
方向転換支援システム
【課題】 Uターン又は切り返しによる車両の方向転換を支援する方向転換支援システムを提供すること。
【解決手段】 ナビゲーションシステム11と、自車両の回転半径に関する回転半径情報が記録された回転半径情報記憶手段14と、ナビゲーションシステムから取得した自車両が走行する道路の道路幅情報と回転半径情報とに基づきUターンが可能か否かを判定するUターン可否判定手段15と、Uターン可否判定手段の判定結果に基づき、自車両の方向転換を支援する方向転換支援手段20、100と、を有することを特徴とする方向転換支援システムを提供する。
【解決手段】 ナビゲーションシステム11と、自車両の回転半径に関する回転半径情報が記録された回転半径情報記憶手段14と、ナビゲーションシステムから取得した自車両が走行する道路の道路幅情報と回転半径情報とに基づきUターンが可能か否かを判定するUターン可否判定手段15と、Uターン可否判定手段の判定結果に基づき、自車両の方向転換を支援する方向転換支援手段20、100と、を有することを特徴とする方向転換支援システムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両をUターン又は切り返して方向転換させる車両操作を支援する方向転換支援システムに関する。
【背景技術】
【0002】
車両の運転中、経路を誤って元の場所に戻りたい場合や反対車線にある店舗に立ち寄りたい場合など、車両のUターンが必要な状況になることがある。このため、Uターンが可能なUターンエリアを検索すると共に、Uターンエリアを経由して車両を誘導するナビゲーション装置が提案されている(例えば、特許文献1参照)。特許文献1記載のナビゲーション装置では、経路を誤った場合に、Uターン可能なエリアを経由した目的地までの経路と、経路を誤って走行している場所から目的地までの経路とを運転者に提示するので、運転者は到達時間等に基づき所望の経路を選択できる。
【特許文献1】特開2002−340585号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1記載のナビゲーション装置では、Uターン可能なエリアを提示するに留まり、車両をUターンさせる操作については記載されていない。車両のUターンにおいては、Uターンが禁止されている区域が存在するため、運転者はまずUターンが可能な区域か否かを判断しなければならない。また、Uターンする場合は、かかる交通規制の他にも、反対車線の車両の走行状況を把握することが必要となる。また、Uターンが規制されていない地点へ到達しても、道路幅と車両の回転半径に応じて適切な舵角及び車速の制御が要求され、また、道路幅等によっては切り返しが必要となる場合があるなど適切な車両操作が要求される。すなわち、Uターンする場合、運転者は、Uターン禁止区域か否かの確認、Uターン可能な区域付近の状況把握、及び、適切な車両操作、等が要求されることとなる。しかしながら、これまで運転者のUターン操作を支援するような方向転換支援システムは提案されていなかった。
【0004】
本発明は、上記問題に鑑み、Uターン又は切り返しによる車両の方向転換を支援する方向転換支援システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明は、ナビゲーションシステムと、自車両の回転半径に関する回転半径情報が記録された回転半径情報記憶手段と、ナビゲーションシステムから取得した自車両が走行する道路の道路幅情報と回転半径情報とに基づきUターンが可能か否かを判定するUターン可否判定手段と、Uターン可否判定手段の判定結果に基づき、自車両の方向転換を支援する方向転換支援手段と、を有することを特徴とする方向転換支援システムを提供する。
【0006】
本発明によれば、Uターン又は切り返しによる車両の方向転換を支援する方向転換支援システムを提供することができる。また、運転者の運転習熟度に関係なく方向転換を支援できる。なお、自車両が走行する道路とは、道路に限られず走行している場所を含む。
【0007】
また、本発明の方向転換支援システムの一形態において、Uターン可否判定手段によりUターンが不可能であると判定された場合、自車両を切り返して方向転換させる切り返し軌道を推定する旋回軌道推定手段(図1の走行軌道推定手段18に相当する)と、旋回軌道推定手段により推定された切り返し軌道を目標に自車両を走行させる旋回走行制御手段と、を有することを特徴とする。
【0008】
本発明によれば、Uターンにより方向転換ができなくても、切り返しにより方向転換することができる。
【0009】
また、本発明の方向転換支援システムの一形態において、Uターン可否判定手段によりUターンが可能であると判定された場合、方向転換支援手段は、自車両を所定の舵角で走行させるUターン走行制御手段を有することを特徴とする。
【0010】
本発明によれば、運転者の運転習熟度に関係なくUターンによる方向転換を支援することができる。
【0011】
また、本発明の方向転換支援システムの一形態において、方向転換支援手段は、運転者に方向転換のための操舵量を教示する、ことを特徴とする。
【0012】
本発明によれば、運転者は教示された操舵量を参考に方向転換のための操舵を行うことができる。
【0013】
また、本発明の方向転換支援システムの一形態において、舵角センサから検出された舵角に基づいて自車両の予想軌跡を推定する予想軌跡推定手段を有し、方向転換支援手段は、予想軌跡推定手段により推定された予想軌跡、及び、所定の舵角で走行させた場合のUターン走行軌跡又は旋回軌道推定手段により推定された切り返し軌道を、運転者に教示する、ことを特徴とする。
【0014】
本発明によれば、自車両の予想軌跡と目標とすべき軌跡とが教示されるので、運転者は、予想軌跡が目標とすべき軌跡に近づくように操舵できる。
【0015】
また、本発明の方向転換支援システムの一形態において、Uターン可否判定手段によるUターンの可否の判定結果を運転者に報知する、ことを特徴とする。
【0016】
本発明によれば、Uターン可否の判定結果が運転者に報知されるので、運転者は切り返しするか否かを判断できる。運転者への報知は、ナビ画面やフロントガラスへの表示、音声により行う。
【0017】
また、本発明は、ナビゲーションシステムと、自車両の走行車線を検知する走行車線検知手段と、走行車線検知手段により検知された自車両の走行車線と前記ナビゲーションシステムから取得したUターン規制情報に基づき、自車両がUターン可能なエリアに存在するか否かを判定するエリア判定手段と、を有することを特徴とする方向転換支援システムを提供する。
【0018】
本発明によれば、走行車線が右端か否かなどを自動に検知すると共に、Uターンが規制されているか否かを判定できる。したがって、ナビゲーションシステムからの情報ではUターンが可能であっても左側のレーンを走行している場合やUターン禁止地点でのUターンを行わないので、危険な運転支援を行うことがない。
【0019】
また、本発明の方向転換支援システムの一形態において、走行車線検知手段は、ナビゲーションシステムから取得した自車両の座標データ又は自車両の車両操作の少なくとも一方から走行車線を検知する、ことを特徴とする。
【0020】
本発明によれば、ナビゲーションシステムと車両操作のいずれか又は双方から走行車線を検知できるので、より精度よく走行車線を検知できる。
【0021】
また、本発明の方向転換支援システムの一形態において、自車両の車両操作は、方向指示器又は舵角の操作であることを特徴とする。
【0022】
本発明によれば、舵角が大きい場合には右左折と、舵角が小さい場合には車線変更と判定できるので、車両操作に基づき走行車線を判定できる。
【0023】
また、本発明の方向転換支援システムの一形態において、車両前方の画像を撮影する画像撮影手段を有し、走行車線検知手段は、画像撮影手段により撮影された画像から検知された白線に基づき自車両の走行車線を検知する、ことを特徴とする。
【0024】
本発明によれば、撮影された画像から検知された白線に基づき、より精度よく車両の走行車線を検知できる。
【発明の効果】
【0025】
Uターン又は切り返しによる車両の方向転換を支援する方向転換支援システムを提供することができる。
【発明を実施するための最良の形態】
【0026】
以下、本発明を実施するための最良の形態について、添付図面を参照しながら説明する。
【実施例1】
【0027】
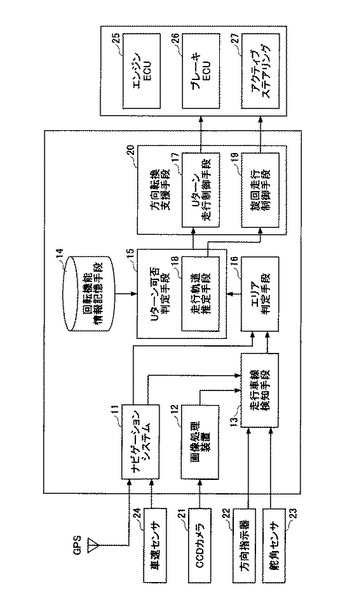
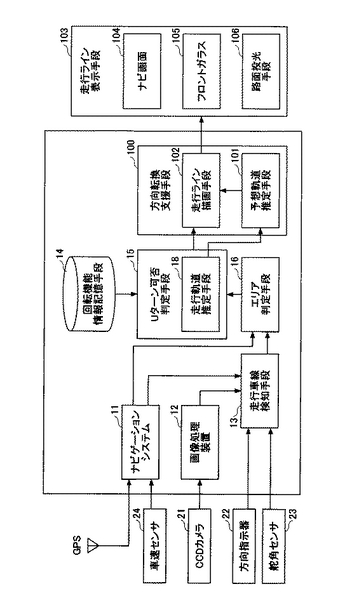
図1は、本実施例の方向転換支援システムの機能構成図を示す。本実施例の方向転換支援システムによれば、運転者の運転習熟度に関わらず、自車両のUターン又は切り返し操作を支援して車両を方向転換させることができる。なお、本実施例における方向転換とは、車両の進行方向を反対車線に変更することをいう。
図1の方向転換支援システムは、走行車線検知手段13と、Uターン可否判定手段15と、エリア判定手段16と、方向転換支援手段20と、画像処理装置12と、車両の回転半径などの回転半径情報が記憶された回転半径情報記憶手段14と、を有するように構成される。
【0028】
方向転換支援手段20は、エンジンECU25、ブレーキECU26及びアクティブステアリング27と電気的に接続されており、これらを介して車両を自動で走行制御できる。また、方向転換支援手段20は、Uターン走行制御手段17と旋回走行制御手段19とを有するように構成され、Uターン走行制御手段17はUターンにより車両の方向転換を、旋回走行制御手段19は切り返しにより車両を方向転換するように、車両を走行制御する。また、方向転換支援システムは、ナビゲーションシステム11と連係して動作する。
【0029】
走行車線検知手段13は、自車両が走行している車線を検知するものである。走行車線検知手段13は、自車両の走行する車線の数を検知し、車線が複数あればそのうち自車両がどの車線を走行しているかを検知する。例えば片側に3車線の車線を検知した場合、自車両の走行する車線が右側か、中央か、あるいは左側かを検知する。
【0030】
走行車線検知手段13は、ナビゲーションシステム11と連係している。ナビゲーションシステム11は、GPS(Global Positioning System)から受信した電波の到達時間と衛星軌道に基づき車両の位置を推測する。車両の位置が推定されると、道路の幅に対する自車両の走行位置から、自車両の走行車線を検知できる。ナビゲーションシステム11には、車速センサ24から車速パルスが入力されており、車速パルスと走行方位及び道路地図データに基づいたマップマッチングで道路地図データの車両位置を高精度に推測する。マップマッチングは、車に取付けた方位センサによる走行方位と車速パルスによる走行距離を、GPSにより得られた座標データと比較することで行われる。座標データとのずれが大きくなると、道路地図上の走行位置を補正することで、正確な車両位置を保持する。マップマッチングが正常に行われている場合、マップマッチングの可否を表すMap_flagに1が設定され、トンネルやビルの影などGPSからの電波受信が困難な場所等マップマッチングができない場所では、Map_flagに0が設定される。したがって、Map_flagが1の場合、走行車線検知手段13は、ナビゲーションシステム11から走行車線を検知することができる。
【0031】
また、ナビゲーションシステム11は、道路地図データに道路の車線数の情報を備えており、GPS等によって自車両の座標データを受信し、道路地図データより自車両の走行する道路の車線数の情報を取得することができる。また、ナビゲーションシステム11は、道路地図データに収録されている道路に関し、Uターン禁止等の交通規制に関する情報を有する。
【0032】
また、自車両には車外の画像を撮影する画像撮影手段としてCCDカメラ21が車載されている。CCDカメラ21が撮影した画像は画像処理装置12により処理された後、走行車線検知手段13に送出される。CCDカメラ21は、例えば、車室内のルームミラー付近に設置され、車両前方の所定範囲を撮影する。なお、車両前方を撮影するカメラにはCMOS素子等いかなる固体撮像素子を用いてもよい。
【0033】
画像処理装置12は、CCDカメラ21が撮影した道路の画像データから白線の輪郭を抽出する。白線の輪郭は、例えば、画像の輝度に基づき、所定の閾値以上の輝度を有する領域を画像底部から上方に向けて検出する。白線であれば、画像底部から上方に向け、長方形状の領域が連続又は所定の間隔で現れるので、当該所定の閾値以上の長方形状が検出されたら白線として検知する。想定される長方形状の領域に対して実際に検知された白線の割合から、白線の検知率LinePを算出し、LinePが所定以上の検知率である場合、走行車線を判定できる程度に白線が検知されていると判定する。
【0034】
走行車線検知手段13は、画像処理装置12が処理した画像により車線の数を検知すると共に、白線が自車両に対しどの位置(右又は左)に存在するかにより自車両が走行している車線を検知する。画像処理装置12による走行車線の検知は、ナビゲーションシステム11と連係ができない場合に有効であるし、ナビゲーションシステム11と共に用いることで走行車線の検知の精度が向上する。なお、走行車線検知手段13は、車線に限らず、自車両と走行方向が同じ車両が右(又は左)に存在することがCCDカメラ21で撮影された場合、自車両の走行車線は左(又は右)と検知できる。
【0035】
また、走行車線検知手段13は、方向指示器22及び舵角センサ23と接続されている。方向指示器22から右左折又は左右に車線変更する車両操作があること、また、舵角センサ23の検出する舵角STRの大きさが走行車線検知手段13に入力される。方向指示器22の操作結果は、方向を示すフラグLR_flag(0の場合には方向指示器22の操作なし)として走行車線検知手段13に入力される。
【0036】
走行車線検知手段13は、舵角センサ23の舵角の大きさに基づき、車線の変更がなされたのか右折又は左折されたのかを判定して、自車両の走行車線を検知できる。方向指示器22及び舵角センサ23による走行車線の検知は、ナビゲーションシステム11と連係ができない場合に有効であるし、ナビゲーションシステム11及び画像処理装置12による走行車線の検知と共に用いることで走行車線の検知の精度が向上する。
【0037】
エリア判定手段16には、走行車線検知手段13により検知された自車両の走行車線が入力されると共に、ナビゲーションシステム11からUターン規制情報等の交通規制に関する情報が入力される。エリア判定手段16は、右端の車線を走行しているか否か、及び、Uターン規制されているか否か、に基づき自車両がUターン可能なエリアに存在するか否かを判定する。また、車両の走行方向前方から、Uターンが規制されていないエリアをナビゲーションシステム11から取得することができる。
【0038】
Uターン可否判定手段15には、エリア判定手段16から、自車両がUターン可能なエリアに存在するか否かの判定結果が入力される。また、Uターン可否判定手段15は、車両の回転半径などの回転半径情報が記憶された回転半径情報記憶手段14と接続されており、回転半径情報記憶手段14から自車両の最小回転半径を取得する。Uターン可否判定手段15は、最小回転半径と道路幅に基づきUターンによる方向転換が可能か否か判定する。
また、Uターン可否判定手段15は、走行軌道推定手段18を有するように構成される。走行軌道推定手段18は、最小回転半径と道路幅に関する情報とに基づき、Uターンによる方向転換、又は、切り返しによる方向転換を行った場合の自車両の走行軌道を推定する。なお、Uターン又は切り返しによる走行軌道の推定については後述する。
【0039】
Uターン可否判定手段15は、Uターンするための操舵角又はUターンによる方向転換を行った場合の自車両の走行軌道をUターン走行制御手段17に送出する。Uターン走行制御手段17は、送出されたUターンするための操舵角により、又は、Uターンの走行軌道を目標の走行軌道として車両を走行制御する。
【0040】
また、Uターン可否判定手段15は、切り返しによる方向転換を行った場合に推定される走行軌道を旋回走行制御手段19に送出する。旋回走行制御手段19は、送出された切り返しによる走行軌道を目標の走行軌道として車両を走行制御する。
【0041】
Uターン走行制御手段17と旋回走行制御手段19は、自車両のエンジンECU25、ブレーキECU26及び強制的なステアリング操作が可能なアクティブステアリング27と接続されている。Uターン走行制御手段17と旋回走行制御手段19は、エンジンスロットルの開度を調整すると共にステアリング操作を行い、また、車両を制動させて車速を制御することで、車両をUターン又は切り返して方向転換することができる。
【0042】
以上の構成に基づき、方向転換支援システムの制御手順について図2及び図3のフローチャート図に基づき説明する。本実施例では、図2の自車両の走行車線の判定と図3のUターン可否の判定及び切り返し軌道の推定に分けて説明する。
【0043】
〔自車両の走行車線の判定〕
図2のフローチャート図の処理は、例えば、運転者により車両のUターンが指示されたり、目的地までの走行経路から外れUターンにより元の走行経路に復帰させる場合に作動する。
【0044】
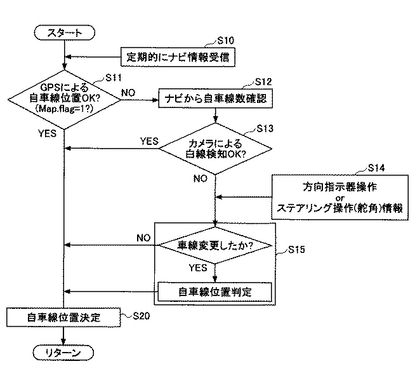
走行車線検知手段13は、定期的にGPSとナビゲーションシステム11から車両の走行位置の推定情報を取得する(S10)。ナビゲーションシステム11のMap_flagが1の場合(ステップS11のYes)、走行車線検知手段13は、車両の走行位置を正確に検出しているものとして、ナビゲーションシステム11における走行車線を現在の走行車線として決定する(S20)。
【0045】
ナビゲーションシステム11のMap_flagが0の場合(ステップS11のNo)、ナビゲーションシステム11から走行している道路の車線数を取得する(S12)。片側の車線数が1であれば、現在の走行車線が右端となるので当該走行車線からUターンしうる。
【0046】
走行している道路に車線が複数ある場合、画像処理装置12は、CCDカメラ21に撮影された道路の画像データから白線を検知する。白線を検知した結果、白線の検知率LinePが所定以上(例えば、70%以上)であれば(ステップS13のYes)、走行車線検知手段13は、白線が検知されていると判定して、走行車線を決定する(S20)。
【0047】
なお、走行車線検知手段13は、CCDカメラ21により撮影された走行している車両の画像データに基づき走行車線を検知してもよい。例えば、進行方向が同じ車両が右側に存在する場合、自車両の走行車線は少なくとも右端ではないと判断できる。
【0048】
白線の検知率LinePが所定より低い場合(ステップS13のNo)、走行車線検知手段13は、方向指示器22から方向指示器の操作を検出すると共に、舵角センサ23からステアリング操作を検出(S14)し、走行車線を判定する。
【0049】
… 舵角STR及び方向指示器の操作による走行車線の判定(S15)…
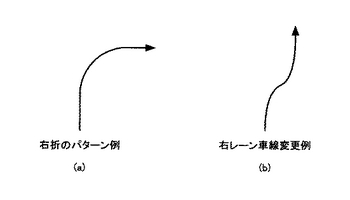
ついで、走行車線検知手段13は、右左折か又は車線変更かを判定することで、自車両の走行車線を検知する。図4(a)及び(b)は、舵角センサ23が検出した舵角により判定される走行ラインを示す。図4(a)は右折した場合の走行ラインを、図4(b)は右の車線に車線変更した場合の走行ラインを、それぞれ示す。
【0050】
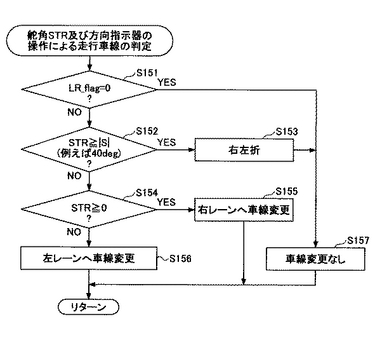
図5は、右左折か又は車線変更かを判定する判定ロジックの一例を示す。LR_flagが0の場合(ステップS151のYes)、走行車線検知手段13は、車線変更又は右左折がないことから、直近のMap_flagが1の状態の走行車線を現在の走行車線と判断する(S157)。
【0051】
LR_flagが0以外の場合(ステップS151のNo)、走行車線検知手段13は、舵角STRが所定値S(S>0)以上か否かを判定する(S152)。舵角STRが例えば40度以上の場合(ステップS152のYes)、走行車線検知手段13は、車両が右折又は左折したと判定し(車線の変更はないものと判定し)、直近のMap_flagが1の状態の走行車線を現在の走行車線と判断する(S157)。
【0052】
舵角STRが所定値Sよりも小さい場合(ステップS152のNo)、走行車線検知手段13は、舵角STRが0以上か否かを判定する(S154)。舵角STRはステアリング操作が右回転の場合を正とするので、舵角STRが0以上の場合(ステップS154のYes)、右のレーンへ車線変更したものと判定し(S155)、走行車線検知手段13は、直近のMap_flagが1の状態の走行車線から一つ右のレーンを走行車線と判断する(S155)。
【0053】
また、舵角STRが0より小さい場合(ステップS154のNo)、左のレーンへ車線変更したものと判定し(S156)、走行車線検知手段13は、直近のMap_flagが1の状態の走行車線から一つ左のレーンを走行車線と判断する(S156)。したがって、走行車線検知手段13は、図5の判定ロジックにより、図4(a)又は(b)のような走行ラインを判定し、自車両が走行している車線を判定できる。
【0054】
また、障害物を回避するためにステアリング操作された場合(例えばミリ波レーダによる障害物の検知結果があった場合)、障害物を回避するためのステアリング操作を除いて走行車線を判定できる。
【0055】
なお、車線変更が複数回行われていた場合、図5の判定を複数回行う。また、かかる場合、基準とする元の走行レーンは直近のMap_flagが1の状態の走行レーンではなく、当該処理により走行車線と判定された走行レーンとなる。
【0056】
以上で図5の判定ロジックが終了し、図2に戻り、自車両の走行車線が決定された(S20)。
【0057】
〔Uターン可否の判定及び切り返し軌道の推定〕
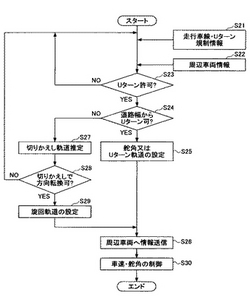
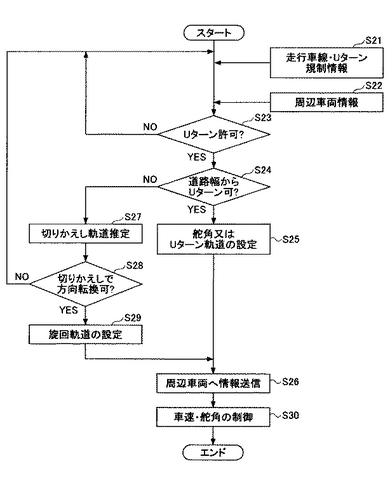
続いて、図3のUターン可否の判定及び切り返し軌道の推定の処理手順について説明する。まず、走行車線検知手段13により検知された走行車線とナビゲーションシステム11から取得されたUターン規制の有無が取得される(S21)。
【0058】
エリア判定手段16は、周辺の車両、特に、反対車線の車両の交通妨害とならないように、周辺の車両から車両情報を取得する(S22)。周辺の車両の車両情報から、反対車線の交通量に関する情報や、反対車線の車両と通信できず車両情報が取得できないといった周辺の車両の情報を取得できる。なお、周辺の車両からの車両情報の受信又は送信には、車車間通信やガードレールや信号機などの路上機器に搭載されたインフラを介して行う。
【0059】
エリア判定手段16は、自車両の走行車線、Uターン規制情報及び周辺の車両の車両情報に基づき、Uターンが許可されているか否かを判定する(S23)。なお、周辺の車両の状況に基づき、Uターン走行が可能な状況か否かの判断を運転者が行ってもよい。
【0060】
Uターンが許可されていない場合(ステップS23のNo)、自車両の走行車線、Uターン規制情報又は周辺の車両の車両情報のうち、Uターンを制限する条件を運転者に知らせ、例えばUターンが許可されるまで待機、又は、Uターン可能なエリアまで誘導する。
【0061】
次いで、Uターン可否判定手段15は、最小回転半径RMと道路幅Dの関係に基づきUターン走行が可能か否か判定する(S24)。Uターン可否判定手段15は、最小回転半径を回転半径情報記憶手段14から取得すると共に、ナビゲーションシステム11から走行している道路の道路幅を取得する。
【0062】
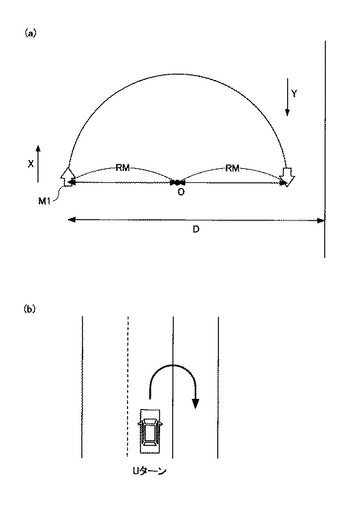
図6(a)は、道路幅Dと自車両の最小回転半径RMとの関係を示す図である。自車両の中心M1は、方向Xを向いており、Uターンにより方向Yに方向転換する。道路幅Dが最小回転半径RMの2倍よりも大きい場合(D>2×RM)、自車両は反対車線の左側に干渉せずにUターンできる。実際には、自車両は所定の車幅を有するので、D>2×RM+αように車幅分αの余裕を確保することが好適である。
【0063】
道路幅Dが最小回転半径RMの2倍よりも大きい場合(ステップS25のYes)、自車両は、車車間通信等により、周辺の車両にUターン操作を行うこと又は行っていることを周辺の車両に通知する(S26)。
【0064】
また、Uターン可否判定手段15は、Uターン可能である旨をUターン走行制御手段17に出力する。Uターン走行制御手段17は、所定の舵角による最小回転半径RMで車両を走行させるため、アクティブステアリングのアクチュエータに信号を送出すると共に、エンジンECU25及びブレーキECU26に所定の速度で走行するように信号を送出する。これにより車両は、図6(b)の如く、Uターンによる方向転換を行う(S30)。なお、走行軌道推定手段18によりUターンの走行軌道を推定し、Uターン走行制御手段17に送出してもよい。Uターン走行制御手段17は、推定されたUターンの走行軌道を目標に車両を走行制御できる。
【0065】
なお、Uターン走行制御手段17によりUターン走行を開始する前に、運転者にUターン走行を開始するか否かの入力を促してもよい。
【0066】
…切り返しによる方向転換(S27〜S29)…
道路幅Dが最小回転半径RMの2倍よりも大きくない場合(ステップS24のNo)、走行軌道推定手段18は、切り返しによる方向転換の走行軌道を推定する(S27)。方向転換支援システムは、Uターンによる方向転換ができない旨を運転者に報知する。これにより、運転者は、Uターンならしてもよいが切り返しはしたくない場合に処理を中止できる。
【0067】
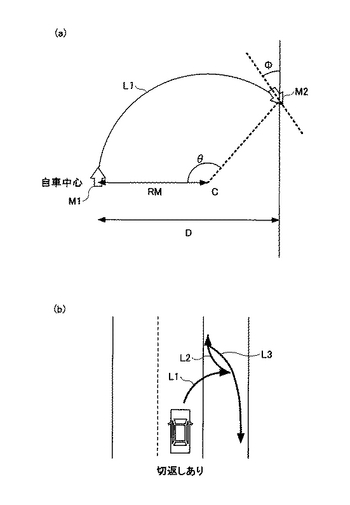
図7は、切り返しによる方向転換を説明するための図である。自車両の車両中心が図7(a)の位置M1にあるものとし、位置M1から切り返しによる方向転換を行う。
【0068】
走行軌道の推定について説明する。旋回半径と舵角STRの間には式(1)の関係があることが知られている。したがって、車両の最小回転半径RMで走行するための舵角STRは式(2)で求められる。
【0069】
【数1】

図7(a)に示すように、最小回転半径RMとなるように舵角を制御しても道路幅Dが最小回転半径RMの2倍以下となるので(D≦2×RM)、自車両は反対車線の左側と干渉する。かかる場合には、走行軌道推定手段18は、図7(b)に示すように切り返して走行する軌道を推定する。図7(b)の切り返し操作では、前進走行による一次旋回L1、後退走行による二次旋回L2、及び、最終的に反対車線の走行を開始する三次旋回L3が示されている。本実施例では、一次旋回L1及び二次旋回L2を切り返しによる方向転換の旋回軌道と称す。
【0070】
走行軌道推定手段18は、最小回転半径RMとなる舵角STRにより車両を走行した場合の、回転中心Cに対する車両の走行回転角度θを、式(3)により算出する。式(3)に示すように、走行回転角度θは、道路幅Dと最小回転半径RMに基づき、逆余弦関数により算出される。
【0071】
【数2】
走行回転角度θが求められると一次旋回L1の旋回距離は、式(4)により算出される。
一次旋回L1の走行が終了した時点では、自車両は、反対車線に対し角度φをなして、反対車線の左側の位置M2にあると推定される。なお、φは反対方向に方向転換するための回転角度180度から一次旋回L1の走行回転角度θを減じたものである。したがって、φとθの間にはφ=180−θの関係がある。
【0072】
一次旋回L1の軌道が推定されたら、次いで、走行軌道推定手段18は、位置M2から二次旋回L2の軌道を推定する。二次旋回L2において自車両は、後退走行をすると共に一次旋回L1とは逆方向に操舵されるので、舵角STRは式(5)により算出される。また、本実施例では、二次旋回L2は、一次旋回L1により反対方向に方向転換できなかった残りの角度φだけ旋回すればよいので、二次旋回L2の旋回距離は式(6)のように算出される。
【0073】
【数3】
二次旋回L2が終了すると、自車両は反対車線の走行方向を向いているので、舵角STR=0にて走行することができる。なお、図7(b)では、二次旋回により切り返し走行が終了することとしたが、道路幅Dが狭い場合など、複数回一次旋回L1及び二次旋回L2の旋回走行を繰り返してもよい。
【0074】
走行軌道推定手段18は、一次旋回L1の旋回距離と二次旋回L2の旋回距離とを走行するように切り返しによる走行軌道を推定する。走行軌道が推定されたら、Uターン可否判定手段15は、切り返しにより方向転換が可能か否かを判定する(S28)。
【0075】
切り返しによる方向転換が可能か否かは、例えば、道路幅Dが狭く一次旋回L1により90度以上の走行回転角度θが得られないと推定される場合、一次旋回L1と二次旋回L2とからなる旋回軌道の走行を3回以上行わなければならないと推定される場合等、により判定される。判定の基準は、予めどのように設計されていてもよいし、また、判定の前に旋回回数の上限を運転者により入力されてもよい。また、切り返しによる方向転換ができない場合、その旨を運転者に報知することが好適である。
【0076】
切り返しにより方向転換が可能であると判定された場合(ステップS28のYes)、走行軌道推定手段18が推定した一次旋回L1及び二次旋回L2とからなる旋回軌道を、必要な旋回回数に応じて旋回走行制御手段19に送出する。旋回走行制御手段19は、走行軌道推定手段18により推定された旋回軌道を走行のための軌道として設定する(S29)。以上で、切り返しによる方向転換のための旋回軌道が設定された。
【0077】
次いで、自車両は、車車間通信等により、周辺の車両に切り返し操作を行うこと又は行っていることを周辺の車両に通知する(S26)。また、旋回走行制御手段19は、推定された旋回軌道を目標に車両を走行させるため、アクティブステアリングのアクチュエータに信号を送出すると共に、エンジンECU25及びブレーキECU26に所定の速度で走行するように信号を送出する。これにより車両は、図7(b)の如く、切り返しによる方向転換を行う(S30)。なお、旋回走行制御手段19により切り返しを開始する前に、運転者に切り返しを開始するか否かの入力を促してもよい。
【0078】
切り返しにより方向転換が可能であると判定されない場合(ステップS28のNo)、道路幅D等の切り返しにより方向転換ができない理由を運転者に知らせ、Uターン又は切り返し可能なエリアまで誘導する。
【0079】
以上のように、本実施例によれば、車両を制御してUターン又は切り返しによる方向転換を行うことができる。より詳細には、Uターン禁止区域か否かをナビゲーションシステムにより自動的に判断でき、また、走行車線の推定によりUターン可能な走行車線か否かを自動的に判定できる。Uターンが許可された走行区域又は走行車線では、車車間通信等により周辺の車両にUターン走行を知らせ、車両を自動でUターン走行させることができる。また、道路幅と最小回転半径との関係からUターンによる方向転換ができない場合、切り返しの旋回軌道を設定し、自動で切り返しによる方向転換を行うことができる。すなわち、運転者の習熟度に依存せずに、車両をUターン又は切り返しにより方向転換させることができる。
【実施例2】
【0080】
実施例1では、車両が自動でUターン又は切り返しにより方向転換する場合について説明した。本実施例では、Uターン又は切り返しに適切な走行ラインをカーナビのディスプレイやヘッドアップディスプレイに表示して、運転者の舵角操作の目標とすることで、走行支援を行う方向転換支援システムについて説明する。
【0081】
図8は、本実施例の方向転換支援システムの機能構成図を示す。なお、図8において図1と同一構成部分には同一の符号を付しその説明は省略する。図8の機能構成図では、方向転換支援手段100が、走行ライン描画手段102及び予想軌跡推定手段101を有し、走行ライン描画手段102が走行ライン表示手段103に接続されている。なお、図1の構成に走行ライン描画手段102等を追加してもよい。
【0082】
予想軌跡推定手段101は、自車両の現在の走行状態等から予想される車両の走行軌跡(以下、予想軌跡という)を推定する。具体的には、予想軌跡推定手段101は、舵角センサ23から入力される舵角STR、回転機能情報記憶手段14に記憶された回転半径情報、及び車両のホイールベースLに基づき、予想される車両の走行軌道を推定する。
【0083】
車両の回転半径R_EXPは舵角STR及びホイールベースLとの間に、R_EXP=L/tan
STR の関係を有するので、予想軌跡推定手段101は回転半径R_EXPから、予想軌道L_EXPを推定できる。また、予想軌跡推定手段101が推定した予想軌道L_EXPは、走行ライン描画手段102に送出される。
【0084】
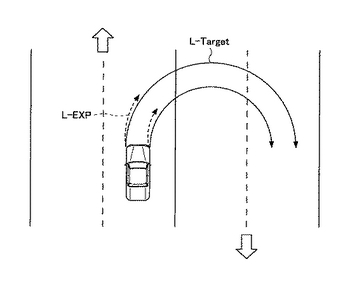
走行軌道推定手段18は、実施例1で説明したように、Uターン又は切り返しに適切な走行軌道を推定する。Uターン走行の場合、所定の舵角、例えば最小回転半径RMで車両を走行させた場合の目標軌道L_Targetを推定する。切り返し走行の場合、最小回転半径RMで車両を走行させた場合の一次旋回L1の目標軌道L_Targetと、後退走行(一次旋回L1と逆方向の舵角による最小回転半径RM)による二次旋回L2の目標軌道L_Targetとを推定する。走行軌道推定手段18が推定した目標軌道L_Targetは、走行ライン描画手段102に送出される。なお、一次旋回L1の目標軌道L_Targetは式(3)、(4)により、二次旋回L2の目標軌道L_Targetは式(5)、(6)により、それぞれ求められる。
【0085】
走行ライン描画手段102は、次述の走行ライン表示手段103に予想軌道L_EXP及び目標軌道L_Targetを表示する。走行ライン描画手段102は、予想軌道L_EXP及び目標軌道L_Targetを一つの画像に表示されるように合成して、ナビ画面104等に表示する。ナビ画面上の自車両の位置は判明しているので、走行ライン描画手段102はナビ画面の現在の車両の位置から予想軌道L_EXP及び目標軌道L_Targetを表示できる。運転者は目標軌道L_Targetを目標に車両の操舵と速度制御を行うことで、スムースに車両を方向転換できる。
【0086】
図9は、走行ライン描画手段102がナビ画面104に表示した予想軌道L_EXP及び目標軌道L_Targetの一例を示す。運転者は、ナビ画面104を参照して、予想軌道L_EXPがL_Targetから外れていれば、L_Targetをトレースするように操舵することで、Uターンが可能になる。
【0087】
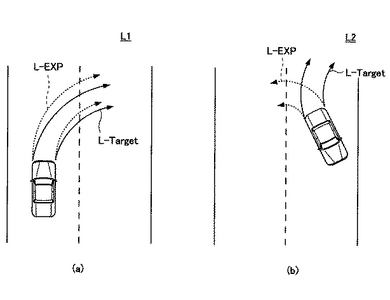
図9には、Uターン走行の場合の走行ラインを示したが、切り返し走行の場合も同様に表示できる。図10(a)は切り返し走行の一次旋回L1の軌道を、図10(b)は二次旋回L2の軌道を、それぞれ示す図である。切り返し走行の場合、前進走行による一次旋回L1及び後退走行による二次旋回L2、とで走行方向が異なる。このため、走行ライン描画手段102は、一次旋回L1の終了まで図10(a)のように予想軌道L_EXP及び目標軌道L_Targetを表示し、一次旋回L1の終了をシフトレバーの操作や走行距離などから検知したら、図10(b)のように、二次旋回L2の予想軌道L_EXP及び目標軌道L_Targetを表示する。
【0088】
一次旋回L1の終了直後の場合、舵角STRから推定される予想軌道L_EXPと二次旋回L2の目標軌道L_Targetは乖離しているので、運転者は、必要な操舵量が大きいことを視覚で認識でき、迅速に目標軌道L_Targetの軌道になるよう操舵できる。
【0089】
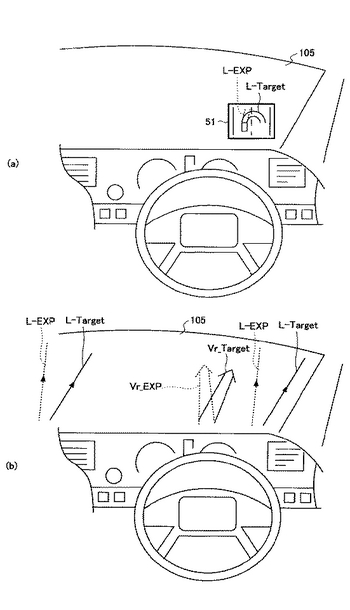
ナビ画面104は、フロントガラス105に投射して表示されるヘッドアップディスプレイであってもよい。図11(a)及び(b)は、ヘッドアップディスプレイ51に表示される予想軌道L_EXPと目標軌道L_Targetを示す。
【0090】
図11(a)に示すように、フロントガラスに投射されたヘッドアップディスプレイ51に軌道を表示することで、運転者は少ない視線移動でL_Targetをトレースするように操舵することができる。
【0091】
また、フロントガラス105に表示される予想軌道L_EXPと目標軌道L_Targetを、図11(b)に示すように、運転席から見た車両の走行ラインとして表示してもよい。道路と予想軌道L_EXP及び目標軌道L_Targetとが、同程度の縮尺で表示されることで、運転者の操舵間隔に合致して操舵の支援を行うことができる。なお、予想軌道L_EXPと目標軌道L_Targetの方向をそれぞれ示す所定長のベクトルVr_EXP、Vr_Targetで表示してもよい。所定長のベクトルで表示することでより簡易的に必要な操舵量を運転者に表示できる。
【0092】
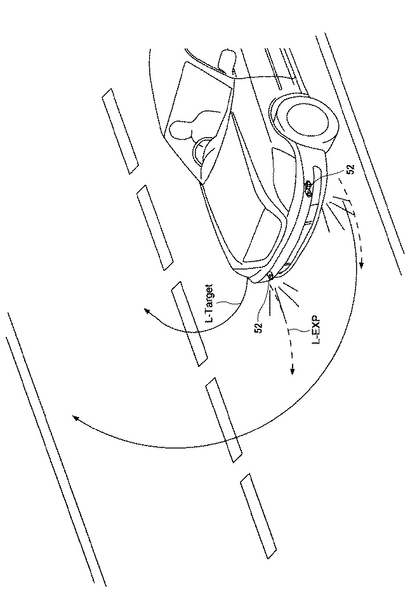
また、予想軌道L_EXPと目標軌道L_Targetを路面に投光して表示してもよい。図12は、路面に投光された予想軌道L_EXPと目標軌道L_Targetとの一例を示す。車両は、バンパの下部に可視光レーザ(例えば、ヘリウムネオンレーザ)照射装置52を備え、予想軌道L_EXPと目標軌道L_Targetを直接路面に投光して表示する。例えば、予想軌道L_EXPを点線で、目標軌道L_Targetを実線で表示することで、運転者は目標とすべき軌道を判別できる。走行する路面に直接光で目標軌道L_Targetが表示されることで、運転者は目標軌道L_Targetをそのまま走行すればよいこととなり、よりスムースに走行支援をすることが可能となる。
【0093】
以上の構成に基づき、本実施例の方向転換支援の手順を図13のフローチャート図に基づき説明する。本実施例の方向転換支援システムは、例えば、運転者により車両のUターンが指示されたり、目的地までの走行経路から外れUターンにより元の走行経路に復帰させる場合に作動する。なお、本実施例では、既に図2のフローチャート図により車両の走行車線は決定されているものとする。
【0094】
車両は、運転者により車両のUターンが指示されたか否かを判定する(S101)、Uターンが指示されない場合は、ステップS101の判定を繰り返す。
【0095】
Uターンの指示があった場合(S101のYes)、CCDカメラ21により周辺の映像を取得すると共に、舵角センサ23が検出した車両の舵角STRを取得する(S102)。走行軌道推定手段18は、舵角STRとホイールベースLとに基づき予想軌道L_EXPを推定する(S103)。
【0096】
走行ライン描画手段102は、予想軌道L_EXPをナビ画面104等に表示する(S104)。予想軌道L_EXPを推定した段階で表示することで、運転者は、予想軌道L_EXPにより現在の舵角でUターンが可能か否かある程度の判断ができる。
【0097】
次いで、車両は、ナビゲーションシステム11から自車両の位置、Uターン規制情報、及び、道路幅情報を取得する(S105)。エリア判定手段16は、走行車線を含む自車両の位置とUターン規制情報に基づき自車両がUターン可能なエリアに存在するか否かを判定する。
【0098】
Uターン可否判定手段15は、最小回転半径RMと道路幅に基づきUターンによる方向転換が可能か否か判定する(S106)。Uターン可否判定手段15は、最小回転半径RMを回転半径情報記憶手段14から取得すると共に、ナビゲーションシステム11から走行している道路の道路幅Dを取得する。Uターン可否判定手段15は、道路幅D>2×RMの場合、Uターン走行が可能であると判定する。
【0099】
Uターンが可能でないと判定された場合(ステップS106のNo)処理を終了するが、切り返し走行が可能か否かを判定して、切り返し走行が可能な場合、切り返しのための走行支援を行ってもよい。
【0100】
Uターンが可能であると判定された場合(ステップS106のYes)、走行軌道推定手段18は目標軌道L_Targetを推定する(S107)。走行軌道推定手段18は、例えば、最小回転半径RMの場合の走行軌道を目標軌道L_Targetとして推定する。
【0101】
次いで、走行ライン描画手段102は、目標軌道L_Targetをナビ画面104等に表示する(S108)。図9ないし12bに示すように、走行ライン描画手段102は、目標軌道L_Targetを予想軌道L_EXPと共に一つの画面に表示するので、運転者は、予想軌道L_EXPが目標軌道L_Targetから外れないように操舵でき、スムースなUターンが可能になる。
【0102】
走行軌道推定手段18は、Uターン走行が終了するまで(S109)、運転者の操舵STRから操作量を検出している(S110)。走行軌道推定手段18は、随時、舵角STRに基づく予想軌道L_EXPの推定を繰り返し、それをナビ画面104等に表示する。運転者は、操舵結果が反映された予想軌道L_EXPと目標軌道L_Targetとを比較しながらUターンを行うことができる。
【0103】
また、Uターン可否判定手段15は、運転者がUターン走行を開始した後の操作量(車両の位置、進行方向、操舵角)と、Uターンが終了するまでに必要な残りの回頭角度に基づいて、Uターンが可能か否かを判定する(S106)。方向転換支援システムは、予想軌道L_EXPが目標軌道L_Targetから所定以上乖離した場合には、警報等により運転者に報知してもよい。
【0104】
Uターンを開始してからUターンが可能でないと判定された場合(S106のNo)、目標軌道L_Targetと予想軌道L_EXPとの表示を中止して、図13のフローチャート図の処理は終了する。なお、Uターン走行の途中でUターンが可能でないと判定された場合、実施例1のように切り返しのための走行軌道を推定し、車両を自動制御してもよい。
【0105】
本実施例によれば、方向転換のための教示された目標軌道L_Targetと予想軌道L_EXPに基づき、運転者が操舵するので、アクティブステアリング27のようにステアリング操作を機械的に制御する機構が必要とされない。アクティブステアリング27は、大舵角を実現するために高トルクを発生させるための電力を要するが、本実施例の方向転換支援システムではかかる電力が要されない。
【0106】
また、実施例1のように自動でUターン走行を行う場合、Uターン中の車速を維持するため高精度なスロットル制御やブレーキ制御が必要であるため、より高性能のエンジンECU25やブレーキECU26が要求されるが、本実施例では既存のECUを使用できるためコストの上昇を抑えられる。
【0107】
また、実施例1では、自動制動中に何らかの障害が生じ車両を緊急回避する必要が生じた場合、方向転換支援システムを停止させる方法や、運転者がアクセルやステアリングを操作した場合のオーバーライドの判定に複雑な処理を必要とするし、他車両との位置関係の把握や、接触を防ぐ手段を講じる必要があるが、本実施例では係る複雑な処理や判定が必要とされない。
【0108】
なお、図12のように、路面に直接走行ラインを投光する走行ラインの表示方法は、駐車支援や狭い路地等で運転を支援する場合に好適である。
【0109】
以上のように、本実施の形態では、運転者の判断や走行を補助することで運転者を支援して、Uターン又は切り返しによる方向転換を行うことができる。
【図面の簡単な説明】
【0110】
【図1】方向転換支援システムの機能構成図である。
【図2】自車両の走行車線の判定の手順を示すフローチャート図の一例である。
【図3】Uターン可否の判定及び走行軌道の推定の手順を示すフローチャート図の一例である。
【図4】舵角センサが検出した舵角により推定される走行ラインの一例である。
【図5】右左折か又は車線変更かを判定する判定ロジックの一例である。
【図6】Uターンによる走行軌道の一例を示す図である。
【図7】切り返しの走行軌道の一例を示す図である。
【図8】実施例2の方向転換支援システムの機能構成図である。
【図9】ナビ画面に表示された予想軌道及び目標軌道の一例を示す図である。
【図10】切り返し走行の場合の予想軌道及び目標軌道の一例を示す図である。
【図11】ヘッドアップディスプレイに表示される予想軌道と目標軌道の一例を示す図である。
【図12】路面に投光された予想軌道と目標軌道の一例を示す図である。
【図13】方向転換支援の手順を示すフローチャート図である。
【符号の説明】
【0111】
11 ナビゲーションシステム
12 画像処理装置
13 走行車線検知手段
14 回転性能情報記憶手段
15 Uターン可否判定手段
16 エリア判定手段
17 Uターン走行制御手段
18 走行軌道推定手段
19 旋回走行制御手段
20 方向転換支援手段
【技術分野】
【0001】
本発明は、車両をUターン又は切り返して方向転換させる車両操作を支援する方向転換支援システムに関する。
【背景技術】
【0002】
車両の運転中、経路を誤って元の場所に戻りたい場合や反対車線にある店舗に立ち寄りたい場合など、車両のUターンが必要な状況になることがある。このため、Uターンが可能なUターンエリアを検索すると共に、Uターンエリアを経由して車両を誘導するナビゲーション装置が提案されている(例えば、特許文献1参照)。特許文献1記載のナビゲーション装置では、経路を誤った場合に、Uターン可能なエリアを経由した目的地までの経路と、経路を誤って走行している場所から目的地までの経路とを運転者に提示するので、運転者は到達時間等に基づき所望の経路を選択できる。
【特許文献1】特開2002−340585号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1記載のナビゲーション装置では、Uターン可能なエリアを提示するに留まり、車両をUターンさせる操作については記載されていない。車両のUターンにおいては、Uターンが禁止されている区域が存在するため、運転者はまずUターンが可能な区域か否かを判断しなければならない。また、Uターンする場合は、かかる交通規制の他にも、反対車線の車両の走行状況を把握することが必要となる。また、Uターンが規制されていない地点へ到達しても、道路幅と車両の回転半径に応じて適切な舵角及び車速の制御が要求され、また、道路幅等によっては切り返しが必要となる場合があるなど適切な車両操作が要求される。すなわち、Uターンする場合、運転者は、Uターン禁止区域か否かの確認、Uターン可能な区域付近の状況把握、及び、適切な車両操作、等が要求されることとなる。しかしながら、これまで運転者のUターン操作を支援するような方向転換支援システムは提案されていなかった。
【0004】
本発明は、上記問題に鑑み、Uターン又は切り返しによる車両の方向転換を支援する方向転換支援システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明は、ナビゲーションシステムと、自車両の回転半径に関する回転半径情報が記録された回転半径情報記憶手段と、ナビゲーションシステムから取得した自車両が走行する道路の道路幅情報と回転半径情報とに基づきUターンが可能か否かを判定するUターン可否判定手段と、Uターン可否判定手段の判定結果に基づき、自車両の方向転換を支援する方向転換支援手段と、を有することを特徴とする方向転換支援システムを提供する。
【0006】
本発明によれば、Uターン又は切り返しによる車両の方向転換を支援する方向転換支援システムを提供することができる。また、運転者の運転習熟度に関係なく方向転換を支援できる。なお、自車両が走行する道路とは、道路に限られず走行している場所を含む。
【0007】
また、本発明の方向転換支援システムの一形態において、Uターン可否判定手段によりUターンが不可能であると判定された場合、自車両を切り返して方向転換させる切り返し軌道を推定する旋回軌道推定手段(図1の走行軌道推定手段18に相当する)と、旋回軌道推定手段により推定された切り返し軌道を目標に自車両を走行させる旋回走行制御手段と、を有することを特徴とする。
【0008】
本発明によれば、Uターンにより方向転換ができなくても、切り返しにより方向転換することができる。
【0009】
また、本発明の方向転換支援システムの一形態において、Uターン可否判定手段によりUターンが可能であると判定された場合、方向転換支援手段は、自車両を所定の舵角で走行させるUターン走行制御手段を有することを特徴とする。
【0010】
本発明によれば、運転者の運転習熟度に関係なくUターンによる方向転換を支援することができる。
【0011】
また、本発明の方向転換支援システムの一形態において、方向転換支援手段は、運転者に方向転換のための操舵量を教示する、ことを特徴とする。
【0012】
本発明によれば、運転者は教示された操舵量を参考に方向転換のための操舵を行うことができる。
【0013】
また、本発明の方向転換支援システムの一形態において、舵角センサから検出された舵角に基づいて自車両の予想軌跡を推定する予想軌跡推定手段を有し、方向転換支援手段は、予想軌跡推定手段により推定された予想軌跡、及び、所定の舵角で走行させた場合のUターン走行軌跡又は旋回軌道推定手段により推定された切り返し軌道を、運転者に教示する、ことを特徴とする。
【0014】
本発明によれば、自車両の予想軌跡と目標とすべき軌跡とが教示されるので、運転者は、予想軌跡が目標とすべき軌跡に近づくように操舵できる。
【0015】
また、本発明の方向転換支援システムの一形態において、Uターン可否判定手段によるUターンの可否の判定結果を運転者に報知する、ことを特徴とする。
【0016】
本発明によれば、Uターン可否の判定結果が運転者に報知されるので、運転者は切り返しするか否かを判断できる。運転者への報知は、ナビ画面やフロントガラスへの表示、音声により行う。
【0017】
また、本発明は、ナビゲーションシステムと、自車両の走行車線を検知する走行車線検知手段と、走行車線検知手段により検知された自車両の走行車線と前記ナビゲーションシステムから取得したUターン規制情報に基づき、自車両がUターン可能なエリアに存在するか否かを判定するエリア判定手段と、を有することを特徴とする方向転換支援システムを提供する。
【0018】
本発明によれば、走行車線が右端か否かなどを自動に検知すると共に、Uターンが規制されているか否かを判定できる。したがって、ナビゲーションシステムからの情報ではUターンが可能であっても左側のレーンを走行している場合やUターン禁止地点でのUターンを行わないので、危険な運転支援を行うことがない。
【0019】
また、本発明の方向転換支援システムの一形態において、走行車線検知手段は、ナビゲーションシステムから取得した自車両の座標データ又は自車両の車両操作の少なくとも一方から走行車線を検知する、ことを特徴とする。
【0020】
本発明によれば、ナビゲーションシステムと車両操作のいずれか又は双方から走行車線を検知できるので、より精度よく走行車線を検知できる。
【0021】
また、本発明の方向転換支援システムの一形態において、自車両の車両操作は、方向指示器又は舵角の操作であることを特徴とする。
【0022】
本発明によれば、舵角が大きい場合には右左折と、舵角が小さい場合には車線変更と判定できるので、車両操作に基づき走行車線を判定できる。
【0023】
また、本発明の方向転換支援システムの一形態において、車両前方の画像を撮影する画像撮影手段を有し、走行車線検知手段は、画像撮影手段により撮影された画像から検知された白線に基づき自車両の走行車線を検知する、ことを特徴とする。
【0024】
本発明によれば、撮影された画像から検知された白線に基づき、より精度よく車両の走行車線を検知できる。
【発明の効果】
【0025】
Uターン又は切り返しによる車両の方向転換を支援する方向転換支援システムを提供することができる。
【発明を実施するための最良の形態】
【0026】
以下、本発明を実施するための最良の形態について、添付図面を参照しながら説明する。
【実施例1】
【0027】
図1は、本実施例の方向転換支援システムの機能構成図を示す。本実施例の方向転換支援システムによれば、運転者の運転習熟度に関わらず、自車両のUターン又は切り返し操作を支援して車両を方向転換させることができる。なお、本実施例における方向転換とは、車両の進行方向を反対車線に変更することをいう。
図1の方向転換支援システムは、走行車線検知手段13と、Uターン可否判定手段15と、エリア判定手段16と、方向転換支援手段20と、画像処理装置12と、車両の回転半径などの回転半径情報が記憶された回転半径情報記憶手段14と、を有するように構成される。
【0028】
方向転換支援手段20は、エンジンECU25、ブレーキECU26及びアクティブステアリング27と電気的に接続されており、これらを介して車両を自動で走行制御できる。また、方向転換支援手段20は、Uターン走行制御手段17と旋回走行制御手段19とを有するように構成され、Uターン走行制御手段17はUターンにより車両の方向転換を、旋回走行制御手段19は切り返しにより車両を方向転換するように、車両を走行制御する。また、方向転換支援システムは、ナビゲーションシステム11と連係して動作する。
【0029】
走行車線検知手段13は、自車両が走行している車線を検知するものである。走行車線検知手段13は、自車両の走行する車線の数を検知し、車線が複数あればそのうち自車両がどの車線を走行しているかを検知する。例えば片側に3車線の車線を検知した場合、自車両の走行する車線が右側か、中央か、あるいは左側かを検知する。
【0030】
走行車線検知手段13は、ナビゲーションシステム11と連係している。ナビゲーションシステム11は、GPS(Global Positioning System)から受信した電波の到達時間と衛星軌道に基づき車両の位置を推測する。車両の位置が推定されると、道路の幅に対する自車両の走行位置から、自車両の走行車線を検知できる。ナビゲーションシステム11には、車速センサ24から車速パルスが入力されており、車速パルスと走行方位及び道路地図データに基づいたマップマッチングで道路地図データの車両位置を高精度に推測する。マップマッチングは、車に取付けた方位センサによる走行方位と車速パルスによる走行距離を、GPSにより得られた座標データと比較することで行われる。座標データとのずれが大きくなると、道路地図上の走行位置を補正することで、正確な車両位置を保持する。マップマッチングが正常に行われている場合、マップマッチングの可否を表すMap_flagに1が設定され、トンネルやビルの影などGPSからの電波受信が困難な場所等マップマッチングができない場所では、Map_flagに0が設定される。したがって、Map_flagが1の場合、走行車線検知手段13は、ナビゲーションシステム11から走行車線を検知することができる。
【0031】
また、ナビゲーションシステム11は、道路地図データに道路の車線数の情報を備えており、GPS等によって自車両の座標データを受信し、道路地図データより自車両の走行する道路の車線数の情報を取得することができる。また、ナビゲーションシステム11は、道路地図データに収録されている道路に関し、Uターン禁止等の交通規制に関する情報を有する。
【0032】
また、自車両には車外の画像を撮影する画像撮影手段としてCCDカメラ21が車載されている。CCDカメラ21が撮影した画像は画像処理装置12により処理された後、走行車線検知手段13に送出される。CCDカメラ21は、例えば、車室内のルームミラー付近に設置され、車両前方の所定範囲を撮影する。なお、車両前方を撮影するカメラにはCMOS素子等いかなる固体撮像素子を用いてもよい。
【0033】
画像処理装置12は、CCDカメラ21が撮影した道路の画像データから白線の輪郭を抽出する。白線の輪郭は、例えば、画像の輝度に基づき、所定の閾値以上の輝度を有する領域を画像底部から上方に向けて検出する。白線であれば、画像底部から上方に向け、長方形状の領域が連続又は所定の間隔で現れるので、当該所定の閾値以上の長方形状が検出されたら白線として検知する。想定される長方形状の領域に対して実際に検知された白線の割合から、白線の検知率LinePを算出し、LinePが所定以上の検知率である場合、走行車線を判定できる程度に白線が検知されていると判定する。
【0034】
走行車線検知手段13は、画像処理装置12が処理した画像により車線の数を検知すると共に、白線が自車両に対しどの位置(右又は左)に存在するかにより自車両が走行している車線を検知する。画像処理装置12による走行車線の検知は、ナビゲーションシステム11と連係ができない場合に有効であるし、ナビゲーションシステム11と共に用いることで走行車線の検知の精度が向上する。なお、走行車線検知手段13は、車線に限らず、自車両と走行方向が同じ車両が右(又は左)に存在することがCCDカメラ21で撮影された場合、自車両の走行車線は左(又は右)と検知できる。
【0035】
また、走行車線検知手段13は、方向指示器22及び舵角センサ23と接続されている。方向指示器22から右左折又は左右に車線変更する車両操作があること、また、舵角センサ23の検出する舵角STRの大きさが走行車線検知手段13に入力される。方向指示器22の操作結果は、方向を示すフラグLR_flag(0の場合には方向指示器22の操作なし)として走行車線検知手段13に入力される。
【0036】
走行車線検知手段13は、舵角センサ23の舵角の大きさに基づき、車線の変更がなされたのか右折又は左折されたのかを判定して、自車両の走行車線を検知できる。方向指示器22及び舵角センサ23による走行車線の検知は、ナビゲーションシステム11と連係ができない場合に有効であるし、ナビゲーションシステム11及び画像処理装置12による走行車線の検知と共に用いることで走行車線の検知の精度が向上する。
【0037】
エリア判定手段16には、走行車線検知手段13により検知された自車両の走行車線が入力されると共に、ナビゲーションシステム11からUターン規制情報等の交通規制に関する情報が入力される。エリア判定手段16は、右端の車線を走行しているか否か、及び、Uターン規制されているか否か、に基づき自車両がUターン可能なエリアに存在するか否かを判定する。また、車両の走行方向前方から、Uターンが規制されていないエリアをナビゲーションシステム11から取得することができる。
【0038】
Uターン可否判定手段15には、エリア判定手段16から、自車両がUターン可能なエリアに存在するか否かの判定結果が入力される。また、Uターン可否判定手段15は、車両の回転半径などの回転半径情報が記憶された回転半径情報記憶手段14と接続されており、回転半径情報記憶手段14から自車両の最小回転半径を取得する。Uターン可否判定手段15は、最小回転半径と道路幅に基づきUターンによる方向転換が可能か否か判定する。
また、Uターン可否判定手段15は、走行軌道推定手段18を有するように構成される。走行軌道推定手段18は、最小回転半径と道路幅に関する情報とに基づき、Uターンによる方向転換、又は、切り返しによる方向転換を行った場合の自車両の走行軌道を推定する。なお、Uターン又は切り返しによる走行軌道の推定については後述する。
【0039】
Uターン可否判定手段15は、Uターンするための操舵角又はUターンによる方向転換を行った場合の自車両の走行軌道をUターン走行制御手段17に送出する。Uターン走行制御手段17は、送出されたUターンするための操舵角により、又は、Uターンの走行軌道を目標の走行軌道として車両を走行制御する。
【0040】
また、Uターン可否判定手段15は、切り返しによる方向転換を行った場合に推定される走行軌道を旋回走行制御手段19に送出する。旋回走行制御手段19は、送出された切り返しによる走行軌道を目標の走行軌道として車両を走行制御する。
【0041】
Uターン走行制御手段17と旋回走行制御手段19は、自車両のエンジンECU25、ブレーキECU26及び強制的なステアリング操作が可能なアクティブステアリング27と接続されている。Uターン走行制御手段17と旋回走行制御手段19は、エンジンスロットルの開度を調整すると共にステアリング操作を行い、また、車両を制動させて車速を制御することで、車両をUターン又は切り返して方向転換することができる。
【0042】
以上の構成に基づき、方向転換支援システムの制御手順について図2及び図3のフローチャート図に基づき説明する。本実施例では、図2の自車両の走行車線の判定と図3のUターン可否の判定及び切り返し軌道の推定に分けて説明する。
【0043】
〔自車両の走行車線の判定〕
図2のフローチャート図の処理は、例えば、運転者により車両のUターンが指示されたり、目的地までの走行経路から外れUターンにより元の走行経路に復帰させる場合に作動する。
【0044】
走行車線検知手段13は、定期的にGPSとナビゲーションシステム11から車両の走行位置の推定情報を取得する(S10)。ナビゲーションシステム11のMap_flagが1の場合(ステップS11のYes)、走行車線検知手段13は、車両の走行位置を正確に検出しているものとして、ナビゲーションシステム11における走行車線を現在の走行車線として決定する(S20)。
【0045】
ナビゲーションシステム11のMap_flagが0の場合(ステップS11のNo)、ナビゲーションシステム11から走行している道路の車線数を取得する(S12)。片側の車線数が1であれば、現在の走行車線が右端となるので当該走行車線からUターンしうる。
【0046】
走行している道路に車線が複数ある場合、画像処理装置12は、CCDカメラ21に撮影された道路の画像データから白線を検知する。白線を検知した結果、白線の検知率LinePが所定以上(例えば、70%以上)であれば(ステップS13のYes)、走行車線検知手段13は、白線が検知されていると判定して、走行車線を決定する(S20)。
【0047】
なお、走行車線検知手段13は、CCDカメラ21により撮影された走行している車両の画像データに基づき走行車線を検知してもよい。例えば、進行方向が同じ車両が右側に存在する場合、自車両の走行車線は少なくとも右端ではないと判断できる。
【0048】
白線の検知率LinePが所定より低い場合(ステップS13のNo)、走行車線検知手段13は、方向指示器22から方向指示器の操作を検出すると共に、舵角センサ23からステアリング操作を検出(S14)し、走行車線を判定する。
【0049】
… 舵角STR及び方向指示器の操作による走行車線の判定(S15)…
ついで、走行車線検知手段13は、右左折か又は車線変更かを判定することで、自車両の走行車線を検知する。図4(a)及び(b)は、舵角センサ23が検出した舵角により判定される走行ラインを示す。図4(a)は右折した場合の走行ラインを、図4(b)は右の車線に車線変更した場合の走行ラインを、それぞれ示す。
【0050】
図5は、右左折か又は車線変更かを判定する判定ロジックの一例を示す。LR_flagが0の場合(ステップS151のYes)、走行車線検知手段13は、車線変更又は右左折がないことから、直近のMap_flagが1の状態の走行車線を現在の走行車線と判断する(S157)。
【0051】
LR_flagが0以外の場合(ステップS151のNo)、走行車線検知手段13は、舵角STRが所定値S(S>0)以上か否かを判定する(S152)。舵角STRが例えば40度以上の場合(ステップS152のYes)、走行車線検知手段13は、車両が右折又は左折したと判定し(車線の変更はないものと判定し)、直近のMap_flagが1の状態の走行車線を現在の走行車線と判断する(S157)。
【0052】
舵角STRが所定値Sよりも小さい場合(ステップS152のNo)、走行車線検知手段13は、舵角STRが0以上か否かを判定する(S154)。舵角STRはステアリング操作が右回転の場合を正とするので、舵角STRが0以上の場合(ステップS154のYes)、右のレーンへ車線変更したものと判定し(S155)、走行車線検知手段13は、直近のMap_flagが1の状態の走行車線から一つ右のレーンを走行車線と判断する(S155)。
【0053】
また、舵角STRが0より小さい場合(ステップS154のNo)、左のレーンへ車線変更したものと判定し(S156)、走行車線検知手段13は、直近のMap_flagが1の状態の走行車線から一つ左のレーンを走行車線と判断する(S156)。したがって、走行車線検知手段13は、図5の判定ロジックにより、図4(a)又は(b)のような走行ラインを判定し、自車両が走行している車線を判定できる。
【0054】
また、障害物を回避するためにステアリング操作された場合(例えばミリ波レーダによる障害物の検知結果があった場合)、障害物を回避するためのステアリング操作を除いて走行車線を判定できる。
【0055】
なお、車線変更が複数回行われていた場合、図5の判定を複数回行う。また、かかる場合、基準とする元の走行レーンは直近のMap_flagが1の状態の走行レーンではなく、当該処理により走行車線と判定された走行レーンとなる。
【0056】
以上で図5の判定ロジックが終了し、図2に戻り、自車両の走行車線が決定された(S20)。
【0057】
〔Uターン可否の判定及び切り返し軌道の推定〕
続いて、図3のUターン可否の判定及び切り返し軌道の推定の処理手順について説明する。まず、走行車線検知手段13により検知された走行車線とナビゲーションシステム11から取得されたUターン規制の有無が取得される(S21)。
【0058】
エリア判定手段16は、周辺の車両、特に、反対車線の車両の交通妨害とならないように、周辺の車両から車両情報を取得する(S22)。周辺の車両の車両情報から、反対車線の交通量に関する情報や、反対車線の車両と通信できず車両情報が取得できないといった周辺の車両の情報を取得できる。なお、周辺の車両からの車両情報の受信又は送信には、車車間通信やガードレールや信号機などの路上機器に搭載されたインフラを介して行う。
【0059】
エリア判定手段16は、自車両の走行車線、Uターン規制情報及び周辺の車両の車両情報に基づき、Uターンが許可されているか否かを判定する(S23)。なお、周辺の車両の状況に基づき、Uターン走行が可能な状況か否かの判断を運転者が行ってもよい。
【0060】
Uターンが許可されていない場合(ステップS23のNo)、自車両の走行車線、Uターン規制情報又は周辺の車両の車両情報のうち、Uターンを制限する条件を運転者に知らせ、例えばUターンが許可されるまで待機、又は、Uターン可能なエリアまで誘導する。
【0061】
次いで、Uターン可否判定手段15は、最小回転半径RMと道路幅Dの関係に基づきUターン走行が可能か否か判定する(S24)。Uターン可否判定手段15は、最小回転半径を回転半径情報記憶手段14から取得すると共に、ナビゲーションシステム11から走行している道路の道路幅を取得する。
【0062】
図6(a)は、道路幅Dと自車両の最小回転半径RMとの関係を示す図である。自車両の中心M1は、方向Xを向いており、Uターンにより方向Yに方向転換する。道路幅Dが最小回転半径RMの2倍よりも大きい場合(D>2×RM)、自車両は反対車線の左側に干渉せずにUターンできる。実際には、自車両は所定の車幅を有するので、D>2×RM+αように車幅分αの余裕を確保することが好適である。
【0063】
道路幅Dが最小回転半径RMの2倍よりも大きい場合(ステップS25のYes)、自車両は、車車間通信等により、周辺の車両にUターン操作を行うこと又は行っていることを周辺の車両に通知する(S26)。
【0064】
また、Uターン可否判定手段15は、Uターン可能である旨をUターン走行制御手段17に出力する。Uターン走行制御手段17は、所定の舵角による最小回転半径RMで車両を走行させるため、アクティブステアリングのアクチュエータに信号を送出すると共に、エンジンECU25及びブレーキECU26に所定の速度で走行するように信号を送出する。これにより車両は、図6(b)の如く、Uターンによる方向転換を行う(S30)。なお、走行軌道推定手段18によりUターンの走行軌道を推定し、Uターン走行制御手段17に送出してもよい。Uターン走行制御手段17は、推定されたUターンの走行軌道を目標に車両を走行制御できる。
【0065】
なお、Uターン走行制御手段17によりUターン走行を開始する前に、運転者にUターン走行を開始するか否かの入力を促してもよい。
【0066】
…切り返しによる方向転換(S27〜S29)…
道路幅Dが最小回転半径RMの2倍よりも大きくない場合(ステップS24のNo)、走行軌道推定手段18は、切り返しによる方向転換の走行軌道を推定する(S27)。方向転換支援システムは、Uターンによる方向転換ができない旨を運転者に報知する。これにより、運転者は、Uターンならしてもよいが切り返しはしたくない場合に処理を中止できる。
【0067】
図7は、切り返しによる方向転換を説明するための図である。自車両の車両中心が図7(a)の位置M1にあるものとし、位置M1から切り返しによる方向転換を行う。
【0068】
走行軌道の推定について説明する。旋回半径と舵角STRの間には式(1)の関係があることが知られている。したがって、車両の最小回転半径RMで走行するための舵角STRは式(2)で求められる。
【0069】
【数1】
図7(a)に示すように、最小回転半径RMとなるように舵角を制御しても道路幅Dが最小回転半径RMの2倍以下となるので(D≦2×RM)、自車両は反対車線の左側と干渉する。かかる場合には、走行軌道推定手段18は、図7(b)に示すように切り返して走行する軌道を推定する。図7(b)の切り返し操作では、前進走行による一次旋回L1、後退走行による二次旋回L2、及び、最終的に反対車線の走行を開始する三次旋回L3が示されている。本実施例では、一次旋回L1及び二次旋回L2を切り返しによる方向転換の旋回軌道と称す。
【0070】
走行軌道推定手段18は、最小回転半径RMとなる舵角STRにより車両を走行した場合の、回転中心Cに対する車両の走行回転角度θを、式(3)により算出する。式(3)に示すように、走行回転角度θは、道路幅Dと最小回転半径RMに基づき、逆余弦関数により算出される。
【0071】
【数2】
走行回転角度θが求められると一次旋回L1の旋回距離は、式(4)により算出される。
一次旋回L1の走行が終了した時点では、自車両は、反対車線に対し角度φをなして、反対車線の左側の位置M2にあると推定される。なお、φは反対方向に方向転換するための回転角度180度から一次旋回L1の走行回転角度θを減じたものである。したがって、φとθの間にはφ=180−θの関係がある。
【0072】
一次旋回L1の軌道が推定されたら、次いで、走行軌道推定手段18は、位置M2から二次旋回L2の軌道を推定する。二次旋回L2において自車両は、後退走行をすると共に一次旋回L1とは逆方向に操舵されるので、舵角STRは式(5)により算出される。また、本実施例では、二次旋回L2は、一次旋回L1により反対方向に方向転換できなかった残りの角度φだけ旋回すればよいので、二次旋回L2の旋回距離は式(6)のように算出される。
【0073】
【数3】
二次旋回L2が終了すると、自車両は反対車線の走行方向を向いているので、舵角STR=0にて走行することができる。なお、図7(b)では、二次旋回により切り返し走行が終了することとしたが、道路幅Dが狭い場合など、複数回一次旋回L1及び二次旋回L2の旋回走行を繰り返してもよい。
【0074】
走行軌道推定手段18は、一次旋回L1の旋回距離と二次旋回L2の旋回距離とを走行するように切り返しによる走行軌道を推定する。走行軌道が推定されたら、Uターン可否判定手段15は、切り返しにより方向転換が可能か否かを判定する(S28)。
【0075】
切り返しによる方向転換が可能か否かは、例えば、道路幅Dが狭く一次旋回L1により90度以上の走行回転角度θが得られないと推定される場合、一次旋回L1と二次旋回L2とからなる旋回軌道の走行を3回以上行わなければならないと推定される場合等、により判定される。判定の基準は、予めどのように設計されていてもよいし、また、判定の前に旋回回数の上限を運転者により入力されてもよい。また、切り返しによる方向転換ができない場合、その旨を運転者に報知することが好適である。
【0076】
切り返しにより方向転換が可能であると判定された場合(ステップS28のYes)、走行軌道推定手段18が推定した一次旋回L1及び二次旋回L2とからなる旋回軌道を、必要な旋回回数に応じて旋回走行制御手段19に送出する。旋回走行制御手段19は、走行軌道推定手段18により推定された旋回軌道を走行のための軌道として設定する(S29)。以上で、切り返しによる方向転換のための旋回軌道が設定された。
【0077】
次いで、自車両は、車車間通信等により、周辺の車両に切り返し操作を行うこと又は行っていることを周辺の車両に通知する(S26)。また、旋回走行制御手段19は、推定された旋回軌道を目標に車両を走行させるため、アクティブステアリングのアクチュエータに信号を送出すると共に、エンジンECU25及びブレーキECU26に所定の速度で走行するように信号を送出する。これにより車両は、図7(b)の如く、切り返しによる方向転換を行う(S30)。なお、旋回走行制御手段19により切り返しを開始する前に、運転者に切り返しを開始するか否かの入力を促してもよい。
【0078】
切り返しにより方向転換が可能であると判定されない場合(ステップS28のNo)、道路幅D等の切り返しにより方向転換ができない理由を運転者に知らせ、Uターン又は切り返し可能なエリアまで誘導する。
【0079】
以上のように、本実施例によれば、車両を制御してUターン又は切り返しによる方向転換を行うことができる。より詳細には、Uターン禁止区域か否かをナビゲーションシステムにより自動的に判断でき、また、走行車線の推定によりUターン可能な走行車線か否かを自動的に判定できる。Uターンが許可された走行区域又は走行車線では、車車間通信等により周辺の車両にUターン走行を知らせ、車両を自動でUターン走行させることができる。また、道路幅と最小回転半径との関係からUターンによる方向転換ができない場合、切り返しの旋回軌道を設定し、自動で切り返しによる方向転換を行うことができる。すなわち、運転者の習熟度に依存せずに、車両をUターン又は切り返しにより方向転換させることができる。
【実施例2】
【0080】
実施例1では、車両が自動でUターン又は切り返しにより方向転換する場合について説明した。本実施例では、Uターン又は切り返しに適切な走行ラインをカーナビのディスプレイやヘッドアップディスプレイに表示して、運転者の舵角操作の目標とすることで、走行支援を行う方向転換支援システムについて説明する。
【0081】
図8は、本実施例の方向転換支援システムの機能構成図を示す。なお、図8において図1と同一構成部分には同一の符号を付しその説明は省略する。図8の機能構成図では、方向転換支援手段100が、走行ライン描画手段102及び予想軌跡推定手段101を有し、走行ライン描画手段102が走行ライン表示手段103に接続されている。なお、図1の構成に走行ライン描画手段102等を追加してもよい。
【0082】
予想軌跡推定手段101は、自車両の現在の走行状態等から予想される車両の走行軌跡(以下、予想軌跡という)を推定する。具体的には、予想軌跡推定手段101は、舵角センサ23から入力される舵角STR、回転機能情報記憶手段14に記憶された回転半径情報、及び車両のホイールベースLに基づき、予想される車両の走行軌道を推定する。
【0083】
車両の回転半径R_EXPは舵角STR及びホイールベースLとの間に、R_EXP=L/tan
STR の関係を有するので、予想軌跡推定手段101は回転半径R_EXPから、予想軌道L_EXPを推定できる。また、予想軌跡推定手段101が推定した予想軌道L_EXPは、走行ライン描画手段102に送出される。
【0084】
走行軌道推定手段18は、実施例1で説明したように、Uターン又は切り返しに適切な走行軌道を推定する。Uターン走行の場合、所定の舵角、例えば最小回転半径RMで車両を走行させた場合の目標軌道L_Targetを推定する。切り返し走行の場合、最小回転半径RMで車両を走行させた場合の一次旋回L1の目標軌道L_Targetと、後退走行(一次旋回L1と逆方向の舵角による最小回転半径RM)による二次旋回L2の目標軌道L_Targetとを推定する。走行軌道推定手段18が推定した目標軌道L_Targetは、走行ライン描画手段102に送出される。なお、一次旋回L1の目標軌道L_Targetは式(3)、(4)により、二次旋回L2の目標軌道L_Targetは式(5)、(6)により、それぞれ求められる。
【0085】
走行ライン描画手段102は、次述の走行ライン表示手段103に予想軌道L_EXP及び目標軌道L_Targetを表示する。走行ライン描画手段102は、予想軌道L_EXP及び目標軌道L_Targetを一つの画像に表示されるように合成して、ナビ画面104等に表示する。ナビ画面上の自車両の位置は判明しているので、走行ライン描画手段102はナビ画面の現在の車両の位置から予想軌道L_EXP及び目標軌道L_Targetを表示できる。運転者は目標軌道L_Targetを目標に車両の操舵と速度制御を行うことで、スムースに車両を方向転換できる。
【0086】
図9は、走行ライン描画手段102がナビ画面104に表示した予想軌道L_EXP及び目標軌道L_Targetの一例を示す。運転者は、ナビ画面104を参照して、予想軌道L_EXPがL_Targetから外れていれば、L_Targetをトレースするように操舵することで、Uターンが可能になる。
【0087】
図9には、Uターン走行の場合の走行ラインを示したが、切り返し走行の場合も同様に表示できる。図10(a)は切り返し走行の一次旋回L1の軌道を、図10(b)は二次旋回L2の軌道を、それぞれ示す図である。切り返し走行の場合、前進走行による一次旋回L1及び後退走行による二次旋回L2、とで走行方向が異なる。このため、走行ライン描画手段102は、一次旋回L1の終了まで図10(a)のように予想軌道L_EXP及び目標軌道L_Targetを表示し、一次旋回L1の終了をシフトレバーの操作や走行距離などから検知したら、図10(b)のように、二次旋回L2の予想軌道L_EXP及び目標軌道L_Targetを表示する。
【0088】
一次旋回L1の終了直後の場合、舵角STRから推定される予想軌道L_EXPと二次旋回L2の目標軌道L_Targetは乖離しているので、運転者は、必要な操舵量が大きいことを視覚で認識でき、迅速に目標軌道L_Targetの軌道になるよう操舵できる。
【0089】
ナビ画面104は、フロントガラス105に投射して表示されるヘッドアップディスプレイであってもよい。図11(a)及び(b)は、ヘッドアップディスプレイ51に表示される予想軌道L_EXPと目標軌道L_Targetを示す。
【0090】
図11(a)に示すように、フロントガラスに投射されたヘッドアップディスプレイ51に軌道を表示することで、運転者は少ない視線移動でL_Targetをトレースするように操舵することができる。
【0091】
また、フロントガラス105に表示される予想軌道L_EXPと目標軌道L_Targetを、図11(b)に示すように、運転席から見た車両の走行ラインとして表示してもよい。道路と予想軌道L_EXP及び目標軌道L_Targetとが、同程度の縮尺で表示されることで、運転者の操舵間隔に合致して操舵の支援を行うことができる。なお、予想軌道L_EXPと目標軌道L_Targetの方向をそれぞれ示す所定長のベクトルVr_EXP、Vr_Targetで表示してもよい。所定長のベクトルで表示することでより簡易的に必要な操舵量を運転者に表示できる。
【0092】
また、予想軌道L_EXPと目標軌道L_Targetを路面に投光して表示してもよい。図12は、路面に投光された予想軌道L_EXPと目標軌道L_Targetとの一例を示す。車両は、バンパの下部に可視光レーザ(例えば、ヘリウムネオンレーザ)照射装置52を備え、予想軌道L_EXPと目標軌道L_Targetを直接路面に投光して表示する。例えば、予想軌道L_EXPを点線で、目標軌道L_Targetを実線で表示することで、運転者は目標とすべき軌道を判別できる。走行する路面に直接光で目標軌道L_Targetが表示されることで、運転者は目標軌道L_Targetをそのまま走行すればよいこととなり、よりスムースに走行支援をすることが可能となる。
【0093】
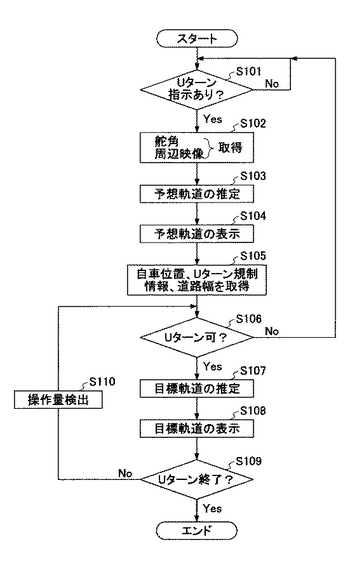
以上の構成に基づき、本実施例の方向転換支援の手順を図13のフローチャート図に基づき説明する。本実施例の方向転換支援システムは、例えば、運転者により車両のUターンが指示されたり、目的地までの走行経路から外れUターンにより元の走行経路に復帰させる場合に作動する。なお、本実施例では、既に図2のフローチャート図により車両の走行車線は決定されているものとする。
【0094】
車両は、運転者により車両のUターンが指示されたか否かを判定する(S101)、Uターンが指示されない場合は、ステップS101の判定を繰り返す。
【0095】
Uターンの指示があった場合(S101のYes)、CCDカメラ21により周辺の映像を取得すると共に、舵角センサ23が検出した車両の舵角STRを取得する(S102)。走行軌道推定手段18は、舵角STRとホイールベースLとに基づき予想軌道L_EXPを推定する(S103)。
【0096】
走行ライン描画手段102は、予想軌道L_EXPをナビ画面104等に表示する(S104)。予想軌道L_EXPを推定した段階で表示することで、運転者は、予想軌道L_EXPにより現在の舵角でUターンが可能か否かある程度の判断ができる。
【0097】
次いで、車両は、ナビゲーションシステム11から自車両の位置、Uターン規制情報、及び、道路幅情報を取得する(S105)。エリア判定手段16は、走行車線を含む自車両の位置とUターン規制情報に基づき自車両がUターン可能なエリアに存在するか否かを判定する。
【0098】
Uターン可否判定手段15は、最小回転半径RMと道路幅に基づきUターンによる方向転換が可能か否か判定する(S106)。Uターン可否判定手段15は、最小回転半径RMを回転半径情報記憶手段14から取得すると共に、ナビゲーションシステム11から走行している道路の道路幅Dを取得する。Uターン可否判定手段15は、道路幅D>2×RMの場合、Uターン走行が可能であると判定する。
【0099】
Uターンが可能でないと判定された場合(ステップS106のNo)処理を終了するが、切り返し走行が可能か否かを判定して、切り返し走行が可能な場合、切り返しのための走行支援を行ってもよい。
【0100】
Uターンが可能であると判定された場合(ステップS106のYes)、走行軌道推定手段18は目標軌道L_Targetを推定する(S107)。走行軌道推定手段18は、例えば、最小回転半径RMの場合の走行軌道を目標軌道L_Targetとして推定する。
【0101】
次いで、走行ライン描画手段102は、目標軌道L_Targetをナビ画面104等に表示する(S108)。図9ないし12bに示すように、走行ライン描画手段102は、目標軌道L_Targetを予想軌道L_EXPと共に一つの画面に表示するので、運転者は、予想軌道L_EXPが目標軌道L_Targetから外れないように操舵でき、スムースなUターンが可能になる。
【0102】
走行軌道推定手段18は、Uターン走行が終了するまで(S109)、運転者の操舵STRから操作量を検出している(S110)。走行軌道推定手段18は、随時、舵角STRに基づく予想軌道L_EXPの推定を繰り返し、それをナビ画面104等に表示する。運転者は、操舵結果が反映された予想軌道L_EXPと目標軌道L_Targetとを比較しながらUターンを行うことができる。
【0103】
また、Uターン可否判定手段15は、運転者がUターン走行を開始した後の操作量(車両の位置、進行方向、操舵角)と、Uターンが終了するまでに必要な残りの回頭角度に基づいて、Uターンが可能か否かを判定する(S106)。方向転換支援システムは、予想軌道L_EXPが目標軌道L_Targetから所定以上乖離した場合には、警報等により運転者に報知してもよい。
【0104】
Uターンを開始してからUターンが可能でないと判定された場合(S106のNo)、目標軌道L_Targetと予想軌道L_EXPとの表示を中止して、図13のフローチャート図の処理は終了する。なお、Uターン走行の途中でUターンが可能でないと判定された場合、実施例1のように切り返しのための走行軌道を推定し、車両を自動制御してもよい。
【0105】
本実施例によれば、方向転換のための教示された目標軌道L_Targetと予想軌道L_EXPに基づき、運転者が操舵するので、アクティブステアリング27のようにステアリング操作を機械的に制御する機構が必要とされない。アクティブステアリング27は、大舵角を実現するために高トルクを発生させるための電力を要するが、本実施例の方向転換支援システムではかかる電力が要されない。
【0106】
また、実施例1のように自動でUターン走行を行う場合、Uターン中の車速を維持するため高精度なスロットル制御やブレーキ制御が必要であるため、より高性能のエンジンECU25やブレーキECU26が要求されるが、本実施例では既存のECUを使用できるためコストの上昇を抑えられる。
【0107】
また、実施例1では、自動制動中に何らかの障害が生じ車両を緊急回避する必要が生じた場合、方向転換支援システムを停止させる方法や、運転者がアクセルやステアリングを操作した場合のオーバーライドの判定に複雑な処理を必要とするし、他車両との位置関係の把握や、接触を防ぐ手段を講じる必要があるが、本実施例では係る複雑な処理や判定が必要とされない。
【0108】
なお、図12のように、路面に直接走行ラインを投光する走行ラインの表示方法は、駐車支援や狭い路地等で運転を支援する場合に好適である。
【0109】
以上のように、本実施の形態では、運転者の判断や走行を補助することで運転者を支援して、Uターン又は切り返しによる方向転換を行うことができる。
【図面の簡単な説明】
【0110】
【図1】方向転換支援システムの機能構成図である。
【図2】自車両の走行車線の判定の手順を示すフローチャート図の一例である。
【図3】Uターン可否の判定及び走行軌道の推定の手順を示すフローチャート図の一例である。
【図4】舵角センサが検出した舵角により推定される走行ラインの一例である。
【図5】右左折か又は車線変更かを判定する判定ロジックの一例である。
【図6】Uターンによる走行軌道の一例を示す図である。
【図7】切り返しの走行軌道の一例を示す図である。
【図8】実施例2の方向転換支援システムの機能構成図である。
【図9】ナビ画面に表示された予想軌道及び目標軌道の一例を示す図である。
【図10】切り返し走行の場合の予想軌道及び目標軌道の一例を示す図である。
【図11】ヘッドアップディスプレイに表示される予想軌道と目標軌道の一例を示す図である。
【図12】路面に投光された予想軌道と目標軌道の一例を示す図である。
【図13】方向転換支援の手順を示すフローチャート図である。
【符号の説明】
【0111】
11 ナビゲーションシステム
12 画像処理装置
13 走行車線検知手段
14 回転性能情報記憶手段
15 Uターン可否判定手段
16 エリア判定手段
17 Uターン走行制御手段
18 走行軌道推定手段
19 旋回走行制御手段
20 方向転換支援手段
【特許請求の範囲】
【請求項1】
ナビゲーションシステムと、自車両の回転半径に関する回転半径情報が記録された回転半径情報記憶手段と、
前記ナビゲーションシステムから取得した自車両が走行する道路の道路幅情報と前記回転半径情報とに基づきUターンが可能か否かを判定するUターン可否判定手段と、
前記Uターン可否判定手段の判定結果に基づき、自車両の方向転換を支援する方向転換支援手段と、
を有することを特徴とする方向転換支援システム。
【請求項2】
前記Uターン可否判定手段によりUターンが不可能であると判定された場合、
前記方向転換支援手段は、自車両を切り返して方向転換させる切り返し軌道を推定する旋回軌道推定手段と、
前記旋回軌道推定手段により推定された切り返し軌道を目標に自車両を走行させる旋回走行制御手段と、
を有することを特徴とする請求項1記載の方向転換支援システム。
【請求項3】
前記Uターン可否判定手段によりUターンが可能であると判定された場合、
前記方向転換支援手段は、自車両を所定の舵角で走行させるUターン走行制御手段を有する、
ことを特徴とする請求項1記載の方向転換支援システム。
【請求項4】
前記方向転換支援手段は、運転者に方向転換のための操舵量を教示する、ことを特徴とする請求項1ないし3いずれか記載の方向転換支援システム。
【請求項5】
舵角センサから検出された舵角に基づいて自車両の予想軌跡を推定する予想軌跡推定手段を有し、
前記方向転換支援手段は、前記予想軌跡推定手段により推定された前記予想軌跡、及び、前記所定の舵角で走行させた場合のUターン走行軌跡又は前記旋回軌道推定手段により推定された前記切り返し軌道を、運転者に教示する、
ことを特徴とする請求項4記載の方向転換支援システム。
【請求項6】
前記Uターン可否判定手段によるUターンの可否の判定結果を運転者に報知する、ことを特徴とする請求項1記載の方向転換支援システム。
【請求項7】
ナビゲーションシステムと、
自車両の走行車線を検知する走行車線検知手段と、
前記走行車線検知手段により検知された自車両の走行車線と前記ナビゲーションシステムから取得したUターン規制情報に基づき、自車両がUターン可能なエリアに存在するか否かを判定するエリア判定手段と、
を有することを特徴とする方向転換支援システム。
【請求項8】
前記走行車線検知手段は、前記ナビゲーションシステムから取得した自車両の座標データ又は自車両の車両操作の少なくとも一方から走行車線を検知する、
ことを特徴とする請求項7記載の方向転換支援システム。
【請求項9】
自車両の前記車両操作は、方向指示器又は舵角の操作であることを特徴とする請求項8記載の方向転換支援システム。
【請求項10】
車両前方の画像を撮影する画像撮影手段を有し、
前記走行車線検知手段は、前記画像撮影手段により撮影された画像から検知された白線に基づき自車両の走行車線を検知する、
ことを特徴とする請求項8記載の方向転換支援システム。
【請求項1】
ナビゲーションシステムと、自車両の回転半径に関する回転半径情報が記録された回転半径情報記憶手段と、
前記ナビゲーションシステムから取得した自車両が走行する道路の道路幅情報と前記回転半径情報とに基づきUターンが可能か否かを判定するUターン可否判定手段と、
前記Uターン可否判定手段の判定結果に基づき、自車両の方向転換を支援する方向転換支援手段と、
を有することを特徴とする方向転換支援システム。
【請求項2】
前記Uターン可否判定手段によりUターンが不可能であると判定された場合、
前記方向転換支援手段は、自車両を切り返して方向転換させる切り返し軌道を推定する旋回軌道推定手段と、
前記旋回軌道推定手段により推定された切り返し軌道を目標に自車両を走行させる旋回走行制御手段と、
を有することを特徴とする請求項1記載の方向転換支援システム。
【請求項3】
前記Uターン可否判定手段によりUターンが可能であると判定された場合、
前記方向転換支援手段は、自車両を所定の舵角で走行させるUターン走行制御手段を有する、
ことを特徴とする請求項1記載の方向転換支援システム。
【請求項4】
前記方向転換支援手段は、運転者に方向転換のための操舵量を教示する、ことを特徴とする請求項1ないし3いずれか記載の方向転換支援システム。
【請求項5】
舵角センサから検出された舵角に基づいて自車両の予想軌跡を推定する予想軌跡推定手段を有し、
前記方向転換支援手段は、前記予想軌跡推定手段により推定された前記予想軌跡、及び、前記所定の舵角で走行させた場合のUターン走行軌跡又は前記旋回軌道推定手段により推定された前記切り返し軌道を、運転者に教示する、
ことを特徴とする請求項4記載の方向転換支援システム。
【請求項6】
前記Uターン可否判定手段によるUターンの可否の判定結果を運転者に報知する、ことを特徴とする請求項1記載の方向転換支援システム。
【請求項7】
ナビゲーションシステムと、
自車両の走行車線を検知する走行車線検知手段と、
前記走行車線検知手段により検知された自車両の走行車線と前記ナビゲーションシステムから取得したUターン規制情報に基づき、自車両がUターン可能なエリアに存在するか否かを判定するエリア判定手段と、
を有することを特徴とする方向転換支援システム。
【請求項8】
前記走行車線検知手段は、前記ナビゲーションシステムから取得した自車両の座標データ又は自車両の車両操作の少なくとも一方から走行車線を検知する、
ことを特徴とする請求項7記載の方向転換支援システム。
【請求項9】
自車両の前記車両操作は、方向指示器又は舵角の操作であることを特徴とする請求項8記載の方向転換支援システム。
【請求項10】
車両前方の画像を撮影する画像撮影手段を有し、
前記走行車線検知手段は、前記画像撮影手段により撮影された画像から検知された白線に基づき自車両の走行車線を検知する、
ことを特徴とする請求項8記載の方向転換支援システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2006−190237(P2006−190237A)
【公開日】平成18年7月20日(2006.7.20)
【国際特許分類】
【出願番号】特願2005−95205(P2005−95205)
【出願日】平成17年3月29日(2005.3.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成18年7月20日(2006.7.20)
【国際特許分類】
【出願日】平成17年3月29日(2005.3.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]