
放射線治療装置
【課題】放射線治療装置の多分割絞り装置においてリーフを駆動するモータの配置に対する自由度を増し、リーフの枚数を増やすこと。
【解決手段】複数枚のリーフを密に配列して形成された絞り体要素の一対からなる絞り体が放射線の照射軸を間にして絞り体要素が対峙するように配置され、各リーフ141を各別に移動させることにより、所望の照射範囲を設定する多分割絞り装置を備えた放射線治療装置は、各リーフ141の歯141aに噛み合わせた駆動歯車143aと、駆動歯車143aの軸芯に結合されたトルクワイヤ143bと、トルクワイヤ143bを介して駆動歯車143aを駆動する駆動手段143cとを具備する。
【解決手段】複数枚のリーフを密に配列して形成された絞り体要素の一対からなる絞り体が放射線の照射軸を間にして絞り体要素が対峙するように配置され、各リーフ141を各別に移動させることにより、所望の照射範囲を設定する多分割絞り装置を備えた放射線治療装置は、各リーフ141の歯141aに噛み合わせた駆動歯車143aと、駆動歯車143aの軸芯に結合されたトルクワイヤ143bと、トルクワイヤ143bを介して駆動歯車143aを駆動する駆動手段143cとを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば悪性腫瘍などの疾患の治療に供される放射線治療装置に係り、被検体に対する放射線の照射範囲(以下、放射線照射野という。)を精度よく設定するようにした多分割絞り装置を備えた放射線治療装置に関する。
【背景技術】
【0002】
放射線治療装置では、放射線防護の見地から、被検体の治療部位に限定的に放射線を照射するように、タングステンなどの放射線を透過させない材料から成る絞り装置が備えられている。この絞り装置は、治療部位の形状に近似させた照射野を、半影を生ずることなくより木目細かく形成することが求められることから、放射線の照射方向に沿って重なるように配置される第1の絞り体と第2の絞り体とから構成される。
【0003】
そして、放射線源に近い側に設けられる第1の絞り体は、放射線の照射軸を間にして対峙するように配置される一対の単体として形成されており、一対の単体は、互いに接近、離反するように駆動される。例えば、一対の単体は、放射線源を中心に含む同心円上を円弧状の軌道面に沿って互いに接近、離反するように駆動される。一方、放射線源より遠い側に設けられる第2の絞り体は、第1の絞り体の移動方向に対して直交する方向に放射線の照射軸を間にして対峙するように配置される一対の絞り体要素(ブロック)として形成される。第2の絞り体の各絞り体要素は、放射線源を中心に含む同心円上を円弧状の軌道面に沿って互いに接近、離反するように格別に移動する複数枚のリーフを密接して配列したものとなっている。
【0004】
第2の絞り体は多分割絞り装置と称され、例えば数十枚のリーフを密に隣接させて集合体とした一対のブロックから構成されている。第2の絞り体は、各リーフは円弧状の軌道面を有し、リーフ毎に設けられた駆動装置によって、各別に円弧状の軌道面に沿って移動可能に駆動されるようになっている。従って、対峙する単体から成る第1の絞り体を、X方向に互いに接近、離反するように移動させるとともに、対峙するリーフの集合体から成る第2の絞り体の各リーフを、それぞれ個別にY方向に互いに接近、離反するように移動させることを組合せることによって、治療部位の形状に近似させた不規則形状の照射野を形成する。なお、第1の絞り体と第2の絞り体を含めて多分割絞り装置と称する場合もある。
【0005】
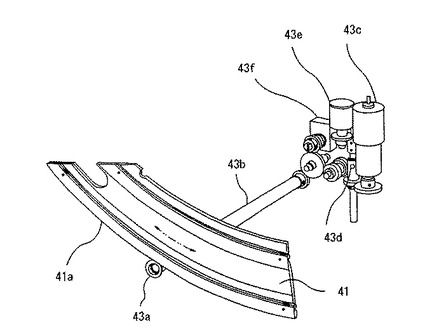
図15は、第2の絞り体を構成する1枚のリーフ41とそれを駆動するための駆動装置43の概要を示す図である。以下、図15を参照してリーフ41の駆動と位置の制御について簡単に説明する。
【0006】
図15に示すリーフ41は、平面は放射線源へ向けて収束するような扇型形状に形成されるとともに、側面は平板状またはくさび状に形成されている。また、リーフ41の外側端部41aは放射線源を中心に含む円弧状の軌道面を形成するように湾曲し、その円弧状の軌道面すなわち、湾曲した外側端部41aには歯が切られている。そして、この外側端部41aの歯に、駆動歯車43aが噛み合わされている。
【0007】
駆動歯車43aはシャフト43bの先端に固着されている。また、シャフト43bは、駆動源であるモータ43cからウォームギヤ43dなどの駆動力伝達機構を介して駆動される。なお、駆動量を検出するために、ポテンショメータ43eやエンコーダ43fが配置されており、これらはリーフ41の位置検出装置として機能する。そして、ポテンショメータ43eやエンコーダ43fからの情報を基に、モータ43cは別途設けられている制御装置によって制御され、個々のリーフ41が所望の位置に設定されて所定の照射野を形成することになる(例えば、特許文献1参照。)。
【0008】
なお、半影の発生を容認する場合には、放射線源を中心に含む同心円上を円弧状の軌道面に沿って移動させるような複雑な構造を取ることなく、多分割絞り装置の各リーフを水平方向に接近、離反するように移動させることが可能である。この場合、各リーフに連結されたネジ切りシャフトを、柔軟ケーブルを介してモータによって駆動するようにした技術が知られている(例えば、特許文献2参照。)。
【特許文献1】特開2002−253686号公報
【特許文献2】特許第2543373号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
上述のように、特開2002−253686号公報に示されているようなものでは、第2の絞り体の各リーフを個別に移動させるためには、モータの回転を各種の歯車とシャフトを介してリーフに伝達する機構が必要となり、このような駆動力伝達機構はリーフ毎に設ける必要がある。ところが、近時放射線防護の見地から、もともと不規則な形状をしている治療部位の形状に、照射野の形状をより一層近似させたいとの要望が強く、そのためにリーフの枚数を増やそうとすることが検討されている。
【0010】
ところが、リーフの枚数を増やそうとすると、リーフの枚数と同じ数のモータ、歯車機構、シャフトなどの駆動力伝達機構が必要となることから、限られた空間の中に、リーフの枚数分だけの駆動力伝達機構を備えるだけのスペースを確保することが難しいとの問題があった。そして、どうしてもリーフの枚数を増やそうとすると、絞り装置が大型化してしまい放射線治療装置としての治療空間を狭めることになるという問題にも繋がるものであった。
【0011】
また、上述の駆動力伝達機構では、歯車とシャフトを介してリーフにモータの回転を伝達しているので、モータをリーフの移動軸に対して平行または直角に配置しなければならないとの制約から、モータの配置に対する自由度が少ないことも、リーフの枚数を増やすことを困難にしていた。さらに、歯車の組合せによるバックラッシュの積み上げがリーフの移動量に誤差を生じさせるので、バックラッシュを除去するための対策も必要であった。
【0012】
一方、特許文献2に示されているものでは、モータの駆動力を、柔軟ケーブルを介してリーフに連結されたネジ切りシャフトに伝達し、リーフを水平方向に押したり引いたりして移動させるものであり、円弧状の軌道面に沿ってリーフを移動させるものに適用した場合には、柔軟ケーブルが伸縮してしまうためにリーフの移動量を精度良く管理することができないという問題があった。
【0013】
本発明は、上記のような種々の問題を解決することを目的としてなされたものである。
【課題を解決するための手段】
【0014】
上述の課題を解決するため、請求項1に記載の発明は、複数枚のリーフを密に配列して形成された絞り体要素の一対からなる絞り体が放射線の照射軸を間にして前記絞り体要素が対峙するように配置され、前記各リーフを各別に移動させることにより、所望の照射範囲を設定する多分割絞り装置を備えた放射線治療装置において、前記各リーフの歯にそれぞれ噛み合わせた駆動歯車と、前記駆動歯車の軸芯にそれぞれ結合されたトルクワイヤと、前記トルクワイヤを介して前記駆動歯車をそれぞれ駆動する駆動手段と、を具備する。
【0015】
また、請求項2に記載の発明は、請求項1に記載の放射線治療装置において、前記駆動手段は、エンコーダを内蔵したトルクモータであることを特徴とする。
【0016】
また、請求項3に記載の発明は、請求項1又は2に記載の放射線治療装置において、前記各リーフにその軌道面上の移動方向に沿って所定のパターンが形成される複数枚のパターン付リーフと、前記パターンを基に前記パターン付リーフの複数位置を検出することによって前記パターン付リーフ毎に移動量をそれぞれ検出する移動量検出部とをさらに具備する。
【0017】
また、請求項4に記載の発明は、請求項3に記載の放射線治療装置において、前記移動量検出部は、前記パターンの一部を照らすように、前記パターン付リーフの移動軌道上の定点に向かって光を照射する光照射部と、前記パターン上の前記定点を含む領域を撮像して定点画像を取得する撮像部と、前記撮像部によって取得される前記定点画像を基に前記パターン付リーフの移動量をそれぞれ演算する移動量演算部とをさらに具備する。
【0018】
また、請求項5に記載の発明は、請求項3に記載の放射線治療装置において、前記パターンは、前記リーフの外側に形成される。
【0019】
また、請求項6に記載の発明は、請求項1又は2に記載の放射線治療装置において、前記各リーフにその軌道面上の移動方向に沿って一定間隔で磁気情報を有する磁気テープが付加される複数枚の磁気テープ付リーフと、前記磁気情報を基に前記磁気テープ付リーフの複数位置を検出することによって前記磁気テープ付リーフ毎に移動量をそれぞれ検出する移動量検出部とをさらに具備する。
【0020】
また、請求項7に記載の発明は、請求項1乃至6のうちいずれか一項に記載の放射線治療装置において、前記リーフは、円弧状の軌道面を有する。
【0021】
また、請求項8に記載の発明は、請求項1乃至6のうちいずれか一項に記載の放射線治療装置において、前記リーフは、直線上の軌道面を有する。
【発明の効果】
【0022】
本発明によれば、優れた回転追従性を備えたトルクワイヤを使用することにより、屈曲部に対して高度な柔軟性を維持して、モータなどの根元側の回転運動を正確に先端側へ伝えることができる。従って、モータをどのような向き、角度に設置しても、トルクワイヤはモータの回転を駆動歯車に正確に伝達することができるので、放射線源を中心に含む同心円上を円弧状の軌道面に沿ってリーフを接近、離反するように駆動することが可能である。
【0023】
よって、リーフの移動軸に対するモータの配置の自由度を極めて高くすることができ、絞り装置内のデッドスペースになっていた部分にもモータを配置することが可能となる。すなわち、絞り装置内のスペースを有効に利用することが可能であり、絞り装置を大型化することなくリーフの枚数を増やすことができる。これにより、治療空間を狭めることがなく、放射線の照射野を治療部位の形状により近づけることができ、より安全に被検体の放射線治療が可能となる。また、駆動装置の駆動歯車は1段でも良いので、バックラッシュの調整も容易となり、動作精度を向上させることができる。
【0024】
また、本発明によれば、トルクモータをエンコーダ付きのものとすることによって、リーフの移動量の検出を容易にすることが可能であり、これにより移動量制御のために多数の歯車をポテンショメータやエンコーダと組み合わせていた従来の複雑な機構を簡素化することができる。
【0025】
また、本発明によれば、非接触でリーフの変位や位置を検出でき、バックラッシュの影響や歯車の摩耗による変位又は位置検出誤差を軽減することができる。従って、バックラッシュに関係なく、高精度にリーフの位置を検出することができ、高精度に照射野を患部形状に合致させることができる。
【発明を実施するための最良の形態】
【0026】
以下、本発明に係る放射線治療装置の実施形態について、図1乃至図14を参照して詳細に説明する。なお、これらの図において、同一部分には同一符号を付して示してある。
【0027】
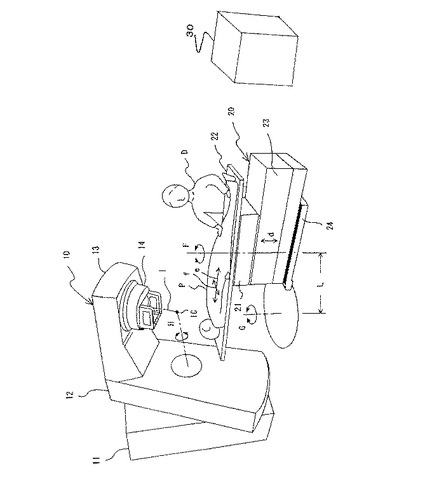
図1は、本実施形態の放射線治療装置の使用状態を示した外観図である。先ず、図1を参照して、本実施形態の放射線治療装置の概略的な構成について説明する。
【0028】
放射線治療装置は、大別すると、放射線源からの放射線を被検体へ照射する放射線照射装置10と、被検体Pを載置して放射線の照射部位の位置決めをする治療台20と、放射線照射装置10および治療台20を始め、放射線治療装置を構成する各機器を有機的に制御する制御装置30とから構成されている。
【0029】
放射線照射装置10は、床に据付られた固定架台11と、固定架台11に回転可能に支持された回転架台12と、回転架台12の一端から横方向へ延びた先端部に設けられた照射ヘッド13と、照射ヘッド13に組み込まれた絞り装置14とを有している。そして、回転架台12は固定架台11の水平な回転中心軸Hの周りに、略360度にわたって回転可能であり、絞り装置14も、照射ヘッド13から照射される放射線の照射軸Iの周りに回転可能となっている。なお、回転架台12の回転中心軸Hと放射線の照射軸Iとの交点をアイソセンタ(isocenter)ICと称している。また、回転架台12は、放射線の固定照射はもとより、それ以外の各種の照射態様例えば、回転照射、振子照射、間欠照射などに対応した回転が可能なように構成されている。
【0030】
一方、治療台20は、アイソセンタICを中心とする円弧に沿って、矢印G方向に所定角度範囲にわたって回転可能に床に設置されている。そして、治療台20の上部には、上部機構21に支持された被検体Pを載置するための天板22が設けられている。この上部機構21は、天板22を矢印eで示す前後方向と、矢印fで示す左右方向に移動させる機構を備えている。
【0031】
また、上部機構21は、昇降機構23に支持されている。この昇降機構23は、例えばリンク機構で構成されるもので、矢印dで示す上下方向にそれ自体が昇降することによって、上部機構21および天板22を所定範囲だけ昇降させるものである。さらに、昇降機構23は、下部機構24に支持されている。この下部機構24は、アイソセンタICから距離L離れた位置を中心として、矢印Fで示す方向に昇降機構23を回転させる機構を備えている。よって、昇降機構23とともに、上部機構21および天板22が矢印F方向に所定角度回転可能である。
【0032】
なお、治療に際して被検体Pの位置決めや絞り装置14による放射線照射野の設定などは、医師などの医療スタッフDにより制御装置30に備えられている操作部を操作することによって行われる。
【0033】
ところで、放射線治療を実施する際には、悪性腫瘍などの治療部位にのみ放射線を集中的に照射して、正常組織にダメージを与えないようにすることが重要である。この、正常組織に極力放射線を照射しないように、放射線照射位置を規制するのが絞り装置14であり、絞り装置14は放射線の照射軸Iの周りに回転可能に、照射ヘッド13に組み込まれている。
【0034】
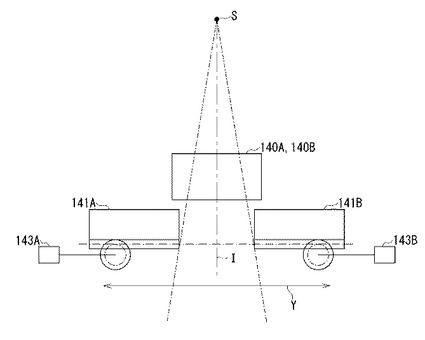
次に、絞り装置14について、図2ないし図7を参照して説明する。図2は、絞り装置14に設ける第1の絞り体の駆動方向を示す側面図である。図3は、絞り装置に設ける第2の絞り体の駆動方向の第1例を示す側面図であり、また、図4は、絞り装置に設ける第2の絞り体の駆動方向の第2例を示す側面図である。なお、図2と図3、図2と図4は、絞り装置14を互いに直交する方向から見た図となっていて、絞り装置14の容器は図示されていない。また、図5は、絞り装置14によって形成される照射野の概念を説明するための上面図である。
【0035】
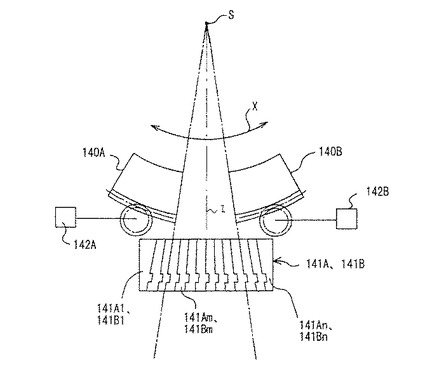
図2乃至図4に示すように、絞り装置14は、タングステンなどの重金属から成る通常2種類の絞り体(第1の絞り体140、第2の絞り体141)が、放射線源Sからの放射線の照射方向に重なるように設けられる。また、各絞り体140、141は、図2および図3にそれぞれ符号140A、140B、141A、141Bを付して示してあるように、一対の要素が対をなすように分割されて対向配置されている。ここで符号A、Bは、各絞り体140、141が対であることを分かり易くするために便宜上付したものである。
【0036】
さて、放射線源Sに近い側に設けられる第1の絞り体要素140A、140Bは、図2によく示されているように、単体として構成されている。また、絞り体要素140A、140Bは、各絞り体要素140A、140Bの端面を放射線の照射軸Iを間にして対峙させるように対向配置される。そして、絞り体要素140A、140Bは、放射線源Sを中心に含む同心円上を円弧状の軌道面に沿って矢印Xの方向へ移動して、互いに接近、離反するように、駆動装置142A、142Bによって駆動されるようになっている。
【0037】
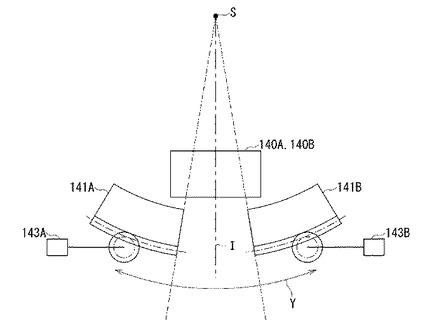
一方、放射線源Sから遠い側に設けられる第2の絞り体要素141A、141Bも、図3によく示されているように円弧状の軌道面を有し、各絞り体要素141A、141Bの端面を放射線の照射軸Iを間にして対峙させるように対向配置される。そして、絞り体要素141A、141Bは、放射線源Sを中心に含む同心円上を円弧状の軌道面に沿って、絞り体要素140A、140Bに対して直交する方向、すなわち、矢印Yの方向に移動して、互いに接近、離反するように、駆動装置143A、143Bによって駆動されるようになっている。
【0038】
また、第2の絞り体要素141A、141Bは、図4によく示されているように直線状の軌道面を有し、各絞り体要素141A、141Bの端面を放射線の照射軸Iを間にして対峙させるように対向配置される。そして、絞り体要素141A、141Bは、第1の絞り体要素140A、140Bに対して直交する方向、すなわち、矢印Yの方向に移動して、互いに接近、離反するように、駆動装置143A、143Bによって駆動されるようになっている。
【0039】
なお、以下、第1の絞り体140が図2を用いて説明したような駆動方向Xをとり、第2の絞り体141が図3を用いて説明したような駆動方向Yをとる場合を用いて説明する。
【0040】
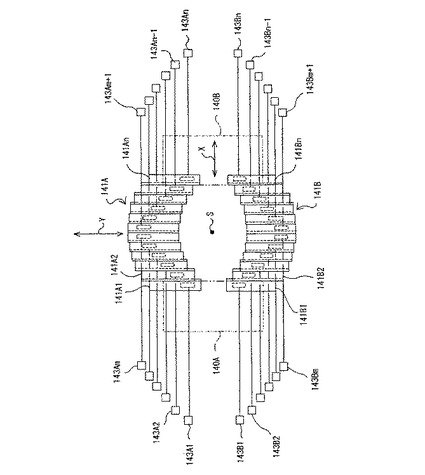
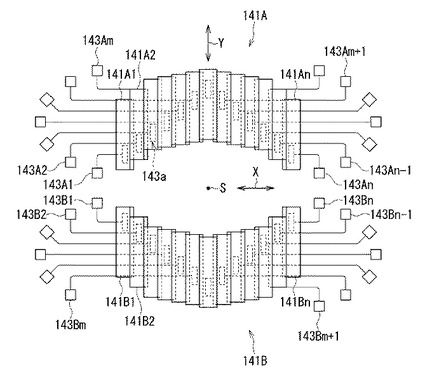
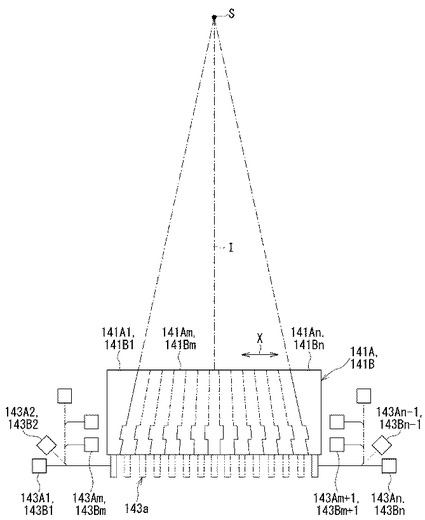
図2に示す第2の絞り体要素141A、141Bは、複数のリーフ141A1〜141An、141B1〜141Bnを密に隣接させた集合体として構成した多分割絞り装置であり、その詳細は図5に示されている。
【0041】
すなわち、第2の絞り体要素141A、141Bの各リーフ141A1〜141An、141B1〜141Bnには、それぞれに駆動装置143A1〜143An、143B1〜143Bnが設けられている。そして、各駆動装置143A1〜143An、143B1〜143Bnによって、リーフ141A1〜141An、141B1〜141Bnは各別に放射線源Sを中心に含む同心円に沿う円弧状の軌道面に沿って矢印Y方向に接近、離反するように駆動されるようになっている。
【0042】
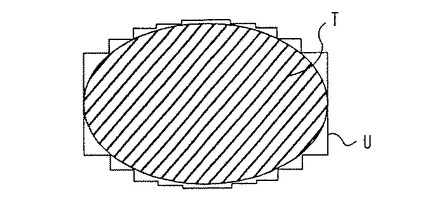
従って、第1の絞り体要素140A、140Bを、X方向に互いに接近、離反するように移動させるとともに、第2の絞り体要素141A、141Bの各リーフ141A1〜141An、141B1〜141Bnを、それぞれ個別にY方向に互いに接近、離反するように移動させることを組合せることによって、図6に示すような、治療部位の形状Tに近似させた不規則形状の照射野Uが形成される。
【0043】
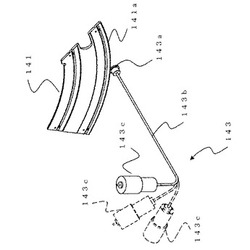
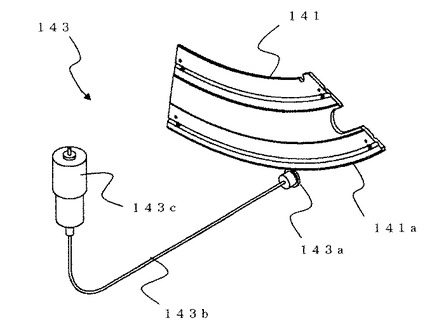
各リーフ141A1〜141An、141B1〜141Bnを移動させるための駆動装置143A1〜143An、143B1〜143Bnの一例を、図7に示してある。
【0044】
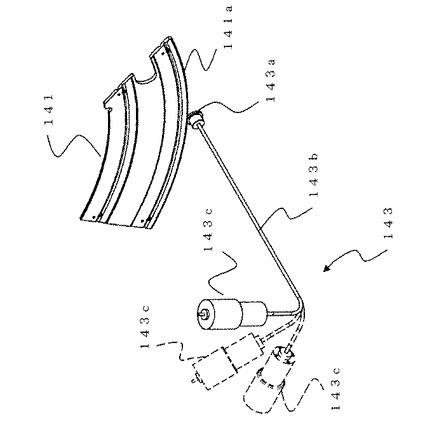
なお、本実施形態の放射線治療装置では、第2の絞り体要素141A、141Bのリーフ141A1〜141An、141B1〜141Bn(以下、単に符号141で示す。)自体は従来のものと同様であり、平面は放射線源へ向けて収束するような扇型形状に形成されるとともに、側面は平板状またはくさび状に形成されている。また、リーフ141の外側端部は放射線源を中心に含む円弧状の軌道面を形成するように湾曲し、その円弧状の軌道面すなわち、湾曲した外側端部には歯141aが切られている。そして、この外側端部の歯141aに、各駆動装置143A1〜143An、143B1〜143Bn(以下、単に符号143で示す。)の駆動歯車143aが噛み合わされている。
【0045】
駆動装置143は、駆動歯車143a、トルクワイヤ143b、トルクモータ143cから構成されている。すなわち、リーフ141の外側端部の歯141aに噛み合わされている駆動歯車143aの回転中心にトルクワイヤ143bの一方端が結合され、トルクワイヤ143bの他方端がトルクモータ143cに結合された構成となっている。従って、トルクモータ143cの回転がトルクワイヤ143bを介して駆動歯車143aに伝達され、リーフ141を駆動するものである。
【0046】
トルクワイヤ143bは、優れた回転追従性を備えており、モータなどの根元側の回転運動を正確に先端側へ伝えることが可能であり、柔軟性も備えているので屈曲部に対しても高度な性能を維持することができるという特徴を備えている。従って、例えば図8に示すように、トルクモータ143cをどのような向き、角度に設置しても、トルクワイヤ143bはトルクモータ143cの回転を駆動歯車143aに正確に伝達することができ、リーフ141を所望の量だけ移動させることができる。すなわち、放射線源を中心に含む同心円上を円弧状の軌道面に沿って第2の絞り体要素141A、141Bのリーフ141を接近、離反するように駆動することが可能である。なお図8には、3つのトルクモータ143cが示されているが、これは3個のトルクモータ143cを表したものではなく、1つのトルクモータ143cがトルクワイヤ143bを介することによっていろいろな向き、角度に設置することが可能であることを説明したものである。
【0047】
よって、リーフ141の移動軸に対するモータ143の配置の自由度を極めて高くすることができ、絞り装置14の容器内のデッドスペースになっていた部分にもモータ143を配置することが可能となる。すなわち、絞り装置内のスペースを有効に利用することが可能であり、絞り装置14を大型化することなくリーフの枚数を増やすことができる。これにより、治療空間を狭めることがなく、放射線の照射野を治療部位の形状により近づけることができ、より安全に被検体の放射線治療が可能となる。また、駆動装置143の駆動歯車143aは1段でも良いので、バックラッシュの調整も容易となり、動作精度を向上させることができる。
【0048】
図9は、駆動装置143の配置例をリーフ上方から見た図である。図10は、駆動装置143の配置例をリーフ側方から見た図である。
【0049】
本実施形態の放射線治療装置において、駆動装置143を、図9及び図10に示すような配置とすることで、リーフ141の移動軸に対するモータ143の配置の自由度を極めて高くすることができ、絞り装置14の容器内のデッドスペースになっていた部分にもモータ143を配置することが可能となる。
【0050】
なお、トルクモータ143cをエンコーダ付きのものとすることによって、リーフ141の移動量の検出を容易にすることが可能であり、これにより移動量制御のために図15に示したような多数の歯車をポテンショメータ43eやエンコーダ43fと組み合わせる複雑な機構を簡素化することができる。また、リーフ141の位置を設定するために、例えば、特開2004−275243号公報に開示されているレーザー光線を使用してリーフの移動量を直接検出するようにしても良い。
【0051】
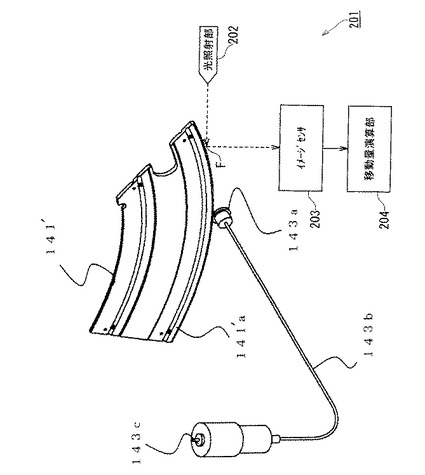
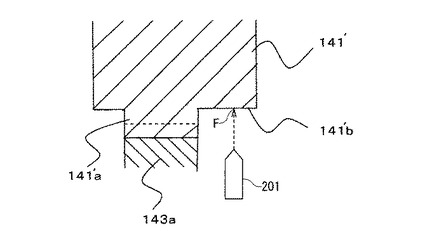
さらに、本実施形態の放射線治療装置は、図11乃至図13に示すように、前述のリーフ141に、その円周に沿って所定の模様を有するパターン200が形成されるリーフ141´と、パターン200を基にリーフ141´の複数位置を検出することによってリーフ141´の移動量を検出する移動量検出部201とを設けてもよい。検出されるリーフ141´の移動量は制御装置30にフィードバックされる。その場合、移動量検出部201は、光照射部202、撮像部(イメージセンサ)203及び移動量演算部204を設ける。
【0052】
設置位置が固定される光照射部202は、発光ダイオード等によって構成され、リーフ141´に形成されるパターンの一部を照らすように、リーフ141´の移動軌道上の定点Fに向かって光を照射する。
【0053】
設置位置が固定される撮像部203は、CCD(charge coupled device)カメラ等によって構成され、パターン上の定点Fを含む領域を撮像して定点画像を取得する。
【0054】
移動量演算部204は、撮像部203によって取得される複数の定点画像を基にリーフ141´の移動量を演算する。
【0055】
移動量検出部201を用いると、非接触でリーフ141´の移動量を直接検出することもできるので、バックラッシュの影響や歯車の摩耗による変位又は位置検出誤差を軽減することができる。これらの方法によってリーフの移動量を直接検出すれば、エンコーダ内蔵のモータでなく普通のモータを使用することもできる。
【0056】
移動量検出部201を用いて非接触でリーフ141´の移動量を直接検出する方法を、図11ないし図13を参照して次に説明する。図11は、リーフ141´に対する移動量検出部201の概要を示す図である。図12は、図11の説明を補足するために示したリーフ141´の側面方向の断面図である。図13は、リーフ141´に形成されるパターンの一例を示した図である。
【0057】
図11に示すように、非接触でリーフ141´の移動量を直接検出するために、光照射部202は、リーフ141´の移動軌道上、例えば、歯141´aの形成されているリーフ141´の外周側の円弧面の移動軌道上の定点Fを照らす。撮像部203は、円弧面の移動軌道上の定点Fを含む領域を撮像して定点画像を取得する。
【0058】
リーフ141´の外周側の円弧面は、図12に示すように、リーフ141´の移動方向に沿って歯141´aを形成する部分と、歯141´aを形成せずにパターン200(図13参照)を形成する部分141´bに分かれている。つまり、リーフ141´の外周側の円弧面には、リーフ141´の厚み方向に歯141´aとパターン200とが並んで形成されている。そして、歯141´aには駆動歯車143aが噛み合わされ、円弧面のパターン200を形成した部分141´bの移動軌道上に、光照射部202からの光が照射される。
【0059】
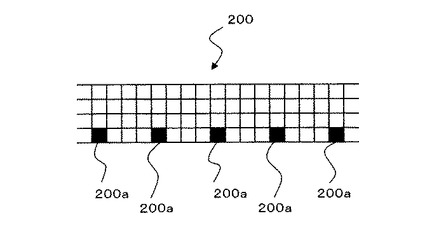
パターン200は、リーフ141´の外周側の円弧面に沿って刻設されているものである。また、パターン200は、図13に一例を示すように、一列に複数連続して刻設され、リーフ141´の移動可能範囲と同一幅に広がっている。そしてこのパターン200は、所定位置に特異な模様200aを有している。特異な模様200aとは、パターン200の他の領域の模様(無地を含む)とは異なる特徴的な模様である。
【0060】
パターン200は、例えば約0.5mm四方の領域を網目状に16分割し、分割領域の隅の格子の一つに特異な模様200aを形成したものの連なりである。この特異な模様200aは、図13には黒色に着色して示してあるが、着色する他に例えば他の分割領域よりも一様に掘り下げたものとしたり、目の粗い溝を刻設したりしたものであってもよい。
【0061】
設置位置が固定される光照射部202から光を照射すると、その光は図13に示すようなパターン200の一部を照らす。光照射部202の照射方向は固定されており、定点Fは、リーフ141´の移動に影響されない絶対的な位置であって所定の面積を有している。さらに光照射部202は、定点Fをリーフ141´の外周側の円弧面方向に設定し、パターン200の刻設された領域の一部を含むように設定されている。
【0062】
一方、撮像部203は、リーフ141´の外周側の円弧面方向を一定間隔で、パターン200上の定点Fを含む領域を撮像するように設けられている。すなわち、撮像部203は、この定点Fから反射した光を経時的に受光して、一定間隔で定点画像を取得する。定点画像にはリーフ141´に刻設されたパターン200の一部が存在している。そして、パターン200には特異な模様200aが含まれているので、移動量演算部204は、撮像部203で捉えられた特異な模様200aの位置を特定し、その経時的なズレからリーフ141´の移動量を演算する。
【0063】
すなわち移動量演算部204は、リーフ141´の移動に従って時系列で取得される複数の定点画像を解析して、リーフ141´の移動量を取得する。リーフ141´が移動すると、リーフ141´に刻設されたパターン200も一緒に移動するので、時系列で取得される複数の定点画像上では、特異な模様200aを含むパターン200上で定点Fの位置が相対的に変化する。よって、移動量演算部204が時系列で取得される複数の定点画像上で、パターンに対する定点Fの相対的な位置を認識し、その位置のズレを判断することによって、移動量検出部201は、リーフ141´の移動量を検出することができる。
【0064】
なお、リーフ141´の移動量の多少に依らず、特異な模様200aの一部又は全部を定点画像内に存在させることが望ましい。従ってリーフ141´に形成されるパターン200の大きさは、できるだけ小さいことが望ましい。また、パターン200の1単位を約0.5mm四方として模様200aを形成したのは、模様200aが、撮像部203が撮像する領域よりも小さい領域とするためである。
【0065】
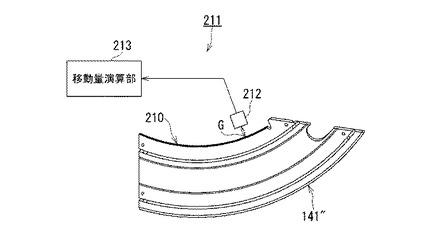
また、本実施形態の放射線治療装置は、図14に示すように、前述のリーフ141に、その円周(内周又に外周)に沿って一定間隔で磁気情報を有する磁気テープ210が付加される(貼り付けられる)リーフ141´´と、磁気情報を基にリーフ141´´の複数位置を検出することによってリーフ141´´の移動量を検出する移動量検出部211とを設けてもよい。検出されるリーフ141´´の移動量は制御装置30にフィードバックされる。その場合、移動量検出部211は、磁気検出部(磁気センサ)212及び移動量演算部213を設ける。
【0066】
設置位置が固定される磁気検出部212は、リーフ141´´に付加される磁気テープ210から磁気情報を検出するように、リーフ141´´の移動軌道上の定点Gから磁気情報を検出する。ここで、磁気テープ210から磁気検出部212までの距離は一定の間隔(数ミクロン)を有するので磨耗等の経年変化の影響を受けない。よって、磁気テープ210にリーフ141´´の円周に沿って一定間隔で磁気情報を記録することで、その間隔が検出精度となる。また、ミクロン単位での磁化が可能なので、リーフ141´´の位置を検出することができる。
【0067】
移動量演算部213は、磁気検出部212によって取得される磁気情報を基にリーフ141´´の移動量を演算する。磁気情報は、パルス信号として出力され、従来のエンコーダによる信号処理と同様のデジタル処理が可能であるので、精度及び信頼性が高い。
【0068】
本実施形態の放射線治療装置によれば、優れた回転追従性を備えたトルクワイヤを使用することにより、屈曲部に対して高度な柔軟性を維持して、モータなどの根元側の回転運動を正確に先端側へ伝えることができる。従って、モータをどのような向き、角度に設置しても、トルクワイヤはモータの回転を駆動歯車に正確に伝達することができるので、放射線源を中心に含む同心円上を円弧状の軌道面に沿ってリーフを接近、離反するように駆動することが可能である。
【0069】
よって、リーフの移動軸に対するモータの配置の自由度を極めて高くすることができ、絞り装置内のデッドスペースになっていた部分にもモータを配置することが可能となる。すなわち、絞り装置14内のスペースを有効に利用することが可能であり、絞り装置14を大型化することなくリーフの枚数を増やすことができる。これにより、治療空間を狭めることがなく、放射線の照射野を治療部位の形状により近づけることができ、より安全に被検体の放射線治療が可能となる。また、駆動装置の駆動歯車は1段でも良いので、バックラッシュの調整も容易となり、動作精度を向上させることができる。
【0070】
また、本実施形態の放射線治療装置によれば、トルクモータをエンコーダ付きのものとすることによって、リーフの移動量の検出を容易にすることが可能であり、これにより移動量制御のために多数の歯車をポテンショメータやエンコーダと組み合わせていた従来の複雑な機構を簡素化することができる。
【0071】
また、本実施形態の放射線治療装置によれば、非接触でリーフの移動量を検出でき、バックラッシュの影響や歯車の摩耗による変位又は位置検出誤差を軽減することができる。従って、バックラッシュに関係なく、高精度にリーフの位置を検出することができ、高精度に照射野を患部形状に合致させることができる。
【図面の簡単な説明】
【0072】
【図1】本実施形態の放射線治療装置の使用状態を示した外観図。
【図2】本実施形態の放射線治療装置に備えられている第1の絞り体及び第2の絞り体を、第2の絞り体の駆動を奥行方向として示す側面図。
【図3】本実施形態の放射線治療装置に備えられている第1の絞り体及び第2の絞り体を、図2に直交する方向から見た第1の側面図。
【図4】本実施形態の放射線治療装置に備えられている第1の絞り体及び第2の絞り体を、図2に直交する方向から見た第2の側面図。
【図5】第2の絞り体によって形成される照射野の概念を説明するための上面図。
【図6】第2の絞り体によって形成される放射線照射野を説明するための上面図。
【図7】リーフに対する駆動装置の概要を示す図。
【図8】本実施形態の放射線治療装置の効果を説明した説明図。
【図9】駆動装置の配置例をリーフ上方から見た図。
【図10】駆動装置の配置例をリーフ側方から見た図。
【図11】リーフに対する移動量検出部の第1例の概要を示す図。
【図12】図11の説明を補足するために示したリーフの側面方向の断面図。
【図13】リーフに形成されるパターンの一例を示した図。
【図14】リーフに対する移動量検出部の第2例の概要を示す図。
【図15】リーフに対する従来の駆動装置の概要を示す図。
【符号の説明】
【0073】
141,141´,141´´ リーフ
141a 歯
143 駆動装置
143a 駆動歯車
143b トルクワイヤ
143c トルクモータ
【技術分野】
【0001】
本発明は、例えば悪性腫瘍などの疾患の治療に供される放射線治療装置に係り、被検体に対する放射線の照射範囲(以下、放射線照射野という。)を精度よく設定するようにした多分割絞り装置を備えた放射線治療装置に関する。
【背景技術】
【0002】
放射線治療装置では、放射線防護の見地から、被検体の治療部位に限定的に放射線を照射するように、タングステンなどの放射線を透過させない材料から成る絞り装置が備えられている。この絞り装置は、治療部位の形状に近似させた照射野を、半影を生ずることなくより木目細かく形成することが求められることから、放射線の照射方向に沿って重なるように配置される第1の絞り体と第2の絞り体とから構成される。
【0003】
そして、放射線源に近い側に設けられる第1の絞り体は、放射線の照射軸を間にして対峙するように配置される一対の単体として形成されており、一対の単体は、互いに接近、離反するように駆動される。例えば、一対の単体は、放射線源を中心に含む同心円上を円弧状の軌道面に沿って互いに接近、離反するように駆動される。一方、放射線源より遠い側に設けられる第2の絞り体は、第1の絞り体の移動方向に対して直交する方向に放射線の照射軸を間にして対峙するように配置される一対の絞り体要素(ブロック)として形成される。第2の絞り体の各絞り体要素は、放射線源を中心に含む同心円上を円弧状の軌道面に沿って互いに接近、離反するように格別に移動する複数枚のリーフを密接して配列したものとなっている。
【0004】
第2の絞り体は多分割絞り装置と称され、例えば数十枚のリーフを密に隣接させて集合体とした一対のブロックから構成されている。第2の絞り体は、各リーフは円弧状の軌道面を有し、リーフ毎に設けられた駆動装置によって、各別に円弧状の軌道面に沿って移動可能に駆動されるようになっている。従って、対峙する単体から成る第1の絞り体を、X方向に互いに接近、離反するように移動させるとともに、対峙するリーフの集合体から成る第2の絞り体の各リーフを、それぞれ個別にY方向に互いに接近、離反するように移動させることを組合せることによって、治療部位の形状に近似させた不規則形状の照射野を形成する。なお、第1の絞り体と第2の絞り体を含めて多分割絞り装置と称する場合もある。
【0005】
図15は、第2の絞り体を構成する1枚のリーフ41とそれを駆動するための駆動装置43の概要を示す図である。以下、図15を参照してリーフ41の駆動と位置の制御について簡単に説明する。
【0006】
図15に示すリーフ41は、平面は放射線源へ向けて収束するような扇型形状に形成されるとともに、側面は平板状またはくさび状に形成されている。また、リーフ41の外側端部41aは放射線源を中心に含む円弧状の軌道面を形成するように湾曲し、その円弧状の軌道面すなわち、湾曲した外側端部41aには歯が切られている。そして、この外側端部41aの歯に、駆動歯車43aが噛み合わされている。
【0007】
駆動歯車43aはシャフト43bの先端に固着されている。また、シャフト43bは、駆動源であるモータ43cからウォームギヤ43dなどの駆動力伝達機構を介して駆動される。なお、駆動量を検出するために、ポテンショメータ43eやエンコーダ43fが配置されており、これらはリーフ41の位置検出装置として機能する。そして、ポテンショメータ43eやエンコーダ43fからの情報を基に、モータ43cは別途設けられている制御装置によって制御され、個々のリーフ41が所望の位置に設定されて所定の照射野を形成することになる(例えば、特許文献1参照。)。
【0008】
なお、半影の発生を容認する場合には、放射線源を中心に含む同心円上を円弧状の軌道面に沿って移動させるような複雑な構造を取ることなく、多分割絞り装置の各リーフを水平方向に接近、離反するように移動させることが可能である。この場合、各リーフに連結されたネジ切りシャフトを、柔軟ケーブルを介してモータによって駆動するようにした技術が知られている(例えば、特許文献2参照。)。
【特許文献1】特開2002−253686号公報
【特許文献2】特許第2543373号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
上述のように、特開2002−253686号公報に示されているようなものでは、第2の絞り体の各リーフを個別に移動させるためには、モータの回転を各種の歯車とシャフトを介してリーフに伝達する機構が必要となり、このような駆動力伝達機構はリーフ毎に設ける必要がある。ところが、近時放射線防護の見地から、もともと不規則な形状をしている治療部位の形状に、照射野の形状をより一層近似させたいとの要望が強く、そのためにリーフの枚数を増やそうとすることが検討されている。
【0010】
ところが、リーフの枚数を増やそうとすると、リーフの枚数と同じ数のモータ、歯車機構、シャフトなどの駆動力伝達機構が必要となることから、限られた空間の中に、リーフの枚数分だけの駆動力伝達機構を備えるだけのスペースを確保することが難しいとの問題があった。そして、どうしてもリーフの枚数を増やそうとすると、絞り装置が大型化してしまい放射線治療装置としての治療空間を狭めることになるという問題にも繋がるものであった。
【0011】
また、上述の駆動力伝達機構では、歯車とシャフトを介してリーフにモータの回転を伝達しているので、モータをリーフの移動軸に対して平行または直角に配置しなければならないとの制約から、モータの配置に対する自由度が少ないことも、リーフの枚数を増やすことを困難にしていた。さらに、歯車の組合せによるバックラッシュの積み上げがリーフの移動量に誤差を生じさせるので、バックラッシュを除去するための対策も必要であった。
【0012】
一方、特許文献2に示されているものでは、モータの駆動力を、柔軟ケーブルを介してリーフに連結されたネジ切りシャフトに伝達し、リーフを水平方向に押したり引いたりして移動させるものであり、円弧状の軌道面に沿ってリーフを移動させるものに適用した場合には、柔軟ケーブルが伸縮してしまうためにリーフの移動量を精度良く管理することができないという問題があった。
【0013】
本発明は、上記のような種々の問題を解決することを目的としてなされたものである。
【課題を解決するための手段】
【0014】
上述の課題を解決するため、請求項1に記載の発明は、複数枚のリーフを密に配列して形成された絞り体要素の一対からなる絞り体が放射線の照射軸を間にして前記絞り体要素が対峙するように配置され、前記各リーフを各別に移動させることにより、所望の照射範囲を設定する多分割絞り装置を備えた放射線治療装置において、前記各リーフの歯にそれぞれ噛み合わせた駆動歯車と、前記駆動歯車の軸芯にそれぞれ結合されたトルクワイヤと、前記トルクワイヤを介して前記駆動歯車をそれぞれ駆動する駆動手段と、を具備する。
【0015】
また、請求項2に記載の発明は、請求項1に記載の放射線治療装置において、前記駆動手段は、エンコーダを内蔵したトルクモータであることを特徴とする。
【0016】
また、請求項3に記載の発明は、請求項1又は2に記載の放射線治療装置において、前記各リーフにその軌道面上の移動方向に沿って所定のパターンが形成される複数枚のパターン付リーフと、前記パターンを基に前記パターン付リーフの複数位置を検出することによって前記パターン付リーフ毎に移動量をそれぞれ検出する移動量検出部とをさらに具備する。
【0017】
また、請求項4に記載の発明は、請求項3に記載の放射線治療装置において、前記移動量検出部は、前記パターンの一部を照らすように、前記パターン付リーフの移動軌道上の定点に向かって光を照射する光照射部と、前記パターン上の前記定点を含む領域を撮像して定点画像を取得する撮像部と、前記撮像部によって取得される前記定点画像を基に前記パターン付リーフの移動量をそれぞれ演算する移動量演算部とをさらに具備する。
【0018】
また、請求項5に記載の発明は、請求項3に記載の放射線治療装置において、前記パターンは、前記リーフの外側に形成される。
【0019】
また、請求項6に記載の発明は、請求項1又は2に記載の放射線治療装置において、前記各リーフにその軌道面上の移動方向に沿って一定間隔で磁気情報を有する磁気テープが付加される複数枚の磁気テープ付リーフと、前記磁気情報を基に前記磁気テープ付リーフの複数位置を検出することによって前記磁気テープ付リーフ毎に移動量をそれぞれ検出する移動量検出部とをさらに具備する。
【0020】
また、請求項7に記載の発明は、請求項1乃至6のうちいずれか一項に記載の放射線治療装置において、前記リーフは、円弧状の軌道面を有する。
【0021】
また、請求項8に記載の発明は、請求項1乃至6のうちいずれか一項に記載の放射線治療装置において、前記リーフは、直線上の軌道面を有する。
【発明の効果】
【0022】
本発明によれば、優れた回転追従性を備えたトルクワイヤを使用することにより、屈曲部に対して高度な柔軟性を維持して、モータなどの根元側の回転運動を正確に先端側へ伝えることができる。従って、モータをどのような向き、角度に設置しても、トルクワイヤはモータの回転を駆動歯車に正確に伝達することができるので、放射線源を中心に含む同心円上を円弧状の軌道面に沿ってリーフを接近、離反するように駆動することが可能である。
【0023】
よって、リーフの移動軸に対するモータの配置の自由度を極めて高くすることができ、絞り装置内のデッドスペースになっていた部分にもモータを配置することが可能となる。すなわち、絞り装置内のスペースを有効に利用することが可能であり、絞り装置を大型化することなくリーフの枚数を増やすことができる。これにより、治療空間を狭めることがなく、放射線の照射野を治療部位の形状により近づけることができ、より安全に被検体の放射線治療が可能となる。また、駆動装置の駆動歯車は1段でも良いので、バックラッシュの調整も容易となり、動作精度を向上させることができる。
【0024】
また、本発明によれば、トルクモータをエンコーダ付きのものとすることによって、リーフの移動量の検出を容易にすることが可能であり、これにより移動量制御のために多数の歯車をポテンショメータやエンコーダと組み合わせていた従来の複雑な機構を簡素化することができる。
【0025】
また、本発明によれば、非接触でリーフの変位や位置を検出でき、バックラッシュの影響や歯車の摩耗による変位又は位置検出誤差を軽減することができる。従って、バックラッシュに関係なく、高精度にリーフの位置を検出することができ、高精度に照射野を患部形状に合致させることができる。
【発明を実施するための最良の形態】
【0026】
以下、本発明に係る放射線治療装置の実施形態について、図1乃至図14を参照して詳細に説明する。なお、これらの図において、同一部分には同一符号を付して示してある。
【0027】
図1は、本実施形態の放射線治療装置の使用状態を示した外観図である。先ず、図1を参照して、本実施形態の放射線治療装置の概略的な構成について説明する。
【0028】
放射線治療装置は、大別すると、放射線源からの放射線を被検体へ照射する放射線照射装置10と、被検体Pを載置して放射線の照射部位の位置決めをする治療台20と、放射線照射装置10および治療台20を始め、放射線治療装置を構成する各機器を有機的に制御する制御装置30とから構成されている。
【0029】
放射線照射装置10は、床に据付られた固定架台11と、固定架台11に回転可能に支持された回転架台12と、回転架台12の一端から横方向へ延びた先端部に設けられた照射ヘッド13と、照射ヘッド13に組み込まれた絞り装置14とを有している。そして、回転架台12は固定架台11の水平な回転中心軸Hの周りに、略360度にわたって回転可能であり、絞り装置14も、照射ヘッド13から照射される放射線の照射軸Iの周りに回転可能となっている。なお、回転架台12の回転中心軸Hと放射線の照射軸Iとの交点をアイソセンタ(isocenter)ICと称している。また、回転架台12は、放射線の固定照射はもとより、それ以外の各種の照射態様例えば、回転照射、振子照射、間欠照射などに対応した回転が可能なように構成されている。
【0030】
一方、治療台20は、アイソセンタICを中心とする円弧に沿って、矢印G方向に所定角度範囲にわたって回転可能に床に設置されている。そして、治療台20の上部には、上部機構21に支持された被検体Pを載置するための天板22が設けられている。この上部機構21は、天板22を矢印eで示す前後方向と、矢印fで示す左右方向に移動させる機構を備えている。
【0031】
また、上部機構21は、昇降機構23に支持されている。この昇降機構23は、例えばリンク機構で構成されるもので、矢印dで示す上下方向にそれ自体が昇降することによって、上部機構21および天板22を所定範囲だけ昇降させるものである。さらに、昇降機構23は、下部機構24に支持されている。この下部機構24は、アイソセンタICから距離L離れた位置を中心として、矢印Fで示す方向に昇降機構23を回転させる機構を備えている。よって、昇降機構23とともに、上部機構21および天板22が矢印F方向に所定角度回転可能である。
【0032】
なお、治療に際して被検体Pの位置決めや絞り装置14による放射線照射野の設定などは、医師などの医療スタッフDにより制御装置30に備えられている操作部を操作することによって行われる。
【0033】
ところで、放射線治療を実施する際には、悪性腫瘍などの治療部位にのみ放射線を集中的に照射して、正常組織にダメージを与えないようにすることが重要である。この、正常組織に極力放射線を照射しないように、放射線照射位置を規制するのが絞り装置14であり、絞り装置14は放射線の照射軸Iの周りに回転可能に、照射ヘッド13に組み込まれている。
【0034】
次に、絞り装置14について、図2ないし図7を参照して説明する。図2は、絞り装置14に設ける第1の絞り体の駆動方向を示す側面図である。図3は、絞り装置に設ける第2の絞り体の駆動方向の第1例を示す側面図であり、また、図4は、絞り装置に設ける第2の絞り体の駆動方向の第2例を示す側面図である。なお、図2と図3、図2と図4は、絞り装置14を互いに直交する方向から見た図となっていて、絞り装置14の容器は図示されていない。また、図5は、絞り装置14によって形成される照射野の概念を説明するための上面図である。
【0035】
図2乃至図4に示すように、絞り装置14は、タングステンなどの重金属から成る通常2種類の絞り体(第1の絞り体140、第2の絞り体141)が、放射線源Sからの放射線の照射方向に重なるように設けられる。また、各絞り体140、141は、図2および図3にそれぞれ符号140A、140B、141A、141Bを付して示してあるように、一対の要素が対をなすように分割されて対向配置されている。ここで符号A、Bは、各絞り体140、141が対であることを分かり易くするために便宜上付したものである。
【0036】
さて、放射線源Sに近い側に設けられる第1の絞り体要素140A、140Bは、図2によく示されているように、単体として構成されている。また、絞り体要素140A、140Bは、各絞り体要素140A、140Bの端面を放射線の照射軸Iを間にして対峙させるように対向配置される。そして、絞り体要素140A、140Bは、放射線源Sを中心に含む同心円上を円弧状の軌道面に沿って矢印Xの方向へ移動して、互いに接近、離反するように、駆動装置142A、142Bによって駆動されるようになっている。
【0037】
一方、放射線源Sから遠い側に設けられる第2の絞り体要素141A、141Bも、図3によく示されているように円弧状の軌道面を有し、各絞り体要素141A、141Bの端面を放射線の照射軸Iを間にして対峙させるように対向配置される。そして、絞り体要素141A、141Bは、放射線源Sを中心に含む同心円上を円弧状の軌道面に沿って、絞り体要素140A、140Bに対して直交する方向、すなわち、矢印Yの方向に移動して、互いに接近、離反するように、駆動装置143A、143Bによって駆動されるようになっている。
【0038】
また、第2の絞り体要素141A、141Bは、図4によく示されているように直線状の軌道面を有し、各絞り体要素141A、141Bの端面を放射線の照射軸Iを間にして対峙させるように対向配置される。そして、絞り体要素141A、141Bは、第1の絞り体要素140A、140Bに対して直交する方向、すなわち、矢印Yの方向に移動して、互いに接近、離反するように、駆動装置143A、143Bによって駆動されるようになっている。
【0039】
なお、以下、第1の絞り体140が図2を用いて説明したような駆動方向Xをとり、第2の絞り体141が図3を用いて説明したような駆動方向Yをとる場合を用いて説明する。
【0040】
図2に示す第2の絞り体要素141A、141Bは、複数のリーフ141A1〜141An、141B1〜141Bnを密に隣接させた集合体として構成した多分割絞り装置であり、その詳細は図5に示されている。
【0041】
すなわち、第2の絞り体要素141A、141Bの各リーフ141A1〜141An、141B1〜141Bnには、それぞれに駆動装置143A1〜143An、143B1〜143Bnが設けられている。そして、各駆動装置143A1〜143An、143B1〜143Bnによって、リーフ141A1〜141An、141B1〜141Bnは各別に放射線源Sを中心に含む同心円に沿う円弧状の軌道面に沿って矢印Y方向に接近、離反するように駆動されるようになっている。
【0042】
従って、第1の絞り体要素140A、140Bを、X方向に互いに接近、離反するように移動させるとともに、第2の絞り体要素141A、141Bの各リーフ141A1〜141An、141B1〜141Bnを、それぞれ個別にY方向に互いに接近、離反するように移動させることを組合せることによって、図6に示すような、治療部位の形状Tに近似させた不規則形状の照射野Uが形成される。
【0043】
各リーフ141A1〜141An、141B1〜141Bnを移動させるための駆動装置143A1〜143An、143B1〜143Bnの一例を、図7に示してある。
【0044】
なお、本実施形態の放射線治療装置では、第2の絞り体要素141A、141Bのリーフ141A1〜141An、141B1〜141Bn(以下、単に符号141で示す。)自体は従来のものと同様であり、平面は放射線源へ向けて収束するような扇型形状に形成されるとともに、側面は平板状またはくさび状に形成されている。また、リーフ141の外側端部は放射線源を中心に含む円弧状の軌道面を形成するように湾曲し、その円弧状の軌道面すなわち、湾曲した外側端部には歯141aが切られている。そして、この外側端部の歯141aに、各駆動装置143A1〜143An、143B1〜143Bn(以下、単に符号143で示す。)の駆動歯車143aが噛み合わされている。
【0045】
駆動装置143は、駆動歯車143a、トルクワイヤ143b、トルクモータ143cから構成されている。すなわち、リーフ141の外側端部の歯141aに噛み合わされている駆動歯車143aの回転中心にトルクワイヤ143bの一方端が結合され、トルクワイヤ143bの他方端がトルクモータ143cに結合された構成となっている。従って、トルクモータ143cの回転がトルクワイヤ143bを介して駆動歯車143aに伝達され、リーフ141を駆動するものである。
【0046】
トルクワイヤ143bは、優れた回転追従性を備えており、モータなどの根元側の回転運動を正確に先端側へ伝えることが可能であり、柔軟性も備えているので屈曲部に対しても高度な性能を維持することができるという特徴を備えている。従って、例えば図8に示すように、トルクモータ143cをどのような向き、角度に設置しても、トルクワイヤ143bはトルクモータ143cの回転を駆動歯車143aに正確に伝達することができ、リーフ141を所望の量だけ移動させることができる。すなわち、放射線源を中心に含む同心円上を円弧状の軌道面に沿って第2の絞り体要素141A、141Bのリーフ141を接近、離反するように駆動することが可能である。なお図8には、3つのトルクモータ143cが示されているが、これは3個のトルクモータ143cを表したものではなく、1つのトルクモータ143cがトルクワイヤ143bを介することによっていろいろな向き、角度に設置することが可能であることを説明したものである。
【0047】
よって、リーフ141の移動軸に対するモータ143の配置の自由度を極めて高くすることができ、絞り装置14の容器内のデッドスペースになっていた部分にもモータ143を配置することが可能となる。すなわち、絞り装置内のスペースを有効に利用することが可能であり、絞り装置14を大型化することなくリーフの枚数を増やすことができる。これにより、治療空間を狭めることがなく、放射線の照射野を治療部位の形状により近づけることができ、より安全に被検体の放射線治療が可能となる。また、駆動装置143の駆動歯車143aは1段でも良いので、バックラッシュの調整も容易となり、動作精度を向上させることができる。
【0048】
図9は、駆動装置143の配置例をリーフ上方から見た図である。図10は、駆動装置143の配置例をリーフ側方から見た図である。
【0049】
本実施形態の放射線治療装置において、駆動装置143を、図9及び図10に示すような配置とすることで、リーフ141の移動軸に対するモータ143の配置の自由度を極めて高くすることができ、絞り装置14の容器内のデッドスペースになっていた部分にもモータ143を配置することが可能となる。
【0050】
なお、トルクモータ143cをエンコーダ付きのものとすることによって、リーフ141の移動量の検出を容易にすることが可能であり、これにより移動量制御のために図15に示したような多数の歯車をポテンショメータ43eやエンコーダ43fと組み合わせる複雑な機構を簡素化することができる。また、リーフ141の位置を設定するために、例えば、特開2004−275243号公報に開示されているレーザー光線を使用してリーフの移動量を直接検出するようにしても良い。
【0051】
さらに、本実施形態の放射線治療装置は、図11乃至図13に示すように、前述のリーフ141に、その円周に沿って所定の模様を有するパターン200が形成されるリーフ141´と、パターン200を基にリーフ141´の複数位置を検出することによってリーフ141´の移動量を検出する移動量検出部201とを設けてもよい。検出されるリーフ141´の移動量は制御装置30にフィードバックされる。その場合、移動量検出部201は、光照射部202、撮像部(イメージセンサ)203及び移動量演算部204を設ける。
【0052】
設置位置が固定される光照射部202は、発光ダイオード等によって構成され、リーフ141´に形成されるパターンの一部を照らすように、リーフ141´の移動軌道上の定点Fに向かって光を照射する。
【0053】
設置位置が固定される撮像部203は、CCD(charge coupled device)カメラ等によって構成され、パターン上の定点Fを含む領域を撮像して定点画像を取得する。
【0054】
移動量演算部204は、撮像部203によって取得される複数の定点画像を基にリーフ141´の移動量を演算する。
【0055】
移動量検出部201を用いると、非接触でリーフ141´の移動量を直接検出することもできるので、バックラッシュの影響や歯車の摩耗による変位又は位置検出誤差を軽減することができる。これらの方法によってリーフの移動量を直接検出すれば、エンコーダ内蔵のモータでなく普通のモータを使用することもできる。
【0056】
移動量検出部201を用いて非接触でリーフ141´の移動量を直接検出する方法を、図11ないし図13を参照して次に説明する。図11は、リーフ141´に対する移動量検出部201の概要を示す図である。図12は、図11の説明を補足するために示したリーフ141´の側面方向の断面図である。図13は、リーフ141´に形成されるパターンの一例を示した図である。
【0057】
図11に示すように、非接触でリーフ141´の移動量を直接検出するために、光照射部202は、リーフ141´の移動軌道上、例えば、歯141´aの形成されているリーフ141´の外周側の円弧面の移動軌道上の定点Fを照らす。撮像部203は、円弧面の移動軌道上の定点Fを含む領域を撮像して定点画像を取得する。
【0058】
リーフ141´の外周側の円弧面は、図12に示すように、リーフ141´の移動方向に沿って歯141´aを形成する部分と、歯141´aを形成せずにパターン200(図13参照)を形成する部分141´bに分かれている。つまり、リーフ141´の外周側の円弧面には、リーフ141´の厚み方向に歯141´aとパターン200とが並んで形成されている。そして、歯141´aには駆動歯車143aが噛み合わされ、円弧面のパターン200を形成した部分141´bの移動軌道上に、光照射部202からの光が照射される。
【0059】
パターン200は、リーフ141´の外周側の円弧面に沿って刻設されているものである。また、パターン200は、図13に一例を示すように、一列に複数連続して刻設され、リーフ141´の移動可能範囲と同一幅に広がっている。そしてこのパターン200は、所定位置に特異な模様200aを有している。特異な模様200aとは、パターン200の他の領域の模様(無地を含む)とは異なる特徴的な模様である。
【0060】
パターン200は、例えば約0.5mm四方の領域を網目状に16分割し、分割領域の隅の格子の一つに特異な模様200aを形成したものの連なりである。この特異な模様200aは、図13には黒色に着色して示してあるが、着色する他に例えば他の分割領域よりも一様に掘り下げたものとしたり、目の粗い溝を刻設したりしたものであってもよい。
【0061】
設置位置が固定される光照射部202から光を照射すると、その光は図13に示すようなパターン200の一部を照らす。光照射部202の照射方向は固定されており、定点Fは、リーフ141´の移動に影響されない絶対的な位置であって所定の面積を有している。さらに光照射部202は、定点Fをリーフ141´の外周側の円弧面方向に設定し、パターン200の刻設された領域の一部を含むように設定されている。
【0062】
一方、撮像部203は、リーフ141´の外周側の円弧面方向を一定間隔で、パターン200上の定点Fを含む領域を撮像するように設けられている。すなわち、撮像部203は、この定点Fから反射した光を経時的に受光して、一定間隔で定点画像を取得する。定点画像にはリーフ141´に刻設されたパターン200の一部が存在している。そして、パターン200には特異な模様200aが含まれているので、移動量演算部204は、撮像部203で捉えられた特異な模様200aの位置を特定し、その経時的なズレからリーフ141´の移動量を演算する。
【0063】
すなわち移動量演算部204は、リーフ141´の移動に従って時系列で取得される複数の定点画像を解析して、リーフ141´の移動量を取得する。リーフ141´が移動すると、リーフ141´に刻設されたパターン200も一緒に移動するので、時系列で取得される複数の定点画像上では、特異な模様200aを含むパターン200上で定点Fの位置が相対的に変化する。よって、移動量演算部204が時系列で取得される複数の定点画像上で、パターンに対する定点Fの相対的な位置を認識し、その位置のズレを判断することによって、移動量検出部201は、リーフ141´の移動量を検出することができる。
【0064】
なお、リーフ141´の移動量の多少に依らず、特異な模様200aの一部又は全部を定点画像内に存在させることが望ましい。従ってリーフ141´に形成されるパターン200の大きさは、できるだけ小さいことが望ましい。また、パターン200の1単位を約0.5mm四方として模様200aを形成したのは、模様200aが、撮像部203が撮像する領域よりも小さい領域とするためである。
【0065】
また、本実施形態の放射線治療装置は、図14に示すように、前述のリーフ141に、その円周(内周又に外周)に沿って一定間隔で磁気情報を有する磁気テープ210が付加される(貼り付けられる)リーフ141´´と、磁気情報を基にリーフ141´´の複数位置を検出することによってリーフ141´´の移動量を検出する移動量検出部211とを設けてもよい。検出されるリーフ141´´の移動量は制御装置30にフィードバックされる。その場合、移動量検出部211は、磁気検出部(磁気センサ)212及び移動量演算部213を設ける。
【0066】
設置位置が固定される磁気検出部212は、リーフ141´´に付加される磁気テープ210から磁気情報を検出するように、リーフ141´´の移動軌道上の定点Gから磁気情報を検出する。ここで、磁気テープ210から磁気検出部212までの距離は一定の間隔(数ミクロン)を有するので磨耗等の経年変化の影響を受けない。よって、磁気テープ210にリーフ141´´の円周に沿って一定間隔で磁気情報を記録することで、その間隔が検出精度となる。また、ミクロン単位での磁化が可能なので、リーフ141´´の位置を検出することができる。
【0067】
移動量演算部213は、磁気検出部212によって取得される磁気情報を基にリーフ141´´の移動量を演算する。磁気情報は、パルス信号として出力され、従来のエンコーダによる信号処理と同様のデジタル処理が可能であるので、精度及び信頼性が高い。
【0068】
本実施形態の放射線治療装置によれば、優れた回転追従性を備えたトルクワイヤを使用することにより、屈曲部に対して高度な柔軟性を維持して、モータなどの根元側の回転運動を正確に先端側へ伝えることができる。従って、モータをどのような向き、角度に設置しても、トルクワイヤはモータの回転を駆動歯車に正確に伝達することができるので、放射線源を中心に含む同心円上を円弧状の軌道面に沿ってリーフを接近、離反するように駆動することが可能である。
【0069】
よって、リーフの移動軸に対するモータの配置の自由度を極めて高くすることができ、絞り装置内のデッドスペースになっていた部分にもモータを配置することが可能となる。すなわち、絞り装置14内のスペースを有効に利用することが可能であり、絞り装置14を大型化することなくリーフの枚数を増やすことができる。これにより、治療空間を狭めることがなく、放射線の照射野を治療部位の形状により近づけることができ、より安全に被検体の放射線治療が可能となる。また、駆動装置の駆動歯車は1段でも良いので、バックラッシュの調整も容易となり、動作精度を向上させることができる。
【0070】
また、本実施形態の放射線治療装置によれば、トルクモータをエンコーダ付きのものとすることによって、リーフの移動量の検出を容易にすることが可能であり、これにより移動量制御のために多数の歯車をポテンショメータやエンコーダと組み合わせていた従来の複雑な機構を簡素化することができる。
【0071】
また、本実施形態の放射線治療装置によれば、非接触でリーフの移動量を検出でき、バックラッシュの影響や歯車の摩耗による変位又は位置検出誤差を軽減することができる。従って、バックラッシュに関係なく、高精度にリーフの位置を検出することができ、高精度に照射野を患部形状に合致させることができる。
【図面の簡単な説明】
【0072】
【図1】本実施形態の放射線治療装置の使用状態を示した外観図。
【図2】本実施形態の放射線治療装置に備えられている第1の絞り体及び第2の絞り体を、第2の絞り体の駆動を奥行方向として示す側面図。
【図3】本実施形態の放射線治療装置に備えられている第1の絞り体及び第2の絞り体を、図2に直交する方向から見た第1の側面図。
【図4】本実施形態の放射線治療装置に備えられている第1の絞り体及び第2の絞り体を、図2に直交する方向から見た第2の側面図。
【図5】第2の絞り体によって形成される照射野の概念を説明するための上面図。
【図6】第2の絞り体によって形成される放射線照射野を説明するための上面図。
【図7】リーフに対する駆動装置の概要を示す図。
【図8】本実施形態の放射線治療装置の効果を説明した説明図。
【図9】駆動装置の配置例をリーフ上方から見た図。
【図10】駆動装置の配置例をリーフ側方から見た図。
【図11】リーフに対する移動量検出部の第1例の概要を示す図。
【図12】図11の説明を補足するために示したリーフの側面方向の断面図。
【図13】リーフに形成されるパターンの一例を示した図。
【図14】リーフに対する移動量検出部の第2例の概要を示す図。
【図15】リーフに対する従来の駆動装置の概要を示す図。
【符号の説明】
【0073】
141,141´,141´´ リーフ
141a 歯
143 駆動装置
143a 駆動歯車
143b トルクワイヤ
143c トルクモータ
【特許請求の範囲】
【請求項1】
複数枚のリーフを密に配列して形成された絞り体要素の一対からなる絞り体が放射線の照射軸を間にして前記絞り体要素が対峙するように配置され、前記各リーフを各別に移動させることにより、所望の照射範囲を設定する多分割絞り装置を備えた放射線治療装置において、
前記各リーフの歯にそれぞれ噛み合わせた駆動歯車と、
前記駆動歯車の軸芯にそれぞれ結合されたトルクワイヤと、
前記トルクワイヤを介して前記駆動歯車をそれぞれ駆動する駆動手段と、
を具備することを特徴とする放射線治療装置。
【請求項2】
前記駆動手段は、エンコーダを内蔵したトルクモータであることを特徴とする請求項1に記載の放射線治療装置。
【請求項3】
前記各リーフにその軌道面上の移動方向に沿って所定のパターンが形成される複数枚のパターン付リーフと、前記パターンを基に前記パターン付リーフの複数位置を検出することによって前記パターン付リーフ毎に移動量をそれぞれ検出する移動量検出部とをさらに具備することを特徴とする請求項1又は2に記載の放射線治療装置。
【請求項4】
前記移動量検出部は、前記パターンの一部を照らすように、前記パターン付リーフの移動軌道上の定点に向かって光を照射する光照射部と、前記パターン上の前記定点を含む領域を撮像して定点画像を取得する撮像部と、前記撮像部によって取得される前記定点画像を基に前記パターン付リーフの移動量をそれぞれ演算する移動量演算部とをさらに具備することを特徴とする請求項3に記載の放射線治療装置。
【請求項5】
前記パターンは、前記リーフの外側に形成されることを特徴とする請求項3に記載の放射線治療装置。
【請求項6】
前記各リーフにその軌道面上の移動方向に沿って一定間隔で磁気情報を有する磁気テープが付加される複数枚の磁気テープ付リーフと、前記磁気情報を基に前記磁気テープ付リーフの複数位置を検出することによって前記磁気テープ付リーフ毎に移動量をそれぞれ検出する移動量検出部とをさらに具備することを特徴とする請求項1又は2に記載の放射線治療装置。
【請求項7】
前記リーフは、円弧状の軌道面を有することを特徴とする請求項1乃至6のうちいずれか一項に記載の放射線治療装置。
【請求項8】
前記リーフは、直線上の軌道面を有することを特徴とする請求項1乃至6のうちいずれか一項に記載の放射線治療装置。
【請求項1】
複数枚のリーフを密に配列して形成された絞り体要素の一対からなる絞り体が放射線の照射軸を間にして前記絞り体要素が対峙するように配置され、前記各リーフを各別に移動させることにより、所望の照射範囲を設定する多分割絞り装置を備えた放射線治療装置において、
前記各リーフの歯にそれぞれ噛み合わせた駆動歯車と、
前記駆動歯車の軸芯にそれぞれ結合されたトルクワイヤと、
前記トルクワイヤを介して前記駆動歯車をそれぞれ駆動する駆動手段と、
を具備することを特徴とする放射線治療装置。
【請求項2】
前記駆動手段は、エンコーダを内蔵したトルクモータであることを特徴とする請求項1に記載の放射線治療装置。
【請求項3】
前記各リーフにその軌道面上の移動方向に沿って所定のパターンが形成される複数枚のパターン付リーフと、前記パターンを基に前記パターン付リーフの複数位置を検出することによって前記パターン付リーフ毎に移動量をそれぞれ検出する移動量検出部とをさらに具備することを特徴とする請求項1又は2に記載の放射線治療装置。
【請求項4】
前記移動量検出部は、前記パターンの一部を照らすように、前記パターン付リーフの移動軌道上の定点に向かって光を照射する光照射部と、前記パターン上の前記定点を含む領域を撮像して定点画像を取得する撮像部と、前記撮像部によって取得される前記定点画像を基に前記パターン付リーフの移動量をそれぞれ演算する移動量演算部とをさらに具備することを特徴とする請求項3に記載の放射線治療装置。
【請求項5】
前記パターンは、前記リーフの外側に形成されることを特徴とする請求項3に記載の放射線治療装置。
【請求項6】
前記各リーフにその軌道面上の移動方向に沿って一定間隔で磁気情報を有する磁気テープが付加される複数枚の磁気テープ付リーフと、前記磁気情報を基に前記磁気テープ付リーフの複数位置を検出することによって前記磁気テープ付リーフ毎に移動量をそれぞれ検出する移動量検出部とをさらに具備することを特徴とする請求項1又は2に記載の放射線治療装置。
【請求項7】
前記リーフは、円弧状の軌道面を有することを特徴とする請求項1乃至6のうちいずれか一項に記載の放射線治療装置。
【請求項8】
前記リーフは、直線上の軌道面を有することを特徴とする請求項1乃至6のうちいずれか一項に記載の放射線治療装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2008−229324(P2008−229324A)
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願番号】特願2008−32993(P2008−32993)
【出願日】平成20年2月14日(2008.2.14)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願日】平成20年2月14日(2008.2.14)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]