
放射線画像読取装置
【課題】厚みやサイズがそれぞれ異なる画像記録体を、湾曲した状態で一様な速度で搬送し、さらには低コストな構成で部分的な部位の交換を容易に行える放射線画像読取装置を提供する。
【解決手段】放射線画像読取装置100は、複数のステッピングモータ126と、複数のステッピングモータを同期させて駆動する単一のモータドライバと、モータドライバを介してステッピングモータ126の駆動を制御する制御部と、プレート状の画像記録体Pを湾曲面で支持する記録体支持部110と湾曲面111A〜111Dに垂直な方向に移動可能に記録体支持部110に保持され、湾曲面向きの押圧力により画像記録体を押圧するとともに、ステッピングモータ126の駆動力を画像記録体Pに伝達する伝達部129と、を備え、駆動力の伝達により搬送される画像記録体Pから放射線照射画像の読み出しと消去を連続して行う。
【解決手段】放射線画像読取装置100は、複数のステッピングモータ126と、複数のステッピングモータを同期させて駆動する単一のモータドライバと、モータドライバを介してステッピングモータ126の駆動を制御する制御部と、プレート状の画像記録体Pを湾曲面で支持する記録体支持部110と湾曲面111A〜111Dに垂直な方向に移動可能に記録体支持部110に保持され、湾曲面向きの押圧力により画像記録体を押圧するとともに、ステッピングモータ126の駆動力を画像記録体Pに伝達する伝達部129と、を備え、駆動力の伝達により搬送される画像記録体Pから放射線照射画像の読み出しと消去を連続して行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プレート状の画像記録体に記録された放射線照射画像を読み取る放射線画像読取装置に関する。
【背景技術】
【0002】
従来、放射線画像はフィルムに記録されていたが、フィルムでは放射線強度をデジタル値として定量的に測定し難く、また現像に時間がかかる等、取り扱いが不便であった。そこで、照射された放射線強度を蓄積し、励起光の照射により蓄積に応じた蛍光を発する蓄積性蛍光体が開発され、取り扱いや測定の精度が大幅に向上した。初期の蓄積性蛍光体の読取装置では、レーザ光を走査するものが主流だったが、位置の精度が求められるにつれて、回転式のドラムに蓄積性蛍光体を巻いてレーザ光をドラムの外から当てるものが開発された。
【0003】
その後、さらに取り扱いの容易性や読取時間の短縮が求められ、蓄積性蛍光体の蓄像面を内側にして、円筒面上で曲げて支持し、円筒面の内側に、その中心線で回転するレーザ光を当てて読取りを行う装置が開発された(たとえば、特許文献1参照)。特許文献1記載の装置は、潜像を読み出すための励起光であるレーザを円筒面に沿って回転させ、蓄積性蛍光体そのものを回転の中心軸と平行な方向に搬送する。そして、搬送のために電気的に同期させた駆動ベルトを使用している。
【0004】
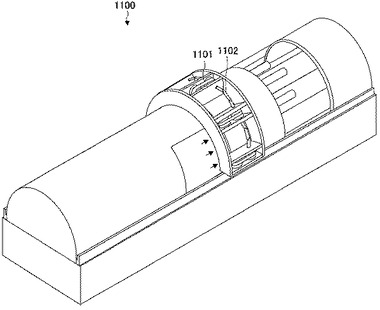
このように複数台のモータと複数台のポジショニングエンコーダを用いる技術が提案されているが(特許文献1の段落〔0075〕、〔0107〕、〔0136〕参照)、パルスに同期させて複数のモータドライバにより複数台のモータを回転させるものに過ぎず、コストが嵩む。これに対し、1モータドライバで1モータを駆動し、機械的連結により複数のベルトを同期させる装置が本発明者らにより提案されている。図11は、ユニバーサルジョイント1102を用いて機械的連結により複数のベルト1101を同期させて駆動する放射線画像読取装置1100を示す図である。一方、一つの駆動回路で複数のステッピングモータを動かす技術が知られている(たとえば、特許文献2参照)。特許文献2記載の装置は、一つのドライバによりステッピングモータの駆動を切り替え、ステッピングモータをホールドする技術であり、モータの同時回転を目的としていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特表2003−509711号公報
【特許文献2】特開昭63−140696号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
放射線画像読取装置は、厚みやサイズがそれぞれ異なる画像記録体を、湾曲した状態で一様な速度で搬送する必要がある。しかしながら、たとえば、ユニバーサルジョイントによる連動でモータを駆動する場合には、屈曲部の回転半径が変わるため、連結先の回転スピードが変わってしまう。その結果、ユニバーサルジョイントでは速度の一様性が保証できない。
【0007】
一方、ベルト連結機構ではベルトの伸縮が遅れに影響するためベルトによる駆動力の伝達に遅れが生じる。特に、異なった角度での搬送には、従来の1モータの場合、連結にカプラー、スプリング、ユニバーサルジョイント等のカップリングで行っても角度が急になるほどメカニカルな連結では角度誤差が生じる。このように、機械的な機構で連動させようとすると一様な駆動を達成できない。一方、モータドライバを複数使用してコンピュータ制御により各モータを駆動させると費用が嵩む。また、これらの方法では、将来的に組み立てられた機構の一部の交換が必要になったときに部分的な部位の交換やその後の調整が困難となる。また、1台のモータドライバにより同時に同速度でモータを駆動する技術については開発されていない。
【0008】
そして、従来の放射線画像読取装置では、搬送機構が画像記録体を支持する円筒面に対して固定された状態で用いられ、画像記録体を送るための隙間が固定される。そのため、画像記録体の厚みやサイズに応じた柔軟な搬送できず画像記録体の詰まりや画像記録体上の皺が生じるおそれがある。
【0009】
本発明は、このような事情に鑑みてなされたものであり、厚みやサイズがそれぞれ異なる画像記録体を、湾曲した状態で一様な速度で搬送し、さらには低コストな構成で部分的な部位の交換を容易に行える放射線画像読取装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
(1)上記の目的を達成するため、本発明に係る放射線画像読取装置は、プレート状の画像記録体に記録された放射線照射画像を読み取る放射線画像読取装置であって、複数のステッピングモータと、前記複数のステッピングモータを同期させて駆動する単一のモータドライバと、前記モータドライバを介して前記ステッピングモータの駆動を制御する制御部と、前記画像記録体を湾曲面で支持する記録体支持部と前記湾曲面に垂直な方向に移動可能に前記記録体支持部に保持され、前記湾曲面向きの押圧力により前記画像記録体を押圧するとともに、前記ステッピングモータの駆動力を前記画像記録体に伝達する伝達部と、を備え、前記駆動力の伝達により搬送される前記画像記録体から前記放射線照射画像の読み出しと消去を連続して行うことを特徴としている。
【0011】
これにより、厚みやサイズがそれぞれ異なる画像記録体を、湾曲した状態で一様な速度で搬送できる。また、異なった角度で画像記録体を搬送する際に画像記録体に皺が生じない。また、モータドライバを一つしか用いないため、低コストで装置を構成できる。さらには部分的な部位の交換を容易に行える。たとえば、故障した1台のステッピングモータを交換する場合には、そのステッピングモータのみを取り外し、同じタイプのステッピングモータを取り付ければよく、オーバーホールや調整は不要である。
【0012】
なお、単一のモータドライバとは、ステッピングモータ1台を駆動する結線のみを有する、1チャンネルのモータドライバを指し、多チャンネルモータドライバの1セット(1台)を指すものではない。
【0013】
(2)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータが、電気的に並列接続されていることを特徴としている。これにより、駆動電圧を大きくすることなくモータ駆動が可能となる。また、複数のステッピングモータ同士が同じタイプのモータでなくても駆動が可能となる。
【0014】
(3)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータが、電気的に直列接続されていることを特徴としている。これにより、定電流駆動ができ、すべてのステッピングモータを同トルクで動かすことができる。
【0015】
(4)また、本発明に係る放射線画像読取装置は、前記モータドライバの供給電圧をE1とし、前記ステッピングモータの逆起電力の総和の電圧をE2とするとき、1.1≦E1/E2であることを特徴としている。これにより、各ステッピングモータによる逆起電力の他のステッピングモータへの影響を低減することができる。
【0016】
なお、複数のステッピングモータが電気的に並列接続されていれば、電圧E1が各々のステッピングモータ回路に印加される。また、複数のステッピングモータが電気的に直列接続されていれば、電圧E1は、直列接続されているステッピングモータの個数分に分割されて各々のステッピングモータ回路に印加される。
【0017】
(5)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータの各コイルに直列にインダクタンス成分が接続されていることを特徴としている。これにより、各ステッピングモータの発電による他のステッピングモータへの影響を低減することができる。
【0018】
(6)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータは、すべて同規格であり、前記モータドライバの供給電流を、前記ステッピングモータ1台の目標電流×前記ステッピングモータの台数×1.1として前記ステッピングモータを駆動することを特徴としている。これにより、各モータを高い駆動力で駆動できる。
【0019】
(7)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータは、すべて同規格であり、前記モータドライバの供給電圧を、前記ステッピングモータ1台の目標電圧×前記ステッピングモータの台数×1.1として前記ステッピングモータを駆動することを特徴としている。これにより、各モータを高い駆動力で駆動できる。
【発明の効果】
【0020】
本発明によれば、厚みやサイズがそれぞれ異なる画像記録体を、湾曲した状態で一様な速度で搬送できる。また、異なった角度で画像記録体を搬送する際に画像記録体に皺が生じない。さらには低コストな構成で部分的な部位の交換を容易に行える。
【図面の簡単な説明】
【0021】
【図1】本発明に係る放射線画像読取装置の全体を示す斜視図である。
【図2】記録体支持部を示す斜視図である。
【図3】本発明に係る放射線画像読取装置を示す断面図である。
【図4】本発明に係る放射線画像読取装置を示す断面図である。
【図5A】搬送部を示す正面断面図である。
【図5B】搬送部を示す平面図である。
【図5C】搬送部を示す側面図である。
【図5D】搬送部を示す側面図である。
【図6】放射線画像読取ユニットの構成を模式的に示す図である。
【図7A】本発明に係る放射線画像読取装置の電気的構成を示すブロック図である。
【図7B】本発明に係る放射線画像読取装置の電気的構成を示すブロック図である。
【図8A】並列接続されたステッピングモータの回路構成を示す模式図である。
【図8B】並列接続されたステッピングモータ全体の回路構成を示す模式図である。
【図9A】並列接続されたステッピングモータの回路構成の一部を示す模式図である。
【図9B】並列接続においてインダクタンス成分が1つのモータに接続されている回路の例を示す模式図である。
【図10A】直列接続されたステッピングモータの回路構成を示す模式図である。
【図10B】直列接続されたステッピングモータ全体の回路構成を示す模式図である。
【図10C】直列接続においてインダクタンス成分が1つのモータに接続されている回路の例を示す模式図である。
【図11】従来の放射線画像読取装置を示す図である。
【発明を実施するための形態】
【0022】
次に、本発明の実施の形態について、図面を参照しながら説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては同一の参照番号を付し、重複する説明は省略する。
【0023】
[実施形態1]
(放射線画像読取装置の構成)
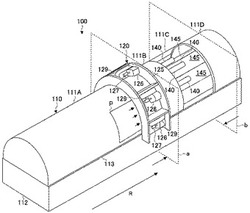
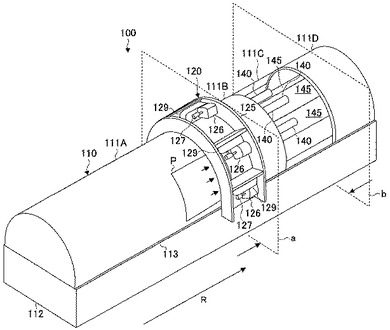
図1は、放射線画像読取装置100の全体を示す斜視図、図2は、記録体支持部110を示す斜視図である。なお、図1の搬送部120については簡略化している。また、図1に示す矢印Rは、円筒面111A〜111Dの軸方向、すなわち画像記録体Pの送り方向を示している。
【0024】
放射線画像読取装置100は、プレート状の画像記録体Pに記録された放射線照射画像を読み取るために用いられ、放射線照射画像の読み出しと消去を連続して行う。画像記録体Pは、放射線が照射された部分にその強度に応じた情報を記憶し、レーザ照射時の輝尽性により光を発生させる媒体である。画像記録体Pには、たとえばX線透過画像やX線回折画像を記録することが可能である。なお、ここでいう放射線には、X線や中性子線以外にも電子線等が含まれる。放射線画像読取装置100は、画像記録体Pを送り出し読取領域を通すことで輝尽光を検出し、画像を読み取る。画像記録体Pの送り出しの際には放射線画像読取装置100は、単一モータドライバ320で複数のステッピングモータ126を同期させて駆動する。
【0025】
電気的な同期により駆動することで、湾曲面上の配置等、同期の必要な機構部分が直線的に配置されていなくても簡単に連動が可能となる。1ドライバで複数のステッピングモータ126を同時に動かすため、異なった角度での搬送、離れた場所でのリンク動作を行う場合に正確に同期させることができる。また、機構部が電気的には連結されているが機械的には分離しているため機構がシンプルで独立しており構成要素の交換が容易である。また、最小限(1台)のモータドライバ320で複数のステッピングモータ126を動かすため安価である。
【0026】
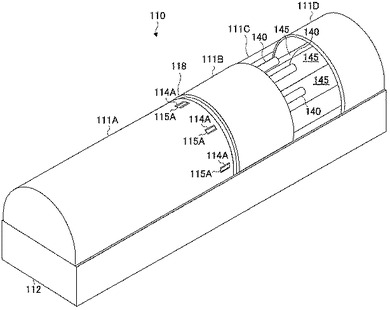
図1および図2に示すように、放射線画像読取装置100は、記録体支持部110および搬送部120を備えている。さらに、記録体支持部110は、円筒面111A〜111D、台座112および押えローラ115Aを有している。円筒面111A〜111D(湾曲面)は、画像記録体Pの放射線が照射された被照射面(記録面)を支持する。円筒面111Aと円筒面111Bとの継ぎ目には、スリット118が形成されており、スリット118は励起光の照射領域かつ輝尽光の読取領域となっている。また、円筒面111A、111B、および111Dには、不透明な材質、円筒面111Cには透明な材質が用いられている。円筒面111Cは、透明ガラスや透明ポリカーボン等の材質で形成されていることが好ましい。
【0027】
押えローラ115Aは、円筒面111A〜111Dの搬送部120が覆う部分に、円筒面111A〜111Dの略軸方向に向けて回動自在に設けられ、搬送中の画像記録体Pに当接し、滑らかな搬送を可能にするとともに搬送方向を調整する。押えローラ115Aは、円筒面111A上の矩形の穴114Aから表面を出している。押えローラ115Aは、円筒面111A〜111D上の搬送ベルト133に対向する位置に設けられていることが好ましい(図3参照)。
【0028】
なお、上記の例では、押えローラ115Aは、円筒面111Aの周方向に一列に設けられているが、画像記録体の搬送方向に対して2重に設けられていてもよい。押えローラ115Aは円筒面111A上の矩形の穴114Aからわずかに突出している。また、円筒面111A上の矩形の穴114Aや押えローラ115Aは、必須の要素ではなく、すべり面を有する材料で円筒面111Aを構成してもよい。
【0029】
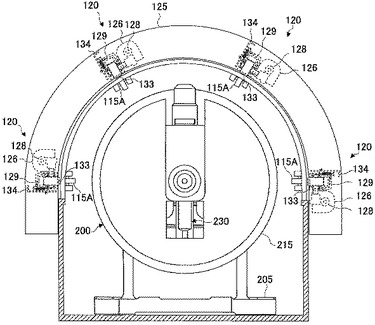
図3は、放射線画像読取装置100の、図1の矢印方向から見た断面aを示す断面図である。図3に示すように、搬送部120は、支持フレーム125、保持板134、ならびに4つのステッピングモータ126および伝達部129を備えている。このように放射線画像読取装置100は、複数のモータを同じスピードで回転させることで、駆動力を分散させている。なお、ステッピングモータ126および伝達部129の個数は、複数であれば特に数は限定されない。
【0030】
搬送部120は、画像記録体Pの記録面を記録体支持部110の円筒面111A〜111Dに押し付けつつ、円筒面111Aの軸方向へ画像記録体Pを搬送する。保持板134は支持フレーム125に固定されており、ステッピングモータ126および伝達部129を円筒面111Aに対して垂直な方向に移動可能にしつつ、他の方向への移動は拘束して保持している。また、保持板134は、バネによりステッピングモータ126、および伝達部129に円筒面111A〜111Dに向う押圧力を与えている。なお、押圧力を与える機構は、弾性部材であることが好ましいが、必ずしもバネでなくてもよい。
【0031】
支持フレーム125は、たとえば金属製の板材を連結して円筒面111A〜111Dを覆うアーチ状に形成されており、円筒面111A〜111Dとの間には画像記録体Pを通せる程度の隙間がある。たとえば、イメージングプレート(画像記録体)は、通常の規格で0.3mm〜0.7mmのものが使用されることがあり、ギャップを固定式にすると決まった厚さのものしか使用できなくなる。
【0032】
ステッピングモータ126は伝達部129に固定されている。伝達部129は、湾曲面に垂直な方向に移動可能に保持板134に保持され、湾曲面向きの押圧力により画像記録体Pを押圧するとともに、ステッピングモータ126の駆動力を画像記録体Pに伝達する。このようにしてステッピングモータ126および伝達部129を円筒面111A〜111Dに対して移動可能にすることにより、厚みの異なるイメージングプレートに対しても使用可能となり、有用性が高まる。このように厚みに応じて柔軟に伝達部129が移動するため、機械的な連結により複数の搬送ベルトを駆動することは難しくなるが、機械的に独立した複数のモータに対して電気的に同期をとることによりこのような問題は解決する。
【0033】
プーリ132Aおよび132Bは、各ステッピングモータ126の駆動が伝わることで同時に同方向に回転する。これにより、円筒面111A〜111D上に設けられた複数の駆動用搬送プーリを湾曲面上で連動させることができる。その結果、画像記録体Pを円筒面の軸方向Rに向けて均一に搬送することができる。搬送部120の詳細については後述する。
【0034】
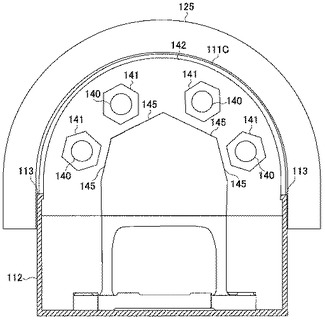
図4は、放射線画像読取装置100の、図1の矢印方向から見た断面bを示す断面図である。図4に示すように、円筒面111Cの内部には、消去ランプ140が固定部141によりフレーム142に固定されている。消去ランプ140は、円筒面111Cの円周に沿って複数設けられており、消去ランプ140より円筒面111Cの中心軸側には、効率よく画像記録体に光を照射できるように反射面145が設けられている。画像記録体Pに残存する画像は消去ランプ140の発光により消去される。ユーザは、画像記録体Pを円筒面111Aから平面部113に沿って導入し、搬送された画像記録体Pはスリット118の位置で記録画像を読み取られ、円筒面111C上で残像が消去される。このようにして、画像記録体に記録された放射線照射画像の読み出しと消去を連続して行うことができる。
【0035】
なお、消去ランプ140は、電球や蛍光灯であってもよいが、発光ダイオード(LED)であることが好ましい。これにより、円筒面111Cへの発熱による影響を小さくできる。台座112は、円筒面111A〜111Dを支えるよう直方体状に形成され、円筒面111A〜111Dの円筒形の軸方向に沿った平面部113を有している。平面部113は、円筒面111A〜111Dに対しほぼ垂直に突き出しており、ガイドとしても機能する。画像記録体Pを放射線画像読取装置100に通す際には平面部113に画像記録体Pの辺縁を当てると画像記録体Pがずれ難い。
【0036】
なお、放射線画像読取装置100は、複数の搬送ベルト133の間に設けられた弾性を有する押え部材を備えていてもよい。押え部材により、搬送の際に記録体支持部110の円筒面111Aから離脱しようとする画像記録体Pを押さえることができる。また、図示しないが、放射線画像読取装置100は、遮光カバーを有している。遮光カバーを用いることで、外部の光に曝露されて画像記録体Pの記録画像を劣化させることなく画像を読みとることができる。遮光カバーは、通常は円筒面111A〜111D全体を覆う形状を有する。
【0037】
放射線画像読取ユニット200は、記録体支持部110内に設置され、励起光を回転させながら、画像記録体Pに照射し、輝尽光を検出することで画像記録体Pに記録された放射線の強度情報を読み取る。放射線画像読取ユニット200は、励起光照射部230から照射された励起光がスリット118を通って画像記録体Pに当たる位置に設けられている。放射線画像読取ユニット200は、円筒面111A〜111Dの中心軸が回転ヘッド215の回転軸となり、円筒面111Aおよび111Bの端部の位置で画像記録体Pに励起光が当たるように設置されている。読み取り時に搬送された画像記録体Pが円筒面111A〜111Dの端部から徐々に送り出される際に、円筒面111A〜111Dに沿って画像記録体Pの表面が円筒状に変形され、その円筒状の表面の画像が読み取られる。
【0038】
(搬送部の構成)
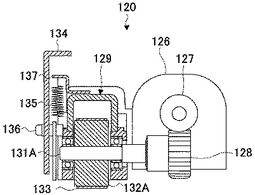
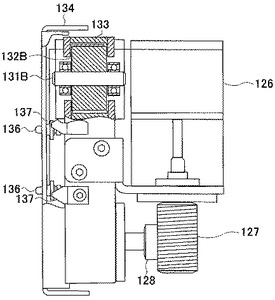
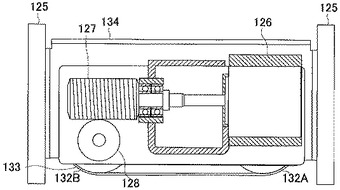
複数設けられている搬送部120の一つの構成を説明する。図5Aは、搬送部120を示す正面断面図、図5Bは、搬送部120を示す平面図、図5Cは、搬送部120を示す側面図、図5Dは、その反対側から搬送部120を見たときの側面図である。各図に示すように、搬送部120は、ステッピングモータ126、ウォームギア127、ギア128および伝達部129を備えている。
【0039】
一つのステッピングモータ126は、他のステッピングモータ126とともに同期されて同じスピードで駆動される。回転力は、シャフトを介してウォームギア127に伝達される。ウォームギア127は、ステッピングモータ126により回転され、その回転力により軸の直交するギア128を回転し、シャフト131Aとともにプーリ132Aを回転させる。プーリ132Aは、シャフト131Bに支持されたプーリ132Bと対に設けられている。これらのプーリ132Aおよび132Bには搬送ベルト133が掛けられており、上記のステッピングモータ126の回転力により搬送ベルト133が回転される。この搬送ベルト133が画像記録体Pに当接することで、画像記録体Pを搬送することができる。
【0040】
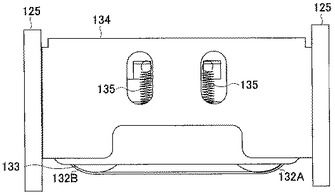
伝達部129は、シャフト131A、131B、プーリ132A、132B、搬送ベルト133により構成されている。伝達部129とステッピングモータ126とはネジ止めなどにより固定されており、伝達部129が移動する場合には、ステッピングモータ126ごと移動することになる。一方、保持板134は、伝達部129側へ突出した凸部136を2つ有している。凸部には溝(図示せず)が設けられ、この溝が伝達部129に設けられた長孔に嵌め込まれることで、伝達部129は、保持板134に保持され、動作を拘束されながらも、円筒面111Aに対して垂直な方向には移動可能となっている。なお、上記の例では溝を長孔に嵌め込むことで一方向のみの移動を可能にしつつ伝達部129を保持しているが、機構は必ずしもこのような形態に限定されない。
【0041】
また、伝達部129は、上記の凸部136に対向する爪部137を2つ有しており、凸部136と爪部137との間には、バネ135が掛けられている。このバネ135の引っ張り力により伝達部129は、円筒面111A側の方向へ押圧力が掛けられている。この押圧力により、定常状態では搬送ベルト133が最も円筒面111Aに近い位置まで押圧されている。したがって、プレート状の画像記録体Pが搬送ベルト133と円筒面111Aとの間に入ったとき、画像記録体Pの厚さに応じて搬送ベルト133が伝達部129ごと位置を変える。複数のステッピングモータを一台のドライバで駆動し、ステッピングモータのウォームギアでゴムベルトがついたプーリを回転させ、複数の搬送ベルト133の回転を連動させる。
【0042】
搬送ベルト133は、一対のプーリ132Aおよび132Bに掛けられており、支持フレーム125と円筒面111Aの間から挿入された画像記録体Pの記録面を円筒面111Aに押し付けながら円筒面111Aの軸方向Rに送り出す。搬送ベルト133と円筒面111Aとのギャップは0.1mm程度となるよう設計されており、搬送ベルト133は、これより厚いものを円筒面111Aに押付けながら送り出す。プーリ132Aおよび132Bは、歯車状に形成され、搬送ベルト133は、プーリ132Aおよび132Bの歯車溝にリブが噛み合うタイミングベルトが用いられることが好ましい。
【0043】
(放射線画像読取ユニットの構成)
図3に示すように、放射線画像読取ユニット200は、記録体支持部110の内部に設けられている。放射線画像読取ユニット200は、台部205、サーボモータ210(図示せず)、回転ヘッド215、励起光照射部230および検出器240を備えている。台部205は、各部を支持する台である。サーボモータ210は、回転ヘッド215を回転させる。サーボモータ210は、定速回転制御がなされることが好ましい。回転ヘッド215は、サーボモータ210の回転駆動力により回転する。回転ヘッド215の回転軸は、円筒面111A〜111Dの中心軸と同一である。
【0044】
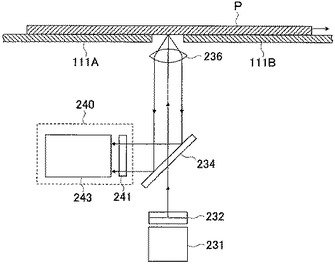
励起光照射部230は、励起光を発生させて、画像記録体Pに照射する。励起光照射部230は、回転ヘッド215に固定され、回転ヘッド215とともに回転しつつ、励起光を照射する。図6は、放射線画像読取ユニット200の構成を模式的に示す図である。励起光照射部230は、レーザ光源231、コリメートレンズ232、選択ミラー234、および集光レンズ236を有している。
【0045】
レーザ光源231は、レーザ光を発生させる。回転ヘッド215に組み込むためには半導体を用いた小型のものが好ましい。選択ミラー234は、ダイクロイックミラーであり、赤色の励起光は透過させるが青色の輝尽光は反射する性質を有している。集光レンズ236は、照射光および輝尽光を通過させる。集光レンズ236は、輝尽光を集光し平行光線とする。
【0046】
検出器240は、励起光が画像記録体Pに照射されて輝尽光を検出する。励起光が画像記録体に照射されることで放射された輝尽光を検出する検出器240は、フィルタ241および光電子増倍管243(PMP)を有している。フィルタ241は、赤色光をカットし、青色光を透過する。光電子増倍管243は、フィルタ241を透過した輝尽光を検出し、輝尽光の強度に応じた電圧を発生させる。
【0047】
次に、放射線画像読取ユニット200内および画像記録体Pと放射線画像読取ユニット200との間における励起光および輝尽光の経路を説明する。レーザ光源231から照射されたレーザ光は、コリメートレンズ232により拡散ビームから平行ビームに変換される。そして、選択ミラー234、集光レンズ236を透過し、画像記録体Pに当たる。画像記録体Pは、励起光を受けると記録されたX線強度に応じた強度の輝尽光を発生する。輝尽光は集光レンズ236で集光され、平行光線とする。平行光線とされた輝尽光は選択ミラー234で反射され、フィルタ241で赤色光がカットされる。フィルタ241を透過した輝尽光は光電子増倍管243により検出される。
【0048】
(放射線画像読取装置の電気的構成)
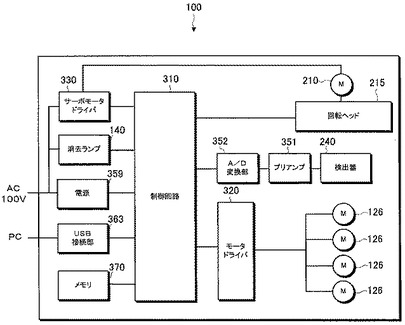
放射線画像読取装置100は、主に内部の制御回路310による電気的な制御を行う。図7A、図7Bは、放射線画像読取装置100の電気的構成を示すブロック図である。放射線画像読取装置100は、制御回路310、モータドライバ320、ステッピングモータ126、サーボモータドライバ330、サーボモータ210、回転ヘッド215、検出器240、プリアンプ351、A/D変換部352、消去ランプ140、電源359、USB接続部363およびメモリ370を備えている。なお、図7Aは、ステッピングモータ126が並列接続されている構成、図7Bは、ステッピングモータ126が直列接続されている構成を示している。各接続については、後述する。
【0049】
制御回路310(制御部)は、ユーザの操作に応じて各部を制御する回路である。制御回路310は、モータドライバ320へモータ駆動のためのパルスを送信する。モータドライバ320は、制御回路310から発信されるパルスを受けて、複数のステッピングモータ126を同期させて駆動させる。その結果、パルスに応じた速さで画像記録体Pを搬送することができる。このように、制御回路310は、モータドライバ320を介してステッピングモータの駆動を制御している。その一方で、制御回路310はサーボモータドライバ330を制御し、サーボモータ210を回転させることで、回転ヘッド215を回転させる。また、画像記録体Pの輝尽光を検出器240で検出し、プリアンプ351で増幅し、A/D変換部352でデジタル信号に変換する。
【0050】
プリアンプ351は、検出器240が検出した信号を増幅する。A/D変換部352は、プリアンプ351が増幅したアナログの検出信号をデジタル信号へ変換し、制御回路310に信号を伝達する。USB接続部363はPC等とのインタフェースとして機能する。メモリ370は、高速に画像データを記憶することが可能なメモリである。PC等とともにメモリ370を併用することで、USBのデータ転送能力が追いつかない場合でも一時的に画像データを記憶しておくことができる。
【0051】
(ステッピングモータの接続)
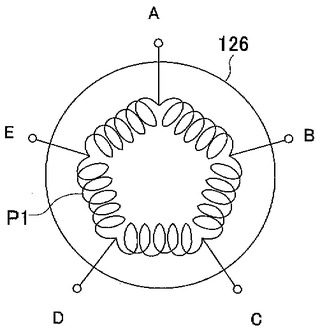
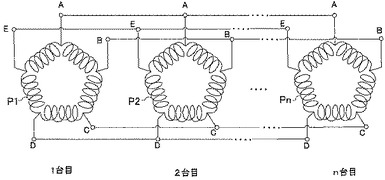
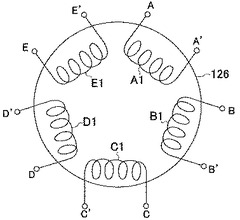
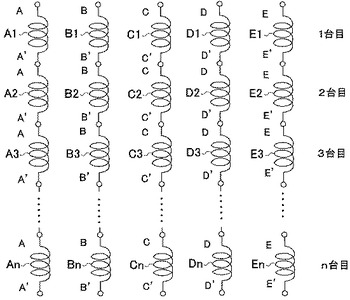
ステッピングモータ126の電気的接続には並列接続および直列接続がある。ステッピングモータ126の各コイルが独立していないもの同士の組み合わせには並列接続が可能である。並列接続の場合には、モータドライバ320には高出力(電流)が必要とされるが結線が簡単になる。各コイル間には抵抗値のバラツキがあるので、駆動力に余力がある場合には並列接続が有効である。図8Aは、並列接続されたステッピングモータ126の回路構成を示す模式図、図8Bは、その全体の回路構成を示す模式図である。
【0052】
図8Aに示すステッピングモータ126は、5つのコイルと5本のリードA〜Eを有しており、それらは回路P1を構成している。そして、図8Bに示すようにステッピングモータ126は複数設けられており、それらの複数のステッピングモータ126の回路P1〜Pnは、1つのモータドライバ320により同期させて駆動できるように電気的に並列接続されている。このような回路により同期駆動を行った場合には、ステッピングモータ126に生ずる逆起電力は、複数のそれぞれのステッピングモータ126の負荷状況により変動するので、その結果、1つのモータの回転が他のモータの動作に影響を及ぼす。たとえば、他のモータがハンチングしたり、他のモータを回転させたりする場合が生じる。このような現象は、モータごとにドライバを設けた場合には生じないが、複数のドライバを設けるとコストが嵩んでしまい現実的ではない。したがって、単一のドライバを用いつつ、上記の現象を抑止することが重要である。
【0053】
上記の現象はドライバが駆動電流を流していない場合には大きく、十分な駆動電流を流している場合には小さい。ただし、並列接続された複数のステッピングモータ126の駆動中でも、この現象で1つのモータが発振気味になると他のモータに動きが伝わる。発電機として動作するステッピングモータ126から生じる位相の異なる電圧はモータドライバ320からの供給電圧によらずモータの回転速度で決まる一定の値である。したがって、一つの防止手段として、モータドライバ320の出力設定電圧を高めておく方法が有効である。モータドライバ320のステッピングモータ126への供給電圧をE1とし、ステッピングモータ126の逆起電力の電圧をE2とするとき、1<E1/E2の関係を満たすよう供給電圧を設定することが好ましい。これにより、発振源のステッピングモータ126に駆動電流が流れ、上記の現象が緩和され他モータへの影響を無視できる程度にまで小さくすることができる。そして、複数のモータを安定して動作させることができる。
【0054】
1<E1/E2とするのが好ましいのは、実験結果に基づく。3台のステッピングモータ126を並列に接続した回路に対して、ステッピングモータ126をホールド状態に維持し、ステッピングモータの1台を手回ししたところ、2V程度の起電力による電圧が発生していることが観察された。そして、このステッピングモータ126には、2V程度に駆動電圧を設定すれば十分に起電力による影響を無視できた。したがって、そのときの設定電圧において、E1/E2=2÷2=1となり、上記の関係が導かれた。なお、実際の動作では、マージン値を加味して1.1≦E1/E2とするのが好ましい。
【0055】
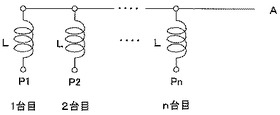
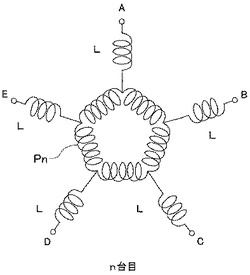
一方、他の防止手段としては、供給電圧とモータの間に抵抗かチョーク(インダクタンス成分)を入れてもよい。図9Aは、並列接続されたステッピングモータ126の回路構成の一部を示す模式図、図9Bは、インダクタンス成分が1つのモータに接続されている回路の例を示す模式図である。図9A、図9Bに示すように各ステッピングモータ126のリードあたり一つのインダクタンス成分Lを設ける。たとえば、5本リードのステッピングモータ126が5個ある構成であれば、5×5=25個のチョーク(インダクタンス成分)を入れる。このように、複数のステッピングモータ126の各コイルに直列にインダクタンス成分を接続することができる。これにより、逆起電力により他モータへ印加される電圧のピークを下げるとともに、逆起電力による電流と電圧の位相をずらして実効的な電力を下げることができる。
【0056】
また、同タイプのステッピングモータ126を用いる場合でも、コイル特性のバラツキが10%ほどあり、バラツキによる動作の低下分を補えるように駆動をする必要がある。したがって、モータドライバ320の設定供給電流を、目標電流×ステッピングモータの台数×1.1以上とすることが好ましい。その際には、ステッピングモータ126の定格電流をオーバーしないよう注意する。なお、マッチング用の抵抗を付加し調整することによって、駆動電流の異なるステッピングモータ同士126を組み合わせて放射線画像読取装置100を構成してもよい。
【0057】
上記の例では、複数のステッピングモータ126を並列接続しているが、ステッピングモータ126の各コイルが独立しているタイプのモータであればモータ同士を直列接続することもできる。図10Aは、直列接続されたステッピングモータ126の回路構成を示す模式図、図10Bは、直列接続されたステッピングモータ126全体の回路構成を示す模式図である。図10Bに示すように、n台のステッピングモータ126の同相に当たるコイルを直列にしたものを1つのコイルと考えてモータドライバ320に接続すると定電流駆動ができ、すべてのステッピングモータ126を同トルクで動かすことができる。図10Bに示す例では、コイルX1〜Xnの端子Xと端子X’を次々に接続している(XにはA〜Eがそれぞれ入る)。このような直列接続の構成は、抵抗値が増すため大きい駆動電圧を印加できるモータドライバ320が必要である。また、定電流駆動ドライバを用いる場合には同じタイプのステッピングモータ126同士の組み合わせに用いる場合に限られる。なお、上記の例では5極のステッピングモータに本発明を適用しているが、2極のステッピングモータへの適用も可能である。
【0058】
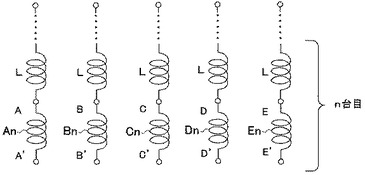
なお、直列接続の場合でも、1つのモータの回転が他のモータへ影響を及ぼす現象を防止するため、供給電圧および各モータの間に抵抗かチョーク(インダクタンス成分)を入れることができる。図10Cは、インダクタンス成分が1つのモータに接続されている回路の例を示す模式図である。図10Cに示すように、基本的には、各ステッピングモータ126のリードあたり一つのインダクタンス成分Lを設ける必要があるが、1台目のステッピングモータ126に対してはインダクタンス成分を省略できる。たとえば、5相ステッピングモータを5台直列接続する場合には、1台目のステッピングモータに対してインダクタンス成分を省略し、(5台−1)×5相=20個のインダクタンス成分を接続することができる。このように、複数のステッピングモータ126の各コイルに直列にインダクタンス成分を接続することができる。
【0059】
(放射線画像読取装置の動作)
次に、このような放射線画像読取装置100の動作を説明する。まず、設定電圧を調整し、モータの定格電圧の1.1倍の電圧となるようにしておく。そして、制御回路310へ操作指示に基づいて、放射線画像読取装置100を起動する。ユーザにより画像記録体Pが搬送部120に送られると、搬送部120は円筒面111Aに沿って画像記録体Pを送り出す。その一方で、検出器240に高電圧が供給されるとともに、サーボモータドライバ330の制御に基づいて回転ヘッド215が回転し、励起光照射部230は回転ヘッド215とともに回転しつつ、円筒面111A〜111Dに沿って送り出された画像記録体Pに励起光を照射する。
【0060】
励起光を照射された画像記録体Pは、蓄積されたX線強度情報に応じた輝尽光を放射する。検出器240は、放射された輝尽光を検出し、検出された情報は、プリアンプ351およびA/D変換部352を経て制御回路310へ送出される。そして、USB接続によりほぼリアルタイムで読取画像データが外部のPC等に記憶される。この際に、USB接続のデータ転送速度が小さすぎ十分にPC等に記憶できない場合には、制御回路310はメモリ370に画像を記憶させる。後でUSB接続のデータ転送速度が十分に大きくなったときにメモリ370に記憶したデータをPC等に移す。このようにして、放射線画像読取装置100は放射線画像データを読み取り、蓄積することができる。
【符号の説明】
【0061】
100 放射線画像読取装置
110 記録体支持部
111A〜111D 円筒面
112 台座
113 平面部
114A 穴
115A 押えローラ
118 スリット
120 搬送部
125 支持フレーム
126 ステッピングモータ
127 ウォームギア
128 ギア
129 伝達部
131A、131B シャフト
132A、132B プーリ
133 搬送ベルト
134 保持板
135 バネ
136 凸部
137 爪部
140 発光体(消去ランプ)
141 固定部
142 フレーム
145 反射面
200 放射線画像読取ユニット
205 台部
210 サーボモータ
215 回転ヘッド
230 照射部(励起光照射部)
231 レーザ光源
232 コリメートレンズ
234 選択ミラー
236 集光レンズ
240 検出器
241 フィルタ
243 光電子増倍管
310 制御回路(制御部)
320 モータドライバ
330 サーボモータドライバ
351 プリアンプ
352 A/D変換部
359 電源
363 USB接続部
370 メモリ
A〜E リード
L インダクタンス成分
P 画像記録体
P1〜Pn ステッピングモータの回路
【技術分野】
【0001】
本発明は、プレート状の画像記録体に記録された放射線照射画像を読み取る放射線画像読取装置に関する。
【背景技術】
【0002】
従来、放射線画像はフィルムに記録されていたが、フィルムでは放射線強度をデジタル値として定量的に測定し難く、また現像に時間がかかる等、取り扱いが不便であった。そこで、照射された放射線強度を蓄積し、励起光の照射により蓄積に応じた蛍光を発する蓄積性蛍光体が開発され、取り扱いや測定の精度が大幅に向上した。初期の蓄積性蛍光体の読取装置では、レーザ光を走査するものが主流だったが、位置の精度が求められるにつれて、回転式のドラムに蓄積性蛍光体を巻いてレーザ光をドラムの外から当てるものが開発された。
【0003】
その後、さらに取り扱いの容易性や読取時間の短縮が求められ、蓄積性蛍光体の蓄像面を内側にして、円筒面上で曲げて支持し、円筒面の内側に、その中心線で回転するレーザ光を当てて読取りを行う装置が開発された(たとえば、特許文献1参照)。特許文献1記載の装置は、潜像を読み出すための励起光であるレーザを円筒面に沿って回転させ、蓄積性蛍光体そのものを回転の中心軸と平行な方向に搬送する。そして、搬送のために電気的に同期させた駆動ベルトを使用している。
【0004】
このように複数台のモータと複数台のポジショニングエンコーダを用いる技術が提案されているが(特許文献1の段落〔0075〕、〔0107〕、〔0136〕参照)、パルスに同期させて複数のモータドライバにより複数台のモータを回転させるものに過ぎず、コストが嵩む。これに対し、1モータドライバで1モータを駆動し、機械的連結により複数のベルトを同期させる装置が本発明者らにより提案されている。図11は、ユニバーサルジョイント1102を用いて機械的連結により複数のベルト1101を同期させて駆動する放射線画像読取装置1100を示す図である。一方、一つの駆動回路で複数のステッピングモータを動かす技術が知られている(たとえば、特許文献2参照)。特許文献2記載の装置は、一つのドライバによりステッピングモータの駆動を切り替え、ステッピングモータをホールドする技術であり、モータの同時回転を目的としていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特表2003−509711号公報
【特許文献2】特開昭63−140696号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
放射線画像読取装置は、厚みやサイズがそれぞれ異なる画像記録体を、湾曲した状態で一様な速度で搬送する必要がある。しかしながら、たとえば、ユニバーサルジョイントによる連動でモータを駆動する場合には、屈曲部の回転半径が変わるため、連結先の回転スピードが変わってしまう。その結果、ユニバーサルジョイントでは速度の一様性が保証できない。
【0007】
一方、ベルト連結機構ではベルトの伸縮が遅れに影響するためベルトによる駆動力の伝達に遅れが生じる。特に、異なった角度での搬送には、従来の1モータの場合、連結にカプラー、スプリング、ユニバーサルジョイント等のカップリングで行っても角度が急になるほどメカニカルな連結では角度誤差が生じる。このように、機械的な機構で連動させようとすると一様な駆動を達成できない。一方、モータドライバを複数使用してコンピュータ制御により各モータを駆動させると費用が嵩む。また、これらの方法では、将来的に組み立てられた機構の一部の交換が必要になったときに部分的な部位の交換やその後の調整が困難となる。また、1台のモータドライバにより同時に同速度でモータを駆動する技術については開発されていない。
【0008】
そして、従来の放射線画像読取装置では、搬送機構が画像記録体を支持する円筒面に対して固定された状態で用いられ、画像記録体を送るための隙間が固定される。そのため、画像記録体の厚みやサイズに応じた柔軟な搬送できず画像記録体の詰まりや画像記録体上の皺が生じるおそれがある。
【0009】
本発明は、このような事情に鑑みてなされたものであり、厚みやサイズがそれぞれ異なる画像記録体を、湾曲した状態で一様な速度で搬送し、さらには低コストな構成で部分的な部位の交換を容易に行える放射線画像読取装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
(1)上記の目的を達成するため、本発明に係る放射線画像読取装置は、プレート状の画像記録体に記録された放射線照射画像を読み取る放射線画像読取装置であって、複数のステッピングモータと、前記複数のステッピングモータを同期させて駆動する単一のモータドライバと、前記モータドライバを介して前記ステッピングモータの駆動を制御する制御部と、前記画像記録体を湾曲面で支持する記録体支持部と前記湾曲面に垂直な方向に移動可能に前記記録体支持部に保持され、前記湾曲面向きの押圧力により前記画像記録体を押圧するとともに、前記ステッピングモータの駆動力を前記画像記録体に伝達する伝達部と、を備え、前記駆動力の伝達により搬送される前記画像記録体から前記放射線照射画像の読み出しと消去を連続して行うことを特徴としている。
【0011】
これにより、厚みやサイズがそれぞれ異なる画像記録体を、湾曲した状態で一様な速度で搬送できる。また、異なった角度で画像記録体を搬送する際に画像記録体に皺が生じない。また、モータドライバを一つしか用いないため、低コストで装置を構成できる。さらには部分的な部位の交換を容易に行える。たとえば、故障した1台のステッピングモータを交換する場合には、そのステッピングモータのみを取り外し、同じタイプのステッピングモータを取り付ければよく、オーバーホールや調整は不要である。
【0012】
なお、単一のモータドライバとは、ステッピングモータ1台を駆動する結線のみを有する、1チャンネルのモータドライバを指し、多チャンネルモータドライバの1セット(1台)を指すものではない。
【0013】
(2)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータが、電気的に並列接続されていることを特徴としている。これにより、駆動電圧を大きくすることなくモータ駆動が可能となる。また、複数のステッピングモータ同士が同じタイプのモータでなくても駆動が可能となる。
【0014】
(3)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータが、電気的に直列接続されていることを特徴としている。これにより、定電流駆動ができ、すべてのステッピングモータを同トルクで動かすことができる。
【0015】
(4)また、本発明に係る放射線画像読取装置は、前記モータドライバの供給電圧をE1とし、前記ステッピングモータの逆起電力の総和の電圧をE2とするとき、1.1≦E1/E2であることを特徴としている。これにより、各ステッピングモータによる逆起電力の他のステッピングモータへの影響を低減することができる。
【0016】
なお、複数のステッピングモータが電気的に並列接続されていれば、電圧E1が各々のステッピングモータ回路に印加される。また、複数のステッピングモータが電気的に直列接続されていれば、電圧E1は、直列接続されているステッピングモータの個数分に分割されて各々のステッピングモータ回路に印加される。
【0017】
(5)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータの各コイルに直列にインダクタンス成分が接続されていることを特徴としている。これにより、各ステッピングモータの発電による他のステッピングモータへの影響を低減することができる。
【0018】
(6)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータは、すべて同規格であり、前記モータドライバの供給電流を、前記ステッピングモータ1台の目標電流×前記ステッピングモータの台数×1.1として前記ステッピングモータを駆動することを特徴としている。これにより、各モータを高い駆動力で駆動できる。
【0019】
(7)また、本発明に係る放射線画像読取装置は、前記複数のステッピングモータは、すべて同規格であり、前記モータドライバの供給電圧を、前記ステッピングモータ1台の目標電圧×前記ステッピングモータの台数×1.1として前記ステッピングモータを駆動することを特徴としている。これにより、各モータを高い駆動力で駆動できる。
【発明の効果】
【0020】
本発明によれば、厚みやサイズがそれぞれ異なる画像記録体を、湾曲した状態で一様な速度で搬送できる。また、異なった角度で画像記録体を搬送する際に画像記録体に皺が生じない。さらには低コストな構成で部分的な部位の交換を容易に行える。
【図面の簡単な説明】
【0021】
【図1】本発明に係る放射線画像読取装置の全体を示す斜視図である。
【図2】記録体支持部を示す斜視図である。
【図3】本発明に係る放射線画像読取装置を示す断面図である。
【図4】本発明に係る放射線画像読取装置を示す断面図である。
【図5A】搬送部を示す正面断面図である。
【図5B】搬送部を示す平面図である。
【図5C】搬送部を示す側面図である。
【図5D】搬送部を示す側面図である。
【図6】放射線画像読取ユニットの構成を模式的に示す図である。
【図7A】本発明に係る放射線画像読取装置の電気的構成を示すブロック図である。
【図7B】本発明に係る放射線画像読取装置の電気的構成を示すブロック図である。
【図8A】並列接続されたステッピングモータの回路構成を示す模式図である。
【図8B】並列接続されたステッピングモータ全体の回路構成を示す模式図である。
【図9A】並列接続されたステッピングモータの回路構成の一部を示す模式図である。
【図9B】並列接続においてインダクタンス成分が1つのモータに接続されている回路の例を示す模式図である。
【図10A】直列接続されたステッピングモータの回路構成を示す模式図である。
【図10B】直列接続されたステッピングモータ全体の回路構成を示す模式図である。
【図10C】直列接続においてインダクタンス成分が1つのモータに接続されている回路の例を示す模式図である。
【図11】従来の放射線画像読取装置を示す図である。
【発明を実施するための形態】
【0022】
次に、本発明の実施の形態について、図面を参照しながら説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては同一の参照番号を付し、重複する説明は省略する。
【0023】
[実施形態1]
(放射線画像読取装置の構成)
図1は、放射線画像読取装置100の全体を示す斜視図、図2は、記録体支持部110を示す斜視図である。なお、図1の搬送部120については簡略化している。また、図1に示す矢印Rは、円筒面111A〜111Dの軸方向、すなわち画像記録体Pの送り方向を示している。
【0024】
放射線画像読取装置100は、プレート状の画像記録体Pに記録された放射線照射画像を読み取るために用いられ、放射線照射画像の読み出しと消去を連続して行う。画像記録体Pは、放射線が照射された部分にその強度に応じた情報を記憶し、レーザ照射時の輝尽性により光を発生させる媒体である。画像記録体Pには、たとえばX線透過画像やX線回折画像を記録することが可能である。なお、ここでいう放射線には、X線や中性子線以外にも電子線等が含まれる。放射線画像読取装置100は、画像記録体Pを送り出し読取領域を通すことで輝尽光を検出し、画像を読み取る。画像記録体Pの送り出しの際には放射線画像読取装置100は、単一モータドライバ320で複数のステッピングモータ126を同期させて駆動する。
【0025】
電気的な同期により駆動することで、湾曲面上の配置等、同期の必要な機構部分が直線的に配置されていなくても簡単に連動が可能となる。1ドライバで複数のステッピングモータ126を同時に動かすため、異なった角度での搬送、離れた場所でのリンク動作を行う場合に正確に同期させることができる。また、機構部が電気的には連結されているが機械的には分離しているため機構がシンプルで独立しており構成要素の交換が容易である。また、最小限(1台)のモータドライバ320で複数のステッピングモータ126を動かすため安価である。
【0026】
図1および図2に示すように、放射線画像読取装置100は、記録体支持部110および搬送部120を備えている。さらに、記録体支持部110は、円筒面111A〜111D、台座112および押えローラ115Aを有している。円筒面111A〜111D(湾曲面)は、画像記録体Pの放射線が照射された被照射面(記録面)を支持する。円筒面111Aと円筒面111Bとの継ぎ目には、スリット118が形成されており、スリット118は励起光の照射領域かつ輝尽光の読取領域となっている。また、円筒面111A、111B、および111Dには、不透明な材質、円筒面111Cには透明な材質が用いられている。円筒面111Cは、透明ガラスや透明ポリカーボン等の材質で形成されていることが好ましい。
【0027】
押えローラ115Aは、円筒面111A〜111Dの搬送部120が覆う部分に、円筒面111A〜111Dの略軸方向に向けて回動自在に設けられ、搬送中の画像記録体Pに当接し、滑らかな搬送を可能にするとともに搬送方向を調整する。押えローラ115Aは、円筒面111A上の矩形の穴114Aから表面を出している。押えローラ115Aは、円筒面111A〜111D上の搬送ベルト133に対向する位置に設けられていることが好ましい(図3参照)。
【0028】
なお、上記の例では、押えローラ115Aは、円筒面111Aの周方向に一列に設けられているが、画像記録体の搬送方向に対して2重に設けられていてもよい。押えローラ115Aは円筒面111A上の矩形の穴114Aからわずかに突出している。また、円筒面111A上の矩形の穴114Aや押えローラ115Aは、必須の要素ではなく、すべり面を有する材料で円筒面111Aを構成してもよい。
【0029】
図3は、放射線画像読取装置100の、図1の矢印方向から見た断面aを示す断面図である。図3に示すように、搬送部120は、支持フレーム125、保持板134、ならびに4つのステッピングモータ126および伝達部129を備えている。このように放射線画像読取装置100は、複数のモータを同じスピードで回転させることで、駆動力を分散させている。なお、ステッピングモータ126および伝達部129の個数は、複数であれば特に数は限定されない。
【0030】
搬送部120は、画像記録体Pの記録面を記録体支持部110の円筒面111A〜111Dに押し付けつつ、円筒面111Aの軸方向へ画像記録体Pを搬送する。保持板134は支持フレーム125に固定されており、ステッピングモータ126および伝達部129を円筒面111Aに対して垂直な方向に移動可能にしつつ、他の方向への移動は拘束して保持している。また、保持板134は、バネによりステッピングモータ126、および伝達部129に円筒面111A〜111Dに向う押圧力を与えている。なお、押圧力を与える機構は、弾性部材であることが好ましいが、必ずしもバネでなくてもよい。
【0031】
支持フレーム125は、たとえば金属製の板材を連結して円筒面111A〜111Dを覆うアーチ状に形成されており、円筒面111A〜111Dとの間には画像記録体Pを通せる程度の隙間がある。たとえば、イメージングプレート(画像記録体)は、通常の規格で0.3mm〜0.7mmのものが使用されることがあり、ギャップを固定式にすると決まった厚さのものしか使用できなくなる。
【0032】
ステッピングモータ126は伝達部129に固定されている。伝達部129は、湾曲面に垂直な方向に移動可能に保持板134に保持され、湾曲面向きの押圧力により画像記録体Pを押圧するとともに、ステッピングモータ126の駆動力を画像記録体Pに伝達する。このようにしてステッピングモータ126および伝達部129を円筒面111A〜111Dに対して移動可能にすることにより、厚みの異なるイメージングプレートに対しても使用可能となり、有用性が高まる。このように厚みに応じて柔軟に伝達部129が移動するため、機械的な連結により複数の搬送ベルトを駆動することは難しくなるが、機械的に独立した複数のモータに対して電気的に同期をとることによりこのような問題は解決する。
【0033】
プーリ132Aおよび132Bは、各ステッピングモータ126の駆動が伝わることで同時に同方向に回転する。これにより、円筒面111A〜111D上に設けられた複数の駆動用搬送プーリを湾曲面上で連動させることができる。その結果、画像記録体Pを円筒面の軸方向Rに向けて均一に搬送することができる。搬送部120の詳細については後述する。
【0034】
図4は、放射線画像読取装置100の、図1の矢印方向から見た断面bを示す断面図である。図4に示すように、円筒面111Cの内部には、消去ランプ140が固定部141によりフレーム142に固定されている。消去ランプ140は、円筒面111Cの円周に沿って複数設けられており、消去ランプ140より円筒面111Cの中心軸側には、効率よく画像記録体に光を照射できるように反射面145が設けられている。画像記録体Pに残存する画像は消去ランプ140の発光により消去される。ユーザは、画像記録体Pを円筒面111Aから平面部113に沿って導入し、搬送された画像記録体Pはスリット118の位置で記録画像を読み取られ、円筒面111C上で残像が消去される。このようにして、画像記録体に記録された放射線照射画像の読み出しと消去を連続して行うことができる。
【0035】
なお、消去ランプ140は、電球や蛍光灯であってもよいが、発光ダイオード(LED)であることが好ましい。これにより、円筒面111Cへの発熱による影響を小さくできる。台座112は、円筒面111A〜111Dを支えるよう直方体状に形成され、円筒面111A〜111Dの円筒形の軸方向に沿った平面部113を有している。平面部113は、円筒面111A〜111Dに対しほぼ垂直に突き出しており、ガイドとしても機能する。画像記録体Pを放射線画像読取装置100に通す際には平面部113に画像記録体Pの辺縁を当てると画像記録体Pがずれ難い。
【0036】
なお、放射線画像読取装置100は、複数の搬送ベルト133の間に設けられた弾性を有する押え部材を備えていてもよい。押え部材により、搬送の際に記録体支持部110の円筒面111Aから離脱しようとする画像記録体Pを押さえることができる。また、図示しないが、放射線画像読取装置100は、遮光カバーを有している。遮光カバーを用いることで、外部の光に曝露されて画像記録体Pの記録画像を劣化させることなく画像を読みとることができる。遮光カバーは、通常は円筒面111A〜111D全体を覆う形状を有する。
【0037】
放射線画像読取ユニット200は、記録体支持部110内に設置され、励起光を回転させながら、画像記録体Pに照射し、輝尽光を検出することで画像記録体Pに記録された放射線の強度情報を読み取る。放射線画像読取ユニット200は、励起光照射部230から照射された励起光がスリット118を通って画像記録体Pに当たる位置に設けられている。放射線画像読取ユニット200は、円筒面111A〜111Dの中心軸が回転ヘッド215の回転軸となり、円筒面111Aおよび111Bの端部の位置で画像記録体Pに励起光が当たるように設置されている。読み取り時に搬送された画像記録体Pが円筒面111A〜111Dの端部から徐々に送り出される際に、円筒面111A〜111Dに沿って画像記録体Pの表面が円筒状に変形され、その円筒状の表面の画像が読み取られる。
【0038】
(搬送部の構成)
複数設けられている搬送部120の一つの構成を説明する。図5Aは、搬送部120を示す正面断面図、図5Bは、搬送部120を示す平面図、図5Cは、搬送部120を示す側面図、図5Dは、その反対側から搬送部120を見たときの側面図である。各図に示すように、搬送部120は、ステッピングモータ126、ウォームギア127、ギア128および伝達部129を備えている。
【0039】
一つのステッピングモータ126は、他のステッピングモータ126とともに同期されて同じスピードで駆動される。回転力は、シャフトを介してウォームギア127に伝達される。ウォームギア127は、ステッピングモータ126により回転され、その回転力により軸の直交するギア128を回転し、シャフト131Aとともにプーリ132Aを回転させる。プーリ132Aは、シャフト131Bに支持されたプーリ132Bと対に設けられている。これらのプーリ132Aおよび132Bには搬送ベルト133が掛けられており、上記のステッピングモータ126の回転力により搬送ベルト133が回転される。この搬送ベルト133が画像記録体Pに当接することで、画像記録体Pを搬送することができる。
【0040】
伝達部129は、シャフト131A、131B、プーリ132A、132B、搬送ベルト133により構成されている。伝達部129とステッピングモータ126とはネジ止めなどにより固定されており、伝達部129が移動する場合には、ステッピングモータ126ごと移動することになる。一方、保持板134は、伝達部129側へ突出した凸部136を2つ有している。凸部には溝(図示せず)が設けられ、この溝が伝達部129に設けられた長孔に嵌め込まれることで、伝達部129は、保持板134に保持され、動作を拘束されながらも、円筒面111Aに対して垂直な方向には移動可能となっている。なお、上記の例では溝を長孔に嵌め込むことで一方向のみの移動を可能にしつつ伝達部129を保持しているが、機構は必ずしもこのような形態に限定されない。
【0041】
また、伝達部129は、上記の凸部136に対向する爪部137を2つ有しており、凸部136と爪部137との間には、バネ135が掛けられている。このバネ135の引っ張り力により伝達部129は、円筒面111A側の方向へ押圧力が掛けられている。この押圧力により、定常状態では搬送ベルト133が最も円筒面111Aに近い位置まで押圧されている。したがって、プレート状の画像記録体Pが搬送ベルト133と円筒面111Aとの間に入ったとき、画像記録体Pの厚さに応じて搬送ベルト133が伝達部129ごと位置を変える。複数のステッピングモータを一台のドライバで駆動し、ステッピングモータのウォームギアでゴムベルトがついたプーリを回転させ、複数の搬送ベルト133の回転を連動させる。
【0042】
搬送ベルト133は、一対のプーリ132Aおよび132Bに掛けられており、支持フレーム125と円筒面111Aの間から挿入された画像記録体Pの記録面を円筒面111Aに押し付けながら円筒面111Aの軸方向Rに送り出す。搬送ベルト133と円筒面111Aとのギャップは0.1mm程度となるよう設計されており、搬送ベルト133は、これより厚いものを円筒面111Aに押付けながら送り出す。プーリ132Aおよび132Bは、歯車状に形成され、搬送ベルト133は、プーリ132Aおよび132Bの歯車溝にリブが噛み合うタイミングベルトが用いられることが好ましい。
【0043】
(放射線画像読取ユニットの構成)
図3に示すように、放射線画像読取ユニット200は、記録体支持部110の内部に設けられている。放射線画像読取ユニット200は、台部205、サーボモータ210(図示せず)、回転ヘッド215、励起光照射部230および検出器240を備えている。台部205は、各部を支持する台である。サーボモータ210は、回転ヘッド215を回転させる。サーボモータ210は、定速回転制御がなされることが好ましい。回転ヘッド215は、サーボモータ210の回転駆動力により回転する。回転ヘッド215の回転軸は、円筒面111A〜111Dの中心軸と同一である。
【0044】
励起光照射部230は、励起光を発生させて、画像記録体Pに照射する。励起光照射部230は、回転ヘッド215に固定され、回転ヘッド215とともに回転しつつ、励起光を照射する。図6は、放射線画像読取ユニット200の構成を模式的に示す図である。励起光照射部230は、レーザ光源231、コリメートレンズ232、選択ミラー234、および集光レンズ236を有している。
【0045】
レーザ光源231は、レーザ光を発生させる。回転ヘッド215に組み込むためには半導体を用いた小型のものが好ましい。選択ミラー234は、ダイクロイックミラーであり、赤色の励起光は透過させるが青色の輝尽光は反射する性質を有している。集光レンズ236は、照射光および輝尽光を通過させる。集光レンズ236は、輝尽光を集光し平行光線とする。
【0046】
検出器240は、励起光が画像記録体Pに照射されて輝尽光を検出する。励起光が画像記録体に照射されることで放射された輝尽光を検出する検出器240は、フィルタ241および光電子増倍管243(PMP)を有している。フィルタ241は、赤色光をカットし、青色光を透過する。光電子増倍管243は、フィルタ241を透過した輝尽光を検出し、輝尽光の強度に応じた電圧を発生させる。
【0047】
次に、放射線画像読取ユニット200内および画像記録体Pと放射線画像読取ユニット200との間における励起光および輝尽光の経路を説明する。レーザ光源231から照射されたレーザ光は、コリメートレンズ232により拡散ビームから平行ビームに変換される。そして、選択ミラー234、集光レンズ236を透過し、画像記録体Pに当たる。画像記録体Pは、励起光を受けると記録されたX線強度に応じた強度の輝尽光を発生する。輝尽光は集光レンズ236で集光され、平行光線とする。平行光線とされた輝尽光は選択ミラー234で反射され、フィルタ241で赤色光がカットされる。フィルタ241を透過した輝尽光は光電子増倍管243により検出される。
【0048】
(放射線画像読取装置の電気的構成)
放射線画像読取装置100は、主に内部の制御回路310による電気的な制御を行う。図7A、図7Bは、放射線画像読取装置100の電気的構成を示すブロック図である。放射線画像読取装置100は、制御回路310、モータドライバ320、ステッピングモータ126、サーボモータドライバ330、サーボモータ210、回転ヘッド215、検出器240、プリアンプ351、A/D変換部352、消去ランプ140、電源359、USB接続部363およびメモリ370を備えている。なお、図7Aは、ステッピングモータ126が並列接続されている構成、図7Bは、ステッピングモータ126が直列接続されている構成を示している。各接続については、後述する。
【0049】
制御回路310(制御部)は、ユーザの操作に応じて各部を制御する回路である。制御回路310は、モータドライバ320へモータ駆動のためのパルスを送信する。モータドライバ320は、制御回路310から発信されるパルスを受けて、複数のステッピングモータ126を同期させて駆動させる。その結果、パルスに応じた速さで画像記録体Pを搬送することができる。このように、制御回路310は、モータドライバ320を介してステッピングモータの駆動を制御している。その一方で、制御回路310はサーボモータドライバ330を制御し、サーボモータ210を回転させることで、回転ヘッド215を回転させる。また、画像記録体Pの輝尽光を検出器240で検出し、プリアンプ351で増幅し、A/D変換部352でデジタル信号に変換する。
【0050】
プリアンプ351は、検出器240が検出した信号を増幅する。A/D変換部352は、プリアンプ351が増幅したアナログの検出信号をデジタル信号へ変換し、制御回路310に信号を伝達する。USB接続部363はPC等とのインタフェースとして機能する。メモリ370は、高速に画像データを記憶することが可能なメモリである。PC等とともにメモリ370を併用することで、USBのデータ転送能力が追いつかない場合でも一時的に画像データを記憶しておくことができる。
【0051】
(ステッピングモータの接続)
ステッピングモータ126の電気的接続には並列接続および直列接続がある。ステッピングモータ126の各コイルが独立していないもの同士の組み合わせには並列接続が可能である。並列接続の場合には、モータドライバ320には高出力(電流)が必要とされるが結線が簡単になる。各コイル間には抵抗値のバラツキがあるので、駆動力に余力がある場合には並列接続が有効である。図8Aは、並列接続されたステッピングモータ126の回路構成を示す模式図、図8Bは、その全体の回路構成を示す模式図である。
【0052】
図8Aに示すステッピングモータ126は、5つのコイルと5本のリードA〜Eを有しており、それらは回路P1を構成している。そして、図8Bに示すようにステッピングモータ126は複数設けられており、それらの複数のステッピングモータ126の回路P1〜Pnは、1つのモータドライバ320により同期させて駆動できるように電気的に並列接続されている。このような回路により同期駆動を行った場合には、ステッピングモータ126に生ずる逆起電力は、複数のそれぞれのステッピングモータ126の負荷状況により変動するので、その結果、1つのモータの回転が他のモータの動作に影響を及ぼす。たとえば、他のモータがハンチングしたり、他のモータを回転させたりする場合が生じる。このような現象は、モータごとにドライバを設けた場合には生じないが、複数のドライバを設けるとコストが嵩んでしまい現実的ではない。したがって、単一のドライバを用いつつ、上記の現象を抑止することが重要である。
【0053】
上記の現象はドライバが駆動電流を流していない場合には大きく、十分な駆動電流を流している場合には小さい。ただし、並列接続された複数のステッピングモータ126の駆動中でも、この現象で1つのモータが発振気味になると他のモータに動きが伝わる。発電機として動作するステッピングモータ126から生じる位相の異なる電圧はモータドライバ320からの供給電圧によらずモータの回転速度で決まる一定の値である。したがって、一つの防止手段として、モータドライバ320の出力設定電圧を高めておく方法が有効である。モータドライバ320のステッピングモータ126への供給電圧をE1とし、ステッピングモータ126の逆起電力の電圧をE2とするとき、1<E1/E2の関係を満たすよう供給電圧を設定することが好ましい。これにより、発振源のステッピングモータ126に駆動電流が流れ、上記の現象が緩和され他モータへの影響を無視できる程度にまで小さくすることができる。そして、複数のモータを安定して動作させることができる。
【0054】
1<E1/E2とするのが好ましいのは、実験結果に基づく。3台のステッピングモータ126を並列に接続した回路に対して、ステッピングモータ126をホールド状態に維持し、ステッピングモータの1台を手回ししたところ、2V程度の起電力による電圧が発生していることが観察された。そして、このステッピングモータ126には、2V程度に駆動電圧を設定すれば十分に起電力による影響を無視できた。したがって、そのときの設定電圧において、E1/E2=2÷2=1となり、上記の関係が導かれた。なお、実際の動作では、マージン値を加味して1.1≦E1/E2とするのが好ましい。
【0055】
一方、他の防止手段としては、供給電圧とモータの間に抵抗かチョーク(インダクタンス成分)を入れてもよい。図9Aは、並列接続されたステッピングモータ126の回路構成の一部を示す模式図、図9Bは、インダクタンス成分が1つのモータに接続されている回路の例を示す模式図である。図9A、図9Bに示すように各ステッピングモータ126のリードあたり一つのインダクタンス成分Lを設ける。たとえば、5本リードのステッピングモータ126が5個ある構成であれば、5×5=25個のチョーク(インダクタンス成分)を入れる。このように、複数のステッピングモータ126の各コイルに直列にインダクタンス成分を接続することができる。これにより、逆起電力により他モータへ印加される電圧のピークを下げるとともに、逆起電力による電流と電圧の位相をずらして実効的な電力を下げることができる。
【0056】
また、同タイプのステッピングモータ126を用いる場合でも、コイル特性のバラツキが10%ほどあり、バラツキによる動作の低下分を補えるように駆動をする必要がある。したがって、モータドライバ320の設定供給電流を、目標電流×ステッピングモータの台数×1.1以上とすることが好ましい。その際には、ステッピングモータ126の定格電流をオーバーしないよう注意する。なお、マッチング用の抵抗を付加し調整することによって、駆動電流の異なるステッピングモータ同士126を組み合わせて放射線画像読取装置100を構成してもよい。
【0057】
上記の例では、複数のステッピングモータ126を並列接続しているが、ステッピングモータ126の各コイルが独立しているタイプのモータであればモータ同士を直列接続することもできる。図10Aは、直列接続されたステッピングモータ126の回路構成を示す模式図、図10Bは、直列接続されたステッピングモータ126全体の回路構成を示す模式図である。図10Bに示すように、n台のステッピングモータ126の同相に当たるコイルを直列にしたものを1つのコイルと考えてモータドライバ320に接続すると定電流駆動ができ、すべてのステッピングモータ126を同トルクで動かすことができる。図10Bに示す例では、コイルX1〜Xnの端子Xと端子X’を次々に接続している(XにはA〜Eがそれぞれ入る)。このような直列接続の構成は、抵抗値が増すため大きい駆動電圧を印加できるモータドライバ320が必要である。また、定電流駆動ドライバを用いる場合には同じタイプのステッピングモータ126同士の組み合わせに用いる場合に限られる。なお、上記の例では5極のステッピングモータに本発明を適用しているが、2極のステッピングモータへの適用も可能である。
【0058】
なお、直列接続の場合でも、1つのモータの回転が他のモータへ影響を及ぼす現象を防止するため、供給電圧および各モータの間に抵抗かチョーク(インダクタンス成分)を入れることができる。図10Cは、インダクタンス成分が1つのモータに接続されている回路の例を示す模式図である。図10Cに示すように、基本的には、各ステッピングモータ126のリードあたり一つのインダクタンス成分Lを設ける必要があるが、1台目のステッピングモータ126に対してはインダクタンス成分を省略できる。たとえば、5相ステッピングモータを5台直列接続する場合には、1台目のステッピングモータに対してインダクタンス成分を省略し、(5台−1)×5相=20個のインダクタンス成分を接続することができる。このように、複数のステッピングモータ126の各コイルに直列にインダクタンス成分を接続することができる。
【0059】
(放射線画像読取装置の動作)
次に、このような放射線画像読取装置100の動作を説明する。まず、設定電圧を調整し、モータの定格電圧の1.1倍の電圧となるようにしておく。そして、制御回路310へ操作指示に基づいて、放射線画像読取装置100を起動する。ユーザにより画像記録体Pが搬送部120に送られると、搬送部120は円筒面111Aに沿って画像記録体Pを送り出す。その一方で、検出器240に高電圧が供給されるとともに、サーボモータドライバ330の制御に基づいて回転ヘッド215が回転し、励起光照射部230は回転ヘッド215とともに回転しつつ、円筒面111A〜111Dに沿って送り出された画像記録体Pに励起光を照射する。
【0060】
励起光を照射された画像記録体Pは、蓄積されたX線強度情報に応じた輝尽光を放射する。検出器240は、放射された輝尽光を検出し、検出された情報は、プリアンプ351およびA/D変換部352を経て制御回路310へ送出される。そして、USB接続によりほぼリアルタイムで読取画像データが外部のPC等に記憶される。この際に、USB接続のデータ転送速度が小さすぎ十分にPC等に記憶できない場合には、制御回路310はメモリ370に画像を記憶させる。後でUSB接続のデータ転送速度が十分に大きくなったときにメモリ370に記憶したデータをPC等に移す。このようにして、放射線画像読取装置100は放射線画像データを読み取り、蓄積することができる。
【符号の説明】
【0061】
100 放射線画像読取装置
110 記録体支持部
111A〜111D 円筒面
112 台座
113 平面部
114A 穴
115A 押えローラ
118 スリット
120 搬送部
125 支持フレーム
126 ステッピングモータ
127 ウォームギア
128 ギア
129 伝達部
131A、131B シャフト
132A、132B プーリ
133 搬送ベルト
134 保持板
135 バネ
136 凸部
137 爪部
140 発光体(消去ランプ)
141 固定部
142 フレーム
145 反射面
200 放射線画像読取ユニット
205 台部
210 サーボモータ
215 回転ヘッド
230 照射部(励起光照射部)
231 レーザ光源
232 コリメートレンズ
234 選択ミラー
236 集光レンズ
240 検出器
241 フィルタ
243 光電子増倍管
310 制御回路(制御部)
320 モータドライバ
330 サーボモータドライバ
351 プリアンプ
352 A/D変換部
359 電源
363 USB接続部
370 メモリ
A〜E リード
L インダクタンス成分
P 画像記録体
P1〜Pn ステッピングモータの回路
【特許請求の範囲】
【請求項1】
プレート状の画像記録体に記録された放射線照射画像を読み取る放射線画像読取装置であって、
複数のステッピングモータと、
前記複数のステッピングモータを同期させて駆動する単一のモータドライバと、
前記モータドライバを介して前記ステッピングモータの駆動を制御する制御部と、
前記画像記録体を湾曲面で支持する記録体支持部と
前記湾曲面に垂直な方向に移動可能に前記記録体支持部に保持され、前記湾曲面向きの押圧力により前記画像記録体を押圧するとともに、前記ステッピングモータの駆動力を前記画像記録体に伝達する伝達部と、を備え、
前記駆動力の伝達により搬送される前記画像記録体から前記放射線照射画像の読み出しと消去を連続して行うことを特徴とする放射線画像読取装置。
【請求項2】
前記複数のステッピングモータは、電気的に並列接続されていることを特徴とする請求項1記載の放射線画像読取装置。
【請求項3】
前記複数のステッピングモータは、電気的に直列接続されていることを特徴とする請求項1記載の放射線画像読取装置。
【請求項4】
前記モータドライバの供給電圧をE1とし、前記ステッピングモータの逆起電力の総和の電圧をE2とするとき、
1.1≦E1/E2であることを特徴とする請求項2または請求項3記載の放射線画像読取装置。
【請求項5】
前記複数のステッピングモータの各コイルに直列にインダクタンス成分が接続されていることを特徴とする請求項2から請求項4のいずれかに記載の放射線画像読取装置。
【請求項6】
前記複数のステッピングモータは、すべて同規格であり、
前記モータドライバの供給電流を、前記ステッピングモータ1台の目標電流×前記ステッピングモータの台数×1.1として前記ステッピングモータを駆動することを特徴とする請求項2記載の放射線画像読取装置。
【請求項7】
前記複数のステッピングモータは、すべて同規格であり、
前記モータドライバの供給電圧を、前記ステッピングモータ1台の目標電圧×前記ステッピングモータの台数×1.1として前記ステッピングモータを駆動することを特徴とする請求項3記載の放射線画像読取装置。
【請求項1】
プレート状の画像記録体に記録された放射線照射画像を読み取る放射線画像読取装置であって、
複数のステッピングモータと、
前記複数のステッピングモータを同期させて駆動する単一のモータドライバと、
前記モータドライバを介して前記ステッピングモータの駆動を制御する制御部と、
前記画像記録体を湾曲面で支持する記録体支持部と
前記湾曲面に垂直な方向に移動可能に前記記録体支持部に保持され、前記湾曲面向きの押圧力により前記画像記録体を押圧するとともに、前記ステッピングモータの駆動力を前記画像記録体に伝達する伝達部と、を備え、
前記駆動力の伝達により搬送される前記画像記録体から前記放射線照射画像の読み出しと消去を連続して行うことを特徴とする放射線画像読取装置。
【請求項2】
前記複数のステッピングモータは、電気的に並列接続されていることを特徴とする請求項1記載の放射線画像読取装置。
【請求項3】
前記複数のステッピングモータは、電気的に直列接続されていることを特徴とする請求項1記載の放射線画像読取装置。
【請求項4】
前記モータドライバの供給電圧をE1とし、前記ステッピングモータの逆起電力の総和の電圧をE2とするとき、
1.1≦E1/E2であることを特徴とする請求項2または請求項3記載の放射線画像読取装置。
【請求項5】
前記複数のステッピングモータの各コイルに直列にインダクタンス成分が接続されていることを特徴とする請求項2から請求項4のいずれかに記載の放射線画像読取装置。
【請求項6】
前記複数のステッピングモータは、すべて同規格であり、
前記モータドライバの供給電流を、前記ステッピングモータ1台の目標電流×前記ステッピングモータの台数×1.1として前記ステッピングモータを駆動することを特徴とする請求項2記載の放射線画像読取装置。
【請求項7】
前記複数のステッピングモータは、すべて同規格であり、
前記モータドライバの供給電圧を、前記ステッピングモータ1台の目標電圧×前記ステッピングモータの台数×1.1として前記ステッピングモータを駆動することを特徴とする請求項3記載の放射線画像読取装置。
【図1】


【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図5D】
【図6】
【図7A】
【図7B】

【図8A】
【図8B】
【図9A】
【図9B】
【図10A】
【図10B】
【図10C】
【図11】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図5D】
【図6】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図10A】
【図10B】
【図10C】
【図11】
【公開番号】特開2010−200839(P2010−200839A)
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願番号】特願2009−47015(P2009−47015)
【出願日】平成21年2月27日(2009.2.27)
【出願人】(000250339)株式会社リガク (206)
【Fターム(参考)】
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願日】平成21年2月27日(2009.2.27)
【出願人】(000250339)株式会社リガク (206)
【Fターム(参考)】
[ Back to top ]