
放射線治療装置
【課題】治療制御コンピュータによって制御される放射線治療装置を提供する。
【解決手段】線源であって、治療用の放射線のビームをビーム軸線に沿って放出することができ且つビーム軸線と実質的に一致する回転軸線を中心として回転することができ、これによって前記軸線を中心として弧を描く、線源と、ビームを所望の形状にコリメートするように構成された多分割コリメータと、線源の線量の率、線源の回転、および、前記多分割コリメータを制御することができる制御手段と、を有するタイプの放射線治療装置用の治療計画装置である。
【解決手段】線源であって、治療用の放射線のビームをビーム軸線に沿って放出することができ且つビーム軸線と実質的に一致する回転軸線を中心として回転することができ、これによって前記軸線を中心として弧を描く、線源と、ビームを所望の形状にコリメートするように構成された多分割コリメータと、線源の線量の率、線源の回転、および、前記多分割コリメータを制御することができる制御手段と、を有するタイプの放射線治療装置用の治療計画装置である。
【発明の詳細な説明】
【技術分野】
【0001】
放射線治療装置は、代表的には、治療制御コンピュータ(Treatment Control Computer)によって制御される。多分割コリメータ(「MLC」)を備えている場合には、治療制御コンピュータは、放射線の発生を制御する放射線制御コンピュータ(Radiation Control Computer)、MLCの形状を制御するMLC制御コンピュータ、及び、ガントリーの位置を制御するガントリー制御コンピュータ(Gantry Control Computer)を備えていると考えることができる。これらのコンピュータは、物理的には、一つ又はそれ以上のコンピュータであってもよいが、本明細書中では、システムの別個の機能的エレメントとして考えられる。
【背景技術】
【0002】
「mu」は、「モニター単位(monitor units)」の略である。これは、放射線治療装置からの放射線の単位について使用される用語である。muは、良好な較正条件下で患者に送出される線量の単位と等価である。muと線量との間の関係は、治療計画コンピュータ(Treatment planning Computer) でモデル化される。使用者は、患者の線量の処方と相互作用するが、治療計画コンピュータは、治療計画をmuの単位で定義する。治療計画コンピュータの仕事の一つは、患者の体内で、腫瘍における線量を十分に高くすること及び患者の他の部分における線量を十分に低くすることの両方に関して特定の線量を達成するために、装置が送出する必要があるmuを確認することである。非公式ではあるが、「線量の率(線量率)」という用語の使用は、「mu率」を意味する。
【0003】
強度変調放射線治療(Intensity Modulated Radiotherapy)は、多くの放射線治療技術についての包括的用語である。これは、本質的には、患者に差し向けられたビームを変化させる。この変化は、空間的であり、時間的であり、又はその両方である。
【0004】
既知のライナック送出技術には、以下に列挙する技術が含まれる。
【0005】
セグメント式または静的多分割コリメータ(segmental or static multi-leaf collimator) −「SMLC」−は、照射中に多分割コリメータ(「MLC」)が静的である技術である。MLCは、照射間に、一つの形状(態様)から次の形状(態様)に移動(変化)する。一つの構造では、照射を停止しMLCを移動させる時点は、線量測定ハードウェアおよび放射線制御コンピュータによって制御される。これにより、MLC形状毎に線量が極めて正確に送出される。変形例のシステムは、同じ効果を得るためにDMLC構造を使用する。MLC制御コンピュータは、送出された線量をモニター(監視)し、一つの形状(態様)から別の形状(態様)に移動(変化)しなければならないことを検出したとき、放射を停止する。この構造と関連した制御システムの必然的遅延のため、MLC形状毎の線量が不確定となり、場合によっては形状を誤る。
【0006】
動的MLC−DMLC−は、ガントリーが静止状態のまま、MLCが照射中に移動する技術である。MLCは、一つの形状から次の形状まで、送出された線量の関数として線型移動する。MLC制御システムは、送出された線量をモニターしなければならず、必然的に遅延が生じる。旧式のシステムでは、この遅延は200ms乃至300msであったが、比較的最新のシステムでは、約40ms乃至50msである。この遅延は、MLCの応答とあいまって、線量に形状ラグ(shape lag) をもたらす。このことは専ら文献上で報告されているが、臨床的には重要でないと広く考えられている。
【0007】
回転DMLC−RDMLC−は、ガントリーの一定の回転中にMLCが照射中に移動する技術である。ガントリーは、mu/度を一定にして、移動する。MLCは、一つの形状から次の形状まで、送出された線量の関数として線型移動する。形状は、通常は、円弧に亘って等間隔で定められるが、必ずしもそうでなくてもよい。これは、実質的に独立したMLC制御コンピュータ、放射線制御コンピュータ、及び、ガントリー制御コンピュータによって行われ得る。
【0008】
増感回転DMLC−ERDMLC−は、可変のmu/度で移動するガントリーの回転中に、MLCが照射中に移動する技術である。ガントリーは、mu/度を可変にして、移動する。可変のガントリー速度または可変の線量率(またはこれらの両方)により以下の効果を得ることができる。可変の線量率だけを使用する場合、ジェント(Gent)大学によって、好ましい選択肢であると分析された。これは、送出時間を長くするためである。MLCは、一つの形状から次の形状まで、送出された線量の関数として線型移動する。形状および線量は、通常は、円弧に亘って等間隔で定められるが、必ずしもそうでなくてもよい。この技術は、MLC制御コンピュータ、放射線制御コンピュータ、及び、ガントリー制御コンピュータ間の非常に高度の一体化を必要とし、現在、ライナックを除き、ERDMLCを送出することができるものはない。従って、理論的に可能性であるのはライナックだけである。
【0009】
治療計画機能およびライナック送出機能を兼ね備えた治療技術及び既知の技術を以下に列挙する。
【0010】
強度変調放射線治療(Intensity Modulated Radiation Therapy)−IMRT−は、一連のMLC形状であり、関連した線量を、SMLC及びDMLCを使用して送出することができる。これらの形状は、代表的には5個乃至9個の限定された数の静止ガントリー位置で定義される。形状及び線量は、使用者が決定した目標に合わせようとするオプティマイザによって決定される。治療計画機能は、一般的には、MLC制限−送出技術に特定的である。
【0011】
回転原体振子照射治療(Rotational Conformal Arc Treatment)−RCAT−は、リーフをターゲット容積の投影に動的に合わせながらガントリーを一定に回転させる技術である。この技術は、日本で多年に亘って使用されてきた。送出技術はRDMLCであり、振子を一つだけ使用する。
【0012】
強度変調振子照射治療(Intensity Modulated Arc Therapy)−IMAT−は、振子およびリーフの位置がターゲット容積の投影によって決められるのではなく、必要な線量分布を、重要なターゲット構造に送出しようとする最適化ルーチンによって決められる治療計画機能である。一般的には、様々なガントリー角度範囲に亘って多くの振子を使用する。最適化がIMRTと同様に行われるが、回転ガントリーの追加の融通性を含む。IMATは、RDMLCを介して送出することができるが、これにより、mu/度を一定とする最適化に制限が加えられる。このため、これは最適でない計画である。更に理想的には、完全な自由およびERDMLC技術を使用することにより、最適化が可能になる。送出時間は極めて短く、代表的には、三分間で計画を完了する。皮相的には、この技術は、RCATと同様に見えるが、MLCの形状を決定する方法が異なる。
【0013】
IMATは、例えば、2004年11月1日付けの国際腫瘍学会誌第60巻の第794頁乃至806頁の第3章に記載の、「計画および送出の両レベルの改善についての大きな可能性を確認した。IMATについての一つの最も重要な技術的改善は、ガントリー速度を可変にすることである」という記載で終了する、デュソイ等の「直腸癌についての強度変調振子照射治療(IMAT)の臨床的実施」で論じられている。すなわち、装置は、ERDMLCを実施することができる。
【0014】
最適セグメント孔単振子照射治療(optimized segment-aperture mono-arc therapy) −OSMAT−は、特殊な等級のIMATであり、振子を一つだけ使用する。これは、幾つかの臨床的表示に適している。RCATの改良と考えることもできる。IMATと同様に、送出技術は単なるRDMLCであってもよいが、更に理想的にはERDMLCである。
送出時間は極めて速く、代表的には、一分間である。
【0015】
振子照射変調最適化アルゴリズム(Arc Modulation Optimisation Algorithm) −AMOA−は、3Dラインメディカルシステムズ社が使用している技術である。リーフ形状を解剖学によって決定し(RCATにおけるのと同様に)、次いで、振子を約20°のサブ振子に分割し、これらのサブ振子の重量またはmu/度を最適化し、最良の線量分布を(IMAT又はIMRTと同様に)提供する。かくして、これは、IMATまたはOSAMATの一形態であり、リーフ位置を変化させる選択肢を使用しない。これは、特にERDMIC送出技術を使用して計画および送出を非常に迅速に行うことができる。
【0016】
ヘリカル強度変調振子照射治療(helical intensity Modulated arc therapy) −HIMAT−は、IMAT技術を発展させた技術であり、患者を長さ方向に並進させると同時にガントリーを回転させる。これにより、治療を行うことができるフィールドの長さ方向長さが、実際上制限されず、実際上、トモセラピー送出技術に匹敵する。米国特許第5,818,902号およびWO97/13552にこの詳細が記載されている。これは、代表的には、固定配向で、リーフが患者に対して横方向に移動するMLCを有する。MLCは、高解像度のリーフを備えており、フィールドの大きさが制限されている。これは、ヘリカル技術を使用することによってフィールドの大きさを延長することができるためである。
【0017】
HIMATについての送出技術は、単なるRDMLCであってもよい。これは、多数の回転により、様々な高い線量を所定の角度から送出することができるためである。送出時間は極めて速く、代表的には、三分間で計画を完了する。
【発明の概要】
【0018】
ERDMLC送出技術が、IMAT治療計画およびHIMAT治療計画よりも有利である場合がある。しかしながらERDMLCを実際に送出することがわからなかった。従って、性能に関してERDMLCとほぼ同様であるが、送出を行う上で技術的に容易な送出技術には大きな価値がある。
【0019】
従来、全ての振子照射は、一定の公称回転速度および一定の線量率で送出されてきた。これにより、回転のmu/度を一定にした。これには、治療計画最適化に制限を加えることが必要とされる。これは、計画の臨床的品質を低下する。更に、多分割コリメータのリーフには最大移動速度があり、従って、所定の振子セグメントについての所与の線量率および線量で、これらのリーフが移動することができる最大距離がある。これもまた、計画における制限であり、計画の品質を制限する。
【0020】
治療計画コンピュータにおける最適化により、mu/度を変化させることができる場合には、更に多くの線量をガントリー角に入れることにより放射線の経路中の重要な臓器の数を少なくする。例えば、前立腺の治療を行う場合、ガントリーが回転するとき、膀胱および直腸が放射線の経路に入ったり出たりする。これらの器官が全く照射されないようにすることは不可能であり、それは望ましい(そうでない場合には前立腺に及ぼされる線量が不十分である)けれども、最適化によりこれらの重要な器官に及ぼされる線量を比較的自在に制御することができるのであれば、望ましからぬ被爆を軽減することができる。
【0021】
振子照射についての線量率を低下することができる場合には、これにより計画を更に自在にすることができるが、送出に時間がかかり、これは望ましくない。本発明の目的は、治療計画プロセスからこのような制限をなくすことであり、従って、計画の品質を最大にすると同時に送出時間を迅速にすることである。迅速な送出時間は、デパートメンタル(departmental)効率及び高精度画像誘導放射線治療について重要であり、撮影と照射完了との間で器官が動かないようにする上で重要である。
【0022】
従って、本発明に従って所望の治療を治療計画コンピュータによって、「制御点」の順序に関して説明する。各「制御点」は、ガントリーの位置、この制御点と次の(前の)制御点との間に送出されるべき線量、及び、制御点でのMLCを決定する。制御点の連続した対の各々は(その間に)、弧セグメント(振子照射セグメント、arc-segment)を決定する。
【0023】
この治療をn番目の制御点と(n+1)番目の制御点との間で実施し、ガントリーをn番目の制御点の位置から(n+1)番目の制御点の位置まで、必要な線量を送出するために組み合わせられた所定の回転速度および線量率で、移動させる。この際、ガントリーが(n+1)番目の制御点にあるとき、リーフがその点について正しい位置にあるようにMLCリーフを移動させる。代表的には、MLCリーフの移動距離が、弧セグメントで照射された線量と常に線型をなして関連する速度でMLCリーフを移動させる。次いで、このプロセスを(n+1)番目の制御点と(n+2)番目の制御点との間の弧セグメントについて繰り返し、これを治療の完了まで実施する。
【0024】
かくして、次の放射線治療装置が提案される。放射線治療装置は、治療用の放射線のビームをビーム軸線に沿って放出することができる線源であって、ビーム軸線と実質的に直交する回転軸線を中心として回転自在であり、これによって軸線を中心とした弧を描く線源と、ビームを所望の形状にコリメートするように(ビームを所望の形状に視準を合わせるように)構成された多分割コリメータと、線源の線量/時間の率、線源の回転速度、および、多分割コリメータの位置を制御することができる制御手段と、を備える。制御手段は、円弧が複数の概念的な弧セグメントに分割されている治療計画であって、弧セグメントについての全体線量ならびにMLCの開始位置および終了位置を特定する治療計画を受け、且つ、計画に従って前記線源を制御するように構成されている。第1の弧セグメントの間、回転速度および線量率の少なくとも一つが一定であるとともに、多分割コリメータが形状を変化させるようになる。また、第2の弧セグメントの間、回転速度および線量率の少なくとも一つが、第1の弧セグメントで採用された一定レベルとは異なるレベルで一定となるようになる。弧セグメントで必要となる全時間であって、弧セグメントの所定の開始時の位置から弧セグメントの所定の終了時の位置までの最大リーフ速度でのMLCリーフ移動と、弧セグメントの開始から終了までの最大線源回転速度での線源の回転と、時間あたり最大の線量率での線量の送出と、を含む複数のファクタについて計算し、且つ、最長時間を示すファクタを選び出し、且つ、選び出されたファクタについてその最大速度で作動し、残りのファクタについて前記最長時間に適合するように選択された減少したペース(率、速度)で作動するように装置を制御することによって、制御手段は線源を制御するように構成されている。
【0025】
制御手段は、典型的には、治療制御コンピュータ及びアクチュエータを含む。
【0026】
放射線治療装置は、好ましくは、治療中に実際に送出された線量、並びに、線源及び/又はMLCの実際の位置をモニターし、これを治療計画と比較し、線源の位置及び/又はMLCの位置及び/又は前記線量の率を制御して、送出された線量と線源位置との間の実際の関係が前記治療計画と実質的に対応するように構成されている。
【0027】
同様に、放射線治療装置は、好ましくは、治療中に実際に送出された線量および患者定位システム(患者配置システム)の実際の位置をモニターし、これを前記治療計画と比較し、患者定位システムの位置及び/又は線量の率を制御して、送出された線量と患者定位システム位置との間の実際の関係が治療計画と実質的に対応するように構成されている。
【0028】
放射線は、好ましくは、第1弧セグメントと第2弧セグメントとの間で中断されない。
【0029】
このようにして、多くの目的についてERDMLCシステムで取り扱うことができるという意味で、実際上ERDMLCに十分に近いシステムが製造される。これによって、(i)線源であって、(a)治療用の放射線のビームをビーム軸線に沿って放出することができ且つ(b)前記ビーム軸線と実質的に一致する回転軸線を中心として回転することができ、これによって前記軸線を中心として弧を描く、線源と、(ii)前記ビームを所望の形状にコリメートするように構成された多分割コリメータと、(iii)前記線源の線量の率、前記線源の回転、および、前記多分割コリメータを制御することができる制御手段と、を有するタイプの放射線治療装置用の治療計画装置が、さらに提案される。この治療計画装置は、所定数のmuを送出することにより、第1の特定の線量を送出するようになされた第1弧セグメントと、第2の特定の線量を送出するようになされた第2弧セグメントを含む。第1弧セグメント中、線源は所定の度(°)である第1の特定の角度だけ回転し、多分割コリメータは第1の特定の角度あたりの率(ペース、速度)で形状を変化させ、第2弧セグメント中、線源は第2の特定の角度回転し、多分割コリメータは第2の特定の角度あたりの率(ペース、速度)で形状を変化させる。第1および第2の特定の線量、前記第1および第2の特定の角度、前記第1および第2の特定の角度あたりの率(ペース、速度)、角度回転(°)あたりのmu、並びに、MLCリーフの移動(mm)あたりのmuの少なくとも一つが、第1弧セグメントおよび第2弧セグメントの間で異なる。
【0030】
ビーム軸線及び線源の回転軸線は、幾何学的単純性のため、実質的に直交していることが好ましい。
【0031】
以上から明らかなように、弧セグメント中、回転速度及び線量率の両方が一定であるのが好ましいが、これらの少なくとも一方が、第1弧セグメント及び第2弧セグメント間で異なる。
【0032】
一般的には、第1弧セグメント及び第2弧セグメントは連続している。しかしながら、個々の連続した弧セグメントが、実際に、回転速度及び線量率が同じ特定の場合がある。しかしながら、本発明による治療計画では、対をなす弧セグメントにおいて、少なくとも一方が異なる。
【0033】
治療計画装置は、勿論、治療計画を放射線治療装置に伝達するため、何らかの形態の出力手段を含む。
【0034】
治療計画装置は、更に、治療中の患者定位システムの移動を含む治療計画を処方する。このシステムの移動は、線源及び/又は線量の送出と相関する方法で行われる。これは、(それ自体)HIMAT治療を提供することができる。
【0035】
次に、本発明の一実施の形態を添付図面を参照して例として説明する。
【図面の簡単な説明】
【0036】
【図1】図1は、治療計画コンピュータからの、リーフ位置及び線量に関する最適化制御点を示すグラフである。
【図2】図2は、治療計画コンピュータからの、ガントリー位置及び治療の進捗に従って送出される線量に関する最適化制御点を、一定の角度あたりのmuが一定であるとの条件での近似とともに、示すグラフである。
【図3】図3は、線量率に関する図2の制御点の効果を、同様の近似とともに、示すグラフである。
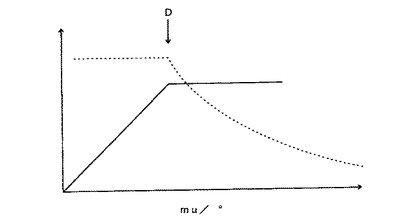
【図4】図4は、線量率(実線)及び回転速度(破線)の理想的計算を示すグラフである。
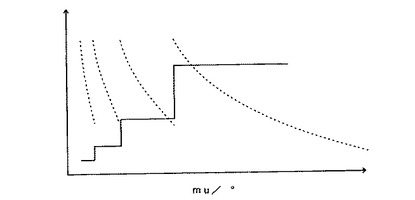
【図5】図5は、連続可変線量率がないシステムの線量率(実線)及び回転速度(破線)の実際の計算を示すグラフである。
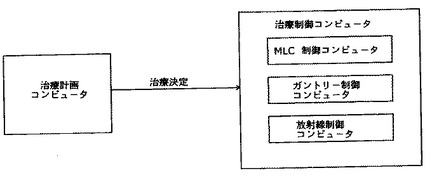
【図6】図6は、コンピュータ間の関係を示している。
【発明を実施するための形態】
【0037】
所望の治療を、治療計画コンピュータによって一連の「制御点」に関連して説明する。各「制御点」は、ガントリーの位置、この制御点と次の制御点(又は前の制御点)との間に送出されるべき線量、および、当該制御点でのMLCの形状(態様)を定義する。連続した対をなした各制御点は(それらの制御点間に)弧セグメント(arc-segment:(振子照射セグメント)) を形成する。
【0038】
制御点は(理論的に)、全円弧に亘って戦略的に間隔が隔てられていてもよい。しかしながら、利用可能な演算処理能力が比較的低い場合、これを行おうとする上で利点はほとんどない。従って、制御点は、代表的には、円弧に亘って、度(°)毎に、数度毎に、又は数分の一度毎に等間隔に間隔が隔てられている。
【0039】
ガントリーを、n番目の制御点の位置から(n+1)番目の制御点の位置の位置まで、所定の回転速度及び所要の線量の送出と関連した線量率で移動することによって、この治療を、n番目の制御点と(n+1)番目の制御点との間で実施する。この際、ガントリーが(n+1)番目の制御点の位置にあるとき、MLCリーフがその点について正しい位置にあるようにMLCリーフを実質的に一定の速度で移動させる。このプロセスは、n=1で開始し、次いで、(n+1)番目の制御点と(n+2)番目の制御点との間の弧セグメントについて繰り返し、これを治療の完了まで実施する。
【0040】
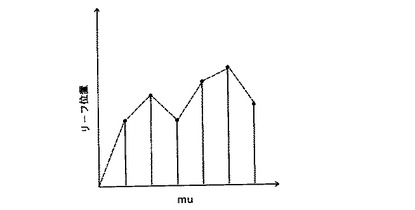
図1及び図2は、治療についての制御点のパターンを示す。図1は、特定のMLCリーフの位置に関し、制御点の詳細を治療の進捗に従ってグラフで示す。治療中、送出された総mu線量を追跡し、リーフを最初に延長し、引っ込め、次いで再び延長する。破線は、次の制御点に達したときにリーフが所望の位置にあるように制御装置がリーフを制御点間で一定の速度で移動させる場合のリーフの瞬間的な位置を示す。80枚(代表的には)のリーフの各々について同様のグラフが存在する。これらのグラフの各々は、一般的には、制御点が6個以上あり、45°、90°、又は180°の制御点がある。
【0041】
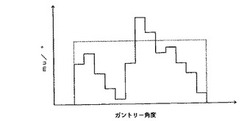
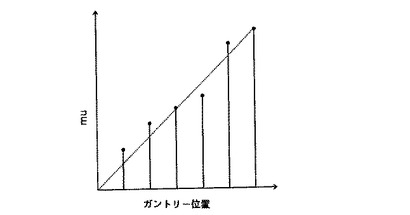
図2は、ガントリーの回転時に送出される総線量に関する制御点の詳細を示す。かくして、これらの制御点は、単調上昇目盛上に記してある。しかしながら、連続した制御点間の増大量は、場合によっては比較的多くの放射線が送出され、そして場合によっては比較的少量の放射線が送出されるガントリー角度と対応して変化する。比較的少量の放射線が送出されるガントリー角度は、ターゲット構造が重要な構造によって隠される角度と対応する。送出される線量は、線量率毎時又はガントリー回転速度のいずれか又はこれらの両方を変化させることにより変化させることができる。明らかに、回転速度を上昇することによって、又は線量率を減少させることによって、所定の位置範囲間に送出される累積線量を減少させることができる。図2は、角度あたりのmu率が一定であることを条件とすることによって与えられる近似を破線で示す。これは、フレキシビリティを低下させ、最適以下の線量分布又はMLC位置によって変化を吸収することのいずれかを必要とし、これによって治療時間が延びてしまう。
【0042】
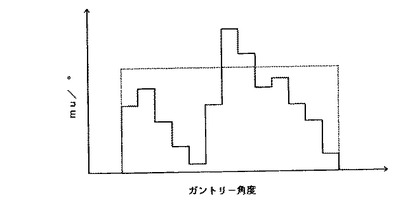
図3は、各ガントリー角度での線量率に関する図2の結果を示す。幾つかのガントリー角度では、線量率が高く、これはターゲット構造の明瞭な画像が得られるということを示す。他のガントリー角度では、線量率が大幅に減少する。これは、ターゲットが重要な構造によって隠されるということを示す。
【0043】
かくして、図1、図2および図3は、従来既知の装置によって課せられる制限がない、治療計画コンピュータによって開発された治療計画を示す。この場合も、放射線治療装置の治療制御コンピュータが、治療計画を、ガントリーの移動、線量率およびMLCの移動(変形)からなる組に変換する。
【0044】
この場合、各弧セグメントが送出され得る最少時間は、線量、ガントリー、又は、MLCのリーフのうちの任意の一つのリーフによって、決定されてもよい。かくして、
最小線量時間=制御点間線量/最大線量率
最小ガントリー時間=ガントリー移動距離/最大ガントリー速度
最小リーフ時間=リーフの移動距離/最大リーフ速度
(移動するリーフの各々について考える)
【0045】
この場合、弧セグメントについての最小時間は、これらの全ての最小値のうちの最も高い値である。このことは、ガントリー、線量、又は80枚のリーフのうちのいずれかがなり得る時間を制約するパラメータ(time limiting parameter)を決定する。
【0046】
線量が時間を制限するパラメータではない場合には、所望の線量率を選択することができ、以下のように計算が行われる。
所望の線量率=制御点線量/最小時間
【0047】
線量が時間を制限するパラメータである場合には、選択された線量率は、勿論、最大線量率である。
【0048】
次いで、ガントリー及びリーフの予想速度を選択された線量率から以下のように計算することができる。
予想弧セグメント時間=制御点線量/選択された線量率
予想ガントリー速度=ガントリー移動距離/予想弧セグメント時間
そして、MLCの各リーフについて、
予想リーフ速度=リーフ移動距離/予想弧セグメント時間
【0049】
図4は、例示の目的でMLCリーフ速度の影響を無視した、線量率とガントリー速度との間の選択を示す。x軸は、実現される角度あたりの線量率であり、これは、二つの制御点間で送出された累積線量と対応する。実線は線量率であり、破線はガントリー回転速度である。これらは、両方とも、使用される特定の装置の制限によって最大のペース(率および速度)が与えられる。かくして、最大回転速度および最大線量率(単位時間当たり)で作動する装置によって、単位回転当たりの線量Dが達成される。
【0050】
Dよりも高い単位回転当たり線量を達成するため、回転速度を反比例して増大させなければならず、従って、この領域での回転速度(破線参照)は、1/xプロファイルを示し、この際、線量率(実線参照)は一定である。単位回転当たり線量をDよりも小さくするためには、線量率を図示のように比例して減少させなければならない。
【0051】
従って、図4は、以上の計算をグラフの形態で示す。
【0052】
幾つかの放射線治療装置は、実際には、連続的に可変の線量率を発生しないということに着目しなければならない。その代わり、線量率は、多くの予備設定レベルのうちの一つを採用することしかできない。そのような場合、所望の線量率よりも低い利用可能な最高線量率を選択しなければならない。他方のファクタは、上述のように決定される。
【0053】
これを図5に示す。これは、線量率が線型の図4の領域において、線量率を、段階的に、最大線量率まで強制的に上昇することを除き、図4と対応している。これを、最大線量率についてだけ補償するのでなく、各段階について一連の1/x曲線を採用した回転速度プロファイルによって補償する。かくして、単位時間当たりの線量率を連続的に変化しない装置を使用することにより、必要とされる治療時間に関して問題点が生じるが、線量分布については問題点が生じない。
【0054】
理想的には、実際の位置は、実際に送出された線量に合わせて制御され、これにより、実際の速度は予想速度から僅かに変化する。しかしながら、予想速度は、サーボ装置の最適な作動を確実にする上で非常に有用なパラメータである。
【0055】
このようにして、多くの目的についてERDMLCシステムとして取り扱うことができるという意味で、実際上ERDMLCに十分に近いシステムが製造され得る。
【0056】
図6は、システムに含まれる様々なコンピュータ間の関係を示す。治療計画コンピュータは、治療を決定する治療計画を生成し、これを治療制御コンピュータに送る。これにより、各弧セグメント(各振子照射)について、いずれのファクタが時間を制限するファクタであるのかが確認される。この結果、MLC制御コンピュータ、ガントリー制御コンピュータ、及び、放射線制御コンピュータの各々に対して、それらの特定のアイテムの当該弧セグメント中の動作についての指示を行うことができる。
【0057】
実際には、例示のコンピュータの各々が別体のコンピュータで存在すべきであるのか、或いは、例示のコンピュータの幾つか又は全てが単一のプロセッサに組み込まれるべきであるのか、を決定することが必要とされる。この決定は、予想計算負荷及び利用可能な演算処理能力のパターンに基づいて行われる。
【0058】
このような治療計画は、現在使用されているのと実質的に同様の放射線治療機械で実施され得る。本発明との物理的相違は、制御装置および治療計画装置、即ち実際の放射ヘッド及びその駆動手段である。そのMLC及び他のシステムは、現在使用されているものであってもよい。しかしながら、装置には、この方法での機械の作動に関しての有用な特定の変更が加えられている。
【0059】
第1に、放射ヘッド用リールシステムには、360°以上に亘って2回転又は3回転又はそれ以上移動することができるという利点がある。これにより、オペレータは、IMAT振子照射で3回又はそれ以上、停止なしで治療することができ、更に、連続した振子照射で患者を下から撮影することができ且つ治療することができる。
【0060】
第2に、好ましくはボアの内側端を閉鎖したCT機又はMR機と同様に、機械全体を一組のカバーに収めることを提案する。可動部品を包囲することにより、危険な衝突の可能性をなくし、従って、ガントリーの速度を1RPMから少なくとも2RPM、場合によっては5RPM又は6RPMまで、かなり容易に増大することができる。これにより、治療時間を大幅に低減することができる。更に、速度を増大することにより、コーンビーム画像捕捉(Cone Beam image acquisition) についての新たな選択肢を提供する。例えば、息を一回止めている間に画像を捕捉することができ、これによって、呼吸運動によるアーチファクト(人為的な悪影響)をなくす。
【0061】
最後に、高い回転速度での治療時間を更に短くするため、ビームの経路中に通常配置されているフラット化フィルタ(flattening filter) をなくすことを提案する。これは、デバイスの穴を横切る放射線の強さを更に均等にするためである。これらのフィルタは、もちろん、穴の中央領域のビームの強さを減少させるように作用し、従って、均一性及び全体線量との間での妥協を図る。その代りに、フラットではない又は不均等なビームを治療計画のために特徴付け及び補償してもよい。これにより、ビームの強さの不均等に関する困難をなくす。これは、他の治療パラメータで調節が行われるためであり、調節により、治療時間を、放射線の「回収」と比例して減少させることができるためである。これは、他の態様では、フラット化フィルタによって除去される。
【0062】
もちろん、本発明の範囲から逸脱することなく、上述の実施の形態に多くの変更を加えることができるということは理解されよう。
【技術分野】
【0001】
放射線治療装置は、代表的には、治療制御コンピュータ(Treatment Control Computer)によって制御される。多分割コリメータ(「MLC」)を備えている場合には、治療制御コンピュータは、放射線の発生を制御する放射線制御コンピュータ(Radiation Control Computer)、MLCの形状を制御するMLC制御コンピュータ、及び、ガントリーの位置を制御するガントリー制御コンピュータ(Gantry Control Computer)を備えていると考えることができる。これらのコンピュータは、物理的には、一つ又はそれ以上のコンピュータであってもよいが、本明細書中では、システムの別個の機能的エレメントとして考えられる。
【背景技術】
【0002】
「mu」は、「モニター単位(monitor units)」の略である。これは、放射線治療装置からの放射線の単位について使用される用語である。muは、良好な較正条件下で患者に送出される線量の単位と等価である。muと線量との間の関係は、治療計画コンピュータ(Treatment planning Computer) でモデル化される。使用者は、患者の線量の処方と相互作用するが、治療計画コンピュータは、治療計画をmuの単位で定義する。治療計画コンピュータの仕事の一つは、患者の体内で、腫瘍における線量を十分に高くすること及び患者の他の部分における線量を十分に低くすることの両方に関して特定の線量を達成するために、装置が送出する必要があるmuを確認することである。非公式ではあるが、「線量の率(線量率)」という用語の使用は、「mu率」を意味する。
【0003】
強度変調放射線治療(Intensity Modulated Radiotherapy)は、多くの放射線治療技術についての包括的用語である。これは、本質的には、患者に差し向けられたビームを変化させる。この変化は、空間的であり、時間的であり、又はその両方である。
【0004】
既知のライナック送出技術には、以下に列挙する技術が含まれる。
【0005】
セグメント式または静的多分割コリメータ(segmental or static multi-leaf collimator) −「SMLC」−は、照射中に多分割コリメータ(「MLC」)が静的である技術である。MLCは、照射間に、一つの形状(態様)から次の形状(態様)に移動(変化)する。一つの構造では、照射を停止しMLCを移動させる時点は、線量測定ハードウェアおよび放射線制御コンピュータによって制御される。これにより、MLC形状毎に線量が極めて正確に送出される。変形例のシステムは、同じ効果を得るためにDMLC構造を使用する。MLC制御コンピュータは、送出された線量をモニター(監視)し、一つの形状(態様)から別の形状(態様)に移動(変化)しなければならないことを検出したとき、放射を停止する。この構造と関連した制御システムの必然的遅延のため、MLC形状毎の線量が不確定となり、場合によっては形状を誤る。
【0006】
動的MLC−DMLC−は、ガントリーが静止状態のまま、MLCが照射中に移動する技術である。MLCは、一つの形状から次の形状まで、送出された線量の関数として線型移動する。MLC制御システムは、送出された線量をモニターしなければならず、必然的に遅延が生じる。旧式のシステムでは、この遅延は200ms乃至300msであったが、比較的最新のシステムでは、約40ms乃至50msである。この遅延は、MLCの応答とあいまって、線量に形状ラグ(shape lag) をもたらす。このことは専ら文献上で報告されているが、臨床的には重要でないと広く考えられている。
【0007】
回転DMLC−RDMLC−は、ガントリーの一定の回転中にMLCが照射中に移動する技術である。ガントリーは、mu/度を一定にして、移動する。MLCは、一つの形状から次の形状まで、送出された線量の関数として線型移動する。形状は、通常は、円弧に亘って等間隔で定められるが、必ずしもそうでなくてもよい。これは、実質的に独立したMLC制御コンピュータ、放射線制御コンピュータ、及び、ガントリー制御コンピュータによって行われ得る。
【0008】
増感回転DMLC−ERDMLC−は、可変のmu/度で移動するガントリーの回転中に、MLCが照射中に移動する技術である。ガントリーは、mu/度を可変にして、移動する。可変のガントリー速度または可変の線量率(またはこれらの両方)により以下の効果を得ることができる。可変の線量率だけを使用する場合、ジェント(Gent)大学によって、好ましい選択肢であると分析された。これは、送出時間を長くするためである。MLCは、一つの形状から次の形状まで、送出された線量の関数として線型移動する。形状および線量は、通常は、円弧に亘って等間隔で定められるが、必ずしもそうでなくてもよい。この技術は、MLC制御コンピュータ、放射線制御コンピュータ、及び、ガントリー制御コンピュータ間の非常に高度の一体化を必要とし、現在、ライナックを除き、ERDMLCを送出することができるものはない。従って、理論的に可能性であるのはライナックだけである。
【0009】
治療計画機能およびライナック送出機能を兼ね備えた治療技術及び既知の技術を以下に列挙する。
【0010】
強度変調放射線治療(Intensity Modulated Radiation Therapy)−IMRT−は、一連のMLC形状であり、関連した線量を、SMLC及びDMLCを使用して送出することができる。これらの形状は、代表的には5個乃至9個の限定された数の静止ガントリー位置で定義される。形状及び線量は、使用者が決定した目標に合わせようとするオプティマイザによって決定される。治療計画機能は、一般的には、MLC制限−送出技術に特定的である。
【0011】
回転原体振子照射治療(Rotational Conformal Arc Treatment)−RCAT−は、リーフをターゲット容積の投影に動的に合わせながらガントリーを一定に回転させる技術である。この技術は、日本で多年に亘って使用されてきた。送出技術はRDMLCであり、振子を一つだけ使用する。
【0012】
強度変調振子照射治療(Intensity Modulated Arc Therapy)−IMAT−は、振子およびリーフの位置がターゲット容積の投影によって決められるのではなく、必要な線量分布を、重要なターゲット構造に送出しようとする最適化ルーチンによって決められる治療計画機能である。一般的には、様々なガントリー角度範囲に亘って多くの振子を使用する。最適化がIMRTと同様に行われるが、回転ガントリーの追加の融通性を含む。IMATは、RDMLCを介して送出することができるが、これにより、mu/度を一定とする最適化に制限が加えられる。このため、これは最適でない計画である。更に理想的には、完全な自由およびERDMLC技術を使用することにより、最適化が可能になる。送出時間は極めて短く、代表的には、三分間で計画を完了する。皮相的には、この技術は、RCATと同様に見えるが、MLCの形状を決定する方法が異なる。
【0013】
IMATは、例えば、2004年11月1日付けの国際腫瘍学会誌第60巻の第794頁乃至806頁の第3章に記載の、「計画および送出の両レベルの改善についての大きな可能性を確認した。IMATについての一つの最も重要な技術的改善は、ガントリー速度を可変にすることである」という記載で終了する、デュソイ等の「直腸癌についての強度変調振子照射治療(IMAT)の臨床的実施」で論じられている。すなわち、装置は、ERDMLCを実施することができる。
【0014】
最適セグメント孔単振子照射治療(optimized segment-aperture mono-arc therapy) −OSMAT−は、特殊な等級のIMATであり、振子を一つだけ使用する。これは、幾つかの臨床的表示に適している。RCATの改良と考えることもできる。IMATと同様に、送出技術は単なるRDMLCであってもよいが、更に理想的にはERDMLCである。
送出時間は極めて速く、代表的には、一分間である。
【0015】
振子照射変調最適化アルゴリズム(Arc Modulation Optimisation Algorithm) −AMOA−は、3Dラインメディカルシステムズ社が使用している技術である。リーフ形状を解剖学によって決定し(RCATにおけるのと同様に)、次いで、振子を約20°のサブ振子に分割し、これらのサブ振子の重量またはmu/度を最適化し、最良の線量分布を(IMAT又はIMRTと同様に)提供する。かくして、これは、IMATまたはOSAMATの一形態であり、リーフ位置を変化させる選択肢を使用しない。これは、特にERDMIC送出技術を使用して計画および送出を非常に迅速に行うことができる。
【0016】
ヘリカル強度変調振子照射治療(helical intensity Modulated arc therapy) −HIMAT−は、IMAT技術を発展させた技術であり、患者を長さ方向に並進させると同時にガントリーを回転させる。これにより、治療を行うことができるフィールドの長さ方向長さが、実際上制限されず、実際上、トモセラピー送出技術に匹敵する。米国特許第5,818,902号およびWO97/13552にこの詳細が記載されている。これは、代表的には、固定配向で、リーフが患者に対して横方向に移動するMLCを有する。MLCは、高解像度のリーフを備えており、フィールドの大きさが制限されている。これは、ヘリカル技術を使用することによってフィールドの大きさを延長することができるためである。
【0017】
HIMATについての送出技術は、単なるRDMLCであってもよい。これは、多数の回転により、様々な高い線量を所定の角度から送出することができるためである。送出時間は極めて速く、代表的には、三分間で計画を完了する。
【発明の概要】
【0018】
ERDMLC送出技術が、IMAT治療計画およびHIMAT治療計画よりも有利である場合がある。しかしながらERDMLCを実際に送出することがわからなかった。従って、性能に関してERDMLCとほぼ同様であるが、送出を行う上で技術的に容易な送出技術には大きな価値がある。
【0019】
従来、全ての振子照射は、一定の公称回転速度および一定の線量率で送出されてきた。これにより、回転のmu/度を一定にした。これには、治療計画最適化に制限を加えることが必要とされる。これは、計画の臨床的品質を低下する。更に、多分割コリメータのリーフには最大移動速度があり、従って、所定の振子セグメントについての所与の線量率および線量で、これらのリーフが移動することができる最大距離がある。これもまた、計画における制限であり、計画の品質を制限する。
【0020】
治療計画コンピュータにおける最適化により、mu/度を変化させることができる場合には、更に多くの線量をガントリー角に入れることにより放射線の経路中の重要な臓器の数を少なくする。例えば、前立腺の治療を行う場合、ガントリーが回転するとき、膀胱および直腸が放射線の経路に入ったり出たりする。これらの器官が全く照射されないようにすることは不可能であり、それは望ましい(そうでない場合には前立腺に及ぼされる線量が不十分である)けれども、最適化によりこれらの重要な器官に及ぼされる線量を比較的自在に制御することができるのであれば、望ましからぬ被爆を軽減することができる。
【0021】
振子照射についての線量率を低下することができる場合には、これにより計画を更に自在にすることができるが、送出に時間がかかり、これは望ましくない。本発明の目的は、治療計画プロセスからこのような制限をなくすことであり、従って、計画の品質を最大にすると同時に送出時間を迅速にすることである。迅速な送出時間は、デパートメンタル(departmental)効率及び高精度画像誘導放射線治療について重要であり、撮影と照射完了との間で器官が動かないようにする上で重要である。
【0022】
従って、本発明に従って所望の治療を治療計画コンピュータによって、「制御点」の順序に関して説明する。各「制御点」は、ガントリーの位置、この制御点と次の(前の)制御点との間に送出されるべき線量、及び、制御点でのMLCを決定する。制御点の連続した対の各々は(その間に)、弧セグメント(振子照射セグメント、arc-segment)を決定する。
【0023】
この治療をn番目の制御点と(n+1)番目の制御点との間で実施し、ガントリーをn番目の制御点の位置から(n+1)番目の制御点の位置まで、必要な線量を送出するために組み合わせられた所定の回転速度および線量率で、移動させる。この際、ガントリーが(n+1)番目の制御点にあるとき、リーフがその点について正しい位置にあるようにMLCリーフを移動させる。代表的には、MLCリーフの移動距離が、弧セグメントで照射された線量と常に線型をなして関連する速度でMLCリーフを移動させる。次いで、このプロセスを(n+1)番目の制御点と(n+2)番目の制御点との間の弧セグメントについて繰り返し、これを治療の完了まで実施する。
【0024】
かくして、次の放射線治療装置が提案される。放射線治療装置は、治療用の放射線のビームをビーム軸線に沿って放出することができる線源であって、ビーム軸線と実質的に直交する回転軸線を中心として回転自在であり、これによって軸線を中心とした弧を描く線源と、ビームを所望の形状にコリメートするように(ビームを所望の形状に視準を合わせるように)構成された多分割コリメータと、線源の線量/時間の率、線源の回転速度、および、多分割コリメータの位置を制御することができる制御手段と、を備える。制御手段は、円弧が複数の概念的な弧セグメントに分割されている治療計画であって、弧セグメントについての全体線量ならびにMLCの開始位置および終了位置を特定する治療計画を受け、且つ、計画に従って前記線源を制御するように構成されている。第1の弧セグメントの間、回転速度および線量率の少なくとも一つが一定であるとともに、多分割コリメータが形状を変化させるようになる。また、第2の弧セグメントの間、回転速度および線量率の少なくとも一つが、第1の弧セグメントで採用された一定レベルとは異なるレベルで一定となるようになる。弧セグメントで必要となる全時間であって、弧セグメントの所定の開始時の位置から弧セグメントの所定の終了時の位置までの最大リーフ速度でのMLCリーフ移動と、弧セグメントの開始から終了までの最大線源回転速度での線源の回転と、時間あたり最大の線量率での線量の送出と、を含む複数のファクタについて計算し、且つ、最長時間を示すファクタを選び出し、且つ、選び出されたファクタについてその最大速度で作動し、残りのファクタについて前記最長時間に適合するように選択された減少したペース(率、速度)で作動するように装置を制御することによって、制御手段は線源を制御するように構成されている。
【0025】
制御手段は、典型的には、治療制御コンピュータ及びアクチュエータを含む。
【0026】
放射線治療装置は、好ましくは、治療中に実際に送出された線量、並びに、線源及び/又はMLCの実際の位置をモニターし、これを治療計画と比較し、線源の位置及び/又はMLCの位置及び/又は前記線量の率を制御して、送出された線量と線源位置との間の実際の関係が前記治療計画と実質的に対応するように構成されている。
【0027】
同様に、放射線治療装置は、好ましくは、治療中に実際に送出された線量および患者定位システム(患者配置システム)の実際の位置をモニターし、これを前記治療計画と比較し、患者定位システムの位置及び/又は線量の率を制御して、送出された線量と患者定位システム位置との間の実際の関係が治療計画と実質的に対応するように構成されている。
【0028】
放射線は、好ましくは、第1弧セグメントと第2弧セグメントとの間で中断されない。
【0029】
このようにして、多くの目的についてERDMLCシステムで取り扱うことができるという意味で、実際上ERDMLCに十分に近いシステムが製造される。これによって、(i)線源であって、(a)治療用の放射線のビームをビーム軸線に沿って放出することができ且つ(b)前記ビーム軸線と実質的に一致する回転軸線を中心として回転することができ、これによって前記軸線を中心として弧を描く、線源と、(ii)前記ビームを所望の形状にコリメートするように構成された多分割コリメータと、(iii)前記線源の線量の率、前記線源の回転、および、前記多分割コリメータを制御することができる制御手段と、を有するタイプの放射線治療装置用の治療計画装置が、さらに提案される。この治療計画装置は、所定数のmuを送出することにより、第1の特定の線量を送出するようになされた第1弧セグメントと、第2の特定の線量を送出するようになされた第2弧セグメントを含む。第1弧セグメント中、線源は所定の度(°)である第1の特定の角度だけ回転し、多分割コリメータは第1の特定の角度あたりの率(ペース、速度)で形状を変化させ、第2弧セグメント中、線源は第2の特定の角度回転し、多分割コリメータは第2の特定の角度あたりの率(ペース、速度)で形状を変化させる。第1および第2の特定の線量、前記第1および第2の特定の角度、前記第1および第2の特定の角度あたりの率(ペース、速度)、角度回転(°)あたりのmu、並びに、MLCリーフの移動(mm)あたりのmuの少なくとも一つが、第1弧セグメントおよび第2弧セグメントの間で異なる。
【0030】
ビーム軸線及び線源の回転軸線は、幾何学的単純性のため、実質的に直交していることが好ましい。
【0031】
以上から明らかなように、弧セグメント中、回転速度及び線量率の両方が一定であるのが好ましいが、これらの少なくとも一方が、第1弧セグメント及び第2弧セグメント間で異なる。
【0032】
一般的には、第1弧セグメント及び第2弧セグメントは連続している。しかしながら、個々の連続した弧セグメントが、実際に、回転速度及び線量率が同じ特定の場合がある。しかしながら、本発明による治療計画では、対をなす弧セグメントにおいて、少なくとも一方が異なる。
【0033】
治療計画装置は、勿論、治療計画を放射線治療装置に伝達するため、何らかの形態の出力手段を含む。
【0034】
治療計画装置は、更に、治療中の患者定位システムの移動を含む治療計画を処方する。このシステムの移動は、線源及び/又は線量の送出と相関する方法で行われる。これは、(それ自体)HIMAT治療を提供することができる。
【0035】
次に、本発明の一実施の形態を添付図面を参照して例として説明する。
【図面の簡単な説明】
【0036】
【図1】図1は、治療計画コンピュータからの、リーフ位置及び線量に関する最適化制御点を示すグラフである。
【図2】図2は、治療計画コンピュータからの、ガントリー位置及び治療の進捗に従って送出される線量に関する最適化制御点を、一定の角度あたりのmuが一定であるとの条件での近似とともに、示すグラフである。
【図3】図3は、線量率に関する図2の制御点の効果を、同様の近似とともに、示すグラフである。
【図4】図4は、線量率(実線)及び回転速度(破線)の理想的計算を示すグラフである。
【図5】図5は、連続可変線量率がないシステムの線量率(実線)及び回転速度(破線)の実際の計算を示すグラフである。
【図6】図6は、コンピュータ間の関係を示している。
【発明を実施するための形態】
【0037】
所望の治療を、治療計画コンピュータによって一連の「制御点」に関連して説明する。各「制御点」は、ガントリーの位置、この制御点と次の制御点(又は前の制御点)との間に送出されるべき線量、および、当該制御点でのMLCの形状(態様)を定義する。連続した対をなした各制御点は(それらの制御点間に)弧セグメント(arc-segment:(振子照射セグメント)) を形成する。
【0038】
制御点は(理論的に)、全円弧に亘って戦略的に間隔が隔てられていてもよい。しかしながら、利用可能な演算処理能力が比較的低い場合、これを行おうとする上で利点はほとんどない。従って、制御点は、代表的には、円弧に亘って、度(°)毎に、数度毎に、又は数分の一度毎に等間隔に間隔が隔てられている。
【0039】
ガントリーを、n番目の制御点の位置から(n+1)番目の制御点の位置の位置まで、所定の回転速度及び所要の線量の送出と関連した線量率で移動することによって、この治療を、n番目の制御点と(n+1)番目の制御点との間で実施する。この際、ガントリーが(n+1)番目の制御点の位置にあるとき、MLCリーフがその点について正しい位置にあるようにMLCリーフを実質的に一定の速度で移動させる。このプロセスは、n=1で開始し、次いで、(n+1)番目の制御点と(n+2)番目の制御点との間の弧セグメントについて繰り返し、これを治療の完了まで実施する。
【0040】
図1及び図2は、治療についての制御点のパターンを示す。図1は、特定のMLCリーフの位置に関し、制御点の詳細を治療の進捗に従ってグラフで示す。治療中、送出された総mu線量を追跡し、リーフを最初に延長し、引っ込め、次いで再び延長する。破線は、次の制御点に達したときにリーフが所望の位置にあるように制御装置がリーフを制御点間で一定の速度で移動させる場合のリーフの瞬間的な位置を示す。80枚(代表的には)のリーフの各々について同様のグラフが存在する。これらのグラフの各々は、一般的には、制御点が6個以上あり、45°、90°、又は180°の制御点がある。
【0041】
図2は、ガントリーの回転時に送出される総線量に関する制御点の詳細を示す。かくして、これらの制御点は、単調上昇目盛上に記してある。しかしながら、連続した制御点間の増大量は、場合によっては比較的多くの放射線が送出され、そして場合によっては比較的少量の放射線が送出されるガントリー角度と対応して変化する。比較的少量の放射線が送出されるガントリー角度は、ターゲット構造が重要な構造によって隠される角度と対応する。送出される線量は、線量率毎時又はガントリー回転速度のいずれか又はこれらの両方を変化させることにより変化させることができる。明らかに、回転速度を上昇することによって、又は線量率を減少させることによって、所定の位置範囲間に送出される累積線量を減少させることができる。図2は、角度あたりのmu率が一定であることを条件とすることによって与えられる近似を破線で示す。これは、フレキシビリティを低下させ、最適以下の線量分布又はMLC位置によって変化を吸収することのいずれかを必要とし、これによって治療時間が延びてしまう。
【0042】
図3は、各ガントリー角度での線量率に関する図2の結果を示す。幾つかのガントリー角度では、線量率が高く、これはターゲット構造の明瞭な画像が得られるということを示す。他のガントリー角度では、線量率が大幅に減少する。これは、ターゲットが重要な構造によって隠されるということを示す。
【0043】
かくして、図1、図2および図3は、従来既知の装置によって課せられる制限がない、治療計画コンピュータによって開発された治療計画を示す。この場合も、放射線治療装置の治療制御コンピュータが、治療計画を、ガントリーの移動、線量率およびMLCの移動(変形)からなる組に変換する。
【0044】
この場合、各弧セグメントが送出され得る最少時間は、線量、ガントリー、又は、MLCのリーフのうちの任意の一つのリーフによって、決定されてもよい。かくして、
最小線量時間=制御点間線量/最大線量率
最小ガントリー時間=ガントリー移動距離/最大ガントリー速度
最小リーフ時間=リーフの移動距離/最大リーフ速度
(移動するリーフの各々について考える)
【0045】
この場合、弧セグメントについての最小時間は、これらの全ての最小値のうちの最も高い値である。このことは、ガントリー、線量、又は80枚のリーフのうちのいずれかがなり得る時間を制約するパラメータ(time limiting parameter)を決定する。
【0046】
線量が時間を制限するパラメータではない場合には、所望の線量率を選択することができ、以下のように計算が行われる。
所望の線量率=制御点線量/最小時間
【0047】
線量が時間を制限するパラメータである場合には、選択された線量率は、勿論、最大線量率である。
【0048】
次いで、ガントリー及びリーフの予想速度を選択された線量率から以下のように計算することができる。
予想弧セグメント時間=制御点線量/選択された線量率
予想ガントリー速度=ガントリー移動距離/予想弧セグメント時間
そして、MLCの各リーフについて、
予想リーフ速度=リーフ移動距離/予想弧セグメント時間
【0049】
図4は、例示の目的でMLCリーフ速度の影響を無視した、線量率とガントリー速度との間の選択を示す。x軸は、実現される角度あたりの線量率であり、これは、二つの制御点間で送出された累積線量と対応する。実線は線量率であり、破線はガントリー回転速度である。これらは、両方とも、使用される特定の装置の制限によって最大のペース(率および速度)が与えられる。かくして、最大回転速度および最大線量率(単位時間当たり)で作動する装置によって、単位回転当たりの線量Dが達成される。
【0050】
Dよりも高い単位回転当たり線量を達成するため、回転速度を反比例して増大させなければならず、従って、この領域での回転速度(破線参照)は、1/xプロファイルを示し、この際、線量率(実線参照)は一定である。単位回転当たり線量をDよりも小さくするためには、線量率を図示のように比例して減少させなければならない。
【0051】
従って、図4は、以上の計算をグラフの形態で示す。
【0052】
幾つかの放射線治療装置は、実際には、連続的に可変の線量率を発生しないということに着目しなければならない。その代わり、線量率は、多くの予備設定レベルのうちの一つを採用することしかできない。そのような場合、所望の線量率よりも低い利用可能な最高線量率を選択しなければならない。他方のファクタは、上述のように決定される。
【0053】
これを図5に示す。これは、線量率が線型の図4の領域において、線量率を、段階的に、最大線量率まで強制的に上昇することを除き、図4と対応している。これを、最大線量率についてだけ補償するのでなく、各段階について一連の1/x曲線を採用した回転速度プロファイルによって補償する。かくして、単位時間当たりの線量率を連続的に変化しない装置を使用することにより、必要とされる治療時間に関して問題点が生じるが、線量分布については問題点が生じない。
【0054】
理想的には、実際の位置は、実際に送出された線量に合わせて制御され、これにより、実際の速度は予想速度から僅かに変化する。しかしながら、予想速度は、サーボ装置の最適な作動を確実にする上で非常に有用なパラメータである。
【0055】
このようにして、多くの目的についてERDMLCシステムとして取り扱うことができるという意味で、実際上ERDMLCに十分に近いシステムが製造され得る。
【0056】
図6は、システムに含まれる様々なコンピュータ間の関係を示す。治療計画コンピュータは、治療を決定する治療計画を生成し、これを治療制御コンピュータに送る。これにより、各弧セグメント(各振子照射)について、いずれのファクタが時間を制限するファクタであるのかが確認される。この結果、MLC制御コンピュータ、ガントリー制御コンピュータ、及び、放射線制御コンピュータの各々に対して、それらの特定のアイテムの当該弧セグメント中の動作についての指示を行うことができる。
【0057】
実際には、例示のコンピュータの各々が別体のコンピュータで存在すべきであるのか、或いは、例示のコンピュータの幾つか又は全てが単一のプロセッサに組み込まれるべきであるのか、を決定することが必要とされる。この決定は、予想計算負荷及び利用可能な演算処理能力のパターンに基づいて行われる。
【0058】
このような治療計画は、現在使用されているのと実質的に同様の放射線治療機械で実施され得る。本発明との物理的相違は、制御装置および治療計画装置、即ち実際の放射ヘッド及びその駆動手段である。そのMLC及び他のシステムは、現在使用されているものであってもよい。しかしながら、装置には、この方法での機械の作動に関しての有用な特定の変更が加えられている。
【0059】
第1に、放射ヘッド用リールシステムには、360°以上に亘って2回転又は3回転又はそれ以上移動することができるという利点がある。これにより、オペレータは、IMAT振子照射で3回又はそれ以上、停止なしで治療することができ、更に、連続した振子照射で患者を下から撮影することができ且つ治療することができる。
【0060】
第2に、好ましくはボアの内側端を閉鎖したCT機又はMR機と同様に、機械全体を一組のカバーに収めることを提案する。可動部品を包囲することにより、危険な衝突の可能性をなくし、従って、ガントリーの速度を1RPMから少なくとも2RPM、場合によっては5RPM又は6RPMまで、かなり容易に増大することができる。これにより、治療時間を大幅に低減することができる。更に、速度を増大することにより、コーンビーム画像捕捉(Cone Beam image acquisition) についての新たな選択肢を提供する。例えば、息を一回止めている間に画像を捕捉することができ、これによって、呼吸運動によるアーチファクト(人為的な悪影響)をなくす。
【0061】
最後に、高い回転速度での治療時間を更に短くするため、ビームの経路中に通常配置されているフラット化フィルタ(flattening filter) をなくすことを提案する。これは、デバイスの穴を横切る放射線の強さを更に均等にするためである。これらのフィルタは、もちろん、穴の中央領域のビームの強さを減少させるように作用し、従って、均一性及び全体線量との間での妥協を図る。その代りに、フラットではない又は不均等なビームを治療計画のために特徴付け及び補償してもよい。これにより、ビームの強さの不均等に関する困難をなくす。これは、他の治療パラメータで調節が行われるためであり、調節により、治療時間を、放射線の「回収」と比例して減少させることができるためである。これは、他の態様では、フラット化フィルタによって除去される。
【0062】
もちろん、本発明の範囲から逸脱することなく、上述の実施の形態に多くの変更を加えることができるということは理解されよう。
【特許請求の範囲】
【請求項1】
治療用の放射線のビームをビーム軸線に沿って放出することができる線源であって、前記ビーム軸線と実質的に直交する回転軸線を中心として回転自在であり、これによって前記軸線を中心とした弧を描く線源と、
前記ビームを所望の形状にコリメートするように構成された多分割コリメータと、
前記線源の線量/時間の率、前記線源の回転速度、および、前記多分割コリメータの位置を制御することができる制御手段と、を備え、
前記制御手段は、
前記弧が複数の概念的な弧セグメントに分割されている治療計画であって、前記弧セグメントについての全体線量ならびにMLCの開始位置および終了位置を特定する治療計画を受け、且つ、
一つの弧セグメントにわたり前記計画に従って前記線源を制御する
ように構成されており、
前記制御手段は、
前記一つの弧セグメントで必要となる全時間であって、
i.当該弧セグメントの所定の開始時の位置から当該弧セグメントの所定の終了時の位置までの、最大リーフ速度でのMLCリーフの移動、
ii.当該弧セグメントの開始から終了までの、最大線源回転速度での前記線源の回転、および、
iii.時間あたり最大の線量率での前記線量の送出
を含む複数のファクタについて計算し、且つ、
最長時間を示すファクタを選び出し、且つ、
選び出されたファクタについてその最大速度で作動し、残りのファクタについて前記最長時間に適合するように選択された減少したペースで作動するように装置を制御する
ことによって前記計画に従って前記線源を制御する
ことを特徴とする放射線治療装置。
【請求項2】
前記制御手段は、治療制御コンピュータおよびアクチュエータを含む
ことを特徴とする請求項1に記載の放射線治療装置。
【請求項3】
前記放射は、第1の弧セグメントと第2の弧セグメントとの間で中断しない
ことを特徴とする請求項1または2に記載の放射線治療装置。
【請求項4】
治療中に実際に送出された線量および前記線源の実際の位置をモニターし、
これを前記治療計画と比較し、および、
前記線源の位置及び/又は前記線量の率を制御して、送出された線量と線源位置との間の実際の関係が前記治療計画と実質的に対応する
ように構成されている
ことを特徴とする請求項1〜3のいずれか一項に記載の放射線治療装置。
【請求項5】
治療中に実際に送出された線量および前記MLCの実際の位置をモニターし、
これを前記治療計画と比較し、および
前記MLCの位置及び/又は前記線量の率を制御して、送出された線量とMLC位置との間の実際の関係が前記治療計画と実質的に対応する
ように構成されている
ことを特徴とする請求項1〜3のいずれか一項に記載の放射線治療装置。
【請求項6】
治療中に実際に送出された線量および患者定位システムの実際の位置をモニターし、
これを前記治療計画と比較し、および
前記患者定位システムの位置及び/又は前記線量の率を制御して、送出された線量と患者定位システム位置との間の実際の関係が前記治療計画と実質的に対応する
ように構成されている
ことを特徴とする請求項1〜3のいずれか一項に記載の放射線治療装置。
【請求項7】
(i)線源であって、(a)治療用の放射線のビームをビーム軸線に沿って放出することができ且つ(b)前記ビーム軸線と実質的に一致する回転軸線を中心として回転することができ、これによって前記軸線を中心として弧を描く、線源と、
(ii)前記ビームを所望の形状にコリメートするように構成された多分割コリメータと、
(iii)前記線源の線量の率、前記線源の回転、および、前記多分割コリメータを制御することができる制御手段と、を有するタイプの放射線治療装置用の治療計画装置であって、
前記治療計画装置は、前記弧を複数の概念的な弧セグメントに分割し、第1の特定の線量を送出するようになされた第1弧セグメントと第2の特定の線量を送出するようになされた第2弧セグメントとを有する治療計画を準備するように構成されており、
前記第1弧セグメント中、前記線源は第1の特定の角度回転し、前記多分割コリメータは第1の特定の角度あたりの率で形状を変化させるようになり、
前記第2弧セグメント中、前記線源は第2の特定の角度回転し、前記多分割コリメータは第2の特定の角度あたりの率で形状を変化させるようになり、
前記第1および第2の特定の線量、前記第1および第2の特定の角度、並びに、前記第1および第2の特定の角度あたりの率の少なくとも一つが、前記第1弧セグメントおよび第2弧セグメントの間で異なるようになる
ことを特徴とする治療計画装置。
【請求項8】
一つの弧セグメント中、前記回転速度および前記線量の率は両方とも一定であり、
これらの少なくとも一つが、前記第1弧セグメントおよび第2弧セグメントの間で異なる
ことを特徴とする請求項7に記載の治療計画装置。
【請求項9】
前記第1弧セグメントおよび前記第2弧セグメントは連続している
ことを特徴とする請求項7または8に記載の治療計画装置。
【請求項10】
前記治療計画を前記放射線治療装置に伝達するための出力手段を含む
ことを特徴とする請求項7〜9のいずれか一項に記載の治療計画装置。
【請求項11】
必要な線量を送出するようになされた各弧セグメントについての照射時間を計算し、前記照射時間から回転速度を推定するように構成されている
ことを特徴とする請求項7〜10のいずれか一項に記載の治療計画装置。
【請求項12】
治療中の患者定位システムの動作を含む治療計画を、前記線源の動きと相関して規定するように構成されている
ことを特徴とする請求項7〜11のいずれか一項に記載の治療計画装置。
【請求項13】
治療中の患者定位システムの動作を含む治療計画を、前記線量の送出と相関して規定するように構成されている
ことを特徴とする請求項7〜11のいずれか一項に記載の治療計画装置。
【請求項14】
前記ビーム軸線および前記線源の前記回転軸線は実質的に直交している
ことを特徴とする請求項7〜13のいずれか一項に記載の治療計画装置。
【請求項15】
実質的に、添付図面を参照して本明細書中に説明された及び/又は添付図面に示された放射線治療装置。
【請求項1】
治療用の放射線のビームをビーム軸線に沿って放出することができる線源であって、前記ビーム軸線と実質的に直交する回転軸線を中心として回転自在であり、これによって前記軸線を中心とした弧を描く線源と、
前記ビームを所望の形状にコリメートするように構成された多分割コリメータと、
前記線源の線量/時間の率、前記線源の回転速度、および、前記多分割コリメータの位置を制御することができる制御手段と、を備え、
前記制御手段は、
前記弧が複数の概念的な弧セグメントに分割されている治療計画であって、前記弧セグメントについての全体線量ならびにMLCの開始位置および終了位置を特定する治療計画を受け、且つ、
一つの弧セグメントにわたり前記計画に従って前記線源を制御する
ように構成されており、
前記制御手段は、
前記一つの弧セグメントで必要となる全時間であって、
i.当該弧セグメントの所定の開始時の位置から当該弧セグメントの所定の終了時の位置までの、最大リーフ速度でのMLCリーフの移動、
ii.当該弧セグメントの開始から終了までの、最大線源回転速度での前記線源の回転、および、
iii.時間あたり最大の線量率での前記線量の送出
を含む複数のファクタについて計算し、且つ、
最長時間を示すファクタを選び出し、且つ、
選び出されたファクタについてその最大速度で作動し、残りのファクタについて前記最長時間に適合するように選択された減少したペースで作動するように装置を制御する
ことによって前記計画に従って前記線源を制御する
ことを特徴とする放射線治療装置。
【請求項2】
前記制御手段は、治療制御コンピュータおよびアクチュエータを含む
ことを特徴とする請求項1に記載の放射線治療装置。
【請求項3】
前記放射は、第1の弧セグメントと第2の弧セグメントとの間で中断しない
ことを特徴とする請求項1または2に記載の放射線治療装置。
【請求項4】
治療中に実際に送出された線量および前記線源の実際の位置をモニターし、
これを前記治療計画と比較し、および、
前記線源の位置及び/又は前記線量の率を制御して、送出された線量と線源位置との間の実際の関係が前記治療計画と実質的に対応する
ように構成されている
ことを特徴とする請求項1〜3のいずれか一項に記載の放射線治療装置。
【請求項5】
治療中に実際に送出された線量および前記MLCの実際の位置をモニターし、
これを前記治療計画と比較し、および
前記MLCの位置及び/又は前記線量の率を制御して、送出された線量とMLC位置との間の実際の関係が前記治療計画と実質的に対応する
ように構成されている
ことを特徴とする請求項1〜3のいずれか一項に記載の放射線治療装置。
【請求項6】
治療中に実際に送出された線量および患者定位システムの実際の位置をモニターし、
これを前記治療計画と比較し、および
前記患者定位システムの位置及び/又は前記線量の率を制御して、送出された線量と患者定位システム位置との間の実際の関係が前記治療計画と実質的に対応する
ように構成されている
ことを特徴とする請求項1〜3のいずれか一項に記載の放射線治療装置。
【請求項7】
(i)線源であって、(a)治療用の放射線のビームをビーム軸線に沿って放出することができ且つ(b)前記ビーム軸線と実質的に一致する回転軸線を中心として回転することができ、これによって前記軸線を中心として弧を描く、線源と、
(ii)前記ビームを所望の形状にコリメートするように構成された多分割コリメータと、
(iii)前記線源の線量の率、前記線源の回転、および、前記多分割コリメータを制御することができる制御手段と、を有するタイプの放射線治療装置用の治療計画装置であって、
前記治療計画装置は、前記弧を複数の概念的な弧セグメントに分割し、第1の特定の線量を送出するようになされた第1弧セグメントと第2の特定の線量を送出するようになされた第2弧セグメントとを有する治療計画を準備するように構成されており、
前記第1弧セグメント中、前記線源は第1の特定の角度回転し、前記多分割コリメータは第1の特定の角度あたりの率で形状を変化させるようになり、
前記第2弧セグメント中、前記線源は第2の特定の角度回転し、前記多分割コリメータは第2の特定の角度あたりの率で形状を変化させるようになり、
前記第1および第2の特定の線量、前記第1および第2の特定の角度、並びに、前記第1および第2の特定の角度あたりの率の少なくとも一つが、前記第1弧セグメントおよび第2弧セグメントの間で異なるようになる
ことを特徴とする治療計画装置。
【請求項8】
一つの弧セグメント中、前記回転速度および前記線量の率は両方とも一定であり、
これらの少なくとも一つが、前記第1弧セグメントおよび第2弧セグメントの間で異なる
ことを特徴とする請求項7に記載の治療計画装置。
【請求項9】
前記第1弧セグメントおよび前記第2弧セグメントは連続している
ことを特徴とする請求項7または8に記載の治療計画装置。
【請求項10】
前記治療計画を前記放射線治療装置に伝達するための出力手段を含む
ことを特徴とする請求項7〜9のいずれか一項に記載の治療計画装置。
【請求項11】
必要な線量を送出するようになされた各弧セグメントについての照射時間を計算し、前記照射時間から回転速度を推定するように構成されている
ことを特徴とする請求項7〜10のいずれか一項に記載の治療計画装置。
【請求項12】
治療中の患者定位システムの動作を含む治療計画を、前記線源の動きと相関して規定するように構成されている
ことを特徴とする請求項7〜11のいずれか一項に記載の治療計画装置。
【請求項13】
治療中の患者定位システムの動作を含む治療計画を、前記線量の送出と相関して規定するように構成されている
ことを特徴とする請求項7〜11のいずれか一項に記載の治療計画装置。
【請求項14】
前記ビーム軸線および前記線源の前記回転軸線は実質的に直交している
ことを特徴とする請求項7〜13のいずれか一項に記載の治療計画装置。
【請求項15】
実質的に、添付図面を参照して本明細書中に説明された及び/又は添付図面に示された放射線治療装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−161662(P2012−161662A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−101576(P2012−101576)
【出願日】平成24年4月26日(2012.4.26)
【分割の表示】特願2009−506917(P2009−506917)の分割
【原出願日】平成18年4月27日(2006.4.27)
【出願人】(500321704)エレクタ、アクチボラグ (18)
【氏名又は名称原語表記】ELEKTA AB
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2012−101576(P2012−101576)
【出願日】平成24年4月26日(2012.4.26)
【分割の表示】特願2009−506917(P2009−506917)の分割
【原出願日】平成18年4月27日(2006.4.27)
【出願人】(500321704)エレクタ、アクチボラグ (18)
【氏名又は名称原語表記】ELEKTA AB
【Fターム(参考)】
[ Back to top ]