
料額印検知装置及びそのミシン目検知方法
【課題】料額印を燐光で検知する料額印検知装置及びそのミシン目検知方法を提供すること。
【解決手段】郵便物を搬送する搬送路に相対向して燐光検知部及びイメージ検知部を配置し、燐光検知部から得られた料額印の燐光画像を、X軸ミシン目テンプレート画像及びX軸に直交するY軸ミシン目テンプレート画像に対しそれぞれX軸方向相関処理及びX軸方向直線検出、Y軸方向相関処理及びY軸方向直線検出並びにこれらの検出結果に基ずく四角検出を角度を変えながら所定の回転角度の範囲内で行う。その結果、X軸ミシン目テンプレート画像又はY軸ミシン目テンプレート画像に最も相関のある角度を抽出し、当該抽出された角度に対するX軸方向直線検出結果及びY軸方向直線検出結果に基づいてミシン目が四角形であることを検出する。
【解決手段】郵便物を搬送する搬送路に相対向して燐光検知部及びイメージ検知部を配置し、燐光検知部から得られた料額印の燐光画像を、X軸ミシン目テンプレート画像及びX軸に直交するY軸ミシン目テンプレート画像に対しそれぞれX軸方向相関処理及びX軸方向直線検出、Y軸方向相関処理及びY軸方向直線検出並びにこれらの検出結果に基ずく四角検出を角度を変えながら所定の回転角度の範囲内で行う。その結果、X軸ミシン目テンプレート画像又はY軸ミシン目テンプレート画像に最も相関のある角度を抽出し、当該抽出された角度に対するX軸方向直線検出結果及びY軸方向直線検出結果に基づいてミシン目が四角形であることを検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、料額印検知装置及びそのミシン目検知方法に関する。
【背景技術】
【0002】
搬送される郵便物の自動取り揃え処理を行う郵便物自動取揃機は、郵便物に貼られた切手等料額印を検知し、当該料額印に押印し、宛先に応じて取り揃える機器である。従って、この郵便物自動取揃機には料額印を検知する料額印検知装置が設けられている。
【0003】
以下、料額印としての切手を検知する従来の方法を説明する。通常、切手の輪郭はミシン目で構成されていることから、切手に対して斜めから光を照射し、当該切手のミシン目によって生成された影を検出することにより切手の貼り付け位置を検出していた(この処理を検切処理と称する。)。または、郵便物の画像を取り込みこの画像の中から切手の検切処理により、封書に対する切手の貼り付け位置、貼り付け状態が明確になり、当該切手の認識を行うことが可能になる(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−122084号公報(第5頁、図2)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した切手の検切処理では、郵便物の画像から切手部分を検切りしているため、封書の窓や波線等を誤認識してしまう課題、及び封書の模様やイラストを誤認識する課題があった。
【0006】
本発明は、上記課題を解決するためになされたもので、切手に紫外線を照射し、当該切手から放射された蛍光又は燐光を検知することにより、切手のミシン目検知及び認識を確実に行うことができる料額印検知装置及びミシン目検知方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の請求項1記載の料額印検知装置は、郵便物を搬送する搬送手段と、この搬送手段によって搬送される郵便物の料額印を励起発光する照射部及びこの照射部によって照射された料額印から放射される燐光画像を検知するカメラ部を有する燐光検知手段と、この燐光検知手段によって検知された燐光画像から料額印の輪郭であるミシン目を検知するミシン目検知手段と、を備え、前記ミシン目検知手段は、郵便物に複数の料額印が用いられている場合であっても、各料額印のミシン目が四角形であることを検知することを特徴とする。
【0008】
また、本発明の請求項2記載の料額印検知装置のミシン目検知方法は、郵便物を搬送する搬送手段と、この搬送手段によって搬送される郵便物の料額印を励起発光する照射部及びこの照射部によって照射された料額印から放射される燐光画像を検知するカメラ部を有する燐光検知手段と、この燐光検知手段によって検知された燐光画像から料額印の輪郭であるミシン目を検知するミシン目検知手段と、を備えた料額印検知装置のミシン目検知方法であって、前記燐光画像を所定の角度回転する第1の工程と、この第1の工程の結果得られた燐光画像とX軸方向ミシン目テンプレート画像とのX軸方向相関処理を行う第2の工程と、前記第1の工程の結果得られた燐光画像に対するX軸方向の直線検出を行う第3の工程と、前記第1の工程の結果得られた燐光画像とY軸方向ミシン目テンプレート画像とのY軸方向相関処理を行う第4の工程と、前記第1の工程の結果得られた燐光画像に対するY軸方向の直線検出を行う第5の工程と、前記X軸方向相関処理の結果及びX軸方向直線検出結果並びにY軸方向相関処理の結果及びY軸方向直線検出結果に基づいてミシン目が四角形であることを検出する四角検出工程と、を有し、前記回転角度を変えながら設定した範囲内で前記第2の工程から第5の工程をループする第6の工程と、この第6の工程の結果に基づいて、当該料額印に対するミシン目を総合的に検出する第7工程を有することを特徴とする。
【図面の簡単な説明】
【0009】
【図1】本発明の実施例に係る料額印検知装置の構成図
【図2】図1に示す料額印検知装置の燐光検知部及びイメージ検知部の構成図
【図3】図1に示す料額印検知装置の燐光検知部の詳細図
【図4】郵便物に貼り付けられた切手の燐光画像の一例
【図5】ミシン目テンプレート画像の一例
【図6】燐光検知PCによるミシン目検知方法を示すフローチャート
【図7】図6に示す処理途中の経過を説明する図
【図8】四角検出結果を示す図
【図9】郵便物に複数の切手が貼られた場合の処理を説明する図
【発明を実施するための形態】
【0010】
本発明の料額印検知装置は、郵便物を搬送する搬送路に相対向して燐光検知部及びイメージ検知部を配置し、これらの検知部から得られた信号により、当該搬送路によって搬送される当該郵便物に貼られた料額印としての切手のミシン目を検知する装置に関する。以下、図面を参照して本発明の実施例を説明する。なお、本実施形態は例示であり、発明の範囲はそれらに限定されない。
【実施例】
【0011】
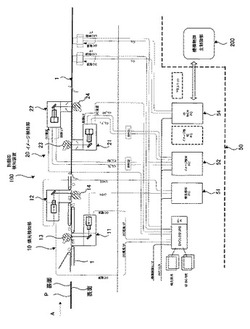
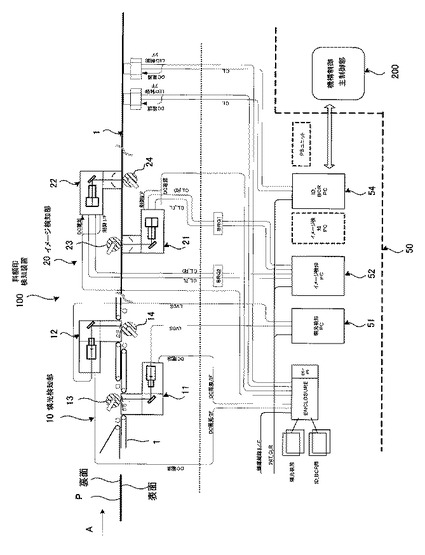
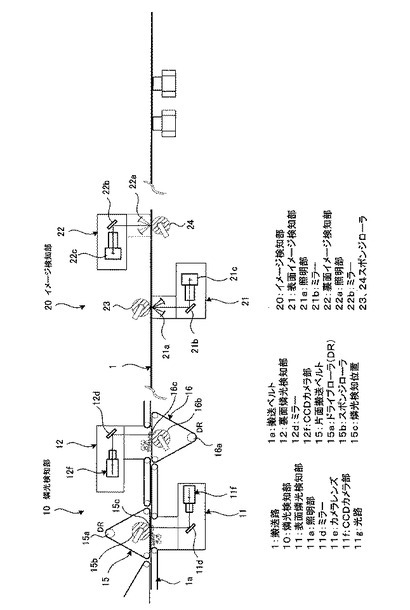
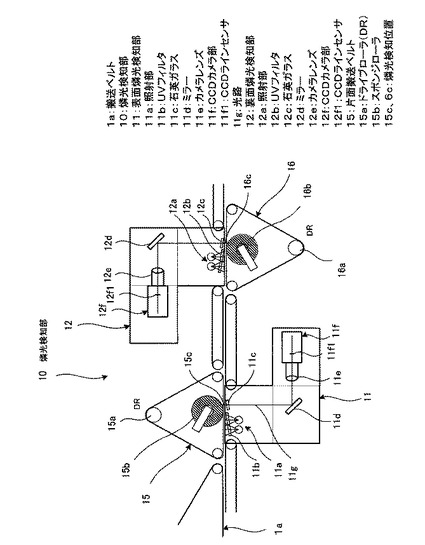
図1は、本発明の実施例に係る料額印検知装置100の構成図の一例である。図2は、図1に示す料額印検知装置100の燐光検知部10及びイメージ検知部20の構成図である。図3は、図1又は図2に示す燐光検知部10の詳細図である。以下、これらの図を参照しながら説明する。本実施例に係る料額印検知装置100は、郵便物の自動取り揃え処理を行う郵便物自動取揃機(図示しない)に搭載され、郵便物Pに貼り付けられた切手を検知する装置で、搬送路1に沿って、搬送上流から下流に向って燐光検知部10、イメージ検知部20及び検知制御部50などを有して構成される。
【0012】
さらに、料額印検知装置100は、機構制御部200と接続され、搬送される郵便物の大きさ、搬送位置情報(スキュー、ピッチ詰りなど)を受信し、当該料額印検知装置100による料額印の検知結果を送信する。
【0013】
なお、図1は、上記各検知部の平面図を示しており、郵便物Pは、搬送ローラ及び搬送ベルト1aで構成された搬送路1上を立位状態で図示矢印A方向に搬送される。
【0014】
燐光検知部(燐光検知手段)10は、郵便物Pの一方の面(表面)を検知する表面燐光検知部11、他方の面(裏面)を検知する裏面燐光検知部12、スポンジローラ13及び搬送ベルト1aなどで構成される。
【0015】
表面燐光検知部11及び表面検知部12は同様に構成されているために、搬送路1上流に表面燐光検知部11が配置されていることから、表面燐光検知部11を中心に説明し、裏面燐光検知部12は異なる部分のみ説明する。
【0016】
表面燐光検知部11は、搬送される切手に塗布された燐光物質を励起発光させるために紫外線を照射する照射部11a及びこの照射部11aによって照射された切手から放射され燐光(可視光)を検知するCCDカメラ部11fを有して構成される。なお、燐光とは、励起発光があるときには当然可視光を放射するが、励起発光が無いときでも短時間残光として放射された光(ここでは可視光)をいう。
【0017】
照射部11aには紫外線を発光する長軸の蛍光ランプ11a1が用いられ、搬送方向と直交する方向の検知エリアを照射する。そのために長軸方向が搬送方向に対して直交する方向になるように配置される。郵便物Pの搬送速度が高速になると、郵便物Pを照射する照射時間が短くなるため、搬送速度を考慮して使用する蛍光ランプ11a1の仕様(照射強度、使用数量など)が設定される。本実施例では2個使用している。
【0018】
また、当該蛍光ランプ11a1と搬送路1との間には、UVフィルタ11bが配置され、紫外線を通過させるが励起発光に寄与しない可視光をカットする。
【0019】
CCDカメラ部11fは、可視光を検知するCCDラインセンサ11f1、このCCDラインセンサ11f1に燐光検知位置15cから放射される可視光を結像するカメラレンズ11e及びこのCCDラインセンサ11f1を駆動する駆動手段(図示しない)などで構成される。
【0020】
また、燐光検知位置15cとCCDラインセンサ11f1間の光路11gは燐光検知位置15cでの燐光検知範囲である燐光検知エリアの大きさ、読取に必要な解像度及びカメラレンズ11eの仕様によって設定される。本実施例では、光路長を確保するために光路11gをミラー11dによって曲げて配置し、小型化を達成している。
【0021】
また、郵便物Pを安定して搬送し、当該郵便物Pの燐光を検知する燐光検知位置15cの変動を抑えるために、燐光検知位置15cと相対向する位置にスポンジローラ15bが配置される。郵便物Pは搬送ベルト1aに挟持されて高速に搬送され、この燐光検知位置15cに到達する。この燐光検知位置15cに到達した郵便物の燐光検知エリアを確保するために、この燐光検知エリア内には挟持搬送ベルトを配置せず、検知エリアの郵便物Pに対する裏面に搬送ベルト(片面搬送ベルト)15がスポンジローラ15bの外周面の一部と接触して配置すされる。このような配置にすることにより、高速に搬送される郵便物Pの検知エリアを確保すると共に当該搬送される郵便物Pの燐光検知位置15cでの搬送位置の変動を抑えることができる。なお、片面搬送ベルト15は、他のベルトから独立した無端搬送ベルトで構成される。
【0022】
このような構成において、蛍光ランプ11a1から照射された紫外線(励起光)は搬送路1を通過する郵便物Pに照射される。郵便物Pに貼り付けられた切手はこの紫外線によって励起されて、燐光(可視光)を放射する。
【0023】
切手に燐光物質が含まれている場合には、励起光の照射がなくなってからも短時間燐光(可視光)を放射する。郵便物Pがさらに搬送されて切手が燐光検知位置15cに到達すると、その位置では、励起光の照射を受けないため、切手から放射された燐光(可視光)を検知することができる。従って、この燐光検知位置15cでは、蛍光ランプ11a1からの照射光及び外乱交が入り込まないように遮光される。
【0024】
燐光検知位置15cから放射された燐光は、耐磨耗性ガラスである石英ガラス11cを通過し、ミラー11dによって曲げられてカメラレンズ11eに導かれる。この燐光は、カメラレンズ11eによってCCDカメラ部11fのCCDラインセンサ11f1に結像される。
【0025】
なお、上記石英ガラス11cには、燐光検知位置15を高速に通過する郵便物の紙粉が蓄積しやすい。この紙粉の蓄積を防止するために石英ガラス11cを燐光検知位置15の近傍に配置して紙粉を吹き飛ばす必要がある。しかしながら、燐光検知位置15の近傍に配置することにより、郵便物が接触し、傷がつきやすくなるという欠点がある。この欠点を解決するために耐磨耗性ガラスが用いられる。本実施例では、対摩耗性ガラスとして石英ガラスを用いたが、これに限定するものではなく、燐光を透過しやすい材質で、かつ、対摩耗性が得られる物であればよい。また、当該石英ガラス11cと後述するミラー11dの間に当該燐光以外の外光をカットするフィルタを用いてもよい。
【0026】
このようにして、燐光検知位置15cを通過する切手の燐光が検知される。裏面燐光検知部12の動作も同様である。
【0027】
表面燐光検知部11及び裏面燐光検知部12で検知された燐光検知情報は、燐光検知PC51に送信される。燐光検知PC(Personal Computer)51は、表面燐光検知部11及び裏面燐光検知部12並びにイメージ検知部20の検知結果及び機構制御部200から受信した郵便物Pの搬送情報(タイミングセンサ情報)を元に切手のミシン目検知を行う。本発明の趣旨ではないので詳細な説明は行わないが、搬送路1上には複数の郵便物が所定の間隔で搬送されるため、各郵便物は搬送路1上に配置された搬送センサ(図示しない)によって検知される。従って、各郵便物はそれぞれ各搬送センサによって検知された搬送情報(例えば、郵便物の大きさ、搬送スキュー量など)を有しており、この搬送情報が機構制御部200を介して燐光検知PC51に送信される。郵便物Pの大きさが規定値を超えている場合には切手の貼り付け位置が検知エリアに含まれない場合が生じる。また、所定の搬送スキュー値を超える郵便物Pが搬送された場合には、当該郵便物Pの燐光検知を行わない場合もある。誤検知の可能性があり、それ防止するためである。なお、具体的なミシン目検知方法は後述する。
【0028】
イメージ検知部20は、郵便物Pの表面のイメージを検知する表面イメージ検知部21及び郵便物の裏面のイメージを検知する裏面イメージ検知部22並びに表面及び裏面イメージ検知部の検知位置の対向する位置にスポンジローラ23、24が配置される。
【0029】
表面イメージ検知部21及び裏面イメージ検知部22は、同様に構成されているため、ここでは表面イメージ検知部21について説明し、裏面イメージ検知部22の説明を省略する。
【0030】
表面イメージ検知部21は、郵便物Pを照明するLED照明装置21a、このLED照明装置21aによって照明された郵便物Pからの反射光の光路長を確保するために光路を曲げるミラー21b、このミラー21bによって曲げられた光を結像するカメラレンズ21c及びこのカメラレンズ21cによって結像された光を検知するCCDカメラ21d有して構成される。
【0031】
上述した表面イメージ検知部21及び裏面イメージ検知部22は、郵便物Pのイメージを検知し、その検知結果をそれぞれイメージ検知PC52に送信する。イメージ検知PC52は、受信したイメージ情報から郵便物Pのどこの位置に切手が貼り付けられているかを検知し、その検知結果を機構制御部200を介して燐光検知部10に通知する。
【0032】
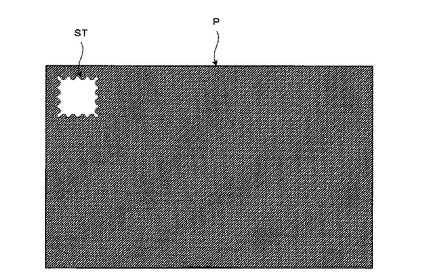
図4は、郵便物Pに貼り付けられた切手STの燐光画像の一例である。表面燐光検知部10又は裏面燐光検知部20で検知した切手の燐光画像(残光画像ともいう)は上述した通り可視画像として検出される。郵便物Pの切手ST以外の部分は、燐光の放射がないために検出されず、切手ST部分の燐光画像が図示したように検出される。
【0033】
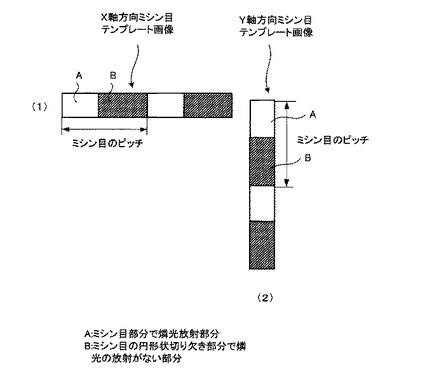
図5は、ミシン目テンプレート画像の一例である。図5(1)は、X軸方向ミシン目テンプレート画像の一例であり、図5(2)は、Y軸方向ミシン目テンプレート画像の一例である。図5(1)Aで示す空白部分は、切手のミシン目部分であり燐光が放射される部分である。一方、図5(1)Bで示す斜線部分は、ミシン目の円形状切り欠き部分に該当し、燐光の放射がない部分である。図5(2)に示すY軸方向ミシン目テンプレートも同様である。
【0034】
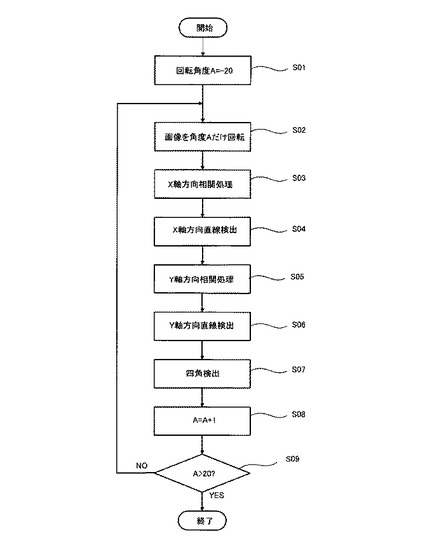
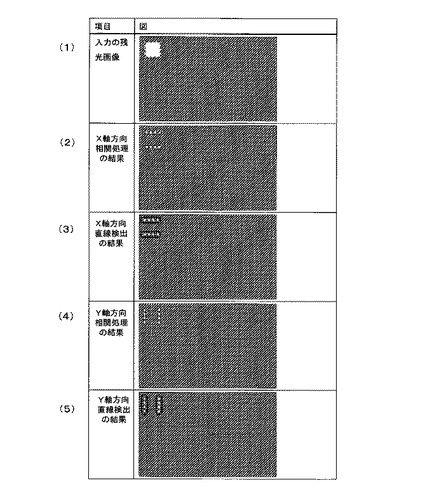
図6は、燐光検知PC51によるミシン目検知方法を示すフローチャートである。燐光検知PC51は、ミシン目検知手段として当該フローチャートに基づく処理を行う。図7は、図6に示す処理の途中経過を説明するための図である。以下、これらの図を参照して説明する。
【0035】
切手は上述した燐光検知部10によってその形状が検知できる。しかしながら、スキューなどしている場合には誤って検知する場合があるため、以下に示す条件の範囲内で切手のミシン目検知を行う。
(1)切手のミシン目のピッチは、事前に分かっており、所定の値とする。
(2)切手の傾きは±20度までの範囲にある。
最初に回転角度Aに回転角の上限値-20を設定する(S01)。
【0036】
上記切手STの燐光画像(図7(1)参照)の角度を角度Aだけ回転する(S02、第1の工程)。この回転した燐光画像と、図5(1)に示すX軸方向ミシン目テンプレート画像との相関処理を行う(S03、第2の工程)。相関処理とは、例えば、切手のミシン目画像とX軸方向ミシン目テンプレート画像との相関係数を算出することである。
【0037】
上記ステップS02の結果、回転した燐光画像に対するX軸方向の直線検出を行う(S04、第3の工程)。
【0038】
次に、この回転した燐光画像と、図5(2)に示すY軸方向ミシン目テンプレート画像との相関処理を行う(S05、第4の工程)。この相関処理はX軸相関処理と同じである。続けてY軸方向直線検出を行う(S06、第5の工程)。
【0039】
次に、上記処理によって検出されたX軸方向相関処理の結果及びX軸方向直線検出結果並びにY軸方向相関処理の結果及びY軸方向直線検出結果に基づいて、ミシン目が四角形であることを検出する四角検出を行う(S07、第6の工程)。
【0040】
次に、回転角度Aを1度増加する(S08)、回転角Aが20以下であれば(S09のNO)、ステップS02からステップS08を繰り返す(第7工程)。
【0041】
この第7の工程の結果に基づいて、切手に対するミシン目を総合的に検出す(第8工程)。
【0042】
上述した処理により、X軸方向相関処理の結果、例えば回転角AnにおけるX軸方向ミシン目テンプレート画像と最も相関値の高い燐光画像が検出される(図7(2)参照)。
【0043】
上記検出された燐光画像に対するX軸方向の直線検出結果が得られる(図7(3)参照)。
【0044】
同様にY軸方向のミシン目画像が検出され(図7(4)参照)、さらにこのY軸方向のミシン目画像に対するY軸方向の直線検出結果が得られる(図7(5)参照)。
【0045】
図8は、四角検出結果を示す図である。図6に示すミシン目検知方法を示す処理フローチャートによる処理の結果、切手STのミシン目によって形成される四角が検出される。
【0046】
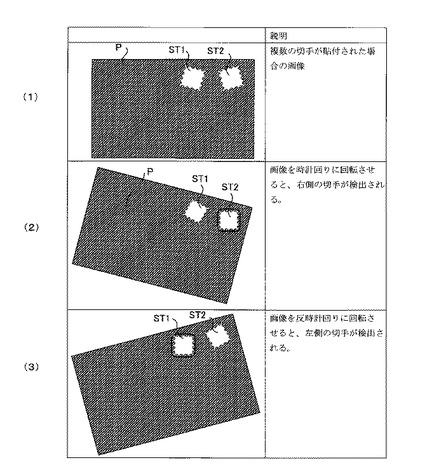
図9は、郵便物Pに複数の切手が貼られた場合の処理を説明する図である。図9(1)は、燐光検知によって検知した切手の読取画像である。
【0047】
図9(2)は、上記図9(1)に対して上述した図6に示すミシン目検知方法を示すフローチャートに基づいて画像を時計回りに所定の角度回転した段階で切手ST2の四角が検出された様子を示す。しかしながら、この段階では、切手ST2と貼り付けられた切手の回転角の方向が異なる切手ST1の四角は検出されない。
【0048】
次に、上述したフローチャートに基づいて画像を反時計回りに所定の角度回転した段階で切手ST1の四角が検出された様子を示す。なお、図6に示すフローチャートでは、回転角度Aを−20〜+20まで一方向に回転しているので、その中の何れかの角度で切手ST1及びST2のミシン目が四角であることが検出される。
【0049】
以上説明したように、図6に示すミシン目検知方法に示す処理フローチャートに従って処理を行うことにより、郵便物Pに複数の切手がそれぞれ異なる貼り付け状態であっても、所定の角度内で当該読取画像を回転しながらミシン目検知を行うことにより切手のミシン目の四角を検知することができる。
【0050】
なお、図6に示すミシン目検知方法は、回転角度Aに対して図6に示すフローチャートに基づいて切手から得られる燐光画像を所定の角度回転し、その回転角に対してX軸方向の相関処理、X軸方向直線検出処理、Y軸方向相関処理及びY軸方向直線検出処理を行い、その結果に基づく四角検出を行っている。この具体的な方法としては、請求項3に記載したように、X軸方向相関処理の結果及びY軸方向相関処理の結果、X軸ミシン目テンプレート画像又はY軸ミシン目テンプレート画像に最も相関のある角度を抽出し、当該抽出された角度に対する前記X軸方向直線検出結果及びY軸方向直線検出結果に基づいてミシン目が四角形を形成することを検出することができる。
【0051】
上述した処理によらず、例えば、切手から得られる画像のX軸方向の相関処理を回転角度の全範囲について算出し、その結果から最も相関値の高い回転角度に対してX軸方向直線検出処理、Y軸方向相関処理及びY軸方向直線検出処理を行う方法によっても同様の効果を得ることができるのは当然である。
【0052】
以上の処理を行うことにより、郵便物に複数の切手が、郵便物にスキューして貼られている場合であっても、切手のミシン目を検出することができる。
【0053】
以上説明したように、本発明の実施例によれば、郵便物に貼られた切手のミシン目を検知するのに、燐光画像を用いているため、封書の窓や波線等をご認識してしまう課題、及び封書の模様やイラストをご認識する課題を解決することができる。また、本実施例では、郵便物に対して切手がスキューして貼られた場合や複数の切手がそれぞれ傾いて貼られた場合であっても当該切手を検知することができる。
【符号の説明】
【0054】
P 郵便物
ST 切手
1 搬送路
10 燐光検知部
11 表面燐光検知部
11a、12a 照明部
11b、12b UVフィルタ
11c、12c 石英ガラス
11d、12d ミラー
11e、12e カメラレンズ
11f、12f CCDカメラ部
12 裏面燐光検知部
15、16 片面搬送ベルト
15a、16a ドライブローラ
15b、16b スポンジローラ
20 イメージ検知部
51 燐光検知PC
52 イメージ検知PC
100 料額印検知装置
200 機構制御・主制御部
【技術分野】
【0001】
本発明の実施形態は、料額印検知装置及びそのミシン目検知方法に関する。
【背景技術】
【0002】
搬送される郵便物の自動取り揃え処理を行う郵便物自動取揃機は、郵便物に貼られた切手等料額印を検知し、当該料額印に押印し、宛先に応じて取り揃える機器である。従って、この郵便物自動取揃機には料額印を検知する料額印検知装置が設けられている。
【0003】
以下、料額印としての切手を検知する従来の方法を説明する。通常、切手の輪郭はミシン目で構成されていることから、切手に対して斜めから光を照射し、当該切手のミシン目によって生成された影を検出することにより切手の貼り付け位置を検出していた(この処理を検切処理と称する。)。または、郵便物の画像を取り込みこの画像の中から切手の検切処理により、封書に対する切手の貼り付け位置、貼り付け状態が明確になり、当該切手の認識を行うことが可能になる(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−122084号公報(第5頁、図2)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した切手の検切処理では、郵便物の画像から切手部分を検切りしているため、封書の窓や波線等を誤認識してしまう課題、及び封書の模様やイラストを誤認識する課題があった。
【0006】
本発明は、上記課題を解決するためになされたもので、切手に紫外線を照射し、当該切手から放射された蛍光又は燐光を検知することにより、切手のミシン目検知及び認識を確実に行うことができる料額印検知装置及びミシン目検知方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の請求項1記載の料額印検知装置は、郵便物を搬送する搬送手段と、この搬送手段によって搬送される郵便物の料額印を励起発光する照射部及びこの照射部によって照射された料額印から放射される燐光画像を検知するカメラ部を有する燐光検知手段と、この燐光検知手段によって検知された燐光画像から料額印の輪郭であるミシン目を検知するミシン目検知手段と、を備え、前記ミシン目検知手段は、郵便物に複数の料額印が用いられている場合であっても、各料額印のミシン目が四角形であることを検知することを特徴とする。
【0008】
また、本発明の請求項2記載の料額印検知装置のミシン目検知方法は、郵便物を搬送する搬送手段と、この搬送手段によって搬送される郵便物の料額印を励起発光する照射部及びこの照射部によって照射された料額印から放射される燐光画像を検知するカメラ部を有する燐光検知手段と、この燐光検知手段によって検知された燐光画像から料額印の輪郭であるミシン目を検知するミシン目検知手段と、を備えた料額印検知装置のミシン目検知方法であって、前記燐光画像を所定の角度回転する第1の工程と、この第1の工程の結果得られた燐光画像とX軸方向ミシン目テンプレート画像とのX軸方向相関処理を行う第2の工程と、前記第1の工程の結果得られた燐光画像に対するX軸方向の直線検出を行う第3の工程と、前記第1の工程の結果得られた燐光画像とY軸方向ミシン目テンプレート画像とのY軸方向相関処理を行う第4の工程と、前記第1の工程の結果得られた燐光画像に対するY軸方向の直線検出を行う第5の工程と、前記X軸方向相関処理の結果及びX軸方向直線検出結果並びにY軸方向相関処理の結果及びY軸方向直線検出結果に基づいてミシン目が四角形であることを検出する四角検出工程と、を有し、前記回転角度を変えながら設定した範囲内で前記第2の工程から第5の工程をループする第6の工程と、この第6の工程の結果に基づいて、当該料額印に対するミシン目を総合的に検出する第7工程を有することを特徴とする。
【図面の簡単な説明】
【0009】
【図1】本発明の実施例に係る料額印検知装置の構成図
【図2】図1に示す料額印検知装置の燐光検知部及びイメージ検知部の構成図
【図3】図1に示す料額印検知装置の燐光検知部の詳細図
【図4】郵便物に貼り付けられた切手の燐光画像の一例
【図5】ミシン目テンプレート画像の一例
【図6】燐光検知PCによるミシン目検知方法を示すフローチャート
【図7】図6に示す処理途中の経過を説明する図
【図8】四角検出結果を示す図
【図9】郵便物に複数の切手が貼られた場合の処理を説明する図
【発明を実施するための形態】
【0010】
本発明の料額印検知装置は、郵便物を搬送する搬送路に相対向して燐光検知部及びイメージ検知部を配置し、これらの検知部から得られた信号により、当該搬送路によって搬送される当該郵便物に貼られた料額印としての切手のミシン目を検知する装置に関する。以下、図面を参照して本発明の実施例を説明する。なお、本実施形態は例示であり、発明の範囲はそれらに限定されない。
【実施例】
【0011】
図1は、本発明の実施例に係る料額印検知装置100の構成図の一例である。図2は、図1に示す料額印検知装置100の燐光検知部10及びイメージ検知部20の構成図である。図3は、図1又は図2に示す燐光検知部10の詳細図である。以下、これらの図を参照しながら説明する。本実施例に係る料額印検知装置100は、郵便物の自動取り揃え処理を行う郵便物自動取揃機(図示しない)に搭載され、郵便物Pに貼り付けられた切手を検知する装置で、搬送路1に沿って、搬送上流から下流に向って燐光検知部10、イメージ検知部20及び検知制御部50などを有して構成される。
【0012】
さらに、料額印検知装置100は、機構制御部200と接続され、搬送される郵便物の大きさ、搬送位置情報(スキュー、ピッチ詰りなど)を受信し、当該料額印検知装置100による料額印の検知結果を送信する。
【0013】
なお、図1は、上記各検知部の平面図を示しており、郵便物Pは、搬送ローラ及び搬送ベルト1aで構成された搬送路1上を立位状態で図示矢印A方向に搬送される。
【0014】
燐光検知部(燐光検知手段)10は、郵便物Pの一方の面(表面)を検知する表面燐光検知部11、他方の面(裏面)を検知する裏面燐光検知部12、スポンジローラ13及び搬送ベルト1aなどで構成される。
【0015】
表面燐光検知部11及び表面検知部12は同様に構成されているために、搬送路1上流に表面燐光検知部11が配置されていることから、表面燐光検知部11を中心に説明し、裏面燐光検知部12は異なる部分のみ説明する。
【0016】
表面燐光検知部11は、搬送される切手に塗布された燐光物質を励起発光させるために紫外線を照射する照射部11a及びこの照射部11aによって照射された切手から放射され燐光(可視光)を検知するCCDカメラ部11fを有して構成される。なお、燐光とは、励起発光があるときには当然可視光を放射するが、励起発光が無いときでも短時間残光として放射された光(ここでは可視光)をいう。
【0017】
照射部11aには紫外線を発光する長軸の蛍光ランプ11a1が用いられ、搬送方向と直交する方向の検知エリアを照射する。そのために長軸方向が搬送方向に対して直交する方向になるように配置される。郵便物Pの搬送速度が高速になると、郵便物Pを照射する照射時間が短くなるため、搬送速度を考慮して使用する蛍光ランプ11a1の仕様(照射強度、使用数量など)が設定される。本実施例では2個使用している。
【0018】
また、当該蛍光ランプ11a1と搬送路1との間には、UVフィルタ11bが配置され、紫外線を通過させるが励起発光に寄与しない可視光をカットする。
【0019】
CCDカメラ部11fは、可視光を検知するCCDラインセンサ11f1、このCCDラインセンサ11f1に燐光検知位置15cから放射される可視光を結像するカメラレンズ11e及びこのCCDラインセンサ11f1を駆動する駆動手段(図示しない)などで構成される。
【0020】
また、燐光検知位置15cとCCDラインセンサ11f1間の光路11gは燐光検知位置15cでの燐光検知範囲である燐光検知エリアの大きさ、読取に必要な解像度及びカメラレンズ11eの仕様によって設定される。本実施例では、光路長を確保するために光路11gをミラー11dによって曲げて配置し、小型化を達成している。
【0021】
また、郵便物Pを安定して搬送し、当該郵便物Pの燐光を検知する燐光検知位置15cの変動を抑えるために、燐光検知位置15cと相対向する位置にスポンジローラ15bが配置される。郵便物Pは搬送ベルト1aに挟持されて高速に搬送され、この燐光検知位置15cに到達する。この燐光検知位置15cに到達した郵便物の燐光検知エリアを確保するために、この燐光検知エリア内には挟持搬送ベルトを配置せず、検知エリアの郵便物Pに対する裏面に搬送ベルト(片面搬送ベルト)15がスポンジローラ15bの外周面の一部と接触して配置すされる。このような配置にすることにより、高速に搬送される郵便物Pの検知エリアを確保すると共に当該搬送される郵便物Pの燐光検知位置15cでの搬送位置の変動を抑えることができる。なお、片面搬送ベルト15は、他のベルトから独立した無端搬送ベルトで構成される。
【0022】
このような構成において、蛍光ランプ11a1から照射された紫外線(励起光)は搬送路1を通過する郵便物Pに照射される。郵便物Pに貼り付けられた切手はこの紫外線によって励起されて、燐光(可視光)を放射する。
【0023】
切手に燐光物質が含まれている場合には、励起光の照射がなくなってからも短時間燐光(可視光)を放射する。郵便物Pがさらに搬送されて切手が燐光検知位置15cに到達すると、その位置では、励起光の照射を受けないため、切手から放射された燐光(可視光)を検知することができる。従って、この燐光検知位置15cでは、蛍光ランプ11a1からの照射光及び外乱交が入り込まないように遮光される。
【0024】
燐光検知位置15cから放射された燐光は、耐磨耗性ガラスである石英ガラス11cを通過し、ミラー11dによって曲げられてカメラレンズ11eに導かれる。この燐光は、カメラレンズ11eによってCCDカメラ部11fのCCDラインセンサ11f1に結像される。
【0025】
なお、上記石英ガラス11cには、燐光検知位置15を高速に通過する郵便物の紙粉が蓄積しやすい。この紙粉の蓄積を防止するために石英ガラス11cを燐光検知位置15の近傍に配置して紙粉を吹き飛ばす必要がある。しかしながら、燐光検知位置15の近傍に配置することにより、郵便物が接触し、傷がつきやすくなるという欠点がある。この欠点を解決するために耐磨耗性ガラスが用いられる。本実施例では、対摩耗性ガラスとして石英ガラスを用いたが、これに限定するものではなく、燐光を透過しやすい材質で、かつ、対摩耗性が得られる物であればよい。また、当該石英ガラス11cと後述するミラー11dの間に当該燐光以外の外光をカットするフィルタを用いてもよい。
【0026】
このようにして、燐光検知位置15cを通過する切手の燐光が検知される。裏面燐光検知部12の動作も同様である。
【0027】
表面燐光検知部11及び裏面燐光検知部12で検知された燐光検知情報は、燐光検知PC51に送信される。燐光検知PC(Personal Computer)51は、表面燐光検知部11及び裏面燐光検知部12並びにイメージ検知部20の検知結果及び機構制御部200から受信した郵便物Pの搬送情報(タイミングセンサ情報)を元に切手のミシン目検知を行う。本発明の趣旨ではないので詳細な説明は行わないが、搬送路1上には複数の郵便物が所定の間隔で搬送されるため、各郵便物は搬送路1上に配置された搬送センサ(図示しない)によって検知される。従って、各郵便物はそれぞれ各搬送センサによって検知された搬送情報(例えば、郵便物の大きさ、搬送スキュー量など)を有しており、この搬送情報が機構制御部200を介して燐光検知PC51に送信される。郵便物Pの大きさが規定値を超えている場合には切手の貼り付け位置が検知エリアに含まれない場合が生じる。また、所定の搬送スキュー値を超える郵便物Pが搬送された場合には、当該郵便物Pの燐光検知を行わない場合もある。誤検知の可能性があり、それ防止するためである。なお、具体的なミシン目検知方法は後述する。
【0028】
イメージ検知部20は、郵便物Pの表面のイメージを検知する表面イメージ検知部21及び郵便物の裏面のイメージを検知する裏面イメージ検知部22並びに表面及び裏面イメージ検知部の検知位置の対向する位置にスポンジローラ23、24が配置される。
【0029】
表面イメージ検知部21及び裏面イメージ検知部22は、同様に構成されているため、ここでは表面イメージ検知部21について説明し、裏面イメージ検知部22の説明を省略する。
【0030】
表面イメージ検知部21は、郵便物Pを照明するLED照明装置21a、このLED照明装置21aによって照明された郵便物Pからの反射光の光路長を確保するために光路を曲げるミラー21b、このミラー21bによって曲げられた光を結像するカメラレンズ21c及びこのカメラレンズ21cによって結像された光を検知するCCDカメラ21d有して構成される。
【0031】
上述した表面イメージ検知部21及び裏面イメージ検知部22は、郵便物Pのイメージを検知し、その検知結果をそれぞれイメージ検知PC52に送信する。イメージ検知PC52は、受信したイメージ情報から郵便物Pのどこの位置に切手が貼り付けられているかを検知し、その検知結果を機構制御部200を介して燐光検知部10に通知する。
【0032】
図4は、郵便物Pに貼り付けられた切手STの燐光画像の一例である。表面燐光検知部10又は裏面燐光検知部20で検知した切手の燐光画像(残光画像ともいう)は上述した通り可視画像として検出される。郵便物Pの切手ST以外の部分は、燐光の放射がないために検出されず、切手ST部分の燐光画像が図示したように検出される。
【0033】
図5は、ミシン目テンプレート画像の一例である。図5(1)は、X軸方向ミシン目テンプレート画像の一例であり、図5(2)は、Y軸方向ミシン目テンプレート画像の一例である。図5(1)Aで示す空白部分は、切手のミシン目部分であり燐光が放射される部分である。一方、図5(1)Bで示す斜線部分は、ミシン目の円形状切り欠き部分に該当し、燐光の放射がない部分である。図5(2)に示すY軸方向ミシン目テンプレートも同様である。
【0034】
図6は、燐光検知PC51によるミシン目検知方法を示すフローチャートである。燐光検知PC51は、ミシン目検知手段として当該フローチャートに基づく処理を行う。図7は、図6に示す処理の途中経過を説明するための図である。以下、これらの図を参照して説明する。
【0035】
切手は上述した燐光検知部10によってその形状が検知できる。しかしながら、スキューなどしている場合には誤って検知する場合があるため、以下に示す条件の範囲内で切手のミシン目検知を行う。
(1)切手のミシン目のピッチは、事前に分かっており、所定の値とする。
(2)切手の傾きは±20度までの範囲にある。
最初に回転角度Aに回転角の上限値-20を設定する(S01)。
【0036】
上記切手STの燐光画像(図7(1)参照)の角度を角度Aだけ回転する(S02、第1の工程)。この回転した燐光画像と、図5(1)に示すX軸方向ミシン目テンプレート画像との相関処理を行う(S03、第2の工程)。相関処理とは、例えば、切手のミシン目画像とX軸方向ミシン目テンプレート画像との相関係数を算出することである。
【0037】
上記ステップS02の結果、回転した燐光画像に対するX軸方向の直線検出を行う(S04、第3の工程)。
【0038】
次に、この回転した燐光画像と、図5(2)に示すY軸方向ミシン目テンプレート画像との相関処理を行う(S05、第4の工程)。この相関処理はX軸相関処理と同じである。続けてY軸方向直線検出を行う(S06、第5の工程)。
【0039】
次に、上記処理によって検出されたX軸方向相関処理の結果及びX軸方向直線検出結果並びにY軸方向相関処理の結果及びY軸方向直線検出結果に基づいて、ミシン目が四角形であることを検出する四角検出を行う(S07、第6の工程)。
【0040】
次に、回転角度Aを1度増加する(S08)、回転角Aが20以下であれば(S09のNO)、ステップS02からステップS08を繰り返す(第7工程)。
【0041】
この第7の工程の結果に基づいて、切手に対するミシン目を総合的に検出す(第8工程)。
【0042】
上述した処理により、X軸方向相関処理の結果、例えば回転角AnにおけるX軸方向ミシン目テンプレート画像と最も相関値の高い燐光画像が検出される(図7(2)参照)。
【0043】
上記検出された燐光画像に対するX軸方向の直線検出結果が得られる(図7(3)参照)。
【0044】
同様にY軸方向のミシン目画像が検出され(図7(4)参照)、さらにこのY軸方向のミシン目画像に対するY軸方向の直線検出結果が得られる(図7(5)参照)。
【0045】
図8は、四角検出結果を示す図である。図6に示すミシン目検知方法を示す処理フローチャートによる処理の結果、切手STのミシン目によって形成される四角が検出される。
【0046】
図9は、郵便物Pに複数の切手が貼られた場合の処理を説明する図である。図9(1)は、燐光検知によって検知した切手の読取画像である。
【0047】
図9(2)は、上記図9(1)に対して上述した図6に示すミシン目検知方法を示すフローチャートに基づいて画像を時計回りに所定の角度回転した段階で切手ST2の四角が検出された様子を示す。しかしながら、この段階では、切手ST2と貼り付けられた切手の回転角の方向が異なる切手ST1の四角は検出されない。
【0048】
次に、上述したフローチャートに基づいて画像を反時計回りに所定の角度回転した段階で切手ST1の四角が検出された様子を示す。なお、図6に示すフローチャートでは、回転角度Aを−20〜+20まで一方向に回転しているので、その中の何れかの角度で切手ST1及びST2のミシン目が四角であることが検出される。
【0049】
以上説明したように、図6に示すミシン目検知方法に示す処理フローチャートに従って処理を行うことにより、郵便物Pに複数の切手がそれぞれ異なる貼り付け状態であっても、所定の角度内で当該読取画像を回転しながらミシン目検知を行うことにより切手のミシン目の四角を検知することができる。
【0050】
なお、図6に示すミシン目検知方法は、回転角度Aに対して図6に示すフローチャートに基づいて切手から得られる燐光画像を所定の角度回転し、その回転角に対してX軸方向の相関処理、X軸方向直線検出処理、Y軸方向相関処理及びY軸方向直線検出処理を行い、その結果に基づく四角検出を行っている。この具体的な方法としては、請求項3に記載したように、X軸方向相関処理の結果及びY軸方向相関処理の結果、X軸ミシン目テンプレート画像又はY軸ミシン目テンプレート画像に最も相関のある角度を抽出し、当該抽出された角度に対する前記X軸方向直線検出結果及びY軸方向直線検出結果に基づいてミシン目が四角形を形成することを検出することができる。
【0051】
上述した処理によらず、例えば、切手から得られる画像のX軸方向の相関処理を回転角度の全範囲について算出し、その結果から最も相関値の高い回転角度に対してX軸方向直線検出処理、Y軸方向相関処理及びY軸方向直線検出処理を行う方法によっても同様の効果を得ることができるのは当然である。
【0052】
以上の処理を行うことにより、郵便物に複数の切手が、郵便物にスキューして貼られている場合であっても、切手のミシン目を検出することができる。
【0053】
以上説明したように、本発明の実施例によれば、郵便物に貼られた切手のミシン目を検知するのに、燐光画像を用いているため、封書の窓や波線等をご認識してしまう課題、及び封書の模様やイラストをご認識する課題を解決することができる。また、本実施例では、郵便物に対して切手がスキューして貼られた場合や複数の切手がそれぞれ傾いて貼られた場合であっても当該切手を検知することができる。
【符号の説明】
【0054】
P 郵便物
ST 切手
1 搬送路
10 燐光検知部
11 表面燐光検知部
11a、12a 照明部
11b、12b UVフィルタ
11c、12c 石英ガラス
11d、12d ミラー
11e、12e カメラレンズ
11f、12f CCDカメラ部
12 裏面燐光検知部
15、16 片面搬送ベルト
15a、16a ドライブローラ
15b、16b スポンジローラ
20 イメージ検知部
51 燐光検知PC
52 イメージ検知PC
100 料額印検知装置
200 機構制御・主制御部
【特許請求の範囲】
【請求項1】
郵便物を搬送する搬送手段と、
この搬送手段によって搬送される郵便物の料額印を励起発光する照射部及びこの照射部によって照射された料額印から放射される燐光画像を検知するカメラ部を有する燐光検知手段と、
この燐光検知手段によって検知された燐光画像から料額印の輪郭であるミシン目を検知するミシン目検知手段と、を備え、
前記ミシン目検知手段は、
郵便物に複数の料額印が用いられている場合であっても、各料額印のミシン目が四角形であることを検知することを特徴とする料額印検知装置。
【請求項2】
郵便物を搬送する搬送手段と、この搬送手段によって搬送される郵便物の料額印を励起発光する照射部及びこの照射部によって照射された料額印から放射される燐光画像を検知するカメラ部を有する燐光検知手段と、この燐光検知手段によって検知された燐光画像から料額印の輪郭であるミシン目を検知するミシン目検知手段と、を備えた料額印検知装置のミシン目検知方法であって、
前記燐光画像を所定の角度回転する第1の工程と、
この第1の工程の結果得られた燐光画像とX軸方向ミシン目テンプレート画像とのX軸方向相関処理を行う第2の工程と、
前記第1の工程の結果得られた燐光画像に対するX軸方向の直線検出を行う第3の工程と、
前記第1の工程の結果得られた燐光画像とY軸方向ミシン目テンプレート画像とのY軸方向相関処理を行う第4の工程と、
前記第1の工程の結果得られた燐光画像に対するY軸方向の直線検出を行う第5の工程と、
前記X軸方向相関処理の結果及びX軸方向直線検出結果並びにY軸方向相関処理の結果及びY軸方向直線検出結果に基づいてミシン目が四角形であることを検知する四角検出工程と、
を有し、前記回転角度を変えながら設定した範囲内で前記第2の工程から第5の工程をループする第6の工程と、
この第6の工程の結果に基づいて、当該料額印に対するミシン目を総合的に検出する第7工程を有することを特徴とする料額印検知装置のミシン目検知方法。
【請求項3】
前記第7工程は、
前記第6工程の結果得られた前記X軸方向相関処理の結果及びY軸方向相関処理の結果、前記X軸ミシン目テンプレート画像又はY軸ミシン目テンプレート画像に最も相関のある角度を抽出し、
当該抽出された角度に対する前記X軸方向直線検出結果及びY軸方向直線検出結果に基づいてミシン目が四角形であることを検知することを特徴とする請求項2記載の料額印検知装置のミシン目検知方法。
【請求項1】
郵便物を搬送する搬送手段と、
この搬送手段によって搬送される郵便物の料額印を励起発光する照射部及びこの照射部によって照射された料額印から放射される燐光画像を検知するカメラ部を有する燐光検知手段と、
この燐光検知手段によって検知された燐光画像から料額印の輪郭であるミシン目を検知するミシン目検知手段と、を備え、
前記ミシン目検知手段は、
郵便物に複数の料額印が用いられている場合であっても、各料額印のミシン目が四角形であることを検知することを特徴とする料額印検知装置。
【請求項2】
郵便物を搬送する搬送手段と、この搬送手段によって搬送される郵便物の料額印を励起発光する照射部及びこの照射部によって照射された料額印から放射される燐光画像を検知するカメラ部を有する燐光検知手段と、この燐光検知手段によって検知された燐光画像から料額印の輪郭であるミシン目を検知するミシン目検知手段と、を備えた料額印検知装置のミシン目検知方法であって、
前記燐光画像を所定の角度回転する第1の工程と、
この第1の工程の結果得られた燐光画像とX軸方向ミシン目テンプレート画像とのX軸方向相関処理を行う第2の工程と、
前記第1の工程の結果得られた燐光画像に対するX軸方向の直線検出を行う第3の工程と、
前記第1の工程の結果得られた燐光画像とY軸方向ミシン目テンプレート画像とのY軸方向相関処理を行う第4の工程と、
前記第1の工程の結果得られた燐光画像に対するY軸方向の直線検出を行う第5の工程と、
前記X軸方向相関処理の結果及びX軸方向直線検出結果並びにY軸方向相関処理の結果及びY軸方向直線検出結果に基づいてミシン目が四角形であることを検知する四角検出工程と、
を有し、前記回転角度を変えながら設定した範囲内で前記第2の工程から第5の工程をループする第6の工程と、
この第6の工程の結果に基づいて、当該料額印に対するミシン目を総合的に検出する第7工程を有することを特徴とする料額印検知装置のミシン目検知方法。
【請求項3】
前記第7工程は、
前記第6工程の結果得られた前記X軸方向相関処理の結果及びY軸方向相関処理の結果、前記X軸ミシン目テンプレート画像又はY軸ミシン目テンプレート画像に最も相関のある角度を抽出し、
当該抽出された角度に対する前記X軸方向直線検出結果及びY軸方向直線検出結果に基づいてミシン目が四角形であることを検知することを特徴とする請求項2記載の料額印検知装置のミシン目検知方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−71248(P2012−71248A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2010−217489(P2010−217489)
【出願日】平成22年9月28日(2010.9.28)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成22年9月28日(2010.9.28)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]