
整畦機
【課題】前回転整畦体及び後回転整畦体による連続的な整畦作業により畦を充分に締圧することができて作業進行速度を高めることができ、かつ、後回転整畦体を退避機構により下方作業位置から上方退避位置に退避させることができ、移動時や保管時等の不使用時における利便性を得ることができる。
【解決手段】走行機体1に連結機構2により機枠4を連結し、機枠に畦W際の泥土を旧畦上に盛上可能な回転盛土体8をもつ盛土機構9を設け、回転盛土体の進行方向後方位置に旧畦を回転整畦可能な回転整畦体をもつ整畦機構7を設けてなり、整畦機構として、回転盛土体の進行方向後方位置に畦を回転整畦可能な前回転整畦体10を設けると共に前回転整畦体の進行方向後方位置に畦を回転整畦可能な後回転整畦体11を設け、後回転整畦体を下方作業位置Vから上方退避位置Zに退避動作させる退避機構12を設けてなる。
【解決手段】走行機体1に連結機構2により機枠4を連結し、機枠に畦W際の泥土を旧畦上に盛上可能な回転盛土体8をもつ盛土機構9を設け、回転盛土体の進行方向後方位置に旧畦を回転整畦可能な回転整畦体をもつ整畦機構7を設けてなり、整畦機構として、回転盛土体の進行方向後方位置に畦を回転整畦可能な前回転整畦体10を設けると共に前回転整畦体の進行方向後方位置に畦を回転整畦可能な後回転整畦体11を設け、後回転整畦体を下方作業位置Vから上方退避位置Zに退避動作させる退避機構12を設けてなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は例えば畦の造成作業や修復作業等に用いられる整畦機に関するものである。
【背景技術】
【0002】
従来、この種の整畦機として、例えば、走行機体に連結機構により機枠を連結し、機枠に畦際の泥土を旧畦上に盛上可能な回転盛土体をもつ盛土機構を設け、回転盛土体の進行方向後方位置に旧畦を回転整畦可能な回転整畦体をもつ整畦機構を設けてなる構造のものが知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4154545号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら上記従来構造の場合、単一個の回転整畦体によって回転整畦する構造となっており、土質や盛土量等の作業条件により、頑丈な畦を整畦する意味で十分な整畦時間を得るため、整畦進行速度を遅くしなければならないことがあり、それだけ、整畦作業性を低下させることがあるという不都合を有している。
【課題を解決するための手段】
【0005】
本発明はこれらの不都合を解決することを目的とするもので、本発明のうちで、請求項1記載の発明は、走行機体に連結機構により機枠を連結し、該機枠に畦際の泥土を旧畦上に盛上可能な回転盛土体をもつ盛土機構を設け、該回転盛土体の進行方向後方位置に旧畦を回転整畦可能な回転整畦体をもつ整畦機構を設けてなり、上記整畦機構として、上記回転盛土体の進行方向後方位置に畦を回転整畦可能な前回転整畦体を設けると共に該前回転整畦体の進行方向後方位置に畦を回転整畦可能な後回転整畦体を設け、該後回転整畦体を下方作業位置から上方退避位置に退避動作させる退避機構を設けてなることを特徴とする整畦機にある。
【0006】
又、請求項2記載の発明は、上記機枠を走行機体の進行方向に対して左右方向に移動させる移動機構を設けてなることを特徴とするものであり、又、請求項3記載の発明は、上記走行機体に連結機構により取付枠を連結し、該取付枠に上記機枠を移動案内機構により上記走行機体の進行方向に対して直交する左右方向に移動自在に設けてなることを特徴とするものである。
【発明の効果】
【0007】
本発明は上述の如く、請求項1記載の発明にあっては、走行機体を旧畦に沿って走行させ、盛土機構の回転盛土体により畦際の泥土を旧畦上に盛り上げ、この旧畦上の盛土を回転盛土体の進行方向後方位置に配置された前回転整畦体により回転整畦し、更に、この前回転整畦体の進行方向後方位置に配置された後回転整畦体により回転整畦することにより畦を連続的に整畦することができ、この前回転整畦体及び後回転整畦体による連続的な整畦作業により畦を充分に締圧することができて作業進行速度を高めることができ、整畦作業性を高めることができ、かつ、後回転整畦体を下方作業位置から上方退避位置に退避動作させる退避機構を設けているから、後回転整畦体を下方作業位置から上方退避位置に退避させることができ、後方突出機長を短くでき、移動時や保管時等の不使用時における利便性を得ることができる。
【0008】
又、請求項2記載の発明にあっては、上記機枠を走行機体の進行方向に対して左右方向に移動させる移動機構を設けているから、盛土機構及び整畦機構を非整畦作業位置と整畦作業位置との間で容易に移動することができ、運搬作業等においては、機枠を非整畦作業位置に移動させることにより容易に運搬進行することができ、又、請求項3記載の発明にあっては、上記走行機体に連結機構により取付枠を連結し、取付枠に上記機枠を移動案内機構により走行機体の進行方向に対して直交する左右方向に移動自在に設けているから、移動案内機構により機枠を円滑に左右移動させることができる。
【図面の簡単な説明】
【0009】
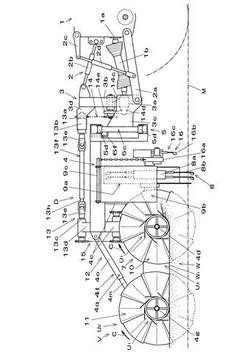
【図1】本発明の実施の形態例の全体側面図である。
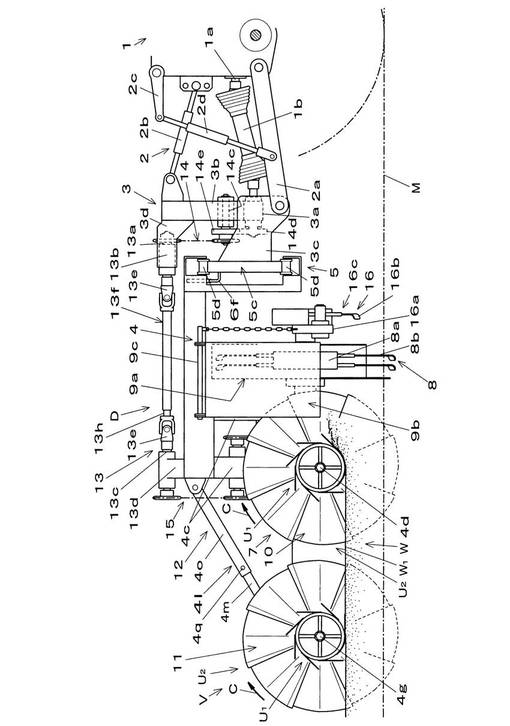
【図2】本発明の実施の形態例の全体側断面図である。
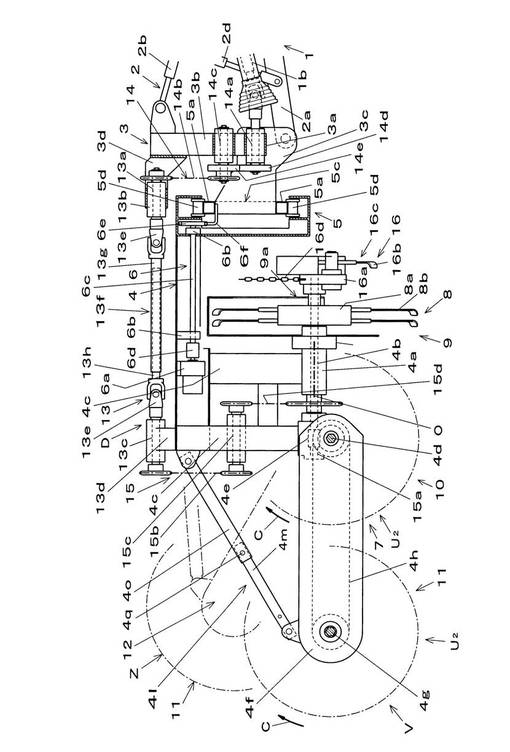
【図3】本発明の実施の形態例の全体平面図である。
【図4】本発明の実施の形態例の部分平断面図である。
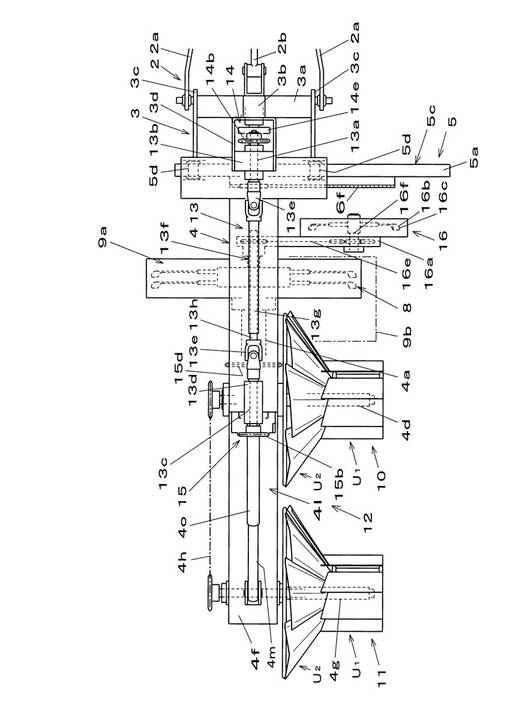
【図5】本発明の実施の形態例の全体後面図である。
【図6】本発明の実施の形態例の全体後断面図である。
【図7】本発明の実施の形態例の全体前断面図である。
【図8】本発明の実施の形態例の部分拡大断面図である。
【図9】本発明の実施の形態例の作業状態の全体平面図である。
【図10】本発明の実施の形態例の作業状態の全体後面図である。
【図11】本発明の実施の形態例の作業状態の全体後断面図である。
【図12】本発明の実施の形態例の部分拡大側断面図である。
【図13】本発明の実施の形態例の退避状態の部分側面図である。
【発明を実施するための形態】
【0010】
図1乃至図13は本発明の実施の形態例を示し、図1、図2の如く、1は走行機体であって、この場合トラクタが用いられ、走行機体1の後部に三点リンク式の連結機構2により取付枠3を上下動可能に連結して構成している。
【0011】
この場合、図2、図3の如く、上記取付枠3は水平杆部3a及び中央縦杆部3bからなる全体として略逆T状に形成され、連結機構2は左右一対の下部リンク2a・2a、上部リンク2b、走行機体1に既設の上下揺動する左右一対の揺動リンク2c・2c及び吊下リンク2d・2dからなり、この下部リンク2a・2a及び上部リンク2bを走行機体1と取付枠3との間に枢着連結し、左右一対の揺動リンク2c・2cの揺動により吊下リンク2d・2dを介して取付枠3を上下動させるように構成している。
【0012】
4は機枠であって、図2、図3の如く、上記取付枠3に移動案内機構5により走行機体1の進行方向に対して直交する左右方向Bに移動自在に設けられ、機枠4を左右方向Bに移動させる移動機構6が設けられている。
【0013】
この場合、図2、図3の如く、上記取付枠3の水平杆部3aに左右一対の支持アーム3c・3cを後方に向けて突設し、支持アーム3c・3cに上下のガイド杆5a・5a及び左右の縦杆5b・5bからなる四角枠状のガイド枠体5cを取付け、機枠4の進行方向の前部に上下一対のガイドロール5d・5dを左右二組設け、ガイド杆5a・5aとガイドロール5d・5dとのスライド嵌合により機枠4を左右方向Bに移動自在に設け、機枠4に作動用モータ6aを取り付けると共に機枠4に軸受6b・6bにより作動軸6cを軸線を進行方向にして回転自在に架設し、作動用モータ6aの主軸と作動軸6cとを継手6dにより連結し、作動軸6cに移動用歯車6eを取り付けると共にガイド枠体5cにラック歯体6fを取付け、作動用モータ6aを正逆回転して移動用歯車6eとラック歯体6fとの歯合により機枠4を左右方向Bに移動させるように構成している。
【0014】
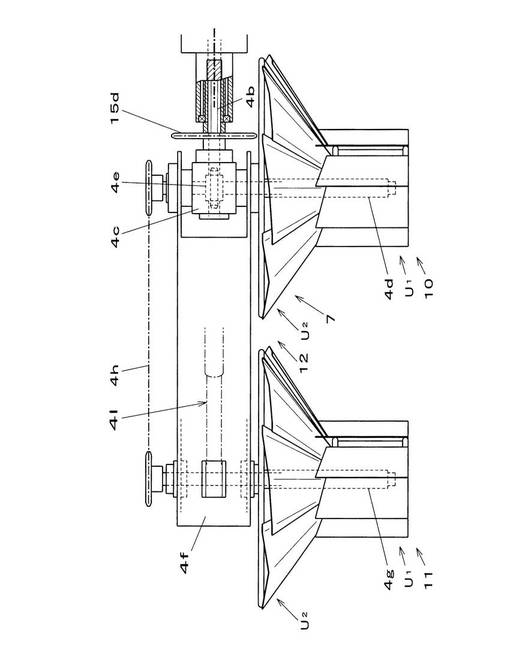
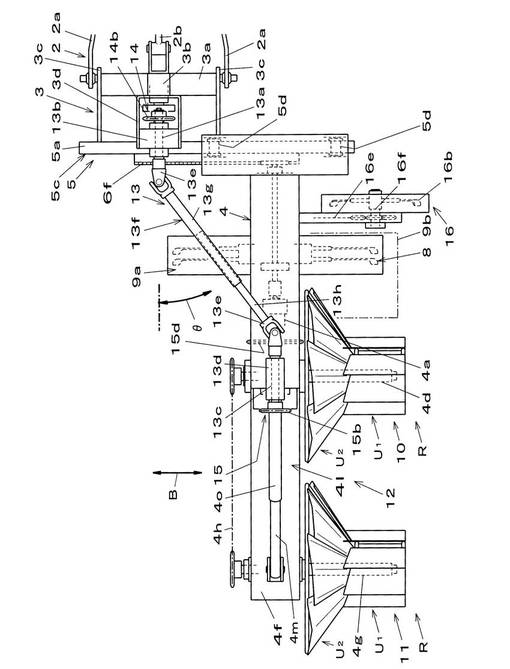
7は整畦機構、8は回転盛土体であって、図4、図6、図10の如く、機枠4に畦W際の圃場Mの泥土を旧畦W上に盛上可能な回転盛土体8をもつ盛土機構9を設け、回転盛土体8の進行方向後方位置に畦Wを回転整畦可能な前回転整畦体10を設けると共に前回転整畦体10の進行方向後方位置に畦Wを回転整畦可能な後回転整畦体11を設け、図2、図13の如く、後回転整畦体11を下方作業位置Vから上方退避位置Zに退避動作させる退避機構12を設けている。
【0015】
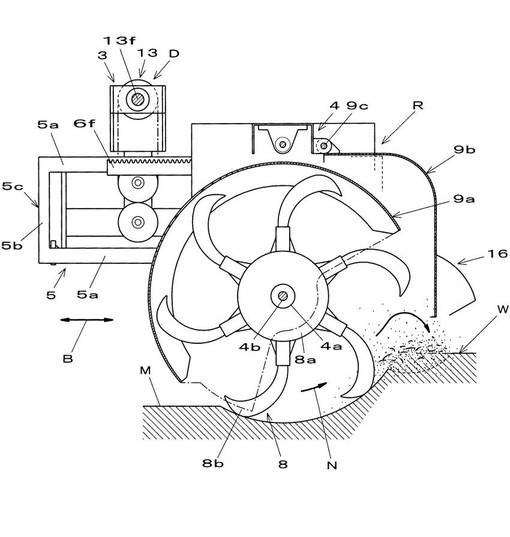
この場合、上記回転盛土体8は、図6の如く、ローター胴8aの外周面に複数個のナタ刃状の跳上刃8bを突設してなり、走行機体1の進行方向の回転軸線Oの廻りに一方向Nに回転して圃場Mの泥土を跳ね上げる構造となっている。
【0016】
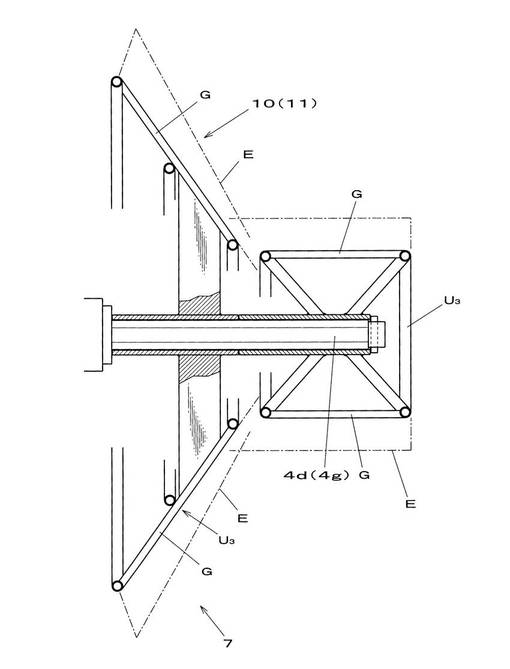
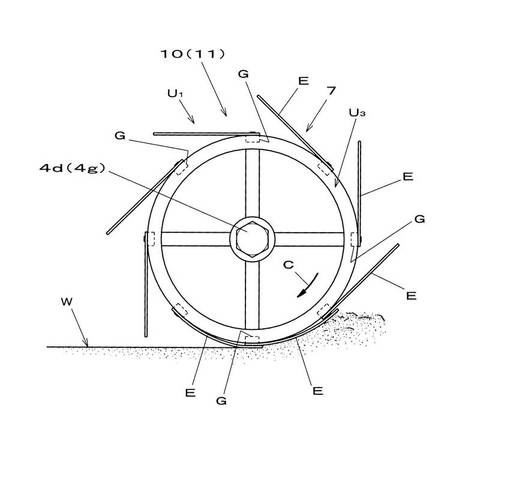
又、この場合、図5、図8の如く、前回転整畦体10及び後回転整畦体11は、それぞれ、畦Wの上面W1を整畦可能な上面整畦部U1及び畦Wの一方側面W2を整畦可能な側面整畦部U2からなり、上面整畦部U1及び側面整畦部U2は、それぞれ、ローター枠体U3の外周面部に複数個、この場合、八個の圧締面部G・・を形成し、各々の圧締面部Gに隣り合う回転方向後方位置の圧締面部Gに至る長さの圧締板体Eを八個配設し、この圧締板体Eは可撓性を有するナイロン樹脂や塩化ビニール樹脂等の合成樹脂やステンレスやバネ鋼等の金属からなる外的負荷により弾性的に撓み得る材質の可撓性板材により形成されている。
【0017】
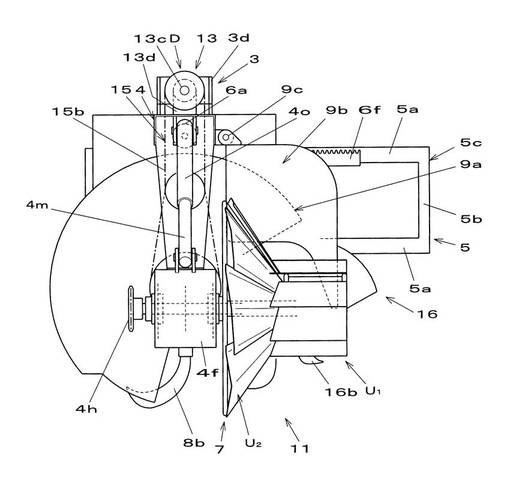
又、この場合、図2、図3の如く、上記取付枠3の中央縦杆部3bの上部にブラケット3dを取り付け、ブラケット3dに走行機体1を駆動源とする駆動軸13aを軸受13bにより配設し、機枠4に整畦機構7の駆動源となる従動軸13cを軸受13dにより配設し、駆動軸13aと従動軸13cとの間に機枠4の左右方向Bの移動を許容するための前後一対の自在継手13e・13e及び伸縮自在な伝動軸13fからなる動力伝動機構13を介装してなり、この伝動軸13fは相互に回り止め状態でスライド自在に嵌合した六角内穴をもつ外筒体13g及び六角棒状の内杆体13hからなり、そして、上記機枠4の左右移動に伴って振れ動作θする動力伝動機構13の上記伝動軸13fを、上記整畦機構7の上方位置とする干渉回避位置Dに配設し、この場合、干渉回避位置Dは上記整畦機構7及び上記機枠4の上方位置であって、上記機枠4の進行方向の後方位置にして上記従動軸13cを上記伝動軸13fが機枠4を跨越する状態となる位置に配設している。
【0018】
又、この場合、図2、図3の如く、上記取付枠3の水平杆部3aに上記走行機体1の動力取出軸1aにより自在継手機構1bを介して駆動される動力軸14aを配設し、上記取付枠3の中央縦杆部3bに中間軸14cを配設し、動力軸14aと中間軸14cとの間に一対の変向用歯車14d・14eを配設し、中間軸14cと上記駆動軸13aとの間にチェーン14bからなる前部伝動機構14を介装し、かつ、上記機枠4に上記従動軸13cの下方に位置して入力軸15aを配設し、上記機枠4の下部に軸受筒部4aを縦架材4c・4cにより設け、軸受筒部4aに駆動主軸4bを軸受し、駆動主軸4bに回転盛土体8を取り付け、機枠4に固定カバー部材9aを取り付けると共に機枠4に跳上カバー9bを枢軸9cにより枢着し、入力軸15aと上記駆動主軸4bとを直結構造とし、入力軸15aと中間軸15cとの間のチェーン機構15d及び上記従動軸13cと中間軸15cとの間のチェーン機構15bからなる後部伝動機構15を介装して構成している。
【0019】
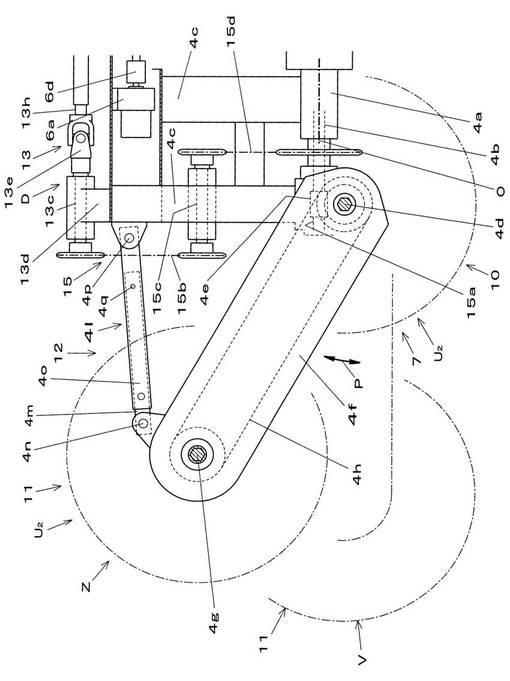
又、上記退避機構12にあっては、図13の如く、上記後回転整畦体11を下方作業位置Vから上方退避位置Zに退避動作させるように構成している。
【0020】
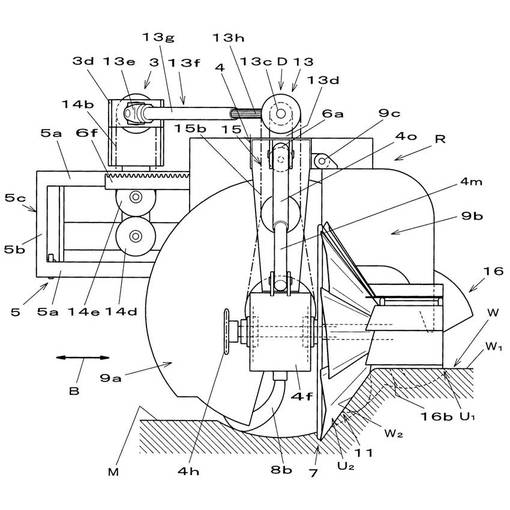
この場合、図13の如く、上記縦架材4cに支持駆動軸4dを走行機体1の進行方向に対して直交する左右方向Bに横設し、駆動主軸4bと支持駆動軸4dとの間に歯車機構4eを設け、支持駆動軸4dの畦側端部に前回転整畦体10を取り付け、かつ、図2、図13の如く、上記縦架材4cに支持駆動軸4dの回転軸線を中心として揺動部材4fを上下揺動自在に取り付け、揺動部材4fの後部に支持駆動軸4gを走行機体1の進行方向に対して直交する左右方向Bに横設し、支持駆動軸4dと支持駆動軸4gとの間にチェーン機構4hを設け、揺動部材4fと縦架材4cとの間に伸縮調節機構4lを設け、伸縮調節機構4lとして、揺動部材4fに小筒体4mを枢軸4nにより枢着し、縦架材4cに小筒体4mにスライド自在な大筒体4oを枢軸4pにより枢着し、大筒体4oと小筒体4mとを図2の伸長位置又は図13の縮小位置に固定する挿脱ピン4qを設け、支持駆動軸4gの畦側端部に後回転整畦体11を取り付け、これにより後回転整畦体11を支持駆動軸4dの回転軸線を中心として下方作業位置Vから上方退避位置Zに退避動作Pさせるように構成し、走行機体1を駆動源として動力伝動機構13を介して駆動主軸4bを一方向Nに回転させ、回転盛土体8、前回転整畦体10及び後回転整畦体11を、図1中、矢印方向の一方向Cに回転させるように構成している。
【0021】
16は前処理機構であって、図7の如く、回転盛土体8の進行方向前方位置に設けられ、この場合、上記軸受筒部4aの前部にチェーンケース16aの基部を一方側方位置Rの畦Wに向けて上下揺動自在に突設し、チェーンケース16aの前部に複数個の前処理刃16bをもつ前処理ロータ16cを回転自在に設け、チェーンケース16aを鎖材16dにより前記枢軸9cに係着し、前処理ロータ16cのロータ軸16fと駆動主軸4bとの間にチェーン機構16eを介在し、チェーン機構16eにより前処理ロータ16cと回転盛土体8の回転方向とを異方向に設定し、旧畦Wと盛土との結着性を高めるため、前処理ロータ16cの回転により一方側方位置Rの畦Wの上面W1を予め削取するように構成している。
【0022】
この実施の形態例は上記構成であるから、図9乃至図11の如く、移動機構6の作動用モータ6aの駆動により移動案内機構5のガイド杆5a・5aとガイドロール5d・5dとのスライド嵌合で機枠4を一方側方位置Rとしての図9中、右側位置に移動させ、この状態で、走行機体1を旧畦に沿って走行させ、走行機体1の動力取出軸1aを回転させると、取付枠3に配設された駆動軸13a、機枠4に配設された従動軸13c、前後一対の自在継手13e・13e及び伸縮自在な伝動軸13fからなる動力伝動機構13を介して整畦機構7が駆動され、前処理機構16の前処理ロータ16cの畦際方向に向く上向き回転Fにより一方側方位置Rの畦Wの上面W1は削取され、盛土機構9の回転盛土体8の一方向Nの回転により圃場Mの泥土はそのまま一方側方位置Rの畦Wの上に跳ね上げられ、回転盛土体8の進行方向後方位置に配置された前回転整畦体10は一方側方位置Rの畦Wの上面W1及び一方側面W2に回転接触して畦Wの上面W1及び一方側面W2を回転整畦し、次いで、前回転整畦体10の進行方向後方位置に配置された後回転整畦体11は一方側方位置Rの畦Wの上面W1及び一方側面W2に回転接触して畦Wの上面W1及び一方側面W2を回転整畦し、前回転整畦体10及び後回転整畦体11による連続的な整畦作業により作業進行速度を高めることができ、整畦作業性を高めることができ、走行機体1の走行速度に対して前回転整畦体10及び後回転整畦体11の回転速度を高めることにより前回転整畦体10及び後回転整畦体11は畦W面に回転すべり接触し、回転すべり接触により畦W面を円滑かつ強固に締圧整畦することができる。
【0023】
したがって、機枠4を移動機構6により走行機体1の進行方向に対して直交する左右方向Bに移動させると共に盛土機構9により回転盛土体8の一方向Nの回転により跳ね上げられる泥土を一方側方位置Rに跳ね上げ、回転盛土体8の後方位置に配置された前回転整畦体10及び前回転整畦体10の進行方向後方位置に配置された後回転整畦体11により一方側方位置Rの畦Wを連続的に整畦することができ、更に、この前回転整畦体10の進行方向後方位置に配置された後回転整畦体11により回転整畦することにより畦を連続的に整畦することができ、この前回転整畦体10及び後回転整畦体11による連続的な整畦作業により畦Wを充分に締圧することができて作業進行速度を高めることができ、整畦作業性を高めることができ、かつ、後回転整畦体11を下方作業位置Vから上方退避位置Zに退避動作させる退避機構12を設けているから、図13の如く、後回転整畦体11を下方作業位置Vから上方退避位置Zに退避させることができ、後方への突出量を短くできて後方突出機長を短くでき、移動時や保管時等の不使用時における利便性を得ることができる。
【0024】
この場合、上記機枠4を走行機体1の進行方向に対して左右方向Bに移動させる移動機構6を設けているから、盛土機構9及び整畦機構7を図3の非整畦作業位置と図9の整畦作業位置との間で容易に移動することができ、運搬作業等においては、機枠4を非整畦作業位置に移動させることにより容易に運搬進行することができ、又、この場合、上記走行機体1に連結機構2により取付枠3を連結し、取付枠3に上記機枠4を移動案内機構5により走行機体1の進行方向に対して直交する左右方向Bに移動自在に設けているから、移動案内機構5により機枠4を円滑に左右移動させることができる。
【0025】
この際、上記機枠4の左右移動に伴って振れ動作θする上記動力伝動機構13の伝動軸13fを、上記整畦機構7の上方位置とする干渉回避位置Dに配設してなるから、進行方向前方の取付枠3に配設された駆動軸13aと機枠4側の従動軸13cとの進行方向の距離を長く取ることができ、それだけ、伝動軸13fの伸縮量、すなわち、外筒体13gと内杆体13hとのスライド量を小さくすることができ、上記機枠4の左右方向Bの移動に伴う上記伝動軸13fの振れ動作θを円滑に行うことができ、機枠4の左右移動も円滑に行うことができ、自在継手13e・13eの折曲角度も小さくできて動力伝動を円滑に行うことができ、整畦作業性を向上することができる。
【0026】
又、この場合、上記干渉回避位置Dは上記整畦機構7及び上記機枠4の上方位置であって、上記機枠4に上記従動軸13cを上記伝動軸13fが機枠4の上方を跨越する状態となる位置に配設されているから、上記機枠4の左右方向Bの移動に支障を与えることがなくなり、機枠4に配設される整畦機構7を構成する回転盛土体8などの構成要素の配置の融通性を高めることができ、又、この場合、上記取付枠3に上記走行機体1の動力取出軸1aにより駆動される動力軸14aを配設し、動力軸14aと上記駆動軸13aとの間に前部伝動機構14を介装してなるから、走行機体1から整畦機構7への動力伝動構造を簡素化することができ、又、この場合、上記機枠4に上記従動軸13cの下方に位置して入力軸15aを配設し、入力軸15aと上記従動軸13cとの間に後部伝動機構15を介装してなるから、走行機体1から整畦機構7への動力伝動構造を簡素化することができ、又、この場合、前回転整畦体10及び後回転整畦体11は、それぞれ、畦Wの上面W1を整畦可能な上面整畦部U1及び畦Wの一方側面W2を整畦可能な側面整畦部U2からなるので、畦Wを確実に締圧することができる。
【0027】
尚、本発明は上記実施の形態例に限られるものではなく、例えば、移動機構6として、走行機体1の駆動源により油圧ポンプを駆動し、この油圧ポンプにより油圧シリンダを駆動し、油圧シリンダにより機枠4を左右移動させる構造を採用したり、走行機体1の電気駆動源を用いて電気制御される電動シリンダにより直接機枠4を左右移動させる構造を採用したり、ハンドルにより回動される親ねじ構造を用いた手動式構造を採用したりすることができ、又、移動案内機構5として、左右一対の水平リンクからなる平行リンク機構を採用したり、他のリンク構造を採用したりすることもでき、その他、取付枠3、移動案内機構5、移動機構6、整畦機構7、回転盛土体8、盛土機構9、前回転整畦体10及び後回転整畦体11の構造や形状等は適宜変更して設計されるものである。
【0028】
以上、所期の目的を充分達成することができる。
【符号の説明】
【0029】
B 左右方向
W 畦
V 下方作業位置
Z 上方退避位置
1 走行機体
2 連結機構
3 取付枠
4 機枠
5 移動案内機構
6 移動機構
7 整畦機構
8 回転盛土体
9 盛土機構
10 前回転整畦体
11 後回転整畦体
12 退避機構
【技術分野】
【0001】
本発明は例えば畦の造成作業や修復作業等に用いられる整畦機に関するものである。
【背景技術】
【0002】
従来、この種の整畦機として、例えば、走行機体に連結機構により機枠を連結し、機枠に畦際の泥土を旧畦上に盛上可能な回転盛土体をもつ盛土機構を設け、回転盛土体の進行方向後方位置に旧畦を回転整畦可能な回転整畦体をもつ整畦機構を設けてなる構造のものが知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4154545号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら上記従来構造の場合、単一個の回転整畦体によって回転整畦する構造となっており、土質や盛土量等の作業条件により、頑丈な畦を整畦する意味で十分な整畦時間を得るため、整畦進行速度を遅くしなければならないことがあり、それだけ、整畦作業性を低下させることがあるという不都合を有している。
【課題を解決するための手段】
【0005】
本発明はこれらの不都合を解決することを目的とするもので、本発明のうちで、請求項1記載の発明は、走行機体に連結機構により機枠を連結し、該機枠に畦際の泥土を旧畦上に盛上可能な回転盛土体をもつ盛土機構を設け、該回転盛土体の進行方向後方位置に旧畦を回転整畦可能な回転整畦体をもつ整畦機構を設けてなり、上記整畦機構として、上記回転盛土体の進行方向後方位置に畦を回転整畦可能な前回転整畦体を設けると共に該前回転整畦体の進行方向後方位置に畦を回転整畦可能な後回転整畦体を設け、該後回転整畦体を下方作業位置から上方退避位置に退避動作させる退避機構を設けてなることを特徴とする整畦機にある。
【0006】
又、請求項2記載の発明は、上記機枠を走行機体の進行方向に対して左右方向に移動させる移動機構を設けてなることを特徴とするものであり、又、請求項3記載の発明は、上記走行機体に連結機構により取付枠を連結し、該取付枠に上記機枠を移動案内機構により上記走行機体の進行方向に対して直交する左右方向に移動自在に設けてなることを特徴とするものである。
【発明の効果】
【0007】
本発明は上述の如く、請求項1記載の発明にあっては、走行機体を旧畦に沿って走行させ、盛土機構の回転盛土体により畦際の泥土を旧畦上に盛り上げ、この旧畦上の盛土を回転盛土体の進行方向後方位置に配置された前回転整畦体により回転整畦し、更に、この前回転整畦体の進行方向後方位置に配置された後回転整畦体により回転整畦することにより畦を連続的に整畦することができ、この前回転整畦体及び後回転整畦体による連続的な整畦作業により畦を充分に締圧することができて作業進行速度を高めることができ、整畦作業性を高めることができ、かつ、後回転整畦体を下方作業位置から上方退避位置に退避動作させる退避機構を設けているから、後回転整畦体を下方作業位置から上方退避位置に退避させることができ、後方突出機長を短くでき、移動時や保管時等の不使用時における利便性を得ることができる。
【0008】
又、請求項2記載の発明にあっては、上記機枠を走行機体の進行方向に対して左右方向に移動させる移動機構を設けているから、盛土機構及び整畦機構を非整畦作業位置と整畦作業位置との間で容易に移動することができ、運搬作業等においては、機枠を非整畦作業位置に移動させることにより容易に運搬進行することができ、又、請求項3記載の発明にあっては、上記走行機体に連結機構により取付枠を連結し、取付枠に上記機枠を移動案内機構により走行機体の進行方向に対して直交する左右方向に移動自在に設けているから、移動案内機構により機枠を円滑に左右移動させることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態例の全体側面図である。
【図2】本発明の実施の形態例の全体側断面図である。
【図3】本発明の実施の形態例の全体平面図である。
【図4】本発明の実施の形態例の部分平断面図である。
【図5】本発明の実施の形態例の全体後面図である。
【図6】本発明の実施の形態例の全体後断面図である。
【図7】本発明の実施の形態例の全体前断面図である。
【図8】本発明の実施の形態例の部分拡大断面図である。
【図9】本発明の実施の形態例の作業状態の全体平面図である。
【図10】本発明の実施の形態例の作業状態の全体後面図である。
【図11】本発明の実施の形態例の作業状態の全体後断面図である。
【図12】本発明の実施の形態例の部分拡大側断面図である。
【図13】本発明の実施の形態例の退避状態の部分側面図である。
【発明を実施するための形態】
【0010】
図1乃至図13は本発明の実施の形態例を示し、図1、図2の如く、1は走行機体であって、この場合トラクタが用いられ、走行機体1の後部に三点リンク式の連結機構2により取付枠3を上下動可能に連結して構成している。
【0011】
この場合、図2、図3の如く、上記取付枠3は水平杆部3a及び中央縦杆部3bからなる全体として略逆T状に形成され、連結機構2は左右一対の下部リンク2a・2a、上部リンク2b、走行機体1に既設の上下揺動する左右一対の揺動リンク2c・2c及び吊下リンク2d・2dからなり、この下部リンク2a・2a及び上部リンク2bを走行機体1と取付枠3との間に枢着連結し、左右一対の揺動リンク2c・2cの揺動により吊下リンク2d・2dを介して取付枠3を上下動させるように構成している。
【0012】
4は機枠であって、図2、図3の如く、上記取付枠3に移動案内機構5により走行機体1の進行方向に対して直交する左右方向Bに移動自在に設けられ、機枠4を左右方向Bに移動させる移動機構6が設けられている。
【0013】
この場合、図2、図3の如く、上記取付枠3の水平杆部3aに左右一対の支持アーム3c・3cを後方に向けて突設し、支持アーム3c・3cに上下のガイド杆5a・5a及び左右の縦杆5b・5bからなる四角枠状のガイド枠体5cを取付け、機枠4の進行方向の前部に上下一対のガイドロール5d・5dを左右二組設け、ガイド杆5a・5aとガイドロール5d・5dとのスライド嵌合により機枠4を左右方向Bに移動自在に設け、機枠4に作動用モータ6aを取り付けると共に機枠4に軸受6b・6bにより作動軸6cを軸線を進行方向にして回転自在に架設し、作動用モータ6aの主軸と作動軸6cとを継手6dにより連結し、作動軸6cに移動用歯車6eを取り付けると共にガイド枠体5cにラック歯体6fを取付け、作動用モータ6aを正逆回転して移動用歯車6eとラック歯体6fとの歯合により機枠4を左右方向Bに移動させるように構成している。
【0014】
7は整畦機構、8は回転盛土体であって、図4、図6、図10の如く、機枠4に畦W際の圃場Mの泥土を旧畦W上に盛上可能な回転盛土体8をもつ盛土機構9を設け、回転盛土体8の進行方向後方位置に畦Wを回転整畦可能な前回転整畦体10を設けると共に前回転整畦体10の進行方向後方位置に畦Wを回転整畦可能な後回転整畦体11を設け、図2、図13の如く、後回転整畦体11を下方作業位置Vから上方退避位置Zに退避動作させる退避機構12を設けている。
【0015】
この場合、上記回転盛土体8は、図6の如く、ローター胴8aの外周面に複数個のナタ刃状の跳上刃8bを突設してなり、走行機体1の進行方向の回転軸線Oの廻りに一方向Nに回転して圃場Mの泥土を跳ね上げる構造となっている。
【0016】
又、この場合、図5、図8の如く、前回転整畦体10及び後回転整畦体11は、それぞれ、畦Wの上面W1を整畦可能な上面整畦部U1及び畦Wの一方側面W2を整畦可能な側面整畦部U2からなり、上面整畦部U1及び側面整畦部U2は、それぞれ、ローター枠体U3の外周面部に複数個、この場合、八個の圧締面部G・・を形成し、各々の圧締面部Gに隣り合う回転方向後方位置の圧締面部Gに至る長さの圧締板体Eを八個配設し、この圧締板体Eは可撓性を有するナイロン樹脂や塩化ビニール樹脂等の合成樹脂やステンレスやバネ鋼等の金属からなる外的負荷により弾性的に撓み得る材質の可撓性板材により形成されている。
【0017】
又、この場合、図2、図3の如く、上記取付枠3の中央縦杆部3bの上部にブラケット3dを取り付け、ブラケット3dに走行機体1を駆動源とする駆動軸13aを軸受13bにより配設し、機枠4に整畦機構7の駆動源となる従動軸13cを軸受13dにより配設し、駆動軸13aと従動軸13cとの間に機枠4の左右方向Bの移動を許容するための前後一対の自在継手13e・13e及び伸縮自在な伝動軸13fからなる動力伝動機構13を介装してなり、この伝動軸13fは相互に回り止め状態でスライド自在に嵌合した六角内穴をもつ外筒体13g及び六角棒状の内杆体13hからなり、そして、上記機枠4の左右移動に伴って振れ動作θする動力伝動機構13の上記伝動軸13fを、上記整畦機構7の上方位置とする干渉回避位置Dに配設し、この場合、干渉回避位置Dは上記整畦機構7及び上記機枠4の上方位置であって、上記機枠4の進行方向の後方位置にして上記従動軸13cを上記伝動軸13fが機枠4を跨越する状態となる位置に配設している。
【0018】
又、この場合、図2、図3の如く、上記取付枠3の水平杆部3aに上記走行機体1の動力取出軸1aにより自在継手機構1bを介して駆動される動力軸14aを配設し、上記取付枠3の中央縦杆部3bに中間軸14cを配設し、動力軸14aと中間軸14cとの間に一対の変向用歯車14d・14eを配設し、中間軸14cと上記駆動軸13aとの間にチェーン14bからなる前部伝動機構14を介装し、かつ、上記機枠4に上記従動軸13cの下方に位置して入力軸15aを配設し、上記機枠4の下部に軸受筒部4aを縦架材4c・4cにより設け、軸受筒部4aに駆動主軸4bを軸受し、駆動主軸4bに回転盛土体8を取り付け、機枠4に固定カバー部材9aを取り付けると共に機枠4に跳上カバー9bを枢軸9cにより枢着し、入力軸15aと上記駆動主軸4bとを直結構造とし、入力軸15aと中間軸15cとの間のチェーン機構15d及び上記従動軸13cと中間軸15cとの間のチェーン機構15bからなる後部伝動機構15を介装して構成している。
【0019】
又、上記退避機構12にあっては、図13の如く、上記後回転整畦体11を下方作業位置Vから上方退避位置Zに退避動作させるように構成している。
【0020】
この場合、図13の如く、上記縦架材4cに支持駆動軸4dを走行機体1の進行方向に対して直交する左右方向Bに横設し、駆動主軸4bと支持駆動軸4dとの間に歯車機構4eを設け、支持駆動軸4dの畦側端部に前回転整畦体10を取り付け、かつ、図2、図13の如く、上記縦架材4cに支持駆動軸4dの回転軸線を中心として揺動部材4fを上下揺動自在に取り付け、揺動部材4fの後部に支持駆動軸4gを走行機体1の進行方向に対して直交する左右方向Bに横設し、支持駆動軸4dと支持駆動軸4gとの間にチェーン機構4hを設け、揺動部材4fと縦架材4cとの間に伸縮調節機構4lを設け、伸縮調節機構4lとして、揺動部材4fに小筒体4mを枢軸4nにより枢着し、縦架材4cに小筒体4mにスライド自在な大筒体4oを枢軸4pにより枢着し、大筒体4oと小筒体4mとを図2の伸長位置又は図13の縮小位置に固定する挿脱ピン4qを設け、支持駆動軸4gの畦側端部に後回転整畦体11を取り付け、これにより後回転整畦体11を支持駆動軸4dの回転軸線を中心として下方作業位置Vから上方退避位置Zに退避動作Pさせるように構成し、走行機体1を駆動源として動力伝動機構13を介して駆動主軸4bを一方向Nに回転させ、回転盛土体8、前回転整畦体10及び後回転整畦体11を、図1中、矢印方向の一方向Cに回転させるように構成している。
【0021】
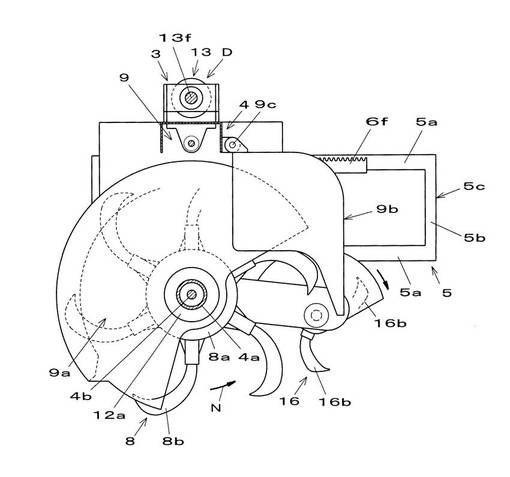
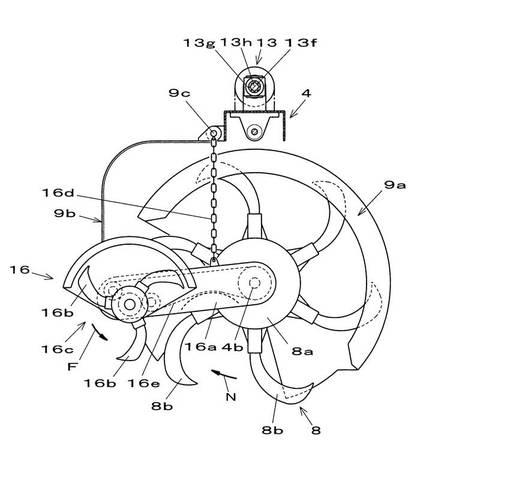
16は前処理機構であって、図7の如く、回転盛土体8の進行方向前方位置に設けられ、この場合、上記軸受筒部4aの前部にチェーンケース16aの基部を一方側方位置Rの畦Wに向けて上下揺動自在に突設し、チェーンケース16aの前部に複数個の前処理刃16bをもつ前処理ロータ16cを回転自在に設け、チェーンケース16aを鎖材16dにより前記枢軸9cに係着し、前処理ロータ16cのロータ軸16fと駆動主軸4bとの間にチェーン機構16eを介在し、チェーン機構16eにより前処理ロータ16cと回転盛土体8の回転方向とを異方向に設定し、旧畦Wと盛土との結着性を高めるため、前処理ロータ16cの回転により一方側方位置Rの畦Wの上面W1を予め削取するように構成している。
【0022】
この実施の形態例は上記構成であるから、図9乃至図11の如く、移動機構6の作動用モータ6aの駆動により移動案内機構5のガイド杆5a・5aとガイドロール5d・5dとのスライド嵌合で機枠4を一方側方位置Rとしての図9中、右側位置に移動させ、この状態で、走行機体1を旧畦に沿って走行させ、走行機体1の動力取出軸1aを回転させると、取付枠3に配設された駆動軸13a、機枠4に配設された従動軸13c、前後一対の自在継手13e・13e及び伸縮自在な伝動軸13fからなる動力伝動機構13を介して整畦機構7が駆動され、前処理機構16の前処理ロータ16cの畦際方向に向く上向き回転Fにより一方側方位置Rの畦Wの上面W1は削取され、盛土機構9の回転盛土体8の一方向Nの回転により圃場Mの泥土はそのまま一方側方位置Rの畦Wの上に跳ね上げられ、回転盛土体8の進行方向後方位置に配置された前回転整畦体10は一方側方位置Rの畦Wの上面W1及び一方側面W2に回転接触して畦Wの上面W1及び一方側面W2を回転整畦し、次いで、前回転整畦体10の進行方向後方位置に配置された後回転整畦体11は一方側方位置Rの畦Wの上面W1及び一方側面W2に回転接触して畦Wの上面W1及び一方側面W2を回転整畦し、前回転整畦体10及び後回転整畦体11による連続的な整畦作業により作業進行速度を高めることができ、整畦作業性を高めることができ、走行機体1の走行速度に対して前回転整畦体10及び後回転整畦体11の回転速度を高めることにより前回転整畦体10及び後回転整畦体11は畦W面に回転すべり接触し、回転すべり接触により畦W面を円滑かつ強固に締圧整畦することができる。
【0023】
したがって、機枠4を移動機構6により走行機体1の進行方向に対して直交する左右方向Bに移動させると共に盛土機構9により回転盛土体8の一方向Nの回転により跳ね上げられる泥土を一方側方位置Rに跳ね上げ、回転盛土体8の後方位置に配置された前回転整畦体10及び前回転整畦体10の進行方向後方位置に配置された後回転整畦体11により一方側方位置Rの畦Wを連続的に整畦することができ、更に、この前回転整畦体10の進行方向後方位置に配置された後回転整畦体11により回転整畦することにより畦を連続的に整畦することができ、この前回転整畦体10及び後回転整畦体11による連続的な整畦作業により畦Wを充分に締圧することができて作業進行速度を高めることができ、整畦作業性を高めることができ、かつ、後回転整畦体11を下方作業位置Vから上方退避位置Zに退避動作させる退避機構12を設けているから、図13の如く、後回転整畦体11を下方作業位置Vから上方退避位置Zに退避させることができ、後方への突出量を短くできて後方突出機長を短くでき、移動時や保管時等の不使用時における利便性を得ることができる。
【0024】
この場合、上記機枠4を走行機体1の進行方向に対して左右方向Bに移動させる移動機構6を設けているから、盛土機構9及び整畦機構7を図3の非整畦作業位置と図9の整畦作業位置との間で容易に移動することができ、運搬作業等においては、機枠4を非整畦作業位置に移動させることにより容易に運搬進行することができ、又、この場合、上記走行機体1に連結機構2により取付枠3を連結し、取付枠3に上記機枠4を移動案内機構5により走行機体1の進行方向に対して直交する左右方向Bに移動自在に設けているから、移動案内機構5により機枠4を円滑に左右移動させることができる。
【0025】
この際、上記機枠4の左右移動に伴って振れ動作θする上記動力伝動機構13の伝動軸13fを、上記整畦機構7の上方位置とする干渉回避位置Dに配設してなるから、進行方向前方の取付枠3に配設された駆動軸13aと機枠4側の従動軸13cとの進行方向の距離を長く取ることができ、それだけ、伝動軸13fの伸縮量、すなわち、外筒体13gと内杆体13hとのスライド量を小さくすることができ、上記機枠4の左右方向Bの移動に伴う上記伝動軸13fの振れ動作θを円滑に行うことができ、機枠4の左右移動も円滑に行うことができ、自在継手13e・13eの折曲角度も小さくできて動力伝動を円滑に行うことができ、整畦作業性を向上することができる。
【0026】
又、この場合、上記干渉回避位置Dは上記整畦機構7及び上記機枠4の上方位置であって、上記機枠4に上記従動軸13cを上記伝動軸13fが機枠4の上方を跨越する状態となる位置に配設されているから、上記機枠4の左右方向Bの移動に支障を与えることがなくなり、機枠4に配設される整畦機構7を構成する回転盛土体8などの構成要素の配置の融通性を高めることができ、又、この場合、上記取付枠3に上記走行機体1の動力取出軸1aにより駆動される動力軸14aを配設し、動力軸14aと上記駆動軸13aとの間に前部伝動機構14を介装してなるから、走行機体1から整畦機構7への動力伝動構造を簡素化することができ、又、この場合、上記機枠4に上記従動軸13cの下方に位置して入力軸15aを配設し、入力軸15aと上記従動軸13cとの間に後部伝動機構15を介装してなるから、走行機体1から整畦機構7への動力伝動構造を簡素化することができ、又、この場合、前回転整畦体10及び後回転整畦体11は、それぞれ、畦Wの上面W1を整畦可能な上面整畦部U1及び畦Wの一方側面W2を整畦可能な側面整畦部U2からなるので、畦Wを確実に締圧することができる。
【0027】
尚、本発明は上記実施の形態例に限られるものではなく、例えば、移動機構6として、走行機体1の駆動源により油圧ポンプを駆動し、この油圧ポンプにより油圧シリンダを駆動し、油圧シリンダにより機枠4を左右移動させる構造を採用したり、走行機体1の電気駆動源を用いて電気制御される電動シリンダにより直接機枠4を左右移動させる構造を採用したり、ハンドルにより回動される親ねじ構造を用いた手動式構造を採用したりすることができ、又、移動案内機構5として、左右一対の水平リンクからなる平行リンク機構を採用したり、他のリンク構造を採用したりすることもでき、その他、取付枠3、移動案内機構5、移動機構6、整畦機構7、回転盛土体8、盛土機構9、前回転整畦体10及び後回転整畦体11の構造や形状等は適宜変更して設計されるものである。
【0028】
以上、所期の目的を充分達成することができる。
【符号の説明】
【0029】
B 左右方向
W 畦
V 下方作業位置
Z 上方退避位置
1 走行機体
2 連結機構
3 取付枠
4 機枠
5 移動案内機構
6 移動機構
7 整畦機構
8 回転盛土体
9 盛土機構
10 前回転整畦体
11 後回転整畦体
12 退避機構
【特許請求の範囲】
【請求項1】
走行機体に連結機構により機枠を連結し、該機枠に畦際の泥土を旧畦上に盛上可能な回転盛土体をもつ盛土機構を設け、該回転盛土体の進行方向後方位置に旧畦を回転整畦可能な回転整畦体をもつ整畦機構を設けてなり、上記整畦機構として、上記回転盛土体の進行方向後方位置に畦を回転整畦可能な前回転整畦体を設けると共に該前回転整畦体の進行方向後方位置に畦を回転整畦可能な後回転整畦体を設け、該後回転整畦体を下方作業位置から上方退避位置に退避動作させる退避機構を設けてなることを特徴とする整畦機。
【請求項2】
上記機枠を走行機体の進行方向に対して左右方向に移動させる移動機構を設けてなることを特徴とする請求項1記載の整畦機。
【請求項3】
上記走行機体に連結機構により取付枠を連結し、該取付枠に上記機枠を移動案内機構により上記走行機体の進行方向に対して直交する左右方向に移動自在に設けてなることを特徴とする請求項1又は2記載の整畦機。
【請求項1】
走行機体に連結機構により機枠を連結し、該機枠に畦際の泥土を旧畦上に盛上可能な回転盛土体をもつ盛土機構を設け、該回転盛土体の進行方向後方位置に旧畦を回転整畦可能な回転整畦体をもつ整畦機構を設けてなり、上記整畦機構として、上記回転盛土体の進行方向後方位置に畦を回転整畦可能な前回転整畦体を設けると共に該前回転整畦体の進行方向後方位置に畦を回転整畦可能な後回転整畦体を設け、該後回転整畦体を下方作業位置から上方退避位置に退避動作させる退避機構を設けてなることを特徴とする整畦機。
【請求項2】
上記機枠を走行機体の進行方向に対して左右方向に移動させる移動機構を設けてなることを特徴とする請求項1記載の整畦機。
【請求項3】
上記走行機体に連結機構により取付枠を連結し、該取付枠に上記機枠を移動案内機構により上記走行機体の進行方向に対して直交する左右方向に移動自在に設けてなることを特徴とする請求項1又は2記載の整畦機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−9616(P2013−9616A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−143400(P2011−143400)
【出願日】平成23年6月28日(2011.6.28)
【出願人】(395008849)株式会社富士トレーラー製作所 (32)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月28日(2011.6.28)
【出願人】(395008849)株式会社富士トレーラー製作所 (32)
【Fターム(参考)】
[ Back to top ]