
方向測定装置
【課題】ボーリング孔の孔軸方向を正確にかつ確実に測定する。
【解決手段】ボーリング孔内へ挿入されるケーシングと、発磁体と該発磁体の移動を検出する平面センサとを有する変位計とを備え、ケーシングの軸上の所定の位置に基端部が揺動可能な状態でかつ片持ちばりの状態で支持される棒状体の自由端に発磁体が取り付けられ、該棒状体の自由端側には第1のフォロワ部が配置され、該第1のフォロワ部は棒状体から放射状に配置される第1のリンク部材に第1の接触輪のケーシングから突出して配置され、該第1のリンク部材は前記第1の接触輪を前記ケーシングの半径方向外方へ付勢して、第1の接触輪を孔の内壁に従動させ、発磁体の基準点を孔の軸心位置に維持し、平面センサはその基準点が前記ケーシングの中心軸上に維持されている。
【解決手段】ボーリング孔内へ挿入されるケーシングと、発磁体と該発磁体の移動を検出する平面センサとを有する変位計とを備え、ケーシングの軸上の所定の位置に基端部が揺動可能な状態でかつ片持ちばりの状態で支持される棒状体の自由端に発磁体が取り付けられ、該棒状体の自由端側には第1のフォロワ部が配置され、該第1のフォロワ部は棒状体から放射状に配置される第1のリンク部材に第1の接触輪のケーシングから突出して配置され、該第1のリンク部材は前記第1の接触輪を前記ケーシングの半径方向外方へ付勢して、第1の接触輪を孔の内壁に従動させ、発磁体の基準点を孔の軸心位置に維持し、平面センサはその基準点が前記ケーシングの中心軸上に維持されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はボーリング孔内で孔軸方向を測定する方向測定装置に関する。
【背景技術】
【0002】
鉱物等の地下資源の採掘や地下深部の空間を利用する目的でボーリング孔を穿孔する場合、岩盤の物理状態の影響を受けボーリング孔の掘削方向(孔軸方向)が乱されることがある。このような場合、ボーリング孔を掘削しつつボーリング孔の掘削方向を測定し、測定結果に基づき掘削方向の修正を行う必要がある。従
来、このような掘削方向の測定に用いられる装置として傾斜計、ジャイロコンパス等を内蔵し、掘削機に組込まれて使用される測定装置が種々提案されている(特許文献1、特許文献2参照)。
上記提案されている測定装置は掘削機に内蔵又は取り付けられて使用されるものであり、その位置は掘削機に対して固定される。一方、作業中の掘削機は進行軸に対して回転する構成であり、掘削機が進行軸に対して常に同じ姿勢を保つことはない。したがって、掘削機にその位置が固定された傾斜計や方位計等の測定装置では掘削作業中に測定基準が回転により変動するため正確な測定値が求められず、掘削方向(ボーリング孔の孔軸方向)を正確に把握することができない。掘削方向を正確に把握できなければ、所望の地点を目指したボーリング孔の掘削ができないこととなる。ここで、測定パラメータを増やしてデータの補正を行い測定データの精度を高める方法も提案されているが(特許文献3参照)、データ解析が複雑になることはもとより、測定機器の構成が複雑になること、データの補正による精度の向上には限度があること、装置の製造コスト及び測定コストが増加すること等から好ましいとは言い難い。また、測定パラメータが増えれば当然に使用する機器数が増え、その結果供給する電力を増やさなければならない。供給電力が増大すれば、測定装置と地表に置かれた電源とを太い電力線(有線)を介して結び、電源電圧の降下を少なくするなどの措置が必要となる。かかる太い有線の使用は掘削機の作業性を著しく低下させ、また深いボーリング孔に適用できないといった問題を生じさせる。
【0003】
そこで本発明者は、ボーリング孔内において測定装置が回転しても、その回転の影響を受けることがないようにするため、測定地点におけるボーリング孔の孔軸の傾斜角で傾斜する傾斜平面を形成する傾斜平面形成手段と、傾斜平面に設置され、この傾斜角を測定する傾斜角測定手段と、水平面を形成する水平面形成手段と、水平面に設置され、孔軸の方位角を測定する方位角測定手段と、を備える方向測定装置を提案している(特許文献4参照)。
【特許文献1】特開昭52−105612号公報
【特許文献2】特開平8−29167号公報
【特許文献3】特開平9−126771号公報
【特許文献4】特開2002−318116号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献4に記載の発明では、傾斜面形成手段として、測定装置の筐体の軸と平行な軸を持つ第1の回転体を筐体内に備え、更に水平面形成手段として、第1の回転体へこれと直交する方向に第2の回転体を設けており、これらが自由回転運動することを前提としている。
ボーリング孔の孔軸が大きく変化する場合には、第1の回転体及び第2の回転体へ充分な力が加わり、それらは確実に回転する。しかしながら、ボーリング孔の孔軸の変化が小さいときには、第1の回転体及び/又は第2の回転体の回転が不十分になるおそれがある。
【課題を解決するための手段】
【0005】
この発明は上記課題を解決すべくなされたものであり、この発明の第1の局面は次のように規定される。
ボーリング孔内へ挿入されるケーシングと、
発磁体と該発磁体の移動を検出する平面センサとを有する変位計とを備え、前記ボーリング孔内で孔軸方向を測定する方向測定装置であって、
前記ケーシングの中心軸上の所定の位置に基端部が揺動可能な状態でかつ片持ちばりの状態で支持される棒状体の自由端に前記発磁体が取り付けられ、該棒状体の自由端側には第1のフォロワ部が配置され、該第1のフォロワ部は前記棒状体から放射状に配置される第1のリンク部材に第1の接触輪が前記ケーシングから突出して配置され、該第1のリンク部材は前記第1の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第1の接触輪を前記ボーリング孔の内壁に従動させ、前記発磁体の基準点を前記ボーリング孔の軸心位置に維持し、
前記平面センサはその基準点が前記ケーシングの中心軸上に維持されている、ことを特徴とするボーリング孔内で孔軸方向を測定する方向測定装置。
【0006】
このように規定される第1の局面の方向測定装置によれば、第1のフォロワ部により発磁体の基準点がボーリング孔の軸心位置に置かれる。他方、平面センサはその基準点がケーシングの中心軸心上に維持されるので、発磁体の基準点と平面センサの基準点との変位を測定することにより、ボーリング孔の軸の向きを特定することができる。換言すれば、ボーリング孔が曲がっていても(方向が変化していても)ケーシングは直線状態であるので、屈曲部分においてボーリング孔の軸心位置とケーシングの中心軸とは一致しない。これにより、ボーリング孔の軸心位置に基準点が置かれる発磁体とケーシングの中心軸に基準点が置かれる平面センサとの間に変位が生じ、孔軸の曲がりに応じて当該変位量が変化する。これにより、ボーリング孔の孔軸方向を特定することができる。
ここに、第1のフォロワ部の第1の接触輪は第1のリンク部材の付勢力により強制的に孔の周壁を追従する。従って、発磁体の基準点は常に、確実に、孔の軸心上に置かれる。換言すれば、孔軸方向の変化が小さい場合においても、その変化が確実に反映され、平面センサに対し変位が現れる。
【0007】
この発明の第2の局面は次のように規定される。即ち、
第1の局面の方向測定装置において、前記ケーシングの先端側に第2のフォロワ部が配置され、該第2のフォロア部は前記ケーシングの周方向へ回転自在な第2の回転軸が前記ケーシングと同心的に配置され、該第2の回転軸から放射状に配置される第2のリンク部材に第2の接触輪が該ケーシングから突出して取り付けられ、該第2のリンク部材は前記第2の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第2の接触輪を常に孔の内壁に従動させ、
前記ケーシングの後端側に第3のフォロワ部が配置され、該第3のフォロア部は前記ケーシングの周方向へ回転自在な第3の回転軸が前記ケーシングと同心的に配置され、該第3の回転軸から放射状に配置される第3のリンク部材に第3の接触輪が該ケーシングから突出して取り付けられ、該第3のリンク部材は前記第3の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第3の接触輪を常に孔の内壁に従動させる。
【0008】
このように規定される第2の局面の方向測定装置によれば、ケーシングの先端と後端にそれぞれ第2のフォロア部と第3のフォロア部とが設けられ、該第2のフォロア部と第3のフォロア部とが設けられる部分においてケーシングの中心軸は孔の軸心位置と一致する。これにより、孔内におけるケーシングの姿勢及びポジションが安定する。よって、平面センサが安定するので発磁体の変位の測定が正確になる。
【0009】
この発明の第3の局面は次のように規定される。即ち、
第2の局面で規定される報告測定装置において、前記第1のフォロア部は前記第2及び第3のフォロア部の間に形成され、前記棒状体の基端部は前記第2のフォロア部側であって前記ケーシングの軸上の所定の位置に支持されている。
このように規定される第3の局面の方向測定装置によれば、棒状体がケーシングの前側に配置されるので、一定長さのケーシング内において棒状体をできる限り長くすることができる。ケーシングの後端側にはロッドが連結され、このロッドには電源線や信号線が通され、ケーシング内の各種測定機器へ電源を供給し、また測定された信号を地上の制御装置へ伝達する。従って、ケーシング内の後端側へ各種測定機器を配置することが好ましい。その結果、ケーシングの後端側には棒状体を配置するスペースを確保し難い。
平面センサの出力もまた信号線へ供給されるので、発磁体に対して平面センサもケーシングの後端側に配置することが好ましい。その結果、発磁体を備える棒状体の基端部はケーシングの先端側、即ち第2のフォロア部側となる。
棒状体を可及的に長くするためには、その基端部を第2のフォロワ部の位置とすることが好ましい。(この発明の第4の局面参照)。ここに、第2のフォロア部の位置とはケーシングの半径方向において第2のフォロア部と同一平面上若しくはその近傍にあることを指す。
【0010】
この発明の第5の局面は次のように規定される。即ち、第4の局面に規定の方向測定装置において、前記発磁体及び前記平面センサはその姿勢が重力方向に対して常に維持されている。
このように規定される方向測定装置によれば、発磁体及び平面センサの姿勢が常に重力方向に対して維持されるので、ボーリング孔内を進行するにつれてケーシングが回転しても、その影響を受けずに平面センサに対する発磁体の変位を正確に測定することができる。
【0011】
この発明の第6の局面は次のように規定される。即ち、第5の局面に規定の方向測定装置において、前記発磁体は第1のフリコ型回転台に固定され、該第1のフリコ型回転台は前記棒状体の自由端にその周方向へ回転可能に取り付けられ(換言すれば、その回転軸が棒状体の軸と一致若しくは平行であり)、
前記平面センサは第2のフリコ型回転台に固定され、該第2のフリコ型回転台は前記ケーシングに対してその周方向へ回転可能に取り付けられている(換言すれば、その回転軸がケーシングの軸と一致もしくは平行である)。
このように規定される第6の局面に規定の方向測定装置によれば、第1及び第2のフリコ型回転台は常にその重り部分が重量方向下向きになる姿勢を取るので、これら第1及び第2のフリコ型回転台に固定される発磁体及び平面センサも重力方向に対して常に一定の姿勢をとる。
【0012】
この発明の第7の局面は次のように規定される。即ち、第7に規定の方向測定装置において、前記発磁体と前記平面センサとの間には隔壁が配置され、前記平面センサは前記ケーシング内の気密室に収納されている。
平面センサからは電子信号が出力されるので、ボーリング孔内に充満することのある水から有効にシールする必要がある。他方、ケーシング外へ突出するフォロア部が取り付けられる棒状体及びこれを収納するケーシング内をシールすることは不可能である。従って、この発明の第7の局面で規定するように、発磁体と平面センサとの間に隔壁を配置し、平面センサはケーシング内の気密室に収納することが好ましい。
【0013】
上記において、発磁体には永久磁石を用いることが部品点数削減の見地から好ましい。勿論電磁コイルを使用することも可能である。第1のフォロワ部によりこの発磁体の基準点は常にボーリング孔の軸心位置に存在する。発磁体の基準点は磁力線の最密部分が好ましく、永久磁石ではその重心を採用することができる。
平面センサは磁気検出素子を2次元的に配列したものであり、発磁体からの磁力線を検知して、発磁体の位置の変化を特定する。平面センサの基準点は常にケーシングの中心軸上に位置する。平面センサの基準点には磁気検出素子のアレイの重心点を採用することができる。
【発明を実施するための最良の形態】
【0014】
この発明の実施例の方向測定装置1を説明する。
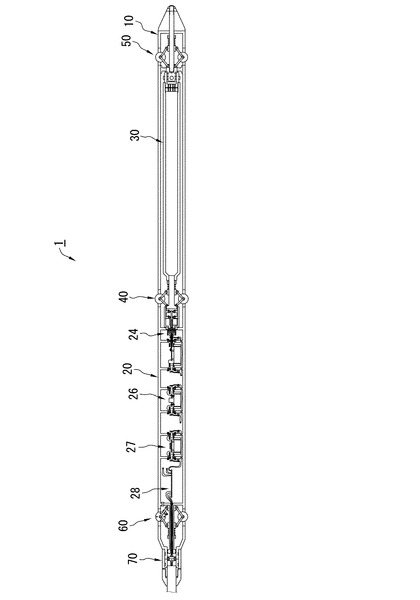
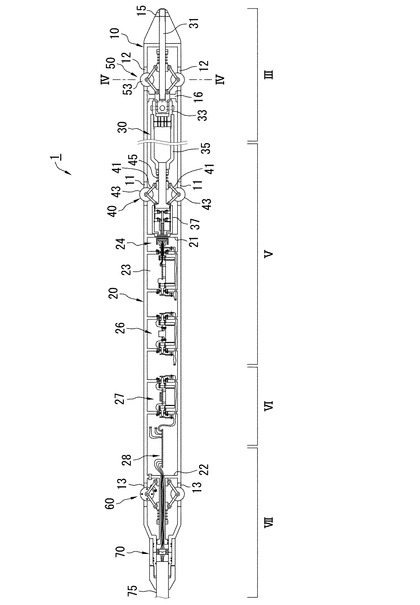
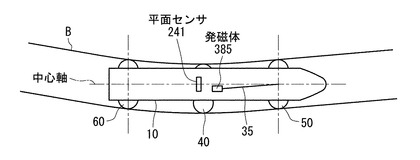
図1に実施例の方向測定装置1の縦断面図を示す。図2は、一部破断断面図である。
図1及び図2に示すように、実施例の方向測定装置1は、ケーシング10、計測部20、棒状部材30、第1のフォロワ部40、第2のフォロワ部50、第3のフォロワ部60及びコネクタ部70を備えてなる。
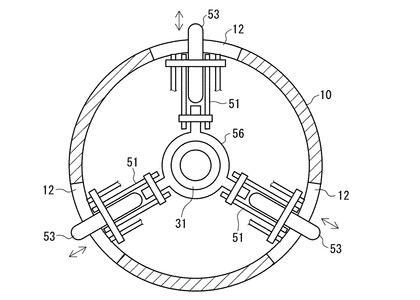
ケーシング10は円筒状でありステンレス鋼等により形成される。その先端部は徐々に縮径して円錐状である。後端部にはコネクタ70が設けられてロッド75へ連結されている。ケーシング10のほぼ中央には3つの溝11がケーシング10の長さ方向に形成されている。この3つの溝11はケーシング10の周方向に均等の間隔を取って配置されている。この溝11から接触輪43がケーシングの10の半径方向外方へ突出する。
【0015】
測定部20はケーシング10において後端側に設けられ、隔壁21、22とケーシング10の周壁とによって気密室23が形成され、この気密室23内に平面センサ部24、傾斜測定部26、方位測定部27及び制御部28が内蔵されている。
棒状部材30は自在継手部33、本体部35、及び発磁部37を備えている。自在継手部33は支軸31に連結されており、本体部35の一端(基端部)を軸支する。即ち、本体部35は支軸31の端部に対して全方向に傾斜可能である。発磁部37は本体部35の他端(自由端)に取り付けられている。これら棒状部材30の各要素につては後で詳述する。
【0016】
第1のフォロワ部40は、リンク部41と接触輪43とを備えてなる。リンク部41は圧縮コイルばね45によりリンクが閉じるように付勢されており、その結果リンク部41へ回転自在に取り付けられた接触輪43をケーシング10の半径方向外方へ付勢する。
第2のフォロア部50及び第3のフォロア部60も第1のフォロア部40と実質的に同一の構成をとる。各フォロア部40、50及び60の詳細については後で詳述する。
【0017】
以下、図2を4つの部分III, V, VI, VIIに分割し、それぞれを拡大断面図として図3〜図7に示した。
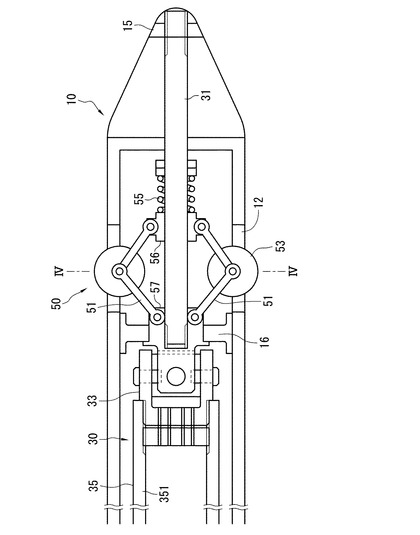
図3はケーシング10の先端部分の要部拡大図であり、図4はIV-IV指示線断面図である。
図3及び図4に示すように、支軸31はケーシング10の先端部15と支持壁部16との間に懸架されている。この支軸31はケーシング10の中心軸上に配置される。支軸31には第2のフォロワ部50のスライダ56が遊挿されている。このスライダ56にリンク部材51の一端が回転自在に取り付けられている。符号57はリンク部材51のリテーナであり、支持壁16に固定される。このリテーナ57へリンク部材51の他端が回転自在に取り付けられる。符号55は圧縮コイルばねであり、リンク機構が立ち上がるように、即ち、接触輪53が半径方外方へ突出するように、スライダ56を図示左側へ付勢する。これにより、3つの接触輪53は常にボーリング孔の周壁に従動することとなる。その結果、第2のフォロワ部50の中心軸がボーリング孔の軸心に一致する。換言すれば、第2のフォロワ部50の中心軸部分において、ケーシング10の中心軸とボーリング孔の軸心とが一致する。
【0018】
符号33は自在継手であり、支軸31と同心的に配置されている。即ち、自在継手33の中心軸はケーシング10の軸と一致する。この自在継手33に棒状部材30の本端部35の基端部が連結される。その結果、棒状部材の本体部35がケーシング10の軸上の位置に回転かつ揺動可能な状態で、かつ片持ちはりの状態で支持される。
【0019】
図5に示すように、本体部35は大径円筒状の基部351と小径な支軸部352を備えてなる。基部351の図示右端が自在継手33へ連結されている。支軸部352の自由端には発磁部37が連結されており、その周縁に第1のフォロワ部40が同心的に取り付けられている。
発磁部37はカップ状の筐体部371を備え、この筐体部371の開口部が支軸部352の自由端大径部位(リテーナ部353)へ気密に嵌合される。筐体部371には一対の支持壁372及び373が形成されている。
符号380は第1のフリコ型回転台であり、その回転軸381が筐体部371の支持壁372、373に回転自在に支持されている。この回転軸381は基部383より偏芯して突出している。これにより、基部383の大面積部分(重り部)が常に重力線方向を向くこととなる。符号385は永久磁石からなる発磁体であり、回転軸381と同一軸線上に配置される。回転軸381、発磁体385及び棒状部材35(特に支軸部352)は同一軸線上に配置されることが好ましい。
【0020】
ここで、棒状部材35は片持ちはりの状態であるので、支軸部352はケーシング10の中心軸と必ずしも一致しない。ボーリング孔が曲がっていると、その曲率に応じて支軸部35はケーシング10の中心軸からずれる。
ここに、発磁体385は支軸部352と同心的に配置されているので、発磁体385もボーリング孔の軸心位置にあり、ボーリング孔が曲がっていると発磁体も385もケーシング10の中心軸からずれることとなる。
この実施例では、発磁体385の基準点(平面センサの測定対象となる点)としてその中心点を採用した。この基準点は支軸部352、更には回転軸381と同軸上となる。勿論、基準点を任意に設定し、補正により平面センサに対する変位量を特定することができる。
【0021】
発磁体385へ対向するようにセンサ部24が配置される。センサ部24は平面センサ241とその筐体243を備えてなる。平面センサ241は磁気感応素子を二次元的に配列してなり、発磁体385の基準点の変位を高い精度で検出することができる。この実施例では平面センサ241の中心をその基準点としてこれをケーシング10の中心軸線上に位置させ、当該基準点と発磁体285の基準点が対向する点との距離及び方向を検出し、ボーリング孔の孔軸方向を特定する。
平面センサ241は筐体243の前壁に固定され、筐体243は回転軸245を介して第2のフリコ型回転台251に結合される。第2のフリコ型回転台251の両端には回転軸245、253が設けられている。各回転軸245、253はフリコ型回転台251の重心から偏芯しており、かつケーシング10の中心軸上に配置されている。これにより、第2のフリコ型回転台251は、ケーシング10の回転の如何に拘わらず、その上面を常に重力方向上向きにした姿勢をとる。その結果、平面センサ241も常にその上辺を重力方向上向きにした姿勢をとる。また、第2のフリコ型回転台251の上面にはセンサ基板254が設けられている。平面センサ241からの信号線247はこのセンサ基板254へ連結され、平面センサ241のアナログ出力がその処理回路によりデジタル化される。処理されたデータはデータ線257、回転軸253、ブラシ258及びデータ線259を介して制御部28へ送られる。制御部28は得られたデータをそのメモリに保存したり地上へ送信したりする。
図中の符号255はブラシであり、電源線256から供給される電力を基板254へ供給する。電源線256は制御部28へ連結されている。
【0022】
測定部20には、図6に示すとおり、傾斜測定部26が備えられている。
傾斜測定部26は第3のフリコ型回転台261を備える。この第3のフリコ型回転台261の両端には回転軸262、263が設けられている。各回転軸262、263は第3のフリコ型回転台261の重心から偏芯しており、かつケーシング10の中心軸上に配置されている。これにより、第3のフリコ型回転台261は、ケーシング10の回転の如何に拘わらず、その上面を常に重力方向上向きにした姿勢をとる。第3のフリコ型回転台261の上面には汎用的な傾斜計264が配設されており、この傾斜計264の姿勢も常に安定することとなる。第3のフリコ型回転台261には傾斜計264の出力をデジタル化する処理回路(図示せず)も備えられている。図中の符号265は制御部28から連結される電源線であり、ブラシ266、回転軸262及び電源線267を介して傾斜計264へ電力を供給する。傾斜計264の出力は図示しない処理回路でデジタル処理されて、データ線268、回転軸263、ブラシ269及びデータ線260を介して制御部28へ送られる。
【0023】
測定部20にはまた方位測定部27が備えられている。
方位測定部27は第4のフリコ型回転台271を備える。この第4のフリコ型回転台271の両端には回転軸272、273が設けられている。各回転軸272、273は第4のフリコ型回転台271の重心から偏芯しており、かつケーシング10の中心軸上に配置されている。これにより、第4のフリコ型回転台271は、ケーシング10の回転の如何に拘わらず、その上面を常に重力方向上向きにした姿勢をとる。第4のフリコ型回転台271の上面には汎用的な磁気方位系274が配設されており、この傾斜計274の姿勢も常に安定することとなる。第4のフリコ型回転台271には傾斜計274の出力をデジタル化する処理回路(図示せず)も備えられている。図中の符号275は制御部28から連結される電源線であり、ブラシ276、回転軸272及び電源線277を介して磁気方位計274へ電力を供給する。磁気方位計274の出力は図示しない処理回路でデジタル処理されて、データ線278、回転軸273、ブラシ279及びデータ線270を介して制御部28へ送られる。
【0024】
測定部20には制御部28が備えられている(図7参照)。
制御部28から既述のセンサ部24、傾斜測定部26、方位測定部27へ電力が供給され、センサ部24、傾斜測定部26及び方位測定部27の出力が集められる。
制御部28は通信機能を有し、各種の信号を地上に対して送受信する。制御部28からの通信線及び電源線はコネクタ部70を介してロッド75内を通される。
【0025】
第3のフォロワ部60は第2のフォロワ部50と同様に作用する。即ち、支軸部69に第3のフォロワ部60のスライダ66が遊挿されている。このスライダ66にリンク部材61の一端が回転自在に取り付けられている。リンク部材61の他端はリテーナ部67へ回転自在に取り付けられる。リテーナ部67は支軸部69に固定されている。支軸部69は円筒形状であり、壁22とコネクタ部70との間に固定されており、その中心軸はケーシング10の中心軸と一致する。
符号65は圧縮コイルばねであり、リンク機構が立ち上がるように、即ち、接触輪63が半径方外方へ突出するように、スライダ66を図示右側へ付勢する。これにより、3つの接触輪63は常にボーリング孔の周壁に従動することとなる。その結果、第3のフォロワ部60の中心軸(即ち支軸部69)がボーリング孔の軸心に一致する。
【0026】
第3のフォロア部60において1つの接触輪63の側壁に、永久磁石81が均等な回転角をあけて(実施例では90度)、且つ同一円周上に配置されている。図7の符号83は磁気センサであり、永久磁石81からの磁力線の変化を測定して、当該永久磁石81が通過する毎に磁気センサ83から出力が制御部28へ送られる。制御部28は磁気センサ83からの出力をカウントし、接触輪63の回転数を演算する。接触輪63の半径は既知であるので、演算した回転数より第3のフォロワ部60の移動距離、ひいては測定装置1の移動距離を演算することができる。
【0027】
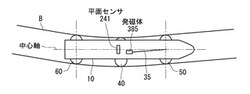
実施例の方向測定装置1によれば、図8に示すとおり、第1のフォロワ部40の作用により発磁体385が常にボーリング孔の軸心位置に維持される。他方平面センサ241は、ケーシング10の中心軸上に維持される。ここに、ボーリング孔Bの変曲点に装置1が位置すると、ケーシング10の中心軸とボーリング孔Bの軸心とがずれ、当該ずれが平面センサ214に対する発磁体385の変位として検出される。
棒状体35の基端部は自在継手37で連結されているので、発磁体385は図面の垂直方向にも変位し、その変位量は平面センサ241で検出できる。
【0028】
方向測定装置1が所定距離(例えば1m)移動するごとに、発磁体385の変位量をプロットすることにより、方向測定装置1の進行の軌跡(即ち、ボーリング孔の三次元的な形状)を特定することができる。
【0029】
この発明は、上記発明の実施の形態及び実施例の説明に何ら限定されるものではない。特許請求の範囲の記載を逸脱せず、当業者が容易に想到できる範囲で種々の変形態様もこの発明に含まれる。
【図面の簡単な説明】
【0030】
【図1】この発明の実施例の方向測定装置の全体縦断面図である。
【図2】同じく一部縦断面図である。
【図3】同じく部分拡大縦断面図である。
【図4】同じく横断面図である。
【図5】同じく部分拡大縦断面図である。
【図6】同じく部分拡大縦断面図である。
【図7】同じく部分拡大縦断面図である。
【図8】実施例の方向測定装置の作用を説明する図である。
【符号の説明】
【0031】
1 方向測定装置、10 ケーシング、24 センサ部、30 棒状体、40第1のフォロア部、50 第2のフォロア部、60 第3のフォロア部
【技術分野】
【0001】
本発明はボーリング孔内で孔軸方向を測定する方向測定装置に関する。
【背景技術】
【0002】
鉱物等の地下資源の採掘や地下深部の空間を利用する目的でボーリング孔を穿孔する場合、岩盤の物理状態の影響を受けボーリング孔の掘削方向(孔軸方向)が乱されることがある。このような場合、ボーリング孔を掘削しつつボーリング孔の掘削方向を測定し、測定結果に基づき掘削方向の修正を行う必要がある。従
来、このような掘削方向の測定に用いられる装置として傾斜計、ジャイロコンパス等を内蔵し、掘削機に組込まれて使用される測定装置が種々提案されている(特許文献1、特許文献2参照)。
上記提案されている測定装置は掘削機に内蔵又は取り付けられて使用されるものであり、その位置は掘削機に対して固定される。一方、作業中の掘削機は進行軸に対して回転する構成であり、掘削機が進行軸に対して常に同じ姿勢を保つことはない。したがって、掘削機にその位置が固定された傾斜計や方位計等の測定装置では掘削作業中に測定基準が回転により変動するため正確な測定値が求められず、掘削方向(ボーリング孔の孔軸方向)を正確に把握することができない。掘削方向を正確に把握できなければ、所望の地点を目指したボーリング孔の掘削ができないこととなる。ここで、測定パラメータを増やしてデータの補正を行い測定データの精度を高める方法も提案されているが(特許文献3参照)、データ解析が複雑になることはもとより、測定機器の構成が複雑になること、データの補正による精度の向上には限度があること、装置の製造コスト及び測定コストが増加すること等から好ましいとは言い難い。また、測定パラメータが増えれば当然に使用する機器数が増え、その結果供給する電力を増やさなければならない。供給電力が増大すれば、測定装置と地表に置かれた電源とを太い電力線(有線)を介して結び、電源電圧の降下を少なくするなどの措置が必要となる。かかる太い有線の使用は掘削機の作業性を著しく低下させ、また深いボーリング孔に適用できないといった問題を生じさせる。
【0003】
そこで本発明者は、ボーリング孔内において測定装置が回転しても、その回転の影響を受けることがないようにするため、測定地点におけるボーリング孔の孔軸の傾斜角で傾斜する傾斜平面を形成する傾斜平面形成手段と、傾斜平面に設置され、この傾斜角を測定する傾斜角測定手段と、水平面を形成する水平面形成手段と、水平面に設置され、孔軸の方位角を測定する方位角測定手段と、を備える方向測定装置を提案している(特許文献4参照)。
【特許文献1】特開昭52−105612号公報
【特許文献2】特開平8−29167号公報
【特許文献3】特開平9−126771号公報
【特許文献4】特開2002−318116号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献4に記載の発明では、傾斜面形成手段として、測定装置の筐体の軸と平行な軸を持つ第1の回転体を筐体内に備え、更に水平面形成手段として、第1の回転体へこれと直交する方向に第2の回転体を設けており、これらが自由回転運動することを前提としている。
ボーリング孔の孔軸が大きく変化する場合には、第1の回転体及び第2の回転体へ充分な力が加わり、それらは確実に回転する。しかしながら、ボーリング孔の孔軸の変化が小さいときには、第1の回転体及び/又は第2の回転体の回転が不十分になるおそれがある。
【課題を解決するための手段】
【0005】
この発明は上記課題を解決すべくなされたものであり、この発明の第1の局面は次のように規定される。
ボーリング孔内へ挿入されるケーシングと、
発磁体と該発磁体の移動を検出する平面センサとを有する変位計とを備え、前記ボーリング孔内で孔軸方向を測定する方向測定装置であって、
前記ケーシングの中心軸上の所定の位置に基端部が揺動可能な状態でかつ片持ちばりの状態で支持される棒状体の自由端に前記発磁体が取り付けられ、該棒状体の自由端側には第1のフォロワ部が配置され、該第1のフォロワ部は前記棒状体から放射状に配置される第1のリンク部材に第1の接触輪が前記ケーシングから突出して配置され、該第1のリンク部材は前記第1の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第1の接触輪を前記ボーリング孔の内壁に従動させ、前記発磁体の基準点を前記ボーリング孔の軸心位置に維持し、
前記平面センサはその基準点が前記ケーシングの中心軸上に維持されている、ことを特徴とするボーリング孔内で孔軸方向を測定する方向測定装置。
【0006】
このように規定される第1の局面の方向測定装置によれば、第1のフォロワ部により発磁体の基準点がボーリング孔の軸心位置に置かれる。他方、平面センサはその基準点がケーシングの中心軸心上に維持されるので、発磁体の基準点と平面センサの基準点との変位を測定することにより、ボーリング孔の軸の向きを特定することができる。換言すれば、ボーリング孔が曲がっていても(方向が変化していても)ケーシングは直線状態であるので、屈曲部分においてボーリング孔の軸心位置とケーシングの中心軸とは一致しない。これにより、ボーリング孔の軸心位置に基準点が置かれる発磁体とケーシングの中心軸に基準点が置かれる平面センサとの間に変位が生じ、孔軸の曲がりに応じて当該変位量が変化する。これにより、ボーリング孔の孔軸方向を特定することができる。
ここに、第1のフォロワ部の第1の接触輪は第1のリンク部材の付勢力により強制的に孔の周壁を追従する。従って、発磁体の基準点は常に、確実に、孔の軸心上に置かれる。換言すれば、孔軸方向の変化が小さい場合においても、その変化が確実に反映され、平面センサに対し変位が現れる。
【0007】
この発明の第2の局面は次のように規定される。即ち、
第1の局面の方向測定装置において、前記ケーシングの先端側に第2のフォロワ部が配置され、該第2のフォロア部は前記ケーシングの周方向へ回転自在な第2の回転軸が前記ケーシングと同心的に配置され、該第2の回転軸から放射状に配置される第2のリンク部材に第2の接触輪が該ケーシングから突出して取り付けられ、該第2のリンク部材は前記第2の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第2の接触輪を常に孔の内壁に従動させ、
前記ケーシングの後端側に第3のフォロワ部が配置され、該第3のフォロア部は前記ケーシングの周方向へ回転自在な第3の回転軸が前記ケーシングと同心的に配置され、該第3の回転軸から放射状に配置される第3のリンク部材に第3の接触輪が該ケーシングから突出して取り付けられ、該第3のリンク部材は前記第3の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第3の接触輪を常に孔の内壁に従動させる。
【0008】
このように規定される第2の局面の方向測定装置によれば、ケーシングの先端と後端にそれぞれ第2のフォロア部と第3のフォロア部とが設けられ、該第2のフォロア部と第3のフォロア部とが設けられる部分においてケーシングの中心軸は孔の軸心位置と一致する。これにより、孔内におけるケーシングの姿勢及びポジションが安定する。よって、平面センサが安定するので発磁体の変位の測定が正確になる。
【0009】
この発明の第3の局面は次のように規定される。即ち、
第2の局面で規定される報告測定装置において、前記第1のフォロア部は前記第2及び第3のフォロア部の間に形成され、前記棒状体の基端部は前記第2のフォロア部側であって前記ケーシングの軸上の所定の位置に支持されている。
このように規定される第3の局面の方向測定装置によれば、棒状体がケーシングの前側に配置されるので、一定長さのケーシング内において棒状体をできる限り長くすることができる。ケーシングの後端側にはロッドが連結され、このロッドには電源線や信号線が通され、ケーシング内の各種測定機器へ電源を供給し、また測定された信号を地上の制御装置へ伝達する。従って、ケーシング内の後端側へ各種測定機器を配置することが好ましい。その結果、ケーシングの後端側には棒状体を配置するスペースを確保し難い。
平面センサの出力もまた信号線へ供給されるので、発磁体に対して平面センサもケーシングの後端側に配置することが好ましい。その結果、発磁体を備える棒状体の基端部はケーシングの先端側、即ち第2のフォロア部側となる。
棒状体を可及的に長くするためには、その基端部を第2のフォロワ部の位置とすることが好ましい。(この発明の第4の局面参照)。ここに、第2のフォロア部の位置とはケーシングの半径方向において第2のフォロア部と同一平面上若しくはその近傍にあることを指す。
【0010】
この発明の第5の局面は次のように規定される。即ち、第4の局面に規定の方向測定装置において、前記発磁体及び前記平面センサはその姿勢が重力方向に対して常に維持されている。
このように規定される方向測定装置によれば、発磁体及び平面センサの姿勢が常に重力方向に対して維持されるので、ボーリング孔内を進行するにつれてケーシングが回転しても、その影響を受けずに平面センサに対する発磁体の変位を正確に測定することができる。
【0011】
この発明の第6の局面は次のように規定される。即ち、第5の局面に規定の方向測定装置において、前記発磁体は第1のフリコ型回転台に固定され、該第1のフリコ型回転台は前記棒状体の自由端にその周方向へ回転可能に取り付けられ(換言すれば、その回転軸が棒状体の軸と一致若しくは平行であり)、
前記平面センサは第2のフリコ型回転台に固定され、該第2のフリコ型回転台は前記ケーシングに対してその周方向へ回転可能に取り付けられている(換言すれば、その回転軸がケーシングの軸と一致もしくは平行である)。
このように規定される第6の局面に規定の方向測定装置によれば、第1及び第2のフリコ型回転台は常にその重り部分が重量方向下向きになる姿勢を取るので、これら第1及び第2のフリコ型回転台に固定される発磁体及び平面センサも重力方向に対して常に一定の姿勢をとる。
【0012】
この発明の第7の局面は次のように規定される。即ち、第7に規定の方向測定装置において、前記発磁体と前記平面センサとの間には隔壁が配置され、前記平面センサは前記ケーシング内の気密室に収納されている。
平面センサからは電子信号が出力されるので、ボーリング孔内に充満することのある水から有効にシールする必要がある。他方、ケーシング外へ突出するフォロア部が取り付けられる棒状体及びこれを収納するケーシング内をシールすることは不可能である。従って、この発明の第7の局面で規定するように、発磁体と平面センサとの間に隔壁を配置し、平面センサはケーシング内の気密室に収納することが好ましい。
【0013】
上記において、発磁体には永久磁石を用いることが部品点数削減の見地から好ましい。勿論電磁コイルを使用することも可能である。第1のフォロワ部によりこの発磁体の基準点は常にボーリング孔の軸心位置に存在する。発磁体の基準点は磁力線の最密部分が好ましく、永久磁石ではその重心を採用することができる。
平面センサは磁気検出素子を2次元的に配列したものであり、発磁体からの磁力線を検知して、発磁体の位置の変化を特定する。平面センサの基準点は常にケーシングの中心軸上に位置する。平面センサの基準点には磁気検出素子のアレイの重心点を採用することができる。
【発明を実施するための最良の形態】
【0014】
この発明の実施例の方向測定装置1を説明する。
図1に実施例の方向測定装置1の縦断面図を示す。図2は、一部破断断面図である。
図1及び図2に示すように、実施例の方向測定装置1は、ケーシング10、計測部20、棒状部材30、第1のフォロワ部40、第2のフォロワ部50、第3のフォロワ部60及びコネクタ部70を備えてなる。
ケーシング10は円筒状でありステンレス鋼等により形成される。その先端部は徐々に縮径して円錐状である。後端部にはコネクタ70が設けられてロッド75へ連結されている。ケーシング10のほぼ中央には3つの溝11がケーシング10の長さ方向に形成されている。この3つの溝11はケーシング10の周方向に均等の間隔を取って配置されている。この溝11から接触輪43がケーシングの10の半径方向外方へ突出する。
【0015】
測定部20はケーシング10において後端側に設けられ、隔壁21、22とケーシング10の周壁とによって気密室23が形成され、この気密室23内に平面センサ部24、傾斜測定部26、方位測定部27及び制御部28が内蔵されている。
棒状部材30は自在継手部33、本体部35、及び発磁部37を備えている。自在継手部33は支軸31に連結されており、本体部35の一端(基端部)を軸支する。即ち、本体部35は支軸31の端部に対して全方向に傾斜可能である。発磁部37は本体部35の他端(自由端)に取り付けられている。これら棒状部材30の各要素につては後で詳述する。
【0016】
第1のフォロワ部40は、リンク部41と接触輪43とを備えてなる。リンク部41は圧縮コイルばね45によりリンクが閉じるように付勢されており、その結果リンク部41へ回転自在に取り付けられた接触輪43をケーシング10の半径方向外方へ付勢する。
第2のフォロア部50及び第3のフォロア部60も第1のフォロア部40と実質的に同一の構成をとる。各フォロア部40、50及び60の詳細については後で詳述する。
【0017】
以下、図2を4つの部分III, V, VI, VIIに分割し、それぞれを拡大断面図として図3〜図7に示した。
図3はケーシング10の先端部分の要部拡大図であり、図4はIV-IV指示線断面図である。
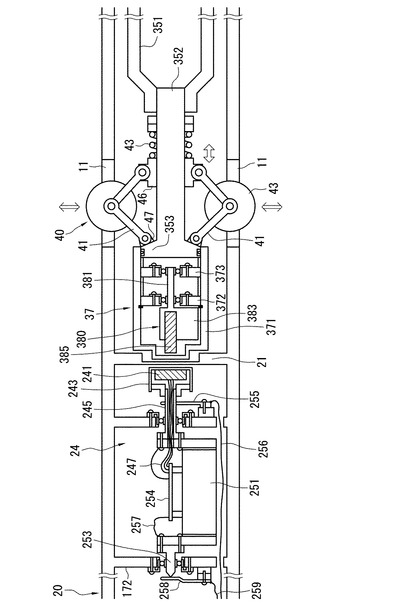
図3及び図4に示すように、支軸31はケーシング10の先端部15と支持壁部16との間に懸架されている。この支軸31はケーシング10の中心軸上に配置される。支軸31には第2のフォロワ部50のスライダ56が遊挿されている。このスライダ56にリンク部材51の一端が回転自在に取り付けられている。符号57はリンク部材51のリテーナであり、支持壁16に固定される。このリテーナ57へリンク部材51の他端が回転自在に取り付けられる。符号55は圧縮コイルばねであり、リンク機構が立ち上がるように、即ち、接触輪53が半径方外方へ突出するように、スライダ56を図示左側へ付勢する。これにより、3つの接触輪53は常にボーリング孔の周壁に従動することとなる。その結果、第2のフォロワ部50の中心軸がボーリング孔の軸心に一致する。換言すれば、第2のフォロワ部50の中心軸部分において、ケーシング10の中心軸とボーリング孔の軸心とが一致する。
【0018】
符号33は自在継手であり、支軸31と同心的に配置されている。即ち、自在継手33の中心軸はケーシング10の軸と一致する。この自在継手33に棒状部材30の本端部35の基端部が連結される。その結果、棒状部材の本体部35がケーシング10の軸上の位置に回転かつ揺動可能な状態で、かつ片持ちはりの状態で支持される。
【0019】
図5に示すように、本体部35は大径円筒状の基部351と小径な支軸部352を備えてなる。基部351の図示右端が自在継手33へ連結されている。支軸部352の自由端には発磁部37が連結されており、その周縁に第1のフォロワ部40が同心的に取り付けられている。
発磁部37はカップ状の筐体部371を備え、この筐体部371の開口部が支軸部352の自由端大径部位(リテーナ部353)へ気密に嵌合される。筐体部371には一対の支持壁372及び373が形成されている。
符号380は第1のフリコ型回転台であり、その回転軸381が筐体部371の支持壁372、373に回転自在に支持されている。この回転軸381は基部383より偏芯して突出している。これにより、基部383の大面積部分(重り部)が常に重力線方向を向くこととなる。符号385は永久磁石からなる発磁体であり、回転軸381と同一軸線上に配置される。回転軸381、発磁体385及び棒状部材35(特に支軸部352)は同一軸線上に配置されることが好ましい。
【0020】
ここで、棒状部材35は片持ちはりの状態であるので、支軸部352はケーシング10の中心軸と必ずしも一致しない。ボーリング孔が曲がっていると、その曲率に応じて支軸部35はケーシング10の中心軸からずれる。
ここに、発磁体385は支軸部352と同心的に配置されているので、発磁体385もボーリング孔の軸心位置にあり、ボーリング孔が曲がっていると発磁体も385もケーシング10の中心軸からずれることとなる。
この実施例では、発磁体385の基準点(平面センサの測定対象となる点)としてその中心点を採用した。この基準点は支軸部352、更には回転軸381と同軸上となる。勿論、基準点を任意に設定し、補正により平面センサに対する変位量を特定することができる。
【0021】
発磁体385へ対向するようにセンサ部24が配置される。センサ部24は平面センサ241とその筐体243を備えてなる。平面センサ241は磁気感応素子を二次元的に配列してなり、発磁体385の基準点の変位を高い精度で検出することができる。この実施例では平面センサ241の中心をその基準点としてこれをケーシング10の中心軸線上に位置させ、当該基準点と発磁体285の基準点が対向する点との距離及び方向を検出し、ボーリング孔の孔軸方向を特定する。
平面センサ241は筐体243の前壁に固定され、筐体243は回転軸245を介して第2のフリコ型回転台251に結合される。第2のフリコ型回転台251の両端には回転軸245、253が設けられている。各回転軸245、253はフリコ型回転台251の重心から偏芯しており、かつケーシング10の中心軸上に配置されている。これにより、第2のフリコ型回転台251は、ケーシング10の回転の如何に拘わらず、その上面を常に重力方向上向きにした姿勢をとる。その結果、平面センサ241も常にその上辺を重力方向上向きにした姿勢をとる。また、第2のフリコ型回転台251の上面にはセンサ基板254が設けられている。平面センサ241からの信号線247はこのセンサ基板254へ連結され、平面センサ241のアナログ出力がその処理回路によりデジタル化される。処理されたデータはデータ線257、回転軸253、ブラシ258及びデータ線259を介して制御部28へ送られる。制御部28は得られたデータをそのメモリに保存したり地上へ送信したりする。
図中の符号255はブラシであり、電源線256から供給される電力を基板254へ供給する。電源線256は制御部28へ連結されている。
【0022】
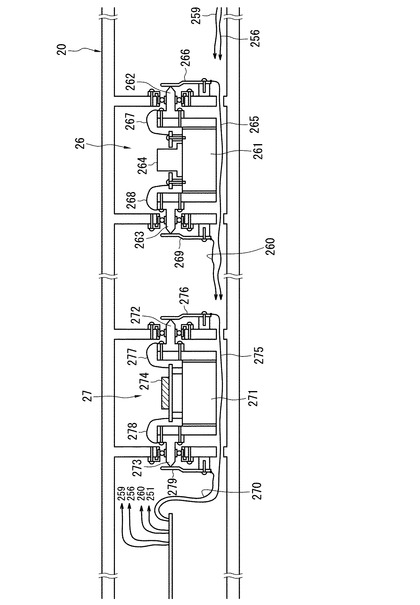
測定部20には、図6に示すとおり、傾斜測定部26が備えられている。
傾斜測定部26は第3のフリコ型回転台261を備える。この第3のフリコ型回転台261の両端には回転軸262、263が設けられている。各回転軸262、263は第3のフリコ型回転台261の重心から偏芯しており、かつケーシング10の中心軸上に配置されている。これにより、第3のフリコ型回転台261は、ケーシング10の回転の如何に拘わらず、その上面を常に重力方向上向きにした姿勢をとる。第3のフリコ型回転台261の上面には汎用的な傾斜計264が配設されており、この傾斜計264の姿勢も常に安定することとなる。第3のフリコ型回転台261には傾斜計264の出力をデジタル化する処理回路(図示せず)も備えられている。図中の符号265は制御部28から連結される電源線であり、ブラシ266、回転軸262及び電源線267を介して傾斜計264へ電力を供給する。傾斜計264の出力は図示しない処理回路でデジタル処理されて、データ線268、回転軸263、ブラシ269及びデータ線260を介して制御部28へ送られる。
【0023】
測定部20にはまた方位測定部27が備えられている。
方位測定部27は第4のフリコ型回転台271を備える。この第4のフリコ型回転台271の両端には回転軸272、273が設けられている。各回転軸272、273は第4のフリコ型回転台271の重心から偏芯しており、かつケーシング10の中心軸上に配置されている。これにより、第4のフリコ型回転台271は、ケーシング10の回転の如何に拘わらず、その上面を常に重力方向上向きにした姿勢をとる。第4のフリコ型回転台271の上面には汎用的な磁気方位系274が配設されており、この傾斜計274の姿勢も常に安定することとなる。第4のフリコ型回転台271には傾斜計274の出力をデジタル化する処理回路(図示せず)も備えられている。図中の符号275は制御部28から連結される電源線であり、ブラシ276、回転軸272及び電源線277を介して磁気方位計274へ電力を供給する。磁気方位計274の出力は図示しない処理回路でデジタル処理されて、データ線278、回転軸273、ブラシ279及びデータ線270を介して制御部28へ送られる。
【0024】
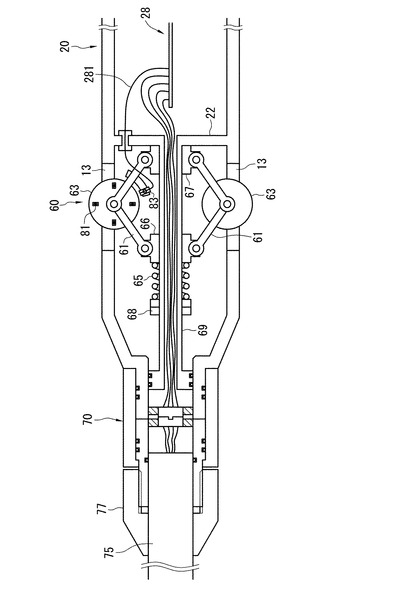
測定部20には制御部28が備えられている(図7参照)。
制御部28から既述のセンサ部24、傾斜測定部26、方位測定部27へ電力が供給され、センサ部24、傾斜測定部26及び方位測定部27の出力が集められる。
制御部28は通信機能を有し、各種の信号を地上に対して送受信する。制御部28からの通信線及び電源線はコネクタ部70を介してロッド75内を通される。
【0025】
第3のフォロワ部60は第2のフォロワ部50と同様に作用する。即ち、支軸部69に第3のフォロワ部60のスライダ66が遊挿されている。このスライダ66にリンク部材61の一端が回転自在に取り付けられている。リンク部材61の他端はリテーナ部67へ回転自在に取り付けられる。リテーナ部67は支軸部69に固定されている。支軸部69は円筒形状であり、壁22とコネクタ部70との間に固定されており、その中心軸はケーシング10の中心軸と一致する。
符号65は圧縮コイルばねであり、リンク機構が立ち上がるように、即ち、接触輪63が半径方外方へ突出するように、スライダ66を図示右側へ付勢する。これにより、3つの接触輪63は常にボーリング孔の周壁に従動することとなる。その結果、第3のフォロワ部60の中心軸(即ち支軸部69)がボーリング孔の軸心に一致する。
【0026】
第3のフォロア部60において1つの接触輪63の側壁に、永久磁石81が均等な回転角をあけて(実施例では90度)、且つ同一円周上に配置されている。図7の符号83は磁気センサであり、永久磁石81からの磁力線の変化を測定して、当該永久磁石81が通過する毎に磁気センサ83から出力が制御部28へ送られる。制御部28は磁気センサ83からの出力をカウントし、接触輪63の回転数を演算する。接触輪63の半径は既知であるので、演算した回転数より第3のフォロワ部60の移動距離、ひいては測定装置1の移動距離を演算することができる。
【0027】
実施例の方向測定装置1によれば、図8に示すとおり、第1のフォロワ部40の作用により発磁体385が常にボーリング孔の軸心位置に維持される。他方平面センサ241は、ケーシング10の中心軸上に維持される。ここに、ボーリング孔Bの変曲点に装置1が位置すると、ケーシング10の中心軸とボーリング孔Bの軸心とがずれ、当該ずれが平面センサ214に対する発磁体385の変位として検出される。
棒状体35の基端部は自在継手37で連結されているので、発磁体385は図面の垂直方向にも変位し、その変位量は平面センサ241で検出できる。
【0028】
方向測定装置1が所定距離(例えば1m)移動するごとに、発磁体385の変位量をプロットすることにより、方向測定装置1の進行の軌跡(即ち、ボーリング孔の三次元的な形状)を特定することができる。
【0029】
この発明は、上記発明の実施の形態及び実施例の説明に何ら限定されるものではない。特許請求の範囲の記載を逸脱せず、当業者が容易に想到できる範囲で種々の変形態様もこの発明に含まれる。
【図面の簡単な説明】
【0030】
【図1】この発明の実施例の方向測定装置の全体縦断面図である。
【図2】同じく一部縦断面図である。
【図3】同じく部分拡大縦断面図である。
【図4】同じく横断面図である。
【図5】同じく部分拡大縦断面図である。
【図6】同じく部分拡大縦断面図である。
【図7】同じく部分拡大縦断面図である。
【図8】実施例の方向測定装置の作用を説明する図である。
【符号の説明】
【0031】
1 方向測定装置、10 ケーシング、24 センサ部、30 棒状体、40第1のフォロア部、50 第2のフォロア部、60 第3のフォロア部
【特許請求の範囲】
【請求項1】
ボーリング孔内へ挿入されるケーシングと、
発磁体と該発磁体の移動を検出する平面センサとを有する変位計とを備え、前記ボーリング孔内で孔軸方向を測定する方向測定装置であって、
前記ケーシングの中心軸上の所定の位置に基端部が揺動可能な状態でかつ片持ちばりの状態で支持される棒状体の自由端に前記発磁体が取り付けられ、該棒状体の自由端側には第1のフォロワ部が配置され、該第1のフォロワ部は前記棒状体から放射状に配置される第1のリンク部材に第1の接触輪が前記ケーシングから突出して配置され、該第1のリンク部材は前記第1の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第1の接触輪を前記ボーリング孔の内壁に従動させ、前記発磁体の基準点を前記ボーリング孔の軸心位置に維持し、
前記平面センサはその基準点が前記ケーシングの中心軸上に維持されている、ことを特徴とするボーリング孔内で孔軸方向を測定する方向測定装置。
【請求項2】
前記ケーシングの先端側に第2のフォロワ部が配置され、該第2のフォロア部は前記ケーシングの周方向へ回転自在な第2の回転軸が前記ケーシングと同心的に配置され、該第2の回転軸から放射状に配置される第2のリンク部材に第2の接触輪が該ケーシングから突出して取り付けられ、該第2のリンク部材は前記第2の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第2の接触輪を常に孔の内壁に従動させ、
前記ケーシングの後端側に第3のフォロワ部が配置され、該第3のフォロア部は前記ケーシングの周方向へ回転自在な第3の回転軸が前記ケーシングと同心的に配置され、該第3の回転軸から放射状に配置される第3のリンク部材に第3の接触輪が該ケーシングから突出して取り付けられ、該第3のリンク部材は前記第3の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第3の接触輪を常に孔の内壁に従動させる、ことを特徴とする請求項1に記載の装置。
【請求項3】
前記第1のフォロア部は前記第2及び第3のフォロア部の間に形成され、前記棒状体の基端部は前記第2のフォロア部側であって前記ケーシングの軸上の所定の位置に支持されている、ことを特徴とする請求項2に記載の装置。
【請求項4】
前記棒状体の基端部は前記第2のフォロア部の位置にある、ことを特徴とする請求項3に記載の装置。
【請求項5】
前記発磁体及び前記平面センサはその姿勢が重力方向に対して常に維持されている、ことを特徴とする請求項4に記載の装置。
【請求項6】
前記発磁体は第1のフリコ型回転台に固定され、該第1のフリコ型回転台は前記棒状体の自由端にその周方向へ回転可能に取り付けられ、
前記平面センサは第2のフリコ型回転台に固定され、該第2のフリコ型回転台は前記ケーシングに対してその周方向へ回転可能に取り付けられている、ことを特徴とする請求項5に記載の装置。
【請求項7】
前記発磁体と前記平面センサとの間には隔壁が配置され、前記平面センサは前記ケーシング内の気密室に収納されている、ことを特徴とする請求項6に記載の装置。
【請求項1】
ボーリング孔内へ挿入されるケーシングと、
発磁体と該発磁体の移動を検出する平面センサとを有する変位計とを備え、前記ボーリング孔内で孔軸方向を測定する方向測定装置であって、
前記ケーシングの中心軸上の所定の位置に基端部が揺動可能な状態でかつ片持ちばりの状態で支持される棒状体の自由端に前記発磁体が取り付けられ、該棒状体の自由端側には第1のフォロワ部が配置され、該第1のフォロワ部は前記棒状体から放射状に配置される第1のリンク部材に第1の接触輪が前記ケーシングから突出して配置され、該第1のリンク部材は前記第1の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第1の接触輪を前記ボーリング孔の内壁に従動させ、前記発磁体の基準点を前記ボーリング孔の軸心位置に維持し、
前記平面センサはその基準点が前記ケーシングの中心軸上に維持されている、ことを特徴とするボーリング孔内で孔軸方向を測定する方向測定装置。
【請求項2】
前記ケーシングの先端側に第2のフォロワ部が配置され、該第2のフォロア部は前記ケーシングの周方向へ回転自在な第2の回転軸が前記ケーシングと同心的に配置され、該第2の回転軸から放射状に配置される第2のリンク部材に第2の接触輪が該ケーシングから突出して取り付けられ、該第2のリンク部材は前記第2の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第2の接触輪を常に孔の内壁に従動させ、
前記ケーシングの後端側に第3のフォロワ部が配置され、該第3のフォロア部は前記ケーシングの周方向へ回転自在な第3の回転軸が前記ケーシングと同心的に配置され、該第3の回転軸から放射状に配置される第3のリンク部材に第3の接触輪が該ケーシングから突出して取り付けられ、該第3のリンク部材は前記第3の接触輪を前記ケーシングの半径方向外方へ付勢して、前記第3の接触輪を常に孔の内壁に従動させる、ことを特徴とする請求項1に記載の装置。
【請求項3】
前記第1のフォロア部は前記第2及び第3のフォロア部の間に形成され、前記棒状体の基端部は前記第2のフォロア部側であって前記ケーシングの軸上の所定の位置に支持されている、ことを特徴とする請求項2に記載の装置。
【請求項4】
前記棒状体の基端部は前記第2のフォロア部の位置にある、ことを特徴とする請求項3に記載の装置。
【請求項5】
前記発磁体及び前記平面センサはその姿勢が重力方向に対して常に維持されている、ことを特徴とする請求項4に記載の装置。
【請求項6】
前記発磁体は第1のフリコ型回転台に固定され、該第1のフリコ型回転台は前記棒状体の自由端にその周方向へ回転可能に取り付けられ、
前記平面センサは第2のフリコ型回転台に固定され、該第2のフリコ型回転台は前記ケーシングに対してその周方向へ回転可能に取り付けられている、ことを特徴とする請求項5に記載の装置。
【請求項7】
前記発磁体と前記平面センサとの間には隔壁が配置され、前記平面センサは前記ケーシング内の気密室に収納されている、ことを特徴とする請求項6に記載の装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−229088(P2009−229088A)
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願番号】特願2008−71330(P2008−71330)
【出願日】平成20年3月19日(2008.3.19)
【特許番号】特許第4206502号(P4206502)
【特許公報発行日】平成21年1月14日(2009.1.14)
【出願人】(805000018)財団法人名古屋産業科学研究所 (55)
【Fターム(参考)】
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願日】平成20年3月19日(2008.3.19)
【特許番号】特許第4206502号(P4206502)
【特許公報発行日】平成21年1月14日(2009.1.14)
【出願人】(805000018)財団法人名古屋産業科学研究所 (55)
【Fターム(参考)】
[ Back to top ]