
方位または磁力線方向情報取得方法及び装置
【課題】衛星や電波源に頼らずとも廉価かつ簡便に、かつ、陸上においても高い信頼性を持って方位情報を取得し得るようにする。
【解決手段】投擲すると回転する回転投擲体11に導体12を設ける。導体12内に所定方向の誘導起電力が生じた時に検出出力を発する検出部13を設け、この検出出力が発せられたことを報知部14にて報知する。
【解決手段】投擲すると回転する回転投擲体11に導体12を設ける。導体12内に所定方向の誘導起電力が生じた時に検出出力を発する検出部13を設け、この検出出力が発せられたことを報知部14にて報知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は方位または磁力線方向情報取得方法及び装置に関し、特に地磁気検出に基づき方位または磁力線方向情報を取得する方法及び装置に関する。
【背景技術】
【0002】
近年の地理情報システムの急展開と衛星測位技術の急速な普及に伴い、陸上でも信頼して使用できる方位情報取得方法の需要が急増している。特に、廉価で簡便、信頼性の高い方法である必要はもちろんのこと、衛星や電波源に頼る必要のない地磁気検出に基づく方法の提供を求める声が高まっている。
【0003】
従来、衛星や電波源に頼る必要のない地磁気検出による方位取得と言えば、伝統的な方位磁針の適用がある。確かに方位磁針を用いての方位情報の取得も、海洋上や上空では一定の有効性を持ってきた。海洋上や上空では自差(船体または機体自体の磁性の影響により方位磁針の示す北方向が真の磁北方向に対して生じる誤差)、偏角(declination)についての補正は煩雑なものの、一応、実質的に可能であるためである。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、陸上では事情が異なっていた。方位磁針の陸上での使用には意外に大きな問題があり、便宜的暫定策としてのみ見られるべきものであった。
【0005】
つまり、個別地点での方位磁針の向きにおける地磁気と外乱磁気の混淆比率が不明である上、この混淆比率は時に1対1ないしそれ以上にも達し、すなわち、誤差の方が大きくなる場合がある。言い換えると、誤差が360度まであり得る。そのため、個別地点における誤差程度が不明のまま、低信頼の結果を使用者に与えてしまい、その誤情報を使用者が信じて行動してしまう危険が大きかった。外乱磁気は、その地点に固有の地質特性や鉄等の埋設物や自動車等の存在、鉄骨ビルの存在や使用者が所持する諸々の磁性金属の影響に由来する。これらは使用者の位置が変われば変化するものであり、あるいは使用者の着用物が変われば変化するものであって、個別の評価は非常に難しい。ここに、船舶や航空機の自差との根本的な違いがある。船舶や航空機の自差は、手続きは煩雑にせよ補正が可能であるが、陸上では余りにも個別の影響物の個数が多過ぎて評価ができない。
【0006】
実際、陸上での方位磁針等の使用は、重要な意思決定には用いられていなかった。なぜなら、計測地点の地物由来の外乱磁気に汚染されている結果であることを否定する証拠が一切持てず、純粋に地磁気を検出しているのか、計測地点の地物由来の外乱磁気に汚染された結果なのかどうかを、その場で迅速に確認する方法が全くなかったためである。これを確認しようとすれば、わざわざ歩行等によって移動し、各地点での方位が元の地点での方位と同一方向であるかを確認するという、煩雑な行為を行わざるを得ない。
【0007】
しかし、このような歩行等による移動は、登山等の野外活動においては極めて貴重な行動資源である体力や時間を急速に減少せしめてしまうという欠点があり、安全確保上も実用性が無かった。すなわち、方位を得るための試行的歩行によって却って霧時の稜線滑落を生んだり、雪庇の踏み抜き転落事故を生んだりする危険もあった。また、事故に繋がらなくても、日没までの貴重な時間を浪費し、夜間に却って危険なビバークを余儀なくされる等の危険に繋がったし、それらの危険に繋がらないまでも、体力を消費するということで、疲労凍死等の危険を増加させるという問題もあった。
【0008】
本発明はこのような従来の実情に鑑み、衛星や電波源に頼らずとも、廉価かつ簡便な手法ないし装置により、陸上においても高い信頼性を持って方位情報を、あるいはまた磁力線方向を取得し得る方法ないし装置の提供を目的としてなされたものである。
【課題を解決するための手段】
【0009】
本発明は上記目的を達成するため、まず基本的な構成として、
投擲すると回転する回転投擲体に導体を設け;
回転によって導体が磁界を横切る際に導体に発生する誘導起電力を検出することで所定の方位情報を取得すること;
を特徴する方位情報取得方法を提案する。
【0010】
さらに本発明では、回転によって導体が磁界を横切る際に当該導体に発生し得る誘導起電力の有無または大きさに基づき、磁力線方向情報を取得する方法も提案する。
【0011】
これらの望ましい下位構成として、本発明は所定の方位情報が取得されたことを報知するか、取得された磁力線方向情報を報知する報知部を設け、この報知部を回転投擲体の中心以外の位置、望ましくは外周縁またはその近傍に配置することも提案する。
【0012】
さらに、報知部は、報知をなす際に、可視的あるいは可聴的に、または可視的及び可聴的に状態を変えるものとすることも提案する。換言すれば、報知部は、報知をなす際に、それ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有するように構成できる。
【0013】
本発明はもちろん、装置としても規定できる。すなわち、
投擲すると回転する回転投擲体と;
この回転投擲体に設けられた導体と;
この導体内に所定方向の誘導起電力が生じた時に検出出力を発する検出部と;
上記の検出出力が発せられたことを報知する報知部と;
を有して成る方位情報取得装置を提案する。
【0014】
方法の発明におけると同様、装置発明としての本発明でもまた、上記の検出部の検出出力を介して得られる導体に発生する誘導起電力の有無または大きさに基づき、磁力線方向情報を報知する磁力線方向情報取得装置も提案する。
【0015】
いずれの発明においても、下位構成としては、例えば報知部は回転投擲体の中心以外の位置に配置されているようにするのが良く、特に外周縁またはその近傍に配置するのが良いし、こうした装置構成においても同様に、報知部は可視的あるいは可聴的、または可視的及び可聴的な報知手段を有するように構成できる。
【0016】
具体的報知手段としては、報知時にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体等が挙げられる。これらの中から一つを用いるか、または幾つか、あるいは全てを組み合わせて用いれば良い。
【0017】
回転投擲体にはさらに、報知部を駆動する電源と、駆動制御部とを設け、検出部が発する上記の検出出力により、駆動制御部が電源から報知部への電力供給を可能にするように構成することもできる。
【0018】
単に稼動電力を供給するのではなく、駆動制御部は、検出部が発する上記の検出出力により報知部の報知形態を変更するように構成されているものであっても良い。すなわち、例えば報知部に設けられている報知手段である発光体の発光色をそれまでとは変えたり、光学特性可変体の光反射率ないし光吸収率の値を変えたり、発音体の音色をそれまでとは変えたりするように構成することができる。
【0019】
さらに、回転投擲体が回転しているか否かを検出する回転検出装置と、この回転検出装置が回転を検出したときに電源からの電力供給を可能とする電源スイッチ部とをさらに設けることで、回転投擲体が使用されていないときの電源節約を図ることもできる。
【0020】
回転検出装置としては、それぞれ回転投擲体の中心から外周に向かう放射方向に沿い、互いには周方向に適当な離角を与えて配置された複数個の水銀スイッチを有するものとして構成でき、各水銀スイッチは、ケーシング内に封入された水銀球が回転に伴う遠心力で半径方向の外周端側に来たときに電気接点を閉成するように構成する。こうすれば、水銀スイッチの全てにおいて電気接点が閉成したときに、当該回転検出装置は回転投擲体が回転したと確実に検出することができる。
【0021】
報知部は回転投擲体の互いに異なる位置に二つ以上を設けても良いし、回転投擲体外周縁に沿って複数個を適宜間隔で配置しても良い。回転投擲体の中心またはその近傍から外周縁の一部位に向け、半径方向に複数個を直線状に適宜間隔で設けるのもまた、良い配置構成である。
【0022】
報知部は無線送信機を含むこともでき、検出部が検出出力を発したときに使用者が保有する無線受信機に報知信号を送信するように構成しても良い。もちろん、受信機側では報知信号の受信に基づき、使用者が認知可能な可視的報知手段及び可聴的報知手段の一方または双方を稼動させる。
【0023】
なお、回転投擲体は、投擲すると略々投擲開始位置に戻ってくる帰還型滑空体であると望ましい場合が多い。
【発明の効果】
【0024】
本発明によると、衛星や電波源に頼らず、廉価かつ簡便でありながら、外乱磁気の影響から免れ得ることで高い信頼性を呈する方位情報取得方法ないし装置を提供できる。しかもそれは、一般に有用な身体中心身体固定座標系表現の様式で方位情報を提示できるものとなる。一般に磁気検出につきものの、煩雑な自差補正等の手続きも不要で、方位磁針の陸上使用の深刻な欠点であった外乱磁気影響の不明を解決し、重要な行動決定への活用を実用水準で実現でき、安心,安全の確保と、誤情報に基づく行動の危険から使用者を保護できる。
【0025】
また、方位磁針の弱点である軸受け等が不要であり、機械的可動部分を必要としないので低故障率である上、廉価に構成できるため、失っても惜しくない。現場で作り直すことも比較的容易にできるし、軽量であるので複数個を携帯して行くこともできる。
【0026】
さらに、本発明の特定の態様によれば、単に方位のみならず、磁力線方向をも検出することができ、これもまた、極めて有効な使途が多々ある。
【発明を実施するための最良の形態】
【0027】
図1(A),(B)には本発明に従って構成された方位または磁力線方向情報取得装置の望ましい一実施形態が示されているが、まずは方位情報取得装置として構成されているものとして説明を始める。図1(A) に示されているように、本装置の主要な構成要素の一つとして回転投擲体11がある。本発明で言う「回転投擲体」とは、人が直接に投擲あるいは投擲を補助する器具も援用して投擲することで回転しながら飛んで行けるものを指し、滑空性能の高い低いは原理的には問わない。滑空性能の高いフリスビー、ブーメラン等はもちろんのこと、滑空性能は低いか滑空能力を持たない野球のボールやドッジボール用のボールの他、これらの中間的存在として飛行中にフリスビー形状とボール形状の相互反転を行う遊具(フラット・ボール)、あたかもペットボトルの口部と底部とを切り落としたかのごとき形状の遊具(Xジャイロ)や日本古来の竹とんぼ、あるいは上昇を安定させるために竹とんぼ様物体の回転をより高速かつ安全にできるべく、引き綱的部分を高速で引くことにより本体に高速に回転を与えられる補助機器を備えたもの、ないしはそれに類する回転上昇体等、各種の投げられるもの、遊具等も含む。
【0028】
ちなみに、図1(A) では円盤形状に示されている回転投擲体11の外周縁部は斜めに描かれているが、円盤の外周縁部が垂直に構成されているもの(ドッジビー)も現在広く流通しており、もちろんその形状でも良い。フリスビーをあたかもブーメランのように(ブーメランよりは少し寝かせ気味にし)、水平から30〜40度程度の角度を与えて前上方へ向かって投げると、前方に上昇してから向きを変えて帰って来る。滑空性能の高い投擲体にあっても上述のようなフリスビー、ブーメラン等は略々投擲開始位置に近い位置まで戻ってくるので、こうしたものは「帰還型滑空体」と名付けることができる。
【0029】
なお、周知のように、フリスビーの飛距離は100mから200mに及ぶし、中心部位を完全に刳り貫き、ドーナツ状に構成したエアロビーと呼称されるものではその飛距離は300mにも及ぶ。ブーメランでも、くの字の形や、三方に腕を持つ形、四方に腕を持つ形等々、多彩な形状のものがあることが知られている。これらも当然、本発明における回転投擲体11として使用可能である。携帯に便利な折りたたみ型のものもあり、こうしたものも本発明の回転投擲体11として便利に使用可能である。
【0030】
この実施形態では、説明の便宜上、回転投擲体11としてフリスビーのようなものを想定して説明するが、回転投擲体11には導体12が設けられている。この実施形態の場合、導体12は回転投擲体11の中心Ocを通る直径に沿ってぐるりと一周巻き付けられた導線12で構成されている。図を簡明にするため、導線12の巻数は一巻きで示しているが、実際には多数回の巻回をなすことが望ましく、その方が後述の誘導起電力をより大きくすることができる。
【0031】
導体12に対しては、当該導体12内に生じる誘導起電力を検出する検出部13を臨ませる。微少な誘導起電力の検出には、市場に流通している半導体系微少電圧検出装置などを任意に用い得る。
【0032】
なお、検出部13は、導体12に生じる誘導起電力が所定の一方向になったときのみ検出するように、例えば簡単には整流ダイオード等を用いて対象とする検出誘導起電力方向を制限できるようにしておいても良い。また、単純に誘導起電力がオン・オフする場合に限らないので、導線12に最大の誘導起電力が生じた時を所定の方向を向いた時として検出するように構成すると良いことが多い。
【0033】
回転投擲体11には、検出部13が導線12内に所定方向の誘導起電力が発生したことを検出したときに稼働する報知部14も設けられており、この報知部14はそのときにそれまでとは異なる状態を可視的あるいは可聴的に、または可視的及び可聴的に具現できるように構成されていれば良い。例えば可視的な表示をするには当該報知手段を代表的には軽量小型で低消費電力な発光ダイオード(LED)等の発光体で構成すれば良いし、可聴的な報知をなすには当該報知手段を代表的にはこれも低消費電力で軽量小型なフィルム・スピーカ等の発音体で構成すれば良く、さらには両者を併用しても良い。また、電気信号により光反射率や光吸収率を制御可能な液晶等の光学特性可変体を単体で、ないしは上記の発光体、発音体と組み合わせて使用することもできる。
【0034】
検出部13の検出出力が十分高く、かつ、報知部14の稼働電力が極めて微少で済む場合には、検出部13の出力でそのまま報知部14を駆動できるので、言わば検出部13はそのまま報知部14の駆動制御部15を構成し得る。例えば将来的に極めて微少な電力で発光できる発光ダイオード等が提供されるのであれば、この発光ダイオードを単に導体12に直列に挿入するだけで、上記の整流ダイオードの働きも兼ね得ることになる。しかし、一般に現今の発光ダイオードやスピーカを駆動するには別電力が必要な場合が多く、本実施形態では軽量にして安価なボタン電池等であって良い電源16を回転投擲体11の内部の適当な位置に設けており、駆動制御部15を介して報知部14を選択的に駆動できるようにしている。図1(A) 中では表記の都合上、電源16は回転投擲体11の中心からややずれた位置に示しているが、中心近傍とすると円盤形の回転投擲体11の場合、回転バランスが良くなる。
【0035】
導線12の巻数が十分に多い場合には、誘導起電力そのものを本体の電源として用いることも可能であるし、内蔵する充電池や電気二重層コンデンサ等、適当なる蓄電体(図示せず)に蓄えられる場合にはそれらを電源16として用いることもできる。
【0036】
検出部13、報知部14、駆動制御部15、電源16の相関回路ブロック例は例えば図1(B) に示されている。駆動制御部15は例えば電界効果トランジスタその他の半導体スイッチング素子を利用する等した電源線路開閉部として組むことができ、検出部13が所定方向の誘導起電力を検出したことを表す検出出力を発したときにこの電源線路開閉部が応答して電源線路を閉じ、電源16からの供給電力で報知部14を駆動するように構成することができる。このような回路構成自体は当業者であれば極めて容易に多様なものを組むことができ、昨今の集積回路技術をすれば、相当に小型、軽量なものとし得る。
【0037】
報知部14の幾何的配置位置は、少なくとも報知を視覚的に行う場合には回転投擲体11の中心Ocを避ける位置である必要があり、望ましくは回転投擲体11の外周縁ないしその近傍とする。この実施形態の場合には回転投擲体11の一表面上で外周縁の近傍に設けられており、また、導体12の上にも乗る位置にある。
【0038】
なお、既に述べたように、検出部13として半導体系の微少電圧検出装置を用いる場合、例えば、“超高性能ADコンバータIHM-A-1500”として流通している集積回路を用いてもよい。これは指先に乗る程に小型で軽量、薄型(縦10mm×横10mm×薄さ5mm)な集積回路であるため、軽量で飛行体に好適に適合する。平たい長方形のパッケージの両方の長辺に外部入出力用のリードが8本ずつ並べられた16ピン集積回路(Integrated Circuit)チップであり、表面実装用のパッケージ方式としてDIP(Dual Inline Package)方式のフラットタイプにあたるSOP (Small Outline Package)方式という、パッケージ方式としてはポピュラーな方式を用いていて、取り扱いが容易であり、低コストである。μVオーダの微小電圧を最大16KHzの周期で検出することができ、16ビットのデジタル信号にて精度の良い出力が可能である。ドイツ国,ISABELLENHUTTE社製の製品であり、極めて廉価に入手できる。ただ、0V入力でもホワイトノイズがあり、下位1,2ビットは完全に0にならないこともあるが,これは高性能な検出感度を備えるこの種の集積回路に寧ろ通常のことであり、それらのビットを無視するか、駆動制御部15での閾値を適切に設定することで対処すれば良い。また、内部コントローラを持たない単なるADコンバータなので、その変換方式はレジスタ書き込み内容で制御可能である。本体は5V電源で動作する。重量も数グラム程度であり、フリスビー本体と同程度ないしそれよりも低廉に流通しているため、本発明装置への適用性が高い。
【0039】
誘導起電力がこうした微少電圧検出装置の集積回路により検出されたときに駆動制御部15の一形態として用いたマイクロコンピュータ(マイコンと略:例えば,PICマイコン:EPROM化してプログラムを持てる)に通知させれば良い。もちろんこれも、5Vの電源で十分動作するために、電源16としては既述したボタン電池で十分である。
【0040】
図2は図1に示した本発明の方位情報取得装置の動作原理を模式的に説明しているが、まず基本的に、本発明では、フレミングの右手の法則を利用している。すなわち、磁場内で磁力線に垂直においた導線を磁場に垂直に動かす場合、右手の人指し指、親指をそれぞれ磁場の方向、導線の運動の方向に向けると、誘導起電力はこれらに垂直に向けた中指の方向に生じる。
【0041】
そこで、導線12の巻き付けられた回転投擲体11、すなわちコイル12を有する回転投擲体11を磁界Mf中で投擲方向Dgに投擲すると、図2中に矢印Roで示す回転投擲体11の回転方向の接線方向の運動ベクトルと地磁気方向ベクトルから誘電起電力ベクトルが生じる。これにより導体(導線)12に所定方向に生じる誘導起電力の発生を検出部13にて検出する。そして、検出部13が誘導起電力を検出したその瞬間に、駆動制御部15を介して電源16からの稼動電力により報知部14を駆動し、例えば報知部14として設けた発光ダイオード等の発光体を符号Leで示すように発光させる。
【0042】
この発光の基準は、誘導起電力に閾値を設定してそれを超えている場合に報知する設計でも良い。あるいは、誘導起電力が観察されたはじめた際に、基本的に回転に伴うサインカーブである筈のその変動サイクルに注目し、直前回誘導起電力のサインカーブにおける最大値の8割の誘導起電力を今回誘導起電力の閾値として、その閾値を超えたら報知する設計でも良い。後者の方法だと、閾値の設定を高くし過ぎたため全く報知されない、ということを回避できる。また、投擲する方向や角度によって誘導起電力が変化することに対応でき、便利である。あるいは両者をスイッチにより切り替えられるようにしておいても良い。
【0043】
前者、すなわち所定の閾値を設定した場合には、発光し続ける方位が広くなり過ぎる場合があるかもしれない。しかしそれは観察する人間により、その大体中心位置と認識できるから問題は少ない。閾値はジョグダイヤル等(図示せず)で、外から設定できるようにしても良い。また1波長分のサインカーブ変動を注意深く検出可能であるなら、誘導起電力の最大値の前後において、適宜発光するように制御することが良いことはもちろんである。このこと自身はそれほど困難ではない。
【0044】
ここで、フレミングの右手の法則により誘導される誘導起電力の大きさについて言及しておく。回転コイル法(rotating-coil flux meter)での電磁誘導による磁界測定は、磁界の絶対値を測定できる。定常磁界中の検出コイル(本発明では導体12がこれを構成)を一定速度で回転させ、コイルに誘導された起電力を測定する。
【0045】
例えば断面積がS、巻数がNの検出コイルを磁界Hに垂直に角速度ωで定速回転させると、コイルを貫通する全磁束Φは,
Φ=μo・H・S・N・cos(ωt)
であるから、誘導起電力Vは次のようになる
V=δΦ/ δt = μo・ω・H・S・N sin(ωt)
【0046】
上式に具体的な数値を入れると次のようになる。
角速度ω=2×3.14(rad/circle)×10(circle/sec)=62.8(rad/sec)(毎秒10回転を仮定),
磁界μoH=0.35(G) = 0.35×10-4 (T) (中緯度地域の水平磁力を仮定),
断面積S=0.015(m-2)(コイル断面積に直径30cm,高さ5cmの矩形を仮定),
巻数N=10(回)
とすれば、
誘導起電力最大値V=3.30×10-4 (V)
となる。
【0047】
従って、既述した廉価な指先大の半導体集積回路による微少電圧検出機器の検出感度が10-6Vであることを考慮すれば、上記の現実的な諸条件下で既に検出感度の330倍の起電力が得られ、十分に対象となる微少電圧範囲を検出することができる。もちろん、先にも述べたように、導線12の巻数Nを増すことで、検出部13による検出感度は実質的により向上する。
【0048】
なお、上記における水平磁力(horizontal magnetic intensity)とは、地磁気の磁場を鉛直方向と水平方向の二成分に分けたときの水平成分を言う。地磁気赤道で最も大きくなり0.4G(0.4×10-4T)程度、東京付近で0.3G程度である。
【0049】
ここで例えば下記非特許文献1によれば、外乱磁気により結果が乱れることが示されている。本発明では、誘導起電力検出にどうしても与えねばならない回転を、局所的外乱磁気影響の最小化を目指す空間移動に随伴する回転と相互に転用することで、簡素かつ効果的な方位情報取得という実際性を生み出した。
【非特許文献1】長崎大学/教科教育学研究報告/7, 「回転コイル法による地磁気の測定と実験室内の地磁気の乱れ」,富山哲之他, NCID AN00178258,VOL.7,1984年3月30日
【0050】
以上のように、本発明装置では地磁気方向ベクトルに対して回転投擲体11がある特定の姿勢になった場合にのみ、発光体14からの発光が行われるようにし得る。すなわち、回転しながら滑空ないし飛翔する投擲体11は、地磁気ベクトルに対してある姿勢を迎えたときにだけ、それに設けてある報知部14としての発光体が発光するように構成できるので、一般には報知部14の位置が磁北方向と合致したときだけ、発光するように構成でき。投擲者はそれにより、磁北を確認できる。この際、必要に応じて、回転投擲体11の中心Ocに、図1(A) 中に仮想線で示すように、別の色で点滅装置とか着色標識を設けると、回転投擲体11上における報知部14のそのときの位置が確認し易くなり、結局は磁北方向の確認がし易くなる。
【0051】
しかるに、本発明による方向情報取得装置での方位報知の表現形態には、上記以外にも多様な形態が考えられる。例えば、上記では中心Ocから報知部14としての発光体14を見る方向が磁北となったときに当該発光体14を発光させるようにしたが、発光体14の設けて有る位置には目立つ着色標識をしておき、磁北検出時には発光体14に代えて発音体14を駆動するようにしても良い。これは発光が認識し難いこともある直射太陽光下における使用に有効であることがある。この場合、着色標識がある方向を向いた瞬間に音が発せられ聞き取られるので、その方向が北と分かるという仕組みである。
【0052】
1気圧20度の大気中での音速は343m/秒であるから、仮に距離が5m、回転速度10回転/秒であると仮定した場合には、音の伝達で5/343=0.01458秒の遅れが生じ、その間に約5度だけ回転は進むことにはなる。しかし、歴史的にも現代でも、方位に期待されるのは8方位(南東などの標記)あるいは高々12方位(北北東などの標記)であって、それ以上の精度は意味がない。実際、8方位と12方位は、夫々誤差範囲として30度、45度等があるが全く問題なく許容されていることに鑑みれば、上記の5度は期待精度の完全な範囲内であるどころか、さらに10倍程度の誤差であったとしても、間違いなく生活実用範囲である。
【0053】
音響出力を利用する場合にも、数回も練習すれば、目視距離に応じて音響伝達速度遅延が含まれることを計算に入れ、随時思考的に5度程度等の補正は容易に期待できる。これらを総合的に勘案すれば、簡便、迅速、廉価に相応の情報取得に至り得ることは容易に理解されよう。
【0054】
もちろん、発光体14と発音体14を併せて駆動しても良く、これでも着色標識の位置と発せられる音、ないしさらには着色標識に重なる光によって投擲者は磁北を認識できる。着色標識と発光体を併設し、別途に設けたスイッチ手段(図示せず)により、発光体の必要の無いときには発光体への電源線路を開けるようにしておいても良い。
【0055】
また、駆動制御部15が電源16からの稼動電力を報知部14に単に選択的に供給するのではなく、検出部13が発する検出出力により報知部14の報知形態を変更するように構成することも既存の技術をすれば極めて容易である。さらに、導線12内を生じる誘導起電力を双方向に別途検出可能としておけば、より多彩な報知表現形態も採り得る。例えば発光体14が北を向いたときに駆動制御部15が当該発光体を第一の発光色として例えば緑、南を向いたときにそれとは異なる第二の発光色として例えば赤に発光させるように構成することもできる。昨今では一つの発光ダイオードのレンズ筐体内に光の三原色発光を選択的に行えるように三つの発光波長の異なるダイオードを組み込んだ製品もあるので、こうしたものを便利に使うことができる。
【0056】
図1(A) 中に仮想線で示すように、報知部14と直径方向で対向する位置にも第二の報知部14’を設けると、それら二つの報知部14,14’の各個が北を向いた際には赤、南を向いた際には緑で発光するようにすることもできる。もちろん、発音体も併用可能であり、状態の変化として音色の変化を生じさせるように駆動制御部15を組むこともできる。
【0057】
このようにすると、本発明装置は例えば視覚障害者等でも使用可能な装置ともし得る。視覚障害者は音が聞こえたにしても、その時の着色標識等の方向を目視確認できない。そこで例えば、検出部13が誘導起電力を検出したときに駆動制御部15により、北を向いている第一の報知部14からある音響を発し、それと180度反対を向いている第二の報知部14'からは別の音響を発するようにする。人間の聴覚は左右の耳の存在により、音響場から立体感のある奥行きを伴う空間知覚を認識できる。ステレオ音響はその一例であり、オーケストラにおける第一バイオリンの奏者の聞き手からの方向、概略位置が例えば左方向、手前であるとか、クラリネット奏者の聞き手からの方向、概略位置が例えば右方向であり奥である等、その方向性と奥行きについて聞き分けられる。そこで、上記のように構成すれば、若干の練習により感覚を掴んでいくことで、視覚障害者の方でも方位の識別ができるようになる。
【0058】
なお、こうした場合には明快に音色・音程・長さ・タイミング・連続性・形式・構成等の異なる二つの音響の発信される方向だけが識別者にとって大切となるから、それら二つの音響発信源方向の差異が使用者からの音響到来方向識別分解能以上となるように、回転投擲体の直径が大きい程、一層迅速な判断ができる上、識別者に近い方が一層迅速な判断ができることは当然である。さらにこの場合、平行移動するものよりも、垂直上昇し、一定時間安定的に浮遊した後に下降する竹トンボ様の回転投擲体や、既述したように引き綱を引いてさらに安定した回転を与える補助具付きのもの等の方が、こうした使途に好適に適合する。頭上から音響がするのであるが、ある音色の方向が北で、その反対方向が南であると判断できる。一つの音響だけであるとその方向は定め難いが、二つの異なった音響が空間中にどういう位置関係になっているかは比較的判別しやすい。
【0059】
さらに、これは図示していないが、回転投擲体11の巻きつけ導線12の両側方向を含む外周縁に沿い複数の発光体を適宜間隔で配置し、その一つが例えば北を向いた際には赤で発光するように制御し、南を向いた際には緑で発光するように制御した上に、それ以外の場合は例えば白色で発光するように制御するように駆動制御部15を組むこと等も、昨今の回路技術をすれば簡単に行える。
【0060】
回転投擲体11の中心部Ocまたはその近傍から外周縁に向け、半径方向に複数の発光体14を直線状に適宜間隔で並べて同時に発光させても良い。こうすると視覚的了解性をかなり高めることができる。回転して飛んでいる回転投擲体11の中心Ocから回転投擲体11の外周縁の一部へ向かう方向がある方位に合致した時に、この直線状の発光が観察者には極めて明白に認知され得るものとなる。中心Ocら外周縁への方向がより明瞭になるよう、中心Ocないしその近傍部分の発光体の色ないし輝度と、外縁部の発光体の色ないし輝度を異ならせても良い。いずれにしろ周囲の照明環境とコストに応じ、種々の形態の中から任意適当なるものを設計選択すれば良い。
【0061】
なお、上記において少し触れたように、直射太陽光下の使用に重点を置く場合には、発光体や上述の着色標識に限らず、それらの代わりに本体表面とは反射率の異なる鏡面素材を半径線上に埋め込むことで、直射太陽光下での方向の識別性を向上させる,という工夫をしても良い。支配的な直射太陽光を逆に活用することもでき、例えば電気信号により光反射率や光吸収率を制御可能な液晶等の光学特性可変体を報知部14として発光体の代わりに用いても良いし、さらにこうした液晶による報知部11を回転投擲体11の半径線上に細長く埋め込んでも良い。
【0062】
本装置には無線送信機を搭載することも可能である。軽量にして小型な無線送信機はフリスビー等の回転投擲体に搭載するに昨今の技術事情をすれば何の問題もなく、発光体ないしは発音体、あるいは着色のどれか一つまたは幾つかで構成される報知部が例えば北を向いた際、当該無線送信機から使用者側の無線受信器、例えばイヤホン型受信機に対して報知信号を送信し、受信側で可聴報知部から音響・音声(「北」等の音声)を出力させるとか、あるいは眼鏡兼用型無線受信機の視野内での可視報知部のLED発光で使用者に遠隔的に通知するように制御することもできる。回転投擲体11との距離は高々100m程度の距離を想定すれば良く、電波法においても規制が緩和されつつある微弱無線電力で十分に満足されうる。
【0063】
図3〜6には、専ら回転投擲体11の採り得る形態例に就き、図1図示のものとは異なる諸例が示されている。図1中におけると同一の符号は同一ないし同様な構成要素を示し、それらに就いての説明はこれまでになされた所をそのままに援用することができるため、再度の説明は省略する場合もある。
【0064】
まず、図3に示されている本発明の実施形態は、図1に示されている回転投擲体11と異なり、円盤表面部分と裏面部分の直径に変化が無く、薄い円筒形上のものになっている。つまり、先にも述べたように、円盤外周縁部は垂直な壁面となっている。昨今ではこうした形状も良く見掛けるようになってきた。もちろん、こうした形状の回転投擲体11にも本発明の構成は適用可能である。図中に示されている各符号12〜16,14’の示す構成要素はこれまで説明してきたものと同じであり、それらに対する説明を援用できる。
【0065】
図4は、裏面側が逆さにしたお盆のように凹んでいる回転投擲体11を示している。外周縁部の壁面は垂直になっているが、図1図示のもののように斜めでも勿論良い。ここでは回転投擲体11とそれに設ける導体ないしコイル12の配置関係にのみ着目しての説明であるため、図の簡明化を図る意味から、図1,3に示してある検出部13、報知部14、さらに望ましくは設けられる駆動制御部15、電源16等々は図示を省略しているが、本発明の趣旨に従い、当然に設けられるものである。
【0066】
このように裏面側が凹んでいる回転投擲体11の場合には、裏面側において外周縁部を構成している側壁の内面に沿わせ、かつ、お盆形状の窪みの表面にぴったりと沿うように導線12を配するのが良い。導線ないしコイル12の断面は凹という文字を上下逆さまにした形状となる。こうすると、投擲あるいは捕捉の動作自由度を損なわない利点が生じる。投擲においては一箇所に手指が掛かってスナップを利かせられれば問題はなく、捕捉においては上下から両手のひらで挟み込むようにすることが標準的であるために、お盆形状の上の中空部分を導線12が渡っていても標準的な捕捉は十分可能であるが、中空部分を導線12が渡っていない場合は投擲、捕捉動作の自由度が一層向上する。
【0067】
既述のように、誘導起電力は磁界を横切るコイル断面積に比例し、コイル巻数に比例する。断面積が矩形の構成に比べ、このような逆凹字構成にすると断面積は減少するが、巻数を圧倒的に増加させても投擲、捕捉動作は円滑にできるため、結局、誘導起電力面では全く問題はない。逆に、捕捉、投擲を妨げずに巻数を劇的に増加可能でもあるから、誘導起電力は寧ろ増加させることが可能である。
【0068】
仮に巻数を増加させないとしても問題は生じない。先の試算で既に検知可能電力の330倍の値が得られていたことから直感的にも予想されることではあろうが、一応の計算を示してみよう。例えば外径30cm, 下面内径25cm, 高さ5cmの回転投擲体11とし、図4図示のように裏面側ではお盆形状の面に沿って導線12を配し、全体として逆凹字型導線とした場合、既掲の誘導起電力の方程式に従って、外径断面積Sに基づく誘導起電力から内径断面積S’に基づく誘導起電力を減じた誘導起電力が期待できる。
【0069】
外経断面積S=0.3mx0.05m=0.015(m-2)、内径断面積S’=0.25mx0.05m=0.0125(m-2)であるから、断面積差分ΔS=0.0025(m-2)である。よって既掲の誘導起電力計算式より、誘導起電力最大値V=52×10-6 (V)を得る。既述した廉価な指先大の半導体集積回路による微少電圧検出機器の検出感度が10-6 (V)である事実に鑑みれば、感度の50倍を超える起電力が得られ、この単純な構成のみでも十分に電圧検出ができる。その上、導線12の巻数Nを増すことで、検出部13による検出感度は実質的により向上させられる。この導線構成では導線12は本体内部に埋め込むことができるし、巻数を10倍あるいはそれ以上にすることも十分に可能である。当然、既述の廉価、微小かつ軽量な微少電圧検出感度10-6 (V)の数百倍の誘導起電力をも得ることができる。
【0070】
なお、こうした図4図示の構成は、近年人気を博している先に述べたドッジビー等に特に好適である。ちなみにこれの素材は極めて柔らかい材質でのみ構成され、捕捉にも適すが、捕捉せずに体に当てて止めても安全となっていて、不特定多数の集団内相互でドッジボールのようにぶつけて遊ぶグループ・ゲームへの応用が積極的に期待されている。もちろん、実質的に裏面がお盆型に抉られた形状であるため、回転投擲体11の肉厚は各所で薄くはなるが、それでも図1,3に示したような、本発明で用いる回路部材13〜16は極めて薄くも構成し得るので、導線12共々、回転投擲体内部に埋め込むことができる。電源16としてボタン電池を用いた場合、構造例を示すまでもなく、それを交換可能に埋設できることも言うを俟たない。
【0071】
図5はさらに導体12の引き回しに関しての別な工夫のされた実施形態を示している。本図でも同様に、図の簡明化を図る意味から、図1,3に示してある検出部13、報知部14、さらに望ましくは設けられる駆動制御部15、電源16等々は図示は省略されている。回転投擲体11は図4図示のものと同様、裏面がお盆型に抉られたものとなっている。ただ、本実施形態の場合、裏面側での導線12を示す破線が投擲体裏面の輪郭破線と重なって見づらいので、導線12の引き回しパタンのみも、図中左下に取り出して縮小表示してある。
【0072】
導線12は裏面側に回り込んだ所で、図4図示のようにお盆型の窪みの表面に沿って直径上を渡るのではなく、窪みの開口縁内周に沿って半円状に円弧を描き、対向端まで渡っている。これでも投擲の自由度を減ずることにならない配置であることが分かるし、また、十分に検出可能な誘導起電力を生じ得る。捕捉、投擲の自由度を減ずることなく巻数を劇的に増加することで、誘導起電力をさらに増し得ることも既述の考察と同様である。
【0073】
図6はさらに別な実施形態を示している。本図でも同様に図1,3に示してある検出部13、報知部14、さらに望ましくは設けられる駆動制御部15、電源16等々は図示を省略しているが、やはり本発明の趣旨に従い、これらは当然に設けられる。この実施形態は、回転投擲体11が完全に中空な円筒形状ないしリング状形状となっていて、回転軸Oaの周りに回転することができるものの場合であり、例えば既述したXジャイロとか中空エアロビー等がこの形状に相当する。
【0074】
このような回転投擲体11に設けるべき導体12は、この実施形態では図示のように、裏面側において先の図5に示した実施形態と同様、中空円筒形状の開口縁の内周に沿って半円状に円弧を描いている一方、表面側においても幾何対称的な関係で中空円筒形状の開口縁の外周に沿い、半円状に円弧を描いている。やはり本図でも、分かり易くするために、この導体12の引き回しパタンのみを図中左下に抜き出して示してある。
【0075】
ただ、こうした中空円筒形状の回転投擲体11であると、軸方向の表裏面部分は寸法的に幅が狭く、本発明に必要な種々の回路部13〜16(図1,3)を設けるには十分な面積部分が存在しない場合も考えられる。しかし、既述のように、それらは指先に乗る程に軽量、小型とし得るので、中空円筒形状の枠に相当する側面部分に相当する部位に埋め込んで行くことは十分に可能である。
【0076】
このような中空円筒形状であるXジャイロを投擲する場合、水平進行方向と一致する回転軸Oaの周りに回転を与えることにより航空力学的に安定した飛行を行うことが知られている。回転軸Oaが南北軸(すなわちこの場合磁力線方向:以下、特に断らない限り東西南北の表現は磁北基準とする)と直交する方向に水平飛行させられた際には、それ以外の方向に飛行させられた場合に比べ、水平磁力由来の誘導起電力としては最大の値が生じうるので、この際には検出部13を介してのそうした検出に伴い、報知部14において容易かつ直裁的に磁北を報知することができる。
【0077】
この場合、さらに興味深いことに、要すれば伏角(magnetic dipもしくはinclination)まで検出することができる。伏角とは地磁気の方向と水平面のなす角である。伏角は低緯度で小さく、高緯度では大きい。本装置が北と指す方向(中心から「北」と指す方向への向き,あるいは「南」と指す方向から「北」と指す方向への向き)は、この場合、地磁気の磁力線方向に相応する。言い換えると、単に「北」を指すのでなく、例えば東京等、中緯度地域での使用を想定すると、地面に向けて48度程度の角度を持った方向を「北」として示す。ちなみに、房総、東海から瀬戸内、北九州を結ぶ領域については、伏角はおよそ48度である。回転投擲体は、自らの周囲に存する磁力線ベクトルのうち、自らの回転軸に垂直である磁力線ベクトル成分について、誘導起電力を検出できる。現在検討している場合のように、東西軸と自らの回転軸が一致している際は、自らの回転軸に垂直である磁力線ベクトル成分とは、すなわち、自らの周囲に存す磁力線ベクトルと完全に一致する。言い換えれば、東西軸と自らの回転軸が一致する際は、検出され得ずに失われる成分がゼロとなる。
【0078】
つまり、東西軸と自らの回転軸が一致する際は、得られる誘導起電力は、磁力線方向を完全に反映しており、方位情報も伏角情報も含めた形で、完全な磁力線方向情報を復元することができるのである。このことを逆に活用し、あえて東西方向に飛行させて、磁力線にはその地に固有の伏角が存在していることの学習の教材とすることにも本発明は好適に適合する。東京で実施する際、札幌で実施する際、シドニーで実施する際には、それぞれにその値は異なる。インターネット等で計測の様子を動画像でリアルタイムに情報交換すること等により、地球の磁気の伏角が簡単に比較でき、国際的協力学習にも役立ち、生徒の学習効果も上がる。廉価・軽量・簡便・迅速などの特徴がこの場合も活かされることはもちろんである。
【0079】
ちなみに、東方向に水平投擲した場合は、投擲者から見て、磁力線は右上から左下へ向けての磁力線として検出される。西方向に水平投擲した場合は、投擲者から見て、磁力線は左上から右下へ向けての磁力線として検出される。この事実を知っておけば、検出された磁力線の伏角の方向から投擲した方角について知ることができ、有用性が保たれる。
【0080】
一方、回転軸Oaが南北軸(磁力線方向)と平行する方向に水平飛行させられた際には、水平磁力を導線が横切らないため、水平磁力由来の誘導起電力は生じない。が、垂直方向成分の影響を受けて、鉛直下向きが「北」であると指し示す。つまり、水平方向には「北」を指し示さない一方、鉛直方向成分のみを検知するのである。この事実を知っておけば、水平方向には「北」を指さず、鉛直下向きに「北」を指し示した際には、その飛行方向自体が北ないし南と判断できる。確定させるためには、投擲者の頭上から見て、例えば時計回りに投擲者を90度回転させ、もう一度投擲すれば良い。その際に、上記の東か西に帰着するので、第一回目の投擲が北であったのか南であったのか、容易に判断が付く。
【0081】
正確には東・西・南・北の各方位と合致しない水平方向に投擲された場合でも、この方法を採用すれば常に最低でも8方位領域の水準で方位が得られ、高い有用性が保たれる。通常、伏角は通常水平面から計るが、ここでは鉛直上向きを0度として、投擲者から見て時計回りに360度まで表示するものとしてみよう。こうすれば、地磁気赤道(geomagnetic equator)の以南でもここでの論法と同じ論旨が成立するので便利である。なお、「地磁気赤道以南」とは略々南半球と一致すると考えて良いが、場所によっては緯度にして15度程度の差異が出る。しかしこれは、ここでの議論にとって余り問題とならない。
【0082】
しかるに、1回目の投擲で得られた伏角の方向F1が180<F1<360なら東領域方位(磁北基準で時計回りに投擲方位をθ1とすると、0度<θ1<180度)であり、0<F1<180なら西領域方位(180度<θ1<360度)となるので、投擲された方向が略々直ちに判別できる。さらに、投擲者の頭上から見て時計回りに90度、投擲者自身が体を回した後、すなわちθ2=θ1+90の条件下で2回目の投擲をなすことで得られる伏角F2の向きにまず注目し、次に伏角F1と比較してのF2の大きさの変化に注目する。
【0083】
2回目の投擲θ2で得られた伏角F2の向きが、1回目投擲θ1の伏角F1と比べ、垂直軸を超える変化、つまり地磁気赤道以北ではF1から時計回りにF2に至る扇形が180度を含む変化、地磁気赤道以南ではF1から時計回りにF2に至る扇形が0度を含む変化が観察されたなら、それは、頭上から見て時計回り90度回転により南北軸を越えたことを意味するので、1回目の投擲方位θ1は北西領域(270度<θ1<360度)か南東領域(90度<θ1<180度)であったと判断できる。これらの中、いずれに該当するかについての識別は、2回目の投擲θ2時の伏角F2の向きで判別可能である。仮に0<F2<180なら、すなわち投擲者から見て地磁気赤道以北では左上から右下、地磁気赤道以南では左下から右上なら、1回目の投擲方位θ1は南東領域(90度<θ1<180度)と確定する。
【0084】
逆に180<F2<360なら、すなわち投擲者から見て地磁気赤道以北では右上から左下、地磁気赤道以南では右下から左上なら、1回目の投擲方位は北西領域(270度<θ1<360度)と確定する。ここまでで既に、生活実用性の高い4方位から1つに定まる上、何らの追加的動作なしに次ぎの考察からさらに、かつ直ちに8方位に絞り込める。
【0085】
頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2の向きが、1回目の投擲の伏角F1と比べて、地磁気赤道以北なら180度、地磁気赤道以南なら0度と、より垂直に近かったならば、1回目の投擲の方向θ1は南東領域(90度<θ1<180度)の中でもさらに東南東領域(90度<θ1<135度)に絞り込まれ、北西領域(270度<θ1<360度)の中でもさらに西北西領域(270度<θ1<315度)まで絞り込まれる。頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2と1回目の投擲で得られた伏角F1とが、180度を軸として対称の位置にあるならば、南東領域(90度<θ1<180度)の中でもさらに南東(θ1=135度)に絞り込まれ、北西領域(270度<θ<360度)の中でもさらに北西(θ1=315度)に絞り込まれる。
【0086】
頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2の向きが、1回目の投擲の伏角F1と比べて、より水平に近かったならば、1回目の投擲の方向θ1は南東領域(90度<θ1<180度)の中でもさらに南南東領域(135度<θ1<180度)に絞り込まれ、北西領域(270度<θ1<360度)の中でもさらに北北西領域(315度<θ1<360度)に絞り込まれる。ここまでで、何らの追加的動作なしに直ちに8方位に絞り込まれることが可能であることを示した。
【0087】
最早類推可能であろうが、上記とは逆に、投擲者の頭上から見て時計回り90度回転後の2回目の投擲θ2で得られた伏角F2の向きが1回目の投擲θ1の伏角F1と比べ、垂直軸を超える変化を示さなかったときには、それは頭上から見て時計回り90度回転により南北軸を越えなかったことを意味するので、1回目の投擲方位θ1は、北東領域(0度<θ1<90度)か南西領域(180度<θ1<270度)であったと判断できる。さらに、2回目の投擲θ2時の伏角F2が0<F2<180となれば、すなわち投擲者から見て地磁気赤道以北では左上から右下、地磁気赤道以南では左下から右上となれば、1回目の投擲方位θ1は南西領域(180度<θ1<270度)と確定する。逆に、180<F2<360なら、すなわち投擲者から見て地磁気赤道以北では右上から左下、地磁気赤道以南では右下から左上となれば、1回目の投擲方位は北東領域(0度<θ1<90度)と確定する。
【0088】
頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2の向きが、1回目の投擲の伏角F1と比べて、より垂直に近かったならば、1回目の投擲の方向θ1は、南西領域(180度<θ1<270度)の中でもさらに西南西領域(225度<θ1<270度)に絞り込まれ、北東領域(0度<θ1<90度)の中でもさらに東北東領域(45度<θ1<90度)まで絞り込まれる。
【0089】
全く同様の考え方で、頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2と1回目の投擲の伏角F1とが180度を軸として対称の位置にあるならば、南西領域(180度<θ1<270度)の中でも特に南西(θ1=225度)に絞り込まれ、北東領域(0度<θ<90度)の中でも特に北西(θ1=45度)に絞り込まれるし、伏角F2の向きが伏角F1と比べてより水平に近かったならば、1回目の投擲の方向θ1は南西領域(180度<θ1<270度)の中でもさらに南南西領域(180度<θ1<225度)に絞り込まれ、北東領域(0度<θ1<90度)の中でもさらに北北東領域(0度<θ1<45度)まで絞り込まれる。
【0090】
以上のように、本発明装置を用いた場合、運がよければ偶発的な一致により、東、西、南、北、北東、南東、北西、南西というはっきりした方位に一意に絞り込める上に、通常の場合でも、単に2回の投擲のみで、何らの追加的動作なしに、8方位に直ちに絞り込める。すなわち、本装置を用いれば、2回の投擲のみで、何らの追加的動作なしに、実用方位として十分な45度範囲以下にまで、直ちに方位を絞り込める事実を明らかにした。
【0091】
ここで改めてまとめ直しておくと、回転投擲体11を南北方向に回転軸を合致させて水平飛行させた際には、水平磁力の影響はゼロであるものの、垂直磁力(水平磁力以外の成分を仮にこのように呼ぶ)の影響を完全に受ける。東西方向に回転軸を合致させて水平飛行させた際には水平磁力の影響も垂直磁力の影響も、共に完全に受ける。
【0092】
そこで、回転軸Oaが、南北軸(磁力線方向)と平行でもなく、垂直でもない方向に水平飛行させた際には、前記の組み合わせとなる。例えば東方向に水平飛行させた際には、磁力線はあたかも北方への伏角48度(例えば東京の場合)のベクトル(この大きさを仮に1とする)として観察できる。北方向に水平飛行させた際には、磁力線は鉛直下向きベクトルのみ観察できるが、その大きさは先の1の大きさの鉛直軸への正射影分に相当する。すなわち大きさは小さくなる。東方向から北方向まで、順次方向を変えて水平飛行させてみれば、検出される磁力線方向は、北方への伏角48度のベクトルが徐々に大きさを減少させつつ下を向いて行き、最後には最初の大きさの正射影の大きさを持って真下を向くベクトルとなるので単純で理解しやすい。他の向きに飛行する場合もこれに準じて簡単に理解できる。
【0093】
例えば東方向から南方向に順次方向を変えて回転投擲体11を水平飛行させてみれば、検出される磁力線方向は、北方への伏角48度のベクトルが徐々に大きさを減少させつつ下を向いて行き、最後には最初の大きさの正射影の大きさを持って真下を向くベクトルとなるので単純で理解しやすい。西方向から北方向にしても同様であるし、西方向から南方向にしても同様である。これを覚えておけば、いずれの方向に飛行させた場合でも、90度の方向転換を挟んでの高々2回の投擲で、少なくとも8方位領域(北北東、東北東、南南東、東南東、北北西、西北西、南南西、西南西の各中心角45度の扇形領域)という、有用な方位情報が判別可能となる。時には、正しく8方位(北、南、東、西、東北、西北、南東、南西の各正対方向)さえ一意に定まる可能性もある。よって、扇形状で良いから迅速に概略値を得たい場合にも大変便利であるし、きちんとした方位を一意に得たい場合にも正しく答えることが手法なのである。
【0094】
言い換えると、東西方向に飛行させた場合が、最も本来の水平方向の北を検出するに十分な起電力が得られるが、南北方向に飛行させるにつれて、だんだんとその起電力は減少して行き、南北方向に飛行させると水平方向の起電力は0になる。そこで、水平方向には北を指さない場合には、偶然、南北軸に合致して飛ばしたものと、逆に推定することができる。しかしながら、垂直磁力の影響はいずれの方位への水平飛行においても起電力をもたらし、それに注目することで、仮に水平方向の北を指し示さなくても、投擲者の90度の方向転換後の今一度の投擲により、南北方向のどちらに向けて飛ばしているのかは容易に判明する。そして、このようなことからしても結局、本発明は、導体に発生する誘導起電力の有無または大きさに基づき、磁力線方向情報を取得する方法ないし装置として定義できることが分かる。
【0095】
そして、少し視点を変えて言うならば、本発明によると、回転投擲体11を投擲しての遊び、時にキャッチボール様の遊びを楽しみつつ、遊びの次元を超えて、鉛直方向に回転軸を持つ回転投擲体であればただ1回のみの投擲により直ちに北の方角を直裁に得ることができるし、仮に水平方向に回転軸を持つ回転投擲体であってもごく簡単な2回の投擲により、方位を8方位まで迅速かつ廉価かつ簡便に、かつ楽しく絞り込める上、地磁気の伏角成分の検出も可能である。さらに回転軸を磁力線方向に沿わせた飛行での誘導起電力の消失、回転軸が磁力線方向と直交する飛行での誘導起電力の最大化の観察から磁気方向情報検出ができる。屋外での回転投擲体を用いた驚きや意外性を伴う体験は、机上の学習のみでは理解され難い伏角を含む地磁気の特性、フレミングの右手の法則、地球物理学、電磁気学、航空工学の総合的学習を可能とする。特に、体を動かしての体験学習であるから印象に残り、短期的記憶を超え、長期的記憶と考えられる体験的記憶・エピソード記憶となり、三次元的な電磁気学の概念の習得の効果もきわめて大きい。普段は目に見えない磁力線を、体を実際に屋外で動かす経験を通じ、広い範囲に亘るフィールドの磁場を投擲により逐一可視化して体験できる上、受け手の存在により、二人が同時にその可視化の体験を共有できる意義も大きい。磁場はマグネティック・フィールド(magnetic field)の訳語であるが、フィールド(field)という語が選択された理由には諸説ある。一説には、西欧の農村の麦畑で風に麦が一斉に靡くさま、つまり不可視の風がもたらすベクトルがフィールド(野)に一瞬に表象される風景に着想を得たことによるとされる。本発明は、不可視であるため理解の容易でない磁気現象を、まさにフィールドにおいて可視化し、磁場を体感的に観察できる稀有な装置である意味で、磁場研究の初期の研究開拓者たちの原体験に近い体験的理解を容易に実現できるメリットがある。本装置による体験的な基本原理の理解の後、話し合いにより、いろいろな発見が生まれる契機を提供する。また、より多数の人数でも視覚的に共有することができ、多数の学習にも最適である。総合的学習教材への活用にも好適に適合する。本装置の一つ一つは廉価に構築可能であるため、貴重ということもなく、多くの学習素材を同時に作成し提供することもできる。必要に応じて廉価で簡単な電子工作も事前に実施させられるので、理科離れを食い止め、学習効果が上昇する。薄暮などの野外イベント会場などにおいて、不特定多数の参加者に配布された廉価かつ軽量な多数の回転投擲体が一斉投擲されることにより、参加者は幻想的な視覚空間を共有でき、イベント・イルミネーションとしても多大な効果を奏する。従来の保持型ペンライト等は動作周期一致性を参加者に要請し、周期が揃わないと不一致感のみが顕著になる。一方、回転投擲体の場合は、ほぼ一斉に投擲されるだけで、投擲方向や回転軸方向と無関係に全ての発光方位は必ず方位を揃える。打ち合わせなしの投擲で発光方位が予想外に一致するとの意外な光景が、参加者に、逆に地球規模の共通言語としての科学技術や、共有地盤としての(地磁気をもたらす)唯一の地球との感覚を喚起し、母語や文化を異にする存在間にも多くの共有部分が当然潜在している事実を想起する契機となる。薄暮の空間におけるこの共通体験は、地球環境保全、科学技術教育重視、民族間コンフリクトの理性的超克等、地球社会時代の問題解決へのメッセージを非言語的に浸透させる際の情動的体験の基盤共有に活用でき、多大な効果を奏する。政治上の国際会議等では、古典音楽の芸術鑑賞等が予定される事はむしろ当然であり、部外者には一見休養にしか見えないその時間が紛争国間の調停出力のより人間的な洗練に貢献してきた事実はつとに知られる。芸術以外に、現代は、科学と芸術の融合がその責を負うことも期待される。国際連合などの国際機関による屋外フォーラムでのパネルディスカッション後の薄暮の多数投擲は、イベント・イルミネーションとして富裕度差、言語差を越えて楽しめる上、意見が異なるがごとく、投擲方向は夫々異なるにしても、不特定多数の投擲体の発光方位は(文化差等を越えて人類共通の普遍的価値を指向する如く)同じ方位を向く、との光景が視覚に新鮮に働き、地球市民という人文的な意識共有、科学技術という数理的な言語共有の2つの共通価値がシナジー効果とともに誘導され、共感的理解と高次の合意形成への指向に、多大な効果を奏する。
【0096】
なお、以上の説明では、便宜上、投擲体の回転軸が投擲者から放射状に延びる方向に投擲する場合は、特に断らない限り、投擲者から見て回転軸を中心に時計回りに投擲することを原則としている。同じく特に断らない限り、投擲体の回転軸が投擲者から放射状に延びる方向に投擲する場合でない場合は、投擲体自身に備わっている上下面の観点から見ての上面から観察した場合に回転軸を中心に時計回りに投擲することを原則としている。
【0097】
ここで、回転投擲体11の回転軸に関し一般化して考えると、基本的に図1〜図6の実施形態に即し、一応、回転軸が鉛直である時を基本と考えて説明をしてきた。このように回転軸が鉛直であれば、水平磁力による起電力だけを考慮すれば良く、それに垂直な地磁気成分は考慮する必要がないという利点もある。しかし、回転投擲体11の回転軸が水平である場合もある。例えば帰還を狙い、フリスビーを意図的に垂直(ないしそれに近く)に立てて投擲した場合、あるいは偶然そうなってしまった場合を考える。
【0098】
まず、水平な回転軸が東西軸と合致する場合(すなわち、フリスビーを立てたまま南北方向に投擲する場合)を考えると、導体12が南北軸を横切る際に最大の誘導起電力が生じる。このときには既述した説明の通り、水平磁力由来の誘導起電力を検出でき、磁北の検出が可能である上、報知も適切にできる。既述の通り、磁力線の伏角までを含めた検知もできる利点がある。当然、伏角の実証等、理科体験野外活動等に活用できる。
【0099】
これに対し、回転軸が水平である場合で、かつ南北軸(磁力線方向)と平行な場合(すなわち立てたまま東西方向に投擲した場合に相当する)には水平磁力由来の誘導起電力は生じない。しかし、既述の通り、垂直磁力由来の誘導起電力は生じる。例えば東方向に投擲した場合、垂直磁力方向として鉛直下向きを指し示すが、これらの事実を知っていれば方位検出が可能となる。つまり、水平方向には何等の方位の報知もなされない事実を以て、偶然、回転軸が南北軸に合致して(東か西に向けて)飛ばされたものと適切に推定できる。後は、投擲者の90度の方向転換後の再投擲により、伏角が投擲者から見て遠方上方から近傍下方の方向に観察されれば、先の投擲は東に向けられたものであったと判定できる。逆に、投擲者の90度の方向転換後の再投擲により、伏角が投擲者から見て近傍上方から遠方下方の方向に観察されれば、先の投擲は西に向けられたものであったと判定できる。これらは、簡単な思考実験により確認できるものであり、これらを知ってさえいれば、方位情報として常に活用可能である。
【0100】
回転軸が水平である場合で、かつ回転軸が南北軸(磁力線方向)と直交でも平行でもない場合(すなわち立てたまま東西方向、南北方向以外に投擲した場合に相当する)には、水平磁力から回転軸直交水平軸への内積正射影成分に応じて相応の誘導起電力が生じるので、北そのものに向かって立てて投擲された時程の大きさの誘導電力ではないがゼロでもない場合、生じた誘導起電力の方向と大きさの報知も検出部を介して入手することで、まずは東か西かのどちらの方向に立てて投擲されたのか等、概略の情報を迅速に把握することが容易に可能である。次いで、投擲者の90度の回転後に同様の投擲を実施することで、8方位領域ないし8方位に絞り込むことが可能である。8方位領域が得られた場合、さらに、8方位のうちいずれかを正確に得るために、情報取得を実施してゆくことも容易である。
【0101】
図7には、上述した各実施形態に対し、さらに改変を加えた場合の実施形態が示されている。一応は図1,3〜5に示した実施形態の改変として、それらの形状に準じた形で平面図により模式的に示しているが、もちろん、図6に示した実施形態にも以下に述べる構成は適用できる。
【0102】
この実施形態では、回転投擲されているときにのみ電源16からの電源線路を閉じ、駆動制御部15、ひいては必要に応じ検出部13、報知部14等、電力を必要とする回路への電力供給を許すことで電源16の節約を図るため、回転検出装置19と、この回転検出装置19が回転投擲体11の回転を検出したときに電力供給を可能とする電源スイッチ部18を設けている。図中、簡明化のために、検出部13、報知部14、駆動制御部15、電源16はブロック図でのみ示し、回転投擲体11に搭載されている模様は示していないが、もちろん、図1,3図に示したように、あるいはこれまで説明してきたように、それらは本実施形態で新たに設けられる回路装置17,18共々、回転投擲体11の適当なる個所に搭載される。
【0103】
しかるに、搭載された物体が回転しているか否かを検出可能な回転検出装置19は、既存の技術をしても種々考えられようし、それらを任意に用いることもできるが、この実施形態では特に、回転は遠心力を伴うことを巧みに利用した簡易にして廉価、合理的な構成となっている。
【0104】
すなわち、この実施形態では、小型軽量の水銀スイッチ19の複数個から回転検出装置19が構成されており、各水銀スイッチ19はそれぞれ回転投擲体11の中心Ocから外周に向かう放射方向に沿い、互いには周方向に適当な離角を与えて配置されており、例えば図示の場合には周方向に互いに60度の離角で計6個の水銀スイッチ19が用いられている。これらはもちろん、適宜、回転投擲体11の本体内に埋設されるのが好ましい。
【0105】
水銀スイッチ19はガラス管等のケーシング19a内に封入された水銀球19bが半径方向の外周端側に来たときに電気接点を閉成するように構成されており、その外周端から離れると電極接点は開くようになっている。従って回転投擲体11が投擲され、回転すると、その際に発生する遠心力で全ての水銀球19bは外周端側に移動し、全ての水銀スイッチ19において電気接点が閉成する。そうではなく、単にどこかに置かれていたり、持ち運ばれているときには、全ての水銀スイッチ19の電気接点が共に閉成している状況は寧ろ考えられず、少なくとも一つ以上は内周方向にずれて、その水銀スイッチ19の電気接点は開いている筈である。
【0106】
そこで、図中では模式的にアンド回路図記号により回転検出回路17を示しているが、この回転検出回路17により水銀スイッチ19の電気接点の閉成状態を監視し、全てが閉成したときにのみ、当該回路17を介し電源スイッチ部18を閉成させて、電源16からの電力を駆動制御部15、ひいては検出部13、報知部14に通電するようにしている。このようにすれば、持ち運びの際にはどのような姿勢でも通電することはなく、回転投擲した際にのみ通電させることができるので、保存時等に電源を節約したい場合に好適である。
【0107】
なお、アンド回路17として示した回転検出回路17の構成も、実際には例えば電源16から負荷回路、例えば駆動制御部15への電源線路間に水銀スイッチ19の各接点を全て直列にして挿入しただけの回路構成であって足りることが多いし、逆に、電源スイッチ部18共々、極めて微少な待機電力で動作する能動素子を含むアンド回路装置であっても良い。
【0108】
以下では本発明の好適な応用使途、ないし本発明により得られるべき種々の恩恵に触れておくが、例えばまず、山岳では遭難環境を脱出する際に役立つ。また、仮に回収せずに投擲したまま放置せざるを得なかったにしても、寧ろ、付近に到達した救助隊に対して近辺になんらかの投擲主体(遭難者・負傷者であることが多い)の存在を示し、一つの、生存の目印になる。自分が谷あいに滑落しているとして、回転投擲体11を稜線方向に投擲して放置しておけば、そして特にその色も目立つ色にしておけば、雪の中でも遭難者が居ることの報知に繋がるため、二重に役立つ。軽量であるため、複数所持することも問題が無い特徴もある。また、発光により絶対方位を知らせることができるので、距離的に視認できるその場に居合わせた者全員が方位情報を一瞬にして共有できる利点がある。山岳においては例えば30m程の距離でも声が十分に届かないこともあるし、声による情報伝達はすでに疲弊している体力を浪費する。救助する山岳パーティの側にしてみても、全員が各自の身体中心座標系における方位を夜間でも一瞬にして確認でき、共有できる。
【0109】
本発明には,潜在的に次のような社会的な波及効果も認められることも無視できない。つまり,逆転的な使用法として、回転投擲体11として既述した帰還型滑空体を用いると磁場の局所的特異点を生じせしめることを狙って、事前に注意深く埋設された強い磁性体等の目標を野外で探索するという新しい競技,いわゆる宝探し競技等の、新しいスポーツ・娯楽が実現できる。この場合、周囲から特異的な違いを持つ磁場様相を示す滑空域があれば、その直下か近傍の地中に目標物(宝)が埋設されていると推定でき、グループ内でのスポーツ・娯楽・ゲームに活用できる。ホイジンガ(Johan Huizinga、オランダの歴史家)やカイヨワ(Roger Caillois、フランスの哲学者)の指摘を待つまでもなく、人類にとって遊びの意義が極めて大きいことは現代では周知の事実である。電磁気学、地球物理学、航空力学,電子工学の知識と技能を動員して、空間性・実体性・自己参加性を同時に発揮して野外で行うことのできるこの体験学習型の競技には、無視できない教育性の潜在が認められる。
【0110】
また、本発明は、ドッグ・フリスビーという文化領域にも潜在的関連が認められる。すなわち、回転投擲体は愛犬とのコミュニケーションをより深めるための遊具としても活用されてきたし、本発明はその活用を一層促進する。例えば雪山登山を愛犬と実施する場合等、人間(主人)に比べ比較的軽量な犬は、人間のようにいわゆるつぼ足(新雪に足が埋まって進行速度が低下する状態)にならず、先を急ぐことができる。一方、雪中での低速の人間(主人)を待っている間等、本発明の回転投擲体としてのフリスビーを投げてやると喜んで取ってくる遊びに興じる。人間(主人)はただ愛犬と遊んでやっているようでいて、実は全方位が白一色である雪山などで山座同定などに失敗しがちな環境で、下手をすると見失いがちな方位を、その都度遊びの中で確認ができることになる。方位を勘違いしたままの歩行は、意外にそれと気付かずに、方向違いのまま数時間継続され、雪中歩行の体力と時間の浪費を経てなお目的地に到着せず、日没後でも到着しない事実をもって、はじめて方向間違いによる遭難に陥ったと判明する事態に結びつきやすい。そのような事態を未然に防ぐことが遊びの中で実現でき安全に貢献できる。同時に、愛犬は時間をもてあますことなく楽しい時間を持て、そのような影響は人間(飼い主)の気持ちの張りにも影響を与え、遭難の危険を回避できる。本発明は、単なる一つの装置には違いないが、ドッグ・フリスビー等の文化的な背景を持つ回転投擲体で実現することから、人間と動物とのコミュニケーションの深化、時間と空間の適切な活用による生活の質的向上の面でも、多大な効果を奏することができることは注目に値する。
【0111】
さらに回転投擲体は、例えば視覚障害者と健常者が共に参加するフライングディスクの国内外における競技会の現在の隆盛と、それを支える長い歴史の主役である。さほどの体力が無くても手首のスナップだけで簡単に飛ばせるので、誰でも参加できる。習熟によって技能の向上が早く、単調なリハビリテーション訓練では得られない喜びの感覚を持ちやすい。健常者との屋外での貴重なリクリエーションとして活用可能である。不用意な歩行移動は危険を伴う視覚障害者にとって、飛行という移動のイメージが楽しい経験に直結する。このように健常者と共に技術的習熟を楽しめる性質から、身体機能回復や自信回復に繋がる医学的効果を持つリハビリテーションとしても、このフライングディスクは一定の役割を果たしてきた。競技には距離を競う分野、投擲の正確さを競う分野等があり,それぞれに視覚障害者の方の多数の参加を毎年数えている。このように、フライングディスクは、世界中で既に存分に親しまれている事実に、まず留意したい。
【0112】
同時に、視覚障害者の自律歩行は、方位情報取得が重大なネックになっていることは意外と知られていない。現在位置把握はできても、体躯なり顔面なりの方位取得は困難である。なぜなら、視覚情報による方位推定が不可能な上、視覚フィードバックが重要な役割をもつ「歩行」実施に付随するリスク(躓き、転倒、衝突、転落、交通事故に巻き込まれる危険等)が健常者よりも圧倒的に高いからである。このため、健常者であれば容易な試行移動による測位差分での方位取得も、困難を極めていた。逆に言えば、簡易で廉価かつ適切な方位情報取得方法がなかったため、やむなく、多忙な健常者に随伴歩行を依頼するという、最初の数回は良いにしても、度重なると時に相互に心理的負担が大きくなり、ひいては段々と相互の関係の疎遠に繋がる場合もあるというような、視覚障害者にはなんらかの改善が期待される現実が存在していた。
【0113】
このような現状に鑑みるに、そもそも障害者に心的距離の近いフライングディスク等を用いるレクリエーションおよび競技会への練習の中で、健常者と共に方位情報取得の技能の習熟に努めることには特別な意義がある。シンプルな科学技術を応用した本発明を通じた健常者とのコミュニケーションと、競技会への参加という前向きな目標の提供、将来的には広大な芝生のような場所における本発明を用いた自律歩行練習の実用性と、それにより正確に目的地に到達することに成功した場合の達成感を取得する経験等、これまでとは次元の異なる、多義的な有用性を提供する面で多大な効果を奏する。フライングディスク技術への競技会等を通じたフライングディスクへの視覚障害者の親和性と、視覚障害者の方位情報取得の潜在的需要の大きさに鑑みる時、フライングディスク等の投擲回転体を用いた方位情報取得方法の価値が、健常者が当初予想する水準を超えて、そこに潜在していることは容易に理解できようし、健常者の側においても、こうした試みを通じ、視覚障害者の方々の方位情報取得に対するニーズが如何に強いか、その理解をより深めることにもなろう。
【0114】
また実用性の高い使用例として,次の例にも言及しておかねばならない。ヨット,ディンギーなどの小型帆走船は一般に高度な計測機器を搭載していない。寧ろ、それらの人工物を搭載しない環境でなんとか操縦して自然のもたらす諸困難を克服することに面白みを感じる愛好者の数は多い。しかし、方位の情報取得はこの場合も重要である。例えば岩礁が構成する自然の良好な停泊場所に接近したものの、夜間かつ荒天ないし曇天,雨天であり、天文航法が不可能な状況は多い。地文航法も不可能で、灯台も無い等の場合、方向の見極めが難しい場合は多々ある。この場合、航路選択の失敗は,即座に座礁という第一の遭難に直結し、自力航行の不能や、船体の浸水、波浪横転と沈没等、特に夜間であれば人命に関わる重篤な第二の遭難にも繋がっていく。方位磁針は船の自差や局所岩礁磁場の撹乱によって誤差が0度から360度まであり得ることから、概略値としてすら用いることの妥当性に疑義が生じるという固有の性質があるため、外乱磁気の影響を免れる試行移動のコストが前記の意味で極大化しているこのような場面での信頼性が薄い。従来はこのような場合、仕方なく航行を停止する。沖で碇を下ろして停泊し、太陽光下の目視による方位確認を期待しつつ夜明けを待つことが現実的であった。
【0115】
このような場合にも本発明は好適に適合する。すなわち、回転投擲体11を用いて報知部14に発光体を備えさせれば夜間でもはっきりと視認可能であるから、適切に磁北を検出できる。回転投擲体11として帰還型を用いれば何度でも計測を使える。万一、帰還に失敗して水中に落下したとしても、水に浮くように構成することは容易であり、蛍光塗料を塗布しておけば視認も可能である。ひとたび方位の概略値が得られた場合、その情報に基づく詳細な局所的な観察から方位を裏付ける情報が連鎖的に得られていくことは多いため、本方法は最も低く見積もってもその貴重な第一歩を十分適切なコストと労力で使用者に与えるという面でも多大な効果を有する。本発明は、これまでは沖合いで停泊して時間を浪費するしかなかった環境でも、座礁を防ぎつつ接岸への航路を選択するための有効な方位情報取得の手段を与えることができる。
【0116】
最後に基本的な効果にもう一度立ち戻るが、本発明装置によれば、計測点を刻々と水平方向に容易に100m程度も変え、かつ、地表面からも垂直方向に10m程度も離れ続けた空間において刻々と磁場検出をなして行くようなことができる。このようにすると個々の計測点固有の外乱磁気の影響を排除することが容易にでき、使用者に意思決定に役立つデータを有効に与えることができる。
【0117】
例えば、回転投擲体11が示す磁北方向が滑空中に万一,次々と大きく変化するならば、それは外乱磁気の影響が滑空の近傍の地表(海上なら水面下の岩礁)に散在することを示している。逆に磁北方向が滑空中に殆ど変化しなかったならば、外乱磁気の影響が小さい地域と見て良い。方位磁針だけでは、万が一の局所的な外乱磁場で値が大きく間違っているかもしれない可能性を否定できなかった。そのため方位磁針だけでは外乱磁気の評価ができないため、不用意な動きが遭難(雪山での方位間違いによる雪庇の踏み抜き、浅瀬での方位間違いによる岩礁座礁、稜線での方位間違いによる稜線滑落等)に直結しており,最終的な行動決定は大変な困難から免れなかった。こういった局面においても、本発明によると地域大局的な情報を簡単かつ迅速かつ広域的に取得でき、総合的な行動決定を有効に支援することができる。
【図面の簡単な説明】
【0118】
【図1】本発明装置の一実施形態の概略構成図である。
【図2】図1に示した本発明装置の動作の説明図である。
【図3】本発明装置の他の実施形態の概略構成図である。
【図4】本発明装置のさらに他の実施形態の概略構成図である。
【図5】本発明装置のまた別な実施形態の概略構成図である。
【図6】本発明装置のさらに異なる実施形態の概略構成図である。
【図7】本発明装置の他の改変例の概略構成図である。
【符号の説明】
【0119】
11 回転投擲体
12 導体(導線)
13 検出部
14 報知部
15 駆動制御部
16 電源
17 回転検出回路
18 電源スイッチ部
19 回転検出装置(水銀スイッチ)
【技術分野】
【0001】
本発明は方位または磁力線方向情報取得方法及び装置に関し、特に地磁気検出に基づき方位または磁力線方向情報を取得する方法及び装置に関する。
【背景技術】
【0002】
近年の地理情報システムの急展開と衛星測位技術の急速な普及に伴い、陸上でも信頼して使用できる方位情報取得方法の需要が急増している。特に、廉価で簡便、信頼性の高い方法である必要はもちろんのこと、衛星や電波源に頼る必要のない地磁気検出に基づく方法の提供を求める声が高まっている。
【0003】
従来、衛星や電波源に頼る必要のない地磁気検出による方位取得と言えば、伝統的な方位磁針の適用がある。確かに方位磁針を用いての方位情報の取得も、海洋上や上空では一定の有効性を持ってきた。海洋上や上空では自差(船体または機体自体の磁性の影響により方位磁針の示す北方向が真の磁北方向に対して生じる誤差)、偏角(declination)についての補正は煩雑なものの、一応、実質的に可能であるためである。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、陸上では事情が異なっていた。方位磁針の陸上での使用には意外に大きな問題があり、便宜的暫定策としてのみ見られるべきものであった。
【0005】
つまり、個別地点での方位磁針の向きにおける地磁気と外乱磁気の混淆比率が不明である上、この混淆比率は時に1対1ないしそれ以上にも達し、すなわち、誤差の方が大きくなる場合がある。言い換えると、誤差が360度まであり得る。そのため、個別地点における誤差程度が不明のまま、低信頼の結果を使用者に与えてしまい、その誤情報を使用者が信じて行動してしまう危険が大きかった。外乱磁気は、その地点に固有の地質特性や鉄等の埋設物や自動車等の存在、鉄骨ビルの存在や使用者が所持する諸々の磁性金属の影響に由来する。これらは使用者の位置が変われば変化するものであり、あるいは使用者の着用物が変われば変化するものであって、個別の評価は非常に難しい。ここに、船舶や航空機の自差との根本的な違いがある。船舶や航空機の自差は、手続きは煩雑にせよ補正が可能であるが、陸上では余りにも個別の影響物の個数が多過ぎて評価ができない。
【0006】
実際、陸上での方位磁針等の使用は、重要な意思決定には用いられていなかった。なぜなら、計測地点の地物由来の外乱磁気に汚染されている結果であることを否定する証拠が一切持てず、純粋に地磁気を検出しているのか、計測地点の地物由来の外乱磁気に汚染された結果なのかどうかを、その場で迅速に確認する方法が全くなかったためである。これを確認しようとすれば、わざわざ歩行等によって移動し、各地点での方位が元の地点での方位と同一方向であるかを確認するという、煩雑な行為を行わざるを得ない。
【0007】
しかし、このような歩行等による移動は、登山等の野外活動においては極めて貴重な行動資源である体力や時間を急速に減少せしめてしまうという欠点があり、安全確保上も実用性が無かった。すなわち、方位を得るための試行的歩行によって却って霧時の稜線滑落を生んだり、雪庇の踏み抜き転落事故を生んだりする危険もあった。また、事故に繋がらなくても、日没までの貴重な時間を浪費し、夜間に却って危険なビバークを余儀なくされる等の危険に繋がったし、それらの危険に繋がらないまでも、体力を消費するということで、疲労凍死等の危険を増加させるという問題もあった。
【0008】
本発明はこのような従来の実情に鑑み、衛星や電波源に頼らずとも、廉価かつ簡便な手法ないし装置により、陸上においても高い信頼性を持って方位情報を、あるいはまた磁力線方向を取得し得る方法ないし装置の提供を目的としてなされたものである。
【課題を解決するための手段】
【0009】
本発明は上記目的を達成するため、まず基本的な構成として、
投擲すると回転する回転投擲体に導体を設け;
回転によって導体が磁界を横切る際に導体に発生する誘導起電力を検出することで所定の方位情報を取得すること;
を特徴する方位情報取得方法を提案する。
【0010】
さらに本発明では、回転によって導体が磁界を横切る際に当該導体に発生し得る誘導起電力の有無または大きさに基づき、磁力線方向情報を取得する方法も提案する。
【0011】
これらの望ましい下位構成として、本発明は所定の方位情報が取得されたことを報知するか、取得された磁力線方向情報を報知する報知部を設け、この報知部を回転投擲体の中心以外の位置、望ましくは外周縁またはその近傍に配置することも提案する。
【0012】
さらに、報知部は、報知をなす際に、可視的あるいは可聴的に、または可視的及び可聴的に状態を変えるものとすることも提案する。換言すれば、報知部は、報知をなす際に、それ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有するように構成できる。
【0013】
本発明はもちろん、装置としても規定できる。すなわち、
投擲すると回転する回転投擲体と;
この回転投擲体に設けられた導体と;
この導体内に所定方向の誘導起電力が生じた時に検出出力を発する検出部と;
上記の検出出力が発せられたことを報知する報知部と;
を有して成る方位情報取得装置を提案する。
【0014】
方法の発明におけると同様、装置発明としての本発明でもまた、上記の検出部の検出出力を介して得られる導体に発生する誘導起電力の有無または大きさに基づき、磁力線方向情報を報知する磁力線方向情報取得装置も提案する。
【0015】
いずれの発明においても、下位構成としては、例えば報知部は回転投擲体の中心以外の位置に配置されているようにするのが良く、特に外周縁またはその近傍に配置するのが良いし、こうした装置構成においても同様に、報知部は可視的あるいは可聴的、または可視的及び可聴的な報知手段を有するように構成できる。
【0016】
具体的報知手段としては、報知時にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体等が挙げられる。これらの中から一つを用いるか、または幾つか、あるいは全てを組み合わせて用いれば良い。
【0017】
回転投擲体にはさらに、報知部を駆動する電源と、駆動制御部とを設け、検出部が発する上記の検出出力により、駆動制御部が電源から報知部への電力供給を可能にするように構成することもできる。
【0018】
単に稼動電力を供給するのではなく、駆動制御部は、検出部が発する上記の検出出力により報知部の報知形態を変更するように構成されているものであっても良い。すなわち、例えば報知部に設けられている報知手段である発光体の発光色をそれまでとは変えたり、光学特性可変体の光反射率ないし光吸収率の値を変えたり、発音体の音色をそれまでとは変えたりするように構成することができる。
【0019】
さらに、回転投擲体が回転しているか否かを検出する回転検出装置と、この回転検出装置が回転を検出したときに電源からの電力供給を可能とする電源スイッチ部とをさらに設けることで、回転投擲体が使用されていないときの電源節約を図ることもできる。
【0020】
回転検出装置としては、それぞれ回転投擲体の中心から外周に向かう放射方向に沿い、互いには周方向に適当な離角を与えて配置された複数個の水銀スイッチを有するものとして構成でき、各水銀スイッチは、ケーシング内に封入された水銀球が回転に伴う遠心力で半径方向の外周端側に来たときに電気接点を閉成するように構成する。こうすれば、水銀スイッチの全てにおいて電気接点が閉成したときに、当該回転検出装置は回転投擲体が回転したと確実に検出することができる。
【0021】
報知部は回転投擲体の互いに異なる位置に二つ以上を設けても良いし、回転投擲体外周縁に沿って複数個を適宜間隔で配置しても良い。回転投擲体の中心またはその近傍から外周縁の一部位に向け、半径方向に複数個を直線状に適宜間隔で設けるのもまた、良い配置構成である。
【0022】
報知部は無線送信機を含むこともでき、検出部が検出出力を発したときに使用者が保有する無線受信機に報知信号を送信するように構成しても良い。もちろん、受信機側では報知信号の受信に基づき、使用者が認知可能な可視的報知手段及び可聴的報知手段の一方または双方を稼動させる。
【0023】
なお、回転投擲体は、投擲すると略々投擲開始位置に戻ってくる帰還型滑空体であると望ましい場合が多い。
【発明の効果】
【0024】
本発明によると、衛星や電波源に頼らず、廉価かつ簡便でありながら、外乱磁気の影響から免れ得ることで高い信頼性を呈する方位情報取得方法ないし装置を提供できる。しかもそれは、一般に有用な身体中心身体固定座標系表現の様式で方位情報を提示できるものとなる。一般に磁気検出につきものの、煩雑な自差補正等の手続きも不要で、方位磁針の陸上使用の深刻な欠点であった外乱磁気影響の不明を解決し、重要な行動決定への活用を実用水準で実現でき、安心,安全の確保と、誤情報に基づく行動の危険から使用者を保護できる。
【0025】
また、方位磁針の弱点である軸受け等が不要であり、機械的可動部分を必要としないので低故障率である上、廉価に構成できるため、失っても惜しくない。現場で作り直すことも比較的容易にできるし、軽量であるので複数個を携帯して行くこともできる。
【0026】
さらに、本発明の特定の態様によれば、単に方位のみならず、磁力線方向をも検出することができ、これもまた、極めて有効な使途が多々ある。
【発明を実施するための最良の形態】
【0027】
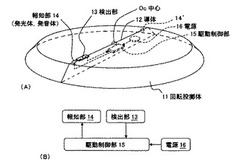
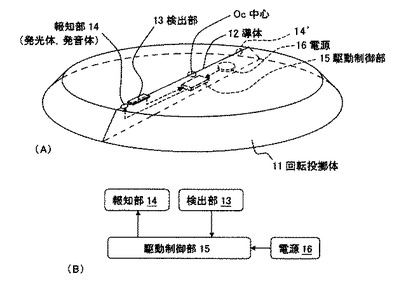
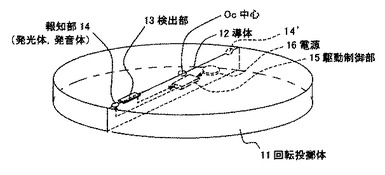
図1(A),(B)には本発明に従って構成された方位または磁力線方向情報取得装置の望ましい一実施形態が示されているが、まずは方位情報取得装置として構成されているものとして説明を始める。図1(A) に示されているように、本装置の主要な構成要素の一つとして回転投擲体11がある。本発明で言う「回転投擲体」とは、人が直接に投擲あるいは投擲を補助する器具も援用して投擲することで回転しながら飛んで行けるものを指し、滑空性能の高い低いは原理的には問わない。滑空性能の高いフリスビー、ブーメラン等はもちろんのこと、滑空性能は低いか滑空能力を持たない野球のボールやドッジボール用のボールの他、これらの中間的存在として飛行中にフリスビー形状とボール形状の相互反転を行う遊具(フラット・ボール)、あたかもペットボトルの口部と底部とを切り落としたかのごとき形状の遊具(Xジャイロ)や日本古来の竹とんぼ、あるいは上昇を安定させるために竹とんぼ様物体の回転をより高速かつ安全にできるべく、引き綱的部分を高速で引くことにより本体に高速に回転を与えられる補助機器を備えたもの、ないしはそれに類する回転上昇体等、各種の投げられるもの、遊具等も含む。
【0028】
ちなみに、図1(A) では円盤形状に示されている回転投擲体11の外周縁部は斜めに描かれているが、円盤の外周縁部が垂直に構成されているもの(ドッジビー)も現在広く流通しており、もちろんその形状でも良い。フリスビーをあたかもブーメランのように(ブーメランよりは少し寝かせ気味にし)、水平から30〜40度程度の角度を与えて前上方へ向かって投げると、前方に上昇してから向きを変えて帰って来る。滑空性能の高い投擲体にあっても上述のようなフリスビー、ブーメラン等は略々投擲開始位置に近い位置まで戻ってくるので、こうしたものは「帰還型滑空体」と名付けることができる。
【0029】
なお、周知のように、フリスビーの飛距離は100mから200mに及ぶし、中心部位を完全に刳り貫き、ドーナツ状に構成したエアロビーと呼称されるものではその飛距離は300mにも及ぶ。ブーメランでも、くの字の形や、三方に腕を持つ形、四方に腕を持つ形等々、多彩な形状のものがあることが知られている。これらも当然、本発明における回転投擲体11として使用可能である。携帯に便利な折りたたみ型のものもあり、こうしたものも本発明の回転投擲体11として便利に使用可能である。
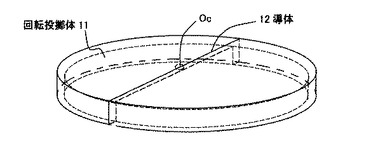
【0030】
この実施形態では、説明の便宜上、回転投擲体11としてフリスビーのようなものを想定して説明するが、回転投擲体11には導体12が設けられている。この実施形態の場合、導体12は回転投擲体11の中心Ocを通る直径に沿ってぐるりと一周巻き付けられた導線12で構成されている。図を簡明にするため、導線12の巻数は一巻きで示しているが、実際には多数回の巻回をなすことが望ましく、その方が後述の誘導起電力をより大きくすることができる。
【0031】
導体12に対しては、当該導体12内に生じる誘導起電力を検出する検出部13を臨ませる。微少な誘導起電力の検出には、市場に流通している半導体系微少電圧検出装置などを任意に用い得る。
【0032】
なお、検出部13は、導体12に生じる誘導起電力が所定の一方向になったときのみ検出するように、例えば簡単には整流ダイオード等を用いて対象とする検出誘導起電力方向を制限できるようにしておいても良い。また、単純に誘導起電力がオン・オフする場合に限らないので、導線12に最大の誘導起電力が生じた時を所定の方向を向いた時として検出するように構成すると良いことが多い。
【0033】
回転投擲体11には、検出部13が導線12内に所定方向の誘導起電力が発生したことを検出したときに稼働する報知部14も設けられており、この報知部14はそのときにそれまでとは異なる状態を可視的あるいは可聴的に、または可視的及び可聴的に具現できるように構成されていれば良い。例えば可視的な表示をするには当該報知手段を代表的には軽量小型で低消費電力な発光ダイオード(LED)等の発光体で構成すれば良いし、可聴的な報知をなすには当該報知手段を代表的にはこれも低消費電力で軽量小型なフィルム・スピーカ等の発音体で構成すれば良く、さらには両者を併用しても良い。また、電気信号により光反射率や光吸収率を制御可能な液晶等の光学特性可変体を単体で、ないしは上記の発光体、発音体と組み合わせて使用することもできる。
【0034】
検出部13の検出出力が十分高く、かつ、報知部14の稼働電力が極めて微少で済む場合には、検出部13の出力でそのまま報知部14を駆動できるので、言わば検出部13はそのまま報知部14の駆動制御部15を構成し得る。例えば将来的に極めて微少な電力で発光できる発光ダイオード等が提供されるのであれば、この発光ダイオードを単に導体12に直列に挿入するだけで、上記の整流ダイオードの働きも兼ね得ることになる。しかし、一般に現今の発光ダイオードやスピーカを駆動するには別電力が必要な場合が多く、本実施形態では軽量にして安価なボタン電池等であって良い電源16を回転投擲体11の内部の適当な位置に設けており、駆動制御部15を介して報知部14を選択的に駆動できるようにしている。図1(A) 中では表記の都合上、電源16は回転投擲体11の中心からややずれた位置に示しているが、中心近傍とすると円盤形の回転投擲体11の場合、回転バランスが良くなる。
【0035】
導線12の巻数が十分に多い場合には、誘導起電力そのものを本体の電源として用いることも可能であるし、内蔵する充電池や電気二重層コンデンサ等、適当なる蓄電体(図示せず)に蓄えられる場合にはそれらを電源16として用いることもできる。
【0036】
検出部13、報知部14、駆動制御部15、電源16の相関回路ブロック例は例えば図1(B) に示されている。駆動制御部15は例えば電界効果トランジスタその他の半導体スイッチング素子を利用する等した電源線路開閉部として組むことができ、検出部13が所定方向の誘導起電力を検出したことを表す検出出力を発したときにこの電源線路開閉部が応答して電源線路を閉じ、電源16からの供給電力で報知部14を駆動するように構成することができる。このような回路構成自体は当業者であれば極めて容易に多様なものを組むことができ、昨今の集積回路技術をすれば、相当に小型、軽量なものとし得る。
【0037】
報知部14の幾何的配置位置は、少なくとも報知を視覚的に行う場合には回転投擲体11の中心Ocを避ける位置である必要があり、望ましくは回転投擲体11の外周縁ないしその近傍とする。この実施形態の場合には回転投擲体11の一表面上で外周縁の近傍に設けられており、また、導体12の上にも乗る位置にある。
【0038】
なお、既に述べたように、検出部13として半導体系の微少電圧検出装置を用いる場合、例えば、“超高性能ADコンバータIHM-A-1500”として流通している集積回路を用いてもよい。これは指先に乗る程に小型で軽量、薄型(縦10mm×横10mm×薄さ5mm)な集積回路であるため、軽量で飛行体に好適に適合する。平たい長方形のパッケージの両方の長辺に外部入出力用のリードが8本ずつ並べられた16ピン集積回路(Integrated Circuit)チップであり、表面実装用のパッケージ方式としてDIP(Dual Inline Package)方式のフラットタイプにあたるSOP (Small Outline Package)方式という、パッケージ方式としてはポピュラーな方式を用いていて、取り扱いが容易であり、低コストである。μVオーダの微小電圧を最大16KHzの周期で検出することができ、16ビットのデジタル信号にて精度の良い出力が可能である。ドイツ国,ISABELLENHUTTE社製の製品であり、極めて廉価に入手できる。ただ、0V入力でもホワイトノイズがあり、下位1,2ビットは完全に0にならないこともあるが,これは高性能な検出感度を備えるこの種の集積回路に寧ろ通常のことであり、それらのビットを無視するか、駆動制御部15での閾値を適切に設定することで対処すれば良い。また、内部コントローラを持たない単なるADコンバータなので、その変換方式はレジスタ書き込み内容で制御可能である。本体は5V電源で動作する。重量も数グラム程度であり、フリスビー本体と同程度ないしそれよりも低廉に流通しているため、本発明装置への適用性が高い。
【0039】
誘導起電力がこうした微少電圧検出装置の集積回路により検出されたときに駆動制御部15の一形態として用いたマイクロコンピュータ(マイコンと略:例えば,PICマイコン:EPROM化してプログラムを持てる)に通知させれば良い。もちろんこれも、5Vの電源で十分動作するために、電源16としては既述したボタン電池で十分である。
【0040】
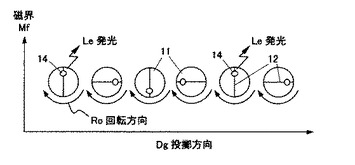
図2は図1に示した本発明の方位情報取得装置の動作原理を模式的に説明しているが、まず基本的に、本発明では、フレミングの右手の法則を利用している。すなわち、磁場内で磁力線に垂直においた導線を磁場に垂直に動かす場合、右手の人指し指、親指をそれぞれ磁場の方向、導線の運動の方向に向けると、誘導起電力はこれらに垂直に向けた中指の方向に生じる。
【0041】
そこで、導線12の巻き付けられた回転投擲体11、すなわちコイル12を有する回転投擲体11を磁界Mf中で投擲方向Dgに投擲すると、図2中に矢印Roで示す回転投擲体11の回転方向の接線方向の運動ベクトルと地磁気方向ベクトルから誘電起電力ベクトルが生じる。これにより導体(導線)12に所定方向に生じる誘導起電力の発生を検出部13にて検出する。そして、検出部13が誘導起電力を検出したその瞬間に、駆動制御部15を介して電源16からの稼動電力により報知部14を駆動し、例えば報知部14として設けた発光ダイオード等の発光体を符号Leで示すように発光させる。
【0042】
この発光の基準は、誘導起電力に閾値を設定してそれを超えている場合に報知する設計でも良い。あるいは、誘導起電力が観察されたはじめた際に、基本的に回転に伴うサインカーブである筈のその変動サイクルに注目し、直前回誘導起電力のサインカーブにおける最大値の8割の誘導起電力を今回誘導起電力の閾値として、その閾値を超えたら報知する設計でも良い。後者の方法だと、閾値の設定を高くし過ぎたため全く報知されない、ということを回避できる。また、投擲する方向や角度によって誘導起電力が変化することに対応でき、便利である。あるいは両者をスイッチにより切り替えられるようにしておいても良い。
【0043】
前者、すなわち所定の閾値を設定した場合には、発光し続ける方位が広くなり過ぎる場合があるかもしれない。しかしそれは観察する人間により、その大体中心位置と認識できるから問題は少ない。閾値はジョグダイヤル等(図示せず)で、外から設定できるようにしても良い。また1波長分のサインカーブ変動を注意深く検出可能であるなら、誘導起電力の最大値の前後において、適宜発光するように制御することが良いことはもちろんである。このこと自身はそれほど困難ではない。
【0044】
ここで、フレミングの右手の法則により誘導される誘導起電力の大きさについて言及しておく。回転コイル法(rotating-coil flux meter)での電磁誘導による磁界測定は、磁界の絶対値を測定できる。定常磁界中の検出コイル(本発明では導体12がこれを構成)を一定速度で回転させ、コイルに誘導された起電力を測定する。
【0045】
例えば断面積がS、巻数がNの検出コイルを磁界Hに垂直に角速度ωで定速回転させると、コイルを貫通する全磁束Φは,
Φ=μo・H・S・N・cos(ωt)
であるから、誘導起電力Vは次のようになる
V=δΦ/ δt = μo・ω・H・S・N sin(ωt)
【0046】
上式に具体的な数値を入れると次のようになる。
角速度ω=2×3.14(rad/circle)×10(circle/sec)=62.8(rad/sec)(毎秒10回転を仮定),
磁界μoH=0.35(G) = 0.35×10-4 (T) (中緯度地域の水平磁力を仮定),
断面積S=0.015(m-2)(コイル断面積に直径30cm,高さ5cmの矩形を仮定),
巻数N=10(回)
とすれば、
誘導起電力最大値V=3.30×10-4 (V)
となる。
【0047】
従って、既述した廉価な指先大の半導体集積回路による微少電圧検出機器の検出感度が10-6Vであることを考慮すれば、上記の現実的な諸条件下で既に検出感度の330倍の起電力が得られ、十分に対象となる微少電圧範囲を検出することができる。もちろん、先にも述べたように、導線12の巻数Nを増すことで、検出部13による検出感度は実質的により向上する。
【0048】
なお、上記における水平磁力(horizontal magnetic intensity)とは、地磁気の磁場を鉛直方向と水平方向の二成分に分けたときの水平成分を言う。地磁気赤道で最も大きくなり0.4G(0.4×10-4T)程度、東京付近で0.3G程度である。
【0049】
ここで例えば下記非特許文献1によれば、外乱磁気により結果が乱れることが示されている。本発明では、誘導起電力検出にどうしても与えねばならない回転を、局所的外乱磁気影響の最小化を目指す空間移動に随伴する回転と相互に転用することで、簡素かつ効果的な方位情報取得という実際性を生み出した。
【非特許文献1】長崎大学/教科教育学研究報告/7, 「回転コイル法による地磁気の測定と実験室内の地磁気の乱れ」,富山哲之他, NCID AN00178258,VOL.7,1984年3月30日
【0050】
以上のように、本発明装置では地磁気方向ベクトルに対して回転投擲体11がある特定の姿勢になった場合にのみ、発光体14からの発光が行われるようにし得る。すなわち、回転しながら滑空ないし飛翔する投擲体11は、地磁気ベクトルに対してある姿勢を迎えたときにだけ、それに設けてある報知部14としての発光体が発光するように構成できるので、一般には報知部14の位置が磁北方向と合致したときだけ、発光するように構成でき。投擲者はそれにより、磁北を確認できる。この際、必要に応じて、回転投擲体11の中心Ocに、図1(A) 中に仮想線で示すように、別の色で点滅装置とか着色標識を設けると、回転投擲体11上における報知部14のそのときの位置が確認し易くなり、結局は磁北方向の確認がし易くなる。
【0051】
しかるに、本発明による方向情報取得装置での方位報知の表現形態には、上記以外にも多様な形態が考えられる。例えば、上記では中心Ocから報知部14としての発光体14を見る方向が磁北となったときに当該発光体14を発光させるようにしたが、発光体14の設けて有る位置には目立つ着色標識をしておき、磁北検出時には発光体14に代えて発音体14を駆動するようにしても良い。これは発光が認識し難いこともある直射太陽光下における使用に有効であることがある。この場合、着色標識がある方向を向いた瞬間に音が発せられ聞き取られるので、その方向が北と分かるという仕組みである。
【0052】
1気圧20度の大気中での音速は343m/秒であるから、仮に距離が5m、回転速度10回転/秒であると仮定した場合には、音の伝達で5/343=0.01458秒の遅れが生じ、その間に約5度だけ回転は進むことにはなる。しかし、歴史的にも現代でも、方位に期待されるのは8方位(南東などの標記)あるいは高々12方位(北北東などの標記)であって、それ以上の精度は意味がない。実際、8方位と12方位は、夫々誤差範囲として30度、45度等があるが全く問題なく許容されていることに鑑みれば、上記の5度は期待精度の完全な範囲内であるどころか、さらに10倍程度の誤差であったとしても、間違いなく生活実用範囲である。
【0053】
音響出力を利用する場合にも、数回も練習すれば、目視距離に応じて音響伝達速度遅延が含まれることを計算に入れ、随時思考的に5度程度等の補正は容易に期待できる。これらを総合的に勘案すれば、簡便、迅速、廉価に相応の情報取得に至り得ることは容易に理解されよう。
【0054】
もちろん、発光体14と発音体14を併せて駆動しても良く、これでも着色標識の位置と発せられる音、ないしさらには着色標識に重なる光によって投擲者は磁北を認識できる。着色標識と発光体を併設し、別途に設けたスイッチ手段(図示せず)により、発光体の必要の無いときには発光体への電源線路を開けるようにしておいても良い。
【0055】
また、駆動制御部15が電源16からの稼動電力を報知部14に単に選択的に供給するのではなく、検出部13が発する検出出力により報知部14の報知形態を変更するように構成することも既存の技術をすれば極めて容易である。さらに、導線12内を生じる誘導起電力を双方向に別途検出可能としておけば、より多彩な報知表現形態も採り得る。例えば発光体14が北を向いたときに駆動制御部15が当該発光体を第一の発光色として例えば緑、南を向いたときにそれとは異なる第二の発光色として例えば赤に発光させるように構成することもできる。昨今では一つの発光ダイオードのレンズ筐体内に光の三原色発光を選択的に行えるように三つの発光波長の異なるダイオードを組み込んだ製品もあるので、こうしたものを便利に使うことができる。
【0056】
図1(A) 中に仮想線で示すように、報知部14と直径方向で対向する位置にも第二の報知部14’を設けると、それら二つの報知部14,14’の各個が北を向いた際には赤、南を向いた際には緑で発光するようにすることもできる。もちろん、発音体も併用可能であり、状態の変化として音色の変化を生じさせるように駆動制御部15を組むこともできる。
【0057】
このようにすると、本発明装置は例えば視覚障害者等でも使用可能な装置ともし得る。視覚障害者は音が聞こえたにしても、その時の着色標識等の方向を目視確認できない。そこで例えば、検出部13が誘導起電力を検出したときに駆動制御部15により、北を向いている第一の報知部14からある音響を発し、それと180度反対を向いている第二の報知部14'からは別の音響を発するようにする。人間の聴覚は左右の耳の存在により、音響場から立体感のある奥行きを伴う空間知覚を認識できる。ステレオ音響はその一例であり、オーケストラにおける第一バイオリンの奏者の聞き手からの方向、概略位置が例えば左方向、手前であるとか、クラリネット奏者の聞き手からの方向、概略位置が例えば右方向であり奥である等、その方向性と奥行きについて聞き分けられる。そこで、上記のように構成すれば、若干の練習により感覚を掴んでいくことで、視覚障害者の方でも方位の識別ができるようになる。
【0058】
なお、こうした場合には明快に音色・音程・長さ・タイミング・連続性・形式・構成等の異なる二つの音響の発信される方向だけが識別者にとって大切となるから、それら二つの音響発信源方向の差異が使用者からの音響到来方向識別分解能以上となるように、回転投擲体の直径が大きい程、一層迅速な判断ができる上、識別者に近い方が一層迅速な判断ができることは当然である。さらにこの場合、平行移動するものよりも、垂直上昇し、一定時間安定的に浮遊した後に下降する竹トンボ様の回転投擲体や、既述したように引き綱を引いてさらに安定した回転を与える補助具付きのもの等の方が、こうした使途に好適に適合する。頭上から音響がするのであるが、ある音色の方向が北で、その反対方向が南であると判断できる。一つの音響だけであるとその方向は定め難いが、二つの異なった音響が空間中にどういう位置関係になっているかは比較的判別しやすい。
【0059】
さらに、これは図示していないが、回転投擲体11の巻きつけ導線12の両側方向を含む外周縁に沿い複数の発光体を適宜間隔で配置し、その一つが例えば北を向いた際には赤で発光するように制御し、南を向いた際には緑で発光するように制御した上に、それ以外の場合は例えば白色で発光するように制御するように駆動制御部15を組むこと等も、昨今の回路技術をすれば簡単に行える。
【0060】
回転投擲体11の中心部Ocまたはその近傍から外周縁に向け、半径方向に複数の発光体14を直線状に適宜間隔で並べて同時に発光させても良い。こうすると視覚的了解性をかなり高めることができる。回転して飛んでいる回転投擲体11の中心Ocから回転投擲体11の外周縁の一部へ向かう方向がある方位に合致した時に、この直線状の発光が観察者には極めて明白に認知され得るものとなる。中心Ocら外周縁への方向がより明瞭になるよう、中心Ocないしその近傍部分の発光体の色ないし輝度と、外縁部の発光体の色ないし輝度を異ならせても良い。いずれにしろ周囲の照明環境とコストに応じ、種々の形態の中から任意適当なるものを設計選択すれば良い。
【0061】
なお、上記において少し触れたように、直射太陽光下の使用に重点を置く場合には、発光体や上述の着色標識に限らず、それらの代わりに本体表面とは反射率の異なる鏡面素材を半径線上に埋め込むことで、直射太陽光下での方向の識別性を向上させる,という工夫をしても良い。支配的な直射太陽光を逆に活用することもでき、例えば電気信号により光反射率や光吸収率を制御可能な液晶等の光学特性可変体を報知部14として発光体の代わりに用いても良いし、さらにこうした液晶による報知部11を回転投擲体11の半径線上に細長く埋め込んでも良い。
【0062】
本装置には無線送信機を搭載することも可能である。軽量にして小型な無線送信機はフリスビー等の回転投擲体に搭載するに昨今の技術事情をすれば何の問題もなく、発光体ないしは発音体、あるいは着色のどれか一つまたは幾つかで構成される報知部が例えば北を向いた際、当該無線送信機から使用者側の無線受信器、例えばイヤホン型受信機に対して報知信号を送信し、受信側で可聴報知部から音響・音声(「北」等の音声)を出力させるとか、あるいは眼鏡兼用型無線受信機の視野内での可視報知部のLED発光で使用者に遠隔的に通知するように制御することもできる。回転投擲体11との距離は高々100m程度の距離を想定すれば良く、電波法においても規制が緩和されつつある微弱無線電力で十分に満足されうる。
【0063】
図3〜6には、専ら回転投擲体11の採り得る形態例に就き、図1図示のものとは異なる諸例が示されている。図1中におけると同一の符号は同一ないし同様な構成要素を示し、それらに就いての説明はこれまでになされた所をそのままに援用することができるため、再度の説明は省略する場合もある。
【0064】
まず、図3に示されている本発明の実施形態は、図1に示されている回転投擲体11と異なり、円盤表面部分と裏面部分の直径に変化が無く、薄い円筒形上のものになっている。つまり、先にも述べたように、円盤外周縁部は垂直な壁面となっている。昨今ではこうした形状も良く見掛けるようになってきた。もちろん、こうした形状の回転投擲体11にも本発明の構成は適用可能である。図中に示されている各符号12〜16,14’の示す構成要素はこれまで説明してきたものと同じであり、それらに対する説明を援用できる。
【0065】
図4は、裏面側が逆さにしたお盆のように凹んでいる回転投擲体11を示している。外周縁部の壁面は垂直になっているが、図1図示のもののように斜めでも勿論良い。ここでは回転投擲体11とそれに設ける導体ないしコイル12の配置関係にのみ着目しての説明であるため、図の簡明化を図る意味から、図1,3に示してある検出部13、報知部14、さらに望ましくは設けられる駆動制御部15、電源16等々は図示を省略しているが、本発明の趣旨に従い、当然に設けられるものである。
【0066】
このように裏面側が凹んでいる回転投擲体11の場合には、裏面側において外周縁部を構成している側壁の内面に沿わせ、かつ、お盆形状の窪みの表面にぴったりと沿うように導線12を配するのが良い。導線ないしコイル12の断面は凹という文字を上下逆さまにした形状となる。こうすると、投擲あるいは捕捉の動作自由度を損なわない利点が生じる。投擲においては一箇所に手指が掛かってスナップを利かせられれば問題はなく、捕捉においては上下から両手のひらで挟み込むようにすることが標準的であるために、お盆形状の上の中空部分を導線12が渡っていても標準的な捕捉は十分可能であるが、中空部分を導線12が渡っていない場合は投擲、捕捉動作の自由度が一層向上する。
【0067】
既述のように、誘導起電力は磁界を横切るコイル断面積に比例し、コイル巻数に比例する。断面積が矩形の構成に比べ、このような逆凹字構成にすると断面積は減少するが、巻数を圧倒的に増加させても投擲、捕捉動作は円滑にできるため、結局、誘導起電力面では全く問題はない。逆に、捕捉、投擲を妨げずに巻数を劇的に増加可能でもあるから、誘導起電力は寧ろ増加させることが可能である。
【0068】
仮に巻数を増加させないとしても問題は生じない。先の試算で既に検知可能電力の330倍の値が得られていたことから直感的にも予想されることではあろうが、一応の計算を示してみよう。例えば外径30cm, 下面内径25cm, 高さ5cmの回転投擲体11とし、図4図示のように裏面側ではお盆形状の面に沿って導線12を配し、全体として逆凹字型導線とした場合、既掲の誘導起電力の方程式に従って、外径断面積Sに基づく誘導起電力から内径断面積S’に基づく誘導起電力を減じた誘導起電力が期待できる。
【0069】
外経断面積S=0.3mx0.05m=0.015(m-2)、内径断面積S’=0.25mx0.05m=0.0125(m-2)であるから、断面積差分ΔS=0.0025(m-2)である。よって既掲の誘導起電力計算式より、誘導起電力最大値V=52×10-6 (V)を得る。既述した廉価な指先大の半導体集積回路による微少電圧検出機器の検出感度が10-6 (V)である事実に鑑みれば、感度の50倍を超える起電力が得られ、この単純な構成のみでも十分に電圧検出ができる。その上、導線12の巻数Nを増すことで、検出部13による検出感度は実質的により向上させられる。この導線構成では導線12は本体内部に埋め込むことができるし、巻数を10倍あるいはそれ以上にすることも十分に可能である。当然、既述の廉価、微小かつ軽量な微少電圧検出感度10-6 (V)の数百倍の誘導起電力をも得ることができる。
【0070】
なお、こうした図4図示の構成は、近年人気を博している先に述べたドッジビー等に特に好適である。ちなみにこれの素材は極めて柔らかい材質でのみ構成され、捕捉にも適すが、捕捉せずに体に当てて止めても安全となっていて、不特定多数の集団内相互でドッジボールのようにぶつけて遊ぶグループ・ゲームへの応用が積極的に期待されている。もちろん、実質的に裏面がお盆型に抉られた形状であるため、回転投擲体11の肉厚は各所で薄くはなるが、それでも図1,3に示したような、本発明で用いる回路部材13〜16は極めて薄くも構成し得るので、導線12共々、回転投擲体内部に埋め込むことができる。電源16としてボタン電池を用いた場合、構造例を示すまでもなく、それを交換可能に埋設できることも言うを俟たない。
【0071】
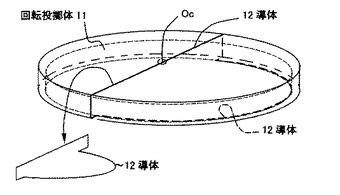
図5はさらに導体12の引き回しに関しての別な工夫のされた実施形態を示している。本図でも同様に、図の簡明化を図る意味から、図1,3に示してある検出部13、報知部14、さらに望ましくは設けられる駆動制御部15、電源16等々は図示は省略されている。回転投擲体11は図4図示のものと同様、裏面がお盆型に抉られたものとなっている。ただ、本実施形態の場合、裏面側での導線12を示す破線が投擲体裏面の輪郭破線と重なって見づらいので、導線12の引き回しパタンのみも、図中左下に取り出して縮小表示してある。
【0072】
導線12は裏面側に回り込んだ所で、図4図示のようにお盆型の窪みの表面に沿って直径上を渡るのではなく、窪みの開口縁内周に沿って半円状に円弧を描き、対向端まで渡っている。これでも投擲の自由度を減ずることにならない配置であることが分かるし、また、十分に検出可能な誘導起電力を生じ得る。捕捉、投擲の自由度を減ずることなく巻数を劇的に増加することで、誘導起電力をさらに増し得ることも既述の考察と同様である。
【0073】
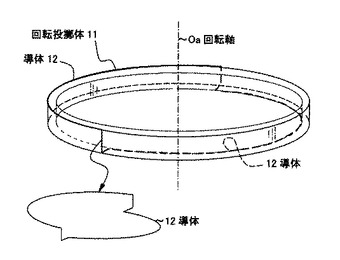
図6はさらに別な実施形態を示している。本図でも同様に図1,3に示してある検出部13、報知部14、さらに望ましくは設けられる駆動制御部15、電源16等々は図示を省略しているが、やはり本発明の趣旨に従い、これらは当然に設けられる。この実施形態は、回転投擲体11が完全に中空な円筒形状ないしリング状形状となっていて、回転軸Oaの周りに回転することができるものの場合であり、例えば既述したXジャイロとか中空エアロビー等がこの形状に相当する。
【0074】
このような回転投擲体11に設けるべき導体12は、この実施形態では図示のように、裏面側において先の図5に示した実施形態と同様、中空円筒形状の開口縁の内周に沿って半円状に円弧を描いている一方、表面側においても幾何対称的な関係で中空円筒形状の開口縁の外周に沿い、半円状に円弧を描いている。やはり本図でも、分かり易くするために、この導体12の引き回しパタンのみを図中左下に抜き出して示してある。
【0075】
ただ、こうした中空円筒形状の回転投擲体11であると、軸方向の表裏面部分は寸法的に幅が狭く、本発明に必要な種々の回路部13〜16(図1,3)を設けるには十分な面積部分が存在しない場合も考えられる。しかし、既述のように、それらは指先に乗る程に軽量、小型とし得るので、中空円筒形状の枠に相当する側面部分に相当する部位に埋め込んで行くことは十分に可能である。
【0076】
このような中空円筒形状であるXジャイロを投擲する場合、水平進行方向と一致する回転軸Oaの周りに回転を与えることにより航空力学的に安定した飛行を行うことが知られている。回転軸Oaが南北軸(すなわちこの場合磁力線方向:以下、特に断らない限り東西南北の表現は磁北基準とする)と直交する方向に水平飛行させられた際には、それ以外の方向に飛行させられた場合に比べ、水平磁力由来の誘導起電力としては最大の値が生じうるので、この際には検出部13を介してのそうした検出に伴い、報知部14において容易かつ直裁的に磁北を報知することができる。
【0077】
この場合、さらに興味深いことに、要すれば伏角(magnetic dipもしくはinclination)まで検出することができる。伏角とは地磁気の方向と水平面のなす角である。伏角は低緯度で小さく、高緯度では大きい。本装置が北と指す方向(中心から「北」と指す方向への向き,あるいは「南」と指す方向から「北」と指す方向への向き)は、この場合、地磁気の磁力線方向に相応する。言い換えると、単に「北」を指すのでなく、例えば東京等、中緯度地域での使用を想定すると、地面に向けて48度程度の角度を持った方向を「北」として示す。ちなみに、房総、東海から瀬戸内、北九州を結ぶ領域については、伏角はおよそ48度である。回転投擲体は、自らの周囲に存する磁力線ベクトルのうち、自らの回転軸に垂直である磁力線ベクトル成分について、誘導起電力を検出できる。現在検討している場合のように、東西軸と自らの回転軸が一致している際は、自らの回転軸に垂直である磁力線ベクトル成分とは、すなわち、自らの周囲に存す磁力線ベクトルと完全に一致する。言い換えれば、東西軸と自らの回転軸が一致する際は、検出され得ずに失われる成分がゼロとなる。
【0078】
つまり、東西軸と自らの回転軸が一致する際は、得られる誘導起電力は、磁力線方向を完全に反映しており、方位情報も伏角情報も含めた形で、完全な磁力線方向情報を復元することができるのである。このことを逆に活用し、あえて東西方向に飛行させて、磁力線にはその地に固有の伏角が存在していることの学習の教材とすることにも本発明は好適に適合する。東京で実施する際、札幌で実施する際、シドニーで実施する際には、それぞれにその値は異なる。インターネット等で計測の様子を動画像でリアルタイムに情報交換すること等により、地球の磁気の伏角が簡単に比較でき、国際的協力学習にも役立ち、生徒の学習効果も上がる。廉価・軽量・簡便・迅速などの特徴がこの場合も活かされることはもちろんである。
【0079】
ちなみに、東方向に水平投擲した場合は、投擲者から見て、磁力線は右上から左下へ向けての磁力線として検出される。西方向に水平投擲した場合は、投擲者から見て、磁力線は左上から右下へ向けての磁力線として検出される。この事実を知っておけば、検出された磁力線の伏角の方向から投擲した方角について知ることができ、有用性が保たれる。
【0080】
一方、回転軸Oaが南北軸(磁力線方向)と平行する方向に水平飛行させられた際には、水平磁力を導線が横切らないため、水平磁力由来の誘導起電力は生じない。が、垂直方向成分の影響を受けて、鉛直下向きが「北」であると指し示す。つまり、水平方向には「北」を指し示さない一方、鉛直方向成分のみを検知するのである。この事実を知っておけば、水平方向には「北」を指さず、鉛直下向きに「北」を指し示した際には、その飛行方向自体が北ないし南と判断できる。確定させるためには、投擲者の頭上から見て、例えば時計回りに投擲者を90度回転させ、もう一度投擲すれば良い。その際に、上記の東か西に帰着するので、第一回目の投擲が北であったのか南であったのか、容易に判断が付く。
【0081】
正確には東・西・南・北の各方位と合致しない水平方向に投擲された場合でも、この方法を採用すれば常に最低でも8方位領域の水準で方位が得られ、高い有用性が保たれる。通常、伏角は通常水平面から計るが、ここでは鉛直上向きを0度として、投擲者から見て時計回りに360度まで表示するものとしてみよう。こうすれば、地磁気赤道(geomagnetic equator)の以南でもここでの論法と同じ論旨が成立するので便利である。なお、「地磁気赤道以南」とは略々南半球と一致すると考えて良いが、場所によっては緯度にして15度程度の差異が出る。しかしこれは、ここでの議論にとって余り問題とならない。
【0082】
しかるに、1回目の投擲で得られた伏角の方向F1が180<F1<360なら東領域方位(磁北基準で時計回りに投擲方位をθ1とすると、0度<θ1<180度)であり、0<F1<180なら西領域方位(180度<θ1<360度)となるので、投擲された方向が略々直ちに判別できる。さらに、投擲者の頭上から見て時計回りに90度、投擲者自身が体を回した後、すなわちθ2=θ1+90の条件下で2回目の投擲をなすことで得られる伏角F2の向きにまず注目し、次に伏角F1と比較してのF2の大きさの変化に注目する。
【0083】
2回目の投擲θ2で得られた伏角F2の向きが、1回目投擲θ1の伏角F1と比べ、垂直軸を超える変化、つまり地磁気赤道以北ではF1から時計回りにF2に至る扇形が180度を含む変化、地磁気赤道以南ではF1から時計回りにF2に至る扇形が0度を含む変化が観察されたなら、それは、頭上から見て時計回り90度回転により南北軸を越えたことを意味するので、1回目の投擲方位θ1は北西領域(270度<θ1<360度)か南東領域(90度<θ1<180度)であったと判断できる。これらの中、いずれに該当するかについての識別は、2回目の投擲θ2時の伏角F2の向きで判別可能である。仮に0<F2<180なら、すなわち投擲者から見て地磁気赤道以北では左上から右下、地磁気赤道以南では左下から右上なら、1回目の投擲方位θ1は南東領域(90度<θ1<180度)と確定する。
【0084】
逆に180<F2<360なら、すなわち投擲者から見て地磁気赤道以北では右上から左下、地磁気赤道以南では右下から左上なら、1回目の投擲方位は北西領域(270度<θ1<360度)と確定する。ここまでで既に、生活実用性の高い4方位から1つに定まる上、何らの追加的動作なしに次ぎの考察からさらに、かつ直ちに8方位に絞り込める。
【0085】
頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2の向きが、1回目の投擲の伏角F1と比べて、地磁気赤道以北なら180度、地磁気赤道以南なら0度と、より垂直に近かったならば、1回目の投擲の方向θ1は南東領域(90度<θ1<180度)の中でもさらに東南東領域(90度<θ1<135度)に絞り込まれ、北西領域(270度<θ1<360度)の中でもさらに西北西領域(270度<θ1<315度)まで絞り込まれる。頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2と1回目の投擲で得られた伏角F1とが、180度を軸として対称の位置にあるならば、南東領域(90度<θ1<180度)の中でもさらに南東(θ1=135度)に絞り込まれ、北西領域(270度<θ<360度)の中でもさらに北西(θ1=315度)に絞り込まれる。
【0086】
頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2の向きが、1回目の投擲の伏角F1と比べて、より水平に近かったならば、1回目の投擲の方向θ1は南東領域(90度<θ1<180度)の中でもさらに南南東領域(135度<θ1<180度)に絞り込まれ、北西領域(270度<θ1<360度)の中でもさらに北北西領域(315度<θ1<360度)に絞り込まれる。ここまでで、何らの追加的動作なしに直ちに8方位に絞り込まれることが可能であることを示した。
【0087】
最早類推可能であろうが、上記とは逆に、投擲者の頭上から見て時計回り90度回転後の2回目の投擲θ2で得られた伏角F2の向きが1回目の投擲θ1の伏角F1と比べ、垂直軸を超える変化を示さなかったときには、それは頭上から見て時計回り90度回転により南北軸を越えなかったことを意味するので、1回目の投擲方位θ1は、北東領域(0度<θ1<90度)か南西領域(180度<θ1<270度)であったと判断できる。さらに、2回目の投擲θ2時の伏角F2が0<F2<180となれば、すなわち投擲者から見て地磁気赤道以北では左上から右下、地磁気赤道以南では左下から右上となれば、1回目の投擲方位θ1は南西領域(180度<θ1<270度)と確定する。逆に、180<F2<360なら、すなわち投擲者から見て地磁気赤道以北では右上から左下、地磁気赤道以南では右下から左上となれば、1回目の投擲方位は北東領域(0度<θ1<90度)と確定する。
【0088】
頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2の向きが、1回目の投擲の伏角F1と比べて、より垂直に近かったならば、1回目の投擲の方向θ1は、南西領域(180度<θ1<270度)の中でもさらに西南西領域(225度<θ1<270度)に絞り込まれ、北東領域(0度<θ1<90度)の中でもさらに東北東領域(45度<θ1<90度)まで絞り込まれる。
【0089】
全く同様の考え方で、頭上から見て時計回り90度回転後の2回目の投擲で得られた伏角F2と1回目の投擲の伏角F1とが180度を軸として対称の位置にあるならば、南西領域(180度<θ1<270度)の中でも特に南西(θ1=225度)に絞り込まれ、北東領域(0度<θ<90度)の中でも特に北西(θ1=45度)に絞り込まれるし、伏角F2の向きが伏角F1と比べてより水平に近かったならば、1回目の投擲の方向θ1は南西領域(180度<θ1<270度)の中でもさらに南南西領域(180度<θ1<225度)に絞り込まれ、北東領域(0度<θ1<90度)の中でもさらに北北東領域(0度<θ1<45度)まで絞り込まれる。
【0090】
以上のように、本発明装置を用いた場合、運がよければ偶発的な一致により、東、西、南、北、北東、南東、北西、南西というはっきりした方位に一意に絞り込める上に、通常の場合でも、単に2回の投擲のみで、何らの追加的動作なしに、8方位に直ちに絞り込める。すなわち、本装置を用いれば、2回の投擲のみで、何らの追加的動作なしに、実用方位として十分な45度範囲以下にまで、直ちに方位を絞り込める事実を明らかにした。
【0091】
ここで改めてまとめ直しておくと、回転投擲体11を南北方向に回転軸を合致させて水平飛行させた際には、水平磁力の影響はゼロであるものの、垂直磁力(水平磁力以外の成分を仮にこのように呼ぶ)の影響を完全に受ける。東西方向に回転軸を合致させて水平飛行させた際には水平磁力の影響も垂直磁力の影響も、共に完全に受ける。
【0092】
そこで、回転軸Oaが、南北軸(磁力線方向)と平行でもなく、垂直でもない方向に水平飛行させた際には、前記の組み合わせとなる。例えば東方向に水平飛行させた際には、磁力線はあたかも北方への伏角48度(例えば東京の場合)のベクトル(この大きさを仮に1とする)として観察できる。北方向に水平飛行させた際には、磁力線は鉛直下向きベクトルのみ観察できるが、その大きさは先の1の大きさの鉛直軸への正射影分に相当する。すなわち大きさは小さくなる。東方向から北方向まで、順次方向を変えて水平飛行させてみれば、検出される磁力線方向は、北方への伏角48度のベクトルが徐々に大きさを減少させつつ下を向いて行き、最後には最初の大きさの正射影の大きさを持って真下を向くベクトルとなるので単純で理解しやすい。他の向きに飛行する場合もこれに準じて簡単に理解できる。
【0093】
例えば東方向から南方向に順次方向を変えて回転投擲体11を水平飛行させてみれば、検出される磁力線方向は、北方への伏角48度のベクトルが徐々に大きさを減少させつつ下を向いて行き、最後には最初の大きさの正射影の大きさを持って真下を向くベクトルとなるので単純で理解しやすい。西方向から北方向にしても同様であるし、西方向から南方向にしても同様である。これを覚えておけば、いずれの方向に飛行させた場合でも、90度の方向転換を挟んでの高々2回の投擲で、少なくとも8方位領域(北北東、東北東、南南東、東南東、北北西、西北西、南南西、西南西の各中心角45度の扇形領域)という、有用な方位情報が判別可能となる。時には、正しく8方位(北、南、東、西、東北、西北、南東、南西の各正対方向)さえ一意に定まる可能性もある。よって、扇形状で良いから迅速に概略値を得たい場合にも大変便利であるし、きちんとした方位を一意に得たい場合にも正しく答えることが手法なのである。
【0094】
言い換えると、東西方向に飛行させた場合が、最も本来の水平方向の北を検出するに十分な起電力が得られるが、南北方向に飛行させるにつれて、だんだんとその起電力は減少して行き、南北方向に飛行させると水平方向の起電力は0になる。そこで、水平方向には北を指さない場合には、偶然、南北軸に合致して飛ばしたものと、逆に推定することができる。しかしながら、垂直磁力の影響はいずれの方位への水平飛行においても起電力をもたらし、それに注目することで、仮に水平方向の北を指し示さなくても、投擲者の90度の方向転換後の今一度の投擲により、南北方向のどちらに向けて飛ばしているのかは容易に判明する。そして、このようなことからしても結局、本発明は、導体に発生する誘導起電力の有無または大きさに基づき、磁力線方向情報を取得する方法ないし装置として定義できることが分かる。
【0095】
そして、少し視点を変えて言うならば、本発明によると、回転投擲体11を投擲しての遊び、時にキャッチボール様の遊びを楽しみつつ、遊びの次元を超えて、鉛直方向に回転軸を持つ回転投擲体であればただ1回のみの投擲により直ちに北の方角を直裁に得ることができるし、仮に水平方向に回転軸を持つ回転投擲体であってもごく簡単な2回の投擲により、方位を8方位まで迅速かつ廉価かつ簡便に、かつ楽しく絞り込める上、地磁気の伏角成分の検出も可能である。さらに回転軸を磁力線方向に沿わせた飛行での誘導起電力の消失、回転軸が磁力線方向と直交する飛行での誘導起電力の最大化の観察から磁気方向情報検出ができる。屋外での回転投擲体を用いた驚きや意外性を伴う体験は、机上の学習のみでは理解され難い伏角を含む地磁気の特性、フレミングの右手の法則、地球物理学、電磁気学、航空工学の総合的学習を可能とする。特に、体を動かしての体験学習であるから印象に残り、短期的記憶を超え、長期的記憶と考えられる体験的記憶・エピソード記憶となり、三次元的な電磁気学の概念の習得の効果もきわめて大きい。普段は目に見えない磁力線を、体を実際に屋外で動かす経験を通じ、広い範囲に亘るフィールドの磁場を投擲により逐一可視化して体験できる上、受け手の存在により、二人が同時にその可視化の体験を共有できる意義も大きい。磁場はマグネティック・フィールド(magnetic field)の訳語であるが、フィールド(field)という語が選択された理由には諸説ある。一説には、西欧の農村の麦畑で風に麦が一斉に靡くさま、つまり不可視の風がもたらすベクトルがフィールド(野)に一瞬に表象される風景に着想を得たことによるとされる。本発明は、不可視であるため理解の容易でない磁気現象を、まさにフィールドにおいて可視化し、磁場を体感的に観察できる稀有な装置である意味で、磁場研究の初期の研究開拓者たちの原体験に近い体験的理解を容易に実現できるメリットがある。本装置による体験的な基本原理の理解の後、話し合いにより、いろいろな発見が生まれる契機を提供する。また、より多数の人数でも視覚的に共有することができ、多数の学習にも最適である。総合的学習教材への活用にも好適に適合する。本装置の一つ一つは廉価に構築可能であるため、貴重ということもなく、多くの学習素材を同時に作成し提供することもできる。必要に応じて廉価で簡単な電子工作も事前に実施させられるので、理科離れを食い止め、学習効果が上昇する。薄暮などの野外イベント会場などにおいて、不特定多数の参加者に配布された廉価かつ軽量な多数の回転投擲体が一斉投擲されることにより、参加者は幻想的な視覚空間を共有でき、イベント・イルミネーションとしても多大な効果を奏する。従来の保持型ペンライト等は動作周期一致性を参加者に要請し、周期が揃わないと不一致感のみが顕著になる。一方、回転投擲体の場合は、ほぼ一斉に投擲されるだけで、投擲方向や回転軸方向と無関係に全ての発光方位は必ず方位を揃える。打ち合わせなしの投擲で発光方位が予想外に一致するとの意外な光景が、参加者に、逆に地球規模の共通言語としての科学技術や、共有地盤としての(地磁気をもたらす)唯一の地球との感覚を喚起し、母語や文化を異にする存在間にも多くの共有部分が当然潜在している事実を想起する契機となる。薄暮の空間におけるこの共通体験は、地球環境保全、科学技術教育重視、民族間コンフリクトの理性的超克等、地球社会時代の問題解決へのメッセージを非言語的に浸透させる際の情動的体験の基盤共有に活用でき、多大な効果を奏する。政治上の国際会議等では、古典音楽の芸術鑑賞等が予定される事はむしろ当然であり、部外者には一見休養にしか見えないその時間が紛争国間の調停出力のより人間的な洗練に貢献してきた事実はつとに知られる。芸術以外に、現代は、科学と芸術の融合がその責を負うことも期待される。国際連合などの国際機関による屋外フォーラムでのパネルディスカッション後の薄暮の多数投擲は、イベント・イルミネーションとして富裕度差、言語差を越えて楽しめる上、意見が異なるがごとく、投擲方向は夫々異なるにしても、不特定多数の投擲体の発光方位は(文化差等を越えて人類共通の普遍的価値を指向する如く)同じ方位を向く、との光景が視覚に新鮮に働き、地球市民という人文的な意識共有、科学技術という数理的な言語共有の2つの共通価値がシナジー効果とともに誘導され、共感的理解と高次の合意形成への指向に、多大な効果を奏する。
【0096】
なお、以上の説明では、便宜上、投擲体の回転軸が投擲者から放射状に延びる方向に投擲する場合は、特に断らない限り、投擲者から見て回転軸を中心に時計回りに投擲することを原則としている。同じく特に断らない限り、投擲体の回転軸が投擲者から放射状に延びる方向に投擲する場合でない場合は、投擲体自身に備わっている上下面の観点から見ての上面から観察した場合に回転軸を中心に時計回りに投擲することを原則としている。
【0097】
ここで、回転投擲体11の回転軸に関し一般化して考えると、基本的に図1〜図6の実施形態に即し、一応、回転軸が鉛直である時を基本と考えて説明をしてきた。このように回転軸が鉛直であれば、水平磁力による起電力だけを考慮すれば良く、それに垂直な地磁気成分は考慮する必要がないという利点もある。しかし、回転投擲体11の回転軸が水平である場合もある。例えば帰還を狙い、フリスビーを意図的に垂直(ないしそれに近く)に立てて投擲した場合、あるいは偶然そうなってしまった場合を考える。
【0098】
まず、水平な回転軸が東西軸と合致する場合(すなわち、フリスビーを立てたまま南北方向に投擲する場合)を考えると、導体12が南北軸を横切る際に最大の誘導起電力が生じる。このときには既述した説明の通り、水平磁力由来の誘導起電力を検出でき、磁北の検出が可能である上、報知も適切にできる。既述の通り、磁力線の伏角までを含めた検知もできる利点がある。当然、伏角の実証等、理科体験野外活動等に活用できる。
【0099】
これに対し、回転軸が水平である場合で、かつ南北軸(磁力線方向)と平行な場合(すなわち立てたまま東西方向に投擲した場合に相当する)には水平磁力由来の誘導起電力は生じない。しかし、既述の通り、垂直磁力由来の誘導起電力は生じる。例えば東方向に投擲した場合、垂直磁力方向として鉛直下向きを指し示すが、これらの事実を知っていれば方位検出が可能となる。つまり、水平方向には何等の方位の報知もなされない事実を以て、偶然、回転軸が南北軸に合致して(東か西に向けて)飛ばされたものと適切に推定できる。後は、投擲者の90度の方向転換後の再投擲により、伏角が投擲者から見て遠方上方から近傍下方の方向に観察されれば、先の投擲は東に向けられたものであったと判定できる。逆に、投擲者の90度の方向転換後の再投擲により、伏角が投擲者から見て近傍上方から遠方下方の方向に観察されれば、先の投擲は西に向けられたものであったと判定できる。これらは、簡単な思考実験により確認できるものであり、これらを知ってさえいれば、方位情報として常に活用可能である。
【0100】
回転軸が水平である場合で、かつ回転軸が南北軸(磁力線方向)と直交でも平行でもない場合(すなわち立てたまま東西方向、南北方向以外に投擲した場合に相当する)には、水平磁力から回転軸直交水平軸への内積正射影成分に応じて相応の誘導起電力が生じるので、北そのものに向かって立てて投擲された時程の大きさの誘導電力ではないがゼロでもない場合、生じた誘導起電力の方向と大きさの報知も検出部を介して入手することで、まずは東か西かのどちらの方向に立てて投擲されたのか等、概略の情報を迅速に把握することが容易に可能である。次いで、投擲者の90度の回転後に同様の投擲を実施することで、8方位領域ないし8方位に絞り込むことが可能である。8方位領域が得られた場合、さらに、8方位のうちいずれかを正確に得るために、情報取得を実施してゆくことも容易である。
【0101】
図7には、上述した各実施形態に対し、さらに改変を加えた場合の実施形態が示されている。一応は図1,3〜5に示した実施形態の改変として、それらの形状に準じた形で平面図により模式的に示しているが、もちろん、図6に示した実施形態にも以下に述べる構成は適用できる。
【0102】
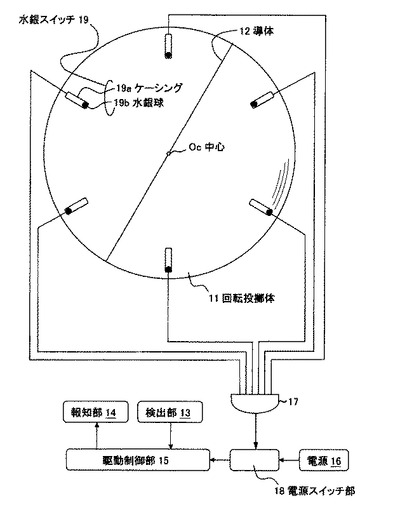
この実施形態では、回転投擲されているときにのみ電源16からの電源線路を閉じ、駆動制御部15、ひいては必要に応じ検出部13、報知部14等、電力を必要とする回路への電力供給を許すことで電源16の節約を図るため、回転検出装置19と、この回転検出装置19が回転投擲体11の回転を検出したときに電力供給を可能とする電源スイッチ部18を設けている。図中、簡明化のために、検出部13、報知部14、駆動制御部15、電源16はブロック図でのみ示し、回転投擲体11に搭載されている模様は示していないが、もちろん、図1,3図に示したように、あるいはこれまで説明してきたように、それらは本実施形態で新たに設けられる回路装置17,18共々、回転投擲体11の適当なる個所に搭載される。
【0103】
しかるに、搭載された物体が回転しているか否かを検出可能な回転検出装置19は、既存の技術をしても種々考えられようし、それらを任意に用いることもできるが、この実施形態では特に、回転は遠心力を伴うことを巧みに利用した簡易にして廉価、合理的な構成となっている。
【0104】
すなわち、この実施形態では、小型軽量の水銀スイッチ19の複数個から回転検出装置19が構成されており、各水銀スイッチ19はそれぞれ回転投擲体11の中心Ocから外周に向かう放射方向に沿い、互いには周方向に適当な離角を与えて配置されており、例えば図示の場合には周方向に互いに60度の離角で計6個の水銀スイッチ19が用いられている。これらはもちろん、適宜、回転投擲体11の本体内に埋設されるのが好ましい。
【0105】
水銀スイッチ19はガラス管等のケーシング19a内に封入された水銀球19bが半径方向の外周端側に来たときに電気接点を閉成するように構成されており、その外周端から離れると電極接点は開くようになっている。従って回転投擲体11が投擲され、回転すると、その際に発生する遠心力で全ての水銀球19bは外周端側に移動し、全ての水銀スイッチ19において電気接点が閉成する。そうではなく、単にどこかに置かれていたり、持ち運ばれているときには、全ての水銀スイッチ19の電気接点が共に閉成している状況は寧ろ考えられず、少なくとも一つ以上は内周方向にずれて、その水銀スイッチ19の電気接点は開いている筈である。
【0106】
そこで、図中では模式的にアンド回路図記号により回転検出回路17を示しているが、この回転検出回路17により水銀スイッチ19の電気接点の閉成状態を監視し、全てが閉成したときにのみ、当該回路17を介し電源スイッチ部18を閉成させて、電源16からの電力を駆動制御部15、ひいては検出部13、報知部14に通電するようにしている。このようにすれば、持ち運びの際にはどのような姿勢でも通電することはなく、回転投擲した際にのみ通電させることができるので、保存時等に電源を節約したい場合に好適である。
【0107】
なお、アンド回路17として示した回転検出回路17の構成も、実際には例えば電源16から負荷回路、例えば駆動制御部15への電源線路間に水銀スイッチ19の各接点を全て直列にして挿入しただけの回路構成であって足りることが多いし、逆に、電源スイッチ部18共々、極めて微少な待機電力で動作する能動素子を含むアンド回路装置であっても良い。
【0108】
以下では本発明の好適な応用使途、ないし本発明により得られるべき種々の恩恵に触れておくが、例えばまず、山岳では遭難環境を脱出する際に役立つ。また、仮に回収せずに投擲したまま放置せざるを得なかったにしても、寧ろ、付近に到達した救助隊に対して近辺になんらかの投擲主体(遭難者・負傷者であることが多い)の存在を示し、一つの、生存の目印になる。自分が谷あいに滑落しているとして、回転投擲体11を稜線方向に投擲して放置しておけば、そして特にその色も目立つ色にしておけば、雪の中でも遭難者が居ることの報知に繋がるため、二重に役立つ。軽量であるため、複数所持することも問題が無い特徴もある。また、発光により絶対方位を知らせることができるので、距離的に視認できるその場に居合わせた者全員が方位情報を一瞬にして共有できる利点がある。山岳においては例えば30m程の距離でも声が十分に届かないこともあるし、声による情報伝達はすでに疲弊している体力を浪費する。救助する山岳パーティの側にしてみても、全員が各自の身体中心座標系における方位を夜間でも一瞬にして確認でき、共有できる。
【0109】
本発明には,潜在的に次のような社会的な波及効果も認められることも無視できない。つまり,逆転的な使用法として、回転投擲体11として既述した帰還型滑空体を用いると磁場の局所的特異点を生じせしめることを狙って、事前に注意深く埋設された強い磁性体等の目標を野外で探索するという新しい競技,いわゆる宝探し競技等の、新しいスポーツ・娯楽が実現できる。この場合、周囲から特異的な違いを持つ磁場様相を示す滑空域があれば、その直下か近傍の地中に目標物(宝)が埋設されていると推定でき、グループ内でのスポーツ・娯楽・ゲームに活用できる。ホイジンガ(Johan Huizinga、オランダの歴史家)やカイヨワ(Roger Caillois、フランスの哲学者)の指摘を待つまでもなく、人類にとって遊びの意義が極めて大きいことは現代では周知の事実である。電磁気学、地球物理学、航空力学,電子工学の知識と技能を動員して、空間性・実体性・自己参加性を同時に発揮して野外で行うことのできるこの体験学習型の競技には、無視できない教育性の潜在が認められる。
【0110】
また、本発明は、ドッグ・フリスビーという文化領域にも潜在的関連が認められる。すなわち、回転投擲体は愛犬とのコミュニケーションをより深めるための遊具としても活用されてきたし、本発明はその活用を一層促進する。例えば雪山登山を愛犬と実施する場合等、人間(主人)に比べ比較的軽量な犬は、人間のようにいわゆるつぼ足(新雪に足が埋まって進行速度が低下する状態)にならず、先を急ぐことができる。一方、雪中での低速の人間(主人)を待っている間等、本発明の回転投擲体としてのフリスビーを投げてやると喜んで取ってくる遊びに興じる。人間(主人)はただ愛犬と遊んでやっているようでいて、実は全方位が白一色である雪山などで山座同定などに失敗しがちな環境で、下手をすると見失いがちな方位を、その都度遊びの中で確認ができることになる。方位を勘違いしたままの歩行は、意外にそれと気付かずに、方向違いのまま数時間継続され、雪中歩行の体力と時間の浪費を経てなお目的地に到着せず、日没後でも到着しない事実をもって、はじめて方向間違いによる遭難に陥ったと判明する事態に結びつきやすい。そのような事態を未然に防ぐことが遊びの中で実現でき安全に貢献できる。同時に、愛犬は時間をもてあますことなく楽しい時間を持て、そのような影響は人間(飼い主)の気持ちの張りにも影響を与え、遭難の危険を回避できる。本発明は、単なる一つの装置には違いないが、ドッグ・フリスビー等の文化的な背景を持つ回転投擲体で実現することから、人間と動物とのコミュニケーションの深化、時間と空間の適切な活用による生活の質的向上の面でも、多大な効果を奏することができることは注目に値する。
【0111】
さらに回転投擲体は、例えば視覚障害者と健常者が共に参加するフライングディスクの国内外における競技会の現在の隆盛と、それを支える長い歴史の主役である。さほどの体力が無くても手首のスナップだけで簡単に飛ばせるので、誰でも参加できる。習熟によって技能の向上が早く、単調なリハビリテーション訓練では得られない喜びの感覚を持ちやすい。健常者との屋外での貴重なリクリエーションとして活用可能である。不用意な歩行移動は危険を伴う視覚障害者にとって、飛行という移動のイメージが楽しい経験に直結する。このように健常者と共に技術的習熟を楽しめる性質から、身体機能回復や自信回復に繋がる医学的効果を持つリハビリテーションとしても、このフライングディスクは一定の役割を果たしてきた。競技には距離を競う分野、投擲の正確さを競う分野等があり,それぞれに視覚障害者の方の多数の参加を毎年数えている。このように、フライングディスクは、世界中で既に存分に親しまれている事実に、まず留意したい。
【0112】
同時に、視覚障害者の自律歩行は、方位情報取得が重大なネックになっていることは意外と知られていない。現在位置把握はできても、体躯なり顔面なりの方位取得は困難である。なぜなら、視覚情報による方位推定が不可能な上、視覚フィードバックが重要な役割をもつ「歩行」実施に付随するリスク(躓き、転倒、衝突、転落、交通事故に巻き込まれる危険等)が健常者よりも圧倒的に高いからである。このため、健常者であれば容易な試行移動による測位差分での方位取得も、困難を極めていた。逆に言えば、簡易で廉価かつ適切な方位情報取得方法がなかったため、やむなく、多忙な健常者に随伴歩行を依頼するという、最初の数回は良いにしても、度重なると時に相互に心理的負担が大きくなり、ひいては段々と相互の関係の疎遠に繋がる場合もあるというような、視覚障害者にはなんらかの改善が期待される現実が存在していた。
【0113】
このような現状に鑑みるに、そもそも障害者に心的距離の近いフライングディスク等を用いるレクリエーションおよび競技会への練習の中で、健常者と共に方位情報取得の技能の習熟に努めることには特別な意義がある。シンプルな科学技術を応用した本発明を通じた健常者とのコミュニケーションと、競技会への参加という前向きな目標の提供、将来的には広大な芝生のような場所における本発明を用いた自律歩行練習の実用性と、それにより正確に目的地に到達することに成功した場合の達成感を取得する経験等、これまでとは次元の異なる、多義的な有用性を提供する面で多大な効果を奏する。フライングディスク技術への競技会等を通じたフライングディスクへの視覚障害者の親和性と、視覚障害者の方位情報取得の潜在的需要の大きさに鑑みる時、フライングディスク等の投擲回転体を用いた方位情報取得方法の価値が、健常者が当初予想する水準を超えて、そこに潜在していることは容易に理解できようし、健常者の側においても、こうした試みを通じ、視覚障害者の方々の方位情報取得に対するニーズが如何に強いか、その理解をより深めることにもなろう。
【0114】
また実用性の高い使用例として,次の例にも言及しておかねばならない。ヨット,ディンギーなどの小型帆走船は一般に高度な計測機器を搭載していない。寧ろ、それらの人工物を搭載しない環境でなんとか操縦して自然のもたらす諸困難を克服することに面白みを感じる愛好者の数は多い。しかし、方位の情報取得はこの場合も重要である。例えば岩礁が構成する自然の良好な停泊場所に接近したものの、夜間かつ荒天ないし曇天,雨天であり、天文航法が不可能な状況は多い。地文航法も不可能で、灯台も無い等の場合、方向の見極めが難しい場合は多々ある。この場合、航路選択の失敗は,即座に座礁という第一の遭難に直結し、自力航行の不能や、船体の浸水、波浪横転と沈没等、特に夜間であれば人命に関わる重篤な第二の遭難にも繋がっていく。方位磁針は船の自差や局所岩礁磁場の撹乱によって誤差が0度から360度まであり得ることから、概略値としてすら用いることの妥当性に疑義が生じるという固有の性質があるため、外乱磁気の影響を免れる試行移動のコストが前記の意味で極大化しているこのような場面での信頼性が薄い。従来はこのような場合、仕方なく航行を停止する。沖で碇を下ろして停泊し、太陽光下の目視による方位確認を期待しつつ夜明けを待つことが現実的であった。
【0115】
このような場合にも本発明は好適に適合する。すなわち、回転投擲体11を用いて報知部14に発光体を備えさせれば夜間でもはっきりと視認可能であるから、適切に磁北を検出できる。回転投擲体11として帰還型を用いれば何度でも計測を使える。万一、帰還に失敗して水中に落下したとしても、水に浮くように構成することは容易であり、蛍光塗料を塗布しておけば視認も可能である。ひとたび方位の概略値が得られた場合、その情報に基づく詳細な局所的な観察から方位を裏付ける情報が連鎖的に得られていくことは多いため、本方法は最も低く見積もってもその貴重な第一歩を十分適切なコストと労力で使用者に与えるという面でも多大な効果を有する。本発明は、これまでは沖合いで停泊して時間を浪費するしかなかった環境でも、座礁を防ぎつつ接岸への航路を選択するための有効な方位情報取得の手段を与えることができる。
【0116】
最後に基本的な効果にもう一度立ち戻るが、本発明装置によれば、計測点を刻々と水平方向に容易に100m程度も変え、かつ、地表面からも垂直方向に10m程度も離れ続けた空間において刻々と磁場検出をなして行くようなことができる。このようにすると個々の計測点固有の外乱磁気の影響を排除することが容易にでき、使用者に意思決定に役立つデータを有効に与えることができる。
【0117】
例えば、回転投擲体11が示す磁北方向が滑空中に万一,次々と大きく変化するならば、それは外乱磁気の影響が滑空の近傍の地表(海上なら水面下の岩礁)に散在することを示している。逆に磁北方向が滑空中に殆ど変化しなかったならば、外乱磁気の影響が小さい地域と見て良い。方位磁針だけでは、万が一の局所的な外乱磁場で値が大きく間違っているかもしれない可能性を否定できなかった。そのため方位磁針だけでは外乱磁気の評価ができないため、不用意な動きが遭難(雪山での方位間違いによる雪庇の踏み抜き、浅瀬での方位間違いによる岩礁座礁、稜線での方位間違いによる稜線滑落等)に直結しており,最終的な行動決定は大変な困難から免れなかった。こういった局面においても、本発明によると地域大局的な情報を簡単かつ迅速かつ広域的に取得でき、総合的な行動決定を有効に支援することができる。
【図面の簡単な説明】
【0118】
【図1】本発明装置の一実施形態の概略構成図である。
【図2】図1に示した本発明装置の動作の説明図である。
【図3】本発明装置の他の実施形態の概略構成図である。
【図4】本発明装置のさらに他の実施形態の概略構成図である。
【図5】本発明装置のまた別な実施形態の概略構成図である。
【図6】本発明装置のさらに異なる実施形態の概略構成図である。
【図7】本発明装置の他の改変例の概略構成図である。
【符号の説明】
【0119】
11 回転投擲体
12 導体(導線)
13 検出部
14 報知部
15 駆動制御部
16 電源
17 回転検出回路
18 電源スイッチ部
19 回転検出装置(水銀スイッチ)
【特許請求の範囲】
【請求項1】
投擲すると回転する回転投擲体に導体を設け;
回転によって該導体が磁界を横切る際に該導体に発生する誘導起電力を検出することで所定の方位情報を取得すること;
を特徴する方位情報取得方法。
【請求項2】
請求項1記載の方位情報取得方法であって;
上記所定の方位情報が取得されたことを報知する報知部を設け;
該報知部を上記回転投擲体の中心以外の位置に配置したこと;
を特徴とする方位情報取得方法。
【請求項3】
請求項2記載の方位情報取得方法であって;
上記報知部を上記回転投擲体の外周縁またはその近傍に配置したこと;
を特徴とする方位情報取得方法。
【請求項4】
請求項2記載の方位情報取得方法であって;
上記報知部は、該報知をなす際に、可視的あるいは可聴的に、または可視的及び可聴的に状態を変えるものであること;
を特徴とする方位情報取得方法。
【請求項5】
請求項4記載の方位情報取得方法であって;
上記報知部は、該報知をなす際にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有すること;
を特徴とする方位情報取得方法。
【請求項6】
投擲すると回転する回転投擲体に導体を設け;
回転によって該導体が磁界を横切る際に該導体に発生し得る誘導起電力の有無または大きさに基づき、磁力線方向情報を取得すること;
を特徴する磁力線方向情報取得方法。
【請求項7】
請求項6記載の磁力線方向情報取得方法であって;
上記取得された磁力線方向情報を報知する報知部を設け;
該報知部を上記回転投擲体の中心以外の位置に配置したこと;
を特徴とする磁力線方向情報取得方法。
【請求項8】
請求項7記載の磁力線方向情報取得方法であって;
上記報知部を上記回転投擲体の外周縁またはその近傍に配置したこと;
を特徴とする磁力線方向情報取得方法。
【請求項9】
請求項7記載の磁力線方向情報取得方法であって;
上記報知部は、該報知をなす際に、可視的あるいは可聴的に、または可視的及び可聴的に状態を変えるものであること;
を特徴とする磁力線方向情報取得方法。
【請求項10】
請求項9記載の磁力線方向情報取得方法であって;
上記報知部は、該報知をなす際にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有すること;
を特徴とする磁力線方向情報取得方法。
【請求項11】
投擲すると回転する回転投擲体と;
該回転投擲体に設けられた導体と;
該導体に所定方向の誘導起電力が生じた時に検出出力を発する検出部と;
該検出出力が発せられたことを報知する報知部と;
を有して成る方位情報取得装置。
【請求項12】
請求項11記載の方位情報取得装置であって;
上記報知部は上記回転投擲体の中心以外の位置に配置されていること;
を特徴とする方位情報取得装置。
【請求項13】
請求項11記載の方位情報取得装置であって;
上記報知部は上記回転投擲体の外周縁またはその近傍に配置したこと;
を特徴とする方位情報取得装置。
【請求項14】
請求項11記載の方位情報取得装置であって;
上記報知部は可視的あるいは可聴的、または可視的及び可聴的な報知手段を有して成ること;
を特徴とする方位情報取得装置。
【請求項15】
請求項14記載の方位情報取得装置であって;
上記報知部は上記報知手段として、報知時にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有すること:
を特徴とする方位情報取得装置。
【請求項16】
請求項11記載の方位情報取得装置であって;
上記回転投擲体にはさらに、上記報知部を駆動する電源と駆動制御部とが設けられ;
上記検出部が発する上記検出出力により該駆動制御部が該電源から該報知部への電力供給を可能にすること;
を特徴とする方位情報取得装置。
【請求項17】
請求項16記載の方位情報取得装置であって;
上記駆動制御部は、上記検出部が発する上記検出出力により上記報知部の報知形態を変更するように構成されていること;
を特徴とする方位情報取得装置。
【請求項18】
請求項16記載の方位情報取得装置であって;
上記回転投擲体が回転しているか否かを検出する回転検出装置と,該回転検出装置が該回転を検出したときに上記電源からの電力供給を可能とする電源スイッチ部とをさらに有すること;
を特徴とする方位情報取得装置。
【請求項19】
請求項18記載の方位情報取得装置であって;
上記回転検出装置は、それぞれ回転投擲体の中心から外周に向かう放射方向に沿い、互いには周方向に適当な離角を与えて配置された複数個の水銀スイッチを有し;
該水銀スイッチは、ケーシング内に封入された水銀球が回転に伴う遠心力で半径方向の外周端側に来たときに電気接点を閉成するように構成されており;
該水銀スイッチの全てにおいて該電気接点が閉成したときに該回転検出装置は該回転投擲体の回転検出とすること;
を特徴とする方位情報取得装置。
【請求項20】
請求項11記載の方位情報取得装置であって;
上記報知部は、上記回転投擲体の互いに異なる位置に二つ以上設けられていること;
を特徴とする方位情報取得装置。
【請求項21】
請求項11記載の方位情報取得装置であって;
上記報知部は、上記回転投擲体の外周縁に沿って複数個が適宜間隔で配置されていること;
を特徴とする方位情報取得装置。
【請求項22】
請求項11記載の方位情報取得装置であって;
上記報知部は、上記回転投擲体の中心またはその近傍から外周縁の一部位に向け、半径方向に複数個が直線状に適宜間隔で配置されていること;
を特徴とする方位情報取得装置。
【請求項23】
請求項11記載の方位情報取得装置であって;
上記報知部は無線送信機を含み、上記検出部が上記検出出力を発したときに使用者が保有する無線受信機に報知信号を送信できるように構成されていること;
を特徴とする方位情報取得装置。
【請求項24】
請求項11記載の方位情報取得装置であって;
上記回転投擲体は、投擲すると略々投擲開始位置に戻ってくる帰還型の滑空体であること;
を特徴とする方位情報取得装置。
【請求項25】
投擲すると回転する回転投擲体と;
該回転投擲体に設けられた導体と;
該導体に生じ得る誘導起電力を検出して検出出力を発する検出部と;
該検出部の該検出出力を介して得られる該導体に発生する該誘導起電力の有無または大きさに基づき、磁力線方向情報を報知する報知部と;
を有して成る磁力線方向情報取得装置。
【請求項26】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は上記回転投擲体の中心以外の位置に配置されていること;
を特徴とする磁力線方向情報取得装置。
【請求項27】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は上記回転投擲体の外周縁またはその近傍に配置したこと;
を特徴とする磁力線方向情報取得装置。
【請求項28】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は可視的あるいは可聴的、または可視的及び可聴的な報知手段を有して成ること;
を特徴とする磁力線方向情報取得装置。
【請求項29】
請求項28記載の磁力線方向情報取得装置であって;
上記報知部は上記報知手段として、報知時にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有すること:
を特徴とする磁力線方向情報取得装置。
【請求項30】
請求項25記載の磁力線方向情報取得装置であって;
上記回転投擲体にはさらに、上記報知部を駆動する電源と駆動制御部とが設けられ;
上記検出部が発する上記検出出力により該駆動制御部が該電源から該報知部への電力供給を可能にすること;
を特徴とする磁力線方向情報取得装置。
【請求項31】
請求項30記載の磁力線方向情報取得装置であって;
上記駆動制御部は、上記検出部が発する上記検出出力により上記報知部の報知形態を変更するように構成されていること;
を特徴とする磁力線方向情報取得装置。
【請求項32】
請求項30記載の磁力線方向情報取得装置であって;
上記回転投擲体が回転しているか否かを検出する回転検出装置と,該回転検出装置が該回転を検出したときに上記電源からの電力供給を可能とする電源スイッチ部とをさらに有すること;
を特徴とする磁力線方向情報取得装置。
【請求項33】
請求項32記載の磁力線方向情報取得装置であって;
上記回転検出装置は、それぞれ回転投擲体の中心から外周に向かう放射方向に沿い、互いには周方向に適当な離角を与えて配置された複数個の水銀スイッチを有し;
該水銀スイッチは、ケーシング内に封入された水銀球が回転に伴う遠心力で半径方向の外周端側に来たときに電気接点を閉成するように構成されており;
該水銀スイッチの全てにおいて該電気接点が閉成したときに該回転検出装置は該回転投擲体の回転検出とすること;
を特徴とする磁力線方向情報取得装置。
【請求項34】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は、上記回転投擲体の互いに異なる位置に二つ以上設けられていること;
を特徴とする磁力線方向情報取得装置。
【請求項35】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は、上記回転投擲体の外周縁に沿って複数個が適宜間隔で配置されていること;
を特徴とする磁力線方向情報取得装置。
【請求項36】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は、上記回転投擲体の中心またはその近傍から外周縁の一部位に向け、半径方向に複数個が直線状に適宜間隔で配置されていること;
を特徴とする磁力線方向情報取得装置。
【請求項37】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は無線送信機を含み、上記検出部が上記検出出力を発したときに使用者が保有する無線受信機に報知信号を送信できるように構成されていること;
を特徴とする方位情報取得装置。
【請求項38】
請求項25記載の磁力線方向情報取得装置であって;
上記回転投擲体は、投擲すると略々投擲開始位置に戻ってくる帰還型の滑空体であること;
を特徴とする方位情報取得装置。
【請求項1】
投擲すると回転する回転投擲体に導体を設け;
回転によって該導体が磁界を横切る際に該導体に発生する誘導起電力を検出することで所定の方位情報を取得すること;
を特徴する方位情報取得方法。
【請求項2】
請求項1記載の方位情報取得方法であって;
上記所定の方位情報が取得されたことを報知する報知部を設け;
該報知部を上記回転投擲体の中心以外の位置に配置したこと;
を特徴とする方位情報取得方法。
【請求項3】
請求項2記載の方位情報取得方法であって;
上記報知部を上記回転投擲体の外周縁またはその近傍に配置したこと;
を特徴とする方位情報取得方法。
【請求項4】
請求項2記載の方位情報取得方法であって;
上記報知部は、該報知をなす際に、可視的あるいは可聴的に、または可視的及び可聴的に状態を変えるものであること;
を特徴とする方位情報取得方法。
【請求項5】
請求項4記載の方位情報取得方法であって;
上記報知部は、該報知をなす際にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有すること;
を特徴とする方位情報取得方法。
【請求項6】
投擲すると回転する回転投擲体に導体を設け;
回転によって該導体が磁界を横切る際に該導体に発生し得る誘導起電力の有無または大きさに基づき、磁力線方向情報を取得すること;
を特徴する磁力線方向情報取得方法。
【請求項7】
請求項6記載の磁力線方向情報取得方法であって;
上記取得された磁力線方向情報を報知する報知部を設け;
該報知部を上記回転投擲体の中心以外の位置に配置したこと;
を特徴とする磁力線方向情報取得方法。
【請求項8】
請求項7記載の磁力線方向情報取得方法であって;
上記報知部を上記回転投擲体の外周縁またはその近傍に配置したこと;
を特徴とする磁力線方向情報取得方法。
【請求項9】
請求項7記載の磁力線方向情報取得方法であって;
上記報知部は、該報知をなす際に、可視的あるいは可聴的に、または可視的及び可聴的に状態を変えるものであること;
を特徴とする磁力線方向情報取得方法。
【請求項10】
請求項9記載の磁力線方向情報取得方法であって;
上記報知部は、該報知をなす際にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有すること;
を特徴とする磁力線方向情報取得方法。
【請求項11】
投擲すると回転する回転投擲体と;
該回転投擲体に設けられた導体と;
該導体に所定方向の誘導起電力が生じた時に検出出力を発する検出部と;
該検出出力が発せられたことを報知する報知部と;
を有して成る方位情報取得装置。
【請求項12】
請求項11記載の方位情報取得装置であって;
上記報知部は上記回転投擲体の中心以外の位置に配置されていること;
を特徴とする方位情報取得装置。
【請求項13】
請求項11記載の方位情報取得装置であって;
上記報知部は上記回転投擲体の外周縁またはその近傍に配置したこと;
を特徴とする方位情報取得装置。
【請求項14】
請求項11記載の方位情報取得装置であって;
上記報知部は可視的あるいは可聴的、または可視的及び可聴的な報知手段を有して成ること;
を特徴とする方位情報取得装置。
【請求項15】
請求項14記載の方位情報取得装置であって;
上記報知部は上記報知手段として、報知時にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有すること:
を特徴とする方位情報取得装置。
【請求項16】
請求項11記載の方位情報取得装置であって;
上記回転投擲体にはさらに、上記報知部を駆動する電源と駆動制御部とが設けられ;
上記検出部が発する上記検出出力により該駆動制御部が該電源から該報知部への電力供給を可能にすること;
を特徴とする方位情報取得装置。
【請求項17】
請求項16記載の方位情報取得装置であって;
上記駆動制御部は、上記検出部が発する上記検出出力により上記報知部の報知形態を変更するように構成されていること;
を特徴とする方位情報取得装置。
【請求項18】
請求項16記載の方位情報取得装置であって;
上記回転投擲体が回転しているか否かを検出する回転検出装置と,該回転検出装置が該回転を検出したときに上記電源からの電力供給を可能とする電源スイッチ部とをさらに有すること;
を特徴とする方位情報取得装置。
【請求項19】
請求項18記載の方位情報取得装置であって;
上記回転検出装置は、それぞれ回転投擲体の中心から外周に向かう放射方向に沿い、互いには周方向に適当な離角を与えて配置された複数個の水銀スイッチを有し;
該水銀スイッチは、ケーシング内に封入された水銀球が回転に伴う遠心力で半径方向の外周端側に来たときに電気接点を閉成するように構成されており;
該水銀スイッチの全てにおいて該電気接点が閉成したときに該回転検出装置は該回転投擲体の回転検出とすること;
を特徴とする方位情報取得装置。
【請求項20】
請求項11記載の方位情報取得装置であって;
上記報知部は、上記回転投擲体の互いに異なる位置に二つ以上設けられていること;
を特徴とする方位情報取得装置。
【請求項21】
請求項11記載の方位情報取得装置であって;
上記報知部は、上記回転投擲体の外周縁に沿って複数個が適宜間隔で配置されていること;
を特徴とする方位情報取得装置。
【請求項22】
請求項11記載の方位情報取得装置であって;
上記報知部は、上記回転投擲体の中心またはその近傍から外周縁の一部位に向け、半径方向に複数個が直線状に適宜間隔で配置されていること;
を特徴とする方位情報取得装置。
【請求項23】
請求項11記載の方位情報取得装置であって;
上記報知部は無線送信機を含み、上記検出部が上記検出出力を発したときに使用者が保有する無線受信機に報知信号を送信できるように構成されていること;
を特徴とする方位情報取得装置。
【請求項24】
請求項11記載の方位情報取得装置であって;
上記回転投擲体は、投擲すると略々投擲開始位置に戻ってくる帰還型の滑空体であること;
を特徴とする方位情報取得装置。
【請求項25】
投擲すると回転する回転投擲体と;
該回転投擲体に設けられた導体と;
該導体に生じ得る誘導起電力を検出して検出出力を発する検出部と;
該検出部の該検出出力を介して得られる該導体に発生する該誘導起電力の有無または大きさに基づき、磁力線方向情報を報知する報知部と;
を有して成る磁力線方向情報取得装置。
【請求項26】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は上記回転投擲体の中心以外の位置に配置されていること;
を特徴とする磁力線方向情報取得装置。
【請求項27】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は上記回転投擲体の外周縁またはその近傍に配置したこと;
を特徴とする磁力線方向情報取得装置。
【請求項28】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は可視的あるいは可聴的、または可視的及び可聴的な報知手段を有して成ること;
を特徴とする磁力線方向情報取得装置。
【請求項29】
請求項28記載の磁力線方向情報取得装置であって;
上記報知部は上記報知手段として、報知時にそれ以前からの状態を変え、無発光状態から発光するか異なる発光色で発光する発光体、光反射率ないし光吸収率の値を可変する光学特性可変体、無音状態から音響を発するか音色を変化させる発音体のいずれか一つまたは幾つか、あるいは全てを有すること:
を特徴とする磁力線方向情報取得装置。
【請求項30】
請求項25記載の磁力線方向情報取得装置であって;
上記回転投擲体にはさらに、上記報知部を駆動する電源と駆動制御部とが設けられ;
上記検出部が発する上記検出出力により該駆動制御部が該電源から該報知部への電力供給を可能にすること;
を特徴とする磁力線方向情報取得装置。
【請求項31】
請求項30記載の磁力線方向情報取得装置であって;
上記駆動制御部は、上記検出部が発する上記検出出力により上記報知部の報知形態を変更するように構成されていること;
を特徴とする磁力線方向情報取得装置。
【請求項32】
請求項30記載の磁力線方向情報取得装置であって;
上記回転投擲体が回転しているか否かを検出する回転検出装置と,該回転検出装置が該回転を検出したときに上記電源からの電力供給を可能とする電源スイッチ部とをさらに有すること;
を特徴とする磁力線方向情報取得装置。
【請求項33】
請求項32記載の磁力線方向情報取得装置であって;
上記回転検出装置は、それぞれ回転投擲体の中心から外周に向かう放射方向に沿い、互いには周方向に適当な離角を与えて配置された複数個の水銀スイッチを有し;
該水銀スイッチは、ケーシング内に封入された水銀球が回転に伴う遠心力で半径方向の外周端側に来たときに電気接点を閉成するように構成されており;
該水銀スイッチの全てにおいて該電気接点が閉成したときに該回転検出装置は該回転投擲体の回転検出とすること;
を特徴とする磁力線方向情報取得装置。
【請求項34】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は、上記回転投擲体の互いに異なる位置に二つ以上設けられていること;
を特徴とする磁力線方向情報取得装置。
【請求項35】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は、上記回転投擲体の外周縁に沿って複数個が適宜間隔で配置されていること;
を特徴とする磁力線方向情報取得装置。
【請求項36】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は、上記回転投擲体の中心またはその近傍から外周縁の一部位に向け、半径方向に複数個が直線状に適宜間隔で配置されていること;
を特徴とする磁力線方向情報取得装置。
【請求項37】
請求項25記載の磁力線方向情報取得装置であって;
上記報知部は無線送信機を含み、上記検出部が上記検出出力を発したときに使用者が保有する無線受信機に報知信号を送信できるように構成されていること;
を特徴とする方位情報取得装置。
【請求項38】
請求項25記載の磁力線方向情報取得装置であって;
上記回転投擲体は、投擲すると略々投擲開始位置に戻ってくる帰還型の滑空体であること;
を特徴とする方位情報取得装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−248205(P2007−248205A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−70889(P2006−70889)
【出願日】平成18年3月15日(2006.3.15)
【出願人】(301022471)独立行政法人情報通信研究機構 (1,071)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月15日(2006.3.15)
【出願人】(301022471)独立行政法人情報通信研究機構 (1,071)
【Fターム(参考)】
[ Back to top ]