
放射線療法デリバリ用の運動適応最適化システムおよび方法
放射線療法治療のデリバリを最適化する方法。この方法は、患者の解剖学的および生理的な変化(例えば、呼吸性運動や、その他の運動など)や、機械パラメータの変化(例えば、ビーム出力係数、治療台エラー、リーフ・エラーなど)などのような様々な因子を考慮するように、リアルタイムで治療デリバリを最適化する。

【発明の詳細な説明】
【技術分野】
【0001】
放射線療法デリバリ用の運動適応最適化システムおよび方法。
【0002】
[0001]本出願は、2009年3月5日に出願された米国特許出願第12/398,869号、および2008年10月27日に出願された米国特許出願第12/259,038号の優先権を主張するものである。これらの出願はともに、その全体が参照により本明細書に組み込まれる。
【背景技術】
【0003】
[0002]放射線療法治療(radiation therapy treatment)のデリバリ(delivery)の最中およびデリバリとデリバリの間に、腫瘍が動く(運動する)ことは広く知られている(Webb,2006a、LangenおよびJones,2001)。報告されているリアルタイム運動補償法は主としてトラッキングに基づく。即ち、計画された強度と同じ強度の放射線ビームを、計画された位置と同じ腫瘍基準フレーム内の位置に、計画された時刻と同時刻に照射することにより、補償が効果的に実行される。これらの方法は、リニアック(linac)トラッキング(Nuyttens他,2006、Murphy,2004)、MLCトラッキング(Keall他,2001、Keall他,2006、Neicu他,2003)、または治療台(couch)トラッキング(D’Souza他,2005)により実現され、ハードウェアによる解決策と特徴づけることができる。
【0004】
[0003]Papiezその他(Papiezその他,2005、PapiezおよびRangaraj,2005、Papiezその他,2007、Papiezその他,1999、PapiezおよびTimmerman,2008、Papiezその他,1994、PapiezおよびLanger,2006、Papiezその他,2002、Papieza,2004)、McMahonその他(McMahonその他,2007a、McMahon他,2007b)、ならびにWebbその他(WebbおよびBinnie,2006、Webb,2006b)は、動的MLCリーフ速度最適化(leaf velocity optimization)に、腫瘍の運動を組み込んだ。これらの方法は、ソフトウェアによる運動補償法とみなされる。
【0005】
[0004]トラッキング・ベースの方法は、運動が検出された直後に運動エラーを完全に補償することを意図している。このような方式は、ハードウェアの限界による補償エラーおよび/または予測を明示的にモデル化しないため、開ループ法(open loop method)とみなされる。これらの開ループ・トラッキング法は、MLC、リニアックまたは治療台などの速度および位置の正確性などのような、ハードウェアに対する要求、ならびに運動予測の正確性に対する要求が大きい。
【発明の概要】
【発明が解決しようとする課題】
【0006】
[0005]最新技術である強度変調放射線療法(intensity modulated radiation therapy)(「IMRT」)のデリバリは、計画されたリーフ・シーケンス(leaf sequence)に従う。このリーフ・シーケンスは治療計画の作成中に最適化されるものであり、これは、患者セットアップ、解剖学的構造および生理的状態を含むある治療構成を仮定する。しかしながら、治療計画の作成手順中に、リアルタイムの治療構成、例えば、患者の呼吸を正確にモデル化することは難しい。治療デリバリ条件が計画作成条件からずれると、線量分布が最適ではなくなる。具体的には、本来動的であるIMRTデリバリを、運動する腫瘍に対して実行すると、その結果として、腫瘍体積中にホット・スポットおよびコールド・スポットが生じる可能性がある。
【0007】
[0006]患者ごとに異なるだけでなく、同じ患者においても刻々と変化するイントラフラクション(intra−fraction)運動の複雑性のため、腫瘍の運動の正確なモデル化や長期予測は依然として実行不可能なタスクである。しかしながら、リアルタイム運動補償は、イントラフラクション運動の演繹的な知識や仮定にあまり依存しないので有望である。
【課題を解決するための手段】
【0008】
[0007]本発明は、累積エラーを考慮し、将来の照射を適応させるリアルタイム最適化を組み込む、IMRTデリバリの閉ループ・フィードバック・システムを含む。放射線療法デリバリ用のリアルタイム運動適応最適化(motion−adaptive−optimization)(「MAO」)の実行可能なワークフローが開発された。
【0009】
[0008]放射線療法デリバリは、多くの投射(projection)により特徴づけられる。MAO誘導型デリバリ(MAO guided delivery)は、各投射のデリバリの直前に、運動エンコーデッド(motion−encoded)累計線量を更新し、リーフ・シーケンスを最適化する。MAO技法は、運動の検出および予測、デリバリされた線量の累計、将来の線量の推定、ならびに投射の最適化を含む、幾つかのリアルタイム手順を含む。MAOがリアルタイムで実行されるとき、これらの手順は、1回の投射時間よりも短い時間で実行される。これらのMAO手順の試験にかかった時間は100ms未満であった。
【0010】
[0009]このMAO誘導型デリバリを、シミュレーションされた1D事例、実際の治療計画、および臨床的な肺および前立腺患者からの運動トレースを使用して、他の2つのタイプのデリバリ、即ち、補償無し運動デリバリ(motion−without−compensation delivery)(MD)および静的デリバリ(static delivery)(SD)と比較した。これらの結果は、全ての試験事例について、提案のMAO技法が運動エラーを効果的に補償したことを示している。MAO誘導型デリバリの線量分配およびDVHは、運動が規則的な呼吸であるか不規則な呼吸であるかや、運動が前立腺の小さな運動であるか大きい運動であるかに関わらず、SDの線量分布およびDVHに非常に近い。
【0011】
[0010]これらの結果は、提案の方法を、放射線療法デリバリにおけるリアルタイム運動補償に適用できることを概念的に証明した。このリアルタイム最適化法を、適応型放射線療法(Adaptive Radiation Therapy)(ART)に適用して、あらゆる種類のデリバリ・エラーを補償することができる。
【0012】
[0011]一実施形態において、本発明は、放射線療法治療をデリバリする方法を提供する。この方法は、患者に対する治療計画を作成するステップと、その患者を、放射線を受け取るように配置するステップとを含む。機械パラメータを実質的にリアルタイムで監視する。機械パラメータを監視するステップは、機械パラメータついての情報を分析し、それらのパラメータが、患者へデリバリされる線量にどのような影響を及ぼすかを分析することを含む。治療計画の少なくとも一部分を、監視された機械パラメータからの分析された情報を含むように、実質的にリアルタイムで最適化する。この方法は更に、最適化された治療計画の少なくとも一部分を患者へデリバリするステップを含む。
【0013】
[0012]本発明の他の態様は、詳細な説明および添付の図面を検討することにより明白になるであろう。
【図面の簡単な説明】
【0014】
【図1】[0013]図1は、放射線療法治療システムの透視図である。
【図2】[0014]図2は、図1に示した放射線療法治療システムで使用することができるマルチリーフ・コリメータの透視図である。
【図3】[0015]図3は、図1の放射線療法治療システムの概略図である。
【図4】[0016]図4は、放射線療法治療システムで使用されるソフトウェア・プログラムの概略図である。
【図5】[0017]図5は、リアルタイムMAO誘導型放射線療法デリバリを示す流れ図である。
【図6】[0018]図6は、リーフ方向(cos(φ−π/2),sin(φ−π/2),0)に沿った運動uの投影を示すものであり、φは源方向の角度である。
【図7】[0019]図7は、リアルタイムMAOの時間ラインを示す。n番目の投射に対する最適化は、(n−1)番目の投射で行われる。最適化が実行された後、その結果は、n番目の投射が始まる前に、デリバリ命令のために機械へ送られる。
【図8】[0020]図8は、1D長方形線量プロファイルのリアルタイムMADデリバリに対するシミュレーション結果を示すグラフである。
【図9】[0021]図9は、リアルタイムMAO誘導型デリバリに対するシミュレーション結果を示すグラフである。
【図10】[0022]図10は、T=4.3秒、A=20mm、b=0およびn=3のルーハン(Lujan)型の規則的な呼吸をシミュレーションした上段のグラフの運動を用いた、リアルタイムMADデリバリに対するシミュレーション結果を示すグラフである。
【図11】[0023]図11は、リアルタイムMAO誘導型デリバリに対するシミュレーション結果を示すグラフである。
【図12】[0024]図12は、実際の肺癌患者で測定した呼吸トレース(上段のグラフ)に対するシミュレーション結果を示すグラフである。
【図13】[0025]図13は、リアルタイムMAO誘導型デリバリに対する或る呼吸トレースに対するシミュレーション結果を示すグラフである。
【図14】[0026]図14は、M字形計画サイノグラムに対するシミュレーション結果を示すグラフである。
【図15】[0027]図15は、TomoTherapy(トモセラピー)治療下の肺癌患者に対する異なるデリバリ法のDVH比較を示す。
【図16】[0028]図16は、別の呼吸トレースについて、TomoTherapy(トモセラピー)治療下の肺癌患者に対する異なるデリバリ法のDVH比較を示す。
【図17】[0029]図17は、図16に示した事例の線量分布を示す。
【図18】[0030]図18は、TomoTherapy(トモセラピー)治療下の前立腺癌患者に対する異なるデリバリ法のDVH比較を示す。
【図19】[0031]図19は、イントラフラクション前立腺運動を経験している前立腺患者に対する異なるデリバリ法のDVH比較を示す。
【図20】[0032]図20は、イントラフラクション前立腺運動を経験している前立腺患者に対する異なるデリバリ法のDVH比較を示す。
【図21】[0033]図21は、図20に示した事例の線量分布を示す。
【図22】[0034]図22は、リアルタイムARTを示す流れ図である。
【図23】[0035]図23は、本発明に従って治療計画を最適化するように動作可能な動的計画法ループを示す流れ図である。
【発明を実施するための形態】
【0015】
[0036]本発明の実施形態を詳細に説明する前に、本発明は、その適用において、以下の説明に記載された構成要素や添付の図面に示された構成要素の構造および配置の詳細に限定されないことを理解されたい。本発明は、他の実施形態を有することができ、様々な方法で実施または実行することができる。また、本明細書で使用される語句および用語は、説明を目的としたものであり、それらを限定するものと考えるべきではないことを理解されたい。本明細書における「含む」、「備える」または「有する」、およびこれらの用語の変形の使用は、それらの前に記載されたアイテムおよびそれらの等価物、ならびに追加のアイテムを包含することを意味する。特に指定または限定しない限り、用語「取り付けられた」、「接続された」、「支持された」および「結合された」、ならびにこれらの用語の変形は、広範な意味で使用され、直接および間接の両方の取付け、接続、支持および結合を包含する。
【0016】
[0037]本明細書では、図面を説明する際に、上、下、下方、上方、後方、底面、前面、後面などのように、方向に言及することがあるが、これらの言及は、便宜上、図面(通常通りに見たときの図面)に対してなされる。これらの方向は、文字通りに解釈されることを意図したものではなく、また、何らかの形態に本発明を限定することを意図したものでもない。更に、「第1」、「第2」、「第3」などの用語は、本明細書では説明の目的で使用され、相対的な重要性または有意性を指示や暗示することを意図したものではない。
【0017】
[0038]更に、本発明の実施形態は、ハードウェア、ソフトウェアおよび電子構成要素または電子モジュールを含み、それらは、議論の目的上、大部分の構成要素があたかもハードウェアだけから実現されるかのように示され、説明されることがあることを理解すべきである。しかしながら、この詳細な説明を読んだ当業者であれば、少なくとも1つの実施形態において、本発明の電子工学ベースの諸態様を、ソフトウェアとして実現することができることを理解するであろう。従って、ハードウェア・ベースおよびソフトウェア・ベースの複数のデバイス、ならびに複数の様々な構造構成要素を使用して、本発明を実現することができることに留意すべきである。更に、後の段落で説明するとおり、図面に示された特定の機械構成は、本発明の実施形態を例示することを意図したものであり、他の代替の機械構成も可能である。
【0018】
[0039]図1は、患者14に放射線療法を提供することができる放射線療法治療システム10を示す。放射線療法治療は、光子ベースの放射線療法、小線源照射療法(brachytherapy)、電子線療法、陽子、中性子または粒子療法、あるいは他のタイプの治療法を含むことができる。放射線療法治療システム10は、ガントリ(gantry)18を含む。ガントリ18は、放射線モジュール22を支持することができ、放射線ビーム30を発生させるように動作可能な放射線源24および線加速器26(「リニアック」としても知られている)を含むことができる。図面に示したガントリ18は環形ガントリであり、即ち、360°の完全な弧を描いて延び、完全な環または円を形成しているが、他のタイプの取り付け配置を使用することもできる。例えば、C字型の部分的に環状のガントリやロボット・アームを使用することができる。患者14に対する様々な回転方向位置および/または軸方向位置に放射線モジュール22を配置することができる他の構成を使用することもできる。更に、放射線源24は、ガントリ18の形状に従わない経路上を運動することができる。例えば、示されたガントリ18の形状は全体的に円形ではあるが、放射線源24は、非円形経路に沿って運動することができる。示された実施形態のガントリ18は、治療の間、患者14がその中へ移動するガントリ開口32を画定する。
【0019】
[0040]放射線モジュール22は更に、放射線ビーム30を変更または変調するように動作可能な変調デバイス34を含むことができる。変調デバイス34は、放射線ビーム30を変調し、患者14に向けて放射線ビーム30を導く。具体的には、放射線ビーム30は、患者の部分38へ向けて導かれる。大まかに言って、この部分が全身を含むこともあるが、大抵は全身よりも小さく、2次元の面積および/または3次元の体積により画定することができる。ターゲットまたはターゲット領域と呼ばれることがある、放射線を受け取らせたい部分または面積は、関心領域の一例である。別のタイプの関心領域は、危険な状態にある領域である。或る部分が危険な状態にある領域を含む場合、放射線ビームは、その危険な状態にある領域からそらされることが好ましい。このような変調は、強度変調放射線療法(「IMRT」)と呼ばれることもある。
【0020】
[0041]変調デバイス34は、図2に示すようなコリメーション・デバイス42を含むことができる。コリメーション・デバイス42は、放射線ビーム30が通過することができる開口50を画定し、開口50のサイズを調整する一組のジョー(jaw)46を含む。ジョー46は、上部ジョー54および下部ジョー58を含む。上部ジョー54および下部ジョー58は、開口50のサイズを調整するように移動可能である。ジョー46の位置は、患者14にデリバリされるビーム30の形状を調節する。
【0021】
[0042]一実施形態では、図2に示すように、変調デバイス34が、強度変調を提供するために或る位置から別の位置へ動くように動作可能な複数のインタレースされたリーフ(leaf)66を含むマルチリーフ・コリメータ62(「MLC」としても知られている)を備えることができる。また、リーフ66は、最小限に開いた位置と最大限に開いた位置との間の任意の位置へ運動することができることに留意されたい。インタレースされた複数のリーフ66は、放射線ビーム30が患者14の部分38へ到達する前に、放射線ビーム30の強度、サイズおよび形状を変調する。放射線の通過を許すまたは妨げるためにリーフ66を高速に開閉できるように、各リーフ66は、モータ、空気弁などのようなアクチュエータ70により独立に制御される。アクチュエータ70は、コンピュータ74および/またはコントローラにより制御することができる。
【0022】
[0043]図1に示すように、放射線療法治療システム10は更に、放射線ビーム30を受け取るように動作可能な検出器78、例えばキロボルテージ(kilovoltage)またはメガボルテージ(megavoltage)検出器を含むことができる。線加速器26および検出器78は、患者14のCT画像を生成するコンピュータ連動断層撮影(CT)システムとしても動作することができる。線加速器26は、患者14の部分38へ向けて放射線ビーム30を発射する。部分38はこの放射線の一部を吸収する。検出器78は、部分38により吸収された放射線の量を検出または測定する。検出器78は、線加速器26が患者14の周りを回転し、患者14へ向けて放射線を発射したときに、様々な角度から吸収データを集める。集められた吸収データは、それらの吸収データを処理して患者の体組織および器官の画像を生成するためにコンピュータ74へ送られる。これらの画像は、骨、軟組織および血管を示すこともできる。システム10は更に、治療の間、患者14の少なくとも一部分を支持するように動作可能な患者支持デバイス(治療台82として示されている)を含むことができる。示された治療台82は患者14の全身を支持するように設計されているが、本発明の他の実施形態では、患者支持デバイスが全身を支持する必要はなく、患者支持デバイスは、治療の間に患者14の一部分だけを支持するように設計することもできる。治療台82は、軸84(即ちY軸)に沿って放射線フィールドに対して出入りする。治療台82は、図1に示されたX軸およびZ軸に沿って運動することもできる。
【0023】
[0044]図2および図3に示されたコンピュータ74は、様々なソフトウェア・プログラムおよび/または通信アプリケーションを実行するオペレーティング・システムを含む。具体的には、コンピュータ74は、放射線療法治療システム10と通信するように動作するソフトウェア・プログラム(1または複数)90を含むことができる。コンピュータ74は、医療従事者によりアクセスされるように適合された適当な任意の入力/出力デバイスを含むことができる。コンピュータ74は、プロセッサ、I/Oインタフェース、記憶デバイス、メモリなどのような、典型的なハードウェアを含むことができる。コンピュータ74は更に、キーボード、マウスなどのような入力デバイスを含むことができる。コンピュータ74は更に、モニタなどの標準出力デバイスを含むことができる。コンピュータ74は更に、プリンタ、スキャナなどの周辺装置を含むことができる。
【0024】
[0045]コンピュータ74と、他のコンピュータ74および放射線療法治療システム10とをネットワーク化することができる。他のコンピュータ74は、追加のコンピュータ・プログラムおよびソフトウェア、ならびに/または異なるコンピュータ・プログラムおよびソフトウェアを含むことができ、他のコンピュータ74は、本明細書に記載されたコンピュータ74と同一である必要はない。コンピュータ74および放射線療法治療システム10は、ネットワーク94と通信することができる。コンピュータ74および放射線療法治療システム10は更に、データベース(1または複数)98およびサーバ(1または複数)102と通信することができる。ソフトウェア・プログラム(1または複数)90はサーバ(1または複数)102上にも存在することができることに留意されたい。
【0025】
[0046]ネットワーク94は、任意のネットワーク化技術またはネットワーク化トポロジ、あるいはネットワーク化技術およびトポロジの組み合わせに従って構築することができ、複数のサブネットワークを含むことができる。図3に示されたコンピュータとシステムとの間の接続は、ローカル・エリア・ネットワーク(「LAN」)、ワイド・エリア・ネットワーク(「WAN」)、一般加入電話網(「PSTN」)、無線ネットワーク、イントラネット、インターネットまたは任意の他の適当なネットワークを介して実施することができる。病院や医療施設では、図3に示されたコンピュータとシステムとの間の通信を、任意のバージョンおよび/または他の必要なプロトコルを有する、ヘルス・レベル・セブン(Health Level Seven)(「HL7」)プロトコルまたは他のプロトコルを介して実現することができる。HL7は、健康管理環境において電子データを交換するための、ベンダの異なる2つのコンピュータ・アプリケーション(送信側と受信側)の間のインタフェースのインプリメンテーションを指定する標準プロトコルである。HL7は、健康管理機関が、異なるアプリケーション・システムから鍵となるデータのセットを交換することを可能にする。具体的には、HL7は、交換されるデータ、相互交換のタイミング、およびアプリケーションへのエラーの伝達を定義することができる。フォーマットは一般に、事実上ジェネリック(generic)であり、含まれるアプリケーションの要求を満たすように構成することができる。
【0026】
[0047]図3に示されたコンピュータとシステムとの間の通信は、任意のバージョンおよび/または他の必要なプロトコルを備えるデジタル・イメージング・アンド・コミュニケーションズ・イン・メディシン(Digital Imaging and Communications in Medicine)(DICOM)プロトコルにより実現することもできる。DICOMは、NEMAにより開発された国際通信規格であり、医療機器の異なる構成要素間で医用画像関連データを転送するために使用されるフォーマットを定義する。DICOM RTは、特に放射線療法データを対象とした規格を指す。
【0027】
[0048]図3の双方向の矢印は、一般に、ネットワーク94と、図3に示された任意の1つのコンピュータ74やシステム10との間の双方向通信および双方向情報転送を表す。しかしながら、コンピュータ化された一部の医療機器では、一方向通信および一方向情報転送のみを必要とする場合もある。
【0028】
[0049]ソフトウェア・プログラム90(図4のブロック図に示されている)は、放射線療法治療プロセスの諸機能を実行するために互いに通信する複数のモジュールを含む。これらの様々なモジュールは更に、放射線療法治療計画のデリバリが意図されたとおりに実行されたかどうかを判定するために互いに通信する。
【0029】
[0050]ソフトウェア・プログラム90は、医療従事者によるシステム10へのデータ入力に基づいて患者14の治療計画を作成するように動作可能な治療計画モジュール106を含む。このデータは、患者14の少なくとも一部分の1または複数の画像(例えば計画画像(planning image)および/または治療前画像)を含む。治療計画モジュール106は、治療を複数のフラクション(fraction)に分け、各フラクションまたは治療の放射線量を、医療従事者による処方入力に基づいて決定する。治療計画モジュール106は更に、部分38に対する放射線量を決定する。この放射線量は、部分38の周囲のマージン(margin)を画定する、部分38の周囲に描かれた様々な輪郭(contour)に基づくことができる。同じ治療計画に複数の部分38が存在して含まれてもよい。
【0030】
[0051]治療計画は、患者へ放射線をデリバリする複数の投射を含む。治療計画モジュール106は更に、各投射の時間期間を規定するように動作可能である。治療計画モジュール106は、全ての投射の合計時間を越えて各投射の時間を調整し、治療計画をデリバリするためにバッファに構築することができる。言い換えると、治療計画モジュール106は、より多くの再最適化の機会を可能にするために、デリバリ能力を意図的に十分に用いないようにすることができる。
【0031】
[0052]ソフトウェア・プログラム90は更に、患者14の少なくとも一部分の画像を取得するように動作可能な画像モジュール108を含む。画像モジュール108は、CT画像化デバイスなどのオンボード画像デバイスに指令して、所望のプロトコルに応じ、治療が始まる前、治療中および治療後に、患者14の画像を取得させることができる。一態様において、画像モジュール108は、患者14が実質的に治療位置にいる間に、患者14の画像を取得する。非定量的なCT、MRI、PET、SPECT、超音波、透過画像化、蛍光透視法、RFベースの局在診断などのような、他のオフライン画像化デバイスまたは画像化システムを使用して、患者14の治療前画像を取得してもよい。取得した治療前画像(1または複数)を使用して、患者14のレジストレーションを実行し、かつ/あるいは1または複数の計画画像(planning image)と1または複数の治療前画像、治療中画像または治療後画像との間の差異を識別するための変形マップを作成することができる。
【0032】
[0053]取得した画像を使用して、患者14のレジストレーション(登録)を実行し、かつ/あるいは患者14にデリバリする放射線量を決定や予測することもできる。取得した画像を使用して、以前の治療またはフラクションの間に患者14が受け取った放射線量を決定することもできる。画像モジュール108は更に、患者14が治療を受けている間に、患者の少なくとも一部分の画像を取得して、患者14がリアルタイムで受け取っている放射線量を決定するように動作可能である。
【0033】
[0054]ソフトウェア・プログラム90は更に、治療デリバリの前および最中に治療計画を最適化するように動作可能な最適化モジュール110を含む。治療デリバリ中のリアルタイム最適化は、患者の解剖学的および生理的変化(例えば、呼吸や他の運動など)、機械構成の変化(例えば、ビーム出力率、治療台エラー、リーフ・エラーなど)などのような、様々な因子をより十分に考慮することができる。ビーム強度のリアルタイム変更は、これらの変化を考慮することができる(例えばビームレット(beamlet)をリアルタイムで再最適化する)。
【0034】
[0055]最適化モジュール110は、累積エラーを考慮し、患者へデリバリされる将来の照射に向けて治療計画を調整する。最適化モジュール110は、運動エンコード化(motion-encoded)累計線量を更新し、各投射をデリバリする直前にリーフ開時間(leaf open time)を最適化する。治療計画の最適化に関する追加の詳細については後に論じる。
【0035】
[0056]ソフトウェア・プログラム90は更に、特定の治療フラクションのためにガントリ18のアイソセンタ(isocenter、等角点)に対して患者14を位置決めし、位置合せするように動作可能な患者位置決めモジュール114を含む。患者が治療台82に乗っている間に、患者位置決めモジュール114は患者14の画像を取得し、患者14のその時点の位置を、基準画像の患者の位置と比較する。基準画像は、計画画像、任意の治療前画像、あるいは計画画像と治療前画像の組合せとすることができる。患者の位置を調整する必要がある場合には、患者位置決めモジュール114は、駆動システム86に指令して治療台82を運動させることができ、また、手作業で患者14を新たな位置に運動させることができる。一構成において、患者位置決めモジュール114は、ガントリ18のアイソセンタに対する患者位置データを提供するために治療室内に配置されたレーザからデータを受け取ることができる。レーザからのデータに基づいて、患者位置決めモジュール114は、患者14とガントリ18との適正な位置合せを達成するため、治療台82を運動させる命令を駆動システム86へ与える。位置合せプロセスを支援するために、レーザ以外のデバイスおよびシステムを使用して、患者位置決めモジュール114にデータを提供することができることに留意されたい。
【0036】
[0057]患者位置決めモジュール114は更に、治療中の患者運動を検出および/または監視するように動作可能である。患者位置決めモジュール114は、X線、インルームCT、レーザ位置決めデバイス、カメラ・システム、肺活量計、超音波、張力測定、胸部バンドなどのような運動検出システム112と通信し、かつ/またはこのような運動検出システム112を含むことができる。患者の運動は不規則であったり、予想外であったりすることがあり、なめらかな経路や再現可能な経路をたどるとは限らない。
【0037】
[0058]ソフトウェア・プログラム90は更に、放射線療法治療システム10に指令して、治療計画に従って患者14へフラクションをデリバリさせるように動作可能な治療デリバリ・モジュール118を含む。治療デリバリ・モジュール118は、患者14へ放射線をデリバリするために命令を生成し、ガントリ18、線加速器26、変調デバイス34および駆動システム86へ送ることができる。これらの命令は、治療計画に指定された適正な量の放射線ビーム30を適正なターゲットへデリバリするために、ガントリ18、変調デバイス34および駆動システム86の必要な運動を調整する。
【0038】
[0059]治療デリバリ・モジュール118は更に、治療計画により指定された処方に一致するように、デリバリされる放射線ビーム30の適当なパターン、位置および強度を計算する。放射線ビーム30のパターンは、変調デバイス34により、より具体的には、マルチリーフ・コリメータの複数のリーフの運動により、生成される。治療デリバリ・モジュール118は、標準の、所定の、または定型的なリーフ・パターンを使用して、放射線ビーム30に対する適当なパターンを治療パラメータに基づいて生成することができる。治療デリバリ・モジュール118は更に、アクセスすることができる、典型的な事例に対するパターンのライブラリを含むことができ、存在する患者データと比較して放射線ビーム30に対するパターンを決定することができる。
【0039】
[0060]ソフトウェア・プログラム90は更に、患者の治療中に放射線療法治療システム10からデータを受け取るように動作可能なフィードバック・モジュール122を含む。フィードバック・モジュール122は、放射線療法治療デバイスからデータを受け取ることができ、患者透過データ、電離箱データ、MLCデータ、システム温度、構成要素速度および/または位置、流量などに関する情報を含むことができる。フィードバック・モジュール122は更に、治療パラメータ、患者が受け取った放射線量の量、治療中に取得した画像データ、および患者の運動に関するデータを受け取ることができる。更に、フィードバック・モジュール122は、ユーザおよび/または他のデータ源から入力データを受け取ることができる。フィードバック・モジュール122は、これらのデータを取得し、他の処理のために必要となるまで記憶する。
【0040】
[0061]ソフトウェア・プログラム90は更に、フィードバック・モジュール122からのデータを分析して、治療計画のデリバリが意図されたとおりに実行されたかどうかを判定し、計画されたデリバリ(planned delivery、計画デリバリ)が合理的であるかどうかを、新たに取得したデータに基づいて検証するように動作可能な分析モジュール126を含む。分析モジュール126は更に、受け取ったデータおよび/または入力された追加のデータに基づいて、治療計画のデリバリの間に問題が起こったかどうかを判定することができる。例えば、分析モジュール126は、その問題が、放射線療法治療デバイス10のエラーに関係するのかどうか、および/または患者の運動などの解剖学的エラーに関係するのかどうか、かおよび/またはデータ入力エラーなどの臨床的エラーに関係するのかどうかを、判定することができる。分析モジュール126は、治療台82、デバイス出力(即ち、線加速器26の出力変動)、ガントリ18、マルチリーフ・コリメータ62、患者セットアップ、および放射線療法治療デバイス10の構成要素間のタイミング・エラーに関係する、放射線療法治療デバイス10でのエラーを検出することができる。例えば、分析モジュール126は、計画作成中に治療台の置換えが実行されたかどうか、計画作成中に固定デバイスが適切に使用および考慮されたかどうか、治療の間に位置および速度が正確かどうかを、判定することができる。分析モジュール126は、放射線療法治療デバイス10の出力パラメータの変化または変動が起こったかどうかを判定することができる。ガントリ18に関して、分析モジュール126は、ガントリ18の速度および位置決めにエラーがあるかどうかを判定することができる。分析モジュール126は、マルチリーフ・コリメータ62が適正に動作しているかどうかを判定するためのデータを受け取ることができる。例えば、分析モジュール126は、リーフ66が正しい時間に運動するかどうか、何れかのリーフ66が同じ場に固着していないかどうか、リーフ・タイミングが適正に校正されているかどうか、およびリーフ変調パターンが所与の治療計画に対して正しいかどうかを判定することができる。分析モジュール126は更に、所与の治療計画について、患者のセットアップ、方向および位置の妥当性を検証することができる。分析モジュール126は更に、ガントリ18、治療台62、線加速器26、リーフ66の間のタイミングが正しいかどうかを検証することができる。
【0041】
[0062]分析モジュール126は更に、デフォーマブル・レジストレーション(deformable registration)データを使用して、複数のフラクションにまたがって患者14が正確な放射線量を受け取っていることを保証することができる。線量を分析するときは、エラーが増大しているかどうかや、エラーが互いに軽減しているかどうかを判定するために、複数の治療フラクションにわたって線量を累計することが有用である。レジストレーションは、複数の画像にわたって患者の解剖学的構造や生理機能の位置間の相関を決定する方法である。デフォーマブル・レジストレーションは、画像、相または時間の間の解剖学的構造の固定的ではない変化(non-rigid change)を考慮するために、患者の解剖学的構造や生理機能の位置の間の相関を決定する方法である。正確な線量が患者14へデリバリされたことや、デリバリされていることを保証するために、放射線療法治療デバイス10からのオンライン画像およびオンライン・フィードバックに基づいて、患者14へデリバリされた放射線量が再計算される。
【0042】
[0063]分析モジュール126は更に、品質保証目的での画像の変形ベースの輪郭生成(deformation-based contouring)に関係したデータを、使用することができる。デフォーマブル・レジストレーション技法を使用して、新たな画像に対する自動または半自動の輪郭を生成することができる。一般に、輪郭セットは、計画画像または他のベースライン患者画像に対して定義されるが、新たな画像では、輪郭セットは通常は容易には取得できない。オペレータが手作業で画像の輪郭を描くことを必要とせずに、画像のデフォーマブル・レジストレーションを実行し、次いで、その変形結果を、新たな患者解剖学的構造を反映するように初期の輪郭セットを変更するベースとして使用することは、より高速であり堅実であり得る。類似の群のテンプレート・ベースの輪郭アルゴリズム群が、以前に使用可能であった画像および輪郭セットに基づき新たに使用可能になった画像に対して輪郭を生成するために、開発された。これらのテンプレート・ベースのアルゴリズムは、以前の患者の画像および輪郭に基づいて、あるいは場合によっては、標準またはアトラス(atlas)の患者の画像および輪郭に基づいて、新たな患者画像に輪郭を描くことができる。これを、それぞれが日毎の自動的な輪郭を有する日毎の画像の線量を累計する手段として、適応療法に対して実行することができる。更に、以前には、これらのアルゴリズムを、標準画像またはアトラス画像に基づいて新たな輪郭を生成する状況において使用したが、本発明の新たな態様では、これらの技法を、画像誘導型の放射線療法中に生じる特定の多数の画像データおよび画像のタイプに適用する。具体的には、これは、同じ患者の複数の画像の変形およびテンプレート・ベースの輪郭生成を含み、輪郭セットは、それらの画像のうちの1つの画像に対してだけ存在し得る。患者のこれらの複数の画像は、オンラインまたはインルームの患者画像化システムを使用して撮影することができ、場合によっては、これらの画像が別々の日に撮影され、また、CTスキャナなどの「4D」画像化システムにより、これらの画像を得ることもでき、このとき、それぞれの画像は、呼吸相などのような運動の相を表す。オンラインまたはインルームの画像化システムは、基準画像と同じ、基準画像に類似、または基準画像とは異なるモダリティ(様式)であり得ることにも留意すべきである。例えば、基準画像はCT画像であることがあり、オンライン画像は、CT、円錐ビームCT、メガボルテージCT、MRI、超音波または異なるモダリティであり得る。これらの輪郭生成技法を、品質保証および適応療法の用途に移植することにより、画像の輪郭生成にかかる時間をかなり節約することができ、この方法は更に、同じ患者の複数の画像(異なる時刻に撮影された画像や、異なる相を表す画像)間の輪郭の整合性を向上させることができる。手作業による輪郭は、再現できないことがあり得る問題が知られているが、自動的に生成された輪郭は、潜在的に、初期の輪郭の原理を後の輪郭の生成に適用することにおいて、より整合性が高いものであり得る。
【0043】
[0064]デフォーマブル・レジストレーション技法を使用した輪郭生成プロセスの他の利点は、生成された輪郭が、変形プロセスの妥当性の検証を提供することができる点である。生成された輪郭が、手で描いた輪郭をよく反映している場合、このことは、変形プロセスが合理的であることを良く示しており、また、自動の輪郭の関連性が低い場合、このことは、変形が不適切であり得ることをユーザに示すだけではなく、手作業による輪郭を検証して誤りや不整合をチェックする機会をユーザに提供する。この方法の他の態様は、変形ベースの輪郭を、適応プロセスに対する輪郭の大まかな下書きとして使用し、オンライン画像に対する所望の輪郭を反映するように手作業で編集することができることである。これを実行するときには、次いで変形プロセスを再実行し、変形マップを制限して、初期の輪郭を、手作業で編集された自動輪郭と一致させることができる。このことは、残りの画像を通して整合した結果を導くのに役立つ。
【0044】
[0065]分析モジュール126は更に、品質保証目的で、変形マップを使用して、様々な画像上で線量計算を実行するように動作可能である。変形マップを使用して、複数の画像を関係づけることができ、或る画像は線量計算に有用な計画画像であり、オンライン画像などのような他の画像は、線量計算には直接にはあまり役立たない性質的な値を有する。次いで、この関係を使用して、このより定量的な画像を、オンライン画像や定量的ではない画像の性質的な形状へ、「リマップ(remap)する」ことができる。その結果得られるリマップされた画像は、第1の画像の定量的な利点と、第2の画像に含まれる更新された解剖学的情報とを有するため、線量計算用途や定量用途には、他の2つの画像の何れよりも適当であろう。これは、第1の画像(例えば計画画像)がCTである場合、追加の画像が定量的な画像値を含まない場合(例えば、MRI、PET、SPECT、超音波、非定量的CTなどの画像)などのような、様々な場合に有用である可能性がある。この方法の類似の用途は、定量的な限界を補正する代わり又は補正することに加えて、幾何学的な歪み、欠陥および/または不完全性を補正することであろう。例えば、解剖学的構造をよく表してはいるが幾何学的な歪みを含む現在のMRI画像を、歪みのないCT画像にリマップすることが考えられる。または、複数の画像を使用して、歪みを補正し、同時に解剖学的変化を表現することができる。
【0045】
[0066]前述のとおり、計画画像の後に取得された患者画像上で線量を再計算することができることは重要である。これらの線量が与えられた場合、デリバリされた複数のフラクションに対して、これらの線量を累計することも有用である。これらの線量は、物理空間内の線量の位置に基づいて加算することもできるが、より都合の良い方法は、このプロセスに変形法を組み込んで、線量を受け取った構造が位置を変えた場合であってもそれらの構造に基づいて線量を加算するようにする方法である。しかしながら、この技術を、新規のタイプの適応療法を実行するように構築することが可能である。
【0046】
[0067]線量を再計算することに関して、このプロセスを改良または容易にする本発明の他の幾つかの態様が存在する。例えば、患者に適用された非毎のレジストレーションを記録した後に、場合によっては画像ガイダンスに基づいて、線量を再計算するときに、それらと同じレジストレーションを患者画像に適用することができる。これは自動でまたは半自動で実行することができる。あるいは、異なるレジストレーションを用いて線量を再計算することもできる。その利点は、記録されたレジストレーションを自動的に使用することにより、デリバリされた線量を再計算するプロセスが簡素化され能率化されることである。更に、異なるレジストレーションに対して線量を再計算することができることにより、他の患者位置合せプロトコルがより有効である否かを判定することを試みることができる。また、記録されたレジストレーションを使用しないことにより、画像ガイダンスがない場合に治療がどれくらい影響を受けるのかを判定することができる。
【0047】
[0068]不完全な画像を穴埋めすることによっても、線量再計算プロセスを強化するができる。これは、軸方向平面内および/または上/下方向のサイズが限定された画像は、線量計算の正確さを低下させることがあるためである。このことを解決する方法は、サイズが限定された画像を、計画画像の画像データなどのような他の画像データで穴埋めする方法である。この穴埋め法(padding method)は、軸方向および上/下方向に限定されたデータに対して機能することができる。更に、上/下方向のデータを穴埋めする他の方法は、改良された線量計算のためにデータが十分に大きくなるまで、不完全な画像の端部の(最後の)スライスを必要なだけ繰り返す方法である。
【0048】
[0069]図5は、リアルタイムMAO誘導型(real-time MAO-guided)放射線療法デリバリの流れ図を示す。この流れ図では、治療計画作成システム(treatment planning system、治療計画システム)(TPS)を使用して、計画されたサイノグラム(planned sinogram、計画サイノグラム)を最適化するが、計画手順において運動マージンは追加されない。この方法は、治療台、ガントリの速度、ジョー位置を変更しない。言い換えると、放射線デリバリの間、計画されたとおりに、治療台およびガントリは一定の速度で運動し、ジョーの位置は固定される。腫瘍位置は、何らかの代用物を介して、または直接に治療ビームを介してリアルタイムで検出/更新されるが、本発明の運動管理システムは運動検出法から独立している。
【0049】
[0070]次の投射に対するリーフ開時間を出力するために、計画サイノグラム、ならびにデリバリされた線量の累計、将来の線量の推定、および腫瘍位置の予測が、最適化プロセスへ送られる。このプロセスは閉ループ・プロセスと考えられるが、それは、最適化機構の出力が、線量をデリバリする命令として機械へ送られ、デリバリされた線量が、4D線量計算器によりリアルタイムで累計され、最適化機構へ(入力として)返されるためである。
【0050】
[0071]4D線量計算器は、デリバリされる最後の投射まで、デリバリされた線量をリアルタイムで累計するために使用される。将来の投射(次の投射を除く)においてデリバリされる線量が推定される。次の投射での予測される腫瘍位置および累計されたデリバリされた線量に基づいて、累積されたデリバリ・エラーと将来の線量推定の両方を考慮するように、次の投射に対するリーフの開時間がリアルタイムで最適化される。この最適化されたリーフ開時間を使用して、次の投射に対する放射線デリバリを変調するMLCを制御する。
【0051】
[0072]この流れ図は、この放射線デリバリ・プロセスを、負のフィードバック・システムとしてモデル化する。この流れ図をリアルタイムで実現するため、示されたプロセスは、オフラインの計画手順を除いて、1回の投射時間よりも短い時間で実行されなければならない。このシステムは1回の投射あたりに1回だけ最適化するため、投射時間は、リアルタイムMAO技法の時間分解能(temporal resolution)とみなすことができる。TomoTherapy(登録商標)(トモセラピー)放射線療法システムの最小投射時間は約200msであり、これは、10秒のガントリ回転あたりに51回の投射に相当する。
【0052】
[0073]本明細書の全体を通じて以下の記号を使用する。
B: サイズM×Nの計画されたビームレット線量の行列。ここで、Mはボクセルの数、Nはビームレットの数である。Bの各列は、単位強度のビームレット(リーフ)からの線量分布である。
w: 添字として投射番号iおよびリーフ番号jを有するリーフ・フルエンス(リーフ開時間)のサイノグラムである。w={wi,j}。
【数1】
:計画手順での最適化により得られた計画サイノグラムであり、ハット記号(hat)により強調される。
【数2】
:腫瘍の運動に基づく計画サイノグラムから調整されたデリバリ・サイノグラムであり、チルド記号(tilde)により強調されている。
δ: ガントリ1回転あたりの治療台の運動。
P: ガントリ1回転あたりの投射数。現行のヘリカルTomoTherapy(登録商標)放射線療法治療システムでは一般にP=51である。
u=(ux,uy,uz): 腫瘍の運動。uiの上部インデックスはi番目の投射の運動であることを示す。
【0053】
1.理論
1.1 計画の最適化
[0074]IMRT計画最適化は一般に、条件付き非線形最適化問題として以下のように公式化することができる。
【0054】
【数3】
【0055】
制約条件は、
Bw∈Dおよびw∈W (2)
であり、Fは計画目的であり、Dは、許容可能な線量分布の空間であり、例えば、最小および最大線量ならびにDVH要件を満たす線量分布の空間であり、Wは、放射線療法機械のハードウェアによりデリバリすることができる実行可能なフルエンス・マップ(fluence map)の空間である。この目的関数Fは一般に、複数の目的関数の加重和として表現することができる。
【0056】
【数4】
【0057】
ビームレット線量の行列Bの各列は、単位強度のビームレットの3D線量分布を表し、積Bwは、wをデリバリした結果としての全体3D線量分布である。フルエンス・マップwは、機械に対するデリバリ命令へと、直接または間接的に変換することができる。フルエンス・マップwからデリバリ命令への直接変換の一例は、TomoTherapy(登録商標)放射線療法治療システムであり、このシステムでは、このフルエンス・マップが、全ての投射に対するリーフ開時間を記述する。ステップ・アンド・シュート(step−and−shoot)および動的MLCベースのデリバリのような間接変換は、フルエンス・マップを、数十から数百のセグメントまたは幾つかのリーフ・シーケンスに変換する。IMRT最適化は、通常、最新のコンピュータであっても数十分から数十時間かかる時間のかかるプロセスである。以下は、IMRT最適化が時間のかかるプロセスとなる原因である幾つかの因子である。
【0058】
1. 式(3)のような目的関数の異なる成分は相互に作用し、より良好なトレードオフは、ユーザが重みaSを調整することにより達成することができる。従って、この最適化を臨床目的に適合させるために、かなりのユーザ操作が必要となることがある。
2. この最適化は、非常に大規模な非線形最適化問題に分類される。この問題の大きさは、行列Bのサイズに反映される。未知量の数(即ち、ビームレットの数またはBの列の数)が、従来のIMRTでは数千であり、最適化では数万ないし数十万にもなることがある。Bの行の数は、一般に数百万個程度である3D体積のボクセルの数に対応する。
3. 行列Bは非常に密であり、疎ではない。理論的には、各ビームレットは、散乱のため、3D体積内の全てのボクセルに寄与する。TomoTherapy(登録商標)システムの場合には、1回転ごとに51回投射され、典型的なピッチは0.3であるため、1次放射線だけを考えたとしても、各ボクセルは、51/0.3=170個のビームレットにより直接に照射される。即ち、最適化機構は、目的関数を最小にするために、それらのビームレット間のトレードオフを見つけ出さなければならず、結果を収束させるためには、通常、数百回の繰返しが必要である。
【0059】
[0075]焦点を明確にするため、以下の議論では、TomoTherapy(登録商標)の治療デリバリ・モードだけを検討する。しかしながら、適応技法は、他の放射線デリバリ・デバイスおよびシステム、ならびに他のタイプのデリバリにも適用することができることに留意されたい。TomoTherapy(登録商標)の治療デリバリは、投射ごとに実行される。即ち、フルエンス・マップwが、ビームレット強度のサイノグラムへと編成される。
w={wi,j} (4)
上記の式で、iは投射のインデックス、jはリーフのインデックスである。典型的には、各サイノグラムには数百から数千の投射が含まれる。
【0060】
1.2 運動エンコード化(motion-encoded、運動エンコーデッド)ビームレット
[0076]計画の最適化の前には、予め、静止した患者に関連したビームレット行列Bがオフラインで計算される。計画の最適化に対して不可欠であるのと同様に、このビームレット行列は、リアルタイムの最適化のために線量を累計し、フルエンス・マップを更新する際にも不可欠である。しかし、デリバリの最中に腫瘍が運くときには、放射線源はもはや腫瘍基準フレーム内の計画された位置にはない可能性がある。従って、患者の線量分布を記述するためには、この初期ビームレット行列Bはもはや有効ではなく、ビームレット行列を改訂する必要がある。改訂されたこのようなビームレットを、運動エンコーデッド・ビームレットと呼ぶ。ビームレットをゼロからリアルタイムで再計算することは実行不可能である。以下では、リアルタイムで初期ビームレットから変更された運動エンコーデッド・ビームレットの近似について説明する。
【0061】
[0077]i番目の投射をデリバリする時点で、腫瘍の運動がu=(ux,uy,uz)であると仮定する。ビームレットの変更を、縦方向と横方向とに分解することができる。最初に縦方向を考える。特に明記しない限り、便宜上、源位置は腫瘍のことを指す。i番目の投射において、計画された源位置は(i/P)・δであり、δは、ガントリ1回転あたりの治療台の運きである。運動u=(ux,uy,uz)で、源位置は(i/P)・δ−uzに変化する。この新しい源位置のビームレットは、同じガントリ角度の最も近い2つの投射の初期ビームレットを線形補間することにより近似することができる。
【0062】
【数5】
【0063】
上記の式は、空間内の全ての点x=(x,y,z)に関してのものであり、上式で、ある整数mおよび0≦α<1について、uz/δ=m+αであり、x1およびx2は下式により定義される。
【0064】
x1=(x,y,z+αδ)およびx2=(x,y,z−(1−α)δ) (6)
【0065】
縦方向の変更と同様に、横方向の運動を考慮した横方向の変更は、最も近い2つのリーフの初期ビームレットを線形補間することにより得ることができる。
【0066】
【数6】
【0067】
上記の式で、ある整数lおよび0≦β<1についてuφ−π/2/a=l+βであり、aはリーフ幅であり、φは、φ=(i/P)2πである投射角であり、uφ−π/2は、図3に示すリーフ方向(cos(φ−π/2),sin(φ−π/2),0)に沿った運動uの投影である。ここで、座標シフトx3およびx4を以下のように定義する。
【0068】
x3=(x,y,z)+βa・(cos(φ−π/2),sin(φ−π/2),0)
x4=(x,y,z)−(1−β)a・(cos(φ−π/2),sin(φ−π/2),0) (8)
【0069】
式(5)および(7)を使用し、i番目の投射に対するリーフ・フルエンスが{wi,j}であると仮定すると、i番目の投射に対する運動エンコーデッド線量diは以下のようになるはずである。
【0070】
【数7】
【0071】
1.3 リアルタイムMAD
[0078]リアルタイム運動適応デリバリ(motion adaptive delivery)(「MAD」)技法は、フルエンスの初期推測値、および後のセクションで論じるMAO戦略における将来の線量の推定のための合理的なモデルを提供する。ここでは、MAD技法の概要を説明する。
【0072】
[0079]任意の投射で、腫瘍の運動がu=(ux,uy,uz)である場合(この運動は、源が、計画された軌道から腫瘍に対して−uだけ動くことに相当する)、投射の線量がその位置で意図された線量に最も近くなるような、補間されたリーフ開時間が使用されることになる。
【数8】
が計画サイノグラムを表すとし、iは投射のインデックス、jはリーフのインデックスである。治療台を基準にすると、投射インデックスiによりパラメータ化された源位置は、円筒周面上でつる巻線を描く。投射iに対して、源が縦方向に−uzだけ動いた場合、新たなリーフ・フルエンス
【数9】
は、計画サイノグラムwを線形補間することにより計算することができる。即ち、下記のようである。
【0073】
【数10】
【0074】
上記の式で、或る整数mおよび0≦α<1について、uz/δ=m+αである。
【0075】
[0080]源の横方向の変位は、円錐効果、逆2乗則などのような必要な補正によりリーフ・フルエンスをシフトさせることにより、更に補償される。
【0076】
1.4 リアルタイムMAO
[0081]時間のかかる計画最適化は、最適な実行可能解
【数11】
を返し、それにより、線量分布
【数12】
が臨床医の目的に適う。しかしながら、リアルタイム患者運動は、計画手順においてモデル化されておらず、またはモデル化することさえできない。骨の折れる計画最適化作業により得られた非常に整合性の高い計画された線量(planned dose、計画線量)分布も、リアルタイムの運動により劣化すると予想される。リアルタイムMAO誘導型デリバリは、放射線デリバリ手順に最適化を組み込む。実際、これは、以前にデリバリされた投射から累積エラーを自己補正する負のフィードバック・システムとみなすことができる。
【0077】
[0082]リアルタイムMAOは、次の投射に対するリーフ開時間だけを最適化する。計画サイノグラムがN個の投射を含み、n番目の投射(次の投射)のデリバリの直前に、下記の式に従って最適化したいと仮定する。
【0078】
【数13】
【0079】
制約条件は、
0≦wn,.≦wmax (12)
であり、wmaxは、各デリバリ計画に対して固定された最大投射時間であり、ddeliveryは
ddelivery=d−+dn+d+ (13)
のように定義される。
【0080】
d−は、既にデリバリされた投射1からn−1までの累計線量、
dnは、n番目の投射デリバリに対して最適化される線量、
d+は、投射n+1からNまでにデリバリされる将来の線量である。
【0081】
ここで、線量分布d−、dn、およびd+は、計画手順と同じ基準フレームで評価される。図7は、リアルタイムMAO手順の時間ラインを示す。n番目の投射に対する最適化は、(n−1)番目の投射のデリバリ中に実行される。最適化における作業は更に、最後にデリバリされた投射n−1の線量を累計線量d−に加算することにより累計線量d−を更新すること、および投射n+1から最後の投射までの将来の線量d+を推定することを含む。
【0082】
[0083]最適化の時点で、投射n−1に対する腫瘍の動きは分かっているが、投射nに対する動きについては予測する必要がある。以下では、n番目の投射に対する最適化を実行していると仮定して、それぞれの作業、即ち、デリバリされた線量の累計、将来の線量の推定、および単一の投射の最適化、がどのように実行されるのかを詳細に説明する。
【0083】
1.4.1 デリバリされた線量の累計
[0084]n番目の投射に対する最適化を実行していると仮定する。投射1からn−2までの累計線量d−は既に計算されている。これに、最後にデリバリされた(n−1)番目の投射の線量
【数14】
を加えることにより、累計線量d−を更新する必要がある。デリバリされたフルエンス・マップ
【数15】
と、運動エンコーデッド・ビームレットとを、
【数16】
を計算するためには知る必要がある。デリバリされたフルエンス・マップ
【数17】
はまさに、(n−1)番目の投射に対する最適化された結果である。しかしながら、腫瘍が運動しないと仮定した計画されたビームレット(計画ビームレット)だけが分かっている。(n−1)番目の投射をデリバリしている時点で、腫瘍の運動un−1のため、ビームレットは計画ビームレットとは異なる。計画ビームレットからデリバリ・ビームレットへの変更は、式(5)および(7)に従う。投射n−1でデリバリされた線量は、下記のようである。
【0084】
【数18】
【0085】
デリバリされた線量は、単純に、以下のように累計される。
【0086】
【数19】
【0087】
1.4.2 将来の線量の推定
[0085]2つの未知量、即ち、1)腫瘍の運動および2)将来の全ての投射に対するフルエンス・マップ(リーフ開時間)があるため、将来の線量の推定は困難な作業である。将来の投射のトレース全体が分かる場合、前述のMAD戦略は、将来の線量の推定に対する優れた候補となる。しかしながら、実際には、運動トレース全体を事前に知ることはできない。自然な修正法は、MAD戦略において、運動をその確率密度関数(PDF、probability density function)に置き換え、将来の線量を期待値により表現する方法である。運動のPDFは、以前のトレースに基づいて容易に推定することができ、PDFは、将来の投射に対してゆっくりと変化すると予想される。MAD戦略に基づく将来の予想線量は、予めオフラインで計算することができる。
【0088】
[0086]ステップ1: 全ての投射iについて、計画された投射線量
【数20】
を、全てのリーフからの寄与を合計することにより計算する。
【0089】
【数21】
【0090】
[0087]ステップ2: 全てのkについて投射kまでの累計された線量g0(k,x)を計算する。
【0091】
【数22】
【0092】
具体的には、g0(N,x)は、全ての投射からの総線量を表し、ここで、Nは、投射の総数である。
【0093】
【数23】
【0094】
[0088]ステップ3: 源の軌道が縦方向に−uzだけ運動した場合の投射kまでの累計線量g(k,x,uz)を計算する。上記の運動は、縦方向の腫瘍の運動uzに等しい。
【0095】
g(k,x,uz)=(1−α)g0(k−mP,x0)+αg0(k−(m+1)P,x1) (19)
【0096】
上記の式で、uz/δ=m+αであり、x0およびx1は、式(6)中のそれらのものとして定義される。具体的には、下記のようになる。
【0097】
g(N,x,uz)=(1−α)g0(N,x0)+αg0(N,x1) (20)
【0098】
[0089]ステップ4: 運動uzのPDF p(uz)に関して、g(k,x,uz)の期待値
【数24】
を計算する。
【0099】
【数25】
【0100】
[0090]ステップ5: 予想される将来の線量d+を計算する。
【0101】
【数26】
【0102】
[0091]この将来の線量の推定は、フルエンスに対するMADと、運動のPDFとに基づく。
【0103】
[0092]源の横方向の変位は、円錐効果、逆2乗則などのような必要な補正によりリーフ・フルエンスをシフトさせることにより補償することができるので、縦方向の変位だけに対処すすればよい。前述のとおり、投射iに対して、源が縦方向に−uzだけ運動した場合、新たなリーフ・フルエンス
【数27】
は、計画サイノグラム
【数28】
を線形補間することにより計算することができる。即ち、下記のようである。
【0104】
【数29】
【0105】
上記の式で、或る整数mおよび0≦α<1について、uz/δ=m+αである。同様に、ビームレットは、式(5)のように計画ビームレットを線形補間することにより近似することができる。
【0106】
【数30】
【0107】
上記の式で、x’=(x、y、z+αδ)、x”=(x,y,z−(1−α)δ)である。従って、投射iに対する新たな線量は以下のとおりである。
【0108】
【数31】
【0109】
[0093]式(25)の3行目は、近似
【数32】
および
【数33】
を使用していることに留意されたい。新たな線量
【数34】
は、実際、腫瘍の運動の関数である。i番目の投射の腫瘍の運動uziに対する依存性を表すために、
【数35】
を使用することにする。将来の投射に対する運動が分かっている場合、投射nの後の将来の線量は、以下のように計算することができる。
【0110】
【数36】
【0111】
しかしながら、将来の投射に対する運動は現実には分からない。uziのPDFが、使用可能であり、全てのi>nに対して同じであり、p(uz)により表されると仮定すると、将来の線量は、式(26)の期待値を使用して推定することができる。
【0112】
【数37】
【0113】
上記の式で、gおよび
【数38】
は上で定義されている。
【0114】
1.4.3 単一の投射の最適化
[0094]ここで、d−およびd+が計算されているため、n番目の投射を最適化する準備が整ったことになる。投射nの線量は以下のように計算される。
【0115】
【数39】
【0116】
上記の式で、
【数40】
は、式(5)および(7)に示した運動エンコーデッド・ビームレットであり、腫瘍の運動unは、投射1からn−1までの運動トレースに基づく予測により得られる。これについては次のセクションで説明する。wn,.は、最適化されるリーフ開時間である。一般に、この最適化には20未満のアクティブのリーフが関与する。それらのリーフは同じ投射内にあるため、それらのリーフのビームレット線量はごくわずかしか重なり合わない。式(11)および(13)に基づく望まれる線量分布
【数41】
は下記のようになる。
【0117】
【数42】
【0118】
ビームレットが重なり合わない場合、フルエンス・マップ
【数43】
は1ステップで解くことができる。
【0119】
【数44】
【0120】
ビームレットが重なり合わないため、j≠j’では
【数45】
であることに留意されたい。ここで、
【数46】
は、2つのベクトルの内積を表す。しかしながら、放射線の半影(penumbra)および分散により、k番目から(k+1)番目の繰返しの以下の比更新(ratio updating)方式は、よりロバストであることが分かった。
【0121】
【数47】
【0122】
上記の式において、
【数48】
である。
【0123】
MAD法で得られたフルエンスが、初期推測値
【数49】
として使用される。wn,jがwmaxを超える場合には、実行可能なリーフ開時間を保証するため、wn,jをwmaxに等しく設定する。典型的には、この最適化は10回以内の繰返しで収束する。
【0124】
1.5 運動予測
[0095]リアルタイム反応システムでは、検出と動作との間に待ち時間があるため、予測が必要となる。TomoTherapy(登録商標)治療に対するリアルタイムMAOの場合には、総待ち時間が、運動の検出から、MAO計算まで、デリバリ命令を送るまで、実際にデリバリするまでの時間からなる。このような運動は、呼吸性の運動や呼吸相や、心臓性の運動や、予想される位置からの腫瘍の動きを引き起こす他の患者運動などのような、直接的運動や、腫瘍変形や、患者の体重減や他の患者変化などのゆうな、より間接的な運動を含み得る。投射時間が200ミリ秒であると仮定すると、総待ち時間または予測長は300ミリ秒未満であり、これは短期予測とみなされる。更に、MAO誘導型デリバリは、後の投射において予測エラーを自己補正することができる負のフィードバック・システムである。従って、高い予測精度は求められず、自己回帰モデル化に基づく単純な線形予測が、この用途に対して一般に良く機能することが分かった。
【0125】
[0096]xiが、i番目の時間サンプルの腫瘍位置を表すとする。自己回帰モデル化に基づく線形予測は、腫瘍の運動を過去のサンプルの線形の結合(組み合わせ)として表す。
【0126】
【数50】
【0127】
上記の式で、nは、モデル次数であり、kは、予測長であり、aiは、訓練データに基づいて計算される係数である。約2秒の運動データに対応するモデル次数nを選択する。運動トレースの最初の40秒が訓練データとして使用され、上記係数を20秒ごとに適応的に更新する。実際の幾つかの呼吸曲線に関する本発明の発明者らの実験によれば、線形予測の正確度、ピーク・ピーク振幅3cmの実際の呼吸性運動および300msの待ち時間に対して、RMS誤差において約0.5mmを達成することができる。
【0128】
[0097]また、将来の線量の推定の式(21)について腫瘍運動のPDFを予測する必要がある。しかし、本発明の発明者らは、将来の腫瘍の運動のPDFを近似するために、単純に、〜20秒の過去のデータを使用する。繰返しになるが、閉ループ系の自己補正機能があるので、将来の線量の推定の正確性はあまり重要ではない。
【0129】
2.結果
[0098]シミュレーションされたデータと臨床データとの両方を使用して、リアルタイムMAO誘導型TomoTherapy(登録商標)治療デリバリを評価した。(Lu,2008b)に記載されているものと同じ運動エンコーデッド線量計算エンジンを使用して、デリバリされた線量を計算した。計画の際と同じ基準フレームで、全ての線量を計算し、DVHを評価した。以下の3つの異なるデリバリ条件の線量を比較した。
1.SD: 静止した腫瘍での通常のデリバリ
2.MD: 運動する腫瘍での通常のデリバリ
3.MAO: 2と同じ腫瘍の運動での運動適応最適化誘導型デリバリ(motion-adaptive-optimization guided delivery)
更に、比較のためMAD技法の線量も計算した。
【0130】
2.1 シミュレーションされたデータ
[0099]TomoTherapy(登録商標)またはTopoTherapy(登録商標)治療デリバリなどのようなバイナリのMLCベースのIMRTについては、イントラフラクション運動の影響は、横方向の運動よりも、縦方向(Z方向または治療台の運動方向)の運動の方が顕著である。この研究では、最初に縦方向の運動に焦点を合わせ、次いで3D運動に拡張した。全てのシミュレーションに対して、ジョー幅1.05cm、ガントリ期間10秒、1回転あたりの投射数(PPR)51およびピッチ0.3を使用した。これらのデリバリ・パラメータは、運動補償のない治療デリバリに対する最悪ケースのシナリオに対応する。
【0131】
[00100]縦方向運動の影響の検討には、「Lu,2008a」に記載された1Dシミュレーションを使用した。運動は縦方向だけであったため、結果を、静的デリバリ・モードとヘリカル・デリバリ・モードとの両方に適用した。MADデリバリとMAO誘導型デリバリの結果を比較した。長さ8cmのターゲットに対して均一な線量分布を意図した。投射時間は196ミリ秒(=回転あたり10秒/回転あたり51投射)とした。計画サイノグラムは、腫瘍領域では131ミリ秒(=196ミリ秒/MF)、それ以外の領域ではゼロ秒のリーフ開時間に対応する単純な長方形プロファイルとした。ここで、MF(=1.5)は、このシミュレーションで使用した変調係数(modulation factor)を表す。
【0132】
[00101]図8〜図14は結果を示す。これらの全ての図において、上段のグラフは縦方向運動のトレース、中段のグラフは、計画サイノグラムおよびデリバリ・サイノグラム、下段のグラフは、SDと、MDと、MAD(図8、図10および図12)またはMAO(図9、図11、図13、図14)との線量を比較する。
【0133】
[00102]図8〜図9は、定速(治療台の速度の〜10%)の運動をシミュレーションする。この種の運動は、腫瘍が放射線ビームの下流側へ(治療台の運動方向とは反対方向)に運動したとき、または治療台が計画よりも10%遅く運動したときに起こる。補償しなければ、このような運動の結果として、1)「動的」な位置合せ不良のために、ターゲットの一部分に放射線が当たらず、正常な組織に過剰照射され、2)ターゲットの一部分が、計画よりも10%長く放射線ビームの下に置かれるため、その部分の線量が約10%過大になる。これらの影響は、MDの線量(下段のグラフの緑色の破線)によりはっきりと示されている。MAD線量は、ターゲット境界においては計画線量(SD)とよく一致しているが、他の領域では、MD線量と同じ程度に「ホット(hot)」である。デリバリ・シーケンスを配列し直すことにより、MADは、放射線が正しい位置にデリバリされることを保証するが、腫瘍の下流側への運動を補償するためにビーム強度を変更することはしない。MADサイノグラム(図8の中段のグラフに「点」で示されている)は、計画と同じ強度レベルを有する。事前に運動トレース全体が分かっており、全ての投射に対して全面的な再最適化を実行したのであれば、腫瘍領域において計画よりも約10%低い強度を有するサイノグラムが得られる。MAO技法は、ビーム強度を再最適化して、全ての投射において、運動により引き起こされた累積エラーを補償する。図9は、MAOの結果を示す。図9の中段のグラフに示されているように、MAOサイノグラムは、計画サイノグラムよりも約10%低く振動する。この振動は、MAO法の負のフィードバック・システムのロバスト性を示している。それぞれの投射で、MAOアルゴリズムは、以前の全ての投射による累積エラーを補償する。デリバリの構成(例えば1投射あたりの最大リーフ開時間)の限界ならびに予測および将来の推定の不確実性のため、このような補償は決して完璧ではない。しかし、この補償エラーと予測エラーの両方を、次の投射により更に補正することができる。この負のフィードバック・システムにより、図9の下段のグラフに示されたMAOの線量は、計画線量(SD)と完全に一致している。
【0134】
[00103]図10〜図11は、ピーク・ピーク振幅2cm、周期4.3秒のルーハン(Lujan)型の呼吸性運動に対するものである。両図の下段のグラフに示されているように、MD線量は、呼吸性運動のため、線量プロファイルの前端と後端との両方で、SD線量からかなり外れている。一方、MAD法とMAO法はともにこの運動を補償し、それらのそれぞれの線量はSD線量と非常によく一致している。MAD線量とMAO線量はほとんど同じだが、それらのサイノグラムは劇的に異なる(図10〜図11の中段のグラフ)。MADサイノグラムは計画と同じ平らな形状を有し、MAOサイノグラムは大きな振動を示す。ビームレット行列は非常に冗長(redundant)なビームレットからなるため、異なるサイノグラムがほぼ同じ線量を与え得る。PPRが51、ピッチが0.3の場合において、各ボクセルは、51/0.3=170の投射から直接照射を受け取る。このような冗長性は、MAOの貪欲性に基づく最適化方式を使用して累積エラーを補償するという同じ目的および実現可能性に対する多数の解決法の存在を暗示する。
【0135】
[00104]図12〜図13は、肺癌患者で測定したピーク・ピーク振幅2cmの不規則呼吸の結果を示す。非常に不規則な呼吸の大きな振幅と、TomoTherapy(登録商標)治療デリバリの小さいフィールド・サイズ(1.05cm)および高速のガントリ回転(10秒)の組み合わせは、下段のグラフに示されているように、結果として、MD線量において高い腫瘍線量不均一性をもたらす。MAD線量は、この場合も、腫瘍の境界ではSD線量とよく一致しているが、腫瘍の内部領域ではMD線量と同じ不均一性を有する(図12)。他方、MAO法は、縁の不鮮明さを低減し且つ腫瘍線量を不均一にする不規則な呼吸の効果を、SD線量から3%以内の差に低減させる(図13)。図14は、同じ不規則呼吸に対するMAOの結果を示しているが、M字形強度マップを用いるものであり、強度が大幅に変調された計画をシミュレーションするものである。この図は、このような大幅に変調された計画であっても、MAO線量がSD線量とよく一致することを示している。
【0136】
[00105]図8および図12のタイプの運動に対してMADが有効でなかったのは、MADが、各腫瘍ボクセルが計画されたのと同じ可能性で照射を受けるという仮定に基づいており、定速運動(図8)と非常に不規則な呼吸性運動(図12)とがともに、この仮定に大きく反するためである。しかしながら、リアルタイムMAO法は、このような仮定に基づいておらず、従って、不定の運動に対してよく適合する。
【0137】
2.2 臨床データ
[00106]リアルタイムMAO誘導型デリバリ技法は、あらゆる種類の運動に適用することができる。ここでは、2種類の運動の結果、即ち、呼吸性の運動と前立腺の運動との結果を示す。
【0138】
2.2.1 呼吸性運動
[00107]肺の下部に約2cmの腫瘍を有するある肺癌の事例を、過去にさかのぼって検討した。ジョー幅2.5cm、ピッチ0.3のTomoTherapy(登録商標)Hi・Art(登録商標)II TPSを使用して、治療計画を最適化した。この最適化では、運動マージンのないターゲットとしてGTVを使用した。計画線量分布は、図17の上段に示されている。その患者の呼吸データがなかったため、他の肺癌患者からの肺活量計信号の2つの異なる呼吸トレースを使用して、検討対象患者の腫瘍の運動をシミュレーションした。測定された肺活量計信号は1Dのみであり、この信号は、相対振幅および相情報を提供した。この信号の振幅を、振幅の下10%から上10%まで範囲が、SI方向3cm、AP方向2cmおよびLR方向1cmにおおよそ対応するようにスケーリングした。これらの運動は、文献に報告された最大呼吸性運動に近い。各運動トレースに対して、MD線量およびMAO線量を計算し、それらをSD線量と比較した。更に、それらのDVHを比較した。
【0139】
[00108]異なるデリバリ・モードに対する運動トレースおよびDVHの比較を図15〜図16に示す。両図とも、MD線量のかなりのコールド・スポットを示している。GTVは約2cmでしかなく、運動は3cmであるため、これは極端な例であることに留意されたい。更に、治療計画には運動マージンが含まれておらず、腫瘍が照射野から外れる可能性があるため、かなりのコールド・スポットが出現することが予想される。しかし、運動マージンがなくとも、MAOのDVHは、計画DVH(SD)と非常によく一致しており、コールド・スポットはごくわずかである。これらの例は、リアルタイムMAO技法が、かなりの呼吸性運動のもとでの小さな肺腫瘍を治療する際のマージンを低減させる有効な方法であることを暗示している。
【0140】
[00109]図17は、図16に示した運動トレースの横断(T)、矢状方向(S)および冠状(C)の図における線量分布を比較する。上段は、SD(計画)線量分布のTSC図、中段は、MD線量分布のTSC図、下段は、MAO線量分布のTSC図である。この図は、DVHの情報と同様の情報を提供する。運動補償をしない場合、等線量(isodose)レベルに示されているように、GTV線量は計画線量よりもかなり少ない。MAO誘導型デリバリについては、高線量領域(腫瘍の周囲)の等線量線はSD線量のそれと非常によく似ているが、低線量領域にはいくらかの相違がある。このような相違は、主に、メモリの限界のためにMAOで完全にはモデル化されない散乱に起因する。また、全ての計算で、剛体運動を仮定したことに留意されたい。剛体運動と仮定することは、小さな腫瘍に対してはごく妥当だが、肺や脊髄に対しては妥当とは言えない。従って、肺および脊髄の線量の結果については注意して解釈すべきだが、本発明の発明者らは、腫瘍が小さくて脊髄から離れているときには、その差異は最小限に留まると予想している。
【0141】
2.2.2 前立腺の運動
[00110]「Langen他,2008b、Langen他,2008a」に報告されているものと同じ前立腺患者の事例を、過去にさかのぼって検討した。前立腺のイントラフラクション運動を、Calypso(登録商標)の4次元定位システムの電磁信号を介してリアルタイムで追跡した。これらの運動を、「Langen他,2008c」に記載されているとおりに、小、中、大の前立腺の変位に分類した。これらの変位はそれぞれ、3mm未満、3mmから5mm、5mm超の振幅に対応し、全追跡データの85%超、〜10%、〜3%を占める。「Langen他,2008b、Langen他,2008a」に記載されているものと同じ、ジョー幅2.47、ピッチ0.287、ガントリ回転周期29から31秒の最適化された治療計画を使用した。
【0142】
[00111]図18は、治療全体にわたって3mm以内の小さな前立腺運動の結果を示す。MDのDVHはSDのDVHよりもわずかに低く、MAOのDVHはSDのDVHに完全に一致している。このことは、このような小さな運動に対するMAO法のロバスト性を示している。
【0143】
[00112]図19は、中位の前立腺運動の結果を示す。前立腺は、SI(上−下)方向に3mmから6mm、かなりの時間運動した。MDの前立腺DVHでは、SDとの比較で、ホット・スポットとコールド・スポットの両方が出現した。これは、左上のグラフのSI運動トレースにより示されているように、腫瘍が、SI方向において、上流側(放射線源の運動とは逆方向)と下流側(放射線源の運動と同じ方向)との両方に運動したためである。上流側への運動により、前立腺の部分が計画線量よりも少ない線量を受け取り、下流側への運動により、他の部分が、計画線量よりも多くの線量を受け取った。これらのDVHプロットに示されているように、MAO技法は両方の運動に対しての補償を行うことができた。MAOの前立腺DVHはSDのそれに非常に近かった。更に、MAOにより膀胱のホット・スポットが補正された。
【0144】
[00113]図20〜図21は、大きい前立腺運動の結果を示す。図21の上段は、計画(SD)線量分布のTSC図、中段は、MD線量分布のTSC図、下段は、MAO線量分布のTSC図を示す。前立腺は、大部分のデリバリ時間の間、SI方向とAP(前−後)方向の両方に5mmから10mm運動した。このような大きな上流側へのSI運動により、前立腺線量分布に、前立腺DVH(図20)およびMDの線量分布(図21の中段)により検出されたかなりのコールド・スポットが生じた。他方、MAO技法は、このような大きい運動に対して非常によく補償が行われた。MAOの等線量線(図21の下段)は、計画線量(図21の上段)に非常によく似ており、MAOのDVHはSDのそれに近かった(図20)。MAOにより直腸のホット・スポットが補正されたことに留意されたい。
【0145】
[00114]これらの例は、リアルタイムMAOが、大小を問わず全ての種類の前立腺の運動を効果的に補償することを示している。とは言え、このような運動の影響は、通常は非常に穏やかであり、デリバリの5回のフラクションの後には急速に排除される。ここでは、全ての研究対象例に対して剛体運動を仮定した。このような仮定は、前立腺に対しは議論の余地があるところであり、膀胱および直腸に対しては明らかに適当でない。従って、ここに示したMDおよびMAOの結果はともに、臨床的ガイダンスとしてではなく、単なる着想の証明として解釈すべきである。
【0146】
3.議論
[00115]治療計画の作成は、デリバリ機械およびCTなどのような患者の解剖学的構造のコミッショニング・データ(commissioning data)に関する情報に基づく。治療デリバリの目標は、治療計画をできるだけ正確に再現することであるため、治療計画の作成では、デリバリ手順を正確にモデル化しなければならない。しかしながら、腫瘍の運動などのようなリアルタイムの変化は、事前に正確にモデル化することが難しい。最新の放射線デリバリは開ループ手順である。開ループ手順は、計画された手順を段階的に再現しようとするが、それぞれの段階で生じ、累積されたエラーに対処する機構を持たない。提案のリアルタイムMAO誘導型放射線治療は、デリバリ方式を、従来の開ループ・システムから、負のフィードバックを有する閉ループ・システムへと変更する。この意味で、MAOの枠組みを、より一般的な方式である、図22に示すようなリアルタイム適応型放射線治療(adaptive radiation therapy)(ART)に容易に拡張することができる。その流れ図では、運動エラー(患者の運動および患者の他の変化に由来する)と機械エラー(様々な機械パラメータに由来する)との両方をリアルタイムで検出および予測する。4D線量再構成エンジンが、デリバリされた線量をリアルタイムで累計する。再構成された線量は、将来の推定とともに、次の投射に対してのリーフ開時間を最適化するリアルタイム最適化機構を駆動するために使用される。
【0147】
[00116]一般的に、ARTは、放射線療法の最中にフィードバックを使用して将来の治療を改善するというコンセプトを指す。フィードバックは、オフライン適応プロセスまたはオンライン・プロセスに対して使用することができる。オフラインARTは、治療フラクションの間などのような、患者が治療されていないときのプロセスを指し、オンラインARTは、患者が治療台上にいるが治療ビームのデリバリが始まる前のプロセスを指す。オフラインARTおよびオンラインARTはともに、インターフラクション変化(inter−fractional change)を補償するためのものである。しかしながら、リアルタイムARTは、イントラフラクション、即ち、リアルタイム、での生じたエラーを補正するためのものであり、それらのエラーが、患者運動に起因するものなのか、またはリニアック出力変化、リーフ開エラー、ガントリ回転エラー、治療台運動エラーなどの不規則な機械変動に起因するものなのかは、問わない。リアルタイムARTにおいて放射線デリバリを駆動するための命令は、機械パラメータおよび患者変化(患者の運動に起因する変化など)を含む多くの構成要素からの系統的なフィードバックを用いてリアルタイムで最適化される。リアルタイムARTは、エラー検出およびシステム応答に対して高い要求を課す。リアルタイム線量再構成も、リアルタイムARTの重要な要素である。運動検出、デリバリ検証、および線量再構成を高い信頼性で実現できることを前提にすると、リアルタイム最適化ワークフローは、TomoTherapy(登録商標)治療デリバリに対するリアルタイムARTを達成することができるはずである。
【0148】
[00117]呼吸性運動、心拍動、および他の生理的変化などのイントラフラクション運動は、従来の分割化したIMRTにとって厄介な問題である。治療モダリティが動的であればあるほど、運動および機械のパラメータの変化またはエラーに起因するイントラフラクション変化の識別が重要となる。
【0149】
[00118]しかし、これは、ターゲットの正確な位置決めが決定的に重要な体幹部定位放射線治療(stereotactic body radiation treatment)(SBRT)および少分割療法(hypofractionated therapy)にとっては、よりいっそう厄介な問題である。SBRTは、その局所的制御の速度が好適であるため、ある種の肺癌における使用がますます増えている。前立腺癌に対する少分割は、治療上の利益および経済的な利点を潜在的に有する。肺および前立腺の事例はともに、かなりのイントラフラクション運動を示す。強度変調陽子線療法(または他の重粒子療法)は、最も厳しい運動管理を必要とする。潜在的には、これらの3つの全ての治療モードに、提案のリアルタイムMAO技法を適用することができる。
【0150】
[00119]提案のMAO技法は依然として、運動を補正すべき「エラー」とみなす、「補償」のカテゴリに分類される。運動は厄介な問題だが、チャンスでもある。「適応分割療法(Adaptive Fractionation Therapy)」を通じてより良い治療を達成するために、腫瘍−OAR構成のインターフラクション変動の利点を使用することができるのと同じように、潜在的には、「計画されたデリバリよりも良好な」デリバリを達成するためにイントラフラクション運動の利点を使用することができる。この可能性は、OAR線量を最小化するために4D DMLCデリバリを使用したPapiezのグループにより証明された(Papiez他,2007)。本発明の発明者らは、より先進のリアルタイム最適化方式は、静的デリバリに基づくどのような計画によっても達成できない優れたデリバリを提供することができるはずだと考えている。このような方式は、より洗練されたアルゴリズムおよび強力なコンピュータを必要とし得る。
【0151】
[00120]本明細書において、本発明の発明者らは、腫瘍の運動は剛体の運動とみなすことができ、危険な状態にある物体(object−at−risk)(「OAR」)は腫瘍と同じように運動すると仮定した。これは、小さい腫瘍および腫瘍に近いOARに対しては良い近似である。運動の補償は、大きい腫瘍に対してよりも小さい腫瘍に対してより有意義であり、腫瘍の近くのOARは、通常、腫瘍から離れたOARよりも重要に考慮する。従って、本発明の発明者らは、このような仮定を、大部分の腫瘍運動の事例に対して妥当とみなす。提案のリアルタイム最適化方式は、回転または一般的な変形を排除しない。しかしながら、それには、変形エンコーデッド・ビームレットを計算するために上に示したものとは異なる式が必要である。問題は、どのようにして、変形の輪郭をリアルタイムで忠実に描くかということである。これは、超高速デフォーマブル・レジストレーション・アルゴリズム、または4DCTなどのような幾つかの4D画像に基づく予め計算された変形マップの使用を含み得る。
【0152】
[00121]閉じたフィードバック・ループを使用することにより、本発明に基づく方法は更に、機械パラメータおよび患者の変化の予測を可能にする。一実施形態では、この予測が、リアルタイムで集められた機械パラメータおよび患者の変化/運動データからの情報の外挿(情報を推断の基礎とすること)に基づく。例えば、機械パラメータまたは患者運動の予測は、識別された機械の傾向または患者運動パターンに基づいて行うことができる。この方法は更に、初期の治療目的と、それまでに受け取った累計線量と、将来の線量デリバリ推定との情報を組み込んだ、その時点のデリバリ命令のリアルタイム最適化を企図する。
【0153】
[00122]閉じたフィードバック・ループを実現する1つの方法は、図23に示すような動的計画法を使用する方法である。動的計画法は、治療デリバリ命令をリアルタイムで最適化するものであり、動的計画法を使用して、デリバリ命令の最適化が、患者に対するリアルタイム・ビーム・デリバリに遅れないことを保証する。本発明の一実施形態では、動的計画法を使用するそれぞれの最適化ループが、機械パラメータおよび患者運動のリアルタイムの情報を集めるステップから始まる。幾つかの実施形態では、将来の治療投射のために、集められたリアルタイムの情報に基づいて、機械パラメータおよび患者の運動/変化情報を予測する。機械パラメータおよび患者運動に関する情報を組み込んで、一番最近の治療投射からの線量を計算する。
【0154】
[00123]次のステップでは、デリバリされた線量へ、この一番最近の線量を加算して、デリバリされる予想線量に対する累計線量を監視する。一番最近にデリバリされた治療投射に関する線量を、機械パラメータおよび患者運動情報を含めてリアルタイムで再構成し、この線量を、基準フレームワークにおけるデリバリされる線量に加算することができるようにする。幾つかの実施形態では、累計されるのはデリバリされた線量の値自体ではなく、予想された線量とデリバリされた線量との差を累計する。この累計された線量の情報から、将来の線量の推定値は、患者運動および機械パラメータについてのモデルを使用して得ることができる。このモデルは、演繹的モデルまたは動的モデルとすることができる。
【0155】
[00124]次いで、その時点の計画に対するデリバリ命令は、その時点の線量と、デリバリされた以前の線量と、将来の線量との組み合わせが、治療目的(即ち、意図された線量)に最もよく一致するか又は治療目的を改善するように、最適化する。この最適化は、デリバリ命令の初期の推測を生成することを含み、この生成は、線量の加算がその治療に対する計画目的に最もよく適合するように、その時点の機械パラメータおよびデリバリ状態に最もよく適合するものを一群のデリバリ命令から選択することにより、なされる。使用する線量情報は、代表点の線量、1D線量プロファイル、2D平面線量、関心領域または全体についての3D線量分布、または線量分布から導き出される他の量(例えば、線量体積ヒストグラム、等価の均一な線量、生物学的に有効な線量など)とすることができる。
【0156】
[00125]全デリバリ・エラーを、後続のリアルタイムで最適化されたフラクション・デリバリにおいて更に補償することができる。計画目的とデリバリされた全線量との差として定義される全デリバリ・エラーを、初期の計画目的に加えて、リアルタイム最適化誘導型デリバリを用いた後続の治療に対しての新たな計画目的を得る。
【0157】
[00126]上記の方法は、単一の投射に対するデリバリ命令を最適化することを企図するが、この方法を、同時の幾つかの治療投射に対するデリバリ命令を最適化するために適用することが可能である。
【0158】
[00127]特許請求の範囲には、本発明の様々な特徴および利点が記載されている。
【技術分野】
【0001】
放射線療法デリバリ用の運動適応最適化システムおよび方法。
【0002】
[0001]本出願は、2009年3月5日に出願された米国特許出願第12/398,869号、および2008年10月27日に出願された米国特許出願第12/259,038号の優先権を主張するものである。これらの出願はともに、その全体が参照により本明細書に組み込まれる。
【背景技術】
【0003】
[0002]放射線療法治療(radiation therapy treatment)のデリバリ(delivery)の最中およびデリバリとデリバリの間に、腫瘍が動く(運動する)ことは広く知られている(Webb,2006a、LangenおよびJones,2001)。報告されているリアルタイム運動補償法は主としてトラッキングに基づく。即ち、計画された強度と同じ強度の放射線ビームを、計画された位置と同じ腫瘍基準フレーム内の位置に、計画された時刻と同時刻に照射することにより、補償が効果的に実行される。これらの方法は、リニアック(linac)トラッキング(Nuyttens他,2006、Murphy,2004)、MLCトラッキング(Keall他,2001、Keall他,2006、Neicu他,2003)、または治療台(couch)トラッキング(D’Souza他,2005)により実現され、ハードウェアによる解決策と特徴づけることができる。
【0004】
[0003]Papiezその他(Papiezその他,2005、PapiezおよびRangaraj,2005、Papiezその他,2007、Papiezその他,1999、PapiezおよびTimmerman,2008、Papiezその他,1994、PapiezおよびLanger,2006、Papiezその他,2002、Papieza,2004)、McMahonその他(McMahonその他,2007a、McMahon他,2007b)、ならびにWebbその他(WebbおよびBinnie,2006、Webb,2006b)は、動的MLCリーフ速度最適化(leaf velocity optimization)に、腫瘍の運動を組み込んだ。これらの方法は、ソフトウェアによる運動補償法とみなされる。
【0005】
[0004]トラッキング・ベースの方法は、運動が検出された直後に運動エラーを完全に補償することを意図している。このような方式は、ハードウェアの限界による補償エラーおよび/または予測を明示的にモデル化しないため、開ループ法(open loop method)とみなされる。これらの開ループ・トラッキング法は、MLC、リニアックまたは治療台などの速度および位置の正確性などのような、ハードウェアに対する要求、ならびに運動予測の正確性に対する要求が大きい。
【発明の概要】
【発明が解決しようとする課題】
【0006】
[0005]最新技術である強度変調放射線療法(intensity modulated radiation therapy)(「IMRT」)のデリバリは、計画されたリーフ・シーケンス(leaf sequence)に従う。このリーフ・シーケンスは治療計画の作成中に最適化されるものであり、これは、患者セットアップ、解剖学的構造および生理的状態を含むある治療構成を仮定する。しかしながら、治療計画の作成手順中に、リアルタイムの治療構成、例えば、患者の呼吸を正確にモデル化することは難しい。治療デリバリ条件が計画作成条件からずれると、線量分布が最適ではなくなる。具体的には、本来動的であるIMRTデリバリを、運動する腫瘍に対して実行すると、その結果として、腫瘍体積中にホット・スポットおよびコールド・スポットが生じる可能性がある。
【0007】
[0006]患者ごとに異なるだけでなく、同じ患者においても刻々と変化するイントラフラクション(intra−fraction)運動の複雑性のため、腫瘍の運動の正確なモデル化や長期予測は依然として実行不可能なタスクである。しかしながら、リアルタイム運動補償は、イントラフラクション運動の演繹的な知識や仮定にあまり依存しないので有望である。
【課題を解決するための手段】
【0008】
[0007]本発明は、累積エラーを考慮し、将来の照射を適応させるリアルタイム最適化を組み込む、IMRTデリバリの閉ループ・フィードバック・システムを含む。放射線療法デリバリ用のリアルタイム運動適応最適化(motion−adaptive−optimization)(「MAO」)の実行可能なワークフローが開発された。
【0009】
[0008]放射線療法デリバリは、多くの投射(projection)により特徴づけられる。MAO誘導型デリバリ(MAO guided delivery)は、各投射のデリバリの直前に、運動エンコーデッド(motion−encoded)累計線量を更新し、リーフ・シーケンスを最適化する。MAO技法は、運動の検出および予測、デリバリされた線量の累計、将来の線量の推定、ならびに投射の最適化を含む、幾つかのリアルタイム手順を含む。MAOがリアルタイムで実行されるとき、これらの手順は、1回の投射時間よりも短い時間で実行される。これらのMAO手順の試験にかかった時間は100ms未満であった。
【0010】
[0009]このMAO誘導型デリバリを、シミュレーションされた1D事例、実際の治療計画、および臨床的な肺および前立腺患者からの運動トレースを使用して、他の2つのタイプのデリバリ、即ち、補償無し運動デリバリ(motion−without−compensation delivery)(MD)および静的デリバリ(static delivery)(SD)と比較した。これらの結果は、全ての試験事例について、提案のMAO技法が運動エラーを効果的に補償したことを示している。MAO誘導型デリバリの線量分配およびDVHは、運動が規則的な呼吸であるか不規則な呼吸であるかや、運動が前立腺の小さな運動であるか大きい運動であるかに関わらず、SDの線量分布およびDVHに非常に近い。
【0011】
[0010]これらの結果は、提案の方法を、放射線療法デリバリにおけるリアルタイム運動補償に適用できることを概念的に証明した。このリアルタイム最適化法を、適応型放射線療法(Adaptive Radiation Therapy)(ART)に適用して、あらゆる種類のデリバリ・エラーを補償することができる。
【0012】
[0011]一実施形態において、本発明は、放射線療法治療をデリバリする方法を提供する。この方法は、患者に対する治療計画を作成するステップと、その患者を、放射線を受け取るように配置するステップとを含む。機械パラメータを実質的にリアルタイムで監視する。機械パラメータを監視するステップは、機械パラメータついての情報を分析し、それらのパラメータが、患者へデリバリされる線量にどのような影響を及ぼすかを分析することを含む。治療計画の少なくとも一部分を、監視された機械パラメータからの分析された情報を含むように、実質的にリアルタイムで最適化する。この方法は更に、最適化された治療計画の少なくとも一部分を患者へデリバリするステップを含む。
【0013】
[0012]本発明の他の態様は、詳細な説明および添付の図面を検討することにより明白になるであろう。
【図面の簡単な説明】
【0014】
【図1】[0013]図1は、放射線療法治療システムの透視図である。
【図2】[0014]図2は、図1に示した放射線療法治療システムで使用することができるマルチリーフ・コリメータの透視図である。
【図3】[0015]図3は、図1の放射線療法治療システムの概略図である。
【図4】[0016]図4は、放射線療法治療システムで使用されるソフトウェア・プログラムの概略図である。
【図5】[0017]図5は、リアルタイムMAO誘導型放射線療法デリバリを示す流れ図である。
【図6】[0018]図6は、リーフ方向(cos(φ−π/2),sin(φ−π/2),0)に沿った運動uの投影を示すものであり、φは源方向の角度である。
【図7】[0019]図7は、リアルタイムMAOの時間ラインを示す。n番目の投射に対する最適化は、(n−1)番目の投射で行われる。最適化が実行された後、その結果は、n番目の投射が始まる前に、デリバリ命令のために機械へ送られる。
【図8】[0020]図8は、1D長方形線量プロファイルのリアルタイムMADデリバリに対するシミュレーション結果を示すグラフである。
【図9】[0021]図9は、リアルタイムMAO誘導型デリバリに対するシミュレーション結果を示すグラフである。
【図10】[0022]図10は、T=4.3秒、A=20mm、b=0およびn=3のルーハン(Lujan)型の規則的な呼吸をシミュレーションした上段のグラフの運動を用いた、リアルタイムMADデリバリに対するシミュレーション結果を示すグラフである。
【図11】[0023]図11は、リアルタイムMAO誘導型デリバリに対するシミュレーション結果を示すグラフである。
【図12】[0024]図12は、実際の肺癌患者で測定した呼吸トレース(上段のグラフ)に対するシミュレーション結果を示すグラフである。
【図13】[0025]図13は、リアルタイムMAO誘導型デリバリに対する或る呼吸トレースに対するシミュレーション結果を示すグラフである。
【図14】[0026]図14は、M字形計画サイノグラムに対するシミュレーション結果を示すグラフである。
【図15】[0027]図15は、TomoTherapy(トモセラピー)治療下の肺癌患者に対する異なるデリバリ法のDVH比較を示す。
【図16】[0028]図16は、別の呼吸トレースについて、TomoTherapy(トモセラピー)治療下の肺癌患者に対する異なるデリバリ法のDVH比較を示す。
【図17】[0029]図17は、図16に示した事例の線量分布を示す。
【図18】[0030]図18は、TomoTherapy(トモセラピー)治療下の前立腺癌患者に対する異なるデリバリ法のDVH比較を示す。
【図19】[0031]図19は、イントラフラクション前立腺運動を経験している前立腺患者に対する異なるデリバリ法のDVH比較を示す。
【図20】[0032]図20は、イントラフラクション前立腺運動を経験している前立腺患者に対する異なるデリバリ法のDVH比較を示す。
【図21】[0033]図21は、図20に示した事例の線量分布を示す。
【図22】[0034]図22は、リアルタイムARTを示す流れ図である。
【図23】[0035]図23は、本発明に従って治療計画を最適化するように動作可能な動的計画法ループを示す流れ図である。
【発明を実施するための形態】
【0015】
[0036]本発明の実施形態を詳細に説明する前に、本発明は、その適用において、以下の説明に記載された構成要素や添付の図面に示された構成要素の構造および配置の詳細に限定されないことを理解されたい。本発明は、他の実施形態を有することができ、様々な方法で実施または実行することができる。また、本明細書で使用される語句および用語は、説明を目的としたものであり、それらを限定するものと考えるべきではないことを理解されたい。本明細書における「含む」、「備える」または「有する」、およびこれらの用語の変形の使用は、それらの前に記載されたアイテムおよびそれらの等価物、ならびに追加のアイテムを包含することを意味する。特に指定または限定しない限り、用語「取り付けられた」、「接続された」、「支持された」および「結合された」、ならびにこれらの用語の変形は、広範な意味で使用され、直接および間接の両方の取付け、接続、支持および結合を包含する。
【0016】
[0037]本明細書では、図面を説明する際に、上、下、下方、上方、後方、底面、前面、後面などのように、方向に言及することがあるが、これらの言及は、便宜上、図面(通常通りに見たときの図面)に対してなされる。これらの方向は、文字通りに解釈されることを意図したものではなく、また、何らかの形態に本発明を限定することを意図したものでもない。更に、「第1」、「第2」、「第3」などの用語は、本明細書では説明の目的で使用され、相対的な重要性または有意性を指示や暗示することを意図したものではない。
【0017】
[0038]更に、本発明の実施形態は、ハードウェア、ソフトウェアおよび電子構成要素または電子モジュールを含み、それらは、議論の目的上、大部分の構成要素があたかもハードウェアだけから実現されるかのように示され、説明されることがあることを理解すべきである。しかしながら、この詳細な説明を読んだ当業者であれば、少なくとも1つの実施形態において、本発明の電子工学ベースの諸態様を、ソフトウェアとして実現することができることを理解するであろう。従って、ハードウェア・ベースおよびソフトウェア・ベースの複数のデバイス、ならびに複数の様々な構造構成要素を使用して、本発明を実現することができることに留意すべきである。更に、後の段落で説明するとおり、図面に示された特定の機械構成は、本発明の実施形態を例示することを意図したものであり、他の代替の機械構成も可能である。
【0018】
[0039]図1は、患者14に放射線療法を提供することができる放射線療法治療システム10を示す。放射線療法治療は、光子ベースの放射線療法、小線源照射療法(brachytherapy)、電子線療法、陽子、中性子または粒子療法、あるいは他のタイプの治療法を含むことができる。放射線療法治療システム10は、ガントリ(gantry)18を含む。ガントリ18は、放射線モジュール22を支持することができ、放射線ビーム30を発生させるように動作可能な放射線源24および線加速器26(「リニアック」としても知られている)を含むことができる。図面に示したガントリ18は環形ガントリであり、即ち、360°の完全な弧を描いて延び、完全な環または円を形成しているが、他のタイプの取り付け配置を使用することもできる。例えば、C字型の部分的に環状のガントリやロボット・アームを使用することができる。患者14に対する様々な回転方向位置および/または軸方向位置に放射線モジュール22を配置することができる他の構成を使用することもできる。更に、放射線源24は、ガントリ18の形状に従わない経路上を運動することができる。例えば、示されたガントリ18の形状は全体的に円形ではあるが、放射線源24は、非円形経路に沿って運動することができる。示された実施形態のガントリ18は、治療の間、患者14がその中へ移動するガントリ開口32を画定する。
【0019】
[0040]放射線モジュール22は更に、放射線ビーム30を変更または変調するように動作可能な変調デバイス34を含むことができる。変調デバイス34は、放射線ビーム30を変調し、患者14に向けて放射線ビーム30を導く。具体的には、放射線ビーム30は、患者の部分38へ向けて導かれる。大まかに言って、この部分が全身を含むこともあるが、大抵は全身よりも小さく、2次元の面積および/または3次元の体積により画定することができる。ターゲットまたはターゲット領域と呼ばれることがある、放射線を受け取らせたい部分または面積は、関心領域の一例である。別のタイプの関心領域は、危険な状態にある領域である。或る部分が危険な状態にある領域を含む場合、放射線ビームは、その危険な状態にある領域からそらされることが好ましい。このような変調は、強度変調放射線療法(「IMRT」)と呼ばれることもある。
【0020】
[0041]変調デバイス34は、図2に示すようなコリメーション・デバイス42を含むことができる。コリメーション・デバイス42は、放射線ビーム30が通過することができる開口50を画定し、開口50のサイズを調整する一組のジョー(jaw)46を含む。ジョー46は、上部ジョー54および下部ジョー58を含む。上部ジョー54および下部ジョー58は、開口50のサイズを調整するように移動可能である。ジョー46の位置は、患者14にデリバリされるビーム30の形状を調節する。
【0021】
[0042]一実施形態では、図2に示すように、変調デバイス34が、強度変調を提供するために或る位置から別の位置へ動くように動作可能な複数のインタレースされたリーフ(leaf)66を含むマルチリーフ・コリメータ62(「MLC」としても知られている)を備えることができる。また、リーフ66は、最小限に開いた位置と最大限に開いた位置との間の任意の位置へ運動することができることに留意されたい。インタレースされた複数のリーフ66は、放射線ビーム30が患者14の部分38へ到達する前に、放射線ビーム30の強度、サイズおよび形状を変調する。放射線の通過を許すまたは妨げるためにリーフ66を高速に開閉できるように、各リーフ66は、モータ、空気弁などのようなアクチュエータ70により独立に制御される。アクチュエータ70は、コンピュータ74および/またはコントローラにより制御することができる。
【0022】
[0043]図1に示すように、放射線療法治療システム10は更に、放射線ビーム30を受け取るように動作可能な検出器78、例えばキロボルテージ(kilovoltage)またはメガボルテージ(megavoltage)検出器を含むことができる。線加速器26および検出器78は、患者14のCT画像を生成するコンピュータ連動断層撮影(CT)システムとしても動作することができる。線加速器26は、患者14の部分38へ向けて放射線ビーム30を発射する。部分38はこの放射線の一部を吸収する。検出器78は、部分38により吸収された放射線の量を検出または測定する。検出器78は、線加速器26が患者14の周りを回転し、患者14へ向けて放射線を発射したときに、様々な角度から吸収データを集める。集められた吸収データは、それらの吸収データを処理して患者の体組織および器官の画像を生成するためにコンピュータ74へ送られる。これらの画像は、骨、軟組織および血管を示すこともできる。システム10は更に、治療の間、患者14の少なくとも一部分を支持するように動作可能な患者支持デバイス(治療台82として示されている)を含むことができる。示された治療台82は患者14の全身を支持するように設計されているが、本発明の他の実施形態では、患者支持デバイスが全身を支持する必要はなく、患者支持デバイスは、治療の間に患者14の一部分だけを支持するように設計することもできる。治療台82は、軸84(即ちY軸)に沿って放射線フィールドに対して出入りする。治療台82は、図1に示されたX軸およびZ軸に沿って運動することもできる。
【0023】
[0044]図2および図3に示されたコンピュータ74は、様々なソフトウェア・プログラムおよび/または通信アプリケーションを実行するオペレーティング・システムを含む。具体的には、コンピュータ74は、放射線療法治療システム10と通信するように動作するソフトウェア・プログラム(1または複数)90を含むことができる。コンピュータ74は、医療従事者によりアクセスされるように適合された適当な任意の入力/出力デバイスを含むことができる。コンピュータ74は、プロセッサ、I/Oインタフェース、記憶デバイス、メモリなどのような、典型的なハードウェアを含むことができる。コンピュータ74は更に、キーボード、マウスなどのような入力デバイスを含むことができる。コンピュータ74は更に、モニタなどの標準出力デバイスを含むことができる。コンピュータ74は更に、プリンタ、スキャナなどの周辺装置を含むことができる。
【0024】
[0045]コンピュータ74と、他のコンピュータ74および放射線療法治療システム10とをネットワーク化することができる。他のコンピュータ74は、追加のコンピュータ・プログラムおよびソフトウェア、ならびに/または異なるコンピュータ・プログラムおよびソフトウェアを含むことができ、他のコンピュータ74は、本明細書に記載されたコンピュータ74と同一である必要はない。コンピュータ74および放射線療法治療システム10は、ネットワーク94と通信することができる。コンピュータ74および放射線療法治療システム10は更に、データベース(1または複数)98およびサーバ(1または複数)102と通信することができる。ソフトウェア・プログラム(1または複数)90はサーバ(1または複数)102上にも存在することができることに留意されたい。
【0025】
[0046]ネットワーク94は、任意のネットワーク化技術またはネットワーク化トポロジ、あるいはネットワーク化技術およびトポロジの組み合わせに従って構築することができ、複数のサブネットワークを含むことができる。図3に示されたコンピュータとシステムとの間の接続は、ローカル・エリア・ネットワーク(「LAN」)、ワイド・エリア・ネットワーク(「WAN」)、一般加入電話網(「PSTN」)、無線ネットワーク、イントラネット、インターネットまたは任意の他の適当なネットワークを介して実施することができる。病院や医療施設では、図3に示されたコンピュータとシステムとの間の通信を、任意のバージョンおよび/または他の必要なプロトコルを有する、ヘルス・レベル・セブン(Health Level Seven)(「HL7」)プロトコルまたは他のプロトコルを介して実現することができる。HL7は、健康管理環境において電子データを交換するための、ベンダの異なる2つのコンピュータ・アプリケーション(送信側と受信側)の間のインタフェースのインプリメンテーションを指定する標準プロトコルである。HL7は、健康管理機関が、異なるアプリケーション・システムから鍵となるデータのセットを交換することを可能にする。具体的には、HL7は、交換されるデータ、相互交換のタイミング、およびアプリケーションへのエラーの伝達を定義することができる。フォーマットは一般に、事実上ジェネリック(generic)であり、含まれるアプリケーションの要求を満たすように構成することができる。
【0026】
[0047]図3に示されたコンピュータとシステムとの間の通信は、任意のバージョンおよび/または他の必要なプロトコルを備えるデジタル・イメージング・アンド・コミュニケーションズ・イン・メディシン(Digital Imaging and Communications in Medicine)(DICOM)プロトコルにより実現することもできる。DICOMは、NEMAにより開発された国際通信規格であり、医療機器の異なる構成要素間で医用画像関連データを転送するために使用されるフォーマットを定義する。DICOM RTは、特に放射線療法データを対象とした規格を指す。
【0027】
[0048]図3の双方向の矢印は、一般に、ネットワーク94と、図3に示された任意の1つのコンピュータ74やシステム10との間の双方向通信および双方向情報転送を表す。しかしながら、コンピュータ化された一部の医療機器では、一方向通信および一方向情報転送のみを必要とする場合もある。
【0028】
[0049]ソフトウェア・プログラム90(図4のブロック図に示されている)は、放射線療法治療プロセスの諸機能を実行するために互いに通信する複数のモジュールを含む。これらの様々なモジュールは更に、放射線療法治療計画のデリバリが意図されたとおりに実行されたかどうかを判定するために互いに通信する。
【0029】
[0050]ソフトウェア・プログラム90は、医療従事者によるシステム10へのデータ入力に基づいて患者14の治療計画を作成するように動作可能な治療計画モジュール106を含む。このデータは、患者14の少なくとも一部分の1または複数の画像(例えば計画画像(planning image)および/または治療前画像)を含む。治療計画モジュール106は、治療を複数のフラクション(fraction)に分け、各フラクションまたは治療の放射線量を、医療従事者による処方入力に基づいて決定する。治療計画モジュール106は更に、部分38に対する放射線量を決定する。この放射線量は、部分38の周囲のマージン(margin)を画定する、部分38の周囲に描かれた様々な輪郭(contour)に基づくことができる。同じ治療計画に複数の部分38が存在して含まれてもよい。
【0030】
[0051]治療計画は、患者へ放射線をデリバリする複数の投射を含む。治療計画モジュール106は更に、各投射の時間期間を規定するように動作可能である。治療計画モジュール106は、全ての投射の合計時間を越えて各投射の時間を調整し、治療計画をデリバリするためにバッファに構築することができる。言い換えると、治療計画モジュール106は、より多くの再最適化の機会を可能にするために、デリバリ能力を意図的に十分に用いないようにすることができる。
【0031】
[0052]ソフトウェア・プログラム90は更に、患者14の少なくとも一部分の画像を取得するように動作可能な画像モジュール108を含む。画像モジュール108は、CT画像化デバイスなどのオンボード画像デバイスに指令して、所望のプロトコルに応じ、治療が始まる前、治療中および治療後に、患者14の画像を取得させることができる。一態様において、画像モジュール108は、患者14が実質的に治療位置にいる間に、患者14の画像を取得する。非定量的なCT、MRI、PET、SPECT、超音波、透過画像化、蛍光透視法、RFベースの局在診断などのような、他のオフライン画像化デバイスまたは画像化システムを使用して、患者14の治療前画像を取得してもよい。取得した治療前画像(1または複数)を使用して、患者14のレジストレーションを実行し、かつ/あるいは1または複数の計画画像(planning image)と1または複数の治療前画像、治療中画像または治療後画像との間の差異を識別するための変形マップを作成することができる。
【0032】
[0053]取得した画像を使用して、患者14のレジストレーション(登録)を実行し、かつ/あるいは患者14にデリバリする放射線量を決定や予測することもできる。取得した画像を使用して、以前の治療またはフラクションの間に患者14が受け取った放射線量を決定することもできる。画像モジュール108は更に、患者14が治療を受けている間に、患者の少なくとも一部分の画像を取得して、患者14がリアルタイムで受け取っている放射線量を決定するように動作可能である。
【0033】
[0054]ソフトウェア・プログラム90は更に、治療デリバリの前および最中に治療計画を最適化するように動作可能な最適化モジュール110を含む。治療デリバリ中のリアルタイム最適化は、患者の解剖学的および生理的変化(例えば、呼吸や他の運動など)、機械構成の変化(例えば、ビーム出力率、治療台エラー、リーフ・エラーなど)などのような、様々な因子をより十分に考慮することができる。ビーム強度のリアルタイム変更は、これらの変化を考慮することができる(例えばビームレット(beamlet)をリアルタイムで再最適化する)。
【0034】
[0055]最適化モジュール110は、累積エラーを考慮し、患者へデリバリされる将来の照射に向けて治療計画を調整する。最適化モジュール110は、運動エンコード化(motion-encoded)累計線量を更新し、各投射をデリバリする直前にリーフ開時間(leaf open time)を最適化する。治療計画の最適化に関する追加の詳細については後に論じる。
【0035】
[0056]ソフトウェア・プログラム90は更に、特定の治療フラクションのためにガントリ18のアイソセンタ(isocenter、等角点)に対して患者14を位置決めし、位置合せするように動作可能な患者位置決めモジュール114を含む。患者が治療台82に乗っている間に、患者位置決めモジュール114は患者14の画像を取得し、患者14のその時点の位置を、基準画像の患者の位置と比較する。基準画像は、計画画像、任意の治療前画像、あるいは計画画像と治療前画像の組合せとすることができる。患者の位置を調整する必要がある場合には、患者位置決めモジュール114は、駆動システム86に指令して治療台82を運動させることができ、また、手作業で患者14を新たな位置に運動させることができる。一構成において、患者位置決めモジュール114は、ガントリ18のアイソセンタに対する患者位置データを提供するために治療室内に配置されたレーザからデータを受け取ることができる。レーザからのデータに基づいて、患者位置決めモジュール114は、患者14とガントリ18との適正な位置合せを達成するため、治療台82を運動させる命令を駆動システム86へ与える。位置合せプロセスを支援するために、レーザ以外のデバイスおよびシステムを使用して、患者位置決めモジュール114にデータを提供することができることに留意されたい。
【0036】
[0057]患者位置決めモジュール114は更に、治療中の患者運動を検出および/または監視するように動作可能である。患者位置決めモジュール114は、X線、インルームCT、レーザ位置決めデバイス、カメラ・システム、肺活量計、超音波、張力測定、胸部バンドなどのような運動検出システム112と通信し、かつ/またはこのような運動検出システム112を含むことができる。患者の運動は不規則であったり、予想外であったりすることがあり、なめらかな経路や再現可能な経路をたどるとは限らない。
【0037】
[0058]ソフトウェア・プログラム90は更に、放射線療法治療システム10に指令して、治療計画に従って患者14へフラクションをデリバリさせるように動作可能な治療デリバリ・モジュール118を含む。治療デリバリ・モジュール118は、患者14へ放射線をデリバリするために命令を生成し、ガントリ18、線加速器26、変調デバイス34および駆動システム86へ送ることができる。これらの命令は、治療計画に指定された適正な量の放射線ビーム30を適正なターゲットへデリバリするために、ガントリ18、変調デバイス34および駆動システム86の必要な運動を調整する。
【0038】
[0059]治療デリバリ・モジュール118は更に、治療計画により指定された処方に一致するように、デリバリされる放射線ビーム30の適当なパターン、位置および強度を計算する。放射線ビーム30のパターンは、変調デバイス34により、より具体的には、マルチリーフ・コリメータの複数のリーフの運動により、生成される。治療デリバリ・モジュール118は、標準の、所定の、または定型的なリーフ・パターンを使用して、放射線ビーム30に対する適当なパターンを治療パラメータに基づいて生成することができる。治療デリバリ・モジュール118は更に、アクセスすることができる、典型的な事例に対するパターンのライブラリを含むことができ、存在する患者データと比較して放射線ビーム30に対するパターンを決定することができる。
【0039】
[0060]ソフトウェア・プログラム90は更に、患者の治療中に放射線療法治療システム10からデータを受け取るように動作可能なフィードバック・モジュール122を含む。フィードバック・モジュール122は、放射線療法治療デバイスからデータを受け取ることができ、患者透過データ、電離箱データ、MLCデータ、システム温度、構成要素速度および/または位置、流量などに関する情報を含むことができる。フィードバック・モジュール122は更に、治療パラメータ、患者が受け取った放射線量の量、治療中に取得した画像データ、および患者の運動に関するデータを受け取ることができる。更に、フィードバック・モジュール122は、ユーザおよび/または他のデータ源から入力データを受け取ることができる。フィードバック・モジュール122は、これらのデータを取得し、他の処理のために必要となるまで記憶する。
【0040】
[0061]ソフトウェア・プログラム90は更に、フィードバック・モジュール122からのデータを分析して、治療計画のデリバリが意図されたとおりに実行されたかどうかを判定し、計画されたデリバリ(planned delivery、計画デリバリ)が合理的であるかどうかを、新たに取得したデータに基づいて検証するように動作可能な分析モジュール126を含む。分析モジュール126は更に、受け取ったデータおよび/または入力された追加のデータに基づいて、治療計画のデリバリの間に問題が起こったかどうかを判定することができる。例えば、分析モジュール126は、その問題が、放射線療法治療デバイス10のエラーに関係するのかどうか、および/または患者の運動などの解剖学的エラーに関係するのかどうか、かおよび/またはデータ入力エラーなどの臨床的エラーに関係するのかどうかを、判定することができる。分析モジュール126は、治療台82、デバイス出力(即ち、線加速器26の出力変動)、ガントリ18、マルチリーフ・コリメータ62、患者セットアップ、および放射線療法治療デバイス10の構成要素間のタイミング・エラーに関係する、放射線療法治療デバイス10でのエラーを検出することができる。例えば、分析モジュール126は、計画作成中に治療台の置換えが実行されたかどうか、計画作成中に固定デバイスが適切に使用および考慮されたかどうか、治療の間に位置および速度が正確かどうかを、判定することができる。分析モジュール126は、放射線療法治療デバイス10の出力パラメータの変化または変動が起こったかどうかを判定することができる。ガントリ18に関して、分析モジュール126は、ガントリ18の速度および位置決めにエラーがあるかどうかを判定することができる。分析モジュール126は、マルチリーフ・コリメータ62が適正に動作しているかどうかを判定するためのデータを受け取ることができる。例えば、分析モジュール126は、リーフ66が正しい時間に運動するかどうか、何れかのリーフ66が同じ場に固着していないかどうか、リーフ・タイミングが適正に校正されているかどうか、およびリーフ変調パターンが所与の治療計画に対して正しいかどうかを判定することができる。分析モジュール126は更に、所与の治療計画について、患者のセットアップ、方向および位置の妥当性を検証することができる。分析モジュール126は更に、ガントリ18、治療台62、線加速器26、リーフ66の間のタイミングが正しいかどうかを検証することができる。
【0041】
[0062]分析モジュール126は更に、デフォーマブル・レジストレーション(deformable registration)データを使用して、複数のフラクションにまたがって患者14が正確な放射線量を受け取っていることを保証することができる。線量を分析するときは、エラーが増大しているかどうかや、エラーが互いに軽減しているかどうかを判定するために、複数の治療フラクションにわたって線量を累計することが有用である。レジストレーションは、複数の画像にわたって患者の解剖学的構造や生理機能の位置間の相関を決定する方法である。デフォーマブル・レジストレーションは、画像、相または時間の間の解剖学的構造の固定的ではない変化(non-rigid change)を考慮するために、患者の解剖学的構造や生理機能の位置の間の相関を決定する方法である。正確な線量が患者14へデリバリされたことや、デリバリされていることを保証するために、放射線療法治療デバイス10からのオンライン画像およびオンライン・フィードバックに基づいて、患者14へデリバリされた放射線量が再計算される。
【0042】
[0063]分析モジュール126は更に、品質保証目的での画像の変形ベースの輪郭生成(deformation-based contouring)に関係したデータを、使用することができる。デフォーマブル・レジストレーション技法を使用して、新たな画像に対する自動または半自動の輪郭を生成することができる。一般に、輪郭セットは、計画画像または他のベースライン患者画像に対して定義されるが、新たな画像では、輪郭セットは通常は容易には取得できない。オペレータが手作業で画像の輪郭を描くことを必要とせずに、画像のデフォーマブル・レジストレーションを実行し、次いで、その変形結果を、新たな患者解剖学的構造を反映するように初期の輪郭セットを変更するベースとして使用することは、より高速であり堅実であり得る。類似の群のテンプレート・ベースの輪郭アルゴリズム群が、以前に使用可能であった画像および輪郭セットに基づき新たに使用可能になった画像に対して輪郭を生成するために、開発された。これらのテンプレート・ベースのアルゴリズムは、以前の患者の画像および輪郭に基づいて、あるいは場合によっては、標準またはアトラス(atlas)の患者の画像および輪郭に基づいて、新たな患者画像に輪郭を描くことができる。これを、それぞれが日毎の自動的な輪郭を有する日毎の画像の線量を累計する手段として、適応療法に対して実行することができる。更に、以前には、これらのアルゴリズムを、標準画像またはアトラス画像に基づいて新たな輪郭を生成する状況において使用したが、本発明の新たな態様では、これらの技法を、画像誘導型の放射線療法中に生じる特定の多数の画像データおよび画像のタイプに適用する。具体的には、これは、同じ患者の複数の画像の変形およびテンプレート・ベースの輪郭生成を含み、輪郭セットは、それらの画像のうちの1つの画像に対してだけ存在し得る。患者のこれらの複数の画像は、オンラインまたはインルームの患者画像化システムを使用して撮影することができ、場合によっては、これらの画像が別々の日に撮影され、また、CTスキャナなどの「4D」画像化システムにより、これらの画像を得ることもでき、このとき、それぞれの画像は、呼吸相などのような運動の相を表す。オンラインまたはインルームの画像化システムは、基準画像と同じ、基準画像に類似、または基準画像とは異なるモダリティ(様式)であり得ることにも留意すべきである。例えば、基準画像はCT画像であることがあり、オンライン画像は、CT、円錐ビームCT、メガボルテージCT、MRI、超音波または異なるモダリティであり得る。これらの輪郭生成技法を、品質保証および適応療法の用途に移植することにより、画像の輪郭生成にかかる時間をかなり節約することができ、この方法は更に、同じ患者の複数の画像(異なる時刻に撮影された画像や、異なる相を表す画像)間の輪郭の整合性を向上させることができる。手作業による輪郭は、再現できないことがあり得る問題が知られているが、自動的に生成された輪郭は、潜在的に、初期の輪郭の原理を後の輪郭の生成に適用することにおいて、より整合性が高いものであり得る。
【0043】
[0064]デフォーマブル・レジストレーション技法を使用した輪郭生成プロセスの他の利点は、生成された輪郭が、変形プロセスの妥当性の検証を提供することができる点である。生成された輪郭が、手で描いた輪郭をよく反映している場合、このことは、変形プロセスが合理的であることを良く示しており、また、自動の輪郭の関連性が低い場合、このことは、変形が不適切であり得ることをユーザに示すだけではなく、手作業による輪郭を検証して誤りや不整合をチェックする機会をユーザに提供する。この方法の他の態様は、変形ベースの輪郭を、適応プロセスに対する輪郭の大まかな下書きとして使用し、オンライン画像に対する所望の輪郭を反映するように手作業で編集することができることである。これを実行するときには、次いで変形プロセスを再実行し、変形マップを制限して、初期の輪郭を、手作業で編集された自動輪郭と一致させることができる。このことは、残りの画像を通して整合した結果を導くのに役立つ。
【0044】
[0065]分析モジュール126は更に、品質保証目的で、変形マップを使用して、様々な画像上で線量計算を実行するように動作可能である。変形マップを使用して、複数の画像を関係づけることができ、或る画像は線量計算に有用な計画画像であり、オンライン画像などのような他の画像は、線量計算には直接にはあまり役立たない性質的な値を有する。次いで、この関係を使用して、このより定量的な画像を、オンライン画像や定量的ではない画像の性質的な形状へ、「リマップ(remap)する」ことができる。その結果得られるリマップされた画像は、第1の画像の定量的な利点と、第2の画像に含まれる更新された解剖学的情報とを有するため、線量計算用途や定量用途には、他の2つの画像の何れよりも適当であろう。これは、第1の画像(例えば計画画像)がCTである場合、追加の画像が定量的な画像値を含まない場合(例えば、MRI、PET、SPECT、超音波、非定量的CTなどの画像)などのような、様々な場合に有用である可能性がある。この方法の類似の用途は、定量的な限界を補正する代わり又は補正することに加えて、幾何学的な歪み、欠陥および/または不完全性を補正することであろう。例えば、解剖学的構造をよく表してはいるが幾何学的な歪みを含む現在のMRI画像を、歪みのないCT画像にリマップすることが考えられる。または、複数の画像を使用して、歪みを補正し、同時に解剖学的変化を表現することができる。
【0045】
[0066]前述のとおり、計画画像の後に取得された患者画像上で線量を再計算することができることは重要である。これらの線量が与えられた場合、デリバリされた複数のフラクションに対して、これらの線量を累計することも有用である。これらの線量は、物理空間内の線量の位置に基づいて加算することもできるが、より都合の良い方法は、このプロセスに変形法を組み込んで、線量を受け取った構造が位置を変えた場合であってもそれらの構造に基づいて線量を加算するようにする方法である。しかしながら、この技術を、新規のタイプの適応療法を実行するように構築することが可能である。
【0046】
[0067]線量を再計算することに関して、このプロセスを改良または容易にする本発明の他の幾つかの態様が存在する。例えば、患者に適用された非毎のレジストレーションを記録した後に、場合によっては画像ガイダンスに基づいて、線量を再計算するときに、それらと同じレジストレーションを患者画像に適用することができる。これは自動でまたは半自動で実行することができる。あるいは、異なるレジストレーションを用いて線量を再計算することもできる。その利点は、記録されたレジストレーションを自動的に使用することにより、デリバリされた線量を再計算するプロセスが簡素化され能率化されることである。更に、異なるレジストレーションに対して線量を再計算することができることにより、他の患者位置合せプロトコルがより有効である否かを判定することを試みることができる。また、記録されたレジストレーションを使用しないことにより、画像ガイダンスがない場合に治療がどれくらい影響を受けるのかを判定することができる。
【0047】
[0068]不完全な画像を穴埋めすることによっても、線量再計算プロセスを強化するができる。これは、軸方向平面内および/または上/下方向のサイズが限定された画像は、線量計算の正確さを低下させることがあるためである。このことを解決する方法は、サイズが限定された画像を、計画画像の画像データなどのような他の画像データで穴埋めする方法である。この穴埋め法(padding method)は、軸方向および上/下方向に限定されたデータに対して機能することができる。更に、上/下方向のデータを穴埋めする他の方法は、改良された線量計算のためにデータが十分に大きくなるまで、不完全な画像の端部の(最後の)スライスを必要なだけ繰り返す方法である。
【0048】
[0069]図5は、リアルタイムMAO誘導型(real-time MAO-guided)放射線療法デリバリの流れ図を示す。この流れ図では、治療計画作成システム(treatment planning system、治療計画システム)(TPS)を使用して、計画されたサイノグラム(planned sinogram、計画サイノグラム)を最適化するが、計画手順において運動マージンは追加されない。この方法は、治療台、ガントリの速度、ジョー位置を変更しない。言い換えると、放射線デリバリの間、計画されたとおりに、治療台およびガントリは一定の速度で運動し、ジョーの位置は固定される。腫瘍位置は、何らかの代用物を介して、または直接に治療ビームを介してリアルタイムで検出/更新されるが、本発明の運動管理システムは運動検出法から独立している。
【0049】
[0070]次の投射に対するリーフ開時間を出力するために、計画サイノグラム、ならびにデリバリされた線量の累計、将来の線量の推定、および腫瘍位置の予測が、最適化プロセスへ送られる。このプロセスは閉ループ・プロセスと考えられるが、それは、最適化機構の出力が、線量をデリバリする命令として機械へ送られ、デリバリされた線量が、4D線量計算器によりリアルタイムで累計され、最適化機構へ(入力として)返されるためである。
【0050】
[0071]4D線量計算器は、デリバリされる最後の投射まで、デリバリされた線量をリアルタイムで累計するために使用される。将来の投射(次の投射を除く)においてデリバリされる線量が推定される。次の投射での予測される腫瘍位置および累計されたデリバリされた線量に基づいて、累積されたデリバリ・エラーと将来の線量推定の両方を考慮するように、次の投射に対するリーフの開時間がリアルタイムで最適化される。この最適化されたリーフ開時間を使用して、次の投射に対する放射線デリバリを変調するMLCを制御する。
【0051】
[0072]この流れ図は、この放射線デリバリ・プロセスを、負のフィードバック・システムとしてモデル化する。この流れ図をリアルタイムで実現するため、示されたプロセスは、オフラインの計画手順を除いて、1回の投射時間よりも短い時間で実行されなければならない。このシステムは1回の投射あたりに1回だけ最適化するため、投射時間は、リアルタイムMAO技法の時間分解能(temporal resolution)とみなすことができる。TomoTherapy(登録商標)(トモセラピー)放射線療法システムの最小投射時間は約200msであり、これは、10秒のガントリ回転あたりに51回の投射に相当する。
【0052】
[0073]本明細書の全体を通じて以下の記号を使用する。
B: サイズM×Nの計画されたビームレット線量の行列。ここで、Mはボクセルの数、Nはビームレットの数である。Bの各列は、単位強度のビームレット(リーフ)からの線量分布である。
w: 添字として投射番号iおよびリーフ番号jを有するリーフ・フルエンス(リーフ開時間)のサイノグラムである。w={wi,j}。
【数1】
:計画手順での最適化により得られた計画サイノグラムであり、ハット記号(hat)により強調される。
【数2】
:腫瘍の運動に基づく計画サイノグラムから調整されたデリバリ・サイノグラムであり、チルド記号(tilde)により強調されている。
δ: ガントリ1回転あたりの治療台の運動。
P: ガントリ1回転あたりの投射数。現行のヘリカルTomoTherapy(登録商標)放射線療法治療システムでは一般にP=51である。
u=(ux,uy,uz): 腫瘍の運動。uiの上部インデックスはi番目の投射の運動であることを示す。
【0053】
1.理論
1.1 計画の最適化
[0074]IMRT計画最適化は一般に、条件付き非線形最適化問題として以下のように公式化することができる。
【0054】
【数3】
【0055】
制約条件は、
Bw∈Dおよびw∈W (2)
であり、Fは計画目的であり、Dは、許容可能な線量分布の空間であり、例えば、最小および最大線量ならびにDVH要件を満たす線量分布の空間であり、Wは、放射線療法機械のハードウェアによりデリバリすることができる実行可能なフルエンス・マップ(fluence map)の空間である。この目的関数Fは一般に、複数の目的関数の加重和として表現することができる。
【0056】
【数4】
【0057】
ビームレット線量の行列Bの各列は、単位強度のビームレットの3D線量分布を表し、積Bwは、wをデリバリした結果としての全体3D線量分布である。フルエンス・マップwは、機械に対するデリバリ命令へと、直接または間接的に変換することができる。フルエンス・マップwからデリバリ命令への直接変換の一例は、TomoTherapy(登録商標)放射線療法治療システムであり、このシステムでは、このフルエンス・マップが、全ての投射に対するリーフ開時間を記述する。ステップ・アンド・シュート(step−and−shoot)および動的MLCベースのデリバリのような間接変換は、フルエンス・マップを、数十から数百のセグメントまたは幾つかのリーフ・シーケンスに変換する。IMRT最適化は、通常、最新のコンピュータであっても数十分から数十時間かかる時間のかかるプロセスである。以下は、IMRT最適化が時間のかかるプロセスとなる原因である幾つかの因子である。
【0058】
1. 式(3)のような目的関数の異なる成分は相互に作用し、より良好なトレードオフは、ユーザが重みaSを調整することにより達成することができる。従って、この最適化を臨床目的に適合させるために、かなりのユーザ操作が必要となることがある。
2. この最適化は、非常に大規模な非線形最適化問題に分類される。この問題の大きさは、行列Bのサイズに反映される。未知量の数(即ち、ビームレットの数またはBの列の数)が、従来のIMRTでは数千であり、最適化では数万ないし数十万にもなることがある。Bの行の数は、一般に数百万個程度である3D体積のボクセルの数に対応する。
3. 行列Bは非常に密であり、疎ではない。理論的には、各ビームレットは、散乱のため、3D体積内の全てのボクセルに寄与する。TomoTherapy(登録商標)システムの場合には、1回転ごとに51回投射され、典型的なピッチは0.3であるため、1次放射線だけを考えたとしても、各ボクセルは、51/0.3=170個のビームレットにより直接に照射される。即ち、最適化機構は、目的関数を最小にするために、それらのビームレット間のトレードオフを見つけ出さなければならず、結果を収束させるためには、通常、数百回の繰返しが必要である。
【0059】
[0075]焦点を明確にするため、以下の議論では、TomoTherapy(登録商標)の治療デリバリ・モードだけを検討する。しかしながら、適応技法は、他の放射線デリバリ・デバイスおよびシステム、ならびに他のタイプのデリバリにも適用することができることに留意されたい。TomoTherapy(登録商標)の治療デリバリは、投射ごとに実行される。即ち、フルエンス・マップwが、ビームレット強度のサイノグラムへと編成される。
w={wi,j} (4)
上記の式で、iは投射のインデックス、jはリーフのインデックスである。典型的には、各サイノグラムには数百から数千の投射が含まれる。
【0060】
1.2 運動エンコード化(motion-encoded、運動エンコーデッド)ビームレット
[0076]計画の最適化の前には、予め、静止した患者に関連したビームレット行列Bがオフラインで計算される。計画の最適化に対して不可欠であるのと同様に、このビームレット行列は、リアルタイムの最適化のために線量を累計し、フルエンス・マップを更新する際にも不可欠である。しかし、デリバリの最中に腫瘍が運くときには、放射線源はもはや腫瘍基準フレーム内の計画された位置にはない可能性がある。従って、患者の線量分布を記述するためには、この初期ビームレット行列Bはもはや有効ではなく、ビームレット行列を改訂する必要がある。改訂されたこのようなビームレットを、運動エンコーデッド・ビームレットと呼ぶ。ビームレットをゼロからリアルタイムで再計算することは実行不可能である。以下では、リアルタイムで初期ビームレットから変更された運動エンコーデッド・ビームレットの近似について説明する。
【0061】
[0077]i番目の投射をデリバリする時点で、腫瘍の運動がu=(ux,uy,uz)であると仮定する。ビームレットの変更を、縦方向と横方向とに分解することができる。最初に縦方向を考える。特に明記しない限り、便宜上、源位置は腫瘍のことを指す。i番目の投射において、計画された源位置は(i/P)・δであり、δは、ガントリ1回転あたりの治療台の運きである。運動u=(ux,uy,uz)で、源位置は(i/P)・δ−uzに変化する。この新しい源位置のビームレットは、同じガントリ角度の最も近い2つの投射の初期ビームレットを線形補間することにより近似することができる。
【0062】
【数5】
【0063】
上記の式は、空間内の全ての点x=(x,y,z)に関してのものであり、上式で、ある整数mおよび0≦α<1について、uz/δ=m+αであり、x1およびx2は下式により定義される。
【0064】
x1=(x,y,z+αδ)およびx2=(x,y,z−(1−α)δ) (6)
【0065】
縦方向の変更と同様に、横方向の運動を考慮した横方向の変更は、最も近い2つのリーフの初期ビームレットを線形補間することにより得ることができる。
【0066】
【数6】
【0067】
上記の式で、ある整数lおよび0≦β<1についてuφ−π/2/a=l+βであり、aはリーフ幅であり、φは、φ=(i/P)2πである投射角であり、uφ−π/2は、図3に示すリーフ方向(cos(φ−π/2),sin(φ−π/2),0)に沿った運動uの投影である。ここで、座標シフトx3およびx4を以下のように定義する。
【0068】
x3=(x,y,z)+βa・(cos(φ−π/2),sin(φ−π/2),0)
x4=(x,y,z)−(1−β)a・(cos(φ−π/2),sin(φ−π/2),0) (8)
【0069】
式(5)および(7)を使用し、i番目の投射に対するリーフ・フルエンスが{wi,j}であると仮定すると、i番目の投射に対する運動エンコーデッド線量diは以下のようになるはずである。
【0070】
【数7】
【0071】
1.3 リアルタイムMAD
[0078]リアルタイム運動適応デリバリ(motion adaptive delivery)(「MAD」)技法は、フルエンスの初期推測値、および後のセクションで論じるMAO戦略における将来の線量の推定のための合理的なモデルを提供する。ここでは、MAD技法の概要を説明する。
【0072】
[0079]任意の投射で、腫瘍の運動がu=(ux,uy,uz)である場合(この運動は、源が、計画された軌道から腫瘍に対して−uだけ動くことに相当する)、投射の線量がその位置で意図された線量に最も近くなるような、補間されたリーフ開時間が使用されることになる。
【数8】
が計画サイノグラムを表すとし、iは投射のインデックス、jはリーフのインデックスである。治療台を基準にすると、投射インデックスiによりパラメータ化された源位置は、円筒周面上でつる巻線を描く。投射iに対して、源が縦方向に−uzだけ動いた場合、新たなリーフ・フルエンス
【数9】
は、計画サイノグラムwを線形補間することにより計算することができる。即ち、下記のようである。
【0073】
【数10】
【0074】
上記の式で、或る整数mおよび0≦α<1について、uz/δ=m+αである。
【0075】
[0080]源の横方向の変位は、円錐効果、逆2乗則などのような必要な補正によりリーフ・フルエンスをシフトさせることにより、更に補償される。
【0076】
1.4 リアルタイムMAO
[0081]時間のかかる計画最適化は、最適な実行可能解
【数11】
を返し、それにより、線量分布
【数12】
が臨床医の目的に適う。しかしながら、リアルタイム患者運動は、計画手順においてモデル化されておらず、またはモデル化することさえできない。骨の折れる計画最適化作業により得られた非常に整合性の高い計画された線量(planned dose、計画線量)分布も、リアルタイムの運動により劣化すると予想される。リアルタイムMAO誘導型デリバリは、放射線デリバリ手順に最適化を組み込む。実際、これは、以前にデリバリされた投射から累積エラーを自己補正する負のフィードバック・システムとみなすことができる。
【0077】
[0082]リアルタイムMAOは、次の投射に対するリーフ開時間だけを最適化する。計画サイノグラムがN個の投射を含み、n番目の投射(次の投射)のデリバリの直前に、下記の式に従って最適化したいと仮定する。
【0078】
【数13】
【0079】
制約条件は、
0≦wn,.≦wmax (12)
であり、wmaxは、各デリバリ計画に対して固定された最大投射時間であり、ddeliveryは
ddelivery=d−+dn+d+ (13)
のように定義される。
【0080】
d−は、既にデリバリされた投射1からn−1までの累計線量、
dnは、n番目の投射デリバリに対して最適化される線量、
d+は、投射n+1からNまでにデリバリされる将来の線量である。
【0081】
ここで、線量分布d−、dn、およびd+は、計画手順と同じ基準フレームで評価される。図7は、リアルタイムMAO手順の時間ラインを示す。n番目の投射に対する最適化は、(n−1)番目の投射のデリバリ中に実行される。最適化における作業は更に、最後にデリバリされた投射n−1の線量を累計線量d−に加算することにより累計線量d−を更新すること、および投射n+1から最後の投射までの将来の線量d+を推定することを含む。
【0082】
[0083]最適化の時点で、投射n−1に対する腫瘍の動きは分かっているが、投射nに対する動きについては予測する必要がある。以下では、n番目の投射に対する最適化を実行していると仮定して、それぞれの作業、即ち、デリバリされた線量の累計、将来の線量の推定、および単一の投射の最適化、がどのように実行されるのかを詳細に説明する。
【0083】
1.4.1 デリバリされた線量の累計
[0084]n番目の投射に対する最適化を実行していると仮定する。投射1からn−2までの累計線量d−は既に計算されている。これに、最後にデリバリされた(n−1)番目の投射の線量
【数14】
を加えることにより、累計線量d−を更新する必要がある。デリバリされたフルエンス・マップ
【数15】
と、運動エンコーデッド・ビームレットとを、
【数16】
を計算するためには知る必要がある。デリバリされたフルエンス・マップ
【数17】
はまさに、(n−1)番目の投射に対する最適化された結果である。しかしながら、腫瘍が運動しないと仮定した計画されたビームレット(計画ビームレット)だけが分かっている。(n−1)番目の投射をデリバリしている時点で、腫瘍の運動un−1のため、ビームレットは計画ビームレットとは異なる。計画ビームレットからデリバリ・ビームレットへの変更は、式(5)および(7)に従う。投射n−1でデリバリされた線量は、下記のようである。
【0084】
【数18】
【0085】
デリバリされた線量は、単純に、以下のように累計される。
【0086】
【数19】
【0087】
1.4.2 将来の線量の推定
[0085]2つの未知量、即ち、1)腫瘍の運動および2)将来の全ての投射に対するフルエンス・マップ(リーフ開時間)があるため、将来の線量の推定は困難な作業である。将来の投射のトレース全体が分かる場合、前述のMAD戦略は、将来の線量の推定に対する優れた候補となる。しかしながら、実際には、運動トレース全体を事前に知ることはできない。自然な修正法は、MAD戦略において、運動をその確率密度関数(PDF、probability density function)に置き換え、将来の線量を期待値により表現する方法である。運動のPDFは、以前のトレースに基づいて容易に推定することができ、PDFは、将来の投射に対してゆっくりと変化すると予想される。MAD戦略に基づく将来の予想線量は、予めオフラインで計算することができる。
【0088】
[0086]ステップ1: 全ての投射iについて、計画された投射線量
【数20】
を、全てのリーフからの寄与を合計することにより計算する。
【0089】
【数21】
【0090】
[0087]ステップ2: 全てのkについて投射kまでの累計された線量g0(k,x)を計算する。
【0091】
【数22】
【0092】
具体的には、g0(N,x)は、全ての投射からの総線量を表し、ここで、Nは、投射の総数である。
【0093】
【数23】
【0094】
[0088]ステップ3: 源の軌道が縦方向に−uzだけ運動した場合の投射kまでの累計線量g(k,x,uz)を計算する。上記の運動は、縦方向の腫瘍の運動uzに等しい。
【0095】
g(k,x,uz)=(1−α)g0(k−mP,x0)+αg0(k−(m+1)P,x1) (19)
【0096】
上記の式で、uz/δ=m+αであり、x0およびx1は、式(6)中のそれらのものとして定義される。具体的には、下記のようになる。
【0097】
g(N,x,uz)=(1−α)g0(N,x0)+αg0(N,x1) (20)
【0098】
[0089]ステップ4: 運動uzのPDF p(uz)に関して、g(k,x,uz)の期待値
【数24】
を計算する。
【0099】
【数25】
【0100】
[0090]ステップ5: 予想される将来の線量d+を計算する。
【0101】
【数26】
【0102】
[0091]この将来の線量の推定は、フルエンスに対するMADと、運動のPDFとに基づく。
【0103】
[0092]源の横方向の変位は、円錐効果、逆2乗則などのような必要な補正によりリーフ・フルエンスをシフトさせることにより補償することができるので、縦方向の変位だけに対処すすればよい。前述のとおり、投射iに対して、源が縦方向に−uzだけ運動した場合、新たなリーフ・フルエンス
【数27】
は、計画サイノグラム
【数28】
を線形補間することにより計算することができる。即ち、下記のようである。
【0104】
【数29】
【0105】
上記の式で、或る整数mおよび0≦α<1について、uz/δ=m+αである。同様に、ビームレットは、式(5)のように計画ビームレットを線形補間することにより近似することができる。
【0106】
【数30】
【0107】
上記の式で、x’=(x、y、z+αδ)、x”=(x,y,z−(1−α)δ)である。従って、投射iに対する新たな線量は以下のとおりである。
【0108】
【数31】
【0109】
[0093]式(25)の3行目は、近似
【数32】
および
【数33】
を使用していることに留意されたい。新たな線量
【数34】
は、実際、腫瘍の運動の関数である。i番目の投射の腫瘍の運動uziに対する依存性を表すために、
【数35】
を使用することにする。将来の投射に対する運動が分かっている場合、投射nの後の将来の線量は、以下のように計算することができる。
【0110】
【数36】
【0111】
しかしながら、将来の投射に対する運動は現実には分からない。uziのPDFが、使用可能であり、全てのi>nに対して同じであり、p(uz)により表されると仮定すると、将来の線量は、式(26)の期待値を使用して推定することができる。
【0112】
【数37】
【0113】
上記の式で、gおよび
【数38】
は上で定義されている。
【0114】
1.4.3 単一の投射の最適化
[0094]ここで、d−およびd+が計算されているため、n番目の投射を最適化する準備が整ったことになる。投射nの線量は以下のように計算される。
【0115】
【数39】
【0116】
上記の式で、
【数40】
は、式(5)および(7)に示した運動エンコーデッド・ビームレットであり、腫瘍の運動unは、投射1からn−1までの運動トレースに基づく予測により得られる。これについては次のセクションで説明する。wn,.は、最適化されるリーフ開時間である。一般に、この最適化には20未満のアクティブのリーフが関与する。それらのリーフは同じ投射内にあるため、それらのリーフのビームレット線量はごくわずかしか重なり合わない。式(11)および(13)に基づく望まれる線量分布
【数41】
は下記のようになる。
【0117】
【数42】
【0118】
ビームレットが重なり合わない場合、フルエンス・マップ
【数43】
は1ステップで解くことができる。
【0119】
【数44】
【0120】
ビームレットが重なり合わないため、j≠j’では
【数45】
であることに留意されたい。ここで、
【数46】
は、2つのベクトルの内積を表す。しかしながら、放射線の半影(penumbra)および分散により、k番目から(k+1)番目の繰返しの以下の比更新(ratio updating)方式は、よりロバストであることが分かった。
【0121】
【数47】
【0122】
上記の式において、
【数48】
である。
【0123】
MAD法で得られたフルエンスが、初期推測値
【数49】
として使用される。wn,jがwmaxを超える場合には、実行可能なリーフ開時間を保証するため、wn,jをwmaxに等しく設定する。典型的には、この最適化は10回以内の繰返しで収束する。
【0124】
1.5 運動予測
[0095]リアルタイム反応システムでは、検出と動作との間に待ち時間があるため、予測が必要となる。TomoTherapy(登録商標)治療に対するリアルタイムMAOの場合には、総待ち時間が、運動の検出から、MAO計算まで、デリバリ命令を送るまで、実際にデリバリするまでの時間からなる。このような運動は、呼吸性の運動や呼吸相や、心臓性の運動や、予想される位置からの腫瘍の動きを引き起こす他の患者運動などのような、直接的運動や、腫瘍変形や、患者の体重減や他の患者変化などのゆうな、より間接的な運動を含み得る。投射時間が200ミリ秒であると仮定すると、総待ち時間または予測長は300ミリ秒未満であり、これは短期予測とみなされる。更に、MAO誘導型デリバリは、後の投射において予測エラーを自己補正することができる負のフィードバック・システムである。従って、高い予測精度は求められず、自己回帰モデル化に基づく単純な線形予測が、この用途に対して一般に良く機能することが分かった。
【0125】
[0096]xiが、i番目の時間サンプルの腫瘍位置を表すとする。自己回帰モデル化に基づく線形予測は、腫瘍の運動を過去のサンプルの線形の結合(組み合わせ)として表す。
【0126】
【数50】
【0127】
上記の式で、nは、モデル次数であり、kは、予測長であり、aiは、訓練データに基づいて計算される係数である。約2秒の運動データに対応するモデル次数nを選択する。運動トレースの最初の40秒が訓練データとして使用され、上記係数を20秒ごとに適応的に更新する。実際の幾つかの呼吸曲線に関する本発明の発明者らの実験によれば、線形予測の正確度、ピーク・ピーク振幅3cmの実際の呼吸性運動および300msの待ち時間に対して、RMS誤差において約0.5mmを達成することができる。
【0128】
[0097]また、将来の線量の推定の式(21)について腫瘍運動のPDFを予測する必要がある。しかし、本発明の発明者らは、将来の腫瘍の運動のPDFを近似するために、単純に、〜20秒の過去のデータを使用する。繰返しになるが、閉ループ系の自己補正機能があるので、将来の線量の推定の正確性はあまり重要ではない。
【0129】
2.結果
[0098]シミュレーションされたデータと臨床データとの両方を使用して、リアルタイムMAO誘導型TomoTherapy(登録商標)治療デリバリを評価した。(Lu,2008b)に記載されているものと同じ運動エンコーデッド線量計算エンジンを使用して、デリバリされた線量を計算した。計画の際と同じ基準フレームで、全ての線量を計算し、DVHを評価した。以下の3つの異なるデリバリ条件の線量を比較した。
1.SD: 静止した腫瘍での通常のデリバリ
2.MD: 運動する腫瘍での通常のデリバリ
3.MAO: 2と同じ腫瘍の運動での運動適応最適化誘導型デリバリ(motion-adaptive-optimization guided delivery)
更に、比較のためMAD技法の線量も計算した。
【0130】
2.1 シミュレーションされたデータ
[0099]TomoTherapy(登録商標)またはTopoTherapy(登録商標)治療デリバリなどのようなバイナリのMLCベースのIMRTについては、イントラフラクション運動の影響は、横方向の運動よりも、縦方向(Z方向または治療台の運動方向)の運動の方が顕著である。この研究では、最初に縦方向の運動に焦点を合わせ、次いで3D運動に拡張した。全てのシミュレーションに対して、ジョー幅1.05cm、ガントリ期間10秒、1回転あたりの投射数(PPR)51およびピッチ0.3を使用した。これらのデリバリ・パラメータは、運動補償のない治療デリバリに対する最悪ケースのシナリオに対応する。
【0131】
[00100]縦方向運動の影響の検討には、「Lu,2008a」に記載された1Dシミュレーションを使用した。運動は縦方向だけであったため、結果を、静的デリバリ・モードとヘリカル・デリバリ・モードとの両方に適用した。MADデリバリとMAO誘導型デリバリの結果を比較した。長さ8cmのターゲットに対して均一な線量分布を意図した。投射時間は196ミリ秒(=回転あたり10秒/回転あたり51投射)とした。計画サイノグラムは、腫瘍領域では131ミリ秒(=196ミリ秒/MF)、それ以外の領域ではゼロ秒のリーフ開時間に対応する単純な長方形プロファイルとした。ここで、MF(=1.5)は、このシミュレーションで使用した変調係数(modulation factor)を表す。
【0132】
[00101]図8〜図14は結果を示す。これらの全ての図において、上段のグラフは縦方向運動のトレース、中段のグラフは、計画サイノグラムおよびデリバリ・サイノグラム、下段のグラフは、SDと、MDと、MAD(図8、図10および図12)またはMAO(図9、図11、図13、図14)との線量を比較する。
【0133】
[00102]図8〜図9は、定速(治療台の速度の〜10%)の運動をシミュレーションする。この種の運動は、腫瘍が放射線ビームの下流側へ(治療台の運動方向とは反対方向)に運動したとき、または治療台が計画よりも10%遅く運動したときに起こる。補償しなければ、このような運動の結果として、1)「動的」な位置合せ不良のために、ターゲットの一部分に放射線が当たらず、正常な組織に過剰照射され、2)ターゲットの一部分が、計画よりも10%長く放射線ビームの下に置かれるため、その部分の線量が約10%過大になる。これらの影響は、MDの線量(下段のグラフの緑色の破線)によりはっきりと示されている。MAD線量は、ターゲット境界においては計画線量(SD)とよく一致しているが、他の領域では、MD線量と同じ程度に「ホット(hot)」である。デリバリ・シーケンスを配列し直すことにより、MADは、放射線が正しい位置にデリバリされることを保証するが、腫瘍の下流側への運動を補償するためにビーム強度を変更することはしない。MADサイノグラム(図8の中段のグラフに「点」で示されている)は、計画と同じ強度レベルを有する。事前に運動トレース全体が分かっており、全ての投射に対して全面的な再最適化を実行したのであれば、腫瘍領域において計画よりも約10%低い強度を有するサイノグラムが得られる。MAO技法は、ビーム強度を再最適化して、全ての投射において、運動により引き起こされた累積エラーを補償する。図9は、MAOの結果を示す。図9の中段のグラフに示されているように、MAOサイノグラムは、計画サイノグラムよりも約10%低く振動する。この振動は、MAO法の負のフィードバック・システムのロバスト性を示している。それぞれの投射で、MAOアルゴリズムは、以前の全ての投射による累積エラーを補償する。デリバリの構成(例えば1投射あたりの最大リーフ開時間)の限界ならびに予測および将来の推定の不確実性のため、このような補償は決して完璧ではない。しかし、この補償エラーと予測エラーの両方を、次の投射により更に補正することができる。この負のフィードバック・システムにより、図9の下段のグラフに示されたMAOの線量は、計画線量(SD)と完全に一致している。
【0134】
[00103]図10〜図11は、ピーク・ピーク振幅2cm、周期4.3秒のルーハン(Lujan)型の呼吸性運動に対するものである。両図の下段のグラフに示されているように、MD線量は、呼吸性運動のため、線量プロファイルの前端と後端との両方で、SD線量からかなり外れている。一方、MAD法とMAO法はともにこの運動を補償し、それらのそれぞれの線量はSD線量と非常によく一致している。MAD線量とMAO線量はほとんど同じだが、それらのサイノグラムは劇的に異なる(図10〜図11の中段のグラフ)。MADサイノグラムは計画と同じ平らな形状を有し、MAOサイノグラムは大きな振動を示す。ビームレット行列は非常に冗長(redundant)なビームレットからなるため、異なるサイノグラムがほぼ同じ線量を与え得る。PPRが51、ピッチが0.3の場合において、各ボクセルは、51/0.3=170の投射から直接照射を受け取る。このような冗長性は、MAOの貪欲性に基づく最適化方式を使用して累積エラーを補償するという同じ目的および実現可能性に対する多数の解決法の存在を暗示する。
【0135】
[00104]図12〜図13は、肺癌患者で測定したピーク・ピーク振幅2cmの不規則呼吸の結果を示す。非常に不規則な呼吸の大きな振幅と、TomoTherapy(登録商標)治療デリバリの小さいフィールド・サイズ(1.05cm)および高速のガントリ回転(10秒)の組み合わせは、下段のグラフに示されているように、結果として、MD線量において高い腫瘍線量不均一性をもたらす。MAD線量は、この場合も、腫瘍の境界ではSD線量とよく一致しているが、腫瘍の内部領域ではMD線量と同じ不均一性を有する(図12)。他方、MAO法は、縁の不鮮明さを低減し且つ腫瘍線量を不均一にする不規則な呼吸の効果を、SD線量から3%以内の差に低減させる(図13)。図14は、同じ不規則呼吸に対するMAOの結果を示しているが、M字形強度マップを用いるものであり、強度が大幅に変調された計画をシミュレーションするものである。この図は、このような大幅に変調された計画であっても、MAO線量がSD線量とよく一致することを示している。
【0136】
[00105]図8および図12のタイプの運動に対してMADが有効でなかったのは、MADが、各腫瘍ボクセルが計画されたのと同じ可能性で照射を受けるという仮定に基づいており、定速運動(図8)と非常に不規則な呼吸性運動(図12)とがともに、この仮定に大きく反するためである。しかしながら、リアルタイムMAO法は、このような仮定に基づいておらず、従って、不定の運動に対してよく適合する。
【0137】
2.2 臨床データ
[00106]リアルタイムMAO誘導型デリバリ技法は、あらゆる種類の運動に適用することができる。ここでは、2種類の運動の結果、即ち、呼吸性の運動と前立腺の運動との結果を示す。
【0138】
2.2.1 呼吸性運動
[00107]肺の下部に約2cmの腫瘍を有するある肺癌の事例を、過去にさかのぼって検討した。ジョー幅2.5cm、ピッチ0.3のTomoTherapy(登録商標)Hi・Art(登録商標)II TPSを使用して、治療計画を最適化した。この最適化では、運動マージンのないターゲットとしてGTVを使用した。計画線量分布は、図17の上段に示されている。その患者の呼吸データがなかったため、他の肺癌患者からの肺活量計信号の2つの異なる呼吸トレースを使用して、検討対象患者の腫瘍の運動をシミュレーションした。測定された肺活量計信号は1Dのみであり、この信号は、相対振幅および相情報を提供した。この信号の振幅を、振幅の下10%から上10%まで範囲が、SI方向3cm、AP方向2cmおよびLR方向1cmにおおよそ対応するようにスケーリングした。これらの運動は、文献に報告された最大呼吸性運動に近い。各運動トレースに対して、MD線量およびMAO線量を計算し、それらをSD線量と比較した。更に、それらのDVHを比較した。
【0139】
[00108]異なるデリバリ・モードに対する運動トレースおよびDVHの比較を図15〜図16に示す。両図とも、MD線量のかなりのコールド・スポットを示している。GTVは約2cmでしかなく、運動は3cmであるため、これは極端な例であることに留意されたい。更に、治療計画には運動マージンが含まれておらず、腫瘍が照射野から外れる可能性があるため、かなりのコールド・スポットが出現することが予想される。しかし、運動マージンがなくとも、MAOのDVHは、計画DVH(SD)と非常によく一致しており、コールド・スポットはごくわずかである。これらの例は、リアルタイムMAO技法が、かなりの呼吸性運動のもとでの小さな肺腫瘍を治療する際のマージンを低減させる有効な方法であることを暗示している。
【0140】
[00109]図17は、図16に示した運動トレースの横断(T)、矢状方向(S)および冠状(C)の図における線量分布を比較する。上段は、SD(計画)線量分布のTSC図、中段は、MD線量分布のTSC図、下段は、MAO線量分布のTSC図である。この図は、DVHの情報と同様の情報を提供する。運動補償をしない場合、等線量(isodose)レベルに示されているように、GTV線量は計画線量よりもかなり少ない。MAO誘導型デリバリについては、高線量領域(腫瘍の周囲)の等線量線はSD線量のそれと非常によく似ているが、低線量領域にはいくらかの相違がある。このような相違は、主に、メモリの限界のためにMAOで完全にはモデル化されない散乱に起因する。また、全ての計算で、剛体運動を仮定したことに留意されたい。剛体運動と仮定することは、小さな腫瘍に対してはごく妥当だが、肺や脊髄に対しては妥当とは言えない。従って、肺および脊髄の線量の結果については注意して解釈すべきだが、本発明の発明者らは、腫瘍が小さくて脊髄から離れているときには、その差異は最小限に留まると予想している。
【0141】
2.2.2 前立腺の運動
[00110]「Langen他,2008b、Langen他,2008a」に報告されているものと同じ前立腺患者の事例を、過去にさかのぼって検討した。前立腺のイントラフラクション運動を、Calypso(登録商標)の4次元定位システムの電磁信号を介してリアルタイムで追跡した。これらの運動を、「Langen他,2008c」に記載されているとおりに、小、中、大の前立腺の変位に分類した。これらの変位はそれぞれ、3mm未満、3mmから5mm、5mm超の振幅に対応し、全追跡データの85%超、〜10%、〜3%を占める。「Langen他,2008b、Langen他,2008a」に記載されているものと同じ、ジョー幅2.47、ピッチ0.287、ガントリ回転周期29から31秒の最適化された治療計画を使用した。
【0142】
[00111]図18は、治療全体にわたって3mm以内の小さな前立腺運動の結果を示す。MDのDVHはSDのDVHよりもわずかに低く、MAOのDVHはSDのDVHに完全に一致している。このことは、このような小さな運動に対するMAO法のロバスト性を示している。
【0143】
[00112]図19は、中位の前立腺運動の結果を示す。前立腺は、SI(上−下)方向に3mmから6mm、かなりの時間運動した。MDの前立腺DVHでは、SDとの比較で、ホット・スポットとコールド・スポットの両方が出現した。これは、左上のグラフのSI運動トレースにより示されているように、腫瘍が、SI方向において、上流側(放射線源の運動とは逆方向)と下流側(放射線源の運動と同じ方向)との両方に運動したためである。上流側への運動により、前立腺の部分が計画線量よりも少ない線量を受け取り、下流側への運動により、他の部分が、計画線量よりも多くの線量を受け取った。これらのDVHプロットに示されているように、MAO技法は両方の運動に対しての補償を行うことができた。MAOの前立腺DVHはSDのそれに非常に近かった。更に、MAOにより膀胱のホット・スポットが補正された。
【0144】
[00113]図20〜図21は、大きい前立腺運動の結果を示す。図21の上段は、計画(SD)線量分布のTSC図、中段は、MD線量分布のTSC図、下段は、MAO線量分布のTSC図を示す。前立腺は、大部分のデリバリ時間の間、SI方向とAP(前−後)方向の両方に5mmから10mm運動した。このような大きな上流側へのSI運動により、前立腺線量分布に、前立腺DVH(図20)およびMDの線量分布(図21の中段)により検出されたかなりのコールド・スポットが生じた。他方、MAO技法は、このような大きい運動に対して非常によく補償が行われた。MAOの等線量線(図21の下段)は、計画線量(図21の上段)に非常によく似ており、MAOのDVHはSDのそれに近かった(図20)。MAOにより直腸のホット・スポットが補正されたことに留意されたい。
【0145】
[00114]これらの例は、リアルタイムMAOが、大小を問わず全ての種類の前立腺の運動を効果的に補償することを示している。とは言え、このような運動の影響は、通常は非常に穏やかであり、デリバリの5回のフラクションの後には急速に排除される。ここでは、全ての研究対象例に対して剛体運動を仮定した。このような仮定は、前立腺に対しは議論の余地があるところであり、膀胱および直腸に対しては明らかに適当でない。従って、ここに示したMDおよびMAOの結果はともに、臨床的ガイダンスとしてではなく、単なる着想の証明として解釈すべきである。
【0146】
3.議論
[00115]治療計画の作成は、デリバリ機械およびCTなどのような患者の解剖学的構造のコミッショニング・データ(commissioning data)に関する情報に基づく。治療デリバリの目標は、治療計画をできるだけ正確に再現することであるため、治療計画の作成では、デリバリ手順を正確にモデル化しなければならない。しかしながら、腫瘍の運動などのようなリアルタイムの変化は、事前に正確にモデル化することが難しい。最新の放射線デリバリは開ループ手順である。開ループ手順は、計画された手順を段階的に再現しようとするが、それぞれの段階で生じ、累積されたエラーに対処する機構を持たない。提案のリアルタイムMAO誘導型放射線治療は、デリバリ方式を、従来の開ループ・システムから、負のフィードバックを有する閉ループ・システムへと変更する。この意味で、MAOの枠組みを、より一般的な方式である、図22に示すようなリアルタイム適応型放射線治療(adaptive radiation therapy)(ART)に容易に拡張することができる。その流れ図では、運動エラー(患者の運動および患者の他の変化に由来する)と機械エラー(様々な機械パラメータに由来する)との両方をリアルタイムで検出および予測する。4D線量再構成エンジンが、デリバリされた線量をリアルタイムで累計する。再構成された線量は、将来の推定とともに、次の投射に対してのリーフ開時間を最適化するリアルタイム最適化機構を駆動するために使用される。
【0147】
[00116]一般的に、ARTは、放射線療法の最中にフィードバックを使用して将来の治療を改善するというコンセプトを指す。フィードバックは、オフライン適応プロセスまたはオンライン・プロセスに対して使用することができる。オフラインARTは、治療フラクションの間などのような、患者が治療されていないときのプロセスを指し、オンラインARTは、患者が治療台上にいるが治療ビームのデリバリが始まる前のプロセスを指す。オフラインARTおよびオンラインARTはともに、インターフラクション変化(inter−fractional change)を補償するためのものである。しかしながら、リアルタイムARTは、イントラフラクション、即ち、リアルタイム、での生じたエラーを補正するためのものであり、それらのエラーが、患者運動に起因するものなのか、またはリニアック出力変化、リーフ開エラー、ガントリ回転エラー、治療台運動エラーなどの不規則な機械変動に起因するものなのかは、問わない。リアルタイムARTにおいて放射線デリバリを駆動するための命令は、機械パラメータおよび患者変化(患者の運動に起因する変化など)を含む多くの構成要素からの系統的なフィードバックを用いてリアルタイムで最適化される。リアルタイムARTは、エラー検出およびシステム応答に対して高い要求を課す。リアルタイム線量再構成も、リアルタイムARTの重要な要素である。運動検出、デリバリ検証、および線量再構成を高い信頼性で実現できることを前提にすると、リアルタイム最適化ワークフローは、TomoTherapy(登録商標)治療デリバリに対するリアルタイムARTを達成することができるはずである。
【0148】
[00117]呼吸性運動、心拍動、および他の生理的変化などのイントラフラクション運動は、従来の分割化したIMRTにとって厄介な問題である。治療モダリティが動的であればあるほど、運動および機械のパラメータの変化またはエラーに起因するイントラフラクション変化の識別が重要となる。
【0149】
[00118]しかし、これは、ターゲットの正確な位置決めが決定的に重要な体幹部定位放射線治療(stereotactic body radiation treatment)(SBRT)および少分割療法(hypofractionated therapy)にとっては、よりいっそう厄介な問題である。SBRTは、その局所的制御の速度が好適であるため、ある種の肺癌における使用がますます増えている。前立腺癌に対する少分割は、治療上の利益および経済的な利点を潜在的に有する。肺および前立腺の事例はともに、かなりのイントラフラクション運動を示す。強度変調陽子線療法(または他の重粒子療法)は、最も厳しい運動管理を必要とする。潜在的には、これらの3つの全ての治療モードに、提案のリアルタイムMAO技法を適用することができる。
【0150】
[00119]提案のMAO技法は依然として、運動を補正すべき「エラー」とみなす、「補償」のカテゴリに分類される。運動は厄介な問題だが、チャンスでもある。「適応分割療法(Adaptive Fractionation Therapy)」を通じてより良い治療を達成するために、腫瘍−OAR構成のインターフラクション変動の利点を使用することができるのと同じように、潜在的には、「計画されたデリバリよりも良好な」デリバリを達成するためにイントラフラクション運動の利点を使用することができる。この可能性は、OAR線量を最小化するために4D DMLCデリバリを使用したPapiezのグループにより証明された(Papiez他,2007)。本発明の発明者らは、より先進のリアルタイム最適化方式は、静的デリバリに基づくどのような計画によっても達成できない優れたデリバリを提供することができるはずだと考えている。このような方式は、より洗練されたアルゴリズムおよび強力なコンピュータを必要とし得る。
【0151】
[00120]本明細書において、本発明の発明者らは、腫瘍の運動は剛体の運動とみなすことができ、危険な状態にある物体(object−at−risk)(「OAR」)は腫瘍と同じように運動すると仮定した。これは、小さい腫瘍および腫瘍に近いOARに対しては良い近似である。運動の補償は、大きい腫瘍に対してよりも小さい腫瘍に対してより有意義であり、腫瘍の近くのOARは、通常、腫瘍から離れたOARよりも重要に考慮する。従って、本発明の発明者らは、このような仮定を、大部分の腫瘍運動の事例に対して妥当とみなす。提案のリアルタイム最適化方式は、回転または一般的な変形を排除しない。しかしながら、それには、変形エンコーデッド・ビームレットを計算するために上に示したものとは異なる式が必要である。問題は、どのようにして、変形の輪郭をリアルタイムで忠実に描くかということである。これは、超高速デフォーマブル・レジストレーション・アルゴリズム、または4DCTなどのような幾つかの4D画像に基づく予め計算された変形マップの使用を含み得る。
【0152】
[00121]閉じたフィードバック・ループを使用することにより、本発明に基づく方法は更に、機械パラメータおよび患者の変化の予測を可能にする。一実施形態では、この予測が、リアルタイムで集められた機械パラメータおよび患者の変化/運動データからの情報の外挿(情報を推断の基礎とすること)に基づく。例えば、機械パラメータまたは患者運動の予測は、識別された機械の傾向または患者運動パターンに基づいて行うことができる。この方法は更に、初期の治療目的と、それまでに受け取った累計線量と、将来の線量デリバリ推定との情報を組み込んだ、その時点のデリバリ命令のリアルタイム最適化を企図する。
【0153】
[00122]閉じたフィードバック・ループを実現する1つの方法は、図23に示すような動的計画法を使用する方法である。動的計画法は、治療デリバリ命令をリアルタイムで最適化するものであり、動的計画法を使用して、デリバリ命令の最適化が、患者に対するリアルタイム・ビーム・デリバリに遅れないことを保証する。本発明の一実施形態では、動的計画法を使用するそれぞれの最適化ループが、機械パラメータおよび患者運動のリアルタイムの情報を集めるステップから始まる。幾つかの実施形態では、将来の治療投射のために、集められたリアルタイムの情報に基づいて、機械パラメータおよび患者の運動/変化情報を予測する。機械パラメータおよび患者運動に関する情報を組み込んで、一番最近の治療投射からの線量を計算する。
【0154】
[00123]次のステップでは、デリバリされた線量へ、この一番最近の線量を加算して、デリバリされる予想線量に対する累計線量を監視する。一番最近にデリバリされた治療投射に関する線量を、機械パラメータおよび患者運動情報を含めてリアルタイムで再構成し、この線量を、基準フレームワークにおけるデリバリされる線量に加算することができるようにする。幾つかの実施形態では、累計されるのはデリバリされた線量の値自体ではなく、予想された線量とデリバリされた線量との差を累計する。この累計された線量の情報から、将来の線量の推定値は、患者運動および機械パラメータについてのモデルを使用して得ることができる。このモデルは、演繹的モデルまたは動的モデルとすることができる。
【0155】
[00124]次いで、その時点の計画に対するデリバリ命令は、その時点の線量と、デリバリされた以前の線量と、将来の線量との組み合わせが、治療目的(即ち、意図された線量)に最もよく一致するか又は治療目的を改善するように、最適化する。この最適化は、デリバリ命令の初期の推測を生成することを含み、この生成は、線量の加算がその治療に対する計画目的に最もよく適合するように、その時点の機械パラメータおよびデリバリ状態に最もよく適合するものを一群のデリバリ命令から選択することにより、なされる。使用する線量情報は、代表点の線量、1D線量プロファイル、2D平面線量、関心領域または全体についての3D線量分布、または線量分布から導き出される他の量(例えば、線量体積ヒストグラム、等価の均一な線量、生物学的に有効な線量など)とすることができる。
【0156】
[00125]全デリバリ・エラーを、後続のリアルタイムで最適化されたフラクション・デリバリにおいて更に補償することができる。計画目的とデリバリされた全線量との差として定義される全デリバリ・エラーを、初期の計画目的に加えて、リアルタイム最適化誘導型デリバリを用いた後続の治療に対しての新たな計画目的を得る。
【0157】
[00126]上記の方法は、単一の投射に対するデリバリ命令を最適化することを企図するが、この方法を、同時の幾つかの治療投射に対するデリバリ命令を最適化するために適用することが可能である。
【0158】
[00127]特許請求の範囲には、本発明の様々な特徴および利点が記載されている。
【特許請求の範囲】
【請求項1】
放射線療法治療をデリバリする方法であって、
患者に対する治療計画を作成するステップと、
前記患者を、放射線を受け取るように配置するステップと、
機械パラメータを実質的にリアルタイムで監視するステップであって、前記機械パラメータついての情報を分析し、前記患者へデリバリされる線量に対して前記パラメータがどのような影響を及ぼすのかを分析することを含む、ステップと、
監視された前記機械パラメータからの分析された情報を含むように、前記治療計画の少なくとも一部分を実質的にリアルタイムで最適化するステップと、
最適化された前記治療計画の少なくとも一部分を前記患者へデリバリするステップと
を備える方法。
【請求項2】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記患者へデリバリされた放射線量の量を実質的にリアルタイムで累計するステップを更に含む、方法。
【請求項3】
放射線療法治療をデリバリする請求項2に記載の方法であって、前記患者へデリバリされた放射線量の量を累計するステップが、前記患者の4D表現上での線量計算を使用することを含む、方法。
【請求項4】
放射線療法治療をデリバリする請求項2に記載の方法であって、将来の投射において前記患者へデリバリされる放射線量の量を推定するステップを更に含む、方法。
【請求項5】
放射線療法治療をデリバリする請求項4に記載の方法であって、前記将来の投射において前記患者へデリバリされると推定される放射線量の量と、前記将来の投射中の患者のターゲットの予測される位置とに基づいて、前記治療計画を調整するステップを更に含む、方法。
【請求項6】
放射線療法治療をデリバリする請求項2に記載の方法であって、デリバリされた線量を実質的にリアルタイムで累計するステップが、デリバリの命令と、デリバリ・エラーの検出と、患者運動の検出とのうちの少なくとも1つに関係した情報を組み込むものである、方法。
【請求項7】
放射線療法治療をデリバリする請求項2に記載の方法であって、前記線量を累計するステップが、その時点の線量と、デリバリされた以前の線量と、デリバリされる将来の線量とを累計して、最適化された前記計画が計画線量と最も良く一致するか又は前記計画線量を最も良く改善するようにすることを含む、方法。
【請求項8】
放射線療法治療をデリバリする請求項2に記載の方法であって、線量を累計する前記ステップが、治療のリアルタイム変更に基づく、方法。
【請求項9】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記治療計画が複数の投射を含み、前記治療計画の少なくとも一部分を最適化するステップが、前記投射のうちの1つの投射においてデリバリされる放射線量の量を、以前の投射で生じた累積されたデリバリ・エラーを補償するように最適化することを含む、方法。
【請求項10】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、以前の投射による累計された放射線量と、将来の投射においてデリバリされる推定された放射線量と、次の投射中の患者の予測される構成とに基づくものである、方法。
【請求項11】
放射線療法治療をデリバリする請求項10に記載の方法であって、前記累積されたデリバリ・エラーが、以前のフラクションからのデリバリ・エラーを含む、方法。
【請求項12】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、線加速器の出力の係数の変動を含む、方法。
【請求項13】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、MLCリーフ位置エラーを含む、方法。
【請求項14】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、リニアック位置エラー、治療台位置エラー、ジョー位置エラー、および補償器エラーのうちの1つを含む、方法。
【請求項15】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、後続の治療デリバリにおいて補償される、方法。
【請求項16】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記治療計画の少なくとも一部分を最適化するステップが、閉フィードバック・ループを介して前記治療計画への変更を組み込むことを含む、方法。
【請求項17】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップを更に含む、方法。
【請求項18】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップが、患者の呼吸相を検出することを含む、方法。
【請求項19】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップが、腫瘍の運動または腫瘍の変形を検出することを含む、方法。
【請求項20】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップが、患者の呼吸相を予測することを含む、方法。
【請求項21】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップが、腫瘍の運動または腫瘍の変形を予測することを含む、方法。
【請求項22】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記計画の少なくとも一部分を実質的にリアルタイムで最適化するステップが、患者の変化を予測することを含む、方法。
【請求項23】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記計画の少なくとも一部分を実質的にリアルタイムで最適化するステップが、機械パラメータを予測することを含む、方法。
【請求項24】
放射線療法治療をデリバリする請求項23に記載の方法であって、前記予測が、機械パラメータについての演繹的なモデルに基づく、方法。
【請求項25】
放射線療法治療をデリバリする請求項23に記載の方法であって、前記予測が、機械パラメータについての動的モデルに基づく、方法。
【請求項26】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記計画の少なくとも一部分を実質的にリアルタイムで最適化するステップが、動的計画法を使用して治療デリバリ命令を最適化することを含む、方法。
【請求項1】
放射線療法治療をデリバリする方法であって、
患者に対する治療計画を作成するステップと、
前記患者を、放射線を受け取るように配置するステップと、
機械パラメータを実質的にリアルタイムで監視するステップであって、前記機械パラメータついての情報を分析し、前記患者へデリバリされる線量に対して前記パラメータがどのような影響を及ぼすのかを分析することを含む、ステップと、
監視された前記機械パラメータからの分析された情報を含むように、前記治療計画の少なくとも一部分を実質的にリアルタイムで最適化するステップと、
最適化された前記治療計画の少なくとも一部分を前記患者へデリバリするステップと
を備える方法。
【請求項2】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記患者へデリバリされた放射線量の量を実質的にリアルタイムで累計するステップを更に含む、方法。
【請求項3】
放射線療法治療をデリバリする請求項2に記載の方法であって、前記患者へデリバリされた放射線量の量を累計するステップが、前記患者の4D表現上での線量計算を使用することを含む、方法。
【請求項4】
放射線療法治療をデリバリする請求項2に記載の方法であって、将来の投射において前記患者へデリバリされる放射線量の量を推定するステップを更に含む、方法。
【請求項5】
放射線療法治療をデリバリする請求項4に記載の方法であって、前記将来の投射において前記患者へデリバリされると推定される放射線量の量と、前記将来の投射中の患者のターゲットの予測される位置とに基づいて、前記治療計画を調整するステップを更に含む、方法。
【請求項6】
放射線療法治療をデリバリする請求項2に記載の方法であって、デリバリされた線量を実質的にリアルタイムで累計するステップが、デリバリの命令と、デリバリ・エラーの検出と、患者運動の検出とのうちの少なくとも1つに関係した情報を組み込むものである、方法。
【請求項7】
放射線療法治療をデリバリする請求項2に記載の方法であって、前記線量を累計するステップが、その時点の線量と、デリバリされた以前の線量と、デリバリされる将来の線量とを累計して、最適化された前記計画が計画線量と最も良く一致するか又は前記計画線量を最も良く改善するようにすることを含む、方法。
【請求項8】
放射線療法治療をデリバリする請求項2に記載の方法であって、線量を累計する前記ステップが、治療のリアルタイム変更に基づく、方法。
【請求項9】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記治療計画が複数の投射を含み、前記治療計画の少なくとも一部分を最適化するステップが、前記投射のうちの1つの投射においてデリバリされる放射線量の量を、以前の投射で生じた累積されたデリバリ・エラーを補償するように最適化することを含む、方法。
【請求項10】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、以前の投射による累計された放射線量と、将来の投射においてデリバリされる推定された放射線量と、次の投射中の患者の予測される構成とに基づくものである、方法。
【請求項11】
放射線療法治療をデリバリする請求項10に記載の方法であって、前記累積されたデリバリ・エラーが、以前のフラクションからのデリバリ・エラーを含む、方法。
【請求項12】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、線加速器の出力の係数の変動を含む、方法。
【請求項13】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、MLCリーフ位置エラーを含む、方法。
【請求項14】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、リニアック位置エラー、治療台位置エラー、ジョー位置エラー、および補償器エラーのうちの1つを含む、方法。
【請求項15】
放射線療法治療をデリバリする請求項9に記載の方法であって、前記累積されたデリバリ・エラーが、後続の治療デリバリにおいて補償される、方法。
【請求項16】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記治療計画の少なくとも一部分を最適化するステップが、閉フィードバック・ループを介して前記治療計画への変更を組み込むことを含む、方法。
【請求項17】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップを更に含む、方法。
【請求項18】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップが、患者の呼吸相を検出することを含む、方法。
【請求項19】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップが、腫瘍の運動または腫瘍の変形を検出することを含む、方法。
【請求項20】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップが、患者の呼吸相を予測することを含む、方法。
【請求項21】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記患者に対する変化を実質的にリアルタイムで監視するステップが、腫瘍の運動または腫瘍の変形を予測することを含む、方法。
【請求項22】
放射線療法治療をデリバリする請求項17に記載の方法であって、前記計画の少なくとも一部分を実質的にリアルタイムで最適化するステップが、患者の変化を予測することを含む、方法。
【請求項23】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記計画の少なくとも一部分を実質的にリアルタイムで最適化するステップが、機械パラメータを予測することを含む、方法。
【請求項24】
放射線療法治療をデリバリする請求項23に記載の方法であって、前記予測が、機械パラメータについての演繹的なモデルに基づく、方法。
【請求項25】
放射線療法治療をデリバリする請求項23に記載の方法であって、前記予測が、機械パラメータについての動的モデルに基づく、方法。
【請求項26】
放射線療法治療をデリバリする請求項1に記載の方法であって、前記計画の少なくとも一部分を実質的にリアルタイムで最適化するステップが、動的計画法を使用して治療デリバリ命令を最適化することを含む、方法。
【図1】

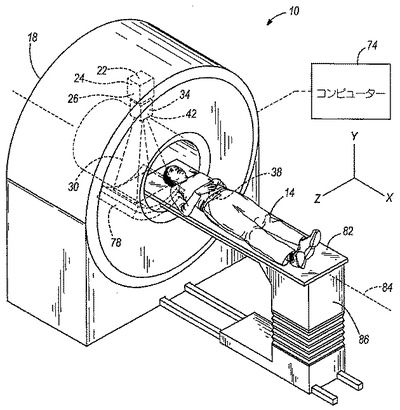
【図2】
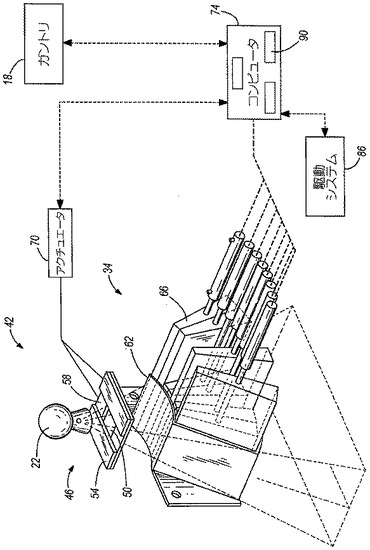
【図3】
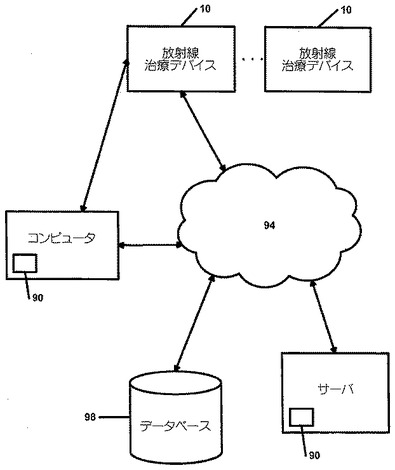
【図4】
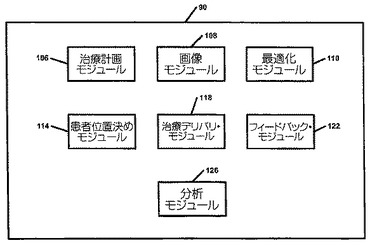
【図5】
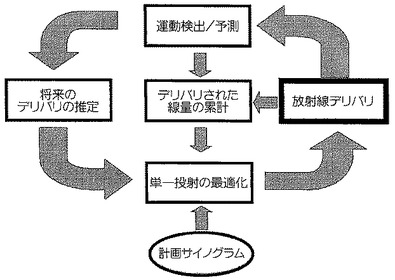
【図6】
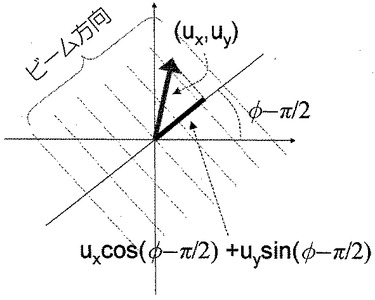
【図7】
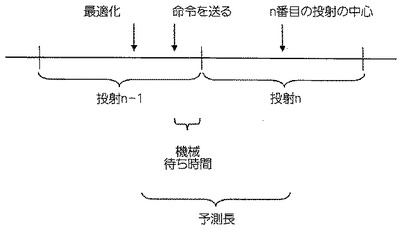
【図8】
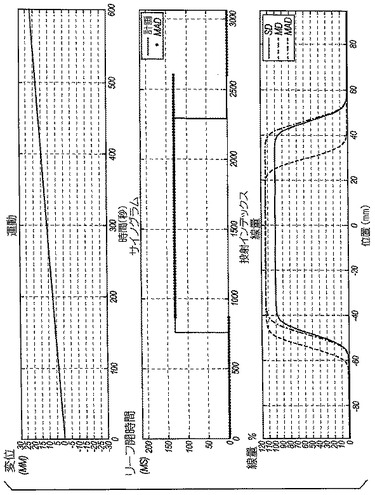
【図9】
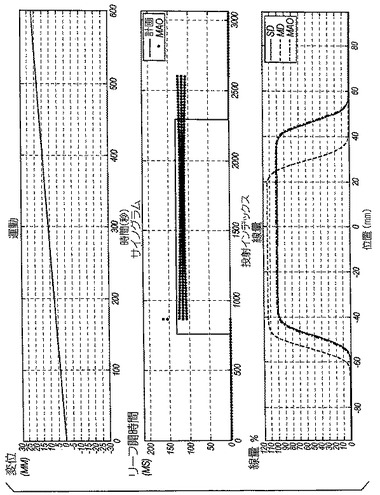
【図10】
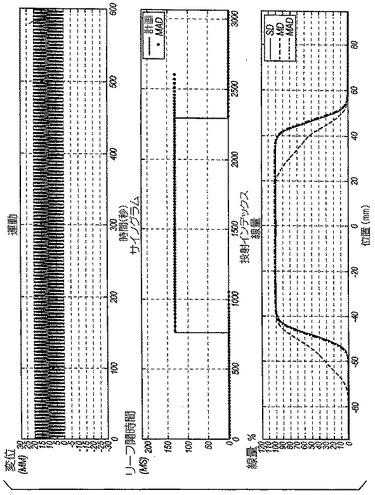
【図11】
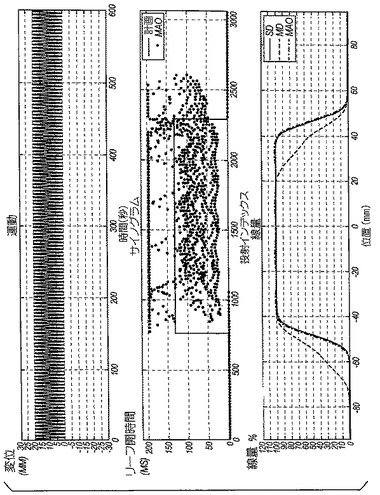
【図12】
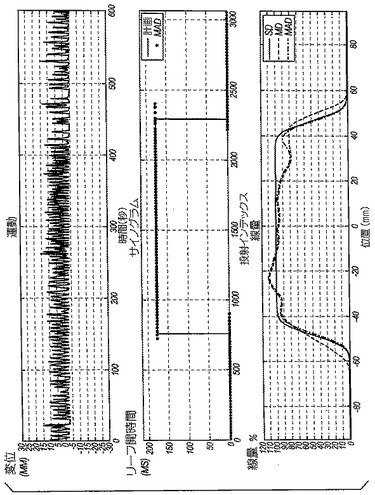
【図13】
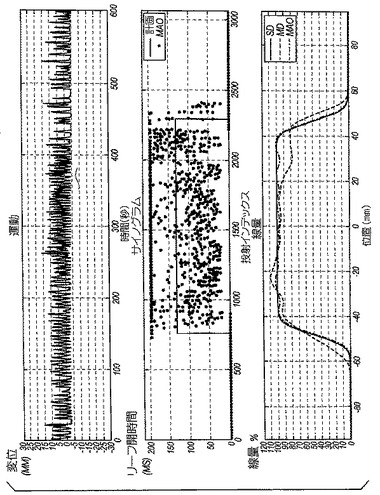
【図14】
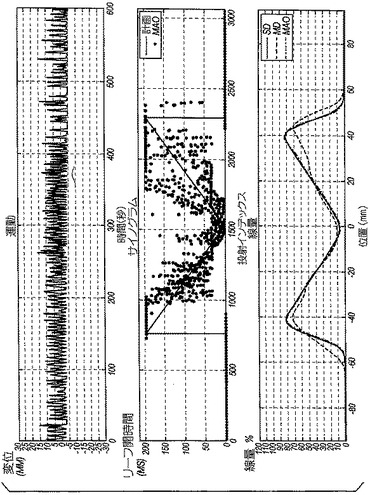
【図15】

【図16】
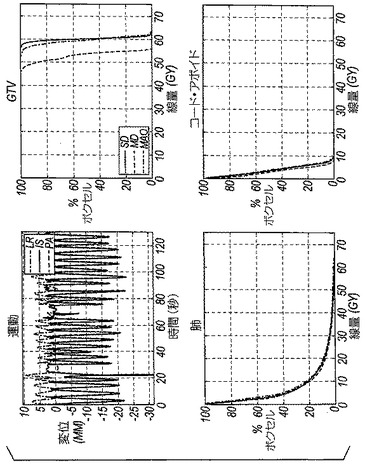
【図17】
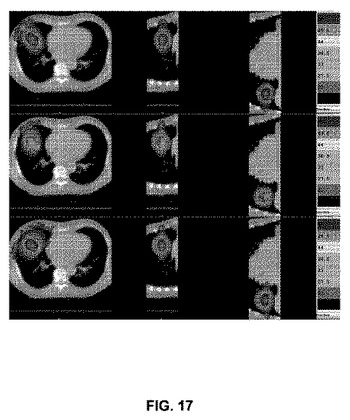
【図18】

【図19】
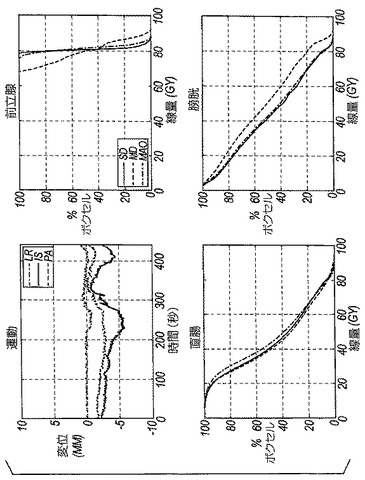
【図20】
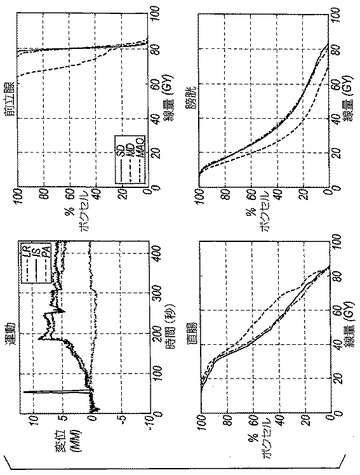
【図21】
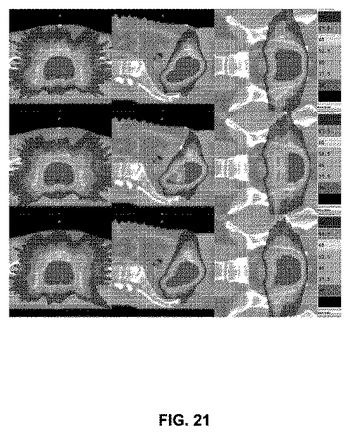
【図22】
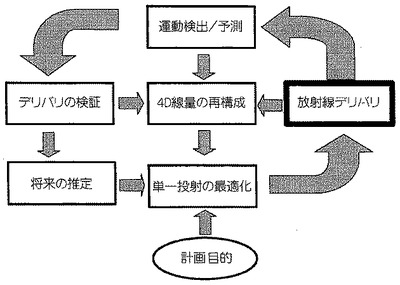
【図23】
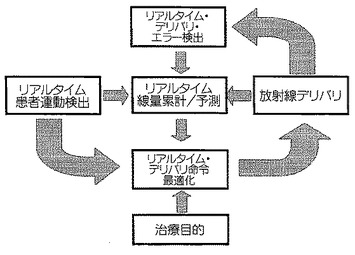
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公表番号】特表2012−506734(P2012−506734A)
【公表日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2011−533408(P2011−533408)
【出願日】平成21年10月26日(2009.10.26)
【国際出願番号】PCT/US2009/062075
【国際公開番号】WO2010/062560
【国際公開日】平成22年6月3日(2010.6.3)
【出願人】(506024320)トモセラピー・インコーポレーテッド (27)
【Fターム(参考)】
【公表日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成21年10月26日(2009.10.26)
【国際出願番号】PCT/US2009/062075
【国際公開番号】WO2010/062560
【国際公開日】平成22年6月3日(2010.6.3)
【出願人】(506024320)トモセラピー・インコーポレーテッド (27)
【Fターム(参考)】
[ Back to top ]