
方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラム
【課題】少ない処理量で方位センサの補正を行うことができる方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラムを提供する。
【解決手段】方位補正システム100は、道路を含む景観の撮影画像を取得する撮影手段101、前記撮影画像の撮影方位を検知する方位検知手段102、前記撮影画像の撮影位置を検知する位置検知手段103、道路の配置状況を含む地図情報を記憶する地図記憶手段104、及び誤差検出手段105を備える。誤差検出手段105は、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する。
【解決手段】方位補正システム100は、道路を含む景観の撮影画像を取得する撮影手段101、前記撮影画像の撮影方位を検知する方位検知手段102、前記撮影画像の撮影位置を検知する位置検知手段103、道路の配置状況を含む地図情報を記憶する地図記憶手段104、及び誤差検出手段105を備える。誤差検出手段105は、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラムに関し、特にカメラを用いて方位センサを補正する技術に関する。
【背景技術】
【0002】
従来より、電子コンパスなどの地磁気を用いた方位センサのキャリブレーション方法として、方位センサが搭載された端末に所定の動きを与える方法、例えばXY平面、YZ平面、ZX平面のうち2つの平面上で何回か回転させるなどの方法が提案されている。
【0003】
しかし、このようなキャリブレーションを行っても、局所的な周辺磁気等の影響により、実際の地磁気の方向と方位センサが測定した地磁気の方向とがずれてしまい、方位センサが正しい方位を示すことが出来ない場合がある。
【0004】
このような現象は、方位センサを用いるアプリケーション等に重大な影響をもたらす場合がある。例えば、近年、ロケーションに紐付けられた情報をカメラ映像に重畳させて、前記情報をあたかも実空間に貼り付いたもののように見せる、いわゆるエアタグ方式のオーギュメンテッド・リアリティを用いたアプリケーションが登場している。このようなアプリケーションでは、仮に方位センサによる方位情報が正しく取得できないとすれば、実際に表示すべき位置とはずれた位置にエアタグを表示してしまう等の問題が生じる。
【0005】
こうした問題を解決するため、特許文献1は、車載カメラが逐次捉える外景画像に含まれる所定の固定物をターゲットとして定め、このターゲットの移動角度から自車の旋回方向及び旋回角度を逐次算出し、これらの旋回方向及び角度の値を利用して方位センサの補正を行う構成を開示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−114565号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1が開示する手法は、画像中のターゲットの特定及び追跡、旋回方向及び角度の算出、及び方位センサの補正を逐次行うために、多量の演算処理を必要とする。このような演算処理を実現するためには、通常、処理能力の高いハードウェアと多くの消費電力とを要する。したがって、上記手法は、例えば利用可能な処理能力及び電力に限界のある携帯型端末等にとって最適なものとはいい難い。
【0008】
本発明は、このような問題点を解決するためになされたものであり、少ない処理量で方位センサの補正を行うことができる方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る方位補正システムは、道路を含む景観の撮影画像を取得する撮影手段と、前記撮影画像の撮影方位を検知する方位検知手段と、前記撮影画像の撮影位置を検知する位置検知手段と、道路の配置状況を含む地図情報を記憶する地図記憶手段と、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する誤差検出手段とを有するものである。
【0010】
また、本発明に係る端末装置は、サーバ装置と通信を行うための通信手段と、道路を含む景観の撮影画像を取得する撮影手段と、前記撮影画像の撮影方位を検知する方位検知手段と、前記撮影画像の撮影位置を検知する位置検知手段と、道路の配置状況を含む地図情報を記憶する地図記憶手段とを有し、前記通信手段は、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するものである。
【0011】
本発明に係るサーバ装置は、端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信する通信手段と、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する誤差検出手段とを有し、前記通信手段は、前記誤差にかかる情報を前記端末装置に送信するものである。
【0012】
本発明に係る方位補正方法は、道路を含む景観の撮影画像を取得するステップと、前記撮影画像の撮影方位を検知するステップと、前記撮影画像の撮影位置を検知するステップと、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップとを有するものである。
【0013】
本発明に係る他の方位補正方法は、道路を含む景観の撮影画像を取得するステップと、前記撮影画像の撮影方位を検知するステップと、前記撮影画像の撮影位置を検知するステップと、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有するものである。
【0014】
本発明に係る他の方位補正方法は、端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信するステップと、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップと、前記誤差にかかる情報を前記端末装置に送信するステップとを有するものである。
【0015】
本発明に係るプログラムは、所定の動作をコンピュータに実行させるためのプログラムであって、道路を含む景観の撮影画像を取得するステップと、前記撮影画像の撮影方位を検知するステップと、前記撮影画像の撮影位置を検知するステップと、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有するものである。
【0016】
本発明に係る他のプログラムは、所定の動作をコンピュータに実行させるためのプログラムであって、道路を含む景観の撮影画像を取得するステップと、前記撮影画像の撮影方位を検知するステップと、前記撮影画像の撮影位置を検知するステップと、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有するものである。
【0017】
本発明に係る他のプログラムは、所定の動作をコンピュータに実行させるためのプログラムであって、端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信するステップと、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップと、前記誤差にかかる情報を前記端末装置に送信するステップとを有するものである。
【発明の効果】
【0018】
本発明により、少ない処理量で方位センサの補正を行うことができる方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラムを提供することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施の形態1の構成を示す図である。
【図2】本発明の実施の形態1の構成を示す図である。
【図3】本発明の実施の形態1の処理フローを示す図である。
【図4】本発明の実施の形態1の処理フローを示す図である。
【図5】本発明の実施の形態1の処理内容を示す図である。
【図6】本発明の実施の形態1の処理内容を示す図である。
【図7】本発明の実施の形態1の処理内容を示す図である。
【図8】本発明の実施の形態1の処理フローを示す図である。
【発明を実施するための形態】
【0020】
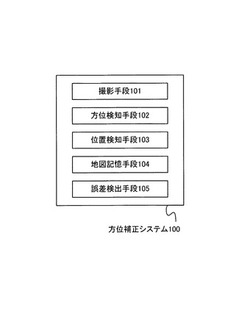
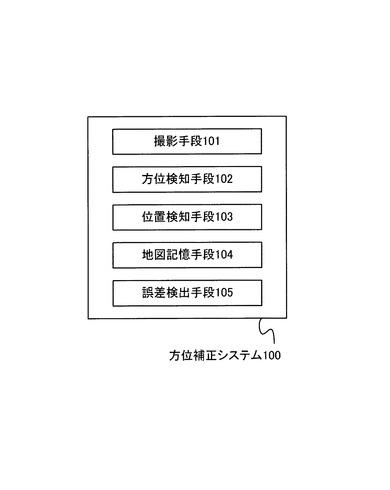
まず、図1を用いて、本発明の実施の形態1にかかる方位補正システム100の構成について説明する。
【0021】
本実施の形態にかかる方位補正システム100は、撮影手段101、方位検知手段102、位置検知手段103、地図記憶手段104及び誤差検出手段105を有する。
【0022】
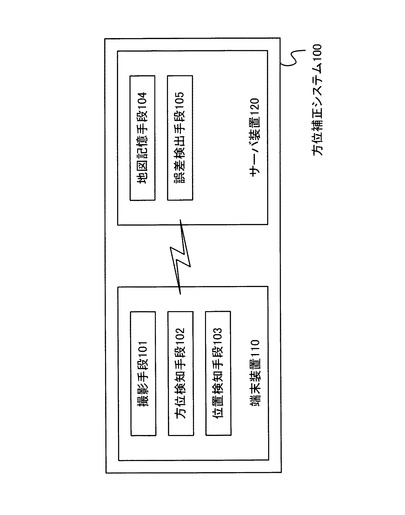
方位補正システム100は、例えば、これらの手段をすべて同一の装置に実装したスタンドアロン型システムであっても良く、又は図2に示すように、これらの手段を端末装置110とサーバ装置120とに分散して実装した分散型システムであっても良い。なお、図2のような分散型システムとする場合には、少なくとも撮影手段101、方位検知手段102及び位置検知手段103については、端末装置110に実装することが好ましい。ここでは、図2に示す分散型システムを例として、本実施の形態の説明を行う。
【0023】
端末装置110は、典型的には携帯電話端末やカーナビゲーション端末等である。本実施の形態では、端末装置110は少なくとも撮影手段101、方位検知手段102及び位置検知手段103を備えている。このほか、端末装置110は、所定のプログラムに従って様々な演算処理を行う情報処理機能、パケット通信網及びインターネット等を介してネットワーク上のサーバ装置120等とデータ通信等を行う通信機能、ユーザに対して所定の情報、たとえば上記撮影手段101による撮影結果や上記情報処理機能による処理結果等を表示する表示機能、及びユーザによる操作を受付ける入力機能等を備えていてもよい。
【0024】
撮影手段101は、撮影した画像を電子データとして出力する機能を有する。本実施の形態では、撮影手段101として、撮影レンズにより集光した可視光を撮像素子によって電子データ化するカメラセンサが用いられている。
【0025】
方位検知手段102は、地磁気を検知して方位情報を出力する手段である。方位検知手段102は、典型的には、まず電子コンパス等のセンサから出力される3軸(XYZ)方向の地磁気の強さを比較演算して南北方向を特定し、この特定された南北方向と前記3軸方向の地磁気の強さとを比較演算することにより、センサの向く方向の方位を検知する。本実施の形態では、方位検知手段102は、撮影手段101が撮影を行った方向(撮影レンズの光軸方向)の方位を検知するよう設定されている。
【0026】
位置検知手段103は、GPSセンサによって位置情報を取得し、現在地の緯度経度を出力する機能を有する。本実施の形態では、位置検知手段103は、撮影手段101が撮影を行った位置を検知するよう設定されている。
【0027】
サーバ装置120は、典型的にはサーバコンピュータである。本実施の形態では、サーバ装置120は少なくとも地図記憶手段104及び誤差検出手段105を備えている。このほか、サーバ装置120は、所定のプログラムに従って様々な演算処理を行う情報処理機能、パケット通信網及びインターネット等を介してネットワーク上の端末装置110等とデータ通信等を行う通信機能を備えていてもよい。
【0028】
サーバ装置120は、一般的に、ユーザが日常的に携行することを前提とする端末装置110との比較において、処理能力や消費電力等の面における制約が少なく、比較的高度な情報処理を行うのに好適である。そのため、本実施の形態では、後述のように大量の記憶容量が要求される地図記憶手段104、また高速かつ多量の情報処理能力が要求される誤差検出手段105を、サーバ装置120に実装している。
【0029】
地図記憶手段104は、道路の配置情報を含む地図情報を記憶及び管理する手段である。本実施の形態における地図記憶手段104は、地図情報を記憶する地図データベースと、指定の位置近傍の地図情報を地図データベースから取得、出力する機能とを含む。
【0030】
誤差検出手段105は、端末装置110から出力された撮影画像、方位情報及び位置情報、並びに地図記憶手段104から出力された地図情報等を利用して、上記方位検知手段102が出力する方位情報に含まれる誤差を検出する手段である。より具体的には、誤差検出手段105は、撮影手段101が出力する撮影画像を解析して前記撮影画像に含まれる道路を検出するとともに、方位検知手段102が出力する方位情報等を利用して前記道路の配置方向を特定する機能、位置検知手段103が出力する位置情報が示す地点の地図情報を地図記憶手段104により取得し、前記地点における道路の配置方向を特定する機能、及び前記撮影画像により特定される道路の配置方向と、前記地図情報により特定される道路の配置方向とを比較することにより、前記方位情報の誤差を検出する機能とを備える。
【0031】
つづいて、図3及び図4を用いて、本発明の実施の形態1にかかる方位補正システム100の処理について説明する。
【0032】
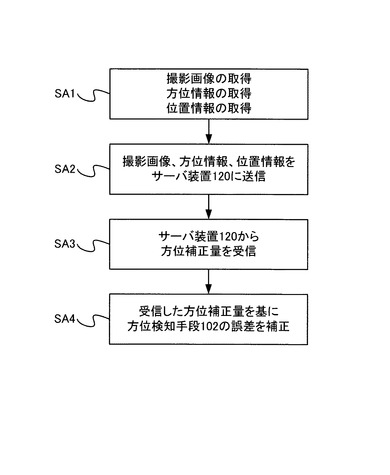
はじめに、図3を用いて端末装置110の動作について説明する。
【0033】
端末装置110は、撮影手段101によって、景観の撮影画像を取得する。本実施の形態では、撮影手段が撮影する景観には道路が含まれているものとする。同時に、方位検知手段102から方位情報として撮影方向の方位情報を取得する。また、位置検知手段103から位置情報として撮影時の緯度経度情報を取得する(SA1)。
【0034】
端末装置110は、例えば、ユーザが前記入力機能としてのアプリケーションランチャーなど利用し、オーギュメンテッド・リアリティ・アプリケーションを起動したこと等を契機として、SA1にかかる処理を開始することができる。
【0035】
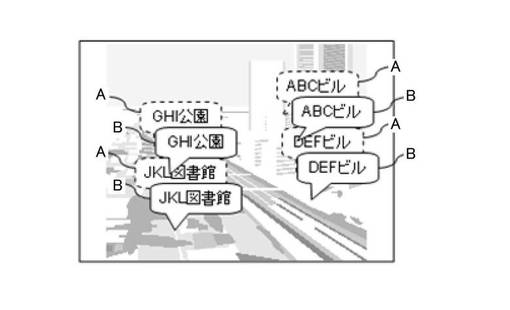
図5に、オーギュメンテッド・リアリティ・アプリケーションの画面の一例を示す。オーギュメンテッド・リアリティ・アプリケーションとは、端末装置110が備える表示機能を用いて、撮影手段101により取得した撮影画像と、予め緯度経度情報と関連付けられた情報であるエアタグ情報とを重畳して表示するアプリケーションである。まず、オーギュメンテッド・リアリティ・アプリケーションは、前記撮影画像の撮影位置及び撮影方向を位置検知手段103及び方位検知手段102により検知し、前記撮影画像に含まれる地理的範囲(撮影範囲)を、緯度及び経度によって特定する。ついで、オーギュメンテッド・リアリティ・アプリケーションは、図示しない記憶手段に予め記憶されているエアタグ情報のなかから、前記撮影範囲内の緯度経度に予め関連付けられているエアタグ情報を取得する。オーギュメンテッド・リアリティ・アプリケーションは、この取得したエアタグ情報を、前記撮影画像の適切な位置に重畳して表示する。エアタグ情報としては、例えば、ビル、公園、図書館等のランドマークの名称が用いられる。これにより、ユーザは、撮影画像内に含まれる前記ランドマークの名称を容易に知ることが可能となる。
【0036】
ここで、仮に方位検知手段102が周辺環境の磁気の影響を受け、方位情報に誤差が発生した場合、前記エアタグ情報は、本来表示されるべき位置(図5においてAとして示す位置)ではなく、誤差の分だけずれた位置(図5においてBとして示す位置)に表示されてしまうことになる。かかる現象を防止するため、端末装置110は上記SA1の処理に引き続き、以下の処理を実行する。
【0037】
端末装置110は、取得した撮影画像、方位情報及び位置情報を、通信機能によりサーバ装置120に送信する(SA2)。
【0038】
つぎに、端末装置110は、サーバ装置120から、方位検知手段102の誤差を補正するための方位補正量データを応答として受信する(SA3)。端末装置110は、この方位補正量データを利用して方位検知手段102の誤差を修正する(SA4)。方位検知手段102の補正は、典型的には以下のような処理により行われる。まず、サーバ装置120から受信した補正量が、方位検知手段102が備える、方位情報を算出するドライバやミドルウェアに入力される。つぎに、前記ドライバ又はミドルウェアが、電子コンパス等のセンサが出力する方位に対して前記補正量分の補正を加える。最後に、前記ドライバ又はミドルウェアが、前記補正された方位を、方位検知手段102の出力値として出力する。
【0039】
つづいて、図4を用いてサーバ装置120の動作について説明する。
【0040】
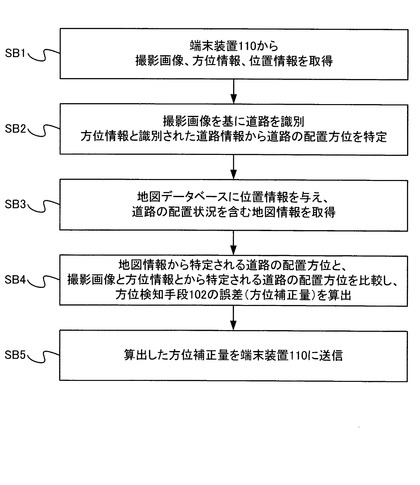
サーバ装置120は、通信機能により、端末装置110から、撮影画像、方位情報及び位置情報を受信する(SB1)。
【0041】
つぎに、サーバ装置120の誤差検出手段105は、撮影画像を解析し、撮影画像に含まれる道路の配置方向を識別する(SB2)。例えば、カメラ画像から、一定以上の幅を持ったグレー色の連続したオブジェクトと、白線や黄線など前記グレー色のオブジェクトとは明度が大きく異なる線状のオブジェクトとをそれぞれ検出し、これらのオブジェクトのエッジの長手方向を道路の配置方向とすることができる。又は、より遠方にある物体は撮影画像上ではより小さくなることを利用して道路の配置方向を認識することもできる。より具体的には、撮影画像を、例えば水平方向又は垂直方向等の所定の方向かつ所定の間隔でスライスしてなる複数の分割画像、あるいはメッシュ状に分割してなる複数の分割画像を生成し、隣接する分割画像同士を比較する。このとき、隣接するスライス画像それぞれにおいて同様な色合いを持つオブジェクトが検出でき、かつそれらのオブジェクトの面積が変化していくことが確認できるならば、それらのオブジェクトが縮小する方向を道路の向きとすることができる。
【0042】
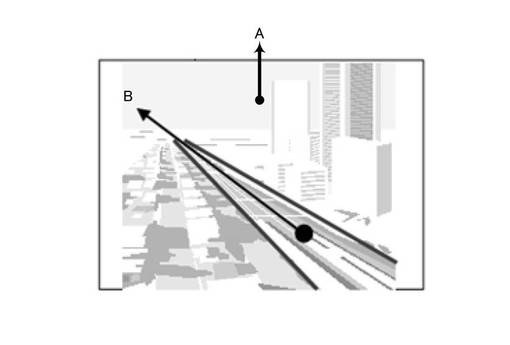
さらに、誤差検出手段105は、上述の処理によって得られた道路の配置方向と、端末装置110から取得した方位情報とを用いて、道路の配置方位を算出する(SB2)。図3を用いて、道路の配置方位の算出方法の一例を示す。上述のように、本実施の形態では方位情報は撮影手段101のレンズの光軸方向の方位を示している。そのため、図3に示す撮影画像においては、矢印Aで示すベクトルの向きが方位情報の向きとなる。ここで、上述の処理により得られた道路の配置方向が、矢印Bで示すベクトルの向きであるとする。このとき、矢印Bが示す方位は、まず矢印Aと矢印Bのなす角度を算出し、つぎにこの角度を撮影手段101のレンズの画角を用いて補正することにより矢印A及び矢印Bの方位角の差分を求め、最後に前記方位情報に対しこの差分を加味することによって算出することができる。
【0043】
例えば、図3の撮影映像において、手前から前方へ向かう矢印Aによって示される方位情報が北を示しているものと仮定する。一方、道路の配置方向は、右下から左上へ向かう矢印Bによって示されている。このとき、矢印Aと矢印Bとの間の方位角の差分が−45度であったならば、矢印Bの方位は北西であることとなる。
【0044】
つづいて、誤差検出手段105は、端末装置110から取得した位置情報をキーとして、地図記憶手段104から地図情報を取得する(SB3)。このとき、地図記憶手段104は、誤差検出手段105から与えられた位置情報の近傍の地図情報を地図データベースから取得し、誤差検出手段105に対して出力する。ここで、地図データベースは、道路の配置状況、すなわち道路の座標とその座標における配置方向に関する情報を含む地図情報を、緯度経度からなる位置情報と関連付けて記憶しているものとする。
【0045】
誤差検出手段105は、この地図情報から、前記位置情報が示す緯度経度に存在する道路を抽出し、その道路の配置方向を特定する。さらに、誤差検出手段105は、この地図情報に基づいて算出した道路の配置方向と、SB2において撮影画像に基づいて算出した道路の配置方向とを比較する。その結果、両者に差があるならば、その差分を算出する(SB4)。この差分は、地図情報における道路の配置方向が正確なものであるという前提に立つならば、撮影画像に基づいて算出した道路の配置方向が含む誤差を示す。ここで、撮影画像に基づいて算出された道路の配置方向は、端末装置110の方位検知手段102が生成した方位情報に基づいて算出されているから、前記差分は、結局のところ、方位検知手段102が有する誤差と認めることができる。
【0046】
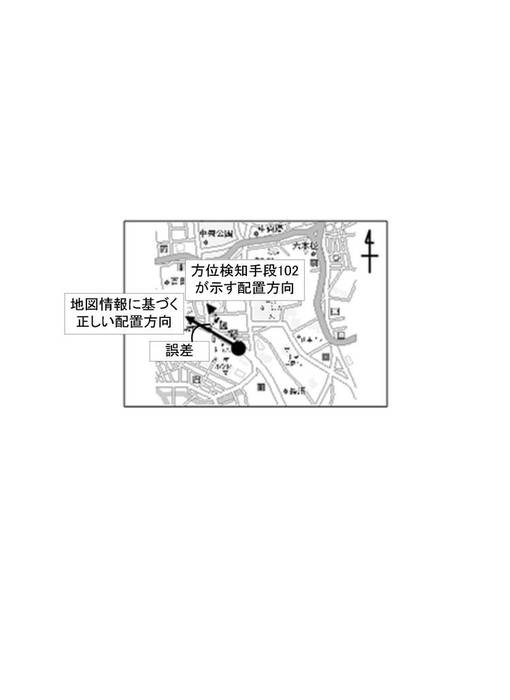
図7を用いて、SB4にかかる処理の概念を示す。図7において、実線の矢印は、地図情報に基づく道路の配置方向を示す。一方、破線の矢印は、撮影画像に基づいて算出された道路の配置方向を示す。ここで、実線の矢印と破線の矢印との差分の方位角がαであった場合、誤差検出手段105は、方位検知手段102が有する誤差はα度であると認識する。
【0047】
以上の処理の後、誤差検出手段105は、SB4において算出した誤差αを、方位検知手段102に対する補正量として、通信手段により端末装置110に送信する(SB5)。
【0048】
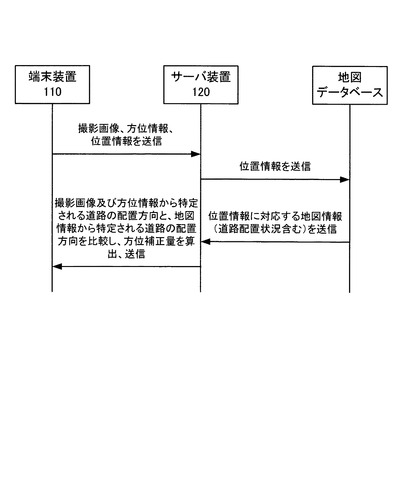
図8を用いて、端末装置110及びサーバ装置120において実行される上記処理のシーケンスを説明する。
【0049】
はじめに、端末装置110は撮影画像、方位情報及び位置情報を端末装置110の各手段から取得し、サーバ装置120に送信する(SC1)。
【0050】
つぎに、サーバ装置120の誤差検出手段105は、端末装置110から受信した位置情報を地図記憶手段104の地図データベースにキーとして与える(SC2)。
【0051】
地図記憶手段104の地図データベースは、与えら得た位置情報に基づいて道路の配置状況を含む地図データを誤差検出手段105に返す(SC3)。
【0052】
最後に、誤差検出手段105は、端末装置110から受信した撮影画像及び方位情報から特定した道路の配置方向と、地図データから特定した道路の配置方向とを比較して、端末装置110の方位検知装置102が正確な方位を出力するために必要な方位補正量を算出し、端末装置110に送信する(SC4)。
【0053】
本実施の形態においては、磁気の影響を受けづらい撮影手段101により取得される撮影画像に基づいて方位検知手段102の補正を行うため、周辺環境の変化により電子コンパス等が磁気の影響を受けたとしても、適切に方位情報を補正することができる。
【0054】
また、本実施の形態においては、撮影画像の解析処理、地図データの解析処理、及び方位補正量の算出処理など、比較的処理能力を必要とする処理をサーバ装置120で行うようにしているので、端末装置110における情報処理量を削減し、端末装置110の消費電力を抑制することができる。
【0055】
また、本実施の形態においては、画像処理技術上、比較的検出が容易である道路を検出対象とし、さらに道路の配置方向という、ある一時点の静止画像からも容易に検出可能なデータに基づいて方位補正量を算出しているので、背景技術よりも比較的少ない処理量で方位検知手段102の補正量を求めることができる。
【0056】
さらに、本実施の形態が方位補正に用いる道路の配置状況にかかるデータは、今日、例えばナビゲーションシステム等の機器に広く搭載されている情報であるため、本発明は、これらの機器への搭載及び統合が技術的に容易であるという特徴を有する。
【0057】
なお、本発明は上述した実施の形態のみに限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能であることは勿論である。
【0058】
例えば、上述の実施の形態では、方位検知手段102の補正量を算出するため道路の配置方向を用いたが、必ずしも道路を用いる必要はなく、例えば建造物や山など、撮影画像から検出可能であってかつ地図情報に含まれている任意の固定された物体であってもよい。
【0059】
また、上述の実施の形態では、ハードウェアの構成として説明したが、これに限定されるものではなく、任意の処理を、CPU(Central Processing Unit)にコンピュータプログラムを実行させることにより実現することも可能である。この場合、コンピュータプログラムは、様々なタイプの非一時的なコンピュータ可読媒体(non−transitory computer readable medium)を用いて格納され、コンピュータに供給することができる。非一時的なコンピュータ可読媒体は、様々なタイプの実体のある記録媒体(tangible storage medium)を含む。非一時的なコンピュータ可読媒体の例は、磁気記録媒体(例えばフレキシブルディスク、磁気テープ、ハードディスクドライブ)、光磁気記録媒体(例えば光磁気ディスク)、CD−ROM(Read Only Memory)、CD−R、CD−R/W、半導体メモリ(例えば、マスクROM、PROM(Programmable ROM)、EPROM(Erasable PROM)、フラッシュROM、RAM(random access memory))を含む。また、プログラムは、様々なタイプの一時的なコンピュータ可読媒体(transitory computer readable medium)によってコンピュータに供給されてもよい。一時的なコンピュータ可読媒体の例は、電気信号、光信号、及び電磁波を含む。一時的なコンピュータ可読媒体は、電線及び光ファイバ等の有線通信路、又は無線通信路を介して、プログラムをコンピュータに供給できる。
【符号の説明】
【0060】
100 方位補正システム
101 撮影手段
102 方位検知手段
103 位置検知手段
104 地図記憶手段
105 誤差検出手段
110 端末装置
120 サーバ装置
【技術分野】
【0001】
本発明は、方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラムに関し、特にカメラを用いて方位センサを補正する技術に関する。
【背景技術】
【0002】
従来より、電子コンパスなどの地磁気を用いた方位センサのキャリブレーション方法として、方位センサが搭載された端末に所定の動きを与える方法、例えばXY平面、YZ平面、ZX平面のうち2つの平面上で何回か回転させるなどの方法が提案されている。
【0003】
しかし、このようなキャリブレーションを行っても、局所的な周辺磁気等の影響により、実際の地磁気の方向と方位センサが測定した地磁気の方向とがずれてしまい、方位センサが正しい方位を示すことが出来ない場合がある。
【0004】
このような現象は、方位センサを用いるアプリケーション等に重大な影響をもたらす場合がある。例えば、近年、ロケーションに紐付けられた情報をカメラ映像に重畳させて、前記情報をあたかも実空間に貼り付いたもののように見せる、いわゆるエアタグ方式のオーギュメンテッド・リアリティを用いたアプリケーションが登場している。このようなアプリケーションでは、仮に方位センサによる方位情報が正しく取得できないとすれば、実際に表示すべき位置とはずれた位置にエアタグを表示してしまう等の問題が生じる。
【0005】
こうした問題を解決するため、特許文献1は、車載カメラが逐次捉える外景画像に含まれる所定の固定物をターゲットとして定め、このターゲットの移動角度から自車の旋回方向及び旋回角度を逐次算出し、これらの旋回方向及び角度の値を利用して方位センサの補正を行う構成を開示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−114565号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1が開示する手法は、画像中のターゲットの特定及び追跡、旋回方向及び角度の算出、及び方位センサの補正を逐次行うために、多量の演算処理を必要とする。このような演算処理を実現するためには、通常、処理能力の高いハードウェアと多くの消費電力とを要する。したがって、上記手法は、例えば利用可能な処理能力及び電力に限界のある携帯型端末等にとって最適なものとはいい難い。
【0008】
本発明は、このような問題点を解決するためになされたものであり、少ない処理量で方位センサの補正を行うことができる方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る方位補正システムは、道路を含む景観の撮影画像を取得する撮影手段と、前記撮影画像の撮影方位を検知する方位検知手段と、前記撮影画像の撮影位置を検知する位置検知手段と、道路の配置状況を含む地図情報を記憶する地図記憶手段と、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する誤差検出手段とを有するものである。
【0010】
また、本発明に係る端末装置は、サーバ装置と通信を行うための通信手段と、道路を含む景観の撮影画像を取得する撮影手段と、前記撮影画像の撮影方位を検知する方位検知手段と、前記撮影画像の撮影位置を検知する位置検知手段と、道路の配置状況を含む地図情報を記憶する地図記憶手段とを有し、前記通信手段は、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するものである。
【0011】
本発明に係るサーバ装置は、端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信する通信手段と、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する誤差検出手段とを有し、前記通信手段は、前記誤差にかかる情報を前記端末装置に送信するものである。
【0012】
本発明に係る方位補正方法は、道路を含む景観の撮影画像を取得するステップと、前記撮影画像の撮影方位を検知するステップと、前記撮影画像の撮影位置を検知するステップと、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップとを有するものである。
【0013】
本発明に係る他の方位補正方法は、道路を含む景観の撮影画像を取得するステップと、前記撮影画像の撮影方位を検知するステップと、前記撮影画像の撮影位置を検知するステップと、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有するものである。
【0014】
本発明に係る他の方位補正方法は、端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信するステップと、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップと、前記誤差にかかる情報を前記端末装置に送信するステップとを有するものである。
【0015】
本発明に係るプログラムは、所定の動作をコンピュータに実行させるためのプログラムであって、道路を含む景観の撮影画像を取得するステップと、前記撮影画像の撮影方位を検知するステップと、前記撮影画像の撮影位置を検知するステップと、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有するものである。
【0016】
本発明に係る他のプログラムは、所定の動作をコンピュータに実行させるためのプログラムであって、道路を含む景観の撮影画像を取得するステップと、前記撮影画像の撮影方位を検知するステップと、前記撮影画像の撮影位置を検知するステップと、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有するものである。
【0017】
本発明に係る他のプログラムは、所定の動作をコンピュータに実行させるためのプログラムであって、端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信するステップと、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップと、前記誤差にかかる情報を前記端末装置に送信するステップとを有するものである。
【発明の効果】
【0018】
本発明により、少ない処理量で方位センサの補正を行うことができる方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラムを提供することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施の形態1の構成を示す図である。
【図2】本発明の実施の形態1の構成を示す図である。
【図3】本発明の実施の形態1の処理フローを示す図である。
【図4】本発明の実施の形態1の処理フローを示す図である。
【図5】本発明の実施の形態1の処理内容を示す図である。
【図6】本発明の実施の形態1の処理内容を示す図である。
【図7】本発明の実施の形態1の処理内容を示す図である。
【図8】本発明の実施の形態1の処理フローを示す図である。
【発明を実施するための形態】
【0020】
まず、図1を用いて、本発明の実施の形態1にかかる方位補正システム100の構成について説明する。
【0021】
本実施の形態にかかる方位補正システム100は、撮影手段101、方位検知手段102、位置検知手段103、地図記憶手段104及び誤差検出手段105を有する。
【0022】
方位補正システム100は、例えば、これらの手段をすべて同一の装置に実装したスタンドアロン型システムであっても良く、又は図2に示すように、これらの手段を端末装置110とサーバ装置120とに分散して実装した分散型システムであっても良い。なお、図2のような分散型システムとする場合には、少なくとも撮影手段101、方位検知手段102及び位置検知手段103については、端末装置110に実装することが好ましい。ここでは、図2に示す分散型システムを例として、本実施の形態の説明を行う。
【0023】
端末装置110は、典型的には携帯電話端末やカーナビゲーション端末等である。本実施の形態では、端末装置110は少なくとも撮影手段101、方位検知手段102及び位置検知手段103を備えている。このほか、端末装置110は、所定のプログラムに従って様々な演算処理を行う情報処理機能、パケット通信網及びインターネット等を介してネットワーク上のサーバ装置120等とデータ通信等を行う通信機能、ユーザに対して所定の情報、たとえば上記撮影手段101による撮影結果や上記情報処理機能による処理結果等を表示する表示機能、及びユーザによる操作を受付ける入力機能等を備えていてもよい。
【0024】
撮影手段101は、撮影した画像を電子データとして出力する機能を有する。本実施の形態では、撮影手段101として、撮影レンズにより集光した可視光を撮像素子によって電子データ化するカメラセンサが用いられている。
【0025】
方位検知手段102は、地磁気を検知して方位情報を出力する手段である。方位検知手段102は、典型的には、まず電子コンパス等のセンサから出力される3軸(XYZ)方向の地磁気の強さを比較演算して南北方向を特定し、この特定された南北方向と前記3軸方向の地磁気の強さとを比較演算することにより、センサの向く方向の方位を検知する。本実施の形態では、方位検知手段102は、撮影手段101が撮影を行った方向(撮影レンズの光軸方向)の方位を検知するよう設定されている。
【0026】
位置検知手段103は、GPSセンサによって位置情報を取得し、現在地の緯度経度を出力する機能を有する。本実施の形態では、位置検知手段103は、撮影手段101が撮影を行った位置を検知するよう設定されている。
【0027】
サーバ装置120は、典型的にはサーバコンピュータである。本実施の形態では、サーバ装置120は少なくとも地図記憶手段104及び誤差検出手段105を備えている。このほか、サーバ装置120は、所定のプログラムに従って様々な演算処理を行う情報処理機能、パケット通信網及びインターネット等を介してネットワーク上の端末装置110等とデータ通信等を行う通信機能を備えていてもよい。
【0028】
サーバ装置120は、一般的に、ユーザが日常的に携行することを前提とする端末装置110との比較において、処理能力や消費電力等の面における制約が少なく、比較的高度な情報処理を行うのに好適である。そのため、本実施の形態では、後述のように大量の記憶容量が要求される地図記憶手段104、また高速かつ多量の情報処理能力が要求される誤差検出手段105を、サーバ装置120に実装している。
【0029】
地図記憶手段104は、道路の配置情報を含む地図情報を記憶及び管理する手段である。本実施の形態における地図記憶手段104は、地図情報を記憶する地図データベースと、指定の位置近傍の地図情報を地図データベースから取得、出力する機能とを含む。
【0030】
誤差検出手段105は、端末装置110から出力された撮影画像、方位情報及び位置情報、並びに地図記憶手段104から出力された地図情報等を利用して、上記方位検知手段102が出力する方位情報に含まれる誤差を検出する手段である。より具体的には、誤差検出手段105は、撮影手段101が出力する撮影画像を解析して前記撮影画像に含まれる道路を検出するとともに、方位検知手段102が出力する方位情報等を利用して前記道路の配置方向を特定する機能、位置検知手段103が出力する位置情報が示す地点の地図情報を地図記憶手段104により取得し、前記地点における道路の配置方向を特定する機能、及び前記撮影画像により特定される道路の配置方向と、前記地図情報により特定される道路の配置方向とを比較することにより、前記方位情報の誤差を検出する機能とを備える。
【0031】
つづいて、図3及び図4を用いて、本発明の実施の形態1にかかる方位補正システム100の処理について説明する。
【0032】
はじめに、図3を用いて端末装置110の動作について説明する。
【0033】
端末装置110は、撮影手段101によって、景観の撮影画像を取得する。本実施の形態では、撮影手段が撮影する景観には道路が含まれているものとする。同時に、方位検知手段102から方位情報として撮影方向の方位情報を取得する。また、位置検知手段103から位置情報として撮影時の緯度経度情報を取得する(SA1)。
【0034】
端末装置110は、例えば、ユーザが前記入力機能としてのアプリケーションランチャーなど利用し、オーギュメンテッド・リアリティ・アプリケーションを起動したこと等を契機として、SA1にかかる処理を開始することができる。
【0035】
図5に、オーギュメンテッド・リアリティ・アプリケーションの画面の一例を示す。オーギュメンテッド・リアリティ・アプリケーションとは、端末装置110が備える表示機能を用いて、撮影手段101により取得した撮影画像と、予め緯度経度情報と関連付けられた情報であるエアタグ情報とを重畳して表示するアプリケーションである。まず、オーギュメンテッド・リアリティ・アプリケーションは、前記撮影画像の撮影位置及び撮影方向を位置検知手段103及び方位検知手段102により検知し、前記撮影画像に含まれる地理的範囲(撮影範囲)を、緯度及び経度によって特定する。ついで、オーギュメンテッド・リアリティ・アプリケーションは、図示しない記憶手段に予め記憶されているエアタグ情報のなかから、前記撮影範囲内の緯度経度に予め関連付けられているエアタグ情報を取得する。オーギュメンテッド・リアリティ・アプリケーションは、この取得したエアタグ情報を、前記撮影画像の適切な位置に重畳して表示する。エアタグ情報としては、例えば、ビル、公園、図書館等のランドマークの名称が用いられる。これにより、ユーザは、撮影画像内に含まれる前記ランドマークの名称を容易に知ることが可能となる。
【0036】
ここで、仮に方位検知手段102が周辺環境の磁気の影響を受け、方位情報に誤差が発生した場合、前記エアタグ情報は、本来表示されるべき位置(図5においてAとして示す位置)ではなく、誤差の分だけずれた位置(図5においてBとして示す位置)に表示されてしまうことになる。かかる現象を防止するため、端末装置110は上記SA1の処理に引き続き、以下の処理を実行する。
【0037】
端末装置110は、取得した撮影画像、方位情報及び位置情報を、通信機能によりサーバ装置120に送信する(SA2)。
【0038】
つぎに、端末装置110は、サーバ装置120から、方位検知手段102の誤差を補正するための方位補正量データを応答として受信する(SA3)。端末装置110は、この方位補正量データを利用して方位検知手段102の誤差を修正する(SA4)。方位検知手段102の補正は、典型的には以下のような処理により行われる。まず、サーバ装置120から受信した補正量が、方位検知手段102が備える、方位情報を算出するドライバやミドルウェアに入力される。つぎに、前記ドライバ又はミドルウェアが、電子コンパス等のセンサが出力する方位に対して前記補正量分の補正を加える。最後に、前記ドライバ又はミドルウェアが、前記補正された方位を、方位検知手段102の出力値として出力する。
【0039】
つづいて、図4を用いてサーバ装置120の動作について説明する。
【0040】
サーバ装置120は、通信機能により、端末装置110から、撮影画像、方位情報及び位置情報を受信する(SB1)。
【0041】
つぎに、サーバ装置120の誤差検出手段105は、撮影画像を解析し、撮影画像に含まれる道路の配置方向を識別する(SB2)。例えば、カメラ画像から、一定以上の幅を持ったグレー色の連続したオブジェクトと、白線や黄線など前記グレー色のオブジェクトとは明度が大きく異なる線状のオブジェクトとをそれぞれ検出し、これらのオブジェクトのエッジの長手方向を道路の配置方向とすることができる。又は、より遠方にある物体は撮影画像上ではより小さくなることを利用して道路の配置方向を認識することもできる。より具体的には、撮影画像を、例えば水平方向又は垂直方向等の所定の方向かつ所定の間隔でスライスしてなる複数の分割画像、あるいはメッシュ状に分割してなる複数の分割画像を生成し、隣接する分割画像同士を比較する。このとき、隣接するスライス画像それぞれにおいて同様な色合いを持つオブジェクトが検出でき、かつそれらのオブジェクトの面積が変化していくことが確認できるならば、それらのオブジェクトが縮小する方向を道路の向きとすることができる。
【0042】
さらに、誤差検出手段105は、上述の処理によって得られた道路の配置方向と、端末装置110から取得した方位情報とを用いて、道路の配置方位を算出する(SB2)。図3を用いて、道路の配置方位の算出方法の一例を示す。上述のように、本実施の形態では方位情報は撮影手段101のレンズの光軸方向の方位を示している。そのため、図3に示す撮影画像においては、矢印Aで示すベクトルの向きが方位情報の向きとなる。ここで、上述の処理により得られた道路の配置方向が、矢印Bで示すベクトルの向きであるとする。このとき、矢印Bが示す方位は、まず矢印Aと矢印Bのなす角度を算出し、つぎにこの角度を撮影手段101のレンズの画角を用いて補正することにより矢印A及び矢印Bの方位角の差分を求め、最後に前記方位情報に対しこの差分を加味することによって算出することができる。
【0043】
例えば、図3の撮影映像において、手前から前方へ向かう矢印Aによって示される方位情報が北を示しているものと仮定する。一方、道路の配置方向は、右下から左上へ向かう矢印Bによって示されている。このとき、矢印Aと矢印Bとの間の方位角の差分が−45度であったならば、矢印Bの方位は北西であることとなる。
【0044】
つづいて、誤差検出手段105は、端末装置110から取得した位置情報をキーとして、地図記憶手段104から地図情報を取得する(SB3)。このとき、地図記憶手段104は、誤差検出手段105から与えられた位置情報の近傍の地図情報を地図データベースから取得し、誤差検出手段105に対して出力する。ここで、地図データベースは、道路の配置状況、すなわち道路の座標とその座標における配置方向に関する情報を含む地図情報を、緯度経度からなる位置情報と関連付けて記憶しているものとする。
【0045】
誤差検出手段105は、この地図情報から、前記位置情報が示す緯度経度に存在する道路を抽出し、その道路の配置方向を特定する。さらに、誤差検出手段105は、この地図情報に基づいて算出した道路の配置方向と、SB2において撮影画像に基づいて算出した道路の配置方向とを比較する。その結果、両者に差があるならば、その差分を算出する(SB4)。この差分は、地図情報における道路の配置方向が正確なものであるという前提に立つならば、撮影画像に基づいて算出した道路の配置方向が含む誤差を示す。ここで、撮影画像に基づいて算出された道路の配置方向は、端末装置110の方位検知手段102が生成した方位情報に基づいて算出されているから、前記差分は、結局のところ、方位検知手段102が有する誤差と認めることができる。
【0046】
図7を用いて、SB4にかかる処理の概念を示す。図7において、実線の矢印は、地図情報に基づく道路の配置方向を示す。一方、破線の矢印は、撮影画像に基づいて算出された道路の配置方向を示す。ここで、実線の矢印と破線の矢印との差分の方位角がαであった場合、誤差検出手段105は、方位検知手段102が有する誤差はα度であると認識する。
【0047】
以上の処理の後、誤差検出手段105は、SB4において算出した誤差αを、方位検知手段102に対する補正量として、通信手段により端末装置110に送信する(SB5)。
【0048】
図8を用いて、端末装置110及びサーバ装置120において実行される上記処理のシーケンスを説明する。
【0049】
はじめに、端末装置110は撮影画像、方位情報及び位置情報を端末装置110の各手段から取得し、サーバ装置120に送信する(SC1)。
【0050】
つぎに、サーバ装置120の誤差検出手段105は、端末装置110から受信した位置情報を地図記憶手段104の地図データベースにキーとして与える(SC2)。
【0051】
地図記憶手段104の地図データベースは、与えら得た位置情報に基づいて道路の配置状況を含む地図データを誤差検出手段105に返す(SC3)。
【0052】
最後に、誤差検出手段105は、端末装置110から受信した撮影画像及び方位情報から特定した道路の配置方向と、地図データから特定した道路の配置方向とを比較して、端末装置110の方位検知装置102が正確な方位を出力するために必要な方位補正量を算出し、端末装置110に送信する(SC4)。
【0053】
本実施の形態においては、磁気の影響を受けづらい撮影手段101により取得される撮影画像に基づいて方位検知手段102の補正を行うため、周辺環境の変化により電子コンパス等が磁気の影響を受けたとしても、適切に方位情報を補正することができる。
【0054】
また、本実施の形態においては、撮影画像の解析処理、地図データの解析処理、及び方位補正量の算出処理など、比較的処理能力を必要とする処理をサーバ装置120で行うようにしているので、端末装置110における情報処理量を削減し、端末装置110の消費電力を抑制することができる。
【0055】
また、本実施の形態においては、画像処理技術上、比較的検出が容易である道路を検出対象とし、さらに道路の配置方向という、ある一時点の静止画像からも容易に検出可能なデータに基づいて方位補正量を算出しているので、背景技術よりも比較的少ない処理量で方位検知手段102の補正量を求めることができる。
【0056】
さらに、本実施の形態が方位補正に用いる道路の配置状況にかかるデータは、今日、例えばナビゲーションシステム等の機器に広く搭載されている情報であるため、本発明は、これらの機器への搭載及び統合が技術的に容易であるという特徴を有する。
【0057】
なお、本発明は上述した実施の形態のみに限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能であることは勿論である。
【0058】
例えば、上述の実施の形態では、方位検知手段102の補正量を算出するため道路の配置方向を用いたが、必ずしも道路を用いる必要はなく、例えば建造物や山など、撮影画像から検出可能であってかつ地図情報に含まれている任意の固定された物体であってもよい。
【0059】
また、上述の実施の形態では、ハードウェアの構成として説明したが、これに限定されるものではなく、任意の処理を、CPU(Central Processing Unit)にコンピュータプログラムを実行させることにより実現することも可能である。この場合、コンピュータプログラムは、様々なタイプの非一時的なコンピュータ可読媒体(non−transitory computer readable medium)を用いて格納され、コンピュータに供給することができる。非一時的なコンピュータ可読媒体は、様々なタイプの実体のある記録媒体(tangible storage medium)を含む。非一時的なコンピュータ可読媒体の例は、磁気記録媒体(例えばフレキシブルディスク、磁気テープ、ハードディスクドライブ)、光磁気記録媒体(例えば光磁気ディスク)、CD−ROM(Read Only Memory)、CD−R、CD−R/W、半導体メモリ(例えば、マスクROM、PROM(Programmable ROM)、EPROM(Erasable PROM)、フラッシュROM、RAM(random access memory))を含む。また、プログラムは、様々なタイプの一時的なコンピュータ可読媒体(transitory computer readable medium)によってコンピュータに供給されてもよい。一時的なコンピュータ可読媒体の例は、電気信号、光信号、及び電磁波を含む。一時的なコンピュータ可読媒体は、電線及び光ファイバ等の有線通信路、又は無線通信路を介して、プログラムをコンピュータに供給できる。
【符号の説明】
【0060】
100 方位補正システム
101 撮影手段
102 方位検知手段
103 位置検知手段
104 地図記憶手段
105 誤差検出手段
110 端末装置
120 サーバ装置
【特許請求の範囲】
【請求項1】
道路を含む景観の撮影画像を取得する撮影手段と、
前記撮影画像の撮影方位を検知する方位検知手段と、
前記撮影画像の撮影位置を検知する位置検知手段と、
道路の配置状況を含む地図情報を記憶する地図記憶手段と、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する誤差検出手段とを有する
方位補正システム。
【請求項2】
前記方位補正システムは、通信可能に接続されたサーバ装置と端末装置とを有し、
前記端末装置は、前記撮影手段、前記方位検知手段及び前記位置検知手段を有し、
前記サーバ装置は、前記地図記憶手段と前記誤差検出手段とを有する
請求項1記載の方位補正システム。
【請求項3】
サーバ装置と通信を行うための通信手段と、
道路を含む景観の撮影画像を取得する撮影手段と、
前記撮影画像の撮影方位を検知する方位検知手段と、
前記撮影画像の撮影位置を検知する位置検知手段と、
道路の配置状況を含む地図情報を記憶する地図記憶手段とを有し、
前記通信手段は、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信する
端末装置。
【請求項4】
端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信する通信手段と、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する誤差検出手段とを有し、
前記通信手段は、前記誤差にかかる情報を前記端末装置に送信する
サーバ装置。
【請求項5】
道路を含む景観の撮影画像を取得するステップと、
前記撮影画像の撮影方位を検知するステップと、
前記撮影画像の撮影位置を検知するステップと、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップとを有する
方位補正方法。
【請求項6】
道路を含む景観の撮影画像を取得するステップと、
前記撮影画像の撮影方位を検知するステップと、
前記撮影画像の撮影位置を検知するステップと、
前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有する
方位補正方法。
【請求項7】
端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信するステップと、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップと、
前記誤差にかかる情報を前記端末装置に送信するステップとを有する
方位補正方法。
【請求項8】
所定の動作をコンピュータに実行させるためのプログラムであって、
道路を含む景観の撮影画像を取得するステップと、
前記撮影画像の撮影方位を検知するステップと、
前記撮影画像の撮影位置を検知するステップと、
前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有する
プログラム。
【請求項9】
所定の動作をコンピュータに実行させるためのプログラムであって、
道路を含む景観の撮影画像を取得するステップと、
前記撮影画像の撮影方位を検知するステップと、
前記撮影画像の撮影位置を検知するステップと、
前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有する
プログラム。
【請求項10】
所定の動作をコンピュータに実行させるためのプログラムであって、
端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信するステップと、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップと、
前記誤差にかかる情報を前記端末装置に送信するステップとを有する
プログラム。
【請求項1】
道路を含む景観の撮影画像を取得する撮影手段と、
前記撮影画像の撮影方位を検知する方位検知手段と、
前記撮影画像の撮影位置を検知する位置検知手段と、
道路の配置状況を含む地図情報を記憶する地図記憶手段と、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する誤差検出手段とを有する
方位補正システム。
【請求項2】
前記方位補正システムは、通信可能に接続されたサーバ装置と端末装置とを有し、
前記端末装置は、前記撮影手段、前記方位検知手段及び前記位置検知手段を有し、
前記サーバ装置は、前記地図記憶手段と前記誤差検出手段とを有する
請求項1記載の方位補正システム。
【請求項3】
サーバ装置と通信を行うための通信手段と、
道路を含む景観の撮影画像を取得する撮影手段と、
前記撮影画像の撮影方位を検知する方位検知手段と、
前記撮影画像の撮影位置を検知する位置検知手段と、
道路の配置状況を含む地図情報を記憶する地図記憶手段とを有し、
前記通信手段は、前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信する
端末装置。
【請求項4】
端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信する通信手段と、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する誤差検出手段とを有し、
前記通信手段は、前記誤差にかかる情報を前記端末装置に送信する
サーバ装置。
【請求項5】
道路を含む景観の撮影画像を取得するステップと、
前記撮影画像の撮影方位を検知するステップと、
前記撮影画像の撮影位置を検知するステップと、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップとを有する
方位補正方法。
【請求項6】
道路を含む景観の撮影画像を取得するステップと、
前記撮影画像の撮影方位を検知するステップと、
前記撮影画像の撮影位置を検知するステップと、
前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有する
方位補正方法。
【請求項7】
端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信するステップと、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップと、
前記誤差にかかる情報を前記端末装置に送信するステップとを有する
方位補正方法。
【請求項8】
所定の動作をコンピュータに実行させるためのプログラムであって、
道路を含む景観の撮影画像を取得するステップと、
前記撮影画像の撮影方位を検知するステップと、
前記撮影画像の撮影位置を検知するステップと、
前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有する
プログラム。
【請求項9】
所定の動作をコンピュータに実行させるためのプログラムであって、
道路を含む景観の撮影画像を取得するステップと、
前記撮影画像の撮影方位を検知するステップと、
前記撮影画像の撮影位置を検知するステップと、
前記撮影画像、前記撮影方位及び前記撮影方位を前記サーバ装置に送信するとともに、前記方位検知手段の誤差にかかる情報を前記サーバ装置から受信するステップとを有する
プログラム。
【請求項10】
所定の動作をコンピュータに実行させるためのプログラムであって、
端末装置から、道路を含む景観の撮影画像、撮影位置及び撮影方位を受信するステップと、
前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、道路の配置状況を含む地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出するステップと、
前記誤差にかかる情報を前記端末装置に送信するステップとを有する
プログラム。
【図1】


【図2】
【図3】
【図4】
【図8】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図8】
【図5】
【図6】
【図7】
【公開番号】特開2013−68482(P2013−68482A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−206398(P2011−206398)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(310006855)NECカシオモバイルコミュニケーションズ株式会社 (1,081)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(310006855)NECカシオモバイルコミュニケーションズ株式会社 (1,081)
【Fターム(参考)】
[ Back to top ]