
散布農薬検出方法
【課題】農薬散布後における農作物への散布状況を確認するべく、光分析技術によって判定できる散布農薬検出方法を提供する。
【解決手段】上面を開放した捕集容器1・1・・・内に液体(溶剤19・19・・・)を充填し、該捕集容器1・1・・・を圃場の適所に複数設置し、農薬散布時に前記捕集容器1・1・・・内の溶剤19・19・・・に散布農薬を捕捉(収集)し、この溶剤19・19・・・を赤外光によりスペクトル分析したデータと、既知の濃度の農薬を前記溶剤19・19・・・に溶融した液体から予め取得した赤外光によるスペクトル分析したデータとをコンピュータ18に入力して比較演算し、散布農薬量を測定する
【解決手段】上面を開放した捕集容器1・1・・・内に液体(溶剤19・19・・・)を充填し、該捕集容器1・1・・・を圃場の適所に複数設置し、農薬散布時に前記捕集容器1・1・・・内の溶剤19・19・・・に散布農薬を捕捉(収集)し、この溶剤19・19・・・を赤外光によりスペクトル分析したデータと、既知の濃度の農薬を前記溶剤19・19・・・に溶融した液体から予め取得した赤外光によるスペクトル分析したデータとをコンピュータ18に入力して比較演算し、散布農薬量を測定する
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、農薬散布時の農作物への付着状況を確認するために、圃場に設置した捕集容器により散布農薬を検出するための技術に関する。
【背景技術】
【0002】
近年、食品衛生法の改正に伴い、農作物に対する厳密な残留農薬基準値が設けられたことから、農作物の残留農薬に対する注目が集まっており、適切な農薬散布や、出荷時における農作物の残留農薬値に対する正確な測定等が求められている。この農作物に残留する農薬の分析方法は赤外分光光度計を用いることで可能となっている(例えば、特許文献1参照。)。
【0003】
しかし、農薬散布時には、風などの影響を受けて、散布対象圃場ではない場所に農薬が飛散する、いわゆるドリフトが発生し、農薬の効能が不足するため該薬剤を追加散布したり、或いは逆に、他の散布対象地となる場所から薬剤が飛散してきて農作物に散布し、該農作物の残留農薬値が基準値を超える場合がある。
【0004】
このような状況において、農薬散布時の散布量やその分布、ドリフト判定等の散布状況の確認は、非常に重要な課題となっており、農薬の散布時、および、農薬の散布後における、農薬散布量(農薬濃度)等の散布状況の確認方法として、作業者による目視、或いは、感水紙による確認方法がとられていた。
【特許文献1】特開平8−170941号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、作業者の目視による確認方法では、正確な農薬の散布状況を判定することは困難であり、各個人における判定結果にばらつきが生じやすく、正確な農薬の散布状況が判定できないばかりか、確認作業に手間がかかっていた。
また、感水紙を用いた確認方法では、農薬散布量(農薬濃度)の農薬散布データを数値化することが困難であった。さらに、農薬散布後において残留農薬基準値を超過しているか否かの判断基準は、作業者等の経験則に基づくものであり、確実性に欠けていた。
【0006】
加えて、感水紙を用いた確認方法では農薬だけでなく、水も農薬と判断されてしまうため、農薬水溶液のいわゆる「溶けむら」に対応できなかったり、雨風等の自然条件を受けて該感水紙の設置角度、設置位置等を変更せざるを得ず、測定精度が落ちたりするという問題点もあった。
【0007】
このような状況を改善するべく、光分析技術を用いた農薬散布状況の判定手法が知られている。前記手法によれば、農薬濃度を測定することで、そこに含まれる農薬の散布量を定量的に把握することができ、精度の高い農薬の散布状況を判定することができる。
【0008】
しかし、前記判定手法は測定手段としては高い精度を保証し得るものの、圃場に載置する板部材に付着した散布後の農薬を直接、測定対象としているため、事実上、正確な判定結果を得ることが困難であった。即ち、板部材に付着した農薬の一滴の濃度は略同じであるため、付着斑点の一つは測定できても、付着した程度までは定量することはできなかった。
【0009】
本発明は、係る問題点を鑑みてなされたものであり、解決しようとする問題は、農薬散布後における農作物への農薬の散布状況を確認するべく、光分析技術によって容易に判定できる、散布農薬検出方法を提供することである。
【課題を解決するための手段】
【0010】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0011】
即ち、請求項1においては、上面を開放した捕集容器内に液体を充填し、該捕集容器を圃場の適所に複数設置し、農薬散布時に前記捕集容器内の液体に散布農薬を捕捉し、この液体を赤外光によりスペクトル分析したデータと、既知の濃度の農薬を前記液体に溶融した液体から予め取得した赤外光によるスペクトル分析したデータとをコンピュータに入力して比較演算し、散布農薬量を測定するものである。
【0012】
請求項2においては、前記捕集容器は液面表面積と同等の開口面積を有する開口部を上部に備えるものである。
【0013】
請求項3においては、前記捕集容器の開口部には、開閉可能な蓋を備えるものである。
【0014】
請求項4においては、前記捕集容器内に充填する液体は水とするものである。
【0015】
請求項5においては、前記捕集容器は圃場面より一定以上の高さ位置に設置されるものである。
【0016】
請求項6においては、前記赤外光のスペクトルはATR法で得るものである。
【0017】
請求項7においては、前記捕集容器内に充填する液体は有機溶剤とするものである。
【発明の効果】
【0018】
本発明の効果として、以下に示すような効果を奏する。
【0019】
請求項1においては、散布された農薬は液体に溶けた状態で捕捉(収集)することができるため、後に赤外分光光度計で分析する際に、測定対象とする農薬を均一に取り出すことができ、該農薬の成分も容易に検出することができる。また、実際に農作物に散布する農薬と同程度の農薬を収集することが可能となり、正確な農作物への農薬散布状況を把握することができる。さらに、散布対象圃場の内外において複数の捕集容器を設置することで、該散布対象圃場ではない場所に農薬が飛散する、いわゆるドリフトによる農薬も収集することができる。
【0020】
請求項2においては、液面表面積の領域内に降り落ちた農薬を正確に収集することができ、該液面表面積の値を単位面積とすることで、単位面積当たりの農薬の散布量を容易に検出することができる。
【0021】
請求項3においては、捕集容器に降り落ちた農薬は回収時に乾固することがなく、容易に捕集容器から取出すことができる。また、搬送時には液体がこぼれ出すこともなく、捕集容器の回収や格納時には、該捕集容器を積み重ねることで省スペースにて該捕集容器の搬送や格納することができる。
【0022】
請求項4においては、薬剤を溶融するための溶媒として用いられる、捕集容器に貯溜する液体(溶剤)を水とすることで、該溶剤を安価で容易に得ることができる。また、捕集容器内部の洗浄も容易に行うことができ、衛生的である。
【0023】
請求項5においては、捕集容器の設置高さを、農作物と略同一の高さにすることで、農作物に実際に散布された状況と略同じ状況にて、散布された農薬を捕捉(収集)することができる。即ち、散布される農薬は全て真直下に降り落ちることはなく、通常は吹付ける噴出力や地上からの熱気等によりその落下軌跡が歪められる。そのため、捕集容器の設置高さの違いによっては、収集される農薬の量が大きく異なることとなるが、本発明においては測定対象とする農作物と同一高さに捕集容器1を設けることで、実際に農作物に散布する農薬と同程度の農薬を収集することを可能としている。
【0024】
請求項6においては、正確な農薬の散布量を検出することができる。
【0025】
請求項7においては、薬剤を溶融するための溶媒として用いられる、捕集容器に貯溜する液体(溶剤)を有機溶剤とすることで、捕捉(収集)した薬剤が固まりとなって浮遊したり沈殿したりすることもなく、該薬剤を確実に溶剤に溶融することができ、薬剤濃度の検出誤差が発生しにくく、正確な前記薬剤の散布量を検出することができる。
【発明を実施するための最良の形態】
【0026】
次に、発明の実施の形態を説明する。
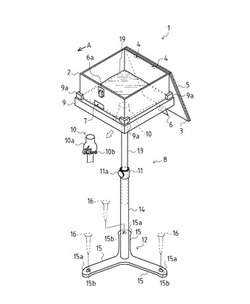
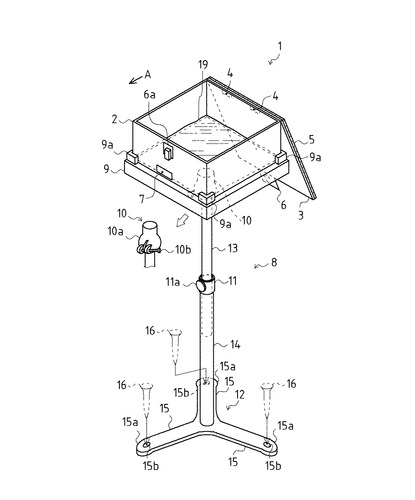
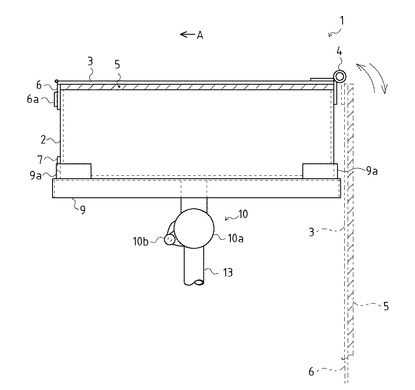
図1は本発明の一実施例に係る捕集容器の全体的な構成を示した斜視図、図2は同じく捕集容器の側面詳細図、図3は散布農薬収集時の模式図、図4は同じく散布農薬収集時の捕集容器の配置例を示す平面図である。
【0027】
[捕集容器1]
まず、本発明の一実施例における捕集容器1と、該捕集容器1を固定保持する支持台8について、図1、および、図2を用いて説明する。尚、図1、および、図2に示す矢印Aの方向は前方を示し、これに基づいて左右方向を規定する。
【0028】
捕集容器1は平面視四角形からなる箱体の本体部2や、該本体部2の上部に設けられる上蓋3等により構成される。本体部2の上面は全面開口されており、前記上蓋3によって捕集容器1は上部の開口が塞がれている。即ち、捕集容器1は液体(溶剤19)を内部に投入しても漏れることがない箱体として構成されている。上蓋3は平面視において本体部2と同形状に形成した板部材からなり、その一辺にヒンジ等からなる複数の連結部材4・4を設けて本体部2と連結し、上蓋3を上下方向に回動して開閉可能に構成している。但し、上蓋3は着脱可能に構成することもできる。
【0029】
また、本体部2の平面視における面積は散布された農薬を収集したときに検査できる程度の濃度が得られる面積とし、望ましくは、前記本体部2の形状を平面視四角形、かつ、平面視における面積の値を単位面積となるように予め形成しておく。このような形状からなる捕集容器1を用いて、散布対象圃場に散布された農薬を収集することで、該農薬の散布対象圃場における単位面積当たりの散布農薬量を容易に計算することができる。
【0030】
本体部2の高さは後述する溶剤19を必要量溜められる高さとする。尚、本体部2の側面部は全て、該本体部2の内部に溶剤19を充填したときに、該溶剤19の液面表面積と上部の開口面積とが同等となるよう、底面部と直角に設けられている。即ち、前記捕集容器1は溶剤19の液面表面積と同等の開口部を上部に備えるため、液面表面積の領域内に降り落ちた農薬を正確に収集することができる。
【0031】
上蓋3と本体部2の間の当接部分にはシール部材5が設けられている。つまり、上蓋3の裏面周囲、または、本体部2の開口部の上部周囲には、合成樹脂またはゴム等の弾性部材からなるシール部材5が貼付されている。このように構成することで、本体部2の上面の開口部を上蓋3によって閉じれば、外部からの衝撃や搬送時の揺れ等が生じても上蓋3と本体部2の間から内部に貯溜される溶剤19が漏れ出すことがないのである。
【0032】
また、上蓋3と本体部2を連結する前記連結部材4・4の前後反対側には係止手段6が配置されている。該係止手段6は本実施例ではワンタッチ係止具で構成し、上蓋3を閉じた状態で、上蓋3の前部先端に設けたフックを本体部2の側面に設けた係止片6aに引っ掛けて固定するようにしている。こうして、上蓋3を簡単、かつ、容易に本体部2に固定することが可能となり、捕集容器1の内部を密閉状態とすることができる。但し、係止手段6の構成は限定するものではなく、上蓋3を本体部2に固定保持できる構成であればよい。
【0033】
このように、前記捕集容器1の開口部には、開閉可能な蓋(上蓋3)を配置して閉じて、係止手段6で上蓋3を固定することで、農薬の散布終了後において、捕集容器1の回収作業中に該捕集容器1を傾斜させたり、あるいは、該捕集容器1に衝撃が加えられたり等して溶剤19が外部に零れ出すこともなく、かつ、捕集容器1を回収する際には、複数の捕集容器1・1・・・同士を互いに積み重ねることで、これら複数の捕集容器1・1・・・を省スペースにて運搬することができる。また回収し終えたこれら複数の捕集容器1・1・・・は重ねた状態で格納することもできるため、該捕集容器1・1・・・の格納スペースを小さくすることができる。
【0034】
また、前記捕集容器1は風で飛ばされることもなく、多少の振動を受けても設置された箇所からズレルことのない、所定の重量を有するように、金属または合成樹脂等で構成している。このため、農薬散布を無人ヘリコプター53で行った場合でもその風圧や、予期せぬ突風等を受けて、前記捕集容器1は設置された箇所より吹き飛ばされることもない。
【0035】
本体部2の側面または底面、或いは、上蓋3のいずれか一面には識別部材7が貼付されており、複数の捕集容器1・1・・を各々識別できるようにしている。該識別部材7は、例えば、ナンバーを付したり、バーコードを付したり、IDタグ等を付設したりして構成される。本実施例ではIDタグを取り付けることによって、各捕集容器1・1・・・を識別できるようにしている。この識別部材7を付設することで農薬散布後の測定結果等の確認が容易にできるようになっている。
【0036】
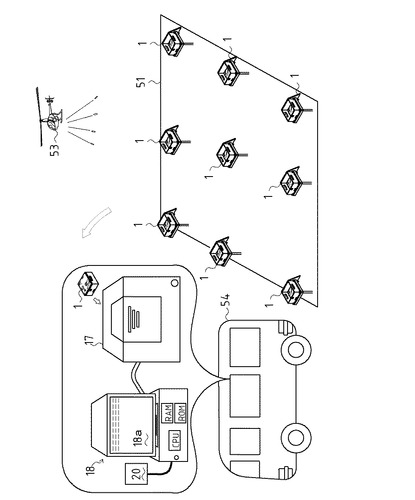
つまり、前記識別部材7には予め散布を予定している農薬や、作物や、日時や、圃場の所有者や、圃場の場所や、設置位置等のデータを書き込んでおき、農薬の散布終了後に、測定箇所に設置された複数の捕集容器1・1・・・を回収して、農薬測定時にコンピュータ18に接続した読取装置20により、これら捕集容器1・1・・・に付設した各々の前記識別部材7・7・・・のデータを読み込む。そして、その測定結果をそのデータに関連付けて格納(記憶)する。更に、散布対象圃場51に設置した全ての捕集容器1・1・・・の測定結果と設置位置から農薬の散布状況を分析する。つまり、散布された農薬が少ない部分や多い部分があるか、ドリフトしているか、規定量の農薬が散布されているか等を分析する。尚、前記コンピュータ18は制御手段(比較演算手段)や、記憶手段や、入力手段や、出力手段としての表示部18a等を備える。
【0037】
このように処理することで、農薬散布状況の検出対象となる圃場(散布対象圃場51)の農薬の散布状況が判り、その結果を記憶し、表示し、印刷等で出力ができるのである。従って、後述するように、農作物の出荷時にコンピュータ18からその農作物の農薬情報を呼び出して開示することができる。さらに、万一、残留農薬が基準値を超過した場合は、その原因を究明するための資料を容易に得ることができ、早急に対策を講じることができる。
【0038】
尚、本実施例において、捕集容器1は矩形状の箱体から形成するものとしているが、これに限定されるものではなく、一定の面積からなる底面を有し、溶剤19を貯溜することが可能であれば、円や楕円形状からなる箱体であってもよい。また、本実施例における捕集容器1は本体部2と上蓋3とを連結部材4・4によって一体構造としているが、これに限定されるものではなく、散布農薬の収集作業の終了後に本体部2の開口を塞いだ後に固定保持されるならば、両部材2・3を別構造にて構成してもよい。
【0039】
[支持台8]
次に、測定対象とする散布農薬採集場所に、捕集容器1を設置するための支持台8について説明する。
前記捕集容器1は支持台8上に載置固定される。該支持台8は天板部9や、角度調節部10や、高さ調節部11や、脚部12等により構成される。即ち、支持台8の最上部には天板部9が配置されており、該天板部9は本実施例では捕集容器1の底面形状に合わせて平面視四角形で略同じ、或いは、多少大きい程度の面積の上面を有するものとし、該上面には捕集容器1を脱着容易に固定する固定手段が設けられている。
【0040】
ここで、本実施例における前記固定手段としては、所定の高さを有するL字形状の突起部9a・9a・・が捕集容器1外周部の四角形の頂点位置に各々設けられており、これら突起部9a・9a・・によって捕集容器1が前後左右方向にずれないように保持されている。尚、前記突起部9a・9a・・は本実施例に限定されるものではなく、例えば、クリップ等を用いて捕集容器1を固定するものであってもよい。
【0041】
天板部9の下面中央部には角度調節部10が固設されており、該角度調節部10の下部には第一軸13が下方に延設されている。そして、該第一軸13の下部はパイプ状に構成した第二軸14の上部に挿入されており、該第二軸14の下端部に脚部12が固設されている。尚、前記第二軸14の上端には高さ調節部11が設けられている。
【0042】
角度調節部10は前記天板部9の下面中央部に球形ジョイント10aを配置して角度変更可能とし、ボルト10bによって所望の角度で固定可能としている。こうして、天板部9が上を向く(水平となる)ように調節して固定支持するものである。即ち、捕集容器1の上蓋3を開き、該捕集容器1の上部の開口が真上を向くように支持するものであって、圃場の傾斜等の土地条件に関わらず散布農薬を収集する時に全ての捕集容器1の角度を水平に一致させて、正確に測定できるようにするものである。
【0043】
尚、角度調節部10は前後方向及び左右方向の回動支点軸により支持して各支点軸を固定する構成であってもよく、所定範囲の角度調節が可能であれば、本実施例の構成に限定するものではない。そして、該角度調節部10の下端部には、第一軸13の上端が固定されている。
【0044】
前記第一軸13及び第二軸14は中空部材からなり、該第一軸13が第二軸14に摺動自在に外嵌されて構成されている。第二軸14の上端には前記高さ調節部11が配設されており、該高さ調節部11にはボルト11a等からなる固定手段が設けられている。そして、第一軸13が第二軸14内で摺動調節(伸縮)された後、該第一軸13を第二軸14に対して前記高さ調節部11によって締着固定することで、天板部9の高さを所望の高さに設定することを可能としている。尚、高さ調節部11は、所定範囲の高さ調節が可能であれば、本実施例の構成に限らず、適用可能である。
【0045】
こうして、前記捕集容器1は圃場面より一定以上の高さ位置に設置されるため、捕集容器1の設置高さを、農作物と略同一の高さとすることで、農作物に実際に散布された状況と略同じ状況にて、散布された農薬を捕捉(収集)することができる。即ち、散布される農薬は全て真直下に降り落ちることはなく、通常は吹付ける農薬の噴出力や地上からの熱気等によりその落下軌跡が歪められる。そのため、捕集容器1の設置高さの違いによっては、収集される農薬の量が大きく異なることとなるが、本発明においては測定対象とする農作物と同一高さに捕集容器1を設けることで、実際に農作物に散布する農薬と同程度の農薬を収集することを可能としている。
【0046】
また、捕集容器1の設置高さはある程度の高さを持たせることができるため、農薬散布用の無人ヘリコプター53の風圧が地上に跳ね返り、下から強風が吹付けられても、内部に貯溜された溶剤19が吹き飛ばされることもない。
【0047】
脚部12は放射状に延びる複数の接地足15・15・・により形成されており、その中心部において第二軸14の下端部に固設されている。各接地足15・15・・の先端部には略円形状の固定部15a・15a・・・が形成されており、該固定部15a・15a・・・の中央部には、杭16・16・・・等によって地面と固定するための孔15b・15b・・が穿孔されている。即ち、外的要因によって転倒したり、設置箇所が変化したりするのを回避するために、脚部12は杭16・16・・・等で地面にしっかりと固定されるのが良い。
【0048】
尚、脚部12は本実施例に示した形状に限らず、所定の重量を有し、地面に固定可能ならば適用可能である。たとえば、該接地足15・15・・・の数は、本実施例(図1)に示す三本に限定されるものではなく、捕集容器1の安定性を担保できればいくつであってもよい。また、接地足15・15・・・の代わりに多角形または円盤状の板部材により接地部を形成することも可能であり、所謂、スタンドとなり安定させることができる構成であればその構造は限定するものではない。
【0049】
このような構成からなる支持台8を用いて、捕集容器1を測定対象とする散布農薬採集場所に設置するには、まず、脚部12の接地足15・15・・・を地面に固定し、次に、高さ調節部11によって、天板部9が農作物(の上端)と略同じ高さになるように高さを調節する。次に、角度調節部10によって、天板部9が上向き(水平)になるように調節し、最後に、散布農薬採集場所のデータを書き込んだIDタグ付捕集容器1を天板部9に固定するようにすればよい。
【0050】
こうして、圃場内外を問わず、地面の状況によらないで、捕集容器1を所望の設置位置に測定に適した状態で固定することができる。また、農作物の種類によらず、農薬散布面を適切な高さ、及び、適切な向きで測定することが可能となり、散布農薬の正確な測定が可能となる。
【0051】
次に、本発明における、圃場での農薬の散布量を検出するための農薬採取方法について説明する。
測定対象となる圃場(散布対象圃場51)の複数箇所において農作物の近傍に前述のように捕集容器1・1・・・を設置する。この捕集容器1・1・・・は、散布対象圃場51内の単位面積当たりに一つづつ、または、所定間隔毎に、或いは、中央部と周囲に適宜間隔をあけて設置する。この設置間隔は天候(風の方向)や、地形や、農薬の種類や、農薬の散布量や、捕集容器1・1・・・の個数等によって適宜考慮して設置される。
【0052】
散布対象圃場51に設置された、これら複数の捕集容器1・1・・・内には収集した農薬が乾燥して固化しないように各々溶剤19・19・・・が充填されている。ここで、本発明においては散布された農薬を捕捉(収集)するための前記溶剤19・19・・・は水を用いるため、容易に安価に溶剤を手に入れることができる。また、各捕集容器1・1・・・内部の洗浄も容易にでき、衛生的である。
【0053】
尚、前記溶剤19・19・・・として用いられる液体は本実施例では水が使用されるが、この場合、純水を使用するのが望ましい。しかし、農薬の種類によっては水に溶けない場合もあり、このような場合は有機溶剤、例えば、アセトン等を使用する。
【0054】
つまり、散布された薬剤を捕捉(収集)するための前記液体は、水に溶けないような農薬を収集するにはアセトン等からなる有機溶剤とすることで、収集した薬剤が固まりとなって浮遊したり沈殿したりすることもなく、該薬剤を確実に溶剤に溶融することができ、薬剤濃度の検出誤差が発生しにくく、正確な前記薬剤の散布量を検出することができる。
【0055】
収集された農薬は後述のとおり、溶剤19・19・・・に溶けた状態のまま、分析装置17を用いて定量的に濃度測定されるため、従来の感水紙等を用いた散布状況の判断法と比べて手間がかからず、また、正確な散布状況、つまり、農作物への農薬の散布状況に関する判断を行うことができる。即ち、感水紙等による判断法では該感水紙等に形成された斑点の大きさを目視で判断するため、農薬散布量の判断結果に個人的格差が生じやすく、また、非常に多くの手間隙がかかったが、本発明によれば、光分析技術を用いた分析装置17により、容易に農薬散布量の判定をおこなうことができる。
【0056】
尚、これら捕集容器1・1・・・の内部には底面全面が浸されるに最低限必要な量の溶剤19・19・・・を貯溜するので、散布された農薬はその後乾固することもなく、容易に捕集容器1・1・・・から採取することができ、かつ、捕集容器1・1・・・に貯溜される溶剤19・19・・・の量は必要最低限で済むため、無駄に溶剤19・19・・・が消費されない。また、溶剤19・19・・・には水を用いることで容易に安価に手に入れることができる。
【0057】
[光分析技術]
次に、図3を用いて本実施例に用いる光分析技術を用いた測定手段となる分析装置17及び、該分析装置17に接続されたコンピュータ18について説明する。
【0058】
本実施例で使用する分析装置17は、フーリエ変換赤外分光光度計(FT−IR)を用いた測定機器であって、その測定方法はATR法(Attenuated Total Reflection、全反射測定法)を適用するものである。ここでATR法とは、ATRプリズムと呼ばれる媒体を介して、測定対象物の表面で全反射する反射光を測定することにより、該測定対象物の赤外吸収スペクトルを得る方法であり、検出された赤外吸収スペクトルを定量的、或いは、定性的に分析することで、農薬散布量(農薬濃度)を検出するものである。
【0059】
即ち、農薬の散布終了後に回収された複数の前記捕集容器1・1・・・に溜めた液体(溶剤19・19・・・)を取り出し、該溶剤19・19・・・を各々ATR法により赤外光(本実施例では中赤外光)を得てフーリエ変換赤外分光光度計(FT−IR)を用いてスペクトル分析して、それぞれの吸光度のデータを取得し、コンピュータ18の記憶手段に記憶する。
【0060】
一方、コンピュータ18には測定対象となる農薬の質量(濃度)を予測算出する検量式を予め記憶させておく。前記検量式は、予め試験等により標準試料(農薬の成分)毎に吸光度と濃度との関係を表す検量線を求めておくものであり、言い換えれば、複数種類の濃度からなる既知の質量の農薬を予め溶解した溶剤19・19・・・に対して吸光度を測定して検量線を得て、農薬の質量(濃度)との関係式(検量式)を導き記憶手段に記憶しておくものである。
【0061】
このようにして前記分析装置17による測定時に、既知の濃度の農薬が溶融した同種液体から予め取得した赤外光によるスペクトル分析したデータと、散布後の捕集容器1の液体(溶剤19)をスペクトル分析して得たデータをコンピュータ18により比較演算して農薬の成分を特定し、それぞれの農薬成分の濃度を前記検量式を用いて算出し、単位面積当たりの農薬質量を予測算出して測定値とし、記憶手段に記憶するとともに、表示部18aに前記予測結果を測定結果として表示するように構成する。
【0062】
そして、この測定結果である算出された農薬の濃度が適正範囲内か、不足しているか、適正範囲を越えているかをコンピュータ18で判断し、その判断結果も表示部18aで表示する。更に、複数の捕集容器1・1・・・で採取したデータ(測定結果)とそれぞれの前記IDタグ等の識別部材7・7・・・のデータ(捕集場所等)と、農薬散布時期、散布農薬量、農薬散布時の風向、風速等のデータを併せてコンピュータ18の記憶手段に記憶しておくことで、今後の散布時に、ドリフト防止や散布方法等に役立てることもでき、更に、出荷時の農薬散布履歴の証明など、所謂、トレーサビリティに役立てることができる。
【0063】
このように、本発明においては、散布された農薬の濃度を、散布された農薬が溶かされた溶剤19を測定対象としているため、該溶剤19における農薬濃度と、散布された農薬の散布量とを定量的に関係付けることができ、農薬の散布量に関する適切な測定結果を得ることができる。
【0064】
そして、上面を開放した捕集容器1・1・・・内に液体(溶剤19・19・・・)を充填し、該捕集容器1・1・・・を圃場の適所に複数設置し、農薬散布時に前記捕集容器1・1・・・内の溶剤19・19・・・に散布農薬を収集し、この溶剤19・19・・・を赤外光によりスペクトル分析したデータと、既知の濃度の農薬を前記溶剤19・19・・・に溶融した液体から予め取得した赤外光によるスペクトル分析したデータとをコンピュータ18に入力して比較演算し、散布農薬量を測定することにより、散布された農薬は溶剤19・19・・・に溶けた状態で収集することができるため、後に赤外分光光度計で分析する際に、測定対象とする農薬を均一に取り出すことができ、成分も容易に検出することができる。
【0065】
また、実際に農作物に散布する農薬と同程度の農薬を収集することが可能となり、正確な農作物への農薬散布状況を把握することができる。さらに、後述のとおり、散布対象圃場の内外において複数の捕集容器1・1・・・を設置することで、該散布対象圃場ではない場所に農薬が飛散する、いわゆるドリフトによる農薬も収集することができる。
[判定方法(捕集容器1の設置)]
【0066】
次に、図3、および、図4を用いて本発明における捕集容器1を用いた散布農薬を収集するための具体的な方法を説明する。
まず、図3、図4に示すように、複数の捕集容器1・1・・・を農薬散布対象となる圃場内外の適所に支持台8を用いて設置する。次に、無人ヘリコプター53、または、ブームスプレヤー等の散布装置、または、人手により農薬を散布する。
【0067】
農薬の散布後、つまり、完全に農薬が作物に行き渡り、空中に遊する農薬がなくなった後に、全ての捕集容器1・1・・・を回収し、分析装置17やコンピュータ18等が搭載された車両54、または、検査機関に持ち込む。そして、回収された捕集容器1・1・・・に貯溜された溶剤19・19・・・において、分析に必要な所定の量を各々の捕集容器1・1・・・から取出し、分析装置17を用いて測定する。
【0068】
こうして、単位面積当たりの散布された農薬の質量を予測算出して散布された農薬濃度の測定結果を得て、散布対象圃場51の農薬散布状況(実際に農作物に散布された農薬の散布量が適量であるかどうか)を判定することができる。
【0069】
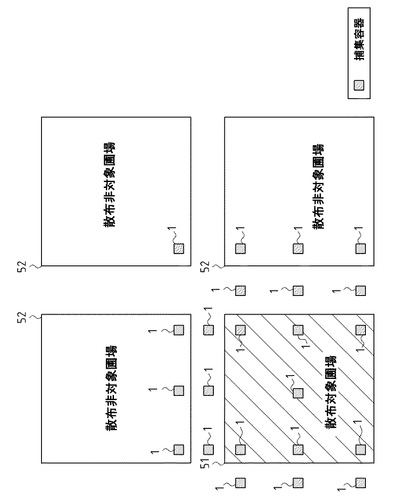
また、農薬の散布対象圃場51だけでなく、該散布対象圃場51の周囲における複数の散布非対象圃場52・52・・・にも設置することで、農薬散布時のドリフト状況を検知することも可能である。
【0070】
具体的には、農薬の散布対象圃場51に近接する散布非対象圃場52・52・・・や畦、或いは、農道などにも、農薬の散布対象圃場51の端部から所定距離離れた位置に捕集容器1・1・・・を散布対象圃場51への設置と同時に設置しておく。尚、この時設置した複数の捕集容器1・1・・・には、各々の設置場所に関する情報をIDタグに書き込んでおく。
【0071】
そして、農薬が散布された後、これら複数の捕集容器1・1・・・を回収し、該捕集容器1・1・・・内の溶剤19・19・・・を前記方法にて測定することで、農薬の散布対象圃場51に設置した捕集容器1・1・・・からは単位面積当たりの農薬の量が適正であるかどうか判断できる。この結果から、農薬の散布量が不足していたり、多過ぎた場合などには、次回の散布作業時に、散布装置の噴出量を調節したり、農薬自体の希釈量を変更したり、農薬の散布量が不足する場合には不足場所に追加散布することができる。
【0072】
また、農薬の散布非対象圃場52・52・・・に設置した捕集容器1・1・・・からはドリフト量を検出することができ、この結果から、風速に対して風上側のどの位置まで散布可能であるか、どれだけ離れた位置までは許容範囲であるか等を判断することができる。
【0073】
このように、農薬散布後における農作物への散布状況を光分析技術によって測定する際の散布農薬の収集方法であって、農薬散布前に前記農作物と同一高さに設けた複数の捕集容器1・1・・・を、圃場内外の測定箇所に設置することで、より正確な農作物への農薬散布状況を把握することができる。
【0074】
また、圃場内外において複数の捕集容器1・1・・・を設置することにより、圃場全体に渡り散布された農薬を一度収集することができ、同時に、散布対象外領域に散布された農薬(所謂ドリフト)も収集することができる。
【図面の簡単な説明】
【0075】
【図1】本発明の一実施例に係る捕集容器の全体的な構成を示した斜視図。
【図2】同じく捕集容器の側面詳細図。
【図3】散布農薬収集時の模式図。
【図4】同じく散布農薬収集時の捕集容器の配置例を示す平面図。
【符号の説明】
【0076】
1 捕集容器
2 本体部
3 上蓋
4 連結部材
5 シール部材
6 板部材
7 識別部材
8 支持台
9 天板部
9a 突起部
10 角度調節部
10b ボルト
11 高さ調節部
11a ボルト
12 脚部
13 第一軸
14 第二軸
15 接地足
15a 固定部
16 杭
【技術分野】
【0001】
本発明は、農薬散布時の農作物への付着状況を確認するために、圃場に設置した捕集容器により散布農薬を検出するための技術に関する。
【背景技術】
【0002】
近年、食品衛生法の改正に伴い、農作物に対する厳密な残留農薬基準値が設けられたことから、農作物の残留農薬に対する注目が集まっており、適切な農薬散布や、出荷時における農作物の残留農薬値に対する正確な測定等が求められている。この農作物に残留する農薬の分析方法は赤外分光光度計を用いることで可能となっている(例えば、特許文献1参照。)。
【0003】
しかし、農薬散布時には、風などの影響を受けて、散布対象圃場ではない場所に農薬が飛散する、いわゆるドリフトが発生し、農薬の効能が不足するため該薬剤を追加散布したり、或いは逆に、他の散布対象地となる場所から薬剤が飛散してきて農作物に散布し、該農作物の残留農薬値が基準値を超える場合がある。
【0004】
このような状況において、農薬散布時の散布量やその分布、ドリフト判定等の散布状況の確認は、非常に重要な課題となっており、農薬の散布時、および、農薬の散布後における、農薬散布量(農薬濃度)等の散布状況の確認方法として、作業者による目視、或いは、感水紙による確認方法がとられていた。
【特許文献1】特開平8−170941号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、作業者の目視による確認方法では、正確な農薬の散布状況を判定することは困難であり、各個人における判定結果にばらつきが生じやすく、正確な農薬の散布状況が判定できないばかりか、確認作業に手間がかかっていた。
また、感水紙を用いた確認方法では、農薬散布量(農薬濃度)の農薬散布データを数値化することが困難であった。さらに、農薬散布後において残留農薬基準値を超過しているか否かの判断基準は、作業者等の経験則に基づくものであり、確実性に欠けていた。
【0006】
加えて、感水紙を用いた確認方法では農薬だけでなく、水も農薬と判断されてしまうため、農薬水溶液のいわゆる「溶けむら」に対応できなかったり、雨風等の自然条件を受けて該感水紙の設置角度、設置位置等を変更せざるを得ず、測定精度が落ちたりするという問題点もあった。
【0007】
このような状況を改善するべく、光分析技術を用いた農薬散布状況の判定手法が知られている。前記手法によれば、農薬濃度を測定することで、そこに含まれる農薬の散布量を定量的に把握することができ、精度の高い農薬の散布状況を判定することができる。
【0008】
しかし、前記判定手法は測定手段としては高い精度を保証し得るものの、圃場に載置する板部材に付着した散布後の農薬を直接、測定対象としているため、事実上、正確な判定結果を得ることが困難であった。即ち、板部材に付着した農薬の一滴の濃度は略同じであるため、付着斑点の一つは測定できても、付着した程度までは定量することはできなかった。
【0009】
本発明は、係る問題点を鑑みてなされたものであり、解決しようとする問題は、農薬散布後における農作物への農薬の散布状況を確認するべく、光分析技術によって容易に判定できる、散布農薬検出方法を提供することである。
【課題を解決するための手段】
【0010】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0011】
即ち、請求項1においては、上面を開放した捕集容器内に液体を充填し、該捕集容器を圃場の適所に複数設置し、農薬散布時に前記捕集容器内の液体に散布農薬を捕捉し、この液体を赤外光によりスペクトル分析したデータと、既知の濃度の農薬を前記液体に溶融した液体から予め取得した赤外光によるスペクトル分析したデータとをコンピュータに入力して比較演算し、散布農薬量を測定するものである。
【0012】
請求項2においては、前記捕集容器は液面表面積と同等の開口面積を有する開口部を上部に備えるものである。
【0013】
請求項3においては、前記捕集容器の開口部には、開閉可能な蓋を備えるものである。
【0014】
請求項4においては、前記捕集容器内に充填する液体は水とするものである。
【0015】
請求項5においては、前記捕集容器は圃場面より一定以上の高さ位置に設置されるものである。
【0016】
請求項6においては、前記赤外光のスペクトルはATR法で得るものである。
【0017】
請求項7においては、前記捕集容器内に充填する液体は有機溶剤とするものである。
【発明の効果】
【0018】
本発明の効果として、以下に示すような効果を奏する。
【0019】
請求項1においては、散布された農薬は液体に溶けた状態で捕捉(収集)することができるため、後に赤外分光光度計で分析する際に、測定対象とする農薬を均一に取り出すことができ、該農薬の成分も容易に検出することができる。また、実際に農作物に散布する農薬と同程度の農薬を収集することが可能となり、正確な農作物への農薬散布状況を把握することができる。さらに、散布対象圃場の内外において複数の捕集容器を設置することで、該散布対象圃場ではない場所に農薬が飛散する、いわゆるドリフトによる農薬も収集することができる。
【0020】
請求項2においては、液面表面積の領域内に降り落ちた農薬を正確に収集することができ、該液面表面積の値を単位面積とすることで、単位面積当たりの農薬の散布量を容易に検出することができる。
【0021】
請求項3においては、捕集容器に降り落ちた農薬は回収時に乾固することがなく、容易に捕集容器から取出すことができる。また、搬送時には液体がこぼれ出すこともなく、捕集容器の回収や格納時には、該捕集容器を積み重ねることで省スペースにて該捕集容器の搬送や格納することができる。
【0022】
請求項4においては、薬剤を溶融するための溶媒として用いられる、捕集容器に貯溜する液体(溶剤)を水とすることで、該溶剤を安価で容易に得ることができる。また、捕集容器内部の洗浄も容易に行うことができ、衛生的である。
【0023】
請求項5においては、捕集容器の設置高さを、農作物と略同一の高さにすることで、農作物に実際に散布された状況と略同じ状況にて、散布された農薬を捕捉(収集)することができる。即ち、散布される農薬は全て真直下に降り落ちることはなく、通常は吹付ける噴出力や地上からの熱気等によりその落下軌跡が歪められる。そのため、捕集容器の設置高さの違いによっては、収集される農薬の量が大きく異なることとなるが、本発明においては測定対象とする農作物と同一高さに捕集容器1を設けることで、実際に農作物に散布する農薬と同程度の農薬を収集することを可能としている。
【0024】
請求項6においては、正確な農薬の散布量を検出することができる。
【0025】
請求項7においては、薬剤を溶融するための溶媒として用いられる、捕集容器に貯溜する液体(溶剤)を有機溶剤とすることで、捕捉(収集)した薬剤が固まりとなって浮遊したり沈殿したりすることもなく、該薬剤を確実に溶剤に溶融することができ、薬剤濃度の検出誤差が発生しにくく、正確な前記薬剤の散布量を検出することができる。
【発明を実施するための最良の形態】
【0026】
次に、発明の実施の形態を説明する。
図1は本発明の一実施例に係る捕集容器の全体的な構成を示した斜視図、図2は同じく捕集容器の側面詳細図、図3は散布農薬収集時の模式図、図4は同じく散布農薬収集時の捕集容器の配置例を示す平面図である。
【0027】
[捕集容器1]
まず、本発明の一実施例における捕集容器1と、該捕集容器1を固定保持する支持台8について、図1、および、図2を用いて説明する。尚、図1、および、図2に示す矢印Aの方向は前方を示し、これに基づいて左右方向を規定する。
【0028】
捕集容器1は平面視四角形からなる箱体の本体部2や、該本体部2の上部に設けられる上蓋3等により構成される。本体部2の上面は全面開口されており、前記上蓋3によって捕集容器1は上部の開口が塞がれている。即ち、捕集容器1は液体(溶剤19)を内部に投入しても漏れることがない箱体として構成されている。上蓋3は平面視において本体部2と同形状に形成した板部材からなり、その一辺にヒンジ等からなる複数の連結部材4・4を設けて本体部2と連結し、上蓋3を上下方向に回動して開閉可能に構成している。但し、上蓋3は着脱可能に構成することもできる。
【0029】
また、本体部2の平面視における面積は散布された農薬を収集したときに検査できる程度の濃度が得られる面積とし、望ましくは、前記本体部2の形状を平面視四角形、かつ、平面視における面積の値を単位面積となるように予め形成しておく。このような形状からなる捕集容器1を用いて、散布対象圃場に散布された農薬を収集することで、該農薬の散布対象圃場における単位面積当たりの散布農薬量を容易に計算することができる。
【0030】
本体部2の高さは後述する溶剤19を必要量溜められる高さとする。尚、本体部2の側面部は全て、該本体部2の内部に溶剤19を充填したときに、該溶剤19の液面表面積と上部の開口面積とが同等となるよう、底面部と直角に設けられている。即ち、前記捕集容器1は溶剤19の液面表面積と同等の開口部を上部に備えるため、液面表面積の領域内に降り落ちた農薬を正確に収集することができる。
【0031】
上蓋3と本体部2の間の当接部分にはシール部材5が設けられている。つまり、上蓋3の裏面周囲、または、本体部2の開口部の上部周囲には、合成樹脂またはゴム等の弾性部材からなるシール部材5が貼付されている。このように構成することで、本体部2の上面の開口部を上蓋3によって閉じれば、外部からの衝撃や搬送時の揺れ等が生じても上蓋3と本体部2の間から内部に貯溜される溶剤19が漏れ出すことがないのである。
【0032】
また、上蓋3と本体部2を連結する前記連結部材4・4の前後反対側には係止手段6が配置されている。該係止手段6は本実施例ではワンタッチ係止具で構成し、上蓋3を閉じた状態で、上蓋3の前部先端に設けたフックを本体部2の側面に設けた係止片6aに引っ掛けて固定するようにしている。こうして、上蓋3を簡単、かつ、容易に本体部2に固定することが可能となり、捕集容器1の内部を密閉状態とすることができる。但し、係止手段6の構成は限定するものではなく、上蓋3を本体部2に固定保持できる構成であればよい。
【0033】
このように、前記捕集容器1の開口部には、開閉可能な蓋(上蓋3)を配置して閉じて、係止手段6で上蓋3を固定することで、農薬の散布終了後において、捕集容器1の回収作業中に該捕集容器1を傾斜させたり、あるいは、該捕集容器1に衝撃が加えられたり等して溶剤19が外部に零れ出すこともなく、かつ、捕集容器1を回収する際には、複数の捕集容器1・1・・・同士を互いに積み重ねることで、これら複数の捕集容器1・1・・・を省スペースにて運搬することができる。また回収し終えたこれら複数の捕集容器1・1・・・は重ねた状態で格納することもできるため、該捕集容器1・1・・・の格納スペースを小さくすることができる。
【0034】
また、前記捕集容器1は風で飛ばされることもなく、多少の振動を受けても設置された箇所からズレルことのない、所定の重量を有するように、金属または合成樹脂等で構成している。このため、農薬散布を無人ヘリコプター53で行った場合でもその風圧や、予期せぬ突風等を受けて、前記捕集容器1は設置された箇所より吹き飛ばされることもない。
【0035】
本体部2の側面または底面、或いは、上蓋3のいずれか一面には識別部材7が貼付されており、複数の捕集容器1・1・・を各々識別できるようにしている。該識別部材7は、例えば、ナンバーを付したり、バーコードを付したり、IDタグ等を付設したりして構成される。本実施例ではIDタグを取り付けることによって、各捕集容器1・1・・・を識別できるようにしている。この識別部材7を付設することで農薬散布後の測定結果等の確認が容易にできるようになっている。
【0036】
つまり、前記識別部材7には予め散布を予定している農薬や、作物や、日時や、圃場の所有者や、圃場の場所や、設置位置等のデータを書き込んでおき、農薬の散布終了後に、測定箇所に設置された複数の捕集容器1・1・・・を回収して、農薬測定時にコンピュータ18に接続した読取装置20により、これら捕集容器1・1・・・に付設した各々の前記識別部材7・7・・・のデータを読み込む。そして、その測定結果をそのデータに関連付けて格納(記憶)する。更に、散布対象圃場51に設置した全ての捕集容器1・1・・・の測定結果と設置位置から農薬の散布状況を分析する。つまり、散布された農薬が少ない部分や多い部分があるか、ドリフトしているか、規定量の農薬が散布されているか等を分析する。尚、前記コンピュータ18は制御手段(比較演算手段)や、記憶手段や、入力手段や、出力手段としての表示部18a等を備える。
【0037】
このように処理することで、農薬散布状況の検出対象となる圃場(散布対象圃場51)の農薬の散布状況が判り、その結果を記憶し、表示し、印刷等で出力ができるのである。従って、後述するように、農作物の出荷時にコンピュータ18からその農作物の農薬情報を呼び出して開示することができる。さらに、万一、残留農薬が基準値を超過した場合は、その原因を究明するための資料を容易に得ることができ、早急に対策を講じることができる。
【0038】
尚、本実施例において、捕集容器1は矩形状の箱体から形成するものとしているが、これに限定されるものではなく、一定の面積からなる底面を有し、溶剤19を貯溜することが可能であれば、円や楕円形状からなる箱体であってもよい。また、本実施例における捕集容器1は本体部2と上蓋3とを連結部材4・4によって一体構造としているが、これに限定されるものではなく、散布農薬の収集作業の終了後に本体部2の開口を塞いだ後に固定保持されるならば、両部材2・3を別構造にて構成してもよい。
【0039】
[支持台8]
次に、測定対象とする散布農薬採集場所に、捕集容器1を設置するための支持台8について説明する。
前記捕集容器1は支持台8上に載置固定される。該支持台8は天板部9や、角度調節部10や、高さ調節部11や、脚部12等により構成される。即ち、支持台8の最上部には天板部9が配置されており、該天板部9は本実施例では捕集容器1の底面形状に合わせて平面視四角形で略同じ、或いは、多少大きい程度の面積の上面を有するものとし、該上面には捕集容器1を脱着容易に固定する固定手段が設けられている。
【0040】
ここで、本実施例における前記固定手段としては、所定の高さを有するL字形状の突起部9a・9a・・が捕集容器1外周部の四角形の頂点位置に各々設けられており、これら突起部9a・9a・・によって捕集容器1が前後左右方向にずれないように保持されている。尚、前記突起部9a・9a・・は本実施例に限定されるものではなく、例えば、クリップ等を用いて捕集容器1を固定するものであってもよい。
【0041】
天板部9の下面中央部には角度調節部10が固設されており、該角度調節部10の下部には第一軸13が下方に延設されている。そして、該第一軸13の下部はパイプ状に構成した第二軸14の上部に挿入されており、該第二軸14の下端部に脚部12が固設されている。尚、前記第二軸14の上端には高さ調節部11が設けられている。
【0042】
角度調節部10は前記天板部9の下面中央部に球形ジョイント10aを配置して角度変更可能とし、ボルト10bによって所望の角度で固定可能としている。こうして、天板部9が上を向く(水平となる)ように調節して固定支持するものである。即ち、捕集容器1の上蓋3を開き、該捕集容器1の上部の開口が真上を向くように支持するものであって、圃場の傾斜等の土地条件に関わらず散布農薬を収集する時に全ての捕集容器1の角度を水平に一致させて、正確に測定できるようにするものである。
【0043】
尚、角度調節部10は前後方向及び左右方向の回動支点軸により支持して各支点軸を固定する構成であってもよく、所定範囲の角度調節が可能であれば、本実施例の構成に限定するものではない。そして、該角度調節部10の下端部には、第一軸13の上端が固定されている。
【0044】
前記第一軸13及び第二軸14は中空部材からなり、該第一軸13が第二軸14に摺動自在に外嵌されて構成されている。第二軸14の上端には前記高さ調節部11が配設されており、該高さ調節部11にはボルト11a等からなる固定手段が設けられている。そして、第一軸13が第二軸14内で摺動調節(伸縮)された後、該第一軸13を第二軸14に対して前記高さ調節部11によって締着固定することで、天板部9の高さを所望の高さに設定することを可能としている。尚、高さ調節部11は、所定範囲の高さ調節が可能であれば、本実施例の構成に限らず、適用可能である。
【0045】
こうして、前記捕集容器1は圃場面より一定以上の高さ位置に設置されるため、捕集容器1の設置高さを、農作物と略同一の高さとすることで、農作物に実際に散布された状況と略同じ状況にて、散布された農薬を捕捉(収集)することができる。即ち、散布される農薬は全て真直下に降り落ちることはなく、通常は吹付ける農薬の噴出力や地上からの熱気等によりその落下軌跡が歪められる。そのため、捕集容器1の設置高さの違いによっては、収集される農薬の量が大きく異なることとなるが、本発明においては測定対象とする農作物と同一高さに捕集容器1を設けることで、実際に農作物に散布する農薬と同程度の農薬を収集することを可能としている。
【0046】
また、捕集容器1の設置高さはある程度の高さを持たせることができるため、農薬散布用の無人ヘリコプター53の風圧が地上に跳ね返り、下から強風が吹付けられても、内部に貯溜された溶剤19が吹き飛ばされることもない。
【0047】
脚部12は放射状に延びる複数の接地足15・15・・により形成されており、その中心部において第二軸14の下端部に固設されている。各接地足15・15・・の先端部には略円形状の固定部15a・15a・・・が形成されており、該固定部15a・15a・・・の中央部には、杭16・16・・・等によって地面と固定するための孔15b・15b・・が穿孔されている。即ち、外的要因によって転倒したり、設置箇所が変化したりするのを回避するために、脚部12は杭16・16・・・等で地面にしっかりと固定されるのが良い。
【0048】
尚、脚部12は本実施例に示した形状に限らず、所定の重量を有し、地面に固定可能ならば適用可能である。たとえば、該接地足15・15・・・の数は、本実施例(図1)に示す三本に限定されるものではなく、捕集容器1の安定性を担保できればいくつであってもよい。また、接地足15・15・・・の代わりに多角形または円盤状の板部材により接地部を形成することも可能であり、所謂、スタンドとなり安定させることができる構成であればその構造は限定するものではない。
【0049】
このような構成からなる支持台8を用いて、捕集容器1を測定対象とする散布農薬採集場所に設置するには、まず、脚部12の接地足15・15・・・を地面に固定し、次に、高さ調節部11によって、天板部9が農作物(の上端)と略同じ高さになるように高さを調節する。次に、角度調節部10によって、天板部9が上向き(水平)になるように調節し、最後に、散布農薬採集場所のデータを書き込んだIDタグ付捕集容器1を天板部9に固定するようにすればよい。
【0050】
こうして、圃場内外を問わず、地面の状況によらないで、捕集容器1を所望の設置位置に測定に適した状態で固定することができる。また、農作物の種類によらず、農薬散布面を適切な高さ、及び、適切な向きで測定することが可能となり、散布農薬の正確な測定が可能となる。
【0051】
次に、本発明における、圃場での農薬の散布量を検出するための農薬採取方法について説明する。
測定対象となる圃場(散布対象圃場51)の複数箇所において農作物の近傍に前述のように捕集容器1・1・・・を設置する。この捕集容器1・1・・・は、散布対象圃場51内の単位面積当たりに一つづつ、または、所定間隔毎に、或いは、中央部と周囲に適宜間隔をあけて設置する。この設置間隔は天候(風の方向)や、地形や、農薬の種類や、農薬の散布量や、捕集容器1・1・・・の個数等によって適宜考慮して設置される。
【0052】
散布対象圃場51に設置された、これら複数の捕集容器1・1・・・内には収集した農薬が乾燥して固化しないように各々溶剤19・19・・・が充填されている。ここで、本発明においては散布された農薬を捕捉(収集)するための前記溶剤19・19・・・は水を用いるため、容易に安価に溶剤を手に入れることができる。また、各捕集容器1・1・・・内部の洗浄も容易にでき、衛生的である。
【0053】
尚、前記溶剤19・19・・・として用いられる液体は本実施例では水が使用されるが、この場合、純水を使用するのが望ましい。しかし、農薬の種類によっては水に溶けない場合もあり、このような場合は有機溶剤、例えば、アセトン等を使用する。
【0054】
つまり、散布された薬剤を捕捉(収集)するための前記液体は、水に溶けないような農薬を収集するにはアセトン等からなる有機溶剤とすることで、収集した薬剤が固まりとなって浮遊したり沈殿したりすることもなく、該薬剤を確実に溶剤に溶融することができ、薬剤濃度の検出誤差が発生しにくく、正確な前記薬剤の散布量を検出することができる。
【0055】
収集された農薬は後述のとおり、溶剤19・19・・・に溶けた状態のまま、分析装置17を用いて定量的に濃度測定されるため、従来の感水紙等を用いた散布状況の判断法と比べて手間がかからず、また、正確な散布状況、つまり、農作物への農薬の散布状況に関する判断を行うことができる。即ち、感水紙等による判断法では該感水紙等に形成された斑点の大きさを目視で判断するため、農薬散布量の判断結果に個人的格差が生じやすく、また、非常に多くの手間隙がかかったが、本発明によれば、光分析技術を用いた分析装置17により、容易に農薬散布量の判定をおこなうことができる。
【0056】
尚、これら捕集容器1・1・・・の内部には底面全面が浸されるに最低限必要な量の溶剤19・19・・・を貯溜するので、散布された農薬はその後乾固することもなく、容易に捕集容器1・1・・・から採取することができ、かつ、捕集容器1・1・・・に貯溜される溶剤19・19・・・の量は必要最低限で済むため、無駄に溶剤19・19・・・が消費されない。また、溶剤19・19・・・には水を用いることで容易に安価に手に入れることができる。
【0057】
[光分析技術]
次に、図3を用いて本実施例に用いる光分析技術を用いた測定手段となる分析装置17及び、該分析装置17に接続されたコンピュータ18について説明する。
【0058】
本実施例で使用する分析装置17は、フーリエ変換赤外分光光度計(FT−IR)を用いた測定機器であって、その測定方法はATR法(Attenuated Total Reflection、全反射測定法)を適用するものである。ここでATR法とは、ATRプリズムと呼ばれる媒体を介して、測定対象物の表面で全反射する反射光を測定することにより、該測定対象物の赤外吸収スペクトルを得る方法であり、検出された赤外吸収スペクトルを定量的、或いは、定性的に分析することで、農薬散布量(農薬濃度)を検出するものである。
【0059】
即ち、農薬の散布終了後に回収された複数の前記捕集容器1・1・・・に溜めた液体(溶剤19・19・・・)を取り出し、該溶剤19・19・・・を各々ATR法により赤外光(本実施例では中赤外光)を得てフーリエ変換赤外分光光度計(FT−IR)を用いてスペクトル分析して、それぞれの吸光度のデータを取得し、コンピュータ18の記憶手段に記憶する。
【0060】
一方、コンピュータ18には測定対象となる農薬の質量(濃度)を予測算出する検量式を予め記憶させておく。前記検量式は、予め試験等により標準試料(農薬の成分)毎に吸光度と濃度との関係を表す検量線を求めておくものであり、言い換えれば、複数種類の濃度からなる既知の質量の農薬を予め溶解した溶剤19・19・・・に対して吸光度を測定して検量線を得て、農薬の質量(濃度)との関係式(検量式)を導き記憶手段に記憶しておくものである。
【0061】
このようにして前記分析装置17による測定時に、既知の濃度の農薬が溶融した同種液体から予め取得した赤外光によるスペクトル分析したデータと、散布後の捕集容器1の液体(溶剤19)をスペクトル分析して得たデータをコンピュータ18により比較演算して農薬の成分を特定し、それぞれの農薬成分の濃度を前記検量式を用いて算出し、単位面積当たりの農薬質量を予測算出して測定値とし、記憶手段に記憶するとともに、表示部18aに前記予測結果を測定結果として表示するように構成する。
【0062】
そして、この測定結果である算出された農薬の濃度が適正範囲内か、不足しているか、適正範囲を越えているかをコンピュータ18で判断し、その判断結果も表示部18aで表示する。更に、複数の捕集容器1・1・・・で採取したデータ(測定結果)とそれぞれの前記IDタグ等の識別部材7・7・・・のデータ(捕集場所等)と、農薬散布時期、散布農薬量、農薬散布時の風向、風速等のデータを併せてコンピュータ18の記憶手段に記憶しておくことで、今後の散布時に、ドリフト防止や散布方法等に役立てることもでき、更に、出荷時の農薬散布履歴の証明など、所謂、トレーサビリティに役立てることができる。
【0063】
このように、本発明においては、散布された農薬の濃度を、散布された農薬が溶かされた溶剤19を測定対象としているため、該溶剤19における農薬濃度と、散布された農薬の散布量とを定量的に関係付けることができ、農薬の散布量に関する適切な測定結果を得ることができる。
【0064】
そして、上面を開放した捕集容器1・1・・・内に液体(溶剤19・19・・・)を充填し、該捕集容器1・1・・・を圃場の適所に複数設置し、農薬散布時に前記捕集容器1・1・・・内の溶剤19・19・・・に散布農薬を収集し、この溶剤19・19・・・を赤外光によりスペクトル分析したデータと、既知の濃度の農薬を前記溶剤19・19・・・に溶融した液体から予め取得した赤外光によるスペクトル分析したデータとをコンピュータ18に入力して比較演算し、散布農薬量を測定することにより、散布された農薬は溶剤19・19・・・に溶けた状態で収集することができるため、後に赤外分光光度計で分析する際に、測定対象とする農薬を均一に取り出すことができ、成分も容易に検出することができる。
【0065】
また、実際に農作物に散布する農薬と同程度の農薬を収集することが可能となり、正確な農作物への農薬散布状況を把握することができる。さらに、後述のとおり、散布対象圃場の内外において複数の捕集容器1・1・・・を設置することで、該散布対象圃場ではない場所に農薬が飛散する、いわゆるドリフトによる農薬も収集することができる。
[判定方法(捕集容器1の設置)]
【0066】
次に、図3、および、図4を用いて本発明における捕集容器1を用いた散布農薬を収集するための具体的な方法を説明する。
まず、図3、図4に示すように、複数の捕集容器1・1・・・を農薬散布対象となる圃場内外の適所に支持台8を用いて設置する。次に、無人ヘリコプター53、または、ブームスプレヤー等の散布装置、または、人手により農薬を散布する。
【0067】
農薬の散布後、つまり、完全に農薬が作物に行き渡り、空中に遊する農薬がなくなった後に、全ての捕集容器1・1・・・を回収し、分析装置17やコンピュータ18等が搭載された車両54、または、検査機関に持ち込む。そして、回収された捕集容器1・1・・・に貯溜された溶剤19・19・・・において、分析に必要な所定の量を各々の捕集容器1・1・・・から取出し、分析装置17を用いて測定する。
【0068】
こうして、単位面積当たりの散布された農薬の質量を予測算出して散布された農薬濃度の測定結果を得て、散布対象圃場51の農薬散布状況(実際に農作物に散布された農薬の散布量が適量であるかどうか)を判定することができる。
【0069】
また、農薬の散布対象圃場51だけでなく、該散布対象圃場51の周囲における複数の散布非対象圃場52・52・・・にも設置することで、農薬散布時のドリフト状況を検知することも可能である。
【0070】
具体的には、農薬の散布対象圃場51に近接する散布非対象圃場52・52・・・や畦、或いは、農道などにも、農薬の散布対象圃場51の端部から所定距離離れた位置に捕集容器1・1・・・を散布対象圃場51への設置と同時に設置しておく。尚、この時設置した複数の捕集容器1・1・・・には、各々の設置場所に関する情報をIDタグに書き込んでおく。
【0071】
そして、農薬が散布された後、これら複数の捕集容器1・1・・・を回収し、該捕集容器1・1・・・内の溶剤19・19・・・を前記方法にて測定することで、農薬の散布対象圃場51に設置した捕集容器1・1・・・からは単位面積当たりの農薬の量が適正であるかどうか判断できる。この結果から、農薬の散布量が不足していたり、多過ぎた場合などには、次回の散布作業時に、散布装置の噴出量を調節したり、農薬自体の希釈量を変更したり、農薬の散布量が不足する場合には不足場所に追加散布することができる。
【0072】
また、農薬の散布非対象圃場52・52・・・に設置した捕集容器1・1・・・からはドリフト量を検出することができ、この結果から、風速に対して風上側のどの位置まで散布可能であるか、どれだけ離れた位置までは許容範囲であるか等を判断することができる。
【0073】
このように、農薬散布後における農作物への散布状況を光分析技術によって測定する際の散布農薬の収集方法であって、農薬散布前に前記農作物と同一高さに設けた複数の捕集容器1・1・・・を、圃場内外の測定箇所に設置することで、より正確な農作物への農薬散布状況を把握することができる。
【0074】
また、圃場内外において複数の捕集容器1・1・・・を設置することにより、圃場全体に渡り散布された農薬を一度収集することができ、同時に、散布対象外領域に散布された農薬(所謂ドリフト)も収集することができる。
【図面の簡単な説明】
【0075】
【図1】本発明の一実施例に係る捕集容器の全体的な構成を示した斜視図。
【図2】同じく捕集容器の側面詳細図。
【図3】散布農薬収集時の模式図。
【図4】同じく散布農薬収集時の捕集容器の配置例を示す平面図。
【符号の説明】
【0076】
1 捕集容器
2 本体部
3 上蓋
4 連結部材
5 シール部材
6 板部材
7 識別部材
8 支持台
9 天板部
9a 突起部
10 角度調節部
10b ボルト
11 高さ調節部
11a ボルト
12 脚部
13 第一軸
14 第二軸
15 接地足
15a 固定部
16 杭
【特許請求の範囲】
【請求項1】
上面を開放した捕集容器内に液体を充填し、該捕集容器を圃場の適所に複数設置し、農薬散布時に前記捕集容器内の液体に散布農薬を捕捉し、この液体を赤外光によりスペクトル分析したデータと、既知の濃度の農薬を前記液体に溶融した液体から予め取得した赤外光によるスペクトル分析したデータとをコンピュータに入力して比較演算し、散布農薬量を測定する、散布農薬検出方法。
【請求項2】
前記捕集容器は液面表面積と同等の開口面積を有する開口部を上部に備える請求項1に記載の散布農薬検出方法。
【請求項3】
前記捕集容器の開口部には、開閉可能な蓋を備える請求項1または請求項2に記載の散布農薬検出方法。
【請求項4】
前記捕集容器内に充填する液体は水である請求項1から請求項3のいずれか1項に記載の散布農薬検出方法。
【請求項5】
前記捕集容器は圃場面より一定以上の高さ位置に設置される請求項1から請求項4のいずれか1項に記載の散布農薬検出方法。
【請求項6】
前記赤外光のスペクトルはATR法で得る請求項1に記載の散布農薬検出方法。
【請求項7】
前記捕集容器内に充填する液体は有機溶剤である請求項1から請求項3のいずれか1項に記載の散布農薬検出方法。
【請求項1】
上面を開放した捕集容器内に液体を充填し、該捕集容器を圃場の適所に複数設置し、農薬散布時に前記捕集容器内の液体に散布農薬を捕捉し、この液体を赤外光によりスペクトル分析したデータと、既知の濃度の農薬を前記液体に溶融した液体から予め取得した赤外光によるスペクトル分析したデータとをコンピュータに入力して比較演算し、散布農薬量を測定する、散布農薬検出方法。
【請求項2】
前記捕集容器は液面表面積と同等の開口面積を有する開口部を上部に備える請求項1に記載の散布農薬検出方法。
【請求項3】
前記捕集容器の開口部には、開閉可能な蓋を備える請求項1または請求項2に記載の散布農薬検出方法。
【請求項4】
前記捕集容器内に充填する液体は水である請求項1から請求項3のいずれか1項に記載の散布農薬検出方法。
【請求項5】
前記捕集容器は圃場面より一定以上の高さ位置に設置される請求項1から請求項4のいずれか1項に記載の散布農薬検出方法。
【請求項6】
前記赤外光のスペクトルはATR法で得る請求項1に記載の散布農薬検出方法。
【請求項7】
前記捕集容器内に充填する液体は有機溶剤である請求項1から請求項3のいずれか1項に記載の散布農薬検出方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−133769(P2009−133769A)
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願番号】特願2007−311129(P2007−311129)
【出願日】平成19年11月30日(2007.11.30)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願日】平成19年11月30日(2007.11.30)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]