
散薬分割装置
【課題】回転テーブルの環状凹溝内に振り撒いた散薬を当該回転テーブルの径方向に掻き取って精度良く均等に分割することができる散薬分割装置を提供する。
【解決手段】環状凹溝11が設けられた回転テーブル10と、環状凹溝内の散薬を掻き取るための分割掻き取り機構20とを備え、環状凹溝内に散薬を振り撒いた後、回転テーブルを所定のピッチで回転させると共に、分割掻き取り機構によって、環状凹溝内の散薬を堰き止め、当該堰き止められた散薬を回転テーブルの径方向に掻き取る散薬分割装置であって、環状凹溝内に振り撒かれた散薬の高さが所定の高さを超えているか否かを検出するためのセンサSを備え、センサSによる検出結果に応じて、回転テーブルの回転ピッチを補正して、最終的な回転ピッチを決定するように構成されている。
【解決手段】環状凹溝11が設けられた回転テーブル10と、環状凹溝内の散薬を掻き取るための分割掻き取り機構20とを備え、環状凹溝内に散薬を振り撒いた後、回転テーブルを所定のピッチで回転させると共に、分割掻き取り機構によって、環状凹溝内の散薬を堰き止め、当該堰き止められた散薬を回転テーブルの径方向に掻き取る散薬分割装置であって、環状凹溝内に振り撒かれた散薬の高さが所定の高さを超えているか否かを検出するためのセンサSを備え、センサSによる検出結果に応じて、回転テーブルの回転ピッチを補正して、最終的な回転ピッチを決定するように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転テーブルの環状凹溝内に振り撒いた散薬を当該回転テーブルの径方向に掻き取って分割する散薬分割装置に関する。
【背景技術】
【0002】
従来より、散薬を所要量ずつ小分けにして包装する分包機として、散薬分割用の環状凹溝を有する回転テーブルを備えた回転式分包機が知られている。
【0003】
より具体的に説明すれば、回転式分包機は、環状凹溝が設けられた回転テーブルと、環状凹溝内の散薬を掻き取るための分割掻き取り機構と、掻き取られた散薬を包装するための包装機構とを備えている。そして、前状凹溝内に散薬を略均等に振り撒いた後、回転テーブルを所定の回転ピッチで回転させると共に、分割掻き取り機構によって、環状凹溝内の散薬を堰き止め、当該堰き止められた散薬を回転テーブルの径方向に掻き取り、包装機構で包装するように構成されている。
【0004】
ここで、回転式分包機における回転テーブルの回転ピッチ(一分割当たりの回転量)は、最初の分割の際には、散薬の分割数に対応するピッチ(=1回転/分割数)から分割掻き取り機構の掻き取り幅を減じた値に設定され、次の分割からは、分割数に対応するピッチに設定されるのが一般的であった。
【0005】
しかしながら、斯かる回転ピッチの設定では、分割量(一分包当たりの散薬の量に相当)が均等にならない(特に、最初及び最後の分割の際に顕著である)ことが知られており、散薬を精度良く均等に分割するには、上記のようにして設定した回転ピッチを適宜補正することが必要である。
【0006】
回転ピッチの補正方法としては、例えば、最初の分割の際には、散薬の分割数に対応するピッチと分割掻き取り機構の掻き取り幅との差から、当該ピッチ内で過剰に掻き取られる部分の面積に相当する角度分だけ減じた値に回転ピッチを設定し、次の分割からは、分割数に対応するピッチに設定し、さらに、最後の分割の際には、分割数に対応するピッチから当該ピッチ内で過剰に掻き取られる部分の面積に相当する角度分だけ減じた値に設定する方法が提案されている(例えば、特許文献1の請求項2参照)。
【0007】
また、前記特許文献1には、分割される散薬の種類に応じて回転ピッチの補正量を調整することも提案されている(例えば、特許文献1の請求項3、4参照)。
【0008】
しかしながら、前記特許文献1に記載された方法は、単に幾何学的な特性(回転テーブルを平面視したときにおける理論的な分割面積と分割掻き取り機構によって実際に掻き取られる面積との間に差が生じること)や、散薬の種類(微粉末、粉末、顆粒、粒子)に応じて回転ピッチを補正することを提案するに留まるものであり、散薬を精度良く均等に分割するには十分でないという問題がある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第3131153号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、斯かる従来技術の問題を解決するためになされたものであり、回転テーブルの環状凹溝内に振り撒いた散薬を当該回転テーブルの径方向に掻き取って精度良く均等に分割することができる散薬分割装置を提供することを課題とする。
【課題を解決するための手段】
【0011】
斯かる課題を解決するべく、本発明の発明者らは鋭意検討した結果、散薬を精度良く均等に分割できないのは、分割掻き取り機構によって堰き止められる散薬の堆積状態が、一分割毎に堰き止められる散薬の量や、環状凹溝内に振り撒かれた散薬の堆積状態に応じて異なる(堰き止められる散薬の量が多ければ、堆積する散薬の山の高さが大きくなり、当該散薬が掻き取られる前に山崩れし易い等)のが一因となっていることを見出し、斯かる知見に基づいて本発明を完成させたものである。
【0012】
すなわち、本発明は、環状凹溝が設けられた回転テーブルと、前記環状凹溝内の散薬を掻き取るための分割掻き取り機構とを備え、前記環状凹溝内に散薬を振り撒いた後、前記回転テーブルを所定のピッチで回転させると共に、前記分割掻き取り機構によって、前記環状凹溝内の散薬を堰き止め、当該堰き止められた散薬を前記回転テーブルの径方向に掻き取る散薬分割装置であって、前記環状凹溝内に振り撒かれた散薬の高さが所定の高さを超えているか否かを検出するためのセンサを備え、前記センサによる検出結果に応じて、前記回転テーブルの回転ピッチを補正して、最終的な回転ピッチを決定することを特徴とする散薬分割装置を提供するものである。
【発明の効果】
【0013】
本発明によれば、環状凹溝内に振り撒かれた散薬の高さに応じて回転テーブルの回転ピッチが補正されるが、前記散薬の高さは、一分割毎に堰き止められる散薬の量や環状凹溝内に振り撒かれた散薬の堆積状態に関連するパラメータであるため、当該パラメータに応じて回転ピッチを補正することにより、散薬を精度良く均等に分割することが可能である。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の一実施形態に係る回転式分包機の概略構成を示す平面図である。
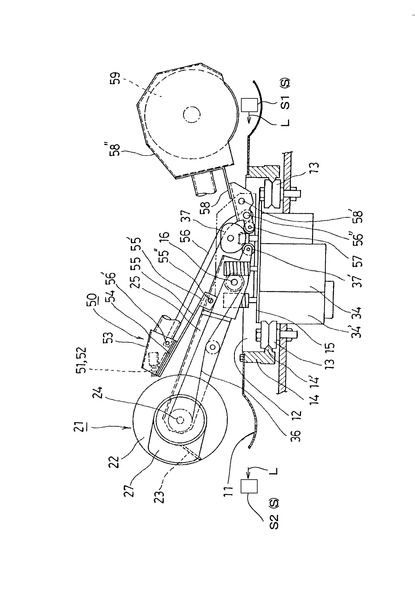
【図2】図2は、図1に示す回転式分包機の部分横断面図である。
【図3】図3は、図1に示す回転式分包機の部分縦断面図である。
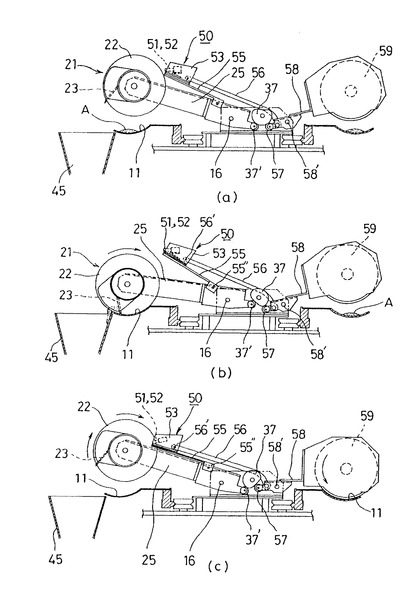
【図4】図4は、図1に示す回転式分包機の動作を説明するための説明図である。
【発明を実施するための形態】
【0015】
以下、添付図面を参照しつつ、本発明の一実施形態について説明する。
【0016】
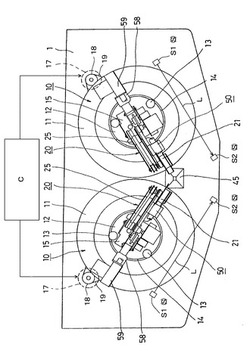
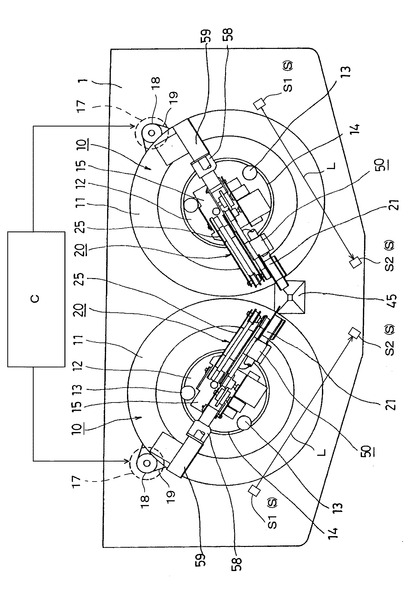
図1は、本発明の一実施形態に係る回転式分包機の概略構成を示す平面図である。また、図2は、図1に示す回転式分包機の部分横断面図である。さらに、図3は、図1に示す回転式分包機の部分縦断面図である。図1〜図3に示すように、本実施形態に係る回転式分包機は、機体フレーム1上に左右2つの回転テーブル10、10を備えている。各回転テーブル10、10には、いずれも環状凹溝11が設けられ、各環状凹溝11に対向する所定の位置には、散薬の分割掻き取り機構20が回転テーブル10、10の回転軌道に交差するようにして配設されている。分割掻き取り機構20に隣接する回転テーブル10、10間の下方には、包装機構(図示せず)に繋がる供給シュート45が配設されている。また、回転テーブル10,10の上方には、各環状凹溝11内に散薬を振り撒くためのフィーダ(図示せず)と供給ホッパ(図示せず)とが配設されている。さらに、回転式分包機には、環状凹溝11内に振り撒かれた散薬の高さを検出するためのセンサSが配設されている。より具体的に説明すれば、本実施形態に係るセンサSは、環状凹溝11の底部より上方で且つ回転テーブル10に略平行になるように光軸Lが設定された投光部S1及び受光部S2を具備する透過型の光電センサ(光電スイッチ)とされている。
【0017】
回転テーブル10、10には、中央に円形の透孔12が設けられ、この透孔12の内周縁に沿うように駆動リング14が下方に向けて突設されている。駆動リング14には、突条14’が設けられており、この突条14’がそれに係合する複数個のガイドローラ13によって案内されるようになっている。駆動リング14は、機体フレーム1上に設置された駆動モータ(パルスモータ)17、17の出力軸に取り付けられたプーリ18との間に巻き掛けられることによって駆動され、これによって回転テーブル10、10が回転するように構成されている。駆動モータ17、17は、コントローラCからの制御信号によって起動・停止及び回転ピッチ(一分割当たりの回転量)が制御される。
【0018】
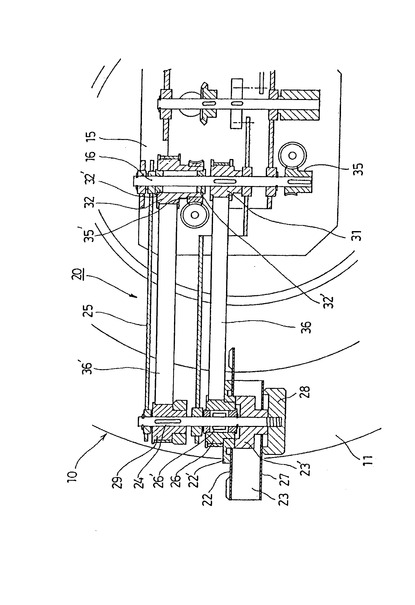
分割掻き取り機構20は、回転テーブル10中央の透孔12内に立設される駆動部支持フレーム15に軸16によって支持された支持アーム25の先端の回転軸24に、環状凹溝11の曲率中心回りに回転する回転板22と、回転板22と同一軸心に設けられた掻き取り板23とが支持されて別個に駆動されるようになっている。
【0019】
支持アーム25の支持軸を兼ねる駆動軸16には、回転板22を駆動するための駆動車31が取り付けられると共に、軸受32’、32’を介して掻き取り板23を駆動するための駆動車32が取り付けられている。各駆動車31、32は、それぞれ単独のモータ(例えばパルスモータ)34、34’によって駆動されるウォーム歯車機構35、35’によって駆動され、駆動車31と回転板22の伝動車26との間にはベルト36が巻掛けられる一方、駆動車32と掻き取り板23の伝動車29との間にはベルト36’が巻き掛けられることにより、回転板22及び掻き取り板23が回転駆動される。なお、本実施形態におけるベルト36、36’はタイミングベルト(歯付きベルト)を用いており、各駆動車31、32及び伝動車26、29は、いずれもタイミングベルトと噛み合う歯車を用いている。
【0020】
支持アーム25は、基端において別駆動力で駆動操作されるカム37と、支持アーム25の端部に付設されたカムフォロア37’との係合により、分割掻き取り動作が終了すると回転テーブル10の環状凹溝11から上方に持ち上げられ、次の分割掻き取り動作が開始されるまで、持ち上げられた位置で静止するように構成されている。なお、本実施形態に係る回転式分包機は、支持アーム25が環状凹溝11から上方へ回動待避する動作に連動して環状凹溝11を清掃できるように、清掃具59が設けられている。
【0021】
次に、以上に説明した構成を有する回転式分包機の動作について説明する。
【0022】
回転式分包機は、使用に際して、散薬の分割掻き取り機構20の支持アーム25が上昇した状態にされ、これにより回転テーブル10の環状凹溝11から回転板22及び掻き取り板23が上方へ持ち上げられる(図4(a)参照)。そして、コントローラCの制御信号に従って回転している回転テーブル10の環状凹溝11内にフィーダから所要量の散薬Aが振り撒かれる。
【0023】
次に、環状凹溝11内への散薬Aの振り撒きが終了すれば、コントローラCの制御信号に従って回転テーブル10は停止すると共に、光電センサSよって振り撒かれた散薬Aの高さが検出され、検出結果(光電センサSのオン・オフ信号)がコントローラCに送信される。
【0024】
光電センサSによる散薬Aの高さ検出が終了すれば、分割掻き取り機構20の支持アーム25をカム37の回動によって下降させ、回転板22を環状凹溝11上に進入させ、掻き取り板23を所定速度で回転させる(図4(b)参照)。斯かる動作と共に、コントローラCは、後述するように、検出結果に応じて回転テーブル10の回転ピッチを補正し、当該補正後の回転ピッチで回転テーブル10を回転させる。これにより、回転板22の回転によって堰き止められた散薬Aは、掻き取り板23によって掻き取られ、供給シュート45を介して包装袋に送り込まれる。なお、回転板22及び掻き取り板23の回転は、分割数の大小等に応じて、両者の同調回転又は掻き取り板23のみの回転が適宜選択される。
【0025】
回転テーブル10の回転、回転板22による散薬Aの堰き止め、掻き取り板23による散薬Aの掻き取りを繰り返し、全分包量の分割掻き取り動作が終了すれば、カム37の回動によりカムフォロア37’を介して支持アーム25が持ち上げられ、分割掻き取り機構20が上昇退避する一方、清掃具59が環状凹溝11に接触して清掃が施される(図4(c)参照)。
【0026】
以下、本発明の特徴部分である、前述したコントローラCによる回転テーブル10の回転ピッチ補正手順について具体的に説明する。
【0027】
コントローラCには、初期設定として、分割数(分包数)に応じた回転テーブル10の回転ピッチが予め設定記憶されている。より具体的に説明すれば、コントローラCには、分包数及び分包する順番(第1包目、第2包目など)に対応する回転テーブル10の各回転ピッチが、駆動モータ17の駆動パルス数の形態で記憶されている(例えば、第1包目は、分包数に対応するピッチのパルス数から掻き取り幅に対応するパルス数を減じた値が記憶され、第2包目以降は、分包数に対応するピッチのパルス数が記憶される)。従って、仮に回転ピッチの補正を施さない場合を考えれば、コントローラCに所定の分包数が入力されると、当該分包数に対応し且つ分包する順番に応じた回転ピッチが順次選択され、当該選択された回転ピッチに従って駆動モータ17、ひいては回転テーブル10が回転駆動されることになる。
【0028】
ここで、コントローラCには、上記のようにして予め設定記憶された回転ピッチを補正するための補正係数が、分包数及び分包する順番に応じて記憶されている。より具体的には、下記表1に一例を示すように、光電センサSによって検出した環状凹溝11内に振り撒かれた散薬Aの高さに応じて異なる補正係数が設定記憶されている。
【表1】

【0029】
ここで、表1の(a)は散薬Aの高さが光電センサSの光軸Lよりも小さい場合(光電センサSの受光器S2からオン信号が送信された場合)に選択される補正係数を、(b)は散薬Aの高さが光電センサSの光軸Lよりも大きい場合(光電センサSの受光器S2からオフ信号が送信された場合)に選択される補正係数を示す。なお、表1中の数値は%単位であり、予め設定記憶された回転ピッチに対して、対応する補正係数を乗算することにより、最終的な回転ピッチが決定されることになる。本実施形態では、分割量に誤差が生じ易い(分割量が他の分包と異なり易い)第1包目、第2包目、最終2包(最終包の一つ前)及び最終包のみについて補正係数を設定しており、他の分包については、予め設定した回転ピッチをそのまま用いる構成を採用している。以上のようにして、予め設定記憶された回転ピッチは補正され、回転テーブル10は、補正後の回転ピッチで回転することになる。
【0030】
以上に説明したように、本実施形態に係る回転式分包機によれば、環状凹溝11内に振り撒かれた散薬Aの高さに応じて回転テーブル10の回転ピッチが補正される。散薬Aの高さは、一分割(一分包)毎に堰き止められる散薬Aの量や環状凹溝11内に振り撒かれた散薬Aの堆積状態に関連するパラメータであるため、当該パラメータに応じて回転ピッチを補正することにより、散薬Aを精度良く均等に分割することが可能である。
【0031】
なお、本実施形態では、散薬の高さを検出するためのセンサSとして、透過型の光電センサを用いる構成について説明したが、本発明はこれに限るものではなく、反射型の光電センサを採用することも可能である。
【0032】
また、本実施形態では、各回転テーブル10毎に一つの光電センサS(一対の投光部S1及び受光部S2)を配設する構成について説明したが、本発明はこれに限るものではなく、上下方向に複数の光電センサを配設する構成の他、2次元距離計や、2次元カメラと画像処理とを組合せた構成などを採用し、散薬Aの高さをより精度良く検出することも可能である。斯かる構成によれば、精度良く検出した高さに応じて補正係数を細かく設定することが可能であり、散薬をより一層精度良く均等に分割し得ることが期待できる。
【符号の説明】
【0033】
10…回転テーブル
11…環状凹溝
20…分割掻き取り機構
S…センサ(光電センサ)
C…コントローラ
【技術分野】
【0001】
本発明は、回転テーブルの環状凹溝内に振り撒いた散薬を当該回転テーブルの径方向に掻き取って分割する散薬分割装置に関する。
【背景技術】
【0002】
従来より、散薬を所要量ずつ小分けにして包装する分包機として、散薬分割用の環状凹溝を有する回転テーブルを備えた回転式分包機が知られている。
【0003】
より具体的に説明すれば、回転式分包機は、環状凹溝が設けられた回転テーブルと、環状凹溝内の散薬を掻き取るための分割掻き取り機構と、掻き取られた散薬を包装するための包装機構とを備えている。そして、前状凹溝内に散薬を略均等に振り撒いた後、回転テーブルを所定の回転ピッチで回転させると共に、分割掻き取り機構によって、環状凹溝内の散薬を堰き止め、当該堰き止められた散薬を回転テーブルの径方向に掻き取り、包装機構で包装するように構成されている。
【0004】
ここで、回転式分包機における回転テーブルの回転ピッチ(一分割当たりの回転量)は、最初の分割の際には、散薬の分割数に対応するピッチ(=1回転/分割数)から分割掻き取り機構の掻き取り幅を減じた値に設定され、次の分割からは、分割数に対応するピッチに設定されるのが一般的であった。
【0005】
しかしながら、斯かる回転ピッチの設定では、分割量(一分包当たりの散薬の量に相当)が均等にならない(特に、最初及び最後の分割の際に顕著である)ことが知られており、散薬を精度良く均等に分割するには、上記のようにして設定した回転ピッチを適宜補正することが必要である。
【0006】
回転ピッチの補正方法としては、例えば、最初の分割の際には、散薬の分割数に対応するピッチと分割掻き取り機構の掻き取り幅との差から、当該ピッチ内で過剰に掻き取られる部分の面積に相当する角度分だけ減じた値に回転ピッチを設定し、次の分割からは、分割数に対応するピッチに設定し、さらに、最後の分割の際には、分割数に対応するピッチから当該ピッチ内で過剰に掻き取られる部分の面積に相当する角度分だけ減じた値に設定する方法が提案されている(例えば、特許文献1の請求項2参照)。
【0007】
また、前記特許文献1には、分割される散薬の種類に応じて回転ピッチの補正量を調整することも提案されている(例えば、特許文献1の請求項3、4参照)。
【0008】
しかしながら、前記特許文献1に記載された方法は、単に幾何学的な特性(回転テーブルを平面視したときにおける理論的な分割面積と分割掻き取り機構によって実際に掻き取られる面積との間に差が生じること)や、散薬の種類(微粉末、粉末、顆粒、粒子)に応じて回転ピッチを補正することを提案するに留まるものであり、散薬を精度良く均等に分割するには十分でないという問題がある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第3131153号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、斯かる従来技術の問題を解決するためになされたものであり、回転テーブルの環状凹溝内に振り撒いた散薬を当該回転テーブルの径方向に掻き取って精度良く均等に分割することができる散薬分割装置を提供することを課題とする。
【課題を解決するための手段】
【0011】
斯かる課題を解決するべく、本発明の発明者らは鋭意検討した結果、散薬を精度良く均等に分割できないのは、分割掻き取り機構によって堰き止められる散薬の堆積状態が、一分割毎に堰き止められる散薬の量や、環状凹溝内に振り撒かれた散薬の堆積状態に応じて異なる(堰き止められる散薬の量が多ければ、堆積する散薬の山の高さが大きくなり、当該散薬が掻き取られる前に山崩れし易い等)のが一因となっていることを見出し、斯かる知見に基づいて本発明を完成させたものである。
【0012】
すなわち、本発明は、環状凹溝が設けられた回転テーブルと、前記環状凹溝内の散薬を掻き取るための分割掻き取り機構とを備え、前記環状凹溝内に散薬を振り撒いた後、前記回転テーブルを所定のピッチで回転させると共に、前記分割掻き取り機構によって、前記環状凹溝内の散薬を堰き止め、当該堰き止められた散薬を前記回転テーブルの径方向に掻き取る散薬分割装置であって、前記環状凹溝内に振り撒かれた散薬の高さが所定の高さを超えているか否かを検出するためのセンサを備え、前記センサによる検出結果に応じて、前記回転テーブルの回転ピッチを補正して、最終的な回転ピッチを決定することを特徴とする散薬分割装置を提供するものである。
【発明の効果】
【0013】
本発明によれば、環状凹溝内に振り撒かれた散薬の高さに応じて回転テーブルの回転ピッチが補正されるが、前記散薬の高さは、一分割毎に堰き止められる散薬の量や環状凹溝内に振り撒かれた散薬の堆積状態に関連するパラメータであるため、当該パラメータに応じて回転ピッチを補正することにより、散薬を精度良く均等に分割することが可能である。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の一実施形態に係る回転式分包機の概略構成を示す平面図である。
【図2】図2は、図1に示す回転式分包機の部分横断面図である。
【図3】図3は、図1に示す回転式分包機の部分縦断面図である。
【図4】図4は、図1に示す回転式分包機の動作を説明するための説明図である。
【発明を実施するための形態】
【0015】
以下、添付図面を参照しつつ、本発明の一実施形態について説明する。
【0016】
図1は、本発明の一実施形態に係る回転式分包機の概略構成を示す平面図である。また、図2は、図1に示す回転式分包機の部分横断面図である。さらに、図3は、図1に示す回転式分包機の部分縦断面図である。図1〜図3に示すように、本実施形態に係る回転式分包機は、機体フレーム1上に左右2つの回転テーブル10、10を備えている。各回転テーブル10、10には、いずれも環状凹溝11が設けられ、各環状凹溝11に対向する所定の位置には、散薬の分割掻き取り機構20が回転テーブル10、10の回転軌道に交差するようにして配設されている。分割掻き取り機構20に隣接する回転テーブル10、10間の下方には、包装機構(図示せず)に繋がる供給シュート45が配設されている。また、回転テーブル10,10の上方には、各環状凹溝11内に散薬を振り撒くためのフィーダ(図示せず)と供給ホッパ(図示せず)とが配設されている。さらに、回転式分包機には、環状凹溝11内に振り撒かれた散薬の高さを検出するためのセンサSが配設されている。より具体的に説明すれば、本実施形態に係るセンサSは、環状凹溝11の底部より上方で且つ回転テーブル10に略平行になるように光軸Lが設定された投光部S1及び受光部S2を具備する透過型の光電センサ(光電スイッチ)とされている。
【0017】
回転テーブル10、10には、中央に円形の透孔12が設けられ、この透孔12の内周縁に沿うように駆動リング14が下方に向けて突設されている。駆動リング14には、突条14’が設けられており、この突条14’がそれに係合する複数個のガイドローラ13によって案内されるようになっている。駆動リング14は、機体フレーム1上に設置された駆動モータ(パルスモータ)17、17の出力軸に取り付けられたプーリ18との間に巻き掛けられることによって駆動され、これによって回転テーブル10、10が回転するように構成されている。駆動モータ17、17は、コントローラCからの制御信号によって起動・停止及び回転ピッチ(一分割当たりの回転量)が制御される。
【0018】
分割掻き取り機構20は、回転テーブル10中央の透孔12内に立設される駆動部支持フレーム15に軸16によって支持された支持アーム25の先端の回転軸24に、環状凹溝11の曲率中心回りに回転する回転板22と、回転板22と同一軸心に設けられた掻き取り板23とが支持されて別個に駆動されるようになっている。
【0019】
支持アーム25の支持軸を兼ねる駆動軸16には、回転板22を駆動するための駆動車31が取り付けられると共に、軸受32’、32’を介して掻き取り板23を駆動するための駆動車32が取り付けられている。各駆動車31、32は、それぞれ単独のモータ(例えばパルスモータ)34、34’によって駆動されるウォーム歯車機構35、35’によって駆動され、駆動車31と回転板22の伝動車26との間にはベルト36が巻掛けられる一方、駆動車32と掻き取り板23の伝動車29との間にはベルト36’が巻き掛けられることにより、回転板22及び掻き取り板23が回転駆動される。なお、本実施形態におけるベルト36、36’はタイミングベルト(歯付きベルト)を用いており、各駆動車31、32及び伝動車26、29は、いずれもタイミングベルトと噛み合う歯車を用いている。
【0020】
支持アーム25は、基端において別駆動力で駆動操作されるカム37と、支持アーム25の端部に付設されたカムフォロア37’との係合により、分割掻き取り動作が終了すると回転テーブル10の環状凹溝11から上方に持ち上げられ、次の分割掻き取り動作が開始されるまで、持ち上げられた位置で静止するように構成されている。なお、本実施形態に係る回転式分包機は、支持アーム25が環状凹溝11から上方へ回動待避する動作に連動して環状凹溝11を清掃できるように、清掃具59が設けられている。
【0021】
次に、以上に説明した構成を有する回転式分包機の動作について説明する。
【0022】
回転式分包機は、使用に際して、散薬の分割掻き取り機構20の支持アーム25が上昇した状態にされ、これにより回転テーブル10の環状凹溝11から回転板22及び掻き取り板23が上方へ持ち上げられる(図4(a)参照)。そして、コントローラCの制御信号に従って回転している回転テーブル10の環状凹溝11内にフィーダから所要量の散薬Aが振り撒かれる。
【0023】
次に、環状凹溝11内への散薬Aの振り撒きが終了すれば、コントローラCの制御信号に従って回転テーブル10は停止すると共に、光電センサSよって振り撒かれた散薬Aの高さが検出され、検出結果(光電センサSのオン・オフ信号)がコントローラCに送信される。
【0024】
光電センサSによる散薬Aの高さ検出が終了すれば、分割掻き取り機構20の支持アーム25をカム37の回動によって下降させ、回転板22を環状凹溝11上に進入させ、掻き取り板23を所定速度で回転させる(図4(b)参照)。斯かる動作と共に、コントローラCは、後述するように、検出結果に応じて回転テーブル10の回転ピッチを補正し、当該補正後の回転ピッチで回転テーブル10を回転させる。これにより、回転板22の回転によって堰き止められた散薬Aは、掻き取り板23によって掻き取られ、供給シュート45を介して包装袋に送り込まれる。なお、回転板22及び掻き取り板23の回転は、分割数の大小等に応じて、両者の同調回転又は掻き取り板23のみの回転が適宜選択される。
【0025】
回転テーブル10の回転、回転板22による散薬Aの堰き止め、掻き取り板23による散薬Aの掻き取りを繰り返し、全分包量の分割掻き取り動作が終了すれば、カム37の回動によりカムフォロア37’を介して支持アーム25が持ち上げられ、分割掻き取り機構20が上昇退避する一方、清掃具59が環状凹溝11に接触して清掃が施される(図4(c)参照)。
【0026】
以下、本発明の特徴部分である、前述したコントローラCによる回転テーブル10の回転ピッチ補正手順について具体的に説明する。
【0027】
コントローラCには、初期設定として、分割数(分包数)に応じた回転テーブル10の回転ピッチが予め設定記憶されている。より具体的に説明すれば、コントローラCには、分包数及び分包する順番(第1包目、第2包目など)に対応する回転テーブル10の各回転ピッチが、駆動モータ17の駆動パルス数の形態で記憶されている(例えば、第1包目は、分包数に対応するピッチのパルス数から掻き取り幅に対応するパルス数を減じた値が記憶され、第2包目以降は、分包数に対応するピッチのパルス数が記憶される)。従って、仮に回転ピッチの補正を施さない場合を考えれば、コントローラCに所定の分包数が入力されると、当該分包数に対応し且つ分包する順番に応じた回転ピッチが順次選択され、当該選択された回転ピッチに従って駆動モータ17、ひいては回転テーブル10が回転駆動されることになる。
【0028】
ここで、コントローラCには、上記のようにして予め設定記憶された回転ピッチを補正するための補正係数が、分包数及び分包する順番に応じて記憶されている。より具体的には、下記表1に一例を示すように、光電センサSによって検出した環状凹溝11内に振り撒かれた散薬Aの高さに応じて異なる補正係数が設定記憶されている。
【表1】
【0029】
ここで、表1の(a)は散薬Aの高さが光電センサSの光軸Lよりも小さい場合(光電センサSの受光器S2からオン信号が送信された場合)に選択される補正係数を、(b)は散薬Aの高さが光電センサSの光軸Lよりも大きい場合(光電センサSの受光器S2からオフ信号が送信された場合)に選択される補正係数を示す。なお、表1中の数値は%単位であり、予め設定記憶された回転ピッチに対して、対応する補正係数を乗算することにより、最終的な回転ピッチが決定されることになる。本実施形態では、分割量に誤差が生じ易い(分割量が他の分包と異なり易い)第1包目、第2包目、最終2包(最終包の一つ前)及び最終包のみについて補正係数を設定しており、他の分包については、予め設定した回転ピッチをそのまま用いる構成を採用している。以上のようにして、予め設定記憶された回転ピッチは補正され、回転テーブル10は、補正後の回転ピッチで回転することになる。
【0030】
以上に説明したように、本実施形態に係る回転式分包機によれば、環状凹溝11内に振り撒かれた散薬Aの高さに応じて回転テーブル10の回転ピッチが補正される。散薬Aの高さは、一分割(一分包)毎に堰き止められる散薬Aの量や環状凹溝11内に振り撒かれた散薬Aの堆積状態に関連するパラメータであるため、当該パラメータに応じて回転ピッチを補正することにより、散薬Aを精度良く均等に分割することが可能である。
【0031】
なお、本実施形態では、散薬の高さを検出するためのセンサSとして、透過型の光電センサを用いる構成について説明したが、本発明はこれに限るものではなく、反射型の光電センサを採用することも可能である。
【0032】
また、本実施形態では、各回転テーブル10毎に一つの光電センサS(一対の投光部S1及び受光部S2)を配設する構成について説明したが、本発明はこれに限るものではなく、上下方向に複数の光電センサを配設する構成の他、2次元距離計や、2次元カメラと画像処理とを組合せた構成などを採用し、散薬Aの高さをより精度良く検出することも可能である。斯かる構成によれば、精度良く検出した高さに応じて補正係数を細かく設定することが可能であり、散薬をより一層精度良く均等に分割し得ることが期待できる。
【符号の説明】
【0033】
10…回転テーブル
11…環状凹溝
20…分割掻き取り機構
S…センサ(光電センサ)
C…コントローラ
【特許請求の範囲】
【請求項1】
環状凹溝が設けられた回転テーブルと、前記環状凹溝内の散薬を掻き取るための分割掻き取り機構とを備え、前記環状凹溝内に散薬を振り撒いた後、前記回転テーブルを所定のピッチで回転させると共に、前記分割掻き取り機構によって、前記環状凹溝内の散薬を堰き止め、当該堰き止められた散薬を前記回転テーブルの径方向に掻き取る散薬分割装置であって、
前記環状凹溝内に振り撒かれた散薬の高さが所定の高さを超えているか否かを検出するためのセンサを備え、
前記センサによる検出結果に応じて、前記回転テーブルの回転ピッチを補正して、最終的な回転ピッチを決定することを特徴とする散薬分割装置。
【請求項1】
環状凹溝が設けられた回転テーブルと、前記環状凹溝内の散薬を掻き取るための分割掻き取り機構とを備え、前記環状凹溝内に散薬を振り撒いた後、前記回転テーブルを所定のピッチで回転させると共に、前記分割掻き取り機構によって、前記環状凹溝内の散薬を堰き止め、当該堰き止められた散薬を前記回転テーブルの径方向に掻き取る散薬分割装置であって、
前記環状凹溝内に振り撒かれた散薬の高さが所定の高さを超えているか否かを検出するためのセンサを備え、
前記センサによる検出結果に応じて、前記回転テーブルの回転ピッチを補正して、最終的な回転ピッチを決定することを特徴とする散薬分割装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−18353(P2010−18353A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2009−240147(P2009−240147)
【出願日】平成21年10月19日(2009.10.19)
【分割の表示】特願2004−50880(P2004−50880)の分割
【原出願日】平成16年2月26日(2004.2.26)
【出願人】(593129342)高園産業株式会社 (232)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成21年10月19日(2009.10.19)
【分割の表示】特願2004−50880(P2004−50880)の分割
【原出願日】平成16年2月26日(2004.2.26)
【出願人】(593129342)高園産業株式会社 (232)
【Fターム(参考)】
[ Back to top ]