
方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法
【課題】歩行者の移動方向の方位を精度良く特定することができる方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法を提供する。
【解決手段】位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性(例えば、道路領域)と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。方位補正部178は、所定時間又は所定距離をカウントするための期間カウンタを備え、位置更新部175で歩行者の位置を道路上に特定した場合、測位方位をその特定位置の道路方位に補正することにより、歩行者の移動方向の方位を特定する。
【解決手段】位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性(例えば、道路領域)と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。方位補正部178は、所定時間又は所定距離をカウントするための期間カウンタを備え、位置更新部175で歩行者の位置を道路上に特定した場合、測位方位をその特定位置の道路方位に補正することにより、歩行者の移動方向の方位を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置特定の技術に関し、特に歩行者が携帯することによって歩行者の位置を検出する場合、その精度の維持を図るために歩行者の移動方向の方位を精度良く特定することができる方位特定装置、該方位特定装置を備える位置特定装置、前記方位特定装置を実現するためのコンピュータプログラム及び方位特定方法に関する。
【背景技術】
【0002】
車両等の移動体の位置を検出するためにナビゲーションで広く利用されている位置検出方法には、例えば、自立航法、衛星航法、地図マッチング法、ハイブリッド航法などがある。自立航法は、距離センサ、方位センサ又は角速度センサなど用い、例えば、経緯度座標系を基にした直交座標系に対する車両の走行の方位角と単位時間当たりの走行距離に基づいて、逐次車両位置を算出するものであるが、道路との整合性は考慮されておらず、走行距離の増加に応じて車両位置の誤差が累積するという問題がある。
【0003】
また、衛星航法は、GPS(Global Positioning System)を用いるものであり、検出される位置には、10〜20m程度の誤差を含む。GPSを用いるため、距離センサ、方位センサ又は角速度センサ等の車載のセンサは不要である。しかし、高架下の道路、建物に挟まれた道路、山道、街路樹等で覆われた道路では、所定数のGPS衛星から電波を受信することができず、検出精度が大きく劣化するという問題がある。また、道路間隔の狭い細街路では、走行道路を間違うという問題もある。
【0004】
また、地図マッチング法は、自立航法による走行軌跡と道路地図との整合性(マッチング)を考慮して車両の位置を検出するものである(特許文献1参照)。すなわち、自立航法による軌跡と、道路地図データとを比較して相関をとりながら、走行していると考えられる複数の道路候補の中から、最も確からしい道路を選定してゆく。そして、候補となる道路が1本に限定された時点で、自立航法により得られた車両の走行軌跡を道路に合致させる。しかし、限定した道路が間違っている場合、それ以降の位置検出が不能になるという問題がある。
【0005】
また、ハイブリッド航法は、衛星航法と地図マッチング法とを組み合わせたものであり、自立航法と衛星航法の誤差を勘案しながら、合理的に車両の位置を推定し、走行している道路を特定するものである(特許文献2参照)。ハイブリッド航法では、例えば、通常時には、地図マッチング法を用いて車両の位置を検出する。地図マッチング法で車両の位置が検出不能に陥った場合、衛星航法により車両の位置、方位を検出して車両の位置を推定し、道路地図データとの整合性を考慮して車両の位置を検出するものである。ハイブリッド航法を用いれば、特殊な場合を除けば、車両が走行している道路を間違う可能性は殆どなく、道路方向の位置精度も、平均的には10m程度の誤差範囲内であり、道路案内目的のナビゲーションでは、実用上殆ど問題ない精度レベルである。
【0006】
一方、歩行者の位置検出方法では、歩行者が携帯する携帯電話又は簡易型ナビゲーション装置等の携帯機器を用いて位置検出を行っている。このような携帯機器では、例えば、GPS衛星からの電波又は基地局との通信により歩行者の現在位置を検出する方法が実用化されている。
【特許文献1】特開昭63−148115号公報
【特許文献2】特開平2−275310号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、GPS衛星から電波を受信して位置を検出する場合、GPS衛星の受信状態が良いときには、位置誤差が10〜20m程度であるが、都心のビル等の建造物の谷間又は高架下の道路などでは、位置を検出することが不能となる場合、あるいは、マルチパス等の影響により位置誤差が数百m程度になり正確な位置が求められない場合がある。特に、歩行者の場合、車両等の移動体と異なり、建造物の近くを建造物に沿って歩く傾向があるため、GPS衛星からの電波の受信レベルが低下する。
【0008】
このため、例えば、ハイブリッド航法を用いて歩行者の位置を検出する場合に、GPS衛星からの電波の受信状況又は歩行者の周辺の環境状況等が悪化したときには、歩行者の歩行方位を求めるための測位データが一時利用することができず、例えば、相対方位センサのみにより測位しなければならない。従って、測位データを利用できない期間が長くなった場合には、歩行者の歩行方位の累積誤差が大きくなり、歩行者の位置を検出する際に検出位置の精度を維持するために必要な測位方位の精度が低下するという問題があった。
【0009】
本発明は、斯かる事情に鑑みてなされたものであり、歩行者の移動方向の方位を精度良く特定することができる方位特定装置、該方位特定装置を備える位置特定装置、前記方位特定装置を実現するためのコンピュータプログラム及び方位特定方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
第1発明に係る方位特定装置は、自身の位置を時系列に測位し、地図上で自身の移動方向の方位を特定する方位特定装置において、地図情報を記憶する記憶手段と、測位して得られた測位データに基づいて地図上の自身の位置を推定する位置推定手段と、該位置推定手段で推定した推定位置及び記憶した地図情報に基づいて、自身の位置を地図上の道路に特定する位置特定手段と、該位置特定手段で特定した位置の道路方位を自身の移動方向の方位として特定する方位特定手段とを備えることを特徴とする。
【0011】
第2発明に係る方位特定装置は、第1発明において、歩行者による携帯が可能であり、前記位置特定手段で特定した位置が歩行者の歩行位置であるか否かを判定する歩行位置判定手段を備え、前記方位特定手段は、前記歩行位置判定手段で歩行位置であると判定した場合、道路方位を自身の移動方向の方位として特定するように構成してあることを特徴とする。
【0012】
第3発明に係る方位特定装置は、第2発明において、計時手段を備え、前記歩行位置判定手段は、前記位置特定手段で特定した位置が唯一である状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする。
【0013】
第4発明に係る方位特定装置は、第3発明において、測位して得られた測位データに基づいて自身の移動方向の方位を推定する方位推定手段と、該方位推定手段で推定した方位の変動量を算出する方位変動量算出手段とを備え、前記歩行位置判定手段は、前記方位変動量算出手段で算出した変動量が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする。
【0014】
第5発明に係る方位特定装置は、第3発明又は第4発明において、前記位置推定手段で推定した推定位置と前記位置特定手段で特定した位置との位置ずれを算出する位置ずれ算出手段を備え、前記歩行位置判定手段は、前記位置ずれ算出手段で算出した位置ずれが所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする。
【0015】
第6発明に係る方位特定装置は、第3発明乃至第5発明のいずれか1つにおいて、測位データの信頼度を算出する信頼度算出手段を備え、前記歩行位置判定手段は、前記信頼度算出手段で算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする。
【0016】
第7発明に係る方位特定装置は、第1発明において、歩行者による携帯が可能であり、前記位置特定手段で特定した位置の道路方位が歩行者の歩行方位であるか否かを判定する歩行方位判定手段を備え、前記方位特定手段は、前記歩行方位判定手段で歩行方位であると判定した場合、道路方位を自身の移動方向の方位として特定するように構成してあることを特徴とする。
【0017】
第8発明に係る方位特定装置は、第7発明において、計時手段と、前記位置特定手段で特定した位置が複数ある場合、特定した各位置の道路方位の方位差を算出する方位差算出手段とを備え、前記歩行方位判定手段は、前記方位差算出手段で算出した方位差が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする。
【0018】
第9発明に係る方位特定装置は、第8発明において、測位して得られた測位データに基づいて自身の移動方向の方位を推定する方位推定手段と、該方位推定手段で推定した方位の変動量を算出する方位変動量算出手段とを備え、前記歩行方位判定手段は、前記方位変動量算出手段で算出した変動量が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする。
【0019】
第10発明に係る方位特定装置は、第8発明又は第9発明において、前記位置推定手段で推定した推定位置と前記位置特定手段で特定した位置との位置ずれを算出する位置ずれ算出手段を備え、前記歩行方位判定手段は、前記位置ずれ算出手段で算出した位置ずれが所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする。
【0020】
第11発明に係る方位特定装置は、第8発明乃至第10発明のいずれか1つにおいて、測位データの信頼度を算出する信頼度算出手段を備え、前記歩行方位判定手段は、前記信頼度算出手段で算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする。
【0021】
第12発明に係る位置特定装置は、第1発明乃至第11発明のいずれか1つに係る方位特定装置を備え、該方位特定装置で特定した方位に基づいて自身の位置を特定することを特徴とする。
【0022】
第13発明に係るコンピュータプログラムは、コンピュータに、自身の位置を時系列に測位させ、地図上で自身の移動方向の方位を特定させるためのコンピュータプログラムにおいて、コンピュータを、測位して得られた測位データに基づいて地図上の自身の位置を推定する位置推定手段と、推定した推定位置及び地図情報に基づいて、自身の位置を地図上の道路に特定する位置特定手段と、特定した位置の道路方位を自身の移動方向の方位として特定する方位特定手段として機能させることを特徴とする。
【0023】
第14発明に係る方位特定方法は、自身の位置を時系列に測位し、地図上で自身の移動方向の方位を特定する方位特定方法において、地図情報を記憶してあり、測位して得られた測位データに基づいて地図上の自身の位置を推定し、推定した推定位置及び記憶した地図情報に基づいて、自身の位置を地図上の道路に特定し、特定した位置の道路方位を自身の移動方向の方位として特定することを特徴とする。
【0024】
第1発明、第13発明及び第14発明にあっては、方位特定装置は、自身の位置を時系列に測位し、測位して得られた測位データに基づいて地図上の自身の位置を推定する。自身の位置を時系列に測位するには、例えば、GPS、基地局通信、距離センサ、方位センサなどの測位データを用いることができる。また、光ビーコン、電波ビーコン等の通信により測位することもできる。方位特定装置は、推定した推定位置及び地図情報に基づいて、自身の位置を地図上の道路に特定する。自身の位置を地図上の道路に特定するには、例えば、地図マッチング法により推定位置を地図上の道路に更新することにより行うことができる。方位特定装置は、地図情報により、特定した位置の道路方位を求め、求めた道路方位を自身(歩行者)の移動方向の方位として特定する。これにより、自身(歩行者)の移動方向の方位を特定した位置の道路の方位と一致させることができ、自身の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができ、歩行者の移動方向の方位を精度良く特定することができる。
【0025】
第2発明にあっては、特定した位置が歩行者の歩行位置であるか否かを判定し、歩行位置であると判定した場合、道路方位を自身の移動方向の方位として特定する。特定した位置が歩行者の歩行位置であるか否かの判定は、歩行位置以外のものを除外することができるものであればよく、例えば、特定した位置が唯一つのみである場合とすることができる。これにより、精度良く歩行者の移動方向の方位を特定することができる。
【0026】
第3発明にあっては、特定した位置が唯一である状態が所定時間及び/又は所定距離に亘って継続したとき、特定した位置を歩行者の歩行位置であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0027】
第4発明にあっては、方位特定装置は、測位して得られた測位データに基づいて自身の移動方向の方位を推定し、推定した方位の変動量を算出する。方位特定装置は、算出した変動量が所定の閾値(例えば、2度、3度など)より小さい状態が所定時間(例えば、20秒、30秒など)及び/又は所定距離(例えば、20m、30m等)に亘って継続した場合、歩行位置であると判定する。これにより、歩行者が直進していると判定される状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0028】
第5発明にあっては、方位特定装置は、推定した推定位置と特定した位置との位置ずれを算出し、算出した位置ずれが所定の閾値(例えば、50m等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0029】
第6発明にあっては、方位特定装置は、測位データの信頼度を算出し、算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。測位データの信頼度は、例えば、GPS、地磁気センサ等の方位センサなどの測位データの信頼性とすることができる。GPSの場合、GPSの受信レベルに応じて信頼度を設定することができる。また、地磁気センサの出力レベルに応じて信頼度を設定することができる。建物内など屋内では、GPSの受信レベル又は基地局通信の通信レベルが低下し、あるいは、建物に含まれる鉄板等により地磁気センサの出力レベルが低下する。これにより、測位方位の信頼性が低い場合に、自身(歩行者)の方位を特定した位置の道路の方位と一致させて、自身の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができる。
【0030】
第7発明にあっては、方位特定装置は、特定した位置の道路方位が歩行者の歩行方位であるか否かを判定し、歩行方位であると判定した場合、道路方位を自身の移動方向の方位として特定する。特定した位置の道路方位が歩行者の歩行方位であるか否かの判定は、歩行方位以外のものを除外することができるものであればよく、例えば、複数の位置が特定された場合に、各特定位置の道路方位がほぼ等しいときとすることができる。これにより、精度良く歩行者の移動方向の方位を特定することができる。
【0031】
第8発明にあっては、方位特定装置は、特定した位置が複数ある場合、特定した各位置の道路方位の方位差を算出し、算出した方位差が所定の閾値(例えば、2度、3度等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。これにより、歩行者の位置を唯一に特定できない状況であっても、それぞれの特定位置の道路方位に所定の閾値より大きな方位差がない場合には、歩行方位であるとして歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0032】
第9発明にあっては、方位特定装置は、測位して得られた測位データに基づいて自身の移動方向の方位を推定し、推定した方位の変動量を算出する。方位特定装置は、算出した変動量が所定の閾値(例えば、2度、3度等)より小さい状態が所定時間(例えば、20秒、30秒など)及び/又は所定距離(例えば、20m、30m等)に亘って継続した場合、歩行方位であると判定する。これにより、歩行者が直進していると判定される状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0033】
第10発明にあっては、方位特定装置は、推定した推定位置と特定した位置との位置ずれを算出し、算出した位置ずれが所定の閾値(例えば、50m等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0034】
第11発明にあっては、方位特定装置は、測位データの信頼度を算出し、算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。測位データの信頼度は、例えば、GPS、地磁気センサ等の方位センサなどの測位データの信頼性とすることができる。GPSの場合、GPSの受信レベルに応じて信頼度を設定することができる。また、地磁気センサの出力レベルに応じて信頼度を設定することができる。建物内など屋内では、GPSの受信レベル又は基地局通信の通信レベルが低下し、あるいは、建物に含まれる鉄板等により地磁気センサの出力レベルが低下する。これにより、測位方位の信頼性が低い場合に、自身(歩行者)の方位を特定した位置の道路の方位と一致させて、自身の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができる。
【0035】
第12発明にあっては、位置特定装置は、方位特定装置で特定した方位に基づいて、自身の位置を特定する。これにより、歩行者の移動方向の方位とともに歩行者の位置を精度良く特定することができる。
【発明の効果】
【0036】
本発明にあっては、歩行者の移動方向の方位を精度良く特定することができる。
【発明を実施するための最良の形態】
【0037】
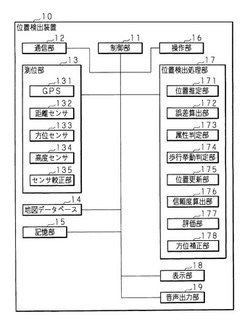
以下、本発明を実施の形態を示す図面に基づいて説明する。図1は本発明に係る方位特定装置としての位置検出装置10の構成の一例を示すブロック図である。本発明に係る位置検出装置10は、自身(歩行者)の位置を時系列に測位し、測位して得られた測位データに基づいて自身の位置を検出(特定)するとともに、歩行者の歩行方位を補正(特定)する。この場合、自身の位置を検出(特定)するとは、測位した測位位置よりもさらに高精度に自身の位置を検出(特定)することを意味する。位置検出装置10は、歩行者(自転車で走行する歩行者も含む)が携帯可能であって、装置全体を制御する制御部11、通信部12、測位部13、地図データベース14、記憶部15、操作部16、位置検出処理部17、表示部18、音声出力部19などを備える。また、測位部13は、GPS131、距離センサ132、方位センサ133、高度センサ134、センサ較正部135などを備える。また、位置検出処理部17は、位置推定部171、誤差算出部172、属性判定部173、歩行挙動判定部174、位置更新部175、信頼度算出部176、評価部177、方位補正部178などを備える。
【0038】
通信部12は、光ビーコン、電波ビーコン、RFID若しくはDSRC等の路上装置との間で通信を行う狭域通信機能、UHF帯若しくはVHF帯などの無線LAN等の中域通信機能、又は、携帯電話、PHS、多重FM放送若しくはインターネット通信などの広域通信機能を備える。通信部12は、例えば、交差点の周辺を範囲とした無線LAN等の中域通信を利用し、路上装置間の路路間通信、路上装置と車両との路車間通信、又は車々間通信で通信された地図情報又は交差点の信号情報などを取得する。ここで、路上装置としては、例えば、超音波感知器、光ビーコン若しくは画像感知器等の交通情報収集装置、交通情報を文字又は図形で提供する情報板装置、信号制御装置等がある。また、通信部12は、携帯電話等の広域通信を利用することにより、情報処理センタ又は交通管制センタ等のセンタ装置から歩行者の周辺の交差点の信号情報又は地図情報を取得することもできる。
【0039】
通信部12は、基地局との間で通信を行う通信機能を備え、複数の基地局からの電波を受信し、受信結果を測位部13へ出力する。また、通信部12は、路上装置との狭域通信により得られた通信地点の位置情報を測位部13へ出力する。
【0040】
測位部13は、歩行者の位置を時々刻々(例えば、0.5秒、1秒等の経過の都度、1m、2m等の移動の都度など)測位し(測位位置を求め)、歩行者の移動距離及び移動方位(測位方位)を時刻とともに測位軌跡として記憶部15に記憶する。
【0041】
GPS131は、複数のGPS衛星から電波を受信し、歩行者の位置を測位する。なお、GPS131に加えて、DGPS(ディファレンシャルGPS)を搭載することもできる。DGPSは、予め位置が分かっている基準局から発信されるFM放送又は中波を受信し、GPS131で求めた測位位置のずれを補正することができ、歩行者の位置の精度を向上させることができる。なお、携帯電話の複数の基地局からの電波により位置を概略的に測位する方式とGPSとを複合した形で測位することも可能である。これにより、屋内でGPS衛星からの電波を受信しにくい場合でも、位置精度が悪いものの一応位置を得ることができる確率が高くなる。
【0042】
距離センサ132は、非常に短い時間での速度、移動距離を検出することができる加速度センサ、比較的長い移動距離を検出することができる歩数センサなどを備えている。ここで歩数センサとして、例えば加速度センサを用いれば、歩行のピッチに合わせて生ずる急峻なデータが得られ、この数を計数することにより歩数や歩行速度を求めることができる。また、この場合、自転車に乗ってペダルをこいでいる場合、あるいは、歩道橋又は地下横断通路の階段を上下する場合には、急峻なデータの特性、例えば、ピーク値(歩行の強さ)が異なるため、これにより、ある程度歩行場所を特定することも可能である。これにより、自立航法において歩行者の位置を短時間かつ短距離の歩行毎に検出することができる。なお、都市圏以外で周囲にビル等がなくGPS衛星の測位精度が非常に良好な場合には、歩数センサを使用せず、GPSの位置測位の差により、歩行した距離を算出するようにしてもよい。また、本願では、歩行速度は、歩行ピッチ(単位時間当たりの歩数)を含む概念で用いる。
【0043】
方位センサ133は、角速度センサ又は角加速度センサ(相対方位センサ)、2次元又は3次元の地磁気センサ(絶対方位センサ)などを備えている。これにより、自立航法において歩行者の移動方位を短時間かつ短距離の歩行毎に検出することができる。また、地磁気センサにより、歩行者が鉄筋物で囲まれた建物内に存在すること、あるいは、歩行者が強い電場又は磁場がある踏切付近に存在することを検出することが可能である。
【0044】
高度センサ134は、気圧計又は加速度センサ等により歩行者の位置での高度を検出する。なお、GPS131、距離センサ132、方位センサ133、高度センサ134は、すべて備える構成でなくてもよい。
【0045】
センサ較正部135は、相対方位センサの場合、地図マッチング法により、歩行者が歩行する道路が特定され、歩行者の推定位置が確定した場合、相対方位センサのスケールファクタを道路地図の方位との差に基づいて較正する。また、歩数センサの場合には、地図マッチング法により2地点間の通過が確実であると判定した場合、その間の道路地図の距離とその間に計測された歩数とから歩数センサを較正する。なお、2地点間の測位軌跡により歩行距離を補正しても良い。
【0046】
測位部13は、測位した測位データ、通信部12を経由して得られた基地局からの電波の受信結果、又は路上装置との狭域通信により得られた通信地点の位置情報などに基づいて、測位位置及び測位位置の誤差を算出する。以下、測位位置及びその誤差の算出方法について説明する。
【0047】
図2は測位位置の誤差範囲の例を示す説明図である。直交座標系(x方向及びy方向)において、GPS、基地局又は路上装置との狭域通信により検出された位置の誤差範囲を、一例として、矩形領域(x方向の長さが4a、y方向の長さが4b)として設定する。すなわち、測位位置は、矩形領域の中心位置であり、誤差範囲は、中心位置からx方向に±2aの範囲だけ広がり、y方向に±2bの範囲だけ広がる。例えば、2aを2シグマと設定した場合、x方向の分散はa2 となり、標準偏差はaと設定することができる。また、2bを2シグマと設定した場合、y方向の分散はb2 となり、標準偏差はb2と設定することができる。
【0048】
路上装置との狭域通信による誤差は、GPS又は基地局通信の場合に比べて小さい(例えば、誤差範囲が数m)ため、誤差範囲は、路上装置との狭域通信を利用するか、GPS又は基地局通信を利用するかに応じて異なる。また、例えば、GPSを利用する場合、誤差範囲は、環境条件、より具体的には、GPSの受信レベル、捕捉衛星数、2次元又は3次元測位の別、CEP(Circular Error Probability)により時間的に変化する。また基地局通信の場合には、誤差範囲は、基地局との通信レベル、基地局の通信範囲等で時間的に変化する。誤差範囲を予め大きめに設定した所定の定数、場所又は時間に応じて予め決定した定数等を用いてもよい。また、誤差範囲の形状は、矩形形状に限らず、円形、楕円形等任意の形状でもよい。例えば、GPSのみで測位する場合、環境条件が良好なときには、誤差範囲として10〜20m程度を設定することができる。
【0049】
以下、歩行者の測位位置の算出方法について説明する。なお、測位位置は、直交座標系における二次元ベクトルで表現するが、3次元では、高度情報を加えるだけであり、容易に拡張可能である。また、以下の説明では、時刻で定式化しているが、実際の処理においては、単位時間の経過の都度の処理の代わりに単位歩行距離の都度処理を行ってもよい。また、以下、大文字のアルファベットはベクトル又は行列とする。
【0050】
時刻tにおける歩行者の位置P(t)を式(1)とすると、時刻t+1(時刻t、t+1の間隔は、所定時間であり、例えば、1秒、0.5秒などである)における歩行者の位置P(t+1)は、式(2)で表すことができる。あるいは、時刻tから歩行者が所定の歩行距離(例えば、1m、2mなど)を歩行した時刻を時刻t+1とすることもできる。なお、ベクトルに付した「T」は転置を意味する。また、式(2)は、歩行者の動特性を示すものである。なお、時刻tにおける歩行者の位置P(t)は、歩行者の真の位置(実際の位置)であり、未知の誤差の存在のため観測不可能な位置である。すなわち、歩行者の測位位置は、真の位置P(t)に対する最適な推定位置を求めるものである。
【0051】
【数1】

【0052】
ここで、D(t)は、式(3)で表され、d(t)は、時刻tから時刻t+1までに歩行者が移動(歩行)した距離、θ(t)は、直交座標系に対する歩行者の移動(歩行)の方位角である。また、E(t)は、式(4)で表され、e(t)は、移動距離d(t)の誤差である。また、誤差E(t)の分散Q(t)は、式(5)で表され、qは、単位距離移動での誤差分散であり、一定値とすることができる。
【0053】
また、時刻tにおいて、GPS、基地局通信又は路上装置との通信により検出された位置S(t)は、式(6)で表すことができる。ここで、G(t)は、位置S(t)の誤差であり、誤差G(t)の共分散行列R(t)は、式(7)で表すことができる。式(7)において、a、bそれぞれは、図2で示した誤差範囲である矩形領域のx方向及びy方向の長さの4分の1である。すなわち、共分散行列R(t)は、2a、2bを2シグマとした場合のx方向及びy方向の分散で構成されている。なお、E(t)、G(t)の平均値は0としても一般性は失わない。
【0054】
時刻tにおける歩行者の位置P(t)の最適な推定位置H(t)は、カルマンフィルタにより式(8)のような漸化式で表される。
【0055】
【数2】
【0056】
ここで、Γ(t)は、推定位置H(t)の推定誤差の分散であり、式(9)のような漸化式で表すことができる。また、行列に付した「−1」は、その行列の逆行列を意味する。また、初期時刻0における推定位置H(0)、その推定誤差の分散Γ(0)は、それぞれ式(10)、式(11)で表すことができる。ここで、Mは、歩行者の最初の位置の先験情報であり、Σは、その誤差分散である。仮に先験情報がない場合、M=0、Σ-1=0となり、初期時刻0における推定位置H(0)、その推定誤差の分散Γ(0)は、それぞれ式(12)、式(13)で表される。
【0057】
なお、式(6)は、GPS、基地局通信又は路上装置との通信により位置が検出された場合に得られるので、GPS、基地局通信又は路上装置との通信が行われない間は、式(7)における誤差a、bが十分大きな値と考えることにより、式(8)において、R-1(t)=0とすれば、式(8)をそのまま用いて推定位置を繰り返し算出することができる。すなわち、この場合は、自立航法のみで位置を測位することと等価になる。
【0058】
移動距離d(t)の誤差e(t)は、距離センサの種類により異なる。例えば、複数の種類の距離センサを同時に利用する場合には、各センサの誤差を結合した結合誤差を設定すれば良い。例えば、2種類のセンサで得られた距離をそれぞれd1、d2、誤差の分散をそれぞれq1、q2とすると、その結合距離を、式(14)で設定し、その結合誤差として分散は、式(15)で設定することができる。
【0059】
【数3】
【0060】
上述の定式化では、記述を簡単にするために、方位(方位角)θの誤差がないと仮定したが、方位(方位角)θの誤差f(t)を考慮して、線形近似することにより上述の定式化を容易に拡張することができる。この場合、誤差e(t)、G(t)と同様に、誤差f(t)の誤差分散を定義する。あるいは、方位誤差を考慮して、位置の誤差分散を大きくすることもできる。
【0061】
例えば、時刻tの方位θの計測値に誤差F(t)が累加した場合、高次の誤差を無視すれば、式(2)は式(16)及び式(17)のように拡張することができる。
【0062】
【数4】
【0063】
この場合、式(5)は、式(18)に置き換えればよい。ここで、uは方位θの誤差の分散である。なお、式(16)〜式(18)に代えて、式(5)のQ(t)を大きめに設定するだけとしてもよい。なお、以上の数式では、2次元の位置検出として定式化したが、高さの次元を加えて3次元で定式化してもよい。
【0064】
地図データベース14は、広範囲の地図情報を記憶してある。なお、歩行者の位置に応じて、その付近の地図情報をセンタ装置又は路上装置などの外部から通信で取得して記憶しておくこともできる。
【0065】
図3は地図情報の一例を示す模式図であり、図4は地図上の領域の属性の一例を示す説明図である。歩行者の位置を検出する場合には、車両の位置を検出する場合に比較して複雑かつ困難になる。すなわち、車両の場合には、推定した位置と地図上の車道との地図マッチングにより、車両の位置を検出することができるのに対し、歩行者の場合には、歩行者用の歩道以外に歩行者が歩行可能な領域は種々存在する。また、屋外のみならず屋内であっても歩行者の位置検出を行う必要性が高い。
【0066】
また、歩行者の位置を検出する場合、歩道と車道との分離等、きめ細かな地図マッチングが必要となるため、地図情報としても詳細のデータが必要になる。ただし、広範囲な地図情報を位置検出装置10の記憶部15に記憶しておく必要はなく、歩行者の位置に合わせて適宜、情報センタ装置又は路上装置等の外部から通信で取得しても良い。
【0067】
図3に示すように、地図上には、歩行者専用道路(歩道)、車道、横断歩道、ビル、小売店、公園、池など、種々の領域が存在する。そこで、図4に示すように、地図上の領域の属性を定義して、地図上の領域を分類する。属性は、まず、歩行可能領域と禁止領域とに区分する。禁止領域は、例えば、立入禁止区域、川、池、海、湖、沼、池、崖、鉄道敷地、皇居など、一般には歩行者の進入が禁止されている領域、あるいは進入が不可能な領域である。
【0068】
歩行可能領域は、屋内領域、道路領域及びその他領域に区分される。屋内領域は、例えば、ビル、地下道、駅舎、店舗、小売店、家屋、工場、地下街、建造物内部などである。道路領域は、例えば、歩行者専用道路、歩道・車道分離の幹線道路の場合の歩道、横断歩道、歩行者用陸橋(歩道橋)、地下横断道路、踏切、その他私有地の道路等(今後、何れも道路と呼ぶ)である。また、その他領域は、例えば、車道、公園、運動場、その他自由に歩行可能な全ての屋外の領域である。なお、屋内領域又はその他領域において、歩行者の歩行が限定されている場合には、その中に歩行通路(道路)を設定して道路領域とすることもできる。
【0069】
図3に示すように、道路領域は、歩行者専用道路、幹線道路の歩道、横断歩道、歩行者用陸橋、地下横断道路であり、屋内領域は、ビル、小売店、家屋であり、小売店には道路が設定されている。また、禁止領域は池であり、その他領域は幹線道路の車道、公園である。図3及び図4の情報に基づいて、地図上の道路(道路領域、地図マッチングのための線分)を設定することができる。なお、図4では、属性を歩行可能領域と禁止領域とに区分した上で、歩行可能領域を屋内領域、道路領域及びその他領域に区分し、各属性の例示として歩行者専用道路、横断歩道、歩行者用陸橋等を挙げたが、属性は上述のように階層構造に限定されるものではなく、歩行者専用道路、横断歩道、歩行者用陸橋等をそれぞれ1つの属性として定義することもできる。また、図4の例は一例であって、これに限定されるものではない。
【0070】
図5は地図上の道路の設定例を示す説明図である。図5に示すように、道路領域、屋内領域、その他領域の道路に対して、地図マッチングのための1又は複数の線分(標準歩行線、地図上の道路)を定義し、各線分の接続関係の情報を設定する。地図上の道路(道路領域)は、リンク及びノードにより構成することもでき、あるいは、線分に対する道路幅に相当する幅を設定することもできる。ノードは、地図上の道路の一部であり、リンクはノードの接続点、すなわち、地図上の道路の接続性を定義する。なお、設定される道路は、道路領域と同義である。
【0071】
例えば、図3の例に対して、地図上の道路は、図5のように設定される。地図上の道路には、道路幅の情報、接続関係の情報を含めることもできる。また、屋内領域、禁止領域には、それぞれの領域の範囲の情報を含めることもできる。その他領域に、領域の範囲の情報を含めてもよく、あるいは、道路領域、屋内領域、禁止領域の何れでもなければその他領域であると判断する場合、その他領域に領域の範囲の情報を含めなくてもよい。なお図3、図5には記していないが、領域と領域とを接続する地点又は道路(通路)を地図上に設定してもよい。例えば、道路上に屋内領域の地下街又は地下鉄駅舎に通じるための連絡口(階段、エレベータ、エスカレータ等)がある場合等であり、これにより、道路から屋内領域に移る場合に、歩行者の位置を修正することができる。
【0072】
記憶部15は、通信部12を介して受信した各種情報、測位部13で測位した測位データ、位置検出処理部17で処理した処理結果などを記憶する。なお、制御部11、位置検出処理部17などをCPU、RAMなどで構成する場合、制御部11、位置検出処理部17の処理手順を定めたコンピュータプログラムを記憶することもできる。
【0073】
操作部16は、各種操作ボタンを備え、歩行者と位置検出装置10とのユーザインタフェースとして機能する。例えば、操作部16は、歩行者の操作により位置検出装置10の動作の開始又は停止の操作を受け付ける。
【0074】
位置検出処理部17は、専用のハードウエア回路で構成してもよく、又は予め処理手順を定めたコンピュータプログラムを実行する構成であってもよい。
【0075】
位置推定部171は、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に算出された推定位置又は推定位置を更新して歩行者の位置として検出された検出位置と、測位部13で算出した測位位置の軌跡(測位軌跡)とに基づいて、地図上の推定位置(推定位置の軌跡)を算出する。より具体的には、直近又は前回に算出された推定位置又は検出位置から測位位置までの測位軌跡に沿った軌跡を求めることにより、推定位置の軌跡及び推定位置を算出する。
【0076】
誤差算出部172は、位置推定部171で推定した推定位置の誤差範囲を算出する。より具体的には、誤差算出部172は、後述するように推定位置を初期登録する場合、あるいは、推定位置を更新する場合、推定位置の誤差範囲を所定値に設定する。例えば、推定位置を初期登録した場合、推定位置の誤差範囲を測位位置の誤差範囲(例えば、20〜200m)とすることができる。また、道路上のカーブ、交差点等の特徴地点で推定位置を更新した場合、最小の誤差(例えば、道路幅程度の範囲)とすることができる。
【0077】
誤差算出部172は、初期登録した推定位置又は更新した推定位置の誤差範囲を所定値に設定した後は、設定した所定値に、初期登録又は更新した推定位置からの歩行者の移動距離又は移動方向に応じた値(例えば、測位誤差の増加分)を加算して誤差範囲を算出する。これにより、一旦歩行者の位置が決定(確定)され、その位置での誤差範囲を所定値に設定した後は、測位軌跡の増加(移動距離又は移動方位)に伴って測位誤差が増加した場合でも、測位軌跡に応じて、推定位置の適切な誤差範囲を求めることができる。なお、誤差範囲を常に適当な所定の一定値(例えば、100m)とすることもできる。
【0078】
属性判定部173は、誤差算出部172で算出した推定位置の誤差範囲内に存在する地図上の領域の属性を判定する。なお、推定位置の誤差範囲内に複数の属性が存在する場合には、推定位置に最も近い(距離が短い)領域の属性であると判定することができる。あるいは、各属性に優先順位を設定しておき、最も優先順位の高い属性であると判定することもできる。この場合、属性の優先順位は、例えば、順位の高いほうから道路領域、屋内領域、その他領域とすることもでき、あるいは、順位の高いほうから道路領域、その他領域、屋内領域とすることもできる。
【0079】
歩行挙動判定部174は、測位部13で得られた測位データに基づいて、歩行者の歩行挙動を判定する。歩行挙動は、歩行者の歩行特性を示すものであり、自転車に乗った場合の歩行特性も含む。歩行挙動は、例えば、歩行の開始、歩行速度、歩行速度の変動、歩行の強さ(例えば、歩数センサで加速が大きさで示されるレベル強度)、歩行の強さの変動、単位時間当たりの歩数(自転車の場合には、ペダルをこぐ回数)、歩数の変動、歩行方位、歩行停止などである。
【0080】
歩行挙動判定部174は、歩行挙動に基づいて歩行の乱れの有無を判定する。歩行の乱れは、例えば、所定の歩行速度又は単位時間当たりの歩数を基準として歩行速度が遅い又は歩数が少ない場合、歩行速度が略一定でなく歩行速度の変動が頻繁にある場合、歩行方位の蛇行又は周回性がある場合、あるいは、歩行の強さが不安定である場合などである。これにより、歩行者が横断歩道、歩行者用陸橋、踏切、地下横断通路等を歩行したり、屋内の階段、エレベータ、エスカレータを利用して上階や下階に行ったり、あるいは、店内を見回ったりしている可能性が判断できる。
【0081】
位置更新部175は、測位位置に基づいて推定位置の初期登録を行う。また、位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として特定(検出)する。この場合、評価部177で算出される評価係数に基づいて、最も確からしい推定位置を歩行者の位置として特定(検出)する。評価係数の詳細は後述する。なお、評価係数の逆数を相関度と定義し、相関度を用いることもできる。
【0082】
信頼度算出部176は、測位部13で測位した測位データの信頼度を算出する。より具体的には、信頼度算出部176は、距離センサ132、方位センサ133、高度センサ134などのセンサ単体でのデータの自己矛盾、あるいは、センサ相互のデータの矛盾又は地図情報との不整合などの異常の有無の判定、GPS131の測位データ及び基地局通信の信頼性を示す使用環境指標の算出などを行う。また、センサ等に異常があると判定した場合には、使用可能なセンサを選択するとともに、使用不可のセンサに対しては、そのセンサの誤差分散を無限大にする(又は大きくする)処理を行う。これにより、常にセンサの使用可否を監視する。以下、信頼度算出部176での処理の詳細について説明する。
【0083】
GPS131の異常の有無の判定は、例えば、GPS131で得られた測位データに基づいて測位した測位位置、歩行者の歩行速度、移動方位などの時間的変化に自己矛盾があるか否かで判定することができる。異常がある場合には、GPS131のデータの誤差分散を無限大にして利用しないようにする。また、このような異常な状況が、所定の時間及び/又は所定の距離の間継続した場合、GPS131の信頼度は低いとする。また、このような異常な状況がなくなった場合、GPS131のデータを利用するとともに、さらに正常な状況が所定の時間及び/又は所定の距離の間継続すれば、GPSの信頼度を正常な値に復帰させる。
【0084】
GPS131の使用環境指標としては、例えば、GPS131の受信レベル、捕捉衛星数、2次元又は3次元測位の別、CEP(Circular Error Probability)が所定の標準値以下であれば、異常であるとしてGPS131のデータの誤差分散を無限大にして利用しないようにする。また、このような異常な状況が、所定の時間及び/又は所定の距離の間継続した場合、GPS131の信頼度は低いとする。また、このような異常な状況がなくなった場合、GPS131のデータを利用するとともに、さらに正常な状況が所定の時間及び/又は所定の距離の間継続すれば、GPS131の信頼度を正常な値に復帰させる。
【0085】
基地局通信の使用環境指標としては、例えば、基地局との通信レベル、基地局の通信範囲等が所定の標準値より低下した場合、異常であるとして基地局通信によるデータの誤差分散を無限大にして利用しないようにする。また、このような異常な状況が、所定の時間及び/又は所定の距離の間継続した場合、基地局通信の信頼度は低いとする。また、このような異常な状況がなくなった場合、基地局通信のデータを利用するとともに、さらに正常な状況が所定の時間及び/又は所定の距離の間継続すれば、基地局通信の信頼度を正常な値に復帰させる。なお上記では、GPSと基地局通信とを区別したが、GPSと基地局通信とを結合した測位方式を利用してもよい。
【0086】
地磁気センサは、その検出原理から周辺の鉄板又は鉄筋等の存在、踏切等の電場又は磁場の存在により検出データにノイズが加わり、検出精度が低下することが多い。このような場合、仮に誤差がない場合でも、地磁気センサを使用しないようにしてもよい。また、建物内(屋内)又は踏切付近では、地磁気センサの検出データにノイズが加わるため、これを利用して歩行者が屋内又は踏切付近に存在する可能性が高いと判定することができる。
【0087】
センサ相互のデータの矛盾の有無の判定は、例えば、過去のある時刻で測位した測位方位(推定方位)に、その時刻から現在時刻までの相対方位センサのデータ増分を加えたものが、現在時刻での地磁気センサのデータと大きく乖離すれば、地磁気センサのデータが異常であるとみなして地磁気センサを利用しないようにすることができる。また、このような異常な状況が、所定の時間及び/又は所定の距離の間継続した場合、地磁気センサの信頼度は低いとする。また、このような異常な状況がなくなった場合、地磁気センサのデータを利用するとともに、さらに正常な状況が所定の時間及び/又は所定の距離の間継続すれば、地磁気センサの信頼度を正常な値に復帰させる。
【0088】
また、方位の誤差を考慮して定式化する場合には、地磁気センサの誤差分散としては、例えば、異常の場合に無限大(又は十分に大きな値)、正常の場合に標準値(例えば、平均的な誤差)とする。相対方位センサの誤差分散は、例えば、較正されたとき最小に設定し、時間又は距離が経過するにつれて誤差分散を増加させる。複数のセンサによる誤差分散は、各々のセンサの分散を結合すれば良い。また、他の相互チェックとしては、過去のある時刻の推定位置に、歩数センサから推定された距離を加えたものが、現在時刻でGPS131により測位した測位位置と大きく乖離すれば、GPS131の測位データが異常であるとみなすことができる。
【0089】
評価部177は、位置推定部171で算出した推定位置、及び位置更新部175で更新した推定位置を評価するための評価係数を算出する。評価係数は、推定位置の確からしさを評価するための係数であり、例えば、評価係数が小さいほど推定位置の確からしさ(確率)が大きいとすることができる。評価係数は、例えば、推定位置と測位位置との位置ずれ、カーブ、交差点等の特徴地点における推定位置と測位位置との位置ずれの差の平均、カーブ、交差点等の特徴地点における推定位置と道路との位置ずれ(距離ずれ)の平均等である。なお、評価係数の詳細は後述する。
【0090】
方位補正部178は、所定時間又は所定距離をカウントするための期間カウンタを備え、地図マッチング法により、位置更新部175で歩行者の位置を道路上に更新(特定)した場合、測位方位をその特定した位置(特定位置)の道路方位に補正することにより、歩行者の移動方向の方位を特定する。なお、方位補正の詳細は後述する。
【0091】
表示部18は、例えば、液晶表示パネルであって、歩行者に自身の位置を地図上に表示する。
【0092】
音声出力部19は、歩行者の位置を表示部18で表示する際に、歩行者に所要の情報を通知するため、又は注意を促すため音声又は音響を出力する。
【0093】
次に位置検出装置10の地図マッチング法による位置検出処理について説明する。なお、以下の説明では、屋内領域及びその他領域には通路(道路)が設定されていないものとする。通路が設定されている場合には、その通路を道路として取り扱うことができる。
【0094】
図6は推定位置の新規登録の一例を示す説明図である。推定位置の新規登録(初期登録)は、地図マッチング処理を開始した場合、あるいは、推定位置の候補が1つもなくなってしまった場合に行う処理である。
【0095】
推定位置の新規登録を行うか否かは、例えば、次の条件(1)、条件(2)により判定する。すなわち、条件(1)及び条件(2)の両方を充足する場合、推定位置の新規登録を実施せず、条件(1)又は条件(2)のいずれかが充足しない場合、推定位置の新規登録を行う。条件(1)は、センサ等の信頼度が所定の閾値以下(信頼性が悪い)場合であり、例えば、GPS131の信頼性が悪い場合、地磁気センサの信頼性が悪い場合などである。また、条件(2)は、所定の範囲(時間及び/又は距離)以上、歩行の乱れがある場合である。すなわち、条件(1)及び条件(2)を充足する場合、歩行者の位置は屋内領域にある可能性が高いため、歩行者が屋内領域から屋外領域に出るまで地図マッチング処理を実施しない。
【0096】
図6に示すように、測位位置Aの誤差範囲内に道路領域、すなわち、地図上の道路があるか否かを判定し、道路(道路領域)がある場合には、測位位置Aに最も近い当該道路上の地点を測位位置Aに対応する新規の推定位置として登録する。図6では、誤差範囲内に2つの道路が存在するため、それぞれの道路において測位位置Aから最も近い地点M、Nを推定位置として登録する。この場合、測位位置Aまでの測位軌跡の方位又は測位位置Aでの測位方位とほぼ方位が一致する道路を予め登録しておくこともできる。仮に、測位軌跡の方位又は測位方位と道路の方位とが略一致するような道路がない場合には、誤差範囲内に登録できる道路が存在するまで推定位置の新規登録を行わずに待機する。
【0097】
推定位置を新規に登録した場合、その推定位置に対応する測位位置の誤差範囲を、新規登録した推定位置の誤差範囲として設定(登録)する。図6の例では、推定位置M、Nの誤差範囲は、推定位置Aの誤差範囲を引き継ぐ。また、新規登録した推定位置M、Nとそれに対応する測位位置Aとの位置ずれに基づいて、推定位置M、Nの評価係数を算出する。
【0098】
図7は新規登録した推定位置の評価係数の算出の一例を示す説明図である。図7の例は、測位位置Aに対応させて推定位置Mを新規登録した場合を示す。測位位置Aの座標を(X、Y)、新規登録した推定位置Mの座標を(x、y)とすると、推定位置Mの評価係数Cは、C=C1+C2とすることができる。ここで、C1=|x−X|、C2=|y−Y|で表わすことができる。すなわち、推定位置Mの評価係数Cは、推定位置Mと測位位置Aのx座標の差、推定位置Mと測位位置Aのy座標の差とすることができる。この場合、評価係数が小さいほど、推定位置の確からしさ(確率)が高いということができる。評価係数Cは、x座標毎、y座標毎に算出するだけでなく、x座標とy座標の絶対値の和、あるいは、自乗和の平方根等により1つの指標とすることもできる。これにより、推定位置Mが測位位置Aに対して、どの程度確かな位置であるかを把握することができる。
【0099】
次に、新規登録後の推定位置の軌跡の算出例について説明する。図8は推定位置の軌跡の算出例を示す説明図である。図8の例では、測位位置Aに対応させて推定位置Mを新規登録した場合を示す。図8(a)に示す推定位置の軌跡の算出例は、推定位置Mを起点として、測位位置Aからの測位軌跡をそのまま平行移動(ずらす)させることにより、推定位置の軌跡を求めるものである。
【0100】
図8(b)の場合は、図8(a)の場合において、地図上の道路の方位と推定位置の軌跡の方位又は推定位置での方位との方位差が所定の閾値より小さい場合には、所定時間の経過及び/又は所定距離の移動の都度、推定位置を道路上に更新(修正)する。なお、推定位置を道路上の位置に更新する際に、位置ずれに応じた値を評価係数に加算してもよい。
【0101】
図8(c)の場合は、図8(a)の場合において、地図上の道路の方位と推定位置の軌跡の方位又は推定位置での方位との方位差が所定の閾値より小さい場合には、常時、推定位置を道路上に更新(修正)する。なお、推定位置を道路上の位置に更新する際に、位置ずれに応じた値を評価係数に加算してもよい。
【0102】
図8(d)の例は、図8(c)の場合において、地図上の道路の方位と推定位置の軌跡の方位又は推定位置での方位との方位差が所定の閾値を越えたときに、道路上の位置に更新(修正)することは行わないことを示す。なお、図8(a)、図8(b)の場合には、表示部18に表示させるときだけ、地図上に修正することもできる。
【0103】
図8(e)の例は、図8(c)が道路を線分で表現した場合の推定位置の修正例であるのに対して、道路を2次元図形そのままで表現した場合に推定位置を修正する例である。
【0104】
推定位置の誤差範囲は、推定位置の新規登録(初期登録)では、測位誤差(例えば、20〜200mの範囲)とすることができる。また、推定位置の誤差範囲は、カーブ、交差点等の特徴地点で推定位置を道路上の位置に更新(修正)した場合には、最小の誤差範囲(例えば、道路幅程度)とすることができる。その後、歩行者が歩行するにつれて、測位誤差が累加されるため、推定位置の誤差範囲を増加させることができる。これにより、一旦歩行者の位置が決定(確定)され、その位置での誤差範囲を所定値に設定した後は、測位軌跡の増加(移動距離又は移動方位)に伴って測位誤差が増加した場合でも、測位軌跡に応じて、推定位置の適切な誤差範囲を求めることができる。なお、推定位置の誤差範囲を常に適当な所定の一定値(例えば、100m)とすることもできる。これにより、位置検出の処理労力を低減することができる。
【0105】
次に、推定位置の更新方法について説明する。推定位置の更新は、例えば、推定位置の誤差範囲内の地図上の領域の属性、道路の接続特性、道路領域と他の領域との接続特性、歩行者の歩行挙動、測位データの信頼度(信頼性)、推定位置の評価係数等に基づいて行う。また、推定位置が妥当でない場合には、推定位置の棄却を行う。
【0106】
図9は推定位置の更新の一例を示す説明図である。図9の例では、歩行者は屋外を歩行しているものとする。測位位置Aまでの測位軌跡に対応して、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に更新した推定位置からの推定位置の軌跡により、測位位置Aに対応して2つの推定位置M、Nが存在するとする。推定位置Mの誤差範囲内には、道路(道路領域)が存在するので、推定位置Mを道路上の位置に更新する。また、推定位置Mと更新した推定位置との位置ずれに対応する値を推定位置Mの評価係数に加算して、更新した推定位置の評価係数として引き継ぐようにしてもよい。また、カーブ、交差点等の特徴のある地点において、推定位置Mの位置ずれを補正して推定位置を更新し、評価係数、誤差範囲を更新することもできる。この場合、更新する誤差範囲としては、例えば、最小値(道路幅程度の範囲)を設定することができる。なお、推定位置の方位と道路の方位との方位差が所定の閾値より小さいか否かを判定し、方位差が閾値より大きい場合、推定位置を道路上に更新しないようにすることもできる。
【0107】
推定位置Nの誤差範囲内では、前回又は直近で更新した推定位置が存在していた道路(道路領域)が誤差範囲外となるため、誤差範囲内に別の道路があるか否かを判定する。仮に別の道路が存在する場合、推定位置をその道路の位置に更新するとともに、推定位置Nの誤差範囲、評価係数を更新した推定位置の誤差範囲、評価係数として引き継ぐ。仮に更新すべき道路がないと判定した場合、推定位置の属性を判定し、判定した属性がその他領域であれば、推定位置Nから、歩行者の歩行に伴う歩行軌跡の変化分を累計した位置を推定位置の軌跡とし、評価係数、誤差範囲を引き継ぐ。また、判定した属性が禁止領域であれば、推定位置Nを棄却する(図9参照)。
【0108】
図10は推定位置の更新の他の例を示す説明図である。図10の例は、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に更新した推定位置が存在する道路が2つの道路に分岐するような場合である。測位位置Aまでの測位軌跡に対応して、前回に更新した推定位置からの推定位置の軌跡により、測位位置Aに対応して1つの推定位置Mが存在するとする。推定位置Mの誤差範囲内には、分岐した一方の道路(道路領域)が存在するので、推定位置Mを道路上の位置に更新する。また、推定位置Mと更新した推定位置との位置ずれに対応する値を推定位置Mの評価係数に加算して、更新した推定位置の評価係数として引き継ぐようにしてもよい。推定位置Mの誤差範囲外となった他方の道路上の推定位置は棄却する。なお、この場合においても、カーブ、交差点等の特徴のある地点において、推定位置Mの位置ずれを補正して推定位置を更新し、評価係数、誤差範囲を更新することもできる。
【0109】
図11は推定位置の更新の他の例を示す説明図である。図11の例も、前回又は直近に更新した推定位置が存在する道路が2つの道路に分岐するような場合である。測位位置Aまでの測位軌跡に対応して、前回又は直近で更新した推定位置からの推定位置の軌跡により、測位位置Aに対応して1つの推定位置Mが存在するとする。推定位置Mの誤差範囲内には、分岐した両方の道路(道路領域)が存在するので、推定位置Mを各道路上の位置に更新する。更新した推定位置を第1候補の推定位置及び第2候補の推定位置とする。また、推定位置Mと第1候補の推定位置及び第2候補の推定位置との位置ずれに対応する値を推定位置Mの評価係数に加算して、第1候補の推定位置及び第2候補の推定位置の評価係数として引き継ぐようにしてもよい。なお、この場合においても、カーブ、交差点等の特徴のある地点において、推定位置Mの位置ずれを補正して推定位置を更新し、評価係数、誤差範囲を更新することもできる。
【0110】
次に、カーブ、交差点等の特徴地点での推定位置の評価係数の算出方法について説明する。図12は特徴地点での推定位置の評価係数の算出の一例を示す説明図である。図12の例では、カーブ等の特徴地点B1、B2、B3において、測位位置A1、A2、A3に対応して道路上の位置に更新した推定位置M1、M2、M3があるとする。測位位置A1と推定位置M1との位置ずれを(x1、y1)とし、測位位置A2と推定位置M2との位置ずれを(x2、y2)とし、測位位置A3と推定位置M3との位置ずれを(x3、y3)とする。また、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に更新した推定位置と対応する測位位置との位置ずれを(x0、y0)とする。推定位置(例えば、推定位置M3)の評価係数を、推定位置と測位位置との位置ずれの差の平均値として求めることができる。
【0111】
すなわち、x方向の位置ずれの差の平均値は、{|x1−x0|+|x2−x1|+|x3−x2|}/3となり、y方向の位置ずれの差の平均値は、{|y1−y0|+|y2−y1|+|y3−y2|}/3となる。各特徴地点B1、B2、B3での位置ずれが等しいほど評価係数は小さくなり、推定位置の確からしさ(確率)が大きいといえる。これにより、推定位置が測位位置に対して、どの程度確かな位置であるかを把握することができる。
【0112】
なお、評価係数として、各特徴地点での位置ずれの差の2乗を合計して平均し、平均した値の平方根を求めることもできる。また、平均値に代えて、中央値、最大値と最小値の和の2分の1の数値など他の統計値を用いることもできる。
【0113】
図13は特徴地点での推定位置の評価係数の算出の他の例を示す説明図である。図13の例では、カーブ等の特徴地点B1、B2、B3において、測位位置A1、A2、A3に対応して推定位置M1、M2、M3があるとする。地点B1の位置と推定位置M1との位置ずれ(距離)をd1とし、地点B2の位置と推定位置M2との位置ずれ(距離)をd2とし、地点B3の位置と推定位置M3との位置ずれ(距離)をd3とする。推定位置(例えば、推定位置M3)の評価係数を、道路上の特徴地点と推定位置との位置ずれ(距離)の平均値(d1+d2+d3)/3として求めることができる。
【0114】
すなわち、推定位置と道路の位置との距離が短いほど、評価係数は小さく、推定位置の確からしさ(確率)が大きいといえる。これにより、推定位置が道路に対して、どの程度確かな位置であるかを把握することができる。
【0115】
図14は推定位置の評価係数の他の例を示す説明図である。推定位置の評価係数を求める場合に、図12、図13の例で示すような道路上のカーブ、交差点等の特徴地点のように、明らかな方位変更がある地点で評価係数を算出する構成に限定されず、例えば、図14に示すように、推定位置の軌跡又は測位軌跡と地図上の道路形状とのマッチングを評価することもできる。なお、上述したような複数の種類の評価係数のいずれか1つを用いて評価することもでき、あるいは、複数種類の評価係数に適宜重み付けを行って合算し、1つの評価係数として用いることもできる。
【0116】
次に、推定位置の評価係数を更新(補正)する方法について説明する。道路上の位置に更新した推定位置が横断歩道又はその付近にある場合に、歩行者の歩行速度の増加又は歩行停止を検出したときは、歩行者が横断歩道内又は横断歩道付近にいる確率が高いとして、推定位置の評価係数に所定の1以下の数値(例えば、m1=1/3)を積算することにより評価係数が小さくなるように更新する。なお、上記評価係数に所定の1以下の数値を積算することにより評価係数が小さくなるように更新する場合、実際には、評価係数と数値(デフォルト値は1)とのデータを用意しておき、評価係数の記憶データはそのままにして、積算すべき数値を変更するという形態とし、他の推定位置と比較するとき等に、見かけ上の評価係数として上記積算値を利用することもできる。これにより、以後の評価係数の算出が矛盾なく実施可能となる。
【0117】
また、道路上の位置に更新した推定位置が横断歩道又はその付近にある場合に、青信号開始時点での歩行挙動又は赤信号開始時点での歩行挙動に応じて評価係数を更新する。例えば、青信号開始時点で歩行停止から歩行開始になった場合、歩行者が横断歩道を歩行している確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m2=1/5)を積算することにより評価係数が小さくなるように更新する。また、赤信号開始時点で歩行速度の増加があった場合、歩行者が横断歩道を歩行している確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m3=1/5)を積算することにより評価係数が小さくなるように更新する。
【0118】
また、道路上の位置に更新した推定位置が歩行者用陸橋にある場合に、階段歩行における歩行速度の変動又は歩行の強さの変動を検出したときは、歩行者が歩行者用陸橋を歩行している確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m4=1/5)を積算することにより評価係数が小さくなるように更新する。この場合、高度の増加又は減少があるか否かを判定し、高度の増加又は減少がある場合、評価係数を小さくなるように更新することもできる。
【0119】
また、道路上の位置に更新した推定位置が地下横断通路にある場合に、階段歩行における歩行速度の変動又は歩行の強さの変動を検出したときは、歩行者が地下横断通路を歩行している確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m5=1/5)を積算することにより評価係数が小さくなるように更新する。この場合、GPS131の信頼性が低い、地磁気センサの信頼性が低い、歩行速度の変動又は歩行の強さの変動等により所定の数値として、例えば、m5=1/5を用いることができる。また、高度の増加又は減少があるか否かを判定し、高度の増加又は減少がある場合、評価係数を小さくなるように更新することもできる。
【0120】
また、道路上の位置に更新した推定位置が踏切の付近にある場合に、歩行者の歩行停止を検出したときは、あるいは、地磁気センサの検出レベルにノイズが加わったときは、歩行者が踏切手前で立ち止まっている確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m6=1/3)を積算することにより評価係数が小さくなるように更新する。
【0121】
上述のように、評価係数を小さくなるように更新して、推定位置の確からしさを大きくすることができ、位置検出の精度を判定することができる。また、推定位置に基づいて自身の位置を検出する場合に、推定位置の候補が複数存在するようなときでも、最も確からしい推定位置に基づいて自身の位置を検出し続けることが可能となる。なお、評価係数の値を小さくする代わりに、他の推定位置を全て棄却してもよい。これは推定位置の初期位置を特定することに相当する。
【0122】
推定位置の候補が複数ある場合には、推定位置の候補の中で最も評価係数の小さい推定位置を歩行者の位置であるとし、評価係数が所定の閾値より大きい推定位置を候補対象から棄却することができる。また、閾値以上の歩行距離で、その他領域の推定位置と道路領域の推定位置とが存在する場合には、その他領域の推定位置は存在確率が低いとして棄却してもよい。さらに、測位位置の誤差範囲外となる推定位置は棄却することができる。また、推定位置が1つだけ存在し、その推定位置が道路上にある状況が所定時間又は所定距離の間続いた場合に、その推定位置を歩行者の位置として確定し、確定した推定位置の評価係数を0にする。また、推定位置が1つも存在しない場合、新規の推定位置が得られるまでの間、測位位置又は直近の推定位置からの測位軌跡を累計した位置を、仮の推定位置(暫定位置)とすることができる。
【0123】
図15はその他領域から道路領域への推定位置Mの更新例を示す説明図である。図15に示すように、推定位置Mの誤差範囲内に道路領域及びその他領域があると判定した場合、歩行者が道路上にいる確率が高いとして、推定位置Mを道路上の位置に更新する。この場合、推定位置Mでの歩行方位と道路の方位とが略一致するか否かを判定し、両者の方位が略一致すると判定された場合に、推定位置Mを道路上の位置に更新するようにしてもよい。推定位置Mを更新した場合、上述の例と同様に、評価係数、誤差範囲を更新又は引き継ぐことができる。
【0124】
図16は屋内領域への推定位置Mの更新例を示す説明図である。位置検出装置10を携帯した歩行者が屋内にいる場合、次の条件(1)及び条件(2)の両方を充足すると考えられる。すなわち、条件(1)は、センサ等の信頼度が所定の閾値以下(信頼性が悪い)場合であり、例えば、GPS131の信頼性が悪い場合、地磁気センサの信頼性が悪い場合などである。また、条件(2)は、所定の範囲(時間又は距離)以上、歩行の乱れがある場合である。歩行の乱れは、例えば、所定の歩行速度又は単位時間当たりの歩数を基準として歩行速度が遅い又は歩数が少ない場合、歩行速度が略一定でなく歩行速度の変動が頻繁にある場合、歩行方位の蛇行又は周回性がある場合、あるいは、歩行の強さが不安定である場合などである。上記の条件以外の別の考え方として、高度が大きく上昇した場合には、屋内である確率が高いことを利用してもよい。なお、歩行者が屋内のビルの屋上又はビルのベランダ等に出た場合には、一時的にGPS又は地磁気センサのデータが改善される場合があるが、信頼性の有無は瞬間値で決定しないため、問題ないと考えられる。もし問題となる場合には、上記した高度とを組み合わせて屋内の有無を判定してもよい。
【0125】
そこで、推定位置Mの誤差範囲内に屋内領域があると判定した場合に、センサ等の信頼度が所定の閾値より小さく、かつ歩行の乱れがあると判定したとき、歩行者が屋内領域にいるとして、推定位置Mを屋内領域内の位置(例えば、推定位置Mに最も近い屋内領域の位置)に更新する。推定位置を更新した後の推定位置は、更新地点からの歩行軌跡の変化分を累計した位置とする。また、評価係数、誤差範囲を更新又は引き継ぐことができる。これにより、歩行者が屋外から屋内へ移動した場合でも、精度良く位置を補足し続けることが可能となる。
【0126】
図17は屋内領域から別の屋内領域への推定位置Mの更新例を示す説明図である。図17に示すように、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に更新した推定位置の誤差範囲内に屋内領域が存在した場合に、推定位置Mの誤差範囲内から先の屋内領域が外れ、別の屋内領域があると判定した場合、推定位置Mをその別の屋内領域内の位置に更新する。これにより、複数の屋内領域が隣接するような状況が存在する場合に、歩行者が屋内領域を通過するときでも、歩行者の位置を補足し続けることが可能となる。
【0127】
図18は屋内領域から道路領域又はその他領域への推定位置Mの更新例を示す説明図である。位置検出装置10を携帯した歩行者が屋内から屋外に移動した場合、次の条件(1)及び条件(2)の両方が充足すると考えられる。すなわち、条件(1)は、センサ等の信頼度が所定の閾値以上となる(信頼性が回復)場合であり、例えば、GPS131の信頼性が回復した場合、地磁気センサの信頼性が回復した場合などである。また、条件(2)は、所定の範囲(時間又は距離)以上、歩行の乱れが回復した場合である。
【0128】
そこで、推定位置Mの誤差範囲内に道路領域又は歩行可能な屋外領域(その他領域)があると判定した場合に、センサ等の信頼度が所定の閾値より大きく、かつ歩行の乱れがないと判定したとき、推定位置Mをその道路領域内の位置又は屋外領域内の位置に更新する。推定位置を更新した後の推定位置は、更新地点からの歩行軌跡の変化分を累計した位置とする。また、評価係数、誤差範囲を更新又は引き継ぐことができる。これにより、歩行者が屋内から屋外へ移動した場合でも、精度良く位置を補足し続けることが可能となる。
【0129】
また、推定位置の誤差範囲内が屋内領域である場合に、以下の条件(1)〜条件(3)のいずれかが充足するときは、推定位置は、屋内領域にはないとして、推定位置を棄却する。条件(1)はセンサ等(GPS131、地磁気センサなど)の信頼性が回復した場合であり、条件(2)は所定の範囲(時間又は距離)以上、歩行の乱れが回復した場合であり、条件(3)は所定の距離(例えば、300m)以上で、歩行速度が所定の範囲(例えば、10km/h〜20km/h)である(すなわち、歩行者は自転車に乗っているとして屋内領域にいる可能性がない)場合である。
【0130】
推定位置の誤差範囲内が、すべて屋内領域、あるいは禁止領域である場合、推定位置が矛盾しているとしてその推定位置を棄却してもよい。
【0131】
次に、方位補正部178で行う測位方位の補正について説明する。方位補正部178は、位置更新部175で歩行者の位置を道路上に更新(特定)した場合、特定した位置が歩行位置であると判定した場合、特定した位置の道路方位を測位方位として補正することにより、歩行者の移動方向の方位を特定する。
【0132】
特定した位置が歩行位置であるか否かの判定は、例えば、特定した位置が唯一つのみである場合に、その位置が唯一である状態が所定時間及び/又は所定距離に亘って継続したとき、特定した位置を歩行者の歩行位置であると判定する。所定時間は、例えば、1分などとすることができ、所定距離は、例えば、50mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0133】
また、特定した位置が歩行位置であるか否かの判定は、測位して得られた測位データに基づいて推定した歩行者の移動方向の方位の変動量を算出し、算出した変動量が所定の閾値(例えば、2度、3度など)より小さい状態が所定時間(例えば、20秒、30秒など)及び/又は所定距離(例えば、20m、30m等)に亘って継続した場合、歩行位置であると判定する。これにより、歩行者が直進していると判定される状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。特定した位置が歩行位置であるか否かの判定は、上述の判定条件のうち1つのみを用いてもよく、あるいは、組み合わせることもできる。
【0134】
方位補正部178は、位置更新部175で歩行者の位置を道路上に更新(特定)した場合、特定した位置の道路方位が歩行方位であると判定した場合、特定した位置の道路方位を測位方位として補正することにより、歩行者の移動方向の方位を特定する。歩行方位を判定に用いるのは、例えば、複数の位置が特定された場合である。
【0135】
特定した位置の道路方位が歩行方位であるか否かの判定は、特定した位置が複数ある場合、特定した各位置の道路方位の方位差を算出し、算出した方位差が所定の閾値(例えば、2度、3度等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定する。所定時間は、例えば、1分などとすることができ、所定距離は、例えば、50mなどとすることができる。これにより、歩行者の位置を唯一に特定できない状況であっても、それぞれの特定位置の道路方位に所定の閾値より大きな方位差がない場合には、歩行方位であるとして歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0136】
また、特定した位置の道路方位が歩行方位であるか否かの判定は、測位して得られた測位データに基づいて推定した方位の変動量を算出し、算出した変動量が所定の閾値(例えば、2度、3度など)より小さい状態が所定時間(例えば、20秒、30秒など)及び/又は所定距離(例えば、20m、30m等)に亘って継続した場合、歩行方位であると判定する。これにより、歩行者が直進していると判定される状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。特定した位置の道路方位が歩行方位であるか否かの判定は、上述の判定条件のうち1つのみを用いてもよく、あるいは、組み合わせることもできる。
【0137】
さらに、歩行位置の判定、歩行方位の判定には、以下のような判定条件を付加することもできる。例えば、位置推定部171で推定した推定位置と位置更新部175で更新(特定)した位置との位置ずれ(例えば、距離など)を算出し、算出した位置ずれが所定の閾値(例えば、50m等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置又は歩行方位であると判定する。所定時間は、例えば、1分などとすることができ、所定距離は、例えば、50mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0138】
また、測位データ(例えば、GPS131、地磁気センサ等)の信頼度を算出し、算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置又は歩行方位であると判定する。具体的には、GPS131が正常である確率が低い場合、地磁気センサが正常である確率が低い場合などである。また、所定時間は、例えば、1分などとすることができ、所定距離は、例えば、50mなどとすることができる。これにより、測位方位の信頼性が低い場合に、自身(歩行者)の方位を特定した位置の道路の方位と一致させて、自身の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができる。
【0139】
次に、歩行者の位置を地図上で表示する表示例について説明する。歩行者の位置を表示部18で表示する場合、推定位置がないときは、測位位置又は暫定位置を表示し、推定位置があるときは、その推定位置(更新した推定位置を含む)を表示する。
【0140】
図19は歩行者の位置の表示の一例を示す説明図である。推定位置が1つの場合、その推定位置(又は更新した推定位置を含む)を地図上に表示した上で、表示した推定位置の誤差範囲も同時に表示する。なお、推定位置が複数ある場合には、評価係数の最も小さい推定位置を1つ表示することもできる。
【0141】
図20は歩行者の位置の表示の他の例を示す説明図である。推定位置が複数存在する場合、複数の推定位置を包含する領域を推定位置として表示する。この場合、各推定位置の誤差範囲を含むような範囲を表示してもよい。また、推定位置の評価係数の大小に応じて、その推定位置の誤差範囲の大きさを拡大又は縮小した上で、推定位置とその誤差範囲とを同時に表示することもでき、また、推定位置が複数ある場合には、各推定位置の誤差範囲を含む範囲を表示してもよい。また、複数の推定位置の重心位置を表示してもよい。
【0142】
図21は歩行者の位置の表示の他の例を示す説明図である。推定位置が複数存在する場合、各推定位置を表示した上で、各推定位置の誤差範囲又は確からしさの順位などを同時に表示する。図21では、第1候補の推定位置が最も確率の高い歩行者の位置であり、第2候補の推定位置は、その次に確率が高い歩行者の位置を示す。また、推定位置が複数存在する場合に、所定の閾値より小さい評価係数の推定位置が複数あるときは、評価係数が閾値より小さい位置だけを表示することもできる。これにより、歩行者は、自身の位置を容易に判断することができるとともに、最も確からしい位置のみならず、可能性のある位置も知ることができる。
【0143】
図22は歩行者の位置の表示の他の例を示す説明図である。図22では、表示部18の表示面が小さく、地図情報を詳細に表示することができないような場合(例えば、地図の縮尺を大きくできない場合)には、道路を線分で表示した上で、歩行者の位置を1つの点で表示することもできる。
【0144】
上述のとおり、推定位置を更新することにより特定(検出)した位置を歩行者の位置として表示する場合に、特定した位置が複数あるときには、算出又は補正した評価係数の大小に応じて、最も確からしい特定位置を表示することもでき、あるいは、複数の特定位置をすべて表示してもよく、あるいは、特定した位置の中からいくつかを選択して表示してもよい。また、歩行者の位置を検出している過程のある時点において、一時的に精度よく位置を検出することができず、仮に評価係数が大きくなり、検出した位置を表示した場合には、歩行者に誤った位置を表示する恐れがあるようなときでも、その後の測位の結果、特定位置の確からしさが十分確保できたような場合には、位置の確からしさを確保できた時点以降、その特定位置を表示させることもできる。
【0145】
次に位置検出処理の手順について説明する。図23、図24及び図25は位置検出処理の手順を示すフローチャートである。制御部11は、位置検出装置10内の各部と協働して位置検出処理を行う。制御部11は、初期位置の探索が必要であるか否かを判定する(S11)。
【0146】
歩行者の場合と異なり、車両の場合には、位置検出が不能になることは殆どなく、電源が切られた場合でも、検出した位置が保存されるため、初期位置を探索する必要性が殆ど皆無である。しかし歩行者の場合には、地下から出てくる場合等、位置検出が不能になる場合があり、初期位置を探索する必要がある。初期位置の探索は、GPS131による測位には時間がかかるため、通常基地局との通信により行う。
【0147】
初期位置の探索が必要である場合(S11でYES)、制御部11は、初期位置の探索を行い(S12)、探索位置を暫定的な測位位置とする(S13)。初期位置の探索が必要でない場合(S11でNO)、すなわち、1又は複数の推定位置をすでに保持している場合、制御部11は、ステップS12、ステップS13の処理を行わずに後述のステップS14の処理を行う。
【0148】
制御部11は、路上装置との通信の有無を判定し(S14)、路上装置との通信がある場合(S14でYES)、測位位置を通信位置に補正し(S15)、保持していた推定位置をすべて棄却する(S16)。路上装置との狭域通信(局所通信)による誤差は、GPS等に比べてかなり小さく、精度が高いため、局所通信により通信位置が得られた場合には、この通信位置を最も信頼性の高い推定位置とすることができる。
【0149】
制御部11は、補正した測位位置を推定位置として登録し(S17)、推定位置の地図領域の属性、誤差範囲、評価係数を登録する(S18)。これにより、推定位置の新規登録(初期登録)が完了するとともに、推定位置の誤差範囲、評価係数が設定される。路上装置との通信がない場合(S14でNO)、制御部11は、ステップS17の処理を行い、暫定的な測位位置を推定位置として登録する。
【0150】
制御部11は、測位データを取得し(S19)、測位データの異常の有無を確認し(S20)、確認結果に応じて、測位データの信頼度を算出する(S21)。制御部11は、測位データに基づいて測位位置を算出し(S22)、測位位置の測位誤差を算出する(S23)。測位位置の算出は、上述したように、距離センサ132、方位センサ133などによる自立航法と、GPS131等による衛星航法との組み合わせにより行うことができる。ただし、周囲にビル等の高い障害物がなく、GPS衛星の測位性能が非常によい場合には、自立航法を用いないで、GPS衛星だけで測位することも可能である。
【0151】
制御部11は、歩行者の歩行挙動を取得し(S24)、外部装置からの地図情報、信号情報の更新の有無を判定する(S25)。地図情報、信号情報の更新があった場合(S25でYES)、制御部11は、地図情報、信号情報を取得する(S26)。地図情報、信号情報の更新がない場合(S25でNO)、制御部11は、ステップS26の処理を行わずに後述のステップS27の処理を行う。
【0152】
制御部11は、地図マッチング機能の停止中であるか否かを判定する(S27)。地図マッチング機能が停止するか否かの条件は、例えば、歩行者の歩行速度が所定の閾値より大きい場合、又は屋内領域内の所定距離以上に亘って歩行者の位置が検出された場合である。所定の閾値は、例えば、60km/hとすることができ、歩行速度が所定の閾値より大きくなった場合、歩行者は、電車、自動車等の車両、あるいは他の交通機関を利用したとして、地図マッチングによる歩行者の位置検出を停止する。また、所定距離は、例えば、5kmとすることができ、屋内領域内の所定距離以上に亘って歩行者の位置が検出された場合には、歩行者は、電車、地下鉄等の他の交通機関を利用したとして、地図マッチングによる歩行者の位置検出を停止する。これにより、誤った位置検出を防止することができる。
【0153】
地図マッチング機能が停止中でない場合(S27でNO)、制御部11は、推定位置の更新処理を行う(S28)。なお、推定位置の更新処理の詳細は後述する。制御部11は、推定位置の更新を行った後、地図マッチング機能の停止の必要性を判定し(S29)、停止の必要性がある場合(S29でYES)、地図マッチング機能を停止し、推定位置をすべて棄却する(S30)。
【0154】
制御部11は、推定位置の初期登録(新規登録)の条件を充足するか否かを判定し(S31)、条件を充足する場合(S31でYES)、測位位置に基づいて推定位置の初期登録(新規登録)を行う(S32)。地図マッチング機能が停止中である場合(S27でYES)、制御部11は、ステップS31の処理を行う。地図マッチング機能の停止の必要性がない場合(S29でNO)、制御部11は、後述のステップS33の処理を行い、推定位置の初期登録(新規登録)の条件を充足しない場合(S31でNO)、同様に後述のステップS33の処理を行う。
【0155】
制御部11は、推定位置(更新した推定位置を含む)の有無を判定し(S33)、推定位置がある場合(S33でYES)、推定位置を表示部18に表示し(S34)、推定位置がない場合(S33でNO)、測位位置又は暫定位置を表示部18に表示する(S35)。
【0156】
制御部11は、測位方位を地図上の道路方位に補正する(S36)。なお、測位方位の補正に関する処理は後述する。
【0157】
制御部11は、センサの較正の要否を判定し(S37)、較正が必要である場合(S37でYES)、センサを較正する(S38)。センサの較正が必要でない場合(S37でNO)、制御部11は、ステップS38の処理を行わずに、後述のステップS39の処理を行う。制御部11は、処理終了の指示の有無を判定し(S39)、指示がない場合(S39でNO)、ステップS11以降の処理を続け、指示がある場合(S39でYES)、処理を終了する。
【0158】
次に、推定位置の更新処理について説明する。図26、図27、図28、図29、図30及び図31は推定位置の更新処理の手順を示すフローチャートである。制御部11は、測位位置と測位軌跡に基づいて推定位置を算出し(S100)、測位方位の変化量(方位角差)が所定の方位閾値より大きいか否かを判定する(S101)。すなわち、制御部11は、測位軌跡の方位が変化中であるか否かを判定する。
【0159】
測位方位の変化量が所定の方位閾値より大きくない場合(S101でNO)、すなわち、測位軌跡の方位が変化中でない場合、制御部11は、ステップS100で算出した推定位置の誤差範囲内の地図領域の属性を判定する(S102)。なお、誤差範囲内に複数の属性がある場合、属性の優先順位に応じて属性を特定することができる。制御部11は、属性が道路領域であるか否かを判定し(S103)、道路領域でない場合(S103でNO)、属性が屋内領域であるか否かを判定する(S104)。
【0160】
属性が屋内領域でない場合(S104でNO)、制御部11は、属性がその他領域であると判定し、測位データの信頼度が所定の閾値より小さいか否かを判定する(S105)。信頼度が閾値より小さい場合(S105でYES)、制御部11は、測位データの信頼性が低いと判定し、歩行者の歩行の乱れの有無を判定する(S106)。
【0161】
歩行者の歩行の乱れがある場合(S106でYES)、制御部11は、推定位置の誤差範囲内に屋内領域があるか否かを判定し(S107)、屋内領域がある場合(S107でYES)、推定位置を屋内領域内の位置に更新し(S108)、推定位置の属性を屋内領域に変更し(S109)、推定位置の誤差範囲、評価係数を更新又は継承し(S110)、処理を終了する。これにより、更新した推定位置の誤差範囲、評価係数を求めることができる。測位方位の変化量が所定の方位閾値より大きい場合(S101でYES)、すなわち、測位軌跡の方位が変化中である場合、制御部11は、処理を終了する。
【0162】
測位データの信頼度が所定の閾値より小さくない場合(S105でNO)、又は歩行者の歩行の乱れがない場合(S106でNO)、制御部11は、歩行者が屋内にいる可能性が低いとして、推定位置の誤差範囲内に道路領域があるか否かを判定する(S111)。誤差範囲内に道路領域がある場合(S111でYES)、制御部11は、測位方位と道路方位がほぼ一致するか否かを判定する(S112)。
【0163】
測位方位と道路方位がほぼ一致する場合(S112でYES)、制御部11は、推定位置を道路領域内の位置に更新し(S113)、推定位置の属性を道路領域に変更し(S114)、推定位置の誤差範囲、評価係数を更新又は継承し(S115)、処理を終了する。測位方位と道路方位がほぼ一致しない場合(S112でNO)、制御部11は、処理を終了する。
【0164】
推定位置の誤差範囲内に道路領域がない場合(S111でNO)、制御部11は、推定位置の誤差範囲内にその他領域があるか否かを判定し(S116)、誤差範囲内にその他領域がある場合(S116でYES)、処理を終了する。誤差範囲内にその他領域がない場合(S116でNO)、制御部11は、推定位置を棄却し(S117)、処理を終了する。推定位置の誤差範囲内に屋内領域がない場合(S107でNO)、制御部11は、ステップS117の処理を行う。
【0165】
推定位置の誤差範囲内の属性が道路領域である場合(S103でYES)、制御部11は、測位データの信頼度が所定の閾値より小さいか否かを判定する(S118)。信頼度が閾値より小さい場合(S118でYES)、制御部11は、測位データの信頼性が低いと判定し、歩行者の歩行の乱れの有無を判定する(S119)。
【0166】
歩行者の歩行の乱れがある場合(S119でYES)、制御部11は、推定位置の誤差範囲内に屋内領域があるか否かを判定し(S120)、屋内領域がある場合(S120でYES)、推定位置を屋内領域内の位置に更新し(S121)、推定位置の属性を屋内領域に変更し(S122)、推定位置の誤差範囲、評価係数を更新又は継承し(S123)、処理を終了する。これにより、更新した推定位置の誤差範囲、評価係数を求めることができる。
【0167】
測位データの信頼度が所定の閾値より小さくない場合(S118でNO)、又は歩行者の歩行の乱れがない場合(S119でNO)、制御部11は、歩行者が屋内にいる可能性が低いとし、道路領域の接続関係を考慮して、前回位置を更新した道路領域が推定位置の誤差範囲外であるか否かを判定する(S124)。誤差範囲外でない場合(S124でNO)、制御部11は、測位方位と道路方位がほぼ一致するか否かを判定する(S125)。
【0168】
測位方位と道路方位がほぼ一致する場合(S125でYES)、制御部11は、推定位置を道路領域内の位置に更新し(S126)、推定位置の評価係数を更新し(S127)、処理を終了する。測位方位と道路方位がほぼ一致しない場合(S125でNO)、制御部11は、処理を終了する。
【0169】
前回位置を更新した道路領域が推定位置の誤差範囲外である場合(S124でYES)、制御部11は、推定位置の誤差範囲内に別の道路領域があるか否かを判定し(S128)、別の道路領域がある場合(S128でYES)、測位方位と道路方位がほぼ一致するか否かを判定する(S129)。
【0170】
測位方位と道路方位がほぼ一致する場合(S129でYES)、制御部11は、推定位置を道路領域(別の道路領域)内の位置に更新し(S130)、推定位置の誤差範囲、評価係数を更新又は継承し(S131)、処理を終了する。測位方位と道路方位がほぼ一致しない場合(S129でNO)、制御部11は、処理を終了する。
【0171】
推定位置の誤差範囲内に別の道路領域がない場合(S128でNO)、制御部11は、推定位置の属性をその他領域に変更し(S132)、推定位置の誤差範囲、評価係数を継承し(S133)、処理を終了する。推定位置の誤差範囲内に屋内領域がない場合(S120でNO)、制御部11は、ステップS117の処理を行う。
【0172】
推定位置の誤差範囲内の属性が屋内領域である場合(S104でYES)、制御部11は、測位データの信頼度が所定の閾値より小さいか否かを判定する(S134)。信頼度が閾値より小さい場合(S134でYES)、制御部11は、測位データの信頼性が低いと判定し、歩行者の歩行の乱れの有無を判定する(S135)。
【0173】
歩行者の歩行の乱れがある場合(S135でYES)、制御部11は、所定距離以上の間、歩行速度が所定の範囲内であるか否かを判定し(S136)、所定の範囲内でない場合(S136でNO)、推定位置の誤差範囲内に屋内領域があるか否かを判定する(S137)。推定位置の誤差範囲内に屋内領域がある場合(S137でYES)、制御部11は、推定位置を屋内領域内の位置に更新し(S138)、推定位置の属性を屋内領域に変更し(S139)、推定位置の誤差範囲、評価係数を更新又は継承し(S140)、処理を終了する。
【0174】
測位データの信頼度が所定の閾値より小さくない場合(S134でNO)、又は歩行者の歩行の乱れがない場合(S135でNO)、制御部11は、歩行者が屋内にいる可能性が低いとし、推定位置の誤差範囲内に道路領域があるか否かを判定し(S141)、道路領域がある場合(S141でYES)、測位方位と道路方位がほぼ一致するか否かを判定する(S142)。
【0175】
測位方位と道路方位がほぼ一致する場合(S142でYES)、制御部11は、推定位置を道路領域内の位置に更新し(S143)、推定位置の属性を道路領域に変更し(S144)、推定位置の誤差範囲、評価係数を更新又は継承し(S145)、処理を終了する。
【0176】
推定位置の誤差範囲内に道路領域がない場合(S141でNO)、又は測位方位と道路方位がほぼ一致しない場合(S142でNO)、制御部11は、推定位置の誤差範囲内にその他領域があるか否かを判定し(S146)、その他領域がある場合(S146でYES)、推定位置の属性をその他領域に変更し(S147)、推定位置の誤差範囲、評価係数を継承し(S148)、処理を終了する。推定位置の誤差範囲内にその他領域がない場合(S146でNO)、制御部11は、ステップS117の処理を行う。
【0177】
所定距離以上の間、歩行速度が所定の範囲内である場合(S136でYES)、又は推定位置の誤差範囲内に屋内領域がない場合(S137でNO)、制御部11は、ステップS117の処理を行う。
【0178】
次に、測位方位の補正処理について説明する。図32及び図33は測位方位の補正処理の手順を示すフローチャートである。制御部11は、所定時間(例えば、1分など)又は所定距離(例えば、50mなど)を計数するための期間カウンタをリセットし(S200)、道路上(地図上の道路領域)に特定位置があるか否かを判定する(S201)。
【0179】
制御部11は、道路上に特定位置がある場合(S201でYES)、特定位置は唯一つのみであるか否かを判定し(S202)、特定位置が唯一つのみでない場合(S202でNO)、複数の特定位置の各道路方位の方位差が所定の閾値より小さいか否かを判定する(S203)。特定位置が唯一つのみである場合(S202でYES)、制御部11は、ステップS203の処理を行わずに、後述のステップS204の処理を行う。
【0180】
方位差が所定の閾値より小さい場合(S203でYES)、制御部11は、特定位置と推定位置の位置ずれ(例えば、距離など)が所定の閾値より小さいか否かを判定し(S204)、位置ずれが所定の閾値より小さい場合(S204でYES)、測位データの信頼度が所定の閾値より小さいか否かを判定する(S205)。
【0181】
測位データの信頼度が所定の閾値より小さい場合(S205でYES)、制御部11は、特定位置の道路方位が直進であるか否かを判定し(S206)、直進である場合(S206でYES)、期間カウンタを計数(所定の数だけ増加させる)し(S207)、計数値が所定の閾値より大きいか否かを判定する(S208)。ここで、所定の閾値は、期間が時間である場合、例えば、1分等であり、期間が距離である場合、50m等である。
【0182】
期間カウンタの計数値が所定の閾値より大きい場合(S208でYES)、制御部11は、所定の歩行距離(例えば、20m、30m等)の間、測位方位の変動量が所定の閾値(例えば、2度、3度など)より小さいか否かを判定し(S209)、測位方位の変動量が所定の閾値より小さい場合(S209でYES)、測位方位を特定位置の道路方位に補正し(S210)、歩行者の移動方向の方位を特定して処理を終了する。ステップS209において、所定の歩行距離に代えて、あるいは、歩行距離に加えて、所定の時間(例えば、20秒、30秒など)測位方位の変動量が所定の閾値より小さいか否かを判定してもよい。
【0183】
道路上に特定位置がない場合(S201でNO)、複数の特定位置の各道路方位の方位差が所定の閾値より大きい場合(S203でNO)、特定位置と推定位置との位置ずれが所定の閾値より大きい場合(S204でNO)、測位データの信頼度が所定の閾値より大きい場合(S205でNO)、特定位置の道路方位が直進でない場合(S206でNO)、期間カウンタの計数値が所定の閾値より小さい場合(S208でNO)、あるいは、所定の歩行距離の間、測位方位の変動量が所定の閾値より大きい場合(S209でNO)、制御部11は、測位方位の補正を行うことなく処理を終了する。
【0184】
以上説明したように、本発明によれば、歩行者の位置を特定した場合、歩行の方位(測位方位)を特定した位置の道路の方位と一致させることができ、歩行者の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができ、歩行者の移動方向の方位を精度良く特定することができる。
【0185】
以上、物理的な位置又は方位と共に、歩行挙動、測位データの信頼度を、地図情報と関連づけて、歩行者の位置を特定する方法としていくつかの例を示したが、この他に、例えば、エレベータ、エスカレータに乗った場合のエレベータ、エスカレータ位置への特定(歩行停止、高度又は気圧の変化、測位データの信頼度を考慮)、地下街又は地下鉄への連絡口に降りた場合の連絡口への特定(歩行速度の変化や歩行の強さの変化、高度又は気圧の変化、測位データの信頼度を考慮)、地下鉄駅舎の券売機で立ち止まった場合の券売機位置への特定(歩行停止、測位データの信頼度を考慮)、バスや市電に停留所で乗車した場合の停留所への特定(歩行停止、位置の変化)等が、地図情報に公共物等の特定位置を登録しておけば可能となる。
【0186】
上記の例では、表現を簡単にするため、地図領域の属性、位置検出、位置検出の誤差範囲等を全て2次元で表現しているが、高度の情報を入れて3次元で表現してもよい。これにより、高度が関係する歩行者用陸橋又は地下横断通路等の判定精度を向上させることができるとともに、屋内領域のビルの何階のフロアーにいるか、屋上にいるかどうか等まで推定することも可能となる。また、上記までの表現では、歩行者が、通常歩行時又は自転車走行時に携帯機器を身に付けている場合について説明しているが、これに限定されるものではなく、歩行者が直接携帯機器を身につけず、かばん、携帯機器を車輪付き旅行ケース、荷車、乳母車、車椅子等に収納、仮設置又は仮置きし、歩行者が持ち歩いたり、車を押したり引いたり、あるいは、手で車輪を回転したりして、歩行者の通行できる領域を通行している場合であってもよい。この場合、歩数センサのデータにより、これらの状況を推定し、歩行者の歩数、又は手で回転させる周期を検知して距離を算出してもよい。
【0187】
また、上記では、歩行者が電車又は自動車に乗った場合、位置検出を中止することにしているが、別途、電車に乗った場合、自動車に乗った場合の地図マッチング型の位置検出システムを用意して、連続的に位置検出が実施できるようにしても良い。これにより、位置検出を最初からやり直す必要がなくなり、より効果的なシステムを構築することができる。さらに、上記の例では、位置検出に必要なデータを全て携帯機器に集約して位置検出する形態を示したが、これに限定されず、路上又はセンタに設置したサーバに携帯機器から必要データを送信し、位置検出処理をサーバで実行させ、その結果を携帯機器に送信する、という形態等にしてもよい。あるいは、処理の実行を分担してもよい。これにより、携帯機器の負担を減らすことが可能となる。
【0188】
上述の位置検出装置は、例えば、携帯電話機、PDA(Personal Digital Assistant)、PHS、ノート型パーソナルコンピュータ、音楽プレーヤ、携帯型ゲーム装置等の情報端末装置又は携帯端末装置などに適用することができる。
【0189】
上述の実施の形態において、位置検出装置に傾斜角センサを備えることもできる。これにより、歩行者の歩行、取り出し、操作等に伴う位置検出装置の振動又は姿勢変化で位置検出装置が傾いた場合、方位センサ又は距離センサの種類によっては機能が停止し、あるいは、性能が劣化することがある。従って、傾斜角センサにより傾斜角を検出し、方位センサ又は距離センサを補正することもできる。
【0190】
上述の実施の形態で示した歩行者の位置を推定するための数式は、一例であって、これらに限定されるものではなく、適宜変形した数式を用いることもできる。
【0191】
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0192】
【図1】本発明に係る方位特定装置としての位置検出装置の構成の一例を示すブロック図である。
【図2】測位位置の誤差範囲の例を示す説明図である。
【図3】地図情報の一例を示す模式図である。
【図4】地図上の領域の属性の一例を示す説明図である。
【図5】地図上の道路の設定例を示す説明図である。
【図6】推定位置の新規登録の一例を示す説明図である。
【図7】新規登録した推定位置の評価係数の算出の一例を示す説明図である。
【図8】推定位置の軌跡の算出例を示す説明図である。
【図9】推定位置の更新の一例を示す説明図である。
【図10】推定位置の更新の他の例を示す説明図である。
【図11】推定位置の更新の他の例を示す説明図である。
【図12】特徴地点での推定位置の評価係数の算出の一例を示す説明図である。
【図13】特徴地点での推定位置の評価係数の算出の他の例を示す説明図である。
【図14】推定位置の評価係数の他の例を示す説明図である。
【図15】その他領域から道路領域への推定位置の更新例を示す説明図である。
【図16】屋内領域への推定位置の更新例を示す説明図である。
【図17】屋内領域から別の屋内領域への推定位置の更新例を示す説明図である。
【図18】屋内領域から道路領域又はその他領域への推定位置の更新例を示す説明図である。
【図19】歩行者の位置の表示の一例を示す説明図である。
【図20】歩行者の位置の表示の他の例を示す説明図である。
【図21】歩行者の位置の表示の他の例を示す説明図である。
【図22】歩行者の位置の表示の他の例を示す説明図である。
【図23】位置検出処理の手順を示すフローチャートである。
【図24】位置検出処理の手順を示すフローチャートである。
【図25】位置検出処理の手順を示すフローチャートである。
【図26】推定位置の更新処理の手順を示すフローチャートである。
【図27】推定位置の更新処理の手順を示すフローチャートである。
【図28】推定位置の更新処理の手順を示すフローチャートである。
【図29】推定位置の更新処理の手順を示すフローチャートである。
【図30】推定位置の更新処理の手順を示すフローチャートである。
【図31】推定位置の更新処理の手順を示すフローチャートである。
【図32】測位方位の補正処理の手順を示すフローチャートである。
【図33】測位方位の補正処理の手順を示すフローチャートである。
【符号の説明】
【0193】
10 位置検出装置
11 制御部
12 通信部
13 測位部
131 GPS
132 距離センサ
133 方位センサ
134 高度センサ
135 センサ較正部
14 地図データベース
15 記憶部
16 操作部
17 位置検出処理部
171 位置推定部
172 誤差算出部
173 属性判定部
174 歩行挙動判定部
175 位置更新部
176 信頼度算出部
177 評価部
178 方位補正部
18 表示部
19 音声出力部
【技術分野】
【0001】
本発明は、位置特定の技術に関し、特に歩行者が携帯することによって歩行者の位置を検出する場合、その精度の維持を図るために歩行者の移動方向の方位を精度良く特定することができる方位特定装置、該方位特定装置を備える位置特定装置、前記方位特定装置を実現するためのコンピュータプログラム及び方位特定方法に関する。
【背景技術】
【0002】
車両等の移動体の位置を検出するためにナビゲーションで広く利用されている位置検出方法には、例えば、自立航法、衛星航法、地図マッチング法、ハイブリッド航法などがある。自立航法は、距離センサ、方位センサ又は角速度センサなど用い、例えば、経緯度座標系を基にした直交座標系に対する車両の走行の方位角と単位時間当たりの走行距離に基づいて、逐次車両位置を算出するものであるが、道路との整合性は考慮されておらず、走行距離の増加に応じて車両位置の誤差が累積するという問題がある。
【0003】
また、衛星航法は、GPS(Global Positioning System)を用いるものであり、検出される位置には、10〜20m程度の誤差を含む。GPSを用いるため、距離センサ、方位センサ又は角速度センサ等の車載のセンサは不要である。しかし、高架下の道路、建物に挟まれた道路、山道、街路樹等で覆われた道路では、所定数のGPS衛星から電波を受信することができず、検出精度が大きく劣化するという問題がある。また、道路間隔の狭い細街路では、走行道路を間違うという問題もある。
【0004】
また、地図マッチング法は、自立航法による走行軌跡と道路地図との整合性(マッチング)を考慮して車両の位置を検出するものである(特許文献1参照)。すなわち、自立航法による軌跡と、道路地図データとを比較して相関をとりながら、走行していると考えられる複数の道路候補の中から、最も確からしい道路を選定してゆく。そして、候補となる道路が1本に限定された時点で、自立航法により得られた車両の走行軌跡を道路に合致させる。しかし、限定した道路が間違っている場合、それ以降の位置検出が不能になるという問題がある。
【0005】
また、ハイブリッド航法は、衛星航法と地図マッチング法とを組み合わせたものであり、自立航法と衛星航法の誤差を勘案しながら、合理的に車両の位置を推定し、走行している道路を特定するものである(特許文献2参照)。ハイブリッド航法では、例えば、通常時には、地図マッチング法を用いて車両の位置を検出する。地図マッチング法で車両の位置が検出不能に陥った場合、衛星航法により車両の位置、方位を検出して車両の位置を推定し、道路地図データとの整合性を考慮して車両の位置を検出するものである。ハイブリッド航法を用いれば、特殊な場合を除けば、車両が走行している道路を間違う可能性は殆どなく、道路方向の位置精度も、平均的には10m程度の誤差範囲内であり、道路案内目的のナビゲーションでは、実用上殆ど問題ない精度レベルである。
【0006】
一方、歩行者の位置検出方法では、歩行者が携帯する携帯電話又は簡易型ナビゲーション装置等の携帯機器を用いて位置検出を行っている。このような携帯機器では、例えば、GPS衛星からの電波又は基地局との通信により歩行者の現在位置を検出する方法が実用化されている。
【特許文献1】特開昭63−148115号公報
【特許文献2】特開平2−275310号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、GPS衛星から電波を受信して位置を検出する場合、GPS衛星の受信状態が良いときには、位置誤差が10〜20m程度であるが、都心のビル等の建造物の谷間又は高架下の道路などでは、位置を検出することが不能となる場合、あるいは、マルチパス等の影響により位置誤差が数百m程度になり正確な位置が求められない場合がある。特に、歩行者の場合、車両等の移動体と異なり、建造物の近くを建造物に沿って歩く傾向があるため、GPS衛星からの電波の受信レベルが低下する。
【0008】
このため、例えば、ハイブリッド航法を用いて歩行者の位置を検出する場合に、GPS衛星からの電波の受信状況又は歩行者の周辺の環境状況等が悪化したときには、歩行者の歩行方位を求めるための測位データが一時利用することができず、例えば、相対方位センサのみにより測位しなければならない。従って、測位データを利用できない期間が長くなった場合には、歩行者の歩行方位の累積誤差が大きくなり、歩行者の位置を検出する際に検出位置の精度を維持するために必要な測位方位の精度が低下するという問題があった。
【0009】
本発明は、斯かる事情に鑑みてなされたものであり、歩行者の移動方向の方位を精度良く特定することができる方位特定装置、該方位特定装置を備える位置特定装置、前記方位特定装置を実現するためのコンピュータプログラム及び方位特定方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
第1発明に係る方位特定装置は、自身の位置を時系列に測位し、地図上で自身の移動方向の方位を特定する方位特定装置において、地図情報を記憶する記憶手段と、測位して得られた測位データに基づいて地図上の自身の位置を推定する位置推定手段と、該位置推定手段で推定した推定位置及び記憶した地図情報に基づいて、自身の位置を地図上の道路に特定する位置特定手段と、該位置特定手段で特定した位置の道路方位を自身の移動方向の方位として特定する方位特定手段とを備えることを特徴とする。
【0011】
第2発明に係る方位特定装置は、第1発明において、歩行者による携帯が可能であり、前記位置特定手段で特定した位置が歩行者の歩行位置であるか否かを判定する歩行位置判定手段を備え、前記方位特定手段は、前記歩行位置判定手段で歩行位置であると判定した場合、道路方位を自身の移動方向の方位として特定するように構成してあることを特徴とする。
【0012】
第3発明に係る方位特定装置は、第2発明において、計時手段を備え、前記歩行位置判定手段は、前記位置特定手段で特定した位置が唯一である状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする。
【0013】
第4発明に係る方位特定装置は、第3発明において、測位して得られた測位データに基づいて自身の移動方向の方位を推定する方位推定手段と、該方位推定手段で推定した方位の変動量を算出する方位変動量算出手段とを備え、前記歩行位置判定手段は、前記方位変動量算出手段で算出した変動量が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする。
【0014】
第5発明に係る方位特定装置は、第3発明又は第4発明において、前記位置推定手段で推定した推定位置と前記位置特定手段で特定した位置との位置ずれを算出する位置ずれ算出手段を備え、前記歩行位置判定手段は、前記位置ずれ算出手段で算出した位置ずれが所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする。
【0015】
第6発明に係る方位特定装置は、第3発明乃至第5発明のいずれか1つにおいて、測位データの信頼度を算出する信頼度算出手段を備え、前記歩行位置判定手段は、前記信頼度算出手段で算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする。
【0016】
第7発明に係る方位特定装置は、第1発明において、歩行者による携帯が可能であり、前記位置特定手段で特定した位置の道路方位が歩行者の歩行方位であるか否かを判定する歩行方位判定手段を備え、前記方位特定手段は、前記歩行方位判定手段で歩行方位であると判定した場合、道路方位を自身の移動方向の方位として特定するように構成してあることを特徴とする。
【0017】
第8発明に係る方位特定装置は、第7発明において、計時手段と、前記位置特定手段で特定した位置が複数ある場合、特定した各位置の道路方位の方位差を算出する方位差算出手段とを備え、前記歩行方位判定手段は、前記方位差算出手段で算出した方位差が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする。
【0018】
第9発明に係る方位特定装置は、第8発明において、測位して得られた測位データに基づいて自身の移動方向の方位を推定する方位推定手段と、該方位推定手段で推定した方位の変動量を算出する方位変動量算出手段とを備え、前記歩行方位判定手段は、前記方位変動量算出手段で算出した変動量が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする。
【0019】
第10発明に係る方位特定装置は、第8発明又は第9発明において、前記位置推定手段で推定した推定位置と前記位置特定手段で特定した位置との位置ずれを算出する位置ずれ算出手段を備え、前記歩行方位判定手段は、前記位置ずれ算出手段で算出した位置ずれが所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする。
【0020】
第11発明に係る方位特定装置は、第8発明乃至第10発明のいずれか1つにおいて、測位データの信頼度を算出する信頼度算出手段を備え、前記歩行方位判定手段は、前記信頼度算出手段で算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする。
【0021】
第12発明に係る位置特定装置は、第1発明乃至第11発明のいずれか1つに係る方位特定装置を備え、該方位特定装置で特定した方位に基づいて自身の位置を特定することを特徴とする。
【0022】
第13発明に係るコンピュータプログラムは、コンピュータに、自身の位置を時系列に測位させ、地図上で自身の移動方向の方位を特定させるためのコンピュータプログラムにおいて、コンピュータを、測位して得られた測位データに基づいて地図上の自身の位置を推定する位置推定手段と、推定した推定位置及び地図情報に基づいて、自身の位置を地図上の道路に特定する位置特定手段と、特定した位置の道路方位を自身の移動方向の方位として特定する方位特定手段として機能させることを特徴とする。
【0023】
第14発明に係る方位特定方法は、自身の位置を時系列に測位し、地図上で自身の移動方向の方位を特定する方位特定方法において、地図情報を記憶してあり、測位して得られた測位データに基づいて地図上の自身の位置を推定し、推定した推定位置及び記憶した地図情報に基づいて、自身の位置を地図上の道路に特定し、特定した位置の道路方位を自身の移動方向の方位として特定することを特徴とする。
【0024】
第1発明、第13発明及び第14発明にあっては、方位特定装置は、自身の位置を時系列に測位し、測位して得られた測位データに基づいて地図上の自身の位置を推定する。自身の位置を時系列に測位するには、例えば、GPS、基地局通信、距離センサ、方位センサなどの測位データを用いることができる。また、光ビーコン、電波ビーコン等の通信により測位することもできる。方位特定装置は、推定した推定位置及び地図情報に基づいて、自身の位置を地図上の道路に特定する。自身の位置を地図上の道路に特定するには、例えば、地図マッチング法により推定位置を地図上の道路に更新することにより行うことができる。方位特定装置は、地図情報により、特定した位置の道路方位を求め、求めた道路方位を自身(歩行者)の移動方向の方位として特定する。これにより、自身(歩行者)の移動方向の方位を特定した位置の道路の方位と一致させることができ、自身の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができ、歩行者の移動方向の方位を精度良く特定することができる。
【0025】
第2発明にあっては、特定した位置が歩行者の歩行位置であるか否かを判定し、歩行位置であると判定した場合、道路方位を自身の移動方向の方位として特定する。特定した位置が歩行者の歩行位置であるか否かの判定は、歩行位置以外のものを除外することができるものであればよく、例えば、特定した位置が唯一つのみである場合とすることができる。これにより、精度良く歩行者の移動方向の方位を特定することができる。
【0026】
第3発明にあっては、特定した位置が唯一である状態が所定時間及び/又は所定距離に亘って継続したとき、特定した位置を歩行者の歩行位置であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0027】
第4発明にあっては、方位特定装置は、測位して得られた測位データに基づいて自身の移動方向の方位を推定し、推定した方位の変動量を算出する。方位特定装置は、算出した変動量が所定の閾値(例えば、2度、3度など)より小さい状態が所定時間(例えば、20秒、30秒など)及び/又は所定距離(例えば、20m、30m等)に亘って継続した場合、歩行位置であると判定する。これにより、歩行者が直進していると判定される状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0028】
第5発明にあっては、方位特定装置は、推定した推定位置と特定した位置との位置ずれを算出し、算出した位置ずれが所定の閾値(例えば、50m等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0029】
第6発明にあっては、方位特定装置は、測位データの信頼度を算出し、算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。測位データの信頼度は、例えば、GPS、地磁気センサ等の方位センサなどの測位データの信頼性とすることができる。GPSの場合、GPSの受信レベルに応じて信頼度を設定することができる。また、地磁気センサの出力レベルに応じて信頼度を設定することができる。建物内など屋内では、GPSの受信レベル又は基地局通信の通信レベルが低下し、あるいは、建物に含まれる鉄板等により地磁気センサの出力レベルが低下する。これにより、測位方位の信頼性が低い場合に、自身(歩行者)の方位を特定した位置の道路の方位と一致させて、自身の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができる。
【0030】
第7発明にあっては、方位特定装置は、特定した位置の道路方位が歩行者の歩行方位であるか否かを判定し、歩行方位であると判定した場合、道路方位を自身の移動方向の方位として特定する。特定した位置の道路方位が歩行者の歩行方位であるか否かの判定は、歩行方位以外のものを除外することができるものであればよく、例えば、複数の位置が特定された場合に、各特定位置の道路方位がほぼ等しいときとすることができる。これにより、精度良く歩行者の移動方向の方位を特定することができる。
【0031】
第8発明にあっては、方位特定装置は、特定した位置が複数ある場合、特定した各位置の道路方位の方位差を算出し、算出した方位差が所定の閾値(例えば、2度、3度等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。これにより、歩行者の位置を唯一に特定できない状況であっても、それぞれの特定位置の道路方位に所定の閾値より大きな方位差がない場合には、歩行方位であるとして歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0032】
第9発明にあっては、方位特定装置は、測位して得られた測位データに基づいて自身の移動方向の方位を推定し、推定した方位の変動量を算出する。方位特定装置は、算出した変動量が所定の閾値(例えば、2度、3度等)より小さい状態が所定時間(例えば、20秒、30秒など)及び/又は所定距離(例えば、20m、30m等)に亘って継続した場合、歩行方位であると判定する。これにより、歩行者が直進していると判定される状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0033】
第10発明にあっては、方位特定装置は、推定した推定位置と特定した位置との位置ずれを算出し、算出した位置ずれが所定の閾値(例えば、50m等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0034】
第11発明にあっては、方位特定装置は、測位データの信頼度を算出し、算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定する。所定時間は、例えば、3分、5分などとすることができ、所定距離は、例えば、200m、300mなどとすることができる。測位データの信頼度は、例えば、GPS、地磁気センサ等の方位センサなどの測位データの信頼性とすることができる。GPSの場合、GPSの受信レベルに応じて信頼度を設定することができる。また、地磁気センサの出力レベルに応じて信頼度を設定することができる。建物内など屋内では、GPSの受信レベル又は基地局通信の通信レベルが低下し、あるいは、建物に含まれる鉄板等により地磁気センサの出力レベルが低下する。これにより、測位方位の信頼性が低い場合に、自身(歩行者)の方位を特定した位置の道路の方位と一致させて、自身の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができる。
【0035】
第12発明にあっては、位置特定装置は、方位特定装置で特定した方位に基づいて、自身の位置を特定する。これにより、歩行者の移動方向の方位とともに歩行者の位置を精度良く特定することができる。
【発明の効果】
【0036】
本発明にあっては、歩行者の移動方向の方位を精度良く特定することができる。
【発明を実施するための最良の形態】
【0037】
以下、本発明を実施の形態を示す図面に基づいて説明する。図1は本発明に係る方位特定装置としての位置検出装置10の構成の一例を示すブロック図である。本発明に係る位置検出装置10は、自身(歩行者)の位置を時系列に測位し、測位して得られた測位データに基づいて自身の位置を検出(特定)するとともに、歩行者の歩行方位を補正(特定)する。この場合、自身の位置を検出(特定)するとは、測位した測位位置よりもさらに高精度に自身の位置を検出(特定)することを意味する。位置検出装置10は、歩行者(自転車で走行する歩行者も含む)が携帯可能であって、装置全体を制御する制御部11、通信部12、測位部13、地図データベース14、記憶部15、操作部16、位置検出処理部17、表示部18、音声出力部19などを備える。また、測位部13は、GPS131、距離センサ132、方位センサ133、高度センサ134、センサ較正部135などを備える。また、位置検出処理部17は、位置推定部171、誤差算出部172、属性判定部173、歩行挙動判定部174、位置更新部175、信頼度算出部176、評価部177、方位補正部178などを備える。
【0038】
通信部12は、光ビーコン、電波ビーコン、RFID若しくはDSRC等の路上装置との間で通信を行う狭域通信機能、UHF帯若しくはVHF帯などの無線LAN等の中域通信機能、又は、携帯電話、PHS、多重FM放送若しくはインターネット通信などの広域通信機能を備える。通信部12は、例えば、交差点の周辺を範囲とした無線LAN等の中域通信を利用し、路上装置間の路路間通信、路上装置と車両との路車間通信、又は車々間通信で通信された地図情報又は交差点の信号情報などを取得する。ここで、路上装置としては、例えば、超音波感知器、光ビーコン若しくは画像感知器等の交通情報収集装置、交通情報を文字又は図形で提供する情報板装置、信号制御装置等がある。また、通信部12は、携帯電話等の広域通信を利用することにより、情報処理センタ又は交通管制センタ等のセンタ装置から歩行者の周辺の交差点の信号情報又は地図情報を取得することもできる。
【0039】
通信部12は、基地局との間で通信を行う通信機能を備え、複数の基地局からの電波を受信し、受信結果を測位部13へ出力する。また、通信部12は、路上装置との狭域通信により得られた通信地点の位置情報を測位部13へ出力する。
【0040】
測位部13は、歩行者の位置を時々刻々(例えば、0.5秒、1秒等の経過の都度、1m、2m等の移動の都度など)測位し(測位位置を求め)、歩行者の移動距離及び移動方位(測位方位)を時刻とともに測位軌跡として記憶部15に記憶する。
【0041】
GPS131は、複数のGPS衛星から電波を受信し、歩行者の位置を測位する。なお、GPS131に加えて、DGPS(ディファレンシャルGPS)を搭載することもできる。DGPSは、予め位置が分かっている基準局から発信されるFM放送又は中波を受信し、GPS131で求めた測位位置のずれを補正することができ、歩行者の位置の精度を向上させることができる。なお、携帯電話の複数の基地局からの電波により位置を概略的に測位する方式とGPSとを複合した形で測位することも可能である。これにより、屋内でGPS衛星からの電波を受信しにくい場合でも、位置精度が悪いものの一応位置を得ることができる確率が高くなる。
【0042】
距離センサ132は、非常に短い時間での速度、移動距離を検出することができる加速度センサ、比較的長い移動距離を検出することができる歩数センサなどを備えている。ここで歩数センサとして、例えば加速度センサを用いれば、歩行のピッチに合わせて生ずる急峻なデータが得られ、この数を計数することにより歩数や歩行速度を求めることができる。また、この場合、自転車に乗ってペダルをこいでいる場合、あるいは、歩道橋又は地下横断通路の階段を上下する場合には、急峻なデータの特性、例えば、ピーク値(歩行の強さ)が異なるため、これにより、ある程度歩行場所を特定することも可能である。これにより、自立航法において歩行者の位置を短時間かつ短距離の歩行毎に検出することができる。なお、都市圏以外で周囲にビル等がなくGPS衛星の測位精度が非常に良好な場合には、歩数センサを使用せず、GPSの位置測位の差により、歩行した距離を算出するようにしてもよい。また、本願では、歩行速度は、歩行ピッチ(単位時間当たりの歩数)を含む概念で用いる。
【0043】
方位センサ133は、角速度センサ又は角加速度センサ(相対方位センサ)、2次元又は3次元の地磁気センサ(絶対方位センサ)などを備えている。これにより、自立航法において歩行者の移動方位を短時間かつ短距離の歩行毎に検出することができる。また、地磁気センサにより、歩行者が鉄筋物で囲まれた建物内に存在すること、あるいは、歩行者が強い電場又は磁場がある踏切付近に存在することを検出することが可能である。
【0044】
高度センサ134は、気圧計又は加速度センサ等により歩行者の位置での高度を検出する。なお、GPS131、距離センサ132、方位センサ133、高度センサ134は、すべて備える構成でなくてもよい。
【0045】
センサ較正部135は、相対方位センサの場合、地図マッチング法により、歩行者が歩行する道路が特定され、歩行者の推定位置が確定した場合、相対方位センサのスケールファクタを道路地図の方位との差に基づいて較正する。また、歩数センサの場合には、地図マッチング法により2地点間の通過が確実であると判定した場合、その間の道路地図の距離とその間に計測された歩数とから歩数センサを較正する。なお、2地点間の測位軌跡により歩行距離を補正しても良い。
【0046】
測位部13は、測位した測位データ、通信部12を経由して得られた基地局からの電波の受信結果、又は路上装置との狭域通信により得られた通信地点の位置情報などに基づいて、測位位置及び測位位置の誤差を算出する。以下、測位位置及びその誤差の算出方法について説明する。
【0047】
図2は測位位置の誤差範囲の例を示す説明図である。直交座標系(x方向及びy方向)において、GPS、基地局又は路上装置との狭域通信により検出された位置の誤差範囲を、一例として、矩形領域(x方向の長さが4a、y方向の長さが4b)として設定する。すなわち、測位位置は、矩形領域の中心位置であり、誤差範囲は、中心位置からx方向に±2aの範囲だけ広がり、y方向に±2bの範囲だけ広がる。例えば、2aを2シグマと設定した場合、x方向の分散はa2 となり、標準偏差はaと設定することができる。また、2bを2シグマと設定した場合、y方向の分散はb2 となり、標準偏差はb2と設定することができる。
【0048】
路上装置との狭域通信による誤差は、GPS又は基地局通信の場合に比べて小さい(例えば、誤差範囲が数m)ため、誤差範囲は、路上装置との狭域通信を利用するか、GPS又は基地局通信を利用するかに応じて異なる。また、例えば、GPSを利用する場合、誤差範囲は、環境条件、より具体的には、GPSの受信レベル、捕捉衛星数、2次元又は3次元測位の別、CEP(Circular Error Probability)により時間的に変化する。また基地局通信の場合には、誤差範囲は、基地局との通信レベル、基地局の通信範囲等で時間的に変化する。誤差範囲を予め大きめに設定した所定の定数、場所又は時間に応じて予め決定した定数等を用いてもよい。また、誤差範囲の形状は、矩形形状に限らず、円形、楕円形等任意の形状でもよい。例えば、GPSのみで測位する場合、環境条件が良好なときには、誤差範囲として10〜20m程度を設定することができる。
【0049】
以下、歩行者の測位位置の算出方法について説明する。なお、測位位置は、直交座標系における二次元ベクトルで表現するが、3次元では、高度情報を加えるだけであり、容易に拡張可能である。また、以下の説明では、時刻で定式化しているが、実際の処理においては、単位時間の経過の都度の処理の代わりに単位歩行距離の都度処理を行ってもよい。また、以下、大文字のアルファベットはベクトル又は行列とする。
【0050】
時刻tにおける歩行者の位置P(t)を式(1)とすると、時刻t+1(時刻t、t+1の間隔は、所定時間であり、例えば、1秒、0.5秒などである)における歩行者の位置P(t+1)は、式(2)で表すことができる。あるいは、時刻tから歩行者が所定の歩行距離(例えば、1m、2mなど)を歩行した時刻を時刻t+1とすることもできる。なお、ベクトルに付した「T」は転置を意味する。また、式(2)は、歩行者の動特性を示すものである。なお、時刻tにおける歩行者の位置P(t)は、歩行者の真の位置(実際の位置)であり、未知の誤差の存在のため観測不可能な位置である。すなわち、歩行者の測位位置は、真の位置P(t)に対する最適な推定位置を求めるものである。
【0051】
【数1】
【0052】
ここで、D(t)は、式(3)で表され、d(t)は、時刻tから時刻t+1までに歩行者が移動(歩行)した距離、θ(t)は、直交座標系に対する歩行者の移動(歩行)の方位角である。また、E(t)は、式(4)で表され、e(t)は、移動距離d(t)の誤差である。また、誤差E(t)の分散Q(t)は、式(5)で表され、qは、単位距離移動での誤差分散であり、一定値とすることができる。
【0053】
また、時刻tにおいて、GPS、基地局通信又は路上装置との通信により検出された位置S(t)は、式(6)で表すことができる。ここで、G(t)は、位置S(t)の誤差であり、誤差G(t)の共分散行列R(t)は、式(7)で表すことができる。式(7)において、a、bそれぞれは、図2で示した誤差範囲である矩形領域のx方向及びy方向の長さの4分の1である。すなわち、共分散行列R(t)は、2a、2bを2シグマとした場合のx方向及びy方向の分散で構成されている。なお、E(t)、G(t)の平均値は0としても一般性は失わない。
【0054】
時刻tにおける歩行者の位置P(t)の最適な推定位置H(t)は、カルマンフィルタにより式(8)のような漸化式で表される。
【0055】
【数2】
【0056】
ここで、Γ(t)は、推定位置H(t)の推定誤差の分散であり、式(9)のような漸化式で表すことができる。また、行列に付した「−1」は、その行列の逆行列を意味する。また、初期時刻0における推定位置H(0)、その推定誤差の分散Γ(0)は、それぞれ式(10)、式(11)で表すことができる。ここで、Mは、歩行者の最初の位置の先験情報であり、Σは、その誤差分散である。仮に先験情報がない場合、M=0、Σ-1=0となり、初期時刻0における推定位置H(0)、その推定誤差の分散Γ(0)は、それぞれ式(12)、式(13)で表される。
【0057】
なお、式(6)は、GPS、基地局通信又は路上装置との通信により位置が検出された場合に得られるので、GPS、基地局通信又は路上装置との通信が行われない間は、式(7)における誤差a、bが十分大きな値と考えることにより、式(8)において、R-1(t)=0とすれば、式(8)をそのまま用いて推定位置を繰り返し算出することができる。すなわち、この場合は、自立航法のみで位置を測位することと等価になる。
【0058】
移動距離d(t)の誤差e(t)は、距離センサの種類により異なる。例えば、複数の種類の距離センサを同時に利用する場合には、各センサの誤差を結合した結合誤差を設定すれば良い。例えば、2種類のセンサで得られた距離をそれぞれd1、d2、誤差の分散をそれぞれq1、q2とすると、その結合距離を、式(14)で設定し、その結合誤差として分散は、式(15)で設定することができる。
【0059】
【数3】
【0060】
上述の定式化では、記述を簡単にするために、方位(方位角)θの誤差がないと仮定したが、方位(方位角)θの誤差f(t)を考慮して、線形近似することにより上述の定式化を容易に拡張することができる。この場合、誤差e(t)、G(t)と同様に、誤差f(t)の誤差分散を定義する。あるいは、方位誤差を考慮して、位置の誤差分散を大きくすることもできる。
【0061】
例えば、時刻tの方位θの計測値に誤差F(t)が累加した場合、高次の誤差を無視すれば、式(2)は式(16)及び式(17)のように拡張することができる。
【0062】
【数4】
【0063】
この場合、式(5)は、式(18)に置き換えればよい。ここで、uは方位θの誤差の分散である。なお、式(16)〜式(18)に代えて、式(5)のQ(t)を大きめに設定するだけとしてもよい。なお、以上の数式では、2次元の位置検出として定式化したが、高さの次元を加えて3次元で定式化してもよい。
【0064】
地図データベース14は、広範囲の地図情報を記憶してある。なお、歩行者の位置に応じて、その付近の地図情報をセンタ装置又は路上装置などの外部から通信で取得して記憶しておくこともできる。
【0065】
図3は地図情報の一例を示す模式図であり、図4は地図上の領域の属性の一例を示す説明図である。歩行者の位置を検出する場合には、車両の位置を検出する場合に比較して複雑かつ困難になる。すなわち、車両の場合には、推定した位置と地図上の車道との地図マッチングにより、車両の位置を検出することができるのに対し、歩行者の場合には、歩行者用の歩道以外に歩行者が歩行可能な領域は種々存在する。また、屋外のみならず屋内であっても歩行者の位置検出を行う必要性が高い。
【0066】
また、歩行者の位置を検出する場合、歩道と車道との分離等、きめ細かな地図マッチングが必要となるため、地図情報としても詳細のデータが必要になる。ただし、広範囲な地図情報を位置検出装置10の記憶部15に記憶しておく必要はなく、歩行者の位置に合わせて適宜、情報センタ装置又は路上装置等の外部から通信で取得しても良い。
【0067】
図3に示すように、地図上には、歩行者専用道路(歩道)、車道、横断歩道、ビル、小売店、公園、池など、種々の領域が存在する。そこで、図4に示すように、地図上の領域の属性を定義して、地図上の領域を分類する。属性は、まず、歩行可能領域と禁止領域とに区分する。禁止領域は、例えば、立入禁止区域、川、池、海、湖、沼、池、崖、鉄道敷地、皇居など、一般には歩行者の進入が禁止されている領域、あるいは進入が不可能な領域である。
【0068】
歩行可能領域は、屋内領域、道路領域及びその他領域に区分される。屋内領域は、例えば、ビル、地下道、駅舎、店舗、小売店、家屋、工場、地下街、建造物内部などである。道路領域は、例えば、歩行者専用道路、歩道・車道分離の幹線道路の場合の歩道、横断歩道、歩行者用陸橋(歩道橋)、地下横断道路、踏切、その他私有地の道路等(今後、何れも道路と呼ぶ)である。また、その他領域は、例えば、車道、公園、運動場、その他自由に歩行可能な全ての屋外の領域である。なお、屋内領域又はその他領域において、歩行者の歩行が限定されている場合には、その中に歩行通路(道路)を設定して道路領域とすることもできる。
【0069】
図3に示すように、道路領域は、歩行者専用道路、幹線道路の歩道、横断歩道、歩行者用陸橋、地下横断道路であり、屋内領域は、ビル、小売店、家屋であり、小売店には道路が設定されている。また、禁止領域は池であり、その他領域は幹線道路の車道、公園である。図3及び図4の情報に基づいて、地図上の道路(道路領域、地図マッチングのための線分)を設定することができる。なお、図4では、属性を歩行可能領域と禁止領域とに区分した上で、歩行可能領域を屋内領域、道路領域及びその他領域に区分し、各属性の例示として歩行者専用道路、横断歩道、歩行者用陸橋等を挙げたが、属性は上述のように階層構造に限定されるものではなく、歩行者専用道路、横断歩道、歩行者用陸橋等をそれぞれ1つの属性として定義することもできる。また、図4の例は一例であって、これに限定されるものではない。
【0070】
図5は地図上の道路の設定例を示す説明図である。図5に示すように、道路領域、屋内領域、その他領域の道路に対して、地図マッチングのための1又は複数の線分(標準歩行線、地図上の道路)を定義し、各線分の接続関係の情報を設定する。地図上の道路(道路領域)は、リンク及びノードにより構成することもでき、あるいは、線分に対する道路幅に相当する幅を設定することもできる。ノードは、地図上の道路の一部であり、リンクはノードの接続点、すなわち、地図上の道路の接続性を定義する。なお、設定される道路は、道路領域と同義である。
【0071】
例えば、図3の例に対して、地図上の道路は、図5のように設定される。地図上の道路には、道路幅の情報、接続関係の情報を含めることもできる。また、屋内領域、禁止領域には、それぞれの領域の範囲の情報を含めることもできる。その他領域に、領域の範囲の情報を含めてもよく、あるいは、道路領域、屋内領域、禁止領域の何れでもなければその他領域であると判断する場合、その他領域に領域の範囲の情報を含めなくてもよい。なお図3、図5には記していないが、領域と領域とを接続する地点又は道路(通路)を地図上に設定してもよい。例えば、道路上に屋内領域の地下街又は地下鉄駅舎に通じるための連絡口(階段、エレベータ、エスカレータ等)がある場合等であり、これにより、道路から屋内領域に移る場合に、歩行者の位置を修正することができる。
【0072】
記憶部15は、通信部12を介して受信した各種情報、測位部13で測位した測位データ、位置検出処理部17で処理した処理結果などを記憶する。なお、制御部11、位置検出処理部17などをCPU、RAMなどで構成する場合、制御部11、位置検出処理部17の処理手順を定めたコンピュータプログラムを記憶することもできる。
【0073】
操作部16は、各種操作ボタンを備え、歩行者と位置検出装置10とのユーザインタフェースとして機能する。例えば、操作部16は、歩行者の操作により位置検出装置10の動作の開始又は停止の操作を受け付ける。
【0074】
位置検出処理部17は、専用のハードウエア回路で構成してもよく、又は予め処理手順を定めたコンピュータプログラムを実行する構成であってもよい。
【0075】
位置推定部171は、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に算出された推定位置又は推定位置を更新して歩行者の位置として検出された検出位置と、測位部13で算出した測位位置の軌跡(測位軌跡)とに基づいて、地図上の推定位置(推定位置の軌跡)を算出する。より具体的には、直近又は前回に算出された推定位置又は検出位置から測位位置までの測位軌跡に沿った軌跡を求めることにより、推定位置の軌跡及び推定位置を算出する。
【0076】
誤差算出部172は、位置推定部171で推定した推定位置の誤差範囲を算出する。より具体的には、誤差算出部172は、後述するように推定位置を初期登録する場合、あるいは、推定位置を更新する場合、推定位置の誤差範囲を所定値に設定する。例えば、推定位置を初期登録した場合、推定位置の誤差範囲を測位位置の誤差範囲(例えば、20〜200m)とすることができる。また、道路上のカーブ、交差点等の特徴地点で推定位置を更新した場合、最小の誤差(例えば、道路幅程度の範囲)とすることができる。
【0077】
誤差算出部172は、初期登録した推定位置又は更新した推定位置の誤差範囲を所定値に設定した後は、設定した所定値に、初期登録又は更新した推定位置からの歩行者の移動距離又は移動方向に応じた値(例えば、測位誤差の増加分)を加算して誤差範囲を算出する。これにより、一旦歩行者の位置が決定(確定)され、その位置での誤差範囲を所定値に設定した後は、測位軌跡の増加(移動距離又は移動方位)に伴って測位誤差が増加した場合でも、測位軌跡に応じて、推定位置の適切な誤差範囲を求めることができる。なお、誤差範囲を常に適当な所定の一定値(例えば、100m)とすることもできる。
【0078】
属性判定部173は、誤差算出部172で算出した推定位置の誤差範囲内に存在する地図上の領域の属性を判定する。なお、推定位置の誤差範囲内に複数の属性が存在する場合には、推定位置に最も近い(距離が短い)領域の属性であると判定することができる。あるいは、各属性に優先順位を設定しておき、最も優先順位の高い属性であると判定することもできる。この場合、属性の優先順位は、例えば、順位の高いほうから道路領域、屋内領域、その他領域とすることもでき、あるいは、順位の高いほうから道路領域、その他領域、屋内領域とすることもできる。
【0079】
歩行挙動判定部174は、測位部13で得られた測位データに基づいて、歩行者の歩行挙動を判定する。歩行挙動は、歩行者の歩行特性を示すものであり、自転車に乗った場合の歩行特性も含む。歩行挙動は、例えば、歩行の開始、歩行速度、歩行速度の変動、歩行の強さ(例えば、歩数センサで加速が大きさで示されるレベル強度)、歩行の強さの変動、単位時間当たりの歩数(自転車の場合には、ペダルをこぐ回数)、歩数の変動、歩行方位、歩行停止などである。
【0080】
歩行挙動判定部174は、歩行挙動に基づいて歩行の乱れの有無を判定する。歩行の乱れは、例えば、所定の歩行速度又は単位時間当たりの歩数を基準として歩行速度が遅い又は歩数が少ない場合、歩行速度が略一定でなく歩行速度の変動が頻繁にある場合、歩行方位の蛇行又は周回性がある場合、あるいは、歩行の強さが不安定である場合などである。これにより、歩行者が横断歩道、歩行者用陸橋、踏切、地下横断通路等を歩行したり、屋内の階段、エレベータ、エスカレータを利用して上階や下階に行ったり、あるいは、店内を見回ったりしている可能性が判断できる。
【0081】
位置更新部175は、測位位置に基づいて推定位置の初期登録を行う。また、位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として特定(検出)する。この場合、評価部177で算出される評価係数に基づいて、最も確からしい推定位置を歩行者の位置として特定(検出)する。評価係数の詳細は後述する。なお、評価係数の逆数を相関度と定義し、相関度を用いることもできる。
【0082】
信頼度算出部176は、測位部13で測位した測位データの信頼度を算出する。より具体的には、信頼度算出部176は、距離センサ132、方位センサ133、高度センサ134などのセンサ単体でのデータの自己矛盾、あるいは、センサ相互のデータの矛盾又は地図情報との不整合などの異常の有無の判定、GPS131の測位データ及び基地局通信の信頼性を示す使用環境指標の算出などを行う。また、センサ等に異常があると判定した場合には、使用可能なセンサを選択するとともに、使用不可のセンサに対しては、そのセンサの誤差分散を無限大にする(又は大きくする)処理を行う。これにより、常にセンサの使用可否を監視する。以下、信頼度算出部176での処理の詳細について説明する。
【0083】
GPS131の異常の有無の判定は、例えば、GPS131で得られた測位データに基づいて測位した測位位置、歩行者の歩行速度、移動方位などの時間的変化に自己矛盾があるか否かで判定することができる。異常がある場合には、GPS131のデータの誤差分散を無限大にして利用しないようにする。また、このような異常な状況が、所定の時間及び/又は所定の距離の間継続した場合、GPS131の信頼度は低いとする。また、このような異常な状況がなくなった場合、GPS131のデータを利用するとともに、さらに正常な状況が所定の時間及び/又は所定の距離の間継続すれば、GPSの信頼度を正常な値に復帰させる。
【0084】
GPS131の使用環境指標としては、例えば、GPS131の受信レベル、捕捉衛星数、2次元又は3次元測位の別、CEP(Circular Error Probability)が所定の標準値以下であれば、異常であるとしてGPS131のデータの誤差分散を無限大にして利用しないようにする。また、このような異常な状況が、所定の時間及び/又は所定の距離の間継続した場合、GPS131の信頼度は低いとする。また、このような異常な状況がなくなった場合、GPS131のデータを利用するとともに、さらに正常な状況が所定の時間及び/又は所定の距離の間継続すれば、GPS131の信頼度を正常な値に復帰させる。
【0085】
基地局通信の使用環境指標としては、例えば、基地局との通信レベル、基地局の通信範囲等が所定の標準値より低下した場合、異常であるとして基地局通信によるデータの誤差分散を無限大にして利用しないようにする。また、このような異常な状況が、所定の時間及び/又は所定の距離の間継続した場合、基地局通信の信頼度は低いとする。また、このような異常な状況がなくなった場合、基地局通信のデータを利用するとともに、さらに正常な状況が所定の時間及び/又は所定の距離の間継続すれば、基地局通信の信頼度を正常な値に復帰させる。なお上記では、GPSと基地局通信とを区別したが、GPSと基地局通信とを結合した測位方式を利用してもよい。
【0086】
地磁気センサは、その検出原理から周辺の鉄板又は鉄筋等の存在、踏切等の電場又は磁場の存在により検出データにノイズが加わり、検出精度が低下することが多い。このような場合、仮に誤差がない場合でも、地磁気センサを使用しないようにしてもよい。また、建物内(屋内)又は踏切付近では、地磁気センサの検出データにノイズが加わるため、これを利用して歩行者が屋内又は踏切付近に存在する可能性が高いと判定することができる。
【0087】
センサ相互のデータの矛盾の有無の判定は、例えば、過去のある時刻で測位した測位方位(推定方位)に、その時刻から現在時刻までの相対方位センサのデータ増分を加えたものが、現在時刻での地磁気センサのデータと大きく乖離すれば、地磁気センサのデータが異常であるとみなして地磁気センサを利用しないようにすることができる。また、このような異常な状況が、所定の時間及び/又は所定の距離の間継続した場合、地磁気センサの信頼度は低いとする。また、このような異常な状況がなくなった場合、地磁気センサのデータを利用するとともに、さらに正常な状況が所定の時間及び/又は所定の距離の間継続すれば、地磁気センサの信頼度を正常な値に復帰させる。
【0088】
また、方位の誤差を考慮して定式化する場合には、地磁気センサの誤差分散としては、例えば、異常の場合に無限大(又は十分に大きな値)、正常の場合に標準値(例えば、平均的な誤差)とする。相対方位センサの誤差分散は、例えば、較正されたとき最小に設定し、時間又は距離が経過するにつれて誤差分散を増加させる。複数のセンサによる誤差分散は、各々のセンサの分散を結合すれば良い。また、他の相互チェックとしては、過去のある時刻の推定位置に、歩数センサから推定された距離を加えたものが、現在時刻でGPS131により測位した測位位置と大きく乖離すれば、GPS131の測位データが異常であるとみなすことができる。
【0089】
評価部177は、位置推定部171で算出した推定位置、及び位置更新部175で更新した推定位置を評価するための評価係数を算出する。評価係数は、推定位置の確からしさを評価するための係数であり、例えば、評価係数が小さいほど推定位置の確からしさ(確率)が大きいとすることができる。評価係数は、例えば、推定位置と測位位置との位置ずれ、カーブ、交差点等の特徴地点における推定位置と測位位置との位置ずれの差の平均、カーブ、交差点等の特徴地点における推定位置と道路との位置ずれ(距離ずれ)の平均等である。なお、評価係数の詳細は後述する。
【0090】
方位補正部178は、所定時間又は所定距離をカウントするための期間カウンタを備え、地図マッチング法により、位置更新部175で歩行者の位置を道路上に更新(特定)した場合、測位方位をその特定した位置(特定位置)の道路方位に補正することにより、歩行者の移動方向の方位を特定する。なお、方位補正の詳細は後述する。
【0091】
表示部18は、例えば、液晶表示パネルであって、歩行者に自身の位置を地図上に表示する。
【0092】
音声出力部19は、歩行者の位置を表示部18で表示する際に、歩行者に所要の情報を通知するため、又は注意を促すため音声又は音響を出力する。
【0093】
次に位置検出装置10の地図マッチング法による位置検出処理について説明する。なお、以下の説明では、屋内領域及びその他領域には通路(道路)が設定されていないものとする。通路が設定されている場合には、その通路を道路として取り扱うことができる。
【0094】
図6は推定位置の新規登録の一例を示す説明図である。推定位置の新規登録(初期登録)は、地図マッチング処理を開始した場合、あるいは、推定位置の候補が1つもなくなってしまった場合に行う処理である。
【0095】
推定位置の新規登録を行うか否かは、例えば、次の条件(1)、条件(2)により判定する。すなわち、条件(1)及び条件(2)の両方を充足する場合、推定位置の新規登録を実施せず、条件(1)又は条件(2)のいずれかが充足しない場合、推定位置の新規登録を行う。条件(1)は、センサ等の信頼度が所定の閾値以下(信頼性が悪い)場合であり、例えば、GPS131の信頼性が悪い場合、地磁気センサの信頼性が悪い場合などである。また、条件(2)は、所定の範囲(時間及び/又は距離)以上、歩行の乱れがある場合である。すなわち、条件(1)及び条件(2)を充足する場合、歩行者の位置は屋内領域にある可能性が高いため、歩行者が屋内領域から屋外領域に出るまで地図マッチング処理を実施しない。
【0096】
図6に示すように、測位位置Aの誤差範囲内に道路領域、すなわち、地図上の道路があるか否かを判定し、道路(道路領域)がある場合には、測位位置Aに最も近い当該道路上の地点を測位位置Aに対応する新規の推定位置として登録する。図6では、誤差範囲内に2つの道路が存在するため、それぞれの道路において測位位置Aから最も近い地点M、Nを推定位置として登録する。この場合、測位位置Aまでの測位軌跡の方位又は測位位置Aでの測位方位とほぼ方位が一致する道路を予め登録しておくこともできる。仮に、測位軌跡の方位又は測位方位と道路の方位とが略一致するような道路がない場合には、誤差範囲内に登録できる道路が存在するまで推定位置の新規登録を行わずに待機する。
【0097】
推定位置を新規に登録した場合、その推定位置に対応する測位位置の誤差範囲を、新規登録した推定位置の誤差範囲として設定(登録)する。図6の例では、推定位置M、Nの誤差範囲は、推定位置Aの誤差範囲を引き継ぐ。また、新規登録した推定位置M、Nとそれに対応する測位位置Aとの位置ずれに基づいて、推定位置M、Nの評価係数を算出する。
【0098】
図7は新規登録した推定位置の評価係数の算出の一例を示す説明図である。図7の例は、測位位置Aに対応させて推定位置Mを新規登録した場合を示す。測位位置Aの座標を(X、Y)、新規登録した推定位置Mの座標を(x、y)とすると、推定位置Mの評価係数Cは、C=C1+C2とすることができる。ここで、C1=|x−X|、C2=|y−Y|で表わすことができる。すなわち、推定位置Mの評価係数Cは、推定位置Mと測位位置Aのx座標の差、推定位置Mと測位位置Aのy座標の差とすることができる。この場合、評価係数が小さいほど、推定位置の確からしさ(確率)が高いということができる。評価係数Cは、x座標毎、y座標毎に算出するだけでなく、x座標とy座標の絶対値の和、あるいは、自乗和の平方根等により1つの指標とすることもできる。これにより、推定位置Mが測位位置Aに対して、どの程度確かな位置であるかを把握することができる。
【0099】
次に、新規登録後の推定位置の軌跡の算出例について説明する。図8は推定位置の軌跡の算出例を示す説明図である。図8の例では、測位位置Aに対応させて推定位置Mを新規登録した場合を示す。図8(a)に示す推定位置の軌跡の算出例は、推定位置Mを起点として、測位位置Aからの測位軌跡をそのまま平行移動(ずらす)させることにより、推定位置の軌跡を求めるものである。
【0100】
図8(b)の場合は、図8(a)の場合において、地図上の道路の方位と推定位置の軌跡の方位又は推定位置での方位との方位差が所定の閾値より小さい場合には、所定時間の経過及び/又は所定距離の移動の都度、推定位置を道路上に更新(修正)する。なお、推定位置を道路上の位置に更新する際に、位置ずれに応じた値を評価係数に加算してもよい。
【0101】
図8(c)の場合は、図8(a)の場合において、地図上の道路の方位と推定位置の軌跡の方位又は推定位置での方位との方位差が所定の閾値より小さい場合には、常時、推定位置を道路上に更新(修正)する。なお、推定位置を道路上の位置に更新する際に、位置ずれに応じた値を評価係数に加算してもよい。
【0102】
図8(d)の例は、図8(c)の場合において、地図上の道路の方位と推定位置の軌跡の方位又は推定位置での方位との方位差が所定の閾値を越えたときに、道路上の位置に更新(修正)することは行わないことを示す。なお、図8(a)、図8(b)の場合には、表示部18に表示させるときだけ、地図上に修正することもできる。
【0103】
図8(e)の例は、図8(c)が道路を線分で表現した場合の推定位置の修正例であるのに対して、道路を2次元図形そのままで表現した場合に推定位置を修正する例である。
【0104】
推定位置の誤差範囲は、推定位置の新規登録(初期登録)では、測位誤差(例えば、20〜200mの範囲)とすることができる。また、推定位置の誤差範囲は、カーブ、交差点等の特徴地点で推定位置を道路上の位置に更新(修正)した場合には、最小の誤差範囲(例えば、道路幅程度)とすることができる。その後、歩行者が歩行するにつれて、測位誤差が累加されるため、推定位置の誤差範囲を増加させることができる。これにより、一旦歩行者の位置が決定(確定)され、その位置での誤差範囲を所定値に設定した後は、測位軌跡の増加(移動距離又は移動方位)に伴って測位誤差が増加した場合でも、測位軌跡に応じて、推定位置の適切な誤差範囲を求めることができる。なお、推定位置の誤差範囲を常に適当な所定の一定値(例えば、100m)とすることもできる。これにより、位置検出の処理労力を低減することができる。
【0105】
次に、推定位置の更新方法について説明する。推定位置の更新は、例えば、推定位置の誤差範囲内の地図上の領域の属性、道路の接続特性、道路領域と他の領域との接続特性、歩行者の歩行挙動、測位データの信頼度(信頼性)、推定位置の評価係数等に基づいて行う。また、推定位置が妥当でない場合には、推定位置の棄却を行う。
【0106】
図9は推定位置の更新の一例を示す説明図である。図9の例では、歩行者は屋外を歩行しているものとする。測位位置Aまでの測位軌跡に対応して、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に更新した推定位置からの推定位置の軌跡により、測位位置Aに対応して2つの推定位置M、Nが存在するとする。推定位置Mの誤差範囲内には、道路(道路領域)が存在するので、推定位置Mを道路上の位置に更新する。また、推定位置Mと更新した推定位置との位置ずれに対応する値を推定位置Mの評価係数に加算して、更新した推定位置の評価係数として引き継ぐようにしてもよい。また、カーブ、交差点等の特徴のある地点において、推定位置Mの位置ずれを補正して推定位置を更新し、評価係数、誤差範囲を更新することもできる。この場合、更新する誤差範囲としては、例えば、最小値(道路幅程度の範囲)を設定することができる。なお、推定位置の方位と道路の方位との方位差が所定の閾値より小さいか否かを判定し、方位差が閾値より大きい場合、推定位置を道路上に更新しないようにすることもできる。
【0107】
推定位置Nの誤差範囲内では、前回又は直近で更新した推定位置が存在していた道路(道路領域)が誤差範囲外となるため、誤差範囲内に別の道路があるか否かを判定する。仮に別の道路が存在する場合、推定位置をその道路の位置に更新するとともに、推定位置Nの誤差範囲、評価係数を更新した推定位置の誤差範囲、評価係数として引き継ぐ。仮に更新すべき道路がないと判定した場合、推定位置の属性を判定し、判定した属性がその他領域であれば、推定位置Nから、歩行者の歩行に伴う歩行軌跡の変化分を累計した位置を推定位置の軌跡とし、評価係数、誤差範囲を引き継ぐ。また、判定した属性が禁止領域であれば、推定位置Nを棄却する(図9参照)。
【0108】
図10は推定位置の更新の他の例を示す説明図である。図10の例は、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に更新した推定位置が存在する道路が2つの道路に分岐するような場合である。測位位置Aまでの測位軌跡に対応して、前回に更新した推定位置からの推定位置の軌跡により、測位位置Aに対応して1つの推定位置Mが存在するとする。推定位置Mの誤差範囲内には、分岐した一方の道路(道路領域)が存在するので、推定位置Mを道路上の位置に更新する。また、推定位置Mと更新した推定位置との位置ずれに対応する値を推定位置Mの評価係数に加算して、更新した推定位置の評価係数として引き継ぐようにしてもよい。推定位置Mの誤差範囲外となった他方の道路上の推定位置は棄却する。なお、この場合においても、カーブ、交差点等の特徴のある地点において、推定位置Mの位置ずれを補正して推定位置を更新し、評価係数、誤差範囲を更新することもできる。
【0109】
図11は推定位置の更新の他の例を示す説明図である。図11の例も、前回又は直近に更新した推定位置が存在する道路が2つの道路に分岐するような場合である。測位位置Aまでの測位軌跡に対応して、前回又は直近で更新した推定位置からの推定位置の軌跡により、測位位置Aに対応して1つの推定位置Mが存在するとする。推定位置Mの誤差範囲内には、分岐した両方の道路(道路領域)が存在するので、推定位置Mを各道路上の位置に更新する。更新した推定位置を第1候補の推定位置及び第2候補の推定位置とする。また、推定位置Mと第1候補の推定位置及び第2候補の推定位置との位置ずれに対応する値を推定位置Mの評価係数に加算して、第1候補の推定位置及び第2候補の推定位置の評価係数として引き継ぐようにしてもよい。なお、この場合においても、カーブ、交差点等の特徴のある地点において、推定位置Mの位置ずれを補正して推定位置を更新し、評価係数、誤差範囲を更新することもできる。
【0110】
次に、カーブ、交差点等の特徴地点での推定位置の評価係数の算出方法について説明する。図12は特徴地点での推定位置の評価係数の算出の一例を示す説明図である。図12の例では、カーブ等の特徴地点B1、B2、B3において、測位位置A1、A2、A3に対応して道路上の位置に更新した推定位置M1、M2、M3があるとする。測位位置A1と推定位置M1との位置ずれを(x1、y1)とし、測位位置A2と推定位置M2との位置ずれを(x2、y2)とし、測位位置A3と推定位置M3との位置ずれを(x3、y3)とする。また、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に更新した推定位置と対応する測位位置との位置ずれを(x0、y0)とする。推定位置(例えば、推定位置M3)の評価係数を、推定位置と測位位置との位置ずれの差の平均値として求めることができる。
【0111】
すなわち、x方向の位置ずれの差の平均値は、{|x1−x0|+|x2−x1|+|x3−x2|}/3となり、y方向の位置ずれの差の平均値は、{|y1−y0|+|y2−y1|+|y3−y2|}/3となる。各特徴地点B1、B2、B3での位置ずれが等しいほど評価係数は小さくなり、推定位置の確からしさ(確率)が大きいといえる。これにより、推定位置が測位位置に対して、どの程度確かな位置であるかを把握することができる。
【0112】
なお、評価係数として、各特徴地点での位置ずれの差の2乗を合計して平均し、平均した値の平方根を求めることもできる。また、平均値に代えて、中央値、最大値と最小値の和の2分の1の数値など他の統計値を用いることもできる。
【0113】
図13は特徴地点での推定位置の評価係数の算出の他の例を示す説明図である。図13の例では、カーブ等の特徴地点B1、B2、B3において、測位位置A1、A2、A3に対応して推定位置M1、M2、M3があるとする。地点B1の位置と推定位置M1との位置ずれ(距離)をd1とし、地点B2の位置と推定位置M2との位置ずれ(距離)をd2とし、地点B3の位置と推定位置M3との位置ずれ(距離)をd3とする。推定位置(例えば、推定位置M3)の評価係数を、道路上の特徴地点と推定位置との位置ずれ(距離)の平均値(d1+d2+d3)/3として求めることができる。
【0114】
すなわち、推定位置と道路の位置との距離が短いほど、評価係数は小さく、推定位置の確からしさ(確率)が大きいといえる。これにより、推定位置が道路に対して、どの程度確かな位置であるかを把握することができる。
【0115】
図14は推定位置の評価係数の他の例を示す説明図である。推定位置の評価係数を求める場合に、図12、図13の例で示すような道路上のカーブ、交差点等の特徴地点のように、明らかな方位変更がある地点で評価係数を算出する構成に限定されず、例えば、図14に示すように、推定位置の軌跡又は測位軌跡と地図上の道路形状とのマッチングを評価することもできる。なお、上述したような複数の種類の評価係数のいずれか1つを用いて評価することもでき、あるいは、複数種類の評価係数に適宜重み付けを行って合算し、1つの評価係数として用いることもできる。
【0116】
次に、推定位置の評価係数を更新(補正)する方法について説明する。道路上の位置に更新した推定位置が横断歩道又はその付近にある場合に、歩行者の歩行速度の増加又は歩行停止を検出したときは、歩行者が横断歩道内又は横断歩道付近にいる確率が高いとして、推定位置の評価係数に所定の1以下の数値(例えば、m1=1/3)を積算することにより評価係数が小さくなるように更新する。なお、上記評価係数に所定の1以下の数値を積算することにより評価係数が小さくなるように更新する場合、実際には、評価係数と数値(デフォルト値は1)とのデータを用意しておき、評価係数の記憶データはそのままにして、積算すべき数値を変更するという形態とし、他の推定位置と比較するとき等に、見かけ上の評価係数として上記積算値を利用することもできる。これにより、以後の評価係数の算出が矛盾なく実施可能となる。
【0117】
また、道路上の位置に更新した推定位置が横断歩道又はその付近にある場合に、青信号開始時点での歩行挙動又は赤信号開始時点での歩行挙動に応じて評価係数を更新する。例えば、青信号開始時点で歩行停止から歩行開始になった場合、歩行者が横断歩道を歩行している確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m2=1/5)を積算することにより評価係数が小さくなるように更新する。また、赤信号開始時点で歩行速度の増加があった場合、歩行者が横断歩道を歩行している確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m3=1/5)を積算することにより評価係数が小さくなるように更新する。
【0118】
また、道路上の位置に更新した推定位置が歩行者用陸橋にある場合に、階段歩行における歩行速度の変動又は歩行の強さの変動を検出したときは、歩行者が歩行者用陸橋を歩行している確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m4=1/5)を積算することにより評価係数が小さくなるように更新する。この場合、高度の増加又は減少があるか否かを判定し、高度の増加又は減少がある場合、評価係数を小さくなるように更新することもできる。
【0119】
また、道路上の位置に更新した推定位置が地下横断通路にある場合に、階段歩行における歩行速度の変動又は歩行の強さの変動を検出したときは、歩行者が地下横断通路を歩行している確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m5=1/5)を積算することにより評価係数が小さくなるように更新する。この場合、GPS131の信頼性が低い、地磁気センサの信頼性が低い、歩行速度の変動又は歩行の強さの変動等により所定の数値として、例えば、m5=1/5を用いることができる。また、高度の増加又は減少があるか否かを判定し、高度の増加又は減少がある場合、評価係数を小さくなるように更新することもできる。
【0120】
また、道路上の位置に更新した推定位置が踏切の付近にある場合に、歩行者の歩行停止を検出したときは、あるいは、地磁気センサの検出レベルにノイズが加わったときは、歩行者が踏切手前で立ち止まっている確率が高いとして、算出した評価係数に所定の1以下の数値(例えば、m6=1/3)を積算することにより評価係数が小さくなるように更新する。
【0121】
上述のように、評価係数を小さくなるように更新して、推定位置の確からしさを大きくすることができ、位置検出の精度を判定することができる。また、推定位置に基づいて自身の位置を検出する場合に、推定位置の候補が複数存在するようなときでも、最も確からしい推定位置に基づいて自身の位置を検出し続けることが可能となる。なお、評価係数の値を小さくする代わりに、他の推定位置を全て棄却してもよい。これは推定位置の初期位置を特定することに相当する。
【0122】
推定位置の候補が複数ある場合には、推定位置の候補の中で最も評価係数の小さい推定位置を歩行者の位置であるとし、評価係数が所定の閾値より大きい推定位置を候補対象から棄却することができる。また、閾値以上の歩行距離で、その他領域の推定位置と道路領域の推定位置とが存在する場合には、その他領域の推定位置は存在確率が低いとして棄却してもよい。さらに、測位位置の誤差範囲外となる推定位置は棄却することができる。また、推定位置が1つだけ存在し、その推定位置が道路上にある状況が所定時間又は所定距離の間続いた場合に、その推定位置を歩行者の位置として確定し、確定した推定位置の評価係数を0にする。また、推定位置が1つも存在しない場合、新規の推定位置が得られるまでの間、測位位置又は直近の推定位置からの測位軌跡を累計した位置を、仮の推定位置(暫定位置)とすることができる。
【0123】
図15はその他領域から道路領域への推定位置Mの更新例を示す説明図である。図15に示すように、推定位置Mの誤差範囲内に道路領域及びその他領域があると判定した場合、歩行者が道路上にいる確率が高いとして、推定位置Mを道路上の位置に更新する。この場合、推定位置Mでの歩行方位と道路の方位とが略一致するか否かを判定し、両者の方位が略一致すると判定された場合に、推定位置Mを道路上の位置に更新するようにしてもよい。推定位置Mを更新した場合、上述の例と同様に、評価係数、誤差範囲を更新又は引き継ぐことができる。
【0124】
図16は屋内領域への推定位置Mの更新例を示す説明図である。位置検出装置10を携帯した歩行者が屋内にいる場合、次の条件(1)及び条件(2)の両方を充足すると考えられる。すなわち、条件(1)は、センサ等の信頼度が所定の閾値以下(信頼性が悪い)場合であり、例えば、GPS131の信頼性が悪い場合、地磁気センサの信頼性が悪い場合などである。また、条件(2)は、所定の範囲(時間又は距離)以上、歩行の乱れがある場合である。歩行の乱れは、例えば、所定の歩行速度又は単位時間当たりの歩数を基準として歩行速度が遅い又は歩数が少ない場合、歩行速度が略一定でなく歩行速度の変動が頻繁にある場合、歩行方位の蛇行又は周回性がある場合、あるいは、歩行の強さが不安定である場合などである。上記の条件以外の別の考え方として、高度が大きく上昇した場合には、屋内である確率が高いことを利用してもよい。なお、歩行者が屋内のビルの屋上又はビルのベランダ等に出た場合には、一時的にGPS又は地磁気センサのデータが改善される場合があるが、信頼性の有無は瞬間値で決定しないため、問題ないと考えられる。もし問題となる場合には、上記した高度とを組み合わせて屋内の有無を判定してもよい。
【0125】
そこで、推定位置Mの誤差範囲内に屋内領域があると判定した場合に、センサ等の信頼度が所定の閾値より小さく、かつ歩行の乱れがあると判定したとき、歩行者が屋内領域にいるとして、推定位置Mを屋内領域内の位置(例えば、推定位置Mに最も近い屋内領域の位置)に更新する。推定位置を更新した後の推定位置は、更新地点からの歩行軌跡の変化分を累計した位置とする。また、評価係数、誤差範囲を更新又は引き継ぐことができる。これにより、歩行者が屋外から屋内へ移動した場合でも、精度良く位置を補足し続けることが可能となる。
【0126】
図17は屋内領域から別の屋内領域への推定位置Mの更新例を示す説明図である。図17に示すように、前回(例えば、直近でもよく、2回又は3回などの複数回前でもよい)に更新した推定位置の誤差範囲内に屋内領域が存在した場合に、推定位置Mの誤差範囲内から先の屋内領域が外れ、別の屋内領域があると判定した場合、推定位置Mをその別の屋内領域内の位置に更新する。これにより、複数の屋内領域が隣接するような状況が存在する場合に、歩行者が屋内領域を通過するときでも、歩行者の位置を補足し続けることが可能となる。
【0127】
図18は屋内領域から道路領域又はその他領域への推定位置Mの更新例を示す説明図である。位置検出装置10を携帯した歩行者が屋内から屋外に移動した場合、次の条件(1)及び条件(2)の両方が充足すると考えられる。すなわち、条件(1)は、センサ等の信頼度が所定の閾値以上となる(信頼性が回復)場合であり、例えば、GPS131の信頼性が回復した場合、地磁気センサの信頼性が回復した場合などである。また、条件(2)は、所定の範囲(時間又は距離)以上、歩行の乱れが回復した場合である。
【0128】
そこで、推定位置Mの誤差範囲内に道路領域又は歩行可能な屋外領域(その他領域)があると判定した場合に、センサ等の信頼度が所定の閾値より大きく、かつ歩行の乱れがないと判定したとき、推定位置Mをその道路領域内の位置又は屋外領域内の位置に更新する。推定位置を更新した後の推定位置は、更新地点からの歩行軌跡の変化分を累計した位置とする。また、評価係数、誤差範囲を更新又は引き継ぐことができる。これにより、歩行者が屋内から屋外へ移動した場合でも、精度良く位置を補足し続けることが可能となる。
【0129】
また、推定位置の誤差範囲内が屋内領域である場合に、以下の条件(1)〜条件(3)のいずれかが充足するときは、推定位置は、屋内領域にはないとして、推定位置を棄却する。条件(1)はセンサ等(GPS131、地磁気センサなど)の信頼性が回復した場合であり、条件(2)は所定の範囲(時間又は距離)以上、歩行の乱れが回復した場合であり、条件(3)は所定の距離(例えば、300m)以上で、歩行速度が所定の範囲(例えば、10km/h〜20km/h)である(すなわち、歩行者は自転車に乗っているとして屋内領域にいる可能性がない)場合である。
【0130】
推定位置の誤差範囲内が、すべて屋内領域、あるいは禁止領域である場合、推定位置が矛盾しているとしてその推定位置を棄却してもよい。
【0131】
次に、方位補正部178で行う測位方位の補正について説明する。方位補正部178は、位置更新部175で歩行者の位置を道路上に更新(特定)した場合、特定した位置が歩行位置であると判定した場合、特定した位置の道路方位を測位方位として補正することにより、歩行者の移動方向の方位を特定する。
【0132】
特定した位置が歩行位置であるか否かの判定は、例えば、特定した位置が唯一つのみである場合に、その位置が唯一である状態が所定時間及び/又は所定距離に亘って継続したとき、特定した位置を歩行者の歩行位置であると判定する。所定時間は、例えば、1分などとすることができ、所定距離は、例えば、50mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0133】
また、特定した位置が歩行位置であるか否かの判定は、測位して得られた測位データに基づいて推定した歩行者の移動方向の方位の変動量を算出し、算出した変動量が所定の閾値(例えば、2度、3度など)より小さい状態が所定時間(例えば、20秒、30秒など)及び/又は所定距離(例えば、20m、30m等)に亘って継続した場合、歩行位置であると判定する。これにより、歩行者が直進していると判定される状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。特定した位置が歩行位置であるか否かの判定は、上述の判定条件のうち1つのみを用いてもよく、あるいは、組み合わせることもできる。
【0134】
方位補正部178は、位置更新部175で歩行者の位置を道路上に更新(特定)した場合、特定した位置の道路方位が歩行方位であると判定した場合、特定した位置の道路方位を測位方位として補正することにより、歩行者の移動方向の方位を特定する。歩行方位を判定に用いるのは、例えば、複数の位置が特定された場合である。
【0135】
特定した位置の道路方位が歩行方位であるか否かの判定は、特定した位置が複数ある場合、特定した各位置の道路方位の方位差を算出し、算出した方位差が所定の閾値(例えば、2度、3度等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定する。所定時間は、例えば、1分などとすることができ、所定距離は、例えば、50mなどとすることができる。これにより、歩行者の位置を唯一に特定できない状況であっても、それぞれの特定位置の道路方位に所定の閾値より大きな方位差がない場合には、歩行方位であるとして歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0136】
また、特定した位置の道路方位が歩行方位であるか否かの判定は、測位して得られた測位データに基づいて推定した方位の変動量を算出し、算出した変動量が所定の閾値(例えば、2度、3度など)より小さい状態が所定時間(例えば、20秒、30秒など)及び/又は所定距離(例えば、20m、30m等)に亘って継続した場合、歩行方位であると判定する。これにより、歩行者が直進していると判定される状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。特定した位置の道路方位が歩行方位であるか否かの判定は、上述の判定条件のうち1つのみを用いてもよく、あるいは、組み合わせることもできる。
【0137】
さらに、歩行位置の判定、歩行方位の判定には、以下のような判定条件を付加することもできる。例えば、位置推定部171で推定した推定位置と位置更新部175で更新(特定)した位置との位置ずれ(例えば、距離など)を算出し、算出した位置ずれが所定の閾値(例えば、50m等)より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置又は歩行方位であると判定する。所定時間は、例えば、1分などとすることができ、所定距離は、例えば、50mなどとすることができる。これにより、歩行者の位置が確実に特定できた状況で歩行者の移動方向の方位を補正することができ、精度良く歩行者の移動方向の方位を特定することができる。
【0138】
また、測位データ(例えば、GPS131、地磁気センサ等)の信頼度を算出し、算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置又は歩行方位であると判定する。具体的には、GPS131が正常である確率が低い場合、地磁気センサが正常である確率が低い場合などである。また、所定時間は、例えば、1分などとすることができ、所定距離は、例えば、50mなどとすることができる。これにより、測位方位の信頼性が低い場合に、自身(歩行者)の方位を特定した位置の道路の方位と一致させて、自身の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができる。
【0139】
次に、歩行者の位置を地図上で表示する表示例について説明する。歩行者の位置を表示部18で表示する場合、推定位置がないときは、測位位置又は暫定位置を表示し、推定位置があるときは、その推定位置(更新した推定位置を含む)を表示する。
【0140】
図19は歩行者の位置の表示の一例を示す説明図である。推定位置が1つの場合、その推定位置(又は更新した推定位置を含む)を地図上に表示した上で、表示した推定位置の誤差範囲も同時に表示する。なお、推定位置が複数ある場合には、評価係数の最も小さい推定位置を1つ表示することもできる。
【0141】
図20は歩行者の位置の表示の他の例を示す説明図である。推定位置が複数存在する場合、複数の推定位置を包含する領域を推定位置として表示する。この場合、各推定位置の誤差範囲を含むような範囲を表示してもよい。また、推定位置の評価係数の大小に応じて、その推定位置の誤差範囲の大きさを拡大又は縮小した上で、推定位置とその誤差範囲とを同時に表示することもでき、また、推定位置が複数ある場合には、各推定位置の誤差範囲を含む範囲を表示してもよい。また、複数の推定位置の重心位置を表示してもよい。
【0142】
図21は歩行者の位置の表示の他の例を示す説明図である。推定位置が複数存在する場合、各推定位置を表示した上で、各推定位置の誤差範囲又は確からしさの順位などを同時に表示する。図21では、第1候補の推定位置が最も確率の高い歩行者の位置であり、第2候補の推定位置は、その次に確率が高い歩行者の位置を示す。また、推定位置が複数存在する場合に、所定の閾値より小さい評価係数の推定位置が複数あるときは、評価係数が閾値より小さい位置だけを表示することもできる。これにより、歩行者は、自身の位置を容易に判断することができるとともに、最も確からしい位置のみならず、可能性のある位置も知ることができる。
【0143】
図22は歩行者の位置の表示の他の例を示す説明図である。図22では、表示部18の表示面が小さく、地図情報を詳細に表示することができないような場合(例えば、地図の縮尺を大きくできない場合)には、道路を線分で表示した上で、歩行者の位置を1つの点で表示することもできる。
【0144】
上述のとおり、推定位置を更新することにより特定(検出)した位置を歩行者の位置として表示する場合に、特定した位置が複数あるときには、算出又は補正した評価係数の大小に応じて、最も確からしい特定位置を表示することもでき、あるいは、複数の特定位置をすべて表示してもよく、あるいは、特定した位置の中からいくつかを選択して表示してもよい。また、歩行者の位置を検出している過程のある時点において、一時的に精度よく位置を検出することができず、仮に評価係数が大きくなり、検出した位置を表示した場合には、歩行者に誤った位置を表示する恐れがあるようなときでも、その後の測位の結果、特定位置の確からしさが十分確保できたような場合には、位置の確からしさを確保できた時点以降、その特定位置を表示させることもできる。
【0145】
次に位置検出処理の手順について説明する。図23、図24及び図25は位置検出処理の手順を示すフローチャートである。制御部11は、位置検出装置10内の各部と協働して位置検出処理を行う。制御部11は、初期位置の探索が必要であるか否かを判定する(S11)。
【0146】
歩行者の場合と異なり、車両の場合には、位置検出が不能になることは殆どなく、電源が切られた場合でも、検出した位置が保存されるため、初期位置を探索する必要性が殆ど皆無である。しかし歩行者の場合には、地下から出てくる場合等、位置検出が不能になる場合があり、初期位置を探索する必要がある。初期位置の探索は、GPS131による測位には時間がかかるため、通常基地局との通信により行う。
【0147】
初期位置の探索が必要である場合(S11でYES)、制御部11は、初期位置の探索を行い(S12)、探索位置を暫定的な測位位置とする(S13)。初期位置の探索が必要でない場合(S11でNO)、すなわち、1又は複数の推定位置をすでに保持している場合、制御部11は、ステップS12、ステップS13の処理を行わずに後述のステップS14の処理を行う。
【0148】
制御部11は、路上装置との通信の有無を判定し(S14)、路上装置との通信がある場合(S14でYES)、測位位置を通信位置に補正し(S15)、保持していた推定位置をすべて棄却する(S16)。路上装置との狭域通信(局所通信)による誤差は、GPS等に比べてかなり小さく、精度が高いため、局所通信により通信位置が得られた場合には、この通信位置を最も信頼性の高い推定位置とすることができる。
【0149】
制御部11は、補正した測位位置を推定位置として登録し(S17)、推定位置の地図領域の属性、誤差範囲、評価係数を登録する(S18)。これにより、推定位置の新規登録(初期登録)が完了するとともに、推定位置の誤差範囲、評価係数が設定される。路上装置との通信がない場合(S14でNO)、制御部11は、ステップS17の処理を行い、暫定的な測位位置を推定位置として登録する。
【0150】
制御部11は、測位データを取得し(S19)、測位データの異常の有無を確認し(S20)、確認結果に応じて、測位データの信頼度を算出する(S21)。制御部11は、測位データに基づいて測位位置を算出し(S22)、測位位置の測位誤差を算出する(S23)。測位位置の算出は、上述したように、距離センサ132、方位センサ133などによる自立航法と、GPS131等による衛星航法との組み合わせにより行うことができる。ただし、周囲にビル等の高い障害物がなく、GPS衛星の測位性能が非常によい場合には、自立航法を用いないで、GPS衛星だけで測位することも可能である。
【0151】
制御部11は、歩行者の歩行挙動を取得し(S24)、外部装置からの地図情報、信号情報の更新の有無を判定する(S25)。地図情報、信号情報の更新があった場合(S25でYES)、制御部11は、地図情報、信号情報を取得する(S26)。地図情報、信号情報の更新がない場合(S25でNO)、制御部11は、ステップS26の処理を行わずに後述のステップS27の処理を行う。
【0152】
制御部11は、地図マッチング機能の停止中であるか否かを判定する(S27)。地図マッチング機能が停止するか否かの条件は、例えば、歩行者の歩行速度が所定の閾値より大きい場合、又は屋内領域内の所定距離以上に亘って歩行者の位置が検出された場合である。所定の閾値は、例えば、60km/hとすることができ、歩行速度が所定の閾値より大きくなった場合、歩行者は、電車、自動車等の車両、あるいは他の交通機関を利用したとして、地図マッチングによる歩行者の位置検出を停止する。また、所定距離は、例えば、5kmとすることができ、屋内領域内の所定距離以上に亘って歩行者の位置が検出された場合には、歩行者は、電車、地下鉄等の他の交通機関を利用したとして、地図マッチングによる歩行者の位置検出を停止する。これにより、誤った位置検出を防止することができる。
【0153】
地図マッチング機能が停止中でない場合(S27でNO)、制御部11は、推定位置の更新処理を行う(S28)。なお、推定位置の更新処理の詳細は後述する。制御部11は、推定位置の更新を行った後、地図マッチング機能の停止の必要性を判定し(S29)、停止の必要性がある場合(S29でYES)、地図マッチング機能を停止し、推定位置をすべて棄却する(S30)。
【0154】
制御部11は、推定位置の初期登録(新規登録)の条件を充足するか否かを判定し(S31)、条件を充足する場合(S31でYES)、測位位置に基づいて推定位置の初期登録(新規登録)を行う(S32)。地図マッチング機能が停止中である場合(S27でYES)、制御部11は、ステップS31の処理を行う。地図マッチング機能の停止の必要性がない場合(S29でNO)、制御部11は、後述のステップS33の処理を行い、推定位置の初期登録(新規登録)の条件を充足しない場合(S31でNO)、同様に後述のステップS33の処理を行う。
【0155】
制御部11は、推定位置(更新した推定位置を含む)の有無を判定し(S33)、推定位置がある場合(S33でYES)、推定位置を表示部18に表示し(S34)、推定位置がない場合(S33でNO)、測位位置又は暫定位置を表示部18に表示する(S35)。
【0156】
制御部11は、測位方位を地図上の道路方位に補正する(S36)。なお、測位方位の補正に関する処理は後述する。
【0157】
制御部11は、センサの較正の要否を判定し(S37)、較正が必要である場合(S37でYES)、センサを較正する(S38)。センサの較正が必要でない場合(S37でNO)、制御部11は、ステップS38の処理を行わずに、後述のステップS39の処理を行う。制御部11は、処理終了の指示の有無を判定し(S39)、指示がない場合(S39でNO)、ステップS11以降の処理を続け、指示がある場合(S39でYES)、処理を終了する。
【0158】
次に、推定位置の更新処理について説明する。図26、図27、図28、図29、図30及び図31は推定位置の更新処理の手順を示すフローチャートである。制御部11は、測位位置と測位軌跡に基づいて推定位置を算出し(S100)、測位方位の変化量(方位角差)が所定の方位閾値より大きいか否かを判定する(S101)。すなわち、制御部11は、測位軌跡の方位が変化中であるか否かを判定する。
【0159】
測位方位の変化量が所定の方位閾値より大きくない場合(S101でNO)、すなわち、測位軌跡の方位が変化中でない場合、制御部11は、ステップS100で算出した推定位置の誤差範囲内の地図領域の属性を判定する(S102)。なお、誤差範囲内に複数の属性がある場合、属性の優先順位に応じて属性を特定することができる。制御部11は、属性が道路領域であるか否かを判定し(S103)、道路領域でない場合(S103でNO)、属性が屋内領域であるか否かを判定する(S104)。
【0160】
属性が屋内領域でない場合(S104でNO)、制御部11は、属性がその他領域であると判定し、測位データの信頼度が所定の閾値より小さいか否かを判定する(S105)。信頼度が閾値より小さい場合(S105でYES)、制御部11は、測位データの信頼性が低いと判定し、歩行者の歩行の乱れの有無を判定する(S106)。
【0161】
歩行者の歩行の乱れがある場合(S106でYES)、制御部11は、推定位置の誤差範囲内に屋内領域があるか否かを判定し(S107)、屋内領域がある場合(S107でYES)、推定位置を屋内領域内の位置に更新し(S108)、推定位置の属性を屋内領域に変更し(S109)、推定位置の誤差範囲、評価係数を更新又は継承し(S110)、処理を終了する。これにより、更新した推定位置の誤差範囲、評価係数を求めることができる。測位方位の変化量が所定の方位閾値より大きい場合(S101でYES)、すなわち、測位軌跡の方位が変化中である場合、制御部11は、処理を終了する。
【0162】
測位データの信頼度が所定の閾値より小さくない場合(S105でNO)、又は歩行者の歩行の乱れがない場合(S106でNO)、制御部11は、歩行者が屋内にいる可能性が低いとして、推定位置の誤差範囲内に道路領域があるか否かを判定する(S111)。誤差範囲内に道路領域がある場合(S111でYES)、制御部11は、測位方位と道路方位がほぼ一致するか否かを判定する(S112)。
【0163】
測位方位と道路方位がほぼ一致する場合(S112でYES)、制御部11は、推定位置を道路領域内の位置に更新し(S113)、推定位置の属性を道路領域に変更し(S114)、推定位置の誤差範囲、評価係数を更新又は継承し(S115)、処理を終了する。測位方位と道路方位がほぼ一致しない場合(S112でNO)、制御部11は、処理を終了する。
【0164】
推定位置の誤差範囲内に道路領域がない場合(S111でNO)、制御部11は、推定位置の誤差範囲内にその他領域があるか否かを判定し(S116)、誤差範囲内にその他領域がある場合(S116でYES)、処理を終了する。誤差範囲内にその他領域がない場合(S116でNO)、制御部11は、推定位置を棄却し(S117)、処理を終了する。推定位置の誤差範囲内に屋内領域がない場合(S107でNO)、制御部11は、ステップS117の処理を行う。
【0165】
推定位置の誤差範囲内の属性が道路領域である場合(S103でYES)、制御部11は、測位データの信頼度が所定の閾値より小さいか否かを判定する(S118)。信頼度が閾値より小さい場合(S118でYES)、制御部11は、測位データの信頼性が低いと判定し、歩行者の歩行の乱れの有無を判定する(S119)。
【0166】
歩行者の歩行の乱れがある場合(S119でYES)、制御部11は、推定位置の誤差範囲内に屋内領域があるか否かを判定し(S120)、屋内領域がある場合(S120でYES)、推定位置を屋内領域内の位置に更新し(S121)、推定位置の属性を屋内領域に変更し(S122)、推定位置の誤差範囲、評価係数を更新又は継承し(S123)、処理を終了する。これにより、更新した推定位置の誤差範囲、評価係数を求めることができる。
【0167】
測位データの信頼度が所定の閾値より小さくない場合(S118でNO)、又は歩行者の歩行の乱れがない場合(S119でNO)、制御部11は、歩行者が屋内にいる可能性が低いとし、道路領域の接続関係を考慮して、前回位置を更新した道路領域が推定位置の誤差範囲外であるか否かを判定する(S124)。誤差範囲外でない場合(S124でNO)、制御部11は、測位方位と道路方位がほぼ一致するか否かを判定する(S125)。
【0168】
測位方位と道路方位がほぼ一致する場合(S125でYES)、制御部11は、推定位置を道路領域内の位置に更新し(S126)、推定位置の評価係数を更新し(S127)、処理を終了する。測位方位と道路方位がほぼ一致しない場合(S125でNO)、制御部11は、処理を終了する。
【0169】
前回位置を更新した道路領域が推定位置の誤差範囲外である場合(S124でYES)、制御部11は、推定位置の誤差範囲内に別の道路領域があるか否かを判定し(S128)、別の道路領域がある場合(S128でYES)、測位方位と道路方位がほぼ一致するか否かを判定する(S129)。
【0170】
測位方位と道路方位がほぼ一致する場合(S129でYES)、制御部11は、推定位置を道路領域(別の道路領域)内の位置に更新し(S130)、推定位置の誤差範囲、評価係数を更新又は継承し(S131)、処理を終了する。測位方位と道路方位がほぼ一致しない場合(S129でNO)、制御部11は、処理を終了する。
【0171】
推定位置の誤差範囲内に別の道路領域がない場合(S128でNO)、制御部11は、推定位置の属性をその他領域に変更し(S132)、推定位置の誤差範囲、評価係数を継承し(S133)、処理を終了する。推定位置の誤差範囲内に屋内領域がない場合(S120でNO)、制御部11は、ステップS117の処理を行う。
【0172】
推定位置の誤差範囲内の属性が屋内領域である場合(S104でYES)、制御部11は、測位データの信頼度が所定の閾値より小さいか否かを判定する(S134)。信頼度が閾値より小さい場合(S134でYES)、制御部11は、測位データの信頼性が低いと判定し、歩行者の歩行の乱れの有無を判定する(S135)。
【0173】
歩行者の歩行の乱れがある場合(S135でYES)、制御部11は、所定距離以上の間、歩行速度が所定の範囲内であるか否かを判定し(S136)、所定の範囲内でない場合(S136でNO)、推定位置の誤差範囲内に屋内領域があるか否かを判定する(S137)。推定位置の誤差範囲内に屋内領域がある場合(S137でYES)、制御部11は、推定位置を屋内領域内の位置に更新し(S138)、推定位置の属性を屋内領域に変更し(S139)、推定位置の誤差範囲、評価係数を更新又は継承し(S140)、処理を終了する。
【0174】
測位データの信頼度が所定の閾値より小さくない場合(S134でNO)、又は歩行者の歩行の乱れがない場合(S135でNO)、制御部11は、歩行者が屋内にいる可能性が低いとし、推定位置の誤差範囲内に道路領域があるか否かを判定し(S141)、道路領域がある場合(S141でYES)、測位方位と道路方位がほぼ一致するか否かを判定する(S142)。
【0175】
測位方位と道路方位がほぼ一致する場合(S142でYES)、制御部11は、推定位置を道路領域内の位置に更新し(S143)、推定位置の属性を道路領域に変更し(S144)、推定位置の誤差範囲、評価係数を更新又は継承し(S145)、処理を終了する。
【0176】
推定位置の誤差範囲内に道路領域がない場合(S141でNO)、又は測位方位と道路方位がほぼ一致しない場合(S142でNO)、制御部11は、推定位置の誤差範囲内にその他領域があるか否かを判定し(S146)、その他領域がある場合(S146でYES)、推定位置の属性をその他領域に変更し(S147)、推定位置の誤差範囲、評価係数を継承し(S148)、処理を終了する。推定位置の誤差範囲内にその他領域がない場合(S146でNO)、制御部11は、ステップS117の処理を行う。
【0177】
所定距離以上の間、歩行速度が所定の範囲内である場合(S136でYES)、又は推定位置の誤差範囲内に屋内領域がない場合(S137でNO)、制御部11は、ステップS117の処理を行う。
【0178】
次に、測位方位の補正処理について説明する。図32及び図33は測位方位の補正処理の手順を示すフローチャートである。制御部11は、所定時間(例えば、1分など)又は所定距離(例えば、50mなど)を計数するための期間カウンタをリセットし(S200)、道路上(地図上の道路領域)に特定位置があるか否かを判定する(S201)。
【0179】
制御部11は、道路上に特定位置がある場合(S201でYES)、特定位置は唯一つのみであるか否かを判定し(S202)、特定位置が唯一つのみでない場合(S202でNO)、複数の特定位置の各道路方位の方位差が所定の閾値より小さいか否かを判定する(S203)。特定位置が唯一つのみである場合(S202でYES)、制御部11は、ステップS203の処理を行わずに、後述のステップS204の処理を行う。
【0180】
方位差が所定の閾値より小さい場合(S203でYES)、制御部11は、特定位置と推定位置の位置ずれ(例えば、距離など)が所定の閾値より小さいか否かを判定し(S204)、位置ずれが所定の閾値より小さい場合(S204でYES)、測位データの信頼度が所定の閾値より小さいか否かを判定する(S205)。
【0181】
測位データの信頼度が所定の閾値より小さい場合(S205でYES)、制御部11は、特定位置の道路方位が直進であるか否かを判定し(S206)、直進である場合(S206でYES)、期間カウンタを計数(所定の数だけ増加させる)し(S207)、計数値が所定の閾値より大きいか否かを判定する(S208)。ここで、所定の閾値は、期間が時間である場合、例えば、1分等であり、期間が距離である場合、50m等である。
【0182】
期間カウンタの計数値が所定の閾値より大きい場合(S208でYES)、制御部11は、所定の歩行距離(例えば、20m、30m等)の間、測位方位の変動量が所定の閾値(例えば、2度、3度など)より小さいか否かを判定し(S209)、測位方位の変動量が所定の閾値より小さい場合(S209でYES)、測位方位を特定位置の道路方位に補正し(S210)、歩行者の移動方向の方位を特定して処理を終了する。ステップS209において、所定の歩行距離に代えて、あるいは、歩行距離に加えて、所定の時間(例えば、20秒、30秒など)測位方位の変動量が所定の閾値より小さいか否かを判定してもよい。
【0183】
道路上に特定位置がない場合(S201でNO)、複数の特定位置の各道路方位の方位差が所定の閾値より大きい場合(S203でNO)、特定位置と推定位置との位置ずれが所定の閾値より大きい場合(S204でNO)、測位データの信頼度が所定の閾値より大きい場合(S205でNO)、特定位置の道路方位が直進でない場合(S206でNO)、期間カウンタの計数値が所定の閾値より小さい場合(S208でNO)、あるいは、所定の歩行距離の間、測位方位の変動量が所定の閾値より大きい場合(S209でNO)、制御部11は、測位方位の補正を行うことなく処理を終了する。
【0184】
以上説明したように、本発明によれば、歩行者の位置を特定した場合、歩行の方位(測位方位)を特定した位置の道路の方位と一致させることができ、歩行者の移動方向の方位の精度を地図情報の道路方位の誤差範囲内で高精度に求めることができ、歩行者の移動方向の方位を精度良く特定することができる。
【0185】
以上、物理的な位置又は方位と共に、歩行挙動、測位データの信頼度を、地図情報と関連づけて、歩行者の位置を特定する方法としていくつかの例を示したが、この他に、例えば、エレベータ、エスカレータに乗った場合のエレベータ、エスカレータ位置への特定(歩行停止、高度又は気圧の変化、測位データの信頼度を考慮)、地下街又は地下鉄への連絡口に降りた場合の連絡口への特定(歩行速度の変化や歩行の強さの変化、高度又は気圧の変化、測位データの信頼度を考慮)、地下鉄駅舎の券売機で立ち止まった場合の券売機位置への特定(歩行停止、測位データの信頼度を考慮)、バスや市電に停留所で乗車した場合の停留所への特定(歩行停止、位置の変化)等が、地図情報に公共物等の特定位置を登録しておけば可能となる。
【0186】
上記の例では、表現を簡単にするため、地図領域の属性、位置検出、位置検出の誤差範囲等を全て2次元で表現しているが、高度の情報を入れて3次元で表現してもよい。これにより、高度が関係する歩行者用陸橋又は地下横断通路等の判定精度を向上させることができるとともに、屋内領域のビルの何階のフロアーにいるか、屋上にいるかどうか等まで推定することも可能となる。また、上記までの表現では、歩行者が、通常歩行時又は自転車走行時に携帯機器を身に付けている場合について説明しているが、これに限定されるものではなく、歩行者が直接携帯機器を身につけず、かばん、携帯機器を車輪付き旅行ケース、荷車、乳母車、車椅子等に収納、仮設置又は仮置きし、歩行者が持ち歩いたり、車を押したり引いたり、あるいは、手で車輪を回転したりして、歩行者の通行できる領域を通行している場合であってもよい。この場合、歩数センサのデータにより、これらの状況を推定し、歩行者の歩数、又は手で回転させる周期を検知して距離を算出してもよい。
【0187】
また、上記では、歩行者が電車又は自動車に乗った場合、位置検出を中止することにしているが、別途、電車に乗った場合、自動車に乗った場合の地図マッチング型の位置検出システムを用意して、連続的に位置検出が実施できるようにしても良い。これにより、位置検出を最初からやり直す必要がなくなり、より効果的なシステムを構築することができる。さらに、上記の例では、位置検出に必要なデータを全て携帯機器に集約して位置検出する形態を示したが、これに限定されず、路上又はセンタに設置したサーバに携帯機器から必要データを送信し、位置検出処理をサーバで実行させ、その結果を携帯機器に送信する、という形態等にしてもよい。あるいは、処理の実行を分担してもよい。これにより、携帯機器の負担を減らすことが可能となる。
【0188】
上述の位置検出装置は、例えば、携帯電話機、PDA(Personal Digital Assistant)、PHS、ノート型パーソナルコンピュータ、音楽プレーヤ、携帯型ゲーム装置等の情報端末装置又は携帯端末装置などに適用することができる。
【0189】
上述の実施の形態において、位置検出装置に傾斜角センサを備えることもできる。これにより、歩行者の歩行、取り出し、操作等に伴う位置検出装置の振動又は姿勢変化で位置検出装置が傾いた場合、方位センサ又は距離センサの種類によっては機能が停止し、あるいは、性能が劣化することがある。従って、傾斜角センサにより傾斜角を検出し、方位センサ又は距離センサを補正することもできる。
【0190】
上述の実施の形態で示した歩行者の位置を推定するための数式は、一例であって、これらに限定されるものではなく、適宜変形した数式を用いることもできる。
【0191】
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0192】
【図1】本発明に係る方位特定装置としての位置検出装置の構成の一例を示すブロック図である。
【図2】測位位置の誤差範囲の例を示す説明図である。
【図3】地図情報の一例を示す模式図である。
【図4】地図上の領域の属性の一例を示す説明図である。
【図5】地図上の道路の設定例を示す説明図である。
【図6】推定位置の新規登録の一例を示す説明図である。
【図7】新規登録した推定位置の評価係数の算出の一例を示す説明図である。
【図8】推定位置の軌跡の算出例を示す説明図である。
【図9】推定位置の更新の一例を示す説明図である。
【図10】推定位置の更新の他の例を示す説明図である。
【図11】推定位置の更新の他の例を示す説明図である。
【図12】特徴地点での推定位置の評価係数の算出の一例を示す説明図である。
【図13】特徴地点での推定位置の評価係数の算出の他の例を示す説明図である。
【図14】推定位置の評価係数の他の例を示す説明図である。
【図15】その他領域から道路領域への推定位置の更新例を示す説明図である。
【図16】屋内領域への推定位置の更新例を示す説明図である。
【図17】屋内領域から別の屋内領域への推定位置の更新例を示す説明図である。
【図18】屋内領域から道路領域又はその他領域への推定位置の更新例を示す説明図である。
【図19】歩行者の位置の表示の一例を示す説明図である。
【図20】歩行者の位置の表示の他の例を示す説明図である。
【図21】歩行者の位置の表示の他の例を示す説明図である。
【図22】歩行者の位置の表示の他の例を示す説明図である。
【図23】位置検出処理の手順を示すフローチャートである。
【図24】位置検出処理の手順を示すフローチャートである。
【図25】位置検出処理の手順を示すフローチャートである。
【図26】推定位置の更新処理の手順を示すフローチャートである。
【図27】推定位置の更新処理の手順を示すフローチャートである。
【図28】推定位置の更新処理の手順を示すフローチャートである。
【図29】推定位置の更新処理の手順を示すフローチャートである。
【図30】推定位置の更新処理の手順を示すフローチャートである。
【図31】推定位置の更新処理の手順を示すフローチャートである。
【図32】測位方位の補正処理の手順を示すフローチャートである。
【図33】測位方位の補正処理の手順を示すフローチャートである。
【符号の説明】
【0193】
10 位置検出装置
11 制御部
12 通信部
13 測位部
131 GPS
132 距離センサ
133 方位センサ
134 高度センサ
135 センサ較正部
14 地図データベース
15 記憶部
16 操作部
17 位置検出処理部
171 位置推定部
172 誤差算出部
173 属性判定部
174 歩行挙動判定部
175 位置更新部
176 信頼度算出部
177 評価部
178 方位補正部
18 表示部
19 音声出力部
【特許請求の範囲】
【請求項1】
自身の位置を時系列に測位し、地図上で自身の移動方向の方位を特定する方位特定装置において、
地図情報を記憶する記憶手段と、
測位して得られた測位データに基づいて地図上の自身の位置を推定する位置推定手段と、
該位置推定手段で推定した推定位置及び記憶した地図情報に基づいて、自身の位置を地図上の道路に特定する位置特定手段と、
該位置特定手段で特定した位置の道路方位を自身の移動方向の方位として特定する方位特定手段と
を備えることを特徴とする方位特定装置。
【請求項2】
歩行者による携帯が可能であり、
前記位置特定手段で特定した位置が歩行者の歩行位置であるか否かを判定する歩行位置判定手段を備え、
前記方位特定手段は、
前記歩行位置判定手段で歩行位置であると判定した場合、道路方位を自身の移動方向の方位として特定するように構成してあることを特徴とする請求項1に記載の方位特定装置。
【請求項3】
計時手段を備え、
前記歩行位置判定手段は、
前記位置特定手段で特定した位置が唯一である状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする請求項2に記載の方位特定装置。
【請求項4】
測位して得られた測位データに基づいて自身の移動方向の方位を推定する方位推定手段と、
該方位推定手段で推定した方位の変動量を算出する方位変動量算出手段と
を備え、
前記歩行位置判定手段は、
前記方位変動量算出手段で算出した変動量が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする請求項3に記載の方位特定装置。
【請求項5】
前記位置推定手段で推定した推定位置と前記位置特定手段で特定した位置との位置ずれを算出する位置ずれ算出手段を備え、
前記歩行位置判定手段は、
前記位置ずれ算出手段で算出した位置ずれが所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする請求項3又は請求項4に記載の方位特定装置。
【請求項6】
測位データの信頼度を算出する信頼度算出手段を備え、
前記歩行位置判定手段は、
前記信頼度算出手段で算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする請求項3乃至請求項5のいずれか1つに記載の方位特定装置。
【請求項7】
歩行者による携帯が可能であり、
前記位置特定手段で特定した位置の道路方位が歩行者の歩行方位であるか否かを判定する歩行方位判定手段を備え、
前記方位特定手段は、
前記歩行方位判定手段で歩行方位であると判定した場合、道路方位を自身の移動方向の方位として特定するように構成してあることを特徴とする請求項1に記載の方位特定装置。
【請求項8】
計時手段と、
前記位置特定手段で特定した位置が複数ある場合、特定した各位置の道路方位の方位差を算出する方位差算出手段と
を備え、
前記歩行方位判定手段は、
前記方位差算出手段で算出した方位差が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする請求項7に記載の方位特定装置。
【請求項9】
測位して得られた測位データに基づいて自身の移動方向の方位を推定する方位推定手段と、
該方位推定手段で推定した方位の変動量を算出する方位変動量算出手段と
を備え、
前記歩行方位判定手段は、
前記方位変動量算出手段で算出した変動量が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする請求項8に記載の方位特定装置。
【請求項10】
前記位置推定手段で推定した推定位置と前記位置特定手段で特定した位置との位置ずれを算出する位置ずれ算出手段を備え、
前記歩行方位判定手段は、
前記位置ずれ算出手段で算出した位置ずれが所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする請求項8又は請求項9に記載の方位特定装置。
【請求項11】
測位データの信頼度を算出する信頼度算出手段を備え、
前記歩行方位判定手段は、
前記信頼度算出手段で算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする請求項8乃至請求項10のいずれか1つに記載の方位特定装置。
【請求項12】
請求項1乃至請求項11のいずれか1つに記載の方位特定装置を備え、該方位特定装置で特定した方位に基づいて自身の位置を特定することを特徴とする位置特定装置。
【請求項13】
コンピュータに、自身の位置を時系列に測位させ、地図上で自身の移動方向の方位を特定させるためのコンピュータプログラムにおいて、
コンピュータを、
測位して得られた測位データに基づいて地図上の自身の位置を推定する位置推定手段と、
推定した推定位置及び地図情報に基づいて、自身の位置を地図上の道路に特定する位置特定手段と、
特定した位置の道路方位を自身の移動方向の方位として特定する方位特定手段と
して機能させることを特徴とするコンピュータプログラム。
【請求項14】
自身の位置を時系列に測位し、地図上で自身の移動方向の方位を特定する方位特定方法において、
地図情報を記憶してあり、
測位して得られた測位データに基づいて地図上の自身の位置を推定し、
推定した推定位置及び記憶した地図情報に基づいて、自身の位置を地図上の道路に特定し、
特定した位置の道路方位を自身の移動方向の方位として特定することを特徴とする方位特定方法。
【請求項1】
自身の位置を時系列に測位し、地図上で自身の移動方向の方位を特定する方位特定装置において、
地図情報を記憶する記憶手段と、
測位して得られた測位データに基づいて地図上の自身の位置を推定する位置推定手段と、
該位置推定手段で推定した推定位置及び記憶した地図情報に基づいて、自身の位置を地図上の道路に特定する位置特定手段と、
該位置特定手段で特定した位置の道路方位を自身の移動方向の方位として特定する方位特定手段と
を備えることを特徴とする方位特定装置。
【請求項2】
歩行者による携帯が可能であり、
前記位置特定手段で特定した位置が歩行者の歩行位置であるか否かを判定する歩行位置判定手段を備え、
前記方位特定手段は、
前記歩行位置判定手段で歩行位置であると判定した場合、道路方位を自身の移動方向の方位として特定するように構成してあることを特徴とする請求項1に記載の方位特定装置。
【請求項3】
計時手段を備え、
前記歩行位置判定手段は、
前記位置特定手段で特定した位置が唯一である状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする請求項2に記載の方位特定装置。
【請求項4】
測位して得られた測位データに基づいて自身の移動方向の方位を推定する方位推定手段と、
該方位推定手段で推定した方位の変動量を算出する方位変動量算出手段と
を備え、
前記歩行位置判定手段は、
前記方位変動量算出手段で算出した変動量が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする請求項3に記載の方位特定装置。
【請求項5】
前記位置推定手段で推定した推定位置と前記位置特定手段で特定した位置との位置ずれを算出する位置ずれ算出手段を備え、
前記歩行位置判定手段は、
前記位置ずれ算出手段で算出した位置ずれが所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする請求項3又は請求項4に記載の方位特定装置。
【請求項6】
測位データの信頼度を算出する信頼度算出手段を備え、
前記歩行位置判定手段は、
前記信頼度算出手段で算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行位置であると判定するように構成してあることを特徴とする請求項3乃至請求項5のいずれか1つに記載の方位特定装置。
【請求項7】
歩行者による携帯が可能であり、
前記位置特定手段で特定した位置の道路方位が歩行者の歩行方位であるか否かを判定する歩行方位判定手段を備え、
前記方位特定手段は、
前記歩行方位判定手段で歩行方位であると判定した場合、道路方位を自身の移動方向の方位として特定するように構成してあることを特徴とする請求項1に記載の方位特定装置。
【請求項8】
計時手段と、
前記位置特定手段で特定した位置が複数ある場合、特定した各位置の道路方位の方位差を算出する方位差算出手段と
を備え、
前記歩行方位判定手段は、
前記方位差算出手段で算出した方位差が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする請求項7に記載の方位特定装置。
【請求項9】
測位して得られた測位データに基づいて自身の移動方向の方位を推定する方位推定手段と、
該方位推定手段で推定した方位の変動量を算出する方位変動量算出手段と
を備え、
前記歩行方位判定手段は、
前記方位変動量算出手段で算出した変動量が所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする請求項8に記載の方位特定装置。
【請求項10】
前記位置推定手段で推定した推定位置と前記位置特定手段で特定した位置との位置ずれを算出する位置ずれ算出手段を備え、
前記歩行方位判定手段は、
前記位置ずれ算出手段で算出した位置ずれが所定の閾値より小さい状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする請求項8又は請求項9に記載の方位特定装置。
【請求項11】
測位データの信頼度を算出する信頼度算出手段を備え、
前記歩行方位判定手段は、
前記信頼度算出手段で算出した信頼度が所定の閾値より低い状態が所定時間及び/又は所定距離に亘って継続した場合、歩行方位であると判定するように構成してあることを特徴とする請求項8乃至請求項10のいずれか1つに記載の方位特定装置。
【請求項12】
請求項1乃至請求項11のいずれか1つに記載の方位特定装置を備え、該方位特定装置で特定した方位に基づいて自身の位置を特定することを特徴とする位置特定装置。
【請求項13】
コンピュータに、自身の位置を時系列に測位させ、地図上で自身の移動方向の方位を特定させるためのコンピュータプログラムにおいて、
コンピュータを、
測位して得られた測位データに基づいて地図上の自身の位置を推定する位置推定手段と、
推定した推定位置及び地図情報に基づいて、自身の位置を地図上の道路に特定する位置特定手段と、
特定した位置の道路方位を自身の移動方向の方位として特定する方位特定手段と
して機能させることを特徴とするコンピュータプログラム。
【請求項14】
自身の位置を時系列に測位し、地図上で自身の移動方向の方位を特定する方位特定方法において、
地図情報を記憶してあり、
測位して得られた測位データに基づいて地図上の自身の位置を推定し、
推定した推定位置及び記憶した地図情報に基づいて、自身の位置を地図上の道路に特定し、
特定した位置の道路方位を自身の移動方向の方位として特定することを特徴とする方位特定方法。
【図1】

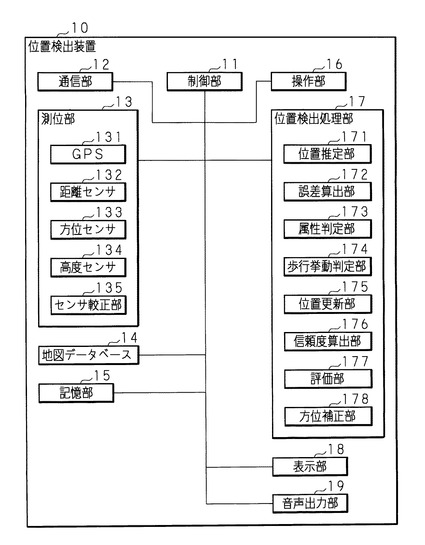
【図2】
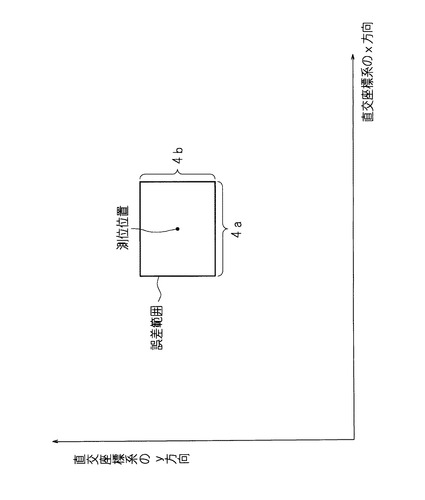
【図3】
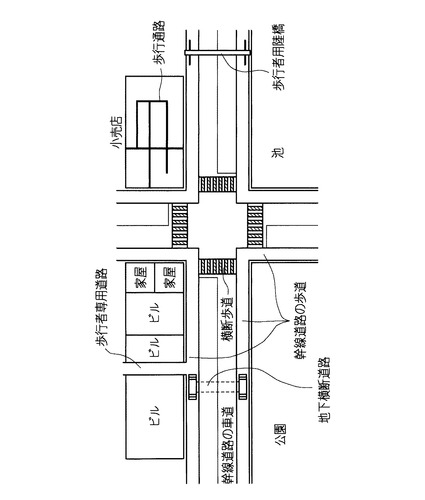
【図4】
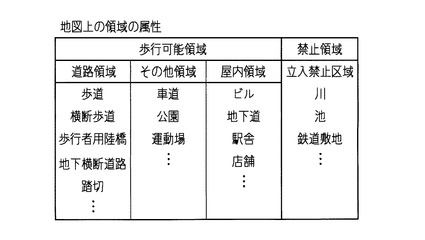
【図5】
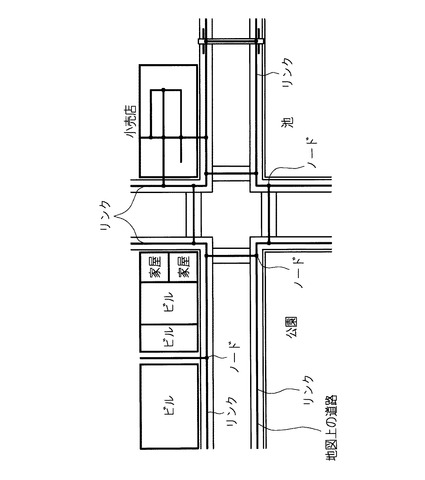
【図6】
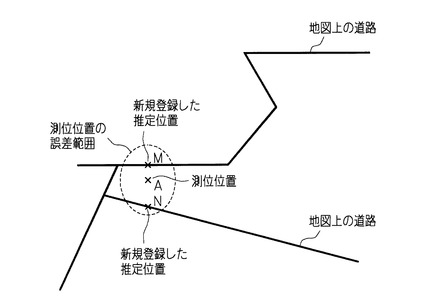
【図7】
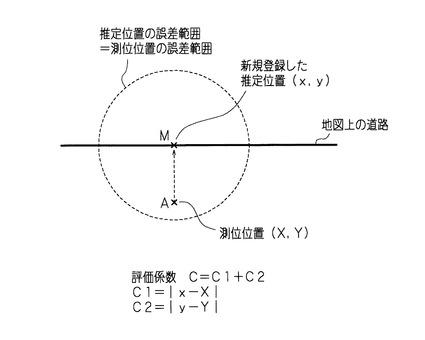
【図8】
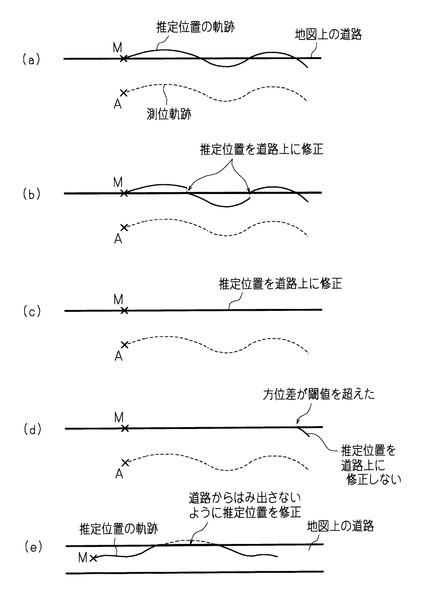
【図9】
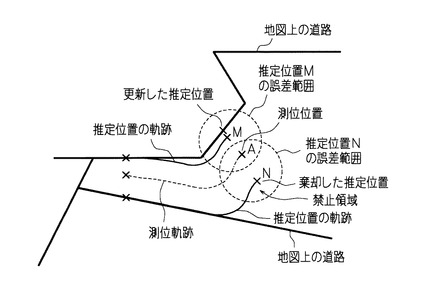
【図10】

【図11】
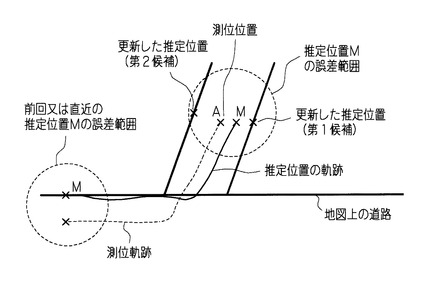
【図12】
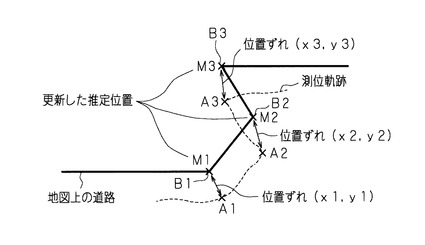
【図13】
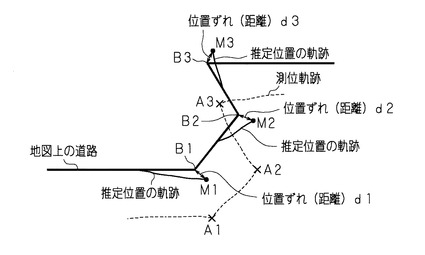
【図14】
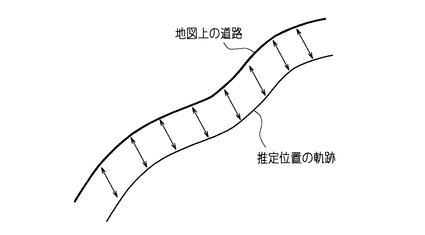
【図15】
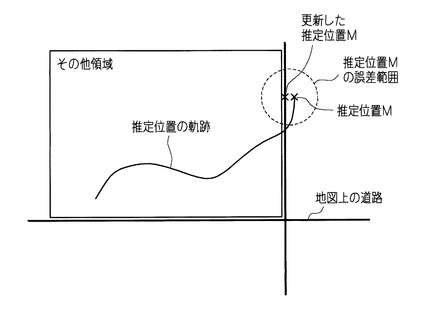
【図16】
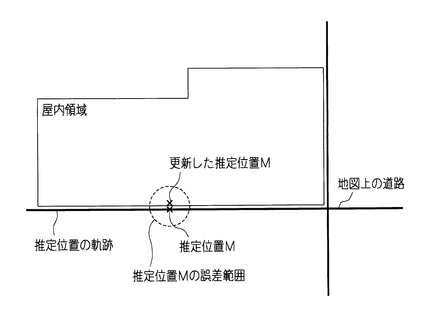
【図17】
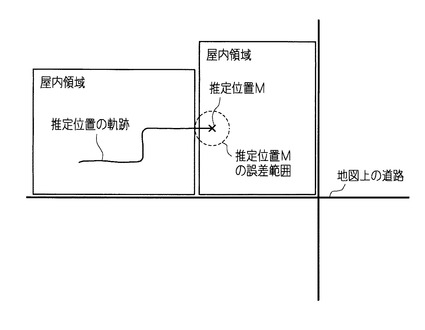
【図18】
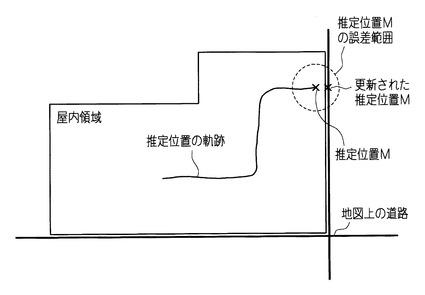
【図19】
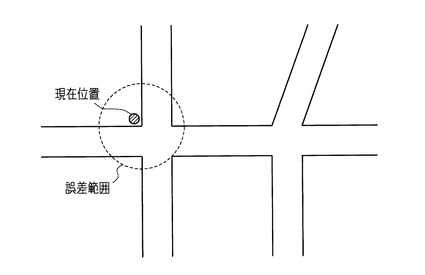
【図20】
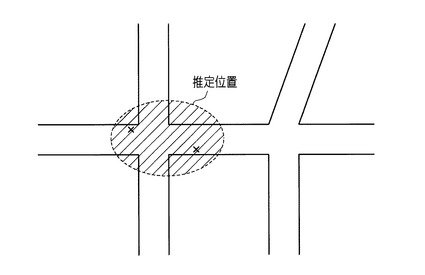
【図21】
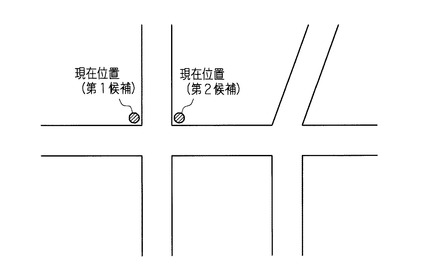
【図22】
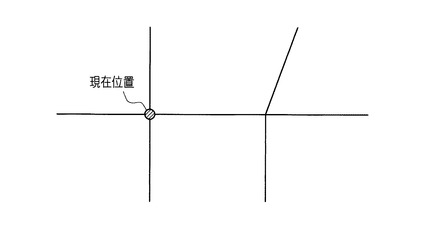
【図23】
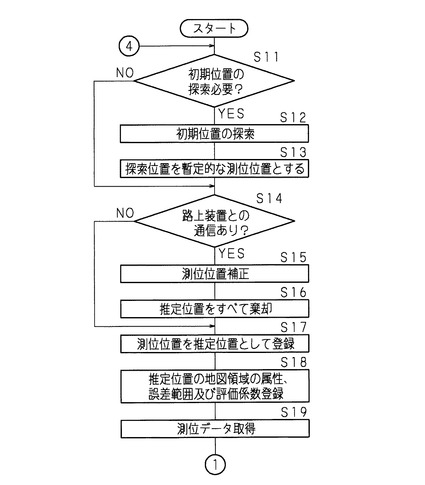
【図24】
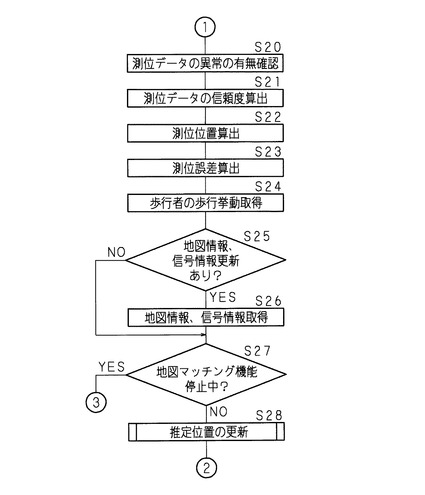
【図25】
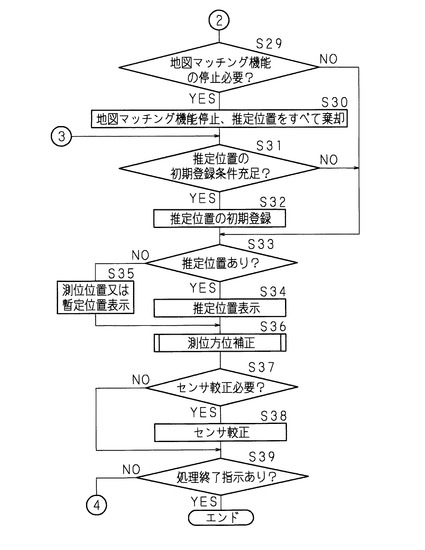
【図26】
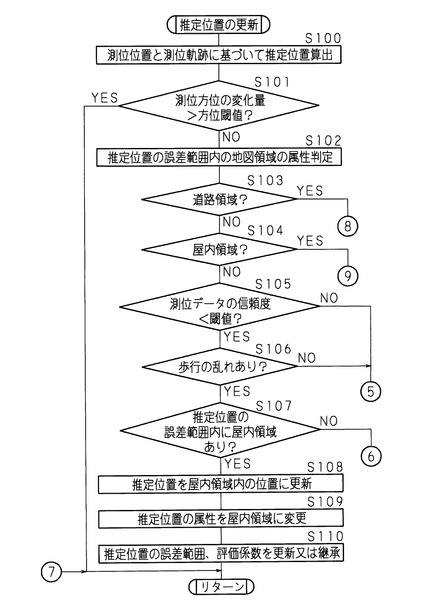
【図27】
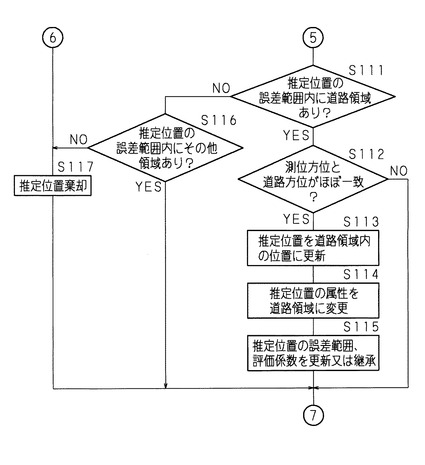
【図28】
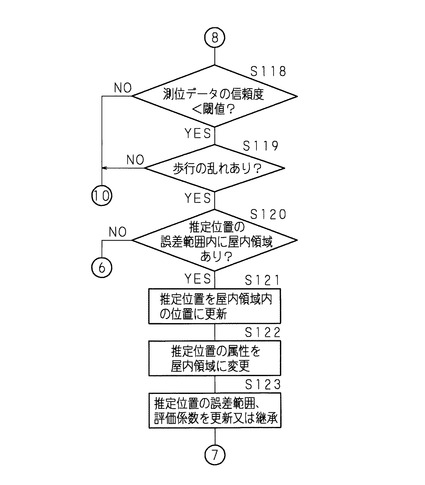
【図29】
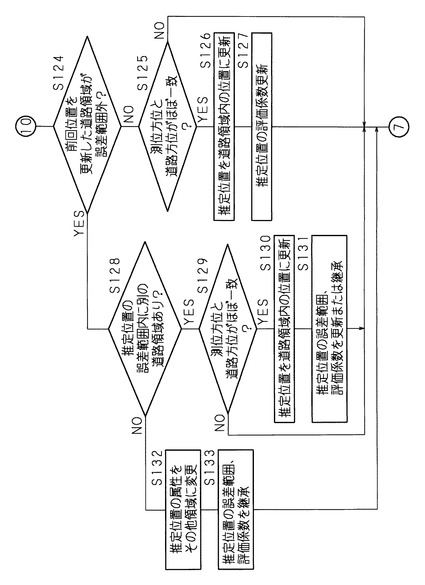
【図30】
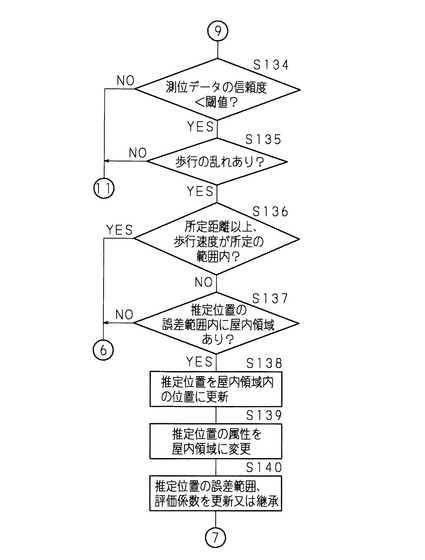
【図31】
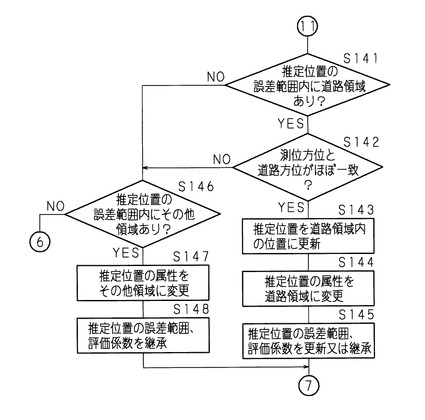
【図32】
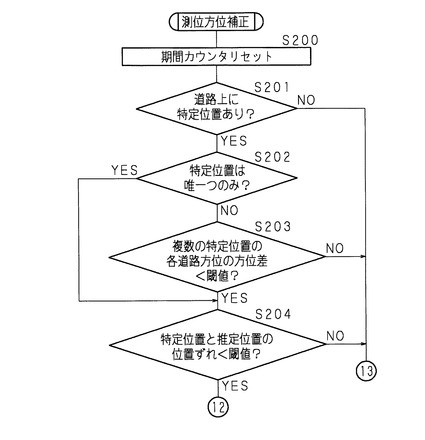
【図33】
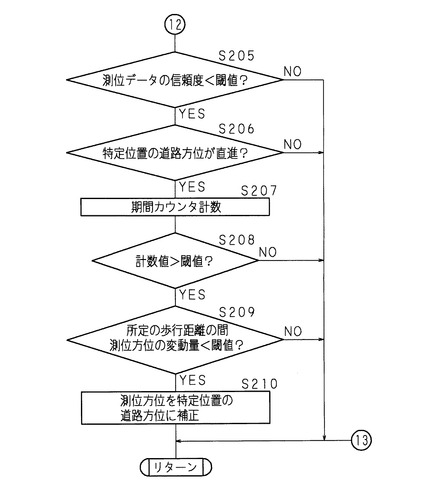
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【公開番号】特開2009−150724(P2009−150724A)
【公開日】平成21年7月9日(2009.7.9)
【国際特許分類】
【出願番号】特願2007−327786(P2007−327786)
【出願日】平成19年12月19日(2007.12.19)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成21年7月9日(2009.7.9)
【国際特許分類】
【出願日】平成19年12月19日(2007.12.19)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]