)に基づいてその表示用透過画像の被写体の位置をより正確に確認することができる。
【発明の効果】
【0023】
本発明による放射線治療装置制御装置および放射線照射方法によれば、ユーザは、ガントリが移動することにより透過画像に映し出される領域が移動するときにも、そのマーカ位置テーブルを用いてその透過画像に写っている領域をより正確に認識することができる。このため、ユーザは、その透過画像に基づいてその放射線とその放射線が照射される対象との位置関係をより正確に確認することができる。
【図面の簡単な説明】
【0024】
【図1】図1は、放射線治療システムを示すブロック図である。
【図2】図2は、本発明による放射線治療装置を示す斜視図である。
【図3】図3は、放射線治療装置制御装置を示すブロック図である。
【図4】図4は、アイソセンタにマーカ部材を配置したときに撮影された透過画像を示す図である。
【図5】図5は、マーカ位置テーブルを示す図である。
【図6】図6は、制御テーブルを示す図である。
【図7】図7は、アイソセンタからずれた位置にマーカ部材を配置したときに撮影された透過画像を示す図である。
【図8】図8は、補正テーブルを示す図である。
【図9】図9は、ディスプレイに表示される表示画面を示す図である。
【図10】図10は、放射線治療する動作を示すフローチャートである。
【図11】図11は、動体追尾照射する動作を示すフローチャートである。
【発明を実施するための形態】
【0025】
図面を参照して、本発明による放射線治療装置制御装置の実施の形態を記載する。その放射線治療装置制御装置2は、図1に示されているように、放射線治療システム1に適用されている。放射線治療システム1は、放射線治療装置制御装置2と放射線治療装置3とを備えている。放射線治療装置制御装置2は、パーソナルコンピュータに例示されるコンピュータである。放射線治療装置制御装置2と放射線治療装置3とは、双方向に情報を伝送することができるように、互いに接続されている。
【0026】
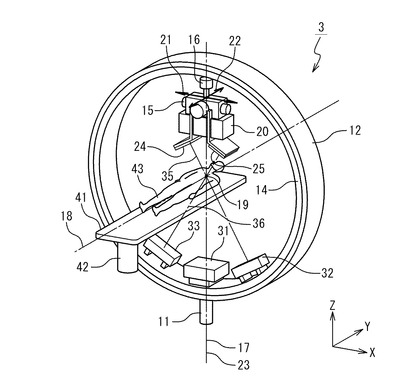
図2は、放射線治療装置3を示している。放射線治療装置3は、旋回駆動装置11とOリング12と走行ガントリ14と首振り機構15と治療用放射線照射装置16とを備えている。旋回駆動装置11は、回転軸17を中心に回転可能にOリング12を土台に支持し、放射線治療装置制御装置2により制御されて回転軸17を中心にOリング12を回転させる。回転軸17は、鉛直方向に平行である。旋回駆動装置11は、さらに、土台に対するOリング12の旋回角を計測する。Oリング12は、回転軸18を軸とするリング状に形成され、回転軸18を中心に回転可能に走行ガントリ14を支持している。回転軸18は、鉛直方向に垂直であり、回転軸17に含まれるアイソセンタ19を通る。回転軸18は、さらに、Oリング12に対して固定され、すなわち、Oリング12とともに回転軸17を中心に回転する。走行ガントリ14は、回転軸18を中心とするリング状に形成され、Oリング12のリングと同心円になるように配置されている。放射線治療装置3は、さらに、図示されていない走行駆動装置を備えている。その走行駆動装置は、放射線治療装置制御装置2により制御されて回転軸18を中心に走行ガントリ14を回転させる。その走行駆動装置は、さらに、Oリング12に対する走行ガントリ14の走行角を計測する。
【0027】
首振り機構15は、治療用放射線照射装置16が走行ガントリ14の内側に配置されるように、治療用放射線照射装置16を走行ガントリ14に支持している。首振り機構15は、チルト軸21およびパン軸22を有している。パン軸22は、走行ガントリ14に対して固定され、回転軸18に交差しないで回転軸18に平行である。チルト軸21は、パン軸22に直交している。首振り機構15は、放射線治療装置制御装置2により制御されて、パン軸22を中心に治療用放射線照射装置16を回転させ、チルト軸21を中心に治療用放射線照射装置16を回転させる。
【0028】
治療用放射線照射装置16は、放射線治療装置制御装置2により制御されて、治療用放射線23を放射する。治療用放射線23は、パン軸22とチルト軸21とが交差する交点を通る直線に概ね沿って放射される。治療用放射線23は、一様強度分布を持つように形成されている。治療用放射線照射装置16は、マルチリーフコリメータ(MLC)20を備えている。そのマルチリーフコリメータ20は、放射線治療装置制御装置2により制御され、治療用放射線23の一部を遮蔽することにより、治療用放射線23が患者に照射されるときの照射野の形状を変更する。
【0029】
治療用放射線23は、このように治療用放射線照射装置16が走行ガントリ14に支持されることにより、首振り機構15で治療用放射線照射装置16がアイソセンタ19に向かうように一旦調整されると、旋回駆動装置11によりOリング12が回転し、または、その走行駆動装置により走行ガントリ14が回転しても、常に概ねアイソセンタ19を通る。即ち、走行・旋回を行うことで任意方向からアイソセンタ19に向けて治療用放射線23の照射が可能になる。
【0030】
放射線治療装置3は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置3は、診断用X線源24、25とセンサアレイ32、33とを備えている。診断用X線源24は、走行ガントリ14に支持されている。診断用X線源24は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源24を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源24は、放射線治療装置制御装置2により制御されてアイソセンタ19に向けて診断用X線35を放射する。診断用X線35は、診断用X線源24が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。診断用X線源25は、走行ガントリ14に支持されている。診断用X線源25は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源25を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源25は、放射線治療装置制御装置2により制御されてアイソセンタ19に向けて診断用X線36を放射する。診断用X線36は、診断用X線源25が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。
【0031】
センサアレイ32は、走行ガントリ14に支持されている。センサアレイ32は、診断用X線源24により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線35を受光して、その被写体の透過画像を生成する。センサアレイ33は、走行ガントリ14に支持されている。センサアレイ33は、診断用X線源25により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線36を受光して、その被写体の透過画像を生成する。センサアレイ32、33としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0032】
このようなイメージャシステムによれば、センサアレイ32、33により得た画像信号に基づき、アイソセンタ19を中心とする透過画像を生成することができる。
【0033】
放射線治療装置3は、さらに、センサアレイ31を備えている。センサアレイ31は、センサアレイ31と治療用放射線照射装置16とを結ぶ線分がアイソセンタ19を通るように配置されて、走行ガントリ14のリングの内側に固定されている。センサアレイ31は、治療用放射線照射装置16により放射されてアイソセンタ19の周辺の被写体を透過した治療用放射線23を受光して、その被写体の透過画像を生成する。センサアレイ31としては、FPD、X線IIが例示される。
【0034】
放射線治療装置3は、さらに、カウチ41とカウチ駆動装置42とを備えている。カウチ41は、放射線治療システム1により治療される患者43が横臥することに利用される。カウチ41は、図示されていない固定具を備えている。その固定具は、その患者が動かないように、その患者をカウチ41に固定する。カウチ駆動装置42は、カウチ41を土台に支持し、放射線治療装置制御装置2により制御されてカウチ41を移動させる。
【0035】
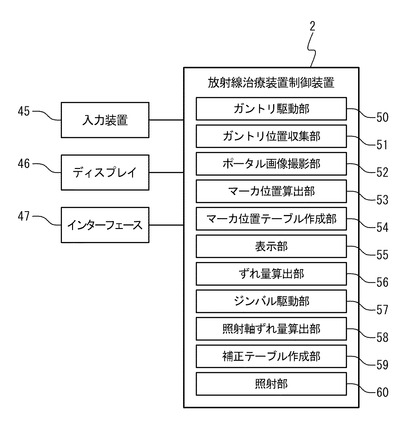
図3は、放射線治療装置制御装置2を示している。放射線治療装置制御装置2は、図示されていないCPUと記憶装置とを備え、入力装置45とディスプレイ46とインターフェース47とを備えている。そのCPUは、放射線治療装置制御装置2にインストールされるコンピュータプログラムを実行して、その記憶装置と入力装置45とディスプレイ46とインターフェース47とを制御する。その記憶装置は、そのコンピュータプログラムを記録し、そのCPUにより生成される情報を一時的に記録する。
【0036】
入力装置45は、ユーザに操作されることにより情報を生成し、その情報をそのCPUに出力する。その入力装置としては、キーボードが例示される。ディスプレイ46は、そのCPUにより生成される画面を表示する。そのインターフェースは、放射線治療装置制御装置2に接続される外部機器により生成される情報をそのCPUに出力し、そのCPUにより生成された情報をその外部機器に出力する。その外部機器は、放射線治療装置3の旋回駆動装置11と走行駆動装置と首振り機構15と治療用放射線照射装置16とマルチリーフコリメータ20とイメージャシステム(診断用X線源24、25、センサアレイ31、32、33)とカウチ駆動装置42とを含んでいる。
【0037】
そのコンピュータプログラムは、ガントリ駆動部50とガントリ位置収集部51とポータル画像撮影部52とマーカ位置算出部53とマーカ位置テーブル作成部54と表示部55とずれ量算出部56とジンバル駆動部57と照射軸ずれ量算出部58と補正テーブル作成部59と照射部60とを含んでいる。
【0038】
ガントリ駆動部50は、旋回駆動装置11を用いて、回転軸17を中心にOリング12を回転させて、入力装置45が操作されることにより入力されたOリング回転角にOリング12を配置する。ガントリ駆動部50は、さらに、放射線治療装置3の走行駆動装置を用いて、回転軸18を中心に走行ガントリ14を回転させて、入力装置45が操作されることにより入力されたガントリ走行角に走行ガントリ14を配置する。
【0039】
ガントリ位置収集部51は、走行ガントリ14が配置されているガントリ位置を放射線治療装置3から収集する。そのガントリ位置は、旋回角と走行角とを示している。すなわち、ガントリ位置収集部51は、その旋回角を旋回駆動装置11から収集し、その走行角を放射線治療装置3の走行駆動装置から収集する。
【0040】
ポータル画像撮影部52は、治療用放射線照射装置16から治療用放射線23が出射されているときに、センサアレイ31を用いて、アイソセンタ19の周辺に配置された被写体の透過画像を撮影する。
【0041】
マーカ位置算出部53は、ポータル画像撮影部52により撮影された透過画像を画像処理することにより、マーカ位置を算出する。
【0042】
マーカ位置テーブル作成部54は、他のコンピュータプログラムから閲覧可能にマーカ位置テーブルを記憶装置に記録する。マーカ位置テーブル作成部54は、ガントリ位置収集部51により収集されたガントリ位置とマーカ位置算出部53により算出されたマーカ位置とに基づいてそのマーカ位置テーブルを更新する。
【0043】
表示部55は、ポータル画像撮影部52により撮影された透過画像とガントリ位置収集部51により収集されたガントリ位置とマーカ位置テーブル作成部54により作成されたマーカ位置テーブルとに基づいて表示画像を生成し、その表示画像をディスプレイ46に表示する。
【0044】
ずれ量算出部56は、ポータル画像撮影部52により撮影された透過画像とガントリ位置収集部51により収集されたガントリ位置とマーカ位置テーブル作成部54により作成されたマーカ位置テーブルとに基づいて、ずれ量を算出する。
【0045】
ジンバル駆動部57は、記憶装置に記録された制御テーブルを参照して、入力装置45が操作されることにより入力されたずれ量に基づいて制御量を算出する。ジンバル駆動部57は、または、ポータル画像撮影部52により撮影された透過画像と補正テーブル作成部59により作成された補正テーブルとに基づいて、制御量を算出する。ジンバル駆動部57は、その算出された制御量に基づいて、首振り機構15を用いて治療用放射線照射装置16を駆動する。
【0046】
照射軸ずれ量算出部58は、ポータル画像撮影部52により撮影された透過画像に基づいて、照射軸ずれ量を算出する。
【0047】
補正テーブル作成部59は、ガントリ位置収集部51により収集されたガントリ位置とジンバル駆動部57により算出された制御量と照射軸ずれ量算出部58により算出された照射軸ずれ量とに基づいて、補正テーブルを作成する。
【0048】
照射部60は、旋回駆動装置11を用いて、回転軸17を中心にOリング12を回転させて、放射線治療装置制御装置2に入力された治療計画が示す回転角にOリング12を配置する。照射部60は、さらに、放射線治療装置3の走行駆動装置を用いて、回転軸18を中心に走行ガントリ14を回転させて、その治療計画が示す走行角に走行ガントリ14を配置する。照射部60は、さらに、ずれ量算出部56により算出されたずれ量に基づいて、患者43の患部を治療用放射線23が透過するように、首振り機構15を用いて治療用放射線照射装置16を駆動する。照射部60は、さらに、ポータル画像撮影部52により撮影された透過画像に基づいて、患者43の患部と異なる危険部位に照射される治療用放射線23の被曝量が低減するように、マルチリーフコリメータ20を用いて治療用放射線23の照射野の形状を制御する。照射部60は、首振り機構15とマルチリーフコリメータ20とを駆動した後で、治療用放射線照射装置16を用いて治療用放射線23を出射する。
【0049】
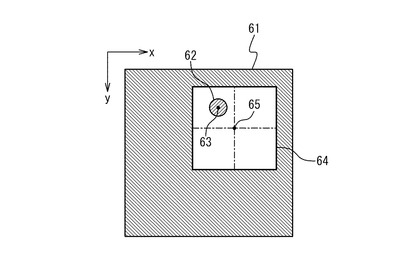
図4は、アイソセンタ19にマーカ部材を配置したときに、ポータル画像撮影部52により撮影された透過画像を示している。そのマーカ部材としては、金属球が例示される。その透過画像61は、マーカ部材図形62が映し出されている。マーカ部材図形62の形状は、そのマーカ部材の形状に対応し、マーカ部材図形62が透過画像61に映し出されているマーカ位置63は、そのマーカ部材が配置されている位置に対応している。透過画像61は、さらに、照射野図形64が映し出されている。照射野図形64の形状は、治療用放射線23の照射野の形状に対応し、照射野図形64が透過画像61に映し出されている照射軸位置65は、治療用放射線23の照射軸に対応している。
【0050】
このとき、マーカ位置テーブル作成部54は、透過画像61を画像処理することにより、マーカ部材図形62のマーカ位置63を算出する。マーカ位置63は、x座標とy座標とを示している。
【0051】
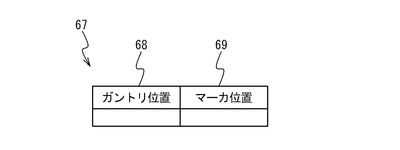
図5は、マーカ位置テーブル作成部54により作成されたマーカ位置テーブルを示している。そのマーカ位置テーブル67は、ガントリ位置集合68をマーカ位置集合69に対応付けている。すなわち、ガントリ位置集合68のうちの任意の要素は、マーカ位置集合69のうちの1つの要素に対応している。ガントリ位置集合68の要素は、それぞれ、走行ガントリ14の位置を示し、旋回角と走行角との組み合わせを示している。マーカ位置集合69の要素は、それぞれ、ポータル画像撮影部52により撮影された透過画像の上の点の位置を示し、x座標とy座標との組合わせを示している。
【0052】
すなわち、マーカ位置テーブル作成部54は、センサアレイ31を用いてアイソセンタ19に配置されたマーカ部材の透過画像を撮影したときに、その透過画像が撮影された時に走行ガントリ14が配置されているガントリ位置をガントリ位置収集部51により収集し、その透過画像を画像処理してそのマーカ部材を映すマーカ部材図形のマーカ位置を算出する。マーカ位置テーブル作成部54は、その収集されたガントリ位置がその算出されたマーカ位置に対応するように、マーカ位置テーブル67を更新する。すなわち、マーカ位置集合69の要素は、ガントリ位置集合68のうちのその要素に対応するガントリ位置に走行ガントリ14が配置されたときに撮影される透過画像で、アイソセンタ19に配置された被写体が映し出される位置を示している。
【0053】
マーカ位置テーブル作成部54は、さらに、透過画像が撮影されていない走行ガントリ14の位置を示すガントリ位置に対応するマーカ位置を算出し、そのガントリ位置がその算出されたマーカ位置に対応するように、マーカ位置テーブル67を更新する。すなわち、旋回角R0と走行角G0とにより定義されるガントリ位置に対応するマーカ位置が示すx座標X_G0R0とy座標Y_G0R0とは、次式:
【数1】

【数2】
により表現される。ここで、旋回角R1と走行角G1とは、透過画像が撮影された走行ガントリ14の位置を示している。旋回角R2と走行角G2とは、他の透過画像が撮影された走行ガントリ14の他の位置を示している。旋回角R1と旋回角R2と走行角G1と走行角G2とは、次式:
G1≦G0≦G2
R1≦R0≦R2
を満足している。さらに、x座標X_G0R1は、次式:
【数3】
により表現される。x座標X_G0R2は、次式:
【数4】
により表現される。y座標Y_G0R1は、次式:
【数5】
により表現される。y座標Y_G0R2は、次式:
【数6】
により表現される。x座標X_G1R1とy座標Y_G1R1とは、旋回角R1と走行角G1とにより定義されるガントリ位置に走行ガントリ14が配置されている時に撮影された透過画像に映し出されるマーカ部材図形の位置を示している。x座標X_G2R2とy座標Y_G2R2とは、旋回角R2と走行角G2とにより定義されるガントリ位置に走行ガントリ14が配置されている時に撮影された透過画像に映し出されるマーカ部材図形の位置を示している。
【0054】
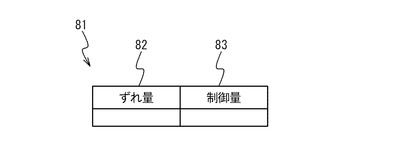
図6は、ジンバル駆動部57により参照される制御テーブルを示している。その制御テーブル81は、ずれ量集合82を制御量集合83に対応付けている。すなわち、ずれ量集合82のうちの任意の要素は、制御量集合83のうちの1つの要素に対応している。ずれ量集合82の要素は、それぞれ、ポータル画像撮影部52により撮影された透過画像の上の2点のずれ量を示し、X成分とy成分との組み合わせを示している。制御量集合83の要素は、それぞれ、首振り機構15を制御するための制御値を示し、パン制御量とチルト制御量との組み合わせを示している。
【0055】
このとき、ジンバル駆動部57は、入力装置45を介してずれ量が入力がされたときに、制御テーブル81を参照して、制御量集合83のうちからその入力されたずれ量に対応する制御量を算出する。ジンバル駆動部57は、次いで、その算出された制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する。
【0056】
図7は、アイソセンタ19から少しずれた位置にマーカ部材を配置したときに、ポータル画像撮影部52により撮影された透過画像を示している。その透過画像71は、マーカ部材図形72が映し出されている。マーカ部材図形72の形状は、そのマーカ部材の形状に対応し、マーカ部材図形72が透過画像71に映し出されているマーカ位置73は、そのマーカ部材が配置されている位置に対応している。透過画像71は、さらに、照射野図形74が映し出されている。照射野図形74の形状は、治療用放射線23の照射野の形状に対応し、照射野図形74が透過画像71に映し出されている照射軸位置75は、治療用放射線23の照射軸に対応している。
【0057】
このとき、ずれ量算出部56は、まず、透過画像71が撮像されたときに走行ガントリ14が配置されていたガントリ位置を収集し、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのその収集されたガントリ位置に対応するアイソセンタ位置76を算出する。ずれ量算出部56は、次いで、透過画像71を画像処理することにより、アイソセンタ位置76とマーカ位置73とのずれ量77を算出する。ずれ量77は、x成分とy成分の組み合わせを示している。
【0058】
ジンバル駆動部57は、ずれ量算出部56により算出されたずれ量に基づいて、治療用放射線23の照射軸がそのマーカ部材を通過するように、治療用放射線照射装置16を駆動する。すなわち、ジンバル駆動部57は、制御テーブル81を参照して、制御量集合83のうちからその算出されたずれ量に対応する制御量を算出する。ジンバル駆動部57は、次いで、その算出された制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する。
【0059】
照射軸ずれ量算出部58は、ジンバル駆動部57により治療用放射線照射装置16が駆動された後に撮影された透過画像に基づいて照射軸ずれ量を算出する。すなわち、照射軸ずれ量算出部58は、その透過画像が透過画像71であるときに、透過画像71を画像処理することにより、マーカ位置73と照射軸位置75とのずれ量である照射軸ずれ量78を算出する。照射軸ずれ量78は、x成分とy成分の組み合わせを示している。
【0060】
図8は、補正テーブル作成部59により作成される補正テーブルを示している。その補正テーブル86は、ガントリ位置集合87とずれ量集合88とを補正量集合89に対応付けている。すなわち、ガントリ位置集合87のうちの任意の要素とずれ量集合88のうちの任意の要素との組み合わせは、補正量集合89のうちの1つの要素に対応している。ガントリ位置集合87の要素は、それぞれ、走行ガントリ14の位置を示し、旋回角と走行角との組み合わせを示している。ずれ量集合88の要素は、それぞれ、アイソセンタ位置とマーカ位置とのずれ量を示し、x成分とy成分の組み合わせを示している。補正量集合89の要素は、それぞれ、首振り機構15を制御するための制御量を補正するための補正量を示し、パン補正量とチルト補正量との組み合わせを示している。
【0061】
ジンバル駆動部57は、補正テーブル86が作成されたときに、補正テーブル86に基づいて補正された制御量を用いて首振り機構15を制御する。すなわち、ジンバル駆動部57は、まず、制御テーブル81を参照して、ずれ量算出部56により算出されたずれ量に対応する制御量を制御量集合83のうちから算出する。ジンバル駆動部57は、そのずれ量の算出に用いられた透過画像が撮影されたときに走行ガントリ14が配置されていたガントリ位置を収集する。ジンバル駆動部57は、補正テーブル86を参照して、補正量集合89のうちからそのガントリ位置とそのずれ量とに対応する補正量を算出する。ジンバル駆動部57は、さらに、その算出された補正量に基づいてその算出された制御量を補正後制御量に補正する。その補正後制御量は、パン制御量とチルト制御量との組み合わせを示している。その補正後制御量のパン制御量は、その制御量のパン制御量にその補正量のパン補正量を加算した値を示している。その補正後制御量のチルト制御量は、その制御量のチルト制御量にその補正量のチルト補正量を加算した値を示している。ジンバル駆動部57は、次いで、その補正後制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する。
【0062】
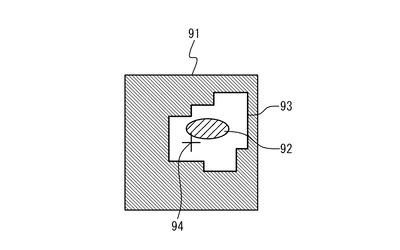
図9は、表示部55により生成される表示画像を示している。その表示画像91は、ポータル画像撮影部52により撮影された透過画像とアイソセンタ位置図形94とが映し出されている。すなわち、表示画像91は、患部図形92が映し出されている。患部図形92の形状は、患者43の患部の形状に対応し、患部図形92が表示画像91に映し出されている位置は、その患部が配置されている位置に対応している。表示画像91は、さらに、照射野図形93が映し出されている。照射野図形93の形状は、治療用放射線23の照射野の形状に対応し、照射野図形93が表示画像91に映し出されている位置は、治療用放射線23の照射軸の位置に対応している。その表示画像91は、アイソセンタ位置図形94が映し出されている。アイソセンタ位置図形94が表示画像91に映し出されている位置は、アイソセンタ19の位置に対応している。
【0063】
すなわち、表示部55は、ポータル画像撮影部52により撮影された透過画像が撮像されたときに走行ガントリ14が配置されていたガントリ位置を収集し、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのその収集されたガントリ位置に対応するアイソセンタ位置を算出する。表示部55は、その透過画像のうちのその算出されたアイソセンタ位置にアイソセンタ位置図形94が映し出されるように、アイソセンタ位置図形94とその透過画像を重ねることにより表示画像91を作成し、表示画像91をディスプレイ46に表示する。
【0064】
本発明による放射線照射方法の実施の形態は、放射線治療システム1により実行され、マーカ位置テーブルを作成する動作と補正テーブルを作成する動作と放射線治療する動作とを備えている
【0065】
そのマーカ位置テーブルを作成する動作では、ユーザは、まず、アイソセンタ19にマーカ部材を配置する。放射線治療装置制御装置2は、走行ガントリ14が配置されているガントリ位置を収集し、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像61を撮影する。放射線治療装置制御装置2は、次いで、透過画像61を画像処理してそのマーカ部材を映すマーカ部材図形のマーカ位置を算出する。放射線治療装置制御装置2は、次いで、その収集されたガントリ位置がその算出されたマーカ位置に対応するように、マーカ位置テーブル67を更新する。
【0066】
放射線治療装置制御装置2は、ユーザによりOリング12が所定の複数の旋回角に配置される毎に、走行ガントリ14が所定の複数の走行角に配置される毎に、同様にして、マーカ位置を算出し、マーカ位置テーブル67を更新する。
【0067】
マーカ位置テーブル作成部54は、さらに、透過画像が撮影されていない走行ガントリ14の位置を示すガントリ位置に対応するマーカ位置を算出し、そのガントリ位置がその算出されたマーカ位置に対応するように、マーカ位置テーブル67を更新する。
【0068】
その補正テーブルを作成する動作では、ユーザは、まず、アイソセンタ19から少しずれた位置にマーカ部材を固定する。ユーザは、次いで、放射線治療装置制御装置2を操作して、治療用放射線23の照射軸がそのマーカ部材を通過するように、首振り機構15を駆動させる。放射線治療装置制御装置2は、走行ガントリ14が配置されていたガントリ位置を収集し、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像71を撮影する。放射線治療装置制御装置2は、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのその収集されたガントリ位置に対応するアイソセンタ位置76を算出する。放射線治療装置制御装置2は、次いで、透過画像71を画像処理することにより、アイソセンタ位置76とマーカ位置73とのずれ量77を算出する。放射線治療装置制御装置2は、ずれ量77に基づいて、補正テーブル86を更新する。
【0069】
放射線治療装置制御装置2は、ユーザによりOリング12が所定の複数の旋回角に配置される毎に、走行ガントリ14が所定の複数の走行角に配置される毎に、同様にして、ずれ量77を算出し、ずれ量77に基づいてマーカ位置テーブル67を更新する。
【0070】
その放射線治療する動作では、ユーザは、まず、放射線治療装置3のカウチ41に患者43を固定する。ユーザは、さらに、患者43の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者43の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。
【0071】
放射線治療装置制御装置2は、患者の患部がアイソセンタ19に配置された後に、走行ガントリ14を治療計画が示すガントリ位置に配置し、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像を撮影する。放射線治療装置制御装置2は、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのそのガントリ位置に対応するアイソセンタ位置76を算出する。放射線治療装置制御装置2は、その透過画像のうちのその算出されたアイソセンタ位置にアイソセンタ位置図形94が映し出されるように、アイソセンタ位置図形94とその透過画像を重ねることにより表示画像91を作成し、表示画像91をディスプレイ46に表示する。
【0072】
放射線治療装置制御装置2は、その透過画像と制御テーブル81と補正テーブル86とに基づいて、治療用放射線23の照射軸がその患部を通過するように、首振り機構15を制御する。放射線治療装置制御装置2は、患者の患部が治療用放射線23に照射されるように患者の患部が配置された後に、患者43の患部に照射された治療用放射線23の線量がその治療計画の線量になるまで、治療用放射線照射装置16を用いて治療用放射線23を出射する。
【0073】
このような動作によれば、放射線治療装置制御装置2は、走行ガントリ14が移動することによりアイソセンタ19が透過画像に映し出される位置が移動するときにも、その透過画像に写っている領域をより正確に認識することができる。このため、ユーザは、その透過画像に基づいて治療用放射線23と患者43の患部との位置関係をより正確に確認することができ、治療用放射線23をより正確な位置に照射することができる。
【0074】
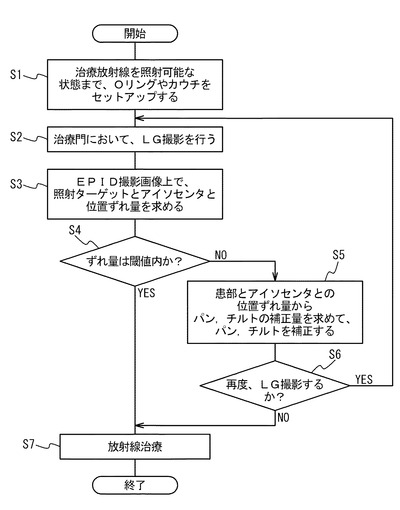
その放射線治療する動作は、放射線治療する他の動作に置換されることもできる。図10は、その置換される動作を示している。その動作では、ユーザは、まず、放射線治療装置3のカウチ41に患者43を固定する。ユーザは、さらに、患者43の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者43の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。放射線治療装置制御装置2は、患者の患部がアイソセンタ19に配置された後に、走行ガントリ14を治療計画が示すガントリ位置に配置する(ステップS1)。
【0075】
放射線治療装置制御装置2は、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像を撮影する(ステップS2)。放射線治療装置制御装置2は、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのそのガントリ位置に対応するアイソセンタ位置を算出する。放射線治療装置制御装置2は、その透過画像を画像処理することにより、そのアイソセンタ位置と患部が映し出される位置とのずれ量を算出する(ステップS3)。
【0076】
放射線治療装置制御装置2は、そのずれ量が所定の閾値より大きいときに(ステップS4、NO)、制御テーブル81を参照して、制御量集合83のうちからその算出されたずれ量に対応する制御量を算出し、その算出された制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する(ステップS5)。放射線治療装置制御装置2は、治療用放射線23がその患部を照射するように治療用放射線照射装置16が位置合わせされていないときに(ステップS6、YES)、ステップS2〜S4を再度実行する。
【0077】
放射線治療装置制御装置2は、治療用放射線23がその患部を照射するように治療用放射線照射装置16が位置合わせされているときに(ステップS6、NO)、または、その算出されたずれ量が所定の閾値より小さいときに(ステップS4、YES)、患者43の患部に照射された治療用放射線23の線量がその治療計画の線量になるまで、治療用放射線照射装置16を用いて治療用放射線23を出射する(ステップS7)。
【0078】
このような動作によれば、放射線治療装置制御装置2は、既述の動作と同様にして、走行ガントリ14が移動することによりアイソセンタ19が透過画像に映し出される位置が移動するときにも、治療用放射線23をより正確な位置に照射することができる。このような動作によれば、放射線治療装置制御装置2は、補正テーブル86を作成する動作を実行する必要がなく、放射線治療の事前に必要な動作が低減して好ましい。
【0079】
なお、その放射線治療する動作は、患者43の患部が呼吸・心鼓動に例示される患者の運動とともに患部が移動する場合には、追尾動作と照射動作とを繰り返す動体追尾照射する動作に置換することができる。
【0080】
その動体追尾照射する動作では、図11に示されているように、ユーザは、まず、放射線治療装置3のカウチ41に患者43を固定する。ユーザは、さらに、患者43の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者43の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。放射線治療装置制御装置2は、患者の患部がアイソセンタ19に配置された後に、走行ガントリ14を治療計画が示すガントリ位置に配置する(ステップS11)。
【0081】
放射線治療装置制御装置2は、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像を撮影する(ステップS12)。ユーザは、その透過画像のうちから患部の画像を抽出することにより、その患部の画像を定義する(ステップS13)。
【0082】
放射線治療装置制御装置2は、治療用放射線照射装置16を用いて治療用放射線23を出射させて(ステップS14)、センサアレイ31を用いて透過画像を撮影し、その透過画像を画像処理することにより、ユーザにより定義された患部の画像が映し出される位置を算出する(ステップS15)。放射線治療装置制御装置2は、さらに、その透過画像を画像処理することにより、患部が映し出される位置とアイソセンタ19が映し出される位置とのずれ量を算出し、患部が映し出される位置と治療用放射線23の照射軸の位置とのずれ量である照射軸ずれ量を算出する(ステップS16)。
【0083】
放射線治療装置制御装置2は、その照射軸ずれ量が所定の閾値より小さいときに(ステップS16、NO)、制御テーブル81を参照して、その算出されたずれ量に対応する制御量を制御量集合83のうちから算出する。放射線治療装置制御装置2は、そのずれ量の算出に用いられた透過画像が撮影されたときに走行ガントリ14が配置されていたガントリ位置を収集する。放射線治療装置制御装置2は、補正テーブル86を参照して、補正量集合89のうちからそのガントリ位置とそのずれ量とに対応する補正量を算出する。放射線治療装置制御装置2は、さらに、その算出された補正量に基づいてその算出された制御量を補正後制御量に補正する。放射線治療装置制御装置2は、次いで、その補正後制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する(ステップS17)。放射線治療装置制御装置2は、治療用放射線照射装置16を駆動した後に、ステップS14〜16を繰り返して実行する。この繰り返しの周期としては、100ms程度が例示される。
【0084】
放射線治療装置制御装置2は、その照射軸ずれ量が所定の閾値より大きいときに(ステップS16、YES)、放射線治療する動作を停止する(ステップS18)。
【0085】
すなわち、このような動作は、動体追尾動作に適用されることができる。このような動作によれば、放射線治療装置制御装置2は、既述の動作と同様にして、走行ガントリ14が移動することによりアイソセンタ19が透過画像に映し出される位置が移動するときにも、治療用放射線23をより正確な位置に照射することができる。
【符号の説明】
【0086】
1 :放射線治療システム
2 :放射線治療装置制御装置
3 :放射線治療装置
11:旋回駆動装置
12:Oリング
14:走行ガントリ
15:首振り機構
16:治療用放射線照射装置
17:回転軸
18:回転軸
19:アイソセンタ
20:マルチリーフコリメータ
21:チルト軸
22:パン軸
23:治療用放射線
24:診断用X線源
25:診断用X線源
31:センサアレイ
32:センサアレイ
33:センサアレイ
35:診断用X線
36:診断用X線
41:カウチ
42:カウチ駆動装置
43:患者
45:入力装置
46:ディスプレイ
47:インターフェース
50:ガントリ駆動部
51:ガントリ位置収集部
52:ポータル画像撮影部
53:マーカ位置算出部
54:マーカ位置テーブル作成部
55:表示部
56:ずれ量算出部
57:ジンバル駆動部
58:照射軸ずれ量算出部
59:補正テーブル作成部
60:照射部
61:透過画像
62:マーカ部材図形
63:マーカ位置
64:照射野図形
65:照射軸位置
67:マーカ位置テーブル
68:ガントリ位置集合
69:マーカ位置集合
71:透過画像
72:マーカ部材図形
73:マーカ位置
74:照射野図形
75:照射軸位置
76:アイソセンタ位置
77:ずれ量
78:照射軸ずれ量
81:制御テーブル
82:ずれ量集合
83:制御量集合
86:補正テーブル
87:ガントリ位置集合
88:ずれ量集合
89:補正量集合
91:表示画像
92:患部図形
93:照射野図形
94:アイソセンタ位置図形
【技術分野】
【0001】
本発明は、放射線治療装置制御装置および放射線照射方法に関し、特に、人体内部の腫瘍患部を放射線治療するときに利用される放射線治療装置および放射線照射方法に関する。
【背景技術】
【0002】
患部(腫瘍)に治療用放射線を照射することにより患者を治療する放射線治療が知られている。その放射線治療は、治療効果が高いことが望まれ、その放射線は、患部の細胞に照射される線量に比較して、正常な細胞に照射される線量がより小さいことが望まれている。このためには治療用放射線を正確に患部に照射する必要がある。その放射線治療を実行する放射線治療装置は、患者の透過画像を撮像するイメージャシステムと、その治療用放射線を出射する治療用放射線照射装置と、その治療用放射線照射装置を駆動する駆動装置とを備えている。その放射線治療装置は、その透過画像に基づいて患部の位置を算出し、その位置に治療用放射線が照射されるようにその駆動装置を用いてその治療用放射線照射装置を駆動する。
【0003】
その治療用放射線照射装置とイメージャシステムとを支持する支持構造は、その支持構造そのものの自重や、その治療用放射線照射装置の重量によりたわむ。このため、その支持構造を移動したときに、その患者の透過画像は、所望の視野からずれている他の視野を写すことがある。このとき、照射対象の位置決め操作や位置決め精度確認において、ユーザに誤った情報を与えてしまう。照射対象の位置決め操作や位置決め精度確認をより正確に実行することが望まれている。
【0004】
特開平10−234715号公報には、改良された医用イメージングシステムが開示されている。その医用イメージングシステムは、放射ビームにより表される像を受け取り、該像を可視像に変換するように構成された像検出器を有し、前記の可視像は、上方限界−境界及び下方限界−境界を有する注目信号を規定するものであり、前記像検出器に作用結合されたビデオ検出器を有し、該ビデオ検出器は、前記可視像を受け取り、該可視像からヒストグラムを生成するものであり、ビデオ処理回路を有し、該ビデオ処理回路は、前記ヒストグラムから前記の注目信号の上方限界−境界を自動的に識別するように構成されていることを特徴とする。
【0005】
特表2001−503176号公報には、放射線治療装置の制御に利用できる装置が開示されている。その装置は、ポータル画像をシミュレーション画像と自動的に照合させる装置であって、前記ポータル画像及びシミュレーション画像をデジタル化してそれぞれデジタルポータル画像信号(DPIS)及びデジタルシミュレーション画像信号(DSIS)を発生させる手段と、前記DPIS及びDSISを処理して照合済みDPIS及びDSISを発生させる処理手段と、照合済みDPIS及びDSISから出力を発生させる出力手段とよりなる。
【0006】
特開2006−149438号公報には、利便性に優れ、再現性よく、照射計画に従った照射部位の位置照合を支援するための照射位置照合システムが開示されている。その照射位置照合システムは、放射線治療計画画像(DRR)と、治療前に撮影する照射野確認画像(LG)とを用いて、照射部位の位置を合わせるための照射位置照合システムであって、前記DRR及び照射野(FOV)形成のための形状データ、前記LGの画像を取得する画像取得手段と、取得した前記DRR及びLGの画像のサイズと位置を合わせる前処理手段と、前記DRRとLGの画像のエッジを強調するエッジ強調手段と、取得した前記形状データを用いて、LG内のFOVエッジを除去するFOVエッジ除去手段と、DRRとLGの画像を2値化する2値化手段と、2値化したDRRとLGの画像のエッジを細線化する細線化処理手段と、前記DRRとLGのずれを検出する照合手段と、照合した結果を表示する表示手段とを備えることを特徴とする。
【0007】
特開2007−267972号公報には、患部に対して適正量のX線を照射し、且つ患部周辺健全組織へのX線照射量の低減を図るために、治療用X線発生源から照射されるX線の照射軸を、常に照射対象患部の位置する所定位置に指向することのできるが開示されている。その放射線治療装置は、アイソセンタを通る第1の軸の周りに回動自在であり、前記アイソセンタで前記第1の軸に交差する第2の軸の周りにも回動自在なガントリと、前記ガントリに配設される撮像装置と、制御装置と、を具備し、前記制御装置は、前記ガントリの前記第1の軸の周りの角度として定義する旋回角度の複数の位置から、前記撮像装置によりマーカ部材の画像を撮像し、前記制御装置は、前記画像それぞれにおける視野位置に基づいて、前記アイソセンタ同定位置を同定する。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平10−234715号公報
【特許文献2】特表2001−503176号公報
【特許文献3】特開2006−149438号公報
【特許文献4】特開2007−267972号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の課題は、照射対象の位置決め操作や位置決め精度確認をより正確に実行する放射線治療装置制御装置および放射線照射方法を提供することにある。
【課題を解決するための手段】
【0010】
以下に、発明を実施するための形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0011】
本発明による放射線治療装置制御装置(2)は、治療用放射線(23)と撮影装置(31)とを用いて、固定された位置(19)に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するポータル画像撮影部(52)と、撮影装置(31)と治療用放射線(23)を射出する放射線照射装置(16)とを支持するガントリ(14)が配置される位置を計測するセンサ(11)から、そのテーブル作成用透過画像が撮影された時にガントリ(14)が配置されるガントリ位置を収集するガントリ位置収集部(51)と、そのマーカ部材がそのテーブル作成用透過画像に映し出されるマーカ位置を算出するマーカ位置算出部(53)と、ガントリ位置がそのマーカ位置に対応するように、複数ガントリ位置(68)を複数マーカ位置(69)に対応付けるマーカ位置テーブル(67)を更新するマーカ位置テーブル作成部(54)とを備えている。このような放射線治療装置制御装置(2)によれば、ユーザは、ガントリ(14)が移動することにより固定された位置(19)がその透過画像に映し出されるマーカ位置が移動するときにも、マーカ位置テーブル(67)を用いてその透過画像に写っている領域をより正確に認識することができる。このため、ユーザは、その透過画像に基づいて治療用放射線(23)と治療用放射線(23)が照射される対象(43)との位置関係をより正確に確認することができる。
【0012】
本発明による放射線治療装置制御装置(2)は、治療用放射線(23)と撮影装置(31)とを用いて撮影された追尾用透過画像と複数マーカ位置(69)のうちのその追尾用透過画像が撮像された時にガントリ(14)が配置された追尾用ガントリ位置に対応する追尾用マーカ位置とに基づいてずれ量を算出するずれ量算出部(56)と、複数ガントリ位置(87)と複数ずれ量(88)とを複数補正量(89)に対応付ける補正テーブル(86)を参照して、その追尾用ガントリ位置とそのずれ量とに対応する複数補正量(89)のうちの補正量に基づいて、駆動装置(15)を用いてガントリ(14)に対して放射線照射装置(16)を駆動するジンバル駆動部(57)をさらに備えていることが好ましい。
【0013】
本発明による放射線治療装置制御装置(2)は、その追尾用透過画像に基づいて、照射野変形装置(20)を用いて治療用放射線(23)の照射野を変形する照射部(60)をさらに備えている。
【0014】
本発明による放射線治療装置制御装置(2)は、治療用放射線(23)と撮影装置(31)とを用いて撮影された補正用透過画像に基づいて照射軸ずれ量を算出する照射軸ずれ量算出部(58)と、その補正用透過画像が撮影された時にガントリ(14)が配置されるガントリ位置とその照射軸ずれ量とに基づいて補正テーブル(86)を更新する補正テーブル作成部(59)をさらに備えている。
【0015】
マーカ位置テーブル作成部(54)は、複数マーカ位置(69)のうちの第1ガントリ位置に対応する第1マーカ位置に基づいて複数マーカ位置(69)のうちのその第1ガントリ位置と異なる第2ガントリ位置に対応する第2マーカ位置を算出し、その第2ガントリ位置がその第2マーカ位置に対応するようにマーカ位置テーブル(67)を更新する。このような放射線治療装置制御装置(2)は、マーカ位置テーブル(67)を作成するために複数ガントリ位置(68)毎に透過画像を撮影する必要がなく、すなわち、第2ガントリ位置にガントリ(14)を配置して透過画像を撮影する必要がなく、マーカ位置テーブル(67)をより速く作成することができる。
【0016】
本発明による放射線治療装置制御装置(2)は、治療用放射線(23)と撮影装置(31)とを用いて撮影された表示用透過画像とマーカ位置図形(94)とを示している表示画像(91)をディスプレイ(46)に表示している表示部(55)をさらに備えている。ガントリ位置収集部は、さらに、その透過画像が撮影された時にガントリ(14)が配置される表示用ガントリ位置を収集する。マーカ位置図形(94)は、複数マーカ位置(69)のうちのその表示用ガントリ位置に対応する表示用マーカ位置を示している。このような放射線治療装置制御装置(2)によれば、ユーザは、表示画像(91)に基づいてその表示用透過画像の被写体の位置をより正確に確認することができる。
【0017】
本発明による放射線照射方法は、治療用放射線(23)と撮影装置(31)とを用いて、固定された位置(19)に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するステップと、そのテーブル作成用透過画像が撮影された時に撮影装置(31)と治療用放射線(23)を射出する放射線照射装置(16)とを支持するガントリ(14)が配置されるガントリ位置を計測するステップと、そのマーカ部材がそのテーブル作成用透過画像に映し出されるマーカ位置を算出するステップと、ガントリ位置がそのマーカ位置に対応するように、複数ガントリ位置(68)を複数マーカ位置(69)に対応付けるマーカ位置テーブル(67)を更新するステップとを備えている。このような放射線照射方法によれば、ユーザは、ガントリ(14)が移動することにより固定された位置(19)がその透過画像に映し出されるマーカ位置が移動するときにも、マーカ位置テーブル(67)を用いてその透過画像に写っている領域をより正確に認識することができる。このため、ユーザは、その透過画像に基づいてその放射線とその放射線が照射される対象との位置関係をより正確に確認することができる。
【0018】
本発明による放射線照射方法は、治療用放射線(23)と撮影装置(31)とを用いて撮影された追尾用透過画像と複数マーカ位置(69)のうちのその追尾用透過画像が撮像された時にガントリ(14)が配置された追尾用ガントリ位置に対応する追尾用マーカ位置とに基づいてずれ量を算出するステップと、複数ガントリ位置(68)と複数ずれ量(88)とを複数補正量(89)に対応付ける補正テーブル(86)を参照して、その追尾用ガントリ位置とそのずれ量とに対応する複数補正量(89)のうちの補正量に基づいて放射線照射装置(16)をガントリ(14)に対して駆動するステップをさらに備えている。
【0019】
本発明による放射線照射方法は、その追尾用透過画像に基づいて治療用放射線(23)の照射野を変形するステップをさらに備えている。
【0020】
本発明による放射線照射方法は、治療用放射線(23)と撮影装置(31)とを用いて撮影された補正用透過画像に基づいて照射軸ずれ量を算出するステップと、その補正用透過画像が撮影された時にガントリ(14)が配置されるガントリ位置とその照射軸ずれ量とに基づいて補正テーブル(86)を更新するステップをさらに備えている。
【0021】
本発明による放射線照射方法は、複数マーカ位置(69)のうちの第1ガントリ位置に対応する第1マーカ位置に基づいて複数マーカ位置(69)のうちのその第1ガントリ位置と異なる第2ガントリ位置に対応する第2マーカ位置を算出するステップと、その第2ガントリ位置がその第2マーカ位置に対応するようにマーカ位置テーブル(67)を更新するステップとをさらに備えている。このような放射線照射方法は、マーカ位置テーブル(67)を作成するために複数ガントリ位置(68)毎に透過画像を撮影する必要がなく、マーカ位置テーブル(67)をより速く作成することができる。
【0022】
本発明による放射線照射方法は、治療用放射線(23)と撮影装置(31)とを用いて撮影された表示用透過画像とマーカ位置図形(94)とを示している表示画像(91)をディスプレイ(46)に表示しているステップをさらに備えている。マーカ位置図形(94)は、その透過画像が撮影された時にガントリ(14)が配置される表示用ガントリ位置に対応する複数マーカ位置(69)のうちの表示用マーカ位置を示している。このような放射線照射方法によれば、ユーザは、表示画像(91)に基づいてその表示用透過画像の被写体の位置をより正確に確認することができる。
【発明の効果】
【0023】
本発明による放射線治療装置制御装置および放射線照射方法によれば、ユーザは、ガントリが移動することにより透過画像に映し出される領域が移動するときにも、そのマーカ位置テーブルを用いてその透過画像に写っている領域をより正確に認識することができる。このため、ユーザは、その透過画像に基づいてその放射線とその放射線が照射される対象との位置関係をより正確に確認することができる。
【図面の簡単な説明】
【0024】
【図1】図1は、放射線治療システムを示すブロック図である。
【図2】図2は、本発明による放射線治療装置を示す斜視図である。
【図3】図3は、放射線治療装置制御装置を示すブロック図である。
【図4】図4は、アイソセンタにマーカ部材を配置したときに撮影された透過画像を示す図である。
【図5】図5は、マーカ位置テーブルを示す図である。
【図6】図6は、制御テーブルを示す図である。
【図7】図7は、アイソセンタからずれた位置にマーカ部材を配置したときに撮影された透過画像を示す図である。
【図8】図8は、補正テーブルを示す図である。
【図9】図9は、ディスプレイに表示される表示画面を示す図である。
【図10】図10は、放射線治療する動作を示すフローチャートである。
【図11】図11は、動体追尾照射する動作を示すフローチャートである。
【発明を実施するための形態】
【0025】
図面を参照して、本発明による放射線治療装置制御装置の実施の形態を記載する。その放射線治療装置制御装置2は、図1に示されているように、放射線治療システム1に適用されている。放射線治療システム1は、放射線治療装置制御装置2と放射線治療装置3とを備えている。放射線治療装置制御装置2は、パーソナルコンピュータに例示されるコンピュータである。放射線治療装置制御装置2と放射線治療装置3とは、双方向に情報を伝送することができるように、互いに接続されている。
【0026】
図2は、放射線治療装置3を示している。放射線治療装置3は、旋回駆動装置11とOリング12と走行ガントリ14と首振り機構15と治療用放射線照射装置16とを備えている。旋回駆動装置11は、回転軸17を中心に回転可能にOリング12を土台に支持し、放射線治療装置制御装置2により制御されて回転軸17を中心にOリング12を回転させる。回転軸17は、鉛直方向に平行である。旋回駆動装置11は、さらに、土台に対するOリング12の旋回角を計測する。Oリング12は、回転軸18を軸とするリング状に形成され、回転軸18を中心に回転可能に走行ガントリ14を支持している。回転軸18は、鉛直方向に垂直であり、回転軸17に含まれるアイソセンタ19を通る。回転軸18は、さらに、Oリング12に対して固定され、すなわち、Oリング12とともに回転軸17を中心に回転する。走行ガントリ14は、回転軸18を中心とするリング状に形成され、Oリング12のリングと同心円になるように配置されている。放射線治療装置3は、さらに、図示されていない走行駆動装置を備えている。その走行駆動装置は、放射線治療装置制御装置2により制御されて回転軸18を中心に走行ガントリ14を回転させる。その走行駆動装置は、さらに、Oリング12に対する走行ガントリ14の走行角を計測する。
【0027】
首振り機構15は、治療用放射線照射装置16が走行ガントリ14の内側に配置されるように、治療用放射線照射装置16を走行ガントリ14に支持している。首振り機構15は、チルト軸21およびパン軸22を有している。パン軸22は、走行ガントリ14に対して固定され、回転軸18に交差しないで回転軸18に平行である。チルト軸21は、パン軸22に直交している。首振り機構15は、放射線治療装置制御装置2により制御されて、パン軸22を中心に治療用放射線照射装置16を回転させ、チルト軸21を中心に治療用放射線照射装置16を回転させる。
【0028】
治療用放射線照射装置16は、放射線治療装置制御装置2により制御されて、治療用放射線23を放射する。治療用放射線23は、パン軸22とチルト軸21とが交差する交点を通る直線に概ね沿って放射される。治療用放射線23は、一様強度分布を持つように形成されている。治療用放射線照射装置16は、マルチリーフコリメータ(MLC)20を備えている。そのマルチリーフコリメータ20は、放射線治療装置制御装置2により制御され、治療用放射線23の一部を遮蔽することにより、治療用放射線23が患者に照射されるときの照射野の形状を変更する。
【0029】
治療用放射線23は、このように治療用放射線照射装置16が走行ガントリ14に支持されることにより、首振り機構15で治療用放射線照射装置16がアイソセンタ19に向かうように一旦調整されると、旋回駆動装置11によりOリング12が回転し、または、その走行駆動装置により走行ガントリ14が回転しても、常に概ねアイソセンタ19を通る。即ち、走行・旋回を行うことで任意方向からアイソセンタ19に向けて治療用放射線23の照射が可能になる。
【0030】
放射線治療装置3は、さらに、複数のイメージャシステムを備えている。すなわち、放射線治療装置3は、診断用X線源24、25とセンサアレイ32、33とを備えている。診断用X線源24は、走行ガントリ14に支持されている。診断用X線源24は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源24を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源24は、放射線治療装置制御装置2により制御されてアイソセンタ19に向けて診断用X線35を放射する。診断用X線35は、診断用X線源24が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。診断用X線源25は、走行ガントリ14に支持されている。診断用X線源25は、走行ガントリ14のリングの内側に配置され、アイソセンタ19から診断用X線源25を結ぶ線分とアイソセンタ19から治療用放射線照射装置16を結ぶ線分とがなす角が鋭角になるような位置に配置されている。診断用X線源25は、放射線治療装置制御装置2により制御されてアイソセンタ19に向けて診断用X線36を放射する。診断用X線36は、診断用X線源25が有する1点から放射され、その1点を頂点とする円錐状のコーンビームである。
【0031】
センサアレイ32は、走行ガントリ14に支持されている。センサアレイ32は、診断用X線源24により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線35を受光して、その被写体の透過画像を生成する。センサアレイ33は、走行ガントリ14に支持されている。センサアレイ33は、診断用X線源25により放射されてアイソセンタ19の周辺の被写体を透過した診断用X線36を受光して、その被写体の透過画像を生成する。センサアレイ32、33としては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0032】
このようなイメージャシステムによれば、センサアレイ32、33により得た画像信号に基づき、アイソセンタ19を中心とする透過画像を生成することができる。
【0033】
放射線治療装置3は、さらに、センサアレイ31を備えている。センサアレイ31は、センサアレイ31と治療用放射線照射装置16とを結ぶ線分がアイソセンタ19を通るように配置されて、走行ガントリ14のリングの内側に固定されている。センサアレイ31は、治療用放射線照射装置16により放射されてアイソセンタ19の周辺の被写体を透過した治療用放射線23を受光して、その被写体の透過画像を生成する。センサアレイ31としては、FPD、X線IIが例示される。
【0034】
放射線治療装置3は、さらに、カウチ41とカウチ駆動装置42とを備えている。カウチ41は、放射線治療システム1により治療される患者43が横臥することに利用される。カウチ41は、図示されていない固定具を備えている。その固定具は、その患者が動かないように、その患者をカウチ41に固定する。カウチ駆動装置42は、カウチ41を土台に支持し、放射線治療装置制御装置2により制御されてカウチ41を移動させる。
【0035】
図3は、放射線治療装置制御装置2を示している。放射線治療装置制御装置2は、図示されていないCPUと記憶装置とを備え、入力装置45とディスプレイ46とインターフェース47とを備えている。そのCPUは、放射線治療装置制御装置2にインストールされるコンピュータプログラムを実行して、その記憶装置と入力装置45とディスプレイ46とインターフェース47とを制御する。その記憶装置は、そのコンピュータプログラムを記録し、そのCPUにより生成される情報を一時的に記録する。
【0036】
入力装置45は、ユーザに操作されることにより情報を生成し、その情報をそのCPUに出力する。その入力装置としては、キーボードが例示される。ディスプレイ46は、そのCPUにより生成される画面を表示する。そのインターフェースは、放射線治療装置制御装置2に接続される外部機器により生成される情報をそのCPUに出力し、そのCPUにより生成された情報をその外部機器に出力する。その外部機器は、放射線治療装置3の旋回駆動装置11と走行駆動装置と首振り機構15と治療用放射線照射装置16とマルチリーフコリメータ20とイメージャシステム(診断用X線源24、25、センサアレイ31、32、33)とカウチ駆動装置42とを含んでいる。
【0037】
そのコンピュータプログラムは、ガントリ駆動部50とガントリ位置収集部51とポータル画像撮影部52とマーカ位置算出部53とマーカ位置テーブル作成部54と表示部55とずれ量算出部56とジンバル駆動部57と照射軸ずれ量算出部58と補正テーブル作成部59と照射部60とを含んでいる。
【0038】
ガントリ駆動部50は、旋回駆動装置11を用いて、回転軸17を中心にOリング12を回転させて、入力装置45が操作されることにより入力されたOリング回転角にOリング12を配置する。ガントリ駆動部50は、さらに、放射線治療装置3の走行駆動装置を用いて、回転軸18を中心に走行ガントリ14を回転させて、入力装置45が操作されることにより入力されたガントリ走行角に走行ガントリ14を配置する。
【0039】
ガントリ位置収集部51は、走行ガントリ14が配置されているガントリ位置を放射線治療装置3から収集する。そのガントリ位置は、旋回角と走行角とを示している。すなわち、ガントリ位置収集部51は、その旋回角を旋回駆動装置11から収集し、その走行角を放射線治療装置3の走行駆動装置から収集する。
【0040】
ポータル画像撮影部52は、治療用放射線照射装置16から治療用放射線23が出射されているときに、センサアレイ31を用いて、アイソセンタ19の周辺に配置された被写体の透過画像を撮影する。
【0041】
マーカ位置算出部53は、ポータル画像撮影部52により撮影された透過画像を画像処理することにより、マーカ位置を算出する。
【0042】
マーカ位置テーブル作成部54は、他のコンピュータプログラムから閲覧可能にマーカ位置テーブルを記憶装置に記録する。マーカ位置テーブル作成部54は、ガントリ位置収集部51により収集されたガントリ位置とマーカ位置算出部53により算出されたマーカ位置とに基づいてそのマーカ位置テーブルを更新する。
【0043】
表示部55は、ポータル画像撮影部52により撮影された透過画像とガントリ位置収集部51により収集されたガントリ位置とマーカ位置テーブル作成部54により作成されたマーカ位置テーブルとに基づいて表示画像を生成し、その表示画像をディスプレイ46に表示する。
【0044】
ずれ量算出部56は、ポータル画像撮影部52により撮影された透過画像とガントリ位置収集部51により収集されたガントリ位置とマーカ位置テーブル作成部54により作成されたマーカ位置テーブルとに基づいて、ずれ量を算出する。
【0045】
ジンバル駆動部57は、記憶装置に記録された制御テーブルを参照して、入力装置45が操作されることにより入力されたずれ量に基づいて制御量を算出する。ジンバル駆動部57は、または、ポータル画像撮影部52により撮影された透過画像と補正テーブル作成部59により作成された補正テーブルとに基づいて、制御量を算出する。ジンバル駆動部57は、その算出された制御量に基づいて、首振り機構15を用いて治療用放射線照射装置16を駆動する。
【0046】
照射軸ずれ量算出部58は、ポータル画像撮影部52により撮影された透過画像に基づいて、照射軸ずれ量を算出する。
【0047】
補正テーブル作成部59は、ガントリ位置収集部51により収集されたガントリ位置とジンバル駆動部57により算出された制御量と照射軸ずれ量算出部58により算出された照射軸ずれ量とに基づいて、補正テーブルを作成する。
【0048】
照射部60は、旋回駆動装置11を用いて、回転軸17を中心にOリング12を回転させて、放射線治療装置制御装置2に入力された治療計画が示す回転角にOリング12を配置する。照射部60は、さらに、放射線治療装置3の走行駆動装置を用いて、回転軸18を中心に走行ガントリ14を回転させて、その治療計画が示す走行角に走行ガントリ14を配置する。照射部60は、さらに、ずれ量算出部56により算出されたずれ量に基づいて、患者43の患部を治療用放射線23が透過するように、首振り機構15を用いて治療用放射線照射装置16を駆動する。照射部60は、さらに、ポータル画像撮影部52により撮影された透過画像に基づいて、患者43の患部と異なる危険部位に照射される治療用放射線23の被曝量が低減するように、マルチリーフコリメータ20を用いて治療用放射線23の照射野の形状を制御する。照射部60は、首振り機構15とマルチリーフコリメータ20とを駆動した後で、治療用放射線照射装置16を用いて治療用放射線23を出射する。
【0049】
図4は、アイソセンタ19にマーカ部材を配置したときに、ポータル画像撮影部52により撮影された透過画像を示している。そのマーカ部材としては、金属球が例示される。その透過画像61は、マーカ部材図形62が映し出されている。マーカ部材図形62の形状は、そのマーカ部材の形状に対応し、マーカ部材図形62が透過画像61に映し出されているマーカ位置63は、そのマーカ部材が配置されている位置に対応している。透過画像61は、さらに、照射野図形64が映し出されている。照射野図形64の形状は、治療用放射線23の照射野の形状に対応し、照射野図形64が透過画像61に映し出されている照射軸位置65は、治療用放射線23の照射軸に対応している。
【0050】
このとき、マーカ位置テーブル作成部54は、透過画像61を画像処理することにより、マーカ部材図形62のマーカ位置63を算出する。マーカ位置63は、x座標とy座標とを示している。
【0051】
図5は、マーカ位置テーブル作成部54により作成されたマーカ位置テーブルを示している。そのマーカ位置テーブル67は、ガントリ位置集合68をマーカ位置集合69に対応付けている。すなわち、ガントリ位置集合68のうちの任意の要素は、マーカ位置集合69のうちの1つの要素に対応している。ガントリ位置集合68の要素は、それぞれ、走行ガントリ14の位置を示し、旋回角と走行角との組み合わせを示している。マーカ位置集合69の要素は、それぞれ、ポータル画像撮影部52により撮影された透過画像の上の点の位置を示し、x座標とy座標との組合わせを示している。
【0052】
すなわち、マーカ位置テーブル作成部54は、センサアレイ31を用いてアイソセンタ19に配置されたマーカ部材の透過画像を撮影したときに、その透過画像が撮影された時に走行ガントリ14が配置されているガントリ位置をガントリ位置収集部51により収集し、その透過画像を画像処理してそのマーカ部材を映すマーカ部材図形のマーカ位置を算出する。マーカ位置テーブル作成部54は、その収集されたガントリ位置がその算出されたマーカ位置に対応するように、マーカ位置テーブル67を更新する。すなわち、マーカ位置集合69の要素は、ガントリ位置集合68のうちのその要素に対応するガントリ位置に走行ガントリ14が配置されたときに撮影される透過画像で、アイソセンタ19に配置された被写体が映し出される位置を示している。
【0053】
マーカ位置テーブル作成部54は、さらに、透過画像が撮影されていない走行ガントリ14の位置を示すガントリ位置に対応するマーカ位置を算出し、そのガントリ位置がその算出されたマーカ位置に対応するように、マーカ位置テーブル67を更新する。すなわち、旋回角R0と走行角G0とにより定義されるガントリ位置に対応するマーカ位置が示すx座標X_G0R0とy座標Y_G0R0とは、次式:
【数1】
【数2】
により表現される。ここで、旋回角R1と走行角G1とは、透過画像が撮影された走行ガントリ14の位置を示している。旋回角R2と走行角G2とは、他の透過画像が撮影された走行ガントリ14の他の位置を示している。旋回角R1と旋回角R2と走行角G1と走行角G2とは、次式:
G1≦G0≦G2
R1≦R0≦R2
を満足している。さらに、x座標X_G0R1は、次式:
【数3】
により表現される。x座標X_G0R2は、次式:
【数4】
により表現される。y座標Y_G0R1は、次式:
【数5】
により表現される。y座標Y_G0R2は、次式:
【数6】
により表現される。x座標X_G1R1とy座標Y_G1R1とは、旋回角R1と走行角G1とにより定義されるガントリ位置に走行ガントリ14が配置されている時に撮影された透過画像に映し出されるマーカ部材図形の位置を示している。x座標X_G2R2とy座標Y_G2R2とは、旋回角R2と走行角G2とにより定義されるガントリ位置に走行ガントリ14が配置されている時に撮影された透過画像に映し出されるマーカ部材図形の位置を示している。
【0054】
図6は、ジンバル駆動部57により参照される制御テーブルを示している。その制御テーブル81は、ずれ量集合82を制御量集合83に対応付けている。すなわち、ずれ量集合82のうちの任意の要素は、制御量集合83のうちの1つの要素に対応している。ずれ量集合82の要素は、それぞれ、ポータル画像撮影部52により撮影された透過画像の上の2点のずれ量を示し、X成分とy成分との組み合わせを示している。制御量集合83の要素は、それぞれ、首振り機構15を制御するための制御値を示し、パン制御量とチルト制御量との組み合わせを示している。
【0055】
このとき、ジンバル駆動部57は、入力装置45を介してずれ量が入力がされたときに、制御テーブル81を参照して、制御量集合83のうちからその入力されたずれ量に対応する制御量を算出する。ジンバル駆動部57は、次いで、その算出された制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する。
【0056】
図7は、アイソセンタ19から少しずれた位置にマーカ部材を配置したときに、ポータル画像撮影部52により撮影された透過画像を示している。その透過画像71は、マーカ部材図形72が映し出されている。マーカ部材図形72の形状は、そのマーカ部材の形状に対応し、マーカ部材図形72が透過画像71に映し出されているマーカ位置73は、そのマーカ部材が配置されている位置に対応している。透過画像71は、さらに、照射野図形74が映し出されている。照射野図形74の形状は、治療用放射線23の照射野の形状に対応し、照射野図形74が透過画像71に映し出されている照射軸位置75は、治療用放射線23の照射軸に対応している。
【0057】
このとき、ずれ量算出部56は、まず、透過画像71が撮像されたときに走行ガントリ14が配置されていたガントリ位置を収集し、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのその収集されたガントリ位置に対応するアイソセンタ位置76を算出する。ずれ量算出部56は、次いで、透過画像71を画像処理することにより、アイソセンタ位置76とマーカ位置73とのずれ量77を算出する。ずれ量77は、x成分とy成分の組み合わせを示している。
【0058】
ジンバル駆動部57は、ずれ量算出部56により算出されたずれ量に基づいて、治療用放射線23の照射軸がそのマーカ部材を通過するように、治療用放射線照射装置16を駆動する。すなわち、ジンバル駆動部57は、制御テーブル81を参照して、制御量集合83のうちからその算出されたずれ量に対応する制御量を算出する。ジンバル駆動部57は、次いで、その算出された制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する。
【0059】
照射軸ずれ量算出部58は、ジンバル駆動部57により治療用放射線照射装置16が駆動された後に撮影された透過画像に基づいて照射軸ずれ量を算出する。すなわち、照射軸ずれ量算出部58は、その透過画像が透過画像71であるときに、透過画像71を画像処理することにより、マーカ位置73と照射軸位置75とのずれ量である照射軸ずれ量78を算出する。照射軸ずれ量78は、x成分とy成分の組み合わせを示している。
【0060】
図8は、補正テーブル作成部59により作成される補正テーブルを示している。その補正テーブル86は、ガントリ位置集合87とずれ量集合88とを補正量集合89に対応付けている。すなわち、ガントリ位置集合87のうちの任意の要素とずれ量集合88のうちの任意の要素との組み合わせは、補正量集合89のうちの1つの要素に対応している。ガントリ位置集合87の要素は、それぞれ、走行ガントリ14の位置を示し、旋回角と走行角との組み合わせを示している。ずれ量集合88の要素は、それぞれ、アイソセンタ位置とマーカ位置とのずれ量を示し、x成分とy成分の組み合わせを示している。補正量集合89の要素は、それぞれ、首振り機構15を制御するための制御量を補正するための補正量を示し、パン補正量とチルト補正量との組み合わせを示している。
【0061】
ジンバル駆動部57は、補正テーブル86が作成されたときに、補正テーブル86に基づいて補正された制御量を用いて首振り機構15を制御する。すなわち、ジンバル駆動部57は、まず、制御テーブル81を参照して、ずれ量算出部56により算出されたずれ量に対応する制御量を制御量集合83のうちから算出する。ジンバル駆動部57は、そのずれ量の算出に用いられた透過画像が撮影されたときに走行ガントリ14が配置されていたガントリ位置を収集する。ジンバル駆動部57は、補正テーブル86を参照して、補正量集合89のうちからそのガントリ位置とそのずれ量とに対応する補正量を算出する。ジンバル駆動部57は、さらに、その算出された補正量に基づいてその算出された制御量を補正後制御量に補正する。その補正後制御量は、パン制御量とチルト制御量との組み合わせを示している。その補正後制御量のパン制御量は、その制御量のパン制御量にその補正量のパン補正量を加算した値を示している。その補正後制御量のチルト制御量は、その制御量のチルト制御量にその補正量のチルト補正量を加算した値を示している。ジンバル駆動部57は、次いで、その補正後制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する。
【0062】
図9は、表示部55により生成される表示画像を示している。その表示画像91は、ポータル画像撮影部52により撮影された透過画像とアイソセンタ位置図形94とが映し出されている。すなわち、表示画像91は、患部図形92が映し出されている。患部図形92の形状は、患者43の患部の形状に対応し、患部図形92が表示画像91に映し出されている位置は、その患部が配置されている位置に対応している。表示画像91は、さらに、照射野図形93が映し出されている。照射野図形93の形状は、治療用放射線23の照射野の形状に対応し、照射野図形93が表示画像91に映し出されている位置は、治療用放射線23の照射軸の位置に対応している。その表示画像91は、アイソセンタ位置図形94が映し出されている。アイソセンタ位置図形94が表示画像91に映し出されている位置は、アイソセンタ19の位置に対応している。
【0063】
すなわち、表示部55は、ポータル画像撮影部52により撮影された透過画像が撮像されたときに走行ガントリ14が配置されていたガントリ位置を収集し、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのその収集されたガントリ位置に対応するアイソセンタ位置を算出する。表示部55は、その透過画像のうちのその算出されたアイソセンタ位置にアイソセンタ位置図形94が映し出されるように、アイソセンタ位置図形94とその透過画像を重ねることにより表示画像91を作成し、表示画像91をディスプレイ46に表示する。
【0064】
本発明による放射線照射方法の実施の形態は、放射線治療システム1により実行され、マーカ位置テーブルを作成する動作と補正テーブルを作成する動作と放射線治療する動作とを備えている
【0065】
そのマーカ位置テーブルを作成する動作では、ユーザは、まず、アイソセンタ19にマーカ部材を配置する。放射線治療装置制御装置2は、走行ガントリ14が配置されているガントリ位置を収集し、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像61を撮影する。放射線治療装置制御装置2は、次いで、透過画像61を画像処理してそのマーカ部材を映すマーカ部材図形のマーカ位置を算出する。放射線治療装置制御装置2は、次いで、その収集されたガントリ位置がその算出されたマーカ位置に対応するように、マーカ位置テーブル67を更新する。
【0066】
放射線治療装置制御装置2は、ユーザによりOリング12が所定の複数の旋回角に配置される毎に、走行ガントリ14が所定の複数の走行角に配置される毎に、同様にして、マーカ位置を算出し、マーカ位置テーブル67を更新する。
【0067】
マーカ位置テーブル作成部54は、さらに、透過画像が撮影されていない走行ガントリ14の位置を示すガントリ位置に対応するマーカ位置を算出し、そのガントリ位置がその算出されたマーカ位置に対応するように、マーカ位置テーブル67を更新する。
【0068】
その補正テーブルを作成する動作では、ユーザは、まず、アイソセンタ19から少しずれた位置にマーカ部材を固定する。ユーザは、次いで、放射線治療装置制御装置2を操作して、治療用放射線23の照射軸がそのマーカ部材を通過するように、首振り機構15を駆動させる。放射線治療装置制御装置2は、走行ガントリ14が配置されていたガントリ位置を収集し、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像71を撮影する。放射線治療装置制御装置2は、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのその収集されたガントリ位置に対応するアイソセンタ位置76を算出する。放射線治療装置制御装置2は、次いで、透過画像71を画像処理することにより、アイソセンタ位置76とマーカ位置73とのずれ量77を算出する。放射線治療装置制御装置2は、ずれ量77に基づいて、補正テーブル86を更新する。
【0069】
放射線治療装置制御装置2は、ユーザによりOリング12が所定の複数の旋回角に配置される毎に、走行ガントリ14が所定の複数の走行角に配置される毎に、同様にして、ずれ量77を算出し、ずれ量77に基づいてマーカ位置テーブル67を更新する。
【0070】
その放射線治療する動作では、ユーザは、まず、放射線治療装置3のカウチ41に患者43を固定する。ユーザは、さらに、患者43の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者43の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。
【0071】
放射線治療装置制御装置2は、患者の患部がアイソセンタ19に配置された後に、走行ガントリ14を治療計画が示すガントリ位置に配置し、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像を撮影する。放射線治療装置制御装置2は、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのそのガントリ位置に対応するアイソセンタ位置76を算出する。放射線治療装置制御装置2は、その透過画像のうちのその算出されたアイソセンタ位置にアイソセンタ位置図形94が映し出されるように、アイソセンタ位置図形94とその透過画像を重ねることにより表示画像91を作成し、表示画像91をディスプレイ46に表示する。
【0072】
放射線治療装置制御装置2は、その透過画像と制御テーブル81と補正テーブル86とに基づいて、治療用放射線23の照射軸がその患部を通過するように、首振り機構15を制御する。放射線治療装置制御装置2は、患者の患部が治療用放射線23に照射されるように患者の患部が配置された後に、患者43の患部に照射された治療用放射線23の線量がその治療計画の線量になるまで、治療用放射線照射装置16を用いて治療用放射線23を出射する。
【0073】
このような動作によれば、放射線治療装置制御装置2は、走行ガントリ14が移動することによりアイソセンタ19が透過画像に映し出される位置が移動するときにも、その透過画像に写っている領域をより正確に認識することができる。このため、ユーザは、その透過画像に基づいて治療用放射線23と患者43の患部との位置関係をより正確に確認することができ、治療用放射線23をより正確な位置に照射することができる。
【0074】
その放射線治療する動作は、放射線治療する他の動作に置換されることもできる。図10は、その置換される動作を示している。その動作では、ユーザは、まず、放射線治療装置3のカウチ41に患者43を固定する。ユーザは、さらに、患者43の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者43の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。放射線治療装置制御装置2は、患者の患部がアイソセンタ19に配置された後に、走行ガントリ14を治療計画が示すガントリ位置に配置する(ステップS1)。
【0075】
放射線治療装置制御装置2は、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像を撮影する(ステップS2)。放射線治療装置制御装置2は、マーカ位置テーブル67を参照して、マーカ位置集合69のうちのそのガントリ位置に対応するアイソセンタ位置を算出する。放射線治療装置制御装置2は、その透過画像を画像処理することにより、そのアイソセンタ位置と患部が映し出される位置とのずれ量を算出する(ステップS3)。
【0076】
放射線治療装置制御装置2は、そのずれ量が所定の閾値より大きいときに(ステップS4、NO)、制御テーブル81を参照して、制御量集合83のうちからその算出されたずれ量に対応する制御量を算出し、その算出された制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する(ステップS5)。放射線治療装置制御装置2は、治療用放射線23がその患部を照射するように治療用放射線照射装置16が位置合わせされていないときに(ステップS6、YES)、ステップS2〜S4を再度実行する。
【0077】
放射線治療装置制御装置2は、治療用放射線23がその患部を照射するように治療用放射線照射装置16が位置合わせされているときに(ステップS6、NO)、または、その算出されたずれ量が所定の閾値より小さいときに(ステップS4、YES)、患者43の患部に照射された治療用放射線23の線量がその治療計画の線量になるまで、治療用放射線照射装置16を用いて治療用放射線23を出射する(ステップS7)。
【0078】
このような動作によれば、放射線治療装置制御装置2は、既述の動作と同様にして、走行ガントリ14が移動することによりアイソセンタ19が透過画像に映し出される位置が移動するときにも、治療用放射線23をより正確な位置に照射することができる。このような動作によれば、放射線治療装置制御装置2は、補正テーブル86を作成する動作を実行する必要がなく、放射線治療の事前に必要な動作が低減して好ましい。
【0079】
なお、その放射線治療する動作は、患者43の患部が呼吸・心鼓動に例示される患者の運動とともに患部が移動する場合には、追尾動作と照射動作とを繰り返す動体追尾照射する動作に置換することができる。
【0080】
その動体追尾照射する動作では、図11に示されているように、ユーザは、まず、放射線治療装置3のカウチ41に患者43を固定する。ユーザは、さらに、患者43の患部が概ねアイソセンタ19に重なって配置されるように、カウチ41を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者43の患部がアイソセンタ19に重なって配置されるようにカウチ41を移動させる。放射線治療装置制御装置2は、患者の患部がアイソセンタ19に配置された後に、走行ガントリ14を治療計画が示すガントリ位置に配置する(ステップS11)。
【0081】
放射線治療装置制御装置2は、治療用放射線照射装置16を用いて治療用放射線23を出射させ、センサアレイ31を用いて透過画像を撮影する(ステップS12)。ユーザは、その透過画像のうちから患部の画像を抽出することにより、その患部の画像を定義する(ステップS13)。
【0082】
放射線治療装置制御装置2は、治療用放射線照射装置16を用いて治療用放射線23を出射させて(ステップS14)、センサアレイ31を用いて透過画像を撮影し、その透過画像を画像処理することにより、ユーザにより定義された患部の画像が映し出される位置を算出する(ステップS15)。放射線治療装置制御装置2は、さらに、その透過画像を画像処理することにより、患部が映し出される位置とアイソセンタ19が映し出される位置とのずれ量を算出し、患部が映し出される位置と治療用放射線23の照射軸の位置とのずれ量である照射軸ずれ量を算出する(ステップS16)。
【0083】
放射線治療装置制御装置2は、その照射軸ずれ量が所定の閾値より小さいときに(ステップS16、NO)、制御テーブル81を参照して、その算出されたずれ量に対応する制御量を制御量集合83のうちから算出する。放射線治療装置制御装置2は、そのずれ量の算出に用いられた透過画像が撮影されたときに走行ガントリ14が配置されていたガントリ位置を収集する。放射線治療装置制御装置2は、補正テーブル86を参照して、補正量集合89のうちからそのガントリ位置とそのずれ量とに対応する補正量を算出する。放射線治療装置制御装置2は、さらに、その算出された補正量に基づいてその算出された制御量を補正後制御量に補正する。放射線治療装置制御装置2は、次いで、その補正後制御量を首振り機構15に出力することにより、治療用放射線照射装置16を駆動する(ステップS17)。放射線治療装置制御装置2は、治療用放射線照射装置16を駆動した後に、ステップS14〜16を繰り返して実行する。この繰り返しの周期としては、100ms程度が例示される。
【0084】
放射線治療装置制御装置2は、その照射軸ずれ量が所定の閾値より大きいときに(ステップS16、YES)、放射線治療する動作を停止する(ステップS18)。
【0085】
すなわち、このような動作は、動体追尾動作に適用されることができる。このような動作によれば、放射線治療装置制御装置2は、既述の動作と同様にして、走行ガントリ14が移動することによりアイソセンタ19が透過画像に映し出される位置が移動するときにも、治療用放射線23をより正確な位置に照射することができる。
【符号の説明】
【0086】
1 :放射線治療システム
2 :放射線治療装置制御装置
3 :放射線治療装置
11:旋回駆動装置
12:Oリング
14:走行ガントリ
15:首振り機構
16:治療用放射線照射装置
17:回転軸
18:回転軸
19:アイソセンタ
20:マルチリーフコリメータ
21:チルト軸
22:パン軸
23:治療用放射線
24:診断用X線源
25:診断用X線源
31:センサアレイ
32:センサアレイ
33:センサアレイ
35:診断用X線
36:診断用X線
41:カウチ
42:カウチ駆動装置
43:患者
45:入力装置
46:ディスプレイ
47:インターフェース
50:ガントリ駆動部
51:ガントリ位置収集部
52:ポータル画像撮影部
53:マーカ位置算出部
54:マーカ位置テーブル作成部
55:表示部
56:ずれ量算出部
57:ジンバル駆動部
58:照射軸ずれ量算出部
59:補正テーブル作成部
60:照射部
61:透過画像
62:マーカ部材図形
63:マーカ位置
64:照射野図形
65:照射軸位置
67:マーカ位置テーブル
68:ガントリ位置集合
69:マーカ位置集合
71:透過画像
72:マーカ部材図形
73:マーカ位置
74:照射野図形
75:照射軸位置
76:アイソセンタ位置
77:ずれ量
78:照射軸ずれ量
81:制御テーブル
82:ずれ量集合
83:制御量集合
86:補正テーブル
87:ガントリ位置集合
88:ずれ量集合
89:補正量集合
91:表示画像
92:患部図形
93:照射野図形
94:アイソセンタ位置図形
【特許請求の範囲】
【請求項1】
治療用放射線と撮影装置とを用いて、固定された位置に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するポータル画像撮影部と、
前記撮影装置と前記治療用放射線を射出する放射線照射装置とを支持するガントリが配置される位置を計測するセンサから、前記テーブル作成用透過画像が撮影された時に前記ガントリが配置されるガントリ位置を収集するガントリ位置収集部と、
前記マーカ部材が前記テーブル作成用透過画像に映し出されるマーカ位置を算出するマーカ位置算出部と、
前記ガントリ位置が前記マーカ位置に対応するように、複数ガントリ位置を複数マーカ位置に対応付けるマーカ位置テーブルを更新するマーカ位置テーブル作成部
とを具備する放射線治療装置制御装置。
【請求項2】
請求項1において、
前記治療用放射線と前記撮影装置とを用いて撮影された追尾用透過画像と前記複数マーカ位置のうちの前記追尾用透過画像が撮像された時に前記ガントリが配置された追尾用ガントリ位置に対応する追尾用マーカ位置とに基づいてずれ量を算出するずれ量算出部と、
前記複数ガントリ位置と複数ずれ量とを複数補正量に対応付ける補正テーブルを参照して、前記追尾用ガントリ位置と前記ずれ量とに対応する前記複数補正量のうちの補正量に基づいて、駆動装置を用いて前記ガントリに対して前記放射線照射装置を駆動するジンバル駆動部
をさらに具備する放射線治療装置制御装置。
【請求項3】
請求項2において、
前記追尾用透過画像に基づいて、照射野変形装置を用いて前記治療用放射線の照射野を変形する照射部
をさらに具備する放射線治療装置制御装置。
【請求項4】
請求項2または請求項3のいずれかにおいて、
前記治療用放射線と前記撮影装置とを用いて撮影された補正用透過画像に基づいて照射軸ずれ量を算出する照射軸ずれ量算出部と、
前記補正用透過画像が撮影された時に前記ガントリが配置されるガントリ位置と前記照射軸ずれ量とに基づいて前記補正テーブルを更新する補正テーブル作成部
をさらに具備する放射線治療装置制御装置。
【請求項5】
請求項1〜請求項4のいずれかにおいて、
前記マーカ位置テーブル作成部は、前記複数マーカ位置のうちの第1ガントリ位置に対応する第1マーカ位置に基づいて前記複数マーカ位置のうちの前記第1ガントリ位置と異なる第2ガントリ位置に対応する第2マーカ位置を算出し、前記第2ガントリ位置が前記第2マーカ位置に対応するように前記マーカ位置テーブルを更新する
放射線治療装置制御装置。
【請求項6】
請求項1〜請求項5のいずれかにおいて、
前記治療用放射線と前記撮影装置とを用いて撮影された表示用透過画像とマーカ位置図形とを示す表示画像をディスプレイに表示する表示部をさらに具備し、
前記ガントリ位置収集部は、さらに、前記透過画像が撮影された時に前記ガントリが配置される表示用ガントリ位置を収集し、
前記マーカ位置図形は、前記複数マーカ位置のうちの前記表示用ガントリ位置に対応する表示用マーカ位置を示す
放射線治療装置制御装置。
【請求項7】
治療用放射線と撮影装置とを用いて、固定された位置に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するステップと、
前記テーブル作成用透過画像が撮影された時に前記撮影装置と前記治療用放射線を射出する放射線照射装置とを支持するガントリが配置されるガントリ位置を計測するステップと、
前記マーカ部材が前記テーブル作成用透過画像に映し出されるマーカ位置を算出するステップと、
前記ガントリ位置が前記マーカ位置に対応するように、複数ガントリ位置を複数マーカ位置に対応付けるマーカ位置テーブルを更新するステップ
とを具備する放射線照射方法。
【請求項8】
請求項7において、
前記治療用放射線と前記撮影装置とを用いて撮影された追尾用透過画像と前記複数マーカ位置のうちの前記追尾用透過画像が撮像された時に前記ガントリが配置された追尾用ガントリ位置に対応する追尾用マーカ位置とに基づいてずれ量を算出するステップと、
前記複数ガントリ位置と複数ずれ量とを複数補正量に対応付ける補正テーブルを参照して、前記追尾用ガントリ位置と前記ずれ量とに対応する前記複数補正量のうちの補正量に基づいて前記放射線照射装置を前記ガントリに対して駆動するステップ
をさらに具備する放射線照射方法。
【請求項9】
請求項8において、
前記追尾用透過画像に基づいて前記治療用放射線の照射野を変形するステップ
をさらに具備する放射線照射方法。
【請求項10】
請求項8または請求項9のいずれかにおいて、
前記治療用放射線と前記撮影装置とを用いて撮影された補正用透過画像に基づいて照射軸ずれ量を算出するステップと、
前記補正用透過画像が撮影された時に前記ガントリが配置されるガントリ位置と前記照射軸ずれ量とに基づいて前記補正テーブルを更新するステップ
をさらに具備する放射線照射方法。
【請求項11】
請求項7〜請求項10のいずれかにおいて、
前記複数マーカ位置のうちの第1ガントリ位置に対応する第1マーカ位置に基づいて前記複数マーカ位置のうちの前記第1ガントリ位置と異なる第2ガントリ位置に対応する第2マーカ位置を算出するステップと、
前記第2ガントリ位置が前記第2マーカ位置に対応するように前記マーカ位置テーブルを更新するステップ
とをさらに具備する放射線照射方法。
【請求項12】
請求項7〜請求項11のいずれかにおいて、
前記治療用放射線と前記撮影装置とを用いて撮影された表示用透過画像とマーカ位置図形とを示す表示画像をディスプレイに表示するステップをさらに具備し、
前記マーカ位置図形は、前記透過画像が撮影された時に前記ガントリが配置される表示用ガントリ位置に対応する前記複数マーカ位置のうちの表示用マーカ位置を示す
放射線照射方法。
【請求項1】
治療用放射線と撮影装置とを用いて、固定された位置に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するポータル画像撮影部と、
前記撮影装置と前記治療用放射線を射出する放射線照射装置とを支持するガントリが配置される位置を計測するセンサから、前記テーブル作成用透過画像が撮影された時に前記ガントリが配置されるガントリ位置を収集するガントリ位置収集部と、
前記マーカ部材が前記テーブル作成用透過画像に映し出されるマーカ位置を算出するマーカ位置算出部と、
前記ガントリ位置が前記マーカ位置に対応するように、複数ガントリ位置を複数マーカ位置に対応付けるマーカ位置テーブルを更新するマーカ位置テーブル作成部
とを具備する放射線治療装置制御装置。
【請求項2】
請求項1において、
前記治療用放射線と前記撮影装置とを用いて撮影された追尾用透過画像と前記複数マーカ位置のうちの前記追尾用透過画像が撮像された時に前記ガントリが配置された追尾用ガントリ位置に対応する追尾用マーカ位置とに基づいてずれ量を算出するずれ量算出部と、
前記複数ガントリ位置と複数ずれ量とを複数補正量に対応付ける補正テーブルを参照して、前記追尾用ガントリ位置と前記ずれ量とに対応する前記複数補正量のうちの補正量に基づいて、駆動装置を用いて前記ガントリに対して前記放射線照射装置を駆動するジンバル駆動部
をさらに具備する放射線治療装置制御装置。
【請求項3】
請求項2において、
前記追尾用透過画像に基づいて、照射野変形装置を用いて前記治療用放射線の照射野を変形する照射部
をさらに具備する放射線治療装置制御装置。
【請求項4】
請求項2または請求項3のいずれかにおいて、
前記治療用放射線と前記撮影装置とを用いて撮影された補正用透過画像に基づいて照射軸ずれ量を算出する照射軸ずれ量算出部と、
前記補正用透過画像が撮影された時に前記ガントリが配置されるガントリ位置と前記照射軸ずれ量とに基づいて前記補正テーブルを更新する補正テーブル作成部
をさらに具備する放射線治療装置制御装置。
【請求項5】
請求項1〜請求項4のいずれかにおいて、
前記マーカ位置テーブル作成部は、前記複数マーカ位置のうちの第1ガントリ位置に対応する第1マーカ位置に基づいて前記複数マーカ位置のうちの前記第1ガントリ位置と異なる第2ガントリ位置に対応する第2マーカ位置を算出し、前記第2ガントリ位置が前記第2マーカ位置に対応するように前記マーカ位置テーブルを更新する
放射線治療装置制御装置。
【請求項6】
請求項1〜請求項5のいずれかにおいて、
前記治療用放射線と前記撮影装置とを用いて撮影された表示用透過画像とマーカ位置図形とを示す表示画像をディスプレイに表示する表示部をさらに具備し、
前記ガントリ位置収集部は、さらに、前記透過画像が撮影された時に前記ガントリが配置される表示用ガントリ位置を収集し、
前記マーカ位置図形は、前記複数マーカ位置のうちの前記表示用ガントリ位置に対応する表示用マーカ位置を示す
放射線治療装置制御装置。
【請求項7】
治療用放射線と撮影装置とを用いて、固定された位置に配置されたマーカ部材が写るテーブル作成用透過画像を撮影するステップと、
前記テーブル作成用透過画像が撮影された時に前記撮影装置と前記治療用放射線を射出する放射線照射装置とを支持するガントリが配置されるガントリ位置を計測するステップと、
前記マーカ部材が前記テーブル作成用透過画像に映し出されるマーカ位置を算出するステップと、
前記ガントリ位置が前記マーカ位置に対応するように、複数ガントリ位置を複数マーカ位置に対応付けるマーカ位置テーブルを更新するステップ
とを具備する放射線照射方法。
【請求項8】
請求項7において、
前記治療用放射線と前記撮影装置とを用いて撮影された追尾用透過画像と前記複数マーカ位置のうちの前記追尾用透過画像が撮像された時に前記ガントリが配置された追尾用ガントリ位置に対応する追尾用マーカ位置とに基づいてずれ量を算出するステップと、
前記複数ガントリ位置と複数ずれ量とを複数補正量に対応付ける補正テーブルを参照して、前記追尾用ガントリ位置と前記ずれ量とに対応する前記複数補正量のうちの補正量に基づいて前記放射線照射装置を前記ガントリに対して駆動するステップ
をさらに具備する放射線照射方法。
【請求項9】
請求項8において、
前記追尾用透過画像に基づいて前記治療用放射線の照射野を変形するステップ
をさらに具備する放射線照射方法。
【請求項10】
請求項8または請求項9のいずれかにおいて、
前記治療用放射線と前記撮影装置とを用いて撮影された補正用透過画像に基づいて照射軸ずれ量を算出するステップと、
前記補正用透過画像が撮影された時に前記ガントリが配置されるガントリ位置と前記照射軸ずれ量とに基づいて前記補正テーブルを更新するステップ
をさらに具備する放射線照射方法。
【請求項11】
請求項7〜請求項10のいずれかにおいて、
前記複数マーカ位置のうちの第1ガントリ位置に対応する第1マーカ位置に基づいて前記複数マーカ位置のうちの前記第1ガントリ位置と異なる第2ガントリ位置に対応する第2マーカ位置を算出するステップと、
前記第2ガントリ位置が前記第2マーカ位置に対応するように前記マーカ位置テーブルを更新するステップ
とをさらに具備する放射線照射方法。
【請求項12】
請求項7〜請求項11のいずれかにおいて、
前記治療用放射線と前記撮影装置とを用いて撮影された表示用透過画像とマーカ位置図形とを示す表示画像をディスプレイに表示するステップをさらに具備し、
前記マーカ位置図形は、前記透過画像が撮影された時に前記ガントリが配置される表示用ガントリ位置に対応する前記複数マーカ位置のうちの表示用マーカ位置を示す
放射線照射方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−183976(P2010−183976A)
【公開日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願番号】特願2009−28934(P2009−28934)
【出願日】平成21年2月10日(2009.2.10)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願日】平成21年2月10日(2009.2.10)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]