
方位センサ装置
【課題】空中を直線的に伝搬してくる光等のエネルギー媒体について、その強度計測と発生源の方位計測を広い視野角の範囲で高精度に行うことができ、追尾機能を容易に付加することが可能な方位センサ装置を提供する。
【解決手段】空中を直線的に伝搬するエネルギー媒体が入射する、平らな検出面S0,S1,S2,S3,S4を有する。入力したエネルギー媒体を電気信号に変換する複数のフォトダイオード18,20,22,24,26と、エネルギー媒体を少なくとも三つの検出面S0,S1,S3で同時に受ける向きに立体配置されたセンサモジュール12を備える。フォトダイオード18,20,22,24,26から出力された電気信号のうち、少なくとも三つに基づいて、エネルギー媒体の強度情報及び発生源の方位情報を出力する電気信号処理部14を備える。
【解決手段】空中を直線的に伝搬するエネルギー媒体が入射する、平らな検出面S0,S1,S2,S3,S4を有する。入力したエネルギー媒体を電気信号に変換する複数のフォトダイオード18,20,22,24,26と、エネルギー媒体を少なくとも三つの検出面S0,S1,S3で同時に受ける向きに立体配置されたセンサモジュール12を備える。フォトダイオード18,20,22,24,26から出力された電気信号のうち、少なくとも三つに基づいて、エネルギー媒体の強度情報及び発生源の方位情報を出力する電気信号処理部14を備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、空中を直線的に伝搬する光等のエネルギー媒体の発生源の方位等を計測し、または、発生源の方位に制御対象物を追尾させる方位センサ装置に関する。
【背景技術】
【0002】
可視光線、紫外線、赤外線等、空中を直線的に伝搬してくるエネルギー媒体を受けて、その強度や発生源の方位を検出する技術は、多くの用途に用いられている。例えば、太陽光発電の分野において、発電効率が最も高い状態にするため、太陽光を光センサ等で受光することによって太陽の方位を観測し、ソーラーパネルの受光面の向きを、太陽光に対して垂直な向きに可変調整する太陽追尾システム等がある。
【0003】
従来の太陽光追尾システムとしては、例えば特許文献1に開示されているように、太陽光を光学系によりスポット状に結像させ、そのスポット像を4分割フォトダイオードに入力させてその出力信号を、所定の方法で信号処理し、太陽光の結像スポット像がリニア捕捉領域以外の飽和領域等に入った場合に、太陽光追尾の制御動作を高速にすることが可能な太陽追尾センサの信号処理方法が提案されている。
【0004】
また、特許文献2に開示されているように、透光性を有し且つ非透明なカバーで形成された略四角錐状部分を、底面の対角線に沿って鉛直方向に直立する境界面によって4つのエリアに区分し、各エリア内に光検出センサが配置され、各境界面に遮光板が設けられた太陽追尾装置が提案されている。この太陽追尾装置は、地表面に対する太陽位置の仰角が変化したときに、遮光板による影の影響で、互いに対向する一対の光検出センサへの入射光量が相補的に増減する現象を利用し、当該一対の光検出センサへの入射光量の差を一定に保つように制御対象物の向きを駆動制御するものである。
【特許文献1】特開平5−126563号公報
【特許文献2】特開2004−146745号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の太陽追尾センサの信号処理方法にあっては、受光部の視野角が±0.25deg程度と非常に狭く、また光源が視野角から外れた場合に自らそれを探す機能を有していないため、天体望遠鏡など、特定の分野に用途が限定されるものであった。また、光源が位置する方位を計測する機能は備えていない。
【0006】
また、特許文献2の太陽追尾装置にあっては、光検出センサの指向性をなくすため、太陽光を一旦非透明のカバーで受け、そのカバーを通過した散乱光を光検出センサに入射させる構造であるため、カバーを通過する際に太陽光が減衰してしまい、太陽光の強度を正確に計測することができないものであった。また、入射光の強度が弱い場合には、ほとんど太陽を追尾することができないものであった。また、太陽が位置する方位を計測する機能は備えていない。
【0007】
この発明は、上記背景技術の問題点に鑑みてなされたものであり、空中を直線的に伝搬してくる光等のエネルギー媒体について、その強度計測や発生源の方位計測を広い視野角の範囲で高精度に行うことができ、追尾機能を容易に付加することが可能な方位センサ装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
この発明は、太陽光等の空中を直線的に伝搬するエネルギー媒体が入射する平らな検出面が設けられ、入力したエネルギー媒体を電気信号に変換する複数のセンサ素子と、前記複数のセンサ素子が、前記検出面の法線が互いに非平行の位置であって、前記エネルギー媒体を、少なくとも三つの前記検出面で同時に受ける向きに立体配置されたセンサモジュールと、各センサ素子から出力された前記電気信号のうち少なくとも三つに基づいて、前記エネルギー媒体の強度情報及び発生源の方位情報を出力する電気信号処理部とを備えた方位センサ装置である。
【0009】
さらに、前記センサモジュールは、五つの前記センサ素子を備え、各センサ素子の前記検出面は、四角錐台の上底面とその側方に位置した四つの斜平面に外向きに各々配置され、前記電気信号処理部は、少なくとも前記上底面側に配置された前記センサ素子が出力する電気信号に基づいて方位情報を出力可能とした方位センサ装置である。特に、前記エネルギー媒体は光であって、前記センサ素子は光検出素子である。
【0010】
さらに、前記電気信号処理部の出力に基づいて制御対象物の方位角および仰角を駆動制御する追尾制御部を備えるものである。前記追尾制御部は、前記電気信号処理部が出力する前記被検出信号の強度情報が、所定の値になるように、前記制御対象物の方位角および仰角を駆動制御することができるものである。また、前記センサモジュールは、前記制御対象物に取り付けられ、前記制御対象物と一体に変位するものでもよい。
【発明の効果】
【0011】
この発明の方位センサ装置によれば、エネルギー媒体が空中を直線的に伝搬してくる可視光線・紫外線・赤外線、その他指向性の高い電磁波や放射線等であって、検出面に入射すると、入射角と強度とがLambertの法則に従う関係、又はそれに類似する関係を示すものであれば、エネルギー媒体の強度計測および発生源の方位計測を同時に行うことができる。また、簡単な構造でありながら、広い視野角で、高精度の計測を行うことができる。
【0012】
また、上記のように測定原理が単純であることから、エネルギー媒体の強度及び方位とセンサ素子が出力する電気信号との関係は、比較的簡単な理論式でほぼ正確に表現することができる。従って、所望の性能を一律に作り込むことが容易であり、装置の大量生産に適している。
【0013】
さらに、本発明の方位センサ装置のセンサモジュールは、小型でコンパクトに構成することができるので、設置方法についての自由度が大きく、制御対象物の形態や性質に合わせて、様々な制御方式の追尾システムを構築することが可能である。
【発明を実施するための最良の形態】
【0014】
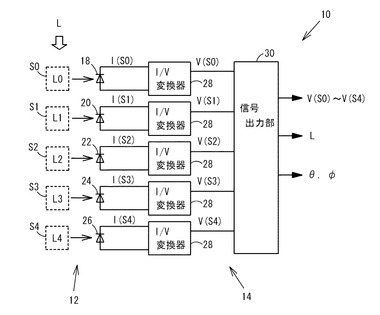
以下、この発明の第一実施形態の方位センサ装置10について、図1〜図7に基づいて説明する。第一の実施形態の方位センサ装置10は、エネルギー媒体としての太陽光の強度及び太陽の方位を計測する装置である。方位センサ装置10は、図1に示すように、受光した太陽光の強度に基づいて電気信号を出力する複数のフォトダイオードを有するセンサモジュール12と、センサモジュール12が出力する電気信号に基づいて、太陽光の強度情報及び太陽の方位情報を出力する電気信号処理部14とを備えている。
【0015】
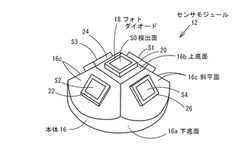
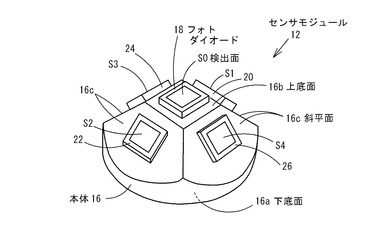
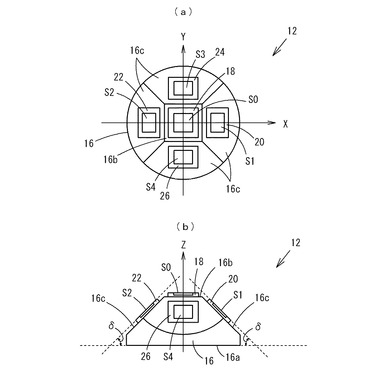
センサモジュール12は、図2に示すように、四角錐台状の本体16と、本体16の所定の面に取り付けられた5つのセンサ素子であるフォトダイオード18,20,22,24,26を備えている。本体16は、図3(a)(b)に示すように、略円形の設置面である下底面16aと、下底面16aと互いに平行な面であって、下底面16aの中心を通る法線(以下、Z軸)に対して回転対称に四角形の上底面16bを備えている。さらに、下底面16aに対して傾斜角δを有し、Z軸を挟んで互いに対称に位置した2組の斜平面16cが設けられている。なお、この実施形態のセンサモジュール12では、各傾斜角δは、一律45degに設定されている。
【0016】
フォトダイオード18は、薄型の直方体の外形を有し、表面側の中央部には、被検出信号である太陽光を受光する検出面S0が、例えば約6mm×約6mmのサイズに形成されている。このフォトダイオード18は、可視光から赤外線領域までの範囲を検出可能な一般的なシリコン・フォトダイオードである。検出面S1で受光した光と、発生する電流は、式(1)の関係式で表される。
【数1】

【0017】
ここで、Liは受光した光強度、Ioは発生電流、Sは感度である。他のフォトダイオード20,22,24,26は、フォトダイオード18と同一のものであり、各々検出面S1,S2,S3,S4が設けられている。
【0018】
上記フォトダイオード18は、本体16の上底面16bに配置され、その検出面S0が上底面16bに対して平行な向きになるよう取り付けられている。また、フォトダイオード20は、一の斜平面16cに配置され、検出面S1がその斜平面16cに対して平行な向きになるよう取り付けられている。フォトダイオード22は、フォトダイオード20とZ軸を挟んで対向する斜平面16cに配置され、検出面S2がその斜平面16cに対して平行な向きになるよう取り付けられている。フォトダイオード24,26も、残る2つの斜平面16cに各々配置され、上記と同様の方法で取り付けられている。そして、各フォトダイオードには、図示しない出力ケーブルが取り付けられ、受光した太陽光の強度に応じて発生する各電流信号を、後段の電気信号処理部14に向けて出力可能に構成されている。ここで、図3(a)に示すように、S2,S0,S1の順に並ぶ方向をX軸、S4,S0,S3の順番に並ぶ方向をY軸と定義する。
【0019】
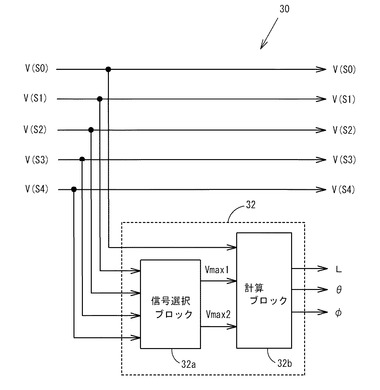
電気信号処理部14は、図1、図4に示すように、各フォトダイオード18,20,22,24,26の出力に各々接続された5つの電流/電圧変換器28(以下、I/V変換器28)と、各I/V変換器28の出力に接続され、所定の演算処理を行う演算部32bが設けられた信号出力部30とを備えている。I/V変換器28は、周知のアナログ増幅回路で構成されている。被検出信号の太陽光は、強度や方位の変化が緩慢であることから、アナログ増幅回路の応答特性はさほど高速である必要ない。ここでは、微弱な太陽光であっても検出できるよう、利得を高く設定しつつ、低雑音化と回路の安定度向上を図る観点から、周波数帯域は数十Hz程度に抑えるよう設定することが望ましい。
【0020】
信号出力部30は、図4に示すように、I/V変換器28が出力する各電圧信号をそのまま外部に出力するほか、信号選択ブロック32aと計算ブロック32bとで構成され、各電圧信号に基づいて所定の演算処理を行って、太陽光の強度情報Lと太陽の方位情報θ,φを出力する演算部32を備えている。なお、信号選択ブロック32aと計算ブロック32bの詳細な機能については、方位センサ装置10の動作説明の中で詳しく述べる。
【0021】
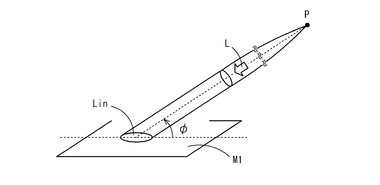
次に、センサモジュール12が太陽光を受光検知する原理について、図5〜図7に基づいて説明する。図5に示すように、光源Pが強度Lの光を照射し、受光面M1において強度Linの光を受光しているモデルを想定する。この場合、光源Pの仰角をφとすると、式(2)に示すLambertの法則が成り立つ。
【数2】
方位センサ装置10は、このLambertの法則に基づく検出量の指向性を利用して、太陽の方位等を検出しようとするものである。
【0022】
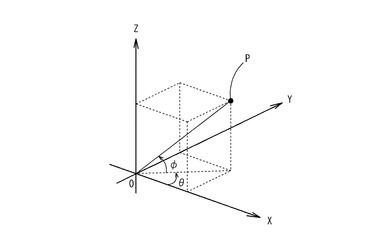
図3に示すように、センサモジュール12に設けられた検出面S0,S1,S2,S3,S4は、各検出面の法線が互いに異なる向きとなるよう配置されているため、一定の太陽光Lが照射されたとき、各検出面S0,S1,S2,S3,S4が受光する光強度L0、L1,L2,L3,L4は、各々異なる値となる。図5、図6に示すように、水平面をXY平面として、光源である点Pからの太陽光Lの方位角をθ、検出面の傾斜角をδとすると、受光面M1において強度Linは、式(2)に座標軸変換を行い、Lambertの法則により方位角θ,仰角φと傾斜角δを用いて、以下の式(3)で表される。この展開は、数学的に既知のものであるので、展開途中の式は省略する。
【数3】
【0023】
この実施形態では、式の簡略化のため、各検出面S0,S1,S2,S3,S4が受光する光強度L0,L1,L2,L3,L4について、検出面16cの傾斜角δは、各々絶対値が一律45deg=π/4としている。そして、光源Pの位置を図6に示す極座標系(方位角θ、仰角φ)で定義すると、光強度L0、L1,L2,L3,L4は、式(3)を基に以下の各式で表される。
【0024】
まず、検出面S0では、水平であるのでδ=0を入れると、以下の式(4)で表される。
【数4】
検出面S1は、水平な検出面S0面に対してδ=−π/4傾斜しているので、
【数5】
となる。
【0025】
検出面S2は、検出面S1に対して方位角θが180deg=π回転していると言え、水平面に対しては検出面S1と同様にδ=−π/4傾斜していることになるので、
【数6】
となる。
【0026】
さらに、検出面S3は、検出面S1に対して方位角θが90deg=π/2回転していると言え、水平面に対しては検出面S1と同様にδ=−π/4傾斜しているので、
【数7】
となる。
【0027】
さらに、検出面S4は、検出面S1に対して方位角θが−90deg=−π/2回転しており、水平面に対しては検出面S1と同様にδ=−π/4傾斜しているので、
【数8】
となる。
【0028】
なお、式(3)〜(8)は、変数の正負を考慮した一般式であるが、センサモジュール12の実際の構造にあっては、太陽光が見える側からしか受光することができない。従って、太陽光が各検出面の表面側に入射可能な方位角θ及び仰角φの範囲にある場合においては、光強度L0,L1,L2,L3,L4は式(4)〜(8)に従って各々観測されるが、それ以外の方位角θ及び仰角φの範囲にある場合は、光強度は観測されない。
【0029】
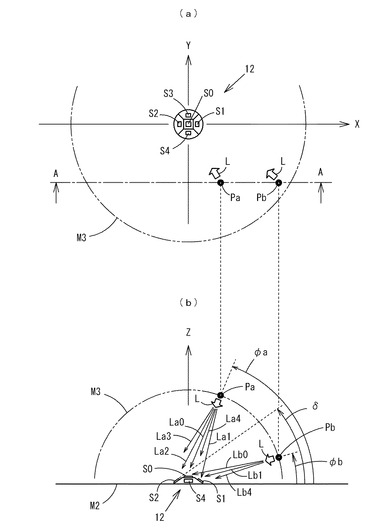
例えば、図7(a)(b)に示すように、光源である太陽が、地表面M2上に形成された半球面M3上を変位し、センサモジュール12は、半球面M3の中点の位置に、下底面16aを地表面M2側向けて設置されているモデルを想定する。例えば、光源が太陽Paである場合、太陽Paの仰角φaはセンサモジュール12の斜平面16cの傾斜角δよりも大きいため、太陽Paの方位角θによらず、すべての検出面S0,S1,S2,S3,S4において、式(4)〜(8)に従って光強度La0,La1,La2,La3,La4が観測される。
【0030】
一方、光源が太陽Pbである場合、太陽Pbの仰角φbはセンサモジュール12の斜平面16cの傾斜角δよりも小さいため、検出面S0,S1,S4では、式(4)〜(8)に従って光強度Lb0,Lb1,Lb4が観測されるが、検出面S3,S4にあっては、太陽Pbの方位角θ上の位置関係により、光強度は観測されず、光強度ゼロとして出力される。
【0031】
このように、太陽の仰角φが斜平面16cの傾斜角δよりも小さい範囲では、検出面S0と、検出面S1,S2,S3,S4の中のいずれか一つまたは二つの検出面のみで、光強度が観測されることになる。そして、その二つの検出面がS1,S2,S3,S4の中のいずれであるかは、方位角θの値によって決まる。一方、検出面S0は、方向角θによらず、理論的には光強度は常に観測されることになる。
【0032】
以上説明した太陽光を受光する原理に基づいて、方位センサ装置10の動作を説明する。図7に示すように、半球面M3の任意の位置に存在する太陽が、光強度Lの太陽光を照射すると、各フォトダイオードの検出面S0、S1,S2,S3,S4には、それぞれ光強度L0、L1,L2,L3,L4の太陽光が入射する。そして、各フォトダイオードに入射した各光強度は、式(1)に示すように、感度Sをもって電流信号I(S0)、I(S1)、I(S2)、I(S3)、I(S4)に変換される。さらに、これらの電流信号は、I/V変換器28に設定された利得Kをもって電圧信号V(S0)、V(S1)、V(S2)、V(S3)、V(S4)に変換される。ここで、各電圧信号と太陽光Lとの関係をまとめると、以下の式に表される
【0033】
【数9】
【数10】
【数11】
【数12】
【数13】
【0034】
これらの電圧信号は、後段の信号出力部30に入力される。信号出力部30は、図4に示すように、各電圧信号をそのまま外部に出力するほか、演算部30で演算処理を行い、太陽光の強度情報L、太陽の方位情報である方位角θと仰角φを算出する。
【0035】
式(9)〜(13)から分かるように、未知の変数はL,θ,φの3つである。従って、測定された電圧信号V(S0)、V(S1)、V(S2)、V(S3)、V(S4)の中から3つを選択し、どの検出面の電圧値なのかを踏まえて上記連立方程式を解けば、L,θ,φを求めることができる。すなわち、計算ブロック32bでは、選択された3つの電圧信号に基づいて、太陽光の強度情報L、太陽の方位情報θ,φを算出する処理が行われる。
【0036】
計算ブロック32bに入力される3つの電圧信号のうち、1つは、太陽の位置によらず常に太陽光を受光している検出面S0の電圧信号V(S0)である。そして、残りの2つは、信号選択ブロック32aによって、電圧信号V(S1)、V(S2)、V(S3)、V(S4)の中から、電圧値の大きなもの2つ(Vmax1,Vmax2)が選択される。上述したように、太陽の仰角φがセンサモジュール12の傾斜角δよりも小さい場合であっても、検出面S1〜S4のうちの少なくとも2つの検出面で太陽光が受光されているので、電圧値の大きなもの2つを選択すれば、それを抽出することができる。また、太陽の仰角φがセンサモジュール12の傾斜角δよりも大きい場合には、検出面S1〜S4の全ての検出面で太陽光が受光されているが、受光強度の大きな検出面から得られた電圧値を選択すれば、より誤差の少ない高精度な解析を行うことができる。
【0037】
例えば、図7に示すように、太陽Pbが太陽光Lを照射している場合、計算ブロック32bに入力される3つの電圧信号は、V(S0),V(S1),V(S4)が選択される。計算ブロック32bには、式(9)(10)(13)に基づいて演算する場合の計算式があらかじめ設定されており、電圧信号V(S0),V(S1),V(S4)はその計算式に代入され、太陽光の強度情報L、太陽の方位情報θ,仰角φを演算し、演算結果を外部に出力する。このように、太陽が半球面M3の任意の位置にあっても、上記の方法で3つの電圧信号を選択し、あらかじめ計算ブロック32bに設定されている計算式から、該当するものを自動的に選択し、太陽光の強度情報L、太陽の方位情報θ,仰角φを演算し、演算結果を外部に出力する動作が行われる。
【0038】
なお、式(4)〜(8)、および式(9)〜(13)は、各検出面16cの傾斜角δが一律45degであるときに成立する式であるが、傾斜角δが45deg以外に設定された場合には、既知の定数δを含んだ新たな式が成立するが、上記と同様の動作に基づいて、太陽光の強度情報L、太陽の方位情報θ,仰角φを算出することが可能であることは言うまでもない。
【0039】
以上説明した方位センサ装置10によれば、太陽光を検出面で受光することによって、太陽光の強度情報L、太陽の方位情報θ,仰角φの計測を同時に行うことができる。また、簡単な構造でありながら、半球面という広い視野角の計測が可能である。
【0040】
また、光の入射角度に対するフォトダイオードの指向性を積極的に利用した方式であり、太陽光は、散乱板や反射板等を介すことなく直接的に検出面に入射するため、計測誤差の発生要因が少なく、微弱な太陽光であっても精度の高い計測が可能である。
【0041】
また、上記のように測定原理が単純であることから、電圧信号を太陽光の強度等に換算するため演算プログラムは簡単な理論式に基づいて定義できるので、一律に所望の計測性能を作り込むことができ、装置の大量生産に適している。
【0042】
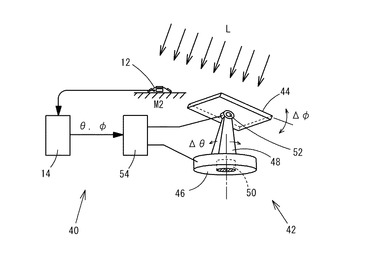
次に、この発明の第二の実施形態である方位センサ装置40について、図8に基づいて説明する。なお、上記方位センサ装置10と同様の構成は、同一の符号を付して説明を省略する。図8は、方位センサ装置40と太陽光発電装置42とを組み合わせて構成された太陽光発電システムである。太陽光発電装置42は、太陽電池セルが敷き詰められたソーラーパネル44を有し、その受光面は太陽光に向けて上向きに配置され、基台46上面に垂直に立設された支柱48の上端に支持されている。そして、基台46の内部には、支柱48を回転自在に駆動する方位角可変アクチュエータ50が設けられ、さらに、支柱48上端には、ソーラーパネル44の受光面を、仰角方向に揺動自在に駆動する仰角可変アクチュエータ52が設けられている。
【0043】
一方、方位センサ装置40は、地表面M2に設置されたセンサモジュール12と、電気信号処理部14とを備え、さらに、方位角可変アクチュエータ50及び仰角可変アクチュエータ52を駆動する駆動信号を出力する追尾制御部54を備えている。
【0044】
このように構成された太陽光発電システムにおいては、信号処理部14は、方位センサ装置10と同様に、センサモジュール12が受光した太陽光Lに基づいて太陽の方位情報(方位角θ,仰角φ)を出力し、追尾制御部42は、その方位情報に基づいて、各アクチュエータの駆動信号を出力する。そして、方位角可変アクチュエータ50及び仰角可変アクチュエータ52は、追尾制御部42が出力する駆動信号に基づいてソーラーパネル44を変位させ、ソーラーパネル44の受光面は、常に太陽光を垂直に受光する方向に追尾する。
【0045】
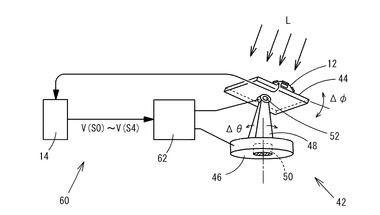
次に、この発明の第三の実施形態である方位センサ装置60について、図9に基づいて説明する。なお、上記方位センサ装置40と同様の構成は、同一の符号を付して説明を省略する。この実施形態の方位センサ装置60は、図9に示すように、太陽光発電装置42のセンサモジュール12が、ソーラーパネル44の受光面に設置されて太陽光発電システムを構成しているものである。さらに、上記と同様の方位角可変アクチュエータ50及び仰角可変アクチュエータ52を駆動する駆動信号を出力する追尾制御部62を備えている。
【0046】
この構成の太陽光発電システムにおいては、信号処理部14は、方位センサ装置10と同様に、センサモジュール12が受光した太陽光Lに基づいて太陽光の強度情報であるV(S0)〜V(S4)を出力する。追尾制御部62は、その強度情報に基づいて各アクチュエータの駆動信号を算出する。
【0047】
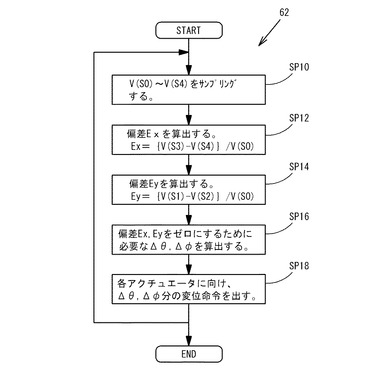
追尾制御部62の駆動信号を算出する算出方法は、図10のフローチャートに示すように、ステップSP10でサンプリングした電圧信号V(S0)、V(S1)、V(S2)、V(S3)、V(S4)に基づき、ステップSP12,SP14で偏差Ex,Eyを算出する。偏差Exは、Y軸方向に一列に配置された検出面S0,S3,S4から得られた電圧信号を用い、V(S3)とV(S4)の差を求め、さらにV(S0)で除算することによって規格化した数値である。同様に、偏差Eyは、X軸方向に一列に配置された検出面S0,S1,S2から得られた電圧信号を用い、V(S1)とV(S2)の差を求め、さらにV(S0)で除算することによって規格化した数値である。
【0048】
ステップSP16では、偏差Ex,Eyを、あらかじめ設定された目標値ゼロにするため、ソーラーパネル12を変位させなければならない方位角変位量Δθおよび仰角変位量Δφを算出する。そして、ステップSP18は、方位角変位量Δθおよび仰角変位量Δφに基づき、方位角可変アクチュエータ50及び仰角可変アクチュエータ52を駆動する駆動信号を出力する。
【0049】
センサモジュール12の各検出面16cは、ソーラーパネル44の受光面に対して一定の傾斜角δでそれぞれ設置されているため、偏差Ex,Eyがゼロになったときが、ソーラーパネル44の受光面が太陽光に対して垂直な向きになっているといえる。従って、ステップSP10〜SP18を繰り返すことによって、ソーラーパネル44の受光面は、常に太陽光を垂直に受光する方向に追尾する。
【0050】
なお、上記傾斜角δが各検出面16c毎に異なる場合は、ソーラーパネル44の受光面が太陽光に対して垂直な向きになったときの偏差Ex,Eyの値を目標値として設定しておけば、同様の動作を行うことができる。また、偏差Ex,Eyは規格化された数値なので、偏差Ex,Eyの目標値は、太陽光Lの強度の変化に応じて変更する必要はない。また、偏差Ex,Eyは、ソーラーパネル44の受光面と平行な向きに配置されている検出面S0に基づく電圧信号V(S0)を基準として規格化されているので、仰角φと偏差ExおよびEyの間に、ほぼ直線的な関係が得られる。従って、ソーラーパネル44の追尾動作の制御特性を、高速に、かつ高い安定度に設定することが容易である。
【0051】
以上説明したように、本発明の方位センサ装置は、センサモジュールを小型でコンパクトに構成できるので、センサモジュールを地表面に固定設置したり、制御対象物の追尾部分(例えばソーラーパネルの受光面)に設置したりするなど、設置方法についての自由度が高い。従って、制御対象物の形態や性質に合わせて、様々な制御方式の追尾システムを構築することが可能である。
【0052】
なお、本発明は上記実施形態に限定するものではなく、検出する光等のエネルギー媒体は、センサ素子の検出面に入射すると、入射角と強度とがLambertの法則に従う関係、又はそれに類似する関係を示すものであれば、可視光線・紫外線・赤外線、その他指向性の高い電磁波や放射線等であってもよく、センサ素子は、当該エネルギー媒体に適したセンサ素子を適宜選択すればよい。また、発生源が位置する方位が所定の範囲に限定される場合には、センサ素子の数を、少なくとも3つのセンサ素子で同時にエネルギー媒体を検知できる数まで減らしてもよい。また、全球面の視野角を備える光方位センサ装置を構成する場合であれば、半球面の視野角もつセンサモジュール12を上下対称に2組み合わせて検知し、一の信号出力部で演算処理等を行うようにしてもよい。
【0053】
また、センサモジュールは、必ずしも独立した本体を備えている必要はなく、例えば、所定の構造物や制御対象物の筐体等の表面にセンサ素子を取り付けて構成してもよい。
【0054】
また、電気信号処理部14は、センサ素子が出力する電気信号を、所望の電気信号等に変換して出力する機能を有するものであればよく、出力する信号の種類や信号変換方法は適宜設定することができる。
【0055】
また、追尾制御部54は、制御対象物の種類や性質に応じて駆動信号を生成する機能を有しており、制御対象物の種類等は限定しない。
【実施例1】
【0056】
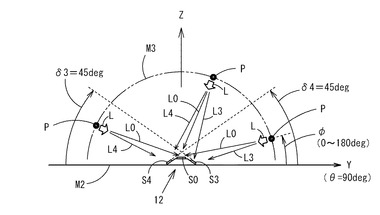
次に、上述の方位センサ装置10を用いて、所定の光源から照射された光を電圧信号V(S0)、V(S1)、V(S2)、V(S3)、V(S4)に変換した実験結果を、図11〜14に基づいて説明する。実験モデルは、図11に示すように、光源Pは、半球面M3上であって、方位角θ=90deg,270deg、仰角φ=0〜180degの軌跡を移動する。そして、光源Pが照射する光Lを、半球面M3の中心であって、XY軸の原点位置の地表面M2に設置されたセンサモジュール12を用いて観測する、というもでるである。なお、センサモジュール12は、フォトダイオード18,20,22,24,26が取り付けられ、検出面S0〜S4を備えているが、X軸上に配置された検出面S1,S2は、この実験で使用していないので図示していない。
【0057】
各フォトダイオードは、約6mm×約6mmのサイズに形成された、市販のシリコン・フォトダイオードダイオードである。可視光から赤外線領域までの範囲を検出可能で、受光した光の強度を電流信号に変換して出力する機能を備えている。
【0058】
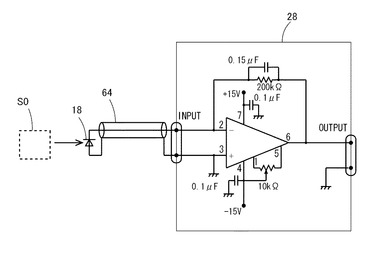
I/V変換器28は、図12に示すように、オペアンプ、抵抗、コンデンサで構成された周知のアナログ増幅回路であって、検出面S0の電流信号I(0)が同軸ケーブル64を介して入力されると、所定の利得をもって電圧信号に変換し、出力する。ここでは、帰還回路の時定数は約30msec、周波数帯域は約50Hz、総合電流利得200mV/μA、最大入力電流50μAに設定されている。他の検出面に接続されているI/V変換器28も、同一のものである。
【0059】
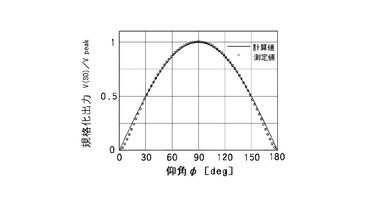
光源Pから所定強度の光を照射したとき、検出面S0を介して得られた電圧信号V(S0)の特性を図13に示す。グラフの縦軸は、仰角φ=90degのとき電圧値を1とした規格化出力である。検出面S0は、地表面M2に対して平行に設置されているため、光源Pが仰角φ=90degの位置にあるときにV(S0)は最大値を示している。計算値と測定値を比較すると、仰角φ=0〜180degの範囲でほぼ一致した。なお、仰角φ=30deg以下、および、仰角φ=150deg以上の範囲でやや測定誤差がみられるが、太陽光発電における太陽光追尾の用途にあっては、問題にならないレベルである。
【0060】
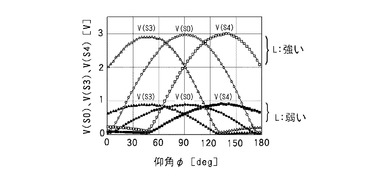
次に、光源の光強度Lに約3倍の比率で強弱をもたせ、それぞれの強度で各電圧信号を測定した。図14に、電圧信号V(S0),V(S3),V(S4)の測定値を示す。光強度の強弱によって、各検出面を介して得られた電圧信号は、それぞれ約3倍の差が生じた。光源Pが仰角φ=45deg,135degの位置にあるときに、V(S3),V(S4)はそれぞれ最大値を示している。これは、検出面S3,S4が、地表面M2に対して傾斜角δ=45degの角度をもって設置されているためである。また、光源Pが仰角φ=0〜45degの範囲にあるときは、検出面S4に光が入射しないため、電圧信号V(S4)は、ほとんど発生していない。同様に、光源Pが仰角φ=135〜180degの範囲にあるときは、検出面S3に光が入射しないため、電圧信号V(S3)は、ほとんど発生していない。
【0061】
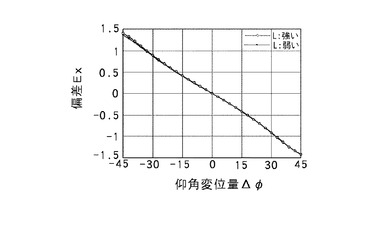
さらに、上述の実施形態の方位センサ装置60における追尾制御部62の動作を検証するため、各電圧信号の測定値に基づいて偏差Exを算出した。その結果、図15に示すように、偏差Exと仰角変位量Δφの間にほぼ直線的な関係が得られた。従って、ソーラーパネル追尾動作の制御を行う場合、太陽の仰角φに応じて制御利得を補正する等しなくとも、単純な制御手法を用いて、高速で安定度の高い追尾動作を実現することができる。また、光強度Lに強弱があっても、偏差Exと仰角変位量Δφの直線的な関係は一致した。従って、ソーラーパネル追尾動作の制御を行う場合、晴れた日と曇りの日で太陽光の強度が変動しても、常に一定の追尾動作を行うことができる。
【図面の簡単な説明】
【0062】
【図1】この発明の第一の実施形態の方位センサ装置を示すブロック図である。
【図2】この実施形態のセンサモジュールの斜視図である。
【図3】この実施形態のセンサモジュールの平面図(a)と側面図(b)である。
【図4】この実施形態の信号出力部の内部を示すブロック図である。
【図5】光源から受光面M1に光が照射する様子を示す斜視図である。
【図6】光源の位置等を定義する極座標系を示す図である。
【図7】この実施形態のセンサモジュールが太陽光を受光する原理を説明する平面図(a)とA−A断面図(b)である。
【図8】この発明の第二の実施形態の方位センサ装置を用いて構成された太陽光発電システムを示す全体図である。
【図9】この発明の第三の実施形態の方位センサ装置を用いて構成された太陽光発電システムを示す全体図である。(a)と、
【図10】第三の実施形態の方位センサ装置を用いて構成された太陽光発電システムの追尾制御部の動作を示すフローチャートである。
【図11】この発明の一実施例の実験方法を説明する側面図である。
【図12】この実施例のI/V変換器の回路図である。
【図13】この実施例の電圧信号V(S0)と仰角φとの関係を示すグラフである。
【図14】この実施例の電圧信号V(S0),V(S3),V(S4)と仰角φとの関係を示すグラフである。
【図15】この実施例において、電圧信号の偏差Exと仰角φとの関係を、光強度の強い場合と弱い場合の各々について示すグラフである。
【符号の説明】
【0063】
10,40,60 方位センサ装置
12 センサモジュール
14 電気信号処理部
18,20,22,24,26 フォトダイオード
30 信号出力部
32 演算部
44 ソーラーパネル
50 方位角可変アクチュエータ
52 仰角可変アクチュエータ
54,62 追尾制御部
P 光源(太陽)
L,L0,L1,L2,L3,L4 光強度
S0,S1,S2,S3,S4 検出面
【技術分野】
【0001】
この発明は、空中を直線的に伝搬する光等のエネルギー媒体の発生源の方位等を計測し、または、発生源の方位に制御対象物を追尾させる方位センサ装置に関する。
【背景技術】
【0002】
可視光線、紫外線、赤外線等、空中を直線的に伝搬してくるエネルギー媒体を受けて、その強度や発生源の方位を検出する技術は、多くの用途に用いられている。例えば、太陽光発電の分野において、発電効率が最も高い状態にするため、太陽光を光センサ等で受光することによって太陽の方位を観測し、ソーラーパネルの受光面の向きを、太陽光に対して垂直な向きに可変調整する太陽追尾システム等がある。
【0003】
従来の太陽光追尾システムとしては、例えば特許文献1に開示されているように、太陽光を光学系によりスポット状に結像させ、そのスポット像を4分割フォトダイオードに入力させてその出力信号を、所定の方法で信号処理し、太陽光の結像スポット像がリニア捕捉領域以外の飽和領域等に入った場合に、太陽光追尾の制御動作を高速にすることが可能な太陽追尾センサの信号処理方法が提案されている。
【0004】
また、特許文献2に開示されているように、透光性を有し且つ非透明なカバーで形成された略四角錐状部分を、底面の対角線に沿って鉛直方向に直立する境界面によって4つのエリアに区分し、各エリア内に光検出センサが配置され、各境界面に遮光板が設けられた太陽追尾装置が提案されている。この太陽追尾装置は、地表面に対する太陽位置の仰角が変化したときに、遮光板による影の影響で、互いに対向する一対の光検出センサへの入射光量が相補的に増減する現象を利用し、当該一対の光検出センサへの入射光量の差を一定に保つように制御対象物の向きを駆動制御するものである。
【特許文献1】特開平5−126563号公報
【特許文献2】特開2004−146745号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の太陽追尾センサの信号処理方法にあっては、受光部の視野角が±0.25deg程度と非常に狭く、また光源が視野角から外れた場合に自らそれを探す機能を有していないため、天体望遠鏡など、特定の分野に用途が限定されるものであった。また、光源が位置する方位を計測する機能は備えていない。
【0006】
また、特許文献2の太陽追尾装置にあっては、光検出センサの指向性をなくすため、太陽光を一旦非透明のカバーで受け、そのカバーを通過した散乱光を光検出センサに入射させる構造であるため、カバーを通過する際に太陽光が減衰してしまい、太陽光の強度を正確に計測することができないものであった。また、入射光の強度が弱い場合には、ほとんど太陽を追尾することができないものであった。また、太陽が位置する方位を計測する機能は備えていない。
【0007】
この発明は、上記背景技術の問題点に鑑みてなされたものであり、空中を直線的に伝搬してくる光等のエネルギー媒体について、その強度計測や発生源の方位計測を広い視野角の範囲で高精度に行うことができ、追尾機能を容易に付加することが可能な方位センサ装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
この発明は、太陽光等の空中を直線的に伝搬するエネルギー媒体が入射する平らな検出面が設けられ、入力したエネルギー媒体を電気信号に変換する複数のセンサ素子と、前記複数のセンサ素子が、前記検出面の法線が互いに非平行の位置であって、前記エネルギー媒体を、少なくとも三つの前記検出面で同時に受ける向きに立体配置されたセンサモジュールと、各センサ素子から出力された前記電気信号のうち少なくとも三つに基づいて、前記エネルギー媒体の強度情報及び発生源の方位情報を出力する電気信号処理部とを備えた方位センサ装置である。
【0009】
さらに、前記センサモジュールは、五つの前記センサ素子を備え、各センサ素子の前記検出面は、四角錐台の上底面とその側方に位置した四つの斜平面に外向きに各々配置され、前記電気信号処理部は、少なくとも前記上底面側に配置された前記センサ素子が出力する電気信号に基づいて方位情報を出力可能とした方位センサ装置である。特に、前記エネルギー媒体は光であって、前記センサ素子は光検出素子である。
【0010】
さらに、前記電気信号処理部の出力に基づいて制御対象物の方位角および仰角を駆動制御する追尾制御部を備えるものである。前記追尾制御部は、前記電気信号処理部が出力する前記被検出信号の強度情報が、所定の値になるように、前記制御対象物の方位角および仰角を駆動制御することができるものである。また、前記センサモジュールは、前記制御対象物に取り付けられ、前記制御対象物と一体に変位するものでもよい。
【発明の効果】
【0011】
この発明の方位センサ装置によれば、エネルギー媒体が空中を直線的に伝搬してくる可視光線・紫外線・赤外線、その他指向性の高い電磁波や放射線等であって、検出面に入射すると、入射角と強度とがLambertの法則に従う関係、又はそれに類似する関係を示すものであれば、エネルギー媒体の強度計測および発生源の方位計測を同時に行うことができる。また、簡単な構造でありながら、広い視野角で、高精度の計測を行うことができる。
【0012】
また、上記のように測定原理が単純であることから、エネルギー媒体の強度及び方位とセンサ素子が出力する電気信号との関係は、比較的簡単な理論式でほぼ正確に表現することができる。従って、所望の性能を一律に作り込むことが容易であり、装置の大量生産に適している。
【0013】
さらに、本発明の方位センサ装置のセンサモジュールは、小型でコンパクトに構成することができるので、設置方法についての自由度が大きく、制御対象物の形態や性質に合わせて、様々な制御方式の追尾システムを構築することが可能である。
【発明を実施するための最良の形態】
【0014】
以下、この発明の第一実施形態の方位センサ装置10について、図1〜図7に基づいて説明する。第一の実施形態の方位センサ装置10は、エネルギー媒体としての太陽光の強度及び太陽の方位を計測する装置である。方位センサ装置10は、図1に示すように、受光した太陽光の強度に基づいて電気信号を出力する複数のフォトダイオードを有するセンサモジュール12と、センサモジュール12が出力する電気信号に基づいて、太陽光の強度情報及び太陽の方位情報を出力する電気信号処理部14とを備えている。
【0015】
センサモジュール12は、図2に示すように、四角錐台状の本体16と、本体16の所定の面に取り付けられた5つのセンサ素子であるフォトダイオード18,20,22,24,26を備えている。本体16は、図3(a)(b)に示すように、略円形の設置面である下底面16aと、下底面16aと互いに平行な面であって、下底面16aの中心を通る法線(以下、Z軸)に対して回転対称に四角形の上底面16bを備えている。さらに、下底面16aに対して傾斜角δを有し、Z軸を挟んで互いに対称に位置した2組の斜平面16cが設けられている。なお、この実施形態のセンサモジュール12では、各傾斜角δは、一律45degに設定されている。
【0016】
フォトダイオード18は、薄型の直方体の外形を有し、表面側の中央部には、被検出信号である太陽光を受光する検出面S0が、例えば約6mm×約6mmのサイズに形成されている。このフォトダイオード18は、可視光から赤外線領域までの範囲を検出可能な一般的なシリコン・フォトダイオードである。検出面S1で受光した光と、発生する電流は、式(1)の関係式で表される。
【数1】
【0017】
ここで、Liは受光した光強度、Ioは発生電流、Sは感度である。他のフォトダイオード20,22,24,26は、フォトダイオード18と同一のものであり、各々検出面S1,S2,S3,S4が設けられている。
【0018】
上記フォトダイオード18は、本体16の上底面16bに配置され、その検出面S0が上底面16bに対して平行な向きになるよう取り付けられている。また、フォトダイオード20は、一の斜平面16cに配置され、検出面S1がその斜平面16cに対して平行な向きになるよう取り付けられている。フォトダイオード22は、フォトダイオード20とZ軸を挟んで対向する斜平面16cに配置され、検出面S2がその斜平面16cに対して平行な向きになるよう取り付けられている。フォトダイオード24,26も、残る2つの斜平面16cに各々配置され、上記と同様の方法で取り付けられている。そして、各フォトダイオードには、図示しない出力ケーブルが取り付けられ、受光した太陽光の強度に応じて発生する各電流信号を、後段の電気信号処理部14に向けて出力可能に構成されている。ここで、図3(a)に示すように、S2,S0,S1の順に並ぶ方向をX軸、S4,S0,S3の順番に並ぶ方向をY軸と定義する。
【0019】
電気信号処理部14は、図1、図4に示すように、各フォトダイオード18,20,22,24,26の出力に各々接続された5つの電流/電圧変換器28(以下、I/V変換器28)と、各I/V変換器28の出力に接続され、所定の演算処理を行う演算部32bが設けられた信号出力部30とを備えている。I/V変換器28は、周知のアナログ増幅回路で構成されている。被検出信号の太陽光は、強度や方位の変化が緩慢であることから、アナログ増幅回路の応答特性はさほど高速である必要ない。ここでは、微弱な太陽光であっても検出できるよう、利得を高く設定しつつ、低雑音化と回路の安定度向上を図る観点から、周波数帯域は数十Hz程度に抑えるよう設定することが望ましい。
【0020】
信号出力部30は、図4に示すように、I/V変換器28が出力する各電圧信号をそのまま外部に出力するほか、信号選択ブロック32aと計算ブロック32bとで構成され、各電圧信号に基づいて所定の演算処理を行って、太陽光の強度情報Lと太陽の方位情報θ,φを出力する演算部32を備えている。なお、信号選択ブロック32aと計算ブロック32bの詳細な機能については、方位センサ装置10の動作説明の中で詳しく述べる。
【0021】
次に、センサモジュール12が太陽光を受光検知する原理について、図5〜図7に基づいて説明する。図5に示すように、光源Pが強度Lの光を照射し、受光面M1において強度Linの光を受光しているモデルを想定する。この場合、光源Pの仰角をφとすると、式(2)に示すLambertの法則が成り立つ。
【数2】
方位センサ装置10は、このLambertの法則に基づく検出量の指向性を利用して、太陽の方位等を検出しようとするものである。
【0022】
図3に示すように、センサモジュール12に設けられた検出面S0,S1,S2,S3,S4は、各検出面の法線が互いに異なる向きとなるよう配置されているため、一定の太陽光Lが照射されたとき、各検出面S0,S1,S2,S3,S4が受光する光強度L0、L1,L2,L3,L4は、各々異なる値となる。図5、図6に示すように、水平面をXY平面として、光源である点Pからの太陽光Lの方位角をθ、検出面の傾斜角をδとすると、受光面M1において強度Linは、式(2)に座標軸変換を行い、Lambertの法則により方位角θ,仰角φと傾斜角δを用いて、以下の式(3)で表される。この展開は、数学的に既知のものであるので、展開途中の式は省略する。
【数3】
【0023】
この実施形態では、式の簡略化のため、各検出面S0,S1,S2,S3,S4が受光する光強度L0,L1,L2,L3,L4について、検出面16cの傾斜角δは、各々絶対値が一律45deg=π/4としている。そして、光源Pの位置を図6に示す極座標系(方位角θ、仰角φ)で定義すると、光強度L0、L1,L2,L3,L4は、式(3)を基に以下の各式で表される。
【0024】
まず、検出面S0では、水平であるのでδ=0を入れると、以下の式(4)で表される。
【数4】
検出面S1は、水平な検出面S0面に対してδ=−π/4傾斜しているので、
【数5】
となる。
【0025】
検出面S2は、検出面S1に対して方位角θが180deg=π回転していると言え、水平面に対しては検出面S1と同様にδ=−π/4傾斜していることになるので、
【数6】
となる。
【0026】
さらに、検出面S3は、検出面S1に対して方位角θが90deg=π/2回転していると言え、水平面に対しては検出面S1と同様にδ=−π/4傾斜しているので、
【数7】
となる。
【0027】
さらに、検出面S4は、検出面S1に対して方位角θが−90deg=−π/2回転しており、水平面に対しては検出面S1と同様にδ=−π/4傾斜しているので、
【数8】
となる。
【0028】
なお、式(3)〜(8)は、変数の正負を考慮した一般式であるが、センサモジュール12の実際の構造にあっては、太陽光が見える側からしか受光することができない。従って、太陽光が各検出面の表面側に入射可能な方位角θ及び仰角φの範囲にある場合においては、光強度L0,L1,L2,L3,L4は式(4)〜(8)に従って各々観測されるが、それ以外の方位角θ及び仰角φの範囲にある場合は、光強度は観測されない。
【0029】
例えば、図7(a)(b)に示すように、光源である太陽が、地表面M2上に形成された半球面M3上を変位し、センサモジュール12は、半球面M3の中点の位置に、下底面16aを地表面M2側向けて設置されているモデルを想定する。例えば、光源が太陽Paである場合、太陽Paの仰角φaはセンサモジュール12の斜平面16cの傾斜角δよりも大きいため、太陽Paの方位角θによらず、すべての検出面S0,S1,S2,S3,S4において、式(4)〜(8)に従って光強度La0,La1,La2,La3,La4が観測される。
【0030】
一方、光源が太陽Pbである場合、太陽Pbの仰角φbはセンサモジュール12の斜平面16cの傾斜角δよりも小さいため、検出面S0,S1,S4では、式(4)〜(8)に従って光強度Lb0,Lb1,Lb4が観測されるが、検出面S3,S4にあっては、太陽Pbの方位角θ上の位置関係により、光強度は観測されず、光強度ゼロとして出力される。
【0031】
このように、太陽の仰角φが斜平面16cの傾斜角δよりも小さい範囲では、検出面S0と、検出面S1,S2,S3,S4の中のいずれか一つまたは二つの検出面のみで、光強度が観測されることになる。そして、その二つの検出面がS1,S2,S3,S4の中のいずれであるかは、方位角θの値によって決まる。一方、検出面S0は、方向角θによらず、理論的には光強度は常に観測されることになる。
【0032】
以上説明した太陽光を受光する原理に基づいて、方位センサ装置10の動作を説明する。図7に示すように、半球面M3の任意の位置に存在する太陽が、光強度Lの太陽光を照射すると、各フォトダイオードの検出面S0、S1,S2,S3,S4には、それぞれ光強度L0、L1,L2,L3,L4の太陽光が入射する。そして、各フォトダイオードに入射した各光強度は、式(1)に示すように、感度Sをもって電流信号I(S0)、I(S1)、I(S2)、I(S3)、I(S4)に変換される。さらに、これらの電流信号は、I/V変換器28に設定された利得Kをもって電圧信号V(S0)、V(S1)、V(S2)、V(S3)、V(S4)に変換される。ここで、各電圧信号と太陽光Lとの関係をまとめると、以下の式に表される
【0033】
【数9】
【数10】
【数11】
【数12】
【数13】
【0034】
これらの電圧信号は、後段の信号出力部30に入力される。信号出力部30は、図4に示すように、各電圧信号をそのまま外部に出力するほか、演算部30で演算処理を行い、太陽光の強度情報L、太陽の方位情報である方位角θと仰角φを算出する。
【0035】
式(9)〜(13)から分かるように、未知の変数はL,θ,φの3つである。従って、測定された電圧信号V(S0)、V(S1)、V(S2)、V(S3)、V(S4)の中から3つを選択し、どの検出面の電圧値なのかを踏まえて上記連立方程式を解けば、L,θ,φを求めることができる。すなわち、計算ブロック32bでは、選択された3つの電圧信号に基づいて、太陽光の強度情報L、太陽の方位情報θ,φを算出する処理が行われる。
【0036】
計算ブロック32bに入力される3つの電圧信号のうち、1つは、太陽の位置によらず常に太陽光を受光している検出面S0の電圧信号V(S0)である。そして、残りの2つは、信号選択ブロック32aによって、電圧信号V(S1)、V(S2)、V(S3)、V(S4)の中から、電圧値の大きなもの2つ(Vmax1,Vmax2)が選択される。上述したように、太陽の仰角φがセンサモジュール12の傾斜角δよりも小さい場合であっても、検出面S1〜S4のうちの少なくとも2つの検出面で太陽光が受光されているので、電圧値の大きなもの2つを選択すれば、それを抽出することができる。また、太陽の仰角φがセンサモジュール12の傾斜角δよりも大きい場合には、検出面S1〜S4の全ての検出面で太陽光が受光されているが、受光強度の大きな検出面から得られた電圧値を選択すれば、より誤差の少ない高精度な解析を行うことができる。
【0037】
例えば、図7に示すように、太陽Pbが太陽光Lを照射している場合、計算ブロック32bに入力される3つの電圧信号は、V(S0),V(S1),V(S4)が選択される。計算ブロック32bには、式(9)(10)(13)に基づいて演算する場合の計算式があらかじめ設定されており、電圧信号V(S0),V(S1),V(S4)はその計算式に代入され、太陽光の強度情報L、太陽の方位情報θ,仰角φを演算し、演算結果を外部に出力する。このように、太陽が半球面M3の任意の位置にあっても、上記の方法で3つの電圧信号を選択し、あらかじめ計算ブロック32bに設定されている計算式から、該当するものを自動的に選択し、太陽光の強度情報L、太陽の方位情報θ,仰角φを演算し、演算結果を外部に出力する動作が行われる。
【0038】
なお、式(4)〜(8)、および式(9)〜(13)は、各検出面16cの傾斜角δが一律45degであるときに成立する式であるが、傾斜角δが45deg以外に設定された場合には、既知の定数δを含んだ新たな式が成立するが、上記と同様の動作に基づいて、太陽光の強度情報L、太陽の方位情報θ,仰角φを算出することが可能であることは言うまでもない。
【0039】
以上説明した方位センサ装置10によれば、太陽光を検出面で受光することによって、太陽光の強度情報L、太陽の方位情報θ,仰角φの計測を同時に行うことができる。また、簡単な構造でありながら、半球面という広い視野角の計測が可能である。
【0040】
また、光の入射角度に対するフォトダイオードの指向性を積極的に利用した方式であり、太陽光は、散乱板や反射板等を介すことなく直接的に検出面に入射するため、計測誤差の発生要因が少なく、微弱な太陽光であっても精度の高い計測が可能である。
【0041】
また、上記のように測定原理が単純であることから、電圧信号を太陽光の強度等に換算するため演算プログラムは簡単な理論式に基づいて定義できるので、一律に所望の計測性能を作り込むことができ、装置の大量生産に適している。
【0042】
次に、この発明の第二の実施形態である方位センサ装置40について、図8に基づいて説明する。なお、上記方位センサ装置10と同様の構成は、同一の符号を付して説明を省略する。図8は、方位センサ装置40と太陽光発電装置42とを組み合わせて構成された太陽光発電システムである。太陽光発電装置42は、太陽電池セルが敷き詰められたソーラーパネル44を有し、その受光面は太陽光に向けて上向きに配置され、基台46上面に垂直に立設された支柱48の上端に支持されている。そして、基台46の内部には、支柱48を回転自在に駆動する方位角可変アクチュエータ50が設けられ、さらに、支柱48上端には、ソーラーパネル44の受光面を、仰角方向に揺動自在に駆動する仰角可変アクチュエータ52が設けられている。
【0043】
一方、方位センサ装置40は、地表面M2に設置されたセンサモジュール12と、電気信号処理部14とを備え、さらに、方位角可変アクチュエータ50及び仰角可変アクチュエータ52を駆動する駆動信号を出力する追尾制御部54を備えている。
【0044】
このように構成された太陽光発電システムにおいては、信号処理部14は、方位センサ装置10と同様に、センサモジュール12が受光した太陽光Lに基づいて太陽の方位情報(方位角θ,仰角φ)を出力し、追尾制御部42は、その方位情報に基づいて、各アクチュエータの駆動信号を出力する。そして、方位角可変アクチュエータ50及び仰角可変アクチュエータ52は、追尾制御部42が出力する駆動信号に基づいてソーラーパネル44を変位させ、ソーラーパネル44の受光面は、常に太陽光を垂直に受光する方向に追尾する。
【0045】
次に、この発明の第三の実施形態である方位センサ装置60について、図9に基づいて説明する。なお、上記方位センサ装置40と同様の構成は、同一の符号を付して説明を省略する。この実施形態の方位センサ装置60は、図9に示すように、太陽光発電装置42のセンサモジュール12が、ソーラーパネル44の受光面に設置されて太陽光発電システムを構成しているものである。さらに、上記と同様の方位角可変アクチュエータ50及び仰角可変アクチュエータ52を駆動する駆動信号を出力する追尾制御部62を備えている。
【0046】
この構成の太陽光発電システムにおいては、信号処理部14は、方位センサ装置10と同様に、センサモジュール12が受光した太陽光Lに基づいて太陽光の強度情報であるV(S0)〜V(S4)を出力する。追尾制御部62は、その強度情報に基づいて各アクチュエータの駆動信号を算出する。
【0047】
追尾制御部62の駆動信号を算出する算出方法は、図10のフローチャートに示すように、ステップSP10でサンプリングした電圧信号V(S0)、V(S1)、V(S2)、V(S3)、V(S4)に基づき、ステップSP12,SP14で偏差Ex,Eyを算出する。偏差Exは、Y軸方向に一列に配置された検出面S0,S3,S4から得られた電圧信号を用い、V(S3)とV(S4)の差を求め、さらにV(S0)で除算することによって規格化した数値である。同様に、偏差Eyは、X軸方向に一列に配置された検出面S0,S1,S2から得られた電圧信号を用い、V(S1)とV(S2)の差を求め、さらにV(S0)で除算することによって規格化した数値である。
【0048】
ステップSP16では、偏差Ex,Eyを、あらかじめ設定された目標値ゼロにするため、ソーラーパネル12を変位させなければならない方位角変位量Δθおよび仰角変位量Δφを算出する。そして、ステップSP18は、方位角変位量Δθおよび仰角変位量Δφに基づき、方位角可変アクチュエータ50及び仰角可変アクチュエータ52を駆動する駆動信号を出力する。
【0049】
センサモジュール12の各検出面16cは、ソーラーパネル44の受光面に対して一定の傾斜角δでそれぞれ設置されているため、偏差Ex,Eyがゼロになったときが、ソーラーパネル44の受光面が太陽光に対して垂直な向きになっているといえる。従って、ステップSP10〜SP18を繰り返すことによって、ソーラーパネル44の受光面は、常に太陽光を垂直に受光する方向に追尾する。
【0050】
なお、上記傾斜角δが各検出面16c毎に異なる場合は、ソーラーパネル44の受光面が太陽光に対して垂直な向きになったときの偏差Ex,Eyの値を目標値として設定しておけば、同様の動作を行うことができる。また、偏差Ex,Eyは規格化された数値なので、偏差Ex,Eyの目標値は、太陽光Lの強度の変化に応じて変更する必要はない。また、偏差Ex,Eyは、ソーラーパネル44の受光面と平行な向きに配置されている検出面S0に基づく電圧信号V(S0)を基準として規格化されているので、仰角φと偏差ExおよびEyの間に、ほぼ直線的な関係が得られる。従って、ソーラーパネル44の追尾動作の制御特性を、高速に、かつ高い安定度に設定することが容易である。
【0051】
以上説明したように、本発明の方位センサ装置は、センサモジュールを小型でコンパクトに構成できるので、センサモジュールを地表面に固定設置したり、制御対象物の追尾部分(例えばソーラーパネルの受光面)に設置したりするなど、設置方法についての自由度が高い。従って、制御対象物の形態や性質に合わせて、様々な制御方式の追尾システムを構築することが可能である。
【0052】
なお、本発明は上記実施形態に限定するものではなく、検出する光等のエネルギー媒体は、センサ素子の検出面に入射すると、入射角と強度とがLambertの法則に従う関係、又はそれに類似する関係を示すものであれば、可視光線・紫外線・赤外線、その他指向性の高い電磁波や放射線等であってもよく、センサ素子は、当該エネルギー媒体に適したセンサ素子を適宜選択すればよい。また、発生源が位置する方位が所定の範囲に限定される場合には、センサ素子の数を、少なくとも3つのセンサ素子で同時にエネルギー媒体を検知できる数まで減らしてもよい。また、全球面の視野角を備える光方位センサ装置を構成する場合であれば、半球面の視野角もつセンサモジュール12を上下対称に2組み合わせて検知し、一の信号出力部で演算処理等を行うようにしてもよい。
【0053】
また、センサモジュールは、必ずしも独立した本体を備えている必要はなく、例えば、所定の構造物や制御対象物の筐体等の表面にセンサ素子を取り付けて構成してもよい。
【0054】
また、電気信号処理部14は、センサ素子が出力する電気信号を、所望の電気信号等に変換して出力する機能を有するものであればよく、出力する信号の種類や信号変換方法は適宜設定することができる。
【0055】
また、追尾制御部54は、制御対象物の種類や性質に応じて駆動信号を生成する機能を有しており、制御対象物の種類等は限定しない。
【実施例1】
【0056】
次に、上述の方位センサ装置10を用いて、所定の光源から照射された光を電圧信号V(S0)、V(S1)、V(S2)、V(S3)、V(S4)に変換した実験結果を、図11〜14に基づいて説明する。実験モデルは、図11に示すように、光源Pは、半球面M3上であって、方位角θ=90deg,270deg、仰角φ=0〜180degの軌跡を移動する。そして、光源Pが照射する光Lを、半球面M3の中心であって、XY軸の原点位置の地表面M2に設置されたセンサモジュール12を用いて観測する、というもでるである。なお、センサモジュール12は、フォトダイオード18,20,22,24,26が取り付けられ、検出面S0〜S4を備えているが、X軸上に配置された検出面S1,S2は、この実験で使用していないので図示していない。
【0057】
各フォトダイオードは、約6mm×約6mmのサイズに形成された、市販のシリコン・フォトダイオードダイオードである。可視光から赤外線領域までの範囲を検出可能で、受光した光の強度を電流信号に変換して出力する機能を備えている。
【0058】
I/V変換器28は、図12に示すように、オペアンプ、抵抗、コンデンサで構成された周知のアナログ増幅回路であって、検出面S0の電流信号I(0)が同軸ケーブル64を介して入力されると、所定の利得をもって電圧信号に変換し、出力する。ここでは、帰還回路の時定数は約30msec、周波数帯域は約50Hz、総合電流利得200mV/μA、最大入力電流50μAに設定されている。他の検出面に接続されているI/V変換器28も、同一のものである。
【0059】
光源Pから所定強度の光を照射したとき、検出面S0を介して得られた電圧信号V(S0)の特性を図13に示す。グラフの縦軸は、仰角φ=90degのとき電圧値を1とした規格化出力である。検出面S0は、地表面M2に対して平行に設置されているため、光源Pが仰角φ=90degの位置にあるときにV(S0)は最大値を示している。計算値と測定値を比較すると、仰角φ=0〜180degの範囲でほぼ一致した。なお、仰角φ=30deg以下、および、仰角φ=150deg以上の範囲でやや測定誤差がみられるが、太陽光発電における太陽光追尾の用途にあっては、問題にならないレベルである。
【0060】
次に、光源の光強度Lに約3倍の比率で強弱をもたせ、それぞれの強度で各電圧信号を測定した。図14に、電圧信号V(S0),V(S3),V(S4)の測定値を示す。光強度の強弱によって、各検出面を介して得られた電圧信号は、それぞれ約3倍の差が生じた。光源Pが仰角φ=45deg,135degの位置にあるときに、V(S3),V(S4)はそれぞれ最大値を示している。これは、検出面S3,S4が、地表面M2に対して傾斜角δ=45degの角度をもって設置されているためである。また、光源Pが仰角φ=0〜45degの範囲にあるときは、検出面S4に光が入射しないため、電圧信号V(S4)は、ほとんど発生していない。同様に、光源Pが仰角φ=135〜180degの範囲にあるときは、検出面S3に光が入射しないため、電圧信号V(S3)は、ほとんど発生していない。
【0061】
さらに、上述の実施形態の方位センサ装置60における追尾制御部62の動作を検証するため、各電圧信号の測定値に基づいて偏差Exを算出した。その結果、図15に示すように、偏差Exと仰角変位量Δφの間にほぼ直線的な関係が得られた。従って、ソーラーパネル追尾動作の制御を行う場合、太陽の仰角φに応じて制御利得を補正する等しなくとも、単純な制御手法を用いて、高速で安定度の高い追尾動作を実現することができる。また、光強度Lに強弱があっても、偏差Exと仰角変位量Δφの直線的な関係は一致した。従って、ソーラーパネル追尾動作の制御を行う場合、晴れた日と曇りの日で太陽光の強度が変動しても、常に一定の追尾動作を行うことができる。
【図面の簡単な説明】
【0062】
【図1】この発明の第一の実施形態の方位センサ装置を示すブロック図である。
【図2】この実施形態のセンサモジュールの斜視図である。
【図3】この実施形態のセンサモジュールの平面図(a)と側面図(b)である。
【図4】この実施形態の信号出力部の内部を示すブロック図である。
【図5】光源から受光面M1に光が照射する様子を示す斜視図である。
【図6】光源の位置等を定義する極座標系を示す図である。
【図7】この実施形態のセンサモジュールが太陽光を受光する原理を説明する平面図(a)とA−A断面図(b)である。
【図8】この発明の第二の実施形態の方位センサ装置を用いて構成された太陽光発電システムを示す全体図である。
【図9】この発明の第三の実施形態の方位センサ装置を用いて構成された太陽光発電システムを示す全体図である。(a)と、
【図10】第三の実施形態の方位センサ装置を用いて構成された太陽光発電システムの追尾制御部の動作を示すフローチャートである。
【図11】この発明の一実施例の実験方法を説明する側面図である。
【図12】この実施例のI/V変換器の回路図である。
【図13】この実施例の電圧信号V(S0)と仰角φとの関係を示すグラフである。
【図14】この実施例の電圧信号V(S0),V(S3),V(S4)と仰角φとの関係を示すグラフである。
【図15】この実施例において、電圧信号の偏差Exと仰角φとの関係を、光強度の強い場合と弱い場合の各々について示すグラフである。
【符号の説明】
【0063】
10,40,60 方位センサ装置
12 センサモジュール
14 電気信号処理部
18,20,22,24,26 フォトダイオード
30 信号出力部
32 演算部
44 ソーラーパネル
50 方位角可変アクチュエータ
52 仰角可変アクチュエータ
54,62 追尾制御部
P 光源(太陽)
L,L0,L1,L2,L3,L4 光強度
S0,S1,S2,S3,S4 検出面
【特許請求の範囲】
【請求項1】
空中を直線的に伝搬するエネルギー媒体が入射する平らな検出面が設けられ、入力したエネルギー媒体を電気信号に変換する複数のセンサ素子と、
前記複数のセンサ素子が、前記検出面の法線が互いに非平行の位置であって、前記エネルギー媒体を、少なくとも三つの前記検出面で同時に受ける向きに立体配置されたセンサモジュールと、
各センサ素子から出力された前記電気信号のうち少なくとも三つに基づいて、前記エネルギー媒体の強度情報及び発生源の方位情報を出力する電気信号処理部とを備えたことを特徴とする方位センサ装置。
【請求項2】
前記センサモジュールは、五つの前記センサ素子を備え、各センサ素子の前記検出面は、四角錐台の上底面とその側方に位置した四つの斜平面に外向きに各々配置され、
前記電気信号処理部は、少なくとも前記上底面側に配置された前記センサ素子が出力する電気信号に基づいて方位情報を出力可能としたことを特徴とする請求項1記載の方位センサ装置。
【請求項3】
前記エネルギー媒体は光であって、前記センサ素子は光検出素子であることを特徴とする請求項1または2記載の方位センサ装置
【請求項4】
前記電気信号処理部の出力に基づいて制御対象物の方位角および仰角を駆動制御する追尾制御部を備えたことを特徴とする請求項1乃至3記載の方位センサ装置。
【請求項5】
前記追尾制御部は、前記電気信号処理部が出力する前記エネルギー媒体の強度情報が、所定の値になるように、前記制御対象物の方位角および仰角を駆動制御することを特徴とする請求項4記載の方位センサ装置
【請求項6】
前記センサモジュールは、前記制御対象物に取り付けられ、前記制御対象物と一体に変位することを特徴とする請求項5記載の方位センサ装置。
【請求項1】
空中を直線的に伝搬するエネルギー媒体が入射する平らな検出面が設けられ、入力したエネルギー媒体を電気信号に変換する複数のセンサ素子と、
前記複数のセンサ素子が、前記検出面の法線が互いに非平行の位置であって、前記エネルギー媒体を、少なくとも三つの前記検出面で同時に受ける向きに立体配置されたセンサモジュールと、
各センサ素子から出力された前記電気信号のうち少なくとも三つに基づいて、前記エネルギー媒体の強度情報及び発生源の方位情報を出力する電気信号処理部とを備えたことを特徴とする方位センサ装置。
【請求項2】
前記センサモジュールは、五つの前記センサ素子を備え、各センサ素子の前記検出面は、四角錐台の上底面とその側方に位置した四つの斜平面に外向きに各々配置され、
前記電気信号処理部は、少なくとも前記上底面側に配置された前記センサ素子が出力する電気信号に基づいて方位情報を出力可能としたことを特徴とする請求項1記載の方位センサ装置。
【請求項3】
前記エネルギー媒体は光であって、前記センサ素子は光検出素子であることを特徴とする請求項1または2記載の方位センサ装置
【請求項4】
前記電気信号処理部の出力に基づいて制御対象物の方位角および仰角を駆動制御する追尾制御部を備えたことを特徴とする請求項1乃至3記載の方位センサ装置。
【請求項5】
前記追尾制御部は、前記電気信号処理部が出力する前記エネルギー媒体の強度情報が、所定の値になるように、前記制御対象物の方位角および仰角を駆動制御することを特徴とする請求項4記載の方位センサ装置
【請求項6】
前記センサモジュールは、前記制御対象物に取り付けられ、前記制御対象物と一体に変位することを特徴とする請求項5記載の方位センサ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2009−210280(P2009−210280A)
【公開日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願番号】特願2008−50824(P2008−50824)
【出願日】平成20年2月29日(2008.2.29)
【出願人】(305060567)国立大学法人富山大学 (194)
【公開日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願日】平成20年2月29日(2008.2.29)
【出願人】(305060567)国立大学法人富山大学 (194)
[ Back to top ]