
放射線照射方法および放射線治療装置制御装置
【課題】被検体に照射される治療用放射線を放射する治療用放射線照射装置が配置される範囲を拡大すること。
【解決手段】治療用放射線を放射する治療用放射線照射装置の位置をセンサ36〜40から収集するステップと、治療用放射線照射装置が移動しているときの速度がその位置に基づいて変化するように、治療用放射線照射装置を駆動する駆動装置31〜35を制御するステップとを備えている。このような放射線照射方法は、その治療用放射線照射装置に伴って移動する機器が他の機器の近傍に位置するときに遅く移動するように設定されているときに、その機器が衝突するときの衝撃を緩和することができる。このため、このような放射線照射方法は、その衝突を防止するために治療用放射線照射装置が移動することを禁止するマージンを大きく設定する必要がなく、治療用放射線照射装置が移動することができる範囲を拡大することができる。
【解決手段】治療用放射線を放射する治療用放射線照射装置の位置をセンサ36〜40から収集するステップと、治療用放射線照射装置が移動しているときの速度がその位置に基づいて変化するように、治療用放射線照射装置を駆動する駆動装置31〜35を制御するステップとを備えている。このような放射線照射方法は、その治療用放射線照射装置に伴って移動する機器が他の機器の近傍に位置するときに遅く移動するように設定されているときに、その機器が衝突するときの衝撃を緩和することができる。このため、このような放射線照射方法は、その衝突を防止するために治療用放射線照射装置が移動することを禁止するマージンを大きく設定する必要がなく、治療用放射線照射装置が移動することができる範囲を拡大することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、放射線照射方法および放射線治療装置制御装置に関し、特に、患部に放射線を照射することにより患者を治療するときに利用される放射線照射方法および放射線治療装置制御装置に関する。
【背景技術】
【0002】
患部(腫瘍)に治療用放射線を照射することにより患者を治療する放射線治療が知られている。その放射線治療では、その患部に互いに異なる方向から治療用放射線が照射される。その放射線治療を実行する放射線治療装置は、カウチと治療用放射線照射装置と駆動装置とを備えている。ユーザは、その患者をそのカウチに寝かせ、その駆動装置を用いて治療用放射線照射装置を所定の位置に駆動して、その治療用放射線照射装置を用いて治療用放射線を患者の患部に照射する。このような放射線治療装置は、その治療用放射線照射装置が駆動されているときに、放射線治療装置の一部が他の一部とぶつからないように、または、放射線治療装置の一部が患者とぶつからないように、治療用放射線照射装置が駆動される範囲が制限されている。治療用放射線照射装置が駆動される範囲を拡大することが望まれている。
【0003】
特開平10−258049号公報には、寝台を被検者の体重も考慮した操作力で、軽く自由に動かすことのできる制御系を構成し、その操作力を任意に制御できる装置を提供し、かつ通常のX線CT検査を始め、その他の種々の検査や治療にも対応できる寝台の動作も可能とする医用診断装置の寝台制御装置が開示されている。その医用診断装置の寝台制御装置は、被検者を寝載する寝台を制御する医用診断装置の寝台制御装置において、前記寝台の位置を検出する寝台位置検出手段と、この寝台位置検出手段の位置検出信号を用いて前記寝台の位置を制御する寝台位置制御手段と、前記寝台を操作する操作者の操作力を検出する操作者操作力検出手段と、この操作者操作力検出手段の出力を用いて前記寝台の操作力を制御する寝台操作力制御手段とを備えて成る。
【0004】
特開平11−137542号公報には、寝台が移動しても周囲の障害物との衝突を回避し、決められた領域内の任意の位置に位置決めできる医用診断装置の寝台制御装置が開示されている。その医用診断装置の寝台制御装置は、被検者を寝載する寝台と、前記寝台の位置を検出する寝台位置検出手段と、この寝台位置検出手段の位置検出信号を用いて前記寝台の位置を制御する寝台位置制御手段と、前記寝台の操作者の操作力を検出する操作者操作力検出手段と、この操作者操作力検出手段の出力を用いて前記寝台の操作力を制御する寝台操作力制御手段とを備えて成る医用診断装置の寝台制御装置において、前記寝台の移動範囲を設定する移動範囲設定手段を設け、前記寝台が前記移動範囲設定手段により設定された移動範囲内にあるときのみ前記寝台操作力制御手段により寝台の操作力を制御することを特徴とする。
【0005】
特開平11−137543号公報には、術式や疾患部位あるいは操作者に応じた操作力で操作できるようにして、寝台の位置決め時の操作性の向上を図ることができる医用診断装置の寝台制御装置が開示されている。その医用診断装置の寝台制御装置は、被検者を寝載する寝台と、この寝台の操作力を検出する操作力検出手段と、前記寝台の移動速度を検出する移動速度検出手段と、前記寝台の位置を検出する位置検出手段とを備え、前記寝台を操作する操作者の操作力指令値が前記操作力検出手段の出力に一致するように前記寝台の操作力を制御する寝台操作力制御手段を備えた医用診断装置の寝台制御装置において、前記寝台操作力制御手段に前記操作力指令値と前記寝台の移動速度の関係を任意に選択できる操作力指令値−移動速度関係選択手段を備えたことを特徴とする。
【0006】
特開2000−222019号公報には、経路生成や速度生成等のように性質の異なる作業を同一の座標上で処理しないようにする機構制御装置が開示されている。その機構制御装置は、機械の動作を制御する装置の座標系において、経路を生成する経路生成座標系と、生成された経路上の速度を演算する速度生成座標系と、経路生成に必要な補助点を生成する補助点生成座標系と、機械の作動可能範囲を設定する干渉チェック座標系とを備え、上記経路生成座標系と速度生成座標系と、補助点生成座標系と干渉チェック座標系の4つの座標系の内少なくとも1つの座標系を他の座標系から独立した座標系に設定可能としたことを特徴とする。
【0007】
特開2006−174885号公報には、短期間で照射計画を立案することが出来る放射線治療装置の照射計画装置が開示されている。その放射線治療装置は、患者を載せるための治療用寝台と、前記治療用寝台に載せられた前記患者の患部に向けて治療用放射線を照射するためのガントリーと、アイソセンタに位置された前記患者の患部に対して放射線を照射するための照射計画を立案するための照射計画装置とを具備し、前記照射計画装置へ前記患者の載せられた前記治療用寝台の位置情報、前記患者の体輪郭の情報、前記ガントリーの形状データおよび前記治療用寝台の形状データが入力され、前記照射計画装置は、前記ガントリーの形状データ、前記治療用寝台の形状データ、前記治療用寝台の位置情報および前記患者の前記体輪郭の情報から前記ガントリーと前記治療用寝台および前記患者とが物理的に干渉しない前記ガントリーから照射される放射線の放射軸角度を算出する。
【0008】
【特許文献1】特開平10−258049号公報
【特許文献2】特開平11−137542号公報
【特許文献3】特開平11−137543号公報
【特許文献4】特開2000−222019号公報
【特許文献5】特開2006−174885号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明の課題は、被検体に照射される治療用放射線を放射する治療用放射線照射装置が配置される範囲を拡大する放射線照射方法および放射線治療装置制御装置を提供することにある。
本発明の他の課題は、被検体に照射される治療用放射線を放射する治療用放射線照射装置を駆動する操作をより容易にする放射線照射方法および放射線治療装置制御装置を提供することにある。
本発明のさらに他の課題は、被検体に照射される治療用放射線を放射する治療用放射線照射装置をより確実に所定の速度で駆動する放射線照射方法および放射線治療装置制御装置を提供することにある。
【課題を解決するための手段】
【0010】
以下に、発明を実施するための最良の形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための最良の形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0011】
本発明による放射線照射方法は、治療用放射線を放射する治療用放射線照射装置の位置をセンサ(36〜40)から収集するステップと、その治療用放射線照射装置が移動しているときの速度がその位置に基づいて変化するように、その治療用放射線照射装置を駆動する駆動装置(31〜35)を制御するステップとを備えている。このような放射線照射方法は、その治療用放射線照射装置に伴って移動する機器が他の機器の近傍に位置するときに遅く移動するように設定されているときに、その機器が衝突するときの衝撃を緩和することができる。このため、このような放射線照射方法は、その衝突を防止するためにその治療用放射線照射装置が移動することを禁止するマージンを大きく設定する必要がなく、その治療用放射線照射装置が移動することができる範囲を拡大することができ、被検体の照射部位にその治療用放射線を照射することができる方向をより増加することができる。
【0012】
本発明による放射線照射方法は、入力装置(23、24)の所定の操作に応答して治療用放射線照射装置が停止するように駆動装置(31〜35)を制御するステップをさらに備えている。このような放射線照射方法によれば、ユーザは、遅く移動するように設定されている領域をその治療用放射線照射装置が移動しているときに、その治療用放射線照射装置をより容易に所望の位置に停止させることができる。
【0013】
本発明による放射線照射方法は、その治療用放射線が照射される被検体が配置されるカウチ(21)のカウチ位置を収集するステップをさらに備えている。このとき、駆動装置(31〜35)は、そのカウチ位置にさらに基づいてその速度が変化するように制御されることが好ましく、たとえば、カウチ(21)に対する治療用放射線照射装置の相対位置に基づいてその速度が変化するように制御されることが好ましい。
【0014】
駆動装置(31〜35)は、領域集合(58)を速度集合(59、60)に対応付ける干渉テーブル(55)を参照して、速度集合(59、60)のうちの治療用放射線照射装置が配置される領域に対応する対応速度で治療用放射線照射装置が移動するように、制御されることが好ましい。
【0015】
本発明による放射線照射方法は、その治療用放射線照射装置が領域集合(58)のうちの第1速度に対応する第1領域から領域集合(58)のうちの第1速度より小さい第2速度に対応する第2領域に移動するときに、治療用放射線照射装置が第1領域に配置される期間のうちから速度変更開始タイミングを算出するステップと、その速度変更開始タイミングに到達したときに、その治療用放射線照射装置が減速するように駆動装置(31〜35)を制御するステップとをさらに備えている。このような放射線照射方法は、その治療用放射線照射装置を第2領域で第2速度以下でより確実に移動させることができる。
【0016】
本発明による放射線治療装置制御装置(2)は、治療用放射線を放射する治療用放射線照射装置の位置をセンサ(36〜40)から収集する位置収集部(42)と、その治療用放射線照射装置が移動しているときの速度が位置に基づいて変化するように、その治療用放射線照射装置を駆動する駆動装置(31〜35)を制御する駆動装置制御部(43)とを備えている。このような放射線治療装置制御装置(2)は、その治療用放射線照射装置に伴って移動する機器が他の機器の近傍に位置するときに遅く移動するように設定されているときに、その機器が衝突するときの衝撃を緩和することができる。このため、このような放射線治療装置制御装置(2)は、その衝突を防止するためにその治療用放射線照射装置が移動することを禁止するマージンを大きく設定する必要がなく、その治療用放射線照射装置が移動することができる範囲を拡大することができ、被検体の照射部位にその治療用放射線を照射することができる方向をより増加することができる。
【0017】
駆動装置制御部(43)は、さらに、入力装置(23、24)の所定の操作に応答して治療用放射線照射装置が停止するように駆動装置(31〜35)を制御する。このような放射線治療装置制御装置(2)によれば、ユーザは、遅く移動するように設定されている領域をその治療用放射線照射装置が移動しているときに、その治療用放射線照射装置をより容易に所望の位置に停止させることができる。
【0018】
位置収集部(42)は、その治療用放射線が照射される被検体が配置されるカウチ(21)のカウチ位置をさらに収集する。このとき、駆動装置(31〜35)は、そのカウチ位置にさらに基づいてその速度が変化するように制御されることが好ましく、たとえば、カウチ(21)に対する治療用放射線照射装置の相対位置に基づいてその速度が変化するように制御されることが好ましい。
【0019】
駆動装置制御部(43)は、領域集合(58)を速度集合(59、60)に対応付ける干渉テーブル(55)を記録装置に記録する干渉テーブル記憶部(51)と、干渉テーブル(55)を参照して、速度集合(59、60)のうちの治療用放射線照射装置が配置される領域に対応する対応速度で治療用放射線照射装置が移動するように、駆動装置(31〜35)を制御する速度制御部(53)とを備えていることが好ましい。
【0020】
駆動装置制御部(43)は、その治療用放射線照射装置が領域集合(58)のうちの第1速度に対応する第1領域から領域集合(58)のうちの第1速度より小さい第2速度に対応する第2領域に移動するときに、その治療用放射線照射装置が第1領域に配置される期間のうちから速度変更開始タイミングを算出する干渉領域到達判定部(52)をさらに備えている。速度制御部(53)は、その速度変更開始タイミングに到達したときに、その治療用放射線照射装置が減速するように駆動装置(31〜35)を制御する。このような放射線照射方法は、その治療用放射線照射装置を第2領域で第2速度以下でより確実に移動させることができる。
【0021】
本発明による放射線治療システム(1)は、本発明による放射線治療装置制御装置(2)と、駆動装置(31〜35)とその治療用放射線照射装置とを備えている放射線治療装置(3)とを備えていることが好ましい。
【発明の効果】
【0022】
本発明による放射線照射方法および放射線治療装置制御装置は、被検体に照射される治療用放射線を放射する治療用放射線照射装置が配置される範囲を拡大することができる。
【発明を実施するための最良の形態】
【0023】
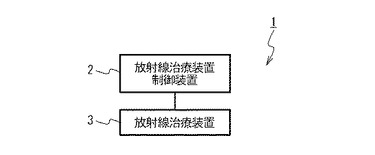
図面を参照して、本発明による放射線治療システムの実施の形態を記載する。その放射線治療システム1は、図1に示されているように、放射線治療装置制御装置2と放射線治療装置3とを備えている。放射線治療装置制御装置2は、パーソナルコンピュータに例示されるコンピュータである。放射線治療装置制御装置2は、双方向に情報を伝送することができるように放射線治療装置3に接続されている。
【0024】
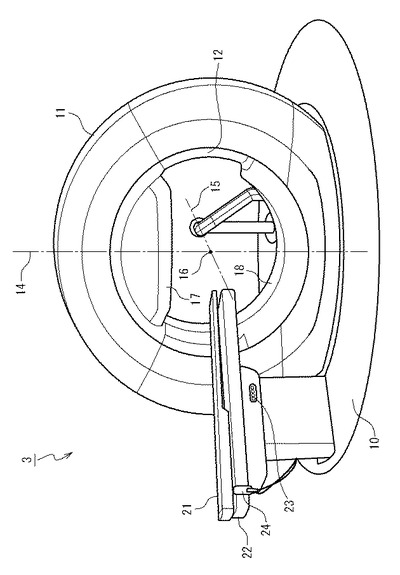
図2は、放射線治療装置3を示している。放射線治療装置3は、Oリング11と走行ガントリ12とを備えている。Oリング11は、回転軸14を中心に回転可能にOリング11を土台10に支持されている。回転軸14は、鉛直方向に平行である。Oリング11は、回転軸15を中心とするリング状に形成され、回転軸15を中心に回転可能に走行ガントリ12を支持している。回転軸15は、鉛直方向に垂直であり、回転軸14に含まれるアイソセンタ16を通る。回転軸15は、さらに、Oリング11に対して固定され、すなわち、Oリング11とともに回転軸14を中心に回転する。走行ガントリ12は、回転軸15を中心とするリング状に形成され、Oリング11のリングと同心円になるように配置されている。
【0025】
走行ガントリ12は、ケーシング17とケーシング18とを備えている。ケーシング17は、内部に図示されていない治療用放射線照射装置と2つの診断用X線源とを備えている。その治療用放射線照射装置は、放射線治療装置制御装置2により制御されて、治療用放射線を放射する。その治療用放射線は、一様強度分布を持つように形成されている。その治療用放射線は、さらに、一部が遮蔽されて治療用放射線が患者に照射されるときの照射野の形状が制御されている。その治療用放射線照射装置は、その治療用放射線がアイソセンタ16に向かうように走行ガントリ12に支持されている。このような治療用放射線照射装置によれば、その治療用放射線は、土台10に対してOリング11が回転し、または、Oリング11に対して走行ガントリ12が回転しても、常に概ねアイソセンタ16を通る。すなわち、放射線治療装置3は、土台10に対してOリング11を回転させ、または、Oリング11に対して走行ガントリ12を回転させることにより、任意方向からアイソセンタ16に向けて治療用放射線を照射することができる。
【0026】
その診断用X線源は、それぞれ、走行ガントリ12に支持され、アイソセンタ16から診断用X線源を結ぶ線分とアイソセンタ16から治療用放射線照射装置を結ぶ線分とがなす角が鋭角になるような位置に配置されている。その診断用X線源は、それぞれ、放射線治療装置制御装置2により制御されてアイソセンタ16に向けてその診断用X線を放射する。
【0027】
ケーシング18は、内部に図示されていない2つのセンサアレイを備えている。そのセンサアレイは、それぞれ、走行ガントリ12に支持され、その2つの診断用X線源により放射されてアイソセンタ16の周辺の被写体を透過したその診断用X線を受光して、その被写体の透過画像を生成する。そのセンサアレイとしては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0028】
放射線治療装置3は、さらに、カウチ21とカウチ駆動装置22とを備えている。カウチ21は、放射線治療システム1により治療される患者が横臥することに利用される。カウチ21は、図示されていない固定具を備えている。その固定具は、その患者が動かないように、その患者をカウチ21に固定する。カウチ駆動装置22は、カウチ21を土台10に支持し、放射線治療装置制御装置2により制御されてカウチ21を移動させる。
【0029】
放射線治療装置3は、さらに、入力装置23、24を備えている。入力装置23は、スイッチを備えている。そのスイッチは、ユーザにより押下または解放されることができるように形成されている。入力装置23は、ユーザにより操作され、その操作内容に対応する電気信号を放射線治療装置制御装置2に即時に出力する。その電気信号は、x軸正方向とx軸負方向とy軸正方向とy軸負方向とz軸正方向とz軸負方向とのうちの1つを示し、そのスイッチが押下されているか解放されているかを示している。入力装置24は、スイッチを備えている。そのスイッチは、ユーザにより押下または解放されることができるように形成されている。入力装置24は、ユーザにより操作され、その操作内容に対応する電気信号を放射線治療装置制御装置2に即時に出力する。その電気信号は、旋回角正方向と旋回角負方向と走行角正方向と走行角負方向とのうちの1つを示し、そのスイッチが押下されているか解放されているかを示している。
【0030】
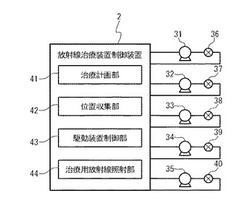
放射線治療装置3は、図3に示されているように、さらに、モータ31〜35とセンサ36〜40とを備えている。モータ31は、放射線治療装置制御装置2により制御されて、カウチ21がx軸方向に平行移動するようにカウチ21を駆動する。モータ32は、放射線治療装置制御装置2により制御されて、カウチ21がy軸方向に平行移動するようにカウチ21を駆動する。モータ33は、放射線治療装置制御装置2により制御されて、カウチ21がz軸方向に平行移動するようにカウチ21を駆動する。そのz軸方向は、鉛直方向に平行である方向である。そのy軸方向は、そのz軸方向に垂直であり、カウチ21が回転軸14に近づいたり遠ざかったりする方向に平行である。そのx軸方向は、そのy軸方向に垂直であり、そのz軸方向に垂直である。モータ34は、放射線治療装置制御装置2により制御されて、Oリング11が回転軸14を中心に回転するようにOリング11を駆動する。モータ35は、走行ガントリ12が回転軸15を中心に回転するように走行ガントリ12を駆動する。
【0031】
センサ36は、カウチ21のx軸方向の位置を測定し、その位置を放射線治療装置制御装置2に出力する。センサ37は、カウチ21のy軸方向の位置を測定し、その位置を放射線治療装置制御装置2に出力する。センサ38は、カウチ21のz軸方向の位置を測定し、その位置を放射線治療装置制御装置2に出力する。センサ39は、土台10に対してOリング11が回転するOリング回転角を測定し、そのOリング回転角を放射線治療装置制御装置2に出力する。センサ40は、Oリング11に対して走行ガントリ12が回転するガントリ回転角を測定し、そのガントリ回転角を放射線治療装置制御装置2に出力する。
【0032】
図3は、放射線治療装置制御装置2を示している。放射線治療装置制御装置2は、コンピュータであり、図示されていないCPUと記憶装置と入力装置と出力装置とドライバとを備えている。そのCPUは、放射線治療装置制御装置2にインストールされるコンピュータプログラムを実行して、その記憶装置と入力装置と出力装置とドライバとを制御する。その記憶装置は、そのコンピュータプログラムを記録し、そのCPUに利用される情報を記録し、そのCPUにより生成される情報を記録する。その入力装置は、ユーザに操作されることにより生成される情報をそのCPUに出力する。その入力装置としては、キーボード、マウスが例示される。その出力装置は、そのCPUにより生成された情報をユーザに認識可能に出力する。その出力装置としては、そのCPUにより生成された画面を表示するディスプレイが例示される。そのドライバは、放射線治療装置制御装置2に接続される外部機器により生成される情報をそのCPUに出力し、または、そのCPUにより生成された情報をその外部機器に出力する。その外部機器は、放射線治療装置3(治療用放射線照射装置と入力装置23〜24とモータ31〜35とセンサ36〜40と)を含んでいる。
【0033】
放射線治療装置制御装置2は、コンピュータプログラムである治療計画部41と位置収集部42と駆動装置制御部43と治療用放射線照射部44とを備えている。
【0034】
治療計画部41は、その患者の患部とその患部の周辺の臓器(危険部位を含む)と位置関係を示す3次元データをユーザにより閲覧可能に出力装置に表示する。治療計画部41は、さらに、その3次元データと入力装置を用いて入力される情報とに基づいて、治療計画を作成する。その治療計画は、その患者の患部の3次元データを示し、照射角度と線量との組み合わせを示している。その線量は、その各照射角度から患部に照射される治療用放射線の線量を示している。その照射角度は、その患者の患部に治療用放射線を照射する方向を示し、すなわち、Oリング回転角とガントリ回転角とを示している。そのOリング回転角は、土台10に対するOリング11の向きを示している。そのガントリ回転角は、Oリング11に対する走行ガントリ12の向きを示している。そのOリング回転角とガントリ回転角とは、Oリング11がカウチ21または患者に干渉しないように(ぶつからないように)算出される。
【0035】
位置収集部42は、センサ36〜38を用いてカウチ21の位置を測定し、その位置をセンサ36〜38から収集する。すなわち、位置収集部42は、センサ36を用いてカウチ21のx軸方向の位置を測定し、そのx軸方向の位置をセンサ36から収集する。位置収集部42は、センサ37を用いてカウチ21のy軸方向の位置を測定し、そのy軸方向の位置をセンサ37から収集する。位置収集部42は、センサ38を用いてカウチ21のz軸方向の位置を測定し、そのz軸方向の位置をセンサ38から収集する。位置収集部42は、さらに、センサ39〜40を用いてOリング11の位置を測定し、その位置をセンサ39〜40から収集する。すなわち、位置収集部42は、センサ39を用いて土台10に対してOリング11が回転するOリング回転角を測定し、そのOリング回転角をセンサ39から収集する。位置収集部42は、センサ40を用いてOリング11に対して走行ガントリ12が回転するガントリ回転角を測定し、そのガントリ回転角をセンサ40から収集する。
【0036】
駆動装置制御部43は、入力装置23の操作に応答して、患者の患部がアイソセンタ16に重なるように、モータ31〜33を制御してカウチ21を移動する。駆動装置制御部43は、さらに、入力装置23、24から出力される電気信号と位置収集部42により収集されたカウチ21の位置とOリング11の位置と走行ガントリ12の位置とに基づいて、Oリング11と走行ガントリ12とが所定の速度で移動するように、モータ34〜35を制御する。
【0037】
治療用放射線照射部44は、さらに、治療計画部41により作成された治療計画が示す線量だけ、治療用放射線照射装置を用いて治療用放射線をその患者に照射する。
【0038】
図4は、駆動装置制御部43を示している。駆動装置制御部43は、カウチ駆動部50と干渉テーブル記憶部51と干渉領域到達判定部52と速度制御部53とを備えている。
【0039】
カウチ駆動部50は、入力装置23の操作に基づいてモータ31〜33用いてカウチ21を駆動する。すなわち、カウチ駆動部50は、入力装置23から出力される電気信号がx軸正方向を示すときに、モータ31を用いてx軸方向の正の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がx軸負方向を示すときに、モータ31を用いてx軸方向の負の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がy軸正方向を示すときに、モータ32を用いてy軸方向の正の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がy軸負方向を示すときに、モータ32を用いてy軸方向の負の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がz軸正方向を示すときに、モータ33を用いてz軸方向の正の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がz軸負方向を示すときに、モータ33を用いてz軸方向の負の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がスイッチが解放されていることを示すときに、カウチ21が停止するようにモータ31〜33を制御する。カウチ駆動部50は、さらに、ユーザによる操作に応答して、放射線治療装置3の診断用X線源を用いてその診断用X線をその患者に照射し、放射線治療装置3のセンサアレイを用いてアイソセンタ16の周辺に配置された被写体の透過画像を生成する。
【0040】
干渉テーブル記憶部51は、他のコンピュータプログラムにより情報処理可能に干渉テーブルを記憶装置に記録している。その干渉テーブルは、走行ガントリ12が駆動される複数の領域を示している。干渉領域到達判定部52は、Oリング11と走行ガントリ12とが移動する経路とその干渉テーブルが示す複数の領域の境界とに基づいて速度変更開始タイミング算出する。速度制御部53は、入力装置24から出力される電気信号が旋回角正方向を示すときに、モータ34を用いて正の方向にOリング11を回転させる。速度制御部53は、入力装置24から出力される電気信号が旋回角負方向を示すときに、モータ34を用いて負の方向にOリング11を回転させる。速度制御部53は、入力装置24から出力される電気信号が走行角正方向を示すときに、モータ35を用いて正の方向に走行ガントリ12を回転させる。速度制御部53は、入力装置24から出力される電気信号が走行角負方向を示すときに、モータ35を用いて負の方向に走行ガントリ12を回転させる。速度制御部53は、入力装置24から出力される電気信号がスイッチが解放されていることを示すときに、Oリング11と走行ガントリ12とが停止するようにモータ34〜35を制御する。速度制御部53は、さらに、干渉テーブル記憶部51により記録される干渉テーブルを参照して、Oリング11と走行ガントリ12とが適切な速度で移動するように、モータ34〜35を制御する。速度制御部53は、さらに、干渉領域到達判定部52により速度変更開始タイミングが算出されたときに、その速度変更開始タイミングでOリング11と走行ガントリ12とが減速するようにモータ34〜35を制御する。
【0041】
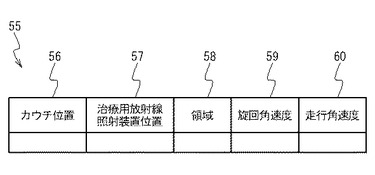
図5は、干渉テーブル記憶部51により記録される干渉テーブルを示している。その干渉テーブル55は、カウチ位置56と治療用放射線照射装置位置57とを領域58に対応付けている。すなわち、カウチ位置56からなる集合のうちの任意の要素と治療用放射線照射装置位置57からなる集合のうちの任意の要素との組み合わせは、領域58からなる集合のうちの1つの要素に対応している。カウチ位置56は、土台10に対するカウチ21の位置を示し、カウチ21のx軸方向の位置とy軸方向の位置とz軸方向の位置とを示している。治療用放射線照射装置位置57は、土台10に対する走行ガントリ12の位置を示し、土台10に対するOリング11のOリング回転角とOリング11に対する走行ガントリ12のガントリ回転角とを示している。領域58は、走行ガントリ12が配置される複数の領域を示し、カウチ21がカウチ位置56に配置されているときにその複数の領域のうちの走行ガントリ12が配置された領域を示している。
【0042】
干渉テーブル55は、さらに、領域58を旋回角速度59と走行角速度60とに対応付けている。すなわち、領域58からなる集合のうちの任意の要素は、旋回角速度59からなる集合のうちの1つの要素に対応し、走行角速度60からなる集合のうちの1つの要素に対応している。旋回角速度59は、走行ガントリ12が領域58に配置されているときに、土台10に対してOリング11を回転させる速度を示している。走行角速度60は、走行ガントリ12が領域58に配置されているときに、Oリング11に対して走行ガントリ12を回転させる速度を示している。
【0043】
図6は、治療用放射線照射装置位置57と領域58との関係を示している。治療用放射線照射装置位置57は、Oリング回転角とガントリ回転角とで張られる空間に対応している。その空間は、非干渉領域61と人型干渉領域62と機械干渉領域63とから形成され、このとき、領域58は、非干渉領域61と人型干渉領域62と機械干渉領域63とに対応している。非干渉領域61と人型干渉領域62と機械干渉領域63とは、互いに重なりがない。非干渉領域61は、走行ガントリ12がカウチ21に干渉しないで、かつ、患者に干渉しない位置の集合に対応している。人型干渉領域62は、走行ガントリ12がカウチ21に干渉しないで、かつ、患者に干渉する可能性がある位置の集合に対応している。機械干渉領域63は、走行ガントリ12がカウチ21に干渉する可能性がある位置の集合に対応している。機械干渉領域63は、放射線治療装置3のCADデータが示す3次元形状に基づいて算出される。人型干渉領域62は、放射線治療装置3の3次元形状とカウチ21に配置された患者の3次元形状とに基づいて算出される。その患者の3次元形状は、事前に計測された患者のCTデータから算出されたものが利用される。なお、その患者の3次元形状は、CTデータから算出されたものに置換して、その患者に見立てた直方体が適用されることもできる。
【0044】
このような関係は、カウチ21が配置される空間を形成する複数の領域ごとに設計される。その領域は、それぞれ、立方体状に形成されている。その立方体の一辺の長さとしては、5cmが例示される。その長さは、小さいほどより高精度に制御することができる点で好ましい。
【0045】
図7は、Oリング11が回転するときの速度の変化の例を示している。その変化71は、Oリング11が位置72から位置73まで回転することを示している。変化71は、さらに、Oリング11が位置72から位置73まで回転するときに、非干渉領域61に対応する区間74と人型干渉領域62に対応する区間75と機械干渉領域63に対応する区間76とを経由することを示している。変化71は、さらに、Oリング11が区間74を回転するときに概ね旋回角速度77で回転することを示し、Oリング11が区間75を回転するときに概ね旋回角速度78で回転することを示し、Oリング11が区間76を回転するときに概ね旋回角速度79で回転することを示している。旋回角速度77としては、7°毎秒が例示される。旋回角速度78は、旋回角速度77より小さい角速度を示し、3°毎秒が例示される。旋回角速度79は、旋回角速度78より小さい角速度を示し、1°毎秒が例示される。
【0046】
すなわち、干渉テーブル55の旋回角速度59は、旋回角速度77と旋回角速度78と旋回角速度79とを要素とする集合である。
【0047】
変化71は、Oリング11が区間74のうちの位置81を通過するときに減速を開始し、区間74と区間75との境界である位置82を通過するときにその減速を終了してOリング11が旋回角速度78で移動することを示している。変化71は、さらに、Oリング11が区間75のうちの位置83を通過するときに減速を開始し、区間75と区間76との境界である位置84を通過するときにその減速を終了してOリング11が旋回角速度79で移動することを示している。変化71は、さらに、Oリング11が区間76のうちの位置85を通過するときに減速を開始し、位置73でOリング11が停止することを示している。
【0048】
すなわち、干渉領域到達判定部52は、治療計画部41により作成された治療計画に基づいて位置73を算出し、位置収集部42により現在のOリング回転角である位置73を収集する。干渉領域到達判定部52は、干渉テーブル55を参照し、位置72と位置73とに基づいて回転軸14を中心にOリング11を回転駆動する旋回角速度の変化71を算出する。すなわち、干渉領域到達判定部52は、Oリング11が非干渉領域61と人型干渉領域62との境界の位置82を通過するときに、Oリング11が人型干渉領域62で旋回角速度78で移動するように、非干渉領域61で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、Oリング11が人型干渉領域62と機械干渉領域63の境界の位置84を通過するときに、Oリング11が機械干渉領域63で旋回角速度79で移動するように、人型干渉領域62で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、Oリング11が位置73で停止するように、減速を開始しなければならない速度変更開始タイミングを算出する。
【0049】
速度制御部53は、入力装置24のスイッチが押下されたことに応答して、入力装置24から出力される電気信号が示す方向に向かってOリング11が回転するようにモータ34を制御する。速度制御部53は、干渉テーブル55を参照して、位置収集部42により収集される現在のOリング回転角に対応する旋回角速度を算出し、その旋回角速度でOリング11が回転するようにモータ34を制御する。速度制御部53は、干渉領域到達判定部52により算出された速度変更開始タイミングになったときに、Oリング11の回転が減速するようにモータ34を制御する。速度制御部53は、入力装置24のスイッチが解放されたことに応答して、Oリング11が停止するようにモータ34を制御する。
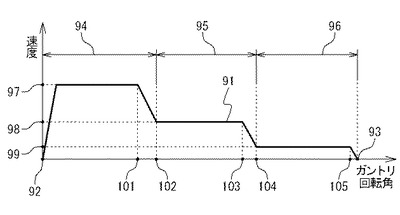
【0050】
図8は、走行ガントリ12が回転するときの速度の変化の例を示している。その変化91は、走行ガントリ12が位置92から位置93まで回転することを示している。変化91は、さらに、走行ガントリ12が位置92から位置93まで回転するときに、非干渉領域61に対応する区間94と人型干渉領域62に対応する区間95と機械干渉領域63に対応する区間96とを経由することを示している。変化91は、さらに、走行ガントリ12が区間94を回転するときに概ね走行角速度97で回転することを示し、走行ガントリ12が区間95を回転するときに概ね走行角速度98で回転することを示し、走行ガントリ12が区間96を回転するときに概ね走行角速度99で回転することを示している。走行角速度97としては、7°毎秒が例示される。走行角速度98は、走行角速度97より小さい角速度を示し、3°毎秒が例示される。走行角速度99は、走行角速度98より小さい角速度を示し、1°毎秒が例示される。
【0051】
すなわち、干渉テーブル55の走行角速度60は、走行角速度97と走行角速度98と走行角速度99とを要素とする集合である。
【0052】
変化91は、走行ガントリ12が区間94のうちの位置101を通過するときに減速を開始し、区間94と区間95との境界である位置102を通過するときにその減速を終了して走行ガントリ12が走行角速度98で移動することを示している。変化91は、さらに、走行ガントリ12が区間95のうちの位置103を通過するときに減速を開始し、区間95と区間96との境界である位置104を通過するときにその減速を終了して走行ガントリ12が走行角速度99で移動することを示している。変化91は、さらに、走行ガントリ12が区間96のうちの位置105を通過するときに減速を開始し、位置93で走行ガントリ12が停止することを示している。
【0053】
すなわち、干渉領域到達判定部52は、治療計画部41により作成された治療計画に基づいて位置93を算出し、位置収集部42により現在のガントリ回転角である位置93を収集する。干渉領域到達判定部52は、干渉テーブル55を参照し、位置92と位置93とに基づいて回転軸15を中心に走行ガントリ12を回転駆動する走行角速度の変化91を算出する。すなわち、干渉領域到達判定部52は、走行ガントリ12が非干渉領域61と人型干渉領域62との境界の位置102を通過するときに、走行ガントリ12が人型干渉領域62で走行角速度98で移動するように、非干渉領域61で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、走行ガントリ12が人型干渉領域62と機械干渉領域63の境界の位置104を通過するときに、走行ガントリ12が機械干渉領域63で走行角速度99で移動するように、人型干渉領域62で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、走行ガントリ12が位置93で停止するように、減速を開始しなければならない速度変更開始タイミングを算出する。
【0054】
速度制御部53は、入力装置24のスイッチが押下されたことに応答して、入力装置24から出力される電気信号が示す方向に向かって走行ガントリ12が回転するようにモータ35を制御する。速度制御部53は、干渉テーブル55を参照して、位置収集部42により収集される現在のガントリ回転角に対応する走行角速度を算出し、その走行角速度で走行ガントリ12が回転するようにモータ35を制御する。速度制御部53は、干渉領域到達判定部52により算出された速度変更開始タイミングになったときに、走行ガントリ12の回転が減速するようにモータ35を制御する。速度制御部53は、入力装置24のスイッチが解放されたことに応答して、走行ガントリ12が停止するようにモータ35を制御する。
【0055】
本発明による放射線照射方法の実施の形態は、放射線治療システム1を用いて実行され、治療計画を作成する動作と、セットアップする動作と、放射線治療する動作とを備えている。
【0056】
その治療計画を作成する動作では、まず、ユーザは、その患者の患部とその患部の周辺の部位との3次元データに基づいて、その患者の患部とその患部の周辺の臓器とを示す画像を生成する。ユーザは、放射線治療装置制御装置2を用いてその画像を閲覧し、その患部の位置を特定する。ユーザは、さらに、その画像に基づいて治療計画を作成し、その治療計画を放射線治療装置制御装置2に入力する。その治療計画は、その患者の患部に治療用放射線を照射する照射角度と、その各照射角度から照射する治療用放射線の線量および性状とを示している。
【0057】
そのセットアップする動作は、放射線治療する動作の直前に実行され、カウチ21を駆動する動作と治療用放射線照射装置を駆動する動作とを備えている。カウチ21を駆動する動作では、ユーザは、まず、その3次元データを採取したときと同様の姿勢に放射線治療装置3のカウチ21にその患者を固定する。ユーザは、患者の患部が概ねアイソセンタ16に重なって配置されるように入力装置23を操作して、カウチ21を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者の患部がアイソセンタ16に重なって配置されるように入力装置23を操作してカウチ21を移動させる。ユーザは、その透過画像の撮像とカウチ21の移動とを繰り返して、患者の患部がアイソセンタ16に正確に重なるように患者の患部を配置する。
【0058】
その治療用放射線照射装置を駆動する動作は、Oリング11を駆動する動作と走行ガントリ12を駆動する動作とを備えている。Oリング11を駆動する動作は、入力装置24のスイッチの押下に応答して開始される。ユーザは、Oリング11を駆動させたいときに入力装置24のスイッチを押下する。放射線治療装置制御装置2は、入力装置24のスイッチが押下されたことに応答して、入力装置24から出力される電気信号が示す方向に向かってOリング11が回転するようにモータ34を制御する。放射線治療装置制御装置2は、干渉テーブル55を参照して、センサ39により測定される現在のOリング回転角に対応する旋回角速度を算出し、その旋回角速度でOリング11が回転するようにモータ34を制御する。放射線治療装置制御装置2は、速度変更開始タイミングになったときに、Oリング11の回転が減速するようにモータ34を制御する。
【0059】
ユーザは、Oリング11を停止させたいときに入力装置24のスイッチを解放する。放射線治療装置制御装置2は、入力装置24のスイッチが解放されたことに応答して、Oリング11が停止するようにモータ34を制御する。
【0060】
走行ガントリ12を駆動する動作は、入力装置24のスイッチの押下に応答して開始される。ユーザは、走行ガントリ12を駆動させたいときに入力装置24のスイッチを押下する。放射線治療装置制御装置2は、入力装置24のスイッチが押下されたことに応答して、入力装置24から出力される電気信号が示す方向に向かって走行ガントリ12が回転するようにモータ35を制御する。放射線治療装置制御装置2は、干渉テーブル55を参照して、センサ40により測定される現在のガントリ回転角に対応する走行角速度を算出し、その走行角速度で走行ガントリ12が回転するようにモータ35を制御する。放射線治療装置制御装置2は、速度変更開始タイミングになったときに、走行ガントリ12の回転が減速するようにモータ35を制御する。
【0061】
ユーザは、走行ガントリ12を停止させたいときに入力装置24のスイッチを解放する。放射線治療装置制御装置2は、入力装置24のスイッチが解放されたことに応答して、走行ガントリ12が停止するようにモータ35を制御する。
【0062】
その放射線治療する動作は、患者の患部に対する治療用放射線照射装置の相対位置が治療計画が示す照射角度に許容範囲内で一致するように、カウチ21とOリング11と走行ガントリ12とが駆動された後に実行される。その放射線治療する動作では、放射線治療装置制御装置2は、その治療計画が示す線量だけ、治療用放射線照射装置を用いて治療用放射線を患者の患部に照射する。
【0063】
このような放射線照射方法によれば、Oリング11または走行ガントリ12は、カウチ21または患者に衝突する可能性があるときに低速で回転し、Oリング11または走行ガントリ12がカウチ21または患者に衝突するときの衝撃を緩和することができる。このため、このような放射線照射方法は、その衝突を防止するためにOリング11または走行ガントリ12が回転することを禁止するマージンを大きく設定する必要がなく、Oリング11または走行ガントリ12が移動することができる範囲を拡大することができる。
【0064】
このような放射線照射方法によれば、Oリング11または走行ガントリ12は、カウチ21または患者に衝突する可能性があるときに低速で回転し、ユーザは、Oリング11または走行ガントリ12をより容易に所望の位置に停止させることができる。このような放射線照射方法によれば、さらに、Oリング11または走行ガントリ12は、カウチ21または患者に衝突する可能性が小さいときに高速で回転し、そのセットアップする動作にかかる時間を低減することができ、放射線治療にかかる時間を低減することができる。このような時間の低減は、患者の負担を軽減する。
【0065】
なお、放射線治療装置制御装置2は、速度変更開始タイミングになったときに減速することに置換して、高速に対応する領域から低速に対応する領域に移動する時刻に減速することもできる。このような動作によれば、放射線治療装置制御装置2は、干渉テーブル55を適切に設計することにより、速度変更開始タイミングになったときに減速することと同様にして、Oリング11または走行ガントリ12が移動することができる範囲を拡大することができ、放射線治療にかかる時間を低減することができる。さらに、放射線治療装置制御装置2は、セットアップするときに速度変更開始タイミングを算出する必要がなく、容易に設計されることができる。
【0066】
なお、放射線治療装置制御装置2は、入力装置24の操作に基づいてOリング11または走行ガントリ12を駆動することに置換して、自動的にOリング11または走行ガントリ12を駆動することもできる。このとき、放射線治療装置制御装置2は、治療用放射線照射装置が現在の位置から治療計画に基づいて算出された位置に移動する経路を算出し、治療用放射線照射装置がその経路を辿って干渉テーブル55を参照して算出される速度で移動するようにモータ34〜35を制御する。このような経路の算出は、公知であり、たとえば、特開2000−222019号公報に開示されている。このとき、放射線治療装置制御装置2は、入力装置24の操作に基づいてOリング11または走行ガントリ12を駆動することと同様にして、Oリング11または走行ガントリ12が移動することができる範囲を拡大することができる。
【0067】
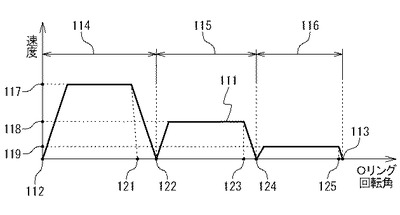
図9は、Oリング11が回転するときの速度の変化の他の例を示している。その変化111は、Oリング11が位置112から位置113まで回転することを示している。変化111は、さらに、Oリング11が位置112から位置113まで回転するときに、非干渉領域61に対応する区間114と人型干渉領域62に対応する区間115と機械干渉領域63に対応する区間116とを経由することを示している。変化111は、さらに、Oリング11が区間114を回転するときに概ね旋回角速度117で回転することを示し、Oリング11が区間115を回転するときに概ね旋回角速度118で回転することを示し、Oリング11が区間116を回転するときに概ね旋回角速度119で回転することを示している。旋回角速度117としては、7°毎秒が例示される。旋回角速度118は、旋回角速度117より小さい角速度を示し、3°毎秒が例示される。旋回角速度119は、旋回角速度118より小さい角速度を示し、1°毎秒が例示される。
【0068】
すなわち、干渉テーブル55の旋回角速度59は、旋回角速度117と旋回角速度118と旋回角速度119とを要素とする集合である。
【0069】
変化111は、Oリング11が区間114のうちの位置121を通過するときに減速を開始し、区間114と区間115との境界である位置122を通過するときにその減速を終了してOリング11が旋回角速度118で移動することを示している。変化111は、さらに、Oリング11が区間115のうちの位置123を通過するときに減速を開始し、区間115と区間116との境界である位置124を通過するときにその減速を終了してOリング11が旋回角速度119で移動することを示している。変化111は、さらに、Oリング11が区間116のうちの位置125を通過するときに減速を開始し、位置113でOリング11が停止することを示している。
【0070】
すなわち、干渉領域到達判定部52は、治療計画部41により作成された治療計画に基づいて位置113を算出し、位置収集部42により現在のOリング回転角である位置113を収集する。干渉領域到達判定部52は、干渉テーブル55を参照し、位置112と位置113とに基づいて回転軸14を中心にOリング11を回転駆動する旋回角速度の変化111を算出する。すなわち、干渉領域到達判定部52は、Oリング11が非干渉領域61と人型干渉領域62との境界の位置122を通過するときに、Oリング11が位置122で停止するように、非干渉領域61で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、Oリング11が人型干渉領域62と機械干渉領域63の境界の位置124を通過するときに、Oリング11が位置124で停止するように、人型干渉領域62で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、Oリング11が位置113で停止するように、減速を開始しなければならない速度変更開始タイミングを算出する。
【0071】
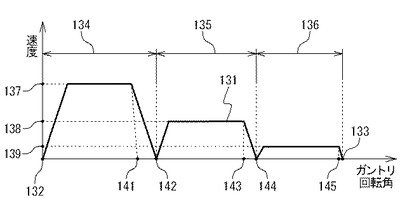
図10は、走行ガントリ12が回転するときの速度の変化の他の例を示している。その変化131は、走行ガントリ12が位置132から位置133まで回転することを示している。変化131は、さらに、走行ガントリ12が位置132から位置133まで回転するときに、非干渉領域61に対応する区間134と人型干渉領域62に対応する区間135と機械干渉領域63に対応する区間136とを経由することを示している。変化131は、さらに、走行ガントリ12が区間134を回転するときに概ね走行角速度137で回転することを示し、走行ガントリ12が区間135を回転するときに概ね走行角速度138で回転することを示し、走行ガントリ12が区間136を回転するときに概ね走行角速度139で回転することを示している。走行角速度137としては、7°毎秒が例示される。走行角速度138は、走行角速度137より小さい角速度を示し、3°毎秒が例示される。走行角速度139は、走行角速度138より小さい角速度を示し、1°毎秒が例示される。
【0072】
すなわち、干渉テーブル55の走行角速度60は、走行角速度137と走行角速度138と走行角速度139とを要素とする集合である。
【0073】
変化131は、走行ガントリ12が区間134のうちの位置141を通過するときに減速を開始し、区間134と区間135との境界である位置142を通過するときにその減速を終了して走行ガントリ12が走行角速度138で移動することを示している。変化131は、さらに、走行ガントリ12が区間135のうちの位置143を通過するときに減速を開始し、区間135と区間136との境界である位置144を通過するときにその減速を終了して走行ガントリ12が走行角速度139で移動することを示している。変化131は、さらに、走行ガントリ12が区間136のうちの位置145を通過するときに減速を開始し、位置133で走行ガントリ12が停止することを示している。
【0074】
すなわち、干渉領域到達判定部52は、治療計画部41により作成された治療計画に基づいて位置133を算出し、位置収集部42により現在のガントリ回転角である位置133を収集する。干渉領域到達判定部52は、干渉テーブル55を参照し、位置132と位置133とに基づいて回転軸15を中心に走行ガントリ12を回転駆動する走行角速度の変化131を算出する。すなわち、干渉領域到達判定部52は、走行ガントリ12が非干渉領域61と人型干渉領域62との境界の位置142を通過するときに、走行ガントリ12が人型干渉領域62で走行角速度138で移動するように、非干渉領域61で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、走行ガントリ12が人型干渉領域62と機械干渉領域63の境界の位置144を通過するときに、走行ガントリ12が機械干渉領域63で走行角速度139で移動するように、人型干渉領域62で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、走行ガントリ12が位置133で停止するように、減速を開始しなければならない速度変更開始タイミングを算出する。
【0075】
ユーザは、変化111に示されるようにOリング11が制御され、変化131に示されるように走行ガントリ12が制御されることにより、Oリング11または走行ガントリ12が領域の境界を通過したことを認識しやすく、好ましい。
【0076】
なお、放射線治療装置制御装置2は、Oリング11または走行ガントリ12と同様にして、カウチ21を駆動させることもできる。すなわち、干渉テーブル55は、さらに領域58をカウチ移動速度に対応付けている。放射線治療装置制御装置2は、入力装置23のスイッチが押下されたことに応答して、入力装置23から出力される電気信号が示す方向に向かってカウチ21が移動するようにモータ31〜33を制御する。放射線治療装置制御装置2は、干渉テーブル55を参照して、センサ36〜38により測定される現在のカウチ21の位置に対応するカウチ移動速度を算出し、そのカウチ移動速度でカウチ21が移動するようにモータ31〜33を制御する。放射線治療装置制御装置2は、カウチ21が所定の速度で移動するために減速を開始しなければならない速度変更開始タイミングを算出し、その速度変更開始タイミングになったときに、カウチ21の移動が減速するようにモータ31〜33を制御する。ユーザは、カウチ21を停止させたいときに入力装置23のスイッチを解放する。放射線治療装置制御装置2は、入力装置23のスイッチが解放されたことに応答して、カウチ21が停止するようにモータ31〜33を制御する。
【図面の簡単な説明】
【0077】
【図1】図1は、本発明による放射線治療システムの実施の形態を示すブロック図である。
【図2】図2は、放射線治療装置を示す斜視図である。
【図3】図3は、本発明による放射線治療装置制御装置の実施の形態を示すブロック図である。
【図4】図4は、駆動装置制御部を示すブロック図である。
【図5】図5は、干渉テーブルを示す図である。
【図6】図6は、治療用放射線照射装置位置と領域との関係を示すグラフである。
【図7】図7は、Oリングが駆動されるときの速度の変化の例を示すグラフである。
【図8】図8は、走行ガントリが駆動されるときの速度の変化の例を示すグラフである。
【図9】図9は、Oリングが駆動されるときの速度の変化の他の例を示すグラフである。
【図10】図10は、走行ガントリが駆動されるときの速度の変化の他の例を示すグラフである。
【符号の説明】
【0078】
1 :放射線治療システム
2 :放射線治療装置制御装置
3 :放射線治療装置
10:土台
11:Oリング
12:走行ガントリ
14:回転軸
15:回転軸
16:アイソセンタ
17:ケーシング
18:ケーシング
21:カウチ
22:カウチ駆動装置
23:入力装置
24:入力装置
31〜35:モータ
36〜40:とセンサ
41:治療計画部
42:位置収集部
43:駆動装置制御部
44:治療用放射線照射部
50:カウチ駆動部
51:干渉テーブル記憶部
52:干渉領域到達判定部
53:速度制御部
55:干渉テーブル
56:カウチ位置
57:治療用放射線照射装置位置
58:領域
59:旋回角速度
60:走行角速度
61:非干渉領域
62:人型干渉領域
63:機械干渉領域
【技術分野】
【0001】
本発明は、放射線照射方法および放射線治療装置制御装置に関し、特に、患部に放射線を照射することにより患者を治療するときに利用される放射線照射方法および放射線治療装置制御装置に関する。
【背景技術】
【0002】
患部(腫瘍)に治療用放射線を照射することにより患者を治療する放射線治療が知られている。その放射線治療では、その患部に互いに異なる方向から治療用放射線が照射される。その放射線治療を実行する放射線治療装置は、カウチと治療用放射線照射装置と駆動装置とを備えている。ユーザは、その患者をそのカウチに寝かせ、その駆動装置を用いて治療用放射線照射装置を所定の位置に駆動して、その治療用放射線照射装置を用いて治療用放射線を患者の患部に照射する。このような放射線治療装置は、その治療用放射線照射装置が駆動されているときに、放射線治療装置の一部が他の一部とぶつからないように、または、放射線治療装置の一部が患者とぶつからないように、治療用放射線照射装置が駆動される範囲が制限されている。治療用放射線照射装置が駆動される範囲を拡大することが望まれている。
【0003】
特開平10−258049号公報には、寝台を被検者の体重も考慮した操作力で、軽く自由に動かすことのできる制御系を構成し、その操作力を任意に制御できる装置を提供し、かつ通常のX線CT検査を始め、その他の種々の検査や治療にも対応できる寝台の動作も可能とする医用診断装置の寝台制御装置が開示されている。その医用診断装置の寝台制御装置は、被検者を寝載する寝台を制御する医用診断装置の寝台制御装置において、前記寝台の位置を検出する寝台位置検出手段と、この寝台位置検出手段の位置検出信号を用いて前記寝台の位置を制御する寝台位置制御手段と、前記寝台を操作する操作者の操作力を検出する操作者操作力検出手段と、この操作者操作力検出手段の出力を用いて前記寝台の操作力を制御する寝台操作力制御手段とを備えて成る。
【0004】
特開平11−137542号公報には、寝台が移動しても周囲の障害物との衝突を回避し、決められた領域内の任意の位置に位置決めできる医用診断装置の寝台制御装置が開示されている。その医用診断装置の寝台制御装置は、被検者を寝載する寝台と、前記寝台の位置を検出する寝台位置検出手段と、この寝台位置検出手段の位置検出信号を用いて前記寝台の位置を制御する寝台位置制御手段と、前記寝台の操作者の操作力を検出する操作者操作力検出手段と、この操作者操作力検出手段の出力を用いて前記寝台の操作力を制御する寝台操作力制御手段とを備えて成る医用診断装置の寝台制御装置において、前記寝台の移動範囲を設定する移動範囲設定手段を設け、前記寝台が前記移動範囲設定手段により設定された移動範囲内にあるときのみ前記寝台操作力制御手段により寝台の操作力を制御することを特徴とする。
【0005】
特開平11−137543号公報には、術式や疾患部位あるいは操作者に応じた操作力で操作できるようにして、寝台の位置決め時の操作性の向上を図ることができる医用診断装置の寝台制御装置が開示されている。その医用診断装置の寝台制御装置は、被検者を寝載する寝台と、この寝台の操作力を検出する操作力検出手段と、前記寝台の移動速度を検出する移動速度検出手段と、前記寝台の位置を検出する位置検出手段とを備え、前記寝台を操作する操作者の操作力指令値が前記操作力検出手段の出力に一致するように前記寝台の操作力を制御する寝台操作力制御手段を備えた医用診断装置の寝台制御装置において、前記寝台操作力制御手段に前記操作力指令値と前記寝台の移動速度の関係を任意に選択できる操作力指令値−移動速度関係選択手段を備えたことを特徴とする。
【0006】
特開2000−222019号公報には、経路生成や速度生成等のように性質の異なる作業を同一の座標上で処理しないようにする機構制御装置が開示されている。その機構制御装置は、機械の動作を制御する装置の座標系において、経路を生成する経路生成座標系と、生成された経路上の速度を演算する速度生成座標系と、経路生成に必要な補助点を生成する補助点生成座標系と、機械の作動可能範囲を設定する干渉チェック座標系とを備え、上記経路生成座標系と速度生成座標系と、補助点生成座標系と干渉チェック座標系の4つの座標系の内少なくとも1つの座標系を他の座標系から独立した座標系に設定可能としたことを特徴とする。
【0007】
特開2006−174885号公報には、短期間で照射計画を立案することが出来る放射線治療装置の照射計画装置が開示されている。その放射線治療装置は、患者を載せるための治療用寝台と、前記治療用寝台に載せられた前記患者の患部に向けて治療用放射線を照射するためのガントリーと、アイソセンタに位置された前記患者の患部に対して放射線を照射するための照射計画を立案するための照射計画装置とを具備し、前記照射計画装置へ前記患者の載せられた前記治療用寝台の位置情報、前記患者の体輪郭の情報、前記ガントリーの形状データおよび前記治療用寝台の形状データが入力され、前記照射計画装置は、前記ガントリーの形状データ、前記治療用寝台の形状データ、前記治療用寝台の位置情報および前記患者の前記体輪郭の情報から前記ガントリーと前記治療用寝台および前記患者とが物理的に干渉しない前記ガントリーから照射される放射線の放射軸角度を算出する。
【0008】
【特許文献1】特開平10−258049号公報
【特許文献2】特開平11−137542号公報
【特許文献3】特開平11−137543号公報
【特許文献4】特開2000−222019号公報
【特許文献5】特開2006−174885号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明の課題は、被検体に照射される治療用放射線を放射する治療用放射線照射装置が配置される範囲を拡大する放射線照射方法および放射線治療装置制御装置を提供することにある。
本発明の他の課題は、被検体に照射される治療用放射線を放射する治療用放射線照射装置を駆動する操作をより容易にする放射線照射方法および放射線治療装置制御装置を提供することにある。
本発明のさらに他の課題は、被検体に照射される治療用放射線を放射する治療用放射線照射装置をより確実に所定の速度で駆動する放射線照射方法および放射線治療装置制御装置を提供することにある。
【課題を解決するための手段】
【0010】
以下に、発明を実施するための最良の形態・実施例で使用される符号を括弧付きで用いて、課題を解決するための手段を記載する。この符号は、特許請求の範囲の記載と発明を実施するための最良の形態・実施例の記載との対応を明らかにするために付加されたものであり、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0011】
本発明による放射線照射方法は、治療用放射線を放射する治療用放射線照射装置の位置をセンサ(36〜40)から収集するステップと、その治療用放射線照射装置が移動しているときの速度がその位置に基づいて変化するように、その治療用放射線照射装置を駆動する駆動装置(31〜35)を制御するステップとを備えている。このような放射線照射方法は、その治療用放射線照射装置に伴って移動する機器が他の機器の近傍に位置するときに遅く移動するように設定されているときに、その機器が衝突するときの衝撃を緩和することができる。このため、このような放射線照射方法は、その衝突を防止するためにその治療用放射線照射装置が移動することを禁止するマージンを大きく設定する必要がなく、その治療用放射線照射装置が移動することができる範囲を拡大することができ、被検体の照射部位にその治療用放射線を照射することができる方向をより増加することができる。
【0012】
本発明による放射線照射方法は、入力装置(23、24)の所定の操作に応答して治療用放射線照射装置が停止するように駆動装置(31〜35)を制御するステップをさらに備えている。このような放射線照射方法によれば、ユーザは、遅く移動するように設定されている領域をその治療用放射線照射装置が移動しているときに、その治療用放射線照射装置をより容易に所望の位置に停止させることができる。
【0013】
本発明による放射線照射方法は、その治療用放射線が照射される被検体が配置されるカウチ(21)のカウチ位置を収集するステップをさらに備えている。このとき、駆動装置(31〜35)は、そのカウチ位置にさらに基づいてその速度が変化するように制御されることが好ましく、たとえば、カウチ(21)に対する治療用放射線照射装置の相対位置に基づいてその速度が変化するように制御されることが好ましい。
【0014】
駆動装置(31〜35)は、領域集合(58)を速度集合(59、60)に対応付ける干渉テーブル(55)を参照して、速度集合(59、60)のうちの治療用放射線照射装置が配置される領域に対応する対応速度で治療用放射線照射装置が移動するように、制御されることが好ましい。
【0015】
本発明による放射線照射方法は、その治療用放射線照射装置が領域集合(58)のうちの第1速度に対応する第1領域から領域集合(58)のうちの第1速度より小さい第2速度に対応する第2領域に移動するときに、治療用放射線照射装置が第1領域に配置される期間のうちから速度変更開始タイミングを算出するステップと、その速度変更開始タイミングに到達したときに、その治療用放射線照射装置が減速するように駆動装置(31〜35)を制御するステップとをさらに備えている。このような放射線照射方法は、その治療用放射線照射装置を第2領域で第2速度以下でより確実に移動させることができる。
【0016】
本発明による放射線治療装置制御装置(2)は、治療用放射線を放射する治療用放射線照射装置の位置をセンサ(36〜40)から収集する位置収集部(42)と、その治療用放射線照射装置が移動しているときの速度が位置に基づいて変化するように、その治療用放射線照射装置を駆動する駆動装置(31〜35)を制御する駆動装置制御部(43)とを備えている。このような放射線治療装置制御装置(2)は、その治療用放射線照射装置に伴って移動する機器が他の機器の近傍に位置するときに遅く移動するように設定されているときに、その機器が衝突するときの衝撃を緩和することができる。このため、このような放射線治療装置制御装置(2)は、その衝突を防止するためにその治療用放射線照射装置が移動することを禁止するマージンを大きく設定する必要がなく、その治療用放射線照射装置が移動することができる範囲を拡大することができ、被検体の照射部位にその治療用放射線を照射することができる方向をより増加することができる。
【0017】
駆動装置制御部(43)は、さらに、入力装置(23、24)の所定の操作に応答して治療用放射線照射装置が停止するように駆動装置(31〜35)を制御する。このような放射線治療装置制御装置(2)によれば、ユーザは、遅く移動するように設定されている領域をその治療用放射線照射装置が移動しているときに、その治療用放射線照射装置をより容易に所望の位置に停止させることができる。
【0018】
位置収集部(42)は、その治療用放射線が照射される被検体が配置されるカウチ(21)のカウチ位置をさらに収集する。このとき、駆動装置(31〜35)は、そのカウチ位置にさらに基づいてその速度が変化するように制御されることが好ましく、たとえば、カウチ(21)に対する治療用放射線照射装置の相対位置に基づいてその速度が変化するように制御されることが好ましい。
【0019】
駆動装置制御部(43)は、領域集合(58)を速度集合(59、60)に対応付ける干渉テーブル(55)を記録装置に記録する干渉テーブル記憶部(51)と、干渉テーブル(55)を参照して、速度集合(59、60)のうちの治療用放射線照射装置が配置される領域に対応する対応速度で治療用放射線照射装置が移動するように、駆動装置(31〜35)を制御する速度制御部(53)とを備えていることが好ましい。
【0020】
駆動装置制御部(43)は、その治療用放射線照射装置が領域集合(58)のうちの第1速度に対応する第1領域から領域集合(58)のうちの第1速度より小さい第2速度に対応する第2領域に移動するときに、その治療用放射線照射装置が第1領域に配置される期間のうちから速度変更開始タイミングを算出する干渉領域到達判定部(52)をさらに備えている。速度制御部(53)は、その速度変更開始タイミングに到達したときに、その治療用放射線照射装置が減速するように駆動装置(31〜35)を制御する。このような放射線照射方法は、その治療用放射線照射装置を第2領域で第2速度以下でより確実に移動させることができる。
【0021】
本発明による放射線治療システム(1)は、本発明による放射線治療装置制御装置(2)と、駆動装置(31〜35)とその治療用放射線照射装置とを備えている放射線治療装置(3)とを備えていることが好ましい。
【発明の効果】
【0022】
本発明による放射線照射方法および放射線治療装置制御装置は、被検体に照射される治療用放射線を放射する治療用放射線照射装置が配置される範囲を拡大することができる。
【発明を実施するための最良の形態】
【0023】
図面を参照して、本発明による放射線治療システムの実施の形態を記載する。その放射線治療システム1は、図1に示されているように、放射線治療装置制御装置2と放射線治療装置3とを備えている。放射線治療装置制御装置2は、パーソナルコンピュータに例示されるコンピュータである。放射線治療装置制御装置2は、双方向に情報を伝送することができるように放射線治療装置3に接続されている。
【0024】
図2は、放射線治療装置3を示している。放射線治療装置3は、Oリング11と走行ガントリ12とを備えている。Oリング11は、回転軸14を中心に回転可能にOリング11を土台10に支持されている。回転軸14は、鉛直方向に平行である。Oリング11は、回転軸15を中心とするリング状に形成され、回転軸15を中心に回転可能に走行ガントリ12を支持している。回転軸15は、鉛直方向に垂直であり、回転軸14に含まれるアイソセンタ16を通る。回転軸15は、さらに、Oリング11に対して固定され、すなわち、Oリング11とともに回転軸14を中心に回転する。走行ガントリ12は、回転軸15を中心とするリング状に形成され、Oリング11のリングと同心円になるように配置されている。
【0025】
走行ガントリ12は、ケーシング17とケーシング18とを備えている。ケーシング17は、内部に図示されていない治療用放射線照射装置と2つの診断用X線源とを備えている。その治療用放射線照射装置は、放射線治療装置制御装置2により制御されて、治療用放射線を放射する。その治療用放射線は、一様強度分布を持つように形成されている。その治療用放射線は、さらに、一部が遮蔽されて治療用放射線が患者に照射されるときの照射野の形状が制御されている。その治療用放射線照射装置は、その治療用放射線がアイソセンタ16に向かうように走行ガントリ12に支持されている。このような治療用放射線照射装置によれば、その治療用放射線は、土台10に対してOリング11が回転し、または、Oリング11に対して走行ガントリ12が回転しても、常に概ねアイソセンタ16を通る。すなわち、放射線治療装置3は、土台10に対してOリング11を回転させ、または、Oリング11に対して走行ガントリ12を回転させることにより、任意方向からアイソセンタ16に向けて治療用放射線を照射することができる。
【0026】
その診断用X線源は、それぞれ、走行ガントリ12に支持され、アイソセンタ16から診断用X線源を結ぶ線分とアイソセンタ16から治療用放射線照射装置を結ぶ線分とがなす角が鋭角になるような位置に配置されている。その診断用X線源は、それぞれ、放射線治療装置制御装置2により制御されてアイソセンタ16に向けてその診断用X線を放射する。
【0027】
ケーシング18は、内部に図示されていない2つのセンサアレイを備えている。そのセンサアレイは、それぞれ、走行ガントリ12に支持され、その2つの診断用X線源により放射されてアイソセンタ16の周辺の被写体を透過したその診断用X線を受光して、その被写体の透過画像を生成する。そのセンサアレイとしては、FPD(Flat Panel Detector)、X線II(Image Intensifier)が例示される。
【0028】
放射線治療装置3は、さらに、カウチ21とカウチ駆動装置22とを備えている。カウチ21は、放射線治療システム1により治療される患者が横臥することに利用される。カウチ21は、図示されていない固定具を備えている。その固定具は、その患者が動かないように、その患者をカウチ21に固定する。カウチ駆動装置22は、カウチ21を土台10に支持し、放射線治療装置制御装置2により制御されてカウチ21を移動させる。
【0029】
放射線治療装置3は、さらに、入力装置23、24を備えている。入力装置23は、スイッチを備えている。そのスイッチは、ユーザにより押下または解放されることができるように形成されている。入力装置23は、ユーザにより操作され、その操作内容に対応する電気信号を放射線治療装置制御装置2に即時に出力する。その電気信号は、x軸正方向とx軸負方向とy軸正方向とy軸負方向とz軸正方向とz軸負方向とのうちの1つを示し、そのスイッチが押下されているか解放されているかを示している。入力装置24は、スイッチを備えている。そのスイッチは、ユーザにより押下または解放されることができるように形成されている。入力装置24は、ユーザにより操作され、その操作内容に対応する電気信号を放射線治療装置制御装置2に即時に出力する。その電気信号は、旋回角正方向と旋回角負方向と走行角正方向と走行角負方向とのうちの1つを示し、そのスイッチが押下されているか解放されているかを示している。
【0030】
放射線治療装置3は、図3に示されているように、さらに、モータ31〜35とセンサ36〜40とを備えている。モータ31は、放射線治療装置制御装置2により制御されて、カウチ21がx軸方向に平行移動するようにカウチ21を駆動する。モータ32は、放射線治療装置制御装置2により制御されて、カウチ21がy軸方向に平行移動するようにカウチ21を駆動する。モータ33は、放射線治療装置制御装置2により制御されて、カウチ21がz軸方向に平行移動するようにカウチ21を駆動する。そのz軸方向は、鉛直方向に平行である方向である。そのy軸方向は、そのz軸方向に垂直であり、カウチ21が回転軸14に近づいたり遠ざかったりする方向に平行である。そのx軸方向は、そのy軸方向に垂直であり、そのz軸方向に垂直である。モータ34は、放射線治療装置制御装置2により制御されて、Oリング11が回転軸14を中心に回転するようにOリング11を駆動する。モータ35は、走行ガントリ12が回転軸15を中心に回転するように走行ガントリ12を駆動する。
【0031】
センサ36は、カウチ21のx軸方向の位置を測定し、その位置を放射線治療装置制御装置2に出力する。センサ37は、カウチ21のy軸方向の位置を測定し、その位置を放射線治療装置制御装置2に出力する。センサ38は、カウチ21のz軸方向の位置を測定し、その位置を放射線治療装置制御装置2に出力する。センサ39は、土台10に対してOリング11が回転するOリング回転角を測定し、そのOリング回転角を放射線治療装置制御装置2に出力する。センサ40は、Oリング11に対して走行ガントリ12が回転するガントリ回転角を測定し、そのガントリ回転角を放射線治療装置制御装置2に出力する。
【0032】
図3は、放射線治療装置制御装置2を示している。放射線治療装置制御装置2は、コンピュータであり、図示されていないCPUと記憶装置と入力装置と出力装置とドライバとを備えている。そのCPUは、放射線治療装置制御装置2にインストールされるコンピュータプログラムを実行して、その記憶装置と入力装置と出力装置とドライバとを制御する。その記憶装置は、そのコンピュータプログラムを記録し、そのCPUに利用される情報を記録し、そのCPUにより生成される情報を記録する。その入力装置は、ユーザに操作されることにより生成される情報をそのCPUに出力する。その入力装置としては、キーボード、マウスが例示される。その出力装置は、そのCPUにより生成された情報をユーザに認識可能に出力する。その出力装置としては、そのCPUにより生成された画面を表示するディスプレイが例示される。そのドライバは、放射線治療装置制御装置2に接続される外部機器により生成される情報をそのCPUに出力し、または、そのCPUにより生成された情報をその外部機器に出力する。その外部機器は、放射線治療装置3(治療用放射線照射装置と入力装置23〜24とモータ31〜35とセンサ36〜40と)を含んでいる。
【0033】
放射線治療装置制御装置2は、コンピュータプログラムである治療計画部41と位置収集部42と駆動装置制御部43と治療用放射線照射部44とを備えている。
【0034】
治療計画部41は、その患者の患部とその患部の周辺の臓器(危険部位を含む)と位置関係を示す3次元データをユーザにより閲覧可能に出力装置に表示する。治療計画部41は、さらに、その3次元データと入力装置を用いて入力される情報とに基づいて、治療計画を作成する。その治療計画は、その患者の患部の3次元データを示し、照射角度と線量との組み合わせを示している。その線量は、その各照射角度から患部に照射される治療用放射線の線量を示している。その照射角度は、その患者の患部に治療用放射線を照射する方向を示し、すなわち、Oリング回転角とガントリ回転角とを示している。そのOリング回転角は、土台10に対するOリング11の向きを示している。そのガントリ回転角は、Oリング11に対する走行ガントリ12の向きを示している。そのOリング回転角とガントリ回転角とは、Oリング11がカウチ21または患者に干渉しないように(ぶつからないように)算出される。
【0035】
位置収集部42は、センサ36〜38を用いてカウチ21の位置を測定し、その位置をセンサ36〜38から収集する。すなわち、位置収集部42は、センサ36を用いてカウチ21のx軸方向の位置を測定し、そのx軸方向の位置をセンサ36から収集する。位置収集部42は、センサ37を用いてカウチ21のy軸方向の位置を測定し、そのy軸方向の位置をセンサ37から収集する。位置収集部42は、センサ38を用いてカウチ21のz軸方向の位置を測定し、そのz軸方向の位置をセンサ38から収集する。位置収集部42は、さらに、センサ39〜40を用いてOリング11の位置を測定し、その位置をセンサ39〜40から収集する。すなわち、位置収集部42は、センサ39を用いて土台10に対してOリング11が回転するOリング回転角を測定し、そのOリング回転角をセンサ39から収集する。位置収集部42は、センサ40を用いてOリング11に対して走行ガントリ12が回転するガントリ回転角を測定し、そのガントリ回転角をセンサ40から収集する。
【0036】
駆動装置制御部43は、入力装置23の操作に応答して、患者の患部がアイソセンタ16に重なるように、モータ31〜33を制御してカウチ21を移動する。駆動装置制御部43は、さらに、入力装置23、24から出力される電気信号と位置収集部42により収集されたカウチ21の位置とOリング11の位置と走行ガントリ12の位置とに基づいて、Oリング11と走行ガントリ12とが所定の速度で移動するように、モータ34〜35を制御する。
【0037】
治療用放射線照射部44は、さらに、治療計画部41により作成された治療計画が示す線量だけ、治療用放射線照射装置を用いて治療用放射線をその患者に照射する。
【0038】
図4は、駆動装置制御部43を示している。駆動装置制御部43は、カウチ駆動部50と干渉テーブル記憶部51と干渉領域到達判定部52と速度制御部53とを備えている。
【0039】
カウチ駆動部50は、入力装置23の操作に基づいてモータ31〜33用いてカウチ21を駆動する。すなわち、カウチ駆動部50は、入力装置23から出力される電気信号がx軸正方向を示すときに、モータ31を用いてx軸方向の正の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がx軸負方向を示すときに、モータ31を用いてx軸方向の負の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がy軸正方向を示すときに、モータ32を用いてy軸方向の正の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がy軸負方向を示すときに、モータ32を用いてy軸方向の負の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がz軸正方向を示すときに、モータ33を用いてz軸方向の正の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がz軸負方向を示すときに、モータ33を用いてz軸方向の負の方向にカウチ21を駆動する。カウチ駆動部50は、入力装置23から出力される電気信号がスイッチが解放されていることを示すときに、カウチ21が停止するようにモータ31〜33を制御する。カウチ駆動部50は、さらに、ユーザによる操作に応答して、放射線治療装置3の診断用X線源を用いてその診断用X線をその患者に照射し、放射線治療装置3のセンサアレイを用いてアイソセンタ16の周辺に配置された被写体の透過画像を生成する。
【0040】
干渉テーブル記憶部51は、他のコンピュータプログラムにより情報処理可能に干渉テーブルを記憶装置に記録している。その干渉テーブルは、走行ガントリ12が駆動される複数の領域を示している。干渉領域到達判定部52は、Oリング11と走行ガントリ12とが移動する経路とその干渉テーブルが示す複数の領域の境界とに基づいて速度変更開始タイミング算出する。速度制御部53は、入力装置24から出力される電気信号が旋回角正方向を示すときに、モータ34を用いて正の方向にOリング11を回転させる。速度制御部53は、入力装置24から出力される電気信号が旋回角負方向を示すときに、モータ34を用いて負の方向にOリング11を回転させる。速度制御部53は、入力装置24から出力される電気信号が走行角正方向を示すときに、モータ35を用いて正の方向に走行ガントリ12を回転させる。速度制御部53は、入力装置24から出力される電気信号が走行角負方向を示すときに、モータ35を用いて負の方向に走行ガントリ12を回転させる。速度制御部53は、入力装置24から出力される電気信号がスイッチが解放されていることを示すときに、Oリング11と走行ガントリ12とが停止するようにモータ34〜35を制御する。速度制御部53は、さらに、干渉テーブル記憶部51により記録される干渉テーブルを参照して、Oリング11と走行ガントリ12とが適切な速度で移動するように、モータ34〜35を制御する。速度制御部53は、さらに、干渉領域到達判定部52により速度変更開始タイミングが算出されたときに、その速度変更開始タイミングでOリング11と走行ガントリ12とが減速するようにモータ34〜35を制御する。
【0041】
図5は、干渉テーブル記憶部51により記録される干渉テーブルを示している。その干渉テーブル55は、カウチ位置56と治療用放射線照射装置位置57とを領域58に対応付けている。すなわち、カウチ位置56からなる集合のうちの任意の要素と治療用放射線照射装置位置57からなる集合のうちの任意の要素との組み合わせは、領域58からなる集合のうちの1つの要素に対応している。カウチ位置56は、土台10に対するカウチ21の位置を示し、カウチ21のx軸方向の位置とy軸方向の位置とz軸方向の位置とを示している。治療用放射線照射装置位置57は、土台10に対する走行ガントリ12の位置を示し、土台10に対するOリング11のOリング回転角とOリング11に対する走行ガントリ12のガントリ回転角とを示している。領域58は、走行ガントリ12が配置される複数の領域を示し、カウチ21がカウチ位置56に配置されているときにその複数の領域のうちの走行ガントリ12が配置された領域を示している。
【0042】
干渉テーブル55は、さらに、領域58を旋回角速度59と走行角速度60とに対応付けている。すなわち、領域58からなる集合のうちの任意の要素は、旋回角速度59からなる集合のうちの1つの要素に対応し、走行角速度60からなる集合のうちの1つの要素に対応している。旋回角速度59は、走行ガントリ12が領域58に配置されているときに、土台10に対してOリング11を回転させる速度を示している。走行角速度60は、走行ガントリ12が領域58に配置されているときに、Oリング11に対して走行ガントリ12を回転させる速度を示している。
【0043】
図6は、治療用放射線照射装置位置57と領域58との関係を示している。治療用放射線照射装置位置57は、Oリング回転角とガントリ回転角とで張られる空間に対応している。その空間は、非干渉領域61と人型干渉領域62と機械干渉領域63とから形成され、このとき、領域58は、非干渉領域61と人型干渉領域62と機械干渉領域63とに対応している。非干渉領域61と人型干渉領域62と機械干渉領域63とは、互いに重なりがない。非干渉領域61は、走行ガントリ12がカウチ21に干渉しないで、かつ、患者に干渉しない位置の集合に対応している。人型干渉領域62は、走行ガントリ12がカウチ21に干渉しないで、かつ、患者に干渉する可能性がある位置の集合に対応している。機械干渉領域63は、走行ガントリ12がカウチ21に干渉する可能性がある位置の集合に対応している。機械干渉領域63は、放射線治療装置3のCADデータが示す3次元形状に基づいて算出される。人型干渉領域62は、放射線治療装置3の3次元形状とカウチ21に配置された患者の3次元形状とに基づいて算出される。その患者の3次元形状は、事前に計測された患者のCTデータから算出されたものが利用される。なお、その患者の3次元形状は、CTデータから算出されたものに置換して、その患者に見立てた直方体が適用されることもできる。
【0044】
このような関係は、カウチ21が配置される空間を形成する複数の領域ごとに設計される。その領域は、それぞれ、立方体状に形成されている。その立方体の一辺の長さとしては、5cmが例示される。その長さは、小さいほどより高精度に制御することができる点で好ましい。
【0045】
図7は、Oリング11が回転するときの速度の変化の例を示している。その変化71は、Oリング11が位置72から位置73まで回転することを示している。変化71は、さらに、Oリング11が位置72から位置73まで回転するときに、非干渉領域61に対応する区間74と人型干渉領域62に対応する区間75と機械干渉領域63に対応する区間76とを経由することを示している。変化71は、さらに、Oリング11が区間74を回転するときに概ね旋回角速度77で回転することを示し、Oリング11が区間75を回転するときに概ね旋回角速度78で回転することを示し、Oリング11が区間76を回転するときに概ね旋回角速度79で回転することを示している。旋回角速度77としては、7°毎秒が例示される。旋回角速度78は、旋回角速度77より小さい角速度を示し、3°毎秒が例示される。旋回角速度79は、旋回角速度78より小さい角速度を示し、1°毎秒が例示される。
【0046】
すなわち、干渉テーブル55の旋回角速度59は、旋回角速度77と旋回角速度78と旋回角速度79とを要素とする集合である。
【0047】
変化71は、Oリング11が区間74のうちの位置81を通過するときに減速を開始し、区間74と区間75との境界である位置82を通過するときにその減速を終了してOリング11が旋回角速度78で移動することを示している。変化71は、さらに、Oリング11が区間75のうちの位置83を通過するときに減速を開始し、区間75と区間76との境界である位置84を通過するときにその減速を終了してOリング11が旋回角速度79で移動することを示している。変化71は、さらに、Oリング11が区間76のうちの位置85を通過するときに減速を開始し、位置73でOリング11が停止することを示している。
【0048】
すなわち、干渉領域到達判定部52は、治療計画部41により作成された治療計画に基づいて位置73を算出し、位置収集部42により現在のOリング回転角である位置73を収集する。干渉領域到達判定部52は、干渉テーブル55を参照し、位置72と位置73とに基づいて回転軸14を中心にOリング11を回転駆動する旋回角速度の変化71を算出する。すなわち、干渉領域到達判定部52は、Oリング11が非干渉領域61と人型干渉領域62との境界の位置82を通過するときに、Oリング11が人型干渉領域62で旋回角速度78で移動するように、非干渉領域61で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、Oリング11が人型干渉領域62と機械干渉領域63の境界の位置84を通過するときに、Oリング11が機械干渉領域63で旋回角速度79で移動するように、人型干渉領域62で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、Oリング11が位置73で停止するように、減速を開始しなければならない速度変更開始タイミングを算出する。
【0049】
速度制御部53は、入力装置24のスイッチが押下されたことに応答して、入力装置24から出力される電気信号が示す方向に向かってOリング11が回転するようにモータ34を制御する。速度制御部53は、干渉テーブル55を参照して、位置収集部42により収集される現在のOリング回転角に対応する旋回角速度を算出し、その旋回角速度でOリング11が回転するようにモータ34を制御する。速度制御部53は、干渉領域到達判定部52により算出された速度変更開始タイミングになったときに、Oリング11の回転が減速するようにモータ34を制御する。速度制御部53は、入力装置24のスイッチが解放されたことに応答して、Oリング11が停止するようにモータ34を制御する。
【0050】
図8は、走行ガントリ12が回転するときの速度の変化の例を示している。その変化91は、走行ガントリ12が位置92から位置93まで回転することを示している。変化91は、さらに、走行ガントリ12が位置92から位置93まで回転するときに、非干渉領域61に対応する区間94と人型干渉領域62に対応する区間95と機械干渉領域63に対応する区間96とを経由することを示している。変化91は、さらに、走行ガントリ12が区間94を回転するときに概ね走行角速度97で回転することを示し、走行ガントリ12が区間95を回転するときに概ね走行角速度98で回転することを示し、走行ガントリ12が区間96を回転するときに概ね走行角速度99で回転することを示している。走行角速度97としては、7°毎秒が例示される。走行角速度98は、走行角速度97より小さい角速度を示し、3°毎秒が例示される。走行角速度99は、走行角速度98より小さい角速度を示し、1°毎秒が例示される。
【0051】
すなわち、干渉テーブル55の走行角速度60は、走行角速度97と走行角速度98と走行角速度99とを要素とする集合である。
【0052】
変化91は、走行ガントリ12が区間94のうちの位置101を通過するときに減速を開始し、区間94と区間95との境界である位置102を通過するときにその減速を終了して走行ガントリ12が走行角速度98で移動することを示している。変化91は、さらに、走行ガントリ12が区間95のうちの位置103を通過するときに減速を開始し、区間95と区間96との境界である位置104を通過するときにその減速を終了して走行ガントリ12が走行角速度99で移動することを示している。変化91は、さらに、走行ガントリ12が区間96のうちの位置105を通過するときに減速を開始し、位置93で走行ガントリ12が停止することを示している。
【0053】
すなわち、干渉領域到達判定部52は、治療計画部41により作成された治療計画に基づいて位置93を算出し、位置収集部42により現在のガントリ回転角である位置93を収集する。干渉領域到達判定部52は、干渉テーブル55を参照し、位置92と位置93とに基づいて回転軸15を中心に走行ガントリ12を回転駆動する走行角速度の変化91を算出する。すなわち、干渉領域到達判定部52は、走行ガントリ12が非干渉領域61と人型干渉領域62との境界の位置102を通過するときに、走行ガントリ12が人型干渉領域62で走行角速度98で移動するように、非干渉領域61で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、走行ガントリ12が人型干渉領域62と機械干渉領域63の境界の位置104を通過するときに、走行ガントリ12が機械干渉領域63で走行角速度99で移動するように、人型干渉領域62で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、走行ガントリ12が位置93で停止するように、減速を開始しなければならない速度変更開始タイミングを算出する。
【0054】
速度制御部53は、入力装置24のスイッチが押下されたことに応答して、入力装置24から出力される電気信号が示す方向に向かって走行ガントリ12が回転するようにモータ35を制御する。速度制御部53は、干渉テーブル55を参照して、位置収集部42により収集される現在のガントリ回転角に対応する走行角速度を算出し、その走行角速度で走行ガントリ12が回転するようにモータ35を制御する。速度制御部53は、干渉領域到達判定部52により算出された速度変更開始タイミングになったときに、走行ガントリ12の回転が減速するようにモータ35を制御する。速度制御部53は、入力装置24のスイッチが解放されたことに応答して、走行ガントリ12が停止するようにモータ35を制御する。
【0055】
本発明による放射線照射方法の実施の形態は、放射線治療システム1を用いて実行され、治療計画を作成する動作と、セットアップする動作と、放射線治療する動作とを備えている。
【0056】
その治療計画を作成する動作では、まず、ユーザは、その患者の患部とその患部の周辺の部位との3次元データに基づいて、その患者の患部とその患部の周辺の臓器とを示す画像を生成する。ユーザは、放射線治療装置制御装置2を用いてその画像を閲覧し、その患部の位置を特定する。ユーザは、さらに、その画像に基づいて治療計画を作成し、その治療計画を放射線治療装置制御装置2に入力する。その治療計画は、その患者の患部に治療用放射線を照射する照射角度と、その各照射角度から照射する治療用放射線の線量および性状とを示している。
【0057】
そのセットアップする動作は、放射線治療する動作の直前に実行され、カウチ21を駆動する動作と治療用放射線照射装置を駆動する動作とを備えている。カウチ21を駆動する動作では、ユーザは、まず、その3次元データを採取したときと同様の姿勢に放射線治療装置3のカウチ21にその患者を固定する。ユーザは、患者の患部が概ねアイソセンタ16に重なって配置されるように入力装置23を操作して、カウチ21を移動させる。ユーザは、放射線治療装置3の診断用X線源とセンサアレイとを用いてその診断用X線をその患者に照射してその患者の患部の透過画像を撮像する。ユーザは、その透過画像に基づいて患者の患部がアイソセンタ16に重なって配置されるように入力装置23を操作してカウチ21を移動させる。ユーザは、その透過画像の撮像とカウチ21の移動とを繰り返して、患者の患部がアイソセンタ16に正確に重なるように患者の患部を配置する。
【0058】
その治療用放射線照射装置を駆動する動作は、Oリング11を駆動する動作と走行ガントリ12を駆動する動作とを備えている。Oリング11を駆動する動作は、入力装置24のスイッチの押下に応答して開始される。ユーザは、Oリング11を駆動させたいときに入力装置24のスイッチを押下する。放射線治療装置制御装置2は、入力装置24のスイッチが押下されたことに応答して、入力装置24から出力される電気信号が示す方向に向かってOリング11が回転するようにモータ34を制御する。放射線治療装置制御装置2は、干渉テーブル55を参照して、センサ39により測定される現在のOリング回転角に対応する旋回角速度を算出し、その旋回角速度でOリング11が回転するようにモータ34を制御する。放射線治療装置制御装置2は、速度変更開始タイミングになったときに、Oリング11の回転が減速するようにモータ34を制御する。
【0059】
ユーザは、Oリング11を停止させたいときに入力装置24のスイッチを解放する。放射線治療装置制御装置2は、入力装置24のスイッチが解放されたことに応答して、Oリング11が停止するようにモータ34を制御する。
【0060】
走行ガントリ12を駆動する動作は、入力装置24のスイッチの押下に応答して開始される。ユーザは、走行ガントリ12を駆動させたいときに入力装置24のスイッチを押下する。放射線治療装置制御装置2は、入力装置24のスイッチが押下されたことに応答して、入力装置24から出力される電気信号が示す方向に向かって走行ガントリ12が回転するようにモータ35を制御する。放射線治療装置制御装置2は、干渉テーブル55を参照して、センサ40により測定される現在のガントリ回転角に対応する走行角速度を算出し、その走行角速度で走行ガントリ12が回転するようにモータ35を制御する。放射線治療装置制御装置2は、速度変更開始タイミングになったときに、走行ガントリ12の回転が減速するようにモータ35を制御する。
【0061】
ユーザは、走行ガントリ12を停止させたいときに入力装置24のスイッチを解放する。放射線治療装置制御装置2は、入力装置24のスイッチが解放されたことに応答して、走行ガントリ12が停止するようにモータ35を制御する。
【0062】
その放射線治療する動作は、患者の患部に対する治療用放射線照射装置の相対位置が治療計画が示す照射角度に許容範囲内で一致するように、カウチ21とOリング11と走行ガントリ12とが駆動された後に実行される。その放射線治療する動作では、放射線治療装置制御装置2は、その治療計画が示す線量だけ、治療用放射線照射装置を用いて治療用放射線を患者の患部に照射する。
【0063】
このような放射線照射方法によれば、Oリング11または走行ガントリ12は、カウチ21または患者に衝突する可能性があるときに低速で回転し、Oリング11または走行ガントリ12がカウチ21または患者に衝突するときの衝撃を緩和することができる。このため、このような放射線照射方法は、その衝突を防止するためにOリング11または走行ガントリ12が回転することを禁止するマージンを大きく設定する必要がなく、Oリング11または走行ガントリ12が移動することができる範囲を拡大することができる。
【0064】
このような放射線照射方法によれば、Oリング11または走行ガントリ12は、カウチ21または患者に衝突する可能性があるときに低速で回転し、ユーザは、Oリング11または走行ガントリ12をより容易に所望の位置に停止させることができる。このような放射線照射方法によれば、さらに、Oリング11または走行ガントリ12は、カウチ21または患者に衝突する可能性が小さいときに高速で回転し、そのセットアップする動作にかかる時間を低減することができ、放射線治療にかかる時間を低減することができる。このような時間の低減は、患者の負担を軽減する。
【0065】
なお、放射線治療装置制御装置2は、速度変更開始タイミングになったときに減速することに置換して、高速に対応する領域から低速に対応する領域に移動する時刻に減速することもできる。このような動作によれば、放射線治療装置制御装置2は、干渉テーブル55を適切に設計することにより、速度変更開始タイミングになったときに減速することと同様にして、Oリング11または走行ガントリ12が移動することができる範囲を拡大することができ、放射線治療にかかる時間を低減することができる。さらに、放射線治療装置制御装置2は、セットアップするときに速度変更開始タイミングを算出する必要がなく、容易に設計されることができる。
【0066】
なお、放射線治療装置制御装置2は、入力装置24の操作に基づいてOリング11または走行ガントリ12を駆動することに置換して、自動的にOリング11または走行ガントリ12を駆動することもできる。このとき、放射線治療装置制御装置2は、治療用放射線照射装置が現在の位置から治療計画に基づいて算出された位置に移動する経路を算出し、治療用放射線照射装置がその経路を辿って干渉テーブル55を参照して算出される速度で移動するようにモータ34〜35を制御する。このような経路の算出は、公知であり、たとえば、特開2000−222019号公報に開示されている。このとき、放射線治療装置制御装置2は、入力装置24の操作に基づいてOリング11または走行ガントリ12を駆動することと同様にして、Oリング11または走行ガントリ12が移動することができる範囲を拡大することができる。
【0067】
図9は、Oリング11が回転するときの速度の変化の他の例を示している。その変化111は、Oリング11が位置112から位置113まで回転することを示している。変化111は、さらに、Oリング11が位置112から位置113まで回転するときに、非干渉領域61に対応する区間114と人型干渉領域62に対応する区間115と機械干渉領域63に対応する区間116とを経由することを示している。変化111は、さらに、Oリング11が区間114を回転するときに概ね旋回角速度117で回転することを示し、Oリング11が区間115を回転するときに概ね旋回角速度118で回転することを示し、Oリング11が区間116を回転するときに概ね旋回角速度119で回転することを示している。旋回角速度117としては、7°毎秒が例示される。旋回角速度118は、旋回角速度117より小さい角速度を示し、3°毎秒が例示される。旋回角速度119は、旋回角速度118より小さい角速度を示し、1°毎秒が例示される。
【0068】
すなわち、干渉テーブル55の旋回角速度59は、旋回角速度117と旋回角速度118と旋回角速度119とを要素とする集合である。
【0069】
変化111は、Oリング11が区間114のうちの位置121を通過するときに減速を開始し、区間114と区間115との境界である位置122を通過するときにその減速を終了してOリング11が旋回角速度118で移動することを示している。変化111は、さらに、Oリング11が区間115のうちの位置123を通過するときに減速を開始し、区間115と区間116との境界である位置124を通過するときにその減速を終了してOリング11が旋回角速度119で移動することを示している。変化111は、さらに、Oリング11が区間116のうちの位置125を通過するときに減速を開始し、位置113でOリング11が停止することを示している。
【0070】
すなわち、干渉領域到達判定部52は、治療計画部41により作成された治療計画に基づいて位置113を算出し、位置収集部42により現在のOリング回転角である位置113を収集する。干渉領域到達判定部52は、干渉テーブル55を参照し、位置112と位置113とに基づいて回転軸14を中心にOリング11を回転駆動する旋回角速度の変化111を算出する。すなわち、干渉領域到達判定部52は、Oリング11が非干渉領域61と人型干渉領域62との境界の位置122を通過するときに、Oリング11が位置122で停止するように、非干渉領域61で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、Oリング11が人型干渉領域62と機械干渉領域63の境界の位置124を通過するときに、Oリング11が位置124で停止するように、人型干渉領域62で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、Oリング11が位置113で停止するように、減速を開始しなければならない速度変更開始タイミングを算出する。
【0071】
図10は、走行ガントリ12が回転するときの速度の変化の他の例を示している。その変化131は、走行ガントリ12が位置132から位置133まで回転することを示している。変化131は、さらに、走行ガントリ12が位置132から位置133まで回転するときに、非干渉領域61に対応する区間134と人型干渉領域62に対応する区間135と機械干渉領域63に対応する区間136とを経由することを示している。変化131は、さらに、走行ガントリ12が区間134を回転するときに概ね走行角速度137で回転することを示し、走行ガントリ12が区間135を回転するときに概ね走行角速度138で回転することを示し、走行ガントリ12が区間136を回転するときに概ね走行角速度139で回転することを示している。走行角速度137としては、7°毎秒が例示される。走行角速度138は、走行角速度137より小さい角速度を示し、3°毎秒が例示される。走行角速度139は、走行角速度138より小さい角速度を示し、1°毎秒が例示される。
【0072】
すなわち、干渉テーブル55の走行角速度60は、走行角速度137と走行角速度138と走行角速度139とを要素とする集合である。
【0073】
変化131は、走行ガントリ12が区間134のうちの位置141を通過するときに減速を開始し、区間134と区間135との境界である位置142を通過するときにその減速を終了して走行ガントリ12が走行角速度138で移動することを示している。変化131は、さらに、走行ガントリ12が区間135のうちの位置143を通過するときに減速を開始し、区間135と区間136との境界である位置144を通過するときにその減速を終了して走行ガントリ12が走行角速度139で移動することを示している。変化131は、さらに、走行ガントリ12が区間136のうちの位置145を通過するときに減速を開始し、位置133で走行ガントリ12が停止することを示している。
【0074】
すなわち、干渉領域到達判定部52は、治療計画部41により作成された治療計画に基づいて位置133を算出し、位置収集部42により現在のガントリ回転角である位置133を収集する。干渉領域到達判定部52は、干渉テーブル55を参照し、位置132と位置133とに基づいて回転軸15を中心に走行ガントリ12を回転駆動する走行角速度の変化131を算出する。すなわち、干渉領域到達判定部52は、走行ガントリ12が非干渉領域61と人型干渉領域62との境界の位置142を通過するときに、走行ガントリ12が人型干渉領域62で走行角速度138で移動するように、非干渉領域61で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、走行ガントリ12が人型干渉領域62と機械干渉領域63の境界の位置144を通過するときに、走行ガントリ12が機械干渉領域63で走行角速度139で移動するように、人型干渉領域62で減速を開始しなければならない速度変更開始タイミングを算出する。干渉領域到達判定部52は、さらに、走行ガントリ12が位置133で停止するように、減速を開始しなければならない速度変更開始タイミングを算出する。
【0075】
ユーザは、変化111に示されるようにOリング11が制御され、変化131に示されるように走行ガントリ12が制御されることにより、Oリング11または走行ガントリ12が領域の境界を通過したことを認識しやすく、好ましい。
【0076】
なお、放射線治療装置制御装置2は、Oリング11または走行ガントリ12と同様にして、カウチ21を駆動させることもできる。すなわち、干渉テーブル55は、さらに領域58をカウチ移動速度に対応付けている。放射線治療装置制御装置2は、入力装置23のスイッチが押下されたことに応答して、入力装置23から出力される電気信号が示す方向に向かってカウチ21が移動するようにモータ31〜33を制御する。放射線治療装置制御装置2は、干渉テーブル55を参照して、センサ36〜38により測定される現在のカウチ21の位置に対応するカウチ移動速度を算出し、そのカウチ移動速度でカウチ21が移動するようにモータ31〜33を制御する。放射線治療装置制御装置2は、カウチ21が所定の速度で移動するために減速を開始しなければならない速度変更開始タイミングを算出し、その速度変更開始タイミングになったときに、カウチ21の移動が減速するようにモータ31〜33を制御する。ユーザは、カウチ21を停止させたいときに入力装置23のスイッチを解放する。放射線治療装置制御装置2は、入力装置23のスイッチが解放されたことに応答して、カウチ21が停止するようにモータ31〜33を制御する。
【図面の簡単な説明】
【0077】
【図1】図1は、本発明による放射線治療システムの実施の形態を示すブロック図である。
【図2】図2は、放射線治療装置を示す斜視図である。
【図3】図3は、本発明による放射線治療装置制御装置の実施の形態を示すブロック図である。
【図4】図4は、駆動装置制御部を示すブロック図である。
【図5】図5は、干渉テーブルを示す図である。
【図6】図6は、治療用放射線照射装置位置と領域との関係を示すグラフである。
【図7】図7は、Oリングが駆動されるときの速度の変化の例を示すグラフである。
【図8】図8は、走行ガントリが駆動されるときの速度の変化の例を示すグラフである。
【図9】図9は、Oリングが駆動されるときの速度の変化の他の例を示すグラフである。
【図10】図10は、走行ガントリが駆動されるときの速度の変化の他の例を示すグラフである。
【符号の説明】
【0078】
1 :放射線治療システム
2 :放射線治療装置制御装置
3 :放射線治療装置
10:土台
11:Oリング
12:走行ガントリ
14:回転軸
15:回転軸
16:アイソセンタ
17:ケーシング
18:ケーシング
21:カウチ
22:カウチ駆動装置
23:入力装置
24:入力装置
31〜35:モータ
36〜40:とセンサ
41:治療計画部
42:位置収集部
43:駆動装置制御部
44:治療用放射線照射部
50:カウチ駆動部
51:干渉テーブル記憶部
52:干渉領域到達判定部
53:速度制御部
55:干渉テーブル
56:カウチ位置
57:治療用放射線照射装置位置
58:領域
59:旋回角速度
60:走行角速度
61:非干渉領域
62:人型干渉領域
63:機械干渉領域
【特許請求の範囲】
【請求項1】
治療用放射線を放射する治療用放射線照射装置の位置をセンサから収集するステップと、
前記治療用放射線照射装置が移動しているときの速度が前記位置に基づいて変化するように、前記治療用放射線照射装置を駆動する駆動装置を制御するステップ
とを具備する放射線照射方法。
【請求項2】
請求項1において、
入力装置の所定の操作に応答して前記治療用放射線照射装置が停止するように前記駆動装置を制御するステップ
を更に具備する放射線照射方法。
【請求項3】
請求項1または請求項2のいずれかにおいて、
前記治療用放射線が照射される被検体が配置されるカウチのカウチ位置を収集するステップを更に具備し、
前記駆動装置は、前記速度が前記カウチ位置に更に基づいて変化するように制御される
放射線照射方法。
【請求項4】
請求項3において、
前記駆動装置は、領域集合を速度集合に対応付ける干渉テーブルを参照して、前記速度集合のうちの前記治療用放射線照射装置が配置される領域に対応する対応速度で前記治療用放射線照射装置が移動するように、制御される
放射線照射方法。
【請求項5】
請求項4において、
前記治療用放射線照射装置が前記領域集合のうちの第1速度に対応する第1領域から前記領域集合のうちの前記第1速度より小さい第2速度に対応する第2領域に移動するときに、前記治療用放射線照射装置が前記第1領域に配置される期間のうちから速度変更開始タイミングを算出するステップと、
前記速度変更開始タイミングに到達したときに、前記治療用放射線照射装置が減速するように前記駆動装置を制御するステップ
とを更に具備する放射線照射方法。
【請求項6】
治療用放射線を放射する治療用放射線照射装置の位置をセンサから収集する位置収集部と、
前記治療用放射線照射装置が移動しているときの速度が前記位置に基づいて変化するように、前記治療用放射線照射装置を駆動する駆動装置を制御する駆動装置制御部
とを具備する放射線治療装置制御装置。
【請求項7】
請求項6において、
前記駆動装置制御部は、更に、入力装置の所定の操作に応答して前記治療用放射線照射装置が停止するように前記駆動装置を制御する
放射線治療装置制御装置。
【請求項8】
請求項6または請求項7のいずれかにおいて、
前記位置収集部は、前記治療用放射線が照射される被検体が配置されるカウチのカウチ位置を更に収集し、
前記駆動装置は、前記速度が前記カウチ位置に更に基づいて変化するように制御される
放射線治療装置制御装置。
【請求項9】
請求項8において、
前記駆動装置制御部は、
領域集合を速度集合に対応付ける干渉テーブルを記録装置に記録する干渉テーブル記憶部と、
前記干渉テーブルを参照して、前記速度集合のうちの前記治療用放射線照射装置が配置される領域に対応する対応速度で前記治療用放射線照射装置が移動するように、前記駆動装置を制御する速度制御部とを備える
放射線治療装置制御装置。
【請求項10】
請求項9において、
前記駆動装置制御部は、前記治療用放射線照射装置が前記領域集合のうちの第1速度に対応する第1領域から前記領域集合のうちの前記第1速度より小さい第2速度に対応する第2領域に移動するときに、前記治療用放射線照射装置が前記第1領域に配置される期間のうちから速度変更開始タイミングを算出する干渉領域到達判定部を更に備え、
前記速度制御部は、前記速度変更開始タイミングに到達したときに、前記治療用放射線照射装置が減速するように前記駆動装置を制御する
放射線治療装置制御装置。
【請求項11】
請求項6〜請求項10のいずれかに記載される放射線治療装置制御装置と、
前記駆動装置と前記センサと前記治療用放射線照射装置とを備える放射線治療装置
とを具備する放射線治療システム。
【請求項1】
治療用放射線を放射する治療用放射線照射装置の位置をセンサから収集するステップと、
前記治療用放射線照射装置が移動しているときの速度が前記位置に基づいて変化するように、前記治療用放射線照射装置を駆動する駆動装置を制御するステップ
とを具備する放射線照射方法。
【請求項2】
請求項1において、
入力装置の所定の操作に応答して前記治療用放射線照射装置が停止するように前記駆動装置を制御するステップ
を更に具備する放射線照射方法。
【請求項3】
請求項1または請求項2のいずれかにおいて、
前記治療用放射線が照射される被検体が配置されるカウチのカウチ位置を収集するステップを更に具備し、
前記駆動装置は、前記速度が前記カウチ位置に更に基づいて変化するように制御される
放射線照射方法。
【請求項4】
請求項3において、
前記駆動装置は、領域集合を速度集合に対応付ける干渉テーブルを参照して、前記速度集合のうちの前記治療用放射線照射装置が配置される領域に対応する対応速度で前記治療用放射線照射装置が移動するように、制御される
放射線照射方法。
【請求項5】
請求項4において、
前記治療用放射線照射装置が前記領域集合のうちの第1速度に対応する第1領域から前記領域集合のうちの前記第1速度より小さい第2速度に対応する第2領域に移動するときに、前記治療用放射線照射装置が前記第1領域に配置される期間のうちから速度変更開始タイミングを算出するステップと、
前記速度変更開始タイミングに到達したときに、前記治療用放射線照射装置が減速するように前記駆動装置を制御するステップ
とを更に具備する放射線照射方法。
【請求項6】
治療用放射線を放射する治療用放射線照射装置の位置をセンサから収集する位置収集部と、
前記治療用放射線照射装置が移動しているときの速度が前記位置に基づいて変化するように、前記治療用放射線照射装置を駆動する駆動装置を制御する駆動装置制御部
とを具備する放射線治療装置制御装置。
【請求項7】
請求項6において、
前記駆動装置制御部は、更に、入力装置の所定の操作に応答して前記治療用放射線照射装置が停止するように前記駆動装置を制御する
放射線治療装置制御装置。
【請求項8】
請求項6または請求項7のいずれかにおいて、
前記位置収集部は、前記治療用放射線が照射される被検体が配置されるカウチのカウチ位置を更に収集し、
前記駆動装置は、前記速度が前記カウチ位置に更に基づいて変化するように制御される
放射線治療装置制御装置。
【請求項9】
請求項8において、
前記駆動装置制御部は、
領域集合を速度集合に対応付ける干渉テーブルを記録装置に記録する干渉テーブル記憶部と、
前記干渉テーブルを参照して、前記速度集合のうちの前記治療用放射線照射装置が配置される領域に対応する対応速度で前記治療用放射線照射装置が移動するように、前記駆動装置を制御する速度制御部とを備える
放射線治療装置制御装置。
【請求項10】
請求項9において、
前記駆動装置制御部は、前記治療用放射線照射装置が前記領域集合のうちの第1速度に対応する第1領域から前記領域集合のうちの前記第1速度より小さい第2速度に対応する第2領域に移動するときに、前記治療用放射線照射装置が前記第1領域に配置される期間のうちから速度変更開始タイミングを算出する干渉領域到達判定部を更に備え、
前記速度制御部は、前記速度変更開始タイミングに到達したときに、前記治療用放射線照射装置が減速するように前記駆動装置を制御する
放射線治療装置制御装置。
【請求項11】
請求項6〜請求項10のいずれかに記載される放射線治療装置制御装置と、
前記駆動装置と前記センサと前記治療用放射線照射装置とを備える放射線治療装置
とを具備する放射線治療システム。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】

【図7】

【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2008−264158(P2008−264158A)
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願番号】特願2007−110433(P2007−110433)
【出願日】平成19年4月19日(2007.4.19)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願日】平成19年4月19日(2007.4.19)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]