
斜方向ソーター
コンベアシステム(100)は、ベルト(102)上の物体を迂回させるよう構成されたベルトローラ(118)を有するコンベアベルト(102)と、ベルトローラ(118)と係合する駆動機構とを具える。この駆動機構はベルトローラ(118)を駆動させるよう構成されており、第1の角度方向および、任意に、第2の対向する角度方向にベルトローラ(118)を選択的に駆動するよう調整され、これにより、物体は所望の角度でベルトの両側に選択的に迂回させることができる。駆動機構の一態様は、カートリッジ(334)に装着された駆動ローラ(308)とカートリッジのピニオンギアと係合するラックギア(342)とを有し、ベルトローラに対する駆動ローラ(308)の方向を調整する。個別に作動する駆動機構によって駆動される一連の連続したローラ作動領域(430)を有するこのようなコンベアシステムは、送込みコンベア(418)および複数レーンの送出しコンベア(424)に対して斜めに配置され、切換コンベアを実現する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は動力駆動コンベアに関し、より具体的には、スイッチ機能を行う斜方向に配置されたローラベルトソーターを用いる切換コンベアに関するものである。
【背景技術】
【0002】
ソーターは、送込みコンベアによってソーターに供給された各物体をソーターの片側または両側から分岐している選択した送出し経路に誘導するコンベアである。切換コンベアは、切換コンベアの端部から物体を受け取りながら、送込みコンベアによって搬送されるのと同一方向に物体を送出し経路に搬送するコンベアである。1つの送込みコンベアと複数の送出し経路を有する切換器は一般に、切換器の上流端部で一列の物体を受け取り、各物体を横方向に移動させて指定の送出し経路に位置合わせする矩形のコンベアによって実現する。処理能力を維持するため、これらの物体は、横方向に誘導されながら切換器に沿って連続的に進行する。従って、送込みコンベアの出口の側面に位置する矩形切換器の上流部分は使用されない。このような使用されない部分に平方フィート以上のコンベア材を購入する必要があり、貴重な床面積を占有してしまう。さらに、大きい直径のスプロケットを要するピッチが長いベルトコンベアを切換コンベアとして使用する場合、大型スプロケットの位置でコンベアベルトの両端にわたって移動させることは難しい。
【発明の概要】
【0003】
これらの欠点は、本発明の特徴を具現化した切換器によって克服される。このような切換器の一態様は、搬送方向に物体を搬送する送込みコンベアと、搬送物体を受け取る複数の送出しコンベアレーンを有して搬送方向に物体を搬送する送出しコンベアとを具える。仕分けコンベアは、搬送方向に対して斜めの対角線上に送込みコンベアと送出しコンベアの間に配置される。この仕分けコンベアは、対角線に沿って進行するベルトを具える。このベルトは、ローラ作動領域に対角線に対して横向きに送出しコンベアの方へと選択的に回転するローラを有しており、これらのローラは仕分けコンベアの長さに沿って連続して配置される。ベルトローラは、送込みコンベアから受け取った物体を仕分けコンベアに沿った選択地点で送出しコンベアへと押し出す。
【0004】
本発明の特徴を具現化した切換器の他の態様は、出口端部を有して物体を搬送方向に出口端部へと搬送する送込みコンベアと、入口端部を有して物体を搬送方向に入口端部から搬送する複数の送出しコンベアレーンとを具えている。仕分けコンベアは、平行な第1と第2の側面の間の上流端部から下流端部まで、送込みコンベアの出口端部と送出しコンベアレーンの入口端部の間の斜め方向の長さに延在している。送込みコンベアは第1の側面を越えて上流位置で仕分けコンベアに物体を供給し、送出しレーンは第2の側面を越えて入口端部で仕分けコンベアから物体を受け取る。仕分けコンベアは、搬送方向に対して斜めのベルトの移動方向に仕分けコンベアの長さに沿って進行するローラベルトを具えている。ベルトの物体支持ベルトローラは、ベルトの移動方向と平行の軸上を選択的に回転する。一連のベルトローラの作動領域は、仕分けコンベアの長さに沿ってローラベルトの下に位置しており、各領域におけるベルトローラを第2の側面へと選択的に回転させて、送出しコンベアレーンへと支持された物体を押し出す。それぞれの作動領域は、隣接する送出しコンベアレーンと関連していることが好ましい。
【0005】
本発明の他の態様は、切換器を作る方法を提供している。この方法は:(a)仕分けコンベアの長さに沿って連続して配置されたローラ作動領域におけるベルトの移動方向に対して垂直な方向に選択的に回転するよう構成された、複数の作動可能な物体支持ローラ付のベルトを有する仕分けコンベアを提供するステップと;(b)ベルトの移動方向に対して斜めの搬送方向に仕分けコンベアの第1の側面から仕分けコンベアへと物体を供給する送込みコンベアを配置するステップと;(c)仕分けコンベアの反対側の第2の側面に搬送方向と平行の複数のレーンを有する送出しコンベアを配置するステップとを含んでおり、それぞれのレーンは第2の側面を越えて仕分けコンベアから物体を受け取るよう構成される。
【図面の簡単な説明】
【0006】
開示するシステムおよび方法は、以下の図面を参照すると理解されるであろう。図面の構成要素は、必ずしも縮尺に従っていない。
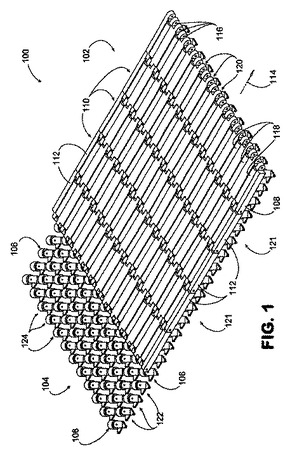
【図1】図1は、コンベアシステムの一部の第1の実施形態の上部透視図である。
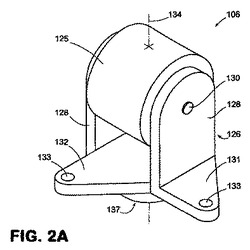
【図2A】図2Aは、図1のコンベアシステムに利用される駆動ローラモジュールの上部透視図である。
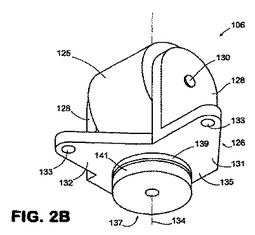
【図2B】図2Bは、図1のコンベアシステムに利用される駆動ローラモジュールの底部透視図である。
【図3】図3は、図1のコンベアシステムの更なる部分の上部透視図である。
【図4】図4は、図1のコンベアシステムに利用される複数の駆動ローラモジュールの底部透視図である。
【図5A】図5Aは、図3に示すコンベアシステム部分の図であり、第1の方向への迂回動作を図示している。
【図5B】図5Bは、図3に示すコンベアシステム部分の図であり、第2の方向への迂回動作を図示している。
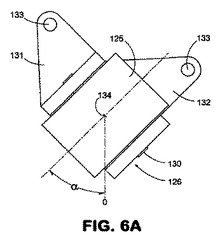
【図6A】図6Aは、駆動ローラモジュールの上面図であり、第1の角度方向へのモジュールの回動を図示している。
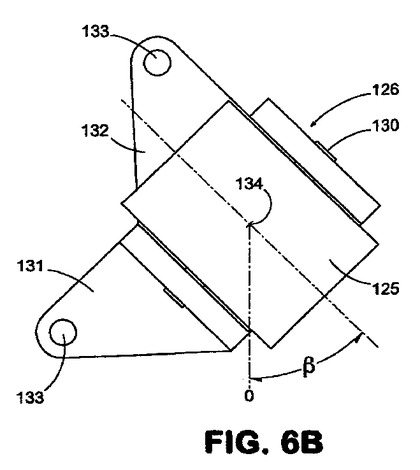
【図6B】図6Bは、駆動ローラモジュールの上面図であり、第2の角度方向へのモジュールの回動を図示している。
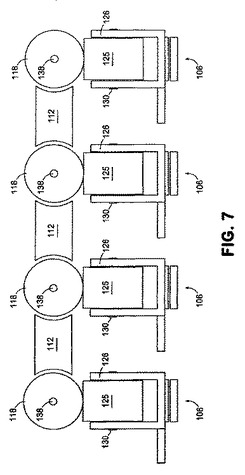
【図7】図7は、図1のコンベアシステム部分の端面図であり、システムの角度調整可能な駆動ローラによって設けられた制動機能を図示している。
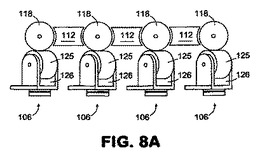
【図8A】図8Aは、図1のコンベアシステムの一部の端部であり、角度調整可能な駆動ローラとコンベアベルトの駆動ローラの係合を図示している。
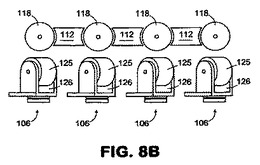
【図8B】図8Bは、図1のコンベアシステムの一部の端部であり、角度調整可能な駆動ローラとコンベアベルトの駆動ローラの係合外れを図示している。
【図9】図9は、コンベアシステムの一部の第2の実施形態の上部透視図である。
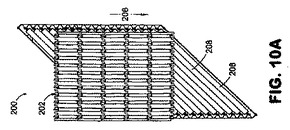
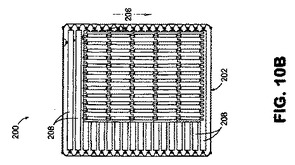
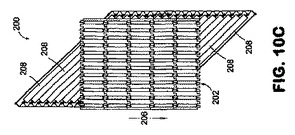
【図10】図10A乃至図10Cは、図9のコンベアシステムの上面図であり、迂回角度を調整する当該システムの駆動ローラの角度調整を図示している。
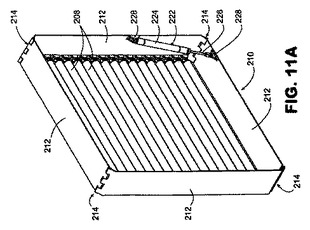
【図11】図11Aおよび図11Bは、図9のコンベアシステムの駆動ローラの角形成を調整するために利用できる機構の実施形態の透視図である。
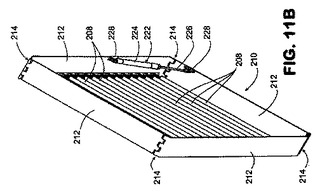
【図12】図12は、図9のコンベアシステムにおける駆動ローラの端部を支持するジョイントの実施形態の詳細図である。
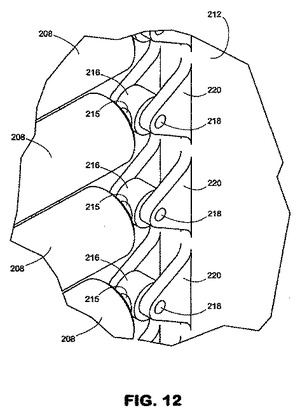
【図13】図13は、ラック・アンド・ピニオンのローラ駆動機構を有するコンベアシステムの一部の第3の実施形態の分解した上面等角図である。
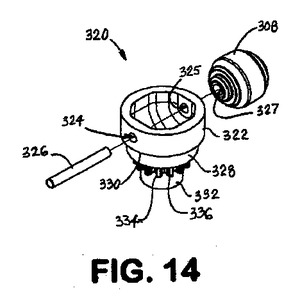
【図14】図14は、図13のコンベアシステムの駆動ローラのカートリッジの分解した上面等角図である。
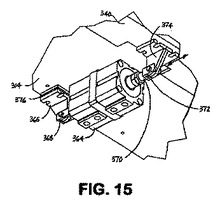
【図15】図15は、図13のローラ駆動機構における線形駆動装置の底面等角図である。
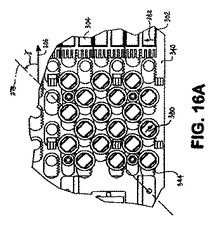
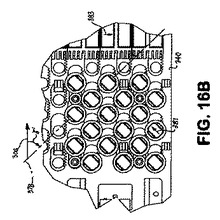
【図16】図16Aおよび図16Bは、正反対の位置に図示された図13のコンベアシステムの駆動ローラの上面図である。
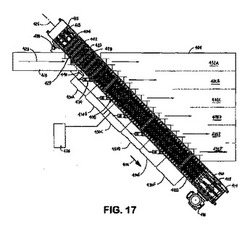
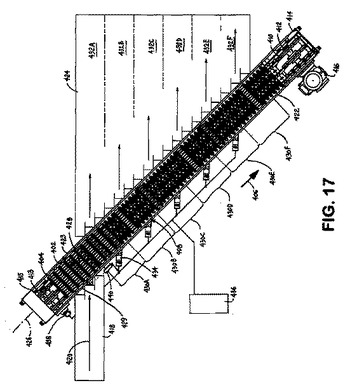
【図17】図17は、本発明の特徴を具現化する切換コンベアの、部分的に切断した、組み合わせた概略的な上面図である。
【発明を実施するための形態】
【0007】
従来の切換コンベアでは、送込みコンベアは物体を切換器の上流端部に供給し、切換器が下流端部で指定した送出しレーンと横方向に一列に各物体を再配置する。本発明の特徴を具現化した切換コンベアは、切換器として、ベルトの移動方向に対して垂直方向に回転するよう構成された選択的に駆動するローラを有するローラベルトコンベアを利用する。ローラベルトコンベアは自由回転する角度調整可能なローラを具える駆動機構を利用し、これらのローラがコンベアベルト内に含まれるローラの回転を制御する。幾つかの実施形態では、コンベアベルトは複数の長手方向を向いた自由回転するローラを具えており、これらのローラはコンベアベルトの下側に配置された自由回転する角度調整可能なローラとの接触によって「駆動」される。このようなシステムでは、角度調整可能なローラの僅かな操作によって、物体を様々な角度でコンベアベルトの何れの側にも迂回させることができる。さらに、角度調整可能なローラがベルトの移動方向に合わせられると、コンベアベルトローラが回転しないように制動させることができ、従って物体の横滑りが減少するかなくなる。さらに、角度調整可能なローラは制動方向から所望の迂回角度へと徐々に回転できるため、コンベアベルトローラを徐々に加速させて、スリップを減少またはなくすことができる。
【0008】
図面を参照すると、同じ数字は幾つかの図面を通して対応する部分を示しており、図1は、様々な角度でシステムの何れの側にも物体を迂回させるよう調整できるコンベアシステム100の一部の実施形態を図示している。図1に示すように、コンベアシステム100は、コンベアベルト102と、角度調整可能な「駆動」ローラモジュール106の領域104とを具えている。図1の実施形態では、コンベアベルト102は、複数の横モジュールのコンベアベルト部110から構成されたコンベアベルトフレーム108を具えている。各コンベアベルト部110の内側は、ベルトの移動方向114に延在し、隣接するコンベアベルト部の隣接するコンベアベルトリンクと連結している複数の細長いコンベアベルトリンク112である。例として、各コンベアベルトリンク112は、ロッドまたはシャフト(図示せず)を受けるそれぞれの対向端部に設けられた開口部116を有する金属またはプラスチックの部材を具えており、コンベアベルト部を互いに連結するために、ロッドまたはシャフトが隣接するコンベアベルト部110のコンベアベルトリンクの開口部を貫通する。
【0009】
コンベアベルトリンク112の間には、細長い長手方向を向いた自由回転するコンベアベルトローラ118が置かれている。この開示のため、用語「自由回転する」とは、ローラが回転軸を中心に何れの角度方向にも自由に回転することを意味する。従って、ローラ118は、適切な力で駆動された場合に何れの角度方向にも自由に回転する「アイドラ」ローラを有しているということができる。図1の実施形態では、ローラ118は、その回転軸がベルトの移動方向114と平行になるように配置されている。図1に示すように、ローラ118がコンベアベルトリンク112に対して各コンベアベルト部110の幅に沿って代替的に設けられ、これにより、各対の隣接するコンベアベルトリンクの間にローラを配置してもよい。このような構成では、様々なコンベアベルト部110のローラ118を、ベルトの移動方向114に延在する列120およびコンベアベルト102の幅にわたって延在する行121に配置することができる。ローラ118は細長いように記載および図示されているが、ローラは回転軸の方向に必ずしも細長くなくてもよいということに留意されたい。
【0010】
コンベアベルトローラ118は金属および/またはプラスチックで作られており、ローラモジュール106のローラがコンベアベルトローラと接触したときの滑りを防ぐゴムまたはプラスチックの高摩擦の外層またはコーティングが設けられている。各ローラ118は、その各端部において、コンベアベルトフレーム108および/または様々なコンベアベルト部110を連結するロッドまたはシャフトに連結することができる。図7に示すように、ローラ118はコンベアベルトフレーム108(およびベルトリンク112)の上面および下面を越えて延在するような大きさであり、これにより、コンベアベルト102上に配置された物体を迂回させ、駆動ローラモジュール106によって下から駆動させることができる。
【0011】
さらに図1を参照すると、角度調整可能な駆動ローラモジュール106の領域104は、複数の行122および列124の駆動ローラモジュールを具えている。これらの駆動ローラモジュール106は、その列124がコンベアベルトローラ118の列120と一直線に並び、その行122が、コンベアシステムの作動中は少なくとも断続的に、コンベアベルトローラの行121と一直線に並ぶよう配置される。図1に示す第1の実施形態では、駆動ローラモジュール106は、(回転軸の方向に)比較的短いキャスターローラ(図2Aおよび図2B参照)を具えており、これらは動作中に少なくとも1の駆動ローラが所与のコンベアベルトローラ118と一直線に並ぶよう互いに十分近接して配置される。実際に、図1の実施形態では、駆動ローラモジュール106は、コンベアの動作中に少なくとも2の駆動ローラが所与のコンベアベルトローラ118と近接して位置するように十分近くに配置されている。
【0012】
図2Aおよび図2Bを見てみると、1つの駆動ローラモジュール106の透視図が図示されており、各駆動ローラモジュールは、回転軸に対して何れの角度方向にも自由に回転する、自由回転の駆動ローラ125を具えている。従って、「駆動」ローラと呼ばれてはいるが、この駆動ローラ125はモータまたはその種の機械的手段によって自身が駆動するものではない。例として、各駆動ローラ125は、コンベアベルトローラ118のように金属および/またはプラスチックで作られており、ゴムまたはプラスチックの高摩擦の外層またはコーティングを有している。
【0013】
図2Aおよび図2Bに示すように、駆動ローラ125は対向する垂直支持部材128を具えるフレーム126内に支持されている。シャフト130が支持部材128の間に駆動ローラ125(図示せず)に設けられた中央の開口部を通って延在しており、駆動ローラはその周りを回転することができる(すなわち、回転軸)。支持部材128に加えて、フレーム126は第1および第2の制御アーム131および132を具えており、以下に説明するように、中心の垂直軸134の周りを駆動ローラモジュール106が回動し、ベルトの移動方向114(図1)に対するローラ125の角度を調整するために利用することができる。図2Aおよび図2Bに示すように、各制御アーム131、132は開口部133を具えており、駆動ローラモジュール106の角度方向を調整するために用いられる適切な部材との回動接続を可能にする。
【0014】
図2Bに最もよく図示されているように、フレーム126は更に、基部135と、基部を支持する回動機構137を具えている。図2Bの実施形態では、回動機構137は互いに反対方向に回転できる上部と下部139および141を具えており、その結果、駆動ローラモジュール106の回動が可能となる。回動を容易にするため、軸受のような適切な摩擦低減要素をこれらの部分139および141の間に設けてもよい。
【0015】
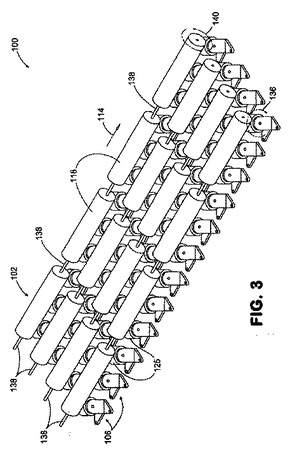
図3は、コンベアシステム100の更なる部分を図示している。より具体的には、図3は、駆動ローラ125とコンベアベルトローラ118の間の相互作用を図示している。特に、コンベアシステム100の他の要素の記載を明確にするため、この図ではコンベアベルトフレーム108を図示していない。
【0016】
図3に示すように、駆動ローラ125はコンベアベルトローラ118と接触するように配置され、これにより、ベルトの移動方向114へのコンベアベルト120の動作が、間の摩擦力によって駆動ローラおよびコンベアベルトローラの双方を回転させる。図3に示す向きでは、駆動ローラ125は矢印136に示す下流方向に回転する。この回転の結果、コンベアベルトローラ118は、シャフト138(すなわち、回転軸)の周りを矢印140に示す方向に回転させられる、または「駆動」する。従って、図3では、(上流を見た端部からコンベアベルト102を図示した場合に)コンベアベルトローラ118は反時計回りに回転し、その結果、コンベアベルトローラに支持された物体を図の左方向に迂回させる。図3に更に示すように、それぞれのコンベアベルトローラ118は複数の駆動ローラ125によって駆動する。
【0017】
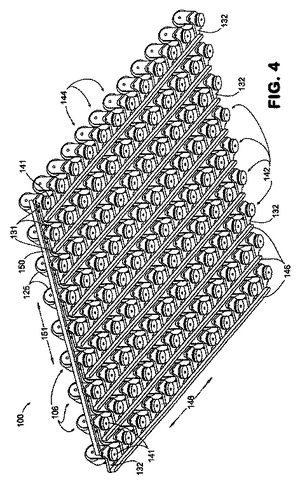
駆動ローラモジュール106ひいては駆動ローラ125が中央の垂直軸134(図2Aおよび図2B)の周りを回動し、ベルトの移動方向に対する角形成を調整することができる。駆動ローラ125は独立して作動してもよく、あるいは全体で同調して作動してもよい。図4は、後者の作動方式(コンベアベルト102は図示せず)を可能にする機構を図示している。図4に示すように、複数の行142および列144の駆動ローラモジュール106は、図2について記載された通常の構成を有するように設けられている。図4に更に示すように、駆動ローラモジュール106の行142は、ローラ125の角度方向を制御する結合部材146で共に連結されている。より具体的には、駆動ローラモジュール106の制御アーム132は結合部材146に回動するよう連結されており、これはロッドまたはシャフトの形態をしていてもよい。例として、この連結は、駆動ローラモジュール106の制御アーム132に設けられた開口部133(図2Aおよび図2B)を通り、位置合わせされた結合部材146の開口部(図示せず)内に延在するピン(図示せず)によってなされる。各駆動ローラモジュール106の位置が中心の垂直軸134に対して固定された場合、例えば回動機構137(図2Aおよび図2B)の下部141を固定することにより、矢印148に示す方向に結合部材146が横移動すると、ローラ125を中心の垂直軸の周りに回転させて、角度方向を調整する。
【0018】
結合部材146は、任意の適切な手段によって動かすことができる。複数の結合部材146を同時に動かし、その結果複数の行のローラ125が同時に回動する実施形態では、結合部材を1つの作動部材150に連結してもよく、この作動部材はコンベアシステム100の片側に近接して配置され、駆動ローラモジュール106の隣接する列144の制御アーム131に回動するよう連結される。このような場合、矢印151に示す方向に作動部材150が長手方向に動くと、隣接する列144の駆動ローラモジュール106を回動させ、その結果、結合部材146を横移動させて、次に、残りの駆動ローラモジュールを回動させる。
【0019】
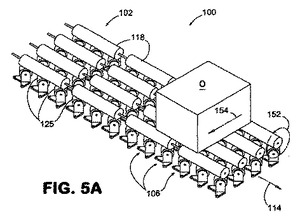
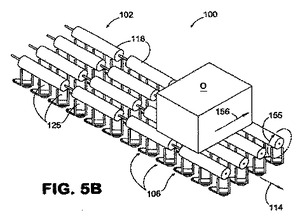
図5Aおよび図5Bは、駆動ローラモジュール106の角度調整の効果を図示している。特に、コンベアシステム100の他の要素の記載を明確にするため、コンベアベルトフレーム108は図5Aおよび図5Bに図示していない。図5Aから始めると、駆動ローラモジュール106は(上からコンベアベルト102を見た場合に)反時計回りの方向に回動しており、(上流を見た端部からコンベアベルトを見た場合に)矢印152に示すように、コンベアベルトローラ118を反時計回りに回転させる。コンベアベルトローラ118のこのような回転は、矢印154の方向に物体Oを移動させるべく、図5Aの左方向へと迂回動作をさせる。しかしながら、図5Bでは、駆動ローラモジュール106は(上からコンベアベルト102を見た場合に)時計回りの方向に回動しており、コンベアベルトローラ118を(上流を見た端部からコンベアベルト102を見た場合に)矢印155に示す時計回りの方向に回転させ、右方向に迂回動作をさせて矢印156の方向に物体Oを移動させる。
【0020】
図6Aおよび図6Bは、駆動ローラモジュール106について可能な迂回角度のばらつきを図示している。図6Aに示すように、各駆動ローラモジュール106は、コンベアベルトの移動方向に対してローラ125の回転軸が直交する0°方向から、αによって表す負の角まで得ることが可能である。図6Bに示すように、駆動ローラモジュール106は、0°方向からβによって表す正の角まで取ることもあり得る。幾つかの実施形態では、αおよびβの双方は0から90°までの任意の角度を含んでもよく、従って、180°の角度のばらつきに相当しうる。このように広い範囲の角度のばらつきが可能であるが、コンベアベルトの速度、駆動ローラ125およびコンベアベルトローラ118に使用される材料の制限が、ローラの滑りを防ぐことができる範囲の角度方向を限定する場合がある。しかしながら、既知の高摩擦面を用いて、少なくとも100ft/分のコンベアベルト速度においては少なくとも約−70°乃至+70°の角度範囲が実現できる。特に、駆動ローラ125の角度の動きは、得られる迂回角度に直接相当する。例えば、駆動ローラ125が図6Aに示すような0°方向から時計回りに35°を向いている場合、右方向に35°の迂回角度が生じる。
【0021】
駆動ローラ125が図7に示す0°方向に位置し、駆動ローラの回転軸がベルトの移動方向に対して垂直であり、駆動ローラが回転する角度方向がベルトの移動方向と一直線になる場合、コンベアベルトローラ118の回転が実質的に妨げられ、その結果「制動」する。従って、必要に応じて駆動ローラモジュール106を制御して0°方向に配置することにより、コンベアベルト上の物体の不要な横方向の動作を防ぐことができる。駆動ローラ125の角度方向が初期位置のような0°方向から調整された場合、コンベアベルトローラ118は一方向または他方向に徐々に加速することができ、その結果、摩擦プレートまたは傾斜ローラが突然コンベアベルトローラと係合した場合に起こりうるローラの滑りが減少する、または完全になくなるということに更に留意されたい。コンベアベルトローラ125を段階的に加速すると、比較的不安定な物体を転倒させることなく迂回させることも可能となる。例えば、迂回する物体が比較的に背が高く、比較的小さい底面を有している場合、0°方向から駆動ローラの角度を徐々に増加させることにより、物体はコンベアベルト102の片側または他方に徐々に加速できる。
【0022】
角度調整が可能であることに加えて、駆動ローラモジュール106は任意に、駆動ローラ125がコンベアベルトローラ118と係合する、または外れるように垂直に動作することができる。このような機能が図8Aおよび図8Bに図示されている。特に、図8Aは、コンベアベルトローラ118と係合している駆動ローラ125を図示しており、図8Bはコンベアベルトローラから外れた駆動ローラを図示している。このような選択的な係合および取外しは、コンベアベルトローラ118と接触するように駆動ローラ125を上昇させたり、コンベアベルトローラと接触しないように駆動ローラを下降させる適切な機構(図示せず)によって提供することができる。
【0023】
このようなコンベアシステムによって、特定の利点を実現させることができる。例えば、別個の制御機構(例えば、リンク部材)を設けることにより、コンベアベルトの移動方向だけではなくコンベアベルトの幅にも沿って、別個のグループの駆動ローラがコンベアシステムの異なる領域において動作しうる。このような場合、コンベアベルト上の物体の位置は、異なる領域における駆動ローラを個々に制御することで非常に正確に制御することができる。実際、画像ベースのシステムのような「高性能の」検出および制御システムが設けられた場合、個々の物体を識別し、ベルトに沿っておよび/またはベルトにわたって正確に移動させることができ、例えば、物体が配置されるコンベアベルト上に更に物体を所望の通りに配列および/または位置合わせすることが可能となる。
【0024】
図9は、コンベアシステム200の一部の第2の実施形態を図示している。この図に示すように、コンベアシステム200は、図1に示すコンベアシステム100に幾つかの点で類似している。従って、コンベアシステム200は通常、複数の長手方向を向いた自由回転するコンベアベルトローラ204を有するコンベアベルト202を具えている。コンベアベルト202は、矢印206に示すベルトの移動方向に移動する。さらに、システム200は、複数の自由回転する角度調整可能な駆動ローラ208を具えている。しかしながら、システム200では、駆動ローラ208は、キャスターローラの代わりに、細長いまたは「長手方向の」ローラを具えている。図9に示す実施形態では、駆動ローラ206はコンベアベルト202の幅よりも長い。
【0025】
図10A乃至10Cは、コンベアベルト202に対する駆動ローラ208の角度調整を図示している。特に、矢印206に示すコンベアベルトの移動方向を仮定すると、図10Aは物体を左に迂回させる駆動ローラ208の角形成を図示しており、図10Bは駆動ローラの「制動」方向を図示しており、図10Cは物体を右に迂回させる駆動ローラの角形成を図示している。
【0026】
コンベアシステム100のように、駆動ローラ208は、様々な調整機構を用いて角度を調整することができる。図11Aおよび図11Bは、このような機構の1つを図示している(明確にするために、コンベアベルトは図示せず)。これらの図に示すように、駆動ローラ208は複数のフレーム部材212を具える矩形フレーム210によって回動するように支持されてもよく、これらのフレーム部材は、フレームの角に位置する回動ジョイント214で互いに回動するように連結されている。例として、各回動ジョイント214は、互いに挟み込み、ピンまたはシャフト(図示せず)で固定されたフレーム部材212の抜き勾配によって形成される。このような構成では、フレーム210の姿勢を、フレーム部材212がそれぞれのフレームの角部でおよそ90°を形成する図11Aに示す直角姿勢から、図11Bに示すように、フレームの角部に2つの鋭角および2つの鈍角を形成する別の姿勢に変更し、これによりフレームを平行四辺形の形状にすることができる。図11Aの直角姿勢では、駆動ローラ208は、図10Bに示すように、ベルトの方向に対して垂直となるように位置決めされる。従って、図11Aの直角姿勢は制動姿勢である。しかしながら、図11Bに示すような他の姿勢では、駆動ローラ208がベルトの移動方向に対して角度をつけて位置するように向けられており、それにより迂回機能を提供する。
【0027】
各駆動ローラ208は、方向の変更さらには自由回転を可能にするジョイントによって両端部で支持されている。図12の詳細図を参照すると、各駆動ローラ208は、例えばフレーム部材212に装着された支持ブラケット220を通って延在するピン218を受けるよう構成された「アイ」コネクタ216を有するシャフト215によって支持されていてもよい。
【0028】
図11Aおよび図11Bでは、フレーム210は、駆動装置222などを用いて、上述のように操作することができる。図11Aおよび図11Bに示す実施形態では、駆動装置222はピストン本体224を有するピストン部材を具えており、ピストンアーム226がこのピストン本体224から例えば水圧または空気圧の影響を受けて伸長しうる。ピストン本体224およびピストンアーム226の双方は、取付ブラケット228によって近接するフレーム部材212と回動するよう連結されている。このような構成では、ピストンアーム226をピストン本体224内に引き込むと、第1の角度方向に駆動ローラ208が角度調整され、ピストンアームがピストン本体から伸長すると、第2の反対の角度方向に駆動ローラが角度調整される。このような動作は、図11Aおよび図11Bから明らかである。特に、図11Aはピストン本体224からのピストンアーム226の第1の伸長範囲および駆動ローラ208の第1の方向を図示しており、図11Bは、ピストン本体からのピストンアームの第2の(大きい)伸長範囲および駆動ローラの第2の方向を図示している。ピストンアーム226を適切に伸長したり引き込むことにより、駆動ローラ208の方向を正確に制御し、図10A乃至図10Cに示すように、様々な迂回角度でコンベアベルト202の何れの側にも物体を迂回させることができる。
【0029】
異なるローラ駆動機構を有するコンベアシステム300を迂回させる別の態様の一部の分解図を図13に示す。コンベアベルト302は、ベルトの移動方向306の長手方向に並んだ軸(図示せず)に装着された複数の円筒形ローラ304を有している。このベルトは、一連の行307の1以上のベルトモジュールから構成されており、図13に示す1行のみ、左右および端と端がヒンジジョイントにおいてコンベア搬送路309の一部に沿ってベルトの移動方向に進行している循環ベルトループに連結されている。ベルトローラは、搬送路の一部に沿って駆動ローラのアレイ308上に支持されている。駆動ローラのアレイの狭いレール310の上流および下流が、搬送路の残りに沿ってベルトを支持する。UHMWのウェアストリップ312の上にある狭いレールは、近接するローラ間のベルトの下側を支持する。
【0030】
このレールは搬送皿314上に装着され、この搬送皿314自体がコンベアフレーム(図示せず)に取り付けられる。この搬送皿は、縦の列318および横の行319に構成された複数の円形の開口部316が穿孔される。この開口部の列は、ベルトローラの横の位置に横方向から位置合わせされる。各開口部は自由回転可能な駆動ローラ308を支持するカートリッジ320を回転できるように収容しており、ベルトがベルトの移動方向に進行すると、対応する列のベルトローラと係合する。ベルトローラと駆動ローラとの間の回転接触により、互いに回転させ、軸が互いに斜めに位置する限り回転するようにする。
【0031】
図14に示すように、駆動ローラのカートリッジ320は、駆動ローラ308の穴部327に収容する軸326の端部を支持する、直径方向に対向する孔324、325付きの保持リング322を具えている。孔324の1つは、カートリッジおよび駆動ローラ内へ挿入されうる軸が通る貫通孔であってもよく、他方の孔325は軸の端部止めを形成する塞がった端部を有していてもよい。この方法では、駆動ローラは、ローラの凸部が保持リングの上部を越えて突出した状態で固定軸に沿ってカートリッジ内に保持される。駆動ローラを取り囲む保持リングから下方に延在しているものは、リングの内側と接合する円筒形の外側表面を有する上側ジャーナル軸328であり、リングの表面と軸面との間に肩部330を形成する。保持リングから遠位の下側ジャーナル軸332は、上側ジャーナル軸よりも直径が小さい。下側ジャーナル軸の外面は、上側ジャーナル軸の内部表面に接合する。カートリッジギア334は、上側軸と下側軸との間に位置する。カートリッジギアは外周歯336を有する平歯車が好ましく、この外周歯の先端は上側ジャーナル軸の表面を越えて延在はしない。
【0032】
カートリッジ320は、図13に示すような搬送皿の開口部316に収容される。開口部の壁が軸受表面338を形成し、これと接触して上側ジャーナル軸が回転しうる。保持リングの直径が開口部の直径よりも大きいため、リングの肩部330は、直径が小さい軸およびギア部が下側に浮いた状態で搬送皿上に位置する。
【0033】
ギアプレート340は、搬送皿の下側に動作できるように配置される。ラックギア342の形態をした駆動ギアがギアプレート上に配置される。各ラックギアは、カートリッジギアの1つの歯と係合するように配置され、ギアプレートが移動すると同時にカートリッジが回転できるラック・アンド・ピニオンのシステムを形成する。ギアプレートはベルトの移動方向に細長い開口部344を有している。これらの細長い開口部には、ラックギアを形成する直線的なアレイの歯346が片側に設けられている。各細長い開口部は、搬送皿の開口部316のうちの1つの下側に位置する。下側ジャーナル軸はギアプレートの細長い開口部を通って延在しており、ギアプレートは2つの他のプレート、つまり搬送皿314と底部プレート348との間に挟まれている。コンベアフレーム350の一部に動かないよう固定された底部プレートは、搬送皿の開口部と垂直方向に調整されるが、搬送皿の開口部よりも直径が小さい複数の開口部352を有している。開口部352は、カートリッジの下側ジャーナル軸332を回転できるように受ける大きさである。これは、上側および下側の支持プレートを位置合わせしてローラ駆動機構の組立を容易にするのに役立ち、さらに回転可能なカートリッジの固定された垂直軸上での回転を制限する。
【0034】
底部プレート348の上面および上部プレート314の底面に対面しているスペーサパッド354は、可動するギアプレート340を収容する2つのプレート間の適切な間隔を維持するのに適している。ギアプレートの幾つかの細長い開口部344’は、中間スロット356によって接続される。スロット部のローラ358は、上部プレートの底面から下方へ延在するピン360に回転するように装着される。ピンの遠位端部は、底部プレートのソケット362内に収容される。ギアプレートが上部プレートおよび底部プレートに対して移動するにつれて、ローラ358がスロットの側面を移動する。
【0035】
ギアプレートは、図15に示すように、空気シリンダのような直線駆動装置364によって移動する。駆動装置の一端は、U字金具およびタイロッド368によって上部プレートの底面または搬送皿314から吊り下げられた取付ブラケット366に取り付けられる。駆動装置の他端から拡張ロッド370を拡張するかは選択可能である。拡張ロッドの遠位端部は、U字金具およびタイロッド372によってギアプレート340の底部から吊り下げられた回動ブラケット374に連結される。この拡張ロッドがギアプレートを移動させ、ロッドの拡張によりギアプレートの位置および駆動ローラの向きが決まる。取付ブラケット366の下のシム376は、搬送路の底部とギアプレートの上部の間をオフセットさせるために用いられる。
【0036】
コンベアシステムを迂回させる動作を図16Aおよび図16Bに示す。図16Aでは、ギアプレート340は、駆動ローラのカートリッジ320が細長いスロット344の右端の位置に移動して示されている。この位置まで回転したカートリッジでは、駆動ローラ308の回転軸378は、ベルトの移動方向306を基準に反時計回りの鋭角γを形成する。コンベアベルト302がベルトの移動方向に進行すると、この向きの駆動ローラは矢印380の方向に回転し、係合したベルトローラが矢印382の方向に図16Aの上部に向かって被搬送物体を誘導する。ギアプレートが、その範囲にわたって、カートリッジが図16Bの細長いスロットの反対側の左端に移動した場合、駆動ローラの回転軸378はベルトの移動方向を基準に時計回りの鋭角γ’を形成する。この向きでは、駆動ローラは矢印381の方向に回転し、ベルトローラは矢印383の方向に回転して図16Aの迂回方向とは逆の図16Bの底部へと被搬送物体を押し出す。
【0037】
切換コンベアは、図17に示すような送込みコンベアおよび複数レーンの送出しコンベアと共に、図4、10、および13に示すような駆動機構を有する90°のローラベルトを用いることにより構成することができる。90°のローラベルト402は、ベルトローラ404が駆動機構408の下にある駆動ローラと接触することによってベルトの移動方向406と平行の軸上を回転するよう構成されているという点で、前記のローラベルト102、202、および302と類似している。ローラベルトは、ローラベルトコンベアの下流および上流端部414、415において駆動シャフトおよびアイドルシャフト412、413に装着された直径が大きいスプロケット410の周りを進む。駆動シャフトは駆動モータ416に連結され、ベルトをベルトの移動方向に進行させる。
【0038】
搬送方向420に進行する送込みコンベア418は、上流端部に近い第1の側面422を超えてローラベルトコンベア上に物体を供給する。搬送方向に進行している複数レーンの送出しコンベア424はさらに、第2の側面423を超えてローラベルトコンベアから物体を受け取る。このローラベルトコンベアは、対角線426上の送込みコンベアと送出しコンベアの間に斜めに配置される。送込みコンベアから供給された物体は、上流の供給ローラ作動領域429の下に位置する供給駆動機構408により横方向428に回転するベルトローラによってベルト上に引き込まれる。ベルトが進行するとベルトローラが回転し、ローラベルトの第1の側面を超えて物体を斜め方向に送達すると、物体が送込みコンベアからベルトに移動する際にその向きが変わるのを防ぐ。ローラベルトコンベアは、ベルトの下に位置する個別に制御可能な出力駆動機構408によって、一連の連続した送出しのローラ作動領域430A−Fに分かれている。各作動領域は、近傍の送出しレーン432A−Fと関連している。従って、ローラベルトコンベアが仕分けコンベアを構成している。前述のように、送込みの作動領域を利用して、物体をベルト上に引き込む。送込み領域では、ベルトローラは送出しの作動領域のように恒久的に作動または選択的に作動しうる。各駆動機構用のモータおよびボールねじなどの駆動装置434は、プログラム可能な論理コントローラ(PLC)などのコントローラ436からの信号によって制御される。ベルトのシャフトの一方に装着されたシャフトエンコーダ438がコントローラに信号を与え、物体が指定した送出しレーンの作動領域に接近するとき、およびその領域におけるローラが作動するタイミングを判定するために利用できる。送込みコンベアの出口など、好適には既知の位置における位置センサ440は、コントローラにローラベルトへの物体の侵入を示し、時間調整を開始する信号を与える。シャフトエンコーダは、物体がその後でローラ作動領域の1つに侵入したときを判定する他の手段と交換してもよい。フォトアイ、近接スイッチ、重量センサ、またはコンベアの長さに沿って配置される他の位置センサは、常にベルト上の物体の位置を判定するために利用できる他の同等な手段の例である。
【0039】
切換器が、以下の通り、コントローラの制御下で、最後の送出しレーン424Fに物体を送達するよう作動する。送込みコンベアは物体をローラベルトに供給し、そのローラベルトのローラは最上流の領域430Aにおいて駆動されて、物体を矢印428に示すベルトへと引き込む。送出し領域用の駆動機構は、図8Bに示すようにベルトローラと外れるように下降する、あるいは、図7または図10Bのように、駆動ローラの軸がベルトの移動方向に対して垂直の状態で回転してベルトローラを制動する。この例の物体は最後の送出しレーン424Fに向かうため、前の作動領域424A−Eは外れるか制動するかの何れかで停止し、ベルトの移動方向に進行するようにベルト上に物体を保持し続ける。一旦、物体が全ての前の領域を通過し、最後の作動領域430Fに到達すると、ベルト上の物体の位置を調整または追跡してきたコントローラが駆動機構に信号を送り、その領域におけるローラを作動させてベルトの第2の側面へと回転させて、物体を第2の側面を越えて選択された最後の送出しレーン424Fへと移動させる。
【0040】
それぞれの送出しレーンに位置合わせするだけではなく、仕分けコンベアの第2の側面を超えてその長さに沿った任意の位置で物体を移動させることも可能である。1以上の連続した領域におけるベルトローラの操作を仕分けコンベアに沿った物体の位置に調整することにより、切換器は仕分けコンベアの長さに沿った任意の選択位置で物体を移動させることができる。例えば、2つの連続した領域を同時に駆動させて、1つのレーンに位置合わせするのではなく、2つの送出しレーンに跨る選択位置で物体を移動させることができる。
【0041】
従って、全体的に斜めのローラベルトソーターを使用することにより、この切換器は貴重な工場空間を無駄にしない。さらに、物体は両側からおよび両側に移動するため、ローラベルトの端部の代わりに、ピッチが長いベルトの性能を向上させる大型のスプロケットをピッチが長いローラベルトに利用することができる。
【0042】
例示するために前記の説明および図面においては特定の実施形態が詳しく開示されてきたが、その変形物および改変が本開示の範囲から逸脱することなくなされうることは、当該技術分野における当業者によって理解されるであろう。このような変形物の1つでは、駆動ローラのカートリッジの下側軸はその底部に中空部を有したり、底部プレートの開口部をカートリッジが回転する中空部に延在する柱と交換してもよい。他の変形物では、切換器用の駆動機構は両方向にベルトローラを駆動できる必要はない。ベルトローラは、一方向にのみ回転する必要があり、さもなければ停止または制動する。従って、制動するため、切換器に必要な片側の駆動ローラのアレイは、左右のローラアレイの角度範囲の半分のみを必要とする。制動が必要ない場合、ローラアレイの角度は固定することができ、ベルトローラからローラアレイを取り外すことでローラは停止する。他の例のように、仕分けコンベアの側面および端部に対して垂直および平行な側面を有する矩形の形状として図17に図示されているローラ作動領域は、仕分けコンベアに対して斜めに配置され、移動位置を厳格に制御できるようにする。
【技術分野】
【0001】
本発明は動力駆動コンベアに関し、より具体的には、スイッチ機能を行う斜方向に配置されたローラベルトソーターを用いる切換コンベアに関するものである。
【背景技術】
【0002】
ソーターは、送込みコンベアによってソーターに供給された各物体をソーターの片側または両側から分岐している選択した送出し経路に誘導するコンベアである。切換コンベアは、切換コンベアの端部から物体を受け取りながら、送込みコンベアによって搬送されるのと同一方向に物体を送出し経路に搬送するコンベアである。1つの送込みコンベアと複数の送出し経路を有する切換器は一般に、切換器の上流端部で一列の物体を受け取り、各物体を横方向に移動させて指定の送出し経路に位置合わせする矩形のコンベアによって実現する。処理能力を維持するため、これらの物体は、横方向に誘導されながら切換器に沿って連続的に進行する。従って、送込みコンベアの出口の側面に位置する矩形切換器の上流部分は使用されない。このような使用されない部分に平方フィート以上のコンベア材を購入する必要があり、貴重な床面積を占有してしまう。さらに、大きい直径のスプロケットを要するピッチが長いベルトコンベアを切換コンベアとして使用する場合、大型スプロケットの位置でコンベアベルトの両端にわたって移動させることは難しい。
【発明の概要】
【0003】
これらの欠点は、本発明の特徴を具現化した切換器によって克服される。このような切換器の一態様は、搬送方向に物体を搬送する送込みコンベアと、搬送物体を受け取る複数の送出しコンベアレーンを有して搬送方向に物体を搬送する送出しコンベアとを具える。仕分けコンベアは、搬送方向に対して斜めの対角線上に送込みコンベアと送出しコンベアの間に配置される。この仕分けコンベアは、対角線に沿って進行するベルトを具える。このベルトは、ローラ作動領域に対角線に対して横向きに送出しコンベアの方へと選択的に回転するローラを有しており、これらのローラは仕分けコンベアの長さに沿って連続して配置される。ベルトローラは、送込みコンベアから受け取った物体を仕分けコンベアに沿った選択地点で送出しコンベアへと押し出す。
【0004】
本発明の特徴を具現化した切換器の他の態様は、出口端部を有して物体を搬送方向に出口端部へと搬送する送込みコンベアと、入口端部を有して物体を搬送方向に入口端部から搬送する複数の送出しコンベアレーンとを具えている。仕分けコンベアは、平行な第1と第2の側面の間の上流端部から下流端部まで、送込みコンベアの出口端部と送出しコンベアレーンの入口端部の間の斜め方向の長さに延在している。送込みコンベアは第1の側面を越えて上流位置で仕分けコンベアに物体を供給し、送出しレーンは第2の側面を越えて入口端部で仕分けコンベアから物体を受け取る。仕分けコンベアは、搬送方向に対して斜めのベルトの移動方向に仕分けコンベアの長さに沿って進行するローラベルトを具えている。ベルトの物体支持ベルトローラは、ベルトの移動方向と平行の軸上を選択的に回転する。一連のベルトローラの作動領域は、仕分けコンベアの長さに沿ってローラベルトの下に位置しており、各領域におけるベルトローラを第2の側面へと選択的に回転させて、送出しコンベアレーンへと支持された物体を押し出す。それぞれの作動領域は、隣接する送出しコンベアレーンと関連していることが好ましい。
【0005】
本発明の他の態様は、切換器を作る方法を提供している。この方法は:(a)仕分けコンベアの長さに沿って連続して配置されたローラ作動領域におけるベルトの移動方向に対して垂直な方向に選択的に回転するよう構成された、複数の作動可能な物体支持ローラ付のベルトを有する仕分けコンベアを提供するステップと;(b)ベルトの移動方向に対して斜めの搬送方向に仕分けコンベアの第1の側面から仕分けコンベアへと物体を供給する送込みコンベアを配置するステップと;(c)仕分けコンベアの反対側の第2の側面に搬送方向と平行の複数のレーンを有する送出しコンベアを配置するステップとを含んでおり、それぞれのレーンは第2の側面を越えて仕分けコンベアから物体を受け取るよう構成される。
【図面の簡単な説明】
【0006】
開示するシステムおよび方法は、以下の図面を参照すると理解されるであろう。図面の構成要素は、必ずしも縮尺に従っていない。
【図1】図1は、コンベアシステムの一部の第1の実施形態の上部透視図である。
【図2A】図2Aは、図1のコンベアシステムに利用される駆動ローラモジュールの上部透視図である。
【図2B】図2Bは、図1のコンベアシステムに利用される駆動ローラモジュールの底部透視図である。
【図3】図3は、図1のコンベアシステムの更なる部分の上部透視図である。
【図4】図4は、図1のコンベアシステムに利用される複数の駆動ローラモジュールの底部透視図である。
【図5A】図5Aは、図3に示すコンベアシステム部分の図であり、第1の方向への迂回動作を図示している。
【図5B】図5Bは、図3に示すコンベアシステム部分の図であり、第2の方向への迂回動作を図示している。
【図6A】図6Aは、駆動ローラモジュールの上面図であり、第1の角度方向へのモジュールの回動を図示している。
【図6B】図6Bは、駆動ローラモジュールの上面図であり、第2の角度方向へのモジュールの回動を図示している。
【図7】図7は、図1のコンベアシステム部分の端面図であり、システムの角度調整可能な駆動ローラによって設けられた制動機能を図示している。
【図8A】図8Aは、図1のコンベアシステムの一部の端部であり、角度調整可能な駆動ローラとコンベアベルトの駆動ローラの係合を図示している。
【図8B】図8Bは、図1のコンベアシステムの一部の端部であり、角度調整可能な駆動ローラとコンベアベルトの駆動ローラの係合外れを図示している。
【図9】図9は、コンベアシステムの一部の第2の実施形態の上部透視図である。
【図10】図10A乃至図10Cは、図9のコンベアシステムの上面図であり、迂回角度を調整する当該システムの駆動ローラの角度調整を図示している。
【図11】図11Aおよび図11Bは、図9のコンベアシステムの駆動ローラの角形成を調整するために利用できる機構の実施形態の透視図である。
【図12】図12は、図9のコンベアシステムにおける駆動ローラの端部を支持するジョイントの実施形態の詳細図である。
【図13】図13は、ラック・アンド・ピニオンのローラ駆動機構を有するコンベアシステムの一部の第3の実施形態の分解した上面等角図である。
【図14】図14は、図13のコンベアシステムの駆動ローラのカートリッジの分解した上面等角図である。
【図15】図15は、図13のローラ駆動機構における線形駆動装置の底面等角図である。
【図16】図16Aおよび図16Bは、正反対の位置に図示された図13のコンベアシステムの駆動ローラの上面図である。
【図17】図17は、本発明の特徴を具現化する切換コンベアの、部分的に切断した、組み合わせた概略的な上面図である。
【発明を実施するための形態】
【0007】
従来の切換コンベアでは、送込みコンベアは物体を切換器の上流端部に供給し、切換器が下流端部で指定した送出しレーンと横方向に一列に各物体を再配置する。本発明の特徴を具現化した切換コンベアは、切換器として、ベルトの移動方向に対して垂直方向に回転するよう構成された選択的に駆動するローラを有するローラベルトコンベアを利用する。ローラベルトコンベアは自由回転する角度調整可能なローラを具える駆動機構を利用し、これらのローラがコンベアベルト内に含まれるローラの回転を制御する。幾つかの実施形態では、コンベアベルトは複数の長手方向を向いた自由回転するローラを具えており、これらのローラはコンベアベルトの下側に配置された自由回転する角度調整可能なローラとの接触によって「駆動」される。このようなシステムでは、角度調整可能なローラの僅かな操作によって、物体を様々な角度でコンベアベルトの何れの側にも迂回させることができる。さらに、角度調整可能なローラがベルトの移動方向に合わせられると、コンベアベルトローラが回転しないように制動させることができ、従って物体の横滑りが減少するかなくなる。さらに、角度調整可能なローラは制動方向から所望の迂回角度へと徐々に回転できるため、コンベアベルトローラを徐々に加速させて、スリップを減少またはなくすことができる。
【0008】
図面を参照すると、同じ数字は幾つかの図面を通して対応する部分を示しており、図1は、様々な角度でシステムの何れの側にも物体を迂回させるよう調整できるコンベアシステム100の一部の実施形態を図示している。図1に示すように、コンベアシステム100は、コンベアベルト102と、角度調整可能な「駆動」ローラモジュール106の領域104とを具えている。図1の実施形態では、コンベアベルト102は、複数の横モジュールのコンベアベルト部110から構成されたコンベアベルトフレーム108を具えている。各コンベアベルト部110の内側は、ベルトの移動方向114に延在し、隣接するコンベアベルト部の隣接するコンベアベルトリンクと連結している複数の細長いコンベアベルトリンク112である。例として、各コンベアベルトリンク112は、ロッドまたはシャフト(図示せず)を受けるそれぞれの対向端部に設けられた開口部116を有する金属またはプラスチックの部材を具えており、コンベアベルト部を互いに連結するために、ロッドまたはシャフトが隣接するコンベアベルト部110のコンベアベルトリンクの開口部を貫通する。
【0009】
コンベアベルトリンク112の間には、細長い長手方向を向いた自由回転するコンベアベルトローラ118が置かれている。この開示のため、用語「自由回転する」とは、ローラが回転軸を中心に何れの角度方向にも自由に回転することを意味する。従って、ローラ118は、適切な力で駆動された場合に何れの角度方向にも自由に回転する「アイドラ」ローラを有しているということができる。図1の実施形態では、ローラ118は、その回転軸がベルトの移動方向114と平行になるように配置されている。図1に示すように、ローラ118がコンベアベルトリンク112に対して各コンベアベルト部110の幅に沿って代替的に設けられ、これにより、各対の隣接するコンベアベルトリンクの間にローラを配置してもよい。このような構成では、様々なコンベアベルト部110のローラ118を、ベルトの移動方向114に延在する列120およびコンベアベルト102の幅にわたって延在する行121に配置することができる。ローラ118は細長いように記載および図示されているが、ローラは回転軸の方向に必ずしも細長くなくてもよいということに留意されたい。
【0010】
コンベアベルトローラ118は金属および/またはプラスチックで作られており、ローラモジュール106のローラがコンベアベルトローラと接触したときの滑りを防ぐゴムまたはプラスチックの高摩擦の外層またはコーティングが設けられている。各ローラ118は、その各端部において、コンベアベルトフレーム108および/または様々なコンベアベルト部110を連結するロッドまたはシャフトに連結することができる。図7に示すように、ローラ118はコンベアベルトフレーム108(およびベルトリンク112)の上面および下面を越えて延在するような大きさであり、これにより、コンベアベルト102上に配置された物体を迂回させ、駆動ローラモジュール106によって下から駆動させることができる。
【0011】
さらに図1を参照すると、角度調整可能な駆動ローラモジュール106の領域104は、複数の行122および列124の駆動ローラモジュールを具えている。これらの駆動ローラモジュール106は、その列124がコンベアベルトローラ118の列120と一直線に並び、その行122が、コンベアシステムの作動中は少なくとも断続的に、コンベアベルトローラの行121と一直線に並ぶよう配置される。図1に示す第1の実施形態では、駆動ローラモジュール106は、(回転軸の方向に)比較的短いキャスターローラ(図2Aおよび図2B参照)を具えており、これらは動作中に少なくとも1の駆動ローラが所与のコンベアベルトローラ118と一直線に並ぶよう互いに十分近接して配置される。実際に、図1の実施形態では、駆動ローラモジュール106は、コンベアの動作中に少なくとも2の駆動ローラが所与のコンベアベルトローラ118と近接して位置するように十分近くに配置されている。
【0012】
図2Aおよび図2Bを見てみると、1つの駆動ローラモジュール106の透視図が図示されており、各駆動ローラモジュールは、回転軸に対して何れの角度方向にも自由に回転する、自由回転の駆動ローラ125を具えている。従って、「駆動」ローラと呼ばれてはいるが、この駆動ローラ125はモータまたはその種の機械的手段によって自身が駆動するものではない。例として、各駆動ローラ125は、コンベアベルトローラ118のように金属および/またはプラスチックで作られており、ゴムまたはプラスチックの高摩擦の外層またはコーティングを有している。
【0013】
図2Aおよび図2Bに示すように、駆動ローラ125は対向する垂直支持部材128を具えるフレーム126内に支持されている。シャフト130が支持部材128の間に駆動ローラ125(図示せず)に設けられた中央の開口部を通って延在しており、駆動ローラはその周りを回転することができる(すなわち、回転軸)。支持部材128に加えて、フレーム126は第1および第2の制御アーム131および132を具えており、以下に説明するように、中心の垂直軸134の周りを駆動ローラモジュール106が回動し、ベルトの移動方向114(図1)に対するローラ125の角度を調整するために利用することができる。図2Aおよび図2Bに示すように、各制御アーム131、132は開口部133を具えており、駆動ローラモジュール106の角度方向を調整するために用いられる適切な部材との回動接続を可能にする。
【0014】
図2Bに最もよく図示されているように、フレーム126は更に、基部135と、基部を支持する回動機構137を具えている。図2Bの実施形態では、回動機構137は互いに反対方向に回転できる上部と下部139および141を具えており、その結果、駆動ローラモジュール106の回動が可能となる。回動を容易にするため、軸受のような適切な摩擦低減要素をこれらの部分139および141の間に設けてもよい。
【0015】
図3は、コンベアシステム100の更なる部分を図示している。より具体的には、図3は、駆動ローラ125とコンベアベルトローラ118の間の相互作用を図示している。特に、コンベアシステム100の他の要素の記載を明確にするため、この図ではコンベアベルトフレーム108を図示していない。
【0016】
図3に示すように、駆動ローラ125はコンベアベルトローラ118と接触するように配置され、これにより、ベルトの移動方向114へのコンベアベルト120の動作が、間の摩擦力によって駆動ローラおよびコンベアベルトローラの双方を回転させる。図3に示す向きでは、駆動ローラ125は矢印136に示す下流方向に回転する。この回転の結果、コンベアベルトローラ118は、シャフト138(すなわち、回転軸)の周りを矢印140に示す方向に回転させられる、または「駆動」する。従って、図3では、(上流を見た端部からコンベアベルト102を図示した場合に)コンベアベルトローラ118は反時計回りに回転し、その結果、コンベアベルトローラに支持された物体を図の左方向に迂回させる。図3に更に示すように、それぞれのコンベアベルトローラ118は複数の駆動ローラ125によって駆動する。
【0017】
駆動ローラモジュール106ひいては駆動ローラ125が中央の垂直軸134(図2Aおよび図2B)の周りを回動し、ベルトの移動方向に対する角形成を調整することができる。駆動ローラ125は独立して作動してもよく、あるいは全体で同調して作動してもよい。図4は、後者の作動方式(コンベアベルト102は図示せず)を可能にする機構を図示している。図4に示すように、複数の行142および列144の駆動ローラモジュール106は、図2について記載された通常の構成を有するように設けられている。図4に更に示すように、駆動ローラモジュール106の行142は、ローラ125の角度方向を制御する結合部材146で共に連結されている。より具体的には、駆動ローラモジュール106の制御アーム132は結合部材146に回動するよう連結されており、これはロッドまたはシャフトの形態をしていてもよい。例として、この連結は、駆動ローラモジュール106の制御アーム132に設けられた開口部133(図2Aおよび図2B)を通り、位置合わせされた結合部材146の開口部(図示せず)内に延在するピン(図示せず)によってなされる。各駆動ローラモジュール106の位置が中心の垂直軸134に対して固定された場合、例えば回動機構137(図2Aおよび図2B)の下部141を固定することにより、矢印148に示す方向に結合部材146が横移動すると、ローラ125を中心の垂直軸の周りに回転させて、角度方向を調整する。
【0018】
結合部材146は、任意の適切な手段によって動かすことができる。複数の結合部材146を同時に動かし、その結果複数の行のローラ125が同時に回動する実施形態では、結合部材を1つの作動部材150に連結してもよく、この作動部材はコンベアシステム100の片側に近接して配置され、駆動ローラモジュール106の隣接する列144の制御アーム131に回動するよう連結される。このような場合、矢印151に示す方向に作動部材150が長手方向に動くと、隣接する列144の駆動ローラモジュール106を回動させ、その結果、結合部材146を横移動させて、次に、残りの駆動ローラモジュールを回動させる。
【0019】
図5Aおよび図5Bは、駆動ローラモジュール106の角度調整の効果を図示している。特に、コンベアシステム100の他の要素の記載を明確にするため、コンベアベルトフレーム108は図5Aおよび図5Bに図示していない。図5Aから始めると、駆動ローラモジュール106は(上からコンベアベルト102を見た場合に)反時計回りの方向に回動しており、(上流を見た端部からコンベアベルトを見た場合に)矢印152に示すように、コンベアベルトローラ118を反時計回りに回転させる。コンベアベルトローラ118のこのような回転は、矢印154の方向に物体Oを移動させるべく、図5Aの左方向へと迂回動作をさせる。しかしながら、図5Bでは、駆動ローラモジュール106は(上からコンベアベルト102を見た場合に)時計回りの方向に回動しており、コンベアベルトローラ118を(上流を見た端部からコンベアベルト102を見た場合に)矢印155に示す時計回りの方向に回転させ、右方向に迂回動作をさせて矢印156の方向に物体Oを移動させる。
【0020】
図6Aおよび図6Bは、駆動ローラモジュール106について可能な迂回角度のばらつきを図示している。図6Aに示すように、各駆動ローラモジュール106は、コンベアベルトの移動方向に対してローラ125の回転軸が直交する0°方向から、αによって表す負の角まで得ることが可能である。図6Bに示すように、駆動ローラモジュール106は、0°方向からβによって表す正の角まで取ることもあり得る。幾つかの実施形態では、αおよびβの双方は0から90°までの任意の角度を含んでもよく、従って、180°の角度のばらつきに相当しうる。このように広い範囲の角度のばらつきが可能であるが、コンベアベルトの速度、駆動ローラ125およびコンベアベルトローラ118に使用される材料の制限が、ローラの滑りを防ぐことができる範囲の角度方向を限定する場合がある。しかしながら、既知の高摩擦面を用いて、少なくとも100ft/分のコンベアベルト速度においては少なくとも約−70°乃至+70°の角度範囲が実現できる。特に、駆動ローラ125の角度の動きは、得られる迂回角度に直接相当する。例えば、駆動ローラ125が図6Aに示すような0°方向から時計回りに35°を向いている場合、右方向に35°の迂回角度が生じる。
【0021】
駆動ローラ125が図7に示す0°方向に位置し、駆動ローラの回転軸がベルトの移動方向に対して垂直であり、駆動ローラが回転する角度方向がベルトの移動方向と一直線になる場合、コンベアベルトローラ118の回転が実質的に妨げられ、その結果「制動」する。従って、必要に応じて駆動ローラモジュール106を制御して0°方向に配置することにより、コンベアベルト上の物体の不要な横方向の動作を防ぐことができる。駆動ローラ125の角度方向が初期位置のような0°方向から調整された場合、コンベアベルトローラ118は一方向または他方向に徐々に加速することができ、その結果、摩擦プレートまたは傾斜ローラが突然コンベアベルトローラと係合した場合に起こりうるローラの滑りが減少する、または完全になくなるということに更に留意されたい。コンベアベルトローラ125を段階的に加速すると、比較的不安定な物体を転倒させることなく迂回させることも可能となる。例えば、迂回する物体が比較的に背が高く、比較的小さい底面を有している場合、0°方向から駆動ローラの角度を徐々に増加させることにより、物体はコンベアベルト102の片側または他方に徐々に加速できる。
【0022】
角度調整が可能であることに加えて、駆動ローラモジュール106は任意に、駆動ローラ125がコンベアベルトローラ118と係合する、または外れるように垂直に動作することができる。このような機能が図8Aおよび図8Bに図示されている。特に、図8Aは、コンベアベルトローラ118と係合している駆動ローラ125を図示しており、図8Bはコンベアベルトローラから外れた駆動ローラを図示している。このような選択的な係合および取外しは、コンベアベルトローラ118と接触するように駆動ローラ125を上昇させたり、コンベアベルトローラと接触しないように駆動ローラを下降させる適切な機構(図示せず)によって提供することができる。
【0023】
このようなコンベアシステムによって、特定の利点を実現させることができる。例えば、別個の制御機構(例えば、リンク部材)を設けることにより、コンベアベルトの移動方向だけではなくコンベアベルトの幅にも沿って、別個のグループの駆動ローラがコンベアシステムの異なる領域において動作しうる。このような場合、コンベアベルト上の物体の位置は、異なる領域における駆動ローラを個々に制御することで非常に正確に制御することができる。実際、画像ベースのシステムのような「高性能の」検出および制御システムが設けられた場合、個々の物体を識別し、ベルトに沿っておよび/またはベルトにわたって正確に移動させることができ、例えば、物体が配置されるコンベアベルト上に更に物体を所望の通りに配列および/または位置合わせすることが可能となる。
【0024】
図9は、コンベアシステム200の一部の第2の実施形態を図示している。この図に示すように、コンベアシステム200は、図1に示すコンベアシステム100に幾つかの点で類似している。従って、コンベアシステム200は通常、複数の長手方向を向いた自由回転するコンベアベルトローラ204を有するコンベアベルト202を具えている。コンベアベルト202は、矢印206に示すベルトの移動方向に移動する。さらに、システム200は、複数の自由回転する角度調整可能な駆動ローラ208を具えている。しかしながら、システム200では、駆動ローラ208は、キャスターローラの代わりに、細長いまたは「長手方向の」ローラを具えている。図9に示す実施形態では、駆動ローラ206はコンベアベルト202の幅よりも長い。
【0025】
図10A乃至10Cは、コンベアベルト202に対する駆動ローラ208の角度調整を図示している。特に、矢印206に示すコンベアベルトの移動方向を仮定すると、図10Aは物体を左に迂回させる駆動ローラ208の角形成を図示しており、図10Bは駆動ローラの「制動」方向を図示しており、図10Cは物体を右に迂回させる駆動ローラの角形成を図示している。
【0026】
コンベアシステム100のように、駆動ローラ208は、様々な調整機構を用いて角度を調整することができる。図11Aおよび図11Bは、このような機構の1つを図示している(明確にするために、コンベアベルトは図示せず)。これらの図に示すように、駆動ローラ208は複数のフレーム部材212を具える矩形フレーム210によって回動するように支持されてもよく、これらのフレーム部材は、フレームの角に位置する回動ジョイント214で互いに回動するように連結されている。例として、各回動ジョイント214は、互いに挟み込み、ピンまたはシャフト(図示せず)で固定されたフレーム部材212の抜き勾配によって形成される。このような構成では、フレーム210の姿勢を、フレーム部材212がそれぞれのフレームの角部でおよそ90°を形成する図11Aに示す直角姿勢から、図11Bに示すように、フレームの角部に2つの鋭角および2つの鈍角を形成する別の姿勢に変更し、これによりフレームを平行四辺形の形状にすることができる。図11Aの直角姿勢では、駆動ローラ208は、図10Bに示すように、ベルトの方向に対して垂直となるように位置決めされる。従って、図11Aの直角姿勢は制動姿勢である。しかしながら、図11Bに示すような他の姿勢では、駆動ローラ208がベルトの移動方向に対して角度をつけて位置するように向けられており、それにより迂回機能を提供する。
【0027】
各駆動ローラ208は、方向の変更さらには自由回転を可能にするジョイントによって両端部で支持されている。図12の詳細図を参照すると、各駆動ローラ208は、例えばフレーム部材212に装着された支持ブラケット220を通って延在するピン218を受けるよう構成された「アイ」コネクタ216を有するシャフト215によって支持されていてもよい。
【0028】
図11Aおよび図11Bでは、フレーム210は、駆動装置222などを用いて、上述のように操作することができる。図11Aおよび図11Bに示す実施形態では、駆動装置222はピストン本体224を有するピストン部材を具えており、ピストンアーム226がこのピストン本体224から例えば水圧または空気圧の影響を受けて伸長しうる。ピストン本体224およびピストンアーム226の双方は、取付ブラケット228によって近接するフレーム部材212と回動するよう連結されている。このような構成では、ピストンアーム226をピストン本体224内に引き込むと、第1の角度方向に駆動ローラ208が角度調整され、ピストンアームがピストン本体から伸長すると、第2の反対の角度方向に駆動ローラが角度調整される。このような動作は、図11Aおよび図11Bから明らかである。特に、図11Aはピストン本体224からのピストンアーム226の第1の伸長範囲および駆動ローラ208の第1の方向を図示しており、図11Bは、ピストン本体からのピストンアームの第2の(大きい)伸長範囲および駆動ローラの第2の方向を図示している。ピストンアーム226を適切に伸長したり引き込むことにより、駆動ローラ208の方向を正確に制御し、図10A乃至図10Cに示すように、様々な迂回角度でコンベアベルト202の何れの側にも物体を迂回させることができる。
【0029】
異なるローラ駆動機構を有するコンベアシステム300を迂回させる別の態様の一部の分解図を図13に示す。コンベアベルト302は、ベルトの移動方向306の長手方向に並んだ軸(図示せず)に装着された複数の円筒形ローラ304を有している。このベルトは、一連の行307の1以上のベルトモジュールから構成されており、図13に示す1行のみ、左右および端と端がヒンジジョイントにおいてコンベア搬送路309の一部に沿ってベルトの移動方向に進行している循環ベルトループに連結されている。ベルトローラは、搬送路の一部に沿って駆動ローラのアレイ308上に支持されている。駆動ローラのアレイの狭いレール310の上流および下流が、搬送路の残りに沿ってベルトを支持する。UHMWのウェアストリップ312の上にある狭いレールは、近接するローラ間のベルトの下側を支持する。
【0030】
このレールは搬送皿314上に装着され、この搬送皿314自体がコンベアフレーム(図示せず)に取り付けられる。この搬送皿は、縦の列318および横の行319に構成された複数の円形の開口部316が穿孔される。この開口部の列は、ベルトローラの横の位置に横方向から位置合わせされる。各開口部は自由回転可能な駆動ローラ308を支持するカートリッジ320を回転できるように収容しており、ベルトがベルトの移動方向に進行すると、対応する列のベルトローラと係合する。ベルトローラと駆動ローラとの間の回転接触により、互いに回転させ、軸が互いに斜めに位置する限り回転するようにする。
【0031】
図14に示すように、駆動ローラのカートリッジ320は、駆動ローラ308の穴部327に収容する軸326の端部を支持する、直径方向に対向する孔324、325付きの保持リング322を具えている。孔324の1つは、カートリッジおよび駆動ローラ内へ挿入されうる軸が通る貫通孔であってもよく、他方の孔325は軸の端部止めを形成する塞がった端部を有していてもよい。この方法では、駆動ローラは、ローラの凸部が保持リングの上部を越えて突出した状態で固定軸に沿ってカートリッジ内に保持される。駆動ローラを取り囲む保持リングから下方に延在しているものは、リングの内側と接合する円筒形の外側表面を有する上側ジャーナル軸328であり、リングの表面と軸面との間に肩部330を形成する。保持リングから遠位の下側ジャーナル軸332は、上側ジャーナル軸よりも直径が小さい。下側ジャーナル軸の外面は、上側ジャーナル軸の内部表面に接合する。カートリッジギア334は、上側軸と下側軸との間に位置する。カートリッジギアは外周歯336を有する平歯車が好ましく、この外周歯の先端は上側ジャーナル軸の表面を越えて延在はしない。
【0032】
カートリッジ320は、図13に示すような搬送皿の開口部316に収容される。開口部の壁が軸受表面338を形成し、これと接触して上側ジャーナル軸が回転しうる。保持リングの直径が開口部の直径よりも大きいため、リングの肩部330は、直径が小さい軸およびギア部が下側に浮いた状態で搬送皿上に位置する。
【0033】
ギアプレート340は、搬送皿の下側に動作できるように配置される。ラックギア342の形態をした駆動ギアがギアプレート上に配置される。各ラックギアは、カートリッジギアの1つの歯と係合するように配置され、ギアプレートが移動すると同時にカートリッジが回転できるラック・アンド・ピニオンのシステムを形成する。ギアプレートはベルトの移動方向に細長い開口部344を有している。これらの細長い開口部には、ラックギアを形成する直線的なアレイの歯346が片側に設けられている。各細長い開口部は、搬送皿の開口部316のうちの1つの下側に位置する。下側ジャーナル軸はギアプレートの細長い開口部を通って延在しており、ギアプレートは2つの他のプレート、つまり搬送皿314と底部プレート348との間に挟まれている。コンベアフレーム350の一部に動かないよう固定された底部プレートは、搬送皿の開口部と垂直方向に調整されるが、搬送皿の開口部よりも直径が小さい複数の開口部352を有している。開口部352は、カートリッジの下側ジャーナル軸332を回転できるように受ける大きさである。これは、上側および下側の支持プレートを位置合わせしてローラ駆動機構の組立を容易にするのに役立ち、さらに回転可能なカートリッジの固定された垂直軸上での回転を制限する。
【0034】
底部プレート348の上面および上部プレート314の底面に対面しているスペーサパッド354は、可動するギアプレート340を収容する2つのプレート間の適切な間隔を維持するのに適している。ギアプレートの幾つかの細長い開口部344’は、中間スロット356によって接続される。スロット部のローラ358は、上部プレートの底面から下方へ延在するピン360に回転するように装着される。ピンの遠位端部は、底部プレートのソケット362内に収容される。ギアプレートが上部プレートおよび底部プレートに対して移動するにつれて、ローラ358がスロットの側面を移動する。
【0035】
ギアプレートは、図15に示すように、空気シリンダのような直線駆動装置364によって移動する。駆動装置の一端は、U字金具およびタイロッド368によって上部プレートの底面または搬送皿314から吊り下げられた取付ブラケット366に取り付けられる。駆動装置の他端から拡張ロッド370を拡張するかは選択可能である。拡張ロッドの遠位端部は、U字金具およびタイロッド372によってギアプレート340の底部から吊り下げられた回動ブラケット374に連結される。この拡張ロッドがギアプレートを移動させ、ロッドの拡張によりギアプレートの位置および駆動ローラの向きが決まる。取付ブラケット366の下のシム376は、搬送路の底部とギアプレートの上部の間をオフセットさせるために用いられる。
【0036】
コンベアシステムを迂回させる動作を図16Aおよび図16Bに示す。図16Aでは、ギアプレート340は、駆動ローラのカートリッジ320が細長いスロット344の右端の位置に移動して示されている。この位置まで回転したカートリッジでは、駆動ローラ308の回転軸378は、ベルトの移動方向306を基準に反時計回りの鋭角γを形成する。コンベアベルト302がベルトの移動方向に進行すると、この向きの駆動ローラは矢印380の方向に回転し、係合したベルトローラが矢印382の方向に図16Aの上部に向かって被搬送物体を誘導する。ギアプレートが、その範囲にわたって、カートリッジが図16Bの細長いスロットの反対側の左端に移動した場合、駆動ローラの回転軸378はベルトの移動方向を基準に時計回りの鋭角γ’を形成する。この向きでは、駆動ローラは矢印381の方向に回転し、ベルトローラは矢印383の方向に回転して図16Aの迂回方向とは逆の図16Bの底部へと被搬送物体を押し出す。
【0037】
切換コンベアは、図17に示すような送込みコンベアおよび複数レーンの送出しコンベアと共に、図4、10、および13に示すような駆動機構を有する90°のローラベルトを用いることにより構成することができる。90°のローラベルト402は、ベルトローラ404が駆動機構408の下にある駆動ローラと接触することによってベルトの移動方向406と平行の軸上を回転するよう構成されているという点で、前記のローラベルト102、202、および302と類似している。ローラベルトは、ローラベルトコンベアの下流および上流端部414、415において駆動シャフトおよびアイドルシャフト412、413に装着された直径が大きいスプロケット410の周りを進む。駆動シャフトは駆動モータ416に連結され、ベルトをベルトの移動方向に進行させる。
【0038】
搬送方向420に進行する送込みコンベア418は、上流端部に近い第1の側面422を超えてローラベルトコンベア上に物体を供給する。搬送方向に進行している複数レーンの送出しコンベア424はさらに、第2の側面423を超えてローラベルトコンベアから物体を受け取る。このローラベルトコンベアは、対角線426上の送込みコンベアと送出しコンベアの間に斜めに配置される。送込みコンベアから供給された物体は、上流の供給ローラ作動領域429の下に位置する供給駆動機構408により横方向428に回転するベルトローラによってベルト上に引き込まれる。ベルトが進行するとベルトローラが回転し、ローラベルトの第1の側面を超えて物体を斜め方向に送達すると、物体が送込みコンベアからベルトに移動する際にその向きが変わるのを防ぐ。ローラベルトコンベアは、ベルトの下に位置する個別に制御可能な出力駆動機構408によって、一連の連続した送出しのローラ作動領域430A−Fに分かれている。各作動領域は、近傍の送出しレーン432A−Fと関連している。従って、ローラベルトコンベアが仕分けコンベアを構成している。前述のように、送込みの作動領域を利用して、物体をベルト上に引き込む。送込み領域では、ベルトローラは送出しの作動領域のように恒久的に作動または選択的に作動しうる。各駆動機構用のモータおよびボールねじなどの駆動装置434は、プログラム可能な論理コントローラ(PLC)などのコントローラ436からの信号によって制御される。ベルトのシャフトの一方に装着されたシャフトエンコーダ438がコントローラに信号を与え、物体が指定した送出しレーンの作動領域に接近するとき、およびその領域におけるローラが作動するタイミングを判定するために利用できる。送込みコンベアの出口など、好適には既知の位置における位置センサ440は、コントローラにローラベルトへの物体の侵入を示し、時間調整を開始する信号を与える。シャフトエンコーダは、物体がその後でローラ作動領域の1つに侵入したときを判定する他の手段と交換してもよい。フォトアイ、近接スイッチ、重量センサ、またはコンベアの長さに沿って配置される他の位置センサは、常にベルト上の物体の位置を判定するために利用できる他の同等な手段の例である。
【0039】
切換器が、以下の通り、コントローラの制御下で、最後の送出しレーン424Fに物体を送達するよう作動する。送込みコンベアは物体をローラベルトに供給し、そのローラベルトのローラは最上流の領域430Aにおいて駆動されて、物体を矢印428に示すベルトへと引き込む。送出し領域用の駆動機構は、図8Bに示すようにベルトローラと外れるように下降する、あるいは、図7または図10Bのように、駆動ローラの軸がベルトの移動方向に対して垂直の状態で回転してベルトローラを制動する。この例の物体は最後の送出しレーン424Fに向かうため、前の作動領域424A−Eは外れるか制動するかの何れかで停止し、ベルトの移動方向に進行するようにベルト上に物体を保持し続ける。一旦、物体が全ての前の領域を通過し、最後の作動領域430Fに到達すると、ベルト上の物体の位置を調整または追跡してきたコントローラが駆動機構に信号を送り、その領域におけるローラを作動させてベルトの第2の側面へと回転させて、物体を第2の側面を越えて選択された最後の送出しレーン424Fへと移動させる。
【0040】
それぞれの送出しレーンに位置合わせするだけではなく、仕分けコンベアの第2の側面を超えてその長さに沿った任意の位置で物体を移動させることも可能である。1以上の連続した領域におけるベルトローラの操作を仕分けコンベアに沿った物体の位置に調整することにより、切換器は仕分けコンベアの長さに沿った任意の選択位置で物体を移動させることができる。例えば、2つの連続した領域を同時に駆動させて、1つのレーンに位置合わせするのではなく、2つの送出しレーンに跨る選択位置で物体を移動させることができる。
【0041】
従って、全体的に斜めのローラベルトソーターを使用することにより、この切換器は貴重な工場空間を無駄にしない。さらに、物体は両側からおよび両側に移動するため、ローラベルトの端部の代わりに、ピッチが長いベルトの性能を向上させる大型のスプロケットをピッチが長いローラベルトに利用することができる。
【0042】
例示するために前記の説明および図面においては特定の実施形態が詳しく開示されてきたが、その変形物および改変が本開示の範囲から逸脱することなくなされうることは、当該技術分野における当業者によって理解されるであろう。このような変形物の1つでは、駆動ローラのカートリッジの下側軸はその底部に中空部を有したり、底部プレートの開口部をカートリッジが回転する中空部に延在する柱と交換してもよい。他の変形物では、切換器用の駆動機構は両方向にベルトローラを駆動できる必要はない。ベルトローラは、一方向にのみ回転する必要があり、さもなければ停止または制動する。従って、制動するため、切換器に必要な片側の駆動ローラのアレイは、左右のローラアレイの角度範囲の半分のみを必要とする。制動が必要ない場合、ローラアレイの角度は固定することができ、ベルトローラからローラアレイを取り外すことでローラは停止する。他の例のように、仕分けコンベアの側面および端部に対して垂直および平行な側面を有する矩形の形状として図17に図示されているローラ作動領域は、仕分けコンベアに対して斜めに配置され、移動位置を厳格に制御できるようにする。
【特許請求の範囲】
【請求項1】
搬送方向に物体を搬送する送込みコンベアと;
物体を受け取り、前記物体を前記搬送方向に搬送する複数の送出しコンベアレーンを具える送出しコンベアと;
前記送込みコンベアと前記送出しコンベアの間の前記搬送方向に対して斜めの対角線上に配置された仕分けコンベアであって、前記対角線に沿って進行し、前記仕分けコンベアの長さに沿って連続的に配置されたローラ作動領域に前記送込みコンベアの方へと前記対角線に対して斜めに選択的に回転可能なローラを有するベルトを具え、前記仕分けコンベアに沿った選択位置で前記送込みコンベアから前記送出しコンベアへと受け取った前記物体を押し出す仕分けコンベアとを具えることを特徴とする切換器。
【請求項2】
請求項1に記載の切換器において、前記ベルトにおける前記ローラを回転させるべく前記仕分けコンベアが前記送込みコンベアに近接するローラ作動領域を具え、前記送込みコンベアから前記ベルトへと物体を引き込むことを特徴とする切換器。
【請求項3】
請求項1に記載の切換器において、各ローラ作動領域が、前記ベルトが前記領域を通過するときに前記ベルトにおける前記ローラと互いに回転接触したり接触しないように選択的に可動する駆動ローラのアレイを具えることを特徴とする切換器。
【請求項4】
請求項3に記載の切換器において、各ローラ作動領域が前記アレイに連結された駆動装置を具え、相互に回転接触すべく前記駆動ローラが前記ベルトにおける前記ローラに対して斜めを向いている第1の位置と、前記ベルトにおける前記ローラを制動する滑り接触をした状態で前記駆動ローラおよび前記ベルトにおける前記ローラが互いに垂直である第2の位置の間で前記アレイが選択的に移動することを特徴とする切換器。
【請求項5】
請求項1に記載の切換器がさらに、前記仕分けコンベア上の既知の位置に物体があることを検出するセンサと、前記物体がその後で前記ローラ作動領域の1つに侵入したときを判定する手段とを具えることを特徴とする切換器。
【請求項6】
請求項5に記載の切換器において、前記判定する手段が、前記ローラのベルトに連結されたシャフトと、当該シャフトに装着されたシャフトエンコーダとを具えることを特徴とする切換器。
【請求項7】
請求項1に記載の切換器において、各ローラ作動領域が近接する送出しコンベアレーンと関連しており、前記関連する送出しコンベアレーンへと物体を押し出すように選択的に駆動されることを特徴とする切換器。
【請求項8】
出口端部を有し、搬送方向に前記出口端部へと物体を搬送する送込みコンベアと;
入口端部を有し、前記搬送方向に前記入口端部から物体を搬送する複数の送出しコンベアレーンと;
平行な第1および第2の側面の間の上流端部から下流端部まで、前記送込みコンベアの前記出口端部と前記送出しコンベアレーンの前記入口端部の間の斜め方向の長さに延在している仕分けコンベアとを具える切換器であって、前記送込みコンベアは前記第1の側面を超えて上流位置で前記仕分けコンベアに物体を供給し、前記送出しコンベアレーンは前記第2の側面を超えて前記入口端部で前記仕分けコンベアから物体を受け取り、前記仕分けコンベアが:
前記仕分けコンベアの長さに沿って前記搬送方向に対して斜めのベルトの移動方向に進行し、前記ベルトの移動方向と平行の軸上を選択的に回転する物体支持するベルトローラを有するローラベルトと;
前記仕分けコンベアの長さに沿って前記ローラベルトの下に位置し、各領域の前記ベルトローラを前記第2の側面の方に選択的に回転させて前記送出しコンベアレーンへと支持された物体を押し出す一連のベルトローラの作動領域とを具えることを特徴とする切換器。
【請求項9】
請求項8に記載の切換器がさらに、前記上流位置に前記第2の側面の方に前記ベルトローラを回転させる送込みベルトローラの作動領域を具え、前記送込みコンベアの前記出口端部から前記ローラベルトへと物体を引き込むことを特徴とする切換器。
【請求項10】
請求項8に記載の切換器において、各ベルトローラの作動領域が、駆動装置と、前記領域を通過しながら前記ベルトローラと回転接触する駆動位置と前記ベルトローラと回転接触しない非駆動位置との間を前記駆動装置によって選択的に移動するキャリアローラのアレイとを具えることを特徴とする切換器。
【請求項11】
請求項8に記載の切換器がさらに、前記仕分けコンベア上の既知の位置に物体があることを検出するセンサと、前記物体がその後で前記ベルトローラの作動領域の1つに侵入したときを判定する手段とを具えることを特徴とする切換器。
【請求項12】
請求項11に記載の切換器において、前記判定する手段が、前記ローラベルトに連結されたシャフトと、当該シャフトに装着されたシャフトエンコーダとを具えることを特徴とする切換器。
【請求項13】
請求項8に記載の切換器において、各作動領域は、近接する前記送出しコンベアレーンの1つと関連していることを特徴とする切換器。
【請求項14】
切換器を作る方法において、当該方法が:
ベルトの移動方向に対して垂直方向に選択的に回転するよう構成された複数の作動できる物体支持ローラを有するベルトを具える仕分けコンベアを、当該仕分けコンベアの長さに沿って連続的に配置されたローラ作動領域に設けるステップと;
前記仕分けコンベアの第1の側面から前記ベルトの移動方向に対して斜めの搬送方向に、前記仕分けコンベアへと物体を供給する送込みコンベアを配置するステップと;
前記仕分けコンベアの対向する第2の側面に前記搬送方向と平行の複数のレーンを有する送出しコンベアを配置するステップとを含んでおり、前記レーンは前記第2の側面を超えて前記仕分けコンベアから物体を受け取るよう構成されることを特徴とする方法。
【請求項1】
搬送方向に物体を搬送する送込みコンベアと;
物体を受け取り、前記物体を前記搬送方向に搬送する複数の送出しコンベアレーンを具える送出しコンベアと;
前記送込みコンベアと前記送出しコンベアの間の前記搬送方向に対して斜めの対角線上に配置された仕分けコンベアであって、前記対角線に沿って進行し、前記仕分けコンベアの長さに沿って連続的に配置されたローラ作動領域に前記送込みコンベアの方へと前記対角線に対して斜めに選択的に回転可能なローラを有するベルトを具え、前記仕分けコンベアに沿った選択位置で前記送込みコンベアから前記送出しコンベアへと受け取った前記物体を押し出す仕分けコンベアとを具えることを特徴とする切換器。
【請求項2】
請求項1に記載の切換器において、前記ベルトにおける前記ローラを回転させるべく前記仕分けコンベアが前記送込みコンベアに近接するローラ作動領域を具え、前記送込みコンベアから前記ベルトへと物体を引き込むことを特徴とする切換器。
【請求項3】
請求項1に記載の切換器において、各ローラ作動領域が、前記ベルトが前記領域を通過するときに前記ベルトにおける前記ローラと互いに回転接触したり接触しないように選択的に可動する駆動ローラのアレイを具えることを特徴とする切換器。
【請求項4】
請求項3に記載の切換器において、各ローラ作動領域が前記アレイに連結された駆動装置を具え、相互に回転接触すべく前記駆動ローラが前記ベルトにおける前記ローラに対して斜めを向いている第1の位置と、前記ベルトにおける前記ローラを制動する滑り接触をした状態で前記駆動ローラおよび前記ベルトにおける前記ローラが互いに垂直である第2の位置の間で前記アレイが選択的に移動することを特徴とする切換器。
【請求項5】
請求項1に記載の切換器がさらに、前記仕分けコンベア上の既知の位置に物体があることを検出するセンサと、前記物体がその後で前記ローラ作動領域の1つに侵入したときを判定する手段とを具えることを特徴とする切換器。
【請求項6】
請求項5に記載の切換器において、前記判定する手段が、前記ローラのベルトに連結されたシャフトと、当該シャフトに装着されたシャフトエンコーダとを具えることを特徴とする切換器。
【請求項7】
請求項1に記載の切換器において、各ローラ作動領域が近接する送出しコンベアレーンと関連しており、前記関連する送出しコンベアレーンへと物体を押し出すように選択的に駆動されることを特徴とする切換器。
【請求項8】
出口端部を有し、搬送方向に前記出口端部へと物体を搬送する送込みコンベアと;
入口端部を有し、前記搬送方向に前記入口端部から物体を搬送する複数の送出しコンベアレーンと;
平行な第1および第2の側面の間の上流端部から下流端部まで、前記送込みコンベアの前記出口端部と前記送出しコンベアレーンの前記入口端部の間の斜め方向の長さに延在している仕分けコンベアとを具える切換器であって、前記送込みコンベアは前記第1の側面を超えて上流位置で前記仕分けコンベアに物体を供給し、前記送出しコンベアレーンは前記第2の側面を超えて前記入口端部で前記仕分けコンベアから物体を受け取り、前記仕分けコンベアが:
前記仕分けコンベアの長さに沿って前記搬送方向に対して斜めのベルトの移動方向に進行し、前記ベルトの移動方向と平行の軸上を選択的に回転する物体支持するベルトローラを有するローラベルトと;
前記仕分けコンベアの長さに沿って前記ローラベルトの下に位置し、各領域の前記ベルトローラを前記第2の側面の方に選択的に回転させて前記送出しコンベアレーンへと支持された物体を押し出す一連のベルトローラの作動領域とを具えることを特徴とする切換器。
【請求項9】
請求項8に記載の切換器がさらに、前記上流位置に前記第2の側面の方に前記ベルトローラを回転させる送込みベルトローラの作動領域を具え、前記送込みコンベアの前記出口端部から前記ローラベルトへと物体を引き込むことを特徴とする切換器。
【請求項10】
請求項8に記載の切換器において、各ベルトローラの作動領域が、駆動装置と、前記領域を通過しながら前記ベルトローラと回転接触する駆動位置と前記ベルトローラと回転接触しない非駆動位置との間を前記駆動装置によって選択的に移動するキャリアローラのアレイとを具えることを特徴とする切換器。
【請求項11】
請求項8に記載の切換器がさらに、前記仕分けコンベア上の既知の位置に物体があることを検出するセンサと、前記物体がその後で前記ベルトローラの作動領域の1つに侵入したときを判定する手段とを具えることを特徴とする切換器。
【請求項12】
請求項11に記載の切換器において、前記判定する手段が、前記ローラベルトに連結されたシャフトと、当該シャフトに装着されたシャフトエンコーダとを具えることを特徴とする切換器。
【請求項13】
請求項8に記載の切換器において、各作動領域は、近接する前記送出しコンベアレーンの1つと関連していることを特徴とする切換器。
【請求項14】
切換器を作る方法において、当該方法が:
ベルトの移動方向に対して垂直方向に選択的に回転するよう構成された複数の作動できる物体支持ローラを有するベルトを具える仕分けコンベアを、当該仕分けコンベアの長さに沿って連続的に配置されたローラ作動領域に設けるステップと;
前記仕分けコンベアの第1の側面から前記ベルトの移動方向に対して斜めの搬送方向に、前記仕分けコンベアへと物体を供給する送込みコンベアを配置するステップと;
前記仕分けコンベアの対向する第2の側面に前記搬送方向と平行の複数のレーンを有する送出しコンベアを配置するステップとを含んでおり、前記レーンは前記第2の側面を超えて前記仕分けコンベアから物体を受け取るよう構成されることを特徴とする方法。
【図1】


【図2A】
【図2B】
【図3】
【図4】
【図5A】
【図5B】
【図6A】
【図6B】
【図7】
【図8A】
【図8B】
【図9】

【図10A】
【図10B】
【図10C】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15】
【図16A】
【図16B】
【図17】
【図2A】
【図2B】
【図3】
【図4】
【図5A】
【図5B】
【図6A】
【図6B】
【図7】
【図8A】
【図8B】
【図9】
【図10A】
【図10B】
【図10C】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15】
【図16A】
【図16B】
【図17】
【公表番号】特表2012−520815(P2012−520815A)
【公表日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2012−500898(P2012−500898)
【出願日】平成22年3月16日(2010.3.16)
【国際出願番号】PCT/US2010/027523
【国際公開番号】WO2010/107823
【国際公開日】平成22年9月23日(2010.9.23)
【出願人】(508181663)レイトラム,エル.エル.シー. (43)
【Fターム(参考)】
【公表日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成22年3月16日(2010.3.16)
【国際出願番号】PCT/US2010/027523
【国際公開番号】WO2010/107823
【国際公開日】平成22年9月23日(2010.9.23)
【出願人】(508181663)レイトラム,エル.エル.シー. (43)
【Fターム(参考)】
[ Back to top ]