
整形外科用の骨鋸および骨ドリルの出力運動を変換するためのアダプタ
【課題】骨鋸および骨ドリルの出力運動を変換するために、骨鋸だけでなく骨ドリルをも振動させるためのアダプタを提供する。
【解決手段】アダプタは、骨鋸の振動運動を、変更された振動運動、または、軌道運動に変換することができる。アダプタは、骨ドリルの回転運動を軌道運動に変換することもできる。
【解決手段】アダプタは、骨鋸の振動運動を、変更された振動運動、または、軌道運動に変換することができる。アダプタは、骨ドリルの回転運動を軌道運動に変換することもできる。
【発明の詳細な説明】
【開示の内容】
【0001】
〔開示の分野〕
本開示は概して、人工関節置換術の間、長骨に使用される整形外科用具、例えば、振動骨鋸(oscillating bone saws)および骨ドリル(bone drills)に関する。具体的には、本開示は、骨鋸および骨ドリルと一緒に使用して各々の出力運動(output motion)を変えるためのアダプタ(adapters)に関する。
【0002】
〔背景〕
整形外科処置にはしばしば、骨構造体、例えば、長骨および/または関節型の骨(joint-type bones)の切断(cutting)、トリミング(trimming)、穿孔(drilling)および/またはシェイビング(shaving)が包含される。長骨は、一般に強度、構造および可動性(mobility)を提供する硬質、高密度の骨である。長骨には、例えば、下肢の大腿骨、脛骨および腓骨、腕の上腕骨、橈骨および尺骨、ならびに指節骨および趾節骨が包含される。振動骨鋸は、例えば、関節炎の関節もしくは損傷した関節の一部または全てを人工関節で置き換える場合、全体的または部分的人工関節置換術のような様々な整形外科処置が行われる間、整形外科インプラントを受け入れて適切に整列させるため、上述の骨を調整するためにしばしば使用される。典型的な骨鋸は、米国特許第3,905,105号、同第3,977,289号、同第6,949,110号、同第6,302,406号明細書、および米国特許出願公開第US2006/0009796号明細書に見出だすことができる。
【0003】
上述の骨構造体は、例えば、筋肉、軟骨、腱および靱帯のような軟部組織によって囲まれている。これらの軟部組織構造体は、骨構造体の切断を含む整形外科処置が行われる間、分離することが困難である場合がある。例えば、外科医は、開創器(retractors)等の器具を使用して、手術部位から軟部組織を引き離し、該骨の適切な視覚化を提供し、かつ、該軟部組織に対するあらゆる不慮の損傷を防止する。しかし、該軟部組織は骨構造体に付着したままであり、限られた量しか該軟部組織を後退させることはできない。したがって、周辺軟部組織は、整形外科処置が行われる間、振動骨鋸によって無意識のうちに損傷を受けることがある。そのような軟部組織の損傷に関する解説は、下記の文献:ダ・シルバ,M.A.(Da Silva, M.A.)等「人工膝関節全置換術が行われる間の膝窩血管損傷(Popliteal Vascular Injury during Total Knee Arthroplasty)」,ジャーナル・オブ・サージカル・リサーチ(Journal of Surgical Research), 第109巻,第2号,pp.170〜174(2003年2月);クラッコウ,K.A.(Krackow, K.A.)「内側側副靱帯の修復および再建(MCL Repair and Reconstruction)」,ザ・ニー・ソサイエティ・スペシャルティ・デイ・ミーティング(The Knee Society Specialty Day Meeting)(2003年2月8日);および、レオポルド,S.S.(Leopold, S.S.)等「人工膝関節全置換術が行われる間の内側側副靱帯の術中破壊の第一次修復(Primary Repair of Intraoperative Disruption of the Medial Collateral Ligament During Total Knee Arthroplasy)」,ザ・ジャーナル・オブ・ボーン・アンド・ジョイント・サージェリー(The Journal of Bone & Joint Surgery),第83−A巻,第1号(2001年1月)、に見出だすことができる。
【0004】
〔概要〕
本発明は、特許請求の範囲に記載の特徴、または、下記の特徴、または、それらの組合せのうち1つ以上を含む。
【0005】
本開示の1つの態様によると、振動骨鋸組立て品は、ドライブ機構を有する振動骨鋸と、該ドライブ機構に連結された骨鋸刃とを含む。該骨鋸刃の遠位端の振動運動の弧長は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)である。更に、該骨鋸刃の旋回点(pivot point)と該骨鋸刃の遠位端との間の長さは、約8.89cm(約3.5インチ)以下である場合がある。該骨鋸刃の該振動運動は、約3.6°以下の角度を定めることができる。
【0006】
本開示のもう1つの態様によると、軌道出力運動を生じさせるための軌道骨鋸組立て品(orbital bone saw assembly)は、ドライブ機構と、前記ドライブ機構に連結された骨鋸刃とを含む。実例として、該骨鋸刃の軌道出力運動は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦(major chord)を定めている。更に、該骨鋸刃の長さ方向軸は、該骨鋸刃の軌道出力運動によって定められた該長弦に対して垂直である場合がある。実例として、軌道骨鋸組立て品は、振動骨鋸または回転骨ドリルを含む場合がある。この場合、該骨鋸および該骨ドリルのうち1つは、それ自体、ドライブ機構と、軌道骨鋸組立て品の刃クランプ(blade clamp)とを含む。
【0007】
本開示の更にもう1つの態様によると、振動骨鋸組立て品を操作する方法は、骨鋸刃を、振動骨鋸のドライブ機構に連結する段階と、該骨鋸刃の遠位端の振動運動の弧長が4.445mm(0.175インチ)〜5.588mm(0.220インチ)となるように、該骨鋸刃を振動させる段階とを含む。該骨鋸刃を振動させる段階は、アダプタを該振動骨鋸の該ドライブ機構に連結し、該骨鋸刃を該アダプタに連結することによって、該振動骨鋸の出力運動を変更する段階を含むことができる。更に、該ドライブ機構の出力運動は、約8°の角度を定めることができ、また、該骨鋸刃の出力運動は、約3.6°以下の角度を定めることができる。第1の軸の周りのドライブ機構にハブコネクタを連結することができ、該骨鋸刃は該ハブコネクタに連結することができ、かつ、第1の軸から間隔を置いて離されている第2の軸の周りに、該骨鋸刃を振動させることができる。
【0008】
本開示の更にもう1つの態様によると、振動骨鋸組立て品を操作する方法は、振動骨鋸または骨ドリルのドライブ機構に骨鋸刃を連結する段階と、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長弦を有する軌道経路を定めるように該骨鋸刃の遠位端を移動させる段階とを含む。該振動骨鋸または該骨ドリルの該ドライブ機構に、アダプタを連結することができる。更に、該骨鋸刃は、該アダプタに連結することができる。該骨鋸刃の近位端に位置する、該骨鋸刃の旋回点は、該骨鋸刃が回転する回転軸から間隔を置いて離されている場合がある。
【0009】
本開示の更にもう1つの態様によると、振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、該振動骨鋸の振動出力運動を変更するためのアダプタは、前記刃クランプに連結されるように構成されたハウジングと、前記刃クランプのハブに連結されるように構成されたハブコネクタと、旋回点を定めるように該ハウジングに旋回可能に連結された骨鋸刃とを含む。実例として、該骨鋸刃の近位端は、該ハブコネクタに連結されている。該ハブコネクタは歯車歯を含むことができ、該骨鋸刃の近位端もまた、該ハブコネクタの該歯車歯と連動された歯車歯を含むことができる。該骨鋸刃と該ハブコネクタとの間の歯車比は約2:1である場合がある。更に、該旋回点から該骨鋸刃の遠位端までの、該骨鋸刃の長さは、約8.89cm(約3.5インチ)以下である場合がある。
【0010】
本開示の更なる態様によると、振動骨鋸に連結されるように構成されたアダプタであって、該振動骨鋸の振動出力運動を軌道運動に変換するためのアダプタは、該振動骨鋸の該刃クランプに連結されるように構成されたハウジングと、該ハウジングに連結された駆動機構であって、該振動骨鋸の該刃クランプのドライブ機構に連結されるように構成された駆動機構と、該駆動機構に連結された刃とを含む。該駆動機構は、該振動骨鋸の該ドライブ機構に連結されるように構成されたハブコネクタと、第1の端部で該ハブコネクタに連結されたリンク機構と、該リンク機構の第2の端部に連結された歯車組立て品とを含むことができる。該駆動機構は、該歯車組立て品に連結された出力シャフトであって、該骨鋸刃の孔を通して受け入れられた出力シャフトを更に含むことができる。
【0011】
実例として、前記歯車組立て品は、前記リンク機構に連結された第1の歯車と、第1の歯車に連結された第2の歯車とを含むことができる。前記出力シャフトは、第2の歯車に連結されている場合があり、かつ、第2の歯車が回転する軸から間隔を置いて離されている場合がある。更に、前記骨鋸刃は、スロットを含むことができ、かつ、前記ハウジングは、該骨鋸刃の該スロットの内部に受け入れられたガイドピンを含むことができる。該スロットの長さ方向軸は、該骨鋸刃の長さ方向軸に平行である場合がある。実例として、該出力シャフトと該回転軸との間の距離は、該回転軸と前記ガイドピンとの間の距離よりも短い場合がある。更に、該回転軸と該ガイドピンとの間の該距離は、該骨鋸刃の該孔と該骨鋸刃の遠位端との間の距離よりも短い場合がある。
【0012】
更に実例として、前記アダプタは、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する主軸を定める、骨鋸刃の遠位端の出力運動を生じさせるように構成されている場合がある。
【0013】
本開示の更にもう1つの態様によると、骨ドリルのチャック(chuck)に連結されるように構成されたアダプタであって、該骨ドリルの回転出力運動を軌道運動に変換するためのアダプタは、第1の回転軸を定めるように該骨ドリルの該チャックの出力ドライブシャフトに連結されるように構成された第1のかさ歯車を含む。該アダプタの第2のかさ歯車は、第1のかさ歯車に連結され、かつ、第1の回転軸に対して垂直な第2の回転軸を定めるように位置付けられている。該アダプタの刃は、第2のかさ歯車に連結されて刃の旋回点を定めている近位端を含む。該刃の前記旋回点は、第2のかさ歯車の第2の回転軸から間隔を置いて離されている場合がある。
【0014】
実例として、前記アダプタは、ハウジングを更に含むことができ、これにより第1および第2のかさ歯車がハウジング内部に位置付けられる。該ハウジングは、前記刃のスロットの内部に位置付けられたガイドピンを含むことができる。該スロットの長さ方向軸は、該刃の長さ方向軸に平行である場合がある。更に実例として、第2の回転軸と該ガイドピンとの間の第1の距離は、第2の回転軸と該刃の前記旋回点との間の第2の距離よりも長い場合がある。該スロットの長さは、第2の距離の少なくとも2倍と該ガイドピンの直径とを併せたものである場合がある。第2の回転軸と該ガイドピンとの間の第1の距離は、該刃の該旋回点と該刃の遠位端との間の第3の距離よりも短い場合がある。
【0015】
前記アダプタは、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦を定める、前記刃の遠位端の出力運動を生じさせるように構成されている場合がある。該出力運動の該長弦は、該刃の長さ方向軸に対して垂直である場合がある。
【0016】
本開示の更にもう1つの態様によると、振動骨鋸の振動出力運動を変更するために、該振動骨鋸の刃クランプに連結されるように構成されたアダプタは、開口部を有する骨鋸刃であって、その開口部の中に該刃クランプの戻り止めを受け入れるように構成された、骨鋸刃を含む。該開口部は、該戻り止めの外面と該開口部の対応する表面との間に少なくとも0.203mm(0.008インチ)の隙間が存在するような大きさに作られている場合がある。該開口部は、第1の直径を定めるように概して円形であってよく、該戻り止めもまた、第2の直径を定めるように概して円形であってよい。実例として、第1の直径は、第2の直径よりも少なくとも0.203mm(0.008インチ)大きくてよい。
【0017】
前記骨鋸刃に、前記アダプタの調整器プレートを連結することができ、該調整器プレートは、該骨鋸刃に対して、第1の位置と第2の位置との間を移動することができる場合がある。該調整器プレートは、該骨鋸刃の前記長さ方向軸に平行な長さ方向軸を有する、概して涙の形をしたスロットを含むことができる。実例として、該スロットの近位端は、該スロットの遠位端の第2の幅より大きい第1の幅を定めている。該スロットの該近位端の第1の幅は、該骨鋸刃の前記開口部の前記直径より大きいか、または、該直径と同等である場合があるのに対して、該スロットの該遠位端の第2の幅は、該骨鋸刃の該開口部の該直径より小さい場合がある。
【0018】
実例として、前記調整器プレートが第1の位置に位置付けられているとき、前記骨鋸刃の前記開口部は、該調整器プレートの前記スロットの遠位端と一直線上に並んでおり、しかも、該調整器プレートが第2の位置に位置付けられているとき、該骨鋸刃の該開口部は、該調整器プレートの該スロットの近位端と一直線上に並んでいる。該骨鋸刃は複数の開口部を含む場合があり、また、該調整器プレートは複数のスロットを含む場合がある。
【0019】
前記アダプタは、前記調整器プレートに連結されたノブであって、第1の位置と第2の位置との間で該調整器プレートを移動させるために、前記骨鋸刃に対して移動することができる、ノブを更に含むことができる。該ノブは、ヘッドと、(i)該骨鋸刃の細長いスロット、および、(ii)該調整器プレートのネジ孔、を通して受け入れられたネジ山付きステムとを含むことができる。実例として、該ノブは、第1の位置と第2の位置との間で該調整器プレートを移動させるために、該骨鋸刃の長さ方向軸に平行な方向に移動することができる場合がある。代わりに、該ノブは、第1の位置と第2の位置との間で該調整器プレートを移動させるために、該骨鋸刃に対して旋回点の周りを回転することができる場合がある。
【0020】
本開示の更にもう1つの態様によると、振動骨鋸組立て品を操作する方法は、骨鋸刃を、振動骨鋸の刃クランプのドライブ機構に連結する段階と、該ドライブ機構を、旋回点の周りに第1の運動角度にわたって振動させる段階と、該骨鋸刃を、該旋回点の周りに、第2の運動角度にわたって振動させる段階とを含む。第2の運動角度は、第1の運動角度より小さい。該骨鋸刃を、該骨鋸刃の該ドライブ機構に連結するために、該骨鋸刃の複数の開口部を通して、該振動骨鋸の複数の戻り止めを受け入れることができる。
【0021】
本開示の更にもう1つの態様によると、振動骨鋸組立て品を操作する方法は、振動骨鋸の戻り止めが骨鋸刃の開口部を通って受け入れられるように、該骨鋸刃を、該振動骨鋸のドライブ機構のチャックに連結する段階と、該戻り止めを、該骨鋸刃に対して旋回点の周りに移動させる段階と、該戻り止めおよび該骨鋸刃を、該旋回点の周りに移動させる段階とを含む。
【0022】
現在認識される、本開示を実施するための最良の形態を例示する、例証となる実施形態の詳細な記述および添付図面を考慮すれば、本開示の上記特徴および他の特徴は、当業者に明らかになるであろう。
【0023】
詳細な記述は、とりわけ、添付図面に言及する。
【0024】
〔図面の詳細な記述〕
本開示の概念は、様々な変更および代替形態を受け入れることができるが、それらの具体的な例証となる実施形態は、図面に一例として示されており、本明細書に詳細に記述する。しかし、本開示を、開示される特定の形態に限定するようには意図されておらず、それどころか、本発明は、特許請求の範囲によって定められる本発明の趣旨および範囲内のあらゆる変更、同等物および代替物を包含するように意図されていることが理解されるべきである。
【0025】
本開示の図1〜図24に示される具体的な実施形態において解説されるように、骨鋸および/または骨ドリルに連結するための様々なアダプタが提供される。骨鋸の刃の出力運動を変更するために、そのようなアダプタの各々が取り付けられる該骨鋸および/または該骨ドリルの出力運動を変更するか、または変換するように、該アダプタは作動する。例えば、従来の骨鋸の刃の遠位端の振動運動の弧長(arc length)を限定することは、外科医が患者の骨を切っている通常領域において、該刃が患者の軟部組織を損傷するのを防止する助けとなることがある。軟部組織には、例えば、静脈、動脈、靱帯、腱、軟骨および筋肉組織だけでなく、整形外科処置が行われる間に損傷を受けることのある他の軟部組織も包含されることができる。同様に、従来の骨鋸の刃の遠位端の軌道運動(orbital motion)の長弦(major chord)を限定することもまた、該刃が上述の軟部組織を損傷するのを防止する手助けとなることがある。
【0026】
従来、前記刃の鋭さおよび/または該刃が作動している速度は、整形外科処置が行われる間の軟部組織の裂傷または破砕に寄与した唯一の因子ではないにせよ、それらに寄与した主な要因であると考えられてきた。しかし、この特定の考え方に反して、該刃それ自体の実運動(actual motion)は、患者の周辺軟部組織を裂傷させるかもしくは切断させることに関連する最も重要な因子、または、患者の周辺軟部組織を裂傷させるかもしくは切断させる最も重要な因子であることを見出だした。換言すれば、軟部組織の伸長不全(elongation failure)を越えて該軟部組織を引き伸ばさない量まで、該刃の運動を制限することによって、裂傷する軟部組織の量を著しく減少させることができる。軟部組織の伸長不全は一般に、該軟部組織の裂傷を引き起こす、該軟部組織を引き伸ばす量または該軟部組織を変形させる量を指す。したがって、特定の軟部組織の伸長不全より小さい変形量は、一般に、該組織が裂傷するのを防止する。当然ながら、周辺軟部組織が損傷する原因となり得る、上記で解説した諸因子が存在するにもかかわらず、骨鋸を操作する外科医は、そのような損傷が起こるのを防止することに対して主として責任を負う。しかし、本明細書に開示される概念は、外科医がそうすることの手助けとなることができる。
【0027】
軟部組織の変形(deformation)または引き伸ばし(stretching)を5.588mm(0.220インチ)以下に制限すれば、該軟部組織の伸長不全に取り組むことなく、該軟部組織の完全性(integrity)が維持されることを見出だした。換言すれば、軟部組織の変形を5.588mm(0.220インチ)以下に制限すれば、裂傷する該軟部組織の量が著しく減少する。当然ながら、体内の様々な軟部組織構造体はそれぞれ、様々な伸長不全率(elongation failure rates)を有することが理解される。しかし、軟部組織の変形を5.588mm(0.220インチ)以下に制限すれば、患者の骨を取り囲む全ての軟部組織の不全の量が著しく減少することを見出だした。
【0028】
当然ながら、前記刃の運動はまた、患者の骨を実際に切り進むのに十分でなければならない。換言すれば、該刃の最小運動は、患者の骨を効果的に切り進むために必要とされる。少なくとも4.445mm(0.175インチ)という、該刃の運動の範囲はそれ自体、患者の骨を十分に切り進むことができることを、実験によって見出だした。したがって、振動骨鋸組立て品(oscillating bone saw assembly)の刃であって、骨を効果的に切り離すと同時に、該刃が接触するかもしれない周辺軟部組織を損傷させる可能性を減少させる該刃の運動の1つの典型的な範囲は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の弧長(arc length)を定め、その範囲にわたって該刃の遠位端が動く。同様に、該刃の遠位端の軌道運動によって定められる長弦もまた4.445mm(0.175インチ)〜5.588mm(0.220インチ)となるような具合に、軌道骨鋸組立て品(orbital bone saw assembly)の骨鋸刃の軌道運動もまた、周辺軟部組織に対する損傷を減少させるように制限することができる。その範囲は、幾つかの典型的な具体例では、4.445mm(0.175インチ)〜5.080mm(0.200インチ)に更に制限される。しかし、該刃の振動運動の弧長、または、該刃の軌道運動の長弦が、例えば、5.588mm(0.220インチ)より長くなるか、または4.445mm(0.175インチ)より短くなるような具合に構成されているアダプタ(adapter)を提供することは、本開示の範囲内である。したがって、前述の、運動を制限することに関する理論的範囲は、実験によって得られたが、そのような範囲は、特許請求の範囲内にそのようなものとして具体的に列挙されない限り、本明細書に開示されるアダプタを限定するものと推論されるべきではない。
【0029】
本明細書およびに開示されるアダプタは、もともと製造されている用具(originally manufactured tool)、例えば、OEM振動骨鋸またはOEM回転骨ドリルと共に使用し、そのような鋸もしくはドリルの出力運動(output motion)を変更するために提供される改装機構(retrofit mechanisms)である。とりわけ、本明細書に開示されるアダプタは、用具保持機構(tool-retention mechanism)、例えば、振動骨鋸の刃クランプ、または、回転骨ドリルの(ソケット等の、調整可能であるか、もしくは調整不可能である)チャック(chuck)に連結されるように構成される。したがって、OEM用具(例えば、骨鋸または骨ドリル)の出力運動を変更するアダプタは、そのようなOEM用具の、いずれの特定の部品とも異なる。なぜなら、そのような用具は、1つの部品と他の部品との間の特定の運動を変更する内部ドライブ機構(internal drive mechanisms)を含むことがあるが、そのような部品は、外部で用具保持機構(tool-retention mechanism)に連結されるようには構成されていないからである。
【0030】
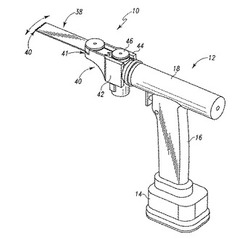
先ず、図1および図2を見ると、(図1および図2に示される)骨鋸用アダプタ10は、以下により詳細に解説されるように、従来の振動骨鋸12の振動出力運動(oscillating output motion)を変更するために、振動骨鋸12に連結されるように構成されている。骨鋸用アダプタ10および振動骨鋸12は、以下により詳細に解説されるように、協働して、患者の骨を切るための骨鋸組立て品を提供する。実例として、振動骨鋸12は、グリップ部(grip portion)16に連結されたバッテリパック(battery pack)14と、グリップ部16に連結されたヘッド部18とを含む。バッテリパック14が図示されているが、振動骨鋸12が、(図示されていない)空気源(pneumatic source)により動力を供給されることもまた、本開示の範囲内である。振動骨鋸12の刃クランプ20は、ヘッド部18に連結されており、また、刃22を振動骨鋸12に連結するために、(図1に示されるように)鋸の骨鋸刃22を受け入れるように提供される。刃クランプ20は、振動骨鋸12の工具(即ち、刃)保持機構と見なすことができる。
【0031】
本明細書で使用される用語「骨鋸刃(bone saw blade)」は、長骨、例えば、大腿骨、脛骨、腓骨、上腕骨、橈骨、尺骨、指節骨および趾節骨を切るために使用される鋸刃として定義される。更に、用語「骨鋸刃」とは、全体的または部分的な整形外科人工関節置換術、例えば、人工股関節置換術、人工膝関節移植手術、人工手首関節移植手術、人工肩関節置換術等が行われる間に使用される鋸刃をいう。したがって、本明細書に解説される骨鋸刃は、歯科手術または耳鼻咽喉(ENT)タイプ手術において使用される他の鋸刃と対比される。
【0032】
刃クランプ20は、ハブ(hub)24であって、このハブ24の上面28から突き出ている戻り止め(detents)26の配列を有する、ハブ24を含む。図1に示されるように、中央支柱32によって、カバー(cover)30がハブ24に連結されている。刃クランプ20は、(図1に示されるように)カバー30がハブ24の上面28から間隔を置いて離されるような開放位置(opened position)と、(図2に示されるように)カバー30がハブ24の上面28に隣接するような閉鎖位置(closed position)との間で移動できる。まず、図1を見ると、刃22の近位端27は、刃クランプ20が開放位置にあるときに該刃クランプの戻り止め26の配列を受け入れるように形成された、スロット(slots)34の配列を含む。刃クランプ20の戻り止め26が刃22のスロット28を通して受け入れられるような具合に、ひとたび刃22が刃クランプ20の内部に受け入れられると、刃クランプ20を(図2に示されるような)閉鎖位置まで移動させて、刃22を振動骨鋸12に固定することができる。
【0033】
次に図2を見ると、アダプタ10は、振動骨鋸12の振動出力運動を変更する。とりわけ、アダプタ10は、刃22が振動骨鋸12に直接連結されるとき、刃22が振動する角度と比べて、骨鋸刃38が振動する角度を減少させるように作動する。したがって、刃38の遠位端64が運動する弧長もまた、減少する。振動骨鋸、例えば、振動骨鋸12は典型的には、低侵襲手術(MIS)、コンピュータ支援外科(CAS)、関節鏡検査のような様々な整形外科処置が行われる間だけでなく、整形外科観血的処置が行われる間も使用することができる。以下により詳細に解説されるように、アダプタ10の刃38の弧長は、4.445mm(0.175インチ)〜5.080mm(0.200インチ)の間である。
【0034】
アダプタ10は、任意の適切な振動骨鋸、例えば、バージニア州シャーロッツビル(Charlottesville)のマイクロエアー・サージカル・インストゥルメンツLLC(MicroAire Surgical Instruments LLC)によって販売されている7600振動鋸(7600 Oscillating Saw)、および/または、フロリダ州ラルゴ(Largo)のコンメド(ConMed)(登録商標)リンバテック(Linvatec)によって販売されているホール(Hall)(登録商標)・パワープロ(PowerPro)(登録商標)空気圧振動鋸に連結されるように構成されることが可能である。骨鋸用アダプタ10が、任意の整形外科処置が行われる間に典型的に使用される、従来の任意の整形外科用振動鋸に連結されるように構成されることは、本開示の範囲内である。
【0035】
次に図2〜図4を見ると、アダプタ10は、概して「U字形の」ハウジング40であって、例えば図2に示されるように、ヘッド部41の他に、ヘッド部41に連結された第1および第2のアーム(arms)42,44であって、振動骨鋸12の刃クランプ20に連結されるように構成された、アームをも有する、ハウジング40を含む。実例として、ハウジング40のアーム42,44は、それらの中に(図示されていない)ネジを受け入れてアダプタ10を刃クランプ20に連結するための(図示されていない)ネジ孔を含むことができる。キャップ46は、ヘッド部41に連結されて、ヘッド部41の刃支持体表面47とキャップ46との間に刃38を保持する。
【0036】
アダプタ10は、図1に示される刃22の近位端27に形成されたスロット34の配列に類似した、スロット50の配列を含むハブコネクタ(hub connector)48を更に含む。したがって、ハブコネクタ48は、ハブコネクタ48を振動骨鋸12に連結するために、振動骨鋸12の刃クランプ20の戻り止め24の配列を受け入れることができる。具体的には、ハブコネクタ48の中央スロット52は、刃クランプ20の垂直支柱32を受け入れて、ハブコネクタ48が周りを振動する旋回点82(図4を参照されたい)として作動する。ハブコネクタ48は、形状が概して円形であり、かつ、一対の歯車歯54を含む。実例として、ハウジング40の各々のアーム42,44は、その中に形成されたチャネル56を含む。したがって、ハブコネクタ48は、チャネル56内部に受け入れられて、ハブコネクタ48をハウジング40に連結する。以下により詳細に解説されるように、ハブコネクタ48は、ハウジング40に対して旋回点82の周りを振動することができる。
【0037】
次に図3を見ると、骨鋸刃38は、歯車歯62を有する近位端60と、鋸歯66を有する遠位端64とを含む。骨鋸刃38は、骨鋸刃38の一部分がハウジング40のヘッド部41の表面47に支持されるような具合に、ヘッド部41とハウジング40のキャップ46との間に位置付けられる。ピン68は、骨鋸刃38の孔70と刃支持体表面47に形成された孔71とを通って受け入れられ、旋回可能に骨鋸刃38をハウジング40に固定する。したがって、骨鋸刃38は、ハウジング40に対して、ピン68の周りを旋回可能に移動することができ、往復振動運動(back and forth oscillating motion)を生じさせる。骨鋸刃38の歯車歯62は、図4に示されるように、ハブコネクタ48の歯車歯54に類似しており、該歯車歯54と連動される。実例として、ハブコネクタ48は2個の歯車歯54を含むように図示され、また、骨鋸刃38は3個の歯車歯62を含むように図示されているが、ハブコネクタ48および骨鋸刃38が任意の数の連動歯車歯を含むことは、本開示の範囲内である。
【0038】
作動中、振動骨鋸12の内部ドライブ機構(internal drive mechanisms)(図示されず)が振動骨鋸12のハブ24に連結されて、ハブ24は、刃クランプ20の垂直支柱32を通る軸(図示されず)の周りを往復振動する。この、振動骨鋸12の出力振動運動は、振動骨鋸12の刃クランプ20の、振動しているハブ24から、アダプタ10のハブコネクタ48まで移動する。したがって、ハブコネクタ48は、振動骨鋸12の内部ドライブ機構によって予め決定された特定の角度にわたって振動するか、または、該角度にわたって旋回する。実例として、振動骨鋸12の出力振動運動は、約8〜9°の角度にわたる往復旋回運動(back-and-forth pivoting movement)を定める。ハブコネクタ48は、振動骨鋸12の振動ハブ(oscillating hub)24に連結されており、したがって、ハブ24と共に約8〜9°の角度にわたって往復振動する。この、ハブコネクタ48の振動によって、骨鋸刃38は、骨鋸刃38とハブコネクタ48との間のかみ合った関係(geared relationship)に起因し、ピン68の周りに振動するように促される。ハブコネクタ48と骨鋸刃38との間のかみ合った関係が作動して、骨鋸刃38が振動する角度は約3.6°まで減少する。
【0039】
図4に示されるように、ハブコネクタ48の旋回点82と歯車歯54,62の間の連動位置との間の第1の距離80は、骨鋸刃38の旋回点84と歯車歯54,62の間の連動位置との間の第2の距離82より短い。実例として、骨鋸刃38とハブコネクタ48との間の歯車比は、2:1である。しかし、骨鋸刃38が振動する角度を、ハブ24およびハブコネクタ48が振動する角度から減少させるために、骨鋸刃38とハブコネクタ48との間に適切なあらゆる歯車比を提供することは、本開示の範囲内である。該歯車比は、上述の第1の距離および/または第2の距離80,82を変化させることによって変えることができることを理解すべきである。
【0040】
実例として、振動骨鋸刃38の遠位端64は、4.445mm(0.175インチ)〜5.080mm(0.200インチ)の弧長にわたり往復して動く。該弧長は、骨鋸刃38がさっと一振りすることによって(through one sweep of motion)骨鋸刃38の遠位端64の任意の地点が特定の角度にわたって動く時、該地点が動く距離として定められる。骨鋸刃38の振動運動は、図15に概略的に示される。骨鋸刃38の遠位端64の任意の地点の振動運動の弧長86は、骨鋸刃38が移動している(ラジアンで測定される)角度88と、骨鋸刃38の旋回点84から骨鋸刃38の遠位端64まで測定される骨鋸刃38の長さ90との関数である。換言すれば、骨鋸刃38の長さ90に、骨鋸刃38が振動している角度88を掛けたものは、骨鋸刃38の遠位端64の任意の特定の地点の振動運動の弧長86に等しい。したがって、例証的に、骨鋸刃38の長さ90、および/または、骨鋸刃38が振動している角度88を変化させれば、骨鋸刃38の遠位端64の任意の地点の振動運動の弧長86は変化する。
【0041】
次に図5〜図8を見ると、もう1つの鋸用アダプタ110は、軌道骨鋸組立て品(orbital bone saw assembly)を提供するために、骨鋸12に連結されるように構成される。アダプタ110は、骨鋸12の振動出力運動(oscillating output motion)を軌道運動(orbital motion)に変化させるように作動する。鋸用アダプタ110は、2つのアーム114,116を含むハウジング112であって、(図2〜図4に示される)骨鋸用アダプタ10のハウジング40が骨鋸12に連結される方法と同様に骨鋸12の刃クランプ20に連結するためのハウジング112を含む。鋸用アダプタ110は、骨鋸12の駆動機構(driven mechanism)121(図6を参照されたい)であって、ハブ24を介して骨鋸12のドライブ機構(図示されず)に連結された、駆動機構121を更に含む。駆動機構121は、ハウジング112に連結されており、かつ、(図6および図7に示される)ハブコネクタ120であって、アダプタ10に関し上述されたハブコネクタ48に類似する、ハブコネクタ120を含む。したがって、ハブコネクタ120のスロット50は、ハブ24の戻り止め26を受け入れることができる。
【0042】
鋸用アダプタ110の駆動機構121は、ハブコネクタ120に連結されたリンク機構(linkage mechanism)122と、リンク機構122に連結された歯車組立て品(gear assembly)123とを更に含む。実例として、リンク機構122は、第1のリンク124であって、第1の端部でハブコネクタ120に連結され、ハブコネクタ120と共に往復振動運動をするための第1のリンク124を含む。実例として、第1のリンク124およびハブコネクタ120は、一体の構造体として形成される。しかし、第1のリンク124およびハブコネクタ120が互いに連結された別個の構造体として形成されることは、本開示の範囲内である。第2のリンク128は、第1の端部で第1のリンク124の第2の端部に、旋回ピン(pivot pin)132によって旋回可能に連結される。第2のリンク128の第2の端部は、歯車機構(gear mechanism)123の第1の歯車136に、ピン138によって連結されている。第2のリンク128の運動によって、歯車136が中心旋回軸139の周りを旋回するような具合に、ピン138は、歯車136の旋回軸139から間隔を置いて離されている。実例として、歯車136は、ハウジング112に連結されたハブ143であって、旋回軸139を定める、ハブ143の周りを旋回する。
【0043】
歯車機構123の第2の歯車140は、第1の歯車136と連動しており、第1の歯車136によって促されて、中心旋回軸141の周りに旋回する。実例として、ハブ145は、第2の歯車140に連結されており、第2の歯車140と共に旋回軸141の周りを旋回する。スルーシャフト(through-shaft)144(図5および図6を参照されたい)がハブ145に連結されており、同様に、第2の歯車140およびハブ145と共に旋回軸141の周りを回転する。実例として、軸受146がスルーシャフト144を取り囲んで、スルーシャフト144が旋回軸141の周りを回転する時、スルーシャフト144の摩擦を減少させる。スルーシャフト144は、実例として、ハウジング112を通って、ハウジング112の底面163からハウジング112の(図5に示される)凹面156まで延びている。ハブ145はそれ自体、スルーシャフト144の第1の端部に連結されている。(図6に示される)出力シャフトまたは出力ペグ(output shaft or peg)142は、スルーシャフト144の第2の端部または反対側の端部に連結されており、かつ、スルーシャフト144の中心からずれている。したがって、出力シャフト142は、旋回軸141の周りを円運動で動く。出力シャフト142が旋回軸141の周りを動く時、出力シャフト142の円運動の直径を調節するため、出力シャフト142を、第2の歯車140の旋回軸141から適切な任意の距離を置いて配置することは、本開示の範囲内である。
【0044】
第2の歯車140は、第1の歯車136よりも小さい。したがって、第1の歯車と第2の歯車との間の歯車比は、第2の歯車140が回転する速度、および、出力シャフト142が第2の歯車140の旋回軸141の周りを回転する速度を増大させるように作用を及ぼす。実例として、第1の歯車136と第2の歯車140との間の歯車比は、約1.8である。換言すれば、実例となる歯車機構123の歯車比は、骨鋸組立て品の速度(rpm)を約1.8倍だけ増大させるように作用を及ぼす。当然ながら、所望のあらゆる速度を作り出すために、異なる歯車比を定める歯車機構を含むことは、本開示の範囲内である。
【0045】
鋸用アダプタ110は、図5および図8に示されるように、ハウジング112の凹部分152に連結されているガイドピン150を更に含む。ハウジング112の凹部分152は、骨鋸刃160の近位端154を受け入れる大きさに作られている。凹部分152は、ハウジング112の凹面156とハウジング112のU字形側壁158とによって画定され、その中に、骨鋸刃160の近位端154が入っている。実例として、骨鋸刃160は、第1の孔162であって、図5に示されるように、駆動機構121の出力シャフト142を第1の孔162の中に受け入れるように構成された、第1の孔162を含む。骨鋸刃160は、孔162から間隔を置いて離されたスロット164を更に含む。スロット164は、骨鋸刃160の長さに沿って長さ方向に延びている。換言すれば、スロット164の(図示されていない)長さ方向軸は、骨鋸刃160の(図示されていない)長さ方向軸と平行である。スロット164は、(出力シャフト142によって提供される)骨鋸刃160の円運動を楕円様運動に変換するために、ハウジング112のガイドピン150を受け入れるように位置付けられている。以下により詳細に解説されるように、骨鋸刃160の遠位端64の出力運動は、形状が概して楕円形である経路(path)をたどる。
【0046】
したがって、作動中、振動骨鋸12のドライブ機構からの振動出力運動によって、振動骨鋸12の刃クランプ20に連結されたハブコネクタ120は、刃クランプ20のハブ24が振動するのと同一の角度にわたって、刃クランプ20のハブ24と共に振動する。したがって、ハブコネクタ120に連結されている第1のリンク124もまた、この同一角度にわたり振動する。第1のリンク124の振動運動が第2のリンク128に移動して、第2のリンク128の第2の端部は、旋回軸139を定めるハブ143の周りを第1の歯車136が回転するように促す。上述のように、第1の歯車136が回転することによって、第2の歯車140は、旋回軸141を定めるハブ145の周りを回転するように促され、それによって、旋回軸141から間隔を置いて離された位置で第2の歯車140に連結された出力シャフト142は、旋回軸141の周りを円運動で運動する。アダプタ110の骨鋸刃160は、出力シャフト142の円運動によって、骨鋸刃160の近位端154が同一の円運動で運動するように促されるような具合に、出力シャフト142に連結される。しかし、骨鋸刃160のスロット164を通して受け入れられたガイドピン150によって、骨鋸刃160の遠位端64の出力運動は、楕円様経路(ellipse-like path)をたどる。
【0047】
実例として、骨鋸刃160の遠位端64の、この軌道運動は、図16に概略的に示されるように、楕円形である場合がある。しかし、骨鋸刃160の軌道運動は、楕円出力運動に限定されるのではなく、対称的閉ループまたは対称的閉曲線を作り出す、任意の形状のあらゆる軌道運動または軌道経路で動くことができることを理解すべきである。例えば、骨鋸刃160の遠位端64の振動運動は、「完全な(perfect)」楕円経路(ellipse path)をたどることができる訳ではなく、長円様形状または楕円様形状を形成する対称的閉ループをたどることができる。
【0048】
図16に示されるように、骨鋸刃160の遠位端64の任意の地点の軌道運動または対称的閉曲線運動は、長軸180および短軸182を定める。対称的閉曲線の長弦(major chord)は、骨鋸刃の長さ方向軸に対して垂直であるか、または、骨鋸刃の長さ方向軸に対して平行である、前記軌道経路を横切る最長距離として定められる。したがって、実例として、図16に示される軌道経路の長弦181は、長軸180に沿って延びている。しかし、長軸は、必ずしも長弦を定めるとは限らない。したがって、長弦181は、例証的に5.588mm(0.220インチ)以下である長さ184を定める。1つの典型的な実施形態において、長弦181の長さ184は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の間、または例証的には4.445mm(0.175インチ)〜5.080mm(0.200インチ)の間である。当然ながら、骨鋸刃の軌道運動が、適切な任意の長さを有する長弦を定めることは、本開示の範囲内である。
【0049】
実例として、図16に示されるように、軌道運動または軌道経路の長軸180は、骨鋸刃160と、骨鋸刃160に形成されたスロット164との両方の(図示されていない)長さ方向軸に対して垂直である。しかし、骨鋸刃160の遠位端64の軌道経路が、骨鋸刃160の長さ方向軸に平行である長軸を定めることは、本開示の範囲内である。更に、骨鋸刃160の出力運動の軌道経路は、骨鋸刃160の長さ方向軸に対して平行でも垂直でもない長軸であって、骨鋸刃160の長さ方向軸に対して幾分角度をなしている、長軸を定めることができる。
【0050】
多くの異なる寸法は、骨鋸刃160の軌道出力運動(orbital output motion)の長弦の長さ184に影響を及ぼす。図8に示されるように、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の間の長さ184を有する長弦を定める、骨鋸刃160の出力運動を依然として維持しながら、骨鋸刃160の出力運動に影響を与えるために、例えば、孔162の中心から骨鋸刃160の遠位端64までの長さ190、出力シャフト142の中心と回転軸141との間の距離または半径192、および、ガイドピン150の中心と回転軸141との間の距離194はそれぞれ、変化させることができる。
【0051】
スロット164および/またはガイドピン150のサイズならびに形状は、骨鋸刃160の遠位端64の出力運動に影響を及ぼすことができる。例えば、実例となるスロット164は、出力シャフト142の中心と回転軸141との間の距離192の少なくとも2倍と、ガイドピン150の直径とを合わせた長さ196を定める。更に実例として、スロット164は、ガイドピン150の直径に少なくとも等しい幅198を定める。
【0052】
しかし、実例として、出力シャフト142と回転軸141との間の半径距離192は、出力シャフト142とガイドピン150との間の距離194より短い。更に、この距離194は、骨鋸刃160の孔162と骨鋸刃160の遠位端64との間で測定された骨鋸刃160の長さ190より短い。図8に示されるように、回転軸141は、ガイドピン150の中心と一直線上に揃っている。アダプタ110のスロット164と同様、アダプタ210の骨鋸刃261のスロット268および/またはガイドピン264のサイズおよび形状もまた、骨鋸刃261の遠位端64の出力運動に影響を及ぼすことがある。例えば、実例となるスロット268は、出力シャフト242の中心と回転軸236との間の距離292の少なくとも2倍と、ガイドピン264の直径とを合わせた長さ296を定める。更に実例として、スロット268は、ガイドピン264の直径に少なくとも等しい幅398を定める。
【0053】
次に図10〜図14を見ると、骨ドリル用アダプタ210が提供されている。実例として、アダプタ210は、以下に解説されるように、骨ドリル250の回転出力運動を軌道運動に変換するため、骨ドリル、例えば、図9に示される骨ドリル250に連結されるように構成されている。したがって、実際には、アダプタ210および骨ドリル250は協働して、軌道骨鋸組立て品(orbital bone saw assembly)を提供する。骨ドリル250は、従来の任意の骨ドリル、例えば、バージニア州シャーロッツビルのマイクロエアー・サージカル・インストゥルメンツLLCによって販売されている7500ドリル/リーマー(7500 Drill/Reamer)であってもよい。換言すれば、アダプタ210が従来の任意の整形外科骨ドリルに連結されるように構成されることは、本開示の範囲内である。上記で解説された振動骨鋸12と同様、骨ドリル250は、チャック(chuck)217または出力ドライブシャフトを軸211の周りに回転させる内部ドライブ機構(図示されず)を含む。そのようなチャックは、骨ドリル250の用具保持機構と見なすことができる。実例となる骨ドリル250は、グリップ部(grip portion)216に連結されたバッテリパック14と、グリップ部216に連結されたヘッド部218とを含む。振動骨鋸12と同様、骨ドリル250は、(図示されていない)空気源により動力を供給されることもできる。ドリルビット(drill bit)215を有する連結器(coupler)213は典型的には、ヘッド部218に連結されて、ビット215を軸211の周りに回転させる。
【0054】
次に図10〜図12を見ると、アダプタ210は、骨ドリル250内部に受け入れられるように構成されたコネクタ220を有するハウジング212を含む。実例として、コネクタ220は、アダプタ210を骨ドリル250にロックするため、第1および第2のキースロット(keyed slots)222であって、それらの中に骨ドリル250の一部分を受け入れるように形成された、キースロット222を含む。該コネクタの、この連結手段212は概して、整形外科手術が行われる間に使用される様々なドリル連結器付属部品、例えば、図9に示される、実例となる付属部品213の接続手段と同一であるか、または該接続手段に類似する。
【0055】
コネクタ220の内部には、アダプタ210のドライブシャフト224が位置付けられており、骨ドリル250の回転出力運動を生じさせる、骨ドリル250の(図示されていない)ソケットの内部に受け入れられるように構成されている。したがって、アダプタ210のドライブシャフト224は、骨ドリル250のソケットの回転運動によって回転するように促される。図12に更に示されるように、アダプタ210のドライブシャフト224は、第1のかさ歯車230に連結されており、第1の長さ方向軸232の周りをドライブシャフト224と共に回転するように第1のかさ歯車230を促す。実例として、第1の長さ方向軸232は、骨ドリル250のソケットが周りを回転する長さ方向軸211と同一直線上にある。第2のかさ歯車234は、第1のかさ歯車230に連結されており、第1のかさ歯車230のドライブシャフト224の回転運動の方向を90°だけ変えるために、第1のかさ歯車230に対して90°の角度で位置付けられている。したがって、実例として、第2のかさ歯車234は、第1のかさ歯車230が周りを回転する第1の軸232に対して垂直である第2の垂直軸236の周りを回転する。
【0056】
第2の垂直軸236の周りを第2のかさ歯車234と共に回転するように、第2のかさ歯車234にディスク(disk)240が連結されている。ディスク240には、オフセット出力ピン(offset output pin)242またはシャフトが連結されている。オフセット出力ピン242は、オフセット出力ピン242が垂直回転軸236の周りを概して円形の運動で回転するような具合に、図12に示されるように、軸236から間隔を置いて離されている。
【0057】
アダプタ210のハウジング212は、コネクタ220に連結された本体部分260であって、その中にかさ歯車230,234を包含する、本体部分260を更に含む。本体部分260は、上面262であって、この上面262の上に刃261を受け入れるように形成された、上面262を画定する(図11および図12を参照されたい)。ディスク240の一部および出力ピン242は、ハウジング212の上面262を通って延びている。更に、ハウジング212のガイドピン264が、上面262に連結されており、かつ、出力ピン242から間隔を置いて離されている。刃261は、骨鋸刃160に類似しており、かつ、孔266であって、この孔266を通して出力ピン242を受け入れるように形成された、孔266の他に、刃261の長さ方向軸(図示されず)に沿って延びている長さ方向軸(図示されず)を有するスロット268をも含む。
【0058】
作動中、刃261の孔266は、出力ピン242を受け入れて、刃261の近位端154が出力ピンまたは出力シャフト242と共に円運動で移動するようにこの刃261の近位端154を促す。しかし、ハウジング212のガイドピン264は、刃261のスロット268の内部に受け入れられる。スロット268によって、刃261の遠位端64の出力運動は、対称的な閉曲線または閉ループによって定められる楕円様軌道運動をたどる。ハウジング212のキャップ(cap)270は、刃261のもう1つの孔274を通して受け入れられたネジ272によって、ハウジング212の本体部分260に連結されている。実例として、刃261の孔274は、該刃のスロット268と該刃の孔266との間に位置付けられており、刃261のいかなる運動も制限されないような大きさに作られている。
【0059】
上述のアダプタ110と同様、アダプタ210の刃261の軌道運動は、楕円出力運動に限定されるのではなく、対称的な閉曲線または閉ループを完成させる、いかなる軌道運動または軌道経路も動くことができる。換言すれば、刃261の軌道出力運動は、円、楕円、長円、または、対称的な閉ループもしくは閉曲線を作り出す他のいかなる形状であってもよい。更に、刃261の軌道運動の長弦の長さ184は、実例として、5.588mm(0.220インチ)以下である。好ましい実施形態において、長弦の長さ184は、4.445mm(0.175インチ)〜5.080mm(0.200インチ)の間である。当然ながら、刃261の軌道運動が、適切な任意のサイズを有する長弦を定めることは、本開示の範囲内である。
【0060】
上述のアダプタ110と同様、アダプタ210の多くの異なる寸法は、刃261の遠位端64の軌道出力運動の長弦の長さ184に影響を及ぼすことがある。図13および図14に示されるように、例えば、孔266の中心から刃261の遠位端64までの長さ290、出力シャフト242の中心と回転軸236との間の距離または半径292、および、ガイドピン264の中心と回転軸236との間の距離294は、それぞれ、刃261の出力運動に影響を与えるように変えることができる。
【0061】
スロット268および/またはガイドピン264のサイズならびに形状もまた、刃261の遠位端64の出力運動に影響を与えることがある。しかし、実例として、出力シャフト241と回転軸236との間の半径距離292は、出力シャフト241とガイドピン264との間の距離294より短い。更に、この距離294は、刃261の孔266と刃261の遠位端64との間で測定された、刃261の長さ290より短い。図13および図14に示されるように、回転軸236は、ガイドピン264の中心と一直線上に並んでいる。
【0062】
次に図17〜図20を見ると、アダプタ310は、骨鋸刃312と、骨鋸刃312に連結されたデュアルモード調整器プレート(dual-mode adjuster plate)314と含む。アダプタ310は、前記鋸の振動出力運動を変更するために、(図示されていない)振動骨鋸に連結されるように構成されている。以下により詳細に解説されるように、アダプタ310は、振動骨鋸に連結されたとき、骨鋸刃312の遠位端の2つの異なる振動出力運動を提供するように作動するデュアルモード振動骨鋸組立て品(dual-mode oscillating bone saw assembly)を提供し、この出力運動は、それぞれ、異なる弧長を定める。実例として、(骨鋸刃312、および調整器プレート314を含む)アダプタ310は、ストライカー・コーポレーション(Stryker Corporation)(ミシガン州カラマズー(Kalamazoo))によって提供される矢状鋸(Sagittal Saw)に連結されるように構成されている。しかし、アダプタ310は、類似する他の振動鋸にも連結されるように構成されることが可能である。
【0063】
実例として、骨鋸刃312は、(図示されていない)振動骨鋸に連結されるように構成された近位端316と、鋸歯66を有する遠位端318とを含む。図示されるように、骨鋸刃312の近位端316は、骨鋸刃312の旋回点322を定めているU字形スロット320と、スロット320の周囲に位置付けられた7個の孔または開口部324とを含む。骨鋸刃312のスロット320は、図1に示される振動骨鋸12の中央支柱32に類似する垂直支柱(図示されず)を受け入れるように構成されているのに対して、骨鋸刃312の孔324は、図1に示される刃22が骨鋸12に連結されるのとほぼ同じように、骨鋸12のハブ24の上面28から突き出ている戻り止め26の配列に類似する、戻り止めの配列(図示されず)を受け入れるように構成されている。以下により詳細に解説されるように、各々の孔324の直径330は、約2.743mm(約0.108インチ)であるのに対して、各々の孔324の内部に受け入れられる、(図示されていない)各々の戻り止めの直径(図示されず)は、2.743mm(0.108インチ)未満である。換言すれば、刃312が連結される振動骨鋸の戻り止めの直径は概して、該戻り止めが受け入れられる、刃312の各々の孔324の直径330より小さい。したがって、各々の孔324は、該戻り止めの外面と各々の孔324の対応する表面との間に最小隙間が存在するような大きさに作られている。例えば、各々の戻り止めの直径は、該戻り止めと各々の対応する孔324の表面との間に0.203mm(0.008インチ)の隙間を提供するために、2.540mm(0.100インチ)である場合がある。
【0064】
次に図18〜図20を見ると、アダプタ310の調整器プレート314は、骨鋸刃312の底面332に隣接しており、また、骨鋸刃312のU字形スロット320とサイズが類似するU字形スロット334であって、U字形スロット320と一直線上に並んでいる、U字形スロット334を含む。更に、調整器プレート314は、7個のスロットまたは開口部336であって、各々が骨鋸刃312の長さ方向軸(図示されず)に平行な長さ方向軸(図示されず)を定めている、スロットまたは開口部336を含む。各々のスロット336は、各々のスロット336の遠位端338が各々のスロット336の近位端340より狭くなるような具合に、概ね涙の形をしている(tear-drop shaped)。実例として、各々のスロット336の遠位端338の(図18に示される)幅342は約2.540mm(約0.100インチ)であるのに対して、各々のスロット336の近位端340の(図19に示される)幅344は約2.845mm(約0.112インチ)である。
【0065】
アダプタ310は、例えば、図20に示されるように、骨鋸刃312と調整器プレート314との両方に連結されたノブ(knob)350を更に含む。実例として、ノブ350は、ヘッド352と、骨鋸刃312中に形成されたスロット356、および調整器プレート314中に形成されたネジ孔358の両方を通して受け入れられるネジ山付き支柱354と、を含む。骨鋸刃312中に形成されたスロット356は、骨鋸刃312の長さ方向軸と平行で、かつ、骨鋸刃312の長さ方向軸と一直線上に並んでいる長さ方向軸を定めている。ノブ350は、以下により詳細に解説されるように、調整器プレート314に連結されており、しかも、骨鋸刃312中に形成されたスロット356の内部で骨鋸刃312に対して移動することができる。ノブ350はまた、外科医または他の専門技術者が調整器プレート314の位置を骨鋸刃312に対して固定することができるように、ノブ350を単に時計回りまたは反時計回りに回転させることによって、骨鋸刃312に対して締め付けられ、緩められることが可能である。
【0066】
調整器プレート314は、図17および図18に示される第1の位置と図19に示される第2の位置との間を移動することができる。第1の位置において、骨鋸刃312の孔324は、調整器プレート314のスロット336の近位端340と、概して一直線上に並んでいる。上述のように、調整器プレート314の各々のスロット336の近位端340の幅344は約2.743mm(約0.108インチ)であるのに対して、骨鋸刃312の各々の孔324の直径330は約2.845mm(約0.112インチ)である。したがって、調整器プレート314は、調整器プレート314が第1の位置にあるとき、骨鋸刃312の孔326のいずれの部分をも覆い隠すようには位置づけられていない。
【0067】
アダプタ310が連結され、かつ、調整器プレート314が第1の位置にある状態で(不図示の)振動骨鋸が作動する間、該振動骨鋸の戻り止め(detents)は、該振動鋸の内部ドライブ機構(図示されず)によって促されて、U字形スロット320の旋回点322と実質的に一直線上に並んでいる旋回点の周りを往復振動する。そのような作動は、図1に示される振動骨鋸12に関連して上述された作動と類似する。したがって、戻り止めの上に受け入れられるアダプタ310も同様に、旋回点322の周りを往復振動するように促される。しかし、骨鋸刃312の各々の孔326の中に受け入れられた該戻り止めに対する、該孔326の、より大きい直径330は、骨鋸刃312に対する、各々の戻り止めの余分の半径方向運動(radial travel)を規定する。換言すれば、各々の孔326の、より大きい直径330は、孔324内部の各々の戻り止めの空動き(lost motion)を規定する。例えば、該骨鋸の各々の戻り止めは、旋回点の周りを、該骨鋸刃に対して少なくとも0.203mm(0.008インチ)移動する。骨鋸刃312はそれ自体、戻り止めが振動する運動の全範囲にわたって振動するようには促されない。実例として、例えば、調整器プレート314が第1の位置にあるとき、戻り止めは、約8°の弧にわたって振動することができるのに対して、アダプタ310は、骨鋸刃312の、より大きい直径の孔324のため、約3.6°の弧にわたって振動するように促されることが可能である。
【0068】
上述のように、調整器プレート314もまた、図19に示される第2の位置まで移動することができる。第2の位置において、調整器プレート314は、第1の位置にあるときに比べ、骨鋸刃312に対してさらに近位に位置付けられる。更に、骨鋸刃312の孔324は、調整器プレート314の各々のスロット336の遠位端338と、概して一直線上に並んでいる。上述のように、各々のスロット336の遠位端338の幅342は、約2.540mm(約0.100インチ)であり、これは、各々のスロット324の近位端340の幅2.743mm(0.108インチ)よりも小さい。したがって、調整器プレート314が第2の位置にあるとき、調整器プレート314の一部分は、該振動骨鋸の戻り止めが受け入れられる孔のサイズを効果的に小さくするために、骨鋸刃312の孔324を覆い隠す。
【0069】
このようにして、骨鋸刃312の各々の孔324の直径の使用可能なサイズは、各々の孔の内部に受け入れられる各々の戻り止めの直径のサイズと概して同等になる。したがって、該骨鋸が作動する間、旋回点322の周りのそれら戻り止めの振動運動は、ほとんどまたは全く失われない。換言すれば、それら戻り止めが往復振動する時、アダプタ310は、概して同一の運動範囲にわたって往復振動するように促される。したがって、該骨鋸の戻り止めが約8°の弧にわたり振動するならば、骨鋸刃312は、同様に、約8°の弧にわたり振動するように促される。
【0070】
したがって、上述のように、調整器プレート314は、2つの動作モード(two modes of operation)を有するアダプタを提供するため、第1の位置と第2の位置との間を、骨鋸刃312に対して移動することができる。第1の動作モードにおいて、調整器プレート314が第1の位置にある時、該骨鋸の振動出力運動は、骨鋸刃312が約3.6°の角度にわたって振動するように促されるような具合に、構成される。骨鋸刃312が振動する角度を減少させることによって、骨鋸刃312の遠位端318の振動運動の弧長もまた減少する。実例として、アダプタ310の骨鋸刃312の遠位端の振動運動は、調整器プレート314が第1の位置にある時、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の弧長、実例として4.445mm(0.175インチ)〜5.080mm(0.200インチ)の弧長にわたって動く。
【0071】
第2の動作モードにおいて、調整器プレート314が第2の位置にある時、骨鋸刃312は、アダプタ310が連結される振動骨鋸の戻り止めとほぼ同一の角度にわたって振動するように促される。換言すれば、第2の動作モードにおいて、骨鋸刃312は、約8°の角度にわたって振動するように促される。したがって、第2の動作モードにおいて、外科医は、骨鋸の振動出力運動を改変することなく、骨鋸を使用することができる。
【0072】
次に図21および図22を見ると、もう1つのアダプタ410は、コンメド(登録商標)・リンバテック社(フロリダ州ラルゴ(Largo))によって販売されているホール(Hall)(登録商標)・パワープロ(PowerPro)(登録商標)空気圧振動鋸と共に使用するために提供される。しかし、アダプタ410を他の振動鋸に連結することは、本開示の範囲内である。アダプタ310と同様、アダプタ410は、骨鋸刃412と、骨鋸刃412に連結されたデュアルモード調整器プレート414とを含む。
【0073】
実例として、骨鋸刃412は、(図示されていない)振動骨鋸に連結されるように構成された近位端416と、(図示されていない)鋸歯を有する遠位端(図示されず)とを含む。骨鋸刃412の近位端416は、骨鋸刃412を(図示されていない)振動骨鋸に連結するため、振動骨鋸の戻り止めの配列を受け入れるように形成された複数のスロットまたは開口部424の配列を含む。実例として、スロット424の配列は、図1に示される骨鋸刃22のスロット34の配列、および、図3および図4に示されるアダプタ10のハブコネクタ48のスロット50の配列に類似する。スロット34,50の、そのような配列は、実例として、図1および図2に示される骨鋸刃12の刃クランプ20の戻り止め26の配列を受け入れるように形成されている。したがって、骨鋸刃412の近位端416は、振動骨鋸の戻り止めの配列を受け入れることができ、アダプタ410は、この振動骨鋸に連結されるように構成されている。具体的には、骨鋸刃412の、中央のU字形カットアウト(center U-shaped cut-out)420は、骨鋸刃412が周りを振動する該鋸の(図示されていない)垂直支柱を受け入れるように構成されている。
【0074】
次に図22を見ると、アダプタ410の調整器プレート414は、骨鋸刃412の底面432に隣接しており、しかも、骨鋸刃412のU字形カットアウト420にサイズが類似した湾曲カットアウト部分(curved cut-out portion)434であって、U字形カットアウト420と一直線上に並んでいる、湾曲カットアウト部分434を含む。さらに、調整器プレート414は、5個のスロットまたは開口部436の配列であって、スロットまたは開口部のそれぞれの形状が、骨鋸刃412のスロット424の配列の対応するスロットに類似する、スロットまたは開口部436の配列を含む。しかし、実例として、調整器プレート414のスロットの配列の内部の各々のスロット436のサイズは、骨鋸刃412のスロットの配列の内部の、各々の対応するスロット424のサイズと異なっている。とりわけ、骨鋸刃412の各々のスロット424の面積は、実例として、調整器プレート414の各々のスロット436の面積よりも大きい。
【0075】
アダプタ410は、例えば、図21に示されるように、骨鋸刃412および調整器プレート414の両方に連結された、ノブ(knob)450を更に含む。実例として、ノブ450は、ヘッド452と、骨鋸刃412中に形成された孔(図示されず)、および、調整器プレート414を通して形成されたネジ孔(図示されず)を通して受け入れられた(図22に示される)ネジ山付き支柱454とを含む。ノブ450は、調整器プレート414に連結されており、該ノブを時計回り方向または反時計回り方向に回転させることが、調整器プレート414を骨鋸刃412に対して移動させるように機能するような具合に、骨鋸刃412に対して回転可能である。具体的には、以下に解説されるように、骨鋸刃412のスロット424の有効サイズを調節するために、ノブ450は、骨鋸刃412に対して、(図22に示される)旋回点460の周りに調整器プレート414を回転させるように機能する。ノブ450はまた、外科医または他の専門技術者が調整器プレート414を骨鋸刃412に対して特定の位置にロックするか、または固定することができるように、骨鋸刃412に対して締め付けられ、かつ緩められることが可能である。
【0076】
調整器プレート314と同様、調整器プレート414は、第1の位置と第2の位置との間を移動することができる。第1の位置において、骨鋸刃412のスロット424は、調整器プレート414が骨鋸刃412のスロット424のいずれの部分をも覆い隠すように機能しないような具合に、調整器プレート414のスロット436と、概して一直線上に並んでいる。実例として、振動骨鋸の各々の戻り止めのサイズは、そのような戻り止めが受け入れられる、骨鋸刃412の各々のスロット424のサイズまたは面積よりも小さい。
【0077】
アダプタ410が連結され、かつ、調整器プレート414が第1の位置にある状態で振動骨鋸が作動する間、該振動骨鋸の戻り止めは、該振動鋸の内部ドライブ機構(図示されず)によって促されて、中央スロット420と実質的に一直線上に並んでいる旋回点の周りを往復振動する。そのような作動は、図1に示される振動骨鋸12に関連して上述された作動と類似する。したがって、戻り止めの上に受け入れられるアダプタ410も同様に、そのような旋回点の周りを往復振動するように促される。しかし、骨鋸刃412の各々のスロット424の中に受け入れられた該戻り止めに対する、該スロット424の、より大きいサイズまたは面積は、骨鋸刃412に対する、各々の戻り止めの余分の半径方向運動に備える。換言すれば、より大きいサイズに作られたスロット424は、各々のスロット424の内部の各々の戻り止めの空運動に備える。骨鋸刃412はそれ自体、それらの戻り止めが振動する運動の全範囲で振動するようには促されない。実例として、例えば、調整器プレート414が第1の位置にあるとき、それらの戻り止めは、約8°の角度にわたって振動することができるのに対して、アダプタ410は、骨鋸刃412の、より大きいサイズのスロット424のために、約3.6°以下の角度にわたって振動するように促されることが可能である。
【0078】
上述のように、調整器プレート414もまた、第2の位置まで移動することができる。第2の位置において、調整器プレート414は、調整器プレート414の一部分が骨鋸刃412のスロット424の一部分を覆い隠すような具合に配置されるように、旋回点460の周りを回転する。したがって、この第2の位置において、振動骨鋸刃の戻り止めが受け入れられるスロットのサイズまたは面積は、小さくなっている。
【0079】
実例として、調整器プレート414が第2の位置にあるとき、部分的に閉塞した各々のスロット424の有効サイズは減少する。したがって、骨鋸刃412の各々のスロット424の有効サイズもしくは有効面積、または使用可能サイズもしくは使用可能面積は、各々の孔の内部に受け入れられる各々の戻り止めのサイズと概して同等になる。したがって、該骨鋸が作動する間、旋回点420の周りのそれら戻り止めの振動運動は、ほとんどまたは全く失われない。換言すれば、それら戻り止めが往復振動する時、アダプタ410は、概して同一の運動範囲にわたり往復振動するように促される。したがって、該調整器プレートが第2の位置にあるとき、該骨鋸の戻り止めが、例えば約8°の角度にわたって振動するように促されるならば、アダプタ410の骨鋸刃412もまた、約8°の角度にわたって振動するように促される
【0080】
したがって、上述のように、調整器プレート414は、2つの動作モード(two modes of operation)を有するアダプタを提供するため、第1の位置と第2の位置との間を、骨鋸刃412に対して移動することができる。第1の動作モードにおいて、調整器プレート414が第1の位置にある時、該骨鋸の振動出力運動は、骨鋸刃412が約3.6°以下の角度にわたり振動するように促されるような具合に、構成される。骨鋸刃412が振動する角度を減少させることによって、骨鋸刃412の遠位端の振動運動の弧長もまた減少する。実例として、アダプタ410の骨鋸刃412の遠位端の振動運動は、調整器プレート414が第1の位置にある時、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の弧長、実例として、4.445mm(0.175インチ)〜5.080mm(0.200インチ)の弧長にわたって動く。
【0081】
第2の動作モードにおいて、調整器プレート414が第2の位置にある時、骨鋸刃412は、アダプタ410が連結されている振動骨鋸の戻り止めとほぼ同一の弧角度(arc angle)にわたって振動するように促される。換言すれば、第2の動作モードにおいて、骨鋸刃412は、約8°の弧角度にわたって振動するように促される。したがって、第2の動作モードにおいて、外科医は、骨鋸の振動出力運動を改変することなく、骨鋸を使用することができる。
【0082】
前述のように、アダプタ310は、ストライカー・コーポレーション(Stryker Corporation)によって提供される矢状鋸(Sagittal Saw)に連結されるように構成されており、アダプタ410は、ホール(Hall)(登録商標)・パワープロ(PowerPro)(登録商標)振動鋸に連結されるように構成されているが、適切な任意の振動骨鋸に連結されるように構成されたアダプタを提供することは、本開示の範囲内である。したがって、そのようなアダプタが、第1の動作モードを提供し、そうすることによって、骨鋸刃の振動運動の弧角度が振動鋸によって出力される弧角度より小さくなるような具合に、該アダプタが連結されている振動骨鋸の出力弧角度が変更されるか、または減少することは、本開示の範囲内である。更に、そのようなアダプタが、第2の動作モードを提供し、そうすることによって、骨鋸刃の振動運動の弧角度が、振動鋸によって出力される弧角度と概して同等となるような具合に、該アダプタが連結されている振動鋸の出力弧角度が、依然として概ね変化しないままであることは、本開示の範囲内である。そのようなアダプタは、外科医に、2つの動作モード間の選択を提供することができる。
【0083】
例えば、外科医または他の専門技術者は、骨鋸刃412の2つの異なる出力運動を生じさせることのできる振動骨鋸組立て品を使用することができることが望ましいことがある。例えば、外科医は、多くの軟部組織が、切られている骨に隣接しているか、または、該骨を取り囲んでいる場合、アダプタを第1の動作モードに位置付けるように選択することができる。代わりに、外科医は、外科手術の特定の他の部分が行われる間、より大きい弧長を提供する骨鋸組立て品に切り替えることを望むことがある。
【0084】
本明細書に記述される様々な骨鋸組立て品は、アダプタと、既存の振動鋸または骨ドリルとを含む改装組立て品(retrofit assemblies)として開示されてきたものの、(本明細書に開示されるアダプタではなく)刃と共に使用されるように組立てられているか、または製造されている(振動または軌道)骨鋸組立て品であって、上記に解説された改装組立て品と同様に機能する、骨鋸組立て品を提供することは、本開示の範囲内であることに注目されるべきである。換言すれば、軟部組織に対する損傷を減少させる点で外科医を手助けすることに関し、上記に解説された概念は、アダプタに代えて、もともと製造されている骨鋸組立て品(original manufactured bone saw assembly)にも適用することができる。
【0085】
本明細書に開示されるように、前記骨鋸刃の振動出力運動もしくは軌道出力運動の弧長または長弦を短縮することによって、切られている特定の骨を取り囲む軟部組織が損傷する可能性を減少させることができる。しかし、刃の運動の弧長または長弦を短縮することによって、特定の骨を切るのに必要な時間が増大することもある。更に、骨鋸または骨鋸組立て品の速度およびトルクは、骨鋸刃の切断効率に更に影響を及ぼすことがある。例えば、現行の多くの骨鋸組立て品は、約11,000サイクル/分(CPM)の速度で作動する。実例として、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の弧長または長弦を作り出す、本明細書に開示される骨鋸組立て品について、その速度は、骨鋸刃が、例えば、より長い弧長および/または長弦を有する出力運動を生じさせる、多くの典型的な骨鋸組立て品の骨切断効率を提供するために、約20,000〜25,000CPMまで増大させることができることに注目すべきである。更に、4.445mm(0.175インチ)未満の弧長または長弦を提供するように作動する骨鋸組立て品であって、刃の運動の弧長または長弦が短縮されることに起因して引き起こされることのある、あらゆる効率損失を補償するために、11,000CPMより大きい速度で作動する、骨鋸組立て品を含むことは、本開示の範囲内である。換言すれば、刃の出力運動の弧長または長弦は、骨鋸組立て品の速度を増大させながら、更に短縮されることができる。
【0086】
骨鋸刃22,38,160,261,312および412は、本明細書に開示されるが、他の刃を含むことも本開示の範囲内である。更に、骨鋸刃22,38,160,261,312および412が様々な適切な材料で作られることは、本開示の範囲内である。例えば、骨鋸刃22,38,160,261,312および412は、ステンレス鋼または他の適切な金属で作ることができる。更に、本明細書に開示される骨鋸刃の質量を減少させるため、そのような骨鋸刃22,38,160,261,312および412は、例えば、アルミニウム、またはチタンで作ることができる。骨鋸刃の質量を減少させることは、それが使用される間、該骨鋸刃と一緒に使用される任意の骨鋸の振動だけでなく、骨鋸組立て品によって生じるノイズのレベルをも減少させることができるような具合に、該骨鋸刃の質量慣性モーメント(mass moment of inertia)を減少させるように働く。更に、より軽い刃の振動出力運動は、より小さい弧角度を作り出して、他の点では同等の、より重い刃の振動出力運動に比べてより小さいたわみ(deflection)を受ける。たわみ、即ち、骨鋸が作動する間の、刃の面外の屈曲(out-of-plane bending)もまた、刃の長さを短縮することによって減少させることができる。例えば、デピュイ・プロダクツ・インコーポレイティッド(DePuy Products, Inc.)(インディアナ州ワルソー(Warsaw))によって製造された標準PFCシグマ刃(Sigma blade)の長さを10.579cm(4.165インチ)から約8.89cm(約3.5インチ)に短縮することによって、そのような刃のたわみを最大40%まで減少させることができることを見出だした。
【0087】
上述のように、骨鋸刃をアルミニウムまたはチタンで製造することによって、骨鋸刃の質量は減少し、これにより今度は、該骨鋸刃が取り付けられている骨鋸の振動が減少するように、該骨鋸刃の質量慣性モーメントは減少する。骨鋸刃の質量は、骨鋸刃の本体から材料を除去すること、換言すれば、骨鋸刃の長さに沿って穴(holes)を形成することによっても減少させることができる。図23を見ると、例えば、骨鋸刃512が示されている。骨鋸刃512は、上記の骨鋸または骨鋸用アダプタのいずれかと一緒に使用されるように構成されることが可能である。実例として、骨鋸刃は、例えば、Ti−6−Al−4Vのようなチタン合金で作られ、しかも、骨鋸もしくは骨鋸用アダプタに連結されるハブまたは近位端514と、鋸歯66を有する遠位端516とを含む。
【0088】
様々なカットアウト部分または穴が、骨鋸刃512の中に、骨鋸刃512の長さに沿って、近位端514と遠位端516との間に備えられる。例えば、4個の大カットアウト部分520が、骨鋸刃512の長さに沿って、直線状に間隔を置いて配置される。各々の大カットアウト部分520は、形状が概して長円形であるが、例えば、円形、正方形、矩形、または、適切な他の任意の形状であってもよい。更に、骨鋸刃512中には、4個の大カットアウト部分520が備えられるが、骨鋸刃512中に、任意の個数の大カットアウト部分520を含むことも本開示の範囲内である。
【0089】
骨鋸刃512は、6個の小カットアウト部分522を更に含む。実例として、6個の小カットアウト部分522のうち3個を含む第1の配列は、第1の配列の各々の小カットアウト部分522が大カットアウト部分520の間に位置付けられるような具合に、骨鋸刃512の長さに沿って直線状に間隔を置いて配置されている。同様に、前記の6個の小カットアウト部分522のうち3個を含む第2の配列は、第2の配列の各々の小カットアウト部分522が大カットアウト部分520の間に位置付けられるような具合に、かつ、第1の配列の小カットアウト部分522と横方向に整列するような具合に、骨鋸刃512の長さに沿って直線状に間隔を置いて配置されている。実例として、小カットアウト部分522の第1の配列は、骨鋸刃512の長さ方向軸(図示されず)から中心がずれて位置付けられるか、または、該長さ方向軸から内側に位置付けられているのに対して、小カットアウト部分522の第2の配列は、該長さ方向軸から外側に位置付けられている。実例として、それらの小カットアウト部分522は、形状が円形であるが、長円形、正方形、矩形、または、他の適切ないかなる形状であってもよい。
【0090】
これらの大カットアウト部分520および小カットアウト部分522は、骨鋸刃512の質量慣性モーメントを減少させるため、骨鋸刃512の質量を減少させるように機能する。上述のように、骨鋸刃512の質量慣性モーメントのそのような減少は、骨鋸組立て品の全体的な振動を減少させるように機能する。振動の減少は更に、骨鋸組立て品が使用される間、該骨鋸組立て品の安定性を増大させるように機能する。更に、大カットアウト部分520および小カットアウト部分522は、骨鋸刃512の強度および剛性を改善するように、かつ、骨鋸刃512が患者の骨を切り進むときの、該骨に及ぼす骨鋸刃512の抗力の影響(drag effect)を減少させるように成形され、かつ位置付けられることが可能である。抗力は、骨が骨鋸刃によって切られるときの、該骨と接触する表面積の量を減らすことによって低下させることができる。抗力のそのような低下はまた、摩擦、エネルギー損失および発生熱の量を減少させるように機能する。
【0091】
次に図24を見ると、もう1つの骨鋸刃612は、本明細書に開示される骨鋸または骨鋸用アダプタのいずれかと共に使用されるために提供される。骨鋸刃612は、骨鋸刃512に類似している。類似の参照番号は、類似要素を示すために用いられる。実例として、骨鋸刃612は、4個の大カットアウト部分520を含み、骨鋸刃512の6個の小カットアウト部分522は含んでいない。実例として、骨鋸刃612は、アルミニウムで作られる。しかし、骨鋸刃612が、適切なあらゆる材料で作られることは、本開示の範囲内である。更に実例として、アルミニウムは、骨鋸刃512が作られるチタン合金に比べ、より軟質の金属であるので、骨鋸刃612の剛性または硬さを増大させるために、6個の小カットアウト部分が除去されている。アルミニウムとそのようなチタン合金との密度の相違に起因して、アルミニウムで作られた骨鋸刃612の質量は、該チタン合金で作られた骨鋸刃512よりも軽い。
【0092】
本明細書に開示される骨鋸刃のような骨鋸刃は、一般に、骨を切る間、大量の応力を受ける。したがって、実例として、アルミニウムおよびチタン合金のような低密度材料で作られる、前述の該骨鋸刃512,612を補強するため、該骨鋸刃それ自体の質量を実質的に増大させることなく該骨鋸刃の硬度を増大させるため、肌焼きプロセス(case-hardening process)を使用することができる。ホワイコ・フィニッシング・テクノロジーズ,LLC(Whyco Finishing Technologies, LLC)(コネチカット州トマソン(Thomason))は、セラフューズ(CeraFuse)(登録商標)コーティングプロセス(coating process)と称される、上述の実例となる肌焼きプロセスを提供する。このコーティングプロセスでは、研磨(polishing)、がら研磨(tumbling)、または他の方法によって、被覆されるべき材料(即ち、骨鋸刃)の外層を一般に除去するマイクロアーク酸化技術(micro-arc oxidation technology)が使用される。このプロセスは、原基体の頂部にコーティングを単に付加するのではなく、原基体(original substrate)の外層の特性を変化させるので、該コーティングプロセスは、骨鋸と共に使用される、チタン合金および/またはアルミニウムの骨鋸刃512,612を適切に硬化することができる。実例として、例えば、そのようなセラミック加工が行われた後、アルミニウムおよびチタン合金の骨鋸刃512,612は、従来のステンレス鋼の骨鋸刃と同程度に硬いか、または、該骨鋸刃よりも硬い場合がある。セラフューズ(CeraFuse)(登録商標)コーティングプロセスは、前記基体に対して、耐磨耗性、熱損傷および腐食損傷からの保護、ならびに、付加的電気抵抗を更に提供する。そのような耐熱性は、骨を切る間に生じることのある熱によって引き起こされる、骨のいかなる壊死をも減少させるように機能することができる。
【0093】
本明細書に開示されるアダプタの設計の幾つか(例えば、空動き(lost motion)を利用するアダプタ310,410)は、それらが自由に作動しているときと比べて、それらが骨とかみ合っているときは、異なる出力運動を生じさせることができるということを認識すべきである。例えば、所定のアダプタの遠位端の弧長は、該アダプタが骨とかみ合っているときは、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の間である場合があるが、同一のアダプタが該骨から解放されて作動しているときは、同一のアダプタの弧長は、この範囲の外にある場合がある。
【0094】
本開示の概念は、図面および前記記述に詳細に例示され記述されてきたが、そのような実例および記述は、特徴が限定的ではなく、典型的であると見なされるべきであり、また、実例となる実施形態のみが図示され記述されてきたということ、ならびに、本開示の趣旨内に入る変形および変更は全て保護されることが望まれているということが理解される。
【0095】
本明細書に記述された装置ならびに方法の様々な特徴から生じる、本開示の複数の利点が存在する。本開示の装置および方法の代替的実施形態は、記述されたそれら特徴の全てを含む訳ではないかもしれないが、そのような特徴の諸利点の少なくとも幾つかによって、依然として利益を得るということに注目すべきである。当業者は、本開示のそれら特徴の1つ以上を組み込んだ装置および方法であって、本開示の趣旨および範囲に含まれる、装置および方法を当業者自身が実施することを、容易に考案するであろう。
【0096】
〔実施の態様〕
(1)振動骨鋸組立て品において、
ドライブ機構を含む、振動骨鋸と、
前記ドライブ機構に連結された、骨鋸刃と、
を備えており、
(i)前記骨鋸刃の遠位端の振動運動の弧長は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)であり、
(ii)前記骨鋸刃の前記振動運動は、約3.6°の角度を定めている、振動骨鋸組立て品。
(2)実施態様1に記載の振動骨鋸組立て品において、
前記骨鋸刃の旋回点と前記骨鋸刃の前記遠位端との間の、前記骨鋸刃の長さは、約8.89cm(約3.5インチ)である、振動骨鋸組立て品。
【0097】
(3)軌道出力運動を生じさせるための軌道骨鋸組立て品において、
ドライブ機構と、
前記ドライブ機構に連結された、骨鋸刃と、
を備えており、
前記骨鋸刃の前記軌道出力運動は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦を定めている、軌道骨鋸組立て品。
(4)実施態様3に記載の軌道骨鋸組立て品において、
前記骨鋸刃の前記軌道出力運動の前記長弦の長さは、4.445mm(0.175インチ)〜5.080mm(0.200インチ)である、軌道骨鋸組立て品。
(5)実施態様3に記載の軌道骨鋸組立て品において、
前記骨鋸刃の長さ方向軸は、前記骨鋸刃の前記軌道出力運動によって定められた前記長弦に対して垂直である、軌道骨鋸組立て品。
(6)実施態様3に記載の軌道骨鋸組立て品において、
前記ドライブ機構を含む、振動骨鋸、
を更に備えている、軌道骨鋸組立て品。
(7)実施態様3に記載の軌道骨鋸組立て品において、
前記ドライブ機構を含む、骨ドリル、
を更に備えている、軌道骨鋸組立て品。
【0098】
(8)振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を変更するための、アダプタにおいて、
前記振動骨鋸の前記刃クランプに連結されるように構成された、ハウジングと、
前記振動骨鋸の前記刃クランプのハブに連結されるように構成された、ハブコネクタと、
旋回点を定めるように前記ハウジングに旋回可能に連結された骨鋸刃であって、前記骨鋸刃の遠位端の振動運動の角度が前記振動骨鋸の前記振動出力運動の角度よりも小さくなるように前記ハブコネクタに連結された近位端を有する、骨鋸刃と、
を備える、アダプタ。
(9)実施態様8に記載のアダプタにおいて、
前記ハブコネクタは、歯車歯を含み、
前記骨鋸刃の前記近位端は、前記ハブコネクタの前記歯車歯と連動された歯車歯を含む、アダプタ。
(10)実施態様9に記載のアダプタにおいて、
前記骨鋸刃と前記ハブコネクタとの間の歯車比は、約2:1である、アダプタ。
(11)実施態様8に記載のアダプタにおいて、
前記旋回点から前記骨鋸刃の遠位端までの、前記骨鋸刃の長さは、約8.89cm(約3.5インチ)である、アダプタ。
【0099】
(12)振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を軌道運動に変換するための、アダプタにおいて、
前記振動骨鋸の前記刃クランプに連結されるように構成された、ハウジングと、
前記ハウジングに連結された駆動機構であって、前記振動骨鋸の前記刃クランプのドライブ機構に連結されるように構成されて、前記振動骨鋸の前記振動出力運動を前記軌道運動に変換する、駆動機構と、
前記駆動機構に連結された骨鋸刃と、
を備えている、アダプタ。
(13)実施態様12に記載のアダプタにおいて、
前記駆動機構は、
前記振動骨鋸の前記ドライブ機構に連結されるように構成された、ハブコネクタと、
第1の端部で前記ハブコネクタに連結された、リンク機構と、
前記リンク機構の第2の端部に連結された、歯車組立て品と、
を含む、アダプタ。
(14)実施態様12に記載のアダプタにおいて、
前記駆動機構は、前記歯車組立て品に連結された出力シャフトであって、前記骨鋸刃の孔を通して受け入れられた、出力シャフトを更に含む、アダプタ。
(15)実施態様14に記載のアダプタにおいて、
前記歯車組立て品は、前記リンク機構に連結された第1の歯車、および前記第1の歯車に連結された第2の歯車を含み、
前記出力シャフトは、前記第2の歯車に連結されており、かつ、前記第2の歯車が周りを回転する軸から間隔を置いて離されている、アダプタ。
(16)実施態様12に記載のアダプタにおいて、
前記骨鋸刃は、スロットを更に含み、
前記ハウジングは、前記骨鋸刃の前記スロットの内部に受け入れられたガイドピンを含む、アダプタ。
(17)実施態様16に記載のアダプタにおいて、
前記駆動機構は、前記骨鋸刃の孔を通して受け入れられた出力シャフトを含み、
前記出力シャフトは、軸から間隔を置いて離されており、かつ、前記軸の周りを回転するように構成されており、
前記出力シャフトと前記軸との間の距離は、前記軸と前記ガイドピンとの間の距離よりも短い、アダプタ。
(18)実施態様17に記載のアダプタにおいて、
前記軸と前記ガイドピンとの間の前記距離は、前記骨鋸刃の前記孔と前記骨鋸刃の遠位端との間の距離よりも短い、アダプタ。
(19)実施態様18に記載のアダプタにおいて、
前記スロットの長さは、前記出力シャフトと前記軸との間の前記距離の少なくとも2倍と、前記ガイドピンの弦とを合わせたものである、アダプタ。
(20)実施態様16に記載のアダプタにおいて、
前記スロットの主軸は、前記骨鋸刃の長さ方向軸に平行である、アダプタ。
(21)実施態様12に記載のアダプタにおいて、
前記アダプタは、前記骨鋸刃の遠位端の出力運動であって、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する主軸を定める、出力運動を生じさせるように構成されている、アダプタ。
【0100】
(22)骨ドリルのチャックに連結されるように構成されたアダプタであって、前記骨ドリルの回転出力運動を軌道運動に変換するための、アダプタにおいて、
前記骨ドリルの前記チャックの出力ドライブシャフトに連結されるように構成されて、第1の回転軸を定める、第1のかさ歯車と、
前記第1のかさ歯車に連結された第2のかさ歯車であって、前記第1の回転軸に垂直な第2の回転軸を定めるように位置付けられている、第2のかさ歯車と、
骨鋸刃であって、前記第2のかさ歯車に連結されて前記骨鋸刃の旋回点を定める近位端を有する、骨鋸刃と、
を備える、アダプタ。
(23)実施態様22に記載のアダプタにおいて、
前記骨鋸刃の前記旋回点は、前記第2のかさ歯車の前記第2の回転軸から間隔を置いて離されている、アダプタ。
(24)実施態様22に記載のアダプタにおいて、
ハウジング、
を更に備えており、
前記第1および第2のかさ歯車は、前記ハウジング内部に位置付けられており、
前記骨鋸刃は、スロットを含み、
前記ハウジングは、前記スロット内部に位置づけられたガイドピンを含む、アダプタ。
(25)実施態様24に記載のアダプタにおいて、
前記スロットの長さ方向軸は、前記骨鋸刃の長さ方向軸に平行である、アダプタ。
(26)実施態様24に記載のアダプタにおいて、
前記第2の回転軸と前記ガイドピンとの間の第1の距離は、前記第2の回転軸と前記骨鋸刃の前記旋回点との間の第2の距離よりも長い、アダプタ。
(27)実施態様26に記載のアダプタにおいて、
前記第1の距離は、前記骨鋸刃の前記旋回点と前記骨鋸刃の遠位端との間の第3の距離よりも短い、アダプタ。
(28)実施態様27に記載のアダプタにおいて、
前記スロットの長さは、前記第2の距離の少なくとも2倍と、前記ガイドピンの直径とを合わせたものである、アダプタ。
(29)実施態様24に記載のアダプタにおいて、
前記アダプタは、前記骨鋸刃の遠位端の出力運動であって、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦を定める、出力運動を生じさせるように構成されている、アダプタ。
(30)実施態様29に記載のアダプタにおいて、
前記長弦は、前記骨鋸刃の長さ方向軸に対して垂直である、アダプタ。
【0101】
(31)振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を変更するための、アダプタにおいて、
前記刃クランプの戻り止めを受け入れるように構成された開口部を含む骨鋸刃であって、前記開口部は、前記戻り止めの外面と前記開口部の対応する表面との間に少なくとも0.203mm(0.008インチ)の隙間が存在するような大きさに作られている、骨鋸刃、
を備えている、アダプタ。
(32)実施態様31に記載のアダプタにおいて、
前記開口部は、概して円形であり、第1の直径を定めており、
前記戻り止めは、概して円形であり、第2の直径を定めており、
前記第1の直径は、前記第2の直径よりも少なくとも0.203mm(0.008インチ)大きい、アダプタ。
(33)実施態様31に記載のアダプタにおいて、
前記骨鋸刃に連結された調整器プレートであって、前記骨鋸刃に対して、第1の位置と第2の位置との間を移動することができる、調整器プレート、
を更に備えている、アダプタ。
(34)実施態様33に記載のアダプタにおいて、
前記調整器プレートは、前記骨鋸刃の長さ方向軸に平行な長さ方向軸を有する、概して涙の形をしたスロットを含む、アダプタ。
(35)実施態様34に記載のアダプタにおいて、
前記スロットの近位端は、第1の幅を定めており、この第1の幅は、前記スロットの遠位端の第2の幅より大きい、アダプタ。
(36)実施態様35に記載のアダプタにおいて、
前記調整器プレートの前記スロットの前記近位端の前記第1の幅は、前記骨鋸刃の前記開口部の直径より大きいか、または、前記直径と同等であり、
前記調整器プレートの前記スロットの前記遠位端の前記第2の幅は、前記骨鋸刃の前記開口部の前記直径より小さい、アダプタ。
(37)実施態様34に記載のアダプタにおいて、
前記骨鋸刃の前記開口部は、前記調整器プレートが前記第1の位置に位置付けられているとき、前記調整器プレートの前記スロットの遠位端と一直線上に並んでおり、
前記骨鋸刃の前記開口部は、前記調整器プレートが前記第2の位置に位置付けられているとき、前記調整器プレートの前記スロットの近位端と一直線上に並んでいる、アダプタ。
(38)実施態様31に記載のアダプタにおいて、
前記骨鋸刃は、複数の開口部を含む、アダプタ。
(39)実施態様34に記載のアダプタにおいて、
前記骨鋸刃は、複数の開口部を含み、
前記調整器プレートは、複数のスロットを含む、アダプタ。
(40)実施態様33に記載のアダプタにおいて、
前記調整器プレートに連結されたノブであって、前記第1の位置と前記第2の位置との間で前記調整器プレートを移動させるために、前記骨鋸刃に対して移動することができる、ノブ、
を更に備えている、アダプタ。
【0102】
(41)振動骨鋸組立て品を操作する方法において、
振動骨鋸の刃クランプのドライブ機構に骨鋸刃を連結する段階と、
旋回点の周りに第1の運動角度にわたって前記ドライブ機構を振動させる段階と、
前記旋回点の周りに、前記第1の運動角度より小さな第2の運動角度にわたって前記骨鋸刃を振動させる段階と、
を含む、方法。
(42)実施態様41に記載の方法において、
前記骨鋸刃を前記ドライブ機構に連結する段階は、前記骨鋸刃の複数の開口部を通して前記振動骨鋸の複数の戻り止めを受け入れる段階を含む、方法。
(43)振動骨鋸組立て品を操作する方法において、
振動骨鋸のチャックのドライブ機構に骨鋸刃を連結する段階であって、前記振動骨鋸の戻り止めが前記骨鋸刃の開口部を通って受け入れられるようにする、段階と、
前記骨鋸刃に対して旋回点の周りに前記戻り止めを移動させる段階と、
前記旋回点の周りに前記戻り止めおよび前記骨鋸刃を移動させる段階と、
を含む、方法。
【図面の簡単な説明】
【0103】
【図1】例証となる従来技術の振動骨鋸、および該振動骨鋸に連結されるように構成された、例証となる従来技術の鋸刃の斜視図である。
【図2】前記骨鋸の振動出力運動を変更するために、図1の振動骨鋸に連結された骨鋸用アダプタの斜視図である。
【図3】図2のアダプタの分解斜視図である。
【図4】図2および図3のアダプタの一部分の上面図である。
【図5】もう1つの骨鋸用アダプタであって、前記骨鋸の振動出力運動を軌道運動に変換するために、図1の振動骨鋸に連結されるように構成された、アダプタの分解斜視図である。
【図6】図5のアダプタの底部分解斜視図である。
【図7】図5および図6のアダプタの下面図である。
【図8】図5〜図7のアダプタの上面図である。
【図9】例証となる従来技術の骨ドリル、および該骨ドリルに連結されるように構成された、例証となる従来技術の付属部品の斜視図である。
【図10】図9に示される骨ドリルの回転出力運動を軌道運動に変換するために、該骨ドリルに連結されるように構成された骨ドリル用アダプタの斜視図である。
【図11】図10の骨ドリル用アダプタの分解斜視図である。
【図12】図9〜図11のアダプタの部分断面部分側面図である。
【図13】図9〜図12のアダプタの刃の軌道運動を示す、該アダプタの上面図である。
【図14】図9〜図12のアダプタの刃の軌道運動を示す、該アダプタの上面図である。
【図15】鋸刃の振動運動を示す線図である。
【図16】鋸刃の軌道運動を示す線図である。
【図17】骨鋸刃とデュアルモード調整器プレートとを含む振動骨鋸用アダプタの上面斜視図である。
【図18】前記骨鋸刃に対して第1の位置にある前記調整器プレートを示す、図17のアダプタの一部分の底部斜視図である。
【図19】前記骨鋸刃に対して第2の位置にある前記調整器プレートを示す、図18に類似するアダプタの一部分の底部斜視図である。
【図20】図17〜図19のアダプタの一部分の断面図である。
【図21】骨鋸刃とデュアルモード調整器プレートとを含むもう1つの振動骨鋸用アダプタの上面斜視図である。
【図22】前記骨鋸刃に対して第1の位置にある前記調整器プレートを示す、図21のアダプタの底部斜視図である。
【図23】骨鋸刃の長さに沿って複数のカットアウト部分を有する該骨鋸刃の上面図である。
【図24】もう1つの骨鋸刃であって、その長さに沿って、図23に示される複数のカットアウト部分に類似する複数のカットアウト部分を有する、該骨鋸刃の上面図である。
【開示の内容】
【0001】
〔開示の分野〕
本開示は概して、人工関節置換術の間、長骨に使用される整形外科用具、例えば、振動骨鋸(oscillating bone saws)および骨ドリル(bone drills)に関する。具体的には、本開示は、骨鋸および骨ドリルと一緒に使用して各々の出力運動(output motion)を変えるためのアダプタ(adapters)に関する。
【0002】
〔背景〕
整形外科処置にはしばしば、骨構造体、例えば、長骨および/または関節型の骨(joint-type bones)の切断(cutting)、トリミング(trimming)、穿孔(drilling)および/またはシェイビング(shaving)が包含される。長骨は、一般に強度、構造および可動性(mobility)を提供する硬質、高密度の骨である。長骨には、例えば、下肢の大腿骨、脛骨および腓骨、腕の上腕骨、橈骨および尺骨、ならびに指節骨および趾節骨が包含される。振動骨鋸は、例えば、関節炎の関節もしくは損傷した関節の一部または全てを人工関節で置き換える場合、全体的または部分的人工関節置換術のような様々な整形外科処置が行われる間、整形外科インプラントを受け入れて適切に整列させるため、上述の骨を調整するためにしばしば使用される。典型的な骨鋸は、米国特許第3,905,105号、同第3,977,289号、同第6,949,110号、同第6,302,406号明細書、および米国特許出願公開第US2006/0009796号明細書に見出だすことができる。
【0003】
上述の骨構造体は、例えば、筋肉、軟骨、腱および靱帯のような軟部組織によって囲まれている。これらの軟部組織構造体は、骨構造体の切断を含む整形外科処置が行われる間、分離することが困難である場合がある。例えば、外科医は、開創器(retractors)等の器具を使用して、手術部位から軟部組織を引き離し、該骨の適切な視覚化を提供し、かつ、該軟部組織に対するあらゆる不慮の損傷を防止する。しかし、該軟部組織は骨構造体に付着したままであり、限られた量しか該軟部組織を後退させることはできない。したがって、周辺軟部組織は、整形外科処置が行われる間、振動骨鋸によって無意識のうちに損傷を受けることがある。そのような軟部組織の損傷に関する解説は、下記の文献:ダ・シルバ,M.A.(Da Silva, M.A.)等「人工膝関節全置換術が行われる間の膝窩血管損傷(Popliteal Vascular Injury during Total Knee Arthroplasty)」,ジャーナル・オブ・サージカル・リサーチ(Journal of Surgical Research), 第109巻,第2号,pp.170〜174(2003年2月);クラッコウ,K.A.(Krackow, K.A.)「内側側副靱帯の修復および再建(MCL Repair and Reconstruction)」,ザ・ニー・ソサイエティ・スペシャルティ・デイ・ミーティング(The Knee Society Specialty Day Meeting)(2003年2月8日);および、レオポルド,S.S.(Leopold, S.S.)等「人工膝関節全置換術が行われる間の内側側副靱帯の術中破壊の第一次修復(Primary Repair of Intraoperative Disruption of the Medial Collateral Ligament During Total Knee Arthroplasy)」,ザ・ジャーナル・オブ・ボーン・アンド・ジョイント・サージェリー(The Journal of Bone & Joint Surgery),第83−A巻,第1号(2001年1月)、に見出だすことができる。
【0004】
〔概要〕
本発明は、特許請求の範囲に記載の特徴、または、下記の特徴、または、それらの組合せのうち1つ以上を含む。
【0005】
本開示の1つの態様によると、振動骨鋸組立て品は、ドライブ機構を有する振動骨鋸と、該ドライブ機構に連結された骨鋸刃とを含む。該骨鋸刃の遠位端の振動運動の弧長は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)である。更に、該骨鋸刃の旋回点(pivot point)と該骨鋸刃の遠位端との間の長さは、約8.89cm(約3.5インチ)以下である場合がある。該骨鋸刃の該振動運動は、約3.6°以下の角度を定めることができる。
【0006】
本開示のもう1つの態様によると、軌道出力運動を生じさせるための軌道骨鋸組立て品(orbital bone saw assembly)は、ドライブ機構と、前記ドライブ機構に連結された骨鋸刃とを含む。実例として、該骨鋸刃の軌道出力運動は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦(major chord)を定めている。更に、該骨鋸刃の長さ方向軸は、該骨鋸刃の軌道出力運動によって定められた該長弦に対して垂直である場合がある。実例として、軌道骨鋸組立て品は、振動骨鋸または回転骨ドリルを含む場合がある。この場合、該骨鋸および該骨ドリルのうち1つは、それ自体、ドライブ機構と、軌道骨鋸組立て品の刃クランプ(blade clamp)とを含む。
【0007】
本開示の更にもう1つの態様によると、振動骨鋸組立て品を操作する方法は、骨鋸刃を、振動骨鋸のドライブ機構に連結する段階と、該骨鋸刃の遠位端の振動運動の弧長が4.445mm(0.175インチ)〜5.588mm(0.220インチ)となるように、該骨鋸刃を振動させる段階とを含む。該骨鋸刃を振動させる段階は、アダプタを該振動骨鋸の該ドライブ機構に連結し、該骨鋸刃を該アダプタに連結することによって、該振動骨鋸の出力運動を変更する段階を含むことができる。更に、該ドライブ機構の出力運動は、約8°の角度を定めることができ、また、該骨鋸刃の出力運動は、約3.6°以下の角度を定めることができる。第1の軸の周りのドライブ機構にハブコネクタを連結することができ、該骨鋸刃は該ハブコネクタに連結することができ、かつ、第1の軸から間隔を置いて離されている第2の軸の周りに、該骨鋸刃を振動させることができる。
【0008】
本開示の更にもう1つの態様によると、振動骨鋸組立て品を操作する方法は、振動骨鋸または骨ドリルのドライブ機構に骨鋸刃を連結する段階と、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長弦を有する軌道経路を定めるように該骨鋸刃の遠位端を移動させる段階とを含む。該振動骨鋸または該骨ドリルの該ドライブ機構に、アダプタを連結することができる。更に、該骨鋸刃は、該アダプタに連結することができる。該骨鋸刃の近位端に位置する、該骨鋸刃の旋回点は、該骨鋸刃が回転する回転軸から間隔を置いて離されている場合がある。
【0009】
本開示の更にもう1つの態様によると、振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、該振動骨鋸の振動出力運動を変更するためのアダプタは、前記刃クランプに連結されるように構成されたハウジングと、前記刃クランプのハブに連結されるように構成されたハブコネクタと、旋回点を定めるように該ハウジングに旋回可能に連結された骨鋸刃とを含む。実例として、該骨鋸刃の近位端は、該ハブコネクタに連結されている。該ハブコネクタは歯車歯を含むことができ、該骨鋸刃の近位端もまた、該ハブコネクタの該歯車歯と連動された歯車歯を含むことができる。該骨鋸刃と該ハブコネクタとの間の歯車比は約2:1である場合がある。更に、該旋回点から該骨鋸刃の遠位端までの、該骨鋸刃の長さは、約8.89cm(約3.5インチ)以下である場合がある。
【0010】
本開示の更なる態様によると、振動骨鋸に連結されるように構成されたアダプタであって、該振動骨鋸の振動出力運動を軌道運動に変換するためのアダプタは、該振動骨鋸の該刃クランプに連結されるように構成されたハウジングと、該ハウジングに連結された駆動機構であって、該振動骨鋸の該刃クランプのドライブ機構に連結されるように構成された駆動機構と、該駆動機構に連結された刃とを含む。該駆動機構は、該振動骨鋸の該ドライブ機構に連結されるように構成されたハブコネクタと、第1の端部で該ハブコネクタに連結されたリンク機構と、該リンク機構の第2の端部に連結された歯車組立て品とを含むことができる。該駆動機構は、該歯車組立て品に連結された出力シャフトであって、該骨鋸刃の孔を通して受け入れられた出力シャフトを更に含むことができる。
【0011】
実例として、前記歯車組立て品は、前記リンク機構に連結された第1の歯車と、第1の歯車に連結された第2の歯車とを含むことができる。前記出力シャフトは、第2の歯車に連結されている場合があり、かつ、第2の歯車が回転する軸から間隔を置いて離されている場合がある。更に、前記骨鋸刃は、スロットを含むことができ、かつ、前記ハウジングは、該骨鋸刃の該スロットの内部に受け入れられたガイドピンを含むことができる。該スロットの長さ方向軸は、該骨鋸刃の長さ方向軸に平行である場合がある。実例として、該出力シャフトと該回転軸との間の距離は、該回転軸と前記ガイドピンとの間の距離よりも短い場合がある。更に、該回転軸と該ガイドピンとの間の該距離は、該骨鋸刃の該孔と該骨鋸刃の遠位端との間の距離よりも短い場合がある。
【0012】
更に実例として、前記アダプタは、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する主軸を定める、骨鋸刃の遠位端の出力運動を生じさせるように構成されている場合がある。
【0013】
本開示の更にもう1つの態様によると、骨ドリルのチャック(chuck)に連結されるように構成されたアダプタであって、該骨ドリルの回転出力運動を軌道運動に変換するためのアダプタは、第1の回転軸を定めるように該骨ドリルの該チャックの出力ドライブシャフトに連結されるように構成された第1のかさ歯車を含む。該アダプタの第2のかさ歯車は、第1のかさ歯車に連結され、かつ、第1の回転軸に対して垂直な第2の回転軸を定めるように位置付けられている。該アダプタの刃は、第2のかさ歯車に連結されて刃の旋回点を定めている近位端を含む。該刃の前記旋回点は、第2のかさ歯車の第2の回転軸から間隔を置いて離されている場合がある。
【0014】
実例として、前記アダプタは、ハウジングを更に含むことができ、これにより第1および第2のかさ歯車がハウジング内部に位置付けられる。該ハウジングは、前記刃のスロットの内部に位置付けられたガイドピンを含むことができる。該スロットの長さ方向軸は、該刃の長さ方向軸に平行である場合がある。更に実例として、第2の回転軸と該ガイドピンとの間の第1の距離は、第2の回転軸と該刃の前記旋回点との間の第2の距離よりも長い場合がある。該スロットの長さは、第2の距離の少なくとも2倍と該ガイドピンの直径とを併せたものである場合がある。第2の回転軸と該ガイドピンとの間の第1の距離は、該刃の該旋回点と該刃の遠位端との間の第3の距離よりも短い場合がある。
【0015】
前記アダプタは、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦を定める、前記刃の遠位端の出力運動を生じさせるように構成されている場合がある。該出力運動の該長弦は、該刃の長さ方向軸に対して垂直である場合がある。
【0016】
本開示の更にもう1つの態様によると、振動骨鋸の振動出力運動を変更するために、該振動骨鋸の刃クランプに連結されるように構成されたアダプタは、開口部を有する骨鋸刃であって、その開口部の中に該刃クランプの戻り止めを受け入れるように構成された、骨鋸刃を含む。該開口部は、該戻り止めの外面と該開口部の対応する表面との間に少なくとも0.203mm(0.008インチ)の隙間が存在するような大きさに作られている場合がある。該開口部は、第1の直径を定めるように概して円形であってよく、該戻り止めもまた、第2の直径を定めるように概して円形であってよい。実例として、第1の直径は、第2の直径よりも少なくとも0.203mm(0.008インチ)大きくてよい。
【0017】
前記骨鋸刃に、前記アダプタの調整器プレートを連結することができ、該調整器プレートは、該骨鋸刃に対して、第1の位置と第2の位置との間を移動することができる場合がある。該調整器プレートは、該骨鋸刃の前記長さ方向軸に平行な長さ方向軸を有する、概して涙の形をしたスロットを含むことができる。実例として、該スロットの近位端は、該スロットの遠位端の第2の幅より大きい第1の幅を定めている。該スロットの該近位端の第1の幅は、該骨鋸刃の前記開口部の前記直径より大きいか、または、該直径と同等である場合があるのに対して、該スロットの該遠位端の第2の幅は、該骨鋸刃の該開口部の該直径より小さい場合がある。
【0018】
実例として、前記調整器プレートが第1の位置に位置付けられているとき、前記骨鋸刃の前記開口部は、該調整器プレートの前記スロットの遠位端と一直線上に並んでおり、しかも、該調整器プレートが第2の位置に位置付けられているとき、該骨鋸刃の該開口部は、該調整器プレートの該スロットの近位端と一直線上に並んでいる。該骨鋸刃は複数の開口部を含む場合があり、また、該調整器プレートは複数のスロットを含む場合がある。
【0019】
前記アダプタは、前記調整器プレートに連結されたノブであって、第1の位置と第2の位置との間で該調整器プレートを移動させるために、前記骨鋸刃に対して移動することができる、ノブを更に含むことができる。該ノブは、ヘッドと、(i)該骨鋸刃の細長いスロット、および、(ii)該調整器プレートのネジ孔、を通して受け入れられたネジ山付きステムとを含むことができる。実例として、該ノブは、第1の位置と第2の位置との間で該調整器プレートを移動させるために、該骨鋸刃の長さ方向軸に平行な方向に移動することができる場合がある。代わりに、該ノブは、第1の位置と第2の位置との間で該調整器プレートを移動させるために、該骨鋸刃に対して旋回点の周りを回転することができる場合がある。
【0020】
本開示の更にもう1つの態様によると、振動骨鋸組立て品を操作する方法は、骨鋸刃を、振動骨鋸の刃クランプのドライブ機構に連結する段階と、該ドライブ機構を、旋回点の周りに第1の運動角度にわたって振動させる段階と、該骨鋸刃を、該旋回点の周りに、第2の運動角度にわたって振動させる段階とを含む。第2の運動角度は、第1の運動角度より小さい。該骨鋸刃を、該骨鋸刃の該ドライブ機構に連結するために、該骨鋸刃の複数の開口部を通して、該振動骨鋸の複数の戻り止めを受け入れることができる。
【0021】
本開示の更にもう1つの態様によると、振動骨鋸組立て品を操作する方法は、振動骨鋸の戻り止めが骨鋸刃の開口部を通って受け入れられるように、該骨鋸刃を、該振動骨鋸のドライブ機構のチャックに連結する段階と、該戻り止めを、該骨鋸刃に対して旋回点の周りに移動させる段階と、該戻り止めおよび該骨鋸刃を、該旋回点の周りに移動させる段階とを含む。
【0022】
現在認識される、本開示を実施するための最良の形態を例示する、例証となる実施形態の詳細な記述および添付図面を考慮すれば、本開示の上記特徴および他の特徴は、当業者に明らかになるであろう。
【0023】
詳細な記述は、とりわけ、添付図面に言及する。
【0024】
〔図面の詳細な記述〕
本開示の概念は、様々な変更および代替形態を受け入れることができるが、それらの具体的な例証となる実施形態は、図面に一例として示されており、本明細書に詳細に記述する。しかし、本開示を、開示される特定の形態に限定するようには意図されておらず、それどころか、本発明は、特許請求の範囲によって定められる本発明の趣旨および範囲内のあらゆる変更、同等物および代替物を包含するように意図されていることが理解されるべきである。
【0025】
本開示の図1〜図24に示される具体的な実施形態において解説されるように、骨鋸および/または骨ドリルに連結するための様々なアダプタが提供される。骨鋸の刃の出力運動を変更するために、そのようなアダプタの各々が取り付けられる該骨鋸および/または該骨ドリルの出力運動を変更するか、または変換するように、該アダプタは作動する。例えば、従来の骨鋸の刃の遠位端の振動運動の弧長(arc length)を限定することは、外科医が患者の骨を切っている通常領域において、該刃が患者の軟部組織を損傷するのを防止する助けとなることがある。軟部組織には、例えば、静脈、動脈、靱帯、腱、軟骨および筋肉組織だけでなく、整形外科処置が行われる間に損傷を受けることのある他の軟部組織も包含されることができる。同様に、従来の骨鋸の刃の遠位端の軌道運動(orbital motion)の長弦(major chord)を限定することもまた、該刃が上述の軟部組織を損傷するのを防止する手助けとなることがある。
【0026】
従来、前記刃の鋭さおよび/または該刃が作動している速度は、整形外科処置が行われる間の軟部組織の裂傷または破砕に寄与した唯一の因子ではないにせよ、それらに寄与した主な要因であると考えられてきた。しかし、この特定の考え方に反して、該刃それ自体の実運動(actual motion)は、患者の周辺軟部組織を裂傷させるかもしくは切断させることに関連する最も重要な因子、または、患者の周辺軟部組織を裂傷させるかもしくは切断させる最も重要な因子であることを見出だした。換言すれば、軟部組織の伸長不全(elongation failure)を越えて該軟部組織を引き伸ばさない量まで、該刃の運動を制限することによって、裂傷する軟部組織の量を著しく減少させることができる。軟部組織の伸長不全は一般に、該軟部組織の裂傷を引き起こす、該軟部組織を引き伸ばす量または該軟部組織を変形させる量を指す。したがって、特定の軟部組織の伸長不全より小さい変形量は、一般に、該組織が裂傷するのを防止する。当然ながら、周辺軟部組織が損傷する原因となり得る、上記で解説した諸因子が存在するにもかかわらず、骨鋸を操作する外科医は、そのような損傷が起こるのを防止することに対して主として責任を負う。しかし、本明細書に開示される概念は、外科医がそうすることの手助けとなることができる。
【0027】
軟部組織の変形(deformation)または引き伸ばし(stretching)を5.588mm(0.220インチ)以下に制限すれば、該軟部組織の伸長不全に取り組むことなく、該軟部組織の完全性(integrity)が維持されることを見出だした。換言すれば、軟部組織の変形を5.588mm(0.220インチ)以下に制限すれば、裂傷する該軟部組織の量が著しく減少する。当然ながら、体内の様々な軟部組織構造体はそれぞれ、様々な伸長不全率(elongation failure rates)を有することが理解される。しかし、軟部組織の変形を5.588mm(0.220インチ)以下に制限すれば、患者の骨を取り囲む全ての軟部組織の不全の量が著しく減少することを見出だした。
【0028】
当然ながら、前記刃の運動はまた、患者の骨を実際に切り進むのに十分でなければならない。換言すれば、該刃の最小運動は、患者の骨を効果的に切り進むために必要とされる。少なくとも4.445mm(0.175インチ)という、該刃の運動の範囲はそれ自体、患者の骨を十分に切り進むことができることを、実験によって見出だした。したがって、振動骨鋸組立て品(oscillating bone saw assembly)の刃であって、骨を効果的に切り離すと同時に、該刃が接触するかもしれない周辺軟部組織を損傷させる可能性を減少させる該刃の運動の1つの典型的な範囲は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の弧長(arc length)を定め、その範囲にわたって該刃の遠位端が動く。同様に、該刃の遠位端の軌道運動によって定められる長弦もまた4.445mm(0.175インチ)〜5.588mm(0.220インチ)となるような具合に、軌道骨鋸組立て品(orbital bone saw assembly)の骨鋸刃の軌道運動もまた、周辺軟部組織に対する損傷を減少させるように制限することができる。その範囲は、幾つかの典型的な具体例では、4.445mm(0.175インチ)〜5.080mm(0.200インチ)に更に制限される。しかし、該刃の振動運動の弧長、または、該刃の軌道運動の長弦が、例えば、5.588mm(0.220インチ)より長くなるか、または4.445mm(0.175インチ)より短くなるような具合に構成されているアダプタ(adapter)を提供することは、本開示の範囲内である。したがって、前述の、運動を制限することに関する理論的範囲は、実験によって得られたが、そのような範囲は、特許請求の範囲内にそのようなものとして具体的に列挙されない限り、本明細書に開示されるアダプタを限定するものと推論されるべきではない。
【0029】
本明細書およびに開示されるアダプタは、もともと製造されている用具(originally manufactured tool)、例えば、OEM振動骨鋸またはOEM回転骨ドリルと共に使用し、そのような鋸もしくはドリルの出力運動(output motion)を変更するために提供される改装機構(retrofit mechanisms)である。とりわけ、本明細書に開示されるアダプタは、用具保持機構(tool-retention mechanism)、例えば、振動骨鋸の刃クランプ、または、回転骨ドリルの(ソケット等の、調整可能であるか、もしくは調整不可能である)チャック(chuck)に連結されるように構成される。したがって、OEM用具(例えば、骨鋸または骨ドリル)の出力運動を変更するアダプタは、そのようなOEM用具の、いずれの特定の部品とも異なる。なぜなら、そのような用具は、1つの部品と他の部品との間の特定の運動を変更する内部ドライブ機構(internal drive mechanisms)を含むことがあるが、そのような部品は、外部で用具保持機構(tool-retention mechanism)に連結されるようには構成されていないからである。
【0030】
先ず、図1および図2を見ると、(図1および図2に示される)骨鋸用アダプタ10は、以下により詳細に解説されるように、従来の振動骨鋸12の振動出力運動(oscillating output motion)を変更するために、振動骨鋸12に連結されるように構成されている。骨鋸用アダプタ10および振動骨鋸12は、以下により詳細に解説されるように、協働して、患者の骨を切るための骨鋸組立て品を提供する。実例として、振動骨鋸12は、グリップ部(grip portion)16に連結されたバッテリパック(battery pack)14と、グリップ部16に連結されたヘッド部18とを含む。バッテリパック14が図示されているが、振動骨鋸12が、(図示されていない)空気源(pneumatic source)により動力を供給されることもまた、本開示の範囲内である。振動骨鋸12の刃クランプ20は、ヘッド部18に連結されており、また、刃22を振動骨鋸12に連結するために、(図1に示されるように)鋸の骨鋸刃22を受け入れるように提供される。刃クランプ20は、振動骨鋸12の工具(即ち、刃)保持機構と見なすことができる。
【0031】
本明細書で使用される用語「骨鋸刃(bone saw blade)」は、長骨、例えば、大腿骨、脛骨、腓骨、上腕骨、橈骨、尺骨、指節骨および趾節骨を切るために使用される鋸刃として定義される。更に、用語「骨鋸刃」とは、全体的または部分的な整形外科人工関節置換術、例えば、人工股関節置換術、人工膝関節移植手術、人工手首関節移植手術、人工肩関節置換術等が行われる間に使用される鋸刃をいう。したがって、本明細書に解説される骨鋸刃は、歯科手術または耳鼻咽喉(ENT)タイプ手術において使用される他の鋸刃と対比される。
【0032】
刃クランプ20は、ハブ(hub)24であって、このハブ24の上面28から突き出ている戻り止め(detents)26の配列を有する、ハブ24を含む。図1に示されるように、中央支柱32によって、カバー(cover)30がハブ24に連結されている。刃クランプ20は、(図1に示されるように)カバー30がハブ24の上面28から間隔を置いて離されるような開放位置(opened position)と、(図2に示されるように)カバー30がハブ24の上面28に隣接するような閉鎖位置(closed position)との間で移動できる。まず、図1を見ると、刃22の近位端27は、刃クランプ20が開放位置にあるときに該刃クランプの戻り止め26の配列を受け入れるように形成された、スロット(slots)34の配列を含む。刃クランプ20の戻り止め26が刃22のスロット28を通して受け入れられるような具合に、ひとたび刃22が刃クランプ20の内部に受け入れられると、刃クランプ20を(図2に示されるような)閉鎖位置まで移動させて、刃22を振動骨鋸12に固定することができる。
【0033】
次に図2を見ると、アダプタ10は、振動骨鋸12の振動出力運動を変更する。とりわけ、アダプタ10は、刃22が振動骨鋸12に直接連結されるとき、刃22が振動する角度と比べて、骨鋸刃38が振動する角度を減少させるように作動する。したがって、刃38の遠位端64が運動する弧長もまた、減少する。振動骨鋸、例えば、振動骨鋸12は典型的には、低侵襲手術(MIS)、コンピュータ支援外科(CAS)、関節鏡検査のような様々な整形外科処置が行われる間だけでなく、整形外科観血的処置が行われる間も使用することができる。以下により詳細に解説されるように、アダプタ10の刃38の弧長は、4.445mm(0.175インチ)〜5.080mm(0.200インチ)の間である。
【0034】
アダプタ10は、任意の適切な振動骨鋸、例えば、バージニア州シャーロッツビル(Charlottesville)のマイクロエアー・サージカル・インストゥルメンツLLC(MicroAire Surgical Instruments LLC)によって販売されている7600振動鋸(7600 Oscillating Saw)、および/または、フロリダ州ラルゴ(Largo)のコンメド(ConMed)(登録商標)リンバテック(Linvatec)によって販売されているホール(Hall)(登録商標)・パワープロ(PowerPro)(登録商標)空気圧振動鋸に連結されるように構成されることが可能である。骨鋸用アダプタ10が、任意の整形外科処置が行われる間に典型的に使用される、従来の任意の整形外科用振動鋸に連結されるように構成されることは、本開示の範囲内である。
【0035】
次に図2〜図4を見ると、アダプタ10は、概して「U字形の」ハウジング40であって、例えば図2に示されるように、ヘッド部41の他に、ヘッド部41に連結された第1および第2のアーム(arms)42,44であって、振動骨鋸12の刃クランプ20に連結されるように構成された、アームをも有する、ハウジング40を含む。実例として、ハウジング40のアーム42,44は、それらの中に(図示されていない)ネジを受け入れてアダプタ10を刃クランプ20に連結するための(図示されていない)ネジ孔を含むことができる。キャップ46は、ヘッド部41に連結されて、ヘッド部41の刃支持体表面47とキャップ46との間に刃38を保持する。
【0036】
アダプタ10は、図1に示される刃22の近位端27に形成されたスロット34の配列に類似した、スロット50の配列を含むハブコネクタ(hub connector)48を更に含む。したがって、ハブコネクタ48は、ハブコネクタ48を振動骨鋸12に連結するために、振動骨鋸12の刃クランプ20の戻り止め24の配列を受け入れることができる。具体的には、ハブコネクタ48の中央スロット52は、刃クランプ20の垂直支柱32を受け入れて、ハブコネクタ48が周りを振動する旋回点82(図4を参照されたい)として作動する。ハブコネクタ48は、形状が概して円形であり、かつ、一対の歯車歯54を含む。実例として、ハウジング40の各々のアーム42,44は、その中に形成されたチャネル56を含む。したがって、ハブコネクタ48は、チャネル56内部に受け入れられて、ハブコネクタ48をハウジング40に連結する。以下により詳細に解説されるように、ハブコネクタ48は、ハウジング40に対して旋回点82の周りを振動することができる。
【0037】
次に図3を見ると、骨鋸刃38は、歯車歯62を有する近位端60と、鋸歯66を有する遠位端64とを含む。骨鋸刃38は、骨鋸刃38の一部分がハウジング40のヘッド部41の表面47に支持されるような具合に、ヘッド部41とハウジング40のキャップ46との間に位置付けられる。ピン68は、骨鋸刃38の孔70と刃支持体表面47に形成された孔71とを通って受け入れられ、旋回可能に骨鋸刃38をハウジング40に固定する。したがって、骨鋸刃38は、ハウジング40に対して、ピン68の周りを旋回可能に移動することができ、往復振動運動(back and forth oscillating motion)を生じさせる。骨鋸刃38の歯車歯62は、図4に示されるように、ハブコネクタ48の歯車歯54に類似しており、該歯車歯54と連動される。実例として、ハブコネクタ48は2個の歯車歯54を含むように図示され、また、骨鋸刃38は3個の歯車歯62を含むように図示されているが、ハブコネクタ48および骨鋸刃38が任意の数の連動歯車歯を含むことは、本開示の範囲内である。
【0038】
作動中、振動骨鋸12の内部ドライブ機構(internal drive mechanisms)(図示されず)が振動骨鋸12のハブ24に連結されて、ハブ24は、刃クランプ20の垂直支柱32を通る軸(図示されず)の周りを往復振動する。この、振動骨鋸12の出力振動運動は、振動骨鋸12の刃クランプ20の、振動しているハブ24から、アダプタ10のハブコネクタ48まで移動する。したがって、ハブコネクタ48は、振動骨鋸12の内部ドライブ機構によって予め決定された特定の角度にわたって振動するか、または、該角度にわたって旋回する。実例として、振動骨鋸12の出力振動運動は、約8〜9°の角度にわたる往復旋回運動(back-and-forth pivoting movement)を定める。ハブコネクタ48は、振動骨鋸12の振動ハブ(oscillating hub)24に連結されており、したがって、ハブ24と共に約8〜9°の角度にわたって往復振動する。この、ハブコネクタ48の振動によって、骨鋸刃38は、骨鋸刃38とハブコネクタ48との間のかみ合った関係(geared relationship)に起因し、ピン68の周りに振動するように促される。ハブコネクタ48と骨鋸刃38との間のかみ合った関係が作動して、骨鋸刃38が振動する角度は約3.6°まで減少する。
【0039】
図4に示されるように、ハブコネクタ48の旋回点82と歯車歯54,62の間の連動位置との間の第1の距離80は、骨鋸刃38の旋回点84と歯車歯54,62の間の連動位置との間の第2の距離82より短い。実例として、骨鋸刃38とハブコネクタ48との間の歯車比は、2:1である。しかし、骨鋸刃38が振動する角度を、ハブ24およびハブコネクタ48が振動する角度から減少させるために、骨鋸刃38とハブコネクタ48との間に適切なあらゆる歯車比を提供することは、本開示の範囲内である。該歯車比は、上述の第1の距離および/または第2の距離80,82を変化させることによって変えることができることを理解すべきである。
【0040】
実例として、振動骨鋸刃38の遠位端64は、4.445mm(0.175インチ)〜5.080mm(0.200インチ)の弧長にわたり往復して動く。該弧長は、骨鋸刃38がさっと一振りすることによって(through one sweep of motion)骨鋸刃38の遠位端64の任意の地点が特定の角度にわたって動く時、該地点が動く距離として定められる。骨鋸刃38の振動運動は、図15に概略的に示される。骨鋸刃38の遠位端64の任意の地点の振動運動の弧長86は、骨鋸刃38が移動している(ラジアンで測定される)角度88と、骨鋸刃38の旋回点84から骨鋸刃38の遠位端64まで測定される骨鋸刃38の長さ90との関数である。換言すれば、骨鋸刃38の長さ90に、骨鋸刃38が振動している角度88を掛けたものは、骨鋸刃38の遠位端64の任意の特定の地点の振動運動の弧長86に等しい。したがって、例証的に、骨鋸刃38の長さ90、および/または、骨鋸刃38が振動している角度88を変化させれば、骨鋸刃38の遠位端64の任意の地点の振動運動の弧長86は変化する。
【0041】
次に図5〜図8を見ると、もう1つの鋸用アダプタ110は、軌道骨鋸組立て品(orbital bone saw assembly)を提供するために、骨鋸12に連結されるように構成される。アダプタ110は、骨鋸12の振動出力運動(oscillating output motion)を軌道運動(orbital motion)に変化させるように作動する。鋸用アダプタ110は、2つのアーム114,116を含むハウジング112であって、(図2〜図4に示される)骨鋸用アダプタ10のハウジング40が骨鋸12に連結される方法と同様に骨鋸12の刃クランプ20に連結するためのハウジング112を含む。鋸用アダプタ110は、骨鋸12の駆動機構(driven mechanism)121(図6を参照されたい)であって、ハブ24を介して骨鋸12のドライブ機構(図示されず)に連結された、駆動機構121を更に含む。駆動機構121は、ハウジング112に連結されており、かつ、(図6および図7に示される)ハブコネクタ120であって、アダプタ10に関し上述されたハブコネクタ48に類似する、ハブコネクタ120を含む。したがって、ハブコネクタ120のスロット50は、ハブ24の戻り止め26を受け入れることができる。
【0042】
鋸用アダプタ110の駆動機構121は、ハブコネクタ120に連結されたリンク機構(linkage mechanism)122と、リンク機構122に連結された歯車組立て品(gear assembly)123とを更に含む。実例として、リンク機構122は、第1のリンク124であって、第1の端部でハブコネクタ120に連結され、ハブコネクタ120と共に往復振動運動をするための第1のリンク124を含む。実例として、第1のリンク124およびハブコネクタ120は、一体の構造体として形成される。しかし、第1のリンク124およびハブコネクタ120が互いに連結された別個の構造体として形成されることは、本開示の範囲内である。第2のリンク128は、第1の端部で第1のリンク124の第2の端部に、旋回ピン(pivot pin)132によって旋回可能に連結される。第2のリンク128の第2の端部は、歯車機構(gear mechanism)123の第1の歯車136に、ピン138によって連結されている。第2のリンク128の運動によって、歯車136が中心旋回軸139の周りを旋回するような具合に、ピン138は、歯車136の旋回軸139から間隔を置いて離されている。実例として、歯車136は、ハウジング112に連結されたハブ143であって、旋回軸139を定める、ハブ143の周りを旋回する。
【0043】
歯車機構123の第2の歯車140は、第1の歯車136と連動しており、第1の歯車136によって促されて、中心旋回軸141の周りに旋回する。実例として、ハブ145は、第2の歯車140に連結されており、第2の歯車140と共に旋回軸141の周りを旋回する。スルーシャフト(through-shaft)144(図5および図6を参照されたい)がハブ145に連結されており、同様に、第2の歯車140およびハブ145と共に旋回軸141の周りを回転する。実例として、軸受146がスルーシャフト144を取り囲んで、スルーシャフト144が旋回軸141の周りを回転する時、スルーシャフト144の摩擦を減少させる。スルーシャフト144は、実例として、ハウジング112を通って、ハウジング112の底面163からハウジング112の(図5に示される)凹面156まで延びている。ハブ145はそれ自体、スルーシャフト144の第1の端部に連結されている。(図6に示される)出力シャフトまたは出力ペグ(output shaft or peg)142は、スルーシャフト144の第2の端部または反対側の端部に連結されており、かつ、スルーシャフト144の中心からずれている。したがって、出力シャフト142は、旋回軸141の周りを円運動で動く。出力シャフト142が旋回軸141の周りを動く時、出力シャフト142の円運動の直径を調節するため、出力シャフト142を、第2の歯車140の旋回軸141から適切な任意の距離を置いて配置することは、本開示の範囲内である。
【0044】
第2の歯車140は、第1の歯車136よりも小さい。したがって、第1の歯車と第2の歯車との間の歯車比は、第2の歯車140が回転する速度、および、出力シャフト142が第2の歯車140の旋回軸141の周りを回転する速度を増大させるように作用を及ぼす。実例として、第1の歯車136と第2の歯車140との間の歯車比は、約1.8である。換言すれば、実例となる歯車機構123の歯車比は、骨鋸組立て品の速度(rpm)を約1.8倍だけ増大させるように作用を及ぼす。当然ながら、所望のあらゆる速度を作り出すために、異なる歯車比を定める歯車機構を含むことは、本開示の範囲内である。
【0045】
鋸用アダプタ110は、図5および図8に示されるように、ハウジング112の凹部分152に連結されているガイドピン150を更に含む。ハウジング112の凹部分152は、骨鋸刃160の近位端154を受け入れる大きさに作られている。凹部分152は、ハウジング112の凹面156とハウジング112のU字形側壁158とによって画定され、その中に、骨鋸刃160の近位端154が入っている。実例として、骨鋸刃160は、第1の孔162であって、図5に示されるように、駆動機構121の出力シャフト142を第1の孔162の中に受け入れるように構成された、第1の孔162を含む。骨鋸刃160は、孔162から間隔を置いて離されたスロット164を更に含む。スロット164は、骨鋸刃160の長さに沿って長さ方向に延びている。換言すれば、スロット164の(図示されていない)長さ方向軸は、骨鋸刃160の(図示されていない)長さ方向軸と平行である。スロット164は、(出力シャフト142によって提供される)骨鋸刃160の円運動を楕円様運動に変換するために、ハウジング112のガイドピン150を受け入れるように位置付けられている。以下により詳細に解説されるように、骨鋸刃160の遠位端64の出力運動は、形状が概して楕円形である経路(path)をたどる。
【0046】
したがって、作動中、振動骨鋸12のドライブ機構からの振動出力運動によって、振動骨鋸12の刃クランプ20に連結されたハブコネクタ120は、刃クランプ20のハブ24が振動するのと同一の角度にわたって、刃クランプ20のハブ24と共に振動する。したがって、ハブコネクタ120に連結されている第1のリンク124もまた、この同一角度にわたり振動する。第1のリンク124の振動運動が第2のリンク128に移動して、第2のリンク128の第2の端部は、旋回軸139を定めるハブ143の周りを第1の歯車136が回転するように促す。上述のように、第1の歯車136が回転することによって、第2の歯車140は、旋回軸141を定めるハブ145の周りを回転するように促され、それによって、旋回軸141から間隔を置いて離された位置で第2の歯車140に連結された出力シャフト142は、旋回軸141の周りを円運動で運動する。アダプタ110の骨鋸刃160は、出力シャフト142の円運動によって、骨鋸刃160の近位端154が同一の円運動で運動するように促されるような具合に、出力シャフト142に連結される。しかし、骨鋸刃160のスロット164を通して受け入れられたガイドピン150によって、骨鋸刃160の遠位端64の出力運動は、楕円様経路(ellipse-like path)をたどる。
【0047】
実例として、骨鋸刃160の遠位端64の、この軌道運動は、図16に概略的に示されるように、楕円形である場合がある。しかし、骨鋸刃160の軌道運動は、楕円出力運動に限定されるのではなく、対称的閉ループまたは対称的閉曲線を作り出す、任意の形状のあらゆる軌道運動または軌道経路で動くことができることを理解すべきである。例えば、骨鋸刃160の遠位端64の振動運動は、「完全な(perfect)」楕円経路(ellipse path)をたどることができる訳ではなく、長円様形状または楕円様形状を形成する対称的閉ループをたどることができる。
【0048】
図16に示されるように、骨鋸刃160の遠位端64の任意の地点の軌道運動または対称的閉曲線運動は、長軸180および短軸182を定める。対称的閉曲線の長弦(major chord)は、骨鋸刃の長さ方向軸に対して垂直であるか、または、骨鋸刃の長さ方向軸に対して平行である、前記軌道経路を横切る最長距離として定められる。したがって、実例として、図16に示される軌道経路の長弦181は、長軸180に沿って延びている。しかし、長軸は、必ずしも長弦を定めるとは限らない。したがって、長弦181は、例証的に5.588mm(0.220インチ)以下である長さ184を定める。1つの典型的な実施形態において、長弦181の長さ184は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の間、または例証的には4.445mm(0.175インチ)〜5.080mm(0.200インチ)の間である。当然ながら、骨鋸刃の軌道運動が、適切な任意の長さを有する長弦を定めることは、本開示の範囲内である。
【0049】
実例として、図16に示されるように、軌道運動または軌道経路の長軸180は、骨鋸刃160と、骨鋸刃160に形成されたスロット164との両方の(図示されていない)長さ方向軸に対して垂直である。しかし、骨鋸刃160の遠位端64の軌道経路が、骨鋸刃160の長さ方向軸に平行である長軸を定めることは、本開示の範囲内である。更に、骨鋸刃160の出力運動の軌道経路は、骨鋸刃160の長さ方向軸に対して平行でも垂直でもない長軸であって、骨鋸刃160の長さ方向軸に対して幾分角度をなしている、長軸を定めることができる。
【0050】
多くの異なる寸法は、骨鋸刃160の軌道出力運動(orbital output motion)の長弦の長さ184に影響を及ぼす。図8に示されるように、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の間の長さ184を有する長弦を定める、骨鋸刃160の出力運動を依然として維持しながら、骨鋸刃160の出力運動に影響を与えるために、例えば、孔162の中心から骨鋸刃160の遠位端64までの長さ190、出力シャフト142の中心と回転軸141との間の距離または半径192、および、ガイドピン150の中心と回転軸141との間の距離194はそれぞれ、変化させることができる。
【0051】
スロット164および/またはガイドピン150のサイズならびに形状は、骨鋸刃160の遠位端64の出力運動に影響を及ぼすことができる。例えば、実例となるスロット164は、出力シャフト142の中心と回転軸141との間の距離192の少なくとも2倍と、ガイドピン150の直径とを合わせた長さ196を定める。更に実例として、スロット164は、ガイドピン150の直径に少なくとも等しい幅198を定める。
【0052】
しかし、実例として、出力シャフト142と回転軸141との間の半径距離192は、出力シャフト142とガイドピン150との間の距離194より短い。更に、この距離194は、骨鋸刃160の孔162と骨鋸刃160の遠位端64との間で測定された骨鋸刃160の長さ190より短い。図8に示されるように、回転軸141は、ガイドピン150の中心と一直線上に揃っている。アダプタ110のスロット164と同様、アダプタ210の骨鋸刃261のスロット268および/またはガイドピン264のサイズおよび形状もまた、骨鋸刃261の遠位端64の出力運動に影響を及ぼすことがある。例えば、実例となるスロット268は、出力シャフト242の中心と回転軸236との間の距離292の少なくとも2倍と、ガイドピン264の直径とを合わせた長さ296を定める。更に実例として、スロット268は、ガイドピン264の直径に少なくとも等しい幅398を定める。
【0053】
次に図10〜図14を見ると、骨ドリル用アダプタ210が提供されている。実例として、アダプタ210は、以下に解説されるように、骨ドリル250の回転出力運動を軌道運動に変換するため、骨ドリル、例えば、図9に示される骨ドリル250に連結されるように構成されている。したがって、実際には、アダプタ210および骨ドリル250は協働して、軌道骨鋸組立て品(orbital bone saw assembly)を提供する。骨ドリル250は、従来の任意の骨ドリル、例えば、バージニア州シャーロッツビルのマイクロエアー・サージカル・インストゥルメンツLLCによって販売されている7500ドリル/リーマー(7500 Drill/Reamer)であってもよい。換言すれば、アダプタ210が従来の任意の整形外科骨ドリルに連結されるように構成されることは、本開示の範囲内である。上記で解説された振動骨鋸12と同様、骨ドリル250は、チャック(chuck)217または出力ドライブシャフトを軸211の周りに回転させる内部ドライブ機構(図示されず)を含む。そのようなチャックは、骨ドリル250の用具保持機構と見なすことができる。実例となる骨ドリル250は、グリップ部(grip portion)216に連結されたバッテリパック14と、グリップ部216に連結されたヘッド部218とを含む。振動骨鋸12と同様、骨ドリル250は、(図示されていない)空気源により動力を供給されることもできる。ドリルビット(drill bit)215を有する連結器(coupler)213は典型的には、ヘッド部218に連結されて、ビット215を軸211の周りに回転させる。
【0054】
次に図10〜図12を見ると、アダプタ210は、骨ドリル250内部に受け入れられるように構成されたコネクタ220を有するハウジング212を含む。実例として、コネクタ220は、アダプタ210を骨ドリル250にロックするため、第1および第2のキースロット(keyed slots)222であって、それらの中に骨ドリル250の一部分を受け入れるように形成された、キースロット222を含む。該コネクタの、この連結手段212は概して、整形外科手術が行われる間に使用される様々なドリル連結器付属部品、例えば、図9に示される、実例となる付属部品213の接続手段と同一であるか、または該接続手段に類似する。
【0055】
コネクタ220の内部には、アダプタ210のドライブシャフト224が位置付けられており、骨ドリル250の回転出力運動を生じさせる、骨ドリル250の(図示されていない)ソケットの内部に受け入れられるように構成されている。したがって、アダプタ210のドライブシャフト224は、骨ドリル250のソケットの回転運動によって回転するように促される。図12に更に示されるように、アダプタ210のドライブシャフト224は、第1のかさ歯車230に連結されており、第1の長さ方向軸232の周りをドライブシャフト224と共に回転するように第1のかさ歯車230を促す。実例として、第1の長さ方向軸232は、骨ドリル250のソケットが周りを回転する長さ方向軸211と同一直線上にある。第2のかさ歯車234は、第1のかさ歯車230に連結されており、第1のかさ歯車230のドライブシャフト224の回転運動の方向を90°だけ変えるために、第1のかさ歯車230に対して90°の角度で位置付けられている。したがって、実例として、第2のかさ歯車234は、第1のかさ歯車230が周りを回転する第1の軸232に対して垂直である第2の垂直軸236の周りを回転する。
【0056】
第2の垂直軸236の周りを第2のかさ歯車234と共に回転するように、第2のかさ歯車234にディスク(disk)240が連結されている。ディスク240には、オフセット出力ピン(offset output pin)242またはシャフトが連結されている。オフセット出力ピン242は、オフセット出力ピン242が垂直回転軸236の周りを概して円形の運動で回転するような具合に、図12に示されるように、軸236から間隔を置いて離されている。
【0057】
アダプタ210のハウジング212は、コネクタ220に連結された本体部分260であって、その中にかさ歯車230,234を包含する、本体部分260を更に含む。本体部分260は、上面262であって、この上面262の上に刃261を受け入れるように形成された、上面262を画定する(図11および図12を参照されたい)。ディスク240の一部および出力ピン242は、ハウジング212の上面262を通って延びている。更に、ハウジング212のガイドピン264が、上面262に連結されており、かつ、出力ピン242から間隔を置いて離されている。刃261は、骨鋸刃160に類似しており、かつ、孔266であって、この孔266を通して出力ピン242を受け入れるように形成された、孔266の他に、刃261の長さ方向軸(図示されず)に沿って延びている長さ方向軸(図示されず)を有するスロット268をも含む。
【0058】
作動中、刃261の孔266は、出力ピン242を受け入れて、刃261の近位端154が出力ピンまたは出力シャフト242と共に円運動で移動するようにこの刃261の近位端154を促す。しかし、ハウジング212のガイドピン264は、刃261のスロット268の内部に受け入れられる。スロット268によって、刃261の遠位端64の出力運動は、対称的な閉曲線または閉ループによって定められる楕円様軌道運動をたどる。ハウジング212のキャップ(cap)270は、刃261のもう1つの孔274を通して受け入れられたネジ272によって、ハウジング212の本体部分260に連結されている。実例として、刃261の孔274は、該刃のスロット268と該刃の孔266との間に位置付けられており、刃261のいかなる運動も制限されないような大きさに作られている。
【0059】
上述のアダプタ110と同様、アダプタ210の刃261の軌道運動は、楕円出力運動に限定されるのではなく、対称的な閉曲線または閉ループを完成させる、いかなる軌道運動または軌道経路も動くことができる。換言すれば、刃261の軌道出力運動は、円、楕円、長円、または、対称的な閉ループもしくは閉曲線を作り出す他のいかなる形状であってもよい。更に、刃261の軌道運動の長弦の長さ184は、実例として、5.588mm(0.220インチ)以下である。好ましい実施形態において、長弦の長さ184は、4.445mm(0.175インチ)〜5.080mm(0.200インチ)の間である。当然ながら、刃261の軌道運動が、適切な任意のサイズを有する長弦を定めることは、本開示の範囲内である。
【0060】
上述のアダプタ110と同様、アダプタ210の多くの異なる寸法は、刃261の遠位端64の軌道出力運動の長弦の長さ184に影響を及ぼすことがある。図13および図14に示されるように、例えば、孔266の中心から刃261の遠位端64までの長さ290、出力シャフト242の中心と回転軸236との間の距離または半径292、および、ガイドピン264の中心と回転軸236との間の距離294は、それぞれ、刃261の出力運動に影響を与えるように変えることができる。
【0061】
スロット268および/またはガイドピン264のサイズならびに形状もまた、刃261の遠位端64の出力運動に影響を与えることがある。しかし、実例として、出力シャフト241と回転軸236との間の半径距離292は、出力シャフト241とガイドピン264との間の距離294より短い。更に、この距離294は、刃261の孔266と刃261の遠位端64との間で測定された、刃261の長さ290より短い。図13および図14に示されるように、回転軸236は、ガイドピン264の中心と一直線上に並んでいる。
【0062】
次に図17〜図20を見ると、アダプタ310は、骨鋸刃312と、骨鋸刃312に連結されたデュアルモード調整器プレート(dual-mode adjuster plate)314と含む。アダプタ310は、前記鋸の振動出力運動を変更するために、(図示されていない)振動骨鋸に連結されるように構成されている。以下により詳細に解説されるように、アダプタ310は、振動骨鋸に連結されたとき、骨鋸刃312の遠位端の2つの異なる振動出力運動を提供するように作動するデュアルモード振動骨鋸組立て品(dual-mode oscillating bone saw assembly)を提供し、この出力運動は、それぞれ、異なる弧長を定める。実例として、(骨鋸刃312、および調整器プレート314を含む)アダプタ310は、ストライカー・コーポレーション(Stryker Corporation)(ミシガン州カラマズー(Kalamazoo))によって提供される矢状鋸(Sagittal Saw)に連結されるように構成されている。しかし、アダプタ310は、類似する他の振動鋸にも連結されるように構成されることが可能である。
【0063】
実例として、骨鋸刃312は、(図示されていない)振動骨鋸に連結されるように構成された近位端316と、鋸歯66を有する遠位端318とを含む。図示されるように、骨鋸刃312の近位端316は、骨鋸刃312の旋回点322を定めているU字形スロット320と、スロット320の周囲に位置付けられた7個の孔または開口部324とを含む。骨鋸刃312のスロット320は、図1に示される振動骨鋸12の中央支柱32に類似する垂直支柱(図示されず)を受け入れるように構成されているのに対して、骨鋸刃312の孔324は、図1に示される刃22が骨鋸12に連結されるのとほぼ同じように、骨鋸12のハブ24の上面28から突き出ている戻り止め26の配列に類似する、戻り止めの配列(図示されず)を受け入れるように構成されている。以下により詳細に解説されるように、各々の孔324の直径330は、約2.743mm(約0.108インチ)であるのに対して、各々の孔324の内部に受け入れられる、(図示されていない)各々の戻り止めの直径(図示されず)は、2.743mm(0.108インチ)未満である。換言すれば、刃312が連結される振動骨鋸の戻り止めの直径は概して、該戻り止めが受け入れられる、刃312の各々の孔324の直径330より小さい。したがって、各々の孔324は、該戻り止めの外面と各々の孔324の対応する表面との間に最小隙間が存在するような大きさに作られている。例えば、各々の戻り止めの直径は、該戻り止めと各々の対応する孔324の表面との間に0.203mm(0.008インチ)の隙間を提供するために、2.540mm(0.100インチ)である場合がある。
【0064】
次に図18〜図20を見ると、アダプタ310の調整器プレート314は、骨鋸刃312の底面332に隣接しており、また、骨鋸刃312のU字形スロット320とサイズが類似するU字形スロット334であって、U字形スロット320と一直線上に並んでいる、U字形スロット334を含む。更に、調整器プレート314は、7個のスロットまたは開口部336であって、各々が骨鋸刃312の長さ方向軸(図示されず)に平行な長さ方向軸(図示されず)を定めている、スロットまたは開口部336を含む。各々のスロット336は、各々のスロット336の遠位端338が各々のスロット336の近位端340より狭くなるような具合に、概ね涙の形をしている(tear-drop shaped)。実例として、各々のスロット336の遠位端338の(図18に示される)幅342は約2.540mm(約0.100インチ)であるのに対して、各々のスロット336の近位端340の(図19に示される)幅344は約2.845mm(約0.112インチ)である。
【0065】
アダプタ310は、例えば、図20に示されるように、骨鋸刃312と調整器プレート314との両方に連結されたノブ(knob)350を更に含む。実例として、ノブ350は、ヘッド352と、骨鋸刃312中に形成されたスロット356、および調整器プレート314中に形成されたネジ孔358の両方を通して受け入れられるネジ山付き支柱354と、を含む。骨鋸刃312中に形成されたスロット356は、骨鋸刃312の長さ方向軸と平行で、かつ、骨鋸刃312の長さ方向軸と一直線上に並んでいる長さ方向軸を定めている。ノブ350は、以下により詳細に解説されるように、調整器プレート314に連結されており、しかも、骨鋸刃312中に形成されたスロット356の内部で骨鋸刃312に対して移動することができる。ノブ350はまた、外科医または他の専門技術者が調整器プレート314の位置を骨鋸刃312に対して固定することができるように、ノブ350を単に時計回りまたは反時計回りに回転させることによって、骨鋸刃312に対して締め付けられ、緩められることが可能である。
【0066】
調整器プレート314は、図17および図18に示される第1の位置と図19に示される第2の位置との間を移動することができる。第1の位置において、骨鋸刃312の孔324は、調整器プレート314のスロット336の近位端340と、概して一直線上に並んでいる。上述のように、調整器プレート314の各々のスロット336の近位端340の幅344は約2.743mm(約0.108インチ)であるのに対して、骨鋸刃312の各々の孔324の直径330は約2.845mm(約0.112インチ)である。したがって、調整器プレート314は、調整器プレート314が第1の位置にあるとき、骨鋸刃312の孔326のいずれの部分をも覆い隠すようには位置づけられていない。
【0067】
アダプタ310が連結され、かつ、調整器プレート314が第1の位置にある状態で(不図示の)振動骨鋸が作動する間、該振動骨鋸の戻り止め(detents)は、該振動鋸の内部ドライブ機構(図示されず)によって促されて、U字形スロット320の旋回点322と実質的に一直線上に並んでいる旋回点の周りを往復振動する。そのような作動は、図1に示される振動骨鋸12に関連して上述された作動と類似する。したがって、戻り止めの上に受け入れられるアダプタ310も同様に、旋回点322の周りを往復振動するように促される。しかし、骨鋸刃312の各々の孔326の中に受け入れられた該戻り止めに対する、該孔326の、より大きい直径330は、骨鋸刃312に対する、各々の戻り止めの余分の半径方向運動(radial travel)を規定する。換言すれば、各々の孔326の、より大きい直径330は、孔324内部の各々の戻り止めの空動き(lost motion)を規定する。例えば、該骨鋸の各々の戻り止めは、旋回点の周りを、該骨鋸刃に対して少なくとも0.203mm(0.008インチ)移動する。骨鋸刃312はそれ自体、戻り止めが振動する運動の全範囲にわたって振動するようには促されない。実例として、例えば、調整器プレート314が第1の位置にあるとき、戻り止めは、約8°の弧にわたって振動することができるのに対して、アダプタ310は、骨鋸刃312の、より大きい直径の孔324のため、約3.6°の弧にわたって振動するように促されることが可能である。
【0068】
上述のように、調整器プレート314もまた、図19に示される第2の位置まで移動することができる。第2の位置において、調整器プレート314は、第1の位置にあるときに比べ、骨鋸刃312に対してさらに近位に位置付けられる。更に、骨鋸刃312の孔324は、調整器プレート314の各々のスロット336の遠位端338と、概して一直線上に並んでいる。上述のように、各々のスロット336の遠位端338の幅342は、約2.540mm(約0.100インチ)であり、これは、各々のスロット324の近位端340の幅2.743mm(0.108インチ)よりも小さい。したがって、調整器プレート314が第2の位置にあるとき、調整器プレート314の一部分は、該振動骨鋸の戻り止めが受け入れられる孔のサイズを効果的に小さくするために、骨鋸刃312の孔324を覆い隠す。
【0069】
このようにして、骨鋸刃312の各々の孔324の直径の使用可能なサイズは、各々の孔の内部に受け入れられる各々の戻り止めの直径のサイズと概して同等になる。したがって、該骨鋸が作動する間、旋回点322の周りのそれら戻り止めの振動運動は、ほとんどまたは全く失われない。換言すれば、それら戻り止めが往復振動する時、アダプタ310は、概して同一の運動範囲にわたって往復振動するように促される。したがって、該骨鋸の戻り止めが約8°の弧にわたり振動するならば、骨鋸刃312は、同様に、約8°の弧にわたり振動するように促される。
【0070】
したがって、上述のように、調整器プレート314は、2つの動作モード(two modes of operation)を有するアダプタを提供するため、第1の位置と第2の位置との間を、骨鋸刃312に対して移動することができる。第1の動作モードにおいて、調整器プレート314が第1の位置にある時、該骨鋸の振動出力運動は、骨鋸刃312が約3.6°の角度にわたって振動するように促されるような具合に、構成される。骨鋸刃312が振動する角度を減少させることによって、骨鋸刃312の遠位端318の振動運動の弧長もまた減少する。実例として、アダプタ310の骨鋸刃312の遠位端の振動運動は、調整器プレート314が第1の位置にある時、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の弧長、実例として4.445mm(0.175インチ)〜5.080mm(0.200インチ)の弧長にわたって動く。
【0071】
第2の動作モードにおいて、調整器プレート314が第2の位置にある時、骨鋸刃312は、アダプタ310が連結される振動骨鋸の戻り止めとほぼ同一の角度にわたって振動するように促される。換言すれば、第2の動作モードにおいて、骨鋸刃312は、約8°の角度にわたって振動するように促される。したがって、第2の動作モードにおいて、外科医は、骨鋸の振動出力運動を改変することなく、骨鋸を使用することができる。
【0072】
次に図21および図22を見ると、もう1つのアダプタ410は、コンメド(登録商標)・リンバテック社(フロリダ州ラルゴ(Largo))によって販売されているホール(Hall)(登録商標)・パワープロ(PowerPro)(登録商標)空気圧振動鋸と共に使用するために提供される。しかし、アダプタ410を他の振動鋸に連結することは、本開示の範囲内である。アダプタ310と同様、アダプタ410は、骨鋸刃412と、骨鋸刃412に連結されたデュアルモード調整器プレート414とを含む。
【0073】
実例として、骨鋸刃412は、(図示されていない)振動骨鋸に連結されるように構成された近位端416と、(図示されていない)鋸歯を有する遠位端(図示されず)とを含む。骨鋸刃412の近位端416は、骨鋸刃412を(図示されていない)振動骨鋸に連結するため、振動骨鋸の戻り止めの配列を受け入れるように形成された複数のスロットまたは開口部424の配列を含む。実例として、スロット424の配列は、図1に示される骨鋸刃22のスロット34の配列、および、図3および図4に示されるアダプタ10のハブコネクタ48のスロット50の配列に類似する。スロット34,50の、そのような配列は、実例として、図1および図2に示される骨鋸刃12の刃クランプ20の戻り止め26の配列を受け入れるように形成されている。したがって、骨鋸刃412の近位端416は、振動骨鋸の戻り止めの配列を受け入れることができ、アダプタ410は、この振動骨鋸に連結されるように構成されている。具体的には、骨鋸刃412の、中央のU字形カットアウト(center U-shaped cut-out)420は、骨鋸刃412が周りを振動する該鋸の(図示されていない)垂直支柱を受け入れるように構成されている。
【0074】
次に図22を見ると、アダプタ410の調整器プレート414は、骨鋸刃412の底面432に隣接しており、しかも、骨鋸刃412のU字形カットアウト420にサイズが類似した湾曲カットアウト部分(curved cut-out portion)434であって、U字形カットアウト420と一直線上に並んでいる、湾曲カットアウト部分434を含む。さらに、調整器プレート414は、5個のスロットまたは開口部436の配列であって、スロットまたは開口部のそれぞれの形状が、骨鋸刃412のスロット424の配列の対応するスロットに類似する、スロットまたは開口部436の配列を含む。しかし、実例として、調整器プレート414のスロットの配列の内部の各々のスロット436のサイズは、骨鋸刃412のスロットの配列の内部の、各々の対応するスロット424のサイズと異なっている。とりわけ、骨鋸刃412の各々のスロット424の面積は、実例として、調整器プレート414の各々のスロット436の面積よりも大きい。
【0075】
アダプタ410は、例えば、図21に示されるように、骨鋸刃412および調整器プレート414の両方に連結された、ノブ(knob)450を更に含む。実例として、ノブ450は、ヘッド452と、骨鋸刃412中に形成された孔(図示されず)、および、調整器プレート414を通して形成されたネジ孔(図示されず)を通して受け入れられた(図22に示される)ネジ山付き支柱454とを含む。ノブ450は、調整器プレート414に連結されており、該ノブを時計回り方向または反時計回り方向に回転させることが、調整器プレート414を骨鋸刃412に対して移動させるように機能するような具合に、骨鋸刃412に対して回転可能である。具体的には、以下に解説されるように、骨鋸刃412のスロット424の有効サイズを調節するために、ノブ450は、骨鋸刃412に対して、(図22に示される)旋回点460の周りに調整器プレート414を回転させるように機能する。ノブ450はまた、外科医または他の専門技術者が調整器プレート414を骨鋸刃412に対して特定の位置にロックするか、または固定することができるように、骨鋸刃412に対して締め付けられ、かつ緩められることが可能である。
【0076】
調整器プレート314と同様、調整器プレート414は、第1の位置と第2の位置との間を移動することができる。第1の位置において、骨鋸刃412のスロット424は、調整器プレート414が骨鋸刃412のスロット424のいずれの部分をも覆い隠すように機能しないような具合に、調整器プレート414のスロット436と、概して一直線上に並んでいる。実例として、振動骨鋸の各々の戻り止めのサイズは、そのような戻り止めが受け入れられる、骨鋸刃412の各々のスロット424のサイズまたは面積よりも小さい。
【0077】
アダプタ410が連結され、かつ、調整器プレート414が第1の位置にある状態で振動骨鋸が作動する間、該振動骨鋸の戻り止めは、該振動鋸の内部ドライブ機構(図示されず)によって促されて、中央スロット420と実質的に一直線上に並んでいる旋回点の周りを往復振動する。そのような作動は、図1に示される振動骨鋸12に関連して上述された作動と類似する。したがって、戻り止めの上に受け入れられるアダプタ410も同様に、そのような旋回点の周りを往復振動するように促される。しかし、骨鋸刃412の各々のスロット424の中に受け入れられた該戻り止めに対する、該スロット424の、より大きいサイズまたは面積は、骨鋸刃412に対する、各々の戻り止めの余分の半径方向運動に備える。換言すれば、より大きいサイズに作られたスロット424は、各々のスロット424の内部の各々の戻り止めの空運動に備える。骨鋸刃412はそれ自体、それらの戻り止めが振動する運動の全範囲で振動するようには促されない。実例として、例えば、調整器プレート414が第1の位置にあるとき、それらの戻り止めは、約8°の角度にわたって振動することができるのに対して、アダプタ410は、骨鋸刃412の、より大きいサイズのスロット424のために、約3.6°以下の角度にわたって振動するように促されることが可能である。
【0078】
上述のように、調整器プレート414もまた、第2の位置まで移動することができる。第2の位置において、調整器プレート414は、調整器プレート414の一部分が骨鋸刃412のスロット424の一部分を覆い隠すような具合に配置されるように、旋回点460の周りを回転する。したがって、この第2の位置において、振動骨鋸刃の戻り止めが受け入れられるスロットのサイズまたは面積は、小さくなっている。
【0079】
実例として、調整器プレート414が第2の位置にあるとき、部分的に閉塞した各々のスロット424の有効サイズは減少する。したがって、骨鋸刃412の各々のスロット424の有効サイズもしくは有効面積、または使用可能サイズもしくは使用可能面積は、各々の孔の内部に受け入れられる各々の戻り止めのサイズと概して同等になる。したがって、該骨鋸が作動する間、旋回点420の周りのそれら戻り止めの振動運動は、ほとんどまたは全く失われない。換言すれば、それら戻り止めが往復振動する時、アダプタ410は、概して同一の運動範囲にわたり往復振動するように促される。したがって、該調整器プレートが第2の位置にあるとき、該骨鋸の戻り止めが、例えば約8°の角度にわたって振動するように促されるならば、アダプタ410の骨鋸刃412もまた、約8°の角度にわたって振動するように促される
【0080】
したがって、上述のように、調整器プレート414は、2つの動作モード(two modes of operation)を有するアダプタを提供するため、第1の位置と第2の位置との間を、骨鋸刃412に対して移動することができる。第1の動作モードにおいて、調整器プレート414が第1の位置にある時、該骨鋸の振動出力運動は、骨鋸刃412が約3.6°以下の角度にわたり振動するように促されるような具合に、構成される。骨鋸刃412が振動する角度を減少させることによって、骨鋸刃412の遠位端の振動運動の弧長もまた減少する。実例として、アダプタ410の骨鋸刃412の遠位端の振動運動は、調整器プレート414が第1の位置にある時、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の弧長、実例として、4.445mm(0.175インチ)〜5.080mm(0.200インチ)の弧長にわたって動く。
【0081】
第2の動作モードにおいて、調整器プレート414が第2の位置にある時、骨鋸刃412は、アダプタ410が連結されている振動骨鋸の戻り止めとほぼ同一の弧角度(arc angle)にわたって振動するように促される。換言すれば、第2の動作モードにおいて、骨鋸刃412は、約8°の弧角度にわたって振動するように促される。したがって、第2の動作モードにおいて、外科医は、骨鋸の振動出力運動を改変することなく、骨鋸を使用することができる。
【0082】
前述のように、アダプタ310は、ストライカー・コーポレーション(Stryker Corporation)によって提供される矢状鋸(Sagittal Saw)に連結されるように構成されており、アダプタ410は、ホール(Hall)(登録商標)・パワープロ(PowerPro)(登録商標)振動鋸に連結されるように構成されているが、適切な任意の振動骨鋸に連結されるように構成されたアダプタを提供することは、本開示の範囲内である。したがって、そのようなアダプタが、第1の動作モードを提供し、そうすることによって、骨鋸刃の振動運動の弧角度が振動鋸によって出力される弧角度より小さくなるような具合に、該アダプタが連結されている振動骨鋸の出力弧角度が変更されるか、または減少することは、本開示の範囲内である。更に、そのようなアダプタが、第2の動作モードを提供し、そうすることによって、骨鋸刃の振動運動の弧角度が、振動鋸によって出力される弧角度と概して同等となるような具合に、該アダプタが連結されている振動鋸の出力弧角度が、依然として概ね変化しないままであることは、本開示の範囲内である。そのようなアダプタは、外科医に、2つの動作モード間の選択を提供することができる。
【0083】
例えば、外科医または他の専門技術者は、骨鋸刃412の2つの異なる出力運動を生じさせることのできる振動骨鋸組立て品を使用することができることが望ましいことがある。例えば、外科医は、多くの軟部組織が、切られている骨に隣接しているか、または、該骨を取り囲んでいる場合、アダプタを第1の動作モードに位置付けるように選択することができる。代わりに、外科医は、外科手術の特定の他の部分が行われる間、より大きい弧長を提供する骨鋸組立て品に切り替えることを望むことがある。
【0084】
本明細書に記述される様々な骨鋸組立て品は、アダプタと、既存の振動鋸または骨ドリルとを含む改装組立て品(retrofit assemblies)として開示されてきたものの、(本明細書に開示されるアダプタではなく)刃と共に使用されるように組立てられているか、または製造されている(振動または軌道)骨鋸組立て品であって、上記に解説された改装組立て品と同様に機能する、骨鋸組立て品を提供することは、本開示の範囲内であることに注目されるべきである。換言すれば、軟部組織に対する損傷を減少させる点で外科医を手助けすることに関し、上記に解説された概念は、アダプタに代えて、もともと製造されている骨鋸組立て品(original manufactured bone saw assembly)にも適用することができる。
【0085】
本明細書に開示されるように、前記骨鋸刃の振動出力運動もしくは軌道出力運動の弧長または長弦を短縮することによって、切られている特定の骨を取り囲む軟部組織が損傷する可能性を減少させることができる。しかし、刃の運動の弧長または長弦を短縮することによって、特定の骨を切るのに必要な時間が増大することもある。更に、骨鋸または骨鋸組立て品の速度およびトルクは、骨鋸刃の切断効率に更に影響を及ぼすことがある。例えば、現行の多くの骨鋸組立て品は、約11,000サイクル/分(CPM)の速度で作動する。実例として、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の弧長または長弦を作り出す、本明細書に開示される骨鋸組立て品について、その速度は、骨鋸刃が、例えば、より長い弧長および/または長弦を有する出力運動を生じさせる、多くの典型的な骨鋸組立て品の骨切断効率を提供するために、約20,000〜25,000CPMまで増大させることができることに注目すべきである。更に、4.445mm(0.175インチ)未満の弧長または長弦を提供するように作動する骨鋸組立て品であって、刃の運動の弧長または長弦が短縮されることに起因して引き起こされることのある、あらゆる効率損失を補償するために、11,000CPMより大きい速度で作動する、骨鋸組立て品を含むことは、本開示の範囲内である。換言すれば、刃の出力運動の弧長または長弦は、骨鋸組立て品の速度を増大させながら、更に短縮されることができる。
【0086】
骨鋸刃22,38,160,261,312および412は、本明細書に開示されるが、他の刃を含むことも本開示の範囲内である。更に、骨鋸刃22,38,160,261,312および412が様々な適切な材料で作られることは、本開示の範囲内である。例えば、骨鋸刃22,38,160,261,312および412は、ステンレス鋼または他の適切な金属で作ることができる。更に、本明細書に開示される骨鋸刃の質量を減少させるため、そのような骨鋸刃22,38,160,261,312および412は、例えば、アルミニウム、またはチタンで作ることができる。骨鋸刃の質量を減少させることは、それが使用される間、該骨鋸刃と一緒に使用される任意の骨鋸の振動だけでなく、骨鋸組立て品によって生じるノイズのレベルをも減少させることができるような具合に、該骨鋸刃の質量慣性モーメント(mass moment of inertia)を減少させるように働く。更に、より軽い刃の振動出力運動は、より小さい弧角度を作り出して、他の点では同等の、より重い刃の振動出力運動に比べてより小さいたわみ(deflection)を受ける。たわみ、即ち、骨鋸が作動する間の、刃の面外の屈曲(out-of-plane bending)もまた、刃の長さを短縮することによって減少させることができる。例えば、デピュイ・プロダクツ・インコーポレイティッド(DePuy Products, Inc.)(インディアナ州ワルソー(Warsaw))によって製造された標準PFCシグマ刃(Sigma blade)の長さを10.579cm(4.165インチ)から約8.89cm(約3.5インチ)に短縮することによって、そのような刃のたわみを最大40%まで減少させることができることを見出だした。
【0087】
上述のように、骨鋸刃をアルミニウムまたはチタンで製造することによって、骨鋸刃の質量は減少し、これにより今度は、該骨鋸刃が取り付けられている骨鋸の振動が減少するように、該骨鋸刃の質量慣性モーメントは減少する。骨鋸刃の質量は、骨鋸刃の本体から材料を除去すること、換言すれば、骨鋸刃の長さに沿って穴(holes)を形成することによっても減少させることができる。図23を見ると、例えば、骨鋸刃512が示されている。骨鋸刃512は、上記の骨鋸または骨鋸用アダプタのいずれかと一緒に使用されるように構成されることが可能である。実例として、骨鋸刃は、例えば、Ti−6−Al−4Vのようなチタン合金で作られ、しかも、骨鋸もしくは骨鋸用アダプタに連結されるハブまたは近位端514と、鋸歯66を有する遠位端516とを含む。
【0088】
様々なカットアウト部分または穴が、骨鋸刃512の中に、骨鋸刃512の長さに沿って、近位端514と遠位端516との間に備えられる。例えば、4個の大カットアウト部分520が、骨鋸刃512の長さに沿って、直線状に間隔を置いて配置される。各々の大カットアウト部分520は、形状が概して長円形であるが、例えば、円形、正方形、矩形、または、適切な他の任意の形状であってもよい。更に、骨鋸刃512中には、4個の大カットアウト部分520が備えられるが、骨鋸刃512中に、任意の個数の大カットアウト部分520を含むことも本開示の範囲内である。
【0089】
骨鋸刃512は、6個の小カットアウト部分522を更に含む。実例として、6個の小カットアウト部分522のうち3個を含む第1の配列は、第1の配列の各々の小カットアウト部分522が大カットアウト部分520の間に位置付けられるような具合に、骨鋸刃512の長さに沿って直線状に間隔を置いて配置されている。同様に、前記の6個の小カットアウト部分522のうち3個を含む第2の配列は、第2の配列の各々の小カットアウト部分522が大カットアウト部分520の間に位置付けられるような具合に、かつ、第1の配列の小カットアウト部分522と横方向に整列するような具合に、骨鋸刃512の長さに沿って直線状に間隔を置いて配置されている。実例として、小カットアウト部分522の第1の配列は、骨鋸刃512の長さ方向軸(図示されず)から中心がずれて位置付けられるか、または、該長さ方向軸から内側に位置付けられているのに対して、小カットアウト部分522の第2の配列は、該長さ方向軸から外側に位置付けられている。実例として、それらの小カットアウト部分522は、形状が円形であるが、長円形、正方形、矩形、または、他の適切ないかなる形状であってもよい。
【0090】
これらの大カットアウト部分520および小カットアウト部分522は、骨鋸刃512の質量慣性モーメントを減少させるため、骨鋸刃512の質量を減少させるように機能する。上述のように、骨鋸刃512の質量慣性モーメントのそのような減少は、骨鋸組立て品の全体的な振動を減少させるように機能する。振動の減少は更に、骨鋸組立て品が使用される間、該骨鋸組立て品の安定性を増大させるように機能する。更に、大カットアウト部分520および小カットアウト部分522は、骨鋸刃512の強度および剛性を改善するように、かつ、骨鋸刃512が患者の骨を切り進むときの、該骨に及ぼす骨鋸刃512の抗力の影響(drag effect)を減少させるように成形され、かつ位置付けられることが可能である。抗力は、骨が骨鋸刃によって切られるときの、該骨と接触する表面積の量を減らすことによって低下させることができる。抗力のそのような低下はまた、摩擦、エネルギー損失および発生熱の量を減少させるように機能する。
【0091】
次に図24を見ると、もう1つの骨鋸刃612は、本明細書に開示される骨鋸または骨鋸用アダプタのいずれかと共に使用されるために提供される。骨鋸刃612は、骨鋸刃512に類似している。類似の参照番号は、類似要素を示すために用いられる。実例として、骨鋸刃612は、4個の大カットアウト部分520を含み、骨鋸刃512の6個の小カットアウト部分522は含んでいない。実例として、骨鋸刃612は、アルミニウムで作られる。しかし、骨鋸刃612が、適切なあらゆる材料で作られることは、本開示の範囲内である。更に実例として、アルミニウムは、骨鋸刃512が作られるチタン合金に比べ、より軟質の金属であるので、骨鋸刃612の剛性または硬さを増大させるために、6個の小カットアウト部分が除去されている。アルミニウムとそのようなチタン合金との密度の相違に起因して、アルミニウムで作られた骨鋸刃612の質量は、該チタン合金で作られた骨鋸刃512よりも軽い。
【0092】
本明細書に開示される骨鋸刃のような骨鋸刃は、一般に、骨を切る間、大量の応力を受ける。したがって、実例として、アルミニウムおよびチタン合金のような低密度材料で作られる、前述の該骨鋸刃512,612を補強するため、該骨鋸刃それ自体の質量を実質的に増大させることなく該骨鋸刃の硬度を増大させるため、肌焼きプロセス(case-hardening process)を使用することができる。ホワイコ・フィニッシング・テクノロジーズ,LLC(Whyco Finishing Technologies, LLC)(コネチカット州トマソン(Thomason))は、セラフューズ(CeraFuse)(登録商標)コーティングプロセス(coating process)と称される、上述の実例となる肌焼きプロセスを提供する。このコーティングプロセスでは、研磨(polishing)、がら研磨(tumbling)、または他の方法によって、被覆されるべき材料(即ち、骨鋸刃)の外層を一般に除去するマイクロアーク酸化技術(micro-arc oxidation technology)が使用される。このプロセスは、原基体の頂部にコーティングを単に付加するのではなく、原基体(original substrate)の外層の特性を変化させるので、該コーティングプロセスは、骨鋸と共に使用される、チタン合金および/またはアルミニウムの骨鋸刃512,612を適切に硬化することができる。実例として、例えば、そのようなセラミック加工が行われた後、アルミニウムおよびチタン合金の骨鋸刃512,612は、従来のステンレス鋼の骨鋸刃と同程度に硬いか、または、該骨鋸刃よりも硬い場合がある。セラフューズ(CeraFuse)(登録商標)コーティングプロセスは、前記基体に対して、耐磨耗性、熱損傷および腐食損傷からの保護、ならびに、付加的電気抵抗を更に提供する。そのような耐熱性は、骨を切る間に生じることのある熱によって引き起こされる、骨のいかなる壊死をも減少させるように機能することができる。
【0093】
本明細書に開示されるアダプタの設計の幾つか(例えば、空動き(lost motion)を利用するアダプタ310,410)は、それらが自由に作動しているときと比べて、それらが骨とかみ合っているときは、異なる出力運動を生じさせることができるということを認識すべきである。例えば、所定のアダプタの遠位端の弧長は、該アダプタが骨とかみ合っているときは、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の間である場合があるが、同一のアダプタが該骨から解放されて作動しているときは、同一のアダプタの弧長は、この範囲の外にある場合がある。
【0094】
本開示の概念は、図面および前記記述に詳細に例示され記述されてきたが、そのような実例および記述は、特徴が限定的ではなく、典型的であると見なされるべきであり、また、実例となる実施形態のみが図示され記述されてきたということ、ならびに、本開示の趣旨内に入る変形および変更は全て保護されることが望まれているということが理解される。
【0095】
本明細書に記述された装置ならびに方法の様々な特徴から生じる、本開示の複数の利点が存在する。本開示の装置および方法の代替的実施形態は、記述されたそれら特徴の全てを含む訳ではないかもしれないが、そのような特徴の諸利点の少なくとも幾つかによって、依然として利益を得るということに注目すべきである。当業者は、本開示のそれら特徴の1つ以上を組み込んだ装置および方法であって、本開示の趣旨および範囲に含まれる、装置および方法を当業者自身が実施することを、容易に考案するであろう。
【0096】
〔実施の態様〕
(1)振動骨鋸組立て品において、
ドライブ機構を含む、振動骨鋸と、
前記ドライブ機構に連結された、骨鋸刃と、
を備えており、
(i)前記骨鋸刃の遠位端の振動運動の弧長は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)であり、
(ii)前記骨鋸刃の前記振動運動は、約3.6°の角度を定めている、振動骨鋸組立て品。
(2)実施態様1に記載の振動骨鋸組立て品において、
前記骨鋸刃の旋回点と前記骨鋸刃の前記遠位端との間の、前記骨鋸刃の長さは、約8.89cm(約3.5インチ)である、振動骨鋸組立て品。
【0097】
(3)軌道出力運動を生じさせるための軌道骨鋸組立て品において、
ドライブ機構と、
前記ドライブ機構に連結された、骨鋸刃と、
を備えており、
前記骨鋸刃の前記軌道出力運動は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦を定めている、軌道骨鋸組立て品。
(4)実施態様3に記載の軌道骨鋸組立て品において、
前記骨鋸刃の前記軌道出力運動の前記長弦の長さは、4.445mm(0.175インチ)〜5.080mm(0.200インチ)である、軌道骨鋸組立て品。
(5)実施態様3に記載の軌道骨鋸組立て品において、
前記骨鋸刃の長さ方向軸は、前記骨鋸刃の前記軌道出力運動によって定められた前記長弦に対して垂直である、軌道骨鋸組立て品。
(6)実施態様3に記載の軌道骨鋸組立て品において、
前記ドライブ機構を含む、振動骨鋸、
を更に備えている、軌道骨鋸組立て品。
(7)実施態様3に記載の軌道骨鋸組立て品において、
前記ドライブ機構を含む、骨ドリル、
を更に備えている、軌道骨鋸組立て品。
【0098】
(8)振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を変更するための、アダプタにおいて、
前記振動骨鋸の前記刃クランプに連結されるように構成された、ハウジングと、
前記振動骨鋸の前記刃クランプのハブに連結されるように構成された、ハブコネクタと、
旋回点を定めるように前記ハウジングに旋回可能に連結された骨鋸刃であって、前記骨鋸刃の遠位端の振動運動の角度が前記振動骨鋸の前記振動出力運動の角度よりも小さくなるように前記ハブコネクタに連結された近位端を有する、骨鋸刃と、
を備える、アダプタ。
(9)実施態様8に記載のアダプタにおいて、
前記ハブコネクタは、歯車歯を含み、
前記骨鋸刃の前記近位端は、前記ハブコネクタの前記歯車歯と連動された歯車歯を含む、アダプタ。
(10)実施態様9に記載のアダプタにおいて、
前記骨鋸刃と前記ハブコネクタとの間の歯車比は、約2:1である、アダプタ。
(11)実施態様8に記載のアダプタにおいて、
前記旋回点から前記骨鋸刃の遠位端までの、前記骨鋸刃の長さは、約8.89cm(約3.5インチ)である、アダプタ。
【0099】
(12)振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を軌道運動に変換するための、アダプタにおいて、
前記振動骨鋸の前記刃クランプに連結されるように構成された、ハウジングと、
前記ハウジングに連結された駆動機構であって、前記振動骨鋸の前記刃クランプのドライブ機構に連結されるように構成されて、前記振動骨鋸の前記振動出力運動を前記軌道運動に変換する、駆動機構と、
前記駆動機構に連結された骨鋸刃と、
を備えている、アダプタ。
(13)実施態様12に記載のアダプタにおいて、
前記駆動機構は、
前記振動骨鋸の前記ドライブ機構に連結されるように構成された、ハブコネクタと、
第1の端部で前記ハブコネクタに連結された、リンク機構と、
前記リンク機構の第2の端部に連結された、歯車組立て品と、
を含む、アダプタ。
(14)実施態様12に記載のアダプタにおいて、
前記駆動機構は、前記歯車組立て品に連結された出力シャフトであって、前記骨鋸刃の孔を通して受け入れられた、出力シャフトを更に含む、アダプタ。
(15)実施態様14に記載のアダプタにおいて、
前記歯車組立て品は、前記リンク機構に連結された第1の歯車、および前記第1の歯車に連結された第2の歯車を含み、
前記出力シャフトは、前記第2の歯車に連結されており、かつ、前記第2の歯車が周りを回転する軸から間隔を置いて離されている、アダプタ。
(16)実施態様12に記載のアダプタにおいて、
前記骨鋸刃は、スロットを更に含み、
前記ハウジングは、前記骨鋸刃の前記スロットの内部に受け入れられたガイドピンを含む、アダプタ。
(17)実施態様16に記載のアダプタにおいて、
前記駆動機構は、前記骨鋸刃の孔を通して受け入れられた出力シャフトを含み、
前記出力シャフトは、軸から間隔を置いて離されており、かつ、前記軸の周りを回転するように構成されており、
前記出力シャフトと前記軸との間の距離は、前記軸と前記ガイドピンとの間の距離よりも短い、アダプタ。
(18)実施態様17に記載のアダプタにおいて、
前記軸と前記ガイドピンとの間の前記距離は、前記骨鋸刃の前記孔と前記骨鋸刃の遠位端との間の距離よりも短い、アダプタ。
(19)実施態様18に記載のアダプタにおいて、
前記スロットの長さは、前記出力シャフトと前記軸との間の前記距離の少なくとも2倍と、前記ガイドピンの弦とを合わせたものである、アダプタ。
(20)実施態様16に記載のアダプタにおいて、
前記スロットの主軸は、前記骨鋸刃の長さ方向軸に平行である、アダプタ。
(21)実施態様12に記載のアダプタにおいて、
前記アダプタは、前記骨鋸刃の遠位端の出力運動であって、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する主軸を定める、出力運動を生じさせるように構成されている、アダプタ。
【0100】
(22)骨ドリルのチャックに連結されるように構成されたアダプタであって、前記骨ドリルの回転出力運動を軌道運動に変換するための、アダプタにおいて、
前記骨ドリルの前記チャックの出力ドライブシャフトに連結されるように構成されて、第1の回転軸を定める、第1のかさ歯車と、
前記第1のかさ歯車に連結された第2のかさ歯車であって、前記第1の回転軸に垂直な第2の回転軸を定めるように位置付けられている、第2のかさ歯車と、
骨鋸刃であって、前記第2のかさ歯車に連結されて前記骨鋸刃の旋回点を定める近位端を有する、骨鋸刃と、
を備える、アダプタ。
(23)実施態様22に記載のアダプタにおいて、
前記骨鋸刃の前記旋回点は、前記第2のかさ歯車の前記第2の回転軸から間隔を置いて離されている、アダプタ。
(24)実施態様22に記載のアダプタにおいて、
ハウジング、
を更に備えており、
前記第1および第2のかさ歯車は、前記ハウジング内部に位置付けられており、
前記骨鋸刃は、スロットを含み、
前記ハウジングは、前記スロット内部に位置づけられたガイドピンを含む、アダプタ。
(25)実施態様24に記載のアダプタにおいて、
前記スロットの長さ方向軸は、前記骨鋸刃の長さ方向軸に平行である、アダプタ。
(26)実施態様24に記載のアダプタにおいて、
前記第2の回転軸と前記ガイドピンとの間の第1の距離は、前記第2の回転軸と前記骨鋸刃の前記旋回点との間の第2の距離よりも長い、アダプタ。
(27)実施態様26に記載のアダプタにおいて、
前記第1の距離は、前記骨鋸刃の前記旋回点と前記骨鋸刃の遠位端との間の第3の距離よりも短い、アダプタ。
(28)実施態様27に記載のアダプタにおいて、
前記スロットの長さは、前記第2の距離の少なくとも2倍と、前記ガイドピンの直径とを合わせたものである、アダプタ。
(29)実施態様24に記載のアダプタにおいて、
前記アダプタは、前記骨鋸刃の遠位端の出力運動であって、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦を定める、出力運動を生じさせるように構成されている、アダプタ。
(30)実施態様29に記載のアダプタにおいて、
前記長弦は、前記骨鋸刃の長さ方向軸に対して垂直である、アダプタ。
【0101】
(31)振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を変更するための、アダプタにおいて、
前記刃クランプの戻り止めを受け入れるように構成された開口部を含む骨鋸刃であって、前記開口部は、前記戻り止めの外面と前記開口部の対応する表面との間に少なくとも0.203mm(0.008インチ)の隙間が存在するような大きさに作られている、骨鋸刃、
を備えている、アダプタ。
(32)実施態様31に記載のアダプタにおいて、
前記開口部は、概して円形であり、第1の直径を定めており、
前記戻り止めは、概して円形であり、第2の直径を定めており、
前記第1の直径は、前記第2の直径よりも少なくとも0.203mm(0.008インチ)大きい、アダプタ。
(33)実施態様31に記載のアダプタにおいて、
前記骨鋸刃に連結された調整器プレートであって、前記骨鋸刃に対して、第1の位置と第2の位置との間を移動することができる、調整器プレート、
を更に備えている、アダプタ。
(34)実施態様33に記載のアダプタにおいて、
前記調整器プレートは、前記骨鋸刃の長さ方向軸に平行な長さ方向軸を有する、概して涙の形をしたスロットを含む、アダプタ。
(35)実施態様34に記載のアダプタにおいて、
前記スロットの近位端は、第1の幅を定めており、この第1の幅は、前記スロットの遠位端の第2の幅より大きい、アダプタ。
(36)実施態様35に記載のアダプタにおいて、
前記調整器プレートの前記スロットの前記近位端の前記第1の幅は、前記骨鋸刃の前記開口部の直径より大きいか、または、前記直径と同等であり、
前記調整器プレートの前記スロットの前記遠位端の前記第2の幅は、前記骨鋸刃の前記開口部の前記直径より小さい、アダプタ。
(37)実施態様34に記載のアダプタにおいて、
前記骨鋸刃の前記開口部は、前記調整器プレートが前記第1の位置に位置付けられているとき、前記調整器プレートの前記スロットの遠位端と一直線上に並んでおり、
前記骨鋸刃の前記開口部は、前記調整器プレートが前記第2の位置に位置付けられているとき、前記調整器プレートの前記スロットの近位端と一直線上に並んでいる、アダプタ。
(38)実施態様31に記載のアダプタにおいて、
前記骨鋸刃は、複数の開口部を含む、アダプタ。
(39)実施態様34に記載のアダプタにおいて、
前記骨鋸刃は、複数の開口部を含み、
前記調整器プレートは、複数のスロットを含む、アダプタ。
(40)実施態様33に記載のアダプタにおいて、
前記調整器プレートに連結されたノブであって、前記第1の位置と前記第2の位置との間で前記調整器プレートを移動させるために、前記骨鋸刃に対して移動することができる、ノブ、
を更に備えている、アダプタ。
【0102】
(41)振動骨鋸組立て品を操作する方法において、
振動骨鋸の刃クランプのドライブ機構に骨鋸刃を連結する段階と、
旋回点の周りに第1の運動角度にわたって前記ドライブ機構を振動させる段階と、
前記旋回点の周りに、前記第1の運動角度より小さな第2の運動角度にわたって前記骨鋸刃を振動させる段階と、
を含む、方法。
(42)実施態様41に記載の方法において、
前記骨鋸刃を前記ドライブ機構に連結する段階は、前記骨鋸刃の複数の開口部を通して前記振動骨鋸の複数の戻り止めを受け入れる段階を含む、方法。
(43)振動骨鋸組立て品を操作する方法において、
振動骨鋸のチャックのドライブ機構に骨鋸刃を連結する段階であって、前記振動骨鋸の戻り止めが前記骨鋸刃の開口部を通って受け入れられるようにする、段階と、
前記骨鋸刃に対して旋回点の周りに前記戻り止めを移動させる段階と、
前記旋回点の周りに前記戻り止めおよび前記骨鋸刃を移動させる段階と、
を含む、方法。
【図面の簡単な説明】
【0103】
【図1】例証となる従来技術の振動骨鋸、および該振動骨鋸に連結されるように構成された、例証となる従来技術の鋸刃の斜視図である。
【図2】前記骨鋸の振動出力運動を変更するために、図1の振動骨鋸に連結された骨鋸用アダプタの斜視図である。
【図3】図2のアダプタの分解斜視図である。
【図4】図2および図3のアダプタの一部分の上面図である。
【図5】もう1つの骨鋸用アダプタであって、前記骨鋸の振動出力運動を軌道運動に変換するために、図1の振動骨鋸に連結されるように構成された、アダプタの分解斜視図である。
【図6】図5のアダプタの底部分解斜視図である。
【図7】図5および図6のアダプタの下面図である。
【図8】図5〜図7のアダプタの上面図である。
【図9】例証となる従来技術の骨ドリル、および該骨ドリルに連結されるように構成された、例証となる従来技術の付属部品の斜視図である。
【図10】図9に示される骨ドリルの回転出力運動を軌道運動に変換するために、該骨ドリルに連結されるように構成された骨ドリル用アダプタの斜視図である。
【図11】図10の骨ドリル用アダプタの分解斜視図である。
【図12】図9〜図11のアダプタの部分断面部分側面図である。
【図13】図9〜図12のアダプタの刃の軌道運動を示す、該アダプタの上面図である。
【図14】図9〜図12のアダプタの刃の軌道運動を示す、該アダプタの上面図である。
【図15】鋸刃の振動運動を示す線図である。
【図16】鋸刃の軌道運動を示す線図である。
【図17】骨鋸刃とデュアルモード調整器プレートとを含む振動骨鋸用アダプタの上面斜視図である。
【図18】前記骨鋸刃に対して第1の位置にある前記調整器プレートを示す、図17のアダプタの一部分の底部斜視図である。
【図19】前記骨鋸刃に対して第2の位置にある前記調整器プレートを示す、図18に類似するアダプタの一部分の底部斜視図である。
【図20】図17〜図19のアダプタの一部分の断面図である。
【図21】骨鋸刃とデュアルモード調整器プレートとを含むもう1つの振動骨鋸用アダプタの上面斜視図である。
【図22】前記骨鋸刃に対して第1の位置にある前記調整器プレートを示す、図21のアダプタの底部斜視図である。
【図23】骨鋸刃の長さに沿って複数のカットアウト部分を有する該骨鋸刃の上面図である。
【図24】もう1つの骨鋸刃であって、その長さに沿って、図23に示される複数のカットアウト部分に類似する複数のカットアウト部分を有する、該骨鋸刃の上面図である。
【特許請求の範囲】
【請求項1】
振動骨鋸組立て品において、
ドライブ機構を含む、振動骨鋸と、
前記ドライブ機構に連結された、骨鋸刃と、
を備えており、
(i)前記骨鋸刃の遠位端の振動運動の弧長は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)であり、
(ii)前記骨鋸刃の前記振動運動は、約3.6°の角度を定めている、振動骨鋸組立て品。
【請求項2】
請求項1に記載の振動骨鋸組立て品において、
前記骨鋸刃の旋回点と前記骨鋸刃の前記遠位端との間の、前記骨鋸刃の長さは、約8.89cm(約3.5インチ)である、振動骨鋸組立て品。
【請求項3】
軌道出力運動を生じさせるための軌道骨鋸組立て品において、
ドライブ機構と、
前記ドライブ機構に連結された、骨鋸刃と、
を備えており、
前記骨鋸刃の前記軌道出力運動は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦を定めている、軌道骨鋸組立て品。
【請求項4】
請求項3に記載の軌道骨鋸組立て品において、
前記骨鋸刃の前記軌道出力運動の前記長弦の長さは、4.445mm(0.175インチ)〜5.080mm(0.200インチ)である、軌道骨鋸組立て品。
【請求項5】
請求項3に記載の軌道骨鋸組立て品において、
前記骨鋸刃の長さ方向軸は、前記骨鋸刃の前記軌道出力運動によって定められた前記長弦に対して垂直である、軌道骨鋸組立て品。
【請求項6】
請求項3に記載の軌道骨鋸組立て品において、
前記ドライブ機構を含む、振動骨鋸、
を更に備えている、軌道骨鋸組立て品。
【請求項7】
請求項3に記載の軌道骨鋸組立て品において、
前記ドライブ機構を含む、骨ドリル、
を更に備えている、軌道骨鋸組立て品。
【請求項8】
振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を変更するための、アダプタにおいて、
前記振動骨鋸の前記刃クランプに連結されるように構成された、ハウジングと、
前記振動骨鋸の前記刃クランプのハブに連結されるように構成された、ハブコネクタと、
旋回点を定めるように前記ハウジングに旋回可能に連結された骨鋸刃であって、前記骨鋸刃の遠位端の振動運動の角度が前記振動骨鋸の前記振動出力運動の角度よりも小さくなるように前記ハブコネクタに連結された近位端を有する、骨鋸刃と、
を備える、アダプタ。
【請求項9】
振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を軌道運動に変換するための、アダプタにおいて、
前記振動骨鋸の前記刃クランプに連結されるように構成された、ハウジングと、
前記ハウジングに連結された駆動機構であって、前記振動骨鋸の前記刃クランプのドライブ機構に連結されるように構成されて、前記振動骨鋸の前記振動出力運動を前記軌道運動に変換する、駆動機構と、
前記駆動機構に連結された骨鋸刃と、
を備えている、アダプタ。
【請求項10】
骨ドリルのチャックに連結されるように構成されたアダプタであって、前記骨ドリルの回転出力運動を軌道運動に変換するための、アダプタにおいて、
前記骨ドリルの前記チャックの出力ドライブシャフトに連結されるように構成されて、第1の回転軸を定める、第1のかさ歯車と、
前記第1のかさ歯車に連結された第2のかさ歯車であって、前記第1の回転軸に垂直な第2の回転軸を定めるように位置付けられている、第2のかさ歯車と、
骨鋸刃であって、前記第2のかさ歯車に連結されて前記骨鋸刃の旋回点を定める近位端を有する、骨鋸刃と、
を備える、アダプタ。
【請求項11】
振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を変更するための、アダプタにおいて、
前記刃クランプの戻り止めを受け入れるように構成された開口部を含む骨鋸刃であって、前記開口部は、前記戻り止めの外面と前記開口部の対応する表面との間に少なくとも0.203mm(0.008インチ)の隙間が存在するような大きさに作られている、骨鋸刃、
を備えている、アダプタ。
【請求項12】
振動骨鋸組立て品を操作する方法において、
振動骨鋸の刃クランプのドライブ機構に骨鋸刃を連結する段階と、
旋回点の周りに第1の運動角度にわたって前記ドライブ機構を振動させる段階と、
前記旋回点の周りに、前記第1の運動角度より小さな第2の運動角度にわたって前記骨鋸刃を振動させる段階と、
を含む、方法。
【請求項13】
請求項12に記載の方法において、
前記骨鋸刃を前記ドライブ機構に連結する段階は、前記骨鋸刃の複数の開口部を通して前記振動骨鋸の複数の戻り止めを受け入れる段階を含む、方法。
【請求項14】
振動骨鋸組立て品を操作する方法において、
振動骨鋸のチャックのドライブ機構に骨鋸刃を連結する段階であって、前記振動骨鋸の戻り止めが前記骨鋸刃の開口部を通って受け入れられるようにする、段階と、
前記骨鋸刃に対して旋回点の周りに前記戻り止めを移動させる段階と、
前記旋回点の周りに前記戻り止めおよび前記骨鋸刃を移動させる段階と、
を含む、方法。
【請求項1】
振動骨鋸組立て品において、
ドライブ機構を含む、振動骨鋸と、
前記ドライブ機構に連結された、骨鋸刃と、
を備えており、
(i)前記骨鋸刃の遠位端の振動運動の弧長は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)であり、
(ii)前記骨鋸刃の前記振動運動は、約3.6°の角度を定めている、振動骨鋸組立て品。
【請求項2】
請求項1に記載の振動骨鋸組立て品において、
前記骨鋸刃の旋回点と前記骨鋸刃の前記遠位端との間の、前記骨鋸刃の長さは、約8.89cm(約3.5インチ)である、振動骨鋸組立て品。
【請求項3】
軌道出力運動を生じさせるための軌道骨鋸組立て品において、
ドライブ機構と、
前記ドライブ機構に連結された、骨鋸刃と、
を備えており、
前記骨鋸刃の前記軌道出力運動は、4.445mm(0.175インチ)〜5.588mm(0.220インチ)の長さを有する長弦を定めている、軌道骨鋸組立て品。
【請求項4】
請求項3に記載の軌道骨鋸組立て品において、
前記骨鋸刃の前記軌道出力運動の前記長弦の長さは、4.445mm(0.175インチ)〜5.080mm(0.200インチ)である、軌道骨鋸組立て品。
【請求項5】
請求項3に記載の軌道骨鋸組立て品において、
前記骨鋸刃の長さ方向軸は、前記骨鋸刃の前記軌道出力運動によって定められた前記長弦に対して垂直である、軌道骨鋸組立て品。
【請求項6】
請求項3に記載の軌道骨鋸組立て品において、
前記ドライブ機構を含む、振動骨鋸、
を更に備えている、軌道骨鋸組立て品。
【請求項7】
請求項3に記載の軌道骨鋸組立て品において、
前記ドライブ機構を含む、骨ドリル、
を更に備えている、軌道骨鋸組立て品。
【請求項8】
振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を変更するための、アダプタにおいて、
前記振動骨鋸の前記刃クランプに連結されるように構成された、ハウジングと、
前記振動骨鋸の前記刃クランプのハブに連結されるように構成された、ハブコネクタと、
旋回点を定めるように前記ハウジングに旋回可能に連結された骨鋸刃であって、前記骨鋸刃の遠位端の振動運動の角度が前記振動骨鋸の前記振動出力運動の角度よりも小さくなるように前記ハブコネクタに連結された近位端を有する、骨鋸刃と、
を備える、アダプタ。
【請求項9】
振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を軌道運動に変換するための、アダプタにおいて、
前記振動骨鋸の前記刃クランプに連結されるように構成された、ハウジングと、
前記ハウジングに連結された駆動機構であって、前記振動骨鋸の前記刃クランプのドライブ機構に連結されるように構成されて、前記振動骨鋸の前記振動出力運動を前記軌道運動に変換する、駆動機構と、
前記駆動機構に連結された骨鋸刃と、
を備えている、アダプタ。
【請求項10】
骨ドリルのチャックに連結されるように構成されたアダプタであって、前記骨ドリルの回転出力運動を軌道運動に変換するための、アダプタにおいて、
前記骨ドリルの前記チャックの出力ドライブシャフトに連結されるように構成されて、第1の回転軸を定める、第1のかさ歯車と、
前記第1のかさ歯車に連結された第2のかさ歯車であって、前記第1の回転軸に垂直な第2の回転軸を定めるように位置付けられている、第2のかさ歯車と、
骨鋸刃であって、前記第2のかさ歯車に連結されて前記骨鋸刃の旋回点を定める近位端を有する、骨鋸刃と、
を備える、アダプタ。
【請求項11】
振動骨鋸の刃クランプに連結されるように構成されたアダプタであって、前記振動骨鋸の振動出力運動を変更するための、アダプタにおいて、
前記刃クランプの戻り止めを受け入れるように構成された開口部を含む骨鋸刃であって、前記開口部は、前記戻り止めの外面と前記開口部の対応する表面との間に少なくとも0.203mm(0.008インチ)の隙間が存在するような大きさに作られている、骨鋸刃、
を備えている、アダプタ。
【請求項12】
振動骨鋸組立て品を操作する方法において、
振動骨鋸の刃クランプのドライブ機構に骨鋸刃を連結する段階と、
旋回点の周りに第1の運動角度にわたって前記ドライブ機構を振動させる段階と、
前記旋回点の周りに、前記第1の運動角度より小さな第2の運動角度にわたって前記骨鋸刃を振動させる段階と、
を含む、方法。
【請求項13】
請求項12に記載の方法において、
前記骨鋸刃を前記ドライブ機構に連結する段階は、前記骨鋸刃の複数の開口部を通して前記振動骨鋸の複数の戻り止めを受け入れる段階を含む、方法。
【請求項14】
振動骨鋸組立て品を操作する方法において、
振動骨鋸のチャックのドライブ機構に骨鋸刃を連結する段階であって、前記振動骨鋸の戻り止めが前記骨鋸刃の開口部を通って受け入れられるようにする、段階と、
前記骨鋸刃に対して旋回点の周りに前記戻り止めを移動させる段階と、
前記旋回点の周りに前記戻り止めおよび前記骨鋸刃を移動させる段階と、
を含む、方法。
【図1】


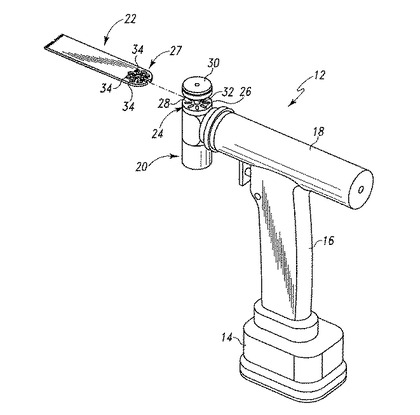
【図2】
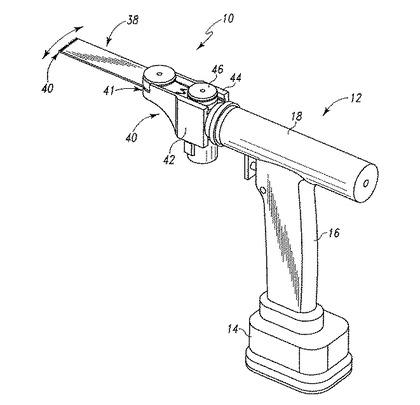
【図3】
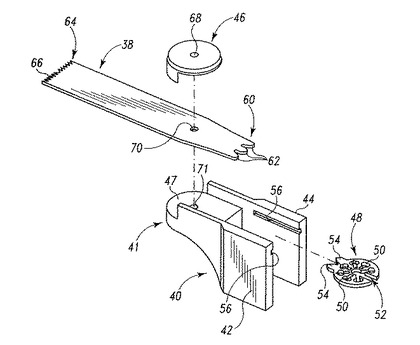
【図4】
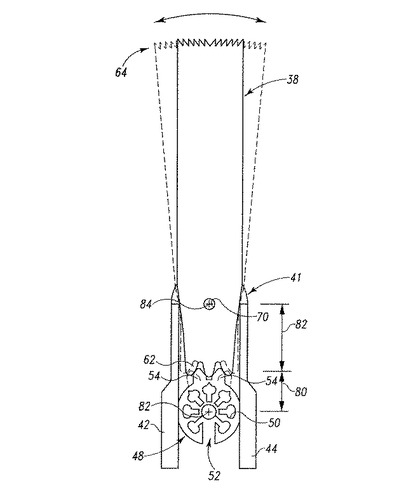
【図5】
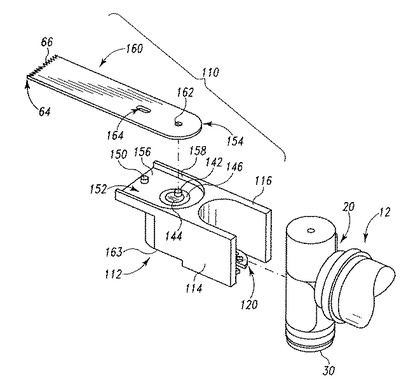
【図6】
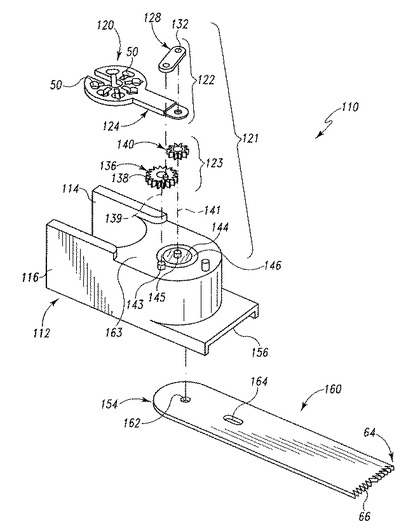
【図7】
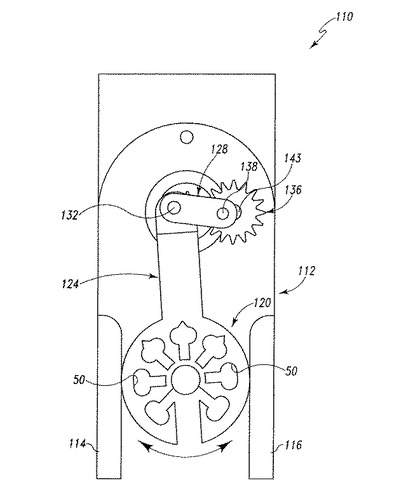
【図8】
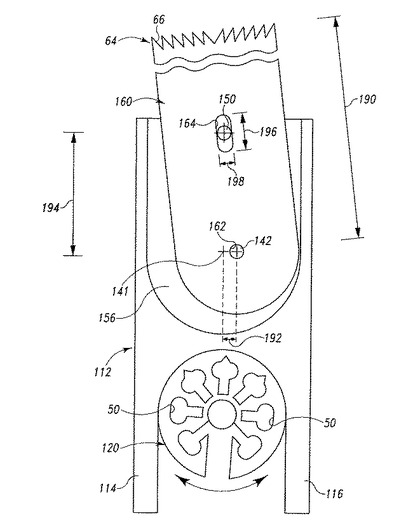
【図9】
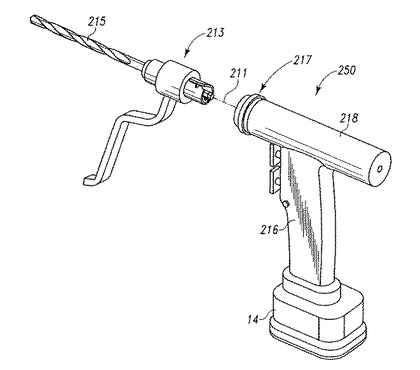
【図10】
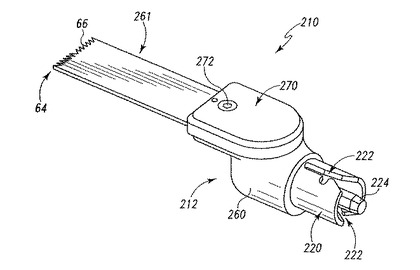
【図11】
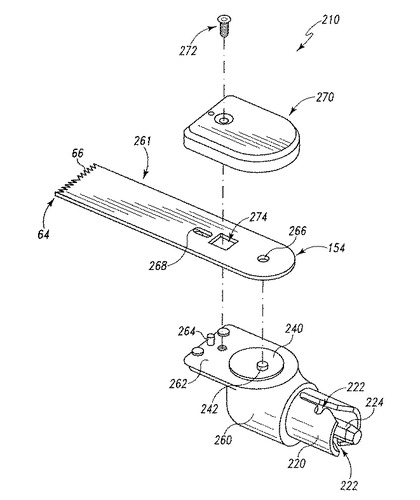
【図12】
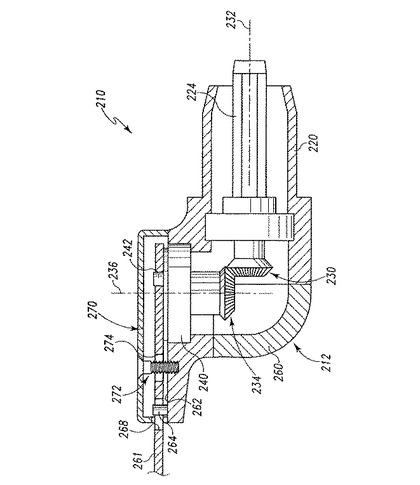
【図13】
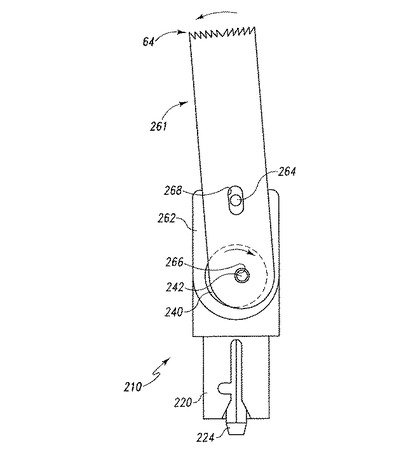
【図14】
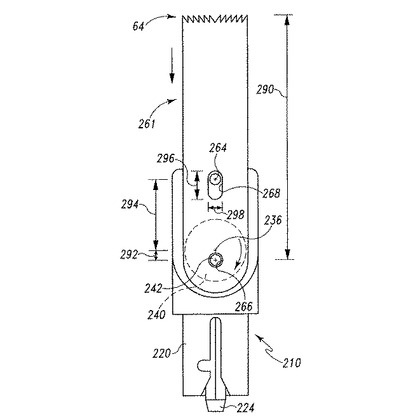
【図15】
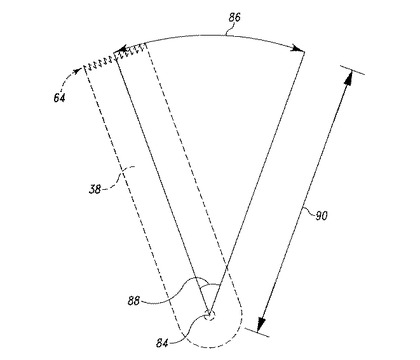
【図16】
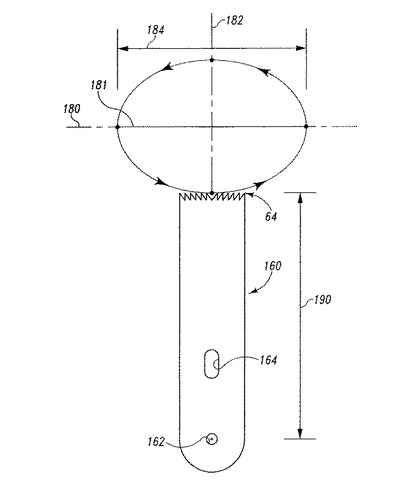
【図17】
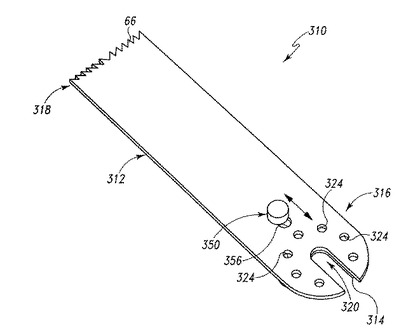
【図18】
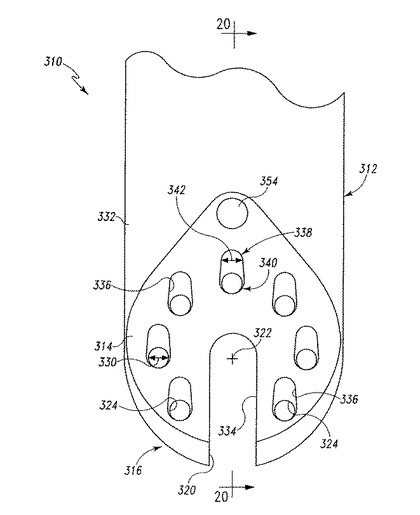
【図19】
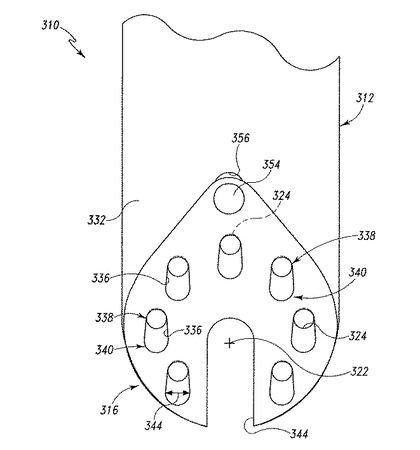
【図20】
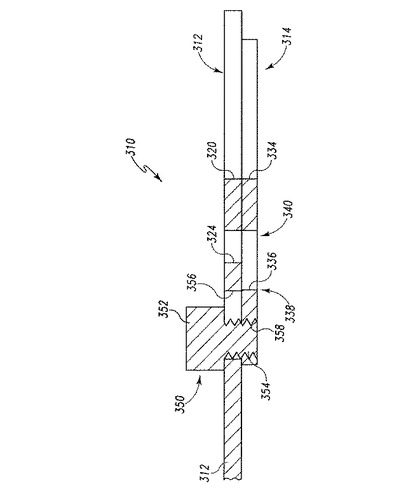
【図21】
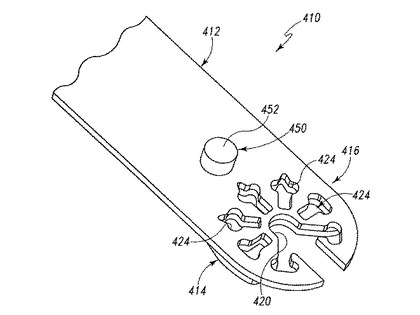
【図22】
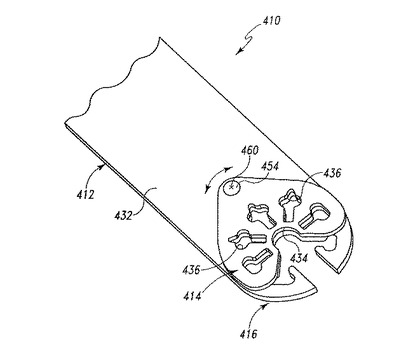
【図23】
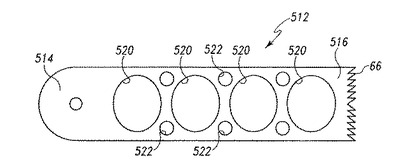
【図24】
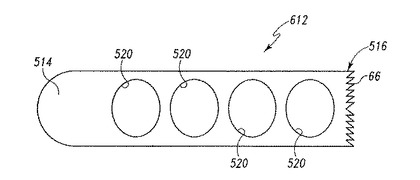
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2008−29848(P2008−29848A)
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【外国語出願】
【出願番号】特願2007−196328(P2007−196328)
【出願日】平成19年7月27日(2007.7.27)
【出願人】(501384115)デピュイ・プロダクツ・インコーポレイテッド (216)
【Fターム(参考)】
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【出願番号】特願2007−196328(P2007−196328)
【出願日】平成19年7月27日(2007.7.27)
【出願人】(501384115)デピュイ・プロダクツ・インコーポレイテッド (216)
【Fターム(参考)】
[ Back to top ]