
散水装置
【課題】粉塵の発生と拡散を効果的に抑制し、しかもそのためのオペレータの操作負担を最小限にして解体作業の効率、質を確保する。
【解決手段】オペレータにより操作される送信機13からの無線指令に基づくシリンダ制御部16からの制御信号によって電動シリンダ8,9を制御し、この電動シリンダ8,9によって散水ノズル7,7に上下、左右の連続した往復首振り運動を行わせる。また、電磁弁制御部17によって散水/散水停止を制御するようにした。
【解決手段】オペレータにより操作される送信機13からの無線指令に基づくシリンダ制御部16からの制御信号によって電動シリンダ8,9を制御し、この電動シリンダ8,9によって散水ノズル7,7に上下、左右の連続した往復首振り運動を行わせる。また、電磁弁制御部17によって散水/散水停止を制御するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は解体現場のような粉塵が発生する場所で使用される散水装置に関するものである。
【背景技術】
【0002】
たとえば建物等の解体現場では解体作業時に多量の粉塵が発生するため、この粉塵を抑えるために作業しながら解体部分に向けて散水が行われる。
【0003】
従来、この散水を行う手段として、解体機そのもの、すなわち解体アタッチメントの先端部(たとえば圧砕装置)に散水ノズルを設け、地上のタンクユニット(タンク及びポンプ)からこの散水ノズルに給水して噴射させるものが公知である。
【0004】
また、クローラ式の自走台車の上にタンク、ポンプ、散水ノズルの散水設備一式を搭載した散水専用車(特許文献1)、及び散水設備をショベルに搭載したショベル兼用車(特許文献2)も公知である。
【0005】
さらに、特許文献2に示されているように、散水ノズルを上下、左右に首振り可能に支持し、無線制御によってノズルの向きを調整できるようにした技術も公知である。
【特許文献1】特開平11−13548号公報
【特許文献2】特開2007−75705号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、上記公知技術によると、散水ノズルの向き(散水方向)の調整は可能でも、散水目標は点であるため、粉塵が広い範囲で発生している状況では、粉塵の発生及び拡散を抑制する点での効率が低いものとなっていた。
【0007】
なお、散水ノズルの向きを連続的に変えることによって散水範囲を広げることは可能であるが、そのためには向き調整操作を連続して行わなければならないため、このノズル操作がきわめて面倒となり、とくに解体機のオペレータが操作する場合にノズル操作に気をとられて肝心の解体作業の効率、質が低下するという弊害が生じる。
【0008】
そこで本発明は、散水ノズルの自動往復首振り運動によって粉塵の発生と拡散を効果的に抑制し、しかもそのためのオペレータの操作負担を最小限にして解体作業の効率、質を確保することができる散水装置を提供するものである。
【課題を解決するための手段】
【0009】
請求項1の発明は、少なくとも一方向の往復首振り運動を行い得る状態で固定部分に支持された散水ノズルと、この散水ノズルに往復首振り運動を行わせるアクチュエータと、このアクチュエータを遠隔操作する制御手段とを具備し、この制御手段は、オペレータにより操作されて作動指令信号を出力する操作部と、この操作部からの連続首振り指令信号に基づいて上記散水ノズルが連続した往復首振り運動を行うように上記アクチュエータの作動を制御するアクチュエータ制御部とを有するものである。
【0010】
請求項2の発明は、請求項1の構成において、散水ノズルは、上下方向と左右方向の往復首振り運動を行い得る状態で固定部分に支持され、アクチュエータとして、散水ノズルに上下往復首振り運動を行わせる上下首振りアクチュエータと、同ノズルに左右往復首振り運動を行わせる左右首振りアクチュエータとがそれぞれ互いに独立して作動する状態で設けられ、アクチュエータ制御部は、この両アクチュエータの作動を互いに独立して制御し得るように構成されたものである。
【0011】
請求項3の発明は、請求項1または2の構成において、アクチュエータ制御部は、散水ノズルの往復首振り運動の範囲を時間によって設定するように構成されたものである。
【0012】
請求項4の発明は、請求項1〜3のいずれかの構成において、アクチュエータ制御部は、操作部からの方向転換指令信号に基づいて、往復首振り運動中の散水ノズルの向かう方向を転換させるように構成されたものである。
【0013】
請求項5の発明は、請求項1〜4のいずれかの構成において、アクチュエータ制御部は、操作部からの運動範囲変更指令信号に基づいて、散水ノズルの往復運動範囲を拡縮変更させ得るように構成されたものである。
【0014】
請求項6の発明は、請求項5の構成において、アクチュエータ制御部は、操作部からの運動範囲変更指令信号が停止した時点の運動範囲を記憶するように構成されたものである。
【0015】
請求項7の発明は、請求項1〜6のいずれかの構成において、アクチュエータ制御部は、操作部からの連続首振り指令信号が入力されたときの散水ノズルの位置を中心として散水ノズルに往復運動を行わせるように構成されたものである。
【0016】
請求項8の発明は、請求項1〜7のいずれかの構成において、散水ノズルの散水/散水停止動作を制御する電磁弁が設けられ、制御手段は、操作部からの散水/散水停止指令信号に基づいてこの電磁弁を開閉制御する電磁弁制御部を具備するものである。
【発明の効果】
【0017】
本発明によると、散水ノズルが少なくとも一方向(請求項2では上下方向と左右方向)の連続した往復首振り運動を行い、解体部分周辺の広い範囲に間断なく散水できるため、解体作業によるほこりの発生、拡散を抑えることができる。
【0018】
しかも、散水ノズルが操作部からの指令信号に基づいて自動で連続した往復首振り運動(以下、連続首振り運動という)を行うため、オペレータは操作部によって連続首振り運動の指令のみを行えばよい。従って、オペレータの操作負担を最小限に軽くできるため、解体作業の効率、質を確保することができる。
【0019】
この場合、請求項2の発明によると、上下と左右の首振り運動を独立して制御できるため、上下、左右及びその組み合わせの中から状況に応じて最も散水効率が良い首振り運動を選択することができる。
【0020】
また、請求項3の発明によると、散水ノズルが上下または左右にどれだけ動いたかをセンサで検出して散水ノズルの首振り運動範囲を制御するのではなく、この散水ノズルの首振り範囲を時間で設定するため、センサ式の場合のようにセンサやその配線が水に濡れて誤作動したり故障したりするおそれがなく、装置の耐久性、信頼性が高くなる。また、センサ及び配線が不要となることでメンテナンスが容易となり、コストダウンとなる。
【0021】
請求項4の発明によると、操作部からの方向転換指令信号に基づいて運動中の散水ノズルの向かう方向を往から復、またはその逆に転換させ、請求項5,6の発明によると、操作部からの運動範囲変更指令信号に基づいて散水ノズルの往復運動範囲を拡縮変更させることができるため、粉塵の発生状況等に応じて散水目標部分を臨機応援に変更することができる。
【0022】
また、請求項6の発明によると、操作部からの運動範囲変更指令信号が停止した時点の運動範囲を記憶するように構成したから、更新された最新の運動範囲で首振り運動を再開させることができる。
【0023】
請求項7の発明によると、操作部からの連続首振り指令信号が入力されたときの散水ノズルの位置を中心として散水ノズルに往復運動を行わせるように構成したから、ノズルの現在位置が首振り中心となることで散水範囲を定め易くなる。
【0024】
請求項8の発明によると、散水ノズルの散水/散水停止を、同ノズルの首振り運動とは無関係に制御できるため、無駄な散水を避け、効率の良い散水作用を行わせることができる。
【発明を実施するための最良の形態】
【0025】
本発明の実施形態を図によって説明する。
【0026】
この実施形態に係る散水装置のハード部分は、たとえば油圧ショベルにおけるアタッチメントの先端からバケットを取外した状態でそのバケット跡に取付けられる。あるいは、専用の台車や、地上に据え付けられた支持台に取付けてもよい。
【0027】
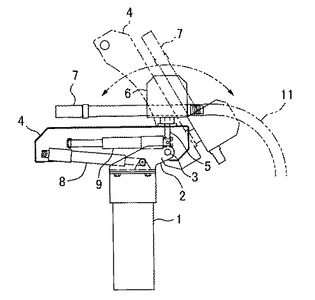
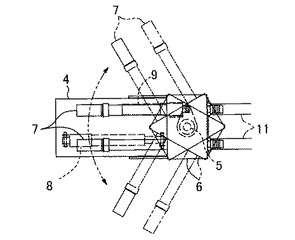
このハード部分は、図1,2に示すように基台1と、この基台1にブラケット2を介して左右方向の水平軸3まわりに上下往復首振り可能に取付けられたメインフレーム4と、このメインフレーム4に垂直軸5まわりに左右往復首振り可能に取付けられたノズルフレーム6と、このノズルフレーム6に取付けられた一乃至複数の散水ノズル(図例の左右二つの場合で説明する。以下、単にノズルという)7,7と、メインフレーム4を上下に往復首振り回動させるアクチュエータとしての上下首振りシリンダ8と、ノズルフレーム6を左右に往復首振り回動させるアクチュエータとしての左右首振りシリンダ9と、ノズル7,7からの散水/散水停止を制御する第1及び第2両電磁弁(図3中に示す)10a,10bとを具備する。
【0028】
両シリンダ8,9は、モータ(電動機)の回転力をラックとピニオン等により往復運動に変換する電動シリンダとして構成され、モータの回転が次に説明する制御手段により制御されて伸縮運動を行う。
【0029】
図1中、11,11はノズル7,7に接続された給水ホースで、地上に設置されたタンク内の水がポンプ(いずれも図示省略)によりこの給水ホース11,11及び第1、第2両電磁弁10a,10bを介してノズル7,7に供給される。
【0030】
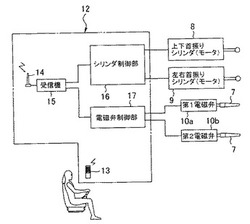
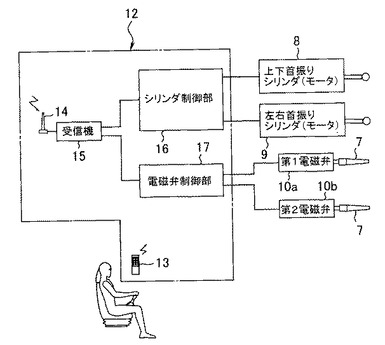
図3にこの散水装置の制御系のブロック構成を示す。
【0031】
上下及び左右の首振りシリンダ(モータ)8,9と電磁弁10a,10bは装置のソフト部分である制御手段12によって遠隔操作される。
【0032】
この制御手段12は、たとえば解体機のオペレータにより操作されて作動指令信号(無線信号)を出力する操作部としての送信機13と、ハード部分側でアンテナ14を介してこの信号を受信する受信機15と、作動指令信号に基づいて両シリンダ8,9の首振り動作を制御するシリンダ制御部(アクチュエータ制御部)16と、作動指令信号に基づいて電磁弁10a,10bの開閉作動を制御する電磁弁制御部17とから成っている。
【0033】
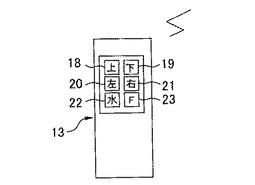
送信機13は、図4に示すように複数の押しボタンを有し、このボタン操作によって作動指令信号が出力される。
【0034】
具体的には、押しボタンとして、上下首振りシリンダ8に対する上行き駆動を指令する「上」ボタン18と、下行き駆動を指令する「下」ボタン19と、左右首振りシリンダ9に対する左行き駆動を指令する「左」ボタン20と、右行き駆動を指令する「右」ボタン21と、電磁弁10a,10bに対する開きまたは閉じ指令を出す「水」ボタン22と、他のボタンとの同時操作によって首振り運動範囲の設定・変更等を指令する「F」ボタン23とを備えている。
【0035】
各ボタンと動作の関係は次のように設定されている。
【0036】
ノズル動作
A.「上」「下」「左」「右」の各ボタン18〜21を単独で押すと、押している間のみノズル7,7が上、下、左、右に動く。
【0037】
B.「上」「下」両ボタン18,19を同時に押すと、現在のノズル位置を中心にしてノズル7,7が上下の連続首振り運動を行う。
【0038】
C.「左」「右」両ボタン20,21を同時に押すと、現在のノズル位置を中心にしてノズル7,7が左右の連続首振り運動を行う。
【0039】
D.上下連続首振り運動中に「上」ボタン18を押すと、下向き運動中であればボタン操作を止めるまで上向きに運動方向を変える。上向き運動中であればそのまま上向きに動く。
【0040】
E.上下連続首振り運動中に「下」ボタン19を押すと、上向き運動中であればボタン操作を止めるまで上向きに運動方向を変える。下向き運動中であればそのまま下向きに動く。
【0041】
F.左右連続首振り運動中に「左」ボタン20を押すと、右向き運動中であればボタン操作を止めるまで左向きに運動方向を変える。左向き運動中であればそのまま左向きに動く。
【0042】
G.左右連続首振り運動中に「右」ボタン21を押すと、左向き運動中であればボタン操作を止めるまで右向きに運動方向を変える。右向き運動中であればそのまま右向きに動く。
【0043】
H.上下連続首振り運動中に「F」ボタン23と「上」ボタン18を同時に押すと、上下首振り運動の範囲が広くなる。ボタン操作を止めた時点でそときの運動範囲が記憶される。
【0044】
I.上下連続首振り運動中に「F」ボタン23と「下」ボタン19を同時に押すと、上下首振り運動の範囲が狭くなる。ボタン操作を止めた時点でそのときの運動範囲が記憶される。
【0045】
J.左右連続首振り運動中に「F」ボタン23と「右」ボタン21を同時に押すと、左右首振り運動の範囲が広くなる。ボタン操作を止めた時点でそときの運動範囲が記憶される。
【0046】
K.左右連続首振り運動中に「F」ボタン23と「左」ボタン20を同時に押すと、左右首振り運動の範囲が狭くなる。ボタン操作を止めた時点でそのときの運動範囲が記憶される。
【0047】
散水動作
L.「水」ボタン22を単独で押すと、一方(たとえば左側)のノズル7のみから水から出る。もう一度押すと水が止まる。
【0048】
M.「水」ボタン22と「F」ボタン23を同時に押すと、他方(たとえば右側)のノズル7から水が出る。もう一度同時に押すと水が止まる。
【0049】
これらの動作を含めたこの装置の作用を図5〜図12に示すフローチャートによって説明する。
【0050】
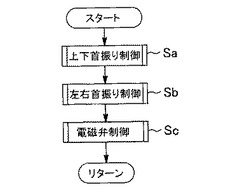
図5はメインフローを示し、電源投入等による制御開始とともに上下首振り制御Sa、左右首振り制御Sb、電磁弁制御Scの各制御が順次行われる。
【0051】
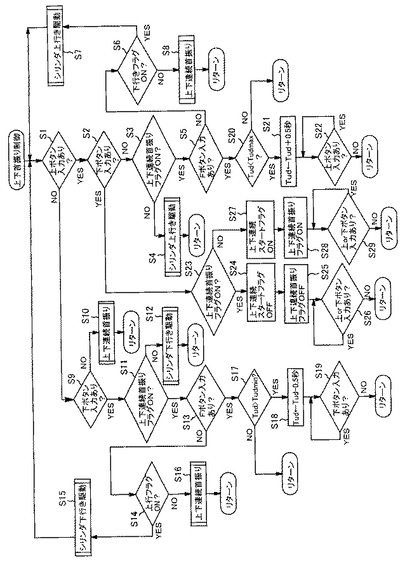
上下首振り制御(図6〜図9参照)
「上下首振り制御」とは、上下首振りシリンダ8の上行き、下行き駆動と、上下連続首振り(自動往復首振り)の各制御をいう。
【0052】
まず、図6によって上下首振り全体の制御フローを説明した後、図7,8によって上行き、下行き駆動の制御内容、図9によって上下連続首振りの制御内容をそれぞれ説明する。
【0053】
図6に示すように、制御開始とともにステップS1で「上」ボタン入力(操作)があったか否かが判別され、入力があった場合(YESの場合)はステップS2で「下」ボタン入力があったか否かが判別される。
【0054】
ここでNOの場合、つまり「上」ボタン操作のみがあった場合は、ステップS3で上下連続首振りフラグがONか否かが判別され、NOとなると、上下連続首振り運動中でないときに「上」ボタン18が押されたとして、ステップS4で上下首振りシリンダ8が上行き駆動されてノズル7,7が上向きに移動する。
【0055】
また、ステップS3でYESの場合、ステップS5で「F」ボタン入力があったか否かが判別され、ここでNOのときにステップS6で下行きフラグがONか否かが判別される。
【0056】
ここでYESとなると、上下連続首振り運動中の下行き時に「上」ボタン18が押されたとして、ステップS7で上下首振りシリンダ8が上行き駆動される。NOの場合は、上下連続首振り運動中の上行き時に「上」ボタン18が押されたとしてステップS8で上下連続首振り運動が継続される。
【0057】
一方、ステップS1で「上」ボタン入力が無ければ(NOの場合)、ステップS9で「下」ボタン入力があったか否かが判別され、NOの場合は何も押されていないとして、ステップS10で上下連続首振り運動が継続される。
【0058】
ステップS9でYESの場合は、ステップS11で上下連続首振りフラグがONか否かが判別され、NOの場合は、上下連続首振り運動中でないときに「下」ボタン19が押されたとして、ステップS12で上下首振りシリンダ8が下行き駆動されてノズル7,7が下向きに移動する。
【0059】
また、ステップS11でYES(上下連続フラグON)の場合、ステップS13で「F」ボタン入力無し、ステップS14で上行きフラグONと判別されたときに、上下連続首振り運動中の上行き時に「下」ボタン19が押されたとして上下首振りシリンダ8が下行き駆動される(ステップ15)。
【0060】
ステップ14でNOの場合は、上下連続首振り運動中の下行き時に「下」ボタン19が押されたとして、ステップS16で上下連続首振り運動が継続される。
【0061】
ステップS13でYES(「F」ボタン入力あり)の場合は、ステップS17でTudが最小値Tudminより大きいか否かが判別され、YESのときにステップS18でTudが(Tud−0.5秒)に設定される。
【0062】
つまり、上下連続首振り運動中に「F」ボタン23と「下」ボタン19を同時に押すと、上下首振り運動の範囲が狭くなり、ボタン操作を止めた時点でそのときの運動範囲(Tud)が記憶される。
【0063】
なお、ステップS18に続くステップS19では、「下」ボタン入力があったか否かが判別され、「下」ボタン19が離されるのを待ってステップS1に戻る。また、ステップS17でNO(Tudが最小値Tudminを超えていない)となると、往復時間Tudの下限なので何もしないでよいとしてステップS1に戻る。
【0064】
一方、ステップS5でYES(「F」ボタン入力あり)の場合、ステップS20でTudが最大値Tudmaxより小さいか否かが判別され、YESのときにステップS21でTudが(Tud+0.5秒)に設定される。
【0065】
つまり、上下連続首振り運動中に「上」ボタン18と「F」ボタン23を同時に押すと、上下首振り運動の範囲が広くなり、ボタン操作を止めた時点でそのときの運動範囲(Tud)が記憶される。
【0066】
なお、ステップS22では「上」ボタン入力があったか否かが判別され、「上」ボタン18が離されるのを待ってステップS1に戻る。
【0067】
ステップS2でYESのとき(「上」ボタン18と「下」ボタン19がともに押されたとき)は、ステップS23に移り、上下連続首振りフラグがONか否かが判別される。
【0068】
ここでYESの場合は、ステップS24,S25で上下連続スタートフラグ及び上下連続首振りフラグがOFFとなり、ステップS26で「上」ボタン18または「下」ボタン19が離されるのを待ってステップS1に戻る。
【0069】
これに対し、ステップS23でNOの場合は、ステップS27,28で上下連続スタートフラグ及び上下連続フラグがそれぞれONとなり、ステップS29で「上」ボタン18または「下」ボタン19が離されるのを待ってステップS1に戻る。
【0070】
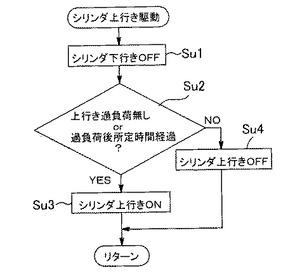
上記ステップS4,S7のシリンダ上行き駆動、及びステップS12,S15の下行き駆動の制御フローを図7,8によって説明する。
【0071】
シリンダ上行き駆動となると、図7に示すようにステップSu1でシリンダ下行き駆動が停止(シリンダ下行きOFF)した後、Su2で上行きの過負荷が無いか(上行きのストロークエンドに達していないか)、または過負荷後所定時間が経過したか(下向きに変わっていないか)が判別され、YESの場合にステップSu3でシリンダ上行き駆動が開始される(シリンダ上行きON)。NOの場合はステップSu4でシリンダ上行き駆動が停止される(シリンダ上行きOFF)。
【0072】
上記過負荷が無いか否かは、上下首振りシリンダ7のモータ電流を検出することによって判別される。
【0073】
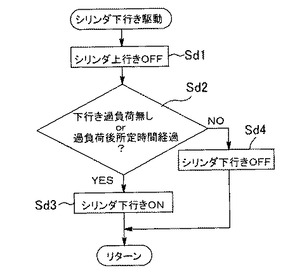
シリンダ下行き駆動の場合も同様で、図8に示すようにステップSd1でシリンダ上行き駆動が停止(シリンダ上行きOFF)した後、ステップSd2で下行きの過負荷が無いか(下行きのストロークエンドに達していないか)、または過負荷後所定時間が経過したか(上向きに変わってないか)が判別され、YESの場合にステップSd3でシリンダ下行き駆動が開始される(シリンダ下行きON)。NOの場合はステップSd4でシリンダ下行き駆動が停止される(シリンダ下行きOFF)。
【0074】
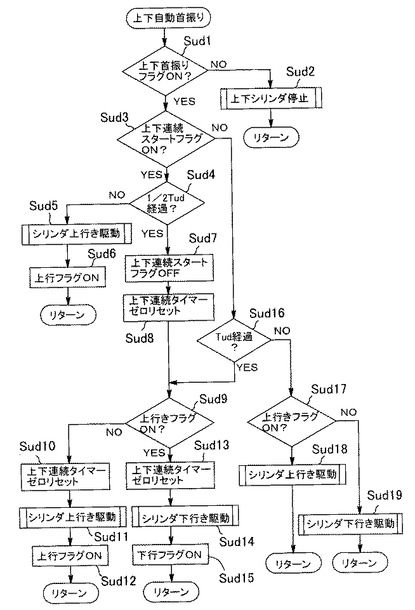
上下連続首振りの制御内容を図9によって説明する。
【0075】
ステップSud1で上下首振りフラグがONか否かの確認が行われ、NOのときはステップSud2で上下首振りシリンダ8が停止する。
【0076】
これに対し、ステップSud1でYESのときはステップSud3で上下連続スタートフラグがONか否かが判別され、ここでYESのときに、ステップSud4において、ノズル7が上限と下限との間を移動するのに要する時間として予め設定されたTudの半分(1/2Tud)が経過したか否かが判別される。
【0077】
つまり、現在のノズル位置を中心にして上下往復運動を開始するときの最初の上行き行程が終了したか否かが判別され、NOのときはステップSudでシリンダ上行き駆動が行われるとともに、ステップSud6で上行きフラグONとなる。
【0078】
ステップSud4でYES(1/2Tud経過)のときは、ステップSud7で上下連続スタートフラグOFF、ステップSud8で上下連続タイマーゼロリセットがそれぞれ行われた後、ステップSud9で上行きフラグがONか否かが判別される。
【0079】
ここで、上下自動首振り開始後はじめてのステップSud9では最初の上行き行程が終了した状態なので判定がYESとなり、ステップSud13で上下連続タイマーがゼロリセットされた後、シリンダ下行き駆動(ステップSud14)が行われるとともとに、ステップSud15で下行きフラグがONとなる。
【0080】
ステップSud3でNO(上下連続スタートフラグが立っていない)の場合は、ステップSud16でTudが経過したか否かが判別され、YESの場合はステップSud9により現在のシリンダの進行方向が判定され、これを反転させるように制御が進む。
【0081】
つまり、ステップSud9で上行きフラグがOFF判定(現在下向きに駆動されている)であれば、ステップSud10で上下連続タイマーゼロリセット、ステップSud11でシリンダ上行き駆動、ステップSud12で上行きフラグがONとなる。また、ステップSud9で上行きフラグがON判定(現在上向きに駆動されている)であれば、ステップSud13、ステップSud14、ステップSud15と進み、下向きに反転する。
【0082】
ステップSud17では上行きフラグがONか否かが判別され、YESのときはシリンダ上行き駆動(ステップSud18)、NOのときはシリンダ下行き駆動(ステップSud)がそれぞれ行われる。
【0083】
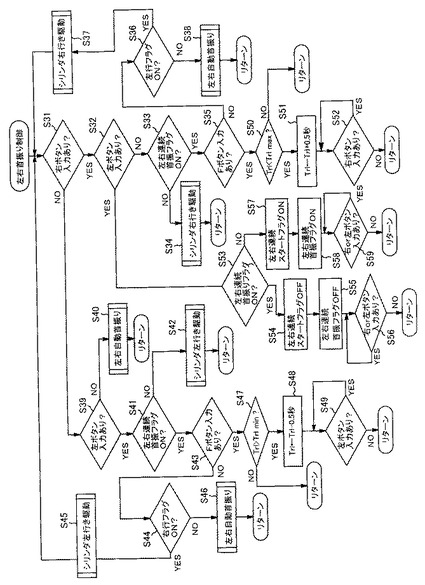
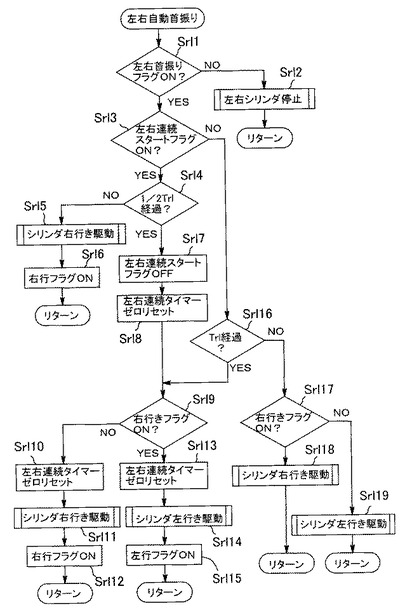
左右首振り制御(図10,11参照)
左右首振り制御の内容は、上記上下首振り制御と基本的に同じであるため、同制御の内容を準用するものとして重複説明を省略する。
【0084】
ここで、上下首振り制御における「上下」を「左右」に、「シリンダ上行き」「シリンダ下行き」を「シリンダ右行き」「シリンダ左行き」に、「下ボタン」「上ボタン」を「左ボタン」「右ボタン」に、「Tud」を「Trl」にそれぞれ読み替えればよい。
【0085】
また、図10のステップS31〜ステップS59は、図6のステップS1〜ステップS29に対応する。
【0086】
さらに、シリンダ左行き駆動、シリンダ右行き駆動の制御フローは、図7,8に示すシリンダ下行き駆動、シリンダ上行き駆動の制御フローと同じのため、上記読み替えを用いるものとして図示及び説明を省略する。
【0087】
以上のようにこの散水装置によると、ノズル7,7が自動で上下または左右に連続した首振り運動を行い、解体部分周辺の広い範囲に間断なく散水できるため、解体作業によるほこりの発生、拡散を抑えることができる。
【0088】
しかも、ノズル7,7が送信機13からの指令信号に基づいて自動で連続首振り運動を行うため、オペレータは送信機13によって連続首振り運動の指令のみを行えばよい。従って、オペレータの操作負担を最小限に軽くできるため、解体作業の効率、質を確保することができる。
【0089】
この場合、上下と左右の首振り運動が独立して制御され、かつ、この両首振り運動を同時に行わせることができるため、上下、左右及びその組み合わせの中から状況に応じて最も散水効率が良い首振り運動を選択することができる。
【0090】
また、ノズル7,7が上下または左右にどれだけ動いたかをセンサで検出して首振り運動を制御するのではなく、このノズル7,7の首振り範囲を時間Tud,Trlで設定するため、センサ式の場合のようにセンサやその配線が水に濡れて誤作動したり故障したりするおそれがなく、装置の耐久性、信頼性が高くなる。また、センサ及び配線が不要となることでメンテナンスが容易となり、コストダウンとなる。
【0091】
さらに、送信機13からの方向転換指令信号に基づいて運動中のノズル7,7の運動方向を転換させること、及び送信機13からの運動範囲変更指令信号に基づいてノズル7,7の往復運動範囲を拡縮変更することができるため、粉塵の発生状況等に応じて散水目標部分を臨機応援に変更することができる。
【0092】
一方、送信機13からの運動範囲変更指令信号が停止した時点の運動範囲を記憶するため、更新された最新の運動範囲で首振り運動を再開させることができる。
【0093】
また、送信機13からの連続首振り指令信号が入力されたときのノズル7,7の位置を中心としてノズル7,7に往復運動を行わせるため、ノズル7,7の現在位置が首振り中心となることで散水範囲を定め易くなる。
【0094】
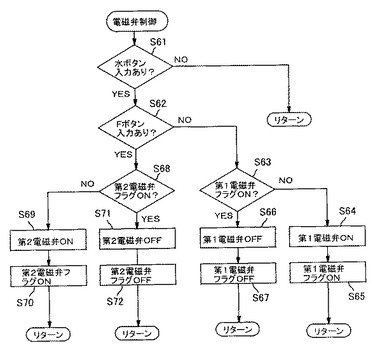
電磁弁制御(図12参照)
ステップS61で水ボタン入力があったか否かが判別され、入力があるまでこれが繰り返される。
【0095】
水ボタン入力があると(ステップS61でYESとなると)、ステップS62で「F」ボタン入力があったか否かで判別され、NOのときはステップS63に移る。
【0096】
ステップS63では第1電磁弁フラグがONか否かが判別され、NOの場合、ステップS64で第1電磁弁ON、ステップS65で第1電磁弁フラグがONとなる。
【0097】
ステップS63でYESの場合は、もう一度水ボタン22の単独操作があったとしてステップS66で第1電磁弁OFF、ステップS67で第1電磁弁フラグOFFとなってステップS61に戻る。
【0098】
つまり、送信機13の「水」ボタン22を単独で押すと、一方(たとえば左側)のノズル7のみから水から出る。もう一度押すと水が止まる。
【0099】
一方、ステップS62でYES(「F」ボタン入力有り)のときは、ステップS68で第2電磁弁フラグがONか否かが判別され、なければステップS69で第2電磁弁10bがONとなるとともに、ステップS70で第2電磁弁フラグがONとなる。
【0100】
ステップS68でYESの場合は、ステップS71で第2電磁弁10bがOFFとされ、ステップS72で第2電磁弁フラグがOFFとなってステップS61に戻る。
【0101】
つまり、「水」ボタン22と「F」ボタン23を同時に押すと、他方(たとえば右側)のノズル7から水が出る。もう一度同時に押すと水が止まる。
【0102】
このように、ノズル7,7の散水/散水停止を同ノズル7,7の首振り運動と独立して制御できるため、無駄な散水を避け、効率の良い散水作用を行わせることができる。
【0103】
他の実施形態
(1) 上記実施形態では、ノズル7,7を上下、左右に首振り駆動するアクチュエータとして、電動機で駆動される電動シリンダ8,9を用いたが、これに代えて油圧シリンダを用いてもよい。
【0104】
この場合、油圧シリンダの作動を制御する電磁式のコントロールバルブを図3のシリンダ制御部17で制御することになる。また、過負荷判断は、シリンダ回路の圧力を圧力センサで検出することによって行うことができる。
【0105】
あるいは、電動機とクランク機構とを組み合わせて上下及び左右の首振り機構を構成し、電動機をアクチュエータとして制御する構成をとってもよい。
【0106】
(2) 上記実施形態では、送信機13を小形にするために、たとえば「上」ボタン18と「下」ボタン19を同時に押すと上下連続首振り運動を行い、「F」ボタン23と「上」ボタン18を同時に押すと上下連続首振り運動の範囲が広くなる等、複数のボタンの同時操作によって動作指令を出すようにしたが、これらの全動作、またはいくつかの動作を単独のボタン操作で指令するように構成してもよい。
【0107】
(3) 上記実施形態では、遠隔操作のための操作部として送信機13を用い、シリンダ制御部(アクチュエータ制御部)16を無線で制御する構成をとったが、操作部と制御部とを操作線でつなぎ、有線制御する構成をとってもよい。
【0108】
(4) ノズル7,7は、上記実施形態のように上下、左右の双方の首振り運動を行うのが望ましいが、その一方のみの首振り運動を行わせるように構成してもよい。あるいは、斜め方向の首振り運動を行わせるようにしてもよい。
【図面の簡単な説明】
【0109】
【図1】本発明の実施形態にかかる散水装置のハード部分の構成を示す側面図である。
【図2】同平面図である。
【図3】散水装置の制御系のブロック構成を示す図である。
【図4】送信機のボタン配置を示す図である。
【図5】制御のメインフローを示す図である。
【図6】上下首振り制御のフローチャートである。
【図7】シリンダ上行き駆動のフローチャートである。
【図8】シリンダ下行き駆動のフローチャートである。
【図9】上下自動首振り制御のフローチャートである。
【図10】左右首振り制御のフローチャートである。
【図11】左右自動首振り制御のフローチャートである。
【図12】電磁弁制御のフローチャートである。
【符号の説明】
【0110】
1 固定部分としての基台
3 ノズルの上下首振り中心となる水平軸
4 ノズル取付用のメインフレーム
5 メインフレームの左右首振り中心となる垂直軸
6 ノズルフレーム
7,7 散水ノズル
8 散水ノズルを上下に首振り駆動するアクチュエータとしてのシリンダ
9 散水ノズルを左右に首振り駆動するアクチュエータとしてのシリンダ
10a,10b 電磁弁
12 制御手段
13 操作手段としての送信機
16 アクチュエータ制御部としてのシリンダ制御部
17 電磁弁制御部
【技術分野】
【0001】
本発明は解体現場のような粉塵が発生する場所で使用される散水装置に関するものである。
【背景技術】
【0002】
たとえば建物等の解体現場では解体作業時に多量の粉塵が発生するため、この粉塵を抑えるために作業しながら解体部分に向けて散水が行われる。
【0003】
従来、この散水を行う手段として、解体機そのもの、すなわち解体アタッチメントの先端部(たとえば圧砕装置)に散水ノズルを設け、地上のタンクユニット(タンク及びポンプ)からこの散水ノズルに給水して噴射させるものが公知である。
【0004】
また、クローラ式の自走台車の上にタンク、ポンプ、散水ノズルの散水設備一式を搭載した散水専用車(特許文献1)、及び散水設備をショベルに搭載したショベル兼用車(特許文献2)も公知である。
【0005】
さらに、特許文献2に示されているように、散水ノズルを上下、左右に首振り可能に支持し、無線制御によってノズルの向きを調整できるようにした技術も公知である。
【特許文献1】特開平11−13548号公報
【特許文献2】特開2007−75705号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、上記公知技術によると、散水ノズルの向き(散水方向)の調整は可能でも、散水目標は点であるため、粉塵が広い範囲で発生している状況では、粉塵の発生及び拡散を抑制する点での効率が低いものとなっていた。
【0007】
なお、散水ノズルの向きを連続的に変えることによって散水範囲を広げることは可能であるが、そのためには向き調整操作を連続して行わなければならないため、このノズル操作がきわめて面倒となり、とくに解体機のオペレータが操作する場合にノズル操作に気をとられて肝心の解体作業の効率、質が低下するという弊害が生じる。
【0008】
そこで本発明は、散水ノズルの自動往復首振り運動によって粉塵の発生と拡散を効果的に抑制し、しかもそのためのオペレータの操作負担を最小限にして解体作業の効率、質を確保することができる散水装置を提供するものである。
【課題を解決するための手段】
【0009】
請求項1の発明は、少なくとも一方向の往復首振り運動を行い得る状態で固定部分に支持された散水ノズルと、この散水ノズルに往復首振り運動を行わせるアクチュエータと、このアクチュエータを遠隔操作する制御手段とを具備し、この制御手段は、オペレータにより操作されて作動指令信号を出力する操作部と、この操作部からの連続首振り指令信号に基づいて上記散水ノズルが連続した往復首振り運動を行うように上記アクチュエータの作動を制御するアクチュエータ制御部とを有するものである。
【0010】
請求項2の発明は、請求項1の構成において、散水ノズルは、上下方向と左右方向の往復首振り運動を行い得る状態で固定部分に支持され、アクチュエータとして、散水ノズルに上下往復首振り運動を行わせる上下首振りアクチュエータと、同ノズルに左右往復首振り運動を行わせる左右首振りアクチュエータとがそれぞれ互いに独立して作動する状態で設けられ、アクチュエータ制御部は、この両アクチュエータの作動を互いに独立して制御し得るように構成されたものである。
【0011】
請求項3の発明は、請求項1または2の構成において、アクチュエータ制御部は、散水ノズルの往復首振り運動の範囲を時間によって設定するように構成されたものである。
【0012】
請求項4の発明は、請求項1〜3のいずれかの構成において、アクチュエータ制御部は、操作部からの方向転換指令信号に基づいて、往復首振り運動中の散水ノズルの向かう方向を転換させるように構成されたものである。
【0013】
請求項5の発明は、請求項1〜4のいずれかの構成において、アクチュエータ制御部は、操作部からの運動範囲変更指令信号に基づいて、散水ノズルの往復運動範囲を拡縮変更させ得るように構成されたものである。
【0014】
請求項6の発明は、請求項5の構成において、アクチュエータ制御部は、操作部からの運動範囲変更指令信号が停止した時点の運動範囲を記憶するように構成されたものである。
【0015】
請求項7の発明は、請求項1〜6のいずれかの構成において、アクチュエータ制御部は、操作部からの連続首振り指令信号が入力されたときの散水ノズルの位置を中心として散水ノズルに往復運動を行わせるように構成されたものである。
【0016】
請求項8の発明は、請求項1〜7のいずれかの構成において、散水ノズルの散水/散水停止動作を制御する電磁弁が設けられ、制御手段は、操作部からの散水/散水停止指令信号に基づいてこの電磁弁を開閉制御する電磁弁制御部を具備するものである。
【発明の効果】
【0017】
本発明によると、散水ノズルが少なくとも一方向(請求項2では上下方向と左右方向)の連続した往復首振り運動を行い、解体部分周辺の広い範囲に間断なく散水できるため、解体作業によるほこりの発生、拡散を抑えることができる。
【0018】
しかも、散水ノズルが操作部からの指令信号に基づいて自動で連続した往復首振り運動(以下、連続首振り運動という)を行うため、オペレータは操作部によって連続首振り運動の指令のみを行えばよい。従って、オペレータの操作負担を最小限に軽くできるため、解体作業の効率、質を確保することができる。
【0019】
この場合、請求項2の発明によると、上下と左右の首振り運動を独立して制御できるため、上下、左右及びその組み合わせの中から状況に応じて最も散水効率が良い首振り運動を選択することができる。
【0020】
また、請求項3の発明によると、散水ノズルが上下または左右にどれだけ動いたかをセンサで検出して散水ノズルの首振り運動範囲を制御するのではなく、この散水ノズルの首振り範囲を時間で設定するため、センサ式の場合のようにセンサやその配線が水に濡れて誤作動したり故障したりするおそれがなく、装置の耐久性、信頼性が高くなる。また、センサ及び配線が不要となることでメンテナンスが容易となり、コストダウンとなる。
【0021】
請求項4の発明によると、操作部からの方向転換指令信号に基づいて運動中の散水ノズルの向かう方向を往から復、またはその逆に転換させ、請求項5,6の発明によると、操作部からの運動範囲変更指令信号に基づいて散水ノズルの往復運動範囲を拡縮変更させることができるため、粉塵の発生状況等に応じて散水目標部分を臨機応援に変更することができる。
【0022】
また、請求項6の発明によると、操作部からの運動範囲変更指令信号が停止した時点の運動範囲を記憶するように構成したから、更新された最新の運動範囲で首振り運動を再開させることができる。
【0023】
請求項7の発明によると、操作部からの連続首振り指令信号が入力されたときの散水ノズルの位置を中心として散水ノズルに往復運動を行わせるように構成したから、ノズルの現在位置が首振り中心となることで散水範囲を定め易くなる。
【0024】
請求項8の発明によると、散水ノズルの散水/散水停止を、同ノズルの首振り運動とは無関係に制御できるため、無駄な散水を避け、効率の良い散水作用を行わせることができる。
【発明を実施するための最良の形態】
【0025】
本発明の実施形態を図によって説明する。
【0026】
この実施形態に係る散水装置のハード部分は、たとえば油圧ショベルにおけるアタッチメントの先端からバケットを取外した状態でそのバケット跡に取付けられる。あるいは、専用の台車や、地上に据え付けられた支持台に取付けてもよい。
【0027】
このハード部分は、図1,2に示すように基台1と、この基台1にブラケット2を介して左右方向の水平軸3まわりに上下往復首振り可能に取付けられたメインフレーム4と、このメインフレーム4に垂直軸5まわりに左右往復首振り可能に取付けられたノズルフレーム6と、このノズルフレーム6に取付けられた一乃至複数の散水ノズル(図例の左右二つの場合で説明する。以下、単にノズルという)7,7と、メインフレーム4を上下に往復首振り回動させるアクチュエータとしての上下首振りシリンダ8と、ノズルフレーム6を左右に往復首振り回動させるアクチュエータとしての左右首振りシリンダ9と、ノズル7,7からの散水/散水停止を制御する第1及び第2両電磁弁(図3中に示す)10a,10bとを具備する。
【0028】
両シリンダ8,9は、モータ(電動機)の回転力をラックとピニオン等により往復運動に変換する電動シリンダとして構成され、モータの回転が次に説明する制御手段により制御されて伸縮運動を行う。
【0029】
図1中、11,11はノズル7,7に接続された給水ホースで、地上に設置されたタンク内の水がポンプ(いずれも図示省略)によりこの給水ホース11,11及び第1、第2両電磁弁10a,10bを介してノズル7,7に供給される。
【0030】
図3にこの散水装置の制御系のブロック構成を示す。
【0031】
上下及び左右の首振りシリンダ(モータ)8,9と電磁弁10a,10bは装置のソフト部分である制御手段12によって遠隔操作される。
【0032】
この制御手段12は、たとえば解体機のオペレータにより操作されて作動指令信号(無線信号)を出力する操作部としての送信機13と、ハード部分側でアンテナ14を介してこの信号を受信する受信機15と、作動指令信号に基づいて両シリンダ8,9の首振り動作を制御するシリンダ制御部(アクチュエータ制御部)16と、作動指令信号に基づいて電磁弁10a,10bの開閉作動を制御する電磁弁制御部17とから成っている。
【0033】
送信機13は、図4に示すように複数の押しボタンを有し、このボタン操作によって作動指令信号が出力される。
【0034】
具体的には、押しボタンとして、上下首振りシリンダ8に対する上行き駆動を指令する「上」ボタン18と、下行き駆動を指令する「下」ボタン19と、左右首振りシリンダ9に対する左行き駆動を指令する「左」ボタン20と、右行き駆動を指令する「右」ボタン21と、電磁弁10a,10bに対する開きまたは閉じ指令を出す「水」ボタン22と、他のボタンとの同時操作によって首振り運動範囲の設定・変更等を指令する「F」ボタン23とを備えている。
【0035】
各ボタンと動作の関係は次のように設定されている。
【0036】
ノズル動作
A.「上」「下」「左」「右」の各ボタン18〜21を単独で押すと、押している間のみノズル7,7が上、下、左、右に動く。
【0037】
B.「上」「下」両ボタン18,19を同時に押すと、現在のノズル位置を中心にしてノズル7,7が上下の連続首振り運動を行う。
【0038】
C.「左」「右」両ボタン20,21を同時に押すと、現在のノズル位置を中心にしてノズル7,7が左右の連続首振り運動を行う。
【0039】
D.上下連続首振り運動中に「上」ボタン18を押すと、下向き運動中であればボタン操作を止めるまで上向きに運動方向を変える。上向き運動中であればそのまま上向きに動く。
【0040】
E.上下連続首振り運動中に「下」ボタン19を押すと、上向き運動中であればボタン操作を止めるまで上向きに運動方向を変える。下向き運動中であればそのまま下向きに動く。
【0041】
F.左右連続首振り運動中に「左」ボタン20を押すと、右向き運動中であればボタン操作を止めるまで左向きに運動方向を変える。左向き運動中であればそのまま左向きに動く。
【0042】
G.左右連続首振り運動中に「右」ボタン21を押すと、左向き運動中であればボタン操作を止めるまで右向きに運動方向を変える。右向き運動中であればそのまま右向きに動く。
【0043】
H.上下連続首振り運動中に「F」ボタン23と「上」ボタン18を同時に押すと、上下首振り運動の範囲が広くなる。ボタン操作を止めた時点でそときの運動範囲が記憶される。
【0044】
I.上下連続首振り運動中に「F」ボタン23と「下」ボタン19を同時に押すと、上下首振り運動の範囲が狭くなる。ボタン操作を止めた時点でそのときの運動範囲が記憶される。
【0045】
J.左右連続首振り運動中に「F」ボタン23と「右」ボタン21を同時に押すと、左右首振り運動の範囲が広くなる。ボタン操作を止めた時点でそときの運動範囲が記憶される。
【0046】
K.左右連続首振り運動中に「F」ボタン23と「左」ボタン20を同時に押すと、左右首振り運動の範囲が狭くなる。ボタン操作を止めた時点でそのときの運動範囲が記憶される。
【0047】
散水動作
L.「水」ボタン22を単独で押すと、一方(たとえば左側)のノズル7のみから水から出る。もう一度押すと水が止まる。
【0048】
M.「水」ボタン22と「F」ボタン23を同時に押すと、他方(たとえば右側)のノズル7から水が出る。もう一度同時に押すと水が止まる。
【0049】
これらの動作を含めたこの装置の作用を図5〜図12に示すフローチャートによって説明する。
【0050】
図5はメインフローを示し、電源投入等による制御開始とともに上下首振り制御Sa、左右首振り制御Sb、電磁弁制御Scの各制御が順次行われる。
【0051】
上下首振り制御(図6〜図9参照)
「上下首振り制御」とは、上下首振りシリンダ8の上行き、下行き駆動と、上下連続首振り(自動往復首振り)の各制御をいう。
【0052】
まず、図6によって上下首振り全体の制御フローを説明した後、図7,8によって上行き、下行き駆動の制御内容、図9によって上下連続首振りの制御内容をそれぞれ説明する。
【0053】
図6に示すように、制御開始とともにステップS1で「上」ボタン入力(操作)があったか否かが判別され、入力があった場合(YESの場合)はステップS2で「下」ボタン入力があったか否かが判別される。
【0054】
ここでNOの場合、つまり「上」ボタン操作のみがあった場合は、ステップS3で上下連続首振りフラグがONか否かが判別され、NOとなると、上下連続首振り運動中でないときに「上」ボタン18が押されたとして、ステップS4で上下首振りシリンダ8が上行き駆動されてノズル7,7が上向きに移動する。
【0055】
また、ステップS3でYESの場合、ステップS5で「F」ボタン入力があったか否かが判別され、ここでNOのときにステップS6で下行きフラグがONか否かが判別される。
【0056】
ここでYESとなると、上下連続首振り運動中の下行き時に「上」ボタン18が押されたとして、ステップS7で上下首振りシリンダ8が上行き駆動される。NOの場合は、上下連続首振り運動中の上行き時に「上」ボタン18が押されたとしてステップS8で上下連続首振り運動が継続される。
【0057】
一方、ステップS1で「上」ボタン入力が無ければ(NOの場合)、ステップS9で「下」ボタン入力があったか否かが判別され、NOの場合は何も押されていないとして、ステップS10で上下連続首振り運動が継続される。
【0058】
ステップS9でYESの場合は、ステップS11で上下連続首振りフラグがONか否かが判別され、NOの場合は、上下連続首振り運動中でないときに「下」ボタン19が押されたとして、ステップS12で上下首振りシリンダ8が下行き駆動されてノズル7,7が下向きに移動する。
【0059】
また、ステップS11でYES(上下連続フラグON)の場合、ステップS13で「F」ボタン入力無し、ステップS14で上行きフラグONと判別されたときに、上下連続首振り運動中の上行き時に「下」ボタン19が押されたとして上下首振りシリンダ8が下行き駆動される(ステップ15)。
【0060】
ステップ14でNOの場合は、上下連続首振り運動中の下行き時に「下」ボタン19が押されたとして、ステップS16で上下連続首振り運動が継続される。
【0061】
ステップS13でYES(「F」ボタン入力あり)の場合は、ステップS17でTudが最小値Tudminより大きいか否かが判別され、YESのときにステップS18でTudが(Tud−0.5秒)に設定される。
【0062】
つまり、上下連続首振り運動中に「F」ボタン23と「下」ボタン19を同時に押すと、上下首振り運動の範囲が狭くなり、ボタン操作を止めた時点でそのときの運動範囲(Tud)が記憶される。
【0063】
なお、ステップS18に続くステップS19では、「下」ボタン入力があったか否かが判別され、「下」ボタン19が離されるのを待ってステップS1に戻る。また、ステップS17でNO(Tudが最小値Tudminを超えていない)となると、往復時間Tudの下限なので何もしないでよいとしてステップS1に戻る。
【0064】
一方、ステップS5でYES(「F」ボタン入力あり)の場合、ステップS20でTudが最大値Tudmaxより小さいか否かが判別され、YESのときにステップS21でTudが(Tud+0.5秒)に設定される。
【0065】
つまり、上下連続首振り運動中に「上」ボタン18と「F」ボタン23を同時に押すと、上下首振り運動の範囲が広くなり、ボタン操作を止めた時点でそのときの運動範囲(Tud)が記憶される。
【0066】
なお、ステップS22では「上」ボタン入力があったか否かが判別され、「上」ボタン18が離されるのを待ってステップS1に戻る。
【0067】
ステップS2でYESのとき(「上」ボタン18と「下」ボタン19がともに押されたとき)は、ステップS23に移り、上下連続首振りフラグがONか否かが判別される。
【0068】
ここでYESの場合は、ステップS24,S25で上下連続スタートフラグ及び上下連続首振りフラグがOFFとなり、ステップS26で「上」ボタン18または「下」ボタン19が離されるのを待ってステップS1に戻る。
【0069】
これに対し、ステップS23でNOの場合は、ステップS27,28で上下連続スタートフラグ及び上下連続フラグがそれぞれONとなり、ステップS29で「上」ボタン18または「下」ボタン19が離されるのを待ってステップS1に戻る。
【0070】
上記ステップS4,S7のシリンダ上行き駆動、及びステップS12,S15の下行き駆動の制御フローを図7,8によって説明する。
【0071】
シリンダ上行き駆動となると、図7に示すようにステップSu1でシリンダ下行き駆動が停止(シリンダ下行きOFF)した後、Su2で上行きの過負荷が無いか(上行きのストロークエンドに達していないか)、または過負荷後所定時間が経過したか(下向きに変わっていないか)が判別され、YESの場合にステップSu3でシリンダ上行き駆動が開始される(シリンダ上行きON)。NOの場合はステップSu4でシリンダ上行き駆動が停止される(シリンダ上行きOFF)。
【0072】
上記過負荷が無いか否かは、上下首振りシリンダ7のモータ電流を検出することによって判別される。
【0073】
シリンダ下行き駆動の場合も同様で、図8に示すようにステップSd1でシリンダ上行き駆動が停止(シリンダ上行きOFF)した後、ステップSd2で下行きの過負荷が無いか(下行きのストロークエンドに達していないか)、または過負荷後所定時間が経過したか(上向きに変わってないか)が判別され、YESの場合にステップSd3でシリンダ下行き駆動が開始される(シリンダ下行きON)。NOの場合はステップSd4でシリンダ下行き駆動が停止される(シリンダ下行きOFF)。
【0074】
上下連続首振りの制御内容を図9によって説明する。
【0075】
ステップSud1で上下首振りフラグがONか否かの確認が行われ、NOのときはステップSud2で上下首振りシリンダ8が停止する。
【0076】
これに対し、ステップSud1でYESのときはステップSud3で上下連続スタートフラグがONか否かが判別され、ここでYESのときに、ステップSud4において、ノズル7が上限と下限との間を移動するのに要する時間として予め設定されたTudの半分(1/2Tud)が経過したか否かが判別される。
【0077】
つまり、現在のノズル位置を中心にして上下往復運動を開始するときの最初の上行き行程が終了したか否かが判別され、NOのときはステップSudでシリンダ上行き駆動が行われるとともに、ステップSud6で上行きフラグONとなる。
【0078】
ステップSud4でYES(1/2Tud経過)のときは、ステップSud7で上下連続スタートフラグOFF、ステップSud8で上下連続タイマーゼロリセットがそれぞれ行われた後、ステップSud9で上行きフラグがONか否かが判別される。
【0079】
ここで、上下自動首振り開始後はじめてのステップSud9では最初の上行き行程が終了した状態なので判定がYESとなり、ステップSud13で上下連続タイマーがゼロリセットされた後、シリンダ下行き駆動(ステップSud14)が行われるとともとに、ステップSud15で下行きフラグがONとなる。
【0080】
ステップSud3でNO(上下連続スタートフラグが立っていない)の場合は、ステップSud16でTudが経過したか否かが判別され、YESの場合はステップSud9により現在のシリンダの進行方向が判定され、これを反転させるように制御が進む。
【0081】
つまり、ステップSud9で上行きフラグがOFF判定(現在下向きに駆動されている)であれば、ステップSud10で上下連続タイマーゼロリセット、ステップSud11でシリンダ上行き駆動、ステップSud12で上行きフラグがONとなる。また、ステップSud9で上行きフラグがON判定(現在上向きに駆動されている)であれば、ステップSud13、ステップSud14、ステップSud15と進み、下向きに反転する。
【0082】
ステップSud17では上行きフラグがONか否かが判別され、YESのときはシリンダ上行き駆動(ステップSud18)、NOのときはシリンダ下行き駆動(ステップSud)がそれぞれ行われる。
【0083】
左右首振り制御(図10,11参照)
左右首振り制御の内容は、上記上下首振り制御と基本的に同じであるため、同制御の内容を準用するものとして重複説明を省略する。
【0084】
ここで、上下首振り制御における「上下」を「左右」に、「シリンダ上行き」「シリンダ下行き」を「シリンダ右行き」「シリンダ左行き」に、「下ボタン」「上ボタン」を「左ボタン」「右ボタン」に、「Tud」を「Trl」にそれぞれ読み替えればよい。
【0085】
また、図10のステップS31〜ステップS59は、図6のステップS1〜ステップS29に対応する。
【0086】
さらに、シリンダ左行き駆動、シリンダ右行き駆動の制御フローは、図7,8に示すシリンダ下行き駆動、シリンダ上行き駆動の制御フローと同じのため、上記読み替えを用いるものとして図示及び説明を省略する。
【0087】
以上のようにこの散水装置によると、ノズル7,7が自動で上下または左右に連続した首振り運動を行い、解体部分周辺の広い範囲に間断なく散水できるため、解体作業によるほこりの発生、拡散を抑えることができる。
【0088】
しかも、ノズル7,7が送信機13からの指令信号に基づいて自動で連続首振り運動を行うため、オペレータは送信機13によって連続首振り運動の指令のみを行えばよい。従って、オペレータの操作負担を最小限に軽くできるため、解体作業の効率、質を確保することができる。
【0089】
この場合、上下と左右の首振り運動が独立して制御され、かつ、この両首振り運動を同時に行わせることができるため、上下、左右及びその組み合わせの中から状況に応じて最も散水効率が良い首振り運動を選択することができる。
【0090】
また、ノズル7,7が上下または左右にどれだけ動いたかをセンサで検出して首振り運動を制御するのではなく、このノズル7,7の首振り範囲を時間Tud,Trlで設定するため、センサ式の場合のようにセンサやその配線が水に濡れて誤作動したり故障したりするおそれがなく、装置の耐久性、信頼性が高くなる。また、センサ及び配線が不要となることでメンテナンスが容易となり、コストダウンとなる。
【0091】
さらに、送信機13からの方向転換指令信号に基づいて運動中のノズル7,7の運動方向を転換させること、及び送信機13からの運動範囲変更指令信号に基づいてノズル7,7の往復運動範囲を拡縮変更することができるため、粉塵の発生状況等に応じて散水目標部分を臨機応援に変更することができる。
【0092】
一方、送信機13からの運動範囲変更指令信号が停止した時点の運動範囲を記憶するため、更新された最新の運動範囲で首振り運動を再開させることができる。
【0093】
また、送信機13からの連続首振り指令信号が入力されたときのノズル7,7の位置を中心としてノズル7,7に往復運動を行わせるため、ノズル7,7の現在位置が首振り中心となることで散水範囲を定め易くなる。
【0094】
電磁弁制御(図12参照)
ステップS61で水ボタン入力があったか否かが判別され、入力があるまでこれが繰り返される。
【0095】
水ボタン入力があると(ステップS61でYESとなると)、ステップS62で「F」ボタン入力があったか否かで判別され、NOのときはステップS63に移る。
【0096】
ステップS63では第1電磁弁フラグがONか否かが判別され、NOの場合、ステップS64で第1電磁弁ON、ステップS65で第1電磁弁フラグがONとなる。
【0097】
ステップS63でYESの場合は、もう一度水ボタン22の単独操作があったとしてステップS66で第1電磁弁OFF、ステップS67で第1電磁弁フラグOFFとなってステップS61に戻る。
【0098】
つまり、送信機13の「水」ボタン22を単独で押すと、一方(たとえば左側)のノズル7のみから水から出る。もう一度押すと水が止まる。
【0099】
一方、ステップS62でYES(「F」ボタン入力有り)のときは、ステップS68で第2電磁弁フラグがONか否かが判別され、なければステップS69で第2電磁弁10bがONとなるとともに、ステップS70で第2電磁弁フラグがONとなる。
【0100】
ステップS68でYESの場合は、ステップS71で第2電磁弁10bがOFFとされ、ステップS72で第2電磁弁フラグがOFFとなってステップS61に戻る。
【0101】
つまり、「水」ボタン22と「F」ボタン23を同時に押すと、他方(たとえば右側)のノズル7から水が出る。もう一度同時に押すと水が止まる。
【0102】
このように、ノズル7,7の散水/散水停止を同ノズル7,7の首振り運動と独立して制御できるため、無駄な散水を避け、効率の良い散水作用を行わせることができる。
【0103】
他の実施形態
(1) 上記実施形態では、ノズル7,7を上下、左右に首振り駆動するアクチュエータとして、電動機で駆動される電動シリンダ8,9を用いたが、これに代えて油圧シリンダを用いてもよい。
【0104】
この場合、油圧シリンダの作動を制御する電磁式のコントロールバルブを図3のシリンダ制御部17で制御することになる。また、過負荷判断は、シリンダ回路の圧力を圧力センサで検出することによって行うことができる。
【0105】
あるいは、電動機とクランク機構とを組み合わせて上下及び左右の首振り機構を構成し、電動機をアクチュエータとして制御する構成をとってもよい。
【0106】
(2) 上記実施形態では、送信機13を小形にするために、たとえば「上」ボタン18と「下」ボタン19を同時に押すと上下連続首振り運動を行い、「F」ボタン23と「上」ボタン18を同時に押すと上下連続首振り運動の範囲が広くなる等、複数のボタンの同時操作によって動作指令を出すようにしたが、これらの全動作、またはいくつかの動作を単独のボタン操作で指令するように構成してもよい。
【0107】
(3) 上記実施形態では、遠隔操作のための操作部として送信機13を用い、シリンダ制御部(アクチュエータ制御部)16を無線で制御する構成をとったが、操作部と制御部とを操作線でつなぎ、有線制御する構成をとってもよい。
【0108】
(4) ノズル7,7は、上記実施形態のように上下、左右の双方の首振り運動を行うのが望ましいが、その一方のみの首振り運動を行わせるように構成してもよい。あるいは、斜め方向の首振り運動を行わせるようにしてもよい。
【図面の簡単な説明】
【0109】
【図1】本発明の実施形態にかかる散水装置のハード部分の構成を示す側面図である。
【図2】同平面図である。
【図3】散水装置の制御系のブロック構成を示す図である。
【図4】送信機のボタン配置を示す図である。
【図5】制御のメインフローを示す図である。
【図6】上下首振り制御のフローチャートである。
【図7】シリンダ上行き駆動のフローチャートである。
【図8】シリンダ下行き駆動のフローチャートである。
【図9】上下自動首振り制御のフローチャートである。
【図10】左右首振り制御のフローチャートである。
【図11】左右自動首振り制御のフローチャートである。
【図12】電磁弁制御のフローチャートである。
【符号の説明】
【0110】
1 固定部分としての基台
3 ノズルの上下首振り中心となる水平軸
4 ノズル取付用のメインフレーム
5 メインフレームの左右首振り中心となる垂直軸
6 ノズルフレーム
7,7 散水ノズル
8 散水ノズルを上下に首振り駆動するアクチュエータとしてのシリンダ
9 散水ノズルを左右に首振り駆動するアクチュエータとしてのシリンダ
10a,10b 電磁弁
12 制御手段
13 操作手段としての送信機
16 アクチュエータ制御部としてのシリンダ制御部
17 電磁弁制御部
【特許請求の範囲】
【請求項1】
少なくとも一方向の往復首振り運動を行い得る状態で固定部分に支持された散水ノズルと、この散水ノズルに往復首振り運動を行わせるアクチュエータと、このアクチュエータを遠隔操作する制御手段とを具備し、この制御手段は、オペレータにより操作されて作動指令信号を出力する操作部と、この操作部からの連続首振り指令信号に基づいて上記散水ノズルが連続した往復首振り運動を行うように上記アクチュエータの作動を制御するアクチュエータ制御部とを有することを特徴とする散水装置。
【請求項2】
散水ノズルは、上下方向と左右方向の往復首振り運動を行い得る状態で固定部分に支持され、アクチュエータとして、散水ノズルに上下往復首振り運動を行わせる上下首振りアクチュエータと、同ノズルに左右往復首振り運動を行わせる左右首振りアクチュエータとがそれぞれ互いに独立して作動する状態で設けられ、アクチュエータ制御部は、この両アクチュエータの作動を互いに独立して制御し得るように構成されたことを特徴とする請求項1記載の散水装置。
【請求項3】
アクチュエータ制御部は、散水ノズルの往復首振り運動の範囲を時間によって設定するように構成されたことを特徴とする請求項1または2記載の散水装置。
【請求項4】
アクチュエータ制御部は、操作部からの方向転換指令信号に基づいて、往復首振り運動中の散水ノズルの向かう方向を転換させるように構成されたことを特徴とする請求項1〜3のいずれか1項に記載の散水装置。
【請求項5】
アクチュエータ制御部は、操作部からの運動範囲変更指令信号に基づいて、散水ノズルの往復運動範囲を拡縮変更させ得るように構成されたことを特徴とする請求項1〜4のいずれか1項に記載の散水装置。
【請求項6】
アクチュエータ制御部は、操作部からの運動範囲変更指令信号が停止した時点の運動範囲を記憶するように構成されたことを特徴とする請求項5記載の散水装置。
【請求項7】
アクチュエータ制御部は、操作部からの連続首振り指令信号が入力されたときの散水ノズルの位置を中心として散水ノズルに往復運動を行わせるように構成されたことを特徴とする請求項1〜6のいずれか1項に記載の散水装置。
【請求項8】
散水ノズルの散水/散水停止動作を制御する電磁弁が設けられ、制御手段は、操作部からの散水/散水停止指令信号に基づいてこの電磁弁を開閉制御する電磁弁制御部を具備することを特徴とする請求項1〜7のいずれか1項に記載の散水装置。
【請求項1】
少なくとも一方向の往復首振り運動を行い得る状態で固定部分に支持された散水ノズルと、この散水ノズルに往復首振り運動を行わせるアクチュエータと、このアクチュエータを遠隔操作する制御手段とを具備し、この制御手段は、オペレータにより操作されて作動指令信号を出力する操作部と、この操作部からの連続首振り指令信号に基づいて上記散水ノズルが連続した往復首振り運動を行うように上記アクチュエータの作動を制御するアクチュエータ制御部とを有することを特徴とする散水装置。
【請求項2】
散水ノズルは、上下方向と左右方向の往復首振り運動を行い得る状態で固定部分に支持され、アクチュエータとして、散水ノズルに上下往復首振り運動を行わせる上下首振りアクチュエータと、同ノズルに左右往復首振り運動を行わせる左右首振りアクチュエータとがそれぞれ互いに独立して作動する状態で設けられ、アクチュエータ制御部は、この両アクチュエータの作動を互いに独立して制御し得るように構成されたことを特徴とする請求項1記載の散水装置。
【請求項3】
アクチュエータ制御部は、散水ノズルの往復首振り運動の範囲を時間によって設定するように構成されたことを特徴とする請求項1または2記載の散水装置。
【請求項4】
アクチュエータ制御部は、操作部からの方向転換指令信号に基づいて、往復首振り運動中の散水ノズルの向かう方向を転換させるように構成されたことを特徴とする請求項1〜3のいずれか1項に記載の散水装置。
【請求項5】
アクチュエータ制御部は、操作部からの運動範囲変更指令信号に基づいて、散水ノズルの往復運動範囲を拡縮変更させ得るように構成されたことを特徴とする請求項1〜4のいずれか1項に記載の散水装置。
【請求項6】
アクチュエータ制御部は、操作部からの運動範囲変更指令信号が停止した時点の運動範囲を記憶するように構成されたことを特徴とする請求項5記載の散水装置。
【請求項7】
アクチュエータ制御部は、操作部からの連続首振り指令信号が入力されたときの散水ノズルの位置を中心として散水ノズルに往復運動を行わせるように構成されたことを特徴とする請求項1〜6のいずれか1項に記載の散水装置。
【請求項8】
散水ノズルの散水/散水停止動作を制御する電磁弁が設けられ、制御手段は、操作部からの散水/散水停止指令信号に基づいてこの電磁弁を開閉制御する電磁弁制御部を具備することを特徴とする請求項1〜7のいずれか1項に記載の散水装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2008−307516(P2008−307516A)
【公開日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願番号】特願2007−160532(P2007−160532)
【出願日】平成19年6月18日(2007.6.18)
【出願人】(000246273)コベルコ建機株式会社 (644)
【Fターム(参考)】
【公開日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願日】平成19年6月18日(2007.6.18)
【出願人】(000246273)コベルコ建機株式会社 (644)
【Fターム(参考)】
[ Back to top ]